Embed Size (px)
Citation preview
1 23
Mathematics in Computer Science ISSN 1661-8270 Math.Comput.Sci.DOI 10.1007/s11786-013-0161-x
Intuitionistic Fuzzy Logic Control forHeater Fans
Muhammad Akram, Saadia Shahzad,Arif Butt & Abdul Khaliq
1 23
Your article is protected by copyright and
all rights are held exclusively by Springer
Basel. This e-offprint is for personal use only
and shall not be self-archived in electronic
repositories. If you wish to self-archive your
article, please use the accepted manuscript
version for posting on your own website. You
may further deposit the accepted manuscript
version in any repository, provided it is only
made publicly available 12 months after
official publication or later and provided
acknowledgement is given to the original
source of publication and a link is inserted
to the published article on Springer's
website. The link must be accompanied by
the following text: "The final publication is
available at link.springer.com”.
Math.Comput.Sci.DOI 10.1007/s11786-013-0161-x Mathematics in Computer Science
Intuitionistic Fuzzy Logic Control for Heater Fans
Muhammad Akram · Saadia Shahzad ·Arif Butt · Abdul Khaliq
Received: 27 May 2013 / Accepted: 11 September 2013© Springer Basel 2013
Abstract The concept of intuitionistic fuzzy systems, including intuitionistic fuzzy sets and intuitionistic fuzzylogic, was introduced by Atanassov as a generalization of fuzzy systems. Intuitionistic fuzzy systems provide amechanism for communication between computing systems and humans. In this paper, we describe the developmentof an intuitionistic fuzzy logic controller for heater fans, developed on the basis of intuitionistic fuzzy systems.Intuitionistic fuzzy inference systems and defuzzification techniques are used to obtain crisp output (i.e., speed ofthe heater fan) from an intuitionistic fuzzy input (i.e., ambient temperature). The speed of the heater fan is calculatedusing intuitionistic fuzzy rules applied in an inference engine using defuzzification methods.
Keywords Intuitionistic fuzzy sets · Intuitionistic fuzzy logic · Intuitionistic fuzzy logic controller · Defuzzification
Mathematics Subject Classification 93C42
Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3 Basic Structure of the Proposed Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4 The Proposed Intuitionistic Fuzzy Inference System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Intuitionistic Fuzzifer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2 Intuitionistic Fuzzy Inference Engine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.3 Defuzzification Using Takagi Sugani Formula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
This work was completed with the support of Principal of PUCIT (Syed Mansoor Sarwar).
M. Akram (B) · S. Shahzad · A. Butt · A. KhaliqPunjab University College of Information Technology, University of the Punjab, Old Campus, 54000 Lahore, Pakistane-mail: [email protected]; [email protected]
S. Shahzade-mail: [email protected]
A. Butte-mail: [email protected]
A. Khaliqe-mail: [email protected]
Author's personal copy

M. Akram et al.
5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Introduction
In a conventional mathematical model, the conventional control theory is sufficient to specify crisp (well-defined)behaviors. Conventional models are not well suited for non-linear problems, specially problems that are more rele-vant to everyday life activities including driving a car, controlling a washing machine, and controlling a heater fan.These tasks are trivial for humans to handle but difficult for the conventional control machines to handle. Fuzzy logicis the solution for handling such tasks. Fuzzy logic uses a human-like knowledge-based fuzzy-rule-base to controlsuch tasks. Early work in fuzzy control was motivated by a desire to mimic the control actions of an experiencedhuman operator and to obtain smooth interpolation between discrete outputs that would normally be obtained. Theinterpolation aspect of fuzzy control has led to the viewpoint where fuzzy systems are seen as smooth functionapproximation schemes. Most frequently used fuzzy logic controllers are: Mamdani (linguistic) controller usuallyused as a direct closed-loop controller and, Takagi–Sugeno controller typically used as a supervisory controller.Presently, science and technology are featured with complex processes and phenomena for which complete infor-mation is not always available. For such cases, mathematical models are developed to handle the type of systemscontaining elements of uncertainty. A large number of these models are based on an extension of the ordinary settheory, namely, fuzzy set theory. The notion of fuzzy sets was introduced by Zadeh [17] as a method of representinguncertainty and vagueness. Since then, the theory of fuzzy sets has become a vigorous area of research in differ-ent disciplines, including medical and life sciences, management sciences, social sciences, engineering, statistics,graph theory, artificial intelligence, signal processing, multiagent systems, pattern recognition, robotics, computernetworks, expert systems, decision making and automata theory [20].
In 1983, Atanassov [5] introduced the concept of intuitionistic fuzzy sets as a generalization of fuzzy sets.Atanassov added in the definition of fuzzy set a new component which determines the degree of nonmembership.Fuzzy sets give the degree of membership of an element in a given set; the nonmembership of degree equalsone minus the degree of membership. Intuitionistic fuzzy sets, which are higher order fuzzy sets, give both adegree of membership and a degree of nonmembership, which are more-or-less independent of each other; theonly requirement is that the sum of these two degrees is not greater than 1. Application of higher order fuzzy setsmakes the solution-procedure more complex, but if the complexity of computation-time, computation-volume andmemory-space are not of concern then we can achieve better results. Agarwal et al. [1] presented the design of aprobabilistic intuitionistic fuzzy rule based controller. In this paper, we present the design of an intuitionistic fuzzylogic controller for heater fans on the basis of intuitionistic fuzzy systems. Intuitionistic fuzzy inference systemsand defuzzification techniques are used to obtain crisp output (i.e., speed of the heater fan) from an intuitionisticfuzzy input (i.e., ambient temperature). The speed of the heater fan is calculated using intuitionistic fuzzy rulesapplied in an inference engine using defuzzification methods. We use standard definitions and terminologies in thispaper. For notations, terminologies and applications that are not mentioned in the paper, the readers are referred to[2,3,5–17,19–22].
2 Preliminaries
In this section, we review some elementary concepts whose understanding is necessary to fully benefit from thispaper.
Definition 2.1 [5] An Intuitionistic Fuzzy Set A in X is defined as an object of the form A = {〈x, μA(x), νA(x)〉 :x ∈ X}, where the functions μA : X → [0, 1] and νA : X → [0, 1] define the degree of membership and the degreeof nonmembership of the element x ∈ X , respectively, and for every x ∈ X in A, 0 ≤ μA(x) + νA(x) ≤ 1 holds.
Author's personal copy

Intuitionistic Fuzzy Logic Control for Heater Fans
Definition 2.2 [5] For every common fuzzy subset A on X , intuitionistic fuzzy index of x in A is defined asπA(x) = 1 −μA(x)− νA(x). It is also known as the degree of hesitancy or the degree of uncertainty of the elementx in A. Obviously, for every x ∈ X , 0 ≤ πA(x) ≤ 1.
Definition 2.3 [8] An intuitionistic fuzzy number (IFN) AI is
(i) an intuitionistic fuzzy subset of the real line,(ii) normal, that is, there is some x0 ∈ R such that μ AI (x0) = 1, ν AI (x0) = 0,
(iii) convex for the membership function μ AI (x),
that is, μ AI (νx1 + (1 − ν)x2) ≥ min(μ AI (x1), μ AI (x2)) for every x1, x2 ∈ R , ν ∈ [0, 1],(iv) concave for the nonmembership function ν AI (x), that is, ν AI (νx1 + (1 − λ)x2) ≤ max(ν AI (x1), ν AI (x2))
for every x1, x2 ∈ R, λ ∈ [0, 1].Definition 2.4 [8] A triangular intuitionistic fuzzy number (TriIFN) AI is an intuitionistic fuzzy set in R withmembership function and nonmembership function as follows:
μ˜AI (x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
x − (a − α)
αfor x ∈ [a − α, a],
a + β − x
βfor x ∈ [a, a + β],
0 otherwise
and
ν˜AI (x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
a − x
α′ for x ∈ [a − α
′, a],
x − a
β′ for x ∈ [a, a + β
′ ],1 otherwise
where a ∈ R, α, β, α′, β
′ ≥ 0 such that α ≥ α′
and β ≤ β′.
The symbolic representation of TriIFN is ˜AIT ri I F N = [a; α, β; α
′, β
′ ]. Here α and β are called left and
right spreads of the membership function μ˜AI (x), respectively; α
′and β
′represent left and right spreads of the
nonmembership function ν˜AI (x), respectively.
Definition 2.5 [7] The support of an intuitionistic fuzzy set ˜AI on R is the crisp set of all x ∈ R such thatμ
˜AI (x) > 0, ν˜AI (x) > 0 and μ
˜AI (x) + ν˜AI (x) ≤ 1.
Definition 2.6 An intuitionistic fuzzy set A = {〈x, μA(x), νA(x)〉/x ∈ X} is called intuitionistic fuzzy normal ifthere exist at least two points x0, x1 ∈ X such that μA(x0) = 1 and νA(x1) = 1. Therefore, a given intuitionisticfuzzy set A is intuitionistic fuzzy normal if there is at least one point that surely belongs to A and at least one pointthat surely does not belong to A.
For each proposition (in the classical sense), one can assign its truth value: 1 for true and 0 for false. In case offuzzy logic this truth value is a real number in the interval [0, 1] and can be called “truth degree” of a particularproposition. In an intuitionistic fuzzy logic, Atanassov and Gargov [7] added one more value, “falsity degree”,which also is in the interval [0, 1]. Thus, one assigns to the proposition p two real numbers μp and νp with thefollowing constraint to hold:
[μp + νp ≤ 1.]Let p = (μp, νp) and q = (μq , νq) be two intuitionistic fuzzy propositions; then
• p∨
q = (max(μp, μq), min(νp, νq)),
• p∧
q = (min(μp, μq), max(νp, νq)),
• ∼ p = (νp, μp),
• p −→ q = (max(νp, μq), min(μp, νq)).
Author's personal copy
M. Akram et al.
IntuitionisticFuzzifier
Intuitionistic Fuzzy Inference EngineIntuitionistic Fuzzy Logic Rules
IntuitionisticDefuzzifier
INTUITIONISTIC FUZZY CONTROLLER
Temperature
INPUT OUTPUT
Heater FanSpeed
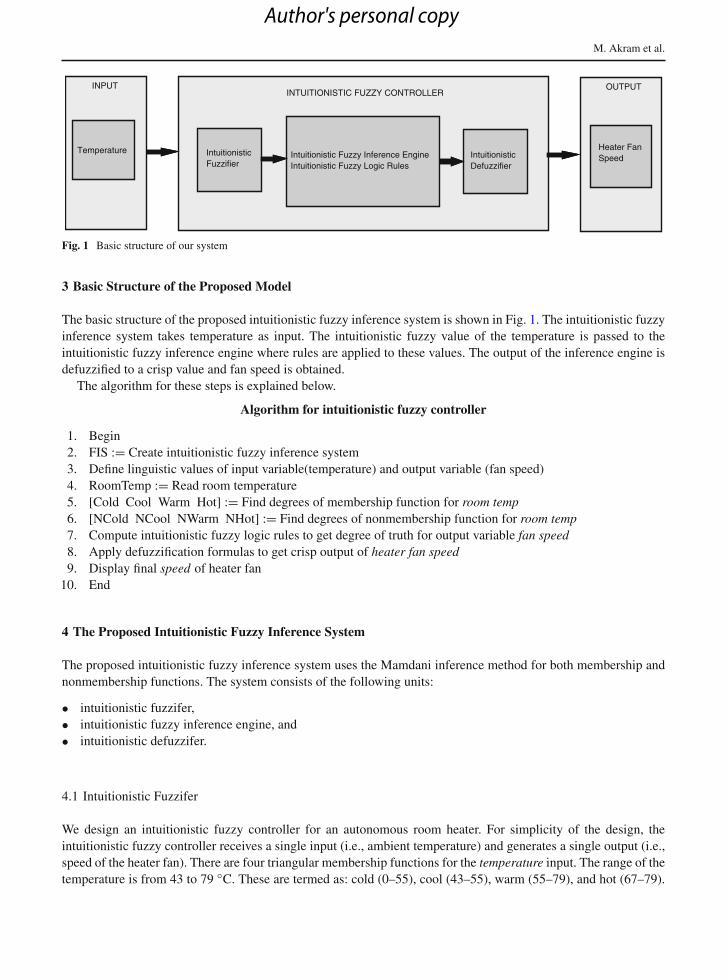
Fig. 1 Basic structure of our system
3 Basic Structure of the Proposed Model
The basic structure of the proposed intuitionistic fuzzy inference system is shown in Fig. 1. The intuitionistic fuzzyinference system takes temperature as input. The intuitionistic fuzzy value of the temperature is passed to theintuitionistic fuzzy inference engine where rules are applied to these values. The output of the inference engine isdefuzzified to a crisp value and fan speed is obtained.
The algorithm for these steps is explained below.
Algorithm for intuitionistic fuzzy controller
1. Begin2. FIS := Create intuitionistic fuzzy inference system3. Define linguistic values of input variable(temperature) and output variable (fan speed)4. RoomTemp := Read room temperature5. [Cold Cool Warm Hot] := Find degrees of membership function for room temp6. [NCold NCool NWarm NHot] := Find degrees of nonmembership function for room temp7. Compute intuitionistic fuzzy logic rules to get degree of truth for output variable fan speed8. Apply defuzzification formulas to get crisp output of heater fan speed9. Display final speed of heater fan
10. End
4 The Proposed Intuitionistic Fuzzy Inference System
The proposed intuitionistic fuzzy inference system uses the Mamdani inference method for both membership andnonmembership functions. The system consists of the following units:
• intuitionistic fuzzifer,• intuitionistic fuzzy inference engine, and• intuitionistic defuzzifer.
4.1 Intuitionistic Fuzzifer
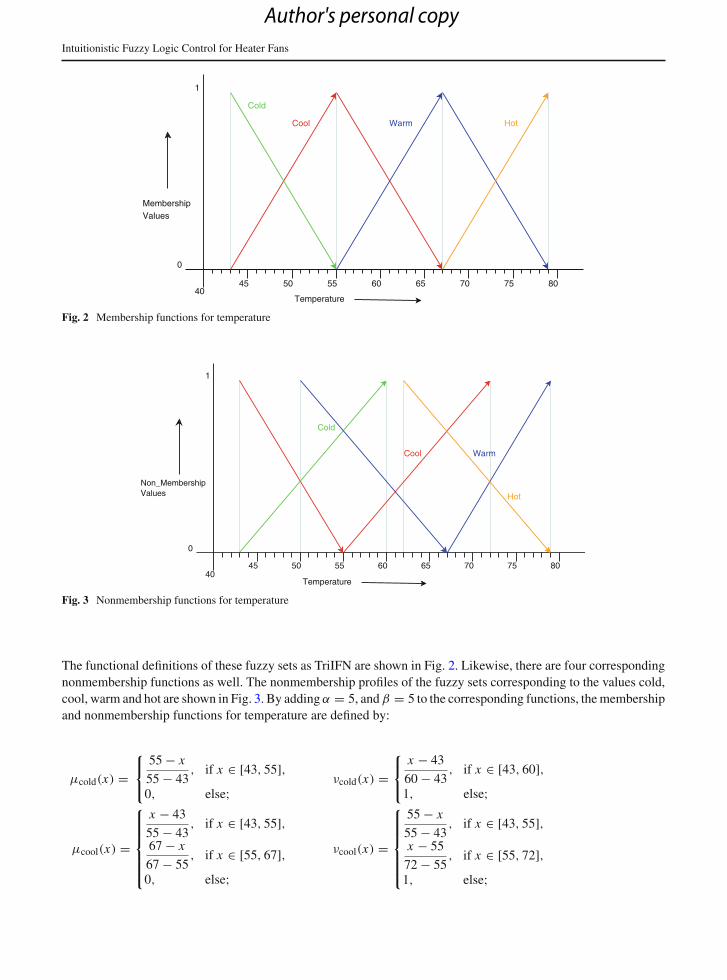
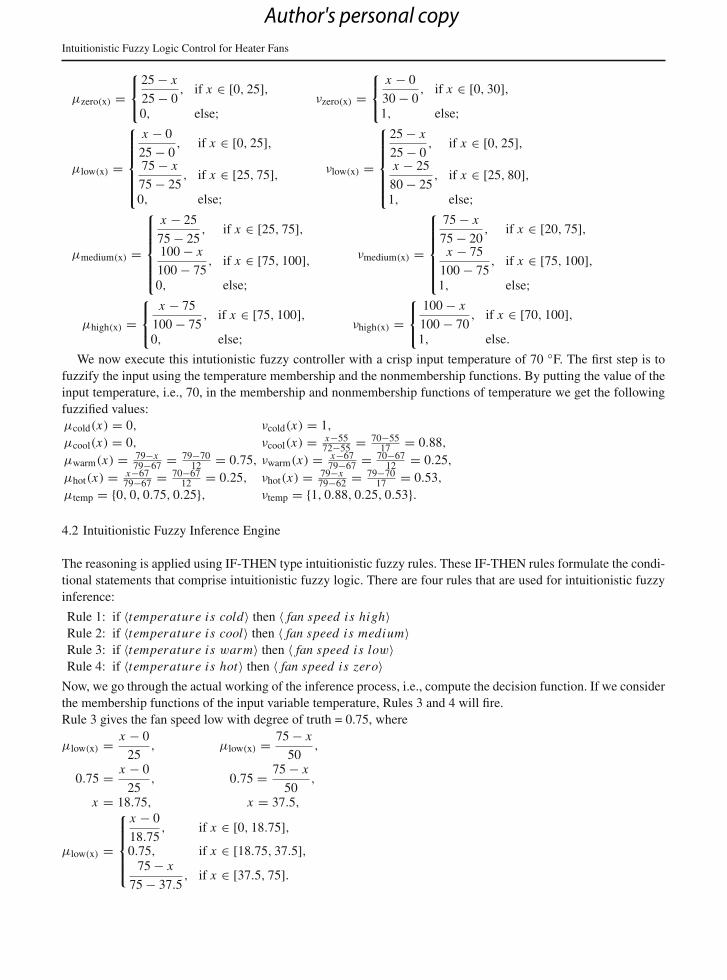
We design an intuitionistic fuzzy controller for an autonomous room heater. For simplicity of the design, theintuitionistic fuzzy controller receives a single input (i.e., ambient temperature) and generates a single output (i.e.,speed of the heater fan). There are four triangular membership functions for the temperature input. The range of thetemperature is from 43 to 79 ◦C. These are termed as: cold (0–55), cool (43–55), warm (55–79), and hot (67–79).
Author's personal copy
Intuitionistic Fuzzy Logic Control for Heater Fans
0
40
1
45 50 55 60 65 70 75 80
Cool
Cold
Warm Hot
Temperature
MembershipValues
Fig. 2 Membership functions for temperature
0
40
1
Cool
Cold
Warm
Hot
Temperature
Non_MembershipValues
45 50 55 60 65 70 75 80
Fig. 3 Nonmembership functions for temperature
The functional definitions of these fuzzy sets as TriIFN are shown in Fig. 2. Likewise, there are four correspondingnonmembership functions as well. The nonmembership profiles of the fuzzy sets corresponding to the values cold,cool, warm and hot are shown in Fig. 3. By adding α = 5, and β = 5 to the corresponding functions, the membershipand nonmembership functions for temperature are defined by:
μcold(x) =⎧
⎨
⎩
55 − x
55 − 43, if x ∈ [43, 55],
0, else;νcold(x) =
⎧
⎨
⎩
x − 43
60 − 43, if x ∈ [43, 60],
1, else;
μcool(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
x − 43
55 − 43, if x ∈ [43, 55],
67 − x
67 − 55, if x ∈ [55, 67],
0, else;
νcool(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
55 − x
55 − 43, if x ∈ [43, 55],
x − 55
72 − 55, if x ∈ [55, 72],
1, else;
Author's personal copy

M. Akram et al.
0
0
1
LowZero MediumHigh
90 100
Fan Speed
MembershipValues
10 20 30 40 50 60 70 80
Fig. 4 Membership functions for fan speed
0
0
1
10 20 30 40 50 60 70 80
Low
Zero Medium
High
90 100
Fan Speed
Non_MembershipValues
Fig. 5 Nonmembership functions for fan speed
μwarm(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
x − 55
67 − 55, if x ∈ [55, 67],
79 − x
79 − 67, if x ∈ [67, 79],
0, else;
νwarm(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
67 − x
67 − 50, if x ∈ [50, 67],
x − 67
79 − 67, if x ∈ [67, 79],
1, else;
μhot(x) =⎧
⎨
⎩
x − 67
79 − 67, if x ∈ [67, 79],
0, else;νhot(x) =
⎧
⎨
⎩
79 − x
79 − 62, if x ∈ [62, 79],
1, else.
There are four intuitionistic triangular fuzzy membership functions for the fan speed output. The range of the fanspeed is from 0 to 100 rpm. These are termed as: zero (0–25), low (0–75), medium (25–100), and high (75–100). Thefunctional definitions of these fuzzy sets as TriIFN are shown in Fig. 4. Like the membership functions, there arefour corresponding nonmembership functions as well. The nonmembership profiles of the fuzzy sets correspondingto the values zero, low, medium and high as shown in Fig. 5. By adding α = 5, and β = 5 to the correspondingfunctions, the membership and nonmembership functions for fan speed are defined by:
Author's personal copy
Intuitionistic Fuzzy Logic Control for Heater Fans
μzero(x) =⎧
⎨
⎩
25 − x
25 − 0, if x ∈ [0, 25],
0, else;νzero(x) =
⎧
⎨
⎩
x − 0
30 − 0, if x ∈ [0, 30],
1, else;
μlow(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
x − 0
25 − 0, if x ∈ [0, 25],
75 − x
75 − 25, if x ∈ [25, 75],
0, else;
νlow(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
25 − x
25 − 0, if x ∈ [0, 25],
x − 25
80 − 25, if x ∈ [25, 80],
1, else;
μmedium(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
x − 25
75 − 25, if x ∈ [25, 75],
100 − x
100 − 75, if x ∈ [75, 100],
0, else;
νmedium(x) =
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
75 − x
75 − 20, if x ∈ [20, 75],
x − 75
100 − 75, if x ∈ [75, 100],
1, else;
μhigh(x) =⎧
⎨
⎩
x − 75
100 − 75, if x ∈ [75, 100],
0, else;νhigh(x) =
⎧
⎨
⎩
100 − x
100 − 70, if x ∈ [70, 100],
1, else.
We now execute this intutionistic fuzzy controller with a crisp input temperature of 70 ◦F. The first step is tofuzzify the input using the temperature membership and the nonmembership functions. By putting the value of theinput temperature, i.e., 70, in the membership and nonmembership functions of temperature we get the followingfuzzified values:μcold(x) = 0, νcold(x) = 1,
μcool(x) = 0, νcool(x) = x−5572−55 = 70−55
17 = 0.88,
μwarm(x) = 79−x79−67 = 79−70
12 = 0.75, νwarm(x) = x−6779−67 = 70−67
12 = 0.25,
μhot(x) = x−6779−67 = 70−67
12 = 0.25, νhot(x) = 79−x79−62 = 79−70
17 = 0.53,
μtemp = {0, 0, 0.75, 0.25}, νtemp = {1, 0.88, 0.25, 0.53}.
4.2 Intuitionistic Fuzzy Inference Engine
The reasoning is applied using IF-THEN type intuitionistic fuzzy rules. These IF-THEN rules formulate the condi-tional statements that comprise intuitionistic fuzzy logic. There are four rules that are used for intuitionistic fuzzyinference:
Rule 1: if 〈temperature is cold〉 then 〈 fan speed is high〉Rule 2: if 〈temperature is cool〉 then 〈 fan speed is medium〉Rule 3: if 〈temperature is warm〉 then 〈 fan speed is low〉Rule 4: if 〈temperature is hot〉 then 〈 fan speed is zero〉
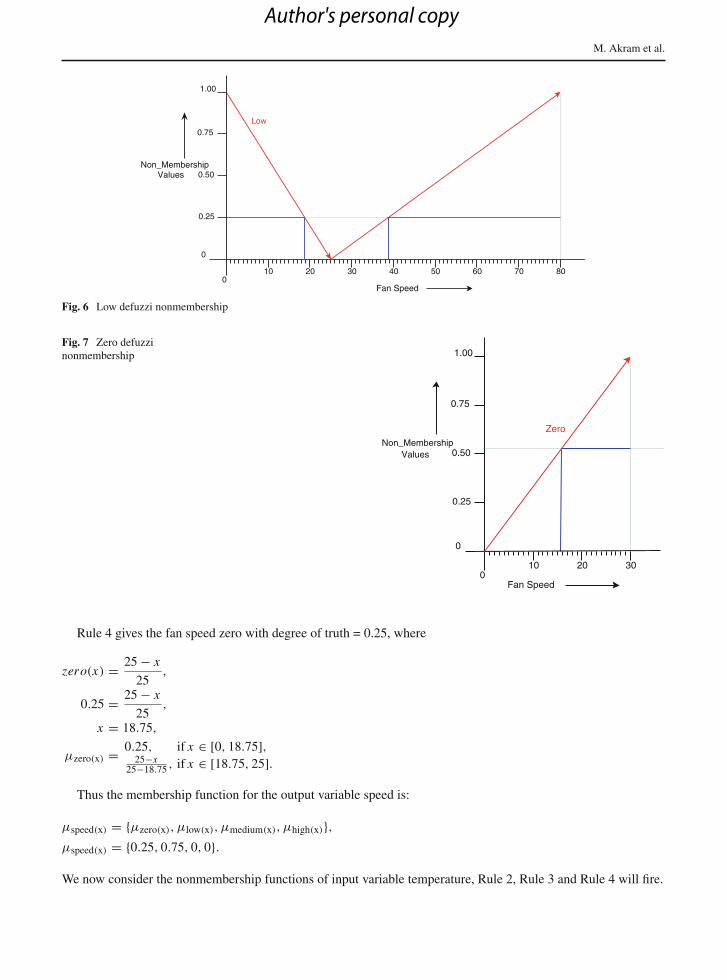
Now, we go through the actual working of the inference process, i.e., compute the decision function. If we considerthe membership functions of the input variable temperature, Rules 3 and 4 will fire.Rule 3 gives the fan speed low with degree of truth = 0.75, where
μlow(x) = x − 0
25, μlow(x) = 75 − x
50,
0.75 = x − 0
25, 0.75 = 75 − x
50,
x = 18.75, x = 37.5,
μlow(x) =
⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
x − 0
18.75, if x ∈ [0, 18.75],
0.75, if x ∈ [18.75, 37.5],75 − x
75 − 37.5, if x ∈ [37.5, 75].
Author's personal copy
M. Akram et al.
0
0
1.00
10 20 30 40 50 60 70 80
Fan Speed
Non_MembershipValues
0.25
0.50
0.75Low
Fig. 6 Low defuzzi nonmembership
Fig. 7 Zero defuzzinonmembership
0
0
1.00
10 20 30
Fan Speed
Non_MembershipValues
0.25
0.50
0.75
Zero
Rule 4 gives the fan speed zero with degree of truth = 0.25, where
zero(x) = 25 − x
25,
0.25 = 25 − x
25,
x = 18.75,
μzero(x) = 0.25, if x ∈ [0, 18.75],25−x
25−18.75 , if x ∈ [18.75, 25].
Thus the membership function for the output variable speed is:
μspeed(x) = {μzero(x), μlow(x), μmedium(x), μhigh(x)},μspeed(x) = {0.25, 0.75, 0, 0}.
We now consider the nonmembership functions of input variable temperature, Rule 2, Rule 3 and Rule 4 will fire.
Author's personal copy
Intuitionistic Fuzzy Logic Control for Heater Fans
Rule 2 gives the fan speed medium with degree of truth = 0.88, where
νmedium(x) = 75 − x
75 − 20, νmedium(x) = x − 75
100 − 75,
0.88 = 75 − x
55, 0.88 = x − 75
25,
x = 26.6, x = 97,
νmedium(x) =
⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
75 − x
75 − 20, if x ∈ [20, 26.6],
0.88, if x ∈ [26.6, 97],x − 75
100 − 75, if x ∈ [97, 100].
Rule 3 gives the fan speed low with degree of truth = 0.25, where
νlow(x) = 25 − x
25 − 0, νlow(x) = x − 25
80 − 25,
0.25 = 25 − x
25, 0.25 = x − 25
55,
x = 18.75, x = 38.75.
νlow(x) =
⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
25 − x
25 − 0, if x ∈ [0, 18.75],
0.25, if x ∈ [18.75, 38.75],x − 25
80 − 25, if x ∈ [38.75, 80].
Rule 4 gives the fan speed zero with degree of truth = 0.53, where
νzero(x) = x − 0
30 − 0,
0.53 = x
30,
x = 15.9,
νzero(x) ={
0.53, if x ∈ [0, 15.9],x−0
30−0 , if x ∈ [15.9, 30].Thus the nonmembership function for the output variable speed is:
νspeed(x) = {νzero(x), νlow(x), νmedium(x), νhigh(x)},νspeed(x) = {0.53, 0.25, 0.88, 1}.
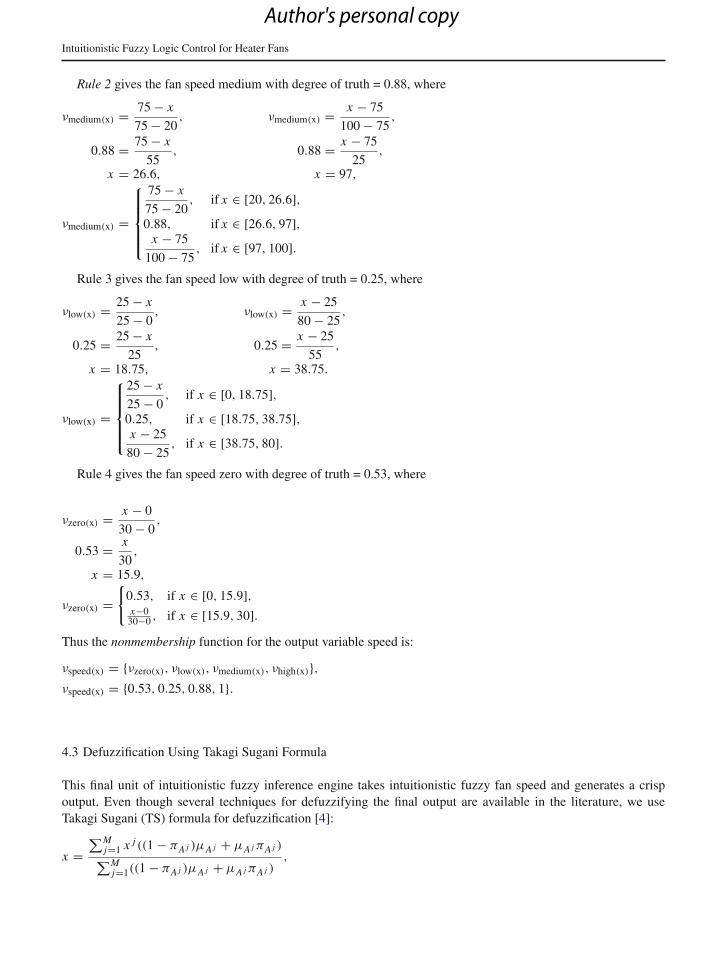
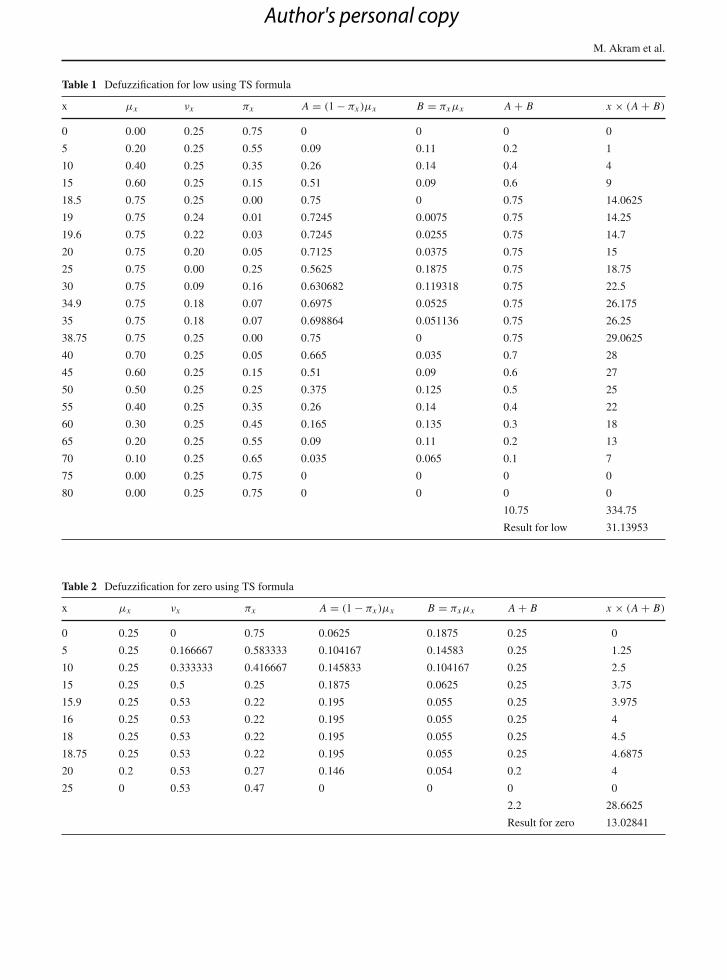
4.3 Defuzzification Using Takagi Sugani Formula
This final unit of intuitionistic fuzzy inference engine takes intuitionistic fuzzy fan speed and generates a crispoutput. Even though several techniques for defuzzifying the final output are available in the literature, we useTakagi Sugani (TS) formula for defuzzification [4]:
x =∑M
j=1 x j ((1 − πA j )μA j + μA j πA j )∑M
j=1((1 − πA j )μA j + μA j πA j ),
Author's personal copy
M. Akram et al.
Table 1 Defuzzification for low using TS formula
x μx νx πx A = (1 − πx )μx B = πxμx A + B x × (A + B)
0 0.00 0.25 0.75 0 0 0 0
5 0.20 0.25 0.55 0.09 0.11 0.2 1
10 0.40 0.25 0.35 0.26 0.14 0.4 4
15 0.60 0.25 0.15 0.51 0.09 0.6 9
18.5 0.75 0.25 0.00 0.75 0 0.75 14.0625
19 0.75 0.24 0.01 0.7245 0.0075 0.75 14.25
19.6 0.75 0.22 0.03 0.7245 0.0255 0.75 14.7
20 0.75 0.20 0.05 0.7125 0.0375 0.75 15
25 0.75 0.00 0.25 0.5625 0.1875 0.75 18.75
30 0.75 0.09 0.16 0.630682 0.119318 0.75 22.5
34.9 0.75 0.18 0.07 0.6975 0.0525 0.75 26.175
35 0.75 0.18 0.07 0.698864 0.051136 0.75 26.25
38.75 0.75 0.25 0.00 0.75 0 0.75 29.0625
40 0.70 0.25 0.05 0.665 0.035 0.7 28
45 0.60 0.25 0.15 0.51 0.09 0.6 27
50 0.50 0.25 0.25 0.375 0.125 0.5 25
55 0.40 0.25 0.35 0.26 0.14 0.4 22
60 0.30 0.25 0.45 0.165 0.135 0.3 18
65 0.20 0.25 0.55 0.09 0.11 0.2 13
70 0.10 0.25 0.65 0.035 0.065 0.1 7
75 0.00 0.25 0.75 0 0 0 0
80 0.00 0.25 0.75 0 0 0 0
10.75 334.75
Result for low 31.13953
Table 2 Defuzzification for zero using TS formula
x μx νx πx A = (1 − πx )μx B = πxμx A + B x × (A + B)
0 0.25 0 0.75 0.0625 0.1875 0.25 0
5 0.25 0.166667 0.583333 0.104167 0.14583 0.25 1.25
10 0.25 0.333333 0.416667 0.145833 0.104167 0.25 2.5
15 0.25 0.5 0.25 0.1875 0.0625 0.25 3.75
15.9 0.25 0.53 0.22 0.195 0.055 0.25 3.975
16 0.25 0.53 0.22 0.195 0.055 0.25 4
18 0.25 0.53 0.22 0.195 0.055 0.25 4.5
18.75 0.25 0.53 0.22 0.195 0.055 0.25 4.6875
20 0.2 0.53 0.27 0.146 0.054 0.2 4
25 0 0.53 0.47 0 0 0 0
2.2 28.6625
Result for zero 13.02841
Author's personal copy

Intuitionistic Fuzzy Logic Control for Heater Fans
where
μA j =n
∧
i=1
μA j
i(x),
νA j =n
∨
i=1
νA j
i(x),
πA j = 1 − μA j − νA j .
Table 1 shows the calculations for low and Table 2 shows the calculations for zero. The result for low is334.751.075 = 31.14 and result for zero is 28.66
2.2 = 13.03. By computing the average of the above two values, thefan-speed comes out to be 22.08 rpm.
5 Conclusions
An intuitionistic fuzzy control system is a control system based on intuitionistic fuzzy logic mathematical systemthat analyzes analog input values in terms of logic variables that take on continuous values between 0 and 1.Intuitionistic fuzzy logic control is a methodology bridging artificial intelligence and traditional control theory.This methodology is usually applied in only those cases where accuracy is not of high importance. By the use ofintuitionistic fuzzy logic control, we have been able to obtain speeds for a heater fan for different types of ambienttemperature. In other words, the situation analysis ability has been incorporated in the heater fan that makes it muchmore automatic compared to normal fans.
Acknowledgments The authors are highly grateful to the Editor-in-Chief, Professor Dongming Wang, and the referees for theirvaluable comments and suggestions.
References
1. Agarwal, M., Biswas, K.K., Hanmandlu, M.: Probabilistic intuitionistic fuzzy rule based controller. ICARA, 214–219 (2011)2. Akram, M., Dudek, W.A.: Intuitionistic fuzzy hypergraphs with applications. Inf. Sci. 218, 182–193 (2013)3. Alcalá, R., Casillas, J., Cordón, O., González, A., Herrera, F.: A genetic rule weighting and selection process for fuzzy control of
heating, ventilating andair conditioning systems. Eng. Appl. Artif. Intell. 18, 279–296 (2005)4. Angelov, P.: Crispification: defuzzification over intuitionistic fuzzy sets. Bull. Stud. Exch. Fuzziness Appl. (BUSEFAL) 64,
51–55 (1995)5. Atanassov, K.T.: Intuitionistic fuzzy sets, VII ITKR’s session, Sofia. Deposed in Central Science—Technology Library of Bulgaria
Academy of Science, 1697/84 (in Bulgarian) (1983)6. Atanassov, K.T., Gargov, G.: Elements of intuitionistic fuzzy logic. Part I. Fuzzy Sets Syst. 95(1), 39–52 (1998)7. Atanassov, K.T.: Intuitionistic Fuzzy Sets: Theory and Applications, Studies in Fuzziness and Soft Computing. Physica-Verlag
Heidelberg/New York (2012)8. Ban, A.I.: Nearest interval approximation of an intuitionistic fuzzy number. In: Reusch, B. (eds.) Computational Intelligence,
Theory and Applications, pp. 229–240. Springer, New York (2006)9. Chen, S.J., Hwang, C.L.: Fuzzy Multiple Attribute Decision Making. Springer Verlag, Berlin/Heildelberg/New York (1992)
10. Ganesh, M.: Introduction to Fuzzy Sets and Fuzzy Logic. Prentice Hall of India, New Delhi (2006)11. Isizoh, A.N., Okide, S.O., Anazia, A.E., Ogu, C.D.: Temperature control system using fuzzy logic technique. Int. J. Adv. Res. Artif.
Intell. 1(3), 27–31 (2012)12. Lin, Y., Zhou, X., Gu, S., Wang, S.: The Takagi-Sugeno intuitionistic fuzzy systems are universal approximators. In: 2nd international
conference on consumer electronics, communications and networks (2012)13. Parvathi, R., Malathi, C., Akram, M., Atanassov, K.T.: Intuitionistic fuzzy linear regression analysis. Fuzzy Optim. Decis.
Mak. 12, 215–229 (2013)14. Pedrycz, W.: Fuzzy control and fuzzy systems. Research studies. Press/John Wiley, New York (1993)15. Su, X., Shi, P., Wu, L., Song, Y.-D.: A novel control design on discrete-time Takagi-Sugeno fuzzy systems with time-varying delays.
IEEE Trans. Fuzzy Syst. doi:10.1109/TFUZZ.2012.2226941
Author's personal copy

M. Akram et al.
16. Su, X., Shi, P., Wu, L., Song, Y.-D.: A novel approach to filter design for T–S fuzzy discrete-time systems with time-varyingdelay. IEEE Trans. Fuzzy Syst. 20(6), 1114–1129 (2012)
17. Zadeh, L.A.: Fuzzy sets. Inf. Control 8, 338–353 (1965)18. Zadeh, L.A.: The concept of linguistic variable and its application to approximate reasoning I. Inf. Sci. 8, 199–249 (1975)19. Zadeh, L.A.: The concept of linguistic variable and its application to approximate reasoning II. Inf. Sci. 8, 310–357 (1976)20. Zimmermann, H.-J.: Fuzzy set theory and its applications. Springer, New York (2012)21. Zou, L., Liu, X., Ruan, D., Xu, Y.: Linguistic truth-valued intuitionistic fuzzy algebra. Multiple Val. Logic Soft Comput. 18
(5–6), 445–456 (2012)22. Zou, L., Li, W., Xu, Y.: Six-element linguistic truth-valued intuitionistic reasoning in decision making. ISNN 1, 266–274 (2008)
Author's personal copy





























