
Rancang Bangun Sistem Pengukuran Kekentalan Nira
Menggunakan Sensor Turbin Adi Prasetyo Hutomo, Drs. Bambang Suprijanto, M.Si, Drs. Tri Anggono Prijo
Program Studi Fisika Fakultas Sains dan Teknologi Universitas Airlangga
Abstract. The aim of this research is to make measurement system of nira viscosity by using turbine,
DC motor, optical rotary encoder, opto-coupler, and microcontroller. Turbine sensor system will detect
the change of viscosity solution which has proportionality with glucose solution and turbine frequency.
Turbine system that has been made in this research is expected to measure the viscosity and glucose
solution continuously. The turbine will be rotated by DC motor which is equipped with optical rotary
encoder and opto-coupler, to measure frequency of the rotation. Value that is gotten from this research
is turbine terminal frequency. The conversion value of measurable frequency becomes glucose value
and viscosity solution which is done by microcontroller. The data of this research show that the
optimum PWM of turbine activator for solution temperature 60oC and the range of the glucose solution
(40-60)obrix is 10%. While for the range of the glucose solution (60-75)obrix is 20%. Correlation
between measurable glucose value (y) and measurable frequency (x) is suitable with the equation y=-
27.11x + 91.31 for the 10% PWM, and y = -23.10x+103.6 for the 20% PWM. Based on the
measurable glucose experiment to glucose as calibrator for PWM 10% is suitable with the equation
y=1.007x-0.296, while for PWM 20% is suitable with the equation y=0.997x+0.104. Variable
conversion of measurable glucose (y) that become measurable viscosity (Ƞ) is suitable with the
equation Ƞ=0,045y-0, 35.
Keywords: glucose, viscosity, brix, terminal frequency, PWM.
Abstrak. Penelitian ini dilakukan untuk membuat sistem pengukuran kekentalan nira menggunakan
turbin, motor DC, optical rotary encoder, opto-coupler dan mikrokontroler. Sistem sensor turbin akan
mendeteksi perubahan kekentalan larutan yang memiliki kesebandingan dengan kadar gula larutan dan
frekuensi turbin. Sistem sensor yang dibuat ini diharapkan dapat melakukan pengukuran kekentalan
dan kadar gula secara kontinu. Turbin akan diputar oleh motor DC yang dilengkapi dengan optical
rotary encoder dan opto-coupler, sehingga dapat diukur frekuensi putarnya. Nilai yang dibaca pada
sistem pengukuran ini adalah frekuensi terminal turbin. Konversi nilai frekuensi terukur menjadi nilai
kadar gula dan kekentalan larutan dilakukan oleh mikrokontroler. Hasil penelitian menunjukan PWM
optimum penggerak turbin pada suhu larutan 60oC dan rentang kadar gula (40-60)obrix adalah 10%,
sedangkan untuk rentang kadar gula (60-75)obrix adalah 20%. Korelasi antara nilai kadar gula terukur
(y) terhadap frekuensi terukur (x) memenuhi persamaan y=-27,11x+91,31 untuk PWM 10% dan y=-
23,10x+103,6 untuk PWM 20%. Berdasarkan pengujian kadar gula terukur terhadap kadar gula
kalibrator untuk PWM 10% memenuhi persamaan y=1,007x-0,296, sedangkan untuk PWM 20%
memenuhi persamaan y=0,997x+0,104. Konversi variabel kadar gula terukur (y) menjadi kekentalan
terukur (Ƞ) memenuhi persamaan Ƞ=0,045y-0,35
Kata kunci: Kadar gula, kekentalan, brix, frekuensi terminal, PWM.
PENDAHULUAN
Industri gula pasir merupakan salah satu sektor industri yang strategis bagi
perekonomian di Indonesia, hal ini karena kebutuhan akan gula pasir di Indonesia sangat
tinggi. Bahkan untuk memenuhi permintaan pasar, Indonesia harus import dari negara-negara

penghasil gula. Salah satu faktor penyebab rendahnya produksi gula dalam negeri adalah
sebagian besar pabrik gula yang ada di Indonesia masih bersifat konvensional, sehingga
dibutuhkan sentuhan teknologi untuk dapat meningkatkan kualitas dan kuantitas hasil
produksi.
Kualitas dan kuantitas produksi pabrik gula sangat ditentukan oleh pemantauan kadar
gula nira terutama pada proses evaporasi terakhir. Selama ini pemantauan kadar gula nira
pada evaporasi terakhir ini dilakukan oleh dokter gula. Pengukuran kadar gula ini dilakukan
dengan metode sampling, yakni menggunakan alat polarimeter dan refraktometer.
Pengukuran dengan cara ini membutuhkan waktu yang cukup lama, sehingga pada
prakteknya seringkali penentuan kadar gula nira ditentukan oleh dokter gula tanpa
menggunakan alat ukur. Pemantauan kadar gula nira dengan cara ini sangat subyektif, karena
sangat bergantung pada pengalaman dari dokter gula. Apabila nira keluaran dari evaporator
terakhir kadar airnya masih terlalu tinggi maka gula pasir yang dihasilkan kualitasnya akan
menurun karena proses kristalisasinya tidak dapat berlangsung secara sempurna yang
mengakibatkan kristal gula pasir yang dihasilkan terlalu lembut, selain itu kuantitas gula pasir
yang dihasilkan juga akan menurun karena sebagian besar nira akan menjadi tetes (limbah
gula pasir). Tetes memang masih memiliki nilai jual, akan tetapi nilai ekonominya jauh lebih
rendah daripada harga gula pasir.
Untuk meningkatkan kualitas dan kuantitas produksi gula ini maka dalam penelitian
ini akan dibuat sistem pengukuran kadar nira pada proses evaporasi terakhir, yang
diharapkan dapat mengukur secara kontinu, sehingga pada proses kristalisasi akan dihasilkan
kristal gula pasir yang optimal. Pada proses evaporasi akhir nilai kadar gula yang
dimungkinkan adalah (40-75)obrix yang ekuivalen (40-75)% massa dengan (1,17331-1,3748)
gr/cm3 pada suhu 27oC. (Hutomo, AP, Fidianto, RA. 2012)
Penentuan kadar gula nira dapat ditentukan melalui proses pengukuran kekentalan nira.
Mekanisme pengukuran ini selain lebih praktis juga memiliki keunggulan dalam hal
kontinuitas penentuan kadar gula pada tahap evaporasi akhir. Sistem pengukuran kekentalan
nira pada penelitian ini menggunakan sensor berupa sistem turbin yang mampu mengubah
informasi nilai kekentalan nira menjadi perubahan kecepatan putar motor listrik. Perubahan
nilai kecepatan putaran motor listrik dihubungkan pada rangkaian mikrokontroler melalui
sistem opto-coupler. Nilai kekentalan nira terukur akan dikonversi menjadi nilai kadar gula
untuk ditampilkan pada display LCD. Nilai kecepatan putar motor yang akan diidentifikasi
sebagai nilai kadar gula nira harus nilai kecepatan putar yang telah mencapai kecepatan
terminal
METODE PENELITIAN
Konstruksi Mekanik Sistem Sensor
Tahap awal yang dilakukan dalam penelitian ini adalah membuat konstruksi mekanik
sistem sensor. Sistem sensor yang dibuat dalam penelitian ini terdiri dari motor DC, optical
rotay encoder, opto-coupler tipe GP1S53VJ000F dan turbin. Rancangan mekanik system
sensor akan ditunjukan pada Gambar 1 berikut ini:
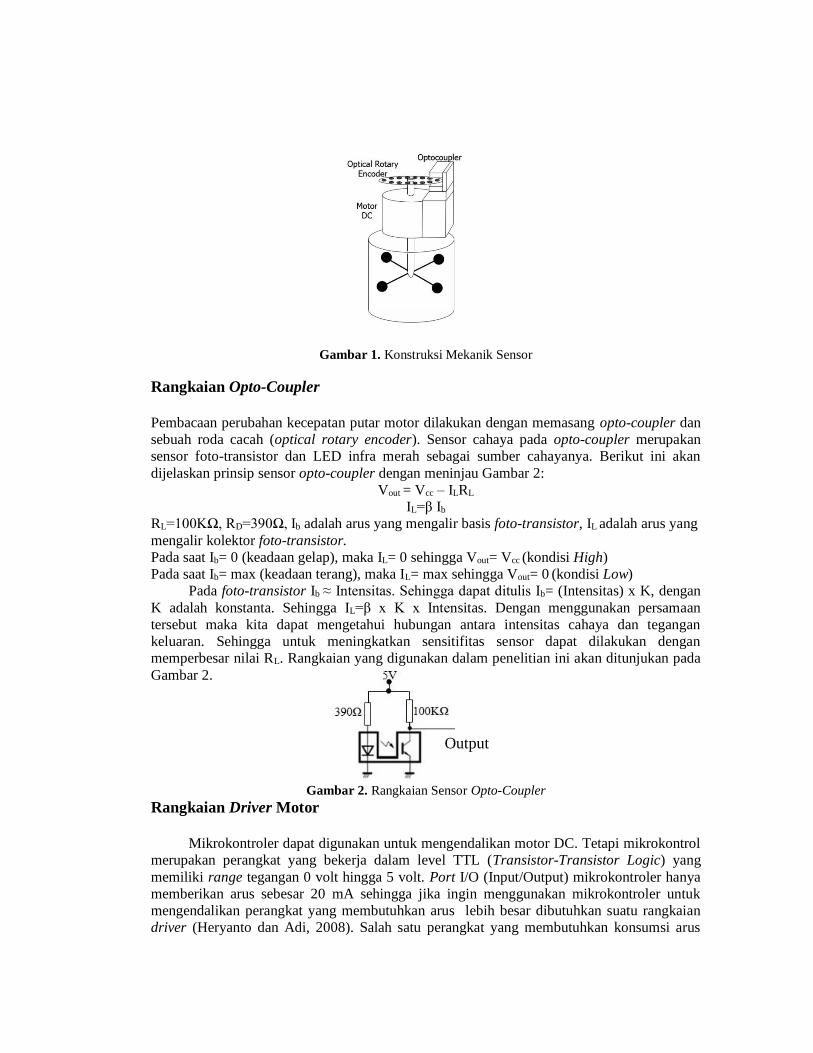
Gambar 1. Konstruksi Mekanik Sensor
Rangkaian Opto-Coupler
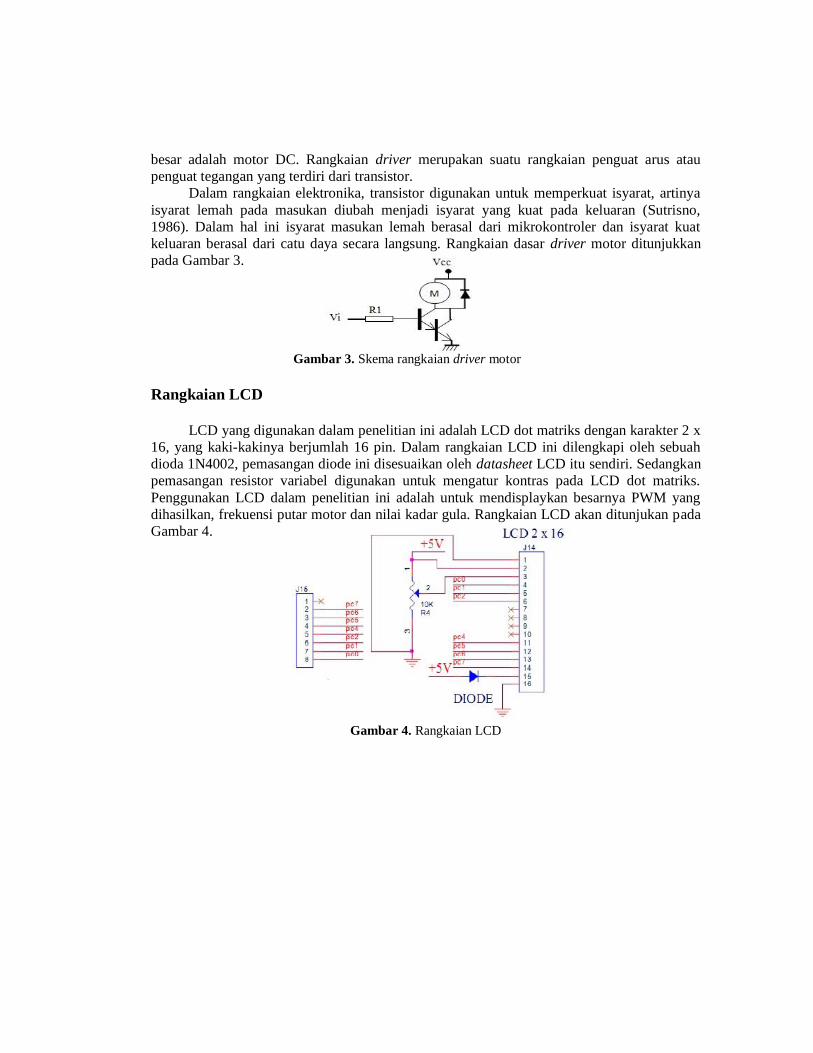
Pembacaan perubahan kecepatan putar motor dilakukan dengan memasang opto-coupler dan
sebuah roda cacah (optical rotary encoder). Sensor cahaya pada opto-coupler merupakan
sensor foto-transistor dan LED infra merah sebagai sumber cahayanya. Berikut ini akan
dijelaskan prinsip sensor opto-coupler dengan meninjau Gambar 2:
Vout = Vcc – ILRL
IL=β Ib
RL=100KΩ, RD=390Ω, Ib adalah arus yang mengalir basis foto-transistor, IL adalah arus yang
mengalir kolektor foto-transistor.
Pada saat Ib= 0 (keadaan gelap), maka IL= 0 sehingga Vout= Vcc (kondisi High)
Pada saat Ib= max (keadaan terang), maka IL= max sehingga Vout= 0 (kondisi Low)
Pada foto-transistor Ib ≈ Intensitas. Sehingga dapat ditulis Ib= (Intensitas) x K, dengan
K adalah konstanta. Sehingga IL=β x K x Intensitas. Dengan menggunakan persamaan
tersebut maka kita dapat mengetahui hubungan antara intensitas cahaya dan tegangan
keluaran. Sehingga untuk meningkatkan sensitifitas sensor dapat dilakukan dengan
memperbesar nilai RL. Rangkaian yang digunakan dalam penelitian ini akan ditunjukan pada
Gambar 2.
Gambar 2. Rangkaian Sensor Opto-Coupler
Rangkaian Driver Motor
Mikrokontroler dapat digunakan untuk mengendalikan motor DC. Tetapi mikrokontrol
merupakan perangkat yang bekerja dalam level TTL (Transistor-Transistor Logic) yang
memiliki range tegangan 0 volt hingga 5 volt. Port I/O (Input/Output) mikrokontroler hanya
memberikan arus sebesar 20 mA sehingga jika ingin menggunakan mikrokontroler untuk
mengendalikan perangkat yang membutuhkan arus lebih besar dibutuhkan suatu rangkaian
driver (Heryanto dan Adi, 2008). Salah satu perangkat yang membutuhkan konsumsi arus
Output
besar adalah motor DC. Rangkaian driver merupakan suatu rangkaian penguat arus atau
penguat tegangan yang terdiri dari transistor.
Dalam rangkaian elektronika, transistor digunakan untuk memperkuat isyarat, artinya
isyarat lemah pada masukan diubah menjadi isyarat yang kuat pada keluaran (Sutrisno,
1986). Dalam hal ini isyarat masukan lemah berasal dari mikrokontroler dan isyarat kuat
keluaran berasal dari catu daya secara langsung. Rangkaian dasar driver motor ditunjukkan
pada Gambar 3.
Gambar 3. Skema rangkaian driver motor
Rangkaian LCD
LCD yang digunakan dalam penelitian ini adalah LCD dot matriks dengan karakter 2 x
16, yang kaki-kakinya berjumlah 16 pin. Dalam rangkaian LCD ini dilengkapi oleh sebuah
dioda 1N4002, pemasangan diode ini disesuaikan oleh datasheet LCD itu sendiri. Sedangkan
pemasangan resistor variabel digunakan untuk mengatur kontras pada LCD dot matriks.
Penggunakan LCD dalam penelitian ini adalah untuk mendisplaykan besarnya PWM yang
dihasilkan, frekuensi putar motor dan nilai kadar gula. Rangkaian LCD akan ditunjukan pada
Gambar 4.
Gambar 4. Rangkaian LCD
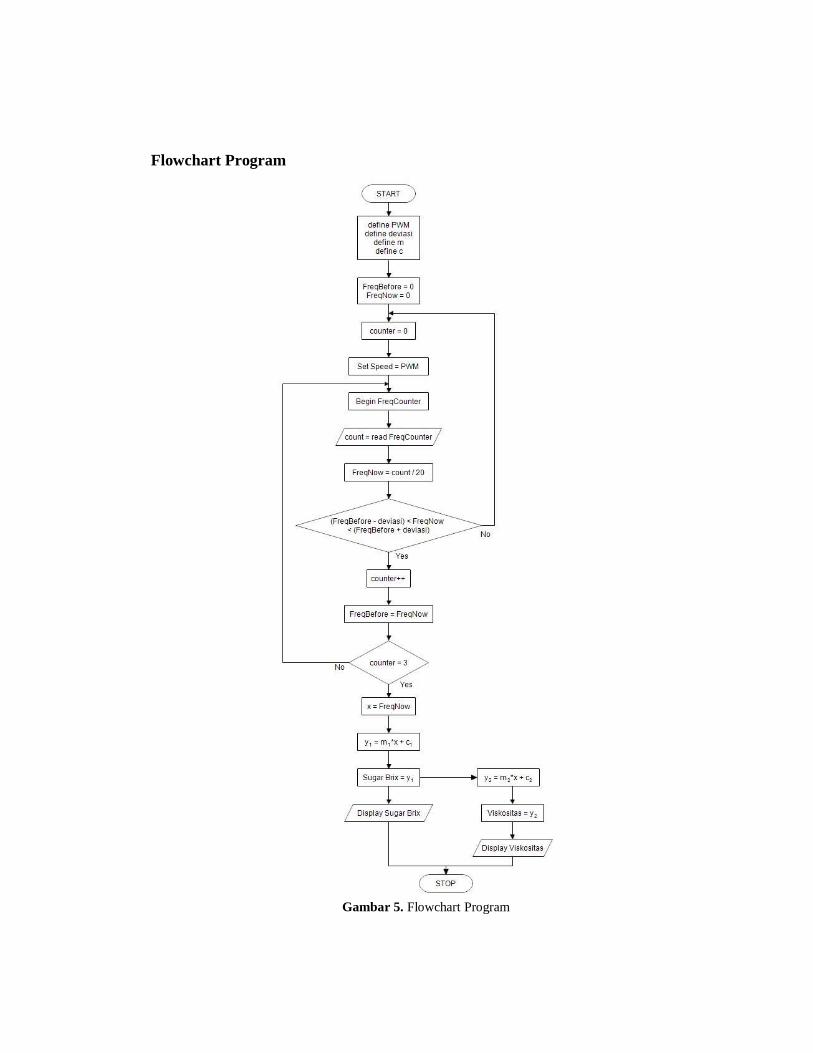
Flowchart Program
Gambar 5. Flowchart Program

HASIL DAN PEMBAHASAN
Hasil Rakitan Opto-Coupler
Berdasarkan hasil pengujian yang telah dilakukan maka didapatkan hasil pada saat
opto-coupler terhalang (keadaan gelap) level tegangan yang dihasilkan adalah 5 volt (high)
dan pada saat tidak terhalang (keadaan terang) level tegangan yang dihasilkan adalah 0 volt
(low). Sinyal keluaran opto-coupler pada saat diputar dengan PWM 100% menghasilkan
frekuensi sebesar 500Hz akan ditunjukan pada Gambar 6.
Gambar 6. Hasil Keluaran Opto-Coupler
Hasil Rakitan Driver Motor
Pada penelitian ini dibuat suatu rangkaian driver motor yang digunakan sebagai saklar
elektronik untuk menggerakkan motor sesuai PWM yang telah dihasilkan oleh
mikrokontroler. Driver motor yang dibuat dalam ini penelitian ini merupakan driver motor
yang hanya mampu menggerakan motor dengan satu arah gerakan saja. Driver motor ini
terdiri dari dua buah transistor NPN yang disusun secara darlington. Transistor yang
digunakan dalam penelitian ini adalah transistor C945 dan C1061. Pada driver motor ini
pulsa dari mikrokontroler ditunjukkan oleh Vi, sedangkan R1 sebesar 1K ohm digunakan
memperkecil arus yang dihasilkan karena pada prinsipnya dengan model darlington seperti
ini tidak membutuhkan arus yang besar pada basis. Diode dalam rangkaian ini digunakan
sebagai pengaman dari arus transien besar yang dihasilkan oleh motor terutama saat motor
baru akan bergerak. Hasil rakitan yang telah dibuat akan ditunjukan pada Gambar 7:
Gambar 7. Hasil Rakitan Driver Motor
Rakitan LCD
Berdasarkan hasil pengujian yang telah dilakukan maka dapat diketahui bahwa rangkaian
yang telah dibuat dapat berfungsi dengan baik, hal ini ditunjukan dengan display LCD yang

mampu menampilkan data sesuai yang diinginkan. Display LCD yang mampu menampilkan
data akan ditunjukan pada Gambar 8
Gambar 8. Display LCD
Hasil Pengukuran
Hubungan Antara Lebar Pulsa Terhadap Daya Motor
Frekuensi PWM yang dibangkitkan dalam penelitian ini adalah sebesar 1K Hz. Arus
listrik yang mengalir pada motor dengan tegangan 11,75V adalah sebesar 66,9 mA, sehingga
dapat diketahui bahwa hambatan lilitan motor sebesar 175,63 ohm. Tegangan puncak pada
saat duty cycle 100% adalah sebesar 11,75 Volt. Besarnya daya pada motor bergantung pada
duty cycle PWM. Besarnya daya pada masing-masing PWM akan disajikan pada Tabel 1.
Tabel 1: Besarnya daya pada masing-masing PWM
Duty Cycle (%) Vefektif (Volt) Vefektif2 (Volt) Pefektif (W)
10 3,71 13,8 0,078
20 5,25 27,6 0,157
30 6,43 41,4 0,236
40 7,43 55,22 0,31
50 8,3 69,03 0,39
Berdasarkan data di atas dapat disimpulkan bahwa semakin besar duty cycle yang digunakan
maka daya yang dihasilkan juga semakin besar. Oleh karena itu semakin besar daya yang
digunakan maka kecepatan putar motor juga akan semakin besar. Sehingga semakin besar
daya yang digunakan maka peluang untuk terjadinya turbulensi pada cairan juga akan
semakin besar.
Pengujian Frekuensi Terminal
Untuk menguji tercapai tidaknya kondisi kecepatan atau frekuensi terminal dilakukan
analisis data berupa presentase kesalahan (%) pada masing-masing pengukuran yang
memenuhi persamaan presentase kesalahan (%) = Δf/f x 100 %. Hasil pengukuran dan
analisis yang telah dilakukan akan disajikan pada Tabel 2.a, 2.b, 2.c, 2.d dan 2.e.
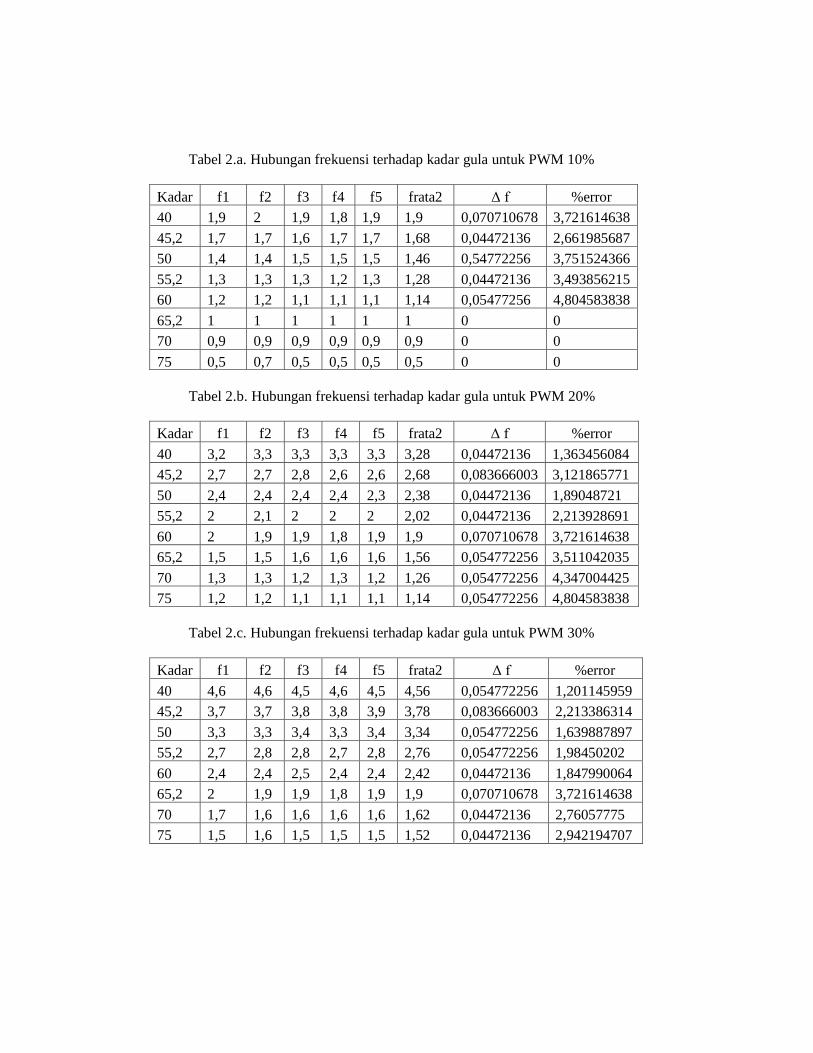
Tabel 2.a. Hubungan frekuensi terhadap kadar gula untuk PWM 10%
Kadar f1 f2 f3 f4 f5 frata2 Δ f %error
40 1,9 2 1,9 1,8 1,9 1,9 0,070710678 3,721614638
45,2 1,7 1,7 1,6 1,7 1,7 1,68 0,04472136 2,661985687
50 1,4 1,4 1,5 1,5 1,5 1,46 0,54772256 3,751524366
55,2 1,3 1,3 1,3 1,2 1,3 1,28 0,04472136 3,493856215
60 1,2 1,2 1,1 1,1 1,1 1,14 0,05477256 4,804583838
65,2 1 1 1 1 1 1 0 0
70 0,9 0,9 0,9 0,9 0,9 0,9 0 0
75 0,5 0,7 0,5 0,5 0,5 0,5 0 0
Tabel 2.b. Hubungan frekuensi terhadap kadar gula untuk PWM 20%
Kadar f1 f2 f3 f4 f5 frata2 Δ f %error
40 3,2 3,3 3,3 3,3 3,3 3,28 0,04472136 1,363456084
45,2 2,7 2,7 2,8 2,6 2,6 2,68 0,083666003 3,121865771
50 2,4 2,4 2,4 2,4 2,3 2,38 0,04472136 1,89048721
55,2 2 2,1 2 2 2 2,02 0,04472136 2,213928691
60 2 1,9 1,9 1,8 1,9 1,9 0,070710678 3,721614638
65,2 1,5 1,5 1,6 1,6 1,6 1,56 0,054772256 3,511042035
70 1,3 1,3 1,2 1,3 1,2 1,26 0,054772256 4,347004425
75 1,2 1,2 1,1 1,1 1,1 1,14 0,054772256 4,804583838
Tabel 2.c. Hubungan frekuensi terhadap kadar gula untuk PWM 30%
Kadar f1 f2 f3 f4 f5 frata2 Δ f %error
40 4,6 4,6 4,5 4,6 4,5 4,56 0,054772256 1,201145959
45,2 3,7 3,7 3,8 3,8 3,9 3,78 0,083666003 2,213386314
50 3,3 3,3 3,4 3,3 3,4 3,34 0,054772256 1,639887897
55,2 2,7 2,8 2,8 2,7 2,8 2,76 0,054772256 1,98450202
60 2,4 2,4 2,5 2,4 2,4 2,42 0,04472136 1,847990064
65,2 2 1,9 1,9 1,8 1,9 1,9 0,070710678 3,721614638
70 1,7 1,6 1,6 1,6 1,6 1,62 0,04472136 2,76057775
75 1,5 1,6 1,5 1,5 1,5 1,52 0,04472136 2,942194707

Tabel 2.d. Hubungan frekuensi terhadap kadar gula untuk PWM 40%
Kadar f1 f2 f3 f4 f5 frata2 Δ f %error
40 6 5,9 6 5,9 5,9 5,94 0,054772256 0,922091848
45,2 4,7 4,8 4,6 4,7 4,7 4,7 0,070710678 1,504482513
50 4,2 4,2 4,3 4,2 4,2 4,22 0,04472136 1,059747857
55,2 3,3 3,2 3,3 3,3 3,2 3,26 0,054772256 1,680130544
60 2,9 2,9 2,9 2,8 2,8 2,86 0,054772256 1,915113837
65,2 2,2 2,2 2,2 2,2 2,2 2,2 0 0
70 1,9 1,8 1,9 1,8 1,9 1,86 0,054772256 2,944744933
75 1,9 1,9 1,8 1,9 1,7 1,84 0,089442719 4,861017342
Tabel 2.e. Hubungan frekuensi terhadap kadar gula untuk PWM 50%
Kadar f1 f2 f3 f4 f5 frata2 Δ f %error
40 7,4 7,4 7,4 7,4 7,4 7,4 0 0
45,2 5,7 5,7 5,8 5,7 5,7 5,72 0,04472136 0,078458526
50 5 5 5 5 5 5 0 0
55,2 3,7 3,8 3,9 3,9 3,8 3,82 0,083666004 0,146782461
60 3,2 3,2 3,1 3,2 3,2 3,18 0,04472136 0,078458526
65,2 2,4 2,4 2,4 2,4 2,4 2,4 0 0
70 2,1 2,1 2,1 2,1 2,1 2,1 0 0
75 2 2 2 2 2 2 0 0
Berdasarkan data yang diperoleh, yakni pengulangan sebanyak 5 kali di masing-
masing nilai kadar gula dan PWM maka dapat terlihat bahwa dalam waktu 50 detik ini sudah
tercapai frekuensi terminal. Hal ini dibuktikan dengan kesamaan nilai frekuensi yang
dihasilkan di setiap pengulangan yang telah dilakukan, dari data tersebut terlihat bahwa error
pengukuran untuk masing-masing kadar gula dan PWM tidak lebih besar dari 5%.
Berdasarkan data yang telah didapatkan maka dapat disimpulkan bahwa pengukuran kadar
gula dengan menggunakan viskositas yang dalam penelitian ini menggunakan system sensor
elektro-mekanik dapat dilakukan dan waktu yang dibutuhkan untuk mencapai kecepatan
terminal tidak terlalu lama yakni kurang dari 50 detik.
Pada pengamatan menggunakan mikrokontroler frekuensi terminal merupakan kriteria
pembacaaan nilai kadar gula yang ditampilkan. Frekuensi terminal dapat diketahui dari
perbandingan 5 frekuensi berurutan yang nilianya sama. Jadi pemrograman mikrokontroler
disesuaikan dengan kriteria tersebut
Hubungan Frekuensi Terminal Terhadap Kadar Gula
Berdasarkan hubungan frekuensi terminal terhadap kadar gula pada masing-masing
nilai PWM dilakukan analisis regresi linier. Analisis regresi linier tersebut digunakan untuk
mendapatkan persamaan linier yang menggambarkan korelasi antar kedua variable. Selain itu
hasil analisis regresi linier juga digunakan untuk mendapatkan PWM optimal berdasarkan
anas nilai R2 terbesar. Hasil analisis regresi linier ditunjukan pada Tabel 3
Tabel 3: Hasil analisis regresi linier pada masing-masing PWM
Keterangan:
x adalah kadar gula dalam satuan obrix
y adalah frekuensi dalam satuan Hz
Berdasarkan data pada Tabel 3, terlihat bahwa R2 masing-masing data hampir
mendekati nilai 1. Hal ini berarti bahwa system sensor yang dibuat untuk masing-masing
PWM memiliki linearitas yang baik. Akan tetapi dari Tabel di atas juga tampak bahwa
semakin besar PWM maka nilai R2 yang dihasilkan semakin mengecil. Mengecilnya nilai R2
pada PWM tinggi ini diakibatkan karena semakin besar PWM yang digunakan maka semakin
cepat motor berputar yang berakibat pada membesarnya riak (turbulensi) pada cairan.
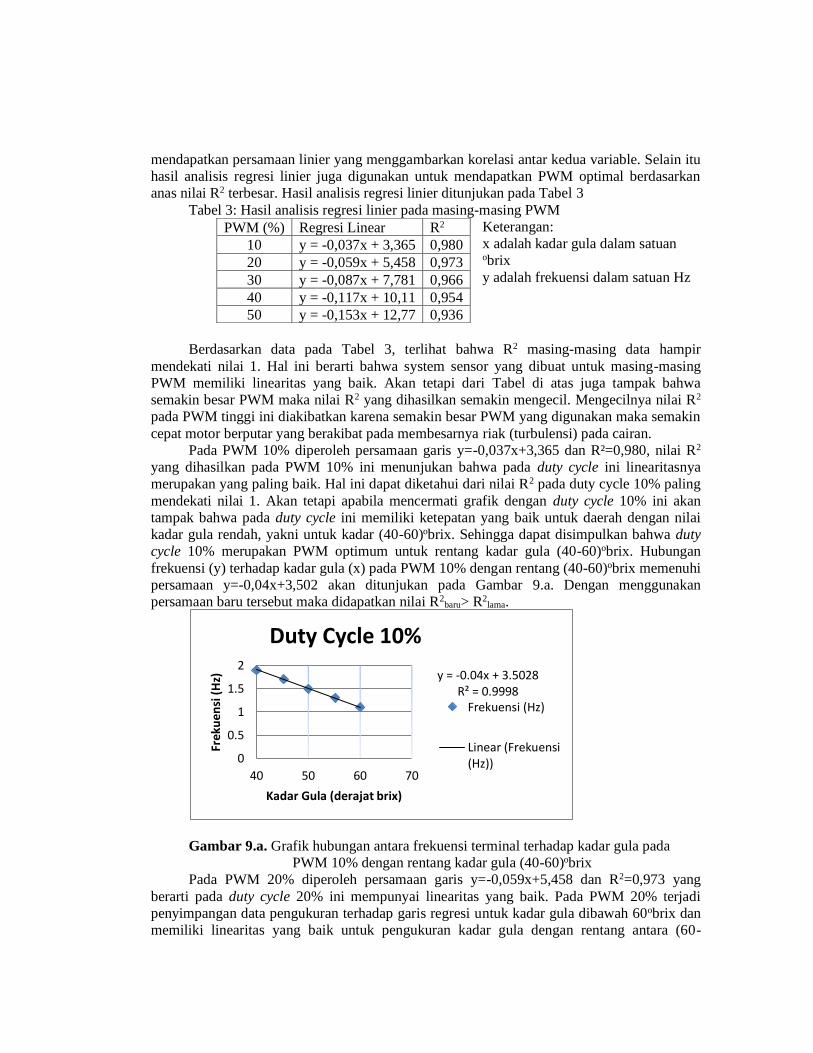
Pada PWM 10% diperoleh persamaan garis y=-0,037x+3,365 dan R²=0,980, nilai R2
yang dihasilkan pada PWM 10% ini menunjukan bahwa pada duty cycle ini linearitasnya
merupakan yang paling baik. Hal ini dapat diketahui dari nilai R2 pada duty cycle 10% paling
mendekati nilai 1. Akan tetapi apabila mencermati grafik dengan duty cycle 10% ini akan
tampak bahwa pada duty cycle ini memiliki ketepatan yang baik untuk daerah dengan nilai
kadar gula rendah, yakni untuk kadar (40-60)obrix. Sehingga dapat disimpulkan bahwa duty
cycle 10% merupakan PWM optimum untuk rentang kadar gula (40-60)obrix. Hubungan
frekuensi (y) terhadap kadar gula (x) pada PWM 10% dengan rentang (40-60)obrix memenuhi
persamaan y=-0,04x+3,502 akan ditunjukan pada Gambar 9.a. Dengan menggunakan
persamaan baru tersebut maka didapatkan nilai R2baru> R2
lama.
Gambar 9.a. Grafik hubungan antara frekuensi terminal terhadap kadar gula pada
PWM 10% dengan rentang kadar gula (40-60)obrix
Pada PWM 20% diperoleh persamaan garis y=-0,059x+5,458 dan R2=0,973 yang
berarti pada duty cycle 20% ini mempunyai linearitas yang baik. Pada PWM 20% terjadi
penyimpangan data pengukuran terhadap garis regresi untuk kadar gula dibawah 60obrix dan
memiliki linearitas yang baik untuk pengukuran kadar gula dengan rentang antara (60-
y = -0.04x + 3.5028R² = 0.9998
0
0.5
1
1.5
2
40 50 60 70
Frek
uen
si (
Hz)
Kadar Gula (derajat brix)
Duty Cycle 10%
Frekuensi (Hz)
Linear (Frekuensi(Hz))
PWM (%) Regresi Linear R2
10 y = -0,037x + 3,365 0,980
20 y = -0,059x + 5,458 0,973
30 y = -0,087x + 7,781 0,966
40 y = -0,117x + 10,11 0,954
50 y = -0,153x + 12,77 0,936
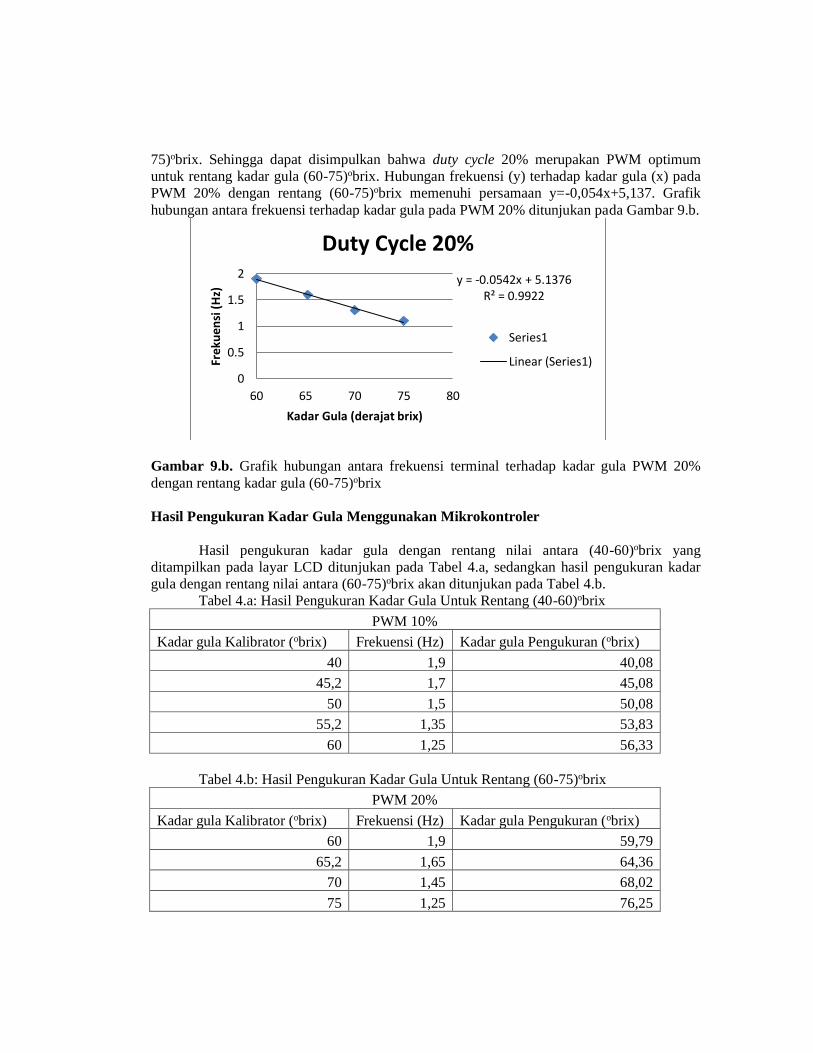
75)obrix. Sehingga dapat disimpulkan bahwa duty cycle 20% merupakan PWM optimum
untuk rentang kadar gula (60-75)obrix. Hubungan frekuensi (y) terhadap kadar gula (x) pada
PWM 20% dengan rentang (60-75)obrix memenuhi persamaan y=-0,054x+5,137. Grafik
hubungan antara frekuensi terhadap kadar gula pada PWM 20% ditunjukan pada Gambar 9.b.
Gambar 9.b. Grafik hubungan antara frekuensi terminal terhadap kadar gula PWM 20%
dengan rentang kadar gula (60-75)obrix
Hasil Pengukuran Kadar Gula Menggunakan Mikrokontroler
Hasil pengukuran kadar gula dengan rentang nilai antara (40-60)obrix yang
ditampilkan pada layar LCD ditunjukan pada Tabel 4.a, sedangkan hasil pengukuran kadar
gula dengan rentang nilai antara (60-75)obrix akan ditunjukan pada Tabel 4.b.
Tabel 4.a: Hasil Pengukuran Kadar Gula Untuk Rentang (40-60)obrix
PWM 10%
Kadar gula Kalibrator (obrix) Frekuensi (Hz) Kadar gula Pengukuran (obrix)
40 1,9 40,08
45,2 1,7 45,08
50 1,5 50,08
55,2 1,35 53,83
60 1,25 56,33
Tabel 4.b: Hasil Pengukuran Kadar Gula Untuk Rentang (60-75)obrix
PWM 20%
Kadar gula Kalibrator (obrix) Frekuensi (Hz) Kadar gula Pengukuran (obrix)
60 1,9 59,79
65,2 1,65 64,36
70 1,45 68,02
75 1,25 76,25
y = -0.0542x + 5.1376R² = 0.9922
0
0.5
1
1.5
2
60 65 70 75 80
Frek
uen
si (
Hz)
Kadar Gula (derajat brix)
Duty Cycle 20%
Series1
Linear (Series1)
Berdasarkan Tabel 4.a dan 4.b maka dapat dilihat bahwa sistem yang dibuat masih
belum sempurna. Hal ini ditunjukan dengan besarnya simpangan nilai yang terukur terhadap
kalibrator. Untuk menyamakan nilai antara kadar gula terukur dengan nilai kadar gula
kalibrator maka dilakukan koreksi persamaan regresi linier yang digunakan dan merubah
rentang pengukuran.
Untuk rentang nilai kadar gula antara (40-60)obrix persamaan koreksi yang
digunakan adalah y=-27,11x+91,31, sedangkan untuk rentang kadar gula antara (60-75)obrix
persamaan koreksi yang digunakan adalah y=-23,10x+103,6 dengan nilai y adalah kadar gula
terukur dan x adalah frekuensi terukur mikrokontroler. Konversi variabel kadar gula terukur
menjadi kekentalan terukur memenuhi persamaan yvis=0,045y-0,35, dengan nilai yvis adalah
nilai kekentalan terukur dan y adalah nilai kadar gula terukur. Setelah dilakukan revisi
program mikrokontroler dengan koreksi faktor koreksi yang baru, dilakukan kalibrasi ulang.
Hasil pengukuran kalibrasi ulang ditunjukan pada Tabel 5.
Tabel 5: Hasil Kalibrasi Ulang
PWM 10%
Kadar gula Kalibrator (obrix) Kadar gula Pengukuran (obrix) Kekentalan (cP)
40 39,801 1,441045
45,2 45,223 1,685035
50 50,654 1,92943
55 54,711 2,111995
60 57,4225 2,234012
PWM 20%
Kadar gula Kalibrator (obrix) Kadar gula Pengukuran (obrix) Kekentalan (cP)
60 59,71 2,33695
65,2 65,485 2,596825
70 70,105 2,804725
75 74,725 3,012625
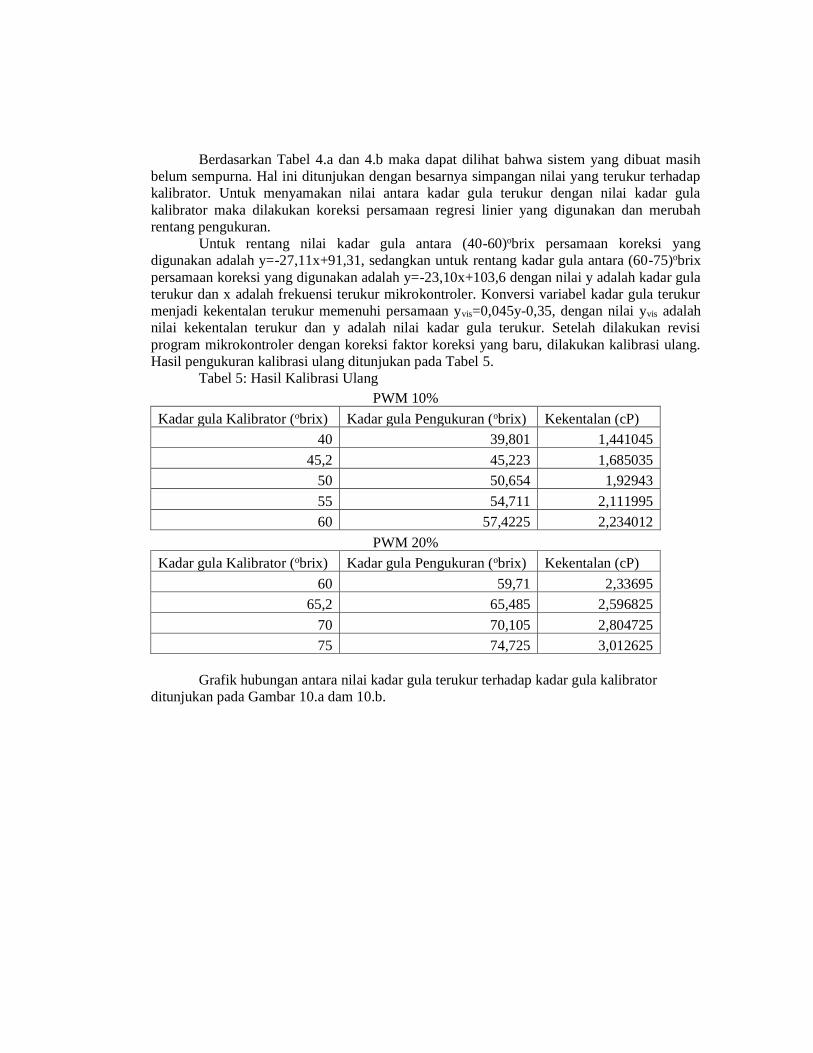
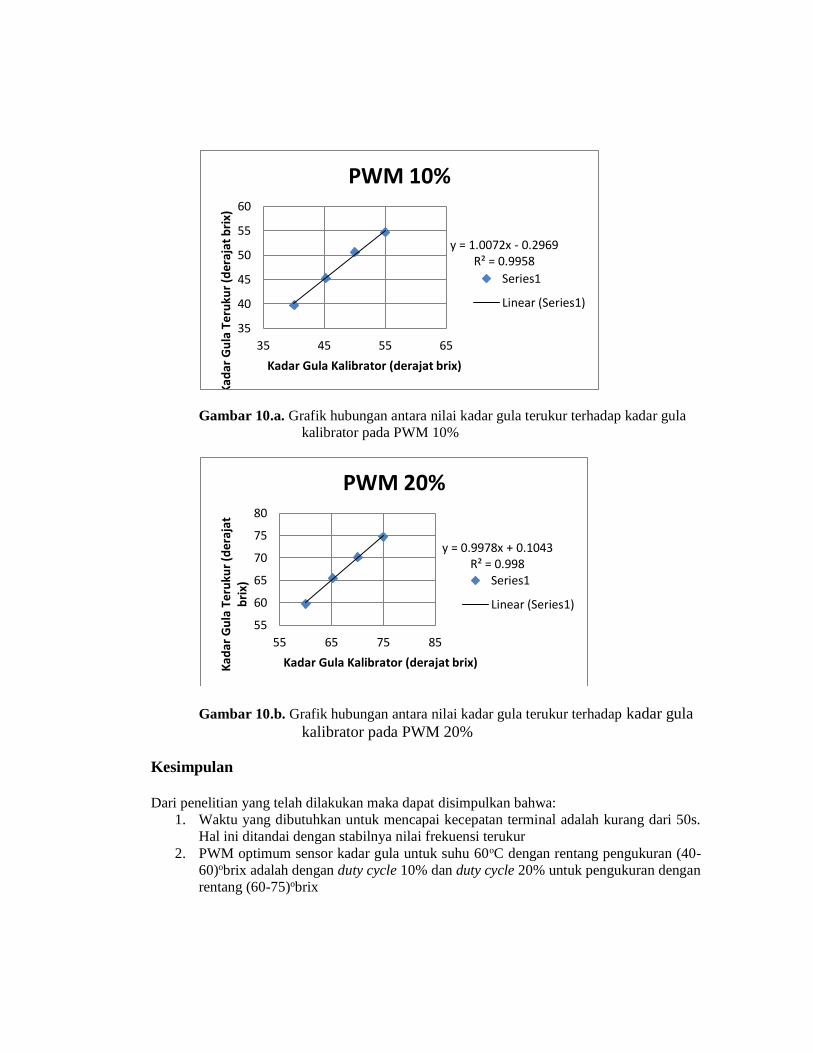
Grafik hubungan antara nilai kadar gula terukur terhadap kadar gula kalibrator
ditunjukan pada Gambar 10.a dam 10.b.
Gambar 10.a. Grafik hubungan antara nilai kadar gula terukur terhadap kadar gula
kalibrator pada PWM 10%
Gambar 10.b. Grafik hubungan antara nilai kadar gula terukur terhadap kadar gula
kalibrator pada PWM 20%
Kesimpulan
Dari penelitian yang telah dilakukan maka dapat disimpulkan bahwa:
1. Waktu yang dibutuhkan untuk mencapai kecepatan terminal adalah kurang dari 50s.
Hal ini ditandai dengan stabilnya nilai frekuensi terukur
2. PWM optimum sensor kadar gula untuk suhu 60oC dengan rentang pengukuran (40-
60)obrix adalah dengan duty cycle 10% dan duty cycle 20% untuk pengukuran dengan
rentang (60-75)obrix
y = 1.0072x - 0.2969R² = 0.9958
35
40
45
50
55
60
35 45 55 65
Kad
ar G
ula
Ter
uku
r (d
eraj
at b
rix)
Kadar Gula Kalibrator (derajat brix)
PWM 10%
Series1
Linear (Series1)
y = 0.9978x + 0.1043R² = 0.998
55
60
65
70
75
80
55 65 75 85
Kad
ar G
ula
Ter
uku
r (d
eraj
at
bri
x)
Kadar Gula Kalibrator (derajat brix)
PWM 20%
Series1
Linear (Series1)
3. Linearitas hubungan antara kadar gula (y) terhadap frekuensi terminal (x) untuk
rentang (40-60)obrix memenuhi persamaan y=-27,11x+91,31 dengan R² = 0,999,
sedangkan untuk rentang (60-75)obrix adalah y=-23,10x+103,6 dengan R2=0,998.
4. Korelasi antara kadar gula terukur (y) terhadap kadar gula kalibrator (x) memenuhi
persamaan y=1,007x-0,296 untuk (40-60)obrix dan y=0,997x+0,104 untuk (60-
75)obrix
5. Nilai kekentalan terukur dapat ditampilkan pada display berdasarkan konversi kadar
gula (y) terhadap kekentalan (Ƞ) yang memenuhi persamaan Ƞ=0,045y-0,35
Saran Untuk kesempurnaan sistem sensor yang telah dibuat dapat dilakukan penelitian
lebih lanjut antara lain dengan:
1. Menampilkan waktu terminal pada display sehingga dapat diketahui respon
waktu alat
2. Mencari hubungan antara frekuensi terminal terhadap kadar gula untuk suhu
yang berbeda-beda
3. Melakukan pengukuran kekentalan dan kadar gula nira di pabrik gula
DAFTAR PUSTAKA [1]Andrianto, Heri. 2008. Pemrograman Mikrokontroler AVR ATMEGA16 Menggunakan
Bahasa C (CodeVision AVR). Informatika: Bandung.
[2]Atmel Corps. 2006. 8-bit Microcontroller AVR with 8K Bytes In-System Programmable
Flash – ATMega328. [Online]. Tersedia:
http://www.atmel.com/dyn/resources/prod_documents/doc2502.pdf [Oktober 2011].
[3]Dunn, PF. 2005. Measurement and Data Analysis for Engineering and Science. McGraw-
Hill Publishing Company. Singapore.
[4]Hutomo, AP, Fidianto, RA. 2012. Sistem Produksi Gula di PT.PG Rejo Agung Baru
Madiun, Laporan Praktek Kerja Lapangan. FSAINTEK UNAIR. Surabaya.
[5]Penuntun Pengawasan Pabrikasi. Buletin Pergulaan no. 11. Jakarta: BP3G.
[6]Prastio, RP, Kristanto, YH. 2012. Sistem Produksi Gula di PT.PG Rejo Agung Baru
Madiun, Laporan Praktek Kerja Lapangan. FSAINTEK UNAIR. Surabaya.
[7]Sharp Corps. 2005. GP1S53VJ000F. Sheet No.: D3-A02601FEN.
[8]Sutrisno. 1986. Elektronika 1 teori dan penerapannya. Penerbit ITB: Bandung.
Recommended

















