Embed Size (px)
Citation preview

Pergamon Expert Systems With Applications, ¥01. 10, No. i, pp. 99-112, 1996
Copyright © 1996 Elsevier Science Ltd Printed in Great Britain. All fights reserved
0957-4174/96 $15.00 + 0.00
095%4174(95)00037-2
Imprecise Knowledge in Expert Systems: A Simple Shell
BERNARD GRABOT AND EMMANUEL CAILLAUD*
F.cole Nationale d'Ing6nieurs de Tarbes, Avenue d'Azereix, BP 1629-65016, Tarbes Cedex, France
Abstract--Expert knowledge is often pervaded by imprecision and/or uncertainty, and this vagueness is considered more and more as a part of the expertise. Methods such as probability theory, error calculation, Bayesian approach or certainty factor have been used for a long time in order to deal with uncertainty or imprecision. Among these methods, fuzzy logic has the particularity to allow the management of uncertainty and imprecision in a unique framework. One of the interests of fuzzy logic in expert systems is that it handles in a single frame both imprecision and uncertainty, for instance through the generalized modus ponens approach. Shells allowing to implement this approach are usually quite heavy to handle and a simple shell that implements these concepts has been developed in order to provide students with a user-friendly and powerful environment. The main originality of this shell, called FLESH (Fuzzy Lo~'c Expert Shell on Hypertext) is that it associates various semantics with the implications involved in the production rules. Furthermore, the simplicity of its interfaces has enabled the use the system for two years for educational purposes. Two expert systems developed with this shell are shortly described: a decision support system for production activity control and an expert system, for ball-bearing selection and assembly.
1. INTRODUCTION
IN ORDER TO ENSURE a n e f f i c i e n t expertise acquisition, it
is essential that expert systems represent expert knowl- edge in a way close to human expertise. This includes in many fields to be able to use imprecise or uncertain knowledge since expertise is often spontaneously expressed through vague propositions.
Many solutions have been tested in expert systems in order to deal with either imprecise or uncertain knowl- edge: probabilities, certainty factors, fuzzy logic, possibility theory are some of them, which are shortly presented in Section 2. Fuzzy logic and the possibility theory appear to be very interesting since they allow the description of both imprecision and uncertainty in a unique conceptual framework. Among the various tech- niques used in order to propagate uncertainty and/or imprecision, the Generalized Modus Ponens is inter- esting but quite difficult to handle. This technique, presented in Section 3, has been implemented in a shell prototype based on the SuperCard TM environment on the Apple Macintosh TM. This shell, called FLESH (Fuzzy Logic Expert Shell on Hypertext) is described in Section 4. It has two main originalities:
• It associates different implication semantics with the production rules. This allows the handling of very
*Currently at Ecole des Mines d'Albi-81013 Albi Cedex 09, France.
different types of elementary reasoning involving vague propositions.
• It uses a sampling technique instead of approximate algorithms in order to perform inference.
The shell has first been designed for educational purposes: expert systems belong to the artificial intelli- gence tools that have to be considered at the user level by young engineers. However the generalization of complex functionalities in commercial shells has led to very powerful, but very complicated tools. In order to be efficient in an educational capacity, FLESH intends to provide a very easy way to handle basic but also quite complex inference techniques, so that the student's effort may focus on knowledge structure rather than on the learning of the shell itself.
This shell has also been used to prototype research applications, two of those are described shortly in Section 5: a decision support system for production activity control and an expert system for ball-bearing selection and assembly.
2. SOME CLASSICAL APPROACHES TO UNCERTAINTY OR IMPRECISION MODELING
The interest in taking into account imprecise or uncertain information in expert systems has nearly appeared at the same time as the expert systems themselves, and several
99
100 B. Grabot and E. Caillaud
methods have been tested in that purpose. We do not intend to give an exhaustive review of these methods in this paper (Somb6, 1990) but only to set the emphasis on some important points, in order to locate the interest of the generalized Modus Ponens technique.
2.1. Probability Approaches
The first way to handle uncertainty historically is the probability theory, based on combinatorial methods. The use of probabilities in order to represent uncertainty leads to several problems:
• It is based on the assumption that precise values may be associated with the occurrence of events, which is not always true for expert knowledge, as pointed out for medicine in Buchanan & Shortliffe (1984).
• Ignorance, or partial knowledge can hardly be modeled with the probability theory: let us consider for example that two opposite events, A and -,A, may occur. If no other information is available, the method that makes the smaller assumption on A and -,A is to consider that P(A) = P(-,A) = 0.5. Nevertheless it supposes that A and -,A have the same probability of occurrence, which is not always the case.
Many authors consider that probability is a frame which is too normative to take into account the various aspects of uncertainty (Dubois & Prade, 1988a; Sombe, 1990).
The Bayesian approach uses probabilities, but relies on the idea that a prior probability of an event may be introduced in a given situation, and may be used in the calculation of conditional or joint probabilities. This approach is closer to revision of belief than to deduction, that is why it has motivated the development of Bayesian networks, i.e. rule networks allowing to propagate or to combine uncertainty. Examples of uncertainty propaga- tion techniques within Bayesian networks may be found in Pearl (1988) or Lauritzen & Spiegelhalter (1988). In practice, it seems difficult to use the Bayesian approach with this strict probabilistic point of view for several reasons (Parsaye & Chignell, 1988):
• It is not always possible to obtain all relevant prior and conditional probabilities.
• Bayes' theorem can only be used when all the possible outcomes are disjointed, which often requires a deep reformulation of the expert knowledge.
For these reasons, some authors consider that even if the Bayesian approach can be adapted to expert systems, this adaptation requires hypotheses which are not well adapted to the management of imprecise data in a context which is not strictly causal. The most well-known expert
system using a Bayesian approach is probably PROS- PECTOR (Duda, Gaschnig & Hart, 1979), which deals with geological data.
2.2. Certainty Theory
The first difficulties encountered with Bayesian probabil- ity have motivated the development of the certainty theories, based on the definition of to what extent a rule is true: the certainty factor, or confidence factor (CF) like in the expert system MYCIN (Shortliffe and Buchanan, 1984). The propagation of the confidence factors is made through rather intuitive laws, such as:
CF(A and B) = min(CF(A), CF(B))
CF(A or B) = max(CF(A), CF(B)).
When several rules conclude on the same fact, it is necessary to combine the respective certainty factors of the rules in order to give an idea of the definitive certainty factor. It is obvious that the addition of the certainty factors is not satisfactory (i.e. if two rules conclude that a fact may be true at 30%, the final confidence in the result is not 60%). l e t us consider the certainty factor of a fact defined by CF1 from rule 1, and CF2 from rule 2. The calculation first used in the expert system MYCIN uses an aggregated certainty factor defined by:
CF = CF1 + CF2-(CF1 ×CF2) (1)
which is based on an analogy with the probabilistic union:
P(A or B ) = P ( A ) + P ( B ) - P ( A and B).
This approach has sometimes been criticized because of the poor semantics of the certainty factors (Somb6, 1990): production rules weighted by certainty factors may be interpreted in several ways, and therefore cannot be expressed in a unique manner to combine the certainty factors. Moreover, the resolution of deep conflicts between several rules by formula (1) may be quite hazardous (Dubois and Prade, 1988b). Nevertheless, many systems are based on MYCIN principles, such as MILORD (Godo, Lopez de Mantaras, Sierra & Verda- guer, 1987) or TAIGER (Farreny, Prade & Wyss, 1986), which uses a possibilistic approach.
2.3. Approaches Based on Fuzzy Logic and Possibility Theory
Fuzzy logic is not a substitute for probability theory, but is basically a method allowing a gradual representation of the likeness between two objects. Fuzzy logic is based on the theory of fuzzy sets (Zadeh, 1965), which defines the membership of an object set as a degree between 0 and 1 instead of a binary value (0 or 1).
Imprecise Knowledge in Expert Systems 101
/J~L 1. ~ o n as young"
O.75
O. 5 ~ . age
I I I I I I 0 10 20 30
FIGURE 1. Membership funcUon of the fuzzy set represent- Ing "young" people.
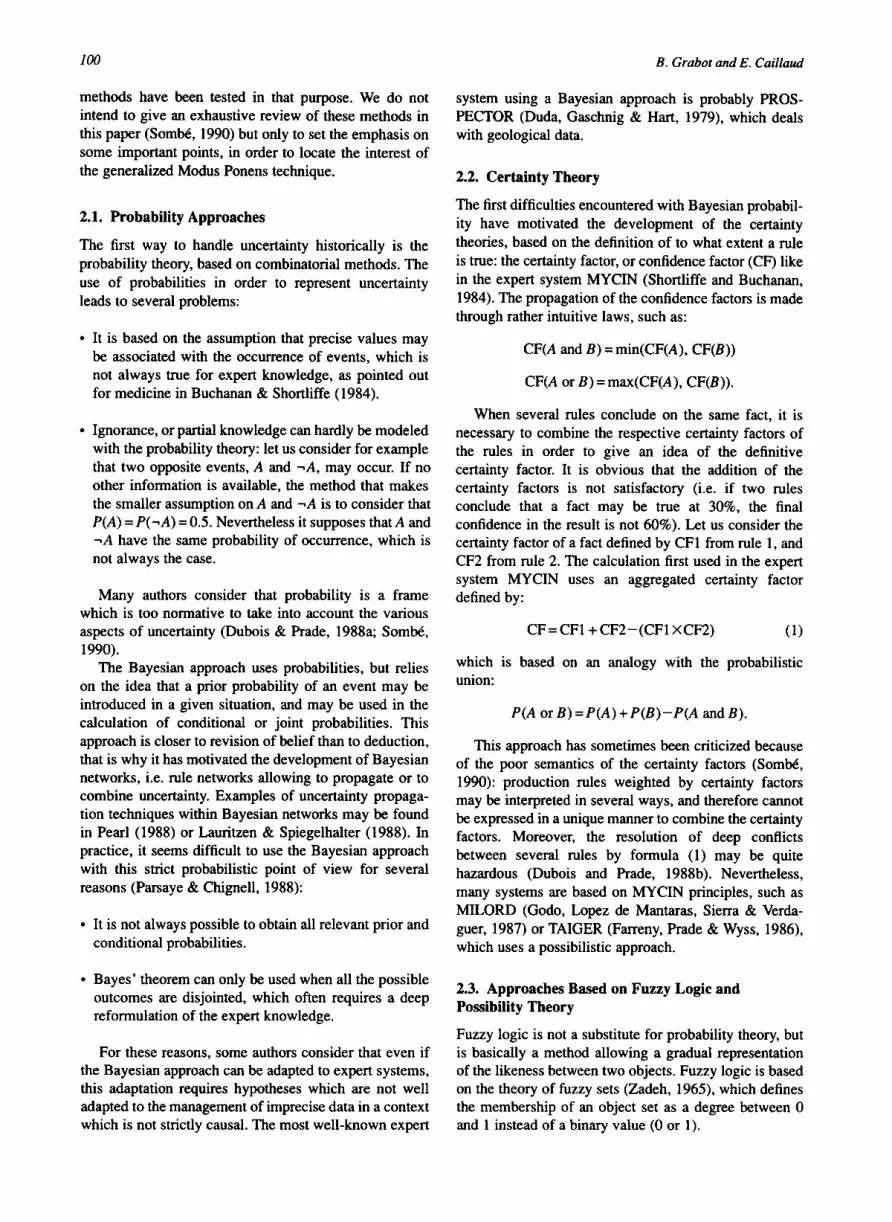
A proposition such as "A person is young" may be modeled by the fuzzy set which is entirely defined by the membership function/z of Figure 1. If John is 20, John's degree of membership to the fuzzy set of young people is /z(20) = 0.75.
Fuzzy logic has been widely used in order to represent imprecise knowledge in expert systems. In the simplest cases, i.e. when only one level of rules is used, the imprecision propagation is often performed using fuzzy control techniques, described for instance in (Sugeno, 1985) (e.g. Turksen, Ulguray & Wang, 1990, Watanabe, 1991; Grabot & Geneste, 1994, Grabot, Geneste & Dupeux, 1994). The modeling of imprecise attributes using fuzzy logic has sometimes been combined with uncertainty propagation using probabilities, i.e. in the FRIL language (Baldwin, 1992).
Fuzzy sets provide a simple way to model impreci- sion, but they also allow the description of uncertain facts. In Figure 1, 0.75 is interpreted as John's degree of membership to the fuzzy set of the young people. The possibility theory (Zadeh, 1978) sets as a postulate that 0.75 may be considered as the possibility that John is 20 years old, given the fact that "John is young". The membership function of the fuzzy set may then be interpreted as the possibility distribution of the ages of John, by analogy with a probability distribution. In order to perform a pattern-matching procedure, the comparison of a fact F, defined by a possibility distribution, with an imprecise premise P defined by a fuzzy set requires two measures:
possibility measure: II (P; F ) = supucu min(/ze(u), 7rp(u))
necessity measure: N(P; F) = infuc U max(/~e(u ), 1 - ~re(u) )
where ~'r denotes the possibility distribution of the fact, and/z e the membership function of the antecedent. The possibility measure may be considered as representing the best possible match between the fact and the antecedent, whereas the necessity measure represents the worst eventuality.
The possibility theory allows not only the representa- tion of imprecise premises (through fuzzy sets) but also to propagate uncertainty through possibility and neces-
sity measures on the conclusions of the rules. Expert systems such as ELFIN (Martin-Clouaire & Prade, 1984) and shells such as MENTA (Palmer & Le Blanc, 1993) or DIPRESS (Padaru, Teodorescu, Costin, Ciobanu & Gradinaru, 1994) are based on this approach.
Most of the time, the inference mechanisms of the expert systems or shells mentioned above have been chosen for their adaptation to the specific field dealt with the expert system (medicine, geology and so on);
• Some of them only manipulate uncertainty.
• Others manipulate rather independently imprecision and uncertainty.
The others choose a unique way to propagate both imprecision and uncertainty, adapted to specific needs.
In order to make very different applications possible, or in order to express different types of reasoning within a given application, it is interesting to allow different types of inference. In so doing, we have chosen the Generalized Modus Ponens approach, used by some of the above mentioned expert systems, since it provides a framework to support different kinds of inference semantics.
3. GENERALIZED MODUS PONENS USING FUZZY LOGIC
3.1. Principle Various kinds of propagation of imprecision and uncer- tainty may be performed in a unique framework when the semantics of the rules correspond to the following statements:
• There is a dependence between the imprecision of the attributes contained in the antecedents of a rule and the imprecision of the conclusion.
• The uncertainty on the conclusion of a rule may arise when facts, which are not strictly equivalent to antecedents, are used in order to fire a rule.
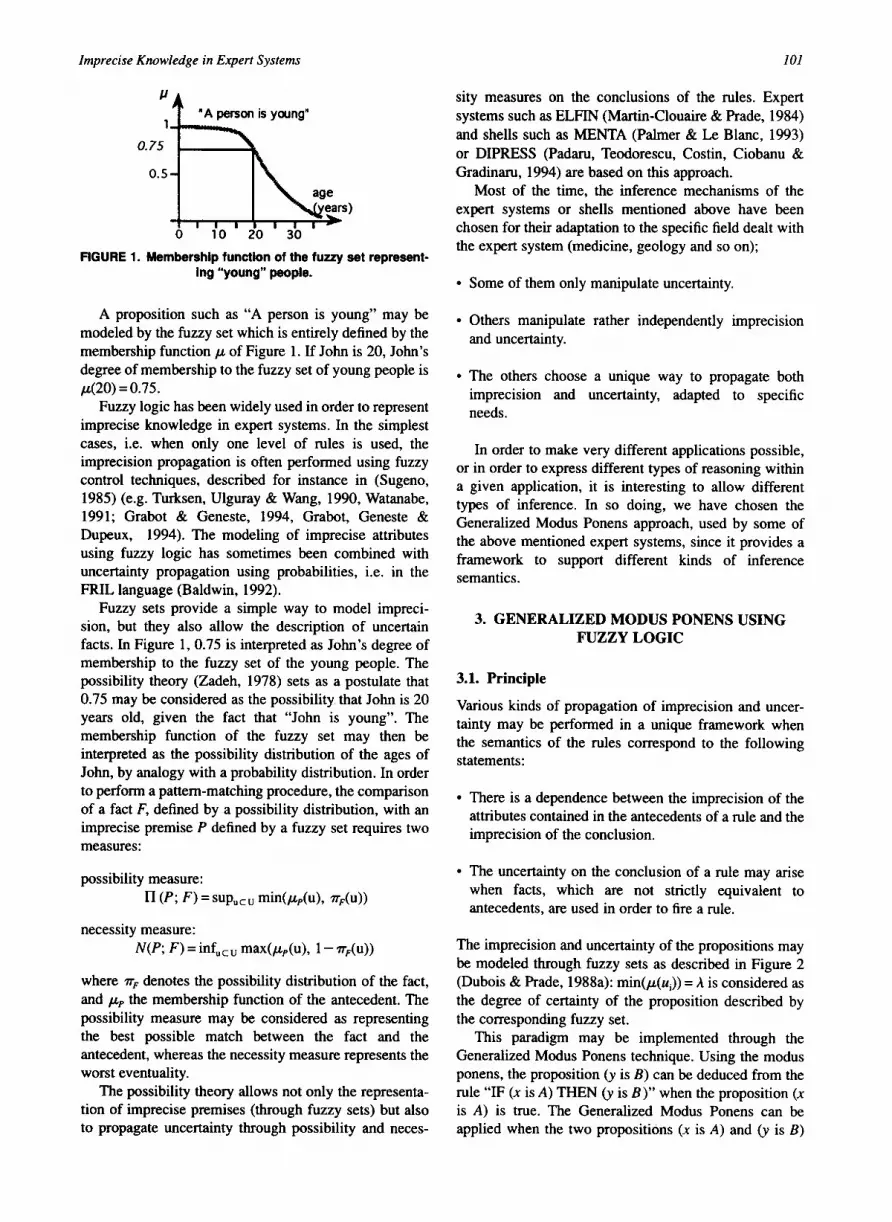
The imprecision and uncertainty of the propositions may be modeled through fuzzy sets as described in Figure 2 (Dubois & Prade, 1988a): min(/z(ui)) = A is considered as the degree of certainty of the proposition described by the corresponding fuzzy set.
This paradigm may be implemented through the Generalized Modus Ponens technique. Using the modus ponens, the proposition (y is B) can be deduced from the rule "IF (x is A) THEN (y is B)" when the proposition (x is A) is true. The Generalized Modus Ponens can be applied when the two propositions (x is A) and (y is B)
102 B. Grabot and E. Caillaud
1~ "X is A" / ~ ~% ~ imprecision
~recision U 'X is A"
"X iS A" unco~nly ~ _ / 1 4 u n c e ~ l ~ n ~ ] ; u
FIGURE 2. Modeling of the Imprecision and uncertainty of • proposition.
are defined as imprecise, i.e. when other propositions can be considered as close even if they are not exactly similar. If a proposition (x is A') close to (x is A) is true, the principle of the Generalized Modus Ponens is to deduce a proposition (y is B') from:
• A measure of the likeness between A and A'.
• The underlying semantics of the " i f . . . then" implication of the rule.
The inference consists of the definition of a fuzzy set B' which is to B what A' is to A. The membership function of B', tzB', is usually computed through a combination between the definition of the chosen implication, noted ( x - > y) and the membership function of A', btA' using the expression (Dubois and Prade, 1988a):
Vy ~ YI~ B, (y) = sup x ~ XT(/~ A, (x), ( x - > y)) (2)
where Y is the referential of y, X the referential of x, and T a triangular norm called 'Generalized Modus Ponens Operator', that makes the Generalized Modus Ponens compatible with the "classical" modus ponens (i.e. when A' =A, the result must be B' =B). ( x - > y ) denotes an implication that expresses the type of causal link that underlies the production rule.
The main interest of approximate reasoning is that it allows the drastic decrease of the number of rules required in order to describe a set of close situations: an imprecise rule can replace a set of precise rules, without facing the problem of arbitrary threshold. Let us consider the problem of inferring the possible tool wear from the duration of its use. This expertise could be described in a discrete way through a set of rules such as:
RI: IF (duration use= lh) THEN (wear= 10%)
R2: IF (duration use = 2h) THEN (wear = 25%)
This way to express the expertise is clearly insatisfactory
since:
• Many rules should be necessary in order to explore the variation field of the input variable.
• The link between the antecedent and the conclusion is probably not as evident as described above, since variations may occur on the wear, depending on the cutting parameters or on the material of the parts.
An improvement should be possible by using intervals instead of precise values:
RI: IF (duration use< lh)THEN (wear< 10%)
R2: IF (1 < duration use < 2h) THEN (15 < wear < 25%)
This way to express the expertise allows to introduce imprecision, and consequently to take into account possible deviations.between standard antecedent/conclu- sion relationships. On the other hand, it introduces subjective threshold, and a good precision can only be obtained thanks to a multiplication of the rules and therefore a multiplication of arbitrary thresholds. The problem of arbitrary thresholds can be partially solved by fuzzy logic: for instance, this knowledge may be expressed through the unique imprecise rule:
R"I: IF (duration use is long) THEN (tool wear is important)
As shown in the following section, this rule allows to infer a possible tool wear from each value of the duration, if "long" and "important" are described through fuzzy sets.
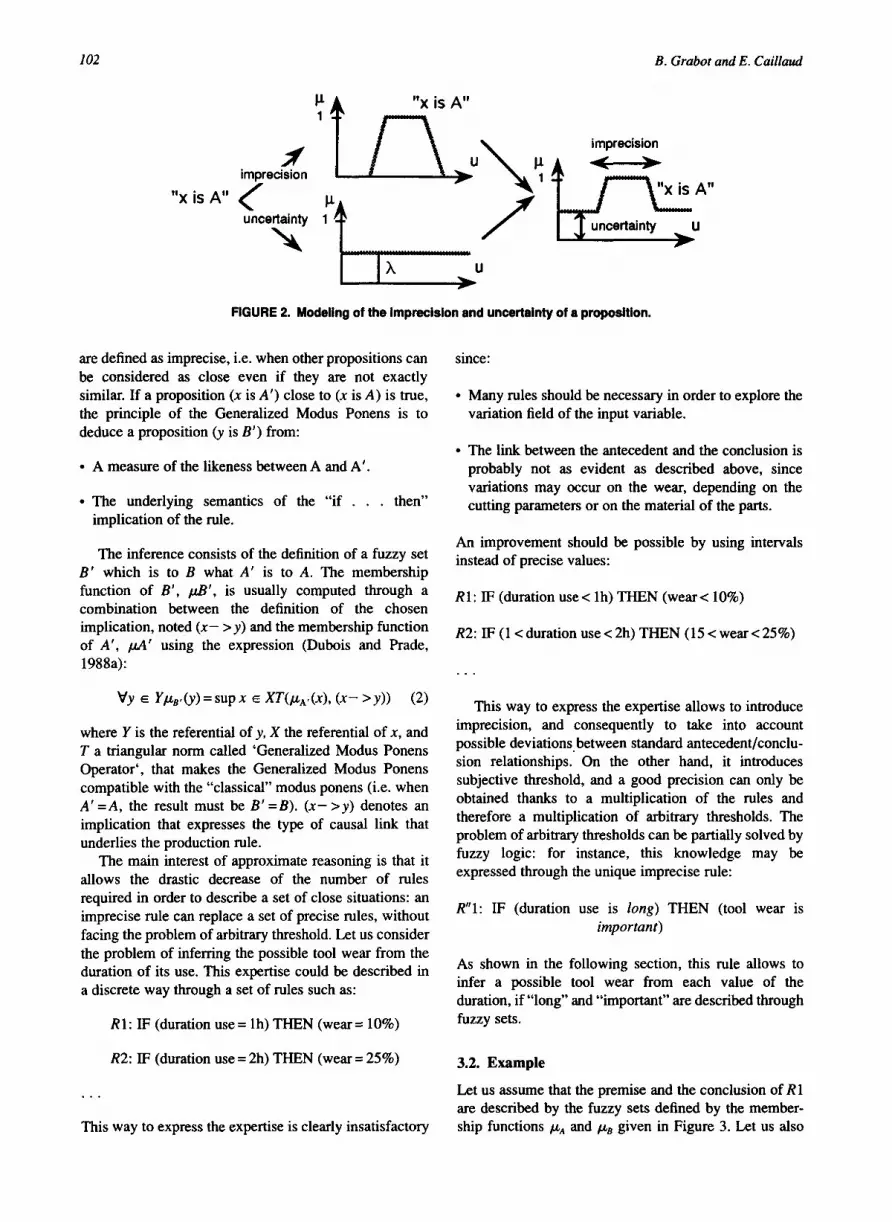
3.2. Example Let us assume that the premise and the conclusion of R 1 are described by the fuzzy sets defined by the member- ship functions/~A and/~a given in Figure 3. Let us also
Imprecise Knowledge in Expert Systems 103
P
I -
0
0
"the use duration is quite important"
(fact) "the use duration t J i is long" I ,t
u r o n
(hours)
I I I I I I I I 5 0
1/J...• "the wear is important" / (standard
I I I I I I I I I 0 50
tool wear (%)
100
FIGURE 3. Membership functions of the premise, conclusion and fact.
suppose that fact A' may be interpreted as (the failure is "quite" important), and defined by a membership function ItA'. It is necessary to choose a T-norm and an implication in order to perform the inference. Let us consider the Zadeh's T-norm defined by:
T(u, v)= Z(u, v)= min(u, v) (3)
and for instance the Brouwer-G0del implication defined by:
(x - >y) = 1 if ItA(X) ~< ItS(Y)
= Its(Y) otherwise (4)
When (2), (3) and (4) are combined, the membership function of the conclusion is defined by:
Its'(Y) = SUpx ~ X min(ItA,(x),
{ 1 if Ita,(x) ~< Its(y); Its(Y) otherwise}) (5)
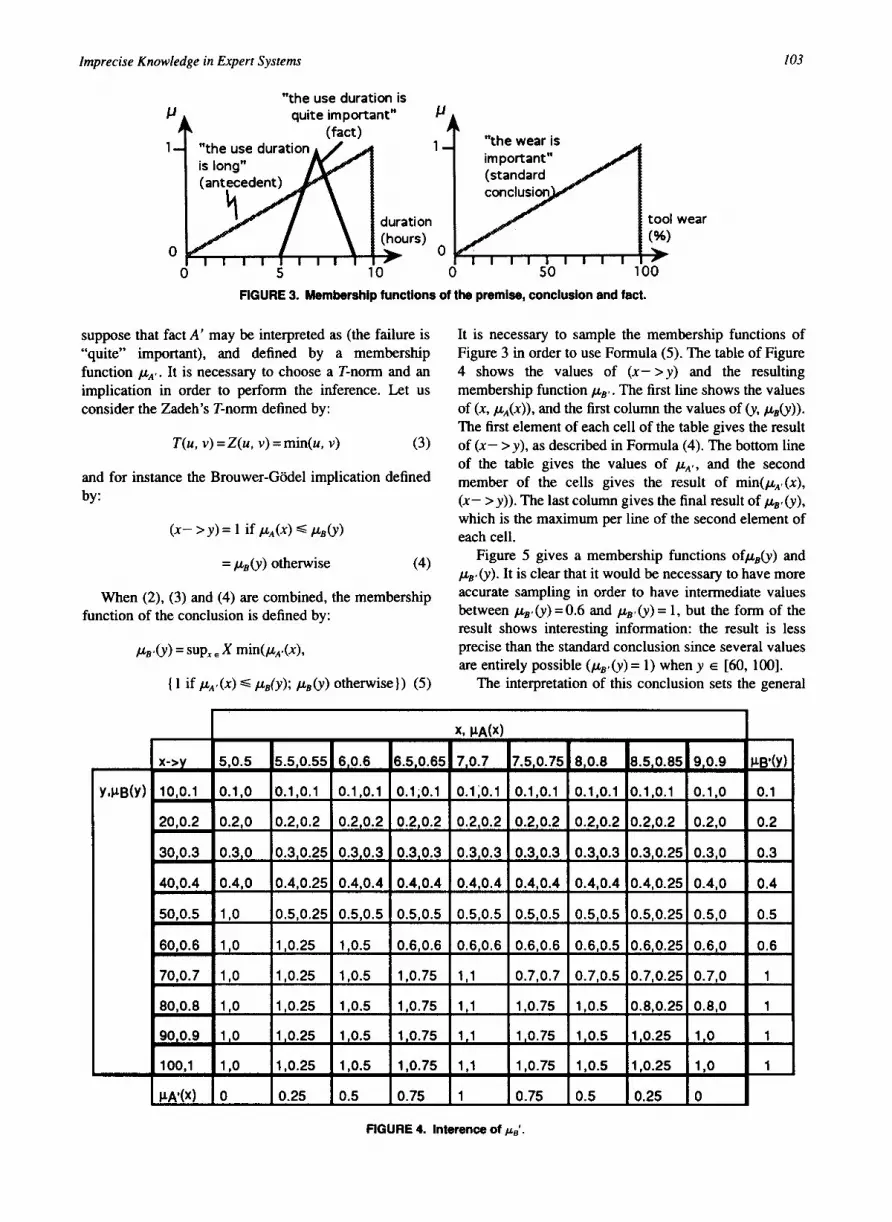
It is necessary to sample the membership functions of Figure 3 in order to use Formula (5). The table of Figure 4 shows the values of ( x - > y ) and the resulting membership function ItB,. The first line shows the values of (x, ItA(X)), and the first column the values of (y, ItB(Y))- The first element of each cell of the table gives the result of ( x - > y), as described in Formula (4). The bottom line of the table gives the values of Ita', and the second member of the cells gives the result of min(itA,(X), (x-- > y)). The last column gives the final result of I t r (Y), which is the maximum per line of the second element of each cell.
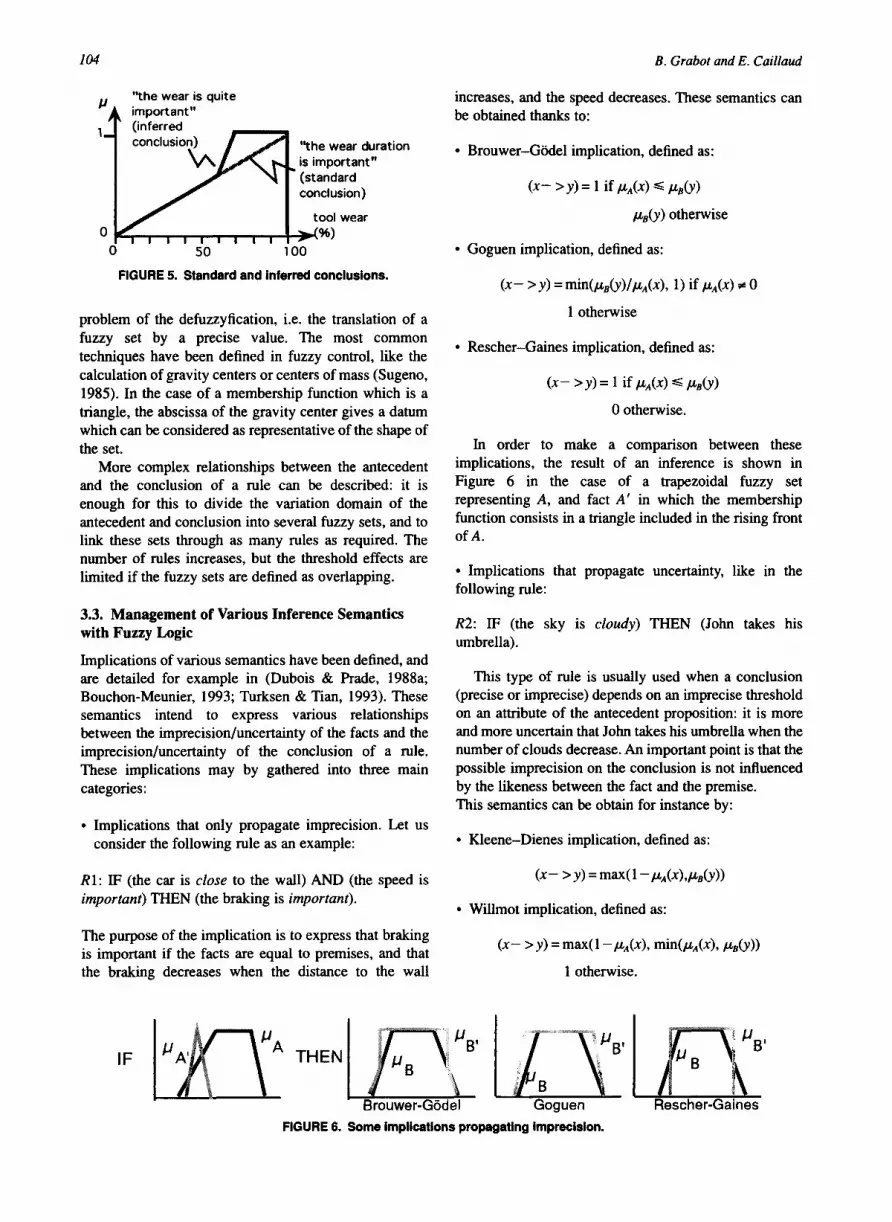
Figure 5 gives a membership functions ofits(Y) and Its' (Y). It is clear that it would be necessary to have more accurate sampling in order to have intermediate values between Its,(Y) =0.6 and Its'(Y) = 1, but the form of the result shows interesting information: the result is less precise than the standard conclusion since several values are entirely possible (its,(Y) = 1) when y E [60, 100].
The interpretation of this conclusion sets the general
x->y 5,0.5 5.5,0.55 6,0.6
10,0.1 0.1,0 0.1,0.1 0.1,0.1
20,0.2 0.2,0 0.2,0.2 0.2,0.2
30~0.3 0.3~0 0.310.25 0.3r0.3
40,0.4 0.4,0 0.4,0.25 0.4,0.4
50,0.5 1,0 0.5,0.25 0.5,0.5
60,0.6 110 1,0.25 1 tO.5
70,0.7 1,0 1,0.25 1,0.5
80,0.8 1,0 1,0.25 1,0.5
90,0.9 1,0 1,0.25 1,0.5
100,1 1,0 1,0.25 1,0.5
I~A'(X) 0 0.25 0.5
x, ~A(X)
6.5,0.65!7,0.7 0.1;0.1 0.1~0.1
0.2,0.2 0.2,0.2
0.310.3 0.3r0.3
0.4,0.4 0.4,0.4
0.5,0.5 0.5,0.5
0.6~0.6 0.6~0.6
1,0.75 1,1
1,0.75 1,1
1,0.75 1,1
1,0.75 1,1
0 . ~ 1
7.5,0.75 8,0.8 8.5,0.85 i9ro.9 0.1,0.1 0.1,0.1 0.1,0.1 0.1,0
0.2,0.2 0.2,0.2 0.2,0.2 0.2,0
0.3,0.3 0.3r0.3 0.3~0.25 0.3~0
0.4,0.4 0.4,0.4 0.4,0.25 0.4,0
0.5,0.5 0.5,0.5 0.5,0.25! 0.5,0
0.6,0.6 0.6,0.5 0.6,0.25 0.6~0
0.7,0.7 0.7,0.5 0.7,0.25 0.7,0
1,0.75 1,0.5 0.8,0.25! 0.8,0
1,0.75 1,0.5 1,0.25 1,0
1,0.75 1,0.5 1,0.25 1,0
0.75 0.5 0.25 0
FIGURE 4. Interence of ~B'.
104 B. Grabot and E. Caillaud
0 0
"the wear is quite important" (inferred
I conclusion) ~ "the wear duration is important" (standard conclusion)
tool wear ~ ( ~ )
SO 1 O0
FIGURE 5. Standard and Inferred conclusions.
problem of the defuzzyfication, i.e. the translation of a fuzzy set by a precise value. The most common techniques have been defined in fuzzy control, like the calculation of gravity centers or centers of mass (Sugeno, 1985). In the case of a membership function which is a triangle, the abscissa of the gravity center gives a datum which can be considered as representative of the shape of the set.
More complex relationships between the antecedent and the conclusion of a rule can be described: it is enough for this to divide the variation domain of the antecedent and conclusion into several fuzzy sets, and to link these sets through as many rules as required. The number of rules increases, but the threshold effects are limited if the fuzzy sets are defined as overlapping.
3.3. Management of Various Inference Semantics with Fuzzy Logic
Implications of various semantics have been defined, and are detailed for example in (Dubois & Prade, 1988a; Bouchon-Meunier, 1993; Turksen & Tian, 1993). These semantics intend to express various relationships between the imprecision/uncertainty of the facts and the imprecision/uncertainty of the conclusion of a rule. These implications may by gathered into three main categories:
• Implications that only propagate imprecision. Let us consider the following rule as an example:
RI: IF (the car is close to the wall) AND (the speed is important) THEN (the braking is important).
The purpose of the implication is to express that braking is important if the facts are equal to premises, and that the braking decreases when the distance to the wall
increases, and the speed decreases. These semantics can be obtained thanks to:
• Brouwer-G6del implication, defined as:
( x - > y) = 1 if/xA(x) ~</xB(y)
/zB(y ) otherwise
• Goguen implication, defined as:
( x - >y) = min(l~B(Y)liZA(X), 1) if IZA(X) ," 0
1 otherwise
• Rescher-Gaines implication, defined as:
( x - > y) = 1 if/.tA(x) ~</zB(y)
0 otherwise.
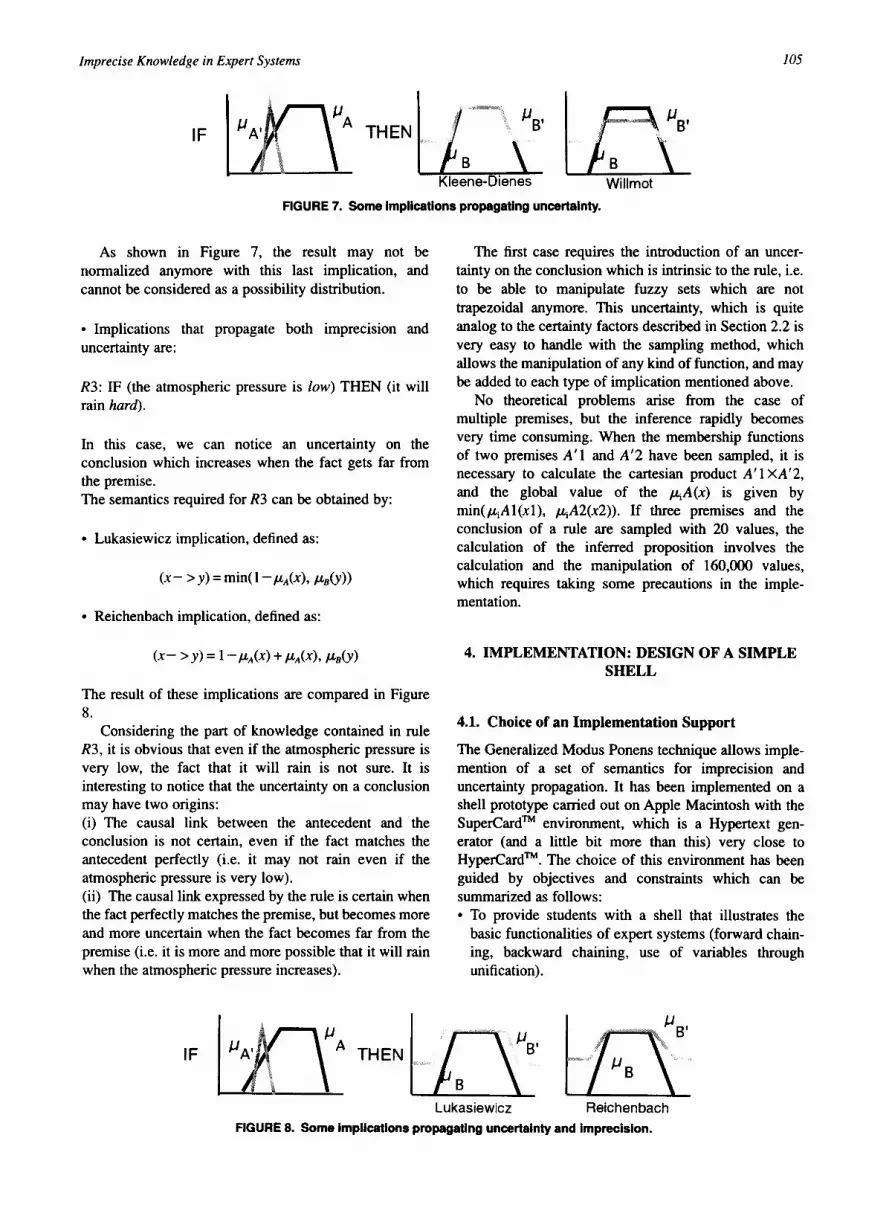
In order to make a comparison between these implications, the result of an inference is shown in Figure 6 in the case of a trapezoidal fuzzy set representing A, and fact A' in which the membership function consists in a triangle included in the rising front of A.
• Implications that propagate uncertainty, like in the following rule:
R2: IF (the sky is cloudy) THEN (John takes his umbrella).
This type of rule is usually used when a conclusion (precise or imprecise) depends on an imprecise threshold on an attribute of the antecedent proposition: it is more and more uncertain that John takes his umbrella when the number of clouds decrease. An important point is that the possible imprecision on the conclusion is not influenced by the likeness between the fact and the premise. This semantics can be obtain for instance by:
• Kleene-Dienes implication, defined as:
( x - >y) = max(1 -i~A(x),izn(y))
• Willmot implication, defined as:
( x - >y)= max(1--/ZA(X), min(/~A(x),/zB(y))
1 otherwise.
I F ~ .................. /dB' I ....................... ~ ~IB' . . . . . . I B' p A THEN
\ B Brouwer -G6de l Goguen Rescher -Ga ines
FIGURE 6. Some Implications propagating Imprecision.
Imprecise Knowledge in Expert Systems 105
p A THEN ~ ............. PB' PB' IF ..... ~ . . . . . . . . . .
Kleene-Dienes Willmot
FIGURE 7. Some Implications propagating uncertainty.
As shown in Figure 7, the result may not be normalized anymore with this last implication, and cannot be considered as a possibility distribution.
• Implications that propagate both imprecision and uncertainty are:
R3: IF (the atmospheric pressure is low) THEN (it will rain hard).
In this case, we can notice an uncertainty on the conclusion which increases when the fact gets far from the premise. The semantics required for R3 can be obtained by:
• Lukasiewicz implication, defined as:
( x - >y) = min(1 --lZA(X), IZn(y))
• Reichenbach implication, defined as:
( x - >y)= 1--I.ta(X ) +/Za(X ),/zn(y )
The result of these implications are compared in Figure 8.
Considering the part of knowledge contained in rule R3, it is obvious that even if the atmospheric pressure is very low, the fact that it will rain is not sure. It is interesting to notice that the uncertainty on a conclusion may have two origins: (i) The causal link between the antecedent and the conclusion is not certain, even if the fact matches the antecedent perfectly (i.e. it may not rain even if the atmospheric pressure is very low). (ii) The causal link expressed by the rule is certain when the fact perfectly matches the premise, but becomes more and more uncertain when the fact becomes far from the premise (i.e. it is more and more possible that it will rain when the atmospheric pressure increases).
The first case requires the introduction of an uncer- tainty on the conclusion which is intrinsic to the rule, i.e. to be able to manipulate fuzzy sets which are not trapezoidal anymore. This uncertainty, which is quite analog to the certainty factors described in Section 2.2 is very easy to handle with the sampling method, which allows the manipulation of any kind of function, and may be added to each type of implication mentioned above.
No theoretical problems arise from the case of multiple premises, but the inference rapidly becomes very time consuming. When the membership functions of two premises A'I and A'2 have been sampled, it is necessary to calculate the cartesian product A'I ×A'2, and the global value of the I~A(x) is given by min(/ziAl(xl), /ziA2(x2)). If three premises and the conclusion of a rule are sampled with 20 values, the calculation of the inferred proposition involves the calculation and the manipulation of 160,000 values, which requires taking some precautions in the imple- mentation.
4. IMPLEMENTATION: DESIGN OF A SIMPLE SHELL
4.1. Choice of an Implementation Support
The Generalized Modus Ponens technique allows imple- mention of a set of semantics for imprecision and uncertainty propagation. It has been implemented on a shell prototype carried out on Apple Macintosh with the SuperCard TM environment, which is a Hypertext gen- erator (and a little bit more than this) very close to HyperCard TM. The choice of this environment has been guided by objectives and constraints which can be summarized as follows: • To provide students with a shell that illustrates the
basic functionalities of expert systems (forward chain- ing, backward chaining, use of variables through unification).
,F TH N .............. / ~ P B '
Lukasiewicz
. . . . . . . . . . .
Reichenbach FIGURE 8. Some implications propagating uncertainty and imprecision.

106 B. Grabot and E. Caillaud
fuzzy inferences
x, ._j
control ~ n ~ I - facts [ - explana ..... [
rulebase ~ % ' [
fuzzy fuzzy inferences inferences
FIGURE 9. General structure of the shell.
membership[~ functions [
• To provide a support in order to implement various kinds of reasoning using uncertainty and imprecision.
• To provide a user-friendly tool, that does not require a lot of learning so that the students may focus on the knowledge base design.
• . . . and not to spend too long time in the shell design! In order to relax some constraints, we decided not to
focus on the performance of the system in terms of computation time, since the student projects do not usually require more than 20-50 rules.
High level hypertext managers such as Hypercard TM
on Macintosh or Toolbook TM on PC were good candi- dates by satisfying our objectives, mainly because of their ability to manage high level interfaces without huge programming efforts. The basic principles of performing inferences through Hypertexts have been given (Evans, 1990), and commercial tools have been available for a long time (e.g. the HyperX shell of Millenium Software with a first freeware version in 1987). Some research applications have also been carried out using expert systems designed with Hypercard (Parant, Charbonnaud, Bertin & Pun, 1988) but they are based on simple inference techniques and do not allow the management of imprecise information.
4 .2 . S t r u c t u r e o f t h e E x p e r t S y s t e m S h e l l
SuperCard is an object-oriented environment, and it allows an easy manipulation of the Macintosh interface facilities (mouse, menus, color, multi-windowing, graph- ics manipulation). The SuperCard standard objects are the primitives that constitute the environment interface, and are prioritized as follows: • Buttons, fields and graphics at the lowest level. • Cards, corresponding to a screen. • Windows, gathering a set of cards.
• Project, gathering a set of windows. • SuperCard, managing the procedures that create a new
object. • Macintosh system.
These objects can react to system events (e.g. messages coming from the keyboard or the mouse) but can also communicate with each other through messages. A message emitted by an object goes up the hierarchy until it finds an object that has an answer procedure. The object-orientation allows an easy implementation of the possibility of attaching an implication semantics to a rule: each rule is implemented in a card including all the procedures allowing the performance of an elementary inference (often called "methods" in object program- ming).
The general structure of the shell is described in Figure 9.
The core of the application is a window that contains the fields where facts are described (initial facts, then inferred ones), and a field where the various steps of the reasoning are stored (see Figure 10). This window contains the "methods" that are called various rule bases (possibly chained). Each rule is implemented in a separate window in order to allow simultaneous rule bases to open. Three main ways to use the system have been implemented: • With propositions (i.e. knowledge that does not
contain variables): - forward chaining; - backward chaining.
• With predicates (i.e. propositions with variables): - backward chaining.
In order to perform backtracking in backward chain- ing, the successive states of the fact base and of the subproblem list are stored in a hidden field, as well as the list of all the rules that could be fired at a moment. If a

Imprecise Knowledge in Expert Systems 107
choice leads to dead-end, fact-base and subproblem lists being restored, the list of the other rules to be fired is also available.
The use of predicates instead of propositions allow the building of more concise rule bases, but is slightly more difficult to use during the pattern matching phrase. Let us consider the following rule:
IF (x is young) THEN (x is single)
and the fact base: "John is young", "Paul is young". Both facts may satisfy the pattern matching phase, but if the first fact is considered, it implies that "x" keeps the value "John" in all the rules fired afterwards. The fact that x stands for John is generally noted x/John and is called an unifier. When several rules are chained, it is then necessary to store the current unifier in order to check that all the pattem-matching phases are consistent. If a dead-end occurs, a new degree of freedom may consist of the definition of a new unifier, i.e. in choosing another proposition that matches the considered predicate. The main difference between the previous operating modes of the inference engine is that a "method" has been added to the system, which is in charge of finding possible unifiers in order to make possible the matching of a proposition to a predicate. The obtained unifier is then stored along with the subproblem list and the fact base at each step of the reasoning. In order to facilitate the understanding of the reasoning, two different tools are provided: • An explanation field, giving the different steps of the
reasoning, and particularly the fired rules, the sub-
problem list and the current state of the unifier (depending on the chosen mode).
• A tree of the reasoning in backward chaining, showing the rules fired and the dead-end that may have occurred (see Figure 10).
4.3. Implementation of the Generalized Modus Ponens
Theoretically, the use of the Generalized Modus Ponens formulas requires the sampling of the membership functions. In order to avoid this difficult task, one may use quick algorithms allowing the building of the membership function of a conclusion on the base of graphic operations on the membership functions of the antecedents (Dubois & Prade, 1988a; Bouchon-Meunier, 1993). The membership functions obtained are not trapezoidal anymore, and it is often necessary to approximate these functions by the closest trapezoidal function to perform several steps of inference. For an educational purpose, we found it interesting to imple- ment the Generalized Modus Ponens as closely as possible to the theoretical formula; we then opted for the sampling technique, that allows us to consider any kind of function, even if this technique is time consuming. Furthermore, we have seen in Section 3.3. that it especially allows the association of an intrinsic uncer- tainty with a rule.
Practically, it is possible to limit the sampling zone to avoid useless computations: the formulas of the Gener- alized Modus Ponens show that the points of interest of
r ~ F i c h i e r Too l s Reg les L a n c e r i n f e r e n c e A r b r e i~:~:,~i~ ~ ~ )
I dessiner I [ e f facer }
r~qle 9 r,qle ? r~qle 5 r~ole 5
controle . m
i - r,0,o, _-
i
Hi¸¸¸ iil i l i !
FIGURE 10. Interface of the system.

108 B. Grabot and E. Caillaud
P ) x isA '
- ?
a a ' b ' b c' d' c d p -
FIGURE 11. Sampling zones.
the membership functions and possibility distributions a r e :
• where/XA,(X) ,~ 0.
• where ixA,(x) ,~ 1, or I.tA,(X) ~ 1.
Let us consider/z A = (a, b, c, d) and/z A, = (a', b', c ' , d') as the membership functions of A and A', with the notation described in Figure 11. The sampling is carried out in the intervals [a', max(b, b')] and [min(c, c'), d'] (see Figure 11).
Another important problem lies in the inference of a conclusion on the basis of an observation which is too far from the premises of a rule. Such an inference rapidly generates a complete uncertainty on the membership function of the conclusion. Two solutions may avoid a congestion of the fact base with unusable facts: • To choose a minimal compatibility degree between the
fact and the premise before firing a rule. • To choose a maximal degree of uncertainty that can be
accepted on a conclusion before adding this conclusion to the fact base. This last solution is naturally not as satisfactory as the first one from the point of view of the computation time. In both solutions, these degrees have to be easily
tuned in order to allow a progressive decrease of the likeness constraints between the facts and the premises until a solution to the problem is found.
Practically, an imprecise rule is composed of a proposition and of an n-uplet that describes the member- ship function of the fuzzy set modeling the imprecise and/or uncertain aspects of the rule (see Figure 12). Each card of the rule bases has a library of the fuzzy implications that can be chosen. An implication seman- tics is selected for a rule by means of a pop-up menu that makes the list of the available implications appear. The implementation of a fuzzy rule is shown in Figure 12, along with the control card in the background. Each proposition contains its membership function, defined as a 4-uplet when it is a trapezoidal function•
The pattern-matching phase is performed by the general inference engine. When a rule is fired, a message is sent to the corresponding card, and the inference is done by a "method" of the card of the rule, according to the selected implication. The result of the inference is
then sent back to the control card to be added to the fact base.
A graphic tool has been added in order to draw the membership functions of the fuzzy sets used in the inference. For instance, this tool allows the superposing of the membership function of an inferred conclusion on the membership function of the standard corresponding conclusion.
This shell is very simple and quite representative of what is basically a fuzzy expert system. Its main advantage is that the learning phase before using the system is very short: in its simplest version, it has successfully been used for educational purposes for two years and seems to be particularly adapted to illustrate theoretical lectures on expert systems. The user-friendli- ness of the system allows a fast prototyping, and it has also been used for research purposes with the prototyp- ing of an expert system for fixture design, developed afterwards on NEXPERT OBJECT TM (Caillaud, Noyes; Anglerot & Padilla, 1993).
The main disadvantage of FLESH is that the language supporting SuperCard, called "SuperTalk", is interpreted and is particularly slow. The performance of this FLESH version does not allow us to consider industrial applica- tions, but gives satisfaction for educational purpose, or in a prototyping phase.
5. TWO EXPERT SYSTEM PROTOTYPES DEVELOPED ON FLESH
Several prototypes of expert systems have been devel- oped, in areas as different as production management diagnosis, fixture design, training program for skiing or • . . choice of a fly for fly fishing. Some details are given hereafter on two typical implementations achieved in a research context: • The prototype of a decision support system for
production activity control in manufacturing systems. • The prototype of a decision support system designed
for ball-bearing selection and assembly.
5.1. Application to Production Activity Control (Grabot & Geneste, 1994)
Production Activity Control (PAC) can be defined as the group of activities directly in charge of managing the transformation of planned orders into manufacturing operations in a workshop. It governs the very short-term detailed planning, execution and monitoring activities required to control the flow of an order as soon as the order is released by the planning system for execution until that order is filled and its disposition completed (Melnyk & Carter, 1986).
The following procedure, in reaction to machine failures, is an example explaining the implementation of a reasoning through a fuzzy inference:

Imprecise Knowledge in Expert Systems
Fichier Edit Tools Regles Lancer inference Arbre 7: ~,i~:~3~
~ ; c o n t r o l e
~r~e (I 5,1 5,15,2C o,5_ /" ~',.~ %~ / B--e. ~ \ ,
n ~ k . ,\,,, B a s e I o -
109
FIGURE 12. Implementation of fuzzy rules.
• If the failure duration is less than 1 h, there is no reaction (i.e. the maintenance is achieved, then the previous planning is followed).
• If there is an available replacement machine, the planned jobs are reallocated to this machine.
This procedure may present differences from a workshop to another one, but we can notice:
• Most of the time, there is an arbitrary threshold on the maintenance duration, a threshold that triggers the decision making.
• The fact that all the propositions are considered as binary, which is not well adapted to the kind of information managed.
With the previously defined tools, the decision- making trigger may be done through a rule of the following type: R l: IF the maintenance duration is long AND the machine is loaded AND there is a replacement machine THEN allocate an important part of the load on the replacement machine.
The last premise has a binary evaluation, and the rule allows at the same time:
• To trigger the decision making. • The divide the load between the failing machine and
the replacement resource, with a "proportionality" between the load reallocated and the maintenance duration.
Since the possibility that the maintenance duration should not be long sets into question the opportunity of
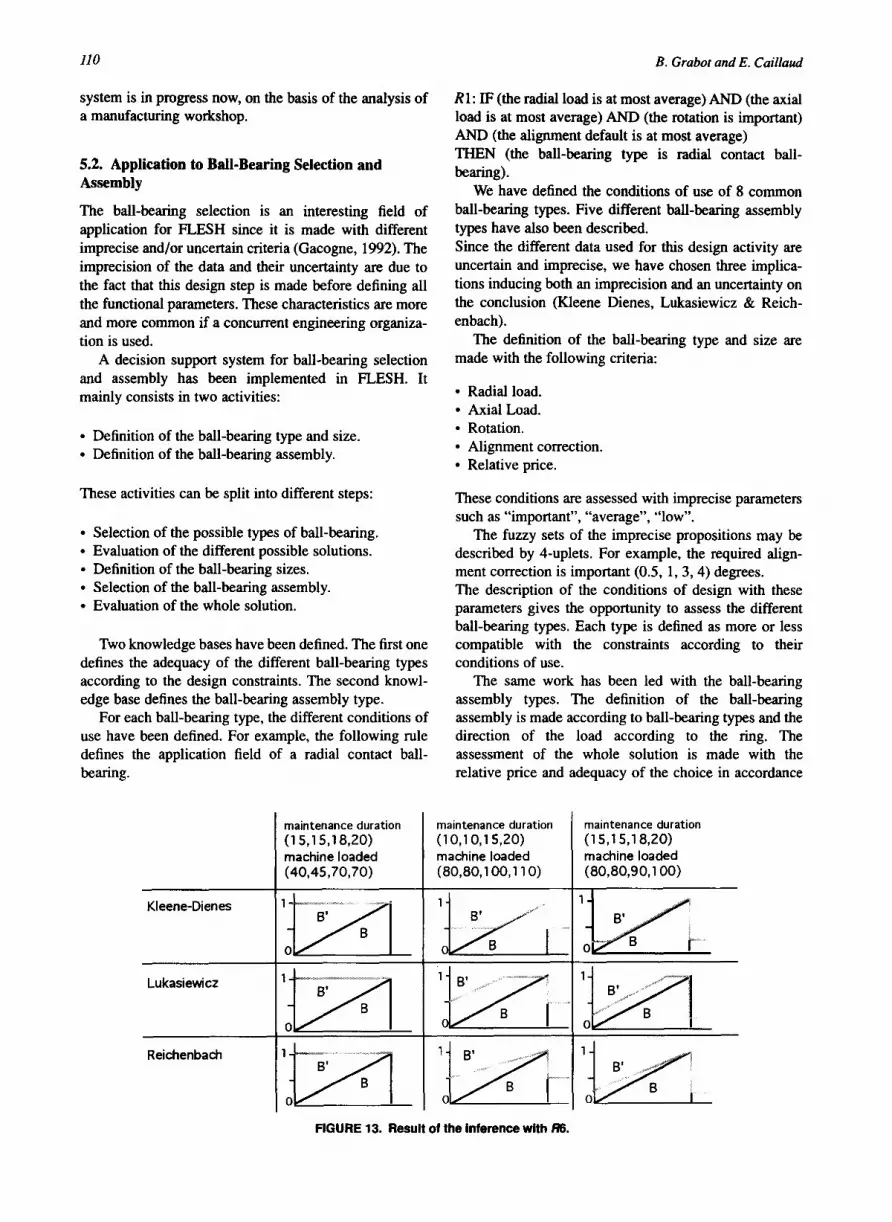
allocating its load to another machine, we have chosen three implications for which the distance between facts and premises induces both an imprecision and an uncertainty on the conclusion (Kleene Dienes, Lukasie- wicz & Reichenbach). The fuzzy sets of the imprecise propositions may be described by the following 4-uplets:
• The maintenance duration is long (0, 20, 20, 20)h. • The machine is loaded (60, 80, 150, 200)% (an
overload is possible). • The allocation of an important part of the load (0, 100,
100, 100)%.
With these choices, we can observe that each maintenance is "long" with a certain degree, and with a degree of 1 when the maintenance lasts more than 20 h. The allocated load may vary from 0 to 100% of the load previously allocated to the machine.
Figure 13 gives the result of the inference of R 1 in three cases describing facts that do not fit, fit a little, and fit the premises of the rules well (the upper curve is the inferred conclusion, and the lower one the standard conclusion). With the three considered implications, the fact relative to the load of the machine in the first case is too far from the premises of R1 in order to give a solution: the uncertainty is then total.
The first tests done on the modeling and implementa- tion of the reasonings used in PAC showed not only the interest of the manipulation of imprecise information, but also the difficulty of implementing a reasoning in a useful and efficient way. The development of a real-scale
110
system is in progress now, on the basis of the analysis of a manufacturing workshop.
5.2. Application to Ball-Bearing Selection and Assembly
The ball-beating selection is an interesting field of application for FLESH since it is made with different imprecise and/or uncertain criteria (Gacogne, 1992). The imprecision of the data and their uncertainty are due to the fact that this design step is made before defining all the functional parameters. These characteristics are more and more common if a concurrent engineering organiza- tion is used.
A decision support system for ball-bearing selection and assembly has been implemented in FLESH. It mainly consists in two activities:
• Definition of the ball-bearing type and size. • Definition of the ball-bearing assembly.
These activities can be split into different steps:
• Selection of the possible types of ball-bearing. • Evaluation of the different possible solutions. • Definition of the ball-bearing sizes. • Selection of the ball-bearing assembly. • Evaluation of the whole solution.
Two knowledge bases have been defined. The first one defines the adequacy of the different ball-bearing types according to the design constraints. The second knowl- edge base defines the ball-beating assembly type.
For each ball-bearing type, the different conditions of use have been defined. For example, the following rule defines the application field of a radial contact ball- bearing.
B. Grabot and E. Caillaud
RI: IF (the radial load is at most average)AND (the axial load is at most average) AND (the rotation is important) AND (the alignment default is at most average) THEN (the ball-bearing type is radial contact ball- bearing).
We have defined the conditions of use of 8 common ball-bearing types. Five different ball-bearing assembly types have also been described. Since the different data used for this design activity are uncertain and imprecise, we have chosen three implica- tions inducing both an imprecision and an uncertainty on the conclusion (Kleene Dienes, Lukasiewicz & Reich- enbach).
The definition of the ball-beating type and size are made with the following criteria:
• Radial load. • Axial Load. • Rotation. • Alignment correction. • Relative price.
These conditions are assessed with imprecise parameters such as "important", "average", "low".
The fuzzy sets of the imprecise propositions may be described by 4-uplets. For example, the required align- ment correction is important (0.5, 1, 3, 4) degrees. The description of the conditions of design with these parameters gives the opportunity to assess the different ball-bearing types. Each type is defined as more or less compatible with the constraints according to their conditions of use.
The same work has been led with the ball-bearing assembly types. The definition of the ball-bearing assembly is made according to ball-bearing types and the direction of the load according to the ring. The assessment of the whole solution is made with the relative price and adequacy of the choice in accordance
Kleene-Dienes
Lukasiewicz
Reichenbach
maintenance duration (15,15,18,20) machine loaded (40,45,70,70)
0
maintenance duration (I 0,10,1S,20) machine loaded (80,80,100,11 O)
1
1 B' ~ J
,,s I . . . .
FIGURE 13. Result of the Inference with R6.
maintenance duration (1S,1S,18,20) machine loaded (80,80,90,100)
1. B' ~ "
1- B ' ..... f : ~ J .... . . . . !

Imprecise Knowledge in Expert Systems 111
with the possibility level. Since ball-bearing selection and assembly use uncertain and imprecise criteria, the use of a fuzzy expert system shell allows the handling of the knowledge rules without any threshold effect. This application shows the interest of FLESH in the design field. The current work is to validate or criticize the results with experts on different examples, in order to improve the rule base.
6. CONCLUSION
Imprecision and uncertainty in expert systems may be considered in some cases as inherent to the expertise, and are necessary in many complex applications. Many research works have been done in this field, for instance with fuzzy logic and the possibility theory. According to us, it is now interesting to give potential users some basic ideas on how an expert system allowing fuzzy inferences works. FLESH has been designed in this purpose, with three main originalities:
• The possibility to associate an inference semantics with each rule, within a library that can be improved.
• The use of an exact inference based on the generalized modus ponens, through a sampling technique.
• Friendly-user interfaces including graphics that allow to use the system at once, and to understand its behavior even during the propagation of imprecision and uncertainty.
After several months of experiments carried out with the most complete version of FLESH, we can draw the following conclusions on the use of the system:
• As a first contact with expert systems, the ergonomics and user-friendliness of a shell are more essential than the number of rules or the speed of the system, at least when the basic functionalities are present. Concurrent projects have been performed by students using NEXPERT on PC computer, and SMECI on a workstation, that showed a considerable loss of time in the understanding of the system. This phase pays when large applications are developed, but not as a first contact with expert system shells.
• The imprecise aspect has to be as restricted as possible, and particularly must consider reasonings that only use few levels of rules: if not, the fast increase of imprecision and uncertainty makes the system unu- sable.
• On the basis of our experiments, the interest in being able to associate a "precise" implication semantics with a rule concerns about one rule out of ten. This number may be considered as low, but it really allows
the expression of a deep expertise on complex cause/ consequence links between facts. Most of the time, it is not useful to consider all the possible implications. It is enough, as a first step, to know if the rule to be implemented is true whatever the likeness fact/premise is, or not. If the rule can be false when the fact and the premise are too different, an implication that generates uncertainty is necessary. Kleene-Dienes' and Willmot' implications may be selected to trigger rules that aim at verifying if a real context is close to the context of a known situation. Since the Willmot implication makes the height of the conclusion-fuzzy set decrease very quickly, it should be used when only facts close to the premises allow the firing of the rule. When the rule also expresses a link of proportionality between the premises and the conclusion, Lukasiewicz' or Reich- enbach' implications can be used. When a rule remains valid whatever the facts are, an
implication that only manipulates imprecision should be used. In many cases these implications give very close results, and it is only when specific facts are more subject than others to occur that it can be possible to adapt precisely an implication to a rule.
In its current version, FLESH has nevertheless important limitations:
FLESH does not provide any help for knowledge or data structuration. The next version will include an object oriented data base that will provide support both in knowledge analysis and in rule design.
As a consequence of the first point, the use of FLESH requires several typings of the same information (e.g. when a propositon is the consequence of the rule and the condition of another one, or when the problem to be solved is described). Since FLESH manipulates character strings, many errors occur when the strings are not exactly similar.
The major inconvenience of FLESH is still its slowness, especially when dealing with imprecise or uncertain propositions. As an example, if a rule contains three premises and a conclusion sampled with 20 values each, the computation of the inferred conclusion requires 160,000 elementary steps (since it requires to build a table similar to Figure 4 composed of 20X20X20 columns for the premise description, and 20 lines to describe the standard conclusion). On a PowerMac with a PowerPC 601 processor at 60 Mhz, it requires more than 10 rain, because of the poor performance of the HyperTalk language.
The use of the new functionalities of the Apple System 7 improves the performance of FLESH, since it makes different applications communicate with mes- sages (the "Apple Events~"). The fuzzy inferences have been rewritten in C + +, and the development of the two versions of the system are in progress: one of them on an

112 B. Grabot and E. Caillaud
Apple Macintosh, using C + + procedures, and the other one on a HP station in C + +, which provides a quasi- immediate processing of inferences up to four premises with samplings of 100 values.
The development of the other FLESH versions will allow the implementation of real-scale industrial expert systems, but we do not believe that these more powerful versions will replace the first SuperCard-based version for educational purposes, for which it seems particularly well adapted.
REFERENCES
Baldwin, J. F. (1992). Evidential support logic, fril and case based reasoning. International Journal of Intelligent Systems, 8,(9) 939-961.
Bouchon-Meunier, B. (1993). La logique Floue, Collection "Que-sais- jeT'. Presses Universitaires de France.
Buchanan, B. G. & Shortliffe, E. H. (1984). Rule Based Expert System- The MYCIN Experiments of the Stanford Heuristic Programming Project. Reading: Addison-Wesley.
Cailland, E. D., Noyes, D., Anglerot G. & Padilla, P. (1993). Towards a simultaneous design of the part and the fixture. In APMS" 93, Elsevier (Ed), 243-250.
Dubois, D. & Prade, H. (1988a). Possibility Theory, an Approach to Computerized Processing of Uncertainty. New York: Plenum Press.
Dubois, D. and Prade, H. (1988b). Handling uncertainty in expert systems: pitfalls, difficulties remedies. A.T.V. Seminar on the Risks in the use of Expert Systems, Copenhagen, May.
Duda, R. O., Gaschnig, J. & Hart, P. E. (1979). Model design in the prospector system for mineral exploration. In Michie, D. (Ed.), Expert Systems in the Microelectronics Age. Scotland: University of Edinburgh.
Evans, R. (1990). Expert systems and HyperCard. BYTE, 317-324. Farreny, H., Prade, H. & Wyss, E. (1986). Approximate reasoning in a
rule-based expert system using possibility theory: a case study, Proceedings of the lOth World IFIP Congress, Dublin, September 1-5, Information Processing "86 (Kugler, H. J. (Ed.), 407-413. North Holland.
Gacogne, L. (1992). Une application de la logique floue dans le domaine du choix des roulements h bille. Les applications des ensemblesflous, 319-324. France: Nimes.
Godo, L., Lopez de Mantaras, R., Sierra, R. & Verdaguer, A. (1987). Managing linguistically expressed uncertainty in MILORD-Appli- cation to medical diagnosis. Proceedings of the 7th international Workshop on Expert Systems and their applications, 571-596. Avignon.
Grabot, B. & Geneste, L. (1994). Inftrence floue pour l'aide ~t la dtcision en pilotage d'atelier. 5th Conference on Information
Processing and Management of Uncertainty in Knowledge-based systems. 56{)-566. Paris, July 4-8.
Grabot, B., Geneste L. & Dupeux A. (1994). Multi-heuristic schedul- ing: three approaches to tune compromises. Journal of Intelligent Manufacturing, 5, 303-313.
Lanritzen, S. L. & Spiegelhalter, D. J. (1988). Local Computations with probabilities on graphical structures and their applications to expert systems. Proceedings of Royal Statistical Society, B.S0, 157-224.
Martin-Clouaire, R. & Prade, H. (1984). Managing uncertainty and imprecision in petroleum geology. International Colloquium on Computers in Earth Sciences for Natural Resources Character- ization, April 9-13, Royer J. J. (Ed.), pp. 85-97. France: Nancy.
Melnyk, S. A. & Carter, P. L. (1986). Identifying the principles of effective production activity control. 29th International Conference of American Production and Inventory Control Society, pp. 227- 232. MO: St. Louis.
Padaru, O., Teodorescu, H. N., Costin, M., Ciobanu, A. and Gradinaru, S. (1994). Fuzzy expert system shell for diagnosis and medical applications. 5th Conference on Information Processing and Management of Uncertainty in Knowledge-based systems, pp. 759- 764. Paris, July 4-8.
Palmer, G. & Le Blanc, B. (1993). MENTA/MD, Moteur dtcisionnel dans le cadre de la logique possibiliste. Troisidmes Journ~es Nationales sur les Applications des ensembles flous, EC2(Ed.), Naterre, 61-68. Nimes, October 26-27.
Parant, P., Charbonnaud, P., Bertin, R. & Pun, L. (1988). Syst~me expert de diagnostic technique: deux approches. 6th International Colloquium on reliability and maintenability. Strasbourg, France, October 6-7.
Parsaye, K. & Chignell, M. (1988). Expert Systems for Experts, New York: John Wiley and Sons.
Pearl, J. (1988). Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference. San Mateo, CA: Morgan Kauf- m a n n .
Sombt, L. (collective name) (1990). Reasoning Under Incomplete Information in Artijfcial Intelligence. New York: John Wiley.
Sugeno, M. (1985). An introduction survey to fuzzy control, Informa- tion Sciences. 36, 149-223.
Turksen, I. B., Ulguray D. and Wang Q. (1990). A qualitative model for hierarchical job shop scheduling. NAFIPS'90 "Quarter Century of Fuzzyness", Toronto, Canada.
Turksen, I. B., Tian, Y. (1993). Combination of rules or their consequences in fuzzy expert systems. Fuzzy Sets and Systems, 58, 3-41.
Watanabe, T. (1991). Job-shop scheduling using fuzzy logic in a computer integrated manufacturing environment. 5th International Conference on Systems Research, lnformatics and Cybernetics, G. Lasker, T. Koizumi and J. Pohl (Ed.), 150-158. International Institute for Advanced Studies in Systems West Germany: Research and Cybernetics Ed.
Zadeh, L. (1965). Fuzzy Sets. Information and Control, 8, 338-353. 7~deh, L. (1978). Fuzzy sets as a basis for a theory of possibility, Fuzzy
Sets and Systems, 1, 3-28.





























