Embed Size (px)
DESCRIPTION
Citation preview

Overview of Artificial Intelligence
Thomas R. IoergerAssociate Professor
Department of Computer ScienceTexas A&M University

What is AI?
• Real applications, not science fiction– Control systems, diagnosis systems, games,
interactive animations, combat simulations, manufacturing scheduling, transportation logistics, financial analysis, computer-aided tutoring, search-and-rescue robots

Different Perspectives• Philosophical perspective
– What is the nature of “intelligence”? Can a machine/program ever be truly “intelligent”?
– Strong AI hypothesis: Is acting intelligently sufficient? – laws of thought; rational (ideal) decision-making
• Socrates is a man; men are mortal; therefore, Socrates is mortal
• Psychological perspective– What is the nature of “human intelligence”?– Cognitive science – concept representations, internal
world model, information processing metaphor– role of ST/LT memory? visualization? emotions?
analogy? creativity?– build programs to simulate inference, learning...

• Mathematical perspective– Is “intelligence” a computable function?– input: world state, output: actions – Can intelligence be systematized? (Leibnitz) – just a matter of having enough rules?– higher-order logics for belief, self-reference
• Engineering (pragmatic) perspective– AI helps build complex systems that solve difficult real-
world problems– decision-making (agents)– use knowledge-based systems
to encode “expertise” (chess, medicine, aircraft engines...)
sense
decide act
weak methods:Search Planning
strong methods:Inference

Search Algorithms
• Define state representation• Define operators (fn: stateneighbor states)• Define goal (criteria)
• Given initial state (S0), generate state spaceS0

Many problems can be modeled as search
• tic-tac-toe– states=boards, operator=moves
• symbolic integration– states=equations, opers=algebraic manipulations
• class schedule– states=partial schedule, opers=add/remove class
• rock band tour (traveling salesman problem) – states=order of cities to visit, opers=swap order
• robot-motion planning– states=robot configuration, opers=joint bending

1
2 12
3 6 8 13 14
4 5 7 9 10 11 15
1
2 43
5 6 7 8 9 10 11 12 13
14 15 16 17 18 19 20
Depth-first search(DFS)
Breadth-first search(BFS)
Notes: recursive algorithms using stacks or queuesBFS often out-performs, due to memory limits for large spaceschoice depends on complexity analysis: consider exponential tree size O(bd)

Heuristics
• give guidance to search in terms of which nodes look “closest to the goal” – node evaluation function– h(n)=w1*(piece_differential)+w2*(center_control)+
w3*(#pieces_can_be_taken)+w4*(#kings)
• greedy algorithms search these nodes first • bias direction of search to explore “best” parts of
state space (most likely to contain goal)• A* algorithm
– optimal (under certain conditions)– finds shortest path to a goal– insensitive to errors in heuristic function

Specialized Search Algorithms
• Game-playing– two-player zero-sum games (alternate moves)– minimax algorithm: form of “look-ahead” – If I make a
move, how will opponent likely respond? Which move leads to highest assured payoff?
• Constraint-satisfaction problems (CSPs)– state=partial variable assignment– goal find assignment that satisfies constraints– algorithms use back-tracking, constraint propagation,
and heuristics– pre-process constraint-graph to make more efficient– examples: map-coloring, propositional satisfiability,
server configuration

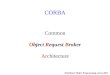
• Variables WA, NT, Q, NSW, V, SA, T
• Domains Di = {red,green,blue}
• Constraints: adjacent regions must have different colors, e.g., WA ≠ NT
CSP algorithmsoperate on the constraint graph

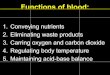
Planning• How to transform world state to achieve goal?• operators represent actions
– encode pre-conditions and effects in logic
Initial state:in(kitchen)have(eggs)have(flour)have(sugar)have(pan)~have(cake)
Goal: have(cake)
mix dryingredients
mix wet ingredients
transferingredientsfrom bowlto pan
bake at 350
applyfrosting
pre-conds: x ingredient(x,cake) dry(x)have(x)
effect: mixed(dry_ingr)
pre-conds: mixed(dry_ingr)& mixed(wet_ingr)
pre-cond: baked
goto kitchen
goto store
startcar
buymilk
sautee
another example to think about:planning rescue mission at disaster site

Planning• How to transform world state to achieve goal?• operators represent actions
– encode pre-conditions and effects in logic
Initial state:in(kitchen)have(eggs)have(flour)have(sugar)have(pan)~have(cake)
Goal: have(cake)
mix dryingredients
mix wet ingredients
transferingredientsfrom bowlto pan
bake at 350
applyfrosting
pre-conds: x ingredient(x,cake) dry(x)have(x)
effect: mixed(dry_ingr)
pre-conds: mixed(dry_ingr)& mixed(wet_ingr)
pre-cond: baked
goto kitchen
goto store
startcar
buymilk
sautee
another example to think about:planning rescue mission at disaster site

Planning Algorithms
have(cake) <= baked(cake)&have(frosting) <=...
• State-space search– search for sequence of actions– very inefficient
• Goal regression– work backwards from goal– identify actions relevant to goal; make sub-goals
• Partial-order planning– treat plan as a graph among actions– add links representing dependencies
• GraphPlan algorithm– keep track of sets of achievable states; more efficient
• SatPlan algorithm – model as a satisfiability problem

Knowledge-Based Methods• need: representation for search heuristics and planning
operators• need expertise to produce expert problem-solving behavior • first-order logic – a formal language for representing
knowledge• rules, constraints, facts, associations, strategies...
– rain(today)wet(road)– feverinfection– in(class_C_air_space)reduce(air_speed,150kts)– can(take_opp_queen,X)&~losing_move(X)do(X)
• use knowledge base (KB) to infer what to do– goals & initial_state & KB do(action)– need inference algorithms to derive what is entailed
• declarative vs. procedural programming

First-Order Logic• lingua franca of AI• syntax
– predicates (relations): author(Candide,Voltaire)– connectives: & (and), v (or), ~ (not), (implies)– quantified variables: X person(X)Y mother(X,Y)
• Ontologies – systems of concepts for writing KBs– categories of stuff (solids, fluids, living, mammals, food,
equipment...) and their properties– places (in), part_of, measures (volume)– domain-dependent: authorship, ambush, infection...– time, action, processes (Situation Calculus, Event Logic)– beliefs, commitments
• issues: granularity, consistency, expressiveness

Inference Algorithms
• Natural deduction– search for proof of query– use rules like modus ponens (from A and AB, get B)
• Backward-chaining– start with goal, reduce to sub-goals– complete only for definite-clause KBs (rules with
conjunctive antecedents)
• Resolution Theorem-proving– convert all rules to clauses (disjunctions)– {AvB,~BvC}AvC– keeping resolving clauses till produce empty clause– complete for all FOL KBs
D
A&BD
A BvC ~C
B

Prolog and Expert Systems
• Automated deduction systems• programming = writing rules• make query, system responds with true/false
plus variable bindings• inference algorithm based on backward-chaining

Prolog examplesibling(X,Y) :- parent(Z,X), parent(Z,Y). grandfather(X,Y) :- father(X,Z),parent(Z,Y).parent(X,Y) :- father(X,Y). parent(X,Y) :- mother(X,Y).mother(tracy, sally). father(bill, sally). father(bill, erica). father(mike, bill).
?- sibling(sally,erica). Yes
?- grandfather(sally,X). grandfather(sally,mike)

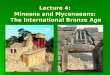
• Unification Algorithm– determine variable bindings to match antecedents of
rules with facts– unif. algorithm traverses syntax tree of expressions– P(X,f(Y),Y) matches P(a,f(b),b) if {X/a,Y/b}
– also matches P(a,f(a),a)– does not match P(a,b,c), P(b,b,b)
P
X f Y
Y
P
a f b
b

• Managing Uncertainty in real expert systems– default/non-monotonic logics (assumptions)– certainty factors (degrees of beliefs)– probabilistic logics– Bayesian networks (causal influences)
• Complexity of inference?– suitable for real-time applications?

Application of Data Structures and Algorithms in AI
• priority queues in search algorithms• recursion in search algorithms• shortest-path algorithm for planning/robotics• hash tables for indexing rules by predicate in KBS• dynamic programming to improve efficiency of
theorem-provers (caching intermediate inferences)• graph algorithms for constraint-satisfaction
problems (arc-consistency)• complexity analysis to select search algorithm
based on branching factor and depth of solution for a given problem

Use of AI in Research• intelligent agents for flight simulation
– collaboration with Dr. John Valasek (Aerospace Eng.)– goal: on-board decision-making without ATC– approach: use 1) multi-agent negotiation, 2)
reinforcement learning
• pattern recognition in protein crystallography– collaboration with Dr. James Sacchettini (Biochem.)– goal: automate determination of protein structures
from electron density maps – approach: extract features representing local 3D
patterns of electron density and use to recognize amino acids and build
– uses neural nets, and heuristics encoding knowledge of typical protein conformations and contacts

• TAMU courses on AI– CPSC 420/625 – Artificial Intelligence– undergrad
• CPSC 452 – Robotics and Spatial Intelligence• also related: CPSC 436 (HCI) and CPSC 470 (IR)
– graduate• CPSC 609 - AI Approaches to Software Engineering*• CPSC 631 – Agents/Programming Environments for AI• CPSC 632 - Expert Systems*• CPSC 633 - Machine Learning• CPSC 634 Intelligent User Interfaces• CPSC 636 - Neural Networks• CPSC 639 - Fuzzy Logic and Intelligent Systems• CPSC 643 Seminar in Intelligent Systems and Robotics• CPSC 644 - Cortical Networks• CPSC 666 – Statistical Pattern Recognition (not official yet) • Special Topics courses (CPSC 689)...• * = not actively taught

goals KB initial state
goal state
perception
action
agent environment