Embed Size (px)
Citation preview
1
MỤC LỤC
1. Tổng quan ........................................................................................................ 2
2. Các công trình nghiên cứu liên quan ............................................................ 3
3. Mục tiêu của đề tài .......................................................................................... 4
4. Cơ sở lý thuyết ................................................................................................. 6
4.1 Hệ thống GPS ........................................................................................................ 6
4.1.1 Giới thiệu về GPS ........................................................................................... 6
4.1.2 Hoạt động của GPS ........................................................................................ 7
4.2 Hệ thống INS ....................................................................................................... 12
4.2.1 Giới thiệu INS .............................................................................................. 12
4.2.1 Các loại mặt phẳng toạ độ ............................................................................ 13
4.3 Bộ lọc Kalman: .................................................................................................... 14
5. Định hướng nghiên cứu ................................................................................ 21
5.1 Khảo sát thiết bị và mô hình GPS, mô hình INS ................................................. 21
5.1.1 Hệ thống GPS ............................................................................................... 21
5.1.2 Hệ thống INS ................................................................................................ 23
5.2 Tìm hiểu hai phương pháp tích hợp theo kiểu loosely và tightly coupled .......... 25
5.3 Xây dựng phần cứng để thu thập dữ liệu ............................................................ 27
5.4 Xây dựng thuật toán ước lượng của mô hình INS/GPS trên Matlab .................. 27
5.5 Hiện thực thuật toán ước lượng của mô hình INS/GPS trên nền vi xử lý ........... 27
6. Các bài báo đã công bố ................................................................................. 28
7. Sơ lược nội dung luận văn ............................................................................ 32
8. Kế hoạch thực hiện ........................................................................................ 33
9. Tài liệu tham khảo......................................................................................... 34
2
1. Tổng quan
Vị trí chính xác của một đối tượng trên trái đất có thể rất quan trọng trong một số
ứng dụng ngày nay. Không những trong những ngành đặc thù như hàng hải và hàng
không, mà còn được ứng dụng trong đời sống hiện nay như hệ thống giám sát, hệ
thống dò đường …
Với nhu cầu cần xác định vị trí của một đối tượng trên bề mặt trái đất hệ thống
GPS (Global Position system) được ra đời năm 1950. Trải qua quá trình phát triển
cùng với sự tiến bộ của khoa học kỹ thuật thì ngày các có nhiều thiết bị có độ chính
xác cao. Đặc biệt những thiết bị có giá thành cao tính chính xác có thể đến vài cm. Tuy
nhiên với những thiết bị thông thường khi nhận tín hiệu thẳng trực tiếp từ vệ tinh thì
sai số lên tới 5-100m. Ngoài ra độ chính xác của nó còn bị ảnh hưởng bởi các yếu tố
như: các tòa nhà, các tầng khí … Bên cạnh đó tốc độ cập nhật dữ liệu của hệ thống
GPS rất chậm thường là 1 lần/giây vì thế nó không thể đáp ứng được trong các ứng
dụng trong xe, tàu, máy bay… Bên cạnh đó trong các ứng dụng hiện nay đòi hỏi hệ
thống cần phải cung cấp dữ liệu chứa thông số như vận tốc, hướng của đối tượng đang
chuyển động. Các dữ liệu đó ta có thể thu được trong hệ thống INS.
Hệ thống GPS và INS có những ưu và khuyết điểm riêng. Trong hệ thống GPS,
vị trí và vận tốc có độ chính xác trong thời gian dài, độ chính xác không phụ thuộc
theo thời gian. Ngược lại, trong hệ thống INS, vị trí và vận tốc có độ chính xác cao
trong khoảng thời gian ngắn và độ chính xác tỷ lệ nghịch với thời gian. Và trong hệ
thống GPS hoạt động với tần số thấp, không thể tự hiệu chỉnh, bị nhiễu và cycle slip
and loss of lock. Trong khi đó hệ thống INS hoạt động với tần số cao, tự hiệu chỉnh và
không bị mất dữ liệu. Khi kết hợp GPS và INS sẽ tạo ra một hệ thống có các đặc điểm
nổi bật như: cung cấp dữ liệu về vị trí và vận tốc có độ chính xác cao, tần số cập nhật
cao, xác định attitude chính xác, định hướng quỹ đạo khi tín hiệu GPS bị mất, hiệu
chỉnh clock bias và clock drift của thiết bị GPS.
Với những ưu điểm trên, việc tích hợp INS/GPS là cần thiết. Tuy nhiên để đạt
hiệu quả như mong muốn thì việc tích hợp INS/GPS đòi hỏi phải có một mô hình và
các phương pháp phù hợp. Trong thực tế, kỹ thuật tích hợp INS/GPS có ba cáu trúc
3
chính, bao gồm: không kết hợp (uncoupled), kết hợp lỏng (loosely-coupled) và kết hợp
chặt (tightly-coupled). Một hệ thống kiểu uncoupled sẽ thực hiện việc kết hợp các giá
trị đo lường của INS và GPS để ước lượng vị trí, vận tốc và hướng; tuy nhiên, hệ
thống này sẽ không tự hiệu chỉnh lại mô hình INS và GPS. Do đó, hệ thống kiểu
uncoupled yêu cầu cảm biến và thiết bị GPS phải có độ chính xác rất cao. Ở hệ thống
kiểu loosely-coupled, ngoài việc ước lượng vị trí, vận tốc và hướng, hệ thống còn ước
lượng các giá trị sai số hệ thống trong mô hình INS để hiệu chỉnh nó; tuy nhiên, thiết
bị GPS sẽ không được hiệu chỉnh. Do đó, trong hệ thống kiểu loosely-coupled, độ
chính xác của thiết bị GPS sẽ quyết định đến chất lượng của hệ thống. Và một hệ
thống kiểu tightly-coupled sẽ tự hiệu chỉnh cả hai mô hình INS và GPS; do đó, chất
lượng của hệ thống này thường tốt hơn hai hệ thống được nêu trên. Vì vậy, việc nghiên
cứu và thực hiện một hệ thống tích hợp INS/GPS theo kiểu tightly-coupled để xác định
những thông tin về quỹ đạo chuyển động của đối tượng với độ chính xác cao, đang là
một yêu cầu đặt ra trong những bài toán xác định quỹ đạo chuyển động của đối tượng
ở nước ta hiện nay.
2. Các công trình nghiên cứu liên quan
Tùy theo điều kiện làm việc, sự phát triển của các thiết bị hỗ trợ (như cảm biến,
thiết bị thu, vi xử lý…) và yêu cầu chất lượng thì sẽ có nhiều giải pháp tích hợp trong
một hệ thống tích hợp INS/GPS. Do đó, hiện nay các nghiên cứu và thực hiện hệ thống
tích hợp INS/GPS đều nhận được sự quan tâm rất lớn, và nhiều báo cáo khoa học gần
đây cũng đã đề cập đến vấn đề này:
Thực hiện bộ lọc Kalman mở rộng dựa trên sơ đồ tích hợp INS/GPS theo
phương pháp loosely coupled, sử dụng DSP và FPGA ([1]-2008).
Xây dựng kỹ thuật tích hợp INS/GPS theo phương pháp tightly coupled dựa
trên các bộ lọc Kalman như KF, EKF, UKF ([2]-2010, [18]-2009).
Cải tiến độ chính xác của hệ thống INS/GPS của đối tượng chuyển động trên
mặt đất ([7]-2001).
4
Thực hiện bộ lọc Kalman mở rộng trong các hệ thống INS/GPS giá thành thấp
để ứng dụng cho các UAV ([19]-2009).
Phân tích hệ thống tích hợp INS/GPS kiểu tightly coupled theo hai phương
pháp Separation và Extrapolution ([20]-1999).
Hệ thống tích hợp INS/GPS theo kiểu tightly coupled ứng dụng cho tên lửa
([6]-2004).
3. Mục tiêu của đề tài
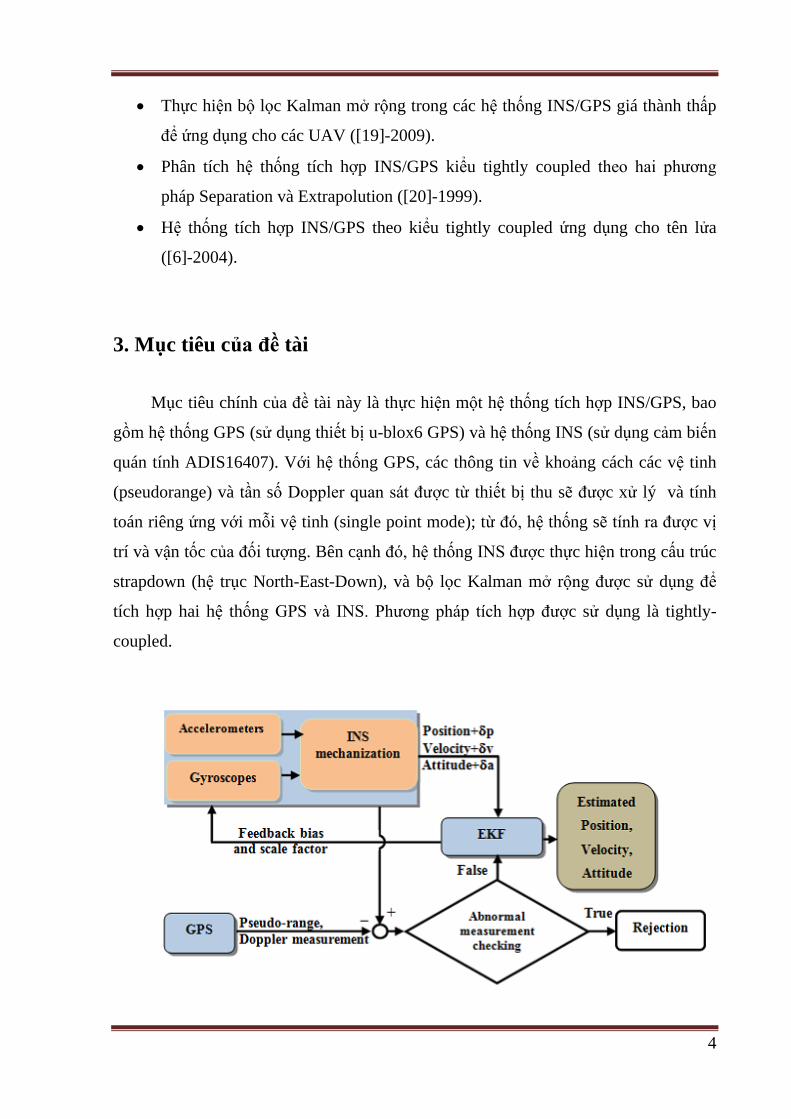
Mục tiêu chính của đề tài này là thực hiện một hệ thống tích hợp INS/GPS, bao
gồm hệ thống GPS (sử dụng thiết bị u-blox6 GPS) và hệ thống INS (sử dụng cảm biến
quán tính ADIS16407). Với hệ thống GPS, các thông tin về khoảng cách các vệ tinh
(pseudorange) và tần số Doppler quan sát được từ thiết bị thu sẽ được xử lý và tính
toán riêng ứng với mỗi vệ tinh (single point mode); từ đó, hệ thống sẽ tính ra được vị
trí và vận tốc của đối tượng. Bên cạnh đó, hệ thống INS được thực hiện trong cấu trúc
strapdown (hệ trục North-East-Down), và bộ lọc Kalman mở rộng được sử dụng để
tích hợp hai hệ thống GPS và INS. Phương pháp tích hợp được sử dụng là tightly-
coupled.
5
Các giá trị bias và scale factor trong cảm biến quán tính được đưa vào mô hình
INS và được xem là nhiễu hệ thống trong mô hình, các giá trị này được ước lượng
trong bộ lọc Kalman và được hồi tiếp về cảm biến để giới hạn sự gia tăng các sai số
này. Việc ràng buộc điều kiện cho các giá trị vận tốc và độ cao trong chuyển động
được đưa ra, để giới hạn sai số của hệ thống INS trong suốt quá trình GPS bi mất.
Nghiên cứu này được phân thành 2 giai đoạn chính: Thứ nhất là xây dựng và
thực hiện thuật toán ước lượng trong hệ thống tích hợp INS/GPS trên môi trường
Matlab để đánh giá. Thứ hai là hiện thực thuật toán ước lượng trong hệ thống tích hợp
INS/GPS trên nền vi xử lý để kiểm nghiệm và đánh giá.
Các nội dung chính của đề tài bao gồm:
- Tìm hiểu và nghiên cứu về hệ thống GPS và GLONASS, các thiết bị GPS
và cảm biến quán tính.
- Nghiên cứu về thuật toán Kalman mở rộng, phương pháp tích hợp theo kiểu
loosely coupled và tightly coupled trong hệ thống tích hợp INS/GPS.
- Xây dựng phần cứng và viết chương trình để thu thập dữ liệu từ GPS và
cảm biến quán tính. Thực hiện thu thập dữ liệu trên xe ôtô trong khu vực đô
thị.
- Trên cơ sở dữ liệu thu được, xây dựng mô hình tích hợp INS/GPS trên môi
trường Matlab, dựa trên hai phương pháp tích hợp kiểu loosely và tightly-
coupled đã nghiên cứu. Đưa ra kết quả để so sánh và đánh giá.
- Lựa chọn phương pháp tối ưu để xây dựng hệ thống chạy trên nền vi xử lý
được chọn. Thu thập kết quả và đánh giá hệ thống.
6
4. Cơ sở lý thuyết
4.1 Hệ thống GPS
4.1.1 Giới thiệu về GPS
GPS (Global Position System ) là hệ thống định vị toàn cầu. Nó gồm các vệ tinh
và các trạm điều khiển trên mặt đất. GPS sử dụng các trạm cố định như là các điểm
chuẩn để tính toán vị trí một cách chính xác và kiểm soát quỹ đạo của các vệ tinh,
GPS được phát minh bởi tập đoàn Ratheon vào năm 1950 dưới sự lãnh đạo của
tiến sỹ Ivan Getting. Hệ thống ban đầu có 18 vệ tinh, chia thành 3 nhóm và chuyển
động trên quỹ đạo xác định. Mỗi quỹ đạo lệch nhau một góc 120 độ.
Hiện nay có hai hệ thống vệ tinh định vị toàn cầu, một là hệ thống GPS của Mỹ
và GLONASS của Nga. Trong đó hệ thống GPS gồm hai dịch vụ: dịch vụ định vị
chuẩn có hạn chế (Standard positioning service) được cung cấp miễn phí và dịch vụ
định vị chất lượng chỉ được sử dụng trong quân đội và những người có quyền sử dụng.
Hệ thống GPS hiện nay có ít nhất là 24 vệ
tinh di chuyển theo 6 quỹ đạo quanh trái đất. Các
quỹ đạo này lệch nhau một góc 55 độ và có mối liền
hệ với đường xích đạo. Chiều dài của các quỹ đạo
này là 20200 km.
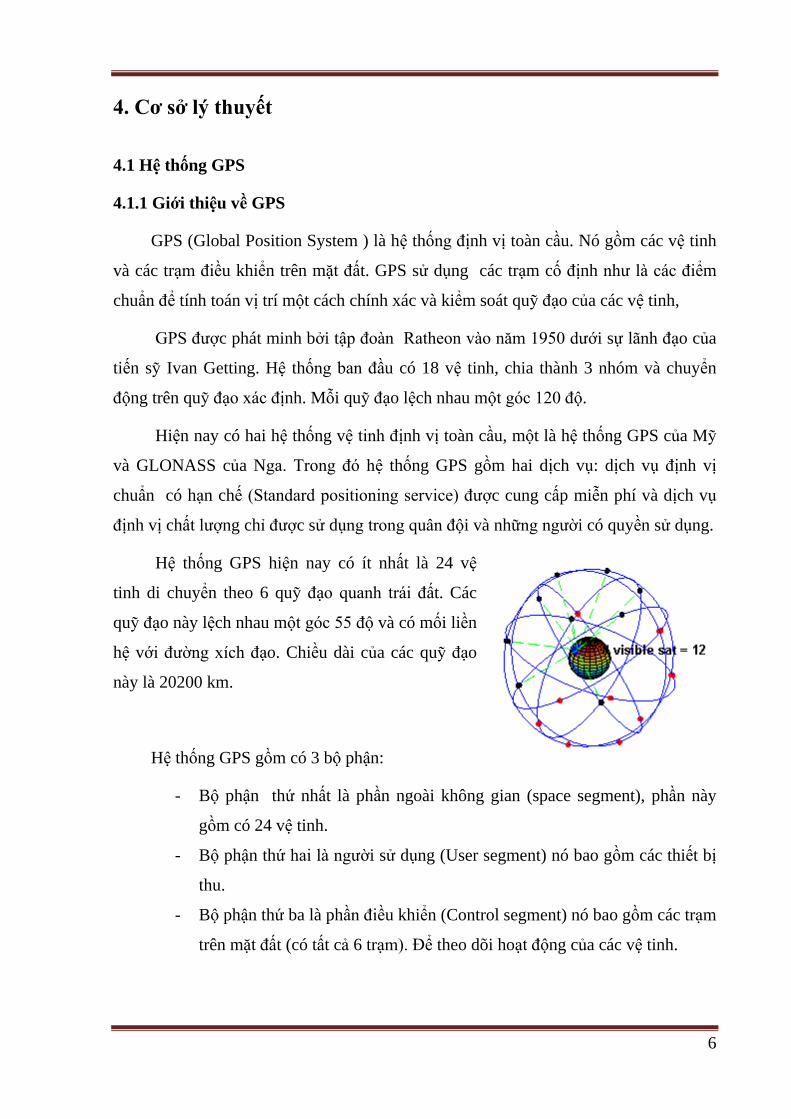
Hệ thống GPS gồm có 3 bộ phận:
- Bộ phận thứ nhất là phần ngoài không gian (space segment), phần này
gồm có 24 vệ tinh.
- Bộ phận thứ hai là người sử dụng (User segment) nó bao gồm các thiết bị
thu.
- Bộ phận thứ ba là phần điều khiển (Control segment) nó bao gồm các trạm
trên mặt đất (có tất cả 6 trạm). Để theo dõi hoạt động của các vệ tinh.
7
Hệ thống GPS cung cấp thông tin vị trí dạng 3 chiều (3-d). Thông tin chứa kinh
độ, vĩ độ và độ cao. Để xác định được vị trí 3 chiều thì thiết bị thu cần thu được tín
hiệu từ 4 vệ tinh. Kết quả tính toán vị trí của một vật phụ thuộc vào một số yếu tố sẽ
được trình bày ở phần sau.
4.1.2 Hoạt động của GPS
Xung và thời gian (Clock và time)
Mỗi vệ tinh GPS truyền tín hiệu với xung nguyên tử (atomic clock ) có tần số dao
động đặc trưng để chứa thông tin về thời gian của tín hiệu được phát bởi vệ tinh. Mối
quan hệ giữa pha , tần số f và thời gian như sau:
dt
tdtf
)()(
Trong đó:
t : thời gian thực
: pha 20
f : tần số = tỉ lệ thay đổi của pha theo thời gian
''
0
0
)()()( dttftt
t
t

8
0t Thời gian ban đầu, tương ứng với thời gian hiển thị (indicated time ) liên
quan tới pha:
0
0 ))(()(
f
tt
Với 0f là tần số danh nghĩa khi khi thời gian hiển thị ban đầu không trùng với
pha ban đầu ))(( 0 t .
Chu kỳ dao động của xung ( ) và thời gian thực )(t khác nhau cả về độ lớn và
gốc. Thời gian thực thể hiện thời gian xung nguyên tử (atomic clock time ) trong US.
Nó cũng khác với thời gian kết hợp phổ (coordinated universal time -UTC) 2000 mẫu
trên 13 giây. Tuy nhiên thời gian thực của GPS được hiệu chỉnh bởi thời gian nguyên
tử (atomic time) U.S. Thời gian thực phản ánh một thực tế là thời gian trên vệ tinh và
thiết bị thu là không đồng nhất và nên được hiệu chỉnh bằng xung hiệu chỉnh (master
clock ) ở trên mặt đất. Mối quan hệ giữa pha-thời gian và thời gian thực được thể
hiện thông qua biểu thức sau:
)()()( 00 ttttt
Trong đó
t
t
dttff
t
0
''
0
)(1
)(
Có thể được viết lại như sau:
)()( ttt
Tín hiệu GPS (GPS signal)
Tín hiệu GPS là sóng mang (carrier wave) được điều biến pha theo mã nhị phân.
Có phương trình toán học như sau:
)2cos()()()( fttDtACtS
Trong đó:
f : là tần số của sóng mang
9
A : là biên độ của tín hiệu
)(tC : là hàm bước có giá trị (-1, 1)
:)(tD là thông tin dữ liệu (data message)
Trong thực tế mỗi vệ tinh sẽ truyền với hai mã khác nhau, mã C/A và mã P. Mã
P có tốc độ chipping và bước sóng cao gấp 10 lần so với mã C/A. Chúng được truyền
trong hai khu vực sóng ngắn khác nhau, tín hiệu 1L được truyền với sóng mang có tần
số MHzf 72.15451 và bước sóng m1903.01 ; và tín hiệu 2L được truyền với sóng
mang có tần số MHzf 6.12272 và bước sóng m2442.02 . Truyền trên hai tần số
cho phép ta tính toán gần đúng thời gian delay của tín hiệu do hiện tượng khúc xạ
trong tần điện ly gây ra. Tổng tín hiệu được truyền bởi các vệ tinh được xác định bằng
tổng của ba sóng hình sin, hai của sóng mang tín hiệu 1l được truyền trong mã C/A và
P, và còn lại là sóng mang tín hiệu 2l được truyền trong mã P. Tổng tín hiệu của các vệ
tinh được xác định bởi biểu thức sau:
)2sin()()()()2sin()()()2cos()()()()( 211 tftDtWtPBtftDtCAtftDtWtPAtS PPP
p
PP
C
PPP
P
P
Trong đó:
:,, pCp BAA Tương đương với biên độ của mã truyền tương ứng
C và P tương ứng với mã truyền C/A và P
D: tương đương với thông tin dữ liệu (data message), ký hiệu p trên đầu để định
dạng vệ tinh đặc trưng.
W: tương ứng với mã đặc biệt, được sử dụng để giải mã quân đội
Các mã hoạt động với hai mục đích sau: xác định khoảng cách giữa vệ tinh và
thiết bị nhận GPS; truyền tín hiệu trên băng thông có tần số rộng, vì vậy cho phép các
anten nhỏ trên mặt đất có thể nhận đầy đủ tín hiệu. Cả hai mã chứa chuỗi các bít trạng
thái số nhị phân, các chuỗi này được tạo ra bằng cách sử dụng quá trình truy cập thuật
toán nhiễu giả ngẫu nhiên (pseudoramdom noise-PRN). Trong mã C/A quá trình PRN
giữa các vệ tinh là khác nhau và được lặp lại với chu kỳ một phần nghìn giây. Trong P
10
quá trình PRN được lặp lại với chu kỳ 38 tuần. Các vệ tinh thường được phân biệt dựa
trên đoạn mã dữ liệu hơn là dựa vào tần số.
Thiết bị thu GPS (GPS Recever)
Trước khi tín hiệu được xử lý bởi thiết bị thu, thì nó được anten khuếch đại và
lọc và sau đó nó được điều chế với tần số phù hợp cho quá trình xử lý (Jekeli, 2000)
Tín hiệu hỗn hợp được xác định bởi biểu thức sau:
))()(2cos(2
))()(2cos(2
))(2cos()2cos()()(
ttffA
ttffA
ttftfAtStS
LOsLOs
sLO
P
r
Trong đó:
:)(tSr Là tín hiệu hình sin thuần túy được tạo ra do dao động của thiết bị nhận
LOf : Là tần số dao động cục bô
)(tS P : Là tín hiệu vệ tinh với tần số sf
A: Là hệ số khuếch đại
Tín hiệu vệ tinh sau đó được chuyển tới tần số trung gian (intermediate
frequency – IF) và biên độ được hiệu chỉnh thông qua các bộ lọc phù hợp cho quá
trình xử lý tiếp theo. Tín hiệu sau đó đi tới phần xử lý chính của thiết bị.
Để tính khoảng cách giữa vệ tinh và thiết bị thu, nhãn thời gian (time tag) của tín
hiệu tại thời điểm truyền và nhận tín hiệu được so sánh, sử dụng tốc độ ánh sáng, dựa
vào thời gian delay ta suy ra khoảng cách. Tuy nhiên với cách tính trên, khoảng cách
xác định được là không chính xác nêu vệ tinh và thiết bị thu hoạt động với xung khác
nhau, vì vậy khoảng cách được tính toán thì được gọi là khoảng cách giả
(pseudorange).
Các nguồn gây ra sai số
Các nguồn gây ra sai số được trình bày như bảng sau (Jekeli, 2000):
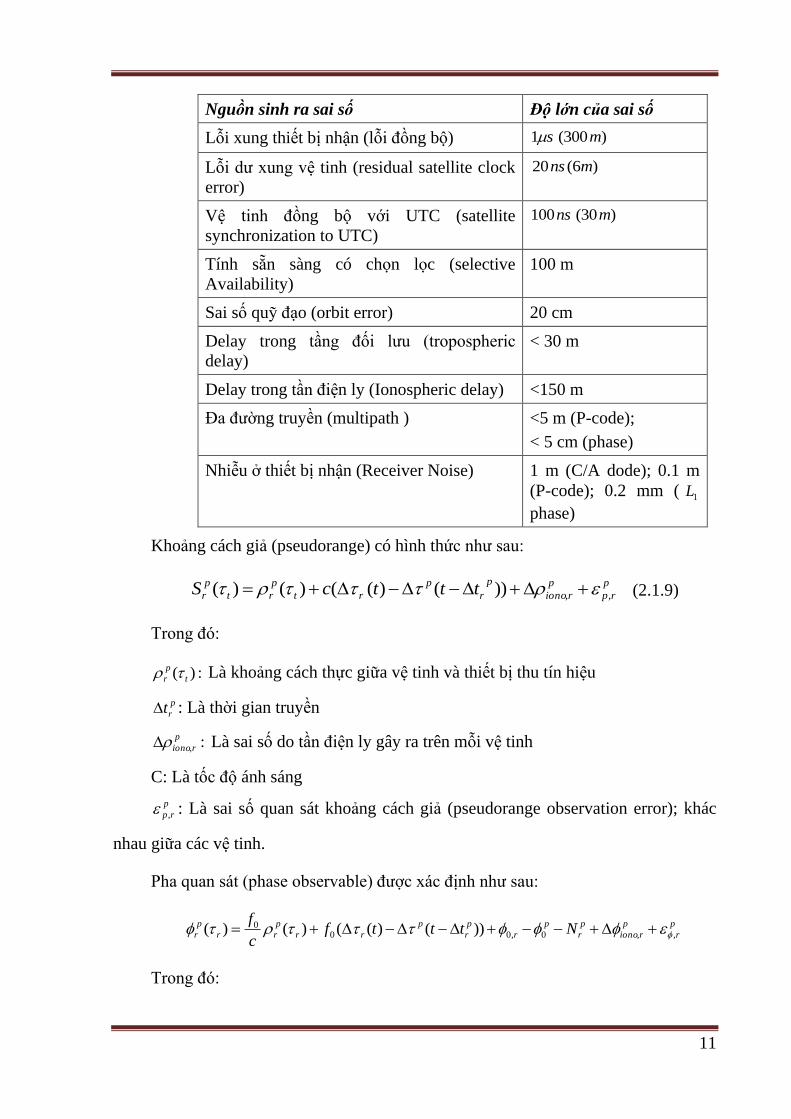
11
Nguồn sinh ra sai số Độ lớn của sai số
Lỗi xung thiết bị nhận (lỗi đồng bộ) )300(1 ms
Lỗi dư xung vệ tinh (residual satellite clock
error)
)6(20 mns
Vệ tinh đồng bộ với UTC (satellite
synchronization to UTC)
)30(100 mns
Tính sẵn sàng có chọn lọc (selective
Availability)
100 m
Sai số quỹ đạo (orbit error) 20 cm
Delay trong tầng đối lưu (tropospheric
delay)
< 30 m
Delay trong tần điện ly (Ionospheric delay) <150 m
Đa đường truyền (multipath ) <5 m (P-code);
< 5 cm (phase)
Nhiễu ở thiết bị nhận (Receiver Noise) 1 m (C/A dode); 0.1 m
(P-code); 0.2 mm ( 1L
phase)
Khoảng cách giả (pseudorange) có hình thức như sau:
p
rp
p
riono
p
r
p
rt
p
rt
p
r tttcS ,,))()(()()( (2.1.9)
Trong đó:
:)( t
p
r Là khoảng cách thực giữa vệ tinh và thiết bị thu tín hiệu
p
rt : Là thời gian truyền
:,
p
riono Là sai số do tần điện ly gây ra trên mỗi vệ tinh
C: Là tốc độ ánh sáng
p
rp, : Là sai số quan sát khoảng cách giả (pseudorange observation error); khác
nhau giữa các vệ tinh.
Pha quan sát (phase observable) được xác định như sau:
p
r
p
riono
p
r
p
r
p
r
p
rr
p
rr
p
r Ntttfc
f,,0,00
0 ))()(()()(
Trong đó:
12
r,0 và p
0 : Là hệ số bù pha tùy ý
p
rN : Là số thực tương ứng với số chu kỳ đầy (full cycles) và còn được gọi như là
sóng mang có pha không rõ ràng (carrier phase ambiguity).
p
r, : Là sai số pha quan sát được (phase observable).
4.2 Hệ thống INS
4.2.1 Giới thiệu INS
Hệ thống dẫn đường quán tính (Inertial Navigation) dựa trên định luật 1 newton;
là một vật luôn có xu hướng duy trì trạng thái ban đầu dưới tác dụng của lực được sinh
ra bởi gia tốc (acceleration). Việc ước lượng giá trị gia tốc cho phép chúng ta xác định
được chuyển động của vật. Lấy tích phân gia tốc theo thời gian ta sẽ xác định được
vận tốc, lấy tích phân gia tốc hai lần theo thời gian chúng ta sẽ xác định được vị trí
chính xác của vật.
Hệ thống dẫn đường quán tính sử dụng cảm biến góc quay (gyroscopes) và cảm
biến gia tốc (accelerometers) để duy trì việc ước lượng vị trí, vận tốc, hướng (attitude)
và attitude rates của đối tượng chuyển động. Cảm biến gia tốc không xác định được
gia tốc trọng lực (gravitational acceleration). Do đó hệ thống INS gồm hai phần, một
là navigation computer dùng để xác định gia tốc trọng lực. Hai là Inertial measurement
unit (IMU) gồm cảm biến gia tốc và cảm biến góc quay.
13
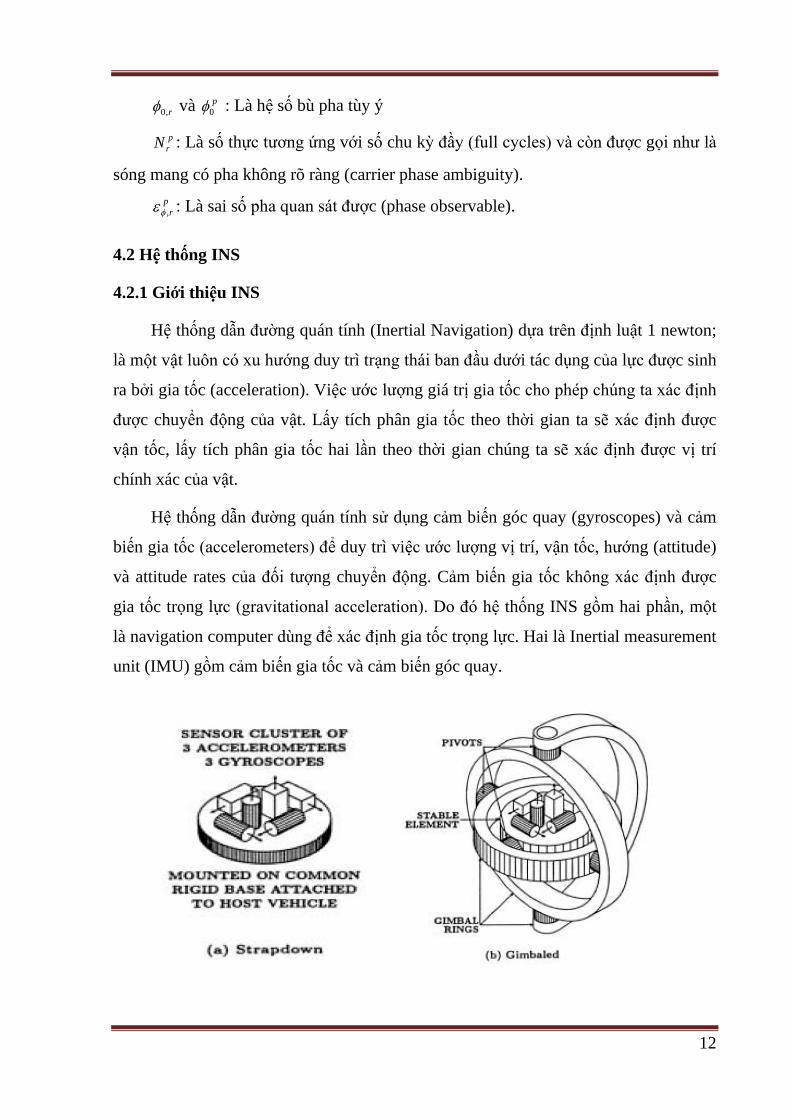
Hệ thống INS thường được thiết kế với hai nhóm chính: hệ thống platform (hoặc
gimbaled) và hệ thống Strapdown. Trong hệ thống gimbaled bộ ba cảm biến gia tốc
được đặt cố định vào bên trong gimbal của ba con quay chuyển hồi (gyros) như hình
dưới.
Ngược lại, hệ thống đạo hàng quán tính Strap-down (strap-down inertial
navigation) sử dụng cảm biến gia tốc trực giao (orthogonal accelerometers) và gyro
triads đặt cố định với các trục của xe đang chuyển động. Vận tốc góc (angular
motion)của hệ thống được đo một cách liên tục thông qua cảm biến tốc độ (rate
sensor). Cảm biến đo gia tốc không duy trì được trạng thái cố định trong không gian
mà nó chuyển động theo chuyển động của xe. Hệ thống được minh họa như hình trên.
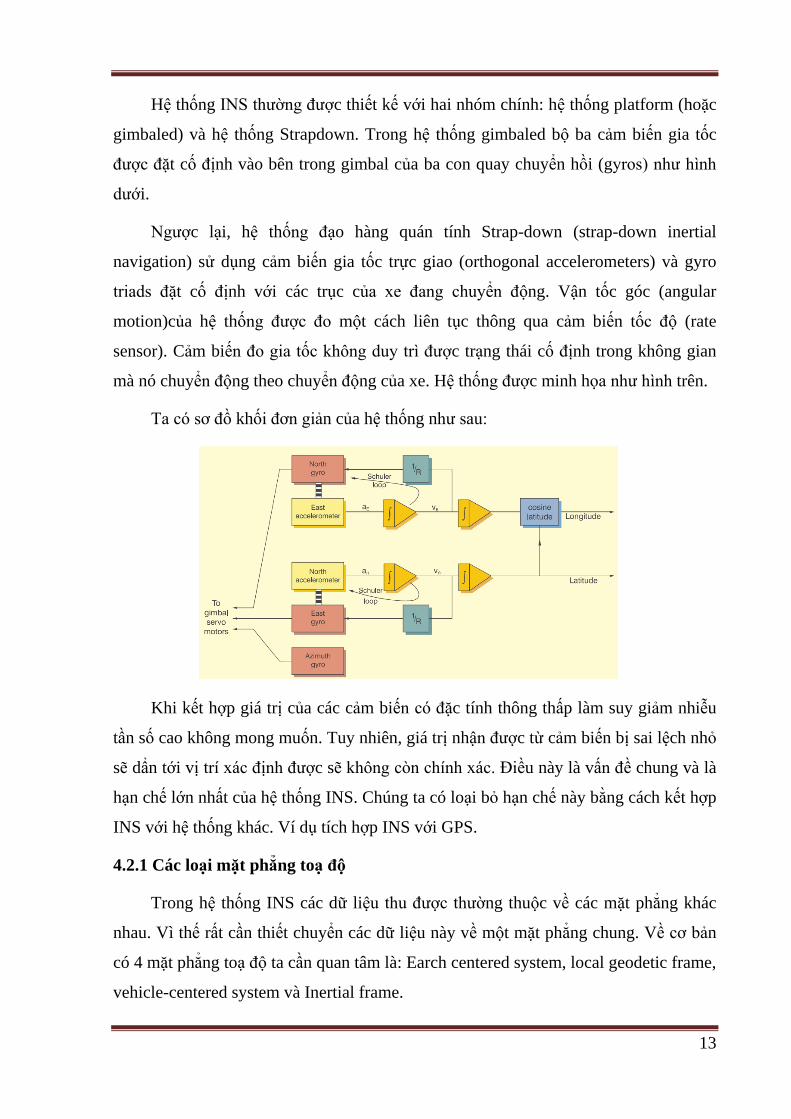
Ta có sơ đồ khối đơn giản của hệ thống như sau:
Khi kết hợp giá trị của các cảm biến có đặc tính thông thấp làm suy giảm nhiễu
tần số cao không mong muốn. Tuy nhiên, giá trị nhận được từ cảm biến bị sai lệch nhỏ
sẽ dẩn tới vị trí xác định được sẽ không còn chính xác. Điều này là vấn đề chung và là
hạn chế lớn nhất của hệ thống INS. Chúng ta có loại bỏ hạn chế này bằng cách kết hợp
INS với hệ thống khác. Ví dụ tích hợp INS với GPS.
4.2.1 Các loại mặt phẳng toạ độ
Trong hệ thống INS các dữ liệu thu được thường thuộc về các mặt phẳng khác
nhau. Vì thế rất cần thiết chuyển các dữ liệu này về một mặt phẳng chung. Về cơ bản
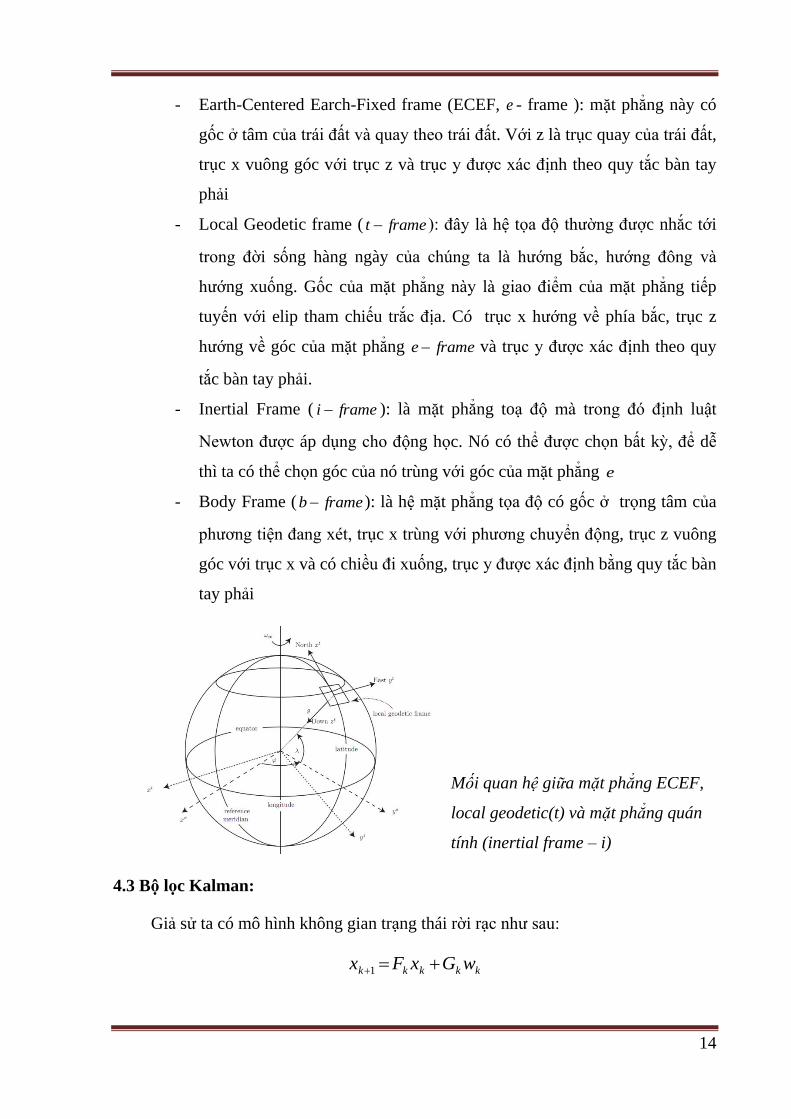
có 4 mặt phẳng toạ độ ta cần quan tâm là: Earch centered system, local geodetic frame,
vehicle-centered system và Inertial frame.
14
- Earth-Centered Earch-Fixed frame (ECEF, e - frame ): mặt phẳng này có
gốc ở tâm của trái đất và quay theo trái đất. Với z là trục quay của trái đất,
trục x vuông góc với trục z và trục y được xác định theo quy tắc bàn tay
phải
- Local Geodetic frame ( framet ): đây là hệ tọa độ thường được nhắc tới
trong đời sống hàng ngày của chúng ta là hướng bắc, hướng đông và
hướng xuống. Gốc của mặt phẳng này là giao điểm của mặt phẳng tiếp
tuyến với elip tham chiếu trắc địa. Có trục x hướng về phía bắc, trục z
hướng về góc của mặt phẳng framee và trục y được xác định theo quy
tắc bàn tay phải.
- Inertial Frame ( framei ): là mặt phẳng toạ độ mà trong đó định luật
Newton được áp dụng cho động học. Nó có thể được chọn bất kỳ, để dễ
thì ta có thể chọn góc của nó trùng với góc của mặt phẳng e
- Body Frame ( frameb ): là hệ mặt phẳng tọa độ có gốc ở trọng tâm của
phương tiện đang xét, trục x trùng với phương chuyển động, trục z vuông
góc với trục x và có chiều đi xuống, trục y được xác định bằng quy tắc bàn
tay phải
Mối quan hệ giữa mặt phẳng ECEF,
local geodetic(t) và mặt phẳng quán
tính (inertial frame – i)
4.3 Bộ lọc Kalman:
Giả sử ta có mô hình không gian trạng thái rời rạc như sau:
kkkkk wGxFx 1

15
kkkk vxHy
Trong đó kx là vector trạng thái n x 1. kv và kw giả sử là nhiễu trắng có trung
bình bằng zero, với
)( klRS
SQwv
w
vE
k
T
k
kkT
l
T
l
k
k
Với ˆky
là ước lượng bình phương tối thiểu tuyến tính của ky dựa vào chuổi
quan sát 1210 ...,,,, kyyyy . Sai số giữa giá trị dự đoán với giá trị thực là
_^_
kkkk yyye
Trong đó ke có thể coi như là thông tin mới được đưa vào hệ thống thông qua ky
. Vì ˆky
là ước lượng bình phương tối thiểu , sai số theo định nghĩa là trực giao với tất
cả khoảng không gian con xác định bởi 1210 ...,,,, kyyyy và được ký hiệu là
1kyL . Như hình dưới
ke là kết hợp tuyến tính của ky và ˆky
. Nó không chỉ là sự đổi mới và chuổi
1210 ...,,,, kyyyy span cùng một không gian con 1kyL = 1keL . Giờ ta phải đi
tìm ước lượng bình phương tối thiểu ˆky
, ta có thể xác định ˆky
như sau:

16
1
1
1 1
ˆ Pr ( )
Pr ( ( ))
Pr ( ) Pr ( )
ˆ
k
k k
k
k k k
k k
k k k
k k
y oj y L y
oj H x v L y
H oj x L y oj v L y
H x
Ở trên phương trình đầu tiên là kết quả của kv bắt đầu chuổi nhiễu trắng. Theo
phương trình trên để xác định ước lượng bình phương tối thiểu của ˆky
ta đi tìm dự báo
trạng thái ˆkx
. Vì )()( kk eLyL và kv là chuổi nhiễu trắng do vậy dự báo trạng thái
có thể viết như sau:
1 1
1
1
1 1
1 1
1 , 1
ˆ Pr ( )
Pr ( )
Pr Pr ( )
Pr ( ( ))
k
k k
k
k
k
k k k
T k k
k k e k k
x oj x L y
oj x L e
oj x e oj x L e
E x e R e oj x L e
Trong đó ma trận covariance innovation được định nghĩa như T
kkke eeER
, .
)(Pr 1
1
k
k eLxoj có thể được biểu diển theo ^_
kx
^
11
11
1
)(PrPr
))((Pr)(Pr
kk
k
kk
k
kk
k
kkkk
k
k
xH
yLvojGyxojH
yLvGxHojyLxoj
Trong đó phương trình đầu tiên là kết quả của 0T
lk yvE với kl . Vì vậy thuật
toán để quy (recursive algorithm) của dự báo trạng thái (state prediction) có thể viết
như sau:
^ kkkk xHye
kkpkkk eKxFx ,
_^_
!
^
1
,1,
ke
T
kkkp RexEK

17
0,_
0
^
00 xye
Vấn đề được đặt ra là phải xác định được kpK , và keR , , dựa vào mô hình của
chúng ta. Ta có ma trận Covariance sai số đứng sau (posterior error covariance matrix)
kP được định nghĩa như sau:
T
kkk xxEP
____
với
kk xxx^__
Ma trận covariance innovation keR , có thể xác định dựa vào
kP như sau:
k
T
kkk
T
kkkkkk
T
kkkkkk
T
kkke
RHPH
vxHvxHE
xHyxHyE
eeER
____
_^^
,
Với kpK , là độ lợi của bộ lọc Kalman, được xác định như sau:
1
,1,
ke
T
kkkp RexEK
Với:
T
kk
kkk
T
k
T
kk
T
kkkkk
T
kk
HP
GvxEHxxE
vGxHxEexE
_
_
Và
k
T
kk
T
kkk
T
kkkkkk
S
wvEHxwE
wxHvEevE
_
__* )(

18
Vì vậy ta có độ lợi của bộ lọc Kalman được xác định như sau:
1
,,
kekk
T
kkkkp RSGHPFK
Từ biểu thức dự báo trạng thái sai số dự báo có thể được xác định như sau:
k
k
kpkkkkpk
kkpkkkpkkk
kkpkkk
kkk
w
vKGxHKF
wKxHKwGx
eKxFx
xxx
,
__
,
,
__
,1
,
_^
1
_
1
^
1
_
1
_
Để đơn giản ta có thể xác định ma trận covariance sai số sau (posteriori error
covariance matrix) như sau:
kp
k
k
T
k
kk
kpk
T
kkpkkkkpk
T
kkk
K
G
RS
SQKG
HKFPHKF
xxEP
,
,
,,
_
1
__
1
_
1
Suy ra: T
kpkekp
T
kkk
T
kkkk KRKGQGFPFP ,,,1
Từ các biểu thức trên ta có hình thức dự báo (prediction form) của bộ lọc
kalman được biểu diển như sau:
00
^
00
,,,
1
1
1
,,
,
_^_
1
^
_^
xExxxEP
KRKGQGFPFP
RHSGHPFK
eKxFx
xHye
T
o
T
kpkekp
T
kkk
T
kkkk
ke
T
kkk
T
kkkkp
kkpkkk
kkkk

19
Trong nhiều ứng dụng nó được quan tâm để tính toán ước lượng của kx cho chuỗi
quan sát kyyyy ...,,, 210 ví dụ ước lượng đã được lọc. Các phương trình của bộ lọc
Kalman dễ dàng sửa đổi để ngõ ra chứa cả ước lượng trạng thái dự đoán và ước lượng
trạng thái đã được lọc sử dụng innovation approach một lần nữa. Bắt đầu bằng cách
chiếu kx vào không gian con )( keL ước lượng có thể được viết như sau:
kkfk
kke
T
kkk
k
kk
eKx
eRexEx
eLxojx
,
^
1
,
^
^
)(Pr
Khi đó độ lợi của bộ lọc được định nghĩa như sau:
1
1
,
1
,
__
1
,,
)(
)(
k
T
kkk
T
kk
ke
T
kk
ke
T
kkkk
ke
T
kkkf
RHPHHP
RHP
RvxHxE
RexEK
Và covariance sai số kP được xác định như sau:
kkkfk
T
kkkf
T
kk
T
kkkfkk
T
kk
T
kkkk
PHKP
xeEKxxE
xeKxxE
xxE
xxEP
,
,
__
,
_^
_
__
)(

20
Các biểu thức này để cập nhập ước lượng dự báo
kx^
tới ước lượng được lọc kx^
và ma trận covariance
kP tới kP . Nếu các giá trị cập nhập từ giá trị ước lượng kx^
tới
các giá trị dự báo
1
^
kx cũng như từ các ma trận covariance kP tới các ma trận
covariance đứng sau
1kP được xác định thì từ phép truy hồi bộ lọc Kalman có thể
được viết lại để cho ra ước lượng được lọc là tốt nhất. Giả sử rằng nhiễu tính toán và
nhiễu quá trình khác nhau, kS thì thời gian cập nhập có thể được xác định như sau:
kk
k
kkkk
k
kk
xF
eLvGxFoj
eLxojx
^
1
_
1
^
)(Pr
)(Pr
,và
T
kkk
T
kkk
T
kkkkkkkk
T
kkk
GQGFPF
vGxFvGxFE
xxEP
))((__
_
1
__
1
_
1
Nếu nhiễu quá trình và nhiễu tính toán có liên quan với nhau thì thời gian cập
nhập trở nên đơn giản. Ta có biểu thức cập nhập thời gian và tính toán được xác định
như sau:
Cập nhập thời gian
Kkk xFx^_
1
^
_
1
^_
1
^
kkk xHy
T
kkk
T
kkkk GQGFPFP
1
Cập nhập tính toán
1
, )( k
T
kkk
T
kkkf RHPHHPK
_^
,
^^
kkkkfkk xHyKxx
,k k f k k kP P K H P
21
5. Định hướng nghiên cứu
Nghiên cứu này được thực hiện bằng việc thu thập dữ liệu, xử lý dữ liệu và xây
dựng mô hình trên matlab để đánh giá. Từ kết quả đó, xây dựng mô hình chạy thực tế
để kiểm nghiệm.
5.1 Khảo sát thiết bị và mô hình GPS, mô hình INS
- Thiết bị thu tín hiệu u-blox 6 GPS.
- Cảm biến quán tính ADIS16407.
- Tính toán quỹ đạo từ các thông tin pseudorange (PR) và pseudorange rate (PRR):
Các giá trị PR, PRR và một số giá trị khác được lấy từ u-blox 6 để tính ra vị trí
và vận tốc của đối tượng trong hệ trục ECEF.
- Hệ thống INS: Gia tốc chuyển động và vận tốc góc được lấy từ cảm biến quán
tính để tính ra vị trí va vận tốc tương đối của đối tượng chuyển động.
5.1.1 Mô hình GPS
Quỹ đạo được tính từ các thông tin pseudorange (PR) và pseudorange rate
(PRR). Các giá trị PR, PRR và một số giá trị khác được lấy từ thiết bi thu GPS để tính
ra vị trí và vận tốc của đơi tượng trong hệ trục ECEF.
+ Tính toán vị trí:
( )x y zz a x a y a z c t
Ở đây:
0z PR PR
0 0 0 0; ; ; ( )x x x y y y z z z c t c t c t
0 0 0
0 0 0
; ;s s sx y z
x x y y z za a a
d d d
2 2 2
0 0 0 0s s sd x x y y z z
+ Tính toán vận tốc:
X Y Z VX X VY Y VZ Zz b x b y b z b V b V b V c t

22
Ở đây:
0z PRR PRR
0 0 0 0; ; ; ( )x x x y y y z z z c t c t c t
0 0 0; ;X X X Y Y Y Z Z ZV V V V V V V V V
0 0 0 0 0 0 00
3
0 0
S S X SX S Y SY S Z SZX SXX
x x x x V V y y V V z z V VV Vb
d d
0 0 0 0 0 0 00
3
0 0
S S X SX S Y SY S Z SZY SYY
y y x x V V y y V V z z V VV Vb
d d
0 0 0 0 0 0 00
3
0 0
S S X SX S Y SY S Z SZZ SZZ
z z x x V V y y V V z z V VV Vb
d d
0 0 0
0 0 0
; ;S S SVX VY VZ
x x y y z zb b b
d d d
2 2 2
0 0 0 0s s sd x x y y z z
Chú ý, ở đây s s sx y z , x y z là tọa độ vệ tinh và tọa độ đối tượng trong
hệ trục ECE; SX SY SZV V V , X Y ZV V V là vận tốc vệ tinh và vận tốc đối tượng
trong hệ trục ECEF; 0 0 0x y z , 0 0 0X Y ZV V V là vị trí và vận tốc của đối tượng
trong chu kỳ kế trước.
Mô hình GPS được thiết lập như sau:
. .PR PR PR
PRR PRR PRR
z Hz x H x
z H
Với: z: giá trị đo lường.
x : là vecto trạng thái, bao gồm sai số vị trí, sai số vận tốc, clock bias và
drift clock.
H : ma trận động học
0 0 0 1 0
. . . . . . . .
0 1
. . . . . . . .
X Y Z
X Y Z VX VY VZ
a a a
Hb b b b b b
23
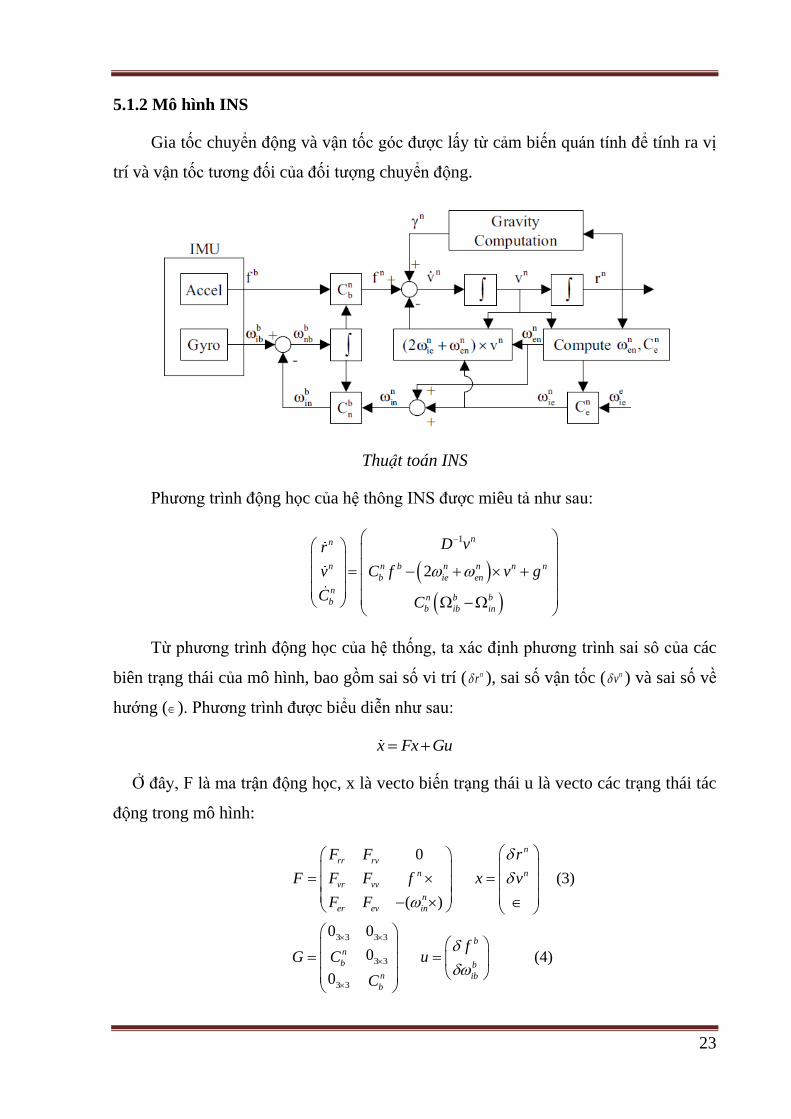
5.1.2 Mô hình INS
Gia tốc chuyển động và vận tốc góc được lấy từ cảm biến quán tính để tính ra vị
trí và vận tốc tương đối của đối tượng chuyển động.
Thuật toán INS
Phương trình động học của hệ thông INS được miêu tả như sau:
1
2
nn
n n b n n n n
b ie en
nn b b
bb ib in
D vr
v C f v g
C C
Từ phương trình động học của hệ thống, ta xác định phương trình sai sô của các
biên trạng thái của mô hình, bao gồm sai số vi trí ( nr ), sai số vận tốc ( nv ) và sai số về
hướng (). Phương trình được biểu diễn như sau:
x Fx Gu
Ở đây, F là ma trận động học, x là vecto biến trạng thái u là vecto các trạng thái tác
động trong mô hình:
3 3 3 3
3 3
3 3
0
(3)
( )
0 0
0 (4)
0
n
rr rv
n n
vr vv
n
er ev in
b
n
b b
n ib
b
F F r
F F F f x v
F F
fG C u
C
24
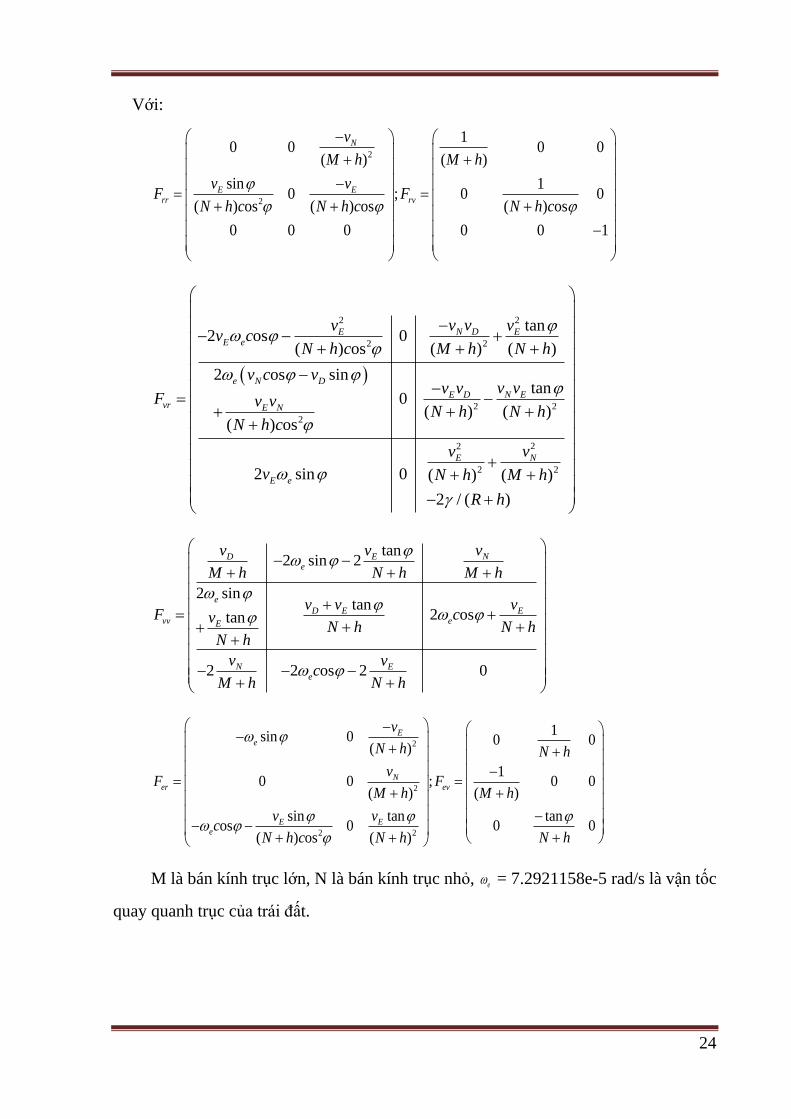
Với:
2
2
10 0 0 0
( ) ( )
sin 10 ; 0 0
( ) os ( ) os ( ) os
0 0 0 0 0 1
N
E Err rv
v
M h M h
v vF F
N h c N h c N h c
2 2
2 2
2 2
2
22
2 2
tan2 os 0
( ) os ( ) ( )
2 os sintan
0( ) ( )
( ) os
2 sin 0 ( ) ( )
2 / ( )
N DE EE e
e N D
N EE Dvr E N
NE
E e
v vv vv c
N h c M h N h
v c vv vv v
F v vN h N h
N h c
vv
v N h M h
R h
tan2 sin 2
2 sintan
2 ostan
2 2 os 2 0
ND Ee
e
D E Evv eE
N Ee
vv v
M h N h M h
v v vF cv
N h N hN h
v vc
M h N h
2
2
2 2
1sin 0 0 0( )
10 0 ; 0 0
( ) ( )
sin tan tan0 0os 0
( ) os ( )
Ee
Ner ev
E Ee
v
N h N h
vF F
M h M h
v vc
N hN h c N h
M là bán kính trục lớn, N là bán kính trục nhỏ, e = 7.2921158e-5 rad/s là vận tốc
quay quanh trục của trái đất.
25
5.2 Tìm hiểu hai phương pháp tích hợp theo kiểu loosely và tightly coupled
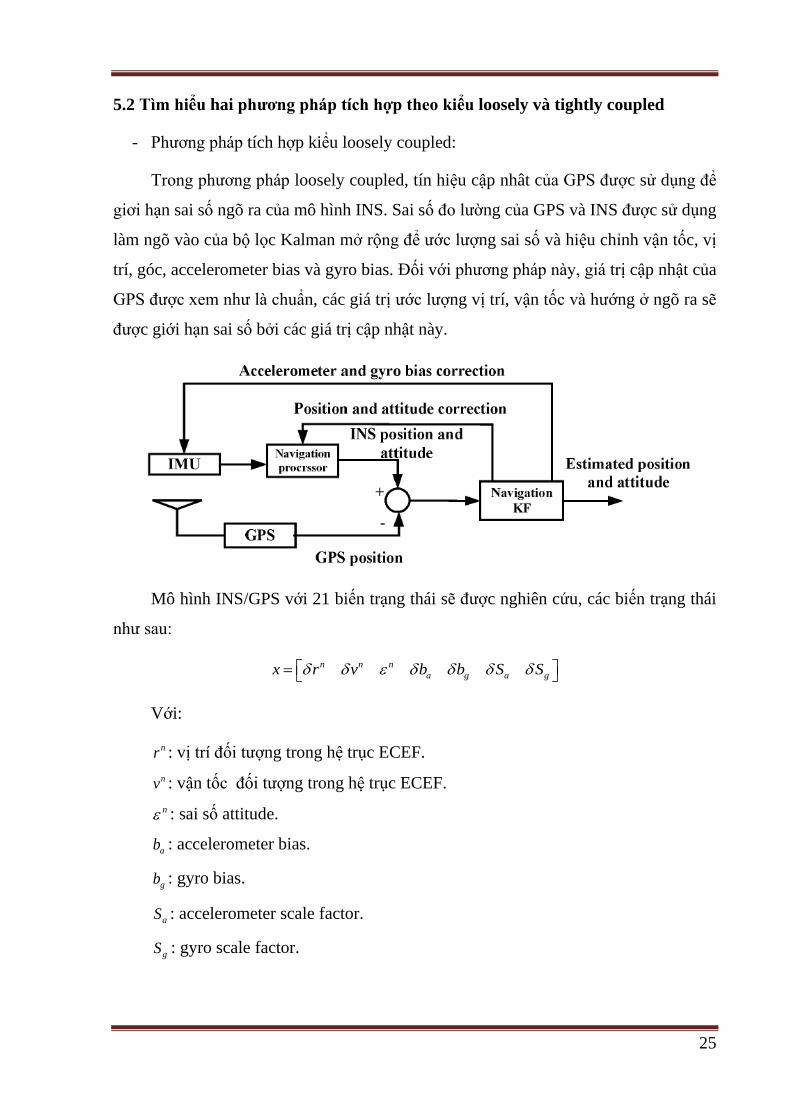
- Phương pháp tích hợp kiểu loosely coupled:
Trong phương pháp loosely coupled, tín hiệu cập nhât của GPS được sử dụng để
giơi hạn sai số ngõ ra của mô hình INS. Sai số đo lường của GPS và INS được sử dụng
làm ngõ vào của bộ lọc Kalman mở rộng để ước lượng sai số và hiệu chỉnh vận tốc, vị
trí, góc, accelerometer bias và gyro bias. Đối với phương pháp này, giá trị cập nhật của
GPS được xem như là chuẩn, các giá trị ước lượng vị trí, vận tốc và hướng ở ngõ ra sẽ
được giới hạn sai số bởi các giá trị cập nhật này.
Mô hình INS/GPS với 21 biến trạng thái sẽ được nghiên cứu, các biến trạng thái
như sau:
n n n
a g a gx r v b b S S
Với:
nr : vị trí đối tượng trong hệ trục ECEF.
nv : vận tốc đối tượng trong hệ trục ECEF.
n : sai số attitude.
ab : accelerometer bias.
gb : gyro bias.
aS : accelerometer scale factor.
gS : gyro scale factor.
26
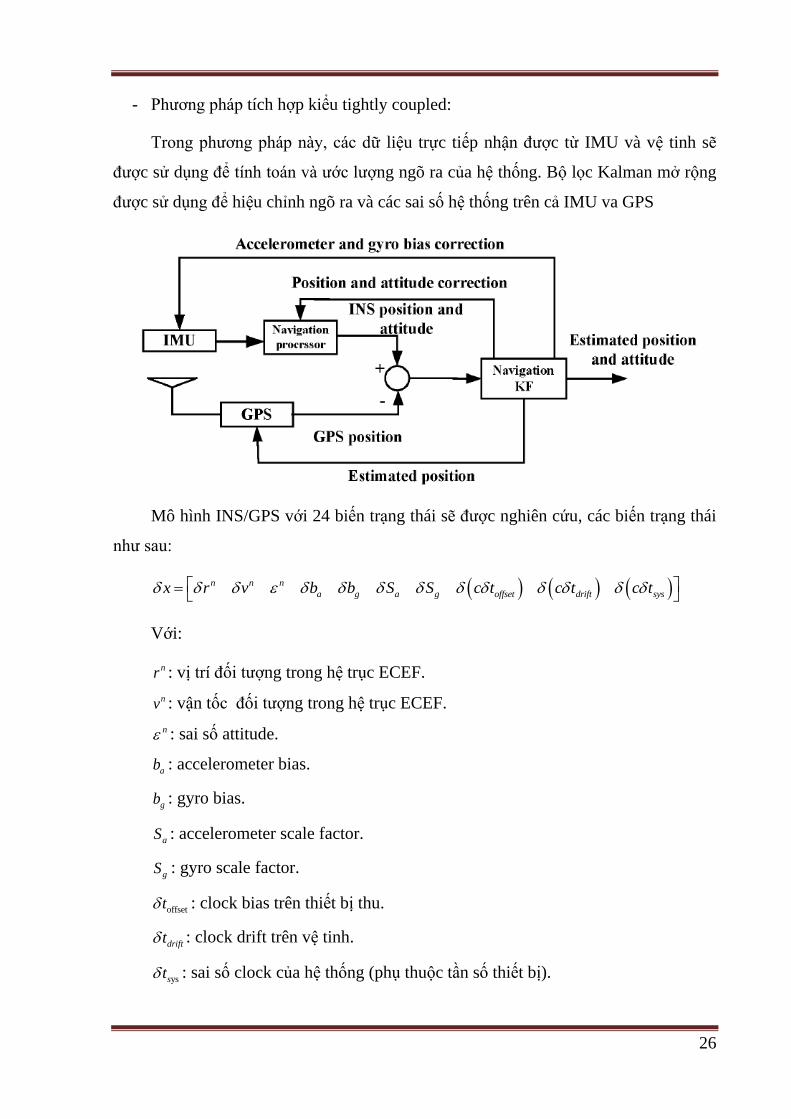
- Phương pháp tích hợp kiểu tightly coupled:
Trong phương pháp này, các dữ liệu trực tiếp nhận được từ IMU và vệ tinh sẽ
được sử dụng để tính toán và ước lượng ngõ ra của hệ thống. Bộ lọc Kalman mở rộng
được sử dụng để hiệu chỉnh ngõ ra và các sai số hệ thống trên cả IMU va GPS
Mô hình INS/GPS với 24 biến trạng thái sẽ được nghiên cứu, các biến trạng thái
như sau:
n n n
a g a g offset drift sysx r v b b S S c t c t c t
Với:
nr : vị trí đối tượng trong hệ trục ECEF.
nv : vận tốc đối tượng trong hệ trục ECEF.
n : sai số attitude.
ab : accelerometer bias.
gb : gyro bias.
aS : accelerometer scale factor.
gS : gyro scale factor.
offsett : clock bias trên thiết bị thu.
driftt : clock drift trên vệ tinh.
ysst : sai số clock của hệ thống (phụ thuộc tần số thiết bị).
27
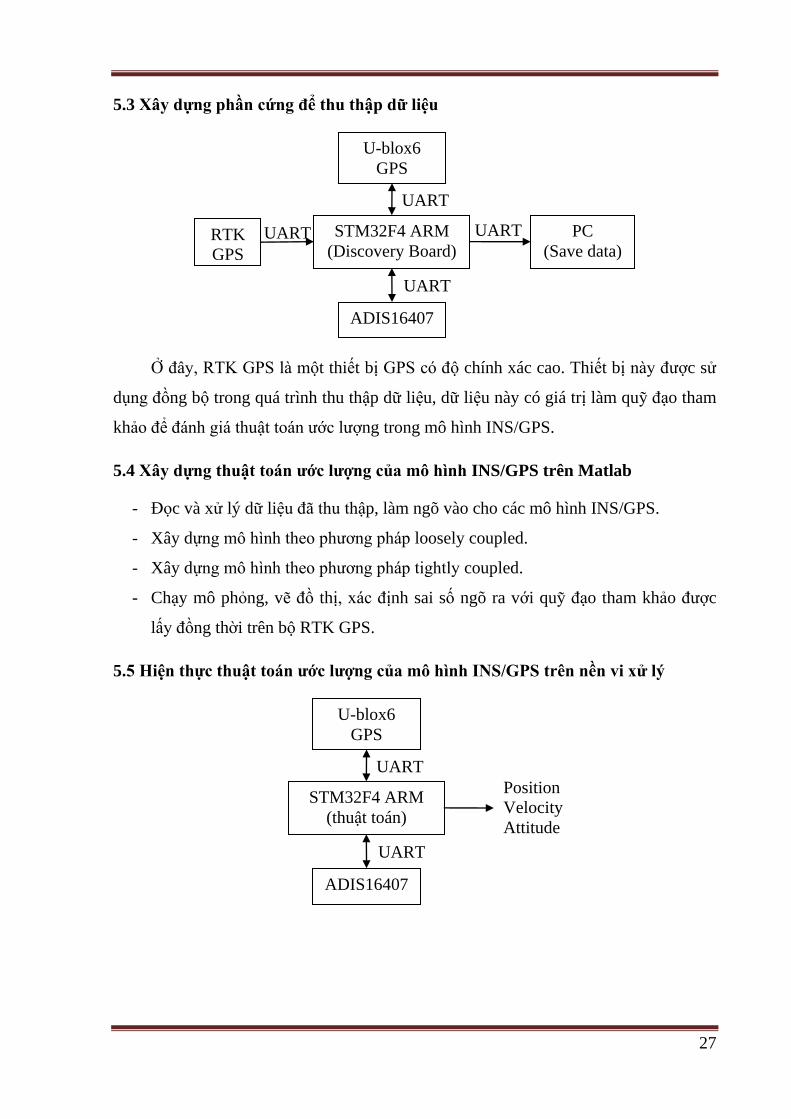
5.3 Xây dựng phần cứng để thu thập dữ liệu
Ở đây, RTK GPS là một thiết bị GPS có độ chính xác cao. Thiết bị này được sử
dụng đồng bộ trong quá trình thu thập dữ liệu, dữ liệu này có giá trị làm quỹ đạo tham
khảo để đánh giá thuật toán ước lượng trong mô hình INS/GPS.
5.4 Xây dựng thuật toán ước lượng của mô hình INS/GPS trên Matlab
- Đọc và xử lý dữ liệu đã thu thập, làm ngõ vào cho các mô hình INS/GPS.
- Xây dựng mô hình theo phương pháp loosely coupled.
- Xây dựng mô hình theo phương pháp tightly coupled.
- Chạy mô phỏng, vẽ đồ thị, xác định sai số ngõ ra với quỹ đạo tham khảo được
lấy đồng thời trên bộ RTK GPS.
5.5 Hiện thực thuật toán ước lượng của mô hình INS/GPS trên nền vi xử lý
U-blox6
GPS
ADIS16407
STM32F4 ARM
(thuật toán)
UART
UART
Position
Velocity
Attitude
U-blox6
GPS
ADIS16407
STM32F4 ARM
(Discovery Board)
PC
(Save data)
UART
UART
UART RTK
GPS
UART

28
6. Các bài báo đã công bố
[1] Hoang-Duy Nguyen, Dang-Long Tran, Vinh-Hao Nguyen “Low-Cost INS-GPS Data
Fusion with Extended Kalman Filter”, in The 2013 International Symposium on Electrical-
Electronics Engineering
Một số kết quả thực hiện được với mô hình loosely coupled tham khảo bài báo đã
công bố:
Hình 1. Phần cứng thu thập dữ liệu với thiết bị thu LS20030 GPS (trên) và ADIS16407 IMU (dưới)
(a)
(b)
Hình 2. Thu thập dữ liệu bằng xe máy(a) and quỹ đạo tham khảo xem trên Google Earth (b)
29
(a)
(b)
(c)
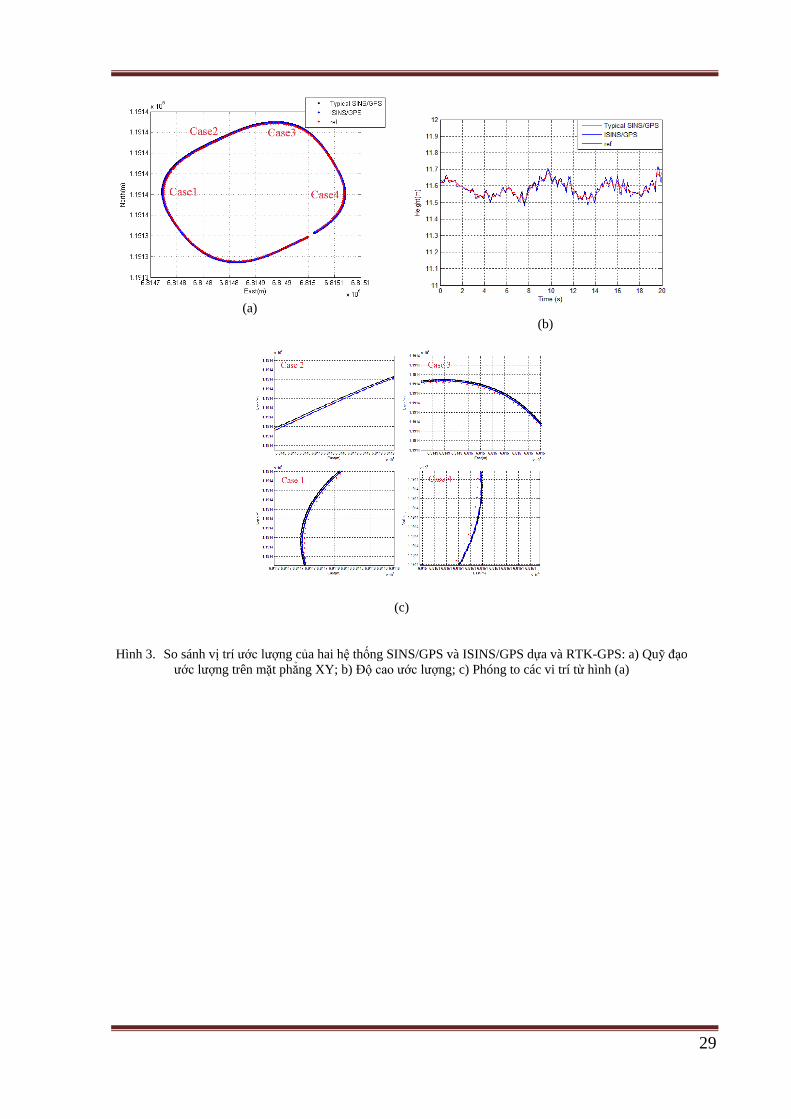
Hình 3. So sánh vị trí ước lượng của hai hệ thống SINS/GPS và ISINS/GPS dựa và RTK-GPS: a) Quỹ đạo
ước lượng trên mặt phẳng XY; b) Độ cao ước lượng; c) Phóng to các vi trí từ hình (a)
30
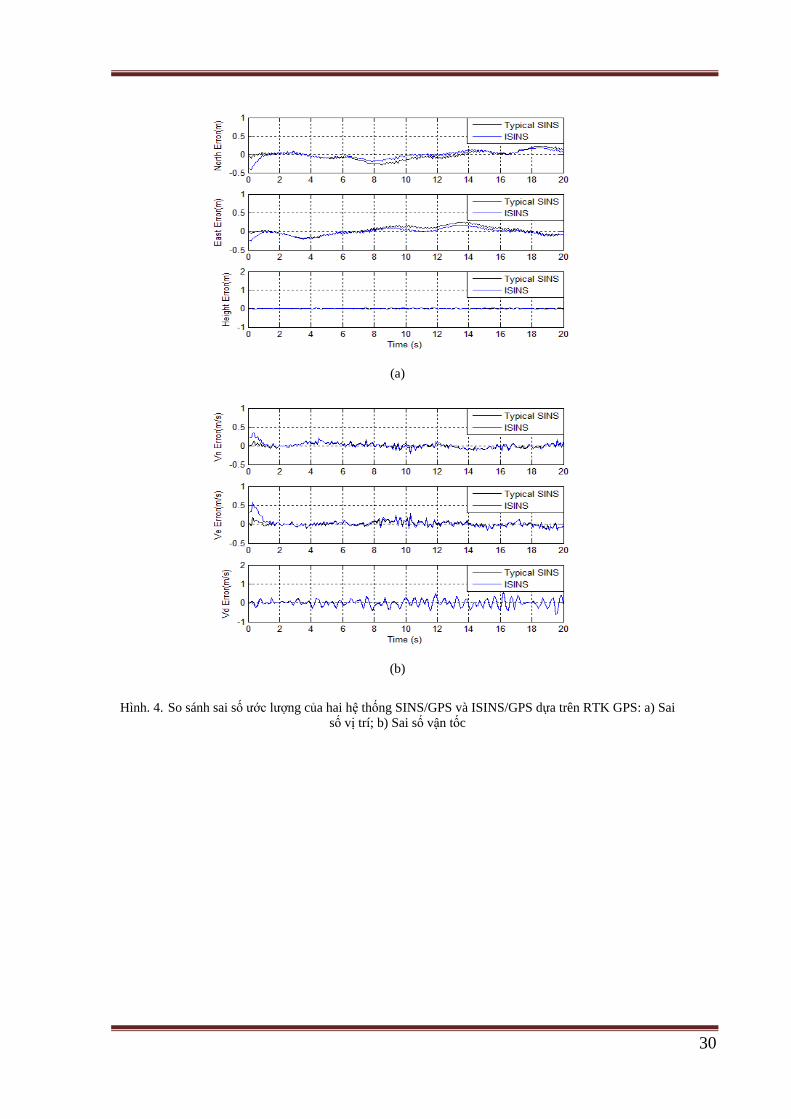
(a)
(b)
Hình. 4. So sánh sai số ước lượng của hai hệ thống SINS/GPS và ISINS/GPS dựa trên RTK GPS: a) Sai
số vị trí; b) Sai số vận tốc
31
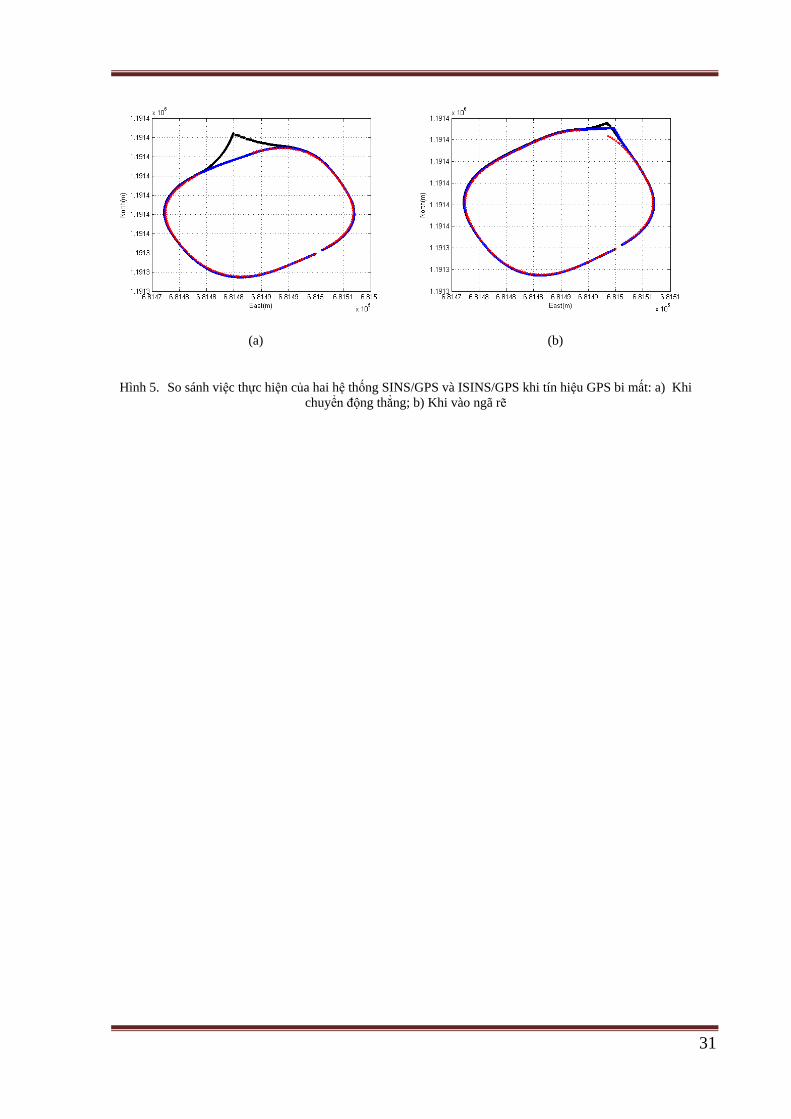
(a)
(b)
Hình 5. So sánh việc thực hiện của hai hệ thống SINS/GPS và ISINS/GPS khi tín hiệu GPS bi mất: a) Khi
chuyển động thẳng; b) Khi vào ngã rẽ
32
7. Sơ lược nội dung luận văn
Luận văn dự kiến sẽ gồm 5 chương và 1 phụ lục
Chương 1. Giới thiệu
1.1. Đặt vấn đề
1.2. Các công trình nghiên cứu liên quan
1.3. Phạm vi nghiên cứu
1.4. Tóm lược nội dung luận văn
Chương 2. Thuât toán GPS và INS
2.1. GPS
2.2. INS
Chương 3. Bộ lọc Kalman mở rộng và mô hình INS/GPS
3.1. Bộ lọc Kalman mở rộng
3.2. Mô hình INS/GPS
3.2.1. Phương pháp loosely coupled
3.2.2. Phương pháp tightly coupled
Chương 4. Thu thập dữ liệu và mô phỏng mô hình trên Matlab
4.1. Thiết kế phần cứng thu thập dữ liệu
4.2. Thiết kế mô hình mô phỏng
4.2.1 Phương pháp loosely coupled
4.2.2 Phương pháp tightly coupled
4.3. Kết quả và đánh giá
Chương 5. Xây dựng mô hình thực tế trên nền vi xử lý.
5.1. Thiết kế phần cứng mô hình
5.2. Lập trình hệ thống INS/GPS theo phương pháp tightly coupled
5.3. Kết quả và đánh giá
Chương 6. Kết luận
6.1 Kết luận
6.2 Hướng phát triển
Phụ lục
33
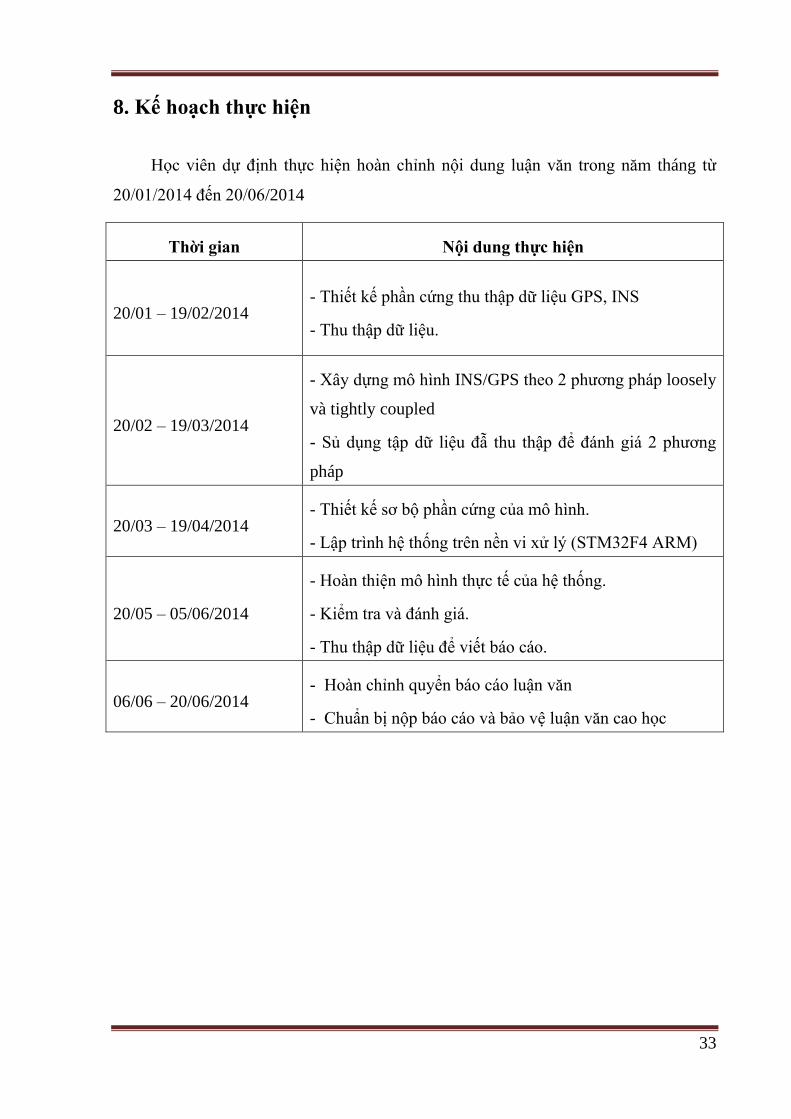
8. Kế hoạch thực hiện
Học viên dự định thực hiện hoàn chỉnh nội dung luận văn trong năm tháng từ
20/01/2014 đến 20/06/2014
Thời gian Nội dung thực hiện
20/01 – 19/02/2014 - Thiết kế phần cứng thu thập dữ liệu GPS, INS
- Thu thập dữ liệu.
20/02 – 19/03/2014
- Xây dựng mô hình INS/GPS theo 2 phương pháp loosely
và tightly coupled
- Sủ dụng tập dữ liệu đẫ thu thập để đánh giá 2 phương
pháp
20/03 – 19/04/2014 - Thiết kế sơ bộ phần cứng của mô hình.
- Lập trình hệ thống trên nền vi xử lý (STM32F4 ARM)
20/05 – 05/06/2014
- Hoàn thiện mô hình thực tế của hệ thống.
- Kiểm tra và đánh giá.
- Thu thập dữ liệu để viết báo cáo.
06/06 – 20/06/2014 - Hoàn chỉnh quyển báo cáo luận văn
- Chuẩn bị nộp báo cáo và bảo vệ luận văn cao học
34
9. Tài liệu tham khảo
[1] Vivek Agarwal*, Hemendra Arya, Biswanath Nayak and Lalit R. Saptarshi.
Extended Kalman Filter based loosely coupled INS/GPS integration scheme using
FPGA and DSP. Int. J. Intelligent Defence Support Systems, Vol. 1, No. 1, 2008
[2] Crassidis, J.L. (2002) Sigma-point kalman filtering for integrated GPS and inertial
navigation, IEEE Transactions on Aerospace and Electronic Systems, Vol. 42, No.
2, pp.750–756.
[3] Wang Huinan. Application and principle of GPS. [M]. Beijing: Publishing House
of Science, 2003
[4] Gordon, G.S. (1997) Navigation systems integration, IEE Colloquium on
Airborne Navigation Systems Workshop, (Digest No.1999 169), pp.1–17.
[5] Grewal, M.S., Weill, L.R. and Andrews, A.P. (2001) Global Positioning Systems
Inertial Navigation and Integration, John Wiley and Sons, New York.
[6] J. Wendel, G. Trommer. Tightly Coupled INS/GPS Integration for Missile
Applications. [J]. Aerospace Science and Technology. 2004 (8):627-634
[7] Eun-Hwan Shin. Accuracy Improvement of Low Cost INS/GPS for Land
Applications. (http://www.geomatics .ucalgary.ca/links/GradTheses.html),
December, 2001.
[8] P´eter Bauer and J´ozsef Bokor. Development and Hardware-in-the-Loop Testing
of an Extended Kalman Filter for Attitude Estimation. 11th IEEE International
Symposium on Computational Intelligence and Informatics • 18–20 November,
2010
[9] Greg Welch, Gary Bishop. An Introduction to the Kalman Filter.
(http://www.cs.unc.edu/~{welch, gb}{welch, gb}@cs.unc.edu), SIGGRAPH 2001.
[10] Sebastian O.H. Madgwick (2010). Estimation of IMU and MARG orientation
using a gradient descent algorithm. http://www.x-io.co.uk/.
[11] E. R. Bachmann et al (1999). Orientation Tracking for Humans and Robots
Using Inertial Sensors. In 1999 International Symposium on Computational
Intelligence in Robotics & Automation (CIRA99).
35
[12] João Luís Marins et al. An Extended Kalman Filter for Quaternion-Based
Orientation Estimation Using MARG Sensors. In Proceedings of the 2001
IEEE/RSJ International Conference on Intelligent Robots and Systems.
[13] Xiaoping Yun et al (2005). Implementation and Experimental Results of a
Quaternion- Based Kalman Filter for Human Body Motion Tracking. In
Proceedings of the 2005 IEEE International Conference on Robotics and
Automation Spain 2005.
[14] Daniel Roetenberg et al. Compensation of Magnetic Disturbances Improves
Inertial and Magnetic Sensing of Human Body Segment Orientation. In IEEE
Transactions On Neural Systems And Rehabilitation Engineering, 2005.
[15] Daniel Roetenberg (2006). Inertial and Magnetic Sensing of Human Motion.
PhD Thesis. University of Twente.
[16] Titterton, D. H. and Weston, J. L. (1997). Strapdown Inertial Navigation
Technology. p.40, Peter Peregrinus Ltd.
[17] Brown, R. G. and Hwang, P. Y. C. (1992). Introduction to Random Signals and
Applied Kalman Filtering. p.220, John Wiley & Sons, Inc., second edition.HAN
Lu, JING Zhan-rong
[18] HAN Lu, JING Zhan-rong (2009). Adaptive Extended Kalman Filter Based on
Genetic Algorithm for Tightly- coupled Integrated Inertial and GPS Navigation, in
2009 Second International Conference on Intelligent Computation Technology and
Automation.
[19] Xiaogang Wang, Jifeng Guo and Naigang Cui (2009). Adaptive Extended
Kalman Filtering Applied to Low-Cost MEMS IMU/GPS Integration for UAV, in
the 2009 IEEE International Conference on Mechatronics and Automation August
9 - 12, Changchun, China.
[20] Dr. Young C. Lee, Daniel G. O’Laughlin (). A Performance Analysis of a
Tightly Coupled GPS/Inertial System for Two Integrity Monitoring Methods, in the
MITRE Corporation, Center for Advanced Aviation System Development
(CAASD) McLean, VA 22102.





























