Embed Size (px)
Citation preview
2016/06/15 M1
➤
➤
➤
➤
➤
2
3
4
5

6
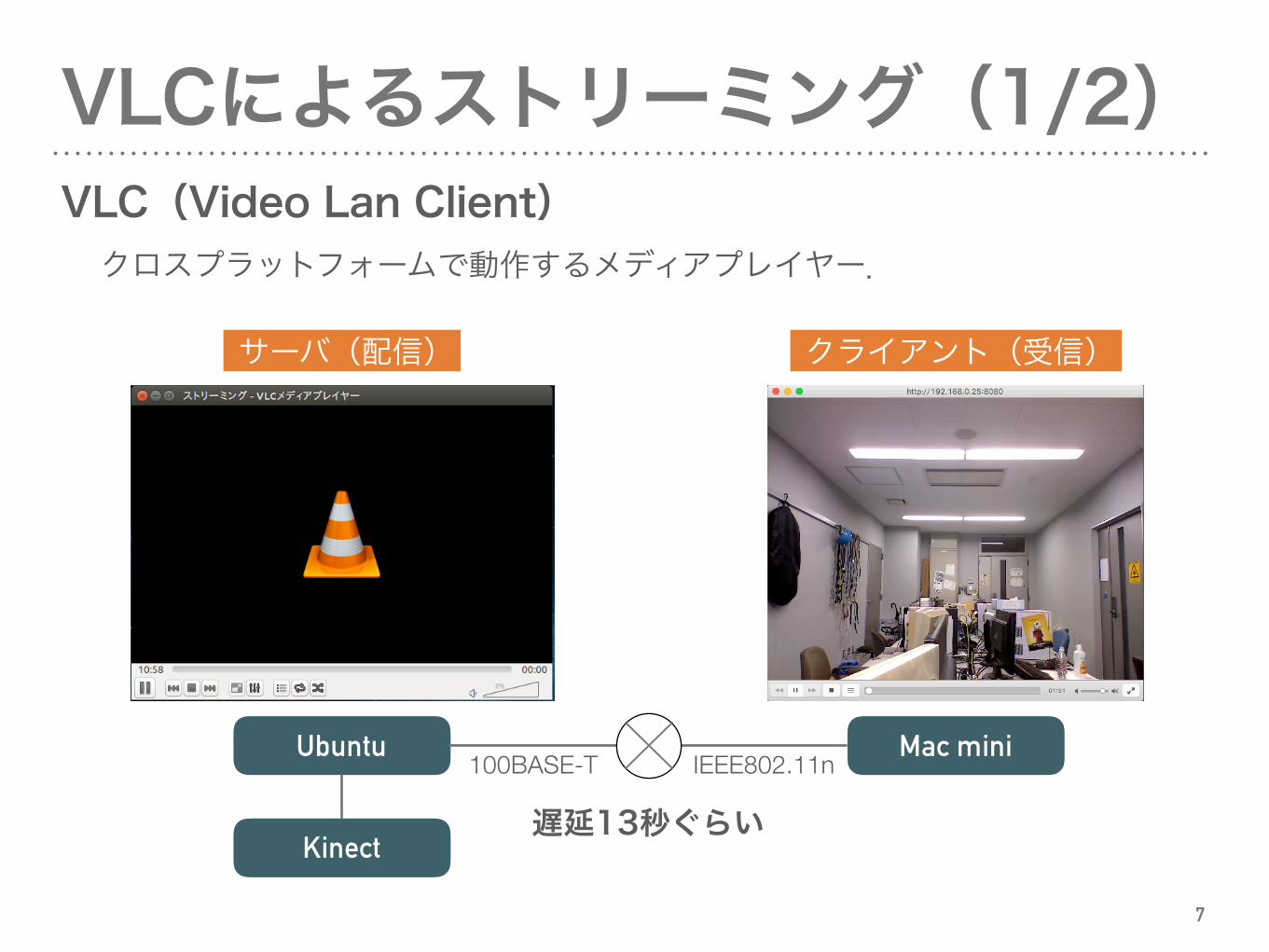
7
Ubuntu Mac mini
Kinect
IEEE802.11n100BASE-T
8
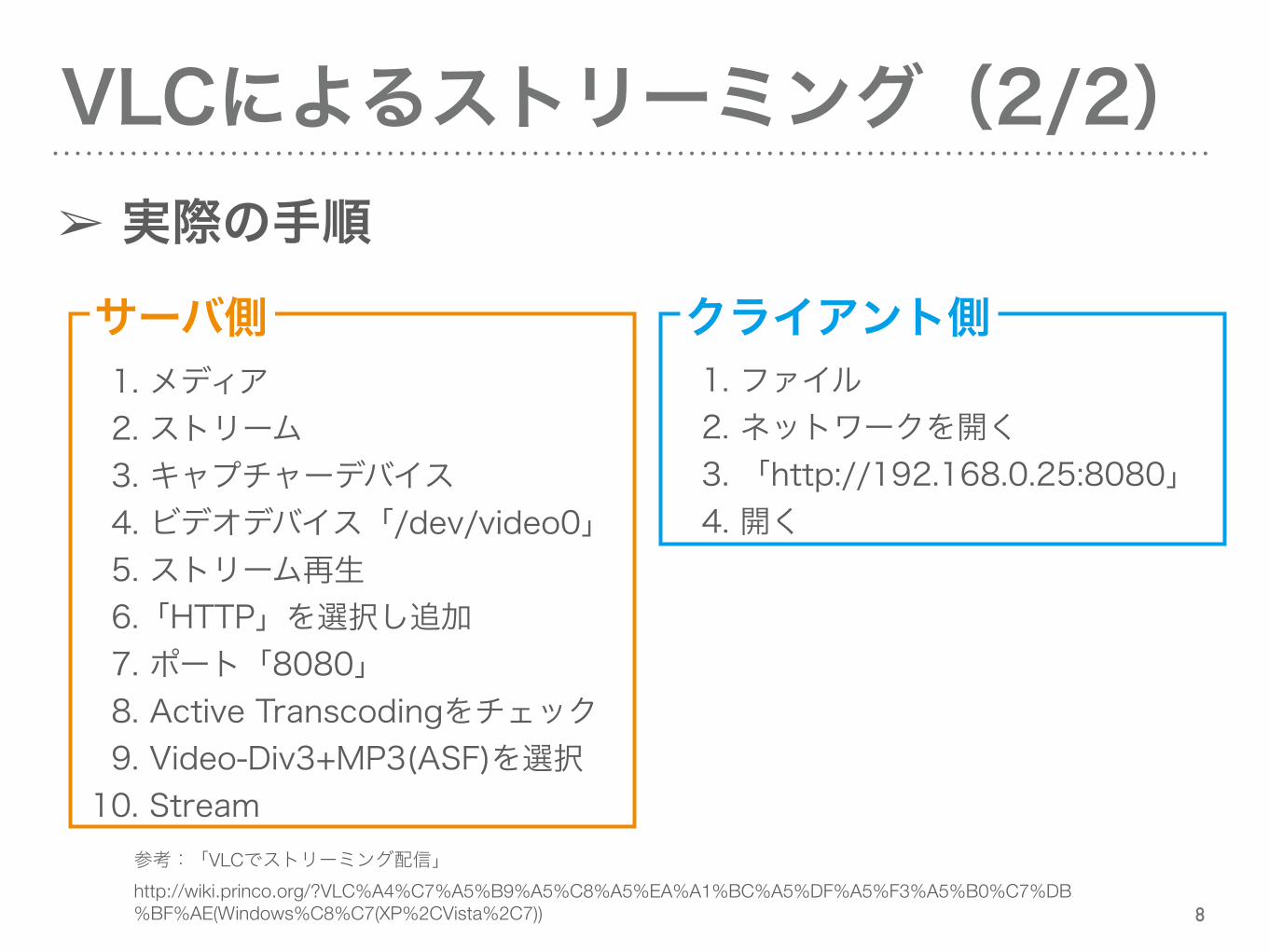
VLC http://wiki.princo.org/?VLC%A4%C7%A5%B9%A5%C8%A5%EA%A1%BC%A5%DF%A5%F3%A5%B0%C7%DB %BF%AE(Windows%C8%C7(XP%2CVista%2C7))
➢

9
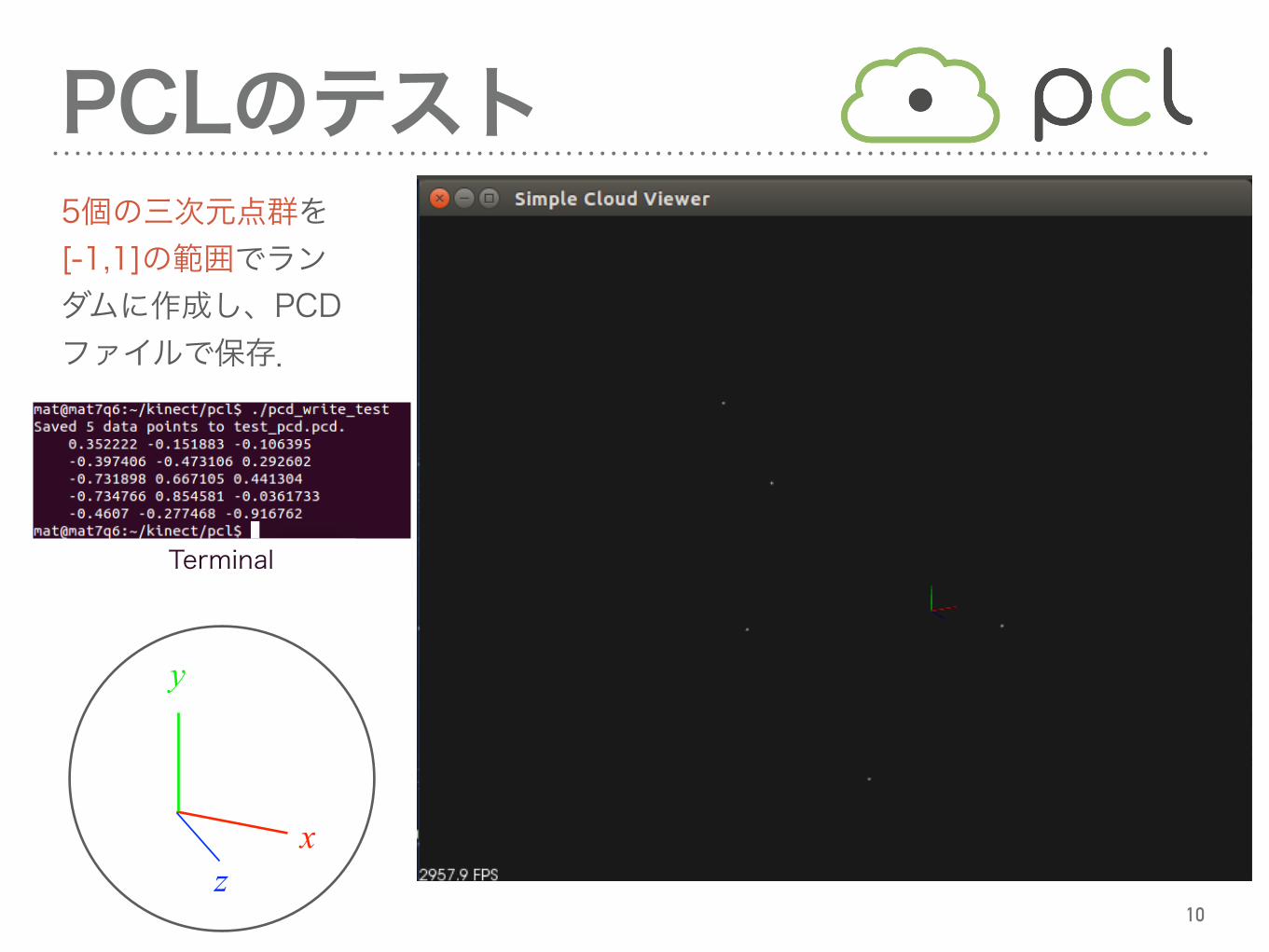
10
x
y
z
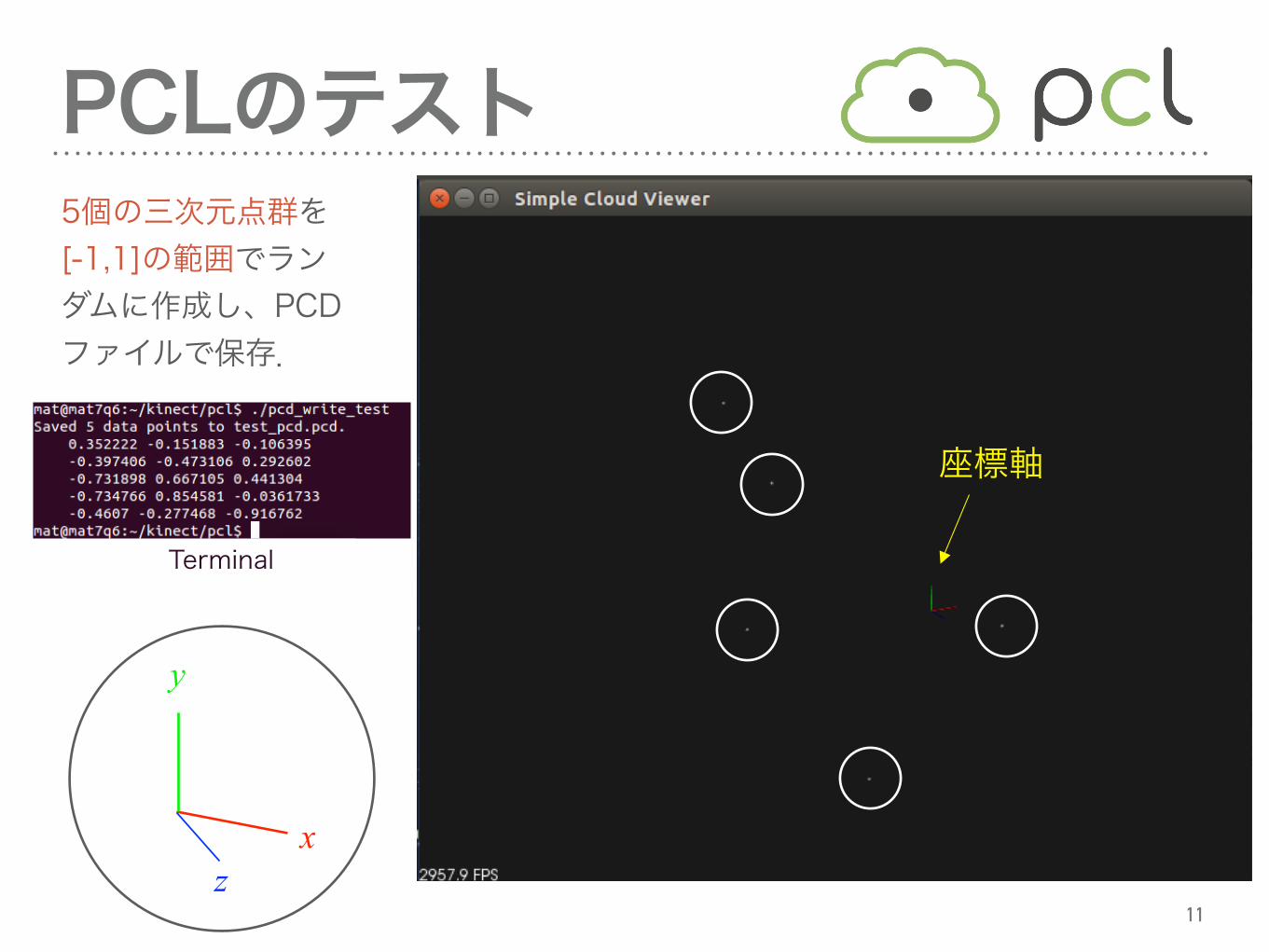
11
x
y
z
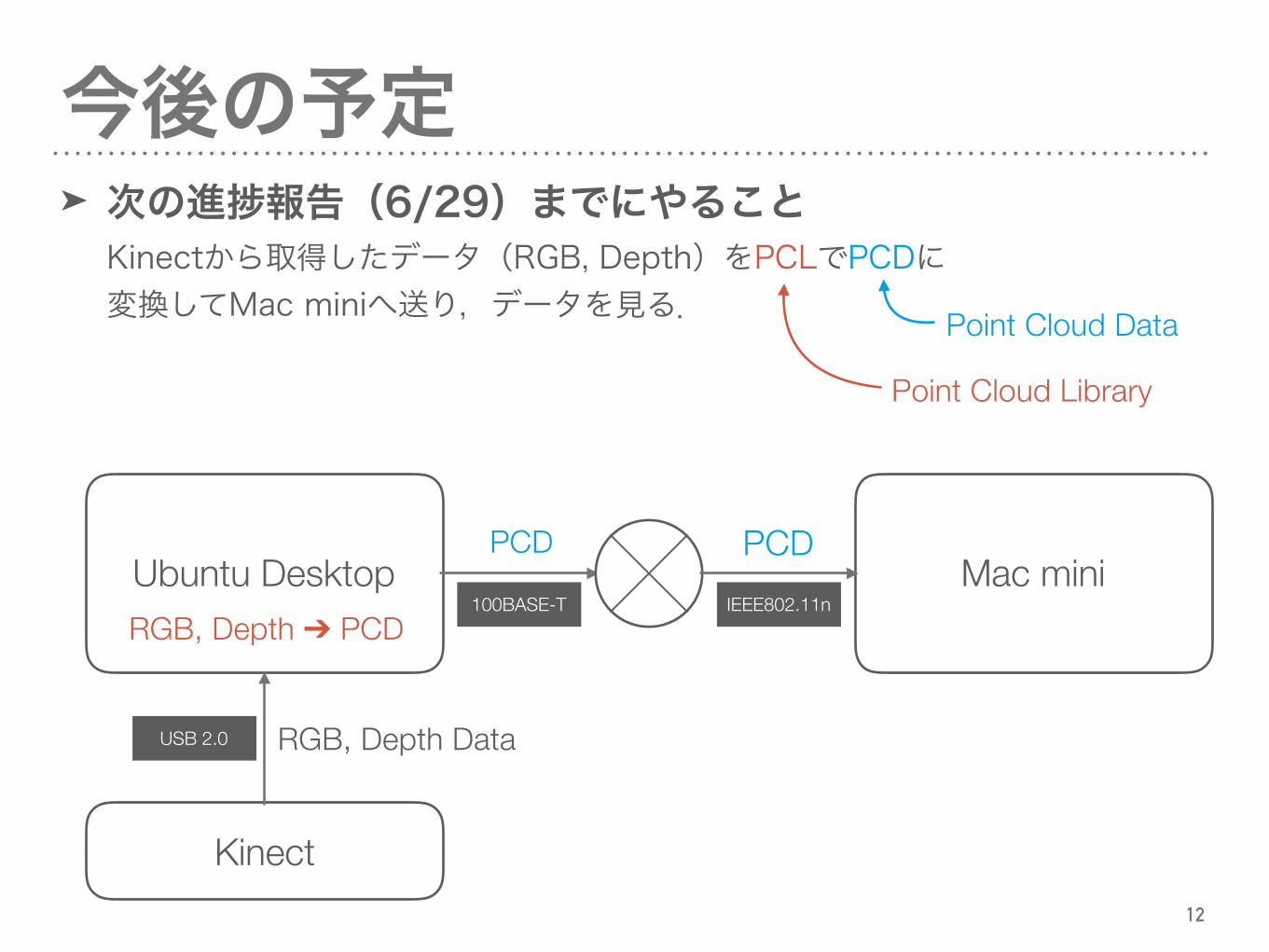
➤
12
Ubuntu Desktop Mac mini
Kinect
RGB, Depth Data
RGB, Depth ➔ PCD
PCD PCD
Point Cloud Library
Point Cloud Data
USB 2.0
100BASE-T IEEE802.11n
13
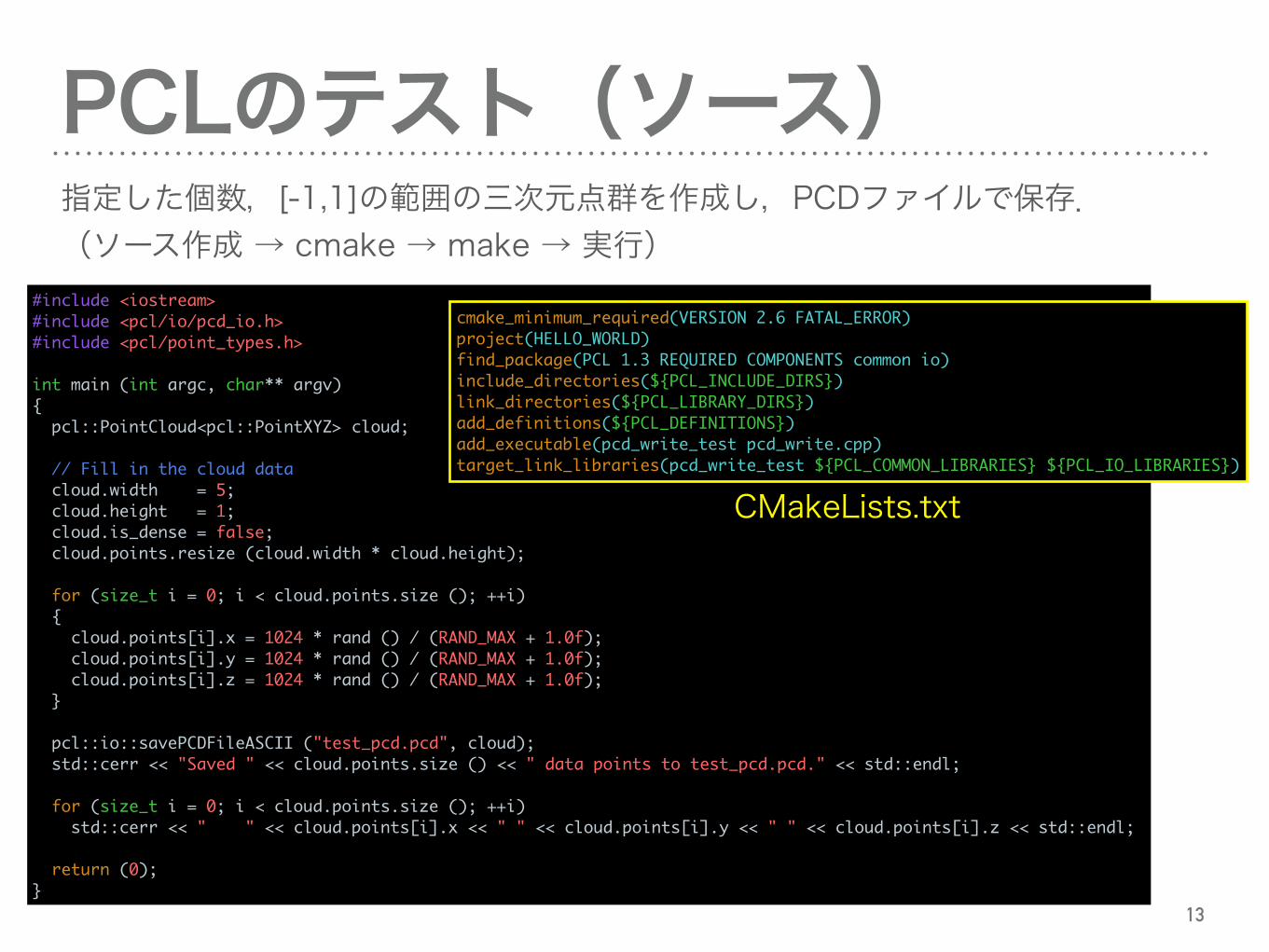
#include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>
int main (int argc, char** argv){ pcl::PointCloud<pcl::PointXYZ> cloud;
// Fill in the cloud data cloud.width = 5; cloud.height = 1; cloud.is_dense = false; cloud.points.resize (cloud.width * cloud.height);
for (size_t i = 0; i < cloud.points.size (); ++i) { cloud.points[i].x = 1024 * rand () / (RAND_MAX + 1.0f); cloud.points[i].y = 1024 * rand () / (RAND_MAX + 1.0f); cloud.points[i].z = 1024 * rand () / (RAND_MAX + 1.0f); }
pcl::io::savePCDFileASCII ("test_pcd.pcd", cloud); std::cerr << "Saved " << cloud.points.size () << " data points to test_pcd.pcd." << std::endl;
for (size_t i = 0; i < cloud.points.size (); ++i) std::cerr << " " << cloud.points[i].x << " " << cloud.points[i].y << " " << cloud.points[i].z << std::endl;
return (0);}
cmake_minimum_required(VERSION 2.6 FATAL_ERROR)project(HELLO_WORLD)find_package(PCL 1.3 REQUIRED COMPONENTS common io)include_directories(${PCL_INCLUDE_DIRS})link_directories(${PCL_LIBRARY_DIRS})add_definitions(${PCL_DEFINITIONS})add_executable(pcd_write_test pcd_write.cpp)target_link_libraries(pcd_write_test ${PCL_COMMON_LIBRARIES} ${PCL_IO_LIBRARIES})