Embed Size (px)
Citation preview

DISCRETE AND CONTINUOUS doi:10.3934/dcds.2013.33.xxDYNAMICAL SYSTEMSVolume 33, Number 3, March 2013 pp. X–XX
INSTABILITY OF THE PERIODIC HIP-HOP ORBIT IN THE
2N-BODY PROBLEM WITH EQUAL MASSES
Mark Lewis and Daniel Offin
Department of Mathematics, Queen’s University
Kingston, Ontario K7L 4V1, Canada
Pietro-Luciano Buono and Mitchell Kovacic
Faculty of Science, University of Ontario Institute of Technology
Oshawa, Ontario L1H 7K4, Canada
Abstract. The hip-hop orbit is an interesting symmetric periodic family of
orbits whereby the global existence methods of variational analysis applied tothe N-body problem result in a collision free solution of (1). Perturbation
techniques have been applied to study families of hip-hop like orbits bifur-cating from a uniformly rotating planar 2N-gon [4] with equal masses, or a
uniformly rotating planar 2N+1 body relative equilibrium with a large cen-
tral mass [18]. We study the question of stability or instability for symmetricperiodic solutions of the equal mass 2N -body problem without perturbation
methods. The hip-hop family is a family of Z2-symmetric action minimizing
solutions, investigated by [7, 23], and is shown to be generically hyperbolicon its reduced energy-momentum surface. We employ techniques from sym-
plectic geometry and specifically a variant of the Maslov index for curves of
Lagrangian subspaces along the minimizing hip-hop orbit to develop conditionswhich preclude the existence of eigenvalues of the monodromy matrix on the
unit circle.
1. Introduction. We consider here the problem of 2N bodies of equal masses inR3 interacting via the Newtonian potential. The equations of motion are
miqi =∂U
∂qi, i = 1, . . . , 2N, (1)
where qi ∈ R3 denotes the position, and mi the mass of the ith particle. Withconfiguration q = (q1, . . . , q2N ), the force function U(q) (negative of the potentialenergy) is defined as
U(q) =∑i<j
mimj
|qi − qj |.
The configuration spaceM is the set of all non-collision positions for the 2N bodies,with center of mass at 0,
M =
{q = (q1, . . . , q2N )
∣∣ qi ∈ R3,
2N∑i=1
miqi = 0, qi 6= qj , i 6= j
}. (2)
2010 Mathematics Subject Classification. 34C35, 34C27, 54H20.Key words and phrases. Hamiltonian, n-body problem, equivariant action integral, reduced
space, spatial and time reversing symmetry group, Lagrangian plane, Maslov index.DO partially supported by a discovery grant from NSERC of Canada.
1

2 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
The Lagrangian L : TM → R is L(q, q) =∑2Ni=1
12mi‖qi‖2 + U(q), and the
action defined on loops in the configuration manifold q ∈ H1 ([0, T ],M), is AT (q) =∫ T0L(q, q)dt.In [18] the authors study spatial perturbations from a uniformly rotating config-
uration with small equal masses on the vertices of a 2N -gon with a large stationarycentral mass, in order to construct a model for planetary rings. They considertwo kinds of spatial perturbations, which they describe as alternating and non-alternating. For the alternating perturbations, the authors consider a highly sym-metric sub-problem where the 2N bodies with equal masses are arranged at thevertices of a spatial prism which includes the 2N -gon as a special case. The config-urations of the symmetric sub-problem are described with the aid of a finite cyclicsubgroup of the orthogonal group generated by A, which consists of rotation abouta central axis of symmetry, together with reflection across the horizontal plane ofcoplanar configurations,
q = (q1, Aq1, A2q1, . . . , A
2N−1q1), q1 ∈ R3, A2N = I. (3)
In recent papers [7] and [23], with first four and then 2N equal masses mi = mj ,i, j = 1, . . . 2N , the absolute minimum of the action integral among anti-symmetricloops of class H1, with fixed period 4T (this choice of notation for the periodanticipates an additional symmetry of order 2 on the reduced space) was shown tobe a collision free, Z2-symmetric solution of the equations of motion (1), which is nota relative equilibrium and has non-zero angular momentum µ 6= 0. The minimizingcurve q satisfies the cyclic spatial symmetry q(t+2T ) = −q(t), and when the actionis restricted to configurations similar to those described in equation (3), the orbitis dubbed the hip-hop family of solutions for the equations (1).
The minimizing hip-hop family has been studied both analytically and numeri-cally [7], and using the same sub-problem as in equation (3), hip-hop-like choreo-graphic families bifurcating out of the uniformly rotating square have been studiedin a perturbative sense [4]. The numerical results show that the action minimizinghip-hop family is orbitally unstable. For uniformly rotating central configurationsof equation (1), there is a well known method to determine non-linear stability.This is the energy-momentum method [14], where the definiteness of the reducedHamiltonian at an equilibrium point of the flow on the reduced space will deter-mine the non-linear stability of the equilibrium. This method does not apply to theminimizing hip-hop family since they are not relative equilibrium solutions of theequations (1).
Roberts [21] introduces a method to study the question of stability for symmetricsolutions of the N-body problem, and applies this method to the minimizing figureeight solution [6] of the equal mass three body problem. However these resultsrequire numerics to determine the linear stability once the figure eight is locatednumerically. The eight orbit has been announced to be elliptic stable, based onnumerical evidence [21, 22, 13]. However there is no purely analytical proof of thestability of the eight, which puts the current work in perspective. The goal of thispaper is to explain how the symmetric minimization together with the geometryof the reduced symmetry group gives an analytic argument for the instability ofthe reduced minimizing hip-hop family, without recourse to numerics. Instead ofnumerics we employ a purely geometric argument for the stability analysis of thisfamily, based on a variant of the Maslov index for invariant curves of Lagrangiansubspaces.

INSTABILITY OF THE HIP-HOP ORBIT 3
More recently, there has been renewed interest in using Maslov index type ar-guments to study the question of stability, in the setting of symmetric minimizingorbits of the N-body problem [13]. The authors of this paper have shown that inthe setting of minimizing trajectories with cyclic symmetry (which is the case in thehip-hop family) instability results when the Conley-Zehnder index of the periodicorbit is an odd integer. They give an interesting formula which relates the Morseindex (which is 0 from minimization), the Conley -Zehnder index and the kernel of(S− I) which in the case of the hip-hop (S = −I) is also 0. Their formula then im-plies that the Conley-Zehnder index must therefore be zero in the case of the cyclicsymmetric hip-hop family of periodic orbits, and thus their result on instability isnot applicable. Our goal is to try to circumvent this difficulty. In this paper we willuse a Maslov index type argument which is different than the one proposed in [13].Our method differs in that we move the geometry to the reduced space and look fora geometric obstruction to the possibility of Lyapunov multipliers on the unit cir-cle. This obstruction is found in the guise of an invariant Lagrangian plane withoutfocal points for all time, once a final reduction has been applied to remove the flowdirection. Our analysis is complicated by the fact that the variational problem doesnot drop to the reduced space, and therefore while the hip-hop orbit does carrysymmetry into the reduced space, we do not assume that the reduced hip-hop orbitis (reduced) action minimizing. We will discuss this interesting point in the nextsection. The importance of finding isolated or hyperbolic periodic solutions to theproblem of non-integrability of sub-systems of equations (1) is described in [2].
The paper is organized as follows. Section 2 discusses the variational prob-lem, the symmetry reductions and a theorem answering positively the conjectureof Chenciner and Venturelli [7] that the projection of the hip-hop orbit to the re-duced configuration space is a brake orbit. Section 3 introduces some concepts fromsymplectic geometry and contains the main intermediate results leading to the in-stability theorem for the hip-hop which closes the section. Section 4 gives a quickdescription of the numerical computations and we end with an outlook on futurework.
2. The variational principle.
2.1. Preliminaries. In this section, we describe the ingredients of the variationalprinciple whose solution gives the hip-hop family of periodic orbits. The equationsof motion (1) are equivalent to the Euler-Lagrange equations associated with theaction functional
A(q) =
∫ 4T
0
2N∑i=1
1
2‖qi‖2 + U(q(t))dt, (4)
where the equal masses mi have been normalized, mi = 1. We consider the varia-tional problem
A(q) = infΛa
A(q), (5)
whereΛa =
{q ∈ H1(R/4TZ,M) | q(t+ 2T ) = −q(t)
}.
Due to the symmetry imposed, the variational problem (5) is equivalent to mini-mization over any time interval of length 2T with anti-periodic boundary conditionsimposed and the same function space setting:
A[−T,T ](q) = infq(T )=−q(−T )
A[−T,T ](q), (6)

4 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
where
A[−T,T ](q) =
∫ T
−T
2N∑i=1
1
2‖qi‖2 + U(q(t))dt. (7)
If an additional symmetry of order 2N is imposed on the space of loops (describedbelow), it was shown in [23] that the absolute minimum of the action functional isan interesting trajectory where the masses are located at the vertices of an “anti-prism” which undergoes non-uniform rotations and oscillations in R3. In the specialcase of four bodies, the configuration alternates between a planar rotating squarecentral configuration and a spatial tetrahedral central configuration; it is this orbitwhich was first called a ‘hip-hop’ orbit [7]. We will address here the question ofinstability of this family of periodic orbits in the 2N -body problem. The fact thatthis orbit is not a relative equilibrium is fundamental, since the energy-momentummethod [14] is not applicable in this case to determine stability or instability. Weshall pay particular attention to the symmetry structure of the reduced orbit, sincethis plays a major role in the analysis of the stability. First we describe the actionof a subgroup of O(3), and how this plays a role in the dynamic properties of thehip-hop orbits.
Consider (A, ρ) ∈ O(3)× S2N where
A =
cos(π/N) − sin(π/N) 0sin(π/N) cos(π/N) 0
0 0 −1
and ρ = (12 . . . 2N) is a cyclic permutation. The action of (A, ρ) on M is given by
(A, ρ).(q1, q2, . . . , q2N ) = (Aqρ−1(1), Aqρ−1(2), . . . , Aqρ−1(2N)).
Consider
C = FixM(Z2N )
where Z2N '〈(A, (12 . . . 2N))〉. C has elements of the form q=(q1, Aq1, . . . , A2N−1q1)
and so the motion of bodies 2, . . . , 2N −1 depend only on q1; the dynamics in C arereduced to the motion of the first body only. It is clear that C is a three dimensionalmanifold, and that the action (4), or equivalently (7), may be restricted to loops inthe manifold C.
By the principle of symmetric criticality, critical points of the action restrictedto loops in C will also be critical points in M. Specifically [23] finds (as a specialcase) a minimizing loop, in fixed time 4T , among the loops in the manifold C:
A(q) = infq∈ΛZ2N
A(q), (8)
where
ΛZ2N={q ∈ H1(R/4TZ, C) | q(t+ 2T ) = −q(t)
}.
Similarly to the pair of variational problems described in (5) and (6), we observethat q also provides the solution to the equivalent variational problem
A[−T,T ](q) = infq(−T )=−q(T )
A[−T,T ](q), q ∈ H1([−T, T ], C), (9)
where A[−T,T ](q) is defined in (7).Translating to the Hamiltonian perspective, in configuration qi and canonical mo-
mentum coordinates pi = ∂L∂qi
, define the Hamiltonian H(q, p) =∑2Ni=1
12mi‖pi‖2 −

INSTABILITY OF THE HIP-HOP ORBIT 5
U(q). The dynamics of (1) are equivalent to those of the Hamiltonian vector fieldXH(q, p) on T ∗M,
qi =1
mipi, pi =
∂U
∂qi, i = 1, . . . , 2N. (10)
In particular, the action of (A, ρ) on M lifts on momentum coordinates to
(A, ρ).(p1, p2, . . . , p2N ) = (Apρ−1(1), Apρ−1(2), . . . , Apρ−1(2N))
forming symplectic symmetries on T ∗M generated by (A, ρ) where A = diag(A,A).Then T ∗C = Fix T∗M(Z2N ), and for q(t) in C we denote the corresponding phasecurve in T ∗C by (q(t), p(t)).
Figure 1. Qualitative diagram of the hip-hop configuration foreight masses.
2.2. Group actions and symmetry reduction. Letting Γ = O(3) × S2N , theHamiltonian functionH is Γ-invariant and is also invariant under the anti-symplecticsymmetry R = diag(I,−I). From the invariance property of H, it is straightfor-ward to check that equation (10) has reversing symmetry group G = Γ × Z2(R)where Γ is the spatial symmetry group.
The normalizer subgroup NΓ(Z2N ) of Z2N in Γ is the largest subgroup of Γwhich leaves the submanifold C invariant (but not necessarily fixed). NΓ(Z2N ) '(SO(2) o D2N )× Z2(k) where SO(2) is the group consisting of matrices
Rθ =
cos θ − sin θ 0sin θ cos θ 0
0 0 1
D2N is generated by (A, (12 . . . 2N)), (κ, (2(2N)), ...(N(N + 2))),κ = diag(1,−1, 1), and k = diag(1, 1,−1). Of course, elements of NΓ(Z2N ) lift tosymplectic symmetries on T ∗C.
The effective action of NG(Z2N ) = NΓ(Z2N ) × Z2(R) on T ∗C is given by theWeyl group
W (Z2N )=NG(Z2N )/Z2N '(SO(2)oZ2(κ, (2(2N)), ...(N(N+2)))
)×Z2(k)×Z2(R).
The action of these elements on q1 ∈ R3 is given directly by the matrices k and κ,and the elements of SO(2).
The SO(2) action on C generates an equivariant momentum map J : T ∗C →T ∗1 SO(2) defined by
〈J(pq), ξ〉 = 〈pq, vξ(q)〉, ξ ∈ T1SO(2), vξ(q) =d
dtetξq.

6 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
Let µ 6= 0 be the angular momentum of the phase curve (q(t), p(t)). The reducedspace is J−1(µ)/Gµ, where Gµ is the isotropy subgroup of SO(2) which leavesthe momentum level set µ = J(q, p) invariant. Because elements of SO(2) areof the form Rθ, using the identification of T1SO(3) with R3 we can write ξ =(0, 0, α), meaning µ = (q × p)ξ. Thus Gµ = SO(2). The reduced space J−1(µ)/Gµis symplectic and the reduced flow on it projects from the flow on the invariantmanifold J−1(µ).
The actions of −I, k and κ in cylindrical coordinates are
−I.(r, θ, z) = (r, θ + π,−z), k.(r, θ, z) = (r, θ,−z), κ.(r, θ, z) = (r,−θ, z).
Using the projection τ : T ∗C → J−1(µ)/Gµ, τ(r, θ, z, R,Θ, Z) = (r, z, R, Z), we findthat on J−1(µ)/Gµ the −I and k actions are identical and the action of κ is trivial.Therefore, the projection of the action of the Weyl group W (Z2N ) on J−1(µ)/Gµis the group D2(S,R) where S = diag(σ,−σ) with σ = diag(1,−1). Both S and Rare anti-symplectic symmetries.
2.3. The hip-hop orbit in reduced space. Our goal is to describe the dynamicalproperties of the solution to (9) corresponding to the hip-hop solution. The relativeequilibrium solutions of (1) are uniform rotations of a planar central configurationq0 and thus consist of those orbits which project under τ to an equilibrium pointof the reduced flow. In the case of the planar 2N-body problem with equal masses,this would consist of uniformly rotating 2N-gon solutions or indeed the uniformrotating solutions for any such central configuration.
Lemma 2.1. The manifold C has a global coordinate chart, with cylindrical co-ordinate functions (r, θ, z). The reduced space J−1(µ)/Gµ is symplectomorphic toT ∗(C/S1), with canonical cotangent coordinates (r, z, R, Z) and canonical symplec-tic form ω = dr ∧ dR + dz ∧ dZ. The reduced Hamiltonian in these coordinatesis
H(r, z, R, Z)=1
2
(R2 +
µ2
r2+ Z2
)− 1
2
2N−1∑k=1
(4r2 sin2
(kπ
2N
)+((−1)k − 1
)2z2
)−1/2
.
(11)Moreover, H is D2(S,R)-invariant.
Proof. The movement of the 2N bodies in the space C is determined entirely bythe motion of the first body. This motion is unrestricted in R3 except for r = 0: apoint q 6= 0 on the vertical axis corresponds to two simultaneous colliding clustersof N bodies each and is thus excluded by definition (2) of M, and of course totalcollision at q = 0 is also excluded. Therefore C is diffeomorphic to R3/{r = 0}, andthe cylindrical coordinates of the first body provide a global coordinate system forC.
In [4] is is shown that the Lagrangian on TC which governs the motion of thefirst mass is
L(r, θ, z, r, θ, z)=1
2(r2 + r2θ2 + z2) +
1
2
2N−1∑k=1
(4r2 sin2
(kπ
2N
)+((−1)k − 1
)2z2
)−1/2
.
The Lagrangian L is invariant under the action of S1 on C, and the correspondingangular momentum µ = r2θ is a conserved quantity. Setting µ equal to the non-zeroangular momentum of the hip-hop orbit (the solution to (8) and (9)) and applyingthe Legendre transform on T (C/S1), we come to the reduced Hamiltonian H on

INSTABILITY OF THE HIP-HOP ORBIT 7
T ∗(C/S1) which corresponds with the energy per mass. The D2 invariance of H iseasily verified.
We remark that we can now define an amended potential function on C/S1 (thenegative of the force function) by
Uµ(r, z) =1
2
µ2
r2− 1
2
2N−1∑k=1
(4r2 sin2
(kπ
2N
)+((−1)k − 1
)2z2
)−1/2
. (12)
The fact that the solution of the variational problems (8) and (9) is actually acollision-free loop in the manifold C is a delicate fact which is proven in [23]. Thefact that the angular momentum µ of the hip-hop orbit is non-zero, amounts toshowing that the solution q(t) is not a loop in a vertical plane of R3 ([7], Lemma4).
Before we move on to describe the hip-hop orbit in the reduced space we com-ment on the corresponding reduced variational problem, which uses the amendedpotential. In the coordinates of C, we denote the minimizing loop q(t), −T ≤ t ≤ T ,of the variational problem (9) by
q(t) = (r(t), θ(t), z(t)) .
The corresponding loop in the reduced configuration space C/S1 is simply x(t) =(r(t), z(t)) on the same time interval −T ≤ t ≤ T . The cyclic symmetry of thehip-hop in C/S1 is generated by the orthogonal group element σ:
x(t+ 2T ) = σx(t). (13)
The possibility arises that the loop x(t) in the reduced space is a minimizer of thereduced action with the Lagrangian L replaced by the reduced Lagrangian (usingthe fixed value of the angular momentum µ), with the corresponding amended po-tential Uµ(r, z) and the anti-symmetric boundary conditions on the interval [−T, T ]replaced by the boundary conditions x(T ) = σx(−T ). Though tempting to imaginesuch a correspondence, there is no proof of this. Indeed it seems unlikely to be truesince there is no reason to assume that a variation in the reduced space correspond-ing to these boundary conditions over the time interval [−T, T ] would correspond inthe un-reduced space to a variation with anti-periodic boundary conditions on thesame time interval. Thus there is no reason to conclude that the reduced hip-hopis action minimizing with the boundary conditions (13).
Continuing with the discussion of the reduced space, x(t) is the configurationcomponent of a corresponding integral curve
γ(t) = (x(t), y(t)) = τ(q(t), p(t)) = (r(t), z(t), R(t), Z(t))
of the reduced Hamiltonian vector field on T ∗(C/S1) with Hamiltonian H (seeLemma (2.1)). The Hamiltonian is conserved along γ(t), and we consider the energysurface H−1(h) and its projection into the Hill’s region
Nh = {x ∈ C/S1 | Uµ(x) ≤ h},
where the amended potential is given in (12). The boundary of the Hill’s regionconsists of the simple closed curve in R2 where Uµ(x) = h. Recall that a brake orbitis an orbit of the Hamiltonian vector field XH restricted to the level set H−1(h),which projects under the canonical mapping π : T ∗(C/S1) −→ C/S1 to a trajectorywhich intersects the boundary of Nh in two distinct points, and which otherwise

8 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
runs through the interior of Nh. Such an orbit of period 4T is known to intersectthe boundary in times t0 and t0 + 2T , see [17].
Theorem 2.2. If q(t), −T ≤ t ≤ T , minimizes the action A[−T,T ] on the function
space H1([−T, T ], C) as in (9), then the corresponding loop x(t) = π ◦ τ(q(t), p(t)),−2T ≤ t ≤ 2T , is a brake orbit in the Hill’s region Nh.
Proof. q(t) is an anti-symmetric loop in C; in polar coordinates the anti-symmetrycondition takes the form
r(t+ 2T ) = r(t), θ(t+ 2T ) = θ(t) + π, z(t+ 2T ) = −z(t).
The projection x(t) of the minimizing curve into the reduced configuration spaceC/S1 is then symmetric across the r axis. The loop must therefore intersect theaxis; without loss of generality we assume x(0) = x(2T ) = (r0, 0). Note that q(−T )and q(T ) in C are distinct points in the horizontal plane which differ only by arotation by π. Now we claim that the orbit x(t) cannot intersect itself transversallyat that point. Suppose it does intersect transversally, and consider the followingtwo paths in C constructed by recombining segments of the minimizer q(t):
q1(t) =
{q(t) −T ≤ t ≤ 0,Bq(2T − t) 0 < t ≤ T, q2(t) =
{q(2T − t) −T ≤ t ≤ 0,Bq(t) 0 < t ≤ T,
where B(r, θ, z) = (r, θ + π, z). Applying this rotation ensures continuity of q1(t)and q2(t) at t = 0, but the transversality assumption means the paths are notsmooth at t = 0. The projections of q1(t) and q2(t) in the reduced space appear tobe defined by switching between branches of x(t) at the intersection point.
Note that both q1(t) and q2(t) satisfy the boundary conditions of the variationalproblem (9). The Lagrangian is invariant under reversal of the velocity which allowsus to compute the action of each of these curves:
A[−T,T ](q1) = 2
∫ 0
−TL(q, ˙q)dt, A[−T,T ](q2) = 2
∫ T
0
L(q, ˙q)dt.
Figure 2. An anti-symmetric loop in TC whose projection inT (C/S1) has a transverse self-intersection (inset).
It follows that
mini=1,2
A[−T,T ](qi) ≤ A[−T,T ](q),
INSTABILITY OF THE HIP-HOP ORBIT 9
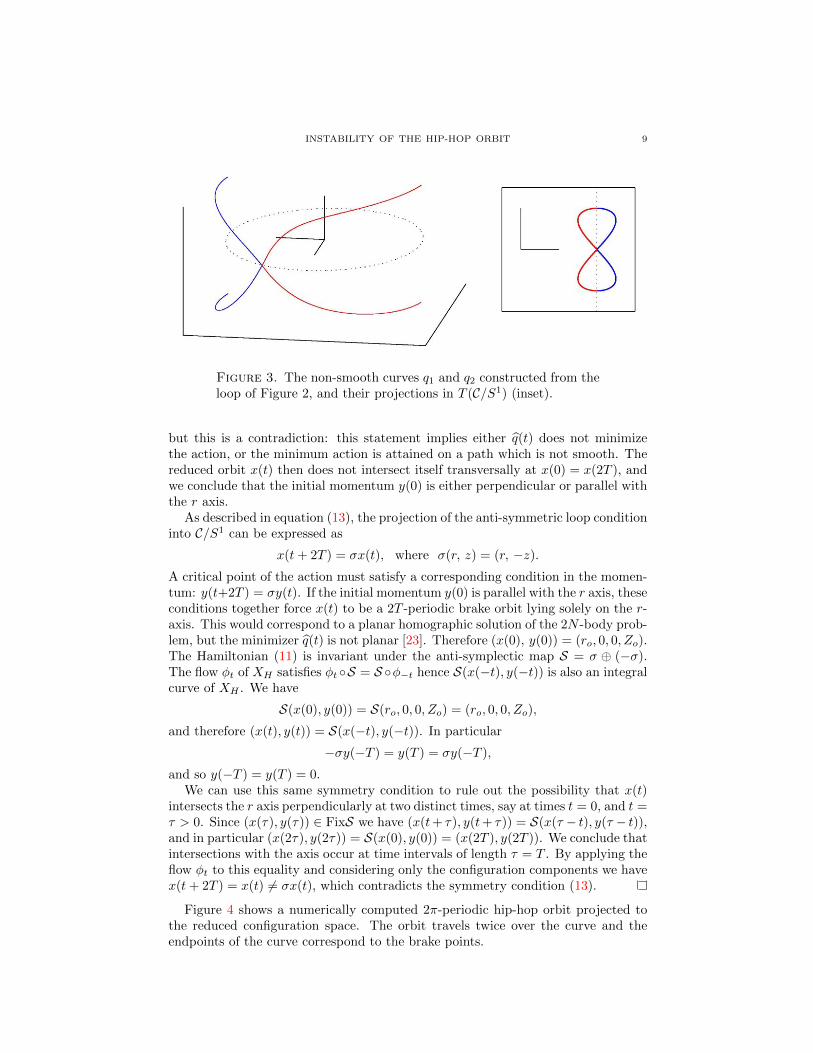
Figure 3. The non-smooth curves q1 and q2 constructed from theloop of Figure 2, and their projections in T (C/S1) (inset).
but this is a contradiction: this statement implies either q(t) does not minimizethe action, or the minimum action is attained on a path which is not smooth. Thereduced orbit x(t) then does not intersect itself transversally at x(0) = x(2T ), andwe conclude that the initial momentum y(0) is either perpendicular or parallel withthe r axis.
As described in equation (13), the projection of the anti-symmetric loop conditioninto C/S1 can be expressed as
x(t+ 2T ) = σx(t), where σ(r, z) = (r, −z).A critical point of the action must satisfy a corresponding condition in the momen-tum: y(t+2T ) = σy(t). If the initial momentum y(0) is parallel with the r axis, theseconditions together force x(t) to be a 2T -periodic brake orbit lying solely on the r-axis. This would correspond to a planar homographic solution of the 2N -body prob-lem, but the minimizer q(t) is not planar [23]. Therefore (x(0), y(0)) = (ro, 0, 0, Zo).The Hamiltonian (11) is invariant under the anti-symplectic map S = σ ⊕ (−σ).The flow φt of XH satisfies φt ◦S = S ◦φ−t hence S(x(−t), y(−t)) is also an integralcurve of XH . We have
S(x(0), y(0)) = S(ro, 0, 0, Zo) = (ro, 0, 0, Zo),
and therefore (x(t), y(t)) = S(x(−t), y(−t)). In particular
−σy(−T ) = y(T ) = σy(−T ),
and so y(−T ) = y(T ) = 0.We can use this same symmetry condition to rule out the possibility that x(t)
intersects the r axis perpendicularly at two distinct times, say at times t = 0, and t =τ > 0. Since (x(τ), y(τ)) ∈ FixS we have (x(t+ τ), y(t+ τ)) = S(x(τ − t), y(τ − t)),and in particular (x(2τ), y(2τ)) = S(x(0), y(0)) = (x(2T ), y(2T )). We conclude thatintersections with the axis occur at time intervals of length τ = T . By applying theflow φt to this equality and considering only the configuration components we havex(t+ 2T ) = x(t) 6= σx(t), which contradicts the symmetry condition (13).
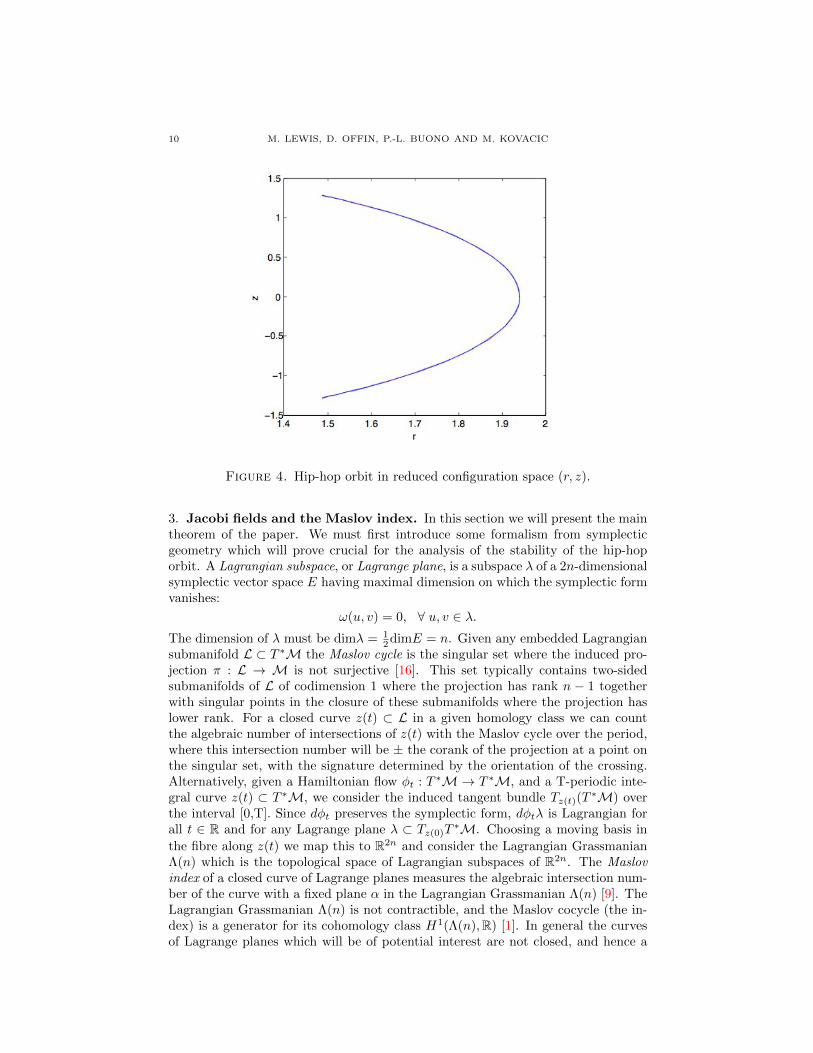
Figure 4 shows a numerically computed 2π-periodic hip-hop orbit projected tothe reduced configuration space. The orbit travels twice over the curve and theendpoints of the curve correspond to the brake points.
10 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
Figure 4. Hip-hop orbit in reduced configuration space (r, z).
3. Jacobi fields and the Maslov index. In this section we will present the maintheorem of the paper. We must first introduce some formalism from symplecticgeometry which will prove crucial for the analysis of the stability of the hip-hoporbit. A Lagrangian subspace, or Lagrange plane, is a subspace λ of a 2n-dimensionalsymplectic vector space E having maximal dimension on which the symplectic formvanishes:
ω(u, v) = 0, ∀ u, v ∈ λ.The dimension of λ must be dimλ = 1
2dimE = n. Given any embedded Lagrangiansubmanifold L ⊂ T ∗M the Maslov cycle is the singular set where the induced pro-jection π : L → M is not surjective [16]. This set typically contains two-sidedsubmanifolds of L of codimension 1 where the projection has rank n − 1 togetherwith singular points in the closure of these submanifolds where the projection haslower rank. For a closed curve z(t) ⊂ L in a given homology class we can countthe algebraic number of intersections of z(t) with the Maslov cycle over the period,where this intersection number will be ± the corank of the projection at a point onthe singular set, with the signature determined by the orientation of the crossing.Alternatively, given a Hamiltonian flow φt : T ∗M→ T ∗M, and a T-periodic inte-gral curve z(t) ⊂ T ∗M, we consider the induced tangent bundle Tz(t)(T
∗M) overthe interval [0,T]. Since dφt preserves the symplectic form, dφtλ is Lagrangian forall t ∈ R and for any Lagrange plane λ ⊂ Tz(0)T
∗M. Choosing a moving basis in
the fibre along z(t) we map this to R2n and consider the Lagrangian GrassmanianΛ(n) which is the topological space of Lagrangian subspaces of R2n. The Maslovindex of a closed curve of Lagrange planes measures the algebraic intersection num-ber of the curve with a fixed plane α in the Lagrangian Grassmanian Λ(n) [9]. TheLagrangian Grassmanian Λ(n) is not contractible, and the Maslov cocycle (the in-dex) is a generator for its cohomology class H1(Λ(n),R) [1]. In general the curvesof Lagrange planes which will be of potential interest are not closed, and hence a

INSTABILITY OF THE HIP-HOP ORBIT 11
correction term must be added to the index [9, 19]. A more in-depth discussion ofthe Maslov index will not be necessary; to determine the stability of the hip-hop or-bit it will suffice to examine the evolution under the Hamiltonian flow of a carefullychosen Lagrange plane associated with the symmetric boundary conditions. Theapproach taken is similar to the arguments in [20] used to prove certain symmetricorbits in the isosceles three body problem are hyperbolic.
Let φt denote the flow of the Hamiltonian vector field XH corresponding tothe reduced Hamiltonian (11), and denote (x, y) = (r(0), z(0), R(0), Z(0)); withoutloss of generality we assume (x, y) = (r0, 0, 0, Z0) ∈ FixS, where the mappingS : T ∗(C/S1) → T ∗(C/S1) was
S = σ ⊕ (−σ), σ =
(1 00 −1
). (14)
As mentioned before, this mapping is anti-symplectic and hence the flow has thefollowing time-reversing symmetry:
φt ◦ S = S ◦ φ−t. (15)
The mapping σ can also be lifted to a symplectic symmetry σ∗ of the Hamiltonianon T ∗(C/S1),
σ∗ = σ ⊕ σ. (16)
We consider the space J of Jacobi fields along the reduced hip-hop orbit γ(t) =φt(x, y) containing tangent variations
(ξ(t), η(t)) ∈ Tγ(t)T∗(C/S1), (ξ(t), η(t)) = dφt(ξo, ηo).
Let Φ denote the linearized flow at γ(0), restricted to the energy surface H−1(h)and evaluated at time t = 2T : Φ = dγ(0)φ2T |TH−1(h). The mapping Φ acts on Jby advancing the initial conditions of a Jacobi field through half of the period 4T :
Φ(ξ(0), η(0)) = (ξ(2T ), η(2T )).
P = dγ(0)φ4T |TH−1(h) = (σ∗Φ)2 is the linearized Poincare map on the energy sur-face. The periodic orbit γ(t) is non-degenerate if Ker (P − I) = XH(x, y).
Proposition 3.1. Assume the reduced hip-hop orbit γ(t) is non-degenerate. TheJacobi fields along γ(t) form a four dimensional linear symplectic space, which maybe decomposed as J = Λ1⊕Λ2, where Λ1 is a symplectic subspace containing the flowdirection XH , and Λ2 is a complementary symplectic subspace of isoenergetic Jacobifields which are transverse to the flow. We assume both Λ1 and Λ2 may be chosento be invariant under the period map P. Moreover, J contains a three dimensionalsubspace W consisting of Jacobi fields which satisfy the symmetric boundary con-ditions ξ(T ) = σξ(−T ). W contains the flow direction XH , and λ = W ∩ Λ2 is a(one dimensional) Lagrangian subspace of Λ2.
Proof. The symplectic form ω on J is defined for pairs of Jacobi fields
ω((ξ1, η1), (ξ2, η2)) = 〈ξ1(t), η2(t)〉 − 〈η1(t), ξ2(t)〉, t ∈ R,
where 〈·, ·〉 is the metric on T (T ∗(C/S1)) induced from the Euclidean metric onR2. Since the flow vector XH annihilates every direction ζ parallel to the energysurface H−1(h), ω(XH , ζ) = 0, it follows that there is a non-zero vector ν which istransverse to the energy surface H−1(h) and complementary to the flow direction,ω(XH , ν) = 1. The subspace of Jacobi fields spanned by XH and ν is a symplecticsubspace Λ1, and may be chosen to coincide with the kernel of (P − I)2 which

12 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
is always invariant under P. The complementary symplectic subspace Λ2 consistsof Jacobi fields which are everywhere tangent to H−1(h), ω(XH ,Λ2) = 0. Theassumption of non-degeneracy is not sufficient to ensure that Λ2 is invariant underP, since it allows the possibility of the geometric multiplicity of +1 as an eigenvalueof P being 1, but with algebraic multiplicity 4. In all other cases, Λ2 can be chosento be invariant under P. For the moment, Λ2 is assumed to be invariant and wewill revisit this point at the end of this section.
Since the reduced hip-hop is a brake orbit, the flow direction XH((γ(t))) satisfiesdπXH((γ(T ))) = dπXH((γ(−T ))) = 0 and this implies that the flow XH belongs toW. Now consider the (two dimensional) Lagrangian subspace Λ+
0 = T(x,y) (FixS)
of T(x,y)T∗(C/S1). Λ+
0 is spanned by the coordinate directions ∂∂r and ∂
∂Z , does not
contain the flow direction XH(x, y), and Λ+t = dφtΛ
+0 is a Lagrangian subspace of
J . Now making use of the time-reversing property (15), we have
Λ+t = dφt ◦ S(Λ+
0 ) = S ◦ dφ−t(Λ+0 ) = SΛ+
−t.
Evaluating at t = T and projecting onto the configuration components ξ using dπ,π : T ∗(C/S1)→ C/S1 being the canonical projection, we have
dπΛ+T = σ(dπΛ+
−T ).
The space W therefore contains both the flow direction and Λ+0 and therefore is at
least three dimensional. It can be further be seen thatW is four dimensional only ifγ(t) is degenerate. Λ+
t is not isoenergetic; we can easily verify that ∇H(x, y) ∈ Λ+0 .
It follows that W ∩ Λ2 = dφt(Λ+
0 ∩ T(x,y)H−1(h)
)is one dimensional.
Here we can make the general observation that the space of Jacobi fields J for thereduced flow φt embeds naturally into the space of Jacobi fields for the Hamiltonianflow φt on T ∗C. This follows since the reduced Jacobi fields correspond to variationsof the flow transverse to the directions of the group orbits vξ(q), for vectors ξ in theLie algebra of SO(2). More simply put, given a reduced Jacobi field on T ∗(C/S1),
(ξ, η) = ξ1∂
∂r+ ξ2
∂
∂z+ η1
∂
∂R+ η2
∂
∂Z,
we can always build it up into a Jacobi field on T ∗C,
(ξ, η) = ξ1∂
∂r+ ξ2
∂
∂z+ ξ3
∂
∂θ+ η1
∂
∂R+ η2
∂
∂Z+ η3
∂
∂Θ,
by solving the linearized equations
ξ3 =1
r2η3, η3 = 0. (17)
The reduced Jacobi fields J correspond to variations for φt which leave the angularmomentum invariant; the latter can be defined by setting η3 = 0 in the previ-ous equation. The angular component ξ3 is then simply a fixed rotation aroundthe z-axis. Note however that unlike the reduced flow, φt is not time reversiblewith respect to the original anti-symmetric boundary condition q(T ) = −q(−T ).These boundary conditions gave rise to the symplectic symmetry on T ∗C, S− =diag (−I,−I).
We shall be interested in isoenergetic Jacobi fields satisfying the symmetricboundary condition given in Proposition 3.1, which form another Lagrange planeΛ = W ∩ TH−1(h), spanned by the flow direction XH and the field λ describedin Proposition 3.1. A focal point of the Lagrange plane Λ is a value t = τ wheredπ : Λ|t=τ → C/S1 is not surjective, or in other words, where the intersection of Λt
INSTABILITY OF THE HIP-HOP ORBIT 13
with the vertical space Vt = Ker dπ|γ(t) is non-trivial. Times τ1 and τ2 are calledconjugate points if dφ(τ2−τ1)Vτ1 ∩ Vτ2 6= {0}. Now we can make use of the time-reversing property (15) to show that focal points of Λ must come in symmetricpairs.
Proposition 3.2. If Λ has a focal point at t = τ , then Λ has a focal point att = −τ .
Proof. The flow direction XH is vertical (only) at the brake points, at times t = ±T .Let λ(t) = (ξ(t), η(t)). If ξ(τ) = 0, then ξ(−τ) = σξ(τ) = 0 since λ(t) ∈ Λ+
t . Itremains to check the case where ξ(τ)− c dπXH(γ(τ)) = 0, c 6= 0. Then we have
ξ(−τ) = σξ(τ) = c σ(dπXH(γ(τ))
)= −c
(dπXH(γ(−τ))
),
where the final equality follows from the fact that at time t = 0, the flow directionXH(γ(0)) is contained in T(x,y) (Fix(−S)). So we have ξ(−τ)+c dπ
(XH(γ(−τ))
)=
0 and −τ is a focal point.
Proposition 3.3. On the interval −T ≤ t ≤ T the Lagrange plane Λ has focalpoints only at the brake points t = ±T .
Proof. We can verify directly that t = 0 is not a focal point of Λ. Proposition 3.2then implies that any focal points other than the brake points at ±T must appearin pairs at ±τ where 0 < τ < T . These focal points do not appear in the sameJacobi field, but in different fields of Λ as shown in the proof of Proposition 3.2.Nevertheless, in this case there are (at least) three focal points of Λ in some interval(s, s + 2T ], −T < s < −τ . This causes every other Lagrange plane in J to haveat least one moment of verticality in this interval, since the reduced system hastwo degrees of freedom [3]. In particular there must be at least one point in thisinterval which is conjugate to s. This reduced Jacobi field ζ(t) which produces such
a conjugate point can be reconstructed to give a Jacobi field ζ(t) of the un-reducedequations on the same time interval, by adding in angular components and angularmomentum components which both vanish, see equation (17). The hip-hop orbitq(t) is minimizing over (s, s+ 2T ] (indeed over any interval of length 2T ) with theanti-symmetric boundary condition q(s+ 2T ) = −q(s), hence a conjugate point inthe interior of (s, s+2T ] would contradict the property of minimization on this timeinterval.
If the endpoints s, s+ 2T are conjugate, consider extending the field ζ(t) to theinterval (s, s+4T ] by defining ζ(t+2T ) = σ∗ζ(t) for s < t ≤ s+2T . If this extensionis smooth at s+ 2T then ζ(t) must be a doubly-symmetric, 4T -periodic Jacobi field(distinct from the flow direction XH), violating the assumption that the reducedhip-hop is non-degenerate. On the other hand, if this extension is not smooth, wecan construct an un-reduced field ζ(t) on (s, s + 4T ] as before. ζ = (ξ, η) will also
be a non-smooth, piece-wise Jacobi field, and satisfies ξ(t + 2T ) = −ξ(t) for alls ≤ t ≤ s+ 2T . Recall that the hip-hop is also minimizing over intervals of length4T subject to the condition q(t + 2T ) = −q(t), however ∂2A[s,s+4T ](q)(ξ, ξ) = 0which is a contradiction.
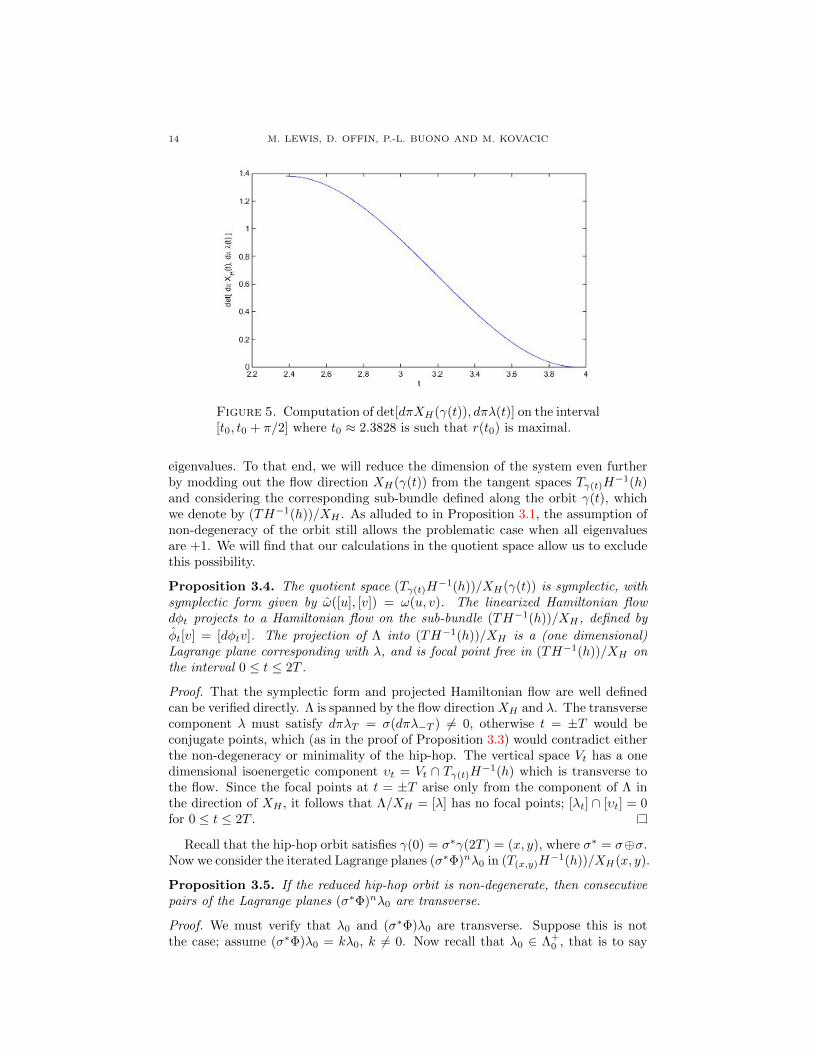
Figure 5 shows that for the numerically computed hip-hop of Figure 4, the firstfocal point in an interval of length π/2 occurs indeed at the first brake point, T =π/2. These recurring focal points along the hip-hop originate with the flow directionitself, which always corresponds with a +1 eigenvalue of the monodromy matrixP = dφ4T . To determine the stability we must investigate the other non-trivial
14 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
Figure 5. Computation of det[dπXH(γ(t)), dπλ(t)] on the interval[t0, t0 + π/2] where t0 ≈ 2.3828 is such that r(t0) is maximal.
eigenvalues. To that end, we will reduce the dimension of the system even furtherby modding out the flow direction XH(γ(t)) from the tangent spaces Tγ(t)H
−1(h)and considering the corresponding sub-bundle defined along the orbit γ(t), whichwe denote by (TH−1(h))/XH . As alluded to in Proposition 3.1, the assumption ofnon-degeneracy of the orbit still allows the problematic case when all eigenvaluesare +1. We will find that our calculations in the quotient space allow us to excludethis possibility.
Proposition 3.4. The quotient space (Tγ(t)H−1(h))/XH(γ(t)) is symplectic, with
symplectic form given by ω([u], [v]) = ω(u, v). The linearized Hamiltonian flowdφt projects to a Hamiltonian flow on the sub-bundle (TH−1(h))/XH , defined by
φt[v] = [dφtv]. The projection of Λ into (TH−1(h))/XH is a (one dimensional)Lagrange plane corresponding with λ, and is focal point free in (TH−1(h))/XH onthe interval 0 ≤ t ≤ 2T .
Proof. That the symplectic form and projected Hamiltonian flow are well definedcan be verified directly. Λ is spanned by the flow directionXH and λ. The transversecomponent λ must satisfy dπλT = σ(dπλ−T ) 6= 0, otherwise t = ±T would beconjugate points, which (as in the proof of Proposition 3.3) would contradict eitherthe non-degeneracy or minimality of the hip-hop. The vertical space Vt has a onedimensional isoenergetic component υt = Vt ∩ Tγ(t)H
−1(h) which is transverse tothe flow. Since the focal points at t = ±T arise only from the component of Λ inthe direction of XH , it follows that Λ/XH = [λ] has no focal points; [λt] ∩ [υt] = 0for 0 ≤ t ≤ 2T .
Recall that the hip-hop orbit satisfies γ(0) = σ∗γ(2T ) = (x, y), where σ∗ = σ⊕σ.Now we consider the iterated Lagrange planes (σ∗Φ)nλ0 in (T(x,y)H
−1(h))/XH(x, y).
Proposition 3.5. If the reduced hip-hop orbit is non-degenerate, then consecutivepairs of the Lagrange planes (σ∗Φ)nλ0 are transverse.
Proof. We must verify that λ0 and (σ∗Φ)λ0 are transverse. Suppose this is notthe case; assume (σ∗Φ)λ0 = kλ0, k 6= 0. Now recall that λ0 ∈ Λ+
0 , that is to say

INSTABILITY OF THE HIP-HOP ORBIT 15
Sλ0 = λ0. Then
S(Φλ0) = kS(σ∗λ0) = kσ∗λ0 = Φλ0,
and so λ2T = Φλ0 ∈ Tγ(2T ) (FixS). By symmetry it follows that λt is 4T -periodic[17], once again contradicting non-degeneracy.
Proposition 3.6. The Lagrange planes (σ∗Φ)nλ0 have no focal points on the in-terval 0 ≤ t ≤ 2T .
Proof. This can be seen as an application of a comparison theorem for Lagrangianplanes found in [19]. We will first need to compute the second variation of the actionfunctional at the minimizer q(t) of (9). Recall that a reduced Jacobi field (ξ, η) ∈λ corresponds to a variation (ξ, η) on T ∗C which leaves the angular momentuminvariant. The action is independent of the angle θ, so the second variation in thedirection of ξ ∈ TC can be expressed in terms of the reduced components only:
∂2A[0,2T ](q)(ξ, ξ) = 〈η, ξ〉∣∣2T0
= 〈η(2T ), σξ(0)〉 − 〈η(0), σξ(2T )〉= ω(λ0, σ
∗Φλ0)
> 0,
where the final inequality follows from the fact that the hip-hop q(t) is minimizing.Moreover, from Proposition 3.4 we can identify ω with the the symplectic form ωon (TH−1(h))/XH ,
ω(λ0, σ∗Φλ0) = ω(λ0, σ
∗Φλ0).
ω is simply the signed area form in the plane of isoenergetic variations transverseto the flow direction along γ(t). The inequality ω(λ0, σ
∗Φλ0) > 0 then implies anorientation of these subspaces in the plane. Now given this orientation and the factthat λ0 is focal point free on [0, 2T ], the comparison theorem allows us to concludethat σ∗Φλ0 is focal point free on the same interval. Since the symplectic mappingσ∗Φ preserves the symplectic form, we have ω(σ∗Φλ0, (σ
∗Φ)2λ0) > 0. We haveestablished that σ∗Φλ0 is focal point free on [0, 2T ]; now comparing with (σ∗Φ)2λ0
and using the orientation supplied by the symplectic form ω, we conclude that(σ∗Φ)2λ0 is focal point free on the interval [0, 2T ] as well. This argument can thenbe repeated for all the following consecutive pairs of iterates (σ∗Φ)nλ0.
Proposition 3.7. The Lagrange plane λ0 of isoenergetic variations transverse tothe flow is focal point free on the interval 0 ≤ t <∞.
Proof. The argument proceeds by showing that λ0 is focal point free on each of theintervals [0, 2T ], [2T, 4T ], . . . This was shown for the first interval in Proposition3.4. For all the remaining intervals, we make use of the Lagrange planes (σ∗Φ)nλ0.In particular, σ∗Φλ0 being focal point free on [0, 2T ] implies that Φλ0 is focal pointfree on [0, 2T ] also, since σ∗V |(x,y) = V |(σx,σy). Therefore λ0 is focal point free on[0, 4T ]. We can continue extending the interval on which there are no focal points inthis fashion; the iterates up to (σ∗Φ)nλ0 being focal point free on [0, 2T ], togetherwith the fact that (σ∗Φ)2 = P implies that λ0 is focal point free on [0, 2(n+1)T ].
Theorem 3.8. The reduced hip hop orbit γ(t) is hyperbolic in the energy sur-face H−1(h) when it is dynamically non-degenerate. If the un-reduced variationalproblem (8) is non-degenerate then the reduced hip hop orbit is always (linearly)unstable.

16 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
Proof. Let us consider the (dynamically) degenerate case first, and suppose thatKer (P − I) contains directions other than the flow direction XH(x, y). An im-portant observation is that the geometric multiplicity of +1 as an eigenvalue of Pcannot be bigger than two. To see why, we must consider a series of possible cases.First let us suppose that 0 and 2T are conjugate points, and let ζ(t), 0 ≤ t ≤ 2T bethe field satisfying πζ(0) = πζ(2T ) = 0. As in the proof of Proposition 3.3, we willextend ζ(t) to the interval [0, 4T ] by setting ζ(t) = σ∗ζ(t − 2T ) for 2T < t ≤ 4T .Again we must consider two possibilities: if this extension is smooth, then ζ(t) isa doubly-symmetric, 4T -periodic Jacobi field which is distinct from the flow di-rection XH . We can lift ζ(t) to a un-reduced Jacobi field ζ = (ξ, η) satisfying
ξ(t + 2T ) = −ξ(t), and ∂2A[0,4T ](q)(ξ, ξ) = 0. If the variational problem is non-
degenerate then only the projected flow direction belongs to the kernel of ∂2A[0,4T ]
and we have a contradiction. Alternatively, if the extension is not smooth then thelifted field ζ(t) is a broken Jacobi field, but again we find that the second variationwill be zero which now contradicts the minimality of the hip-hop q(t) over [0, 4T ].
If 0 and 2T are not conjugate, then there exists an isoenergetic Jacobi field ζ =(ξ, η) which satisfies ξ(0) = σξ(2T ), ξ(0) 6= 0. This field must be 4T -periodic, andif it is naturally doubly symmetric then once again the corresponding un-reducedJacobi field will satisfy ∂2A[0,4T ](q)(ξ, ξ) = 0, contradicting the (variational) non-degeneracy. If ζ(t) is not doubly-symmetric, we can construct two symmetrizedbroken Jacobi fields:
ζ1(t) =
{ζ(t) 0 ≤ t ≤ 2T,σ∗ζ(t− 2T ) 2T < t ≤ 4T,
ζ2(t) =
{σ∗ζ(t+ 2T ) 0 ≤ t ≤ 2T,ζ(t) 2T < t ≤ 4T.
Lifting each field to the un-reduced space by adding zero angular components andcalculating the second variations, we find
∂2A[0,4T ](q)(ξ1, ξ1) = 〈η1, ξ1〉∣∣2T0
+ 〈η1, ξ1〉∣∣4T2T
= 〈η(2T ), ξ(2T )〉 − 〈η(0), ξ(0)〉+ 〈ση(2T ), σξ(2T )〉−〈ση(0), σξ(0)〉
= 2〈η(2T )− ση(0), ξ(2T )〉> 0,
where the final inequality of course follows from minimization. However we alsohave
∂2A[0,4T ](q)(ξ2, ξ2) = 〈η2, ξ2〉∣∣2T0
+ 〈η2, ξ2〉∣∣4T2T
= 〈ση(0), σξ(0)〉 − 〈ση(2T ), σξ(2T )〉+ 〈η(0), ξ(0)〉−〈η(2T ), ξ(2T )〉
= 2〈ση(0)− η(2T ), ξ(2T )〉< 0,
which is a contradiction. Finally we can conclude that the +1 eigenvalue of P musthave a higher dimensional generalized eigenspace, but in this case the linearizedPoincare map is unstable (in the sense that ‖Pn‖ → ∞).
Now in the non-degenerate case, assuming the algebraic multiplicity of +1 is not4, we examine the iterates (σ∗Φ)nλ0 of the subspace λ0 in the space of isoenergeticvariations transverse to the flow. In light of Proposition 3.6 and the fact thatω((σ∗Φ)nλ0, (σ
∗Φ)n+1λ0) > 0 defines an orientation for the successive iterates, we

INSTABILITY OF THE HIP-HOP ORBIT 17
conclude that the sequence (σ∗Φ)nλ0 must have a limit subspace
β = limn→∞
(σ∗Φ)nλ0.
The subspace β is Lagrangian and invariant under the the symplectic map σ∗Φ,hence it is invariant under the linearized Poincare map since P = (σ∗Φ)2. Moreover,forward iterates PnV0 rotate clockwise [19], and cannot cross any of the iterates(σ∗Φ)nλ0 by Proposition 3.7. We deduce that β can also be represented at theforward limit of the iterates of the vertical space,
β = limn→∞
PnV0.
It then follows that β represents the stable subspace of the hip-hop orbit. FromProposition 3.7 it also follows that backwards iterates of the vertical space V0 un-der P cannot cross the subspace λ0. Therefore the unstable subspace α can berepresented as the limit in backwards time,
α = limn→∞
P−nV0.
Finally we can verify the subspaces α and β are transverse. In the non-degeneratecase ω(λ0, σ
∗Φλ0) > 0, which implies ω(α, β) > 0 and the spaces must be transverse.If the algebraic multiplicity of +1 is equal to 4 (geometric multiplicity equal to
1) then the orbit is non-degenerate but not hyperbolic. However, all of the preced-ing calculations in the quotient space can be performed, and two one-dimensionalinvariant subspaces must exist. This forces P|TH−1(h)/XH
= Id since all eigenvaluesare +1, but this is a contradiction since ω(λ0,Pλ0) > 0.
4. Numerics and future work. For the case of four masses, numerical simu-lations have been performed by approximating the configuration variables via aFourier series of the general form
qi,j(t) ≈ c0 +
n∑k=1
ck cos
(kπt
4T
)+ sk sin
(kπt
4T
)where qi,j(t) is the position of the ith body in the jth dimension for i = 1, 2, 3, 4 andj = 1, 2, 3. We set 4T = 2π. The (so called) Italian symmetry q(t+ 2T ) = −q(t) ofthe hip-hop imposed on qi,j(t) forces restrictions on the coefficients of the Fourierseries. After the restriction to C and changing to cylindrical coordinates we obtain aFourier approximation q1(t) for q1(t) = (r(t), θ(t), z(t)) (and its derivatives) whichwe substitute in the action functional A to obtain
A(q1) =
∫ 2π
0
L(q1(t), ˙q1(t)) dt. (18)
Discretizing the time interval and integrating (18) through trapezoidal approxima-tion leads to a function F(ck, sk; k = 1, . . . , n). Given an initial condition, thisfunction is minimized numerically with pre-defined tolerance according to the de-sired approximation.
Figure 4 was obtained using a Fourier expansion with six non-zero coefficientsin each component with a tolerance of 10−6 and with 100 pts in the discretizationof the integral. In this approximation, the maximal value of r(t) is obtained att = t0 ≈ 2.3828.
Using the analytic approximation γ(t) of the hip-hop, we can substitute into thederivative of the vector field dXH(γ(t)) and so are able to compute a numerical

18 M. LEWIS, D. OFFIN, P.-L. BUONO AND M. KOVACIC
Figure 6. Poincare maps near the reduced hip-hop orbit.
approximation to the fundamental matrix solution. The Lagrange subspace Λ =W ∩ TH−1(h) of Proposition 3.1 is obtained numerically, the basis is
XH(γ(t0)) = (0,−1.3810,−0.9144, 0), λ(t0) = (1, 0, 0, 0.6621),
where λ(t) = dφtλ(t0) is inW∩Λ2. Figure 5 shows the computation of focal pointsdone by computing det[dπ(XH(γ(t)), dπ(λ(t))] on a discretization of [t0, t0 + π/2].
We can go even further and compute isoenergetic Poincare sections in the (r,R)-plane near the reduced hip-hop orbit for various values of the energy h and observebifurcations of the hip-hop orbit. Figure 6 shows a qualitative change in a neigh-borhood of the reduced hip-hop orbit located near (r,R) = (1.8, 0). The study ofthose bifurcations is the topic of ongoing work [5].
Acknowledgments. PLB would like to acknowledge the financial support of UOITand of NSERC in the form of a Discovery Grant. MK would like to thank UOITfor financial support, and ML would like to thank Queen’s University.
REFERENCES
[1] V. I. Arnol’d, Characteristic class entering in quantization conditions, Funct. Anal. Appl., 1(1967), 1–14.
[2] V. I. Arnol’d, “Dynamical Systems III,” Encyclopaedia Math. Sci., 3, Springer-Verlag, Berlin,1988.
[3] V. I. Arnol’d, Sturm theorems and symplectic geometry, Funct. Anal. Appl., 19 (1985), 251–
259.[4] E. Barrabes, J. M. Cors, C. Pinyol and J. Soler, Hip-hop solutions of the 2N-body problem,
Celest. Mech. Dynam. Astron., 95 (2006), 55–66.[5] P. L. Buono, M. Kovacic, M. Lewis and D. Offin, Symmetry-breaking bifurcations of the
hip-hop orbit, in preparation.[6] A. Chenciner and R. Montgomery, On a remarkable periodic orbit of the three body problem
in the case of equal masses, Ann. Math., 152 (2000), 881–901.[7] A. Chenciner and A. Venturelli, Minima de l’integrale d’action du probleme Newtonien de 4
corps de masses egales dans R3: orbites ‘hip-hop’ , Celest. Mech. Dynam. Astron., 77 (2000),139–152.
[8] G. F. Dell’Antonio, Variational calculus and stability of periodic solutions of a class of Hamil-tonian systems, Reviews in Math. Physics, 6 (1994), 1187–1232.
[9] J. J. Duistermaat, On the morse index in variational calculus, Adv. Math., 21 (1976) 173–195.
[10] I. Ekeland, “Convexity Methods in Hamiltonian Systems,” Springer-Verlag, New York, 1991.

INSTABILITY OF THE HIP-HOP ORBIT 19
[11] D. Ferrario and S. Terracini, On the existence of collisionless equivariant minimizers for theclassical n-body problem, Inv. Math., 155 (2004), 305–362.
[12] W. B. Gordon, A minimizing property of Keplerian orbits, Amer. J. Math., 99 (1970), 961–
971.[13] X. Hu and S. Sun, Index and stability of symmetric periodic orbits in Hamiltonian systems
with application to figure-eight orbit , Comm. Math. Phys., 290 (2009), 737–777.[14] J. Marsden, “Lectures on Mechanics,” Springer-Verlag, New York, 1991.
[15] C. Marchal, How the method of minimization of action avoids singularities, Celest. Mech.
Dynam. Astron., 83 (2002), 325–353.[16] V. P. Maslov, “Theory of Perturbations and Asymptotic Methods,” (Russian), MGU, Moscow,
1965.
[17] K. R. Meyer, Hamiltonian systems with a discrete symmetry, J. Diff. Eqns., 41 (1981), 228–238.
[18] K. R. Meyer, and D. S. Schmidt, Librations of central configurations and braided Saturn
rings, Celest. Mech. Dynam. Astron., 55 (1993), 289–303.[19] D. C. Offin, Hyperbolic minimizing geodesics, Trans. Amer. Math. Soc., 352 (2000), 3323–
3338.
[20] D. C. Offin, and H. Cabral, Hyperbolicity for symmetric periodic orbits in the isosceles threebody problem, Discrete Contin. Dyn. Syst. Ser. S, 2 (2009), 379–392.
[21] G. E. Roberts, Linear stability analysis of the figure-eight orbit in the three-body problem,Ergod. Th. & Dynam. Sys., 27 (2007), 1947–1963.
[22] C. Simo, Dynamical properties of the figure eight solution of the three body problem, Contemp.
Math., 292 (2002), 209–228.[23] S. Terracini and A. Venturelli, Symmetric trajectories for the 2N-body problem with equal
masses, Arch. Rational. Mech. Anal., 184 (2007), 465–493.
Received April 2011; revised March 2012.
E-mail address: [email protected]
E-mail address: [email protected]
E-mail address: [email protected]
E-mail address: [email protected]





























