Embed Size (px)
Citation preview

Locating Texture Boundaries Using a Fast Unsupervised Approach Based on Clustering
Algorithms Fusion and Level Set Mehryar Emambakhsh #1, Mohammad Hossein Sedaaghi *2, Hossein Ebrahimnezhad #3
#Computer Vision Lab, Department of Electrical Engineering, Sahand University of Technology
Sahand New City, Tabriz, Iran 1 [email protected] 3 [email protected]
*Department of Electrical Engineering, Sahand University of Technology
Sahand new city, Tabriz, Iran 2 [email protected]
Abstract—Image segmentation deals with partitioning an
input image into disjoint/non-overlapping regions. Among
different segmentation algorithms, level set methods have been
very popular. Less sensitivity to initialization, ability to split and
merge the contour, and also, involving statistical inference have
made level set even more accepted than similar methods like
snakes. However, it is very time-consuming. To solve this
problem, in this paper a fast variational approach is presented
for texture segmentation. For this purpose, first a feature space
based on non-linear diffusion is set up from CIE L*a*b* colour
components. Then, this feature space is clustered by fusion of
clustering algorithms. Finally, the produced cluster map is used
in level set for contour evolution. As it is shown in the simulation
results, our algorithm is robust in segmenting noisy texture. Also,
it is faster than previous level set approaches for texture
segmentation.
I. INTRODUCTION
Image segmentation is the art of automatically partitioning
an input image into non-overlapping regions, where each
region has uniformity in its pre-defined features. These
features can be simply pixels intensity, colour, texture, motion
(in a video sequence), or an integration of them.
Different methods have been proposed for image
segmentation. One of the most popular algorithms is energy
minimization methods. In these approaches, first, an energy
function based on image features is defined. After that, this function is minimized by a contour evolution. Evolving the
contour is usually performed by active contour methods,
which are either snakes or level set. Level set has some
superiority compared to snakes [1 and 2]. Its implicit contour
evolution results in changing the topology of the contour, i.e.,
the contour can split and merge. Therefore disjoint regions,
with the same properties can be segmented. More than that,
considering statistical inference is much easier in level set
approaches. Furthermore, it is less-sensitive to contour
initialization. Finally, level set methods are much more
suitable for region-based segmentation approaches which are
more robust for noisy images than edge-based approaches.
In [1], a level set method is proposed that integrates colour,
texture, and motion features. Also, in [2] a level set method is
presented for texture segmentation. In both [1] and [2]
approaches, a multi-dimensional feature vector is established.
Then, it is supposed that the feature distribution is accorded with a Gaussian Probability Density Function (PDF). After
that, the mean vector and the covariance matrix are computed
for the Gaussian distribution and are used in a Bayesian
inference. That is, an energy function based on the posterior
probability is maximized through level set evolution. In [3],
level set is utilized in medical image analysis for segmenting
the thalamus in Diffusion Tensor Magnetic Resonance
Imaging (DT-MRI). In [4] another level set utilization, in the
field of medical image segmentation, is proposed. In [5],
supervised texture segmentation is performed by level set, and
in [6] structure tensors are used with level set to perform the
segmentation.
Despite all of the mentioned interesting features of level
set, its computational complexity is very high. To solve this
problem, in this paper, instead of setting up a multi-
dimensional feature vector as the input for level set, this
feature vector is first clustered by clustering algorithms fusion. Fuzzy C-Means (FCM), Self-Organizing Map (SOM),
Gaussian Mixture Model (GMM), and K-means are
considered as the clustering methods in our work. Using these
clustering algorithms with level set, significantly improves the
segmentation speed. To be more specific, in this paper, a fast
variational framework is presented for locating texture
boundaries. For this purpose, first the colour space of the input
image is transformed into CIE L*a*b*. Then, non-linear
diffusion of L*, a*, and b* colour components are computed.
This results in a feature space with 3 dimensions. After that,
clustering algorithms are used on the feature space leading to
4 cluster maps and then, they are fused. Finally, the fusion
result is used to evolve the contour in level set. After the
contour convergence, the inner part locates the texture. As it
will be shown in the simulation results, our algorithm shows
robustness in segmenting noisy images.
2009 IEEE International Conference on Signal and Image Processing Applications
978-1-4244-5561-4/09/$26.00 ©2009 129
This paper is organized as follows. In Section II, the
proposed method is presented, where in subsection II-A the feature extraction method from texture is explained. Then, in
subsection II-B clustering algorithms fusion is demonstrated.
Level set is explained in subsection II-C. The simulation
results are presented in Section III. Finally, Section IV is
dedicated to our conclusion.
II. THE PROPOSED METHOD
Our proposed method is illustrated in Fig. 1, in a block
diagram. Each block is explained in the next sub-sections.
Fig. 1 The proposed algorithm in a block diagram
A. Feature extraction
In this section, feature extraction from the texture image, is
explained. First of all, a color transformation is utilized, i.e.
the color space of the input image is transformed from RGB to
CIE L*a*b*. After that, non-linear diffusion of L*a*b* color
components is computed.
1) RGB to CIE L*a*b*
It can be understood from McAdams ellipses [7] that RGB
colour domain is not a good choice for processing colour
images. Moreover, if RGB colour components are used as
feature vectors, it can be verified that there will be a big
overlap between feature channels. On the other hand, feature
vectors calculated from CIE L*a*b* colour space have much
more detachability compared to RGB colour space. Therefore,
CIE L*a*b* colour space is utilized instead of RGB.
Consequently, first, the input RGB image is transformed into
CIEXYZ colour space using the following equation:
úúú
û
ù
êêê
ë
é
úúú
û
ù
êêê
ë
é=
úúú
û
ù
êêê
ë
é
B
G
R
Z
Y
X
116.1066.0000.0
114.0587.00299
200.0174.0607.0 (1)
Then, the components of L*a*b* colour domain are
computed using the subsequent equations, i.e.
ïïî
ïïí
ì
³-
<=
008856.016)100(25
008856.0)(3.903
00
00*
Y
Yif
Y
Y
Y
Yif
Y
Y
L
)(13
)(13
/
0
/**
/
0
/**
vvLb
vuLa
-=
-= (2)
While we have,
)315(
4/
ZYX
Xu
++= (3)
460900.0,0200953.0,255
)315(
9
/0
/00
/
===
++=
vuY
ZYX
Xv (4)
The produced colour components are used in the next sub-
section as inputs for non-linear diffusion.
2) Non-linear diffusion
Non-linear diffusion is a method for image de-noising and
simplification. It was initially proposed by Perona and Malik
in [8] for edge detection. At first it was only used for grey
scale (scalar) images. But after G. Gerig et al in [9], proposed
the vector-value version of diffusion equation, it became
applicable for processing colour images, texture feature vectors, and also hyper-spectral images. Also, preserving
image edges, processing on only one scale of the image and
therefore less redundant information production, have made
non-linear diffusion a more popular method for image
segmentation than structure tensors [10 and 11] and Gabor
filters [12, 13, and 14].
Therefore, due to these interesting features, it is employed
in our work to establish the feature space. As it has been seen
in the results, this feature space helps the segmentation
algorithm robust against noise.
The input vector for non-linear diffusion is the L*a*b*
colour components, i.e,
*
*,
*,
2
1
0
bu
au
Lu
=
=
= (5)
The non-linear diffusion equation for vector-valued images
is [2],
))||((1
0
2
i
N
k kit uugdivu ÑÑ=¢¶ å -
= (6)
Where iu¢ is the result of non-linear diffusion when the
input vector is iu . N equals to the dimension of the vector-
valued image. In our wok, it is 3. g(.) is a decreasing function
of the image gradient. In this study, the following function is
employed:
ïî
ïíì
£
>--=
01
0))/(
exp(1)(
s
ss
C
sg m
m
l (7)
Cm is put in the equation to have the S*g(s) flux increasing
for l<g and decreasing for l³g . Also l is a parameter for
controlling image contrast. In comparison with the suggested
functions in [1] and [2] for g(.), our proposed function in (8) has more free parameters, and has more flexibility for wider
range of images.
Solving (6) results in a (3)-dimensional feature vector, i.e.:
),,( 210 uuuu ¢¢¢=¢ (8)
This feature vector will be used in the clustering algorithm.
B. Clustering algorithms fusion
1) Clustering algorithms
Clustering
algorithms
fusion
Feature
extraction
RGB to CIE
L*a*b*
Non-linear
diffusion
SOM
K-means
FCM
GMM
Fusion
Input
imageSegmented
image
Level
set
130

In this study, SOM, K-means, GMM, and FCM methods
are used to cluster the feature space in (8).
· SOM Kohonen’s SOM is an unsupervised competitive neural
network. It uses the neighbourhood interaction set to
approximate lateral neural interaction and discovers the
topological structure hidden in the data for visual display in
one or two dimensional space ([16 and 17]). After finishing
the training step, trained SOM network can be used in the test
phase to cluster test images.
In this work, a two stage SOM network is used. The first
stage, maps the feature space from 3-dimension to 4-
dimension. The second stage performs the unsupervised
classification. Batch unsupervised weight/bias training method
is used to train the neural network. The structure of SOM
neural network is plotted in Fig. 2.
Fig. 2. The SOM structure.
· K-means
K-means is another well-known clustering algorithm that
we utilize. It assigns each point to the cluster whose center
(also called centroid) is nearest. The center is the average of
all the points in the cluster — that is, its coordinates are the
arithmetic mean for each dimension separately over all the
points in the cluster.
It must be mentioned that Euclidean distance is used as
distance criterion for K-means. This distance criterion is much
faster than Mahalanobis, and produces better results than city-block and Hamming distances.
· GMMIn GMM, each mass of features is modelled as a multi-
variate normal density function. These models are fit to data
using expectation maximization (EM) algorithm, which
assigns posterior probabilities to each observation. The fitting
method uses an iterative algorithm that converges to a local
optimum. Actually in the test phase, the a posterioriprobability is computed for each model. The dependency of
each pixel to a specific cluster is determined by examining the
greatness of the probability.
· FCM FCM is the final clustering method we use. FCM provides a
method that shows how to group data points that populate
some multidimensional space into a specific number of
different clusters ([18]). It is a data clustering technique
wherein each data point belongs to a cluster to some degree that is specified by a membership grade. In K-means a data
point, is assumed to be in exactly one cluster. However, this
condition can be relaxed and we can assume that each
sampleju¢ , has some graded or fuzzy cluster membership
( )ji u¢m in clusteriw , where ( ) 10 £¢£ ji um . Basically, this
membership is equivalent to the probability ( )q,|ˆji uwP ¢ , i.e.
([15]),
( )
å
å
=
--
--
=
úû
ùêë
é -¢S-¢-S
úû
ùêë
é -¢S-¢-S=
¢
¢=¢
C
c
ccjc
t
cjc
iiji
t
iji
C
c
cccj
iiij
ji
wPuu
wPuu
wPwup
wPwupuwP
1
12
1
12
1
1
)(ˆ)ˆ(ˆ)ˆ(2
1exp|ˆ|
)(ˆ)ˆ(ˆ)ˆ(2
1exp|ˆ|
)(ˆ)ˆ,|(
)(ˆ)ˆ,|(ˆ,|ˆ
mm
mm
q
(9)
C is the number of clusters where it is equal to 2 in our
work. )(ˆiwP (the a priori probability) is the fraction of
samples from iw ,
im is the mean of the samples, and iS is the
corresponding sample covariance matrix. The a posterioriprobability in (9), is between 0.0 and 1.0. In FCM, a minimum
of the following global cost function is sought [15],
( )[ ]åå= =
-¢¢=C
c
n
j
ij
b
ji uuwPL1 1
2||||ˆ,|ˆ mq (10)
Where b>1 is a free parameter chosen to adjust the
"blending" of different clusters.
2) Fusion
Each clustering method has its own benefits. The
performance of the clustering algorithm significantly depends
on the input feature space distribution. A clustering method
maybe suitable for an image, but for another image it may
produce poor results. It is seen in our work that for a non-
overlapping feature space, GMM produces desirable results.
While for small amount of overlap, FCM and K-means are
more suitable. For highly overlapped feature spaces, SOM
seems to be a good clustering method. Considering these
problems, as it is depicted in our simulation results, clustering
algorithms fusion produces the best generalization for wider ranges of images. For this purpose, the following equation is
considered for each clustering result, i.e.
14
1
4321
=
+++=
å=
-
i
i
GMMSOMFCMmeansK CCCCD
a
aaaa (11)
meansKC -,
FCMC ,SOMC , and
GMMC are binary images each
represent for K-means, FCM, SOM, and GMM clustering
results, respectively. ia ( 4,,1L=i ) is the weight factor for
each clustering algorithm. Finally, D is the decision map. The
final result can be found by a simple thresholding,
îíì
£
>=
0
0
0
1
TD
TDV
(12)
C. Level set
In this section, the variational framework used for level set
evolution is explained. For this purpose, the cluster map is
used to find the internal energy. The level set equation is [1
and 2],
1st stage 2nd stage
0u¢Background
Foreground
1u¢
2u¢
131
÷÷ø
öççè
æ++
ÑÑ
Ñ=¶
¶21)
||.())((
),(mm
ff
fdf
e r
rr
vxt
tx (13)
f is the level set function, which is made by Signed
Distance Functions (SDF), ( ).ed is the smoothed Dirac impulse
function, and v is a scalar that determines the level set
evolution rate. 1m and
2m are the mean of inner and outer
parts of the contour, i.e.,
2,1, ==ò
ò
W
W idx
dxI
i
i
c
ic
cm (14)
W is the image domain and ic is allocated to the inner and
outer part of the contour, i.e. 1c is for the inner, and 2c is for
the outer part,
)(1)(),()( 11 zHzzHz ee cc -==
)(zHe is the regularized Heaviside function. cI is the
cluster map. As it was mentioned earlier, f is calculated from
a SDF, i.e. ®W:f where,
îíì
WÎW¶-
WÎW¶=
2
1
),(
),()(
xifxD
xifxDxf (15)
),( W¶xD is the distance function between x , each image
pixels, and W¶ , the contour ( 0»f ). After initializing the
level set function, the level set equation (13) is solved using the gradient descent algorithm iteratively. It converges when
there is not a major change in 1m and
2m .
III. SIMULATION RESULTS
In this section, the simulation results of our algorithm are presented. The results have been evaluated on an Intel Core 2
Due CPU (T7250). The algorithm has been tested on 59
images from Corel texture dataset [19] and the following
average values have been found for 4,,1, L=iia :
2819.01 =a , 3176.02 =a , 2462.03 =a , and 1543.04 =a .
Also 589.00 =T is considered in (12). Moreover, for training
SOM, 120 and 80 epochs are used for the first and the second
stages, respectively. Fig. 3-a is utilized as the input image.
Also the ground truth is plotted in Fig. 3-b.
(a) (b)
Fig. 3: (a) The input image (b) The corresponding ground truth
(a) (b) (c)
Fig. 4: Colour components (a) L*, (b) a*, and (c) b*
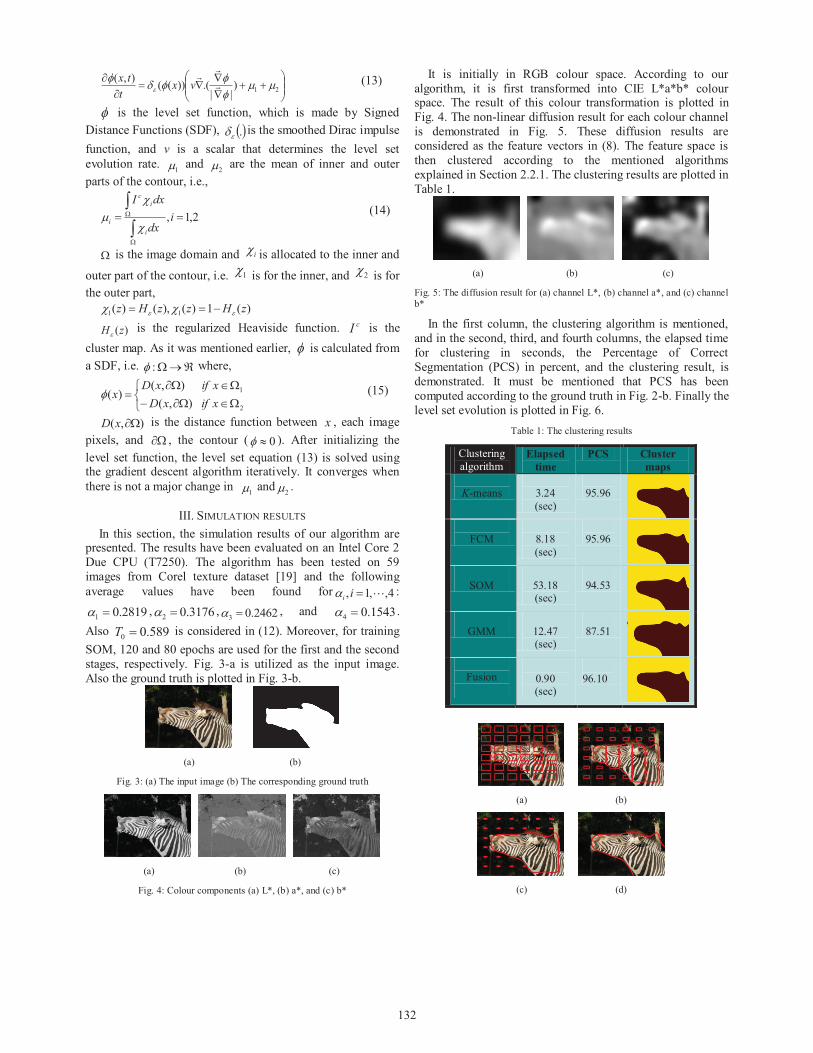
It is initially in RGB colour space. According to our
algorithm, it is first transformed into CIE L*a*b* colour space. The result of this colour transformation is plotted in
Fig. 4. The non-linear diffusion result for each colour channel
is demonstrated in Fig. 5. These diffusion results are
considered as the feature vectors in (8). The feature space is
then clustered according to the mentioned algorithms
explained in Section 2.2.1. The clustering results are plotted in
Table 1.
(a) (b) (c)
Fig. 5: The diffusion result for (a) channel L*, (b) channel a*, and (c) channel b*
In the first column, the clustering algorithm is mentioned,
and in the second, third, and fourth columns, the elapsed time
for clustering in seconds, the Percentage of Correct
Segmentation (PCS) in percent, and the clustering result, is
demonstrated. It must be mentioned that PCS has been
computed according to the ground truth in Fig. 2-b. Finally the
level set evolution is plotted in Fig. 6.
Table 1: The clustering results
Clustering
algorithmElapsed
time
PCS Cluster
maps
K-means 3.24
(sec)
95.96
FCM 8.18
(sec)
95.96
SOM 53.18(sec)
94.53
GMM 12.47(sec)
87.51
Fusion 0.90(sec)
96.10
(a) (b)
(c) (d)
132
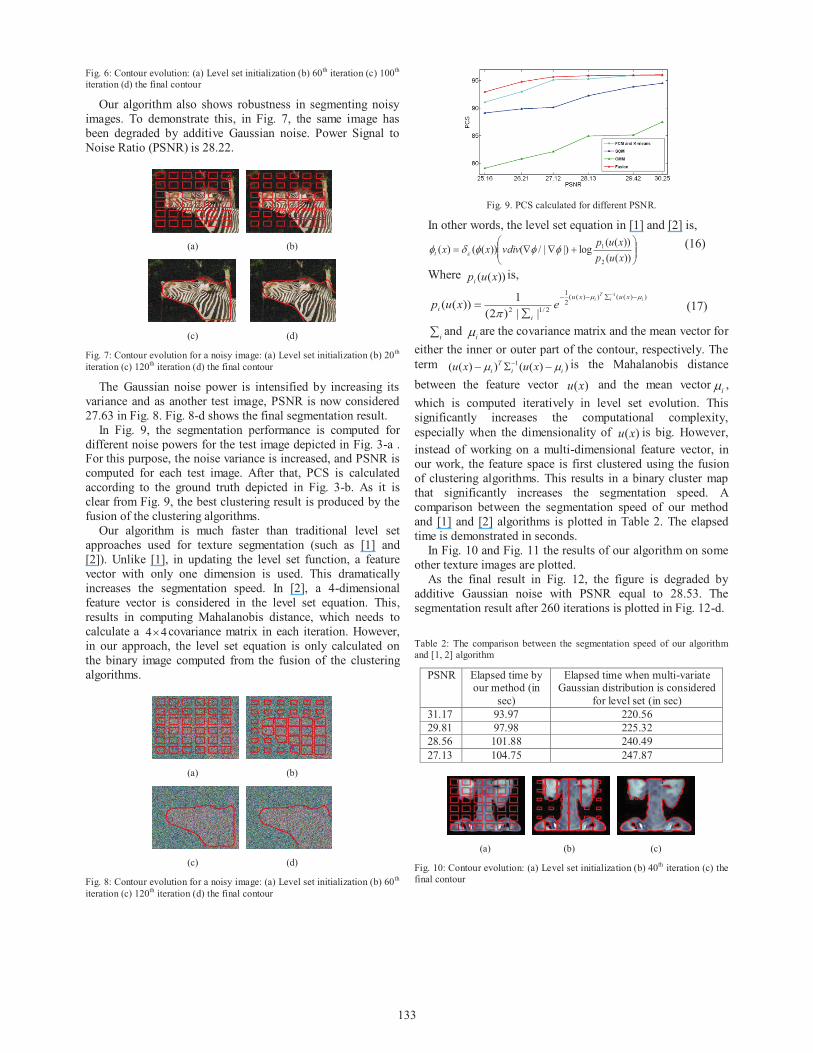
Fig. 6: Contour evolution: (a) Level set initialization (b) 60th iteration (c) 100th
iteration (d) the final contour
Our algorithm also shows robustness in segmenting noisy
images. To demonstrate this, in Fig. 7, the same image has
been degraded by additive Gaussian noise. Power Signal to
Noise Ratio (PSNR) is 28.22.
(a) (b)
(c) (d)
Fig. 7: Contour evolution for a noisy image: (a) Level set initialization (b) 20th
iteration (c) 120th iteration (d) the final contour
The Gaussian noise power is intensified by increasing its
variance and as another test image, PSNR is now considered
27.63 in Fig. 8. Fig. 8-d shows the final segmentation result.
In Fig. 9, the segmentation performance is computed for
different noise powers for the test image depicted in Fig. 3-a .For this purpose, the noise variance is increased, and PSNR is
computed for each test image. After that, PCS is calculated
according to the ground truth depicted in Fig. 3-b. As it is
clear from Fig. 9, the best clustering result is produced by the
fusion of the clustering algorithms.
Our algorithm is much faster than traditional level set
approaches used for texture segmentation (such as [1] and
[2]). Unlike [1], in updating the level set function, a feature
vector with only one dimension is used. This dramatically
increases the segmentation speed. In [2], a 4-dimensional
feature vector is considered in the level set equation. This,
results in computing Mahalanobis distance, which needs to
calculate a 44´ covariance matrix in each iteration. However,
in our approach, the level set equation is only calculated on
the binary image computed from the fusion of the clustering
algorithms.
(a) (b)
(c) (d)
Fig. 8: Contour evolution for a noisy image: (a) Level set initialization (b) 60th
iteration (c) 120th iteration (d) the final contour
Fig. 9. PCS calculated for different PSNR.
In other words, the level set equation in [1] and [2] is,
÷÷ø
öççè
æ+ÑÑ=
))((
))((log|)|/())(()(
2
1
xup
xupvdivxxt fffdf e
(16)
Where ))(( xupiis,
))(())((2
1
2/12
1
||)2(
1))((
iiT
i xuxu
i
i exupmm
p
-å-- -
å= (17)
iå and im are the covariance matrix and the mean vector for
either the inner or outer part of the contour, respectively. The
term ))(())(( 1
ii
T
i xuxu mm -S- - is the Mahalanobis distance
between the feature vector )(xu and the mean vectorim ,
which is computed iteratively in level set evolution. This
significantly increases the computational complexity,
especially when the dimensionality of )(xu is big. However,
instead of working on a multi-dimensional feature vector, in
our work, the feature space is first clustered using the fusion
of clustering algorithms. This results in a binary cluster map
that significantly increases the segmentation speed. A
comparison between the segmentation speed of our method
and [1] and [2] algorithms is plotted in Table 2. The elapsed
time is demonstrated in seconds.
In Fig. 10 and Fig. 11 the results of our algorithm on some
other texture images are plotted.
As the final result in Fig. 12, the figure is degraded by
additive Gaussian noise with PSNR equal to 28.53. The
segmentation result after 260 iterations is plotted in Fig. 12-d.
Table 2: The comparison between the segmentation speed of our algorithm and [1, 2] algorithm
PSNR Elapsed time by our method (in
sec)
Elapsed time when multi-variate Gaussian distribution is considered
for level set (in sec)
31.17 93.97 220.56
29.81 97.98 225.32
28.56 101.88 240.49
27.13 104.75 247.87
(a) (b) (c)
Fig. 10: Contour evolution: (a) Level set initialization (b) 40th iteration (c) the final contour
133

(a) (b) (c)
Fig. 11: Contour evolution: (a) Level set initialization (b) 20th iteration (c) the
final contour
(a) (b)
(c) (d)
Fig. 12: (a) The input image (b) level set initialization (c) 60th iteration (d) the final result
Noise power is increased in Fig. 13 for the same image.
PSNR is 26.72 for this figure. The segmentation result is plotted in Fig. 13-d.
(a) (b)
(c) (d)
Fig. 13: (a) The input image (b) level set initialization (c) 60th iteration (d) the
final result
IV. CONCLUSION
In this paper a fast algorithm is presented for texture
segmentation. Traditional level set methods that calculate
energy functions based on a multi-dimensional feature space
are so time-consuming. To solve this problem, in our work, a
feature space, which is established upon non-linear diffusion
of the CIE L*a*b* colour components, is first clustered with
the fusion of clustering algorithms. This leads to a cluster map
that is used to evolve level set in a variational framework.
The advantages of our algorithm are:
(1) Our approach is much faster than previous level set
methods proposed in [1 and 2].
(2) Due to non-linear diffusion computation and also the
intrinsic region-based nature of our approach, the proposed
method shows robustness in segmenting noisy images.
(3) Unlike the method presented in [1], image gradients are
not calculated for texture images. For noisy images,
derivatives computation intensifies noise, and reduces the performance of the segmentation.
(4) Clustering algorithms fusion has much more
generalization than using an algorithm solely. The fusion
significantly improves the segmentation result.
REFERENCES
[1] S. Daniel Cremers, M. Rousson, and R. Deriche, "A Review of Statistical Approaches to level sets Segmentation: Integrating Colour,
Texture, Motion and Shape", 2007, International Journal of Computer
Vision 72(2), 195–215 [2] M. Rousson, T. Brox, and R. Deriche, "Active Unsupervised Texture
Segmentation on a Diffusion Based Feature Space", 2003, Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision
and Pattern Recognition (CVPR’03)
[3] L. Jonasson, P. Hagmann, C. Pollo, X. Bresson, C. R. Wilson, R.
Meuli, and J. Thiran. A level set method for segmentation of the thalamus and its nuclei in DT-MRI. Signal Processing, Tensor Signal
Processing, 87(2):309–321, February 2007. [4] K. Seongjai and Lim. Hyeona. A hybrid level set segmentation for
medical imagery. In IEEE Nuclear Science Symposium Conference
Record, volume 3, page 5, October 2005. [5] N. Paragios and R. Deriche. "Geodesic active regions and level sets
methods for supervised texture segmentation", International Journal of Computer Vision, 46(3):223, 2002.
[6] C. Feddern, J.Weickert and B. Burgeth, "Level-set methods for tensor-valued images", In Proc. of the IEEE 2nd Workshop on VLSM, pages
65–72, 2003. [7] Forsyth and Ponce, Computer Vision: A Modern Approach, pages: 71-
73, Prentice-Hall, 2002.
[8] P. Perona and J. Malik. "Scale space and edge detection using anisotropic diffusion". IEEE Transactions on Pattern Analysis and
Machine Intelligence, 12:629–639, 1990. [9] G. Gerig, O. Kubler, R. Kikinis, and F. A. Jolesz. "Nonlinear
anisotropic filtering of MRI data", IEEE Transactions on Medical Imaging, 11:221–232, 1992.
[10] Zhizhou Wang and Baba C. Vemuri, "An Affine Invariant Tensor Dissimilarity Measure and its Applications to Tensor-valued Image
Segmentation", Proceedings of the 2004 IEEE Computer Society
Conference on Computer Vision and Pattern Recognition (CVPR’04)
[11] C. Chefd’hotel, O. Faugeras, D. Tschumperl and R. Deriche.
"Constrained flows of matrix-valued functions: Application to diffusion tensor regularization", In ECCV, pages 251–265, 2002.
[12] Roman Sandler and Michael Lindenbaum, "Gabor Filter Analysis for Texture Segmentation", Proceedings of the 2006 Conference on
Computer Vision and Pattern Recognition Workshop (CVPRW’06)
[13] Chen Sagiv Sochen, N.A. Zeevi, Y.Y. , "Integrated active contours
for texture segmentation", June 2006, Volume:15,Issue:6 On page(s):
1633-1646 [14] Kamarainen, J.-K. Kyrki, V. Kalviainen, H. "Invariance properties of
Gabor filter-based features-overview and applications", Volume: 15, Issue: 5, 1088-1099, 2006
[15] R. O. Duda, P. E. Hart, and D. G. Stork. Pattern classification. John Wiley and Sons, 2nd. Edition, 2001.
[16] Z. Dokur, Z. Iscan, and T. Olmez. Segmentation of medical images by using wavelet transform and incremental self-organizing map, volume
4293/2006 of Lecture Notes in Computer Science, pages 800–809.
Springer, Berlin, Heidelberg, 2006 [17] W. Kuo, C. Lin, and Y. Sun. Brain MR images segmentation using
statistical ratio: Mapping between watershed and competitive Hopfield clustering network algorithms. Computer Methods and Programs in
Biomedicine, 91(3):191 – 198, 2008. [18] J.Wang, J. Kong, Y. Lu, M. Qi, and B. Zhang, 2008. A modified FCM
algorithm for MRI brain image segmentation using both local and non-local spatial constraints, Computerized Medical Imaging and Graphics
(PMID: 18818051)
[19] www.corel.com, access time: 2009-05-21
134





























