Embed Size (px)
Citation preview
Studying the control of non-invasive prosthetic hands over large time spans
Relatore: Barbara Caputo
Correlatore: Umberto Nanni
Candidato: Mara Graziani
129/10/15
Studying the control of non invasive prosthetic hands over large time spans
Amputati: realtà e problematiche
Popolazione mondiale: circa 7,3 miliardi
# Amputati >11 milioni 3 milioni agli arti superiori
2Mara Graziani

Amputati: realtà e problematiche
2000 amputati Haiti
5% soldati Vietnam War
4% Iraq Operation Freedom
Studying the control of non invasive prosthetic hands over large time spans 3Mara Graziani

Ricostruzione del movimento
invasive
non invasive
cosmetiche e uncini
Protesi
Mara GrazianiStudying the control of non invasive prosthetic hands over large time spans 4
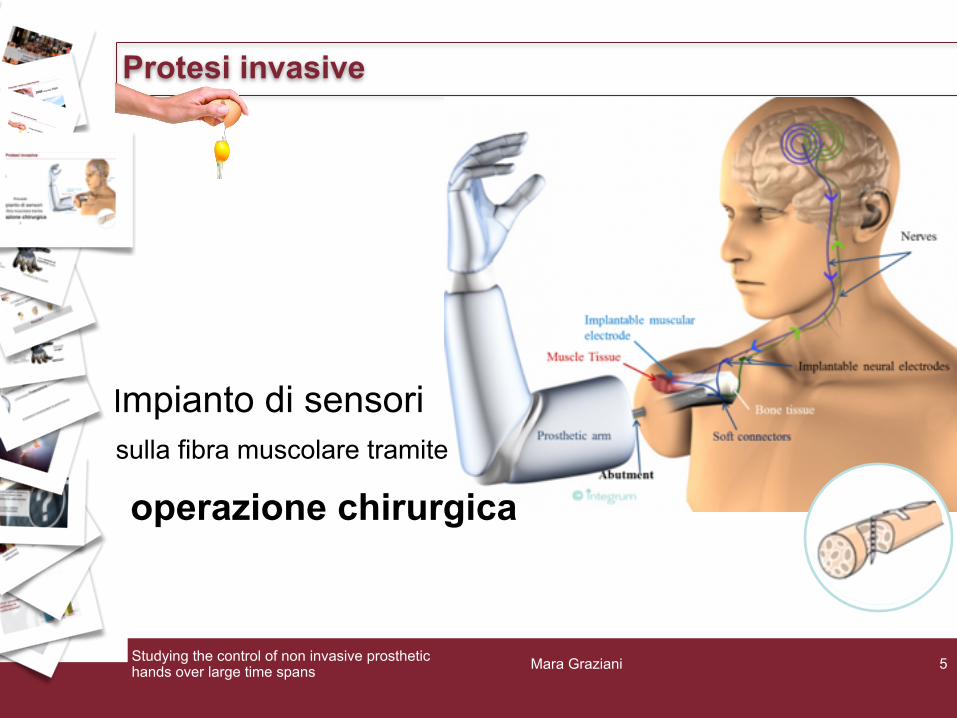
Protesi invasive
Studying the control of non invasive prosthetic hands over large time spans
operazione chirurgica
Impianto di sensori sulla fibra muscolare tramite
5Mara Graziani

Protesi non invasive
Si indossa come un guanto
sensori di superficie
(sEMG)
Studying the control of non invasive prosthetic hands over large time spans 6Mara Graziani
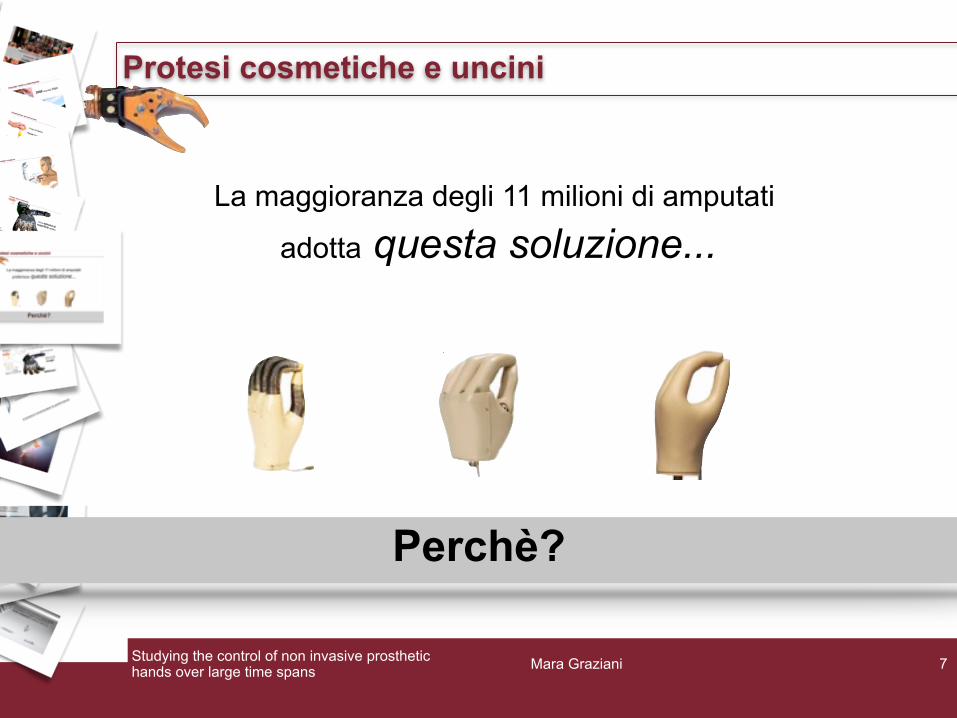
Protesi cosmetiche e uncini
La maggioranza degli 11 milioni di amputati
adotta questa soluzione...
Perchè?
Studying the control of non invasive prosthetic hands over large time spans 7Mara Graziani

Controindicazioni
Obiettivo Possibilità di rigetto
Non sempre attuabile
£ 6.000.000 o più
Pochi movimenti
Allenamenti
faticosi
lunghi0 DoF
nessun movimento
Studying the control of non invasive prosthetic hands over large time spans
e molto
£ 500
8Mara Graziani
Machine Learning
si possono incrementare le performance
La protesi si può addestrare
a riconoscere l'intenzione di un movimento
Studying the control of non invasive prosthetic hands over large time spans 9Mara Graziani

Si potrebbe arrivare persino a
Studying the control of non invasive prosthetic hands over large time spans
ShadowHand
10Mara Graziani
Conceptual Question - Domanda concettuale
Il giorno dopo, indossa nuovamente la protesi.
Il paziente indossa la protesi ed effettua la calibrazione per la prima volta.
Studying the control of non invasive prosthetic hands over large time spans 11Mara Graziani
Conceptual Question - Domanda concettuale
Cosa succede se non rieffettua la calibrazione?
Studying the control of non invasive prosthetic hands over large time spans 12Mara Graziani
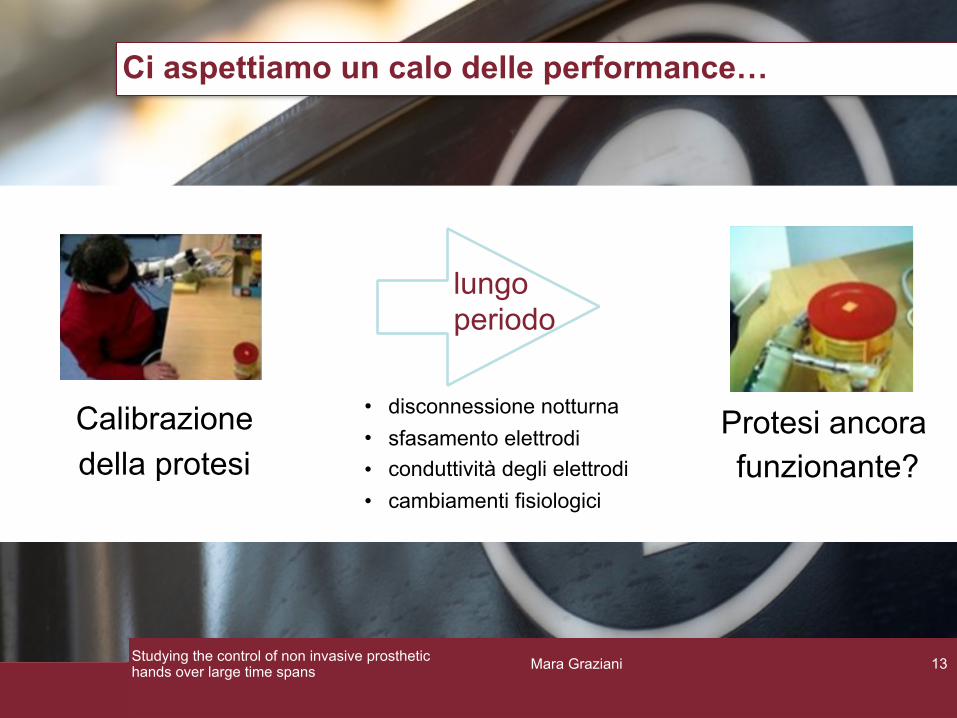
lungo periodo
Calibrazione della protesi
Protesi ancora funzionante?
• disconnessione notturna • sfasamento elettrodi • conduttività degli elettrodi • cambiamenti fisiologici
Studying the control of non invasive prosthetic hands over large time spans
Ci aspettiamo un calo delle performance…
13Mara Graziani
Fasi dello studio
Acquisizione
Processamento
Classificazione
Test
Studying the control of non invasive prosthetic hands over large time spans
Ogni passaggio è stato eseguito attraverso MATLAB con Statistics and Machine Learning Toolbox e la libreria libSVM
14Mara Graziani

Fasi dello studio - Acquisizione
Acquisizione
Processamento
Classificazione
Test
Acquisizione di 17 movimenti e posture della mano
17 movimenti x 10 ripetizioni x 3 volte al giorno x 4 giorni
Studying the control of non invasive prosthetic hands over large time spans
soggetto intatto10 sensori sEMG Ottobock
15Mara Graziani
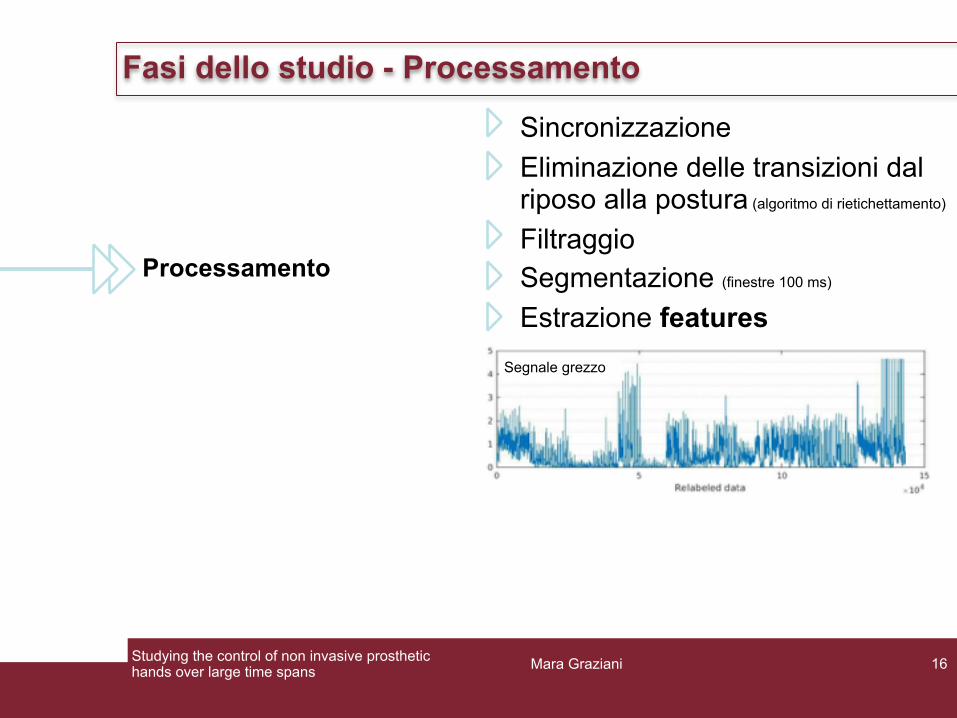
Fasi dello studio - Processamento
Acquisizione
Processamento
Classificazione
Test
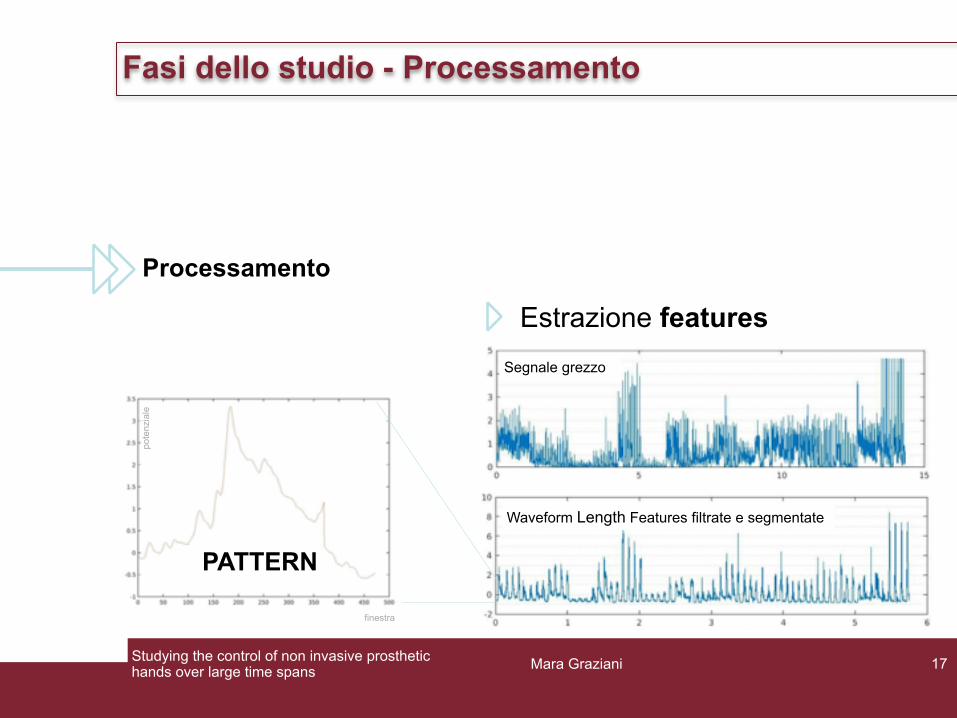
Sincronizzazione Eliminazione delle transizioni dal riposo alla postura (algoritmo di rietichettamento)
Filtraggio Segmentazione (finestre 100 ms) Estrazione features
Studying the control of non invasive prosthetic hands over large time spans
Segnale grezzo
16Mara Graziani
Fasi dello studio - Processamento
Acquisizione
Processamento
Classificazione
Test
PATTERN
Studying the control of non invasive prosthetic hands over large time spans 17
finestra
pote
nzia
le
Waveform Length Features filtrate e segmentate
Segnale grezzo
Sincronizzazione Eliminazione delle transizioni dal riposo alla postura (algoritmo di rietichettamento)
Filtraggio Segmentazione (finestre 100 ms) Estrazione features
17Mara Graziani
Fasi dello studio - Classificazione
Acquisizione
Processamento
Classificazione
Test
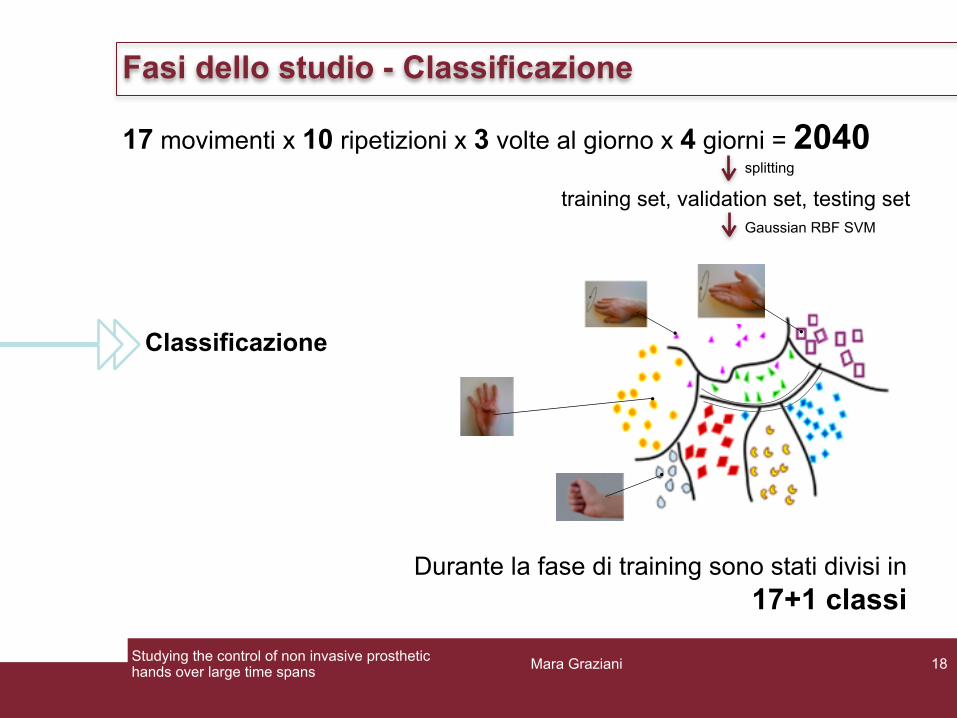
17 movimenti x 10 ripetizioni x 3 volte al giorno x 4 giorni = 2040
Durante la fase di training sono stati divisi in 17+1 classi
Studying the control of non invasive prosthetic hands over large time spans 18
training set, validation set, testing setGaussian RBF SVM
splitting
18Mara Graziani

Acquisizione
Processamento
Classificazione
Test
I dati del Giorno 1 sono stati usati per l'addestramento dell'algoritmo.
E ripetuti in tre momenti della giornata.
I test sono stati svolti a distanza di:
1 giorno 2 giorni 3 giorni
Fasi dello studio - Test
Studying the control of non invasive prosthetic hands over large time spans 19 19Mara Graziani
20
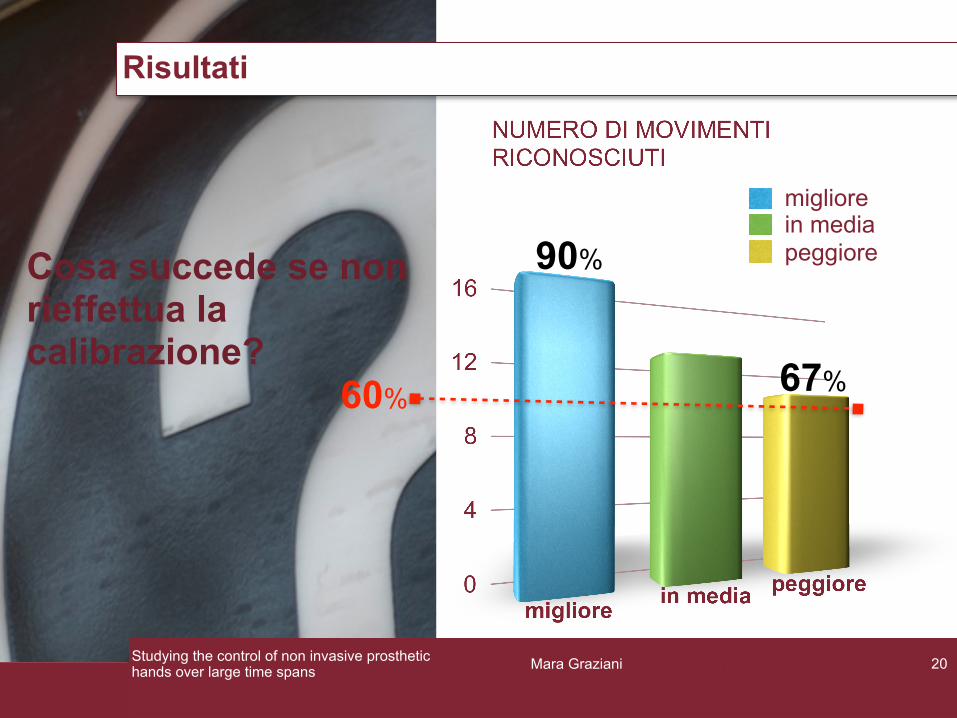
Risultati
Cosa succede se non rieffettua la calibrazione?
migliorein mediapeggiore90%
67%
Studying the control of non invasive prosthetic hands over large time spans
60%
20Mara Graziani
21
Risultati
Considerando ogni movimento equiprobabile, la probabilità di scegliere correttamente in modo randomico la postura scelta è di:
117
cioè del 6%…
Studying the control of non invasive prosthetic hands over large time spans 21Mara Graziani

22
Conclusioni
Si ha un calo del 20% subito dopo il primo giorno, che tende a fermarsi nei giorni successivi.
Complessivamente vengono persi al massimo 5 movimenti, ovvero il 30% del set completo.
Studying the control of non invasive prosthetic hands over large time spans
Come studio futuro bisognerebbe estendere il numero di soggetti
22Mara Graziani
23
emgrepeatability.wordpress.com
Studying the control of non invasive prosthetic hands over large time spans
archive.org/details/prostheticHandsOverTime
23Mara Graziani
24
sEMG
KERNEL SVM
repeatability
WL
STFT
datasets
windowing
splitting
smoothing confmatric
Studying the control of non invasive prosthetic hands over large time spans 24Mara Graziani

25
Grazieper il prezioso tempo e l’attenzione

26
1. Dougherty, Paul J., et al. "Bilateral transfemoral/transtibial amputations due to battle injuries: a comparison of Vietnam veterans with Iraq and Afghanistan servicemembers." Clinical Orthopaedics and Related Research® 472.10 (2014): 3010-3016.
2. http://nationalamputation.org 3. http://www.drtessier.com/ilac.aspx 4. http://www.amputee-coalition.org/ 5. The Limb Loss Research and Statistics Program Johns Hopkins Bloomberg School of Public Health: People
with amputations speak out with the Amputee Coalition of America from amputee-coalition.org 6. Maurice LeBlanc, MSME, CP "Give Hope - Give a Hand" - The LN-4 Prosthetic Hand from https://
web.stanford.edu/class/engr110/2011/LeBlanc-03a.pdf 7. http://www.handicap-international.us/haiti_estimates_over_2_000_amputees 8. http://www.bbc.com/news/technology-34044453 9. http://www.theloop.com.au/DMartinez/portfolio/hand-cracking-an-egg-image/82385 10.http://www.discovery-zone.com/wp-content/uploads/2014/02/Amputee-Feels-with-Bionic-Hand.jpg 11.http://www.dailymail.co.uk/sciencetech/article-2313507/i-limb-ultra-revolution-The-16-year-old-boy-Britains-
app-controlled-bionic-hand.html 12.http://www.discovery-zone.com/technology-amputee-feels-real-time-bionic-hand/ 13.http://sciencenordic.com/implanted-muscular-electrodes-improve-prosthetic-flexibility 14.http://www.theloop.com.au/DMartinez/portfolio/hand-cracking-an-egg-image/82385 15.http://www.nottecriminale.it/contents/2012/11/sicurezza-pin-300x201.jpg 16.http://sr.photos2.fotosearch.com/bthumb/UNY/UNY052/u28704454.jpg 17.http://www.rehab.research.va.gov/jour/2012/494/images/smit494f02lb.jpg 18.http://www.google.it/url?
sa=i&source=imgres&cd=&ved=0CAYQjBwwAGoVChMIpYeastq6yAIVSjgUCh3o4gaQ&url=http%3A%2F%2Fimg.medicalexpo.com%2Fimages_me%2Fphoto-m%2Fbody-powered-hand-prosthesis-hook-clamp-adult-74842-170709.jpg&psig=AFQjCNF7kS3Vnt4PreYaiZLz7QfeU_c9cw&ust=1444662785061896
19.http://www-3.unipv.it/scienzemotorie/public/901sEMG.pdf 20.flickr.com per tutte le immagini
Fonti
Studying the control of non invasive prosthetic hands over large time spans
29/10/15 Mara Graziani
27
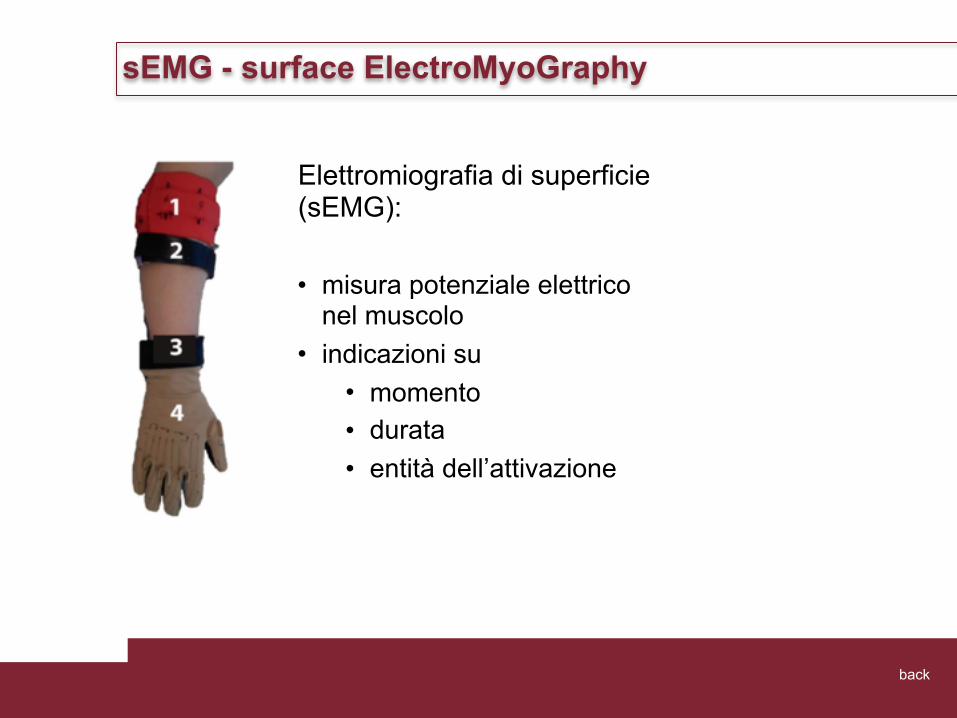
sEMG - surface ElectroMyoGraphy
Elettromiografia di superficie (sEMG):
• misura potenziale elettrico nel muscolo
• indicazioni su • momento • durata • entità dell’attivazione
back
28
Gaussian RBF kernel SVM
back
Se i dati non sono linearmente separabili si può utilizzare una funzione non lineare, chiamata kernel, per mappare i dati in uno spazio differente (aggiunta di una dimensione).
Tramite un iperparametro, gamma, si può controllare la capacità del sistema.
29
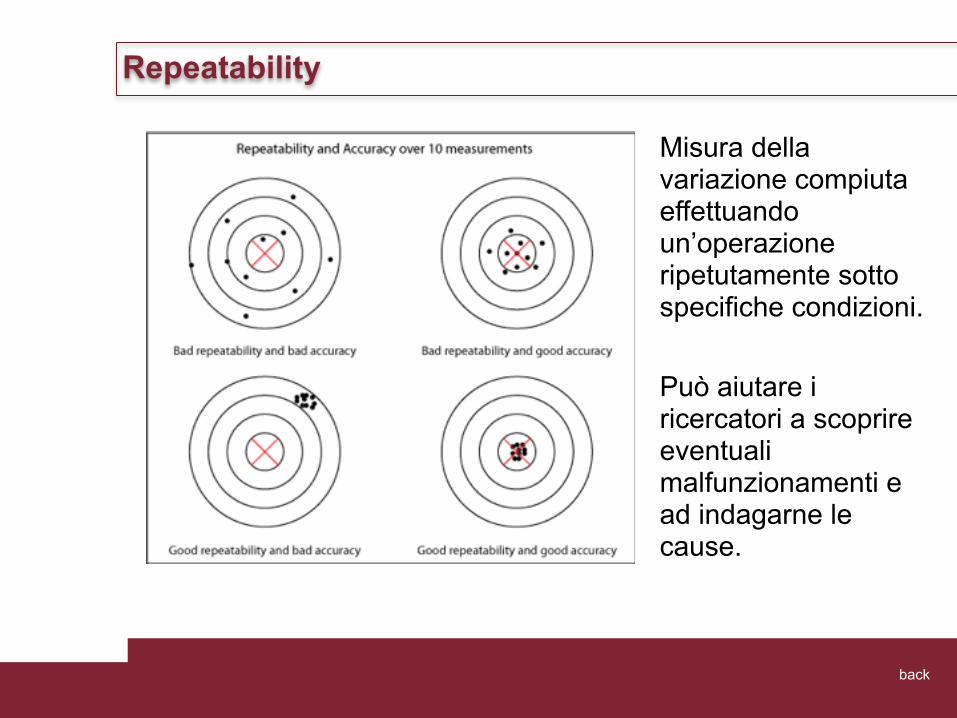
Repeatability
Misura della variazione compiuta effettuando un’operazione ripetutamente sotto specifiche condizioni.
Può aiutare i ricercatori a scoprire eventuali malfunzionamenti e ad indagarne le cause.
back

30
WL - Waveform Length
Rappresenta la lunghezza cumulativa della forma d’onda nel periodo T. Si usa come misura dell’ampiezza del segnale.
Segnale Grezzo Waveform Length
Feature nel dominio del tempo.
back
31
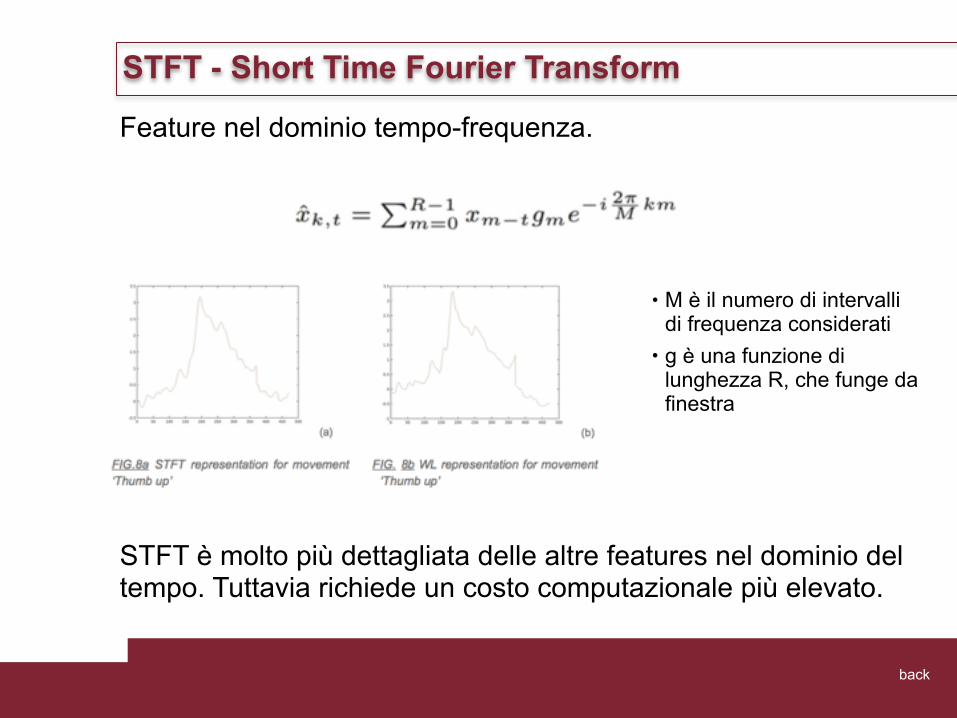
STFT - Short Time Fourier Transform
STFT è molto più dettagliata delle altre features nel dominio del tempo. Tuttavia richiede un costo computazionale più elevato.
Feature nel dominio tempo-frequenza.
• M è il numero di intervalli di frequenza considerati
• g è una funzione di lunghezza R, che funge da finestra
back
32
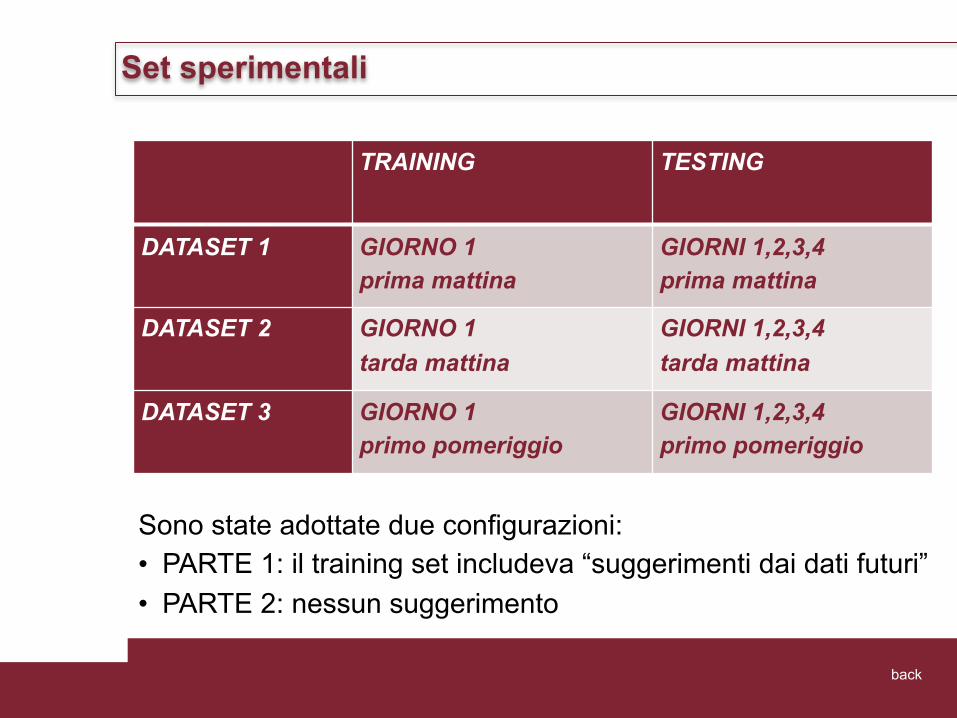
Set sperimentali
back
Sono state adottate due configurazioni: • PARTE 1: il training set includeva “suggerimenti dai dati futuri” • PARTE 2: nessun suggerimento
TRAINING TESTING
DATASET 1 GIORNO 1 prima mattina
GIORNI 1,2,3,4 prima mattina
DATASET 2 GIORNO 1 tarda mattina
GIORNI 1,2,3,4 tarda mattina
DATASET 3 GIORNO 1 primo pomeriggio
GIORNI 1,2,3,4 primo pomeriggio
33
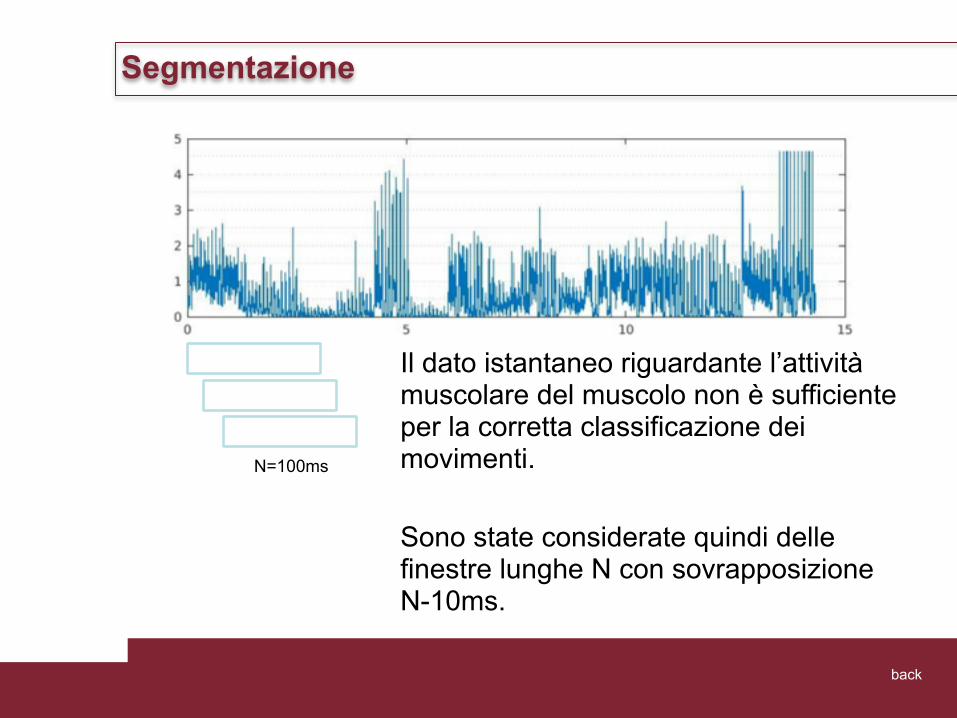
Segmentazione
back
Il dato istantaneo riguardante l’attività muscolare del muscolo non è sufficiente per la corretta classificazione dei movimenti.
Sono state considerate quindi delle finestre lunghe N con sovrapposizione N-10ms.
N=100ms

34
Smoothing
Tecnica utilizzata per incrementare le performances del classificatore. Lo scopo è di tracciare un’idea generale dei cambiamenti relativamente lenti delle assegnazioni delle labels. Per ottenere questo scopo è stata implementata una finestra scorrevole, di ampiezza arbitraria, che cercasse, con una metodologia di majority voting, la label più frequente.
back
35
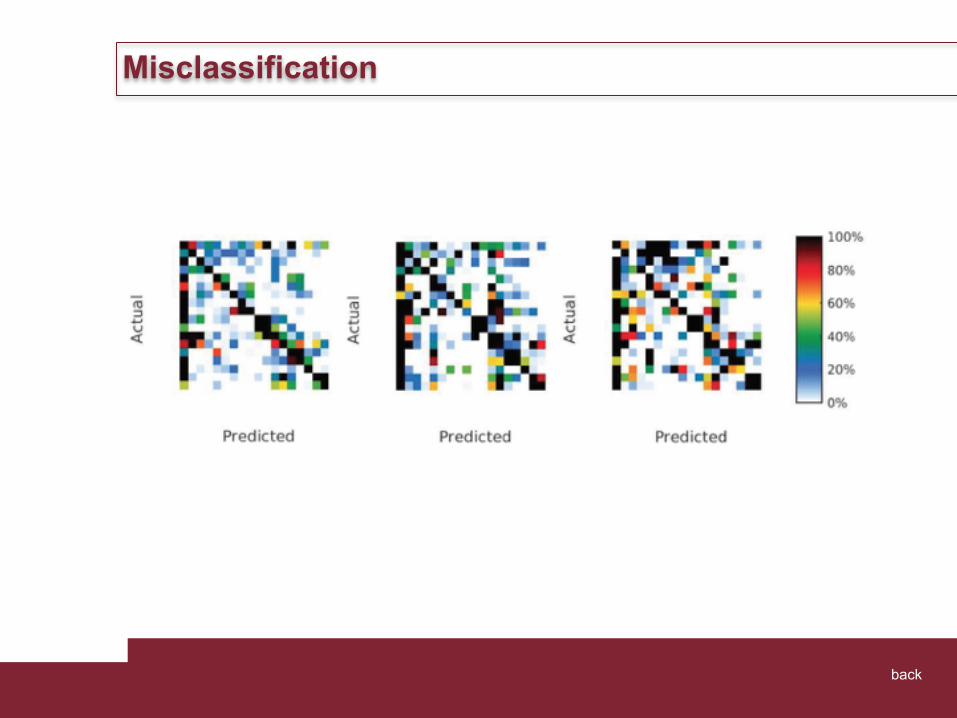
Misclassification
back