Embed Size (px)
Citation preview

COOPERATIVE TRANSIT TRACKING USING SMART-
PHONES
ESOE R98525087 李孟翰ESOE R99525045 郭羿呈
Arvind Thiagarajan MIT CSAILJames Biagioni Tomas Gerlich Jakob Eriksson University of Illinois at
ChicagoSenSys’10, November 3–5, 2010, Zurich,
Switzerland.Copyright 2010 ACM 978-1-4503-0344-6/10/11 ...
$10.00

2
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

3
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

4
車快到了
~^^
&$*@#$*%)
Polly’s story
Xx
通訊
月底省點錢

5
Why ?
Xx
通訊
發送訊息
等待公車更新資料

6
Why ?
Figure 2. GPS trace and an actual trajectory of a bus ride downtown Chicago

7
Why ?
Figure 3. CDF of GPS localization errors for downtown and suburban environments

8
Why ?
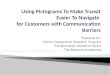
Figure 1. Measured difference between scheduled and actual arrival times of buses in Chicago

9
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

10
Motivation
Provide more precise way for tracking services.
Other issues need to be considered.
energy efficiency
Activity Classification
Tracking Underground
Arvind Thiagarajan MIT CSAILJames Biagioni Tomas Gerlich Jakob Eriksson University of Illinois at Chicago
Cooperative Transit Tracking using Smart-phones

11
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

12
System Overview
Figure 4. Cooperative transit tracking system

13
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

14
Activity Classification by Accelerometer

15
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Filtering out spurious stops
Performance Evaluation Conclusion

16
Spatio-temporal Trajectory Matching
∃𝑘 ,𝑑𝑖𝑠𝑡 (𝐿𝑘 ,𝑆 (𝐶 ,𝑘 ) )>𝜆Sequential GPS Location
𝐸𝑆 (𝐶 ,𝑖 )=∑𝑘=1
𝑖
𝑑𝑖𝑠𝑡 (𝐿𝐾 ,𝑆(𝐶 ,𝑘))
√ 𝐸𝑆(𝐶 ,𝑖)𝑛
>𝜏Check slide
windows and return only
one bus number
𝐶𝐵𝑒𝑠𝑡
𝑟=𝐼𝑎𝑐𝑡𝑢𝑎𝑙𝐼 h𝑠𝑐 𝑒𝑑𝑢𝑙𝑒𝑑
Car Bus Unknown
INPUT
OUTPUT
Outlier Removal
Least Squares Minimization
Post Processing
Schedule Deviation
Overlapping Routes
YES
YES
YES
NO
NO
NO

17
Spatio-temporal Trajectory Matching
Other Exception Check Stopping Check
Need more than 3 stops, and each stop remains exceeds 15 sec.
Inter-Stop Distance CDF
Overlapping Routes Check RMES > τ and Slide Windows
more than 1 possible buses confidence cutoff(CC)
Low: quick real-time tracking High: more precise route
map
Figure 8. Inter-Stop Distance CDF for buses
and cars.

18
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

19
Tracking Underground Transit
Schedule-based hidden Markov mode(HMM) Set of emission score (ES) INPUT
Check States
Check the condition (con) of
“stopped in tunnel”
State is moving ?
Is con satisfied?
Moving in tunnel Stopped in tunnel Stopped at station
OUTPUT
States Transitions
Emission detector
YES
NO
YES
NO

20
Tracking Underground Transit
States Transitions
Emission detector
Figure 10. HMM for accelerometer and schedule-based subway tracking
{ 𝐸 ( 𝑡 h𝑠𝑐 𝑒𝑑− 𝑡 ,𝜆 h𝑎 𝑒𝑎𝑑 ) ,𝑡<𝑡 h𝑠𝑐 𝑒𝑑
𝜅 𝐸 (𝑡−𝑡 h𝑠𝑐 𝑒𝑑 ,𝜆 h𝑏𝑒 𝑖𝑛𝑑 ) ,𝑡 ≥𝑡 h𝑠𝑐 𝑒𝑑
S topped∈tunnel⟺ { 𝑡>𝑡 h𝑠𝑐 𝑒𝑑⇒ 𝐿𝑜𝑤𝑛𝑜𝑛− 𝑧𝑒𝑟𝑜𝑡<𝑡 h𝑠𝑐 𝑒𝑑⇒𝑃 𝑠𝑡𝑜𝑝 (1−𝐸 (𝑡 ,𝜆 h𝑎 𝑒𝑎𝑑 )) 𝑖𝑠 h h𝑖𝑔

21
Tracking Underground Transit
Other issues need to be considered : Filtering out spurious stops in tunnel.
Figure 9. Detecting bus mobility by accelerometer.

22
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

23
Activity Classifier Accuracy
Table 3. Walking detection accuracy on a variety of labeled test traces.

24
Trajectory Matching Accuracy
Figure 12. Prec./recall vs Confidence Cutoff, CTA Data.
Figure 13. CDF of Decision Time, CTA Data.

25
Table 4. Transit matching on car traces along or near known bus routes.
Trajectory Matching Accuracy

26
Tracking Accuracy in Subway
Figure 15. Comparison of estimated, scheduled and actual arrival time at
each station.

27
Utility of Cooperative Transit Tracking
Figure 17. Wait time vs. Penetration level using Cooperative Transit
Tracking Only.
Figure 16. Wait time vs. Penetration level using Cooperative Transit
Tracking with fallback on schedule.

28
Utility of Cooperative Transit Tracking
Figure 18. Requests served vs. Penetration level.

29
Outline
Introduction Motivation Proposed Method
System Overview Activity Classification by Accelerometer Spatio-temporal Trajectory Matching Tracking Underground Transit
Performance Evaluation Conclusion

30
Conclusion
Cooperative transit tracking that combines power-efficient activity detection using
accelerometer data memory-efficient spatio-temporal bus
trajectory matching using least squares minimization
accelerometer in conjunction with a Hidden Markov model to track underground trains when other localization schemes do not work.

31
Q&A