Embed Size (px)
Citation preview
SISTEMAS DINÁMICOSCAPITULO 3: MODELOS DE SISTEMAS FISICOS .
Ing. Gerardo Becerra, M.Sc.
Modelos de sistemas físicos
1. Preparar y ejecutar el plan de acción para formular y resolver un modelo. (CDIO 2.1.1.4)
2. Obtener modelos conceptuales y cualitativos de diversos sistemas físicos. (CDIO 2.1.2.2)
3. Establecer las conexiones entre los fenómenos físicos y el modelo. (CDIO 2.1.2.3)
4. Usar modelos cuantitativos y soluciones. (CDIO 2.1.2.4)
GJB-Mar-2015
Modelos de sistemas físicos
5. Generalizar suposiciones para simplificar ambientes y sistemas complejos (CDIO 2.1.2.1)
6. Discutir una aproximación desde varias disciplinas para asegurar que el sistema se entienda desde todas las perspectivas relevantes. (CDIO 2.3.1.2)
7. Establecer prioridades dentro de las metas generales (CDIO 2.1.1.3)
GJB-Mar-2015
Contenido
Clase 9. 1. Definir los concepto de transducción.2. Describir transductores para diferente
variables físicas.3. Modelar elementos de acople por campo
eléctrico.4. Modelar elementos de acople por campo
magnético.
GJB-Mar-2015
Sistemas Electromecánicos
• Elementos de medición o transducción: micrófonos, parlantes, celdas de carga etc.
• Elementos de control y producción de fuerza como solenoides, electroimanes y relevadores.
• Equipos convertidores de energía de régimen continuo y mayor potencia como motores y generadores.
GJB-Mar-2015
Sistemas Electromecánicos
• Estudiar el proceso de conversión de energía implicado: campo eléctrico, campo magnético o resistivo.
• Plantear un modelo que describa las características fundamentales y que se pueda emplear en el diseño de equipos y soluciones.
• Comprender las características de los elementos físicos reales que realizan las conversiones
GJB-Mar-2015
Máquinas ideales y Transductores
• Transmiten energía de un puerto a otro
• Variables de flujo y de esfuerzo cambian de magnitud.
• No hay almacenamiento, generación ni disipación de energía.
• La disipación de energía en forma de calor se puede modelar por aparte.
GJB-Mar-2015
Máquinas ideales y Transductores
• Transformador y Girador
• Conservación de energía:
• Bidireccionales
(E1 , F1) (E2 ,F2)
2211 fefe
MAQUINAIDEAL
GJB-Mar-2015

Máquinas ideales y Transductores
• Transformador:𝑓2 = 𝑇𝑓1
• T = relación o módulo de transformación. Se asume constante.
• De la conservación de energía:𝑒1 = 𝑇𝑒2
• La relación de esfuerzos es inversa de la relación de los flujos.
GJB-Mar-2015
Máquinas ideales y Transductores
• Girador:𝑒2 = 𝐺𝑓1
• G = relación o módulo del girador, se asume constante.
• De la conservación de energía
21 Gfe
GJB-Mar-2015
Máquinas ideales y Transductores
• Transductor: dispositivo de dos puertos que convierte o TRADUCE energía de un dominio a otro.• De potencia: convierten niveles altos
• De medición: bajos niveles de energía, normalmente se convierte a energía eléctrica
GJB-Mar-2015
Acople Resistivo
• Una variable mecánica modifica la resistencia eléctrica de un elemento sensor.
• Resistencia vs Posición (translación o rotación).
• Resistencia vs Temperatura.
• Resistencia vs fuerza.
GJB-Mar-2015
Resistencia vs Posición (Lineal)
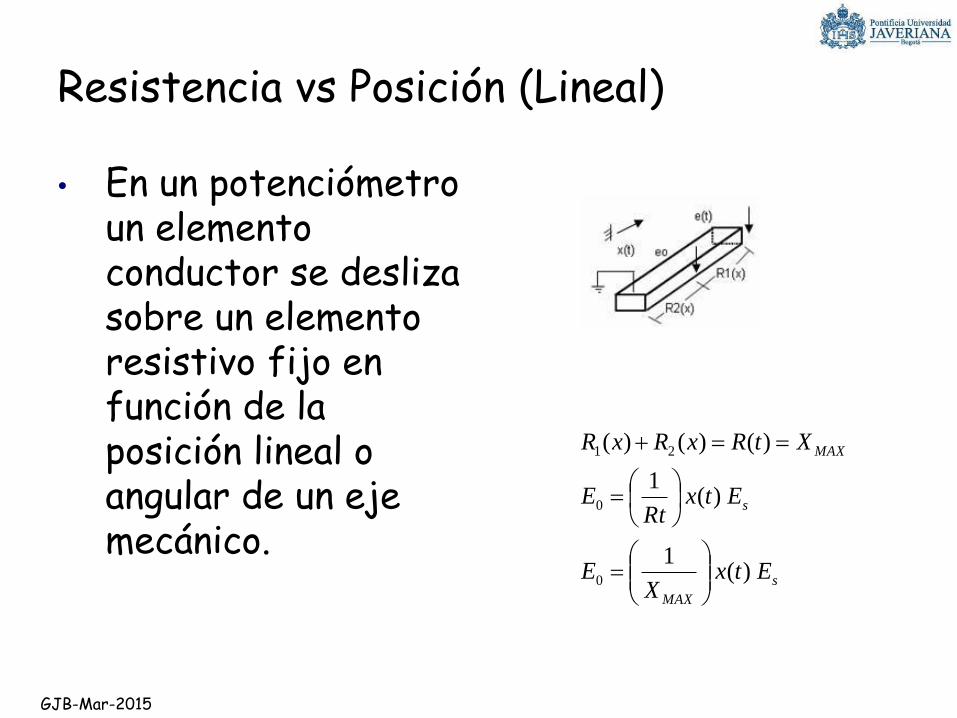
• En un potenciómetro un elemento conductor se desliza sobre un elemento resistivo fijo en función de la posición lineal o angular de un eje mecánico.
s
MAX
s
MAX
EtxX
E
EtxRt
E
XtRxRxR
)(1
)(1
)()()(
0
0
21
GJB-Mar-2015
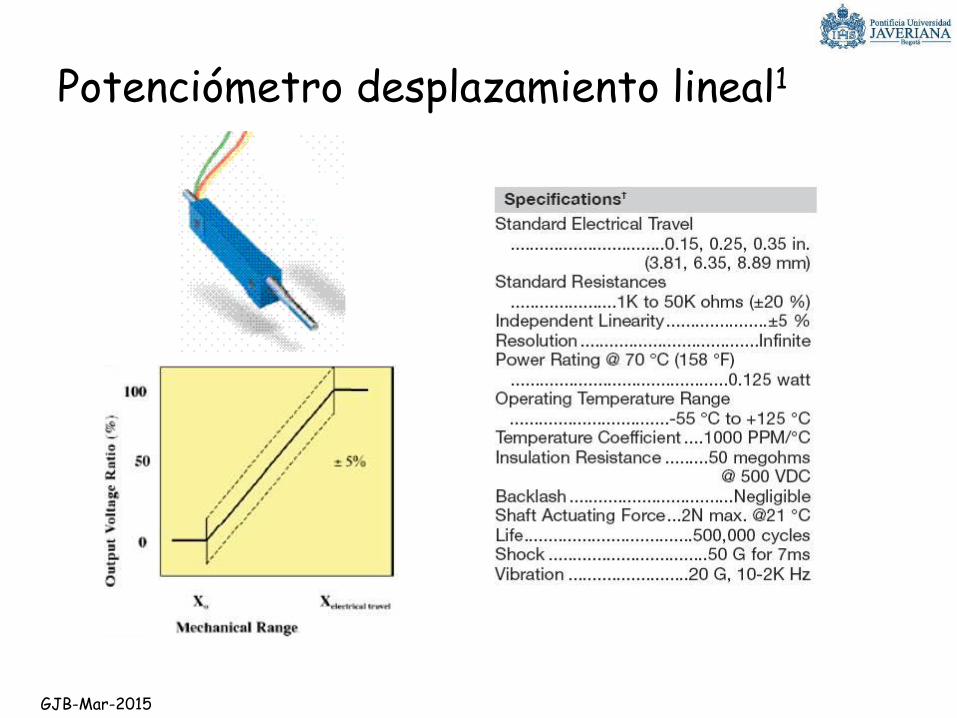
Potenciómetro desplazamiento lineal1
GJB-Mar-2015
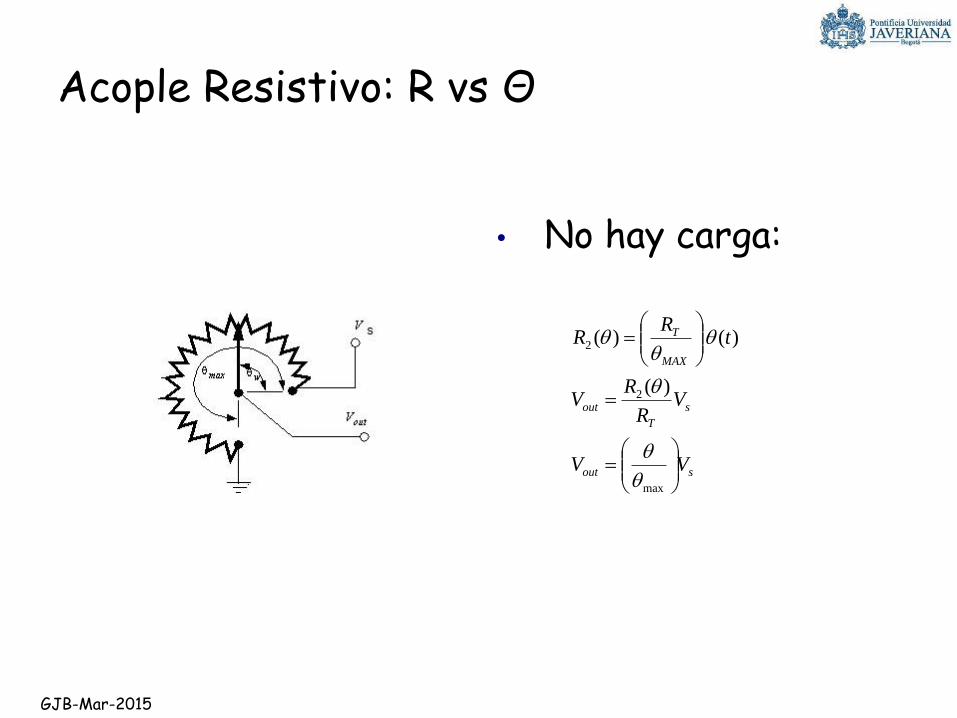
Acople Resistivo: R vs Θ
• No hay carga:
sout
s
T
out
MAX
T
VV
VR
RV
tR
R
max
2
2
)(
)()(
GJB-Mar-2015
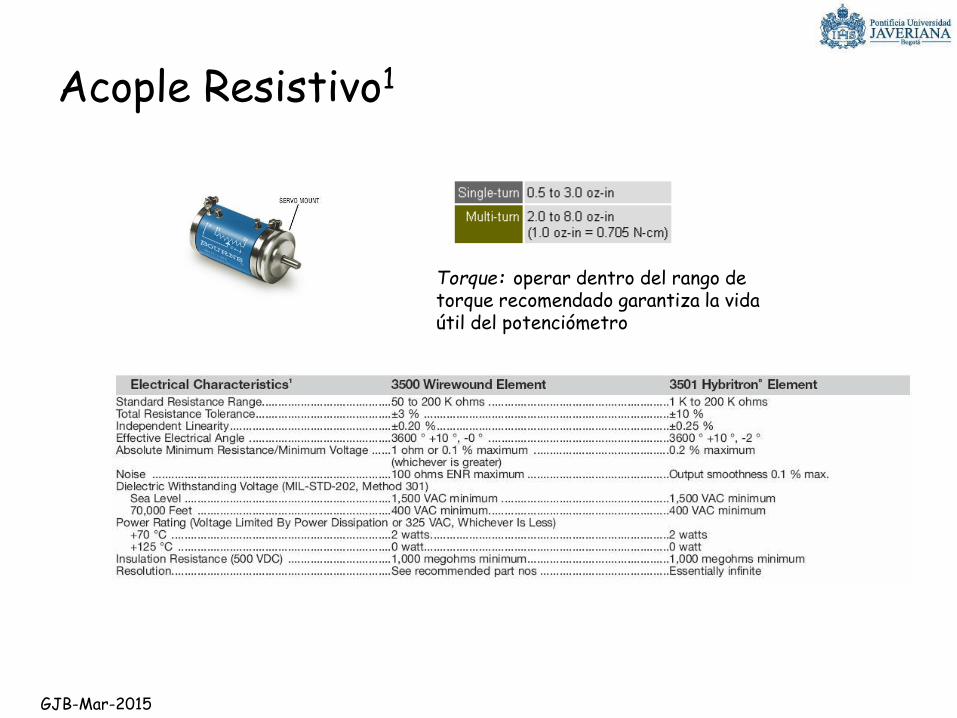
Acople Resistivo1
Torque: operar dentro del rango de torque recomendado garantiza la vida útil del potenciómetro
GJB-Mar-2015
Resistance Temperature Detector : R vs T2
• La resistencia de un sensor cambia con la temperatura de una forma reproducible.
• Elemento conductor: RTD
• Elemento semiconductor: Termistor
• La resistencia de los metales varia con la temperatura según la ecuación: (R0 = resistencia para T = 0):
𝑅 = 𝑅0(1 + 𝑎1𝑇 + 𝑎2𝑇2+. . )
GJB-Mar-2015
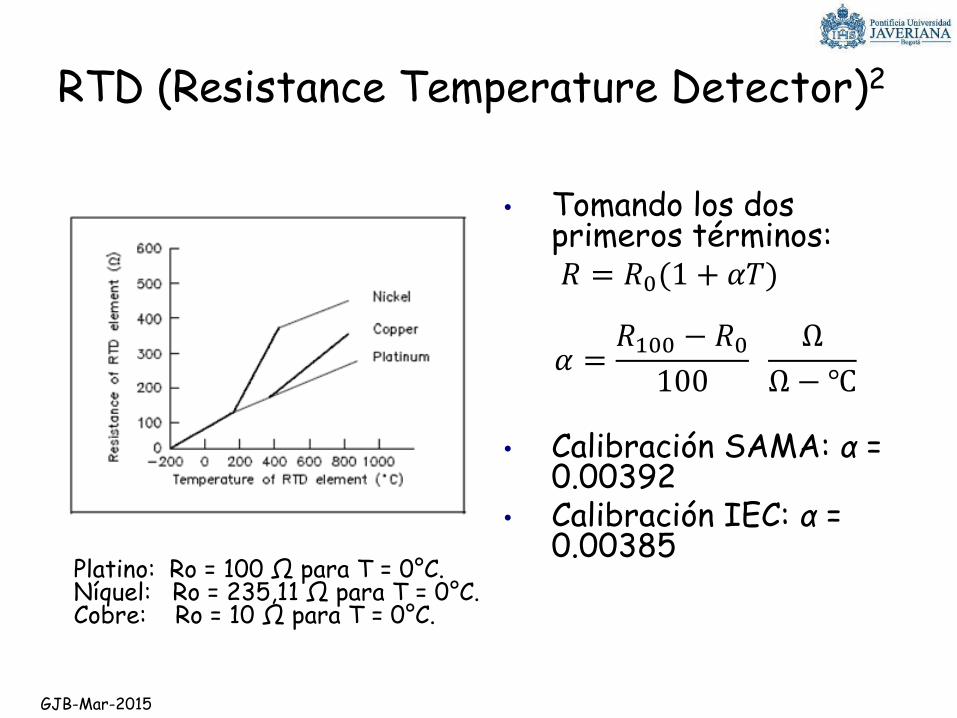
RTD (Resistance Temperature Detector)2
• Tomando los dos primeros términos:𝑅 = 𝑅0(1 + 𝛼𝑇)
𝛼 =𝑅100 − 𝑅0
100
Ω
Ω −℃
• Calibración SAMA: α = 0.00392
• Calibración IEC: α = 0.00385
Platino: Ro = 100 Ω para T = 0°C.Níquel: Ro = 235,11 Ω para T = 0°C.Cobre: Ro = 10 Ω para T = 0°C.
GJB-Mar-2015
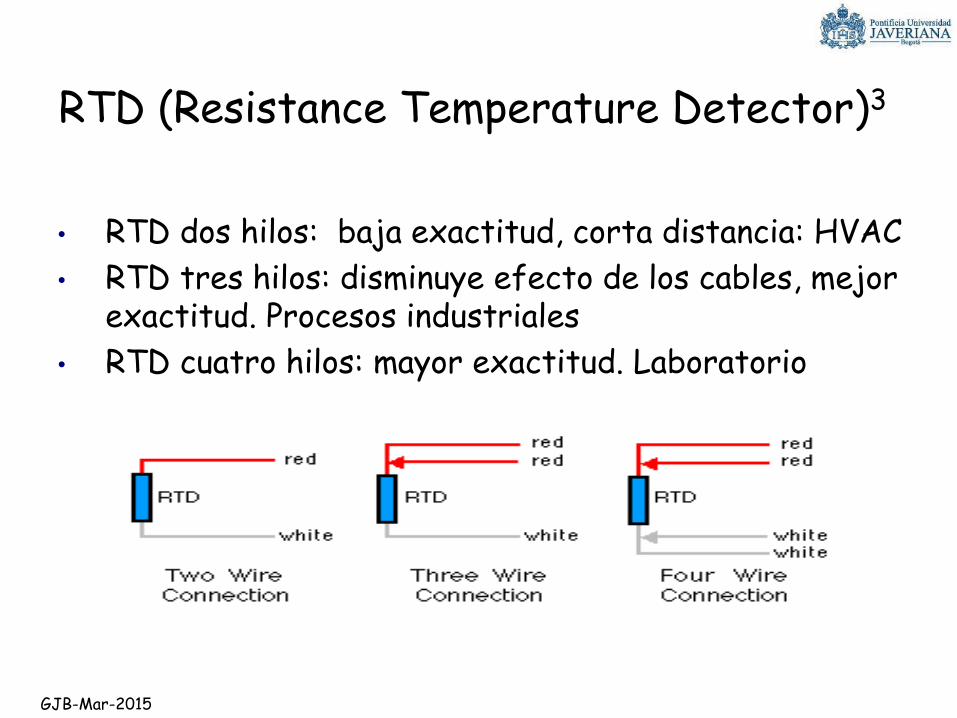
RTD (Resistance Temperature Detector)3
• RTD dos hilos: baja exactitud, corta distancia: HVAC
• RTD tres hilos: disminuye efecto de los cables, mejor exactitud. Procesos industriales
• RTD cuatro hilos: mayor exactitud. Laboratorio
GJB-Mar-2015
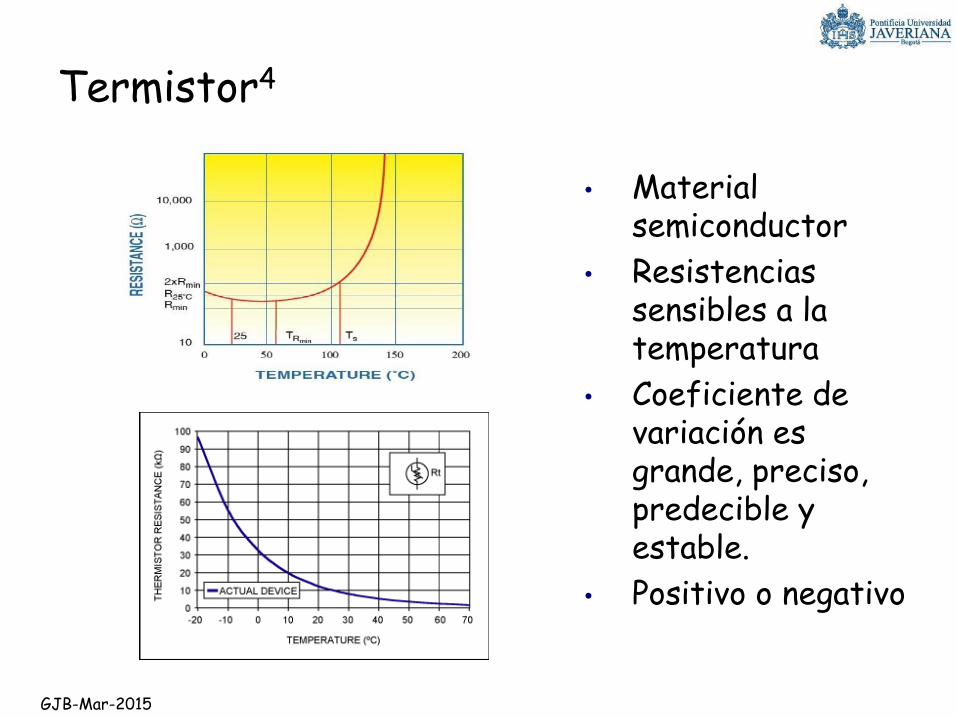
Termistor4
• Material semiconductor
• Resistencias sensibles a la temperatura
• Coeficiente de variación es grande, preciso, predecible y estable.
• Positivo o negativo
GJB-Mar-2015
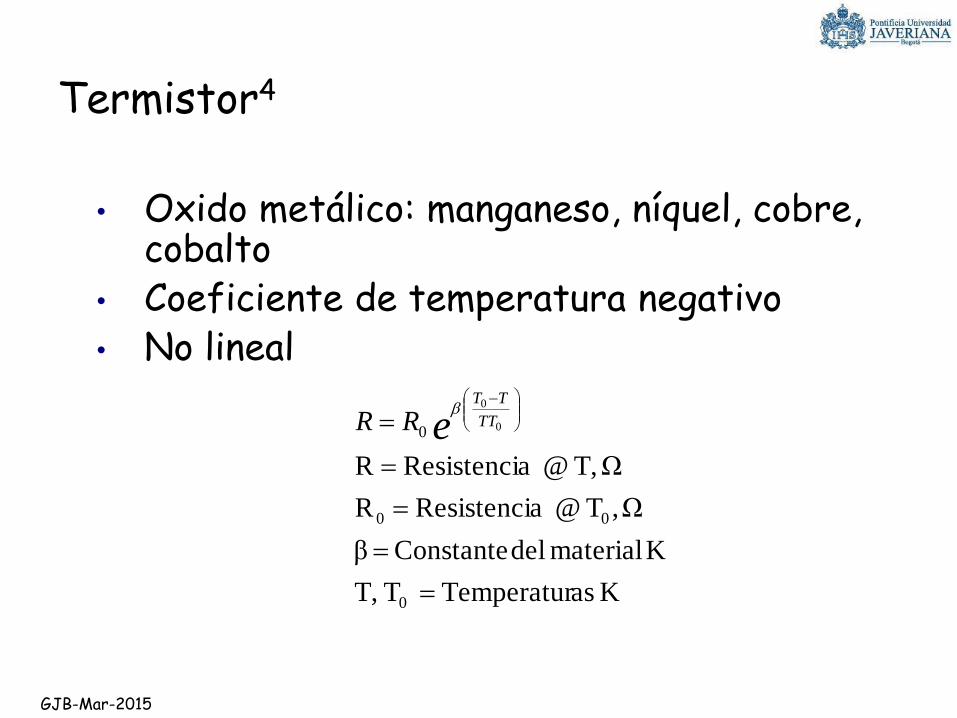
Termistor4
K asTemperaturT T,
K material del Constante β
Ω,T @ aResistenciR
ΩT, @ aResistenciR
0
00
0 0
0
e TT
TT
RR
• Oxido metálico: manganeso, níquel, cobre, cobalto
• Coeficiente de temperatura negativo• No lineal
GJB-Mar-2015

Termistor4
• La variación incremental de resistencia respecto a temperatura es:
𝑆 =𝑑𝑅
𝑑𝑇= −
𝛽
𝑇2R
Ω
Ω −℃
• Si β = 4000 a temperatura ambiente el coeficiente de temperatura es -0.045.
• Una RTD de platino tiene un coeficiente +0.0039
GJB-Mar-2015
Ecuación Steinhart-Hart4
• Ecuación de Steinhart – Hart da una aproximación de la temperatura absoluta en función de la resistencia:
1
𝑇= 𝐴 + 𝐵 𝑙𝑛𝑅𝑇 + 𝐶(𝑙𝑛𝑅𝑇)
3
• Constantes A, B y C se determinan experimentalmente o a partir de los datos del fabricante. T en K y R en Ω.
GJB-Mar-2015
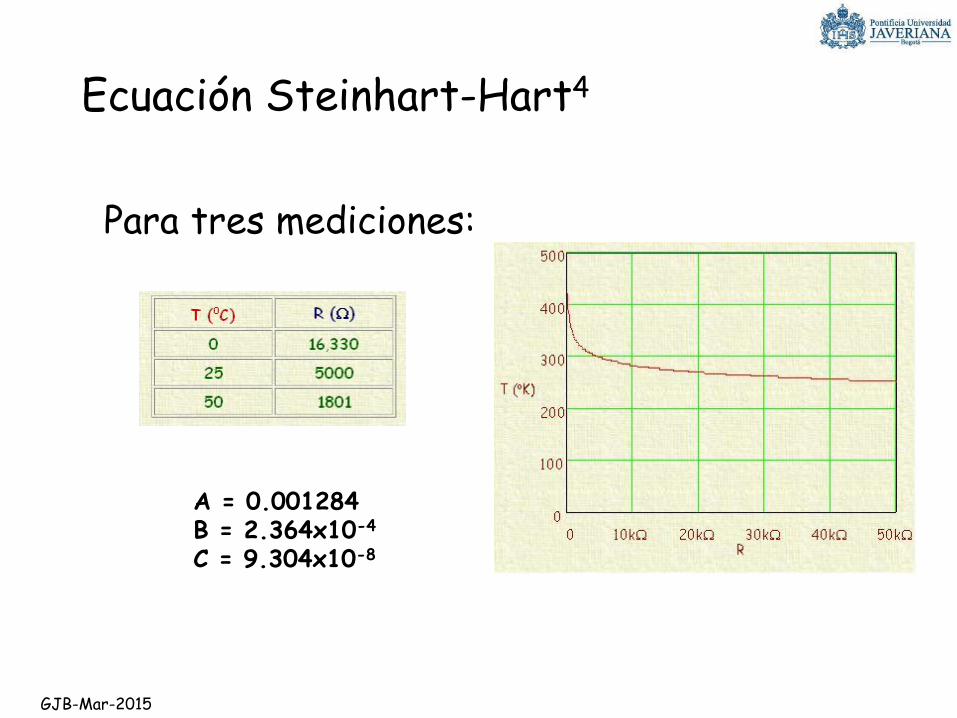
Ecuación Steinhart-Hart4
Para tres mediciones:
A = 0.001284B = 2.364x10-4
C = 9.304x10-8
GJB-Mar-2015
Stress & Strain
• La aplicación de fuerzas externas a un cuerpo sólido produce una deformación del mismo. El termino “STRESS” es usado para describir la carga o fuerza externa y el termino “STRAIN” describe la deformación.
GJB-Mar-2015
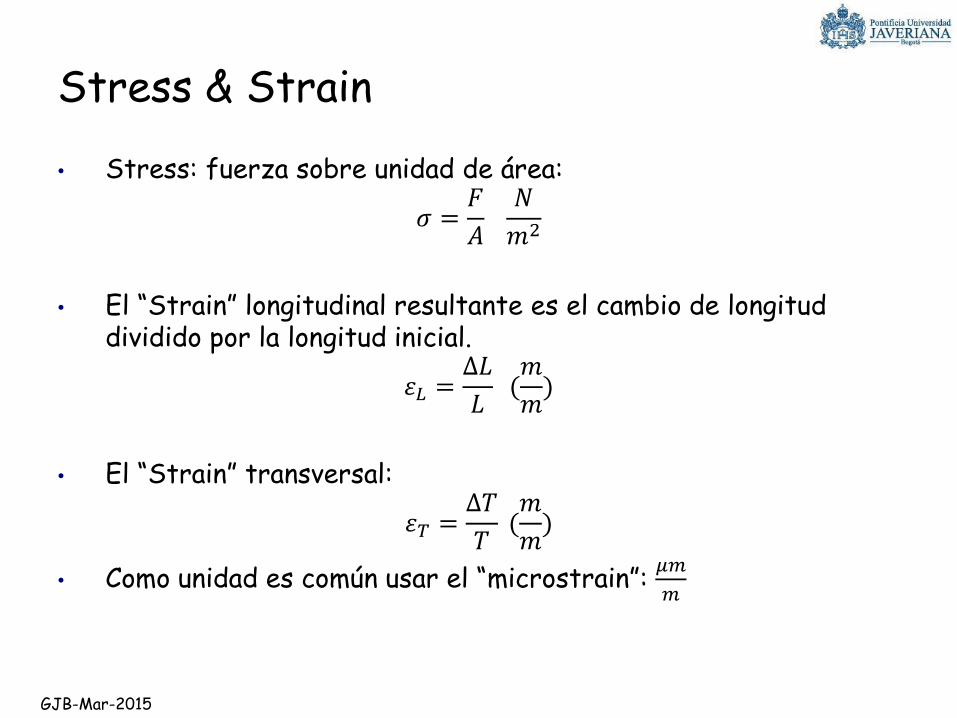
Stress & Strain
• Stress: fuerza sobre unidad de área:
𝜎 =𝐹
𝐴
𝑁
𝑚2
• El “Strain” longitudinal resultante es el cambio de longitud dividido por la longitud inicial.
𝜀𝐿 =∆𝐿
𝐿(𝑚
𝑚)
• El “Strain” transversal:
𝜀𝑇 =∆𝑇
𝑇(𝑚
𝑚)
• Como unidad es común usar el “microstrain”: 𝜇𝑚
𝑚
GJB-Mar-2015
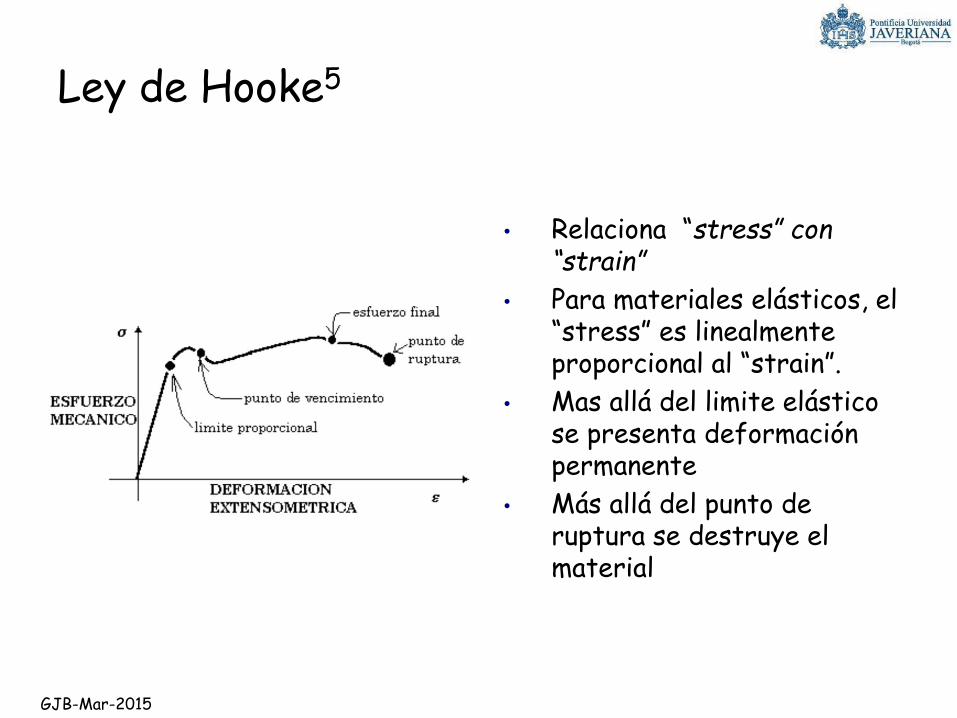
Ley de Hooke5
• Relaciona “stress” con “strain”
• Para materiales elásticos, el “stress” es linealmente proporcional al “strain”.
• Mas allá del limite elástico se presenta deformación permanente
• Más allá del punto de ruptura se destruye el material
GJB-Mar-2015

Stress & Strain5
• En la región lineal se define: E Módulo de Young:
2m
NE
L
L
GJB-Mar-2015
Stress & Strain
• La relación de Poisson ν es la relación del “strain” de contracción transversal al “strain” de extensión longitudinal, medido en la dirección de la fuerza aplicada. Deformación de “tensión” se considera positiva y deformación de “compresión” se considera negativa.
• La definición de la relación de Poisson tiene un signo negativo, tal que materiales normales tienen una relación positiva:
ν = - εtransversal / εlongitudinal
GJB-Mar-2015
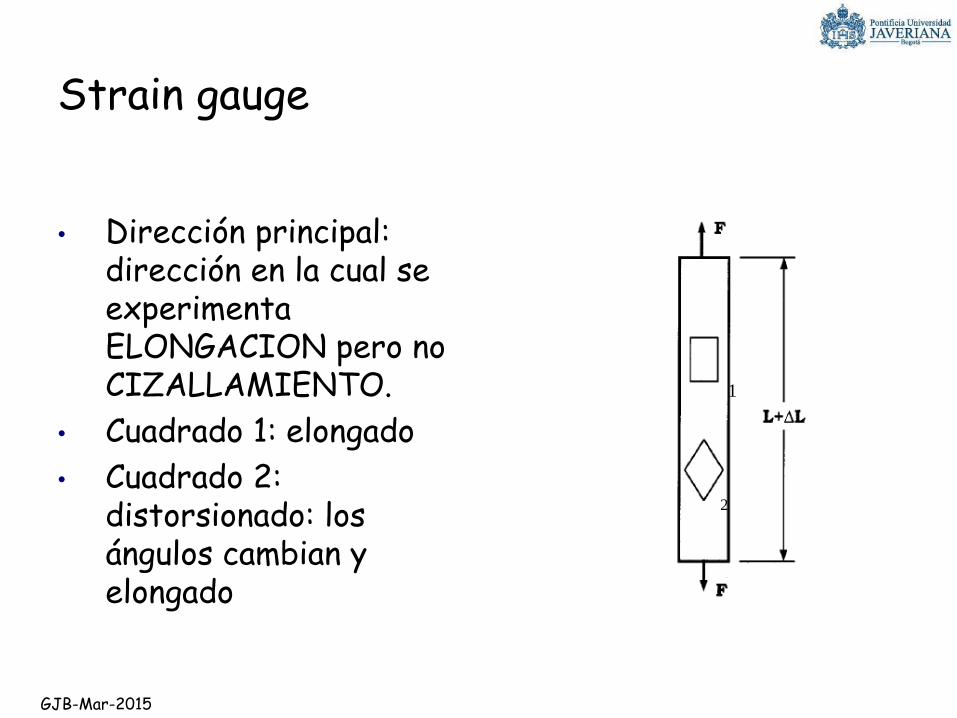
Strain gauge
• Dirección principal: dirección en la cual se experimenta ELONGACION pero no CIZALLAMIENTO.
• Cuadrado 1: elongado
• Cuadrado 2: distorsionado: los ángulos cambian y elongado
1
2
GJB-Mar-2015
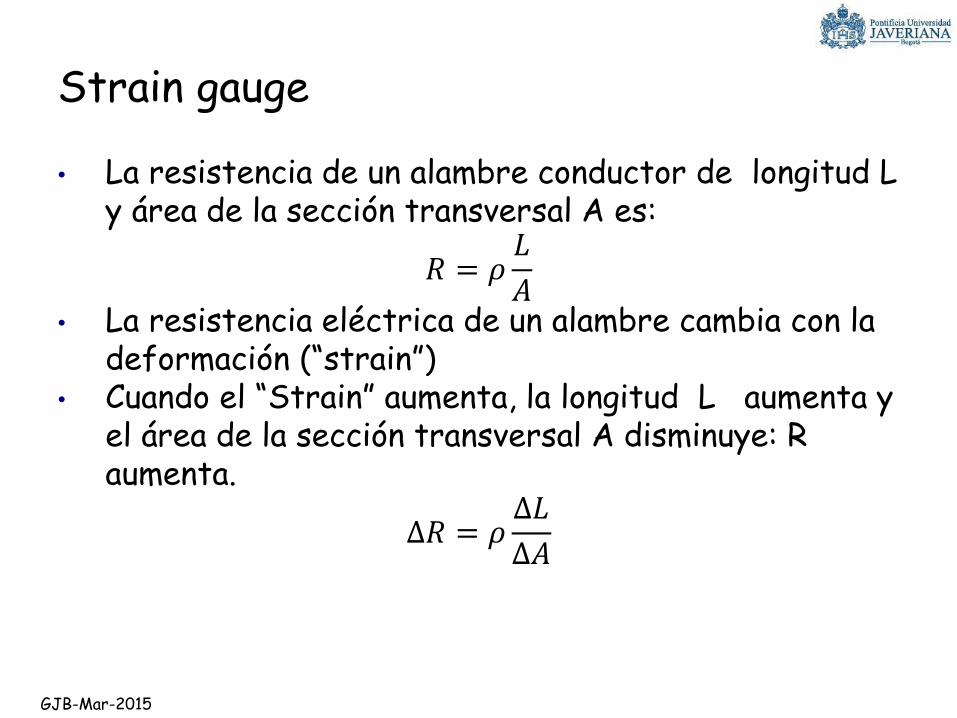
Strain gauge
• La resistencia de un alambre conductor de longitud L y área de la sección transversal A es:
𝑅 = 𝜌𝐿
𝐴• La resistencia eléctrica de un alambre cambia con la
deformación (“strain”) • Cuando el “Strain” aumenta, la longitud L aumenta y
el área de la sección transversal A disminuye: R aumenta.
Δ𝑅 = 𝜌Δ𝐿
Δ𝐴
GJB-Mar-2015
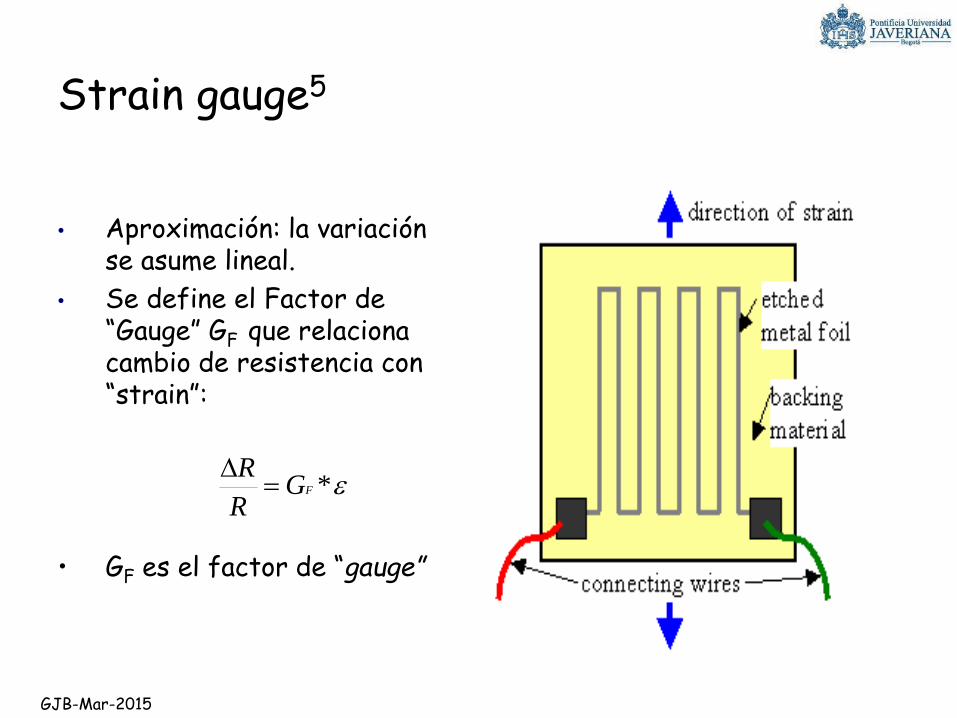
Strain gauge5
• Aproximación: la variación se asume lineal.
• Se define el Factor de “Gauge” GF que relaciona cambio de resistencia con “strain”:
• GF es el factor de “gauge”
*FGR
R
GJB-Mar-2015
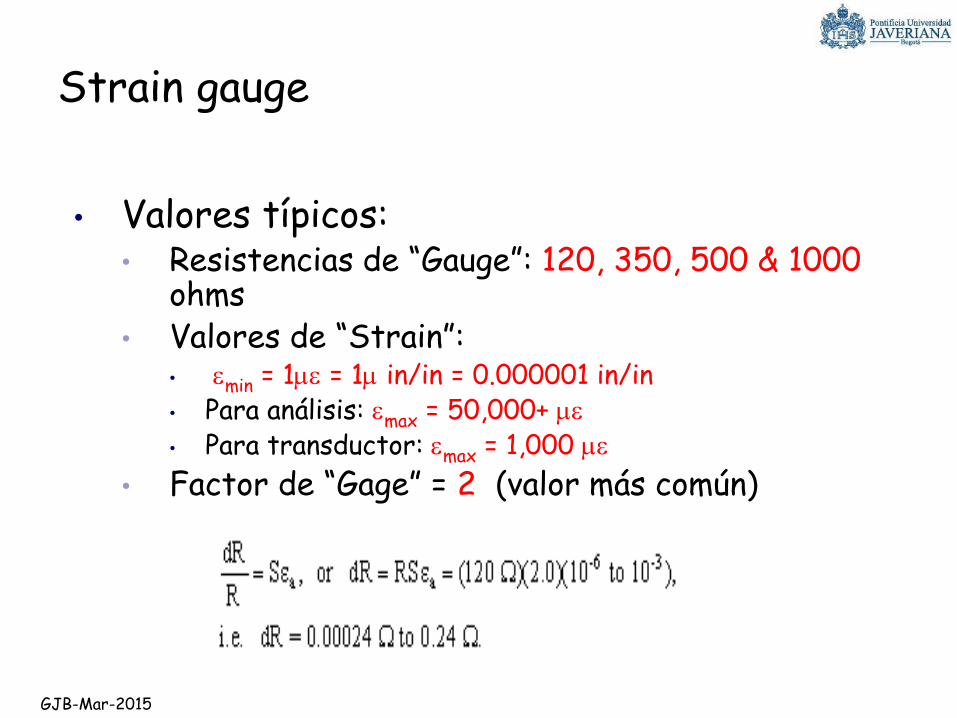
Strain gauge
• Valores típicos:• Resistencias de “Gauge”: 120, 350, 500 & 1000
ohms• Valores de “Strain”:
• min = 1 = 1 in/in = 0.000001 in/in• Para análisis: max = 50,000+ • Para transductor: max = 1,000
• Factor de “Gage” = 2 (valor más común)
GJB-Mar-2015
Strain gauge5
No hay compensación de temperatura. Sólo para aplicaciones con T constante
GJB-Mar-2015
Ejemplo 106
• Un alambre de aluminio de resistencia Ro = 120 Ω experimenta una deformación εL = 1000 µm/m; el coeficiente de temperatura es α = 0,00429 Ω/Ω-°C. GF = 2 y εT es despreciable. El cambio de temperatura es de 1 °C.
• Comparar las variaciones de resistencia debidas a la deformación longitudinal y a la temperatura.
GJB-Mar-2015
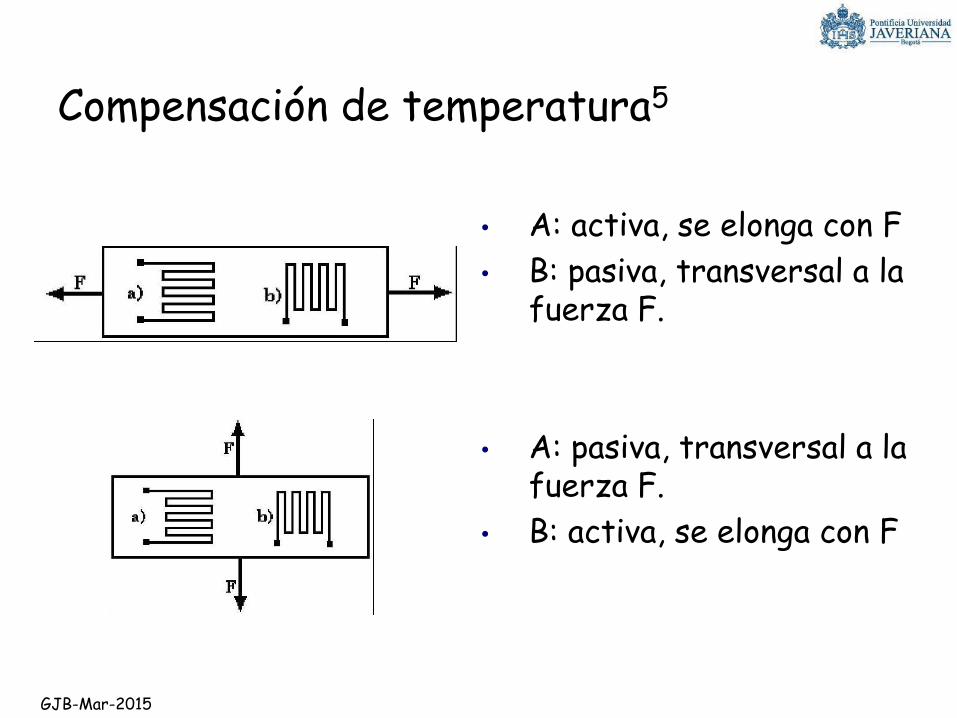
Compensación de temperatura5
• A: activa, se elonga con F
• B: pasiva, transversal a la fuerza F.
• A: pasiva, transversal a la fuerza F.
• B: activa, se elonga con F
GJB-Mar-2015
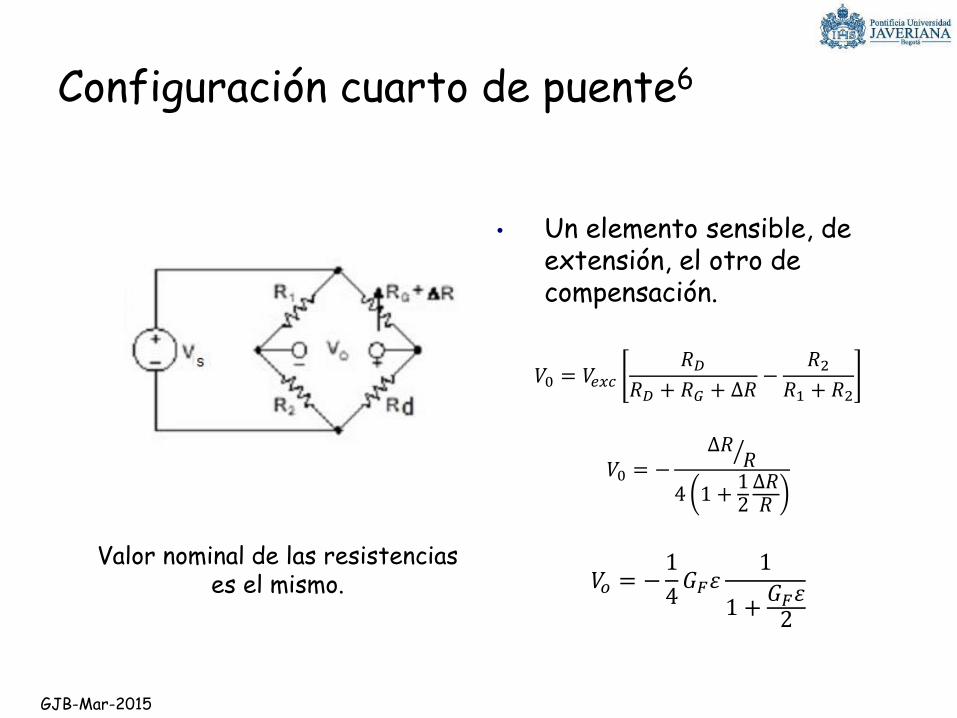
Configuración cuarto de puente6
• Un elemento sensible, de extensión, el otro de compensación.
𝑉0 = 𝑉𝑒𝑥𝑐𝑅𝐷
𝑅𝐷 + 𝑅𝐺 + ∆𝑅−
𝑅2𝑅1 + 𝑅2
𝑉0 = − ∆𝑅𝑅
4 1 +12∆𝑅𝑅
𝑉𝑜 = −1
4𝐺𝐹𝜀
1
1 +𝐺𝐹𝜀2
Valor nominal de las resistencias es el mismo.
GJB-Mar-2015
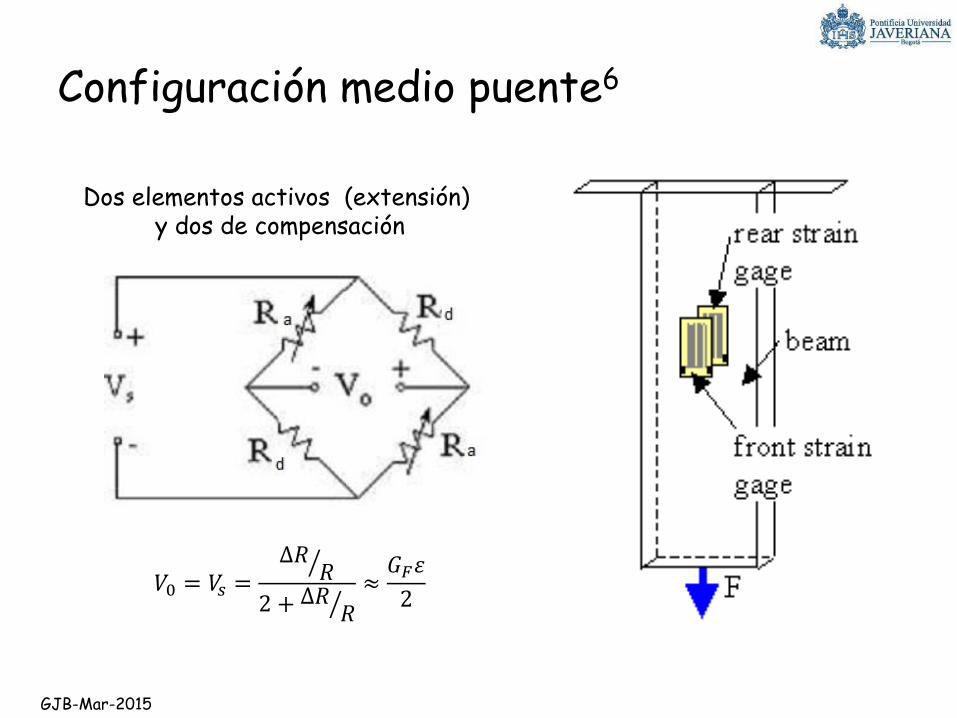
Configuración medio puente6
𝑉0 = 𝑉𝑠 = ∆𝑅𝑅
2 + ∆𝑅𝑅
≈𝐺𝐹𝜀
2
Dos elementos activos (extensión) y dos de compensación
GJB-Mar-2015
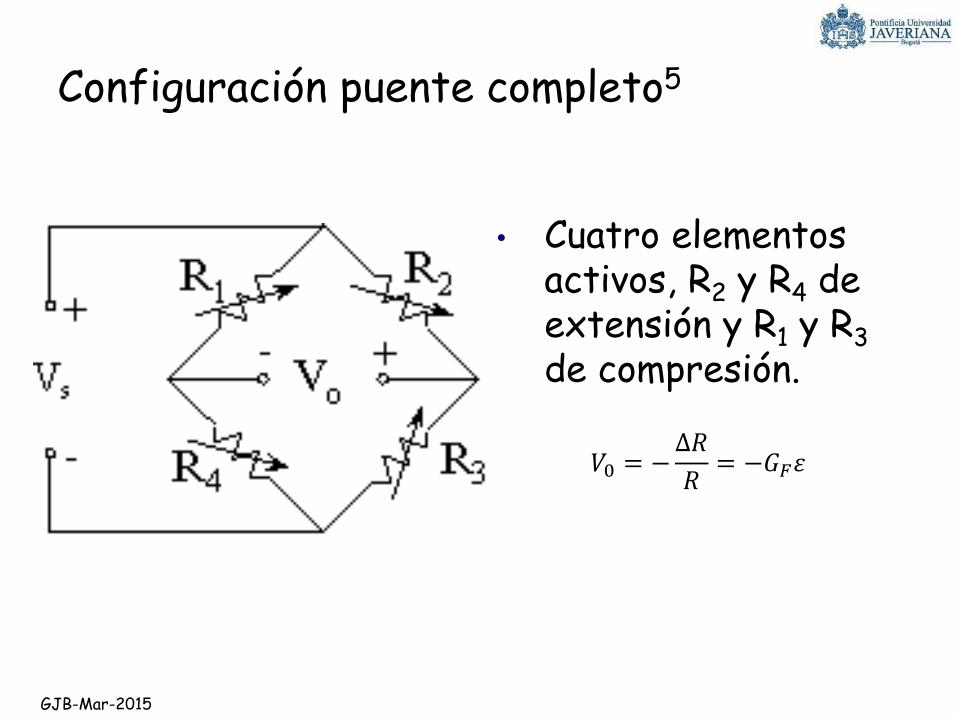
Configuración puente completo5
• Cuatro elementos activos, R2 y R4 de extensión y R1 y R3
de compresión.
𝑉0 = −∆𝑅
𝑅= −𝐺𝐹𝜀
GJB-Mar-2015
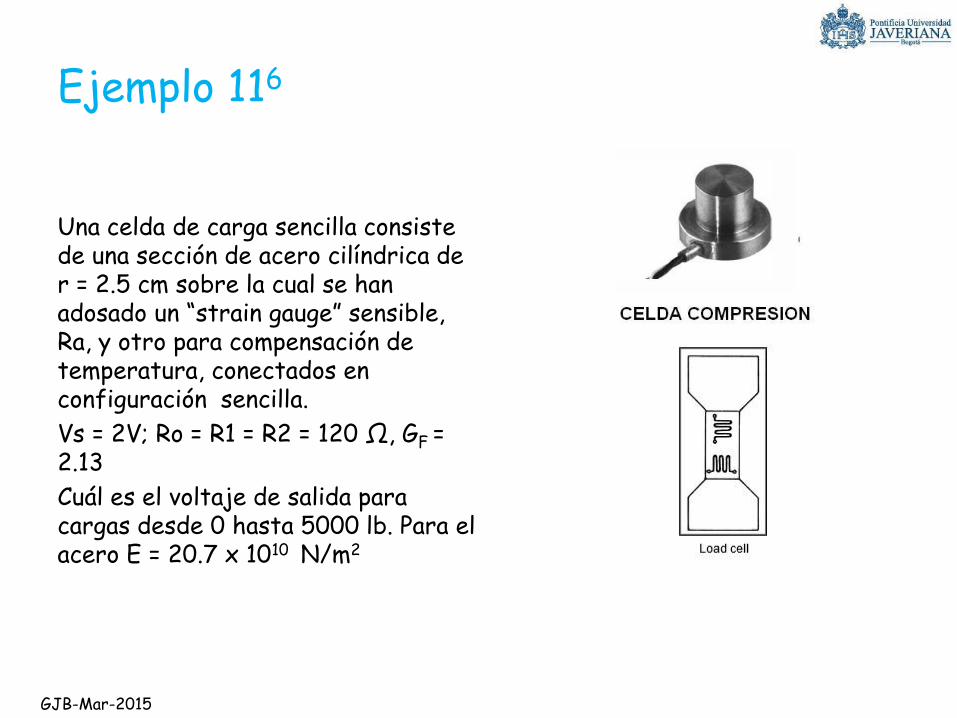
Ejemplo 116
Una celda de carga sencilla consiste de una sección de acero cilíndrica de r = 2.5 cm sobre la cual se han adosado un “strain gauge” sensible, Ra, y otro para compensación de temperatura, conectados en configuración sencilla.
Vs = 2V; Ro = R1 = R2 = 120 Ω, GF = 2.13
Cuál es el voltaje de salida para cargas desde 0 hasta 5000 lb. Para el acero E = 20.7 x 1010 N/m2
GJB-Mar-2015
Acople por campo eléctrico
• El proceso de conversión de energía mecánica a eléctrica se realiza por medio de variaciones en el campo eléctrico.
• Un componente que exhibe este comportamiento es la celda de capacidad variable.
GJB-Mar-2015
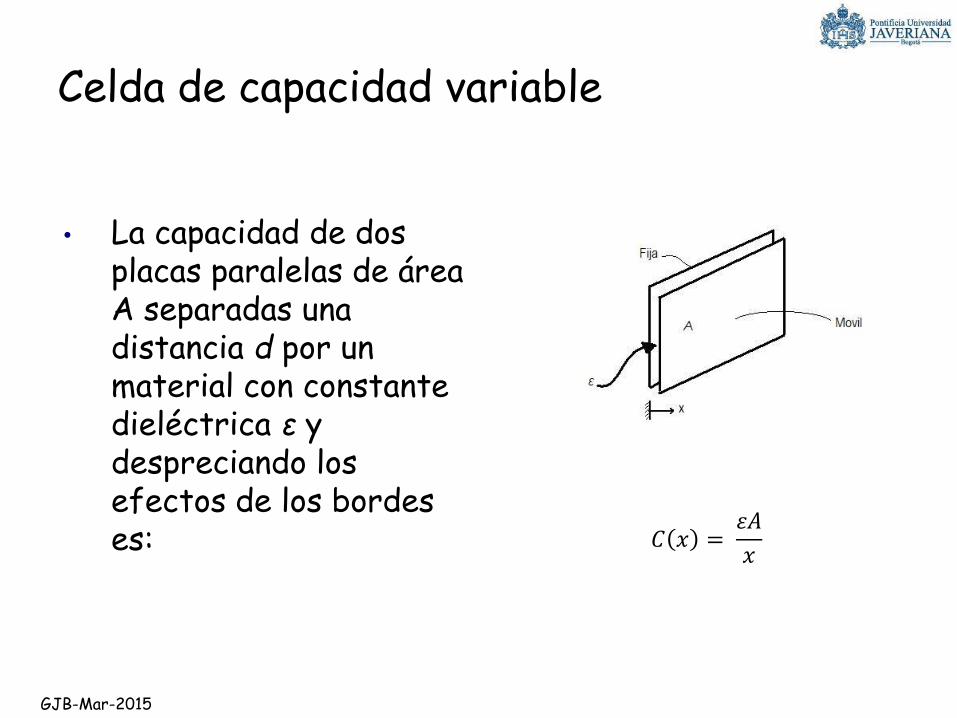
Celda de capacidad variable
• La capacidad de dos placas paralelas de área A separadas una distancia d por un material con constante dieléctrica ε y despreciando los efectos de los bordes es: 𝐶 𝑥 =
𝜀𝐴
𝑥
GJB-Mar-2015
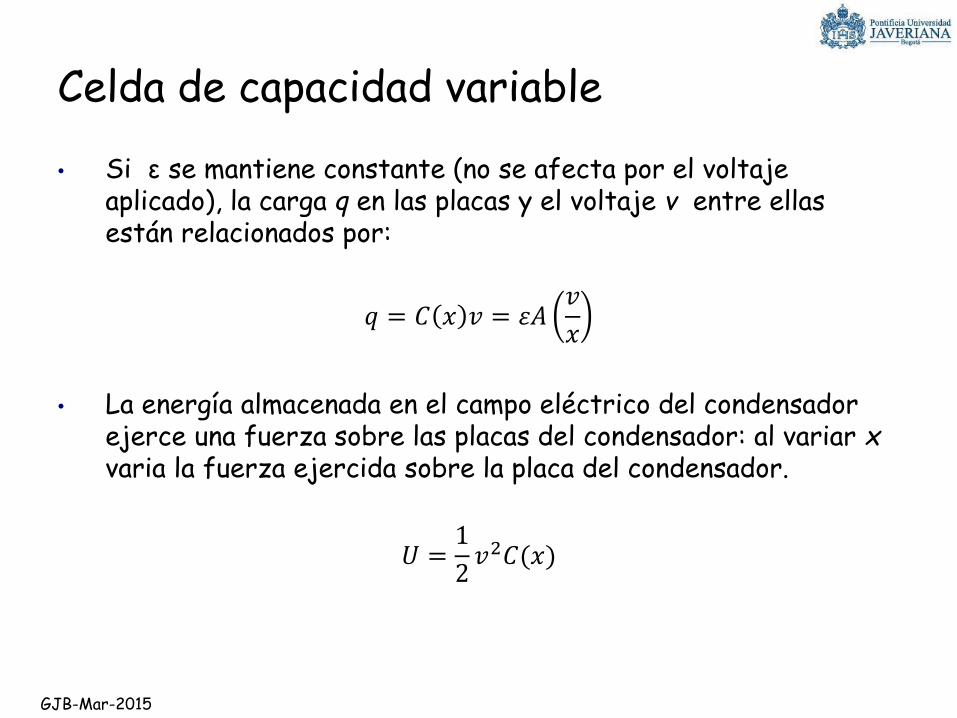
Celda de capacidad variable
• Si ε se mantiene constante (no se afecta por el voltaje aplicado), la carga q en las placas y el voltaje v entre ellas están relacionados por:
𝑞 = 𝐶 𝑥 𝑣 = 𝜀𝐴𝑣
𝑥
• La energía almacenada en el campo eléctrico del condensador ejerce una fuerza sobre las placas del condensador: al variar xvaria la fuerza ejercida sobre la placa del condensador.
𝑈 =1
2𝑣2𝐶(𝑥)
GJB-Mar-2015
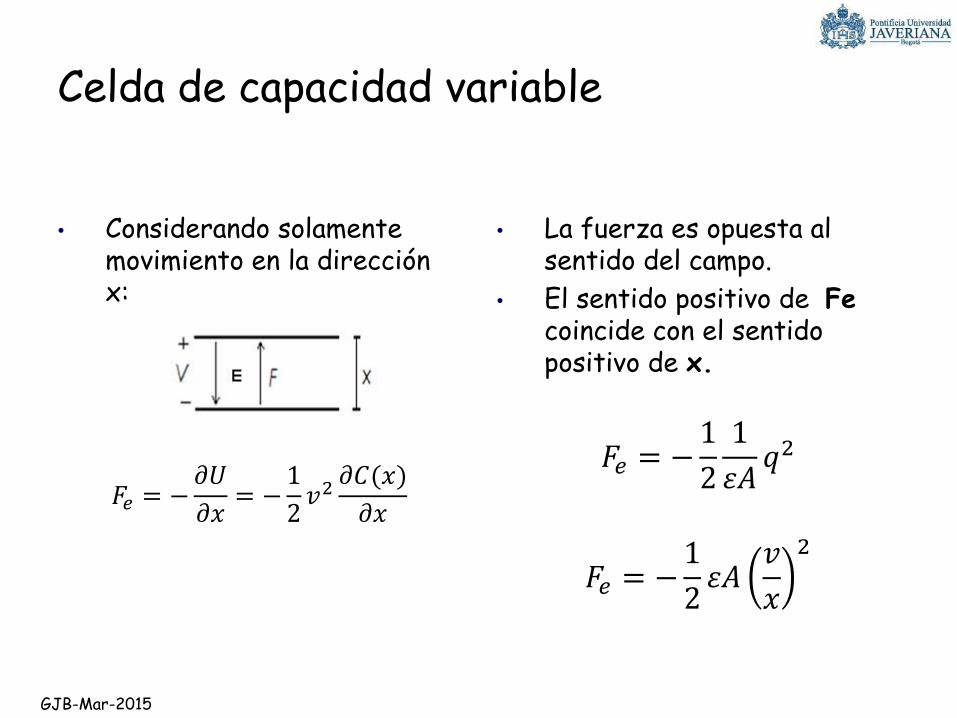
Celda de capacidad variable
• Considerando solamente movimiento en la dirección x:
𝐹𝑒 = −𝜕𝑈
𝜕𝑥= −
1
2𝑣2
𝜕𝐶(𝑥)
𝜕𝑥
• La fuerza es opuesta al sentido del campo.
• El sentido positivo de Fe coincide con el sentido positivo de x.
𝐹𝑒 = −1
2
1
𝜀𝐴𝑞2
𝐹𝑒 = −1
2𝜀𝐴
𝑣
𝑥
2
GJB-Mar-2015

Celda de capacidad variable7
GJB-Mar-2015
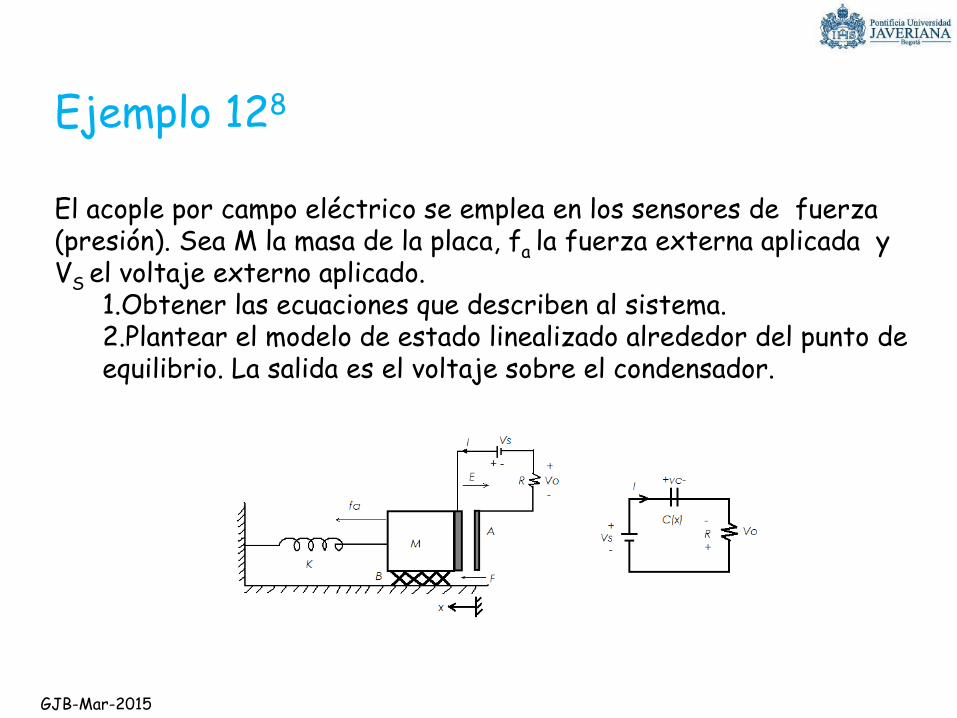
Ejemplo 128
El acople por campo eléctrico se emplea en los sensores de fuerza (presión). Sea M la masa de la placa, fa la fuerza externa aplicada y VS el voltaje externo aplicado.
1.Obtener las ecuaciones que describen al sistema.2.Plantear el modelo de estado linealizado alrededor del punto de equilibrio. La salida es el voltaje sobre el condensador.
GJB-Mar-2015
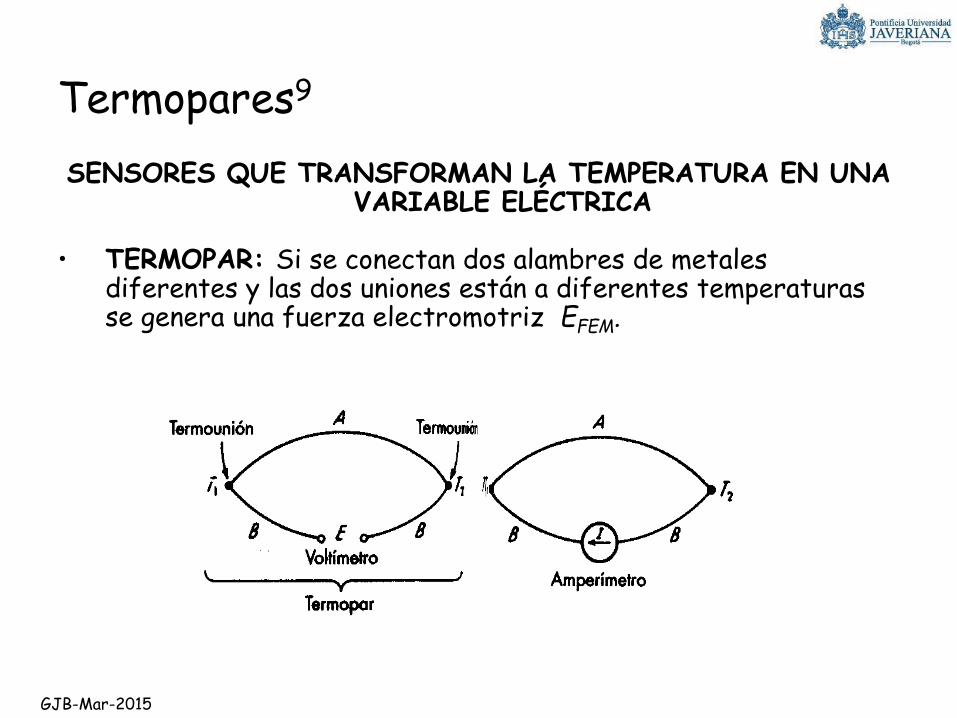
Termopares9
SENSORES QUE TRANSFORMAN LA TEMPERATURA EN UNA VARIABLE ELÉCTRICA
• TERMOPAR: Si se conectan dos alambres de metales diferentes y las dos uniones están a diferentes temperaturas se genera una fuerza electromotriz EFEM.
GJB-Mar-2015
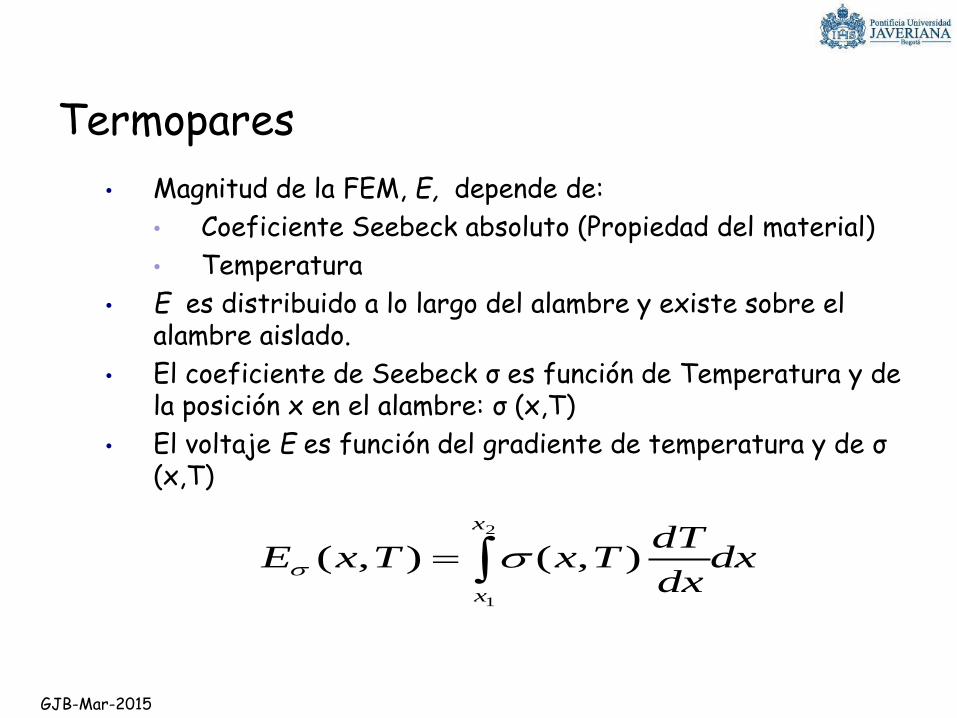
Termopares
• Magnitud de la FEM, E, depende de:
• Coeficiente Seebeck absoluto (Propiedad del material)
• Temperatura
• E es distribuido a lo largo del alambre y existe sobre el alambre aislado.
• El coeficiente de Seebeck σ es función de Temperatura y de la posición x en el alambre: σ (x,T)
• El voltaje E es función del gradiente de temperatura y de σ(x,T)
dxdx
dTTxTxE
x
x
2
1
),(),(
GJB-Mar-2015
Termopares
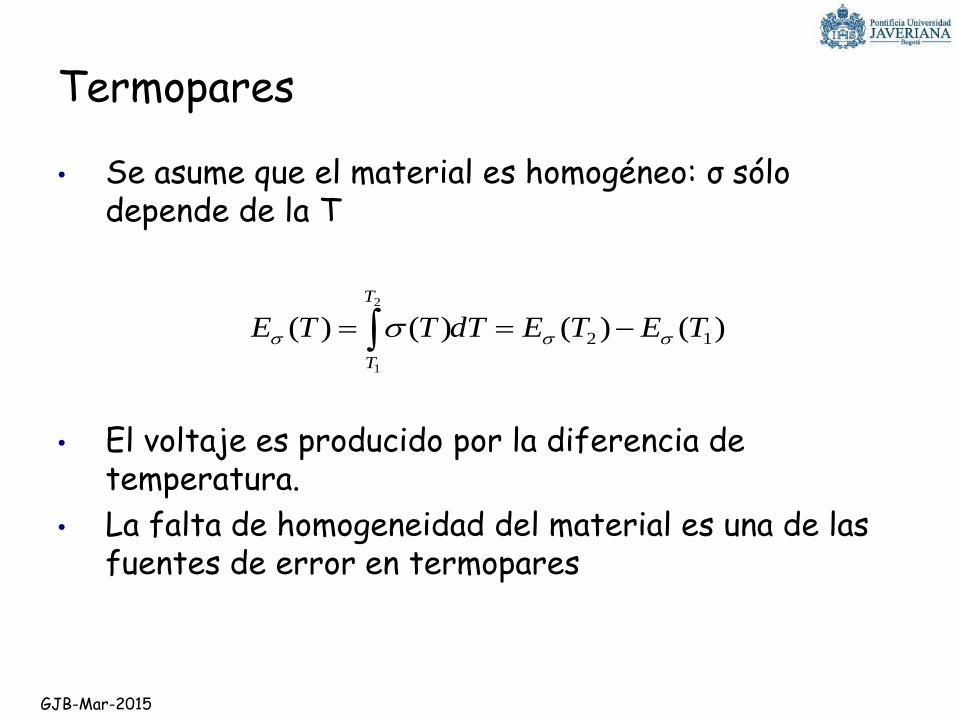
• Se asume que el material es homogéneo: σ sólo depende de la T
• El voltaje es producido por la diferencia de temperatura.
• La falta de homogeneidad del material es una de las fuentes de error en termopares
)()()()( 12
2
1
TETEdTTTE
T
T
GJB-Mar-2015
Termopares
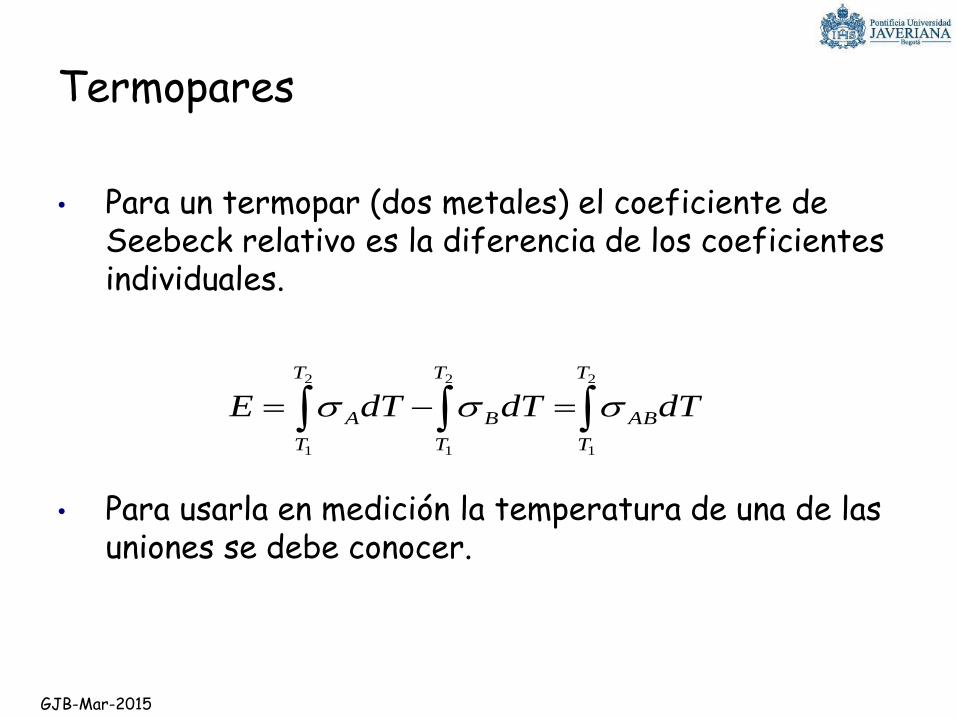
• Para un termopar (dos metales) el coeficiente de Seebeck relativo es la diferencia de los coeficientes individuales.
• Para usarla en medición la temperatura de una de las uniones se debe conocer.
2
1
2
1
2
1
T
T
AB
T
T
B
T
T
A dTdTdTE
GJB-Mar-2015
Termopares
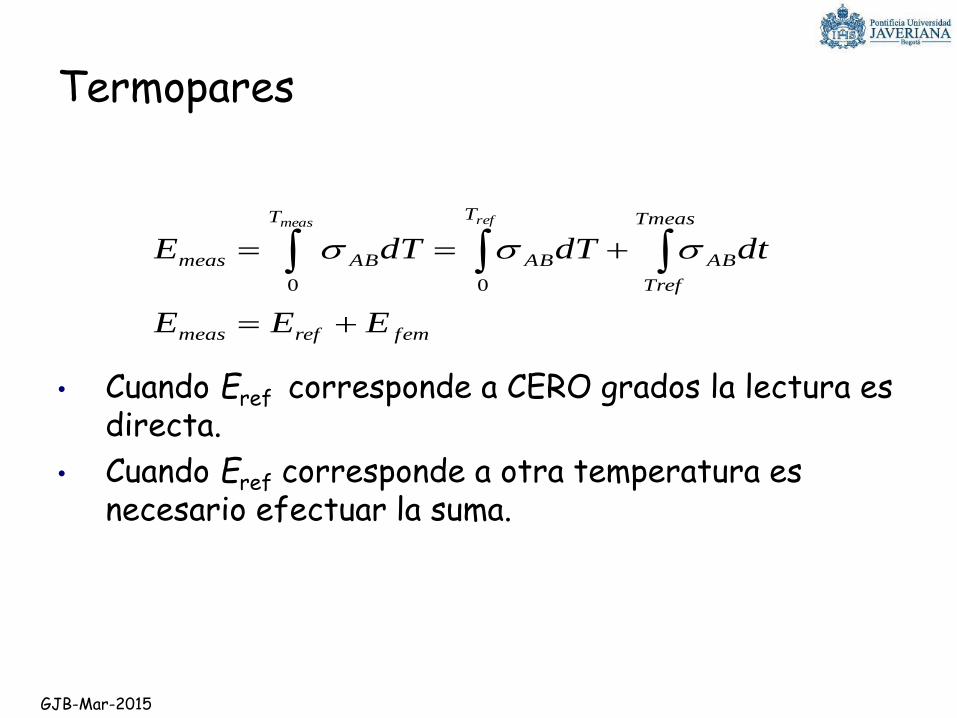
• Cuando Eref corresponde a CERO grados la lectura es directa.
• Cuando Eref corresponde a otra temperatura es necesario efectuar la suma.
femrefmeas
Tmeas
Tref
AB
T T
ABABmeas
EEE
dtdTdTEmeas ref
0 0
GJB-Mar-2015
Termopares9
GJB-Mar-2015
Termopares
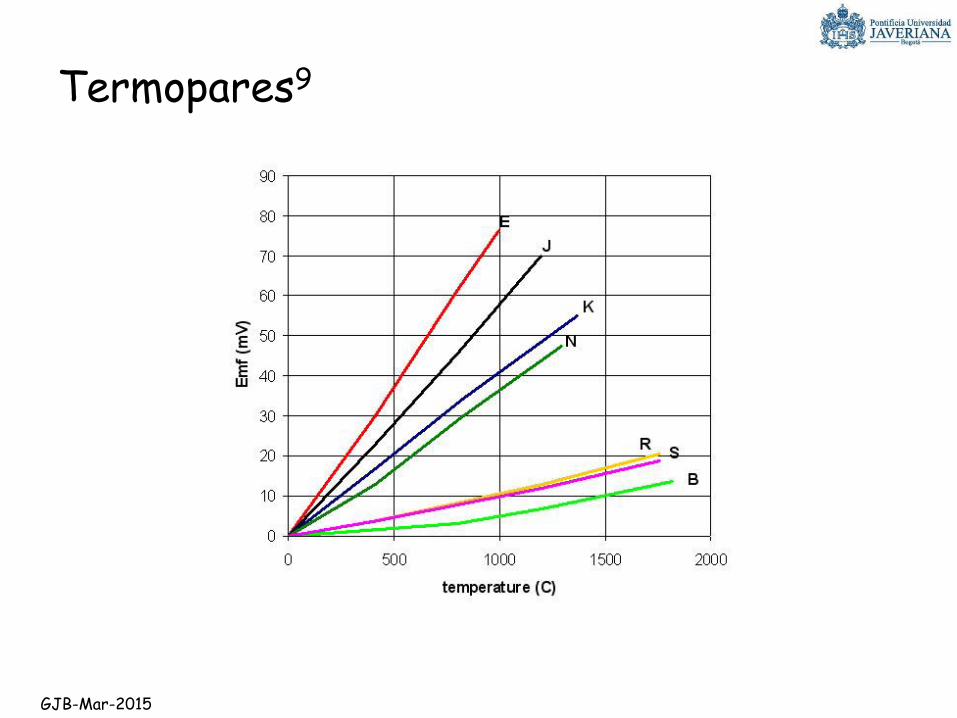
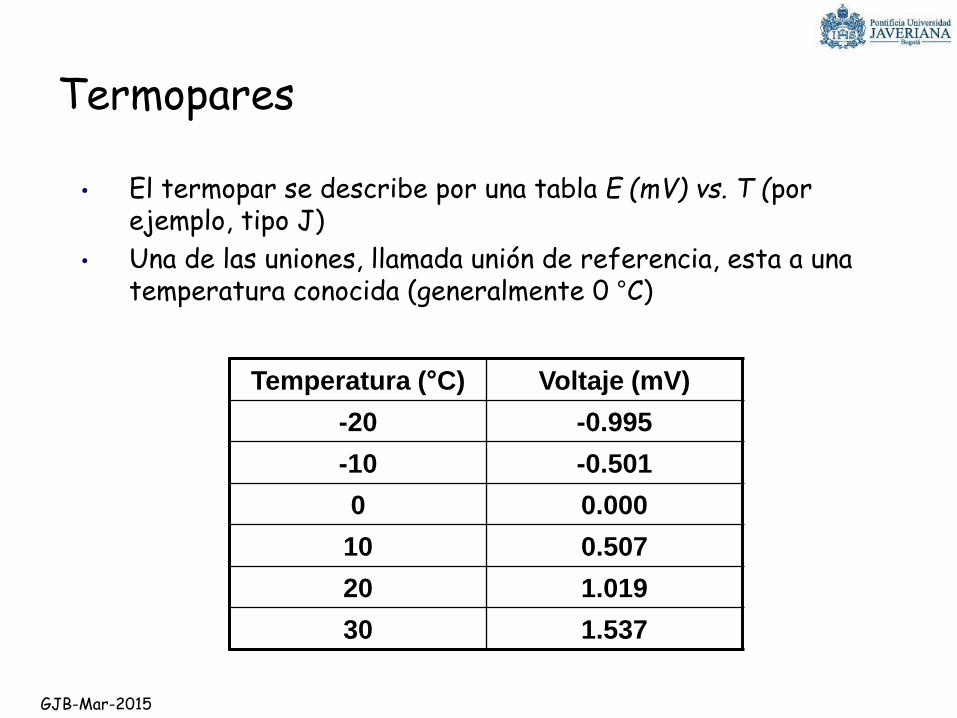
• El termopar se describe por una tabla E (mV) vs. T (por ejemplo, tipo J)
• Una de las uniones, llamada unión de referencia, esta a una temperatura conocida (generalmente 0 °C)
Temperatura (°C) Voltaje (mV)
-20 -0.995
-10 -0.501
0 0.000
10 0.507
20 1.019
30 1.537
GJB-Mar-2015
Termopares10
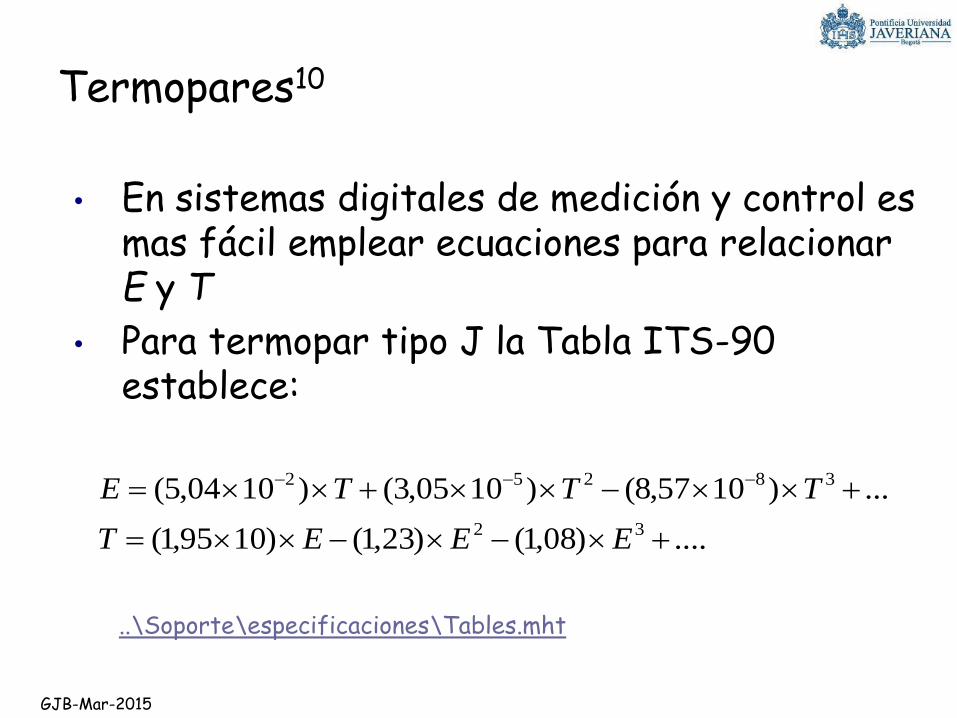
• En sistemas digitales de medición y control es mas fácil emplear ecuaciones para relacionar E y T
• Para termopar tipo J la Tabla ITS-90 establece:
....)08,1()23,1()1095,1(
...)1057,8()1005,3()1004,5(
32
38252
EEET
TTTE
..\Soporte\especificaciones\Tables.mht
GJB-Mar-2015

Termopares
• Para medir temperatura a partir de mediciones de voltaje se debe conocer la temperatura de una de las uniones.
• La caída de voltaje a lo largo de los alambres debe ser mínima.
• Como no se puede asegurar que Tref sea igual a cero se emplea un conector isotérmico y se mide su temperatura con un sensor semiconductor.
GJB-Mar-2015
Ejemplo 13
Para un termopar tipo J la Tref es de 10°C, y el voltaje Efem es de 1,4280 mV. Cuál es la temperatura medida?
a. Emplear interpolación lineal.b. Emplear la aproximación polinómica
GJB-Mar-2015
Acople por campo magnético
• Ley de Ampere: un conductor que porta corriente produce un campo magnético a su alrededor.
• Ley de Faraday: un campo magnético variable en el tiempo induce un voltaje en un conductor que pasa a través de él.
• Ley de Lorentz: un conductor que porta corriente en presencia de un campo magnético experimentará una fuerza sobre él.
• Un conductor eléctrico que se mueve dentro de un campo magnético tendrá un voltaje inducido sobre él: este es el principio generador.
GJB-Mar-2015
Ley de Ampere11
El campo magnético en el espacio alrededor de un conductor es proporcional a la corriente eléctrica que lo produce.
GJB-Mar-2015
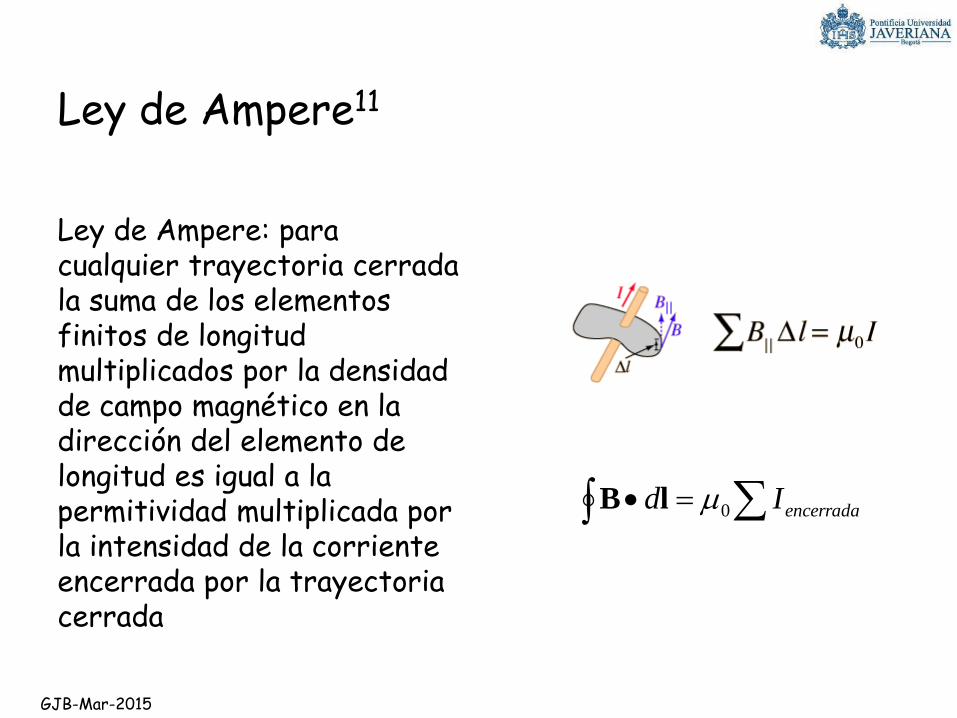
Ley de Ampere11
Ley de Ampere: para cualquier trayectoria cerrada la suma de los elementos finitos de longitud multiplicados por la densidad de campo magnético en la dirección del elemento de longitud es igual a la permitividad multiplicada por la intensidad de la corriente encerrada por la trayectoria cerrada
encerradaId 0lB
GJB-Mar-2015
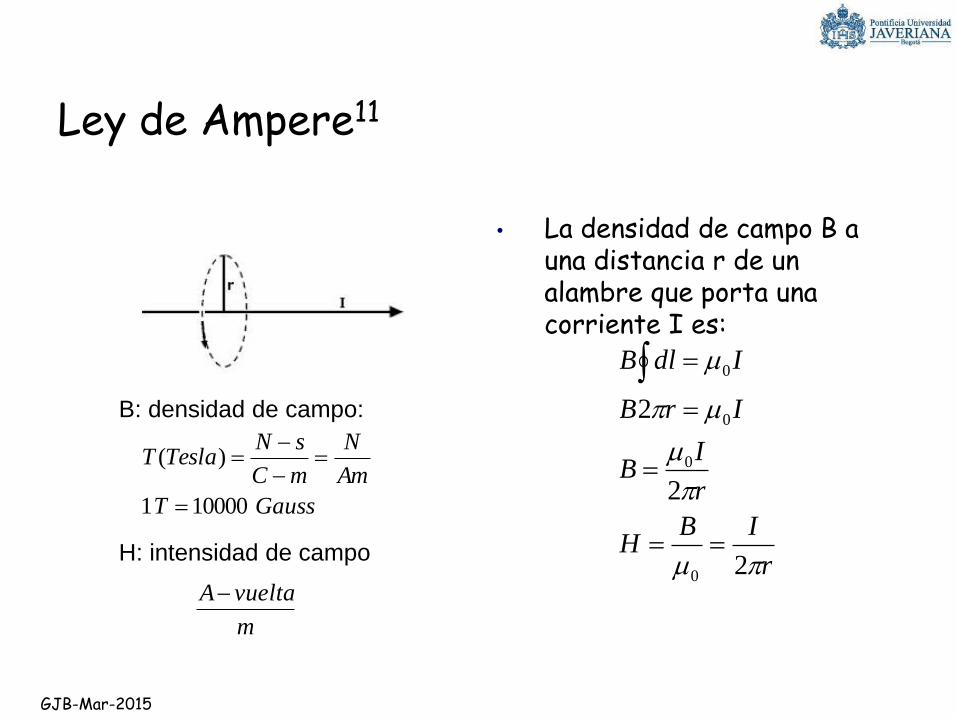
Ley de Ampere11
• La densidad de campo B a una distancia r de un alambre que porta una corriente I es:
r
IBH
r
IB
IrB
IdlB
2
2
2
0
0
0
0
B: densidad de campo:
GaussT
Am
N
mC
sNTeslaT
10000 1
)(
H: intensidad de campo
m
vueltaA
GJB-Mar-2015

Ley de Faraday11
• No importa como se genera el cambio:
• Cambiar B(t) produce una f.e.m inducida
• Cambiar el área (Acercar o alejar un conductor) produce una f.e.m por movimiento.
• Lo importante es la variación
GJB-Mar-2015

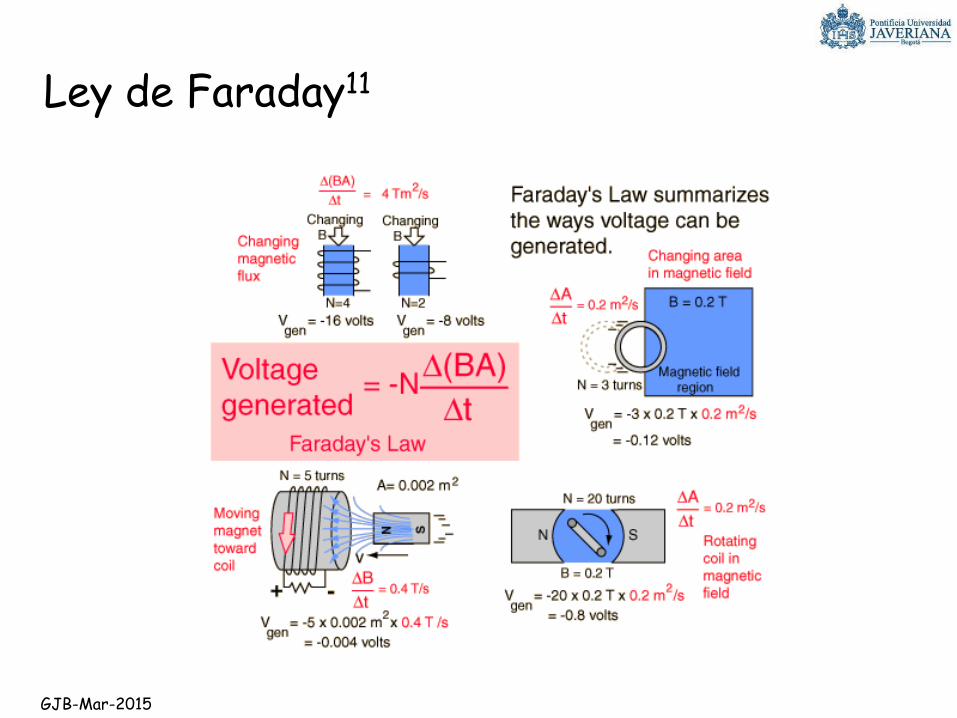
Ley de Faraday11
• Ley de Faraday: la Fuerza Electro Motriz (fem) inducida en un circuito es directamente proporcional a la tasa de cambio del flujo magnético a través del circuito.
• Para una vuelta.
dt
tdAtB
dt
tdBtA
dt
tAtdB
dt
d
fem
mfem
)()(
)()(
)()(
GJB-Mar-2015
Ley de Faraday11
GJB-Mar-2015
Ley de Lenz11
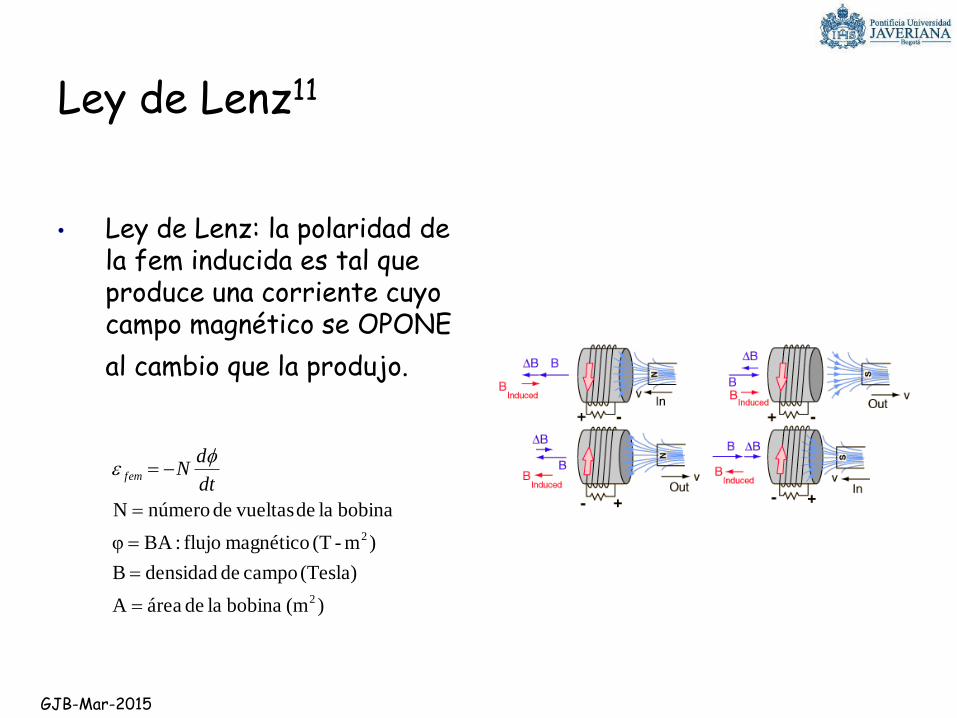
• Ley de Lenz: la polaridad de la fem inducida es tal que produce una corriente cuyo campo magnético se OPONE
al cambio que la produjo.
)(m bobina la de áreaA
(Tesla) campo de densidadB
)m-(T magnético flujo:BAφ
bobina la de vueltasde númeroN
2
2
dt
dNfem
GJB-Mar-2015
Ley de Lorentz12
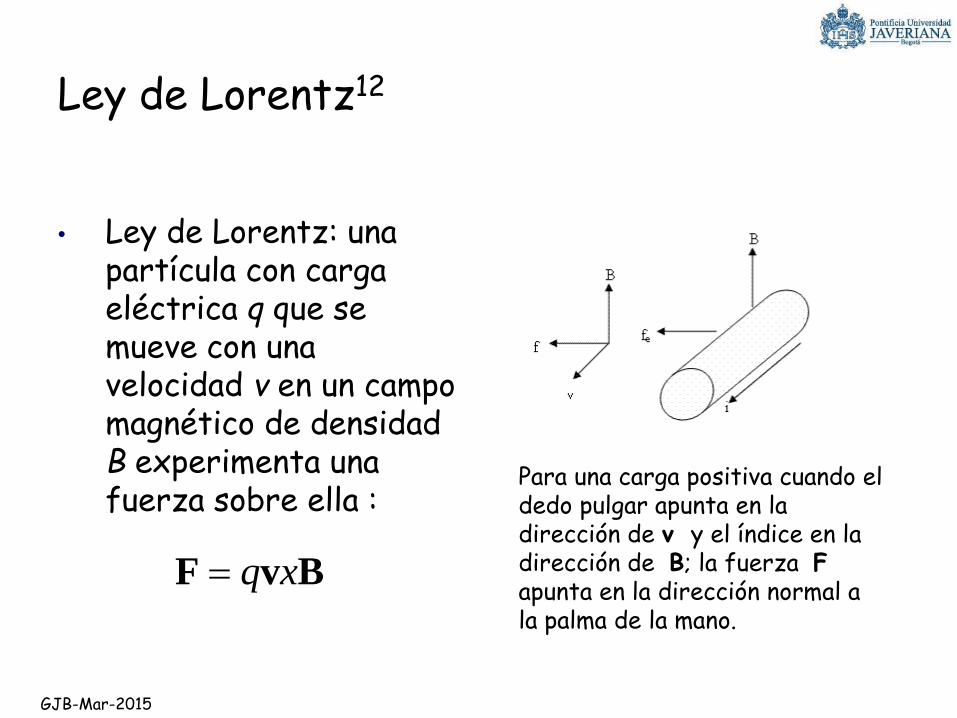
• Ley de Lorentz: una partícula con carga eléctrica q que se mueve con una velocidad v en un campo magnético de densidad B experimenta una fuerza sobre ella :
BvF xq
Para una carga positiva cuando el dedo pulgar apunta en la dirección de v y el índice en la dirección de B; la fuerza F apunta en la dirección normal a la palma de la mano.
GJB-Mar-2015
Ley de Lorentz12
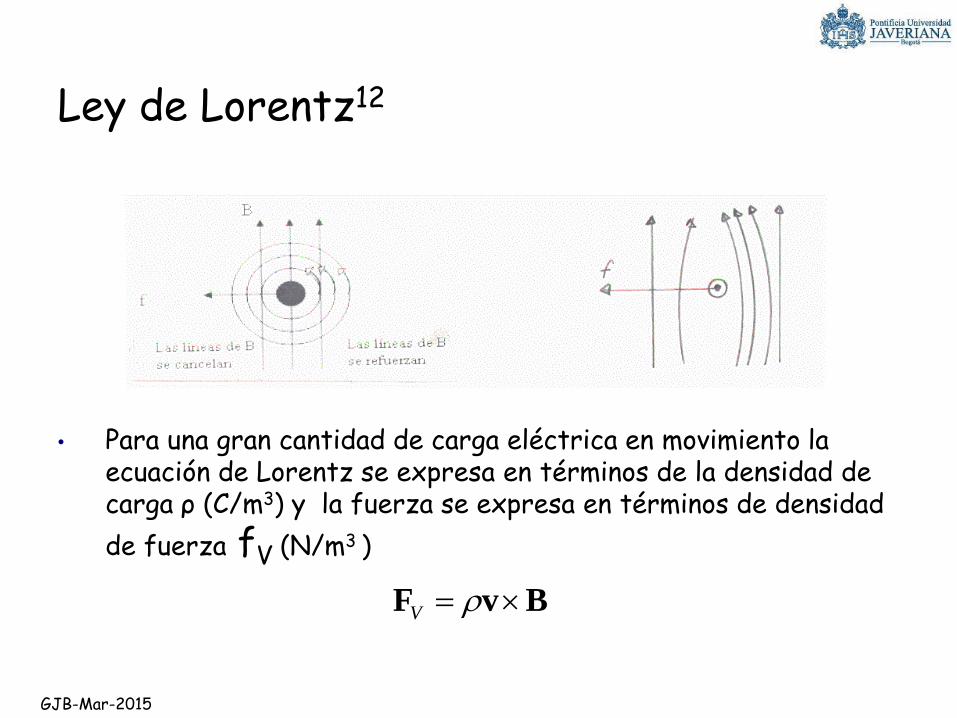
• Para una gran cantidad de carga eléctrica en movimiento la ecuación de Lorentz se expresa en términos de la densidad de carga ρ (C/m3) y la fuerza se expresa en términos de densidad
de fuerza fV (N/m3 )
BvF V
GJB-Mar-2015
Ley de Lorentz12
• La densidad de corriente: 𝐽 = ρ 𝑣
• La fuerza que actúa sobre un conductor en un campo magnético:
𝐹𝑉 = 𝐽𝑥𝐵
• Para un conductor de longitud l metros y que conduce una corriente de i amperios la fuerza inducida es:
𝐹 = 𝑖 𝑙𝑥𝐵
GJB-Mar-2015
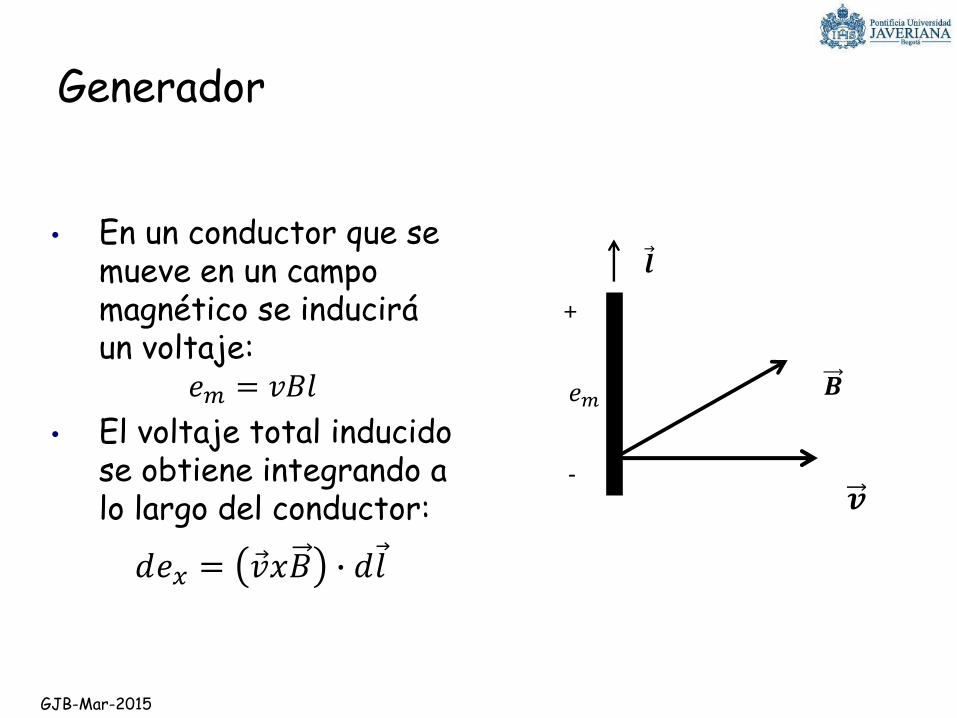
Generador
• En un conductor que se mueve en un campo magnético se inducirá un voltaje:
𝑒𝑚 = 𝑣𝐵𝑙
• El voltaje total inducido se obtiene integrando a lo largo del conductor:
𝑑𝑒𝑥 = 𝑣𝑥𝐵 ∙ 𝑑 𝑙
𝒗
𝑩
𝒍
+
-
𝑒𝑚
GJB-Mar-2015
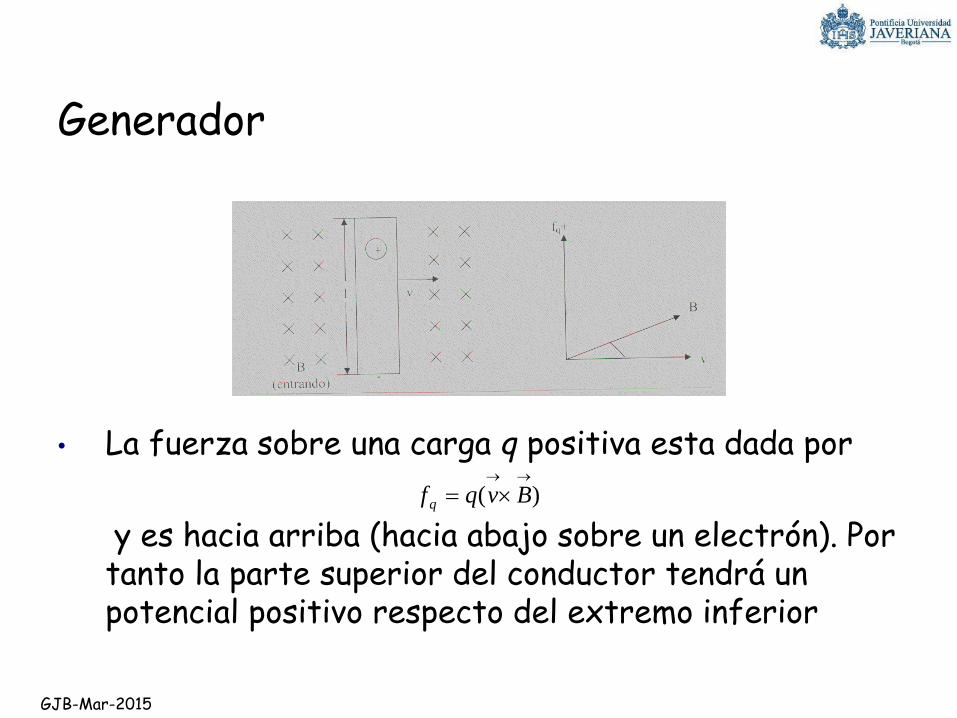
Generador
• La fuerza sobre una carga q positiva esta dada por
y es hacia arriba (hacia abajo sobre un electrón). Por tanto la parte superior del conductor tendrá un potencial positivo respecto del extremo inferior
)(
Bvqfq
GJB-Mar-2015

Generador
GJB-Mar-2015
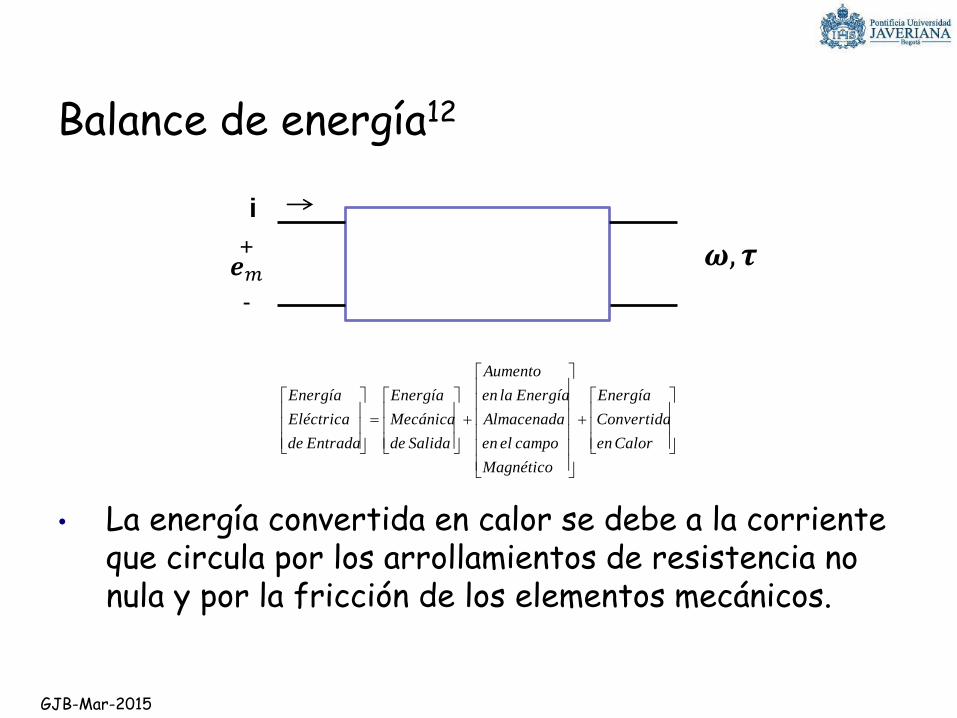
Balance de energía12
Caloren
Convertida
Energía
Magnético
campoelen
Almacenada
Energíalaen
Aumento
Salidade
Mecánica
Energía
Entradade
Eléctrica
Energía
• La energía convertida en calor se debe a la corriente que circula por los arrollamientos de resistencia no nula y por la fricción de los elementos mecánicos.
GJB-Mar-2015
𝝎, 𝝉
i
𝒆𝑚+
-
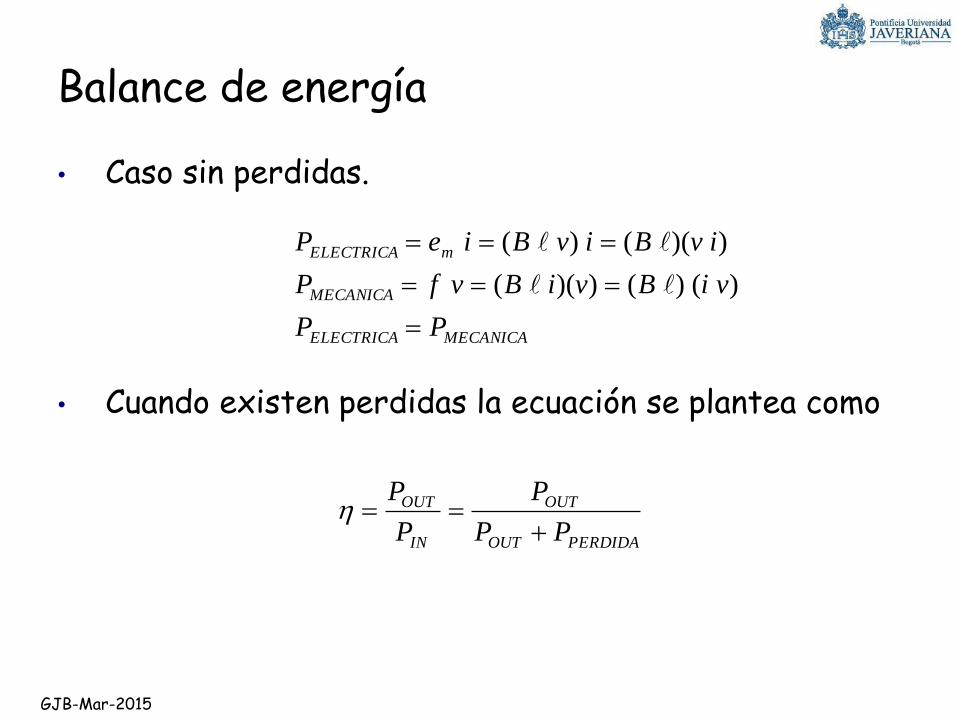
Balance de energía
• Caso sin perdidas.
• Cuando existen perdidas la ecuación se plantea como
MECANICAELECTRICA
MECANICA
mELECTRICA
PP
viBviBvfP
ivBivBieP
)()())((
))(()(
PERDIDAOUT
OUT
IN
OUT
PP
P
P
P
GJB-Mar-2015
Ejemplo 148
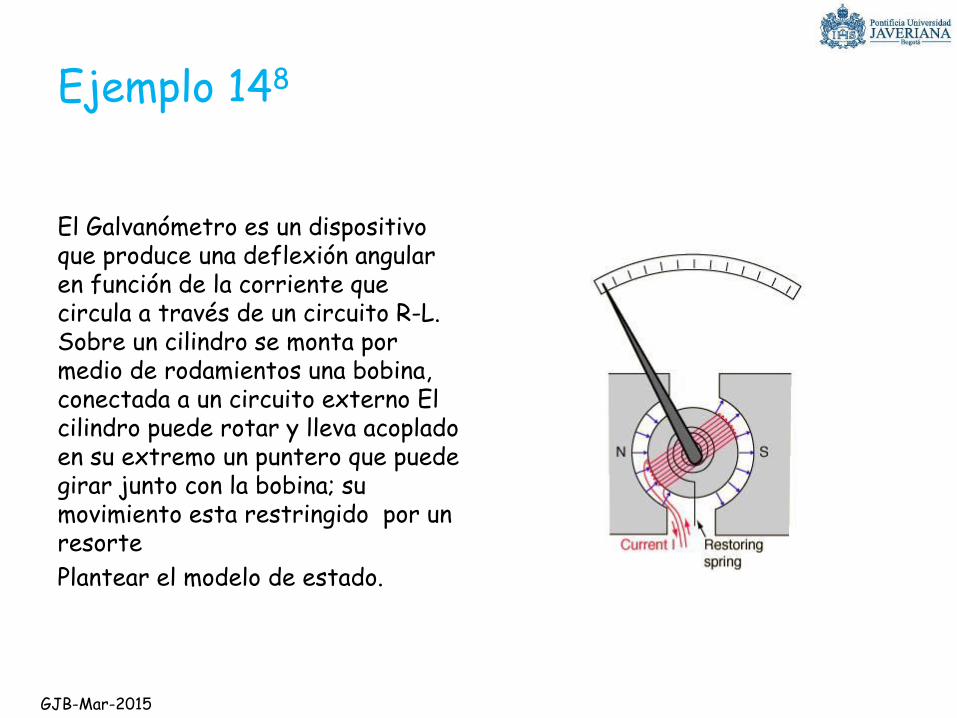
El Galvanómetro es un dispositivo que produce una deflexión angular en función de la corriente que circula a través de un circuito R-L. Sobre un cilindro se monta por medio de rodamientos una bobina, conectada a un circuito externo El cilindro puede rotar y lleva acoplado en su extremo un puntero que puede girar junto con la bobina; su movimiento esta restringido por un resorte
Plantear el modelo de estado.
GJB-Mar-2015
Ejemplo 1513
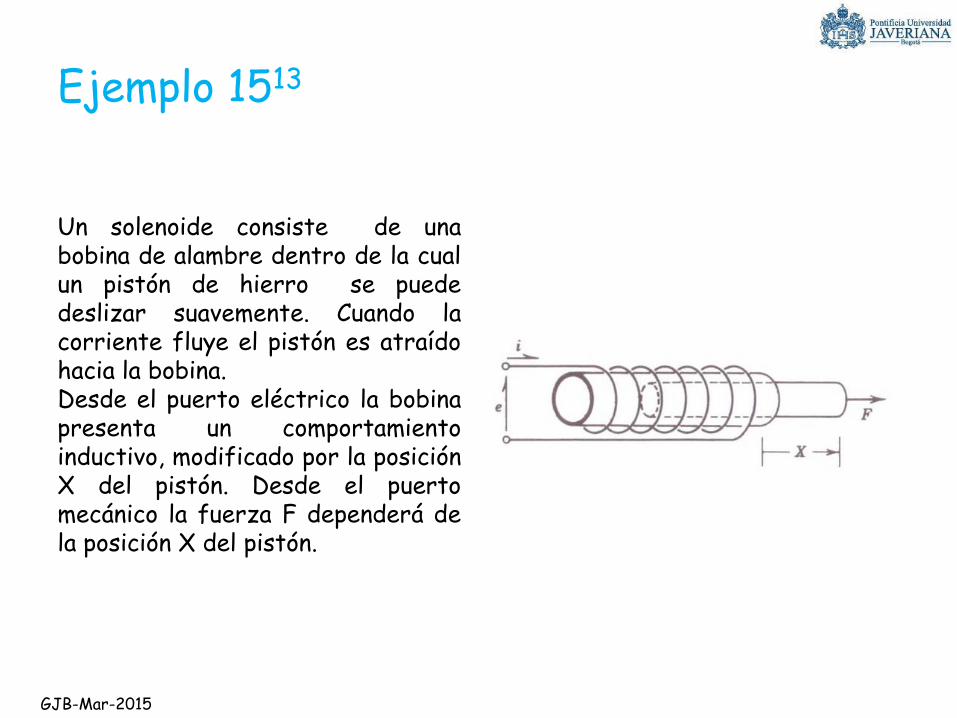
Un solenoide consiste de unabobina de alambre dentro de la cualun pistón de hierro se puededeslizar suavemente. Cuando lacorriente fluye el pistón es atraídohacia la bobina.Desde el puerto eléctrico la bobinapresenta un comportamientoinductivo, modificado por la posiciónX del pistón. Desde el puertomecánico la fuerza F dependerá dela posición X del pistón.
GJB-Mar-2015
Referencias
1. Bourns. AN TO612. Linear Motion Potentiometers. 20062. SANDBERG Robert. Temperature. In: Measurements,
Instrumentation and Sensors Handbook. Boca Raton: CRC Press. 2000. Chapter 32.
3. ILX Lightwave. Using Three-Wire RTDs with the LDT-5900 Series Temperature Controllers . TN5900-2.
4. Application Note # 4. Thermistor calibration and the Steinhart – Hart equation. ILX Lightwave. 2003
5. Strain Gage Measurement System Micro measurement Group.2001. http://www.measurementsgroup.com/guide/ta/sgms/sgmsndex.htm.
6. National Instruments. Measuring Strain with Strain Gauges.
GJB-Mar-2015
Referencias
7. Shure. Microphone Techniques. Publication AL1265J. 2009.8. CLOSE Charles, FREDERICK Dean and NEWELL Jonathan.
Modeling and Analysis of Dynamic Systems. 3rd Edition. John Wiley & Sons. 2002.
9. Thomas J. Bajzek. Thermocouples: A Sensor for Measuring Temperature. IEEE Instrumentation & Measurement Magazine. March 2005.
10. srdata.nist.gov/its90/main/11. http://hyperphysics.phy-astr.gsu.edu12. MOHAN Ned. Electric Drives: An Integrative Approach.
Edition Year 2003. Minneapolis: Mnpere. 2003.13. Johnson Electric. Ledex- saia-burgess Solenoids. Technical
data. http://www.ledex.com/
GJB-Mar-2015





























