Embed Size (px)
Citation preview

Research Article
Linear optimal control of continuous time chaotic systems
Kaveh Merat, Jafar Abbaszadeh Chekan, Hassan Salarieh n, Aria AlastyDepartment of Mechanical Engineering, Sharif University of Technology, P.O. Box 11155-9567, Tehran, Iran
a r t i c l e i n f o
Article history:Received 11 June 2013Received in revised form4 December 2013Accepted 17 January 2014This paper was recommended for publica-tion by Mohammad Haeri.
Keywords:ChaosOptimal controlContinuous time systemRossler systemAFM system
a b s t r a c t
In this research study, chaos control of continuous time systems has been performed by using dynamicprogramming technique. In the first step by crossing the response orbits with a selected Poincare sectionand subsequently applying linear regression method, the continuous time system is converted to adiscrete type. Then, by solving the Riccati equation a sub-optimal algorithm has been devised for theobtained discrete chaotic systems. In the next step, by implementing the acquired algorithm on thequantized continuous time system, the chaos has been suppressed in the Rossler and AFM systems assome case studies.
& 2014 ISA. Published by Elsevier Ltd. All rights reserved.
1. Introduction
The nonlinear dynamical systems which exhibit chaos phenom-enon are appeared in many fields of science such as engineering,economy, ecology, and engineering. The concept of chaos has beenintroduced in 1975 by Li and Yorke for the first time [1]. Theelimination of chaos has been studied in many researches andinvestigations, and different techniques including optimal approaches,and advanced nonlinear methods were utilized for chaos stabilization.The primary technique which is well known as the OGY method wasproposed by Ott et al. for stabilizing the unstable periodic orbitsembedded in a chaotic attractor [2]. In addition, some approachesbased on OGY method such as SOGY have been presented to enhancethe performance of control [3,4]. Pyragas [5] also proposed the delayedfeedback technique to stabilize the unstable periodic orbits. Further-more, the model free control of the Lorenz chaotic system isperformed by utilizing an approach based on an approximate optimalcontrol in [6]. In [7] an optimal control policy has been introduced tocontrol a chaotic system via state feedback. In the mentioned study, atfirst the system has been converted to an uncertain piecewise linearmodel and then an optimal controller has been designed whichminimizes the upper bound on cost function under constraints inthe form of bilinear matrix inequality. In some other case studies,synchronization of chaos is concerned instead of controlling chaoticsystems. For instance in [8], Jayaram and Tadi utilized State DependentRiccati Equation (SDRE) method to synchronize chaotic systems.
Furthermore, Park synchronized two chaotic systems using a non-linear controller designed based on the Lyapunov stability theory [9].In some other studies, Robust, adaptive and nonlinear control theory,also were applied. Cao introduced a nonlinear adaptive method forcontrolling a chaotic oscillator [10]. In [11] Layeghi et al. stabilizedperiodic orbits of chaotic systems by applying fuzzy adaptive slidingmode control. The Adaptive Lyapunov-based control which is anothernonlinear control approach was hired by Salarieh and Shahrokhi in[12] to suppress the chaotic motion. Also, Fuh et al. introduced aRobust controller which combines feedback linearization and distur-bance observer to suppress chaotic motion in a nonlinear systemwhich is under external excitation [13]. Zhang and Tang [14] studiedthe dynamics of a new chaotic system containing two systemparameters with nonlinear terms, using the Lyapunov exponents.They both stabilized and synchronized the mentioned chaotic systemglobally, using a linear state feedback controller, designed through thesimple sufficient conditions resulted from the Lyapunov stabilitycriteria. Dynamics of a new three dimensional chaotic system contain-ing a nonlinear term in the form of arc-hyperbolic sine function wasstudied in [15], in which the system has been converted to anuncertain piecewise linear system. Using piecewise quadratic Lyapu-nov function method, the chaos phenomenon has been controlledglobally in this system with alpha-stability constraint and via piece-wise linear state feedback. The same authors in [16], by applyingLyapunov stability criteria, synchronized chaos in a chaotic systemwith a nonlinear term which does not satisfy Lipschitz continuity butsatisfies 1/2- Hölder continuity.
Since the target of our study is stabilizing chaotic systems viadynamic programming algorithm, reviewing some relevant works isuseful. Dynamic programming concept was introduced in 1957 by
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/isatrans
ISA Transactions
http://dx.doi.org/10.1016/j.isatra.2014.01.0030019-0578 & 2014 ISA. Published by Elsevier Ltd. All rights reserved.
n Corresponding Author. Tel: þ982166165538.E-mail address: [email protected] (H. Salarieh).
Please cite this article as: Merat K, et al. Linear optimal control of continuous time chaotic systems. ISA Transactions (2014), http://dx.doi.org/10.1016/j.isatra.2014.01.003i
ISA Transactions ∎ (∎∎∎∎) ∎∎∎–∎∎∎
Bellman [17] and subsequently many modifications on this approachhave been proposed by other researchers [18,19]. Merat et al. appliedthe dynamic programming approach to stabilize n-th order unstableperiodic orbits of discrete chaotic systems in [20] where a linearfeedback control with its applicable domain is obtained.
In this research study, the control of continuous time chaoticsystems has been done through using a stabilizing algorithm specia-lized for discrete systems. In order to apply this optimal controlalgorithm on a continuous time system, it should be quantized in timedomain. To this aim, a Poincare section is selected which crosses all ofsystem response trajectories where each cross point is mapped on thePoincare surface. Consequently, a nonlinear discrete map from acontinuous time system that gives a comprehensive knowledge aboutthe dynamic behavior of the main system is achieved. So omitting thechaos phenomenon from the acquired discrete Poincare map leads toregular behavior of the corresponding continuous system. The onlycomplexity that arises is that obtaining the nonlinear equations ofPoincare map for a chaotic system is a difficult task and in some casesis not possible. So, as a solution, local linearization of the Poincare mapis suggested. Then through solving Riccati equation, a linear controlleris presented which can stabilize the acquired quantized continuoustime chaotic system around its fixed points.
Hence, utilizing the presented optimal linear controller for theobtained discrete system, results in the stabilizing the systemunstable fixed point (UFP) and subsequently stabilizing the corre-sponding unstable periodic orbit (UPO) in the continuous timesystem.
In this article, first a method based on regression approach issuggested which gives a linear approximation for the Poincaremap around its fix point and then by solving the Ricatti equation,a linear optimal control technique is introduced to stabilize theobtained discrete system on its UFP which leads to suppression ofchaos. It is notable that, the introduced method can be used forautonomous and non-autonomous chaotic systems. At the end, thepresented approach is implemented for controlling two contin-uous time chaotic systems namely the Rossler System and an AFM(Atomic Force Microscope) system in its tapping mode. Beinginvented by Bining et al. [21], AFM made an impressive revolutionin the topography of different surfaces in the small scale. Due tohigh demands in having pictures with further quality control AFMsystems with chaotic behavior have attracted great attention.Elimination of chaos for this system can be accomplished throughtwo ways. The first method is changing some parameters of thesystem to the values in which no chaotic behavior occurs [22]. Thesecond approach consists of implementing an active controllerthrough piezo-actuators to stabilize systems UPO [23]. There aresome studies which are done in controlling the chaotic AFMsystems. In [24], the chaos control of continuous AFM system inits tapping mode has been analyzed. Assuming model parametersuncertainties, the sliding nonlinear delayed feedback controlapproach is applied to stabilize the first order periodic orbit ofthe system. Salarieh and Alasty [25] presented an active control forthe AFM system in its tapping mode. They applied delayed feed-back method in which the feedback gain is obtained and adoptedaccording to the Minimum Entropy algorithm. In their investiga-tion the target was stabilizing the system on its unstable fixedpoint. In [26] Wang and Yau studied the nonlinear dynamicbehavior of the probe tip of an AFM system with a PD feedbackcontroller using differential transformation method.
2. Continuous time chaotic system quantization usingregression method
By selecting an appropriate Poincare section and specifying thecross points of the system trajectories with this section, the
resultant Poincare map can be defined and introduced as;
zkþ1 ¼ Pðzk;ukÞ ð1Þin which zkAℜm�1 is the k-th point of the system response thatcrossed the Poincare map (m indicates the number of statevariables of continues system including the explicit term of timein the equations). ukAℜp is the control signal, exerted to thecontinues system between two subsequent touch of the systemresponse with the Poincare map. By linearization of Eq.(1) aroundits fixed point ðjÞZn
F and using the variable change zk ¼ zk�ðjÞZnF we
may write
zkþ1 ¼ ðjÞAzkþðjÞBuk; j¼ 1;…;n ð2ÞIn the above equation ðjÞA is a matrix with the dimension ofðm�1Þ � ðm�1Þ and ðjÞB is a ðm�1Þ � p matrix, both correspond tothe j-th fixed point of the system with the order of “n”, ðjÞZn
F . Thetarget is to find the so-called matrices. For this aim, differentpoints on the Poincare surface and in the vicinity of the corre-sponding fixed point, ðjÞZn
F , are chosen which are shown by ξ1i . Inthe next step, each of these points is set as the initial condition foruncontrolled system trajectory. Then the next cross point of thesystem response with the Poincare section is acquired which ismarked by ξ2i . The couples of subsequent points, ðζ1i ; ζ
2i Þ are on the
Poincare section, hence, all couples fulfill the equation:
ζ2i ¼ Pðζ1i ;0Þ ð3ÞWith the assumption that, ξ1i are close enough to the fixed point. Itis assumed that the couple ðξ1i ; ξ2i Þ satisfies the linear uncontrolledPoincare map:
ζ2i ¼ ðjÞAζ1i ð4ÞFor appropriate number of ðξ1i ; ξ2i Þ, using the linear regressionmethod the matrix ðjÞA can be obtained.
Generally the regression approach is applicable for the multiinput (n)- multi output (m) systems in the shape of
Ym�q ¼ βm�nXn�qþεm�q ð5Þin which, Y is the output matrix for the input matrix X, and q is thenumber of couples ðxi; yiÞ, where xi and yj are input and outputvectors respectively. The matrices X, Y can be built as
ð6Þ
The goal is finding the coefficient matrix β which minimizes thevalue of S defined in
S¼ ∑q
j ¼ 1∑m
i ¼ 1εij2 ð7Þ
This problem is categorized into the class of the least squareproblems which has a known solution.
Considering ζ1i and obtained ζ2i for the uncontrolled system theinput and output matrices are
ð8Þ
Using the linear regression technique for this multi-input multi-output system, the coefficient matrix β¼ ðjÞAðm�1Þ�ðm�1Þ can beacquired.
For extraction of matrix, ðjÞB in Eq.(2), similar to the calculationof ðjÞA a few points, ζ1i close to the fixed point ðjÞZ
nF on the Poincare
surface are selected, then by exerting control signals, ηi, to thesystem, the continuous time equations are solved for the initialconditions, ζ1i . The next crossed points, ζ2i are obtained. Now,
K. Merat et al. / ISA Transactions ∎ (∎∎∎∎) ∎∎∎–∎∎∎2
Please cite this article as: Merat K, et al. Linear optimal control of continuous time chaotic systems. ISA Transactions (2014), http://dx.doi.org/10.1016/j.isatra.2014.01.003i
regarding Eq.(2), the input and output matrices X; Y can bewritten as
ð9ÞApplying the linear regression method, the coefficient matrixβ¼ ðjÞB m�1ð Þ�p can be attained.
3. Stabilizing the first order unstable fixed point of a discretechaotic system via linear optimal control algorithm in infinitetime domain
In this section, the goal is stabilizing the first order UFP, x1F , for a
chaotic system using dynamic programming in infinite timedomain. Similar to the research in [20], the system, xkþ1 ¼f ðxk;ukÞ is linearized around its UFP, x1
F , while the control signalis set to zero. Considering only the first order terms in the TaylorExtension, it can be written as
xkþ1�x1F ¼ Aðxk�x1
F ÞþBuk ð10Þwhere xkAℜm and ukAℜp are the state vector and control signalin the k-th step respectively, and the matrices A and B are constant.
Considering the change of variable, ek ¼ ðxk�x1F Þ, Eq.(10) can be
rewritten as
ekþ1 ¼ AekþBuk ð11Þand the objective scalar function for this system for infinite timedomain is introduced by
J ¼ ∑1
k ¼ 0
12ek
TWekþ12uk
TΛuk
� �ð12Þ
In which W and Λ represent constant weighting matrices thatreport the significance of state variables and control signal withrespect to each other. The weighting matrices are positive definiteand symmetric. The following theorem presented in [27] gives thelinear controller for stabilizing the first order fixed point of thechaotic system.
Theorem. [27] Considering the m�m matrix A, and m� p matrix B,if the m�m matrices W and Λ are symmetric and positive definite,the Riccati equation can be written as;
Kkþ1 ¼WþATKkA�ðATKkBÞ ðBTKkBþΛT Þ�1ðBTKkAÞ ð13Þwhere its initial value, K0, can be every arbitrary symmetric, positivedefinite matrix.
Assuming the couples ðA;BÞ and ðA;W1=2Þ, if the followingconditions hold:
ðA;BÞ is Controllable; ðA;W1=2Þ is observable ð14Þthen:
(i) There is a symmetric, positive definite matrix K such that:limk-1
Kk ¼ K ð15Þ
that for an arbitrary initial value K0, is the unique solution ofthe following Riccati equation:
K ¼WþATKA�ðATKBÞ ðBTKBþΛT Þ�1ðBTKAÞ ð16Þ
(ii) Furthermore, the closed loop system with the linear optimalcontrol, uk ¼ G xk,
ekþ1 ¼ ðAþBGÞek ¼ ACLek ð17Þ
where
G¼ �ðBTKBþΛT Þ�1ðBTKAÞ ð18Þ
is asymptotically stable and all of the eigen-values of theclosed-loop system matrix ACL is inside the unique circle.
3.1. Chaos control of the Rossler system
In this section the stated procedure is applied for stabilizing thefirst order UPO of the Rossler chaotic system where its state spaceequations are
_x¼ y�x_y¼ xþay_z¼ xz�czþb
ð19Þ
In [28], for the following parameters, the chaotic behavior hasbeen reported for this system.
a¼ 0:2; b¼ 0:2; c¼ 5:7 ð20Þ
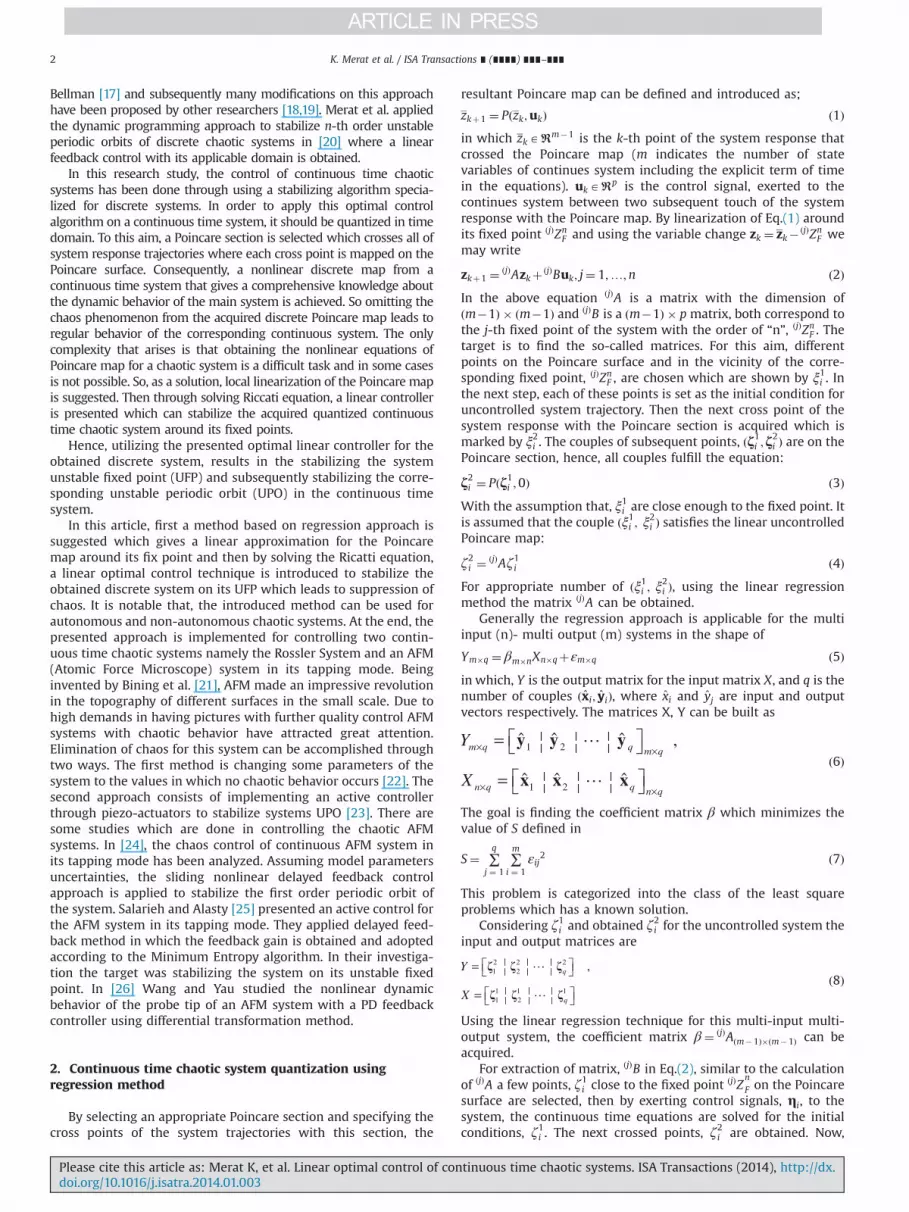
The chaotic attractor of this system for the parameters mentionedin Eq.(20) has been plotted in phase space and shown in Fig. 1. Itcan be seen that if the plane, y¼ 0 is chosen as the Poincaresection, it will cross all the trajectories of system solution.
In this analysis, to suppress chaos in the system, the first orderUPO has been considered which its corresponding unstable fixedpoint is
x1F ¼ ½ �7:21138 0 0:01556 � ð21Þ
To obtain the linearized Poincare map around the fixed pointrepresented in Eq. (21), a 5� 5 square mesh with the length of0:005 is defined. By choosing the center of each square as ζ1i , therewill be 25 points. For each of these points, considering Eqs. (3) and(19), the next crossed point, ζ2i is found.
In this way, regarding Eq.(8) the input and output matrices canbe built and subsequently the matrix ð1ÞA for the linearizedPoincare map represented in Eq.(2) can be achieved, which is
ð1ÞA ¼ �2:4065 0:18629�0:29134 0:22554� 10�3
� �ð22Þ
Similar to the matrix ð1ÞA, the procedure is done for extraction ofmatrix ð1ÞB. For the selected ζ1i , the next touch points, ζ2i arecomputed for the control signals, ηjA �0:25 ; �0:1 ;f 0:1 ; 0:25g.
-10-5
05
1015
-15-10
-50
5100
5
10
15
20
25
xy
z
Fig. 1. Chaotic attractor of the Rossler system.
K. Merat et al. / ISA Transactions ∎ (∎∎∎∎) ∎∎∎–∎∎∎ 3
Please cite this article as: Merat K, et al. Linear optimal control of continuous time chaotic systems. ISA Transactions (2014), http://dx.doi.org/10.1016/j.isatra.2014.01.003i

Assembling the input and output matrices as stated in Eq.(9)and using the regression method give
ð1ÞB ¼ �1:35457�0:25846� 10�2
� �ð23Þ
To design the linear controller, the weighting parameters,W ¼ Identity; Λ¼ 0:1 are chosen, then the Riccati equations,presented in Eq.(16), is solved for K. Finally the linear optimalcontroller coefficient, G, is acquired by Eq.(18). Note that thesolution of the Riccati equations is unique because the couplesðA;BÞ and ðA;W1=2Þ are controllable and observable respectively.
Fig. 2 shows the result of simulation in the phase space, inwhich the system's stabilized periodic orbit has been shown withbold line and the transient response of the system has beenmarked with dotted lines.
The time series of the system states, x, y, z have been plottedand represented in Fig. 3 under the implementation of theacquired linear controller. The results show after about 25 s, thesystem has been stabilized on its periodic orbit.
Fig. 4 illustrates the control signal. It is notable that controlsignal is constant within the time interval between two successiveresponse touches to the Poincare section.
3.2. Chaos control in atomic force microscope (AFM)
In this section, the active chaos control of AFM in its Tappingmode has been inspected. This has been performed throughstabilizing its fixed point located on the Poincare section via thepresented method in this investigation. AFM is a time periodicsystem which is excited by an external actuator with constant
period. This tool has a vast application in different realms such asinspecting surface properties, changing the material in Nano scale,identification, and assembling nano-particles. AFM in its tappingmode is composed of a micro-cantilever beam which is under theperiodic base excitation. There is nonlinear forces resultant frominternal molecular forces exerted on the tip of this beam. Toachieve high quality of picture using AFM, the base excitation ofsystem should be intensified, because further amplitude of excita-tion, gives picture with high horizontal and vertical resolution.
An increase in the amplitude of excitation can affect thestability of system where in some cases results in chaotic behavior[29,30] and consequently low quality in achieved pictures. This isthe essence why the act of inspecting AFM's performance andeliminating the chaotic behavior is vital.
3.2.1. Governing equations of AFMA forced dynamical system which resembles the performance
of AFM in its tapping mode has been introduced and studied in[22]. The cantilever-tip-sample system is modeled by a spherewhich is suspended by a spring and damper. Accordingly, thedynamics of this system is formulated by the equation:
meq €x tð Þþbeq _x tð Þþkeqx tð Þ ¼ Fo cos ωtð Þþ f IL ð24Þin which, considering spring-sphere mass-damper model forcantilever, The cantilever tip position is given by x measured fromthe equilibrium position, ω is the excitation frequency and meq isthe equivalent mass at the tip of beam. beq, keq and Fo CosðωtÞrepresent the equivalent damping coefficient, spring coefficientand exerted force on the base respectively. Finally based on theLennard-Jones potential [31], f IL that comprises the Van der Waalsforces can be described by
f IL ¼A1R
180ðZþxÞ8� A2R
6ðZþxÞ2ð25Þ
where Z is the distance between the equilibrium position of thecantilever tip point and the sample when only the gravity is actingon it. x is the distance of the case from the fixed frame (Base) andA1;A2 are Hamacker constants and, R is the radiuses of the spheremass which represents the tip point. Eq. (24) in the non-dimensional form can be formulated in a similar way as repre-sented in [31]:
€ξ1 τð Þ ¼ �δ _ξ1 τð Þ�ξ1ðτÞþ ~f cos ðΩτÞþ ~s6d
30ðαþξ1ðτÞÞ8� d
ðαþξ1ðτÞÞ2ð26Þ
Fig. 2. Transient response of the Rossler system during stabilizing its first orderUPO. The transient response (dotted line) and the 1st order UPO (bold line).
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
xy
z
time (s)
-10
0
10
0 20 40 60 80 100 120 140 160 180 200
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
Fig. 3. Time series of state variables for the Rossler system obtained throughstabilizing its first order UPO.
0 5 10 15 20 25 30 35-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Time (s)
uk
Fig. 4. The exerted control signal in stabilizing the Rossler system first order UPO.
K. Merat et al. / ISA Transactions ∎ (∎∎∎∎) ∎∎∎–∎∎∎4
Please cite this article as: Merat K, et al. Linear optimal control of continuous time chaotic systems. ISA Transactions (2014), http://dx.doi.org/10.1016/j.isatra.2014.01.003i
in which
D¼ A2R6keq
; Zs ¼ 32 ð2DÞ1=3; ω2
0 ¼keqmeq
; μ¼ beqmeq
; s¼ A1A2
� �1=2
Ω¼ ωω0; ~f ¼ F0
ω20Zs
; d¼ 427; α¼ Z
Zs; ~s ¼ s
Zs; δ¼ μ
ω0Zs; ξ1 ¼ x
Zs; ξ2 ¼ _x
ω0Zs
ð27Þwhere the derivatives also have been taken with respect to non-dimensional time ðω0t ¼ τÞ where ω0 is the system naturalfrequency.
Substituting τ with t gives:
€ξ1ðtÞ ¼ �δ _ξ1ðtÞ�ξ1ðtÞþ ~f cos ðΩtÞþ f ILðtÞ ð28Þwhere it can be written in the shape of a 3rd order differentialequation as
_ξ1ðtÞ ¼ ξ2ðtÞ_ξ2ðtÞ ¼ �δξ2ðtÞ�ξ1ðtÞþ ~f cos ðΘÞþ ~s6d
30ðαþξ1ðtÞÞ8� d
ðαþξ1ðtÞÞ2
_Θ¼Ω
ð29Þ
Generally due to the presence of the harmonic base excitation, thegoverning differential equations of the AFM system have harmonicterm which causes the system even in the absence of nonlinearterms, oscillate with a combination of natural and excitationfrequencies.
Taking into account this fact that the AFM system works intapping mode, the excitation frequency is close to its naturalfrequency, consequently the system in the absence of nonlinearforce oscillates with a frequency, close to the natural Frequency. Atthe presence of nonlinear force, when the amplitude of excitationis low, the system still will have oscillation with natural frequency[32], but increase in the excitation amplitude leads to appearanceof chaos phenomenon in system [33,34]. In this domain, differentfrequencies appear dynamically in the system where the resultantperturbed motion is a combination of periodic and semi-periodicresponses that is representative of the presence of a rich structurefrom different frequencies in chaotic attractor region.
3.2.2. Stabilizing AFM system's first order fixed pointFor the parameters:
δ¼ 0:04; ~s ¼ 0:3; α¼ 0:8; ~f ¼ 2:0; Ω¼ 1; d¼ 427
ð30Þ
The chaotic behavior has been reported for this dynamical systemin [22].
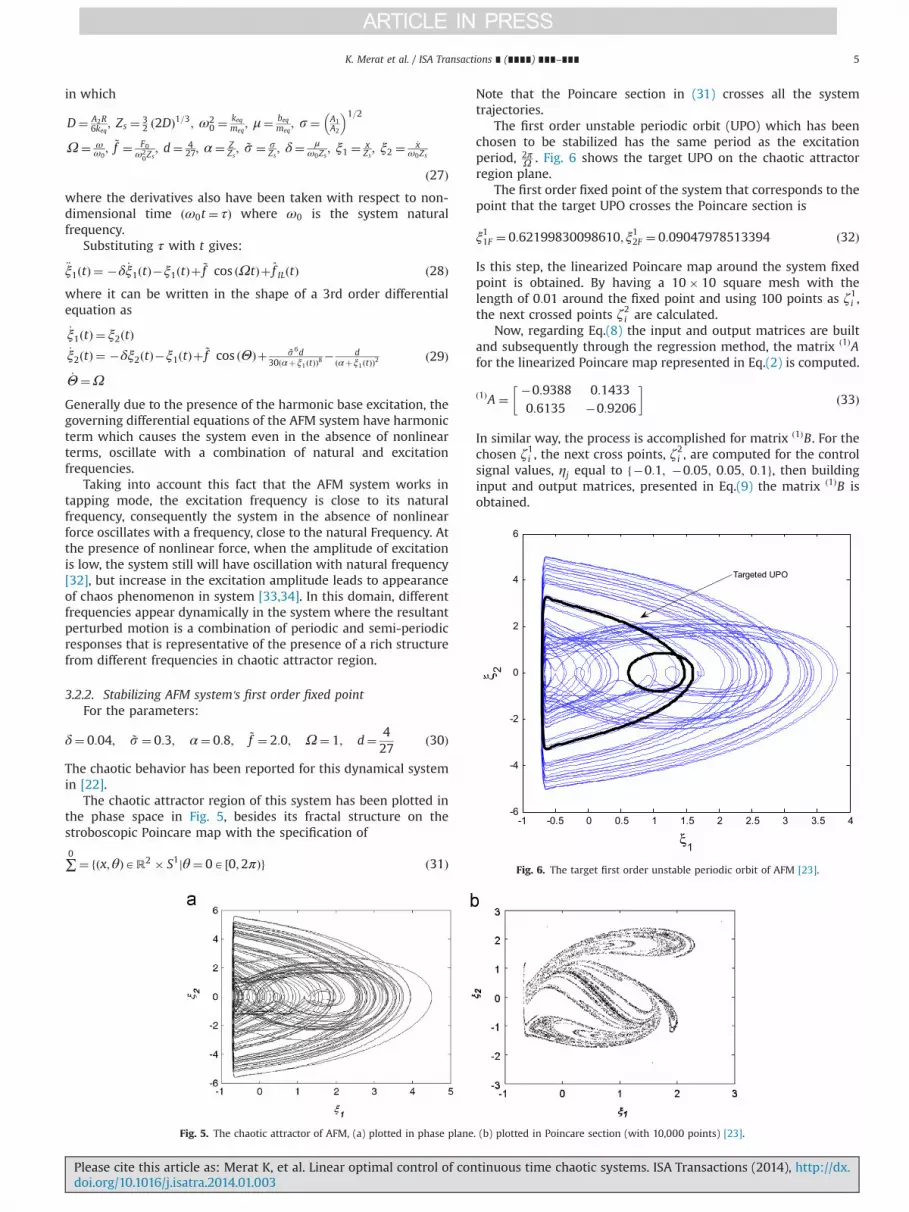
The chaotic attractor region of this system has been plotted inthe phase space in Fig. 5, besides its fractal structure on thestroboscopic Poincare map with the specification of
∑0¼ fðx;θÞAℝ2 � S1jθ¼ 0A ½0;2πÞg ð31Þ
Note that the Poincare section in (31) crosses all the systemtrajectories.
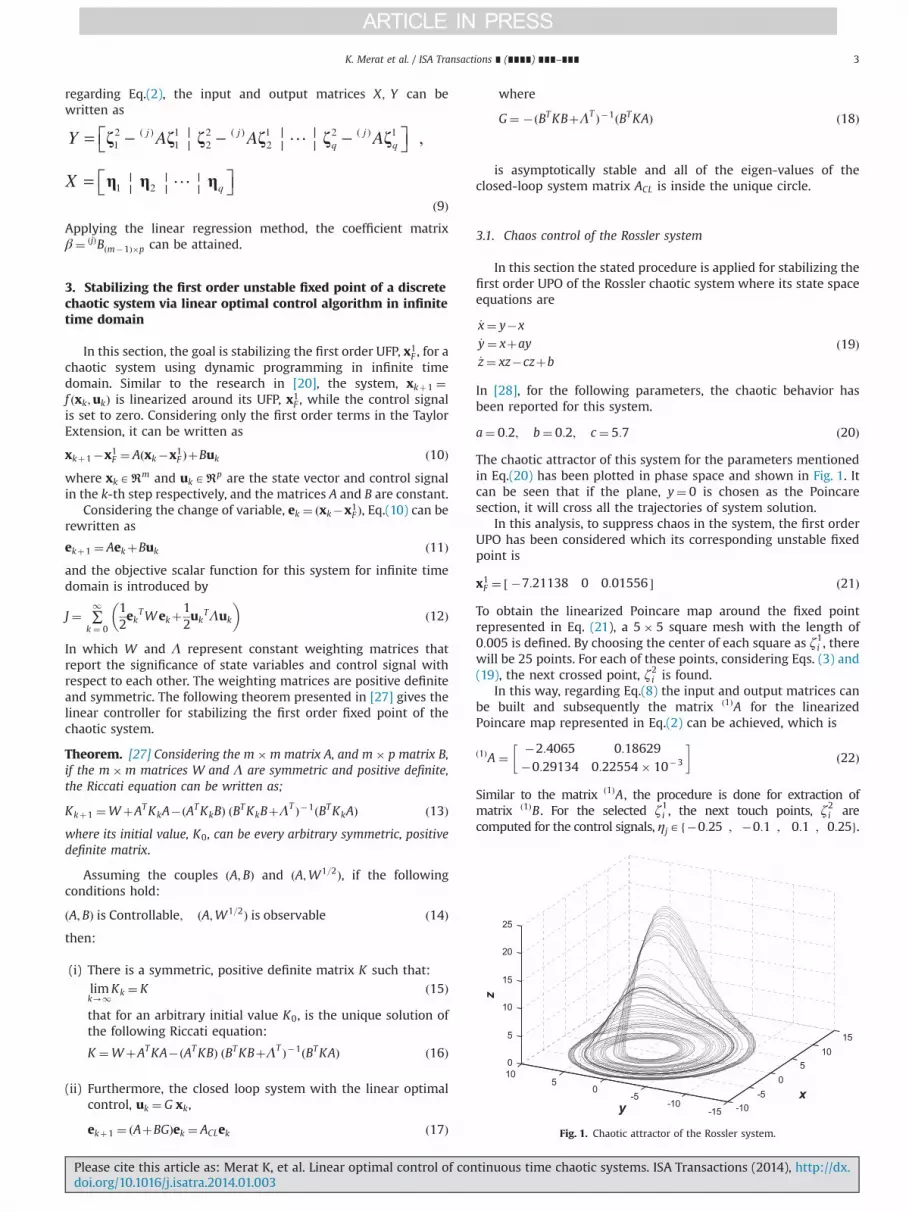
The first order unstable periodic orbit (UPO) which has beenchosen to be stabilized has the same period as the excitationperiod, 2π
Ω . Fig. 6 shows the target UPO on the chaotic attractorregion plane.
The first order fixed point of the system that corresponds to thepoint that the target UPO crosses the Poincare section is
ξ11F ¼ 0:62199830098610; ξ12F ¼ 0:09047978513394 ð32Þ
Is this step, the linearized Poincare map around the system fixedpoint is obtained. By having a 10� 10 square mesh with thelength of 0:01 around the fixed point and using 100 points as ζ1i ,the next crossed points ζ2i are calculated.
Now, regarding Eq.(8) the input and output matrices are builtand subsequently through the regression method, the matrix ð1ÞAfor the linearized Poincare map represented in Eq.(2) is computed.
ð1ÞA ¼ �0:9388 0:14330:6135 �0:9206
� �ð33Þ
In similar way, the process is accomplished for matrix ð1ÞB. For thechosen ζ1i , the next cross points, ζ2i , are computed for the controlsignal values, ηj equal to f�0:1; �0:05; 0:05; 0:1g, then buildinginput and output matrices, presented in Eq.(9) the matrix ð1ÞB isobtained.
Fig. 5. The chaotic attractor of AFM, (a) plotted in phase plane. (b) plotted in Poincare section (with 10,000 points) [23].
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4-6
-4
-2
0
2
4
6
ξ1
ξ 2
Targeted UPO
Fig. 6. The target first order unstable periodic orbit of AFM [23].
K. Merat et al. / ISA Transactions ∎ (∎∎∎∎) ∎∎∎–∎∎∎ 5
Please cite this article as: Merat K, et al. Linear optimal control of continuous time chaotic systems. ISA Transactions (2014), http://dx.doi.org/10.1016/j.isatra.2014.01.003i
As it was stated, an AFM micro-beam is clamped and in itstapping mode is excited via a piezo-actuator periodically. Suppres-sing the chaos phenomenon in this system can be done applyingthe presented linear control method through adding a feedbackcontrol signal to the exciting signal, which is created by piezo-actuator. It is assumed that both state variables ξ1ðtÞ and ξ2ðtÞ,which represent the position and velocity of the tip respectively,are measurable. In this way, the non-dimensional governingequation of motion in the presence of control force u can bewritten as
€ξ1ðtÞ ¼ �δ _ξ1ðtÞ�ξ1ðtÞþ ~f cos ðΩtÞþ f ILðtÞþuðtÞ ð34Þ
As it was pointed out before, via the stroboscopic Poincare map,the system is quantized in the time t ¼ k2πΩ ; k¼ 1;2;…. Supposingξ1ðkÞ and ξ2ðkÞ are the state variables in the kth cross, the control
low is considered to have the following feedback form:
uPoincareðkÞ ¼ �Gðx � xf Þ ¼ �G1½ξ1ðkÞ�ξ1F ��G2½ξ2ðkÞ�ξ2F �uðtÞ ¼ uPoincareðkÞ k2πΩ rto ðkþ1Þ2πΩ
ð35Þ
Using the introduced linear optimal control algorithm, withconsideration of weighting parameters W ¼ Identity; Λ¼ 0:5,and substituting the obtained result into Eq.(18), the optimallinear coefficient, G is acquired:
G¼ �0:2236;0:2141½ � ð36Þ
Similar to the discussed Rossler system, the couples ðA;BÞ andðA;W1=2Þ for AFM system are also controllable and observablerespectively, hence uniqueness of solution for the Riccati equationis assured.
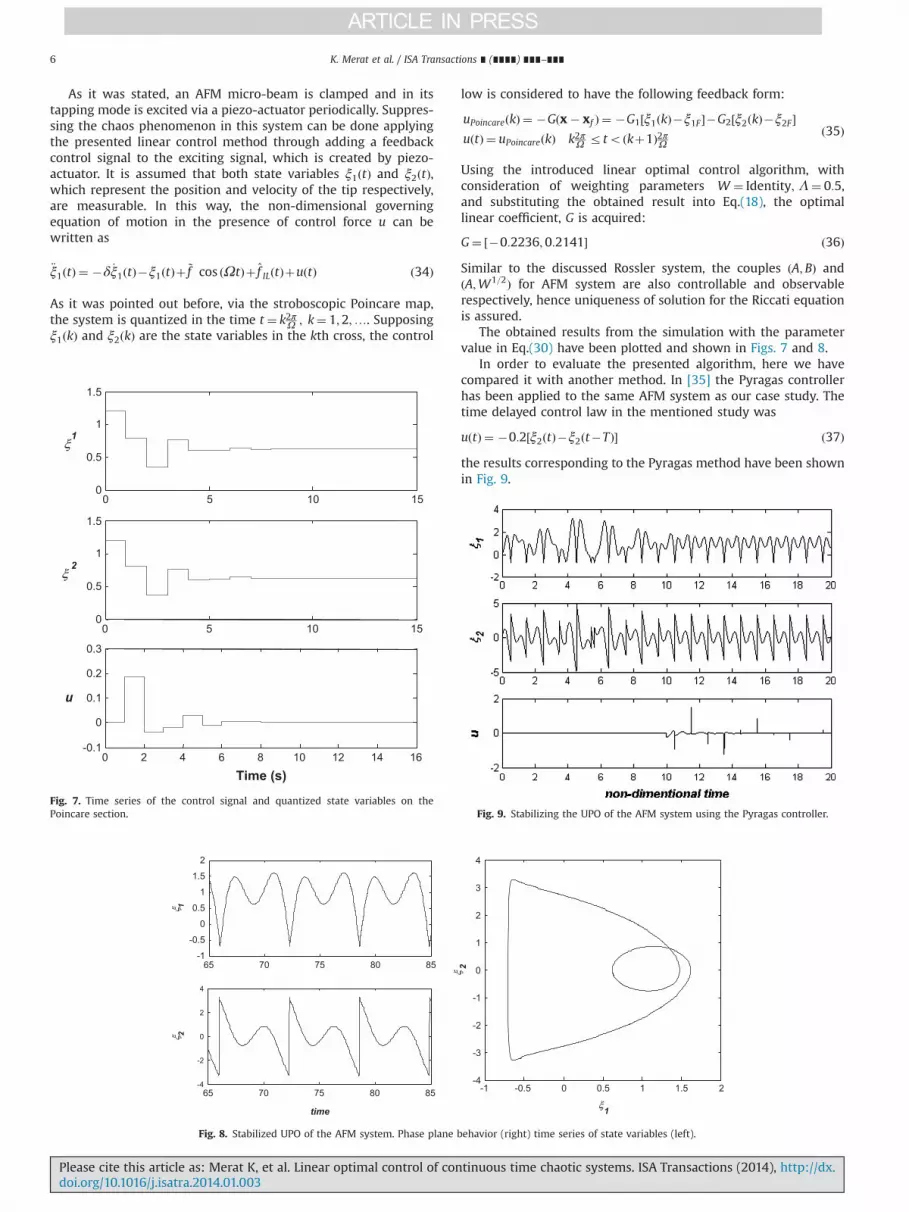
The obtained results from the simulation with the parametervalue in Eq.(30) have been plotted and shown in Figs. 7 and 8.
In order to evaluate the presented algorithm, here we havecompared it with another method. In [35] the Pyragas controllerhas been applied to the same AFM system as our case study. Thetime delayed control law in the mentioned study was
uðtÞ ¼ �0:2½ξ2ðtÞ�ξ2ðt�TÞ� ð37Þ
the results corresponding to the Pyragas method have been shownin Fig. 9.
0 2 4 6 8 10 12 14 16-0.1
0
0.1
0.2
0.3
u
Time (s)
5 10 150
0.5
1
1.5
ξ1
ξ2
0
5 10 1500
0.5
1
1.5
Fig. 7. Time series of the control signal and quantized state variables on thePoincare section.
65 70 75 80 85-1
-0.5
0
0.5
1
1.5
2
ξ 1
-4
-2
0
2
4
ξ 2
time
-1 -0.5 0 0.5 1 1.5 2-4
-3
-2
-1
0
1
2
3
4
ξ 2
ξ1
65 70 75 80 85
Fig. 8. Stabilized UPO of the AFM system. Phase plane behavior (right) time series of state variables (left).
Fig. 9. Stabilizing the UPO of the AFM system using the Pyragas controller.
K. Merat et al. / ISA Transactions ∎ (∎∎∎∎) ∎∎∎–∎∎∎6
Please cite this article as: Merat K, et al. Linear optimal control of continuous time chaotic systems. ISA Transactions (2014), http://dx.doi.org/10.1016/j.isatra.2014.01.003i

As it can be seen, both methods, including the presentedapproach in this study and the Pyragas method have stabilizedthe target UPO, but the comparison indicates, even though thePyragas technique has stabilized the system faster, but the magni-tude of control parameter in our introduced technique is lower.
4. Conclusion
In this paper, the first order periodic orbit stabilization of acontinuous time system was accomplished using a suboptimalcontroller. At first, using the concept of Poincare map the systemwas converted to a discrete time system. Because of the difficultyin extraction of the nonlinear Poincare map, the regressionmethod was used for extracting a linear approximation of thePoincare map around a fixed point. By solving the Riccati equation,a linear optimal control algorithm in infinite time horizon wasobtained for stabilizing the discrete chaotic system on its firstorder fixed point. At the end, the presented procedure was appliedon the continuous Rossler system which is an autonomous systemand also on the chaotic AFM system which is non-autonomous.The simulation results showed that this algorithm can stabilizecontinuous time chaotic systems on their UPOs. Finally theperformance of the proposed technique was compared with thePyragas method.
References
[1] Li TY, York JA. Period three imply chaos. Am Math Mon 1975;82:985–92.[2] Ott E, Grebogi C, Yorke JA. Controlling chaos. Phys Rev Lett 1990;64:1196–9.[3] Shinbort T, Ott E, Grebogi C, Yorke JA. Using chaos to direct trajectories to
targets. Phys Rev Lett 1990;65:3215–8.[4] Shinbort T, Grebogi C, Ott E, Yorke JA. Using small perturbation to control
chaos. Nature 1993;386:411–7.[5] Pyragas K. Continuous control of chaos by self-controlling feedback. Phys Lett
A 1992;170:421–8.[6] Li S, Li Y, Liu B, Murray T. Model-free control of Lorenz chaos using an
approximate optimal control strategy. Commun Nonlinear Sci Numer Simul2012;17(12):4891–900.
[7] Zhang J, Tang W. Optimal control for a class of chaotic systems. J Appl Math.2012;2012.
[8] Jayaram A, Tadi M. Synchronization of chaotic systems based on SDRE method.Chaos Solitons Fractals 2006;28:707–15.
[9] Hilborn RC. Chaos and nonlinear dynamics. New York: Oxford UniversityPress; 1994.
[10] Cao YJ A. Nonlinear adaptive approach to controlling chaotic oscillators. PhysLett A 2000;270:171–6.
[11] Layeghi H, Arjmand MT, Salarieh H, Alasty A. Stabilizing periodic orbits ofchaotic systems using fuzzy adaptive sliding mode control. Chaos SolitonsFractals 2008;37:1125–35.
[12] Salarieh H, Shahrokhi M. Indirect adaptive control of discrete chaotic systems.Chaos Solitons Fractals 2007;34:1188–201.
[13] Fuh CC, Tsai HH, Yao WH. Combining a feedback linearization controller with adisturbance observer to control a chaotic system under external excitation.Commun Nonlinear Sci Numer Simul 2011;17(3):1423–9.
[14] Zhang J, Tang W. Control and synchronization for a class of new chaoticsystems via linear feedback. Nonlinear Dyn 2009;58:675–86.
[15] Zhang J, Tang W. Analysis and control for a new chaotic system via piecewiselinear feedback. Chaos Solitons Fractals 2009;42:2181–90.
[16] Zhang J, Tang W. A chaotic system with Hölder continuity. Nonlinear Dyn2010;62:761–8.
[17] Bellman R. Dynamic programming. Princeton NJ.: Princeton University Press;1957.
[18] Bjornberg J, Diehl M. Approximate robust dynamic programming and robustlystable MPC. Automatica 2006;42:777–82.
[19] de Cooman G, Troffaes MCM. Dynamic programming for deterministicdiscrete-time systems with uncertain gain. Int J Approx Reason 2005;39:257–78.
[20] Merat K, Salarieh H, Alasty A. Implementation of dynamic programming forchaos control in discrete systems. J Comput Appl Math 2009;233:531–44.
[21] Bining G, Gerber C, Quate C. Atomic Force Microscope. Phys Rev Lett 1986:930.[22] Ashhab M, Salapaka M, Dahleh M, Mezic I. Dynamical analysis and control of
micro-cantilevers. Automatica 1999;35:1663–70.[23] Liaw CY, Bishop SR. Nonlinear heave-roll coupling and slip rolling. Nonlinear
Dyn 1995;8:197–211.[24] Manffra EF, Caldas IL, Viana RL. Stabilizing periodic orbits in a chaotic
semiconductor laser. Chaos Solitons Fractals 2003;15:327–41.[25] Rudin W. Principles of mathematical analysis. New York: McGraw-Hill; 1976.[26] Fradkov AL, Evans RJ. Control of chaos: methods and applications in engineer-
ing. Annu Rev Control 2005;29:33–56.[27] Bertsekas DP. Dynamic programming and optimal control. Athena Scientific;
1995.[28] Rossler OE. An equation for continuous chaos. Phys Lett A 1976:57.[29] Basso M, Giarrk L, Dahleh M, Mezic I. Numerical analysis of complex dynamics
in atomic force microscopes. In: Proceedings of the 1998 IEEE InternationalConference on, IEEE, Control Applications, 1998; 2: 1026-1030.
[30] Basso M, Giarrk L, Dahleh M, Mezic I. Complex dynamics in a harmonicallyexcited Lennard-Jones oscillator: micro-cantilever-sample interaction in scan-ning probe microscopes. J Dyn Syst Meas Control 2000;122:240–5.
[31] Ashhab M, Salapaka M, Dahleh M, Mezic I. Melnikov-based dynamical analysisof microcantilevers in scanning probe microscopy. Nonlinear Dyn 1999;20:197–220.
[32] Pishkenari HN, Jalili N, Alasti A, Megdari A. Non-linear dynamic analysis andchaotic behavior in atomic force microscopy. IDETC/CIE, DETC2005-84822.Long Beach, California, USA2005.
[33] Hu QQ, Chen LQ. Bifurcation and chaos in atomic force microscope. ChaosSolitons Fractals 2007;33:711–5.
[34] Hu S, Raman A. Chaos in atomic force microscopy. Phys Rev Lett 2006;96:36107.
[35] Yamasue K, Hikihara T. Control of microcantilevers in dynamic force micro-scopy using time delayed feedback. Rev Sci Instrum 2006;77:053703.
K. Merat et al. / ISA Transactions ∎ (∎∎∎∎) ∎∎∎–∎∎∎ 7
Please cite this article as: Merat K, et al. Linear optimal control of continuous time chaotic systems. ISA Transactions (2014), http://dx.doi.org/10.1016/j.isatra.2014.01.003i





























