Embed Size (px)
DESCRIPTION
G. Huang, "Decision feedback equalization and channel estimation for SC-FDMA," PhD thesis, University of Bristol, 2011.
Citation preview

Decision-Feedback Equalization and
Channel Estimation for Single-Carrier
Frequency Division Multiple Access
Gillian Huang
July 2011
A dissertation submitted to the University of Bristol in accordance with the
requirements of degree of Doctor of Philosophy in the Faculty of Engineering
Department of Electrical and Electronic Engineering


Abstract
Long-Term Evolution (LTE) is standardized by the 3rd Generation Partnership
Project (3GPP) to meet the customers’ need of high data-rate mobile communications
in the next 10 years and beyond. A popular technique, orthogonal frequency division
multiple access (OFDMA), is employed in the LTE downlink. However, the high peak-
to-average ratio (PAPR) of OFDMA transmit signals leads to low power efficiency that
is particular undesirable for power-limited mobile handsets. Single-carrier frequency
division multiple access (SC-FDMA) is employed in the LTE uplink due to its inherent
low-PAPR property, simple frequency domain equalization (FDE) and flexible resource
allocation. Working within the physical (PHY) layer, this thesis focuses on decision-
feedback equalization (DFE) and channel estimation for SC-FDMA systems.
In this thesis, DFE is investigated to improve the equalization performance of SC-
FDMA. Hybrid-DFE and iterative block decision-feedback equalization (IB-DFE) are
considered. It is shown that hybrid-DFE is liable to error propagation, especially in
channel-coded systems. IB-DFE is robust to error propagation due to the feedback (FB)
reliability information. Since the FB reliability is the key to optimize the performance of
IB-DFE, but is generally unknown at the receiver, FB reliability estimation techniques
are presented.
Furthermore, several transform-based channel estimation techniques are presented.
Various filter design algorithms for discrete Fourier transform (DFT) based channel
estimation are presented and a novel uniform-weighted filter design is derived. Also,
channel estimation techniques based on different transforms are provided and a novel
pre-interleaved DFT (PI-DFT) scheme is presented. It is shown that SC-FDMA em-
ploying the PI-DFT based channel estimator gives a close error rate performance to
the optimal linear minimum mean square error (LMMSE) channel estimator but with
a much lower complexity. In addition, a novel windowed DFT-based noise variance
estimator that remains unbiased up to an SNR of 50dB is presented.
Finally, pilot design and channel estimation schemes for uplink block-spread code
division multiple access (BS-CDMA) are presented. It is demonstrated that the recently
proposed bandwidth-efficient BS-CDMA system is a member of the SC-FDMA family.
From the viewpoint of CDMA systems, novel pilot design and placement schemes are
proposed and a channel tracking algorithm is provided. It is shown that the performance
of the proposed schemes remain robust at a Doppler frequency of 500Hz, while the pilot
block scheme specified in the LTE uplink fails to work in such a rapidly time-varying
channel.


Acknowledgements
During four years of study in the Centre for Communications Research at the Uni-
versity of Bristol, I was very fortunate to work with many distinguished researchers. I
would like to take this opportunity to sincerely thank my supervisors, Prof. Andrew
Nix and Dr. Simon Armour, for their endless enthusiasm and encouragement. Having
a meeting with them is always inspiring and enjoyable. Their confidence in me and my
ability to conduct good research is much appreciated.
I would like to thank Prof. Joe McGeehan for his support throughout my PhD study
and giving me the opportunity to work in Toshiba TRL Bristol in my fourth year of
PhD. A special thanks goes to my mentors at TRL, Dr. Justin Coon and Dr. Yue
Wang, for their kindly support and encouragement that led to the novel pilot design
schemes detailed in Chapter 6. I am thankful to many colleagues at the University of
Bristol and TRL for participating in discussions that have helped me solve the problems
and improve my work.
I would like to thank my parents and my sister for their unconditional patience and
love in all these years. Moreover, I would like to thank all my friends, who has made
my life in Bristol enjoyable and unforgettable. Finally, the completion of this thesis
would not have been possible without the merciful blessing and provision of God.
v


Author’s Declaration
I declare that the work in this dissertation was carried out in accordance with the
requirements of the University’s Regulations and Code of Practice for Research Degree
Programmes and that it has not been submitted for any other academic award. Except
where indicated by specific reference in the text, the work is the candidate’s own work.
Work done in collaboration with, or with the assistance of, others, is indicated as such.
Any views expressed in the dissertation are those of the author.
SIGNED: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DATE: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Copyright
Attention is drawn to the fact that the copyright of this thesis rests with the author.
This copy of the thesis has been supplied on the condition that anyone who consults it
is understood to recognize that its copyright rests with its author and that no quotation
from the thesis and no information derived from it may be published without the prior
written consent of the author. This thesis may be made available for consultation
within the University Library and may be photocopied or lent to other libraries for the
purpose of consultation.
vii


Contents
List of Figures xvii
List of Tables xix
List of Abbreviations xxiv
1 Introduction 1
1.1 3GPP Long-Term Evolution (LTE) . . . . . . . . . . . . . . . . . . . . . 2
1.2 Thesis Overview and Key Contributions . . . . . . . . . . . . . . . . . . 4
1.3 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Variable Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Radio Channel Propagation and Broadband Wireless Communica-
tions 9
2.1 Radio Channel Propagation . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 Large-Scale Fading . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2 Small-Scale Fading . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.2.1 Rayleigh Fading and Rician Fading . . . . . . . . . . . 12
2.1.2.2 Delay-Dispersive Channel . . . . . . . . . . . . . . . . . 16
2.1.2.3 Time-Varying Channel . . . . . . . . . . . . . . . . . . 18
2.2 Mitigation and Broadband Wireless Communication Systems . . . . . . 21
2.2.1 Mitigation Techniques . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.2 Broadband Wireless Communication Systems . . . . . . . . . . . 22
2.3 Simulation Verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Error Probability Derivation . . . . . . . . . . . . . . . . . . . . 25
2.3.1.1 Error Probability of BPSK in an AWGN Channel . . . 25
2.3.1.2 Error Probability of BPSK in a Flat Rayleigh Fading
Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
ix

CONTENTS
2.3.2 Simulation Model Description and Verification . . . . . . . . . . 27
2.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3 Single-Carrier Frequency Division Multiple Access 31
3.1 Mathematical Description of Single-Carrier FDMA Systems . . . . . . . 32
3.2 Linear Frequency Domain Equalization . . . . . . . . . . . . . . . . . . . 36
3.2.1 Linear ZF-FDE and MMSE-FDE Design . . . . . . . . . . . . . . 37
3.2.2 Performance Comparison of IFDMA, LFDMA and OFDMA with
FDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3 Peak-to-Average Power Ratio . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3.1 PAPR of SC-FDMA Transmit Signals . . . . . . . . . . . . . . . 42
3.3.1.1 PAPR Analysis of Multi-Carrier and SC-FDMA Signals 42
3.3.1.2 Obtaining the PAPR via Oversampling the Transmit
Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3.1.3 PAPR Simulation Results and Discussion . . . . . . . . 45
3.3.2 PAPR Reduction via Frequency Domain Spectrum Shaping . . . 47
3.3.2.1 Description of Frequency Domain Spectrum Shaping . . 47
3.3.2.2 PAPR Simulation Results with Raised Cosine Spectrum
Shaping . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.3.3 PAPR Reduction Modulation Scheme . . . . . . . . . . . . . . . 51
3.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4 Decision Feedback Equalization for Single-Carrier FDMA 55
4.1 Matched Filter Bound . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.1.1 Matched Filter Bound Operation . . . . . . . . . . . . . . . . . . 57
4.1.2 Discussion on Analytical MFB performance . . . . . . . . . . . . 60
4.1.3 Performance Comparison of LE and MFB . . . . . . . . . . . . . 60
4.2 Hybrid Decision-Feedback Equalizer . . . . . . . . . . . . . . . . . . . . 62
4.2.1 Description of Hybrid Decision-Feedback Equalizer Design . . . . 62
4.2.2 Performance of SC-FDMA with Hybrid-DFE . . . . . . . . . . . 65
4.3 Iterative Block Decision-Feedback Equalizer . . . . . . . . . . . . . . . . 68
4.3.1 Description of IB-DFE Design and Operation . . . . . . . . . . . 68
4.3.2 Feedback Reliability Estimation for IB-DFE . . . . . . . . . . . . 72
4.3.2.1 Feedback Reliability Derivation for QPSK . . . . . . . . 73
4.3.2.2 Gaussian CDF Approximation for 16QAM . . . . . . . 74
4.3.2.3 Lookup Table for Systems with Channel Coding . . . . 76
x

CONTENTS
4.3.3 Performance of SC-FDMA with IB-DFE . . . . . . . . . . . . . . 77
4.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5 Transform-Based Channel Estimation for Single-Carrier FDMA 85
5.1 LS and LMMSE Channel Estimation . . . . . . . . . . . . . . . . . . . . 86
5.1.1 LS Channel Estimator . . . . . . . . . . . . . . . . . . . . . . . . 87
5.1.2 MSE of LS Channel Estimator and Optimal Pilot Sequence . . . 88
5.1.3 LMMSE Channel Estimator . . . . . . . . . . . . . . . . . . . . . 89
5.1.4 Performance of LS and LMMSE Channel Estimator . . . . . . . 90
5.2 DFT-Based Channel Estimation . . . . . . . . . . . . . . . . . . . . . . 92
5.2.1 Generalized DFT-Based Channel Estimator . . . . . . . . . . . . 93
5.2.2 Denoise Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.2.3 Uniform-Weighted Filter . . . . . . . . . . . . . . . . . . . . . . . 95
5.2.4 MMSE Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.2.5 Simulation Results and Discussion . . . . . . . . . . . . . . . . . 98
5.3 Transform-Based Channel Estimation . . . . . . . . . . . . . . . . . . . 100
5.3.1 Generalized Transform-Based Channel Estimator . . . . . . . . . 100
5.3.2 Pre-Interleaved DFT-Based Channel Estimator . . . . . . . . . . 101
5.3.3 DCT-Based Channel Estimator . . . . . . . . . . . . . . . . . . . 104
5.3.4 KLT-Based Channel Estimator . . . . . . . . . . . . . . . . . . . 104
5.3.5 Derivation of Equalized SNR Gain . . . . . . . . . . . . . . . . . 105
5.3.6 Simulation Results and Discussion . . . . . . . . . . . . . . . . . 107
5.4 DFT-Based Noise Variance Estimation . . . . . . . . . . . . . . . . . . . 109
5.4.1 Low-Rank DFT-Based Noise Variance Estimator . . . . . . . . . 110
5.4.2 Windowed DFT-Based Noise Variance Estimator . . . . . . . . . 110
5.4.3 Simulation Results and Discussion . . . . . . . . . . . . . . . . . 113
5.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
6 Pilot Design and Channel Estimation for Uplink BS-CDMA 117
6.1 Pilot Block Based Channel Estimation for Uplink BS-CDMA . . . . . . 118
6.1.1 System Description . . . . . . . . . . . . . . . . . . . . . . . . . . 119
6.1.2 Time Domain LS Channel Estimator . . . . . . . . . . . . . . . . 122
6.1.3 MSE Derivation of Pilot Block Based Channel Estimation . . . . 123
6.1.3.1 Minimum MSE of the Time Domain LS Channel Esti-
mator and Optimal Pilot Sequence . . . . . . . . . . . . 124
xi

CONTENTS
6.1.3.2 MSE of the Pilot Block Scheme in a Time-Varying Chan-
nel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
6.1.4 Simulation Results and Discussion . . . . . . . . . . . . . . . . . 125
6.2 Pilot Symbol Based Channel Estimation for Uplink BS-CDMA . . . . . 127
6.2.1 System Description . . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.2.2 Time Domain LS Channel Estimation and Pilot Design Criterion 131
6.2.3 Pilot Design and Placement Schemes . . . . . . . . . . . . . . . . 133
6.2.3.1 Scheme-1: Single Pilot Symbol Placement . . . . . . . . 133
6.2.3.2 Scheme-2: Multiple Interleaved Pilot Symbol Placement 134
6.2.3.3 Scheme-3: Superimposed Pilot Placement . . . . . . . . 135
6.2.4 RLS Channel Tracking Algorithm in a Time-Varying Channel . . 135
6.2.4.1 RLS Channel Tracking Algorithm . . . . . . . . . . . . 136
6.2.4.2 Finding the Optimal RLS Forgetting Factor . . . . . . 138
6.2.5 Simulation Results and Discussion . . . . . . . . . . . . . . . . . 139
6.3 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
7 Conclusions 145
7.1 Thesis Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
7.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
A Comparison of an L-tap i.i.d. Complex Gaussian Channel Model and
the 3GPP SCME 149
B Mitigating the BER Floor due to the Denoise Channel Estimator 153
C Simulation Results with Sample-Based Channel Variation 155
D List of Publications 157
Bibliography 159
xii

List of Figures
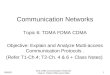
2.1 Received signal power as a function of antenna displacement based on
a free space path loss model. The transmit signal power is 1mW (i.e.
0dBm). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 PDF of the received signal envelope for Rayleigh and Rician fading chan-
nels, where the mean power of the NLoS multipath signal is 2σ2 = 1. . . 15
2.3 CDF of the received signal power relative to the mean received signal
power for Rayleigh and Rician fading channels. . . . . . . . . . . . . . . 15
2.4 (a) Delay-dispersive channel (an 8-tap i.i.d. complex Gaussian channel).
(b) Corresponding frequency-selective fading channel. . . . . . . . . . . 17
2.5 Received channel power relative to the mean received channel power as
a function of ∆d normalized to λ, in an one-tap channel with Jakes model. 19
2.6 (a) BPSK transmit data symbols. (b) Conditional PDFs of the received
BPSK signals in an AWGN channel. . . . . . . . . . . . . . . . . . . . . 25
2.7 Block diagram of a baseband SC simulation model with block-based
transmission/reception. . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.8 Analytic and simulated error probabilities of BPSK in AWGN and flat
Rayleigh fading channels. . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1 Block diagram of SC-FDMA system. . . . . . . . . . . . . . . . . . . . . 32
3.2 BER comparison of IFDMA with ZF-FDE and MMSE-FDE in an 8-tap
i.i.d. complex Gaussian channel. . . . . . . . . . . . . . . . . . . . . . . 40
3.3 BER comparison of IFDMA, LFDMA and OFDMA with MMSE-FDE
in an 8-tap i.i.d. complex Gaussian channel. . . . . . . . . . . . . . . . . 40
3.4 Example of (a) IFDMA transmit signal, and (b) LFDMA transmit signal. 43
3.5 Comparison of QPSK signal amplitude. (a) Nyquist-rate QPSK symbols.
(b) Continuous SC transmit signals after oversampling the Nyquist-rate
QPSK symbols. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
xiii

LIST OF FIGURES
3.6 PAPR comparison of SC-FDMA employing interleaved, localized, and
randomized subcarrier mapping schemes (denoted as IFDMA, LFDMA
and RFDMA) with QPSK signaling. . . . . . . . . . . . . . . . . . . . . 46
3.7 PAPR comparison of IFDMA and OFDMA with QPSK and 16QAM. . 46
3.8 Block diagram of frequency domain spectrum shaping in SC-FDMA. . . 48
3.9 Equivalent RC spectrum with ro = 0.5, where K = 18, Kd = 18 and
N = 90. (a) Interleaved subcarrier mapping. (b) Localized subcarrier
mapping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.10 PAPR of SC-FDMA employing RC frequency domain spectrum shaping
with QPSK signaling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.11 PAPR of SC-FDMA employing RC frequency domain spectrum shaping
with 16QAM signaling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.12 Constellation diagram of various baseband modulation schemes. . . . . . 52
3.13 PAPR comparison of BPSK, QPSK, π/2-BPSK and π/4-QPSK (with
K = 128, N = 512 and IFDMA transmission scheme). . . . . . . . . . . 53
4.1 Block diagram of block based frequency domain MFB operation for SC
systems. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2 BER comparison of SC-FDMA employed MMSE-LE and MFB in a 8-tap
i.i.d. complex Gaussian channel with QPSK signaling. . . . . . . . . . . 61
4.3 BER comparison of SC-FDMA employed MMSE-LE and MFB in a 8-tap
i.i.d. complex Gaussian channel with 16QAM signaling. . . . . . . . . . 61
4.4 Block diagram of Hybrid-DFE at the receiver for a SC system . . . . . . 63
4.5 BER of IFDMA employed hybrid-DFE in a 8-tap i.i.d complex Gaussian
channel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.6 BER of LFDMA employed hybrid-DFE in a 8-tap i.i.d complex Gaussian
channel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.7 BER of IFDMA employed hybrid DFE in a 8-tap i.i.d complex Gaussian
channel with 1/2-rate convolutional channel coding. . . . . . . . . . . . 67
4.8 Block diagram of IB-DFE reception for a SC system. . . . . . . . . . . . 69
4.9 Hard-decision error pattern for QPSK with x(s = 0) = 1√2(1 + j) being
the transmit symbol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.10 Linear regression with cj = aΓj + b, where a = 0.0756 and b = 0.4055. . 75
4.11 Reliability approximation for uncoded 16QAM using a Gaussian CDF
model, i.e. ρj =12 + 1
2erf(aΓj + b), where a = 0.0756 and b = 0.4055. . . 75
xiv

LIST OF FIGURES
4.12 Block diagram of the proposed FB reliability estimation scheme for IB-
DFE in a channel coded system. . . . . . . . . . . . . . . . . . . . . . . 76
4.13 Re-encoded reliability lookup table for QPSK and 16QAM when a 1/2-
rate convolutional encoder (133,171) and a soft-decision Viterbi decoder
are used. Simulation is performed in an AWGN channel. . . . . . . . . . 77
4.14 BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaussian
channel with QPSK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.15 BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaussian
channel with 16QAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.16 Coded BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaus-
sian channel with QPSK, where 1/2-rate convolutional channel coding
is used. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.17 Coded BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaus-
sian channel with 16QAM, where 1/2-rate convolutional channel coding
is used. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.1 Slot structure specified in the LTE uplink. . . . . . . . . . . . . . . . . . 86
5.2 MSE of LS and LMMSE channel estimators for LFDMA and IFDMA in
a 8-tap i.i.d. complex Gaussian channel. . . . . . . . . . . . . . . . . . . 91
5.3 BER of LFDMA with LS and LMMSE channel estimators in a 8-tap
i.i.d. complex Gaussian channel. . . . . . . . . . . . . . . . . . . . . . . 91
5.4 BER of IFDMA with LS and LMMSE channel estimators in a 8-tap i.i.d.
complex Gaussian channel. . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.5 (a) Frequency domain channel response on user subcarriers. (b) Equiv-
alent time domain channel response obtained via IDFT. . . . . . . . . . 93
5.6 Block diagram of a DFT-based channel estimator. . . . . . . . . . . . . 94
5.7 MSE of different DFT-based channel estimators for LFDMA in a 8-tap
i.i.d. complex Gaussian channel. . . . . . . . . . . . . . . . . . . . . . . 99
5.8 BER of LFDMA with different DFT-based channel estimators in a 8-tap
i.i.d. complex Gaussian channel, where baseband data modulation is
QPSK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.9 Block diagram of a transform-based channel estimator. . . . . . . . . . . 101
5.10 Block diagram of a pre-interleaved DFT-based channel estimator. . . . . 102
5.11 Frequency domain channel response: (a) Before interleaving. (b) After
interleaving. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
xv

LIST OF FIGURES
5.12 Transform domain channel response: (a) DFT, (b) PI-DFT, (c) DCT
and (d) KLT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.13 MSE comparison of the transform-based channel estimators with MMSE
scalar noise filtering in a 8-tap i.i.d. complex Gaussian channel. . . . . . 108
5.14 BER of LFDMA with different transform-based channel estimators in a
8-tap i.i.d. complex Gaussian channel. QPSK modulation is used for
data symbols. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.15 Equalized SNR gain at the MMSE-FDE output due to the use of the
transform-based channel estimator over the LS channel estimator. . . . 109
5.16 Block diagram of a windowed DFT-based noise variance estimator. . . . 110
5.17 The time domain window function (wn). The black solid line denotes
a rectangular window and the red dotted line denotes a window with
smooth transition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.18 Frequency domain filter response of time domain rectangular and RC
window functions (where a roll-off factor is ro = 0.25). . . . . . . . . . . 112
5.19 Performance comparison of DFT-based noise variance estimators in an
8-tap i.i.d. complex Gaussian channel. . . . . . . . . . . . . . . . . . . . 114
5.20 BER comparison of four LFDMA systems (listed in Table 5.1) in an
8-tap i.i.d. complex Gaussian channel with 16QAM modulation. . . . . 114
6.1 Block diagram of BS-CDMA transceiver architecture. . . . . . . . . . . 119
6.2 MSE of the pilot block based channel estimation scheme for BS-CDMA
in a time-varying 8-tap i.i.d. complex Gaussian channel. . . . . . . . . . 126
6.3 BER of BS-CDMA employing pilot block based channel estimation in a
time-varying 8-tap i.i.d. complex Gaussian channel, where data modu-
lation is QPSK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
6.4 Block diagram of the uplink BS-CDMA transceiver architecture with the
proposed pilot transmission. . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.5 Proposed pilot design and placement schemes for uplink BS-CDMA. . . 134
6.6 PAPR of the BS-CDMA transmit signal with different transmit pilot
power α in the superimposed pilot placement scheme, where K = 128
and QPSK are used. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
6.7 The heuristically-optimal RLS forgetting factor as a function of SNR
and Doppler frequency. The solid line and the dotted line represent the
transmit pilot power of α = 1 and α = 16 respectively. . . . . . . . . . . 139
xvi

LIST OF FIGURES
6.8 MSE of different pilot design and channel estimation schemes in a 8-tap
i.i.d. complex Gaussian channel at fd = 50Hz. . . . . . . . . . . . . . . . 141
6.9 BER of BS-CDMA employing different pilot design and channel estima-
tion schemes in a 8-tap i.i.d. complex Gaussian channel at fd = 50Hz. . 141
6.10 MSE of different pilot design and channel estimation schemes in a 8-tap
i.i.d. complex Gaussian channel at fd = 250Hz. . . . . . . . . . . . . . . 142
6.11 BER of BS-CDMA employing different pilot design and channel estima-
tion schemes in a 8-tap i.i.d. complex Gaussian channel at fd = 250Hz. . 142
6.12 MSE of different pilot design and channel estimation schemes in a 8-tap
i.i.d. complex Gaussian channel at fd = 500Hz. . . . . . . . . . . . . . . 143
6.13 BER of BS-CDMA employing different pilot design and channel estima-
tion schemes in a 8-tap i.i.d. complex Gaussian channel at fd = 500Hz. . 143
A.1 Channel PDPs: (a) 8-tap i.i.d complex Gaussian model. (b) 3GPP urban
macro SCME. (c) 3GPP urban micro SCME. The sample period is TS =
0.1302µs and the mean power of all the channel taps is normalized to 1. 150
A.2 BER comparison of SC-FDMA with MMSE-FDE in 8-tap i.i.d. complex
Gaussian channel model, 3GPP urban macro SCME and 3GPP urban
micro SCME. The baseband modulation scheme is QPSK. . . . . . . . . 152
C.1 BER of BS-CDMA employing the proposed pilot design and channel
estimation schemes in a 8-tap i.i.d. complex Gaussian channel with the
Jakes model at fd = 500Hz. The dashed line assumes the static channel
response within a block. The solid line with markers assumes that the
channel response varies from sample to sample within a block. . . . . . . 156
xvii


List of Tables
3.1 A complexity comparison of FDE and TDE in terms of the required
complex multipliers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2 Simulation parameters for IFDMA, LFDMA and OFDMA systems. . . . 39
3.3 Comparison of the PAPR and the bandwidth efficiency via RC spectrum
shaping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.1 A complexity and performance comparison of MMSE-FDE (i.e. IB-
DFE(1) at the first iteration), IB-DFE(2) at the second iteration and
hybrid-DFE in the uncoded system. . . . . . . . . . . . . . . . . . . . . 80
4.2 A complexity and performance comparison of MMSE-FDE (i.e. IB-
DFE(1) at the first iteration), IB-DFE(2) at the second iteration and
hybrid-DFE in the channel coded system. . . . . . . . . . . . . . . . . . 82
5.1 Four LFDMA systems used in the simulation. . . . . . . . . . . . . . . . 113
6.1 Simulation parameters for the pilot block scheme and the proposed pilot
design schemes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
A.1 Comparison of mean excess delay (τ), RMS delay spread (τRMS) and
coherence bandwidth (f0) with (a) 8-tap i.i.d complex Gaussian model,
(b) 3GPP urban macro SCME and (c) 3GPP urban micro SCME. . . . 151
xix


List of Abbreviations
1G First Generation
2D Two-Dimensional
2G Second Generation
3G Third Generation
3GPP Third Generation Partnership Project
4G Fourth Generation
AM/AM Amplitude-to-Amplitude Modulation
AM/PM Amplitude-to-Phase Modulation
AMPS Analogue Mobile Phone System
AWGN Additive White Gaussian Noise
BER Bit Error Rate
bps bits per second
BPSK Binary Phase Shift Keying
BS-CDMA Block Spread Code Division Multiple Access
CAZAC Constant Amplitude Zero Auto-Correlation
CCDF Complementary Cumulative Distribution Function
CDD Cyclic Delay Diversity
CDF Cumulative Distribution Function
CDM Code Division Multiplexing
CDMA Code Division Multiple Access
CDS Channel-Dependent Scheduling
CIBS-CDMA Chip-Interleaved Block Spread Code Division Multiple Access
CoMP Coordinated Multi-Point Transmission/Reception
CP Cyclic Prefix
DAB Digital Audio Broadcasting
DC Direct Current
DCT Discrete Cosine Transform
xxi

LIST OF ABBREVIATIONS
DFE Decision-Feedback Equalization
DFT Discrete Fourier Transform
DVB Digital Video Broadcasting
FB Feed-Back
FDE Frequency Domain Equalization
FDM Frequency Division Multiplexing
FDMA Frequency Division Multiple Access
FF Feed-Forward
FFT Fast Fourier Transform
FH Frequency Hopping
GSM Global System for Mobile Communications
HSDPA High Speed Downlink Packet Access
HSPA+ Evolved High Speed Packet Access
HSUPA High Speed Uplink Packet Access
IB-DFE Iterative Block Decision-Feedback Equalization
IBI Inter-Block Interference
ICI Inter-Carrier Interference
IDFT Inverse Discrete Fourier Transform
IEEE Institute of Electrical and Electronics Engineers
IFDMA Interleaved Frequency Division Multiple Access
i.i.d. independent and identically distributed
ISI Inter-Symbol Interference
KLT Karhunen-Loeve transform
LE Linear Equalization
LFDMA Localized Frequency Division Multiple Access
LMMSE Linear Minimum Mean-Square Error
LoS Light-of-Sight
LS Least Squares
LTE Long-Term Evolution
MC Multi-Carrier
MFB Matched Filter Bound
MIMO Multiple-Input Multiple-Output
MLSE Maximum Likelihood Sequence Estimation
MMSE Minimum Mean-Square Error
MRC Maximal-Ratio Combining
MSE Mean Squared Error
xxii

LIST OF ABBREVIATIONS
MUI Multi-User Interference
NLoS Non Light-of-Sight
OFDM Orthogonal Frequency Division Multiplexing
OFDMA Orthogonal Frequency Division Multiple Access
PA Power Amplifier
PAPR Peak-to-Average Power Ratio
PDF Probability Density Function
PDP Power Delay Profile
PHY Physical
PI-DFT Pre-Interleaved Discrete Fourier Transform
QAM Quadrature Amplitude Modulation
QPSK Quadrature Phase Shift Keying
RC Raised Cosine
RF Radio frequency
RFDMA Randomized Frequency Division Multiple Access
RLS Recursive Least Squares
RMS Root Mean Square
SC Single-Carrier
SCME Spatial Channel Model Extension
SCBC Space-Code Block Code
SC-FDE Single-Carrier Frequency Domain Equalization
SC-FDMA Single-Carrier Frequency Division Multiple Access
SFBC Space-Frequency Block Code
SIC Successive Interference Cancellation
SISO Single-Input Single-Output
SINR Signal-to-Interference-plus-Noise Ratio
SM Spatial Multiplexing
SNR Signal-to-Noise Ratio
STBC Space-Time Block Code
TACS Total Access Communication System
TDE Time Domain Equalization
TDM Time Division Multiplexing
TDMA Time Division Multiple Access
UMTS Universal Mobile Telecommunications System
WCDMA Wideband Code Division Multiple Access
Wi-Fi Wireless Fidelity
xxiii

LIST OF ABBREVIATIONS
WiMAX Worldwide Interoperability for Microwave Access
WLAN Wireless Local Area Network
WMAN Wireless Metropolitan Area Network
ZF Zero Forcing
xxiv

Chapter 1
Introduction
Communication over a wireless medium using electromagnetic waves is one of the great-
est scientific achievements and has become indispensable in modern life. In 1895,
Marconi built and demonstrated the first radio telegraph, and the era of wireless com-
munications thus began. From Marconi’s first telegraph, to Shannon’s communication
theory [1] and the recent capacity-approaching error-correcting codes [2], wireless com-
munication has attracted considerable research and practical interest for over a cen-
tury. Today, wireless communication systems can transmit/receive voice, image and
video data all over the globe. Moreover, wireless communication makes the demand of
accessing the Internet anytime, anywhere possible.
‘First Generation’ (1G) mobile communication systems using analogue technology
arrived in the 1980s, e.g. the Analogue Mobile Phone System (AMPS) used in America
and the Total Access Communication System (TACS) used in parts of Europe. How-
ever, the number of subscribers were limited at that time due to costly heavy handsets
and spectrally inefficient modulation. Global roaming first became possible with the
development of the digital ‘Second Generation’ (2G) Global System for Mobile Com-
munications (GSM). In the late 1990s, GSM achieved worldwide commercial success.
GSM phones were small and affordable with a long battery life.
Followed by the success of GSM, the Universal Mobile Telecommunications System
(UMTS) [3] is the ‘Third Generation’ (3G) mobile communication system developed
by the 3rd Generation Partnership Project (3GPP). UMTS employed wideband code-
division multiple access (WCDMA) technology to offer a higher data-rate for mobile
communications. Hence, the 3G handset is more than just a mobile phone. Various
applications such as video-telephony, Internet access and file transfer are supported
in 3G devices. The evolution of mobile communications continues. 3GPP has been
1

Chapter 1. Introduction
developing a beyond-3G system called Long-Term Evolution (LTE) [4] to meet the
customers’ need for the next 10 years and beyond.
The evolution of wireless communications also takes place in the Institute of Electri-
cal and Electronics Engineers (IEEE). Examples include the IEEE 802.11 [5–8], known
as Wi-Fi1, and the IEEE 802.16 [9], known as Worldwide Interoperability for Microwave
Access (WiMAX). Wi-Fi networks provide high data-rate communication over a fixed
Wireless Local Area Network (WLAN). Today, WiFi networks are widely used in homes,
offices, coffee shops and hotels for wireless Internet access. To overcome the restriction
of fixed access, WiMAX aims to provide high data-rate mobile communication over a
Wireless Metropolitan Area Network (WMAN). LTE and WiMAX are emerging tech-
nologies with similar targets and transmission techniques, and both are paving the way
to the development of ‘Fourth Generation’ (4G) mobile communication systems.
The rest of this chapter is organized as follows. The features and requirements of
the 3GPP LTE standard are highlighted in Section 1.1. A thesis overview and the key
contributions of this work are given in Section 1.2. The mathematical notation and
variables used throughout this thesis are defined in Section 1.3 and Section 1.4.
1.1 3GPP Long-Term Evolution (LTE)
The 3GPP standards are structured as Releases. The first release of UMTS (Release
99 ) in theory enabled 2Mbps, but in practice gave 384kbps [3]. Several releases were
then specified as enhancements to the first release. High Speed Downlink Packet Access
(HSDPA) in Release 5 supports a data rate up to 14Mbps in the downlink and High
Speed Uplink Packet Access (HSUPA) in Release 6 supports data rates up to 5.76Mbps
in the uplink. Through the use of multiple-input multiple output (MIMO) techniques
and higher order 64 quadrature amplitude modulation (64QAM), Evolved High-Speed
Packet Access (HSPA+) in Release 7 pushes the data rate up to 56Mbps in the downlink
and 22Mbps in the uplink. The 3G operators have started rolling out HSPA+ networks
in Europe, Australia and the North America.
Since the enhancements based on WCDMA technology have become a bottleneck, a
new physical (PHY) layer design and radio network architecture are required to provide
a high data-rate, low-latency and packet-optimized service for the next 10 years and
beyond. Hence, LTE is introduced as Release 8 in the 3GPP standard, and the targets
of the LTE are [10]:
1Wi-Fi is an abbreviation of wireless fidelity.
2

1.1. 3GPP Long-Term Evolution (LTE)
• Significantly increased peak data rate, i.e. 100Mbps (downlink) and 50Mbps
(uplink) within a 20MHz spectrum allocation.
• Significantly improved spectrum efficiency, i.e. 3-4 times HSDPA for the downlink
and 2-3 times HSUPA for the uplink.
• Increased cell-edge throughput as well as average throughput (to deliver a more
uniform user experience across the cell area).
• Control plane latency (transition time to active state) less than 100ms (for idle
to active).
• Flexible and scalable bandwidth of 1.25, 2.5, 5, 10, 15 and 20MHz.
• Reasonable complexity and power consumption for the mobile terminal.
• System should be optimized at low mobile speed from 0 to 15km/hr. High mobile
speeds between 15 and 120km/hr should be supported with high performance.
Communication across the cellular network should be maintained at speeds from
120 to 350km/hr.
As mentioned previously, an evolution of the PHY layer design is required in LTE
to achieve the targeted high data-rate. As a popular choice in the emerging technolo-
gies, orthogonal frequency division multiple access (OFDMA) is employed in the LTE
donwlink and WiMAX (both downlink and uplink) due to its simple frequency do-
main equalization (FDE) and flexible resource allocation. Since the main drawback of
OFDMA is its high peak-to-average power ratio (PAPR), which results in low power
amplifier (PA) efficiency, single-carrier frequency division multiple access (SC-FDMA)
is employed in the LTE uplink due to its low-PAPR. For the power-limited mobile
handsets, the use of SC-FDMA enables power-efficient uplink transmission and thus
improves the battery life [11].
As the first release of LTE standard was completed in the end of 2008, 3GPP has be-
gun studying the further evolution based on the LTE, which is known as LTE-Advanced
(Release 10 ) [12]. The LTE-Advanced aims to fulfill the International Mobile Telecom-
munications (IMT)-Advanced 4G requirements [13], and its targeted peak data rates are
up to 1Gbps on the downlink and 500Mbps on the uplink [14]. The enhanced technolo-
gies currently being considered in the LTE-Advanced included spectrum aggregation,
multi-antenna sloutions, coordinated multi-point transmission/reception (CoMP) and
relaying [12]. Similar to the migration from the first release of UMTS to the later
3

Chapter 1. Introduction
HSPA technologies, the LTE-Advanced is developed to be backwards compatible with
the LTE (Release 8 ).
1.2 Thesis Overview and Key Contributions
As the bandwidth and data rate increases, the signal dispersion caused by a delay-
dispersive channel results in inter-symbol interference (ISI). To recover the distorted
received signal, equalization is required at the receiver for ISI mitigation [15] and the
channel response needs to be estimated for equalizer coefficient calculation. Therefore,
equalization and channel estimation are key steps in the PHY layer of all broadband
wireless communication systems.
Since SC-FDMA is a relative new transmission technique, this thesis focuses on
the investigation of SC-FDMA systems. Emphasis is placed on PAPR characteristics,
decision-feedback equalization (DFE), channel estimation, pilot design and channel
tracking algorithms in SC-FDMA. The purpose of this thesis is to:
• Stimulate interest in the field of SC-FDMA.
• Provide a clear and concise technical reference for researchers already working on
SC-FDMA and LTE uplink.
• Detail the benefits and design challenges of using SC-FDMA rather than OFDMA.
• Document original work that was conducted in the area of DFE and channel
estimation in an SC-FDMA system.
The thesis is structured as follows:
Chapter 2 : This chapter describes the characteristics of radio channel propagation and
the impact to mobile communication systems. Mitigation techniques are provided. Ex-
isting broadband wireless communication systems based on FDE are discussed, and
some of the key differences between single-carrier (SC) and multi-carrier (MC) systems
are highlighted. Simulation verification is also provided.
Chapter 3 : An overview of SC-FDMA systems is presented. A PAPR comparison
of OFDMA and SC-FDMA signals with different subcarrier mapping and modulation
schemes is presented and discussed. Also, the PAPR reduction techniques for SC-
FDMA signals are provided. The key contributions documented in this chapter are:
4

1.2. Thesis Overview and Key Contributions
• Detailed mathematical description of SC-FDMA systems.
• Detailed explanation and simulation results on the PAPR characteristics of SC-
FDMA signals (published in IEEE PIMRC’07 [16]).
Chapter 4 : This chapter investigates the DFE techniques for SC-FDMA systems. The
performance gap between the matched filter bound (MFB) and linear FDE is high-
lighted. The use of a hybrid-DFE is extended to SC-FDMA and the error propagation
phenomenon is highlighted. Feedback reliability estimation for iterative block decision-
feedback equalization (IB-DFE) is proposed to mitigate error propagation. The key
contributions documented in this chapter are:
• Extending the use of hybrid-DFE to SC-FDMA and addressing the associated
error propagation problem (published in IEEE PIMRC’08 [17]).
• Feedback reliability estimation techniques for IB-DFE (published in IEEE VTC’09-
Fall [18]).
Chapter 5 : Transform-based channel estimation techniques for SC-FDMA are inves-
tigated. Various filter design algorithms for discrete Fourier transform (DFT) based
channel estimation are presented. Furthermore, channel estimation techniques based
on different transforms are provided. Finally, DFT-based noise variance estimation
techniques are described. The novel contributions documented in this chapter are:
• Uniform-weighted filter design for DFT-based channel estimation (a UK patent
application filed in May 2009 [19]).
• Pre-interleaving scheme for DFT-based channel estimation, i.e. PI-DFT based
channel estimation.
• Derivation of the signal-to-noise ratio (SNR) gain/loss at the equalizer output
due to channel estimation error.
• Windowed DFT-based noise variance estimation technique (published in IEEE
VTC’10-Fall [20]).
Chapter 6 : This chapter focuses on pilot design and channel estimation for uplink block
spread code division multiple access (BS-CDMA). The drawback of pilot block based
channel estimation is addressed. Pilot symbol based design and placement schemes for
5

Chapter 1. Introduction
uplink BS-CDMA are proposed. A channel tracking algorithm that enhances the per-
formance in a time-varying channel is presented. The novel contributions documented
in this chapter are:
• Proposing the use of a common pilot spreading code for all users in the uplink
BS-CDMA.
• Derivation of mutually orthogonal pilot design criteria for multi-user interference
(MUI) free uplink channel estimation.
• Pilot symbol based design and placement schemes for uplink BS-CDMA (submit-
ted to IEEE Trans. Veh. Technol. [21]).
Chapter 7 : Conclusions about SC-FDMA and the novel work presented in this thesis
are drawn. Future work in the area of SC-FDMA is discussed.
1.3 Notation
The mathematical notation used throughout this work is provided as follows.
• Bold uppercase fonts are used to denote matrices, e.g. X.
• Bold lowercase fonts are used to denote column vectors, e.g. x.
• Frequency domain variables are identified with a tilde, e.g. x.
• IN is the N ×N identity matrix.
• 0N×M is the N ×M zero matrix.
• (·)∗ denotes the complex conjugate operation.
• (·)T denotes the transpose operation.
• (·)H denotes the Hermitain (conjugate transpose) operation.
• E[·] is the expectation operator.
• | · | is the absolute value operator.
• ‖·‖ is the norm operator.
• diag· denotes the diagonal entries of a matrix.
6

1.4. Variable Definition
• tr· denotes the trace of a matrix.
• ⊗ denotes the Kronecker product operator.
• ℜ[·] denotes the real part of the argument.
• X† = (XHX)−1XH denotes the pseudo inverse of a matrix X.
1.4 Variable Definition
The variables defined in this thesis are kept as consistent as possible. For ease of
reference, the global variables used throughout this work are listed here.
• fc denotes the carrier frequency.
• fd denotes the Doppler frequency.
• ro denotes the roll-off factor of a raised cosine (RC) filter.
• γ denotes the instantaneous SNR.
• γ denotes the average SNR.
• σ2n denotes the noise variance.
• J denotes the cost function in an optimization process.
• L denotes the length of channel delay spread.
• TBLK denotes the transmission block period.
• FK denotes a size-K normalized DFT matrix, where FK(p, q) = e−j 2πK
pq for
p, q = 0, . . . ,K − 1.
• JnK is defined as a size-K matrix which is obtained by cyclically shifting a size-K
identity matrix downward along its column by n element(s).
7


Chapter 2
Radio Channel Propagation and
Broadband Wireless
Communications
This chapter focuses on the characteristics of the mobile radio channel and the miti-
gation techniques in modern broadband wireless communications. In the application
of wireless communications, the signal propagates over a hostile radio channel, which
leads to signal fading and distortion. Moreover, the received signal is corrupted by
thermal noise generated at the receiver, which is usually modeled as additive white
Gaussian noise (AWGN). Hence, when simulating the physical layer performance of a
wireless communication system, channel distortion and thermal noise are often used as
the primary sources of performance degradation.
The rest of this chapter is organized as follows. Section 2.1 describes the radio chan-
nel propagation. In Section 2.2, the mitigation techniques for combating the channel
fading and distortion are described and the existing broadband wireless communica-
tions systems based on FDE are discussed. In Section 2.3.2, simulation verification is
provided. Section 2.4 summarizes the chapter.
2.1 Radio Channel Propagation
There are two types of mobile channel fading effects; large-scale and small-scale fading.
Large-scale fading represents the average signal power attenuation due to motion over
a large geographical area. Small-scale fading refers to the dynamic changes of signal
amplitude and phase due to a small change of the antenna displacement and orientation,
9

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
which is as small as a half-wavelength [22]. In a mobile radio channel, the received signal
experiences both large-scale fading and small scale fading.
This section is organized as follows. Section 2.1.1 describes the path loss model
for large-scale fading. Section 2.1.2 describes the statistics and two mechanisms of
small-scale fading.
2.1.1 Large-Scale Fading
The simplest model for large-scale fading is to assume the radio channel propagation
takes place over an ideal free space (i.e. no objects that might absorb or reflect the
radio frequency (RF) energy in the region between the transmit and receive antennas).
In the idealized free space model the signal attenuation as a function of the distance
between the transmit and receive antennas follows an inverse-square law. Let PT and
PR(d) denote the transmit and received signal power respectively, where d denotes the
distance between the transmit and receive antennas in meters. When the antennas are
isotropic, the signal attenuation (or free space path loss) is given by [22]
L0(d) =PT
PR(d)=
(4πd
λ
)2
=
(4πdfcc
)2
(2.1)
where λ = cfc
is the wavelength of the propagating signal, fc is the carrier frequency in
Hz and c = 3× 108m/s is the speed of light.
Suppose the transmit power is PT = 1mW (i.e. 0dBm). Based on the free space
path loss model in (2.1), the received signal power as a function of distance and carrier
frequency is shown in Fig. 2.1. It is shown that the received signal power decreases
as the distance between the transmit and receive antennas increases. Moreover, the
use of a higher carrier frequency gives a larger signal attenuation. Given the received
signal power threshold of -90dBm, a carrier frequency of 800MHz allows the spatial
separation of the transmit and receive antennas up to 1km, while a carrier frequency of
5GHz can only support the spatial separation of 150m. Hence, a low carrier frequency
is desirable for long-range wireless communication systems. For short-range wireless
communication systems, a high carrier frequency can be used1.
Since the wireless channel does not behave as a perfect medium and there are
normally obstacles (e.g. hills, buildings, tree, etc.) in the region of signal propagation,
the free space path loss model does not reflect the practical large-scale fading scenario.
1Nevertheless, the use of a high carrier frequency can achieve a higher capacity (by enabling a
larger number of small cells in cellular communication systems) and reduce the physical size of the
antenna [23]. In addition, from the regulation’s viewpoint, more bandwidth is available at the high
frequency spectrum.
10

2.1. Radio Channel Propagation
100
101
102
103
−110
−100
−90
−80
−70
−60
−50
−40
−30
Distance (meter)
Rec
eive
d si
gnal
pow
er (
dBm
)
fc=800MHzfc=2GHzfc=5GHz
Figure 2.1: Received signal power as a function of antenna displacement based on a
free space path loss model. The transmit signal power is 1mW (i.e. 0dBm).
For mobile radio applications, the mean path loss as a function of distance between the
transmitter and the receiver can be modeled as [24]
LS ∝(
d
d0
)n
(2.2)
where n denotes the path loss exponent and d0 denotes a reference distance. The above
mean path loss model is often expressed in terms of dB, i.e.
LS (dB) = L0(d0) (dB) + 10n log10
(d
d0
). (2.3)
In the above mean path loss model, the reference distance d0 corresponds to a point
located in the far field of the transmit antenna. The typical values of d0 are 1km
for large cells, 100m for microcells and 1m for picocells [22]. The path loss L0(d0) at
the reference distance d0 can be found using measured results [22]. The value of the
path loss exponent depends on the carrier frequency, antenna height and propagation
environment. In ideal free space, n = 2 since the signal attenuation as a function
of distance follows the inverse-square law. In the urban mircocell, n > 2 due to the
presence of dense obstructions such as buildings [25].
11

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
The mean path loss model in (2.3) is an average of the path loss at different sites
for a given distance between the transmitter and the receiver. For different sites,
there is a variation about the mean path loss. When there are less obstacles between
the transmitter and receiver, the path loss at this site is smaller than the mean path
loss. However, for the same distance with the receiver located at a different site, the
propagation paths may be blocked by tall buildings and the path loss at this site is
higher than the mean. The measurement results in [26] show that the path loss LS(d)
can be modeled as a log-normal distributed random variable with a mean of LS in (2.3).
Therefore, the path loss model for large-scale fading can be described as [24]
LS(d) (dB) = LS +Xν (dB)
= L0(d0) (dB) + 10n log10
(d
d0
)+Xν (dB) (2.4)
where Xν denotes a zero-mean Gaussian random variable with a standard deviation
of ν (the values of Xν and ν are both in dB). Since Xν has a normal distribution in
a log scale, Xν is often stated as log-normal fading [27]. The value of the standard
deviation ν can be found from measurement results. The typical value of ν is 6-10dB
or greater [22, 25]. For the path loss model used in the 3GPP spatial channel model
(SCM), ν = 10dB in the urban micro scenario [28]. Note that the log-normal fading is
part of large-scale fading since its variation occurs at different sites or the change over
a large geographical area. In the next section, small-scale fading will be described.
2.1.2 Small-Scale Fading
As mentioned previously, small-scale fading leads to dynamic changes in signal ampli-
tude and phase, which is caused by a small change of antenna displacement (as small as
a half-wavelength). This section describes the statistics and two mechanisms of small-
scale fading. Section 2.1.2.1 describes the statistics of small-scale fading, i.e. Rayleigh
and Rician fading. Section 2.1.2.2 describes the signal dispersion in the time-delay
domain (i.e. frequency-selective channel). Section 2.1.2.3 describes the time variation
of the channel response due to mobility (i.e. time-selective channel).
2.1.2.1 Rayleigh Fading and Rician Fading
In a wireless channel, a signal can travel from the transmitter to the receiver through
multiple reflective rays [22]. When multiple reflective rays arrive at the receiver simul-
taneously, they become unresolvable and the receiver sees it as a single path. Each
arrived ray experiences a different level of signal attenuation and phase shift due to the
12

2.1. Radio Channel Propagation
characteristics of the wireless channel. When the arrived rays combine constructively,
the received signal envelope (or amplitude) is high. When the arrived rays combine
destructively, the received signal envelope is low. Hence, multiple simultaneous arrived
rays cause a variation in the received signal envelope, which is referred to as multipath
fading [22].
Rayleigh Fading
Suppose there is no dominant arriving ray, e.g. a non light-of-sight (NLoS) scenario.
Assuming the arriving rays are large in number and statistically independently and
identically distributed (i.i.d.). According to the central-limit theorem, the path (i.e. the
sum of the arrived rays) seen by the receiver can be modeled as a Gaussian distributed
random variable [15]. Hence, the received signal envelope (denoted as r) has a Rayleigh
probability density function (PDF) [15], i.e.
ρ(r) =
rσ2 e
− r2
2σ2 , r ≥ 0
0, r < 0(2.5)
where 2σ2 is the pre-detection mean power of the NLoS multipath signal. In the NLoS
Rayleigh fading case, 2σ2 = E[r2]. When the received signal envelope due to small-
scale fading follows a Rayleigh distribution, such a wireless channel is referred to as a
Rayleigh fading channel.
It is useful to derive the cumulative distribution function (CDF) of the received
signal power in a Rayleigh fading channel, since it can provide information on the
dynamic range of the received signal power variation. The CDF of the received signal
power can be defined as the probability of the received signal power (denoted as r2)
being smaller than a reference received signal power (denoted as r20). In a Rayleigh
fading channel, the CDF of the received signal power is described by the CDF of a
central chi-square distribution [15], i.e.
F (r20) = pr(r2 > r20) = 1− e−r20/2σ2, r, r0 ≥ 0. (2.6)
Rician Fading
In a Rayleigh fading channel, there is no dominant arrived ray. However, when there
is a dominant ray (e.g. a light-of-sight (LoS) scenario), the received signal envelope has
a Rician PDF [27], i.e.
ρ(r) =
rσ2 e
− r2+A2
2σ2 I0(rAσ2
), r ≥ 0
0, r < 0(2.7)
13

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
where A2 is the pre-detection received signal power from the dominant ray, 2σ2 is the
pre-detection mean power of the NLoS multipath signal, and I0(·) is the zero-th order
modified Bessel function of the first kind. When a dominant ray exists, the received
signal envelope follows a Rician PDF and such a wireless channel is referred to as a
Rician fading channel. Note that when the dominant ray disappears (i.e. A = 0), (2.7)
reduces to a Rayleigh PDF as shown in (2.5).
In the literature, a Rician fading channel is often described in terms of its K-factor.
The K-factor is defined as the ratio of the power of the dominant component to the
power of the remaining random components (often expressed in dB) [27], i.e.
K = 10 log10
(A2
2σ2
). (2.8)
In the above equation, when A = 0, K = −∞dB corresponds to a Rayleigh fading
channel. Due to the existence of the dominant component, the CDF of the received
signal power in a Rician fading channel is described by the CDF of a non-central chi-
square distribution [15], i.e.
F (r20) = pr(r2 > r20) = 1−Q1
(A
σ,r0σ
), r, r0 ≥ 0 (2.9)
where Q1(a, b) denotes the Marcum Q-function.
Comparison of Rayleigh Fading and Rician Fading
Fig. 2.2 shows the PDF of the received signal envelope for Rayleigh and Rician
fading channels, where the mean power of the NLoS multipath signal is 2σ2 = 1.
Note that the peak of the Rayleigh PDF occurs at r = σ = 0.7071 [27]. When the
K-factor is large, the Rician PDF approaches a Gaussian PDF with a mean of the
dominant component amplitude A [27]. Compared to the Rayleigh fading channel, the
received signal envelope in a Rician fading channel is strengthened due to the dominant
component. As the K-factor increases, the average received signal envelope is higher
and the probability of having a deep-faded received signal envelope is lower.
Let PN denote the received signal power relative to the mean received signal power,
i.e.
PN =
r2
2σ2 , for Rayleigh fading
r2
A2+2σ2 , for Rician fading.(2.10)
Based on (2.6) and (2.9), Fig. 2.3 shows the CDF of the received signal power relative
to the mean received signal for Rayleigh and Rician fading channels. It is shown that
the received signal power in a Rayleigh fading channel has a dynamic range of 27dB
14

2.1. Radio Channel Propagation
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Received signal envelope, r
ρ(r
)
Rayleigh fadingRician fading (K = 5 dB)Rician fading (K = 10 dB)
r = σ = 0.7071
A = 1.7783 A = 3.1623
Figure 2.2: PDF of the received signal envelope for Rayleigh and Rician fading channels,
where the mean power of the NLoS multipath signal is 2σ2 = 1.
−30 −25 −20 −15 −10 −5 0 5 1010
−3
10−2
10−1
100
Normalized received signal power, PN,0 (dB)
Pr(P
N<
PN
,0)
Rayleigh fadingRician fading (K = 5 dB)Rician fading (K = 10 dB)
Figure 2.3: CDF of the received signal power relative to the mean received signal power
for Rayleigh and Rician fading channels.
15

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
for 99% of the time, while the dynamic range is reduced to 10dB in a Rician fading
channel with K = 10dB. Moreover, the probabilities of the received signal power being
10dB lower than the mean received signal power are 10% and 0.5% for Rayleigh and
Rician fading (where the K-factor is K = 10dB) channels respectively.
Both Fig. 2.2 and Fig. 2.3 show that the received signal is more likely to be
faded in a Rayleigh fading channel than a Rician fading channel. Although a Rician
fading channel is a more friendly environment for wireless communications, the mobile
communication applications often take place in NLoS scenarios, where the dominant
component does not exist. Hence, Rayleigh fading is assumed as the statistics for
small-scale fading in the following sections.
2.1.2.2 Delay-Dispersive Channel
There are two mechanisms for small-scale fading. One of these is signal dispersion in
the time-delay domain, which results in a frequency-selective channel. The other one
is the time variation of a mobile channel, which results in a time-selective channel. In
this section, the signal dispersion mechanism is described.
In the previous section, a single multipath signal was used to describe Rayleigh
fading and Rician fading. However, there may be clusters of rays that arrive at the
receiver with different time delays due to different propagation distances. When the
relative time delay between the arrived clusters excesses a symbol period, there is more
than one resolvable path seen by the receiver. In other words, the received signal
becomes dispersive in the time-delay domain.
Fig. 2.4(a) shows the impulse response for a delay-dispersive channel, where the
symbol period is 0.2µs and an 8-tap i.i.d. complex Gaussian channel is assumed. For
an 8-tap i.i.d. complex Gaussian channel, there are 8 resolvable paths seen by the
receiver. Each path is modeled as an i.i.d. complex Gaussian random variable and thus
experiences Rayleigh fading individually. Since a wireless channel can be viewed as a
linear filter to the transmit signal, the received signal is the convolution of the transmit
signal and channel impulse response. Hence, a delay-dispersive channel introduces ISI
into the received signal. Note that the ISI can lead to an irreducible error floor in the
system performance, unless equalization is employed at the receiver to mitigate the ISI.
When converting a one-tap channel into the frequency domain, its frequency domain
channel response is flat. Such a channel is called a flat fading channel. However, for a
delay-dispersive channel, as shown in Fig. 2.4(a), its frequency domain channel response
becomes selective as shown in Fig. 2.4(b) (where the carrier frequency is 2GHz and
16

2.1. Radio Channel Propagation
0 1 2 3 4 50
0.2
0.4
0.6
0.8
Time delay, τ (µs)
|h(τ
)|
(a) Delay−dispersive channel
1997.5 1998 1998.5 1999 1999.5 2000 2000.5 2001 2001.5 2002 2002.50
0.5
1
1.5
2
Frequency, f (MHz)
|h(f
)|
(b) Frequency−selective fading channel
Figure 2.4: (a) Delay-dispersive channel (an 8-tap i.i.d. complex Gaussian channel).
(b) Corresponding frequency-selective fading channel.
the signal bandwidth is 5MHz). Such a channel is called a frequency-selective fading
channel. Note that a frequency-selective fading channel is a dual to a delay-dispersive
channel [22] when viewing the signal distortion in the frequency domain.
The frequency selectivity of a wireless channel can be characterized by its coherence
bandwidth. The coherence bandwidth (denoted as f0) is a statistical measure of the
range of frequencies over which the channel has approximately equal gain and linear
phase [22]. Let r2l denote the average power of the l-th channel tap at a time delay
of τl. The mean excess delay (which represents the time for half the channel power to
arrive) is defined as [24]
τ =
∑l r
2l τl∑
l r2l
(2.11)
and the root mean square (RMS) delay spread is defined as [24]
τRMS =
√∑l r
2l (τl − τ)2∑
l r2l
. (2.12)
As a rule of thumb, a popular approximation of the coherence bandwidth with a cor-
relation of at least 0.5 is given by [24]
f0 ≈1
5τRMS. (2.13)
17

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
When the transmit signal bandwidth is small compared to the coherence bandwidth
(i.e. the symbol period is long compared to the channel delay spread), the received
signal experiences a flat fading channel (i.e. an one-tap channel). In this case, channel-
induced ISI does not occur. However, when this channel tap is faded, the system
suffers from performance degradation due to low received signal-to-noise ratio (SNR).
When the transmit signal bandwidth is larger than the coherence bandwidth (i.e. the
symbol period is shorter than the channel delay spread), the received signal experiences
a frequency-selective fading channel (i.e. a delay-dispersive channel). In this case,
equalization is required at the receiver to mitigate the ISI. Since the probability of all
the channel taps being in fades at the same time is very low, there is less fluctuation
in the received SNR compared to a flat fading channel.
In the remainder of this thesis, an 8-tap i.i.d. complex Gaussian channel model that
varies independently across the transmission blocks will be assumed in the simulations
unless otherwise stated. In the next section, a time-varying channel due to small-scale
fading is described.
2.1.2.3 Time-Varying Channel
As mentioned earlier, a relative motion (as small as a half-wavelength) between the
transmitter and the receiver can cause a significant fluctuation in the received signal
power. In this section, the popular Jakes model [29] is used to describe the time
variation mechanism of a mobile channel due to small-scale fading.
In the Jakes model, it is assumed that the receiver is traveling at a constant ve-
locity of v m/s, and N equal-strength rays arrive at the receiver simultaneously (that
constitutes a single resolvable fading path2). Jakes further assumes that the azimuth
arrival angles of the rays (denoted as αn) at the receiver are uniformly distributed from
0 to 2π, i.e.
αn =2πn
N, n = 0, . . . , N − 1. (2.14)
Let φn denote a random initial phase of the n-th ray. Assuming the mean channel
power is normalized to 1 (i.e. E[|h(t)|2] = 1), the channel response at a time instant t
is given by [29]
h(t) =1√2N
N−1∑
n=0
cos (2πfd(cosαn)t+ φn)+j1√2N
N−1∑
n=0
sin (2πfd(cosαn)t+ φn) (2.15)
2The delay-dispersive channel with multiple resolvable paths can be generated using the Jakes
model. However, for brevity, a single resolvable path is used to explain the time variation mechanism
of a mobile channel.
18

2.1. Radio Channel Propagation
0 1 2 3 4 5 6 7 8−35
−30
−25
−20
−15
−10
−5
0
5
10
∆d/λ
Nor
mal
ized
rec
eive
d ch
anne
l pow
er (
dB)
Figure 2.5: Received channel power relative to the mean received channel power as a
function of ∆d normalized to λ, in an one-tap channel with Jakes model.
where fd = vλ is the maximum Doppler frequency and λ is the propagation wave-
length. Note that when N is large, according to the central-limit theorem, h(t) is
well-approximated as a Gaussian random variable and thus leads to a flat Rayleigh
fading channel.
Since the relative motion between the transmitter and the receiver (i.e. the distance
traveled by the receiver) is given by ∆d = vt, the channel response h(t) in (2.15) can
be written as a function of ∆d, i.e.
h(∆d) =1√2N
N−1∑
n=0
cos
(2π∆d
λ(cosαn) + φn
)+j
1√2N
N−1∑
n=0
sin
(2π∆d
λ(cosαn) + φn
).
(2.16)
Based on the above equation, Fig. 2.5 shows the received channel power relative to the
mean channel power (i.e. |h(∆d)|2/E[|h(∆d)|2]) as a function of ∆d normalized to λ.
It is shown that the channel power varies significantly with a small change of antenna
displacement, and the distance traveled by the receiver corresponding to two adjacent
nulls is on the order of a half-wavelength (λ/2) [24]. Therefore, when the carrier
frequency is fc = 2GHz and λ = cfc
= 0.15m, the coherence distance of the channel is
small and the channel response can change dramatically with antenna displacements of
19

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
just a few centimeters. This coherence distance can be translated to the coherence time
via the traveling speed of the receiver. When the receiver is traveling at a high speed,
the coherence time of the channel becomes shorter, which leads to a fast time-varying
channel (or time-selective fading channel).
Let ∆t denote a time difference; the space-time correlation function of the Jakes
model in (2.15) is given by [30]
R(∆t) = E[h∗(t)h(t+∆t)] = J0(2πfd∆t) (2.17)
where J0(·) denotes the zero-th order Bessel function of the first kind. It is shown
in [31] that the coherence time of a mobile channel over which the channel response to
a sinusoid has a correlation greater than 0.5 is approximately
T0 ≈9
16πfd. (2.18)
For a FDE system, such as orthogonal frequency division multiplexing (OFDM)
and single-carrier frequency domain equalization (SC-FDE), it is assumed that the
channel response remains highly correlated during a symbol period (or a transmission
block period). Otherwise, inter-carrier interference (ICI) occurs due to Doppler spectral
broadening [22]. In the LTE standard, the symbol period is TS = 66.67µs. In a high-
speed train scenario with v = 350km/hr, the Doppler frequency is fd = vfcc = 648Hz
when the carrier frequency is fc = 2GHz. Based on (2.18), the channel coherence time
(T0 ≈ 276µs) is still long compared to the symbol period (i.e. TS = 66.67µs). Hence,
the Doppler spectral broadening effect may not cause severe performance degradation
in this high-mobility scenario.
From other design aspects, the high mobility still has a great impact upon the
system performance. For example, the pilot block based channel estimation is specified
in the LTE uplink [11]. In the high-mobility scenario, the channel estimate obtained
in the pilot block may become out-dated for the data blocks. The impact of mobility
on the channel estimation performance will be investigated in Chapter 6, where an
8-tap i.i.d. complex Gaussian channel following the Jakes model [29] will be assumed
to simulate a time-varying channel. Moreover, when channel-dependent scheduling
(CDS) is employed, the channel quality may become very different after the round-trip
delay [32]. Hence, the time variation of the mobile channel should be taken into account
in the system design.
20

2.2. Mitigation and Broadband Wireless Communication Systems
2.2 Mitigation and Broadband Wireless Communication
Systems
In the previous section, the characteristics of mobile radio channels were described.
To combat the channel fading and distortion, appropriate mitigation techniques and
broadband wireless communication systems are described in this section.
2.2.1 Mitigation Techniques
This section describes two categories of mitigation technique. The first one is to com-
bat the SNR loss due to signal power attenuation. The second one is to combat the
frequency-selective channel distortion.
Combating SNR Loss
The received SNR can be attenuated considerably in a wireless channel, especially
in a flat Rayleigh fading channel as shown in Fig. 2.3 and Fig. 2.5. To combat
the SNR loss, error-correcting codes can be used to lower the SNR requirement [33].
Alternatively, diversity techniques can be used to combat the SNR loss by improving
the received SNR [33].
Diversity techniques involve obtaining multiple copies of the same transmit signal
via uncorrelated channels, which can be achieved in terms of time, frequency and space.
For time diversity, the uncorrelated channels can be achieved when the separation of
transmission time slots is larger than the coherence time (i.e. T0). For frequency
diversity, the uncorrelated channels can be obtained when separation of the used car-
rier frequencies is larger than the coherence frequency (i.e. f0). Moreover, frequency
diversity is also achieved when the signal bandwidth is larger than f0 (e.g. a frequency-
selective channel as shown in Fig. 2.4(b)). This is because the channel responses at all
frequencies are unlikely to fade at the same time, and hence the fluctuation of the re-
ceived SNR is smaller. For spatial diversity, the uncorrelated channels can be obtained
through the use of multiple transmit or receive antennas with the spatial separation
larger than the coherence distance, e.g. maximal ratio combining (MRC) [34] for receive
diversity, and cyclic delay diversity (CDD) [35] and space-time block codes (STBC) [36]
for transmit diversity.
Combating Frequency-Selective Channel Distortion
When transmitting the signal over a frequency-selective fading channel, equalization
is required to mitigate the channel distortion. For SC systems, the simplest method for
21

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
mitigating frequency-selective channel distortion (i.e. combating ISI) is linear equal-
ization. The SC equalization algorithms are traditionally implemented in the time
domain, e.g. linear transversal equalizers. When viewing linear equalization (LE) in
the frequency domain, it is desirable that the multiplication of the equalizer response
and the frequency-selective channel response leads to (or close to) a flat spectrum with
a linear phase. Hence, the equalized channel impulse response becomes (close to) an
impulse and ISI is mitigated.
Since LE does not yield the best equalization performance due to an implicit trade-
off between noise enhancement and residual-ISI, DFE can improve the equalization
performance through the use of the previous detected symbols for feedback ISI cancel-
lation. The use of DFE for broadband SC systems will be detailed in Chapter 4. Apart
from the filter-based equalization schemes (such as LE and DFE), maximum-likelihood
sequence estimation (MLSE) is known as the optimal equalization algorithm in the
sense of minimizing the error probability [15]. However, its computational complex-
ity, which grows exponentially with channel symbol/sample memory, often makes it
prohibitive for practical use.
In contrast to SC systems, MC systems (such as OFDM) do not suffer from channel-
induced ISI in a frequency-selective channel [33]. For MC systems, the data symbols are
transmitted in parallel using multiple orthogonal subcarriers. When the symbol period
is long compared to the channel delay spread, each symbol experiences different flat
fading (according to the frequency-selectivity of the channel). As a result, a one-tap
per subcarrier FDE is sufficient to compensate the amplitude and phase distortion due
to the channel.
The FDE concept was soon extended to SC systems [37]. For SC systems, FDE
provides a computational efficient solution for LE implementation. Since FDE has
become a popular equalization technique due to its simplicity, the existing broadband
wireless communications systems based on FDE are discussed in the following section.
2.2.2 Broadband Wireless Communication Systems
High data-rate wireless communications are highly desirable nowadays to provide sat-
isfactory service (such as real-time video streaming) to the users. The simplest way
to achieve high data-rate transmission is to increase the signal bandwidth by building
a broadband wireless communication system. Hence, it becomes inevitable for broad-
band signals to experience frequency-selective fading channels. The existing broadband
transmission techniques based on FDE are discussed in the following paragraphs.
22

2.2. Mitigation and Broadband Wireless Communication Systems
Before going into the detail of FDE-based broadband wireless systems, the history
of OFDM is briefly described since SC-FDMA, SC-FDE and OFDMA are all closely
related to (or developed from) the concept of OFDM, especially in terms of efficient
FDE. The concept of using parallel data transmission and frequency division multi-
plexing (FDM) was published in the mid-1960s [38–40]. Some early development is
traced back to the 1950s [41]. In 1971, Weinstein and Ebert applied DFT to parallel
data transmission systems [42]. This leads to bandwidth-efficient data transmission in
OFDM, and the transceiver can be implemented using efficient fast Fourier transform
(FFT) techniques. Since the main drawback of OFDM is its high PAPR, Sari et. al.
proposed a SC-FDE technique [37,43] based on the concept of OFDM in 19933. As its
name implies, a low-PAPR SC signal is obtained at the transmitter for power-efficient
transmission and efficient FDE can be used at the receiver [37, 44]. With an increased
interest in optimizing the multi-user scenario, Sari et. al. proposed OFDMA [45, 46]
in 1996 by combining OFDM and FDMA, and SC-FDE was extended to SC-FDMA.
Although the concept of SC-FDMA was not completely new, interleaved frequency di-
vision multiple access (IFDMA) was proposed in 1998 [47]. To the best of author’s
knowledge, the term “SC-FDMA” first appeared in the LTE uplink standard [48] in
2006.
As mentioned previously, the key advantage of OFDM is that it does not suffer
from channel-induced ISI and a one-tap FDE is sufficient to compensate the channel
distortion. OFDM converts the ISI problem into unequal channel gains for each data
symbol since each data symbol is mapped to a corresponding subcarrier in the frequency
domian. Even when the SNR is high, deep-faded subcarriers still occur in a frequency-
selective fading channel. Hence, channel coding is necessary in practical OFDM systems
to prevent the deeply faded subcarriers from dominating the overall error performance
[49]. However, the main drawback of OFDM is the high-PAPR, which is undesirable
for power-limited devices (The PAPR issue will be detailed in Section 3.3). Hence,
OFDM is employed in the downlink, broadcast and WLAN scenarios, such as Digital
Audio Broadcasting (DAB) [50], Digital Video Broadcasting (DVB) [51] and IEEE
802.11a/g/n [5, 7, 8].
As mentioned previously, FDE can also be employed in SC systems, i.e. SC-FDE
[37,44]. SC-FDE maintains the efficient FDE implementation while having low-PAPR
SC transmit signals. Hence, it is particularly suitable for uplink transmission, where
the mobile handset is normally power-limited [44]. Without channel coding, SC-FDE
3According to the author, the concept of SC-FDE [43] was first published in 1993 but his most
well-known SC-FDE paper [37] was published in 1995.
23

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
outperforms OFDM since all the SC data symbols receive the same channel power.
However, when channel coding is applied, OFDM outperforms SC-FDE [44]. This is
because OFDM does not suffer from channel-induced ISI and error-correcting codes can
yield a large performance gain. For SC-FDE, the performance is limited by residual-ISI
since a one-tap FDE is equivalent to LE for SC systems. Therefore, to improve the
performance of SC-FDE, the residual-ISI must be overcome, e.g. hybrid-DFE [44, 52]
and IB-DFE [53].
OFDMA extends the use of OFDM to a multiple-access technique [45, 46]. In
OFDMA, multiple users can access the resource simultaneously and a distinct set of
subcarriers are assigned to each user. Hence, flexible resource allocation can be achieved
in OFDMA via a scheduling algorithm. Since different users may have different service
requirements (such as data-rate and priority), an intelligent scheduler can make good
use of the available resource. Moreover, when CDS is employed to exploit multiuser
diversity, aggregated cell-throughput can be significantly enhanced [54]. OFDMA is
currently employed in the LTE downlink [4] and IEEE 802.16 [9]. As with OFDM, the
main drawback of OFDMA is the high-PAPR transmit signal.
SC-FDMA extends the use of SC-FDE to a multiple-access technique, where a dis-
tinct set of subcarriers are assigned to each user. Hence, SC-FDMA can be viewed
as SC-FDE with the flexibility of resource allocation. For SC-FDMA, interleaved and
localized subcarrier mapping schemes are referred to as IFDMA and LFDMA, respec-
tively. LFDMA with CDS can be used to exploit multiuser diversity, while IFDMA or
LFDMA with frequency hopping (FH) can be used to exploit frequency diversity [55].
Note that IFDMA and LFDMA are the only special cases for the SC-FDMA trans-
mit signals to maintain the low-PAPR property (This will be detailed in Section 3.3).
Since low-PAPR transmit signals are particularly desirable to enable power-efficient
uplink transmission, SC-FDMA is currently employed in the LTE uplink [4]. As with
SC-FDE, the performance of SC-FDMA is also limited by the residual-ISI when con-
ventional FDE is used.
SC-FDMA is a relatively new broadband transmission technique, and it has at-
tracted a lot of research interest in recent years. This thesis focuses on the equalization
and channel estimation schemes for SC-FDMA. To overcome the residual-ISI problem,
the use of DFE is investigated in the first part of the thesis. Since channel estimation
is required at the receiver to calculate the equalizer coefficients, accurate channel es-
timation plays an important role in minimizing the performance loss. Hence, channel
estimation techniques are investigated in the second part of this thesis. In the following
section, a simulation verification based on analytic results is provided.
24

2.3. Simulation Verification
Figure 2.6: (a) BPSK transmit data symbols. (b) Conditional PDFs of the received
BPSK signals in an AWGN channel.
2.3 Simulation Verification
This section provides a verification of the simulator used in the thesis. In Section 2.3.1,
the error probabilities of binary phase shift keying (BPSK) modulation in AWGN and
flat Rayleigh fading channels are derived. In Section 2.3.2, a baseband SC simulation
model is described, and verification is performed by comparing the simulated error
probability with the analytic error probability.
2.3.1 Error Probability Derivation
2.3.1.1 Error Probability of BPSK in an AWGN Channel
When BPSK modulation is used, the transmit data symbol is either x1 =√σ2x and
x2 = −√σ2x (where σ2
x = E[|x1|2] = E[|x2|2] denotes the data symbol power), as shown
in Fig. 2.6(a). Assume x1 and x2 are equally likely to be transmitted. When x1 is
transmitted over an AWGN channel, the received data symbol is given by
y = x1 + n (2.19)
where n represents the complex white Gaussian noise component, which has a mean of
zero and a variance of σ2n = E[|n|2].
Let r = ℜ(y) denote the real part of the received symbol, since the imaginary part
of the noise does not affect the error probability of BPSK. The decision is made by
comparing r with the zero threshold. If r > 0, the decision is made in favor of x1. If
r < 0, the decision is made in favor of x2. Since the received signal is corrupted by
Gaussian noise, the received signal (i.e. r) has a Gaussian conditional PDF, as shown
in Fig. 2.6(b). When x1 is transmitted, the conditional PDF of r is given by [15]
ρ(r|x1) =1√πσ2
n
e−(r−√
σ2x
)2/σ2
n . (2.20)
25

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
Similarly, when x2 is transmitted, the conditional PDF of r is
ρ(r|x1) =1√πσ2
n
e−(r+√
σ2x
)2/σ2
n . (2.21)
Given that x1 is transmitted, the erroneous decision occurs if r < 0 and the error
probability can be obtained as
P (r < 0|x1) =∫ 0
−∞ρ(r|x1)dr
=1√πσ2
n
∫ 0
−∞e−(r−√
σ2x
)2/σ2
ndr
︸ ︷︷ ︸Rewrite r=
√σ2n/2t+
√σ2x and dr=
√σ2n/2dt
=1√2π
∫ −√
2σ2x/σ
2n
−∞e−t2/2dt
=1√2π
∫ ∞√
2σ2x/σ
2n
e−t2/2dt
= Q
(√2σ2
x
σ2n
)(2.22)
where Q(·) is the Q-function. Similarly, when x2 is transmitted, the error probability
is given by P (r > 0|x2) = Q(√
2σ2x/σ
2n
). Since the occurrence of x1 and x2 is equally
likely, the average error probability of BPSK in an AWGN channel is given by [15]
P e =1
2P (r < 0|x1) +
1
2P (r > 0|x2)
= Q
(√2σ2
x
σ2n
). (2.23)
2.3.1.2 Error Probability of BPSK in a Flat Rayleigh Fading Channel
When transmitting a BPSK symbol x1 over a flat Rayleigh fading channel, the received
symbol is given by
y = hx1 + n (2.24)
where h = βejθ denotes a flat Rayleigh fading channel response (β and θ are the
amplitude and phase of the channel response respectively).
Let γ = β2.σ2x
σ2n
denote the instantaneous received SNR in a flat Rayleigh fading
channel. Based on the result in (2.23), the error probability of BPSK as a function of
γ is given by
Pe(γ) = Q(√
2γ). (2.25)
26

2.3. Simulation Verification
Figure 2.7: Block diagram of a baseband SC simulation model with block-based trans-
mission/reception.
Since γ is random (due to random β), the error probability must be averaged over the
PDF of γ (denoted as ρ(γ)). Therefore, the average error probability is given by
P e =
∫ ∞
0Pe(γ)ρ(γ)dγ. (2.26)
Since β is Rayleigh distributed, β2 has a chi-square PDF with two degrees of freedom.
Hence, γ also has a chi-square PDF [15], i.e.
ρ(γ) =1
γe−γ/γ (2.27)
where γ = E[β2].σ2x
σ2ndenotes the average received SNR.
Substituting (2.25) and (2.27) into (2.26), (2.26) can be expressed as a double
integral, which can be solved by changing the order of integration. Therefore, the
average error probability of BPSK in a flat Rayleigh fading channel is derived as
P e =
∫ ∞
0Pe(γ)ρ(γ)dγ
=1√2π
.1
γ
∫ ∞
0e−γ/γ
∫ ∞
√2γ
et2/2dtdγ
=1√2π
.1
γ
∫ ∞
0et
2/2
∫ t2/2
0e−γ/γdγ
︸ ︷︷ ︸=γ(1−e−t2/2γ)
dt
=1√2π
∫ ∞
0e−t2/2 − e−(t2/2)(1+1/γ)dt
︸ ︷︷ ︸where
∫∞
0 e−at2dt= 12
√π/a.
=1√2π
(1
2
√2π − 1
2
√2π
(γ
γ + 1
))
=1
2
(1−
√γ
γ + 1
). (2.28)
2.3.2 Simulation Model Description and Verification
Fig. 2.7 shows the block diagram of a baseband SC simulation model with block-based
transmission/reception. At the transmitter, the input bits are grouped and mapped to
27

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
a block of data symbols via a symbol mapper. Let x = [x(0), . . . , x(K−1)]T denote the
data symbol vector, where x(k) denotes the k-th (k = 0, . . . ,K−1) data symbol and K
is the number of data symbols in a transmission block. Let σ2x = E[|x(k)|2] denote the
expected data symbol power, which is normalized to 1 in the simulation, i.e. σ2x = 1.
Therefore, for BPSK modulation, when the k-th input bit is 1, x(k) =√σ2x = 1. When
the k-th input bit is 0, x(k) = −√σ2x = −1.
It is assumed that the channel response remains invariant within a block transmis-
sion period. For AWGN and flat fading channels (i.e. no channel delay spread), the
channel model is thus described by a K ×K diagonal-constant matrix H with h being
its diagonal entries. In the simulation, the mean channel power is normalized to 1, i.e.
E[|h|2] = 1. Hence, for an AWGN channel, h = 1. For a flat Rayleigh fading channel,
the channel tap is given by h = βejθ, where β and θ denote the amplitude and phase of
the channel tap. Based on the central-limit theorem (as mentioned in Section 2.1.2.1),
a Rayleigh fading channel tap βejθ can be modeled as a complex Gaussian random
variable with a mean of zero and a variance of 1 in the simulation.
Let n = [n(0), . . . , n(K − 1)]T denote a length-K complex white Gaussian noise
vector, where each element has a mean of zero and a variance of σ2n = E[|n(k)|2]. The
received data symbol vector is thus given by
y = Hx+ n. (2.29)
Since the channel power is normalized to 1, the average received SNR is γ = σ2x
σ2n.
To compensate the channel effect, an equalizer (denoted asG) is employed to correct
the amplitude and phase of the received data symbols. Since H is a K ×K diagonal-
constant matrix, G is also a K×K diagonal-constant matrix with g being its diagonal
entries. When the minimum mean-square error (MMSE) criterion is used, the equalizer
coefficient is given by4
g =h∗
|h|2 + σ2n
σ2x
. (2.30)
Hence, the equalized data symbol vector is obtained as
z = Gy. (2.31)
The equalized data symbols are then decoded using the zero threshold decision rule to
generate the output bits. By comparing the input bits and output bits, the simulated
error probability can be obtained.
4The design of a MMSE equalizer will be derived in Section 3.2.1.
28

2.4. Summary
0 5 10 15 20 25 3010
−5
10−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
Analytic resultSimulation result
AWGNchannel
Flat Rayleigh fading channel
Figure 2.8: Analytic and simulated error probabilities of BPSK in AWGN and flat
Rayleigh fading channels.
In the simulation, K = 128 is used (the choice of K does not affect the simulated
bit error rate (BER) results in this case). Ideal knowledge of the channel response and
SNR is assumed at the receiver. To produce sufficiently accurate BER curves, 200,000
independent channel realizations are generated. Fig. 2.8 shows that the simulated error
probabilities match the analytic error probabilities in both AWGN and flat Rayleigh
fading channels. The simulator is thus verified.
2.4 Summary
This chapter began with a description of the characteristics of mobile wireless channels.
It was shown that when transmitting a radio signal over a hostile wireless channel, the
received signal power could be considerably attenuated. Moreover, the received sig-
nal suffers from ISI or frequency-selective distortion in a delay-dispersive channel. To
combat the channel fading and distortion, mitigation techniques were described. Since
FDE has become a popular technique for compensating frequency-selective channel
distortion due to its simplicity, the existing broadband wireless communication sys-
tems based on FDE were discussed. Finally, a simulation verification was provided by
29

Chapter 2. Radio Channel Propagation and Broadband Wireless Communications
showing that the simulated error probability matched the analytic error probability in
the simple cases of AWGN and flat Rayleigh fading channels. In the next chapter, an
overview of SC-FDMA systems will be presented.
30

Chapter 3
Single-Carrier Frequency
Division Multiple Access
SC-FDMA is currently employed in the LTE uplink, while OFDMA is employed in the
downlink [4]. The main drawback of MC systems is that the transmit signals exhibit
high-PAPR [56]. Hence, the main advantage of SC-FDMA is its inherent low-PAPR
property, which enables power-efficient uplink transmission for the power-limited mo-
bile handset [11]. Furthermore, computationally efficient FDE can be supported in
SC-FDMA via the use of a CP [37]. The difference of using FDE in OFDMA and SC-
FDMA is that SC-FDMA may be liable to a performance loss due to channel-induced
ISI in a frequency-selective channel, while OFDMA sees a frequency-selective fading
channel as individual flat fading channels on its subcarriers (this will be detailed in
Chapter 4). Since the base station can usually afford higher complexity by employing
a more expensive linear PA to support OFDMA transmission, OFDMA is preferable
on the downlink to achieve higher throughput in the demanding downlink traffic. Al-
though SC-FDMA with linear FDE may suffer from some performance loss compared
to OFDMA in the channel coding case [44, 57], its low-PAPR signal advantage (which
translates to a small back-off requirement at the PA1) may outweight this performance
loss and lead to an overall performance gain over OFDMA for the low-cost, power-
limited mobile handset. Therefore, SC-FDMA is preferable for uplink transmission.
SC-FDMA is often perceived as DFT-precoded OFDMA since the data symbols
are precoded using a DFT prior to the OFDMA modulator [58,59]. Alternatively, SC-
FDMA can be viewed as SC-FDE with the flexibility of scheduling orthogonal frequency
resource to multiple users, where a low-PAPR transmit signal can be maintained via
1This will be detailed in Section 3.3.
31

Chapter 3. Single-Carrier Frequency Division Multiple Access
Figure 3.1: Block diagram of SC-FDMA system.
interleaved and localized resource allocation schemes [11]. In the reminder of the thesis,
SC-FDMA with interleaved and localized subcarrier mapping schemes are referred to
as IFDMA and LFDMA respectively [55].
The early concept of IFDMA was proposed in [47], where time domain data block
spreading was employed to achieve the interleaved subcarrier mapping in the frequency
domain. In contrast to time domain signal generation [47], frequency domain signal
generation is employed in the LTE standard as it provides better resource allocation
flexibility, and is consistent with the downlink OFDMA resource allocation scheme [11].
SC-FDMA is a relatively new transmission technique, and a comprehensive overview
of the key features of SC-FDMA is presented in this chapter.
This chapter is organized as follows. In Section 3.1, the mathematical description
of SC-FDMA systems is given and the equivalent received data symbols are derived. In
Section 3.2, linear FDE designs based on the zero-forcing (ZF) and MMSE criteria are
derived. A performance comparison of SC-FDMA with ZF-FDE and SC-FDMA with
MMSE-FDE is then presented. In Section 3.3, IFDMA and LFDMA transmit signals
are shown to be SC signals, and their PAPR is compared with OFDMA signals. PAPR
reduction techniques are then investigated via frequency domain spectrum shaping and
modified baseband modulation schemes.
3.1 Mathematical Description of Single-Carrier FDMA
Systems
Fig. 3.1 shows the block digram of an uplink SC-FDMA system. In this chapter,
the mathematical description of an uplink SC-FDMA system using a matrix form is
32

3.1. Mathematical Description of Single-Carrier FDMA Systems
extended from the mathematical description of SC-FDE and OFDM systems given
in [60,61]. At the transmitter, the µ-th user’s (µ = 1, . . . , U) data symbols are denoted
as xµ = [xµ(0), . . . , xµ(K − 1)]T , where U is the number of users, K is the length of
the data symbol vector (or the DFT size), and xµ(k) is the k-th data symbol from the
µ-th user. Let xµ = [xµ(0), . . . , xµ(K − 1)]T denote the µ-th user’s frequency domain
data symbols, which can be obtained using a size-K DFT, i.e.
xµ = FKxµ (3.1)
where FK(p, q) = 1√Ke−j 2π
Kpq (p, q = 0, . . . ,K − 1) is the normalized K × K DFT
matrix.
The µ-th user’s frequency domain symbols are then mapped to a set of user-specific
subcarriers. Interleaved and localized subcarrier mapping schemes are recommended
in uplink SC-FDMA systems [11], since they are the only special cases that maintain
the low PAPR property of the SC transmit signal. This will be further explained in
Section 3.3. The µ-th user’s subcarrier mapping block can be described as an N ×K
matrix Dµ (where N is the total number of available subcarriers to be shared by all
users):
Interleaved: Dµ(n, k) =
1, n = (µ− 1) + N
K k
0, otherwise
Localized: Dµ(n, k) =
1, n = (µ− 1)K + k
0, otherwise.(3.2)
The above equations show that each user is given a distinct set of subcarriers (i.e. they
are orthogonal in the frequency domain), which satisfy the following criteria:
DTmDµ =
IK , m = µ
0K×K , m 6= µ.(3.3)
where IK is the K ×K identity matrix and 0K×K is a K ×K zero matrix. Hence the
received signal from different users can be separated in the frequency domain at the
receiver.
After subcarrier mapping, a size-N inverse DFT (IDFT) block FHN is used to convert
the frequency domain signal back to the time domain, where FHN (p, q) = 1√
Nej
2πN
pq
(p, q = 0, . . . , N − 1). Finally a cyclic prefix (CP) is added to form a SC-FDMA
transmission block. Assuming the CP length is equal to or longer than the maximum
33

Chapter 3. Single-Carrier Frequency Division Multiple Access
channel delay spread, the CP insertion block is defined as a (L+N)×N matrix (where
L represents the maximum channel delay spread), i.e.
T =
[ICP
IN
](3.4)
where IN is an N ×N identity matrix, and ICP is a L×N matrix that copies the last
L rows of IN .
The µ-th user’s transmission block is thus given by
xBLK,µ = TFHNDµ(FKxµ)
= TFHNDµxµ (3.5)
where xBLK,µ is a L+N column vector.
Assuming perfect uplink synchronization at the base station, the sum of the received
signals from all users is given by
r =
U∑
µ=1
HµxBLK,µ + n. (3.6)
In the above equation, n = [n(0), . . . , n(L+N − 1)]T is the received noise vector; each
element is modeled as a complex, zero mean, Gaussian noise sample with a variance
of σ2n = E[|n(k)|2]. The (L + N) × (L + N) channel matrix Hµ (denoting the linear
convolution of the channel impulse response and the transmission block) is given by
Hµ =
hµ(0) 0 · · · · · · · · · 0... hµ(0)
. . ....
hµ(L− 1)...
. . .. . .
...
0 hµ(L− 1). . .
. . ....
.... . .
. . .. . . 0
0 · · · 0 hµ(L− 1) · · · hµ(0)
(3.7)
where hµ(l) is the l-th channel impulse response for the µ-th user.
As shown in Fig. 3.1, the inverse process is performed at the receiver (Note: the
equalization block is not shown in this figure, but the commonly used linear FDE [37]
will be derived in Section 3.2). Let 0N×L denote a N ×L zero matrix. The CP removal
block is defined as
Q =[0N×L IN
]. (3.8)
After removing the CP, a size-N DFT block FN is used to convert the received time
domain signals back into the frequency domain, where FN (p, q) = 1√Ne−j 2π
Npq (p, q =
34

3.1. Mathematical Description of Single-Carrier FDMA Systems
0, . . . , N − 1). The subcarrier demapping block DTm (see (3.2)) is then employed to
extract the m-th user’s received signal2 from the sum of the received signals. After
subcarrier demapping, the m-th user’s received data symbols in the frequency domain
are given by
ym = (DTmFNQ)r
=U∑
µ=1
DTmFN QHµT︸ ︷︷ ︸
HC,µ
FHNDµxµ +DT
mFNQn︸ ︷︷ ︸vm
(3.9)
where vm is them-th user’s received noise vector in the frequency domain (each element
has a variance of σ2n, as FN is normalized), and HC,µ = QHµT is a N × N circulant
channel matrix given by
HC,µ =
hµ(0) 0 · · · 0 hµ(L− 1) · · · hµ(1)... hµ(0)
. . .. . .
. . ....
......
. . .. . .
. . . hµ(L− 1)
hµ(L− 1)...
. . .. . . 0
0 hµ(L− 1). . .
. . ....
.... . .
. . .. . . 0
0 · · · 0 hµ(L− 1) · · · · · · hµ(0)
.
(3.10)
The above equation shows that CP insertion at the transmitter and CP removal
at the receiver convert the linear channel matrix Hµ into a circulant channel matrix
HC,µ. Furthermore, it is well-known that a circulant matrix can be diagonalized by pre-
and post-multiplication of DFT and IDFT matrices [62]. Thus the resultant diagonal
matrix can be written as
HC,µ = FNHC,µFHN = diag
hµ(0), . . . , hµ(N − 1)
(3.11)
where hµ(n) is the µ-th user’s frequency domain channel response on the n-th subcarrier
(i.e. hµ(n) =∑L−1
l=0 hµ(l)e−j 2π
Nnl for n = 0, . . . , N − 1).
Based on the orthogonality criteria stated in (3.3), it follows that
DTmHC,µDµ =
˜Hm, m = µ
0K×K , m 6= µ.(3.12)
2The reason for employing a different user index m at the receiver is to illustrate the MUI-free
reception mathematically, as shown in (3.3) and (3.12).
35

Chapter 3. Single-Carrier Frequency Division Multiple Access
The above equation shows that MUI-free reception can be achieved since the received
signal from all the users are mutually orthogonal (providing the received signal from all
the users are synchronized to the base station). In the above equation, ˜Hm is a K ×K
diagonal channel matrix for the m-th user, which is given by
˜Hm = diag˜hm(0), . . . , ˜hm(K − 1)
(3.13)
where ˜hm(k) is the channel response on the m-th user’s k-th subcarrier. Depending on
the subcarrier mapping scheme, ˜hm(k) is given by
Interleaved: ˜hm(k) = hm
((m− 1) +
N
K.k
), k = 0, . . . ,K − 1
Localized: ˜hm(k) = hm ((m− 1)K + k) , k = 0, . . . ,K − 1. (3.14)
Based on the above analysis, (3.9) can be rewitten and the m-th user’s received
data symbols in the frequency domain are given by
ym = ˜Hmxm + vm. (3.15)
Since ˜Hm is a diagonal matrix, it can be written as a circulant matrix being pre- and
post-multiplied by DFT and IDFT matrices, i.e. ˜Hm = FNHmFHN , where Hm is a
K×K circulant channel matrix with its first column given by [hm(0), . . . , hm(K−1)]T
and its first row given by [hm(0), hm(K − 1), . . . , hm(1)]. The matrix element hm(l)
is the l-th equivalent channel impulse response that is experienced by the m-th user,
where hm(l) = 1K
∑K−1k=0
˜hµ(k)ej2πN
kl (l = 0, . . . ,K − 1). Hence, when converting back
to the time domain, the time domain received data symbols can be described as
ym = FHK ym
= FHKFKHmFH
K xm + FHK vm︸ ︷︷ ︸vm
= Hmxm + vm (3.16)
where vm represents the m-th user’s equivalent received noise in the time domain.
Based on (3.15) and (3.16), it becomes clear that with MUI-free reception, any time
domain or frequency domain single-user equalization algorithm [15] can be used at the
SC-FDMA receiver to compensate for frequency-selective channel distortion.
3.2 Linear Frequency Domain Equalization
As previously mentioned, an equalizer is required to combat the multipath fading chan-
nel (i.e. ISI in a SC system). Linear FDE is widely used in practice, for example with
36

3.2. Linear Frequency Domain Equalization
Table 3.1: A complexity comparison of FDE and TDE in terms of the required complex
multipliers.
Required complex multipliers
FDE K log2K +K
TDE L.K
OFDM and SC-FDE systems [37,44], and can also be employed with SC-FDMA. Linear
FDE has become popular with SC systems because it offers a lower complexity than
linear time domain equalization (TDE) when the channel delay spread is long [44].
A complexity comparison of FDE and TDE in terms of the required complex multi-
pliers is given in Table 3.1. For TDE, the total number of required complex multipliers
to equalize a block of K data symbols is L.K, where L is the length of channel delay
spread normalized to the data symbol period. Hence, the complexity of TDE increases
linearly with L. For FDE, it is known that a size-K DFT/IDFT requires K2 log2K
complex multipliers when the radix-2 FFT algorithm is used [63]. Hence, the total
number of complex multipliers required in FDE (which comprises a size-K DFT, K
one-tap equalizers and a size-K IDFT) for equalizing a block of K data symbols is
K log2K + K, which is not affected by L. Therefor, it can be seen in Table 3.1 that
when L < log2K + 1, TDE is more efficient than FDE; when L > log2K + 1, FDE
is more efficient than TDE. Generally speaking, when L is short, TDE has lower com-
plexity when taking the DFT/IDFT operation of FDE into account. However, when
L is long, FDE is significantly more efficient than TDE [44]. A complexity comparison
of FDE and TDE with different length of channel delay spread is also found in Fig. 4
in [44].
In this section, we consider the commonly used linear FDE instead of traditional
linear TDE. Next, the linear FDE is derived and simulation results are presented.
3.2.1 Linear ZF-FDE and MMSE-FDE Design
Let Gm denote the m-th user’s linear FDE block, The equalized frequency domain
symbols are then given by
zm = Gmym
= Gm˜Hmxm + Gmvm (3.17)
where Gm = diaggm(0), . . . , gm(K−1) is a K×K diagonal matrix with the diagonal
entries gm(k) being the FDE coefficients.
37

Chapter 3. Single-Carrier Frequency Division Multiple Access
The simplest equalizer design is based on the ZF criterion, and the aim of the ZF-
FDE is to remove all the ISI [15]. The ZF-FDE is designed such that the equalized
frequency domain channel response is flat, i.e. Gm˜Hm = IK . Hence the ZF-FDE is
described as
GZF,m = ˜H−1
m . (3.18)
In the above equation, the k-th diagonal element of GZF,m is given by
gZF,m(k) =1
˜hm(k)=
˜h∗m(k)
∣∣∣˜hm(k)∣∣∣2 . (3.19)
Since the ZF-FDE tries to invert the frequency domain channel response, it causes
noise enhancement in deep-faded subcarriers. In order to avoid this noise enhancement
problem, the MMSE criterion is commonly used in practice for FDE design. The aim
of the MMSE-FDE, as indicated by its name, is to minimize the mean-squared error
(MSE) of the equalized frequency domain symbols [15]. The MSE is given by
J = trE[(zm − xm)(zm − xm)H
]
= tr
Gm
˜HmE[xmxHm]︸ ︷︷ ︸
σ2xIK
˜HH
mGHm + GmE[vmvH
m]︸ ︷︷ ︸σ2nIK
GHm + E[xmxH
m]︸ ︷︷ ︸σ2xIK
− tr
Gm
˜HmE[xmxHm]︸ ︷︷ ︸
σ2xIK
−E[xmxHm]︸ ︷︷ ︸
σ2xIK
˜HH
mGHm
(3.20)
where σ2n is the received noise variance, and σ2
x is the average transmit data symbol
power (σ2x = 1 is assumed in the following derivation).
Taking the derivative of J with respect to G∗m and equating it to zero:
∂J
∂G∗m
= Gm˜Hm
˜HH
m + Gm
(σ2nIK
)− ˜H
H
m = 0K×K . (3.21)
Solving the above equation, the MMSE-FDE is thus described as
GMMSE,m = ˜HH
m
(˜Hm
˜HH
m + σ2nIK
)−1
. (3.22)
The k-th diagonal element of GMMSE,m is given by
gMMSE,m(k) =˜h∗m(k)
∣∣∣˜hm(k)∣∣∣2+ σ2
n
. (3.23)
38

3.2. Linear Frequency Domain Equalization
Table 3.2: Simulation parameters for IFDMA, LFDMA and OFDMA systems.
Number of available subcarriers N = 512
Number of user subcarriers K = 128
Baseband modulation QPSK
Channel model 8-tap i.i.d. complex Gaussian channel
Channel coding No
3.2.2 Performance Comparison of IFDMA, LFDMA and OFDMA
with FDE
Simulation results are presented in this section which compare the performance of
IFDMA, LFDMA and OFDMA. In the simulation, the total number of available sub-
carriers is N = 512, the number of user subcarriers is K = 128, and the baseband
modulation scheme is quadrature phase shift keying (QPSK). An 8-tap i.i.d. complex
Gaussian channel3 is used, such that the maximum channel delay spread is L = 8. To
obtain a sufficiently accurate BER down to 10−4 (at least 106 bits should be trans-
mitted), 200, 000 independent (or block-fading) channel realizations are simulated. No
channel coding is applied in this simulation. The simulation parameters for IFDMA,
LFDMA and OFDMA systems are summarized in Table 3.2.
Fig. 3.2 compares the performance of ZF-FDE and MMSE-FDE in an IFDMA
system. It is shown that the MMSE-FDE outperforms the ZF-FDE significantly. This
is because the MMSE-FDE minimizes the MSE of the equalized symbols, while the
ZF-FDE suffers from performance degradation due to noise enhancement on the faded
subcarriers.
Fig. 3.3 compares the performance of IFDMA, LFDMA and OFDMA with MMSE-
FDE. It can be seen that SC-FDMA outperforms OFDMA in the uncoded case. This
is because the power of the data symbols are distributed to all the user subcarriers via
the DFT precoding. Even when several subcarriers are faded, the data symbols may
still be correctly received using energy from other high channel gain subcarriers. In
MC systems, the data symbols are mapped directly onto the subcarriers, so the data
symbols transmitted to the faded subcarriers are likely to be received erroneously.
3A comparison of 8-tap i.i.d. complex Gaussian channel model with uniform power delay profile
(PDP) and the popular 3GPP spatial channel model extension (SCME) [28] is presented and discussed
in detail in Appendix A. The reason of using 8-tap i.i.d. complex Gaussian channel model with uniform
power delay profile (PDP) throughout the thesis is for the convenience of performance analysis and
derivation process.
39

Chapter 3. Single-Carrier Frequency Division Multiple Access
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
ZF−FDEMMSE−FDE
Figure 3.2: BER comparison of IFDMA with ZF-FDE and MMSE-FDE in an 8-tap
i.i.d. complex Gaussian channel.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IFDMALFDMAOFDMA
Figure 3.3: BER comparison of IFDMA, LFDMA and OFDMA with MMSE-FDE in
an 8-tap i.i.d. complex Gaussian channel.
40

3.3. Peak-to-Average Power Ratio
Note that although OFDM(A) has poor performance without channel coding (as
shown in Fig. 3.3), it is shown in [44, 57] that OFDM systems outperform SC sys-
tems with MMSE-FDE when 1/2-rate convolutional channel coding is applied. As
mentioned previously, since there is no channel-induced ISI in OFDM(A) systems,
compared to SC systems a significant performance gain can be obtained in OFDM(A)
systems through channel coding. Hence OFDM(A) systems generally operate with
channel coding, whereas SC systems can give better performance in the case without
channel coding, or with higher-rate channel coding [57].
Furthermore, Fig. 3.3 shows that IFDMA yields better performance than LFDMA
since it is able to exploit frequency diversity using the interleaved subcarriers. Never-
theless, LFDMA can be used to exploit multi-user diversity via frequency domain CDS.
This can significantly improve the received SNR (and thus enhance cell throughput)
when applied [55].
3.3 Peak-to-Average Power Ratio
Since the main drawback of OFDM(A) is the high-PAPR transmit signal, SC-FDMA is
employed in the LTE uplink due to its low-PAPR. High-PAPR transmit signals require
a large back-off to ensure that the PA operates in the linear region. Back-off is defined
as the gap between the PA operating point and the 1-dB compression point [64]. Since
the PA is the most power consuming device at the transmitter, it is desirable to operate
the PA at its maximum efficiency around the 1-dB compression point. However, the PA
efficiency drops considerably when a large back-off is required [64]. It is shown in [65]
that the power efficiency of a class B PA is 45% with a 5dB back-off and is reduced to
25% with a 10dB back-off.
Note that beyond the 1-dB compression point, the PA is characterized by its non-
linear AM/AM4 and AM/PM5 conversions [64]. It is undesirable to operate the PA
in the non-linear region since it results in in-band signal distortion and out-of-band
spectral regrowth. In particular, when spectral regrowth occurs, the amplified transmit
signal may no longer meet the spectral mask specification as a result of adjacent channel
interference.
For a power-limited device, such as a mobile handset, it is particularly desirable to
have low-PAPR transmit signals (i.e. a small back-off requirement) to enable power-
efficient transmission. In addition, the uplink performance at the cell-edge can also
4AM/AM refers to amplitude-to-amplitude modulation.5AM/PM refers to amplitude-to-phase modulation.
41

Chapter 3. Single-Carrier Frequency Division Multiple Access
be improved when the PA at the mobile handset is able to drive a higher maximum
transmit signal power with a smaller back-off. In this section, the PAPR characteristics
of the SC-FDMA transmit signals and the PAPR reduction techniques are investigated.
3.3.1 PAPR of SC-FDMA Transmit Signals
In this section, the PAPR analysis of MC and SC-FDMA signals is given. It is then
shown that oversampling the Nyquist-rate data symbols is required to obtain accurate
PAPR results. Finally, the PAPR simulation results of MC and SC-FDMA with differ-
ent subcarrier mapping and baseband modulation schemes are presented and discussed.
3.3.1.1 PAPR Analysis of Multi-Carrier and SC-FDMA Signals
Let xTX(t, i) denote the transmit signal after oversampling (e.g. passing the digital
samples at the modulator output through an interpolator) at the time instant t of
the i-th transmission block (the user index µ is omitted for brevity). The reason for
oversampling the data symbols will be detailed in Section 3.3.1.2. The PAPR of the
i-th transmission block is defined as
PAPR(i) = 10 log10
max
t
|xTX(t, i)|2
E [|xTX(t, i)|2]
(3.24)
where maxt
|xTX(t, i)|2 is the peak transmit signal power and E[|xTX(t, i)|2
]is the av-
erage transmit signal power. The PAPR of the transmit signal is generally obtained by
simulation and plotted as a complementary cumulative distribution function (CCDF)
against a reference PAPR value (denoted as PAPR0), where the CCDF is defined as
the probability of the PAPR(i) being less than PAPR0 dB:
CCDF = Pr (PAPR(i) < PAPR0) . (3.25)
The PAPRs of conventional MC and SC transmit signals are discussed as follows.
Let x(k) denote the k-th complex data symbols. The time domain OFDM transmit
symbols (with size-K IDFT operation) are given by xOFDM(n) = 1√K
∑K−1k=0 x(k)ej
2πK
kn,
where n, k = 0, . . . ,K − 1. It can be seen that xOFDM(n) is the sum of K independent
and identically distributed complex data symbols with different phase shifts. Similar
to the concept of a Rayleigh fading channel, it follows that when the K independent
data symbols are summed constructively, a peak occurs in the OFDM transmit symbols
(likewise, a notch occurs when the data symbols sum up destructively). Therefore, MC
signals generally have large amplitude variations and a high PAPR.
42

3.3.Peak
-to-Average
Pow
erRatio
Figure 3.4: Example of (a) IFDMA transmit signal, and (b) LFDMA transmit signal.
43

Chapter 3. Single-Carrier Frequency Division Multiple Access
In conventional SC systems, the transmit symbols are the actual modulated data
symbols, i.e. xSC(n) = x(n), where n = 0, . . . ,K − 1 (assuming block-based transmis-
sion). After oversampling the transmit symbols, the peak and the notch of the output
transmit signal amplitude does not deviate from the average transmit signal amplitude
as much as for OFDM signals. Hence SC systems have a lower PAPR than MC systems.
However, the PAPR of SC transmit signals will depend on the baseband modulation
scheme, e.g. high-level QAM has higher PAPR than low-level QAM.
For SC-FDMA, the interleaved and localized subcarrier mapping schemes are the
only two special cases where the output transmit signals maintain the low-PAPR prop-
erty of the SC system. The SC-FDMA signals with interleaved and localized subcarrier
mapping schemes are illustrated in Fig. 3.4. In the interleaved mode, the placement of
the frequency domain data symbols with the interleaved subcarrier leads to data block
repetition in the time domain [47]. In the localized mode, zero padding the frequency
domain data symbols leads to the data symbols being cyclically interpolated in the
time domain. After CP insertion and oversampling the digital samples at the modula-
tor output, IFDMA and LFDMA both have continuous SC transmit signals. The only
difference is that the LFDMA modulator performs digital interpolation (i.e. equivalent
to oversampling) while the IFDMA modulator performs data block repetition. If a
randomized subcarrier mapping scheme is used, the output signal will no longer look
like a SC signal and it will thus exhibit a higher PAPR.
3.3.1.2 Obtaining the PAPR via Oversampling the Transmit Signal
When performing PAPR simulation, oversampling the transmit signal at the modulator
output is required in order to obtain accurate PAPR results. For example, Fig. 3.5(a)
shows that the Nyquist-rate QPSK signals appear to have constant envelope. However,
after oversampling, Fig. 3.5(b) shows that the continuous QPSK transmit signal does
have envelope variation due to the phase transition between adjacent data symbols.
To obtain accurate PAPR results by simulation, oversampling can be performed via
frequency domain zero-padding [66] (Note: frequency domain zero-padding is equiva-
lent to applying a sinc pulse shaping filter to the digital signal at the modulator output,
which oversamples the digital signal via interpolation). That is, converting the time
domain transmit signal to the frequency domain, padding the frequency domain trans-
mit signals with a long string of zeros, and converting it back to the time domain. Thus
the oversampled time domain transmit signals can be obtained. It is shown in [66] that
an oversampling rate of 4 is able to provide sufficiently accurate PAPR results.
44

3.3. Peak-to-Average Power Ratio
0 5 10 15 200
0.5
1
1.5
(a) Nyquist−rate QPSK symbols with constant envelope
Sig
nal a
mpl
itude
0 5 10 15 200
0.5
1
1.5
2
(b) Continuous SC transmit signals with envelope variation
Sig
nal a
mpl
itude
Figure 3.5: Comparison of QPSK signal amplitude. (a) Nyquist-rate QPSK symbols.
(b) Continuous SC transmit signals after oversampling the Nyquist-rate QPSK symbols.
3.3.1.3 PAPR Simulation Results and Discussion
In the following simulation, N = 512 and K = 128 are used. As previously mentioned,
oversampling the digital samples at the modulator output is performed via frequency
domain zero-padding, and an oversampling rate of 4 is used [66]. To produce sufficiently
accurate CCDF curves, 200, 000 independent transmission blocks are simulated.
Fig. 3.6 shows the PAPR comparison of SC-FDMA employing different subcarrier
mapping schemes with QPSK signaling. IFDMA and LFDMA are shown to have the
same low-PAPR since their output transmit signals are SC signals. With a randomized
subcarrier scheme (referred to as RFDMA), the SC property no longer holds. Fig. 3.6
shows that RFDMA signals exhibit high-PAPR that is close to that of OFDMA signals.
Note that the subcarrier mapping scheme does not change the PAPR of OFDMA
signals, since its high-PAPR is due to the summation of random data symbols regardless
of the phase shifts (different subcarrier mapping schemes lead to different phase-shifted
data symbols being summed up). As shown in Fig. 3.6, IFDMA and LFDMA provide
approximately 4dB of PAPR improvement over OFDMA, so they are well-suited for
power-efficient uplink transmission. The CCDF graph also provides useful information
on the back-off requirement at the PA. For example, it is shown in Fig. 3.6 that 99.9%
45

Chapter 3. Single-Carrier Frequency Division Multiple Access
0 2 4 6 8 10 12 1410
−4
10−3
10−2
10−1
100
PAPR0 (dB)
CC
DF
LFDMAIFDMARFDMAOFDMA
Figure 3.6: PAPR comparison of SC-FDMA employing interleaved, localized, and ran-
domized subcarrier mapping schemes (denoted as IFDMA, LFDMA and RFDMA) with
QPSK signaling.
0 2 4 6 8 10 12 1410
−4
10−3
10−2
10−1
100
PAPR0 (dB)
CC
DF
IFDMA (QPSK)IFDMA (16QAM)OFDMA (QPSK)OFDMA (16QAM)
Figure 3.7: PAPR comparison of IFDMA and OFDMA with QPSK and 16QAM.
46

3.3. Peak-to-Average Power Ratio
of SC-FDMA transmission blocks have a PAPR less than 7.7dB. The back-off can be
set to this value to ensure that the PA operates in the linear region 99.9% of time.
Fig. 3.7 compares the PAPR of IFDMA and OFDMA with QPSK and 16QAM
modulation. As IFDMA and LFDMA have the same PAPR, only the IFDMA results
are shown. As mentioned in Section 3.3.1.1, the PAPR of SC-FDMA transmit sig-
nals depends on the baseband modulation scheme. However, the PAPR of OFDMA
signals is independent of the baseband modulation. This is because its high-PAPR is
dominated by the summation of random data symbols, and the envelope variation of
the data symbols has negligible impact on the PAPR (Note: the PAPR of the MC
signals increases with an increasing number of user subcarriers, since more random
data symbols are summed to form each time domain output sample) [56]. Although
16QAM gives higher PAPR than QPSK in IFDMA systems, 16QAM-IFDMA signals
still provide approximately 3dB of PAPR improvement over OFDMA signals.
3.3.2 PAPR Reduction via Frequency Domain Spectrum Shaping
It was shown in the previous section that SC-FDMA is able to provide PAPR improve-
ment over MC systems. However, it is still of research interest and practical interest
to further reduce the PAPR. In this section, PAPR reduction via frequency domain
spectrum shaping is investigated.
3.3.2.1 Description of Frequency Domain Spectrum Shaping
There is a subtle difference between the frequency domain spectrum shaping used in
SC-FDMA and the time domain pulse shaping filter used in traditional SC systems,
although they appear to be equivalent operations. The frequency domain spectrum
shaping is used to achieve PAPR reduction, while the traditional time domain pulse
shaping filter is applied to achieve band-limiting [15].
Considering the SC-FDMA transmit signal from a user terminal, when K fre-
quency domain data symbols are all mapped to K user subcarriers, this corresponds to
the brick-wall transmission spectrum after oversampling the Nyquist-rate signal. The
abrupt discontinuity at the spectrum edges gives rise to a large variation in the contin-
uous transmit signal waveform. Hence, by allowing the use of some user subcarriers to
smooth the transition bandwidth, frequency domain spectrum shaping can be used to
smooth the transmit signal waveform [11]. As a result, PAPR can be reduced at the
cost of a reduction in bandwidth efficiency.
Fig. 3.8 shows the block digram with frequency domain spectrum shaping in a
47

Chapter 3. Single-Carrier Frequency Division Multiple Access
Figure 3.8: Block diagram of frequency domain spectrum shaping in SC-FDMA.
SC-FDMA system. Let K denote the number of user subcarriers and Kd denote the
number of data symbols (where Kd ≤ K, so the bandwidth efficiency is reduced toKdK ), the frequency domain data symbols are denoted as x = [x(0), . . . , x(Kd − 1)]T .
Prior to spectrum shaping, the frequency domain data symbols are up-sampled via a
spectrum repetition block, i.e.
xSR = Πx (3.26)
where Π is a K ×Kd spectrum repetition matrix given by
Π =
0Ke×(Kd−Ke) IKe
IKd
IKe 0Ke×(Kd−Ke)
(3.27)
where Ke =K−Kd
2 . Hence the up-sampled frequency domain symbols are given by
xSR =[x(Kd −Ke), . . . , x(Kd − 1), xT , x(0), . . . , x(Ke − 1)
]T. (3.28)
Let Ω denote the frequency domain spectrum shaping matrix (where Ω is a K ×K
diagonal matrix with its k-th diagonal entry being the k-th spectrum shaping filter
coefficient), the spectrum shaped frequency domain symbols are thus given by
xSS = ΩxSR. (3.29)
Suppose the frequency domain spectrum shaping filter is designed with the raised
cosine (RC) spectrum. Since multiplication in the frequency domain is equivalent to
convolution in the time domain, the transmit signal after RC spectrum shaping is
equivalent to the time domain data symbols convolved with the RC filter. When the
roll-off factor is ro = 0 (Note: we use ro to denote the roll-off factor, since the commonly
used notation α will be used in the later chapter to denote pilot power), there is no
excess bandwidth and the ripples on the time domain RC filter decay slowly [67]. Hence
it is more likely to generate a high peak value (when the adjacent data symbols are
coherently combined through filtering). The PAPR simulation results shown in Section
3.3.1.3 correspond to the PAPR results with ro = 0. As ro increases (i.e. larger excess
bandwidth), the RC filter ripples decay faster, so the peak value of the transmit signal
48

3.3. Peak-to-Average Power Ratio
0 10 20 30 40 50 60 70 80 900
0.2
0.4
0.6
0.8
1
(a) Interleaved subcarrier mapping scheme
Inte
rleav
ed R
C s
pect
rum
0 10 20 30 40 50 60 70 80 900
0.2
0.4
0.6
0.8
1
(b) Localized subcarrier mapping scheme
Loca
lized
RC
spe
ctru
m
User subcarriersZero mappingFilter bandwidth
Figure 3.9: Equivalent RC spectrum with ro = 0.5, where K = 18, Kd = 18 and
N = 90. (a) Interleaved subcarrier mapping. (b) Localized subcarrier mapping.
waveform will reduce accordingly. Therefore, it can be expected that the PAPR will
be smaller with a larger roll-off factor.
The spectrum shaping for PAPR reduction can also be implemented in the time
domain. That is, followed by the CP insertion, the transmission block is up-sampled
by inserting zeros between the data samples, and convolved with an equivalent time
domain pulse shaping filter. Clearly, the frequency domain spectrum shaping is more
computational efficient than the time domain convolution process. Nevertheless, if
spectrum shaping is to be implemented in the time domain, the bandwidth of the
pulse shaping filter has to be designed correctly. Fig. 3.9(a) shows that the IFDMA
pulse shaping filter requires wider filter bandwidth design, while Fig. 3.9(b) shows that
the LFDMA pulse shaping filter requires narrower filter bandwidth design. Moreover,
the LFDMA filter bandwidth has to be designed according to the number of user
subcarriers.
3.3.2.2 PAPR Simulation Results with Raised Cosine Spectrum Shaping
The PAPR of SC-FDMA signals employing RC frequency domain spectrum shaping
with different roll-off factors are presented in this section. In the simulation, the number
49

Chapter 3. Single-Carrier Frequency Division Multiple Access
3 4 5 6 7 8 910
−4
10−3
10−2
10−1
100
PAPR0 (dB)
CC
DF
IFDMA (ro = 0)IFDMA (ro = 0.1)IFDMA (ro = 0.2)LFDMA (ro = 0)LFDMA (ro = 0.1)LFDMA (ro = 0.2)
Figure 3.10: PAPR of SC-FDMA employing RC frequency domain spectrum shaping
with QPSK signaling.
4 5 6 7 8 9 1010
−4
10−3
10−2
10−1
100
PAPR0 (dB)
CC
DF
IFDMA (ro = 0)IFDMA (ro = 0.1)IFDMA (ro = 0.2)LFDMA (ro = 0)LFDMA (ro = 0.1)LFDMA (ro = 0.2)
Figure 3.11: PAPR of SC-FDMA employing RC frequency domain spectrum shaping
with 16QAM signaling.
50

3.3. Peak-to-Average Power Ratio
Table 3.3: Comparison of the PAPR and the bandwidth efficiency via RC spectrum
shaping.
Bandwidth efficiency KdK 100% 90.6% 82.6%
PAPR of QPSK at CCDF = 0.001 7.7dB 7.1dB 6.2dB
PAPR of 16QAM at CCDF = 0.001 8.6dB 8.3dB 7.8dB
of user subcarriers is K = 128 and the total number of available subcarriers is N = 512.
The PAPR is compared at the roll-off factor ro = 0, ro = 0.1 and ro = 0.2, where the
number of transmit data symbols is Kd = 128, Kd = 116, Kd = 106 respectively. To
produce sufficiently accurate CCDF curves, 200, 000 independent transmission blocks
are simulated.
Fig. 3.10 and 3.11 shows the simulation results for QPSK and 16QAM respectively.
Both figures show that the PAPR is reduced as the roll-off factor increases, and the
spectrum shaped IFDMA and LFDMA transmit signals have the same PAPR. Note
that given the same roll-off factor, QPSK signaling shows a larger PAPR reduction
than 16QAM signaling. For example, when ro = 0.2, the PAPR reduction for QPSK
and 16QAM is 1.5dB and 0.8dB respectively. For convenience, the PAPR results and
the corresponding bandwidth efficiencies are summarized in Table 3.3.
3.3.3 PAPR Reduction Modulation Scheme
Apart from frequency domain spectrum shaping, PAPR can also be reduced via mod-
ulation scheme modification [48]. Fig. 3.12 shows the constellation diagrams of BPSK,
QPSK, π/2-BPSK and π/4-QPSK. For conventional BPSK and QPSK, zero crossing
the origin occurs in the symbol transition state after oversampling. This gives rise to
the amplitude variation of the transmit signal that generally yields a higher PAPR.
To avoid zero crossing, π/2-BPSK and π/4-QPSK can be employed, as shown in Fig.
3.12(c) and 3.12(d). π/2-BPSK is obtained by phase shifting the even symbols by 90.
This results in a similar symbol transition as offset-QPSK [15] and thus gives lower
signal amplitude variations. Similarly, π/4-QPSK is obtained by phase shifting the
even symbols by 45.
Furthermore, the zero crossing implies that the symbol transition undergoes ±180
phase jumps, so avoiding the zero crossing removes the abrupt ±180 phase jumps in
the symbol transition. As shown in Fig. 3.12(c) and 3.12(d), π/2-BPSK reduces the
phase jumps to ±90 and π/4-QPSK reduces the largest phase jump to ±135.
Fig. 3.13 shows the PAPR comparison of BPSK, QPSK, π/2-BPSK and π/4-QPSK.
51

Chapter 3. Single-Carrier Frequency Division Multiple Access
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
Real
Imag
inar
y
(a) BPSK
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
Real
Imag
inar
y
(b) QPSK
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
Real
Imag
inar
y
Odd symbolsEven symbols
(c) π/2-BPSK
−1 −0.5 0 0.5 1
−1
−0.5
0
0.5
1
Real
Imag
inar
y
Odd symbolsEven symbols
(d) π/4-QPSK
Figure 3.12: Constellation diagram of various baseband modulation schemes.
52

3.4. Summary
0 2 4 6 8 1010
−4
10−3
10−2
10−1
100
PAPR0 (dB)
CC
DF
BPSKπ/2-BPSKQPSKπ/4-QPSK
Figure 3.13: PAPR comparison of BPSK, QPSK, π/2-BPSK and π/4-QPSK (with
K = 128, N = 512 and IFDMA transmission scheme).
Again, 200, 000 independent transmission blocks are simulated. BPSK is shown to have
larger PAPR than QPSK. This is because zero crossings occur more frequently in the
symbol transition of BPSK than QPSK. π/2-BPSK gives approximately 2.5dB PAPR
improvement over BPSK since the phase jump is reduced from±180 to±90. However,
π/4-QPSK shows little PAPR improvement (just 0.3dB) over QPSK due to the smaller
phase jump reduction (i.e. from ±180 to ±135).
3.4 Summary
In this chapter, a mathematical description for an uplink SC-FDMA system was pro-
vided. The FDE based on ZF and MMSE criteria was derived. MMSE-FDE was
shown to outperform ZF-FDE in a time-dispersive channel due to the avoidance of
noise enhancement. The PAPR characteristics of SC-FDMA signals were investigated
and compared with that of MC signals. IFDMA and LFDMA were the only special
cases for which the output transmit signal maintained the low-PAPR property of SC
systems. When user subcarriers are randomly assigned, the output signal exhibited a
high PAPR close to MC signals. Result showed that SC-FDMA could provide 3-4dB
53

Chapter 3. Single-Carrier Frequency Division Multiple Access
of PAPR improvement over OFDMA (with QPSK and 16QAM).
The PAPR reduction techniques were also investigated to further reduce the PAPR
of SC-FDMA signals,. When frequency domain pulse shaping is applied, the PAPR
can be reduced at the cost of bandwidth efficiency reduction. When PAPR reduction
modulation is used, results showed that π/2-BPSK provided a large PAPR reduction of
2.5dB over conventional BPSK. However, π/4-QPSK gives little PAPR improvement
(0.3dB) over the conventional QPSK since ±135 phase jumps still occurred in the
symbol transition.
Since the impact of employing PAPR reduction techniques has negligible (if not
zero) impact to the BER performance of SC-FDMA systems, frequency domain spec-
trum shaping and modified modulation schemes will not be used in the simulation model
for the remaining chapters. In the following chapters, QPSK and 16QAM (as specified
in the LTE uplink standard [4]) will be used for performance evaluation. This chapter
introduced the MMSE-FDE for SC-FDMA to combat the ISI in a frequency-selective
fading channel. However, linear MMSE-FDE does not give the best equalization perfor-
mance for a SC system due to the residual-ISI. In the next chapter, the non-linear DFE
techniques for SC-FDMA will be investigated to improve the equalization performance.
54

Chapter 4
Decision Feedback Equalization
for Single-Carrier FDMA
As mentioned in Chapter 3, similar to MC systems, computationally efficient MMSE-
FDE is commonly used to equalize SC-FDMA signals. Although MMSE-FDE is suf-
ficient to equalize a MC signal, it is not necessarily the best way to equalize a SC
signal. The reasons are explained as follows. In MC systems, data symbols are directly
mapped to frequency subcarriers. Although each received data symbol may experience
different frequency channel distortion, the frequency-selective fading channel does not
introduce ISI to the received MC signals (Note: ISI is often interpreted as ICI in MC
systems). Hence one-tap per subcarrier equalizer is sufficient to combat the channel
distortion and recover the data symbols for MC systems.
For SC systems, data symbols are transmitted in the time domain. The received SC
signals are therefore affected by ISI in a multipath fading channel. The MMSE-FDE for
a SC system is an equivalent operation to the conventional time domain MMSE linear
transversal equalizer [44]. Since the MMSE-LE design is based on the minimization of
the MSE of the filtered noise and residual-ISI [15], the SNR at the MMSE-LE output
is thus lower than the SNR at the decision point of the MFB. This is because the
MFB assumes that a matched filter is employed at the receiver to maximize the SNR
at the decision point (i.e. minimize the MSE of the filtered noise only) and all the ISI
is perfectly removed. Note that the MFB is the lowest bound on BER of all the SC
equalization schemes, and there is a considerable performance gap from MMSE-LE to
the MFB due to residual-ISI [44, 53]. Hence, DFE is investigated in this chapter to
improve the equalization performance of SC-FDMA.
In fact, to combat the channel-induced ISI, most of the SC equalization algorithms
55

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
described in [15, 68] can be applied to SC-FDMA. MLSE is known as the optimal SC
equalization scheme in the sense of minimizing the error probability1. However, MLSE
is performed purely in the time domain, and its complexity grows exponentially with the
channel delay spread and signaling alphabet. Hence MLSE is not suitable to SC-FDMA
systems due to the high complexity. Among the other SC equalization algorithms, DFE
gives a good compromise between complexity and performance. By exploiting the
previous hard-decision detected symbols as feedback (FB) symbols to perform partial
ISI cancellation, DFE generally outperforms LE (when the error propagation is not
severe). Variants of time domain DFE have been well-investigated in traditional SC
systems [15, 68]. This chapter investigates the application of DFE to SC-FDMA. In
particular, the DFE is partially or totally implemented in the frequency domain to
reduce the complexity [44, 52, 53].
This chapter is organized as follows. Section 4.1 describes the MFB concept and the
simulation approach. A performance comparison of SC-FDMA with MMSE-LE and
MFB is presented. Section 4.2 describes the hybrid-DFE that consists of a frequency
domain feedforward (FF) filter and a time domain FB filter. Performance of SC-FDMA
with a hybrid-DFE is presented and the error propagation problem is discussed. Section
4.3 describes the IB-DFE with FF and FB filters both implemented in the frequency
domain. Since the performance of the IB-DFE is optimized at each iteration according
to the reliability of the FB symbols, FB reliability estimation schemes are proposed in
this section, and a performance comparison of SC-FDMA with IB-DFE and hybrid-
DFE is presented. Finally, Section 4.4 summarizes the chapter.
4.1 Matched Filter Bound
The MFB is the lower bound on BER for all SC equalization algorithms. As indicated by
its name, a matched filter is used as a FF filter to maximize the SNR at the detection
point. Since the channel impulse response is reshaped via the matched filter SNR
maximization, both precursor and postcursor ISI (i.e. the ISI from future symbols and
previous symbols) occur at the matched filter output. Based on the ideal assumption
that all the ISI can be completely removed (i.e. all the feedback and feedforward
symbols are correct), a lower bound performance can be derived. The frequency domain
1MLSE has performance very close or equal to the MFB but does not outperform it [69]. At high
SNR, MLSE asymptotically achieves the MFB. At low SNR, MLSE does not achieve the MFB. Since
MLSE is a sequence estimation algorithm, once a single decision error is made (more likely to occur at
low SNR), MLSE is liable to a short period of burst errors on the estimated sequence.
56

4.1. Matched Filter Bound
Figure 4.1: Block diagram of block based frequency domain MFB operation for SC
systems.
block based MFB operation is described in Section 4.1.1. Analytical MFB performance
is discussed in section 4.1.2. Performance comparison of LE and MFB for SC-FDMA
is presented in Section 4.1.3.
4.1.1 Matched Filter Bound Operation
Fig. 4.1 shows the block diagram of block-based MFB operation that consists of a
FF filter and FB filter, both in the frequency domain. As mentioned in the previous
chapter, the received frequency domain symbol on the k-th user subcarrier can be
described as
yk = ˜hkxk + ηk, k = 0, . . . ,K − 1 (4.1)
where ˜hk, xk and ηk denote the equivalent channel response, frequency domain transmit
symbol and equivalent received noise on the k-th user subcarrier respectively. K is the
number of user subcarriers.
Let gFF,k denote the frequency domain FF filter coefficient on the k-th subcarrier,
the FF filtered frequency domain symbols are given by
yFF,k = gFF,kyk
= gFF,k˜hkxk + gFF,kηk. (4.2)
The n-th FF filtered symbols in the time domain are given by
yFF,n =1√K
K−1∑
k=0
yFF,kej 2πK
kn
=1√K
K−1∑
k=0
gFF,k˜hkxkej
2πK
kn
︸ ︷︷ ︸Sn
+1√K
K−1∑
k=0
gFF,kηkej 2πK
kn
︸ ︷︷ ︸Nn
(4.3)
57

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
where n = 0, . . . ,K − 1. Sn and Nn are the FF filtered symbol and FF filtered noise in
the time domain respectively. Hence the SNR after FF filtering is defined as the ratio
of the instantaneous output signal power to the mean noise power, i.e. [67]
γ =|Sn|2
E [|Nn|2]. (4.4)
Assuming the noise ηk is a zero-mean white Gaussian process with a variance of σ2n,
the mean noise power can thus be described as
E[|Nn|2
]= E
∣∣∣∣∣
1√K
K−1∑
k=0
gFF,kηkej 2πK
kn
∣∣∣∣∣
2
=
(1
K
K−1∑
k=0
|gFF,k|2)σ2n. (4.5)
According to the Cauchy-Schwarz inequality stated in [67], if two complex functions
f1(x) and f2(x) have finite energy, i.e. satisfying the following conditions
∫ ∞
−∞|f1(x)|2 dx < ∞
∫ ∞
−∞|f2(x)|2 dx < ∞, (4.6)
then the following inequality equation is true
∣∣∣∣∫ ∞
−∞f1(x)f2(x)dx
∣∣∣∣2
≤∫ ∞
−∞|f1(x)|2 dx
∫ ∞
−∞|f2(x)|2 dx. (4.7)
In the above statement, the equality holds, if and only if
f1(x) = βf∗2 (x) (4.8)
where β is an arbitrary constant.
Based on the above mentioned Cauchy-Schwarz inequality, the FF filtered signal
power in (4.3) can be written as
|Sn|2 =∣∣∣∣∣
1√K
K−1∑
k=0
gFF,k˜hkxkej
2πK
kn
∣∣∣∣∣
2
≤(
1
K
K−1∑
k=0
|gFF,k|2)(
1
K
K−1∑
k=0
|˜hk|2)(
1
K
K−1∑
k=0
|xk|2)
︸ ︷︷ ︸σ2x
(4.9)
58

4.1. Matched Filter Bound
where the transmit symbol power is assumed to be 1 in the following derivation, i.e.
σ2x = 1. Similar to (4.8), the equality in (4.9) holds (i.e. when the signal power is
maximized) if and only if
gFF,k = β˜h∗k. (4.10)
It can be seen that gFF,k is a matched filter in the sense that its filter response is
matched to the channel response. For convenience, β in (4.10) can be defined as
β =1
1K
∑K−1k=0
∣∣∣˜hk∣∣∣2 (4.11)
such that the FF filtered symbol power |Sn|2 is normalized to 1. Furthermore, substi-
tuting (4.5) and (4.9) into (4.4), the maximized SNR after FF filtering is thus given
by
γ =1K
∑K−1k=0 |˜hk|2σ2n
. (4.12)
Based on the FF matached filter design in (4.10), the FF filtered frequency domain
symbols can be written as
yFF,k = β|˜hk|2xk + β˜h∗kηk. (4.13)
Since the FF filtered channel response β|˜hk|2 in the above equation is not a flat spectrum
across all K user subcarriers, residual ISI persists in the time domain FF filtered
symbols. In order to remove the ISI, a unit impulse response in the time domain
is required. As the time domain unit impulse response is equivalent to a flat spectrum
response in the frequency domain, a frequency domain FB filter can be used to remove
the ISI and thus flatten the resultant spectrum response. Let gFB,k denote the FB filter
coefficient on the k-th user subcarrier. Assumming ideal FB symbols, the frequency
domain symbols after ISI cancellation (see Fig. 4.1) are given by
zk = yFF,k + gFB,kxk
=(β|˜hk|2 + gFB,k
)xk + β˜h
∗kηk. (4.14)
Imposing the flat spectrum constraint β|˜hk|2+ gFB,k = 1 for all k to the above equation,
the frequency domain FB filter is thus given by
gFB,k = 1− β|˜hk|2. (4.15)
After ISI cancellation, the frequency domains zk is converted to the time domain (i.e.
zn = 1√K
∑K−1k=0 zke
j 2πK
kn, where n = 0, . . . ,K − 1) for detection.
59

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
4.1.2 Discussion on Analytical MFB performance
Let p(γ) denote the PDF of γ in (4.11) and Pe(γ) denote the error probability function
for a baseband modulation scheme at an SNR of γ. The MFB error probability can be
evaluated as [15]
Pe,MFB =
∫ ∞
0Pe(γ)p(γ)dγ. (4.16)
In the equation above, since the channel with different characteristics has different p(γ),
the MFB varies with channel response. It may not always be possible to obtain an
exact mathematical expression of p(γ). Even when p(γ) is available, the integration in
(4.16) is generally complicated. The exact analytical MFB with two-ray and extended
Rayleigh fading channels was investigated in [70, 71].
Although a closed form expression may not always be possible, the MFB perfor-
mance can be understood via a simple approach. Recalling γ in (4.11) is the instanta-
neous SNR with the instantaneous channel energy of all the multipaths, the distribution
of γ can be characterized in a simple statistical form, i.e. γ ∼ (γ, σ2γ), where γ and σ2
γ
are the mean and variance of γ respectively.
Generally spreaking, for a channel with rich multipath (where the channel is more
frequency selective), the variation of the instantaneous SNR σ2γ tends to be smaller,
which yields a better MFB performance for a given γ. In the extreme case when σ2γ → 0,
the error probability of MFB approaches the error probability in AWGN.
If a channel has small delay spread (where the channel is less frequency-selective),
σ2γ tends to be larger, which yields a degraded MFB performance for a given γ. In the
extreme case (e.g. a single-tap Rayleigh fading channel), the error probability of MFB
is the same as the error probability in a flat Rayleigh fading channel.
4.1.3 Performance Comparison of LE and MFB
Performance comparison of SC-FDMA employing MMSE-LE and MFB is presented
in this section. Results are obtained via simulations wherein the number of available
subcarriers N = 512, the number of user subcarriers is K = 128, and an 8-tap i.i.d.
Gaussian channel is employed. 100,000 independent channel realizations are simulated.
Fig. 4.2 shows that there is an approximate 5dB performance gap between MMSE-
LE and MFB with QPSK signaling at a BER of 0.001. This is because the MFB maxi-
mizes the SNR at the detection point with ideal ISI-cancellation, while the MMSE-LE
allows some residual-ISI to minimize the overall equalization noise with linear oper-
ation. As previously mentioned, the MFB performance varies with different channel
characteristics. Since a LFDMA has more correlated frequency channel response that
60

4.1. Matched Filter Bound
0 5 10 15 20 2510
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IFDMA−LEIFDMA−MFBLFDMA−LELFDMA−MFB
Figure 4.2: BER comparison of SC-FDMA employed MMSE-LE and MFB in a 8-tap
i.i.d. complex Gaussian channel with QPSK signaling.
5 10 15 20 25 30 3510
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IFDMA−LEIFDMA−MFBLFDMA−LELFDMA−MFB
Figure 4.3: BER comparison of SC-FDMA employed MMSE-LE and MFB in a 8-tap
i.i.d. complex Gaussian channel with 16QAM signaling.
61

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
can fade together, there is more fluctuation in the instantaneous block SNR γ (i.e.
σ2γ is larger as mentioned in Section 4.1.2). However, IFDMA has a less correlated
channel response on the interleaved subcarriers and this leads to smaller variation in
the instantaneous block SNR γ (i.e. σ2γ is smaller). Hence, IFDMA gives better MFB
performance than LFDMA since the effective channel characteristics experienced by
the two multiple access variants are different.
Furthermore, Fig. 4.3 shows a larger performance gap (i.e. approximately 8dB)
between MMSE-LE and MFB with 16QAM signaling at a BER of 0.001. This is
because the performance of LE with 16QAM signaling suffers more due to residual-ISI.
Therefore, if a more advanced equalization technique is employed, the performance of
SC-FDMA can be considerably improved (e.g. up to a 5dB and 8dB of SNR gain for
QPSK and 16QAM, respectively).
4.2 Hybrid Decision-Feedback Equalizer
Hybrid-DFE for SC-FDE was proposed in [44, 52], where the FF filter is implemented
in the frequency domain to reduce computational complexity. In this section, the
application of hybrid-DFE is extended to SC-FDMA.
4.2.1 Description of Hybrid Decision-Feedback Equalizer Design
Fig. 4.4 shows the block diagram of a hybrid-DFE system. In the operation of hybrid-
DFE, the FB filter is implemented in the time domain on a symbol-by-symbol basis as
the conventional approach [15]. The FF filter is implemented in the frequency domain
on a block basis, since the frequency domain design is more computational efficient. As
mentioned in Chapter 3, the received frequency domain symbol on the k-th subcarrier
is given by
yk = hkxk + ηk, k = 0, . . . ,K − 1. (4.17)
where hk is the channel response on the k-th (user) subcarrier, xk is the frequency do-
main data symbol on the k-th subcarrier, ηk is the received noise on the k-th subcarrier
with a noise variance of σ2n, and K is the number of user subcarriers.
Let gFF,k denote the FF filter coefficient on the k-th subcarrier, the frequency
domain FF filtered symbol is given by
yFF,k = gFF,kyk. (4.18)
Let xn denote the n-th transmit data symbol in the time domain, the time domain FF
62

4.2. Hybrid Decision-Feedback Equalizer
Figure 4.4: Block diagram of Hybrid-DFE at the receiver for a SC system
filtered symbol is given by
yFF,n =1√K
K−1∑
k=0
yFF,kej 2πK
kn
=
(1√K
K−1∑
k=0
gFF,khkej 2πK
kl
)
︸ ︷︷ ︸ul
∗ xn−l +
(1√K
K−1∑
k=0
gFF,kηkej 2πK
kl
)
︸ ︷︷ ︸ηFF,n
(4.19)
where ul is the FF filtered channel response in the time domain, ηFF,n is the FF filtered
noise and ∗ denotes the cyclic convolution operator.
Note that u0 =1√K
∑K−1k=0 gFF,khk in (4.19) is the useful data gain at the detection
point and ul for l 6= 0 exhibits the post-cursor ISI. Let L denote the length of the FF
filtered channel response (e.g. ul 6= 0 for l = 0, . . . , L − 1), L can be estimated based
on the maximum channel delay spread L, e.g. L = L. To remove all the post-cursor
ISI, the FB filter length is set to NFB = L− 1 and the FB filter is designed as
gFB,l =
ul, l = 1, . . . , NFB
0, elsewhere.(4.20)
Hence, the time domain equalized symbols after post-cursor ISI cancellation are
zn = yFF,n +
NFB∑
l=1
gFB,lxn−l (4.21)
where xn = hardlimitzn is the hard-limited estimated symbol that is used to cancel
the post-cursor ISI. Since the CP insertion at the transmitter and the CP removal at the
receiver leads to the cyclic convolution of the channel and the transmit data symbols in
the time domain, the initial FB symbols are the last few data symbols in a transmission
63

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
block that can be obtained via MMSE-LE. Let xLE,n denote the hard-limited estimated
symbols with MMSE-LE, xn−l = xLE,n−l+K when n− l < 0.
The FF and FB filter coefficient design problem can be formulated as follows. As-
suming that all the post-cursor ISI can be completely removed (i.e. all the FB symbols
are correct), design a FF filter such that the MSE at the detection point is minimized
(i.e. the MSE of the FF filtered noise is minimized). Let gFB,k = 1√K
∑NFBl=1 gFB,le
−j 2πK
kl
denote the FB filter response in the frequency domain and xk = 1√K
∑K−1n=0 xne
−j 2πK
kn
denote the frequency domain data symbols (where k = 0, . . . ,K − 1), the cost function
of the hybrid DFE is given by [52]
J = E[|zn − xn|2
]
= E
∣∣∣∣∣
1√K
K−1∑
k=0
(gFF,khkxk + gFF,kηk + gFB,kxk
)ej
2πK
kn − 1√K
K−1∑
k=0
xkej 2πK
kn
∣∣∣∣∣
2
=1
K
K−1∑
k=0
[∣∣∣gFF,khk + gFB,k − 1∣∣∣2σ2x + |gFF,k|2 σ2
n
]
(4.22)
where σ2x = E[|xk|2] = E[|xn|2] is the data symbol power. Taking the derivative with
respect to gFF,k and equating it to zero,
∂J
∂g∗FF,k=(gFF,k|hk|2 + gFB,kh
∗k − h∗k
)σ2x + gFF,kσ
2n = 0. (4.23)
By solving the above equation, the FF filter coefficient is given by [52]
gFF,k =h∗k (1− gFB,k)
|hk|2 + σ2n
σ2x
. (4.24)
Substituting (4.24) into (4.22), (4.22) can be written as
J =σ2n
K
K−1∑
k=0
(|hk|2 +
σ2n
σ2x
)−1
|1− gFB,k|2
=σ2n
K
K−1∑
k=0
(|hk|2 +
σ2n
σ2x
)−1∣∣∣∣∣1−
NFB∑
l=1
gFB,le−j 2π
Kkl
∣∣∣∣∣
2
. (4.25)
Let gHFB = [gFB,1, . . . , gFB,NFB
] denote a length-NFB row vector with FB filter coeffi-
cients and fk = [e−j 2πK
k.1, . . . , e−j 2πK
k.NFB ]T denote a length-NFB phase rotating column
64

4.2. Hybrid Decision-Feedback Equalizer
vector, (4.25) can be rewritten as
J =σ2n
K
K−1∑
k=0
(|hk|2 +
σ2n
σ2x
)−1 (1− gH
FBfk) (
1− gHFBfk
)H
=σ2n
K
K−1∑
k=0
(|hk|2 +
σ2n
σ2x
)−1 (1− fHk gFB − gH
FBfk + gHFBfkf
Hk gFB
). (4.26)
Taking the derivative with respect to g∗FB and equating it to zero
∂J
∂g∗FB
=σ2n
K
K−1∑
k=0
(|hk|2 +
σ2n
σ2x
)−1 (fkf
Hk gFB − fk
)= 0NFB×1. (4.27)
By solving the above the equation, the FB filter coefficients are given by [52]
gHFB =
[K−1∑
k=0
(|hk|2 +
σ2n
σ2x
)−1
fHk
][K−1∑
k=0
(|hk|2 +
σ2n
σ2x
)−1
fkfHk
]−1
. (4.28)
Therefore, once the FB filter is determined, the FF filter coefficients can be calcualted
via (4.24).
4.2.2 Performance of SC-FDMA with Hybrid-DFE
In this section, the performance of SC-FDMA employing hybrid-DFE with and without
channel coding is presented and the error propagation problem is discussed. In the
simulation, the total number of available subcarriers is N = 512 and the number
of user subcarriers is K = 128. An 8-tap i.i.d. complex Gaussian channel model
is used (i.e. L = 8), where 200, 000 independent channel realizations are simulated
to obtain sufficiently accurate BER curves. When channel coding is applied, a 1/2-
rate convolutional encoder (133,171) followed by a block interleaver is used at the
transmitter and a block de-interleaver followed by a soft-decision Viterbi decoder is
used at the receiver. The FB decisions used in the hybrid-DFE are generated from the
previous hard-decision detected symbols (i.e. hard-decisons at the equalizer output for
both coded and uncoded cases). Hence the impact of error propagation is included in
the model. For the ideal hybrid-DFE, the FB symbols are assumed to be error-free.
Fig. 4.5 and 4.6 show the uncoded BER of IFDMA and LFDMA with different
equalization schemes respectively. Both IFDMA and LFDMA have similar perfor-
mance gain/loss when comparing different equalization schemes, except that IFDMA
has better performance than LFDMA due to less fluctuation in the instantaneous re-
ceived block SNR. Results show that, in the uncoded case, the hybrid-DFE gives ap-
proximately 2dB and 3dB SNR gain over MMSE-LE (at a BER of 0.001) with QPSK
65

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
MMSE−LEH−DFEIdeal H−DFEMFB
QPSK
16QAM
Figure 4.5: BER of IFDMA employed hybrid-DFE in a 8-tap i.i.d complex Gaussian
channel.
0 5 10 15 20 25 30 3510
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
MMSE−LEH−DFEIdeal H−DFEMFB
16QAM
QPSK
Figure 4.6: BER of LFDMA employed hybrid-DFE in a 8-tap i.i.d complex Gaussian
channel.
66

4.2. Hybrid Decision-Feedback Equalizer
0 5 10 15 20 2510
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
MMSE−LEH−DFEIdeal H−DFEMFB
16QAM
QPSK
Figure 4.7: BER of IFDMA employed hybrid DFE in a 8-tap i.i.d complex Gaussian
channel with 1/2-rate convolutional channel coding.
and 16QAM modulation schemes respectively. Larger performance gain is observed
with 16QAM signaling since 16QAM is more sensitive to residual-ISI than QPSK for
the same channel model. There is a gap of approximately 1dB and 2.5dB between
the decision-directed hybrid-DFE and the ideal hybrid-DFE (at a BER of 0.001) with
QPSK and 16QAM respectively. This performance degradation shows the impact of er-
ror propagation, where one incorrect FB symbol may cause a short burst of subsequent
detected symbols to be erroneous. Note that the ideal hybrid-DFE does not achieve
the MFB performance. This is because the ideal hybrid-DFE assumes ideal post-cursor
ISI cancellation but still gives residual pre-cursor ISI, while the MFB assumes ideal ISI
cancellation for both pre- and post-cursors.
Fig. 4.7 shows the BER of IFDMA with the hybrid-DFE when 1/2-rate convolu-
tional coding is applied. It is shown that the decision-directed hybrid-DFE gives worse
performance than the LE due to the catastrophic error propagation problem. Since a
channel coded system has the ability to correct bit errors and operates at low SNR,
the hard-decision symbols at the equalizer output are generally erroneous. Using the
unreliable decisions at the equalizer output as the FB symbols introduces more errors
into the decision-feedback equalized symbols, which leads to severe performance degra-
67

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
dation in the channel coding case. Hence, it can be concluded that the conventional
decision-directed hybrid-DFE is not suitable to be employed in the channel coded SC
system. Although various methods have been proposed to tackle error propagation
in the traditional DFE [72–74], non of them leads to satisfactory performance in the
channel coded system. A new class of IB-DFE [53, 75] is described the next section to
improve this aspect of the design.
4.3 Iterative Block Decision-Feedback Equalizer
In order to overcome the error propagation problem in the decision-directed hybrid-
DFE, a new class of IB-DFE [53, 75] is described in this section. Compared to a
conventional hybrid-DFE, the IB-DFE has two distinct properties: (1) an iterative
block operation allows all the detected symbols from the previous iteration to be used
as FB symbols in the current iteration. Hence both pre- and post-cursor ISI can
be cancelled via the FB process. (2) The design of the IB-DFE is optimized at each
iteration according to the reliability of the FB symbols. Hence, it is robust against error
propagation and better performance is achieved with increasing iteration number. Note
that good treatment of the FB reliability is the key to optimizing the performance of
IB-DFE.
In contrast to the time domain IB-DFE [75], the frequency domain IB-DFE in
[53] implements its FF and FB filters in the frequency domain. This gives a very
computational efficient solution. Furthermore, the frequency domain IB-DFE has lower
complexity (per iteration) than the hybrid-DFE due to the FD-FB filter and a simpler
approach to coefficient calculation (i.e. no matrix inversion is required for IB-DFE).
The soft-decision IB-DFE is also proposed in [53]. Due to the high complexity of
obtaining soft-decision FB symbols (especially in a coded system), we focus on the
hard-decision IB-DFE in this section. In the remainder of this section, IB-DFE is used
to refer to the frequency domain hard-decision IB-DFE.
In Section 4.3.1, the IB-DFE operation is described and the IB-DFE coefficients
are derived. Section 4.3.2 discusses the FB reliability estimation methods considered
in this thesis. Section 4.3.3 presents the performance of SC-FDMA with IB-DFE.
4.3.1 Description of IB-DFE Design and Operation
Fig. 4.8 shows the IB-DFE receiver for a SC system. Although the IB-DFE coefficient
derivation can be found in [53], this section aims to provide an unified description of
DFEs used in this thesis. In Fig. 4.8, the k-th received frequency domain symbol is
68

4.3. Iterative Block Decision-Feedback Equalizer
Figure 4.8: Block diagram of IB-DFE reception for a SC system.
denoted as yk = hkxk + ηk, the k-th frequency domain FF and FB filter coefficient at
the i-th iteration is denoted as g(i)FF,k and g
(i)FB,k respectively. Let x(i−1)
k denote the k-th
frequency domain FB symbols obtained from the previous (i − 1)-th iteration. The
frequency domain equalized symbols at the i-th iteration are given by
z(i)k = g
(i)FF,kyk + g
(i)FB,k
x(i−1)
k , k = 0, . . . ,K − 1 (4.29)
where K is the number of user subcarriers.
The time domain equalized symbols at the i-th iteration are given by [53]
z(i)n =1√K
K−1∑
k=0
z(i)k ej
2πK
kn, n = 0, . . . ,K − 1. (4.30)
The hard-decision detected data symbols at the i-th iteration are obtained by making
the hard decision over z(i)k , i.e. x
(i)k = hardlimitz(i)k . The estimated frequency domain
symbol at the i-th iteration is thus given by
x(i)k =1√K
K−1∑
k=0
x(i)n e−j 2πK
kn. (4.31)
Note that the estimated frequency domain symbols at the current iteration will be used
as the frequency domain FB symbols for the next iteration.
There are two methods to derive the FF and FB filter coefficients for the IB-DFE. In
[75], the filter coefficients are obtained by signal-to-interference-plus-noise ratio (SINR)
maximization with the Cauchy-Schwarz inequality. In this section, the filter coefficients
will be derived by applying the gradient method to the defined cost function [53].
Letting xn denote the transmit data symbol in the time domain, the cost function is
69

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
defined as [53]
J = E
[∣∣∣z(i)n − xn
∣∣∣2]
= E
∣∣∣∣∣
1√K
K−1∑
k=0
(g(i)FF,khkxk + g
(i)FF,kηk + g
(i)FB,k
x(i−1)
k
)ej
2πK
kn − 1√K
K−1∑
k=0
xkej 2πK
kn
∣∣∣∣∣
2
=1
K
K−1∑
k=0
∣∣∣g(i)FF,khk − 1∣∣∣2σ2x +
∣∣∣g(i)FF,k
∣∣∣2σ2n +
∣∣∣g(i)FB,k
∣∣∣2σ2x
+1
K
K−1∑
k=0
(g(i)FF,khk − 1
)g∗(i)FB,kE
[xkx
∗(i−1)
k
]+(g∗(i)FF,kh
∗k − 1
)g(i)FB,kE
[x∗kx(i−1)
k
]
(4.32)
where σ2x = E
[|xk|2
]= E
[∣∣∣∣x(i−1)
k
∣∣∣∣2]
is the expected data symbol power and σ2n =
E[|ηk|2
]is the received noise variance.
We now take the derivative of (4.32) with respect to g∗(i)FB,k and equate it to zero, i.e.
∂J
∂g∗(i)FB,k
= g(i)FB,kσ
2x +
(g(i)FF,khk − 1
)E
[xkx
∗(i−1)
k
]= 0. (4.33)
Solving the above equation for g(i)FB,k, the frequency domain FB filter at the i-th iteration
is given by [53]
g(i)FB,k = −ρ(i−1)
[g(i)FF,khk − 1
](4.34)
where
ρ(i−1) =
E
[xkx
∗(i−1)
k
]
σ2x
. (4.35)
In the equation above, ρ(i−1) is defined as the reliability of the estimated symbols at the
(i− 1)-th iteration (or the reliability of the FB symbols) that takes the value between
0 and 1.
Note that the time domain FB filter has to be direct current (DC) free, i.e. g(i)FB,0 =
1K
∑K−1k=0 g
(i)FB,k = 0, such that the useful signal gain is retained after ISI cancellation.
Based on (4.34), in order to have a DC-free time domain FB filter response, the FF
filter has to be designed such that the following condition is met, i.e.
1
K
K−1∑
k=0
g(i)FF,khk = 1. (4.36)
When (4.36) is satisfied, the useful signal gain after FF filtering is normalized to 1.
70

4.3. Iterative Block Decision-Feedback Equalizer
Substituting (4.34) into (4.32), the cost function can be written as
J =1
K
K−1∑
k=0
[∣∣∣g(i)FF,khk − 1∣∣∣2σ2x +
∣∣∣g(i)FF,k
∣∣∣2σ2n −
∣∣∣g(i)FF,khk − 1∣∣∣2 (
ρ(i−1))2
σ2x
]. (4.37)
We now take the derivative of the above the equation with respect to g∗(i)FF,k and equate
it to zero, i.e.
∂J
∂g∗(i)FF,k
= h∗k
(g(i)FF,khk
)σ2x + g
(i)FF,kσ
2n − h∗k
(g(i)FF,khk
)(ρ(i−1)
)2σ2x = 0. (4.38)
Solving the above equation, g(i)FF,k can be obtained as
g(i)FF,k =
h∗k
(1−
(ρ(i−1)
)2)
∣∣∣hk∣∣∣2 (
1−(ρ(i−1)
)2)+ σ2
nσ2x
. (4.39)
However, in order to satisfy the constraint given in (4.36), replacing the subcarrier
index independent scaling factor 1 −(ρ(i−1)
)2at the numerator of (4.39) with a new
scaling factor β, the frequency domain FF filter can be written as
g(i)FF,k = β.
h∗k∣∣∣hk∣∣∣2 (
1−(ρ(i−1)
)2)+ σ2
nσ2x
. (4.40)
Substituting (4.40) into (4.36) and solving for β, β is therefore given by
β = K
K−1∑
k=0
∣∣∣hk∣∣∣2
∣∣∣hk∣∣∣2 (
1−(ρ(i−1)
)2)+ σ2
nσ2x
−1
. (4.41)
Hence the frequency domain FF and FB filter coefficients at the i-th iteration of the
IB-DFE can be designed using (4.40) and (4.34) respectively. However, the reliability
of the FB symbols as defined in (4.35) is generally unknown as xk is unknown at the
receiver. In Section 4.3.2, we propose the FB reliability estimation method to facilitate
the IB-DFE operation.
At the first iteration, no FB symbols are available and the FB reliability is set to
zero, i.e. x(0)n = 0 for n = 0, . . . ,K−1 and ρ(0) = 0. In this case, the FF filter coincides
with the MMSE-LE and the FB filter is turned off (see (4.40) and (4.34)). As the FB
reliability increases, the FB filter tends to cancel more ISI. Therefore the performance
improves with the number of iterations. When ρ(l−1) = 1, the FF filter coincides
with the matched filter and the FB filter aims to cancel all the ISI. Hence the ideal
performance of IB-DFE (assuming all the FB symbols are error free and ρ(l−1) = 1) is
the MFB.
71

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
4.3.2 Feedback Reliability Estimation for IB-DFE
It was shown in the previous section that the FF and FB filter coefficient calculation
is based on knowledge of the FB reliability. Since the FB reliability is the key to the
IB-DFE operation, but is generally unknown at the receiver, accurate FB reliability
estimation is desired to optimize the IB-DFE performance. Underestimating the FB
reliability results in slower convergence of the IB-DFE, and overestimating the FB
reliability will introduce more errors at the equalizer output which will degrade the
performance of IB-DFE [53].
In [75], the approximated FB reliability calculation is given for uncoded M -ary
phase-shift keying (PSK) via a symbol error probability. In [53], the FB reliability
estimate is obtained by taking the channel response into account, but this approach is
specifically for the uncoded QPSK case and may not be applicable to other modulation
and coding schemes. To the author’s best knowledge, in the literature the results on
IB-DFE are limited to uncoded QPSK due to the lack of FB reliability estimation
methods. In this section, we investigate the FB reliability estimation methods and
extend the performance evaluation of IB-DFE to M -ary QAM for systems with and
without channel coding.
In order to keep the FB reliability estimation simple and channel-independent, we
propose to calculate the FB reliability from the SINR at the equalizer output. The
SINR at the IB-DFE output for the i-th iteration can be estimated as
γ(i) =1
1K
∑K−1n=0
∣∣∣z(i)n − x(i)n
∣∣∣2 . (4.42)
Note that the noise at the IB-DFE output is the sum of the FF filtered noise, residual-
ISI and the ISI cancellation error. The residual-ISI occurs because the FB filter design
does not aim to cancel all the ISI at the FF filter output (considering the FB reliability),
as shown in (4.34). The ISI cancellation error is due to the incorrect FB symbols.
The following FB reliability estimation schemes are based on the assumption that
the symbol error probability of the FB symbols (according to the SINR at the equalizer
output) is well-approximated by the symbol error probability of detecting the data
symbols (according to the received SNR) in an AWGN channel [75]. This occurs because
the equalized noise is mainly dominated by the FF filtered noise (Note: the FF filtered
noise will still be Gaussian distributed even though it is colored) and in a time-dispersive
channel the residual-ISI can be approximated by a Gaussian distribution from the
central-limit theorem. For convenience, the ISI cancellation error will be treated as
part of the SINR estimation error.
72

4.3. Iterative Block Decision-Feedback Equalizer
Figure 4.9: Hard-decision error pattern for QPSK with x(s = 0) = 1√2(1+ j) being the
transmit symbol.
4.3.2.1 Feedback Reliability Derivation for QPSK
The time domain hard-decision symbols at the i-th iteration can be written as x(i)n =
xn + e(i)n , where e
(i)n is the hard decision error (Note: the iteration index i is omitted in
the following derivation for brevity). Hence the FB reliability in (4.35) is given by
ρ =E[xkx∗k
]
σ2x
=E [xnx
∗n]
σ2x
= 1 +E [enx
∗n]
σ2x
(4.43)
where E [enx∗n] can be expressed as
E [enx∗n] =
∑
s
∑
r 6=s
e(r, s)x∗(s)p (e(r, s), x∗(s)) . (4.44)
In (4.44), for QPSK, x(s) = ejπ4(2s+1) for s = 0, . . . , 3, e(r, s) = ej
π4(2r+1)−ej
π4(2s+1) for
r = 0, . . . , 3 and r 6= s, p (e(r, s), x∗(s)) is the probability of e(r, s) and x(s) occurring
at the same time. Since each QPSK transmit symbol has the same magnitude and the
same symbol error probability (Note: this will not be the case for 16QAM), (4.44) can
be simplified to
E [enx∗n] =
∑
r 6=s
e(r, s)x∗(s)p (e(r, s)|x∗(s)) . (4.45)
Fig. 4.9 shows the hard-decision error pattern for QPSK, where the transmit symbol
x(s = 0) = 1√2(1 + j) is assumed. Let γ denote the equivalent SNR at the IB-DFE
output (assuming the equalized noise at the IB-DFE output is Gaussian noise), the
probability of receiving the symbol in the region of r = 1 when transmitting x(s = 0)
is [15]
p(e(r = 1, s = 0)|x(s = 0)) = Q (√γ) [1−Q (
√γ)] (4.46)
73

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
where Q(√γ) = 1√
2π
∫∞√γ e
−t2/2dt. Likewise, the probabilities of receiving the symbols
in the region of r = 2 and r = 3 are
p(e(r = 2, s = 0)|x(s = 0)) = [Q (√γ)]2 (4.47)
p(e(r = 3, s = 0)|x(s = 0)) = Q (√γ) [1−Q (
√γ)] . (4.48)
Substituting (4.46)-(4.48) into (4.45), it can be shown that E[enx∗n] = −2Q(
√γ). Since
σ2x = 1 is used in the derivation, the FB reliability for uncoded QPSK is given by [75]
ρ = 1− 2Q(√γ). (4.49)
4.3.2.2 Gaussian CDF Approximation for 16QAM
It is possible to derive the reliability for uncoded 16QAM using (4.44). However, the
derivation process is very tedious and the final expression includes numerous terms. It
is observed that the simulated reliability curves for uncoded 16QAM and 64QAM fit
well to a Gaussian CDF model and this model also gives values between 0 and 1. Hence
we propose to approximate the reliability for uncoded 16QAM as a function of SNR at
the equalizer output using a Gaussian CDF model [15], i.e.
ρj =1
2+
1
2erf (aΓj + b) (4.50)
where erf(u) = 2√π
∫ u0 e−t2dt is the error function, Γj is the j-th SNR value in dB and
ρj is the approximated reliability when the SNR is Γj dB. a and b are parameters of
the Gaussian CDF model, which can be determined via regression to obtain the best-fit
reliability curve.
Let εj denote the j-th error between the proposed Gaussian CDF model and the
simulated reliability curve (i.e. the observed data). The simulated reliability can thus
be written as
ρj =1
2+
1
2erf (aΓj + b+ εj) . (4.51)
Based on (4.51), the aim is to find the values of a and b such that the sum of the square
error between the proposed model and the observed data is minimized (i.e.∑
j εj is
minimized). Normally, the regression technique is useful to solve this kind of problem.
However, since (4.51) is a non-linear model, this leads to a complicated non-linear
regression problem. In this case, rearranging (4.51) and letting cj = erf−1(2ρj − 1), a
simple linear model for the observed data can be established, i.e.
cj = aΓj + b+ εj . (4.52)
74

4.3. Iterative Block Decision-Feedback Equalizer
−30 −20 −10 0 10 20 30−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
Γj
c j
Observed dataLinear regression
Regression range
Figure 4.10: Linear regression with cj = aΓj + b, where a = 0.0756 and b = 0.4055.
−30 −20 −10 0 10 20 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR-dB (Γj)
Rel
iability
(ρj)
Observed reliabilityGaussian CDF model
Figure 4.11: Reliability approximation for uncoded 16QAM using a Gaussian CDF
model, i.e. ρj =12 + 1
2erf(aΓj + b), where a = 0.0756 and b = 0.4055.
75

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
Figure 4.12: Block diagram of the proposed FB reliability estimation scheme for IB-
DFE in a channel coded system.
Hence, using the linear regression method the optimal a and b that minimize the sum
of the square error of εj in (4.52) are given by [76]
a =Γjcj − Γjcj
Γ2j −
(Γj
)2 (4.53)
b = cj − aΓj (4.54)
where (·) denotes the average operator.
Fig. 4.10 shows the linear regression graph of cj vs. Γj , where a = 0.0756 and b =
0.4055 are calculated using (4.53) and (4.54) respectively. The regression is performed
in the SNR range from -10dB to 10dB since the accuracy of low reliability at low SNR
is not of interest and cj goes to infinity at high SNR. Fig. 4.11 shows that the observed
reliability for uncoded 16QAM is well-approximated using the Gaussian CDF model
in (4.50) with a = 0.0756 and b = 0.4055. Fig. 4.11 also shows that the reliability
approaches 1 when SNR is high, and the reliability is low when SNR is low.
Therefore, the FB reliability of the IB-DFE with uncoded 16QAM can be obtained
by 1) estimating the equalized SNR at the IB-DFE output using (4.42) and 2) calcu-
lating the FB reliability using (4.50) with a = 0.0756 and b = 0.4055. Although not
shown, the reliability curve for uncoded 64QAM is also well-approximated via (4.50)
with different values of a and b.
4.3.2.3 Lookup Table for Systems with Channel Coding
When operating the IB-DFE in a channel coded system, it is recommended to decode
the equalized symbols and use the re-encoded data to form the FB symbols with higher
reliability [75]. However, there is no explicit method for deriving the reliability of the
re-encoded symbols. Hence, we propose to use a pre-defined lookup table for reliability
mapping in the channel coding case. Fig. 4.12 shows the block diagram of the proposed
FB reliability estimation scheme for an IB-DFE operating in a channel coded system.
Note that the re-encoded symbols are also used as the reference hard-decision symbols
x(i)n in (4.42) to obtain a more accurate SNR estimate.
76

4.3. Iterative Block Decision-Feedback Equalizer
−30 −25 −20 −15 −10 −5 0 5 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR (dB)
Rel
iabi
lity
QPSK16QAM
Figure 4.13: Re-encoded reliability lookup table for QPSK and 16QAM when a 1/2-rate
convolutional encoder (133,171) and a soft-decision Viterbi decoder are used. Simula-
tion is performed in an AWGN channel.
The reliability curve of the re-encoded FB symbols can be generated via a large
number of simulations (in an AWGN channel). Fig. 4.13 shows the re-encoded relia-
bility for QPSK and 16QAM when a 1/2-rate convolutional encoder (133,171) and a
soft-decision Viterbi decoder are used. This graph is then used to map the estimated
SNR at the IB-DFE output (using (4.42) with x(i)n being the re-encoded symbols) to
the reliability of the re-encoded symbols.
4.3.3 Performance of SC-FDMA with IB-DFE
In this section, the performance of SC-FDMA employing IB-DFE with and without
channel coding is presented. In the simulation, the total number of available subcar-
riers is N = 512, the number of user subcarriers is K = 128. An 8-tap i.i.d. complex
Gaussian channel model is used (i.e. L = 8), where 200, 000 independent channel real-
izations are simulated. Interleaved subcarrier mapping is used. When channel coding
is applied, a 1/2-rate convolutional encoder (133,171) followed by a block interleaver is
used at the transmitter and a block de-interleaver followed by a soft-decision Viterbi
decoder is used at the receiver. The number of simulated iterations for IB-DFE opera-
77

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
tion is 4. For clarification of the curves, the results of the third iteration are not shown
in the following BER graphs.
Fig. 4.14 and Fig. 4.15 show the uncoded BER of IFDMA with IB-DFE for
QPSK and 16QAM respectively. The first iteration of IB-DFE corresponds to MMSE-
LE. It can be seen that for IB-DFE the second iteration gives a large gain over the
first iteration and the gains of further iterations are reduced. This is because the
performance of MMSE-LE is limited by residual-ISI. The use of FB ISI cancellation
in the second iteration is able to overcome this limitation and hence achieves a large
performance gain.
Furthermore, Fig. 4.14 and Fig. 4.15 both show that the IB-DFE in the second
iteration has comparable performance to hybrid-DFE for the uncoded case. While the
complexity of hybrid-DFE grows linearly with the time domain FB filter length (or
channel delay spread), the IB-DFE requires only a one-tap per subcarrier frequency
domain FB filter. Moreover the matrix inversion required as part of the hybrid-DFE
coefficient calculation (see (4.28)) results in greatly increased complexity. Hence, de-
spite the second iteration, the IB-DFE still has significantly lower complexity than
the hybrid-DFE in the uncoded case. A complexity and performance comparison of
MMSE-FDE, IB-DFE(2) at the second iteration and hybrid-DFE in the uncoded sys-
tem is summarized in Table 4.1, where the difference in the complexity requirement
of IB-DFE(2) and hybrid-DFE is highlighted using a text color of blue. It is shown
in Table 4.1 that in the uncoded system, IB-DFE(2) can achieve comparable perfor-
mance gain (i.e. 3dB SNR gain over MMSE-FDE) as hybrid-DFE while having lower
complexity.
Fig. 4.14 shows that the IB-DFE in the fourth iteration has slightly degraded per-
formance than the second iteration. This is because the performance of IB-DFE is
particular sensitive to the accuracy of reliability estimation in the unocded QPSK sys-
tem. Even with the FB reliability obtained from the derivation (see (4.49)), the slight
error in SNR estimation at the equalizer output could lead to an overestimate of the
FB reliability. As previously mentioned, overestimating the FB reliability will intro-
duce more errors at the equalizer output and hence cause degraded BER performance.
However, when estimating the FB reliability with the proposed Gaussian CDF model
for uncoded 16QAM, Fig. 4.15 shows that the performance of the IB-DFE improves
consistently as the number of iterations increases.
Fig. 4.16 and Fig. 4.17 show the coded BER of IFDMA employing IB-DFE for
QPSK and 16QAM respectively. It can be seen that IB-DFE is able to provide improved
performance over MMSE-LE in the channel coded case, while decision-directed hybrid-
78

4.3. Iterative Block Decision-Feedback Equalizer
0 5 10 15 2010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IB−DFE(1)IB−DFE(2)IB−DFE(4)H−DFEIdeal H−DFEMFB
Figure 4.14: BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaussian
channel with QPSK.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IB−DFE(1)IB−DFE(2)IB−DFE(4)H−DFEIdeal H−DFEMFB
Figure 4.15: BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaussian
channel with 16QAM.
79

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
Table 4.1: A complexity and performance comparison of MMSE-FDE (i.e. IB-DFE(1)
at the first iteration), IB-DFE(2) at the second iteration and hybrid-DFE in the un-
coded system.
Uncoded Complexity Performance (see Fig. 4.15)
MMSE-FDE • Low complexity MMSE-FDE • 8dB of performance gap to
the MFB at BER = 10−3
IB-DFE(2) • Low complexity MMSE-FDE • 3dB of SNR gain compared to
(obtain FB symbols) MMSE-FDE at BER = 10−3
• Data symbol hard-limiting
• Low-complexity FD-FF and FD-FB
Hybrid-DFE • Low-complexity MMSE-FDE • 3dB of SNR gain compared to
(FB initialization) MMSE-FDE at BER = 10−3
• High-complexity matrix inversion
in FB coefficient calculation
• Low-complexity FD-FF
• Mid-complexity TD-FB
DFE gives worse performance than MMSE-LE due to error propagation. The main
reason that the IB-DFE outperforms the hybrid-DFE is due to the block FB process
which allows the use of the re-encoded symbols as the FB symbols. Since the re-encoded
symbols have higher reliability than the hard-decision symbols at the equalizer output,
ISI-cancellation can be performed more effectively and hence better performance can be
achieved. Moreover, Fig. 4.17 shows that using the proposed FB reliability estimation
scheme via a pre-defined lookup table, IB-DFE at the fourth iteration is able to perform
within 1dB of the ideal hybrid-DFE in the coded 16QAM case.
A complexity and performance comparison of MMSE-FDE, IB-DFE(2) and hybrid-
DFE in the channel coded system is summarized in Table 4.2, where the difference in
the complexity requirement of IB-DFE(2) and hybrid-DFE is highlighted using a text
color of blue. It can be seen in Table 4.2 that depending on the complexity of channel
decoder and encoder, IB-DFE(2) may require higher complexity than hybrid-DFE in
the coded system. However, IB-DFE(2) is able to provide a SNR gain of 1.7dB over
MMSE-FDE while hybrid-DFE results in a SNR loss of 2.6dB. Therefore, compared to
hybrid-DFE, IB-DFE(2) is still preferable in the coded system.
To summarize the observation from Fig. 4.14 to Fig. 4.17, it can be seen that there is
a larger performance gap between the MMSE-LE and the MFB for 16QAM (i.e. higher-
80

4.3. Iterative Block Decision-Feedback Equalizer
0 2 4 6 8 10 1210
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IB−DFE(1)IB−DFE(2)IB−DFE(4)H−DFEIdeal H−DFEMFB
Figure 4.16: Coded BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaus-
sian channel with QPSK, where 1/2-rate convolutional channel coding is used.
0 5 10 15 20 2510
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IB−DFE(1)IB−DFE(2)IB−DFE(4)H−DFEIdeal H−DFEMFB
Figure 4.17: Coded BER of IFDMA employing IB-DFE in a 8-tap i.i.d complex Gaus-
sian channel with 16QAM, where 1/2-rate convolutional channel coding is used.
81

Chapter 4. Decision Feedback Equalization for Single-Carrier FDMA
Table 4.2: A complexity and performance comparison of MMSE-FDE (i.e. IB-DFE(1)
at the first iteration), IB-DFE(2) at the second iteration and hybrid-DFE in the channel
coded system.
Coded Complexity Performance (see Fig. 4.17)
MMSE-FDE • Low complexity MMSE-FDE • 5dB of performance gap to
• Channel decoding the MFB at BER = 10−3
IB-DFE(2) • Low complexity MMSE-FDE (1) • 1.7dB of SNR gain compared to
• Channel decoding (1) MMSE-FDE at BER = 10−3
• Channel re-encoding
• Low-complexity FD-FF and FD-FB
• Channel decoding (2)
Hybrid-DFE • Low-complexity MMSE-FDE • 2.6dB of SNR loss compared to
(FB initialization) MMSE-FDE at BER = 10−3
• High-complexity matrix inversion
in FB coefficient calculation
• Low-complexity FD-FF
• Mid-complexity TD-FB
• Channel decoding
level baseband modulation) than for QPSK (i.e. lower-level baseband modulation).
This is because the performance of 16QAM with MMSE-LE suffers more from the
effects of residual-ISI. Therefore, when a suitable DFE is used, a larger performance gain
over the MMSE-LE can be achieved with 16QAM signaling. Moreover, it is observed
that channel coding is able to reduce the performance gap between MMSE-LE and the
MFB. For QPSK, the performance gap is 5dB and 3dB in the uncoded and coded cases
respectively (see Fig. 4.14 and Fig. 4.16). For 16QAM, the performance gap is 8dB
and 5dB in the uncoded and coded cases respectively (see Fig. 4.15 and Fig. 4.17). In
other words, through correcting the bit errors, the impact of residual-ISI coming from
MMSE-LE is reduced.
4.4 Summary
This chapter described the use of the DFE to enhance the equalization performance
for SC-FDMA. The application of hybrid-DFE was extended to SC-FDMA in Section
4.2. The hybrid-DFE consists of a computationally efficient frequency domain FF
82

4.4. Summary
filter and a time domain FB filter that aims to remove the postcursor-ISI from the
previous hard decision detected symbols. Since the hybrid-DFE design is based on
the assumption of error-free FB symbols (i.e. all the postcursor-ISI can be completely
removed), the decision-directed hybrid-DFE is liable to error propagation. Despite
the error propagation, the hybrid-DFE outperforms MMSE-LE in the uncoded case.
However, the hybrid-DFE gives worse performance than MMSE-LE in the channel
coded case. This is because the coded system is generally operated at low SNR and
the hard-decisions at the equalizer output (before decoding) are likely to be erroneous.
The highly unreliable FB symbols cause catastrophic error propagation and thus lead
to degraded performance relative to MMSE-LE.
To improve the DFE performance in the channel coded case, a new class of IB-DFE
was described in Section 4.3. IB-DFE has FF and FB filters both implemented in the
frequency domain, which gives a very computational efficient solution. By utilizing the
block iteration operation, both precursor and postcusor-ISI can be cancelled in the FB
process. Moreover, the IB-DFE design is optimized at each iteration according to the
reliability of the FB symbols. This makes IB-DFE robust against error propagation.
Since the FB reliability is the key to the optimize the IB-DFE operation, the FB re-
liability estimation schemes were proposed in Section 4.3.2. By using the re-encoded
symbols as the reliable FB symbols and the proposed reliability mapping scheme, IB-
DFE was shown to outperform both hybrid-DFE and MMSE-LE in the channel coded
case. It was also shown that the IB-DFE at the second iteration was able to give
comparable performance to the hybrid-DFE in the uncoded case. Finally, a complex-
ity and performance comparison of MMSE-FDE, IB-DFE at the second iteration and
hybrid-DFE in both coded and uncoded system was presented.
So far, ideal channel knowledge has been assumed in the simulation for equalizer co-
efficient calculation. In Chapter 5, the pilot block based channel estimation scheme will
be considered in the SC-FDMA simulation. In particular, low complexity transform-
based channel estimation techniques will be investigated.
83


Chapter 5
Transform-Based Channel
Estimation for Single-Carrier
FDMA
In the previous chapters, ideal knowledge of the channel response was assumed when
calculating the equalizer coefficients. In this chapter, the impact of non-ideal channel
estimation is considered in the performance of SC-FDMA, where the pilot block scheme
specified in the LTE uplink [11] is assumed. The least squares (LS) channel estimator
is widely used in practice due to its simplicity [77]. However, the frequency domain
LS channel estimator results in approximately 3dB performance loss compared to the
optimal linear minimum mean-square error (LMMSE) channel estimator [78]. Despite
of the optimal channel estimation performance, the LMMSE channel estimator is not
commonly used in practice due its very high complexity [77]. Hence, low complexity
transform-based channel estimation techniques are investigated in this chapter.
The properties of the correlated frequency domain channel response and the uncor-
related noise can be utilized to design a scalar filter in the transform domain [78–81].
Therefore, a more accurate channel estimate can be obtained through transform do-
main noise filtering. For the DFT-based channel estimator, three filter designs are
investigated. Since the DFT leads to a channel energy smearing effect in its transform
domain (i.e. the time domain), different unitary transforms are explored to overcome
this limitation and provide improved performance.
The SC-FDMA receiver also requires a noise variance estimator for MMSE-FDE
coefficient calculation. The low-rank DFT-based noise variance estimator reported in
[82] is biased at high SNR due to the residual channel power. In [83] virtual subcarriers
85

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
Figure 5.1: Slot structure specified in the LTE uplink.
are used to estimate the noise variance. When applying this concept to SC-FDMA
systems, the noise variance can be estimated using the unoccupied frequency resource
or guard subcarriers. However, different frequency resources may experience different
levels of interference, which is considered as part of the received noise. It is thus
desirable to estimate the user in-band noise variance. The Karhunen-Loeve transform
(KLT) based noise variance estimator [84] gives good in-band noise variance estimation
performance, but the complexity of the KLT is high. This chapter presents a novel
windowed DFT-based noise variance estimator that is able to estimate the user in-
band noise variance with negligible bias.
This chapter is organized as follows. Section 5.1 describes the LS and LMMSE
channel estimators. The optimal pilot sequence that yields the minimum MSE of the
LS channel estimator is discussed. A performance comparison of SC-FDMA with LS
and LMMSE channel estimators is presented. In Section 5.2, the time domain channel
smearing effect due to the DFT is illustrated. Three filter designs for the DFT-based
channel estimator are described, and their performance is compared. In Section 5.3, the
channel estimators based on different transforms are described and the equalized SNR
gain over the LS channel estimator is derived. In Section 5.4, a windowed DFT-based
noise variance estimator is presented. Section 5.5 summarizes the chapter contents.
5.1 LS and LMMSE Channel Estimation
In the LTE uplink, a block of pilot symbols is transmitted periodically to estimate
the channel [11]. Fig. 5.1 shows the slot structure adopted in the LTE uplink. Each
slot consists of 7 transmission blocks, and the pilot block is placed in the middle of
the slot [11]. Note that in a fast time-varying channel (e.g. operating a wireless
communication system with a high vehicle speed), the pilot block scheme may suffer
from severe performance degradation due to the out-dated channel estimate and this
will be further investigated in Chapter 6. In this chapter, a slow-variant channel is
assumed (where the channel response is assumed to be the same during the slot period)
and the channel estimate obtained in the pilot block is used to calculate the equalizer
coefficients for the data blocks within the same slot.
86

5.1. LS and LMMSE Channel Estimation
This section gives the description of a LS channel estimator and shows that a pilot
sequence with flat spectrum is able to minimize the MSE of the LS channel estimator.
Following that, an optimal LMMSE channel estimator is derived. Finally, performance
comparison of LS and LMMSE channel estimators is presented and discussed.
5.1.1 LS Channel Estimator
Let pk denote the transmit pilot symbol on the k-th user subcarrier, where σ2p = E[|pk|2]
is the expected pilot symbol power. The received pilot symbol on the k-th subcarrier
is given by
yk = hkpk + ηk, k = 0, . . . ,K − 1 (5.1)
where K is the number of user subcarriers, hk is the k-th frequency channel response,
and ηk is the k-th received noise with a variance of σ2n.
Rewriting (5.1) in matrix form, the received pilot vector, denoted as y = [y0, . . . ,
yK−1]T , is given by
y = Ph+ η (5.2)
where P = diagp0, . . . , pK−1 is the frequency domain pilot matrix, h = [h0, . . . , hK−1]T
is the frequency domain channel vector, and η = [η0, . . . , ηK−1] is the received noise
vector.
In the LS estimation method, the aim is to minimize the squared difference between
the observed signal and the desired signal [77]. Hence, lethLS = [
hLS,0, . . . ,
hLS,K−1]
T
denote the frequency domain LS channel estimate vector, the cost function is [77]
JLS =
(y − P
hLS
)H (y − P
hLS
)
= yH y − yHPhLS − h
H
LSPH y − h
H
LSPHPhLS. (5.3)
Taking the derivative of JLS with respect toh∗LS and equating it to zero,
∂JLS
∂h∗LS
= PH y − PHPhLS = 0K×1. (5.4)
Solving the above equation forhLS, the LS frequency channel estimate is thus given
by [77]hLS =
(PHP
)−1PH y. (5.5)
Since P is a diagonal matrix, the LS channel estimate on the k-th subcarrier can be
obtained ashLS,k =
p∗k|pk|2
yk =ykpk
. (5.6)
87

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
5.1.2 MSE of LS Channel Estimator and Optimal Pilot Sequence
Substituting (5.5) into (5.2), the LS channel estimate vector is given by
hLS = h+
(PHP
)−1PH η
︸ ︷︷ ︸εLS
(5.7)
where εLS = [εLS,0, . . . , εLS,K−1]T is the LS estimation noise vector. Hence the MSE of
the LS channel estimate is given by
MSE =1
KtrE[εLSε
HLS
]
=1
Ktr
(PHP
)−1PH E
[ηLSη
HLS
]
︸ ︷︷ ︸σ2nIK
P(PHP
)−1
=σ2n
Ktr
(PHP
)−1. (5.8)
It is shown in [85] that the minimum MSE is attained if and only if (PHP)−1 is a
diagonal matrix and all the diagonal elements are equal (i.e. |pk|2 = σ2p for all k).
Hence, when the pilot symbols have a flat frequency spectrum, the minimum MSE ofσ2n
σ2pis achieved.
It is shown in [86] that the pilot sequence with a flat spectrum is optimal for
frequency domain channel estimation, while the pilot sequence with a periodic zero-
autocorrelation property is optimal for time domain channel estimation. To design a
pilot sequence that is optimal for both frequency domain and time domain channel
estimation, a Kronecker delta function satisfies the above mentioned criteria. However,
for practical reasons, a Kronecker delta function is not suitable due to its instantaneous
high-PAPR. Hence, a constant amplitude zero auto-correlation (CAZAC) sequence [87]
is specified in the LTE uplink for channel estimation [11]. A CAZAC sequence is a low-
PAPR optimal pilot sequence. As indicated by its name, a CAZAC sequence has a
constant amplitude, a zero-autocorrelation property and a flat spectrum. For example,
the Chu sequence [88] is a well-known CAZAC sequence. Let pn denote the n-th time
domain pilot symbol (where n = 0, . . . ,K − 1), the optimal pilot sequence can be
designed as a length-K Chu sequence, i.e. [88]
pn =
ejmn2/K , for even K
ejmn(n+1)/K , for odd K(5.9)
where m is relatively prime to K (i.e. the only common divisor for m and K is 1).
88

5.1. LS and LMMSE Channel Estimation
5.1.3 LMMSE Channel Estimator
The LS channel estimator is widely used in practice due to its ease of implementation,
amounting to the minimization of a least squares error criterion. However, no claims
about optimality can be made [77]. By exploiting a priori knowledge of the channel
statistics, the LMMSE estimator is optimal in the sense of minimizing the MSE of the
channel estimate and hence provides the best channel estimation performance in terms
of the lowest MSE.
The LS frequency channel estimatehLS can be viewed as the noisy observation of
the actual frequency channel h. Let a K×K matrix Θ denote the LMMSE estimation
matrix, the LMMSE channel estimate can be obtained by filteringhLS [80], i.e.
hLMMSE = Θ
hLS. (5.10)
The cost function is defined as the MSE betweenhLMMSE and h, i.e. [77]
JLMMSE = tr
E
[(hLMMSE − h
)(hLMMSE − h
)H]
= tr
E
[(Θh+ΘεLS − h
)(Θh+ΘεLS − h
)H]
= tr
ΘR
hhΘH −ΘR
hh+Θ
(σ2n
σ2p
IK
)ΘH −R
hhΘH −R
hh
(5.11)
where Rhh
= E[hhH ] is a K × K channel correlation matrix, and E[ηηH ] = σ2n
σ2pIK
(provided the optimal pilot sequence is used). Taking the derivative of JLMMSE with
respect to Θ∗ and equating it to zero, we obtain
∂JLMMSE
∂Θ∗ = ΘRhh
+Θ
(σ2n
σ2p
IK
)−R
hh= 0K×1 (5.12)
Solving the above equation for Θ, the LMMSE estimation matrix is obtained as
Θ = Rhh
(R
hh+
σ2n
σ2p
IK
)−1
. (5.13)
Substituting (5.13) into (5.10), the LMMSE channel estimate is given by [80]
hLMMSE = R
hh
(R
hh+
σ2n
σ2p
IK
)−1 hLS. (5.14)
As shown in (5.14), a matrix multiplication is required to obtain the LMMSE chan-
nel estimate, and a matrix inversion is required for estimator coefficient calculation.
Therefore, the LMMSE channel estimator requires a much higher complexity than the
LS channel estimator.
89

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
5.1.4 Performance of LS and LMMSE Channel Estimator
This section presents a performance comparison of LS and LMMSE channel estimators.
In the simulation, the total number of available subcarriers is N = 512, the number of
user subcarriers is K = 128, and a 8-tap i.i.d complex Gaussian channel with uniform
PDP is used. The slot structure specified in the LTE uplink is adopted (see Fig. 5.1).
In the pilot block, K pilot symbols drawn from a length-K Chu sequence are transmit-
ted for uplink channel estimation. It is assumed that the channel response is invariant
within the same slot, but varies independently across different slots. Hence, the channel
estimate obtained in the pilot block is used to calculate MMSE-FDE coefficients for
the data block within the same slot. Ideal noise variance estimation is assumed (Noise
variance estimation will be detailed in Section 5.4). 200,000 independent channel re-
alizations are generated in the simulation. The channel correlation matrix Rhh
used
in the LMMSE channel estimation is generated via the average of the 200,000 channel
realizations [78].
Fig. 5.2 shows the MSE of LS and LMMSE channel estimators for LFDMA and
IFDMA systems. It can be seen that the LMMSE channel estimator has much lower
MSE than the LS channel estimator due to the use of priori knowledge of the channel
statistics in the channel estimation process. The LS channel estimator gives the same
MSE for LFDMA and IFDMA systems. However, the LMMSE channel estimator gives
degraded performance in IFDMA, compared to that in LFDMA. This is because the
LMMSE channel estimator is able to exploit the correlation of the input signal (i.e.
the LS frequency channel estimate) and produce a better estimate by suppressing the
uncorrelated noise. Since the localized frequency channel is more correlated than the
interleaved frequency channel, the LMMSE channel estimator yields better channel
estimation performance in LFDMA than that in IFDMA.
Fig. 5.3 shows the BER of LFDMA with LS and LMMSE channel estimators. It
can be seen that the LMMSE channel estimator has almost the same BER as the ideal
channel estimator. However, the LS channel estimator yields approximately 3dB of
performance loss compared to the ideal channel estimator [78]. This performance loss
due to the LS channel estimator is the same for QPSK and 16QAM. Fig. 5.4 shows
the BER of IFDMA with LS and LMMSE channel estimators. For IFDMA, it is shown
in Fig. 5.4 that the BER performance gap between the LMMSE channel estimator
and the ideal channel estimator is slightly larger due to the slightly degraded LMMSE
channel estimation performance in IFDMA. Nevertheless, it is still very close to the
ideal case.
90

5.1. LS and LMMSE Channel Estimation
0 5 10 15 20 25 30 35 40
10−4
10−3
10−2
10−1
100
SNR (dB)
MS
E
LFDMA−LSLFDMA−LMMSEIFDMA−LSIFDMA−LMMSE
Figure 5.2: MSE of LS and LMMSE channel estimators for LFDMA and IFDMA in a
8-tap i.i.d. complex Gaussian channel.
0 5 10 15 20 25 30 35 4010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
LSLMMSEIdeal
16QAM
QPSK
Figure 5.3: BER of LFDMA with LS and LMMSE channel estimators in a 8-tap i.i.d.
complex Gaussian channel.
91

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
0 5 10 15 20 25 30 35 4010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
LSLMMSEIdeal
16QAM
QPSK
Figure 5.4: BER of IFDMA with LS and LMMSE channel estimators in a 8-tap i.i.d.
complex Gaussian channel.
As shown in Fig. 5.3 and 5.4, a SC-FDMA system employed the LMMSE channel
estimator provides a 3dB of SNR gain over the LS channel estimator at the expense
of the largely increased complexity. Hence, there is a trade-off between the perfor-
mance and complexity. In the following sections, we will investigate the low com-
plexity transform-based channel estimation techniques to improve the performance of
SC-FDMA. In the remainder of this chapter, the performance of different channel esti-
mators will be compared using a LFDMA system for the convenience of channel energy
smearing simulation, which will be explained in Section 5.2.1.
5.2 DFT-Based Channel Estimation
In this section, a low complexity transform-based channel estimation technique using
the DFT is investigated. As previously mentioned, the LS channel estimate can be
viewed as the noisy observation of the actual channel response. It is known that the
frequency domain channel is correlated while the observed noise is uncorrelated. By
converting the frequency domain LS channel estimate to the time domain via the IDFT,
the channel energy will be concentrated in a few time domain taps and the LS estimation
92

5.2. DFT-Based Channel Estimation
0 10 20 30 40 500
0.5
1
1.5
2(a) Frequency domain channel response on user subcarriers
|hk|
k
0 10 20 30 40 500
1
2
3
4(b) Equivalent time domain channel response obatined via IDFT
|hn|
n
Figure 5.5: (a) Frequency domain channel response on user subcarriers. (b) Equivalent
time domain channel response obtained via IDFT.
noise will be distributed uniformly across all the taps. Hence, a scalar filter can be
employed in the time domain to filter the noise. Finally, by converting the filtered time
domain channel estimate back to the frequency domain via the DFT, a more accurate
frequency domain channel estimate can be obtained for FDE coefficient calculation. In
this section, three time domain scalar filter designs are considered.
This section is organized as follows. Section 5.2.2 illustrates the channel energy
smearing effect in the time domain and gives the generalized description of the DFT-
based channel estimator. Section 5.2.2 describes the denoise filter design. Section 5.2.3
proposes the uniform-weighted filter design, which is modified from the denoise filter.
Section 5.2.4 describes the MMSE filter design. Finally, a performance comparison of
the above mentioned DFT-based channel estimators are presented in Section 5.2.5.
5.2.1 Generalized DFT-Based Channel Estimator
The DFT-based channel estimator was first proposed in [78]. Before describing the
DFT-based channel estimator, the time domain channel energy smearing effect should
be noted. Let hk denote the channel response on the k-th user subcarrier, where
k = 0, . . . ,K−1 and K is the number of user subcarriers. Generally speaking, as shown
93

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
Figure 5.6: Block diagram of a DFT-based channel estimator.
in Fig. 5.5(a), the channel response on adjacent user subcarriers is highly correlated
and the channel response on the edges of the user subcarriers (e.g. h0 and hK−1) is
highly uncorrelated. The equivalent time domain channel response can be obtained
via IDFT, i.e. hn = 1√K
∑K−1k=0 hke
j 2πK
kn for n = 0, . . . ,K − 1. Fig. 5.5(b) shows
that although most of the channel energy in hn is concentrated in the first few taps,
the rest of channel energy is smeared over all the taps. This is because the DFT
assumes a periodic extension [63], and the amplitude and phase discontinuities at the
edges of the extension (i.e. h0 and hK−1 being uncorrelated) gives rise to the channel
energy smearing effect in hn [78]. Since the uncorrelated channel response at the edges
of the user subcarriers is achieved in the LFDMA simulation without oversampling1,
for convenience the performance of the transform-based channel estimators will be
compared using an LFDMA system in the remainder of this chapter.
Fig. 5.6 shows the block diagram of a DFT-based channel estimator. Let a length-
K column vectorhLS denote the frequency domain LS channel estimate, which is ob-
tained via (5.5). Let FHK denote a normalized size-K IDFT matrix (where FK(k, n) =
1√Ke−
2πK
kn for k, n = 0, . . . ,K − 1), the time domain LS channel estimate can be ob-
tained as hLS = FHKhLS. The time domain filter matrix is denoted as Σ = diaga0, . . . ,
aK−1, where an is the n-th scalar time domain filter coefficient. Hence the filtered time
domain channel estimate is given by h = ΣhLS. Let FK denote an normalized size-K
DFT matrix, the filtered frequency domain channel estimate is thus given by [79]
h = FKΣFH
KhLS. (5.15)
In the scalar form, the time domain LS channel estimate on the n-th tap can be
described as
hLS,n = hn + εLS,n, n = 0, . . . ,K − 1 (5.16)
where εLS,n denotes the LS channel estimation noise in the time domain and E[|εLS,n|2] =σ2n
σ2p(see Section 5.1.2). Note that in (5.16), the power of εLS,n is distributed uniformly
1Without oversampling, the frequency channel response at the edges of the interleaved subcarriers is
continuous. Hence, the energy smearing effect will not be observed in the IFDMA simulation without
oversampling.
94

5.2. DFT-Based Channel Estimation
on all the taps, while the channel power of hn is concentrated in a few taps. Hence, by
suppressing the taps in the middle, a more accurate time domain channel estimate can
be obtained via a scalar filter an, i.e.
hn = anhLS,n. (5.17)
Three time domain scalar filter designs are described in the following sections.
5.2.2 Denoise Filter
The denoise filter is given by [78]
an =
1, n ∈ RC
0, n ∈ RS
(5.18)
where RC = n : 0, . . . , L + S − 1,K − S, . . . ,K − 1 is defined as the channel power
concentration region and RS = n : L + S, . . . ,K − S − 1 is defined as the channel
power smearing region. L denotes the equivalent channel delay spread normalized to
the user symbol rate, which can be estimated as L = ceil(L× K
N
)for LFDMA2. S
is the number of taps that contains significant smeared channel power, which will be
excluded from the denoising process.
The choice of S is investigated in [78]. When S is small, good noise reduction
is achieved at low SNR, but the channel estimation error floor is larger at high SNR
due to the truncation of more smeared channel power. When S is large, the channel
estimation error floor is smaller at high SNR but the noise reduction is also less at low
SNR. Hence, when the denoise filter is used, there is a tradeoff between good noise
reduction performance at low SNR and low channel estimation error floor at high SNR.
5.2.3 Uniform-Weighted Filter
In order to solve the error floor problem in the denoise filter, we propose a uniform-
weighted filter in this section. Instead of setting the taps in RS to zero, a real-valued
uniform-weight ω is applied such that ω → 0 at low SNR and ω → 1 at high SNR.
Hence the uniform-weighted filter is given by
an =
ω, n ∈ RC
0, n ∈ RS.(5.19)
2Since LFDMA experiences only a portion of the frequency selectivity of the original chan-
nel response, the equivalent channel delay spread at the user symbol rate can be estimated as
L = ceil(
L×KN
)
. In addition, since IFDMA experiences the same degree of frequency selectivity
as the original channel response, L will be estimated as L = L.
95

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
As a result, the channel estimation error floor can be avoided at high SNR, while
maintaining good noise reduction performance at low SNR.
When deriving ω based on the LS method, the cost function is defined as the squared
error of the filtered channel estimate taps in the channel power smearing region, i.e.
JLS =∑
n∈RS
∣∣∣ωhLS,n − hn
∣∣∣2
=∑
n∈RS
ω2∣∣∣hLS,n
∣∣∣2− ωh∗LS,nhn − ωhLS,nh
∗n − |hn|2 . (5.20)
Taking the derivative of JLS with respect to ω, and equating it to zero, i.e.
dJLSdω
= 2ω∑
n∈RS
∣∣∣hLS,n∣∣∣2− 2ℜ
∑
n∈RS
h∗LS,nhn
= 0 (5.21)
where ℜ[·] denotes the real part of a complex value. Solving the above equation for ω,
the uniform weight ω is obtained as
ω =ℜ[∑
n∈RSh∗LS,nhn
]
∑n∈RS
∣∣∣hLS,n∣∣∣2 . (5.22)
In (5.22), since hn is unknown, the approximation of the numerator is carried out
as follows. Let hn+1 = hn + ∆n, where ∆n denotes the difference between hn+1 and
hn. The (n+ 1)-th LS channel estimate tap can thus be written as
hLS,n+1 = hn+1 + εLS,n+1
= hn +∆n + εLS,n+1. (5.23)
Let NS = K − L− 2S denote the number of taps in RS, the correlation between hLS,n
and hLS,n+1 in the channel power smearing region is given by
1
NS
∑
n∈RS
h∗LS,nhLS,n+1
=1
NS
∑
n∈RS
h∗LS,n (hn +∆n + εLS,n+1)
=1
NS
∑
n∈RS
h∗LS,nhn +(h∗n + ε∗LS,n
)(∆n + εLS,n+1)
=1
NS
∑
n∈RS
h∗LS,nhn +1
NS
∑
n∈RS
h∗n∆n + h∗nεLS,n+1 + ε∗LS,n∆n + ε∗LS,nεLS,n+1
︸ ︷︷ ︸≈E[h∗
n∆n+h∗nεLS,n+1+ε∗LS,n∆n+ε∗LS,nεLS,n+1]=0
. (5.24)
96

5.2. DFT-Based Channel Estimation
In (5.24), when NS is sufficiently large, the second average operator in the final line
can be well-approximated as the expectation operator. Since hn, ∆n, εLS,n and εLS,n+1
are mutually uncorrelated, the expectation term can be set to zero. Hence, based on
the result in (5.24), the numerator in (5.22) can be approximated using the real part of
the correlation between between the adjacent LS channel estimate taps in the channel
power smearing region3. The uniform weight calculation can thus be simplified to
ω =ℜ[∑
n∈RSh∗LS,nhLS,n+1
]
∑n∈RS
∣∣∣hLS,n∣∣∣2 . (5.25)
As shown in (5.25), ω can be determined purely based on the LS channel estimate
taps. In the next section, the MMSE filter will be described, where knowledge of the
channel statistics is required to calculate the filter coefficients.
5.2.4 MMSE Filter
The MMSE filter proposed in [79] aims to minimize the MSE of each filtered channel
estimate tap. Compared to the optimal LMMSE channel estimator described in Section
5.1.3, the MMSE filter ignores the correlation between the time domain channel taps.
Hence the DFT-based MMSE filter does not achieve the performance of the optimal
LMMSE. However, when a scalar filter is assumed, the MMSE filter approach provides
a lower bound performance for all the DFT-based channel estimation techniques.
The cost function is defined as the MSE of the filtered channel estimate, i.e.
JMMSE = E
[∣∣∣anhLS,n − hn
∣∣∣2]
= a2nE[|hn|2]− 2anE[|hn|2] + a2nE[|εLS,n|2]− E[|hn|2]. (5.26)
where E[|εLS,n|2] = σ2n
σ2p. Taking the derivative of JMMSE with respect to an and equating
it to zero, we obtain
dJMMSE
dan= 2anE[|hn|2]− 2E[|hn|2] + 2an.
σ2n
σ2p
. (5.27)
Solving the above equation for an, the n-th MMSE filter coefficient is thus given by [79]
an =E[|hn|2]
E[|hn|2] + σ2n
σ2p
(5.28)
where E[|hn|2] is the expected channel power on the n-th tap.
3A similar approach is also found in [89], where the frequency correlation on adjacent subcarriers is
used to estimate the signal power.
97

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
5.2.5 Simulation Results and Discussion
This section presents a performance comparison of the DFT-based channel estimators
with different time domain scalar filter designs in an LFDMA system. In the sim-
ulation, the number of total available subcarriers is N = 512, the number of user
subcarriers is K = 128, and QPSK modulation is used for data symbols. An 8-tap
i.i.d. complex Gaussian channel model is used (i.e. L = 8), where 200,000 indepen-
dent channel realizations are generated. For the denoise and uniform-weighted filters,
the equivalent channel delay spread normalized to the user symbol rate is estimated
as L = ceil(L× K
N
)= 2, and the number of taps with significant smeared channel
power is set to S = 5 (an arbitrary choice as used in [78]). For the MMSE filter, ideal
knowledge of the channel statistics and MSE of the LS estimation noise is assumed.
The obtained channel estimate is then used to calculate the MMSE-FDE coefficients,
where ideal SNR is assumed. Performance of the optimal LMMSE channel estimator
is shown in the following figures as the lower bound.
Fig. 5.7 shows the MSE of the DFT-based channel estimators with different time
domain filter design. It is shown that the denoise filter is able to reduce the MSE at
low SNR, but leads to an MSE floor at high SNR due to the truncation of the smeared
channel power. By applying an uniform weight ω to the channel power smearing region,
the MSE floor can be avoided at high SNR while good noise reduction is maintained at
low SNR. It is shown that the MSE of the proposed uniform-weighted filter converges
to the LS channel estimator at high SNR, as a result of ω → 1. When the SNR is low,
the MMSE filter outperforms the uniform-weighted filter. This is because the MMSE
filter minimizes the MSE on each channel estimate tap, while the uniform-weighted
filter tolerates the noise in the channel power concentration region. However, both
filters achieve similar MSE performance at high SNR.
Fig. 5.8 shows the BER of LFDMA with different DFT-based channel estimators.
The BER results are consistent with the MSE results shown in Fig. 5.7. It is shown
in Fig. 5.8 that the denoise filter leads to a BER floor at high SNR due to its channel
estimation MSE floor. Since ideal SNR is assumed in the MMSE-FDE coefficient
calculation, the channel estimate with the same MSE gives more inaccurate MMSE-
FDE coefficients with increased SNR. As a result, a higher BER is observed for the
denoise filter at high SNR. The proposed uniform-weighted filter and the MMSE filter
have almost the same BER, and this is close to the optimal LMMSE channel estimator
at low SNR and converges to the LS channel estimator at high SNR. For example, at a
BER = 0.001, both DFT-based filters show a 1.5dB of SNR gain over the LS channel
98

5.2. DFT-Based Channel Estimation
0 5 10 15 20 25 3010
−5
10−4
10−3
10−2
10−1
100
SNR (dB)
MS
E
LSDFT−denoiseDFT−uniformDFT−MMSELMMSE
Figure 5.7: MSE of different DFT-based channel estimators for LFDMA in a 8-tap
i.i.d. complex Gaussian channel.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
LSDFT−denoiseDFT−uniformDFT−MMSELMMSE
Figure 5.8: BER of LFDMA with different DFT-based channel estimators in a 8-tap
i.i.d. complex Gaussian channel, where baseband data modulation is QPSK.
99

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
estimator and perform within 1.5dB to the LMMSE channel estimator.
Note that although the DFT-based MMSE filter has the best performance among
the DFT-based filter designs, it still has a significant performance gap to the optimal
LMMSE channel estimator. This is because the smeared channel power becomes larger
compared to the LS estimation noise as the SNR increases. Hence, when the MMSE
filter coefficient an → 1 at high SNR, the noise filtering ability becomes very limited. To
overcome the performance limitation due to the channel power smearing effect through
the use of DFT, the channel estimation techniques based on different transforms are
investigated in the next section.
5.3 Transform-Based Channel Estimation
As mentioned previously, the performance of a DFT-based channel estimator is limited
by the time domain channel smearing effect due to the periodic extension assumption in
a DFT. In other words, given a set of correlated signals, the DFT does not achieve good
energy compaction performance. Since various transform coding techniques have been
investigated to compress the correlated data in the field of image processing (e.g. the
discrete cosine transform (DCT) and the KLT both achieve better energy compaction
than DFT) [90], these ideas can be extended to the application of noise filtering. Hence,
channel estimation techniques based on different transforms are investigated in this
section.
This section is organized as follows. Section 5.3.1 gives the generalized description of
a transform-based channel estimator. Section 5.3.2 proposes a pre-interleaved DFT (PI-
DFT) based channel estimator. Section 5.3.3 describes a DCT-based channel estimator.
In section 5.3.4, it is shown that the LMMSE channel estimator can be implemented via
a KLT-based channel estimator. Section 5.3.5 derives the equalized SNR gain achieved
by the transform-based channel estimator over the LS channel estimator. Finally,
a performance comparison of the transform-based channel estimators is presented in
Section 5.3.6.
5.3.1 Generalized Transform-Based Channel Estimator
Fig. 5.9 shows the block diagram of the transform-based channel estimator, where U
denotes a K × K transform matrix. Note that U must have K mutually orthogonal
columns such that [91]
UHU = IK . (5.29)
100

5.3. Transform-Based Channel Estimation
Figure 5.9: Block diagram of a transform-based channel estimator.
Since U−1U = IK , the inverse matrix coincides with its Hermitian matrix4, i.e. U−1 =
UH . Hence UH can be employed as the inverse transform. Let Σ = diaga0, . . . , aK−1denote the transform domain scalar filter, the filtered frequency domain channel esti-
mate is given by
h = UHΣU
hLS. (5.30)
When U = FHK , (5.30) becomes a DFT-based channel estimator (see (5.15)). Assuming
the MMSE scalar filtering criterion described in Section 5.2.4 is employed in Σ, three
transform matrix designs are given in the following sections.
5.3.2 Pre-Interleaved DFT-Based Channel Estimator
To reduce the time domain channel smearing effect that occurs in the conventional
DFT-based channel estimator, a novel PI-DFT based channel estimator is proposed in
this section. Fig. 5.10 shows the block digram of the proposed DFT-based channel es-
timator, where a pre-interleaver is applied prior to the DFT such that the discontinuity
at the edges of the periodic extension is removed.
The interleaving scheme is illustrated in Fig. 5.11. Fig. 5.11(a) shows the fre-
quency domain channel response before interleaving (i.e. |hk|), where amplitude and
phase discontinuity occurs at the edges. By reversing the order of the even subcarriers
and padding them to the end of all the odd subcarriers, Fig. 5.11(b) shows that the
interleaved frequency domain channel response (i.e. |hPI,k|) is nearly symmetric, and
the discontinuity at the edges is removed. In other words, let h = [h0, . . . , hK−1]T
denote the frequency domain channel vector, the interleaved frequency domain channel
vector is given by
hPI =[hPI,0, . . . , hPI,K−1
]T
=
h0, h2, . . . , hK−2︸ ︷︷ ︸
Odd subcarriers
, hK−1, hK−3, . . . , h1︸ ︷︷ ︸Even subcarriers
T
. (5.31)
4A nonsingular matrix with this property is called a unitary matrix [91].
101

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
Figure 5.10: Block diagram of a pre-interleaved DFT-based channel estimator.
0 10 20 30 40 500
0.5
1
1.5
2
k
|hk|
(a) Before interleaving
Odd subcarriersEven subcarriers
0 10 20 30 40 500
0.5
1
1.5
2(b) After interleaving
k
|hP
I,k|
Reverse the order of theoriginal even subcarriers
Figure 5.11: Frequency domain channel response: (a) Before interleaving. (b) After
interleaving.
By applying the DFT to the input frequency domain channel response, Fig. 5.12(a)
and Fig. 5.12(b) show the transform domain channel taps (i.e. hn) corresponding
to Fig. 5.10(a) and Fig. 5.10(b) respectively. It can be seen in Fig. 5.10(b) that
the channel smearing effect is significantly reduced via the pre-interleaving process,
which implies better noise filtering performance in the presence of noise. In addition,
Fig. 5.10(b) shows that for the PI-DFT, the last few transform domain taps hn have
significant channel power. This is because the interleaved frequency domain channel
response is nearly symmetric.
As shown in Fig. 5.10, the cascade of the pre-interleaver and the DFT can be
viewed as a transform U. Hence, the cascade of the IDFT and the de-interleaver can
be viewed as an inverse transform UH . Let FK = [f1, . . . , fK ] denote a normalized
K×K DFT matrix, where fk denotes the k-th column of FK . The PI-DFT matrix has
102

5.3. Transform-Based Channel Estimation
0 10 20 30 40 500
1
2
3
4(a) DFT
n
|hn|
0 10 20 30 40 500
1
2
3
4(b) PI−DFT
n
|hn|
0 10 20 30 40 500
1
2
3
4(c) DCT
n
|hn|
0 10 20 30 40 500
1
2
3
4(d) KLT
n
|hn|
Figure 5.12: Transform domain channel response: (a) DFT, (b) PI-DFT, (c) DCT and
(d) KLT.
103

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
the interchanged DFT columns, which is given by
U =
f1, f3, . . . , fK−1︸ ︷︷ ︸Odd DFT columns
, fK , fK−2, . . . , f2︸ ︷︷ ︸Even DFT columns
. (5.32)
5.3.3 DCT-Based Channel Estimator
The DCT-based channel estimator is proposed in [81]. Unlike the DFT, the DCT
assumes a symmetric extension [92]. Hence the amplitude and phase discontinuity at
the edges of the extension is avoided. As a result, better energy compaction performance
can be achieved in the DCT domain. Let k + 1 and n+ 1 denote the row and column
indexes of U respectively, the transform matrix for the DCT-based channel estimator
is given by
Uk+1,n+1 =wk√K
cos
(π(2n+ 1)k
2K
), k, n = 0, . . . ,K − 1 (5.33)
where wk = 1 for k = 0 and wk =√2 for k = 1, . . . ,K − 1.
Given the frequency domain channel response as shown in Fig. 5.11(a), the DCT
domain channel response is shown in Fig. 5.12(c). It can be seen that the DCT
achieves a better energy compaction performance than the DFT and the PI-DFT (see
Fig. 5.12(a) and (b) respectively). In addition, the DCT can be implemented using a
fast algorithm or a double-size DFT [93]. Since fast Fourier transform (FFT) blocks are
embedded in the SC-FDMA receiver, it is desirable to reuse the existing FFT blocks
rather than adding new fast DCT blocks for channel estimation. Hence, we assume
that the DCT has complexity of a double-size DFT in this chapter.
5.3.4 KLT-Based Channel Estimator
Unlike the DFT and DCT, the KLT is a signal-dependent transform, which requires
knowledge of the correlation matrix of the input signals (i.e. Rhh). Since the KLT
achieves the best energy compaction performance, when applying the KLT for noise
filtering, optimal noise filtering can be achieved in the sense of minimizing the MSE.
In the following derivation, it is shown that the LMMSE channel estimator can be
implemented via the KLT [80].
Let Q = [q1, . . . ,qK ] and V = diagv1, . . . , vK, where qk is the k-th length-K
eigenvector corresponding to the k-th eigenvalue vk of the K ×K channel correlation
matrix Rhh. Owing to the orthonormal nature of the eigenvectors (i.e. K eigenvectors
are mutually orthogonal), Q is an unitary matrix (i.e. Q−1 = QH). Hence, based on
104

5.3. Transform-Based Channel Estimation
the unitary similarity transformation, the channel correlation matrix may be written
as [91]
Rhh
= QVQH . (5.34)
Using (5.34), the LMMSE channel estimation given in (5.14) can be decomposed as
h = R
hh
(R
hh+
σ2n
σ2p
IK
)−1 hLS
= QVQH
(QVQH +Q
(σ2n
σ2p
IK
)QH
)−1 hLS
= QVQH
(Q
(V +
σ2n
σ2p
IK
)QH
)−1 hLS
= Q︸︷︷︸UH
V
(V +
σ2n
σ2p
IK
)−1
︸ ︷︷ ︸Σ
QH
︸︷︷︸U
hLS. (5.35)
In the final line of (5.35), let U = QH , UH = Q and Σ = V(V + σ2
nσ2pIK
)−1=
diag
v1
v1+σ2n
σ2p
, . . . , vK
vK+σ2n
σ2p
. The LMMSE channel estimator can be implemented as a
KLT-based channel estimator with a MMSE scalar filter [80]. Compared to (5.14),
where a matrix inversion term is present in the standard form of LMMSE estimation,
the KLT-based LMMSE estimation in the final line of (5.35) has lower complexity since
V is a diagonal matrix and Σ is calculated via simpler scalar division.
Given the frequency domain channel response in Fig. 5.11(a), Fig. 5.12(d) shows
the KLT domain channel response. It can be seen that the KLT achieves the best energy
compaction performance among all the transform techniques, which implies that the
best noise filtering performance can be achieved. Although the KLT-based LMMSE
estimation has lower complexity than the standard form of LMMSE estimation, there
is no fast algorithm to implement the KLT due to its signal-dependence [90]. Hence,
the complexity ranking of the transforms is KLT > DCT > PI-DFT ≈ DFT, where the
DCT implementation using a double-size DFT is assumed.
5.3.5 Derivation of Equalized SNR Gain
It is observed in Fig. 5.2 5.3 that the SNR gain in channel estimation MSE does
not linearly translate to the SNR gain in BER performance. In order to analyze the
impact of channel estimation MSE to the receiver performance, we propose to derive
the equalized SNR gain achieved by the use of a particular channel estimator over the
105

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
LS channel estimator (i.e. using the equalized SNR with the LS channel estimator as
the benchmark) in this section.
Lethk = hk+εk denote the transform-based channel estimate on the k-th subcarrier,
where hk and εk are the actual channel response and the estimation noise on the k-th
subcarrier respectively, and E[|εk|2] = σ2ε . Assuming ideal noise variance estimation,
the MMSE-FDE coefficient is calculated as
gk =h∗k
|hk|2 + σ2n
σ2x
=h∗k + ε∗k
|hk + εk|2 + σ2n
σ2x
. (5.36)
Let yk = hkxk+ηk denote the received frequency domain symbol on the k-th subcarrier,
where xk and ηk are the transmit frequency domain symbol and the received noise on
the k-th subcarrier respectively, and E[|ηk|2] = σ2n. Hence the equalized frequency
domain symbol is given by
z = gkyk
=
h∗k + ε∗k
|hk + εk|2 + σ2n
σ2x
(hkxk + ηk
)
=|hk|2
|hk + εk|2 + σ2n
σ2x
xk
︸ ︷︷ ︸Sk
+h∗kηk + ε∗khkxk + η∗kηk
|hk + εk|2 + σ2n
σ2x︸ ︷︷ ︸
Nk
. (5.37)
where Sk and Nk denote the signal and the noise on the k-th subcarrier after MMSE-
FDE.
Assuming the mean channel power, signal power and pilot power are normalized
to 1, i.e. E[|hk|2] = E[|xk|2] = E[|pk|2] = 1, based on (5.37) the equalized SNR with
MMSE-FDE using the transform-based channel estimate is given by
γCE =E[|Sk|2]E[|Nk|2]
=1
σ2n + σ2
ε + σ2εσ
2n
. (5.38)
As mentioned in Section 5.1.2, the MSE of the LS channel estimator is E[|ηLS,k|2] =σ2n
σ2p= σ2
n (since σ2p = 1 is assumed). Hence, the equalized SNR with MMSE-FDE using
the LS channel estimator is given by
γLS =1
σ2n(2 + σ2
n). (5.39)
Usng (5.39) as the benchmark, the equalized SNR gain due to the use of the transform-
based channel estimator is given by
∆γ =γCE
γLS=
2 + σ2n
1 + σ2ε
σ2n+ σ2
ε
(5.40)
106

5.3. Transform-Based Channel Estimation
and this equalized SNR gain in dB is given by
∆ΓdB = 10log(2 + σ2n)− 101og
(1 +
σ2ε
σ2n
+ σ2ε
). (5.41)
Note that in (5.41) when ideal channel estimation is assumed (i.e. σ2ε = 0), ∆ΓdB ≈
3dB at high SNR. In other words, the LS channel estimator gives approximately 3dB
of performance loss compared to the ideal channel estimator. This is consistent with
the result shown in Fig. 5.3. Furthermore, since σ2n ≪ 2 and σ2
ε ≪ 1 at high SNR, the
equalized SNR gain in (5.40) can be approximated as ∆γ = 2
1+σ2ε
σ2n
. This leads to an
interesting result that the equalized SNR again is dominated by the ratio σ2ε
σ2n, where a
smaller σ2ε
σ2nleads to a larger SNR gain improvement.
5.3.6 Simulation Results and Discussion
This section presents a performance comparison of the transform-based channel esti-
mators in combination with the transform domain MMSE scaler filter for an LFDMA
system. In the simulation, the number of total available subcarriers is N = 512, the
number of user subcarriers is K = 128, and QPSK modulation for data symbols is
used. An 8-tap i.i.d. complex Gaussian channel model is used such that L = 8, and
200,000 independent channel realizations are simulated. For the MMSE scalar filter,
the expected transform domain channel power as required in its coefficient calculation
is obtained via the average of the generated channel realizations. The obtained channel
estimate is then used to calculate the MMSE-FDE coefficients.
Fig. 5.13 shows the MSE comparison of the transform-based channel estimator.
It can be seen that the channel estimation performance is related to the energy com-
paction performance shown in Fig. 5.12. PI-DFT and DCT-based channel estimators
are both able to provide better performance than the DFT-based channel estimator.
This is because the PI-DFT and the DCT both avoid the discontinuity at the edges
of the transformation extension, which yields better energy compaction performance.
As a result, better noise filtering and channel estimation performance can be achieved.
As mentioned previously, the KLT-based channel estimator gives the best energy com-
paction performance and leads to the optimal LMMSE channel estimator when the
MMSE filter is used. Hence the performance ranking of the transform-based channel
estimators is KLT > DCT > PI-DFT > DFT.
Fig. 5.14 shows the BER of LFDMA with different transform-based channel esti-
mators. It is observed that both PI-DFT and DCT-based channel estimators give a
very close BER to the optimal KLT-based channel estimator. Fig. 5.15 shows the SNR
107

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
0 5 10 15 20 25 3010
−5
10−4
10−3
10−2
10−1
100
SNR (dB)
MS
E
LSDFTPI−DFTDCTKLT (LMMSE)
Figure 5.13: MSE comparison of the transform-based channel estimators with MMSE
scalar noise filtering in a 8-tap i.i.d. complex Gaussian channel.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
LSDFTPI−DFTDCTKLT (LMMSE)
Figure 5.14: BER of LFDMA with different transform-based channel estimators in a
8-tap i.i.d. complex Gaussian channel. QPSK modulation is used for data symbols.
108

5.4. DFT-Based Noise Variance Estimation
0 5 10 15 20 25 300
0.5
1
1.5
2
2.5
3
3.5
4
4.5
SNR (dB)
Equ
aliz
ed S
NR
gai
n (d
B)
DFTPI−DFTDCTKLT (LMMSE)
Figure 5.15: Equalized SNR gain at the MMSE-FDE output due to the use of the
transform-based channel estimator over the LS channel estimator.
gain at the MMSE-FDE output due to the use of the transform-based channel estima-
tor over the LS channel estimator. The equalized SNR gain is calculated using (5.41),
where the MSE of the transform-based channel estimator is obtained from Fig. 5.13.
It is shown in Fig. 5.15 that the SNR gain of the DFT-based channel estimator drops
rapidly as the SNR increases, while the PI-DFT, DCT and KLT-based channel estima-
tors all significantly outperform the DFT-based channel estimator. At an SNR of 30dB,
the DFT-based channel estimator achieves very little improvement (i.e. 0.25dB) over
the LS channel estimator. However, PI-DFT, DCT and KLT-based channel estimators
still achieve SNR gains of 1.8dB, 2.3dB and 2.8dB respectively.
5.4 DFT-Based Noise Variance Estimation
In this section, DFT-based noise variance estimation is investigated. Section 5.4.1 de-
scribes the low-rank noise variance estimator and Section 5.4.2 proposes the windowed
noise variance estimator. The performance of SC-FDMA with different noise variance
estimators is presented in 5.4.3.
109

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
Figure 5.16: Block diagram of a windowed DFT-based noise variance estimator.
5.4.1 Low-Rank DFT-Based Noise Variance Estimator
The noise variance estimator reported in [82] uses the same assumption as the denoise
channel estimator (see Section 5.2.2). That is, it assumes that all the taps outside
the channel power concentration region contain noise only. Hence, this low-rank noise
variance estimator in [82] is given by
σ2n =
1
K − L− 2S
∑
n∈RS
∣∣∣hLS,n∣∣∣2. (5.42)
where L, S and RS are defined in Section 5.2.2. Since non-negligible hn remains in
the channel power smearing region RS, this approach gives a significant bias to the
estimated noise variance at high SNR.
5.4.2 Windowed DFT-Based Noise Variance Estimator
Fig. 5.16 shows the block diagram of the proposed windowed DFT-based noise variance
estimator. The frequency domain LS channel estimatehLS,k is first converted to the
time domain, i.e. hLS,n = 1√K
∑K−1k=0
hLS,ke
2πK
kn, where n = 0, . . . ,K − 1. A window
function wn is then applied to the time domain LS channel estimate hLS,n. After
converting it back to the frequency domain, the windowed channel estimatehW,k is
used in conjunction with the LS channel estimatehLS,k to estimate the noise variance.
The time domain window function wn is illustrated in Fig. 5.17, where T denotes
the number of samples in the stopband. Since the first L samples contain most of
channel power, wn is offset by L samples. The time domain LS channel estimate after
windowing is given by
hW,n = wnhLS,n = hW,n + εW,n (5.43)
where hW,n = wnhn denotes the channel response after windowing and εW,n = wnεLS,n
denotes the remaining LS estimation noise after windowing.
After converting hW,n back to the frequency domain, the remaining noise in the
frequency domain is given by εW,k = 1√K
∑K−1n=0 wnεLS,ne
− 2πK
kn. Assuming that the
110

5.4. DFT-Based Noise Variance Estimation
Figure 5.17: The time domain window function (wn). The black solid line denotes a
rectangular window and the red dotted line denotes a window with smooth transition.
time domain LS channel estimation noise εLS,n is white Gaussian noise, εW,k will be
Gaussian noise (slightly correlated in the frequency domain due to the time domain
windowing). Let εT,k denote the frequency domain noise that is eliminated by the time
domain windowing process; the original frequency domain LS channel estimation noise
can be written as
εLS,k = εW,k + εT,k. (5.44)
Let wj denote the DFT of wn (e.g. wj is a sinc function when wn is a rectangular
window). Since the time domain multiplication (hW,n = wnhn) results in a cyclic
convolution in the frequency domain, the windowed frequency channel (without noise)
is given by
hW,k = wj ∗ hk−j = hk + bk (5.45)
where ∗ denotes the cyclic convolution operator and bk denotes the resultant frequency
domain channel distortion due to the time domain windowing. Note that wj can be
perceived as a low-pass filter that smooths the frequency domain channel response
cyclically. Since hk has a abrupt discontinuity at the frequency edges, bk is large on the
subcarriers at the frequency edges. Moving towards the center of the frequency band,
bk becomes smaller.
Based on (5.45) and (5.45), the LS channel estimate and the windowed channel
estimate in the frequency domain can be expressed as (5.46) and (5.47) respectively.
hLS,k = hk + εLS,k = hk + εW,k + εT,k (5.46)
hW,k = hk + εW,k = hk + bk + εW,k. (5.47)
By taking the average squared difference ofhLS,k and
hW,k in the frequency range where
bk is negligible, the variance of εT,k (denoted as σ2T = E[|εT,k|2]) can be estimated. Since
111

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
0 2 4 6 8 10 12 14 160
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
j
|wj|
Sinc filter (RC filter with ro = 0)RC filter with ro = 0.25
Figure 5.18: Frequency domain filter response of time domain rectangular and RC
window functions (where a roll-off factor is ro = 0.25).
the mean ratio of σ2n to σ2
T is KT , the received noise variance can be estimated as
σ2n =
K
Tσ2T =
K
T (K − 2B)
K−B−1∑
k=B
∣∣∣∣hLS,k − hW,k
∣∣∣∣2
(5.48)
where B denotes the number of subcarriers at the frequency edges with large bk.
Choice of Parameters
There is a compromise when choosing the number of stopband samples T in wj .
Large T (i.e. a small passband) in the time domain window function wj leads to a
wider mainlobe and sidelobes in the frequency domain smoothing filter wj . In this
case, larger B has to be chosen to ensure bk ≈ 0 and less samples are available in
the averaging region in (5.48) to obtain accurate σ2T. Hence, the accuracy of σ2
n is
reduced. If a small value of T is used, the instantaneous ratio of σ2n to σ2
T may deviate
considerably from its mean ratio KT . This also lowers the accuracy of σ2
n. Hence, as a
compromise, T = K2 is used in the simulation.
For a rectangular wn, wj is a sinc filter and its sidelobes roll off slowly. This makes
the channel distortion bk roll off slowly in the frequency domain. Therefore, the noise
112

5.4. DFT-Based Noise Variance Estimation
Table 5.1: Four LFDMA systems used in the simulation.
Channel estimator Noise variance estimator
System-I Ideal Ideal
System-II LS Ideal
System-III LS Low-rank
System-IV LS Proposed (ro = 0.25)
variance estimate becomes slightly biased at high SNR when bk is large compared to
εT,k. Hence, a window function with a smooth transition band (see Fig. 5.17) can
be applied to reduce the sidelobes of wj . Using a smooth window function, the bias
problem at high SNR is further improved.
Fig. 5.18 shows the frequency domain filter response |wj | of time domain rectangular
and RC window functions, where K = 128 and T = K2 = 64. It is shown that a RC
filter with a small rolloff factor ro = 0.25 has much lower sidelobes than a sinc filter
and after four sidelobes (i.e. B = 11 samples), wj ≈ 0.
5.4.3 Simulation Results and Discussion
This section presents a performance comparison of DFT-based noise variance estimators
for an LFDMA system, where a non-ideal noise variance estimate is used to calculate the
MMSE-FDE coefficients. In the simulation, the number of total available subcarriers
is N = 512, the number of user subcarriers is K = 128, and 16QAM modulation
is used for data symbols. An 8-tap i.i.d. complex Gaussian channel model is used
such that L = 8. The equivalent channel delay spread normalized to the user symbol
rate for LFDMA is estimated as L = ceil(L× K
N
)= 2. For the low-rank noise variance
estimator, the number of taps with significant smeared channel power is set to S = 5 (an
arbitrary choice as used in [78]). For the proposed windowed noise variance estimator,
T = K2 = 64 and B = 11 are used in the simulation.
Fig. 5.19 shows a performance comparison of the DFT-based noise variance es-
timators. While the low rank noise variance estimator gives a large bias due to the
residual channel power, the proposed noise variance estimator gives a much lower bias.
In particular, when a RC window with a small roll-off factor ro = 0.25 is applied, no
bias is observed up to SNR values of 50dB.
Fig. 5.20 shows a BER comparison of four LFDMA systems listed in Table 5.1. It
can be seen that the BER is more sensitive to the channel estimation error rather than
the noise variance estimation bias. For the low-rank noise variance estimator, although
113

Chapter 5. Transform-Based Channel Estimation for Single-Carrier FDMA
0 10 20 30 40 5010
−5
10−4
10−3
10−2
10−1
100
SNR (dB)
Mea
n no
ise
varia
nce
estim
ate
IdealLow-rankProposed (ro = 0)Proposed (ro = 0.25)
Figure 5.19: Performance comparison of DFT-based noise variance estimators in an
8-tap i.i.d. complex Gaussian channel.
0 5 10 15 20 25 30 35 4010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
System-ISystem-IISystem-IIISystem-IV
Figure 5.20: BER comparison of four LFDMA systems (listed in Table 5.1) in an 8-tap
i.i.d. complex Gaussian channel with 16QAM modulation.
114

5.5. Summary
the bias occurs at SNR > 12.5dB (see Fig. 5.19), BER degradation appears at SNR
> 25dB and eventually leads to a BER floor. When the proposed noise variance esti-
mator with ro = 0.25 is used, no BER degradation is observed. Since the results show
that nearly ideal noise variance estimation is achievable via the proposed windowing
technique, this chapter and the following chapter mainly focus on channel estimation
and ideal knowledge of the noise variance is assumed in the simulation.
5.5 Summary
This chapter investigated transform-based channel estimation techniques for SC-FDMA.
For DFT-based channel estimation, the denoise filter could reduce the channel estima-
tion MSE at low SNR, but led to an MSE floor at high SNR. The proposed uniform-
weighted filter was shown to solve the MSE floor at high SNR while maintaining good
noise reduction performance at low SNR. In particular, without requiring knowledge of
the channel statistics, results showed that the DFT-based uniform-weighted estimator
achieved comparable performance to the DFT-based estimator with optimal MMSE
scalar filter design. Nevertheless, the performance of DFT-based channel estimators is
generally very limited due to the channel smearing effect.
To overcome the energy smearing effect, the channel estimators based on PI-DFT,
DCT and KLT were investigated. In particular, we proposed a novel PI-DFT based
channel estimator such that the discontinuity at the edges of the periodic extension is
removed. For the DCT, a symmetric extension is assumed, so the edges of the exten-
sion are smooth. Hence, both the PI-DFT and the DCT give better energy compaction
than the DFT. To this end, results showed that both PI-DFT and DCT-based chan-
nel estimators significantly outperforms the DFT-based channel estimator, and have
close BER to the optimal KLT-based LMMSE channel estimator. Furthermore, the
derivation of equalized SNR gain due to channel estimation MSE was presented.
A novel windowed DFT-based noise variance estimator was also proposed in this
chapter. Results showed that the proposed noise variance estimator remains unbiased
up to SNR values of 50dB. In this chapter, a slow time-varying channel was assumed
in the simulation (i.e. the channel response remains the same within a slot). In the
next chapter, a rapidly time-varying channel scenario will be considered. The pilot
symbol based design and the channel tracking algorithm for uplink BS-CDMA will be
investigated.
115


Chapter 6
Pilot Design and Channel
Estimation for Uplink BS-CDMA
Recently, a bandwidth efficient block spread code division multiple access (BS-CDMA)
framework was proposed in [94]. It is shown in [94] that BS-CDMA can be generalized to
variants of well-known multiple access techniques such as low complexity OFDMA, chip-
interleaved BS-CDMA (CIBS-CDMA) [95] and time division multiple access (TDMA).
In particular, by using the proposed spreading code and precoder design [94], bandwidth
efficient BS-CDMA leads to a special case of IFDMA that is considered in the LTE
uplink standard [11]. In this chapter, novel pilot design and channel estimation schemes
for the uplink BS-CDMA are proposed.
Channel estimation as specified in the LTE uplink relies on the transmission of a
block of pilot symbols to estimate the channel for the data blocks within the same
slot [11]. In a fast time-varying channel, the channel estimate obtained in the pilot
block may become out-dated for the data blocks, resulting in degraded performance.
This issue becomes more severe at high velocities. In particular, the emerging LTE
standard aims to support communication in a high-speed train scenario, where the
vehicle speed can be up to 350km/hr [11].
The channel estimation performance in a fast time-varying channel can be improved
by employing a pilot symbol based channel estimation scheme, where the data symbols
and the pilot symbols are transmitted in the same block. For conventional CDMA
systems, such as the UMTS [3], a pilot symbol based scheme is used. However, in the
UMTS uplink, each user transmits its pilot signal with an individual pilot spreading
code to avoid MUI in the uplink channel estimation. Since a large amount of resource
is used for pilot transmission, the bandwidth efficiency is considerably reduced.
117

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
In this chapter, new pilot design and channel estimation schemes for uplink BS-
CDMA are proposed. The aim is to obtain an accurate channel estimate in a fast time-
varying channel while maintaining high bandwidth efficiency. Hence, it is proposed
that all users transmit their pilot signals with a common pilot spreading code. To
achieve MUI-free uplink channel estimation, three pilot design and placement schemes
are proposed based on the criterion of mutual orthogonality between all users’ transmit
pilot signals. Moreover, a recursive least squares (RLS) channel tracking algorithm is
employed to enhance the channel estimation performance in a time-varying channel.
Generally speaking, it is not intuitive to design a low-PAPR pilot symbol placement
scheme for uplink IFDMA since FDM of data and pilot signals comes as a natural
approach for FDMA systems. However, in this chapter we show that low-PAPR pilot
symbol placement is achievable for broadband SC systems from an viewpoint of CDMA
systems using code division multiplexing (CDM) and time division multiplexing (TDM)
of data and pilot signals. Moreover, thanks to the elegant equivalence of IFDMA and
BS-CDMA [94], which will be detailed in Section 6.1.1, it should be highlighted that
the proposed pilot design and channel estimation schemes for uplink BS-CDMA are
also applicable to uplink IFDMA.
This chapter is organized as follows. Section 6.1 investigates the pilot block based
channel estimation scheme for uplink BS-CDMA. A time domain LS channel estimator
is described, and the MSE of pilot block based channel estimation in a time-varying
channel is derived. A performance evaluation of BS-CDMA employing the pilot block
scheme in a time-varying channel is presented. Section 6.2 investigates pilot symbol
based channel estimation schemes for uplink BS-CDMA. Pilot design and placement
schemes are proposed, and the RLS channel tracking algorithm is investigated. A
performance comparison of BS-CDMA employing the proposed pilot design schemes
and the pilot block scheme in a time-varying channel is presented.
6.1 Pilot Block Based Channel Estimation for Uplink BS-
CDMA
This section investigates the performance of uplink BS-CDMA with the pilot block
based channel estimation scheme in a time-varying channel. Section 6.1.1 provides a
description of the uplink BS-CDMA system model. Section 6.1.2 derives a time domain
LS channel estimator based on the pilot block scheme. In Section 6.1.3, the MSE of
the pilot block based channel estimate in a time-varying channel is derived. Simulation
118

6.1. Pilot Block Based Channel Estimation for Uplink BS-CDMA
Figure 6.1: Block diagram of BS-CDMA transceiver architecture.
results are presented and discussed in Section 6.1.4.
6.1.1 System Description
Fig. 6.1 shows the block diagram of a BS-CDMA transceiver. LetM denote the number
of orthogonal spreading codes available in the system; the number of users that can
be supported is thus MU = M . At the transmitter, let dµ = [dµ(0), . . . , dµ(K − 1)]T
denote the data symbol vector from the µ-th (µ = 1, . . . ,MU ) user, where dµ(n) is
the n-th transmit data symbol from the µ-th user. The data symbol vector dµ is then
precoded by a K×K user-specific matrix Λµ and block spread by a length-M user-
specific spreading code cµ. Hence, the µ-th user’s transmit signal after precoding and
block spreading is a length-MK vector given by [94]
xµ = cµ ⊗Λµdµ. (6.1)
Prior to transmission, a CP is inserted to mitigate inter-block interference (IBI), where
the CP length is equal to or longer than the maximum channel delay spread.
At the base station, assuming the signal from all users arrive synchronously, the
received signal after CP removal is given by
r =
MU∑
µ=1
Hµxµ + n. (6.2)
In the equation above, Hµ is the µ-th user’s circulant channel matrix with its first
row given by [hµ(0),01×(MK−L), hµ(L − 1), . . . , hµ(1)] and its first column given by
[hµ(0), . . . , hµ(L − 1),01×(MK−L)]T , where hµ(l) is the l-th channel tap for the µ-th
user and L is the maximum channel delay spread. n is the received noise vector, each
element of which has a zero mean with a variance of σ2n.
119

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
To recover the m-th user’s signal from the received signal r, block despreading and
decoding operations are employed. Let Dm = cm ⊗ Γm denote the m-th user’s data
despreading matrix, where cm and Γm denote a length-M block despreading code and
a K ×K decoding matrix respectively. The m-th user’s despread (and decoded) signal
is given by
ym = DHmr. (6.3)
Note that the circulant channel matrix Hµ can be decomposed as [95]
Hµ = IM ⊗HLµ + JM ⊗HU
µ (6.4)
where HLµ is a K ×K lower triangular Toeplitz matrix with its first column given by
[hµ(0), . . . , hµ(L−1),01×(K−L)]T , HU
µ is a K×K upper triangular Toeplitz matrix with
its first row given by [01×(K−L), hµ(L−1), . . . , hµ(1)], IM is an M ×M identity matrix,
and JM is an M × M circulant matrix obtained by cyclically shifting IM downward
along its column by one element. By using the properties of the Kronecker product,
i.e. (A1 ⊗ A2)(A3 ⊗ A4) = (A1A3) ⊗ (A2A4) [96], it follows that the received data
signal for the m-th user after despreading can be written as
ym = DHmr
=
MU∑
µ=1
(cHm ⊗ ΓHm)(IM ⊗HL
µ + JM ⊗HUµ )(cµ ⊗Λµ)dµ +DH
mn
=
MU∑
µ=1
(cHmcµ)ΓHmHL
µΛµdµ + (cHmJMcµ)ΓHmHU
µΛµdµ +DHmn. (6.5)
The spreading code cµ can be designed as the µ-th column of a normalized M ×M
DFT matrix [94], i.e.
cµ =1√M
[eθµ(0), . . . , eθµ(M−1)
]T(6.6)
where θµ(k) = −2πM (µ − 1)k. Given (6.6), the following mutual shift orthogonality
conditions are met
cHmcµ =
1, m = µ
0, m 6= µ
cHmJMcµ =
e−j 2π
M(1−m), m = µ
0, m 6= µ.(6.7)
120

6.1. Pilot Block Based Channel Estimation for Uplink BS-CDMA
Substituting (6.7) into (6.5), MUI-free reception can be achieved and the m-th user’s
despread data signal is thus given by
ym = ΓHm
(HL
m + e−j 2πM
(1−m)HUm
)Λm
︸ ︷︷ ︸Hm
dm +DHmn (6.8)
where Hm denotes the equivalent channel matrix experienced by the m-th user’s data
signal. It is shown in [94] that the precoding and decoding matrix can be designed as
Λm = Γm = diageφm(0), . . . , eφm(K−1)
(6.9)
where φm(n) = − 2πMK (m − 1)n. In this case, the equivalent data channel matrix Hm
is circulant with its first row given by [hm(0),01×(K−L), hm(L− 1), . . . , hm(1)] and the
first column given by [hm(0), . . . , hm(L− 1),01×(K−L)]T . Moreover, the l-th equivalent
channel tap for the m-th user is given by [94]
hm(l) = ej2πMK
(m−1)lhm(l), l = 0, . . . , L− 1. (6.10)
Since MUI-free reception is achieved by using the appropriately designed spreading
matrix Cm (where Cm = cm ⊗ Λm) and the despreading matrix Dm, any single-user
linear equalizer Gm (where Gm is a K × K matrix) can be used to compensate the
effect of channel distortion. In particular, since H is circulant, a computational efficient
FDE Gm (where Gm is a K ×K diagonal matrix) can be employed by letting
Gm = FHKGmFK (6.11)
where FK and FHK are normalized K×K DFT and IDFT matrices respectively. Hence,
the equalized data symbol vector can be obtained as
zm = Gmym. (6.12)
Finally, the equalized data symbols are sliced and demapped to the binary bits.
BS-CDMA with the above mentioned precoder/decoder and spreading/despreading
code design leads to a special case of IFDMA [11, 47]. Since the spreading matrix is
121

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
given by
Cµ = cµ ⊗Λµ
=
ejθµ(0)
...
ejθµ(M−1)
⊗
ejφµ(0) 0. . .
0 ejφµ(K−1)
=
ej(θµ(0)+φµ(0)) 0. . .
0 ej(θµ(0)+φµ(K−1))
. . .
. . .
. . .
ej(θµ(M−1)+φµ(0)) 0. . .
0 ej(θµ(M−1)+φµ(K−1))
(6.13)
the spread signal xµ = Cµdµ consists ofM repeated data blocks dµ, and the progressive
user-specific phase rotation occurs in each sample of xµ [47]. As a result, IFDMA
can be obtained via the BS-CDMA approach. In fact, it is shown in [94] that when
different precoder/decoder and spreading/despreading codes are used, BS-CDMA can
be generalized to other well-known multiple access techniques, such as low-complexity
OFDMA, CIBS-CDMA [95] and TDMA systems. In this chapter, the description and
simulation focus on an IFDMA-based BS-CDMA system.
6.1.2 Time Domain LS Channel Estimator
The time domain LS channel estimator for the pilot block scheme is derived in this
section. For the data block, the m-th user’s despread data symbols are given in (6.8).
For the pilot block, let pm = [pm(0), . . . , pm(K − 1)]T denote the m-th user’s pilot
symbol vector, where pm(n) is the n-th transmit pilot symbol. Based on (6.8), the
despread pilot symbol vector for the m-th user is thus given by
ym = Hmpm +DHmn. (6.14)
The above equation can be written equivalently as
ym = PL,mhm +DHmn (6.15)
122

6.1. Pilot Block Based Channel Estimation for Uplink BS-CDMA
where hm = [hm(0), . . . , hm(L − 1)]T is a length-L equivalent channel vector. Let
Pm denote a K ×K circulant pilot matrix with its first row given by [pm(0), pm(K −1), . . . , pm(1)] and its first column given by pm, PL,m is a K ×L tall pilot matrix that
comprises the first L columns of Pm.
Let hLS,m denote the LS estimate of hm, the cost function of the LS channel esti-
mator is defined as
JLS =(ym −PL,m
hLS,m
)H (ym −PL,m
hLS,m
)
= yHmym − yH
mPL,mhLS,m − h
H
LS,mPHL,mym + h
H
LS,mPHL,mPL,m
hLS,m. (6.16)
Taking the derivative of JLS with respect to h∗LS,m and equating it to zero, i.e.
∂JLS
∂ h∗LS,m
= PHL,mPL,m
hLS,m −PHL,mym = 0K×1. (6.17)
Solving the above equation, hLS,m is obtained as
hLS,m =(PH
L,mPL,m
)−1PH
L,m︸ ︷︷ ︸P
†L,m
ym
= hm +P†L,mDH
mn (6.18)
where P†L,m =
(PH
L,mPL,m
)−1PH
L,m denotes the pseudo-inverse matrix, which is also
the time domain LS channel estimator matrix1.
6.1.3 MSE Derivation of Pilot Block Based Channel Estimation
In this section, the MSE derivation of pilot block based channel estimation is given.
Section 6.1.3.1 derives the minimum MSE of the time domain LS channel estimator
and the optimal pilot sequence design. Section 6.1.3.2 derives the MSE of the pilot
block scheme in a time-varying channel.
1Note that the time domain LS channel estimator P†L,m is equivalent to a DFT-based channel
estimator with a time domain denoise filter as described in Section 5.2.2. In this chapter, Nyquist-rate
BS-CDMA is assumed in the system model and the simulation. Hence, the performance degradation due
to the channel smearing effect does not occur in the simulation results. However, when oversampling is
considered in the system model/simulation, there are a number of methods to combat the performance
degradation at high SNR due to the denoise assumption in the time domain LS channel estimator.
Possible solutions are given in Appendix B. However, applying these solutions to the oversampled
BS-CDMA scenario is beyond the scope of the thesis.
123

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
6.1.3.1 Minimum MSE of the Time Domain LS Channel Estimator and
Optimal Pilot Sequence
Let hLS(i) denote a length-L time domain LS channel estimate vector at the i-th pilot
block (Note: the user index m is omitted in the following derivation for brevity). Based
on (6.18), hLS(i) can be described as
hLS(i) = h(i) + εLS(i) (6.19)
where h(i) is the equivalent time domain channel response at the i-th pilot block, and
εLS(i) = P†LD
Hn(i) is the LS channel estimation noise at the i-th pilot block. Hence
the MSE of the time domain LS channel estimator at the i-th pilot block is given by
trE[εLS(i)ε
HLS(i)
]
=tr
(PH
LPL
)−1PH
LDH E[n(i)nH(i)
]︸ ︷︷ ︸
σ2nIL
DPL
(PH
LPL
)−1
=σ2ntr(
PHLPL
)−1. (6.20)
For the above equation, it is shown in [85] that minimum MSE is attained if and
only if (PHLPL)
−1 is a diagonal-constant matrix. Let JnK denote a K ×K matrix that
is obtained by cyclic shifting IK downward by n elements, (PHLPL)
−1 is given by
(PH
LPL
)−1=
pH · · · pHJL−1K p
.... . .
...
pH(JL−1K )Hp · · · pH(JL−1
K )HJL−1K p
. (6.21)
Hence, in order to minimize the MSE of the time domain LS channel estimator, the
optimal pilot sequence must satisfy the following conditions, i.e. [86]
pHJnKp =
Kσ2
p, n = 0
0, n = 1, . . . , L− 1(6.22)
where E[|p(n)|2] = σ2p is the expected pilot symbol power. For example, a Chu sequence
is an optimal pilot sequence since it has a good autocorrelation property [88]. Therefore,
when an optimal pilot sequence is used, (PHLPL)
−1 is a diagonal-constant matrix with
its diagonal elements given by 1Kσ2
p. Substituting this result into (6.20), the MSE due
to the time domain LS estimation noise at the pilot block is bounded by Lσ2n
Kσ2p.
124

6.1. Pilot Block Based Channel Estimation for Uplink BS-CDMA
6.1.3.2 MSE of the Pilot Block Scheme in a Time-Varying Channel
For the pilot block scheme, the channel estimate obtained in the pilot block is used
to calculate the equalizer coefficients for all the data blocks within the same packet.
Hence, in a time-varying channel, the error between the LS channel estimate at the
i-th pilot block and the actual channel response at the n-th data block is given by
ǫPB(i, n) =hLS(i)− h(n) = h(i) + εLS(i)− h(n). (6.23)
The error correlation matrix of ǫPB(i, n) can be expressed as
E[ǫPB(i, n)ǫ
HPB(i, n)
]
=E[h(i)hH(i) + εLS(i)ε
HLS(i) + h(n)hH(n)− h(i)hH(n)− h(n)hH(i)
]. (6.24)
In the above equation, let Rhh = E[h(i)hH(i)] = E[h(n)hH(n)] denote the L × L
time domain channel correlation matrix. When the channel taps are independently
distributed, Rhh = diagE[|h(0)|2], . . . , E[|h(L− 1)|2]
is a diagonal matrix. As-
suming that the time-varying channel follows the Jakes model [29], the channel cor-
relation matrix between the i-th pilot block and the n-th data block is given by
E[h(i)hH(n)] = J0(2πfdTBLK|i− n|)Rhh, where J0(·) is the zero-th order Bessel func-
tion, fd is the Doppler frequency and TBLK is the transmission block period. As derived
in the previous section, E[εLS(i)εHLS(i)] =
σ2n
Kσ2pIL. Therefore, the MSE of the pilot block
scheme in a time-varying channel is given by
JPB(i, n) = trE[ǫPB(i, n)ǫ
HPB(i, n)
]
= tr
2Rhh +
σ2n
Kσ2p
IL − 2J0(2πfdTBLK|i− n|)Rhh
=Lσ2
n
Kσ2p
+ 2 [1− J0 (2πfdTBLK|i− n|)] (6.25)
where trRhh = 1 since the mean channel power is normalized to 1 (i.e.∑
l E[|h(l)|2] =1). Note that in (6.25), the first term in the last equality is the MSE due to the LS
estimation noise, and the second term is the MSE due to the Doppler frequency.
6.1.4 Simulation Results and Discussion
This section presents the performance of BS-CDMA employing pilot block based chan-
nel estimation in a time-varying channel. In the simulation, the length of the data
symbol vector is K = 128, the length of the spreading code is M = 8 and the data
modulation scheme is QPSK. An 8-tap i.i.d complex Gaussian channel (i.e. L = 8)
125

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
MS
E
fd = 50Hzfd = 250Hzfd = 500Hz
Figure 6.2: MSE of the pilot block based channel estimation scheme for BS-CDMA in
a time-varying 8-tap i.i.d. complex Gaussian channel.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
Idealfd = 50Hzfd = 250Hzfd = 500Hz
Figure 6.3: BER of BS-CDMA employing pilot block based channel estimation in a
time-varying 8-tap i.i.d. complex Gaussian channel, where data modulation is QPSK.
126

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
with each tap following the Jakes model [29] is used to generate the time-varying chan-
nel, where 200,000 channel realizations are simulated. The performance is simulated at
fd = 50Hz, 250Hz and 500Hz, which correspond to vehicle speeds of 27km/hr, 135km/hr
and 270km/hr for a carrier frequency of 2GHz. Based on the signaling rate specified in
the LTE standard [11], the simulated block period is set to TBLK = 67.18µs. For the
pilot block scheme specified in the LTE uplink [11], each slot consists of 7 transmission
blocks and the pilot block is placed in the middle of the slot to minimize the impact of
out-dated channel estimates (see Fig. 5.1). A Chu sequence [88] is transmitted in the
pilot block. The channel estimate obtained in the pilot block is used to calculate the
MMSE-FDE coefficients (where ideal SNR is assumed) for all the data blocks within
the same slot.
Fig. 6.2 shows the MSE of the pilot block channel estimation scheme at fd =
50Hz, 250Hz and 500Hz. As the Doppler frequency increases, the channel estimation
MSE becomes worse. This is because the channel estimate obtained in the pilot block
becomes out-dated for the data block in a fast time-varying channel. Fig. 6.3 shows the
BER of BS-CDMA employing pilot block channel estimation at fd = 50Hz, 250Hz and
500Hz. It is observed that at fd = 50Hz, the pilot block scheme is able to give similar
BER as the ideal channel estimator. However, as the Doppler frequency increases, the
pilot block scheme suffers from severe performance degradation due to the out-dated
channel estimate in a fast time-varying channel. Note that Fig. 6.3 shows that at
fd = 250Hz and 500Hz, the BER increases slightly at high SNR when the MSE is flat,
as shown in Fig. 6.2. This is because when ideal SNR is assumed, the channel estimate
with the same MSE leads to more inaccurate MMSE-FDE coefficients at high SNR.
Therefore, the BER becomes slightly worse at high SNR.
It can be concluded from the results that the pilot block channel estimation scheme
is not suitable in a fast time-varying channel (e.g. the high-speed train scenario, where
the vehicle speed is up to 350km/hr [11]). In the next section, the pilot symbol design
for uplink BS-CDMA employing the RLS channel tracking algorithm is proposed to
improve the channel estimation performance in a fast time-varying channel.
6.2 Pilot Symbol Based Channel Estimation for Uplink
BS-CDMA
In this section, the pilot symbol design for uplink BS-CDMA employing RLS channel
tracking is proposed. In particular, to achieve the bandwidth efficiency, we propose
127

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
Figure 6.4: Block diagram of the uplink BS-CDMA transceiver architecture with the
proposed pilot transmission.
that all the users transmit their pilot signals using a common pilot spreading code.
Based on the use of a common pilot spreading code, we propose three pilot design and
placement schemes such that MUI-free uplink channel estimation is achieved. Moreover,
a RLS channel tracking algorithm is investigated to enhance the channel estimation
performance in a fast time-varying channel.
This section is organized as follows. Section 6.2.1 gives the system description of
uplink BS-CDMA with the proposed pilot transmission. In Section 6.2.2, time domain
LS channel estimation is described and a mutually orthogonal pilot design criterion
is derived. In Section 6.2.3, the three pilot design and placement schemes are pro-
posed. In Section 6.2.4, a RLS channel tracking algorithm is investigated. Finally, the
performance of the proposed pilot design and channel tracking algorithm for uplink
BS-CDMA in a time-varying channel is presented and discussed in Section 6.2.5.
6.2.1 System Description
The block diagram of the uplink BS-CDMA system model with the proposed pilot
transmission is shown in Fig. 6.4. Let M denote the number of orthogonal spreading
codes available in the system. In the proposed scheme, one of the M orthogonal spread-
ing codes is reserved for pilot transmission, and the other M − 1 orthogonal spreading
128

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
codes are used for data transmission. Hence, the number of users that can be supported
in the system is MU = M − 1.
At the transmitter, the data symbol vector from the µ-th (µ = 1, . . . ,MU ) user is
denoted as dµ = [dµ(0), . . . , dµ(K)]T , where dµ(n) is the n-th data symbol and K is the
number of transmit data symbols. The K data symbols are then mapped to a length-K
data sequence dµ (where K ≥ K) using a K × K symbol-to-sequence mapping matrix
Bµ, i.e. d = Bµdµ. For example, dµ may consist of K data symbols and K − K zeros
depending on the pilot placement scheme (the design of Bµ will be described in Section
6.2.3). The data sequence dµ is then precoded with a K ×K user-specific matrix Λµ
and block spread with a length-M user-specific spreading code cµ. Hence, as shown in
(6.1), the spread data signal for the µ-th user is given by cµ ⊗Λµdµ.
For pilot transmission, let a length-K vector pµ = [pµ(0), . . . , pµ(K − 1)]T denote
the µ-th user’s pilot sequence, where pµ(n) is the n-th pilot symbol from the µ-th user
(the pµ design via cyclic shifting a base sequence pBS will be described in Section 6.2.3).
Each user’s pilot sequence is precoded with a common K × K precoding matrix Λq
and block spread by a common length-M spreading code cq (where q 6= µ). Hence, the
µ-th user’s spread pilot signal is given by cq ⊗ Λqpµ. As shown in Fig. 6.4, the µ-th
user’s transmit signal is obtained by adding the spread data signal and the spread pilot
signal, i.e.
xµ = cµ ⊗Λµdµ + cq ⊗Λqpµ. (6.26)
Prior to transmission, a CP is inserted to mitigate the IBI. It is assumed that the CP
length is equal to or longer than the maximum channel delay spread L.
At the base station, assuming the signal from all users arrive synchronously, the
received signal after CP removal is given by
r =
MU∑
µ=1
Hµxµ + n
=
MU∑
µ=1
(IM ⊗HL
µ + JM ⊗HUµ
)xµ + n (6.27)
where the detail description of Hµ and its decomposition is given in (6.2) and (6.4).
To recover the data signal for the m-th user, let Dm = cm⊗Γm denote the m-th user’s
data despreading matrix, where cm and Γm denote the data despreading code and data
decoding matrix respectively. Hence, the m-th user’s received signal after despreading
129

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
and decoding is given by
ym = DHmr
=
MU∑
µ=1
(cHm ⊗ ΓHm)(IM ⊗HL
µ + JM ⊗HUµ ) ((cµ ⊗Λµ)dµ + (cq ⊗Λq)pµ) +DH
mn
=
MU∑
µ=1
(cHmcµ)ΓHmHL
µΛµdµ + (cHmJMcµ)ΓHmHU
µΛµdµ
+
MU∑
µ=1
(cHmcq)ΓHmHL
µΛqpµ + (cHmJMcq)ΓHmHU
µΛqpµ +DHmn.
(6.28)
As mentioned in Section 6.1.1, when designing the spreading codes cµ and cq as
the column vectors of a normalized M ×M DFT matrix (see (6.6)) [94], the following
mutual shift orthogonality conditions are met
cHmcµ =
1, m = µ
0, m 6= µ
cHmcq = 0 since m 6= q
cHmJMcµ =
e−j 2π
M(1−m), m = µ
0, m 6= µ
cHmJMcq = 0 since m 6= q. (6.29)
Substituting (6.29) into (6.28), the despread data signal for the m-th user’s is given
by
ym = ΓHm
(HL
m + e−j 2πM
(1−m)HUm
)Λm
︸ ︷︷ ︸Hm
dm +DHmn (6.30)
where Hm denotes the equivalent data channel matrix for the m-th user. When the
precoder and the decoder matrices are designed using (6.9), Hm is circulant with its
first row given by [hm(0),01×(K−L), hm(L − 1), . . . , hm(1)], where the equivalent data
channel tap hm(l) is given in (6.10).
After data despreading and decoding, MUI-free reception is achieved. A single-
user linear equalizer Gm can be used to compensate the effect of channel distortion,
and the equalized data sequence is given by zm = Gmym. Let the pseudo-inverse
B†m = (BH
mBm)−1BHm (where B†
m is a K ×K matrix) denote the demapping matrix as
shown in Fig. 6.4. The equalized data symbol vector is given by zm = B†mzm. Finally,
zm is sliced and demapped to binary bits.
130

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
To recover the received pilot signals from all users, let Dq = cq⊗Γq denote the pilot
despreading matrix, where cq and Γq denote the pilot despreading and pilot decoding
matrices espectively. Given the mutual shift-orthogonality stated in (6.29), the received
pilot signals after despreading and decoding are given by
yq = DHq r
=
MU∑
µ=1
(cHq cµ)ΓHq HL
µΛµdµ + (cHq JMcµ)ΓHq HU
µΛµdµ
+
MU∑
µ=1
(cHq cq)ΓHq HL
µΛqpµ + (cHq JMcq)ΓHq HU
µΛqpµ +DHq n
=
MU∑
µ=1
ΓHq
(HL
µ + e−j 2πM
(1−q)HUµ
)Λq
︸ ︷︷ ︸H
(µ)q
pµ +DHq n (6.31)
where H(µ)q is the equivalent channel matrix experienced by the µ-th user’s pilot signal
(Note: the equivalent pilot channel matrix H(µ)q is different from the equivalent data
channel matrix Hµ due to the use of different spreading codes). Given the precoder
and the decoder design in (6.9), H(µ)q is a circulant matrix with its first row given by
[h(µ)q (0),01×(K−L), h
(µ)q (L− 1), . . . , h
(µ)q (1)], where the l-th equivalent pilot channel tap
for the µ-th user is given by
h(µ)q (l) = ej2πMK
(q−1)lhµ(l), l = 0, . . . , L− 1. (6.32)
Note that, based on (6.10), the equivalent data channel tap can be described as
hµ(l) = ej2πMK
(µ−1)lhµ(l) = ej2πMK
(µ−q)lh(µ)q (l), l = 0, . . . , L− 1. (6.33)
As shown in Fig. 6.4, (6.33) indicates that after obtaining the pilot channel estimate
for the m-th user, a phase rotation matrix is required to obtain the data channel
estimate for the m-th user. However, the last equality in (6.31) shows that the received
pilot signals from all user are superimposed. In the following section, novel pilot design
and placement schemes are proposed to achieve MUI-free uplink channel estimation.
6.2.2 Time Domain LS Channel Estimation and Pilot Design Crite-
rion
In this section, time domain LS channel estimation and pilot design criterion are de-
scribed. We can rewrite the despread pilot signal in (6.31) as
yq =
MU∑
µ=1
PL,µh(µ)q +DH
q n (6.34)
131

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
where h(µ)q = [h
(µ)q (0), . . . , h
(µ)q (L− 1)]T is the µ-th user’s pilot channel vector. Let Pµ
denote a K × K circulant pilot matrix with its first column given by pµ and its first
row given by [pµ(0), pµ(K − 1), . . . , pµ(1)], PL,µ in (6.34) is a K × L tall pilot matrix
that comprises the first L columns of Pµ.
Let hq =[h(1)Tq , . . . , h
(MU )Tq
]Tdenote the length-MUL pilot channel vector for all
users and A = [PL,1, . . . ,PL,MU] denote the K ×MUL tall pilot matrix for all users,
(6.34) can be written as
yq =[PL,1 · · · PL,MU
]
︸ ︷︷ ︸A
h(1)q
...
h(MU )q
︸ ︷︷ ︸hq
+DHq n. (6.35)
By using the LS method, the pilot channel estimate for all users, i.e. hLS,q =[h(1)T
LS,q , . . . ,h(MU )T
LS,q
]T, is obtained as
hLS,q = A†yq
= hq +A†DHq n (6.36)
where A† = (AHA)−1AH is the LS channel estimation matrix. To obtain the L-tap
channel estimate for MU users, the matrix A must have a full column rank which only
occurs when K ≥ MUL. Therefore, the number of users that can be supported for
simultaneous uplink channel estimation is constrained by K and L.
The MSE of the LS channel estimate hLS,q is given by
JLS = tr
E
[(hLS,q − hq
)(hLS,q − hq
)H]
= trE[(AHA)−1AHDH
q nnHDqA(AHA)−1]
= σ2ntr(AHA)−1
. (6.37)
It is shown in [85] that the minimum MSE is attained if and only if (AHA)−1 is a
diagonal matrix and all the diagonal elements are equal. Since
(AHA)−1 =
PHL,1PL,1 · · · PH
L,1PL,MU
.... . .
...
PHL,MU
PL,1 · · · PHL,MU
PL,MU
−1
, (6.38)
the criteria for minimizing the MSE in (6.37) is thus given by
PHL,mPL,µ =
αIL, m = µ
0L×L, m 6= µ(6.39)
132

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
where α = pHmpm is the total transmit pilot power per block. Substituting (6.39) and
(6.38) into (6.37), the MSE is bounded by JLS = MULσ2n
α . Therefore, to achieve MUI-
free LS channel estimation with minimum MSE, the pilot sequence for each user has
to be designed such that (6.39) is satisfied. This is detailed in the next section.
When (6.39) is satisfied, the m-th user’s LS channel estimation matrix is P†L,m =
(PHL,mPL,m)−1PH
L,m and the LS pilot channel estimate for the m-th user is obtained by
applying P†L,m to (6.34), i.e.
h(m)
LS,q = P†L,myq
=
MU∑
µ=1
(PH
L,mPL,m
)−1PH
L,mPL,µh(µ)q +P†
L,mDHq n
= h(m)q +P†
L,mDHq n. (6.40)
As shown in Fig. 6.4, a phase rotation matrix R(m)q is required to obtain the data
channel estimate. Based on (6.33), the phase rotation matrix is designed as
R(m)q = diag
ej
2π(m−q)MK
×0, . . . , ej2π(m−q)
MK(L−1)
. (6.41)
Hence, the data channel estimate for the m-th user is obtained as
hLS,m = R(m)qh(m)
LS,q
= hm +R(m)q P†
L,mDHq n. (6.42)
6.2.3 Pilot Design and Placement Schemes
Let pBS denote a length-K base sequence with good autocorrelation preoperty (i.e.
pBS is orthogonal to its own cyclic-shifted copy), the µ-th user’s pilot sequence pµ can
be generated by cyclic shifting the base sequence, i.e.
pµ = J(µ−1)LK pBS. (6.43)
One can confirm that when pµ is generated using the above equation, (6.39) is satisfied
when K ≥ MUL. Next, based on the pilot design framework given in (6.43), three pilot
design and placement schemes are proposed via different base sequence design.
6.2.3.1 Scheme-1: Single Pilot Symbol Placement
When a single pilot symbol is inserted in a transmission block, the base sequence is
designed as a Kronecker delta function, i.e.
pBS =
[1
0K−1×1
](6.44)
133

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
Figure 6.5: Proposed pilot design and placement schemes for uplink BS-CDMA.
where the pilot symbol power is assumed to be unity (as is the data symbol power).
Clearly, a Kronecker delta function has a good autocorrelation property. Therefore,
(6.39) is satisfied via (6.43).
For the single pilot symbol placement, the number of transmit data symbols per
block is K = K − 1 and the data symbol-to-sequence mapping matrix is given by
Bµ = J(µ−1)LK B, where B =
[01×K−1
IK−1
]. (6.45)
The above Bµ design gives an absent data symbol at the position where the single pilot
symbol is placed (i.e. pHµ dµ = 0). Hence, the low PAPR property of the transmit
signal is maintained. Note that the pilot signal and the data signal are both TDM and
CDM. The proposed single pilot symbol placement scheme is illustrated in Fig. 6.5(a).
6.2.3.2 Scheme-2: Multiple Interleaved Pilot Symbol Placement
Multiple pilot symbols may be desired to obtain more accurate channel estimate. In this
case, a base sequence withQ equal-spaced pilot symbols drawn from a Chu sequence [88]
can be used. Let aQ denote a length-Q Chu sequence column vector and Lp =KQ denote
134

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
the pilot symbol spacing (assuming Q divides K), the base sequence is given by
pBS = aQ ⊗[
1
0Lp−1×1
]. (6.46)
Since a Chu sequence has a good autocorrelation property, it follows that the above
pBS design also has a good autocorrelation property.
Similar to Scheme-1, no data symbol is placed at the position of the pilot symbols
and the low-PAPR property of the transmit signal is maintained (see Fig. 6.5(b)).
Hence the number of transmit data symbols per block is K = K−Q, and the mapping
matrix is given by
Bµ = J(µ−1)LK B, where B = IQ ⊗
[01×Lp−1
ILp−1
]. (6.47)
6.2.3.3 Scheme-3: Superimposed Pilot Placement
In the first two schemes, the zeros in the data sequence dµ are an unused resource. To
improve the bandwidth efficiency, this section proposes to transmit K data symbols
with K superimposed pilot symbols, as shown in Fig. 6.5(c). Let α = pHµ pµ denote
the transmit pilot power per block (where α can be flexibly assigned) and aK denote a
length-K Chu sequence vector; the base sequence can be designed as
pBS =
√α
KaK . (6.48)
To maintain the same total transmit signal power, the data signal power needs to be
reduced accordingly. Hence the mapping matrix is given by
Bµ =
√K − α
KIK . (6.49)
Fig. 6.6 shows that when α ≪ K, the PAPR increase due to the superimposition is
small, where data modulation is QPSK. Given K = 128, with α = 1, α = 4 and α = 16,
the PAPR increase is 0.3dB, 0.5dB and 0.7 dB respectively (compared to the case of
α = 0, i.e. no superimposed pilots). It is also shown that the PAPR of BS-CDMA
signals with superimposed pilot placement is still considerably lower (i.e. at least 2.5dB
lower) than the PAPR of OFDMA signals.
6.2.4 RLS Channel Tracking Algorithm in a Time-Varying Channel
When the proposed pilot symbol based schemes are used, the RLS algorithm can be
employed to enhance the channel estimation performance in a time-varying channel.
135

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
0 2 4 6 8 10 1210
−4
10−3
10−2
10−1
100
PAPR0 (dB)
CC
DF
α = 0α = 1α = 4α = 16OFDMA
Figure 6.6: PAPR of the BS-CDMA transmit signal with different transmit pilot power
α in the superimposed pilot placement scheme, where K = 128 and QPSK are used.
In Section 6.2.4.1, the RLS channel tracking algorithm is described. In Section 6.2.4.2,
the heuristically-optimal RLS forgetting factor is found based on the analytical MSE.
6.2.4.1 RLS Channel Tracking Algorithm
For the RLS algorithm, the cost function is defined as [91]
ξ(i) =i∑
n=1
λi−n ‖e(n, i)‖2 (6.50)
where λ is the forgetting factor with the property that 0 ≤ λ < 1 and ‖·‖ is the vector
norm operator. Since the actual channel response is unknown, the error term e(n, i)
in (6.50) is defined as the difference between the observed input at the n-th block and
the desired output at the i-th block, i.e.
e(n, i) = hLS(n)− hRLS(i) (6.51)
where hLS(n) is the LS channel estimate at the n-th block and hRLS(i) is the RLS
channel estimate at the i-th block. For brevity, the m-th user index is omitted in (6.51)
and the following derivation.
136

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
Substituting (6.51) into (6.50), the cost function can be expressed as
ξ(i) =i∑
n=1
λi−neH(n, i)e(n, i)
=i∑
n=1
λi−n
(hH
LS(n)hLS(n)− h
H
LS(n)hRLS(i)− h
H
RLS(i)hLS(n) +
hH
RLS(i)hRLS(i)
).
(6.52)
Taking the derivative of the above equation with respect to h∗RLS(i) and equating it to
zero, i.e.
∂ξ(i)
∂ h∗RLS(i)
=
(i∑
n=1
λi−n
)hRLS(i)−
i∑
n=1
λi−n hLS(n) = 0L×1. (6.53)
Solving the above equation, hRLS(i) is given by
hRLS(i) =
(1
∑in=1 λ
i−n
)i∑
n=1
λi−n hLS(n)
=
(1
∑in=1 λ
i−n
)
︸ ︷︷ ︸≈1−λ
(hLS(i) + λhLS(i− 1) + . . .+ λi−1 hLS(1)). (6.54)
As i → ∞, the first term in the second line of (6.54) approaches 1 − λ. Similar to
(6.54), the RLS channel estimate at the (i− 1)-th block is given by
hRLS(i− 1) =
(1
∑i−1n=1 λ
i−n−1
)i−1∑
n=1
λi−n−1 hLS(n)
=
(1
∑i−1n=1 λ
i−n
)
︸ ︷︷ ︸≈1−λ
(hLS(i− 1) + λhLS(i− 2) + . . .+ λi−2 hLS(1)). (6.55)
Substituting (6.55) to (6.54), the RLS channel tracking algorithm is obtained as [97]
hRLS(i) = (1− λ) hLS(i) + λhRLS(i− 1). (6.56)
In the above equation, when λ = 0, it becomes an ordinary LS method. As λ increases,
the memory of the RLS algorithm increases and the current RLS channel estimate relies
more on the previous RLS channel estimate.
To initialize the RLS algorithm in (6.56), hRLS(0) can be set to zero. Alternatively,
a pilot block can be sent prior to data transmission to obtain a reliable hRLS(0) [98].
Nevertheless, both initialization methods yield the same RLS steady-state error per-
formance.
137

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
6.2.4.2 Finding the Optimal RLS Forgetting Factor
As shown in (6.56), the forgetting factor λ is a key parameter to optimize the RLS
channel tracking algorithm. This section proposes a heuristic method to find the near-
optimal forgetting factor based on the analytical MSE of the RLS channel estimator.
Based on (6.54), the error of the RLS channel estimator is given by
εRLS(i) =hRLS(i)− h(i)
=1
∑in=1 λ
i−n
[(h(i)− h(i)
)+ λ
(h(i− 1)− h(i)
)+ . . .+ λi−1
(h(1)− h(i)
)]
+1
∑in=1 λ
i−n
[εLS(i) + λεLS(i− 1) + . . .+ λi−1εLS(1)
]
(6.57)
where εLS(i) =hLS(i)− h(i) denotes the LS channel estimation noise at the i-th block.
Hence, when the Jakes model [29] is assumed for a time-varying channel, the MSE can
be expressed as [98]
JRLS = trE[εRLS(i)ε
HRLS(i)
]
=
[(1− λ)(1 + λi)
(1 + λ)(1− λi).Lσ2
n
α
]+
[(1− λ)2
(1− λi)2λTΦλ− 2(1− λ)
(1− λi)λTϕ+ 1
](6.58)
where λ = [1, λ, . . . , λi−1]T and ϕ = [1, J0(2πfdTBLK), . . . , J0(2πfdTBLK(i − 1))]T is a
column vector of channel correlation in time (where J0(·) is the zero-th order Bessel
function, fd is the Doppler frequency and TBLK is the transmission block period). Φ
is the channel correlation matrix in time, which is a i× i diagonal-constant symmetric
matrix with the first row given by ϕT and the first column given by ϕ. Note that
the first bracket in (6.58) is the MSE due to the LS estimation noise, and the second
bracket is the MSE due to the channel variation caused by the Doppler frequency.
As shown in (6.58), the MSE can be minimized with respective to λ. However, tak-
ing the derivative of (6.58) with respect to λ does not lead to a closed form expression.
Hence, a heuristic method is proposed to find the near-optimal solution. That is, for a
given SNR and Doppler frequency, the MSE calculation based on (6.58) is performed
repeatedly with different values of λ. The λ value that yields the lowest MSE is then
chosen as the heuristically-optimal forgetting factor, denoted as λmin. Fig. 6.7 shows
the plot of the heuristically-optimal forgetting factor as a function of SNR and Doppler
frequency, where α is the total pilot symbol power in a transmission block (e.g. α = 1
can be used in the proposed Scheme-1 and α = 16 can be used in the proposed Scheme-
2 and scheme-3). It is shown that when the SNR is low or fd is small, λmin is large and
138

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
λm
in
SNR (dB)
fd=50Hzfd=250Hzfd=500Hz
Figure 6.7: The heuristically-optimal RLS forgetting factor as a function of SNR and
Doppler frequency. The solid line and the dotted line represent the transmit pilot power
of α = 1 and α = 16 respectively.
hRLS(i) relies more on hRLS(i− 1) (see (6.56)). As the SNR increases or fd increases,
λmin becomes small and hRLS(i) relies more on hLS(i).
6.2.5 Simulation Results and Discussion
The performance of BS-CDMA employing the proposed pilot design schemes with RLS
channel tracking algorithm in a time-varying channel is presented in this section. In
the simulation, the length of data sequence is K = 128, the length of the spreading
code is M = 8 and the baseband modulation scheme is QPSK. An 8-tap i.i.d. complex
Gaussian channel (L = 8) with the Jakes model [29] is used to generate the time-varying
channel. For simplicity, the channel is assumed to be static within a block but varies
across the blocks. 200,000 channel realizations are simulated. The CP length is set
to the maximum channel delay spread L to avoid IBI. The simulation is performed at
fd = 50Hz, 250Hz and 500Hz which correspond to vehicle speeds of 27km/hr, 135km/hr
and 270km/hr when the carrier frequency is 2GHz. Based on the signaling rate specified
in the LTE [11], the simulated block period is set to TBLK = 67.18µs.
For the pilot block scheme, the number of supported users is MU = M = 8. As
139

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
Table 6.1: Simulation parameters for the pilot block scheme and the proposed pilot
design schemes.
Pilot block Scheme-1 Scheme-2 Scheme-3
Transmit pilot symbols per block N/A Q = 1 Q = 16 α = 16
Transmit pilot symbols per slot K = 128 Q = 7 Q = 112 α = 112
specified in the LTE uplink [11], each slot consists of 7 transmission blocks and the pilot
block is placed in the middle of the slot (i.e. 128 pilot symbols per slot are transmitted).
The channel estimate obtained in the pilot block is used to calculate the MMSE-FDE
coefficients for all data blocks in the same slot. For the proposed pilot design schemes,
the number of supported users is MU = M − 1 = 7, however, all the blocks are used
for data transmission. The simulation parameters for the three proposed schemes are
given in Table 6.1, where Scheme-2 and Scheme-3 have the equivalent transmit pilot
power. The heuristically-optimal forgetting factor shown in Fig. 6.7 is used in the RLS
channel tracking algorithm, where ideal knowledge of the Doppler frequency and SNR
is assumed. Doppler frequency estimation is beyond the scope of this thesis.
Fig. 6.8 to Fig. 6.13 show the MSE and BER comparison of BS-CDMA employing
different pilot design and channel estimation schemes at fd = 50Hz, 250Hz and 500Hz.
Fig. 6.9 shows that Scheme-2 and the pilot block scheme are both able to achieve the
BER performance close to the ideal channel estimation case at fd = 50Hz. Although
Fig. 6.8 shows that Scheme-2 and Scheme-3 give the same MSE due to the equivalent
transmit pilot power, Fig. 6.9 shows that Scheme-3 has slightly degraded BER per-
formance compared to Scheme-2. This is because, in order to maintain the same total
transmit signal power, Scheme-3 has lower transmit power on each data symbol than
Scheme-2. In other words, given the same transmit signal power, Scheme-3 transmits
less energy per bit than Scheme-2. Hence, when comparing at the same energy per bit
level, Scheme-2 and Scheme-3 will give the same BER performance. Fig. 6.8 and Fig.
6.9 show that Scheme-1 does not perform as well as Scheme-2 and Scheme-3 since its
transmit pilot power is too low to obtain sufficiently accurate channel estimates.
Fig. 6.10 to Fig. 6.13 show that the pilot block scheme suffers from severe per-
formance degradation due to the out-dated channel estimate as the Doppler frequency
increases. However, even with less transmit pilot power per slot (see Table 6.1), the
proposed Scheme-2 and Scheme-3 with RLS channel tracking are able to provide sig-
nificant performance improvement over the pilot block scheme in a fast time-varying
channel. In particular, Fig. 6.13 shows that the performance of BS-CDMA with the
140

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
MS
E
Pilot blockScheme-1 (Q = 1)Scheme-2 (Q = 16)Scheme-3 (α = 16)
Figure 6.8: MSE of different pilot design and channel estimation schemes in a 8-tap
i.i.d. complex Gaussian channel at fd = 50Hz.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IdealPilot blockScheme-1 (Q = 1)Scheme-2 (Q = 16)Scheme-3 (α = 16)
Figure 6.9: BER of BS-CDMA employing different pilot design and channel estimation
schemes in a 8-tap i.i.d. complex Gaussian channel at fd = 50Hz.
141

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
MS
E
Pilot blockScheme-1 (Q = 1)Scheme-2 (Q = 16)Scheme-3 (α = 16)
Figure 6.10: MSE of different pilot design and channel estimation schemes in a 8-tap
i.i.d. complex Gaussian channel at fd = 250Hz.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IdealPilot blockScheme-1 (Q = 1)Scheme-2 (Q = 16)Scheme-3 (α = 16)
Figure 6.11: BER of BS-CDMA employing different pilot design and channel estimation
schemes in a 8-tap i.i.d. complex Gaussian channel at fd = 250Hz.
142

6.2. Pilot Symbol Based Channel Estimation for Uplink BS-CDMA
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
MS
E
Pilot blockScheme-1 (Q = 1)Scheme-2 (Q = 16)Scheme-3 (α = 16)
Figure 6.12: MSE of different pilot design and channel estimation schemes in a 8-tap
i.i.d. complex Gaussian channel at fd = 500Hz.
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IdealPilot blockScheme-1 (Q = 1)Scheme-2 (Q = 16)Scheme-3 (α = 16)
Figure 6.13: BER of BS-CDMA employing different pilot design and channel estimation
schemes in a 8-tap i.i.d. complex Gaussian channel at fd = 500Hz.
143

Chapter 6. Pilot Design and Channel Estimation for Uplink BS-CDMA
proposed Scheme-2 and Scheme-3 remains robust at fd = 500Hz2, where Scheme-2 and
Scheme-3 are shown to perform within 1.3dB and 2.2dB to the ideal channel estima-
tion case at a BER of 0.001. However, the BS-CDMA system employing the pilot block
scheme fails to work in such a rapidly time-varying channel.
6.3 Conclusions
In this chapter, novel pilot design and channel estimation schemes for uplink BS-CDMA
were proposed. It was shown that BS-CDMA could lead to a special case of IFDMA
via the DFT spreading/despreading code design and the progressive phase rotation
precoder/decoder design. In the conventional uplink CDMA system, an individual
pilot spreading code is assigned to each user to avoid MUI in uplink channel estimation.
However, the bandwidth efficiency is considerably lowered. To improve the bandwidth
efficiency, this chapter proposed that all the users transmit their pilot signals using a
common pilot spreading code. To achieve MUI-free uplink channel estimation, three
pilot design and placement schemes were proposed based on the criterion of mutual
orthogonality between all users’ transmit pilot sequences. Moreover, the RLS channel
tracking algorithm was employed in the proposed pilot design schemes to enhance the
channel estimation performance in a time-varying channel.
The performance of the proposed pilot design schemes employing the RLS channel
tracking algorithm was compared with the pilot block based channel estimation scheme
specified in the LTE uplink. Results showed that the proposed pilot design and channel
tracking schemes were able to achieve comparable performance to the pilot block scheme
in a slow time-varying channel, while providing significant performance improvement
over the pilot block scheme in a fast time-varying channel. In particular, the results
showed that the performance of BS-CDMA employing the proposed Scheme-2 and
Scheme-3 remained robust (i.e. performed within 1.3dB and 2.2dB to the ideal channel
estimation case) at fd = 500Hz. However, a BS-CDMA system employing the pilot
block scheme failed to work in such a high mobility scenario due to the out-dated
channel estimate.
2Simulation results are verified in a more realistic case where the channel response varies from sample
to sample within a block (see Appendix C). Note that this channel variation within a block translates
to ICI in the frequency domain and may cause performance degradation. It is shown in Appendix C
that for Scheme-2 and Scheme-3, the performance degradation due to the channel variation within a
block remains small at fd = 500Hz (i.e. less than 1dB at a BER of 0.001).
144

Chapter 7
Conclusions
The research interest of broadband wireless communication systems has primary been
focused on OFDMA due to the low complexity FDE, simple adaptation to MIMO
techniques and flexible resource allocation. However, the main drawback of OFDMA is
its high-PAPR signal, which results in a significant power efficiency loss in the transmit
PA. Since this is particularly undesirable for a power-limited mobile device, SC-FDMA
was proposed in the LTE uplink to enable power efficient transmission. SC-FDMA has
attracted a lot of research attention for the following reasons. A low-PAPR SC transmit
signal is achieved, an efficient FDE can be employed and flexible resource allocation
can be performed. Since SC-FDMA is a relative new broadband technique, not all the
issues have been well-addressed in the literature. Hence, this thesis has focused on the
areas of DFE and channel estimation for SC-FDMA.
7.1 Thesis Summary
The fundamentals of radio channel propagation and mitigation techniques were de-
scribed in Chapter 2. The growing demand for high data-rate wireless communication
systems has led to the development of broadband wireless communication techniques,
and it has become inevitable for broadband transmit signals to experience frequency-
selective channels. To combat the frequency-selective distortion, FDE has been widely
used in both MC and SC systems (such as OFDM/OFDMA and SC-FDE/SC-FDMA)
due to its simplicity. In particular, this thesis focuses on the SC-FDMA broadband
technique that is currently employed in the LTE uplink.
A mathematical description of a SC-FDMA system was given in Chapter 3, and
the PAPR characteristics of SC-FDMA transmit signals were investigated. The main
advantage of SC-FDMA over OFDMA is its low-PAPR transmit signal, which enables
145

Chapter 7. Conclusions
power-efficient transmission. It was shown that the PAPR of the IFDMA and LFDMA
transmit signal was 3-4dB lower than that of an OFDMA transmit signal. However,
RFDMA (i.e. SC-FDMA with randomized subcarrier mapping) exhibited a high-PAPR
transmit signal close to OFDMA. Hence, only IFDMA and LFDMA were specified in
the LTE uplink standard. To further reduce the PAPR, frequency domain spectrum
shaping can be employed at the cost of bandwidth efficiency reduction, and/or PAPR
reduction modulation schemes (such as π/2-BPSK and π/4-QPSK) can be used.
Unlike MC systems, SC systems experience channel-induced ISI in a frequency-
selective channel. Hence, SC-FDMA with linear MMSE-FDE suffers from a residual-
ISI problem, which degrades the equalization performance. In Chapter 4, the use of a
hybrid-DFE (with a frequency domain FF filter and a time domain FB filter) [44, 52]
was extended to SC-FDMA. It was shown that the hybrid-DFE outperformed a linear
FDE in the uncoded case, but led to a catastrophic error propagation problem in the
channel coding case due to unreliable FB symbols. To overcome the error propagation
problem, frequency domain IB-DFE (where FF and FB filters are both implemented
in the frequency domain) [53] was extended to the application of SC-FDMA. Since
the performance of the IB-DFE is optimized according to the FB reliability, the key
contribution of this chapter was to propose new FB reliability estimation methods that
facilitates the practical operation of IB-DFE in both coded and uncoded cases. It is
shown in [99] that the proposed FB reliability estimation method has similar or better
error rate performance than the training sequence method without the associated loss
of bandwidth efficiency.
A channel estimator is required at the receiver to obtain the channel estimate for
equalizer coefficient calculation. In particular, a number of transform-based channel
estimation techniques were investigated in Chapter 5. One novel contribution was the
derivation of a uniform-weighted filtering algorithm for DFT-based channel estimation.
Compared to the denoise filter [78], the proposed uniform-weighted filter solved the
error floor problem at high SNR while maintaining good noise reduction at low SNR.
Another key contribution was to propose the PI-DFT based channel estimator. By
employing a pre-interleaving scheme such that the discontinuities at the edges of the
DFT periodic extension are avoided, the channel energy compaction (and thus the
noise filtering performance) can be significantly improved. Result showed that SC-
FDMA with a PI-DFT based channel estimator (which has a much lower computational
complexity) was able to achieve a BER close to that with an optimal LMMSE channel
estimator. Finally, a novel windowed DFT-based noise variance estimator was presented
to facilitate MMSE-FDE coefficient calculation. The proposed noise variance estimator
146

7.2. Future Work
was shown to remain unbiased up to an SNR of 50dB.
Pilot block based channel estimation (as specified in the LTE uplink) is liable to
performance degradation in a fast time-varying channel due to the effects of an out-
dated channel estimate. To improve the performance in a high-mobility scenario, the
pilot symbol based design and channel estimation schemes for a bandwidth-efficient
uplink BS-CDMA [94] (which can be regarded as IFDMA) were proposed in Chapter
6. The novel contribution of this work is to propose the use of a common pilot spreading
code for all users such that a high bandwidth efficiency is achieved. To achieve MUI-
free uplink channel estimation, three novel pilot design and placement schemes were
proposed. Moreover, a RLS channel tracking algorithm was employed to enhance the
channel estimation performance in a time-varying channel. Results showed that the
performance of the proposed schemes remained robust at a Doppler frequency of 500Hz,
while the LTE-based pilot block scheme failed to work in such a high-mobility scenario.
7.2 Future Work
This thesis has investigated DFE, channel estimation, pilot design and placement
schemes and RLS channel tracking algorithms for SC-FDMA in the single-input single-
output (SISO) case. However, in order to fulfill the targeted high data rate and spec-
trum efficiency required in the LTE-Advanced1, it becomes inevitable to employ multi-
antenna techniques on the LTE-Advanced uplink [12]. Hence, the design challenges
and solutions for MIMO SC-FDMA need to be addressed.
• For open-loop spatial multiplexing (SM) OFDM/OFDMA, the received MC sig-
nals experience inter-stream interference, and MMSE successive interference can-
cellation (SIC) [100,101] is commonly used to mitigate the inter-stream interfer-
ence. However, for open loop SM SC-FDE/SC-FDMA, the received SC signals
experience inter-stream interference as well as ISI. Since the channel-induced in-
terference is now two-dimensional (2D), a 2D interference canceler can be devel-
oped to improve the performance of open-loop SM SC-FDE/SC-FDMA. Note that
since MC systems do not suffer from channel-induced ISI (or ICI), such a design
challenge does not exist in MIMO OFDM/OFDMA systems. For open-loop SM
OFDM/OFDMA systems, one-dimensional (1D) inter-stream interference cancel-
lation is sufficient to optimize the performance at the receiver.
1The LTE-Advanced targets a downlink peak data rate of 1Gbps and an uplink peak data rate of
500Mbps. Moreover, the LTE-Advanced standard aims to support a downlink peak spectrum efficiency
of 30bps/Hz and a uplink peak spectrum efficiency of 15bps/Hz [14].
147

Chapter 7. Conclusions
• For BS-CDMA systems, the proposed pilot design and placement schemes can
easily be extended to the application of single-user MIMO channel estimation.
Moreover, when STBC or space-frequency block code (SFBC) is employed as the
transmit diversity scheme, performance degradation may occur due to the mis-
matched channel response between adjacent transmission blocks (e.g. in a fast
time-varying channel) or adjacent subcarriers (e.g. in a very frequency-selective
channel) [102]. Since the resources of BS-CDMA are shared in the code domain,
a new class of space-code block code (SCBC) can be developed as the transmit
diversity, where two signals are spread via two different orthogonal spreading
codes, but transmitted simultaneously using the same frequency resource. There-
fore, the impact of the mismatched time domain and frequency domain channel
response is minimized, and better performance can be expected.
• As mentioned in Chapter 2, CDS could significantly enhance the cell throughput
[55], and the impact of imperfect channel information (due to the feedback delay)
was investigated in [32]. However, most of the resource allocation research for
SC-FDMA has focused on the single-antenna scenario. As the deployment of
MIMO techniques is expected in the LTE-Advanced uplink, multi-user resource
allocation algorithms for MIMO SC-FDMA must be addressed.
148

Appendix A
Comparison of an L-tap i.i.d.
Complex Gaussian Channel
Model and the 3GPP SCME
This section provides a channel model comparison for an L-tap i.i.d. complex Gaus-
sian channel model with uniform PDP and the 3GPP spatial channel model extension
(SCME) [28]. The 3GPP SCME is a widely used interim channel model for simulating
link and system performance of the LTE, where the NLoS urban macro (micro) sce-
nario models the typical NLoS channel of macrocell (microcell) in urban areas. The
Matlab codes for generating the 3GPP SCME with different scenarios can be found
in [103]. Despite the popularity of the 3GPP SCME, the reason of employing L-tap
i.i.d. complex Gaussian channel model throughout the thesis is for the convenience of
performance analysis and MSE derivation, especially in Chapter 6. Hence, this section
highlights the characteristics of 8-tap i.i.d. complex Gaussian channel model (L = 8
is used in this thesis) and the 3GPP SCME with NLoS urban macro and urban mi-
cro scenarios in terms of channel PDP, delay spread and coherence bandwidth. A BER
comparison of SC-FDMA with different channel models is also presented in this section.
For the SC-FDMA system model used in this thesis, the subcarrier mapping is
∆f = 15kHz [4], the number of total subcarriers is N = 512 and the number of user
subcarriers is K = 128. Hence, the total available system bandwidth is N × ∆f =
7.68MHz, a SC-FDMA symbol period is TSCFDMA = 1∆f = 66.67µs, the sample period
is TS = 1N×∆f = 0.1302µs. Fig. A.1 shows the channel PDPs for 8-tap i.i.d. complex
Gaussian channel, the 3GPP urban macro SCME and the 3GPP urban micro SCME,
where the channel PDP is defined as the expected power per channel tap v.s. excess
149

Appendix A. Comparison of an L-tap i.i.d. Complex Gaussian Channel Model andthe 3GPP SCME
0 1 2 3 4 50
0.2
0.4
(a) 8−tap i.i.d. complex Gaussian channel model
Excess delay (µs)
PD
P
0 1 2 3 4 50
0.2
0.4
(b) 3GPP urban macro SCME
Excess delay (µs)
PD
P
0 1 2 3 4 50
0.2
0.4
(c) 3GPP urban micro SCME
Excess delay (µs)
PD
P
Figure A.1: Channel PDPs: (a) 8-tap i.i.d complex Gaussian model. (b) 3GPP urban
macro SCME. (c) 3GPP urban micro SCME. The sample period is TS = 0.1302µs and
the mean power of all the channel taps is normalized to 1.
delay. In Fig. A.1, the mean power of all the channel taps is normalized to 1. It can be
seen that the maximum excess delay in the urban macro scenario (see Fig. A.1(b)) is
longer than that in the urban micro scenario (see Fig. A.1(c)) due to larger cell size. In
both SCME scenarios, channel power tends to decay as the excess delay increases. It
is also shown that 8-tap i.i.d. complex Gaussian channel model has similar maximum
excess delay (≈ 1µs) as the urban micro SCME, but its expected channel power is the
same for all the taps (see Fig. A.1(a)).
Recall the channel parameter calculation for the mean excess delay (τ) in (2.11),
the RMS delay spread (τRMS) in (2.12) and the coherence bandwidth estimation (f0)
in (2.13). A comparison of τ , τRMS and f0 with the above mentioned channel models is
summarized in Table A.1. Table A.1 shows that the urban macro SCME has larger RMS
delay spread than the urban micro SCME, so its coherence bandwidth is smaller (due
to the reciprocal relationship between τRMS and f0). Hence, the urban macro SCME
150

Table A.1: Comparison of mean excess delay (τ), RMS delay spread (τRMS) and co-
herence bandwidth (f0) with (a) 8-tap i.i.d complex Gaussian model, (b) 3GPP urban
macro SCME and (c) 3GPP urban micro SCME.
Channel model (a) 8-tap i.i.d. (b) SCME-macro (c) SCME-micro
τ 0.4557µs 0.4711µs 0.2961µs
τRMS 0.2983µs 0.8414µs 0.2942µs
f0 670kHz 238kHz 680kHz
is more frequency-selective than the urban micro SCME. Moreover, the 8-tap i.i.d.
complex Gaussian channel has similar RMS delay spread as the urban micro SCME,
and this leads similar coherence bandwidth for both channel models. Therefore, despite
different channel PDPs and the mean excess delay, the channel characteristic of 8-tap
i.i.d. complex Gaussian channel model used in this thesis should be more similar to
the urban micro SCME (compared to the urban macro SCME) in terms of coherence
bandwidth and frequency-selectivity.
Fig. A.2 shows a BER comparison of SC-FDMA with MMSE-FDE in 8-tap i.i.d.
complex Gaussian channel, the 3GPP urban macro SCME and the 3GPP urban micro
SCME, where the baseband modulation scheme is QPSK. It can be seen that the
performance of SC-FDMA operating in the urban macro SCME outperforms the urban
macro SCME. This is because the fluctuation of the instantaneous received SNR is
smaller in a more frequency-selective fading channel (see Section 2.2.1). It is also shown
in Fig. A.2 that the performance of SC-FDMA operating in a 8-tap i.i.d. complex
Gaussian channel is more similar to the urban micro SCME (compared to urban macro
SCME) due to similar channel frequency selectivity. Moreover, the performance of
LFDMA is shown to be more sensitive to different channel model compared to IFDMA.
Hence, the impact of different channel models to the proposed techniques in this thesis
can be investigated as further work to obtain broader conclusions. For the 8-tap i.i.d
complex Gaussian channel, the conclusions drawn in this thesis are valid in a fairly
frequency-selective fading channel, which may not be always true in the LoS case or a
flat fading channel.
151

Appendix A. Comparison of an L-tap i.i.d. Complex Gaussian Channel Model andthe 3GPP SCME
0 5 10 15 20 2510
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
IFDMA (8−tap i.i.d.)IFDMA (SCME−macro)IFDMA (SCME−micro)LFDMA (8−tap i.i.d.)LFDMA (SCME−macro)LFDMA (SCME−micro)
Figure A.2: BER comparison of SC-FDMA with MMSE-FDE in 8-tap i.i.d. complex
Gaussian channel model, 3GPP urban macro SCME and 3GPP urban micro SCME.
The baseband modulation scheme is QPSK.
152

Appendix B
Mitigating the BER Floor due to
the Denoise Channel Estimator
The time domain LS channel estimator is equivalent to the DFT-based channel estima-
tor with a denoise filter. As mentioned in Section 5.2.5, the truncation of the smeared
channel energy results in a channel estimation error floor at high SNR, which results
in inaccurate equalizer coefficients. Hence, the BER floor occurs at high SNR. Two
solutions of mitigating the BER floor due to the denoise assumption in the time domain
LS channel estimator are provided as follows.
It is shown in [20] that the channel estimation error floor due to the truncation of
the smeared channel energy is mainly distributed on the subcarriers at the frequency
edges. Hence, by assigning less or non data signal power at the frequency edges, the
BER floor at high SNR due to inaccurate FDE at the frequency edges can be mitigated.
Alternatively, the BER floor can be mitigated via the use of channel coding. Fig.
5.8 shows that the denoise assumption gives an uncoded BER floor of 0.01. Given the
uncoded BER of 0.01, it is shown in [2] that a 1/2-rate Turbo code is able to reduce
the BER level to be lower than 0.0001, and more decoding iterations yields better
performance. Since a Turbo code is employed in the LTE, the BER floor due to the
channel estimation error floor can be mitigated. However, when the uncoded BER
level is higher than 0.06, it may not be possible to correct the erroneous bits via Turbo
coding regardless the number of decoding iterations [2]. Channel coding can be used
in conjunction with the first solution to mitigate the BER floor more effectively.
153


Appendix C
Simulation Results with
Sample-Based Channel Variation
Fig. C.1 shows the BER performance of BS-CDMA employing the proposed pilot
design and channel estimation schemes at fd = 500Hz, where the channel variation
from sample to sample within a block is considered in the simulation. Apart from the
sample-based channel variation, the rest of simulation parameters are the same as those
used in Fig. 6.13.
It is shown in Fig. C.1 that for Scheme-2 and Scheme-3, the performance degrada-
tion due to the channel variation within a block remains small at fd = 500Hz (i.e. less
than 1dB at a BER of 0.001). For the three proposed schemes, it is observed that this
performance degradation becomes larger at higher SNRs. As mentioned previously,
a non-static channel response within a block leads to ICI in the received frequency
domain symbols, which cannot be corrected via one-tap FDE. Hence, as the SNR in-
creases, the ICI power becomes significant compared to the noise power and a larger
BER degradation is observed. For the pilot block scheme, the poor BER performance
is dominated by the out-dated channel estimate from the pilot block to the data blocks
at fd = 500Hz, so the impact of ICI becomes relatively negligible in this case.
155

Appendix C. Simulation Results with Sample-Based Channel Variation
0 5 10 15 20 25 3010
−4
10−3
10−2
10−1
100
SNR (dB)
BE
R
Pilot blockScheme−1Scheme−2Scheme−3Pilot block (Sample)Scheme−1 (Sample)Scheme−2 (Sample)Scheme−3 (Sample)
Figure C.1: BER of BS-CDMA employing the proposed pilot design and channel es-
timation schemes in a 8-tap i.i.d. complex Gaussian channel with the Jakes model at
fd = 500Hz. The dashed line assumes the static channel response within a block. The
solid line with markers assumes that the channel response varies from sample to sample
within a block.
156

Appendix D
List of Publications
• G. Huang, A. Nix, and S. Armour, “Impact of radio resource allocation and pulse
shaping on PAPR of SC-FDMA signals,” in Proc. IEEE Personal, Indoor and
Mobile Radio Communications (PIMRC’07), Sep. 2007.
• G. Huang, A. Nix, and S. Armour, “Decision feedback equalization in SC-FDMA,”
in Proc. IEEE Personal, Indoor and Mobile Radio Communications (PIMRC’08),
Sep. 2008.
• G. Huang, A. Nix, and S. Armour, “Channel estimation in 4G LTE,” United
Kingdom Patent Application No. GB0902290.6, filed in May 2009.
• G. Huang, A. Nix, and S. Armour, “Feedback reliability calculation for an it-
erative block decision feedback equalizer,” in Proc. IEEE Vehicular Technology
Conference (VTC’09-Fall), Sep. 2009.
• G. Huang, A. Nix, and S. Armour, “DFT-based channel estimation and noise vari-
ance estimation techniques for single-carrier FDMA,” in Proc. IEEE Vehicular
Technology Conference (VTC’10-Fall), Sep. 2010.
• G. Huang, Y. Wang, and J. Coon, “Pilot design and channel estimation for uplink
block spread CDMA,” submitted to IEEE Trans. Wireless Commun..
157


Bibliography
[1] C. Shannon, “A mathematical theory of communication,” Bell Sys. Tech. J.,
vol. 27, pp. 379–423, 623–656, Jul., Oct. 1948.
[2] C. Berrou, A. Glavieux, and P. Thitimajshima, “Near shannon limit error-
correcting code and decoding: Turbo-codes (1),” in Proc. IEEE International
Conference on Communications (ICC’93), vol. 2, May 1993, pp. 1064–1070.
[3] H. Holma and A. Toskala, WCDMA for UMTS: Radio Access for Third Genera-
tion Mobile Communications, 4th ed. England: John Wiley & Sons, 2007.
[4] 3rd Generation Partnership Project; Technical Specification Group Radio Access
Network; Evolved Universal Terrestrial Radio Access (E-UTRA); Physical
Channels and Modulation (Release 8), 3GPP Std. TS 36.211, Dec. 2008. [Online].
Available: http://www.3gpp.org/ftp/Specs/html-info/36212.htm
[5] Supplement to IEEE Standard for Information technology - Telecommunications
and information exchange between systems - Local and metropolitan area
networks - Specific requirements, Part 11: Wireless LAN Medium Access Control
(MAC) and Physical Layer (PHY) specifications, High-speed Physical Layer in
the 5 GHz Band, IEEE Std. 802.11a-1999(R2003), Jun. 2003. [Online]. Available:
http://standards.ieee.org/getieee802/download/802.11a-1999.pdf
[6] IEEE Standard for Information technology - Telecommunications and information
exchange between systems - Local and metropolitan area networks - Specific
requirements, Part 11: Wireless LANMedium Access Control (MAC) and Physical
Layer (PHY) specifications: Higher-Speed Physical Layer (PHY) Extension in the
2.4 GHz band, IEEE Std. 802.11b-1999(R2003), Jun. 2003. [Online]. Available:
http://standards.ieee.org/getieee802/download/802.11b-1999.pdf
[7] IEEE Standard for Information technology - Telecommunications and information
exchange between systems - Local and metropolitan area networks - Specific
159

BIBLIOGRAPHY
requirements, Part 11: Wireless LAN Medium Access Control (MAC) and
Physical Layer (PHY) specifications, Amendment 4: Further Higher Data Rate
Extension in the 2.4 GHz Band, IEEE Std. 802.11g-2003, Jun. 2003. [Online].
Available: http://standards.ieee.org/getieee802/download/802.11g-2003.pdf
[8] IEEE Standard for Information technology - Telecommunications and information
exchange between systems - Local and metropolitan area networks - Specific
requirements, Part 11: Wireless LAN Medium Access Control (MAC)
and Physical Layer (PHY) specifications, Amendment 5: Enhancement for
Higher Throughput, IEEE Std. 802.11n-2009, Oct. 2009. [Online]. Available:
http://standards.ieee.org/getieee802/download/802.11n-2009.pdf
[9] IEEE Standard for Local and Metropolitan Area Networks - Part 16: Air
Interface for Broadband Wireless Access Systems, IEEE Std. 802.16-2009, May
2009. [Online]. Available: http://standards.ieee.org/getieee802/download/802.
16-2009.pdf
[10] 3rd Generation Partnership Project; Technical Specification Group Radio Access
Network; Requirements for Evolved UTRA (E-UTRA) and Evolved UTRAN
(E-UTRAN) (Release 8), 3GPP Std. TR 25.913, Dec. 2008. [Online]. Available:
http://www.3gpp.org/ftp/Specs/html-info/25913.htm
[11] S. Sesia, I. Toufik, and M. Baker, LTE - The UMTS Long Term Evolution: from
Theory to Practice. John Wiley & Son, 2009.
[12] S. Parkvall, E. Dahlman, A. Furuskar, Y. Jading, M. Olsson, S. Wanstedt, and
K. Zangi, “LTE-advanced - evolving LTE towards IMT-advanced,” in Proc. IEEE
Vehicular Technology Conference, (VTC’08-Fall), Sep. 2008, pp. 1–5.
[13] Framework and Overall Objectives of the Future Development of IMT-2000 and
Systems beyond IMT-2000, ITU-R Std. M. 1645, Jul. 2010. [Online]. Available:
http://www.itu.int/rec/R-REC-M.1645/e
[14] 3rd Generation Partnership Project; Technical Specification Group Radio
Access Network; Requirements for further advancements for Evolved Universal
Terrestrial Radio Access (E-UTRA) (LTE-Advanced) (Release 9), 3GPP Std.
TR 36.913, Dec. 2009. [Online]. Available: http://www.3gpp.org/ftp/Specs/
archive/36 series/36.913/
[15] J. Proakis, Digital Communications, 4th ed. New York: McGraw-Hill, 2001.
160

BIBLIOGRAPHY
[16] G. Huang, A. Nix, and S. Armour, “Impact of radio resource allocation and pulse
shaping on PAPR of SC-FDMA signals,” in Proc. IEEE Personal, Indoor and
Mobile Radio Communications (PIMRC’07), Sep. 2007.
[17] ——, “Decision feedback equalization in SC-FDMA,” in Proc. IEEE Personal,
Indoor and Mobile Radio Communications (PIMRC’08), Sep. 2008.
[18] ——, “Feedback reliability calculation for an iterative block decision feedback
equalizer,” in Proc. IEEE Vehicular Technology Conference (VTC’09-Fall), Sep.
2009.
[19] ——, “Channel estimator,” United Kingdom Patent Application No.
GB0902290.6, filed in May 2009.
[20] ——, “DFT-based channel estimation and noise variance techniques for single-
carrier FDMA,” in Proc. IEEE Vehicular Technology Conference (VTC’10-Fall),
Sep. 2010.
[21] G. Huang, Y. Wang, and J. Coon, “A new pilot transmission scheme for uplink
block spread CDMA,” submitted to IEEE Trans. Veh. Technol.
[22] B. Sklar, “Rayleigh fading channels in mobile communication systems part I:
characterization,” IEEE Wireless Commun. Mag., vol. 35, no. 7, pp. 90–100, Jul.
1997.
[23] C. Balanis, Antenna Theory: Analysis and Design, 2nd ed. New York: John
Wiley & Sons, 1996.
[24] T. Rappaport, Wireless Communications. Upper Saddle River, New Jersey:
Prentice Hall, 1996.
[25] S. Seidel, T. Rappaport, S. Jain, M. Lord, and R. Singh, “Path loss, scatter-
ing and multipath delay statistics in four european cities for digital cellular and
microcellular radiotelephone,” IEEE Trans. Veh. Technol., vol. 40, no. 4, pp.
721–730, Nov. 1991.
[26] D. Cox, R. Murray, and A. Norris, “800-MHz attenuation measured in and around
suburban houses,” Bell Lab. Tech. J., vol. 63, no. 6, pp. 921–954, Jul.-Aug. 1984.
[27] J. Parsons, The Mobile Radio Propagation Channel, 2nd ed. England: John
Wiley & Sons, 2000.
161

BIBLIOGRAPHY
[28] D. Baum, J. Hansen, J. Salo, G. Galdo, M. Milojevic, and P. Kyosti, “An in-
terim channel model for beyond-3G systems: extending the 3GPP spatial chan-
nel model (SCM),” in Proc. IEEE Vehicular Technology Conference (VTC’05-
Spring), vol. 5, May 2005, pp. 3132–3136.
[29] W. Jakes, Microwave Mobile Communications. New York: John Wiley & Sons,
1974.
[30] R. Clarke, “A statistical theory of mobile radio reception,” Bell Sys. Tech. J.,
vol. 47, no. 6, pp. 957–1000, Jul.-Aug. 1968.
[31] R. Steele and L. Hanzo, Mobile Radio Communications, 2nd ed. England: John
Wiley & Sons, 1999.
[32] H. Myung, O. Kyungjin, L. Junsung, and D. Goodman, “Channel-dependent
scheduling of an uplink SC-FDMA with imperfect channel information,” in Proc.
IEEE Wireless Communications and Networking Conference (WCNC’08), Mar.
2008, pp. 1860–1864.
[33] B. Sklar, “Rayleigh fading channels in mobile communication systems part II:
mitigation,” IEEE Wireless Commun. Mag., vol. 35, no. 7, pp. 102–109, Jul.
1997.
[34] D. Brennan, “Linear diversity combining techniques,” Proc. IEEE, vol. 47, no. 1,
pp. 1075–1102, Jun. 1959.
[35] A. Dammann and S. Kaiser, “Standard conformable antenna diversity techniques
for OFDM and its application to the DVB-T system,” in Proc. IEEE Global
Telecommunications Conference, (Globecom’01), vol. 16, Nov. 2001, pp. 3100–
3105.
[36] S. Alamouti, “A simple transmit diversity technique for wireless communica-
tions,” IEEE J. Sel. Areas Commun., vol. 16, no. 8, pp. 1451–1458, Oct. 1998.
[37] H. Sari, G. Karam, and I. Jeanclaude, “Transmission techniques for digital ter-
restrial TV broadcasting,” IEEE Wireless Commun. Mag., vol. 33, no. 2, pp.
100–109, Feb. 1995.
[38] R. Chang, “Synthesis of band limited orthogonal signals for multichannel data
transmission,” Bell Syst. Tech. J., vol. 45, pp. 1775–1796, Dec. 1966.
162

BIBLIOGRAPHY
[39] ——, “Orthogonal frequency multiplex data transmission system,” U.S. Patent
No. 3,488,445, filed in Nov. 1966 and issued in Jan. 1970.
[40] B. Salzberg, “Performance of an efficient parallel data transmission system,”
IEEE Trans. Commun., vol. COM-15, pp. 805–813, Dec. 1967.
[41] R. Mosier and R. Clabaugh, “Kineplex, a bandwidth efficient binary transmission
system,” AIEE Trans., vol. 76, pp. 723–728, Jan. 1958.
[42] S. Weinstein and P. Ebert, “Data transmission by frequency division multiplexing
using the discrete Fourier transform,” IEEE Trans. Commun., vol. COM-19,
no. 10, pp. 628–634, Oct. 1971.
[43] H. Sari, G. Karam, and I. Jeanclaude, “Channel equalization and synchronization
in OFDM systems,” in International Tirrenia Workshop on Digital Communica-
tions, 1993.
[44] D. Falconer, S. Ariyavisitakul, A. Benyamin-Seeyar, and B. Eidson, “Frequency
domain equalization for single-carrier broadband wireless systems,” IEEE Wire-
less Commun. Mag., vol. 40, no. 4, pp. 58–66, Apr. 2002.
[45] H. Sari, Y. Levy, and G. Karam, “Orthogonal frequency-division multiplex access
for the return channel in CATV networks,” in ICT’96 Conf. Rec., Apr. 1996.
[46] H. Sari and G. Karam, “Orthogonal frequency-division multiple access and its
application to CATV networks,” Eur. Trans. Telecommun. (ETT), vol. 9, no. 6,
pp. 171–178, Dec. 2003.
[47] U. Sorger, I. D. Broech, and M. Schnell, “Interleaved FDMA - a new spread-
spectrum multiple-access scheme,” in Proc. IEEE International Conference on
Communications (ICC’98), vol. 2, Jun. 1998, pp. 1013–1017.
[48] 3rd Generation Partnership Project; Technical Specification Group Radio Access
Network; Physical layer aspects for evolved Universal Terrestrial Radio Access
(UTRA) (Release 7), 3GPP Std. TR 25.814, Sep. 2006. [Online]. Available:
http://www.3gpp.org/ftp/specs/html-info/25814.htm
[49] W. Zou and Y. Wu, “COFDM: an overview,” IEEE Trans. Broadcast., vol. 4,
no. 1, pp. 1–8, Mar. 1995.
[50] Radio Broadcasting Systems; Digital Audio Broadcasting (DAB) to mobile,
portable and fixed receivers, ETSI Std. EN 300 401 (Ver. 1.4.1), Jun. 2006.
163

BIBLIOGRAPHY
[51] Digital Video Broadcasting (DVB); Framing structure, channel coding and mod-
ulation for digital terrestrial television, ETSI Std. EN 300 744 (Ver. 1.6.1), Jan.
2009.
[52] N. Benvenuto and S. Tomasin, “On the comparison of OFDM and single car-
rier modulation with a DFE using a frequency-domain feedforward filter,” IEEE
Trans. Commun., vol. 50, no. 6, pp. 947–955, Jun. 2002.
[53] ——, “Iterative design and detection of a DFE in the frequency domain,” IEEE
Trans. Commun., vol. 53, no. 11, pp. 1867–1875, Nov. 2005.
[54] J. Jang and K. Lee, “A transmit power adaptation for multiuser OFDM systems,”
IEEE J. Sel. Areas Commun., vol. 21, no. 2, pp. 171–178, Feb. 2003.
[55] H. Myung, J. Lim, and D. Goodman, “Single-carrier FDMA for uplink wireless
transmission,” IEEE Veh. Technol. Mag., vol. 1, no. 3, pp. 30–38, Sep. 2006.
[56] R. van Nee and R. Prasad, OFDM for Wireless Multimedia Communications.
Boston: Artech House, 2000.
[57] A. Gusmao, R. Dinis, J. Conceicao, and N. Esteves, “Comparison of two modu-
lation choices for broadband wireless communications,” in Proc. IEEE Vehicular
Technology Conference (VTC’00-Spring), vol. 2, May 2000, pp. 1300–1305.
[58] T. Frank, A. Klein, and T. Haustein, “A survey on the envelope fluctuations
of DFT precoded OFDMA signals,” in Proc. IEEE International Conference on
Communications (ICC’08), May 2008, pp. 3495–3500.
[59] P. Xia, S. Zhou, and G. Giannakis, “Bandwidth- and power- efficient multicarrier
multiple access,” IEEE Trans. Commun., vol. 51, no. 11, pp. 1828–1837, Nov.
2003.
[60] J. Coon, “Frequency domain equalization of single-carrier transmission in single-
antenna and multiple-antenna systems,” Ph.D. dissertation, University of Bristol,
UK, 2004.
[61] J. Siew, “An investigation on the performance and channel parameter acquisition
of MIMO-OFDM systems for wireless LANs,” Ph.D. dissertation, University of
Bristol, UK, 2005.
[62] T. Moon and W. Stirling, Mathematical Methods and Algorithms for Signal Pro-
cessing, 1st ed. Upper Saddle River, New Jersey: Prentice Hall, 1999.
164

BIBLIOGRAPHY
[63] A. Oppenheim, R. Schafer, and J. Buck, Discrete-Time Signal Processing, 2nd ed.
New Jersey: Prentice Hall, 1999.
[64] S. Cripps, RF Power Amplifier for Wireless Communications, 2nd ed. Boston:
Artech House, 2006.
[65] “Designing a high-efficiency WCDMA BTS using TI GC5322 digital pre-
distortion processor,” Texas Instruments, Tech. Rep., Jun. 2010. [Online].
Available: http://focus.ti.com/lit/an/slwa060/slwa060.pdf
[66] S. Han and J. Lee, “An overview of peak-to-average power ratio reduction tech-
niques for multicarrier transmission,” IEEE Wireless Commun., vol. 12, no. 2,
pp. 56–65, Apr. 2005.
[67] S. Haykin, Communication Systems, 4th ed. New York: John Wiley & Son,
2001.
[68] S. Qureshi, “Adaptive equalization,” Proc. IEEE, vol. 73, no. 9, pp. 1349–1387,
Sep. 1985.
[69] J. Mietzner, S. Badri-Hoeher, I. Land, and P. Hoeher, “Equalization of sparse
intersymbol-interference channels revisited,” EURASIP J. Wireless Communica-
tions and Networking, vol. 2006, no. 2, pp. 1–13, Apr. 2006.
[70] J. Mazo, “Exact matched filter bound for two-beam rayleigh fading,” IEEE Trans.
Commun., vol. 39, no. 7, pp. 1027–1030, Jul. 1991.
[71] F. Ling, “Matched filter-bound for time-discrete mutlipath rayleigh fading chan-
nel,” IEEE Trans. Commun., vol. 43, no. 2/3/4, pp. 710–713, Feb./Mar./Apr.
1995.
[72] E. Dahlman and B. Gudmundson, “Performance improvement in decision feed-
back equalizer by using ‘’soft-decision’,” Electron. Lett., vol. 24, no. 17, pp. 1084–
1085, Aug. 1988.
[73] J. Bergmans, J. Voorman, and H. Wong-Lam, “Dual decision feedback equalizer,”
IEEE Trans. Commun., vol. 45, no. 5, pp. 514–518, May 1997.
[74] C. Beare, “The choice of desired impulse response in combined linear-viterbi
algorithm equalizers,” IEEE Trans. Commun., vol. 26, no. 8, pp. 1301–1307,
Aug. 1978.
165

BIBLIOGRAPHY
[75] A. Chan and G. Wornell, “A class of block-iterative equalizers for intersymbol
interference channels: fixed channel results,” IEEE Trans. Commun., vol. 49,
no. 11, pp. 1966–1976, Nov. 2001.
[76] G. James, Advanced Modern Engineering Mathematics, 2nd ed. England:
Prentice-Hall, 1999.
[77] S. Kay, Fundamentals of Statistical Signal Processing, Volume I: Estimation The-
ory, 1st ed. Upper Saddle River, New Jersey: Prentice Hall, 1993.
[78] J. J. van de Beek, O. Edfors, M. Sandell, S. K. Wilson, and P. O. Borjesson,
“On channel estimation in OFDM systems,” in Proc. IEEE Vehicular Technology
Conference (VTC’95-Spring), Jul. 1995, pp. 815–819.
[79] O. Edfors, M. Sandell, J. J. van de Beek, S. K. Wilson, and P. O. Borjesson, “Anal-
ysis of DFT-based channel estimators for OFDM,” Wireless Personal Commun.,
vol. 12, no. 1, pp. 55–70, Jan. 2000.
[80] ——, “OFDM channel estimation by singular value decomposition,” IEEE Trans.
Commun., vol. 46, no. 7, pp. 931–939, Jul. 1998.
[81] Y. Yeh and S. Chen, “DCT-based channel estimation for OFDM systems,” in
Proc. IEEE International Conference on Communications (ICC’04), vol. 4, Jun.
2004, pp. 2442–2446.
[82] Y. Zheng and C. Xiao, “Frequency-domain channel estimation and equalization
for broadband wireless communications,” in Proc. IEEE International Conference
on Communications (ICC’07), Jun. 2007, pp. 4475–4480.
[83] L. Huang, G. Mathew, and J. Bergmans, “Pilot-aided channel estimation for
systems with virtual subcarriers,” in Proc. IEEE International Conference on
Communications (ICC’06), vol. 7, Jun. 2006, pp. 3070–3075.
[84] S. Schiffermuller and V. Jungnickel, “Practical channel interpolation for
OFDMA,” in Proc. IEEE Global Communications Conference (Globecom’06),
Nov. 2006, pp. 1–6.
[85] T. Tung and K. Yao, “Channel estimation and optimal power allocation for
multiple-antenna OFDM systems,” EURASIP J. Appl. Signal Process., pp. 330–
339, Mar. 2002.
166

BIBLIOGRAPHY
[86] C. Tellambura, M. Parker, Y. Guo, S. Shepherd, and S. Barton, “Optimal se-
quences for channel estimation using discrete fourier transform techniques,” IEEE
Trans. Commun., vol. 47, no. 2, pp. 230–238, Feb. 1999.
[87] A. Milewski, “Periodic sequences with optimal properties for channel estimation
and fast start-up equalization,” IBM J. Res. Develop., vol. 27, no. 5, pp. 426–431,
Sep. 1983.
[88] D. Chu, “Polyphase codes with good periodic correlation properties,” IEEE
Trans. Inf. Theory, vol. 18, no. 4, pp. 531–532, Jul. 1972.
[89] S. Boumard, “Novel noise variance and SNR estimation algorithm for wire-
less MIMO OFDM systems,” in Proc. IEEE Global Communications Conference
(Globecom’03), vol. 3, Dec. 2003, pp. 1330–1334.
[90] K. Sayood, Introduction to Data Compression, 2nd ed. San Francisco, CA:
Morgan Kaufmann, 2000.
[91] S. Haykin, Adaptive Filter Theory, 4th ed. Upper Saddle River, New Jersey:
Prentice Hall, 2001.
[92] N. Ahmed, T. Natarajan, and K. Rao, “Discrete cosine transform,” IEEE Trans.
Comput., vol. C-23, no. 1, pp. 90–93, Jan. 1974.
[93] W. Chen, C. Smith, and S. Fralick, “A fast computational algorithm for the
discrete cosine transform,” IEEE Trans. Commun., vol. 25, no. 9, pp. 1004–1009,
Sep. 1977.
[94] J. Coon, “Generalized precoded block-spread CDMA,” IEEE Trans. Commun.,
vol. 57, no. 7, pp. 1919–1923, Jul. 2009.
[95] S. Zhou, G. Giannakis, and C. Martret, “Chip-interleaved block-spread code di-
vision multiple access,” IEEE Trans. Commun., vol. 50, no. 2, pp. 235–248, Feb.
2002.
[96] J. Brewer, “Kronecker products and matrix calculus in system theory,” IEEE
Trans. Circuits Syst., vol. CAS-25, no. 9, pp. 772–781, Sep. 1978.
[97] R. Negi and J. Cioffi, “Pilot tone selection for channel estimation in a mobile
OFDM system,” IEEE Trans. Consum. Electron., vol. 44, no. 3, pp. 1122–1128,
Aug. 1998.
167

BIBLIOGRAPHY
[98] J. Coon, M. Sandell, M. Beach, and J. McGeehan, “Channel and noise variance
estimation and tracking algorithm for unique-word based single-carrier systems,”
IEEE Trans. Wireless Commun., vol. 5, no. 6, pp. 1488–1496, Jun. 2006.
[99] G. Huang, A. Nix, and S. Armour, “Feedback reliability calculation for an it-
erative block decision feedback equalizer,” in Proc. IEEE Vehicular Technology
Conference, (VTC’09-Fall), Sep. 2009, pp. 1–5.
[100] P. Wolniansky, G. Foschini, G. Golden, and R. Valenzuela, “V-BLAST: an archi-
tecture for realizing very high data rates over the rich-scattering wireless chan-
nel,” in Proc. International Symposium on Signals, Systems, and Electronics
(ISSSE’98), Sep. 1998, pp. 295–300.
[101] G. Golden, G. Foschini, R. Valenzuela, and P. Wolniansky, “Detection algorithm
and initial laboratory results using V-BLAST space-time communication archi-
tecture,” Electron. Lett., vol. 35, no. 1, pp. 14–16, Jan. 1999.
[102] G. Bauch, “Space-time block codes versus space-frequency block codes,” in Proc.
IEEE Vehicular Technology Conference (VTC’03-Spring), vol. 1, Apr. 2003, pp.
567 – 571.
[103] D. Baum, J. Salo, M. Milojevic, P. Kyosti, and J. Hansen, “Matlab
implementation of the interim channel model for beyond-3G systems (SCME),”
May 2005. [Online]. Available: http://www.tkk.fi/Units/Radio/scm/
168