Structural Analysis of Truss Structures using Stiffness Matrix
Dr. Nasrellah Hassan Ahmed
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS
In general, there are three types of relationships:
● Equilibrium equations,
● compatibility conditions, and
● constitutive relations.
Equilibrium Equations :
A structure is considered to be in equilibrium if, initially at rest, it remains at rest when subjected to a system of forces and couples.
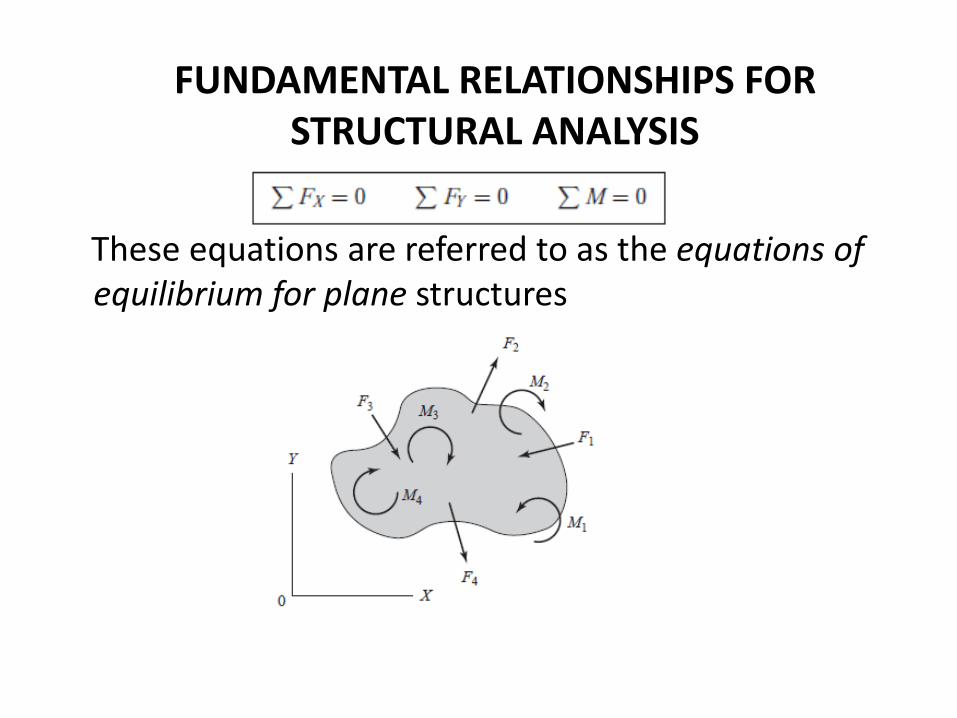
These equations are referred to as the equations of equilibrium for plane structures
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS
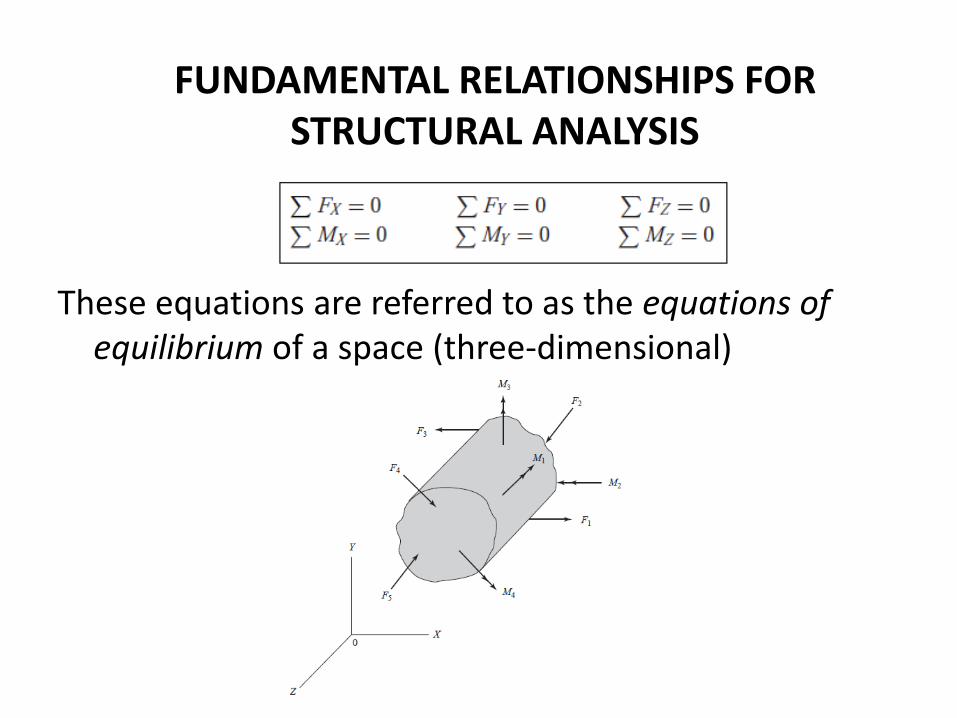
These equations are referred to as the equations of equilibrium of a space (three-dimensional)
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS
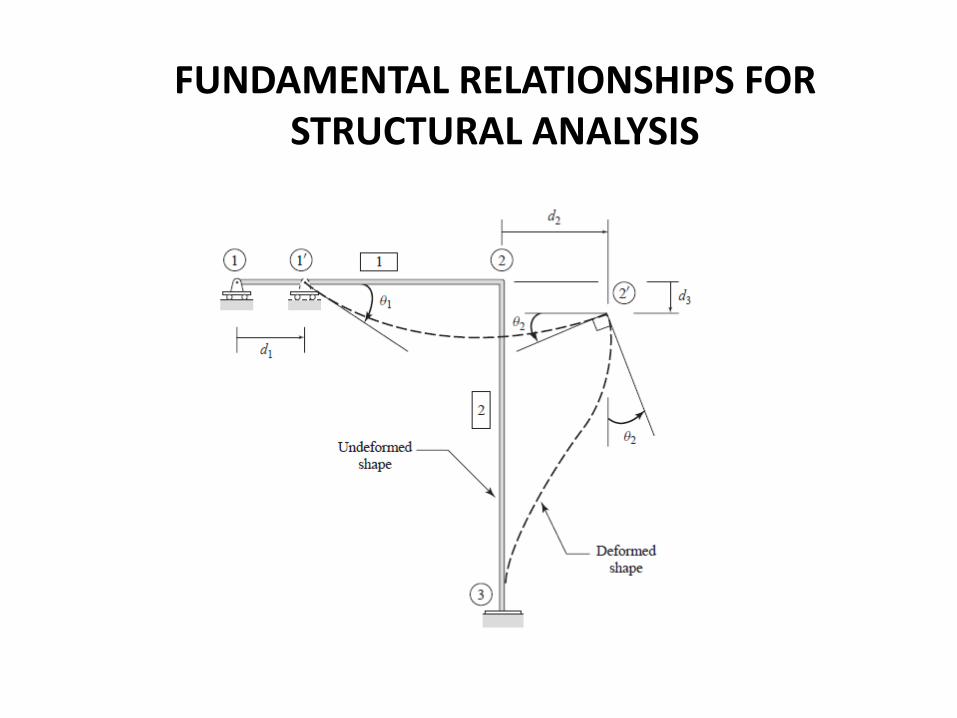
• Compatibility Conditions:
The compatibility conditions relate the deformations of a structure so that its various parts (members, joints, and supports) fit together without any gaps or overlaps. These conditions (also referred to as the continuity conditions) ensure that the deformed shape of the structure is continuous (except at the locations of any internal hinges)
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS
• Constitutive Relations:
• The constitutive relations (also referred to as the stress-strain relations) describe the relationships between the stresses and strains of a structure.
The constitutive relations provide the link between the equilibrium equations and compatibility conditions that is necessary to establish the load-deformation relationships for a structure or a member.
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS

• Global and Local Coordinate Systems:
• Degrees Of Freedom :
• The degrees of freedom of a structure, in general, are defined as the independent joint displacements (translations and rotations) that are necessary to specify the deformed shape of the structure when subjected to an arbitrary loading.
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS
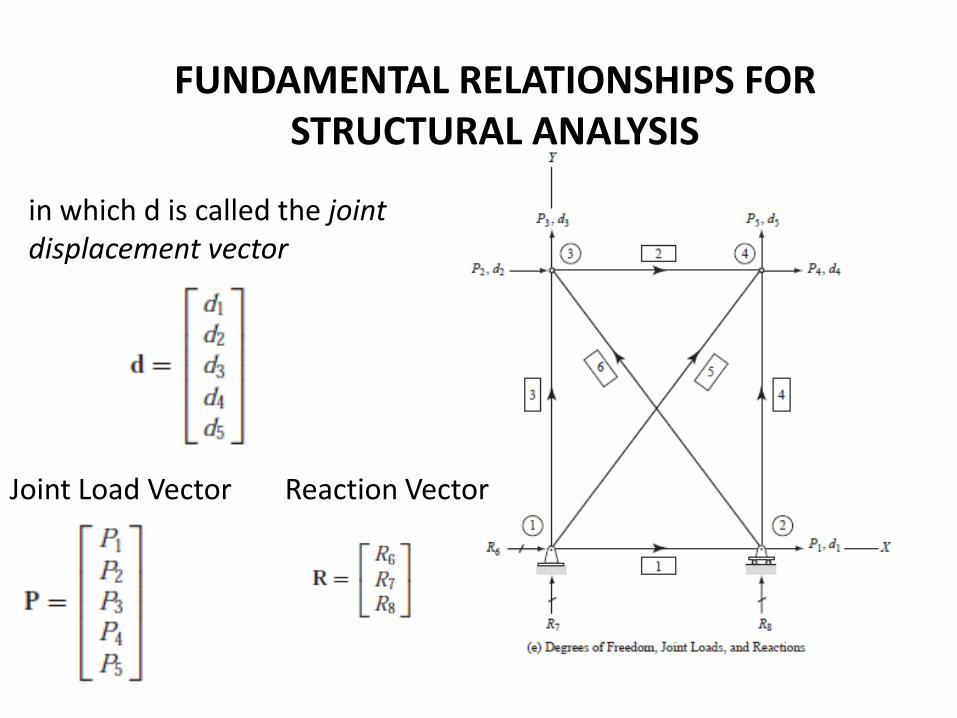
in which d is called the joint displacement vector
Joint Load Vector Reaction Vector
FUNDAMENTAL RELATIONSHIPS FOR
STRUCTURAL ANALYSIS
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
In the stiffness method of analysis, the joint displacements, d, of a structure due to an external loading, P, are determined by solving a system of simultaneous equations, expressed in the form.
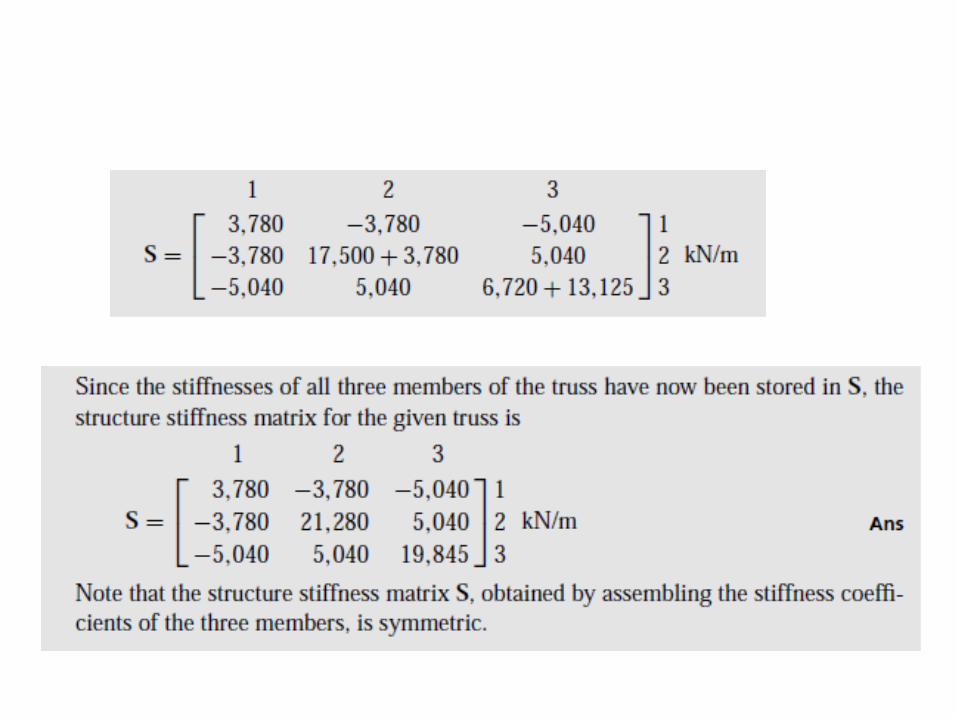
in which S is called the structure stiffness matrix. It will be shown subsequently that the stiffness matrix for the entire structure, S, is formed by assembling the stiffness matrices for its individual members.
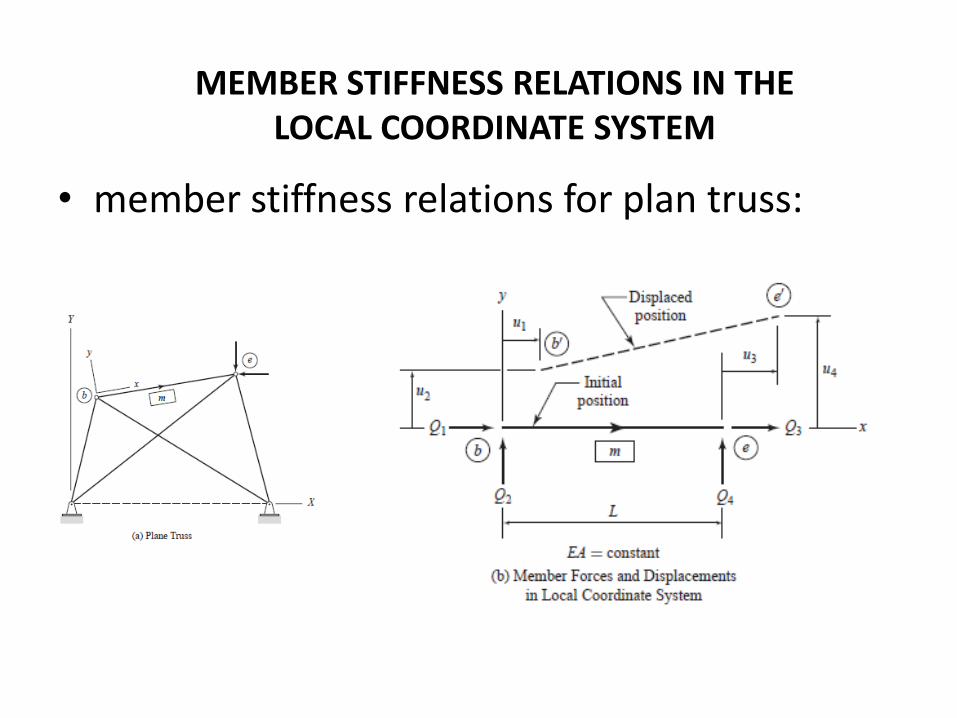
• member stiffness relations for plan truss:
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
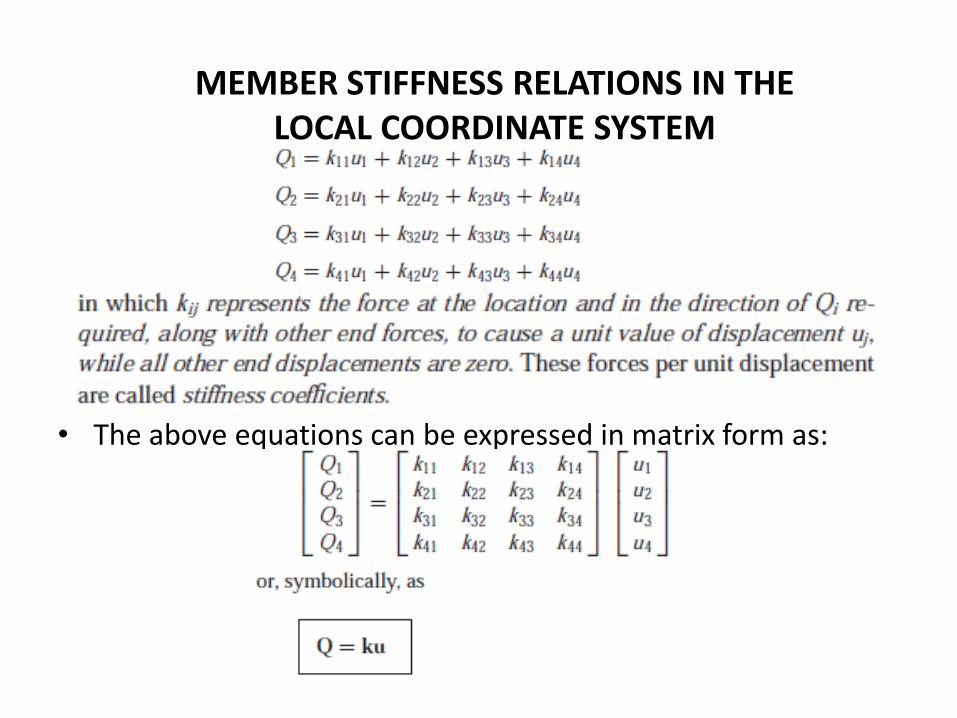
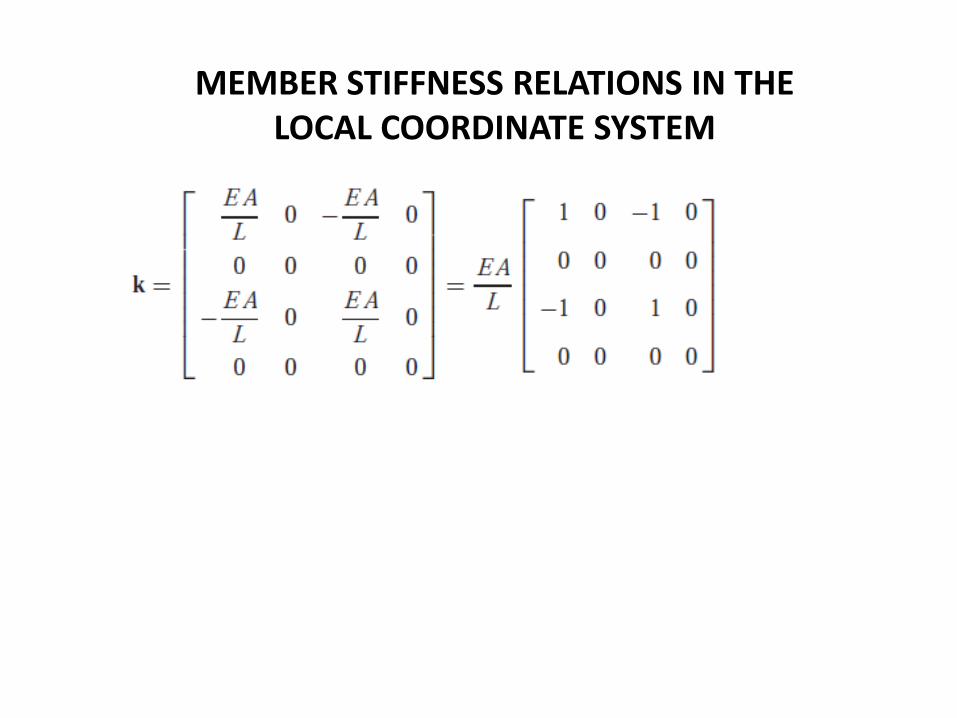
• The above equations can be expressed in matrix form as:
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM

in which Q and u are the member end force and member end displacement vectors, respectively, in the local coordinate system; and k is called the member stiffness matrix in the local coordinate system.
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM

MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
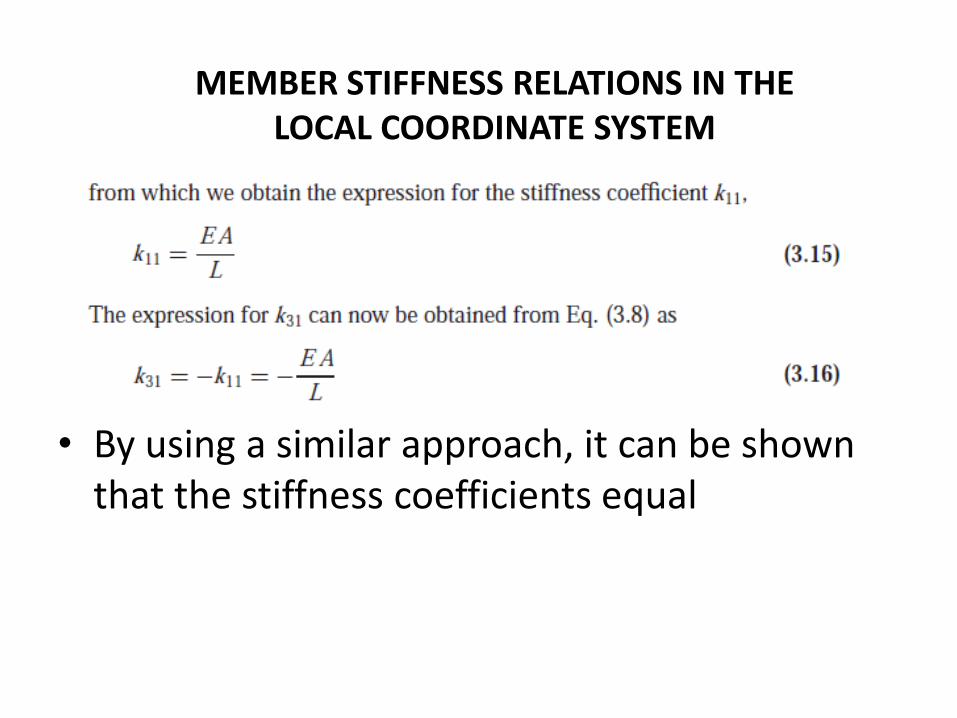
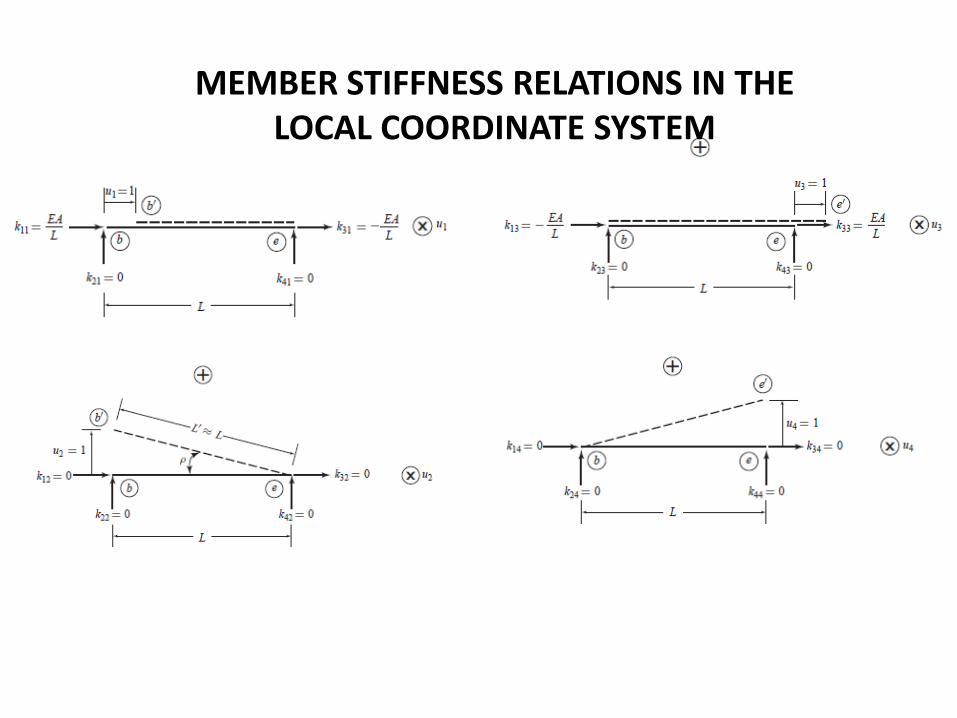
• By using a similar approach, it can be shown that the stiffness coefficients equal
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM

MEMBER STIFFNESS RELATIONS IN THE
LOCAL COORDINATE SYSTEM
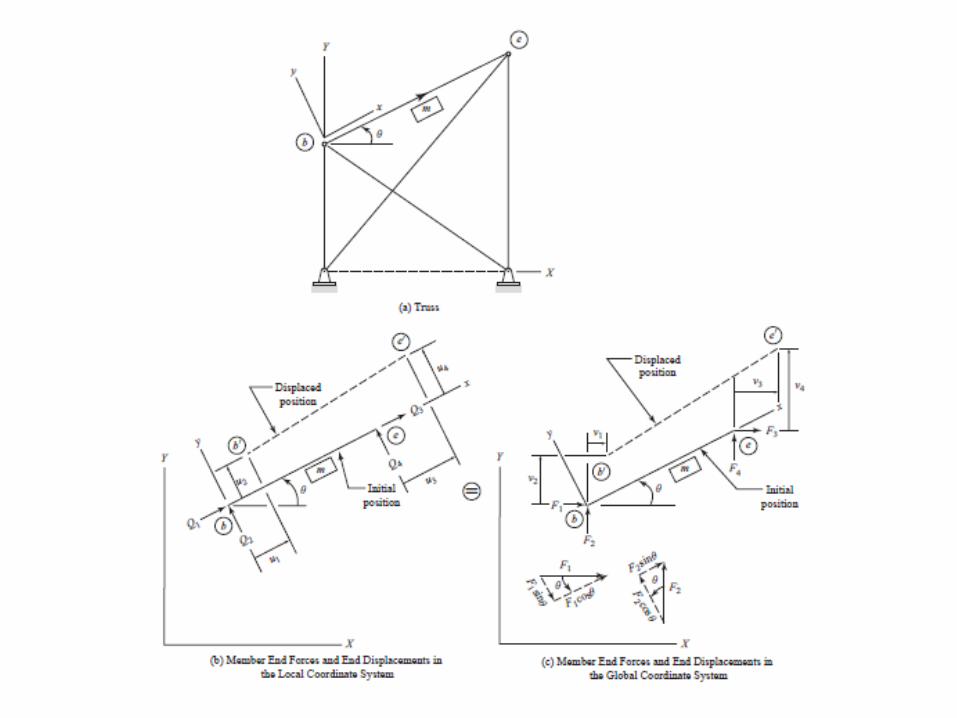
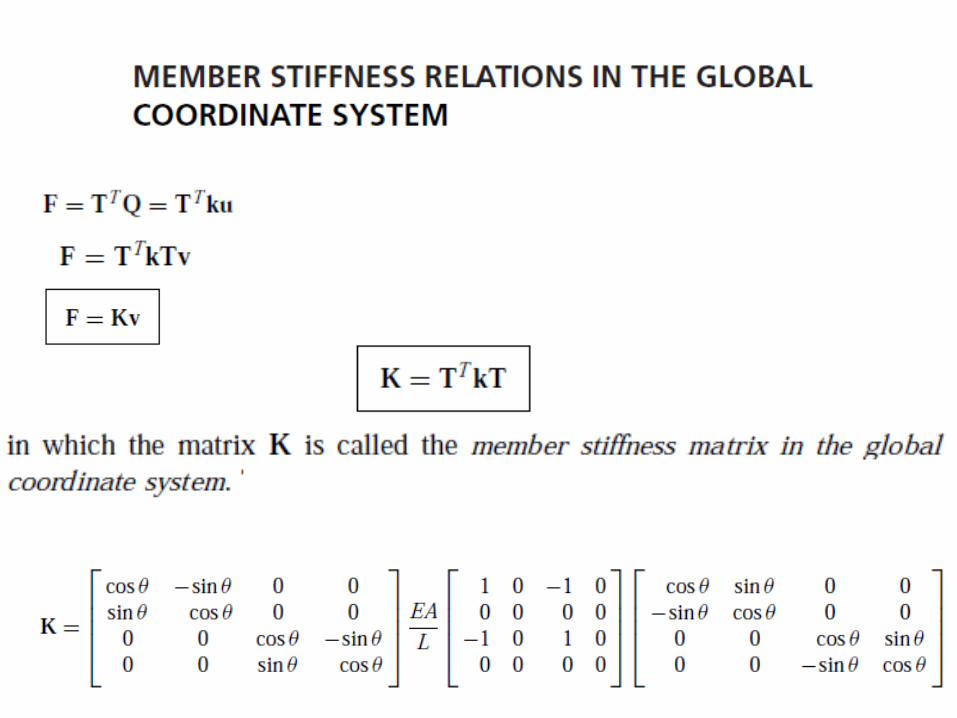
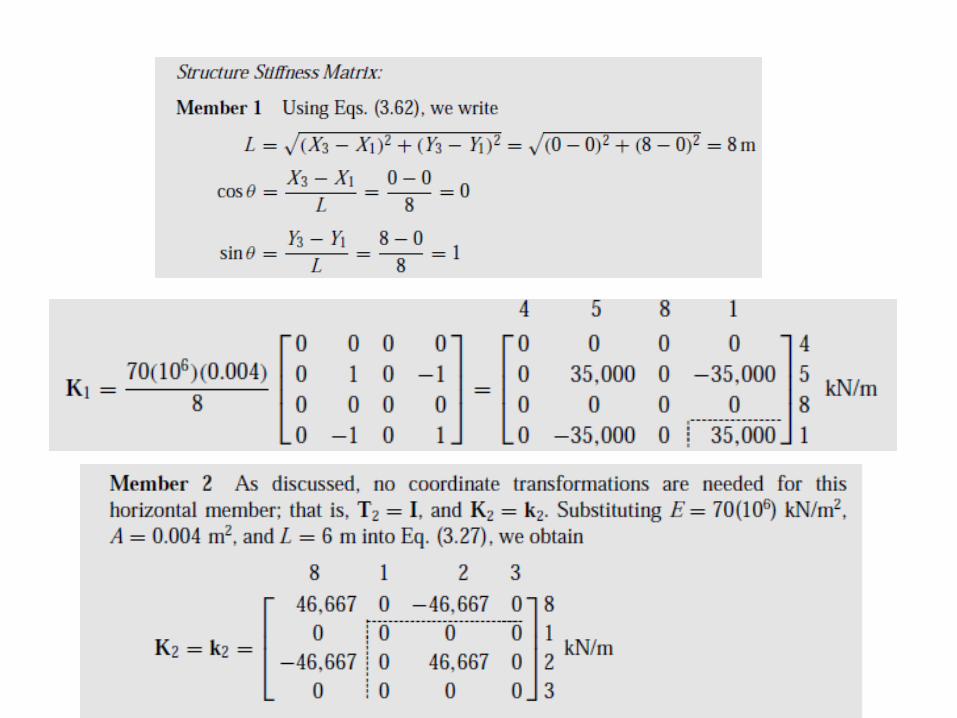
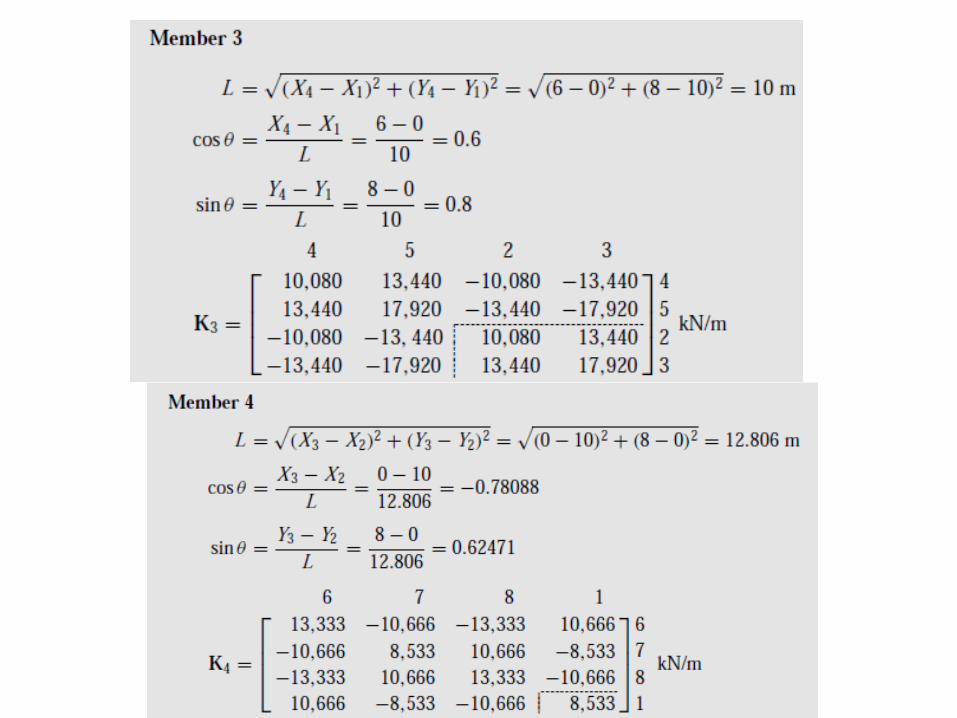
COORDINATE TRANSFORMATIONS
• When members of a structure are oriented in different directions, it becomes necessary to transform the stiffness relations for each member from its local coordinate system to a single global coordinate system selected for the entire structure.
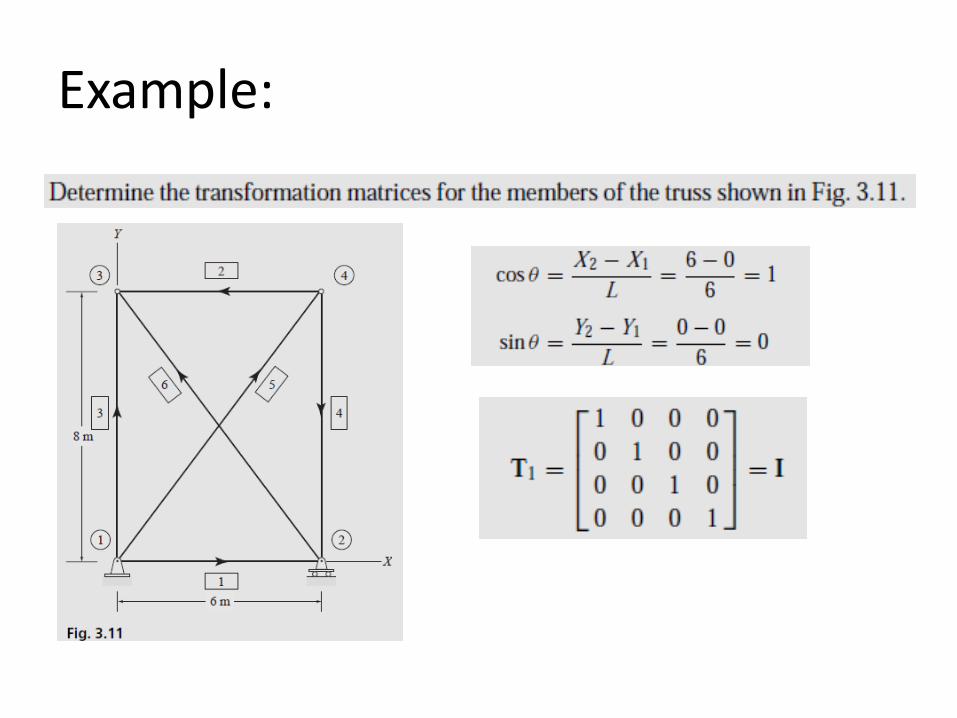
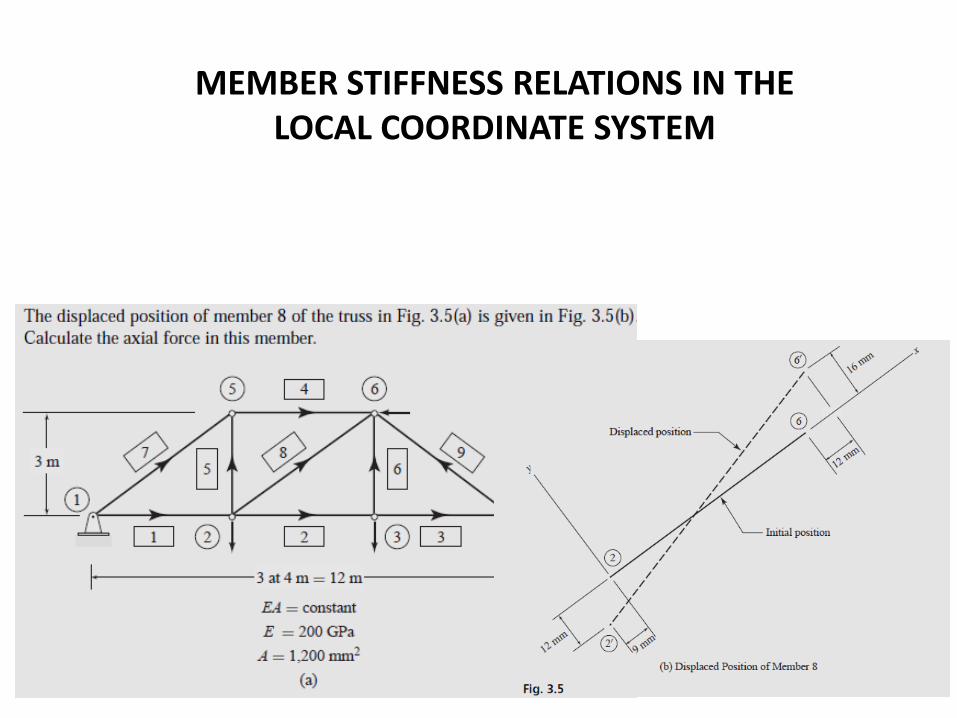
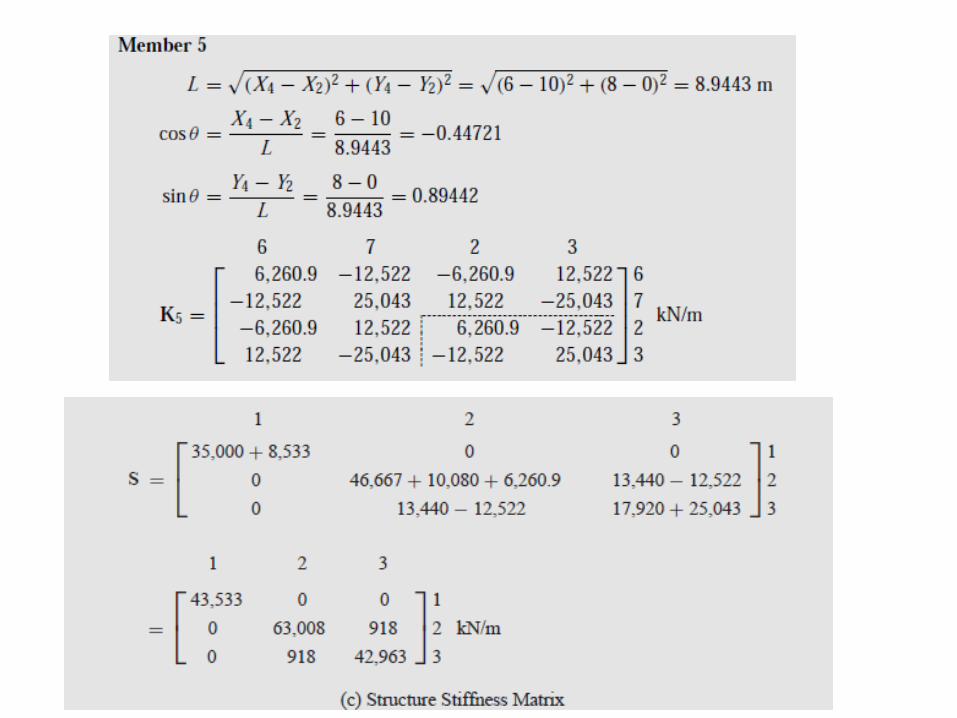
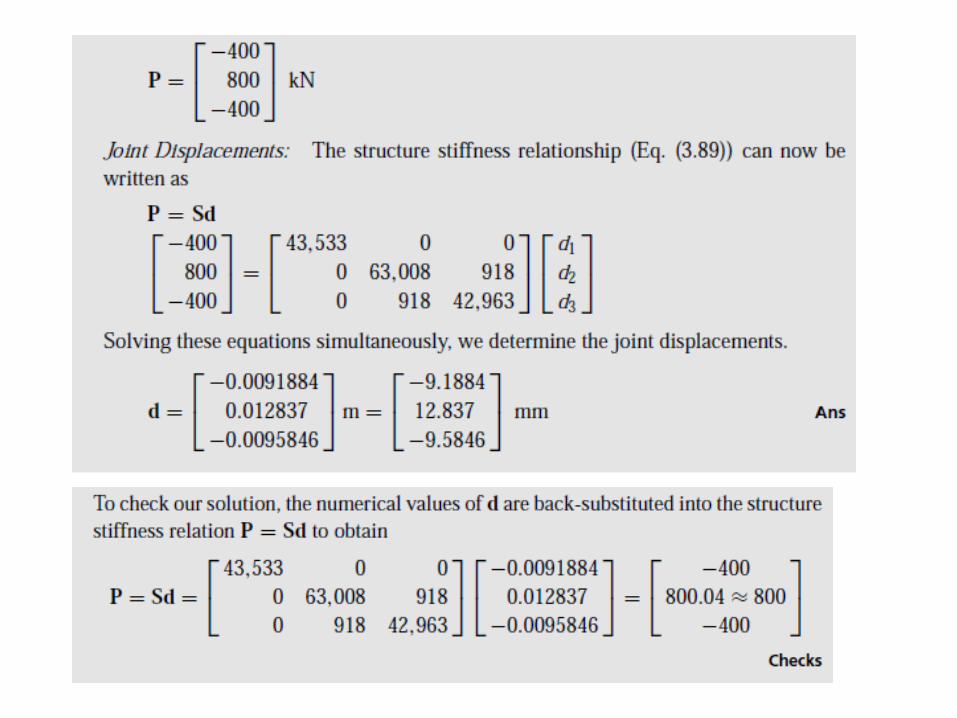
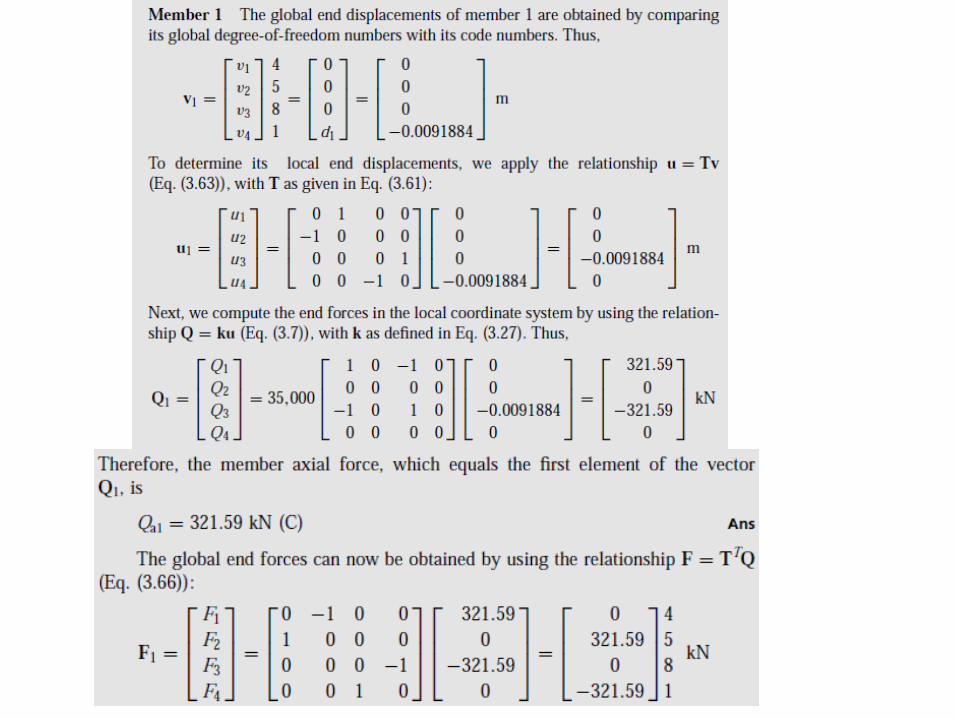
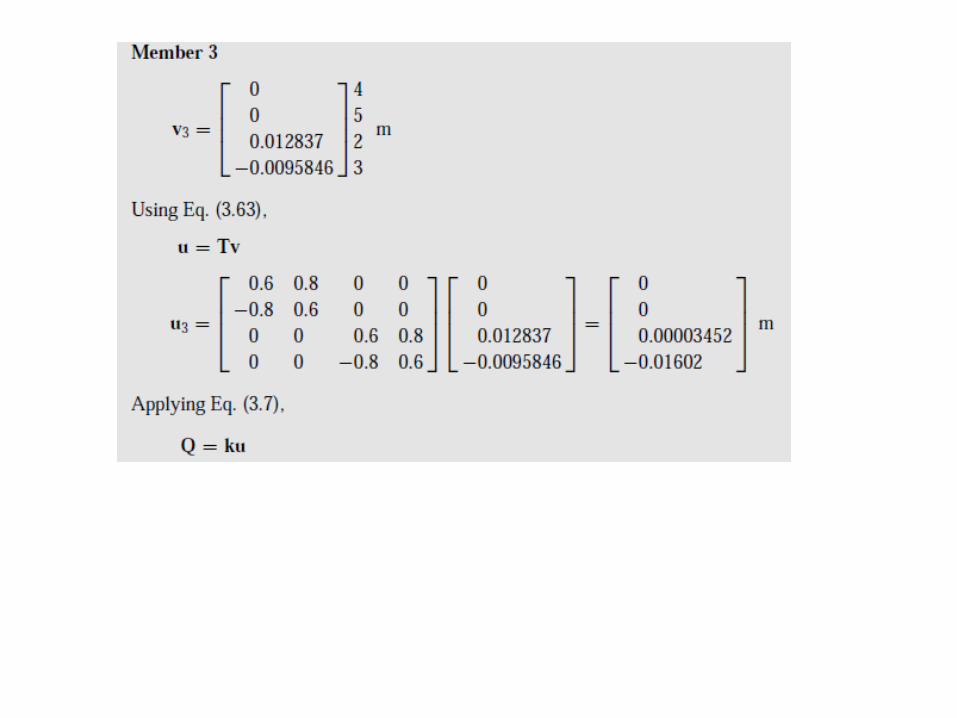
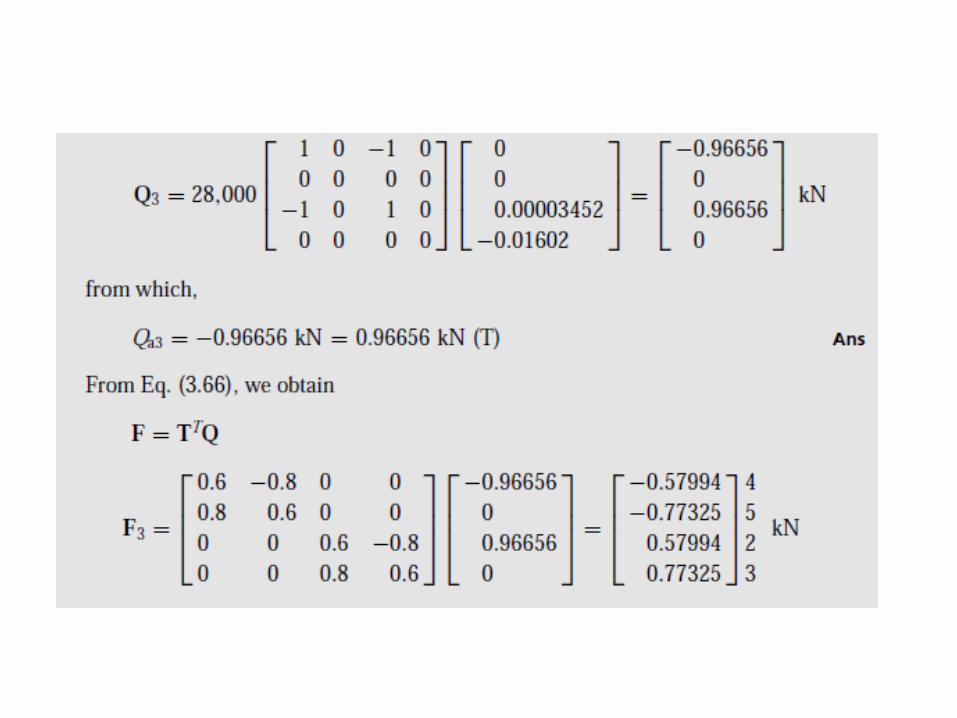
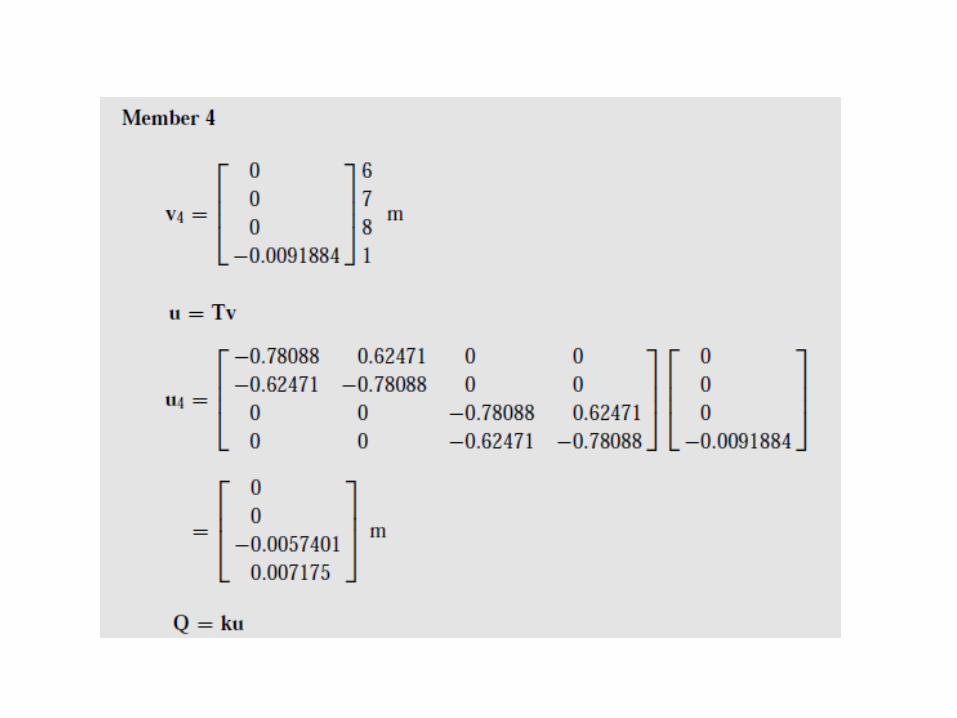
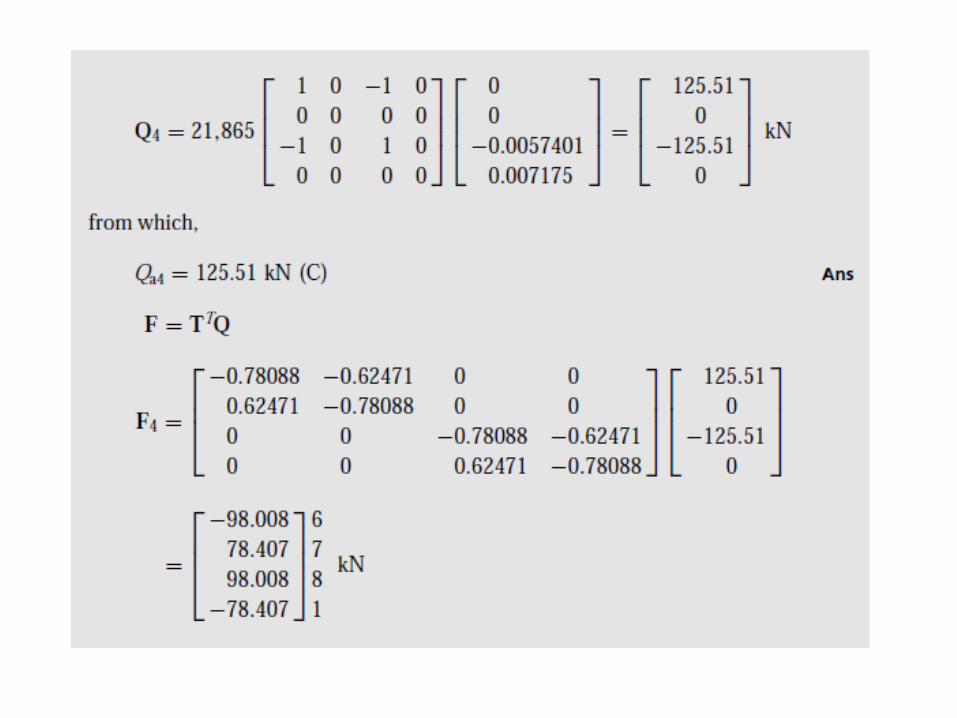
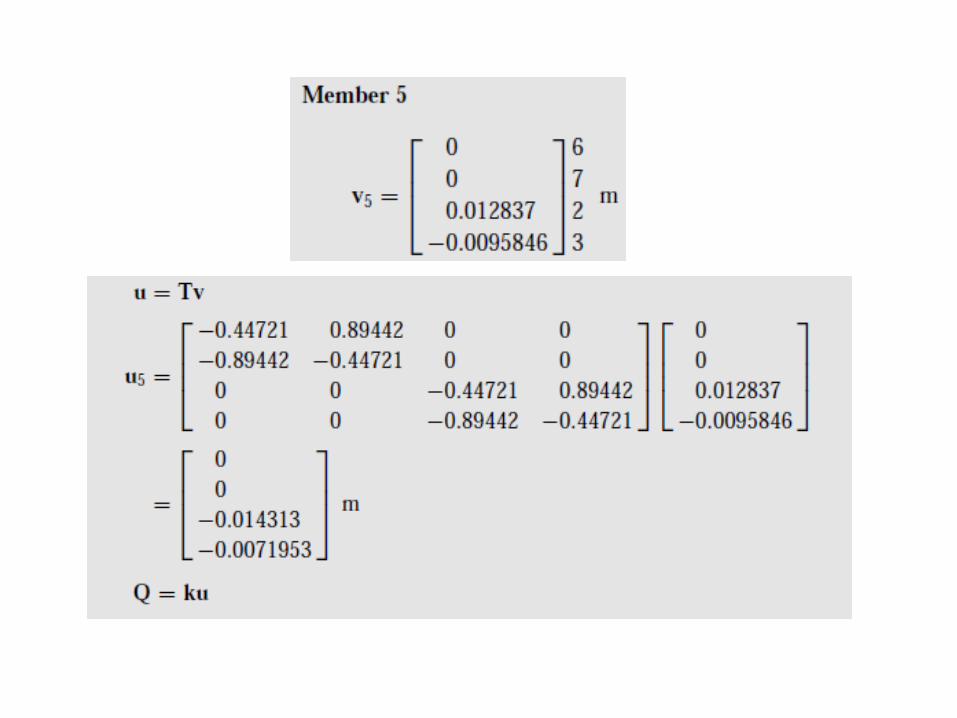
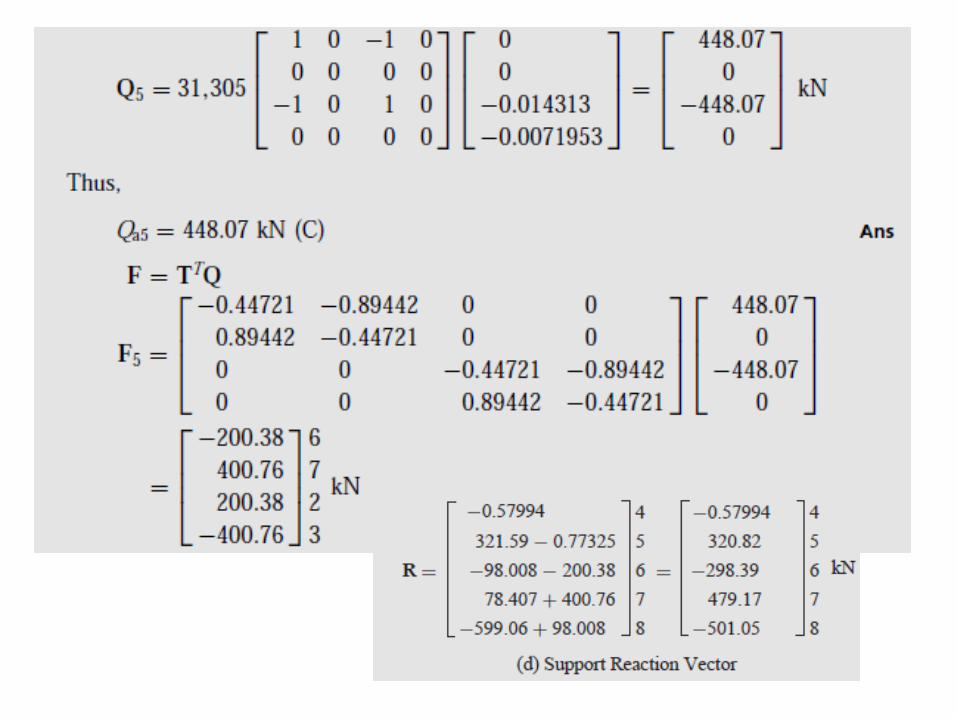
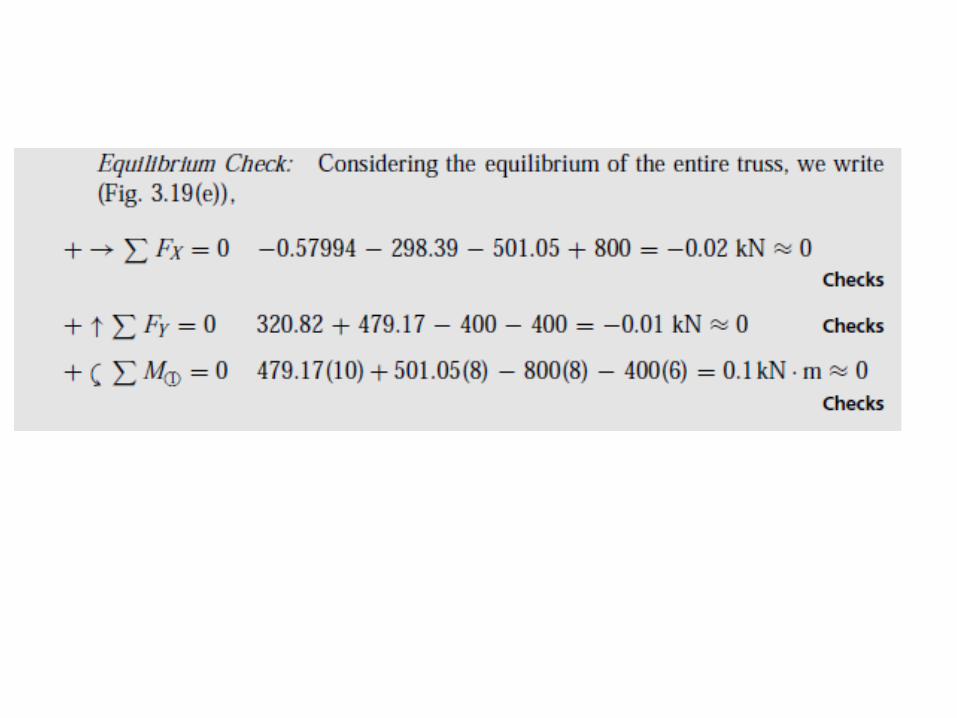
Example:
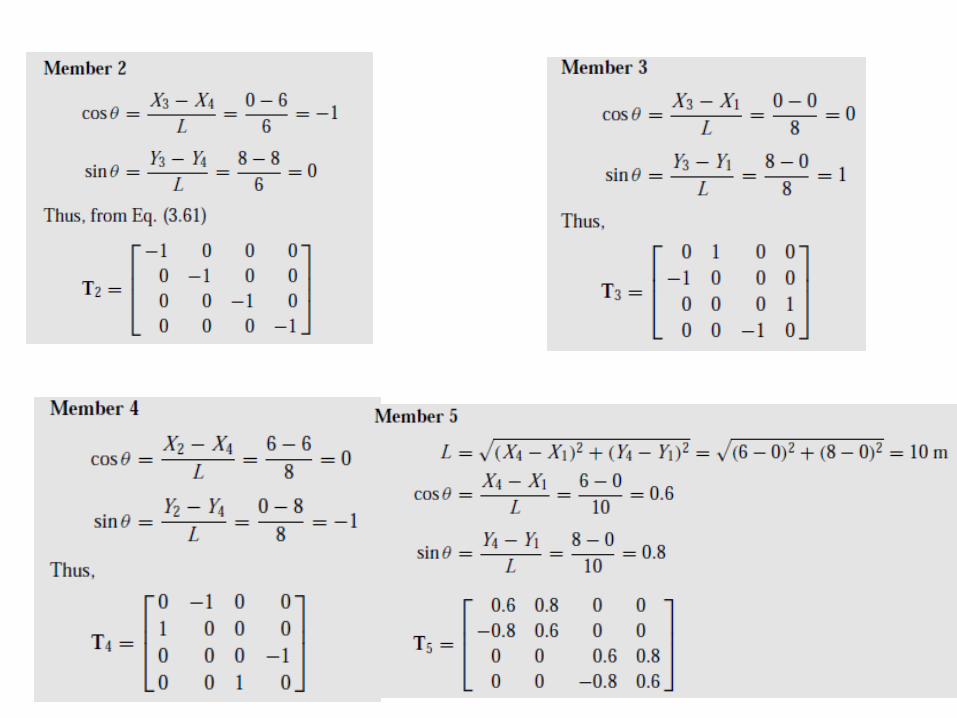
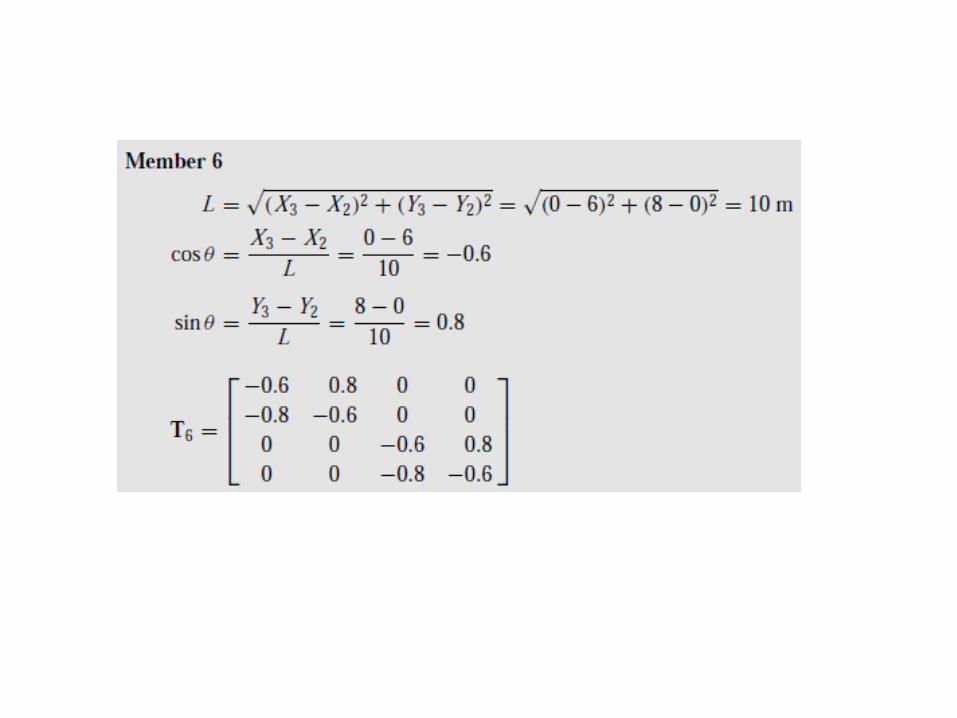

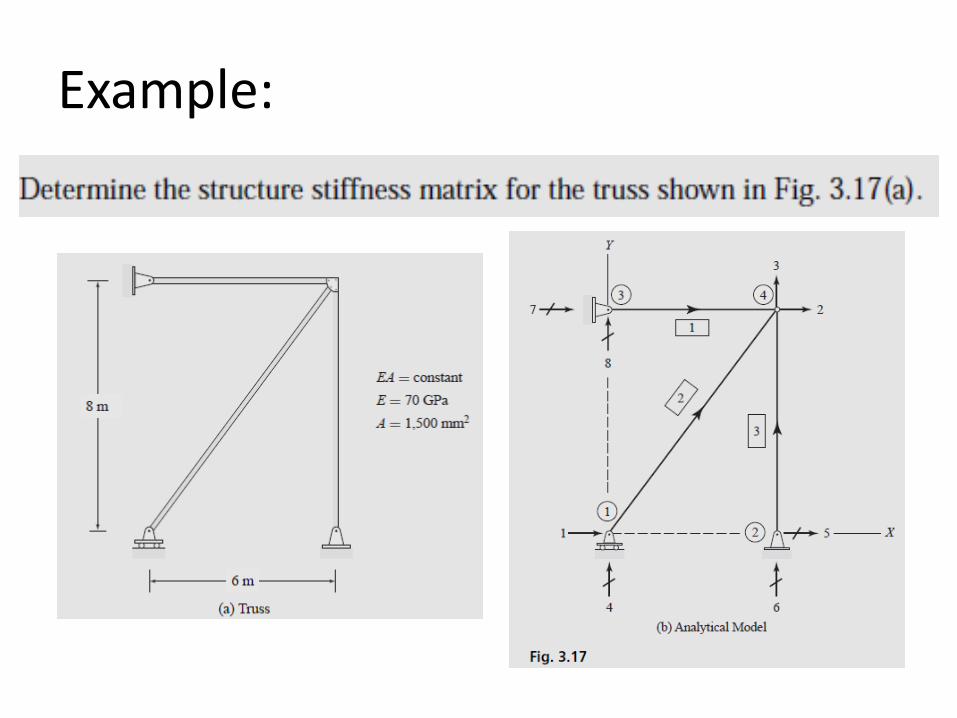
Example:
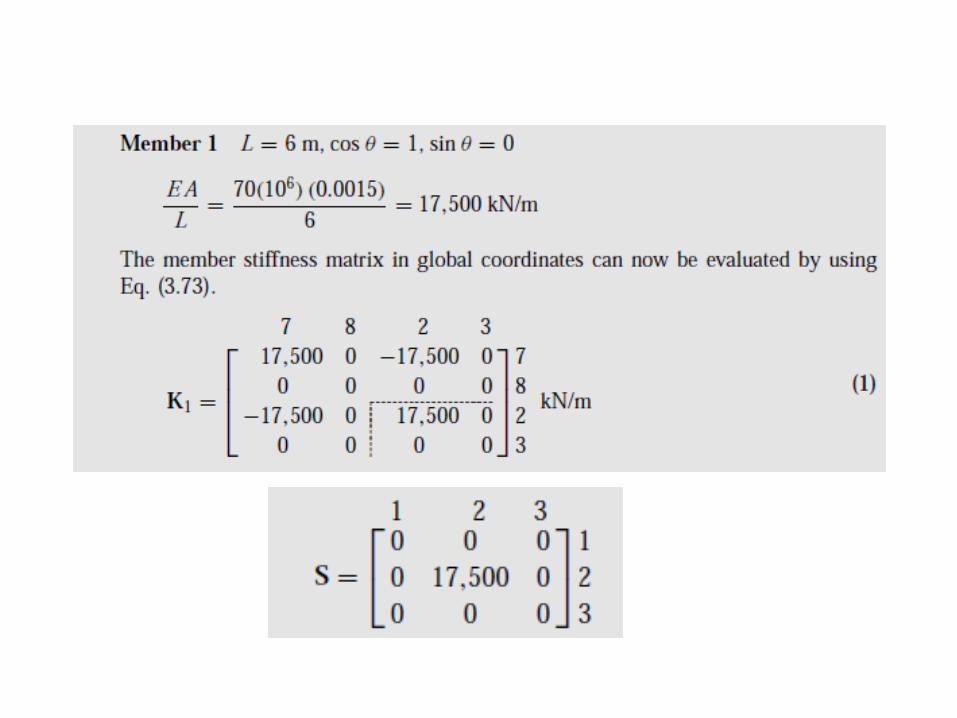
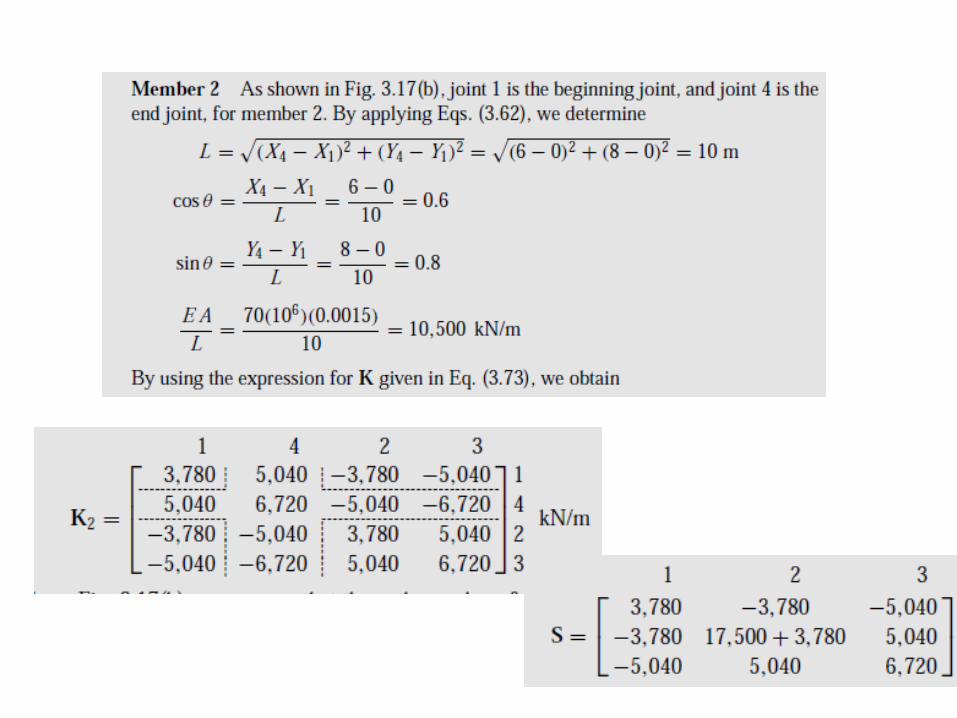
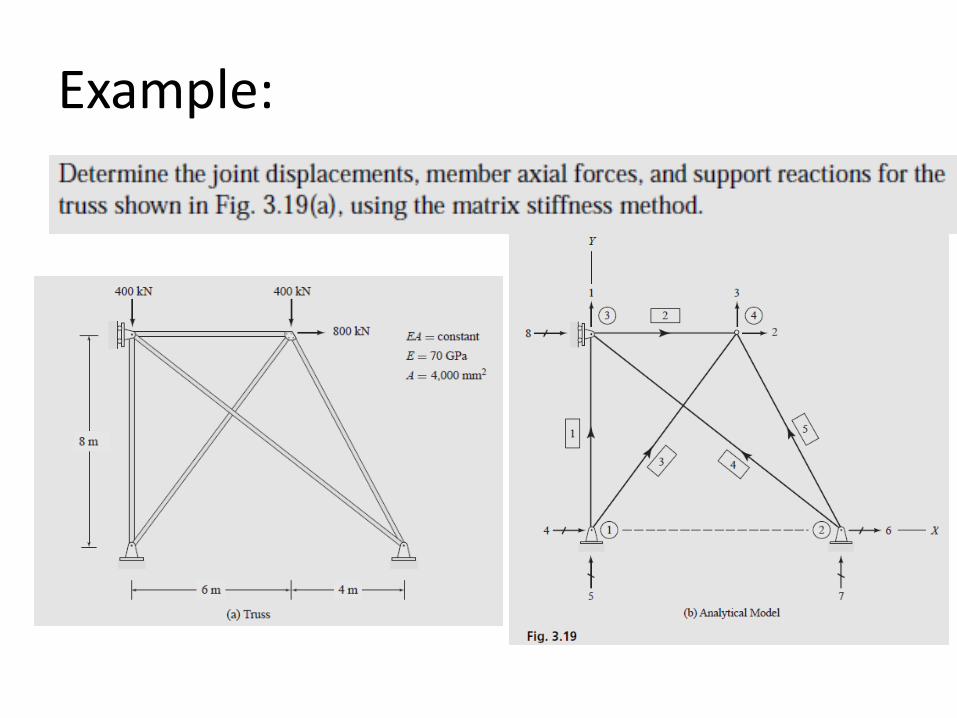
Example:

Recommended