Embed Size (px)
Citation preview
Information Fusion 5 (2004) 131–140
www.elsevier.com/locate/inffus
Acoustic robot navigation using distributed microphone arrays
Qing Hua Wang, Teodor Ivanov, Parham Aarabi *
Electrical and Computer Engineering, University of Toronto, 10 Kings College Road, Toronto, Canada M5S3G4
Received 22 July 2003; received in revised form 15 October 2003; accepted 15 October 2003
Abstract
This paper presents a method for the navigation of a mobile robot using sound localization in the context of a robotic lab tour
guide. Sound localization, which is achieved using an array of 24 microphones distributed on two walls of the lab, is performed
whenever the robot speaks as part of the tour. The SRP-PHAT sound localization algorithm is used to estimate the current location
of the robot using approximately 2 s of recorded signal. Navigation is achieved using several stops during which the estimated
location of the robot is used to make course adjustments. Experiments using the acoustic robot navigation system illustrate the
accuracy of the proposed technique, which resulted in an average localization error of about 7 cm close to the array and 30 cm far
away from the array.
� 2003 Elsevier B.V. All rights reserved.
Keywords: Robot navigation; Sound localization; Microphone arrays
1. Introduction
Numerous applications exist for mobile robots
capable of exploring and navigating through their
environment. They can be deployed in hazardous envi-ronments like mines and chemically contaminated
buildings, which are too dangerous for human intrusion.
They can and have been used in the exploration of new
or otherwise inaccessible environments like other plan-
ets. They can also be used in tasks such as conducting
guided tours of museums or laboratories. All of these
applications rely heavily on an accurate navigation
system, which in turn requires accurate estimations ofthe position of the robot. Once this information is
known, it is possible to plot a path between two or more
points, or even to find a course for an articulated robot
in a tightly spaced environment [17].
A wide variety of robot localization algorithms have
been explored in the past. A commonly applied method
makes use of electromagnetic beacons, which are de-
tected by the robot and used for localization [15,18].A robot localization technique that utilized environ-
mental landmarks was discussed by [19]. This system
required bearing measurements from the robot to three
*Corresponding author. Tel.: +1-416-9467893; fax: +1-416-
9784425.
E-mail address: [email protected] (P. Aarabi).
1566-2535/$ - see front matter � 2003 Elsevier B.V. All rights reserved.
doi:10.1016/j.inffus.2003.10.002
or more landmarks in order to perform robot localiza-
tion. Additional hardware, such as unspecified bearing
sensors were required to localize the robot from land-
mark information.
Vision-based localization represents another com-monly applied solution to the problem. One such
example is the technique of [6], which used cameras
mounted on the robot to capture landmark images and
compared them to a prior landmark map. The tech-
niques of [9,11] present two other examples of vision-
based robot localization. The technique used by [9] took
brightness measurements of the ceiling using a vertically
mounted camera, knowledge of the robot’s motion, anda base map of the entire environment’s ceiling brightness
in order to calculate the robot’s position. The vision-
based technique proposed by [11] used a neural network
trained with a set of sample images in the environment
in order to determine the robot’s position from camera
images. A similar technique involving visual landmarks
proposed by [20] combines the benefits of vision-based
and landmark-based localization. Each of these vision-based localization methods brings certain solutions to
the robot localization problem, but all require addi-
tional computation and hardware onboard the robot.
The ultrasonic sensor-based localization method
presented by [12] employed a set of ultrasonic sensors in
a ring configuration to create a map of the environment,
which was then compared with a prior environment
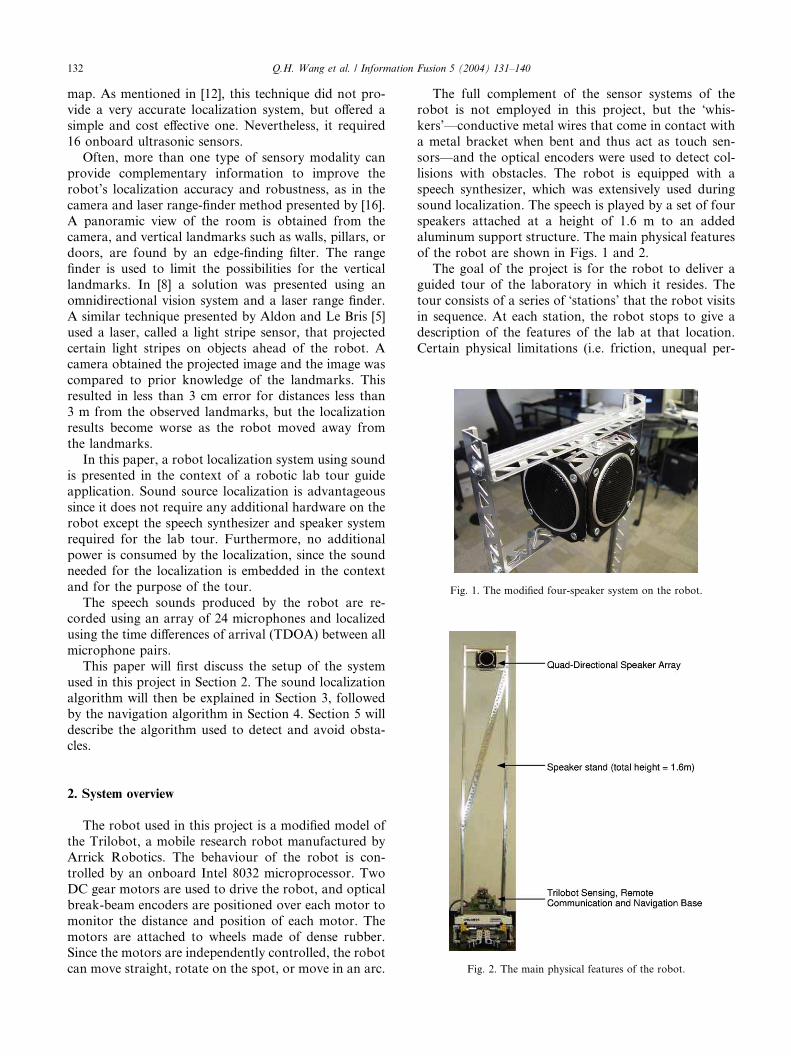
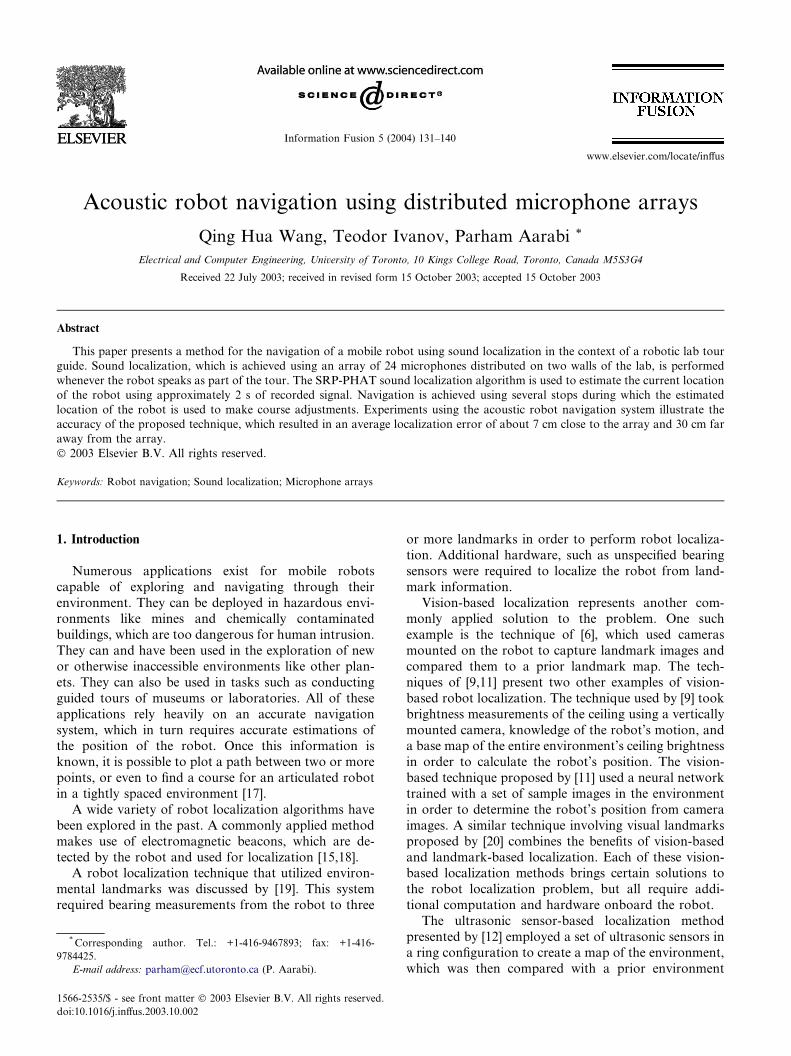
Fig. 1. The modified four-speaker system on the robot.
132 Q.H. Wang et al. / Information Fusion 5 (2004) 131–140
map. As mentioned in [12], this technique did not pro-vide a very accurate localization system, but offered a
simple and cost effective one. Nevertheless, it required
16 onboard ultrasonic sensors.
Often, more than one type of sensory modality can
provide complementary information to improve the
robot’s localization accuracy and robustness, as in the
camera and laser range-finder method presented by [16].
A panoramic view of the room is obtained from thecamera, and vertical landmarks such as walls, pillars, or
doors, are found by an edge-finding filter. The range
finder is used to limit the possibilities for the vertical
landmarks. In [8] a solution was presented using an
omnidirectional vision system and a laser range finder.
A similar technique presented by Aldon and Le Bris [5]
used a laser, called a light stripe sensor, that projected
certain light stripes on objects ahead of the robot. Acamera obtained the projected image and the image was
compared to prior knowledge of the landmarks. This
resulted in less than 3 cm error for distances less than
3 m from the observed landmarks, but the localization
results become worse as the robot moved away from
the landmarks.
In this paper, a robot localization system using sound
is presented in the context of a robotic lab tour guideapplication. Sound source localization is advantageous
since it does not require any additional hardware on the
robot except the speech synthesizer and speaker system
required for the lab tour. Furthermore, no additional
power is consumed by the localization, since the sound
needed for the localization is embedded in the context
and for the purpose of the tour.
The speech sounds produced by the robot are re-corded using an array of 24 microphones and localized
using the time differences of arrival (TDOA) between all
microphone pairs.
This paper will first discuss the setup of the system
used in this project in Section 2. The sound localization
algorithm will then be explained in Section 3, followed
by the navigation algorithm in Section 4. Section 5 will
describe the algorithm used to detect and avoid obsta-cles.
Fig. 2. The main physical features of the robot.
2. System overview
The robot used in this project is a modified model of
the Trilobot, a mobile research robot manufactured by
Arrick Robotics. The behaviour of the robot is con-
trolled by an onboard Intel 8032 microprocessor. Two
DC gear motors are used to drive the robot, and optical
break-beam encoders are positioned over each motor to
monitor the distance and position of each motor. The
motors are attached to wheels made of dense rubber.Since the motors are independently controlled, the robot
can move straight, rotate on the spot, or move in an arc.
The full complement of the sensor systems of therobot is not employed in this project, but the �whis-kers’––conductive metal wires that come in contact with
a metal bracket when bent and thus act as touch sen-
sors––and the optical encoders were used to detect col-
lisions with obstacles. The robot is equipped with a
speech synthesizer, which was extensively used during
sound localization. The speech is played by a set of four
speakers attached at a height of 1.6 m to an addedaluminum support structure. The main physical features
of the robot are shown in Figs. 1 and 2.
The goal of the project is for the robot to deliver a
guided tour of the laboratory in which it resides. The
tour consists of a series of �stations’ that the robot visitsin sequence. At each station, the robot stops to give a
description of the features of the lab at that location.
Certain physical limitations (i.e. friction, unequal per-
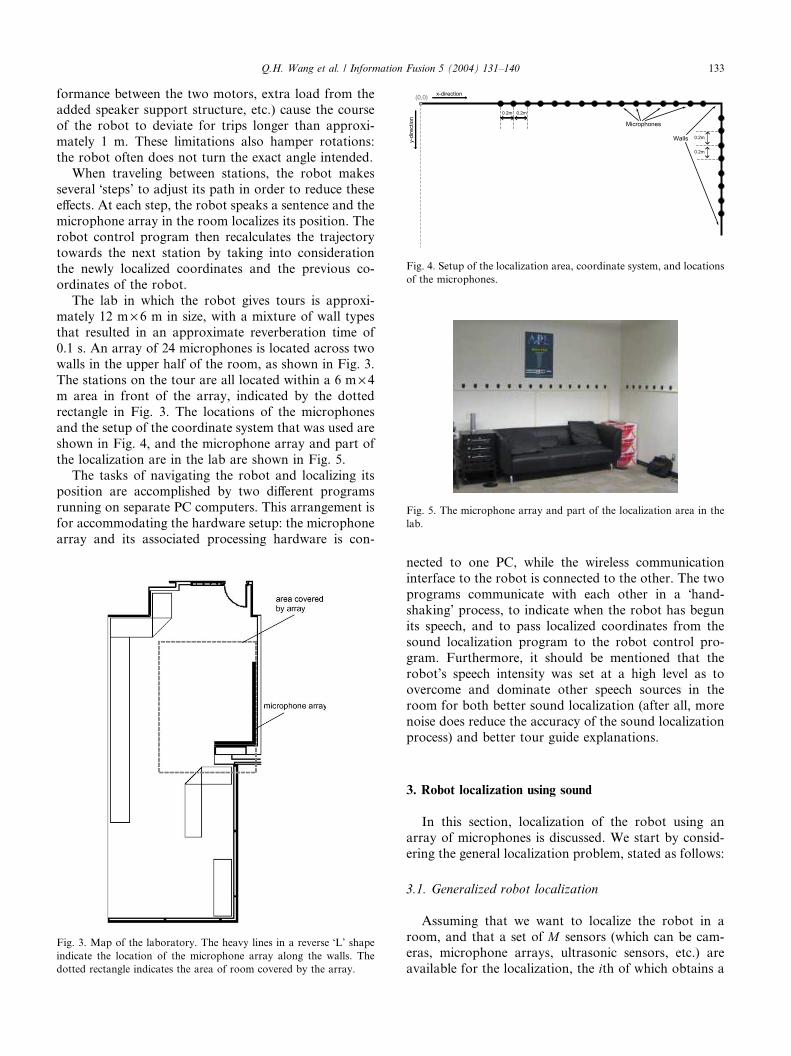
Microphones
0.2m
Walls
(0,0)x-direction
y-di
rect
ion
Fig. 4. Setup of the localization area, coordinate system, and locations
of the microphones.
Fig. 5. The microphone array and part of the localization area in the
lab.
Q.H. Wang et al. / Information Fusion 5 (2004) 131–140 133
formance between the two motors, extra load from theadded speaker support structure, etc.) cause the course
of the robot to deviate for trips longer than approxi-
mately 1 m. These limitations also hamper rotations:
the robot often does not turn the exact angle intended.
When traveling between stations, the robot makes
several �steps’ to adjust its path in order to reduce these
effects. At each step, the robot speaks a sentence and the
microphone array in the room localizes its position. Therobot control program then recalculates the trajectory
towards the next station by taking into consideration
the newly localized coordinates and the previous co-
ordinates of the robot.
The lab in which the robot gives tours is approxi-
mately 12 m · 6 m in size, with a mixture of wall types
that resulted in an approximate reverberation time of
0.1 s. An array of 24 microphones is located across twowalls in the upper half of the room, as shown in Fig. 3.
The stations on the tour are all located within a 6 m · 4m area in front of the array, indicated by the dotted
rectangle in Fig. 3. The locations of the microphones
and the setup of the coordinate system that was used are
shown in Fig. 4, and the microphone array and part of
the localization are in the lab are shown in Fig. 5.
The tasks of navigating the robot and localizing itsposition are accomplished by two different programs
running on separate PC computers. This arrangement is
for accommodating the hardware setup: the microphone
array and its associated processing hardware is con-
Fig. 3. Map of the laboratory. The heavy lines in a reverse �L’ shapeindicate the location of the microphone array along the walls. The
dotted rectangle indicates the area of room covered by the array.
nected to one PC, while the wireless communication
interface to the robot is connected to the other. The two
programs communicate with each other in a �hand-shaking’ process, to indicate when the robot has begun
its speech, and to pass localized coordinates from the
sound localization program to the robot control pro-
gram. Furthermore, it should be mentioned that the
robot’s speech intensity was set at a high level as toovercome and dominate other speech sources in the
room for both better sound localization (after all, more
noise does reduce the accuracy of the sound localization
process) and better tour guide explanations.
3. Robot localization using sound
In this section, localization of the robot using an
array of microphones is discussed. We start by consid-
ering the general localization problem, stated as follows:
3.1. Generalized robot localization
Assuming that we want to localize the robot in a
room, and that a set of M sensors (which can be cam-eras, microphone arrays, ultrasonic sensors, etc.) are
available for the localization, the ith of which obtains a

134 Q.H. Wang et al. / Information Fusion 5 (2004) 131–140
data vector Wi, the maximum likelihood robot locationis:
~x ¼ argmaxx
P ðxjW1;W2; . . . ;WMÞ ð1Þ
If we assume that the prior probability of the robot
location is uniform over all spatial positions (i.e. P ðxÞ isa constant), then the above statement is equivalent to:
~x ¼ argmaxx
P ðW1;W2; . . . ;WM jxÞ ð2Þ
Now, if we assume that, given the robot location, the
data vector of each sensor is independent, then we have:
~x ¼ argmaxx
YMi¼1
P ðWijxÞ ð3Þ
which, due to the monotonicity of the logarithm is
equivalent to:
~x ¼ argmaxx
XMi¼1
log PðWijxÞ ð4Þ
Eq. (4) can be viewed as a summation of different
spatial likelihood function (SLF) layers for each sensors.
For example, we can separately compute SLF layers for
the microphone arrays, each camera, and other sensors,
and then combine them by appropriately scaling themand adding them. While ideally a variety of sensors will
be used for the localization of the robot, in this paper we
focus on microphone array based localization. In other
words, if the entire data recorded by the microphones
is defined as W, we wish to compute:
~x ¼ argmaxx
log P ðWjxÞ ð5Þ
3.2. Sound localization
When the robot produces a sound, this sound arrives
at different microphones at different times and with
different intensities. These time differences and intensity
differences can be used to localize the sound source
location [1–4,7,13,14]. In practice, due to the presence ofreverberations, the TDOAs are more reliable for sound
source localization, and hence are commonly used as the
primary basis for source localization.
Assuming that the signal arriving at the ith micro-
phone is denoted as miðtÞ and is recorded from time t1 totime t2, then a standard cross correlation can be used to
localize the source position. In fact, if we assume our
sound source to be localized and the sensor noises to beindependent white Gaussian, then Eq. (5) is equivalent
to the standard cross correlation based localization
algorithm shown below:
~x ¼ argmaxx
Z t2
t1
Xi
Xj
miðtÞmjðt � sijðxÞÞdt ð6Þ
where ~x is the estimated source position vector and sijðxÞis the TDOA between microphones i and j corre-
sponding to position x. In practice, because the recorded
signal is discrete, we use a discrete-time form of Eq. (6).
Furthermore, in order to avoid delaying discrete signals
by non-integer amounts, and for other reasons that shall
soon become clear, we state the localization equation
in the frequency domain.
Assuming that the sampled signal miðtÞ is recordedfor a total of N samples, and denoting the fast Fourier
transform (FFT) of this discrete signal as MiðkÞ, we havean equivalent frequency domain and discrete-time ver-
sion of Eq. (6):
~x ¼ argmaxx
XN�1
k¼0
Xm
Xn
MmðkÞMnðkÞe�j2pkFssijðxÞ=N ð7Þ
where Fs is the sampling rate of the signal.
Hence, we compute a SLF, whose maximum value we
hope occurs at the true sound source location. While
such a strategy is commonly used for source localiza-
tion, the choice of SLF used in Eq. (7), which is knownas steered response power (SRP), is not commonly used
due to its poor performance in adverse (noisy and/or
reverberant) environments. A more commonly used
technique is to filter the recorded signals with a
weighting function prior to source localization. When
the filters are frequency whitening filters, this technique
is known as the SRP PHAse Transform, or SRP-PHAT
[2,10]. The SRP-PHAT approach has been successfullyemployed in practical environments even in the presence
of reverberations. Since our recorded signals are real
in the time domain, the SRP-PHAT version of Eq. (7)
can be stated as:
~x ¼ argmaxx
XN=2�1
k¼0
Xm
Xn
cosð\MmðkÞ � \MnðkÞ
� 2pkFssijðxÞ=NÞ ð8Þ
4. Navigation algorithm description
4.1. Tour algorithm
Within the main tour program, the coordinates of thestations are stored in an array, and the verbal explana-
tions required at each station are stored in a separate
array in the same order as the corresponding stations.
The algorithm that runs the entire tour is fairly simple: it
calls a separate traversal algorithm repeatedly to direct
the robot from one station to another until the final
station is reached. The traversal algorithm is the one
responsible for the navigation––recalculating trajecto-ries, handling obstacles, etc.––between two adjacent
stations.
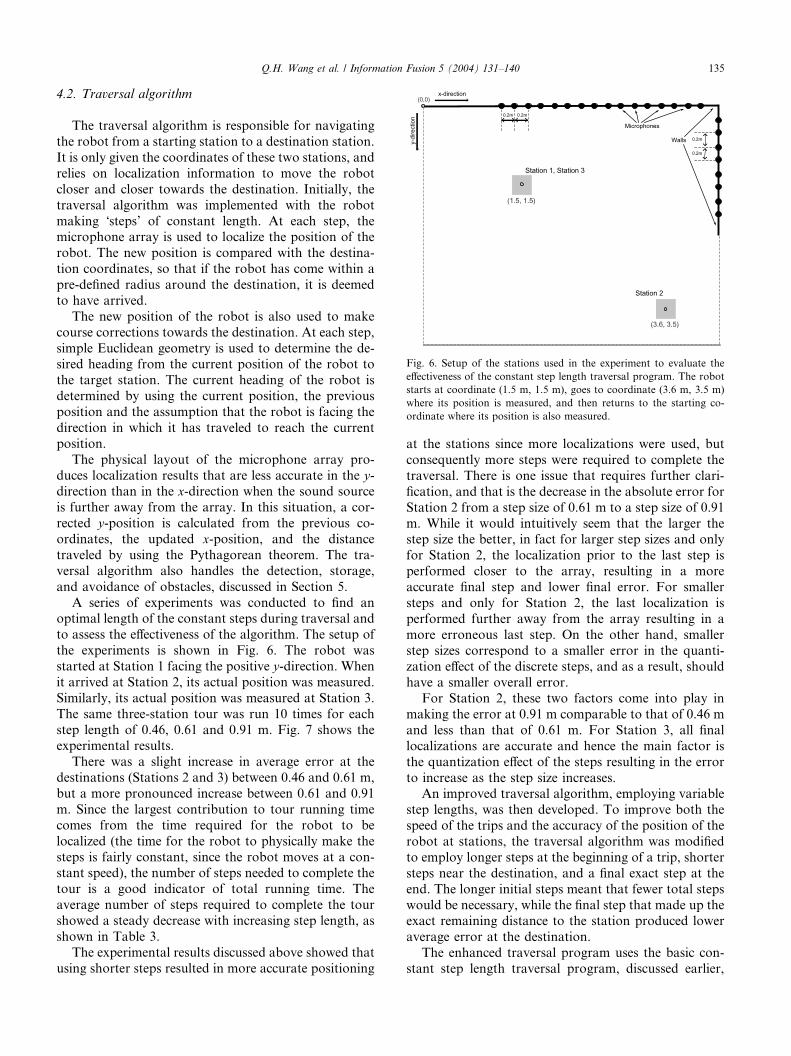
Microphones
Walls
(0,0)x-direction
y-di
rect
ion
(1.5, 1.5)
(3.6, 3.5)
Station 1, Station 3
Station 2
Fig. 6. Setup of the stations used in the experiment to evaluate the
effectiveness of the constant step length traversal program. The robot
starts at coordinate (1.5 m, 1.5 m), goes to coordinate (3.6 m, 3.5 m)
where its position is measured, and then returns to the starting co-
ordinate where its position is also measured.
Q.H. Wang et al. / Information Fusion 5 (2004) 131–140 135
4.2. Traversal algorithm
The traversal algorithm is responsible for navigating
the robot from a starting station to a destination station.
It is only given the coordinates of these two stations, and
relies on localization information to move the robot
closer and closer towards the destination. Initially, the
traversal algorithm was implemented with the robot
making �steps’ of constant length. At each step, themicrophone array is used to localize the position of the
robot. The new position is compared with the destina-
tion coordinates, so that if the robot has come within a
pre-defined radius around the destination, it is deemed
to have arrived.
The new position of the robot is also used to make
course corrections towards the destination. At each step,
simple Euclidean geometry is used to determine the de-sired heading from the current position of the robot to
the target station. The current heading of the robot is
determined by using the current position, the previous
position and the assumption that the robot is facing the
direction in which it has traveled to reach the current
position.
The physical layout of the microphone array pro-
duces localization results that are less accurate in the y-direction than in the x-direction when the sound source
is further away from the array. In this situation, a cor-
rected y-position is calculated from the previous co-
ordinates, the updated x-position, and the distance
traveled by using the Pythagorean theorem. The tra-
versal algorithm also handles the detection, storage,
and avoidance of obstacles, discussed in Section 5.
A series of experiments was conducted to find anoptimal length of the constant steps during traversal and
to assess the effectiveness of the algorithm. The setup of
the experiments is shown in Fig. 6. The robot was
started at Station 1 facing the positive y-direction. When
it arrived at Station 2, its actual position was measured.
Similarly, its actual position was measured at Station 3.
The same three-station tour was run 10 times for each
step length of 0.46, 0.61 and 0.91 m. Fig. 7 shows theexperimental results.
There was a slight increase in average error at the
destinations (Stations 2 and 3) between 0.46 and 0.61 m,
but a more pronounced increase between 0.61 and 0.91
m. Since the largest contribution to tour running time
comes from the time required for the robot to be
localized (the time for the robot to physically make the
steps is fairly constant, since the robot moves at a con-stant speed), the number of steps needed to complete the
tour is a good indicator of total running time. The
average number of steps required to complete the tour
showed a steady decrease with increasing step length, as
shown in Table 3.
The experimental results discussed above showed that
using shorter steps resulted in more accurate positioning
at the stations since more localizations were used, but
consequently more steps were required to complete the
traversal. There is one issue that requires further clari-
fication, and that is the decrease in the absolute error for
Station 2 from a step size of 0.61 m to a step size of 0.91
m. While it would intuitively seem that the larger thestep size the better, in fact for larger step sizes and only
for Station 2, the localization prior to the last step is
performed closer to the array, resulting in a more
accurate final step and lower final error. For smaller
steps and only for Station 2, the last localization is
performed further away from the array resulting in a
more erroneous last step. On the other hand, smaller
step sizes correspond to a smaller error in the quanti-zation effect of the discrete steps, and as a result, should
have a smaller overall error.
For Station 2, these two factors come into play in
making the error at 0.91 m comparable to that of 0.46 m
and less than that of 0.61 m. For Station 3, all final
localizations are accurate and hence the main factor is
the quantization effect of the steps resulting in the error
to increase as the step size increases.An improved traversal algorithm, employing variable
step lengths, was then developed. To improve both the
speed of the trips and the accuracy of the position of the
robot at stations, the traversal algorithm was modified
to employ longer steps at the beginning of a trip, shorter
steps near the destination, and a final exact step at the
end. The longer initial steps meant that fewer total steps
would be necessary, while the final step that made up theexact remaining distance to the station produced lower
average error at the destination.
The enhanced traversal program uses the basic con-
stant step length traversal program, discussed earlier,
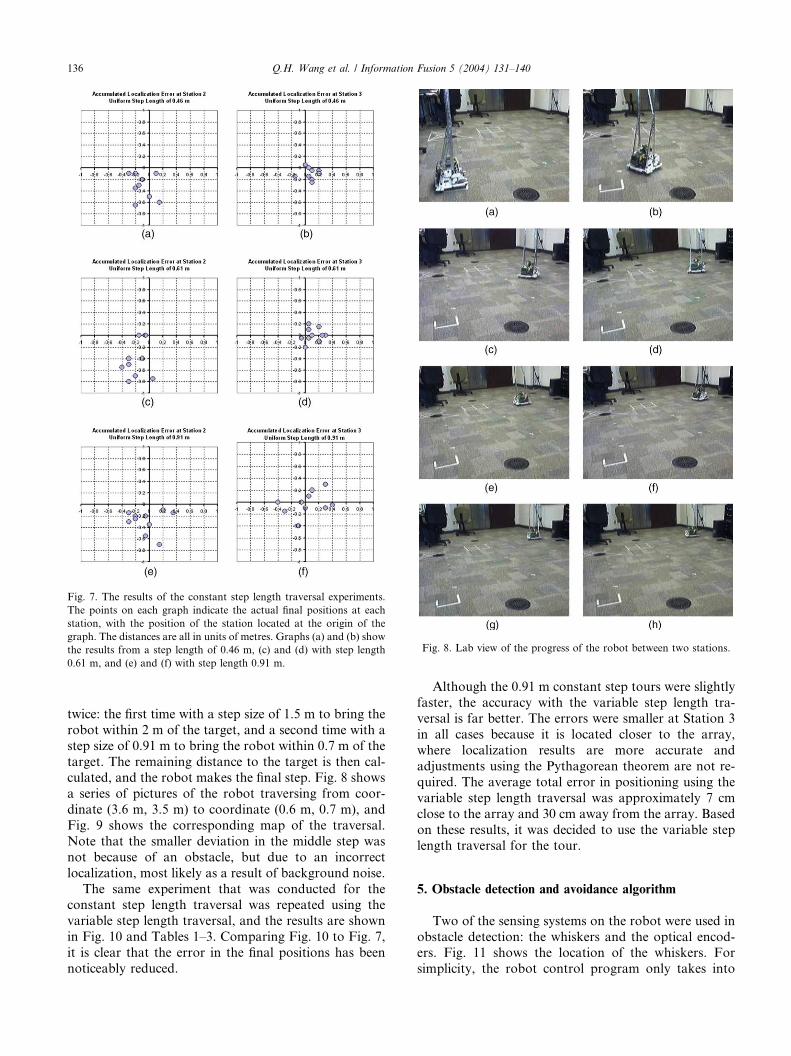
Fig. 7. The results of the constant step length traversal experiments.
The points on each graph indicate the actual final positions at each
station, with the position of the station located at the origin of the
graph. The distances are all in units of metres. Graphs (a) and (b) show
the results from a step length of 0.46 m, (c) and (d) with step length
0.61 m, and (e) and (f) with step length 0.91 m.
Fig. 8. Lab view of the progress of the robot between two stations.
136 Q.H. Wang et al. / Information Fusion 5 (2004) 131–140
twice: the first time with a step size of 1.5 m to bring the
robot within 2 m of the target, and a second time with a
step size of 0.91 m to bring the robot within 0.7 m of the
target. The remaining distance to the target is then cal-culated, and the robot makes the final step. Fig. 8 shows
a series of pictures of the robot traversing from coor-
dinate (3.6 m, 3.5 m) to coordinate (0.6 m, 0.7 m), and
Fig. 9 shows the corresponding map of the traversal.
Note that the smaller deviation in the middle step was
not because of an obstacle, but due to an incorrect
localization, most likely as a result of background noise.
The same experiment that was conducted for theconstant step length traversal was repeated using the
variable step length traversal, and the results are shown
in Fig. 10 and Tables 1–3. Comparing Fig. 10 to Fig. 7,
it is clear that the error in the final positions has been
noticeably reduced.
Although the 0.91 m constant step tours were slightly
faster, the accuracy with the variable step length tra-versal is far better. The errors were smaller at Station 3
in all cases because it is located closer to the array,
where localization results are more accurate and
adjustments using the Pythagorean theorem are not re-
quired. The average total error in positioning using the
variable step length traversal was approximately 7 cm
close to the array and 30 cm away from the array. Based
on these results, it was decided to use the variable steplength traversal for the tour.
5. Obstacle detection and avoidance algorithm
Two of the sensing systems on the robot were used in
obstacle detection: the whiskers and the optical encod-ers. Fig. 11 shows the location of the whiskers. For
simplicity, the robot control program only takes into
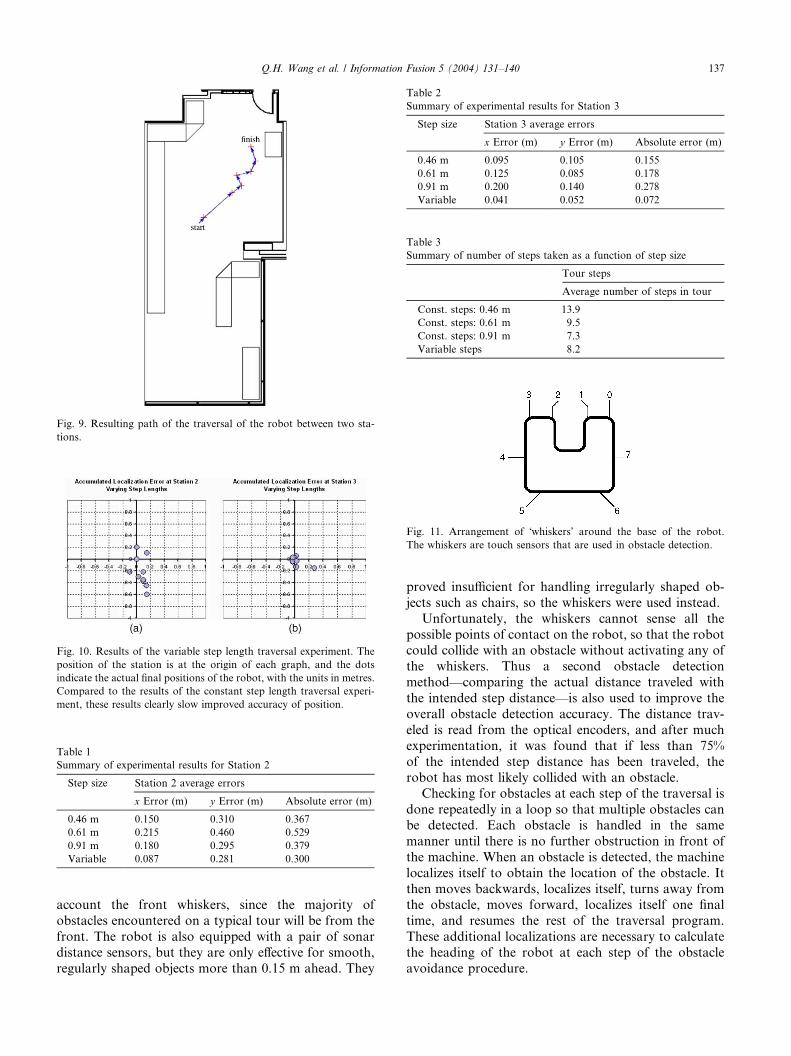
Fig. 9. Resulting path of the traversal of the robot between two sta-
tions.
Fig. 10. Results of the variable step length traversal experiment. The
position of the station is at the origin of each graph, and the dots
indicate the actual final positions of the robot, with the units in metres.
Compared to the results of the constant step length traversal experi-
ment, these results clearly slow improved accuracy of position.
Table 1
Summary of experimental results for Station 2
Step size Station 2 average errors
x Error (m) y Error (m) Absolute error (m)
0.46 m 0.150 0.310 0.367
0.61 m 0.215 0.460 0.529
0.91 m 0.180 0.295 0.379
Variable 0.087 0.281 0.300
Table 2
Summary of experimental results for Station 3
Step size Station 3 average errors
x Error (m) y Error (m) Absolute error (m)
0.46 m 0.095 0.105 0.155
0.61 m 0.125 0.085 0.178
0.91 m 0.200 0.140 0.278
Variable 0.041 0.052 0.072
Table 3
Summary of number of steps taken as a function of step size
Tour steps
Average number of steps in tour
Const. steps: 0.46 m 13.9
Const. steps: 0.61 m 9.5
Const. steps: 0.91 m 7.3
Variable steps 8.2
Fig. 11. Arrangement of �whiskers’ around the base of the robot.
The whiskers are touch sensors that are used in obstacle detection.
Q.H. Wang et al. / Information Fusion 5 (2004) 131–140 137
account the front whiskers, since the majority of
obstacles encountered on a typical tour will be from the
front. The robot is also equipped with a pair of sonar
distance sensors, but they are only effective for smooth,
regularly shaped objects more than 0.15 m ahead. They
proved insufficient for handling irregularly shaped ob-
jects such as chairs, so the whiskers were used instead.
Unfortunately, the whiskers cannot sense all the
possible points of contact on the robot, so that the robotcould collide with an obstacle without activating any of
the whiskers. Thus a second obstacle detection
method––comparing the actual distance traveled with
the intended step distance––is also used to improve the
overall obstacle detection accuracy. The distance trav-
eled is read from the optical encoders, and after much
experimentation, it was found that if less than 75%
of the intended step distance has been traveled, therobot has most likely collided with an obstacle.
Checking for obstacles at each step of the traversal is
done repeatedly in a loop so that multiple obstacles can
be detected. Each obstacle is handled in the same
manner until there is no further obstruction in front of
the machine. When an obstacle is detected, the machine
localizes itself to obtain the location of the obstacle. It
then moves backwards, localizes itself, turns away fromthe obstacle, moves forward, localizes itself one final
time, and resumes the rest of the traversal program.
These additional localizations are necessary to calculate
the heading of the robot at each step of the obstacle
avoidance procedure.
138 Q.H. Wang et al. / Information Fusion 5 (2004) 131–140
After the robot has moved away from the obstacle,the direction to turn, either left or right, is determined
based on the current heading direction and current
location of the robot. The aim is to turn such that
subsequent forward motion will tend to be toward the
center of the room, in order to avoid losing the robot off
the edges of the localization region. When the robot is
not near the edges, the direction of the turn depends on
the whiskers being pressed so that the robot turns away
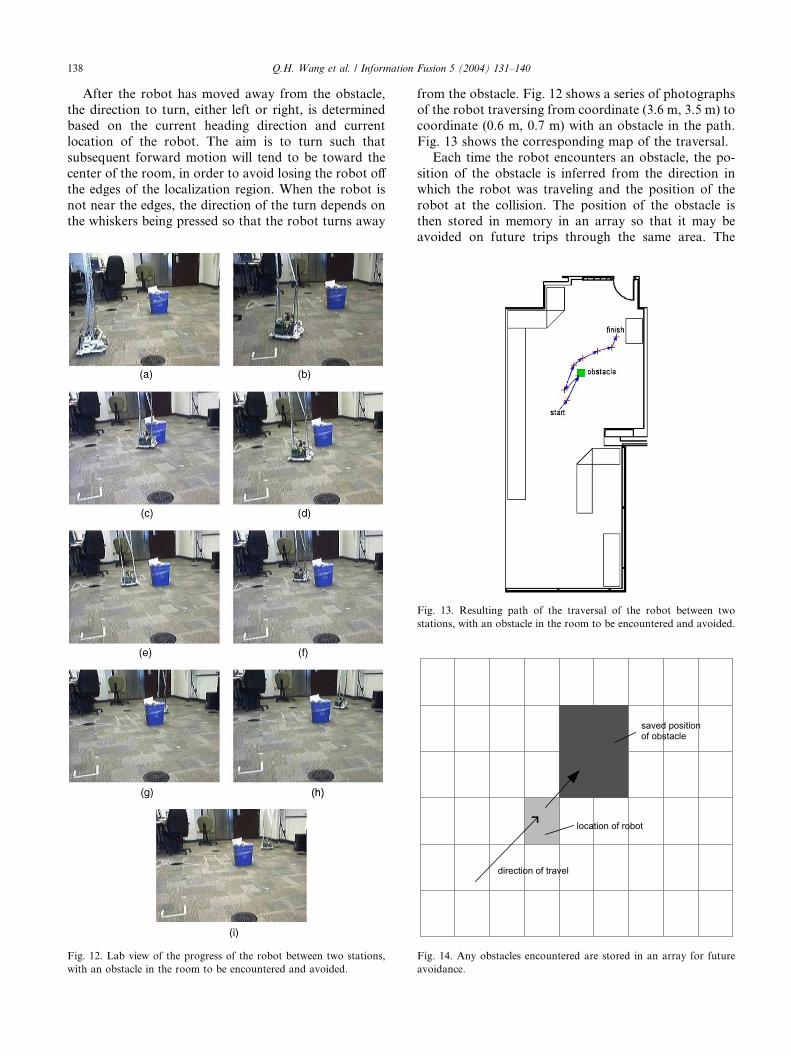
Fig. 12. Lab view of the progress of the robot between two stations,
with an obstacle in the room to be encountered and avoided.
from the obstacle. Fig. 12 shows a series of photographsof the robot traversing from coordinate (3.6 m, 3.5 m) to
coordinate (0.6 m, 0.7 m) with an obstacle in the path.
Fig. 13 shows the corresponding map of the traversal.
Each time the robot encounters an obstacle, the po-
sition of the obstacle is inferred from the direction in
which the robot was traveling and the position of the
robot at the collision. The position of the obstacle is
then stored in memory in an array so that it may beavoided on future trips through the same area. The
Fig. 13. Resulting path of the traversal of the robot between two
stations, with an obstacle in the room to be encountered and avoided.
direction of travel
location of robot
saved positionof obstacle
Fig. 14. Any obstacles encountered are stored in an array for future
avoidance.
Q.H. Wang et al. / Information Fusion 5 (2004) 131–140 139
relationship between the position of the robot at thecollision, the position of the saved obstacle, and the
direction of travel are shown in Fig. 14.
Before making each step in the traversal, the robot
control program checks the region ahead that will be
covered by the step for known obstacles so that they can
be avoided in advance. The program checks ahead more
than the distance of the step so that the robot does not
complete the step directly in front of a known obstacle,resulting in a collision on the next step. The regions to
either side of the checking path are also checked, to allow
for drift in the movements of the robot. If an obstacle is
found, the program calculates the angle needed for the
robot to turn and avoid the obstacle, and checks along
this new path for additional known obstacles until a clear
path is found. A representation of algorithm to check
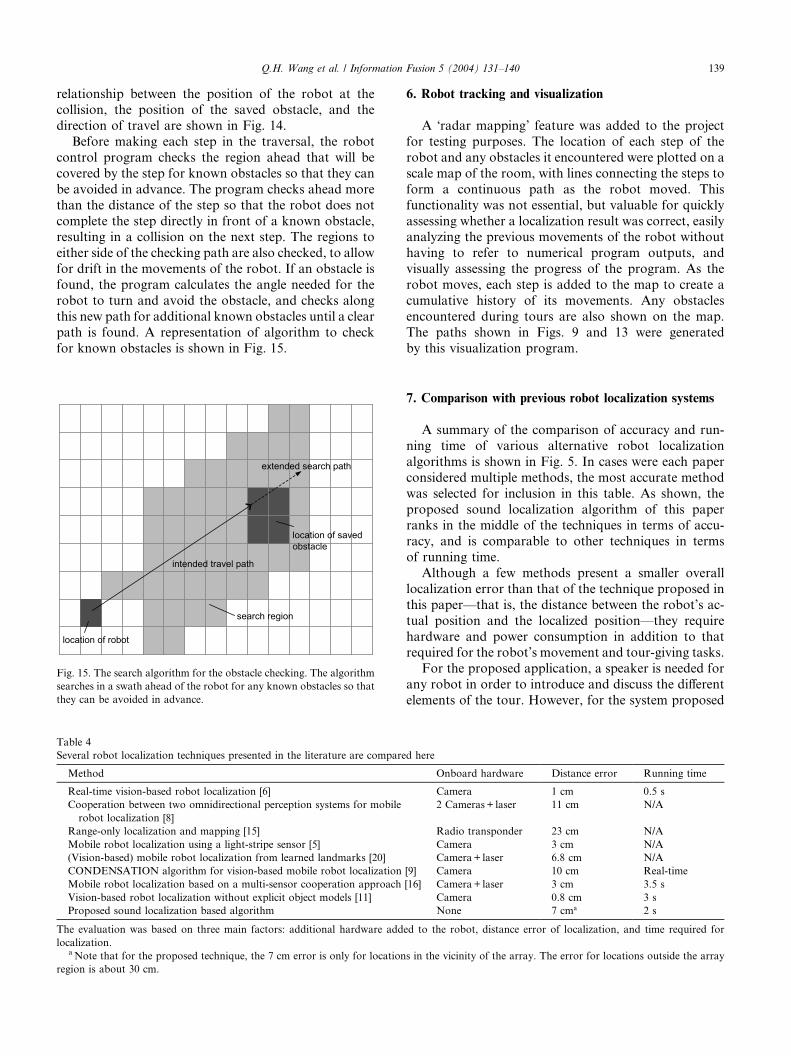
for known obstacles is shown in Fig. 15.
location of robot
intended travel path
extended search path
search region
location of saved obstacle
Fig. 15. The search algorithm for the obstacle checking. The algorithm
searches in a swath ahead of the robot for any known obstacles so that
they can be avoided in advance.
Table 4
Several robot localization techniques presented in the literature are compare
Method
Real-time vision-based robot localization [6]
Cooperation between two omnidirectional perception systems for mobile
robot localization [8]
Range-only localization and mapping [15]
Mobile robot localization using a light-stripe sensor [5]
(Vision-based) mobile robot localization from learned landmarks [20]
CONDENSATION algorithm for vision-based mobile robot localization
Mobile robot localization based on a multi-sensor cooperation approach
Vision-based robot localization without explicit object models [11]
Proposed sound localization based algorithm
The evaluation was based on three main factors: additional hardware add
localization.aNote that for the proposed technique, the 7 cm error is only for location
region is about 30 cm.
6. Robot tracking and visualization
A �radar mapping’ feature was added to the project
for testing purposes. The location of each step of the
robot and any obstacles it encountered were plotted on a
scale map of the room, with lines connecting the steps to
form a continuous path as the robot moved. This
functionality was not essential, but valuable for quickly
assessing whether a localization result was correct, easilyanalyzing the previous movements of the robot without
having to refer to numerical program outputs, and
visually assessing the progress of the program. As the
robot moves, each step is added to the map to create a
cumulative history of its movements. Any obstacles
encountered during tours are also shown on the map.
The paths shown in Figs. 9 and 13 were generated
by this visualization program.
7. Comparison with previous robot localization systems
A summary of the comparison of accuracy and run-
ning time of various alternative robot localization
algorithms is shown in Fig. 5. In cases were each paper
considered multiple methods, the most accurate method
was selected for inclusion in this table. As shown, the
proposed sound localization algorithm of this paperranks in the middle of the techniques in terms of accu-
racy, and is comparable to other techniques in terms
of running time.
Although a few methods present a smaller overall
localization error than that of the technique proposed in
this paper––that is, the distance between the robot’s ac-
tual position and the localized position––they require
hardware and power consumption in addition to thatrequired for the robot’s movement and tour-giving tasks.
For the proposed application, a speaker is needed for
any robot in order to introduce and discuss the different
elements of the tour. However, for the system proposed
d here
Onboard hardware Distance error Running time
Camera 1 cm 0.5 s
2 Cameras+ laser 11 cm N/A
Radio transponder 23 cm N/A
Camera 3 cm N/A
Camera+ laser 6.8 cm N/A
[9] Camera 10 cm Real-time
[16] Camera+ laser 3 cm 3.5 s
Camera 0.8 cm 3 s
None 7 cma 2 s
ed to the robot, distance error of localization, and time required for
s in the vicinity of the array. The error for locations outside the array

140 Q.H. Wang et al. / Information Fusion 5 (2004) 131–140
in this paper, no extra hardware on the robot is requiredfor tracking purposes. Ideally, to improve the accuracy
and robustness of the localization, a multi-modal ap-
proach should eventually be employed combining our
proposed acoustic method with the visual methods that
are compared in Table 4.
8. Conclusion
In this paper a robot navigation system was imple-
mented using sound localization. A distributed array of24 microphones was used to localize the position of the
robot. With this system, the robot was programmed to
conduct a guided laboratory tour. To travel between
stations on the tour, the robot made a series of steps,
and at each step sound localization was used to find the
new location, taking advantage of the fact that the robot
was speaking as part of the tour. The updated locations
were used to calculate any needed course corrections.Experimental results showed that the error in the posi-
tion of the robot at each station was approximately 7 cm
close to the array. The robot detected obstacles with a
set of touch sensors, and with the use of sound locali-
zation, the positions of the obstacles were saved in
memory to be avoided for future tours.
References
[1] P. Aarabi, Self localizing dynamic microphone arrays, IEEE
Transactions on Systems, Man, and Cybernetics, Part C 32 (4)
(2002) 474–484.
[2] P. Aarabi, The fusion of distributed microphone arrays for sound
localization, EURASIP Journal on Applied Signal Processing
Special Issue on Sensor Networks 4 (2003) 338–347.
[3] P. Aarabi, A. Mahdavi, The relation between speech segment
selectivity and time-delay estimation accuracy, in: Proceedings of
the IEEE Conference on Acoustics, Speech, and Signal Processing,
May 2002.
[4] P. Aarabi, S. Zaky, Robust sound localization using multi-source
audiovisual information fusion, Information Fusion 3 (2) (2001)
209–223.
[5] M.J. Aldon, L. Le Bris, Mobile robot localization using a light-
stripe sensor, in: Proceedings of the ’94 Symposium on Intelligent
Vehicles, October 1994, pp. 255–259.
[6] Sami Atiay, Greg Hager, Real-time vision-based robot localiza-
tion, IEEE International Conference on Robotics and Automa-
tion 1 (1991) 639–644.
[7] M.S. Brandstein, H. Silverman, A robust method for speech signal
time-delay estimation in reverberant rooms, in: Proceedings of the
IEEE Conference on Acoustics, Speech, and Signal Processing,
May 1997.
[8] A. Clerentin, L. Delahoche, E. Brassart, Cooperation between two
omnidirectional perception systems for mobile robot localization,
in: IEEE International Conference on Intelligent Robots and
Systems, vol. 2, October 2000, pp. 1499–1504.
[9] F. Dellaert, W. Burgardan, D. Fox, S. Thrun, Using the
condensation algorithm for robust, vision-based mobile robot
localization, in: IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition, vol. 2, 1999, pp. 588–
594.
[10] J. DiBiase, H. Silverman, M. Brandstein, Robust localization in
reverberant rooms, in: M.S. Brandstein, D.B. Ward (Eds.),
Microphone Arrays: Signal Processing Techniques and Applica-
tions, 2001.
[11] G. Dudek, C. Zhang, Vision-based robot localization without
explicit object models, in: IEEE International Conference on
Robotics and Automation, vol. 1, April 1996, pp. 76–82.
[12] Feng-ji Zhao, Hai-jiao Guo, Abe Kenichi, A mobile robot
localization using ultrasonic sensors in indoor environment, in:
Proceedings of the 6th IEEE International Workshop on Robot
and Human Communication, RO-MAN’97, October 1997,
pp. 52–57.
[13] J. Flanagan, J. Johnston, R. Zahn, G. Elko, Computer-steered
microphone arrays for sound transduction in large rooms, Journal
of the Acoustical Society of America (1985) 1508–1518.
[14] K. Guentchev, J. Weng, Learning-based three dimensional sound
localization using a compact non-coplanar array of microphones,
in: Proceedings of the 1998 AAAI Symposium on Intelligent
Environments, 1998.
[15] G. Kantor, S. Singh, Preliminary results in range-only localization
and mapping, in: IEEE International Conference on Robotics and
Automation, vol. 2, May 2002, pp. 1818–1823.
[16] D. Laurent, M. El Mustapha, P. Claude, V. Pascal, A mobile
robot localization based on a multisensor cooperation approach,
in: Proceedings of the IEEE IECON 22nd International Confer-
ence on Industrial Electronics, Control and Instrumentation,
vol. 1, August 1996, pp. 155–160.
[17] Elisha Sacks, Path planning for planar articulated robots using
configuration spaces and compliant motion, IEEE Transactions
on Robotics and Automation 19 (3) (2003) 381–390.
[18] Ishwar K. Sethi, Gening Yu, A neural network approach to robot
localization using ultrasonic sensors, Proceedings of the 5th IEEE
International Symposium on Intelligent Control 1 (1990) 513–
517.
[19] I. Shimshoni, On mobile robot localization from landmark
bearings, IEEE Transactions on Robotics and Automation 18
(2002) 971–976.
[20] R. Sim, G. Dudek, Mobile robot localization from learned
landmarks, in: IEEE International Conference on Intelligent
Robots and Systems, vol. 2, October 1998, pp. 1060–1065.




























