Embed Size (px)
Citation preview
Developers.IO 2016 La-5
Ⓒ Classmethod, Inc.
Feb.20.2016
1
IoTT H E F O R C E A W S K E N S
WARS字幕:清野 完治
自己紹介
清野 剛史(せーの)
クラスメソッド株式会社
AWSコンサルティング部所属 IoTチーム所属 デバイスやセンサーと向き合う毎日 2015年12月 暗黒面に堕ちる
2
La-5

デバイスの検証作業
3
楽しい

Groveでセンサー系も
超ラクに
4
超音波センサー
PIR(人感)センサー
サウンドセンサー
温度/湿度/9軸/加速度
気圧/光量/I2C/水分量
etc…
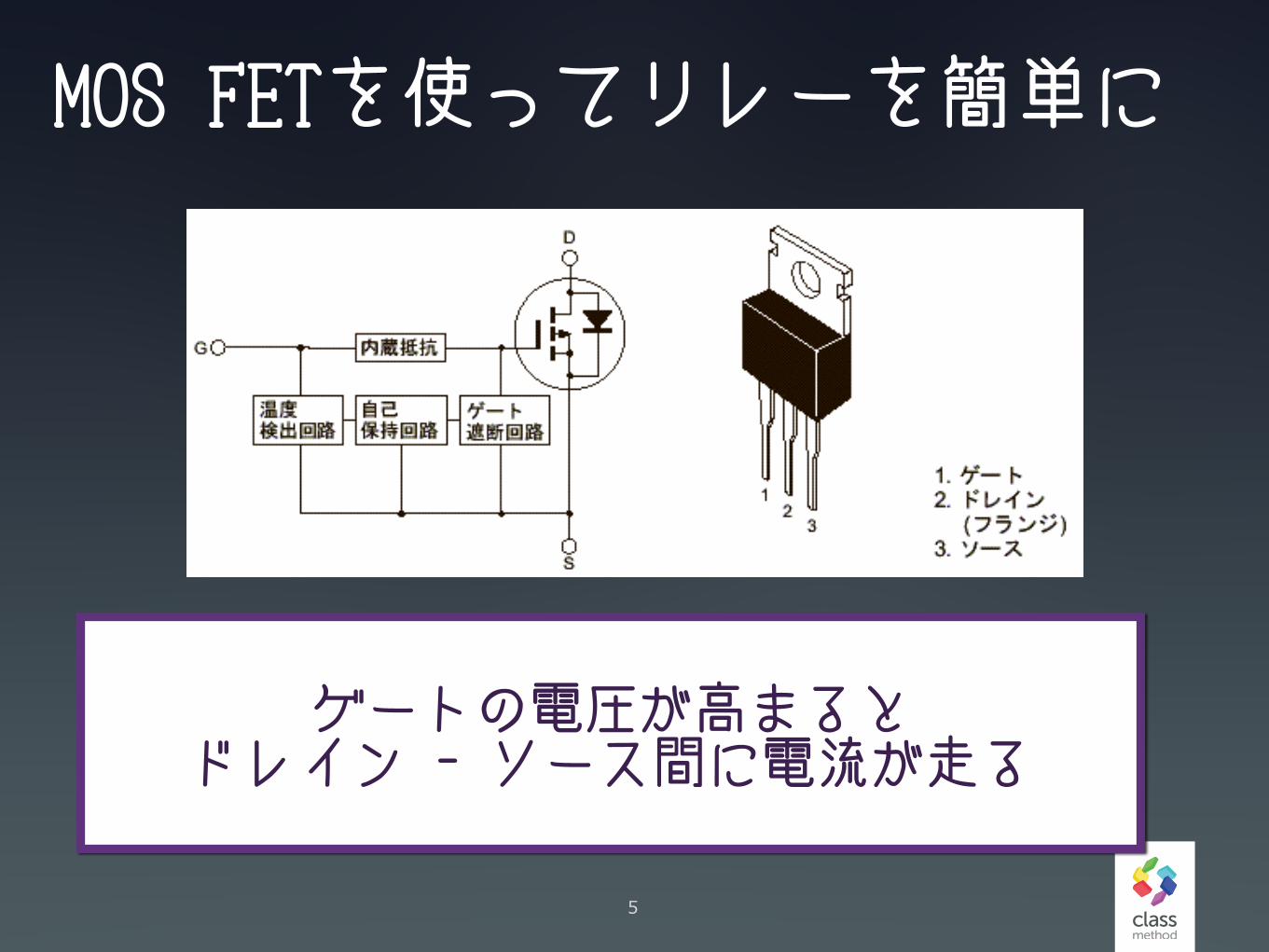
MOS FETを使ってリレーを簡単に
5
ゲートの電圧が高まると ドレイン - ソース間に電流が走る
MOS FETを使ってリレーを簡単に
6
挿して配線するだけ
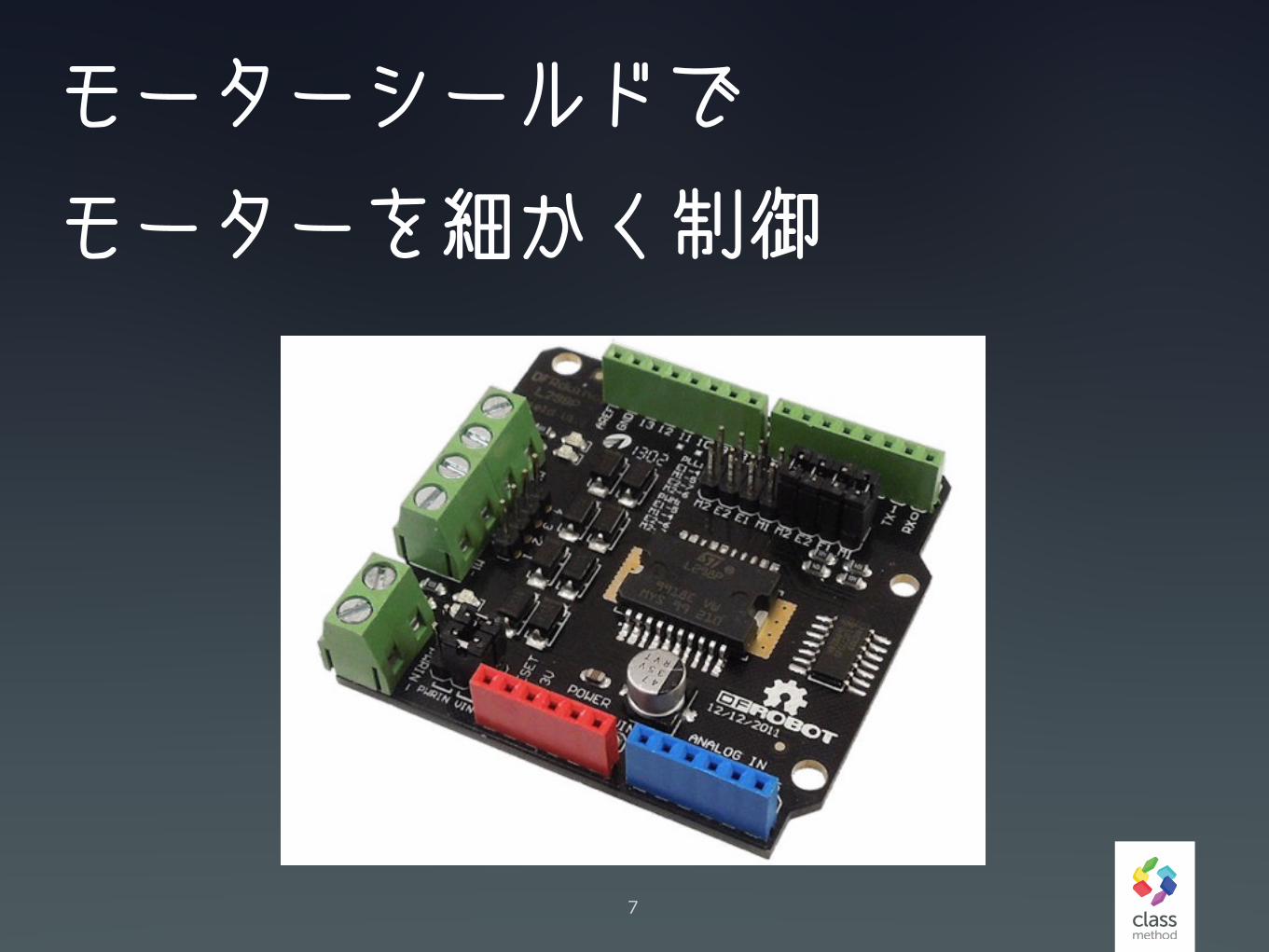
モーターシールドで
モーターを細かく制御
7
既存の電子機器をバラして
チップを確認する
8
シングルボードとつなげることで 制御可能
世の中の殆どの電子制御機器には
チップが搭載されている
全能感
9
ある映画と出会います
10

11
見たことがなかった
12
6週連続 S.W.勉強会開催
13
11/06(金) 18:30~ - スター・ウォーズ エピソード4/新たなる希望
11/13(金) 18:30~ - スター・ウォーズ エピソード5/帝国の逆襲
11/20(金) 18:30~ - スター・ウォーズ エピソード6/ジェダイの帰還
11/27(金) 18:30~ - スター・ウォーズ エピソード1/ファントム・メナス
12/04(金) 18:30~ - スター・ウォーズ エピソード2/クローンの攻撃
12/11(金) 18:30~ - スター・ウォーズ エピソード3/シスの復讐
12/18(金) 18:30~ - スター・ウォーズ エピソード7/フォースの覚醒
ジェダイの騎士となる
暗黒面に堕ちる
結論:フォースに目覚めたから
14
今日は皆様に フォースの使い方を教えます
15
フォースを起こすポイント
• デバイスが小さい => 隠しやすい
• 既存の技術を組み合わせて新しい現象を起
こす => 学習コストが低い
• 手じゃないと動くはずのないものを動かす
16
フォースを起こすポイント
• デバイスが小さい => 隠しやすい
• 既存の技術を組み合わせて新しい現象を起
こす => 学習コストが低い
• 手じゃないと動くはずのないものを動かす
17
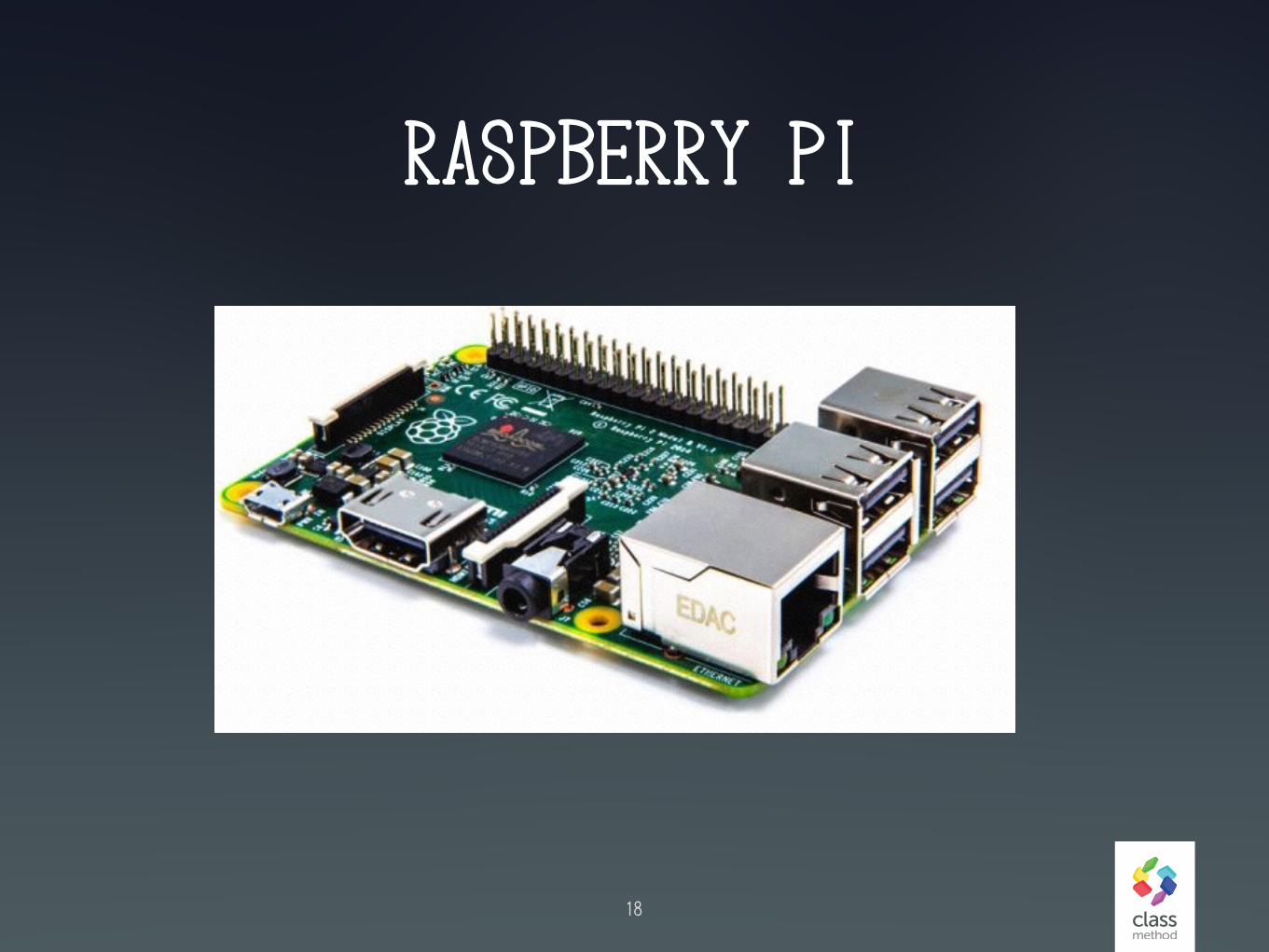
RASPBERRY PI
18

LEGOで隠す
19
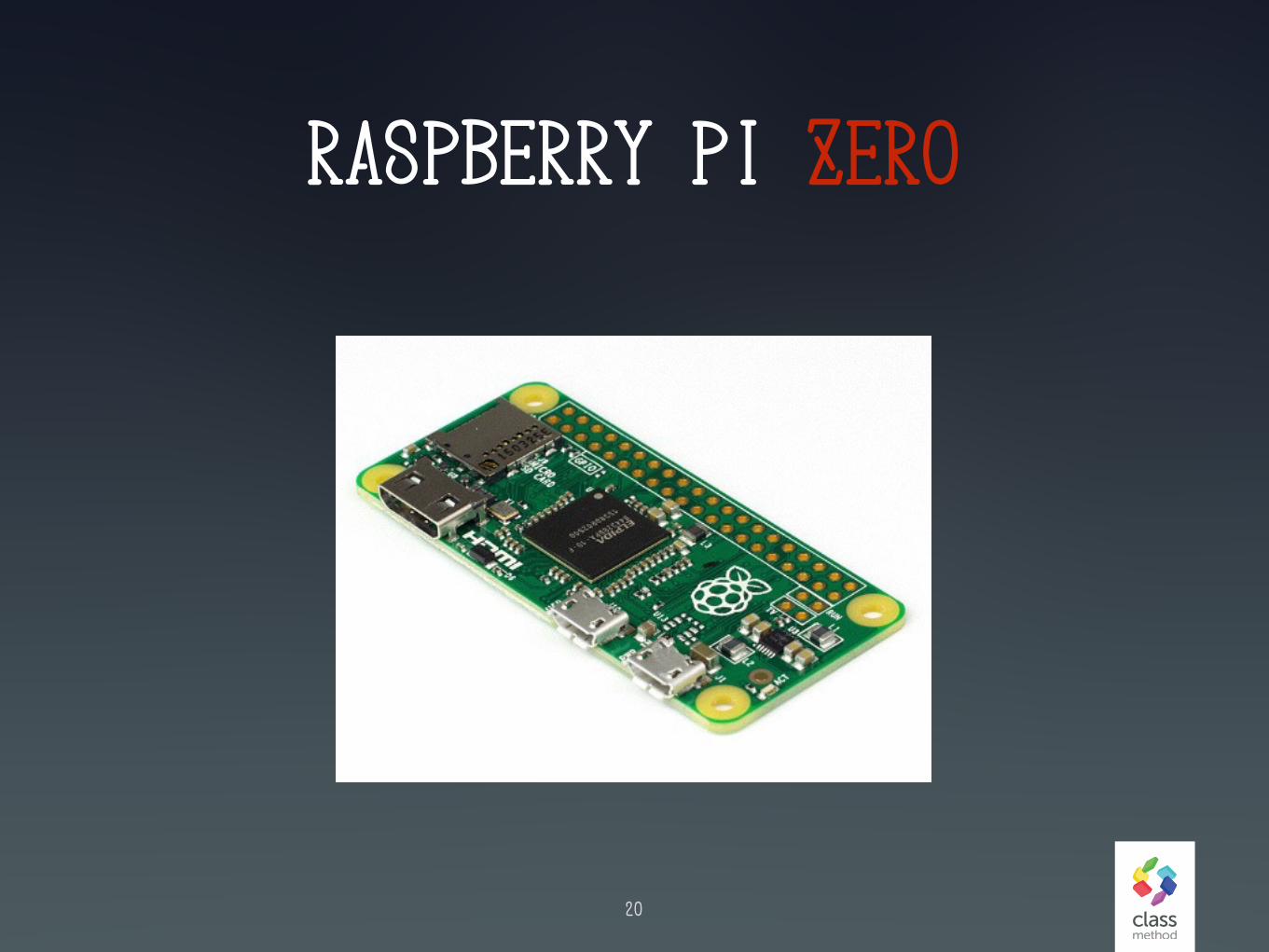
RASPBERRY PI ZERO
20

フリスクで隠す
21
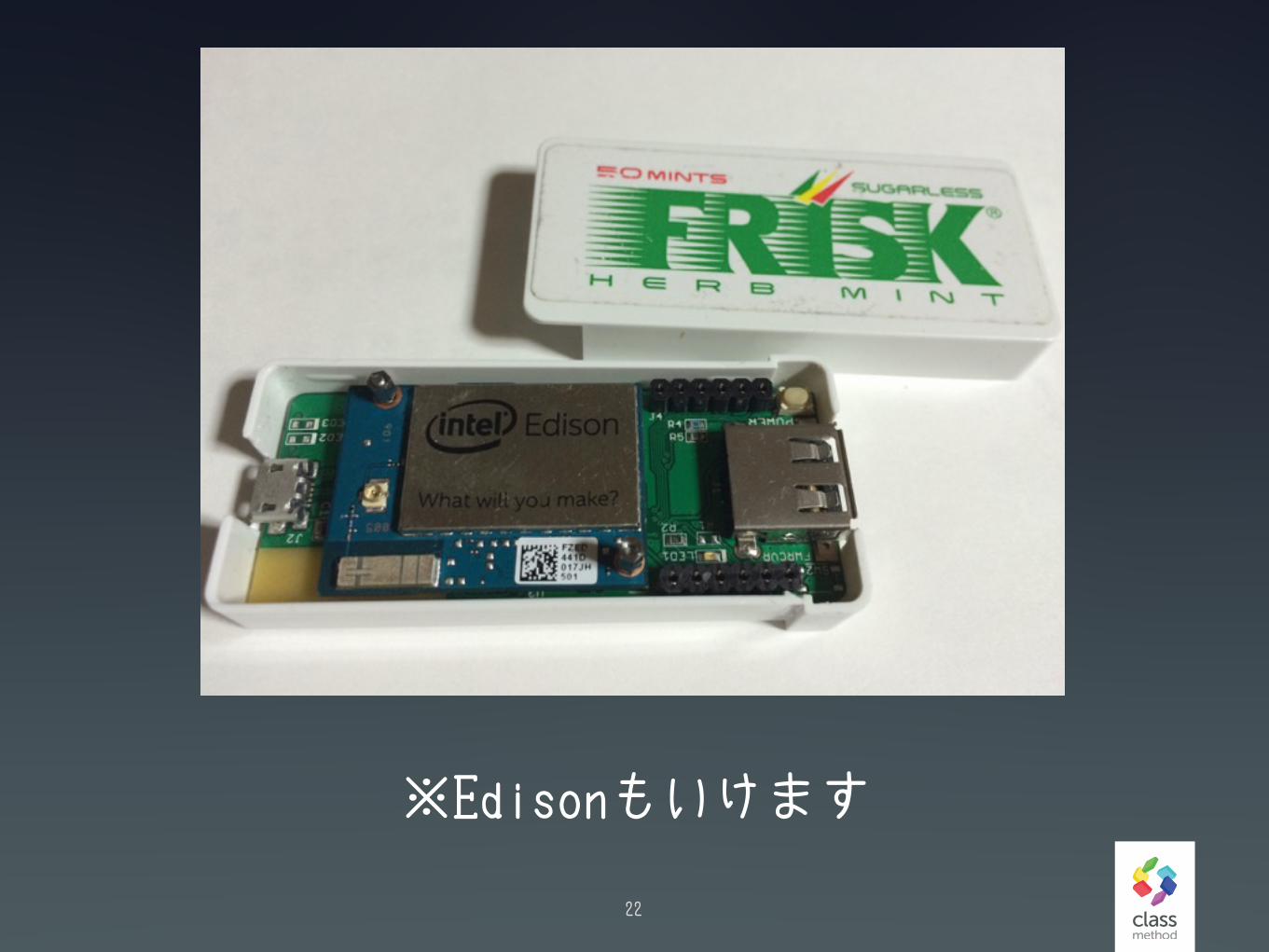
※Edisonもいけます
22
フォースを起こすポイント
• デバイスが小さい => 隠しやすい
• 既存の技術を組み合わせて新しい現象を起
こす => 学習コストが低い
• 手じゃないと動くはずのないものを動かす
23
デバイス間の疎結合
通信技術の向上により 各コンポーネントを同プラットフォームで 組み上げる必要がなくなった
24
独立したセンサー、ゲートウェイ、クラウドコンポーネントを インターフェースでつなぐだけ
ex.顔認識ソリューション
センサー: HVC-C2W(OMRON)
入力I/F: iPod touch
ゲートウェイ: OpenBlocks BX1 (ぷらっとホーム)
25
ex.顔認識ソリューション
26
{ "cameraId": "xxxxxxxxxxxxxxx", "result": [ { "age": { "nAge": 38, "nConfidence": 666 }, "blink": { "nLeftEye": 527, "nRightEye": 597 }, "center": { "nX": 412, "nY": 785 }, "direction": { "nLR": -2, "nRoll": 5, "nUD": 4 },
"direction": { "nLR": -2, "nRoll": 5, "nUD": 4 }, "expression": { "anScore": [ 5 ], "nDegree": -95 }, "gaze": { "nLR": -9, "nUD": -12 }, "gender": { "nConfidence": 1000, "nGender": 1 }, "nConfidence": 660, "nSize": 76, "recognition": { "nScore": -127, "nUID": -127
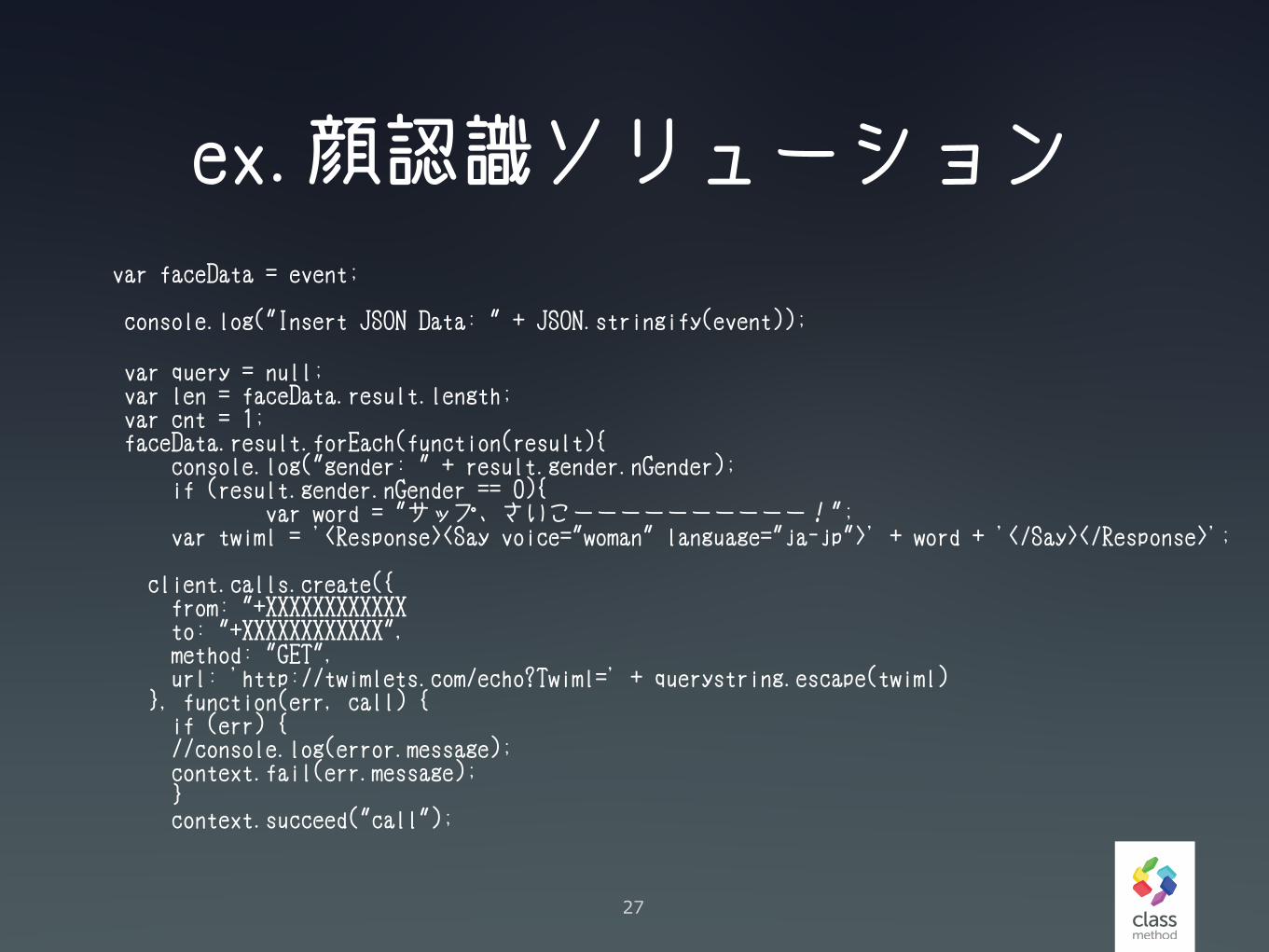
ex.顔認識ソリューション
27
var faceData = event;
console.log("Insert JSON Data: " + JSON.stringify(event));
var query = null; var len = faceData.result.length; var cnt = 1; faceData.result.forEach(function(result){ console.log("gender: " + result.gender.nGender); if (result.gender.nGender == 0){ var word = "サップ、さいこーーーーーーーーーー!"; var twiml = '<Response><Say voice="woman" language="ja-jp">' + word + '</Say></Response>';
client.calls.create({ from: "+XXXXXXXXXXXX to: "+XXXXXXXXXXXX", method: "GET", url: 'http://twimlets.com/echo?Twiml=' + querystring.escape(twiml) }, function(err, call) { if (err) { //console.log(error.message); context.fail(err.message); } context.succeed("call");

DEMO
28
フォースを起こすポイント
• デバイスが小さい => 隠しやすい
• 既存の技術を組み合わせて新しい現象を起
こす => 学習コストが低い
• 手じゃないと動くはずのないものを動かす
29

ex.LEDテープライト
30
ex.LEDテープライト
31
• RGB型式 • 点灯に12V必要(Raspberry Pi GPIOは3.3V or 5V) • RGBそれぞれに1-255の明るさ調節がある。それを組み合わせることにより様々な色を出す。
LEDテープを制御
32
pi-gpioを使う ピン番号 + value(0-1)を入れるだけの簡単仕様
Pythonが書ける人はPIGPIOでもよい

DEMO
33
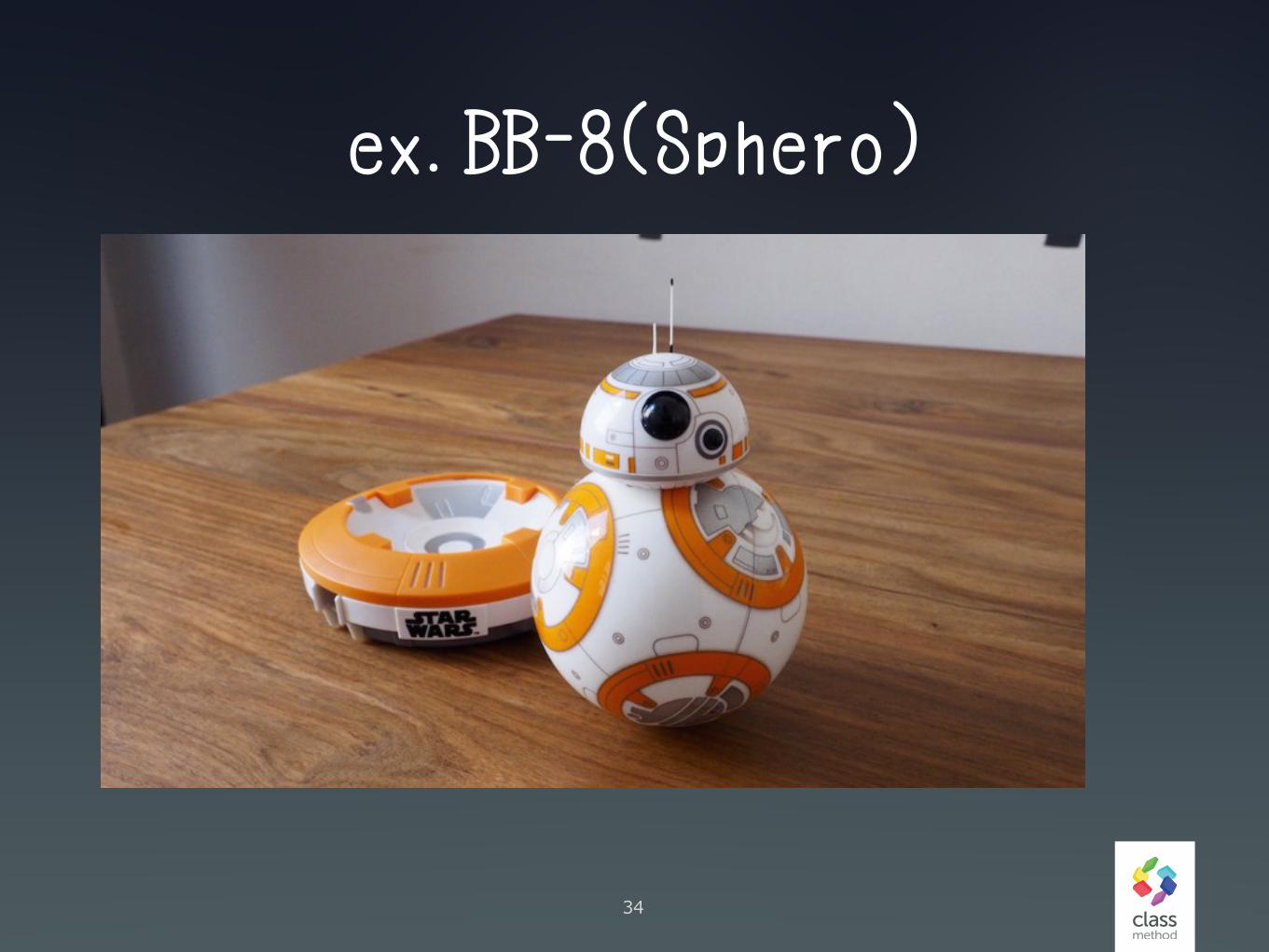
ex.BB-8(Sphero)
34

DEMO
35
ex.ドローン
36

ex.BEBOP DRONE
37
APIで動くドローン
BEBOP DRONEを制御
38
公式にあるSDKはUNIX / Objective-C / Android Java
Node.js用フレームワーク。 ロボットやドローン等の
ハードウェア系制御ライブラリが多数ある。

入力デバイス
39
お高かった。

入力デバイス
40
手元にあったから。
DEMO
41
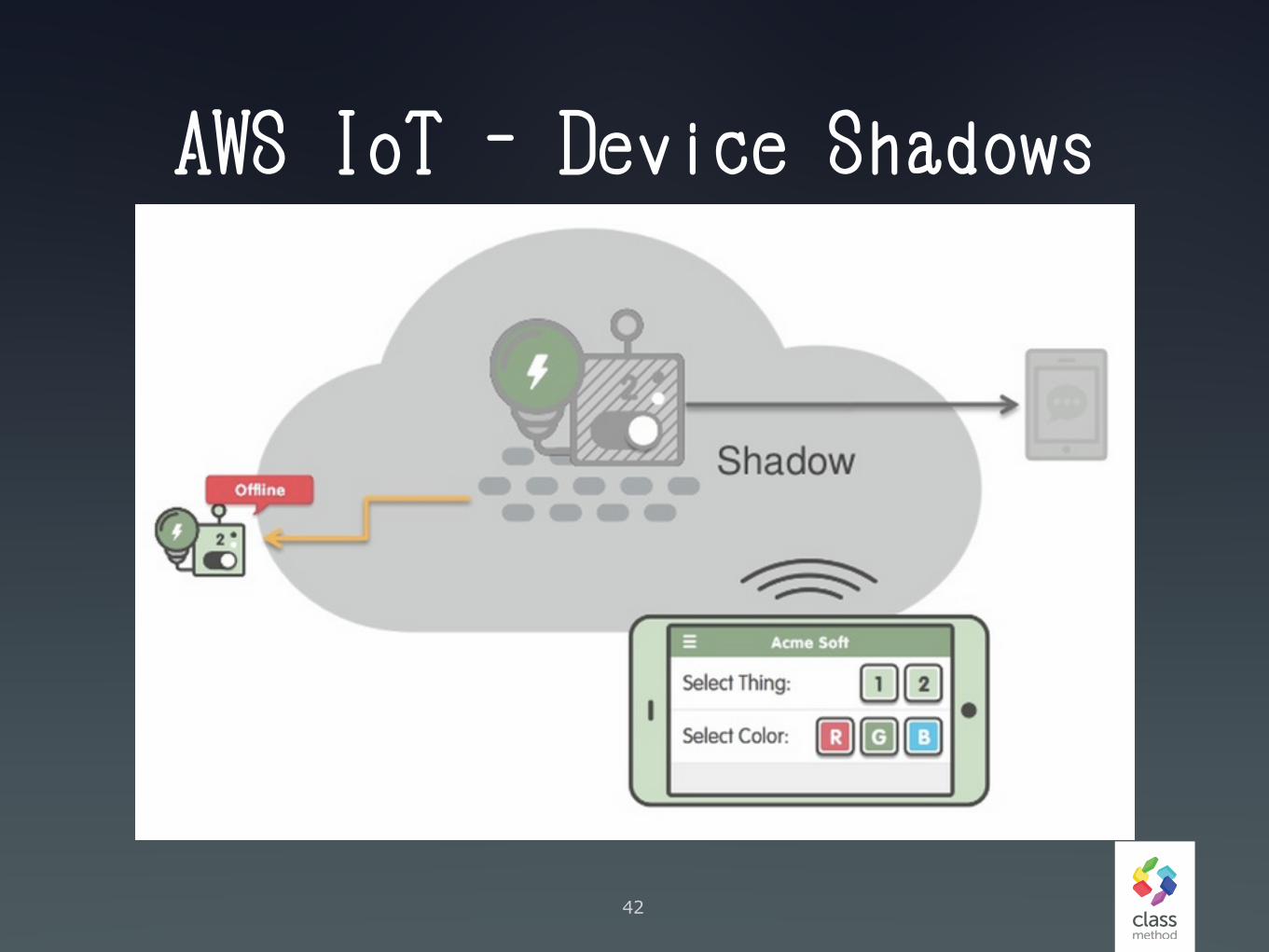
AWS IoT - Device Shadows
42
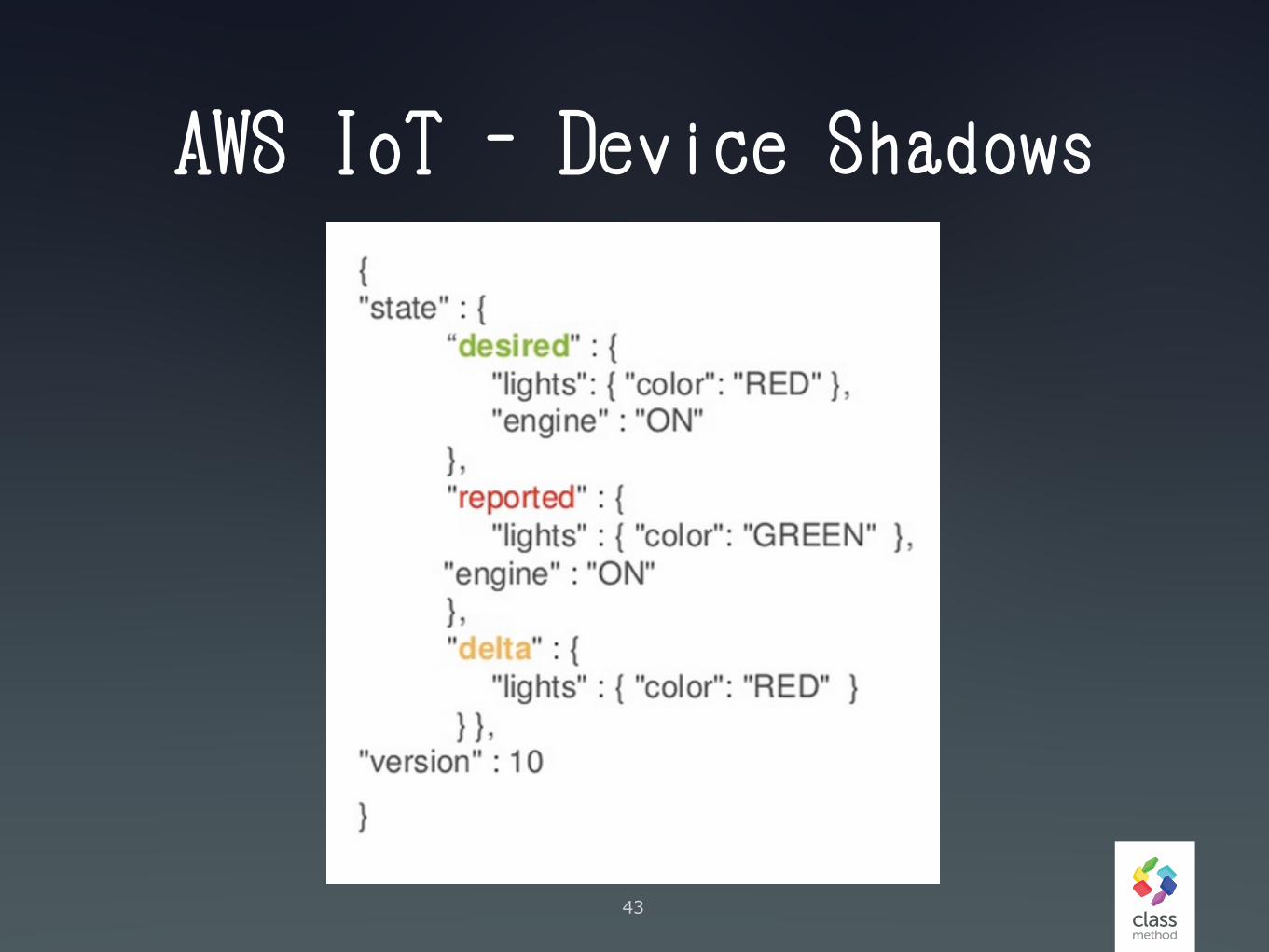
AWS IoT - Device Shadows
43

44Ⓒ Classmethod, Inc.