
Available at https://jtsiskom.undip.ac.id (15 February 2020)DOI:10.14710/jtsiskom.8.2.2020.106-112
Jurnal Teknologi dan Sistem Komputer, 8(2), 2020, 106-112
Klasterisasi udang berdasarkan ukuran berbasis pemrosesan citra digitalmenggunakan metode CCA dan DBSCAN
Shrimps clusterization by size using digital image processing with CCA and DBSCAN
Adri Priadana*,1), Aris Wahyu Murdiyanto2)
1)Program Studi Teknik Informatika, Universitas Jenderal Achmad Yani YogyakartaJl. Siliwangi, Ringroad Barat, Banyuraden, Gamping, Sleman, Daerah Istimewa Yogyakarta, Indonesia 55293
2)Program Studi Sistem Informasi, Universitas Jenderal Achmad Yani YogyakartaJl. Siliwangi, Ringroad Barat, Banyuraden, Gamping, Sleman, Daerah Istimewa Yogyakarta, Indonesia 55293
Cara sitasi: A. Priadana and A. W. Murdiyanto, "Klasterisasi udang berdasarkan ukuran berbasis pemrosesan citradigital dengan metode CCA dan DBSCAN," Jurnal Teknologi dan Sistem Komputer, vol. 8, no. 2, pp. 106-112,2020. doi: 10.14710/jtsiskom.8.2.2020.106-112, [Online].
Abstract - The quality of farmed shrimps has severalcriteria, one of which is shrimp size. The shrimpselection was carried out by the contractor at theharvest time by grouping the shrimp based on theirsize. This study aims to apply digital image processingfor shrimp clustering based on size using theconnected component analysis (CCA) and density-based spatial clustering of applications with noise(DBSCAN) methods. Shrimp group images were takenwith a digital camera at a light intensity of 1200-3200lux. The clustering results were compared withclustering from direct observation by two experts, eachof which obtained an accuracy of 79.81 % and 72.99 %so that the average accuracy of the method was 76.4 %.
Keywords - size clustering; vaname shrimp; imageprocessing; connected component analysis; DBSCAN
Abstrak - Kualitas udang hasil panen memilikibeberapa kriteria, salah satunya adalah ukuran udang.Proses pemilihan udang yang dilakukan pemborongpada waktu panen, salah satunya adalah denganmengelompokkan udang berdasarkan ukurannya.Penelitian ini bertujuan untuk menerapkan metodeconnected component analysis (CCA) dan metodedensity-based spatial clustering of applications withnoise (DBSCAN) untuk klasterisasi udangberdasarkan ukuran menggunakan pengolahan citradigital. Citra kelompok udang diambil dengan kameradigital di intensitas cahaya lokasi 1200-3200 lux. Hasilklasterisasi dari metode dibandingkan dengan hasilpengamatan secara langsung oleh dua orang ahli yangmasing-masing menghasilkan akurasi 79,81 % dan72,99 % sehingga rata-rata akurasinya 76,4 %.
Kata Kunci – klasterisasi ukuran; udang vaname;pengolahan citra; connected component analysis;DBSCAN
I. PENDAHULUAN
Saat ini udang memiliki peranan yang besar terhadapkinerja ekonomi perikanan Indonesia. BerdasarkanSiaran Pers Nomor SP51/SJ.04/III/2018 KementrianKelautan dan Perikanan Negara Republik Indonesia,kontribusi nilai ekspor udang vaname beku (letapenausvanamae) terhadap total nilai ekspor perikanan tahun2016 mencapai lebih dari 27 persen. Selain itu, sejaktahun 2013 mulai terjadi peningkatan permintaan udangvaname di pasar internasional. Kondisi ini berimbasterhadap pelaku usaha tambak udang vaname dankelompok pembudidaya untuk terus mengembangkanusahanya [1].
Kualitas udang hasil panen pembudidaya memilikibeberapa kriteria, salah satunya adalah ukuran udang.Proses pemilihan udang yang dilakukan pemborongpada waktu panen salah satunya dilakukan untukmengelompokkan udang berdasarkan ukurannya.Pemilihan ini dilakukan secara manual dimanapemborong telah menyiapkan beberapa pekerja. Hal inimembuat proses pemilihan membutuhkan waktu yanglama. Hal ini diperburuk ketika pemborong hanyamemiliki sedikit pekerja untuk melakukan prosespemilihan udang.
Teknologi dapat diterapkan untuk mengelompokkanukuran udang secara otomatis sesuai klaster-klasteryang telah ditentukan berdasarkan ukuran udang padasuatu periode panen. Beberapa penelitian telahmenerapkan dan mengembangkan beragam teknologipada usaha budidaya udang [2]-[5]. Penerapanteknologi, seperti sistem tertanam dan wireless sensornetwork, telah dilakukan dalam [2] untuk pemantauansecara otomatis dan sistem kontrol lingkungan tambakudang. Teknologi lain, seperti Internet of Things (IoT),juga telah diterapkan dalam [3] untuk pemantauanotomatis dan pengendalian kondisi lingkungan tempatbudidaya udang. Teknologi jaringan ZigBee diterapkandalam [4], [5] untuk sistem pemantauan dan kontrolkondisi lingkungan tempat budidaya udang.
Copyright ©2020, JTSiskom, e-ISSN: 2338-0403, p-ISSN: 2620-4002 Submitted: 11 August 2019; Revised: 11 February 2019; Accepted: 14 February 2020; Published: 30 April 2020
*) Penulis korespondensi (Adri Priadana)Email: [email protected]

Fokus penerapan teknologi pada usaha budidayaudang tersebut di atas lebih mengarah pada penerapanteknologi untuk pemantauan dan pengendalian kondisilingkungan tempat budidaya udang. Teknologi untukmengukur atau mengklasterisasi udang hasil panenberdasarkan kualitas seperti ukuran udang belumditerapkan. Di sisi lain, teknik pengolahan citra digitaltelah diaplikasikan dalam sistem untuk mengukurkualitas daging [6], telur ayam omega-3 [7], danidentifikasi nominal uang kertas rupiah [8]. Sistemtersebut menggunakan pustaka open source computervision (OpenCV).
Beragam teknik pengolahan citra bisa digunakan,salah satunya adalah connected component analysis(CCA) untuk ekstraksi jumlah piksel dari objek citradan density-based spatial clustering of applicationswith noise (DBSCAN) untuk klasterisasi ukuran objekdari hasil ekstraksi jumlah piksel. Metode CCA telahditerapkan untuk mengekstraks teks dari sebuah citradokumen [9], klasterisasi citra laju alarm palsu konstandari radar Doppler [10], klasifikasi telur ayam dan telurburung puyuh [11], dan aplikasi sistem tertanam [12],[13]. Metode DBSCAN telah diterapkan untuksegmentasi citra [14], ekstraksi objek citra radar FM-CW[15], klasterisasi radiasi matahari [16], pengelompokkanrumah kos mahasiswa [17], klasterisasi resiko tsunami[18], dan klasterisasi negara-negara dunia [19].
Metode CCA dapat digunakan untuk mengekstrakobjek-objek yang ada pada citra dan membedakananatara satu objek dengan objek yang lain pada citraberdasarkan piksel yang saling terhubung (connected).Metode DBSCAN memiliki kemampuan untukmemisahkan derau dari data citra masukan. Belum adakajian yang menerapkan metode-metode tersebut untukmengukur atau mengklasterisasi kualitas udang hasilpanen berdasarkan ukurannya. Penelitian ini bertujuanuntuk mengembangkan sistem yang dapatmengklasterisasi kualitas udang berdasarkan ukurannyamenggunakan CCA dan DBSCAN yang belumdilakukan oleh kajian lain. Hasil penelitian inidiharapkan dapat menjadi tahap awal dan bagian darisistem untuk mengelompokkan udang berdasarkanukuran secara otomatis untuk mengetahui kualitasproduksi udang dengan cepat dan akurat.
II. METODE PENELITIAN
Tahapan penelitian dalam penelitian ini terdiri ataspengumpulan data, perancangan sistem, dan pengujiansistem. Perancangan sistem terdiri dari tahap praproses,tahap ekstraksi ukuran piksel masing-masing objek, dantahap klasterisasi.
A. Pengumpulan data
Data yang digunakan pada penelitian ini adalahenam variasi citra yang masing-masing terdiri darikumpulan udang yang didapat dari proses akuisisi citradengan menggunakan kamera Sony A5000. Jarak antarakamera dengan objek adalah 60 cm dengan warna latarbelakang putih. Visualisasi proses akuisisi citra
ditunjukkan pada Gambar 1. Data hasil akuisisi citraudang ditunjukkan pada Tabel 1.
B. Perancangan sistem
Proses klasterisasi udang berdasarkan ukuranberbasis pemrosesan citra pada sistem ini terdiri daritiga tahapan proses utama, yaitu praproses, ekstraksijumlah piksel objek menggunakan CCA, dan prosesklasterisasi menggunakan DBSCAN. Secara umum,tahapan proses dari sistem klasterisasi udangberdasarkan ukuran berbasis pemrosesan citra padapenelitian ini dapat dilihat pada Gambar 2.
1. Tahap praproses
Tahap pra proses pada penelitian ini terdiri daripengaturan ulang ukuran citra (resizing), konversi citradari format RGB ke grayscale, dan pemisahan latarbelakang dan objek menggunakan thresholding. Citrapertama kali mengalami operasi pengaturan ulang skalake skala resolusi tetap yang lebih kecil, yaitu 360 x 500piksel. Citra RGB kemudian dikonversi menjadi citragrayscale menggunakan Persamaan 1 [20].
Y′=0.299R+0.587G+0.114B (1)
Tahap terakhir dari praproses pada sistem ini adalahproses pemisahan latar belakang dan objekmenggunakan thresholding. Teknik thresholdingmelakukan pengambangan atau segmentasi menjadi duawilayah dengan mengatur jumlah derajat keabuan yangada pada citra. Dengan teknik ini, pemisahan objekdengan latar belakang dapat dilakukan.
2. Tahap ekstraksi jumlah piksel setiap objek
Metode ekstraksi jumlah piksel dari setiap objekudang pada penelitian ini dilakukan dengan
Copyright ©2020, JTSiskom, e-ISSN: 2338-0403, p-ISSN: 2620-4002 Jurnal Teknologi dan Sistem Komputer, 8(2), 2020, 107
Gambar 1. Proses akuisisi citra udang
Tabel 1. Data hasil akuisisi citra udang
No Nama citra Jumlah udang1 Citra_1.jpg 232 Citra_2.jpg 223 Citra_3.jpg 224 Citra_4.jpg 225 Citra_5.jpg 226 Citra_6.jpg 22

menggunakan metode CCA. Metode CCA inimerupakan kombinasi antara dua komputasi, yaituconnected component labeling (CCL) dan featurescomputation (FC) [13], [14]. CCL berfungsi untukmembedakan objek yang berbeda pada sebuah citradengan menetapkan label unik untuk semua piksel yangmerujuk pada objek yang sama. FC kemudianmengubah citra berlabel menjadi data sintetis yangberguna untuk pemrosesan selanjutnya.
Pada penelitian ini metode CCA digunakan untukmengekstrak objek-objek yang ada pada citra danmembedakan antara satu objek dengan objek yang lainberdasarkan piksel yang saling terhubung (connected).Langkah akhir dari proses ini adalah mengekstrakjumlah piksel dari masing-masing objek yang ada padacitra. Metode CCA diterapkan dengan memanfaatkankombinasi pustaka Scikit-image dan OpenCV yangberisi fungsi-fungsi pemrograman untuk teknologicomputer vision.
Pada pustaka Scikit-image, terdapat sebuah fungsiyang bernama measure.label() dan digunakan untukmendapatkan semua objek yang terdiri dari sekumpulanpiksel yang saling bertetangga (terhubung) danmemberikan label dari masing-masing objek dari sebuahcitra. Pada pustaka OpenCV, terdapat sebuah fungsiyang bernama cv2.circle() dan digunakan untukmenandai objek-objek yang diperoleh denganmemberikan sebuah bingkai dengan warna. Jumlahpiksel dari masing-masing objek dapat diketahui daricitra hasil proses CCA tersebut. Jumlah piksel tersebutmerepresentasikan ukuran dari masing-masing udang.
3. Tahap klasterisasi udang berdasarkan ukuran
Metode klasterisasi udang berdasarkan ukuran udangdilakukan dengan menggunakan metode DBSCAN.Metode DBSCAN merupakan salah satu metodeclustering yang dilakukan dengan cara menemukanklaster berdasarkan daerah-daerah dengan kepadatantinggi yang terhubung [21]. Daerah padat dinyatakansebagai klaster [16].
Metode DBSCAN memerlukan dua parameter yangharus ditentukan, yaitu radius ketetanggaan danminimum objek yang menjadi batasan kepadatan ataudensity threshold untuk menentukan suatu daerahtermasuk padat atau tidak. Alur metode DBSCAN
dinyatakan dalam Algoritme 1 [21]. Pada penelitian ini,metode DBSCAN digunakan untuk mengklasterisasiukuran udang berdasarkan jumlah piksel dari masing-masing objek udang yang diperoleh dari prosesekstraksi sebelumnya.
Algoritme 1. Metode klasterisasi DBSCAN
repeat Pilih secara acak sebuah objek p dari semua objek yang berlabel unvisited Tandai p sebagai visited if dalam radius ɛ objek p memiliki MinObj objek then Buat sebuah klaster baru C Tambahkan p ke dalam C Masukkan semua objek yang menjadi tetangga p ke N for setiap objek p’ di N do if p’ berlabel unvisited then Tandai p’ sebagai visited if dalam radius ɛ objek p’ memiliki minimal MinObj objek then tambahkan semua objek dalam radius ɛ tersebut ke dalam N if p’ bukan anggota dari klaster manapun then Tambahkan p’ ke dalam C end Keluarkan C sebagai sebuah klaster output Else tandai p sebagai derauuntil tidak ada objek yang berlabel unvisited
C. Pengujian sistem
Pengujian sistem pada penelitian ini bertujuan untukmenilai tingkat akurasi sistem, yaitu meliputi pengujianuntuk mengukur akurasi metode CCA, pengujian untukmengukur kualitas klasterisasi dari metode DBSCAN,dan pengujian untuk mengukur akurasi sistem.Pengujian metode CCA dilakukan dengan caramembandingkan jumlah objek udang yang dihasilkanoleh sistem dengan jumlah udang yang dihitung secaramanual melalui pengamatan, yaitu oleh pekerja dari timpemborong atau pembeli udang yang bertugas untukmengelompokkan udang berdasarkan ukurannya.
Pengujian metode DBSCAN dilakukan untukmengukur kualitas klasterisasi. Pada penelitian inipengukuran kualitas klasterisasi dilakukan denganmenggunakan metode silhouette coefficient. Padametode ini, untuk sebuah himpunan data D yang berisin objek D dipartisi ke dalam k klaster, C1, ..., Ck. Untuksetiap objek o dimana o ∈ D, a(o) dihitung sebagai rata-rata jarak antara objek o dengan semua objek lain dalam
Copyright ©2020, JTSiskom, e-ISSN: 2338-0403, p-ISSN: 2620-4002 Jurnal Teknologi dan Sistem Komputer, 8(2), 2020, 108
Citra masukan
Resizing citra
Konversi RGB ke Grayscale
Thresholding
ConnectedComponent
Analysis
Density-BasedSpatial Clustering
of Applications with Noise
HasilKlasterisasi
PraprosesEkstraksi jumlah
piksel setiap objekKlasterisasi ukuran udang berdasarkan jumlah piksel
Gambar 2. Tahapan proses sistem klasterisasi udang berdasarkan ukuran
klaster tersebut dan b(o) sebagai rata-rata jarakminimum dari objek o ke semua klaster lain (yangbukan klaster o). Jika o ∈ C1 (1≤ i ≤ k), maka nilaia(o) dihitung berdasarkan Persamaan 2, nilai b(o) dihitungberdasarkan Persamaan 3, dan silhouette coefficient s(o)dari o dihitung berdasarkan Persamaan 4 [21].
a (o )=
∑o' ϵ C i , o≠ o'
dist (o,o' )
|C i|−1
(2)
b (o )=minCi:1≤ j≤ k , j≠ i {
∑o ' ϵ Ci
dist (o, o' )
|C j|} (3)
s (o)=b (o )−a(o)
max {a ( o ) , b(o)} (4)
Nilai a(o) menyatakan kepadatan klaster yangmengandung objek o. Semakin kecil nilai a(o), semakinpadat klaster tersebut. b(o) menggambarkan seberapajauh objek o terpisah dari klaster-klaster lain. Semakinbesar nilai b(o), semakin jauh objek o terpisah dariklaster-klaster lain. Jadi, jika a(o) bernilai sangat kecildan b(o) bernilai sangat besar, maka silhouettecoefficient dari 0 akan mendekati 1. Sebaliknya, jikaa(o) bernilai sangat besar dan b(o) bernilai sangat kecil,maka silhouette coefficient dari 0 akan medekati -1. Jikasilhouette coefficient dari 0 mendekati 1, maka berartiklaster yang berisi objek o sangat padat dan objek oterpisah jauh dari klaster-klaster lain. Sebaliknya, jikasilhouette coefficient dari 0 mendekati -1, berarti klasteryang berisi objek o tidak padat dan objek o sangat dekatdengan klaster-klaster lain.
Pengujian sistem dilakukan dengan caramembandingkan hasil klasterisasi sistem dengan hasilklasterisasi yang dilakukan secara manual melaluipengamatan oleh pekerja dari tim pemborong ataupembeli udang yang bertugas untuk mengelompokkanudang berdasarkan ukurannya. Untuk mengukur akurasimetode CCA dan akurasi sistem digunakan Persamaan 5.
akurasi ( variasi )=Σ databenar
Σ seluruhdatax 100% (5)
III. HASIL DAN PEMBAHASAN
Bagian ini menjelaskan tentang rangkaian uji cobadan evaluasi terhadap metode yang diimplementasikanpada sistem klasterisasi ini. Tahap uji coba bertujuanuntuk melihat besar nilai akurasi yang dihasilkan olehsistem dan seberapa baik hasil klasterisasi. Tahapevaluasi pada penelitian ini dilakukan dengan caramenganalisis hasil uji coba yang telah dilakukan dimanahasil tersebut digunakan sebagai dasar untuk membuatkesimpulan dan saran. Bahasa pemrograman yangdigunakan pada penelitian ini adalah Python.
Pada penelitian ini, terdapat beberapa parameterkondisi yang diterapkan pada pengujian sistem, yaituintensitas cahaya dan ketinggian kamera. Pada tahappengambilan citra, intensitas cahaya kurang lebih adalah1200-3200 lux. Intensitas ini merupakan kondisi cahayayang disesuaikan dengan kondisi cahaya pada lokasidimana proses pemilihan undang saat panen dilakukanyaitu dalam kondisi yang tidak terlalu gelap dan tidakterlalu terang. Selain itu, ketinggian kamera dari objekadalah kurang lebih 60 cm agar citra yang dihasilkandapat mencakup banyak udang dan masing-masingudang masih tetap dapat terlihat jelas. Jarak tersebutdisesuaikan dengan kondisi pada saat proses pemilihanudang oleh pengamat dimana jarak tersebut merupakanjarak antara mata dengan udang yang akan dipilihdengan menggunakan kedua telapak tangan.
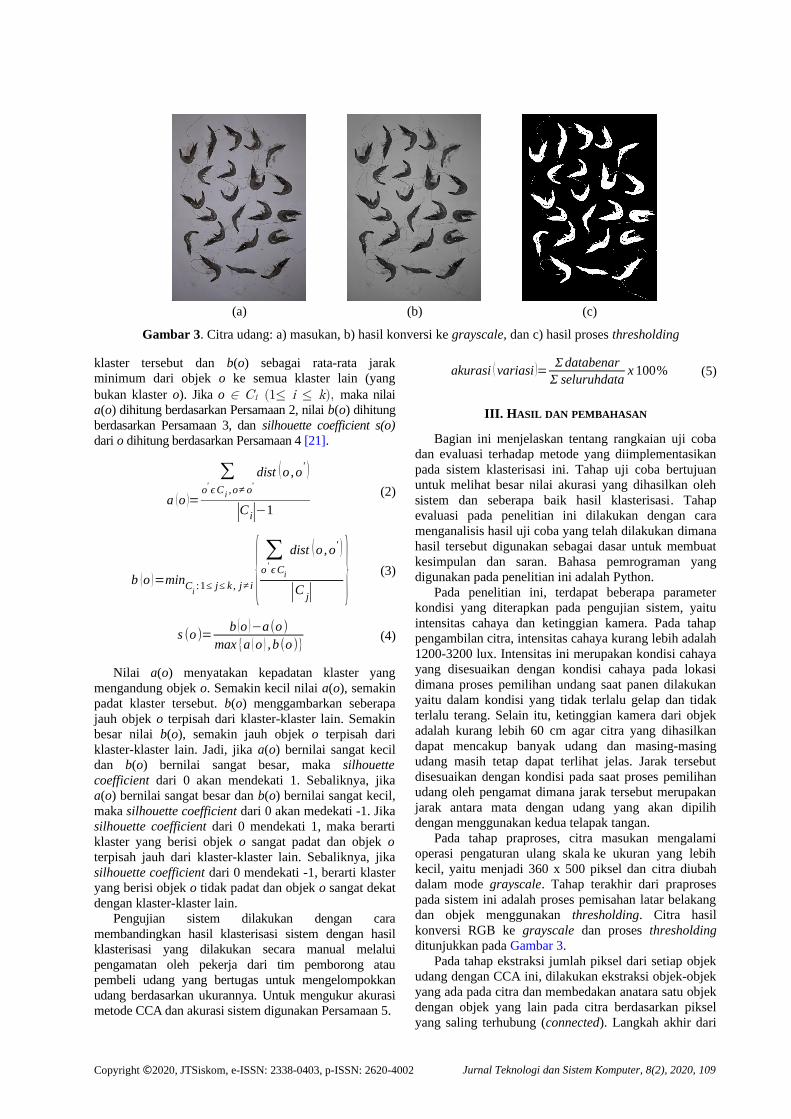
Pada tahap praproses, citra masukan mengalamioperasi pengaturan ulang skala ke ukuran yang lebihkecil, yaitu menjadi 360 x 500 piksel dan citra diubahdalam mode grayscale. Tahap terakhir dari praprosespada sistem ini adalah proses pemisahan latar belakangdan objek menggunakan thresholding. Citra hasilkonversi RGB ke grayscale dan proses thresholdingditunjukkan pada Gambar 3.
Pada tahap ekstraksi jumlah piksel dari setiap objekudang dengan CCA ini, dilakukan ekstraksi objek-objekyang ada pada citra dan membedakan anatara satu objekdengan objek yang lain pada citra berdasarkan pikselyang saling terhubung (connected). Langkah akhir dari
Copyright ©2020, JTSiskom, e-ISSN: 2338-0403, p-ISSN: 2620-4002 Jurnal Teknologi dan Sistem Komputer, 8(2), 2020, 109
(a) (b) (c)
Gambar 3. Citra udang: a) masukan, b) hasil konversi ke grayscale, dan c) hasil proses thresholding
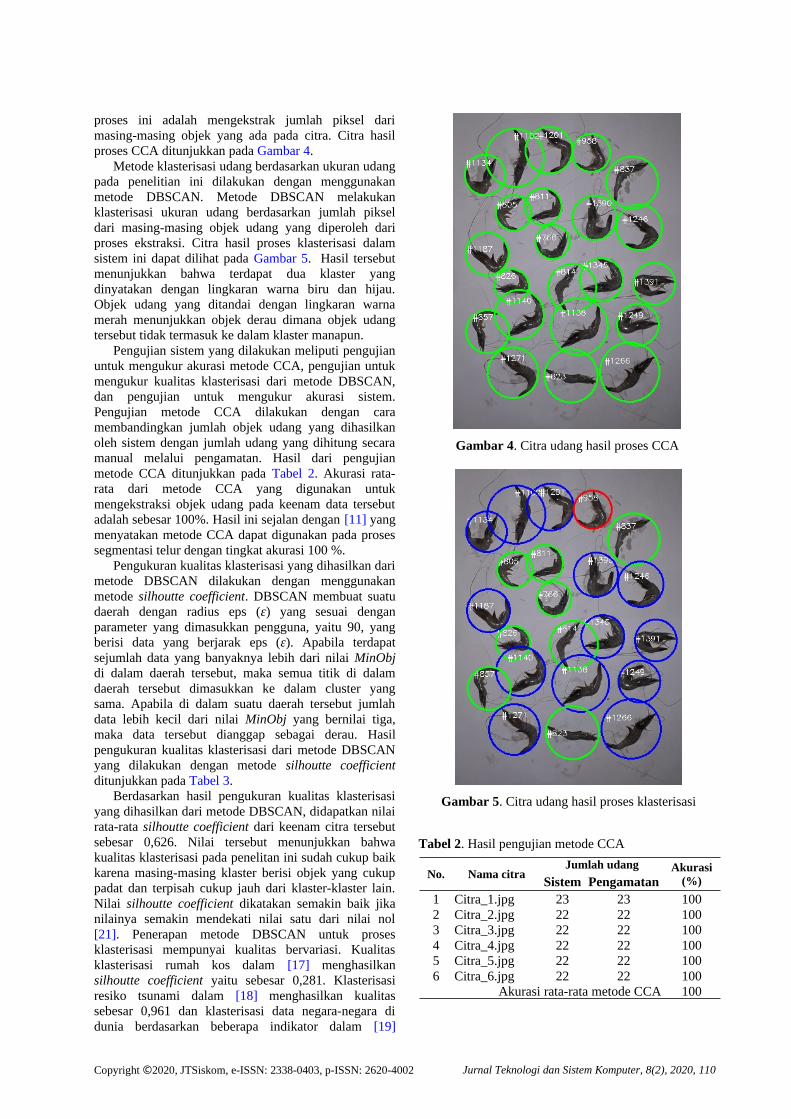
proses ini adalah mengekstrak jumlah piksel darimasing-masing objek yang ada pada citra. Citra hasilproses CCA ditunjukkan pada Gambar 4.
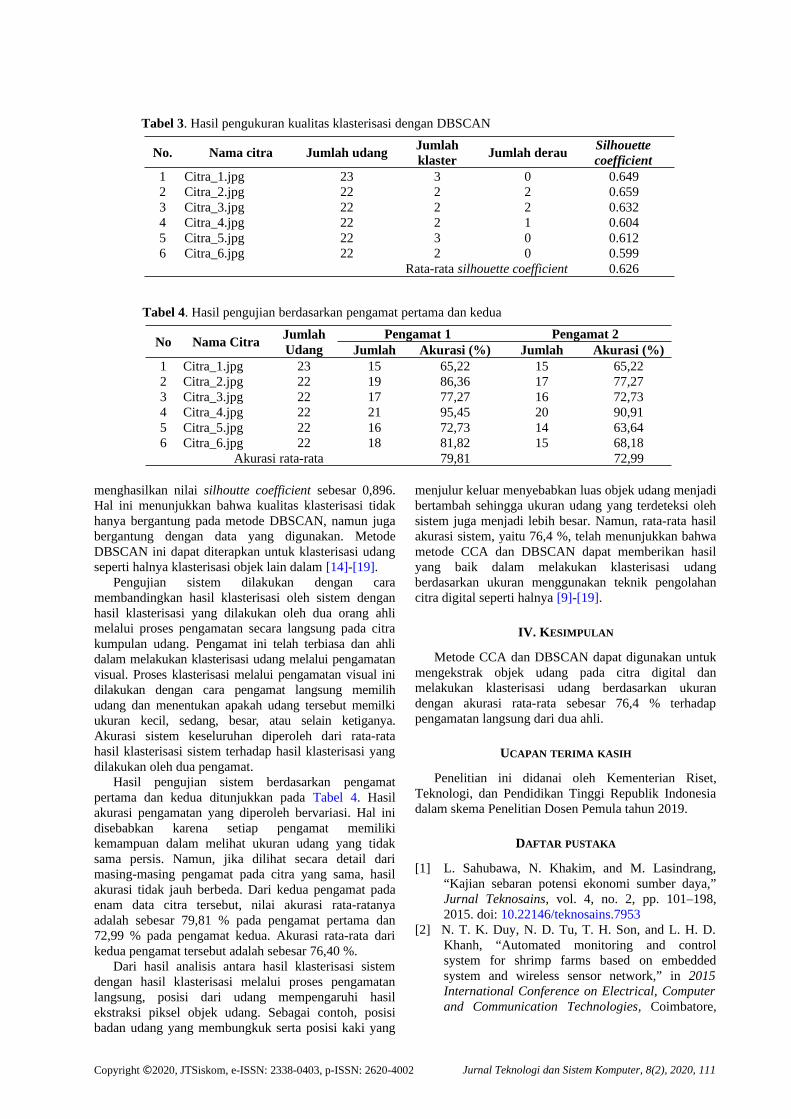
Metode klasterisasi udang berdasarkan ukuran udangpada penelitian ini dilakukan dengan menggunakanmetode DBSCAN. Metode DBSCAN melakukanklasterisasi ukuran udang berdasarkan jumlah pikseldari masing-masing objek udang yang diperoleh dariproses ekstraksi. Citra hasil proses klasterisasi dalamsistem ini dapat dilihat pada Gambar 5. Hasil tersebutmenunjukkan bahwa terdapat dua klaster yangdinyatakan dengan lingkaran warna biru dan hijau.Objek udang yang ditandai dengan lingkaran warnamerah menunjukkan objek derau dimana objek udangtersebut tidak termasuk ke dalam klaster manapun.
Pengujian sistem yang dilakukan meliputi pengujianuntuk mengukur akurasi metode CCA, pengujian untukmengukur kualitas klasterisasi dari metode DBSCAN,dan pengujian untuk mengukur akurasi sistem.Pengujian metode CCA dilakukan dengan caramembandingkan jumlah objek udang yang dihasilkanoleh sistem dengan jumlah udang yang dihitung secaramanual melalui pengamatan. Hasil dari pengujianmetode CCA ditunjukkan pada Tabel 2. Akurasi rata-rata dari metode CCA yang digunakan untukmengekstraksi objek udang pada keenam data tersebutadalah sebesar 100%. Hasil ini sejalan dengan [11] yangmenyatakan metode CCA dapat digunakan pada prosessegmentasi telur dengan tingkat akurasi 100 %.
Pengukuran kualitas klasterisasi yang dihasilkan darimetode DBSCAN dilakukan dengan menggunakanmetode silhoutte coefficient. DBSCAN membuat suatudaerah dengan radius eps (ɛ) yang sesuai denganparameter yang dimasukkan pengguna, yaitu 90, yangberisi data yang berjarak eps (ɛ). Apabila terdapatsejumlah data yang banyaknya lebih dari nilai MinObjdi dalam daerah tersebut, maka semua titik di dalamdaerah tersebut dimasukkan ke dalam cluster yangsama. Apabila di dalam suatu daerah tersebut jumlahdata lebih kecil dari nilai MinObj yang bernilai tiga,maka data tersebut dianggap sebagai derau. Hasilpengukuran kualitas klasterisasi dari metode DBSCANyang dilakukan dengan metode silhoutte coefficientditunjukkan pada Tabel 3.
Berdasarkan hasil pengukuran kualitas klasterisasiyang dihasilkan dari metode DBSCAN, didapatkan nilairata-rata silhoutte coefficient dari keenam citra tersebutsebesar 0,626. Nilai tersebut menunjukkan bahwakualitas klasterisasi pada penelitan ini sudah cukup baikkarena masing-masing klaster berisi objek yang cukuppadat dan terpisah cukup jauh dari klaster-klaster lain.Nilai silhoutte coefficient dikatakan semakin baik jikanilainya semakin mendekati nilai satu dari nilai nol[21]. Penerapan metode DBSCAN untuk prosesklasterisasi mempunyai kualitas bervariasi. Kualitasklasterisasi rumah kos dalam [17] menghasilkansilhoutte coefficient yaitu sebesar 0,281. Klasterisasiresiko tsunami dalam [18] menghasilkan kualitassebesar 0,961 dan klasterisasi data negara-negara didunia berdasarkan beberapa indikator dalam [19]
Copyright ©2020, JTSiskom, e-ISSN: 2338-0403, p-ISSN: 2620-4002 Jurnal Teknologi dan Sistem Komputer, 8(2), 2020, 110
Gambar 4. Citra udang hasil proses CCA
Gambar 5. Citra udang hasil proses klasterisasi
Tabel 2. Hasil pengujian metode CCA
No. Nama citraJumlah udang Akurasi
(%)Sistem Pengamatan1 Citra_1.jpg 23 23 1002 Citra_2.jpg 22 22 1003 Citra_3.jpg 22 22 1004 Citra_4.jpg 22 22 1005 Citra_5.jpg 22 22 1006 Citra_6.jpg 22 22 100
Akurasi rata-rata metode CCA 100
menghasilkan nilai silhoutte coefficient sebesar 0,896.Hal ini menunjukkan bahwa kualitas klasterisasi tidakhanya bergantung pada metode DBSCAN, namun jugabergantung dengan data yang digunakan. MetodeDBSCAN ini dapat diterapkan untuk klasterisasi udangseperti halnya klasterisasi objek lain dalam [14]-[19].
Pengujian sistem dilakukan dengan caramembandingkan hasil klasterisasi oleh sistem denganhasil klasterisasi yang dilakukan oleh dua orang ahlimelalui proses pengamatan secara langsung pada citrakumpulan udang. Pengamat ini telah terbiasa dan ahlidalam melakukan klasterisasi udang melalui pengamatanvisual. Proses klasterisasi melalui pengamatan visual inidilakukan dengan cara pengamat langsung memilihudang dan menentukan apakah udang tersebut memilkiukuran kecil, sedang, besar, atau selain ketiganya.Akurasi sistem keseluruhan diperoleh dari rata-ratahasil klasterisasi sistem terhadap hasil klasterisasi yangdilakukan oleh dua pengamat.
Hasil pengujian sistem berdasarkan pengamatpertama dan kedua ditunjukkan pada Tabel 4. Hasilakurasi pengamatan yang diperoleh bervariasi. Hal inidisebabkan karena setiap pengamat memilikikemampuan dalam melihat ukuran udang yang tidaksama persis. Namun, jika dilihat secara detail darimasing-masing pengamat pada citra yang sama, hasilakurasi tidak jauh berbeda. Dari kedua pengamat padaenam data citra tersebut, nilai akurasi rata-ratanyaadalah sebesar 79,81 % pada pengamat pertama dan72,99 % pada pengamat kedua. Akurasi rata-rata darikedua pengamat tersebut adalah sebesar 76,40 %.
Dari hasil analisis antara hasil klasterisasi sistemdengan hasil klasterisasi melalui proses pengamatanlangsung, posisi dari udang mempengaruhi hasilekstraksi piksel objek udang. Sebagai contoh, posisibadan udang yang membungkuk serta posisi kaki yang
menjulur keluar menyebabkan luas objek udang menjadibertambah sehingga ukuran udang yang terdeteksi olehsistem juga menjadi lebih besar. Namun, rata-rata hasilakurasi sistem, yaitu 76,4 %, telah menunjukkan bahwametode CCA dan DBSCAN dapat memberikan hasilyang baik dalam melakukan klasterisasi udangberdasarkan ukuran menggunakan teknik pengolahancitra digital seperti halnya [9]-[19].
IV. KESIMPULAN
Metode CCA dan DBSCAN dapat digunakan untukmengekstrak objek udang pada citra digital danmelakukan klasterisasi udang berdasarkan ukurandengan akurasi rata-rata sebesar 76,4 % terhadappengamatan langsung dari dua ahli.
UCAPAN TERIMA KASIH
Penelitian ini didanai oleh Kementerian Riset,Teknologi, dan Pendidikan Tinggi Republik Indonesiadalam skema Penelitian Dosen Pemula tahun 2019.
DAFTAR PUSTAKA
[1] L. Sahubawa, N. Khakim, and M. Lasindrang,“Kajian sebaran potensi ekonomi sumber daya,”Jurnal Teknosains, vol. 4, no. 2, pp. 101–198,2015. doi: 10.22146/teknosains.7953
[2] N. T. K. Duy, N. D. Tu, T. H. Son, and L. H. D.Khanh, “Automated monitoring and controlsystem for shrimp farms based on embeddedsystem and wireless sensor network,” in 2015International Conference on Electrical, Computerand Communication Technologies, Coimbatore,
Copyright ©2020, JTSiskom, e-ISSN: 2338-0403, p-ISSN: 2620-4002 Jurnal Teknologi dan Sistem Komputer, 8(2), 2020, 111
Tabel 3. Hasil pengukuran kualitas klasterisasi dengan DBSCAN
No. Nama citra Jumlah udangJumlahklaster
Jumlah derauSilhouettecoefficient
1 Citra_1.jpg 23 3 0 0.6492 Citra_2.jpg 22 2 2 0.6593 Citra_3.jpg 22 2 2 0.6324 Citra_4.jpg 22 2 1 0.6045 Citra_5.jpg 22 3 0 0.6126 Citra_6.jpg 22 2 0 0.599
Rata-rata silhouette coefficient 0.626
Tabel 4. Hasil pengujian berdasarkan pengamat pertama dan kedua
No Nama CitraJumlahUdang
Pengamat 1 Pengamat 2Jumlah Akurasi (%) Jumlah Akurasi (%)
1 Citra_1.jpg 23 15 65,22 15 65,222 Citra_2.jpg 22 19 86,36 17 77,273 Citra_3.jpg 22 17 77,27 16 72,734 Citra_4.jpg 22 21 95,45 20 90,915 Citra_5.jpg 22 16 72,73 14 63,646 Citra_6.jpg 22 18 81,82 15 68,18
Akurasi rata-rata 79,81 72,99
India, Mar. 2015, pp. 1–5. doi: 10.1109/ICECCT.2015.7226111
[3] P. S. Sneha and V. S. Rakesh, “Automaticmonitoring and control of shrimp aquaculture andpaddy field based on embedded system and IoT,”in 2017 International Conference on InventiveComputing and Informatics, Coimbatore, India,Nov. 2017, pp. 1085–1089. doi: 10.1109/ICICI.2017.8365307
[4] A. Rerkratn and A. Kaewpoonsuk, “ZigBee basedwireless temperature monitoring system for shrimpfarm,” in 2015 International Conference onControl, Automation and Systems, Busan, SouthKorea, Oct. 2015, pp. 428–431. doi: 10.1109/ICCAS.2015.7364953
[5] N. T. K. Duy, T. T. Hieu, and L. H. D. Khanh, “Aversatile, low poweron monitoring and controlsystem for shrimp farms based on NI myRIOandZigBee network,” in 2015 InternationalConference on Computation of Power, Energy,Information and Communication, Chennai, India,Apr. 2015, pp. 282–287. doi: 10.1109/ICCPEIC.2015.7259476
[6] A. S. Herlambang, O. D. Nurhayati, and K. T.Martono, “Sistem pendeteksi kualitas dagingdengan ekualisasi histogram dan thresholdingberbasis Android,” Jurnal Teknologi dan SistemKomputer, vol. 4, no. 2, pp. 404-413, 2016. doi:10.14710/jtsiskom.4.2.2016.404-413
[7] A. Muzami, O. D. Nurhayati, and K. T. Martono,“Aplikasi identifikasi citra telur ayam omega-3dengan metode segmentasi region of interestberbasis Android,” Jurnal Teknologi dan SistemKomputer, vol. 4, no. 2, pp. 380-388, 2016. doi:10.14710/jtsiskom.4.2.2016.380-388
[8] A. Priadana and A. W. Murdiyanto, “MetodeSURF dan FLANN untuk identifikasi nominaluang kertas rupiah tahun emisi 2016 pada variasirotasi,” Jurnal Teknologi dan Sistem Komputer,vol. 7, no. 1, pp. 19-24, 2019. doi: 10.14710/jtsiskom.7.1.2019.19-24
[9] X. Zhang, L. Duan, L. Ma, and J. Wu, “Textextraction for historical Tibetan document imagesbased on connected component analysis and cornerpoint detection,” Communications in Computerand Information Science, vol. 772, pp. 545–555,2017. doi: 10.1007/978-981-10-7302-1_45
[10] R. S. Narasimhan, A. Vengadarajan, and K. R.Ramakrishnan, “Design of connected componentanalysis based clustering of CFAR image in pulseDoppler radars,” in 2017 Aerospace Conference,2017, Big Sky, USA, Mar. 2017, pp. 1–6. doi:10.1109/AERO.2017.7943725
[11] I. Ruslianto, “Klasifikasi telur ayam dan telurburung puyuh menggunakan metode connectedcomponent analysis,” SISFOTENIKA, vol. 3, no. 1,pp. 41–50, 2013.
[12] F. Spagnolo, F. Frustaci, S. Perri, and P.Corsonello, “An efficient connected componentlabeling architecture for embedded systems,”Journal of Low Power Electronics andApplications, vol. 8, no. 1, pp. 1-7, 2018. doi:10.3390/jlpea8010007
[13] M. J. Klaiber, D. G. Bailey, Y. O. Baroud, and S.Simon, “A resource-efficient hardware architecturefor connected component analysis,” IEEETransactions on Circuits System for VideoTechnology, vol. 26, no. 7, pp. 1334–1349, 2016.doi: 10.1109/TCSVT.2015.2450371
[14] Q. Chen, K. K. F. Yuen, and C. Guan, “Towards ahybrid approach of self-organizing map anddensity-based spatial clustering of applicationswith noise for image segmentation,” in 2017International Conference on Developments ineSystems Engineering, Paris, France, Jun. 2017,pp. 238–241. doi: 10.1109/DeSE.2017.24
[15] V. Zilvan, “Ekstraksi objek pada citra radar FM-CW dengan metode DBSCAN,” INKOM: JurnalInformatika, Sistem Kendali, dan Komputer, vol. 9,no. 1, pp. 29–38, 2015.
[16] B. Khalil and C. Ali, “Density-based spatial clusteringof application with noise algorithm for theclassification of solar radiation time series,” in 2016International Conference on Modelling, Identificationand Control, Algiers, Algeria, Nov. 2016, pp. 279–283. doi: 10.1109/ICMIC.2016.7804123
[17] S. A. D. Budiman, D. Safitri, and D. Ispriyanti,“Perbandingan metode k-means dan metodeDBSCAN pada pengelompokan rumah kostmahasiswa di kelurahan Tembalang Semarang,”Jurnal Gaussian, vol. 5, no. 4, pp. 757–762, 2016.
[18] M. Tanzil Furqon and L. Muflikhah, “Clustering thepotential risk of tsunami using density-based spatialclustering of application with noise (DBSCAN),”Journal of Enviromental Engineering andSustainable Technology, vol. 3, no. 1, pp. 1–8, 2016.doi: 10.21776/ub.jeest.2016.003.01.1
[19] S. Kamseno and B. Satya, “Analisis data worlddevelopment indicators menggunakan cluster datamining,” Semnasteknomedia Online, vol. 5, no. 1, pp.2-1–121, 2017.
[20] K. Dawson-Howe, A practical introduction tocomputer vision with OpenCV, enhanced edition,1st ed. West Suusex: Wiley, 2014.
[21] S. Suyanto, Data mining untuk klasifikasi danklasterisasi data. Bandung: Informatika, 2017.
Copyright ©2020, JTSiskom, e-ISSN: 2338-0403, p-ISSN: 2620-4002 Jurnal Teknologi dan Sistem Komputer, 8(2), 2020, 112
Recommended

















