Embed Size (px)
Citation preview

Elektronik automotiveworld of solutions
11 November 2020 9,00 €
E-VEhiclEs & connEctEd car
Bordnetz-Kongress 2020: Energiebordnetz vor großen Herausforderungen
Verbesserung des CAN-Signals in Fahrzeugnetzwerken
Sicherheitslücken im Fahrzeug – Hacken leicht gemacht?
High-End-Innovationen erobern den Markt
DISplAy-TrENDS IM ÜBErBlICK
vector.com/security
Die durchgängige Security-Lösung von Vector. Gegnerische Attacken kommen oft aus dem Hinterhalt. Das gilt auch bei der Entwicklung von Embedded-Software. Mit Cybersecurity-Lösungen von Vector geben Sie das Spiel nicht so einfach aus der Hand: Denn sie schützen Ihre Steuergeräte und Netzwerke effizienter gegen ungewollte Angriffe von außen. Hilfreiche Tools reduzieren außerdem den Arbeitsaufwand für das Entwickeln und Testen, bei gleichzeitig verringerten Kosten. So bleiben Sie sicher auf der Gewinnerseite.
Holen Sie sich mit Vector Sicherheit für Ihre Steuergeräte und Netzwerke.
Automotive Cybersecurity
Ein echter Gewinner: Unsere Defense gegen Cyber-Angriffe.
Vector_EK-auto_11_20.pdf;S: 1;Format:(210.00 x 297.00 mm);16.Oct 2020 12:08:27
11.2020 Elektronik automot ive 3
Editorial
EmotionEn Ernst nEhmEnGefühle beeinflussen das menschliche Verhalten. Das ist im Straßenverkehr nicht anders als in jeder anderen Situation.Mein täglicher Fahrtweg mit dem Auto führt mich über eine Straße, wie sie fürs Alpenvorland südlich von München typisch ist: 150 m Höhenunterschied, bis zu zehn Prozent Steigung, kurvenreich und durch den Wald. Schlicht und einfach unübersichtlich. Vor allem am Nachmittag, wenn die durch die lich-ten Baumwipfel fallenden Sonnenstrahlen einen steten Wechsel aus Licht und Schatten verursachen. Auf der Strecke sind viele Fahrradfahrer unterwegs. Speziell bei schönem Wetter und damit bei besonders schwierigen Sichtverhältnissen. Schon oft habe ich einen vor mir fahrenden Radler erst sehr spät gesehen, um nicht zu sagen im letzten Moment. Die Befürchtung, eines Tages einen Fahrradfahrer zu spät wahrzunehmen und nicht mehr ausweichen zu können, veranlasst mich deshalb dazu, dort äußerst umsichtig zu fahren. Andererseits überlege ich mir ganz genau, ob ich den Berg wirklich mit dem Zweirad zurücklegen möchte. Denn woher soll ich wissen, ob andere Autofahrer das Unfallrisiko an dieser Stelle ebenso einschätzen wie ich und genauso vorausschauend unterwegs sind? Emotionen können also sogar Einfluss auf die Wahl des Verkehrsmittels haben. Forscher am KIT haben dies erkannt: Im Rahmen des Projekts „Cape Reviso“ untersuchen sie, wie sich Fußgänger und Radfahrer im Straßenverkehr – insbeson-dere im Stadtverkehr – fühlen. Neben Faktoren wie Kosten und Wegzeit hänge die Wahl des Verkehrsmittels auch davon ab, ob Mobilität als angenehm oder unan-genehm empfunden werde, so die Wissenschaftler. Subjektiv empfundener Stress, etwa bei Beinahezusammenstößen, spiele dabei eine wichtige Rolle.Die Forschungsarbeit ist komplex: Fahrradfahrer werden mit Abstandssensoren ausgestattet, sodass sich feststellen lässt, wo und wann Autofahrer beim Über-holen die gesetzlich festgelegten Sicherheitsabstände unterschreiten. Außerdem fließen Daten aus Stresssensoren, GPS-Trackern und Befragungen in die Analyse
ein. Ziel ist es, Konfliktsituationen zwischen den unterschied-lichen Verkehrsteilnehmern zu entschärfen, zum Beispiel durch das Anlegen von Radfahrstreifen und -wegen oder durch eine Veränderung der Streckenführung. Bereits jetzt ist bekannt, dass sich das, was Verkehrspla-
nern sinnvoll vorkommt, nicht unbedingt mit der Wahrnehmung der einzelnen Verkehrsteilnehmer
deckt. Doch mehr Sicherheit im Straßenver-kehr ist nur dann möglich, wenn Fußgänger,
Radfahrer und Autofahrer gleichermaßen gelassen unterwegs sein können.
irina hübnEr
Redakteurin
Twitter: @Irina_Huebner
HMS_EK-auto_11_20.pdf;S: 1;Format:(72.00 x 297.00 mm);30.Sep 2020 12:44:16
INHALT
4 Elektronik automot ive 11.2020
16
40
22
36
EdITorIAL
3 Emotionen ernst nehmen
ImpuLsE
6 Bordnetz-Kongress 2020: Energiebordnetz vor großen Herausforderungen
10 Software steuert thermische Komponenten: Thermomanagement von Batterien optimieren
13 Zusammenarbeit von Continental und Xilinx: 4D-Imaging-Radarsystem für automatisiertes Fahren
WIrTscHAfT
14 BorgWarner: Akquise von Delphi Technologies abgeschlossen14 Mahle: Globales Entwicklungszentrum für Mechatronik15 Hella: Verkauf des Bereichs Frontkamerasoftware
coNNEcTEd cAr
16 High-End-Innovationen erobern den Markt: Display-Trends im Blick
22 Adaptive Anwendungen im vernetzten Fahrzeug: Das smarte Auto lernt von selbst
26 Adäquate Cybersicherheit als Voraussetzung für die Typgenehmigung: UNECE-Wunsch trifft AUTOSAR-Wirklichkeit
INHALT
11.2020 Elektronik automot ive 5
26
32
46
43
CoNNeCTed CAr
32 Fahrzeug-Hacking – eine Bestandsaufnahme: Den weißen Hut auf
36 Verbesserung des CAN-Signals in Fahrzeug-netzwerken: Mehr Daten, schnell bitte!
e-VeHICLes
40 Sicherungen in automobilen Batteriesystemen: Kombinierter Schutz für starke Akkus
43 Kompakte und robuste Steckverbinder für die Automobilelektronik: Hart im Nehmen
e-MobILITy
46 OpenScenario – einheitlicher Standard: Testszenarien für autonomes Fahren
51 Impressum51 Inserenten

6 Elektronik automot ive 11.2020
IMpulse
Per Live-Schalte aus den USA gab das Referenten-Duo Jeremy Stout (links oben) und Dr. Deepak Patil (rechts unten) von Molex in der Abschluss-Keynote Einblicke in die Physik der Kontakte. Die Q&A-Session leiteten Prof. Dr. Mathias Rausch und Prof. Götz Roderer von der HS Landshut.
Mit über 100 Teilnehmern fand der „9. Bordnetz-Kongress“ Corona-bedingt diesmal im virtuellen
Raum statt. Schwerpunkte waren Aspekte der Energiebordnetze, der Bordnetztopologie und der
Entwicklungs- und Fertigungsprozesse. Von Gerhard Stelzer
Der „9. Bordnetz-Kongress“ der Elektro
nik automotive musste in diesem Jahr
Corona-bedingt in den virtuellen Raum
ausweichen, konnte dabei aber immerhin
über 100 aktive Teilnehmer, Referenten
und Aussteller anziehen. Das technisch an-
spruchsvolle und umfangreiche Programm,
welches das hochkarätige Programm-
komitee um Program Chair Prof. Dr. Ma-
thias Rausch von der Hochschule Lands-
hut zusammengestellt hatte, konnte durch
Live-Schalten nach Spanien und in die
USA sowie in das FIZ (Forschungs- und
Ingenieurzentrum) von BMW in München
vollständig im geplanten Umfang statt-
finden. Als ein besonderer Schwerpunkt
zeichnete sich in diesem Jahr das Thema
Energiebordnetze ab, das auch Gegen-
stand der beiden Keynotes zum Auftakt
des Bordnetzkongresses war.
MaSSgeSchneiderteS Bordnetz iM BaukaStenprinzip
Mit der „Evolution des Energiebordnet-
zes: Maßgeschneiderte Lösungen auf
Basis des Baukastenprinzips“ beschäf-
tigte sich der Vortrag des Referenten-
Duos Martin Hopf von Leoni und Sebasti-
an Kahnt von Intedis, einem Joint Venture
von Leoni und Hella. Ausgehend von den
drei Trends, Elektrifizierung der Kompo-
nenten (48 V), Elektrifizierung des An-
triebsstrangs und Fahrerassistenzsys-
temen bis hin zum autonomen Fahren,
„Bordnetz-Kongress 2020“
EnErgiEbordnEtz vor groSSEn HErauSfordErungEn
entstehen zahlreiche neue Anforderun-
gen an das Bordnetz. Wie lässt sich die
Energie im Fahrzeug verteilen ohne Si-
cherheitsaspekte zu vernachlässigen?
Hopf und Kahnt gingen das Problem mit
einer Architekturanalyse an, die die Funk-
tionspartitionierung und die Erfüllung
von funktionaler Sicherheit unter die Lu-
pe nimmt und daraus dann einen digita-
len Zwilling für das Energie-Management
entwickelt. Design und Validierung finden
dabei dann per Simulation des digitalen
Zwillings statt. Bei der Analyse wurden
drei Szenarien untersucht: ein risikover-
meidender, ein evolutionärer und ein re-
volutionärer Ansatz (Bild 1). Das Fazit von
Hopf und Kahnt war, dass es leider noch
keine Standardisierung der Energiever-
teilung gibt, die für die Durchsetzung
eines revolutionären Ansatzes wichtig
wäre. Kurzfristig seien risikovermeiden-
de Ansätze mit Prefuse-Komponenten zu
(Bild
: Ele
ktro
nik)

vector.com/security
Die durchgängige Security-Lösung von Vector. Gegnerische Attacken kommen oft aus dem Hinterhalt. Das gilt auch bei der Entwicklung von Embedded-Software. Mit Cybersecurity-Lösungen von Vector geben Sie das Spiel nicht so einfach aus der Hand: Denn sie schützen Ihre Steuergeräte und Netzwerke effizienter gegen ungewollte Angriffe von außen. Hilfreiche Tools reduzieren außerdem den Arbeitsaufwand für das Entwickeln und Testen, bei gleichzeitig verringerten Kosten. So bleiben Sie sicher auf der Gewinnerseite.
Holen Sie sich mit Vector Sicherheit für Ihre Steuergeräte und Netzwerke.
Automotive Cybersecurity
Ein echter Gewinner: Unsere Defense gegen Cyber-Angriffe.
Vector_EK-auto_11_20.pdf;S: 1;Format:(210.00 x 297.00 mm);16.Oct 2020 12:08:27
Bei Conrad finden Sie jetzt Ihren technischenBetriebsbedarf und umfassende Services.
WAS AUCH IMMER SIE BRAUCHEN– MIT DER SOURCING PLATFORMBESCHAFFEN WIR DAS!
Conrad_Elektronik-auto_11_20.pdf;S: 1;Format:(210.00 x 297.00 mm);21.Oct 2020 09:02:25

8 Elektronik automot ive 11.2020
IMpulse
erwarten, mittelfristig intelligente PDUs
(Power Distribution Units).
Komplexität erfordert virtuelle entwicKlung
Auch bei BMW sieht man die virtuelle
Entwicklung eines Energiebordnetzes
als unvermeidbar an. Dazu war das
Referenten-Duo Dr. Christoph Weissin-
ger und Stefan Schwimmbeck live aus
dem Forschungs- und Ingenieurzen-
trum von BMW in München zugeschal-
tet, und stellte ihre vier Megatrends im
Kontext des Energiebordnetzes vor: CO2
und Emission, Antriebsvielfalt, Safety
und Topologievielfalt. Daraus leitet das
Duo ab, dass die Komplexitätsbeherr-
schung der Energiebordnetz-Entwick-
lung künftig nur noch mittels virtueller
Entwicklungsmethoden möglich ist.
Dazu haben die beiden BMW-Ingenieure
sechs zentrale Disziplinen der virtuellen
Energiebordnetz-Entwicklung für eine
optimierte Auslegung definiert. Diese
virtuelle Entwicklungsmethodik ermögli-
che ein optimiertes Energiebord netz-
Design mit hoher Qualitätsreife bereits
zu einem frühen Zeitpunkt. Ein wesent-
licher Aspekt sei dabei eine detaillierte
Modellbildung.
Die komplexe Wechselwirkung der Kom -
ponenten und Funktionen im Energie
bordnetz in Kombination mit Integri -
tätsanforderungen an die Energieversor -
gung lassen sich künftig nur noch per
Systemsimulation im hoch aufgelösten
Zeitbereich beherrschen. Daher postulie-
ren Weissinger und Schwimmbeck, dass
eine belastbare Systemauslegung über
automatisierte Daten- und Modellierungs-
prozesse erfolgen muss (Bild 2). Für die
prozesssichere Simulationsdurchführung
benötige man ein vernetztes Datenma-
nagement und dedizierte Schnittstellen.
Eine Validierung der Simulation konnte
anhand von Messungen am Versuchsträ-
ger erfolgreich durchgeführt werden. Die
Bild 1. Für die Evolution des Energiebordnetzes untersuchte das Referenten-Duo Martin Hopf von Leoni und Sebastian Kahnt von Intedis drei Szenarien: ein
risikovermeidender, ein evolutionärer und ein revolutionärer Ansatz. (Bild: Leoni, Intedis)
Bild 2. Komponenten und Zusammenspiel automatisierter Daten- und Modellierungsprozesse. Für die
prozesssichere Simulationsdurchführung empfiehlt man bei BMW ein vernetztes Datenmanagement und
dedizierte Schnittstellen. (Bild: BMW)
Modellierung von Betriebs- und Alterungs-
zuständen ermöglicht eine Zuverlässig-
keitsanalyse im realen Kundenbetrieb.
fehlertolerantes energieBordnetz
Mit zunehmender Automatisierung des
Fahrens steht als Rückfallebene kein
Fahrer mehr zur Verfügung, der im Not-
fall noch lenken und bremsen könnte.
Also müssen diese Aufgabe elektroni-
sche Systeme im Fahrzeug übernehmen.
Das bedeutet, dass das Energiebordnetz
(EBN) auch im Fehlerfall funktionieren
# pcimeurope
Spezialisiert auf
LEISTUNGSELEKTRONIK?Jetzt Ausstellerunterlagen anfordern:pcim.de/aussteller
Internationale Fachmesse und Konferenzfür Leistungselektronik, Intelligente Antriebstechnik,Erneuerbare Energie und Energiemanagement
Nürnberg, 04. – 06.05.2021
Mesago_EK-auto_11_20.pdf;S: 1;Format:(210.00 x 110.00 mm);16.Oct 2020 12:08:24
IMpulse
muss, also „fail-operational“ sein muss.
Eine Notfallabschaltung reicht nicht aus.
Christian Sültrop vom Fraunhofer IISB
in Erlangen beschäftigte sich in seinem
Vortrag „Fehlertolerantes Energiebord-
netz mit intelligenten Netzknoten“ genau
mit dieser Problemstellung und stellte
das BMBF-geförderte Forschungspro-
jekt „HiBord“ vor, in dem es um „Hoch-
verfügbare und intelligente Bordnetz-
topologien für automatisierte Fahrzeuge“
geht. Volle Redundanz erfordert eine
hohe Anzahl an Komponenten, deshalb
orientiert sich HiBord an einem ganzheit-
lichen Ansatz, der vier Aspekte umfasst:
➔ Auswirkung der Elektrifizierung des
Antriebsstrangs auf das EBN gezielt
nutzen
➔ Verfügbarkeit der Energieversorgung
nur so weit steigern, wie nötig
➔ Abstimmung der Systemarchitektur
sowie des System- und Komponen-
tenverhaltens aufeinander
➔ Einführung möglichst weniger neuer
Komponenten
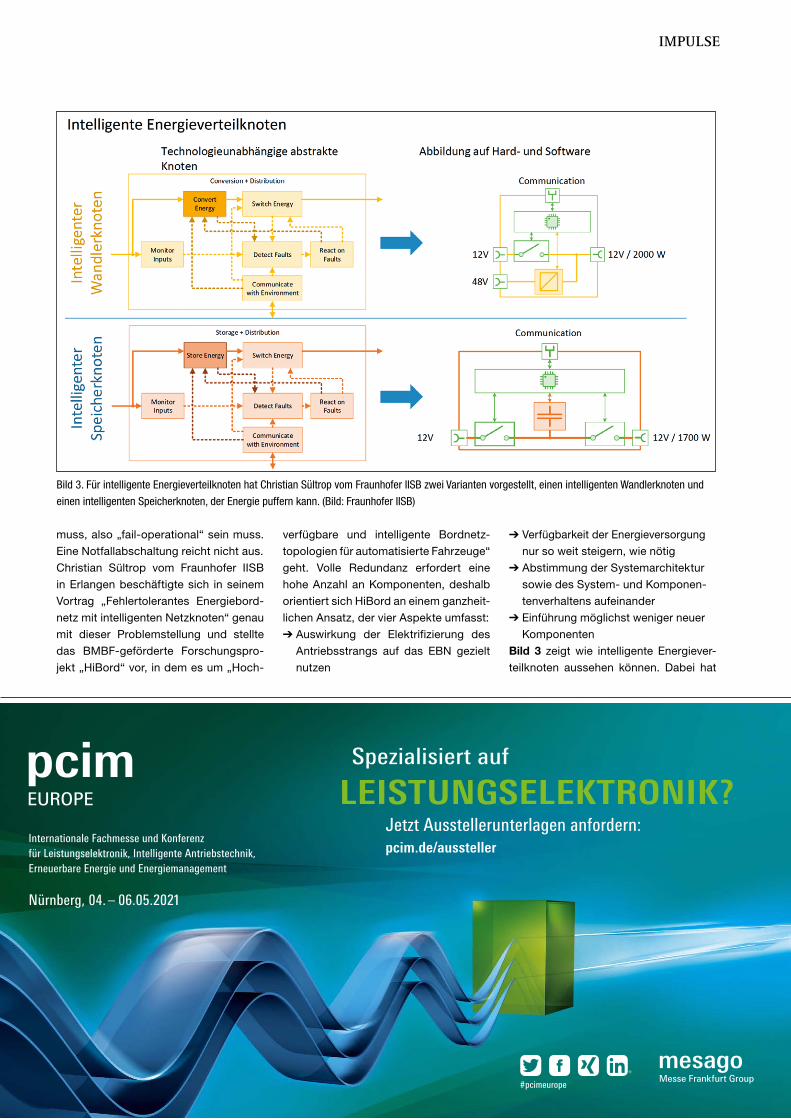
Bild 3 zeigt wie intelligente Energiever-
teilknoten aussehen können. Dabei hat
Bild 3. Für intelligente Energieverteilknoten hat Christian Sültrop vom Fraunhofer IISB zwei Varianten vorgestellt, einen intelligenten Wandlerknoten und
einen intelligenten Speicherknoten, der Energie puffern kann. (Bild: Fraunhofer IISB)
# pcimeurope
Spezialisiert auf
LEISTUNGSELEKTRONIK?Jetzt Ausstellerunterlagen anfordern:pcim.de/aussteller
Internationale Fachmesse und Konferenzfür Leistungselektronik, Intelligente Antriebstechnik,Erneuerbare Energie und Energiemanagement
Nürnberg, 04. – 06.05.2021
Mesago_EK-auto_11_20.pdf;S: 1;Format:(210.00 x 110.00 mm);16.Oct 2020 12:08:24

10 Elektronik automot ive 11.2020
IMpulse
Sültrop zwei Varianten vorgestellt, einen
intelligenten Wandlerknoten und einen
intelligenten Speicherknoten, der Ener-
gie puffern kann.
Datenübertragung im borDnetz
Yao Yao von CAN in Automation gab ei-
nen Überblick über den aktuellen Sta-
tus des Busstandards CAN sowie einen
Ausblick. Im Fokus stand dabei „CAN
XL“, wobei sie besonders auf die neuen
CAN-SIC-XL-Transceiver einging, die Da-
tenraten von 10 Mbit/s und darüber er-
möglichen. Yao geht davon aus, dass
CAN FD (Flexible Datarate) mittelfristig
den klassischen CAN-Bus ablösen wird,
wenn eine höhere Datenrate als 1 Mbit/s
und Nutzdaten von mehr als 8 byte pro
Daten-Frame erforderlich sind. CAN XL
hingegen eignet sich besonders für höhere
Software Steuert thermiSche Komponenten
ThermomanagemenT von BaTTerien opTimierenDas vorausschauende Thermoma-
nagement, das Porsche Engineering im
vergangenen Jahr als Konzeptstudie
entwickelt hat, soll für kürzere Batterie-
ladezeiten und höhere Reichweiten sor-
gen. Die Technologie sorgt dafür, dass
Batterien für den Stopp an der Lade-
säule optimal temperiert sind und das
Schnellladen nur wenige Minuten dau-
ert. Die Temperatur spielt dafür eine
Schlüsselrolle: Sind die Zellen zu kalt
oder zu heiß, sinkt die Ladeleistung. Das
ließe sich mit dem prädiktiven Thermo-
management vermeiden. Dabei soll ei-
ne Software im Auto den kommenden
Fahrtverlauf voraussagen und alle ther-
Datenraten und bietet Zusatzfunktionen,
wie Virtual Networking, Multi-Protokoll-
Unterstützung und Sicherheitsfunktionen
für die Data-Link-Schicht.
Mit der physikalischen Schicht der
10-Mbit/s-Welt beschäftigte sich Mag-
nus-Maria Hell, Lead Principal für Fahr-
zeugnetze bei Infineon. In seinem Vortrag
stellte er die Physical-Layer-Konzepte
von CAN XL, 10BaseT1S und FlexRay
gegenüber und leitete daraus Empfeh-
lungen für das Bordnetz ab.
Wichtig seien eine geringe Impedanz-
streuung bei verdrillten Zweidrahtleitun-
gen (Twisted Pair) von +/- 105 Ohm oder
120 Ohm sowie beim ECU-Layout eine
geringe Toleranz der beiden Leitungen
zwischen Steckverbinder und Transcei-
ver sowie gleiche parasitäre Kapazitäts-
beläge der beiden Leitungen. Sein Fazit
war, dass FlexRay bei aktiver Sterntopo-
logie bei 10 Mbit/s eine gute Signalinte-
grität erreicht. CAN XL biete Bitraten, die
sich an die Topologie anpassen lassen
und gestatte die Nutzung existierender
CAN-FD-Topologien. Außerdem ermög-
liche CAN XL einen sanften Übergang
zu Ethernet. Bei 10BaseT1S lassen sich
die Vorteile von Ethernet nutzen und mit
Daisy Chaining lasse sich eine gute
Signalintegrität erreichen.
Mit der Übertragung hoher Datenraten
per Licht beschäftigten sich zwei Vor-
träge, wobei Jürgen Schachtschnei-
der und Cesar Esteban von KDPOF auf
passive optische Lichtleiter (POF) set-
zen, während Dr. Alexander Noack vom
Fraunhofer IPMS vorschlägt (bild 4) „Wireless TSN über LiFi“ zu übertragen.
Das Referenten-Duo Schachtschneider
Bild 4. Dr. Alexander Noack vom Fraunhofer IPMS
schlägt vor, „Wireless TSN über LiFi“ zu übertra-
gen. Hier sind typische Anwendungen dargestellt.
und Esteban stellten gegenwärtig verfüg-
bare 100-Mbit/s- und 1Gbit/s-Lösungen
vor und zeichneten den Entwicklungspfad
zu Datenraten von 10, 25 und 50 Gbit/s
nach IEEE 802.3 OMEGA (GBase-SR) vor.
Bei diesen hohen Datenraten kommen
dann anstelle von LEDs VCSEL-Laser als
Lichtquellen zum Einsatz.
miniaturisierung unD eine million meilen
Per Live-Schalte aus den USA gab
das Referenten-Duo Jeremy Stout und
Dr. Deepak Patil von Molex in der Ab-
schluss-Keynote Einblicke in die Physik
der Kontakte. Die „Miniaturisierung von
Automotive Steckverbindern“ lässt sich
angesichts neuer Elektronik und Senso-
rik, zusätzlicher Leitungen bei begrenz-
tem Platz- und Gewichtsbudget und
einer zunehmenden Dichte an elektroni-
schen Steuergeräten im Auto kaum ver-
meiden. Mit zunehmender Miniaturisie-
rung der Steckverbindungen wird es
immer schwieriger für die gleiche Ro-
bustheit zu sorgen.
Molex hat deshalb eine „Zero Wear Tech-
nology“ (Null-Verschleiß-Technik) entwi-
ckelt, die ein vorhersagbares und wieder-
holbares elektrisches und mechanisches
Verhalten aufweist. Zen trale Elemente
sind dabei eine geringere Reibung, die
in niedrigeren Steckkräften resultiert,
und freies Zinn an der Schnittstelle so-
wie ein optimaler Kontaktdruck für einen
niedrigen und stabilen elektrischen Über-
gangswiderstand. Erreicht wird dies vor
allem mit einer optimierten Kontaktgeo-
metrie. GS
mischen Komponenten so steuern, dass
die Batterie optimal temperiert ist. Durch
diesen Blick in die Zukunft wird zudem
unnötiges Aufheizen oder Abkühlen
verhindert, was Energie spart und die
Reichweite erhöht.
Diese Vorhersage unterscheidet das neue
System vom herkömmlichen Thermoma-
(Bild
: Fra
unho
fer I
PMS)
Online finden Sie
weitere Bilder.

IMpulse
nagement, wie es derzeit in Fahrzeugen
realisiert ist. Im einfachsten Fall handelt
es sich dabei heute um einen Regelkreis,
der die Motortemperatur immer in einem
sicheren Korridor hält. Das funktioniert
aber meist rein reaktiv: Wird das An-
triebsaggregat zu heiß, öffnet sich zum
Beispiel die Kuhlerjalousie, um die Tem-
peratur zu senken. Bei Verbrennern funk-
tioniert diese Ad-hoc-Regelung recht
gut, weil sich ein Motorblock in wenigen
Minuten abkuhlen lässt. Die
bis zu 700 kg schweren Bat-
terien in E-Fahrzeugen sind
allerdings thermisch deutlich
träger. Um die große Batte-
rie in E-Fahrzeugen rechtzei-
tig auf die richtige Temperatur
furs Laden zu bringen, muss
die Fahrzeugsteuerung mög-
liche Belastungen fruher er-
kennen.
Hierfur hat Porsche Enginee-
ring das Thermomanagement
entwickelt, das die Batterie-
temperaturen der kommen-
den Fahrt vorhersagt. Merkt
das Prognoseprogramm zum
Beispiel, dass der Fahrer
eine Schnellladesäule an-
steuert, aktiviert das Sys-
tem mit dem nötigen Vorlauf
die Kuhl- oder Heizsysteme
an Bord, sodass die Batte-
rie bei Ankunft die perfekte
Temperatur fur einen schnel-
len Ladevorgang hat. Fur sol-
che komplexen Berechnun-
gen in Echtzeit waren bis vor
Kurzem noch leistungsstar-
ke Großrechner nötig. Durch
Optimierung läuft die Soft-
ware dagegen auf einem nor-
malen Steuergerät.
Simulation deS FahrzeugS alS BaSiS
Damit die Fahrzeugsteue-
rung entscheiden kann, wann
kuhlend oder heizend einzu-
greifen ist, muss sie zunächst
wissen, wie die verschiede-
nen Komponenten zusam-
menspielen. Werden die
Zellen zum Beispiel gekuhlt, steigt der
Stromverbrauch, was wiederum Reich-
weite kostet. Deshalb bildet eine Simu-
lation des gesamten Fahrzeugs die Ba-
sis des Thermomanagements: In ihr wird
alles – von der Batterie uber Antrieb und
Kuhlung bis zur Klimaanlage – mittels
Modellen nachgebildet. Dieser digitale
Zwilling verhält sich genau wie ein echtes
Fahrzeug. Wird zum Beispiel die Heizung
aufgedreht, lässt sich an der Simulation
genau ablesen, wie das den Ladezu-
stand der Batterie beeinflussen wird.
Das im Rechner nachgebaute Auto liefert
jedoch nur einen Soll-Zustand. In der Re-
alität beeinflussen viele weitere und oft
nicht direkt messbare Faktoren das Ver-
halten eines Fahrzeugs: der Fahrstil, die
Zuladung, die Straßenoberfläche, sogar
Verschmutzungen an der Karosserie oder
die Farbe der Lackierung (bei schwarzen
Modellen heizt sich der Innenraum stärker
Vorausschauender RückblickEinwandfreie Sicht nach hinten durch ein im Innenspiegel integriertes Display. Kameras in den Außenspiegel reduzieren den toten Winkel. Warnhinweise & Informationsanzeigen im Displayspiegel sorgen für mehr Sicherheit. Kameras und Sensoren im Innenraum steigern Wohlbefi nden und Komfort.
Gentex bietet die Lösung für digitale Sichtsysteme in Fahrzeugen von heute mit Technologien von morgen.
TODAY’S FEATURES » TOMORROW’S TECHNOLOGY
GENTEX.COM // GENTEXTECH.COM
DISPLAYSPIEGEL1-Kamera-System
DIGITALE SPIEGELERSATZSYSTEME3-Kamera-System
INFORMATIONSDISPLAYS ADAS-Warnhinweise &
Informationen
SENSORIKInnenraumsensoren
TODAY AUTONOMOUS
2019-Gentex-Elektronik-Automotive-Digital-Vision-ad-GER.indd 1 1/8/20 10:28 AM
Gentex_Elektronik-Automotive_11_20.pdf;S: 1;Format:(147.00 x 210.00 mm);12.Oct 2020 09:56:02
12 Elektronik automot ive 11.2020
IMpulse
auf). Deshalb sorgt
ein spezielles Soft-
ware-Modul (Real-
time Estimator, RTE)
dafur, dass auch diese
thermischen Einflus -
se berucksichtigt wer-
den. Es vergleicht das
tatsächliche Verhalten
des Fahrzeugs mit der
Simulation und passt
das Modell so schritt-
weise an die Realität
an.
Um in die Zukunft
blicken zu können,
muss das Fahrzeug
naturlich wissen, wo-
hin die Reise gehen wird. Doch kaum
jemand gibt jedes Ziel ins Navigations-
gerät ein. Deshalb kann der Fahrer sei-
nem Auto auch einfach erlauben, die
Fahrten zu „lernen“. Es verfolgt dann
per GPS die Routen und identifiziert von
selbst häufig gefahrene Strecken. Auf-
grund dieser Erfahrungswerte kann das
System später bereits kurz nach dem
Start die vor ihm liegende Fahrt erken-
nen und intern eine Karte der kommen-
den Strecke erstellen. Zum Beispiel „funf
Kilometer Stadtverkehr gefolgt von 20
Kilometern Autobahn mit 120 km/h“. Kern
des vorausschauenden Thermomanage-
ments ist der Optimizer. Er nimmt die
Daten des simulierten Fahrzeugs plus
die Routeninformationen und berechnet
daraus die optimale thermische Reak-
tion des Autos. Wann muss die Wärme-
pumpe aktiviert werden, um die Batterie
vorzuheizen? Wann empfiehlt es sich, sie
mithilfe von Kuhler oder Klimaanlage auf
eine niedrigere Temperatur zu bringen?
Welches Ziel dabei verfolgt wird, legt die
Kostenfunktion fest. Standardmäßig ver-
sucht der Algorithmus, sowohl die La-
dezeit als auch den Energieverbrauch
zu minimieren. Theoretisch könnte die
Priorität jedoch auch auf Leistung ge-
legt werden: Das Thermomanagement
wurde in diesem Fall die Batterie schon
vor dem Erreichen einer Autobahnauf-
fahrt vorheizen, damit schneller be-
schleunigt werden kann. Das Besondere
am Optimizer ist, dass er seine Prognose
alle paar Sekunden neu berechnet und
an die Realität anpasst. Zieht sich der
Fahrer zum Beispiel die Jacke aus und
schaltet die Heizung herunter, wurde der
Algorithmus das bemerken und die Aus-
wirkungen in seiner nächsten Prognose
berucksichtigen.Der ständige Blick in die Zukunft bringt
etliche Vorteile: Wird ein E-Auto beispiels-
weise uberwiegend fur kurze Innenstadt-
fahrten genutzt, lernt das Steuergerät
dieses Muster und kann die Batterietem-
peratur uber den normalen Korridor hin-
aus – aber dennoch im sicheren Bereich
– ansteigen lassen. Denn es weiß, dass
die Fahrt ohnehin bald zu Ende sein wird
und das Fahrzeug sich beim Parken dann
von selbst abkuhlt. So wurde keine Ener-
gie fur eine uberflussige Kuhlung ver-
schwendet werden. Vorausschauendes
Thermomanagement kann dadurch nicht
nur das Laden verkurzen, sondern auch
die Reichweite des Fahrzeugs verbes-
sern. So seien zehn bis 30 Prozent Ener-
gieeinsparung theoretisch möglich.
AnpAssung Auf weniger rechenleistung
Mathematisch handelt es sich bei der
Temperatursteuerung um eine modell-
basierte prädiktive Regelung (Model
Predictive Control, MPC). Sie kommt
uberall dort zum Einsatz, wo viele Fak-
toren auf ein System einwirken und kom-
mende Ereignisse berucksichtigt werden
mussen. Die Methode hat einen Nachteil:
Sie ist sehr rechenintensiv.
Die größte Herausforderung fur die
Mathematiker bestand darin, das hoch-
komplexe Optimierungsprogramm so
zu verändern, dass das Steuergerät
eines normalen Autos die Berechnun-
gen stemmen kann. Dafur waren eini-
ge Kniffe nötig, weil dort in der Regel
weniger Rechenleistung als in einem
Smartphone zur Verfugung steht. Da-
rum arbeitet das Programm beispiels-
weise mit Look-up-Tables, in denen
diskrete Werte stehen, etwa uber den
Zusammenhang zwischen Tempera-
tur und Batteriewiderstand. Das spart
Rechenzeit.
Die Entwicklung der Prognosesoft-
ware stellte Schritt eins dar. Der zwei-
te bestand darin, die neue Technologie
in einem Prototyp zu implementieren.
So musste eine Lösung gefunden wer-
den, die mit existierenden Steuergeräten
funktioniert. Der Code wurde zunächst
an die Fahrzeugarchitektur angepasst,
danach In einem Demonstratorfahrzeug
vom Typ Porsche Taycan getestet und
kalibriert. Dabei wählten die Entwick-
ler realitätsnahe Fahrten aus, also zum
Beispiel durch die Stadt, uber Landstra-
ßen oder die Autobahn, inklusive Stau.
Es wäre sinnlos, ein solches System auf
einer Teststrecke zu erproben. Denn dort
geschieht nur wenig Unvorhersehbares,
was in einer Prognose berucksichtigt
werden musste.
Mittlerweile ist das Projekt abgeschlos-
sen. Die Konzeptstudie hat gezeigt, dass
das prädiktive Thermomanagement ein
hohes Potenzial fur die Serienentwick-
lung hat und in Zukunft in ein Kunden-
fahrzeug eingebaut werden kann. ECK
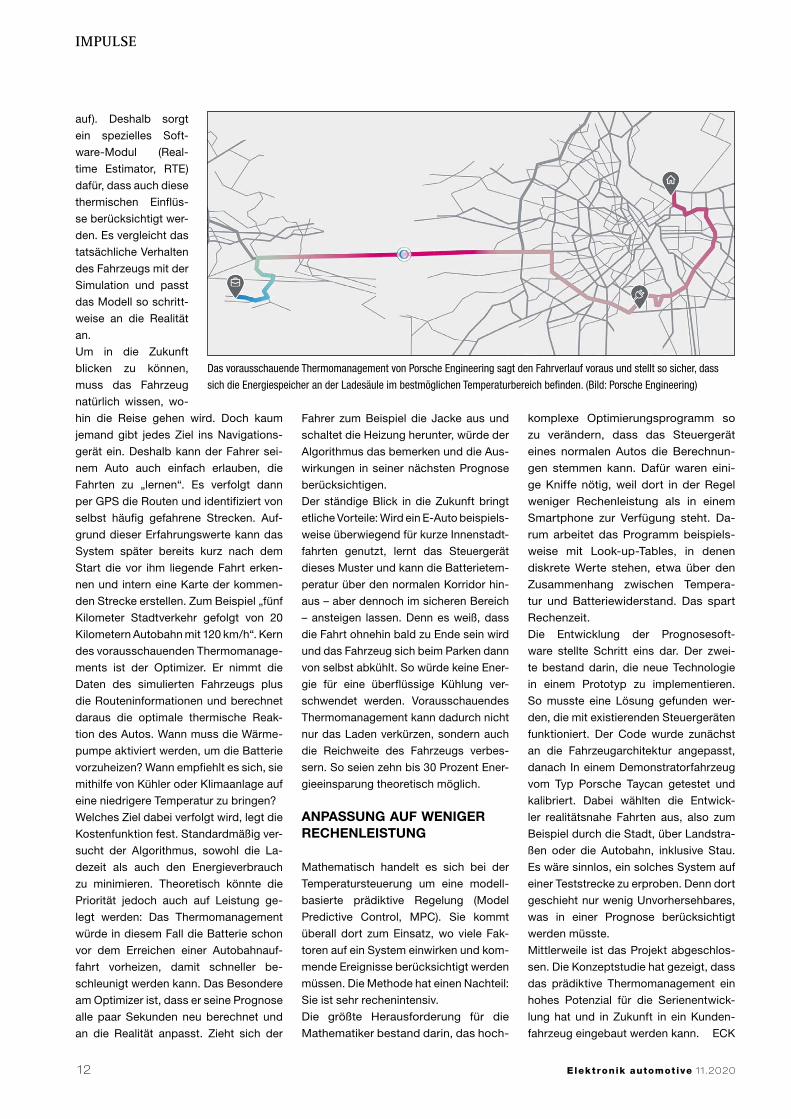
Das vorausschauende Thermomanagement von Porsche Engineering sagt den Fahrverlauf voraus und stellt so sicher, dass
sich die Energiespeicher an der Ladesäule im bestmöglichen Temperaturbereich befinden. (Bild: Porsche Engineering)

11.2020 Elektronik automot ive 13
IMpulse
9.—11. NOVEMBER 2021Messegelände Berlinmobility-electronics.de
JETZT ANMELDEN!
EARLY BOOKING
PREIS SICHERN!
MOBILITYELECTRONICSSUPPLIERS
expo
Veranstalter
Mit Unterstützung von
MesseBerlin_ElektronikAutomotive_11_20.pdf;S: 1;Format:(72.00 x 297.00 mm);07.Oct 2020 15:44:53
Zusammenarbeit von Continental und XilinX
4D-ImagIng-RaDaRsystem füR automatIsIeRtes fahRen
Xilinx wird den neuen Advanced Radar Sensor 540 von
Continental mit der Zynq UltraScale+ MPSoC-Plattform
betreiben. Fahrzeuge mit dem ARS540 sollen teilauto-
matisierte Funktionen nach SAE-Level 2 ermöglichen.
Das 4D-Imaging-Radar steht laut Hersteller für die
Produktion bereit.
4D-Imaging-Radar bestimmt die Position eines Objekts in Entfernung,
Azimut, Höhe und Relativgeschwindigkeit, um detaillierte Informationen
über die Fahrumgebung zu liefern, welche Radarsysteme, die nur Ge-
schwindigkeit und Azimut erfassen, nicht liefern können. Der ARS540 von
Continental ist ein Fernbereichsradarsensor, der in Kombination mit anderen
Technologien hochautomatisiertes Fahren ermöglicht. Mit einer Reichweite
von bis zu 300 m und einem Öffnungswinkel von ±60° soll der Radarsensor in
einem ersten Schritt die Realisierung von Fahrerassistenzfunktionen und
im nächsten Schritt dann das automatisierte Fahren ermöglichen. Der
Öffnungswinkel ist wichtig, um eine autonome Notbremsung bei queren-
dem Verkehr an Kreuzungen zu unterstützen und dabei Motorräder oder
Pedelecs sicher zu erkennen. Zu den Merkmalen des ARS540 gehört unter
anderem eine höhere Auflösung im Vergleich zu den vorherigen Genera-
tionen, durch die ein exakteres Bild der Verkehrssituation gewonnen wird.
Darüber hinaus kann durch die Elevationsmessfähigkeit auch die Höhe
von Objekten bestimmt werden. Hiermit können beispielsweise Stau -
enden unter einer Brücke oder auch Straßenbegrenzungen wie Rand steine
erkannt werden.
Das Zynq UltraScale+ MPSoC von Xilinx ist eine anpassungsfähige Platt-
form, die es dem ARS540 ermöglicht, verschiedene Sensorplattformkon-
figurationen zu unterstützen und sich der vom Automobilhersteller vorge-
gebenen Spezifikation anzupassen. Die Parallelverarbeitung innerhalb der
programmierbaren Logik des Bausteins ermöglicht unabhängige, jedoch
gleichzeitige Verarbeitungspipelines, die für die 4D-Sensorik des ARS540
entscheidend sind. Die DSP-Slices ermöglichen eine Hardwarebeschleu-
nigung der Echtzeit-Radarsensoreingänge. ECK
(Bild: Xilinx)

Wirtschaft
14 Elektronik automot ive 11.2020
Wirtschaft
BorgWarner
Akquise von Delphi Technologies AbgeschlossenBorgWarner hat den Abschluss der Akquisition von Delphi Technologies bekannt gegeben. Der
Zusammenschluss beider Unternehmen soll die Bereiche Elektronik und Leistungselektronik
ausbauen sowie deren Kapazitäten erhöhen.
„Wir freuen uns über den Abschluss un-
serer Akquise von Delphi Technologies“,
betont Frédéric Lissalde, Präsident und
CEO von BorgWarner, und ist sich sicher:
„Durch diese Verbindung ist BorgWarner
in der Lage, ein noch umfassenderes
Portfolio an führenden Antriebslösungen
und -systemen im Bereich Verbrenner,
Hybrid und Elektrofahrzeuge anbieten zu
können. Wir gehen davon aus, dass der
Zusammenschluss auch unser Geschäft
im Bereich Nutzfahrzeuge und Aftermar-
ket stärken wird. Wir heißen die Kollegen
von Delphi Technologies auf der ganzen
Welt herzlich willkommen im BorgWarner
Team und freuen uns darauf, gemeinsam
neue Möglichkeiten und Markttrends in
Richtung Elektrifizierung anzugehen.“
Durch den Zusammenschluss von Borg-
Warner und Delphi Technologies erwar-
tet man sich:
➔ zusätzliche Kapazitäten durch den
Ausbau der Bereiche Elektronik und Leis-
tungselektronik. Damit wird BorgWarner
gut aufgestellt für den kommenden Tech-
nologiewandel bei Fahrzeug antrieben
sein. Delphi Technologies verfügt über
Leistungselektronik, bewährte Ferti-
gungskapazitäten, verlässliche Lieferket-
ten sowie einen festen Kundenstamm.
Das vereinte Unternehmen wird Stand-
alone- und integrierte Lösungen im Be-
reich Leistungselektronik bieten können.
Das umfasst Hochvolt-Inverter, Konver-
ter, On-Board-Charger, Batteriemanage-
mentsysteme und Software sowie weitere
Lösungen in den Bereichen Systeminteg-
ration und Wärmemanagement.
➔ Eine Stärkung der Geschäftsfelder Ver-
brennungs-, Nutzfahrzeug- und Aftermar-
ket-Technologien, da sich die Sortimente
der Unternehmen gut ergänzen.
Die Transaktion wird nun abgeschlossen,
nachdem die Zustimmung der Aktionäre
von Delphi Technologies, die erforderli-
chen behördlichen Freigaben, die Erfül-
lung bestimmter Bedingungen in Bezug
auf die Schuldenlast von Delphi Technolo-
gies sowie die Erfüllung oder Aussetzung
der üblichen Abschlussbedingungen er-
folgte. In Verbindung mit dem Abschluss
dieser Transaktion wird die Stammaktie
von Delphi Technologies nicht mehr an
der New Yorker Börse gehandelt. ECK
Der Automobilzulieferer hat in den Auf-
bau des Zentrums einen mittleren zwei-
stelligen Millionenbetrag investiert. Be-
reits Anfang des Jahres hatte Mahle
einen eigenen Geschäftsbereich für Elek-
tronik und Mechatronik gegründet. In
den nächsten zehn Jahren erwartet das
Unternehmen für dieses Geschäftsfeld
ein deutlich zweistelliges Umsatzwachs-
tum. Die Themenschwerpunkte des neuen
Entwicklungszentrums sind Mechatronik,
Elektrik/Elektronik sowie Programmierung
und Software für komplexe Produktlö-
sungen und -systeme. Der Fokus liegt
dabei auf der Entwicklung von Gesamt-
systemen. Ein Beispiel für eine solche Pro-
duktlösung ist das vor Ort neu entwickel-
te elektrische Expansionsventil. Es sorgt
in Kältekreisläufen für eine optimale Steu-
erung der Klimaanlage sowie der Kühlung
der Traktionsbatterien. Die Komponente
wird ab 2022 in Serie gehen und kann so-
wohl in Fahrzeugen mit konventionellem
Verbrennungsmotor als auch in batterie-
elektrischen oder in Hybrid-Anwendungen
eingesetzt werden. In modernen Prüfein-
richtungen, die ebenfalls in Kornwestheim
angesiedelt sind, können Produkte wie
dieses Expansionsventil umfassend ge-
testet und validiert werden. ECK
Bild: Mahle
Mahle errichtet in Kornwestheim bei Stuttgart ein
globales Entwicklungszentrum für Mechatronik. Rund
100 Ingenieure werden Lösungen für elektrische
Antriebs systeme, Aktuatoren und elektrische Neben
aggre gate für Fahrzeuge mit Hybrid, Wasserstoff
oder batterie elektrischen Antrieben entwickeln.
Mahle
globAles enTwicklungszenTrum für mechATronik

WirtschaftWirtschaft
11.2020 Elektronik automot ive 15
Hella
Verkauf des bereichs frontkamerasoftware
Hella veräußert sein Geschäft mit Frontkamerasoftware sowie
die zugehörigen Aktivitäten im Bereich Testing und Validation
an die Car.Software Org von Volkswagen. Eine entsprechende
Vereinbarung haben beide Unternehmen unterzeichnet.
Die Transaktion wird im Falle eines erfolg-
reichen Abschlusses zu einem Ertrag in
der Größenordnung von in etwa 100 Mil-
lionen Euro führen. Die zu veräußernden
Geschäftsaktivitäten sind bei der Tochter -
gesellschaft Hella Aglaia Mobile Vision in
Berlin angesiedelt. Im Zuge der Veräuße-
rung soll rund die Hälfte der Belegschaft
von Hella Aglaia in die Car.Software Org
wechseln, die Volkswagen Anfang des
Jahres als markenübergreifende Einheit
für Softwareentwicklung gegründet hatte.
Die Transaktion steht noch unter Vorbe-
halt der Freigabe durch die zuständigen
Kartellbehörden und soll aller Voraus-
sicht nach im ersten Quartal 2021 zum
Abschluss kommen.
„Der Ausstieg aus dem Geschäft mit
Frontkamerasoftware erfolgt auf Basis
eines stringenten Portfoliomanagements.
Maßgeblich hierfür sind unsere strate-
gischen Eckpfeiler Technologieführer-
schaft, Marktführerschaft sowie die Erfül-
lung bestimmter finanzieller Kennzahlen“,
erklärt Dr. Rolf Breidenbach, Vorsitzender
der Hella-Geschäftsführung den Verkauft.
„Wenn wir eines dieser drei Kriterien mit
einem Produkt nicht nachhaltig erreichen
können, verfolgen wir die entsprechen-
den Geschäftsaktivitäten nicht weiter.
Um unsere Ziele dauerhaft zu erreichen,
hätten wir im Bereich Frontkamerasoft-
ware außerordentlich hohe Investitionen
verbunden mit einem großen unterneh-
merischen Risiko tätigen müssen. Von
daher freuen wir uns, mit Volkswagen nun
einen starken Partner gefunden zu haben,
der diese Aktivitäten strategisch weiter-
entwickeln wird.“Nicht von der Veräußerung betroffen sind
die weiteren Geschäftsaktivitäten der
Berliner Tochter in den Bereichen Ener-
giemanagement, Lichtsteuerung und
People Sensing. „Wir werden weiterhin
konsequent in automobile Zukunftsthe-
men wie Elektromobilität, automatisier-
tes Fahren, Software und Digitalisie-
rung investieren“, unterstreicht Dr. Rolf
Breidenbach. Mit dem neu gegründeten
Global Software House, will der Automo-
bilzuliefer beispielsweise die weltweiten
Softwarekompetenzen weiter ausbauen.
Zugleich investiert das Unternehmen
auch weiterhin in Schlüsselkomponen-
ten für das assistierte und automatisierte
Fahren. Dazu gehören insbesondere die
Bereiche Radarsensorik und Lenkungs-
elektronik. ECK
(Bild
: Hel
la)
TRAUMKURVENNACH NORMSysteme für normativeAutomotive Tests
12 V und 48V Bordnetze
Modularer Aufbau – erweiterbar fürIhre individuellen Applikationen
160W bis zu 10.000W Ausgangsleistung
Intuitiv bedienbare Software WaveControlzur Erzeugung beliebiger Kurvenverläufe
Umfangreiche Kurvenbibliotheken zurDurchführung automotiver Normen, u. a.LV 124 / LV 148
***Weltweite Referenzen***
WWW.TOELLNER.DETelefon: 02330 – 979191
MADE IN GERMANY
LV 124 / LV148
Toellner_EKAUTO SH03_19.pdf;S: 1;Format:(72.00 x 297.00 mm);21.Jun 2019 08:10:29

ConneCted Car | displays
16 Elektronik automot ive 11.2020
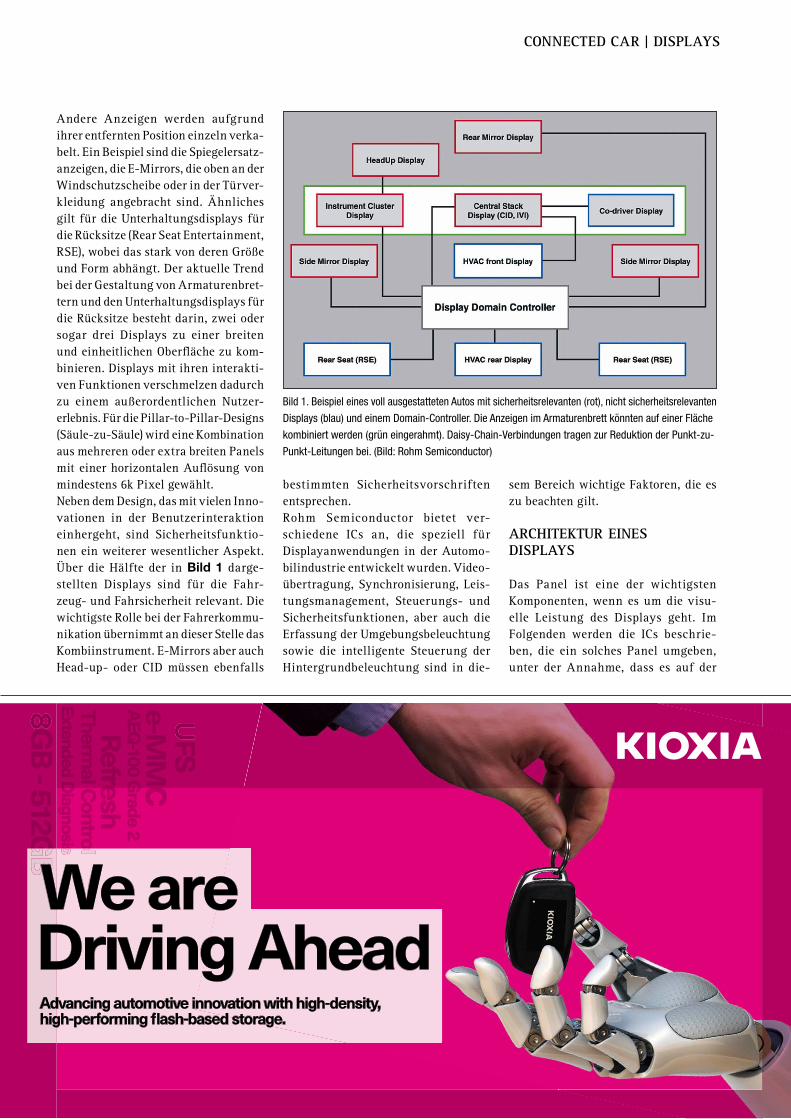
In den vergangenen Jahren hat sich die Architektur der Displayanzeigen im Fahrzeug grundlegend verändert, sodass man heute in einem voll aus-gestatteten Auto eine große Vielfalt an Displays findet (Bild 1). Typischerweise werden sie mit einem Domain-Con-troller verbunden, der als Videoquelle fungiert. Bilder und Grafiken werden dabei zentral in leistungsfähigen GPUs
Für moderne Fahrzeuge kommen neben der Instrumententafel und der
Mittelkonsole immer mehr Bildschirmanzeigen wie etwa E-Mirrors,
Head-up- oder Entertainment-Displays auf den Markt. Um diese optimal
zu integrieren, werden sowohl die Innenraum- als auch die Bedien-
konzepte angepasst. Neben funktionalen Aspekten müssen dabei
Qualitäts- und Sicherheitsfaktoren beachtet werden. Von Stefan Drouzas
erstellt und anschließend über Hochge-schwindigkeits-Kabelverbindungen zu den entfernten Displays übertragen. Die Verkabelung und mögliche Verkettun-gen (Daisy Chaining) werden durch den Standort und die Funktion jeder einzel-nen Anzeige beeinflusst. Die jeweilige optionale Fahrzeugkonfiguration, d.h. welche Displays ausgewählt und instal-liert werden, ist entscheidend.
Ein typisches Beispiel für eine Daisy Chain ist die Verkettung der Anzeige des Kombiinstruments mit dem Head-up-Display. Die Daisy Chain ist außer-dem die bevorzugte Verbindung zwi-schen dem Center Information Display (CID) und dem optionalen Beifahrer-display und/oder dem Display zur Steuerung der Klimaanlage (Heating, Ventilation, Air-Conditioning, HVAC).
(Bild
: Roh
m S
emic
ondu
ctor
)
HigH-End-innovationEn ErobErn dEn Markt
DISplAy-TrENDS IM BlIck
KIOXIA_Elektronik Automotive_11_20.pdf;S: 1;Format:(210.00 x 110.00 mm);21.Oct 2020 16:08:42
ConneCted Car | displays
Andere Anzeigen werden aufgrund ihrer entfernten Position einzeln verka-belt. Ein Beispiel sind die Spiegelersatz-anzeigen, die E-Mirrors, die oben an der Windschutzscheibe oder in der Türver-kleidung angebracht sind. Ähnliches gilt für die Unterhaltungsdisplays für die Rücksitze (Rear Seat Entertainment, RSE), wobei das stark von deren Größe und Form abhängt. Der aktuelle Trend bei der Gestaltung von Armaturenbret-tern und den Unterhaltungsdisplays für die Rücksitze besteht darin, zwei oder sogar drei Displays zu einer breiten und einheitlichen Oberfläche zu kom-binieren. Displays mit ihren interakti-ven Funktionen verschmelzen dadurch zu einem außerordentlichen Nutzer-erlebnis. Für die Pillar-to-Pillar-Designs (Säule-zu-Säule) wird eine Kombination aus mehreren oder extra breiten Panels mit einer horizontalen Auflösung von mindestens 6k Pixel gewählt.Neben dem Design, das mit vielen Inno-vationen in der Benutzerinteraktion einhergeht, sind Sicherheitsfunktio-nen ein weiterer wesentlicher Aspekt. Über die Hälfte der in Bild 1 darge-stellten Displays sind für die Fahr-zeug- und Fahrsicherheit relevant. Die wichtigste Rolle bei der Fahrerkommu-nikation übernimmt an dieser Stelle das Kombiinstrument. E-Mirrors aber auch Head-up- oder CID müssen ebenfalls
bestimmten Sicherheitsvorschriften entsprechen.Rohm Semiconductor bietet ver-schiedene ICs an, die speziell für Display anwendungen in der Automo-bilindustrie entwickelt wurden. Video-übertragung, Synchronisierung, Leis-tungsmanagement, Steuerungs- und Sicherheitsfunktionen, aber auch die Erfassung der Umgebungsbeleuchtung sowie die intelligente Steuerung der Hintergrundbeleuchtung sind in die-
sem Bereich wichtige Faktoren, die es zu beachten gilt.
arChitektur eines displays
Das Panel ist eine der wichtigsten Komponenten, wenn es um die visu-elle Leistung des Displays geht. Im Folgenden werden die ICs beschrie-ben, die ein solches Panel umgeben, unter der Annahme, dass es auf der
Bild 1. Beispiel eines voll ausgestatteten Autos mit sicherheitsrelevanten (rot), nicht sicherheitsrelevanten
Displays (blau) und einem Domain-Controller. Die Anzeigen im Armaturenbrett könnten auf einer Fläche
kombiniert werden (grün eingerahmt). Daisy-Chain-Verbindungen tragen zur Reduktion der Punkt-zu-
Punkt-Leitungen bei. (Bild: Rohm Semiconductor)
KIOXIA_Elektronik Automotive_11_20.pdf;S: 1;Format:(210.00 x 110.00 mm);21.Oct 2020 16:08:42
ConneCted Car | displays
18 Elektronik automot ive 11.2020
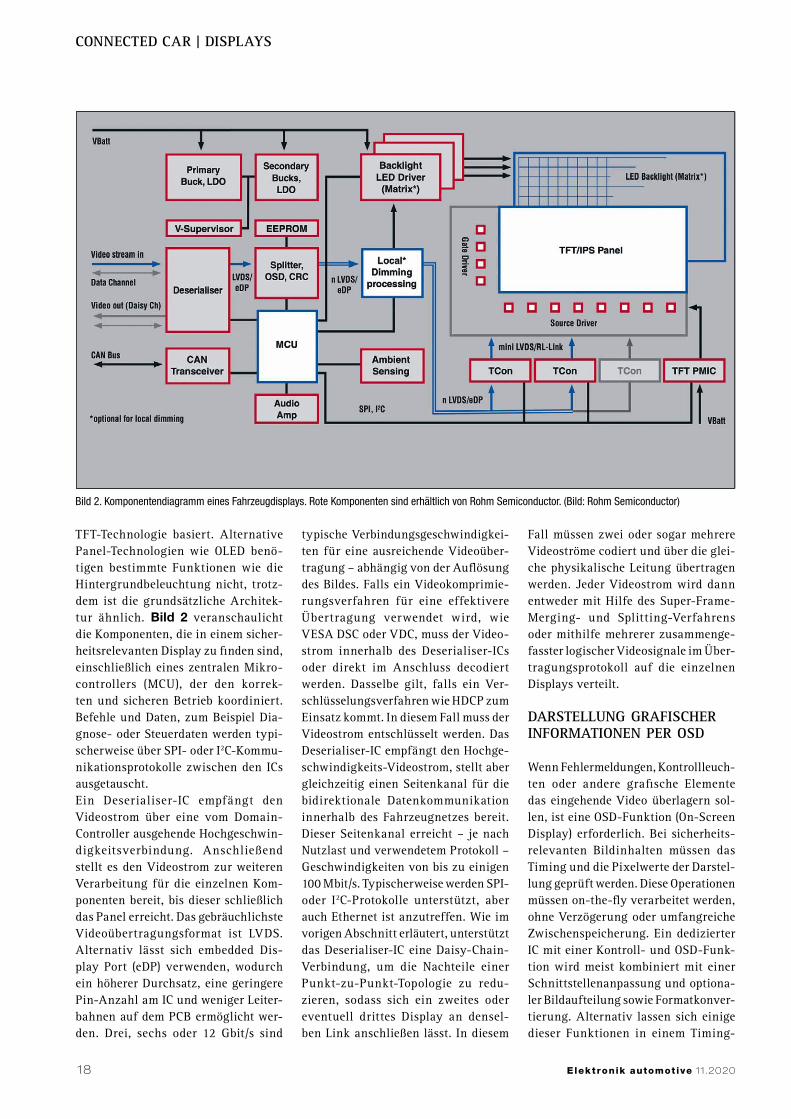
TFT-Technologie basiert. Alternative Panel-Technologien wie OLED benö-tigen bestimmte Funktionen wie die Hintergrundbeleuchtung nicht, trotz-dem ist die grundsätzliche Architek-tur ähnlich. Bild 2 veranschaulicht die Komponenten, die in einem sicher-heitsrelevanten Display zu finden sind, einschließlich eines zentralen Mikro-controllers (MCU), der den korrek-ten und sicheren Betrieb koordiniert. Befehle und Daten, zum Beispiel Dia-gnose- oder Steuerdaten werden typi-scherweise über SPI- oder I2C-Kommu-nikationsprotokolle zwischen den ICs ausgetauscht.Ein Deserialiser-IC empfängt den Videostrom über eine vom Domain-Controller ausgehende Hochgeschwin-digkeitsverbindung. Anschließend stellt es den Videostrom zur weiteren Verarbeitung für die einzelnen Kom-ponenten bereit, bis dieser schließlich das Panel erreicht. Das gebräuchlichste Videoübertragungsformat ist LVDS. Alternativ lässt sich embedded Dis-play Port (eDP) verwenden, wodurch ein höherer Durchsatz, eine geringere Pin-Anzahl am IC und weniger Leiter-bahnen auf dem PCB ermöglicht wer-den. Drei, sechs oder 12 Gbit/s sind
typische Verbindungsgeschwindigkei-ten für eine ausreichende Videoüber-tragung – abhängig von der Auflösung des Bildes. Falls ein Videokomprimie-rungsverfahren für eine effektivere Übertragung verwendet wird, wie VESA DSC oder VDC, muss der Video-strom innerhalb des Deserialiser-ICs oder direkt im Anschluss decodiert werden. Dasselbe gilt, falls ein Ver-schlüsselungsverfahren wie HDCP zum Einsatz kommt. In diesem Fall muss der Videostrom entschlüsselt werden. Das Deserialiser-IC empfängt den Hochge-schwindigkeits-Videostrom, stellt aber gleichzeitig einen Seitenkanal für die bidirektionale Datenkommunikation innerhalb des Fahrzeugnetzes bereit. Dieser Seitenkanal erreicht – je nach Nutzlast und verwendetem Protokoll – Geschwindigkeiten von bis zu einigen 100 Mbit/s. Typischerweise werden SPI- oder I2C-Protokolle unterstützt, aber auch Ethernet ist anzutreffen. Wie im vorigen Abschnitt erläutert, unterstützt das Deserialiser-IC eine Daisy-Chain-Verbindung, um die Nachteile einer Punkt-zu-Punkt-Topologie zu redu-zieren, sodass sich ein zweites oder eventuell drittes Display an densel-ben Link anschließen lässt. In diesem
Fall müssen zwei oder sogar mehrere Videoströme codiert und über die glei-che physikalische Leitung übertragen werden. Jeder Videostrom wird dann entweder mit Hilfe des Super-Frame-Merging- und Splitting-Verfahrens oder mithilfe mehrerer zusammenge-fasster logischer Videosignale im Über-tragungsprotokoll auf die einzelnen Displays verteilt.
darstellung grafisCher informationen per osd
Wenn Fehlermeldungen, Kontrollleuch-ten oder andere grafische Elemente das eingehende Video überlagern sol-len, ist eine OSD-Funktion (On-Screen Display) erforderlich. Bei sicherheits-relevanten Bildinhalten müssen das Timing und die Pixelwerte der Darstel-lung geprüft werden. Diese Operationen müssen on-the-fly verarbeitet werden, ohne Verzögerung oder umfangreiche Zwischenspeicherung. Ein dedizierter IC mit einer Kontroll- und OSD-Funk-tion wird meist kombiniert mit einer Schnittstellenanpassung und optiona-ler Bildaufteilung sowie Formatkonver-tierung. Alternativ lassen sich einige dieser Funktionen in einem Timing-
Bild 2. Komponentendiagramm eines Fahrzeugdisplays. Rote Komponenten sind erhältlich von Rohm Semiconductor. (Bild: Rohm Semiconductor)
11.2020 Elektronik automot ive 19
ConneCted Car | displays
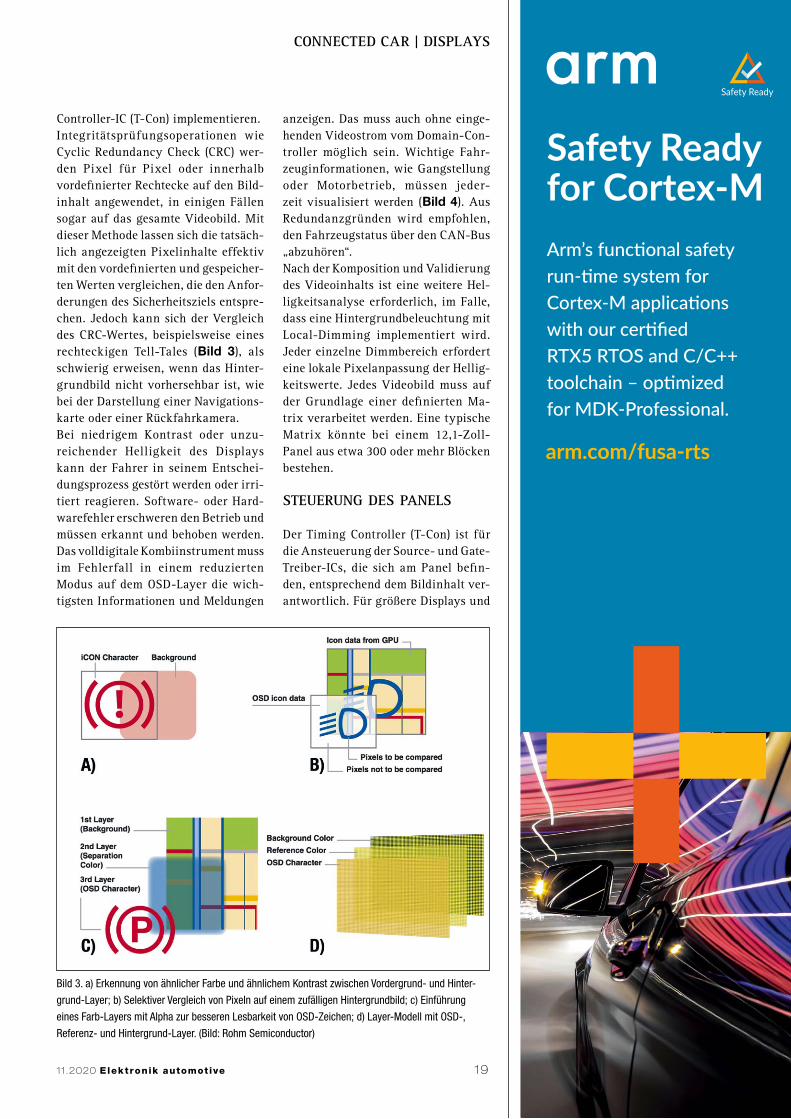
Controller-IC (T-Con) implementieren.Integritätsprüfungsoperationen wie Cyclic Redundancy Check (CRC) wer-den Pixel für Pixel oder innerhalb vordefinierter Rechtecke auf den Bild-inhalt angewendet, in einigen Fällen sogar auf das gesamte Videobild. Mit dieser Methode lassen sich die tatsäch-lich angezeigten Pixelinhalte effektiv mit den vordefinierten und gespeicher-ten Werten vergleichen, die den Anfor-derungen des Sicherheitsziels entspre-chen. Jedoch kann sich der Vergleich des CRC-Wertes, beispielsweise eines rechteckigen Tell-Tales (Bild 3), als schwierig erweisen, wenn das Hinter-grundbild nicht vorhersehbar ist, wie bei der Darstellung einer Navigations-karte oder einer Rückfahrkamera.Bei niedrigem Kontrast oder unzu-reichender Helligkeit des Displays kann der Fahrer in seinem Entschei-dungsprozess gestört werden oder irri-tiert reagieren. Software- oder Hard-warefehler erschweren den Betrieb und müssen erkannt und behoben werden. Das volldigitale Kombiinstrument muss im Fehlerfall in einem reduzierten Modus auf dem OSD-Layer die wich-tigsten Informationen und Meldungen
anzeigen. Das muss auch ohne einge-henden Videostrom vom Domain-Con-troller möglich sein. Wichtige Fahr-zeuginformationen, wie Gangstellung oder Motorbetrieb, müssen jeder-zeit visualisiert werden (Bild 4). Aus Re dundanzgründen wird empfohlen, den Fahrzeugstatus über den CAN-Bus „abzuhören“.Nach der Komposition und Validierung des Videoinhalts ist eine weitere Hel-ligkeitsanalyse erforderlich, im Falle, dass eine Hintergrundbeleuchtung mit Local-Dimming implementiert wird. Jeder einzelne Dimmbereich erfordert eine lokale Pixelanpassung der Hellig-keitswerte. Jedes Videobild muss auf der Grundlage einer definierten Ma -trix verarbeitet werden. Eine typische Matrix könnte bei einem 12,1-Zoll-Panel aus etwa 300 oder mehr Blöcken bestehen.
steuerung des panels
Der Timing Controller (T-Con) ist für die Ansteuerung der Source- und Gate-Treiber-ICs, die sich am Panel befin-den, entsprechend dem Bildinhalt ver-antwortlich. Für größere Displays und
Bild 3. a) Erkennung von ähnlicher Farbe und ähnlichem Kontrast zwischen Vordergrund- und Hinter-
grund-Layer; b) Selektiver Vergleich von Pixeln auf einem zufälligen Hintergrundbild; c) Einführung
eines Farb-Layers mit Alpha zur besseren Lesbarkeit von OSD-Zeichen; d) Layer-Modell mit OSD-,
Referenz- und Hintergrund-Layer. (Bild: Rohm Semiconductor)
Arm’s functional safety run-time system for Cortex-M applications with our certified RTX5 RTOS and C/C++ toolchain – optimized for MDK-Professional.
arm.com/fusa-rts
Safety Ready for Cortex-M
ARM_EK-auto_11_20.pdf;S: 1;Format:(72.00 x 297.00 mm);22.Oct 2020 13:45:18

ConneCted Car | displays
20 Elektronik automot ive 11.2020
höhere Auflösungen als HD (1920 x 720) werden üblicherweise mehrere T-Con-ICs parallelgeschaltet, um das TFT-Panel anzusteuern. Die Anzahl der T-Con-ICs geben die Anzahl der LVDS- oder eDP-Kanäle vor, die für die Einspeisung des Videostroms für jeden T-Con erforderlich sind. Am T-Con-Ausgang und im Falle eines breiten Pilar-to-Pilar-Panels müssen Verbindungen zwischen dem T-Con und den Treibern unterstützt werden, die länger als 0,5 m werden können. Um eine solche Hochgeschwindigkeitsver-bindung sicherzustellen, hat Rohm die RL-Link-Technologie entwickelt. Dabei werden jedoch im Gegensatz zu einer Standard-mini-LVDS-Verbindung auch die Sicherheitsanforderungen beson-ders berücksichtigt. Zur Unterstüt-zung der In-Cell-Touch-Technologie werden T-Cons oft mit der Touch-Funk-tion (Touch Display Driver Integration, TDDI) kombiniert. Eine zusätzliche Touch-Sensorschicht ist daher über-flüssig und somit verbessern sich die visuellen Eigenschaften des Panels.
ansteuerung der HintergrundbeleuCHtung
Bei TFT-Panels ist es wichtig, dass die Hintergrundbeleuchtung über eine angemessene Kontrastdynamik und eine entsprechende Steuerung verfügt. Doch auch eine angemessene Auflösung und ein großer Dimmbereich unter ver-schiedenen Umgebungslichtbedingun-gen sind für ein positives Nutzer erlebnis von großer Bedeutung. Bei Verwendung der TFT-Technologie ist eine externe LED-Lichtquelle oder Hintergrundbe-
leuchtung erforderlich, die sich hinter dem TFT-Display befindet. Die LEDs der Hintergrundbeleuchtung sind entweder entlang der Kante oder gleichmäßig über die gesamte Panelrückfläche posi-tioniert. Bei Anwendungen mit Local-Dimming werden die Leuchtdioden in definierten Matrix blöcken positioniert, in denen das Licht in Abhängigkeit vom Videoinhalt moduliert wird. Das hat den Vorteil, dass aufgrund der dyna-mischen Kontrastmodulation der LEDs und einer geringeren Verlustleistung bei der Gesamtleistung der Leuchtdi-oden eine höhere Helligkeitsauflösung erreicht wird. Bei der Auswahl eines LED-Treibers für Anwendungen im Automobilbe-reich müssen wichtige Voraussetzun-gen beachtet werden. Zum Beispiel muss ein konstanter Stromfluss unter verschiedenen Bedingungen wie Span-nungsschwankungen beim Fahrzeug-start gewährleistet sein. Abhängig von den Anforderungen an die Ausgangs-spannung, die durch die Anzahl der LED-Elemente der Serie in dem spe-zifischen Kanal bestimmt wird, kön-nen Buck-, Boost- oder Buck-Boost-Topologien zum Einsatz kommen. Die Eingangsspannung entspricht der Batteriespannung einschließlich aller Spannungsschwankungen, die zum Beispiel aufgrund von Störungen oder Effekte in der Verkabelung auftreten können.Dimm-Methoden wie DC- oder Analog-Dimming, PWM-Dimming oder eine Kombination von DC und Pulsbreiten-modulation (Pulse Width Modulation, PWM) ermöglichen einen sichereren Betrieb bei allen Umgebungslicht-
bedingungen. Besonders PWM ist eine beliebte Dimm-Methode, denn sie garantiert eine lineare Dimm-Leis-tung und hohe Auflösung insbesondere bei niedrigen Dimm-Stufen. Außer-dem gewährleistet PWM eine korrekte Farbbalance und eine gute Störfestig-keit über den gesamten Dimm-Bereich. Auch die Rauschimmunität wird ver-bessert, indem während der PWM-Steuerung eine Phasenverschiebung der verschiedenen LED-Kanäle vorge-nommen wird, wodurch die Brumm-spannung reduziert und wahrnehm-bares Rauschen vermieden wird. Die Phasenverschiebung reduziert zusätz-lich die optische Wellenbildung, was wiederum den Wasserfalleffekt bei TFT-Displays vermeidet. Bei diesem unerwünschten Effekt entstehen auf-grund von Interferenzen zwischen der TFT-Wiederholfrequenz und der PWM-Frequenz über dem angezeigten Bild durchlaufende dunkle Bänder.Eine weitere wichtige Anforderung ist die Verbindung des LED-Treibers mit der MCU entweder über eine SPI- oder I2C-Schnittstelle. So lassen sich ver-schiedene LED-Einstellungen flexibel und einfach steuern, Sicherheitsfunk-tionen ordnungsgemäß überwachen sowie Diagnosen durchführen, um die Anforderungen an die funktionale Sicherheit gemäß der ISO 26262 und des angenommenen ASILs – im Allgemei-nen ASIL B für Displays – zu gewähr-leisten.
stromversorgung für den störungsfreien betrieb
Eine robuste und sichere Stromversor-gung ist für einen stabilen und kon-tinuierlichen Betrieb unerlässlich. Schaltregler in Kombination mit einer Multispannungsüberwachung werden häufig für die Primär- oder Sekun-därstufe (Bild 2), mit oder ohne inte-grierten FET (Boost/Buck/Buck-Boost), in ein- oder mehrkanaliger Konfigu-ration verwendet. Die Kontrolle der verschiedenen Spannungsstufen wird mit einem Spannungsüberwacher (Vol-tage Supervisor) gewährleistet, damit die Anforderungen an die funktionale Sicherheit erfüllt werden. Ein primärer
Bild 4. Anzeige des Kombiinstruments im reduzierten Modus ohne Hintergrundvideo.
(Bild
: Roh
m S
emic
ondu
ctor
)

11.2020 Elektronik automot ive 21
ConneCted Car | displays
stefan drouzas
ist Senior Application Marketing Manager
für Fahrerinformation und Automobilbe-
leuchtung bei Rohm Semiconductor Europe.
Nach Abschluss seines Ingenieurstudiums
im Jahr 2001 war er in verschiedenen
Positionen in der Halbleiterindustrie als
Entwickler und Marketing Manager mit
dem Schwerpunkt Video- und Displayan-
wendungen im Consumer- und Automotive-
Segment tätig.
noffz.com
SMART TEST SYSTEMS FOR THE
FUTURE OF MOBILITY
Pro
duct
Val
idat
ion
Boa
rd-L
evel
-Tes
tEn
d-of
-Lin
e-Te
st
Multi DUT RF Test
Radar Test System & 5G OTA Test
Cellular, GNSS & Wireless
LiDAR
RADAR
Radar Test System & 5G OTA Test
LiDAR
GPSGALILEO
BEIDOU
GLONASS
BT5G
RADAR
GPSGALILEOGALILEO
BTBT5G
Noffz_Elektronik-Automotive_10_20.pdf;S: 1;Format:(54.00 x 297.00 mm);08.Sep 2020 13:02:28
DCDC (5-V- oder 3,3-V-Ausgang) muss nahtlos in einem weiten Eingangsspan-nungsbereich (3,5 bis 40 V) arbeiten und einen hohen Ausgangsstrom (über 3 A), einen niedrigen Ruhestrom (10 µA) und eine wählbare Schaltfrequenz zusam-men mit geringem Rauschen mithilfe einer Spread-Spektrum-Funktion lie-fern. Die primären LDOs für die perma-nente Versorgung müssen ebenfalls in einem weiten Eingangsspannungsbe-reich (bis zu 45 V), einem sehr niedrigen Ruhestrom (< 2 µA) und einem hohen Ausgangsstrom arbeiten. Der sekun-däre DC/DC muss typischerweise ver-schiedene Spannungspegel (1 V; 1,2 V; 1,5 V; 1,8 V; 3,3 V) liefern, idealerweise mit integrierten P&N-Kanal-MOSFETs.
dediziertes pMiC für das panel
Ein dediziertes TFT-Power-Manage-ment-IC (PMIC) unterstützt die spezi-fischen Spannungen des Panels. Für die Ansteuerung des TFTs werden vier Versorgungen benötigt, und jede Ver-sorgung stellt wiederum spezifische Anforderungen. Die Versorgung für die Videodatenleitung erfordert eine geringe Spannungswelligkeit, eine große Immunität gegen jegliche Tran-sienten oder Interferenzen, um LCD-Artefakte wie Flimmern zu verhindern. Hierfür kommt ein Aufwärtsregler zum Einsatz. Die Gate-Versorgung, die für die Aktivierung und Deaktivierung des TFTs unerlässlich ist, stellt weniger strenge Anforderungen und verwendet zur Erzeugung der Spannungen die Ladungspumpentechnologie. Eine Tem-peraturkompensation wird eingesetzt, um ein korrektes Schalten bei niedriger Temperatur zu gewährleisten.Die Backplane wird mit einer Referenz-spannung versorgt; ihre Schlüsselpa-rameter sind Ausgangsstromfähigkeit, Bandbreite und Anstiegsgeschwindig-keit. Sie schwankt je nach Video- oder Gate-Änderungen und verfügt über Kalibrier- und Temperaturkompensa-tionsfunktionen.Die funktionale Sicherheit erfordert die Überwachung von Spannungsanoma-lien. Im Falle einer Spannungsano-malie wird der Betrieb automatisch
abgeschaltet. Erkannt werden diese Anomalien durch Diagnosefunktio-nen mit redundanten Registern. Sie beinhalten eine automatische Aktua-lisierung, die eine Wiederherstellung ermöglicht. Das garantiert eine hohe Zuverlässigkeit und eine hohe Störfes-tigkeit. Die Schnittstelle zwischen dem TFT-PMIC und der MCU verwendet I2C, was eine flexible und einfache Steue-rung der PMIC-Register und eine ange-messene Überwachung der Schutz- und Diagno sefunktionen ermöglicht. Auf diese Weise können die Anforde-rungen an die funktionale Sicherheit erfüllt werden.
sChlussfolgerung
Displays stellen die wichtigste Kom-munikationsschnittstelle im Fahrzeug dar. Sie müssen zuverlässig, sicher, aber auch benutzerfreundlich und attraktiv sein. Entwicklungen im Bereich des autonomen Fahrens sind ohne die Inte-gration der durch Displays erzeugten, intuitiven Umgebung schwer zu reali-sieren. Autodesigner forcieren die von Verbrauchern und Marketingexperten geforderten technischen Möglichkeiten und schließen immer mehr die Lücke zu vergleichbar agileren Märkten, wie dem Consumer-Markt. Rohm Semicon-ductor bietet ein umfassendes Produkt-portfolio, um die hohen Standards der Automotive-Branche für jedes Display zu erfüllen. ECK
ConneCted Car | Fahrerassistenzsysteme
22 Elektronik automot ive 11.2020
„Zero Death/Zero Accidents“, also keine Unfälle und keine Verkehrstoten ist das Credo der Automobilbranche – das Ziel, das alle ansteuern. Damit Fahrzeuge Gefahrensituationen besser einschät-zen können, mit bereits bekannten Situ-ationen abgleichen und erprobte Ver-haltensweisen auf neue Gegebenheiten anwenden können, kommt Machine Learning mittels adaptiver Anwendun-gen zum Einsatz.
Eine Vision steht in der Automobilbranche über allen: Die Idee des
unfallfreien Fahrens. Um das zu erreichen, müssen menschliche Fehler
minimiert werden. Voraussetzung dafür ist, dass das vernetzte und
(teil-)autonome Fahrzeug „lernfähig“ ist und sowohl aktuelle Umstände
als auch vorherige Vorkommnisse berücksichtigt. Von Mike Potts
AdAptive Anwendungen im vernetzten FAhrzeug
DAs sMArtE AUto lErnt Von sElbst
Unter adaptiven Anwendungen ver-steht man jede funktionale Anwendung im Fahrzeug – zum Beispiel hochpräzi-ses GNSS, Bremsen, Lenken, Beschleu-nigen oder Verzögern – die schnell in Fahrzeugsensoren verarbeitet werden kann, um ein gewünschtes Ergebnis oder die Positionierung des Fahrzeugs zu beeinflussen. Diese Anwendungen sind dann in der Lage, auf Grundlage der Sensoren und deren Daten Rück-
schlüsse zu ziehen und bestimmte Situationen zu erlernen und zukünftig dementsprechend zu reagieren. Sie las-sen sich mit einem Fahrlehrer verglei-chen, der seinem Fahrschüler anfangs noch Hinweise gibt, die er beachten muss, um ihn schlussendlich dazu zu bringen, eigene Entscheidungen zu treffen und selbstständig zu fahren. Adaptive Anwendungen, ähnlich wie Machine-Learning-Anwendungen in
(Bild: Molex)

ConneCted Car | Fahrerassistenzsysteme
11.2020 Elektronik automot ive 23
der Industrie, bekommen dafür anfangs Informationen in Form von künstlicher Intelligenz von Hochleistungsrech-nern aus dem Backoffice, von anderen Fahrzeugen oder per Sensor Sharing und lernen so, wie sich das Fahrzeug in einer bestimmten Situation verhal-ten muss. Das Netzwerk ist in diesem Fall also der Fahrlehrer, der sein Wis-sen an das Auto weitergibt. Kommt das Fahrzeug erneut in eine ähnliche Situation, weiß es, wie es sich verhal-ten muss – und kann so beispielsweise die Geschwindigkeit in einem Baustel-lenbereich automatisch verringern. Es wird also eine intelligente Basis basie-rend auf den KI-Informationen aus dem Backoffice aufgebaut, die dank Sensor Sharing auch mit anderen Fahrzeu-gen geteilt wird. So soll das Fahrzeug den Fahrer unterstützen, die mensch-lichen Reaktionszeiten zu verbessern und erforderliche Maßnahmen schnell einzuleiten. Machine Learning ist wichtig, da das Fahrzeug anpassungsfähig sein muss. Es wird zudem nicht in der Lage sein, alle Sensordaten ständig zu überwa-chen und zu berechnen und auf deren Grundlage vorausschauend Vorhersa-gen zu treffen. Änderungen im Fahr-verhalten und Reaktionen auf Umwelt-einflüsse müssen daher zum Teil auch aus gelernten Situationen übernommen werden (Bild 1).
Voraussetzungen Für adaptiVe anwendungen
Damit Machine Learning durch adap-tive Anwendungen im vernetzten Fahrzeug funktioniert, müssen einige Voraussetzungen erfüllt werden. Die wichtigste ist dabei ein hochpräzises GNSS-System, das Daten über die TCU satellitengestützt ausgibt. Damit das Auto aus Umgebungseinflüssen lernen kann, muss es genau wissen, wo es sich befindet. Zwar besitzen viele Fahrzeuge bereits heute ein Ortungssystem, um beispielsweise Spurhalteassistenten zu bedienen, jedoch ist es meist nicht prä-zise genug für zukünftige ADAS/AD-Anwendungen. Verschiebt sich bei-spielsweise eine Spur aufgrund einer Baustelle oder touchiert ein Fahrer die
Markierung nur ganz leicht, bekommt er keine Meldung. Im Falle des auto-nomen oder teilautonomen Fahrens ist eine solche Varianz nicht akzeptabel. Hochpräzise GNSS oder andere Satel-liteninformationen hingegen ermög-lichen zusammen mit IVN-Sensor-Fusionsdaten und KI-Daten aus dem Backoffice dem Fahrzeug ein genaues Bild, wo es sich befindet und was vor ihm liegt. Es muss genau wissen, wie breit eine Lücke zwischen zwei Fahr-zeugen ist und ob sich das Fahrzeug dort gefahrenlos einfädeln kann oder nicht. Dafür muss es allerdings nicht nur die eigene Position berücksich-tigen, sondern auch die der anderen Verkehrsteilnehmer. Auch das Sensor Sharing, also das Teilen gesammelter Daten mit Fahrzeugen der Umgebung, wird beim Thema adaptive Anwendun-gen demnach eine wichtige Rolle spie-len. Fahrzeuge lernen, sich die Daten anderer Verkehrsteilnehmer zu sichern und mithilfe des Backoffices eigene Schlüsse und Vorhersagen zu treffen.
BaCkoFFiCe als „externes gehirn“
Innerhalb des Fahrzeugs selbst kann nicht viel Rechenleistung zur Verfü-gung gestellt werden. Neue Erkennt-nisse, die das Fahrzeug lernt, müssen daher über die TCU zurück ins soge-nannte Backoffice gespiegelt werden. Dieses sammelt die unterschiedlichen Informationen verschiedenster Fahr-zeuge und kann Auskünfte über eine neue Baustelle oder eine Änderung im Straßenverkehr an das Auto zurück-spiegeln. Das Auto wiederrum kann diese Information validieren oder negieren und so für weitere Lernef-fekte sorgen. In gewisser Weise nutzt Google Maps diese Funktion bereits heute, indem es aus den Standortda-ten von Handynutzern Informationen gewinnt und daraus ableitet, ob eine Strecke stark befahren ist oder ob Stau herrscht, und diese Daten live auf sein Kartenmaterial überträgt. Die Anpas-sungsfähigkeit ist insofern wichtig, als dass das Auto aufgrund begrenz-ter Rechenkapazitäten nicht in der Lage sein wird, die Sensordaten, die es über
diese Szenarien lernen muss, ständig zu überwachen, zu berechnen und vor-ausschauend Vorhersagen zu treffen, die sich zudem an wechselnde Umwelt-bedingungen anpassen, und an das es Lenkung, Bremsen, Beschleunigung und Verzögerung anpassen muss.Um Daten in und aus dem Backoffice zu erhalten, braucht es eine schnelle, sichere und zuverlässige Datenverbin-dung, die zudem die Sensoren im Auto integriert, um die Steuervorgänge im Fahrzeug auf Grundlage der Sensor-daten zu validieren. Automotive Ether-net bietet hierfür eine genügend große Bandbreite, sodass die Daten genau dann in einen bestimmten Bereich gelan-gen können, wenn sie benötigt wer-den. Allerdings ist derzeit noch nicht sicher, ob nur das Automotive Ethernet diese Funktion erfüllen kann. Grund-sätzlich ist nur eine schnelle, zuver-lässige Kommunikationsverbindung
DOPPLERSIMULATORMDS 77
Tel.: 0 29 42/9 79 26-059590 Geseke, [email protected] · www.heicks.de
MDS 77
Für die Überprüfung undJustage von modernen
Fahrzeug-Radar-Systemenim 77 GHz Bereich.
Heicks_EK-auto_10_20.pdf;S: 1;Format:(42.00 x 128.00 mm);22.Sep 2020 10:09:55

ConneCted Car | Fahrerassistenzsysteme
24 Elektronik automot ive 11.2020
notwendig – wie auch immer sie auf-gebaut ist. Es muss dadurch die Mög-lichkeit gegeben sein, den Verkehr zu überwachen und Latenzzeiten zu mini-mieren, damit Daten schnell dorthin gebracht werden, wo sie benötigt wer-den. Und zwar genau zu dem Zeitpunkt, an dem sie gebraucht werden. Ethernet bietet standardisierte Methoden, die dies schon heute ermöglichen. Das Backoffice selbst wird derzeit noch von jedem OEM selbst betrie-ben. In Zukunft sind aber sowohl Koopera tionen verschiedener Herstel-ler als auch mit externen Anbietern wie Google, Amazon oder Microsoft vorstellbar. So können Nutzern neue Dienstleistungen beispielsweise als SaaS-Anwendung angeboten werden. Die Unternehmenslandschaft befindet sich in der Entwicklung und es wird einige Jahre dauern, bis sie sich ent-sprechend etabliert hat.
die mensChliChe reaktionsFähigkeit verbessern
Machine Learning und adaptive Anwen-dungen sind keine reine Zukunfts-musik. Bereits heute gibt es eine Reihe von Anwendungen, die das Leben von Fahrern schützen und den Fahrkomfort erhöhen (Bild 2).
Dazu gehören zum einen einfachere Anwendungen wie die Meldung und Vermeidung von Gefahren im Straßen-verkehr, zum Beispiel bei einem Unfall auf der geplanten Strecke oder einer geänderten Wegführung oder beim automatisierten Parken. Aber auch fort-schrittlichere Anwendungen wie eine Spur- und Abfahrtswarnung existieren bereits heute. Jedoch sind sie momen-tan noch nicht so ausgereift und prä-zise, dass sie die Sicherheit der Fahrer zu hundert Prozent schützen. Momen-tan sind die Sensoren etwa noch nicht in der Lage, in einer solchen Situation genau zu bestimmen, ob der Fahrer von der Spur abweicht oder nicht. In Zukunft wird sich das ändern, unter anderem aufgrund präziserer und iden-tifizierbarer Daten im Hinblick auf die absolute Positionsbestimmung. Eine Reihe von Situationen zeigen, dass diese absolute Positionsbestimmung und Spurhaltetechnik wichtig sind: Befindet sich ein Fahrzeug beispiels-weise in einem Schneesturm oder in starkem Regen, ist die Sicht des Fahrers stark eingeschränkt und er kann sich nicht an Markierungen auf der Fahr-bahn oder der Umgebung orientieren. Machine Learning wird eine wichtige Rolle dabei spielen, das Auto in der Spur zu halten. Dank des Backoffice und der dadurch zur Verfügung gestellten
absoluten Positionsbestimmung im Zusammenspiel mit den eigenen Sen-sordaten wird das vernetzte Fahrzeug zukünftig in der Lage sein, die Situation einzuschätzen, sich anzupassen und zu lernen, wo genau es sich befindet und wie genau es fahren muss, um die Fahr-spur zu halten. Eine weitere Anwendung adaptiver Applikationen ist das Erkennen und Verstehen von Straßenschildern. So können Fahrzeuge beispielsweise fest-stellen, wenn sich ein Geschwindig-keitsschild aufgrund einer Baustelle geändert hat und entsprechend reagie-ren. Dazu muss das Auto verstehen, was die Zahlen auf dem jeweiligen Schild bedeuten und wie es auf sie zu reagieren hat – nämlich mit der Anpassung der Höchstgeschwindigkeit. Zudem muss es bemerken oder durch die KI des Back-offices darauf hingewiesen werden, dass es eine Änderung gab und sich „erinnern“ welche Höchstgeschwindig-keit vorher existierte. Auch die Beleuchtung des Fahrzeu-ges gehört zum Anwendungsbereich adaptiver Applikationen. Heutzutage vergessen Fahrer häufig Scheinwerfer richtig einzustellen oder die Position an die Beladung des Autos anzupas-sen. Fährt das Fahrzeug nun um eine Kurve ist das aus zweierlei Gründen nicht optimal: Zum einen ist die Kurve nicht perfekt ausgeleuchtet, was es dem Fahrer erschwert, Gegenstände oder Gegenverkehr zu erkennen. Zum ande-ren besteht die Gefahr, dass Anwoh-ner durch das (falsch) einfallende Licht geblendet oder massiv gestört werden. Adaptive Applikationen können hier Abhilfe schaffen und zum einen den Scheinwerfer immer ideal einstellen – angepasst an Umweltänderungen und die physischen Änderungen im Fahr-zeug, zum Beispiel durch schwere Bela-dung – und zum anderen dafür sor-gen, dass sich der Lichtstrahl mit der Bewegung des Fahrzeugs verändert, sodass Störungen von Anwohnern und die schlechte Ausleuchtung des Weges vermieden werden. Der Fahrer erhält so mehr Sicht und dadurch auch eine höhere Sicherheit. Darüber hinaus gibt es bereits erste Überlegungen für fortgeschrittene
Bild 1. Menschliches Fehlverhalten ist die Ursache für mehr als 90 Prozent der Verkehrsunfälle. Adaptive
Anwendungen, die ihr Verhalten ohne Einfluss der HMI-Schnittstelle auf Situationen anpassen, könnten
dabei helfen, Unfälle zu vermeiden. (Bild: Molex)

ConneCted Car | Fahrerassistenzsysteme
11.2020 Elektronik automot ive 25
Anwendungsfälle, die wichtiger werden, je autonomer das Fahrzeug agiert. Eine betrifft die Höchstgeschwindigkeit autonomer Fahrzeuge ab Stufe 5. Derzeit ist die Höchstgeschwindigkeit bei autonomen Fahrzeugen mit circa 56 bis 73 km/h in bestimmten Testarealen noch eher gering. Diese muss in der Zukunft erhöht werden, wollen Fahrzeuge wirklich autonom agieren. Das heißt allerdings auch, dass die Software bei höherer Geschwindigkeit – ähnlich wie ein Fahrer – auch weniger Reaktionszeit hat. Derzeit ist sie noch nicht in der Lage mit geringerer Reaktionszeit eine sichere Fahrt zu gewährleiten. So ist beispielswiese die Frequenz und Übertragungsgeschwindigkeit der IVNKameras noch nicht hoch genug, um Informationen schnell genug bereitzustellen, die für das sichere Fahren benötigt werden. Eine weitere anspruchsvollere Anwendung ist ein Sensor, der erkennt, ob ein Fahrer müde oder unkonzentriert ist oder ob es ihm gesundheitlich nicht gut geht, und in einem solchen Fall dessen Zugang zum Lenkrad und anderen Fahreigenschaften einschränkt. Das ist insofern relevant, als dass in niedrigeren Autonomiestufen (Stufe 3) der Fahrer noch als „Rückfallmöglichkeit“ für das autonome System gilt. Ist er in einem solchen Fall jedoch abgelenkt, beeinträchtigt das die Sicherheit. Der Sensor würde dann verhindern, dass
der Fahrer das Lenkrad und damit verbundene Fahrtätigkeiten übernimmt.
aktuelle herausForderungen bei adaptiven applikationen
Die größte Herausforderung bei der Integration und Entwicklung Adaptiver Applikationen in das vernetzte und (teil)autonome Fahrzeug sind die Kosten. Aufgrund der Komplexität der Anwendungen sind diese derzeit noch viel zu hoch, um eine wirtschaftliche Integration in das Fahrzeug abbilden zu können. Selbst die Integration bereits bestehender Anwendungen in Fahrzeuge ist derzeit noch sehr kosteninten
miChael (mike) potts
arbeitet als Advanced Technolog and
Innofation Lead Architect für Molex CMS.
Er ist seit über 30 Jahren in der Automo-
bil-, Fertigungs- und Industriebranche
tätig, unter anderem bei Unternehmen
wie General Motors, Chrysler und Cisco.
Darüber hinaus betätigt er sich als aktives
Mitglied und Leiter zahlreicher Allianzen
und Ausschüsse zu Ethernet- und Techno-
logiestandards. Mike Potts ist Inhaber
mehrerer Patente. Sein Studium absolvierte
er an der University of Michigan-Dearborn
sowie am Walsh College.
Bild 2. Ein Anwendungsbeispiel, bei dem adaptive Applikationen zum Einsatz kommen können: Ein
parkender Lkw versperrt die Sicht auf andere Verkehrsteilnehmer. Systeme zur Kollisionsvermeidung
können in solchen Fällen die Einschränkungen der menschlichen Reaktionszeit mildern. (Bild: Molex)
siv. Eine Reduktion der Kosten sowohl bei der Entwicklung als auch der Integration gilt daher als Grundvoraussetzung für den Erfolg von Machine Learning und adaptiven Applikationen im vernetzten Fahrzeug. Eine weitere Herausforderung: Fehlende Kommunikationsstandards. Es ist derzeit nicht geklärt, welche Frequenzbänder weltweit für die Kommunikation vernetzter Fahrzeuge zur Verfügung stehen: DSRC, WiFi, 5G oder eine Mischung aus den anderen Systemen? Viele Möglichkeiten sind noch im Rennen und die aktuelle Situation rund um Covid19 und der sich eintrübenden Wirtschaftsprognosen hat eine Einigung in noch weitere Ferne rücken lassen. IH
AdAptive ApplikAtionen – Wohin geht die Reise?
Die Sicherheit der Fahrzeuginsassen ist wichtig für alle Beteiligten: OEMs, Zulieferer und Passagiere
selbst. Alle müssen am gleichen Strang ziehen, um das Ziel Zero Death/Zero Accidents zu erreichen.
Die Reise zum Traum von null Unfällen und null Verkehrstoten muss schnell vorangehen. Denn alleine
in Deutschland sind vergangenes Jahr 3.059 Menschen bei Unfällen im Straßenverkehr ums Leben
gekommen. Ein Punkt, der dabei wichtig ist: Es ist ein Konsens gefragt, was die Sicherheit, die adaptive
Applikationen und Machine Learning bieten, wert ist. Diese Systeme in vernetzte und (teil-) autonome
Fahrzeuge zu integrieren, wird nicht billig werden – aber es lohnt sich. Die Kooperation mit anderen
Bereichen wie der Luftfahrt, der Logistik, dem Militär oder der Spieleindustrie (gerade im Hinblick auf
Drohnen) bietet zudem eine Möglichkeit voneinander zu lernen, Erfahrungen auszutauschen und Ent-
wicklungskosten zu teilen. OEMs und Zulieferer müssen noch stärker über ihren Schatten springen und
Partnerschaften suchen, die vielleicht auch jenseits ihres heutigen Horizonts liegen, um das gemeinsame
Ziel zu erreichen: Die Korrektur des menschlichen Versagens durch die Technik und das darin enthaltene
Sicherheitsversprechen, dass Unfälle und Verkehrstote zukünftig der Vergangenheit angehören.

26 Elektronik automot ive 11.2020
ConneCted Car | SeCurity
Schon bald wird der Nachweis einer adäquaten Absicherung des Fahrzeugs
gegen Cyberangriffe zur Voraussetzung für die Typgenehmigung. Bereits
während der Entwicklung des Fahrzeugtyps müssen kritische Elemente
identifiziert und angemessene Schutzmaßnahmen implementiert werden.
Was sind dabei die entscheidenden Fragestellungen? Und wie kann AUTOSAR
bereits heute dabei helfen?
Von Dr. Christopher Kusch, Dr. Moritz Minzlaff, Dr. Michael Schneider und
Dr. Alexandre Berthold
AdäquAte CybersiCherheit Als VorAussetzung für die typgenehmigung
UNECE-WUNSCh TRiFFT AUTOSAR-WiRKliChKEiT
(Bild: Rawpixel | cherezoff | Escrypt | Shutterstock)

11.2020 Elektronik automot ive 27
ConneCted Car | SeCurity
die Anwendung des Cybersecurity-Managementsystems (CSMS) während der Entwicklung des Fahrzeugtyps. So müssen Automobilhersteller gemäß der UNECE-Regularien ab Juli 2022 ein gültiges „Certificate of Compliance“ für ihr CSMS vorweisen. Sie müssen aber auch und vor allem belegen können, dass die im CSMS definierten Prozesse während der Fahrzeugtyp-Entwick-lung tatsächlich angewendet werden.Auch wenn das Cybersicherheits-Management bei vielen Fahrzeugher-stellern noch im Aufbau befindlich ist, so werden sie dennoch nachwei-sen müssen, dass die Produktsicher-heit adäquat betrachtet wurde. Insbe-sondere gilt es, sogenannte „kritische Elemente“ des Fahrzeugtyps zu iden-tifizieren und diese mit angemessen IT-Sicherheitsmaßnahmen vor zuvor definierten Bedrohungen zu schützen. Orientierung liefert hier Annex 5 des UNECE-Regulierungstexts: Dort wer-den sowohl Schwachstellen und Bedro-hungen gelistet, die es zu beachten gilt (Part A), als auch technische Maßnah-men zu deren Mitigierung (Part B, C). Demnach ist der Typgenehmigung am ehesten dann Erfolg beschieden, wenn die Automobilhersteller einer nachvoll-ziehbaren, evidenzbasierten Herange-hensweise folgen, die zumindest die folgenden Fragen beantwortet:➔➔ Sind alle notwendigen Artefakte
vorhanden, um die Entwicklung gemäß des CSMS nachzuweisen?Mit der Beantwortung dieser Frage schlägt der OEM bereits jetzt die Brü-cke zum CSMS. Denn für die Genehmi-gung des Fahrzeugtyps muss er künftig belegen, dass dieser gemäß einem
Cybersecurity-Managementsystem ent-wickelt wurde. Dazu muss er die entspre-chenden Artefakte, wie Risikoanalysen, Nachweise über Security-Maßnahmen, -Architektur oder Security-Tests, erzeu-gen, ablegen und jederzeit im Zugriff haben. Selbst wenn er anfangs noch nicht über ein zertifiziertes CSMS ver-fügt, muss der OEM die Entwicklung des Fahrzeugtyps also UNECE-konform vorantreiben und seine Prozesse auf eine vollständige Dokumentation, das Erstellen und Archivieren aller geneh-migungsrelevanten Artefakte, gemäß CSMS ausrichten. ➔➔ Was sind die kritischen Elemente der
E/E-Architektur?Um diese Frage zu beantworten, bedarf es eines Readiness-Checks bezüg-lich der typgenehmigungsrelevanten Anforderungen. Auf diese Weise lässt sich systematisch analysieren, welche technische Maßnahmen in der E/E-Architektur bereits getroffen sind und wo potenzielle Sicherheitslücken beste-hen, die es zu schließen gilt. Die Iden-tifizierung noch vorhandener Lücken erlaubt in der Folge valide Budgetschät-zungen, zielführende Nachbesserungen und eine Priorisierung der anschließen-den Aufgaben (Bild 2).➔➔ Was sind adäquate technische Cyber-
security-Maßnahmen, sowohl auf Steu-ergeräte- als auch auf E/E-Level, wie sie die UNECE WP.29 fordert?Im dritten entscheidenden Schritt hin zur Typgenehmigung geht es darum, die notwendigen technischen Maß-nahmen zur Herstellung adäquater IT-Sicherheit für das Fahrzeug festzu-legen und umzusetzen. In ihren Spe-zifikationen 7.3.3 und 7.3.4 fordert die
Bild 1. In nicht einmal zwei Jahren wird die die Einhaltung der UNECE-Cybersecurity-Anforderungen auf wichtigen Automobilmärkten Bedingung für die
Typgenehmigung. (Bild: Escrypt)
Mit Verabschiedung des Regelwerkes der UNECE WP.29 zu Cybersicherheit und Software-Updates von Fahrzeu-gen im Sommer dieses Jahres ist das Thema Produktsicherheit bei Automo-bilherstellern und -zulieferern endgül-tig nach oben auf die Agenda gerückt. Um in den UNECE-Unterzeichnerstaa-ten künftig weiterhin Genehmigun-gen für ihre Fahrzeugtypen zu erlan-gen, werden die OEMs ein zertifiziertes Cybersecurity-Managementsystem (CSMS) betreiben sowie ein angemes-senes Security-Level und die kontinu-ierliche Risikobehandlung ihrer Fahr-zeuge nachweisen müssen [1].Die EU plant, diese Vorgaben für neue Fahrzeugtypen bereits ab Mitte 2022 verbindlich einzufordern und ab 2024 auf Bestandsarchitekturen auszudeh-nen; Japan und Korea werden sich dem Abkommen anschließen (Bild 1). Ent-sprechend machen sich die Autobauer weltweit – unter Einbeziehung ihrer Zulieferer – daran, organisatorische und prozessuale Strukturen gemäß der UNECE-Cybersicherheitsanforde-rungen aufzubauen und notwendige IT-Sicherheitsfunktionen in die E/E-Architektur der Fahrzeuge einzubetten. Detaillierte Informationen können im Artikel „Cybersecurity-Management beginnt im Steuergerät“ in der Aus-gabe 10/2020 der Elektronik Automo-tive nachgelesen werden.
typgenehmigung: CyberSeCurity-management während der entwiCklung
Eine entscheidende Bruchkante auf dem Weg zur Typgenehmigung ist
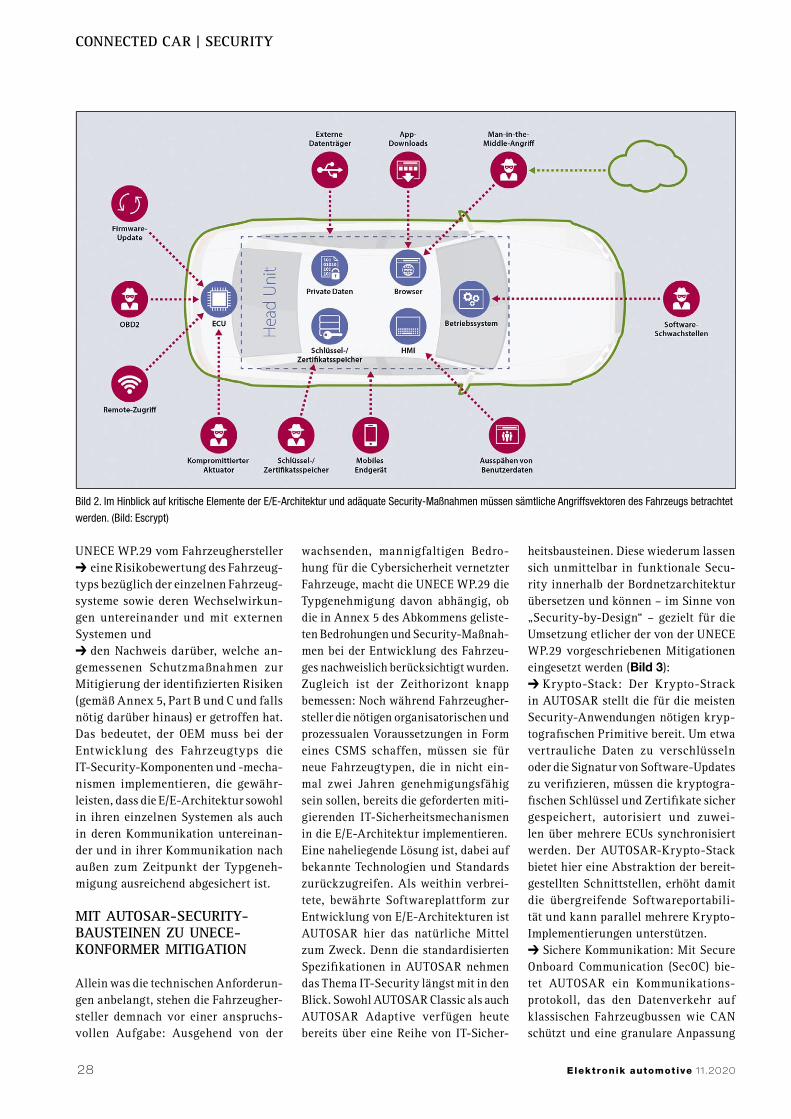
28 Elektronik automot ive 11.2020
ConneCted Car | SeCurity
UNECE WP.29 vom Fahrzeughersteller ➔➔ eine Risikobewertung des Fahrzeug
typs bezüglich der einzelnen Fahrzeugsysteme sowie deren Wechselwirkungen untereinander und mit externen Systemen und➔➔ den Nachweis darüber, welche an
gemessenen Schutzmaßnahmen zur Mitigierung der identifizierten Risiken (gemäß Annex 5, Part B und C und falls nötig darüber hinaus) er getroffen hat.Das bedeutet, der OEM muss bei der Entwicklung des Fahrzeugtyps die ITSecurityKomponenten und mechanismen implementieren, die gewährleisten, dass die E/EArchitektur sowohl in ihren einzelnen Systemen als auch in deren Kommunikation untereinander und in ihrer Kommunikation nach außen zum Zeitpunkt der Typgenehmigung ausreichend abgesichert ist.
Mit autoSar-SeCurity-BauSteinen zu uneCe-konforMer Mitigation
Allein was die technischen Anforderungen anbelangt, stehen die Fahrzeughersteller demnach vor einer anspruchsvollen Aufgabe: Ausgehend von der
wachsenden, mannigfaltigen Bedrohung für die Cybersicherheit vernetzter Fahrzeuge, macht die UNECE WP.29 die Typgenehmigung davon abhängig, ob die in Annex 5 des Abkommens gelisteten Bedrohungen und SecurityMaßnahmen bei der Entwicklung des Fahrzeuges nachweislich berücksichtigt wurden. Zugleich ist der Zeithorizont knapp bemessen: Noch während Fahrzeughersteller die nötigen organisatorischen und prozessualen Voraussetzungen in Form eines CSMS schaffen, müssen sie für neue Fahrzeugtypen, die in nicht einmal zwei Jahren genehmigungsfähig sein sollen, bereits die geforderten mitigierenden ITSicherheitsmechanismen in die E/EArchitektur implementieren.Eine naheliegende Lösung ist, dabei auf bekannte Technologien und Standards zurückzugreifen. Als weithin verbreitete, bewährte Softwareplattform zur Entwicklung von E/EArchitekturen ist AUTOSAR hier das natürliche Mittel zum Zweck. Denn die standardisierten Spezifikationen in AUTOSAR nehmen das Thema ITSecurity längst mit in den Blick. Sowohl AUTOSAR Classic als auch AUTOSAR Adaptive verfügen heute bereits über eine Reihe von ITSicher
heitsbausteinen. Diese wiederum lassen sich unmittelbar in funktionale Security innerhalb der Bordnetzarchitektur übersetzen und können – im Sinne von „SecuritybyDesign“ – gezielt für die Umsetzung etlicher der von der UNECE WP.29 vorgeschriebenen Mitigationen eingesetzt werden (Bild 3):➔➔ KryptoStack: Der KryptoStrack
in AUTOSAR stellt die für die meisten SecurityAnwendungen nötigen kryptografischen Primitive bereit. Um etwa vertrauliche Daten zu verschlüsseln oder die Signatur von SoftwareUpdates zu verifizieren, müssen die kryptografischen Schlüssel und Zertifikate sicher gespeichert, autorisiert und zuweilen über mehrere ECUs synchronisiert werden. Der AUTOSARKryptoStack bietet hier eine Abstraktion der bereitgestellten Schnittstellen, erhöht damit die übergreifende Softwareportabilität und kann parallel mehrere KryptoImplementierungen unterstützen.➔➔ Sichere Kommunikation: Mit Secure
Onboard Communication (SecOC) bietet AUTOSAR ein Kommunikationsprotokoll, das den Datenverkehr auf klassischen Fahrzeugbussen wie CAN schützt und eine granulare Anpassung
Bild 2. Im Hinblick auf kritische Elemente der E/E-Architektur und adäquate Security-Maßnahmen müssen sämtliche Angriffsvektoren des Fahrzeugs betrachtet
werden. (Bild: Escrypt)

ConneCted Car | SeCurity
der Sicherheitsstufen erlaubt. AUTOSAR ermöglicht außerdem, für die TCP/IP-Kommunikation via Ethernet mittels TLS und IPSec geschützte Kanäle für eine authentische und vertrauliche Kommu-nikation innerhalb des Fahrzeugs sowie mit externen Instanzen aufzubauen.➔➔ Sichere Diagnose/Logging: AUTO-
SAR wacht über den autorisierten Zugriff auf sensible Daten im Fahr-zeugnetzwerk mittels der UDS-Dienste 0x27 (Security Access) und 0x29 (Authentication). Der Diagnosetester beispielsweise erhält erst dann Zugriff auf solche Daten, wenn er zuvor eine Challenge-Response-Kommunikation durchgeführt oder sich per Zertifikat authentifiziert hat. Daneben unter-stützt AUTOSAR das Logging von sicherheitsrelevanten Ereignissen im Security Event Memory.➔➔ Identity- und Access-Management:
Das AUTOSAR-Modul „Identity- und Access-Management“ sorgt dafür, dass nur autorisierte Applikationen auf bestimmte kritische Systemres-sourcen, zum Beispiel sensible Daten
im persistenten Speicher, Kommunika-tionskanäle, kryptografische Schlüssel, Zugriff erhalten. Diese Zugriffsrechte können in AUTOSAR bedarfsgerecht konfiguriert und jederzeit upgedatet werden.➔➔ Intrusion Detection System: Wich-
tiger Bestandteil eines wirksamen Secu-rity-Managements über den gesamten Fahrzeuglebenszyklus ist ein Intrusion Detection System (IDS), das Angriffe auf das Fahrzeug erkennt und an ein Backend meldet. Aus diesem Grund ist der IDS-Manager (IdsM) als maßgeb-liche Schaltstelle eines verteilten IDS künftig in AUTOSAR integriert. Die IdsM-Standardisierung wird mit dem aktuellen AUTOSAR Releases R20-11 vollzogen [2].➔➔ Sichere Updates: Probates Mittel, um
etwaige Sicherheitslücken im Fahrzeug zu schließen und Anwendungen zu aktualisieren, sind Firmware-Updates over-the-air (FOTA). Die Secure-Update-Funktion in AUTOSAR unter-stützt das Aufspielen solcher Software-Updates und -Patches auf ECUs, Vehicle
Computer (VCs) oder Domänencontrol-ler. Die durch das Backend signierten Update-Blobs – egal, ob für Einzelan-wendungen oder die gesamte Fahrzeug-plattform – werden in AUTOSAR über UCM-Master und -Client authentifiziert und zielgerecht verteilt.➔➔ Trusted Platform: Nicht nur die
Updates, sondern auch die Anwendun-gen auf ECUs und VCs bedürfen regel-mäßiger Überprüfung. Diese Aufgabe übernimmt Secure Boot beziehungs-weise die Trusted-Platform-Funktion in AUTOSAR. Sie verifiziert als Vertrau-ensanker (Trust Anchor) alle Anwen-dungen und die Plattform als solche. So ist sichergestellt, dass nur vertrau-enswürdige Software ausgeführt wird.
umgang mit LegaCy-SyStemen
Während neue Fahrzeugtypen gemäß UNECE-Anforderungen und CSMS von vorne herein genehmigungsfähig ent-wickelt werden können, stellen sich die Fragen nach den kritischen Elementen

30 Elektronik automot ive 11.2020
ConneCted Car | SeCurity
und adäquaten Security-Maßnahmen künftig auch für die Typgenehmigung von Fahrzeugen, die auf Bestandsarchi-tekturen basieren, für die ursprünglich keine Security-Prozesse nach UNECE WP.29 vorgesehen waren. Für diese Architekturen nachträglich adäquate Security nach aktuellem Stand der Tech-nik umzusetzen, ist mitunter schwierig.Auch hier kann AUTOSAR helfen, bestehende Lücken zu schließen: In
vielen AUTOSAR-Classic-basierten Steuergeräten ist das SecOC-Modul ent-weder bereits vorhanden oder lässt sich mit niedrigem Aufwand nachrüsten. Auf diese Weise lässt sich die sichere Onboard-Kommunikation in Bestands-architekturen vergleichsweise unpro-blematisch implementieren, sodass diese Architekturen in ihrer weiter-entwickelten Form auch weiterhin eine Zulassung erhalten können.
Teil 1: AUTOSAR AlS löSUngSbAUSTein deR SecURiTy-AnfORdeRUngen AUS Unece WP.29
In der Ausgabe 10 der Elektronik automotive erschien unter dem Titel „Cybersecurity-Management
beginnt im Steuergerät“ der erste Teil dieser zweiteiligen Artikelserie. Mit Verabschiedung der UNECE-
WP.29-Regularien spannt sich das gesamte Anforderungsspektrum der Cyber sicherheit vernetzter
Fahrzeug vor Automobilherstellern und -zulieferern auf. Die Autobauer müssen für die Typgenehmigung
zukünftig ein zerti fiziertes CSMS betreiben und ein an gemessenes Security-Level sowie die kontinuier-
liche Risikobehandlung neuer Fahrzeugtypen genehmigungspflichtig nachweisen. Für eine Security-
Behandlung der Fahrzeuge im laufenden Betrieb werden ein Intrusion Detection System und Firmware-
Updates over-the-air unverzichtbar sein. AUTOSAR hilft, hierfür im Fahrzeug die Voraussetzungen zu
schaffen.
Die Nachrüstung von Bestandsarchi-tekturen mit AUTOSAR funktioniert allerdings nur in begrenztem Maße: So ist SecOC bereits seit mehreren Releases fester Bestandteil von AUTOSAR und daher mit hoher Wahrscheinlichkeit in den entsprechenden ECUs vorhanden. Neuere Security-Features wie Angriffs-erkennung per Intrusion Detection Sys-tem (IDS) oder sichere Updates hingegen lassen sich nicht so leicht nachrüsten, weil sie mit früheren AUTOSAR-Ver-sionen nicht kompatibel sind. Es gilt bei Legacy-Systemen also genau abzuwä-gen, welche Maßnahmen für die Typge-nehmigung notwendig sind und ob oder wie diese – zum Beispiel mit Hilfe von AUTOSAR – effizient umsetzbar sind.
Fazit: Mit autoSar zur ganzheitliChen SeCurity
Sehr bald schon werden Automobil-hersteller gemeinsam mit ihren Zulie-ferern für die Typgenehmigung Pro-zesse und Maßnahmen nachweisen
Bild 3. Verpflichtende Maßnahmen gemäß Annex 5 der UNECE WP.29-Regularien und deren Abdeckung durch IT-Sicherheitsbausteine in AUTOSAR. (Bild: Escrypt)

11.2020 Elektronik automot ive 31
ConneCted Car | SeCurity
dr. ChriStopher KuSCh
ist Security Consultant bei Escrypt in
Berlin. Er berät Automobilhersteller und
-zulieferer weltweit zum Thema Cyber-
security-Managementsystem im Kontext
der neuen UNECE Regulierung.
dr. Moritz Minzlaff
ist Senior Manager bei Escrypt in Berlin.
Seit über zehn Jahren ist er im Bereich
Cybersicherheit aktiv und unterstützt
Automobilhersteller und -zulieferer auf
der ganzen Welt bei organisatorischen und
technologischen Fragestellungen rund um
die Cybersicherheit von Fahrzeugen.
dr. MiChael SChneider
ist Project Manager AUTOSAR Security
bei Escrypt in Berlin. Seit drei Jahren
ist er Mitglied der Security-Gruppe des
AUTOSAR-Konsortiums und begleitet
dort aktuell die IdsM-Standardisierung.
dr. alexandre Berthold
ist Referent für IT-Sicherheit bei der
Landesbeauftragten für Datenschutz und
Akteneinsicht Brandenburg (LDA Bran-
denburg). Zuvor hat er über viele Jahre
internationale Automobilhersteller zum
Einsatz von Security-Systemen in ihren
Fahrzeugen beraten und bis hin zur Seri-
enfertigung begleitet.
müssen, die eine adäquate Security im Fahrzeug gewährleisten. Sie sind daher verpflichtet, bei der Entwicklung des Fahrzeugtyps ein zertifiziertes CybersecurityManagementsystem (CSMS) zur Anwendung zu bringen. Und sie müssen schon jetzt, derweil sie ihr Cybersicherheitsmanagement aufbauen, die mitigierende SecurityMechanismen gemäß den UNECEAnforderungen in die Entwicklung ihrer E/EArchitekturen einbeziehen. Einen effizienten Einstieg eröffnet hier AUTOSAR. Als weit verbreiteter, gut eingeführter Standard und mit seinen bereits vorhandenen ITSicherheitsbausteinen liefert AUTOSAR einen guten Hebel hin zu einer hinreichend abgesicherten E/EArchitektur und wird so zu einer wichtigen Stütze der UNECEkonformen Typgenehmigung. Allerdings wird die wirksame holistische Absicherung des Fahrzeuges, wie Sie die UNECE WP.29 einfordert, letztlich über den Standard hinausreichen müssen – vom HardwareSecurityModul (HSM) im Mikrocontroller über das fahrzeuginterne Netzwerk hinaus bis ins OEMBackend oder Vehicle Security Operations Center (VSOC) sowie über die gesamte Lieferkette und den kompletten Lebenszyklus des Fahrzeugs hinweg. Kurzum: AUTOSAR bietet einen guten Startpunkt auf dem Weg zur genehmigungsfähigen Cybersicherheit. Das Ziel allerdings ist eine ganzheitliche Security. ECK
literatur + links
[1] uneCe World forum for harmoniza
tion of Vehicle regulations: proposal for
a new un regulation on uniform provi
sions concerning the approval of vehicles
with regards to cyber security and cyber
security management system. unter:
http://www.unece.org/fileadmin/daM/
trans/doc/2020/wp29grva/eCetranS
Wp292020079revised.pdf
[2) das autoSar release r2011 (u.a.
neue Spezifikationen zu idS und fota)
wird veröffentlicht zum 30.11.2020.
aktuelle informationen unter: https://
www.autosar.org/standards/
10-12 Nov 2020
The Future of Wireless – the motto of the panel discussion with keynote speakers at the Wireless Congress: Systems & Applications – is also the motto of the entire congress program. Not only in the lectures in the Technology, Industrial and Compliance sessions will speakers address topics that will be of decisive importance for future wireless applications.
Experience the Event live and interactive via Internet on 10-12 November 2020 and register now!
KeynotesDemands and Requirements in Fire Protection and Security Techniques for Wireless Communication Günter Grundmann, VdS Schadenverhuetung
A Roadmap for 5G Implementation in the Industrial Market Joseph Barry, Analog Devices
5G Goes Industry 4.0 Dr. Josef Blanz, Qualcomm CDMA Technologies GmbH
Semiconductor Components for Terahertz Electronics Prof. Dr. Nils Weimann, University of Duisburg-Essen (UDE)
6 reasons to take part! ■ Explore the latest innovations with
immediate access to supplier experts in live video sessions and get your questions answered.
■ Interact with speakers in the session panels after the sessions.
■ Connect directly with other attendees, speakers and exhibitors.
■ Schedule meetings, engage in chats and attend networking events.
■ No travel expenses! Attend from the comfort of your home or offi ce as if you were there.
■ All lectures will be recorded and can be re-watched afterwards for 2 weeks.
Event Organizers
www.wireless-congress.com
virtual Event
32 Elektronik automot ive 11.2020
ConneCted Car | SeCurity
Hacker zur Suche nach Sicherheitslücken in Software zu engagieren, ist in anderen Branchen schon lange verbrei-tet. So brachte ein Hersteller namens Hunter & Ready im Jahr 1980 das Echtzeit-Betriebssystem Versatile Real-Time Executive (VRTX) auf den Markt – eine Technologie, die auch das Hubble-Weltraum-Teleskop nutzt. Im Jahr 1983 initiierten sie das erste bekannte „Bug-Bounty“-Programm. Dabei warb Hunter & Ready in Zeitungen, dass, wenn jemand einen Fehler im System findet, das Unternehmen ihn mit einem Volkswagen Käfer entlohnen würde. In der Zeitungs-annonce wurden der Umfang und der Prozess der Meldung von Schwachstellen klar umrissen, so wie es heute bei den großen Technologiekonzernen auf ihren Websites oder
Moderne Fahrzeuge sind bei genauerer Betrachtung nichts anderes als
motorisierte Computer. Sie haben im Vergleich zu herkömmlichen PCs
aber einen gravierenden Nachteil: Die vielen Betriebssysteme sorgen
nicht nur für eine hohe Komplexität, sondern auch für Sicherheitslücken.
Die Kfz-Hersteller und deren Zulieferer lassen White-Hats – „gute“ Hacker –
nach diesen Bugs suchen, bevor die Fahrzeuge ausgeliefert werden.
Von Thaddeus Bender
Fahrzeug-hacking – eine BestandsauFnahme
DeN WeiSSeN HuT auF
Bug-Bounty-Plattformen der Fall ist. Dabei ist Bug Bounty die Prämie, die der Hacker für das Finden, Melden und selbst-verständlich auch Dokumentieren der Schwachstelle erhält.In der Zwischenzeit sind Kraftfahrzeuge aber kein ausgelobter Preis mehr, sondern immer wieder das Ziel von Cyberattacken (Bild 1). Um die Chancen für den Erfolg solcher Angriffe zu minimieren und/oder den Aufwand für die Kriminellen der-art zu erhöhen, dass das Fahrzeug als Ziel unattraktiv wird, können sich Hersteller ebenfalls an Hacker wenden und deren Dienste in Anspruch nehmen. Das erfolgt über Plattformen wie HackerOne: Aktuell nutzen bereits vier der zehn führenden Automobilhersteller diesen Service. Hier nehmen Hacker die im Automobil verbauten Systeme, aber auch IT-Ressourcen
(Bild: delcarmat | Shutterstock)

11.2020 Elektronik automot ive 33
ConneCted Car | SeCurity
der Kraftfahrzeughersteller ins Visier, um eine möglichst hohe Sicherheitsabdeckung zu erzielen (Bild 2).Seit den Tagen, als der Volkswagen Käfer als erste Prämie ausgelobt wurde, sind Fahrzeuge wesentlich komplexer geworden. Selbst wenn man Connected Cars und autonome Fahrzeuge außer Acht lässt, verfügen die meisten modernen Autos über GPS, Infotainment-Systeme einschließlich WiFi, Sicherheitsüberwachung und schlüssellose Zugangssysteme. Zusätzlich wird Design, Entwicklung, Herstellung, Finanzie-rung, Marketing und Verkauf dieser Fahrzeuge auch durch Technologie und das Internet vorangetrieben.Auch der Sicherheitsansatz beim Auto ändert sich. Sprach man früher in diesem Zusammenhang von einem Lenk-radschloss, das es zu knacken oder aufzubrechen galt, ist die Angriffsfläche eines modernen Fahrzeugs nun weitaus komplexer. Das führt dazu, dass sich jahrzehntelang tätige Autohersteller über Cybersicherheit genauso viel Gedanken machen müssen wie jedes andere Technologieunternehmen des 21. Jahrhunderts.
HaCken moderner FaHrzeuge
Die am häufigsten ausgenutzten Schwachstellen in einem Fahrzeug betreffen den Zugang zum Fahrzeug, etwa über einen Funkschlüssel. Diese verfügen typischerweise über eine schwache Verschlüsselung beziehungsweise Algorith-men der Transaktion zwischen dem Radiofrequenz modul und dem Schlüssel. In diesem Zusammenhang wurden bereits Informationen öffentlich bekannt, anhand derer die-ser Umstand belegt werden kann. So besitzt der benutzer-definierte NXP-Algorithmus HiTag und neuerdings HiTag2 Schwachstellen. Dennoch produzieren Automobilhersteller immer noch Fahrzeuge mit diesem Algorithmus, obwohl er sich unter realen Bedingungen als anfällig erwiesen hat. Nicht nur Kostengründe stehen der Lösung dieses Problems im Weg. Auch die Einstellung der Automobilhersteller ver-hindern Verbesserungen. Denn sie argumentieren, dass man „sich Zugriff mittels eines Ziegelsteins“ genauso verschaffen könne. Stellt sich die Frage nach Auslösen einer Alarmanlage oder die Reaktion in der Öffentlichkeit, wenn ein Fahrzeug mit brachialer Gewalt geöffnet wird. Die Automobilbranche hat bis heute noch nicht das Bewusstsein entwickelt, dass Fragen des Fahrzeugzugriffs und -diebstahls längst auch den Bereich der Cybersicherheit betreffen.Darüber hinaus scheint es für die Automobilhersteller wei-terhin attraktiv zu sein, nicht allzu hohe Investitionen zu tätigen, die den Schutz der Fahrzeuge gegen Cyberangriffe erhöhen würden. Der Grund ist das aktuelle Modell der Kfz-Versicherung: Denn, wenn ein Kunde ein Fahrzeug kauft, das aufgrund von Sicherheitsmängeln gestohlen wird, zahlt die Versicherung. Somit kann der Geschädigte erneut ein Fahrzeug des Herstellers erwerben.Doch wie verschaffen sich Hacker Zugriff? Die meisten in den Fahrzeugen verbauten Controller-Area-Netzwerke (CANs) wurden im Wesentlichen ohne ausreichende Sicher-heitsmaßnahmen konzipiert. Wenn ein Angreifer physischen
Zugang zum CAN-Bus erhält, hat er bei den meisten Fahr-zeugen bereits einen Root-Zugriff – also einen vollständigen Systemzugriff. Das Hacken eines Fahrzeugnetzwerks durch physischen Zugriff würde in gewisser Weise den Zugang zum CAN erfordern, beispielsweise den Zugriff auf den On-Board-Diagnostics-II-Port (OBDII) mit einem Computer, der entwe-der direkt mit dem Port physisch verbunden ist oder über die Nutzung eines Remote-Dongles. Hacker können dann sowohl kostenpflichtige als auch kostenlose Softwarepro-dukte nutzen, die für das Reverse Engineering mithilfe der ausgetauschten Daten entwickelt wurden. Dieses Reverse Engineering wird durch den Umstand geför-dert, dass die Fahrzeugkommunikationsprotokolle auf stan-dardisierten Protokollen basieren, die größtenteils in Vor-schriften oder internationalen Normen (UDS, XCP, CCP, LIN) festgelegt wurden. Durch den Zugang zu diesem Wis-sen sind entsprechende Zustände identifizierbar, sodass hier einige typische Funktionen abzuleiten sind. Für den Fahrzeug zugang kann Software Defined Radio (SDR) wie
Bild 1. Jedes Fahrzeug ist ein potenzielles Angriffsziel für kriminelle Hacker.
(Bild: Shutterstock)
Bild 2. Plattformen wie HackerOne bieten Automobilherstellern die Möglich-
keit, dass sie ihre Sicherheitssysteme durch White-Hats hacken lassen, um
so Sicherheitslücken zu identifizieren. (Bild: Hackerone)

34 Elektronik automot ive 11.2020
ConneCted Car | SeCurity
hackRF, bladeRF, Ubertooth oder yardstick genutzt werden. Diese erfassen die RF-Transaktionen mit dem Fahrzeug und können so die Signalverschlüsselung wiedergeben, weiter-leiten oder knacken. Bei einem SDR handelt es sich um eine Radioantenne, die mit einem Controller verbunden ist, der wiederum mittels Software an einem Computer angeschlossen ist. Die Kosten für ein SDR rangieren von etwa 20 bis hin zu etwa 2000 US-Dollar. Der Preis wird durch die Anzahl der Funkfrequenzen bestimmt, die sie abdecken, ob sie gleichzeitig senden und empfangen können sowie die Anzahl der Kanäle, die das Gerät unterstützt.
angriff via relay und replay
Bei den Angriffstechniken sind Replay und Relay derzeit am häufigsten anzutreffen. Ein Replay-Angriff liegt vor, wenn der Angreifer in der Lage ist, eine Funkschlüsselanforderung, wie etwa das Entsperren eines Fahrzeugs, zu erfassen und zu speichern, um dieses Signal dann erneut erfolgreich zu verwenden. Wenn sich das Opfer in Reichweite seines Fahr-zeugs befindet, sind diese Angriffe mit Verschlüsselung, rol-lierenden Codes und anderen Synchronisierungstechniken ziemlich schwierig. Eine Variante eines Replay-Angriffs, die von Sammy Kamkar stammt, blockiert die Funkschlüssel-frequenz mit einer Antenne und fängt währenddessen ein gültiges Signal ein. Wenn das Opfer dann ein zweites Mal versucht, das Fahrzeug zu entriegeln, leitet der Angreifer das erste Signal weiter und speichert das zweite Signal, sodass der Angreifer am Ende eine einzige gültige Anfrage erhält. Dieser Angriff ist allerdings aufgrund verschiedener Her-steller-Designs begrenzt.Relay-Angriffe hingegen sind bei den derzeitigen Fahrzeug-diebstählen viel häufiger und mit relativ einfacher Technolo-gie umzusetzen. Hierbei kommen zwei Geräte zum Einsatz, die in der Regel von zwei Angreifern verwendet werden. Dabei wird Gerät A in Reichweite des Fahrzeugs platziert, während Gerät B sich neben dem Funkschlüssel befindet. Gerät B kommuniziert mit dem Funkschlüssel und sendet ein gültiges Signal an Gerät A, das dann als Funkschlüs-sel fungiert und mit dem Fahrzeug kommuniziert. Weil das
Fahrzeug keine Möglichkeit hat, einen Zeitstempel des Funkschlüssels zu bestätigen, ist ihm nicht bekannt, dass sich der tatsächliche Schlüssel in Wahr-heit außerhalb der Reichweite befindet und zwei weitere Geräte passiert hat.Insbesondere für die Vermeidung von Relay-Angriffen gibt es jedoch längst eine Lösung – die Triangulation. Diese erfordert mehrere Sensoren an ver-schiedenen Punkten im Fahrzeug. Bei-spielsweise wenn ein Fahrer die „Öff-nen-Taste“ des Schlüssels betätigt und anschließend eine Schlüsselanforde-rung an den Funkschlüssel gesendet
wird, suchen die Sensoren dann nach einem Hardware-Trust-Anchor oder einem sekundären vertrauenswürdigen Gerät am Funkschlüssel. Wenn das nicht zurückgemeldet wird, unterbleibt die angeforderte Aktivität. Eine ganzheitlichere Lösung des Problems bietet das Smartphone in seiner Rolle als Funkschlüssel, indem es direkt mit dem Fahrzeug kom-muniziert, um authentifizierte Anfragen zu stellen. Diese Herangehensweise birgt zwar andere Risiken, aber die Lösun-gen und Optionen werden auch leistungsfähiger.Weitere Zugangspunkte zum Fahrzeug sind das jederzeit ein-geschaltete Bluetooth, ein WLAN-Hotspot, ADAS-Sensoren oder sogar der Reifendrucküberwachungssensor (Tyre Pres-sure Monitoring System, TPMS). Künftig wird der Kabelbaum eine der schwersten, nicht-mechanischen Komponenten des Fahrzeugs sein. Weil die Hersteller ständig um Gewichtsein-sparungen bemüht sind, dürfte daher oftmals die Variante der drahtlosen Datenübermittlung zum Zuge kommen. Das löst zwar das Gewichtsproblem, eröffnet aber auch neue und unbekannte Angriffspunkte für Hacker.
HerauSforderungen
Um sich Zugang zum CAN-System zu verschaffen, sind für Cyberkriminelle noch viele Hürden zu meistern. Allein die Beschaffung aller CAN-ISO-Dokumente kann Tausende von Euro kosten. Die professionellen Lizenzen für entsprechende Werkzeuge erfordern Tausende von Dollar. Dabei sind die meisten CAN-Scanner darauf ausgerichtet, die Funktionen einzuschränken oder zu vereinfachen. Derzeit besteht die einzige Möglichkeit, Know-how zu Technologien wie CAN zu erwerben, größtenteils darin, Beteiligter der Automobil-industrie oder einer ähnlichen Branche zu sein. Aber es geht auch anders. Das bekannteste Spionagewerkzeug bei Kraftfahrzeugen ist das Tool Vehicle Spy von Intrepid Con-trol Systems. Dieses ermöglicht Reverse Engineering sowie das Kompromittieren von Fahrzeugnetzwerken. Günstig ist dieses Werkzeug nicht, denn es schlägt mit etwa 10.000 Euro zu Buche. Daher halten sich viele an Raspberry Pi‘s, CANtact oder CANable.io, deren Preise in der Größenordnung von ein paar Hundert Euro rangieren. Diese lassen sich mit der Open-Source-Software SocketCAN unter Linux einsetzen,
Bild 3. Die Zusammenarbeit von Automobilherstellern mit White-Hat-Hackern führt zu einem verbesserten
Schutz des Fahrzeugs. (Bild: Hackerone)

11.2020 Elektronik automot ive 35
ConneCted Car | SeCurity
um mit dem Fahrzeugnetzwerk zu interagieren. Jedoch bie-tet SocketCAN keine Benutzeroberfläche oder Erklärung von Informationen. Es werden nur die reinen Daten über-mittelt. Reverse Engineering auf diese Weise ist kompliziert und daher eine Herausforderung. Die Methode besteht in diesem Fall darin, eine Aktivität am Fahrzeug vorzuneh-men, um anschließend nach Änderungen im CAN-Verkehr zu suchen und dann diesen Befehl für den gleichen Effekt erneut zu nutzen.CAN-Befehle werden üblicherweise in drei Intervallen gesen-det: bei Aktion, im oberen „Totpunkt“ (TDC) oder in einem Intervall. So muss nicht nur der Befehl wiedergegeben und erkannt werden, welcher Frame sich ändert und warum, son-dern man muss die Interaktion über diese gültige „Nachricht“ stattfinden lassen. Zusammen mit den kostspieligen ISO/SAE-Dokumenten und den notwendigen proprietären Informationen ist die-ser Ansatz schwierig umzusetzen. Nicht zuletzt können sich gravierende Konsequenzen ergeben, wenn ein Steuergerät im eigenen Fahrzeug versagt und zu einem Unfall führt. Ohne die finanzielle Unterstützung eines Unternehmens ist es daher äußerst schwierig, sich in die Methoden des CAN-Bus-Hackings einzuarbeiten.Ein weiterer Grund für die schwere Erlernbarkeit liegt im CAN selbst. Selbst HF-Tests können eine monatelange Ein-arbeitung erfordern, nur um die Technologie zu verstehen. Die Tools sind dabei fast ausschließlich „Einzelstücke“ und in der Hackerwelt nicht besonders benutzerfreundlich. Das Startkapital, das ein Hobby-Hacker hierfür benötigt, ist im Vergleich extrem hoch, wobei die Werkzeuge je nach der zu testenden Technologie, den Lizenzkosten und der Qualität des Tools zwischen 20 und 20.000 Euro liegen. Schließlich muss man ein Fahrzeug oder Fahrzeugsystem zum Testen haben – nicht allzu viele dürften erpicht darauf sein, ihr Haupt- oder sogar einziges Transportmittel zu hacken. Die Folge ist, dass es nur wenige Wege gibt, sich in diese Technologie einzuarbeiten. Das macht es für den derzeitigen Talent-Pool an Hackern schwierig, sich dieser Sicherheitsprobleme anzu-nehmen. Das heißt, der verbesserte Schutz eines Fahrzeugs durch die Zusammenarbeit der Hersteller mit White-Hat-Hackern bedarf einer weitgehenden Planung.Denn trotz der Herausforderungen, die das Hacken von Fahrzeugen mit sich bringt, profitieren Automobilmarken allmählich von den Vorteilen verschiedener Sicherheits-tests (Bild 3), die auch bei ihren sonstigen IT-Ressourcen An wendung finden. Daher beginnen die Hersteller, die Hacker- Community proaktiv einzubinden.
General MotorS iM FokuS
General Motors (GM) hat schon vor langer Zeit die Notwen-digkeit erkannt, sich mit potenziellen Sicherheitsproblemen auseinanderzusetzen. Das veranlasste den Automobilher-steller dazu, mit einer Vulnerability Disclosure Policy (VDP) zu beginnen. Später haben Hacker dem Unternehmen, die mit dem VDP-Programm von GM arbeiteten, dabei geholfen,
mehr als 700 Fehler zu identifizieren und zu beheben. Dabei wurde GM über eine Möglichkeit zur Umgehung der Daten-beschränkungen auf dem OnStar-Wi-Fi-Hotspot-System seines Automobils informiert. Dieser Hotspot existiert in über vier Millionen GM-Fahrzeugen, sodass die möglichen Auswirkungen dieser Schwachstelle eine große Tragweite gehabt hätten. Der Autobauer versucht im Rahmen seines Programms, gefundene Bugs möglichst umgehend zu behe-ben. Sobald ein Hackerbericht eintrifft, setzt General Motors sein internes Sicherheitsteam auf die Behebung des Fehlers an. Dabei hat das Unternehmen erkannt, wie wertvoll die Zusammenarbeit mit der Hacker-Community bei der Suche nach etwaig übersehenen Schwachstellen ist. Weil jedoch ein erheblicher Teil der potenziellen Angriffsfläche gar nicht vom Hersteller selbst stammt, bindet GM auch seine Zulie-ferer und andere externe Partner mit ein. Zwar stehen IT-Sicherheitstests bei Automobilen noch am Anfang. Weil aber vernetzte Technologie immer mehr in Fahrzeuge integriert wird, müssen die Hersteller zeigen, dass sie das Thema Security ernst nehmen, zumal die Ver-braucher aufgrund der Gefahren, die von einem technisch hochg erüsteten Fahrzeug ausgehen, sich Sorgen machen. Neue Technologien bieten zunächst oftmals Einfallstore, die Cyberkriminelle ausnutzen können, um das Fahrzeug zu hacken. Daher sollten Produktentwickler, die Systeme im Fahrzeug so gut es geht absichern. ECK
thaddeuS Bender
ist Solutions Architect bei HackerOne mit Erfahrungen
im Bereich der IoT-Cybersicherheit. In seiner Funktion bei HackerOne
ist er für die Entwicklung und Bereitstellung von Produkten und Dienst -
leistungen wie zum Beispiel Penetrationstests, Bug-Bounty, Offenlegung
von Schwachstellen und anderen gezielten offensiven Maßnahmen zur
Gewährleistung der Sicherheit von Kunden verantwortlich.
• Digitale Erkennung von AC- und DC-Fehlerströmen• Analoge Ausgabe von Größe & Richtung des Fehlerstromes• Geeignet für Mode2- Laden nach IEC62752• Kompatibles Model für Mode3- Laden nach IEC 62955 in Arbeit
Leckstromsensor für AC-Lader!
©AdobeStock/OrthsMedien
+43 1 86 305–0 | [email protected] | www.codico.com/shop
CODICO_EK-auto_11_20.pdf;S: 1;Format:(90.00 x 62.00 mm);30.Sep 2020 12:42:58
36 Elektronik automot ive 11.2020
ConneCted Car | Bussysteme
CAN FD sollte für einen höheren Datendurchsatz sorgen, verursachte
jedoch zu viele Probleme bei der Signalintegrität. Und in den automobilen
Topologien kam die HS-CAN-Erweiterung nicht wie gewünscht zum
Tragen. Jetzt sollen neue CAN FD Transceiver mit deutlichen
Signalverbesserungen die Einschränkungen beseitigen und die CAN-
Datenübertragung signifikant beschleunigen. Von Tony Adamson
(Bild
: kks
sr |
Shut
ters
tock
)
Verbesserung des CAn-signAls in FAhrzeugnetzwerken
MEHr DATEN, SCHNEll biTTE!

11.2020 Elektronik automot ive 37
ConneCted Car | Bussysteme
Immer höhere Bitraten über ein CAN-Netzwerk zu übertragen, ist keine neue Problemstellung, Bandbreite ist seit jeher gefragt. Mit der zunehmenden Digitalisierung und den damit verbun-denen Datenflüssen stoßen die Automo-bilnetzwerke in puncto Bandbreitenka-pazität immer wieder an ihre Grenzen. Die maximale Bitrate, mit der ein CAN-Netzwerk zuverlässig arbeiten kann, wurde traditionell durch die Schlei-fenverzögerung, einen im ISO11898-2-Standard definierten Timingpa-rameter, begrenzt. Im Wesentlichen entsprach dies einem einfachen Prin-zip: höhere Bitraten bedingen kleinere Netzwerke und damit kleinere Abstände zwischen den Knoten.Der maximale Abstand ergibt sich aus der Arbitrierungsphase, in der alle Knoten das Signal aller anderen Kno-ten korrekt empfangen müssen, um gemeinsam zu vereinbaren, wer Priori-tät zum Senden hat. So könnte CAN FD nur in der Datenphase der Kommunika-tion auf höhere Bitraten beschleunigen, wenn die Arbitrierung abgeschlossen ist und nur ein Knoten sendet. Hier gilt die Anforderung an die Schleifenver-zögerung nicht mehr, während sie auch bei CAN FD in der Arbitrierungsphase unverändert gilt. Daher hat jedes CAN-FD-Netzwerk zwei definierte Bitraten: die Bitrate während der Arbitrierungs-phase (ähnliche Bitraten wie bei HS-CAN-Netzwerken) und die Datenphase – oder „Fast Phase“-Bitrate beim Sen-den der eigentlichen Daten mit wesent-lich höhere Bitraten.
Can-BesChleunigung auf 2 mBit/s
Die Bitrate von CAN FD wurde in der ISO 11898-2:2016 zwar mit bis zu 5 Mbit/s für die Datenphase definiert, in der Pra-xis fiel jedoch schnell auf, dass bei den höheren Bitarten die Geschwindigkeit Grenzen hatte. Ziel ist in erster Linie ein stabiles Signal während des rezessiven Bits. Zwei topologische Effekte sorgen hier für eine Verzerrung: Einschwing-vorgänge, welche durch nicht abge-schlossene Stichleitungen (oder Ver-zweigungen) im Kabelbaum verursacht werden, und Signalplateaus, die durch
eine niedrigere charakteristische Kabel-impedanz bedingt werden. Diese beiden Effekte stören das Signal zu Beginn des rezessiven Bits und verzögern dessen Stabilisierung bei einer Differenzspan-nung kleiner als 0,5 V. Bei diesen 0,5 V handelt es sich um die Schwelle für den Spannungshub am Empfänger – defi-niert in ISO 11898-2:2016 als der Punkt, an dem alle Transceiver das Signal als rezessiv interpretieren müssen.Die beiden Effekte waren keine spe-zifischen CAN-FD-Probleme, sondern traten bereits in HS-CAN-Netzwerken auf. Die höhere Bitrate in der schnel-len Phase verkürzte jedoch die Dauer der einzelnen Bits erheblich und so wurden die normalerweise weit vor dem Abtastpunkt liegenden kleinen Artefakte plötzlich zu signifikanten Hürden einer zuverlässigen CAN-FD-Kommunikation.In Bild 1 zeigen die horizontalen Linien die unteren und oberen Schwellen am Empfänger. Um eine zuverlässige Kom-munikation zu gewährleisten, muss
das Signal zum Zeitpunkt der Abtas-tung unterhalb der unteren Empfän-gerschwelle stabil bleiben, typischer-weise für etwa 70-80 % der Bitdauer. Im Beispiel mit 2 Mbit/s liegt das Sig-nal über dieser Schwelle, wodurch eine zuverlässige Kommunikation verhin-dert wird.Um die Störeffekte in den Griff zu bekommen, mussten Netzwerkent-wickler die Komplexität ihrer Topo-logien reduzieren. Statt nicht abge-schlossener Stichleitungen wurde stattdessen mit einer reduzierten Anzahl von Knoten in einem typi-scherweise linearen (oder verketteten) Netzwerk gearbeitet. So war zwar eine gute Datenübertragung gewährleistet, es traten aber Nebenwirkungen auf: Eine höhere Anzahl von Netzwerk-zweigen resultierte in komplexeren Gateways, mehr Anschlüssen, mehr Verkabelung im Fahrzeug sowie komplexeren Installationen und Tests während der Fahrzeugproduktion. Ein einfaches Beispiel ist das Verlegen
Bild 1. Beispiele für Einschwingvorgänge von Signalen bei 500 kbit/s (oben) und 2 Mbit/s (unten). (Bild: NXP)
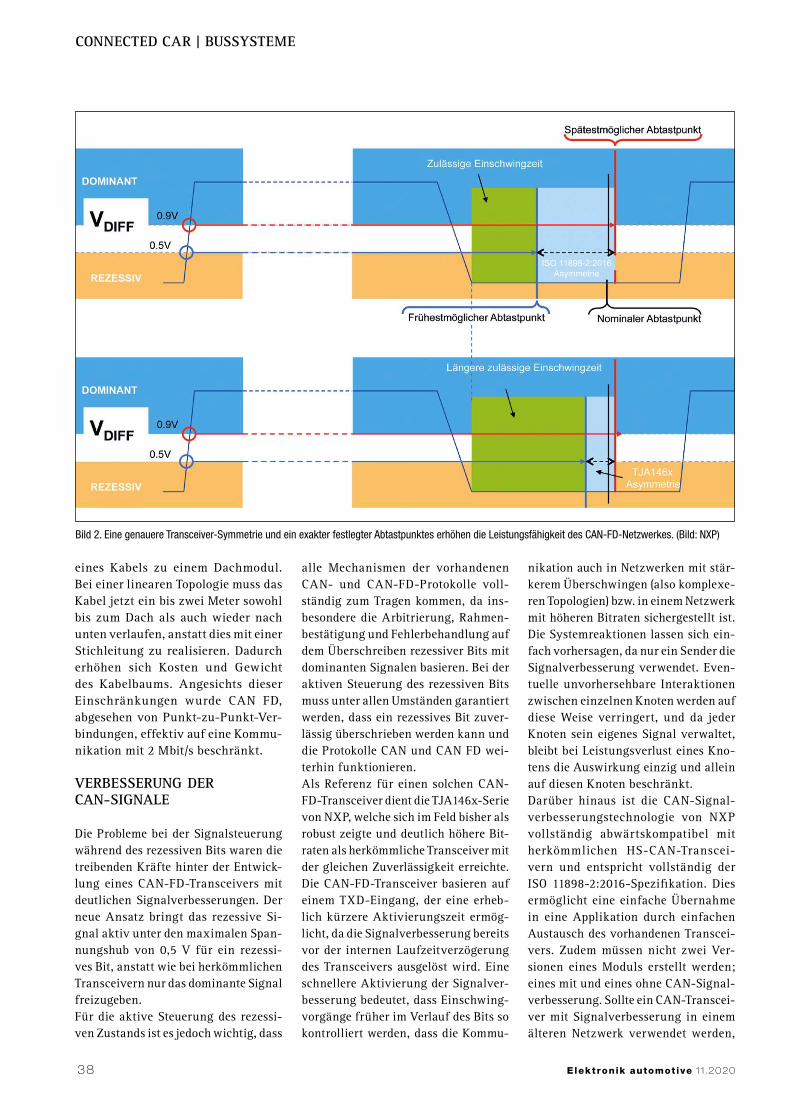
38 Elektronik automot ive 11.2020
ConneCted Car | Bussysteme
eines Kabels zu einem Dachmodul. Bei einer linearen Topologie muss das Kabel jetzt ein bis zwei Meter sowohl bis zum Dach als auch wieder nach unten verlaufen, anstatt dies mit einer Stichleitung zu realisieren. Dadurch erhöhen sich Kosten und Gewicht des Kabelbaums. Angesichts dieser Einschränkungen wurde CAN FD, abgesehen von Punkt-zu-Punkt-Ver-bindungen, effektiv auf eine Kommu-nikation mit 2 Mbit/s beschränkt.
VerBesserung der Can-signale
Die Probleme bei der Signalsteuerung während des rezessiven Bits waren die treibenden Kräfte hinter der Entwick-lung eines CAN-FD-Transceivers mit deutlichen Signalverbesserungen. Der neue Ansatz bringt das rezessive Si -gnal aktiv unter den maximalen Span-nungshub von 0,5 V für ein rezessi-ves Bit, anstatt wie bei herkömmlichen Transceivern nur das dominante Signal freizugeben.Für die aktive Steuerung des rezessi-ven Zustands ist es jedoch wichtig, dass
alle Mechanismen der vorhandenen CAN- und CAN-FD-Protokolle voll-ständig zum Tragen kommen, da ins-besondere die Arbitrierung, Rahmen-bestätigung und Fehlerbehandlung auf dem Überschreiben rezessiver Bits mit dominanten Signalen basieren. Bei der aktiven Steuerung des rezessiven Bits muss unter allen Umständen garantiert werden, dass ein rezessives Bit zuver-lässig überschrieben werden kann und die Protokolle CAN und CAN FD wei-terhin funktionieren.Als Referenz für einen solchen CAN-FD-Transceiver dient die TJA146x-Serie von NXP, welche sich im Feld bisher als robust zeigte und deutlich höhere Bit-raten als herkömmliche Transceiver mit der gleichen Zuverlässigkeit erreichte. Die CAN-FD-Transceiver basieren auf einem TXD-Eingang, der eine erheb-lich kürzere Aktivierungszeit ermög-licht, da die Signalverbesserung bereits vor der internen Laufzeitverzögerung des Transceivers ausgelöst wird. Eine schnellere Aktivierung der Signalver-besserung bedeutet, dass Einschwing-vorgänge früher im Verlauf des Bits so kontrolliert werden, dass die Kommu-
nikation auch in Netzwerken mit stär-kerem Überschwingen (also komplexe-ren Topologien) bzw. in einem Netzwerk mit höheren Bitraten sichergestellt ist. Die Systemreaktionen lassen sich ein-fach vorhersagen, da nur ein Sender die Signalverbesserung verwendet. Even-tuelle unvorhersehbare Interaktionen zwischen einzelnen Knoten werden auf diese Weise verringert, und da jeder Knoten sein eigenes Signal verwaltet, bleibt bei Leistungsverlust eines Kno-tens die Auswirkung einzig und allein auf diesen Knoten beschränkt.Darüber hinaus ist die CAN-Signal-verbesserungstechnologie von NXP vollständig abwärtskompatibel mit herkömmlichen HS-CAN-Transcei-vern und entspricht vollständig der ISO 11898-2:2016-Spezifikation. Dies ermöglicht eine einfache Übernahme in eine Applikation durch einfachen Austausch des vorhandenen Transcei-vers. Zudem müssen nicht zwei Ver-sionen eines Moduls erstellt werden; eines mit und eines ohne CAN-Signal-verbesserung. Sollte ein CAN-Transcei-ver mit Signalverbesserung in einem älteren Netzwerk verwendet werden,
Bild 2. Eine genauere Transceiver-Symmetrie und ein exakter festlegter Abtastpunktes erhöhen die Leistungsfähigkeit des CAN-FD-Netzwerkes. (Bild: NXP)


E-VEhiclEs | stromVErsorgung
40 Elektronik automot ive 11.2020
In Elektroautos mit immer leistungsfähigeren Akku-Packs steigt die Gefahr
von Überlast und Kurzschlüssen. Probleme bei der Koordination von
Schmelzsicherungen und Schutzeinrichtungen sowie Limitierungen sind
die Folge. Hybride Schutz- und Schalteinrichtungen bieten eine hochvolt-
geeignete Alternative. Von Till Wagner
Sicherungen in automobilen batterieSyStemen
KombI-ScHuTz FÜr STArKE AKKuS
(Bild
: Lig
htsp
ring
| Shu
tters
tock
)
Alltagstaugliche Elektromobilität ver-langt nach kurzen Ladezeiten, hohen Kilometerleistungen pro Akku-Ladung und einer großen Vielfalt an elektri-schen Fahrzeugmodellen. Diese Fak-toren beeinflussen das Design und die Leistung des elektrischen Antriebs-strangs. Mit einer erhöhten Gesamt-leistung geht meist auch eine Erhöhung der Systemspannung einher. Heutige Elektrofahrzeuge sind hauptsächlich im 400-V-Bereich zu finden. Techno-logische Herausforderungen verlangsa-men die Einführung von 800-V-Hoch-volt-Systemen, obwohl sie langfristig Vorteile haben.
Mit einer höheren Gesamtleistung zur Steigerung der Akkukapazitäten gehen allerding auch höhere potenzielle Feh-lerströme einher, welche das Bordnetz eines Elektroautos beeinträchtigen oder beschädigen können. Die höheren Feh-lerströme sind dementsprechend ein wichtiges Kriterium für die Auswahl passender Schutzkomponenten im Batterie-Management-System (BMS). Die Anforderungen an Schalt- und Schutzgeräte steigen zusätzlich durch anspruchsvollere Schnellladezyklen und Motorenleistungen – sie müssen dann höheren Betriebsströmen und zyklischen Anforderungen standhalten.
Herkömmliche Sicherheitsarchitektu-ren, bestehend aus Schütz und Schmelz-sicherung, sind diesen gesteigerten Anforderungen nicht mehr gewachsen; beziehungsweise ist es damit zuneh-mend schwieriger, ein hinreichendes Sicherheitsniveau bei vertretbarem Wartungsaufwand zu garantieren.
Koordination Von schmElzsichErungEn
Die Schmelzsicherung ist nicht umsonst eines der am längsten genutzten elek-trischen Bauteile überhaupt. Die kom-pakte Baugröße, ein einfacher Aufbau

E-VEhiclEs | stromVErsorgung
und der günstige Preis sprechen für sich. Allerdings ist das Auslösen einer Schmelzsicherung ein irreversibler Vorgang und lässt sich nicht aktiv ansteuern. Neben diesen bekannten Aspekten treten in der Elektromobili-tät zusätzliche Herausforderungen auf. Das Schnellladen auf Gleichstrombasis wird aktuell viel diskutiert, um lange Ladezeiten und damit ein großes Hemm-nis für den Kauf von Elektrofahrzeugen zu beseitigen. Bei dieser Art Anwendung werden allerdings Leistungen erreicht, die in einer konventionellen Auslegung beinahe an Fehlerszenarien heranrei-chen. Dieses Problem ist allerdings nicht nur auf das Laden beschränkt, auch im Fahrbetrieb steigen die Leistungen. Für eine Sicherung ergibt sich ganz konkret das Problem, dass sie rechtzeitig aus-lösen muss, um das System zu schüt-zen – aber eben nicht zu früh. Löst die Sicherung beim Schnellladen verfrüht aus, ist das für den Autobesitzer ‚nur‘ ärgerlich, während der Fahrt kann es dagegen problematisch sein. Eine konventionelle Sicherung erkennt nicht, ob es sich um einen beschleunig-ten, aber noch zu tolerierenden Lade-vorgang oder eine fehlerhafte Überlast handelt – als passives Bauteil kann sie nicht direkt angesteuert werden. Ent-wickler versuchen diesem Problem mit Pyroswitches entgegenzuwirken. Die Komponenten können angesteuert werden und durchtrennen mittels einer
kleinen Explosion eine Stromschiene. Ein Pyroswitch ist ein NC-Bauteil (Nor-mally Closed) und damit nicht „Fail Safe“ ausgelegt. Um es auszulösen und den Stromkreis zu trennen, muss dem-entsprechend immer eine Steuerspan-nung vorhanden sein. Ein weiteres Pro-blem ist, dass der Pyroswitch nicht über eine Stromlimitierung verfügt. Das bedeutet: Bis das Gerät auslöst, fließt der volle Fehlerstrom durch das System. Eine naheliegende Lösung wäre es, Schmelzsicherungen zu wählen, die erst bei deutlich höheren als im Nor-malbetrieb auftretenden Strömen aus-lösen. Dabei kommt es allerdings zu Schwierigkeiten in der Koordination mit dem Schütz, welches den Akku im Normalbetrieb schaltet. Bei der Zusam-menschaltung dieser Bauteile ist es essenziell, dass die Kontakte des Schüt-zes solange geschlossen bleiben, bis die Sicherung auslöst. Bei höheren Strömen
kommen physikalische Effekte (Levita-tion) zum Tragen – die Kontakte werden auseinandergedrückt. Der Energiefluss, den eine Schmelzsicherung zum Aus-lösen braucht, wird zeitweise unter-brochen (Bild 1).
AbhEbEndE schützE: Vom ProblEm zur lösung
Verantwortlich für diese Bewegung ist die Lorentzkraft im Leiter, die im Nano-sekundenbereich einsetzt. Die Auslö-sezeit der Sicherung und Pyroswitches liegt allerdings im Millisekundenbe-reich. In konventionellen Designs soll-ten also Sicherungen bereits bei Strö-men auslösen, bei denen es nicht zu Levitationseffekten kommt. Ansons-ten besteht die Gefahr einer unkon-trollierten Bewegung der Kontakte. Der Widerstand im entstehenden Lichtbo-gen kann zu einem Stromabfall führen,
Bild 1. Schwierige Schützkoordination bei hohen Strömen. (Bild: Eaton)
The heart of your device
Tadiran Batteries GmbH | Industriestr. 22 | 63654 BÜDINGEN | GERMANYTel: +49 6042 954-0 | Fax: +49 6042 954-190 | E-mail: [email protected]
Batterielösung für E-Callund andere Automotive-Anwendungen
weitere Kfz-Einsatzmöglichkeiten: www.tadiranbatteries.de >> Info/Transport >> Anwendungsgebiete >> Kfz-Systeme
Tadiran_EK-auto_01_20.pdf;S: 1;Format:(185.00 x 90.00 mm);23.Jan 2020 14:09:52
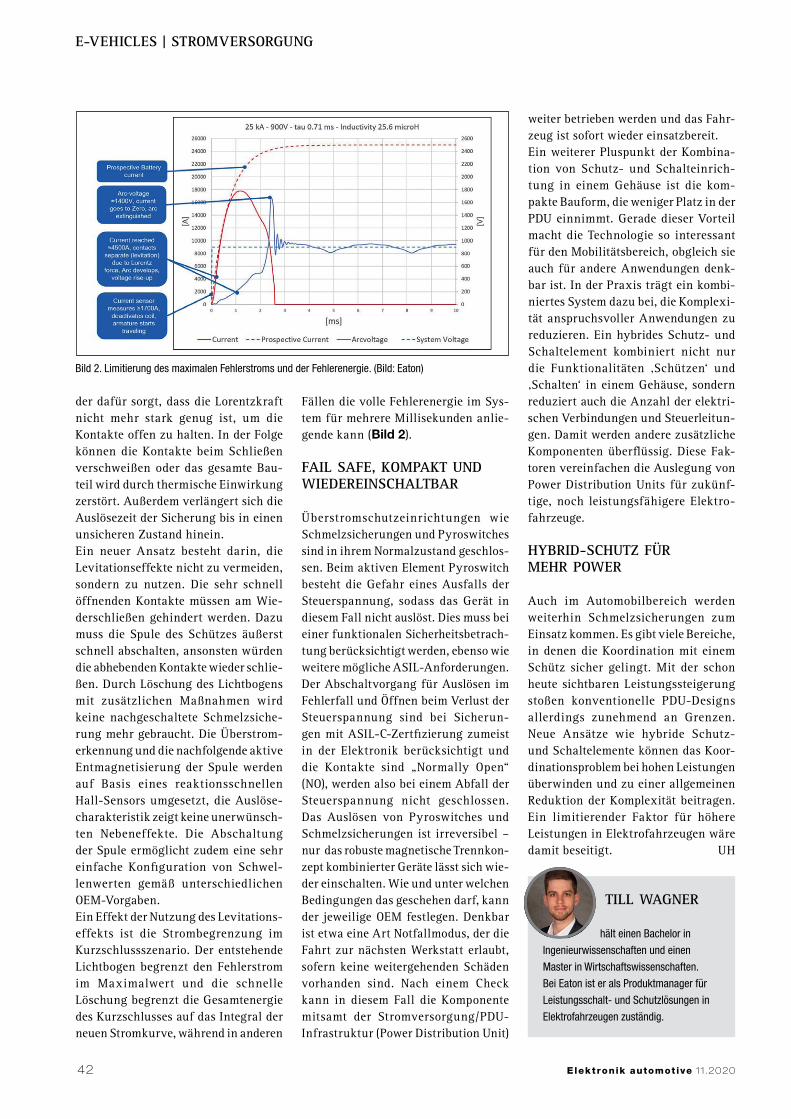
E-VEhiclEs | stromVErsorgung
42 Elektronik automot ive 11.2020
der dafür sorgt, dass die Lorentzkraft nicht mehr stark genug ist, um die Kontakte offen zu halten. In der Folge können die Kontakte beim Schließen verschweißen oder das gesamte Bauteil wird durch thermische Einwirkung zerstört. Außerdem verlängert sich die Auslösezeit der Sicherung bis in einen unsicheren Zustand hinein.Ein neuer Ansatz besteht darin, die Levitationseffekte nicht zu vermeiden, sondern zu nutzen. Die sehr schnell öffnenden Kontakte müssen am Wiederschließen gehindert werden. Dazu muss die Spule des Schützes äußerst schnell abschalten, ansonsten würden die abhebenden Kontakte wieder schließen. Durch Löschung des Lichtbogens mit zusätzlichen Maßnahmen wird keine nachgeschaltete Schmelzsicherung mehr gebraucht. Die Überstromerkennung und die nachfolgende aktive Entmagnetisierung der Spule werden auf Basis eines reaktionsschnellen HallSensors umgesetzt, die Auslösecharakteristik zeigt keine unerwünschten Nebeneffekte. Die Abschaltung der Spule ermöglicht zudem eine sehr einfache Konfiguration von Schwellenwerten gemäß unterschiedlichen OEMVorgaben. Ein Effekt der Nutzung des Levitationseffekts ist die Strombegrenzung im Kurzschlussszenario. Der entstehende Lichtbogen begrenzt den Fehlerstrom im Maximalwert und die schnelle Löschung begrenzt die Gesamtenergie des Kurzschlusses auf das Integral der neuen Stromkurve, während in anderen
Fällen die volle Fehlerenergie im System für mehrere Millisekunden anliegende kann (Bild 2).
Fail saFE, kompakt und wiEdErEinschaltbar
Überstromschutzeinrichtungen wie Schmelzsicherungen und Pyroswitches sind in ihrem Normalzustand geschlossen. Beim aktiven Element Pyroswitch besteht die Gefahr eines Ausfalls der Steuerspannung, sodass das Gerät in diesem Fall nicht auslöst. Dies muss bei einer funktionalen Sicherheitsbetrachtung berücksichtigt werden, ebenso wie weitere mögliche ASILAnforderungen. Der Abschaltvorgang für Auslösen im Fehlerfall und Öffnen beim Verlust der Steuerspannung sind bei Sicherungen mit ASILCZertfizierung zumeist in der Elektronik berücksichtigt und die Kontakte sind „Normally Open“ (NO), werden also bei einem Abfall der Steuerspannung nicht geschlossen. Das Auslösen von Pyroswitches und Schmelzsicherungen ist irreversibel – nur das robuste magnetische Trennkonzept kombinierter Geräte lässt sich wieder einschalten. Wie und unter welchen Bedingungen das geschehen darf, kann der jeweilige OEM festlegen. Denkbar ist etwa eine Art Notfallmodus, der die Fahrt zur nächsten Werkstatt erlaubt, sofern keine weitergehenden Schäden vorhanden sind. Nach einem Check kann in diesem Fall die Komponente mitsamt der Stromversorgung/PDUInfrastruktur (Power Distribution Unit)
weiter betrieben werden und das Fahrzeug ist sofort wieder einsatzbereit. Ein weiterer Pluspunkt der Kombination von Schutz und Schalteinrichtung in einem Gehäuse ist die kompakte Bauform, die weniger Platz in der PDU einnimmt. Gerade dieser Vorteil macht die Technologie so interessant für den Mobilitätsbereich, obgleich sie auch für andere Anwendungen denkbar ist. In der Praxis trägt ein kombiniertes System dazu bei, die Komplexität anspruchsvoller Anwendungen zu reduzieren. Ein hybrides Schutz und Schaltelement kombiniert nicht nur die Funktionalitäten ‚Schützen‘ und ‚Schalten‘ in einem Gehäuse, sondern reduziert auch die Anzahl der elektrischen Verbindungen und Steuerleitungen. Damit werden andere zusätzliche Komponenten überflüssig. Diese Faktoren vereinfachen die Auslegung von Power Distribution Units für zukünftige, noch leistungsfähigere Elektrofahrzeuge.
hybrid-schutz Für mEhr powEr
Auch im Automobilbereich werden weiterhin Schmelzsicherungen zum Einsatz kommen. Es gibt viele Bereiche, in denen die Koordination mit einem Schütz sicher gelingt. Mit der schon heute sichtbaren Leistungssteigerung stoßen konventionelle PDUDesigns allerdings zunehmend an Grenzen. Neue Ansätze wie hybride Schutz und Schaltelemente können das Koordinationsproblem bei hohen Leistungen überwinden und zu einer allgemeinen Reduktion der Komplexität beitragen. Ein limitierender Faktor für höhere Leistungen in Elektrofahrzeugen wäre damit beseitigt. UH
Bild 2. Limitierung des maximalen Fehlerstroms und der Fehlerenergie. (Bild: Eaton)
till wagnEr
hält einen Bachelor in
Ingenieurwissenschaften und einen
Master in Wirtschaftswissenschaften.
Bei Eaton ist er als Produktmanager für
Leistungsschalt- und Schutzlösungen in
Elektrofahrzeugen zuständig.

11.2020 Elektronik automot ive 43
E-VEhiclEs | ElEktromEchanik
Für Fahrerassistenzsysteme müssen die Daten zahlreicher Sensoren erfasst,
verarbeitet und Aktoren entsprechend angesteuert werden. Nur durch eine
sichere Verbindung ist ein perfektes Zusammenspiel der unter schiedlichen
Systeme möglich. Denn unter den rauen Umgebungsbedin gungen im Auto
müssen Stecksysteme eine hohe Vibrationsfestigkeit, Dichtheit, Temperatur
beständigkeit, hohe Stromtragfähigkeit sowie einfache Handhabung beweisen.
Von Markus Breitenbücher
KompaKte und robuste stecKverbinder für die automobileleKtroniK
HArT iM NeHMeN
(Bild: Irina Shi | Shutterstock)
Letztendlich erfordert die Umsetzung von Elektromobilität und automatisiertem Fahren eine bisher nicht gekannte Vernetzung in Automobilen und damit leistungsfähige, platzsparende und zuverlässige Steckverbinderlösungen. Für dieses Anwendungsspektrum sind kompakte, zuverlässige und robuste Steckverbinderlösungen gefragt. Die Applikationen reichen von hochsensiblen Front und Heckkameralösungen über intelligente Scheinwerfersysteme mit dynamischem Kurvenlicht bis hin zu Airbags, die sich präzise auf das Gewicht der Insassen einstellen können. Als robuste "Koshiri"Varianten lieferbare Steckverbinder kommen u.a. in elektronisch geregelten Lenksystemen oder aber in der Leuchtweitenregulierung zum Einsatz. Platzsparende
Kabelstecker findet man aber auch in Rückfahrkameras und Einparkhilfesensoren.In vielen Fällen haben die entsprechenden Steckverbinder nicht nur Zertifizierungen wie ISO TS16949 oder erfüllen die KoshiriVorgaben, sondern bieten zudem ausreichende DesignMargen, um auch höhere Ströme oder Spannungen bei kleinen Rastern handhaben zu können. MiniBridge (Raster 1,27 mm), MaxiBridge (2,54 mm) und MicroBridge (1,27 mm)Kabelsteckverbinder erfüllen auch die anwendbaren Vorgaben nach LV 214. Die LV 214 definiert in 29 Prüfgruppen elektrische, klimatische, mechanische und korrosive Beanspruchungsszenarien, die ein Kontaktsystem überstehen muss.
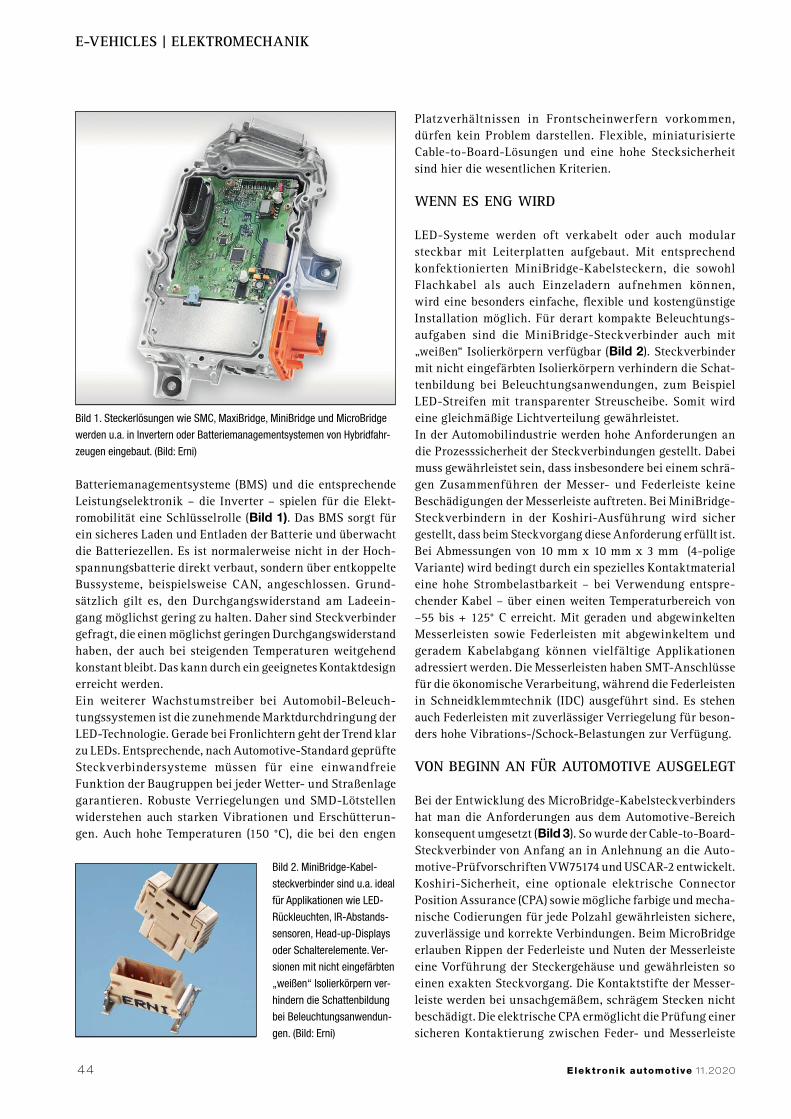
44 Elektronik automot ive 11.2020
E-VEhiclEs | ElEktromEchanik
Platzverhältnissen in Frontscheinwerfern vorkommen, dürfen kein Problem darstellen. Flexible, miniaturisierte Cable-to-Board-Lösungen und eine hohe Stecksicherheit sind hier die wesentlichen Kriterien.
WEnn Es Eng Wird
LED-Systeme werden oft verkabelt oder auch modular steckbar mit Leiterplatten aufgebaut. Mit entsprechend konfektionierten MiniBridge-Kabelsteckern, die sowohl Flachkabel als auch Einzeladern aufnehmen können, wird eine besonders einfache, flexible und kostengünstige Installation möglich. Für derart kompakte Beleuchtungs - auf gaben sind die MiniBridge-Steckverbinder auch mit „weißen“ Isolierkörpern verfügbar (Bild 2). Steckverbinder mit nicht eingefärbten Isolierkörpern verhindern die Schat-tenbildung bei Beleuchtungsanwendungen, zum Beispiel LED-Streifen mit transparenter Streuscheibe. Somit wird eine gleich mäßige Lichtverteilung gewährleistet.In der Automobilindustrie werden hohe Anforderungen an die Prozesssicherheit der Steckverbindungen gestellt. Dabei muss gewährleistet sein, dass insbesondere bei einem schrä-gen Zusammenführen der Messer- und Federleiste keine Beschädigungen der Messerleiste auftreten. Bei MiniBridge-Steckverbindern in der Koshiri-Ausführung wird sicher gestellt, dass beim Steckvorgang diese Anforderung erfüllt ist. Bei Abmessungen von 10 mm x 10 mm x 3 mm (4-polige Variante) wird bedingt durch ein spezielles Kontaktmaterial eine hohe Strombelastbarkeit – bei Verwendung entspre-chender Kabel – über einen weiten Temperaturbereich von –55 bis + 125° C erreicht. Mit geraden und abgewinkelten Messerleisten sowie Federleisten mit abgewinkeltem und geradem Kabelabgang können vielfältige Applikationen adressiert werden. Die Messerleisten haben SMT-Anschlüsse für die ökonomische Verarbeitung, während die Federleisten in Schneidklemmtechnik (IDC) ausgeführt sind. Es stehen auch Federleisten mit zuverlässiger Verriegelung für beson-ders hohe Vibrations-/Schock-Belastungen zur Verfügung.
Von BEginn an für automotiVE ausgElEgt
Bei der Entwicklung des MicroBridge-Kabelsteckverbinders hat man die Anforderungen aus dem Automotive-Bereich konsequent umgesetzt (Bild 3). So wurde der Cable-to-Board-Steckverbinder von Anfang an in Anlehnung an die Auto-motive-Prüfvorschriften VW75174 und USCAR-2 entwickelt. Koshiri-Sicherheit, eine optionale elektrische Connector Position Assurance (CPA) sowie mögliche farbige und mecha-nische Codierungen für jede Polzahl gewährleisten sichere, zuverlässige und korrekte Verbindungen. Beim MicroBridge erlauben Rippen der Federleiste und Nuten der Messerleiste eine Vorführung der Steckergehäuse und gewährleisten so einen exakten Steckvorgang. Die Kontaktstifte der Messer-leiste werden bei unsachgemäßem, schrägem Stecken nicht beschädigt. Die elektrische CPA ermöglicht die Prüfung einer sicheren Kontaktierung zwischen Feder- und Messerleiste
Batteriemanagementsysteme (BMS) und die entsprechende Leistungselektronik – die Inverter – spielen für die Elekt-romobilität eine Schlüsselrolle (Bild 1). Das BMS sorgt für ein sicheres Laden und Entladen der Batterie und überwacht die Batteriezellen. Es ist normalerweise nicht in der Hoch-spannungsbatterie direkt verbaut, sondern über entkoppelte Bussysteme, beispielsweise CAN, angeschlossen. Grund-sätzlich gilt es, den Durchgangswiderstand am Ladeein-gang möglichst gering zu halten. Daher sind Steckverbinder gefragt, die einen möglichst geringen Durchgangswiderstand haben, der auch bei steigenden Temperaturen weitgehend konstant bleibt. Das kann durch ein geeignetes Kontakt design erreicht werden.Ein weiterer Wachstumstreiber bei Automobil-Beleuch-tungssystemen ist die zunehmende Marktdurchdringung der LED-Technologie. Gerade bei Fronlichtern geht der Trend klar zu LEDs. Entsprechende, nach Automotive-Standard ge prüfte Steckverbindersysteme müssen für eine einwandfreie Funktion der Baugruppen bei jeder Wetter- und Straßenlage garantieren. Robuste Verriegelungen und SMD-Lötstellen widerstehen auch starken Vibrationen und Erschütterun-gen. Auch hohe Temperaturen (150 °C), die bei den engen
Bild 1. Steckerlösungen wie SMC, MaxiBridge, MiniBridge und MicroBridge
werden u.a. in Invertern oder Batteriemanagementsystemen von Hybridfahr-
zeugen eingebaut. (Bild: Erni)
Bild 2. MiniBridge-Kabel-
steckverbinder sind u.a. ideal
für Applikationen wie LED-
Rückleuchten, IR-Abstands-
sensoren, Head-up-Displays
oder Schalterelemente. Ver-
sionen mit nicht eingefärbten
„weißen“ Isolierkörpern ver-
hindern die Schattenbildung
bei Beleuchtungsanwendun-
gen. (Bild: Erni)

11.2020 Elektronik automot ive 45
E-VEhiclEs | ElEktromEchanik
adressiert werden. Die Sicherheit im verriegelten Zustand, beispielsweise bei Vibrations- und Schockbelastungen, steht hierbei genauso im Vordergrund wie der präzise und fehler-freie Steckvorgang. Die spezielle Geometrie der abgewinkelten IDC-Federleiste und der geraden SMT-Messerleiste erfordert eine definierte Kraft zum Verriegeln der Wire-to-Board-Verbindung. Der Anwender erfährt so eine deutliche Rückmeldung (hörbar, taktil) der sicheren Verbindung. Mit zusätzlichen Führungen und verbreiterten Rasthebeln sind Kontaktbeschädigungen beim Stecken praktisch ausgeschlossen. Das Lösen der Ver-bindung erfolgt durch ein kostengünstiges Entriegelungs-werkzeug. ECK
bereits beim Steckvorgang. Dafür wird bei der Messerleiste ein verkürzter Prüf-Pin ohne Signal- und Stromversorgungs-funktion verwendet. Alle genannten Funktionsmerkmale für eine hohe Stecksicherheit sowie zuverlässige Kontaktgabe tragen dazu bei, mögliche Ausfälle in der Produktion und im Feld zu reduzieren.Trotz des kleinen Rasters von 1,27 mm ist der MicroBridge robust. So widersteht der Steckverbinder den rauen Umge-bungsbedingungen mit Vibrationen oder Schockbelastungen und hohen Temperaturen im Fahrzeug: Dafür sorgen u.a. die beidseitige Verriegelung und die hohe Temperaturbe-ständigkeit. Die beidseitige Gehäuseverriegelung bietet eine akustische und haptische Rückmeldung der Verriegelung beim Stecken. Die Verriegelung ist ohne Werkzeug lösbar. Die Lötclips der Messerleisten absorbieren mechanischen Stress und widerstehen hohen Schock- und Vibrationsbelastun-gen. Die hohe Temperaturbeständigkeit von bis zu 150 °C ermöglicht auch den Einsatz in thermisch anspruchsvol-len Bereichen wie in LED-Nähe im Frontscheinwerfer. Die Strombelastbarkeit je Kontakt ist mit 9,0 A bei 20 °C (2-polige Version) spezifiziert.Der MicroBridge ist als einreihige Messerleiste in gerader und abgewinkelter SMT-Ausführung verfügbar. Die Mes-serleisten werden in Gurtverpackung für die automatische Bestückung geliefert. Die einreihigen Federleisten sind in Schneidklemmausführung (IDC) erhältlich. Sie stehen aktu-ell mit 90-Grad-Leitungsabgang zur Verfügung und sind nach international anerkannten Standards qualifiziert. Die doppelte Ausführung der Schneidklemme sorgt für eine besonders zuverlässige Kontaktgabe. Darüber hinaus schützt die integrierte Zugentlastung die Schneidklemmverbindung vor mechanischer Belastung durch Leitungsbewegungen.
DoppElt sichEr
Auch die SMC-Familie im 1,27-mm-Raster empfiehlt sich für anspruchsvolle, oft räumlich eingeschränkte Applikationen im Automotive-Bereich. So bietet die SMC-Steckverbinder-familie auch 50-polige Versionen mit Secure-Lock-Verrie-gelung (Bild 4). Die elektrisch zuverlässige Kontaktgabe bei den Secure-Lock-Ausführungen erfolgt im gesteckten Zustand durch den bewährten doppelseitigen Federkontakt. Zur sicheren mechanischen Verbindung zweier Baugrup-pen wurde die Wire-to-Board-Lösung (Stecksystem mit IDC-Federleiste und SMT-Messerleiste) entsprechend modifiziert und optimiert. Damit können auch anspruchsvolle Applika-tionen wie in Invertern von Elektro- und Hybrid-Fahrzeugen
Bild 3. MicroBridge-Kabelsteckverbinder wurden von Beginn an speziell
für die Automobilindustrie entwickelt und orientierten sich an Vorgaben wie
VW75174 und USCAR-2. (Bild: Erni)
markus BrEitEnBüchEr
Ist nach Ausbildung im elektrotechnischen Bereich und
Weiterbildung zum Stated-Certified Engineer seit mehr als 20 Jahren
im Produktmarketing von Erni in Adelberg tätig. Derzeit hat er die
Funktion als Teamleiter Marketing & Produktdaten Manager inne.
Pengutronix_60x80_EK14.pdf;S: 1;Format:(60.00 x 80.00 mm);19.Jun 2019 15:35:13
Bild 4. SMC Secure
Lock ist eine sichere Wire-to-
Board-Lösung, die auch die hohen Vibrations- und Schockanforderungen
der Automobilindustrie erfüllt. (Bild: Erni)

46 Elektronik automot ive 11.2020
E-Mobility | MEssEn und tEstEn
Ein wesentlicher Teil der Absicherung von Fahrerassistenzsystemen und autonomen Fahrzeugen besteht darin, mögliche Verkehrssituationen zunächst in einer Simulationsumgebung zu testen – bevor solche Tests mit realen Fahrzeugen durchgeführt werden. Umgekehrt werden Ereignisse von realen Testfahrten in der Simulationsumgebung nachgestellt. Die genaue Anzahl der Szenarien, die für eine zuverlässige Überprüfung not
wendig ist, lässt sich nur schwer ermitteln – schließlich ist die reale Welt komplex und bringt Autofahrer immer wieder in unerwartete Situationen. Dennoch liegt das Ziel von Wissenschaftlern und Ingenieuren im Bereich des autonomen Fahrens darin, eine größtmögliche Anzahl von Situationen zusammenzustellen und daraus Testszenarien zu generieren, die sich früh in der Fahrzeugentwicklung überprüfen lassen.
Zur Nachbildung solcher Szenarien an HardwareintheLoopSystemen (HiL) oder in einer virtuellen SoftwareintheLoopUmgebung (SiL) verfolgen die Automobilhersteller und Zulieferer unterschiedliche Vorgehensweisen. Die Association for Standardization of Automation and Measuring Systems, kurz ASAM, hat daher ein Projekt gestartet, um einen offiziellen Standard für den Test autonomer Fahrfunktionen
Wie testet man eigentlich autonome Fahrzeuge? Indem ihr „Verhalten“ in
möglichst vielen Situationen überprüft wird. Um hierfür einheitliche
Qualitätsstandards und Kompatibilität bei gemeinsamen Entwicklungen zu
gewährleisten, hat ASAM den Standard OpenScenario entwickelt. Dieser
ist seit März 2020 verfügbar.
Von Abduelkerim Dagli, Christian Demmelmeier und Tobias Weimer
OpenScenariO – einheitlicher Standard
TESTSzEnArIEn Für AUTOnOMES FAhrEn
(Bild: Wright Studio | Shutterstock)

11.2020 Elektronik automot ive 47
E-Mobility | MEssEn und tEstEn
mithilfe solcher Szenarien zu entwi-ckeln. Ziel ist eine Vereinheitlichung, die einerseits erstmals die Kompatibi-lität der unterschiedlichen Forschungs-ergebnisse miteinander ermöglicht und andererseits gemeinsame Entwick-lungen vereinfacht.
Was ist opEnscEnario?
OpenScenario dient zur Definition von dynamischen Inhalten in einer simu-lierten Welt, also insbesondere der Verkehrsteilnehmer und ihrer Bewe-gungen. Diese werden im Standard als Datenstrukturen mit UML (Uni-fied Modeling Language) definiert und in einer Datenbank oder als Dateien abgebildet, vorzugsweise im XML-Format (Extensible Markup Language). Eine Arbeitsgruppe des ASAM hat in Zusammenarbeit mit Automobilher-stellern, Zulieferern und Dienstleistern im Rahmen des „OpenScenario Transfer Projects“ die Version 1.0 dieses Stan-dards erarbeitet. Als Basis diente die bereits öffentlich verfügbare Spezifika-tion zur Version 0.9.1, die in den Jahren zuvor von einem Core-Team entwickelt und nun zur Weiterentwicklung und Langzeitpflege an den ASAM überge-ben wurde. OpenScenario 1.0 ist zur Version 0.9.1 nicht abwärtskompatibel, im Standard ist jedoch ein XSLT-Migra-tions-Script (Extensible Stylesheet Lan-guage Transformation) enthalten, mit dem sich XML-Dateien der Version 0.9.1 in die Version 1.0.0 überführen lassen.Statische Inhalte der simulierten Welt, wie Häuser, Bäume oder Fahrbahn-markierungen, sind nicht Bestandteil von OpenScenario, können aber einge-bunden werden. Dazu hat ASAM mit OpenDrive und OpenCRG zwei wei-tere Standards entwickelt: OpenDrive
ermöglicht die logische Beschreibung von Straßennetzen, zum Beispiel Gera-den, Kurven, Kreuzungen und Fahrspu-ren, die als Eingabe für eine Fahrdyna-mik-, Verkehrs- oder Sensorsimulation genutzt werden kann. OpenCRG bietet eine detaillierte Beschreibung der Ober-fläche einer Fahrbahn, die beispiels-weise aus Scans auf Straßen erstellt wird. Diese kommen bei der Fahrdyna-miksimulation und beim Test von Fah-rerassistenzsystemen sowie autonomen Fahrzeugen zum Einsatz. Gemeinsam ermöglichen die drei Standards also eine umfassende Definition der sta-tischen und dynamischen Inhalte in Simulationen für den Test von autono-men Fahrzeugen.
diffErEnziErung tEstfall und szEnario
Um den Szenario-basierten Test von Fahrerassistenzsystemen und automa-tisierten Fahrzeugen näher zu beschrei-ben, müssen zunächst zwei Begriffe voneinander abgegrenzt werden: das Szenario und der Testfall.Ein Testfall umfasst neben dem eigent-lichen Ablauf, also der Aktion, auch
die notwendigen Vor- und Nachbe-reitungen, wie die Initialisierung und De-Initialisierung der Mess- und Simu-lationstechnik sowie die Bewertung, ob der Test bestanden wurde oder nicht. Somit bildet er auch den Rahmen für die Ausführung des Szenarios während der Aktion des Testfalls. Das Szenario defi-niert dabei im Detail das Verhalten der einzelnen Bestandteile der Simulation, also besonders der Verkehrsteilnehmer. Einen Überblick über die Unterschiede zwischen Szenarien und Testfällen gibt Tabelle 1.
opEnscEnario iM dEtail
OpenScenario definiert ein Dateiformat für die Beschreibung des dynamischen Inhalts von Fahr- und Verkehrssimula-toren. Tabelle 2 erklärt seine wichtigs-ten Bestandteile. Nachfolgend werden die Parametrisierung und die Übertrag-barkeit von OpenScenario zwischen Simulatoren beschrieben.
ParameTrisierungIn OpenScenario ist die Parametrisie-rung eine zentrale Funktion: Ein Test-szenario kann Parameter enthalten,
ASAM iM Überblick
ASAM besteht überwiegend aus internationalen Automobilherstellern, -zulieferern und Ingenieurdienst-
leistern. Ziel ist die Schaffung eines unternehmensübergreifenden Standards: Sämtliche Werkzeuge
einer Entwicklungsprozesskette sollen miteinander kompatibel sein und auf diese Weise ein durchgehender
Datenaustausch möglich werden. Die ASAM-Standards definieren Protokolle, Dateiformate und Application
Programming Interfaces (APIs) für die Softwareentwicklung und den Test von Steuergeräten.
Die HiL-Simulatoren von MicroNova verfügen bereits über eine gemäß ASAM standardisierte XiL-Schnitt-
stelle. Durch diese API lassen sich die NovaCarts-Systeme mittels Plug & Play in ASAM-konforme
Testumgebungen integrieren. Parallel hat MicroNova eine Anbindung der kostenfrei vom Unternehmen
bereitgestellten Testautomatisierungslösung EXAM an die XiL-Schnittstelle entwickelt. Volkswagen
beispielsweise nutzt EXAM konzernweit als Standardlösung für die Testautomatisierung.
Testfall Szenario
Hauptanwendungsgebiet Tests an HiL- und SiL-Systemen, Unit-Tests Tests in virtuellen, rein-Software-basierten Umgebungen in der Cloud
Abstraktions-Level Tests auf Signalebene Tests auf Ebene der Verkehrsteilnehmer
Bestandteile Fahrzeugfunktionen (z.B. Zündung, Gangwahl/Wählhebel, Gaspedal, Bremse, Lenkrad, Licht)
Dynamische Bestandteile der virtuellen Welt (z. B. Verkehrsteil-nehmer und deren Verhalten, Verkehrszeichen, Wetter)
Ablauf Hauptsächlich sequenzieller Ablauf: Vorbedingung, Aktion, erwartetes Ergebnis/Auswertung, Nachbedingung
Paralleler Ablauf: Verkehrsteilnehmer bewegen sich gleichzeitig durch die simulierte Welt
Auswertung Bewertung, ob Test bestanden oder nicht bestanden wurde, ist Teil des Testfalls
Bewertung, ob Szenario bestanden oder nicht bestanden wurde, ist nicht Teil des Szenarios
Tabelle 1. Abgrenzung Testfall und Szenario
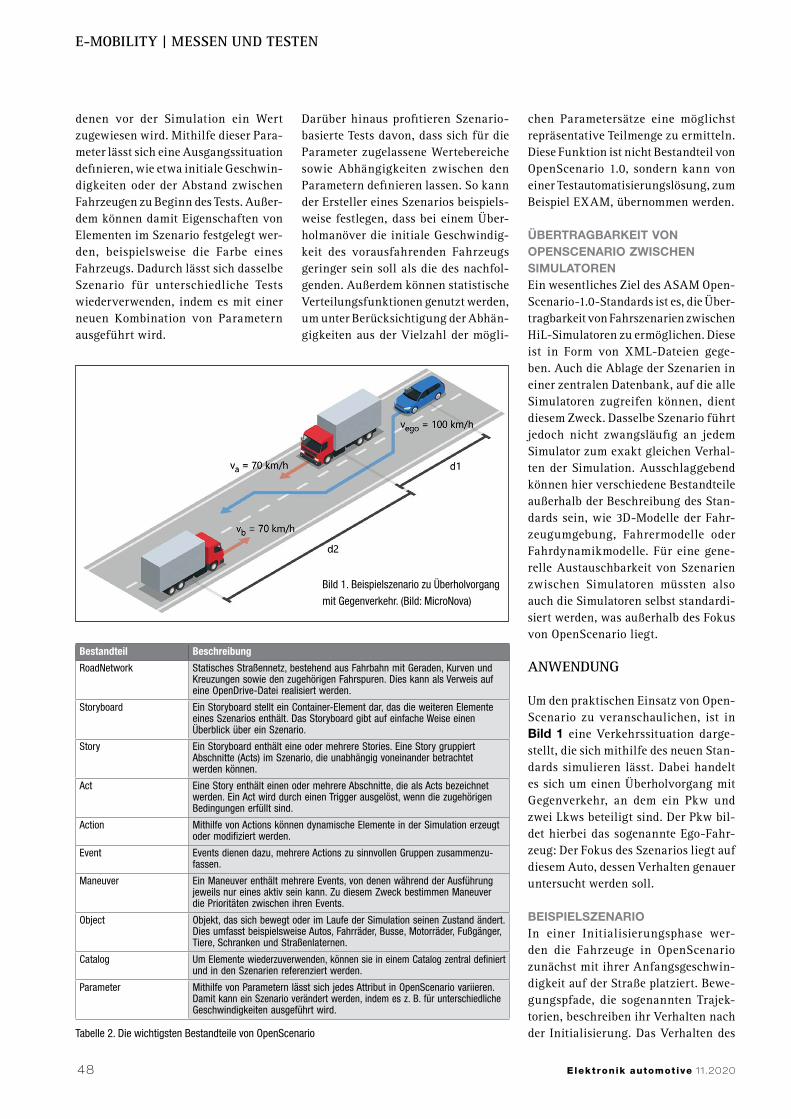
48 Elektronik automot ive 11.2020
E-Mobility | MEssEn und tEstEn
denen vor der Simulation ein Wert zugewiesen wird. Mithilfe dieser Para-meter lässt sich eine Ausgangssituation definieren, wie etwa initiale Geschwin-digkeiten oder der Abstand zwischen Fahrzeugen zu Beginn des Tests. Außer-dem können damit Eigenschaften von Elementen im Szenario festgelegt wer-den, beispielsweise die Farbe eines Fahrzeugs. Dadurch lässt sich dasselbe Szenario für unterschiedliche Tests wiederverwenden, indem es mit einer neuen Kombination von Parametern ausgeführt wird.
Darüber hinaus profitieren Szenario-basierte Tests davon, dass sich für die Parameter zugelassene Wertebereiche sowie Abhängigkeiten zwischen den Parametern definieren lassen. So kann der Ersteller eines Szenarios beispiels-weise festlegen, dass bei einem Über-holmanöver die initiale Geschwindig-keit des vorausfahrenden Fahrzeugs geringer sein soll als die des nachfol-genden. Außerdem können statistische Verteilungsfunktionen genutzt werden, um unter Berücksichtigung der Abhän-gigkeiten aus der Vielzahl der mögli-
chen Parametersätze eine möglichst repräsentative Teilmenge zu ermitteln. Diese Funktion ist nicht Bestandteil von OpenScenario 1.0, sondern kann von einer Testautomatisierungslösung, zum Beispiel EXAM, übernommen werden.
Übertragbarkeit von openScenario zwiSchen SimulatorenEin wesentliches Ziel des ASAM Open-Scenario-1.0-Standards ist es, die Über-tragbarkeit von Fahrszenarien zwischen HiL-Simulatoren zu ermöglichen. Diese ist in Form von XML-Dateien gege-ben. Auch die Ablage der Szenarien in einer zentralen Datenbank, auf die alle Si mulatoren zugreifen können, dient diesem Zweck. Dasselbe Szenario führt jedoch nicht zwangsläufig an jedem Simulator zum exakt gleichen Verhal-ten der Simulation. Ausschlaggebend können hier verschiedene Bestandteile außerhalb der Beschreibung des Stan-dards sein, wie 3D-Modelle der Fahr-zeugumgebung, Fahrermodelle oder Fahrdynamikmodelle. Für eine gene-relle Austauschbarkeit von Szenarien zwischen Simulatoren müssten also auch die Simulatoren selbst standardi-siert werden, was außerhalb des Fokus von OpenScenario liegt.
AnwEndung
Um den praktischen Einsatz von Open-Scenario zu veranschaulichen, ist in bild 1 eine Verkehrssituation darge-stellt, die sich mithilfe des neuen Stan-dards simulieren lässt. Dabei handelt es sich um einen Überholvorgang mit Gegenverkehr, an dem ein Pkw und zwei Lkws beteiligt sind. Der Pkw bil-det hierbei das sogenannte Ego-Fahr-zeug: Der Fokus des Szenarios liegt auf diesem Auto, dessen Verhalten genauer untersucht werden soll.
beiSpielSzenarioIn einer Initialisierungsphase wer-den die Fahrzeuge in OpenScenario zunächst mit ihrer Anfangsgeschwin-digkeit auf der Straße platziert. Bewe-gungspfade, die sogenannten Trajek-torien, beschreiben ihr Verhalten nach der Initialisierung. Das Verhalten des
Bestandteil Beschreibung
RoadNetwork Statisches Straßennetz, bestehend aus Fahrbahn mit Geraden, Kurven und Kreuzungen sowie den zugehörigen Fahrspuren. Dies kann als Verweis auf eine OpenDrive-Datei realisiert werden.
Storyboard Ein Storyboard stellt ein Container-Element dar, das die weiteren Elemente eines Szenarios enthält. Das Storyboard gibt auf einfache Weise einen Überblick über ein Szenario.
Story Ein Storyboard enthält eine oder mehrere Stories. Eine Story gruppiert Abschnitte (Acts) im Szenario, die unabhängig voneinander betrachtet werden können.
Act Eine Story enthält einen oder mehrere Abschnitte, die als Acts bezeichnet werden. Ein Act wird durch einen Trigger ausgelöst, wenn die zugehörigen Bedingungen erfüllt sind.
Action Mithilfe von Actions können dynamische Elemente in der Simulation erzeugt oder modifiziert werden.
Event Events dienen dazu, mehrere Actions zu sinnvollen Gruppen zusammenzu-fassen.
Maneuver Ein Maneuver enthält mehrere Events, von denen während der Ausführung jeweils nur eines aktiv sein kann. Zu diesem Zweck bestimmen Maneuver die Prioritäten zwischen ihren Events.
Object Objekt, das sich bewegt oder im Laufe der Simulation seinen Zustand ändert. Dies umfasst beispielsweise Autos, Fahrräder, Busse, Motorräder, Fußgänger, Tiere, Schranken und Straßenlaternen.
Catalog Um Elemente wiederzuverwenden, können sie in einem Catalog zentral definiert und in den Szenarien referenziert werden.
Parameter Mithilfe von Parametern lässt sich jedes Attribut in OpenScenario variieren. Damit kann ein Szenario verändert werden, indem es z. B. für unterschiedliche Geschwindigkeiten ausgeführt wird.
Tabelle 2. Die wichtigsten Bestandteile von OpenScenario
Bild 1. Beispielszenario zu Überholvorgang
mit Gegenverkehr. (Bild: MicroNova)

11.2020 Elektronik automot ive 49
E-Mobility | MEssEn und tEstEn
Ego-Fahrzeugs wird dabei durch seine Fahrerassistenzsysteme beeinf lusst oder komplett von der autonomen Steu-erungssoftware vorgegeben. Daher ist seine genaue Trajektorie vor Ausfüh-rung des Szenarios nicht bekannt.Zudem lassen sich die Abstände d1 und d2 durch Parameter variieren, wodurch das Verhalten des Ego-Fahr-zeugs beispielsweise unter den fol-genden Gesichtspunkten untersucht werden kann:➔➔ Wie groß muss der Abstand d1 min-
destens sein, damit die Sensoren des Ego-Fahrzeugs den entgegenkommen-den Lkw früh genug erkennen, obwohl der vorausfahrende Lkw im Weg ist? Wie verhält sich das Ego-Fahrzeug, wenn aufgrund eines Sensorrausfalls der entgegenkommende Lkw sehr spät erkannt wird?➔➔ Wie groß muss der Abstand d1 min-
destens sein, damit das Ego-Fahrzeug beim Ausscheren nicht fahrdynamisch instabil wird?➔➔ Wie klein darf der Abstand d2 höchs-
tens werden, damit das Ego-Fahrzeug den Überholvorgang noch ohne Kolli-sion durchführen kann? Wie klein darf der Abstand höchstens werden, damit ein komfortables Fahrverhalten des Ego-Fahrzeugs erhalten bleibt?➔➔ Hat das gewünschte Szenario „Über-
holvorgang bei Gegenverkehr“ über-haupt stattgefunden, oder hat sich das Ego-Fahrzeug entschieden, hinter dem vorausfahrenden Lkw herzufahren und nicht zu überholen?Solche Bewertungskriterien (Key Per-formance Indices, KPIs) für Szenarien in Bezug auf Sicherheit, Fahrdynamik und Komfort sind nicht Bestandteil von OpenScenario. Bei der Durchfüh-rung eines Szenarios lassen sich jedoch Messwerte aufzeichnen, mit deren Hilfe die KPIs in einer nachgelagerten Daten-analyse ermittelt werden können.
Prozess szenarioerstellungUm die große Anzahl von Szenarien erstellen zu können, die für den umfas-senden Test eines autonomen Fahr-zeugs notwendig sind, und gleichzei-tig eine hohe Qualität der Szenarien zu gewährleisten, ist ein einheitlicher Prozess erforderlich. Ein solcher Pro-
zess sollte die in Bild 2 abgebildeten Rollen umfassen. tabelle 3 beschreibt diese näher. Im Rahmen eines solchen Prozes-ses (Bild 3) profitieren die einzelnen Rollen auf verschiedene Weise von OpenScenario:➔➔ Die Lösung unterstützt den Ersteller
eines Szenarios, indem sie die benötig-ten Elemente für ein Szenario anbietet, eine schnelle Variierung über Parame-trisierung ermöglicht und die Wieder-verwendung von Szenarioelementen mithilfe von Catalogs erlaubt.➔➔ Der Test System Operator gewinnt
durch OpenScenario eine höhere Flexi-bilität, weil er Szenarien einfacher zwi-schen Prüfsystemen austauschen kann.➔➔ Die klaren Datenstrukturen, die der
Standard vorgibt, vereinfachen die Rolle des Data Analyst. Zudem erspart die standardisierte und einheitliche Vorgehensweise den Umgang mit ver-schiedenen Formaten.➔➔ Auch die Review-Aufgaben des Test
Managers werden letztlich durch diese klaren Strukturen vereinfacht.
opEnscEnario-2.0-concEpt-projEct
Parallel zum ersten Projekt wurde von der ASAM das „OpenScenario-2.0-Concept-Project“ durchgeführt, das
ebenfalls seit März 2020 abgeschlos-sen ist. Das Ergebnis ist keine weitere Version des Standards, sondern ein Vor-schlag, wie OpenScenario in Zukunft weiterentwickelt werden soll.Beide Versionen unterscheiden sich erheblich in der Struktur, mit der die simulierten Objekte und ihr Verhalten definiert werden: OpenScenario 1.0 beschreibt eine Datenstruktur, bei der die Objekte der Simulation als ver-schachtelte Baumstruktur definiert werden, und die sich anschließend bei-spielsweise als XML-Datei speichern lässt. Das Konzept für OpenScenario 2.0 sieht dagegen eine sogenannte Domain Specific Language (DSL) vor. Eine sol-che formale Sprache ähnelt einer Pro-grammiersprache und ist speziell für die Definition des Verhaltens von Verkehrs-objekten in der Simulation angepasst.Aus Sicht eines Szenarioerstellers ist dieser Unterschied kaum sichtbar, weil er die OpenScenario-Datenstrukturen üblicherweise über ein Tool bearbeitet und mit der Ablage als XML-Datei oder als DSL-Code nicht direkt in Berührung kommt. Dagegen arbeitet der Data Ana-lyst direkt mit den Daten, und seine Arbeitsweise wird von den Strukturen stark beeinflusst. Das ist besonders deshalb relevant, weil ein Data Analyst in der Lage sein muss, tausende oder zehntausende von Szenarien sowie die
Rolle Beschreibung
Test Manager Koordination der Testaktivitäten
Ersteller Erstellung und Parametrisierung von OpenScenario, Erstellung des Straßennetzes in OpenDrive, Erstellung von Straßenoberflächen in OpenCRG;Ablage dieser Daten in der Szenariodatenbank
Test System Operator Aufbau und Betrieb des Testsystems, Durchführung von Tests;Ablage der Testergebnisse in der Testergebnis-Datenbank
Data Analyst Auswertung von Testergebnissen, Ermittlung von KPIs (z.B. Testabdeckung, Time to Collision), Analyse der Gründe für nicht bestandene Tests
Tabelle 3. Rollenbeschreibung
Bild 2. Rollen bei der Szenarioerstellung. (Bild: MicroNova)
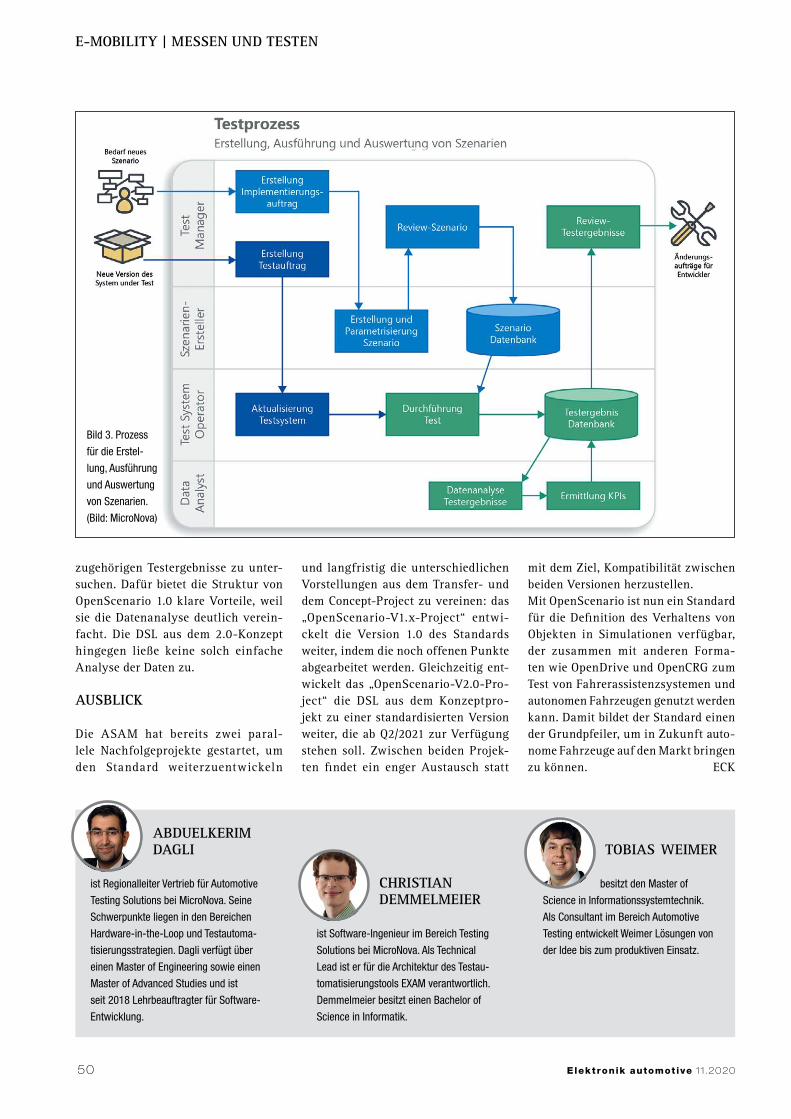
50 Elektronik automot ive 11.2020
E-Mobility | MEssEn und tEstEn
zugehörigen Testergebnisse zu unter-suchen. Dafür bietet die Struktur von OpenScenario 1.0 klare Vorteile, weil sie die Datenanalyse deutlich verein-facht. Die DSL aus dem 2.0-Konzept hingegen ließe keine solch einfache Analyse der Daten zu.
Ausblick
Die ASAM hat bereits zwei paral-lele Nachfolgeprojekte gestartet, um den Standard weiterzuentwickeln
und langfristig die unterschiedlichen Vorstellungen aus dem Transfer- und dem Concept-Project zu vereinen: das „OpenScenario-V1.x-Project“ entwi-ckelt die Version 1.0 des Standards weiter, indem die noch offenen Punkte abgearbeitet werden. Gleichzeitig ent-wickelt das „OpenScenario-V2.0-Pro-ject“ die DSL aus dem Konzeptpro-jekt zu einer standardisierten Version weiter, die ab Q2/2021 zur Verfügung stehen soll. Zwischen beiden Projek-ten findet ein enger Austausch statt
mit dem Ziel, Kompatibilität zwischen beiden Versionen herzustellen. Mit OpenScenario ist nun ein Standard für die Definition des Verhaltens von Objekten in Simulationen verfügbar, der zusammen mit anderen Forma-ten wie OpenDrive und OpenCRG zum Test von Fahrerassistenzsystemen und autonomen Fahrzeugen genutzt werden kann. Damit bildet der Standard einen der Grundpfeiler, um in Zukunft auto-nome Fahrzeuge auf den Markt bringen zu können. ECK
tobiAs WEiMEr
besitzt den Master of
Science in Informationssystemtechnik.
Als Consultant im Bereich Automotive
Testing entwickelt Weimer Lösungen von
der Idee bis zum produktiven Einsatz.
christiAn dEMMElMEiEr
ist Software-Ingenieur im Bereich Testing
Solutions bei MicroNova. Als Technical
Lead ist er für die Architektur des Testau-
tomatisierungstools EXAM verantwortlich.
Demmelmeier besitzt einen Bachelor of
Science in Informatik.
AbduElkEriM dAgli
ist Regionalleiter Vertrieb für Automotive
Testing Solutions bei MicroNova. Seine
Schwerpunkte liegen in den Bereichen
Hardware-in-the-Loop und Testautoma-
tisierungsstrategien. Dagli verfügt über
einen Master of Engineering sowie einen
Master of Advanced Studies und ist
seit 2018 Lehrbeauftragter für Software-
Entwicklung.
Bild 3. Prozess
für die Erstel-
lung, Ausführung
und Auswertung
von Szenarien.
(Bild: MicroNova)
11.2020 Elektronik automot ive 51
RedaktionAnschrift: Redaktion Elektronik automotive, Richard-Reitzner-Allee 2, 85540 HaarAssistenz: Andrea Seidel, Silvia LangfordTelefon: 089 25556-1332; Telefax: -1670Internet: www.elektronik.deE-Mail: [email protected]
Chefredakteur: Dipl.-Ing. Frank Riemenschneider (fr/-1714)Editor-at-Large, stv. Chefredakteur: Dipl.-Ing. Gerhard Stelzer (gs/-1337)Leitende Redakteurin: Stefanie Eckardt (eck/-1342)Chef vom Dienst: Dipl.-Ing. (FH) Markus Kien (mk/-1333)
Redaktion: Selina Doulah (sd/-1609): Distribution, GMM, Elektronik neo Stefanie Eckardt (eck/-1342): Kfz-Elektronik, Automotive Ute Häußler (uh/-1369): Leistungselektronik, Stromversorgung, AutomotiveDipl.-Phys. Markus Haller (mha/-1371): Displays, Sensorik, Messen+Testen, Konsum elektronik/Multimedia, Organische Elektronik Dipl.-Phys. Irina Hübner (ih/-1339): Kfz-Elektronik, Automotive B. Eng. Tobias Schlichtmeier (ts/-1368): Computertechnik, Software-/Entwicklung, Embedded, Security Dipl.-Ing. Harry Schubert (hs/-1338): Halbleiter, Mikrocontroller/-prozessoren, Wireless (HF-Technik)/RFID, Kommunikation, Elektronikfertigung, LeiterplattenDipl.-Ing. Gerhard Stelzer (gs/-1337): Mikroelektronik, Kfz-Elektronik, Automotive, Elektromechanik, Passive Bauelemente
Layout, Grafik: Andreas Geyh, Anja SchumannTitel: Andreas GeyhBilderdienst: Shutterstock
Sonderdrucke: Alle in dieser Ausgabe erschiene-nen Beiträge können für Werbezwecke in Form von Sonderdrucken hergestellt werden. Anfragen an Marion Stephan, Tel. 089 25556-1442, [email protected]: JournalMedia GmbH, Richard-Reitzner-Allee 4, 85540 HaarDruck: L. N. Schaffrath, Marktweg 42–50, 47608 GeldernOrganschaft: Die Elektronik ist Organ der VDE/VDI-Gesellschaft Mikroelektronik, Mikrosystem- und Feinwerktechnik (GMM).
Urheberrechte: Die in der Zeitschrift veröffentlich-ten Beiträge sind urheberrechtlich geschützt. Alle Rechte, insbeson dere das der Übersetzung in fremde Sprachen, vorbehalten. Kein Teil dieser Zeitschrift darf ohne schriftliche Genehmigung des Verlages in irgendei ner Form – durch Fotokopie, Mikrofilm oder andere Verfahren – reproduziert oder in eine von Maschi nen, insbesondere von Datenverarbeitungs anlagen, verwendbare Sprache übertragen werden. Auch die Rechte der Wieder-gabe durch Vortrag, Funk- oder Fernsehsendung, im Magnetton verfahren oder ähnlichem Wege blei-ben vorbehalten. Foto kopien für den persön lichen und sonstigen eigenen Gebrauch dürfen nur von einzelnen Bei trägen oder Teilen daraus als Einzel-kopien hergestellt werden. Für unverlangt eingesandte Manuskripte, Fotos, Grafiken und Datenträger wird keine Haftung übernommen, Rücksendung erfolgt nicht.
Printed in Germany. Imprimé en Allemagne. © 2020 für alle Beiträge bei WEKA FACHMEDIEN GmbH 20. Jahrgang, ISSN 1614-0125, Vertriebskennzeichen B 60343
MediabeRatung (Anschrift wie Verlag)E-Mail: [email protected],Internet: www.weka-fachmedien.de/media.htmlAssistenz: Rosi Böhm (-1307, [email protected])Michaela Stolka (-1376, [email protected])
Director New Business: Marc Adelberg (-1572, [email protected])Sales Director: Christian Stadler (-1375, [email protected])Sales Director: Sonja Winkler (-1383, [email protected])
Mediaberatung: Petra Beck (-1378, [email protected]): Regional Sales Manager PLZ 7Burkhard Bock (-1305, [email protected]): Key Account Manager, Regional Sales Manager PLZ 0 – 2Birgit Fischer (-1372, [email protected]): Regional Sales Manager PLZ 3, 85 – 89Tanja Lewin (-1386, [email protected]): Regional Sales Manager PLZ 4, 5 Konrad Nadler (-1382, [email protected]): International Account Manager (w/o USA/CAN), A, CH, UK Martina Niekrawietz (-1309, [email protected]): International Account Manager USA, Regional Sales Manager PLZ 80 – 84Bernhard Reinisch (-1381, [email protected]): Regional Sales Manager PLZ 6, 9 Corina Prell (-1393, [email protected]): Sales Manager Events Telefax-Anzeigen: 089 25556-1651/-1670 Anzeigen Karriere-Markt: 089 25556-1383, [email protected]
Disposition: Jeanette Blaukat (-1014, [email protected])Nadine Ziegler (-1473, [email protected])
Anzeigenpreise nach Preisliste 20, gültig ab 1. 1. 2020. Media-Information auf Anforderung.
anzeigenveRtRetung ausland USA West: Huson International Media, Lanibel Collado, 16615 Lark Avenue, Suite 100, Los Gatos, CA 95032, Tel. 001 408 879 6666, Fax 001 408 879 6669, [email protected]
veRlagAnschrift: WEKA FACHMEDIEN GmbH, Richard-Reitzner-Allee 2, 85540 Haar, Telefon: 089 25556-1000; Telefax: -1396 www.weka-fachmedien.deVertriebsleitung: Marc Schneider (-1509, [email protected])Herstellungsleitung: Marion Stephan (-1442)Geschäftsführung: Kurt Skupin, Matthäus Hose
Bestell- und Abonnement-Service: WEKA FACHMEDIEN GmbH c/o Zenit Pressever-trieb GmbH, Postfach 810640, 70523 Stuttgart, Tel. +49 (0)711 7252-210, Fax +49 (0)711 7252-333, [email protected] online: https://shop.weka-fachmedien.deBestellungen Schweiz: Thali AG, Industriestr. 14, CH-6285 Hitzkirch, Tel. 041 9196611, Fax 041 9196677 [email protected], www.thali.chAbonnementpreise: Inland 12 Ausgaben € 72,00 Studentenpreis Inland 12 Ausgaben € 54,00 Ausland 12 Ausgaben € 84,40 Schweiz 12 Ausgaben sfr 104,09Einzelheftbestellung: € 9,– zzgl. € 3 VersandBankverbindung: HypoVereinsbankIBAN: DE37 7002 0270 0035 7049 81 BIC: HYVEDEMMXXX
I m p r e s s u m I n s e r e n t e n v e r z e I c h n I s
ARM Germany GmbH www.arm.com ......................................................................................19
CODICO GmbH www.codico.com ................................................................................. 35
Conrad Electronic SE www.conrad.de ...................................................................................... 7
ETAS GmbH www.etas.com ..................................................................................... 52
FibreCode GmbH www.fibrecode.com ............................................................................. 39
GENTEX GmbH A Smarter Vision www.gentex.com ..................................................................................11
Heicks Industrieelektronik GmbH www.heicks.de .................................................................................... 23
HMS Technology Center Ravensburg GmbH www.ixxat.de ......................................................................................... 3
KIOXIA Europe GmbH www.kioxia.com ....................................................................................17
Mesago Messe Frankfurt GmbH www.mesago.de .................................................................................... 9
Messe Berlin GmbH www.berlin-messe.de ............................................................................13
NOFFZ Technologies GmbH www.noffz.com .................................................................................... 21
Pengutronix e.K. Industrial Linux Solutions www.pengutronix.de ............................................................................. 45
ROHM Semiconductor GmbH www.rohm.com/eu ................................................................................. 1
Tadiran Batteries GmbH www.tadiranbatteries.de.........................................................................41
TOELLNER Electronic Instrumente GmbH www.toellner.de ....................................................................................15
Vector Informatik GmbH www.vector.com .................................................................................... 2
WEKA FACHMEDIEN GmbH www.weka-fachmedien.de ......................................................... 29, 31, 51
LERNEN SIE DASJUNGE MAGAZIN DER KENNEN
Jetzt Wissensvorsprung
sichern!
SCHNELL KOSTENFREIEN
BEZUG SICHERN!
weka-fachmedien.de/shop
© S
hutt
erst
ock
- sa
n4ez
z

Escrypt_ETAS_Anzeige_Elektronik_automotive_11_20.pdf;S: 1;Format:(210.00 x 297.00 mm);21.Oct 2020 09:03:55





























