Embed Size (px)
Citation preview

Analisi Matematica 1
Filippo De Mari


Indice
Capitolo 1. Insiemi 51. Nozioni di base. 52. Gli insiemi numerici. 113. L’induzione. 12
Capitolo 2. Numeri reali 171. Descrizione assiomatica dei numeri reali. 182. La retta e i numeri reali. 203. Intervalli. Insiemi aperti e intorni. 214. Valore assoluto e disuguaglianza triangolare. 235. Alcune proprieta dei numeri reali. 246. Estremo superiore e inferiore. 257. Potenze e radici. 28
Capitolo 3. Funzioni 331. Prodotto cartesiano. Il grafico di una funzione. 362. Operazioni sui grafici e simmetrie. 433. Funzioni surgettive, iniettive e bigettive. 524. Elementi di calcolo combinatorio. 555. Funzioni monotone. 616. Composizione di funzioni. 647. Funzioni invertibili. 688. Esponenziali e logaritmi. 73
Capitolo 4. Limiti e continuita 831. Successioni e loro limiti. 852. Limiti di funzioni. 1133. Funzioni continue. 1384. Proprieta globali delle funzioni continue. 144
Capitolo 5. Calcolo differenziale 1551. Linearizzazione e derivabilita 1552. Derivate di funzioni elementari 1663. I teoremi classici del calcolo differenziale 1714. Sviluppi di Taylor 1825. Proprieta locali di funzioni regolari 202
Bibliografia 211
3


CAPITOLO 1
Insiemi
La nozione di insieme, in matematica, e quella del linguaggio corrente. Un insieme euna collezione di oggetti, che si dicono gli elementi dell’insieme. Si conosce l’insieme sese ne conoscono gli elementi, pur di non sottilizzare eccessivamente sul significato dellaparola conoscere. Se ad esempio dico: sia P l’insieme di tutti i numeri primi, quasi tuttii lettori capiscono che cosa intendo, ma nessuno puo asserire di conoscere esattamentel’insieme P . Nessuno infatti conosce tutti i numeri primi. Chiunque sara peraltrod’accordo sul fatto che, dato un numero naturale, sia possibile stabilire, almeno in lineadi principio, se esso e primo oppure no: basta verificare se e divisibile solo per se stesso eper uno, oppure no. In altre parole, la proprieta che definisce un numero primo e chiarae non equivoca, cosicche siamo d’accordo che l’insieme P e definito in modo chiaro enon equivoco. Analoghe considerazioni valgono per l’insieme dei numeri di telefonoitaliani (attivi), per l’insieme dei quadri di Van Gogh, eccetera: per individuare uninsieme basta enunciare una o piu proprieta che ci consentano di capire se un oggettovi appartiene oppure non vi appartiene. Non usiamo alcun artificio formale per definirela nozione di insieme, ne facciamo riferimento ad alcun’altra nozione piu semplice: lariguardiamo come nozione primitiva, una sorta di atomo concettuale.
La matematica che sviluppiamo in questi appunti e basata su diversi concetti primi-tivi quali quello di insieme e di elemento di un insieme. Un altro concetto primitivo equello di retta, o di punto del piano. I concetti primitivi sono quelli che non vengonodefiniti; e piuttosto mediante i concetti primitivi che le definizioni sono formulate.
Poiche la matematica e in buona misura un linguaggio, in questo capitolo ci ac-contentiamo di esporne le principali regole grammaticali, senza alcuna pretesa di com-pletezza, di correttezza formale o di particolare originalita. A proposito di linguaggio,l’alfabeto greco viene considerato noto e sara utilizzato senza commenti.
1. Nozioni di base.
Se A e un insieme, scriveremo a ∈ A se a e un elemento di A e a �∈ A se a non eun elemento di A . La scrittura a ∈ A si legge “a appartiene ad A”. Per gli insiemi siusano solitamente lettere maiuscole e per gli elementi lettere minuscole. Per descriverequali sono gli elementi di un insieme si usano parentesi graffe, all’interno delle quali sielencano gli elementi dell’insieme oppure le proprieta che li individuano. Ad esempio,A = {2, 4, 6} oppure P = {numeri primi} .
Si ammette l’esistenza di uno ed un solo insieme privo di elementi. Questo insiemesi chiama l’insieme vuoto e si denota ∅ . Quindi la scrittura a ∈ ∅ e sempre falsa, qualeche sia a , mentre a �∈ ∅ e sempre vera.
5
6 Analisi Matematica 1
Siano A e B due insiemi. Se ogni elemento di A e anche un elemento di B
diremo che A e un sottoinsieme di B e scriveremo A ⊂ B oppure, in modo del tuttoequivalente, A ⊆ B . Entrambe le scritture A ⊂ B oppure A ⊆ B si leggono “A econtenuto in B”. I sottoinsiemi di un insieme X vengono spesso descritti medianteuguaglianze del tipo
Y = {x ∈ X : x soddisfa una certa proprieta}.
Ad esempio, se D e l’insieme dei numeri naturali dispari, ossia D = {1, 3, 5, 7, 9, . . . }possiamo formarne il sottoinsieme
Y = {y ∈ D : y = 4n+ 1 con n numero intero positivo}.
Che insieme e Y ? Esso e costituito da quei numeri che sono del tipo 4n+ 1, dove n eun numero intero positivo. Siccome 4n e pari, essi sono effettivamente dispari e quindiY ⊂ D . In questo caso, la scrittura
Y = {5, 9, 13, 17, . . . }
non sarebbe stata altrettanto chiara. Il lettore e invitato a verificare la sensatezza dellaseguente definizione: se D e ancora l’insieme dei numeri naturali dispari, sia
S = {s ∈ D : s = d2 con d ∈ D}.
Siano A e B due insiemi. Se valgono entrambe le relazioni A ⊆ B e B ⊆ A alloraA e B sono formati dalla stessa collezione di oggetti, in quanto ogni elemento di A eanche un elemento di B e ogni elemento di B e anche un elemento di A . In questocaso i due insiemi si dicono uguali e si scrive A = B . Se A e un sottoinsieme di B maB non e un sottoinsieme di A allora A si dice un sottoinsieme proprio di B .
E opportuno osservare che le nozioni di sottoinsieme e di elemento sono diverse enon vanno confuse, anche qualora un sottoinsieme consista di un solo elemento. Se adesempio A = {1, 2, 3} allora la scrittura 1 ∈ A e corretta, in quanto 1 e uno deglielementi di A , mentre 1 ⊂ A non e corretta perche 1 non e un insieme. Se vogliamoriferirci a quel sottoinsieme di A formato dal solo elemento 1, dovremo scrivere adesempio B = {1} ed esprimere la relazione che abbiamo in mente mediante B ⊂ A
oppure piu semplicemente {1} ⊂ A . Si osservi che naturalmente {1} ∈ A e sbagliato,perche {1} e un insieme e non un elemento.
1.1. Unione, intersezione, differenza. Se A e B sono insiemi, la loro unione
A ∪ B e l’insieme costituito da tutti gli elementi di A e da tutti gli elementi di B .Quindi, x ∈ A ∪ B se e solo se x ∈ A oppure x ∈ B . Per esempio, se A = {1, 2, 4}e B = {21, 77} , allora A ∪ B = {1, 2, 4, 21, 77} . E ovvio che A ∪ B = B ∪ A e cheA ⊆ (A ∪ B), B ⊆ (A ∪B).
Esempi.
(1) Proviamo la seguente ovvia affermazione: se A ⊂ B allora A ∪ B = B . Il modostandard per provare che due insiemi X e Y sono uguali e provare che valgono entrambele inclusioni X ⊆ Y e Y ⊆ X . Nel caso in questione, l’inclusione B ⊆ (A∪B) e ovvia.Dobbiamo pertanto dimostrare che (A∪B) ⊆ B , ossia che se x ∈ A∪B allora x ∈ B .

Insiemi 7
Sia dunque x ∈ A ∪B , cosicche x ∈ A oppure x ∈ B . Nel secondo caso, ossia x ∈ B ,non c’e nulla da dimostrare; se x ∈ A allora per ipotesi x ∈ B in quanto A ⊂ B .
(2) Dovrebbe essere chiaro che cosı come si puo formare l’unione di due insiemi, sipuo formare anche l’unione di una famiglia qualunque di insiemi: essa sara l’insiemeottenuto prendendo tutti gli elementi di tutti gli insiemi della famiglia considerata. Sead esempio A1 = {11, 13, 17} , A2 = {21, 23, 27} , A3 = {31, 33, 37} e A4 = {41, 43, 47} ,allora A1 ∪ A2 ∪ A3 ∪ A4 = {11, 13, 17, 21, 23, 27, 31, 33, 37, 41, 43, 47} .
Un modo efficace per capire le nozioni insiemistiche e quello di far uso di disegni,rappresentando gli insiemi come regioni del piano, ad esempio colorate oppure sem-plicemente racchiuse da un qualche contorno. Per esempio la figura
A
B
C
rappresenta schematicamente tre insiemi, cui si sono dati i nomi A , B e C . L’unioneA ∪B ∪ C e dunque rappresentata dalla parte colorata di blu.
L’Esempio (2) considerato sopra suggerisce di introdurre una opportuna notazioneper le famiglie di insiemi. Abbiamo usato l’espressione famiglia per evitare la locuzione“insieme di insiemi” che puo generare confusione, anche se corretta. Nulla infatti vietadi considerare un insieme i cui elementi siano insiemi. Nell’esempio appena visto,avremmo potuto definire l’insieme A = {A1, A2, A3, A4} . Per quanto legittimo, cio nonavrebbe in nulla agevolato il nostro scopo, cioe di formare l’unione A1 ∪ A2 ∪ A3 ∪ A4
che certo non e uguale a A . Cio di cui abbiamo bisogno e solo un modo ragionevoledi dare dei nomi quando gli insiemi sono molti e le lettere dell’alfabeto diventanopoche oppure piu semplicemente innaturali. Nel caso in esame possiamo considerare ildizionario I = {1, 2, 3, 4} che parametrizza i nomi degli insiemi: per ciascun elementodi I c’e un insieme che ne porta il nome, ossia se i ∈ I allora vi e uno ed un solo insiemeAi della famiglia. Gli elementi di I si dicono indici. In generale, se I e un insieme e se

8 Analisi Matematica 1
per ogni i ∈ I e definito un insieme Ai , si suole indicare la famiglia mediante {Ai}i∈I ,ossia
{Ai}i∈I = {Ai : i ∈ I}.Esso e un insieme di insiemi. L’unione di tutti gli insiemi Ai si denota invece
�
i∈I
Ai.
Se I e l’insieme dei primi N interi positivi, I = {1, 2, . . . , N} , si scrive anche
N�
i=1
Ai.
Banalmente, nel caso dell’esempio4�
i=1
Ai =�
i∈I
Ai,
dove I = {1, 2, 3, 4} . L’uso di indici sara adottato in varie circostanze; sara ad esempiomolto utile per scrivere somme o prodotti di molti numeri.
Se A e B sono insiemi, la loro intersezione A ∩ B e l’insieme i cui elementi sonogli elementi che appartengono sia ad A sia a B . Quindi, x ∈ A ∩ B se e solo sex ∈ A e x ∈ B . Per esempio, se A = {2, 3, 4, 8} e B = {−2, 3, 8, 197} , alloraA ∩ B = {3, 8} . Le inclusioni (A ∩ B) ⊆ A e (A ∩ B) ⊆ B sono ovvie, cosı comel’uguaglianza A ∩ B = B ∩ A . Naturalmente, per l’intersezione di tutti gli insiemi diuna famiglia {Ai}i∈I varra la notazione
�
i∈I
Ai.
Riprendiamo il disegno considerato sopra, evidenziando le intersezioni.
A
B
C
A ∩B
A ∩ C
B ∩ C

Insiemi 9
Si osservi che se due insiemi non hanno elementi comuni, allora la loro intersezionee l’insieme vuoto. Ad esempio, nel disegno, (A ∩ B) ∩ C = ∅ . Questa e una delleragioni che giustificano l’introduzione dell’insieme vuoto. Per coerenza logica e formale,e infatti ragionevole richiedere che dati due insiemi qualunque la loro intersezione siaancora un insieme. Quindi, per coprire anche il caso in cui i due insiemi siano disgiunti,si deve ammettere la possibilita che vi sia un insieme senza elementi. E poi piuttostoevidente che un siffatto insieme e necessariamente unico: se ve ne fosse un altro e idue fossero quindi diversi, allora ci sarebbe un elemento che sta in uno dei due ma nonnell’altro; d’altra parte non si puo esibire un siffatto elemento perche per definizioneentrambi gli insiemi sono privi di elementi.
Se A e B sono insiemi, la differenza A \ B e costituita dagli elementi di A chenon sono elementi di B . Per esempio, se A = {2, 3, 5, 6} e B = {3, 6, 8, 12} , alloraA \ B = {2, 5} mentre B \ A = {8, 12} . Se si sta lavorando in un contesto in cui gliinsiemi che si considerano sono tutti intesi come sottoinsiemi di uno stesso insieme X ,allora ci si riferisce all’insieme X \A come al complementare di A . Si sottointende cioeA ⊂ X e si scrive Ac in luogo di X \A . La scrittura Ac si legge ”il complementare diA in X ”. Poiche l’insieme X non compare nel simbolo, deve essere molto chiaro dalcontesto quale sia X .
1.2. Connettivi logici, quantificatori. Le proposizioni matematiche sono affer-mazioni che stabiliscono relazioni tra varie entita. Una proposizione puo essere vera ofalsa, nel senso corrente delle parole. Ad esempio la proposizione “ogni numero pari edivisibile per 4” e falsa, in quanto il numero 6 e pari ma non e divisibile per 4, mentrela proposizione “ogni numero divisibile per 4 e pari” e vera, perche ogni numero checontiene il fattore 4 = 2× 2 contiene anche il fattore 2.
A partire da una o piu proposizioni, se ne possono formare delle altre mediante icosiddetti connettivi logici. Sono connettivi la negazione, la disgiunzione e la congiun-
zione. Per spiegare questi concetti, consideriamo il caso in cui siano date le proposizioni:
P = (il numero tre e positivo) Q = (oggi piove).
La negazione di P , ossia “nonP ” si denota in logica matematica ¬P . Nel caso inquestione la negazione di P e la proposizione “il numero tre non e positivo”, mentre lanegazione di Q e evidentemente “oggi non piove”. La disgiunzione di P e Q , denotataP ∨Q , e la proposizione “P oppure Q”. Essa e vera se almeno una tra P e Q e vera,ed e falsa se sono entrambe false. Nel nostro caso, la proposizione P ∨ Q e “tre epositivo, oppure oggi piove”; siccome tre e positivo, essa e vera. La congiunzione diP e Q , denotata P ∧ Q , e la proposizione “P e Q”. Essa e vera se entrambe P eQ sono vere, ed e falsa se almeno una di esse e falsa. Nel nostro caso, P ∧ Q e verasolamente se oggi piove.
Si faccia caso alla somiglianza grafica tra i simboli ∪ e ∨ e tra i simboli ∩ e ∧ .Essa non e casuale: se infatti abbiamo le proposizioni:
P = (a ∈ A) Q = (a ∈ B),
allora P∨Q e vera se e solo se a ∈ A oppure a ∈ B , ossia se e solo se a ∈ A∪B , mentreP∧Q e vera se e solo se a ∈ A e anche a ∈ B , ossia se e solo se a ∈ A∩B . Sottolineiamoinfine che per quanto l’accento di questi appunti non cada mai su questioni meramente

10 Analisi Matematica 1
logiche, e tuttavia molto importante essere sempre in grado di stabilire quale sia lanegazione di una proposizione e quando due proprieta che intervengono in un enunciatovadano intese in senso disgiuntivo o di congiunzione.
Fondamentale e il connettivo implicazione. In matematica esso si denota “⇒”.Quando scriviamo P ⇒ Q intendiamo che P implica Q , ossia che se P e vera, alloraanche Q e vera. In tal caso si e soliti dire che P e l’ipotesi, mentre Q e la tesi.Altre possibili espressioni sono: P e condizione sufficiente affinche valga Q , oppureQ e condizione necessaria affinche valga P . Se oltre a valere P ⇒ Q vale anchel’implicazione opposta Q ⇒ P , se esse cioe valgono congiuntamente, si scrive alloraP ⇐⇒ Q e si legge “P se e solo se Q”. Naturalmente, cio va inteso nel senso che Pe Q sono sempre entrambe vere o entrambe false.
La logica insegna che ogni implicazione e equivalente alla sua implicazione con-
tronominale, ossia “P implica Q” e equivalente all’implicazione “se Q e falsa, allorae falsa anche P ”. Utilizzando le notazioni della logica abbiamo percio perfetta equiva-lenza tra P ⇒ Q e (¬Q) ⇒ (¬P). Questo fatto e di grande importanza in matema-tica, ed e il fondamento delle cosiddette dimostrazioni per assurdo. Un esempio e ladimostrazione della Proposizione 1.4 del prossimo capitolo, nel corso della quale si sta-bilisce che se il quadrato (p/q)2 del rapporto p/q tra due numeri interi e uguale a 2,allora p e q non possono essere primi tra loro. L’implicazione contronominale dellaprecedente e che il rapporto p/q tra due numeri interi primi tra loro non soddisfa mai(p/q)2 = 2. Unitamente al teorema di scomposizione in fattori primi - che implica cheogni rapporto tra numeri interi e esprimibile come rapporto tra numeri interi primi traloro - questo dimostra la ben nota irrazionalita di
√2.
Nella maggior parte delle proposizioni matematiche intervengono i cosiddetti quan-tificatori logici. Essi non sono altro che la locuzione per ogni, oppure piu semplicementeogni, e la locuzione esiste. Il primo si denota “∀” e si dice un po’ pomposamentequantificatore universale, mentre il secondo si denota “∃” e si dice altrettanto pom-posamente quantificatore esistenziale. Va detto che questi due simboli sono di estremautilita nella pratica della scrittura matematica ma che, in generale, l’abuso di sosti-tuti simbolici dei termini della lingua corrente puo sortire l’effetto opposto a quellodesiderato: appesantire anziche alleggerire il discorso.
Illustriamo brevemente un aspetto dei quantificatori logici, forse per alcuni versisorprendente, che verra ulteriormente esemplificato nel corso della Sezione 3 del Capi-tolo 3: i simboli ∀ e ∃ svolgono un ruolo simmetrico nell’enunciato di una proposizionee della sua negazione. Tipicamente infatti, una proposizione affermera che tutte le en-tita di un certo tipo godono di una certa proprieta, ad esempio “tutti gli asini volano”.Per negare l’affermazione precedente e sufficiente asserire che vi sono delle eccezioni,ossia che “esiste un asino che non vola”. Similmente, negare la proposizione “esiste unnumero primo pari diverso da 2” significa affermare che “tutti i numeri primi diversida 2 sono dispari”.
Infine, una semplice questione notazionale. Per motivi che hanno soprattutto a chefare con la sintassi, la locuzione “tale che” compare, implicita o esplicita, in quasi tuttele pagine di matematica e merita percio un’abbreviazione. Al simbolo “�” adottatotalvolta nei paesi anglosassoni preferiremo il semplice acronimo “t.c.” oppure una

Insiemi 11
sbarretta verticale “|” oppure ancora il segno di interpunzione dei due punti. Quindi,per esempio
{x ∈ R t.c. x ≥ 2} = {x ∈ R | x ≥ 2} = {x ∈ R : x ≥ 2}.
2. Gli insiemi numerici.
Questa sezione e dedicata a stabilire alcune notazioni e a ricordare alcune proprietadei numeri naturali, interi e razionali. I numeri naturali sono 0, 1, 2, 3, . . . eccetera.Ossia i numeri che si usano per contare, piu lo zero. L’insieme dei numeri naturali sidenota N . Va subito chiarito che l’uguaglianza
(2.1) N = {0, 1, 2, 3, . . . }.non e universalmente condivisa. Per molti autori lo zero non e un numero naturale.Risparmiamo al lettore uggiosi commenti al riguardo. Ricordiamo piuttosto che, comesempre in matematica, basta intendersi. In questi appunti, primariamente per ragionidi comodita, assumiamo che lo zero sia un numero naturale, cioe che valga (2.1).Adotteremo spesso la convenzione1 che se A e un insieme di numeri, allora A∗ = A\{0} ,cosicche naturalmente
N∗ = {1, 2, 3, . . . }.Tra numeri naturali sono definite la somma e il prodotto: se n e m sono numerinaturali, allora anche n+m e nm sono numeri naturali. Diamo per noto il significatodi queste operazioni, ossia come si formino n + m e nm se sono noti n e m . I dueelementi 0 e 1 si comportano in modo molto particolare, essi sono cioe gli elementi
neutri rispettivamente per la somma e per il prodotto, cioe:
0 + n = n, 1n = n ∀n ∈ N.I numeri interi, detti anche interi relativi, sono i numeri 0, 1,−1, 2,−2, . . . , ossia inumeri naturali assieme ai loro opposti. L’insieme dei numeri interi e indicato con Z :
Z = {0,±1,±2, . . . }.I numeri naturali sono da riguardarsi come particolari numeri interi. In altre parole,l’inclusione N ⊂ Z e ovvia. Si noti che la seguente affermazione
per ogni n ∈ X esiste m ∈ X tale che m+ n = 0
e falsa se X = N , mentre e vera se X = Z . In effetti, Z e il piu piccolo insieme checontiene N per il quale l’affermazione precedente e vera! In altri termini, l’insieme deinumeri interi viene introdotto per risolvere l’equazione nell’incognita x
n+ x = 0,
per qualunque numero naturale fissato n . Tale equazione esprime il cosiddetto pro-blema dell’opposto. Consideriamo ora l’affermazione analoga alla precedente per ilprodotto, questa volta utilizzando i quantificatori logici:
∀n ∈ X \ {0} ∃m ∈ X t.c. mn = 1.
1Questa convenzione non e adottata nella sezione 6 di questo capitolo, dove l’apice “ ∗ ” hatutt’altro significato.

12 Analisi Matematica 1
Essa e falsa sia per X = N , sia per X = Z . Per risolvere l’equazione
nx = 1
nell’incognita x per ogni n ∈ Z \ {0} , ossia per risolvere il problema dell’inverso, siintroducono i numeri razionali. Essi sono quei numeri che si ottengono come frazioni
di numeri interi. Si ricordi che in latino ratio significa rapporto. L’insieme dei numerirazionali si denota Q . Avremo dunque
Q =
�p
q: p ∈ Z, q ∈ Z \ {0}
�,
dove p si dice il numeratore e q si dice il denominatore. Scriviamo senza ulterioricommenti le uguaglianze che esprimono somma e prodotto in Q :
a
b+
c
d=
ad+ bc
bda
b
c
d=
ac
bd.
Naturalmente, i numeri interi possono essere visti come quei particolari numeri razionaliil cui denominatore e uguale a 1. Quindi N ⊂ Z ⊂ Q .
3. L’induzione.
Supponiamo di voler calcolare la somma S(n) dei primi n interi positivi. Per farciun’idea, calcoliamone qualche valore:
S(1) = 1
S(2) = 1 + 2 = 3
S(3) = 1 + 2 + 3 = (1 + 3) + 2 = 6
S(4) = 1 + 2 + 3 + 4 = (1 + 4) + (2 + 3) = 10
S(5) = 1 + 2 + 3 + 4 + 5 = (1 + 5) + (2 + 4) + 3 = 15.
Un modo rapido per fare il conto e suggerito dall’uso che abbiamo fatto delle parentesi:si somma l’ultimo con il primo e si ottiene n+1, il penultimo con il secondo e si ottieneancora (n− 1)+2 = n+1 e via dicendo. L’addendo (n+1) compare un certo numerok di volte ed eventualmente rimane un resto. Piu precisamente, se n e pari k = n/2 enon c’e resto, se n e dispari k = (n− 1)/2 e il resto e (n+ 1)/2. Quindi
S(n) =
(n+ 1)n
2se n e pari
(n+ 1)(n− 1)
2+
(n+ 1)
2=
(n+ 1)(n− 1 + 1)
2se n e dispari
e giungiamo a formulare la congettura:
(3.2) S(n) =n(n+ 1)
2.
In effetti, non abbiamo dimostrato alcunche, ma arguito ragionevolmente a partire daiprimi 5 casi. Per essere certi che la formula sia vera, procediamo come segue.

Insiemi 13
(i) Verifichiamo che (3.2) valga per n = 1. Infatti 1 = 1(1 + 1)/2.(ii) Supponiamo che (3.2) sia vera per S(n) e vediamo se allora vale anche per
S(n+ 1), ossia se S(n+ 1) = (n+ 1)(n+ 2)/2. Infatti
S(n+ 1) = (1 + 2 + · · ·+ n) + (n+ 1)
= S(n) + (n+ 1)
=n(n+ 1)
2+ (n+ 1)
=n(n+ 1) + 2(n+ 1)
2
=(n+ 1)(n+ 2)
2.
Ma allora: sappiamo che la formula vale per il primo intero positivo; valendo per ilprimo vale anche per il successivo, cioe per il secondo; valendo per il secondo vale ancheper il successivo, cioe per il terzo, e cosı via. Quindi vale per tutti.
Questo tipo di dimostrazione, del quale si fa spesso uso in matematica, si chiamadimostrazione per induzione e si fonda sul seguente principio generale.
Metodo di dimostrazione per induzione. Supponiamo che ad ogni numeronaturale k sia associata una asserzione P(k). Se valgono le due proprieta seguenti:
(i) P(0) e vera;(ii) se P(k) e vera (ipotesi induttiva), allora e anche P(k + 1) e vera;
allora P(k) e vera per ogni k ∈ N .
L’enunciato formale del metodo di dimostrazione per induzione andra adattato divolta in volta al caso in esame, in cui cioe si deve interpretare P(0) come la primadelle varie proposizioni della lista, che alle volte corrisponde all’intero 1 anziche a 0,come nell’esempio (3.2).
Per poter formulare esempi significativi di questo metodo, e opportuno introdurreil simbolo di sommatoria. Si tratta di un modo sintetico per esprimere la somma di“molti” numeri, nello stesso spirito adottato alla Sezione 1.1 per le unioni e intersezionidi famiglie di insiemi. Se per ogni i ∈ {1, 2, . . . , n} e assegnato un numero reale ai ,scriveremo
�ni=1 ai per la somma di tutti gli ai , ossia
n�
i=1
ai = a1 + · · ·+ an.
La notazione introdotta ammette ovvie varianti, quali�
1≤i≤n
ai,
�
i∈I
ai
se I e un insieme finito. Nelle notazioni introdotte, la formula appena provata perS(n) puo esprimersi
n�
i=1
i =n(n+ 1)
2.

14 Analisi Matematica 1
Naturalmente, il simbolo�
e soggetto a tutte le trasformazioni che derivano dalleproprieta della somma. In particolare si avra
n�
i=1
ai =k�
i=1
ai +n�
i=k+1
ai
se 1 ≤ k < n . Equivalentemente, se I = J ∪K dove I e finito e J e K sono disgiunti�
i∈I
ai =�
i∈J
ai +�
i∈K
ai.
Importante e la proprieta di traslazione degli indici, che si esprime mediante la formula
(3.3)n�
i=m
ai =n−p�
i=m−p
ai+p =n+q�
i=m+q
ai−q
ogniqualvolta si abbiano interi positivi m,n, p, q tali che p ≤ m ≤ n . In effetti tuttie tre i membri della precedente uguaglianza esprimono la somma am + · · · + an . Perspiegare, consideriamo il significato del secondo membro in (3.3), cioe di
(3.4)n−p�
i=m−p
ai+p.
La sommatoria va letta come la somma di tutti gli elementi ai+p al variare di i
nell’insieme {m− p,m− p+ 1, . . . , n− p} ; cio equivale a sommare gli elementi
a(m−p)+p = am,
a(m−p+1)+p = am+1,
. . . . . .
a(n−p)+p = an,
cioe am, am+1, . . . , an , come volevasi. Il lettore e invitato ad analizzare il significato delterzo membro in (3.3).
Un altro modo, forse migliore, per capire la formula e quello di interpretarla comeun vero e proprio cambio del nome della variabile. Se cioe in (3.4) si pone j = i + p ,allora quando i = m− p si ha j = m e quando i = n− p risulta j = n , cosicche
n−p�
i=m−p
ai+p =n�
j=m
aj.
Un’ultima riflessione convincera il lettore che questa e esattamente la prima delle dueuguaglianze in (3.3). Infatti, le lettere i e j sono perfettamente interscambiabili inquanto rappresentano, come si suol dire, variabili mute. Esse rappresentano semplice-mente un indice; l’insieme degli elementi che esse indicizzano e lo stesso.
A titolo di esempio del metodo di dimostrazione per induzione e dell’uso del simbolodi sommatoria, dimostriamo la formula
n�
i=1
(2i− 1) = n2

Insiemi 15
che vale per ogni intero positivo n . La proposizione P(n) e evidentemente la precedenteuguaglianza, con n intero positivo. Ora, P(1) asserisce 2·1−1 = 1, ed e evidentementevera. Se si assume vera P(n), si avra dunque, ponendo ai = 2i− 1
n+1�
i=1
(2i− 1) =n+1�
i=1
ai
=
�n�
i=1
ai
�+ an+1
=n�
i=1
(2i− 1) + 2n+ 1
(per ipotesi induttiva) = n2 + 2n+ 1
= (n+ 1)2,
cioe P(n+ 1).Un altro risultato che si dimostra facilmente per induzione e la formula del binomio
di Newton. Si veda la Proposizione 4.1 del Capitolo 3.

16 Analisi Matematica 1
Esercizi
1. Siano A , B e C insiemi. Provare le seguenti formule:
(i) (A ∪ B) ∪ C = A ∪ (B ∪ C), detta proprieta associativa dell’unione;(ii) (A ∩ B) ∩ C = A ∩ (B ∩ C), detta proprieta associativa dell’intersezione;(iii) A ∩ (B ∪ C) = (A ∩ B) ∪ (A ∩ B), detta proprieta distributiva dell’unione
rispetto all’intersezione;(iv) A \ (B ∪ C) = (A \B) ∩ (A \ C);(v) A \ (B ∩ C) = (A \B) ∪ (A \ C).
2. Provare mediante il metodo di induzione le seguenti affermazioni:
(i) per ogni numero razionale a �= 1,n�
k=0
ak =
1− an+1
1− a;
(ii)n�
k=0
k2 =
n(n+ 1)(2n+ 1)
6;
(iii) 2n > n per ogni n ∈ N \ {0} ;(iv) per ogni numero reale h ≥ −1, (1 + h)n ≥ 1 + nh , detta diseguaglianza di
Bernoulli;
(v) per ogni x ∈ R , sin(2−nx)
n�
j=1
cos(2−jx) = 2−n sin x , detta formula di Vieta.

CAPITOLO 2
Numeri reali
Storicamente i numeri reali sono stati introdotti per misurare le grandezze geome-triche. Se ad esempio vogliamo assegnare un numero al rapporto tra la lunghezzad della diagonale e la lunghezza l del lato del quadrato, applichiamo il teorema diPitagora e scriviamo l2 + l2 = d2 ossia (d/l)2 = 2. Siamo portati a dire che il numerocercato, reale in quanto esprime una relazione geometrica reale, e esattamente uguale ad/l =
√2. Analogamente, dalla geometria siamo convinti dell’esistenza di π , il numero
che esprime il rapporto tra la circonferenza e la lunghezza del diametro del cerchio. Inumeri
√2 e π non si possono scrivere come rapporto di numeri interi, non sono cioe
razionali. Viceversa, ogni numero razionale, potendosi pensare come un numero cheesprime il rapporto tra lunghezze di coppie di segmenti commensurabili, ha da essereun numero reale.
Che cosa sono, dunque, i numeri reali? Si potrebbe dire che sono delle entitaadeguate a misurare la lunghezza di ogni segmento. Questa risposta e insoddisfacentedal punto di vista formale, anche se per molti versi accurata. La risposta formale vieneformulata nell’ambito della teoria degli insiemi mediante la costruzione, a partire dainumeri naturali, di un insieme normalmente denotato R e i cui elementi si dicononumeri reali. L’insieme R ha tutte le proprieta algebriche che si desiderano. In essocioe valgono le regole usuali che governano la somma, il prodotto e le relazioni d’ordine,e ha l’ulteriore cruciale proprieta che si chiama completezza. Essa consente di compiereuno dei passi piu importanti della matematica: pensare i punti di una retta comenumeri e viceversa, costruendo cioe una corrispondenza biunivoca1 tra la retta ed R .La corrispondenza tra punti e numeri non e unica, ne banale, ma e proprio ad essa chela costruzione di R e ispirata. Non e unica perche la scelta di un’origine e di una scalasono arbitrarie, ossia la selezione di due punti sulla retta cui si danno i nomi zero euno. Una volta fatta questa scelta, esiste un modo essenzialmente unico, quantomenocanonico, per procedere nell’identificazione punto–numero.
Naturalmente, per parlare di corrispondenza biunivoca tra due insiemi e necessariodapprima sapere che cosa sono, cioe come sono definiti. Da un lato si presupponenota la nozione di retta; si assume di sapere che cosa sia l’insieme retta e quali nesiano le proprieta che siamo disposti ad accettare a priori. Dall’altro, bisogna disporredell’insieme R dei numeri reali, definito in modo piu o meno astratto. Solo a questopunto si puo procedere alla definizione di una corrispondenza. La costruzione di Rpuo essere fatta in diverse maniere equivalenti ma presenta difficolta concettuali ed
1La nozione esatta di corrispondenza biunivoca tra due insiemi verra data nel Capitolo 3. Infor-malmente, cio significa che ad ogni elemento di un insieme si associa uno ed un solo elemento dell’altroe viceversa, cosicche i due insiemi risultano identificabili l’uno con l’altro.
17

18 Analisi Matematica 1
espositive che esulano dagli scopi di questi appunti. Noi procederemo per una via piubreve. Elencheremo dapprima una serie di proprieta, i cosiddetti assiomi dei numeri
reali. In seguito enunceremo, senza dimostrarla, l’esistenza di un insieme non vuotoR , essenzialmente unico, che soddisfa tutti gli assiomi elencati. Accenneremo infinebrevemente alla corrispondenza tra R e la retta.
1. Descrizione assiomatica dei numeri reali.
Le proprieta che individuano l’insieme dei numeri reali riguardano, in primo luogo:
• le operazioni di somma e prodotto• la relazione di ordine• la compatibilita tra operazioni e ordinamento.
Chiariamo subito che cosa si intenda per relazione di ordine.
Definizione 1.1. Una relazione binaria su un insieme A, denotata “<”, e detta
relazione d’ordine se essa soddisfa
(i) se a, b ∈ A, allora una ed una sola delle seguenti possibilita si verifica: a < b,
oppure a = b oppure b < a;
(ii) se a, b, c ∈ A sono tali che a < b e b < c, allora si ha anche a < c.
Le proprieta di somma e prodotto definiscono su R la struttura algebrica di corpo,mentre la compatibilita delle operazioni con la relazione d’ordine definiscono cio chesi chiama un corpo ordinato. Tutte queste proprieta sono godute anche da Q , che equindi anch’esso un corpo ordinato. Esse stabiliscono le regole di calcolo, che valgonoin R quanto in Q .
Definizione 1.2. Un corpo e un insieme F su cui siano definite le due operazioni
di addizione (o somma) e moltiplicazione (o prodotto), che soddisfano i seguenti as-
siomi:
(A) Assiomi dell’addizione.
(A1) Se x ∈ F e y ∈ F allora x+ y ∈ F .
(A2) L’addizione e commutativa: x+ y = y + x per ogni x, y ∈ F .
(A3) L’addizione e associativa: x+ (y + z) = (x+ y) + z per ogni x, y, z ∈ F .
(A4) Esiste un elemento 0 ∈ F tale che x+ 0 = x per ogni x ∈ F .
(A5) Ad ogni x ∈ F corrisponde un elemento −x ∈ F tale che x+ (−x) = 0.
(M) Assiomi della moltiplicazione.
(M1) Se x ∈ F e y ∈ F allora xy ∈ F .
(M2) La moltiplicazione e commutativa: xy = yx per ogni x, y ∈ F .
(M3) La moltiplicazione e associativa: x(yz) = (xy)z per ogni x, y, z ∈ F .
(M4) Esiste un elemento 1 ∈ F , 1 �= 0, tale che 1x = x per ogni x ∈ F .
(M5) Ad ogni x ∈ F , x �= 0, corrisponde un elemento 1/x ∈ F tale che: x(1/x) =1.
(D) Proprieta distributiva.Per ogni x, y, z ∈ F si ha x(y + z) = xy + xz .

Numeri reali 19
L’elemento −x si dice l’opposto di x , mentre l’elemento 1/x si dice il reciproco
di x . Come conseguenza degli assiomi di corpo valgono le regole di calcolo che sonoenunciate negli Esercizi 1, 2 e 3 di questo capitolo.
Passiamo adesso agli assiomi che stabiliscono la compatibilita tra le operazioni e larelazione d’ordine.
Definizione 1.3. Un corpo ordinato e un corpo F in cui sia definita una relazione
d’ordine < per la quale siano soddisfatti i seguenti assiomi
(O) Assiomi dell’ordine.
(O1) Se x, y, z ∈ F e y < z , allora x+ y < x+ z .
(O2) Se x, y ∈ F e x > 0, y > 0, allora xy > 0.
Nel seguito, con la scrittura x ≤ y intendiamo che sia x < y oppure x = y .
Ribadiamo che tutti gli assiomi finora elencati sono soddisfatti in particolare da Q ,che e quindi un corpo ordinato. I numeri razionali tuttavia non soddisfano l’assiomache segue, il vero e proprio tratto distintivo di R .
(C) Assioma di completezza.
Un insieme F munito di una relazione d’ordine < si dice (ordinalmente) completo
se dati due sottoinsiemi non vuoti A e B di F tali che
a ≤ b per ogni a ∈ A e per ogni b ∈ B,
esiste un elemento s ∈ F , detto elemento separatore, tale che
a ≤ s ≤ b per ogni a ∈ A e per ogni b ∈ B.
Si faccia attenzione al fatto che l’elemento separatore non e necessariamente unico.Per esempio ciascun razionale compreso tra 0 e 1 separa in Q i sottoinsiemi {0} e{1} di Q . Osserviamo pero che i sottoinsiemi A = {a ∈ Q : a2 < 2} e B = {b ∈Q : a2 > 2} di Q non sono separati in Q . Non esiste cioe alcun numero razionales tale che a ≤ s ≤ b per ogni a ∈ A ed ogni b ∈ B ; se esistesse un tale elementos , infatti, si avrebbe s2 = 2. Quest’ultima implicazione e intuitivamente chiara, maha una dimostrazione che richiede l’archimedeita di Q , una proprieta che discuteremopiu avanti in questo capitolo (cfr il Teorema (5.1)). Il lettore curioso puo svolgeregli Esercizi (16) e (17) al riguardo. La proposizione che segue mostra peraltro chel’equazione s2 = 2 non ha soluzioni in Q , il che prova che A e B non sono separati inQ . Ne discende che Q non e completo.
Proposizione 1.4. Non esiste alcun numero razionale s tale che s2 = 2.
Dimostrazione. Se esistesse, si potrebbero trovare due interi positivi p e q primi traloro tali che (p/q)2 = 2, ossia p2 = 2q2 . Poiche il membro destro e pari, tale e anchep2 e quindi p (il quadrato di un numero dispari e dispari). Ma allora p = 2r e quindi4r2 = 2q2 , cioe 2r2 = q2 . Con lo stesso ragionamento si conclude che allora q e pari,contro l’ipotesi che p e q siano primi fra loro. ��
Enunciamo finalmente il teorema di esistenza.
Teorema 1.5. Esiste un corpo ordinato completo R.

20 Analisi Matematica 1
Il teorema di esistenza andrebbe in realta perfezionato, specificando che R e es-
senzialmente unico. Il significato dell’avverbio “essenzialmente” fa riferimento allanozione di isomorfismo di corpi ordinati che viene omessa per semplicita. In sostanza,la cosiddetta unicita a meno di isomorfismi di R , consiste nel fatto che ogni altrocorpo ordinato e completo F puo essere messo in corrispondenza biunivoca con R inmodo da rispettare le operazioni e l’ordine, cosicche distinguere R da F diviene unaquestione solamente nominalistica, inessenziale.
2. La retta e i numeri reali.
La retta geometrica non e un corpo ordinato e completo, nel senso che su di essanon sono definite a priori la somma e il prodotto, ne’ e chiaro quali siano, ad esempio, ipunti 0 e 1. Non possiamo quindi fare appello all’unicita di R per identificare la rettacon R . Sara piuttosto la costruzione di una corrispondenza biunivoca a consentirci ditrasferire sulla retta le operazioni ed avere in tal modo un modello geometrico di R .La costruzione che tratteggiamo qui di seguito e basata sulla nozione intuitiva di retta.
Il primo passo consiste nello scegliere due punti distinti sulla retta, che chiami-amo rispettivamente O (lo zero) e U (l’uno). La retta privata di O consiste di duesemirette. Chiamiamo semiretta positiva quella che contiene il punto U . Per semplifi-care l’esposizione, supponiamo di immaginare la retta in posizione orizzontale e che U
stia a destra di O .Il secondo passo consiste nell’individuare i punti interi sulla retta. Consideriamo
dapprima la semiretta positiva. Sia S un segmento di lunghezza uguale alla lunghezzadel segmento OU ed il cui estremo sinistro coincida con il punto U . L’estremo destroD di S sara il punto che corrisponde al numero naturale 2.
O
OU
U
S
D ↔ 2✉ ✉ ✉ � � � � �Ripetendo la costruzione, otteniamo via via i punti che corrispondono ai numeri 3, 4,5,..., ossia un insieme di punti sulla retta che chiameremo punti naturali. Riportandospecularmente i punti naturali sulla semiretta negativa si ottengono i punti interi nega-tivi. Abbiamo quindi determinato una corrispondenza biunivoca tra Z ed un certosottoinsieme della retta i cui elementi abbiamo chiamato punti interi.
Il terzo passo consiste nell’individuare i punti razionali sulla retta. Partiamo alsolito dalla semiretta positiva. Diciamo che il punto R su di essa e un punto razionalese esistono due interi positivi p e q (cui corrispondano rispettivamente i punti interiP e Q) tali che il segmento OP coincida con il segmento di estremo sinistro O e diestremo destro il punto a distanza q -volte la lunghezza di OR . In tal caso associamoad R il numero razionale positivo p/q .
O R ↔ 3/2 P ↔ 3
OR
OP = 2 OR
✉ ✉ ❡❜ ✉ ✉ � � � � �

Numeri reali 21
Viceversa, dato il numero razionale positivo p/q , il punto razionale R che ad essocorrisponde e costruito dividendo in q segmenti uguali il segmento OP : esso saral’estremo destro del primo di tali segmenti. Riportando specularmente i punti razionalipositivi sulla semiretta negativa si ottengono i punti razionali negativi. Abbiamo quindideterminato una corrispondenza biunivoca tra Q ed un certo sottoinsieme della retta icui elementi abbiamo chiamato punti razionali. Osserviamo che tra due punti razionalidistinti vi e sempre almeno un altro punto razionale, ad esempio il punto medio.
Il quarto passo consiste nel completare la corrispondenza tra i punti della retta edi numeri reali. Questo e ovviamente il passo piu sottile. Innanzitutto definiamo sullaretta l’ordine naturale, stabilendo cioe che P > Q se P e a destra di Q , nel sensointuitivo cui abbiamo fatto gia riferimento. In secondo luogo, ci appelliamo ancorauna volta alla nostra intuizione geometrica per osservare che l’assioma di completezza(ordinale) ha sulla retta un significato evidente e lo assumiamo quindi come vero: sedue sottoinsiemi giacciono l’uno completamente alla destra dell‘altro, salvo avere al piuun punto in comune, si potra “tagliare” la retta in due semirette in modo che uno deidue insiemi sia completamente contenuto in una semiretta e l’altro nell’altra, perdendoal piu il punto di taglio.
Prendiamo dunque un punto qualunque X sulla retta e consideriamo gli insiemi Ae B formati rispettivamente da tutti i punti razionali a sinistra di X e da tutti i puntirazionali a destra di X . Come conseguenza del fatto che tra punti razionali distinti vene e sempre un altro, si puo vedere che X e l’unico elemento separatore tra A e B .Ai sottoinsiemi A e B della retta corrispondono sottoinsiemi A� e B� in R formatida numeri razionali e per i quali risulta a < b per ogni a ∈ A� e per ogni b ∈ B� .Si puo dimostrare che l’elemento separatore x ∈ R tra A� e B� , certo esistente pervia dell’assioma di completezza, e anch’esso unico. Associamo quindi a X il numeroreale x . Viceversa, dato il numero reale x , consideriamo i sottoinsiemi A� e B� diR formati rispettivamente da tutti i numeri razionali minori di x e da tutti i numerirazionali maggiori di x . Agli insiemi A� e B� corrispondono sottoinsiemi A e B dellaretta formati da punti razionali e per i quali risulta P < Q per ogni P ∈ A e per ogniQ ∈ B . Il punto X della retta che separa A e B e anch’esso unico, ed e il puntoassociato ad x .
3. Intervalli. Insiemi aperti e intorni.
Questa sezione e dedicata a introdurre una classe di sottoinsiemi di R particolar-mente rilevanti: gli intervalli. Mediante gli intervalli si possono poi formulare i concettidi insieme aperto e insieme chiuso, ed il concetto di intorno di un punto. Essi definisco-no cio che si suole chiamare la topologia della retta, ossia la nozione di “punti vicini”ad un dato punto.
Un intervallo e un insieme di numeri reali cui corrisponde un segmento o unasemiretta, estremi inclusi o esclusi. Gli intervalli sono quindi definiti in termini diordinamento. Se a e b sono numeri reali e a < b , poniamo:
(a, b) = {x ∈ R : a < x < b} intervallo aperto;[a, b] = {x ∈ R : a ≤ x ≤ b} intervallo chiuso;(a, b] = {x ∈ R : a < x ≤ b} intervallo aperto a sinistra e chiuso a destra;

22 Analisi Matematica 1
[a, b) = {x ∈ R : a ≤ x < b} intervallo aperto a destra e chiuso a sinistra.
Per quanto riguarda le semirette, introduciamo i simboli +∞ e −∞ . E bene chiarireche essi non rappresentano alcun numero reale, ma servono semplicemente a scriverein modo efficiente. Poniamo:
(−∞, a) = {x ∈ R : x < a} semiretta aperta e superiormente limitata2;(−∞, a] = {x ∈ R : x ≤ a} semiretta chiusa e superiormente limitata;(a,+∞) = {x ∈ R : a < x} semiretta aperta e inferiormente limitata;[a,+∞) = {x ∈ R : a ≤ x} semiretta chiusa e inferiormente limitata.
Si dicono intervalli degeneri gli insiemi del tipo {a} ove a ∈ R . Infine, R stesso e dariguardarsi come un intervallo, fatto che viene evidenziato scrivendo R = (−∞,+∞).Si noti che l’intersezione di due intervalli e sempre un intervallo, eventualmente degenereo vuoto, mentre l’unione di due intervalli puo essere un intervallo oppure no. Adesempio, (0, 3] ∪ [4, 5) non e un intervallo, mentre (0, 3) ∪ [1, 3] = (0, 3].
Convenzionalmente, come abbiamo fatto noi, si usano parentesi tonde in corrispon-denza di estremi esclusi e parentesi quadre in corrispondenza di estremi inclusi. Nelprimo caso, abbiamo usato la parola aperto e nel secondo la parola chiuso. Questeparole hanno, come vedremo, un significato preciso.
Si dice intervallo aperto centrato nel punto x0 di semiampiezza a > 0 l’intervallo(x0 − a, x0 + a). Esso e un intervallo aperto il cui punto medio e esattamente x0 .
� � � x0 − a
( ✉x0 x0 + a
) � � �Se consideriamo un punto x0 ∈ R , ogni intervallo aperto centrato in x0 contiene
tutti i punti vicini ad x0 , nel senso che in ogni intervallo (x0 − a, x0 + a) vi sonotutti i punti che distano da x0 meno di a . Ognuno di questi intervalli costituisce unasorta di bolla che isola x0 : tutti i punti al di fuori dell’intervallo sono ad una certadistanza (almeno a) da x0 e quindi non sono poi cosı vicini ad x0 . Gli intervalli aperticentrati in x0 sono il prototipo di cio che si chiama un intorno di x0 , come chiaritodalla definizione che segue.
Definizione 3.1. Sia x0 ∈ R. Si dice intorno di x0 un insieme U che soddisfi le
due seguenti proprieta:
(i) x0 ∈ U(ii) esiste un intervallo aperto I centrato in x0 tale che I ⊂ U .
Un insieme G si dice aperto se esso e intorno di ogni suo punto, ossia se per ogni
x ∈ G esiste un intervallo aperto centrato in x che sia tutto contenuto in G . Infine,
un insieme F si dice chiuso se il suo complementare in R e aperto.
E a questo punto evidente che gli intervalli aperti sono aperti nel senso dellaDefinizione (3.1). Infatti, dato un intervallo (s, d) ed un suo punto qualunque x0
2Le parole superiormente limitata e inferiormente limitata hanno un significato preciso che verradiscusso nella Sezione 6. Per ora esse hanno da essere intese in senso informale e intuitivo.
Numeri reali 23
potremo certo trovare un a > 0 tale che (x0 − a, x0 + a) ⊂ (s, d): basta scegliere a
minore o uguale al piu piccolo tra (x0 − s)/2 e (d− x0)/2.
� � �s� x0 − a
( ✉x0 x0 + a
)�d
� � �Similmente, sono aperte le semirette aperte del tipo (−∞, a) oppure (a,+∞).
Osserviamo che l’unione di due o piu insiemi aperti e sempre aperta. E invece forse unpo’ meno evidente che gli intervalli chiusi sono chiusi nel senso della Definizione (3.1).Basta pero notare che
[a, b] = R \ {(−∞, a) ∪ (b,+∞)}e siccome (−∞, a)∪(b,+∞) e aperto, [a, b] risulta essere il complementare di un apertoed e quindi chiuso. Similmente, da
(−∞, a] = R \ (a,+∞), [a,+∞) = R \ (−∞, a)
si vede che le semirette chiuse sono chiuse nel senso della Definizione (3.1).
4. Valore assoluto e disuguaglianza triangolare.
La nozione di valore assoluto serve ad esprimere l’idea di distanza che abbiamoimplicitamente usato nella sezione precedente.
Definizione 4.1. Per ogni numero reale x definiamo
|x| =�x se x ≥ 0
−x se x < 0.
Il numero |x| si chiama il valore assoluto (o il modulo) di x.
Il numero non negativo |x| esprime la distanza di x dall’origine:
� � � x ✉0 |x| � � �Evidentemente |x− y| esprime allora la distanza di x da y :
� � � x y � � �Riassumiamo alcune proprieta del valore assoluto nella proposizione che segue. Si
faccia particolare attenzione al punto (iii).
Proposizione 4.2. Valgono le seguenti proprieta:
(i) |− x| = |x| per ogni x ∈ R;

24 Analisi Matematica 1
(ii) se a > 0 la relazione |x| < a e equivalente alla relazione −a < x < a e
similmente |x| ≤ a e equivalente alla relazione −a ≤ x ≤ a;
(iii) per ogni x, y ∈ R vale la disuguaglianza triangolare, cioe |x+ y| ≤ |x|+ |y|;(iv) |xy| = |x| |y| per ogni x, y ∈ R;
(v) ||x|− |y|| ≤ |x− y| per ogni x, y ∈ R.
Dimostrazione. (i) Questo e ovvio.(ii) Se x ≥ 0 allora x > −a e sempre soddisfatta, ed inoltre x = |x| < a . Se invece
x < 0 allora x < a e sempre soddisfatta, ed inoltre x = −|x| > −a .(iii) Se x ed y sono entrambi non negativi, allora |x+y| = x+y = |x|+ |y| , mentre
se sono entrambi negativi tale e anche x+y e quindi |x+y| = −(x+y) = (−x)+(−y) =|x|+ |y| . Supponiamo allora che siano l’uno negativo e l’altro non negativo, ad esempiox < 0 ≤ y . Allora x+ y < y < y + |x| = |y|+ |x| e x+ y ≥ x ≥ x− |y| = −|x|− |y| .In altre parole abbiamo
−(|x|+ |y|) ≤ x+ y ≤ (|x|+ |y|)e l’asserto segue da (ii).
(iv) Questo e ovvio per via di (i).(v) Dalla disuguaglianza triangolare si ha
|x| = |x− y + y| ≤ |x− y|+ |y|,ossia |x|− |y| ≤ |x− y| . D’altra parte anche
|y| = |y − x+ x| ≤ |y − x|+ |x|,ossia −|x− y| ≤ |x|− |y| . Abbiamo visto che −|x− y| ≤ |x|− |y| ≤ |x− y| e possiamopercio concludere utilizzando (ii). ��
5. Alcune proprieta dei numeri reali.
Dall’assioma di completezza si puo derivare una importante conseguenza, nota comela proprieta archimedea di R . Essa e una proprieta piu debole della completezza.Infatti, anche Q e archimedeo, pur non essendo completo.
Teorema 5.1 (Archimedeita di R). Per ogni y ∈ R ed ogni x ∈ R, x > 0, esisteun intero positivo n tale che nx > y .
Dimostrazione. Se y < 0 oppure 0 < y ≤ x non c’e nulla da dimostrare. Dunquee lecito assumere x < y . Supponiamo che la tesi sia falsa. Posto A = {nx : n ∈ N} ,si ha a ≤ y per ogni a ∈ A , cosicche se B = {b ∈ R : b ≥ a per ogni a ∈ A} risultaB �= ∅ in quanto y ∈ B . Sia s un elemento separatore tra A e B . Poiche x > 0,s−x < s . Se d = s−x soddisfacesse d ≥ nx per ogni n , allora sarebbe d ∈ B cosicches ≤ d per definizione di elemento separatore; ma questo contraddice il fatto che d < s .Pertanto deve esistere un intero positivo n tale che d = s−x < nx ossia s < (n+1)x .D’altra parte (n + 1)x ∈ A e s ≥ a per ogni a ∈ A . Da questa contraddizione segueche la tesi e vera. ��
Corollario 5.2. Sia x ∈ R. Se per ogni intero n > 0 si ha |x| ≤ 1/n, allorax = 0.

Numeri reali 25
Dimostrazione. Se fosse |x| > 0, allora in virtu del teorema precedente esisterebbeun intero positivo tale che n|x| > 1, contro l’ipotesi. ��
Un’altra proprieta importantissima di R e la cosiddetta densita dei razionali, ossiail fatto che tra due reali qualunque cade sempre un razionale.
Teorema 5.3 (Densita di Q). Se x, y ∈ R e x < y , allora esiste r ∈ Q tale che
x < r < y .
Dimostrazione. Poiche x < y si ha y − x > 0 e per la proprieta archimedea diR esiste un intero positivo n tale che n(y − x) > 1. Applicando ancora due volte laproprieta archimedea, otteniamo due interi positivi m1 ed m2 tali che m1 = m11 > nx
e m2 = m21 > −nx , ossia−m2 < nx < m1.
Percio esiste un intero m con −m2 ≤ m ≤ m1 tale che
m− 1 ≤ nx < m.
Dalle disuguaglianze precedenti otteniamo
nx < m ≤ 1 + nx < ny.
Infine, siccome n > 0 si ha
x <m
n< y
e l’asserto e dimostrato con r = m/n . ��
6. Estremo superiore e inferiore.
L’assioma di completezza riveste, come abbiamo visto, un ruolo di fondamentaleimportanza. Come spesso accade in matematica, un concetto puo essere riformulatoed assumere una valenza maggiormente operativa. E’ questo il caso dell’assioma dicompletezza, che risulta essere equivalente all’esistenza del cosiddetto estremo superio-
re di ogni insieme non vuoto che si trovi, per cosı dire, tutto a sinistra di un certopunto. Si potrebbe dire che l’estremo superiore di un siffatto insieme S e il puntopiu appiccicato ad S tra quelli che stanno ancora a destra di S , quando non ne eproprio l’elemento piu grande. La definizione di estremo superiore non e molto piuconcreta di quella di elemento separatore ma le caratterizzazioni che se ne possonodare ne consentono un uso in un certo senso abbastanza pratico. Mediante la nozionedi estremo superiore e possibile esprimere in modo sintetico e persino intuitivamentesoddisfacente molte verita sottili dell’Analisi Matematica.
Iniziamo col precisare che cosa abbiamo inteso dire con l’espressione “S sta tuttoa sinistra (o a destra) di un certo punto”.
Definizione 6.1. Sia S un sottoinsieme non vuoto di R. Diremo che S e supe-
riormente limitato se esiste M ∈ R tale che s ≤ M per ogni s ∈ S . In questo caso, M
si dira un maggiorante di S . Analogamente, diremo che S e inferiormente limitato se
esiste m ∈ R tale che m ≤ s per ogni s ∈ S . In questo caso, m si dira un minorante
di S . Diremo infine che S e limitato se e superiormente e inferiormente limitato.

26 Analisi Matematica 1
Si puo riformulare la definizione precedente considerando l’insieme dei maggiorantidi S , ponendo cioe S∗ = {M ∈ R : M ≥ s per ogni s ∈ S} e dicendo che S e supe-riormente limitato se S∗ �= ∅ . Analogamente si puo procedere introducendo l’insiemeS∗ = {m ∈ R : m ≤ s per ogni s ∈ S} dei minoranti di S .
Esempi.
(1) Le semirette (−∞, 0] e (−∞, 0) sono entrambe superiormente limitate ma noninferiormente limitate. In effetti, 0 e un maggiorante per entrambe ma non vi sonominoranti ne’ per l’una ne’ per l’altra. Quindi non sono limitate.
(2) L’intervallo (0, 1] e limitato inferiormente da 0 e superiormente limitato da 1.Quindi e limitato.
(3) L’insieme I = {1/n : n ∈ N \ {0}} e limitato inferiormente da 0 e superiormenteda 1, perche 1/n ≤ 1 per ogni naturale non nullo n . Quindi e limitato. In particolareabbiamo provato che I ⊂ (0, 1].
(4) Prendendo spunto dall’esempio precedente, possiamo dimostrare che se A ⊆ B eB e limitato, tale e anche A . Infatti se M ed m sono rispettivamente un maggioranteed un minorante di B , allora m ≤ b ≤ M per ogni b ∈ B . D’altra parte, per ognia ∈ A risulta a ∈ B cosicche m ≤ a ≤ M per ogni a ∈ A .
Se un insieme S ha un maggiorante M , sono maggioranti di S anche tutti i numerimaggiori di M . Non e invece detto che ve ne sia qualcuno piu piccolo di M . Se c’eun maggiorante M � < M , possiamo dire che M � e meglio di M nel senso che M �
descrive piu accuratamente la regione in cui e localizzato S , approssimandone meglioil confine destro. Poniamoci quindi la seguente domanda: esiste il migliore, cioe il piupiccolo, dei maggioranti? Questo certamente avviene se S possiede un elemento che epiu grande di tutti gli altri suoi elementi: esso marca il confine.
Definizione 6.2. Sia S un sottoinsieme non vuoto di R. Diremo che S ammette
massimo e che M ∈ R e il massimo di S se M ∈ S e se M ≥ x per ogni x ∈ S . In
tal caso scriveremo M = maxS . Analogamente, diremo che S ammette minimo e che
m ∈ R e il minimo di S se m ∈ S e se m ≤ x per ogni x ∈ S . In tal caso scriveremo
m = minS .
Possiamo ora definire i concetti di estremo superiore e di estremo inferiore. Sinoti che la definizione fa uso esclusivamente della relazione d’ordine e di nessun’altraproprieta di R .
Definizione 6.3. Sia S un sottoinsieme non vuoto di R. Si chiama estremo
superiore di S il minimo dei maggioranti di S , se esso esiste. In tal caso esso si
denota supS . Si chiama estremo inferiore di S il massimo dei minoranti di S , se
esso esiste. In tal caso esso si denota inf S . Definiamo inoltre supS = +∞ se S non
e superiormente limitato e inf S = −∞ se S non e inferiormente limitato.
Osserviamo che se S ammette un massimo M , allora M e anche l’estremo superioredi S . Infatti, M e un maggiorante e se ve ne fosse uno piu piccolo M � , si avrebbeM � < M , contraddicendo il fatto che M � sia un maggiorante, in quanto M ∈ S ; percio

Numeri reali 27
M e il minimo dei maggioranti, cioe M = supS . Similmente, se S ammette minimom , allora m = inf S .
Ne segue in particolare che se esiste supS ma supS �∈ S , allora S non ha massimo.Infatti, se esistesse il massimo M esso coinciderebbe con l’estremo superiore, cioeM = supS , cosicche si avrebbe supS ∈ S , contro l’ipotesi. Similmente, se esiste inf Sma inf S �∈ S , allora S non ha minimo.
Esempi.
(5) Riprendiamo l’esempio (1) e proviamo che max(−∞, 0] = sup(−∞, 0] = 0. Infatti0 ∈ (−∞, 0] e x ≤ 0 per ogni x ∈ (−∞, 0], da cui max(−∞, 0] = 0. Per quantoosservato sopra, sup = max se il massimo esiste e quindi sup(−∞, 0] = 0.
Proviamo ora che sup(−∞, 0) = 0, mentre il massimo di (−∞, 0) non esiste.Chiaramente, 0 e un maggiorante. Se M < 0, M non e un maggiorante in quantoM < M/2 < 0 e M/2 ∈ (−∞, 0). Percio per ogni maggiorante M si ha 0 ≤ M equesto prova che 0 e il minimo dei maggioranti, cioe 0 = sup(−∞, 0). Infine, siccome0 �∈ (−∞, 0), il massimo di (−∞, 0) non esiste.
(6) Riprendiamo l’esempio (4) e proviamo che, posto I = {1/n : n ∈ N \ {0}} , siha max I = sup I = 1, inf I = 0, ma min I non esiste. Per ogni intero positivo n
si ha n ≥ 1, cosicche 1/n ≤ 1 e 1 e un maggiorante di I . Siccome 1 = 1/1 ∈ I ,esso e il massimo e quindi anche il sup. Ora, 0 e un minorante per I in quanto ognielemento di I e strettamente positivo. Sia ora m un numero reale positivo. SiccomeR e archimedeo, dati i numeri reali m > 0 e 1, esiste un intero positivo n tale chenm > 1, cioe 1/n < m . Abbiamo provato che nessun numero positivo m puo essereun minorante per I . Quindi, per ogni minorante m di I si ha m ≤ 0 e 0 e dunque ilmassimo dei minoranti, cioe 0 = inf I . D’altra parte, I non ha minimo perche 0 �∈ I .
La definizione di estremo superiore puo essere riformulata mediante l’insieme S∗
dei maggioranti di S , ponendo
supS =
�minS∗ se S∗ �= ∅ e se S∗ ammette minimo
+∞ se S∗ = ∅.
Potrebbe quindi darsi che S sia superiormente limitato, cioe S∗ �= ∅ , ma che S∗
non ammetta minimo, nel qual caso non esisterebbe l’estremo superiore di S . Cionon si verifica mai, nel senso che se S∗ �= ∅ , allora esiste minS∗ ∈ R , ossia ogniinsieme superiormente limitato ammette estremo superiore. Omettiamo la non difficiledimostrazione del seguente teorema, a cui abbiamo accennato all’inizio di questa sezionee da cui segue l’affermazione che abbiamo appena fatto, nonche l’analoga per l’estremoinferiore.
Teorema 6.4. Sia F un corpo ordinato. Le asserzioni seguenti sono equivalenti:
(i) F e ordinalmente completo;
(ii) ogni sottoinsieme non vuoto e superiormente limitato di F ammette estremo
superiore in F ;
(iii) ogni sottoinsieme non vuoto e inferiormente limitato di F ammette estremo
inferiore in F .

28 Analisi Matematica 1
Dal Teorema (6.4) segue appunto che poiche R e ordinalmente completo, cioe valela proprieta (i), allora ogni sottoinsieme non vuoto e superiormente limitato di Rammette estremo superiore, ossia vale la proprieta (ii). Di piu e vero: si potrebbesostituire l’assioma di completezza ordinale (C) con una qualunque delle proprieta (ii)oppure (iii) e ancora si otterrebbe un unico corpo ordinato con tale proprieta, ossia R .
Passiamo ora a dare una caratterizzazione di sup e inf .
Proposizione 6.5. Sia S un sottoinsieme non vuoto di R.
Il numero β ∈ R e l’estremo superiore di S se e solo se
(i) β e un maggiorante per S ;
(ii) per ogni x ∈ R con x < β esiste s ∈ S tale che x < s.
Il numero α ∈ R e l’estremo inferiore di S se e solo se
(i) α e un minorante per S ;
(ii) per ogni x ∈ R con x > α esiste s ∈ S tale che s < x.
Dimostrazione. Supponiamo che β = supS e proviamo che β soddisfa (i) e (ii). La(i) e banalmente soddisfatta. Sia ora x ∈ R con x < β . Siccome β e il minimo deimaggioranti, x non e un maggiorante e quindi esiste un s ∈ S piu grande di x , cioetale che s > x .
Viceversa, supponiamo che β soddisfi (i) e (ii) e proviamo che allora β = supS .Dobbiamo provare che β e il minimo dei maggioranti. Supponiamo invece che vi siaun maggiorante x piu piccolo di β , cioe tale che x < β . Per la (ii) esiste allora s ∈ S
tale che x < s , in contraddizione con l’ipotesi che x sia un maggiorante. Pertanto β eil minimo dei maggioranti.
La dimostrazione dell’enunciato relativo all’estremo inferiore e del tutto analoga eviene lasciata per esercizio. ��
7. Potenze e radici.
Se x ∈ R ed n ∈ N \ {0} e ben noto che cosa si intenda per la potenza n-esima dix , denotata xn , ossia
xn = x · x · · · x� �� �
n volte
.
La associativita del prodotto rende non ambigua l’espressione precedente. Si osserviche se x > 0 allora xn > 0 per ogni intero positivo n (mentre se x < 0, il segno dixn dipende da n : se n e pari allora xn > 0 mentre se n e dispari, allora xn < 0). Inparticolare quindi, se fissiamo un intero positivo n l’insieme
Pn = {xn : x > 0}e un sottoinsieme di R+ = (0,+∞). Una domanda naturale da porsi e se Pn sia unsottoinsieme proprio di R+ o se viceversa coincida con esso. In questo secondo caso,che e naturalmente quello che si verifica, si ha che per ogni intero positivo n ed ogniy > 0 esiste x > 0 tale che xn = y (vedi il Teorema (1.30) qui sotto). Il numero realepositivo x si chiama la radice n-esima di y , e si denota con uno dei simboli y1/n oppuren√y . Per poter dimostrare questo semplice ma fondamentale teorema, premettiamo due
semplici osservazioni.

Numeri reali 29
Lemma 7.1. Sia k un intero positivo. Se 0 < a < b allora 0 < ak < bk .
Dimostrazione. Esercizio. ��
Lemma 7.2. Se 0 < a < b ed n e un intero positivo, allora
(7.5) bn − a
n ≤ n(b− a)bn−1
Dimostrazione. Fattorizzando ed utilizzando il lemma precedente si ha
bn − a
n = (b− a)(bn−1 + bn−2
a+ · · ·+ ban−2 + a
n−1)
≤ (b− a)(bn−1 + bn−2
b+ · · ·+ bbn−2 + b
n−1)
= (b− a)nbn−1.
��
Teorema 7.3. Per ogni numero reale positivo y ed ogni intero positivo n esiste
una ed una sola radice n-esima positiva y1/n .
Dimostrazione. L’unicita e ovvia per via del Lemma (7.1): se 0 < x1 < x2 si haanche 0 < xn
1 < xn2 . Sia ora y > 0 fissato e consideriamo l’insieme
A = {x ∈ R : xn ≤ y}.Questo insieme non e vuoto, perche α = min{1, y} ∈ A ed e limitato superiormenteperche β = max{1, y} e un maggiorante. Infatti:
αn = (min{1, y})n ≤ min{1, y} ≤ y
βn = (max{1, y})n ≥ max{1, y} ≥ y.
Esiste quindi x = supA . Proveremo ora che xn = y . Scegliamo un qualunque numeropositivo ε . Siccome x ≥ α > 0, posto
δ = min�
ε
n2nxn−1;x
2
�
si ha ovviamente 0 < δ < x . Allora, da
0 < x− δ < x < x+ δ
segue(x− δ)n < x
n< (x+ δ)n.
D’altra parte, per le proprieta dell’estremo superiore, tra x − δ ed x vi e certamenteun elemento di A , mentre senz’altro x+ δ �∈ A . Quindi
(x− δ)n < y < (x+ δ)n.
Da queste diseguaglianze, e da (7.5), segue
|xn − y| < (x+ δ)n − (x− δ)n ≤ 2δn(x+ δ)n−1< 2δn(2x)n−1 = δn2nxn−1 ≤ ε.
Poiche quindi |xn − y| < ε per ogni ε > 0 si ha xn = y , come volevasi. ��

30 Analisi Matematica 1
Esercizi
1. Provare che gli assiomi dell’addizione implicano le seguenti proprieta
(a) Se x+ y = y + z allora x = z .(b) Se x+ y = y allora x = 0.(c) Se x+ y = 0 allora y = −x (unicita dell’opposto).(d) −(−x) = x .
2. Provare che gli assiomi della moltiplicazione implicano le seguenti proprieta
(a) Se x �= 0 e xy = xz , allora y = z .(b) Se x �= 0 e xy = y , allora x = 1.(c) Se x �= 0 e xy = 1, allora y = 1/x (unicita del reciproco).(d) Se x �= 0, allora 1/(1/x) = x .
3. Provare che gli assiomi di corpo implicano le seguenti proprieta
(a) 0x = 0.(b) Se x �= 0 e y �= 0, allora xy �= 0.(c) (−x)y = −(xy) = x(−y).(d) (−x)(−y) = xy .
Nota: gli esercizi dal (4) al (13) servono per ripassare l’algebra delle disuguaglianze.
Essi sono “in ordine”, nel senso che per svolgerne uno puo essere necessario utilizzarne
uno precedente.
4. Siano x, y ∈ R . Provare che x ≤ y se e solo se y − x ≥ 0 e x < y se e solose y − x > 0. Dedurne che l’opposto di un numero positivo e un numero negativo el’opposto di un numero negativo e un numero positivo.
5. Siano x1 , x2 , y1 , y2 ∈ R . Provare che se x1 ≤ y1 e x2 ≤ y2 allora si ha anchex1+x2 ≤ y1+y2 ; provare inoltre che quest’ultima diseguaglianza e stretta (ossia “<”)se e solo se una delle due precedenti lo e.
6. Provare che la somma di un numero finito di numeri reali non negativi e non negativae che se almeno uno di essi e positivo, la somma e positiva.
7. Siano x , y , z ∈ R con z < 0. Provare che se x ≤ y , allora xz ≥ yz e se x < y ,allora xz < yz .
8. Provare che per ogni numero reale x si ha x2 ≥ 0 e che se x2 = 0 allora x = 0.
9. Siano x1 , x2 , y1 , y2 ∈ R . Provare che
(a) se 0 ≤ x1 ≤ y1 e 0 ≤ x2 ≤ y2 allora x1x2 ≤ y1y2 ;(b) se y1 > 0 e y2 > 0 e x1 < y1 oppure x2 < y2 , allora x1x2 < y1y2 .

Numeri reali 31
10. Provare che il prodotto di un numero finito di numeri reali positivi e positivo.
11. Provare che se x ∈ R e positivo, allora 1/x > 0 e se e negativo allora 1/x < 0.
12. Siano x e y due numeri reali positivi. Provare che x ≤ y se e solo se y/x ≥ 1 ex < y se e solo se y/x > 1.
13. Siano x, y ∈ R entrambi non nulli. Provare che
(a) se 0 < x < y oppure x < y < 0, allora 1/x > 1/y ;(b) se x < 0 < y allora 1/x < 1/y .
14. Risolvere le seguenti disequazioni
(i) x(x+ 2)2 < 0;(ii) (2x+ 3)4(x+ 4) < 0;
(iii)2x− 1
x+ 2≥ 0;
(iv)x2 − 3x− 10
x2 + x+ 1< 0.
15. Siano Ak = {x ∈ R : kx− 5 ≥ 0} e B = {x ∈ R : x− 3 < 0} . Per quali k ∈ R siha Ak ⊆ B? Per quali k ∈ R si ha Ak ∩B �= ∅?16. Sia s ∈ Q tale che s2 < 2.
(i) si provi utilizzando l’archimedeita di Q che esiste un intero n > 1 per il qualen(2− s2) > 2s+ 1;
(ii) utilizzando il punto precedente, si provi che esiste un numero razionale deltipo r = s+ 1/n con n intero positivo, tale che r2 < 2.
17. Si provi che se esistesse un razionale s che separa gli insiemi A = {a ∈ Q : a2 < 2}e B = {b ∈ Q : b2 > 2} , allora necessariamente s2 = 2. [Traccia: si proceda provandoche ne s2 < 2 ne s2 > 2 possono essere vere per via di quanto visto all’esercizioprecedente.]
18. Provare che se A e B sono sottoinsiemi limitati di R tali sono anche A ∪ B eA ∩B .
19. Dimostrare il punto (ii) della Proposizione 6.5.
20. Dimostrare il Lemma 7.1.


CAPITOLO 3
Funzioni
Moltissime leggi della scienza sono espresse come relazioni che legano fra loro dueo piu quantita. Tipicamente, una legge fisica si formula affermando che una certaquantita y dipende da un’altra quantita x secondo una precisa regola, ossia che x e y
soddisfano una relazione per la quale ad ogni valore di x corrisponde un ben precisovalore di y . Il modo in cui y e determinato a partire dalla conoscenza di x e, ne piune meno, il contenuto della legge fisica. Per questa ragione, i modelli classici dellafisica sono anche noti come modelli deterministici: la conoscenza del valore di uno opiu parametri fisici determina univocamente il valore di altri parametri ad essi legatimediante cio che si suol definire una relazione funzionale. Si potrebbe parafrasaredicendo che una legge della fisica classica e spesso un’affermazione del tipo: “dimmiquanto vale x e io ti dico quanto vale y”.
Il tipo di relazione appena descritta si presenta in molte altre situazioni, non solonelle leggi fisiche. Ad esempio, se ogni persona che entra in un negozio ritira un bigliettonumerato, ad ogni numero chiamato dal negoziante corrispondera un unico avventore:“dimmi un numero e io ti dico a chi tocca”. Se una banca pattuisce un certo interesseannuo per le somme in deposito, ad ogni cliente verra riconosciuta a fine anno unasomma di competenza: “dimmi quanto hai in deposito e io ti dico quale e l’interessedovuto”. La lista dei possibili esempi e naturalmente infinita.
Il punto di vista matematico consiste nell’estrarre gli elementi essenziali di unavasta classe di modelli di riferimento e definire un concetto generale che si possa poiadattare a varie possibili situazioni, non solo ai modelli da cui si e partiti. Il concettogenerale cui stiamo alludendo e il concetto di funzione. Il punto di partenza consistenell’individuare due insiemi, diciamo A e B . L’insieme A sara l’insieme all’interno delquale x puo variare – e per questa ragione x sara detta una variabile – mentre B saral’insieme dei possibili valori di y . Una funzione da A a B non e altro che una leggeche ad ogni x ∈ A fa corrispondere uno ed un solo y ∈ B . Formalizziamo cio in unadefinizione.
Definizione 0.4. Una funzione (o applicazione) tra gli insiemi A e B e una
regola f che ad ogni elemento a ∈ A associa uno ed un solo elemento f(a) ∈ B , detto
l’immagine di a mediante f . Una funzione si indica con il simbolo f : A → B . Spesso
si scrive a �→ b in luogo di f(a) = b per indicare che b e l’immagine di a mediante f .
Una funzione e quindi una terna (A,B, f), nel senso che per avere una funzionedevono essere specificati l’insieme A di partenza, l’insieme B di arrivo e la regola cheabbiamo sinteticamente indicato con la lettera f . Ne segue che due funzioni f : A → B
e g : C → D sono uguali se e solo se (A,B, f) = (C,D, g), ossia se e solo se coincidono
33

34 Analisi Matematica 1
gli insiemi di partenza, cioe A = C , gli insiemi di arrivo, cioe B = D e le regole, cioef = g , nel senso che f(a) = g(a) per ogni a ∈ A = C .
Alle volte e utile rappresentare le funzioni mediante disegni del tipo
✲f
A B
in cui si evidenzia che f , per cosı dire, porta i punti di A in punti di B .
Esempi.
(1) Siano A = N , B = Z e sia f : N → Z la funzione definita dalla regola n �→ n−n2 .E evidente che ad ogni intero non negativo n ∈ N corrisponde uno ed un solo interomediante f , cioe f(n) = n − n2 . Ad esempio, f(0) = 0, f(1) = 0, f(2) = −2 ef(3) = −6. Qual’e l’immagine di 10 mediante f ?
(2) Siano D l’insieme degli interi positivi dispari e P l’insieme degli interi positivipari. La legge f(n) = n2 non definisce una funzione f : D → P in quanto non e veroche ad ogni numero dispari n corrisponda il numero pari n2 ; infatti se n e dispari talee anche n2 e quindi f(n) = n2 �∈ P . Per una ragione analoga, non abbiamo neppureuna funzione f : P → D . Piuttosto, la corrispondenza n �→ n2 definisce una funzioneg : D → D , ma anche una funzione h : P → P , perche se n e pari tale e anche n2 .D’altra parte, si potrebbe pensare che n �→ n2 definisca una funzione dagli interi agliinteri, o dai razionali ai razionali, o dai reali ai reali.... se non si specifica con esattezza
quali siano l’insieme di partenza e l’insieme d’arrivo, la sola legge di corrispondenza
non individua necessariamente una funzione.
(3) Sia M l’insieme dei mesi dell’anno 2003 e sia G = {28, 30, 31} . La corrispondenzag che ad ogni mese fa corripondere il numero dei giorni di quel mese e una funzioneg : M → G . Ad esempio g(marzo 2003) = 31. Se invece M fosse l’insieme dei mesidell’anno 2004, la stessa corrispondenza non definirebbe una funzione, in quanto ilmese di febbraio 2004 ha 29 giorni e 29 �∈ G .

Funzioni 35
(4) Le potenze x �→ xn con n intero e positivo sono funzioni da R ad R . Sono anchefunzioni le seguenti
f : R \ {0} → R, x �→ x−n
, n ∈ N \ {0};f : (0,+∞) → (0,+∞), x �→ x
1/n, n ∈ N \ {0};
f : (0,+∞) → (0,+∞), x �→ 1/x1/n, n ∈ N \ {0}.
(5) Indichiamo con [x] la cosiddetta parte intera di x , dove x e un numero realequalsiasi. Essa e definita come il piu grande numero intero minore o uguale a x , cioe
[x] = max{m ∈ Z : m ≤ x}.Chiaramente, [x] ∈ Z per ogni x ∈ R , cosicche [ · ] : R → Z , x �→ [x] e una funzione.
Una questione di terminologia: spesso si usa il termine mappa invece di applicazioneo funzione. La ragione e semplice. Ci si riferisce al fatto che una mappa e un disegnoche rappresenta una certa regione, o citta, o edificio. Ad ogni punto del disegno eassociato uno ed un solo luogo geografico.
La maggior parte delle funzioni nelle quali siamo interessati in questi appunti sonofunzioni tra sottoinsiemi degli insiemi numerici N , Z , Q ed R . In particolare, il verooggetto di studio saranno le funzioni del tipo f : I → R dove I e un sottoinsiemedi R . Per questa ragione e utile stabilire una convenzione che abbrevia in molti casila scrittura e che in un certo senso rimuove l’ambiguita illustrata nell’Esempio (2.4).Vogliamo cioe poter assegnare formule che definiscano funzioni in modo chiaro, senzadover specificare di volta in volta quali siano gli insiemi di partenza e di arrivo. Se adesempio scriviamo f(x) =
√1− x2 vogliamo dire che f e la funzione f : [−1, 1] → R
definita da x �→√1− x2 .

36 Analisi Matematica 1
Convenzione 0.5. Se scriviamo f(x) = “formula che coinvolge x” intendiamo la
funzione f : I → R dove I e il piu grande sottoinsieme di R in cui la formula ha senso
e definisce un unico numero reale. L’insieme I verra detto l’insieme di definizione di
f , oppure il suo dominio, oppure ancora il suo campo di esistenza.
Esempi.
(6) Il dominio di f(x) = x2 e I = R : si puo fare il quadrato di ogni numero reale.
(7) Il dominio di f(x) =√x+
√−x e l’insieme {0} . Infatti, devono valere simultane-
amente le diseguaglianze x ≥ 0 e −x ≥ 0.
(8) Il dominio I di f(x) = tan(1−x2) si trova imponendo 1−x2 �∈ {π/2+kπ : k ∈ Z} .Esso e quindi I = R \ {±
�j�π + 1
2
�+ 1 : j ∈ Z} . Il lettore e naturalmente invitato a
verificare quest’ultima affermazione.
1. Prodotto cartesiano. Il grafico di una funzione.
Cosı come i punti della retta possono essere pensati come numeri reali, e utilepensare i punti del piano come coppie di numeri reali. L’idea, dovuta a Cartesio,consiste nell’osservare che se tracciamo nel piano due rette r ed s non parallele, quindiincidenti in un punto O , ogni punto P fuori di esse determina altri due punti, uno sur ed uno su s : i punti di intersezione tra r ed s e le parallele ad esse passanti per P .La costruzione e piu naturale se r ed s sono ortogonali.
r
s
✉O✉P❡❡
Poiche r ed s possono essere identificate con R , a ciascuno dei due punti di inter-sezione puo essere associato un numero reale. In ultima analisi, possiamo associare aP una coppia di numeri reali.
Ogniqualvolta si sia fissata la scelta delle identificazioni di r ed s con R , la proce-dura appena descritta definisce cio che si chiama un sistema di coordinate nel piano.Solitamente, si scelgono r ed s ortogonali e si identifica con 0 ∈ R il punto O di inter-sezione su entrambe le rette. In questo caso il sistema di coordinate si dira ortogonale
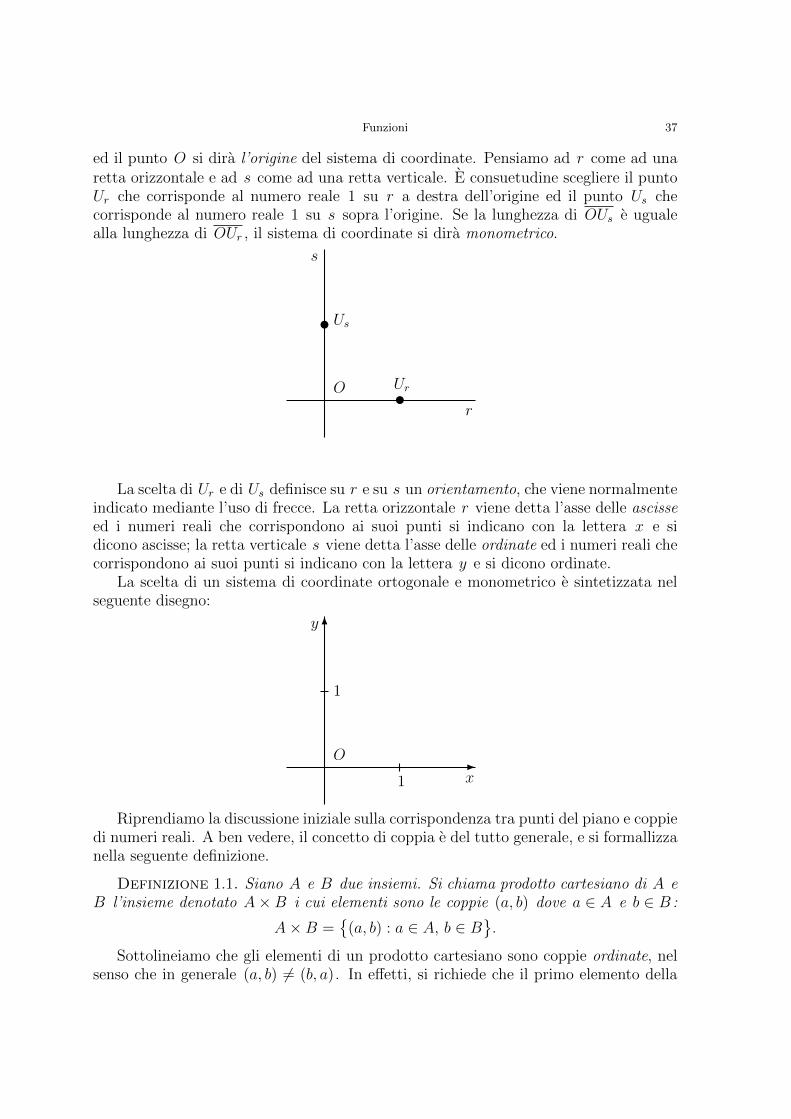
Funzioni 37
ed il punto O si dira l’origine del sistema di coordinate. Pensiamo ad r come ad unaretta orizzontale e ad s come ad una retta verticale. E consuetudine scegliere il puntoUr che corrisponde al numero reale 1 su r a destra dell’origine ed il punto Us checorrisponde al numero reale 1 su s sopra l’origine. Se la lunghezza di OUs e ugualealla lunghezza di OUr , il sistema di coordinate si dira monometrico.
r
✉Ur
s
✉Us
O
La scelta di Ur e di Us definisce su r e su s un orientamento, che viene normalmenteindicato mediante l’uso di frecce. La retta orizzontale r viene detta l’asse delle ascisseed i numeri reali che corrispondono ai suoi punti si indicano con la lettera x e sidicono ascisse; la retta verticale s viene detta l’asse delle ordinate ed i numeri reali checorrispondono ai suoi punti si indicano con la lettera y e si dicono ordinate.
La scelta di un sistema di coordinate ortogonale e monometrico e sintetizzata nelseguente disegno:
✲x1
✻y
1
O
Riprendiamo la discussione iniziale sulla corrispondenza tra punti del piano e coppiedi numeri reali. A ben vedere, il concetto di coppia e del tutto generale, e si formallizzanella seguente definizione.
Definizione 1.1. Siano A e B due insiemi. Si chiama prodotto cartesiano di A e
B l’insieme denotato A×B i cui elementi sono le coppie (a, b) dove a ∈ A e b ∈ B :
A× B =�(a, b) : a ∈ A, b ∈ B
�.
Sottolineiamo che gli elementi di un prodotto cartesiano sono coppie ordinate, nelsenso che in generale (a, b) �= (b, a). In effetti, si richiede che il primo elemento della

38 Analisi Matematica 1
coppia (a, b), cioe a , stia nel primo insieme A ed il secondo, b , nel secondo insieme B .Quindi, se a ∈ A e b ∈ B , la coppia (b, a) non appartiene a A×B , ma a B ×A , chee un insieme diverso. Questa osservazione diventa cruciale quando A = B . In questocaso gli insiemi A × B e B × A coincidono, in quanto sono entrambi formati dallecoppie (a, b) con a e b in A = B . Ma se a �= b , la coppia (a, b) e diversa dalla coppia(b, a).
Il caso che a noi interessa maggiormente e il prodotto cartesiano R × R , perchevogliamo stabilire una corrispondenza biunivoca tra i suoi elementi ed i punti del piano.Supponiamo dunque di aver fissato un sistema di coordinate ortogonale e monometriconel piano. Ad ogni punto P0 del piano associamo la coppia (x0, y0) ∈ R × R , dovex0 e l’ascissa del punto di intersezione tra la retta passante per P0 e parallela all’asseverticale delle ordinate e y0 e l’ordinata del punto di intersezione tra la retta passanteper P0 e parallela all’asse orizzontale delle ascisse.
✲xx0
✻y
y0�P0. . . . . . . . . . . .
...
...
Viceversa, data la coppia (x0, y0) ∈ R×R , tracciamo la retta parallela all’asse delleordinate e passante per il punto x0 sulla retta delle ascisse, e la retta parallela all’assedelle ascisse e passante per il punto y0 sulla retta delle ordinate. Queste due rette siincontreranno in un punto P0 del piano. Associamo dunque a (x0, y0) ∈ R×R il puntoP0 . Si noti in particolare, che alla coppia (0, 0) corrisponde l’origine O .
Per via dell’identificazione che abbiamo stabilito tra il piano e il prodotto carte-siano R × R , scriveremo con lieve abuso P0 = (x0, y0). Per brevita di notazione, sisuole scrivere R2 in luogo di R × R . Possiamo concludere dicendo che un sistema dicoordinate nel piano determina una corrispondenza biunivoca tra R2 e il piano. Salvoesplicito avviso del contrario, supporremo sempre di aver fatto una scelta di un sistemadi coordinate ortogonale e monometrico e di aver identificato R2 col piano.
Supponiamo ora di avere una funzione f : I → R dove I e un sottoinsieme di R ,ad esempio un intervallo. Un modo spesso molto efficiente di visualizzare la funzionef e quello di disegnarne il grafico. Esso e il sottoinsieme del piano
Γ(f) =�(x, f(x)) : x ∈ I
�.
Sia ad esempio I = [a, b] . Un tipico grafico potrebbe essere:

Funzioni 39
✲xa
...
...
...
...
...
...
x0 b
✻y
� �f(x0) . . . . . . . . . . . . . . . � (x0, f(x0))
Data una funzione f : I → R si ottiene percio un sottoinsieme del piano, il suografico. Quali sottoinsiemi del piano si ottengono come grafici di funzioni f : I → R equali sottoinsiemi invece non possono rappresentare grafici di funzioni di questo tipo?La risposta e che i sottoinsiemi che si possono ottenere sono tutti e soli quegli insiemi(non vuoti) Γ che godono della proprieta seguente: ogni retta verticale interseca Γ in
al piu un punto. Infatti, data f : I → R ed una retta verticale di ascissa x , avremoche essa interseca il grafico di f nel solo punto (x, f(x)) se x ∈ I ed in nessun puntose x �∈ I . Viceversa, dato un insieme Γ del tipo detto, esiste una ed una sola funzionef che ha Γ come grafico: basta definire I come l’insieme delle ascisse x di quelle retteche hanno intersezione non nulla con Γ e, per ogni siffatto x , porre f(x) = y , dove(x, y) e il punto di intersezione della retta di ascissa x con Γ .
Esempi.
(9) La funzione piu semplice e forse f(x) = x , il cui grafico e naturalmente:
(10) Mettiamo subito in guardia il lettore sul fatto che, contrariamente a cio che sipotrebbe forse pensare, non tutte le funzioni hanno grafici disegnabili. Si consideri per

40 Analisi Matematica 1
esempio la seguente funzione, nota come funzione di Dirichlet:
D : [0, 1] → R, D(x) =
�1 se x ∈ Q ∩ [0, 1]
0 se x ∈ [0, 1] \Q.
Ovviamente, non e possibile stabilire graficamente se un punto ha coordinate razionalioppure no e quindi nessun disegno ragionevole puo essere fatto del grafico di questafunzione.
(11) Dalla discussione svolta sopra, si deduce che la circonferenza centrata nell’originee di raggio r non e il grafico di una funzione f : I → R in quanto tutte le rette verticalidi ascissa in (−r, r) intersecano la circonferenza in due punti.
−r r
�
�
(12) La funzione x �→ |x| ha grafico:

Funzioni 41
(13) Le funzioni x �→ x2 e x �→ x3 hanno grafici, rispettivamente:
(14) Consideriamo ora una interessante funzione, la mantissa di x , denotata (x). Essae definita a partire dalla parte intera [x] (cfr. ’esempio (5)) dalla relazione
(x) = x− [x].
Si osservi che naturalmente [x] = n se n ≤ x < n+1. Il grafico di x �→ [x] sara quindi
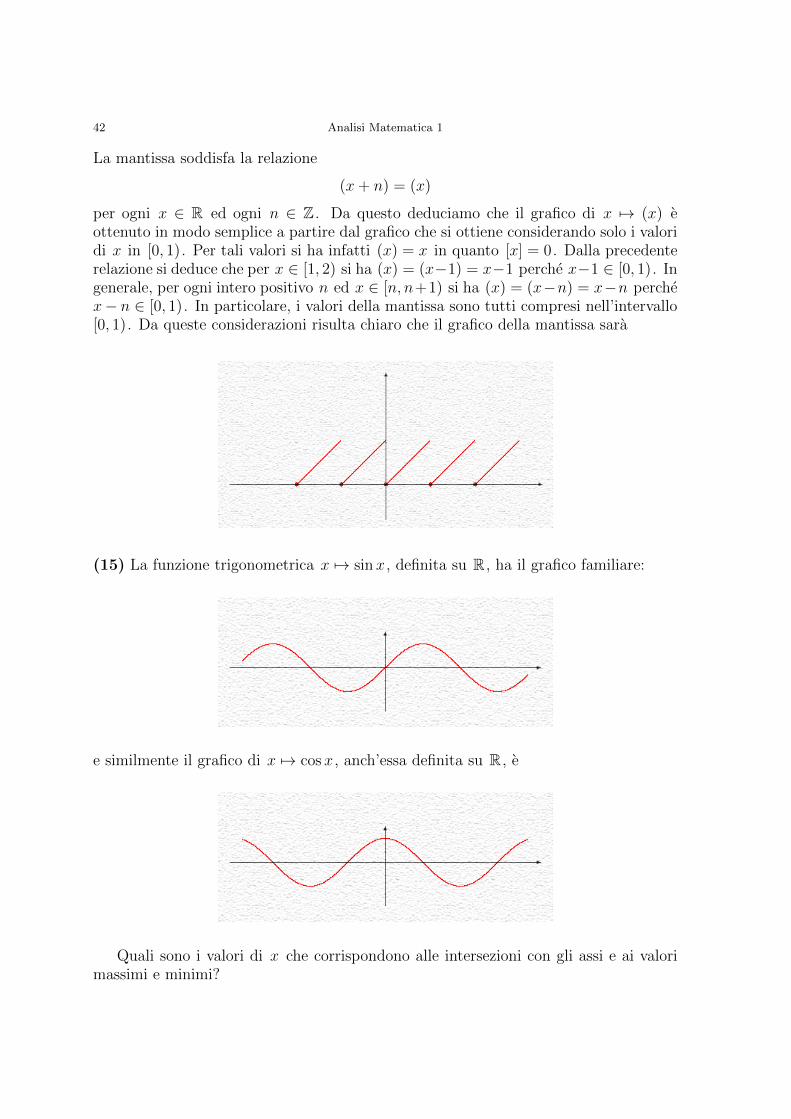
42 Analisi Matematica 1
La mantissa soddisfa la relazione
(x+ n) = (x)
per ogni x ∈ R ed ogni n ∈ Z . Da questo deduciamo che il grafico di x �→ (x) eottenuto in modo semplice a partire dal grafico che si ottiene considerando solo i valoridi x in [0, 1). Per tali valori si ha infatti (x) = x in quanto [x] = 0. Dalla precedenterelazione si deduce che per x ∈ [1, 2) si ha (x) = (x−1) = x−1 perche x−1 ∈ [0, 1). Ingenerale, per ogni intero positivo n ed x ∈ [n, n+1) si ha (x) = (x−n) = x−n perchex− n ∈ [0, 1). In particolare, i valori della mantissa sono tutti compresi nell’intervallo[0, 1). Da queste considerazioni risulta chiaro che il grafico della mantissa sara
(15) La funzione trigonometrica x �→ sin x , definita su R , ha il grafico familiare:
e similmente il grafico di x �→ cos x , anch’essa definita su R , e
Quali sono i valori di x che corrispondono alle intersezioni con gli assi e ai valorimassimi e minimi?

Funzioni 43
(16) E bene abituarsi a saper disegnare il grafico delle funzioni definite, come si suoldire, “a pezzi”. Anziche tentare di dare una definizione generale astrusa, consideriamoil seguente esempio
f(x) =
sin(x3) se x < 0
cos x se 0 ≤ x < π
−1 se x ≥ π.
Il grafico sara ottenuto “incollando” varie parti di grafici di funzioni semplici.
π
2. Operazioni sui grafici e simmetrie.
Sia f : I → R una funzione. Fissiamo a ∈ R e ci chiediamo se le scritture
f(x+ a), f(x) + a, f(ax), af(x)
definiscano in qualche senso naturale delle “nuove” funzioni. In caso affermativo, qualelegame sussiste tra f e le nuove funzioni? Ci aspettiamo che i grafici delle nuove fun-zioni siano ottenuti dal grafico di f mediante operazioni elementari di tipo geometrico.
Esaminiamo il primo caso. Per ragioni che saranno chiare tra breve, convieneconsiderare piuttosto f(x − a) anziche f(x + a). Per poter dar senso all’espressionef(x−a) bisogna che l’argomento x−a appartenga al dominio I ⊆ R di f . In tal casosi avra x− a = y per qualche y ∈ I e quindi x = y + a . Se percio poniamo
I + a = {y + a : y ∈ I},la formula x �→ f(x− a) ha senso per ogni x ∈ I + a e definisce una funzione. Questafunzione si chiama la traslata di f mediante a e si denota spesso τaf . In simboli:
τaf : I + a −→ R, τaf(x) = f(x− a).
Cerchiamo ora di comprendere quale sia il legame tra il grafico Γ(f) di f ed ilgrafico Γ(τaf) di τaf . E evidente che I + a e ottenuto traslando I di a . Se a > 0,la traslazione sara a destra, nel senso che I + a si ottiene spostando I a destra della

44 Analisi Matematica 1
quantita a . Questa e la ragione per considerare f(x − a) anziche f(x + a): a valoripositivi di a corrispondono traslazioni a destra. Se a < 0 la traslazione sara a sinistra,della quantita |a| . Se ad esempio I = (0, 1) e a = 3, allora I + a = (3, 4).
� � � (0
)1
I
(3
)4
I + a✲� � �
Il grafico Γ(τaf) si otterra semplicemente traslando Γ(f) a destra di una lunghezza a ,se a > 0. Infatti, il valore in x = y + a di τaf e uguale al valore in y di f , in quantoτaf(y + a) = f(y).
Γ(f) Γ(τaf)
Analizziamo ora la funzione definita da f(x) + a . Essa ha senso esattamente perle stesse x per le quali ha senso f , cioe per x ∈ I . I valori assunti da questa funzione,che si denota semplicemente f + a , sono traslati di a rispetto ai valori assunti da f .Il grafico sara quindi ottenuto traslando Γ(f) in alto di una lunghezza a , se a > 0: igrafici di f e di f + a sono uno sopra l’altro.
� �
Γ(f)
Γ(f + a)

Funzioni 45
Passiamo ora ad analizzare gli effetti della moltiplicazione. Innanzitutto, possiamosupporre a �= 0. Per ragioni che saranno spiegate tra breve, consideriamo f(a−1x)anziche f(ax). Affinche l’espressione abbia senso, bisognera che a−1x ∈ I . In tal casoa−1x = y per qualche y ∈ I e quindi x = ay . Se percio poniamo
aI = {ay : y ∈ I},la formula x �→ f(a−1x) ha senso per ogni x ∈ aI e definisce una funzione. Questafunzione si chiama la dilatata di f mediante a e si denota spesso δaf . In simboli:
δaf : aI −→ R, δaf(x) = f(a−1x).
Per quanto riguarda il legame tra Γ(f) e Γ(δaf), osserviamo innanzitutto che aI
e ottenuto dilatando I di un fattore a . Quindi, se a > 1 si avra effettivamenteuna dilatazione, mentre se a < 1 si avra una contrazione. Questa e la ragione perconsiderare f(a−1x) anziche f(ax): a valori di a maggiori di 1 corrispondono vere eproprie dilatazioni, cioe ingrandimentti.
La traslazione e uno spostamento rigido e quindi e insensibile alla posizione di I ,nel senso che la posizione relativa di I e di I+a e sempre la medesima. La dilatazionedipende invece dalla posizione di I . Sia ad esempio a = 3 e consideriamo gli intervalliI = (0, 1/2) e J = (1, 3/2), entrambi di lunghezza 1/2. Avremo aI = (0, 3/2), mentreaJ = (3, 9/2). Si osservi che I ∩ 3I �= ∅ , mentre J ∩ 3J = ∅ .
� � � (0
)1/2
)3/2 � � �
� � � (1
)3/2
(3
)9/2 � � �
Il grafico Γ(δaf) si otterra dilatando Γ(f) di un fattore a , se a > 1. Infatti, il valorein x = ay di δaf e esattamente uguale al valore in y di f , in quanto δaf(ay) = f(y).
Γ(δ2f)
Γ(f)
In figura sono riportati i grafici di una sinusoide e della sua dilatata di un fattoredue: il grafico viene dilatato orizzontalmente. Sotto invece, la stessa sinusoide e dilatatadi un fattore 1/2: il grafico viene compresso orizzontalmente.
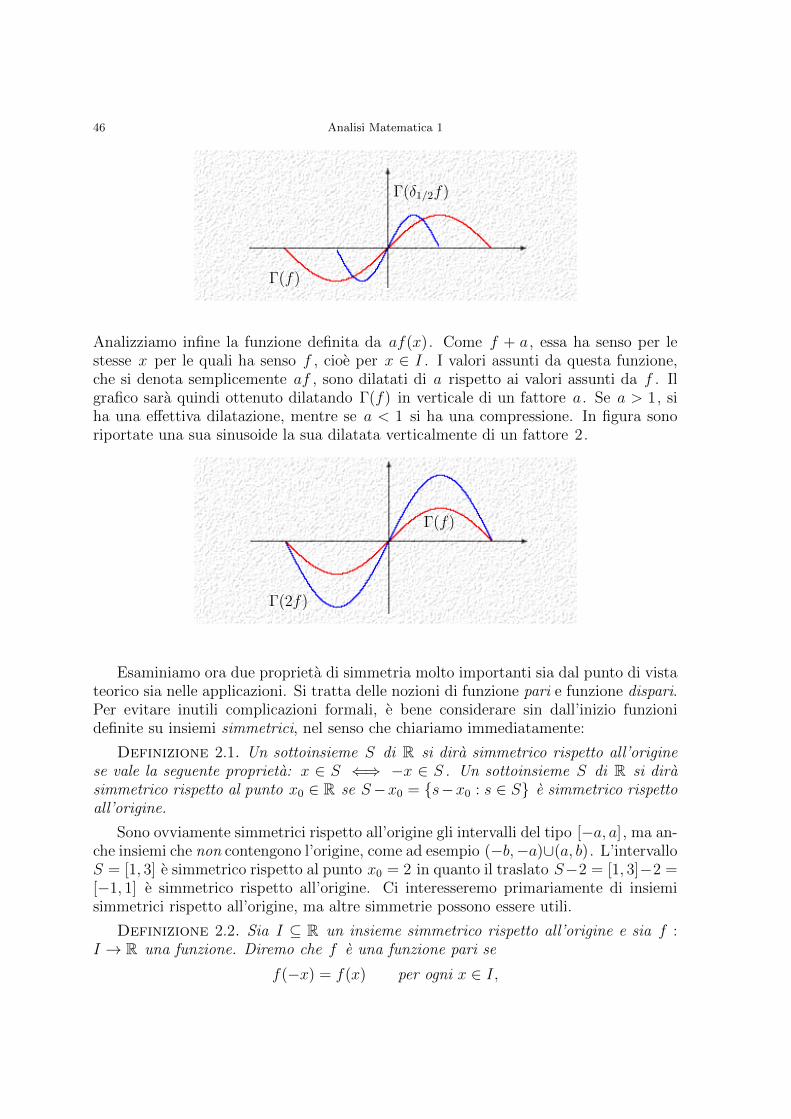
46 Analisi Matematica 1
Γ(f)
Γ(δ1/2f)
Analizziamo infine la funzione definita da af(x). Come f + a , essa ha senso per lestesse x per le quali ha senso f , cioe per x ∈ I . I valori assunti da questa funzione,che si denota semplicemente af , sono dilatati di a rispetto ai valori assunti da f . Ilgrafico sara quindi ottenuto dilatando Γ(f) in verticale di un fattore a . Se a > 1, siha una effettiva dilatazione, mentre se a < 1 si ha una compressione. In figura sonoriportate una sua sinusoide la sua dilatata verticalmente di un fattore 2.
Γ(2f)
Γ(f)
Esaminiamo ora due proprieta di simmetria molto importanti sia dal punto di vistateorico sia nelle applicazioni. Si tratta delle nozioni di funzione pari e funzione dispari.Per evitare inutili complicazioni formali, e bene considerare sin dall’inizio funzionidefinite su insiemi simmetrici, nel senso che chiariamo immediatamente:
Definizione 2.1. Un sottoinsieme S di R si dira simmetrico rispetto all’origine
se vale la seguente proprieta: x ∈ S ⇐⇒ −x ∈ S . Un sottoinsieme S di R si dira
simmetrico rispetto al punto x0 ∈ R se S−x0 = {s−x0 : s ∈ S} e simmetrico rispetto
all’origine.
Sono ovviamente simmetrici rispetto all’origine gli intervalli del tipo [−a, a] , ma an-che insiemi che non contengono l’origine, come ad esempio (−b,−a)∪(a, b). L’intervalloS = [1, 3] e simmetrico rispetto al punto x0 = 2 in quanto il traslato S−2 = [1, 3]−2 =[−1, 1] e simmetrico rispetto all’origine. Ci interesseremo primariamente di insiemisimmetrici rispetto all’origine, ma altre simmetrie possono essere utili.
Definizione 2.2. Sia I ⊆ R un insieme simmetrico rispetto all’origine e sia f :I → R una funzione. Diremo che f e una funzione pari se
f(−x) = f(x) per ogni x ∈ I,

Funzioni 47
e diremo invece che f e una funzione dispari se
f(−x) = −f(x) per ogni x ∈ I.
Esempi.
(17) Il prototipo di funzione pari e dato da una potenza pari di x . In effetti sef(x) = x2n con n ∈ N , allora evidentemente (−x)2n = x2n per ogni x ∈ R . Anchela funzione |x| e chiaramente pari. Il prototipo di funzione dispari e invece dato dauna potenza dispari di x . In effetti se f(x) = x2n+1 con n ∈ N , allora evidentemente(−x)2n+1 = −(x2n+1). Naturalmente, tutte le potenze, pari e dispari, sono definite sututto R che e un insieme simmetrico rispetto all’origine.
(18) Altri esempi canonici di funzioni simmetriche si ottengono dalla trigonometria: epari il coseno e sono dispari il seno e la tangente.
Il grafico di una funzione pari e simmetrico rispetto all’asse y : la parte sinistra delgrafico (ascisse negative) e l’immagine speculare della parte destra. Ad esempio
e l’aspetto di una tipica funzione pari. Per ottenere la parte sinistra del grafico di unafunzione dispari e necessario rifletterne la parte destra due volte: prima nell’asse x
e poi nell’asse y . Oppure, piu semplicemente, la si riflette rispetto all’origine. Unafunzione dispari e quindi del tipo:
Si osservi che se l’origine appartiene all’insieme I , allora la richiesta f(x) = f(−x) siriduce, per x = 0, all’identita f(0) = f(0), che e sempre verificata. In altri termini, sef e pari su un insieme che contiene l’origine, possiamo modificarne il valore nell’originein modo arbitrario ed essa rimarra pari. La richiesta f(x) = −f(−x) si riduce invece,per x = 0, all’uguaglianza f(0) = −f(0), che implica f(0) = 0. Quindi, se f e disparisu un insieme che contiene l’origine, necessariamente f(0) = 0.
In generale, una funzione, quand’anche definita su un insieme simmetrico rispettoall’origine, non sara ne pari ne dispari. Ad esempio, la funzione f(x) = x3 + x2 edefinta su R ma f(1) = 2 e f(−1) = 0 e quindi non e ne pari ne dispari. Si notiperaltro che f e la somma di una funzione pari, cioe x �→ x2 , e di una funzione dispari,

48 Analisi Matematica 1
cioe x �→ x3 . Come appureremo nella Proposizione 2.4, ogni funzione definita su uninsieme simmetrico rispetto all’origine si puo esprimere in modo unico come la sommadi una funzione pari e di una funzione dispari.
Definizione 2.3. Sia I ⊆ R simmetrico rispetto all’origine e sia f : I → R. Le
funzioni fp e fd definite su I dalle formule:
(2.6) fp(x) =1
2(f(x) + f(−x)) , fd(x) =
1
2(f(x)− f(−x))
si chiamano, rispettivamente, parte pari e parte dispari di f .
Le proprieta di fp e fd sono descritte nella proposizione che segue.
Proposizione 2.4. Sia I ⊆ R simmetrico rispetto all’origine e sia f : I → R.
Allora fp e pari, fd e dispari e f = fp+ fd . Questa decomposizione e unica, nel senso
che se f = p+d con p, d : I → R funzioni rispettivamente pari e dispari, allora p = fp
e d = fd .
Dimostrazione. Innanzitutto, abbiamo
fp(−x) =1
2(f(−x) + f(x)) = fp(x)
fd(−x) =1
2(f(−x)− f(x)) = −fd(x)
per ogni x ∈ I . Cio prova che fp e pari e fd e dispari. Inoltre, per ogni x ∈ I si ha
fp(x) + fd(x) =1
2(f(x) + f(−x)) +
1
2(f(x)− f(−x)) = f(x),
ed anche il secondo asserto e provato. Infine, si supponga f = p+ d , con p, d : I → Rfunzioni rispettivamente pari e dispari. Allora per ogni x ∈ I si ha
fp(x) =1
2(f(x) + f(−x)) =
1
2(p(x) + d(x) + p(−x) + d(−x)) = p(x)
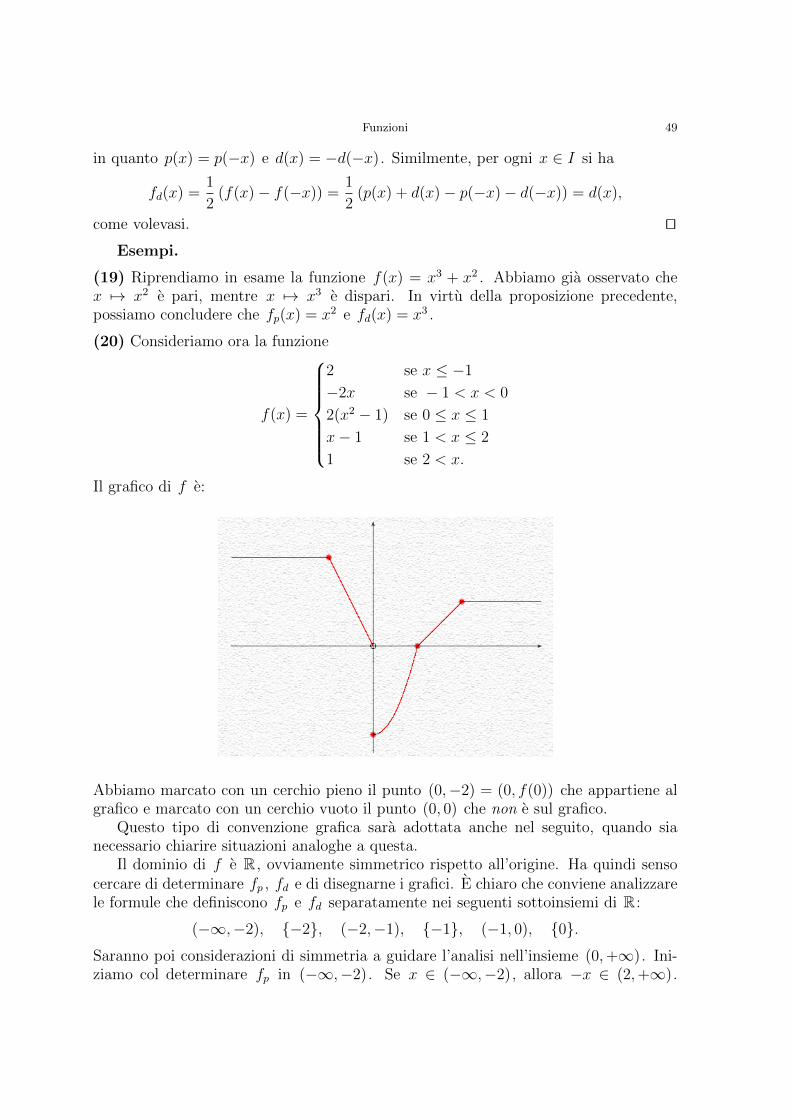
Funzioni 49
in quanto p(x) = p(−x) e d(x) = −d(−x). Similmente, per ogni x ∈ I si ha
fd(x) =1
2(f(x)− f(−x)) =
1
2(p(x) + d(x)− p(−x)− d(−x)) = d(x),
come volevasi. ��Esempi.
(19) Riprendiamo in esame la funzione f(x) = x3 + x2 . Abbiamo gia osservato chex �→ x2 e pari, mentre x �→ x3 e dispari. In virtu della proposizione precedente,possiamo concludere che fp(x) = x2 e fd(x) = x3 .
(20) Consideriamo ora la funzione
f(x) =
2 se x ≤ −1
−2x se − 1 < x < 0
2(x2 − 1) se 0 ≤ x ≤ 1
x− 1 se 1 < x ≤ 2
1 se 2 < x.
Il grafico di f e:
Abbiamo marcato con un cerchio pieno il punto (0,−2) = (0, f(0)) che appartiene algrafico e marcato con un cerchio vuoto il punto (0, 0) che non e sul grafico.
Questo tipo di convenzione grafica sara adottata anche nel seguito, quando sianecessario chiarire situazioni analoghe a questa.
Il dominio di f e R , ovviamente simmetrico rispetto all’origine. Ha quindi sensocercare di determinare fp , fd e di disegnarne i grafici. E chiaro che conviene analizzarele formule che definiscono fp e fd separatamente nei seguenti sottoinsiemi di R :
(−∞,−2), {−2}, (−2,−1), {−1}, (−1, 0), {0}.Saranno poi considerazioni di simmetria a guidare l’analisi nell’insieme (0,+∞). Ini-ziamo col determinare fp in (−∞,−2). Se x ∈ (−∞,−2), allora −x ∈ (2,+∞).

50 Analisi Matematica 1
Quindi f(x) = 1 e f(−x) = 1/2. La formula (2.6) fornisce pertanto:
fp(x) =1
2(f(x) + f(−x)) =
1
2(2 + 1) =
3
2.
Per quanto riguarda il punto −2, il valore f(2) e ottenuto calcolando x− 1 in x = 2,cioe f(2) = 1. Quindi
fp(2) =1
2(f(−2) + f(2)) =
1
2(2 + 1) =
3
2.
Ragionando similmente per i rimanenti insiemi, avremo:
fp(x) =1
2(2 + ((−x)− 1)) =
1
2(1− x) , x ∈ (−2,−1)
fp(−1) =1
2(2 + 0) = 1
fp(x) =1
2
�−2x+
�(−x)2 − 1
��=
�x2 − x− 1
�, x ∈ (−1, 0)
fp(0) =1
2(f(0) + f(−0)) = f(0) = −1(2.7)
Per simmetria, ossia facendo ricorso al fatto che fp(x) = fp(−x), si ottiene l’espressionedi fp in (0,+∞). Il lettore e invitato a verificare in tutti i dettagli che
(2.8) fp(x) =
3/2 se x ≤ −2
(1− x) /2 se − 2 < x ≤ −1
x2 − x− 1 se − 1 < x < 0
−2 se x = 0
x2 + x− 1 se 0 < x < 1
(1 + x)/2 se 1 ≤ x < 2
3/2 se x ≥ 2
e che la funzione qui scritta e effettivamnete pari. Con le convenzioni grafiche stabilitesopra, il suo grafico e presto disegnato:

Funzioni 51
Calcoli del tutto analoghi conducono alla seguente espressione esplicita di fd :
(2.9) fd(x) =
1/2 se x ≤ −2
(3 + x) /2 se − 2 < x ≤ −1
−x2 − x+ 1 se − 1 < x < 0
0 se x = 0
x2 − x− 1 se 0 < x < 1
(x− 3)/2 se 1 ≤ x < 2
−1/2 se x ≥ 2.
Il grafico di fd e:
Il lettore e invitato a fare ancora qualche verifica: in primo luogo, che le formule perfd conducono alla funzione ora scritta, in secondo luogo che quest’ultima sia dispari,e infine che effettivamente fp + fd = f . D’altra parte, utilizzando ancora una volta laProposizione 2.4, sappiamo che se (2.8) e (2.9) definiscono rispettivamente una funzionepari ed una dispari e se la loro somma e f , allora sono necessariamente fp e fd .
Ancora qualche osservazione. Se f e definita su un insieme che contiene l’origine,allora il calcolo svolto in (2.7) e del tutto generale. Unitamente all’osservazione giafatta che una funzione dispari si annulla in zero , abbiamo le formule
fp(0) = f(0), fd(0) = 0.
Le funzioni pari e dispari si comportano rispettivamente come il segno piu e il segnomeno rispetto al prodotto e alla somma: il prodotto (oppure la somma) di due funzionipari e sempre pari; il prodotto di due funzioni dispari e sempre pari mentre la lorosomma e dispari; il prodotto di una funzione pari per una dispari e sempre dispari;la somma di una funzione pari e di una dispari e... qualunque cosa, come abbiamoappena imparato.

52 Analisi Matematica 1
3. Funzioni surgettive, iniettive e bigettive.
In questa sezione vogliamo discutere due nozioni generali: la nozione di applicazionesurgettiva e quella di applicazione iniettiva. Se f : A → B e una applicazione, l’insieme
im (A) := {f(a) : a ∈ A},denotato spesso anche con f(A), si chiama l’immagine di A mediante f , oppurel’immagine di f . Si osservi che naturalmente f(A) ⊂ B ma in generale f(A) �= B .
f✲A im (A)
B
Ad esempio, la funzione f : Z → N definita da f(n) = n2 ha come immagine i quadratiperfetti e siccome non tutti i numeri naturali sono quadrati perfetti si ha f(Z) �= N .
Definizione 3.1. Sia f : A → B una applicazione. Diremo che f e surgettiva se
f(A) = B , ossia se per ogni b ∈ B esiste a ∈ A tale che f(a) = b.
✲f
A f(A) = B

Funzioni 53
Utilizzando i quantificatori logici, la definizione precedente puo essere formulata cosı
(3.10) ∀ b ∈ B ∃ a ∈ A t.c. f(a) = b.
Come gia osservato nel primo capitolo, quando si introduce un concetto matematicomediante una definizione, e opportuno essere in grado di scrivere la formulazione esattaanche della sua negazione. Se ad esempio ci chiediamo se una certa funzione sia surget-tiva o meno, sara utile sapere che cosa significa essere non surgettiva, ossia non esseresurgettiva. Nella fattispecie, e chiaro che una applicazione f : A → B non e surgettivase f(A) �= B , cioe se l’immagine di f e strettamente contenuta in B , cioe ancora se visono elementi di B (almeno uno!) che non fanno parte di f(A) e sono quindi diversida tutti quelli del tipo f(a):
(3.11) ∃ b ∈ B t.c. ∀ a ∈ A si ha f(a) �= b.
Si osservi che in (3.11) i quantificatori ∀ ed ∃ hanno, per cosı dire, scambiato i lororuoli rispetto a (3.10). Questo e un fatto di natura generale su cui il lettore e invitatoa riflettere, ma la cui discussione dettagliata esula dagli scopi di questi appunti.
Definizione 3.2. Diremo che l’applicazione f : A → B e iniettiva se essa manda
punti distinti in punti distinti, ossia se dati comunque a1, a2 ∈ A con a1 �= a2 risulta
f(a1) �= f(a2).
a1✲� � f(a1)
a2✲� � f(a2)
Nella definizione di mappa iniettiva compare l’implicazione: a1 �= a2 ⇒ f(a1) �= f(a2).Essa puo essere riscritta in modo forse piu agile mediante la sua versione contronomi-nale, ossia f(a1) = f(a2) ⇒ a1 = a2 . Quest’ultima facilita anche la comprensione diche cosa significhi negare l’iniettivita: una applicazione f non e iniettiva ogniqualvolta
∃ a1, a2 ∈ A, a1 �= a2 t.c. f(a1) = f(a2).
Una funzione non iniettiva presentera cioe un comportamento del tipo:

54 Analisi Matematica 1
a1 ③
�f(a1) = f(a2) �
a2 ✘✘✘✘✘✘✘✘✘✘✘✘✘✘✘✘✿
�
Per chiarire ulteriormente i concetti di applicazione iniettiva e surgettiva, e utileintrodurre la nozione di controimmagine di un insieme. Se f : A → B e una appli-cazione e se J ⊆ B , si chiama controimmagine di J mediante f l’insieme di quei puntidi A che vengono mandati in J da f :
f−1(J) = {a ∈ A : f(a) ∈ J} ⊆ A.
In particolare, se J consiste di un solo punto, se cioe J = {b} , l’insieme f−1({b}) eformato da quei punti a ∈ A tali che f(a) = b .
Come abbiamo gia implicitamente osservato, una funzione iniettiva ha la proprietache le controimmagini dei punti sono insiemi formati (al piu) da un punto solo. Seinfatti per un qualche b ∈ B risultasse f−1({b}) ⊇ {a1, a2} , dove a1 �= a2 , allora, perdefinizione, si avrebbe f(a1) = b = f(a2), contro l’ipotesi che f e iniettiva. Natural-mente puo benissimo capitare che f−1({b}) = ∅ , cioe che nessun elemento di A vengamandato da f in b . In questo caso si verifica esattamente cio che e scritto in (3.11),cioe che f non e surgettiva.
Le osservazioni appena fatte ci consentono di interpretare iniettivita e surgettivitanel contesto che ci interessa di piu, quello delle funzioni f : I ⊆ R → R . Se f e unasiffatta funzione e se Γ(f) e il suo grafico, le controimmagini dei punti si trovano inmodo semplicissimo. Sia y0 ∈ R una ordinata. La controimmagine f−1({y0}) e, perdefinizione, l’insieme delle ascisse x ∈ I tali che f(x) = y0 . Quindi
f−1({y0}) = {x ∈ I : (x, y0) ∈ Γ(f)}.
In altre parole, per determinare f−1({y0}) basta tracciare la retta parallela all’asse x
di ordinata y0 e considerare tutti i punti in cui tale retta intercetta il grafico di f . Lacontroimmagine di y0 non sara altro che l’insieme delle ascisse dei punti trovati.

Funzioni 55
✲a b
✻
� �y1
y0�
...
...
...
...
...
�x1
�
...
...
...
...
...
�x2
f−1({y0}) = {x1, x2}, f−1({y1}) = ∅
In conclusione, una funzione risulta iniettiva se ogni retta orizzontale interseca ilgrafico in al piu un punto, mentre essa risulta surgettiva se ogni retta orizzontale1
interseca il grafico in almeno un punto. La funzione dell’esempio in figura non e neiniettiva (infatti f−1({y0}) = {x1, x2}) ne surgettiva (infatti f−1({y1}) = ∅).
Definizione 3.3. Sia f : A → B una applicazione. Diremo che f e bigettiva se
essa e iniettiva e surgetiva. In questo caso si dice anche che f stabilisce una bigezione,
oppure corrispondenza biunivoca, tra A e B .
Nel Capitolo 2 abbiamo descritto la corrispondenza tra numeri reali e retta. Con illinguaggio appena introdotto possiamo dunque dire che la scelta di due punti su unaretta consente di stabilire in modo canonico una bigezione tra i due insiemi.
Esempi.
(21) La funzione f : [0, 1] → [0, 1] definita da x �→ x e una bigezione. Naturalmenteanche x �→ xn stabilisce una bigezione di [0, 1] in [0, 1] per ogni intero positivo n .
(22) La mappa ϕ : [−π/2, π/2] → [−1, 1] definita da ϕ(x) = sin(x) e una bigezione.E invece chiaro che f(x) = sin x , ossia la mappa su tutto R definita da x �→ sin x none bigettiva in quanto non e iniettiva: sin(x) = sin(x+ 2kπ) per ogni k ∈ Z .
4. Elementi di calcolo combinatorio.
Nella precedente sezione abbiamo introdotto il concetto di bigezione tra insiemi.Consideriamo una coppia A e B di insiemi finiti con lo stesso numero di elementi. Eevidente che si potra definire almeno una bigezione tra A e B . Ad esempio gli insiemiA = {1, 2, 3} e B = {Tizio,Caio, Sempronio} hanno lo stesso numero di elementi, cioetre. Una possibile bigezione tra A e B e
1 �→ Tizio, 2 �→ Caio, 3 �→ Sempronio.
1Questa caratterizzazione grafica della surgettivita si riferisce al caso di una f : I → R ; sef : I → J , le rette orizzontali da considerare sono solo quelle con ordinata in J . Si veda la discussionesvolta nella Sezione 7.

56 Analisi Matematica 1
Essa non e certamente l’unica bigezione possibile. Il lettore puo facilmente verificareche ve ne sono esattamente 6. Naturalmente, e lecito pensare che vi sia una formulagenerale che esprima il numero di bigezioni tra insiemi che hanno lo stesso numero dielementi, ed e anche ovvio che da questo punto di vista non c’e ragione per supporeche i due insiemi siano diversi: la formula cercata, se c’e, dipendera solo dal numero n
di elementi e si potra quindi supporre A = B = {1, 2, . . . , n} .Il computo del numero di bigezioni di un insieme di n elementi in se e il prototipo
di problema del Calcolo Combinatorio, quella branca della Matematica che si occupain generale di problemi di conteggio. Di molti insiemi si sa infatti a priori che sonocostituiti da un numero finito di elementi, ma la determinazione del numero esattodi essi puo presentare delle difficolta: e sorprendente la varieta e vastita dei problemidi conteggio che sorgono nelle discipline tecnico-scientifiche. Per ragioni che hannoin parte a che vedere con lo sviluppo dell’informatica, il Calcolo Combinatorio e unsettore di ricerca estremamente attivo. Ci limiteremo qui a presentare alcune formuleelementari di frequente utilizzo.
4.1. Bigezioni di un insieme, o permutazioni. Il primo problema di conteggioche affrontiamo e quello gia formulato sopra: quante sono le bigezioni di un insieme din elementi in se stesso? Per semplicita possiamo pensare che l’insieme sia costituitodai primi n interi positivi. Trattando problemi di natura combinatoria, adotteremopertanto la notazione
In = {1, 2, . . . , n}.Vogliamo contare quante sono tutte le possibili bigezioni σ : In → In . Chiaramente, visono n possibili modi per definire il valore σ(1), cioe tutti i possibili numeri 1, 2, . . . , n .Per ogni scelta di σ(1), rimangono esattamente n− 1 numeri a disposizione per poterdefinire σ(2) in modo da rispettare l’iniettivita di σ , cioe in modo che sia σ(2) �= σ(1).Vi sono pertanto n(n − 1) scelte possibili per la coppia (σ(1), σ(2)). Per ogni sceltacompiuta di tali valori , rimangono esattamente n− 2 numeri a disposizione per poterdefinire σ(3) in modo che sia σ(3) �∈ {σ(1), σ(2)} . Vi sono pertanto n(n − 1)(n − 2)scelte possibili per la terna (σ(1), σ(2), σ(3)). Il lettore avra gia immaginato che ilnumero di possibili bigezioni e il numero
n! = n(n− 1)(n− 2) · · · 3 · 2 · 1,
che si legge n fattoriale. Per esprimere in modo coerente varie formule che appaionoin matematica, si pone 0! = 1 per definizione. Riportiamo i primi valori del fattoriale.Essi diventano molto grandi al crescere di n :
0! = 1 5! = 120
1! = 1 6! = 720
2! = 2 7! = 5.040
3! = 6 8! = 40.320
4! = 24 9! = 362.880

Funzioni 57
E costume chiamare permutazione di n elementi una bigezione di un insieme din elementi in se, e indicare mediante Pn il numero di tali permutazioni. Abbiamopertanto dimostrato l’uguaglianza
Pn = n!
Si osservi che dalla definizione segue in modo ovvio la proprieta
(4.12) n! = (n− 1)!n
Essa ha anche una semplice interpretazione dal punto di vista del calcolo del numerodelle permutazioni: per ciascuna delle n possibili scelte per σ(n), vi sono (n−1)! modiper scegliere i rimanenti σ(1), . . . , σ(n− 1).
4.2. Mappe iniettive, o disposizioni. Ci poniamo ora il problema: quante sonole mappe iniettive da Ik a In? A ben riflettere, una mappa iniettiva δ : Ik → In sidescrive semplicemente mediante la lista δ(1), δ(2), . . . , δ(k). L’ipotesi di iniettivitaconsiste semplicemente nell’assumere che gli elementi δ(1), δ(2), . . . , δ(k) siano tuttidistinti, e quindi dovremo in particolare supporre che si abbia k ≤ n . Una lista di kelementi distinti scelti tra n elementi si dice una disposizione di n oggetti presi k alla
volta, oppure in sequenze di k . Denotiamo con Dn,k il numero di tali disposizioni.Vi sono n modi per scegliere δ(1), gli n elementi di In . Per ogni scelta di δ(1)
abbiamo n−1 modi per sceglere δ(2). Vi sono pertanto n(n−1) possibili scelte per lacoppia (δ(1), δ(2)). E evidente che possiamo arguire in modo assolutamente analogo alcaso del computo delle permutazioni, con la differenza che quando abbiamo effettuatole prime k scelte il processo termina. Avremo pertanto
Dn,k = n(n− 1)(n− 2) · · ·� �� �k termini
= n(n− 1)(n− 2) · · · (n− k + 1).
La formula precedente puo anche essere riscritta nella forma
(4.13) Dn,k =n!
(n− k)!
per la semplice ragione algebrica
n! =�n(n− 1) · · · (n− k + 1)
��(n− k)(n− k − 1) · · · 2 · 1
�= Dn,k · (n− k)!
La (4.13) ha peraltro un’interpretazione combinatoria: per formare una permutazionedi n elementi, possiamo dapprima scegliere k elementi, ossia formare una disposizione,e poi scegliere i rimanenti n − k . Quindi Pn sara uguale al numero di possibili per-mutazioni di n− k elementi per ogni disposizione in sequenze di k . Cio equivale allaformula
(4.14) Pn = Pn−kDn,k,
che e una ulteriore versione di (4.13). Si noti la coerenza: se k = n , allora Dn,n
deve essere uguale a Pn dal punto di vista combinatorio, in quanto una disposizione insequenze di n e esattamente una permutazione di n elementi. D’altra parte, abbiamoposto 0! = 1, ossia Pn−n = P0 = 1. Dunque, la formula (4.14) vale anche nel casok = n , cosı come la formula (4.13).

58 Analisi Matematica 1
4.3. Mappe qualunque, o disposizioni con ripetizione. Ci poniamo ora ilproblema di calcolare il numero totale di mappe R : Ik → In , abbandonando cioel’ipotesi di iniettivita e in particolare l’ipotesi k ≤ n . Per ragioni che dovrebberoessere a questo punto chiare, una mappa R : Ik → In si dice una disposizione con
ripetizione di n elementi presi k alla volta, oppure in sequenze di k . Il loro numerocomplessivo si denota Dr
n,k . Il calcolo di Drn,k e molto semplice. Ci sono n scelte per
R(1); per ogni siffatta scelta ci sono ancora n scelte per R(2), e cosı via. Si ottienedunque
Drn,k = n
k.
Un’applicazione della formula precedente ai pronostici sportivi: date k partite, indovi-nare per ciascuna di esse se vincera la squadra di casa (simbolo 1), la squadra ospite(simbolo 2), oppure se l’incontro terminera in un pareggio (simbolo X ). Si tratta discegliere una mappa che a ciascuna delle k partite assegni uno dei tre simboli 1, X, 2.Il numero dei possibili pronostici e quindi Dr
3,k , di cui riportiamo il valore nei casik = 9, k = 13 e k = 14:
Dr3,9 = 39 = 19.683
Dr3,13 = 313 = 1.594.323
Dr3,14 = 314 = 6.377.292.
4.4. Sottoinsiemi di un insieme, o combinazioni. Vogliamo ora determinareil numero di sottoinsiemi di In costituiti da k elementi. Dobbiamo nuovamente as-sumere k ≤ n . Un sottoinsieme di k elementi si dice una combinazione di n elementipresi k alla volta ed il numero complessivo di esse si indica con Cn,k . Il calcolo diCn,k puo essere fatto in molti modi. Un modo rapido consiste nell’osservare che unacombinazione e una disposizione in cui si sia “dimenticato” l’ordine. In altre parole, sesi pensano le disposizioni (di n elementi in sequenze di k ) come mappe iniettive e siidentificano tra loro tutte le k! disposizioni le cui immagini coincidono, si individua inmodo unico il particolare sottoinsieme costituito dagli elementi dell’immagine. In altreparole, avremo
Cn,k =Dn,k
k!=
n!
k!(n− k)!.
Il numero appena trovato si chiama in matematica coefficiente binomiale per ragioniche saranno chiarite tra breve. Esso e definito dalla formula�
n
k
�=
n!
k!(n− k)!
e si legge “n su k” oppure, all’inglese, “n choose k”. Abbiamo pertanto dimostrato
Cn,k =
�n
k
�.
Un’applicazione semplice della formula ora ottenuta riguarda le estrazioni di lotte-ria. Una estrazione di k numeri su n numeri e evidentemente la scelta di un sottoin-sieme di k elementi di In . Quindi il numero di possibili estrazioni e proprio Cn,k . Ad

Funzioni 59
esempio, il numero di sestine scelte tra 90 numeri e
C90,6 =90!
6!84!=
90 · 89 · 88 · 87 · 86 · 85720
= 622.614.630.
I coefficienti binomiali godono di una sorprendente quantita di proprieta notevoli.Ci limitiamo ad indicarne alcune tra le piu rilevanti. Innanzitutto, la simmetria
�n
k
�=
�n
n− k
�.
Come spesso accade in Calcolo Combinatorio, questa formula ha una doppia interpre-tazione, quella meramente algebrica e quella, appunto, combinatoria. Algebricamenteessa e ovvia: �
n
n− k
�=
n!
k!(n− k)!=
�n
k
�.
Dal punto di vista del problema di conteggio associato, e altrettanto chiara: ad ognisottoinsieme formato da k elementi corrisponde il suo complementare, che e formato dan − k elementi. Quindi Cn,k = Cn,n−k . Lasciamo al lettore la (doppia) dimostrazionedelle semplici formule:
(4.15)
�n
n
�=
�n
0
�= 1,
�n
1
�=
�n
n− 1
�= n.
Un poco meno semplice e la dimostrazione della formula seguente, nota come formuladi Stiefel: �
n
k
�=
�n− 1
k − 1
�+
�n− 1
k
�.
In effetti dal punto di vista algebrico abbiamo, utilizzando varie volte (4.12)�n− 1
k − 1
�+
�n− 1
k
�=
(n− 1)!
(k − 1)!(n− k)!+
(n− 1)!
k!(n− k − 1)!
=k(n− 1)! + (n− k)(n− 1)!
k!(n− k)!
=n(n− 1)!
k!(n− k)!
=
�n
k
�.
Dal punto di vista combinatorio, la formula di Stiefel si interpreta come segue. Sipossono suddividere i sottoinsiemi di k elementi di In in due classi. La prima classee formata da quelli che non contengono n , che sono in numero uguale al numero deisottoinsiemi di k elementi di In−1 , ossia Cn−1,k . La seconda classe e formata da quelliche invece contengono n , che sono in numero uguale al numero dei sottoinsiemi di In−1
che contengono k − 1 elementi, perche uno e gia stato scelto, e quindi tolto; questiultimi sono Cn−1,k−1 . Dal punto di vista combinatorio abbiamo quindi
Cn,k = Cn−1,k + Cn−1,k−1,
che si traduce nella formula di Stiefel.

60 Analisi Matematica 1
Riportiamo in una tabella i valori di Cn,k per n ≤ 5. Il lettore riconoscera ilrinomato triangolo di Tartaglia, che serve per costruire i coefficienti nello sviluppo delbinomio (a + b)n . Come noto, ogni riga e ottenuta dalla precedente sommando valoriadiacenti, ossia utilizzando proprio la formula di Stiefel.
n \ k 0 1 2 3 4 5
1 1 12 1 2 13 1 3 3 14 1 4 6 4 15 1 5 10 10 5 1
Passiamo ora ad enunciare e dimostrare un celeberrimo risultato, che giustifica iltermine “coefficiente binomiale”. Adottiamo la convenzione a0 = 1 se a �= 0.
Proposizione 4.1. Per ogni a, b ∈ R \ {0} e per ogni n intero positivo si ha
(a+ b)n =n�
k=0
�n
k
�an−k
bk,
detta la formula del binomio di Newton.
Dimostrazione. Proviamo l’asserto mediante il principio di induzione. Innanzitutto,la formula e vera per n = 1 in quanto a destra si legge
�1
0
�a1b0 +
�1
1
�a0b1 = a+ b.
Supponiamo ora che la formula del binomio sia vera per l’esponente n . Allora
(a+ b)n+1 = (a+ b)n(a+ b)
=
�n�
k=0
�n
k
�an−k
bk
�(a+ b)
=n�
k=0
�n
k
�an+1−k
bk +
n�
k=0
�n
k
�an−k
bk+1
.
Consideriamo separatamente i due addendi. Il primo si riscriven�
k=0
�n
k
�an+1−k
bk =
�n
0
�an+1
b0 +
n�
k=1
�n
k
�an+1−k
bk = a
n+1 +n�
k=1
�n
k
�an+1−k
bk.
Per il secondo, traslando gli indici, ossia ponendo j = k + 1, si ottienen�
k=0
�n
k
�an−k
bk+1 =
n−1�
k=0
�n
k
�an−k
bk+1 +
�n
n
�a0bn+1
=n�
j=1
�n
j − 1
�an+1−j
bj + b
n+1.

Funzioni 61
Quindi, chiamando nuovamente k l’indice muto j , sommando i due membri e utiliz-zando la formula di Stiefel, otteniamo
(a+ b)n+1 = an+1 +
n�
k=1
��n
k
�+
�n
k − 1
��a(n+1)−k
bk + b
n+1
(Stiefel) = an+1 +
n�
k=1
�n+ 1
k
�a(n+1)−k
bk + b
n+1
=n+1�
k=0
�n+ 1
k
�a(n+1)−k
bk,
che e quanto richiesto. ��
Corollario 4.2. Il numero di sottoinsiemi di un insieme di n elementi e 2n ,laddove si contino anche l’insieme vuoto e l’insieme stesso.
Dimostrazione. Il numero di sottoinsiemi di In , compresi ∅ e In , e evidentementen�
k=0
Cn,k =n�
k=0
�n
k
�=
n�
k=0
�n
k
�1n−k1k = (1 + 1)n = 2n.
��
5. Funzioni monotone.
Che cosa hanno in comune i seguenti grafici?
Una risposta ragionevole e: ciascuno di essi o scende oppure sale, oppure non sale,oppure non scende. Essi hanno un “solo tipo di comportamento”. La nozione cheandiamo ora a definire esprime in modo preciso questa unicita di andamento: e lanozione di funzione monotona
2.
Definizione 5.1. Siano f : I ⊆ R → R una funzione e J ⊆ I . Diremo che f e:
(i) crescente su J se per ogni x, y ∈ J tali che x < y si ha f(x) < f(y);(ii) decrescente su J se per ogni x, y ∈ J tali che x < y si ha f(x) > f(y);(iii) non decrescente su J se per ogni x, y ∈ J tali che x < y si ha f(x) ≤ f(y);(iv) non crescente su J se per ogni x, y ∈ J tali che x < y si ha f(x) ≥ f(y).
Una funzione che soddisfi una qualunque delle precedenti proprieta di sice monotona su
J . Se J = I , essa si dira monotona. Una funzione che soddisfi la proprieta (i) oppure
la (ii) si dice strettamente monotona su J , e strettamente monotona se J = I .
Purtroppo non vi e consenso generale sulla terminologia introdotta nella definizioneprecedente. Alcuni autori utilizzano piuttosto le parole strettamente crescente per indi-care l’implicazione x < y ⇒ f(x) < f(y) e strettamente decrescente per l’implicazionex < y ⇒ f(x) > f(y), mentre chiamano rispettivamente crescenti oppure decrescenti
le funzioni che soddisfano le diseguaglianze deboli, come in (iii) e (iv).
2La pronuncia della parola e monotona, ma l’accento solitamente non si scrive.

62 Analisi Matematica 1
In sintesi, la proprieta rilevante della classe delle funzioni monotone e il loro com-portamentto rispetto alla relazione d’ordine di R : una funzione monotona trasformasempre coppie di punti per le quali vale “<” in coppie di punti per cui vale una tra lerelazioni “<”, “≤”, “>” oppure “≥”. Quindi preserva oppure inverte l’ordine.
Esempi.
(23) Sono crescenti su R le funzioni x �→ x , x �→ x3 e, in generale, ogni potenzadispari d(x) = x2n+1 con n intero positivo. Le funzioni f(x) = ax + b sono crescentise a > 0 in quanto in tal caso se x < y allora ax < ay e quindi f(x) < f(y).Analogamente, se a < 0 esse sono decrescenti. La funzione g(x) = x2 e crescente su[0,+∞) e decrescente su (−∞, 0]. Lo stesso vale per ogni potenza pari p(x) = x2n conn intero positivo.
(24) Le radici r(x) = x1/n con n intero positivo sono tutte crescenti sul loro dominio[0,+∞). A ben vedere, questo fatto e conseguenza del fatto che tutte le potenze sonocrescenti sulla semiretta positiva, e verra discusso nei dettagli nella Sezione 7.
(25) Si osservi che la somma di funzioni monotone con lo stesso tipo di monotonia,ad esempio la somma di funzioni crescenti, e ancora monotona dello stesso tipo, inquanto se f1(x) < f1(y) e f2(x) < f2(y) allora anche f1(x) + f2(x) < f1(y) + f2(y).Quest’ultima diseguaglianza vale ancora se f1(x) ≤ f1(y) oppure se f2(x) ≤ f2(y).Lasciamo al lettore la disamina di tutti i vari possibili casi.
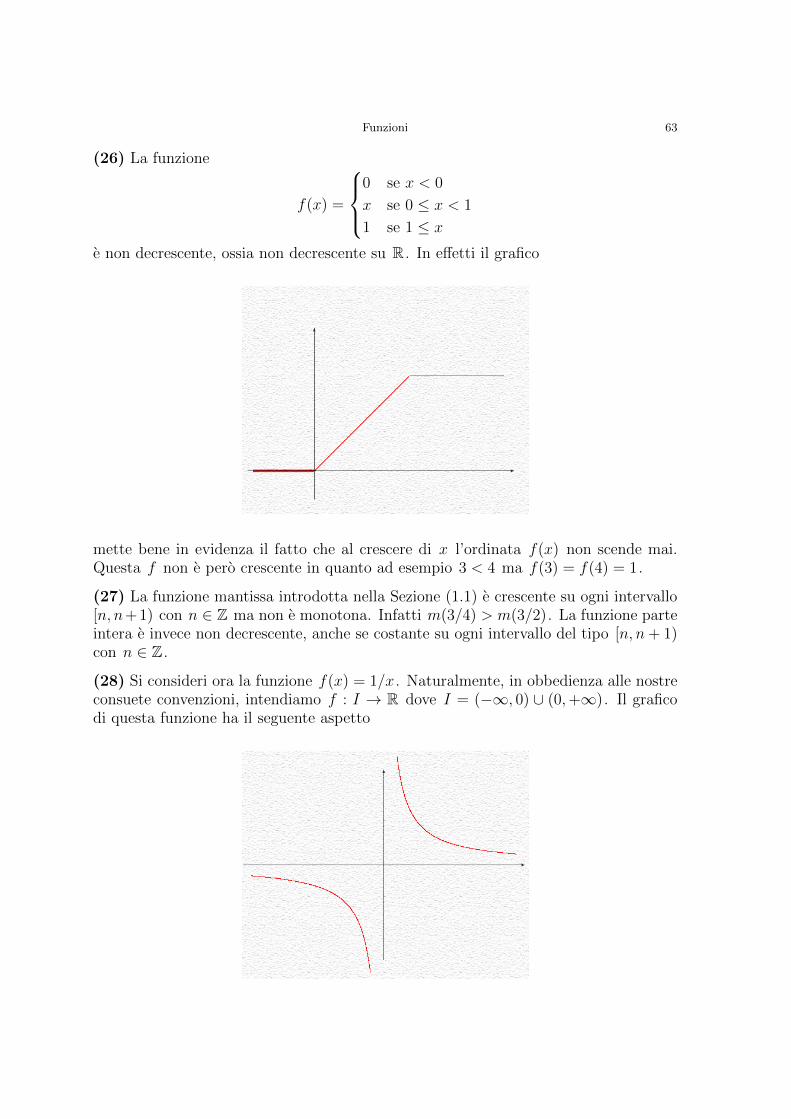
Funzioni 63
(26) La funzione
f(x) =
0 se x < 0
x se 0 ≤ x < 1
1 se 1 ≤ x
e non decrescente, ossia non decrescente su R . In effetti il grafico
mette bene in evidenza il fatto che al crescere di x l’ordinata f(x) non scende mai.Questa f non e pero crescente in quanto ad esempio 3 < 4 ma f(3) = f(4) = 1.
(27) La funzione mantissa introdotta nella Sezione (1.1) e crescente su ogni intervallo[n, n+1) con n ∈ Z ma non e monotona. Infatti m(3/4) > m(3/2). La funzione parteintera e invece non decrescente, anche se costante su ogni intervallo del tipo [n, n+ 1)con n ∈ Z .
(28) Si consideri ora la funzione f(x) = 1/x . Naturalmente, in obbedienza alle nostreconsuete convenzioni, intendiamo f : I → R dove I = (−∞, 0) ∪ (0,+∞). Il graficodi questa funzione ha il seguente aspetto

64 Analisi Matematica 1
Guardando il grafico, si vedono due rami (di iperbole), ciascuno dei quali ha andamentodecrescente. Ci chiediamo quindi se f e monotona. La risposta e no. Infatti, nonos-tante la funzione sia decrescente nell’intervallo J = (−∞, 0) e anche nell’intervalloK = (0,+∞) – come il lettore e invitato a verificare per esercizio – essa non e affattodecrescente, ossia decrescente su tutto I . Infatti, tutte le ordinate f(x) corrispondentia x < 0 sono negative e quindi minori di tutte le ordinate f(y) corrispondenti a y > 0.In altre parole, per tutte le coppie x, y con x < 0 < y si ha f(x) < f(y) e quindi fnon e decrescente ne non crescente.
Come appena illustrato, una funzione puo benissimo essere crescente su ciascunodi due insiemi disgiunti J e K senza essere crescente su J ∪K . E quindi necessariospecificare con chiarezza l’insieme su cui si indaga la monotonia di una funzione.
Proposizione 5.2. Se f : I ⊆ R → R e strettamente monotona, essa e iniettiva.
Dimostrazione. Supponiamo che f sia crescente. Siano x, y ∈ I con x �= y . Alloranecessariamente x < y oppure x > y . Poiche f e crescente, avremo f(x) < f(y)nel primo caso e f(x) > f(y) nel secondo. In ogni evenienza, f(x) �= f(y) e f einiettiva. Il caso in cui f sia decrescente e trattato in modo analogo e viene lasciatoper esercizio. ��
La proposizione precedente si sintetizza nell’implicazione: “f strettamente mono-tona ⇒ f iniettiva”. L’implicazione opposta e invece falsa, come mostra l’Esempio (28)discusso sopra. Infatti, la funzione f(x) = 1/x e iniettiva, ma non e monotona.
6. Composizione di funzioni.
Abbiamo spesso disegnato schematicamente le applicazioni come diagrammi. Con-sideriamo ora un diagramma del tipo:
A ✲f
C ✲g
D

Funzioni 65
Stiamo supponendo di avere: una applicazione f : A → C e un’altra applicazioneg : C → D . Ci chiediamo se l’idea suggerita dal diagramma di poter andare daA a D utilizzando prima f e poi g sia sensata, ovvero se dalle due applicazioni dipartenza sia possibile crearne una nuova, concatenando le precedenti. Questo e possibilein condizioni anche un po’ piu generali. Si supponga cioe di avere le applicazionif : A → B e g : C → D soggette alla sola ipotesi f(A) ⊆ C .
A ✲ff(A)
C
B
✲g
D
Preso allora a ∈ A , l’elemento f(a) appartiene a C per ipotesi ed ha quindi sensoconsiderare g (f(a)). Cosı facendo possiamo associare ad ogni a ∈ A uno ed un soloelemento di D , cioe g (f(a)). Abbiamo definito una nuova applicazione. Si noti chenulla e detto sull’insieme B , che gioca un ruolo relativamente inessenziale. Non eaffatto chiaro che sia B ⊆ C oppure C ⊆ B ; in generale nessuna delle due relazioni evera, anche se naturalmenete B ∩ C �= ∅ in quanto f(A) ⊆ (B ∩ C). Formalizziamoquesta discussione nella definizione che segue.
Definizione 6.1. Siano f : A → B e g : C → D due applicazioni e si supponga
che f(A) ⊆ C . Si chiama composta di g ed f l’applicazione
g ◦ f : A −→ D, a �→ g (f(a))
Esempi.
(29) Siano f(x) = (1/x) + 2 e g(y) = (y2 +1)/|y− 2| . Coerentemente con la Conven-zione (0.5), la funzione f e definita su A = R \ {0} e la sua immagine e il sottoinsiemeR \ {2} di B = R . Poiche la funzione g e a sua volta definita su C = R \ {2} = f(A),la funzione
g ◦ f(x) =�1x + 2
�2+ 1��� 1
x + 2�− 2
�� = |x|�
1
x2+
2
x+ 5
�
e ben definita su A = R \ {0} .

66 Analisi Matematica 1
(30) Si considerino le funzioni f : R → R e g : [0,+∞) → [0,+∞) definite rispet-tivamente da f(x) = x2 e g(x) =
√x . Ci chiediamo se hanno senso f ◦ g , g ◦ f e,
in caso affermativo, quali funzioni esse definiscano. Ora, in virtu del Teorema (1.30),sappiamo che g([0,+∞)) = [0,+∞) ⊂ R . Quindi possiamo fare f ◦ g , ottenendo
f ◦ g(x) = f(g(x)) = (g(x))2 = (√x)2 = x
per ogni x ∈ [0,+∞). Siccome x2 ∈ [0,+∞) per ogni x ∈ R , si ha f(R) ⊆ [0,+∞),cosicche possiamo fare anche g ◦ f , ottenendo
g ◦ f(x) = g(f(x)) =�
f(x) =√x2 = |x|
per ogni x ∈ R .
(31) Sia h : R → R definita da h(x) = x2 +2x− 1 e sia g la radice quadrata, pensatacome nell’Esempio (30). Ovviamente e possibile fare h ◦ g : [0,+∞) → R e la funzioneottenuta e x �→ x+2
√x− 1. Viceversa pero non e possibile formare la composta g ◦h
in quanto h(R) �⊆ [0,+∞). In effetti vi sono valori di x per i quali risulta h(x) < 0,cioe tutti i numeri nell’intervallo (r1, r2) di estremi le due radici r1 = −1 −
√2 e
r2 = −1+√2 del polinomio x2+2x− 1. Si osservi che se definiamo la nuova funzione
h : I → [0,+∞) mediante h(x) = x2 + 2x − 1 dove I = (−∞, r1] ∪ [r2,+∞) alloraeffettivamente h(I) ⊆ [0,+∞) e la composizione g ◦ h(x) =
√x2 + 2x− 1 e ben
definita. La funzione h e diversa da h , ma h(x) = h(x) se x ∈ I .
Motivati dall’Esempio (31), approfondiamo la nozione di composizione per includereanche quei casi in cui una coppia di funzioni f : A → B e g : C → D non soddisfistrettamente l’ipotesi f(A) ⊆ C ma un’ipotesi un po’ piu debole, cioe f(A) ∩ C �= ∅ .
A ✲ff(A)
C ✲g
D

Funzioni 67
In questo caso esiste certamente qualche a ∈ A , anche se magari non tutti, per ilquale e possibile fare la composizione a �→ f(a) �→ g(f(a)). In effetti, se a ∈ A
e tale che f(a) ∈ C , cioe se a ∈ f−1(f(A) ∩ C), allora ha senso scrivere g(f(a)).Come nell’esempio (31), potremo definire una nuova funzione f che coincidera con f
nell’insieme f−1(f(A) ∩ C) e per la quale avra senso la composizione g ◦ f .Per sintetizzare efficacemente quanto appena discusso e utile introdurre una nozione
generale. Se f : A → B e una applicazione e se E ⊂ A e un sottoinsieme di A , lafunzione definita solo su E che associa ad e ∈ E l’elemento f(e) ∈ B si chiama larestrizione di f a E e si denota f |E . In breve:
f |E : E −→ B, e �→ f(e).
Riprendiamo il discorso precedente, che riassumiamo nella seguente:
Convenzione 6.2. Siano f : A → B e g : C → D due applicazioni e supponiamo
che f(A)∩C �= ∅. Posto E = f−1(f(A)∩C) scriveremo per semplicita (con lieve abuso
di notazione) g◦f in luogo di g◦(f |E) per denotare la funzione composta x �→ g(f(x))che e definita su E .
La precedente convenzione e coerente con la Convenzione (0.5) in quanto si stipulache g ◦ f sia definita sul piu grande insieme possibile.
Esempio.
(32) Si consideri la funzione ϕ(x) =�
sin(x2). Analizziamo f coerententemente conle Convenzioni (0.5) e (6.2). Possiamo pensare, in modo inizialmente un po’ impreciso,che ϕ =
�(·) ◦ sin ◦(·)2 := g ◦ f ◦ e , nel senso che la composizione sara
x �→ x2 �→ sin(x2) �→
�sin(x2)
ma dobbiamo ancora determinare gli insiemi su cui sono definite e , f , g . Analizziamoϕ dall’esterno all’interno, scrivendo cioe ϕ(x) = g (f (e(x))) e guardando dapprima lacomposizione g ◦ f(y) =
√sin y . Coerententemente con le nostre convenzioni, questa
sara definita per quelle y per le quali sin y ≥ 0. Naturalmente, sin y ≥ 0 se e solo se
y ∈�
k∈Z
[2kπ, π + 2kπ] = B.
Pertanto g ◦ f : B → [0, 1]. Infine, analizziamo la composizione (g ◦ f) ◦ e . Essasara ovviamente definita sull’insieme A = e−1(B) costituito da quelle x per le qualie(x) = x2 ∈ B . Poiche x2 ≥ 0, si ha x2 ∈ B se e solo se x2 sta in un intervallo deltipo [2kπ, π + 2kπ] per qualche intero non negativo k , il che avviene se e solo se
x ∈�
k∈N
�[−
√π + 2kπ,−
√2kπ] ∪ [
√2kπ,
√π + 2kπ]
�= A.
In conclusione abbiamo:
A −→ B −→ [0,+∞) −→ [0, 1]
x �→ x2 �→ sin(x2) �→
�sin(x2).

68 Analisi Matematica 1
Graficamente, risulta:
f ◦ e(x) = sin(x2)
g ◦ f ◦ e(x) =�
sin(x2)
[−√3π,−
√2π] [−
√π,
√π] [
√2π,
√3π]
7. Funzioni invertibili.
Sia Q il sottoinsieme di N costituito dai quadrati perfetti:
Q = {m2 : m ∈ N}.Consideriamo la mappa S : N → Q che ad ogni intero non negativo associa il suoquadrato: S(n) = n2 . Ci chiediamo se sia possibile definire una mappa che “torniindietro”, ossia, nel nostro esempio, una mappa R : Q → N che applicata ad unintero del tipo n2 restitusce n . Vogliamo cioe che la composizione R ◦ Q soddisfin �→ n2 �→ n . E ovvio che, se esiste, la mappa R non puo essere altro che la radicequadrata. D’altra parte, se q ∈ Q , il numero
√q e un numero naturale e naturalmente
succede cio che volevamo, cioe R ◦ S(n) =√n2 = n . Se avessimo considerato invece
di S l’applicazione S definita mediante la stessa legge, cioe S(x) = x2 ma vistacome mappa S : R → R , allora una R : R → R che torna indietro, cioe tale cheper ogni x ∈ R si abbia R(S(x)) = x , non sarebbe esistita! Infatti, sicuramentesaremmo forzati a definire R(4) = 2 in quanto R(4) = R(22) = R(S(2)) = 2, maallora R(S(−2)) = R((−2)2) = R(4) = 2 �= −2.

Funzioni 69
Con i nostri consueti diagrammi il problema generale che vogliamo affrontare sischematizza nel disegno
f✲
g✛
A B
... e dall’esempio trattato sappiamo che data f : A → B non sempre esiste una mappag : B → A che torna indietro al punto di partenza. Per rendere precisa l’espressione“tornare al punto di partenza”, introduciamo la seguente notazione: se A e un insiemequalunque, si chiama identita su A la mappa idA : A → A definita da idA(a) = a perogni a ∈ A .
Definizione 7.1. Sia f : A → B una applicazione. Diremo che f e invertibile se
esiste una applicazione g : B → A tale che
(i) g ◦ f = idA
(ii) f ◦ g = idB .
In tal caso g si chiama l’inversa di f e si scrive g = f−1 .
Nella definizione precedente compare implicitamente una affermazione che non estata di fatto provata: nel dire “g si chiama l’inversa di f ” anziche “g si chiamauna inversa di f ” stiamo dicendo che g e unica. Questo fatto e un corollario dellaproposizione che segue.
Proposizione 7.2. Siano f : A → B e g : B → A tali che g ◦ f = idA . Allora
f e iniettiva e g e surgettiva.
Dimostrazione. Siano a1, a2 ∈ A tali che f(a1) = f(a2). Allora
a1 = idA(a1) = g ◦ f(a1) = g(f(a1)) = g(f(a2)) = g ◦ f(a2) = idA(a2) = a2.
Quindi f e iniettiva. Sia ora a ∈ A . Siccome,
a = idA(a) = g(f(a)),
l’elemento b = f(a) soddisfa g(b) = a e quindi g e surgettiva. ��
Corollario 7.3. Sia f : A → B invertibile. Allora l’inversa di f e unica.

70 Analisi Matematica 1
Dimostrazione. Supponiamo che g1 e g2 siano entrambe inverse di f . Siccomef ◦ gi = idB , con i = 1, 2, sappiamo dalla Proposizione 7.2 che f e surgettiva. Datob ∈ B , sia quindi a ∈ A tale che f(a) = b . Allora
g1(b) = g1(f(a)) = g1 ◦ f(a) = idA(a) = g2 ◦ f(a) = g2(f(a)) = g2(b).
Pertanto g1(b) = g2(b) per ogni b ∈ B e le due applicazioni coincidono. ��
Proposizione 7.4. Sia f : A → B una applicazione. Allora f e invertibile se e
solo se f e bigettiva.
Dimostrazione. Supponiamo f invertibile e sia g l’inversa di f . Dalla definizionedi invertibilita e dalla Proposizione 7.2 abbiamo:
g ◦ f = idA =⇒ f iniettiva
f ◦ g = idB =⇒ f surgettiva.
Quindi f e bigettiva. Viceversa, supponiamo f bigettiva. Dobbiamo definire unaapplicazione g : B → A che soddisfi le proprieta (i) e (ii) della Definizione 7.1. Siab ∈ B fissato. Siccome f e surgettiva per ipotesi, esiste a ∈ A tale che f(a) = b . Talea e inoltre unico in quanto f e iniettiva: se f(a) = f(a�) allora a = a� . Definiamoallora una mappa g : B → A assegnando ad ogni b ∈ B l’unico elemento g(b) di A lacui immagine mediante f e b . Si noti che g(f(a)) = a , perche a e l’unico elemento diA la cui immagine mediante f e f(a), e che f(g(b)) = b in quanto g(b) = a dove a
e l’unico elemento di A per il quale f(a) = b , e quindi f(g(b)) = f(a) = b . Ne segueche g ◦ f = idA e f ◦ g = idB , ossia che f e invertibile con inversa g . ��
Esempi.
(33) Si consideri la funzione di elevamento al quadrato
q : [0,+∞) → [0,+∞), x �→ x2.
Essa e iniettiva in quanto
x2 = y
2 =⇒ x2 − y
2 = 0 =⇒ (x− y)(x+ y) = 0 =⇒ x = y oppure x = −y.
D’altra parte, a meno che x e y non siano entrambi uguali a zero, il caso x = −y
non si puo dare perche x e y devono essere entrambi positivi. Percio necessariamentex = y e q e iniettiva. Inoltre q e surgettiva per via del Teorema 1.30: per ogni y > 0esiste un (solo) x > 0 tale che x2 = y , ossia x =
√y . Quindi q e invertibile. La sua
inversa e evidentemente l’estrazione di radice quadrata:
r : [0,+∞) → [0,+∞), x �→√x.
Si faccia attenzione al fatto che la funzione s(x) = x2 invece non e invertibile. Infatti,secondo la nostra consueta convenzione, essa e definita su R e non e ivi iniettiva.
(34) Si consideri ora la funzione
f : [0, 1] → R, x �→ 2 +√1− x2.
Poiche se x ∈ [0, 1] si ha x2 ∈ [0, 1], la radice e sempre ben definita. Inoltre, con lastessa dimostrazione vista nell’esempio precedente, la funzione x �→ x2 e iniettiva su

Funzioni 71
qualunque sottoinsieme di [0,+∞). La radice e anch’essa iniettiva e x �→ x+2 lo e inmodo ovvio. In quanto composta di funzioni iniettive, f e iniettiva (vedi l’Esercizio 6).
Siccome x2 ∈ [0, 1], anche 1 − x2 ∈ [0, 1] e√1− x2 ∈ [0, 1], cosicche per ogni
x ∈ [0, 1] si ha 2 +√1− x2 ∈ [2, 3], ossia f([0, 1]) = [2, 3]. Pertanto la funzione
f : [0, 1] → [2, 3], f(x) = f(x)
ottenuta da f ridefinendo l’insieme di arrivo e surgettiva e sicuramente anche iniettiva.Quindi f e invertibile. Calcoliamone l’inversa, ponendo per semplicita f(x) = y
y = 2 +√1− x2 =⇒ y − 2 =
√1− x2
=⇒ (y − 2)2 = 1− x2
=⇒ 1− (y − 2)2 = x2
=⇒�
1− (y − 2)2 = x.
Quindi siamo portati a concludere che la funzione inversa g = (f)−1 soddisfa
g : [2, 3] → [0, 1], g(x) =�1− (x− 2)2.
In effetti, tenendo presente che per ogni x ∈ [0, 1] si ha f(x) = f(x), per tali x avremo:
g ◦ f(x) =�1− (f(x)− 2)2
=�1− (2 +
√1− x2 − 2)2
=�1− (
√1− x2)2
=�1− (1− x2)
= x,
ossia g ◦ f = id[0,1] . Il lettore e invitato a verificare che analogamente f ◦ g = id[2,3] .
L’esempio precedente mette in evidenza alcuni aspetti non ancora discussi del pro-blema dell’inversione. Sia f : A → B una applicazione tra insiemi qualunque. Invirtu della Proposizione 7.4 la ricerca di una eventuale inversa g : B → A ha sensosolo se f e surgettiva, ossia solo se B = f(A). D’altra parte, la richiesta di surget-tivita e innaturale se l’obbiettivo e “tornare indietro”: si puo tornare solo da dove epossibile arrivare, ossia da f(A). E pertanto legittimo riguardare f come una fun-zione il cui insieme d’arrivo sia costituito dalla sola immagine f(A), e dimenticare larichiesta di surgettivita, ovvero renderla automatica. Nell’Esempio 34 abbiamo calco-lato l’immagine di f , ossia f([0, 1]) = [2, 3], e affrontato il problema di trovare unag : [2, 3] → [0, 1] che funga da inversa.
Formalizziamo le osservazioni appena fatte. Data una mappa qualunque f : A → B
e sempre possibile definirne un’altra
(7.16) f : A → f(A), f(a) = f(a)
che diviene automaticamente surgettiva. L’applicazione f e, in generale, diversa daf perche diverso e, a priori, l’insieme d’arrivo. Infatti in generale sara f(A) �= B .

72 Analisi Matematica 1
L’insieme di partenza e la legge sono pero le medesime e quindi si puo convenire chel’informazione contenuta in f e la stessa di quella contenuta in f .
Convenzione 7.5. Data una applicazione f : A → B chiameremo applicazione
surgettiva naturale associata a f l’applicazione definita in (7.16), spesso denotata an-
cora f invece di f . Diremo anche che una applicazione e pensata come surgettiva per
intendere l’applicazione surgettiva naturale ad essa associata.
Sia f : I ⊆ R → R una funzione. Come discusso sopra, il problema dell’invertibiltadi f si puo riformulare in modo piu naturale come una coppia di domande: f einiettiva? qual’e l’immagine J di f ? Se f e iniettiva, l’applicazione surgettiva naturalead essa associata sara evidentemente invertibile. Supponiamo che cio sia vero, ossia chef sia iniettiva. Il problema successivo e come fare a calcolarne l’inversa. L’Esempio 34mostra una tecnica standard per questo tipo di calcolo. Innanzitutto, se possibile, siriguarda f come una composizione f = f1 ◦ f2 ◦ · · · ◦ fn di mappe, definita su J . None difficile convincersi del fattto che esse sono tutte necessariamente iniettive: se unadi esse non fosse iniettiva, non sarebbe iniettiva neppure f . Ciascuna di esse e quindiinvertibile sull’insieme opportuno. Si pone allora y = f(x) e si calcola:
y = f1(f2 ◦ · · · ◦ fn(x)) =⇒ f−11 (y) = f2 ◦ · · · ◦ fn(x)
=⇒ f−12 (f−1
1 (y)) = f3 ◦ · · · ◦ fn(x)=⇒ f
−12 ◦ f−1
1 (y) = f3 ◦ · · · ◦ fn(x)=⇒ . . .
=⇒ f−1n ◦ · · · ◦ f−1
2 ◦ f−11 (y) = x,
invertendo, per cosı dire, dall’esterno all’interno. In formule, abbiamo provato che
(f1 ◦ f2 · · · ◦ fn)−1 = f−1n ◦ · · · ◦ f−1
2 ◦ f−11 .
Discutiamo infine l’aspetto grafico del problema dell’inversione, ossia di come siaposizionato Γ(f−1) rispetto a Γ(f). Verifichiamo cioe che i grafici Γ(f−1) e Γ(f) sonol’uno il simmetrico dell’altro rispetto alla bisettrice y = x .

Funzioni 73
Sia infatti f : I → J una funzione invertibile con inversa f−1 : J → I . Se(x, y) ∈ Γ(f), allora x ∈ I , y ∈ J e y = f(x). Quindi f−1(y) = f−1(f(x)) = x e(y, x) = (y, f−1(y)) ∈ Γ(f−1). In altre parole abbiamo provato che se (x, y) ∈ Γ(f),allora (y, x) ∈ Γ(f−1). E del tutto ovvio che scambiando i ruoli di f e f−1 si ottienel’implicazione opposta. In conclusione,
(x, y) ∈ Γ(f) ⇐⇒ (y, x) ∈ Γ(f−1),
che e quanto si voleva mostrare. Concludiamo questa sezione con un semplice ed utilerisultato, la cui dimostrazione e lasciata per esercizio.
Proposizione 7.6. L’applicazione surgettiva naturale associata ad una funzione
crescente (risp. decrescente) ha inversa crescente (risp. decrescente).
8. Esponenziali e logaritmi.
Le funzioni esponenziali che introduciamo in questa sezione costituiscono una classedi fondamentale importanza in matematica. In sintesi, esse sono le funzioni x �→ ax ,dove a e un numero positivo fissato e x ∈ R . La ragione del termine esponenziale
risiede evidentemente nel fatto che la variabile gioca il ruolo di esponente, mentre labase e fissata. La definizione di ax e piuttosto delicata, ed avviene per passi.
Esponente intero positivo, base qualunque. Abbiamo visto nella Sezione 7 ilsignificato dell’espressione an per a ∈ R e n ∈ N∗ intero positivo. Ricordiamo che
an = a · a · · · a� �� �
n volte
.
e che an > 0 se a > 0, mentre 0n = 0 per ogni intero positivo. Valgono evidentementele proprieta
an+m = a
nam,(8.17)
(an)m = anm(8.18)
per ogni a ∈ R e per ogni coppia di interi positivi n , m .
Esponente intero, base non nulla. Sia ora a �= 0 e sia n ∈ Z . Vogliamoestendere la definizione di an al caso in cui sia n ≤ 0. Poniamo allora:
an =
�1 se n = 01
a−n se n < 0.
La definizione funziona, in quanto se n < 0 allora −n e un intero positivo e quindia−n definisce un numero reale non nullo se la base a e a sua volta non nulla. Quindi1/a−n ha senso. Non avrebbe invece senso se a = 0, in quanto in tal caso a−n = 0. Siosservi che per ogni n ∈ Z si ha nuovamente an > 0 se a > 0 e che le proprieta (8.17)e (8.18) valgono per ogni a �= 0 e per coppia di interi n , m .

74 Analisi Matematica 1
Base nulla, esponente positivo. Abbiamo visto che anche rimanendo nell’ambitodi esponenti interi se a = 0 si puo solamente definire an per n > 0, e naturalmente0n = 0. Estendiamo quindi la definizione a tutti gli esponenti reali positivi:
0x = 0 per ogni x ∈ (0,+∞).
Esponente razionale, base positiva. Vogliamo estendere la definizione al casodi esponente razionale. Il punto di partenza e il Teorema 1.30 che ci consente di definirea1/q se a > 0 e q e un intero positivo. Come noto, se a < 0 non e possibile dare unsenso coerente all’espressione
√a ossia a1/2 , nel senso che certamente non esiste alcun
numero reale il cui quadrato sia il numero negativo a . Per questa ragione la definizionedi ar con r ∈ Q deve essere ristretta al caso di basi non negative. Poiche il caso a = 0e gia stato discusso, ci limitiamo al caso a > 0. Si pone
ap/q = (ap)1/q, p ∈ Z, q ∈ N∗
.
Poiche a > 0, anche ap > 0 per qualunque intero p . Quindi il Teorema 1.30 garantisceesistenza e unicita della radice q–esima di ap , che e ancora un numero positivo. Si notiche l’ipotesi q > 0 non e restrittiva, in quanto il segno di p/q puo essere scaricato sulsegno di p . Le proprieta (8.17) e (8.18) valgono per ogni a > 0 e per ogni n , m ∈ Q .Proviamo ora un risultato che risultera utile sia nel definire potenze con esponenti realisia nel provare la monotonia delle funzioni esponenziali.
Lemma 8.1. Sia a > 1 e siano r, s ∈ Q tali che r < s. Allora ar < as .
Dimostrazione. Utilizzando la (8.17), l’asserto e equivalante a
ar�as−r − 1
�= a
s − ar> 0
e siccome ar > 0 per ogni r ∈ Q , e sufficiente provare che as−r > 1. Il numerorazionale positivo s− r puo essere scritto
s− r =p
q, p, q ∈ N∗
.
Ora, dal Lemma 7.1, segue che
a > 1 =⇒ ap> 1p = 1
dal momento che p e un intero positivo. Affermiamo che per la stessa ragione3
ap> 1 =⇒ (ap)1/q > 11/q = 1.
Se in effetti fosse (ap)1/q ≤ 11/q allora usando ancora il Lemma 7.1 si avrebbe
ap =
�(ap)1/q
�q ≤�11/q
�q= 1,
contro quanto appena provato. Ma allora as−r = (ap)1/q > 1, come volevasi. ��Ancora un interessante risultato di natura elementare.
Lemma 8.2. Se a > 1, allora inf {ar : r ∈ Q, r > 0} = 1.
3Si veda la Proposizione 7.6.

Funzioni 75
Dimostrazione. Siano E = {ar : r ∈ Q, r > 0} e b = inf E . Dal lemma precedentesappiamo che ar > 1 per ogni razionale positivo r e quindi che gli elementi di E
sono tutti maggiori di 1. Percio 1 e un minorante di E e b ≥ 1. Se fosse b < 1,allora sarebbe b < b2 e quindi, per le proprieta dell’estremo inferiore discusse nellaProposizione 6.5, esisterebbe un elemento di E , ossia un esponente razionale r > 0,tale che ar < b2 . Estraendo le radici quadrate, si avrebbe allora ar/2 < b . Siccome r/2e anch’esso un numero razionale positivo, avremmo trovato ar/2 ∈ E piu piccolo di b .Questa contraddizione implica b = 1, come desiderato. ��
Esponente reale, base positiva. Siamo finalmente in grado di definire ax perogni a > 0 e x ∈ R . La definizione e fondata sulla possibilita di approssimare ax dalsotto e dal sopra mediante esponenti razionali con precisione arbitraria. La proposizioneche segue chiarifica, nel caso a > 1, il senso del processo di approssimazione.
Proposizione 8.3. Siano a > 1 e x ∈ R. Consideriamo gli insiemi
R = {ar : r ∈ Q, r < x}, S = {as : s ∈ Q, s > x}.
Esiste uno ed un solo elemento separatore tra R ed S , che e supR = inf S .
Dimostrazione. Per via del Lemma 8.1 si ha x ≤ y per ogni x ∈ R e per ogniy ∈ S . Quindi esiste certamente un elemento separatore tra R e S . Proviamo che essoe unico. Se ξ < η fossero due elementi separatori distinti, si avrebbe ar ≤ ξ < η ≤ as
per ogni coppia di razionali r, s tali che r < x < s . Ma allora si avrebbe
as−r =
as
ar≥ η
ξ> 1
per ogni coppia di razionali r, s tale che r < x < s . Ogni numero razionale positivo p
e peraltro del tipo s− r dove r, s ∈ Q sono tali che r < x < s , e quindi si avrebbe
ap ≥ η
ξ> 1
per ogni razionale positivo p . Questo contraddice il Lemma 8.2. Quindi l’elementoseparatore e unico e verra denotato provvisoriamente con ω .
Per definizione di elemento separatore, R e superiormente limitato da ω . Siapertanto ρ = supR ≤ ω . Se fosse ρ < ω , allora ρ sarebbe un altro elemento separatoretra R e S diverso da ω . Infatti, ovviamente ρ ≥ x per ogni x ∈ R ed inoltre ρ < ω ≤ y
per ogni y ∈ S . L’unicita dimostrata sopra implica percio ρ = ω . In modo del tuttoanalogo si prova che ω = inf S . Quindi l’unico elemento separatore e supR = inf S .
��
Dato dunque a > 1 e x ∈ R , si definisce
ax = sup {ar : r ∈ Q, r < x} = inf {as : s ∈ Q, s > x}.
Poiche in particolare ax e un maggiorante di un insieme di numeri strettamente positivi,evidentemente ax > 0 per ogni a > 1 e per ogni x ∈ R . Infine, se a < 1 si pone
(8.19) ax =
�1
a
�−x
.

76 Analisi Matematica 1
Abbiamo pertanto definito ax per ogni esponente x ∈ R e per ogni base positiva a .Esso e sempre un numero positivo. Per ogni a > 0 si ha a0 = 1 e le proprieta (8.17)e (8.18) valgono per ogni n , m ∈ R . La dimostrazione di quest’ultimo asserto vieneomessa. Il lettore curioso puo trovarla a pag.79 di [DM], oppure provare a dimostrarla.Nel libro citato si dimostra anche che per ogni a > 0 si ha
(8.20) {ax : x ∈ R} = (0,+∞).
La (8.20) puo essere vista come una conseguenza del fattto che F = {ax : x ∈ R} e ungruppo moltiplicativo (ossia soddisfa gli assiomi (M) visti nella Definizione 1.2 del primocapitolo) per il quale F ∩ (1,+∞) non ha minimo. Queste due proprieta consentonodi concludere che F ricopre tutta la semiretta (0,+∞).
Dal Lemma 8.1 segue facilmente che se a > 1, allora x < y implica ax < ay ;viceversa, dalla definizione (8.19), se a < 1, allora x < y implica ax > ay .
Definiamo per ogni a > 0 la funzione
(8.21) expa : R → (0,+∞), expa(x) = ax,
detta funzione esponenziale di base a . Riassumiamo le principali proprieta delle fun-zioni esponenziali in una lista:
(E0) expa(1) = a ;(E1) expa(x+ y) = expa(x) expa(y) per ogni x, y ∈ R ;(E2) expa(0) = 1;(E3) expa(R) = (0,+∞) se a �= 1;(E4) expa e crescente se a > 1 e decrescente se a < 1;(E5) expexpa(x)
(y) = expa(xy) per ogni x, y ∈ R ;(E6) exp1(x) = 1 per ogni x ∈ R .
Il grafico di una funzione esponenziale con base a > 1 ha il seguente aspetto:

Funzioni 77
Nella figura che segue sono disegnati i grafici di expa con a = 1/2, 1/4, 1, 4 e 2.
2x
4x
1x = 1
�14
�x
�12
�x
Per basi maggiori di 1 le funzioni esponenziali divengono via via piu ripide alcrescere della base. Vale la pena di osservare esplicitamente che come conseguenza di(E1) ed (E2) si ha 1 = a0 = ax−x = axa−x per ogni x ∈ R , e quindi per ogni basea > 0 risulta
(8.22) a−x =
1
ax, per ogni x ∈ R.
Fissiamo ora una base a > 0 e consideriamo la corrispondente funzione esponenzialeexpa . La proprieta (E3) dice che essa e surgettiva, mentre la (E4) implica che essa einiettiva se a �= 1. Dunque, se a �= 1, expa e invertibile e la sua funzione inversa
loga : (0,+∞) → R, a �= 1,
si chiama il logaritmo in base a . Per simmetria rispetto alla bisettrice, possiamo subitodire che il grafico della funzione logaritmo con base a > 1 sara del tipo

78 Analisi Matematica 1
La definizione di loga che abbiamo dato, ossia come funzione inversa della funzioneesponenziale, e equivalente alle due seguenti fondamenteali identita:
loga(ax) = x per ogni x ∈ R;(8.23)
aloga x = x per ogni x ∈ (0,+∞).(8.24)
Le proprieta del logaritmo sono presto dedotte dalle proprieta dell’esponenziale:
(L0) loga(a) = 1(L1) loga(xy) = loga(x) + loga(y) per ogni x, y ∈ (0,+∞);(L2) loga(1) = 0;(L3) loga((0,+∞)) = R se a �= 1;(L4) loga e crescente se a > 1 e decrescente se a < 1;(L5) loga(x
y) = y loga(x) per ogni x ∈ (0,+∞) e ogni y ∈ R ;(L6) logb(x) = (logb a)(loga x) per ogni x ∈ (0,+∞) e ogni b > 0.
Infatti (L1), (L2) e (L3) sono immediate conseguenze delle proprieta (E1), (E2) e (E3).La (L4) e conseguenza di (E4) e della Proposizione 7.6. Per la (L5), osserviamo che,in virtu di (E5) e dell’identita fondamentale (8.24), si ha
ay loga(x) =
�aloga(x)
�y= x
y = aloga(x
y).
Dall’iniettivita dell’esponenziale segue y loga(x) = loga(xy). Infine la (L6) viene detta
la formula di cambiamento di base dei logaritmi, ed e conseguenza di (L5) e di (8.24):
(loga x)(logb a) = logb�aloga x
�= logb x.

Funzioni 79
Esercizi
1. Verificare la formula per il dominio di f(x) = tan(1− x2) provata nell’Esempio 8.
2. Tracciare i grafici delle seguenti funzioni:
f1(x) = |x+ 2|; f2(x) = |x− 3|; f3(x) = |x|− 2;
f4(x) = 1− |x|; f5(x) = |3x|; f6(x) = |2− x2|;
f7(x) = 1− |(x− 2)2 − 1|; f8(x) =1
|x| ; f9(x) = |x+ 1|− |2(x+ 1)|;
f10(x) =|x|x
+ 2|x|−��1− |x|
��; f11(x) =���1−
��1− |x|�����; f12(x) = |x+ 2|− (x+ 2);
3. Tracciare il grafico di f(x) = x/(x− 2). [Suggerimento: aggiungere e togliere 2 alnumeratore.]
4. Tracciare il grafico di f(x) = x2 + 2x e di g(x) = 1/f(x).
5. Dato il grafico di y = f(x) disegnato in figura,
−3 −1 2 4 6
disegnare i grafici delle funzioni:
f1(x) = −f(x); f2(x) = f(−x); f3(x) = |f(x)|;
f4(x) = f(|x|); f5(x) = f(x− 1); f6(x) = f(x+ 2);

80 Analisi Matematica 1
f7(x) = f(x)− 2; f8(x) = 2f(x); f9(x) = f(x)/2;
f10(x) = f(3x); f11(x) = f(x/2).
6. Provare che la composizione di funzioni iniettive e iniettiva.
7. Provare che la composizione di funzioni crescenti e crescente, e che lo stesso valeper le funzioni non decrescenti, decrescenti e non crescenti.
8. Provare che se f e crescente e g e decrescente, allora f ◦ g e g ◦ f sono decrescenti,se e quando sono definite.
9. Provare che se f e crescente e negativa e g e decrescente e positiva allora fg ecrescente (e naturalmente negativa). Che cosa si puo dire del prodotto fg se f ecrescente e positiva e g e decrescente e negativa?
10. Dimostrare la Proposizione 7.6.
11. Si consideri la funzione f(x) =1
x2 − x+ 3− 3
11.
(a) Disegnare il grafico di f .(b) Sia g(x) = f(x) per x > (1/2). Determinare g−1 , se esiste, specificandone
l’insieme di definizione.
12. Si consideri la funzione f : (−∞,+∞) → [−1, 1] definita da
f(x) =
1
xse x ∈ (−∞,−1]
x se x ∈ (−1, 0)
1− x se x ∈ [0, 1)
−1
xse x ∈ [1,+∞).
(a) Disegnare il grafico di f ;(b) dire se f e iniettiva e/o surgettiva;(c) determinare in quali intervalli f e crescente;(d) disegnare il grafico di f(|x|).
13. Si consideri la funzione f : (−∞,+∞) → (−π2 ,
π2 ] definita da
f(x) =
arctan x se x ∈ (−∞,−π4 ] ∪ [π4 ,+∞)
2x+π
2se x ∈ (−π
4 , 0]
−2x se x ∈ (0, π4 ).
(a) Disegnare il grafico di f ;(b) Dire se f e iniettiva e/o surgettiva;(c) determinare in quali intervalli f e crescente;(d) scrivere la decomposizione f = fp + fd dove fp e pari e fd e dispari.
14. Sia f(x) =1
1 +�
|x− 2|.

Funzioni 81
(a) Determinare l’insieme di definizione di f .(b) Verificare se per x > 2 f e invertibile e in caso affermativo determinare la
funzione inversa f−1 .(c) Disegnare il grafico di f , giustificandone il procedimento.(d) Determinare la parte pari e la parte dispari della funzione g(x) = f(x+ 2).
15. Sia f(x) =1
1− 3x
(a) Determinare l’insieme di definizione I di f e l’immagine di f .(b) Studiare la monotonia di f e stabilire se f e invertibile.(c) Disegnare il grafico di f , giustificando il procedimento.(d) Se esiste, determinare f−1 specificandone insieme di definizione e immagine.
16. Provare che (8.17) e (8.18) valgono per ogni a �= 0 e per coppia di interi n , m .
17. Provare che (8.17) e (8.18) valgono per ogni a > 0 e per coppia di razionali n , m .
18. Riscrivere le proprieta (E1), (E2) e (E3) delle funzioni esponenziali sostituendoexpa y con ay .
19. Dimostrare le proprieta (L1), (L2) e (L4) delle funzioni logaritmo.
20. Stabilre quale e piu grande tra le seguenti coppie di numeri reali:
(i) log√2 + 47 log 27, 141 log 3 (ii) log2 3, log3 2 (iii) log3 10, log4 15
(iv) 251, 334 (v) 477, 751 (vi) log6 108, log5 125.


CAPITOLO 4
Limiti e continuita
Una delle nozioni centrali dell’Analisi Matematica e la nozione di continuita diuna funzione. Quando riferita ad una funzione del tipo f : I ⊂ R → R , essa puoessere formulata in modo grossolano dicendo che una funzione e continua se e possibiledisegnarne il grafico “senza staccare la penna dal foglio”, ovvero “senza fare salti”.Purtroppo non ci sono carta e penna in matematica: bisogna fare lo sforzo di tradurrele nostre intuizioni in definizioni stringenti, possibilmente anche abbastanza semplici egenerali da poterle poi adattare a contesti diversi. La definizione rigorosa di continuitaviene formulata oggigiorno mediante la nozione di limite, il vero cuore dell’Analisi. Essaincorpora l’idea intuitiva dell’avvicinarsi sempre piu, diventare arbirariamente vicini,ossia tendere ad un certo valore, senza necessariamente raggiungerlo.
Un’applicazione dell’idea di limite molto facile da comprendere e l’esempio dellesuccessive bisezioni di un segmento. Dato un segmento S0 di lunghezza L , sia S1
uno dei due segmenti ottenuti tagliando S0 nel punto medio, ossia in due. Esso avralunghezza L/2. Il segmento S2 ottenuto tagliando S1 a meta avra lunghezza (L/2)/2 =L/22 e la meta di questo, ossia S3 , avra lunghezza L/23 , e cosı via. Il processo ideale diiterata suddivisione in due di un segmento produce, al passo n–esimo, un segmento Sn
di lunghezza L/2n . Poiche 2n puo essere reso grande quanto vogliamo, pur di prenderen opportunamente grande, la lunghezza di Sn puo essere resa piccola a piacere, ovvero,come impareremo ad esprimerci, essa tende a zero. Dunque, astraendo, a mano a manoche la variabile (nel nostro caso, n) cresce indefinitamente, una grandezza che da essadipende si avvicina sempre piu ad un certo valore limite (nel nostro caso, zero).
Nella discussione svolta, e importante interpretare la crescita indefinita di n comel’approssimarsi di n ad una meta ideale che non sara mai raggiunta. La meta cui allu-diamo in questo caso non e identificabile in un punto preciso, cosı come non e un puntopreciso l’orizzonte visivo. I matematici creano espressioni quali tendere all’infinito
per suggerire un’immagine, per consentire una sorta di visualizzazione dei fenomeniche si intendono studiare: la conclusione matematica dell’esempio della bisezione delsegmento sara espressa dicendo che L/2n tende a zero quando n tende all’infinito.
In generale, saremo interessati al comportamento che una funzione di variabile realepuo esibire quando la variabile si avvicina sempre piu ad una certa meta. Essa potraessere – come discusso finora – un punto all’infinito, cioe una meta indefinitamentegrande o indefinitamente grandemente negativa, oppure puo essere un punto al finito,cioe un numero reale x0 . In quest’ultimo caso, si trattera di analizzare che cosa succedeai valori della funzione quando la variabile si trova nelle regioni immediatamente vicinead x0 , senza peraltro curarsi di che cosa accada in x0 . Illustriamo questo caso me-diante un vero “classico”, che verra ripreso piu avanti. Consideriamo la circonferenza
83
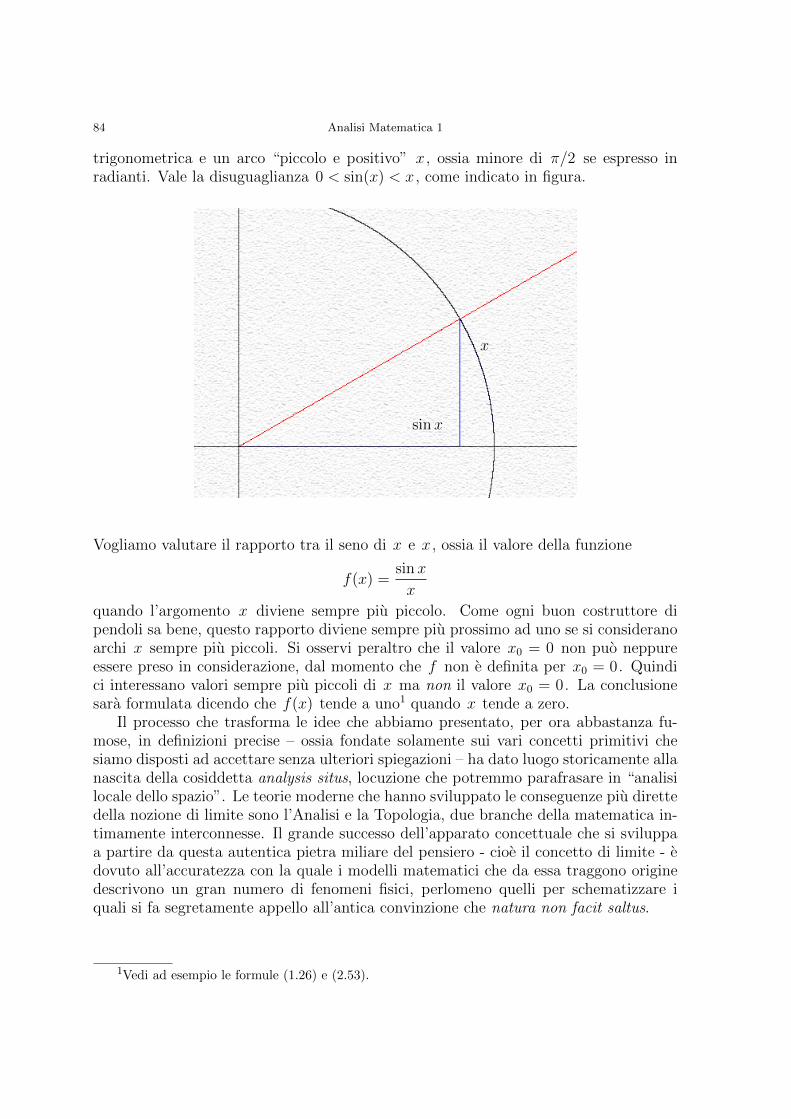
84 Analisi Matematica 1
trigonometrica e un arco “piccolo e positivo” x , ossia minore di π/2 se espresso inradianti. Vale la disuguaglianza 0 < sin(x) < x , come indicato in figura.
sin x
x
Vogliamo valutare il rapporto tra il seno di x e x , ossia il valore della funzione
f(x) =sin x
x
quando l’argomento x diviene sempre piu piccolo. Come ogni buon costruttore dipendoli sa bene, questo rapporto diviene sempre piu prossimo ad uno se si consideranoarchi x sempre piu piccoli. Si osservi peraltro che il valore x0 = 0 non puo neppureessere preso in considerazione, dal momento che f non e definita per x0 = 0. Quindici interessano valori sempre piu piccoli di x ma non il valore x0 = 0. La conclusionesara formulata dicendo che f(x) tende a uno1 quando x tende a zero.
Il processo che trasforma le idee che abbiamo presentato, per ora abbastanza fu-mose, in definizioni precise – ossia fondate solamente sui vari concetti primitivi chesiamo disposti ad accettare senza ulteriori spiegazioni – ha dato luogo storicamente allanascita della cosiddetta analysis situs, locuzione che potremmo parafrasare in “analisilocale dello spazio”. Le teorie moderne che hanno sviluppato le conseguenze piu direttedella nozione di limite sono l’Analisi e la Topologia, due branche della matematica in-timamente interconnesse. Il grande successo dell’apparato concettuale che si sviluppaa partire da questa autentica pietra miliare del pensiero - cioe il concetto di limite - edovuto all’accuratezza con la quale i modelli matematici che da essa traggono originedescrivono un gran numero di fenomeni fisici, perlomeno quelli per schematizzare iquali si fa segretamente appello all’antica convinzione che natura non facit saltus.
1Vedi ad esempio le formule (1.26) e (2.53).

Limiti e continuita 85
1. Successioni e loro limiti.
L’esempio delle bisezioni iterate di un segmento e un’istanza particolare di unaclasse di fenomeni o esempi che possono essere formalizzati introducendo le successioni.Una successione e infatti una lista di numeri reali. Il linguaggio matematico traeispirazione dal linguaggio corrente anche in questo caso: nel dire lista, intendiamoproprio dire che c’e un primo e poi un secondo e poi un terzo, e cosı via. Diamosenz’altro la definizione formale:
Definizione 1.1. Una successione e una applicazione
a : N → R.Solitamente l’immagine di n ∈ N si scrive an invece di a(n) e si legge “a con n”.
Evidentemente, una successione e nota se sono noti i numeri reali a0, a1, a2 . . . ,che formano una lista ordinata. Per coerenza con le notazioni adottate nel caso deglielementi del prodotto cartesiano R × R , in cui cioe abbiamo distinto la coppia (x, y)dalla coppia (y, x) perche diverso e l’ordine in cui essi sono scritti, conveniamo didenotare una successione mediante (a0, a1, a2, . . . ), ovvero, sinteticamente
(an)n≥0 oppure (an)n∈N.
Va detto che in molti testi viene preferita una delle scritture
{an}n≥0 oppure {an}n∈N,a nostro avviso meno coerenti in quanto l’uso delle parentesi graffe e solitamente riser-vato agli insiemi, per i quali invece nessun tipo di ordinamento e rilevante.
Spesso si descrive una successione mediante una formula generale che individual’applicazione, cosı come abbiamo visto per molte funzioni2 f : I ⊂ R → R . Sead esempio scriviamo an = n + 2 intendiamo la successione a : N → R definita dan �→ n + 2 ossia la lista (2, 3, 4, 5, . . . ). Dovrebbe essere peraltro evidente che ancheuna formula del tipo an =
√n− 3 definisce una successione anche se non sono definiti
i valori a0 , a1 e a2 e quindi, a rigore, non e definita una mappa a : N → R . Infatti,la formula da comunque luogo ad una lista, cioe (0, 1,
√2,√3, 2,
√5, . . . ). Per essere
pignoli, dovremmo allora dire che una successione e una applicazione del tipo
a : {n ∈ N : n ≥ k} → Rdove k e un qualche intero non negativo. In effetti questa pignoleria puo essere incor-porata senza difficolta nella scrittura standard: basta scrivere
(an)n≥k.
Nell’enunciare i vari risultati sulle successioni ci risparmieremo senz’altro questo eccessodi zelo formale, confidando nella capacita del lettore di riadattarli di volta in volta.
2Da questo punto di vista, valgono tutte le convenzioni stabilite finora per le funzioni del tipof : I ⊂ R → R , perche N e a tutti gli effetti un particolare sottoinsieme di R .

86 Analisi Matematica 1
Esempi.
(1) Sia L un numero reale positivo. La formula an = L/2n , con n ≥ 0, definisce la suc-cessione (L,L/2, L/4, L/8, . . . ). Essa e la successione che funge da modello matematicoper il processo di bisezione iterata di un segmento – o di qualunque altra grandezza L .
(2) La formula an = (−1)n , con n ≥ 0, definisce la successione (1,−1, 1,−1, . . . ).Infatti per n ∈ N si ha evidentemente
(−1)n =
�1 se n e pari
−1 se n e dispari.
(3) Studieremo nei dettagli l’importante successione definita per n ≥ 1 dalla formula
an =
�1 +
1
n
�n
.
(4) La formula an = 1/n , con n ≥ 1, definisce la successione (1, 12 ,13 ,
14 , . . . ).
(5) La formula an = n/(n+ 1), con n ≥ 0, definisce la successione (0, 12 ,23 ,
34 ,
45 , . . . ).
(6) Dato un qualunque numero reale λ ∈ R , possiamo formare la successione i cuivalori sono tutti uguali a λ , ossia an = λ per ogni n ∈ N . Una siffatta successioneverra detta successione costante.
(7) Date due successioni (an)n≥0 e (bn)n≥0 si puo naturalmente definirne la somma e ilprodotto nel modo naturale: la loro somma sara la successione n �→ an + bn , denotata(an + bn)n≥0 , mentre il loro prodotto sara n �→ anbn , e sara denotato (anbn)n≥0 .Quest’ultima definizione comprende anche il caso in cui (bn)n≥0 sia una successionecostante, e quindi possiamo formare anche la successione (λan)n≥0 per ogni λ ∈ R .
E importante osservare che la particolare struttura di N consente di definire suc-cessioni mediante una procedura che ricorda il principio di induzione. Si tratta delladefinizione per ricorrenza. Vediamo un esempio. Consideriamo le formule
a0 = 1
an+1 =1
1 + an.
Se prendiamo n = 0, esse implicano
a1 =1
1 + a0=
1
1 + 1=
1
2
e quindi per n = 1 abbiamo
a2 =1
1 + a1=
1
1 + 12
=2
3.
E chiaro che cosa succede: la conoscenza di a0 consente di calcolare a1 , la conoscenzadel quale consente di calcolare a2 , e cosı via. Nota l’immagine di n possiamo conoscerel’immagine del successivo, cioe di n+1 e quindi possiamo conoscere tutta la successione,almeno in linea di principio. Il procedimento ha senso proprio perche tra numeri

Limiti e continuita 87
naturali esiste la nozione di successivo. Si osservi che se avessimo dato ad a0 un valorediverso da 1, avremmo ottenuto una successione diversa, ancorche ottenuta mediantela stessa formula ricorsiva.
L’esempio precedente puo essere generalizzato. Consideriamo per esempio la famosasuccessione di Fibonacci3, ossia la successione 1, 1, 2, 3, 5, 8, 13, 21, 34, . . . Dal terzo inpoi, ciascun elemento della successione e ottenuto sommando i due precedenti. In altreparole, abbiamo la regola an+2 = an + an+1 . Essa permette di costruire la successionedi Fibonacci quando siano noti i primi due valori, cioe a0 = a1 = 1. Cambiandoquesti valori si ottengono successioni diverse; se ad esempio a0 = a1 = 0 si ottiene lasuccessione costantemente nulla. Il punto importante che vogliamo mettere in evidenza,e che ogni coppia di valori (an, an+1) consente di calcolare il successivo an+2 , mentrela conoscenza di uno solo di essi, an oppure an+1 , non e sufficiente.
Il lettore avra intuito che esistono metodi ricorsivi di passo arbitrario: nulla vietainfatti di definire una successione assegnandone esplicitamente i primi k valori – dove k
e un intero positivo qualsiasi – e di procedere mediante una formula che attribuisca unvalore all’elemento an+k a partire dalla conoscenza della k -upla (an, an+1, . . . , an+k−1).Nel caso della successione di Fibonacci k = 2. L’intero k , ossia il minimo numero divalori consecutivi che devono essere noti per poter calcolare il successivo si dice il passodella successione definita per ricorrenza.
Abbiamo gia osservato che una successione e, in particolare, una funzione del tipof : I ⊂ R → R . Come tale, essa avra certamente un grafico. Siccome in tutti i casiI = N (o quasi, nel senso discusso sopra), il grafico di una successione avra un aspettodel tutto peculiare: esso e costituito da punti di ascissa intera non negativa. Quindi, ilgrafico di una successione sara tipicamente
✲
✻
✉✉1
✉2
✉3
✉4
✉
5
✉
6
✉
7
✉
8
✉
9
✉
10
3Leonardo Fibonacci, matematico pisano del secolo XII, fu il primo ad introdurre in Italia e inEuropa la numerazione araba.
88 Analisi Matematica 1
1.1. Successioni convergenti. Il problema che ci interessa soprattutto di af-frontare e come si possa formalizzare l’idea che i valori di an tendano ad un valorelimite al crescere di n , come discusso all’inizio del capitolo.
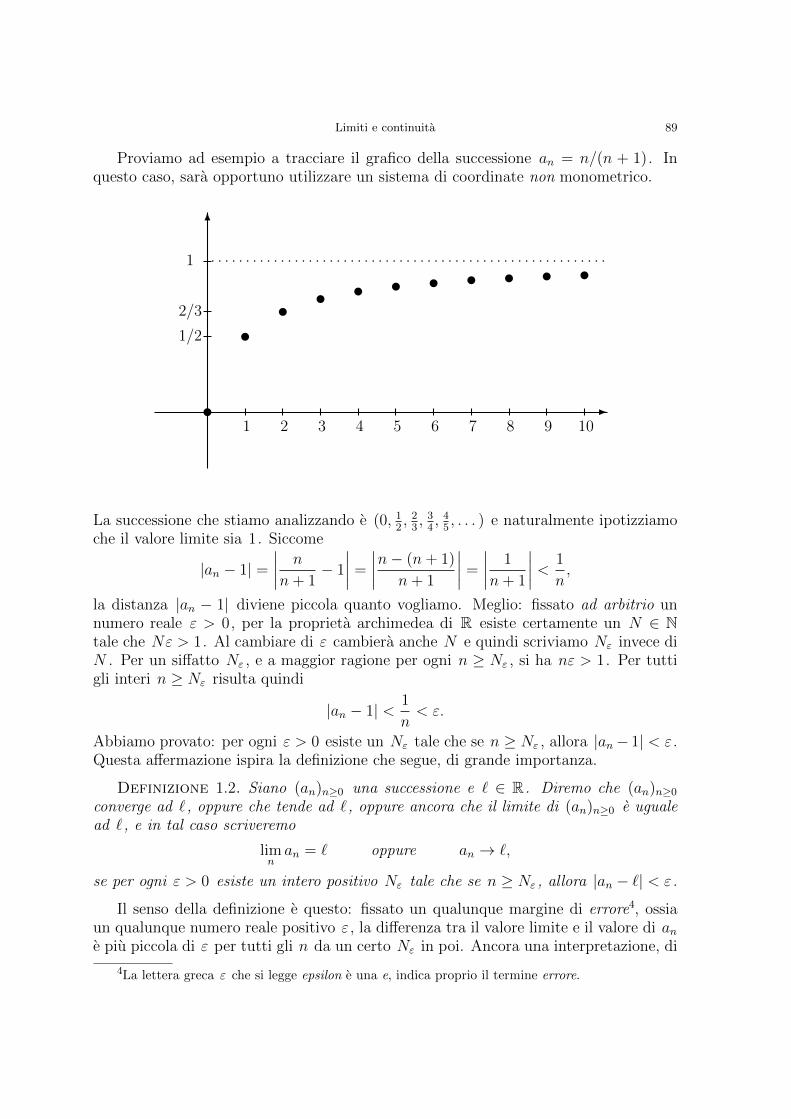
Limiti e continuita 89
Proviamo ad esempio a tracciare il grafico della successione an = n/(n + 1). Inquesto caso, sara opportuno utilizzare un sistema di coordinate non monometrico.
✲
✻
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
1/2
2/3
✉
✉
1
✉
2
✉
3
✉
4
✉
5
✉
6
✉
7
✉
8
✉
9
✉
10
La successione che stiamo analizzando e (0, 12 ,23 ,
34 ,
45 , . . . ) e naturalmente ipotizziamo
che il valore limite sia 1. Siccome
|an − 1| =����
n
n+ 1− 1
���� =����n− (n+ 1)
n+ 1
���� =����
1
n+ 1
���� <1
n,
la distanza |an − 1| diviene piccola quanto vogliamo. Meglio: fissato ad arbitrio unnumero reale ε > 0, per la proprieta archimedea di R esiste certamente un N ∈ Ntale che Nε > 1. Al cambiare di ε cambiera anche N e quindi scriviamo Nε invece diN . Per un siffatto Nε , e a maggior ragione per ogni n ≥ Nε , si ha nε > 1. Per tuttigli interi n ≥ Nε risulta quindi
|an − 1| < 1
n< ε.
Abbiamo provato: per ogni ε > 0 esiste un Nε tale che se n ≥ Nε , allora |an − 1| < ε .Questa affermazione ispira la definizione che segue, di grande importanza.
Definizione 1.2. Siano (an)n≥0 una successione e � ∈ R. Diremo che (an)n≥0
converge ad �, oppure che tende ad �, oppure ancora che il limite di (an)n≥0 e uguale
ad �, e in tal caso scriveremo
limn
an = � oppure an → �,
se per ogni ε > 0 esiste un intero positivo Nε tale che se n ≥ Nε , allora |an − �| < ε.
Il senso della definizione e questo: fissato un qualunque margine di errore4, ossiaun qualunque numero reale positivo ε , la differenza tra il valore limite e il valore di ane piu piccola di ε per tutti gli n da un certo Nε in poi. Ancora una interpretazione, di
4La lettera greca ε che si legge epsilon e una e, indica proprio il termine errore.
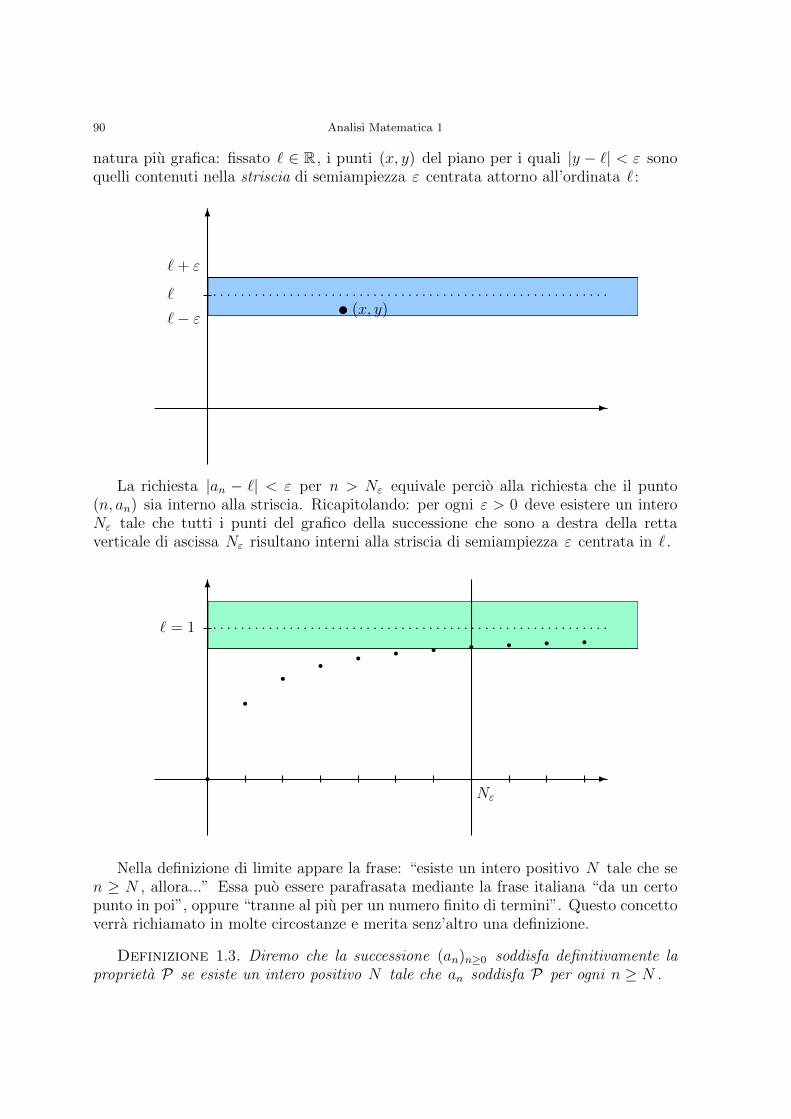
90 Analisi Matematica 1
natura piu grafica: fissato � ∈ R , i punti (x, y) del piano per i quali |y − �| < ε sonoquelli contenuti nella striscia di semiampiezza ε centrata attorno all’ordinata � :
✲
✻
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .�
�− ε
�+ ε
✉(x, y)
La richiesta |an − �| < ε per n > Nε equivale percio alla richiesta che il punto(n, an) sia interno alla striscia. Ricapitolando: per ogni ε > 0 deve esistere un interoNε tale che tutti i punti del grafico della successione che sono a destra della rettaverticale di ascissa Nε risultano interni alla striscia di semiampiezza ε centrata in � .
✲
✻
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .� = 1
�
�� � � � � �
Nε
� � �
Nella definizione di limite appare la frase: “esiste un intero positivo N tale che sen ≥ N , allora...” Essa puo essere parafrasata mediante la frase italiana “da un certopunto in poi”, oppure “tranne al piu per un numero finito di termini”. Questo concettoverra richiamato in molte circostanze e merita senz’altro una definizione.
Definizione 1.3. Diremo che la successione (an)n≥0 soddisfa definitivamente la
proprieta P se esiste un intero positivo N tale che an soddisfa P per ogni n ≥ N .

Limiti e continuita 91
Prima di discutere alcuni esempi, un commento circa le notazioni. Oltre a quelleche abbiamo introdotto, sono anche molto usate, e certamente accettabili, le seguenti:
limn→∞
an = �, limn→+∞
an = �,
che vengono lette, rispettivamente, “il limite di an per n che tende all’infinito e ugualea �” e “il limite di an per n che tende a piu infinito e uguale a �”. Esse non sono moltoeconomiche. In effetti, come sara piu chiaro quando tratteremo limiti di funzioni, lavariabile intera e positiva n , se tende da qualche parte, non puo che tendere all’infinito(anzi, a +∞) ed e dunque pleonastico specificarlo nella notazione.
Esempi.
(8) Consideriamo la successione (2−n)n≥0 da cui siamo partiti. Vogliamo mostrareche essa tende a zero. Fissiamo ε > 0. Dobbiamo provare che esiste Nε tale che ladiseguaglianza 2−n < ε vale per ogni n ≥ Nε . Passando al logaritmo in base 2, checome sappiamo e crescente, la diseguaglianza per Nε e equivalente a Nε > (− log2 ε).L’esistenza di un intero Nε che la soddisfi e garantita dalla proprieta archimedea (siosservi che per ε < 1 si ha − log2 ε > 0). Tale diseguaglianza vale a maggior ragionese n ≥ Nε . In conclusione: fissato ε > 0 sia Nε tale che Nε > (− log2 ε). Se n ≥ Nε ,allora 2−n < ε . Questo dimostra che 2−n → 0.
(9) Anche la successione an = 1/n , con n ≥ 1 tende evidentemente a zero. Fissatoε > 0 sia Nε un intero tale che Nεε > 1. Per ogni n ≥ Nε si ha nε > 1 e quindi(1/n) < ε , come volevasi.
(10) Una successione costante converge evidentemente a quel valore costante.
(11) Che cosa significa dire che una successione non converge? Significa che nessun� ∈ R ne e un valore limite, ossia, che per ogni � ∈ R si ha:
(1.25) ∃ ε > 0 tale che ∀N ∈ N : ∃ n ≥ N tale che |an − �| ≥ ε.
(12) Proviamo che la successione an = (−1)n non converge. Fissiamo allora � ∈ R eproviamo che vale (1.13) per la successione in esame. L’idea da seguire e la seguente:i punti della successione sono alternatamente 1 e −1 ed hanno quindi mutua distanzauguale a 2. Se scegliamo una striscia abbastanza sottile centrata intorno ad � , peresempio di semiampiezza 1/2, essa non potra contenere sia 1 sia −1.
Scegliamo quindi ε = 1/2 e fissiamo N . Dobbiamo esibire un n ≥ N per il qualerisulti |an − �| ≥ 1/2. Si danno tre casi che (come vedremo) si escludono a vicenda:la distanza di 1 da � e minore di 1/2, oppure la distanza di −1 da � e minore di1/2, oppure ne 1 ne −1 distano da � meno di 1/2. In quest’ultimo caso, tutti gli ansoddisfano |an − �| ≥ 1/2, e quindi (1.13) e verificata. Se risulta |1− �| < 1/2, allorainnanzitutto � > 1/2. Ma allora |� − (−1)| = |� + 1| = � + 1 > 3/2. Percio se ladistanza di 1 da � e minore di 1/2, allora la distanza di −1 da � e maggiore di 1/2.Quindi, ad ogni n dispari (e percio certamente a qualche n ≥ N ) corrisponde un an
per il quale |an − �| ≥ 1/2. Anche in questo caso (1.13) e verificata.Lasciamo al lettore la conclusione del ragionamento, cioe la disamina del caso in
cui |(−1)− �| < 1/2.

92 Analisi Matematica 1
Passiamo ora a dimostrare le principali proprieta dei limiti delle successioni.
Proposizione 1.4. Se una successione converge, il limite e unico.
Dimostrazione. Supponiamo che � e �� siano due limiti di (an)n≥0 . Fissiamo ε > 0.Allora esisteranno Nε/2 e N �
ε/2 con le seguenti proprieta:
n ≥ Nε/2 =⇒ |an − �| < ε
2
n ≥ N�ε/2 =⇒ |an − �
�| < ε
2.
Se N = max{Nε/2, N�ε/2} si avra allora per ogni n ≥ N :
|�− ��| = |�− an + an − �
�| ≤ |�− an|+ |an − ��| < ε
2+
ε
2= ε.
Abbiamo provato che per ogni fissato ε > 0 si ha |�− ��| < ε . Per il Corollario 5.2 delCapitolo 2 ne segue che � = �� . ��
Nel corso della precedente dimostrazione e emerso un fatto di cui faremo uso im-plicito o esplicito in diverse circostanze, e che vale la pena enunciare formalmente.
Lemma 1.5. Se una successione soddisfa definitivamente la proprieta P e soddisfa
definitivamente anche la proprieta Q, allora essa soddisfa definitivamente la proprieta
P ∧Q, cioe P e Q valgono definitivamente in modo congiunto.
Dimostrazione. Se an soddisfa P per n ≥ N e soddisfa Q per n ≥ M , allora an
soddisfa P ∧Q per n ≥ max{N,M} . ��
Teorema 1.6 (Confronto I). Siano (an)n≥0 e (bn)n≥0 due successioni e suppo-
niamo an → a e bn → b.
(i) Se definitivamente an < bn oppure an ≤ bn , allora a ≤ b;
(ii) se a < b, allora definitivamente an < bn ;
(iii) se a < λ ∈ R, allora definitivamente an < λ; se a > µ ∈ R, allora definitiva-
mente an > µ.
Dimostrazione. Proviamo dapprima (ii). Fissiamo ε > 0 e supponiamo inoltre cheε < (b− a)/2. Applicando il Lemma 1.5, le disuguaglianze
an < a+ ε, bn > b− ε,
sono entrambe definitivamente vere. Ne segue che definitivamente si ha
bn − an > b− a− 2ε > 0,
come volevasi. Questo implica subito (i), in quanto se viceversa si avesse a > b , allorasi avrebbe definitivamente an > bn .
Infine, per quanto riguarda (iii), basta applicare (ii) al caso particolare di unasuccessione costante λn = λ , oppure µn = µ . ��
Il punto (i) del teorema precedente non e migliorabile, nel senso che in effetti anchese vale la disuguaglianza stretta an < bn definitivamente, non si puo concludere che ladisuguaglianza stretta valga anche tra i limiti. Basta considerare ad esempio an = 1/ne bn = 2/n . Anche se an e la meta di bn , entrambe le successioni convergono a zero.

Limiti e continuita 93
Corollario 1.7 (Permanenza del segno). Se la successione (an)n≥0 converge
a � �= 0, allora (an)n≥0 ha definitivamente il segno di �.
Dimostrazione. Si applichi il punto (iii) del Teorema 1.6 al caso λ = 0 (se � < 0),oppure al caso µ = 0 (se � > 0). ��
Teorema 1.8 (Confronto II, o “Teorema dei carabinieri”). Siano (an)n≥0 ,
(bn)n≥0 e (cn)n≥0 tre successioni e supponiamo che
(A) an → � e cn → �;
(B) definitivamente an ≤ bn ≤ cn .
Allora esiste anche limn
bn e limn
bn = �.
Dimostrazione. Sia ε > 0 fissato. Dall’ipotesi (A) e per via del Lemma1.5, risultanocongiuntamente verificate definitivamente le seguenti disuguaglianze:
�− ε < an, cn < �+ ε.
Applicando percio l’ipotesi (B) si ha definitivamente
�− ε < an ≤ bn ≤ cn < �+ ε,
cosicche |bn − �| < ε definitivamente. Quindi bn → � . ��Il significato del curioso titolo “Teorema dei carabinieri” e dovuto all’idea seguente:
se due carabinieri accompagnano un mariuolo, l’uno a destra e l’altro a sinistra, e seentrambi i carabinieri vanno in guardina, ci va anche il mariuolo.
Esempi.
(13) Consideriamo la successione definita per n ≥ 1 dalla formula bn = sin(1/n).Come abbiamo gia osservato all’inizio del capitolo, vale per archi x che siano “piccolie positivi” la diseguaglianza 0 < sin(x) < x . In particolare, essa si applica a x = 1/nper ogni n intero positivo. Quindi, avremo
0 < sin
�1
n
�<
1
n.

94 Analisi Matematica 1
Interpretiamo lo zero a sinistra come l’elemento n-esimo della successione costantean = 0. Poiche sappiamo che cn = 1/n → 0, il Teorema dei carabinieri implicasin(1/n) → 0.
Definizione 1.9. Diremo che la successione (an)n≥0 e limitata se l’insieme dei
suoi valori A = {an : n ≥ 0} e limitato. In particolare, (an)n≥0 e limitata se e solo se
esiste M ≥ 0 tale che |an| ≤ M per ogni n ∈ N.
Proposizione 1.10. Una successione convergente e limitata.
Dimostrazione. Sia � = limn an e sia ε > 0 fissato. Esistera allora Nε tale che||an|−|�|| ≤ |an−�| < ε per ogni n ≥ Nε . In particolare, per tali n risulta |an| ≤ |�|+ε .Posto allora
M = max�|a0|, |a1|, . . . , |aNε−1|, |�|+ ε
�,
avremo che |an| ≤ M per ogni n ∈ N . Quindi (an)n≥0 e limitata. ��
Facciamo notare che l’implicazione opposta a quella enunciata nella proposizioneprecedente non e vera, ossia non e vero che se (an)n≥0 e limitata, allora essa e con-vergente. Come abbiamo visto nell’Esempio 12, la successione definita da an = (−1)n
non converge, pur essendo ovviamente limitata da M = 1.
Teorema 1.11 (Algebra dei limiti). Siano (an)n≥0 e (bn)n≥0 due successioni, e
supponiamo an → a e bn → b. Allora:
(i) |an| → |a|;(ii) an + bn → a+ b;
(iii) anbn → ab;
(iv) per ogni λ ∈ R, λan → λa;
(v) se b �= 0, allora5 an/bn → a/b.
Dimostrazione. (i) Siccome definitivamente |an − a| < ε , segue che definitivamente||an|− |a|| ≤ |an − a| < ε .
(ii) Fissiamo ε > 0. Definitivamente abbiamo |an − a| < ε/2 e |bn − b| < ε/2.Utilizzando il Lemma 1.5 possiamo dire che definitivamente risulta
|an + bn − (a+ b)| ≤ |an − a|+ |bn − b| < ε/2 + ε/2,
come volevasi.(iii) Sia ε > 0. Siccome (an)n≥0 e convergente, essa e limitata per via della Propo-
sizione 1.10. Quindi |an| ≤ M0 per un qualche M0 > 0. Poniamo M = max{M0, |b|}ed osserviamo che M > 0 anche se fosse b = 0. Dal fatto che entrambe le successioniconvergono, definitivamente risulta |an − a| < ε/(2M) e |bn − b| < ε/(2M), sempre
5Per il senso da attribuire al quoziente an/bn , si veda la dimostrazione.

Limiti e continuita 95
per via del Lemma1.5. Quindi definitivamente si ha
|anbn − ab| = |anbn − anb+ anb− ab|≤ |an(bn − b)|+ |(an − a)b|= |an| |bn − b|+ |an − a| |b|≤ M (|bn − b|+ |an − a|)
< M
�ε
2M+
ε
2M
�,
come richiesto per provare l’asserto.(iv) Discende da (iii) nel caso particolare in cui (bn)n≥0 sia la successione costante
uguale a λ .(v) Poiche b �= 0, per permanenza del segno, ossia per il Corollario 1.7, anche bn
e definitivamente diverso da zero ed ha quindi senso considerare il quoziente an/bn ,perlomeno definitivamente. Ora, da (i) abbiamo |bn| → |b| > 0 e quindi in virtu delpunto (iii) del Teorema 1.6, scelto µ ∈ (0, |b|) risulta |bn| > µ definitivamente. D’altraparte, ancora una volta per via del Lemma1.5, si ha definitivamente
|an − a| < µ|b|ε2M
, |bn − b| < µ|b|ε2M
,
dove M = max{|a|, |b|} . Quindi����an
bn− a
b
���� =|anb− abn|
|bnb|
=|anb− ab+ ab− abn|
|bnb|
≤ |b| |an − a|+ |a| |bn − b||bn| |b|
≤ M
µ|b| (|an − a|+ |bn − b|)
<ε
2+
ε
2,
come volevasi. ��Come conseguenza del precedente teorema abbiamo, sinteticamente:
an − bn → a− b,1
an→ 1
a, se a �= 0.
Utilizziamo tutti i risultati esposti per fornire un certo numero di esempi significativi.Alcuni di essi rientrano nella categoria dei cosiddetti limiti notevoli, ossia limiti diparticolare rilevanza cui spesso capita di ricondursi. Altri sono semplici illustrazioni ditecniche standard.

96 Analisi Matematica 1
Esempi.
(14) Proveremo che cos(1/n) → 1. In effetti, dalla formula di bisezione
cos x = 1− 2�sin
x
2
�2
abbiamo in particolare per ogni intero positivo n
cos(1/n) = 1− 2
�sin
1
2n
�2
.
Applicando il Teorema dei carabinieri come fatto nell’Esempio 13, otteniamo facilmenteche sin(1/2n) → 0. Poi, applicando in sequenza (come indicato) i vari punti delTeorema 1.11, otteniamo:
(iii) ⇒�sin
1
2n
�2
→ 0
(iv) ⇒ 2
�sin
1
2n
�2
→ 0
(ii) ⇒ cos(1/n) = 1− 2
�sin
1
2n
�2
→ 1,
come desiderato.
(15) Consideriamo la circonferenza trigonometrica e archi piccoli e positivi x , ossia0 < x < π/2. Riprendiamo, affinandole, le considerazioni svolte all’inizio del capitolo.
sin x
tan x
Valgono evidentemente le disuguaglianze
0 < sin x < x < tan x.
Passando ai reciproci e moltiplicando poi per sinx > 0 otteniamo
0 <cos x
sin x<
1
x<
1
sin x=⇒ 0 < cos x <
sin x
x< 1.

Limiti e continuita 97
In particolare, per ogni intero positivo n risulta
0 < cos(1/n) <sin(1/n)
(1/n)< 1
e quindi applicando il Teorema dei carabinieri e il risultato cos(1/n) → 1 abbiamo illimite notevole
(1.26) limn
n sin(1/n) = limn
sin(1/n)
(1/n)= 1.
Questa e una versione del risultato cui si faceva cenno all’inizio di questo capitolo.
(16) Consideriamo la successione definita da
an =n+ a0
n+ b0,
dove a0 e b0 sono due numeri reali qualunque. Essa e sicuramente definita per ognin se −b0 �∈ N ed e invece definita per n > −b0 se −b0 ∈ N . In ogni caso, potremoscrivere
an =1 + (a0/n)
1 + (b0/n).
Partiamo dalla conoscenza del limite 1/n → 0 e applichiamo in sequenza (come indi-cato) i vari punti del Teorema 1.11:
(iv) ⇒ a0/n → 0 e b0/n → 0
(ii) ⇒ 1 + (a0/n) → 1 e 1 + (b0/n) → 1
(v) ⇒ 1 + (a0/n)
1 + (b0/n)→ 1
1= 1
In conclusione an → 1. La pedantesca cura nell’evidenziare tutti i singoli passaggi sararispiarmiata al lettore d’ora in poi.
(17) Si puo applicare la stessa tecnica utilizzata nell’esempio precedente per provareche per ogni scelta di numeri reali a0, a1, b0, b1 si ha
n2 + a1n+ a0
n2 + b1n+ b0→ 1
e immaginare facilmente che per ogni intero positivo k ed ogni scelta di numeri realia0, a1, . . . , ak−1 e b0, b1, . . . , bk−1 si ha
nk +�k−1
j=0 ajnj
nk +�k−1
j=0 bjnj→ 1.
(18) Generalizziamo ora l’esempio base 1/n → 0 e proviamo il limite notevole
(1.27) limn
1
nα= 0 per ogni α > 0.

98 Analisi Matematica 1
Sia α > 0 e fissiamo ε > 0. Il numero reale ε1/α e ben definito e certamente posi-tivo. Per la proprieta archimedea di R , possiamo allora trovare un intero Nε tale cheNεε
1/α > 1. A maggior ragione, se n > Nε si ha nε1/α > 1 e quindi
1
n< ε
1/α =⇒ 1
nα< ε.
Percio fissato ε > 0 si ha 1/nα < ε definitivamente e (1.27) e provata.
(19) Illustriamo ora una tecnica standard, basata banalmente sul prodotto notevole(a− b)(a+ b) = a2 − b2 . Ad esempio, sia
an =√n+ 1−
√n.
Siccome
0 <√n+ 1−
√n =
�√n+ 1−
√n� �√
n+ 1 +√n�
�√n+ 1 +
√n�
=1�√
n+ 1 +√n� <
1√n,
il limite notevole (1.27) (con α = 1/2) ed il Teorema dei carabinieri permettono diconcludere che an → 0.
(20) Applichiamo la tecnica precedente per derivare di un altro limite notevole. Perogni x ∈ R valgono le identita
1− cos x
x2=
(1− cos x) (1 + cosx)
x2 (1 + cos x)
=1− (cos x)2
x2 (1 + cos x)
=
�sin x
x
�2 1
1 + cosx.
In particolare, per ogni intero positivo n si avra
1− cos(1/n)
1/n2=
�sin(1/n)
(1/n)
�2 1
1 + cos(1/n).
Usando l’algebra dei limiti e i limiti cos(1/n) → 0 e (1.26) otteniamo il limite notevole
(1.28) limn
1− cos(1/n)
1/n2=
1
2.
(21) Questo esempio e piu sofisticato, ed e basato sulla diseguaglianza di Bernoulli
(1.29) (1 + h)n ≥ 1 + nh
valida per ogni numero reale h ≥ −1. La dimostrazione di (1.29) e un facile esercizio6
sul metodo di induzione. Sia p > 1 un numero reale. Quindi per ogni intero positivon anche p1/n e un numero reale maggiore di uno (la radice n-esima e crescente e la
6Si veda l’Esercizio 2 del Capitolo 1.

Limiti e continuita 99
radice n-esima di uno e uno) e possiamo pertanto definire il numero reale positivohn = p1/n − 1. Dalla definizione di hn e dalla disuguaglianza di Bernoulli si ha
p = (1 + hn)n ≥ 1 + nhn =⇒ 0 < hn ≤ p− 1
n.
Per il Teorema dei carabinieri si ha quindi hn → 0 e conseguentemente, ossia dallauguaglianza hn + 1 = p1/n , si conclude p1/n → 1.
Consideriamo ora il caso in cui p < 1. Anche la sua radice n-esima sara minore diuno e dunque per ogni intero positivo n esistera un numero reale positivo kn tale che
p1/n =
1
1 + kn.
Sempre in virtu di (1.29) risultera
p =1
(1 + kn)n≤ 1
1 + nkn,
da cui
0 < kn ≤ 1/p− 1
n.
Un’ulteriore applicazione del Teorema dei carabinieri implica kn → 0 e quindi ancorap1/n → 1. Abbiamo provato il limite notevole
(1.30) limn
p1/n = lim
nn√p = 1 per ogni p > 0.
(22) Proviamo ora il limite notevole
(1.31) limn
n
An= 0 per ogni A > 1
facendo nuovamente ricorso alla disuguaglianza di Bernoulli (1.29). Posto√A = 1+h ,
essa fornisceA
n/2 = (√A)n = (1 + h)n ≥ 1 + nh > nh,
da cui
An> n
2h2 =⇒ 0 <
n
An<
1
nh2
e (1.31) segue nuovamente dal Teoema dei carabinieri e dal limite noto (1/n) → 0.
1.2. Successioni divergenti. Siamo ora interessati a successioni i cui elementidivengono arbitrariamente grandi, oppure arbitrariamente grandemente negativi. Adesempio an = n2 diviene arbitrariamente grande, mentre log(1/n) diviene, al cresceredi n , sempre piu grande in valore assoluto ma negativo.
Definizione 1.12. Diremo che la successione (an)n≥0 diverge a +∞, e scriveremo
limn
an = +∞ oppure an → +∞,
se per ogni K > 0 esiste un intero positivo NK tale che se n ≥ NK , allora an > K .
Similmente, diremo che la successione (an)n≥0 diverge a −∞, e scriveremo
limn
an = −∞ oppure an → −∞,
se per ogni K > 0 esiste un intero positivo NK tale che se n ≥ NK , allora an < −K .

100 Analisi Matematica 1
Diamo un’interpretazione grafica delle definizioni appena viste. I punti (x, y) delpiano per i quali y > K sono quelli contenuti nel semipiano limitato inferiormentedall’ordinata K . Se K marca l’orizzonte, essi stanno “sopra l’orizzonte”.
✲
✻
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .K
✉(x, y)
La richiesta an > K per n > NK equivale percio alla richiesta che (n, an) sia internoal semipiano. Per ogni K > 0 deve esistere NK tale che tutti i punti del grafico dellasuccessione che sono a destra della retta x = NK risultano interni al semipiano limitatoinferiormente da K : essi stanno sopra ogni orizzonte e quindi “tendono all’infinito”.
✲
✻
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .K
� � � � � � �
NK
��
�
Avendo dato le definizioni di successione convergente e di successione divergente,non ci resta che dare un nome alle rimanenti.
Definizione 1.13. Diremo che una successione non ha limite se essa non e ne
convergente ne divergente.

Limiti e continuita 101
Esempi.
(23) Un esempio ovvio di successione che diverge a +∞ e an = n : fissato K > 0 siaN > K ; se n ≥ N allora an = n > K . Di altrettanto facile dimostrazione e il fattoche per ogni numero reale positivo α si ha nα → +∞ , che completa (1.27).
(24) Dimostriamo il limite notevole
(1.32) limn
An = +∞ per ogni A > 1
Fissato K > 0, sia N > logA K . Per ogni n ≥ N risulta a maggior ragione n ≥ logA K
e quindi, applicando la mappa esponenziale expA che e crescente in quanto A > 1,abbiamo expA n ≥ expA(logA K) = K , come desiderato.
(25) La successione an = (−1)n non ha limite. Sappiamo gia che essa non converge.Per provare che essa neppure diverge, basta osservare che essa non e mai maggiore di1 ne mai minore di −1, quindi non diverge ne a +∞ , ne a −∞ .
Ci chiediamo se sia possibile estendere in qualche senso il Teorema 1.11 al caso incui almeno una delle successioni coinvolte sia divergente, oppure se sia possibile unaqualche versione di un teorema di confronto. Iniziamo da quest’ultimo tipo di risultato.
Teorema 1.14 (Confronto III). Siano (an)n≥0 e (bn)n≥0 due successioni, e sup-
poniamo che definitivamente risulti an ≤ bn . Allora:
(i) se an → +∞, allora bn → +∞;
(ii) se bn → −∞, allora an → −∞.
Dimostrazione. (i) Fissiamo K > 0. Sono allora definitivamente verificate entrambele disuguaglianze bn ≥ an > K . Quindi per ogni K > 0 si ha bn > K definitivamente.Cio prova (i). La dimostrazione di (ii) e analoga. ��
Per quanto riguarda l’algebra (estesa) dei limiti, anziche formulare un teorema, cilimitiamo ad una tabella riassuntiva.
(1.33)
limn
an limn
bn limn(an + bn) lim
n(anbn)
a > 0 +∞ +∞ +∞a > 0 −∞ −∞ −∞a < 0 +∞ +∞ −∞a < 0 −∞ −∞ +∞0 +∞ +∞ F.I.0 −∞ −∞ F.I.
+∞ +∞ +∞ +∞−∞ −∞ −∞ +∞+∞ −∞ F.I. −∞
La tabella va interpretata nel modo pressoche ovvio: ad esempio, la terza riga diceche se an → a < 0 e bn → +∞ allora an + bn → +∞ mentre anbn → −∞ . L’unicocommento aggiuntivo e relativo all’acronimo “F.I.” che sta per forma indeterminata.Esso si riferisce al fatto che l’informazione a disposizione non e suficiente per concludere

102 Analisi Matematica 1
qualcosa circa il comportamento della successione in esame, an + bn oppure anbn : visono esempi in cui essa converge, esempi in cui diverge ed esempi in cui non ha limite.
E bene chiarire che i simboli “+∞” e “−∞” sono dei meri segni grafici che abbre-viano complesse definizioni. Essi non sono numeri reali e come tali non si sommano anumeri reali, ne ad essi si moltiplicano. Quindi scritture del tipo
1 +∞ = +∞, π(−∞) = −∞
sono scorrette e sicuramente da evitare.D’altra parte, puo essere utile avere delle abbreviazioni per le forme indeterminate,
per ragioni essenzialmente mnemoniche. Nella letteratura, o perlomeno nella prassi,si e soliti fare riferimento alle forme indeterminate che compaiono nella quinta e sestariga come forme indeterminate del tipo “zero per infinito”, con abbreviazione “0 ·∞”,e alla forma indeterminata che compare nell’ultima riga come alla forma indeterminatadel tipo “infinito meno infinito”, con abbreviazione “∞−∞”.
Esempi.
(26) Consideramo esempi di forme indeterminate del tipo “0 ·∞”. Se an = 1/√n e
bn = n , allora an → 0, bn → +∞ e anbn =√n → +∞ .
Se an = 1/2n e bn = n , allora an → 0, bn → +∞ e anbn = n/2n → 0 per via dellimite notevole (1.31).
Se an = (−1)n/n e bn = n , allora |an| ≤ 1/n mostra che an → 0. Inoltrebn → +∞ , mentre anbn = (−1)n non ha limite.
(27) Consideramo la forma indeterminata del tipo “∞ − ∞”. Se an =√n+ 1,
bn = −√n allora an + bn =
√n+ 1−
√n → 0, come visto nell’Esempio 19.
Se an = n , bn = −√n allora an + bn = n −
√n =
√n(√n − 1) → +∞ in quanto√
n → +∞ e√n− 1 → +∞ : il risultato segue dalla terza riga della tabella.
Se an = n2 + (−1)n , bn = −n2 allora n2 + (−1)n ≥ n2 − 1 → +∞ , e an → +∞ invirtu del Teorema 1.14. Chiaramente an + bn = (−1)n che non ha limite.
La tabella (1.33) puo essere completata dal risultato seguente.
Proposizione 1.15. Sia (an)n≥0 una successione.
(i) Se (an)n≥0 diverge, allora a−1n → 0;
(ii) se (an)n≥0 e definitivamente positiva e an → 0, allora a−1n → +∞;
(iii) se (an)n≥0 e definitivamente negativa e an → 0, allora a−1n → −∞.
Dimostrazione. (i) Supponiamo che (an)n≥0 diverga a +∞ e sia ε > 0. Esisteallora Nε tale che se n ≥ Nε , allora an > ε−1 , ossia a−1
n < ε . Dimostrazione analogavale nel caso in cui (an)n≥0 diverga a −∞ .
(ii) Fissiamo K > 0. Siccome an → 0, e (an)n≥0 e definitivamente positiva,risultera definitivamente 0 < an < K−1 , ossia an > K . La dimostrazione di (iii) esimile e viene lasciata per esercizio. ��

Limiti e continuita 103
1.3. Successioni infinitesime. Di interesse particolare sono le successioni checonvergono a zero. Ad esse e riservato un nome speciale:
Definizione 1.16. Una successione (an)n≥0 si dice infinitesima se an → 0.
Abbiamo naturalmente gia visto diversi esempi di successioni infinitesime. Conside-riamo ora la successione definita dalla formula an = (−1)n/n . Nonostante an sia posi-tiva per n pari e negativa per n dispari, il suo valore assoluto diviene arbitrariamentepiccolo ed e quindi naturale atendersi che essa sia infinitesima. Questa conclusione puoessere infatti dedotta dal Teorema dei carabinieri e dalla semplicissima diseguaglianza
0 < |an| =����(−1)n
n
���� ≤1
n.
Ora, (an)n≥1 e il prodotto delle successioni definite da bn = (−1)n e cn = 1/n . Sic-come (bn)n≥1 non ha limite, come ben sappiamo, non sarebbe stato possibile dedurrela convergenza di (an)n≥1 utilizzando l’algebra dei limiti. Infatti, il prodotto di unasuccessione che non ha limite per una che invece converge o diverge e una forma inde-terminata. Lasciamo al lettore la verifica dettagliata del fatto (bncn)n≥1 non ha limitese bn = (−1)n e se per esempio cn = (n+ 1)/n oppure cn = n2 .
Nel caso in esame, abbiamo il prodotto di due successioni una delle quali e non soloconvergente ma infinitesima e l’altra, pur non avendo limite, ha una caratteristica che,per cosı dire, la redime: essa e limitata.
Proposizione 1.17. Il prodotto di una successione infinitesima e di una succes-
sione limitata e una successione infinitesima.
Dimostrazione. Siano (an)n≥0 infinitesima e (bn)n≥0 limitata. In particolare, siaM > 0 tale che |bn| ≤ M per ogni n . Si ha allora per ogni n
0 < |anbn| ≤ M |an|e l’asserto segue dal Teorema dei carabinieri. ��
1.4. Successioni monotone. . Siccome ogni successione e una funzione a valorireali definita su un sottoinsieme di R , ci si puo naturalmente chiedere se una successionesia monotona oppure no. Ricordiamo che una funzione f : I → R si dice, ad esempio,crescente se e solo se per ogni x, y ∈ I si ha
(1.34) x < y =⇒ f(x) < f(y).
Nel caso di una successione si ha I ⊆ N . In particolare, se la successione (an)n≥0 ecrescente, ponendo x = n e y = n+ 1 in (1.34) si avra
(1.35) ∀n ∈ N : an < an+1.
Quindi la condizione (1.35) e certamente necessaria affinche (an)n≥0 sia crescente. Laparticolare struttura di N implica che in effetti essa e anche sufficiente. Abbiamo infattila seguente:
Proposizione 1.18. Sia (an)n≥0 una successione.
(i) (an)n≥0 e crescente se e solo se an < an+1 per ogni n ∈ N;

104 Analisi Matematica 1
(ii) (an)n≥0 e decrescente se e solo se an > an+1 per ogni n ∈ N;
(iii) (an)n≥0 e non decrescente se e solo se an ≤ an+1 per ogni n ∈ N;
(iv) (an)n≥0 e non crescente se e solo se an ≥ an+1 per ogni n ∈ N.
Dimostrazione. Ci limitiamo a provare (i); la dimostrazione degli altri enunciati eanaloga e viene lasciata per esercizio.
Supponiamo che an < an+1 per ogni n ∈ N . Per stabilire che (an)n≥0 e crescenteutilizzando (1.34), dobbiamo appurare che se p e q sono due interi non negativi ep < q , allora ap < aq . D’altra parte, se q > p esiste un intero positivo k tale cheq = p + k . Verifichiamo allora per induzione su k che (1.35) implica ap < ap+k perogni p e per ogni k > 0. Se k = 1, questo e esattamente (1.35) nel caso n = p .Supponiamo induttivamente che ap < ap+k . Applicando (1.35) a n = p+ k otteniamoap+k < ap+k+1 , che unitamente all’ipotesi induttiva ap < ap+k implica ap < ap+k+1 .Questo conclude la dimostrazione per induzione che ap < ap+k e vera per ogni k > 0e che quindi ap < aq se p < q . ��
Osserviamo che la condizione f(x) < f(x + 1) per una funzione definita su unsottoinsieme qualunque di R non implica affatto che la funzione sia crescente. Siconsideri la funzione definita su tutto R da
f(x) = (sin(2πx) + 3n) /2 se x ∈ [n, n+ 1)).
Essa ha un grafico del tipo
E evidente che se x ∈ [n, n+ 1), allora x+ 1 ∈ [n+ 1, n+ 2) e quindi
f(x+1) = 12 (sin(2π(x+ 1)) + 3(n+ 1)) = 1
2 (sin(2πx) + 3n+ 3)) = f(x)+3/2 > f(x).
D’altra parte x �→ sin(2πx) contiene un ciclo sinusoidale completo se x ∈ [n, n + 1),cosicche in tale intervallo f non e monotona.
Teorema 1.19. Siano (an)n≥0 una successione e A = {an : n ≥ 0}.(i) Se (an)n≥0 e crescente oppure non decrescente, allora lim
nan = supA;
(ii) se (an)n≥0 e decrescente oppure non crescente, allora limn
an = inf A

Limiti e continuita 105
Dimostrazione. Proviamo solo la (i); la dimostrazione di (ii) e analoga e vienelasciata per esercizio. Poniamo � = supA e distinguiamo a seconda che si abbia� = +∞ oppure � ∈ R .
Se � = +∞ , allora A non e superiormente limitato e quindi per ogni K > 0esiste un elemento di A maggiore di K , cioe esiste NK tale che aNK > K . Siccome(an)n≥0 e non decrescente (oppure crescente), se n ≥ NK avremo a maggior ragionean ≥ aNK > K . Quindi per ogni K > 0 esiste NK tale che se n > NK allora an > K ,ossia (an)n≥0 diverge a +∞ .
Supponiamo ora � ∈ R . Per la Proposizione 6.5, sappiamo che � e un maggiorantedi A e che per ogni x ∈ R con x < � esiste un elemento di A maggiore di x . Quindi,per ogni ε > 0 esiste un Nε tale che aNε > � − ε . Poiche (an)n≥0 e non decrescente(oppure crescente), se n ≥ Nε avremo a maggior ragione
�− ε < aNε ≤ an ≤ � < �+ ε.
In conclusiuone, per ogni ε > 0 esiste un Nε tale che se n ≥ Nε si ha |an − �| < ε ,ossia (an)n≥0 converge a � . ��
1.5. Il numero di Nepero e, l’esponenziale e il logaritmo naturale. Sup-poniamo che su un capitale C venga applicato un interesse annuo pari a I . Dopoun anno il capitale sara C(1 + I). Se invece viene pagato mensilmente un interessecomposto di I/12, dopo un mese il capitale sara C(1+ I/12), dopo due mesi esso sara[C(1+I/12)](1+I/12) = C(1+I/12)2 ed evidentemente, dopo un anno, C(1+I/12)12 .Dal punto di vista dell’investitore, la soluzione del pagamento mensile sarebbe preferi-bile, nel senso che C(1 + I/12)12 > C(1 + I). Se l’interesse composto fosse cor-risposto addirittura ogni giorno, con un tasso pari a I/365, si avrebbe dopo un annoC(1 + I/365)365 . E se venisse corrisposto ogni ora? Ogni minuto? Ogni secondo?Che capitale risulterebbe a fine anno? E forse sorprendente scoprire che se il tasso I ebasso, la frequenza con la quale vengono corrisposti gli interessi, cioe il numero interon che appare nella formula Cn = C(1+I/n)n cui stiamo facendo implicito riferimento,non influisce granche sul risultato finale Cn , anche se piu alto e il tasso, maggiore e ladifferenza. Riportiamo in una tabella i risultati corrispondenti ad un investimento dimille euro ai tassi I rispettivamente del 5% e del 20%:
n Frequenza Cn, I = 5% Cn, I = 20%1 anno 1.050, 00 1.200, 0012 mese 1.051, 16 1.219, 39365 giorno 1.051, 27 1.221, 348.760 ora 1.051, 27 1.221, 40525.600 minuto 1.051, 27 1.221, 40
31.436.000 secondo 1.051, 27 1.221, 40
La domanda che ci poniamo e naturalmente se al tendere di n all’infinito si pervienead un limite e se esso e esprimibile mediante una formula sensata. La risposta e cheil limite esiste e vale CeI , dove e e un numero compreso tra 2 e 3, di fondamentaleimportanza in matematica.

106 Analisi Matematica 1
Per dimostrare la correttezza della affermazione appena fatta, studiamo il casopilota di capitale unitario C = 1 e interesse unitario I = 1, corrispondente ad un tassodel 100%. In altre parole, ci occupiamo solo del problema matematico di fondo.
Proposizione 1.20. La successione an =
�1 +
1
n
�n
e crescente e limitata.
Dimostrazione. Applichiamo la formula del binomio di Newton:�1 +
1
n
�n
=n�
k=0
�n
k
�1
nk
=n�
k=0
n(n− 1) · · · (n− k + 1)
k!
1
nk
=n�
k=0
1
k!
�n
n
��n− 1
n
�· · ·
�n− k + 1
n
�(1.36)
Vogliamo utilizzare questa espressione per mostrare che la successione e crescente, ossiache an < an+1 per ogni n . Innanzitutto
�n
n
��n− 1
n
�· · ·
�n− k + 1
n
�=
�1− 1
n
�· · ·
�1− k − 1
n
�(1.37)
<
�1− 1
n+ 1
�· · ·
�1− k − 1
n+ 1
�
Quindi ogni addendo in (1.36) diviene piu grande se sostituiamo n + 1 ad n . Inoltre,la sommatoria corrispondente a an+1 contiene un addendo in piu di quella per an . Equindi chiaro che an < an+1 .
Ripartiamo da (1.36) per provare che la successione e limitata. Utilizzando la primauguaglianza in (1.37), si vede subito che il prodotto di tutti i termini entro parentesi eun numero strettamente positivo e minore di uno. Vale percio la stima
�1 +
1
n
�n
≤n�
k=0
1
k!
=1
0!+
1
1!+
1
2!+
1
3!+
1
4!+ · · ·+ 1
n!
= 1 + 1 +1
2+
1
3 · 2 +1
4 · 3 · 2 + · · ·+ 1
n · (n− 1) · · · · · 3 · 2
< 1 + 1 +1
2+
1
2 · 2 +1
2 · 2 · 2 + · · ·+ 1
2 · · · · · 2� �� �(n−1) fattori
= 1 +
�1 +
1
2+
1
22+
1
23+ · · ·+ 1
2n−1
�.

Limiti e continuita 107
Sfruttando ora7 la formulaN�
k=0
xk = (1− x
N+1)/(1− x) valida per ogni x �= 1, si ha
�1 +
1
n
�n
≤ 1 +n−1�
k=0
�1
2
�k
= 1 +1− (1/2)n
1− 1/2< 1 +
1
1− 1/2= 3.
Quindi la successione (an)n≥1 e limitata superiormente da 3, e inferiormente da zero.��
Dalla precedente proposizione e dal Teorema 1.19 segue che la successione (an)n≥1 inesame e convergente ad un numero reale, detto numero di Nepero e denotato tradizional-mente e . In sintesi,
(1.38) limn
�1 +
1
n
�n
= e.
Con venti cifre decimali esatte risulta
e = 2.71828182845904523536...
Il numero e e irrazionale e quindi la sua espansione decimale non e finita. Esso vieneutilizzato come base naturale per il logaritmo. Le ragioni di questa scelta emergerannoin modo chiaro nei prossimi capitoli. Scriveremo
exp x = ex log x = loge x
per l’esponenziale ed il logaritmo in base e . Salvo esplicito avviso del contrario, ilogaritmi saranno sempre in base e . Concludiamo questa sezione discutendo alcuneproprieta notevoli della funzione esponenziale ex .
Proposizione 1.21. Se x ∈ R \ {0} si ha
(1.39) 0 <
�1 +
x
n
�n<
�1 +
x
n+ 1
�n+1
per ogni naturale n > −x.
Dimostrazione. La condizione n > −x garantisce che (1+x/n) > 0, ossia la primadiseguaglianza in (1.39). Riscriviamo la seconda nella forma
�n+ x
n
�n
<
�n+ 1 + x
n+ 1
�n+1
,
che certamente non vale per x = 0 perche entrambi i membri sono in tal caso ugualia uno. Se x �= 0 moltiplichiamo ambo i membri per (n/n+ x)n+1 , che e una quantitapositiva, ed otteniamo:
(1.40)n
n+ x<
�(n+ 1 + x)n
(n+ 1)(n+ x)
�n+1
.
7Essa e nell’Esercizio 2 del Capitolo 1 per x ∈ Q \ {1} , ma vale naturalmente per x ∈ R \ {1} .

108 Analisi Matematica 1
Siccome il numeratore del membro destro e (n + 1 + x)n = (n + 1)n + xn mentre ildenominatore e (n+ 1)(n+ x) = (n+ 1)n+ xn+ x = (n+ 1+ x)n+ x , esso si riscrive
�(n+ 1 + x)n
(n+ 1)(n+ x)
�n+1
=
�1 +
−x
(n+ 1)(n+ x)
�n+1
.
La disuguaglianza di Bernoulli (1.29) ci permette di concludere allora�1 +
−x
(n+ 1)(n+ x)
�n+1
> 1 + (n+ 1)−x
(n+ 1)(n+ x)=
n
n+ x
in quanto −x/(n + 1)(n + x) > −1 nelle ipotesi fatte. Quindi (1.40) e dimostrata e(1.39) e ad essa equivalente. ��
Proposizione 1.22. Per ogni x ∈ R la successione di termine generale
(1.41) en(x) =�1 +
x
n
�n.
e limitata.
Dimostrazione. Se x < 0, ovviamente 1 + x/n < 1 e non appena il numero interopositivo n soddisfa n > −x si ha 0 < 1 + x/n . Siccome 0 < 1 + x/n < 1, si ha anche0 < (1 + x/n)n = en(x) < 1, il che prova l’asserto per x < 0. Se x = 0 si ha en(0) = 1e non c’e nulla da dimostrare. Sia infine x > 0. In tal caso, dalla Proposizione 1.21applicata a −x risulta che per n > n0 > x = −(−x) si ha
�1 +
−x
n
�n
>
�1 +
−x
n0
�n0
> 0
e quindi
(1.42) 0 <
�1− x
n
�−n<
�1− x
n0
�−n0
.
D’altra parte, per tali n si ha anche 0 < x/n < 1, cosicche 0 < (x/n)2 < 1 e quindi
0 <
�1− x2
n2
�n
=�1− x
n
�n �1 +
x
n
�n< 1,
da cui ancora
0 <
�1 +
x
n
�n<
�1− x
n
�−n.
Combinando quest’ultima diseguaglianza e (1.42) si ha che per n0 > x risulta
0 < en(x) <
�1− x
n0
�−n0
per n > n0,
il che prova la limitatezza di (en(x))n≥1 per ogni x ∈ R . ��Dalle due proposizioni precedenti risulta che per ogni numero reale x , la successione
(en(x))n≥1 e positiva, definitivamente crescente e limitata. Sappiamo pertanto che essaconverge ad un numero reale positivo. Piu precisamente, poniamo:
(1.43) E(x) = limn
�1 +
x
n
�n= sup
��1 +
x
n
�n: n = 1, 2, . . .
�> 0.

Limiti e continuita 109
E evidente che E(1) = e . Si puo dimostrare che la funzione x �→ E(x), che e definitaper ogni x ∈ R , soddisfa E(x + y) = E(x)E(y) per ogni x, y ∈ R . Il lettore curiosotrova questa dimostrazione in [DM]. Osserviamo che E(x) e monotona non decres-cente. Se infatti x < y ed n0 e un intero positivo con n0 > −x > −y , allora per ognin > n0 tale diseguaglianza e verificata a fortiori e quindi 0 < 1 + x/n < 1 + y/n .Prendendo le potenze n-esime, 0 < en(x) < en(y) definitivamente. Dal Teorema 1.6segue che
E(x) = limn
en(x) ≤ limn
en(y) = E(y),
come affermato. Le osservazioni appena fatte assumono una particolare rilevanza allaluce del risultato che segue, la cui dimostrazione puo essere trovata in [DM].
Teorema 1.23. Per ogni numero reale positivo a esiste una ed una sola funzione
monotona Ea : R → R che soddisfa le due seguenti condizioni:
(E0) Ea(1) = a;
(E1) Ea(x+ y) = Ea(x)Ea(y).
Essa inoltre gode delle seguenti proprieta:
(E2) Ea(0) = 1;(E3) Ea(R) = (0,+∞) se a �= 1;(E4) Ea e crescente se a > 1 e decrescente se a < 1;
Poiche le funzioni esponenziali introdotte nella Sezione 8 del Capitolo 3 sono monotone,
e soddisfano (E0) ed (E1), si ha Ea = expa per ogni a > 0.
Il lettore e naturalmente invitato a confrontare le precedenti con le (E0)-(E4) dellaSezione 8 del Capitolo 3. Dal teorema precedente si evince che la funzione E(x)introdotta in 1.43 e una funzione esponenziale, e poiche E(1) = e ci riferiamo allafunzione esponenziale di base e . In altre parole
(1.44) limn
�1 +
x
n
�n= e
x. per ogni x ∈ R.
e1(x)e3(x)e5(x)
e2(x)e4(x)
y = ex
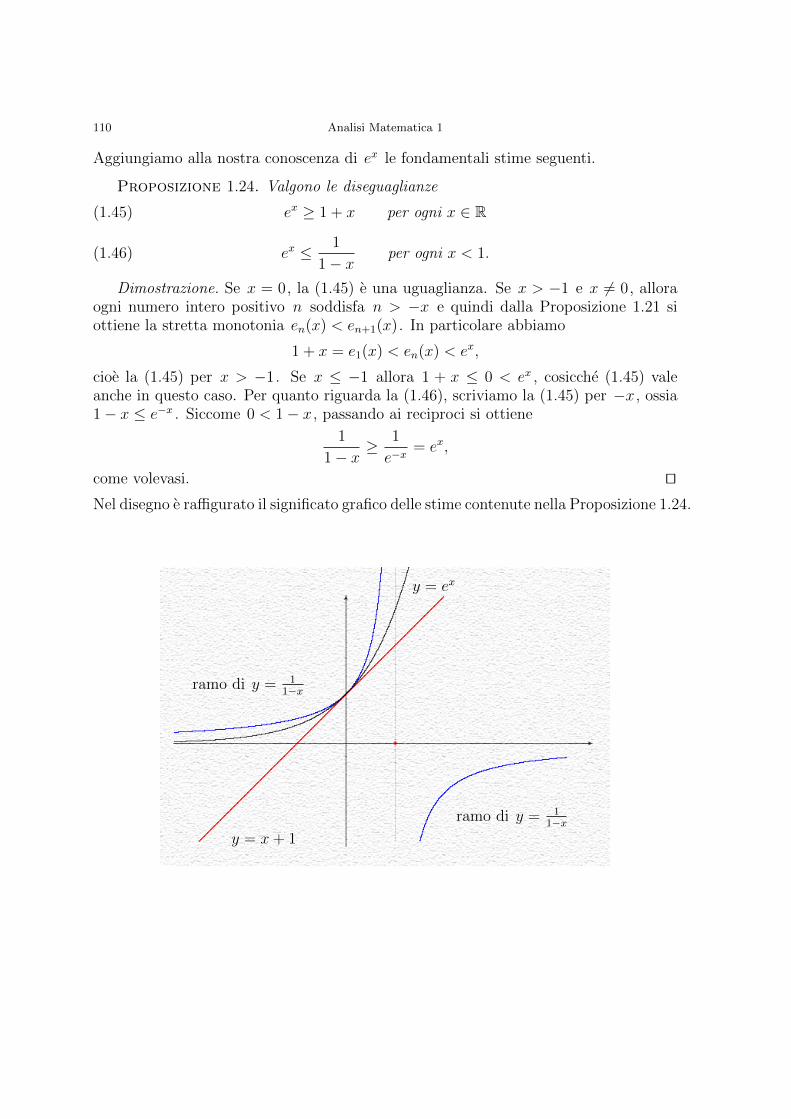
110 Analisi Matematica 1
Aggiungiamo alla nostra conoscenza di ex le fondamentali stime seguenti.
Proposizione 1.24. Valgono le diseguaglianze
(1.45) ex ≥ 1 + x per ogni x ∈ R
(1.46) ex ≤ 1
1− xper ogni x < 1.
Dimostrazione. Se x = 0, la (1.45) e una uguaglianza. Se x > −1 e x �= 0, alloraogni numero intero positivo n soddisfa n > −x e quindi dalla Proposizione 1.21 siottiene la stretta monotonia en(x) < en+1(x). In particolare abbiamo
1 + x = e1(x) < en(x) < ex,
cioe la (1.45) per x > −1. Se x ≤ −1 allora 1 + x ≤ 0 < ex , cosicche (1.45) valeanche in questo caso. Per quanto riguarda la (1.46), scriviamo la (1.45) per −x , ossia1− x ≤ e−x . Siccome 0 < 1− x , passando ai reciproci si ottiene
1
1− x≥ 1
e−x= e
x,
come volevasi. ��Nel disegno e raffigurato il significato grafico delle stime contenute nella Proposizione 1.24.
ramo di y = 11−x
ramo di y = 11−x
y = x+ 1
y = ex

Limiti e continuita 111
Corollario 1.25. Valgono le diseguaglianze
(1.47) log(1 + x) ≤ x per ogni x > −1
(1.48) log(1 + x) ≥ x
x+ 1per ogni x > −1.
Dimostrazione. Si applichi il logaritmo ad entrambi i membri in (1.45) per ot-tenere (1.47): naturalmente va supposto 1 + x > 0. Si consideri poi (1.46) con t alposto di x . Ponendo y = 1/(1 − t) si ha y > 0 e t = 1 − y−1 , cosicche da (1.46) siottiene
e1− 1
y ≤ y, y > 0.
e per la monotonia del logaritmo,
1− 1
y≤ log y, y > 0.
Scrivendo infine y = x+ 1 si ha x > −1 ex
x+ 1≤ log(1 + x),
come desiderato. ��Nel disegno e raffigurato il significato grafico delle stime contenute nella Proposizione 1.25.
ramo di y = xx+1
ramo di y = xx+1
y = x
y = log(1 + x)
Vale la pena osservare che il disegno precedente e ottenuto mediante una opportunasimmetria dal corrispettivo disegno per l’esponenziale. Quale?

112 Analisi Matematica 1
Esercizi
1. Per ogni intero non-negativo n , sia
an =n2 − 4n+ 2
n2 + 1.
(i) Calcolare, se esistono, supA , inf A , maxA e minA , dove A = {an : n =0, 1, 2, . . . } .
(ii) Calcolare, se esiste, limn→+∞
an .
2. Sia an = sin(nπ2 ). Stabilire il carattere di ciascuna delle seguenti successioni (cioe
dire se e convergente, divergente oppure indeterminata).
(i) (bn)n≥1 , dove bn = nan ;(ii) (cn)n≥1 , dove cn = 1
nan ;(iii) (dn)n≥1 , dove dn = cos(nπ
2 )an .
3. Sia A =
�n+ 1
5n2 − 1: n = 0, 1, 2, 3, . . .
�. Determinare, se esistono, supA , inf A ,
maxA e minA .
4. Sia A =
�n
�1 +
16
n3: n = 1, 2, 3 . . .
�. Determinare, se esistono, supA , inf A ,
maxA e minA .
5. Si calcoli il limite limn→+∞
an della successione (an)n≥1 , dove
an =√n+ 1
�log
�√n+ 1√n
�− 1√
n
�.

Limiti e continuita 113
2. Limiti di funzioni.
Siamo ora interessati a studiare il comportamento dei valori che una funzione as-sume quando la variabile si avvicina indefinitamente ad un certo punto. Cio si esprimeramediante la locuzione “il limite di f(x) per x che tende a x0”. Bisogna innanzituttochiarire quali siano i punti in cui abbia senso calcolare un limite. Essi sono quelli “at-taccati” al dominio I di f : per calcolare f(x) dobbiamo restare in I . Il significatodi “attaccato” e l’oggetto della definizione che segue, per formulare la quale in modosemplice e opportuno utilizzare la nozione di intervallo bucato centrato in un punto.Dato x0 ∈ R , l’intervallo aperto centrato in x0 di semiampiezza δ > 0 e naturalmentel’intervallo B(x0, δ) = (x0 − δ, x0 + δ), come abbiamo visto nella Sezione 3 del Capi-tolo 2. L’intervallo bucato centrato in x0 e di semiampiezza δ > 0 e semplicemente
B(x0, δ) \ {x0} = {x ∈ R : 0 < |x− x0| < δ},cioe l’intervallo stesso privato del suo centro, cioe di x0 .
Definizione 2.1. Siano I un sottoinsieme non vuoto di R e sia x0 ∈ R. Diremo
che x0 e un punto di accumulazione per I se ogni intervallo bucato centrato in x0
interseca I in almeno un punto, ossia se
per ogni δ > 0 : {x ∈ R : 0 < |x− x0| < δ} ∩ I �= ∅.
Il significato della definizione precedente e il seguente: se x0 e di accumulazioneper I , e impossibile separarlo da I mediante un intervallo che non contenga altri puntidi I . Il fatto che x0 appartenga o meno ad I e in ogni caso inessenziale.
Esempi.
(28) Sia I = (0, 1). Innanzitutto, mostriamo che i punti di I sono tutti punti diaccumulazione per I . Infatti, se x0 ∈ I , allora se δ e sufficientemente piccolo (cioeminore della distanza di x0 dal bordo di I , cioe minore di min{x0, 1−x0}) allora tuttol’intervallo B(x0, δ) sara contenuto in I : (B(x0, δ) \ {x0}) ∩ I = B(x0, δ) \ {x0} �= ∅.Graficamente:
0� x0 − δ
( ❡x0 x0 + δ
)�1
� � �A maggior ragione l’intersezione sara non vuota se si sceglie δ piu grande.
Consideriamo ora x0 = 0. Anch’esso e un punto di accumulazione per I . Infatti,ogni intervallo centrato nell’origine avra intersezione non vuota con I . Piu precisa-mente, se 0 < δ < 1 allora (B(0, δ) \ {0}) ∩ (0, 1) = {x ∈ R : 0 < x < δ} = (0, δ) �= ∅ .Graficamente:
0�−δ
( ❡ δ
)�1
� � �Anche in questo caso l’intersezione sara a maggior ragione non vuota se si sceglie δ
piu grande. Simili considerazioni valgono per il punto x0 = 1, che e anch’esso diaccumulazione per I .

114 Analisi Matematica 1
Se invece scegliamo x0 < 0, allora prendendo δ sufficientemente piccolo, cioeδ < |x0| , allora per ogni y ∈ B(x0, δ) si ha y < x0 + |x0| = x0 − x0 = 0 cosicche(B(x0, δ) \ {x0}) ∩ (0, 1) = ∅ e x0 non e di accumulazione. Graficamente:
0�−δ
( ❡x0
δ
)�1
� � �Simili considerazioni valgono per i punti x0 > 1, che non sono di accumulazione per I .Riassumendo, l’insieme dei punti di accumulazione di (0, 1) e l’insieme [0, 1]. Il lettoree invitato a verificare che l’insieme dei punti di accumulazione di [0, 1] e ancora [0, 1].
(29) Consideriamo ora una semplice ma importante variante dell’esempio precedente.Sia cioe I = (0, 1) ∪ {2} . Come nel caso precedente, sono di accumulazione perI tutti i punti dell’intervallo chiuso [0, 1], e non sono di accumulazione tutti puntidella semiretta (−∞, 0), ne tutti quelli della semiretta (1,+∞) diversi da 2 (e la di-mostrazione di queste asserzioni e lasciata per esercizio). Ci chiediamo se 2 sia di accu-mulazione oppure no. La risposta e che nonostante 2 ∈ I , esso non e di accumulazioneper I . Infatti, preso δ = 1/2, l’intervallo bucato centrato in 2 e di semiampiezza 1/2ha intersezione vuota con I . Infatti:
B(2, 1/2) ∩ ((0, 1) ∪ {2}) = {2} =⇒ (B(2, 1/2) \ {2}) ∩ ((0, 1) ∪ {2}) = ∅
Il punto cruciale e che si considerano gli intervalli bucati, in quanto si vuole determinarese i punti vicini a x0 cadono in I oppure no, mentre non e rilevante sapere se x0 ∈ I
oppure no. Questa scelta a commisurata al nostro intento, che e di capire che cosasuccede quando ci si avvicina arbitrariamente ad x0 restando in I .
(30) Sia ora I = {1/n : n = 1, 2, 3 . . . } . Proviamo che 0 e di accumulazione per I .In effetti, e sufficiente provare che se δ > 0, allora nell’intervallo (0, δ) cadono puntidi I . Cio avviene se e solo se esiste un intero positivo n tale che 1/n < δ ossia taleche nδ > 1, il che e garantito dalla archimedeita di R . Questo esempio bene illustrala scelta della parola “accumulazione”: nonostante 0 �∈ I , i punti di I si accumulanoin 0, nel senso che e impossibile separare 0 da I mediante un intervallo.
(31) Consideriamo infine l’insieme I = R\{0} , che e il dominio naturale della funzionef(x) = sin x/x da cui le nostre considerazioni introduttive erano partite. E evidenteche ogni punto di I e di accumulazione per I , in quanto esso e aperto8 e quindi ogniintervallo di ampiezza sufficientemente piccola centrato in un suo qualunque punto ecompletamente contenuto in I . A maggior ragione lo sara il corrispondente intervallobucato. Ma anche l’origine e di accumulazione per I , in quanto per ogni δ > 0 si haB(0, δ) \ {0} ∩ I = B(0, δ) \ {0} = (−δ, 0) ∪ (0, δ), che e non vuoto.
2.1. Funzioni convergenti in un punto. Siamo finalmente in condizione dipoter dare una delle definizioni piu importanti dell’Analisi Matematica.
8Si veda l’Esercizio 2 alla fine di questo capitolo.

Limiti e continuita 115
Definizione 2.2. Siano I ⊂ R non vuoto, x0 un punto di accumulazione per I ,
f : I → R una funzione e � ∈ R. Diremo che f converge ad � per x che tende a x0 ,
oppure che il limite di f per x che tende a x0 e �, e in tal caso scriveremo
limx→x0
f(x) = �, oppure f(x) −−−→x→x0
�
se per ogni ε > 0 esiste δε > 0 tale che se x ∈ I soddisfa 0 < |x − x0| < δε , allora
|f(x)− �| < ε.
Il senso della definizione e questo: se fissiamo un margine di errore ε > 0, esisterauna distanza δ (che dipende da ε) per la quale in tutti i punti x ∈ I che distino dax0 per meno di δ (certo ve ne sono perche x0 e di accumulazione per I ) la funzioneassume un valore f(x) che differisce da � per meno di ε . In altri termini, fissata unastriscia di semiampiezza ε attorno al valore limite � , tutti i punti (x, f(x)) del graficodi f saranno contenuti nella striscia purche x sia sufficientemente vicino a x0 .
�− ε
�
�+ ε
f(x0)
x0 + δx0 − δ
Mettiamo ancora una volta in evidenza che il valore di f in x0 e del tutto irrilevanteai fini del calcolo del limite per x che tende a x0 ; di fatto, non e neppure necessarioche esso sia definito, in quanto puo benissimo aversi x0 �∈ I . Nella figura, f(x0) e piupiccolo del limite.

116 Analisi Matematica 1
Esempi.
(32) Vogliamo ora provare il fatto intuitivamente piuttosto ovvio che sin x → 0 perx → 0. Abbiamo gia detto diverse volte che per x piccolo e positivo si ha 0 < sin x < x .Semplicissime considerazioni geometriche mostrano che la diseguaglianza precedentepuo essere estesa alla disuguaglianza:
(2.49) | sin x| ≤ |x| per ogni x ∈ R.Il segno di uguaglianza vale se e solo se x = 0. Va precisato che la (2.49) e tanto migliorequanto minore e |x| . Piu avanti impareremo a quantificare questa affermazione9. Fis-siamo ε > 0. Se poniamo δ = ε , allora per 0 < |x| < δ risulta:
| sin x− 0| = | sin x| ≤ |x| < δ = ε.
Percio per ogni ε > 0 esiste δ tale che se 0 < |x− 0| < δ allora | sin x− 0| < ε . Dalladefinizione di limite segue pertanto che
limx→0
sin x = 0,
come desiderato.
(33) Consideriamo ora la semplicissima funzione lineare f(x) = ax+ b , con a, b ∈ R .Fissiamo x0 ∈ R e proviamo che
limx→x0
(ax+ b) = ax0 + b.
Se a = 0, la funzione in esame e costante (cioe f(x) = b) ed il limite presunto eovviamente la costante stessa (cioe � = b). Infatti, se ε > 0, qualsiasi scelta di δ > 0 vabene, nel senso che per ogni x ∈ R (e quindi per quelle che verificano 0 < |x−x0| < δ )si ha |f(x)− �| = |b− b| = 0 < ε . Assumiamo pertanto che a �= 0 e fissiamo ε > 0. Sescegliamo δ = ε/|a| , allora per 0 < |x− x0| < δ risulta
|f(x)− �| = |(ax+ b)− (ax0 + b)| = |a(x− x0)| = |a||x− x0| < |a| ε|a| = ε,
come volevasi.
(34) Diamo ora un esempio di funzione che non ammette limite in un punto di accu-mulazione del suo dominio. E bene capire esattamente che cosa significhi in generaleche una funzione f : I → R non ammette alcun limite � ∈ R in un punto x0 . Unaprima possibilita e che x0 non sia un punto di accumulazione di I . In questo casonon ha proprio senso porsi la domanda se esista o meno il limite. Assumiamo pertantoche x0 sia di accumulazione per I . Allora l’affermazione che f non ammette alcunlimite reale10 significa che nessun numero reale � e un limite, ossia che ogni � ∈ R non
soddisfa la definizione di limite. In breve, dobbiamo verificare che per ogni � ∈ R esisteun ε > 0 tale che comunque si fissi δ > 0 possiamo trovare x ∈ I per il quale si abbia0 < |x− x0| < δ ma |f(x)− �| > ε .
9Si veda la sezione sugli sviluppi di Taylor.10Al momento ci riferiamo naturalmente ai limiti finiti. Si veda la sezione sui limiti infiniti per
una discussione piu completa.

Limiti e continuita 117
Consideriamo la funzione definita da
f(x) =
1x+ 1
2
se x > 0
1x− 1
2
se x < 0.
Il suo dominio e I = R\{0} e l’origine e un punto di accumulazione per I . Siccome suentrambe le semirette (−∞, 0) e (0,+∞) la funzione e data da un ramo di iperbole,non e difficile convincersi che il grafico di f e qualitativamente il seguente.
12
−1
−12
1
Ora, se x ∈ (0, 1/2), allora 0 < x + 1/2 < 1 e quindi f(x) = 1/(x + 1/2) > 1. Seinvece x ∈ (−1/2, 0), allora −1 < x − 1/2 < 0 e quindi f(x) = 1/(x − 1/2) < −1.Abbiamo provato il fatto ben evidenziato dal grafico che se x e positiva e vicina a 0allora f(x) > 1, mentre se x e negativa e vicina a 0 allora f(x) < −1. Il lettore einvitato a dedurre da queste osservazioni che non esiste alcun � ∈ R per il quale siabbia f(x) → � per x → 0 (si fissi ε < 2).
(35) Proviamo ora, mediante la definizione, i due semplici limiti seguenti:
limx→x0
cos x = cosx0(2.50)
limx→x0
sin x = sin x0.(2.51)
Dalle formule di prostaferesi
cos β − cosα = 2 sin
�β − α
2
�sin
�β + α
2
�
sin β − sinα = 2 sin
�β − α
2
�cos
�β + α
2
�

118 Analisi Matematica 1
otteniamo
| cos x− cos x0| = 2
����sin�x− x0
2
�sin
�x+ x0
2
�����
≤ 2
����sin�x− x0
2
�����
≤ 2
����x− x0
2
���� = |x− x0|.
Fissiamo ε > 0; bastera scegliere δ = ε per far si che se 0 < |x − x0| < δ , allora| cos x− cos x0| < |x− x0| < δ = ε . Il limite (2.51) si dimostra in modo analogo.
La maggior parte dei risultati riguardanti i limiti delle successioni possono esseredimostrati mutatis mutandis per i limiti delle funzioni. Esiste tuttavia un risultato, diinteresse indipendente, che consente di trasferire i risultati gia noti per le successioninell’ambito delle funzioni. Tale risultato, che andiamo adesso a dimostrare, consen-tirebbe allo stesso modo di percorrere il cammino inverso: svolgere dapprima la teoriaper i limiti delle funzioni ed adattarla poi alle successioni11.
Teorema 2.3 (Limite fatto per successioni, I). Siano x0 un punto di accumu-
lazione per I ⊆ R, f : I → R e � ∈ R. Sono fatti equivalenti:
(i) limx→x0
f(x) = �;
(ii) per ogni successione (xn)n≥0 di elementi di I \ {x0} tale che xn → x0 si ha
limn
f(xn) = �.
Dimostrazione. “(i) ⇒ (ii).” Supponiamo che f(x) → � per x → x0 e sia (xn)n≥0
una successione di elementi di I \ {x0} tale che xn → x0 . Fissato ε > 0 esiste δε > 0tale che se x ∈ I e 0 < |x−x0| < δε , allora |f(x)−�| < ε . Inoltre, in corrispondenza diδε esistera Nε = Nδε
12 tale che se n > Nε allora |xn−x0| < δε . Siccome xn ∈ I \{x0} ,si avra anche 0 < |xn − x0| , cosicche, per ipotesi, |f(xn) − �| < ε . In altre parole,fissato ε > 0 esiste Nε tale che se n > Nε allora |f(xn)− �| < ε , cioe f(xn) → � .
“(ii) ⇒ (i).” Viceversa, assumiamo che per ogni successione (xn)n≥0 di elementidi I \ {x0} tale che xn → x0 si abbia f(xn) → � . Supponiamo per assurdo che (i)sia falsa. Quindi esistera ε > 0 tale che per ogni δ > 0 possiamo trovare xδ ∈ I
con 0 < |xδ − x0| < δ per il quale risulta |f(xδ) − �| ≥ ε . In paticolare, scelto unintero positivo qualsiasi n e posto δ = 1/n , esistera xn ∈ I con 0 < |xn − x0| < 1/nper il quale risulta |f(xn) − �| ≥ ε . Gli elementi della successione (xn)n≥0 sono tuttiin I \ {x0} per costruzione. Se proviamo che essa converge a x0 avremo trovatouna contraddizione, in quanto la disuguaglianza |f(xn) − �| ≥ ε , vera per ogni n , ciassicura che (f(xn))n≥0 non converge a � , contro l’ipotesi. D’altra parte, per ogniη > 0 possiamo trovare un Nη tale che se n > Nη allora 1/n < η ; quindi per ognin > Nη avremo che |xn − x0| < 1/n < η , ossia xn → x0 , come desiderato. ��
11Si veda anche la verione piu completa nella Sezione 2.3, ossia il Teorema 2.1812Osserviamo che δε dipende da ε e che Nδε dipende da δε , quindi da ε . Percio scriviamo Nε

Limiti e continuita 119
Oltre all’interesse di natura teorica, che tra poco sfrutteremo, il Teorema 2.3 eanche, per cosı dire, di utilita pratica. Esso e infatti uno strumento molto efficace perdimostrare che una funzione non ha limite.
Esempi.
(36) Consideriamo la funzione a gradino definita da
(2.52) f(x) =
1 se x > 0
0 se x = 0
−1 se x < 0,
il cui grafico e:
−1
1
Utilizziamo il Teorema 2.3 per provare il fatto (del tutto ovvio) che il limite di f
per x → 0 non esiste. Si considerino le succesioni di termine generale xn = 1/ne yn = −1/n , entrambe convergenti a x0 = 0. Siccome f(xn) = 1 per ogni n ef(yn) = −1 per ogni n , ovviamente f(xn) → 1 e f(yn) → −1. Abbiamo trovatodue successioni (xn)x≥1 e (yn)x≥1 di elementi non nulli (cioe diversi da x0 = 0) checonvergono a x → 0 e per le quali risulta limx→x0 f(xn) �= limx→x0 f(yn). In virtudel Teorema 2.3 il limite di f per x → 0 non esiste. Infatti, se esso esistesse allora idue limiti limx→x0 f(xn) e limx→x0 f(yn) non solo dovrebbero esistere, ma dovrebberosoprattutto essere uguali.
(37) Illustriamo un altro esempio nello stesso spirito del precedente. Introduciamo lafunzione
f(x) = sin
�1
x
�.
Il grafico qualitativo di f e:Il bizzarro aspetto di questo grafico merita senz’altro piu di un commento. Innanzi-tutto, f e definita solo per x �= 0. In secondo luogo, sicuramente si avra −1 ≤ f(x) ≤ 1in quanto tali diseguaglianze valgono per il seno di un qualunque numero reale.
Cerchiamo infine di capire la ragione dell’infittirsi delle oscillazioni vicino all’origine.In effetti, se x varia in un piccolo intervallo vicino all’origine, ad esempio nell’intervallo[(2000π)−1, (1000π)−1] , che e di ampiezza minore di 1/3000 e dista meno di 1/6000dall’origine, allora il reciproco 1/x di x varia in un grande intervallo lontano dall’origine:

120 Analisi Matematica 1
esso infatti varia in [1000 π, 2000 π] che e di ampiezza maggiore di 3000 e dista dall’origi-ne piu di 3000. Quindi, come x percorre una brevissima distanza, 1/x ne percorre unaenorme, nella quale il seno oscilla moltissime volte. Nel nostro esempio, nell’intervallo[1000π, 2000 π] , che misura 1000π , il seno compie 500 oscillazioni complete. In ultimaanalisi, nell’intervallo [(2000 π)−1, (1000 π)−1] la funzione f oscilla 500 volte!
Naturalmente, ci aspettiamo che una funzione dal comportamento cosı repentina-mente oscillante non abbia limite, e cosı e. Consideriamo infatti le succesioni di terminegenerale
xn =1
π2 + 2nπ
, yn =1
3π2 + 2nπ
.
Evidentemente, xn → 0 e yn → 0. Inoltre,
f(xn) = sin�π
2+ 2nπ
�= 1
f(yn) = sin
�3π
2+ 2nπ
�= −1
per ogni n . Ne segue che f(xn) → 1 mentre f(yn) → −1, il che prova che il limitenon esiste. Si osservi che la scelta di xn e di yn e stata fatta in modo da selezionare i“picchi” e le “valli” che si susseguono sempre piu frequentemente all’avvicinarsi di x ax0 = 0 da destra.
Passiamo ora ad utilizzare il Teorema 2.3 da un punto di vista piu teorico. Loschema concettuale che abbiamo in mente puo riassumersi come segue: se conosciamoun risultato vero per le successioni, possiamo tradurlo per le funzioni alla luce delTeorema 2.3. Infatti tutti i principali risultati di convergenza che abbiamo dimostratoper le successioni nella sezione precedente ammettono una opportuna riformulazioneper le funzioni. Naturalmente, e anche possibile dimostrarli in modo diretto, cioe senzafar ricorso al Teorema 2.3. Le dimostrazioni13 sono lasciate per esercizio al lettore, chepuo opinare per una dimostrazione diretta o mediante il Teorema 2.3.
Teorema 2.4 (Confronto I). Siano f, g : I → R due funzioni, x0 un punto di
accumulazione per I e supponiamo f(x) → � e g(x) → m per x → x0 .
(i) Se esiste un intorno bucato di x0 nei punti del quale si ha f(x) < g(x) oppure
f(x) ≤ g(x), allora � ≤ m;
13I quattro risultati che seguono valgono anche se x → +∞ oppure x → −∞ ; si veda la Sezione 2.3per il significato da attribuire a queste locuzioni, e come vada intesa in tal caso l’espressione “intorno”.

Limiti e continuita 121
(ii) se � < m, allora esiste un intorno bucato di x0 nei punti del quale f(x) <
g(x);(iii) se � < λ ∈ R (rispettivamente � > µ ∈ R), allora allora esiste un intorno
bucato di x0 nei punti del quale risulta f(x) < λ (rispettivamente f(x) > µ).
Corollario 2.5 (Permanenza del segno). Se limx→x0
f(x) = � �= 0, allora esiste
un intorno bucato di x0 nei punti del quale f ha il segno di �.
Teorema 2.6 (Confronto II, o “Teorema dei carabinieri”). Siano f, g e h
tre funzioni definite su I ⊆ R, sia x0 di accumulazione per I e supponiamo che
(A) f(x) → � e h(x) → � per x → x0 ;
(B) esiste un intorno bucato di x0 nei punti del quale risulta f(x) ≤ g(x) ≤ h(x).
Allora esiste anche limx→x0
g(x) e limx→x0
g(x) = �.
Teorema 2.7 (Algebra dei limiti). Siano f, g : I → R due funzioni, x0 di
accumulazione per I e supponiamo f(x) → � e g(x) → m per x → x0 . Allora, per
x → x0 si ha:
(i) |f(x)| → |�|;(ii) f(x) + g(x) → �+m;
(iii) f(x)g(x) → �m;
(iv) per ogni λ ∈ R, λf(x) → λ�;
(v) se m �= 0, allora14 f(x)/g(x) → �/m.
Esempi.
(38) Nell’Esempio (15) e stata vista l’importante stima elementare
0 < cos x <sin x
x< 1,
vera per valori “piccoli e positivi” di x , ad esempio per x ∈ (0, π/2). Poiche le funzionicos x , sin x/x e 1 sono pari, la stessa stima varra per valori “piccoli e negativi” di x ,ad esempio per x ∈ (−π/2, 0).
14Al solito, si deve applicare il teorema di permanenza del segno per dare senso al quoziente.

122 Analisi Matematica 1
Quindi nell’intorno bucato (−π/2, π/2) \ {0} si presenta una situazione nella quale epossibile applicare il Teorema dei carabinieri. Se ne conclude il limite fondamentale
(2.53) limx→0
sin x
x= 1
da cui le nostre considerazioni introduttive erano partite.
(39) Abbiamo gia visto nell’Esempio (20) l’identita
1− cos x
x2=
�sin x
x
�2 1
1 + cos x.
Applicando ripetutamente l’algebra dei limiti, otteniamo l’altro limite notevole
(2.54) limx→0
1− cos x
x2=
1
2.
(40) Consideriamo ora le diseguaglianze viste nella Proposizione 1.24 in un intorno(bucato) di x0 = 0, ossia
1 + x ≤ ex ≤ 1
1− x.
La prima puo essere riscritta ex − 1 ≥ x e la seconda ex − 1 ≤ x/(1 − x). Dividendoper x > 0 si ottiene
1 ≤ ex − 1
x≤ 1
1− x, x > 0
mentre dividendo per x < 0 si ha
1
1− x≤ ex − 1
x≤ 1, x < 0.
Posto pertanto
f(x) =
�1
1−x se x < 0
1 se x > 0h(x) =
�1 se x < 01
1−x se x > 0
siamo nuovamente nelle ipotesi del Teorema dei carabinieri, nel senso che
f(x) ≤ ex − 1
x≤ h(x)
vale in un intorno bucato di x0 = 0. Poiche f(x) → 0 e h(x) → 0 per x → 0 (come illettore e invitato a dimostrare per esercizio) possiamo concludere che
(2.55) limx→0
ex − 1
x= 1.
(41) Considerando le diseguaglianze viste nella Proposizione 1.25 ed arguendo in modoanalogo al caso precedente, si ottiene il limite notevole
(2.56) limx→0
log(1 + x)
x= 1.

Limiti e continuita 123
Nel processo di estensione dei risultati dalle successioni alle funzioni e naturalechiedersi se valga l’analogo della Proposizione 1.9. A tal fine premettiamo la seguenteimportante definizione
Definizione 2.8. Una funzione f : I → R si dice limitata se l’insieme dei suoi
valori e un sottoinsieme limitato di R. Equivalentemente,15
essa e limitata se esiste
M ≥ 0 tale che |f(x)| ≤ M per ogni x ∈ I .
Proposizione 2.9. Se f converge a � ∈ R per x → x0 , esiste un intervallo bucato
centrato in x0 su cui f e limitata16.
Dimostrazione. Sia ε > 0. Siccome f(x) → � per x → x0 , esistera δ > 0 tale chese x ∈ B(x0, δ) \ {x0} , allora |f(x) − �| < ε . Quindi in tale intervallo bucato si ha�− ε < f(x) < �+ ε , come volevasi. ��
Si potrebbe riassumere il risultato precedente nell’affermazione: se f e convergentein x0 , allora essa e localmente limitata in x0 . Il significato della parola “localmente”e evidentemente riferito all’esistenza di un intervallo bucato, magari piccolo, nei puntidel quale l’asserto e vero. L’implicazione opposta e falsa: la funzione a gradino definitain (2.52) e limitata e quindi lo e in ogni intervallo bucato centrato nell’origine; d’altraparte essa non converge per x → 0.
2.2. Limiti da destra e da sinistra. Passiamo ora a raffinare un poco il concettodi limite, consentendo alla variabile di avvicinarsi al punto x0 da una sola direzione,ossia, per esempio, da destra. Cio sara possibile se il punto x0 ha alla sua destrapunti arbitrariamente vicini che facciano parte dell’insieme di definizione della fun-zione in esame. In altre parole, e necessario formalizzare l’idea che un punto x0 diaccumulazione per I aderisce ad esso da destra o da sinistra o da entrambi i lati.
Definizione 2.10. Siano I ⊆ R e x0 ∈ R. Diremo che:
(i) x0 e un punto di accumulazione per I da destra, ovvero, che i punti di I si
accumulano in x0 da destra, se per ogni δ > 0 risulta (x0, x0 + δ) ∩ I �= ∅;(ii) x0 e un punto di accumulazione per I da sinistra, ovvero, che i punti di I si
accumulano in x0 da sinistra, se per ogni δ > 0 risulta (x0 − δ, x0) ∩ I �= ∅;
Ad esempio, i punti di (0, 1) si accumulano in 0 da destra, come illustrato nelseguente disegno.
0�✉ δ
)�1
� � �La seguente proposizione mette in relazione le varie nozioni di punto di accumulazione.
Proposizione 2.11. Siano I ⊆ R e x0 ∈ R. Allora:
15Si veda l’Esrecizio 6.16La Proposizione 2.9 vale anche se x → +∞ oppure se x → −∞ ; si veda la Sezione 2.3 per il
significato da attribuire a queste locuzioni, e come vada intesa in tal caso l’espressione “intervallo”.

124 Analisi Matematica 1
(i) x0 e di accumulazione per I se e solo se x0 e di accumulazione da destra
oppure17
da sinistra;
(ii) se x0 e di accumulazione sia da destra sia da sinistra per I , allora e di accu-
mulazione.
Dimostrazione. (i) Sia x0 sia un punto di accumulazione per I e supponiamoper assurdo che esso non sia di accumulazione ne da destra, ne da sinistra. Al-lora esisteranno δ− e δ+ tali che (x0 − δ−, x0) ∩ I = ∅ e (x0, x0 + δ+) ∩ I = ∅ .Ma allora, posto δ = min{δ−, δ+} , si ha ((x0 − δ, x0) ∪ (x0, x0 + δ)) ∩ I = ∅ , ossia(B(x0, δ) \ {x0}) ∩ I = ∅ , in contraddizione con l’ipotesi che x0 e di accumulazione.
Viceversa, se x0 e di accumulazione per I da destra allora per ogni δ > 0 risultera((B(x0, δ) \ {x0}) ∩ I) ⊇ (x0, x0 + δ) ∩ I �= ∅ , cosicche x0 e di accumulazione per I .Similmente si ragiona se x0 e di accumulazione per I da sinistra.
(ii) E una ovvia conseguenza di (i). ��Osserviamo che l’implicazione opposta a quella in (ii) non e vera. In effetti, 0 e di
accumulazione da destra per (0, 1) ma non lo e da sinistra; esso e pero di accumulazione.
Definizione 2.12. Siano I ⊆ R e f : I → R.
(i) Sia x0 di accumulazione per I da destra. Diremo che il limite per x che tende
a x0 da destra di f e � ∈ R, ed in tal caso scriveremo
limx→x+
0
f(x) = �, oppure f(x) −−−→x→x+
0
�,
se per ogni ε > 0 esiste δε > 0 tale che se x ∈ I soddisfa 0 < x − x0 < δε ,
allora |f(x)− �| < ε. Chiameremo � il limite destro di f in x0 .
(ii) Sia x0 di accumulazione per I da sinistra. Diremo che il limite per x che
tende a x0 da sinistra di f e � ∈ R, ed in tal caso scriveremo
limx→x−
0
f(x) = �, oppure f(x) −−−→x→x−
0
�,
se per ogni ε > 0 esiste δε > 0 tale che se x ∈ I soddisfa 0 < x0 − x < δε ,
allora |f(x)− �| < ε. Chiameremo � il limite sinistro di f in x0 .
Esempi.
(42) Sia f(x) = x/|x| . Essa e definita in R \ {0} e vale 1 sulla semiretta positiva e−1 sulla semiretta negativa. E pertanto del tutto evidente che
limx→x+
0
x
|x| = 1, limx→x−
0
x
|x| = −1.
Proposizione 2.13. Siano I ⊆ R, x0 ∈ R un punto di accumulazione sia da
destra sia da sinistra per I e sia f : I → R. Sono fatti equivalenti:
(i) esiste limx→0
f(x) = � ∈ R;
(ii) esistono limx→0+
f(x) = limx→0−
f(x) = � ∈ R.
17In questo caso la parola “oppure” va inteso nel senso non disgiuntivo, ossia che almeno una delledue affermazioni e vera.

Limiti e continuita 125
Dimostrazione. Supponiamo che f(x) → � per x → x0 . Si fissi ε > 0. Esiste alloraδ > 0 tale che se x ∈ I soddisfa 0 < x − x0 < δ oppure 0 < x0 − x < δ , ossia se0 < |x− x0| < δ , allora risulta |f(x)− �| < ε . Quindi esistono entrambi i limiti destroe sinistro e sono uguali a � . Viceversa, se limite destro e sinistro esistono entrambi esono uguali a � ∈ R , allora fissato ε > 0 esisteranno δ+ > 0 e δ− > 0 tale che se x ∈ I
soddisfa 0 < x− x0 < δ+ risulta |f(x) − �| < ε , e se x ∈ I soddisfa 0 < x0 − x < δ−risulta |f(x)− �| < ε . Posto δ = min{δ+, δ−} , per x ∈ I tale che 0 < |x− x0| < δ siavra |f(x)− �| < ε . Quindi f converge a � in x0 . ��
La Proposizione 2.13 si applica per lo piu per verificare che una funzione non halimite in un punto, nel caso cioe in cui i limiti destro e sinistro esistano ma siano diversi.

126 Analisi Matematica 1
2.3. Funzioni divergenti e limiti a piu e meno infinito. Cosı come per lesuccessioni, si formalizza il concetto di funzione che diviene arbitrariamente grande (ograndemente negativa) all’avvicinarsi della variabile ad un punto mediante i simbilimatematici “+∞” e “−∞”.
Definizione 2.14. Siano I ⊂ R non vuoto, x0 un punto di accumulazione per I
e f : I → R una funzione.
(i) Diremo che f diverge a +∞ per x che tende a x0 , oppure che il limite di f
per x che tende a x0 e +∞, e in tal caso scriveremo
limx→x0
f(x) = +∞, oppure f(x) −−−→x→x0
+∞
se per ogni K > 0 esiste δK > 0 tale che se x ∈ I soddisfa 0 < |x−x0| < δK ,
allora f(x) > K .
(ii) Diremo che f diverge a −∞ per x che tende a x0 , oppure che il limite di f
per x che tende a x0 e −∞, e in tal caso scriveremo
limx→x0
f(x) = −∞, oppure f(x) −−−→x→x0
−∞
se per ogni K > 0 esiste δK > 0 tale che se x ∈ I soddisfa 0 < |x−x0| < δK ,
allora f(x) < −K .
I concetti espressi nella definizione precedente sono illustrati qui sotto.
K
x0 − δ x0 + δ
Si osservi che la scelta di δ nella Definizione 2.14 dipende naturalmente da K .Come avremo modo di sottolineare ancora, tale scelta e fatta in modo che l’intervalloU = B(x0, δ) soddisfi f (U \ {x0}) ⊂ V , dove V e la semiretta (K,+∞). E importantenotare che il ruolo svolto dall’intervallo B(�, ε) nel caso della Definizione 2.2 e ora svoltoda (K,+∞). In altre parole, possiamo suggestivamente pensare che una semiretta deltipo (K,+∞) sia un “intorno di +∞”, allo stesso modo in cui B(�, ε) e un intornodi � . Vi e percio una grande similitudine nelle due definizioni: gli intorni (bucati) dix0 devono essere mandati da f in intorni del valore limite, sia esso finito o meno. Piu

Limiti e continuita 127
precisamente, fissato un intorno V del valore limite, deve esistere un intorno U di x0
che, privato di x0 , va a finire in V , ossia tale che f (U \ {x0}) ⊂ V .
V
f (U \ {x0})
U
Esempi.
(43) Esempi naturali di funzioni divergenti in un punto sono costruiti mediante potenzenegative. Ad esempio f(x) = |x − x0|−1 , ma anche f(x) = |x − x0|−n con n interopositivo. Infatti, fissato K > 0 e scelto δ = K−1/n , se 0 < |x − x0| < δ = K−1/n ,allora |x− 1|−n > δ−n = K .
(44) Sia f(x) = | tan x| e sia x0 = π/2. Sappiamo gia che per x → π/2 il cosenotende a zero. Fissato percio K > 0 e posto ε = 1/(2K) esistera δK tale che se0 < |x − π/2| < δK allora | cos x| < ε = 1/(2K). Poiche inoltre il seno tende a unoper x → π/2, possiamo certamente fare in modo che per 0 < |x− π/2| < δK si abbia| sin x| > 1/2. Ma allora per le stesse x si ha
| tan x| =����sin x
cos x
���� >1
2
1
|cos x| > K,
(45) Il lettore non avra difficolta ad estendere quanto visto nella Sezione 2.2 al casodi funzioni divergenti: la definizione di funzione divergente (a +∞ oppure a −∞) perx → x
+0 oppure per x → x
−0 e lasciata per esercizio. Sara poi facile provare che
limx→π
2−tan x = +∞ lim
x→π2+tan x = −∞
riadattando opportunamente le considerazioni fatte nell’esempio precedente.
Il quadro delle possibili nozioni di limite per funzioni definite su sottoinsiemi di Rsi completa mediante la nozione di limite “per x → +∞” oppure “per x → −∞”.E utile a questo proposito richiamare le considerazioni svolte poco sopra circa l’idea
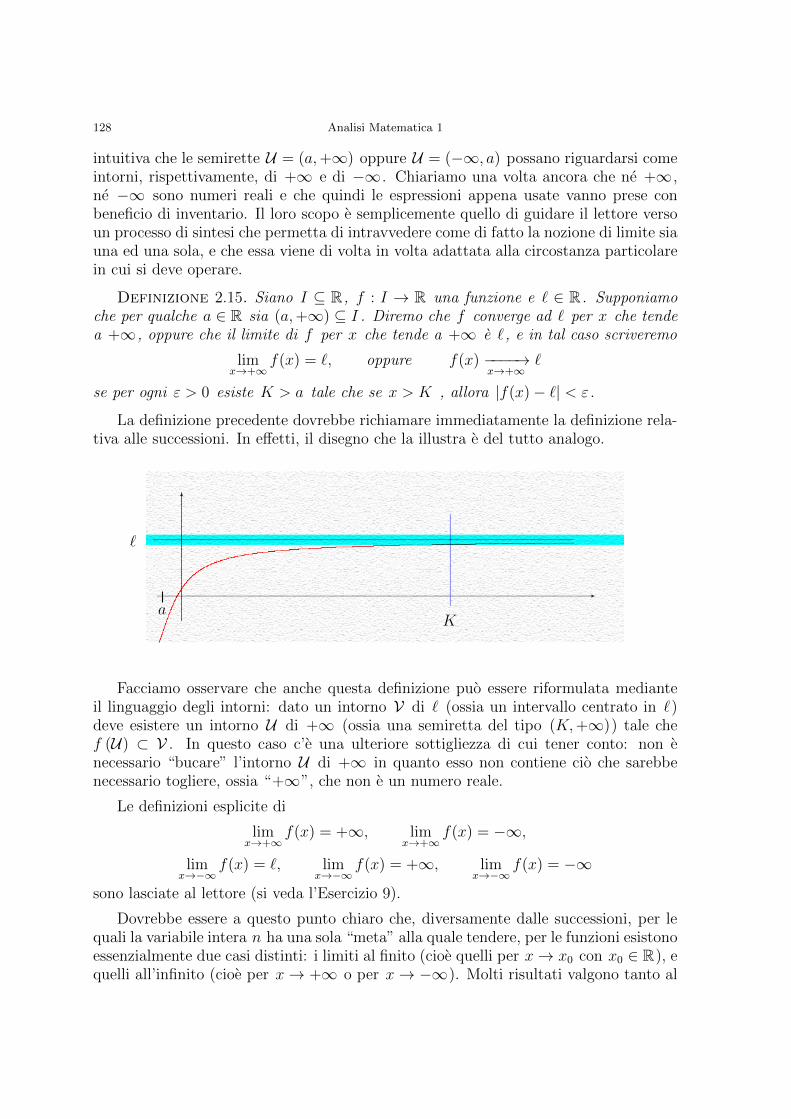
128 Analisi Matematica 1
intuitiva che le semirette U = (a,+∞) oppure U = (−∞, a) possano riguardarsi comeintorni, rispettivamente, di +∞ e di −∞ . Chiariamo una volta ancora che ne +∞ ,ne −∞ sono numeri reali e che quindi le espressioni appena usate vanno prese conbeneficio di inventario. Il loro scopo e semplicemente quello di guidare il lettore versoun processo di sintesi che permetta di intravvedere come di fatto la nozione di limite siauna ed una sola, e che essa viene di volta in volta adattata alla circostanza particolarein cui si deve operare.
Definizione 2.15. Siano I ⊆ R, f : I → R una funzione e � ∈ R. Supponiamo
che per qualche a ∈ R sia (a,+∞) ⊆ I . Diremo che f converge ad � per x che tende
a +∞, oppure che il limite di f per x che tende a +∞ e �, e in tal caso scriveremo
limx→+∞
f(x) = �, oppure f(x) −−−−→x→+∞
�
se per ogni ε > 0 esiste K > a tale che se x > K , allora |f(x)− �| < ε.
La definizione precedente dovrebbe richiamare immediatamente la definizione rela-tiva alle successioni. In effetti, il disegno che la illustra e del tutto analogo.
�
Ka
Facciamo osservare che anche questa definizione puo essere riformulata medianteil linguaggio degli intorni: dato un intorno V di � (ossia un intervallo centrato in �)deve esistere un intorno U di +∞ (ossia una semiretta del tipo (K,+∞)) tale chef (U) ⊂ V . In questo caso c’e una ulteriore sottigliezza di cui tener conto: non enecessario “bucare” l’intorno U di +∞ in quanto esso non contiene cio che sarebbenecessario togliere, ossia “+∞”, che non e un numero reale.
Le definizioni esplicite di
limx→+∞
f(x) = +∞, limx→+∞
f(x) = −∞,
limx→−∞
f(x) = �, limx→−∞
f(x) = +∞, limx→−∞
f(x) = −∞
sono lasciate al lettore (si veda l’Esercizio 9).
Dovrebbe essere a questo punto chiaro che, diversamente dalle successioni, per lequali la variabile intera n ha una sola “meta” alla quale tendere, per le funzioni esistonoessenzialmente due casi distinti: i limiti al finito (cioe quelli per x → x0 con x0 ∈ R), equelli all’infinito (cioe per x → +∞ o per x → −∞). Molti risultati valgono tanto al

Limiti e continuita 129
finito quanto all’infinito, e sarebbe assai pedante formulare tutti i possibili enunciati.Vorremo invece poter scrivere
limx→p
f(x), p ∈ R ∪ {±∞}
e coprire tutti i casi simultaneamente. Inoltre, vi sono enunciati che valgono sia nelcaso in cui il limite sia un numero reale � ∈ R , sia nel caso in cui la funzione inesame diverga a +∞ oppure a −∞ . Queste considerazioni giustificano l’introduzionedi definizioni generali, che procediamo a dare sulla scorta delle discussioni svolte inprecedenza. Stipuliamo innanzitutto una convenzione.
Convenzione 2.16. Sia p ∈ R ∪ {±∞}. Chiameremo intorno di p un insieme
che contiene:
(i) un intervallo aperto B(p, δ) se p ∈ R;
(ii) una semiretta del tipo (a,+∞) se p = +∞;
(iii) una semiretta del tipo (−∞, a) se p = −∞.
Un intorno bucato di p e un insieme del tipo U \ {p}, dove U e un intorno di p. Se
p = ±∞, le espressioni “intorno” e “intorno bucato” assumono le stesso significato:
infatti U \ {p} = U , in quanto p �∈ U . Infine, diremo che p e di accumulazione per un
insieme I se ogni intorno bucato di p ha intersezione non vuota con I .
Possiamo finalmente procedere alla definizione generale di limite cui abbiamo allusogia diverse volte.
Definizione 2.17. Siano I ⊂ R, p ∈ R ∪ {±∞} di accumulazione per I , e sia
f : I → R. Diremo che il limite di f per x che tende a p e q ∈ R ∪ {±∞}, ed in tal
caso scriveremo
limx→p
f(x) = q oppure f(x) −−→x→p
q
se per ogni intorno V di q esiste un intorno U di p tale che f (U \ {p}) ⊆ V .
Molti dei risultati gia visti si estendono al caso p ∈ R ∪ {±∞} . Per semplicitatuttavia, non procediamo ad una riformulazione esplicita nel caso x → +∞ oppurex → −∞ . Il lettore e invitato a verificare che il Teorema 2.4 e il suo Corollario 2.5,nonche il Teorema 2.6, il Teorema 2.7 e la Proposizione 2.9, possono essere enunciatitenendo conto della Convenzione 2.16, ovvero della Definizione 2.17.
La definizione generale di limite e inoltre molto utile per descrivere l’algebra (este-sa) dei limiti delle funzioni. Come per le successioni, ci limitiamo ad uno schemariassuntivo. Nella tabella che segue p ∈ R ∪ {±∞} , mentre f e g sono due funzionidefinite su uno stesso insieme, che ha p come punto di accumulazione. Al solito,l’acronimo “F.I.” sta per “forma indeterminata”, e si riferisce a situazioni nelle qualinon si hanno a disposizione informazioni sufficienti per poter concludere. Per ciascunaforma indeterminata presente nella tabella, il lettore e invitato a produrre esempi neiquali la somma (o il prodotto) tende a zero, oppure converge a � ∈ R \ {0} , o divergea +∞ o diverge a −∞ .

130 Analisi Matematica 1
(2.57)
limx→p
f(x) limx→p
g(x) limx→p
f(x) + g(x) limx→p
f(x)g(x)
� > 0 +∞ +∞ +∞� > 0 −∞ −∞ −∞� < 0 +∞ +∞ −∞� < 0 −∞ −∞ +∞0 +∞ +∞ F.I.0 −∞ −∞ F.I.
+∞ +∞ +∞ +∞−∞ −∞ −∞ +∞+∞ −∞ F.I. −∞
Un altro risultato che puo essere esteso al caso p = ±∞ e l’importante Teorema 2.3.In effetti, adattando la dimostrazione gia vista, non e difficile dimostrare la seguenteversione completa del teorema.
Teorema 2.18 (Limite fatto per successioni, II). Siano p ∈ R ∪ {±∞} di
accumulazione per I , f : I → R e q ∈ R ∪ {±∞}. Sono fatti equivalenti:
(i) limx→p
f(x) = q ;
(ii) per ogni successione (xn)n≥0 di elementi di I \ {p} tale che xn → p, si ha
limn
f(xn) = q .
Il quadro dei risultati generali sui limiti si va via via completando. Passiamo oraa considerare funzioni infinitesime e funzioni monotone. A tale scopo ribadiamo laDefinizione 1.16 nel caso delle funzioni.
Definizione 2.19. Siano p ∈ R ∪ {±∞} di accumulazione per I e f : I → R.
Diremo che f e infinitesima per x → p se limx→p
f(x) = 0.
I seguenti risultati si dimostrano direttamente, oppure adattando, mediante il Teo-rema 2.18, gli analoghi risultati per le successioni.
Proposizione 2.20. Siano p ∈ R ∪ {±∞} di accumulazione per I e f : I → R.
(i) Se f(x) diverge per x → p, allora 1/f(x) e infinitesima per x → p;
(ii) se f(x) e positiva in un intorno bucato di p e infinitesima per x → p, allora
1/f(x) → +∞ per x → p;
(iii) se f(x) e negativa in un intorno bucato di p e infinitesima per x → p, allora
1/f(x) → −∞ per x → p.
Proposizione 2.21. Siano p ∈ R ∪ {±∞}, I un intorno di p e f, g : I → R.
Se f e limitata in un intorno bucato di p e g e infinitesima per x → p, allora fg e
infinitesima per x → p.
Un poco piu delicata e l’estensione al caso delle funzioni dei risultati che riguardanole funzioni monotone.

Limiti e continuita 131
Teorema 2.22. Siano p ∈ R ∪ {±∞} e sia f : I → R non decrescente in I .
(i) Se p ∈ R e di accumulazione per I da sinistra, allora
limx→p−
f(x) = sup{f(x) : x ∈ I, x < p}.
(ii) Se p ∈ R e di accumulazione per I da destra, allora
limx→p+
f(x) = inf{f(x) : x ∈ I, x > p}.
(iii) Se p = +∞ e di accumulazione per I , allora limx→+∞
f(x) = sup{f(x) : x ∈ I}.(iv) Se p = −∞ e di accumulazione per I , allora lim
x→−∞f(x) = inf{f(x) : x ∈ I}.
Evidentemente, il Teorema 2.22 ha una riformulazione per le funzioni non crescenti.
Esempi.
(46) Applichiamo il Teorema 2.22 all’importante caso delle funzioni esponenziale elogaritmo in base naturale18. Poiche sia exp : R → (0,+∞) sia log : (0,+∞) → Rsono monotone crescenti e surgettive, da (iii) del Teorema 2.22 avremo
limx→+∞
ex = sup {ex : x ∈ R} = sup (0,+∞) = +∞
limx→+∞
log x = sup {log x : x ∈ (0,+∞)} = sup R = +∞.
Utilizzando (iv) e (ii) del Teorema 2.22 avremo inoltre
limx→−∞
ex = inf {ex : x ∈ R} = inf (0,+∞) = 0
limx→0+
log x = inf {log x : x ∈ (0,+∞)} = inf R = −∞.
(47) Mediante il Teorema 2.22 si dimostra in modo immediato che
(2.58) limx→−π/2+
tan x = −∞, limx→π/2−
tan x = +∞
e similmente che
(2.59) limx→−∞
arctan x = −π
2, lim
x→+∞arctan x =
π
2.
18I risultati che seguono sono ancora veri se si prende una qualunque base a > 1. Che cosasuccede invece se a < 1?

132 Analisi Matematica 1
2.4. Cambiamento di variabile nel calcolo dei limiti. Supponiamo di volercalcolare il seguente semplice limite
limx→0
log (1 + sinx)
x.
Ricordando i limiti notevoli (2.53) e (2.56), verrebbe naturale scrivere dapprima
log (1 + sinx)
x=
log (1 + sinx)
sin x
sin x
x
e poi arguire come segue. Il secondo fattore sin x/x tende a uno. Nel primo fattore,poniamo y = sin x . Siccome y = sin x → 0 per x → 0, utilizzando (2.56) si ha
log (1 + sinx)
sin x=
log (1 + y)
y−−→y→0
1,
e il limite cercato vale uno. Il ragionamento svolto e plausibile, ma non e giustificato daalcun teorema visto finora. Esso mostra pero quanto possa essere desiderabile procederead un cambio di variabile, ovvero di sostituzione, nel calcolo di un limite: vogliamocalcolare il limite della funzione composta g ◦ f (nel nostro caso g = log(1 + y)/y ef(x) = sin x) e siamo tentati di concludere che esso coincide con il limite della funzioneesterna g per y → y0 , se y0 e il limite della funzione interna f per x → x0 .
Il procedimento sopra descritto e effettivamente lecito in certe circostanze. Noi cilimitiamo a trattare un caso che si presenta spesso e che richiede una certa regolarita19
della funzione esterna g . Risultati piu generali si possono trovare in [DM].
Teorema 2.23 (Cambio di variabile). Siano p, q ∈ R ∪ {±∞} e si supponga
che esista
limx→p
f(x) = q.
Sia g definita in un intorno di q , e si supponga inoltre che
(i) se q ∈ R, allora limy→q
g(y) = g(q);
(ii) se q = ±∞, allora esiste limx→q
g(x) ∈ R ∪ {±∞}.
Allora esiste il limite limx→p
g(f(x)) della funzione composta g ◦ f per x → p e risulta
limx→p
g(f(x)) = limy→q
g(y).
Dimostrazione. Proviamo solamente (i). La dimostrazione di (ii) e del tutto analogae viene lasciata per esercizio. Le ipotesi sono pertanto che q ∈ R , che g e definita suun intorno di q , che g(y) → g(q) per y → q e naturalmente che f(x) → q per x → p .Dobbiamo provare che g(f(x)) → g(q) per x → p .
Fissiamo un intorno V di g(q). Dall’ipotesi che g(y) → g(q) per y → q si deduceche possiamo trovare un intorno W di q tale che g (W \ {q}) ⊆ V . Inoltre g(q) ∈ Vin quanto V e un intorno di g(q). Quindi la precedente inclusione si estende a
g (W) ⊆ V .19Alla luce delle nozioni introdotte nella prossima sezione, la regolarita cui si allude qui e, nel caso
in cui i calcoli avvengano “al finito”, la continuita di g .

Limiti e continuita 133
Si consideri ora l’intorno W di q . Siccome f(x) → q per x → p , possiamo trovare unintorno U di p tale che f (U \ {p}) ⊆ W . In conclusione, in corrispondenza dell’intornoV di q abbiamo trovato un intorno U di p tale che
g ◦ f (U \ {p}) = g (f (U \ {p})) ⊆ g (W) ⊆ U ,che e quanto richiesto. ��
Esempi.
(48) Vediamo il caso di una sostituzione tipica. Si voglia calcolare il limite
limx→+∞
x sin1
x.
Guardando la tabella (2.57), il limite precedente si presenta nella forma “∞ · 0”, chee indeterminata. Possiamo pero notare che
x sin1
x=
sin(1/x)
1/x.
Poniamo dunque
g(y) =
�sin yy se y �= 0
1 se y = 0.
Evidentemente, g converge a 1 = g(0) per y → 0 ed inoltre y = 1/x → 0 perx → +∞ . La sostituzione y = 1/x e pertanto lecita ed il limite cercato vale 1.
(49) Utilizziamo il Teorema 2.23 per discutere un certo tipo di forma apparentementeindeterminata. Supponiamo cioe di voler calcolare un limite della forma
(2.60) limx→p
�f(x)g(x)
�,
in cui si suppone che f sia strettamente positiva in un intorno bucato di p ∈ R∪{±∞} .Sfruttando le proprieta di esponenziali e logaritmi, otteniamo
f(x)g(x) = elog[f(x)g(x)] = e
g(x) log f(x).
Ci chiediamo che cosa succede se f e infinitesima e se g(x) → +∞ per x → p , cosicchecertamente g(x) log f(x) → −∞ . La funzione in esame e dunque la composizione dellafunzione esponenziale (esterna) e della funzione g(x) log f(x): siamo nelle ipotesi delTeorema 2.23, in quanto y �→ ey ammette limite per y → −∞ . Possiamo concludereche il limite cercato vale quanto il limite di ey per y → −∞ , cioe zero.
Se invece supponiamo che f sia ancora infinitesima ma che g(x) → −∞ per x → p ,allora g(x) log f(x) → +∞ ed limite cercato vale quanto il limite di ey per y → +∞ ,cioe +∞ . Possiamo riassumere questa breve discussione scrivendo che se che f epositiva in un intorno bucato di p ∈ R ∪ {±∞} , allora
limx→p
f(x) = 0, limx→p
g(x) = +∞ ⇒ limx→p
f(x)g(x) = 0
limx→p
f(x) = 0, limx→p
g(x) = −∞ ⇒ limx→p
f(x)g(x) = +∞.

134 Analisi Matematica 1
Le corrette implicazioni precedenti sono alle volte sintetizzate nelle scorrette scrittureinformali:
(0+)+∞ = 0, (0+)−∞ = +∞.
(50) Utilizziamo ora il Teorema 2.23 per estendere il limite notevole (1.38), ossia perprovare che
(2.61) limx→+∞
�1 +
1
x
�x
= e, limx→−∞
�1 +
1
x
�x
= e.
In effetti, usando al solito le proprieta di esponenziale e logaritmo�1 +
1
x
�x
= ex log(1+x−1)
,
cosicche (2.61) sara dimostrata se proviamo che x log(1 + x−1) → 1 per x → ±∞ .D’altra parte
x log(1 + x−1) =
log(1 + x−1)
x−1
e posto y = x−1 possiamo concludere utilizzando il limite notevole log(1 + y)/y → 1per y → 0, visto che y = x−1 → 0 per x → ±∞ .
(51) Alla luce dell’esempio precedente, si potrebbe essere tentati di arguire che le formedel tipo “1+∞” non siano indeterminate. Mostriamo subito che cio e falso, considerandouna variante del caso precedente. Infatti,
�1 +
1
x
�x2
si presenta ancora nella forma “1+∞”. Passaggi analoghi a quelli svolti in precedenzaportano a esaminare l’esponente
x2 log(1 + x
−1) = x · log(1 + x−1)
x−1,
che diverge a +∞ per x → +∞ . Dunque
limx→+∞
�1 +
1
x
�x2
= +∞.
(52) Ancora qualche limite notevole. Supponiamo di sapere che per ogni a > 0,
limx→x0
ax = a
x0 , x0 ∈ R;(2.62)
limx→x0
loga x = loga x0, x0 ∈ (0,+∞), a �= 1.(2.63)

Limiti e continuita 135
Entrambe le affermazioni precedenti sono vere e verranno provate nella Sezione ??.Vogliamo provare che
limx→0
loga(1 + x)
x=
1
log a, a > 0, a �= 1;(2.64)
limx→0
ax − 1
x= log a, a > 0;(2.65)
limx→0
(1 + x)α − 1
x= α, α ∈ R.(2.66)
Consideriamo il primo limite. Ovviamente, si deve richiedere a > 0 e a �= 1. Siccome
loga(1 + x)
x= loga(1 + x)1/x = loga
�1 +
1
1/x
�1/x
,
possiamo sfruttare il fatto che 1/x → ±∞ per x → 0± , poi i limiti notevoli (2.61) edinfine l’ipotesi (2.63) per dedurre che il limite cercato vale loga e , ossia 1/ log a .
Passiamo a (2.65). Se a = 1 il risultato e banale. Per x → 0, abbiamo ax− 1 → 0.Posto percio y = ax − 1 e osservato che in tal caso x = loga(y + 1), si ha
ax − 1
x=
y
loga(y + 1)→ log a,
in virtu di (2.64)Per (2.66), siccome x → 0, certamente in un intorno bucato di 0 avremo 1+x > 0
cosicche la potenza (1 + x)α e ben definita ed avra anche senso porre 1 + x = ey .Quindi
(1 + x)α − 1
x=
eαy − 1
ey − 1=
eαy − 1
y
y
ey − 1=
(eα)y − 1
y
y
ey − 1.
Il secondo fattore converge a 1, mentre il primo, converge a log(eα) = α per viadi (2.65).

136 Analisi Matematica 1
Esercizi
1. Mostrare che se I e un insieme aperto, allora ogni suo punto e di accumulazioneper I .
2. Dimostrare il Teorema 2.4, sia mediante il Teorema 2.3, sia in modo diretto.
3. Dimostrare il Corollario 2.5, sia mediante il Teorema 2.3, sia in modo diretto.
4. Dimostrare il Teorema 2.6, sia mediante il Teorema 2.3, sia in modo diretto.
5. Dimostrare il Teorema 2.7, sia mediante il Teorema 2.3, sia in modo diretto.
6. Sia Y ⊂ R . Provare che le due seguenti affermazioni sono equivalenti:
(i) Esistono due numeri reali s e S tali che s ≤ y ≤ S per ogni y ∈ Y ;(ii) esiste M ≥ 0 tale che |y| ≤ M per ogni y ∈ Y .
7. E possibile dimostrare la Proposizione 2.9 usando il Teorema 2.3?
8. Completare tutti i dettagli omessi nell’Esempio 45
9. Definire le seguenti nozioni di limite:
(i) limx→+∞
f(x) = +∞; (ii) limx→+∞
f(x) = +∞; (iii) limx→−∞
f(x) = �;
(iv) limx→−∞
f(x) = +∞; (v) limx→−∞
f(x) = −∞.
10. Formulare il Teorema 2.4 e il suo Corollario 2.5, nonche il Teorema 2.6, il Teo-rema 2.7 e la Proposizione 2.9 con p = ±∞ in luogo di x0 ∈ R .
11. Formulare un analogo del Teorema 2.22 per le funzioni non crescenti o decrescenti.
12. Per ciascuno dei seguenti limiti stabilire se essi hanno senso o meno; in caso affer-mativo stabilire se essi esistono o no e, se si, calcolarli. Quando compare il parametroα , si intende α ∈ R e si richiede la discussione del limite al variare di α . Similmente,k denota un parametro intero ed il limite va discusso al variare di k ∈ Z .
(i) limx→0
sin 5x
sin 3x; (ii) lim
x→+∞
sin 3x
x; (iii) lim
x→0
sin(x3)
x;
(iv) limx→0
x sin x; (v) limx→+∞
x sin x; (vi) limx→0+
1− cos x
xα sin x;
(vii) limx→0+
x2 − sin2x
x2 + sin2x; (viii) lim
x→0+
xα
sin x; (ix) lim
x→+∞
tan 2x
sin 3x;
(x) limx→2
(x− 2) sin1
x− 2; (xi) lim
x→1
√x− 1
x− 1; (xii) lim
x→0+
x2 + sin2x
x2 + sin(x2);

Limiti e continuita 137
(xiii) limx→0
√1 + cosx−
√2
sin(x2); (xiv) lim
x→2
x2 − 3x+ 2
x− 2; (xv) lim
x→kπ[sin x];
(xvi) limx→π/2
sin2x− 3 sin x+ 2
sin x− 1; (xvii) lim
x→π
sin2(π − x)
cos x+ 1; (xviii) lim
x→π/2
2− 2 sin x
(π − 2x)2;
(xix) limx→0+
tan x− sin x
xα; (xx) lim
x→0
log(1 + x2)
3x2; (xxi) lim
x→−∞
√x3 + 1;
(xxii) limx→0+
esinx − 1√x arctan 2
√x; (xxiii) lim
x→+∞
�2x+ 1
x+ 1; (xxiv) lim
x→0(1 + x)1/5x
(xxv) limx→1
(x− 1) sin2
�1
x− 1
�; (xxvi) lim
x→0e−1/x; (xxvii) lim
x→1
sin(x− 1)
x− 1;
(xxviii) limx→1
3x− sin x
4x− 5 sin x; (xxix) lim
x→0
sin x
|x| ; (xxx) limx→0
e1−cosx − 1
x sin x;
(xxxi) limx→+∞
√x+ 3−
√x+ 1; (xxxii) lim
x→−∞
�1− 1
x
�4x
; (xxxiii) limx→0
2x − 3x
1− 3x;
(xxxiv) limx→+∞
x
x+ 1sin x; (xxxv) lim
x→0
(1 + tan x)x − 1
x2; (xxxvi) lim
x→+∞
e√x
x4 + 1;
(xxxvii) limx→+∞
x4 sin2x
x2 + 1sin x; (xxxviii) lim
n→+∞cos(nπ) n
√n; (xxxix) lim
n→+∞2n sin
1
2n;

138 Analisi Matematica 1
3. Funzioni continue.
Siamo ora in grado di formulare la nozione di continuita.
Definizione 3.1. Siano I ⊂ R, f : I → R e x0 ∈ I un punto di accumulazione
per I . Diremo che f e continua in x0 se
limx→x0
f(x) = f(x0).
Se J ⊂ I e f e continua in ogni punto di J , diremo che f e continua su J e se f e
continua in ogni punto di I , diremo semplicemente che essa e continua.
Si noti che nella definizione di continuita in x0 si richiede che x0 non solo sia unpunto di accumulazione, ma che esso appartenga ad I . La ragione e che si deve potercalcolare sia il limite di f per x → x0 , sia f(x0).
Esempi.
(53) Dall’esempio (33) segue che le funzioni lineari x �→ ax + b sono continue. Inparticolare, le funzioni costanti sono continue. Le relazioni (2.50) e (2.51) dicono chele funzioni seno e coseno sono continue. Le relazioni (2.62) e (2.63), che non sonostate ancora dimostrate, implicano invece la continuita delle funzioni esponenziali elogaritmiche. La (2.62) e dimostrata in questa sezione, nella Proposizione 3.7.
(54) La funzione a gradino definita in (2.52) evidentemente non e continua nell’originein quanto il limite per x → 0 non esiste, e quindi non puo essere uguale a f(0) = 0.
La dimostrazione del risultato che segue e basata sul Teorema 2.3, di cui e una lievevariante.
Proposizione 3.2 (Continuita per successioni). Siano x0 ∈ I un punto di
accumulazione per I ⊆ R e f : I → R. Sono fatti equivalenti:
(i) f e continua in x0 ;
(ii) per ogni successione (xn)n≥0 di elementi di I tale che xn → x0 si ha che
limn
f(xn) = f(x0).
Dimostrazione. Si osservi che al punto (ii) la richiesta di convergenza di (f(xn))n≥0
e relativa a tutte le successioni (xn)n≥0 di elementi di I e non di elementi di I \ {x0} .Questa e apparentemente una richiesta piu forte di quella del Teorema 2.3. In altritermini, se (ii) e vera per ogni sucessione (xn)n≥0 di elementi di I convergente a x0 ,allora e vera in particolare per quelle i cui punti sono in I \ {x0} e percio se vale (ii)allora vale (i) per via del Teorema 2.3. Viceversa, se vale (i), allora possiamo ripetere ladimostrazione che (i) implica (ii) del Teorema 2.3 ed osservare che data una successione(xn)n≥0 di elementi di I (quindi magari xn = x0 per uno o addirittura infiniti valoridi n), la condizione |f(xn)− f(x0)| = |f(xn)− �| < ε e automatica se xn = x0 . ��
I teoremi della sezione precedente comportano conseguenze piu o meno dirette sullaclasse delle funzioni continue. Al fine di snellire gli enunciati, d’ora in poi eviteremo,quando cio non generi confusione, di specificare eccessivamente la natura dei dati;cosı scriveremo ad esempio “sia f continua in x0” anziche “siano x0 ∈ I un punto di

Limiti e continuita 139
accumulazione per I ⊆ R, f : I → R e si supponga f continua in x0”. In altri termini,la locuzione “sia f continua in x0” include implicitamente tutti i dati precedenti.
Proposizione 3.3 (Permanenza del segno). Se f e continua in x0 e f(x0) �= 0,allora esiste un intorno bucato di x0 nei punti del quale f ha il segno di f(x0).
Proposizione 3.4 (Algebra delle funzioni continue). Siano f, g : I → R due
funzioni continue in x0 . Allora sono continue in x0 anche le funzioni
(i) |f |;(ii) f + g ;
(iii) fg ;
(iv) λf , per ogni λ ∈ R;
(v) f/g , se g(x0) �= 0.
Dalla proposizione precedente si evince che di ogni coppia di funzioni continue suun dato insieme I si possano fare combinazioni lineari. L’insieme
(3.67) C(I) =�f : I → R : f e continua in I
�.
possiede quindi la struttura di spazio vettoriale.20
Esempi.
(55) Tutti i polinomi sono funzioni continue su R . In effetti, si puo ragionare in-duttivamente su n e provare dapprima che tutte le potenze x �→ xn sono continue.Un nuovo ragionamento induttivo permette poi di concludere, osservando che ognipolinomio Pn(x) di grado n si puo scrivere nella forma Pn(x) = Pn−1(x) + λxn . Lacontinuita segue evidentemente da quelle di Pn−1(x) e di xn . Nella Proposizione 3.6che segue poco sotto, viene dimostrata la continuita delle potenze reali x �→ xr (x > 0e r ∈ R). Ne discendera, ad esempio, che x �→
√x e continua.
(56) Ogni funzione razionale del tipo f(x) = P (x)/Q(x), con P e Q polinomi, econtinua nell’insieme complementare di ZQ = {x ∈ R : Q(x) = 0} .(57) Nonostante questo possa sembrare strano, la funzione f(x) = 1/x e continua. Ineffetti, essa e definita in I = R \ {0} , ed in ciascun punto x0 ∈ I risulta 1/x → 1/x0 ,come segue facilmente dall’algebra dei limiti.
Un’altra fondamentale proprieta delle funzioni continue e il fatto che esse possonoessere composte, nel senso descritto dal risultato seguente. Esso e una conseguenzaimmediata del Teorema 2.23, la cui ipotesi (i) e precisamente la continuita di g .
Proposizione 3.5 (Continuita della composta). Se f e continua in x0 e g e
continua in f(x0), allora g ◦ f e continua in x0 .
A partire dalle funzioni elementari si possono quindi generare grandi famiglie di fun-zioni continue, mediante operazioni algebriche (combinazioni lineari prodotti e quozien-ti) e composizioni. Proviamo ora la continuita delle potenze reali e delle funzioni espo-nenziali. Quella delle funzioni logaritmo seguira dal Teorema??.
20In realta, C(I) e anche un’algebra rispetto alla moltiplicazione puntuale.

140 Analisi Matematica 1
Proposizione 3.6. Per ogni r ∈ R la funzione x �→ xr e continua su (0,+∞).
Dimostrazione. Innanzitutto e chiaro che possiamo assumere r > 0, in quantoxr = 1/x−r . Dobbiamo provare che per ogni x0 > 0 si ha xr → xr
0 per x → x0 .Evidentemente e sufficiente provarlo separatamente per x → x
+0 e x → x
−0 . La di-
mostrazione del caso x → x−0 e del tutto analoga a quella del caso x → x
+0 , ed e
lasciata per esercizio.Supponiamo dapprima x0 = 1. Sia n un intero non negativo tale che n ≤ r < n+1.
Siccome x �→ xr e crescente, si avra
0 < xn − 1 ≤ x
r − 1 < xn+1 − 1
e dal teorema dei carabinieri segue che per x → 1+ si ha xr → 1 in quanto la continuitadi x → xn e di x �→ xn+1 e gia stata osservata nell’Esempio 55. Analogamente si provail caso x → 1− e si conclude quindi la continuita in x0 = 1.
Sia ora x0 positivo qualsiasi. Se x → x+0 allora x/x0 → 1 (da destra) e quindi,
fissato ε > 0 esiste δ > 0 tale che se x0 < x < x0 + δ allora 0 < (x/x0)r − 1 < εx−r0 .
Per tali x si ha quindi
0 < xr − x
r0 = x
r0
��x
x0
�r
− 1
�< x
r0εx
−r0 = ε.
Percio xr → xr0 per x → x
+0 . ��
Proposizione 3.7. Per ogni a > 0 la funzione x �→ ax e continua.
Dimostrazione. Il caso a = 1 e banale. Proviamo il caso a > 1, da cui segue ilcaso a < 1 in quanto ax = (1/a)−x . E’ sufficiente dimostrare che, fissato x0 ∈ R , siha ax → ax0 per x → x
+0 e poi per x → x
−0 . La dimostrazione del caso x → x
−0 e del
tutto analoga a quella del caso x → x+0 , ed e lasciata per esercizio.
In virtu del Teorema 2.3, per dimostrare che ax → ax0 per x → x+0 , basta provare
che axn → ax0 per ogni successione (xn)n≥0 tale che xn → x0 e xn > x0 per ognin . Sia quindi (xn)n≥0 una siffatta successione e fissiamo ε > 0. Il limite notevolea1/n → 1 (si veda (1.30)) implica che in corrispondenza di εa−x0 > 0 esiste un interoK tale che per ogni n ≥ K (quindi anche per n = K ) risulta
a1/n − 1 < εa
−x0 .
D’altra parte, siccome xn → x0 , in corrispondenza di 1/K si avra definitivamente0 < xn − x0 < 1/K e quindi, siccome x �→ ax e crescente (si veda la proprieta (E4)delle funzioni esponenziali)
axn−x0 < a
1/K.
In conclusione, fissato ε > 0, valgono definitivamente le disuguaglianze
0 < axn − a
x0 = ax0�axn−x0 − 1
�≤ a
x0�a1/K − 1
�< a
x0εa−x0 = ε,
il che prova che axn → ax0 , come volevasi. ��

Limiti e continuita 141
Esempi.
(58) Sono funzioni continue le funzioni iperboliche:
cosh x =ex + e−x
2
sinh x =ex − e−x
2,
dette rispettivamente il coseno iperbolico ed il seno iperbolico di x . Si osservi che essenon sono altro che la parte pari e la parte dispari di x �→ ex . E’ anche continua sututto R la tangente iperbolica
tanh x =sinh x
cosh x=
ex − e−x
ex + e−x.
Concludiamo questa sezione con una breve discussione sui vari tipi di discontinuita.
Definizione 3.8. Una funzione f : I → R si dice avere una discontinuita elimi-
nabile in x0 ∈ I , se x0 e di accumulazione per I e se esiste finito il limx→x0
f(x) = � ∈ Rma � �= f(x0). Nel caso in cui x0 �∈ I ma pur sempre esista il lim
x→x0
f(x) = � ∈ R, la
funzione f si dira prolungabile per continuita in x0 . In entrambi i casi, la funzione
f(x) =
�f(x) se x ∈ I
� se x = x0
e continua in x0 .
Evidentemente, una discontinuita eliminabile e una sorta di “falsa” discontinuita:basta modificare il valore di f nel solo punto x0 per avere una funzione continua. Unesempio di funzione prolungabile per continuita nell’origine e la funzione f(x) = sin x/xche non e definita in x = 0. Siccome pero f(x) → 1 per x → 0, possiamo a tutti glieffetti considerare f come una funzione continua ponendo per definizione f(0) = 1.
Definizione 3.9. Una funzione f : I → R si dice avere una discontinuita a salto
o di prima specie in x0 ∈ I se x0 e di accumulazione per I , se esistono finiti i limiti
di f per x → x+0 e per x → x
−0 ma
[f ]x0 = limx→x+
0
f(x)− limx→x−
0
f(x) �= 0.
La quantita [f ]x0 si chiama il salto di f in x0 . Una discontinuita che non sia ne
eliminabile ne di prima specie si dice di seconda specie.
Esempi.
(59) La funzione
f(x) =
�x/|x| se x �= 0
0 se x = 0

142 Analisi Matematica 1
ha una discontinuita di prima specie nell’origine. La funzione
f(x) =
�sin(1/x) se x �= 0
0 se x = 0
ha una discontinuita di seconda specie nell’origine, in quanto non esistono ne il limitedestro ne il limite sinistro.

Limiti e continuita 143
Esercizi
1. Si consideri la funzione:
f(x) =
log(1− 2x)
xse x < 0;
a se x = 0;
x2 + b cos x se x > 0.
Si determini per quali valori di a e b , se ne esistono, la funzione f risulta continuanell’origine.
2. Siano α ∈ R e β ∈ R due parametri, e sia
ϕ(x) =
�xαx se x > 1
βx+ 1− β se x ≤ 1.
Si discuta per quali valori di α e β , se ve ne sono, ϕ risulta continua nel punto x0 = 1.
3. Sia a ∈ R e si consideri la funzione
g(x) =
eax − 1 se x > 0
0 se x = 01− cos x
2 arctan xse x < 0.
Si determini per quali valori di a ∈ R , se ve ne sono, g e continua nell’origine.
4. Siano α e β parametri reali e sia
ψ(x) =
α log(1 + x) se x ≥ 0
β x2 sin�1x
�se x < 0
Stabilire per quali valori di α e β , se ve ne sono, ψ risulta continua nell’origine.
5. Si provi che una funzione f : R → R e continua se e solo se per ogni insieme apertoU si ha che anche f−1(U) e un insieme aperto.

144 Analisi Matematica 1
4. Proprieta globali delle funzioni continue.
In questa sezione ci occuperemo delle proprieta delle funzioni continue definite suinsiemi di natura molto particolare: gli intervalli chiusi e limitati, ossia gli intervalli deltipo [a, b] . Alcuni dei risultati ottenuti sono vere e proprie pietre miliari dell’AnalisiMatematica e vengono utilizzati innumerevoli volte, talora anche tacitamente. Lanatura dell’insieme [a, b] e duplice: esso e il prototipo di insieme compatto, concetto difondamentale importanza in matematica e di cui ci occuperemo, seppur brevemente,nella paragrafo 4.1 , ed e anche il prototipo di insieme connesso, ossia di un insieme“tutto di un pezzo”. Oltre, naturalmente alla continuita della funzione, talora e lacompattezza a giocare un ruolo cruciale (ad esempio nel Teorema 4.9) e talora e laconnessione (ad esempio nel Teorema 4.10 oppure nel Teorema 4.19). Alcuni dei teoremiche vedremo ammettono versioni piu generali che non necessariamente e indispensabileconoscere. E’ pero importante capire che in alcuni casi la chiave di volta risiede inuna sorta di “finitezza” del dominio, mentre in altri e la natura di intervallo, ossia diinsieme “ininterrotto”. L’esistenza del massimo o del minimo di un insieme finito dinumeri reali non ci stupisce affatto, ed il Teorema 4.9 ne e una (raffinata) estensione:in un certo senso la compattezza e un concetto che estende il concetto di finitezza.Invece, il fatto che per passare con un tratto continuo di penna da un punto che giacesotto l’asse x ad un punto che giace sopra si debba attraversare l’asse, dipende dallarichiesta che lo spostamento non abbia interruzioni, ovvero che non si facciano “voli”da una parte all’altra del grafico: il concetto di connessione si riferisce alla possibilita dispostarsi senza interruzioni lungo un insieme e, nel caso di R , e esattamente il concettodi intervallo.
4.1. Sottosuccessioni e compattezza. Per meglio illustrare la portata dellanozione di insieme compatto, e opportuno introdurre il concetto di estratta di unasuccessione:
Definizione 4.1. Siano (an)n≥0 e (bj)j≥0 due successioni. Diremo che (bj)j≥0 e
una sottosuccessione di (an)n≥0 , ovvero che ne e una successione estratta, se esiste una
funzione f : N → N strettamente crescente tale che
bj = af(j).
Solitamente si scrive (anj)j≥0 in luogo di (af(j))j≥0 , intendendo che nj = f(j).
Non e difficile verificare che se (an)n≥0 e convergente, allora ogni estratta e ancheconvergente. Vale peraltro anche l’implicazione opposta:
Proposizione 4.2. Una successione e convergente se e solo se ogni sua sottosuc-
cessione e convergente.
Come e facile dimostrare (cfr. l’Esercizio 2), l’esistenza di una estratta convergentenon e affatto sufficiente per provare che la successione di partenza lo e. Per unadimostrazione del celebre risultato che segue21 si veda ad esempio [T].
21Solitamente, il teorema si enuncia cosı : ogni sottoinsieme limitato e infinito di R ammettealmeno un punto di accumulazione. Si puo facilmente verificare che il nostrio enunciato e equivalente.

Limiti e continuita 145
Teorema 4.3 (Bolzano-Weierstrass). Ogni successione limitata ha un’estratta
convergente.
Si osservi che il teorema di Bolzano-Weierstrass implica, ad esempio, che la suc-cessione (sinn)n≥0 ammette un’estratta convergente, fatto la cui dimostrazione direttapresenta qualche difficolta.
Passiamo ora alla moderna definizione di insieme compatto, che richiede la nozionedi ricoprimento.
Definizione 4.4. Sia X ⊆ R un insieme non vuoto e sia I un insieme qualunque.
Una famiglia {Xi : i ∈ I} di sottoinsiemi di R si chiama ricoprimento di X se
�
i∈I
Xi ⊆ X.
Esso si chiama ricoprimento aperto se ogni Xi e un aperto22
di R.
Esempi.
(60) La famiglia {[n, n + 1) : n ∈ Z} e un ricoprimento di R . La famiglia {(0, 1/n) :n = 1, 2, 3, . . . } e un ricoprimento aperto di (0, 1) ed in particolare
�
n∈N∗
(0,1
n) = (0, 1).
Sia ε > 0; la famiglia {(t, 1 + t) : t ∈ [−ε, ε]} e un ricoprimento aperto di [0, 1] inquanto �
t∈[−ε,ε]
(t, 1 + t) = (−ε, 1 + ε) ⊃ [0, 1].
Definizione 4.5. Un sottoinsieme non vuoto K di R si dice compatto se da ogni
ricoprimento aperto {Ui : i ∈ I} di K e possibile estrarre un sottoricoprimento finito,
ossia se esiste una sottofamiglia finita {Ui1 , . . . ,UiN} tale che K ⊂ (Ui1 ∪ · · · ∪ UiN ).
Nell’esempio appena visto, il ricoprimento {(−ε, 1 − ε), (ε, 1 + ε)} e un sottorico-primento finito del ricoprimento {(t, 1 + t) : t ∈ [−ε, ε]} , naturalmente se ε < 1/2. Sideve peraltro prestare attenzione al fatto che la definizione di compattezza richiede cheil procedimento di estrazione di una sottofamiglia finita di aperti deve essere possibileper ogni ricoprimento aperto.
Teorema 4.6 (Heine-Borel). Sia K un sottoinsieme non vuoto di R. Sono fatti
equivalenti:
(i) K e compatto;
(ii) K e chiuso e limitato;
(ii) ogni successione di punti di K ha una estratta convergente ad un punto di K .
22Si veda la Definizione 3.1 del Capitolo 2

146 Analisi Matematica 1
Il teorema di Heine-Borel individua con precisione i sottoinsiemi compatti di R : essisono esattamente i sottoinsiemi chiusi e limitati. Il prototipo di insieme compatto edunque un intervallo del tipo [a, b] , ma si deve fare attenzione al fatto che tali intervallinon sono affato gli unici compatti di R . Non solo sara compatta una unione (disgiunta)di due intervalli di tal sorta, ma anche una famiglia finita di punti, oppure ad esempiol’insieme K = {1/n : n = 1, 2, 3, . . . } ∪ {0} , come il lettore e invitato a verificare peresercizio. I compatti di R possono essere in realta anche piuttosto complicati, ma anoi interesseranno primariamente gli intervalli chiusi e limitati.
4.2. Esistenza di massimi e minimi. Come vedremo nel prossimo capitolo, tra isuccessi dell’Analisi vi sono i metodi di ricerca dei massimi e dei minimi di una funzionef : I → R , qualora essa goda di qualche proprieta di regolarita. Assai meno praticodal punto di vista operativo, ma di fondamentale importanza teorica, e il teorema cheandiamo a dimostrare circa l’esisitenza di estremi. Abbiamo gia introdotto la nozionedi massimo e di minimo di un sottoinsieme di R . Riferiti ad una funzione, questiconcetti devono essere interpretati come segue:
Definizione 4.7. Sia f : I → R. Un punto ξ ∈ I e detto punto di massimo per f
(o semplicemente un massimo di f ) se f(ξ) = max f(I), cioe se f(ξ) ≥ f(x) per ogni
x ∈ I . Similmente, un punto η ∈ I e detto punto di minimo per f (o semplicemente
un minimo di f ) se f(η) = min f(I), cioe se f(η) ≤ f(x) per ogni x ∈ I . Si dice
estremo di f un punto che sia un massimo oppure un minimo.
Alcuni autori riservano il termine massimo assoluto a cio che qui abbiamo chiamatomassimo e minimo assoluto a cio che noi abbiamo chiamato minimo. Questa differenzae da imputarsi alla necessita di distinguere tra le nozioni globali che abbiamo appenaintrodotto e quelle locali che vedremo piu avanti.
Proposizione 4.8. Sia f : [a, b] → R continua. Allora f e limitata.
Dimostrazione. Si supponga per assurdo che f non sia limitata. Allora per ogniintero positivo n possiamo trovare un xn ∈ [a, b] tale che |f(xn)| ≥ n . La successione(xn)n≥1 e costituita da elementi di [a, b] e quindi, per il teorema di Bolzano-Weierstrass,ammette un’estratta (xnj)j≥1 convergente ad un elemento x0 ∈ [a, b] . Siccome f econtinua, e siccome x0 ∈ [a, b] , la Proposizione 3.2 implica
limj
f(xnj) = f(x0).
Poiche quindi (f(xnj))j≥1 e convergente, essa e limitata. Ma questo contraddice ilfatto che |f(xn)| ≥ n . Infatti, nj ≥ j (in quanto j �→ nj e crescente) e percio|f(xnj)| ≥ nj ≥ j , il che prova che (f(xnj))j≥1 non puo essere limitata. ��
Teorema 4.9 (di Weierstrass). Sia f : [a, b] → R continua. Allora f ammette
massimo e minimo, cioe esistono ξ, η ∈ [a, b] tali che f(ξ) ≤ f(x) ≤ f(η) per ogni
x ∈ [a, b].
Dimostrazione. Dalla Proposizione 4.8 sappiamo che l’immagine f([a, b]) e un sot-toinsieme limitato e certamente non vuoto di R . Sia percio M = sup f([a, b]), unnumero reale. Mostreremo innanzitutto che esiste ξ ∈ [a, b] tale che f(ξ) = M .

Limiti e continuita 147
Naturalmente M e un maggiorante per l’immagine ed inoltre, per ogni n ∈ Nesiste un elemento xn ∈ [a, b] tale che f(xn) > M − 1/n . La successione (xn)n≥1 ecostituita da elementi di [a, b] e quindi, per il teorema di Bolzano-Weierstrass, ammetteun’estratta (xnj)j≥1 convergente ad un elemento ξ ∈ [a, b] . Siccome f e continua, eξ ∈ [a, b] , la Proposizione 3.2 implica
limj
f(xnj) = f(ξ).
D’altra parte, per costruzione, e visto che certamente nj ≥ j , si ha
f(xnj) > M − 1
nj≥ M − 1
j.
Passando al limite per n → ∞ e utiizzando il teorema del confronto si ha
f(ξ) = limn
f(xnj) ≥ M
e siccome f(ξ) ≤ M (in quanto M e un maggiorante per l’immagine) possiamo con-cludere che f(ξ) = M , come desiderato.
Si ricordi ora che f(x) ≤ M per ogni x ∈ [a, b] per definizione di maggiorante,e quindi f(x) ≤ f(ξ) per ogni x ∈ [a, b] , il che prova che ξ e un massimo. Ladimostrazione dell’esistenza di un minimo e del tutto analoga e viene omessa. ��
Esempi.
(61) Il lettore avra osservato che il punto chiave nella dimostrazione sia della Propo-sizione 4.8 sia del Teorema 4.9 e l’utilizzo del teorema di Bolzano-Weierstrass. Non edifficile convincersi del fatto che gli stessi argomenti possano essere utilizzati per di-mostrare entrambi i risultati nelle ipotesi piu generali in cui f : K → R con K ⊆ Rcompatto. Basta infatti applicare il Teorema di Heine-Borel per ottenere le necessarieinformazioni sulle successioni estratte.
(62) Se l’intervallo su cui e definita f non e chiuso o non e limitato, il teorema echiaramente falso. Si prenda ad esempio la funzione f : (−π/2, π/2) → R definita daf(x) = tan x . Essa e continua sull’intervallo limitato ma non chiuso (−π/2, π/2) edevidentemente non ha ne massimi ne minimi. La funzione g : [0,+∞) → R definitada g(x) = x sin x e continua sull’intervallo chiuso ma non limitato [0,+∞) e non hane massimi ne minimi.
(63) Il Teorema 4.9 asserisce l’esistenza di almeno un massimo e di almeno un minimo,ma non ne asserisce affatto l’unicita, che puo naturalmente non esservi: la funzionef : [−2π, 2π] → R definita da f(x) = sin x ha due massimi (in −3π/4 e in π/2) e dueminimi (in −π/2 e in 3π/2).
4.3. Zeri e struttura dell’immagine. In questo paragrafo esaminiamo le pro-prieta globali delle funzioni definite su intervalli. Nelle loro versioni piu tipiche, glienunciati vengono dati su intervalli chiusi e limitati, ossia del tipo [a, b] . Come avremomodo di capire, l’ipotesi chiave e che l’insieme sia un intervallo (ossia che contengatutti i punti compresi tra due suoi punti qualsiasi) piuttosto che la compattezza, ossiala proprieta di essere chiuso e limitato.

148 Analisi Matematica 1
Teorema 4.10 (Zeri). Sia f : [a, b] → R continua. Se f(a) e f(b) hanno segno
opposto, allora f ha almeno uno zero, cioe esiste ξ ∈ [a, b] tale che f(ξ) = 0.
Dimostrazione. Possiamo supporre che f(a) < 0 < f(b) (altrimenti si prende −f ).Poniamo a0 = a , b0 = b e c0 = (a0 + b0)/2, il punto medio. Se f(c0) = 0, allorala dimostrazione e terminata. Atrimenti, f(c0) �= 0 e in almeno uno dei due inter-valli [a0, c0] oppure [c0, b0] la funzione soddisfa ipotesi analoghe a quelle soddisfattenell’intervallo di partenza: essa assume valori opposti agli estremi. Ribattezziamo untale intervallo [a1, b1] . Quindi [a1, b1] ⊂ [a0, b0] ed inoltre
f(a1) < 0 < f(b1), b1 − a1 =b0 − a0
2.
Iterando il ragionamento, o si perviene dopo un numero finito di suddivisioni ad unozero di f , nel qual caso la dimostrazione termina, oppure il procedimento non hatermine e si ottiene in tal modo una successione di intervalli [a1, b1] che soddisfa
[a0, b0] ⊃ [a1, b1] · · · ⊃ [a1, b1] ⊃ . . .
f(an) < 0 < f(bn), bn − an =b0 − a0
2n.
Proviamo ora che esiste uno ed un solo punto ξ che e contenuto in tutti gli intervalli edin cui f si annulla. Per costruzione, la successione (an)n≥0 e monotona non decrescenteed e limitata superiormente da b0 , mentre (bn)n≥0 e monotona non crescente ed elimitata inferiormente da a0 . Pertanto entrambe le successioni convergono. Dettia, b ∈ [a, b] , rispetivamente, i limiti, si ha
b− a = limn(bn − an) = lim
n
b0 − a0
2n= 0
e dunque a = b . Indichiamo con ξ tale punto di [a, b] . Siccome f e continua si avra
limn
f(an) = limn
f(bn) = f(ξ).
Per costruzione, f(an) < 0 < f(bn) e quindi, passando al limite per n → ∞ edapplicando il teorema del confronto si ha
f(ξ) = limn
f(an) ≤ 0 ≤ limn
f(bn) = f(ξ),
ossia f(ξ) = 0, come desiderato. ��
Si noti che la chiave della dimostrazione consiste nel procedimento di bisezionedell’intervallo, ovvero nella costruzione della successione di intervalli chiusi inscatolatil’uno nell’altro, agli estremi di ciascuno dei quali la funzione assume valori di segnoopposto: sempre negativi a sinistra e sempre positivi a destra, o viceversa. Il fatto cheil punto medio tra gli estremi sia ancora in I (il dominio di f ) dipende dal fatto che I eun intervallo, cosı come il fatto che esso venga suddiviso in due sottointervalli mediantela scelta di un punto in mezzo. Come si vede, quindi, la compattezza dell’insieme didefinizione di f non e indispensabile, bensı la struttura di intervallo.
La seguente utile estensione del teorema precedente mette in ulteriore evidenza leconsiderazioni appena svolte. A tal fine pero e necessario chiarire una questione dilinguaggio:

Limiti e continuita 149
Convenzione 4.11. Diremo che due elementi non nulli s1 e s2di R∪{±∞} hanno
segno opposto se si verifica una di queste situazioni:
(i) s1 < 0 < s2 ;
(ii) s1 = −∞ e s2 > 0;(iii) s1 < 0 e s2 = +∞;
(iv) s1 = −∞ e s2 = +∞;
Corollario 4.12. Sia f continua su un intervallo I . Supponamo che f ammetta
limiti (finiti o infiniti) agli estremi di I , che essi siano diversi da zero e abbiano segno
opposto. Allora f ha uno zero in I .
Dimostrazione. Siano p1 e p2 gli estremi di I , quindi p1 ∈ R ∪ {−∞} e p2 ∈R ∪ {+∞} e siano
q1 = limx→p1
f(x), q2 = limx→p2
f(x).
Evidentemente si assume qj �= 0 per j = 1, 2 e che essi abbiano segni opposti. Quindi,per permanenza del segno, esisono due intorni, U1 di p1 e U2 di p2 , sui quali la funzioneassume il segno rispettivamente di q1 e di q2 , escludendo naturalmente p1 e p2 stessi.Ad esempio cioe f (U1 \ {p1}) ⊂ (−∞, 0) mentre f (U2 \ {p2}) ⊂ (0,+∞). Scelti alloraa ∈ U1 \ {p1} e b ∈ U2 \ {p2} si ha f(a) < 0 < f(b). Poiche f e certamente continuasu [a, b] ⊂ I esistera ξ ∈ (a, b) tale che f(ξ) = 0, come desiderato. ��
Il corollario che segue e invece molto utile per risolvere, almeno in linea di principio,equazioni del tipo f(x) = g(x) quando f e g sono funzioni continue.
Corollario 4.13. Siano f, g : [a, b] → R due funzioni continue e supponiamo che
f(a) < g(a) mentre f(b) > g(b). Allora esiste un punto ξ ∈ (a, b) tale che f(ξ) = g(ξ).
Dimostrazione. Sia h(x) = g(x) − f(x). Evidentemente h e continua su [a, b] esoddisfa h(a) < 0 < h(b). Quindi ha uno zero ξ . ��
Teorema 4.14 (Valori intermedi, I). Sia f : [a, b] → R continua. Allora f
assume tutti i valori compresi tra f(a) e f(b).
Dimostrazione. Se f(a) = f(b) il risultato e banale. Supponiamo allora f(a) <
f(b). Sia y un valore intermedio, ossia f(a) < y < f(b). La funzione g(x) = f(x)− y
e continua su [a, b] e soddisfa g(a) < 0 < g(b). Esiste dunque ξ tale che h(ξ) = 0ossia f(ξ) = y , come volevasi. ��
Corollario 4.15 (Valori intermedi, II). Sia f : [a, b] → R continua. Allora
f([a, b]) e un intervallo chiuso e limitato, cioe f([a, b]) = [m,M ].
Dimostrazione. Sappiamo dal teorema di Weierstrass che esistono ξ, η ∈ [a, b] taliche f(ξ) = M = max f([a, b]) e f(η) = m = min f([a, b]). Dal Teorema 4.14 sappiamoinoltre che f assume tutti i valori compresi tra m ed M . Poiche non puo assumerevalori minori di m ne valori maggiori di M , essa assume esattamente i valori di [m,M ] .
��Omettiamo la dimostrazione del seguente risultato che caratterizza la struttura di
f(I) quando f e una funzione continua e I e un intervallo.

150 Analisi Matematica 1
Corollario 4.16. L’immagine di un intervallo mediante una funzione continua e
un intervallo.
Esempi.
(64) Supponiamo di voler risolvere l’equazione log(2 + x) = x . Evidentemente, sitratta di utilizzare il Corollario 4.13, ovvero di trovare gli zeri di x − log(2 + x) inI = (−2,+∞).
Si ponga f(x) = log(2 + x) e g(x) = x . Evidentemente
limx→−2+
f(x) = −∞, limx→−2+
f(x) = −2
e quindi, per permanenza del segno, esiste un punto x0 < 0 sufficientemente vicino a−2 (e a destra di esso) in cui f(x0) < g(x0). Inoltre
f(0) = log 2 g(0) = 0,
e quindi per x1 = 0 si ha f(x1) > g(x1). Poiche f e g sono continue in [x0, x1] ,possiamo concludere che esiste almeno una soluzione dell’equazione log(2 + x) = x
nell’intervallo (−2, 0). Similmente, siccome ad esempio f(e2 − 2) = 2 < e2 − 2 =g(e2 − 2), si puo inferire l’esistenza di un’altra soluzione nell’intervallo (x1, x2) dovex2 = e2 − 2. Al momento non abbiamo gli strumenti necessari per poter dire che difatto queste sono le uniche soluzioni. Si osservi che a tal fine sarebbe sufficiente provareche la funzione f − g e monotona crescente in (−2,−1] e decrescente in [−1,+∞).

Limiti e continuita 151
4.4. Funzioni monotone. Concludiamo il capitolo con qualche osservazione sulleproprieta di continuita delle funzioni monotone e delle loro inverse. Ci limiteremo allapresentazione e discussione dei principali risultati. Per le dimostrazioni il lettore e puoconsultare ad esempio [DM]. Innanzitutto, una osservazione:
Proposizione 4.17. Sia D ⊆ R e f : D → R monotona. Se f(D) e un intervallo,
allora f e continua.
Dalla proposizione precedente e dal Corollario 4.16 segue subito il seguente risultato:
Corollario 4.18 (Continuita delle funzioni monotone). Sia I un intervallo
e sia f : I → R monotona. Allora f e continua se e solo se f(I) e un intervallo.
Esempio.
(65) In generale, la continuita di f−1 non e affatto garantita dalla continuita di f . Siconsideri la funzione definita in I = (−∞,−1) ∪ [1,+∞) da
f(x) =
�x+ 1 se x < −1
x− 1 se x ≥ 1
Essa e chiaramente continua (si noti che tutti i punti di I sono di accumulazione perI ), e invertibile ed ha come inversa f−1 : R → I la funzione
f−1(x) =
�x− 1 se x < 0
x+ 1 se x ≥ 0.
I grafici di f e f−1 sono:
Evidentemente, f−1 non e continua, anche se f lo e. Il punto cruciale e che inquesto caso I non e un intervallo. Se invece I e un intervallo, questo fenomeno nonpuo accadere, come spiegato nel risultato che segue.

152 Analisi Matematica 1
Teorema 4.19 (Continuita della funzione inversa). Sia I un intervallo e sia
f : I → R continua. Allora:
(i) f e iniettiva su I se e solo se e strettamente monotona su I ;
(ii) se f e crescente (decrescente) su I , allora f(I) = J e un intervallo e f−1 :J → I e continua e crescente (decrescente).
Esempio.
(66) Se l’insieme I non e un intervallo, una funzione f : I → J puo benissimo essereuna bigezione continua con inversa continua senza che nessuna delle due sia monotona.Si consideri per esempio I = J = (−2,−1) ∪ (−1, 1) ∪ (1, 2) e sia
f(x) =
−x− 3 se x ∈ (−2,−1)
x se x ∈ (−1, 1)
−x+ 3 se x ∈ (1, 2).
Essa e invertibile e coincide con f−1 ; e chiaramente continua anche se non e monotona.I grafici di f e f−1 sono:

Limiti e continuita 153
Esercizi
1. Provare la Proposizione 4.2.
2. Provare che se (an)n≥0 ha una estratta convergente, essa puo non avere limite, puoconvergere o puo divergere.
3. Sia f(x) =x
2x− 2x
x. Determinare il numero di zeri di f nell’intervallo x ∈ (−∞, 0)
e localizzare ciascuno di essi in un intervallo di lunghezza 1/2.
4. Sia f(x) = e1/x arctan x − ex arctan(1/x). Provare che f ha esattamente uno zeronel semiasse negativo, cioe x0 = −1.
5. Sia f(x) = (x log x)2 − 1. Determinare il numero di zeri di f e localizzare ciascunodi essi in un intervallo di lunghezza uno. [Traccia: si utilizzi la diseguaglianza log x >
1− x−1 vera per x > 0 e x �= 1, in cui vale l’uguaglianza.]


CAPITOLO 5
Calcolo differenziale
1. Linearizzazione e derivabilita
La nozione di derivata, di capitale importanza in matematica e nelle sue appli-cazioni, e legata all’idea geometrica di retta tangente e all’idea fisica di velocita. Essafu introdotta nel XVII secolo da Leibnitz e da Newton a fondamento del calcolo in-
finitesimale, come allora fu battezzato quel corpus di idee e tecniche che diede luogoalla disciplina che oggi si chiama Analisi Matematica.
Ma che cosa significa retta tangente ad una curva? Qual’e la retta che meglioapprossima una curva in un punto? Immaginiamo di essere a bordo di un aeroplanoin fase di atterraggio e assumiamo per il momento come accettabile la seguente idea,ancorche imprecisa: il pilota realizzera un atterraggio perfetto ogniqualvolta la trai-ettoria descritta dal carrello sia tangente alla pista, che per semplicita supponiamoorizzontale (l’asse x). In questo caso, che cosa vediamo dal finestrino nei momentiimmediatamente precedenti il momento di contatto? Sperabilmente, vediamo la pistascorrerci sotto quasi parallela all’aereo, mentre esso si abbassa molto dolcemente: ladistanza orizzontale che percorre in quei secondi e, per unita di tempo, molto maggioredella quota che perde. Se x0 e il punto della pista dove avverra l’atterraggio, se x e laproiezione a terra del carrello e se f(x) e la sua altezza dal suolo (cosicche f(x0) = 0),allora il rapporto f(x)/(x − x0) diviene sempre piu piccolo a mano a mano che ciavviciniamo al momento di contatto, cioe f(x)/(x− x0) → 0 per x → x0 .
155

156 Analisi Matematica 1
Se anziche atterrare su una pista orizzontale atterrassimo su una pista inclinata, chenel nostro schema bidimensionale pensiamo rappresentata dal grafico di una funzionelineare p(x), allora l’abilita del pilota stara nel far si che (f(x) − p(x))/(x − x0) → 0per x → x0 . Ribaltando il punto di vista, la retta p(x) e la migliore approssimazionerettilinea della traiettoria f(x) nel punto x0 . Il processo di astrazione matematicaconduce, da questo o da altri simili esempi, alle nozioni di linearizzazione e di derivata ,per mezzo delle quali potremo dare un significato rigoroso al concetto di retta tangente.
Definizione 1.1 (Linearizzabilita). Sia f : (a, b) → R e sia x0 ∈ (a, b). Diremo
che f e linearizzabile in x0 se esiste un polinomio di primo grado p1(x) tale che
p1(x0) = f(x0) e per il quale risulti
(1.68) limx→x0
f(x)− p1(x)
x− x0= 0.
In tal caso, p1 si chiama la linearizzazione di f in x0 .
Esempi.
(1) Si osservi che la linearizazione in un punto, se c’e, e unica. Infatti, osserviamoinnanzitutto che ogni polinomio di primo grado p tale che p(x0) = f(x0) e della forma
p(x) = f(x0) + d(x− x0)
per qualche d ∈ R . Percio, se q e un’altra linearizzazione di f in x0 , si ha q(x) =f(x0) + e(x− x0) per qualche e ∈ R , e quindi
d− e =p(x)− q(x)
x− x0=
p(x)− f(x) + f(x)− q(x)
x− x0=
p(x)− f(x)
x− x0− q(x)− f(x)
x− x0.
Siccome d− e e costante, se ne deduce
d− e = limx→x0
�p(x)− f(x)
x− x0− q(x)− f(x)
x− x0
�= 0− 0 = 0,
il che implica p = q .
(2) Come ci dobbiamo aspettare, se f e essa stessa un polinomio di primo grado,coincide con la propria linearizzazione in ogni punto. Se f(x) = ax2 + bx + c , lalinearizzazione in x0 = 0 e p(x) = bx+ c . Infatti
(ax2 + bx+ c)− (bx+ c)
x= ax → 0
per x → 0. Similmente, la linearizzazione in x0 = 0 di un polinomio di grado n deltipo
�nj=0 ajx
j e p(x) = a0 + a1x in quanto
(�n
j=0 ajxj)− (a0 + a1x)
x=
a2x2 + · · ·+ an−1x
n−1 + anxn
x
= a2x+ · · ·+ an−1xn−2 + anx
n−1 → 0
per x → 0. In generale, la linearizzazione di�n
j=0 aj(x− x0)j e a0 + a1(x− x0), comeil lettore e invitato a verificare.

Calcolo differenziale 157
(3) La nostra intuizione geometrica ci suggerisce che una curva che presenti uno spigolonon sia linearizzabile in tal punto. Il prototipo di una siffatta curva e il grafico dellafunzione x �→ |x| . Proviamo che in effetti f(x) = |x| non e linearizzabile nell’origine. Selo fosse, la sua linearizzazione dovrebbe essere del tipo p(x) = ax , in quanto p(0) = 0.Ma allora
f(x)− p(x)
x=
|x|− ax
x=
|x|x
− a =
�1− a se x > 0
−1− a se x < 0,
ed evidentemente il limite per x → 0 non esiste.
(4) La linearizzazione di f(x) = sin x nell’origine e x . Infatti
sin x− x
x=
sin x
x− 1 → 0
per x → 0. Similmente, la linearizzazione di f(x) = ex − 1 nell’origine e x , comequella di f(x) = log(1 + x). Quella di f(x) = cos x e invece p(x) = 1, in quanto:
cos x− 1
x→ 0.
per x → 0. Ecco i grafici delle funzioni discusse e le relative linearizzazioni nell’origine.
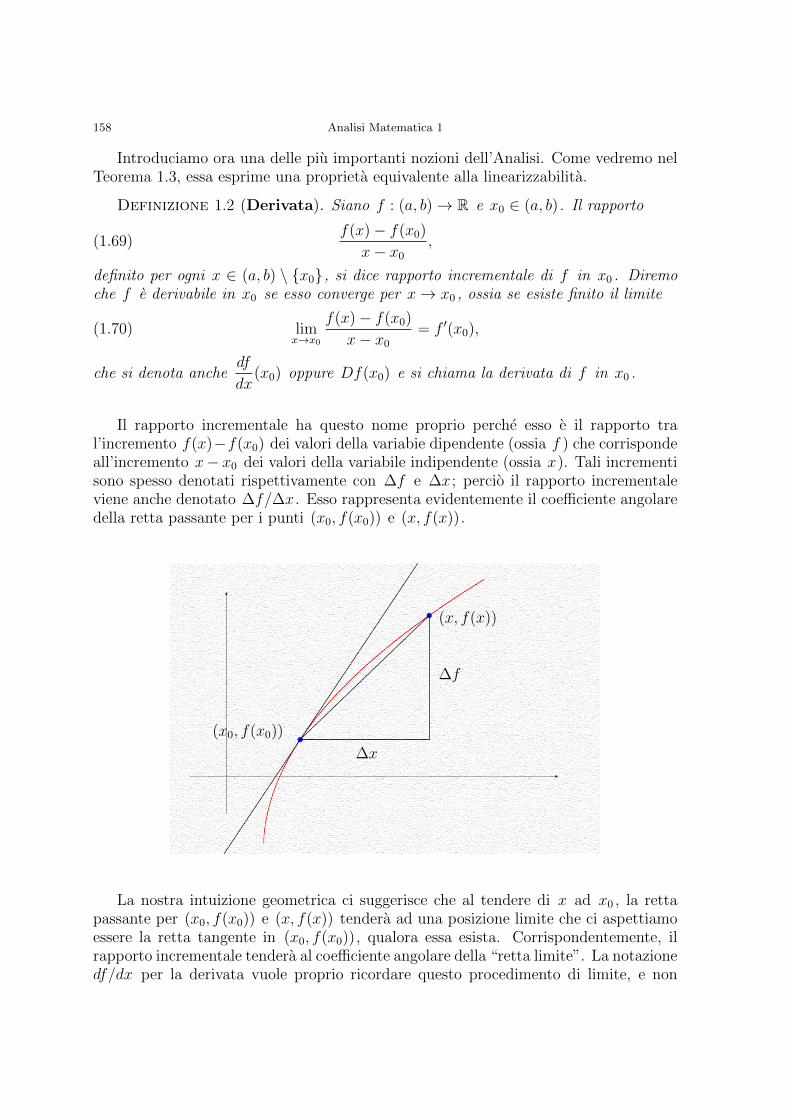
158 Analisi Matematica 1
Introduciamo ora una delle piu importanti nozioni dell’Analisi. Come vedremo nelTeorema 1.3, essa esprime una proprieta equivalente alla linearizzabilita.
Definizione 1.2 (Derivata). Siano f : (a, b) → R e x0 ∈ (a, b). Il rapporto
(1.69)f(x)− f(x0)
x− x0,
definito per ogni x ∈ (a, b) \ {x0}, si dice rapporto incrementale di f in x0 . Diremo
che f e derivabile in x0 se esso converge per x → x0 , ossia se esiste finito il limite
(1.70) limx→x0
f(x)− f(x0)
x− x0= f
�(x0),
che si denota anchedf
dx(x0) oppure Df(x0) e si chiama la derivata di f in x0 .
Il rapporto incrementale ha questo nome proprio perche esso e il rapporto tral’incremento f(x)−f(x0) dei valori della variabie dipendente (ossia f ) che corrispondeall’incremento x− x0 dei valori della variabile indipendente (ossia x). Tali incrementisono spesso denotati rispettivamente con ∆f e ∆x ; percio il rapporto incrementaleviene anche denotato ∆f/∆x . Esso rappresenta evidentemente il coefficiente angolaredella retta passante per i punti (x0, f(x0)) e (x, f(x)).
(x0, f(x0))
∆x
(x, f(x))
∆f
La nostra intuizione geometrica ci suggerisce che al tendere di x ad x0 , la rettapassante per (x0, f(x0)) e (x, f(x)) tendera ad una posizione limite che ci aspettiamoessere la retta tangente in (x0, f(x0)), qualora essa esista. Corrispondentemente, ilrapporto incrementale tendera al coefficiente angolare della “retta limite”. La notazionedf/dx per la derivata vuole proprio ricordare questo procedimento di limite, e non

Calcolo differenziale 159
deve essere intesa come un vero rapporto tra le quantita df e dx (nessuna delle qualirappresenta un numero reale!) bensı come un semplice simbolo.
Il rapporto incrementale si puo scrivere anche in un modo diverso, naturalmenteequivalente a (1.69), utilizzando in modo ancora piu esplicito l’idea di incremento. Perh sufficientemente piccolo (ossia |h| < b− a) esso puo scriversi
f(x0 + h)− f(x0)
h.
Per passare dall’una all’altra espressione bastera porre h = x− x0 , e la definizione diderivata diventera
(1.71) f�(x0) = lim
h→0
f(x0 + h)− f(x0)
h.
Le considerazioni geometriche che abbiamo svolto suggeriscono fortemente che, se f
e derivabile in x0 , la retta di coefficiente angolare f �(x0) dovrebbe essere esattamentela linearizzazione di f in tal punto e, viceversa, se f e linearizzabile in x0 allora la sualinearizzazione dovrebbe avere come coefficiente angolare la derivata di f in x0 . Cio eesattamente cio che avviene, come provato nel risultato che segue.
Teorema 1.3. Siano f : (a, b) → R e x0 ∈ (a, b). Sono fatti equivalenti:
(i) f e linearizzabile in x0 ;
(ii) f e derivabile in x0 ;
(iii) esistono un numero reale d ed una funzione R1 : (a, b) → R che soddisfano:
(1.72) f(x) = f(x0) + d(x− x0) +R1(x)
per ogni x ∈ (a, b) e
(1.73) limx→x0
R1(x)
x− x0= 0.
Dimostrazione. (i)“⇒” (ii). Sia p1(x) la linearizzazione di f in x0 . Come giaosservato, ogni polinomio di primo grado p1 tale che p1(x0) = f(x0) e della forma
p1(x) = f(x0) + d(x− x0)
per qualche d ∈ R . D’altra parte, per ipotesi
0 = limx→x0
f(x)− p1(x)
x− x0= lim
x→x0
f(x)− f(x0)− d(x− x0)
x− x0= lim
x→x0
f(x)− f(x0)
x− x0− d.
Quindi f e derivabile in x0 con derivata uguale a d .(ii)“⇒” (iii). Sia ora d il valore della derivata di f in x0 e si ponga
R1(x) = f(x)− f(x0)− d(x− x0),
una funzione ben definta per ogni x ∈ (a, b). Evidentemente, la formula (1.72) everificata per ogni x ∈ (a, b) ed inoltre
limx→x0
R1(x)
x− x0= lim
x→x0
f(x)− f(x0)− d(x− x0)
x− x0= lim
x→x0
f(x)− f(x0)
x− x0− d = 0,
come desiderato.

160 Analisi Matematica 1
(iii)“⇒” (i). Si ponga p1(x) = f(x0) + d(x − x0). Chiaramente, p1(x0) = f(x0).Le formule (1.72) e (1.73) forniscono inoltre
limx→x0
f(x)− p1(x)
x− x0= lim
x→x0
f(x)− f(x0)− d(x− x0)
x− x0= lim
x→x0
R1(x)
x− x0= 0,
cosicche f e linearizzabile in x0 . ��
Qualche commento sul punto (iii) del teorema precedente e d’obbligo. La deri-vabilita e la linearizzabilita di f risultano dunque equivalenti alla scrittura
(1.74) f(x) = p1(x) +R1(x) = f(x0) + f�(x0)(x− x0) +R1(x),
che chiameremo sviluppo di Taylor al prim’ordine1, dove evidentemente
p1(x) = f(x0) + f�(x0)(x− x0)
non e altro che la linearizzazione di f , mentre R1 e un resto di cui si conosce ilcomportamento per x → x0 . In effetti, alla luce del Teorema 1.3, il coefficiente angolaredi p1 e la derivata di f in x0 e il resto, ossia l’errore che si commette approssimandof mediante p1 , e tanto migliore quanto piu x e vicino ad x0 : esso tende a zero perx → x0 e vi tende piu rapidamente di quanto x tende ad x0 , come quantificato dallaformula (1.73). Questa osservazione e resa ancora piu precisa dal Teorema 1.5 chesegue, e in particolare dalla sua dimostrazione.
Possiamo finalmente formalizzare la nozione di retta tangente cui abbiamo gia di-verse volte alluso facendo affidamento alla nostra intuizione geometrica.
Definizione 1.4. Sia f : (a, b) → R e sia x0 ∈ (a, b). Se f e derivabile in x0 , la
retta tangente al grafico di f nel punto (x0, f(x0)) e la retta di equazione
(1.75) y = f(x0) + f�(x0)(x− x0).
Se f non e derivabile in x0 , diremo che la retta tangente al grafico di f nel punto
(x0, f(x0)) non esiste.
Esempi.
(5) Le funzioni costanti hanno derivata nulla in ogni punto in quanto il rapportoincrementale e costantemente uguale a zero.
(6) Abbiamo visto nell’Esempio 2 che la linearizzazione nell’origine di un polinomiodi grado n , diciamo Q(x) =
�nj=0 ajx
j , e semplicemente il termine lineare p(x) =a0 + a1x . Quindi Q�(0) = a1 . Cio naturalmente segue anche dalla definizione diderivata. Infatti
Q(x)−Q(0)
x=
Q(x)− a0
x=
�nj=1 ajx
j
x=
n�
j=1
ajxj−1 = a1 + a2x+ · · ·+ anx
n−1
ed evidentemente questo converge a a1 per x → 0.
1La formula (1.74) e la prima di una famiglia di formule del tipo f(x) = pn(x) + Rn(x) , notecome sviluppi di Taylor di ordine n .

Calcolo differenziale 161
(7) Come discusso nell’Esempio 3, la funzione x �→ |x| non e linearizzabile in x0 = 0e quindi non esiste la retta tangente al grafico nell’origine.
(8) La maggior parte dei limiti notevoli che abbiamo incontrato possono essere in-terpretati come la dimostrazione della derivabilita (spesso nell’origine) dell’opportunafunzione elementare. Riprendendo i casi visti nell’Esempio 4, abbiamo la tabella:
f(x) f�(0) retta tangente
sin x 1 x
cos x 0 1ex 1 x+ 1
log(1 + x) 1 x
Come accennato all’inizio del capitolo, la derivata e legata al concetto di velocita.Supponiamo infatti di descrivere il moto di un punto su una retta mediante una funzionef : I → R definita in un intervallo di tempo I , e per semplicita supponiamo I = (a, b).Dunque f(t) descrive la posizione del punto all’istante t . Se pertanto t0 e un istantefissato e h e un piccolo incremento temporale, in tale lasso di tempo il punto si espostato di f(t0 + h)− f(t0). Evidentemente, il rapporto incrementale
f(t0 + h)− f(t0)
h
rappresenta la velocita media del punto in quell’intervallo temporale: se il moto fosseuniforme, essa sarebbe esattamente la velocita costante con la quale il punto si espostato da f(t0) a f(t0 + h). Passando percio al limite per h → 0 si ottiene lavelocita istantanea del punto nell’istante t0 . Questa idea e di fondamentale impor-tanza in Meccanica.
Il risultato che segue conferma l’idea intuitivamente chiara che la derivabilita in unpunto sia una proprieta piu forte della continuita.
Proposizione 1.5. Se f : (a, b) → R e derivabile in x0 ∈ (a, b), allora essa e
continua in x0 .
Dimostrazione. In virtu del punto (iii) del Teorema 1.3, per ogni x ∈ (a, b) abbiamo
f(x) = f(x0) + f�(x0)(x− x0) +R1(x)
con R1(x)/(x − x0) → 0. Siccome dunque R1(x)/(x − x0) e convergente, essa elocalmente limitata (Proposizione 2.9) e poiche x − x0 e infinitesima, il prodotto einfinitesimo (Proposizione 2.21), ossia R1(x) → 0 per x → x0 . Ma allora
limx→x0
f(x) = limx→x0
[f(x0) + f�(x0)(x− x0) +R1(x)] = f(x0),
da cui la continuita in x0 . ��
Si osservi che naturalmente l’implicazione opposta a quella della proposizione prece-dente e falsa: la funzione x �→ |x| e continua ma non derivabile nell’origine.

162 Analisi Matematica 1
Passiamo ora allo studio delle cosiddette regole di derivazione, ossia al vero e propriocalcolo delle derivate.
Proposizione 1.6 (Derivata di somme e prodotti). Siano f, g : (a, b) → Rderivabili in x0 ∈ (a, b). Allora sono derivabili in x0 anche le funzioni f + g , fg e αf
per ogni α ∈ R e si ha:
(i) (f + g)�(x0) = f �(x0) + g�(x0);(ii) (fg)�(x0) = f �(x0)g(x0) + f(x0)g�(x0);(iii) (αf)�(x0) = αf �(x0).
Dimostrazione. Per la somma si ha
(f + g)(x)− (f + g)(x0)
x− x0=
f(x)− f(x0)
x− x0+
g(x)− g(x0)
x− x0→ f
�(x0) + g�(x0)
per x → x0 . Per il prodotto invece
(fg)(x)− (fg)(x0)
x− x0=
f(x)g(x)− f(x)g(x0) + f(x)g(x0)− f(x0)g(x0)
x− x0
= f(x)
�g(x)− g(x0)
x− x0
�+ g(x0)
�f(x)− f(x0)
x− x0
�.
Ora, poiche f e g sono derivabili in x0 , esse sono continue in x0 . Quindi il rapportoincrementale tende a f(x0)g�(x0)+g(x0)f �(x0) per x → x0 . La (iii) segue da (ii) perchele costanti hanno derivata nulla: basta prendere g(x) = α per ogni x ∈ (a, b). ��
La formula in (ii) e nota come regola di Leibnitz. Dai punti (i) e (iii) segue lalinearita della derivazione, nel senso che per ogni α, β ∈ R si ha
(αf + βg)�(x0) = αf�(x0) + βg
�(x0).
Proposizione 1.7 (Derivata della funzione composta). Siano f : (a, b) → Re g : (c, d) → R derivabili rispettivamente in x0 ∈ (a, b) e in f(x0) ∈ (c, d) e si
supponga che f((a, b)) ⊆ (c, d). Allora la funzione g ◦ f e derivabile in x0 e si ha:
(g ◦ f)�(x0) = g�(f(x0))f
�(x0).
Dimostrazione. Poniamo per semplicita y0 = f(x0) e consideriamo gli sviluppi diTaylor al prim’ordine
f(x) = f(x0) + f�(x0)(x− x0) +Rf (x)
g(y) = g(y0) + g�(y0)(y − y0) +Rg(x),
ove si sono denotati con Rf e Rg i resti. Quindi, per ipotesi Rf (x)/(x− x0) → 0 perx → x0 mentre Rg(y)/(y − y0) → 0 per y → y0 . Pertanto, in y = f(x) si ha
g(f(x)) = g(y0) + g�(y0)(f(x)− y0) +Rg(f(x))
= g(y0) + g�(y0)
�f(x0) + f
�(x0)(x− x0) +Rf (x)�− g
�(y0)f(x0) +Rg(f(x))
=�g(f(x0)) + g
�(f(x0))f�(x0)(x− x0)
�+�g�(f(x0))Rf (x) +Rg(f(x))
�.

Calcolo differenziale 163
L’espressione precedente per g ◦ f e costituita dalla somma di due addendi: l’addendolineare g(f(x0)) + g�(f(x0))f �(x0)(x− x0) piu il secondo addendo
Q(x) = g�(f(x0))Rf (x) +Rg(f(x)).
Se proviamo che
limx→x0
Q(x)
x− x0= 0,
allora il Teorema 1.3 ci dice che l’espressione ottenuta e lo sviluppo di Taylor alprim’ordine di g ◦ f , in quanto Q si comporta esattamente come il resto di g ◦ f .Ne seguirebbe allora che g ◦ f e derivabile in x0 e dunque in particolare che il coef-ficiente del termine lineare, ossia g�(f(x0))f �(x0) e proprio la derivata in x0 , comedesideriamo dimostrare. D’altre parte,
Q(x)
x− x0=
g�(f(x0))Rf (x) +Rg(f(x))
x− x0
= g�(f(x0))
Rf (x)
x− x0+
Rg(f(x))
x− x0
= g�(f(x0))
Rf (x)
x− x0+
Rg(f(x))
f(x)− f(x0)
f(x)− f(x0)
x− x0
= g�(f(x0))
Rf (x)
x− x0+
�Rg(y)
y − y0
��f(x)− f(x0)
x− x0
�.
Ora, siccome f e continua in x0 , posto y = f(x) si ha y → y0 per x → x0 . In altritermini, possiamo applicare il Teorema 2.23 di cambio di variabile nei limiti ed ottenere
Q(x)
x− x0→ g
�(f(x0)) · 0 + 0 · f �(x0) = 0,
come volevamo. ��
La regola di derivazione della funzione composta viene detta anche regola della
catena, traduzione dell’inglese chain rule.Completiamo il quadro relativo alle regole di derivazione con i tre risultati che
seguono. Procederemo poi a ottenere le derivate delle funzioni elementari e a disporrepercio degli strumenti adeguati per il calcolo della maggior parte delle derivate cheragionevomente capita di dover calcolare. Omettiamo la non difficile dimostrazionedella proposizione che segue. Il lettore curioso la potra ricavare da solo per eserciziooppure leggerla ad esempio in [DM].
Proposizione 1.8 (Derivata dell’inversa). Sia f : (a, b) → R continua e inver-
tibile in (a, b) e derivabile in x0 ∈ (a, b) e si supponga f �(x0) �= 0. Allora la funzione
inversa f−1 e derivabile in y0 = f(x0) e si ha
(f−1)�(y0) =1
f �(x0)=
1
f �(f−1(y0)).

164 Analisi Matematica 1
Se sapessimo a priori che la funzione inversa e derivabile in y0 , potremmo ottenerel’espressione della derivatta dall’identita f−1(f(x)) = x , certamente valida per ognix ∈ (a, b). Infatti, dal Teorema 1.7 e dal fatto che la derivata di x �→ x e 1 si ottiene
1 = (f−1 ◦ f)�(x0) = (f−1)�(f(x0))f�(x0) = (f−1)�(y0)f
�(x0),
da cui la formula.Il fatto che il coefficiente angolare della retta tangente al grafico di f−1 sia il
reciproco di quello della retta tangente al grafico di f nel punto corrispondente, none sorprendente: i ruoli di x e y sono per l’appunto invertiti e quindi il rapportoincrementale e il reciproco.
Modificando le notazioni della Proposizione 1.8, abbiamo percio che nel punto(x0, f
−1(x0)) = (f(t0), t0), la retta tangente al grafico della funzione inversa ha equazione:
(1.76) y = f−1(x0) + (f−1)�(x0)(x− x0) = t0 +
x− x0
f �(t0).
Proposizione 1.9 (Derivata del reciproco). Sia f : (a, b) → R derivabile in
x0 ∈ (a, b) e si supponga f(x0) �= 0. Allora la funzione reciproca 1/f e definita in un
intorno di x0 , e derivabile in x0 e si ha
�1
f
��
(x0) = − f �(x0)
(f(x0))2.
Dimostrazione. Il rapporto incrementale di 1/f(x) in x0 e
1
x− x0
�1
f(x)− 1
f(x0)
�=
1
x− x0
�f(x0)− f(x)
f(x)f(x0)
�= − 1
f(x)f(x0)
f(x)− f(x0)
x− x0.
Siccome f e continua, esso converge a −f �(x0)/(f(x0))2 per x → x0 . ��
Corollario 1.10 (Derivata del quoziente). Siano f, g : (a, b) → R derivabili
in x0 ∈ (a, b) e si supponga g(x0) �= 0. Allora la funzione quoziente f/g e definita in

Calcolo differenziale 165
un intorno di x0 , e derivabile in x0 e si ha
�f
g
��
(x0) =f �(x0)g(x0)− f(x0)g�(x0)
(g(x0))2.
Dimostrazione. Applichiamo la regola di Leibnitz al prodotto f(1/g) e la Propo-sizione 1.9, ottenendo
�f1
g
��
(x0) = f�(x0)
1
g(x0)+ f(x0)
�1
g
��
(x0)
=f �(x0)
g(x0)− f(x0)
g�(x0)
(g(x0))2
=f �(x0)g(x0)− f(x0)g�(x0)
(g(x0))2.
��
Concludiamo questo paragrafo con qualche osservazione sui limiti destri e sinistri.
Definizione 1.11. Sia f : [a, b] → R.
(i) se x0 ∈ [a, b) e se esiste finito il limite
limx→x+
0
f(x)− f(x0)
x− x0
esso si denota f �+(x0) e si chiama la derivata destra di f in x0 ;
(ii) se x0 ∈ (a, b] e se esiste finito il limite
limx→x−
0
f(x)− f(x0)
x− x0
esso si denota f �−(x0) e si chiama la derivata sinistra di f in x0 .
Evidentemente, se x0 ∈ (a, b) allora f e derivabile in x0 se e solo se esistono sia la
derivata destra che la derivata sinistra in x0 e si ha f �+(x0) = f �
−(x0).
Esempi.
(9) Come visto nell’Esempio 3, la funzione |x| non e derivabile nell’origine. Pero
limx→0+
f(x)− f(0)
x= lim
x→0+
|x|− 0
x= lim
x→0+
x
x= 1
limx→0−
f(x)− f(0)
x= lim
x→0−
|x|− 0
x= lim
x→0−
−x
x= −1
cosicche f �+(0) = 1 e f �
−(0) = −1.

166 Analisi Matematica 1
2. Derivate di funzioni elementari
In questo paragrafo calcoleremo le derivate delle principali funzioni elementari cheabbiamo incontrato finora. Utilizzeremo spesso le notazioni
f�(x),
df
dx(x)
per indicare la derivata di f come funzione. In effetti, se f : (a, b) → R e derivabilein ogni punto di (a, b), allora e definita in modo naturale la funzione x �→ f �(x), cheevidentemente si chiama la derivata di f . La seconda notazione e particolarmentecomoda quando f e definita mediante una formula. Ad esempio,
d
dx
�log(1 + x)
indica la derivata di x �→�log(1 + x), dove e se esiste, e ci consente di lavorare
direttamente con la formula, evitando di dare un “nome” alla funzione. Similmente, sef e definita mediante una formula e vogliamo calcolare f �(g(x)), dove g(x) e un’altrafunzione, avremo occasione di scrivere
d
dx(x �→ f(x)) (g(x)).
Ad esempio, scriveremo
(2.77)d
dx
�x �→
�log(1 + x)
�(ex).
2.1. Potenze con esponente intero, polinomi. Abbiamo gia visto negli esempi2 e 6 che la derivata di x �→ x e 1, come peraltro risulta chiaro dal fatto che il rapportoincrementale in ognoi punto vale esattamente 1. Proviamo ora per induzione su n che
(2.78)d
dxxn = nx
n−1.
Supponendo (2.78) vera fino al grado n , si ha poi, per ipotesi induttiva e per la regoladi Leibnitz
d
dxxn+1 =
d
dx
�xnx�=
�d
dxxn
�x+ x
n
�d
dxx
�= nx
n−1 · x+ xn · 1 = (n+ 1)xn
,
che e esattamente (2.78) per n+1. Dalla linearita della derivata, si ottiene subito che
(2.79)d
dx
n�
k=0
akxk =
n�
k=1
kakxk−1 =
n−1�
k=0
(k + 1)akxk.
Quindi la derivata di un polinomio di grado n e un polinomio di grado n− 1.

Calcolo differenziale 167
2.2. Esponenziali e logaritmi. La derivata della mappa esponenziale x �→ ex siottiene molto facilmente dalla derivata nell’origine (che abbiamo gia calcolato) e dalleproprieta della funzione:
ex+h − ex
h=
exeh − ex
h= e
x eh − 1
h→ e
x
per h → 0, per via del solito limite notevole. Vale dunque la fondamentale formulaw
(2.80)d
dxex = e
x
che, in particolare, esprime il fatto che la funzione esponenziale e derivabile su tuttol’asse reale. Dimostreremo che essa e l’unica funzione derivabile su R che soddisfa leproprieta �
f �(x) = f(x) per ogni x ∈ Rf(0) = 1.
Similmente, per ogni base reale a > 0 si ottiene
ax+h − ax
h=
axah − ax
h= a
x ah − 1
h→ a
x log a,
da cui
(2.81)d
dxax = a
x log a.
Applicando le varie regole di derivazione viste e (2.80) si ha inoltre
d
dxcosh x =
d
dx
�ex + e−x
2
�=
1
2
�d
dxex +
d
dxe−x
�=
1
2
�ex + e
−x(−1)�.
Quindi
(2.82)d
dxcosh x = sinh x
e similmente
(2.83)d
dxsinh x = coshx.
Dalla regola di derivazione della funzione inversa si ottiene
d
dxlog x =
1ddx(x �→ ex)(log x)
=1
x,
ossia
(2.84)d
dxlog x =
1
x.
Similmente, si ottiene
(2.85)d
dxloga x =
1
x log a.

168 Analisi Matematica 1
2.3. Potenze generali. Se α ∈ R e x > 0, utilizzando la regola di derivazionedella funzione composta e le derivate calcolate sopra, abbiamo
d
dxxα =
d
dxeα log x =
d
dx(x �→ e
x) (α log x) · d
dxα log x = e
α log x · αx,
ossia
(2.86)d
dxxα = αx
α−1,
che evidentemente generalizza (2.78) al caso di potenza reale. Osserviamo che, inparticolare, per α = 1/2, si ha
(2.87)d
dx
√x =
1
2√x.
Se la potenza e a sua volta una funzione di x , anziche una costante, la regola (2.86) siestende in modo complicato, anche se il metodo di calcolo e lo stesso. Piu in generale,se f e una funzione derivabile positiva e g e una funzione derivabile qualunque, si ha
d
dxf(x)g(x) =
d
dxeg(x) log f(x)
=d
dx(x �→ e
x) (g(x) log f(x)) · d
dxg(x) log f(x)
= f(x)g(x)�g�(x) log f(x) + g(x)
d
dxlog f(x)
�
= f(x)g(x)�g�(x) log f(x) + g(x)
1
f(x)f�(x)
�,
ossia
(2.88)d
dxf(x)g(x) = f(x)g(x)
�g�(x) log f(x) +
g(x)
f(x)f�(x)
�.
Quindi, se g(x) = α , ossia se g e costante, si ha
(2.89)d
dxf(x)α = αf(x)α−1
f�(x),
coerentemente con (2.86) se f(x) = x .
2.4. Funzioni trigonometriche. Dalle formule di prostaferesi
sin(x+ h)− sin x
h=
2
hcos
�2x+ h
2
�sin
�h
2
�= cos
�x+
h
2
�sin (h/2)
h/2.
Percio, utilizzando la continuita del coseno e il solito limite notevole sinx/x → 1 perx → 0 si ottiene
(2.90)d
dxsin x = cosx.
Similmente,
cos(x+ h)− cos x
h= −2
hsin
�2x+ h
2
�sin
�h
2
�= − sin
�x+
h
2
�sin (h/2)
h/2,

Calcolo differenziale 169
da cui
(2.91)d
dxcos x = − sin x.
Applicando la formula di derivazione del quoziente si ha pertanto
d
dxtan x =
d
dx
�sin x
cos x
�=
�ddx sin x
�cos x− sin x
�ddx cos x
�
(cos x)2=
(cos x)2 + (sin x)2
(cos x)2,
da cui le due formule
(2.92)d
dxtan x = 1 + (tan x)2 =
1
(cos x)2.
Applichiamo ora le regole di derivazione della funzione inversa e calcoliamo la derivatadi arcsin x , arccosx e arctan x . Innanzitutto,
d
dxarcsin x =
1
cos (arcsin x).
Per x ∈ [−π/2, π/2] il coseno e non negativo, percio cos x =�
1− sin2x . Ne segue
d
dxarcsin x =
1�1− sin2 (arcsin x)
ossia
(2.93)d
dxarcsin x =
1√1− x2
e similmente
(2.94)d
dxarccosx = − 1√
1− x2.
Infined
dxarctan x =
1
1 + tan2(arctan x)e quindi
(2.95)d
dxarctan x =
1
1 + x2.
Esempi.
(10) Riprendiamo 2.77 ed effettuiamo il calcolo. Siccome
d
dx
�log(1 + x) =
1
2�
log(1 + x)
1
1 + x,
si avrad
dx
�x �→
�log(1 + x)
�(ex) =
1
2�
log(1 + ex)
1
1 + ex.
(11) Vogliamo calcolare la derivata di f(x) = xx . Siccome
xx = e
log xx= e
x log x
170 Analisi Matematica 1
si avrad
dxxx = e
x log x
�1 · log x+ x · 1
x
�= x
x(1 + log x).

Calcolo differenziale 171
3. I teoremi classici del calcolo differenziale
In questo paragrafo studiamo alcuni teoremi classici, che consentono di ottenere in-formazioni molto rilevanti sul comportamento di una funzione a partire dalla conoscenzadelle proprieta della sua derivata o, viceversa, a dedurre proprieta della derivata daquelle della funzione. Ci riferiamo soprattutto alla monotonia e allo studio degli es-tremi locali, un raffinamento dei concetti di massimo e minimo introdotti e discussi neicapitoli precedenti. E infatti molto importante estendere queste nozioni, conferendovianche un significato anche locale.
Supponiamo di studiare l’andamento della temperatura di una certa citta in fun-zione del tempo. Come i servizi metereologici non mancano mai di ricordarci, nell’arcodella giornata vengono registrate le temperature massime e minime. Si tratta, appunto,di valori relativi ad una sola giornata. Evidentemente, la temperatura massima reg-istrata in un giorno di gennaio sara assai inferiore alla massima registrata a luglio (emagari inferiore anche alla minima). Similmente, le minime di agosto saranno notevol-mente superiori a quelle di dicembre (e magari anche alle massime). Cio nondimeno,relativamente ad un breve lasso di tempo quale una giornata, oppure anche una sta-gione, le massime e le minime, giornaliere o stagionali, forniscono informazioni utili einteressanti.
L’importanza del concetto di massimo o minimo locale e ancora piu trasparente sesi pensa alla mappatura dei rilievi terrestri: per dare una descrizione adeguata dellageografia di una regione e senz’altro significativo individuare colline e avvallamenti. Inquesto caso, la funzione che si vuole descrivere e l’altezza sul livello del mare di unazona della superficie terrestre, ed e quindi definita su una porzione di piano2 anzichesu un sottoinsieme della retta reale. Da un punto di vista concettuale, l’obbiettivo chesi vuole raggiungere e pero del tutto analogo, cioe distinguere aspetti locali da aspettiglobali. La cima di una collina rappresenta un massimo locale, anche se magari vi sonoaltre colline o montagne che sono piu alte.
Definizione 3.1. Siano I ⊂ R e f : I → R. Diremo che x0 ∈ I e un punto di:
(i) massimo globale (o assoluto) se f(x0) ≥ f(x) per ogni x ∈ I ;
(ii) minimo globale (o assoluto) se f(x0) ≤ f(x) per ogni x ∈ I ;
(iii) massimo locale (o relativo) se esiste δ > 0 tale che f(x0) ≥ f(x) per ogni
x ∈ (x0 − δ, x0 + δ) ∩ I ;
(iv) minimo locale (o relativo) se esiste δ > 0 tale che f(x0) ≤ f(x) per ogni
x ∈ (x0 − δ, x0 + δ) ∩ I .
2Il geoide terrestre viene assimilato ad un piano se si considerano regioni abbastanza piccole.

172 Analisi Matematica 1
Se x0 soddisfa (i) o (ii) esso si dice un estremo globale (o assoluto) per f ; se esso
soddisfa (iii) o (iv) esso si dice un estremo locale (o relativo) per f . Se inoltre le
diseguaglianze valgono in senso stretto per x �= x0 , si parla di massimi o minimi (locali
o globali) forti.
Si osservi che se x0 e un estremo assoluto allora e anche un estremo relativo, mentreil viceversa e falso. Si consideri ad esempio la seguente funzione
Evidentemente, essa ha cinque massimi relativi di cui uno assoluto e due agli es-tremi, e quattro minimi relativi, di cui due assoluti.
Teorema 3.2 (di Fermat). Sia f : (a, b) → R e sia x0 ∈ (a, b). Se x0 e un
estremo relativo e se f e derivabile in x0 , allora f �(x0) = 0.
Dimostrazione. Supponiamo che x0 sia di minimo relativo; il caso in cui esso e dimassimo relativo e analogo, e la dimostrazione viene lasciata per esercizio. Allora esisteδ > 0 tale che
f(x0 + h)− f(x0)
h≥ 0 per ogni h ∈ (0, δ),
f(x0 + h)− f(x0)
h≤ 0 per ogni h ∈ (−δ, 0).
Passando al limite per h → 0, si ottiene f �+(x0) ≥ 0 e f �
−(x0) ≤ 0. Poiche per ipotesi fe derivabile in x0 si ha necessariamente f �
+(x0) = f �−(x0) = f �(x0), cosicche f �(x0) = 0.
��
Definizione 3.3. Sia f : (a, b) → R. Se x0 ∈ (a, b) e un punto in cui f e
derivabile e f �(x0) = 0, allora esso si dice un punto critico (o stazionario) di f .

Calcolo differenziale 173
Esempi.
(12) Il teorema di Fermat puo essere formulato dicendo che se x0 e un punto di estremorelativo per f ed esiste f �(x0), allora esso e un punto critico per f . Il viceversa e falso:la funzione f(x) = x3 ha nell’origine un punto critico (in quanto f �(x) = 3x2 cheevidentemente si annulla nell’origine) ma esso non e un estremo relativo. Infati, sex > 0 (quindi a destra e arbitrariamente vicino all’origine) allora f(x) > 0, mentre sex < 0 (quindi a sinistra e arbitrariamente vicino all’origine) allora f(x) < 0.
(13) Sia f : [a, b] → R e supponiamo che f sia derivabile in tutto l’intervallo aperto(a, b) e che inoltre esistano f �
+(a) e f �−(b). Se a oppure b sono estremi (anche assoluti)
non e affatto detto che f �+(a) = 0 oppure f �
−(b) = 0. Si consideri infatti la funzionef(x) = x in [0, 1]. Essa e derivabile in (0, 1) con derivata f �(x) = 1. Evidentementef �+(0) = f �
−(1) = 1 anche se 0 e il massimo assoluto e 1 e il minimo assoluto di f .
Presentiamo ora il classico “trittico” del calcolo differenziale: i teoremi di Rolle, La-grange e Cauchy. Essi sono tra essi equivalenti, ovvero, supponendo che uno qualunquesia vero, si possono dimostrare gli altri due. Nonostante l’equivalenza, il teorema piu(direttamente) utile e quello di Lagrange, noto anche come teorema dei valori intermedi,e, piu ancora, sono di grande utilita i suoi corollari.
Teorema 3.4 (Rolle). Sia f : [a, b] → R continua in [a, b] e derivabile in (a, b).Se f(a) = f(b), allora esiste ξ ∈ (a, b) tale che f �(ξ) = 0.
Dimostrazione. Se f e costante, allora f �(x) = 0 per ogni x e il risultato e ovvio.Supponiamo allora che f non sia costante. Siano xM , xm ∈ [a, b] , rispettivamente, ilmassimo e il minimo (assoluti) di f , certo esistenti per il teorema di Weierstrass. Unotra xM e xm non e un estremo dell’intervallo [a, b] , perche altrimenti il valore massimoe il valore minimo di f coinciderebbero, ed f sarebbe costante. Sia ξ l’estremo di fche sta in (a, b). Poiche in ξ la funzione e certamente derivabile, per il teorema diFermat si conclude che f �(ξ) = 0. ��
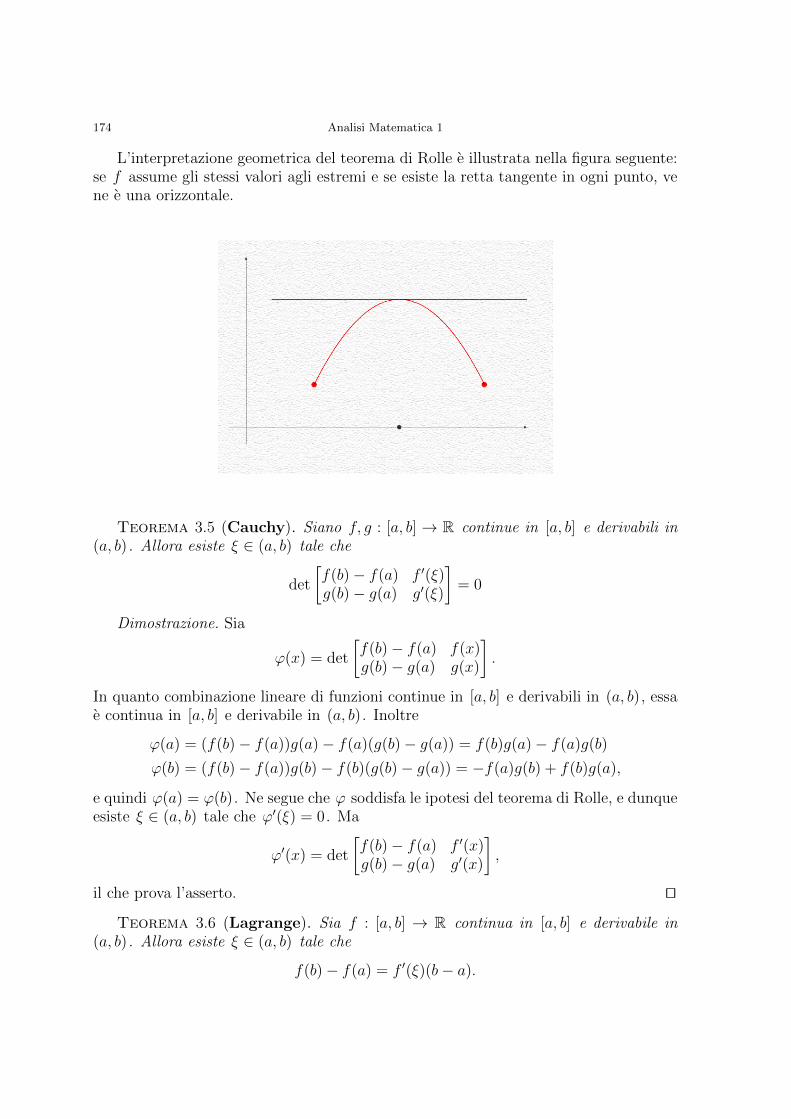
174 Analisi Matematica 1
L’interpretazione geometrica del teorema di Rolle e illustrata nella figura seguente:se f assume gli stessi valori agli estremi e se esiste la retta tangente in ogni punto, vene e una orizzontale.
Teorema 3.5 (Cauchy). Siano f, g : [a, b] → R continue in [a, b] e derivabili in
(a, b). Allora esiste ξ ∈ (a, b) tale che
det
�f(b)− f(a) f �(ξ)g(b)− g(a) g�(ξ)
�= 0
Dimostrazione. Sia
ϕ(x) = det
�f(b)− f(a) f(x)g(b)− g(a) g(x)
�.
In quanto combinazione lineare di funzioni continue in [a, b] e derivabili in (a, b), essae continua in [a, b] e derivabile in (a, b). Inoltre
ϕ(a) = (f(b)− f(a))g(a)− f(a)(g(b)− g(a)) = f(b)g(a)− f(a)g(b)
ϕ(b) = (f(b)− f(a))g(b)− f(b)(g(b)− g(a)) = −f(a)g(b) + f(b)g(a),
e quindi ϕ(a) = ϕ(b). Ne segue che ϕ soddisfa le ipotesi del teorema di Rolle, e dunqueesiste ξ ∈ (a, b) tale che ϕ�(ξ) = 0. Ma
ϕ�(x) = det
�f(b)− f(a) f �(x)g(b)− g(a) g�(x)
�,
il che prova l’asserto. ��
Teorema 3.6 (Lagrange). Sia f : [a, b] → R continua in [a, b] e derivabile in
(a, b). Allora esiste ξ ∈ (a, b) tale che
f(b)− f(a) = f�(ξ)(b− a).
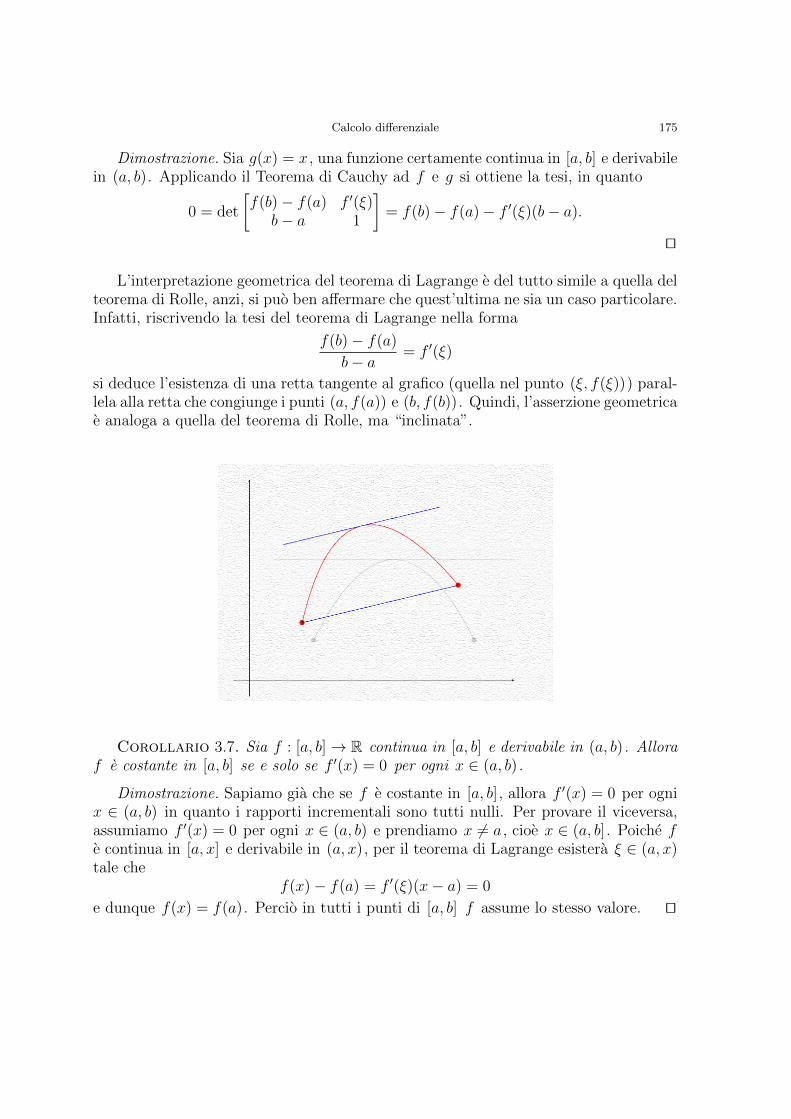
Calcolo differenziale 175
Dimostrazione. Sia g(x) = x , una funzione certamente continua in [a, b] e derivabilein (a, b). Applicando il Teorema di Cauchy ad f e g si ottiene la tesi, in quanto
0 = det
�f(b)− f(a) f �(ξ)
b− a 1
�= f(b)− f(a)− f
�(ξ)(b− a).
��
L’interpretazione geometrica del teorema di Lagrange e del tutto simile a quella delteorema di Rolle, anzi, si puo ben affermare che quest’ultima ne sia un caso particolare.Infatti, riscrivendo la tesi del teorema di Lagrange nella forma
f(b)− f(a)
b− a= f
�(ξ)
si deduce l’esistenza di una retta tangente al grafico (quella nel punto (ξ, f(ξ))) paral-lela alla retta che congiunge i punti (a, f(a)) e (b, f(b)). Quindi, l’asserzione geometricae analoga a quella del teorema di Rolle, ma “inclinata”.
Corollario 3.7. Sia f : [a, b] → R continua in [a, b] e derivabile in (a, b). Alloraf e costante in [a, b] se e solo se f �(x) = 0 per ogni x ∈ (a, b).
Dimostrazione. Sapiamo gia che se f e costante in [a, b] , allora f �(x) = 0 per ognix ∈ (a, b) in quanto i rapporti incrementali sono tutti nulli. Per provare il viceversa,assumiamo f �(x) = 0 per ogni x ∈ (a, b) e prendiamo x �= a , cioe x ∈ (a, b] . Poiche f
e continua in [a, x] e derivabile in (a, x), per il teorema di Lagrange esistera ξ ∈ (a, x)tale che
f(x)− f(a) = f�(ξ)(x− a) = 0
e dunque f(x) = f(a). Percio in tutti i punti di [a, b] f assume lo stesso valore. ��

176 Analisi Matematica 1
Esempi.
(14) Si noti bene che nel precedente corollario e essenziale che la funzione sia definitasu un intervallo. Ad esempio, la funzione
f(x) =
�1 se x ∈ [0, 1]
2 se x ∈ [2, 3]
e continua in I = [0, 1] ∪ [2, 3] e derivabile all’interno di I , ossia in J = (1, 2) ∪ (2, 3),ha derivata nulla in J ma non e affatto costante.
(15) Il Corollario 3.7 puo essere esteso da intervalli limitati a intervalli illimitati, os-servando che se ad esempio una funzione f : (c,+∞) → R ha derivata identicamentenulla, allora essa e in particolare nulla su ogni sottointervallo del tipo (a, b) con a > c
e quindi e costante in ogni sottointervallo del tipo [a, b] . Essa e dunque costante in(a,+∞). Per un esempio interessante, si consideri la funzione
f(x) = arctan x+ arctan1
x
defnita su R\{0} , ove e certamente derivabile in quanto somma di composte di funzioniderivabili. Calcolando la derivata si ha
f�(x) =
1
1 + x2+
1
1 + (1/x)2·�− 1
x2
�= 0.
Allora f e costante in (0,+∞) e tale costante e il valore di f in qualsiasi punto x > 0,ad esempio f(1) = arctan 1 + arctan 1 = π/2. Se ne deduce l’interessante formula
(3.96)π
2− arctan x = arctan
1
x
vera per x ∈ (0,+∞). Che formula si ottiene in (−∞, 0)?
Corollario 3.8. Sia f : [a, b] → R continua in [a, b] e derivabile in (a, b).
(i) Se f �(x) > 0 per ogni x ∈ (a, b), allora f e strettamente crescente in [a, b];(ii) se f �(x) < 0 per ogni x ∈ (a, b), allora f e strettamente decrescente in [a, b].

Calcolo differenziale 177
Dimostrazione. Dimostriamo (i); la dimostrazione di (ii) e del tutto analoga e vienelasciata per esercizio. Siano x1, x2 ∈ [a, b] e si supponga x1 < x2 . Evidentemente, f econtinua in [x1, x2] e derivabile in (x1, x2), e quindi per il teorema di Lagrange esisteξ ∈ (x1, x2) tale che
f(x2)− f(x1) = f�(ξ)(x2 − x1).
ll membro destro di questa uguaglianza e positivo per l’ipotesi su f � e per la scelta dix1 e x2 . Quindi f(x2) > f(x1) e si ha la tesi. ��
Esempi.
(16) Le implicazioni del precedente corollario non possono essere invertite, ossia nonsi puo dire che se f , supposta continua in [a, b] e derivabile in (a, b), e strettamentecrescente, allora f �(x) > 0 in (a, b). Si consideri f : [−1, 1] → R definita da f(x) = x3 .Esssa e strettamente crescente in [−1, 1] ma f �(0) = 0. E invece vero che le “versionideboli” di monotonia e positivita sono equivalenti, nel senso del corollario che segue.
Corollario 3.9. Sia f : [a, b] → R continua in [a, b] e derivabile in (a, b).
(i) f �(x) ≥ 0 per ogni x ∈ (a, b) se e solo se f e non decrescente in [a, b];(ii) f �(x) ≤ 0 per ogni x ∈ (a, b) se e solo se f e non crescente in [a, b].
Dimostrazione. Al solito, ci limitiamo a (i). Per dimostrare che se f �(x) ≥ 0 perogni x ∈ (a, b) allora e f e non decrescente in [a, b] si ragiona come nella dimostrazionedel Corollario 3.8. Viceversa, supponiamo f non decrescente e prendiamo x ∈ (a, b).Per h �= 0 sufficientemente piccolo in valore assoluto, x+ h ∈ (a, b) e per ipotesi
f(x+ h)− f(x) e
�≥ 0 se h > 0
≤ 0 se h < 0.
Dividendo per h ed osservando che le precedenti diseguaglianze mantengono il versoper h > 0 e lo invertono per h < 0, si ottiene
f(x+ h)− f(x)
h≥ 0
per ogni h �= 0 sufficientemente piccolo in valore assolto, indipendentemente dal segno.Passando al limite per h → 0 si ha f �(x) ≥ 0, come desiderato. ��
Si deve quindi interpretare cum granu salis il corollario precedente: se abbiamouna funzione strettamente crescente in un intervallo chiuso (quindi in particolare nondecrescente), e derivabile al suo interno, possiamo dedurre che f �(x) ≥ 0 nell’intervalloaperto, ma non possiamo affatto inferire che f �(x) > 0, come visto nell’Esempio 16.
Passiamo ora ad un corollario del teorema di Rolle e del Corollario 3.9, noto cometeorema di Darboux. Esso si enuncia alle volte dicendo che l’immagine di un intervallomediante una derivata e un intervallo. La versione che interessa a noi e la seguente:
Corollario 3.10 (Darboux). Sia f : (a, b) → R derivabile in (a, b). Se ξ ed η
sono due punti di (a, b), allora f � assume tutti i valori compresi tra f �(ξ) ed f �(η).

178 Analisi Matematica 1
Dimostrazione. Se f �(ξ) = f �(η) non c’e nulla da dimostrare. Supponiamo alloraper esempio f �(ξ) < f �(η) e prendiamo λ tale che f �(ξ) < λ < f �(η). Dobbiamoprovare che esiste un punto c ∈ (a, b) tale che f �(c) = λ . Si consideri la funzioneg(x) = f(x) − λx , certamente ben definita e derivabile in tutto (a, b). Per ipotesi,g�(ξ) = f �(ξ) − λ < 0 mentre g�(η) = f �(η) − λ > 0. Segue dal Corollario 3.9 cheg non puo essere monotona nell’intervallo chiuso I di estremi ξ ed η : se lo fosse, lasua derivata non potrebbe cambiare segno. Poiche g e continua, essa non e iniettivae dunque esistono due punti α < β in I tali che g(α) = g(β). Percio g soddisfa leipotesi del teorema di Rolle in [α, β] e ne consegue l’esistenza di un punto c ∈ (α, β)tale che 0 = g�(c) = f �(c)− λ , come si voleva. ��
Dal risultato precedente si deduce che una derivata non puo avere discontinuita diprima specie, cioe a salto.
Concludiamo il capitolo con gli importanti teoremi di de l’Hopital e le loro con-seguenze. Essi riguardano la possibilita di calcolare limiti del tipo
limx→p
f(x)
g(x),
qualora si presentino come forme indeterminate, sapendo calcolare piuttosto
limx→p
f �(x)
g�(x).
Sotto opportune ipotesi, l’esistenza del secondo limite ci permette di dedurre che ancheil primo esiste e che essi sono uguali. La natura del punto p e del processo di limitenon e importante, ossia se p ∈ R oppure p = ±∞ oppure ancora se p ∈ R ma x → p+
ovvero x → p− , nel senso che enunciati analoghi valgono in tutte le situazioni possibili.Per semplicita, daremo l’enunciato in un solo caso, invitando il lettore a produrre glienunciati nei casi rimanenti.
Teorema 3.11 (de l’Hopital). Siano f, g : (a, b) → R derivabili in (a, b), sia
g�(x) �= 0 per ogni x ∈ (a, b) e supponiamo che esista
limx→a+
f �(x)
g�(x)= �,
finito o infinito3. Se
(i) entrambe f e g sono infinitesime per x → a+ , oppure
(ii) g diverge per x → a+ ,
allora esiste anche il limite limx→p
(f(x)/g(x)) e si ha
limx→p
f(x)
g(x)= �.
3Ossia � ∈ R ∪ {±∞} .

Calcolo differenziale 179
Dimostrazione. Ci limitiamo a dimostrare il teorema nel caso (i) e nelle ipotesi incui � ∈ R . Il lettore curioso puo trovare la dimostrazione dei casi restanti in [R].
Sia ε > 0. Siccome f �(ξ)/g�(ξ) → � , esiste δ > 0 tale che se a < ξ < a+ δ , allora
�− ε
2<
f �(ξ)
g�(ξ)< �+
ε
2.
Presi ora x, y con a < x < y < a+ δ , per il teorema di Cauchy esistera ξ ∈ (x, y) taleche
�− ε
2<
f(x)− f(y)
g(x)− g(y)=
f �(ξ)
g�(ξ)< �+
ε
2.
Passando al limite per x → a+ , siccome f e g sono entrambe infinitesime, si ha
�− ε
2≤ f(y)
g(y)≤ �+
ε
2
per ogni y ∈ (a, a+ δ). Per definizione di limite, si ha la tesi, in quanto per ogni ε > 0abbiamo trovato δ > 0 tale che per ogni y ∈ (a, a+ δ) risulta
����f(y)
g(y)− �
���� < ε,
visto che �− ε < �− ε/2 e anche �+ ε/2 < �+ ε . ��
Le ipotesi (i) e (ii) si riassumono in gergo dicendo che il teorema di de l’Hopitalvale nei casi
0
0oppure
“qualunque cosa”
∞ .
Le virgolette sono naturalmente d’obbligo, e anche quando queste espressioni sianocorrettamente interpretate, non si deve dimenticare l’ipotesi fondamentale g� �= 0 vicinoal punto in cui si calcola il limite. Il lettore attento avra notato che questa ipotesi difatto implica la sensatezza del limite per x → a+ del rapporto f(x)/g(x). Infatti,siccome la derivata di g non si annulla, essa sara o positiva o negativa e quindi g sarastrettamente monotona in (a, b). Ma allora g puo annullarsi al piu una volta in taleintervallo e quindi per x abbastanza vicino ad a certamente si avra g(x) �= 0. Infine,la monotonia di g e stata implicitamente usata nella dimostrazione: quando si applicail teorema di Cauchy si divide per g(x)− g(y) che non e nullo per x e y vicini ad a .
Esempi.
(17) Supponiamo di voler calcolare
limx→0
ex − 1 + log(1− x)
tan x− x,
che e una forma indeterminata del tipo “zero su zero”. La derivata del denominatore e
d
dx(tan x− x) = 1 + (tanx)2 − 1 = (tan x)2

180 Analisi Matematica 1
e non si annulla in un intorno bucato dell’origine. Possiamo quindi provare ad applicareil teorema di de l’Hopital una prima volta, ossia possiamo calcolare il rapporto tra lederivate, ottenendo:
(3.97)ddx (e
x − 1 + log(1− x))ddx(tan x− x)
=ex − 1
1−x
(tan x)2=
(cos x)2
1− x
(ex(1− x)− 1)
(sin x)2.
Anche questo rapporto e una forma indeterminata del tipo “zero su zero”. Prima diprocedere ad applicare nuovamente il teorema, osserviamo che esso comporta il calcolodi diverse derivate. Conviene dunque se possibile (e nel nostro caso lo abbiamo fatto)scrivere la funzione come il prodotto di un termine convergente e di un altro che contienela forma indeterminata. Il termine convergente, infatti, che nel nostro caso e
(cos x)2
1− x,
puo essere escluso dai calcoli successivi. Per quanto riguarda la forma indeterminata,siccome
d
dx(sin x)2 = 2 sin x cos x
non si annulla in un intorno bucato dell’origine, possiamo provare ad analizzarla cal-colando ancora il rapporto tra le derivate. Siccome
ddx(e
x(1− x)− 1)ddx(sin x)
2=
−xex
2 sin x cos x= −1
2
x
sin x
ex
cos x→ −1
2
per x → 0, per il teorema di de l’Hopital, possiamo dedurre che
limx→0
(ex(1− x)− 1)
(sin x)2= −1
2
e quindi che il limite in (3.97) vale anch’esso −1/2. Ma allora, nuovamente per ilteorema di de l’Hopital, il limite iniziale vale −1/2.
(18) Dimostriamo ora il limite notevole
(3.98) limx→+∞
log x
xα= 0, α > 0.
In effetti,ddx log x
ddxx
α=
1/x
αxα−1=
1
αxα→ 0
e per il teorema di de l’Hopital si conclude. Quindi, per x → +∞ , il logaritmo divergepiu lentamente di qualunque potenza del suo argomento.
(19) Viceversa, per x → +∞ , l’esponenziale diverge piu rapidmente di qualunquepotenza del suo argomento:
(3.99) limx→+∞
ex
xα= +∞, α > 0.

Calcolo differenziale 181
In effetti, abbiamo a che fare con una forma indeterminata del tipo “infinito su infinito”e calcolando il rapporto delle derivate una prima volta si ha:
ddxe
x
ddxx
α=
ex
αxα−1.
Se α− 1 ≤ 0, tale rapporto diverge a +∞ , altrimenti si ha ancora una forma indeter-minata del tipo “infinito su infinito” e calcolando nuovamente il rapporto delle derivatesi ottiene
ex
α(α− 1)xα−2.
Se α− 2 ≤ 0, esso diverge a +∞ , altrimenti si itera il procedimento. Siccome esisteraun intero non negativo n per il quale α ∈ (n, n + 1], calcolando il rapporto dellederivate n+ 1 volte si perviene a
ex
α(α− 1)(α− 1) . . . (α− n)xα−(n+1)→ +∞
in quanto α− (n+ 1) ≤ 0. La tesi segue evidentemente dal teorema di de l’Hopital.
(20) Un altro limite notevole interessante riguarda il comportamento del logaritmo perx → 0+ , cioe
(3.100) limx→0+
xε log x = 0. ε > 0.
In questo caso, dobbiamo prima osservare che
xε log x =
log x
x−ε,
che e una forma indeterminata del tipo “infinito su infinito”. Questa osservazione cimostra peraltro che il limite (3.100) dice in realta che il logaritmo diverge (negativa-mente) piu lentamente di ogni potenza negativa di x . L’aspetto interessante e che sipuo prendere ε arbitrariamente piccolo, e non nel considerare valori grandi (ad esempiomaggiori di 1) di ε . Se infatti (3.100) e vera per ε = 1, lo e a maggior ragione perogni esponente maggiore di 1. Venendo alla dimostrazione,
ddx log xddxx
−ε=
1/x
−εx−ε−1= −1
εxε → 0,
da cui segue (3.100) per il teorema di de l’Hopital.
(21) Infine, un esempio nel quale il teorema non si puo applicare. Si consideri il limite
limx→+∞
x− sin x
x+ sin x.
La derivata del denominatore e infatti 1− cos x e si annulla in ogni “intorno di +∞”,ossia in ogni semiretta del tipo (a,+∞). Dunque il rapporto tra le derivate non puoneppure essere preso in esame. D’altra parte pero
x− sin x
x+ sin x=
1− sinxx
1 + sinxx
→ 1
in quanto sinx e limitata e 1/x infinitesima per x → +∞ .

182 Analisi Matematica 1
4. Sviluppi di Taylor
In questa sezione ci addentriamo in uno dei temi centrali dell’analisi, ossia la tecnicadi approssimazione locale di una funzione (sufficientemente regolare) mediante poli-nomi. Il piu semplice esempio che illustra l’idea generale e fornito dalla formula (1.74).La funzione f e espressa, vicino al punto x0 , come la somma di una parte lineare,ossia x �→ f(x0) + d(x− x0), e di un resto R1(x). Di R1(x) sappiamo che esso e tantopiu piccolo quanto piu x e vicino ad x0 ; esso tende a zero per x → x0 e vi tende piuvelocemente di quanto x tenda ad x0 , come chiarito dalla formula (1.73). La formu-lazione geometrica delle affermazioni precedenti consiste nel dire che la retta tangenteal grafico di f approssima molto bene il grafico stesso nelle vicinanze del punto di con-tatto (x0, f(x0)) tra la retta stessa ed il grafico: essa e anzi la migliore approssimazionelineare possibile. Quest’ultimo fatto e contenuto nel Teorema 1.3, secondo il quale lalinearizzazione di f in x0 , cioe la migliore approssimazione lineare possibile in quelpunto, e la retta il cui coefficiente angolare d e la derivata f �(x0).
E del tutto naturale chiedersi se si possa fare di meglio mediante curve, ossia se esistaad esempio una parabola che passa per (x0, f(x0)) ed il cui grafico si adatti a quellodi f in modo da approssimarlo in modo ancora migliore di quanto non lo approssimila retta tangente, o magari una cubica, o un polinomio di grado ancora superiore.Un esempio molto semplice si ottiene guardando la sovrapposizione dei grafici dellefunzioni f(x) = cosx , la funzione costante uguale ad uno, che ne e la linearizzazionenel punto (0, 1), ed infine il polinomio di secondo grado p2(x) = 1− 1
2x2 . E del tutto
evidente che quest’ultimo rappresenta un’approssimazione molto migliore di f nellevicinanze di (0, 1).
Come vedremo, esso e la migliore approssimazione del secondo ordine di f in (0, 1),ossia mediante polinomi di secondo grado. Il senso da attribuire a questa affermazionesara chiarito in tutti i dettagli; anticipiamo che la differenza tra f e p2 sara un restoR2 che andra a zero di ordine superiore al secondo.
L’idea di sviluppare una funzione localmente intorno ad un punto con polinomi digrado via via piu alto conduce infine al concetto di serie di potenze, mediante il quale

Calcolo differenziale 183
e possibile dare un significato preciso a formule del tipo
log(1 + x) = x− 1
2x2 +
1
3x3 + . . .
ex = 1 + x+
1
2x2 +
1
3!x3 + . . .
sin x = x− 1
3!x3 +
1
5!x5 + . . .
cos x = 1− 1
2!x2 +
1
4!x4 + . . .
1
1− x= 1 + x+ x
2 + x3 + x
4 + . . .
che, oltre ad avere profonde implicazioni teoriche, consentono di effettuare rapidamentecalcoli di precisione arbitraria.
4.1. Derivate di ordine superiore al primo. Per formalizzare correttamentela nozione di approssimazione di ordine superiore, e per molte altre buone ragioni, enecessario introdurre le nozioni di derivata seconda, derivata terza e cosı via.
Supponiamo che f : (a, b) → R sia derivabile in tutti i punti di (a, b). Allora ad ognipunto x di tale intervallo possiamo associare il numero reale f �(x) ed abbiamo pertantola funzione x �→ f �(x) cui abbiamo gia implicitamente fatto riferimento in precedenza.Essa si chiama la derivata (prima) di f in (a, b). Nulla vieta di supporre che anchef � sia a sua volta derivabile in (a, b). Si potra quindi considerare la derivata (f �)�(x)in ogni punto x ∈ (a, b), ossia la derivata seconda di f ; essa si denota solitamente conuno dei seguenti simboli:
f��(x), f
(2)(x),d2f
dx2(x), D
2f(x).
Si potra quindi definire induttivamente la derivata di ordine k di una funzione, ammessoche esista, come la derivata della derivata di ordine k − 1. Scriveremo pertanto
f��(x), f ���(x), . . .
ed in modo piu chiaro quando l’ordine diventa elevato
f(k)(x),
dkf
dxk(x), D
kf(x).
Varra evidentemente la formula
f(k)(x) =
d
dxf(k−1)(x)
e le altre simili formule che si possono ottenere utilizzando i simboli introdotti, comead esempio D(Dkf)(x) = Dk+1f(x). Chiaramente, la derivata n-esima della derivatam-esima sara la derivata (n + m)-esima; in altre parole, gli ordini di derivazione sisommano. Per ragioni di coerenza notazionale che saranno chiare nel seguito, poniamo
(4.101) f(0)(x0)
def= f(x0).

184 Analisi Matematica 1
Ancora una osservazione sulle notazioni. Alle volte la derivata di ordine k in x0 sidenota anche
dkf
dxk
���x=x0
.
Come sappiamo, condizione necessaria affinche una funzione sia derivabile e che essasia continua. Quindi, affinche esista f ��(x0) in un punto x0 ∈ (a, b) e necessario che f �
sia continua in un intorno aperto di x0 . Considerando se necessario un intervallo piupiccolo di (a, b), si avra dunque che sia f sia f � sono continue in ogni punto di taleintervallo. Iterando il ragionamento si perviene alla seguente nozione.
Definizione 4.1 (Classi di derivabilita). Siano f : (a, b) → R una funzione e k
un intero positivo. Diremo che f e di classe Ck in (a, b) se esistono tutte le derivate
f (n) di ordine n ≤ k di f in (a, b) e se esse sono ivi continue. Diremo inoltre che
f e di classe C0 in (a, b) se essa e continua in (a, b). L’insieme di tutte le funzioni
di classe Ck in (a, b) sara denotato Ck((a, b)). In generale, se U ⊆ R e un insieme
aperto, l’insieme di tutte le funzioni ci classe Ck su U sara denotato Ck(U). Valgonole inclusioni
(4.102) C0(U) ⊃ C
1(U) ⊃ C2(U) ⊃ . . .
Si pone infine
(4.103) C∞(U) =
�
k≥0
Ck(U),
l’insieme delle funzioni indefinitamente derivabili in U , ossia con derivate di ogni
ordine in U .
Esempi.
(22) Esistono funzioni che sono derivabili in un intervallo ma che in esso non sono diclasse C1 . Cio significa che la derivata esiste ma non e continua. L’esempio standarde il seguente:
f(x) =
�x2 sin
�1x
�se x ∈ (0, 1]
0 se (−1, 0].
Ovviamente f e derivabile in (−1, 0) ∪ (0, 1). Inoltre,
f(x)− f(0)
x=
x2 sin�1x
�
x= x sin
�1
x
�→ 0
per x → 0, in quanto x �→ x e infinitesima e x �→ sin(1/x) e limitata. Quindi f �(0)esiste ed e uguale a zero e banalmente f �(x) = 0 per x ∈ (−1, 0). D’altra parte, perx ∈ (0, 1) si ha
f�(x) = 2x sin
�1
x
�+ x cos
�1
x
��− 1
x2
�= 2x sin
�1
x
�− cos
�1
x
�

Calcolo differenziale 185
e questa non ha limite per x → 0 (il primo addendo e infinitesimo e il secondo nonammette limite). Quindi f e derivabile in (−1, 1) ma la sua derivata non e continuanell’origine.
(23) Si puo dimostrare facilmente che ciascuna delle inclusioni Ck+1(U) ⊂ Ck(U) eun’inclusione propria, ossia non vale mai il segno di uguaglianza tra due classi distintedi derivabilita, qualunque sia l’aperto (non vuoto) U .
(24) La classe C∞(U), di grande importanza in analisi, contiene in effetti moltissimielementi. Prendiamo per esempio U = R . La funzione esponenziale, i polinomi e lefunzioni trigonometriche sono esempi di funzioni in C∞(R).(25) Un classico ed importante esempio di funzione in C∞(R) e la funzione
(4.104) f(x) =
�e−1/x2
se x �= 0
0 se x = 0.
Ci limitiamo ad indicare le ragioni per le quali f ammette derivate di qualunqueordine nell’origine, che sono tutte uguali a zero, ossia
(4.105) f(k)(0) = 0 per ogni k ≥ 0.
Esaminiamo il rapporto incrementale destro nell’origine:
f(x)− f(0)
x=
1
xe−1/x2
.
Ponendo t = 1/x , si ha t → +∞ per x → 0+ , ed il rapporto diviene
te−t2 =
t
et2
che per t → +∞ e infinitesimo, come si verifica facilmente ad esempio con il Teorema dide l’Hopital. Quindi f �
+(0) = 0 e similmente per la derivata sinistra; percio f �(0) = 0.Si noti che per x �= 0 si ha
f�(x) = 2x−3
e−x−2

186 Analisi Matematica 1
e quindi il rapporto incrementale di f � nell’origine e 2x−4e−x−2. Considerazioni del
tutto analoghe alle precedenti mostrano che anche f ��(0) = 0. In generale, la derivatadi ordine k di f per x �= 0 e esprimibile nella forma R(x)e−x−2
, dove R(x) e unafunzione razionale, ossia un rapporto di polinomi, in cui il denominatore si annullanell’origine (in effetti si puo provare che R(x) = P (1/x), dove P e un polinomio). Lastessa forma avra pertanto il rapporto incrementale di fk(x) ed applicando il Teoremadi de l’Hopital si vede che tale rapporto e infinitesimo. Un modo informale ma efficaceper esprimere quanto appena provato e dire che f si “appiattisce di ordine infinito”nell’origine, pur essendo diversa da zero in tutti i punti x �= 0.
4.2. Polinomi di Taylor. Siamo ora in grado di esprimere in modo quantitati-vamente preciso il fatto che due funzioni sono “indistinguibili” ad una certa scala oordine. Nel seguito della sezione questa affermazione verra chiarita meglio.
Definizione 4.2 (Ordine di contatto). Siano n > 0 un intero, f, g : (a, b) → Re supponiamo che f e g abbiano (almeno) n derivate in x0 ∈ (a, b). Diremo che esse
hanno ordine di contatto n in x0 se i loro valori coincidono in x0 , cosı come tutte le
derivate fino all’ordine n, ossia se f (k)(x0) = g(k)(x0) per 0 ≤ k ≤ n.
Per maggiore chiarezza, f e g hanno ordine di contatto n in x0 se e solo se
f(x0) = g(x0)
f�(x0) = g
�(x0)
f��(x0) = g
��(x0)
. . . . . .
f(n)(x0) = g
(n)(x0).
Evidentemente, e necessario che f e g abbiano entrambe almeno n derivate in x0 mapotrebbero averne di piu.
Dalla definizione dovrebbe essere chiaro che se f e derivabile in x0 allora essa e lasua linearizzazione in x0 hanno ordine di contatto uno in tal punto.
Esempi.

Calcolo differenziale 187
(26) Consideriamo f(x) = cosx , g(x) = 1 − 12x
2 e prendiamo x0 = 0. Come giaosservato, f, g ∈ C∞(R), cioe esse hanno derivate di ogni ordine in ogni punto; leprime quattro derivate nell’origine sono:
f(0) = 1 g(0) = 1
f�(0) = − sin(0) = 0 g
�(0) = 0
f(2)(0) = − cos(0) = −1 g
(2)(0) = −1
f(3)(0) = sin(0) = 0 g
(3)(0) = 0
f(4)(0) = cos(0) = 1 g
(4)(0) = 0.
Quindi f e g hanno ordine di contatto 3 (quindi anche 2) nell’origine, ma non hannoordine di contatto 4, in quanto le derivate quarte non coincidono nell’origine.
(27) L’esempio (25) mostra che la funzione e−1/x2(prolungata per continuita a zero
nell’origine) ha ordine di contatto arbitrariamente alto con la funzione identicamentezero, ossia queste due funzioni hanno derivate di ogni ordine coincidenti nell’origine,pur essendo diverse l’una dall’altra in ogni punto x �= 0.
(28) Consideriamo la funzione esponenziale f(x) = ex in un intorno dell’origine. Sic-come f (n)(x) = f(x) = ex per ogni n ≥ 0, si avra f (n)(0) = 1 per ogni intero n ≥ 0.Consideriamo poi il monomio g(x) = 1
n!xn . E un semplicissimo esercizio mostrare che
g(k)(0) =
�0 se k �= n
1 se k = n.
Ad esempio, x2/2 si annulla nell’origine ed anche la sua derivata x ; la derivata secondavale identicamente 1 (quindi anche nell’origine) e tutte le derivate successive sonooviamente zero. Analogo fenomeno accade per ogni n , come si puo facilmente vederericordando le regole di derivazione delle potenze. Da questo fatto segue che il polinomiodi grado n
pn(x) = 1 + x+1
2!x2 +
1
3!x3 + · · ·+ 1
n!xn
soddisfa
p(k)n (0) =
�1 se k ≤ n
0 se k > n.
Ma allora pn ed ex hanno ordine di contatto esattamente n (e non piu di n) nell’origine,in quanto tutte le derivate fino alla n-esima coincidono; le derivate di ordine n + 1nell’origine sono invece diverse: una e zero e l’altra e 1.
Ispirandoci all’esempio precedente, possiamo osservare che e facile costruire unafunzione la cui derivata di ordine k abbia un preassegnato valore ak in x0 e le cui altrederivate siano tutte nulle i tal punto. Consideriamo il monomio
mk(x) =ak
k!(x− x0)
k.

188 Analisi Matematica 1
Le sue derivate in x0 sono tutte nulle, tranne la k -esima che vale ak . In formule:
m(j)k (x0) =
�0 se j �= k
ak se j = k,
come si puo dimostrare per induzione sull’intero k . Se ne deduce quindi che sommandoun certo numero di monomi di tal sorta (di gradi diversi), si puo ottenere un polinomiole cui derivate in x0 abbiano tutte valori preassegnati.
Proposizione 4.3. Il polinomio
(4.106) pn(x) =n�
k=0
ak
k!(x− x0)
k
ha in x0 derivate a0, a1, . . . , an , ossia
(4.107) p(k)n (x0) =
�0 se k > n
ak se k ≤ n.
Esso e inoltre l’unico polinomio di grado n con tale proprieta.
Dimostrazione. La verifica che il polinomio (4.106) soddisfa (4.107) e lasciata allettore, ed e una conseguenza della discussione appena svolta. Quanto all’unicita, siaQn un polinomio di grado n . Scegliendo opportunamente le costanti b0, b1, . . . , bn , essopuo essere scritto nella forma
qn(x) =n�
k=0
bk
k!(x− x0)
k.
Per quanto appena visto, risulta
q(k)n (x0) =
�0 se k > n
bk se k ≤ n.
Se quindi qn soddisfa anch’esso la formula (4.107), se cioe ha in x0 derivate a0, a1, . . . , an ,bisogna che bk = ak per k = 1, . . . , n . Ma allora qn = pn , come volevasi. ��
La Proposizione 4.3 dice in realta che e facile costruire un polinomio che abbial’ordine di contatto che desideriamo con un’assegnata funzione in un dato punto.
Teorema 4.4 (Polinomio di Taylor). Siano f(a, b) → R ed x0 ∈ (a, b). Sup-
poniamo che f ammetta (almeno) n derivate in x0 . Esiste allora uno ed un solo
polinomio di grado n che ha ordine di contatto n con f in x0 . Esso si chiama il
polinomio di Taylor di f di grado n in x0 , ed e definito dalla formula
(4.108) pn(x) =n�
k=0
f (k)(x0)
k!(x− x0)
k.
Se x0 = 0, esso si dice il polinomio di McLaurin di grado n di f .

Calcolo differenziale 189
Dimostrazione. La derivata k -esima del polinomio definito da (4.108) e f (k)(x0) invirtu della Proposizione 4.3, e questo vale per 1 ≤ k ≤ n . Quindi pn ed f hannoordine di contatto n in x0 . Per la stessa proposizione, un polinomio di tal grado e contali derivate e unico. ��
Deve essere chiaro che un polinomio di Taylor dipende dalla funzione f , dal gradon e dal punto x0 . Per essere precisi bisognerebbe quindi usare una notazione deltipo pn,x0 [f ](x), che e eccessivamente pesante. Se sara necessario mettere in evidenzail grado, mentre la funzione ed il punto sono chiari dal contesto, scriveremo pn(x);similmente potremo scrivere p[f ] oppure pn[f ] qualora qualche parametro debba essereevidenziato e gli altri siano chiari.
Esempi.
(29) Da quanto visto nell’esempio (28), il polinomio di McLaurin di grado n di ex e
pn[exp x] = 1 + x+1
2!x2 +
1
3!x3 + · · ·+ 1
n!xn.
(30) Il polinomio di McLaurin di grado n di un qualunque polinomio Pn di grado n
e il polinomio stesso, cioe Pn . Infatti, se
Pn(x) =n�
k=0
ckxk,
allora P(k)n (0) = ckk! , da cui l’asserto.
(31) Un metodo efficace per calcolare ordinatamente il polinomio di Taylor di unadata funzione e di realizzare una tabella. Illustriamo questo metodo applicandolo allafunzione f(x) = sin x , di cui vogliamo calcolare i polinomi di McLaurin.
n f(n)(x) f
(n)(0)0 sin x 01 cos x 12 − sin x 03 − cos x −14 sin x 05 . . . . . .
La tabella mostra un’evidente periodicita: il comportamento delle derivate si ripeteogni quattro ordini. In particolare, osserviamo che tutte le derivate di ordine pari sonozero mentre le derivate di ordine dispari sono alternativamente 1 e −1. Quindi, ilpolinomio di McLaurin di sinx di un grado qualsiasi conterra solo potenze dispari asegni alternati, ossia sara del tipo
(4.109) p2n+1[sin x] = x− 1
3!x3 +
1
5!x5 − 1
7!x7 +
1
9!x9 + · · ·+ (−1)n
1
(2n+ 1)!x2n+1
.

190 Analisi Matematica 1
Si guardi con attenzione l’ultimo termine: esso indica il segno giusto. Il segno posi-tivo compare infatti per le potenze 1, 5, 9 . . . , ossia per i dispari 2n + 1 con n pari.Un’ultima osservazione: il polinomio di McLaurin di grado pari di sin x e un polinomiodi grado dispari! Infatti, per definizione, l’ultimo termine che compare nel polinomio diMcLaurin di grado ad esempio 4, ha come coefficiente di x4 il numero reale f (4)(0)/4!,che e zero. Quindi tale polinomio e in effetti p4(x) = x− 1
3!x3 . Piu in generale, si puo
dire che
p2n+1[sin x] = p2n+2[sin x]
ed entrambi sono polinomi di grado 2n+ 1 nel senso usuale del termine.
(32) Utilizzando il metodo precedente per la funzione f(x) = cos x , abbiamo
n f(n)(x) f
(n)(0)0 cos x 11 − sin x 02 − cos x −13 sin x 04 cos x 15 . . . . . .
Questa volta tutte le derivate di ordine dispari sono zero mentre le derivate di ordinepari sono alternativamente 1 e −1. Quindi, il polinomio di McLaurin di cos x di ungrado qualsiasi conterra solo potenze pari a segni alternati, ossia sara del tipo
(4.110) p2n[cosx] = 1− 1
2!x2 +
1
4!x4 − 1
6!x6 +
1
8!x8 + · · ·+ (−1)n
1
(2n)!x2n.
Considerzioni analoghe a quelle svolte per il polinomio di McLaurin della funzione senomostrano che
p2n[cosx] = p2n+1[cosx]
ed entrambi sono polinomi di grado 2n nel senso usuale del termine.
(33) Prendiamo ora f(x) = log(1 + x). La tabellina e questa volta
n f(n)(x) f
(n)(0)0 log(1 + x) 01 (1 + x)−1 12 −(1 + x)−2 −13 2(1 + x)−3 24 −3!(1 + x)−4 −3!5 4!(1 + x)−5 4!6 −5!(1 + x)−6 −5!
d’interpretazione non piu difficile. A partire dalla derivata prima in poi, i segni dialternano e vale la formula f (k)(0) = ±(k − 1)! con il segno opposto alla parita. Si

Calcolo differenziale 191
avra dunque
(4.111) pn[log(1 + x)] = x− 1
2x2 +
1
3x3 − 1
4x4 +
1
5x5 + · · ·+ (−1)n+1 1
nxn.
(34) La formula (4.105) mostra che il polinomio di McLaurin (del prolungamento percontinuita) della funzione e−1/x2
di qualunque grado e la funzione identicamente nulla.
Concludiamo questa sezione con una osservazione, che formalizziamo nella propo-sizione che segue; la dimostrazione e lasciata per esercizio al lettore
Proposizione 4.5. Siano f, g : (a, b) → R derivabili n volte in x0 ∈ (a, b) e siano
α, β ∈ R. Si ha allora:
(i) pn[αf + βg] = αpn[f ] + βpn[g];(ii) p�n[f ] = pn−1[f �].
4.3. Sviluppi di Taylor. Il teorema che segue generalizza il Teorema 1.3 ed ancheTeorema 3.6 a gradi piu alti.
Teorema 4.6 (Sviluppo di Taylor). Sia f : (a, b) → R derivabile n volte in
x0 ∈ (a, b) e sia pn il suo polinomio di Taylor di grado n in x0 . Posto
(4.112) Rn(x) = f(x)− pn(x),
si ha
(4.113) limx→x0
Rn(x)
(x− x0)n= 0 (formula di Peano).
Se inoltre f e derivabile (n + 1) volte in (a, b) \ {x0}, per ogni x ∈ (a, b) esiste ξ
compreso tra x0 ed x tale che
(4.114) Rn(x) =f (n+1)(ξ)
(n+ 1)!(x− x0)
n+1 (formula di Lagrange).
Dimostrazione. Dimostriamo (4.113) per induzione su n . Per n = 1 essa e esatta-mente (1.72). Supponiamo ora che la formula (4.113) sia vera per ogni funzione con n
derivate in x0 . Se supponiamo che f ne abbia (n + 1), allora f � ne ha n e possiamoscrivere la formula (4.113) per f � , cioe
limx→x0
f �(x)− pn[f �](x)
(x− x0)n= 0.
Si osservi che, riscrivendo il numeratore tenendo conto della Proposizione 4.5, l’uguaglianzaprecedente diviene
limx→x0
ddx (f(x)− pn+1[f ]) (x)
(x− x0)n= 0.

192 Analisi Matematica 1
D’altra parte, applicando il Teorema di de l’Hopital si ha
limx→x0
(f(x)− pn+1[f ]) (x)
(x− x0)n+1= lim
x→x0
ddx (f(x)− pn[f ]) (x)
ddx(x− x0)n+1
= limx→x0
ddx (f(x)− pn+1[f ]) (x)
(n+ 1)(x− x0)n= 0,
che e quanto serve per provare induttivamente la formula di Peano.Dimostriamo la (4.114) assumendo x > x0 . Il caso x < x0 si dimostra in modo
analogo. Poniamo per semplicita R(x) = Rn(x). Per definizione, visto che pn e ilpolinomio di Taylor di f di grado n , si avra:
R(x0) = R�(x0) = · · · = R
(n)(x0) = 0, R(n+1)(x) = f
(n+1)(x),
per ogni x ∈ (a, b) \ {x0} . Poniamo ora S(x) = (x− x0)n+1 . Evidentemente
S(x0) = S�(x0) = · · · = S
(n)(x0) = 0, S(n+1)(x) = (n+ 1)!.
Le funzioni R e S soddisfano le ipotesi del Teorema di Cauchy nell’intervallo [x0, x] .Esiste percio un punto ξ1 ∈ (x0, x) tale che
R(x)
S(x)=
R�(ξ1)
S �(ξ1).
Similmente, le funzioni R� e S � soddisfano le ipotesi del Teorema di Cauchy nell’inter-vallo [x0, ξ1] . Esiste percio un punto ξ2 ∈ (x0, ξ1) tale che
R�(ξ1)
S �(ξ1)=
R��(ξ2)
S ��(ξ2).
Procedendo, si perviene ad una sequenza di (n+ 1) numeri ξ1, . . . , ξn+1 tali che
x0 < ξn+1 < ξn < · · · < ξ2 < ξ1
e tali cheR(x)
S(x)=
R�(ξ1)
S �(ξ1)=
R��(ξ2)
S ��(ξ2)= · · · = R(n+1)(ξn+1)
S(n+1)(ξn+1).
Ponendo ξ = ξn+1 , il primo e l’ultimo membro dell’uguaglianza precedente forniscono
f(x)− pn(x) =f (n+1)(ξ)
(n+ 1)!(x− x0)
n+1,
cioe la tesi. ��
Il polinomio di Taylor approssima dunque f in un intorno di x0 con una precisionevia via superiore al crescere del grado del polinomio, nel senso che la differenza Rn tendea zero, per x → x0 , piu rapidamente, di quanto tenda a zero la potenza (x − x0)n ;questo il senso della formula (4.113). Vale anche il viceversa:
Proposizione 4.7. Se f : (a, b) → R ha n derivate in x0 e P e un polinomio di
grado minore o uguale a n tale che
limx→x0
f(x)− P (x)
(x− x0)n= 0,

Calcolo differenziale 193
allora P e il polinomio di Taylor di grado n di f in x0 .
Dimostrazione. Sia pn il polinomio di Taylor di grado n di f in x0 . La (4.113) el’ipotesi implicano che
limx→x0
pn(x)− P (x)
(x− x0)n= lim
x→x0
pn(x)− f(x)
(x− x0)n+
f(x)− P (x)
(x− x0)n= 0.
Se poniamo
pn(x)− P (x) = d0 + d1(x− x0) + · · ·+ dn(x− x0)n,
si ha dunque
0 = limx→x0
d0
(x− x0)n+
d1
(x− x0)n−1+ · · ·+ dn−1
x− x0+ dn,
il che e possibile se e solo se d0 = d1 = · · · = dn−1 = dn = 0, ossia P (x) = pn(x), che equanto si voleva provare. ��
In figura sono riportati i polinomi di McLaurin del seno di grado n = 1, 5, 9, 15.

194 Analisi Matematica 1
4.4. Il simbolo “o-piccolo” di Landau. Per esprimere in modo operativamentesnello la formula di Peano, e molto utile introdurre una notazione inventata da Landau4.
Definizione 4.8. Siano f, g : (a, b) → R, x0 ∈ (a, b) e g(x) �= 0 in un intorno
bucato di x0 . Diremo che f e o-piccolo di g per x → x0 se
limx→x0
f(x)
g(x)= 0
e in tal caso scriveremo f = o (g).
Spieghiamo il senso del simbolo. L’affermazione matematica “f e o-piccolo di g” sipuo parafrasare dicendo che “f tende a zero piu rapidamente di g”. Quindi il rapportof/g dovra essere piccolo in un intorno del punto in esame e questo suggerisce di utiliz-zare la lettera graficamente piu simile allo zero, ossia la “o”. Il concetto matematico chesi vuole sintetizzare potrebbe essere altrettanto bene espresso dalla scrittura f/g = o ,algebricamente equivalente a f = o · g , dove o indica una funzione infinitesima perx → x0 (e non nulla in un intorno di x0 ). Si usa invece la parentesi anziche il prodottoperche cio che si vuole evidenziare e il comportamento di f rispetto a g e non l’esattovalore del rapporto. Questa osservazione e importante, perche prima di aver compresoappieno l’uso del simbolo di Landau si e indotti facilmente all’errore. Ad esempio, puobenissimo capitare che siano vere entrambe le scritture f = o (x) e anche f = o (x2)per x → 0, senza implicare x = x2 , che ovviamente e falso. Anzi, se f/x2 → 0 perx → 0, allora a maggior ragione si avra f/x = (f/x2)x → 0. Scrivere invece f = o ·x2
e simultaneamente f = o ·x con la stessa lettera “o” ad indicare una funzione sarebbescorretto (perche se ne dedurrebbe x = x2 ) ed usare due lettere diverse, ridondante.
Utilizzando il simbolo di Landau, la formula di Peano per una funzione f con n
derivate in x0 diviene
(4.115) f(x) = pn(x) + o ((x− x0)n) .
Essa evidenzia in quale misura valga l’approssimazione locale di f mediante il suopolinomio di Taylor perche esprime il confronto tra la differenza f(x) − pn(x) e lapotenze intera e positiva (x− x0)n .
Il simbolo o-piccolo, in combinazione con gli sviluppi di Taylor, permette in molticasi di svolgere il calcolo dei limiti con grande efficacia, come vedremo. La seguente
4Edmund Georg Landau, 1877–1938, matematico tedesco.

Calcolo differenziale 195
proposizione sintetizza le principali proprieta di tipo algebrico del simbolo; la faciledimostrazione e un utile esercizio che viene lasciato al lettore.
Proposizione 4.9 (L’algebra di o-piccolo). Sia g : (a, b) → R una funzione
non nulla in un intorno bucato di x0 ∈ (a, b). Per x → x0 , si ha:
(i) o (λg) = o (g), per ogni λ ∈ R \ {0};(ii) ϕ(x)o (g) = o (g), per ogni ϕ : (a, b) → R limitata in un intorno di x0 .
Se n ed m sono interi non negativi, si ha inoltre:
(iii) o ((x− x0)n)± o ((x− x0)m) = o ((x− x0)p), con p = min{n,m};(iv) o ((x− x0)n) o ((x− x0)m) = o ((x− x0)n+m);(v) [o ((x− x0)n)]
m = o ((x− x0)mn);(vi) (x− x0)no ((x− x0)m) = o ((x− x0)n+m);(vii) o [o ((x− x0)n)] = o ((x− x0)n);(viii) se f = o ((x− x0)n), con n > 0, allora f = o ((x− x0)m) per ogni 0 ≤ m < n.
Illustriamo le precedenti considerazioni e le proprieta algebriche appena enunciatecon alcuni esempi.
(35) Dalla definizione, abbiamo che per x → 0
(4.116) 1− cos x = o (x) ,
in quanto il solito limite notevole del coseno implica che
1− cos x
x= x
�1− cos x
x2
�→ 0 · 1
2= 0.
Per le stesse ragioni, per ogni numero reale λ avremo per x → 0
λ(1− cos x) = o (x) ,
che illustra (i). Per quanto riguarda (ii), e ovvio che ad esempio per x → 0
cos x(1− cos x) = o (x)
perche applicando la definizione si ha
cos x(1− cos x)
x= cosx
�1− cos x
x
�→ 0.
(36) Una o piu formule di McLaurin, unitamente alla formula generale (4.115) e alla(iii), possono essere usate in sequenza per ottenere informazioni precise su sommedi funzioni. Per illustrare questo aspetto, ridimostriamo la (4.116). Lo sviluppo diMcLaurin del coseno, ossia (4.110), per n = 2 implica che per x → 0
1− cos x =1
2x2 + o
�x5�
e poiche dalla definizione si ha x2/2 = o (x), la (iii) dice proprio che il membro destroe un o-piccolo di x , visto che min{1, 5} = 1.
La (iii), nel caso n = m , mette in guardia da un possibile errore: in generale, none vero che o (xn)− o (xn) = 0, bensı , un po’ sorprendentemente,
o (xn)− o (xn) = o (xn) .

196 Analisi Matematica 1
L’espressione o (xn)− o (xn) va infatti interpretata come la differenza tra due funzioni,a priori diverse, ciascuna delle quali tende a zero piu rapidamente di xn . Ad esempio,
x3 = o
�x2�, 2x3 = o
�x2�
per x → 0,
ma certamente x3 − 2x3 = −x3 �= 0. Il significato di (iii) e che il comportamento diuna somma (o differenza che sia) e quello del “peggiore” degli addendi. Per esempio,per x → 0 abbiamo
x3 = o
�x2�, x
4 = o�x3�
e della differenza x3 − x4 possiamo dire che essa e un o (x2), come garantito da (iii).
(37) Per provare(ex − 1)2 = o (x) per x → 0,
si puo osservare che
(ex − 1)2
x= x
�ex − 1
x
�2
→ 0 · 1 = 0
oppure, sapendo che ex = 1 + x+ o (x), si calcola:
(ex − 1)2 = [x+ o (x)]2 = x2 + 2xo (x) + o (x)2 = x
2 + o�x2�.
Infatti, usando (vi) si ha xo (x) = o (x2), mentre (v) implica o (x)2 = o (x2). Laconclusione si trae applicando (iii) ancora una volta: o (x2) + o (x2) = o (x2).
(38) La (v) e una conseguenza immediata di (iv). La (vii) puo essere parafrasatadicendo: qualcosa che per x → x0 tende a zero piu velocemente di qualcos’altro che vitende piu velocemente di (x− x0)n , tende a zero piu velocemente di (x− x0)n .
(39) Infine, la (viii) e una conseguenza della (vii) perche se m < n , allora per x → x0
si ha (x− x0)n = o ((x− x0)m), visto che
(x− x0)n
(x− x0)m= (x− x0)
n−m → 0.
Quindi se ad esempio f = o (x2) allora f = o (x), mentre il viceversa e palesementefalso: come abbiamo gia visto, 1−cos x = o (x), mentre l’affermazione 1−cos x = o (x2)e falsa perche (1− cos x)/x2 → 1/2 per x → 0.
(40) Vale la pena di osservare che l’affermazione “f e infinitesima per x → x0” esemplicemente f = o (1) per x → x0 .
(41) Gli sviluppi di Taylor consentono di ottenere informazioni molto piu sofisticatedi quelle che discendono dalle semplici regole algebriche della Proposizione 4.9. Adesempio, sappiamo che per x → 0 si ha x = o(1) e anche sin x = o(1), e nessuna delledue e migliorabile, nel senso che nessuna delle due e un o-piccolo di xn per qualcheintero positivo n . Quindi, dalla (iii) si deduce che sicuramente sin x− x = o(1). Allaluce della formula (4.109), si puo pero dimostrare molto di piu, ossia sinx−x = o (x2).Piu precisamente ancora:
(4.117) limx→0
sin x− x
x3= −1
6

Calcolo differenziale 197
Infatti:
sin x− x
x3=
�x− 1
3!x3 + o (x3)
�− x
x3=
− 13!x
3 + o (x3)
x3= −1
6+
o (x3)
x3→ −1
6.
Se quindi le regole algebriche sono di grande utilita nelle manipolazioni, lo strumentoanalitico, ossia lo sviluppo di Taylor, fornisce informazioni molto piu precise.
(42) Riprendiamo l’Esempio 17 della Sezione 3, ossia
limx→0
ex − 1 + log(1− x)
tan x− x.
Dagli sviluppi notevoli sappiamo che
ex − 1 = x+
1
2x2 +
1
6x3 + o
�x3�
log(1− x) = −x− 1
2x2 − 1
3x3 + o
�x3�
tan x− x =1
3x3 + o
�x3�.
Se ne deduce che
limx→0
ex − 1 + log(1− x)
tan x− x= lim
x→0
−16x
3 + o (x3)13x
3 + o (x3)= lim
x→0
−16 +
o(x3)x3
13 +
o(x3)x3
= −1
2.
(43) Il lettore attento avra notato dall’esempio (42) che una volta espressa una formaindeterminata del tipo “0/0” mediante gli sviluppi di McLaurin fino ad arrivare a
axn + o (xn)
bxm + o (xm)
il limite per x → 0 e presto calcolato:
(4.118) limx→0
axn + o (xn)
bxm + o (xm)=
a/b se n = m
0 se n > m
non esiste se n < m.
La non esistenza del limite se n < m dipende dal fatto che la funzione in esamesi comporta come (a/b)xn−m , ossia come una potenza negativa di x : essa divergerapositivamente per x → 0+ e negativamente per x → 0− o viceversa, a seconda delsegno di a/b .
4.5. Composizione di sviluppi. Supponiamo di voler calcolare il polinomio diMcLaurin di f(x) = log(1+sin x) di ordine ad esempio 4. Siamo tentati di argomentarecome segue. Siccome
log(1 + y) = y − 1
2y2 +
1
3y3 − 1
4y4 + o
�y4�
sin x = x− 1
3!x3 + o
�x4�

198 Analisi Matematica 1
ponendo y = sin x si avra allora:
log(1 + sinx) = sin x− 1
2(sin x)2 +
1
3(sin x)3 − 1
4(sin x)4 + o
�(sin x)4
�
=
�x− 1
3!x3 + o
�x4��
− 1
2
�x− 1
3!x3 + o
�x4��2
+1
3
�x− 1
3!x3 + o
�x4��3
− 1
4
�x− 1
3!x3 + o
�x4��4
+ o
��x− 1
3!x3 + o
�x4��4
�.
Ora, usando l’algebra di o-piccolo�x− 1
3!x3 + o
�x4��2
= x2 +
�1
3!x3
�2
+ o�x4�2 − 2x
�1
3!x3
�
+ 2xo�x4�+ 2
�1
3!x3
�o�x4�
= x2 − 1
3x4 + o
�x4�
e similmente�x− 1
3!x3 + o
�x4��3
= x3 + o
�x4�,
�x− 1
3!x3 + o
�x4��4
= x4 + o
�x4�.
Quindi, sommando:
log(1 + sinx) = x− 1
3!x3 + o
�x4�− 1
2
�x2 − 1
3x4 + o
�x4��
+1
3
�x3 + o
�x4��
− 1
4
�x4 + o
�x4��
+ o�x4�
= x− 1
2x2 +
1
6x3 − 1
12x4 + o
�x4�.
L’algebra di o-piccolo e stata usata per avere espressioni con le potenze di x fino allaquarta, inglobando poi tutti i termini di ordine superiore in o (x4). Il ragionamentoe corretto, come spiegato dal risultato che segue. Includiamo la dimostrazione perchenon e facile reperirla nei libri di testo piu comuni.
Teorema 4.10. Supponiamo che:
(i) f : (a, b) → (c, d) sia derivabile n volte in x0 ;
(ii) g : (c, d) → R sia derivabile m volte in y0 = f(x0).
Denotato con P il polinomio di Taylor di grado n di f in x0 e con Q il polinomio di
Taylor di grado m di g in y0 = f(x0), e posto
Q ◦ P (x) =n+m�
k=0
ck(x− x0)k,
il polinomio
T (x) =µ�
k=0
ck(x− x0)k,

Calcolo differenziale 199
dove µ = min{n,m}, e il polinomio di Taylor di grado µ di g ◦ f in x0 .
Dimostrazione. Utilizzeremo la Proposizione 4.7. Mostriamo dapprima che
(4.119) g ◦ f(x) = Q ◦ P (x) + o ((x− x0)µ)
Scriviamo innanzitutto
g ◦ f(x)−Q ◦ P (x)
(x− x0)µ=
g(f(x))−Q(f(x))
(x− x0)µ+
Q(f(x))−Q(P (x))
(x− x0)µ.
Ora, ponendo y = f(x) e usando il cambio di variabile nel calcolo del limite
g(f(x))−Q(f(x))
(x− x0)µ=
g(f(x))−Q(f(x))
(f(x)− f(x0))m
(f(x)− f(x0))m
(x− x0)µ
=g(y)−Q(y)
(y − y0)m
�f(x)− f(x0)
x− x0
�µ
(f(x)− f(x0))m−µ −→ 0.
Infatti, il primo fattore e infinitesimo perche Q e il polinomio di Taylor di grado m di gin y0 , il secondo tende ad una potenza non negativa di f �(x0) ed il terzo e infinitesimoperche f e continua in x0 . D’altra parte, applicando il Teorema di Lagrange, esisteun punto ξ compreso tra f(x) e P (x) per il quale si ha
Q(f(x))−Q(P (x))
(x− x0)µ= Q
�(ξ)f(x)− P (x)
(x− x0)µ= Q
�(ξ)f(x)− P (x)
(x− x0)n(x− x0)
n−µ.
L’espressione precedente e infinitesima per x → x0 in quanto il primo fattore tendea g�(y0), il secondo e infinitesimo perche P e il polinomio di Taylor di grado n di fin x0 e il terzo e infinitesimo perche e una potenza non negativa di x− x0 . Abbiamopercio provato la (4.119). Osserviamo infine che
g ◦ f(x)−Q ◦ P (x)
(x− x0)µ=
g ◦ f(x)− T (x)
(x− x0)µ+
n+m�
k=µ+1
ck(x− x0)k−µ
.
Siccome il secondo addendo e infinitesimo, e abbiamo provato che lo e anche il membrosinistro, ne segue che
limx→x0
g ◦ f(x)− T (x)
(x− x0)µ= 0.
Siccome T e un polinomio di grado minore o uguale a µ , la Proposizione 4.7 ci permettedi dire che esso e il polinomio di Taylor di grado µ di g ◦ f in x0 . ��
Esempi.
(44) Concludiamo con un esempio. Supponiamo di voler calcolare il limite
limx→0+
eλx −�1 + log(1 + x)
1− cos(λx)
al variare di λ ∈ R . Innanzitutto, per λ = 0 il denominatore e identicamente nulloe quindi per tale valore il lilmite cercato non ha senso. Per ogni altro valore di λ , la

200 Analisi Matematica 1
funzione e senza’altro definita in un intorno destro dell’origine, che e quanto necessarioper poter calcolare il limite. Ricordiamo gli sviluppi di Taylor:
ex = 1 + x+
1
2!x2 + o
�x2�
√1 + x = 1 +
1
2x− 1
8x2 + o
�x2�
log(1 + x) = x− 1
2x2 + o
�x2�
cos x = 1− 1
2!x2 +
1
4!x4 + o
�x2�.
Innanzitutto�
1 + log(1 + x) = 1 +1
2
�x− 1
2x2 + o
�x2��
− 1
8
�x− 1
2x2 + o
�x2��2
+ o�x2�
= 1 +1
2x− 1
4x2 + o
�x2�− 1
8x2 + o
�x2�2
= 1 +1
2x− 3
8x2 + o
�x2�
e quindi il numeratore e
eλx −
�1 + log(1 + x) =
�λ− 1
2
�x+
�3
8+
λ2
2
�x2 + o
�x2�.
Il denominatore e evidentemente
1− cos(λx) =λ2
2x2 + o
�x4�.
Applichiamo ora la formula (4.118). Per λ = 1/2 il limite cercato e uguale al rapportotra i coefficienti dei termini di grado 2, ossia
limx→0+
ex/2 −�
1 + log(1 + x)
1− cos(x/2)=
38 +
18
18
= 4
Se λ �= 1/2 si ha invece
limx→0+
ex/2 −�
1 + log(1 + x)
1− cos(x/2)=
�+∞ se λ >
12
−∞ se λ <12 .

Calcolo differenziale 201
Esercizi
1. Calcolare i polinomi di Taylor di quarto grado delle funzioni seguenti:
(i) xe−x + x log(1 + x) + 2x , x0 = 0;(ii) x log x− sin(x− 1), x0 = 1(iii) (sin x)2 − arctan(x2), x0 = 0;(iv) e1−cosx − cos(ex − 1), x0 = 0;
2. Calcolare, se esiste, il limite limx→0
�cos x+
1
2(sin x)2
�1/x4
.

202 Analisi Matematica 1
5. Proprieta locali di funzioni regolari
In questa sezione useremo l’apparato analitico introdotto nelle sezioni precedenti,soprattutto gli sviluppi di Taylor, per studiare proprieta locali di funzioni sufficien-temente regolari, che abbiano cioe una o piu derivate in un punto. Un particolareinteresse rivestono i concetti di ordine di infinitesimo (o di infinito) e di estremo locale.
5.1. Confronto locale tra funzioni infinitesime o infinite. Le funzioni inesame saranno definite tipicamente su intervalli aperti (a, b) che vanno pensati comeintorni del punto vicino al quale l’analisi si concentra. Cio non esclude che il dominiodelle funzioni sia magari piu grande, ma le ipotesi che via via verranno fatte riguarde-ranno le loro proprieta locali, ossia valide in un intervallo anche molto piccolo che con-tiene un dato punto x0 . Introduciamo una comoda notazione. Sianof, g : (a, b) → R esupponiamo che g(x) �= 0 per ogni x ∈ (a, b). Se lim
x→x0
f(x)/g(x) = � �= 0, scriveremo
(5.120) f � g per x → x0.
La scrittura (5.120) significa per definizione che il limite del rapporto f/g esiste ed e unnumero reale diverso da zero ed e, dal punto di vista grafico, e non a caso, simmetrica.In effetti, per permanenza del segno, sappiamo che f/g non e nulla in un intornobucato di x0 , e quindi lo stesso vale per f . Ma allora si puo considerare il rapportog/f , che tende evidentemente a 1/� �= 0. In altri termini, se f � g allora g � f .
Definizione 5.1. Siano f, g : (a, b) → R entrambe infinitesime per x che tende a
x0 ∈ (a, b), e supponiamo g(x) �= 0 per ogni x ∈ (a, b). Diremo che f e infinitesima
(i) di ordine superiore a g se f = o (g) per x → x0 ;
(ii) dello stesso ordine di g se f � g per x → x0 ;
(iii) di ordine inferiore a g se g = o (f) per x → x0 ;
(iv) di un ordine non confrontabile con g se limx→x0
f(x)/g(x) non esiste.
Abbiamo espresso il concetto di confronto locale tra f e g “al finito”, ossia quandof e g sono infinitesime per x → x0 ∈ R . Non vi e alcuna difficolta ad estendere lenozioni precedenti nel caso in cui il punto limite sia +∞ oppure −∞ . Se f e g sonoentrambe infinitesime per x → +∞ , per esempio, si supporra g(x) �= 0 su una qualchesemiretta (a,+∞) e si considerera il limite per x → +∞ del rapporto f(x)/g(x).Lasciamo questo facile esercizio al lettore. Similmente, ci si puo limitare a considerarex → x
+0 oppure x → x
−0 .
Come vedremo, anche se la definizione precedente non richiede alcun tipo di deri-vabilita delle funzioni f e g , il suo ambito piu tipico di applicazione sara quando g eper esempio una potenza intera e positiva di (x− x0), mentre f e una funzione che sivuole analizzare e possiede un certo numero di derivate in x0 .
Esempi.
(45) La potenza intera (x − x0)n e infinitesima di ordine superiore a (x − x0)m se esolo se n > m ; le due potenze saranno dello stesso ordine se e solo se n = m e infine

Calcolo differenziale 203
(x−x0)n e infinitesima di ordine inferiore a (x−x0)m se e solo se n < m . Questo casoparadigmatico spiega la scelta della terminologia.
(46) Come abbiamo osservato diverse volte, x e sin x sono entrambe infinitesime perx → 0. Il limite notevole sin x/x → 1 esprime il fatto che esse sono infinitesime dellostesso ordine per x → 0, cioe sin x � x . Similmente, nell’origine, log(1 + x) � x ,ex − 1 � x , 1− cos x � x2 .
(47) Sia n ≥ 1. Un polinomio del tipo P (x) = anxn + an+1x
n+1 + · · · + aNxN con
an �= 0, e infinitesimo dello stesso ordine di xn per x → 0. Infatti
P (x)
xn= an + an+1x+ · · ·+ aNx
N−n → an �= 0.
Inoltre, se an �= 0 e f(x) = anxn + o (xn), allora anche f e infinitesima dello stesso
ordine di xn per x → 0. Infatti
f(x)
xn= an +
o (xn)
xn→ an
per definizione di o-piccolo. Questo esempio e molto importante.
(48) Le funzioni x e x sin(1/x) sono entrambe infinitesime per x → 0. Tuttavia ilrapporto x sin(1/x)/x = sin(1/x) non ha limite per x → 0. Si tratta quindi di dueinfinitesimi non confrontabili.
Discorsi completamente analoghi ai precedenti valgono per funzioni divergenti. Datedue funzioni divergenti per x → x0 (ma anche per x → x
±0 oppure per x → ±∞)
e in molti casi interessante stabilire quale delle due diverga piu rapidamente, ovvero,selezionata una classe di funzioni divergenti, confrontare con essa una data funzionedivergente. Come nel caso della Definizione 5.1, invitiamo il lettore a formulare ladefinizione che segue per limiti fatti da destra o da sinista oppure a ±∞ .
Definizione 5.2. Siano f, g : (a, b) → R entrambe divergenti per x che tende a
x0 ∈ (a, b). Diremo che f e infinita
(i) di ordine superiore a g se g = o (f) per x → x0 ;
(ii) dello stesso ordine di g se f � g per x → x0 ;
(iii) di ordine inferiore a g se f = o (g) per x → x0 ;
(iv) di un ordine non confrontabile con g se limx→x0
f(x)/g(x) non esiste.
Lo spirito nel quale si vogliono utilizzare le definizioni precedenti e quello di se-lezionare una famiglia di funzioni per quantificare la nozione di ordine di infinitesimoo di infinito. Si tratta in altri termini di scegliere un campione (positivo) ϕ , o meglio,una scala di campionamento {ϕα : α > 0} , e confrontare poi una data funzione con lafamiglia selezionata.
Definizione 5.3. Siano f,ϕ : (a, b) → R e supponiamo che esista α > 0 tale che
f � ϕα per x → x0 .
(i) se f e ϕ sono entrambe infinitesime per x → x0 diremo che f e infinitesima
di ordine α rispetto a ϕ;

204 Analisi Matematica 1
(ii) se f e ϕ sono entrambe divergenti per x → x0 diremo che f e infinita di
ordine α rispetto a ϕ.
Esiste la piu completa liberta nella scelta del campione ϕ che si puo considerarenella definizione precedente. Tuttavia, nella stragrande magioranza dei casi le seguentiscelte standard vengono date per scontate. Si noti che nella definizione di ordine,si considera la potenza ϕα con esponente positivo α non necessariamente intero. Siassume quindi implicitamente che ϕ sia positiva in un intorno bucato del punto limite,oppure che α sia un intero (positivo). Questo introduce una piccola complicazione,come discusso di seguito.
(A-0) Infinitesimi campione per x → x0 . In questo caso, qualora ci si voglialimitare agli ordini interi si sceglie come infinitesimo campione la funzione
ϕ(x) = (x− x0)
mentre se si vogliono considerare ordini arbitrari (positivi), ossia anche noninteri, allora esso sara
ϕ(x) = |x− x0|.(A-∞) Infiniti campione per x → x0 . Similmente, per i soli ordini interi, l’infinito
campione sara la funzione
ϕ(x) =1
x− x0
mentre per gli ordini arbitrari, interi e non interi, l’infinito campione sara
ϕ(x) =1
|x− x0|.
(B-0) Infinitesimi campione per x → x+0 (oppure per x → x
−0 ). L’infinitesimo
campioneϕ(x) = (x− x0)
e positivo per x → x+0 e quindi puo essere utilizzato per ordini arbitrari. Per
x → x−0 si prende naturalmente ϕ(x) = (x0 − x).
(B-∞) Infiniti campione per x → x+0 (oppure per x → x
−0 ). L’infinito campione
ϕ(x) =1
x− x0
e positivo. Per x → x−0 si prende ϕ(x) = 1/(x0 − x).
(C-0) Infinitesimi campione per x → +∞ (oppure per x → −∞). L’infinite-simo campione
ϕ(x) =1
x
e positivo per x → +∞ . Per x → −∞ si prende ϕ(x) = 1/|x| .(C-∞) Infiniti campione per x → +∞ (oppure per x → −∞). L’infinito
campioneϕ(x) = x
e positivo per x → +∞ . Per x → −∞ si prende ϕ(x) = |x| .

Calcolo differenziale 205
D’ora in avanti, i campioni appena definiti verranno dati per scontati e quindi par-leremo tranquillamente di ordine di infinitesimo o di infinito di una funzione, omettendodi specificare rispetto a quale scelta di infinitesimo o infinito campione.
Esempi.
(49) Per x → 0 le seguenti funzioni:
sin x, tan x, arctan x, ex − 1, log(1 + x)
sono tutte infinitesime di ordine uno; la funzione
1− cos x
e infinitesima di ordine due e le funzioni
sin x− x, tan x− x, arctan x− x
sono tutte infinitesime di ordine tre.
(50) Con riferimento alla formula (50) della Sezione 3, mostriamo che la funzionef(x) = π/2−arctan x e infinitesima di ordine uno per x → +∞ (rispetto all’infinitesimocampione standard per x → +∞ , ossia 1/x). Infatti, utilizzando (50) e il cambio divariabile y = 1/x abbiamo
limx→+∞
π2 − arctan x
1/x= lim
x→+∞
arctan(1/x)
1/x= lim
y→0+
arctan y
y= 1,
il che mostra che f(x) � 1/x e che quindi f ha ordine uno.
(51) Il limite notevole (3.98) della Sezione 3 esprime il fatto che per x → +∞ lafunzione logaritmo e infinita di ordine inferiore ad ogni potenza del suo argomento,mentre la funzione esponenziale e infinita di ordine superiore ad ogni potenza del suoargomento, come chiarito da (3.99) della stessa sezione. Interessantemente, la (3.100)dice che per x → 0+
xε log x =
log x
x−ε→ 0,
ossia che anche per x → 0+ il logaritmo e infinito di ordine inferiore ad ogni potenzadel suo argomento.
Il risultato seguente illustra uno dei principali metodi di calcolo degli ordini diinfinitesimo.
Proposizione 5.4. Se f : (a, b) → R e derivabile n volte in x0 ed inoltre
f(x0) = f�(x0) = · · · = f
(n−1)(x0) = 0, f(n)(x0) �= 0,
allora f e infinitesima di ordine n in x0 .
Dimostrazione. La formula di Peano in questo caso si scrive
f(x) =f (n)(x0)
n!(x− x0)
n + o ((x− x0)n) ,

206 Analisi Matematica 1
cosicchef(x)
(x− x0)n=
f (n)(x0)
n!+
o ((x− x0)n)
(x− x0)n→ f (n)(x0)
n!�= 0.
Pertanto f � (x− x0)n , come volevasi. ��
Esempi.
(52) Vogliamo determinare, al variare del parametro λ in R\{0} , l’ordine di infinites-imo per x → 0 della funzione f(x) = (1 + x)λ − cos(λx)− λx . Scriviamo innanzitutto(1 + x)λ = eλ log(1+x) e utilizziamo gli sviluppi di McLaurin di cosx , ex e log(1 + x),ottenendo:
f(x) = 1 + [λ log(1 + x)] +1
2[λ log(1 + x)]2 +
1
6[λ log(1 + x)]3 + o(x3)
−�1− 1
2(λx)2 + o(x3)
�− λx
= 1 + λ
�x− 1
2x2 +
1
3x3 + o(x3)
�+
λ2
2
�x− 1
2x2 +
1
3x3 + o(x3)
�2
+λ3
6
�x− 1
2x2 +
1
3x3 + o(x3)
�3−
�1− 1
2(λx)2 + o(x3)
�− λx
= 1 + λ
�x− 1
2x2 +
1
3x3 + o(x3)
�+
λ2
2
�x2 − 2
1
2x · x2 + o(x3)
�
+λ3
6
�x3 + o(x3)
�−�1− 1
2(λx)2 + o(x3)
�− λx
= λ(λ− 1
2)x2 +
λ
6(λ2 − 3λ+ 2)x3 + o(x3).
Se λ �= 1/2, f e infinitesima di ordine 2; se λ = 1/2, f e infinitesima di ordine 3.

207
FORMULE DI TRIGONOMETRIA
Relazioni tra funzioni goniometriche
(sin x)2 + (cosx)2 = 1
(sin x)2 =(tan x)2
1 + (tan x)2(cos x)2 =
1
1 + (tan x)2
sin(π2 − x) = sin(π2 + x) = cos x cos(π2 − x) = − cos(π2 + x) = sin x
sin(π − x) = − sin(π + x) = sin x cos(π − x) = cos(π + x) = − cos x
Formule di addizione e sottrazione
sin(α + β) = sinα cos β + cosα sin β sin(α− β) = sinα cos β − cosα sin β
cos(α + β) = cosα cos β − sinα sin β cos(α− β) = cosα cos β + sinα sin β
tan(α + β) =tanα + tan β
1− tanα tan βtan(α− β) =
tanα− tan β
1 + tanα tan β
Formule di duplicazione e bisezione
sin(2x) = 2 sin x cos x cos(2x) = (cos x)2 − (sin x)2
sin�x
2
�=
�1− cos x
2, x ∈ (0, 2π) cos
�x
2
�=
�1 + cosx
2, x ∈ (−π, π)
tan�x
2
�=
�1− cos x
1 + cos x=
1− cos x
sin x=
sin x
1 + cosx, x ∈ (0, π)
Formule parametriche (t = tan(x
2))
sin x =2t
1 + t2cos x =
1− t2
1 + t2tan x =
2t
1− t2
Formule di prostaferesi
sinα + sin β = 2 sin(α + β
2) cos(
α− β
2) sinα− sin β = 2 cos(
α + β
2) sin(
α− β
2)
cosα + cos β = 2 cos(α + β
2) cos(
α− β
2) cosα− cos β = −2 sin(
α + β
2) sin(
α− β
2)
tanα± tan β =sin(α± β)
cosα cos β

208
LIMITI NOTEVOLI
limx→0
sin x
x= 1 lim
x→0
1− cos x
x2=
1
2
limx→0
ex − 1
x= 1 lim
x→0
log(1 + x)
x= 1
limx→±∞
�1 +
1
x
�x
= e limx→0
loga(1 + x)
x=
1
log a, a > 0, a �= 1
limx→0
ax − 1
x= log a, a > 0 lim
x→0
(1 + x)α − 1
x= α, α ∈ R.
DERIVATE
d
dxsin x = cosx
d
dxarcsin x =
1√1− x2
d
dxcos x = − sin x
d
dxarccosx = − 1√
1− x2
d
dxtan x = 1 + (tan x)2 =
1
(cos x)2d
dxarctan x =
1
1 + x2
d
dxxα = αx
α−1 d
dxf(x)g(x) = f(x)g(x)
�g�(x) log f(x) +
g(x)
f(x)f�(x)
�
d
dxex = e
x d
dxax = a
x log a
d
dxlog x =
1
x
d
dxloga x =
1
x log a
d
dxsinh x = coshx
d
dxcosh x = sinh x

209
SVILUPPI DI TAYLOR
ex = 1 + x+
1
2!x2 +
1
3!x3 +
1
4!x4 + · · ·+ 1
n!xn + o (xn)
log (1 + x) = x− 1
2x2 +
1
3x3 − 1
4x4 + · · · ± 1
nxn + o (xn)
sin x = x− 1
3!x3 +
1
5!x5 − 1
7!x7 + · · · ± 1
(2n− 1)!x2n−1 + o
�x2n�
cos x = 1− 1
2!x2 +
1
4!x4 − 1
6!x6 + · · · ± 1
(2n)!x2n + o
�x2n+1
�
tan x = x+1
3x3 + o
�x4�
arctan x = x− 1
3x3 + o
�x4�
√1 + x = 1 +
1
2x− 1
8x2 +
1
16x3 + o
�x3�


Bibliografia
[AD] R. Adams, Calcolo differenziale 1 (Terza Ed.), Casa Editrice Ambrosiana, Milano, 2003.[AP] T.M. Apostol, Calcolo, Volume primo. Analisi1, Bollati Boringhieri, Torino, 1977.[BR] A. Bacciotti, F. Ricci, Lezioni di Analisi Matematica 1, Levrotto & Bella, Torino, 1991.[CS] J. Cecconi, G. Stampacchia, Analisi Matematica, 10 volume, Liguori Editore, Napoli, 1974.[CT] C. Canuto, A. Tabacco, Analisi Matematica 1, Springer-Verlag Italia, Milano, 2003.[DM] G. De Marco, Analisi uno, Decibel Editrice, Padova, 1992.[G] E. Giusti, Analisi Matematica 1 (Seconda Ed.), Bollati Boringhieri, Torino, 1988.[PS] C.D. Pagani, S. Salsa, Analisi Matematica, Volume 1, Masson, Milano, 1992.[PZ] F. Parodi, T. Zolezzi, Appunti di Analisi Matematica, ECIG, Genova, 1992.[R] W. Rudin, Analisi Matematica, McGraw–Hill Libri Italia, Milano, 1991.[T] T. Tao, Analysis I, Hindustani Book Agency, New Delhi, 2006.
211





![Analisi Matematica 1 (Modulo) Prove Parziali A.A. 1999/2008web.inge.unige.it/DidRes/Analisi/PrA1.pdf · Analisi Matematica 1 (Modulo) Prove Parziali A.A. 1999/2008 1- PrA1.TEX| []](https://img.dokumen.tips/doc/110x75/5f73f978b939a45d7f161aba/analisi-matematica-1-modulo-prove-parziali-aa-1999-analisi-matematica-1-modulo.jpg)










![[ITA] Esercizi di Analisi MAtematica 1 Ingegneria.pdf](https://img.dokumen.tips/doc/110x75/577cc2131a28aba711942553/ita-esercizi-di-analisi-matematica-1-ingegneriapdf.jpg)












