CAP 3:MASINA DE CURENT CONTINUU
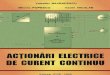
1. -maşini de curent continuu cu excitaţie separată sau independentă,la care înfăşurarea de excitaţie se alimentează de la o sursă separată; -maşini de curent continuu cu autoexcitaţie,la care înfăşurarea de excitaţie se alimentează de la bornele indusului: - maşinile de curent continuu cu excitaţie derivaţie (înfăşurarea de excitaţie în paralel cu înfăşurarea indusului); - maşini de curent continuu cu excitaţie serie (înfăşurarea de excitaţie conectată în serie cu înfăşurarea indusului); - maşinile de curent continuu cu excitaţie mixtă (cu două înfăşurări de excitaţie, una conectată în serie cu indusul şi una conectată în paralel cu acesta).
2. Ca orice altă maşină electrică rotativă,maşina de curent continuu este alcătuită din cele două subansambluri fundamentale: statorul şi rotorul.
Statorul,partea fixă a maşinii,are rolul de inductor şi cuprinde: carcasa,circuitul magnetic statoric,circuitul electric statoric,scuturile,dispozitivul portperii, portperiile şi periile. Carcasa are formă cilindrică,se realizează din tablă,oţel sau fontă şi cuprinde: tălpile de fixare de fundaţie ,inelul de ridicare ,plăcuţa cu datele tehnice ale maşinii şi borna de legare la pământ. Partea din carcasă care serveşte la închiderea liniilor din câmp magnetic se numeşte jug statoric. Circuitul magnetic statoric,cuprinde pe lângă partea de carcasă prin care se închide câmpul magnetic inductiv,polii magnetici principali şi polii auxiliari.Polii principali se execută fie din oţel masiv,fie din tole de oţel electrotehnic cu grosimi de 0,51 mm, strânse şi consolidate cu ajutorul unor nituri şi se termină cu nişte tălpi polare,de lăţime mai mare decât corpul polilor,tălpi ce servesc şi ca suport pentru bobinele montate pe acestea.Polii auxiliari,denumiţi şi poli de comutaţie sunt amplasaţi în axele neutre,au dimensiuni mai reduse şi se întâlnesc numai la maşinile de putere medie şi mare. Circuitul electric, este format din înfăşurările de excitaţie şi de comutaţie care se execută din sârmă sau bare de cupru izolate sub forma unor bobine concentrate dispuse pe poli. Scuturile frontale conţin lagărele cu rostogolire,colierul de susţinere a periilor , tijele portperii , portperiile şi periile colectoare.
Periile, realizate din grafit, bronz sau cupru grafitat sunt în general, egale ca număr cu numărul polilor, se amplasează în axele neutre.

Rotorul, are rolul de indus şi se compune din: arborele maşinii, circuitul magnetic rotoric, înfăşurarea rotorică, colectorul şi ventilatorul maşinii. Circuitul magnetic rotoric, realizat din tole de oţel electrotehnic de 0,5 mm grosime este solidarizat cu arborele cu ajutorul unor pene longitudinale. Înfăşurarea rotorică este o înfăşurare distribuită uniform în crestăturile rotorice, realizată din mai multe secţiuni ale căror capete se racordează prin lipire la lamelele colectorului . Colectorul are rolul de redresor mecanic şi este realizat sub forma unui cilindru divizat după generatoare în lamele de cupru de formă trapezoidală în secţiune şi izolate atât între ele cât şi faţă de arbore, cu micanită.
3. Distanţa dintre două axe neutre consecutive,măsurată la periferia miezului rotoric(în unităţi de lungime sau unităţi de unghi) se numeşte pas polar şi se notează cu . Numărul perechilor de poli se notează cu p, iar axele de simetrie ale polilor se numesc polare sau longitudinale. Bisectoarele unghiurilor formate de două axe longitudinale consecutive se numesc axe transversale sau axe neutre. Considerăm o maşină de curent continuu cu o singură pereche de poli ( 1p ) şi cu suprafaţa rotorului netedă,adică întrefierul constant de-a lungul tălpii polare. Solenaţia eee IN determinată de înfăşurarea de excitaţie având Ne spire şi parcursă de curentul Ie, va determina fluxul magnetic util 0 care va străbate de două ori întrefierul închizându-se prin circuitul magnetic format din întrefier, miezul rotoric, miezul polului şi jugul statoric.Dacă D este diametrul miezului rotoric, lungimea
pasului polar p este dată de relaţia: pD
p 2π
,iar valoarea medie a inducţiei magnetice medB de-a
lungul unui pas polar este: 00
π
Dlp
lB
pmed unde l reprezintă lungimea miezului rotoric. Pasul
polar=distanta masurata în întrefier sau unghiul dintre axele a doi poli consecutivi (de polaritate
opusa).Dacă p=2, lungimea pasului polar p este dată de relaţia: 4
πDp iar valoarea medie a inducţiei
magnetice 00
π4
DllB
pmed ,unde l reprezintă lungimea miezului rotoric.
4. Conform legii inducţiei electromagnetice, în fiecare conductor al înfăşurării rotorice se va induce o tensiune electromotoare ecu a cărei valoare instantanee este dată de relaţia:
lc lBve
0d)( Deoarece viteza v a laturii spirei este tangentă la periferia rotorului, iar
câmpul magnetic în întrefier are un spectru radial, rezultă că Bv , astfel încât tensiunea electromotoare indusă într-un conductor al spirei se poate scrie:
lvBlvBlvBlBvelll
c 000ddd)( , iar sensul acesteia în cele două
conductoare ale spirei este dat de produsul vectorial Bv .
nknaNpl
DlpDn
aNE e 000 30π
260
π
unde 0 fluxul magnetic inductor, ek
constanta elastica,N,a,p-parametrii constructive,n-viteza de rotatie

6. Infăşurarea rotorică s-a rezumat la o singură spiră în formă de cadru dreptunghiular. Cele două laturi 1 şi 2 ale spirei (de lungime l) cu capetele 1a şi 2a legate la două lamele semicilindrice 1c şi 2c (lamelele colectorului) care se rotesc simultan cu spira. Pe lamelele colectorului „calcă” periile colectoare 1P şi 2P susţinute de dispozitivul portperii de pe armătura statorică.
Tensiunile electromotoare induse în conductoarele 1 şi 2 ale spirei au sensuri opuse astfel că între capetele 1a şi 2a ale celor două laturi se va obţine o tensiune electromotoare 12e egală cu dublul tensiunii ce .
Sensul tensiunii 12e se schimbă după o jumătate de rotaţie a spirei, când latura 2 ajunge sub polul nord, iar latura 1 sub polul sud, deci este o tensiune variabilă în timp. La viteză constantă ( vconstant), forma de variaţie în timp a tensiunii 12e este determinată de variaţia inducţiei B în întrefier. Presupunând pentru B o variaţie sinusoidală de-a lungul întrefierului, atunci şi 12e va fi sinusoidală, peria 2P este tot timpul pozitivă, iar peria 1P mereu negativă. Periile conductoare vor colecta mereu tensiunea electromotoare din conductoarele care ocupă aceeaşi poziţie faţă de poli, colectorul realizând astfel funcţia de redresor mecanic.
Variaţia în timp a tensiunii electromotoare induse în spiră ( 12e ) este reprezentată în figura 4.7 cu linie continuă, iar tensiunea la perii pe cu linie întreruptă. Punctele în care tensiunile electromotoare
12e şi pe se anulează, coincid cu momentele de timp în care periile colectoare trec de pe o lamelă pe alta, adică atunci când planul spirei devine perpendicular pe axa polilor.
Caracterul pulsatoriu al tensiunii obţinute la perii ( pe ) se poate atenua considerabil prin creşterea numărului de spire al înfăşurării rotorice, prin creşterea numărului de lamele ale colectorului şi creşterea numărului de perechi de poli statorici (p).
Dacă N este numărul total de spire al înfăşurării rotorice, a2 - numărul căilor de curent (prin cale de curent înţelegând porţiunea din înfăşurarea rotorică cuprinsă între două perii colectoare consecutive de semne contrare) tensiunea electromotoare indusă într-o cale de curent va fi:
lvBaNlvB
aNe
aNe sa 2
22 . Deoarece:
60πDnv şi considerând 0 π
2DlpBB med
constant, expresia tensiunii electromotoare induse în calea de curent (care este tensiunea
electromotoare indusă a generatorului) devine:
nknaNpl
DlpDn
aNE e 000 30π
260
π
.
Aşadar, tensiunea electromotoare indusă în rotorul generatorului de curent continuu este proporţională cu viteza de rotaţie n a rotorului şi cu fluxul magnetic inductor 0 produs de curentul de excitaţie eI . )(f0 eI
pee ,12pe
cS eee 212
tT2T
Fig. 4.7. Variaţia în timp
a tensiunilor electromotoare induse.
Factorul de proporţionalitate ek numit constanta electrică a maşinii depinde de parametrii constructivi Np, şi a , fiind deci o mărime constantă pentru un generator dat. Regimul de funcţionare al
generatorului de curent continuu caracterizat prin curent rotoric )( AI egal cu zero (rotorul deschis) este regimul de funcţionare în gol. În acest regim, tensiunea UA la bornele generatorului este egală cu tensiunea electromotoare indusă ( EU A ). Conectând la bornele indusului o rezistenţă de sarcină SR , conductoarele rotorice vor fi parcurse de curentul AI , care va determina o cădere de tensiune pe indus
AAIR , astfel încât tensiunea AU la bornele indusului devine: AAA IREU , în care RA este rezistenţa înfăşurării rotorice.
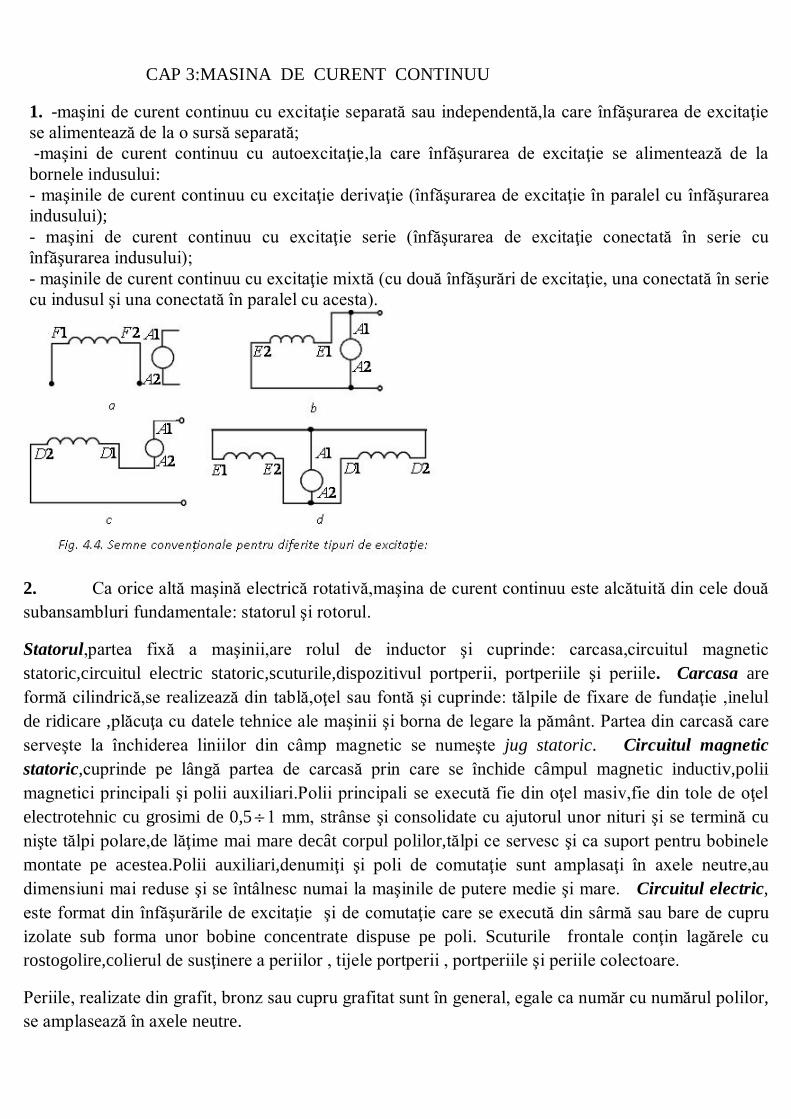
Ecuaţia reprezintă modelul matematic al indusului generatorului de curent continuu cu excitaţie separată, model care se poate obţine şi prin aplicarea teoremei a II-a a lui Kirchhoff circuitului rotoric al generatorului de curent continuu cu excitaţie separată a cărui schemă electrică este prezentată în figura 4.8, în care asocierea sensurilor pentru mărimile AIE, şi AU s-a realizat după regula laturilor generatoare.
9.Asupra conductoarelor rotorice parcurse de curent şi aflate în câmpul magnetic vor acţiona forţe de tip Laplace.
Astfel, dacă aI este curentul printr-un conductor al înfăşurării rotorice, B - inducţia magnetică în întrefier şi ld - elementul de linie orientat, asupra elementului de conductor va
acţiona forţa elementară: )d(d BlIF ac . Deoarece Bl d şi considerând B = constant =medB , valoarea cF a forţei ce va acţiona asupra conductoarelor de lungime l va fi:
aamed
l
a
l
cc IDpl
DlpIBlIFF 00 00 π
2π2
2πsindd .
Asupra fiecărei spire rotorice forţele Fc vor acţiona perechi (egale ca valoare dar de sensuri contrare) astfel că asupra fiecărei spire va acţiona un cuplu sM , a cărui valoare este:
Aacs Ia
pIpDFM
00 ππ2 .
în care: D - distanţa dintre direcţiile forţelor (diametrul rotorului); AI - curentul absorbit de cele a2 căi de curent în paralel ( aA IaI 2 ).
Momentul cuplului electromagnetic rezultant care va acţiona asupra rotorului cu N spire este un
cuplu rezistent şi este dat de relaţia:
AMAs IkIa
pNMNM
00π unde:
apNkM
π
este
constanta mecanică a maşinii de curent continuu. eee IRU ; AAA IUP
în care AP reprezintă puterea electrică debitată sarcinii pe la bornele indusului constituie modelul matematic al generatorului de curent continuu cu excitaţie separată.
Fig. 4.8. Schema electrică a generatorului
eR
eI
eU
M
n
AI
SRAUE
AR
7. Colectorul are rolul de redresor mecanic şi este realizat sub forma unui cilindru divizat după generatoare în lamele de cupru de formă trapezoidală în secţiune şi izolate atât între ele cât şi faţă de arbore, cu micanită.
11. Caracteristica de funcţionare în gol
Regimul de funcţionare în gol al generatorului de curent continuu este regimul caracterizat prin absenţa sarcinii la bornele indusului, adică sR şi 0AI . Caracteristica de funcţionare în gol evidenţiază modul în care se modifică tensiunea electromotoare indusă )(E la modificarea curentului de excitaţie )( eI în condiţiile: constant ;0 nI A , adică:
)(f0 eIE . Deoarece la n = constant,tensiunea electromotoare 0E variază liniar cu 0 ,
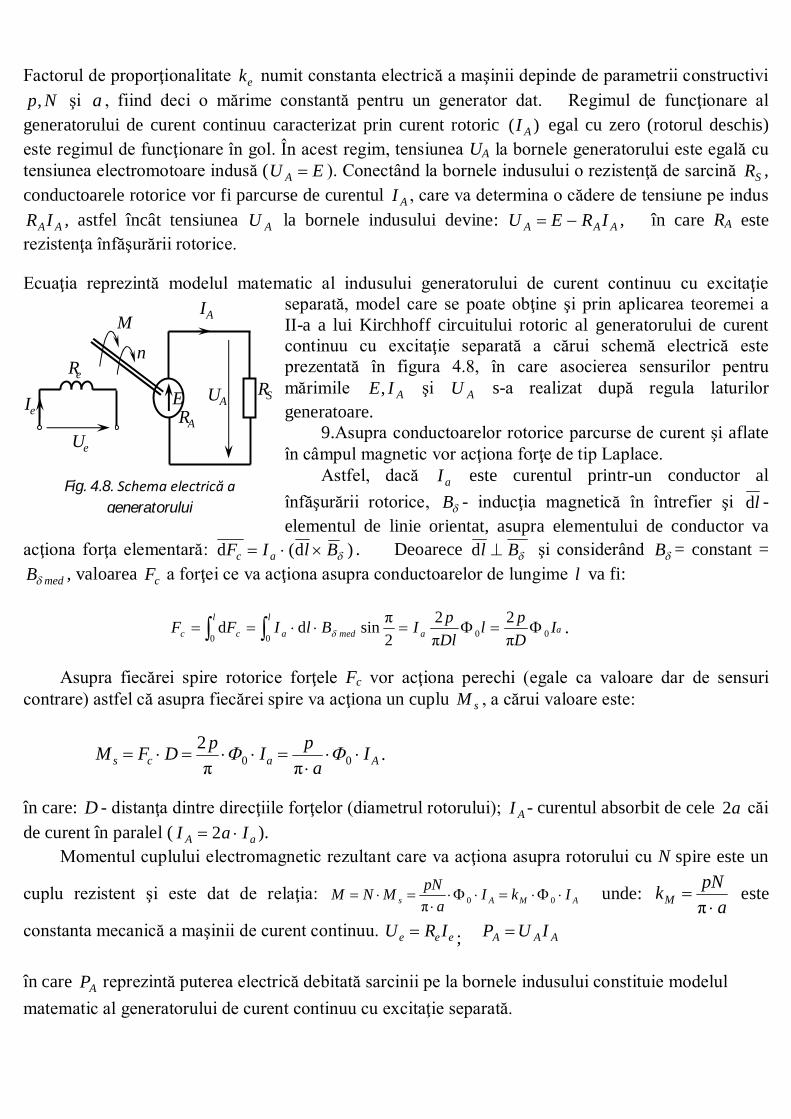
0 variază proporţional cu B, B depinde de H după curba de magnetizare )(f HB ,iar H variază liniar cu Ie, forma caracteristicii de mers în gol este similară caracteristicii de magnetizare.Graficul calitativ al caracteristicii de mers în gol este prezentat în figura şi scoate în evidenţă cele trei particularităţi ale curbei de magnetizare:
-fenomenul de histerezis; - fenomenul de saturaţie; -fenomenul de rema-nenţă.
La curent de excitaţie nul )0( eI ,tensiunea electro-motoare indusă este diferită de zero (fenomen de remanenţă). Cu creşterea curentului de excitaţie eI , tensiunea electromotoare creşte (după curba a) până la o valoare Es (de saturaţie) corespunzătoare curentului esI .
Reducerea curentului de excitaţie eI este însoţită de reducerea tensiunii electromotoare induse E,dar această reducere se realizează după curba b situată de regulă deasupra ramurii ascendente (curba a) datorită fenomenului de histerezis magnetic.
Uneori,drept caracteristică de funcţionare în gol se consideră caracteristica trasată cu linie întreruptă,obţinută prin medierea celor două ramuri ale ciclului de histerezis.
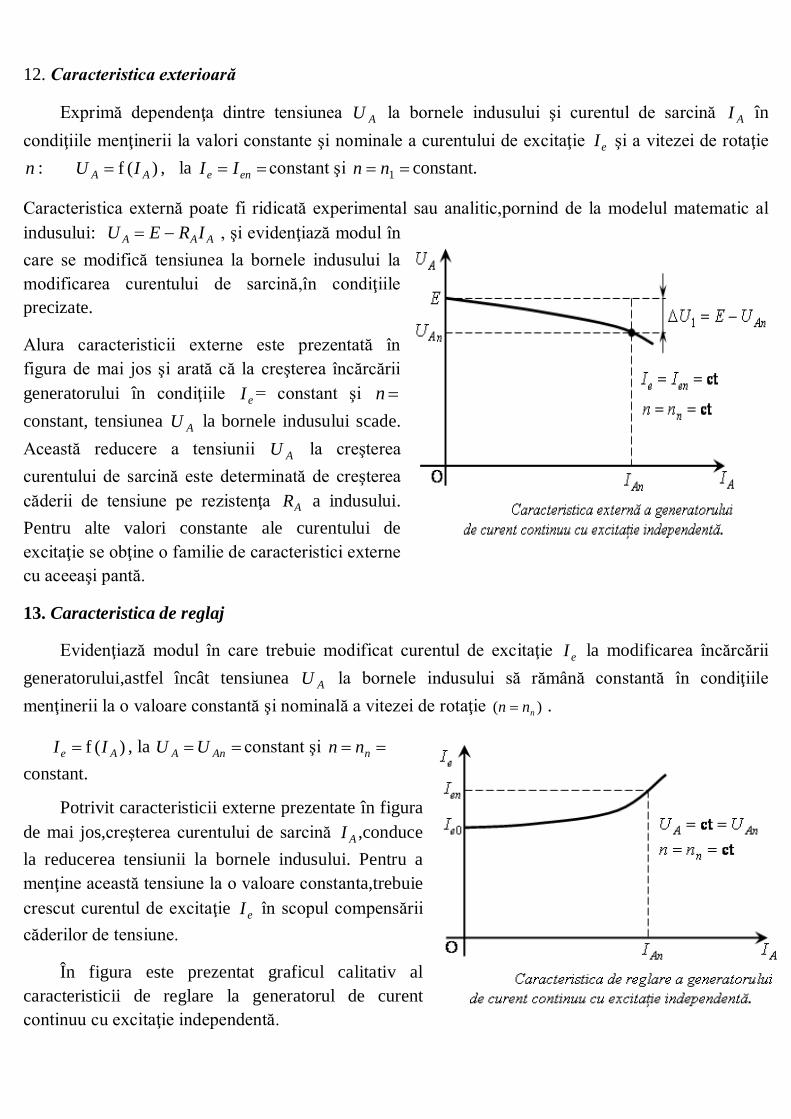
12. Caracteristica exterioară
Exprimă dependenţa dintre tensiunea AU la bornele indusului şi curentul de sarcină AI în condiţiile menţinerii la valori constante şi nominale a curentului de excitaţie eI şi a vitezei de rotaţie n : )(f AA IU , la ene II constant şi 1nn constant.
Caracteristica externă poate fi ridicată experimental sau analitic,pornind de la modelul matematic al indusului: AAA IREU , şi evidenţiază modul în care se modifică tensiunea la bornele indusului la modificarea curentului de sarcină,în condiţiile precizate.
Alura caracteristicii externe este prezentată în figura de mai jos şi arată că la creşterea încărcării generatorului în condiţiile eI = constant şi nconstant, tensiunea AU la bornele indusului scade. Această reducere a tensiunii AU la creşterea curentului de sarcină este determinată de creşterea căderii de tensiune pe rezistenţa AR a indusului. Pentru alte valori constante ale curentului de excitaţie se obţine o familie de caracteristici externe cu aceeaşi pantă.
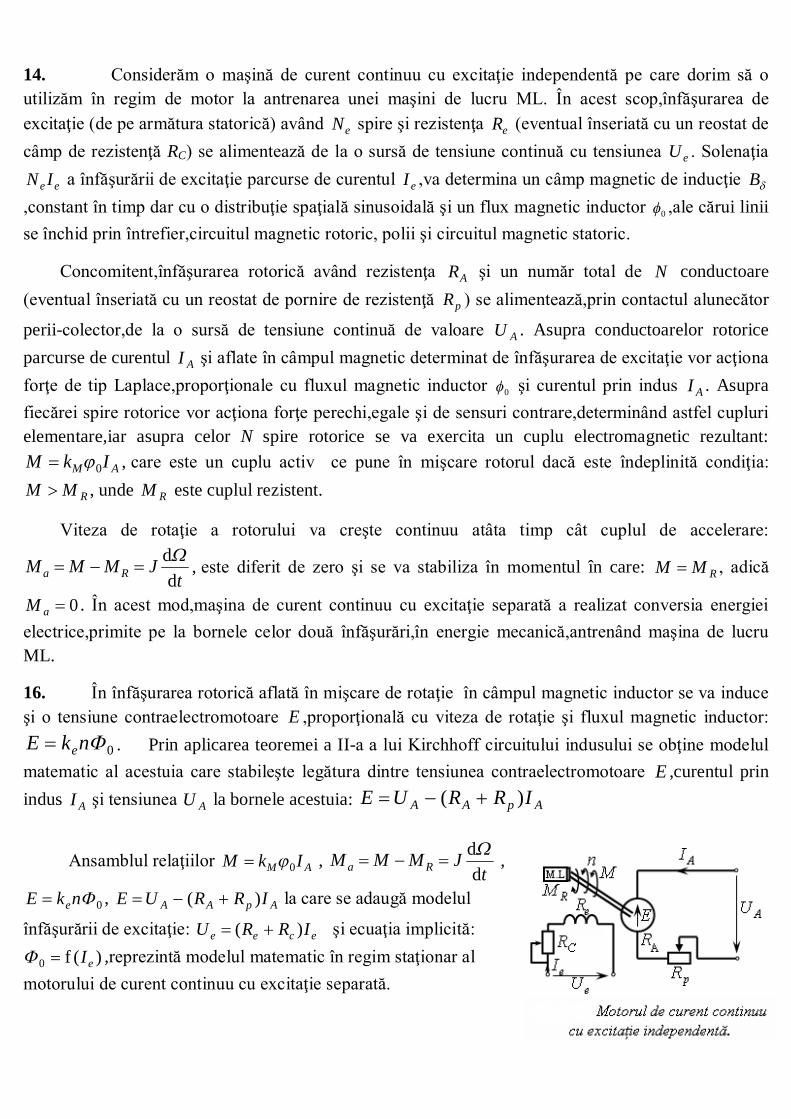
13. Caracteristica de reglaj
Evidenţiază modul în care trebuie modificat curentul de excitaţie eI la modificarea încărcării generatorului,astfel încât tensiunea AU la bornele indusului să rămână constantă în condiţiile menţinerii la o valoare constantă şi nominală a vitezei de rotaţie )( nnn .
)(f Ae II , la AnA UU constant şi nnnconstant.
Potrivit caracteristicii externe prezentate în figura de mai jos,creşterea curentului de sarcină AI ,conduce la reducerea tensiunii la bornele indusului. Pentru a menţine această tensiune la o valoare constanta,trebuie crescut curentul de excitaţie eI în scopul compensării căderilor de tensiune.
În figura este prezentat graficul calitativ al caracteristicii de reglare la generatorul de curent continuu cu excitaţie independentă.
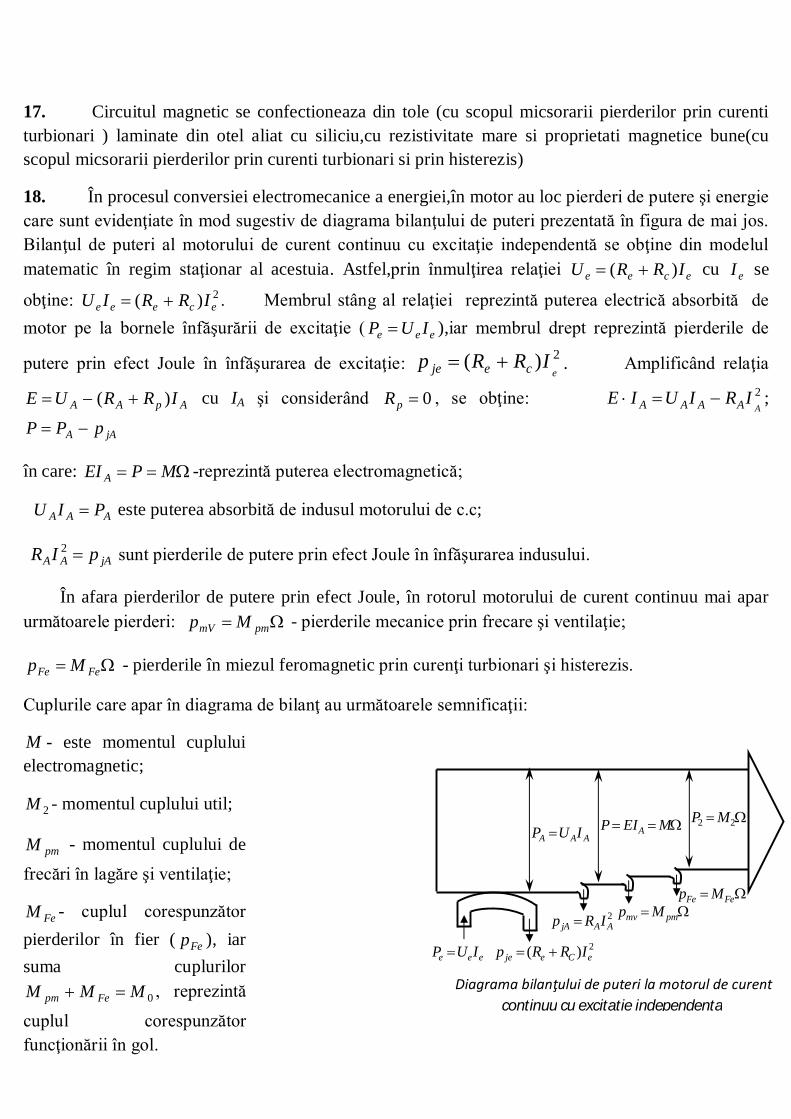
14. Considerăm o maşină de curent continuu cu excitaţie independentă pe care dorim să o utilizăm în regim de motor la antrenarea unei maşini de lucru ML. În acest scop,înfăşurarea de excitaţie (de pe armătura statorică) având eN spire şi rezistenţa eR (eventual înseriată cu un reostat de câmp de rezistenţă RC) se alimentează de la o sursă de tensiune continuă cu tensiunea eU . Solenaţia
ee IN a înfăşurării de excitaţie parcurse de curentul eI ,va determina un câmp magnetic de inducţie B,constant în timp dar cu o distribuţie spaţială sinusoidală şi un flux magnetic inductor 0 ,ale cărui linii se închid prin întrefier,circuitul magnetic rotoric, polii şi circuitul magnetic statoric.
Concomitent,înfăşurarea rotorică având rezistenţa AR şi un număr total de N conductoare (eventual înseriată cu un reostat de pornire de rezistenţă pR ) se alimentează,prin contactul alunecător
perii-colector,de la o sursă de tensiune continuă de valoare AU . Asupra conductoarelor rotorice parcurse de curentul AI şi aflate în câmpul magnetic determinat de înfăşurarea de excitaţie vor acţiona forţe de tip Laplace,proporţionale cu fluxul magnetic inductor 0 şi curentul prin indus AI . Asupra fiecărei spire rotorice vor acţiona forţe perechi,egale şi de sensuri contrare,determinând astfel cupluri elementare,iar asupra celor N spire rotorice se va exercita un cuplu electromagnetic rezultant:
AM IkM 0 , care este un cuplu activ ce pune în mişcare rotorul dacă este îndeplinită condiţia:
RMM , unde RM este cuplul rezistent.
Viteza de rotaţie a rotorului va creşte continuu atâta timp cât cuplul de accelerare:
tJMMM Ra d
d , este diferit de zero şi se va stabiliza în momentul în care: RMM , adică
0aM . În acest mod,maşina de curent continuu cu excitaţie separată a realizat conversia energiei electrice,primite pe la bornele celor două înfăşurări,în energie mecanică,antrenând maşina de lucru ML.
16. În înfăşurarea rotorică aflată în mişcare de rotaţie în câmpul magnetic inductor se va induce şi o tensiune contraelectromotoare E ,proporţională cu viteza de rotaţie şi fluxul magnetic inductor:
0nkE e . Prin aplicarea teoremei a II-a a lui Kirchhoff circuitului indusului se obţine modelul matematic al acestuia care stabileşte legătura dintre tensiunea contraelectromotoare E ,curentul prin indus AI şi tensiunea AU la bornele acestuia: ApAA IRRUE )(
Ansamblul relaţiilor AM IkM 0 , t
JMMM Ra dd ,
0nkE e , ApAA IRRUE )( la care se adaugă modelul
înfăşurării de excitaţie: ecee IRRU )( şi ecuaţia implicită: )(f0 eI ,reprezintă modelul matematic în regim staţionar al
motorului de curent continuu cu excitaţie separată.
17. Circuitul magnetic se confectioneaza din tole (cu scopul micsorarii pierderilor prin curenti turbionari ) laminate din otel aliat cu siliciu,cu rezistivitate mare si proprietati magnetice bune(cu scopul micsorarii pierderilor prin curenti turbionari si prin histerezis)
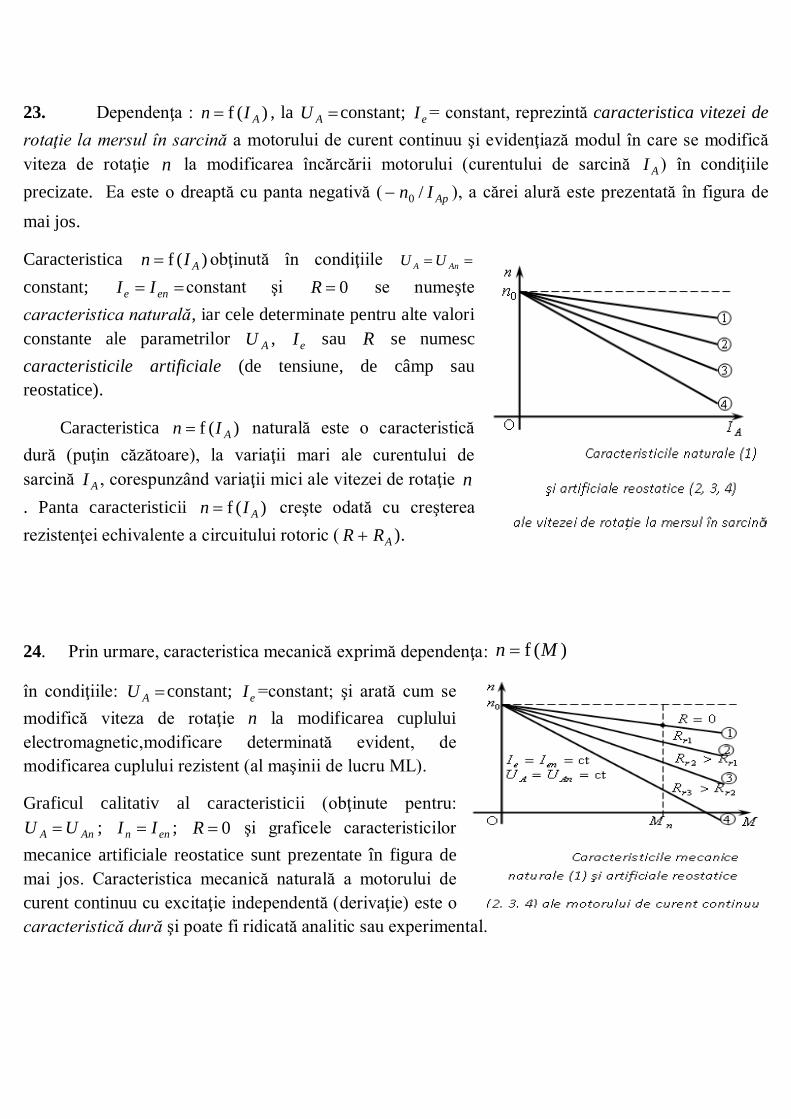
18. În procesul conversiei electromecanice a energiei,în motor au loc pierderi de putere şi energie care sunt evidenţiate în mod sugestiv de diagrama bilanţului de puteri prezentată în figura de mai jos. Bilanţul de puteri al motorului de curent continuu cu excitaţie independentă se obţine din modelul matematic în regim staţionar al acestuia. Astfel,prin înmulţirea relaţiei ecee IRRU )( cu eI se
obţine: 2)( eceee IRRIU . Membrul stâng al relaţiei reprezintă puterea electrică absorbită de
motor pe la bornele înfăşurării de excitaţie ( eee IUP ),iar membrul drept reprezintă pierderile de
putere prin efect Joule în înfăşurarea de excitaţie: 2)(e
IRRp ceje . Amplificând relaţia
ApAA IRRUE )( cu IA şi considerând 0pR , se obţine: 2A
IRIUIE AAAA ;
jAA pPP
în care: MPEI A -reprezintă puterea electromagnetică;
AAA PIU este puterea absorbită de indusul motorului de c.c;
jAAA pIR 2 sunt pierderile de putere prin efect Joule în înfăşurarea indusului.
În afara pierderilor de putere prin efect Joule, în rotorul motorului de curent continuu mai apar următoarele pierderi: pmmV Mp - pierderile mecanice prin frecare şi ventilaţie;
FeFe Mp - pierderile în miezul feromagnetic prin curenţi turbionari şi histerezis.
Cuplurile care apar în diagrama de bilanţ au următoarele semnificaţii:
M - este momentul cuplului electromagnetic;
2M - momentul cuplului util;
pmM - momentul cuplului de
frecări în lagăre şi ventilaţie;
FeM - cuplul corespunzător pierderilor în fier ( Fep ), iar suma cuplurilor
0MMM Fepm , reprezintă
cuplul corespunzător funcţionării în gol.
22 MP MEIP AAAA IUP
eee IUP 2)( eCeje IRRp
2AAjA IRp
pmmv Mp FeFe Mp
Diagrama bilanţului de puteri la motorul de curent continuu cu excitatie independenta

19. Randamentul al motorului se poate defini cu relaţia:
100100[%] 2
1
2
Ae PP
PPP
în care: 2P - este puterea utilă (la arborele motorului) transmisă ML; Ae PPP 1 - este puterea absorbită de motor pe la bornele celor două înfăşurări.
Diferenţa: FemVjAjet pppppPP 21 , reprezintă pierderile totale de putere ce au loc în motor în procesul conversiei electromecanice a energiei.
21. Dacă în relaţia ApAA IRRUE )( considerăm 0pR şi înlocuim tensiunea electromotoare
indusă E cu valoarea dată de ecuaţia 0nkE e , vom obţine: AAAe IRUnk 0 de unde
rezultă:
A
A
A
e
A
e
AAA
RUI
kU
kIRUn 1
00 . Notând: 0
0n
kUe
A
, viteza de mers în gol ideal şi
ApA
A IRU
, curentul absorbit de indus la pornirea prin conectare directă, relaţia devine:
Ap
A
IInn 10
22. Deoarece: AM IkM 0 , vom avea şi: ApoMp IkM ,
în care: pM - este momentul cuplului de pornire;
ApI - curentul la pornire absorbit de indus.
Împărţind membru cu membru relaţiile de mai sus se poate scrie: Ap
A
p II
MM
şi înlocuind în
Ap
A
IInn 10 rezultă:
pMMnn 10 .
Relaţia reprezintă modelul matematic al caracteristicii mecanice a motorului de curent continuu cu excitaţie separată (derivaţie).
23. Dependenţa : )(f AIn , la AU constant; eI = constant, reprezintă caracteristica vitezei de rotaţie la mersul în sarcină a motorului de curent continuu şi evidenţiază modul în care se modifică viteza de rotaţie n la modificarea încărcării motorului (curentului de sarcină AI ) în condiţiile precizate. Ea este o dreaptă cu panta negativă ( ApIn /0 ), a cărei alură este prezentată în figura de
mai jos.
Caracteristica )(f AIn obţinută în condiţiile AnA UU
constant; ene II constant şi 0R se numeşte caracteristica naturală, iar cele determinate pentru alte valori constante ale parametrilor AU , eI sau R se numesc caracteristicile artificiale (de tensiune, de câmp sau reostatice).
Caracteristica )(f AIn naturală este o caracteristică dură (puţin căzătoare), la variaţii mari ale curentului de sarcină AI , corespunzând variaţii mici ale vitezei de rotaţie n. Panta caracteristicii )(f AIn creşte odată cu creşterea rezistenţei echivalente a circuitului rotoric ( ARR ).
24. Prin urmare, caracteristica mecanică exprimă dependenţa: )(f Mn
în condiţiile: AU constant; eI =constant; şi arată cum se modifică viteza de rotaţie n la modificarea cuplului electromagnetic,modificare determinată evident, de modificarea cuplului rezistent (al maşinii de lucru ML).
Graficul calitativ al caracteristicii (obţinute pentru: AnA UU ; enn II ; 0R şi graficele caracteristicilor
mecanice artificiale reostatice sunt prezentate în figura de mai jos. Caracteristica mecanică naturală a motorului de curent continuu cu excitaţie independentă (derivaţie) este o caracteristică dură şi poate fi ridicată analitic sau experimental.
26. Maşina de curent continuu este o maşină electrică rotativă,reversibilă,care realizează conversia energiei electrice în energie mecanică la funcţionarea în regim de motor electric sau a energiei mecanice în energie electrică la funcţionarea în regim de generator. Conversia energiei se realizează în regim electrocinetic staţionar (de curent continuu, cu 0f ; U constant; I constant).
Maşinile de curent continuu sunt cele mai vechi maşini electrice rotative, construindu-se şi în prezent pentru puteri nominale de la zeci de waţi până la mii de kilowaţi,într-o gamă largă de turaţii de tensiuni. Utilizarea acestora în regim de motor se recomandă în sistemele de acţionare electrică în care regimurile dinamic (porniri, opriri, frânări, inversări de sens, modificări ale vitezei de rotaţie) sunt frecvente. Astfel,motoarele de curent continuu se folosesc în tracţiunea electrică,metalurgie,instalaţii de foraj cu acţionare electrică,în acţionările reglabile ale maşinilor unelte etc. Ca generatoare, de curent continuu se folosesc la alimentarea înfăşurărilor de excitaţie ale generatoarelor sincrone din centralele electrice şi din cadrul grupurilor electrogene,la sudarea cu arc electric de curent continuu (generatoare de sudură),generatoare auto (dinamuri) etc.
27. Tensiunile electromotoare induse în înfăşurarea rotorică (conform legii inducţiei electromagnetice) sunt redresate prin intermediul colectorului (solidar cu arborele rotorului) şi al periilor colectoare (solidare cu statorul) care „calcă” pe colector. Ansamblul perii-colector permite transferul energiei din exterior în rotor sau invers, în cazul funcţionării în regim de generator.
Caracterul pulsatoriu al tensiunii obţinute la perii ( pe ) se poate atenua considerabil prin creşterea numărului de spire al înfăşurării rotorice, prin creşterea numărului de lamele ale colectorului şi creşterea numărului de perechi de poli statorici (p).
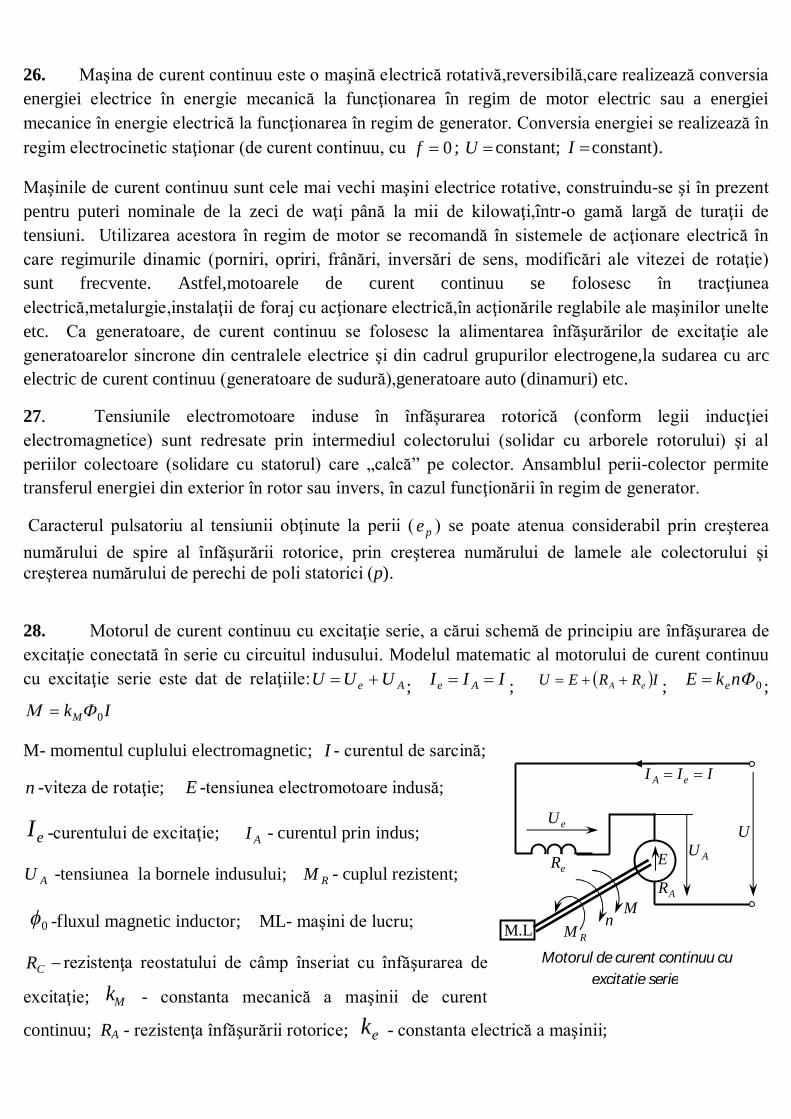
28. Motorul de curent continuu cu excitaţie serie, a cărui schemă de principiu are înfăşurarea de excitaţie conectată în serie cu circuitul indusului. Modelul matematic al motorului de curent continuu cu excitaţie serie este dat de relaţiile: Ae UUU ; III Ae ; IRREU eA ; 0nkE e ;
IkM 0
M- momentul cuplului electromagnetic; I - curentul de sarcină;
n -viteza de rotaţie; E -tensiunea electromotoare indusă;
eI -curentului de excitaţie; AI - curentul prin indus;
AU -tensiunea la bornele indusului; RM - cuplul rezistent;
0 -fluxul magnetic inductor; ML- maşini de lucru;
CR rezistenţa reostatului de câmp înseriat cu înfăşurarea de
excitaţie; Mk - constanta mecanică a maşinii de curent
continuu; RA - rezistenţa înfăşurării rotorice; ek - constanta electrică a maşinii;
Motorul de curent continuu cu excitatie serie
E
eU
III eA
AR
n
eR
M.L
AUU
M
RM
29. Cum însă: 210 IkkIkM MM ,dependenţa dintre curentul de sarcină şi momentul cuplului
electromagnetic M devine:
Mkkk
MIM
21
Înlocuind în relaţia 11 kkRR
IkkUn
e
eA
e
obţinem:
121
Rekk
RMkkk
Une
A
e
, relaţie din care se poate
observa că viteza de rotaţie scade considerabil cu creşterea lui M. Relaţia exprimă modelul matematic al caracteristicii mecanice, )(f Mn ,a motorului de curent continuu cu excitaţie serie. Caracteristica mecanică, )(f Mn la U = constant, se poate reprezenta grafic fie pe cale analitică,fie experimental.
31. Dependenţa dintre viteza de rotaţie n şi curentul de sarcină I este dată de modelul:
0
Re)(
ke
IRUn A ,şi presupunând o variaţie liniară a fluxului inductor 0 cu curentul de sarcină I
,adică: Ik10 ,se poate scrie: 11 kkRR
IkkUn
e
eA
e
. Cum însă: 2
10 IkkIkM MM ,dependenţa dintre
curentul de sarcină şi momentul cuplului electromagnetic M devine:
Mkkk
MIM
21
Obţinem: 121
Rekk
RMkkk
Une
A
e
,relaţie din care se poate observa că viteza de rotaţie scade
considerabil cu creşterea lui M.
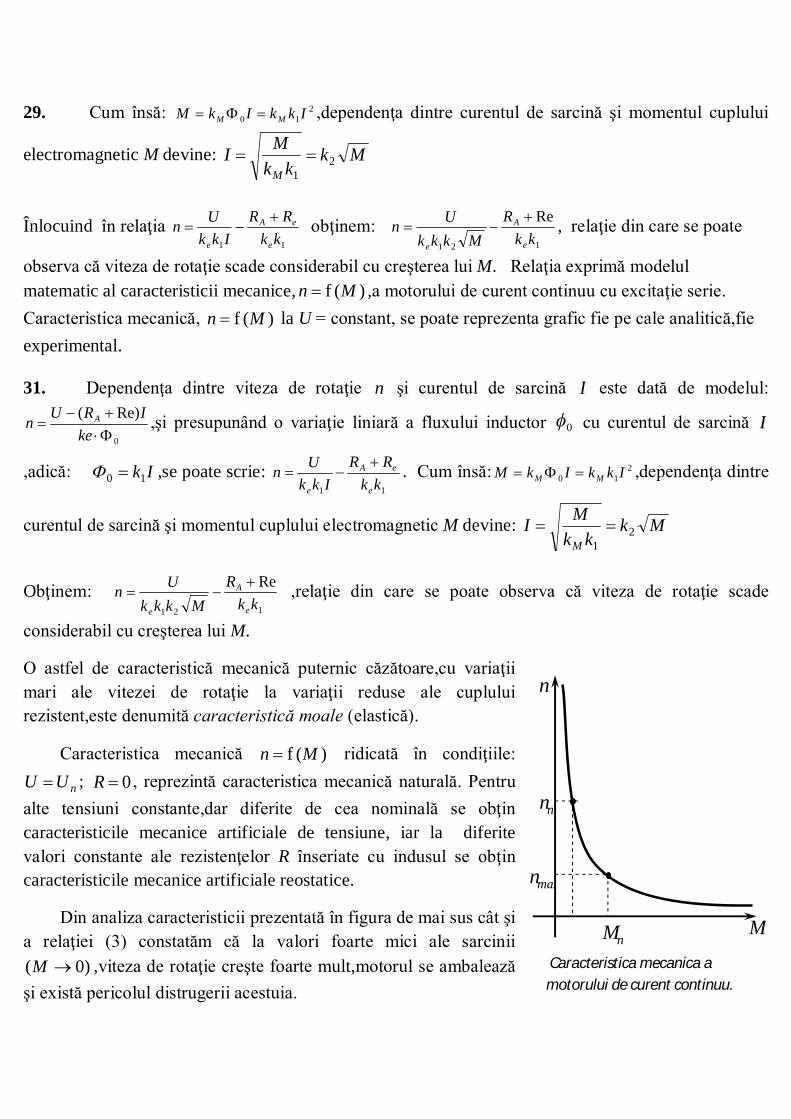
O astfel de caracteristică mecanică puternic căzătoare,cu variaţii mari ale vitezei de rotaţie la variaţii reduse ale cuplului rezistent,este denumită caracteristică moale (elastică).
Caracteristica mecanică )(f Mn ridicată în condiţiile:
nUU ; 0R , reprezintă caracteristica mecanică naturală. Pentru alte tensiuni constante,dar diferite de cea nominală se obţin caracteristicile mecanice artificiale de tensiune, iar la diferite valori constante ale rezistenţelor R înseriate cu indusul se obţin caracteristicile mecanice artificiale reostatice.
Din analiza caracteristicii prezentată în figura de mai sus cât şi a relaţiei (3) constatăm că la valori foarte mici ale sarcinii
)0( M ,viteza de rotaţie creşte foarte mult,motorul se ambalează şi există pericolul distrugerii acestuia.
nn
n
maxn
MnM
Caracteristica mecanica a motorului de curent continuu.
32. Procesul de pornire al motorului de curent continuu se caracterizează prin valori mari ale curentului de indus AI cu efecte negative asupra izolaţiei înfăşurării rotorice, asupra aparatelor de conectare, măsură şi comandă înseriate în amonte,asupra comutaţiei,periilor,conductoarelor de alimentare şi nu în ultimul rând asupra maşinii de lucru acţionate, prin şocurile mari de cuplu care apar pe durata pornirii. Valoarea mare a curentului rotoric ApI absorbit la pornire se poate explica
prin analiza relaţiilor: AAA IRUE ; 0 nkE e
Cum la pornire 0n ,rezultă 0E şi A
AAp R
UI . ( AR - rezistenţa înfăşurării rotorice având o valoare
foarte mică). Cu creşterea vitezei de rotaţie tensiunea electromotoare E creşte, iar curentul prin indus,
A
AA R
EUI , scade.
33. Acesta este motivul pentru care trebuie evitată funcţionarea în gol sau cu o sarcină redusă (sub 20-25% din sarcina nominală), firma constructoare garantând funcţionarea motoarelor serie până la viteză de rotaţie maximă, nmax nn 2 . Datorită formei caracteristicii mecanice, acest tip de motor se utilizează în tracţiunea electrică, la acţionarea mecanismelor de ridicat precum şi în alte sisteme de acţionare electrică caracterizate prin porniri frecvente, mase cu inerţie mare, sarcini variabile cu şocuri şi frânări rapide.
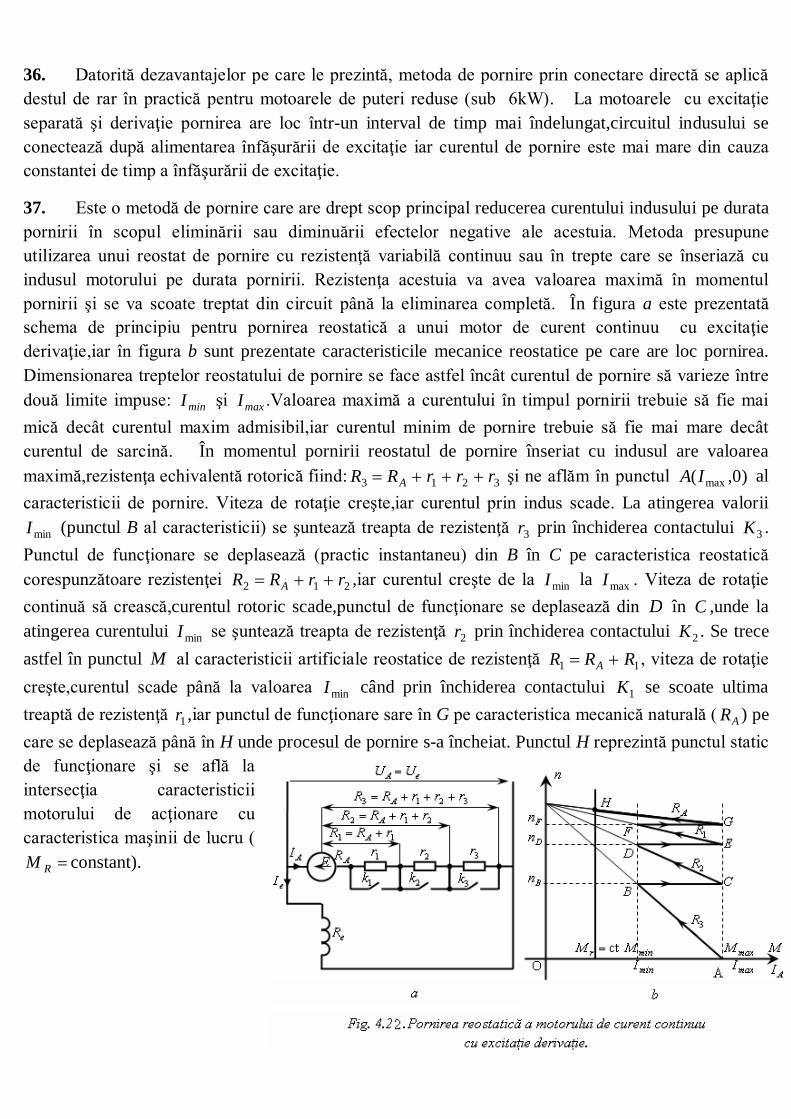
34. Pornirea prin conectare directă este cea mai simplă metodă de pornire şi constă în alimentarea indusului motorului de rezistenţă AR ,fără alte rezistenţe înseriate,la sursa de tensiune continuă AU de valoare nominală ( AnA UU ). Valoarea maximă a curentului de pornire pI (şocul de curent) este
foarte mare, variaţia în timp a curentului )(f ti p şi a vitezei de rotaţie )f(tn pe durata pornirii fiind
prezentate calitativ. Curentul de pornire creşte foarte repede până la o valoare maximă pI
(dependentă şi ea de momentul de inerţie J ) după care începe să scadă odată cu creşterea vitezei de
rotaţie,tinzând aperiodic sau oscilatoriu amortizat către o valoare de regim stabilizat: 0
02
M
s kMM
I
.Dacă momentul de inerţie J al maselor aflate în mişcare de rotaţie (raportat la arborele motorului) are o valoare ridicată, pornirea este lentă, iar pI se apropie de valoarea extremă ARU / . Cu cât momentul
de inerţie J este mai redus, pornirea este mai rapidă, iar pI se îndepărtează mai mult de valoarea
extremă. Curentul de şoc pI depinde şi de tipul excitaţiei motorului .Astfel,la motoarele cu excitaţie
separată şi derivaţie pornirea are loc într-un interval de timp mai îndelungat,circuitul indusului se conectează după alimentarea înfăşurării de excitaţie iar curentul de pornire este mai mare din cauza constantei de timp a înfăşurării de excitaţie.
36. Datorită dezavantajelor pe care le prezintă, metoda de pornire prin conectare directă se aplică destul de rar în practică pentru motoarele de puteri reduse (sub 6kW). La motoarele cu excitaţie separată şi derivaţie pornirea are loc într-un interval de timp mai îndelungat,circuitul indusului se conectează după alimentarea înfăşurării de excitaţie iar curentul de pornire este mai mare din cauza constantei de timp a înfăşurării de excitaţie.
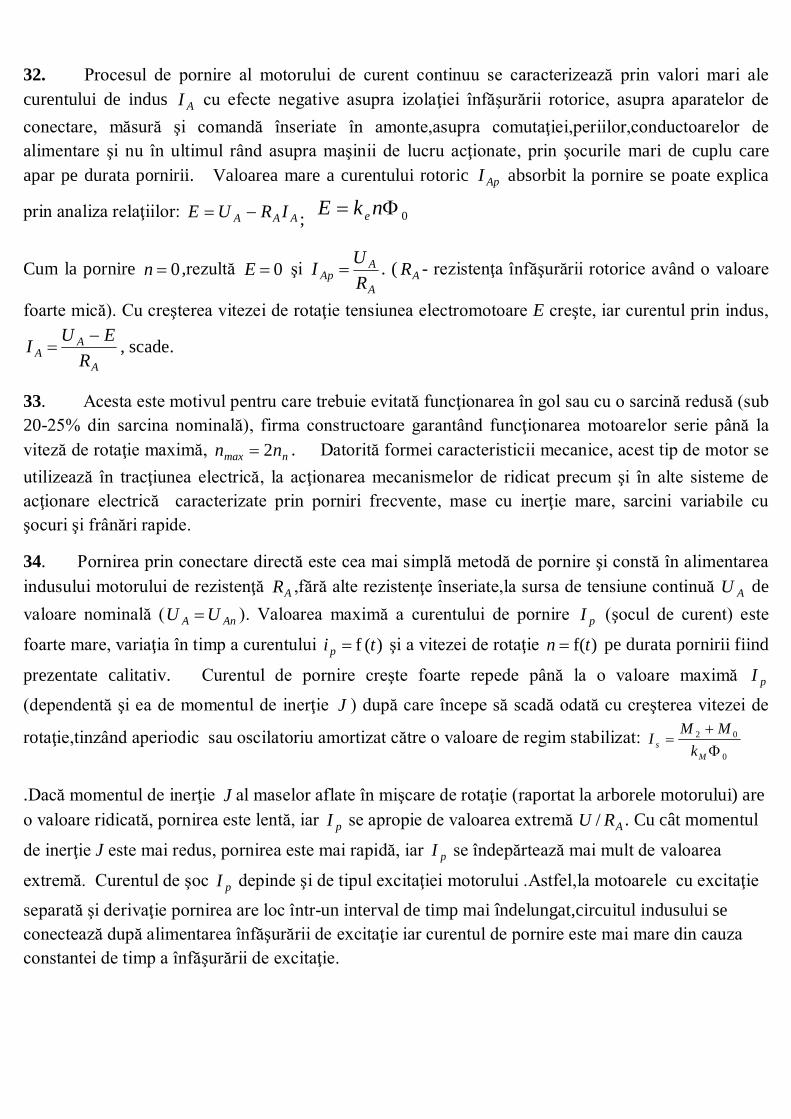
37. Este o metodă de pornire care are drept scop principal reducerea curentului indusului pe durata pornirii în scopul eliminării sau diminuării efectelor negative ale acestuia. Metoda presupune utilizarea unui reostat de pornire cu rezistenţă variabilă continuu sau în trepte care se înseriază cu indusul motorului pe durata pornirii. Rezistenţa acestuia va avea valoarea maximă în momentul pornirii şi se va scoate treptat din circuit până la eliminarea completă. În figura a este prezentată schema de principiu pentru pornirea reostatică a unui motor de curent continuu cu excitaţie derivaţie,iar în figura b sunt prezentate caracteristicile mecanice reostatice pe care are loc pornirea. Dimensionarea treptelor reostatului de pornire se face astfel încât curentul de pornire să varieze între două limite impuse: minI şi maxI .Valoarea maximă a curentului în timpul pornirii trebuie să fie mai mică decât curentul maxim admisibil,iar curentul minim de pornire trebuie să fie mai mare decât curentul de sarcină. În momentul pornirii reostatul de pornire înseriat cu indusul are valoarea maximă,rezistenţa echivalentă rotorică fiind: 3213 rrrRR A şi ne aflăm în punctul )0,( maxIA al caracteristicii de pornire. Viteza de rotaţie creşte,iar curentul prin indus scade. La atingerea valorii
minI (punctul B al caracteristicii) se şuntează treapta de rezistenţă 3r prin închiderea contactului 3K . Punctul de funcţionare se deplasează (practic instantaneu) din B în C pe caracteristica reostatică corespunzătoare rezistenţei 212 rrRR A ,iar curentul creşte de la minI la maxI . Viteza de rotaţie continuă să crească,curentul rotoric scade,punctul de funcţionare se deplasează din D în C ,unde la atingerea curentului minI se şuntează treapta de rezistenţă 2r prin închiderea contactului 2K . Se trece astfel în punctul M al caracteristicii artificiale reostatice de rezistenţă 11 RRR A , viteza de rotaţie creşte,curentul scade până la valoarea minI când prin închiderea contactului 1K se scoate ultima treaptă de rezistenţă 1r ,iar punctul de funcţionare sare în G pe caracteristica mecanică naturală ( AR ) pe care se deplasează până în H unde procesul de pornire s-a încheiat. Punctul H reprezintă punctul static de funcţionare şi se află la intersecţia caracteristicii motorului de acţionare cu caracteristica maşinii de lucru (
RM constant).
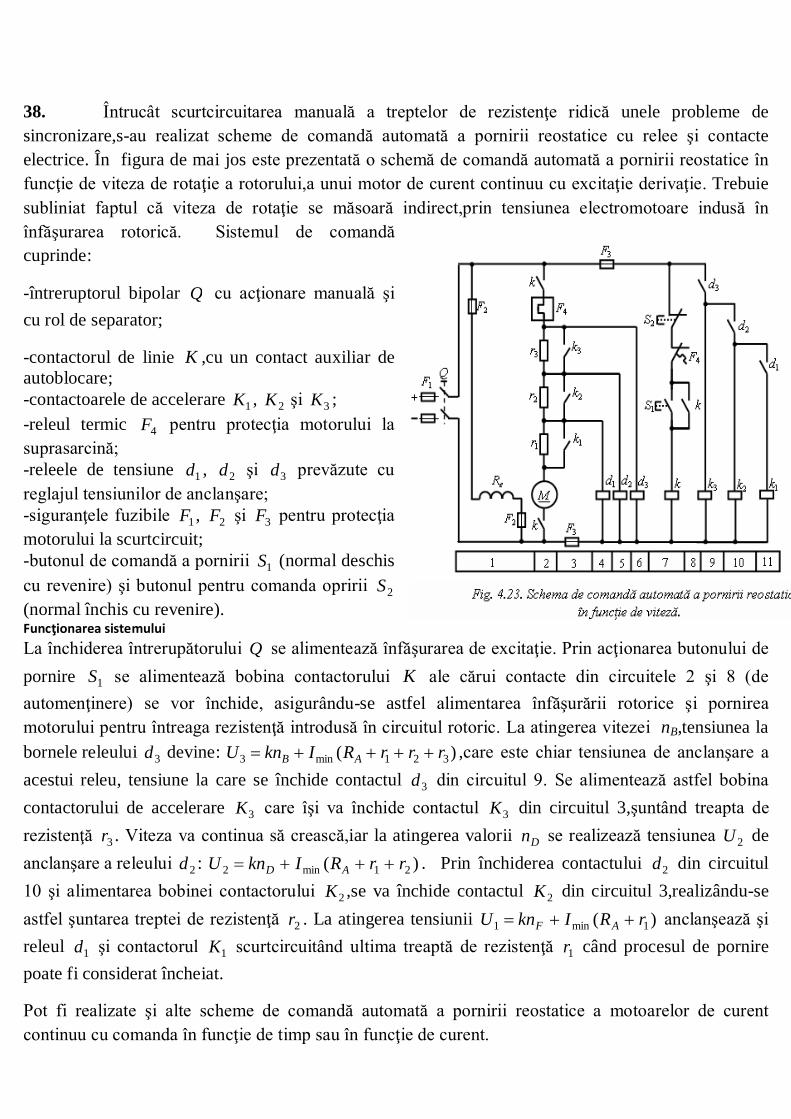
38. Întrucât scurtcircuitarea manuală a treptelor de rezistenţe ridică unele probleme de sincronizare,s-au realizat scheme de comandă automată a pornirii reostatice cu relee şi contacte electrice. În figura de mai jos este prezentată o schemă de comandă automată a pornirii reostatice în funcţie de viteza de rotaţie a rotorului,a unui motor de curent continuu cu excitaţie derivaţie. Trebuie subliniat faptul că viteza de rotaţie se măsoară indirect,prin tensiunea electromotoare indusă în înfăşurarea rotorică. Sistemul de comandă cuprinde:
-întreruptorul bipolar Q cu acţionare manuală şi cu rol de separator;
-contactorul de linie K ,cu un contact auxiliar de autoblocare; -contactoarele de accelerare 1K , 2K şi 3K ; -releul termic 4F pentru protecţia motorului la suprasarcină; -releele de tensiune 1d , 2d şi 3d prevăzute cu reglajul tensiunilor de anclanşare; -siguranţele fuzibile 1F , 2F şi 3F pentru protecţia motorului la scurtcircuit; -butonul de comandă a pornirii 1S (normal deschis cu revenire) şi butonul pentru comanda opririi 2S (normal închis cu revenire). Funcţionarea sistemului La închiderea întrerupătorului Q se alimentează înfăşurarea de excitaţie. Prin acţionarea butonului de pornire 1S se alimentează bobina contactorului K ale cărui contacte din circuitele 2 şi 8 (de automenţinere) se vor închide, asigurându-se astfel alimentarea înfăşurării rotorice şi pornirea motorului pentru întreaga rezistenţă introdusă în circuitul rotoric. La atingerea vitezei nB,tensiunea la bornele releului 3d devine: )( 321min3 rrrRIknU AB ,care este chiar tensiunea de anclanşare a acestui releu, tensiune la care se închide contactul 3d din circuitul 9. Se alimentează astfel bobina contactorului de accelerare 3K care îşi va închide contactul 3K din circuitul 3,şuntând treapta de rezistenţă 3r . Viteza va continua să crească,iar la atingerea valorii Dn se realizează tensiunea 2U de anclanşare a releului 2d : )( 21min2 rrRIknU AD . Prin închiderea contactului 2d din circuitul 10 şi alimentarea bobinei contactorului 2K ,se va închide contactul 2K din circuitul 3,realizându-se astfel şuntarea treptei de rezistenţă 2r . La atingerea tensiunii )( 1min1 rRIknU AF anclanşează şi releul 1d şi contactorul 1K scurtcircuitând ultima treaptă de rezistenţă 1r când procesul de pornire poate fi considerat încheiat.
Pot fi realizate şi alte scheme de comandă automată a pornirii reostatice a motoarelor de curent continuu cu comanda în funcţie de timp sau în funcţie de curent.

39. Pornirea reostatică prezintă dezavantajul pierderilor prin efect electrocaloric pe durata pornirii şi al gabaritului deseori considerabil al reostatului de pornire. Din aceste considerente,în numeroase sisteme de acţionare cu maşini de curent continuu, pornirea se realizează prin alimentarea indusului cu tensiune redusă cu posibilitatea creşterii progresive a acesteia de la 0 până la valoarea nominală. Tensiunea continuă reglabilă necesară alimentării indusului pe durata pornirii se poate obţine prin:
-utilizarea unor convertoare rotative (ex. grupul generator-motor); -utilizarea unor autotransformatoare pentru modificarea tensiunii alternative aplicate transformatorului de adaptare al redresorului necomandat; -utilizarea redresoarelor comandate cu tiristoare sau a variatoarelor de tensiune continuă; -utilizarea unor elemente de baterii de acumulatoare ce pot fi conectate în serie sau paralel.
41. Dacă în relaţia considerăm 0pR şi înlocuim tensiunea electromotoare indusă E cu valoarea
dată de ecuaţia , vom obţine: AAAe IRUnk 0 ; de unde rezultă:
A
A
A
e
A
e
AAA
RUI
kU
kIRUn 1
00 .
Notând: 00
nkUe
A
, viteza de mers în gol ideal şi ApA
A IRU
, curentul absorbit de indus la pornirea
prin conectare directă, relaţia devine:
Ap
A
IInn 10 .
Dependenţa : )(f AIn , la AU constant; eI = constant, reprezintă caracteristica vitezei de rotaţie la mersul în sarcină a motorului de curent continuu şi evidenţiază modul în care se modifică viteza de rotaţie n la modificarea încărcării motorului (curentului de sarcină AI ) în condiţiile precizate.Caracteristica )(f AIn obţinută în condiţiile AnA UU constant; ene II constant şi 0R se numeşte caracteristica naturală, iar cele determinate pentru alte valori constante ale parametrilor
AU , eI sau R se numesc caracteristicile artificiale (de tensiune, de câmp sau reostatice).
Caracteristica )(f AIn naturală este o caracteristică dură (puţin căzătoare), la variaţii mari ale curentului de sarcină AI , corespunzând variaţii mici ale vitezei de rotaţie n . Panta caracteristicii
)(f AIn creşte odată cu creşterea rezistenţei echivalente a circuitului rotoric ( ARR ).
Deoarece: AM IkM 0 , vom avea şi: ApoMp IkM în care: pM - este momentul cuplului
de pornire; ApI - curentul la pornire absorbit de indus. Împărţind membru cu membru relaţiile de mai
sus se poate scrie: Ap
A
p II
MM
;
pMMnn 10
Relaţia reprezintă modelul matematic al caracteristicii mecanice a motorului de curent continuu cu excitaţie separată (derivaţie).Prin urmare, caracteristica mecanică exprimă dependenţa: )(f Mn ,
în condiţiile: AU constant; eI=constant; şi arată cum se modifică viteza de rotaţie n la modificarea cuplului electromag-netic, modificare deter-minată evident, de modificarea cuplului rezistent (al maşinii de lucru ML).
Graficul calitativ al caracteristicii (obţinute pentru: AnA UU ; enn II ; 0R şi graficele caracteristicilor mecanice artificiale reostatice sunt prezentate în figura 4.18 fiind asemănătoare celor prezentate în figura 4.17. Caracteristica mecanică naturală a motorului de curent continuu cu excitaţie independentă (derivaţie) este o caracteristică dură şi poate fi ridicată analitic sau experimental.
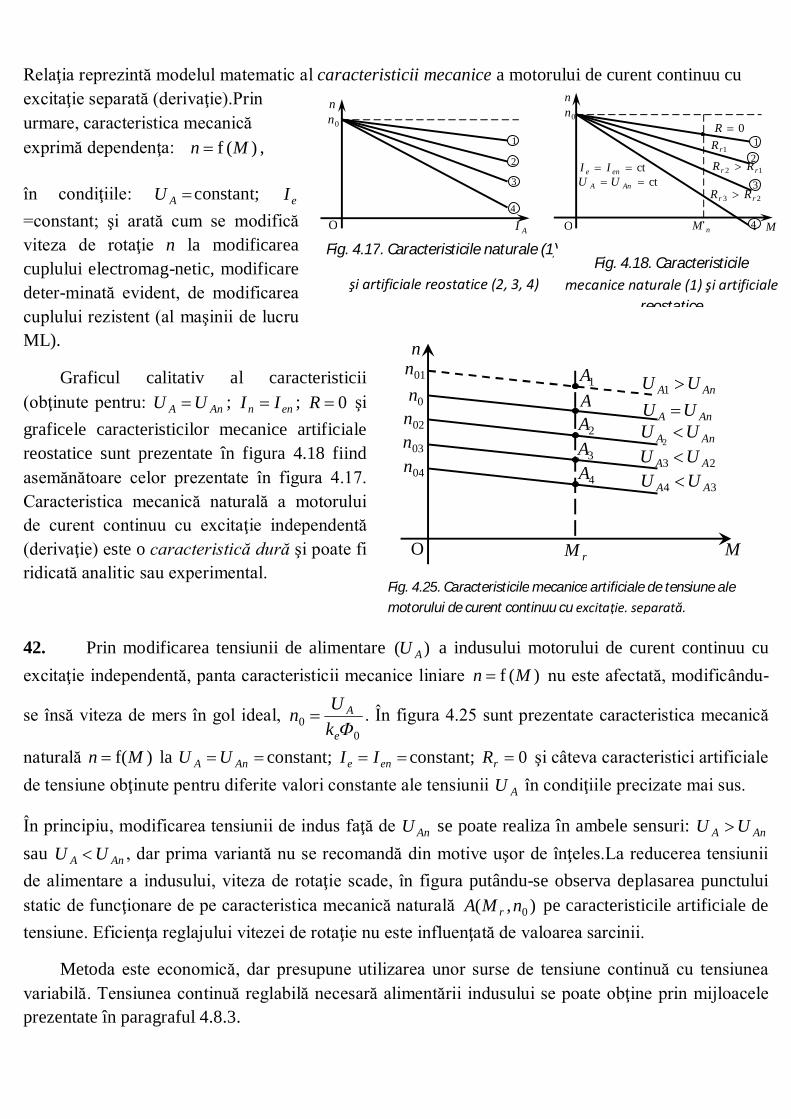
42. Prin modificarea tensiunii de alimentare )( AU a indusului motorului de curent continuu cu excitaţie independentă, panta caracteristicii mecanice liniare )(f Mn nu este afectată, modificându-
se însă viteza de mers în gol ideal, 0
0 eA
kUn . În figura 4.25 sunt prezentate caracteristica mecanică
naturală )f(Mn la AnA UU constant; ene II constant; 0rR şi câteva caracteristici artificiale de tensiune obţinute pentru diferite valori constante ale tensiunii AU în condiţiile precizate mai sus.
În principiu, modificarea tensiunii de indus faţă de AnU se poate realiza în ambele sensuri: AnA UU sau AnA UU , dar prima variantă nu se recomandă din motive uşor de înţeles.La reducerea tensiunii de alimentare a indusului, viteza de rotaţie scade, în figura putându-se observa deplasarea punctului static de funcţionare de pe caracteristica mecanică naturală ),( 0nMA r pe caracteristicile artificiale de tensiune. Eficienţa reglajului vitezei de rotaţie nu este influenţată de valoarea sarcinii.
Metoda este economică, dar presupune utilizarea unor surse de tensiune continuă cu tensiunea variabilă. Tensiunea continuă reglabilă necesară alimentării indusului se poate obţine prin mijloacele prezentate în paragraful 4.8.3.
Fig. 4.17. Caracteristicile naturale (1)
şi artificiale reostatice (2, 3, 4)
ale vitezei de rotaţie la mersul în
Fig. 4.18. Caracteristicile mecanice naturale (1) şi artificiale
reostatice
1
2
3
4
n0n
O AI
12
3
4
n0n
O M
0R1rR
12 rr RR
23 rr RR
ct ene IIct AnA UU
nM
n
0n02n03n04n
01n
A2A3A4A
1A
AnA UU AnA UU
2
23 AA UU
34 AA UU
AnA UU 1
rM MO
Fig. 4.25. Caracteristicile mecanice artificiale de tensiune ale motorului de curent continuu cu excitaţie. separată.

43. Modificarea vitezei de rotaţie prin slăbire de câmp se realizează prin introducerea în circuitul de excitaţie al motorului a unui reostat cu rezistenţa variabilă, numit reostat de câmp cu ajutorul căruia se modifică curentul de excitaţie eI . Reducerea curentului de excitaţie(şi implicit a fluxului magnetic inductor 0 ) are ca efect creşterea vitezei de mers în gol ideal 0n precum şi creşterea pantei caracteristicii mecanice. În figura sunt prezentate caracteristicile mecanice naturală, şi artificiale obţinute la reglarea vitezei de rotaţie prin slăbire de câmp. La o aceeaşi valoare a cuplului rezistent, odată cu reducerea curentului de excitaţie viteza de rotaţie creşte, metoda realizând creşterea vitezei de rotaţie la valori mai mari decât viteza corespunzătoare curentului de excitaţie nominal ( enI ). Din aceste considerente, metoda este cuplată de regulă cu altă metodă de modificare a vitezei de rotaţie Acest procedeu de modificare a vitezei de rotaţie este simplu şi nu necesită investiţii importante. Pierderile de putere sunt reduse datorită valorilor mici ale curentului de excitaţie. Domeniul de reglare (eficienţa reglării) creşte concomitent cu reducerea încărcării. Metoda prezintă totuşi şi unele inconveniente care trebuiesc luate în considerare. Deoarece modificarea vitezei de rotaţie se poate realiza numai în sens crescător (peste valoarea nominală) aceasta se va realiza cu maximă prudenţă pentru a evita distrugerea motorului ca urmare a suprasolicitărilor mecanice. La cuplu rezistent constant reducerea curentului de excitaţie (deci a fluxului magnetic inductor) conduce la creşterea curentului prin indus AI , după cum se poate constata din analiza relaţiei:
AMar IKMM 0 constant.
n
0n
02n
01n
A
2A1A
nM MO
)0( cene RII)0( 1 cene RII
)( 1212 ccee RRII
Caracteristicile mecanice ale motorului de curent continuu cu excitaţie independentă
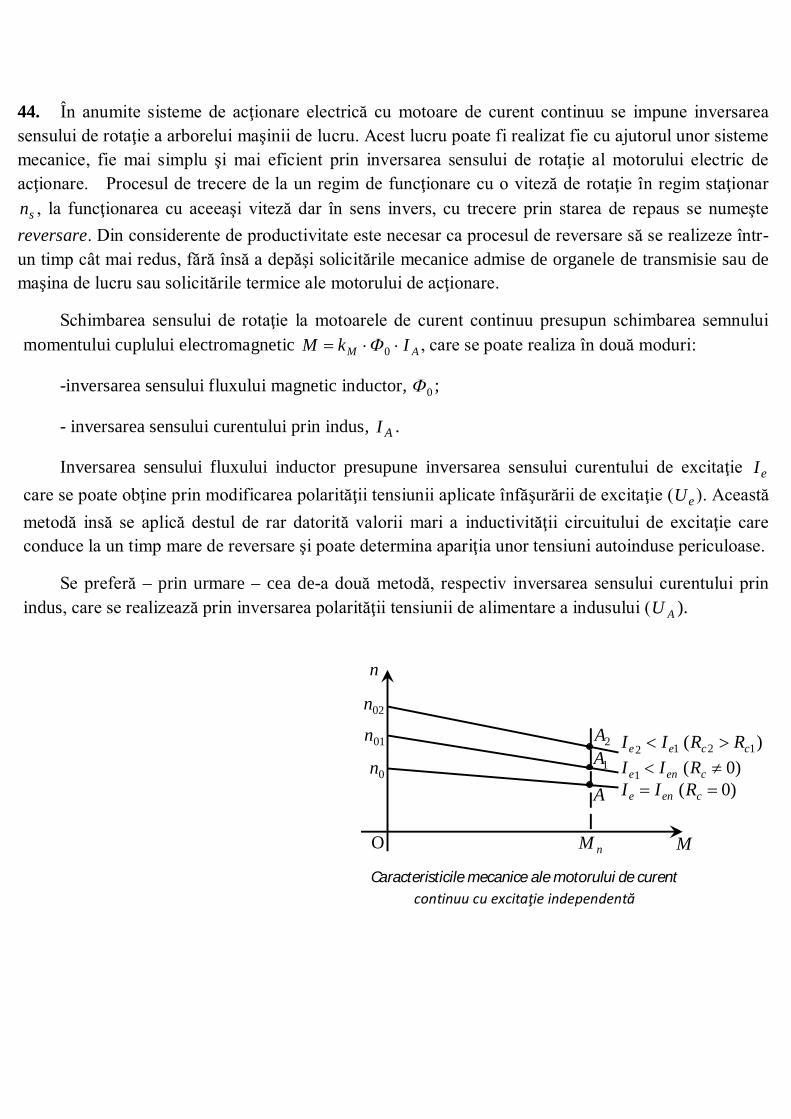
44. În anumite sisteme de acţionare electrică cu motoare de curent continuu se impune inversarea sensului de rotaţie a arborelui maşinii de lucru. Acest lucru poate fi realizat fie cu ajutorul unor sisteme mecanice, fie mai simplu şi mai eficient prin inversarea sensului de rotaţie al motorului electric de acţionare. Procesul de trecere de la un regim de funcţionare cu o viteză de rotaţie în regim staţionar
sn , la funcţionarea cu aceeaşi viteză dar în sens invers, cu trecere prin starea de repaus se numeşte reversare. Din considerente de productivitate este necesar ca procesul de reversare să se realizeze într-un timp cât mai redus, fără însă a depăşi solicitările mecanice admise de organele de transmisie sau de maşina de lucru sau solicitările termice ale motorului de acţionare.
Schimbarea sensului de rotaţie la motoarele de curent continuu presupun schimbarea semnului momentului cuplului electromagnetic AM IkM 0 , care se poate realiza în două moduri:
-inversarea sensului fluxului magnetic inductor, 0 ;
- inversarea sensului curentului prin indus, AI .
Inversarea sensului fluxului inductor presupune inversarea sensului curentului de excitaţie eI care se poate obţine prin modificarea polarităţii tensiunii aplicate înfăşurării de excitaţie ( eU ). Această metodă insă se aplică destul de rar datorită valorii mari a inductivităţii circuitului de excitaţie care conduce la un timp mare de reversare şi poate determina apariţia unor tensiuni autoinduse periculoase.
Se preferă – prin urmare – cea de-a două metodă, respectiv inversarea sensului curentului prin indus, care se realizează prin inversarea polarităţii tensiunii de alimentare a indusului ( AU ).
123 fff RRR
1fR 2fR 3fR
1A 2A 3A 0nAn
0 AM
n
M
),( AA nMA
Fig. 4.27. Caracteristica mecanică de frânare mecanică ale motorului de curent continuu
MOTORGENERATOR
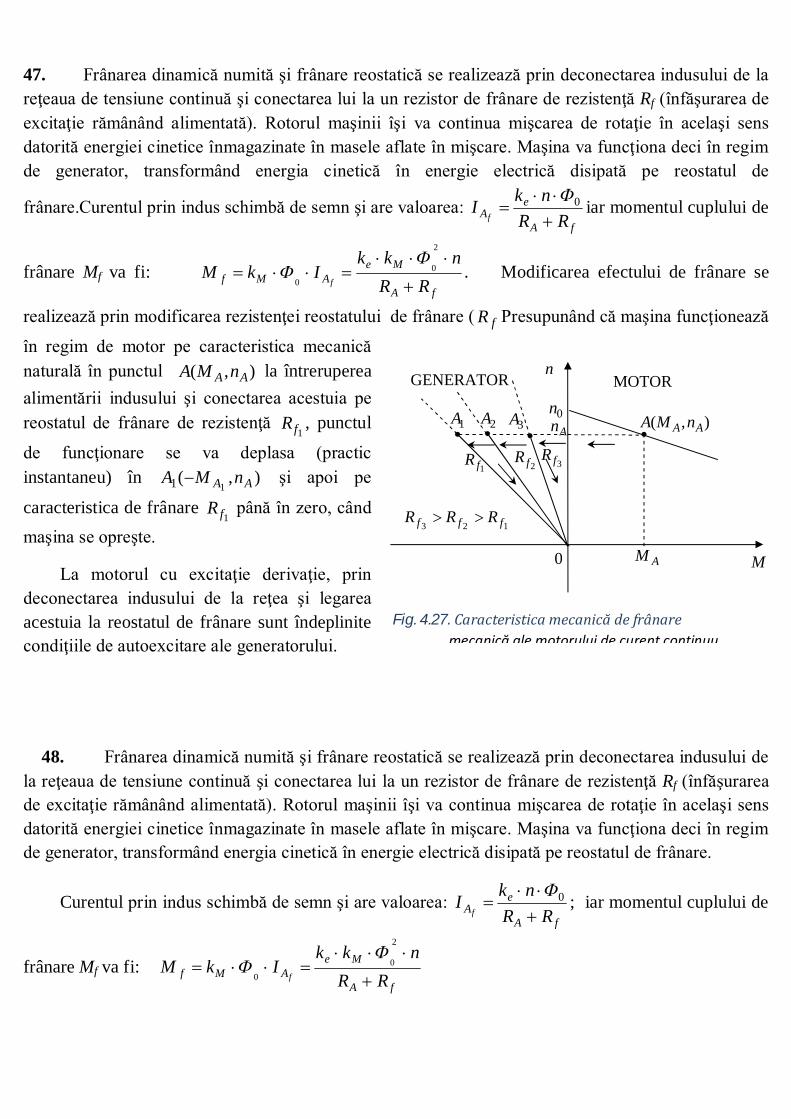
47. Frânarea dinamică numită şi frânare reostatică se realizează prin deconectarea indusului de la reţeaua de tensiune continuă şi conectarea lui la un rezistor de frânare de rezistenţă Rf (înfăşurarea de excitaţie rămânând alimentată). Rotorul maşinii îşi va continua mişcarea de rotaţie în acelaşi sens datorită energiei cinetice înmagazinate în masele aflate în mişcare. Maşina va funcţiona deci în regim de generator, transformând energia cinetică în energie electrică disipată pe reostatul de
frânare.Curentul prin indus schimbă de semn şi are valoarea: fA
eA RR
nkIf
0 iar momentul cuplului de
frânare Mf va fi: fA
MeAMf RR
nkkIkM
f
2
00
. Modificarea efectului de frânare se
realizează prin modificarea rezistenţei reostatului de frânare ( fR Presupunând că maşina funcţionează
în regim de motor pe caracteristica mecanică naturală în punctul ),( AA nMA la întreruperea alimentării indusului şi conectarea acestuia pe reostatul de frânare de rezistenţă
1fR , punctul
de funcţionare se va deplasa (practic instantaneu) în ),(
11 AA nMA şi apoi pe
caracteristica de frânare 1fR până în zero, când
maşina se opreşte.
La motorul cu excitaţie derivaţie, prin deconectarea indusului de la reţea şi legarea acestuia la reostatul de frânare sunt îndeplinite condiţiile de autoexcitare ale generatorului.
48. Frânarea dinamică numită şi frânare reostatică se realizează prin deconectarea indusului de la reţeaua de tensiune continuă şi conectarea lui la un rezistor de frânare de rezistenţă Rf (înfăşurarea de excitaţie rămânând alimentată). Rotorul maşinii îşi va continua mişcarea de rotaţie în acelaşi sens datorită energiei cinetice înmagazinate în masele aflate în mişcare. Maşina va funcţiona deci în regim de generator, transformând energia cinetică în energie electrică disipată pe reostatul de frânare.
Curentul prin indus schimbă de semn şi are valoarea: fA
eA RR
nkIf
0 ; iar momentul cuplului de
frânare Mf va fi: fA
MeAMf RR
nkkIkM
f
2
00

49. Dacă din diverse cauze viteza de rotaţie a unui motor de curent continuu (cu excitaţie derivaţie)
depăşeşte viteza de mers în gol ideal 0
0
e
A
kUn , tensiunea electromotoare indusă devine mai mare
decât tensiunea de alimentare a indusului AU , iar sensul curentului prin indus se schimbă:
00
A
eAA R
nkUI
.
Deoarece sensul fluxului magnetic inductor rămâne neschimbat se va schimba şi sensul momentului cuplului electromagnetic ( AM IkM
0 ) care devine astfel un cuplu de frânare. Maşina
trece în regim de generator debitând în reţeaua de alimentare putere electrică. Frânarea cu recuperare de energie se poate realiza pornind de pe caracteristica mecanică naturală (c.m.n) sau de pe caracteristici mecanice artificiale reostatice, date de modelul:
20
020
0)()( Me
ffA
Me
fA
kkMRR
nkk
MRRnn
unde: MM f reprezintă momentul cuplului de
frânare.
Frânarea cu recuperare de energie este întâlnită frecvent în practică în cazul mecanismelor de ridicat şi a vehiculelor cu tracţiune electrică, în coborâre. Este cea mai economică metodă de frânare, dar prezintă dezavantajul că se poate aplica numai la viteze mai mari decât 0n .
Prin urmare, prin această metodă nu se poate opri mecanismul de lucru, putându-se limita doar viteza acestuia.
Domeniul de frânare prin recuperare se poate extinde prin alimentarea maşinii de la o sursă de tensiune variabilă, obţinându-se astfel diferite viteze de mers în gol ideal.
51. Frânarea cu recuperare de energie este întâlnită frecvent în practică în cazul mecanismelor de ridicat şi a vehiculelor cu tracţiune electrică, în coborâre. Este cea mai economică metodă de frânare, dar prezintă dezavantajul că se poate aplica numai la viteze mai mari decât 0n . Prin urmare, prin această metodă nu se poate opri mecanismul de lucru, putându-se limita doar viteza acestuia. Domeniul de frânare prin recuperare se poate extinde prin alimentarea maşinii de la o sursă de tensiune variabilă, obţinându-se astfel diferite viteze de mers în gol ideal. Dacă din diverse cauze viteza de rotaţie a unui motor de curent continuu (cu excitaţie derivaţie) depăşeşte viteza de mers în gol ideal, tensiunea electromotoare indusă devine mai mare decât tensiunea de alimentare a indusului
AU , iar sensul curentului prin indus se schimbă. Deoarece sensul fluxului magnetic inductor rămâne neschimbat se va schimba şi sensul momentului cuplului electromagnetic care devine astfel un cuplu de frânare. Maşina trece în regim de generator debitând în reţeaua de alimentare putere electrică. Frânarea cu recuperare de energie se poate realiza pornind de pe caracteristica mecanică naturală (c.m.n) sau de pe caracteristici mecanice artificiale reostatice.
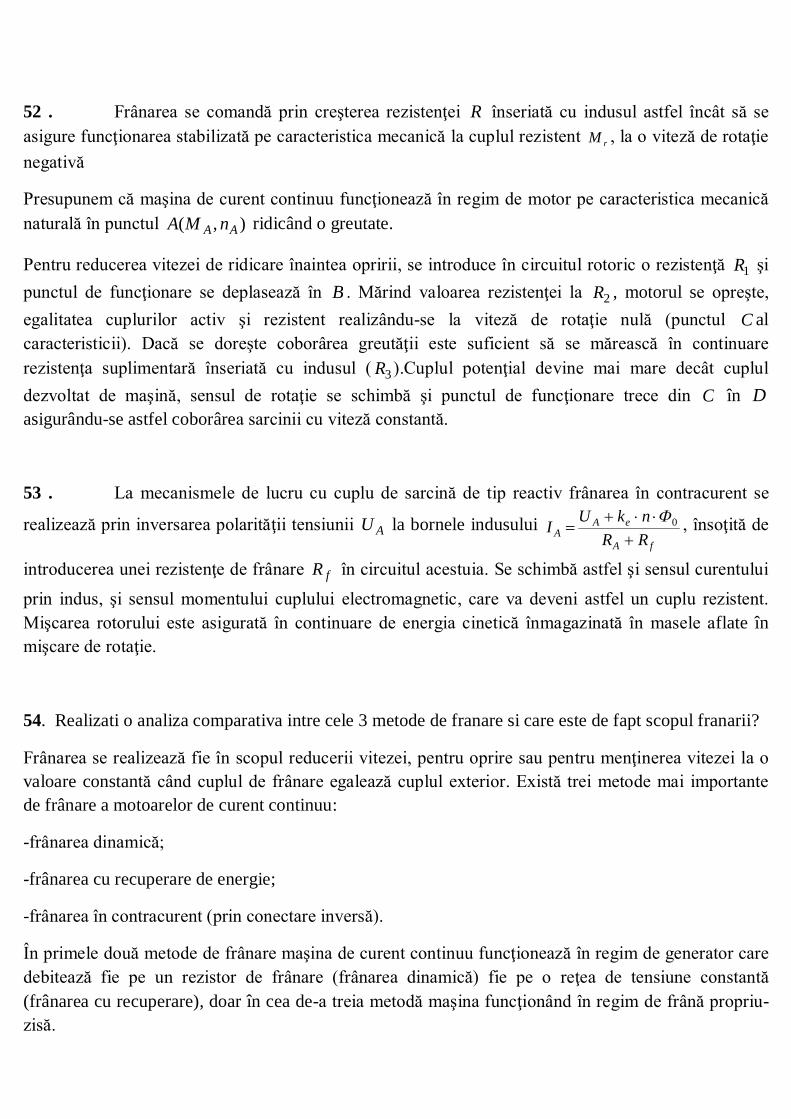
52 . Frânarea se comandă prin creşterea rezistenţei R înseriată cu indusul astfel încât să se asigure funcţionarea stabilizată pe caracteristica mecanică la cuplul rezistent rM , la o viteză de rotaţie negativă
Presupunem că maşina de curent continuu funcţionează în regim de motor pe caracteristica mecanică naturală în punctul ),( AA nMA ridicând o greutate.
Pentru reducerea vitezei de ridicare înaintea opririi, se introduce în circuitul rotoric o rezistenţă 1R şi punctul de funcţionare se deplasează în B . Mărind valoarea rezistenţei la 2R , motorul se opreşte, egalitatea cuplurilor activ şi rezistent realizându-se la viteză de rotaţie nulă (punctul C al caracteristicii). Dacă se doreşte coborârea greutăţii este suficient să se mărească în continuare rezistenţa suplimentară înseriată cu indusul ( 3R ).Cuplul potenţial devine mai mare decât cuplul dezvoltat de maşină, sensul de rotaţie se schimbă şi punctul de funcţionare trece din C în D asigurându-se astfel coborârea sarcinii cu viteză constantă.
53 . La mecanismele de lucru cu cuplu de sarcină de tip reactiv frânarea în contracurent se
realizează prin inversarea polarităţii tensiunii AU la bornele indusului fA
eAA RR
nkUI
0 , însoţită de
introducerea unei rezistenţe de frânare fR în circuitul acestuia. Se schimbă astfel şi sensul curentului
prin indus, şi sensul momentului cuplului electromagnetic, care va deveni astfel un cuplu rezistent. Mişcarea rotorului este asigurată în continuare de energia cinetică înmagazinată în masele aflate în mişcare de rotaţie.
54. Realizati o analiza comparativa intre cele 3 metode de franare si care este de fapt scopul franarii?
Frânarea se realizează fie în scopul reducerii vitezei, pentru oprire sau pentru menţinerea vitezei la o valoare constantă când cuplul de frânare egalează cuplul exterior. Există trei metode mai importante de frânare a motoarelor de curent continuu:
-frânarea dinamică;
-frânarea cu recuperare de energie;
-frânarea în contracurent (prin conectare inversă).
În primele două metode de frânare maşina de curent continuu funcţionează în regim de generator care debitează fie pe un rezistor de frânare (frânarea dinamică) fie pe o reţea de tensiune constantă (frânarea cu recuperare), doar în cea de-a treia metodă maşina funcţionând în regim de frână propriu-zisă.
Recommended