Embed Size (px)
Citation preview

ATC MCU电机控制算法固件介绍
2020年9月

MCU 产品线 1
MCU生态系统 2
电机算法固件应用场景 3
联系我们 5
问题答疑 6
电机算法固件简介 4

01 MCU产品线
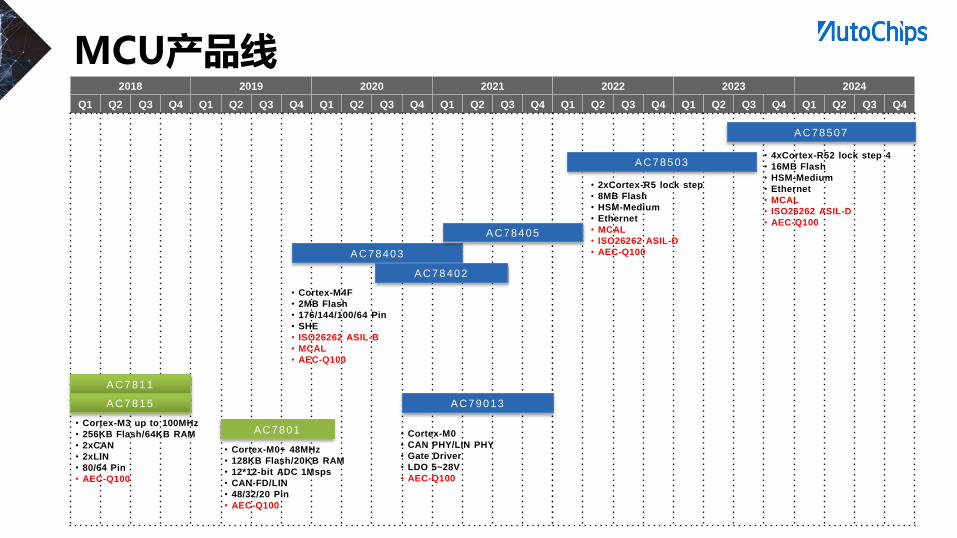
2018 2019 2020 2021
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
2022 2023 2024
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
A C 7 8 1 1
A C 7 8 1 5
• Cortex-M3 up to 100MHz
• 256KB Flash/64KB RAM
• 2xCAN
• 2xLIN
• 80/64 Pin
• AEC-Q100
AC7801
• Cortex-M0+ 48MHz
• 128KB Flash/20KB RAM
• 12*12-bit ADC 1Msps
• CAN-FD/LIN
• 48/32/20 Pin
• AEC-Q100
AC78403
AC78402
AC78405
AC79013
AC78503
AC78507
• Cortex-M4F
• 2MB Flash
• 176/144/100/64 Pin
• SHE
• ISO26262 ASIL-B
• MCAL
• AEC-Q100
• 2xCortex-R5 lock step
• 8MB Flash
• HSM-Medium
• Ethernet
• MCAL
• ISO26262 ASIL-D
• AEC-Q100
• 4xCortex-R52 lock step 4
• 16MB Flash
• HSM-Medium
• Ethernet
• MCAL
• ISO26262 ASIL-D
• AEC-Q100
• Cortex-M0
• CAN PHY/LIN PHY
• Gate Driver
• LDO 5~28V
• AEC-Q100
MCU产品线
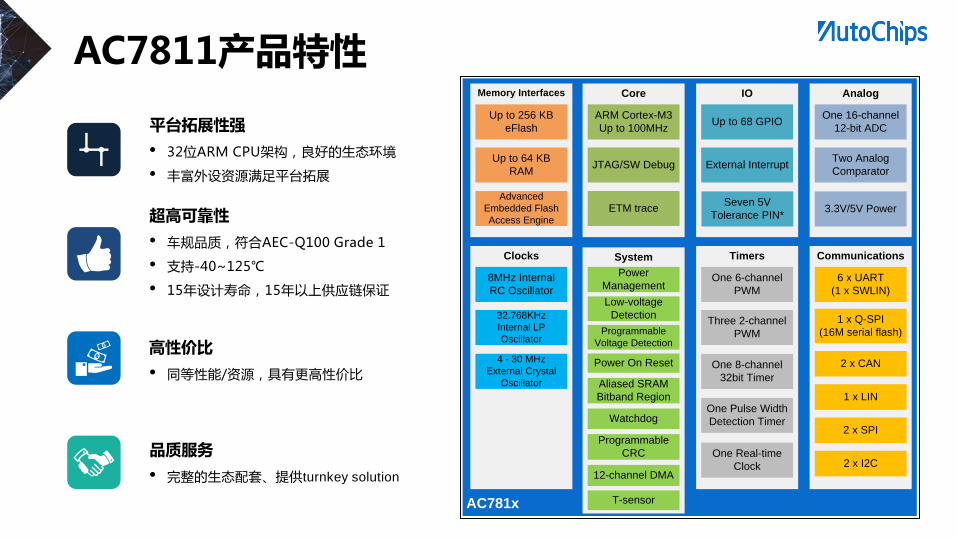
AC781x
Clocks
8MHz Internal
RC Oscillator
32.768KHz
Internal LP
Oscillator
4 - 30 MHz
External Crystal
Oscillator
System
Power
Management
Low-voltage
Detection
Watchdog
12-channel DMA
Core
ARM Cortex-M3
Up to 100MHz
Timers
One 6-channel
PWM
Three 2-channel
PWM
One 8-channel
32bit Timer
One Pulse Width
Detection Timer
One Real-time
Clock
Memory Interfaces
Up to 256 KB
eFlash
Up to 64 KB
RAM
IO
Up to 68 GPIO
External Interrupt
Communications
6 x UART
(1 x SWLIN)
2 x CAN
1 x LIN
2 x SPI
2 x I2C
Analog
One 16-channel
12-bit ADC
Two Analog
ComparatorJTAG/SW Debug
3.3V/5V PowerSeven 5V
Tolerance PIN*
Programmable
Voltage Detection
ETM trace
1 x Q-SPI
(16M serial flash)
Programmable
CRC
Aliased SRAM
Bitband Region
Power On Reset
T-sensor
Advanced
Embedded Flash
Access Engine
AC7811产品特性
平台拓展性强
• 32位ARM CPU架构,良好的生态环境
• 丰富外设资源满足平台拓展
超高可靠性
• 车规品质,符合AEC-Q100 Grade 1
• 支持-40~125℃
• 15年设计寿命,15年以上供应链保证
高性价比
• 同等性能/资源,具有更高性价比
品质服务
• 完整的生态配套、提供turnkey solution
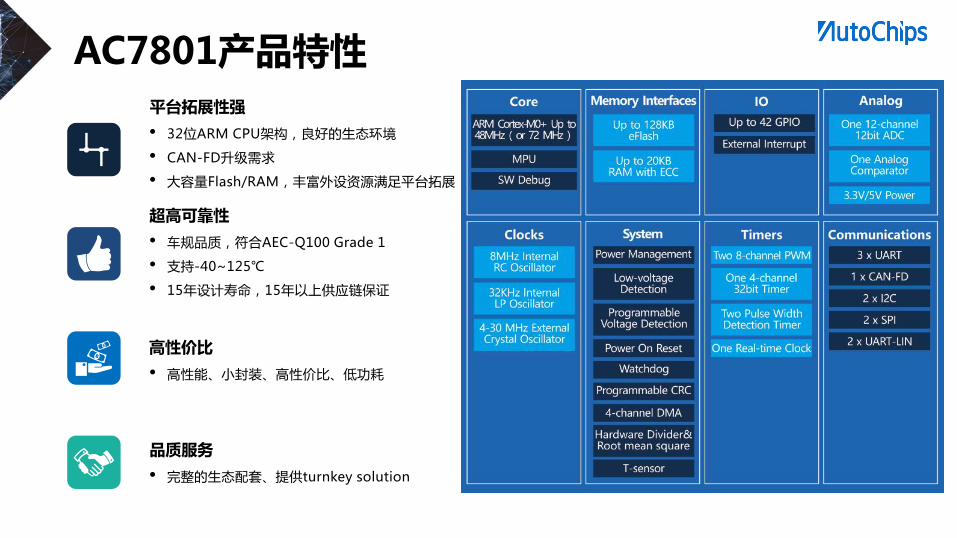
AC7801产品特性 平台拓展性强
• 32位ARM CPU架构,良好的生态环境
• CAN-FD升级需求
• 大容量Flash/RAM,丰富外设资源满足平台拓展
超高可靠性
• 车规品质,符合AEC-Q100 Grade 1
• 支持-40~125℃
• 15年设计寿命,15年以上供应链保证
高性价比
• 高性能、小封装、高性价比、低功耗
品质服务
• 完整的生态配套、提供turnkey solution
02 MCU生态系统

应用文档(中英文)
• 产品简介 参考手册
• 数据手册 应用设计说明
解决方案
• 电机控制 TBOX
• 乘用车BCM …
评估板
• BCM开发套件 通用开发套件
• 电机开发套件 mini板
库函数及例程
驱动接口函数库 RTOS
电机驱动算法库 应用例程
烧录工具
• 周立功离线编程器 ATC离线烧录器
• 君达离线烧录器
仿真工具
• U-LINK ATC-LINK
• J-LINK
集成开发环境
• KEIL IAR
• Motor Studio AutoGen Studio
技术支持
21 IC论坛
原厂FAE
生态系统
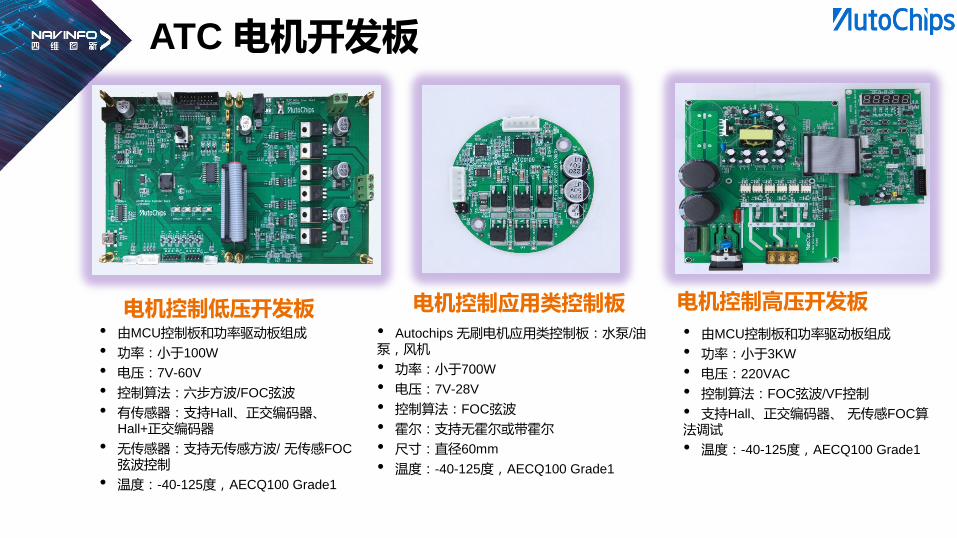
ATC 电机开发板
电机控制低压开发板 • 由MCU控制板和功率驱动板组成
• 功率:小于100W
• 电压:7V-60V
• 控制算法:六步方波/FOC弦波
• 有传感器:支持Hall、正交编码器、
Hall+正交编码器
• 无传感器:支持无传感方波/ 无传感FOC
弦波控制
• 温度:-40-125度,AECQ100 Grade1
• Autochips 无刷电机应用类控制板:水泵/油泵,风机
• 功率:小于700W
• 电压:7V-28V
• 控制算法:FOC弦波
• 霍尔:支持无霍尔或带霍尔
• 尺寸:直径60mm
• 温度:-40-125度,AECQ100 Grade1
电机控制应用类控制板
• 由MCU控制板和功率驱动板组成
• 功率:小于3KW
• 电压:220VAC
• 控制算法:FOC弦波/VF控制
• 支持Hall、正交编码器、 无传感FOC算法调试
• 温度:-40-125度,AECQ100 Grade1
电机控制高压开发板
03 电机算法固件应用场景
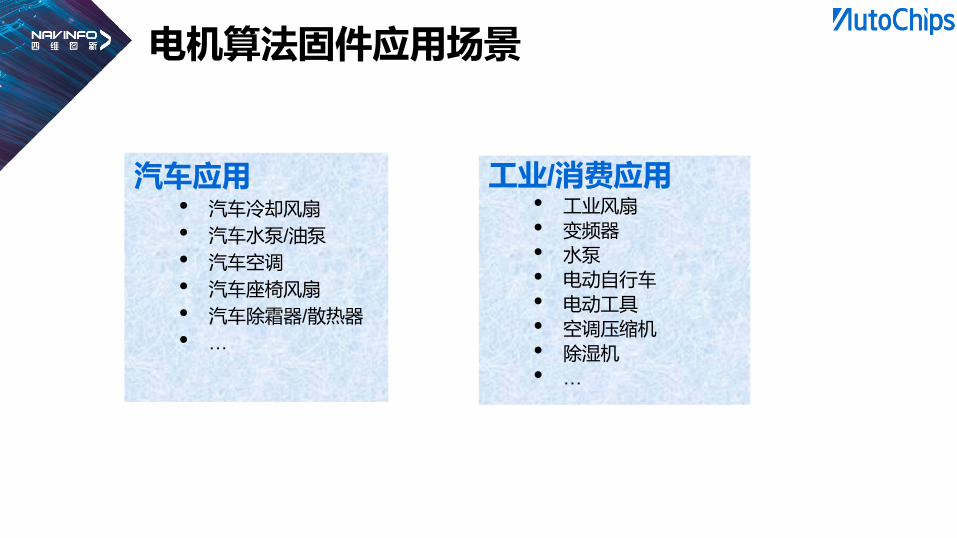
电机算法固件应用场景
汽车应用 • 汽车冷却风扇
• 汽车水泵/油泵
• 汽车空调
• 汽车座椅风扇
• 汽车除霜器/散热器
• …
工业/消费应用 • 工业风扇
• 变频器
• 水泵
• 电动自行车
• 电动工具
• 空调压缩机
• 除湿机
• …
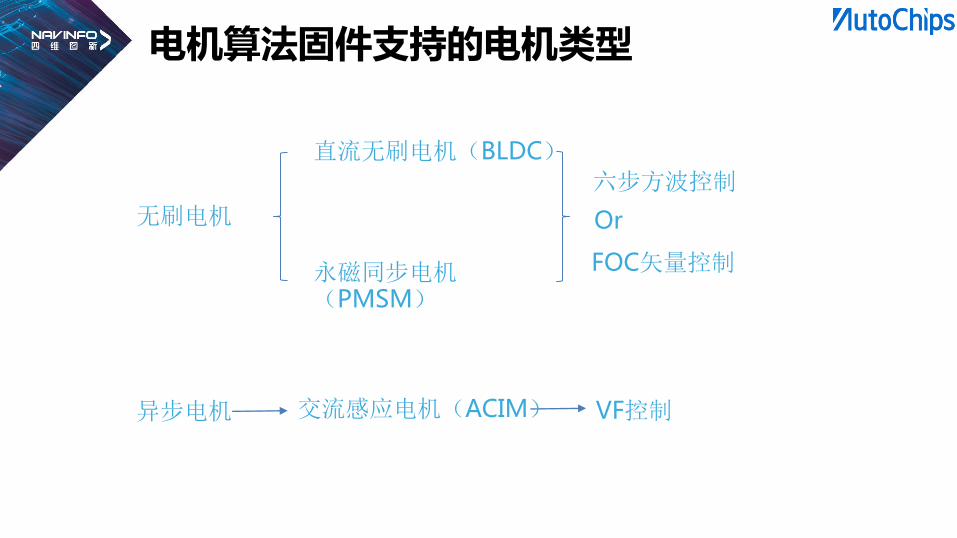
电机算法固件支持的电机类型
无刷电机
直流无刷电机(BLDC)
永磁同步电机(PMSM)
异步电机 交流感应电机(ACIM)
六步方波控制
FOC矢量控制
Or
VF控制
04 电机算法固件简介
Copyright © AutoChips Inc . All rights reserved.
Internal Use
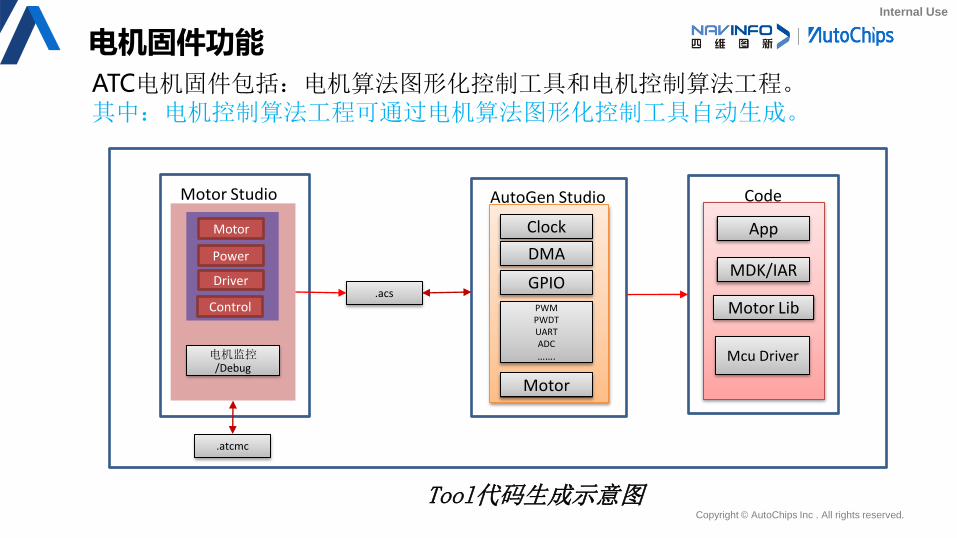
电机固件功能
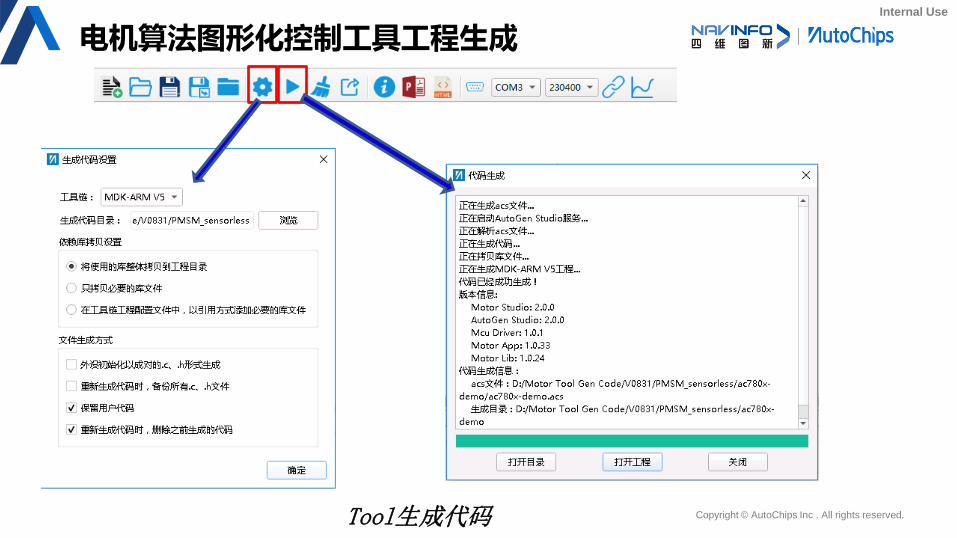
ATC电机固件包括:电机算法图形化控制工具和电机控制算法工程。 其中:电机控制算法工程可通过电机算法图形化控制工具自动生成。
电机监控/Debug
.atcmc
Motor Studio AutoGen Studio
.acs
Clock
DMA
GPIO
Code
App
Motor Lib
MDK/IAR
Mcu Driver
Motor
Power
Driver
Control PWM PWDT UART ADC
…….
Motor
Tool代码生成示意图
Copyright © AutoChips Inc . All rights reserved.
Internal Use
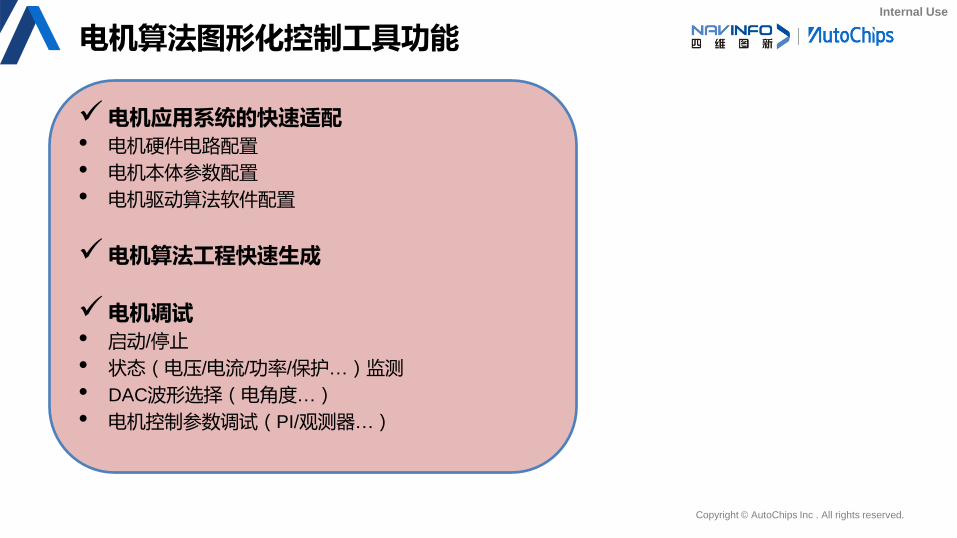
电机算法图形化控制工具功能
电机应用系统的快速适配
• 电机硬件电路配置
• 电机本体参数配置
• 电机驱动算法软件配置
电机算法工程快速生成
电机调试
• 启动/停止
• 状态(电压/电流/功率/保护…)监测
• DAC波形选择(电角度…)
• 电机控制参数调试(PI/观测器…)
Copyright © AutoChips Inc . All rights reserved.
Internal Use
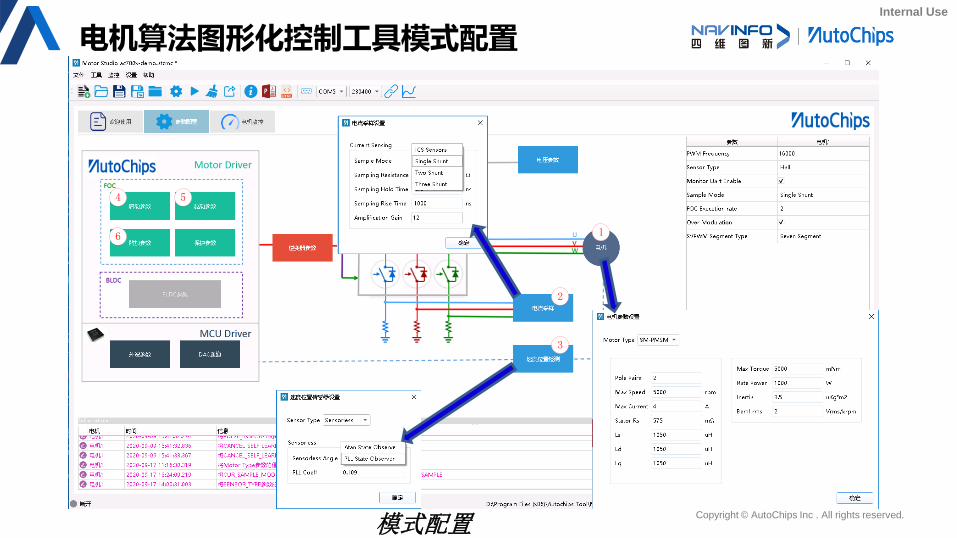
电机算法图形化控制工具模式配置
1
2
3
4
6
5
模式配置
Copyright © AutoChips Inc . All rights reserved.
Internal Use
电机算法图形化控制工具工程生成
Tool生成代码
Copyright © AutoChips Inc . All rights reserved.
Internal Use
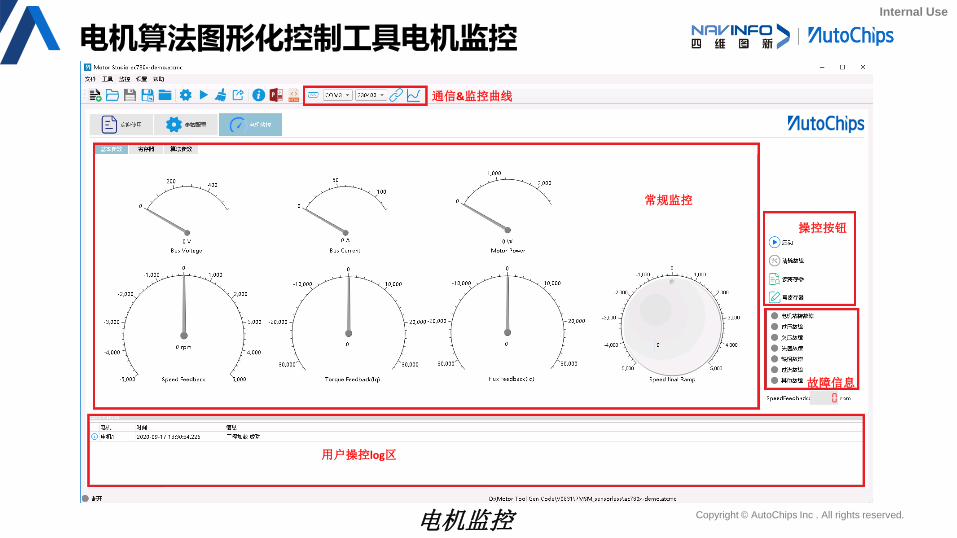
电机算法图形化控制工具电机监控
通信&监控曲线
常规监控
操控按钮
故障信息
用户操控log区
电机监控

电机算法固件功能
支持的电机控制核心算法 • 有/无霍尔六步方波控制
• 有/无传感FOC控制
• 异步电机VF控制
• 霍尔传感器自学习
• 脉冲注入法(识别转子初始位置)
• 高频注入法(静止/低速下无传感控制)
• 滑模观测器(无传感观测器算法)
• 磁链观测器(无传感观测器算法)
• 电流前馈控制
• PI调节器
• PI参数自整定
• 五/七段式SVPWM
• 母线电流及功率估测
• MTPA控制(Maximum Torque Per Ampere)
• 弱磁控制
• 死区补偿
• 过调制算法
• 电磁刹车/制动
• 电机参数识别
支持的电机位置传感器类型
• 霍尔传感器
• 正交增量编码器
• 霍尔+正交增量编码器
• 无位置传感器
• …
支持的电流采样方式
• 单电阻
• 双电阻
• 三电阻
• MOS内阻
• 电流传感器
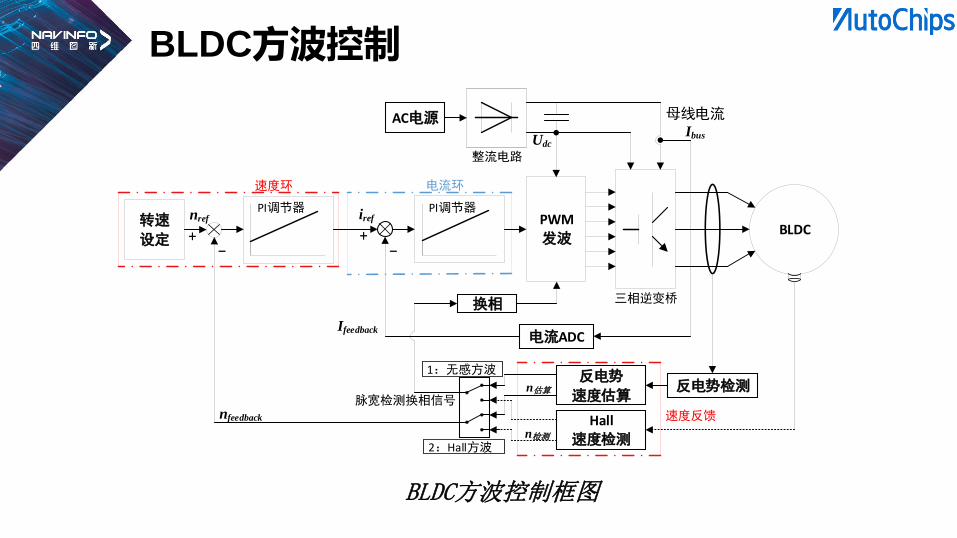
BLDC方波控制
转速
设定
PWM
发波BLDC
Hall
速度检测
AC电源
nref iref
Udc
母线电流Ibus
nfeedback
整流电路
三相逆变桥
速度环 电流环
+-
+-
PI调节器 PI调节器
n检测
速度反馈
反电势
速度估算
电流ADC
反电势检测
Ifeedback
1:无感方波
换相
n估算
2:Hall方波
脉宽检测换相信号
BLDC方波控制框图
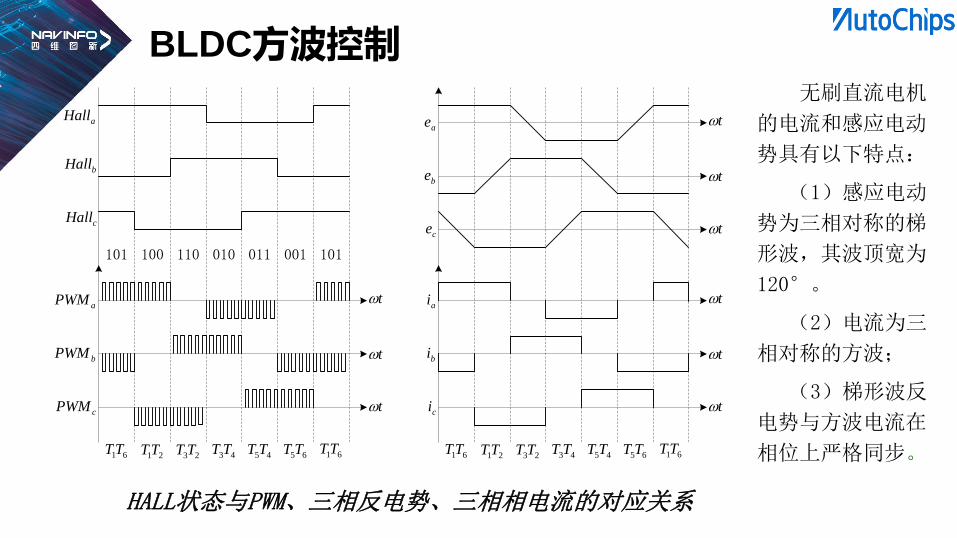
BLDC方波控制
HALL状态与PWM、三相反电势、三相相电流的对应关系
aPWM
bPWM
cPWM
aHall
bHall
cHall
t
t
t
61TT23TT 43TT 45TT 65TT
21TT 61TT
ai
bi
ci
t
t
t
61TT23TT 43TT 45TT 65TT
21TT 61TT
ae
be
ce
t
t
t
101 100 110 010 011 001 101
无刷直流电机
的电流和感应电动
势具有以下特点:
(1)感应电动
势为三相对称的梯
形波,其波顶宽为
120°。
(2)电流为三
相对称的方波;
(3)梯形波反
电势与方波电流在
相位上严格同步。
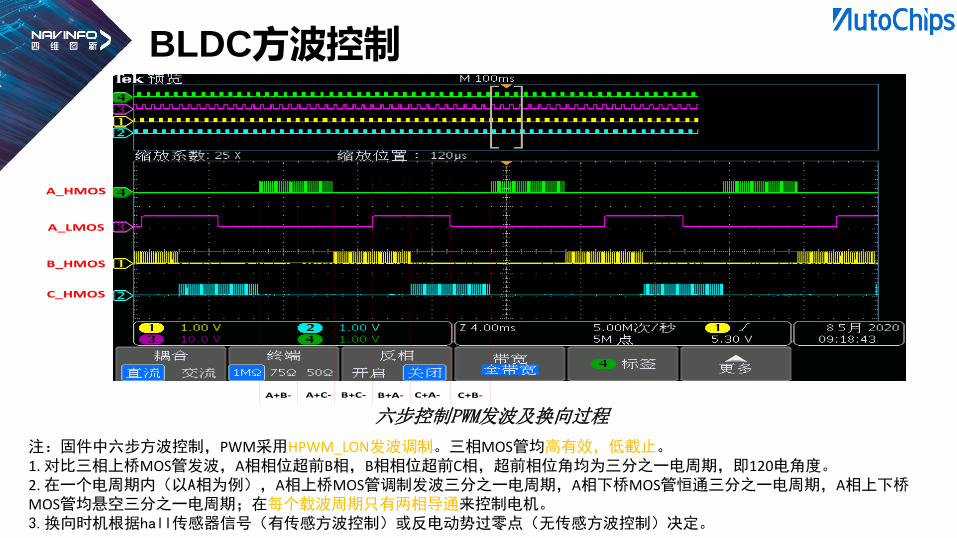
BLDC方波控制
注:固件中六步方波控制,PWM采用HPWM_LON发波调制。三相MOS管均高有效,低截止。 1. 对比三相上桥MOS管发波,A相相位超前B相,B相相位超前C相,超前相位角均为三分之一电周期,即120电角度。 2. 在一个电周期内(以A相为例),A相上桥MOS管调制发波三分之一电周期,A相下桥MOS管恒通三分之一电周期,A相上下桥MOS管均悬空三分之一电周期;在每个载波周期只有两相导通来控制电机。 3.换向时机根据hall传感器信号(有传感方波控制)或反电动势过零点(无传感方波控制)决定。
六步控制PWM发波及换向过程
A_HMOS
A_LMOS
B_HMOS
C_HMOS
A+B- A+C- B+C- B+A- C+A- C+B-
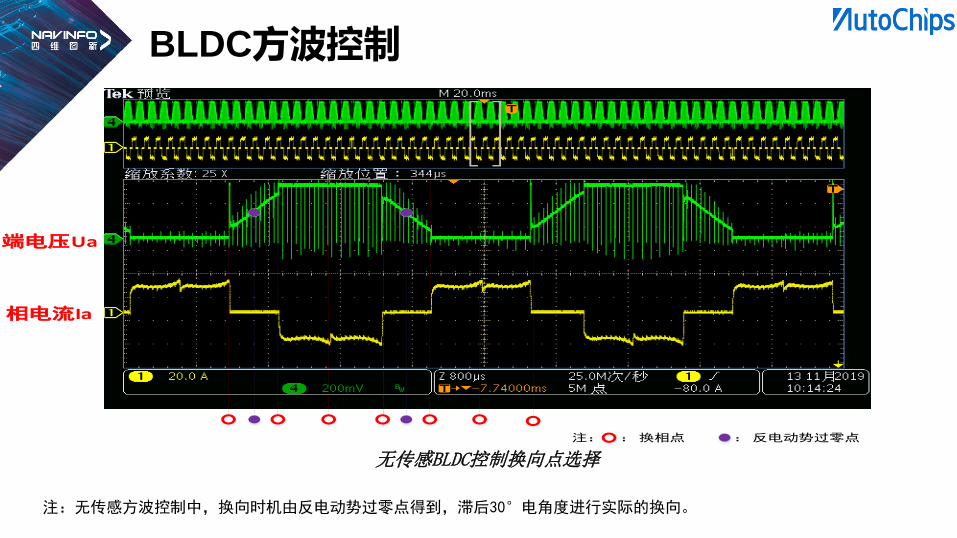
BLDC方波控制
注:无传感方波控制中,换向时机由反电动势过零点得到,滞后30°电角度进行实际的换向。
端电压Ua
相电流Ia
注: : 换相点 : 反电动势过零点
无传感BLDC控制换向点选择
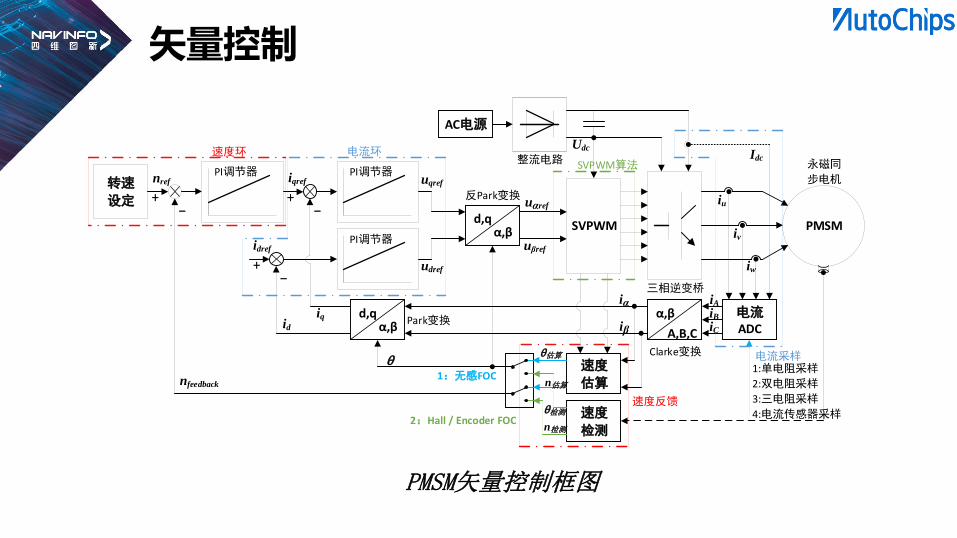
矢量控制
转速
设定
SVPWM PMSM
电流ADC
d,qα,β A,B,C
α,β
速度
估算
速度
检测
d,qα,β
AC电源
nref iqref
idref
uqref
udref
uαref
uβref
UdcIdc
iw
iv
iu
iAiBiC
iα
iβ
iqid
nfeedback
θ1:单电阻采样
2:双电阻采样
3:三电阻采样
4:电流传感器采样
1:无感FOC
整流电路
三相逆变桥
永磁同
步电机
速度环 电流环
+-
+-
-+
PI调节器 PI调节器
PI调节器
θ估算
n检测
Clarke变换
Park变换
反Park变换
SVPWM算法
速度反馈
电流采样
2:Hall / Encoder FOC
n估算
θ检测
PMSM矢量控制框图
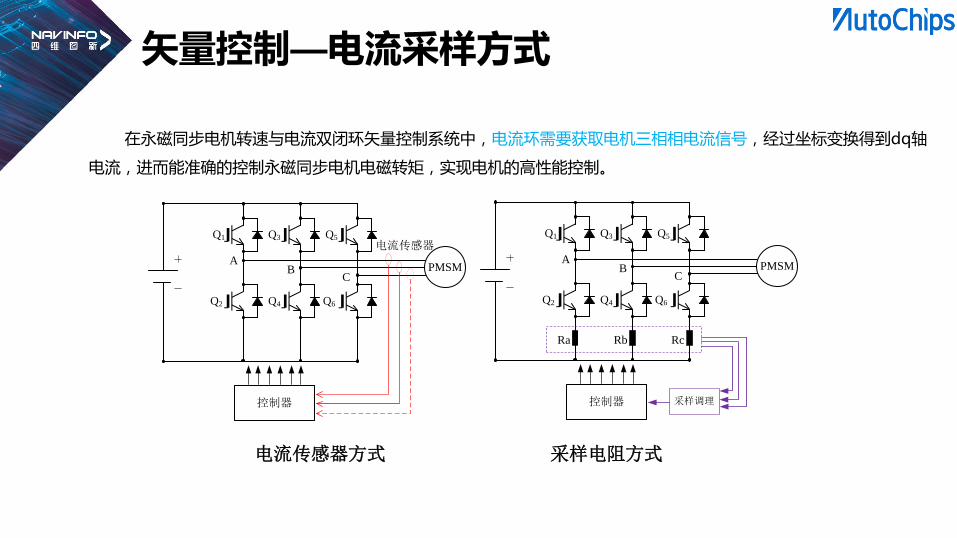
矢量控制—电流采样方式
在永磁同步电机转速与电流双闭环矢量控制系统中,电流环需要获取电机三相相电流信号,经过坐标变换得到dq轴
电流,进而能准确的控制永磁同步电机电磁转矩,实现电机的高性能控制。
PMSM
Q1 Q3 Q5
Q2 Q4 Q6
Ra RcRb
采样调理控制器
AB
CPMSM
Q1 Q3 Q5
Q2 Q4 Q6
控制器
AB
C
电流传感器
电流传感器方式 采样电阻方式
矢量控制—电流采样方式
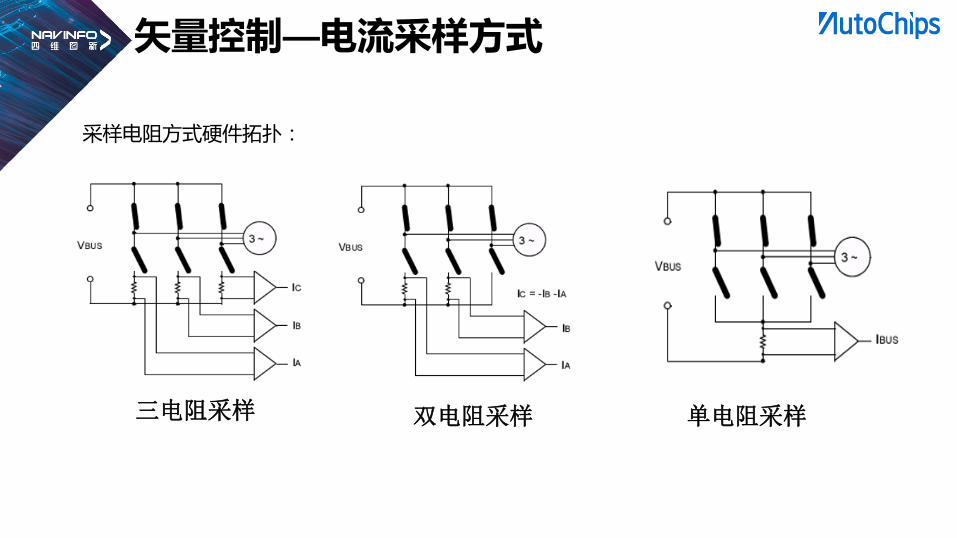
采样电阻方式硬件拓扑:
三电阻采样 双电阻采样 单电阻采样
矢量控制—电流采样方式
隔离型: 电流传感器:在桥臂的相线上串上霍尔电流传感器或直接使用分流电阻+线性光耦。这种
方法理论上是采集相电流的最佳方法,但实际效果与器件线性误差有关,同时成本较高。
非隔离型(采样电阻): 三电阻:在三个桥臂的下臂MOS管基极串分流器再用运放放大。这种方法主要是为了节省
隔离器件成本。并且需要在固定时刻采样的值才有效。 双电阻:三电阻可减小至两个(母线电流检测不可少),缺省的一相由计算得出 。 单电阻:为进一步节省成本发展出直接在母线电阻上检测三相电流的方法。这种方法需要
分时采样,不同时刻的电流代表不同相的电流。 四种采样方式成本和性能从高到低。
矢量控制—DQ轴电流
定子电流被分解成:
— 直轴电流 Id : 用于产生磁场,与转子磁场相叠加。
— 交轴电流 Iq : 用于控制转矩(作用等同于直流电机的电枢电流)。
矢量算法的核心思想是:根据交流电动机的动态数学模型,利用坐标
变换的手段,将交流电动机的定子电流分解成磁场分量电流和转矩分量电流。
矢量控制—坐标变换
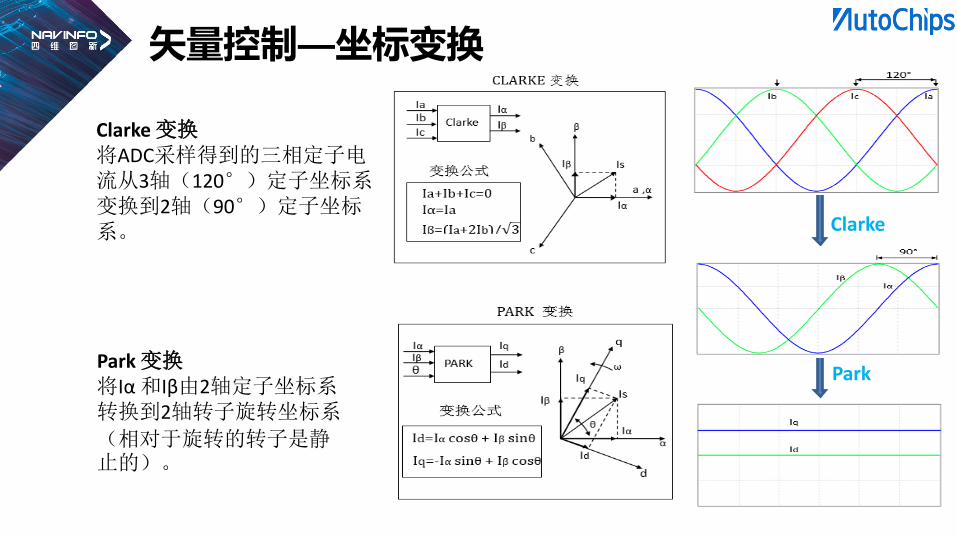
Clarke 变换 将ADC采样得到的三相定子电流从3轴(120°)定子坐标系变换到2轴(90°)定子坐标系。
Park 变换 将Iα 和Iβ由2轴定子坐标系转换到2轴转子旋转坐标系
(相对于旋转的转子是静止的)。
Clarke
Park
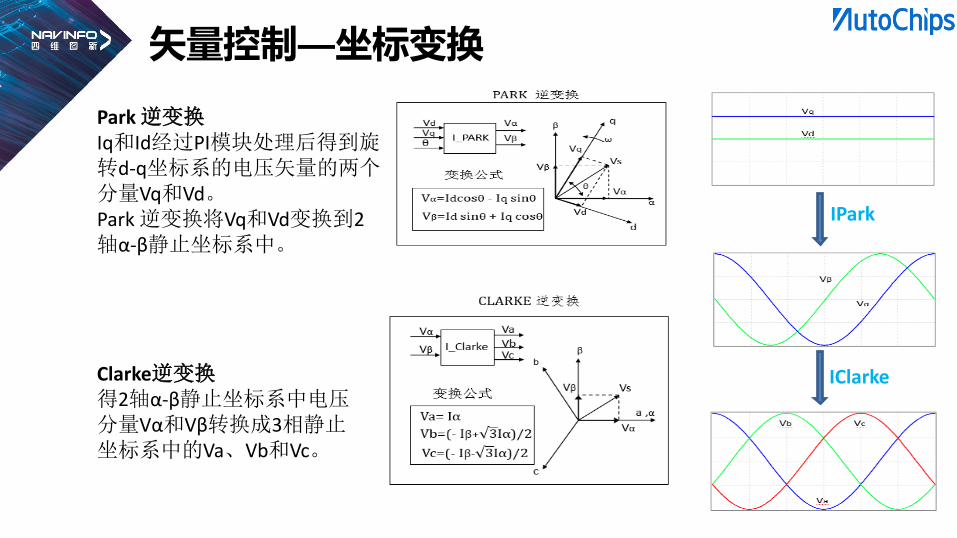
矢量控制—坐标变换
Park 逆变换 Iq和Id经过PI模块处理后得到旋转d-q坐标系的电压矢量的两个分量Vq和Vd。 Park 逆变换将Vq和Vd变换到2轴α-β静止坐标系中。
Clarke逆变换 得2轴α-β静止坐标系中电压分量Vα和Vβ转换成3相静止坐标系中的Va、Vb和Vc。
IClarke
IPark
矢量控制—PI控制器
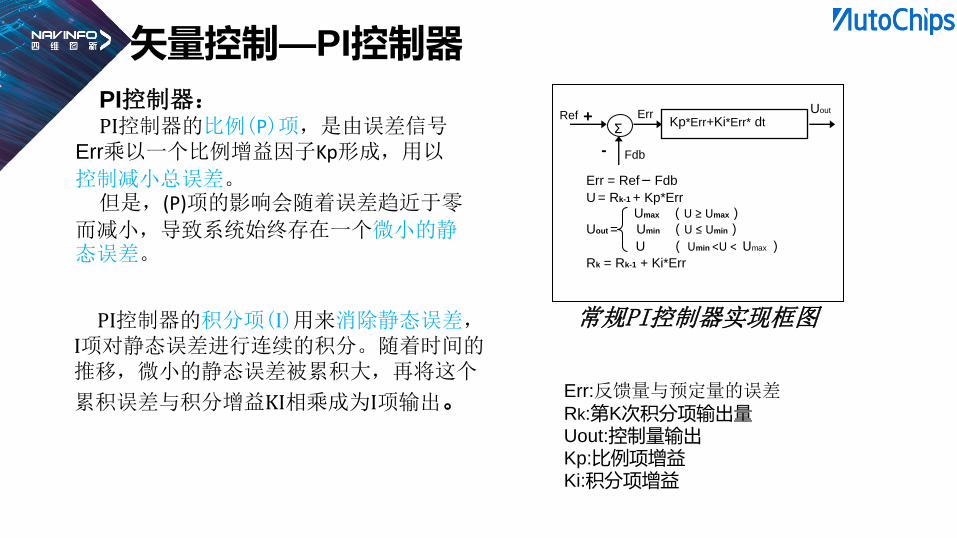
PI控制器: PI控制器的比例(P)项,是由误差信号
Err乘以一个比例增益因子Kp形成,用以
控制减小总误差。 但是,(P)项的影响会随着误差趋近于零
而减小,导致系统始终存在一个微小的静态误差。
Kp*Err+Ki*Err* dt
Fdb
Uout
Ref
+
-
Σ Err
Err = Ref – Fdb
U = Rk-1 + Kp*Err
Umax (U ≥ Umax) Uout = Umin (U ≤ Umin)
U ( Umin <U < Umax )
Rk = Rk-1 + Ki*Err
Err:反馈量与预定量的误差 Rk:第K次积分项输出量
Uout:控制量输出
Kp:比例项增益
Ki:积分项增益
PI控制器的积分项(I)用来消除静态误差, I项对静态误差进行连续的积分。随着时间的 推移,微小的静态误差被累积大,再将这个
累积误差与积分增益KI相乘成为I项输出。
常规PI控制器实现框图
矢量控制—PI控制器
FOC算法中可能使用PI控制器的场景: • 电流环D轴(控制转子磁通) • 电流环Q轴(控制转子转矩) • 速度环( 控制转速) • 位置环(控制位置) • 电流观测器PLL(转速及角度估算)
ATC固件中提供四种PI方式:
• 串联型PI
• 并联型PI
• 位置式PI
• 增量式PI
矢量控制—PI控制器
ATC固件中PI参数整定方式:
• DQ电流环
电流环的PI参数只与电机本体参数(电阻、电感)有关。
用户设置相应的电流响应带宽进行电流环的PI参数适配。
• 速度环
速度环的PI参数除了与电机本体参数(电阻、电感)有关,还与电机系统的转动惯量和阻尼系数相关。
对于恒负载的电机控制系统,速度环PI系数可选择一组。对于负载变化的电机控制系统,根据调试情况
确定是否需要分段PI系数,建议手动方式进行整定。
• 位置环
位置环一般只使用P控制,客户可根据需要决定积分项的添加,PI系数以手动方式进行整定。
• 电流观测器PLL(转速及角度估算)
PLL锁相环中的PI参数,ATC 电机固件将KP、KI两个参数简化为调整一个PLL锁相环系数,通过PLL锁相环
系数计算得到。
矢量控制—SVPWM
dU
AS BS CS
AS BS CS
+
-
逆变电路
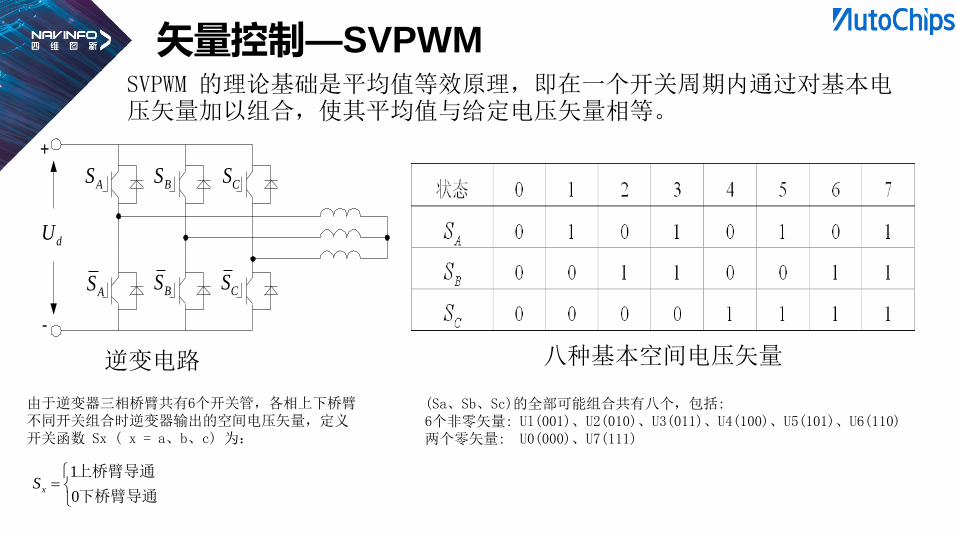
由于逆变器三相桥臂共有6个开关管,各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,定义开关函数 Sx ( x = a、b、c) 为:
下桥臂导通
上桥臂导通
0
1xS
(Sa、Sb、Sc)的全部可能组合共有八个,包括: 6个非零矢量: Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110) 两个零矢量: U0(000)、U7(111)
八种基本空间电压矢量
SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
矢量控制—SVPWM
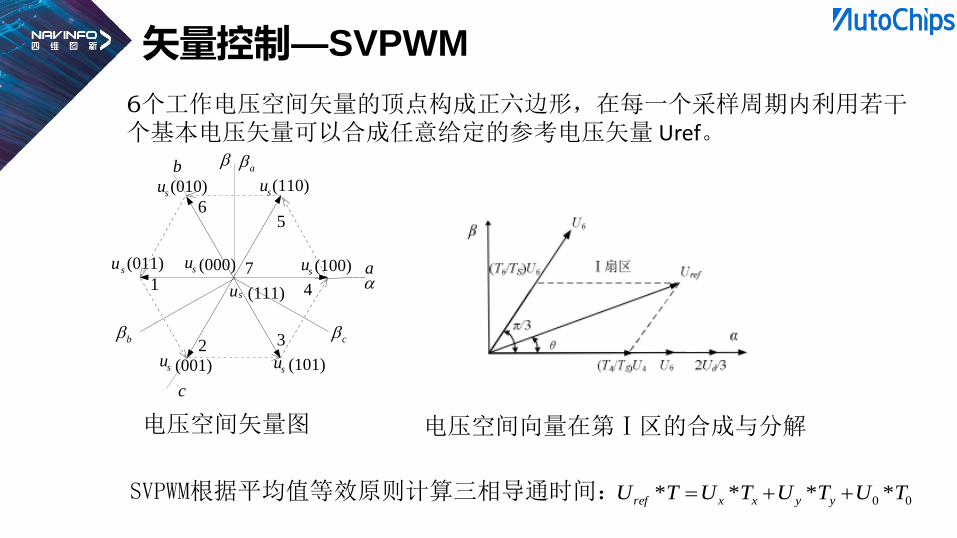
6个工作电压空间矢量的顶点构成正六边形,在每一个采样周期内利用若干个基本电压矢量可以合成任意给定的参考电压矢量 Uref。
(100)su
(110)su(010)su
(011)su
(001)su (101)su
(000)su
(111)su
a
b
c
a
b c
1
2 3
4
56
7
电压空间向量在第Ⅰ区的合成与分解 电压空间矢量图
00 **** TUTUTUTU yyxxref SVPWM根据平均值等效原则计算三相导通时间:
矢量控制—SVPWM
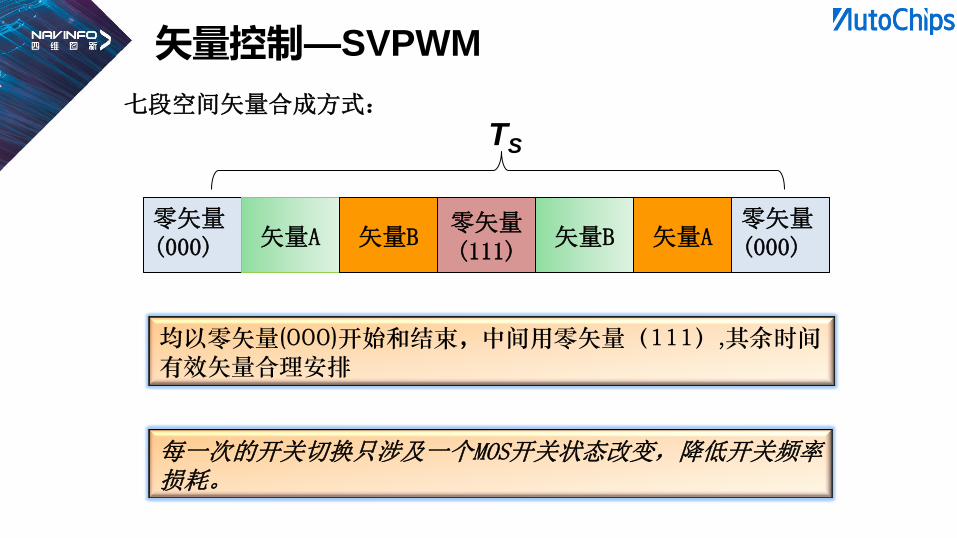
每一次的开关切换只涉及一个MOS开关状态改变,降低开关频率损耗。
零矢量 (000) 矢量A 矢量B
零矢量(111)
矢量B 矢量A 零矢量 (000)
TS
七段空间矢量合成方式:
均以零矢量(000)开始和结束,中间用零矢量(111),其余时间有效矢量合理安排
霍尔相序与安装偏差角度自学习
霍尔传感器使用影响因素:
霍尔传感器在安装时,霍尔相序受霍尔线序及电机线序所影响。
同时制造水平、人工干扰等因素影响,霍尔传感器存在安装偏差。会导致使用霍尔传感器估算得到
的转子位置不准确,影响磁场定向控制性能,例如:电机输出效率低、运行部顺畅、甚至运行失控的问题。
霍尔相序与霍尔安装偏差自学习:
霍尔相序与安装偏差角度自学习算法适用于任何未知霍尔安装的情况,对各种霍尔线序、电机线序、
60度霍尔、120度霍尔进行快速适配,顺利估算得到转子位置。
霍尔传感器角度估算
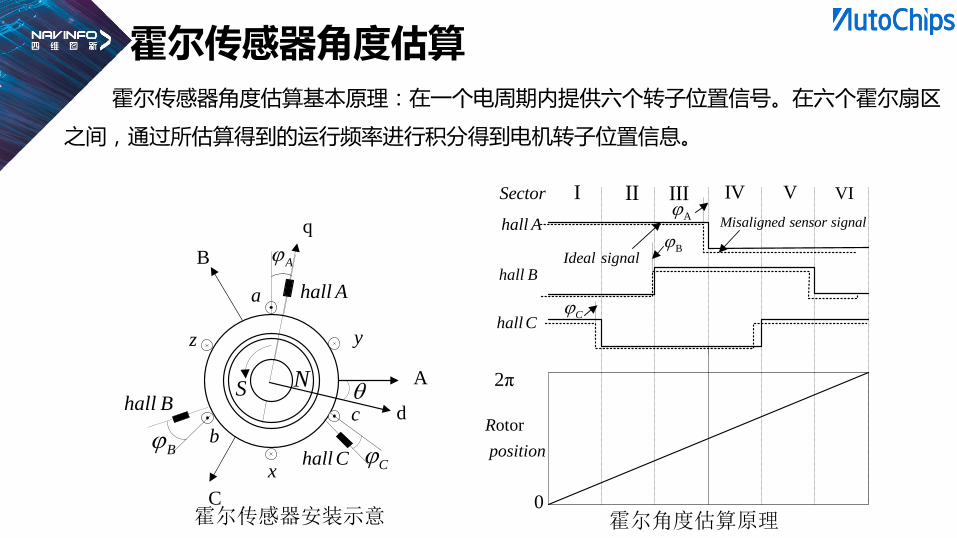
霍尔传感器角度估算基本原理:在一个电周期内提供六个转子位置信号。在六个霍尔扇区
之间,通过所估算得到的运行频率进行积分得到电机转子位置信息。
A
B
C
NS
a
z
b
x
c
y
hall A
B
hall B
hallC
A
C
hall A
hall B
hallC
0
2π
Sector I II III IV V VI
otor
R
position
A
B
C
Ideal signal
Misaligned sensor signal
d
q
霍尔传感器安装示意 霍尔角度估算原理
矢量控制—电流观测器
电流观测器: 电流观测器的作用是对数字化构建的电机模型进行校正,使其与目标PMSM电机同步运转,根据估算出反电动势大小计算电机的转速及角度信息。
ATC固件中包含两种电流观测器:
滑模观测器
磁链观测器
矢量控制—滑模观测器
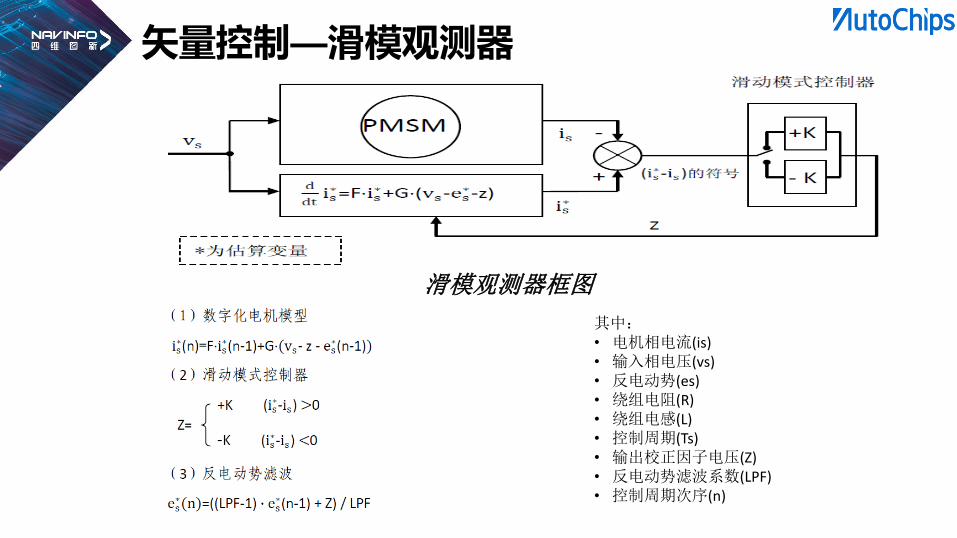
滑模观测器框图
其中: • 电机相电流(is) • 输入相电压(vs) • 反电动势(es) • 绕组电阻(R) • 绕组电感(L) • 控制周期(Ts) • 输出校正因子电压(Z) • 反电动势滤波系数(LPF) • 控制周期次序(n)
矢量控制—磁链观测器
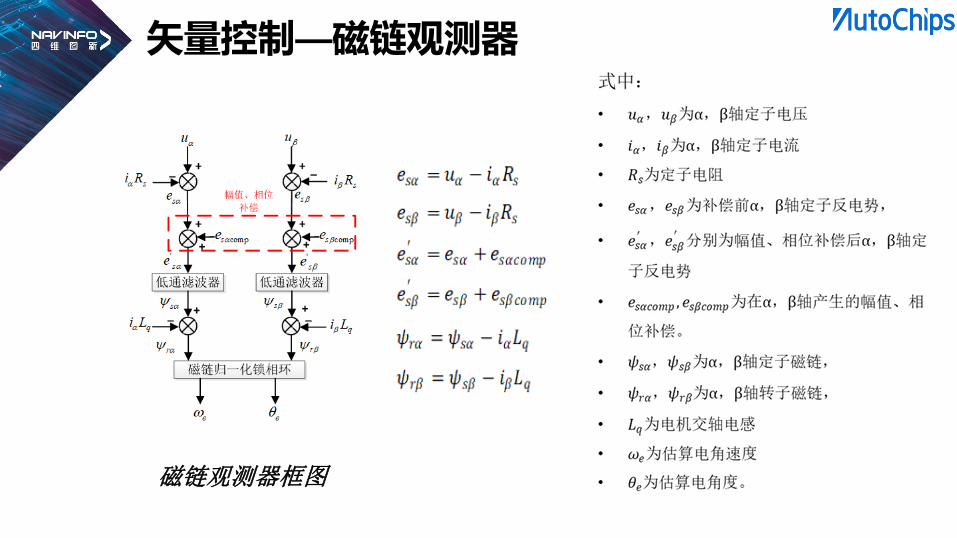
磁链观测器框图
矢量控制—电流观测器
矢量控制—无感启动方式
ATC电机固件矢量控制中无感启动方式包括: 预定位法 启动过程会出现小角度正转或反转,需预定位到设定角度(一般为电角度零位)后再开环启动。 脉冲注入法 启动过程无正反转抖动(平顺启动),但脉冲注入过程会伴随短时电磁噪音(100ms以内完成)。 只能用于静止状态下电机初始位置识别。 高频注入法 启动过程无抖动(平顺启动),但高频注入过程会持续伴随电磁噪音,切换至电流观测器后噪音消失。 可用于静止状态下或低速下电机位置识别。 与电流观测器配合使用,可以实现无传感全速度范围内的转速闭环控制。
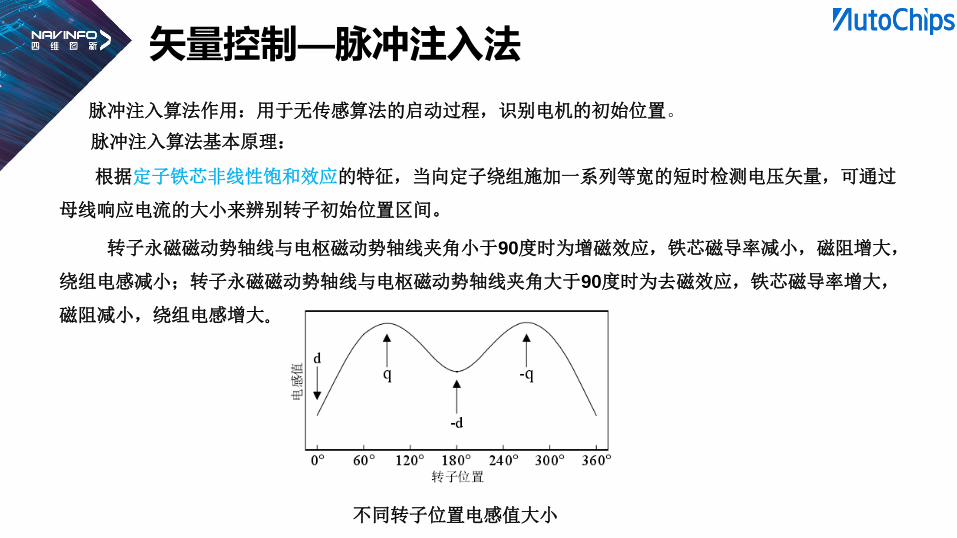
矢量控制—脉冲注入法
脉冲注入算法作用:用于无传感算法的启动过程,识别电机的初始位置。
脉冲注入算法基本原理:
根据定子铁芯非线性饱和效应的特征,当向定子绕组施加一系列等宽的短时检测电压矢量,可通过
母线响应电流的大小来辨别转子初始位置区间。
转子永磁磁动势轴线与电枢磁动势轴线夹角小于90度时为增磁效应,铁芯磁导率减小,磁阻增大,
绕组电感减小;转子永磁磁动势轴线与电枢磁动势轴线夹角大于90度时为去磁效应,铁芯磁导率增大,
磁阻减小,绕组电感增大。
不同转子位置电感值大小
脉冲注入法
通过判断母线响应中最大电流来辨别转子初始扇区,实现无传感器控制的无抖动启动。
脉冲注入算法实验波形
矢量控制—高频注入法
高频注入算法作用:用于无传感模式静止及低速情况下电机的位置识别。
高频注入算法基本原理:
无感控制方式一般藉由反电动势估测来计算转子磁通位置,然而反电动势在零转速及低转速的情况
之下较小,较难以估测实际转子磁通位置。
高频注入算法通过向定子线圈注入特定的电压载波信号,藉由电机d-q轴电感的差异特性,进而产
生与转子角度误差相关的电流信号,再依此电流信号进行估测角度的修正以达到无感测启动之目的。
高频注入算法利用电机d-q轴电感的差异特性,适合凸极特性较好的内嵌式永磁同步电机(IPMSM)使用。
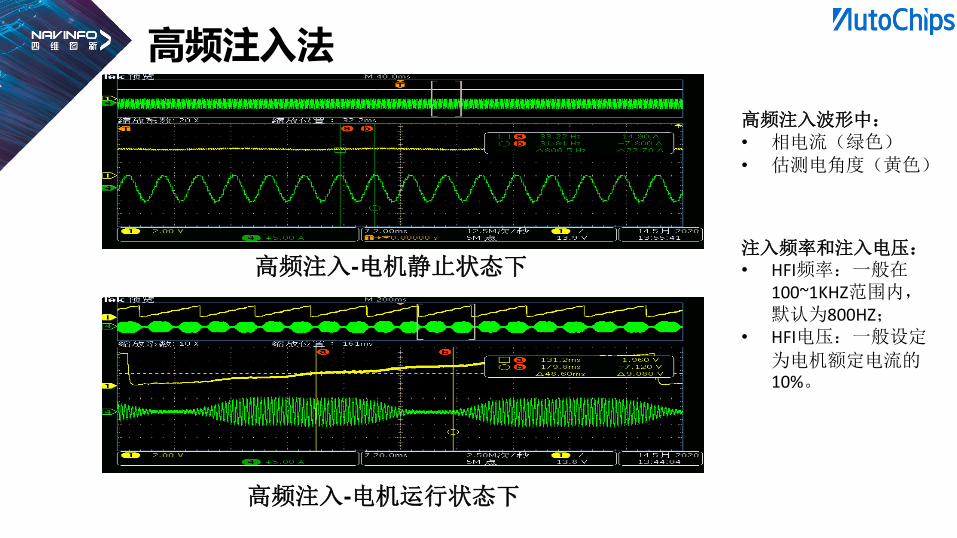
高频注入法
高频注入波形中: • 相电流(绿色) • 估测电角度(黄色)
高频注入-电机静止状态下
高频注入-电机运行状态下
注入频率和注入电压: • HFI频率:一般在
100~1KHZ范围内,默认为800HZ;
• HFI电压:一般设定
为电机额定电流的10%。
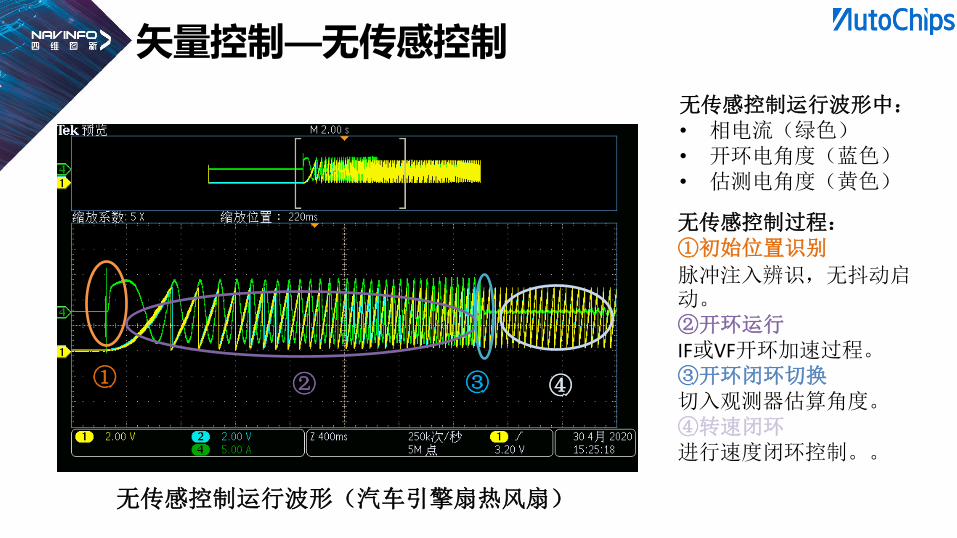
矢量控制—无传感控制
无传感控制过程: ①初始位置识别
脉冲注入辨识,无抖动启动。 ②开环运行 IF或VF开环加速过程。 ③开环闭环切换 切入观测器估算角度。 ④转速闭环 进行速度闭环控制。。
无传感控制运行波形(汽车引擎扇热风扇)
① ② ③ ④
无传感控制运行波形中: • 相电流(绿色) • 开环电角度(蓝色) • 估测电角度(黄色)
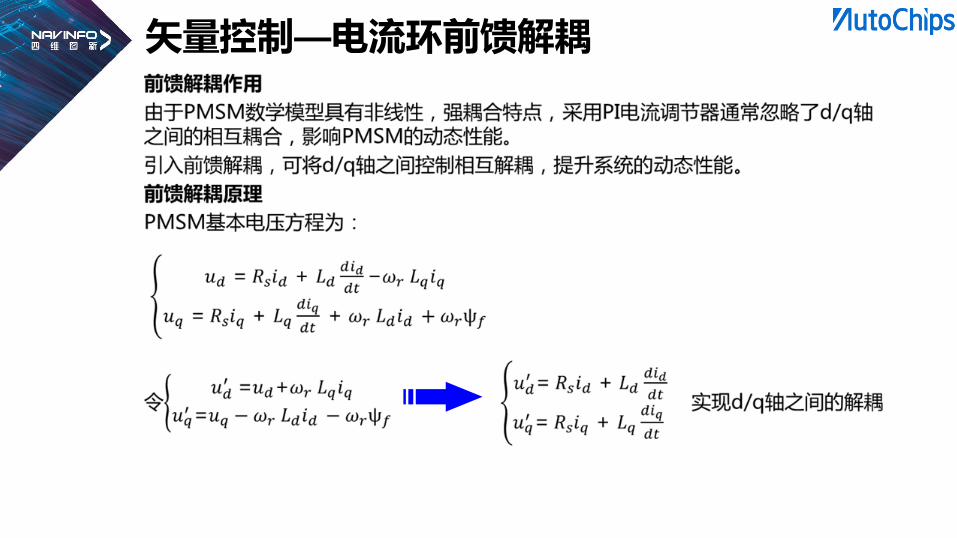
矢量控制—电流环前馈解耦
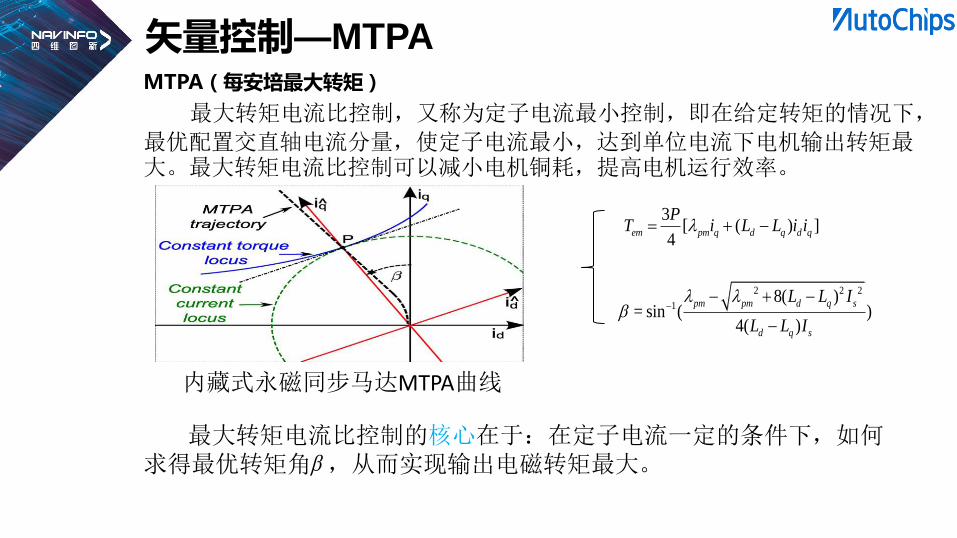
矢量控制—MTPA MTPA(每安培最大转矩)
最大转矩电流比控制,又称为定子电流最小控制,即在给定转矩的情况下,
最优配置交直轴电流分量,使定子电流最小,达到单位电流下电机输出转矩最大。最大转矩电流比控制可以减小电机铜耗,提高电机运行效率。
最大转矩电流比控制的核心在于:在定子电流一定的条件下,如何求得最优转矩角 ,从而实现输出电磁转矩最大。
内藏式永磁同步马达MTPA曲线
3[ ( ) ]
4em pm q d q d q
PT i L L i i
2 2 2
18( )
= sin ( )4( )
pm pm d q s
d q s
L L I
L L I
矢量控制—弱磁控制
FOC控制的矢量电流必须位于电流极限圆和电动势极限椭圆内,否则电枢电流不能跟随给定电流,永磁同步电机的调速性能将下降。
在电机低速运行区域,电动势极限椭圆较大,电流控制器输出电流能
力主要受电流极限圆的约束,限制了永磁同步电机低速时的输出转矩。 在高速运行区域,电动势极限椭圆不断缩小,电动势极限椭圆变成了
逆变器输出约束的主要方面,从而限制了永磁同步电机的调速运行范围。 弱磁控制:通过使定子绕组中有负向的d轴电流流过,削弱转子方向
上的磁通量,提高电机运行的最高转速。
矢量控制—母线电流及功率估算
矢量控制—限母线电流运行
矢量控制—死区补偿算法
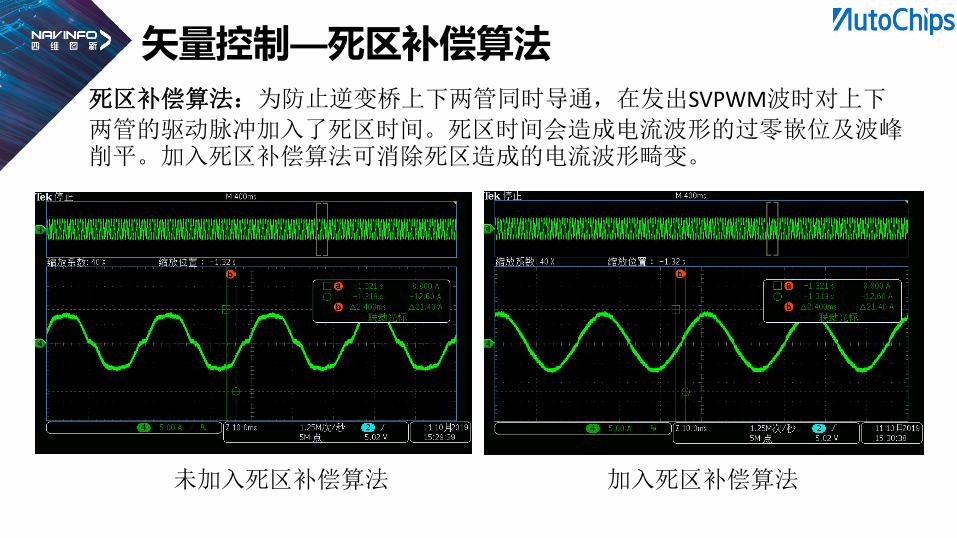
死区补偿算法:为防止逆变桥上下两管同时导通,在发出SVPWM波时对上下
两管的驱动脉冲加入了死区时间。死区时间会造成电流波形的过零嵌位及波峰削平。加入死区补偿算法可消除死区造成的电流波形畸变。
加入死区补偿算法 未加入死区补偿算法
矢量控制—过调制算法
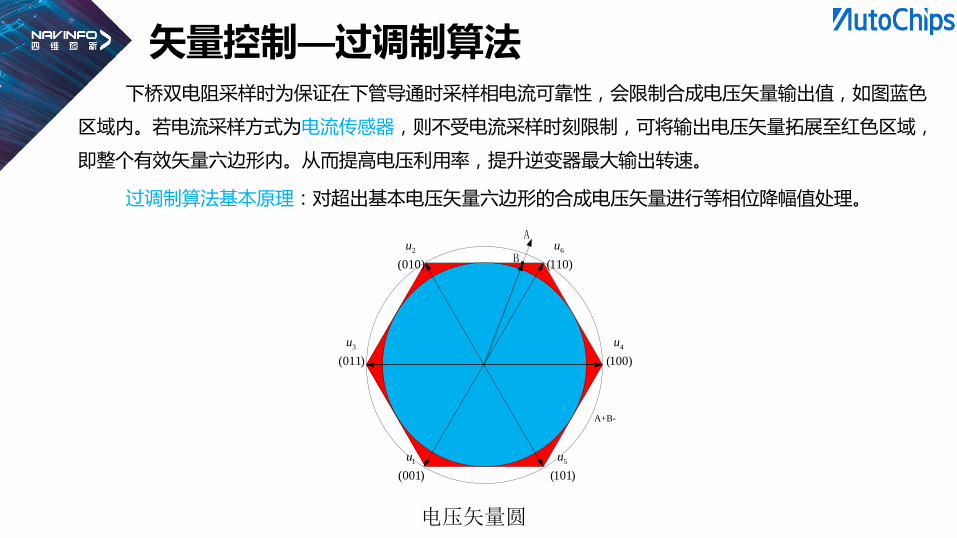
下桥双电阻采样时为保证在下管导通时采样相电流可靠性,会限制合成电压矢量输出值,如图蓝色
区域内。若电流采样方式为电流传感器,则不受电流采样时刻限制,可将输出电压矢量拓展至红色区域,
即整个有效矢量六边形内。从而提高电压利用率,提升逆变器最大输出转速。
过调制算法基本原理:对超出基本电压矢量六边形的合成电压矢量进行等相位降幅值处理。
电压矢量圆
2
(010)
u
4
(100)
u
6
(110)
u
3
(011)
u
1
(001)
u 5
(101)
u
A+B-
A
B
矢量控制—电磁刹车(能量回收)
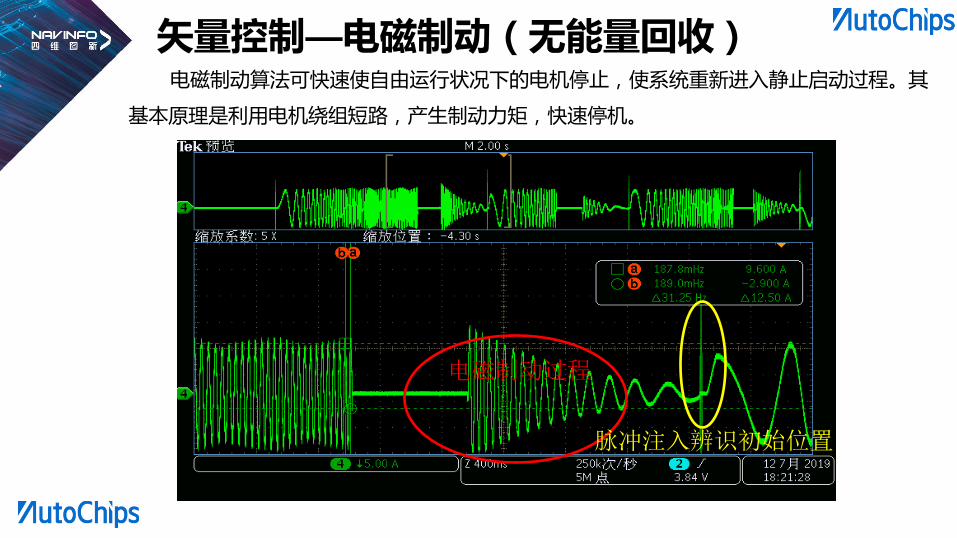
矢量控制—电磁制动(无能量回收) 电磁制动算法可快速使自由运行状况下的电机停止,使系统重新进入静止启动过程。其
基本原理是利用电机绕组短路,产生制动力矩,快速停机。
电磁制动过程
脉冲注入辨识初始位置
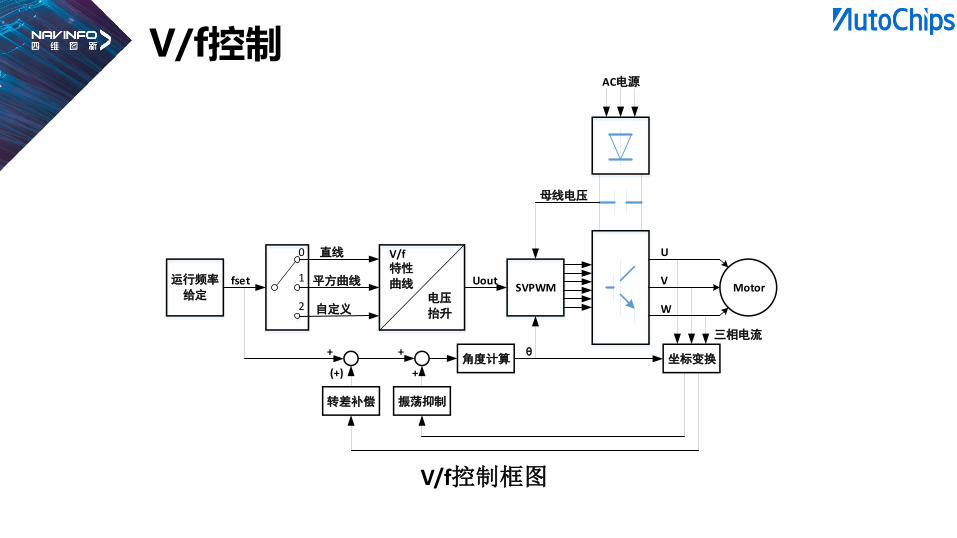
V/f控制
V/f控制框图
MotorSVPWM运行频率
给定
AC电源
U
V
W
母线电压
0
1
2
直线
平方曲线
自定义
fset Uout
V/f特性
曲线电压
抬升
坐标变换角度计算
转差补偿 振荡抑制
三相电流
+
(+) +
+ θ
ATC电机固件—V/f控制
V/f控制固件包含: • 转差补偿功能 对于异步电机,其定子电频率快于转子,定转子间存在转差。 视负载情况使用,提高电机带载能力。 • 电压抬升功能 能够在电机起动时提供转矩,使起动过程更加快速和平滑。 • 振荡抑制功能 能够在电机电流震荡时平复电流波动,使电机平稳运行。 同时,支持直线型、平方曲线型、自定义V/f特性曲线,根据实际需要进行选择。
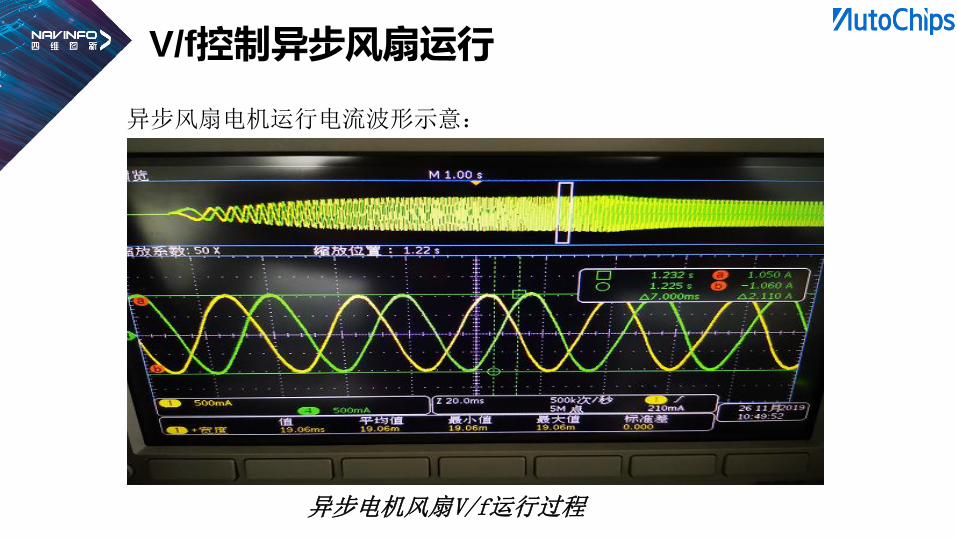
V/f控制异步风扇运行
异步风扇电机运行电流波形示意:
异步电机风扇V/f运行过程

电机演示实例
“小圆板”座椅通风演示:
https://www.bilibili.com/video/BV1nz411e7F5/
汽车冷却风扇演示:
https://www.bilibili.com/video/BV14V411r767/
吸油烟机演示:
https://www.bilibili.com/video/BV1Zp4y1U7LJ/
车窗升降器演示:
https://www.bilibili.com/video/BV1L54y1X7Q9/
联系我们
http://www.autochips.com/
(技术支持样品申请)
0755-26638118-10
[email protected] https://bbs.21ic.com/iclist-864-1.html
21论坛

问题答疑
敬请期待其他专题
ATC AC78xx无
传感电机应用介
绍
ATC AC78xx有
传感电机应用介
绍
ATC AC78xx电
机UI界面介绍
MCU EMC硬件
设计及实验 ……
典型问题答疑 如何获取AutoChips电机开发套件? 官方电机开发套件资料可通过杰发科技官网获取。
原厂电机开发板可通过官网进行样片申请,填写相关信息后,商务端会安排进行对接。样品申请链接:http://www.autochips.com/cn/SampleApply/ 原厂能提供哪些电机开发板?
目前对外提供的开发板有低压电机开发板、高压电机开发板、电机小圆板、继电器开发板(针对直流电机)。 AutoChips电机控制固件支持哪些算法? 1.方波支持有感、无感方波。 2.FOC支持HALL,编码器、无传感FOC。 3.电流采样支持单电阻、双电阻、三电阻、MOS内阻、电流传感器。 4.无感FOC角度估算支持滑膜和磁链观测器。 5.HALL FOC支持角度自学习,在不知道电机线序的情况下,可快速自学习获取角度。 6.更多算法支持,如脉冲注入、高频注入、顺逆风启动、电流前馈,MTPA,弱磁控制等。若需了解更多,可与我们联系。联系渠道可参考“联系我们”中提供的方式。
典型问题答疑 利用FOC算法进行控制,电机带载启动会否抖动 采用FOC算法,有感/无感的控制电机带载启动都不会出现抖动情况。 pid参数要调节吗?还是可以自动匹配
可手动整定,也可通过设置相关的参数(电流环响应带宽电机电阻、电感、惯量、反电动势常数、阻尼系数,速度环带宽)计算得到。 磁链观测器滤波器补偿用什么办法?是利用电容超前进行补偿吗?
磁链观测器滤波器补偿不是利用电容超前进行补偿,是对定子的反电动势做幅值和相位的补偿。 PMSM 无感FOC,什么条件下电机过热?
在适配新电机时,如果电机角度估测效果不佳,电机的运行效率会偏低,同样转速下电流偏大,电机发热严重。 正常运行时,电机中有电流流过,电机就会发热。负载越大,电机电流越大,电机发热会越严重。 PMSM可以一直用高频注入方式运行吗?
内嵌的永磁同步电机,在静止和低速可以采用高频注入方式运行,中高速高频注入效果角度估测会变差,需切换使用到电流观测器估算角度。

Thanks www.autochips.com













