2 / 2006
Revista técnica del Grupo ABB
www.abb.com/abbreview
RevistaABB
Pioneering spirits
A revolution in high dc current measurement
page 6
Team-mates: MultiMove functionality heralds a new era in robot applications
page 26
Best innovations 2004page 43
a
Tecnologías de sistemas
integradosSoluciones de aplicación enlatadas
Tendencias de los sistemas integradospágina 9
Redes de sensores inalámbricospágina 39
El canto de las líneas eléctricaspágina 50
Las latas están bien establecidas como envase para el transporte y almacenamiento de muchos produc-tos. Uno de los factores más impor-tantes de este éxito es la simplicidad. Si es necesaria una herramienta de apertura, se trata simplemente del modesto abrelatas, de uso universal.
El mundo de los ordenadores ha sido durante mucho tiempo la antítesis de todo esto. Incluso las tareas más simples necesitaban del concurso de un especialista. No así para los siste-mas integrados. En ellos, el ordenador es parte del dispositivo y reacciona directamente a los acontecimientos relevantes. En el caso extremo, nadie se da cuenta de que está ahí, hasta que se echa una mirada en el interior.
3Revista ABB 2/2006
Editorial
‘Embedded, Everywhere’, dispositivos integrados por doquier, es el título de una agenda de investigación publicada en 2001 por la Academia Nacional de Ciencias de EE UU. En ella se destacaba la importancia de la investigación de los ordenado-res integrados para la comunidad científica. Hoy, cinco años después, los dispositivos inteligentes integrados están muy extendidos y se estima que su número ya supera al de habi-tantes del planeta. Se calcula que en 2010 habrá al menos tres ordenadores integrados por habitante, el equivalente a 16.000 millones de máquinas, que serán 40.000 millones en 2020. La Unión Europea está formulando actualmente una importante iniciativa de investigación sobre la próxima generación de tec-nologías de dispositivos integrados, que se concentrará en la interacción entre redes integradas. ARTEMIS1), así se llama el programa, une industrias e instituciones universitarias para dirigir los trabajos de desarrollo, que estarán financiados por los estados miembro y por la UE. Asia también es consciente de la importancia de las tecnologías integradas para el creci-miento económico y la prosperidad del futuro. Ya existen pro-gramas subvencionados estatalmente en Japón, Corea y China, cada uno de ellos con sus características y prioridades propias. Estos programas, de carácter nacional e internacional, promue-ven el uso de dispositivos integrados en multitud de aplicacio-nes de todos los sectores industriales, en grandes infraestruc-turas, en los campos de la salud y el entretenimiento, y en redes fijas y móviles. ¿En qué consiste esta tecnología, cómo la utilizamos en ABB? ¿Con qué retos nos enfrentamos? ¿Adónde nos lleva esta tecnología? Este número de Revista ABB está centrado en estas cuestiones y encuentra respuestas para casi todos los campos de Investigación y Desarrollo de ABB.Los ordenadores integrados existen desde hace ya varias décadas. Sus tareas han estado limitadas principalmente a aplicaciones autónomas y a pequeñas redes con interac-ción limitada con el usuario. El término “integrado” hace referencia a la naturaleza de estas tareas, que están relacio-nadas sobre todo con funciones subordinadas específicas que escapan a la apreciación humana (mientras las tareas se realicen correctamente). Por ejemplo, un automóvil actual incluye más de 20 ordenadores integrados que se ocupan de los sistemas de frenos, confort, control del mo-tor, etc. La próxima fase prevista para estos dispositivos integrados es su incorporación completa, como sistemas inteligentes y de comunicación de redes basadas en senso-res, capaces no sólo de intercambiar información entre ellos mismos, sino también con redes diferentes. El creci-miento exponencial en complejidad, comparado con nues-
tro nivel actual de capacidad, crea un vacío tecnológico para el que hemos de encontrar puentes de unión. De aquí la importancia de iniciativas como la europea ARTE-MIS y de sus programas análogos en EE UU y Asia.Dos autores participan como invitados en este número de Revista ABB, presentando a nuestros lectores las tecnologías integradas. El Doctor Kostas Glinos, de la Comisión Europea, describe en el primer artículo la importancia que la UE con-cede a esta tecnología y presenta con cierto detalle la inicia-tiva ARTEMIS. En el segundo artículo principal, el Doctor Richard Zurawski, presidente del Grupo ISA de Santa Clara (California), examina con más detalle el estado de las tecno-logías integradas de hardware y software y se plantea adón-de nos llevan las tendencias actuales. Un análisis del uso de los sistemas integrados en la cartera de productos propia de ABB completa la sección general. A continuación se describen varias aplicaciones de los siste-mas integrados. Esta serie de artículos cubre una gran varie-dad de productos que, gracias a la incorporación de tecnolo-gías integradas ya en las primeras fases de diseño, ofrecen im-portantes ventajas al cliente.La siguiente sección está dedicada a las diversas capacidades de comunicación de los dispositivos integrados. Comunicación inalámbrica y Ethernet industrial, buses de campo y ondas portadoras sobre líneas de energía son sólo algunos ejemplos que ponen de relieve cómo ABB puede soportar el intercam-bio de información en diferentes niveles y sobre diferentes medios. Las dos últimas secciones de este número de Revista ABB describen implementaciones de software y hardware.Las tecnologías necesarias para ofrecer a nuestros clientes las ventajas propias de un rendimiento mayor tienen una amplitud considerable. Mantener actualizados los conoci-mientos en campos tan cambiantes y distantes entre sí como son las aplicaciones de baja potencia para la genera-ción y verificación de software, el proceso avanzado de señales y las tecnologías FPGA es un gran reto para nues-tros equipos de Investigación y Desarrollo de todo el mun-do. Pero no cabe duda de que estos retos de investigación son la mejor motivación para nuestros investigadores. Espero que disfrute usted de la lectura de este número.
Peter TerwieschChief Technology OfficerABB Ltd.
Tecnologías de sistemas integrados
Nota1) El nombre ARTEMIS está formado con las iniciales de Advanced Research &
Technology for EMbedded Intelligence and Systems.
4 Revista ABB 2/2006
Revista ABB 2/2006Tecnologías de sistemas integrados
Índice
6El reto de los sistemas integradosGestión de la revolución de las tecnologías de digitales
integradas, uno de los sectores TI con mayor crecimiento
9Tendencias de los sistemas integradosOportunidades y desafíos de System-on-Chip y de las
tecnologías de sistemas integrados en red para la auto-
matización industrial
14Tecnología de sistemas integrados en ABB Desafíos actuales y futuros. Más rendimiento y funciona-
lidad con tamaños menores y menos costes, nuevos
retos para los desarrolladores.
18Protección integrada de energíaMejora de las aplicaciones integradas en la automati-
zación de sistemas de energía para la protección de
muchas nuevas aplicaciones especiales
23Los motores del cambioPor qué el controlador DTC de ABB se ha convertido
prácticamente en la solución ideal.
26Laminación y control¿Qué tienen en común un tren ligero y un laminador?
Los dos utilizan el sistema AC800 PEC de control rápido
y flexible.
30Los sistemas integrados amplían la automatizaciónEl sistema 800XA incorpora numerosos dispositivos
integrados.
35Control de accionamientosNuevo sistema de gestión de la vida útil para tomar el
pulso al sistema
39Redes de sensores sin hilosIntroducción de las redes de sensores sin hilos en la
automatización industrial
43Ethernet de alto rendimientoABB amplía su gama de dispositivos compatibles con
Ethernet para mejorar la comunicación.
46Buses de campo para accionamientosLos buses de campo avanzados mejoran la conectividad.
48Medicina de motoresChequeo para aumentar la productividad de los motores
50El canto de las líneas eléctricasRefuerzo de las comunicaciones. ETL600 de
ABB transmite informaciones por las líneas eléctricas.
Tecnologías de sistemas integrados
5Revista ABB 2/2006
14
39
46
58
www.abb.com/abbreview
54Ideas brillantesEl desarrollo de productos de ABB Distribution
Automation se beneficia de la cooperación internacional.
58Robótica do-it-yourselfFlexPendant, el kit de desarrollo de software, pone sobre
la mesa un sistema de programación fácil de robots.
62Patrones de diseñoCómo creó ABB el controlador AC800 PEC.
66Energía inalámbrica en productos sin cablesMenos cambios de dirección, más flexibilidad. La ali-
mentación sin cables de los dispositivos en puntos de
difícil acceso reduce los costes de instalación y abre
nuevas posibilidades para los dispositivos electrónicos
distribuidos.
70Hacia la mayoría de edadFPGA llena el hueco entre hardware y software.
75Procesamiento de señales en sistemas integradosLos nuevos algoritnmos para la instrumentación de
dispositivos aumentan el rendimiento y amplían la funcio-
nalidad.

6 Revista ABB 2/2006
¿Qué tienen en común un teléfono móvil, un robot industrial, un cable de módem, un reproductor MP3 y un automóvil? Todos estos productos utilizan sistemas integrados. De he-cho, las tecnologías integradas consti-tuyen uno de los sectores TI de más rápido crecimiento hoy en día. Sin em-bargo, los fabricantes están sometidos a una presión cada día mayor para sacar al mercado productos innovado-res cada vez más rápidamente y a pre-cios cada vez más bajos y esto signifi-ca que garantizar la calidad del pro-ducto reduciendo al mismo tiempo el
El reto de los sistemas integradosKostas Glinos
como calefacción, aire acondicionado, ascensores y escaleras mecánicas, y en las unidades de fabricación, desde la robótica hasta los sistemas de automati-zación y control de la producción. Tam-bién se utilizan ampliamente en medici-na, especialmente en equipos médicos de diagnóstico y en los dispositivos in-teligentes, cada vez más numerosos, que se implantan en el cuerpo humano. El sector del transporte también ha sido testigo de la rápida proliferación de los sistemas integrados en automóviles, ca-miones, trenes o aviones. Las cifras son asombrosas: se estima que más del 90 por ciento de todos
tros negocios en un mercado globali-zado y muy competitivo. Los ordena-dores se han convertido en herramien-tas cotidianas integradas en todo tipo de actividades sociales y comerciales.Más destacable, aunque menos llamati-va, es la revolución de la tecnología di-gital integrada, que se encuentra en to-do tipo de equipos y sistemas y está destinada a ampliar la funcionalidad y mejorar el funcionamiento con bajos costes. De hecho, casi todos los apara-tos técnicos tienen ordenadores integra-dos: desde los simples electrodomésti-cos de uso general hasta las instalacio-nes, inclusive el control de las mismas,
En menos de cuatro décadas, la tec-nología de la información digital
ha revolucionado por completo nues-tro mundo. Los equipos han evolucio-nado desde los primitivos mainframes, que operan fundamentalmente como ordenadores principales en centros de cálculo, hasta los sistemas interconec-tados de ordenadores de sobremesa y portátiles que utilizamos actualmente. Esta amplia infraestructura digital in-fluye profundamente en nuestros ne-gocios y en nuestra vida familiar de cada día: nos permite estar en contac-to con amigos y parientes en todo el mundo y nos ayuda a desarrollar nues-
coste, el tiempo de desarrollo y la complejidad del sistema se ha conver-tido en todo un reto.Europa está considerada como líder mundial en tecnologías integradas para los sectores aerospacial, de automoción, industrial, de comunica-ción y de electrónica de consumo. Sin embargo, esta posición de vanguardia está amenazada por la competencia global, la fragmentación y la falta de coordinación en estos sectores indus-triales. Mantenerse a la vanguardia de la tecnología de sistemas integrados requerirá una inversión importante,
con objetivos claros, en investigación y desarrollo.Para afrontar estas cuestiones, la Comisión Europea ha facilitado el desarrollo de una iniciativa llamada ARTEMIS. ARTEMIS es una amplia alianza de actores de la industria y la investigación en el campo de las tec-nologías de sistemas integrados. La asociación ARTEMIS agrupa numero-sos sectores industriales muy fuertes en Europa, entre ellos la automoción, el sector aerospacial, la electrónica de consumo, las comunicaciones, la medicina y la fabricación.
Cou
rtes
y A
irbus

Tecnologías de sistemas integrados
7Revista ABB 2/2006
El reto de los sistemas integrados
los equipos informáticos se encuentran en sistemas integrados y no en siste-mas de sobremesa. En términos de valor de mercado, por ejemplo, sólo el sector automovilístico representa cerca del 5 por ciento del mercado mundial de semiconductores (unos 200.000 millones de euros en 2005).Más impresionante aún es la forma en que los sistemas integrados aumentan el valor de muchos productos. Por ejemplo, los sistemas integrados re-presentan actualmente el 20 por cien-to del valor total de un automóvil me-dio y en 2009 este valor ascenderá previsiblemente al 36 por ciento. Ese mismo año, la electrónica y el soft-ware integrados constituirán el 22 por ciento del valor de los sistemas de au-tomatización industrial, el 41 por cien-to de la electrónica de consumo y el 33 por ciento de los equipos médicos.El índice de crecimiento supera ac-tualmente el 10 por ciento anual en todos los sectores de aplicación y se espera que en 2020 habrá más de 40.000 millones de chips integrados en todo el mundo.Gracias a los grandes avances logrados por la tecnología de semiconductores, impulsada por la demanda de los clien-tes, que exigen productos y servicios innovadores con más funciones y a pre-cios más bajos, los sistemas integrados han evolucionado desde los simples ordenadores autónomos de los años ochenta y primeros noventa del pasado siglo, con un solo procesador, hasta los refinados sistemas multiprocesadores de hoy. Pero este desarrollo también tiene una cara negativa: la creciente complejidad de los sistemas, cada día más difíciles de diseñar, ensayar y veri-
ficar. A medida que aumenta el grado de interconexión de los sistemas, éstos se hacen también más vulnerables. La interoperabilidad real se ve obstaculiza-da por la falta de estándares abiertos comunes y programas estándar perso-nalizados (middleware). Aunque mu-chos de estos desarrollos siguen perte-neciendo a sectores concretos, entre di-chos sectores existen grandes sinergias que es necesario aprovechar. Además, no abundan los ingenieros expertos en, por ejemplo, arquitectura de sistemas. Estos problemas han de ser resueltos. De otro lado, se espera que para 20091) la inversión de la industria europea en sistemas I+D integrados superará los 22.000 millones de euros anuales, casi el doble de lo invertido en 2003.Considerando los retos industriales y de investigación mencionados y dada la im-portancia de la tecnología de sistemas integrados para sectores industriales fundamentales (desde la automatización industrial y los equipos médicos hasta la automoción y la aviónica), la Comisión Europea ha dedicado una parte específi-ca de su programa IST (Information So-ciety Technologies) a la investigación de sistemas integrados. Sólo en los tres últi-mos años ha invertido 140 millones de euros en proyectos de colaboración en-tre la industria, la universidad y los cen-tros de investigación. Estos proyectos se centran en gran medida en el diseño de sistemas, los sistemas críticos para la se-guridad, la computación integrada, las plataformas middleware, las redes de sensores inalámbricos y los sistemas de control distribuido e híbrido. Los siste-mas integrados también constituyen uno de los seis ‘pilares’ de investigación ICT según las propuestas de la Comisión Europea para el 7o Programa Marco que debe iniciarse en 2007. En 2004 se creó la Plataforma Tecnoló-gica ARTEMIS (Advanced Research and Technology for EMbedded Intelligence and Systems). ARTEMIS es una iniciati-va de la industria que tiene por objeto reforzar la posición de la UE como des-tacado actor global en el diseño, inte-gración y suministro de sistemas inte-grados2). Su manifiesto, titulado ‘Buil-ding ARTEMIS’, fue firmado por 20 eje-
cutivos de varias compañías de la UE y su objetivo es establecer e implementar una estrategia europea, coherente y completa para sistemas integrados, que cubra, entre otros aspectos, las priorida-des de investigación y desarrollo, las infraestructuras de investigación nece-sarias y la política de estandarización, además de los historiales de estudios. Esta estrategia ha sido publicada recien-temente como la ‘Agenda de Investiga-ción Estratégica’ de ARTEMIS.La fuerza que impulsa la iniciativa ARTEMIS es la visión de una sociedad donde todos los sistemas, máquinas y objetos se han convertido en recursos digitales, de comunicación y autogestio-nados. Estas transformaciones son posi-bles gracias a los avances de la tecnolo-gía de sistemas integrados y a su des-pliegue en gran escala, no sólo en la in-dustria y los servicios, sino en todas los campos de actividad humana. Este de-
Notas1) Estudio FAST sobre ‘Tendencias mundiales y pro-
gramas I+D en sistemas integrados, con vistas a
maximizar el impacto de una plataforma tecnoló-
gica en este campo’2) http://www.cordis.lu/ist/artemis/index.html
ARTEMIS, Iniciativa europea para sistemas integrados.
Centro musical, por cortesía de Nokia
Cockpit del A380, por cortesía de Airbus

8 Revista ABB 2/2006
El reto de los sistemas integrados
sarrollo tendrá importantes consecuen-cias para la sociedad y la economía: La vida en nuestra sociedad –y su estabilidad y seguridad– dependerá cada vez más de sistemas integra-dos.
La competitividad de la industria europea en casi todos los sectores dependerá de la capacidad de inno-vación en el campo de los sistemas integrados.
Dada la importancia, cada día ma-yor, de los sistemas integrados para el crecimiento de la productividad, estas tecnologías serán vitales para corregir el actual desequilibrio de dicho crecimiento entre Europa, Estados Unidos y Asia.
Mantener una posición de vanguardia en la tecnología de sistemas integra-dos requerirá importantes inversiones en I+D, centradas en prioridades con-juntas específicas. Abordar los retos de I+D es una condición necesaria,
pero no suficiente. ARTEMIS facilitará y estimulará el éxito europeo en siste-mas integrados, estableciendo un en-torno de ayuda a la innovación que posibilite intensificar la cooperación y la competencia en el desarrollo tecno-lógico. También estimulará proactiva-mente la emergencia de una nueva in-dustria de suministro de nuevos com-ponentes, herramientas y metodolo-gías de diseño que apoyen a los siste-mas integrados y se centrará en la I+D para conseguir un uso más efectivo de los recursos, evitando la fragmenta-ción y facilitando el despliegue de las soluciones.Aunque los sistemas integrados perso-nalizados añaden un gran valor en be-neficio de los clientes y los proyectos, y los productos individuales pueden llegara a ser muy rentables, los merca-dos están muy divididos. Tradicional-mente, esto ha conducido a la frag-mentación de la industria de suminis-tros y de las inversiones en I+D. La estrategia ARTEMIS ha sido concebida para evitar esta fragmentación e incre-mentar la eficiencia del desarrollo tec-nológico y, al mismo tiempo, facilitar el establecimiento de un mercado com-petitivo de suministro de tecnologías.La concepción, el diseño y el desplie-
Tecnologías de sistemas integrados
gue de sistemas personalizados añadi-rán aún más valor a la mayoría de productos y servicios en la futura so-ciedad de la información. Europa ha sido muy fuerte en este campo duran-te las últimas décadas, con excelentes resultados especialmente en los cam-pos de la telefonía móvil, de los siste-mas hechos a medida para los sectores del transporte y aerospacial y de la in-geniería industrial. ARTEMIS tiene por objeto obtener máximos beneficios del potencial europeo, aunque siendo consciente del potencial de los com-petidores globales. La iniciativa ARTE-MIS eliminará barreras entre los secto-res de aplicación, estimulando así la creatividad y produciendo resultados reutilizables en múltiples dominios.Estoy profundamente convencido de que la creación de un entorno que fa-vorezca y apoye la innovación en siste-mas integrados, concentrando nuestros recursos de I+D en objetivos comunes, ambiciosos, no sólo nos permitirá con-seguir el máximo en términos de com-petitividad industrial, sino también me-jorar la calidad de vida y la seguridad de los ciudadanos. El éxito de esta ini-ciativa sólo será posible si todas las partes implicadas –del sector público o privado, de la industria o del mundo universitario– colaboran estrechamente comprometidos a favor de los objetivos comunes. Los grandes progresos del último año en esta dirección me han convencido de que se cumplirán estas condiciones y que este esfuerzo colec-tivo será un éxito.
Kostas Glinos
Comisión Europea
Los puntos de vista expresados son los propios del
autor y no representan necesariamente el punto de
vista oficial de la Comisión Europea sobre este tema.
Kostas Glinos trabaja en la Comi-sión Europea desde 1992. Actual-mente dirige la unidad de Sistemas Integrados del programa IST. Antes de entrar a formar parte de la Co-misión trabajó en diversas compa-ñías multinacionales e institutos de investigación de Estados Unidos, Grecia y Bélgica. Es doctor en Ingeniería Química y posee un master en Gestión Financiera.
Kostas Glinos
Automóvil, por cortesía de Daimler Chrysler Sala de estar, por cortesía de Philips Componentes integrados
Robot industrial, por cortesía de ABB
9Revista ABB 2/2006
Tendencias de los sistemas integradosOportunidades y retos de la tecnología de sistemas en chips y de sistemas integrados interconectados en la automatización industrialGrant Martin, Richard Zurawski
Courtesy Philips
Los avances de la tecnología de procesos y la disponibilidad de nuevas herra-mientas de diseño están ampliando el campo de aplicación de los sistemas integrados, que se implementan como conjunto de chips en una placa o como conjunto de módulos en un circuito integrado. La tecnología de sistemas en chips (SoC, System-on-Chip) se está extendiendo actualmente en la automatiza-ción industrial para crear complejos dispositivos inteligentes de campo. Esta tendencia va acompañada de la adopción de diseños basados en plataformas, lo que facilita el diseño y la verificación de sistemas complejos SoC con una amplia reutilización del hardware y software IP (Propiedad Intelectual). Otro importante aspecto de la evolución de los sistemas integrados es la tendencia a interconec-tar nodos integrados aplicando tecnologías de redes especializadas, conocidas frecuentemente como sistemas integrados interconectados (NES, Networked Embedded Systems).

10 Revista ABB 2/2006
Tendencias de los sistemas integrados
La tecnología SoC (System-on-Chip), una revolución del diseño de circui-
tos integrados (CI), ha sido posible gra-cias a los avances de la tecnología de procesos, que permiten integrar los principales componentes y subsistemas de un producto electrónico en un solo chip o juego integrado de chips [1]. Es-te desarrollo ha sido muy bien acogido por los diseñadores de chips comple-jos, ya que permite la máxima integra-ción posible para obtener más rendi-miento con menor consumo de energía y ofrece otras ventajas de coste y tama-ño. Estos factores son muy importantes para el diseño y la utilización de SoC es, con gran probabilidad, una de las principales decisiones del desarrollo de sistemas integrados en tiempo real.Un procesador SoC es un circuito inte-grado complejo, o juego integrado de chips, que combina los principales ele-mentos o subsistemas funcionales de un producto completo. Los diseños SoC más exigentes incluyen al menos un
procesador programable y a menudo una combinación de un procesador de control RISC y un DSP de procesado de señales digitales. También incluyen es-tructuras de comunicaciones sobre chips: bus o buses de procesadores y de periféricos y, en ocasiones, un bus de sistema de alta velocidad. Para los pro-cesadores SoC es muy importante que el chip tenga unidades de memoria jerar-quizadas y enlaces con memorias exter-nas. Para la mayoría de las aplicaciones de proceso de señales se proporciona por medio de hardware cierto grado de unidad funcional de aceleración, que consigue más rendimiento y menos con-sumo de energía. Para la interconexión con el exterior, el diseño de SoC incluye varios bloques de proceso de periféricos compuestos por componentes analógi-cos e interfaces digitales (por ejemplo, para buses de sistema en el nivel de tar-jeta o panel posterior). La futura tecno-logía SoC puede incorporar sensores y actuadores basados en sistemas micro-
electro-mecánicos, o proce samiento quí-mico (laboratorio en un chip) 1 .Entre los diseños SoC más interesantes, que comprenden hardware y software, están los procesadores programables, los sistemas operativos en tiempo real y otros elementos de software dependien-tes del hardware. Así pues, el diseño y uso de SoC implica, además del hard-ware, diseño e ingeniería en el nivel de sistemas, compromisos de hardware-software y particiones, así como arqui-tectura, diseño e implementación de software.
Sistemas en chips programables Recientemente se ha ampliado el campo de aplicación de SoC. Además de circui-tos integrados personalizados (custom IC), circuitos integrados de aplicación específica (ASIC) o componentes están-dar de aplicación específica (ASSP), el nuevo planteamiento incluye ahora el diseño y uso de partes lógicas reconfi-gurables y complejas con procesadores integrados. En algunos casos se incorpo-ran, además, otros bloques de elemen-tos con propiedad intelectual, disponi-bles en el mercado, como procesadores, memorias o funciones especiales para aplicaciones, que se adquieren a terce-ros.Xilinx (Virtex-II PRO Platform FPGA, Virtex-IV) y Altera (SOPC) son algunas empresas que ofrecen estas matrices FPGA de puertas programables por el usuario. Esta tendencia hacia la tecnolo-gía SoC combina gran número de circui-tos lógicos reconfigurables con procesa-dores RISC (reduced instruction set computing) integrados, para aplicar a un diseño combinaciones flexibles y adap-tables de proceso de hardware y soft-ware. Los algoritmos con gran conteni-do de lógica de control y gran flujo de datos de proceso pueden dividirse en el procesador RISC de control, cuya lógica reconfigurable acelera el hardware. La combinación resultante no maximiza el rendimiento ni minimiza el consumo de energía ni los costes, en comparación con custom IC o ASIC/ASSP para las mismas funciones, pero a cambio es muy flexible para modificar el diseño en el campo y evita los grandes costes de ingeniería que provocan los cambios en el campo. Por tanto las nuevas aplica-ciones e interfaces y los algoritmos me-jorados pueden ser transferidos a pro-ductos que ya están en funcionamiento real.
Tecnologías de sistemas integrados
1 Dispositivo SoC típico para aplicaciones de consumo
Acceso a memoria externa
FlashRAMDMA
ICacheDCache
Microprocesador DSP
Bus periférico
PLL
Test
PCI
USB
Puente de bus
Audio CODEC
RAMFlash
DCacheICacheBus de sistema
Descodificatión MPEG
Video I/F
Disk Controller
100 base-T
11Revista ABB 2/2006
Tendencias de los sistemas integrados
Otros productos para este campo son los núcleos de proceso e interfaces for-mados por bloques de multiplicación y acumulación (MAC, Multiply–ACcumula-te), destinados al procesado de imáge-nes y de señales de flujo de datos DSP, y las interfaces serie de alta velocidad para la comunicación por cable, entre ellos los bloques serializadores/de-seria-lizadores SERDES. Los SoC de integra-ción de sistemas en chip programable no son específicos de una aplicación, pero tampoco completamente genéricos.Queda por ver si los SoC tendrán éxi-to en aplicaciones de consumo de gran volumen o quedarán limitados a dos campos principales: la rápida creación de prototipos de diseños que serán reorientados hacia implementa-ciones ASIC o ASSP y los elementos de gama superior, relativamente caros, de infraestructura de comunicaciones, que requieren flexibilidad in situ y pa-ra los cuales se pueden aceptar mayo-res costes y más consumo de energía junto con un rendimiento menor.
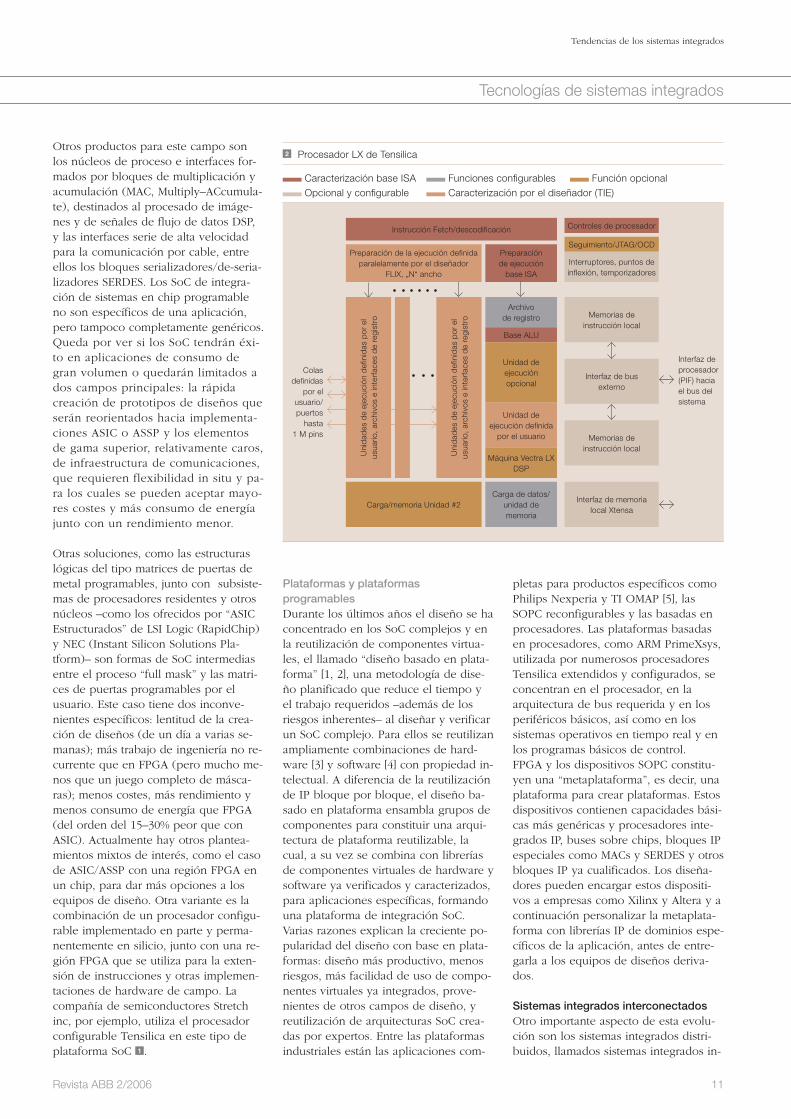
Otras soluciones, como las estructuras lógicas del tipo matrices de puertas de metal programables, junto con subsiste-mas de procesadores residentes y otros núcleos –como los ofrecidos por “ASIC Estructurados” de LSI Logic (RapidChip) y NEC (Instant Silicon Solutions Pla-tform)– son formas de SoC intermedias entre el proceso “full mask” y las matri-ces de puertas programables por el usuario. Este caso tiene dos inconve-nientes específicos: lentitud de la crea-ción de diseños (de un día a varias se-manas); más trabajo de ingeniería no re-currente que en FPGA (pero mucho me-nos que un juego completo de másca-ras); menos costes, más rendimiento y menos consumo de energía que FPGA (del orden del 15–30% peor que con ASIC). Actualmente hay otros plantea-mientos mixtos de interés, como el caso de ASIC/ASSP con una región FPGA en un chip, para dar más opciones a los equipos de diseño. Otra variante es la combinación de un procesador configu-rable implementado en parte y perma-nentemente en silicio, junto con una re-gión FPGA que se utiliza para la exten-sión de instrucciones y otras implemen-taciones de hardware de campo. La compañía de semiconductores Stretch inc, por ejemplo, utiliza el procesador configurable Tensilica en este tipo de plataforma SoC 1 .
Plataformas y plataformas programablesDurante los últimos años el diseño se ha concentrado en los SoC complejos y en la reutilización de componentes virtua-les, el llamado “diseño basado en plata-forma” [1, 2], una metodología de dise-ño planificado que reduce el tiempo y el trabajo requeridos –además de los riesgos inherentes– al diseñar y verificar un SoC complejo. Para ellos se reutilizan ampliamente combinaciones de hard-ware [3] y software [4] con propiedad in-telectual. A diferencia de la reutilización de IP bloque por bloque, el diseño ba-sado en plataforma ensambla grupos de componentes para constituir una arqui-tectura de plataforma reutilizable, la cual, a su vez se combina con librerías de componentes virtuales de hardware y software ya verificados y caracterizados, para aplicaciones específicas, formando una plataforma de integración SoC.Varias razones explican la creciente po-pularidad del diseño con base en plata-formas: diseño más productivo, menos riesgos, más facilidad de uso de compo-nentes virtuales ya integrados, prove-nientes de otros campos de diseño, y reutilización de arquitecturas SoC crea-das por expertos. Entre las plataformas industriales están las aplicaciones com-
pletas para productos específicos como Philips Nexperia y TI OMAP [5], las SOPC reconfigurables y las basadas en procesadores. Las plataformas basadas en procesadores, como ARM PrimeXsys, utilizada por numerosos procesadores Tensilica extendidos y configurados, se concentran en el procesador, en la arquitectura de bus requerida y en los periféricos básicos, así como en los sistemas operativos en tiempo real y en los programas básicos de control. FPGA y los dispositivos SOPC constitu-yen una “metaplataforma”, es decir, una plataforma para crear plataformas. Estos dispositivos contienen capacidades bási-cas más genéricas y procesadores inte-grados IP, buses sobre chips, bloques IP especiales como MACs y SERDES y otros bloques IP ya cualificados. Los diseña-dores pueden encargar estos dispositi-vos a empresas como Xilinx y Altera y a continuación personalizar la metaplata-forma con librerías IP de dominios espe-cíficos de la aplicación, antes de entre-garla a los equipos de diseños deriva-dos.
Sistemas integrados interconectadosOtro importante aspecto de esta evolu-ción son los sistemas integrados distri-buidos, llamados sistemas integrados in-
Tecnologías de sistemas integrados
2 Procesador LX de Tensilica
Instrucción Fetch/descodificación
Preparación de la ejecución definida paralelamente por el diseñador
FLIX, „N“ ancho
Preparación de ejecución
base ISA
Controles de procesador
Seguimiento/JTAG/OCD
Interruptores, puntos de inflexión, temporizadores
Memorias de instrucción local
Interfaz de bus externo
Memorias de instrucción local
Interfaz de memorialocal Xtensa
Archivo de registro
Base ALU
Unidad de ejecución opcional
Máquina Vectra LX DSP
Carga de datos/unidad de memoria
Carga/memoria Unidad #2
Uni
dade
s de
eje
cuci
ón d
efin
idas
por
el
usua
rio, a
rchi
vos
e in
terf
aces
de
regi
stro
Unidad de ejecución definida
por el usuario
Interfaz de procesador (PIF) hacia el bus del sistema
Colas definidas
por el usuario/puertos
hasta 1 M pins
Uni
dade
s de
eje
cuci
ón d
efin
idas
por
el
usua
rio, a
rchi
vos
e in
terf
aces
de
regi
stro
Caracterización base ISA Funciones configurables Función opcional Opcional y configurable Caracterización por el diseñador (TIE)

12 Revista ABB 2/2006
Tendencias de los sistemas integrados
terconectados para resaltar la infraes-tructura de interconexión y el protocolo de comunicación. Un sistema integrado interconectado es un conjunto de nodos integrados, distribuidos espacial y fun-cionalmente, interconectados por una infraestructura de comunicación cablea-da y/o inalámbrica y de protocolos, que interaccionan entre sí y con el entorno por medio de sensores y actuadores. El sistema también puede comprender un nodo maestro que coordina la computa-ción y la comunicación para conseguir objetivos específicos. Los controladores integrados en nodos o dispositivos de campo, como sensores y actuadores, se encargan de la conver-sión de señales, del proceso de datos y señales y de la comunicación sobre chips. La funcionalidad y las capacida-des de proceso y comunicación de los controladores, cada día mayores, han re-forzado la extendida tendencia a inter-conectar dispositivos de campo en torno a redes especializadas, frecuentemente llamadas redes de áreas de campo, que normalmente son un enlace de comuni-cación digital multipunto y bidireccional [6]. En general, el uso de redes especia-lizadas (de áreas de campo) es ventajo-so: la combinación de hardware y soft-ware integrados es más flexible, el siste-ma ofrece mejores prestaciones y se simplifican la instalación, actualización y mantenimiento del sistema. Los sistemas integrados interconectados están presentes en numerosas aplicacio-nes (automoción, trenes y aviones, edifi-cios de oficinas y aplicaciones industria-les) y están dedicados principalmente a
la supervisión y el control. Algunos ejemplos representativos son las redes que conectan dispositivos de campo, como los sensores y actuadores con controladores de campo, concretamente los controladores PLC para automatiza-ción industrial o las unidades de control electrónico (ECU) para la automoción. También se utilizan en interfaces hom-bre-máquina, por ejemplo, en visualiza-dores del salpicadero de automóviles y en el sistema SCADA (control de super-vision y adquisición de datos) para au-tomatización industrial. Las tecnologías de redes especializadas son tan diversas como los campos de aplicación. Por ejemplo: PROFIBUS, PROFInet o Ether-Net/IP (ambas con comunicación en tiempo real) para el control y automati-zación industrial; LonWorks, BACnet, y EIB/KNX para la automatización y con-trol de edificios; CAN, TTP/C y FlexRay para la automoción; y Train Communi-cation Network (TCN) para la automati-zación de trenes. La diversidad de requi-sitos de las aplicaciones (tiempo real flexible/riguroso, seguridad crítica, topo-logía de red, etc.) exige gran variedad de soluciones y el uso de protocolos ba-sados en diversos principios de opera-ción. El resultado de ello ha sido una plétora de redes para numerosas aplica-ciones específicas [6] 3 .Dados los requisitos de comunicación de las aplicaciones, las redes de áreas de campo –a diferencia de las redes LAN– suelen tener bajas velocidades de transferencia de datos, manejan paque-tes pequeños de datos y generalmente han de operar en tiempo real, lo que
puede hacer necesaria la transferencia de datos determinista o de tiempo limi-tado. No obstante, en las redes de cam-po ya son comunes velocidades de transferencia de datos superiores a 10 Mbit/s, como en las redes LAN. Las re-des de áreas de campo para automatiza-ción industrial (a diferencia de la auto-matización y control de edificios) no tie-nen gran necesidad de funciones de en-caminamiento o de control de extremo a extremo. En consecuencia, en estas redes sólo se utilizan las capas 11 (capa física), 2 (capa de enlace de datos, in-clusive implícitamente la capa de con-trol de acceso al medio) y 7 (capa de aplicación, inclusive capa de usuario) del modelo de referencia ISO/OSI [7].Para garantizar una respuesta determi-nista hay que utilizar esquemas de pla-nificación apropiados, frecuentemente en sistemas operativos en tiempo real de dominios específicos de aplicación o en aplicaciones en tiempo real, “desnu-das” (mínimas) y personalizadas. Los sistemas integrados interconectados para aplicaciones en que la seguridad es crítica, como x-by-wire, que adopta so-luciones electro-mecánicas para sustituir soluciones mecánicas o hidráulicas por sistemas eléctricos/electrónicos, han de tener un alto grado de dependencia que garantice la seguridad del sistema a los fallos. Como ejemplos mencionaremos el control de vuelo en aviones y de con-ducción por cable en automóviles, cuyo fallos pueden poner en peligro vidas humanas, propiedades o el medio am-biente. Para evitar estos riesgos es nece-sario suministrar servicios fiables, a prueba de fallos, a petición del usuario. La dependencia de los sistemas x-by-wire es un requisito principal, pero tam-bién una restricción a la hora de adoptar este tipo de sistema. Aunque el uso de redes de áreas de campo basadas en líneas cableadas es muy común, la tecnología inalámbrica, inclusive las soluciones híbridas de lí-neas con o sin cables, resulta muy in-teresante en varios campos de aplica-ción. En la automatización industrial, por ejemplo, las redes de dispositivos inalámbricos (sensores y actuadores) pueden proporcionar ayuda para las operaciones móviles, como en el caso
3 Típica arquitectura de red de área de campo en la automatización industrial
Control network
Field areanetwork
(Fieldbus)
motor
switchgear drives instrument
controller
I/O modules
Tecnologías de sistemas integrados
Nota1) Véase en la figura 1, página 47, una breve descrip-
ción del modelo OSI.

13Revista ABB 2/2006
Tendencias de los sistemas integrados
de robots móviles, y para la supervi-sión y control de equipos en entornos peligrosos y de difícil acceso. Una ca-tegoría independiente es la de redes de sensores inalámbricos, concebida específicamente para la supervisión.
Oportunidades y retos de SoC y MPSoC Numerosas oportunidades se derivan del eficiente diseño, sin errores, de SoC y especialmente de un SoC multi-procesador (MPSoC, Multi-Processor System-on-Chip), que combina las ventajas del proceso en paralelo y de la alta capacidad de integración de SoC. Otros campos de interés son la verificación de núcleos integrados en SoC, los cálculos de energía, la seguri-dad de los sistemas integrados y el desarrollo de sistemas de seguridad crítica en el contexto de control por cable (vuelo, conducción) y otras apli-caciones [8]. Densidades de circuitos y frecuencias de operación cada vez mayores, así como el uso de diseños de sistemas sobre chips, han producido un gran volumen de datos de prueba para los actuales cir-cuitos integrados basados en núcleos in-corporados. Reducir el volumen de da-tos y el tiempo son dos retos importan-tes a la hora de verificar los circuitos de este tipo. Otros problemas son la cre-ciente disparidad entre las prestaciones de diseño y el equipo automático utili-zado para las pruebas, que ha converti-do las pruebas de velocidad, especial-mente las de circuitos de alta velocidad, en un desafío, con el resultado de pérdi-da creciente de productividad, alto coste de las pruebas funcionales hechas ma-nualmente y mayores costes de equipos de prueba de alta velocidad y gran nú-mero de patillas. La creciente disipación de energía, re-sultado del aumento de densidad de circuitos integrados y de la frecuencia del reloj, afecta directamente al coste de encapsulado y refrigeración, ade-más de a la fiabilidad y a la vida útil. Éstos y otros factores, como la alimen-tación por baterías y el tamaño limita-do de los dispositivos (como en el ca-so de los portátiles), hacen que el di-seño para bajo consumo de energía sea prioritario en los sistemas integra-dos. Las técnicas y metodologías de diseño que tienen por objeto reducir la disipación de energía, tanto estática como dinámica, suelen concentrarse
en los siguientes campos: optimiza-ción en el nivel de sistema/aplicación, que explora la implementación de ta-reas con diferencias de potencia/ener-gía en función de las características del servicio; subsistemas de proceso con bajo consumo de energía, como el escalado de tensión y frecuencia, el escalado de recursos dinámicos y la selección de núcleos de procesadores; finalmente, los subsistemas de memo-ria con bajo consumo de energía, co-mo la optimización jerárquica de me-moria caché, los nuevos esquemas de partición horizontal y vertical de me-moria caché y el escalado dinámico de elementos de memoria. Los recursos de anchura de banda co-mercial para la computación, memoria y ancho de banda de comunicación de los controladores en dispositivos inte-grados (dispositivos de campo en au-tomatización industrial, por ejemplo), relativamente limitados, plantean retos considerables a la implantación de po-líticas eficaces de seguridad que, en general, exigen importantes recursos.
Esto limita la aplicabilidad de los prin-cipales protocolos criptográficos, in-cluso de las versiones personalizadas por los proveedores. Los sistemas ope-rativos que se ejecutan en controlado-res pequeños suelen implementar úni-camente los servicios esenciales y no ofrecen la posibilidad de autentifica-ción o control de acceso para proteger los dispositivos de campo cuya misión y seguridad son críticas. La creciente demanda de acceso remoto para pro-cesar datos en fábrica puede exponer los sistemas de automatización a posi-bles ataques contra la seguridad elec-trónica y con ello comprometer la in-tegridad de estos sistemas y la seguri-dad de la planta. La exigencia de dis-ponibilidad del sistema y/o de la plan-ta puede tener como consecuencia que la actualización del software de seguridad en dispositivos de campo en funcionamiento resulte poco práctica o esté plagada de riesgos.
Grant Martin
Tensilica, USA
Richard Zurawski
ISA Group, USA
Bibliografía
[1] H. Chang, L. Cooke, M. Hunt, G. Martin,
A. McNelly, L. Todd: Surviving the SOC Revolution:
A Guide to Platform-Based Design. Kluwer Academic
Publishers, 1999.
[2] A. Sangiovanni-Vincentelli, G. Martin: Platform-
Based Design and Software Design Methodology
for Embedded Systems. IEEE Design and Test of
Computers 18 (2001) 6, 23–33.
[3] M. Keating, P. Bricaud: Reuse Methodology
Manual for System-on-a-Chip Designs. Kluwer
Academic Publishers, 1998 (First Edition),
1999 (Second Edition), 2002 (Third Edition).
[4] G. Martin, C. Lennard: Invited CICC paper. Impro-
ving Embedded Software Design and Integration
for SOCs. Custom Integrated Circuits Conference,
May 2000, 101–108.
[5] G. Martin, H. Chang (Editors): Winning the SOC
Revolution: Experiences in Real Design. Kluwer
Academic Publishers, 2003.
[6] R. Zurawski (ed.): The Industrial Communication
Systems, Special Issue. Proceedings of the IEEE,
93 (2005) 6.
[7] Zimmermann H.: OSI Reference Model: The ISO
model of architecture for open system intercon-
nection. IEEE Transactions on Communications,
28(4): 425–432, 1980.
[8] R. Zurawski (ed.): Embedded Systems Handbook.
Taylor & Francis, 2005.
Grant Martin es Director científico en Tensilica, Inc. Su licenciatura y máster en Matemáticas los hizo en la Universidad de Waterloo (Cana-dá). Ha trabajado en Burroughs (Escocia), BNR/Nortel (Canadá) y Cadence Design Systems en San José (California) antes de ingresar en Tensilica en 2004.
Grant Martin
Tecnologías de sistemas integrados
Richard Zurawski es Presidente de ISA Group (San Francisco). Ha ocupado puestos ejecutivos en diversas empresas de la región de San Francisco y en Kawasaki Elec-tric (Tokyo) y ha sido catedrático del Instituto de Ciencias Industria-les de la Universidad de Tokyo. Es editor de una colección de libros sobre tecnología de información industrial (CRC Press/Taylor & Francis). Tiene un máster en Inge-niería eléctrica y es licenciado en Ciencias Computacionales.
Richard Zurawski
Revista ABB 2/2006
Los sistemas integrados se utilizan en una gama de productos y aplicacio-nes de ABB que crece a medida que van evolucionando las tecnologías subyacentes. Los avances de esta tecnología implican por un lado más rendimiento y más funciones y por otro lado menores costes y tamaños. Aunque todo ello beneficia al usuario final, la creciente complejidad de los sistemas integrados plantea nuevos retos a los desarrolladores. Este artí-culo es una breve introducción al uso y aplicación de la tecnología de siste-mas integrados en productos eléctri-cos y de automatización de ABB y a los retos actuales y futuros.
Tecnología de sistemas integrados en ABB Christoffer Apneseth
14

15Revista ABB 2/2006
Tecnología de sistemas integrados en ABB
Los sistemas integrados son sistemas informáticos
de propósito especial total-mente incorporados y aloja-dos en los dispositivos de los que forman parte o que controlan (de ahí el término ‘sistemas integrados’, literal-mente ‘empotrados’). Aun-que ésta es una definición generalmente aceptada de sistemas integrados, no pro-porciona muchas pistas so-bre las características espe-ciales que poseen estos sis-temas.
¿Cómo está aplicando ABB los sistemas integrados?Para comprender mejor la fi-nalidad de la tecnología de sistemas integrados parece conveniente res-ponder a algunas preguntas sobre la tecnología subyacente. En primer lugar la siguiente: ¿En qué se diferencian los sistemas integrados de los sistemas informáticos de propó-sito general? La respuesta es ‘depen-de’. Por definición, un sistema integra-do se diseña para realizar un conjunto de tareas predefinidas, cuya compleji-dad puede variar desde la simple su-pervisión de funcionamiento de un conmutador eléctrico, hasta controlar los movimientos de un potente robot industrial altamente flexible. Las dos soluciones, en consecuencia, serán completamente diferentes. La primera solución se optimiza para un gran vo-lumen de producción de muy bajo coste y para ejecutar un pequeño con-junto de algoritmos predefinidos. La última solución se diseñaría para cal-cular complejas trayectorias de movi-mientos programables y transformar las señales que controlan los motores del manipulador.
La segunda pregunta que debemos formularnos es la siguiente: ¿Por qué necesitamos sistemas integrados? La respuesta es que los ordenadores de uso general, como los PC, serían de-masiado costosos para la mayor parte de los productos que están incorpo-rando actualmente alguna forma de tecnología de sistemas integrados. Una solución general podría no satis-facer varios requisitos funcionales o de rendimiento, tales como las limita-ciones en consumo de potencia y las
limitaciones de tamaño, fiabilidad o funcionamiento en tiempo real.
Sistemas integrados, ¿dónde se encuentran?ABB lleva más de un siglo desarro-llando tecnologías de energía y auto-matización. y de la energía eléctrica. Los conceptos básicos de algunas de estas tecnologías han evolucionado lentamente: los modernos transforma-dores de potencia, por ejemplo, fun-cionan en la actualidad según los mis-mos principios que en los inicios de la transmisión de energía eléctrica. A pesar del enorme progreso de las tec-nologías de conmutación y de la cien-cia de materiales, un interruptor auto-mático sigue estando basado en los mismos principios que hace cincuenta años. Ahora que disponemos de pe-
queños y potentes microcon-troladores a bajo precio, los componentes de sistemas in-tegrados van encontrando aplicación en estos productos, maduros desde hace mucho tiempo. En estos productos, los sistemas integrados suelen asumir una función auxiliar: se utilizan para supervisar, proteger o controlar la fun-ción básica del producto. La tecnología es una forma de proporcionar estos atributos a mejor precio o con más valor añadido que con otras solu-ciones alternativas.
Otras series de productos que ofrece ABB serían inconcebi-
bles sin la tecnología de sistemas inte-grados. Buen ejemplo de ello son los sistemas de control distribuido (DCS) que pueden automatizar y controlar de forma segura grandes y complejas plantas industriales, como refinerías petrolíferas, centrales eléctricas y fá-bricas de papel. En los primeros tiem-pos de la automatización industrial se utilizaba lógica de relés para diversas funciones sencillas de control. La lle-gada de los circuitos integrados y de los primeros microcontroladores co-merciales en los años setenta y ochen-ta permitió utilizar controladores in-dustriales programables para ejecutar una lógica de control más compleja. Hoy día, el Sistema ABB de Automati-zación Ampliada 800xA de la platafor-ma Industrial IT integra dispositivos de campo inteligentes, ampliamente distribuidos, con funciones de siste-mas de alto nivel que optimizan los activos de producción además del proceso propiamente dicho.
Retos en aplicaciones industriales de sistemas integradosEn este número de Revista ABB se discute una gran variedad de oportu-nidades y retos relacionados con la introducción de la tecnología de siste-mas integrados en la cartera de pro-ductos y soluciones de ABB. Muchas de las ventajas y requisitos son típicas de los sistemas integrados en general –como el bajo coste, el pequeño ta-maño, etc.– mientras que otras son es-pecíficas de las aplicaciones industria-les.
Tecnología moderna de transformadores
Instalación de instrumentos avanzados in situ
Tecnologías de sistemas integrados

16 Revista ABB 2/2006
Tecnología de sistemas integrados en ABB
Requisitos industrialesLos requisitos industriales varían enormemente de una aplicación a otra, pero entre ellos están generalmente los siguientes: Disponibilidad y fiabilidad Seguridad Respuesta determinista en tiempo real
Consumo de energía Tiempo de vida útil
Disponibilidad y fiabilidadLos sistemas eléctricos han de tener una gran disponibi-lidad y fiabilidad para mini-mizar el coste de explota-ción (es decir, minimizar el tiempo de mantenimiento programado e imprevisto).
SeguridadMientras que los clientes generalmente exigen que sus sistemas integrados sean de alta calidad y muy fiables, es-te aspecto no es necesariamente vital si, por ejemplo, es necesario reiniciar un PDA (personal digital assistant) cada vez que una aplicación provoca un fallo del sistema. En aplicaciones industriales, por el contrario, un fallo del sistema podría tener efectos devas-tadores. En una plataforma petrolífera, por ejemplo, es necesario detectar una fuga de gas y provocar una parada de seguridad del proceso, ya que de otro modo correrían peligro activos muy valiosos e incluso vidas humanas. Aná-logamente, la inestabilidad en las re-des de transmisión y distribución eléc-trica debe detectarse antes de que se pueda propagar y provocar grandes apagones. Las consecuencias económi-cas y la seguridad personal dependen de que los sistemas tengan una gran integridad. ABB emplea los sistemas integrados en las configuraciones que cumplen funciones críticas. Para ofre-cer productos probados y certificados, de alta integridad, se aplican procesos de desarrollo y metodologías de dise-ño especiales.
Propiedades de tiempo real‘Tiempo real’ es un término frecuente-mente asociado a los sistemas integra-dos. Puesto que los sistemas integra-dos se usan para controlar o supervi-sar procesos en tiempo real, han de ser capaces de realizar fiablemente
ciertas tareas en un plazo de tiempo dado. Pero la definición de ‘tiempo real’ varía con la aplicación. Por ejem-plo, una reacción química puede ser lenta y es probable que baste con leer la temperatura en un punto una vez por segundo. Sin embargo, el progra-ma ha de ser previsible. En el otro ex-tremo de la escala, los dispositivos de protección de equipos de alta tensión necesitan muestrear corrientes y ten-siones a razón de miles de veces por segundo para detectar y actuar en una fracción de ciclo, si es necesario.
Consumo de energíaA primera vista parece que el consu-mo de potencia de la electrónica in-dustrial no es un problema importante, dada la abundancia de energía dispo-nible. Sin embargo, no siempre se dis-pone de energía y la necesidad de mantener bajos los costes de instala-ción ha creado una demanda de pro-ductos y sistemas que no requieren alimentación eléctrica aparte para la electrónica; estos dispositivos son autosuficientes energéticamente y satisfacen sus necesidades extrayendo pequeñas cantidades de energía de su entorno. Los sensores inalámbricos para la automatización de edificios, fábricas o procesos han de funcionar durante años con baterías o autóno-mamente. Las fuentes de alimentación independientes pueden ser diseñadas para extraer niveles minúsculos de energía desde fuentes electromagnéti-cas o solares, gradientes de temperatu-ra o vibraciones en el entorno inme-diato, lo que con frecuencia se conoce
como “cosecha de energía”. Aunque se disponga de ener-gía, el diseño con bajo consu-mo es necesario para reducir la generación excesiva de calor, que haría necesarios dispositivos de refrigeración costosos y susceptibles de generar errores.
Ciclo de vida útilOtro requisito frecuente de los sistemas industriales inte-grados es la gran duración de la vida útil del propio produc-to y el ciclo de vida de la se-rie de productos. Mientras que los productos modernos de la electrónica de consumo tienen actualmente una vida
útil inferior a cinco años –desde cuán-do no se ven teléfonos de más años–, la mayor parte de los equipos indus-triales han de funcionar en el terreno durante 20 años o más.Esto plantea varios retos, no sólo a la robustez de la electrónica, sino tam-bién al manejo del producto durante toda su vida útil, puesto que los com-ponentes del hardware, los sistemas operativos y las herramientas de desa-rrollo evolucionan y los productos concretos van quedando obsoletos.
Cuestiones fundamentales del desarrollo de sistemas integradosAlgunos desafíos propios del diseño de sistemas integrados no han cam-biado realmente durante las dos últi-mas décadas. Por ejemplo, los esfuer-zos por conseguir más rendimiento con menores costes y tamaños se mantendrán mientras lo permitan los avances de las tecnologías subyacen-tes. Otros retos relacionados con el diseño de sistemas están cambiando rápida-mente. La complejidad, la conectivi-dad y la utilidad son tres campos que merecen una atención muy especial.
ComplejidadAunque la densidad de transistores y las velocidades de los circuitos inte-grados, cada día mayores, ofrecen muchas oportunidades, son mejoras que conllevan un reto muy importante que han de afrontar los desarrollado-res (personas, equipos, organizacio-nes): ¿cómo manejar la complejidad añadida?
Tecnologías de sistemas integrados
Transmisión de energía sin cables: a alimentación de energía b bobina primariac conmutación con bobinas secundarias
a
b
c

Brazo de robot equipado con conmutador de proximidad sin cables
17Revista ABB 2/2006
Tecnología de sistemas integrados en ABB
Hoy día, un moderno sistema integra-do puede constar de cientos de miles de líneas de código de programación. Cada vez más frecuentemente, los productos incluyen sistemas integra-dos complejos. Las organizaciones de desarrollo han de evolucionar con los productos y tecnologías y es necesario establecer procesos, métodos y herra-mientas de desarrollo adecuados. ABB aprovecha su presencia en todo el mundo, de modo que las mejores prácticas desarrolladas en una parte de su organización las aplica en otras partes de la misma para mejorar el rendimiento general. El desarrollo de plataformas de productos es otro medio eficaz para garantizar la reutili-zación y aumentar la eficiencia.
ConectividadAntes del extenso despliegue de la comunicación digital, los sistemas integrados operaban casi siempre de modo autónomo. Algunos tenían capacidades de supervisión y control remoto, pero generalmente ejecutaban
autónomamente la mayoría de las fun-ciones. Este aspecto está cambiando rápidamente. Actualmente, los siste-mas integrados suelen formar parte de redes distribuidas refinadas. Los sen-sores sencillos con electrónica basada en transmisores han sido sustituidos por complejos dispositivos de campo inteligentes. La consecuencia es la im-posibilidad de diseñar diferentes pro-ductos independientes entre sí, sino que éstos han de tener algunos com-ponentes comunes. La comunicación ha dejado de ser una pequeña parte de un sistema para convertirse en una función muy importante. Donde, an-tes, la comunicación en serie peer-to-peer (de igual a igual) era la única forma de conectar un dispositivo a un sistema de control, actualmente se in-tegran numerosos dispositivos com-plejos por medio de buses de campo. La necesidad de conectar diferentes aplicaciones en los sistemas para ase-gurar la información y los servicios en los dispositivos de campo, está impul-sando la implantación de tecnologías ICT estándar, como Ethernet y los ser-vicios web.
UtilidadLos dispositivos de campo complejos suelen ser programables o configura-bles. Un transductor de presión puede contener actualmente varios cientos de parámetros. La interacción con un dispositivo –desde un panel interno o desde una aplicación de software en el sistema– se ha hecho más compleja. A menudo se ha subestimado la tarea de ocultar esta complejidad al usuario al crear un dispositivo de fácil uso. Mientras que la mayoría de los requi-sitos son absolutos o fácilmente cuan-tificables, la ‘utilidad’ es más difícil de definir. No obstante, un sistema intui-tivo y fácil de utilizar reducirá los costes de puesta en servicio y mante-nimiento. El sistema evitará errores y contribuirá mucho a la satisfacción general del cliente. Por esta razón, la utilidad es priorita-ria en el diseño y desarrollo de los productos de ABB, desde la fase con-ceptual hasta las pruebas finales.
Últimas tendencias de los sistemas integrados ABB está dando forma al futuro de la energía y de la automatización con nuevos productos y soluciones innova-
doras y en esta tarea cada día son más importantes las tecnologías de sistemas integrados. Esa es la causa de que, para tener controlada esta evolución, ABB tenga que anticiparse a las ten-dencias y oportunidades emergentes.
Una de estas tendencias es la tecnolo-gía SoC de sistemas sobre chips (Sys-tems on Chip). La emergencia de SoC permite que sistemas extremadamente potentes –hardware y software– se ejecuten en plataformas configurables que contienen todos los bloques fun-cionales de un sistema integrado: microprocesadores, DSPs, lógica de hardware programable, memoria, procesadores de comunicaciones y controladores de displays, entre otros ejemplos.
Otras tendencias son las de los siste-mas internos de comunicación inalám-brica y de los dispositivos integrados, interconectados y autoconfigurables. Estas tendencias permiten un uso ex-tendido de los dispositivos de campo inteligentes en aplicaciones hasta aho-ra no factibles debido a los costes de cableado. ABB figura a la vanguardia del desarrollo de tecnologías y aplica-ciones que aprovechan los últimos avances en investigación, junto con tecnologías de otros sectores indus-triales, como las telecomunicaciones y la electrónica de consumo.
Hoy por hoy no se puede predecir con exactitud cómo serán los sistemas eléctricos y de automatización de aquí a veinte años. Pero, sea cual fuere el desarrollo, los sistemas integrados se-rán los principales actores que habili-tarán e impulsarán el cambio.
Christoffer Apneseth
ABB Corporate Research, ABB AS
Billingstad, Norway
Módulo de comunicación para la transmisión por radio
Tecnologías de sistemas integrados

Thema
Protección integrada de energíaAplicaciones integradas en la automatización de sistemas eléctricosKornel Scherrer
Desde los inicios de la electrifica-ción, hace ya más de 130 años, proteger los activos contra los cor-tes o caídas de tensión ha sido un objetivo fundamental. Desde enton-ces, nuevas tecnologías integradas de información, incorporadas a la automatización de sistemas eléctri-cos, gestionan los aspectos relativos a la protección, además de otras muchas aplicaciones especiales. Esta evolución y sus futuras tenden-cias se discuten de forma resumida en este artículo, dedicado a la auto-matización de sistemas eléctricos aplicada a la generación, transmi-sión y distribución de electricidad.
18 Revista ABB 2/2006

19
La automatización de sistemas eléc-tricos tiene su origen en la protec-
ción de equipos de alta o media ten-sión en caso de daños provocados por un fallo del sistema de energía. Entre estos equipos están los aparatos de conmutación de potencia, los inte-rruptores y líneas de transporte de energía, así como los motores y gene-radores. Los primeros dispositivos de protección se desarrollaron hace más de 130 años, cuando se iniciaron los primeros proyectos de electrificación. Por aquel entonces, los dispositivos de protección se basaban en princi-pios electromecánicos y actuaban de forma completamente mecánica. To-davía hoy existen muchos de estos relés electromecánicos en muchos sistemas eléctricos instalados por todo el mundo. A medida que surgieron nuevas tecnologías de componentes electrónicos y de semiconductores, surgieron también nuevas posibilida-des de proteger los sistemas eléctricos y se diseñó una segunda generación de dispositivos de protección con componentes electrónicos. Estos relés de estado sólido habilitaron nuevas aplicaciones que incorporaban mejo-res funciones de protección, además de mediciones de potencia, disparo de alarmas y análisis de tendencias básicas. Finalmente, gracias a la dis-ponibilidad comercial de microproce-sadores en los primeros años ochenta del pasado siglo, surgió la protección numérica. La tecnología de micropro-cesadores ha puesto a nuestra disposi-ción una gran profusión de nuevas funciones. Estos dispositivos numéri-cos integrados ofrecen actualmente ventajas esenciales en cuanto a pro-tección, control, monitorización y au-tosupervisión, así como para la comu-nicación de datos.
Impulsores de la automatización de sistemas eléctricosMientras que, en el pasado, la única fi-nalidad de un dispositivo de protección era proteger un equipo de alta y media tensión, el entorno comercial actual de la transmisión y distribución de la ener-gía eléctrica impone nuevos requisitos que exigen nuevas soluciones. Los as-pectos técnicos van acompañados de un gran número de nuevos retos. Libe-ralización del mercado de la electrici-dad, especial atención a los clientes de compañías eléctricas, conservación de
los clientes, calidad y fiabilidad de la energía, servicio con valor añadido, ren-dimiento financiero, menores costes de explotación y mantenimiento y gestión de activos, son tan sólo algunos de los retos que impulsan la implementación de modernas soluciones de automatiza-ción en el campo del suministro de energía. La comunicación de datos en tiempo real es una característica funda-mental y el acceso desde cualquier lugar a la información del proceso es esencial para sacar provecho de las so-luciones modernas.
Áreas de aplicación de la automatiza-ción de sistemas eléctricosLa automatización de sistemas eléctricos es un caso claramente diferenciado de la automatización industrial en general. Debido a la proximidad con equipos de
alta y media tensión, las soluciones de automatización de los sistemas eléctricos tienen que satisfacer requisitos más rigu-rosos. Respecto de la automatización in-dustrial, las diferencias principales son la señalización de tensiones más altas, la detección de corriente y tensión altas, la detección de sucesos con una precisión de 1 ms, el corto tiempo de respuesta (del orden de algunos milisegundos) y los requisitos más estrictos de verifica-ción EMC (compatibilidad electromagné-tica) y EMI (interferencias electromagné-ticas). A continuación se presentan y describen algunas aplicaciones típicas de automatización de sistemas eléctricos. El número de componentes de sistemas integrados está creciendo rápidamente. Los componentes, con sus diversas ta-reas, cubren todo el proceso de sumi-nistro de energía eléctrica, desde la pro-
Tecnologías de sistemas integrados
Protección integrada de energía
Revista ABB 2/2006
20 Revista ABB 2/2006
Protección integrada de energía
ducción al consumo. Un criterio básico para la caracterización de un sistema in-tegrado, o de un componente del siste-ma, es su capacidad para reaccionar an-te sucesos o condiciones del proceso en una franja determinista de tiempo. Estas aplicaciones en tiempo real tienen una ejecución típicamente cíclica. El tiempo de ciclo determina la mayor rapidez de la respuesta y, por consiguiente, ha de ser diseñado específicamente para la aplicación. En general, las aplicaciones más cercanas al proceso de suministro de energía requieren tiempos de ciclo más cortos que las aplicaciones situadas en lugares remotos, como son los cen-tros de control de la red. La figura pe-queña representa una estructura típica de suministro eléctrico que incluye va-rias aplicaciones de automatización con diferentes características. En general, la funcionalidad básica de la automatiza-ción de sistemas eléctricos incluye la protección del equipo del sistema eléc-trico, el control del flujo de potencia, la monitorización del proceso de suminis-tro energético y la supervisión del esta-do del equipo.
Central eléctricaEl control industrial es la tecnología de automatización predominante en una central eléctrica. Sin embargo, los equi-pos con mayores tensiones, como los generadores de potencia, utilizan dispo-sitivos de automatización de sistemas eléctricos, entre cuyas funciones suelen estar las siguientes: Protección y control de generadores Funciones de control del funciona-miento síncrono (Synchrocheck), que garantizan una temporización correc-ta cuando el generador está conecta-do a la red de transmisión de energía
Protección y control de interruptores
Todos los dispositivos de automatiza-ción de los sistemas eléctricos están integrados por lo general en el siste-ma de automatización de las centrales eléctricas, permitiendo controlar centralizadamente toda la estación.
Red de transmisión de energíaTípicamente, en cada extremo de una línea de transporte de energía eléctrica hay situada una subestación. La aplica-ción más característica en la red de transmisión es la función de protección de la línea de transporte, integrada co-mo tarea dedicada en el sistema de au-
tomatización instalado en la subestación. La protección diferencial de la línea se basa en dos dispositivos electrónicos que miden la tensión y la corriente en ambos extremos de la línea. Enlaces de comunicación especializados transmiten estas mediciones, que en condiciones normales de operación no deben mos-trar diferencia alguna. Una diferencia en las cantidades indicaría un fallo en la lí-nea y se activarían (dispararían) los inte-rruptores en cuestión de milisegundos, desconectando la línea de la red de transmisión. Tales fallos pueden ser temporales, en caso de un rayo, o per-manentes, como cuando cae un árbol. En caso de fallo temporal, las funciones de automatización reconectarán la línea automáticamente.Otra aplicación común es la protección de distancia que realiza una función si-milar, pero basada en la impedancia de la línea y no en las diferencias de ten-sión o de intensidad. En caso de produ-cirse un fallo en la línea, el dispositivo integrado no sólo la desconectará, sino que también dará alguna indicación de a qué distancia de la subestación se ha producido el fallo.Todos los dispositivos de automatiza-ción en una subestación están conecta-dos típicamente a una terminal o pasa-rela (gateway) de comunicación remota, que intercambia información con el cen-tro de control de la red.Aunque la red de transmisión opera con corriente alterna (AC), para la transmi-sión de energía a largas distancias gene-ralmente se emplea corriente continua de alta tensión (HVDC). La energía se ha de convertir en ambos extremos de la línea, de alterna a continua y de con-tinua a alterna, mediante convertidores controlados por tiristores. Estos circuitos requieren equipos de control y protec-ción muy refinados y potentes, que ope-ra en tiempos muy pequeños, del orden de 100 nanosegundos.
Subestación de transmisiónEn la subestación, grandes transforma-dores de potencia aislados con aceite convierten los niveles de tensión desde una tensión de transmisión de 240 kV a 110 kV, por ejemplo. Sistemas específi-cos de interruptores permiten controlar fiablemente el flujo de potencia. Son muchos los sistemas integrados que se instalan con fines de automatización. En general, cabe distinguir entre funciones de protección de objetos, como es la
protección de líneas, transformadores o interruptores, y las funciones de protec-ción de sistemas, por ejemplo de las ba-rras colectoras. Los cortocircuitos en la subestación pueden alcanzar valores de hasta 100.000 amperios. Por tanto, los dispositivos de protección tienen que reaccionar en 10 a 20 ms para desconec-tar la parte defectuosa de la estación.Por razones de seguridad de funciona-miento, se suelen utilizar dispositivos integrados independientes para la pro-tección y el control. Así pues, una sub-estación puede necesitar muchas doce-nas de dispositivos de automatización, que en grandes estaciones pueden lle-gar a ser varios cientos. Los dispositivos de automatización son componentes de sistemas modulares con una cantidad variable de entradas y salidas de proce-so y con diversas potencias de cálculo.
Subestación de distribución primariaLa subestación de distribución primaria realiza las mismas funciones que una subestación de transmisión pero a niveles inferiores de tensión. Transformadores más pequeños de potencia convierten los niveles de tensión de 110 kV a 38 kV, por ejemplo. A este nivel, la protección y el control suelen estar integrados en un único dispositivo que ejecuta simultánea-mente todas las funciones. La energía afectada por una avería es menos vital que en un sistema de transmisión y, por consiguiente, los requisitos de respuesta en tiempo real son algo menos estrictos. No obstante, los tiempos de operación si-guen estando en el rango de algunas decenas de milisegundos.
Subestación de distribución secundariaLa subestación de distribución secunda-ria está situada más cerca de los consu-midores y opera a niveles más bajos de tensión. Puede incluir o no un transfor-mador, y el sistema completo es consi-derablemente menos complejo que en una subestación primaria.La sofisticación de la automatización está también muy limitada y casi siempre se reduce a funciones sencillas de protec-ción. Los dispositivos están estandariza-dos y disponibles a muy bajo coste. Por lo general no se emplea comunicación en este nivel de la red de distribución.
Estación generadora de potencia distribuidaLa aplicación más común de un genera-dor de potencia distribuida es servir co-
Tecnologías de sistemas integrados

21Revista ABB 2/2006
Protección integrada de energía
mo fuente de energía de reserva en caso de emergencia para consumidores críti-cos con especiales necesidades de elec-tricidad, como pueden ser hospitales, diversas aplicaciones industriales o una infraestructura con carácter crítico. Una aplicación esencial en tales estaciones es el conmutador de transferencia desde la fuente de energía normal a la fuente de reserva. La integración de funciones apropiadas de automatización garantiza la ejecución correcta de las funciones de todos los dispositivos utilizados, como son, entre otras, desconectar la línea
de energía, arrancar el generador y co-nectar este último al consumidor crítico. En caso de que el suministro de energía deba mantenerse sin interrupción, como normalmente se requiere en centros de servidores de información, se utilizarían grandes baterías o tecnología de volan-tes de inercia para acumular energía y vencer el retardo en el arranque del ge-nerador. Las operaciones de transferen-cia se pueden ejecutar de forma rápida y completa en pocos milisegundos, manteniendo sin interrupción el equipo informático vital.
Automatización de alimentadoresLa aplicación de dispositivos de protec-ción y control fuera de la subestación y en la línea de distribución de potencia se conoce como automatización de ali-mentadores. Entre sus funciones típicas están la protección contra sobrecorrien-tes, la localización de averías y la reco-nexión de interruptores. La restauración rápida e inteligente de alimentadores de distribución averiados es otro buen ejemplo de las modernas funciones integradas de automatización.
Red industrialLos grandes consumidores de energía eléctrica, como parques industriales, plantas químicas y fábricas, mantienen su red de distribución de potencia in situ para alimentar motores y otros grandes equipos. Para ello se instala un gran número de dispositivos que reali-zan funciones de protección, control y medición. Todos estos dispositivos de automatización de sistemas eléctricos suelen estar integrados en el sistema de control del proceso global.
Centro de control de la redEl centro de control de la red es el em-plazamiento central desde donde se dirige el funcionamiento de la red. Po-tentes sistemas de adquisición de datos y control supervisor (SCADA) recogen información de todas las subestaciones y realizan cálculos complejos. En este nivel se ejecutan aplicaciones de ges-tión de la energía, habilitando la opera-ción correcta y estable de los genera-dores, red de transmisión y consumido-res. En él se realizan cálculos comple-jos del flujo de potencia para supervi-sar las condiciones críticas y permitir que el personal de control de la red tome las medidas apropiadas.
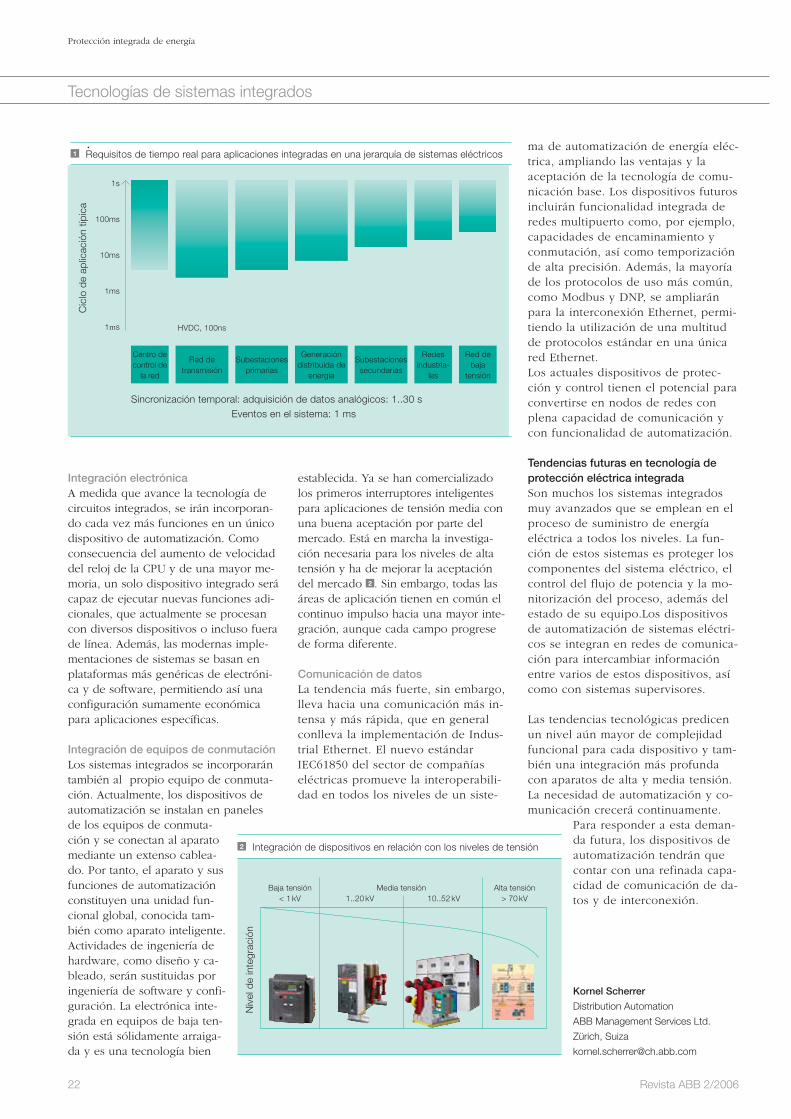
Los dispositivos integrados de auto-matización de sistemas eléctricos rea-lizan funciones vitales en tiempo real en todos los niveles del sistema y de la jerarquía de control. El gráfico de la figura 1 clasifica las aplicaciones an-tes mencionadas de acuerdo con su requisito de respuesta en tiempo real.
Tendencias tecnológicasEl futuro de los componentes integra-dos en la automatización de sistemas eléctricos estará determinado por tres tendencias tecnológicas distintas.
Tecnologías de sistemas integrados
Los primeros dispositivos de protección y control numérico de sistemas eléctri-cos utilizaban unidades especiales de proceso de señales digitales (DSP). Las implementaciones actuales están impul-sando la gran potencia de cálculo disponible en unidades de proceso cen-tral (CPU) de propósito general. En este sentido, los microcontroladores PowerPC proporcionan una gran poten-cia de cálculo con bajo consumo de energía y, por consiguiente, baja disipa-ción de potencia. Se utiliza memoria de acceso aleatorio (RAM) para ejecutar programas, mientras que la memoria de sólo lectura, programable y borrable (EPROM), almacena información de programas y de configuración. Una configuración típica puede incluir un microcontrolador PowerPC a 400 MHz, 64 Mbytes de EPROM y 64 Mbytes de RAM. La CPU puede comprender ade-
más matrices de puertas programables por el usuario (FPGA, Field Program-mable Gate Array) que integran funcio-nalidad lógica y de preproceso de seña-les. Un dispositivo de automatización incluye generalmente varias placas de circuito impreso (PCBA, Printed Circuit Board Assembly) en consonancia con los requisitos correspondientes a la di-versidad y número de circuitos diferen-tes de entrada y salida. La comunica-ción entre módulos tiene lugar en serie, a alta velocidad, permitiendo a la CPU enviar y adquirir datos desde/hacia los módulos de entrada y salida. Se diseñan circuitos de aplicaciones específicas pa-ra optimizar los objetivos técnicos y económicos globales. La figura inferior muestra un ejemplo de un módulo CPU de alto rendimiento conectado a un módulo de comunicación Ethernet con entrada binaria.
Tecnología de automatización de subestaciones
a EPROMb FPGA, preprocesado de señalesc Dispositivo interno de
comunicación a 100 bits/sd Alimentación de energía
e Dispositivo Ethernet multipuerto con acceso óptico y eléctrico de 100 Mbits/s a Ethernet
f 18 entradas binarias de 300 Vg Entrada binaria de procesado ASICh RAMi Microcontrolador PowerPC
a
b
c
d
e
f
h
g
i
22 Revista ABB 2/2006
Protección integrada de energía
Integración electrónicaA medida que avance la tecnología de circuitos integrados, se irán incorporan-do cada vez más funciones en un único dispositivo de automatización. Como consecuencia del aumento de velocidad del reloj de la CPU y de una mayor me-moria, un solo dispositivo integrado será capaz de ejecutar nuevas funciones adi-cionales, que actualmente se procesan con diversos dispositivos o incluso fuera de línea. Además, las modernas imple-mentaciones de sistemas se basan en plataformas más genéricas de electróni-ca y de software, permitiendo así una configuración sumamente económica para aplicaciones específicas.
Integración de equipos de conmutaciónLos sistemas integrados se incorporarán también al propio equipo de conmuta-ción. Actualmente, los dispositivos de automatización se instalan en paneles de los equipos de conmuta-ción y se conectan al aparato mediante un extenso cablea-do. Por tanto, el aparato y sus funciones de automatización constituyen una unidad fun-cional global, conocida tam-bién como aparato inteligente. Actividades de ingeniería de hardware, como diseño y ca-bleado, serán sustituidas por ingeniería de software y confi-guración. La electrónica inte-grada en equipos de baja ten-sión está sólidamente arraiga-da y es una tecnología bien
establecida. Ya se han comercializado los primeros interruptores inteligentes para aplicaciones de tensión media con una buena aceptación por parte del mercado. Está en marcha la investiga-ción necesaria para los niveles de alta tensión y ha de mejorar la aceptación del mercado 2 . Sin embargo, todas las áreas de aplicación tienen en común el continuo impulso hacia una mayor inte-gración, aunque cada campo progrese de forma diferente.
Comunicación de datosLa tendencia más fuerte, sin embargo, lleva hacia una comunicación más in-tensa y más rápida, que en general conlleva la implementación de Indus-trial Ethernet. El nuevo estándar IEC61850 del sector de compañías eléctricas promueve la interoperabili-dad en todos los niveles de un siste-
ma de automatización de energía eléc-trica, ampliando las ventajas y la aceptación de la tecnología de comu-nicación base. Los dispositivos futuros incluirán funcionalidad integrada de redes multipuerto como, por ejemplo, capacidades de encaminamiento y conmutación, así como temporización de alta precisión. Además, la mayoría de los protocolos de uso más común, como Modbus y DNP, se ampliarán para la interconexión Ethernet, permi-tiendo la utilización de una multitud de protocolos estándar en una única red Ethernet.Los actuales dispositivos de protec-ción y control tienen el potencial para convertirse en nodos de redes con plena capacidad de comunicación y con funcionalidad de automatización.
Tendencias futuras en tecnología de protección eléctrica integradaSon muchos los sistemas integrados muy avanzados que se emplean en el proceso de suministro de energía eléctrica a todos los niveles. La fun-ción de estos sistemas es proteger los componentes del sistema eléctrico, el control del flujo de potencia y la mo-nitorización del proceso, además del estado de su equipo.Los dispositivos de automatización de sistemas eléctri-cos se integran en redes de comunica-ción para intercambiar información entre varios de estos dispositivos, así como con sistemas supervisores.
Las tendencias tecnológicas predicen un nivel aún mayor de complejidad funcional para cada dispositivo y tam-bién una integración más profunda con aparatos de alta y media tensión. La necesidad de automatización y co-municación crecerá continuamente.
Para responder a esta deman-da futura, los dispositivos de automatización tendrán que contar con una refinada capa-cidad de comunicación de da-tos y de interconexión.
Kornel Scherrer
Distribution Automation
ABB Management Services Ltd.
Zürich, Suiza
Tecnologías de sistemas integrados
2 Integración de dispositivos en relación con los niveles de tensión
Baja tensión < 1 kV
Media tensión 1..20 kV 10..52 kV
Alta tensión > 70 kV
Niv
el d
e in
tegr
ació
n
1 Requisitos de tiempo real para aplicaciones integradas en una jerarquía de sistemas eléctricos
Red de transmisión
Centro de control de
la red
Subestaciones primarias
Generación distribuida de
energía
Subestaciones secundarias
Redes industria-
les
Red de baja
tensión
1s
100ms
10ms
1ms
1ms
Cic
lo d
e ap
licac
ión
típic
a
Sincronización temporal: adquisición de datos analógicos: 1..30 s Eventos en el sistema: 1 ms
HVDC, 100ns
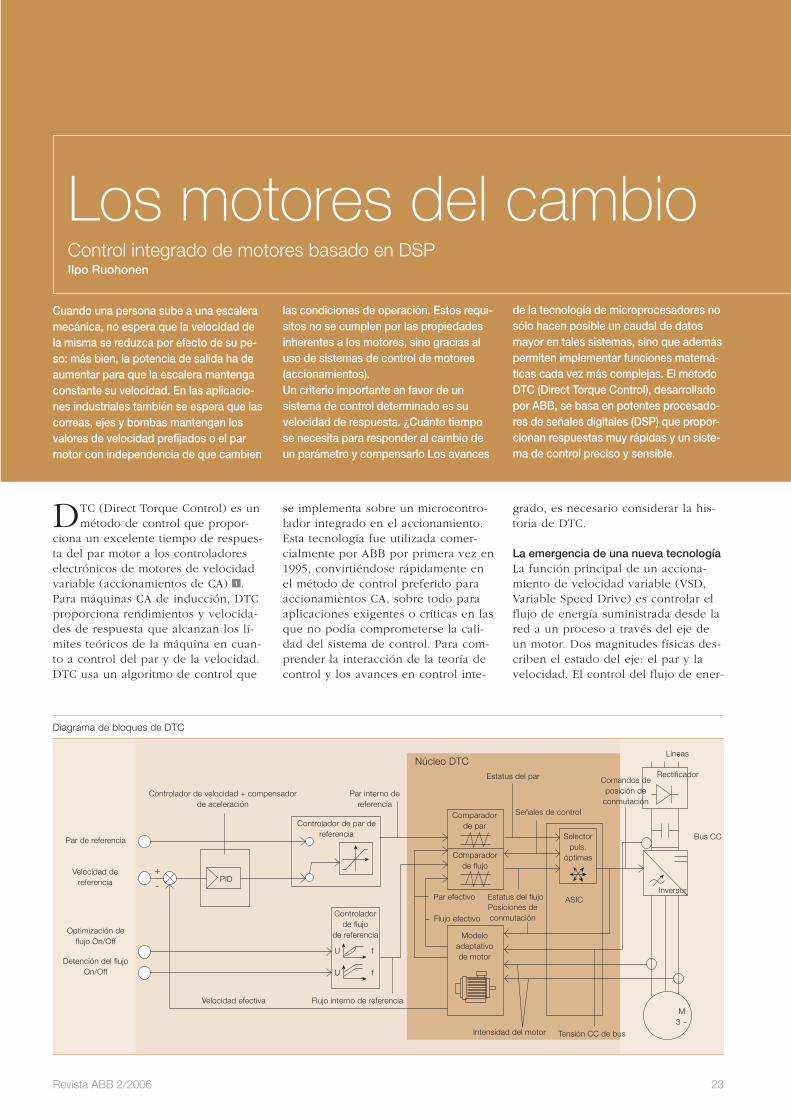
23Revista ABB 2/2006
DTC (Direct Torque Control) es un método de control que propor-
ciona un excelente tiempo de respues-ta del par motor a los controladores electrónicos de motores de velocidad variable (accionamientos de CA) 1 . Para máquinas CA de inducción, DTC proporciona rendimientos y velocida-des de respuesta que alcanzan los lí-mites teóricos de la máquina en cuan-to a control del par y de la velocidad.DTC usa un algoritmo de control que
se implementa sobre un microcontro-lador integrado en el accionamiento. Esta tecnología fue utilizada comer-cialmente por ABB por primera vez en 1995, convirtiéndose rápidamente en el método de control preferido para accionamientos CA, sobre todo para aplicaciones exigentes o críticas en las que no podía comprometerse la cali-dad del sistema de control. Para com-prender la interacción de la teoría de control y los avances en control inte-
grado, es necesario considerar la his-toria de DTC.
La emergencia de una nueva tecnologíaLa función principal de un acciona-miento de velocidad variable (VSD, Variable Speed Drive) es controlar el flujo de energía suministrada desde la red a un proceso a través del eje de un motor. Dos magnitudes físicas des-criben el estado del eje: el par y la velocidad. El control del flujo de ener-
Cuando una persona sube a una escalera mecánica, no espera que la velocidad de la misma se reduzca por efecto de su pe-so: más bien, la potencia de salida ha de aumentar para que la escalera mantenga constante su velocidad. En las aplicacio-nes industriales también se espera que las correas, ejes y bombas mantengan los valores de velocidad prefijados o el par motor con independencia de que cambien
las condiciones de operación. Estos requi-sitos no se cumplen por las propiedades inherentes a los motores, sino gracias al uso de sistemas de control de motores (accionamientos).Un criterio importante en favor de un sistema de control determinado es su velocidad de respuesta. ¿Cuánto tiempo se necesita para responder al cambio de un parámetro y compensarlo Los avances
de la tecnología de microprocesadores no sólo hacen posible un caudal de datos mayor en tales sistemas, sino que además permiten implementar funciones matemá-ticas cada vez más complejas. El método DTC (Direct Torque Control), desarrollado por ABB, se basa en potentes procesado-res de señales digitales (DSP) que propor-cionan respuestas muy rápidas y un siste-ma de control preciso y sensible.
Los motores del cambioControl integrado de motores basado en DSPIlpo Ruohonen
Diagrama de bloques de DTC
PID
Par de referencia
Velocidad de referencia
Optimización de flujo On/Off
Detención del flujoOn/Off
Controlador de velocidad + compensador de aceleración
Velocidad efectiva
Controlador de par de referencia
Controlador de flujo
de referencia
Par interno de referencia
Flujo interno de referencia
Comparador de par
Comparador de flujo
Par efectivo
Flujo efectivo
Modelo adaptativo de motor
Estatus del par
Señales de control
Estatus del flujoPosiciones de conmutación
Intensidad del motor
Selectorpuls.
óptimas
ASIC
Tensión CC de bus
Líneas
Rectificador
Bus CC
Inversor
M 3 ~
Comandos de posición de
conmutación
+
-
Núcleo DTC
U
U
f
f

24 Revista ABB 2/2006
Los motores del cambio
gía depende del control de estas mag-nitudes.
En la práctica se puede controlar cual-quiera de las dos magnitudes y su im-plementación se conoce como “con-trol de par” o “control de velocidad”. Cuando un VSD opera en modo de control del par motor, la carga deter-mina la velocidad. Análogamente, cuando opera en modo de control de velocidad, la carga determina el par. En ambos casos existe una relación entre el par, la corriente real y el flujo magnético real en la máquina. La idea de DTC es utilizar el flujo magnético y el par motor como variables básicas de control, contrariamente a la forma en que los tradicionales accionamien-tos de CA controlan la frecuencia y la tensión de entrada, aunque en princi-pio es similar a como se realiza con un accionamiento de CC.
Además, con los tradicionales acciona-mientos que utilizan modulación por anchura de impulsos (PWM, Pulse Width Modulation) y vectores de flujo magnético, la tensión aplicada al mo-tor requiere una etapa moduladora. El tiempo de esta etapa se añade al tiem-po de proceso de la señal, limitando por tanto la velocidad de respuesta del sistema de control y, por consi-guiente, el tiempo de respuesta del par y de la velocidad.
El hecho de que DTC no requiera mo-dulador es una de las razones de que este método de control ofrezca unas respuestas tan rápidas, diez veces más rápidas que con el método convencio-nal de control vectorial del flujo. Ade-más, DTC consigue este control rápi-do, basado en el campo magnético, sin necesidad de realimentación de la velocidad: usa una avanzada teoría de motores para calcular el par motor y el flujo magnético del estator.
DSP hace posible el progreso tecnológico Aunque, teóricamente, ya se conocían las ventajas de utilizar DTC, su imple-mentación tuvo que esperar hasta que los avances del control integrado hi-cieron posible ejecutar los ciclos de control primarios a una frecuencia suficientemente alta. Los microproce-sadores convencionales, por ejemplo
los que se utilizan en los ordenadores personales, no consiguen un caudal de datos suficientemente alto. La in-troducción de los procesadores de se-ñales digitales (DSP) hizo posible la implementación de DTC. Estos proce-sadores se desarrollaron en principio para la industria de las telecomunica-ciones, pero hoy día han encontrado un uso muy extendido para el control de accionamientos. Un moderno ac-cionamiento DTC calcula el par real en el eje del motor al menos 40.000 veces por segundo (cada 25 µs). Esto proporciona una reacción extremada-mente rápida a las variaciones de car-ga en el eje del motor, así como a los cambios en la velocidad o el par fija-dos como referencia por el usuario.
El tiempo de reacción de DTC es tan rápido que abre nuevas posibilidades para el control de velocidad variable. Por ejemplo, un accionamiento DTC es ideal para proteger la mecánica contra sobrecargas y variaciones brus-cas de la carga. Además, el rápido control del par motor significa que se pueden implementar fácilmente algo-ritmos refinados para amortiguar vi-braciones mecánicas en aplicaciones con resonancias mecánicas intrínsecas. Análogamente, un accionamiento DTC puede detectar rápidamente una pér-dida de par de carga causada por una avería mecánica, por ejemplo por la rotura de una cinta transportadora, y actuar para evitar que se produzcan otros daños. Dado su corto tiempo de respuesta existen muchos otros ejem-plos de DTC integrado en funciones protectoras para las máquinas y moto-res.
Mientras que, por lo general, en ac-cionamientos de baja potencia para aplicaciones no muy exigentes se si-guen métodos de control más senci-llos, como el control vectorial sin sen-sores, DTC se usa preferentemente en aplicaciones más exigentes, que re-quieren un tiempo muy corto de res-puesta del par motor para conseguir un rendimiento óptimo. Puesto que los accionamientos de alta potencia obligan a hacer importantes inversio-nes, DTC también se usa en estos ti-pos de accionamientos de ABB, con independencia de la aplicación.
Fábrica de Ideaplast en Italia con un extrusor de línea simple (detalle de la cabeza del extru-sor y del bobinado de los rollos de película)
Transportador fiable, para la automatización de panaderías (Fazer Bakery, Finlandia).
Estación elevadora de presión en Pietersaari (Finlandia), accionamientos con DTC e IPC (Intelligent Pump Control)
Tecnologías de sistemas integrados

25Revista ABB 2/2006
Los motores del cambio
Extensión a otras aplicacionesCon la llegada de DTC poco queda por mejorar en el método de control de accionamientos de velocidad varia-ble: ya no es el convertidor de fre-cuencia el que limita el rendimiento de un accionamiento de velocidad variable, sino el propio motor. La in-vestigación ha derivado recientemente hacia la aplicación de DTC en otros marcos. Se han abierto algunos nue-vos apasionantes campos de des-arrollo del control integrado de accionamientos.
Uno de ellos es la aplicación de DTC en motores de imanes permanentes. Aunque los principales aspectos de los motores de imanes permanentes se conocen ya desde hace tiempo, su explotación comercial tuvo que espe-rar al debido desarrollo de los mate-riales magnéticos.
Los imanes de NdFeB (neodimio, hie-rro y boro) están disponibles desde 1987, pero fueron necesarias diversas mejoras en la composición de los ma-teriales antes de que las propiedades mecánicas y magnéticas de estos ima-nes permitieran usarlos en la fabrica-ción de motores. Desde entonces no han dejado de perfeccionarse las téc-nicas de producción y, actualmente,
ya son viables comercialmente los motores de imanes permanentes de gran potencia.
El motor de imanes permanentes es un motor síncrono, es decir, funciona según principios algo diferentes a los de un motor asíncrono. ABB ha crea-do una versión de DTC adaptada es-pecíficamente para motores de imanes permanentes. Esta combinación de DTC y motores de imanes permanen-tes (PM-DTC) ofrece varias ventajas. Aunque compatibles con los acciona-mientos tradicionales, los motores se fabrican en bastidores y dimensiones mecánicas estándares de CEI y la combinación PM-DTC ofrece un con-trol más preciso sin necesidad de co-dificadores y un alto par motor a bajas velocidades. Ello ha permitido supri-mir las cajas de engranajes en las má-quinas de papel. Los accionamientos PM-DTC pueden reducir mucho los costes. En comparación con las solu-ciones tradicionales, estos acciona-mientos tienen menos componentes (ni engranajes, ni acoplamientos, ni codificadores), requieren menos traba-jo de ingeniería, ahorran espacio, reducen los costes de mantenimiento, emiten menos ruidos, tienen mayor disponibilidad y son más eficientes desde el punto de vista energético. Muchas de estas ventajas pueden atri-buirse al desarrollo de DTC y a los avances en el campo del control inte-grado. Las máquinas de papel figura-ban entre las primeras aplicaciones de la tecnología PM-DTC, otras aplicacio-nes actuales son la propulsión de bar-cos y las turbinas eólicas.
Otra nueva aplicación de DTC está en la sección de entrada de los acciona-mientos. Con algunas modificaciones, ABB ha aplicado DTC a la unidad de alimentación que está conectada a la red y proporciona energía a la unidad inversora. Con la ayuda de DTC ha sido posible crear un accionamiento que produce solamente una distorsión armónica muy baja.
En los accionamientos tradicionales, la energía se suministra a través de un puente pasivo de diodos conectado a las redes. El inconveniente de este método es que el puente de diodos distorsiona la tensión en la red, lo cual puede afectar a otros equipos
conectados a la misma. Una solución muy eficaz para mitigar este problema es utilizar un accionamiento con una sección de entrada “activa” controlada con DTC. La unidad de alimentación de DTC controla la corriente de la línea y elimina las distorsiones armó-nicas leves. Las distorsiones armónicas intensas se eliminan utilizando un pequeño filtro. El resultado es una corriente de línea prácticamente sinusoidal y sin perturbaciones.Las soluciones tradicionales se basan en aumentar el número de impulsos en la unidad de alimentación, en in-versores de 12 ó 24 impulsos, y en la utilización de un voluminoso transfor-mador de desplazamiento de fase. La sección de entrada activa con DTC no necesita tal transformador y el paque-te en conjunto es considerablemente más pequeño. Estos ejemplos ilustran una importante tendencia: los avances de la electrónica han producido un aumento de la potencia de cálculo in-tegrado y de la memoria en el accio-namiento. Esto, a su vez, ha traído consigo el éxito de la implementación de un método de control superior, el DTC. Las ventajas de DTC han condu-cido por su parte a nuevas aplicacio-nes y funciones. Los accionamientos actuales son más pequeños, más rápi-dos, más eficientes, más fiables y más fáciles de usar que los de la genera-ción anterior. Esto ha sido posible gracias a los avances del control inte-grado.
Ilpo Ruohonen
ABB Oy
Helsinki, Finlandia
Existen dos tipos básicos de sistemas de control de motores. Los sistemas de control de bucle cerrado tienen codificadores en el motor que infor-man del estado del mismo. La infor-mación se utiliza para realimentar el algoritmo de control. Los sistemas de bucle abierto son más sencillos, ya que prescinden de estos codificado-res, aunque a costa de perder preci-sión en el control. ¿Es posible conse-guir precisión en un bucle cerrado que no dispone de codificadores? Es-to es justamente lo que hace el méto-do DTC de ABB: utiliza funciones matemáticas para predecir el estado del motor. La precisión y repetibilidad que ofrece este sistema son equipara-bles a las de los sistemas de bucle cerrado normales, pero con la ventaja añadida de que la velocidad de res-puesta es hasta diez veces mayor.
Control de motores
Las oficinas modernas tienen innumerables equipos sensibles, que requieren mantener el nivel más bajo posible de armónicos en la red. Los accionamientos con bajo nivel de armóni-cos que utilizan DTC son ideales para este tipo de entorno.
Tecnologías de sistemas integrados

26 Revista ABB 2/2006
Control rápido en una aplicación de tracción
Los trenes modernos se están ha-ciendo más ligeros y ágiles para redu-cir los costes de explotación y hacer más atractivo este medio de trans-porte. Los convertidores de potencia de a bordo han de seguir la misma tendencia ofreciendo mayores veloci-dades, más capacidad de respuesta y más fiabilidad, y todo en una superfi-cie menor. Conozcamos el converti-dor de potencia CC750® de ABB.
El convertidor IGBT de baja tensión CC750® constituye el núcleo del
circuito de potencia del tipo de tren
FLIRT2 de la Red Ferroviaria Federal Suiza (SBB) 1 [1] así como de los vehí-culos GTW para los operadores THUR-BO (Thurgau-Bodensee Bahn) y RM (Regionalverkehr Mittelland), todos ellos fabricados por Stadler Rail AG.
La gran fiabilidad, velocidad y precisión que requieren los accionamientos y convertidores de potencia exigen controladores de alto rendimiento. El controlador AC 800PEC de ABB está integrado en el sistema de control 800xA, desarrollado con gran éxito por nuestra compañía y que goza de gran aceptación. El contro-lador AC 800PEC es adecuado para numerosas aplicaciones y no está limitado estric-tamente al control de la electrónica de potencia, ya que entre sus aplica-ciones están los laminadores del sector del metal, cuyo proceso completo controla. Los dos ejemplos siguientes ilustran la acertada integración del AC 800PEC1) en apli-caciones de trac-ción de locomoto-ras e instalaciones de laminación.
Laminación y controlPlataforma de control AC 800PEC, para numerosas aplicaciones Armin Eichmann, Andreas Vollmer
Desde su primera operación comercial, en diciembre de 2003, han entrado en servicio, en total, unos 250 vehículos. Todos estos convertidores de potencia son controlados por medio de unidades AC 800PEC de ABB.
1 Los convertidores de potencia CC750® de ABB son parte integrante de los modernos trenes ligeros FLIRT.

27Revista ABB 2/2006
Laminación y control
Configuración del sistemaEl CC750® fue desarrollado como con-vertidor de tracción para trenes eléc-tricos, regionales y suburbanos, de unidades múltiples. El CC750®, que dispone de alimentación auxiliar inte-grada, es adecuado para diversas tensiones de catenaria, por ejemplo 15 kV / 16,7 Hz y 25 kV / 50 Hz. El convertidor utiliza módulos IGBT de transistores bipolares de puerta aisla-da (Insulated Gate Bipolar Transistor) con tensión de bloqueo de 1.200 V, tanto en su circuito de alimentación de tracción como en el convertidor auxiliar.La configuración del sistema principal se muestra en 2 . Dos sistemas conver-tidores CC750® idénticos ( 2d y 2e ) se conectan a la catenaria 2a por medio de un transformador común de alta tensión, refrigerado por aceite 2c . Los dos sistemas convertidores son com-pletamente redundantes: en caso de que uno de ellos falle, el vehículo puede seguir funcionando, aunque con menor potencia.
Sistema de control integradoPara el hardware de control 3 se eli-gió un concepto descentralizado que consta de las siguientes unidades: Controlador AC 800PEC 3e , sistema de control de proceso de nivel su-perior, desarrollado por ABB. Se puede programar usando MATLAB®/Simulink® y Real-Time Workshop®.
La tarjeta de interfaz PEBB 3b (Power Electronics Building Block), utilizada como dispositivo E/S re-moto universal. Esta tarjeta controla y protege los convertidores IGBT. Los enlaces con los controladores de los módulos IGBT son bidirec-cionales.
Tarjeta Combi E/S 3c : un dispositivo E/S remoto universal para aplicacio-nes de tracción de alta velocidad.
Módulos auxiliares 3a 3d , que com-prenden fuentes de alimentación y transductores intermedios de co-rriente y tensión, así como el con-trol de los dispositivos conmutado-res y desconectadores.
Además, el sistema del hardware in-cluye mediciones de corriente alterna y tensión continua (muestreo síncro-no), protección contra sobrecorrientes y bloqueo de modulación y disparo.Para garantizar una gran tolerancia a
las interferencias electromagnéticas, la comunicación entre el controlador AC 800PEC, la tarjeta de interfaz PEBB y la tarjeta Combi E/S se realiza por fi-bra óptica. Un enlace óptico adicional conecta el sistema de control de los convertidores con el sistema de con-trol del vehículo, de nivel superior, por medio de un bus CANopen. La conexión con un ordenador central dedicado a la programación y supervi-sión se establece por medio de un en-lace Ethernet. Software de control de AC 800PECLos sistemas de control digital de alta velocidad representan la más avanza-da tecnología en electrónica de poten-cia. Por lo general, para aquellas fun-ciones en las que el tiempo es un fac-tor sumamente crítico, en el rango de microsegundos y tiempos inferiores, se usan matrices de puertas programa-bles por el usuario (FPGA, Field-Pro-grammable Gate Array) que utilizan avanzadas herramientas de programa-
Tecnologías de sistemas integrados
2 Disposición de los convertidores de tracción en THURBO GTW, dos unidades CC750® que proporcionan una potencia total de tracción de 1,1 MW.
a
b
c
d e
fg
h
i
j
l
m
n
k
a pantógrafo (catenaria de 15 kV, 16 2/3 Hz)b interruptor principalc transformadord y e unidades convertidoras de potencia CC750®
f devanado de transformador auxiliar para alimentar la calefacción del treng inversor de red (entrada de 390 V)
h enlace de CC (750 V)i inversor de tracción (480 V / 0 – 170 Hz,
potencia de tracción 750 kVA)j y k motor de tracción asíncronol alimentación auxiliar trifásica
(50 kVA / 3 x 400 V CA)m cargador de batería (12 kW / 36 V CC)n pulsador de freno
3 Panel del hardware de control del convertidor CC750®
a
b c
d
e
a módulo auxiliarb tarjeta de interfaz PEBBc tarjeta Combi E/Od módulo auxiliare AC 800PEC

Table 2 Relación de datos básicos de un laminador en frío
Máxima fuerza del laminador = 30 MN Máximo peso de cilindros en una
plataforma = 40 toneladas Máxima aceleración del laminador = 2 m/s2
Máxima velocidad del laminador = 150 km/h Mínimo grosor de la lámina = 6 µm Tolerancia de grosor = 0,5 ... 1,0 por ciento
28 Revista ABB 2/2006
Laminación y control
ción VHDL (lenguaje de descripción del hardware de circuitos integrados de muy alta velocidad). En el rango de velocidades inter-medias (desde 100 µs hasta milisegundos), AC 800PEC proporciona una capa de software basada en MAT-LAB®/Simulink® con Real-Time Workshop® [2]. Este entorno permite la progra-mación gráfica de alto nivel, en el nivel de abstracción conceptual ade-cuado para los ingenieros de control y de sistemas. Todas las funciones de
codificación, transferencia y supervisión están integradas en la plataforma. El ingeniero queda así liberado del costoso trabajo de codificación de bajo nivel, susceptible a los errores.Los sistemas de control cons-tan generalmente de compo-nentes con diferentes constan-tes de tiempo. Por consiguien-te, el software contiene subta-reas que se ejecutan a interva-los diferentes. En el software de control utilizado para el CC750® se han implementado tres ciclos de software que se ejecutan en tiempos de ciclo de 1 ms, 250 µs y 50 µs Tabla 1 .
En la industria del metal cada día es ma-yor la exigencia de calidad de los pro-ductos y de productividad y flexibilidad de las instalaciones. La nueva genera-ción de sistemas ABB de automatiza-ción de trenes de laminación incluye una serie de soluciones integradas y avanzadas que satisfacen las necesida-des de los clientes en cuanto a calidad y rendimiento de sus productos. El uso de la plataforma de automatización 800xA de ABB con el potente controlador AC 800PEC hace posible una automatiza-ción uniforme en el nivel de fábrica, inte-grando sin fisuras soluciones avanzadas en el sistema de control del proceso.
En los talleres de laminación en ca-liente y en frío 4 , la exigencia de
rentabilidad y productividad de la planta y de mejor calidad del produc-to no deja de crecer. Al mismo tiem-po, el laminador ha de ser flexible pa-ra adaptarse a la creciente variedad de productos. La calidad de la banda me-tálica y el rendimiento del laminador dependen de varios factores, como el diseño mecánico, el equipo eléctrico, las alimentaciones auxiliares y la es-trategia de control. Para conseguir la calidad de producto deseada es nece-sario controlar minuciosamente todas las variables asociadas. La Tabla 2 proporciona una relación de los datos básicos de un tren de lami-
nación en frío. Para poder controlar una instalación tan grande y compleja como ésta y satisfacer las altas exigen-cias de velocidad procesual y de cali-dad del producto hay que disponer de un potente controlador que maneje todas las funciones requeridas, desde el control binario de bajo nivel hasta las soluciones de control de avanzada tecnología. El controlador AC 800PEC es ideal para satisfacer estos requisi-tos. Además de la total integración en la plataforma de automatización 800xA con comunicación por unida-des E/S, accionamientos, diversos sis-temas de buses de campo y la interfaz hombre-sistema, sus ventajas residen en su gran capacidad de programa-ción (basada en IEC 61131-3) y en el rendimiento alcanzado por la CPU 5 .La función más exigente de un lami-nador es el control del espesor. Man-tener el grosor de la lámina con una pequeña tolerancia es uno de los re-quisitos fundamentales del laminador.
Tecnologías de sistemas integrados
Tareas (ejemplos) Tiempo de ciclo
Control del vehículo instrucciones de 50 ms por CANopen velocidad y par motorAC 800PEC, Tarea C máquina de estado, 1 msMATLAB®/ protección lenta,Simulink® controlador de flujocon Real-Time Workshop® Tarea B controladores de 250 µs corriente, detección de salto del pantógrafo Tarea A controladores muy 50 µs rápidos de corriente FPGA, VHDL moduladores, Rango de ns protección muy rápida
Tabla 1 Tareas del software y sus tiempos de ciclo
4 Laminador totalmente bajo control
Tren de laminación en el sector del metal
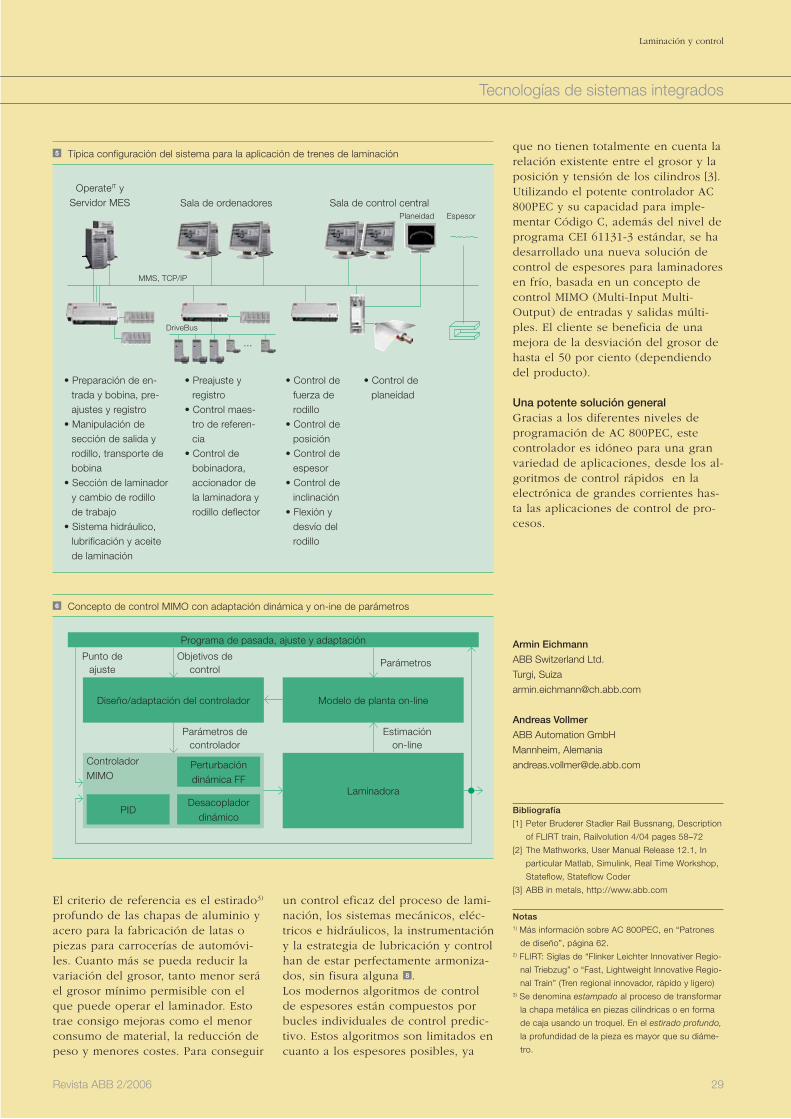
29Revista ABB 2/2006
Laminación y control
un control eficaz del proceso de lami-nación, los sistemas mecánicos, eléc-tricos e hidráulicos, la instrumentación y la estrategia de lubricación y control han de estar perfectamente armoniza-dos, sin fisura alguna 8 .Los modernos algoritmos de control de espesores están compuestos por bucles individuales de control predic-tivo. Estos algoritmos son limitados en cuanto a los espesores posibles, ya
que no tienen totalmente en cuenta la relación existente entre el grosor y la posición y tensión de los cilindros [3].Utilizando el potente controlador AC 800PEC y su capacidad para imple-mentar Código C, además del nivel de programa CEI 61131-3 estándar, se ha desarrollado una nueva solución de control de espesores para laminadores en frío, basada en un concepto de control MIMO (Multi-Input Multi-Output) de entradas y salidas múlti-ples. El cliente se beneficia de una mejora de la desviación del grosor de hasta el 50 por ciento (dependiendo del producto).
Una potente solución generalGracias a los diferentes niveles de programación de AC 800PEC, este controlador es idóneo para una gran variedad de aplicaciones, desde los al-goritmos de control rápidos en la electrónica de grandes corrientes has-ta las aplicaciones de control de pro-cesos.
Armin Eichmann
ABB Switzerland Ltd.
Turgi, Suiza
Andreas Vollmer
ABB Automation GmbH
Mannheim, Alemania
Bibliografía
[1] Peter Bruderer Stadler Rail Bussnang, Description
of FLIRT train, Railvolution 4/04 pages 58–72
[2] The Mathworks, User Manual Release 12.1, In
particular Matlab, Simulink, Real Time Workshop,
Stateflow, Stateflow Coder
[3] ABB in metals, http://www.abb.com
Notas1) Más información sobre AC 800PEC, en “Patrones
de diseño”, página 62.2) FLIRT: Siglas de “Flinker Leichter Innovativer Regio-
nal Triebzug” o “Fast, Lightweight Innovative Regio-
nal Train” (Tren regional innovador, rápido y ligero)3) Se denomina estampado al proceso de transformar
la chapa metálica en piezas cilíndricas o en forma
de caja usando un troquel. En el estirado profundo,
la profundidad de la pieza es mayor que su diáme-
tro.
6 Concepto de control MIMO con adaptación dinámica y on-ine de parámetros
Programa de pasada, ajuste y adaptación
Punto de ajuste
Objetivos de control
Diseño/adaptación del controlador Modelo de planta on-line
Parámetros de controlador
Parámetros
Estimación on-line
Controlador MIMO
Perturbación dinámica FF
PIDDesacoplador
dinámico
Laminadora
Tecnologías de sistemas integrados
El criterio de referencia es el estirado3) profundo de las chapas de aluminio y acero para la fabricación de latas o piezas para carrocerías de automóvi-les. Cuanto más se pueda reducir la variación del grosor, tanto menor será el grosor mínimo permisible con el que puede operar el laminador. Esto trae consigo mejoras como el menor consumo de material, la reducción de peso y menores costes. Para conseguir
5 Típica configuración del sistema para la aplicación de trenes de laminación
OperateIT y Servidor MES Sala de ordenadores Sala de control central
Espesor
MMS, TCP/IP
DriveBus
• Preparación de en-trada y bobina, pre-ajustes y registro
• Manipulación de sección de salida y rodillo, transporte de bobina
• Sección de laminador y cambio de rodillo de trabajo
• Sistema hidráulico, lubrificación y aceite de laminación
• Preajuste y registro
• Control maes-tro de referen-cia
• Control de bobinadora, accionador de la laminadora y rodillo deflector
• Control de fuerza de rodillo
• Control de posición
• Control de espesor
• Control de inclinación
• Flexión y desvío del rodillo
• Control de planeidad
...
Planeidad

Los usuarios esperan –y exigen– que los sistemas de automatización tengan más funciones que nunca. Los compo-nentes de sistema integrados en un sistema de control hacen posible gran parte de la funcionalidad requerida. Soluciones avanzadas de automatiza-ción, como el sistema 800xA de auto-matización ampliada de ABB, precisan de la integración de numerosas tecno-logías para ejecutar la gran cantidad de funciones de mejora de la producti-vidad que demandan los clientes de las industrias de procesos de transfor-mación. Dado que hay fábricas que pueden operar bajo control remoto y teniendo en cuenta la necesidad impe-riosa de mantener operativa la produc-ción las 24 horas del día durante va-rios años, sin interrupción alguna, los clientes de las industrias de procesos de transformación necesitan disponer de opciones que les permitan un sen-cillo mantenimiento y reconfiguración sin interrumpir la producción. Este artí-culo estudia las tecnologías de siste-mas integrados que ayudan al sistema 800xA a satisfacer estas necesidades.
30 Revista ABB 2/2006
Los sistemas integrados amplían la automatizaciónEl sistema 800xA incorpora numerosas aplicaciones integradas Kai Hansen, Tomas Lindström, Lars Mårtensson, Hans Thilderkvist
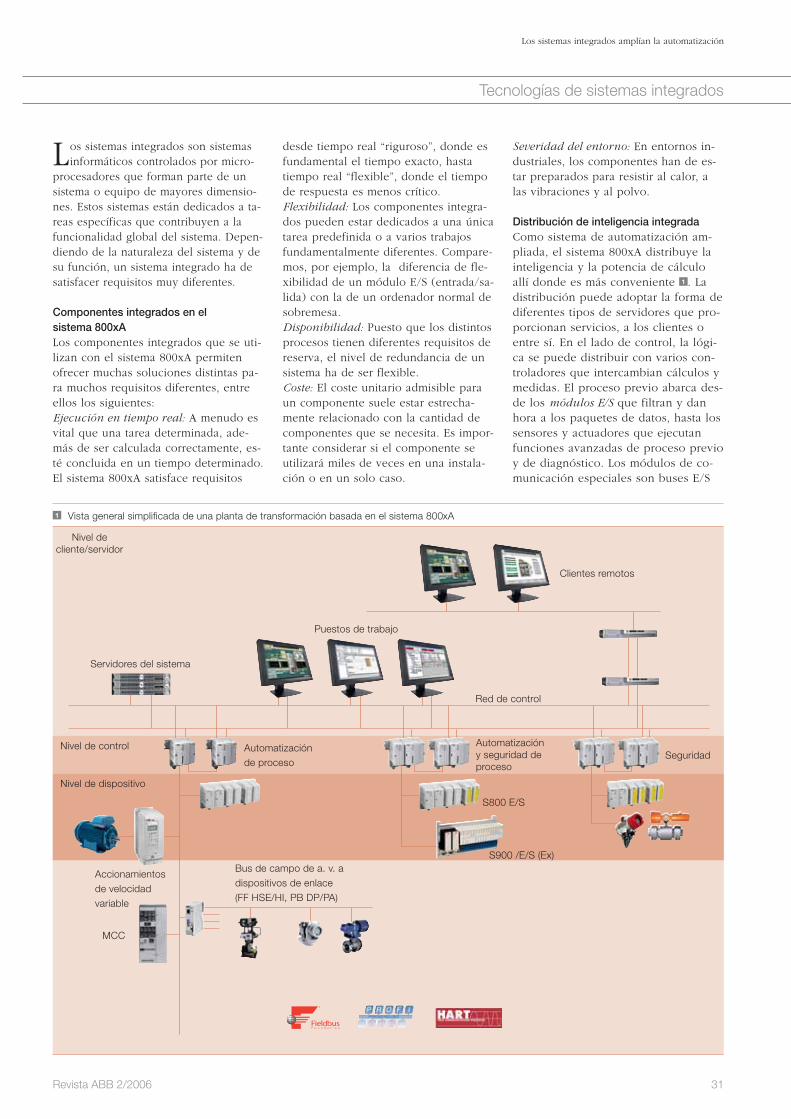
31Revista ABB 2/2006
Los sistemas integrados amplían la automatización
Los sistemas integrados son sistemas informáticos controlados por micro-
procesadores que forman parte de un sistema o equipo de mayores dimensio-nes. Estos sistemas están dedicados a ta-reas específicas que contribuyen a la funcionalidad global del sistema. Depen-diendo de la naturaleza del sistema y de su función, un sistema integrado ha de satisfacer requisitos muy diferentes.
Componentes integrados en el sistema 800xALos componentes integrados que se uti-lizan con el sistema 800xA permiten ofrecer muchas soluciones distintas pa-ra muchos requisitos diferentes, entre ellos los siguientes: Ejecución en tiempo real: A menudo es vital que una tarea determinada, ade-más de ser calculada correctamente, es-té concluida en un tiempo determinado. El sistema 800xA satisface requisitos
desde tiempo real “riguroso”, donde es fundamental el tiempo exacto, hasta tiempo real “flexible”, donde el tiempo de respuesta es menos crítico. Flexibilidad: Los componentes integra-dos pueden estar dedicados a una única tarea predefinida o a varios trabajos fundamentalmente diferentes. Compare-mos, por ejemplo, la diferencia de fle-xibilidad de un módulo E/S (entrada/sa-lida) con la de un ordenador normal de sobremesa. Disponibilidad: Puesto que los distintos procesos tienen diferentes requisitos de reserva, el nivel de redundancia de un sistema ha de ser flexible.Coste: El coste unitario admisible para un componente suele estar estrecha-mente relacionado con la cantidad de componentes que se necesita. Es impor-tante considerar si el componente se utilizará miles de veces en una instala-ción o en un solo caso.
Severidad del entorno: En entornos in-dustriales, los componentes han de es-tar preparados para resistir al calor, a las vibraciones y al polvo.
Distribución de inteligencia integradaComo sistema de automatización am-pliada, el sistema 800xA distribuye la inteligencia y la potencia de cálculo allí donde es más conveniente 1 . La distribución puede adoptar la forma de diferentes tipos de servidores que pro-porcionan servicios, a los clientes o entre sí. En el lado de control, la lógi-ca se puede distribuir con varios con-troladores que intercambian cálculos y medidas. El proceso previo abarca des-de los módulos E/S que filtran y dan hora a los paquetes de datos, hasta los sensores y actuadores que ejecutan funciones avanzadas de proceso previo y de diagnóstico. Los módulos de co-municación especiales son buses E/S
Tecnologías de sistemas integrados
1 Vista general simplificada de una planta de transformación basada en el sistema 800xA
Puestos de trabajo
Clientes remotos
S800 E/S
S900 /E/S (Ex)
Seguridad
Nivel de cliente/servidor
Nivel de control
Nivel de dispositivo
MCC
Automatización y seguridad de proceso
Red de control
Servidores del sistema
Accionamientos de velocidad variable
Automatización de proceso
Bus de campo de a. v. a dispositivos de enlace(FF HSE/HI, PB DP/PA)

32 Revista ABB 2/2006
explorados para datos de entrada y salida.En su gran mayoría, los componentes del sistema se implementan como siste-mas integrados, con un diseño optimi-zado para necesidades específicas:Los módulos E/S con proceso simple de señales se pueden implementar total-mente con componentes de hardware, siendo la lógica ejecutada en parte en una matriz de puertas programable por el usuario (FPGA). Los módulos E/S, sensores y actuadores inteligentes más complejos se basan en microcontrola-dores integrados que ofrecen más flexi-bilidad funcional. Muchos de ellos utili-zan algún tipo de sistema operativo en tiempo real. Los módulos de comunicación pueden implementar una pila de protocolos, en parte en hardware y en parte en fir-mware, que se ejecuta en la unidad central de proceso (CPU) integrada. Pa-ra dividir el trabajo es posible procesar mensajes acíclicos con la CPU y mane-jar mensajes cíclicos con una unidad de acceso directo a memoria (DMA), y en ocasiones con un circuito integrado de
aplicación específica (ASIC, Applica-tion-Specific Integrated Circuit) dedica-do a la tarea. El módulo procesador del AC 800M usa un sistema operativo comercial en tiem-po real y ejecuta una de las aplicacio-nes integradas más complejas y flexi-bles. El usuario define por completo casi todas sus funciones 2 .
Nivel de cliente/servidorEn el nivel de cliente/servidor, varios sistemas de software se combinan para incorporar la funcionalidad operacio-nal, por ejemplo presentando a los operadores valores medidos y el estado del proceso. Los sistemas también so-portan funciones de ingeniería, puesta en servicio y mantenimiento de todo el sistema. En este nivel, los servidores y los ordenadores estándar se basan en tecnología Windows en lugar de siste-mas integrados, pero incluso en este caso se dispone de soluciones especia-les, como redundancia de servidores y redes para garantizar una alta disponi-bilidad del sistema.
Nivel de controladorLos sistemas integrados más avanzados se encuentran en este nivel, en el que los componentes han de resistir condi-ciones duras de vibración y calor. Un controlador debe tener también una alta flexibilidad y soportar funciones sim-ples, que abarcan desde el control bina-rio hasta el control PID (proporcional, integral y diferencial) avanzado. ABB dispone de una serie de unidades con-troladoras, la más avanzada de las cua-les es el módulo procesador del AC 800M 3 . Para conseguir la deseada flexibilidad de opciones de comunicación, el módu-lo procesador del AC 800M dispone de varias interfaces diferentes de comuni-cación 4 : Dos puertos Ethernet permiten la comunicación con el nivel de cliente/servidor y otros controladores.
El bus ModuleBus admite módulos S800 E/S conectados directamente.
El bus de ampliación de comunica-ción (CEX, Communication EXpan-sion) permite conectar otros módulos de comunicación.
Hay dos puertos RS232 disponibles para protocolos de comunicación en serie.
También se dispone de un enlace con una unidad de control de redundan-cia (RCU, Redundancy Control Unit).
La eliminación de partes móviles, como los discos duros y ventiladores, garanti-za la fiabilidad de la unidad de control en condiciones ambientales severas. En
Los sistemas integrados amplían la automatización
4 Controlador AC 800M montado en un armario de bastidor
Tecnologías de sistemas integrados
2 Puesto de trabajo ampliado 800xA
3 Módulo procesador de AC 800M, la unidad central del controlador
Redundancy Control Unit (RCU) Link Connector
Plug-in CPU unit
DIN-rail Back-plane unit
Power supply card
CPU card
Serial RS232 ports
Ethernet
Communication Expansion (CEX) bus

33Revista ABB 2/2006
Los sistemas integrados amplían la automatización
el módulo procesador del AC 800M, el programa y los datos se almacenan en memoria Flash PROM (memoria progra-mable sólo de lectura) y RAM (memoria de acceso aleatorio) y, gracias a la efi-ciencia energética de la CPU, la unidad se refrigera únicamente mediante circu-lación natural de aire. Los problemas de mantenimiento prohíben el uso de ven-tiladores mecánicos.Si el módulo procesador de un sistema de control se basa en un microcontrola-dor integrado, se reduce el número de componentes necesarios, así como los costes y el consumo de energía. Para la mayor parte de la lógica interna adicio-nal necesaria se utiliza una matriz de puertas FPGA. Los puertos Ethernet y los puertos serie se implementan en el microcontrolador. Además, varias fun-ciones especiales que podrían haberse implementado en unidades discretas de hardware, por ejemplo la interfaz ModuleBus, el bus CEX y la unidad de control de redundancia, se implementan como módulos o bloques funcionales en la matriz de puertas FPGA. Las capa-cidades combinadas del procesador y del sistema operativo en tiempo real permiten al software ejecutar diversas tareas para la respuesta en tiempo real de los bucles de control y la comunica-ción oportuna con el operador de la planta. La tarea principal del módulo procesa-dor, y por tanto una tarea prioritaria, es la ejecución de la lógica de control del proceso, consistente en un conjunto de cálculos que definen en qué momento se han de abrir y cerrar válvulas, arran-car motores, la velocidad de éstos, etc., además de las demás acciones que con-
trolan directamente el proceso. Puesto que el cálculo se basa en datos de en-trada y salida, la lógica del proceso de control depende totalmente de la preci-sión con que se lean estos datos. El software del sistema integrado ha de manejar la lógica de control del proceso y la lectura E/S de una forma suficiente-mente flexible, que permita efectuar cambios lógicos sin perder el control del proceso de producción en curso.La alta disponibilidad del AC 800M se garantiza por medio de unidades redun-dantes de CPU del controlador. La in-corporación de redundancia en sistemas integrados es una empresa complicada, ya que requiere un detallado conoci-miento de todos los fallos posibles de un sistema y de las soluciones de re-dundancia apropiadas para gestionar cada tipo de fallo. Algunos procesos son más importantes que otros y por tanto surgen complicaciones adiciona-les, pero el AC 800M permite detectar los fallos críticos e implementar una CPU completa de reserva en menos de 10 ms.
ComunicaciónEl sistema 800xA incluye muchas unida-des diferentes que se comunican a tra-vés de un bus o una red 5 . El sector de automatización de procesos utiliza varios estándares para la comuni-cación entre controladores de procesos y unidades periféricas, como sistemas E/S, sensores y actuadores inteligentes y otros dispositivos de campo. El con-trolador AC 800M soporta una amplia gama de estos protocolos, entre ellos buses normalizados internacionalmente como PROFIBUS, Foundation Fieldbus
y HART, que facilitan la comunicación con diversos componentes del sistema, como son los sistemas E/S y los senso-res y actuadores inteligentes.Los protocolos de comunicación en se-rie, como Modbus y otros, que pueden ser implementados por el usuario en la lógica de control, constituyen otro gru-po de protocolos de comunicaciones soportados por el AC 800M.Un tercer grupo de protocolos de co-municaciones soportados por el AC 800M proporciona conectividad para otros productos específicos, como el sistema INSUM de control de motores de ABB, los sistemas avanzados de ac-cionamiento de ABB y los distintos sis-temas E/S que usan protocolos de co-municación dedicados.La mayoría de estas opciones se imple-mentan como módulos dedicados de comunicación que se conectan al mó-dulo procesador con el bus CEX. Los módulos de comunicación implementan los protocolos y el intercambio de los datos y del estado del proceso, con el módulo procesador a través de una in-terfaz de software estandarizada. Los datos se intercambian por medio de memoria de doble acceso (Dual Port) en el módulo de comunicación, al que accede el módulo procesador a través del bus CEX. Los requisitos de ejecución en tiempo real en un módulo de comunicación pueden ser muy complejos, en parte por la gran cantidad de datos que se han de procesar y en parte porque las limitaciones de temporización del pro-tocolo pueden ser muy estrictas. Estos dos problemas justifican el uso de un módulo dedicado de comunicación con una CPU local integrada, en lugar de, simplemente, añadir más componentes de hardware en el módulo procesador.En lugar de utilizar un módulo dedicado adicional en el bus CEX se implementan algunas opciones de comunicación que utilizan el bus ModuleBus. Ciertos ac-cionamientos por motor se pueden co-nectar directamente con este bus, ya que utilizan el mismo protocolo que el módulo S800 I/O de entrada/salida. La comunicación HART para sensores y actuadores inteligentes se implementa mediante módulos E/S especiales que, además de manejar señales normales de proceso, manejan la señal FSK (modu-lación por desplazamiento de frecuen-cia) digital que se superpone a la señal del proceso.
Tecnologías de sistemas integrados
5 Interfaces de comunicación utilizadas con AC 800M
CI8
60
CI8
58
CI8
57
CI8
56
CI8
55
CI8
54
CI8
51
CI8
53
SM
810
PM
865
FF H
SE
Driv
eBus
INS
UM
S10
0 I/O
MB
300
PR
OFI
BU
S D
P
PR
OFI
BU
S D
P
RS
232
Con
trol
N
etw
ork
RS
232

34 Revista ABB 2/2006
Los sistemas integrados amplían la automatización
Sustitución en directoPara conseguir una alta dis-ponibilidad, los módulos de comunicación se pueden intercambiar estando en fun-cionamiento el controlador. De este modo, en caso de avería de un módulo de co-municación es posible susti-tuirlo por otro de reserva sin necesidad de reiniciar el con-trolador ni, por tanto, de inte-rrumpir el proceso de pro-ducción. Esta estrategia también facilita reconfigurar el controlador y, por tanto, modificar las opciones de comunicación sin detener el controlador. La lógica de control y los enlaces de comunicación no modificados siguen funcionando du-rante la reconfiguración. La única parte de la aplicación de control afectada es la que utiliza datos del módulo de co-municación modificado.Para apoyar esta función, el software del sistema integrado que accede a los módulos de comunicación está capaci-tado para manejar unidades que sufren fallos repentinos y responder configu-rando y reiniciando un módulo en buen estado.
Comunicación redundanteAlgunos módulos de comunicación so-portan redundancia. La comunicación con unidades por medio de PROFIBUS y Foundation Fieldbus HSE (High Speed Ethernet), por ejemplo, emplea módu-los duales de comunicación para elimi-nar puntos de fallos individuales entre el controlador y la unidad externa.
Dispositivos de E/S e instrumentosEl nivel de dispositivos, que incluye las unidades de E/S e instrumentación, se encuentra un escalón más abajo, hacia el proceso. El número de unidades E/S (por ejemplo, unidades de entrada digi-tal) en una planta es mucho mayor que el número de controladores. Por consi-guiente, el coste de los componentes es un factor a considerar, además de la ra-zón por la cual en este caso se utilizan procesadores integrados poco avanza-dos con más frecuencia que en los con-troladores. También podría ser preferi-ble una simple planificación de tareas, en lugar de un sistema operativo com-pleto en tiempo real. Sin embargo, la respuesta en tiempo real es tan impor-tante en este nivel como en el nivel del controlador.
Es posible que algunas partes del siste-ma E/S tengan que ser ‘intrínsecamente seguras’, es decir, adecuadas para en-tornos peligrosos. Esto se puede conse-guir encerrando el equipo en un aloja-miento de alto precio o, preferiblemen-te, utilizando unidades E/S con muy bajo consumo de energía, de modo que no se generen chispas eléctricas poten-cialmente peligrosas. ABB proporciona una amplia gama de unidades E/S para diferentes necesidades, entre ellas el sistema S800 I/O 6 . El sistema S800 I/O consta de un gran número de módulos distintos de solu-ciones de hardware y software con características específicas propias. Por ejemplo, el hardware de la entrada/sali-da de seguridad del S880 se basa en un microcontrolador integrado y en un mó-dulo FPGA. Como módulo E/S de segu-ridad emplea una solución dual, en la que el microcontrolador y la matriz de puertas FPGA ejecutan un protocolo esclavo ModuleBus y la lógica para la entrada y salida de datos y diagnósticos. Los requisitos de tiempo real en esta unidad son muy estrictos. Cuando se re-cibe un mensaje desde el controlador, la respuesta ha de darse en un plazo de 330 ms. El incumplimiento de este ‘pla-zo límite’ lleva al controlador a suponer que la unidad E/S no está funcionando y a pasar a la siguiente unidad. El mó-dulo de E/S también tiene que gestionar los datos de configuración y todos los posibles estados de error.
Fuente de alimentaciónOtro importante aspecto de todos los dispositivos integrados en un sistema de alta disponibilidad es la fuente de alimentación. Las unidades han de dis-poner de detección de sobretensiones y subtensiones. Las fuentes de alimenta-ción redundantes se han de diseñar cui-dadosamente para que no constituyan un punto de fallo individual.
Los módulos de sistema integra-dos ofrecen gran flexibilidadLa gran cantidad de sistemas integrados que se encuentran en una planta típica de proce-sos de transformación ofrece numerosas soluciones de hard-ware y software. Organizar es-tos componentes en un único sistema unificado es todo un reto, pero los resultados bien merecen el esfuerzo. Como muestra este análisis, muy sim-
plificado, las diferentes exigencias que han de satisfacer las distintas partes de un sistema crean elementos heterogé-neos dentro de un sistema unificado. Con el sistema 800xA, ABB ha reunido componentes óptimos integrados de hardware y software y los ha combina-do para proporcionar un sistema fiable con todas las funciones avanzadas que hoy en día necesitan las industrias de procesos de transformación.Los mejores equipos y sistemas de la gama, diseñados conjuntamente con los usuarios finales, continuarán mejorando la automatización de la producción y aumentando la eficiencia. ABB es una de las compañías líderes mundiales en la automatización de procesos y por tanto una buena elección para conse-guir dos factores fundamentales para cualquier sector industrial que quiera prosperar: la capacidad y la productivi-dad.
Tomas Lindström
ABB Automation Technologies AB
Västerås, Suecia
Lars Mårtensson
Hans Thilderkvist
ABB Automation Technologies AB,
Malmö, Suecia
lars.må[email protected]
Kai Hansen
ABB Corporate Research, ABB AS
Billingstad, Noruega
6 S800 E/S
Tecnologías de sistemas integrados

Control de accionamientosInteligencia integrada en productos, para mejorar la gestión y el rendimiento de sistemas de accionamiento durante toda la vida útilMaciej Wnek, Michal Orkisz, Jaroslaw Nowak, Stefano Legnani
Los buenos productos son mejores cuando están combinados con amplios programas de soporte y mantenimiento. Por medio de un contrato de mantenimiento puede conseguirse un funcionamiento óptimo con costes mínimos durante la vida útil del producto, pero ges-tionar eficazmente la vida útil exige un seguimiento permanente del historial de los activos, es decir, del funcionamiento, del desgaste, de los posibles daños y del mantenimiento. Una atenta supervisión del estado y rendimiento de los activos permite implementar pro-gramas de mantenimiento predictivo que reducen notablemente los costes de manteni-miento y el riesgo de que se produzcan fallos. Sin esta información, el funcionamiento se degrada y los costes de mantenimiento aumentan.
ABB Medium Voltage (MV) Drives ha desarrollado con ABB Corporate Research un nuevo sis-tema de ayuda para el cliente –Drive Asset Monitor (Drive AM)–, un paquete de software que permite a un operador supervisar el rendimiento de un sistema de accionamiento de media tensión, recopilar datos y guardar el historial del accionamiento, todo ello desde un ordena-dor remoto. El sistema está pasando sus pruebas en las obras del Túnel base del Gotardo, en Suiza, y ofrece una importante mejora de las herramientas de gestión de la vida útil.
35Revista ABB 2/2006

36 Revista ABB 2/2006
Control de accionamientos
a considerar es la amplitud del siste-ma, es decir, si se trata de un activo concreto (por ejemplo, un acciona-miento), o de una línea completa de producción con gran variedad de acti-vos. El segundo aspecto es la disponi-bilidad de los datos, desde los dispo-nibles directamente hasta los obteni-dos con sistemas específicos de medi-ción que detectan vibraciones, co-rrientes, corrosión etc. El tercer as-pecto es el nivel creciente de conoci-miento y funciones de diagnóstico: en un extremo está un umbral límite sim-ple, en el otro los algoritmos avanza-dos de predicción del tiempo de vida.
Para mantener bajos los costes de las herramientas, los sistemas de manteni-miento deben ser flexibles y adapta-bles a muchos tipos de activos. Acti-vos del mismo tipo han de ser trata-dos análogamente, aunque hay que prestarles atención especial depen-diendo de su contexto en el sistema. Por ejemplo, dos motores eléctricos podrían ser idénticos, pero si uno mueve un ventilador secundario mien-tras que el otro impulsa un ventilador vital para la extracción de humos, sus programas de mantenimiento serían similares, pero el nivel de inversión tendría que ser adecuado a la impor-tancia de cada uno.
Un sistema escalable no equivale a una combinación de métodos que abordan
diferentes aspectos de la gestión de la vida útil. Para ser eficiente, una herra-mienta ha de garantizar una interope-rabilidad completa de datos, puntos in-dividuales de entrada de datos y un sistema unificado de interconexión, uso y presentación de informes. Se pueden combinar varios sistemas en un proyecto de integración de tecnolo-gías de información (TI), pero sólo una herramienta escalable puede optimizar auténticamente el mantenimiento.
En resumen, es preciso evaluar cada activo para determinar el nivel de inversión adecuado en razón de las funciones concretas de dicho activo. Un buen sistema de evaluación del estado del activo ha de tener las características siguientes: ampliable, para adaptarse a objetos de activos individuales o múltiples
capaz de aplicar reglas de diversa complejidad a los activos, basadas en vibraciones, temperaturas, prue-bas eléctricas, datos de operación, estadística e historiales, etc.
capaz de adquirir datos de diversas fuentes, por ejemplo, de sistemas de accionamiento y de control, herramientas de medición de vibraciones, entradas manuales y el activo mismo
ABB aplicó este método en el desarro-llo de sus conceptos de optimización de activos (Asset Optimization) y mo-
1 Accionamiento de media tensión, un activo con gran despliegue tecnológico y una rica fuente de información
Java/.Net
Si Cu
Assembler
2 Los principios de diseño de Drive AM
Drive Asset Monitor Unit
Industrial PC
VPN
Router Firewall
Ethernet TCP/IP
Optical Fibers
ACS drivers1 ........... 5
NDBU 95
3 Drive AM analizando el pulso del sistema
Los sistemas reales de fabricación constan de una gran variedad de
activos. Algunos son sencillos, incluso muy simples, mientras que otros son ‘inteligentes’ y tienen capacidad de autodiagnóstico e incluso de autocorrec-ción. Los activos vitales de gran tamaño suelen tener sus propios sistemas de control supervisor, pero todos los activos que intervienen en una cadena de proceso son proveedores de informa-ción, ya sea directamente, por medio de sensores internos, o indirectamente, informando sobre los demás activos de la cadena. Es necesario supervisar cuidadosamente todos estos activos.
Recopilación y procesamiento rentable de datosUn sistema eficiente de gestión de la vida útil requiere herramientas escala-bles que puedan adaptarse a la natu-raleza de un activo, a su valor y a su estado, así como a la política general de mantenimiento. El primer aspecto
Tecnologías de sistemas integrados
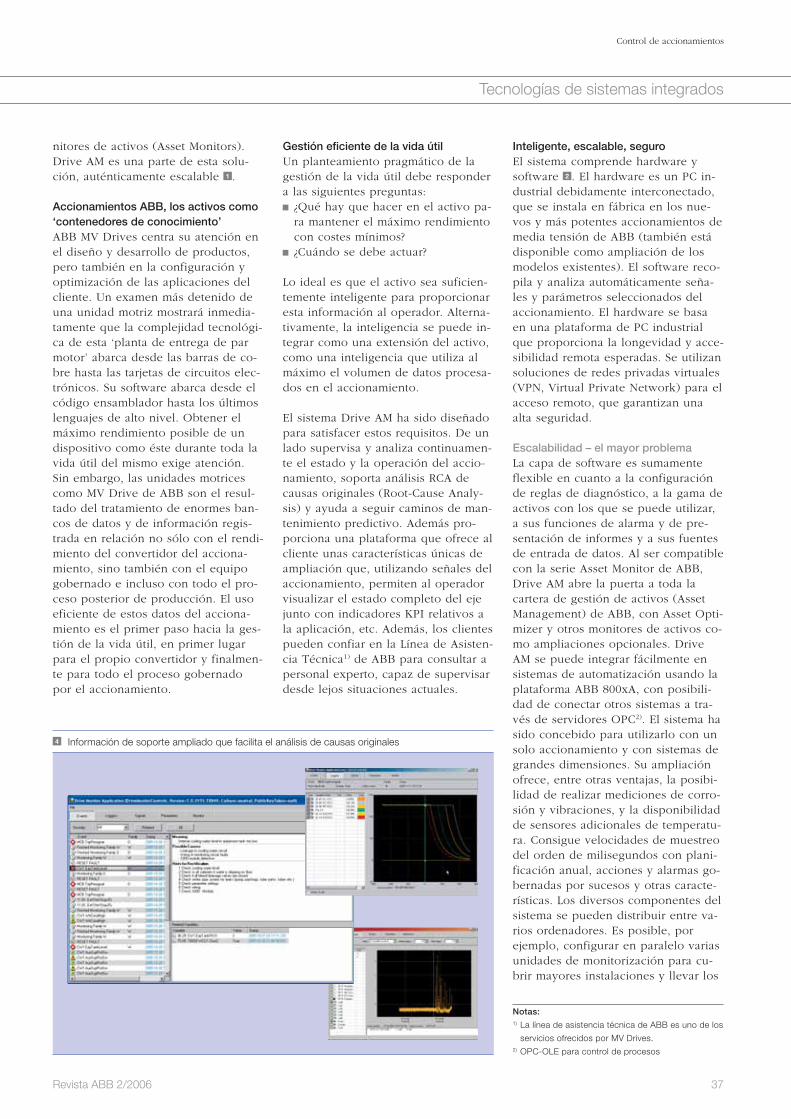
37Revista ABB 2/2006
Control de accionamientos
nitores de activos (Asset Monitors). Drive AM es una parte de esta solu-ción, auténticamente escalable 1 .
Accionamientos ABB, los activos como ‘contenedores de conocimiento’ABB MV Drives centra su atención en el diseño y desarrollo de productos, pero también en la configuración y optimización de las aplicaciones del cliente. Un examen más detenido de una unidad motriz mostrará inmedia-tamente que la complejidad tecnológi-ca de esta ‘planta de entrega de par motor’ abarca desde las barras de co-bre hasta las tarjetas de circuitos elec-trónicos. Su software abarca desde el código ensamblador hasta los últimos lenguajes de alto nivel. Obtener el máximo rendimiento posible de un dispositivo como éste durante toda la vida útil del mismo exige atención. Sin embargo, las unidades motrices como MV Drive de ABB son el resul-tado del tratamiento de enormes ban-cos de datos y de información regis-trada en relación no sólo con el rendi-miento del convertidor del acciona-miento, sino también con el equipo gobernado e incluso con todo el pro-ceso posterior de producción. El uso eficiente de estos datos del acciona-miento es el primer paso hacia la ges-tión de la vida útil, en primer lugar para el propio convertidor y finalmen-te para todo el proceso gobernado por el accionamiento.
Gestión eficiente de la vida útilUn planteamiento pragmático de la gestión de la vida útil debe responder a las siguientes preguntas: ¿Qué hay que hacer en el activo pa-ra mantener el máximo rendimiento con costes mínimos?
¿Cuándo se debe actuar? Lo ideal es que el activo sea suficien-temente inteligente para proporcionar esta información al operador. Alterna-tivamente, la inteligencia se puede in-tegrar como una extensión del activo, como una inteligencia que utiliza al máximo el volumen de datos procesa-dos en el accionamiento.
El sistema Drive AM ha sido diseñado para satisfacer estos requisitos. De un lado supervisa y analiza continuamen-te el estado y la operación del accio-namiento, soporta análisis RCA de causas originales (Root-Cause Analy-sis) y ayuda a seguir caminos de man-tenimiento predictivo. Además pro-porciona una plataforma que ofrece al cliente unas características únicas de ampliación que, utilizando señales del accionamiento, permiten al operador visualizar el estado completo del eje junto con indicadores KPI relativos a la aplicación, etc. Además, los clientes pueden confiar en la Línea de Asisten-cia Técnica1) de ABB para consultar a personal experto, capaz de supervisar desde lejos situaciones actuales.
Inteligente, escalable, seguroEl sistema comprende hardware y software 2 . El hardware es un PC in-dustrial debidamente interconectado, que se instala en fábrica en los nue-vos y más potentes accionamientos de media tensión de ABB (también está disponible como ampliación de los modelos existentes). El software reco-pila y analiza automáticamente seña-les y parámetros seleccionados del accionamiento. El hardware se basa en una plataforma de PC industrial que proporciona la longevidad y acce-sibilidad remota esperadas. Se utilizan soluciones de redes privadas virtuales (VPN, Virtual Private Network) para el acceso remoto, que garantizan una alta seguridad.
Escalabilidad – el mayor problemaLa capa de software es sumamente flexible en cuanto a la configuración de reglas de diagnóstico, a la gama de activos con los que se puede utilizar, a sus funciones de alarma y de pre-sentación de informes y a sus fuentes de entrada de datos. Al ser compatible con la serie Asset Monitor de ABB, Drive AM abre la puerta a toda la cartera de gestión de activos (Asset Management) de ABB, con Asset Opti-mizer y otros monitores de activos co-mo ampliaciones opcionales. Drive AM se puede integrar fácilmente en sistemas de automatización usando la plataforma ABB 800xA, con posibili-dad de conectar otros sistemas a tra-vés de servidores OPC2). El sistema ha sido concebido para utilizarlo con un solo accionamiento y con sistemas de grandes dimensiones. Su ampliación ofrece, entre otras ventajas, la posibi-lidad de realizar mediciones de corro-sión y vibraciones, y la disponibilidad de sensores adicionales de temperatu-ra. Consigue velocidades de muestreo del orden de milisegundos con plani-ficación anual, acciones y alarmas go-bernadas por sucesos y otras caracte-rísticas. Los diversos componentes del sistema se pueden distribuir entre va-rios ordenadores. Es posible, por ejemplo, configurar en paralelo varias unidades de monitorización para cu-brir mayores instalaciones y llevar los
4 Información de soporte ampliado que facilita el análisis de causas originales
Tecnologías de sistemas integrados
Notas:1) La línea de asistencia técnica de ABB es uno de los
servicios ofrecidos por MV Drives.2) OPC-OLE para control de procesos

38 Revista ABB 2/2006
Control de accionamientos
resultados a un PC situado en una sala de control central para mayor comodidad del operador.
Escalabilidad, dimensión del hardwareLa configuración del accionamiento de media tensión puede abarcar una am-plia variedad de productos. Dependien-do de la aplicación, la configuración puede incluir varias unidades rectifica-doras e inversoras, todas ellas apropia-das para las funciones supervisoras. Para adquirir datos de forma rápida y fiable se pueden configurar varias uni-dades de monitorización en torno a una unidad individual que actúa como pun-to de acceso para la adquisición de datos. El ordenador central, también en este caso, puede situarse en una sala de control. Es posible configurar solucio-nes de sistemas similares para unidades de múltiples accionamientos.
Área de aplicaciónLa función básica del sistema Drive AM es ‘vigilar’ la parte del convertidor del sistema de un eje motor 3 . Drive AM supervisa continuamente el estado del accionamiento y responde cuando cambia ese estado. Los cambios en el estado del accionamiento se pueden deber a averías (paradas imprevistas del accionamiento), alarmas (señales que rebasan valores umbrales), varia-ciones de parámetros definidos por el usuario y alarmas específicas de la aplicación, generadas por Drive AM,
de nivel superior. En este modo bási-co, cuando se produce un suceso, el software guarda el estado actual e ini-cia la supervisión a fondo de los sub-sistemas relevantes del accionamiento 4 . Estos datos son vitales para deter-minar la causa original de un suceso. Sin una herramienta como ésta se per-dería la información antes de que un técnico de servicio llegara al lugar, y algunos sucesos reveladores (por ejemplo las alarmas de valores umbra-les) serían ignorados si no han provo-cado directamente una avería. La in-formación de conjunto obtenida con los datos del monitor permitirá elimi-nar averías e identificar más rápida-mente componentes defectuosos, lo que supone para el cliente más tiem-po útil de buen funcionamiento.Con paquetes adicionales de diagnósti-co, Drive AM puede controlar otros componentes del tren axial como el interruptor principal, el transformador y la máquina gobernada. En el máximo nivel se pueden integrar en el sistema paquetes especializados, directamente relacionados con áreas de aplicaciones específicas (por ejemplo, trenes de la-minación, bombas de agua y compre-sores). Este tipo de ampliación se pue-de realizar en cualquier momento, de-pendiendo de las necesidades del cliente. También es posible incorporar mediciones adicionales más allá de las señales del accionamiento. En tales casos, el sistema Drive AM, que puede
ya incorporar datos de diversas fuen-tes, puede alojar varias soluciones dis-ponibles inmediatamente. Las rutinas de diagnóstico basadas en Drive AM son valiosas ampliaciones para cual-quier programa de gestión de activos (Asset Management) a nivel de planta, como solución ABB para la optimiza-ción de activos (Asset Optimization).
Integrado en un marco más amplioLa organización Product Support de ABB garantiza un despliegue eficiente de las políticas de gestión de la vida útil para productos y sistemas de accio-namiento. Las herramientas como Drive AM desempeñan un papel central en el sistema de soporte, pero son parte de un método integrado de atención al cliente que realiza funciones básicas de mantenimiento y de resolución de pro-blemas, de entrega de repuestos y de optimización del rendimiento.
ConclusionesDebido a su compleja función en proce-sos industriales, los accionamientos ge-neran y acceden a grandes cantidades de datos, los cuales soportan el control del accionamiento y sirven, además, pa-ra el diagnóstico. Si se dispone de datos no harán falta mediciones adicionales. La supervisión de accionamientos de ABB aprovecha esta posibilidad en be-neficio de sus clientes. El sistema fun-ciona en versión piloto en varias instala-ciones industriales y en las obras del Túnel del Gotardo 5 , donde se ha insta-lado un montacargas con un acciona-miento ACS6000. El montacargas es fun-damental para el progreso del túnel, ya que eleva el material rocoso desde el nivel del túnel hasta la superficie por un pozo de 800 m. Drive AM contribuye a optimizar el funcionamiento de la má-quina y el proceso de mantenimiento.
Maciej Wnek
Michal Orkisz
Jaroslaw Nowak
ABB Corporate Research
Cracovia, Polonia
Stefano Legnani
ABB MV Drives
Turgi, Suiza
5 El sistema Drive AM conecta al personal experto con lugares muy lejanos, en este caso, las obras del Túnel del Gotardo en Suiza.
Tecnologías de sistemas integrados

La visión de sistemas informáticos, presentes en todas partes, exige un cambio de modelo para integrar en nuestro entorno la potencia de cálcu-lo, en lugar de tenerla concentrada en ordenadores de sobremesa o portáti-les. Esta amplia visión del futuro ha impulsado varios campos de investi-gación poco definidos, entre ellos las redes de sensores inalámbricos.
Un sistema WSN (Wireless Sensor Network) de sensores inalámbricos
es una red con numerosos dispositivos distribuidos espacialmente, que utilizan sensores para controlar diversas condi-ciones en distintos puntos, entre ellas la temperatura, el sonido, la vibración, la presión y movimiento o los contami-nantes. Los dispositivos son unidades autónomas que constan de un micro-controlador, una fuente de energía (casi siempre una batería), un radiotranscep-tor y un elemento sensor 1 .
Debido a las limitaciones de la vida de la batería, los nodos se construyen teniendo presente la conservación de la energía, y generalmente pasan mucho tiempo en modo ‘durmiente’ (sleep) de bajo consumo de potencia. Los nodos autoorganizan sus redes en una forma ad hoc, en lugar de tener una topología de red previamente programada. Además, WSN tiene ca-pacidad de autorrestauración, es decir,
si se avería un nodo, la red encontrará nuevas vías para encaminar los pa-quetes de datos. De esta forma, la red sobrevivirá en su conjunto, aunque haya nodos individuales que pierdan potencia o se destruyan.
Aunque es un tema de investigación controvertido, este punto de vista, más bien clásico, de WSN tiene pocas aplicaciones interesantes. Por ejemplo, algunos autores especializados en este campo señalan la detección de incen-dios forestales como una de las apli-caciones de WSN. Para que la defini-ción de WSN tenga más aplicaciones en la industria ha de ser más amplia y menos estricta.
WSN en el mundo de la automatización industrialLas aplicaciones industriales divergen de la definición anterior en varios as-pectos. En primer lugar, y esto quizás sea lo más importante, todos los sen-
sores son vitales para la operación de la planta. Esto significa que no se puede admitir la pérdida de un nodo aunque la red global siga siendo ope-rativa. Un nodo averiado tendrá que ser sustituido.En segundo lugar, el tiempo es esen-cial. Mientras que un paquete de da-tos en una WSN estándar puede em-plear un tiempo indeterminado desde su origen hasta su destino, una aplica-ción industrial requerirá frecuente-mente límites rigurosos de la máxima demora permitida.
39Revista ABB 2/2006
Redes de sensores inalámbricos Nuevas soluciones de interconexión para la automatización industrialNiels Aakvaag, Jan-Erik Frey
1 Dispositivo autónomo de una red de sensores inalámbricos
SensorTransmisor/
receptor de radio Fuente de
energíaCPU/Memoria
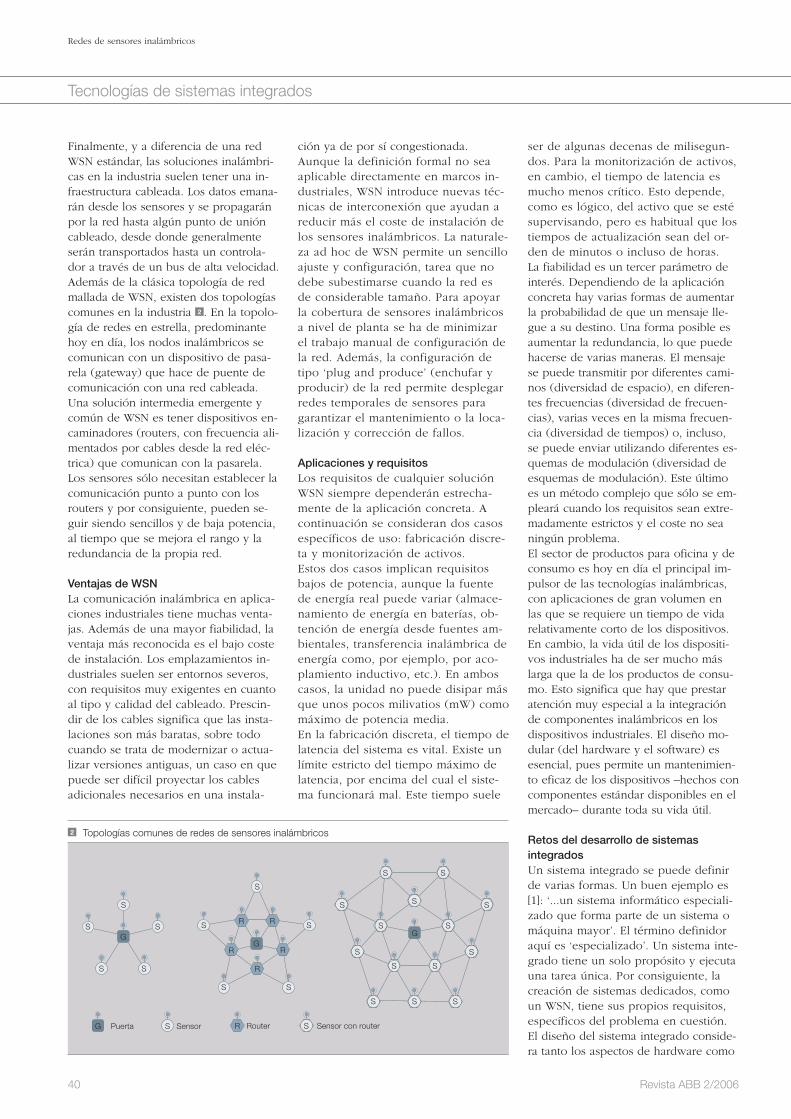
40 Revista ABB 2/2006
Redes de sensores inalámbricos
ción ya de por sí congestionada. Aunque la definición formal no sea aplicable directamente en marcos in-dustriales, WSN introduce nuevas téc-nicas de interconexión que ayudan a reducir más el coste de instalación de los sensores inalámbricos. La naturale-za ad hoc de WSN permite un sencillo ajuste y configuración, tarea que no debe subestimarse cuando la red es de considerable tamaño. Para apoyar la cobertura de sensores inalámbricos a nivel de planta se ha de minimizar el trabajo manual de configuración de la red. Además, la configuración de tipo ‘plug and produce’ (enchufar y producir) de la red permite desplegar redes temporales de sensores para garantizar el mantenimiento o la loca-lización y corrección de fallos.
Aplicaciones y requisitosLos requisitos de cualquier solución WSN siempre dependerán estrecha-mente de la aplicación concreta. A continuación se consideran dos casos específicos de uso: fabricación discre-ta y monitorización de activos.Estos dos casos implican requisitos bajos de potencia, aunque la fuente de energía real puede variar (almace-namiento de energía en baterías, ob-tención de energía desde fuentes am-bientales, transferencia inalámbrica de energía como, por ejemplo, por aco-plamiento inductivo, etc.). En ambos casos, la unidad no puede disipar más que unos pocos milivatios (mW) como máximo de potencia media.En la fabricación discreta, el tiempo de latencia del sistema es vital. Existe un límite estricto del tiempo máximo de latencia, por encima del cual el siste-ma funcionará mal. Este tiempo suele
ser de algunas decenas de milisegun-dos. Para la monitorización de activos, en cambio, el tiempo de latencia es mucho menos crítico. Esto depende, como es lógico, del activo que se esté supervisando, pero es habitual que los tiempos de actualización sean del or-den de minutos o incluso de horas.La fiabilidad es un tercer parámetro de interés. Dependiendo de la aplicación concreta hay varias formas de aumentar la probabilidad de que un mensaje lle-gue a su destino. Una forma posible es aumentar la redundancia, lo que puede hacerse de varias maneras. El mensaje se puede transmitir por diferentes cami-nos (diversidad de espacio), en diferen-tes frecuencias (diversidad de frecuen-cias), varias veces en la misma frecuen-cia (diversidad de tiempos) o, incluso, se puede enviar utilizando diferentes es-quemas de modulación (diversidad de esquemas de modulación). Este último es un método complejo que sólo se em-pleará cuando los requisitos sean extre-madamente estrictos y el coste no sea ningún problema.El sector de productos para oficina y de consumo es hoy en día el principal im-pulsor de las tecnologías inalámbricas, con aplicaciones de gran volumen en las que se requiere un tiempo de vida relativamente corto de los dispositivos. En cambio, la vida útil de los dispositi-vos industriales ha de ser mucho más larga que la de los productos de consu-mo. Esto significa que hay que prestar atención muy especial a la integración de componentes inalámbricos en los dispositivos industriales. El diseño mo-dular (del hardware y el software) es esencial, pues permite un mantenimien-to eficaz de los dispositivos –hechos con componentes estándar disponibles en el mercado– durante toda su vida útil.
Retos del desarrollo de sistemas integradosUn sistema integrado se puede definir de varias formas. Un buen ejemplo es [1]: ‘...un sistema informático especiali-zado que forma parte de un sistema o máquina mayor’. El término definidor aquí es ‘especializado’. Un sistema inte-grado tiene un solo propósito y ejecuta una tarea única. Por consiguiente, la creación de sistemas dedicados, como un WSN, tiene sus propios requisitos, específicos del problema en cuestión.El diseño del sistema integrado conside-ra tanto los aspectos de hardware como
Finalmente, y a diferencia de una red WSN estándar, las soluciones inalámbri-cas en la industria suelen tener una in-fraestructura cableada. Los datos emana-rán desde los sensores y se propagarán por la red hasta algún punto de unión cableado, desde donde generalmente serán transportados hasta un controla-dor a través de un bus de alta velocidad. Además de la clásica topología de red mallada de WSN, existen dos topologías comunes en la industria 2 . En la topolo-gía de redes en estrella, predominante hoy en día, los nodos inalámbricos se comunican con un dispositivo de pasa-rela (gateway) que hace de puente de comunicación con una red cableada. Una solución intermedia emergente y común de WSN es tener dispositivos en-caminadores (routers, con frecuencia ali-mentados por cables desde la red eléc-trica) que comunican con la pasarela. Los sensores sólo necesitan establecer la comunicación punto a punto con los routers y por consiguiente, pueden se-guir siendo sencillos y de baja potencia, al tiempo que se mejora el rango y la redundancia de la propia red.
Ventajas de WSN La comunicación inalámbrica en aplica-ciones industriales tiene muchas venta-jas. Además de una mayor fiabilidad, la ventaja más reconocida es el bajo coste de instalación. Los emplazamientos in-dustriales suelen ser entornos severos, con requisitos muy exigentes en cuanto al tipo y calidad del cableado. Prescin-dir de los cables significa que las insta-laciones son más baratas, sobre todo cuando se trata de modernizar o actua-lizar versiones antiguas, un caso en que puede ser difícil proyectar los cables adicionales necesarios en una instala-
Tecnologías de sistemas integrados
2 Topologías comunes de redes de sensores inalámbricos
G
S
RG
GSS
S S
R R
R
S S
S
S S
R
S S
S S
S
S S
S
SS
S
S S S
R SG Puerta S Sensor Router Sensor con router

41Revista ABB 2/2006
Redes de sensores inalámbricos
de software. Los dos sistemas están entrelazados y la solu-ción óptima, si realmente se puede hallar una, implica la interacción entre ellos.
Elección de los bloques funcionalesUna importante característica de WSN es reducir al mínimo el consumo de energía de los nodos, proporcionando al mismo tiempo el mayor rendi-miento posible a los usuarios del sistema. Diseñar los nodos para un bajo consumo supone elegir componentes de baja potencia, algo que a primera vista puede parecer tri-vial, pero que suele ser más complejo de lo que parece. El primer parámetro a considerar es el consumo de energía de la CPU, el sensor, el radiotranscep-tor y, posiblemente, de otros elemen-tos, como la memoria externa y los periféricos durante el modo normal de operación. La elección de elementos de baja potencia implica normalmente aceptar compromisos sobre el rendi-miento medio. Por regla general, una CPU de baja potencia opera en un ci-clo reducido de reloj, con menos ca-racterísticas en el chip que otras uni-dades homólogas que consumen más energía. La solución está en elegir ele-mentos con el rendimiento justo para poder hacer el trabajo.Es importante que el consumo de energía en modo durmiente sea bajo. A menudo se puede incluso desconec-tar por completo la alimentación del sensor y del transceptor. Sin embargo, la CPU necesitará alguna alimentación en modo durmiente para poder reacti-varse. Para el presupuesto de la po-tencia total es esencial que el consu-mo en modo durmiente sea bajo.Otro aspecto que también se suele pa-sar por alto es el tiempo de activación y desactivación de los elementos. Por ejemplo, el transceptor necesitará un cierto tiempo mínimo hasta que se estabilicen sus osciladores. Durante la espera, tanto el transceptor como la CPU consumen energía, consumo que es necesario minimizar. Lo mismo ocurre, como es lógico, al energizar la CPU y el sensor.Finalmente, es preciso garantizar el control por la CPU de todos los elemen-
tos necesarios. Ésta es la unidad maes-tra del sistema y necesita controlar por completo todos los bloques funcio-nales.
Aspectos del sistemaCon frecuencia se proporciona el proto-colo de comunicación con objeto de uti-lizar los recursos disponibles dentro de los límites especificados y que ningún elemento esté energizado, si no es im-prescindible. El trabajo se reduce a acti-var y desactivar unidades, como el sen-sor, la CPU y el transceptor, con la tem-porización apropiada. Supongamos que un nodo necesita despertar del modo durmiente a intervalos regulares para transmitir el valor de su sensor, pero só-lo si el nuevo valor tiene una diferencia mínima dada con el último valor. Una vez enviado el valor por el canal de radio, la unidad espera recibir un men-saje de confirmación que indica que el paquete ha sido recibido correctamente. El comportamiento requerido del soft-ware se explica mejor con un diagrama de estados: una representación esque-mática del estado en que se encuentra el software, de los sucesos que lo llevan de un estado a otro y de las acciones asociadas a cada transición de estado 3
.Obsérvese que, en el sistema descrito, las unidades se energizan sólo cuando es necesario, minimizando así la pérdida de energía.
Aspectos del protocoloAdemás de utilizar componentes electró-nicos de baja potencia y un programa inteligente de durmiente/reactivación, el protocolo de comunicación tiene una gran influencia sobre el consumo final de energía del sistema.
En el protocolo de comunica-ción se determinan los límites inferiores del consumo. Algu-nos protocolos de comunica-ción son poco eficientes y nin-guna programación integrada inteligente ayudará a reducir el consumo hasta un nivel acepta-ble. Otros protocolos se dise-ñan para conseguir un bajo consumo sin comprometer in-debidamente el rendimiento de la comunicación. Uno de estos protocolos de baja potencia es la plataforma tecnológica de in-terconexión inalámbrica para sensores y actuadores (WISA, Wireless Interface to Sensors
and Actuators)1) [2] [3]. El alto rendi-miento se puede atribuir a dos factores: salto simple y multiplexación por divi-sión en el tiempo (TDM). El primer fac-tor evita demoras en los nodos interme-dios, el segundo garantiza que sólo ha-brá un nodo en el canal, es decir, que no habrá colisiones. La especificación ZigBee [4], recientemente desarrollada con el protocolo subyacente 802.15.4, es de tipo más general, pero su rendimien-to de comunicación será menor. Incluye multisalto, lo que implica que un men-saje puede utilizar varios saltos en las ondas de radio para llegar a su destino. Los nodos no tienen asignados interva-los específicos de tiempo, sino que han de competir para acceder al canal. Esto permite el acceso de más usuarios al medio inalámbrico, pero introduce in-certidumbre en el sistema, ya que la de-mora y el consumo de energía aumen-tan cuando un nodo está esperando su turno. Además, los nodos intermedios desconocen el momento en que pueden ser solicitados para encaminar paquetes para otros. Por consiguiente, es aconse-jable disponer de nodos intermedios, también conocidos como routers, ali-mentados desde la red eléctrica (véase figura 2 , la topología de la red).En resumen, el protocolo WISA se adap-ta bien a los requisitos de la fabricación discreta, siempre que se cumpla la con-dición de salto simple. Por el contrario, ZigBee resulta ideal para aplicaciones de monitorización de activos, suponien-do que los nodos routers están conecta-dos por cable a la red eléctrica.Los diferentes métodos de hardware y soft-ware influyen directamente en el consumo de energía de los dispositivos 4 . Hasta ahora no se han cuantificado los diversos
3 Sucesos y acciones que provocan la transición del software de un estado a otro
EVENT_timer_wakeACTION_power_up_CPU
ACTION_power_up_sensor
EVENT_difference_largeACTION_power_down_sensor
ACTION_power_up_radioACTION_send_value
EVENT_acknowledge_OKACTION_power_down_radioACTION_power_down_CPU
EVENT_difference_smallACTION_power_down_CPU
ACTION_power_down_sensor
SLEEP WAIT_FOR_VALUE
WAIT_FOR_ACKNOWLEDGE
Tecnologías de sistemas integrados

Arquitectura de software
Pro
toco
lo d
e co
mun
icac
ión
Tamaño de empaquetamiento de datos (dimensión de carga útil, tamaño de colector, CRC, etc)
Acceso a medios sin limitaciones (p.ej. TDMA)
Acceso a medios basado en limitaciones (p.ej. CDMA)
Monosalto Multisalto
Parada de componentes durante el funcionamiento en vacío
Tiempo de parada / arranque Controlable por medio de la CPUConsumo de energía en funcionamiento normal
Consumo de energía en estado durmiente
Componentes de Hardware
Mecanismo de sincronización (registrado, ranuras de tiempo fijo), esquema de modulación, transmisión técnica RF, etc.
42 Revista ABB 2/2006
Redes de sensores inalámbricos
efectos, pero esto dependerá de que se desarrolle la red WSN específica.
ModularidadEl diseño modular es necesario con objeto de poder reutilizar los elemen-tos. Sin embargo, la modularidad con-lleva limitaciones de diseño y se ha de tener cuidado para garantizar que las interfaces entre módulos, hardware y software sean suficientemente gene-rales para permitir la portabilidad.Un ejemplo clásico de la separación de módulos es la división entre el protoco-lo de comunicación y el software de aplicación. Este último es escrito inva-riablemente por ABB, mientras que el protocolo se suele adquirir a otra em-presa. Integrar estos dos componentes en el mismo microcontrolador puede ser difícil. Aún más complejo es mane-jar versiones nuevas, tratamientos de errores y documentación cuando el software que se ejecuta en el mismo procesador tiene varias fuentes. Tam-bién es alto el riesgo de suboptimiza-ción, es decir, los dos módulos de soft-ware están optimizados individualmen-te (con respecto a potencia, rendimien-to, tamaño de código, etc.), pero esto no proporciona necesariamente una so-lución globalmente óptima.La modularidad se puede conseguir también a un nivel inferior. El proto-colo de comunicación puede conside-rarse formado por varios bloques, co-nocidos como capas OSI (Open Stan-
dards Interface). Dado un procedi-miento correcto de diseño, cabe la posibilidad de cambiar una capa indi-vidual por otra de una fuente diferen-te. Como es obvio, cuanto más dividi-do esté el código tanto más modular resulta. Al mismo tiempo aumenta la ‘suboptimización’, de modo que la so-lución dista de ser perfecta.
NormalizaciónActualmente hay varias iniciativas en curso que buscan normalizar WSN pa-ra el uso industrial. Una de las más conocidas es la norma ZigBee, que es una especificación inalámbrica de baja potencia, bajo coste y baja velocidad de transferencia de datos, destinada a electrodomésticos, juguetes, aplicacio-nes industriales y otras similares. Zig-Bee Alliance ha empezado a trabajar hace poco en un perfil para la moni-torización de plantas industriales.Otra importante iniciativa, la especifica-ción inalámbrica HART [6], tiene como objetivo extender este famoso estándar al dominio inalámbrico y abrir el merca-do al gran número de usuarios HART. Esta iniciativa especificará perfiles y ca-sos prácticos en los que se podrá aplicar directamente el control inalámbrico.La tercera iniciativa en marcha es la nor-ma ISA-SP100 [6]. En vez de normalizar todos los elementos del sistema, ISA-SP100 especifica sólo los niveles supe-riores de la pila, con varias implementa-ciones posibles a nivel inferior.
Estando en los comienzos del proceso es difícil predecir cuál de estas iniciati-vas prevalecerá. Los clientes finales se-rán los que decidan en su día basándose en el rendimiento y la disponibilidad de los productos. El reto actual es adoptar óptimamente la norma dominante, es decir, utilizar la norma en la mayor me-dida posible, satisfaciendo al mismo tiempo los requisitos críticos de la mi-sión y manteniendo/actualizando eficaz-mente la implementación. La llegada de las redes de sensores ina-lámbricos conlleva la introducción de muchas y apasionantes tecnologías nue-vas en el mundo de la automatización industrial. El desafío tecnológico funda-mental es mantener en un mínimo el consumo de energía de los nodos sen-sores, proporcionando al mismo tiempo el mayor rendimiento posible a los usuarios del sistema. El segundo reto es crear un diseño modular del sistema que permita el mantenimiento de los dispositivos durante toda su vida útil, satisfaciendo asimismo todos los requisi-tos de aplicación críticos de la misión.
Niels Aakvaag
ABB Corporate Research
Noruega
Jan-Erik Frey
ABB Automation Technologies
Västerås, Sweden
Bibliografia
[1] Webopedia, http://www.webopedia.com/TERME/
embedded_system.html
[2] Jan-Erik Frey, Andreas Kreitz, Guntram Scheible;
“Desenchufado pero conectado, Parte 1: Redefi-
nición de lo inalámbrico”, Revista ABB 3/2005.
[3] Jan-Erik Frey, Jan Endresen, Andreas Kreitz, Gun-
tram Scheible; “Desenchufado pero conectado,
Parte 2: Sensores y ejecutores inalámbricos en sis-
temas de control industrial”, Revista ABB 4/2005.
[4] ZigBee Alliance, http://www.zigbee.org
[5] HART Communication Foundation,
http://www.hartcomm.org
[6] ISA-SP100, http://www.isa.org
Nota:1) WISA es un protocolo de ABB basado en hardware
estándar de bajo coste (transmisores de radio de 2,4
GHz), pero mejorado por medio de un protocolo que
dirige específicamente la automatización de planta,
en tiempo real, en el nivel de dispositivo de campo.
Tecnologías de sistemas integrados
4 Métodos de hardware y software que influyen directamente en el consumo de energía de los dis-positivos

El uso de Ethernet en plantas indus-triales se está extendiendo, entre
otras razones, por su buena relación prestaciones/coste y por su capacidad para soportar el uso de tecnologías de fibra óptica, cables eléctricos y comuni-caciones inalámbricas en un único siste-ma. Otra ventaja de Ethernet es que las tecnologías TCP/IP (transmission proto-colo de control / protocolo de Internet)
asociadas a Ethernet proporcionan una infraestructura de red que se puede ges-tionar de forma unitaria. Esto racionaliza el despliegue y mantenimiento de la in-fraestructura y consigue importantes ahorros en la formación y en el suminis-tro de repuestos.Las necesidades de comunicación en el mundo de las oficinas no coinciden con las de la industria; también son
distintas las necesidades de los disposi-tivos integrados en diferentes aplica-ciones industriales. Un requisito típico del mundo de la industria es la res-puesta de control en tiempo real. Si las soluciones de comunicación afectan a un bucle de control, el tiempo de res-puesta es vital. El retardo admisible en el tiempo de respuesta está determina-do por las leyes físicas o químicas que
Los sistemas de control industrial comprenden gran número de diferentes dispositivos integrados (por ejemplo, sensores, actuadores y controlado-res) y varios ordenadores que trabajan juntos para controlar un sistema
físico. Estos sistemas pueden controlar una enorme variedad de instala-ciones, como plantas de proceso, sistemas de generación y distribu-
ción eléctrica, fábricas de automóviles y sistemas de aire acondicio-nado para centros comerciales. ABB suministra sistemas de control
y un enorme número de dispositivos integrados diseñados espe-cialmente para estas aplicaciones. Aunque algunas aplicaciones sólo requieren un control de bajo nivel tecnológico, basado en componentes individuales que funcionan aisladamente, cada vez son más los clientes que demandan dispositivos que pue-dan comunicarse entre sí, intercambiando información y pro-porcionando datos y actualizaciones de estado a los operado-res cuando éstos los soliciten. Los dispositivos de ABB se caracterizan por incluir buenas solu-ciones de comunicación, así como por su facilidad de uso y su fiabilidad. Los clientes pueden elegir su dispositivo en función de las necesidades de su sistema y dar por supuesto que disfrutarán de comunicaciones con la calidad y eficiencia propias de ABB. Dado que el mercado evoluciona hacia un mayor uso de Ethernet para atender sus necesidades de comunicaciones, ABB está am-pliando su gama de dispositivos compatibles con Ethernet.
Ethernet de alto rendimiento ABB amplía su gama de dispositivos compatibles con EthernetKai Hansen
43Revista ABB 2/2006

44 Revista ABB 2/2006
Ethernet, alto rendimiento
controladores, trasladándolo más cerca del campo y reforzando los requisitos de tiempo real, fiabilidad y seguridad. Esto exige disponer de buenas soluciones integradas compatibles con Ethernet y de protocolos normalizados para la comunicación de datos sobre Ethernet. Actualmente se utilizan varios protoco-los, siendo los más prometedores FF HSE, PROFINET, EtherNet/IP, Modbus TCP y algunas soluciones especiales pro-yectadas para el control de movimientos. El límite teórico del caudal de datos con cables y fibras Ethernet no es un proble-ma serio en la mayoría de las aplicacio-nes de automatización. Sin embargo, la capacidad de las unidades centrales de proceso (CPU) de los dispositivos inte-grados puede originar un cuello de bo-tella en el flujo de comunicación en la red, por lo que se ha de prestar gran atención a este problema. La eficiencia de la implementación de pilas de alma-cenamiento temporal de datos en un dispositivo integrado es el problema concreto más importante para el rendi-miento. Si el factor limitador es la capa-cidad del procesador para analizar sin-tácticamente un protocolo, un aumento de capacidad de una CPU muy pequeña en un dispositivo próximo al nivel de campo, pasando de un sistema Ethernet de 10 Mbits/s a un sistema Ethernet de 1 Gbit/s, podría no aumentar el rendi-miento. Sin embargo, para tal dispositi-vo suele bastar un ancho de banda de 10 Mbits/s. Para proporcionar la eficien-cia requerida en la traslación de pilas, algunos de los protocolos estándar usuales con Ethernet en aplicaciones de oficina han de modificarse o utilizarse conjuntamente con otros protocolos.Una comparativa del retardo medido en el tráfico UDP/IP en los sistemas operativos Windows XP, funcionando sobre un procesador Pentium a 2,5 GHz 1 muestra que, incluso con un procesador tan rápido, la mayor parte del tiempo se emplea en manejar el mensaje en el procesador. Con un sis-tema Ethernet de 1 Gbit/s, el retardo de la red es sin duda muy pequeño.
Requisitos de tiempo realLos requisitos de tiempo real suponen un problema particular para sistemas Ethernet “anticuados” que se basan en cables coaxiales o hubs. Tales sistemas disponían de detección de colisiones para que, si dos dispositivos intentaban enviar datos simultáneamente (o casi
simultáneamente), se perdieran ambos paquetes de datos y cada dispositivo intentara su reenvío después de un tiempo de espera cuasi aleatorio. Si se producían varias de estas colisiones consecutivamente, entonces la demora era importante y difícil de predecir. Los nuevos sistemas Ethernet, sin embargo, se basan en tecnología de conmutación full-duplex, en la que no se producen tales colisiones. Cada dispositivo tiene una línea física dedicada a un conmuta-dor y los conmutadores almacenarán y enviarán todos los paquetes de datos. Si el puerto de conexión está operando con el siguiente conmutador o dispositi-vo, el conmutador pondrá el paquete en una cola de espera y lo enviará cuando esté disponible el puerto. Esta tecnolo-gía proporciona respuestas en tiempo real adecuadas para la inmensa mayoría de las aplicaciones industriales. Para aplicaciones más exigentes, como el
rigen el proceso objeto de control. Por ejemplo, en el control de corrientes alternas de alta tensión, los retardos admisibles podrían ser de sólo algunos milisegundos; en el control de movi-mientos mecánicos, la tolerancia po-dría ser inferior a un milisegundo. En el caso de reacciones químicas, que suelen ser mucho más lentas, podría ser aceptable un retardo de un segun-do en la acción del actuador, aunque, no obstante, es necesario satisfacer plazos de tiempo estrictos, ya que una reacción química, una vez iniciada, no se detendrá. Las soluciones de comuni-cación han de responder a esta varie-dad requisitos, sea con una única solu-ción o combinando varias tecnologías.
Rendimiento y fiabilidadEl rendimiento y la fiabilidad de un sis-tema de comunicación también son factores fundamentales al elegir una solución para las comunicaciones. Tam-bién en este caso las distintas aplicacio-nes tienen requisitos diferentes. Las de-mandas de rendimiento pueden influir en la capacidad de operación en tiem-po real de un sistema, ya que la aplica-ción de grandes cargas puede destruir las respuestas en tiempo real. El ele-mento físico de una solución de comu-nicaciones define las opciones básicas de diseño. Ethernet sobre cables de cobre y fibras ópticas constituye un sistema muy eficiente, con muy poco ruido y escasas pérdidas debidas al mismo. La comunicación inalámbrica es menos fiable y con ella se puede per-der un número importante de paquetes de datos. El software del protocolo garantizará el reenvío de los paquetes perdidos, pero a costa de pérdida de rendimiento y de respuestas en tiempo real. Por otro lado, si el cable o la fibra resultan seriamente dañados por alguna razón, ningún programa conseguirá co-municar el mensaje. La única solución a este problema consiste en crear re-dundancia física en las interfaces de comunicación en forma de un segundo o tercer cable o fibra. Sin embargo, la introducción de redundancia puede complicar la interfaz del usuario. Durante los últimos años, el mercado de la automatización ha convenido en utili-zar Fieldbus para la conexión de equi-pos de proceso y de Ethernet para la co-nexión de terminales, servidores y con-troladores. La tendencia actual es exten-der el uso de Ethernet más allá de los
Tecnologías de sistemas integrados
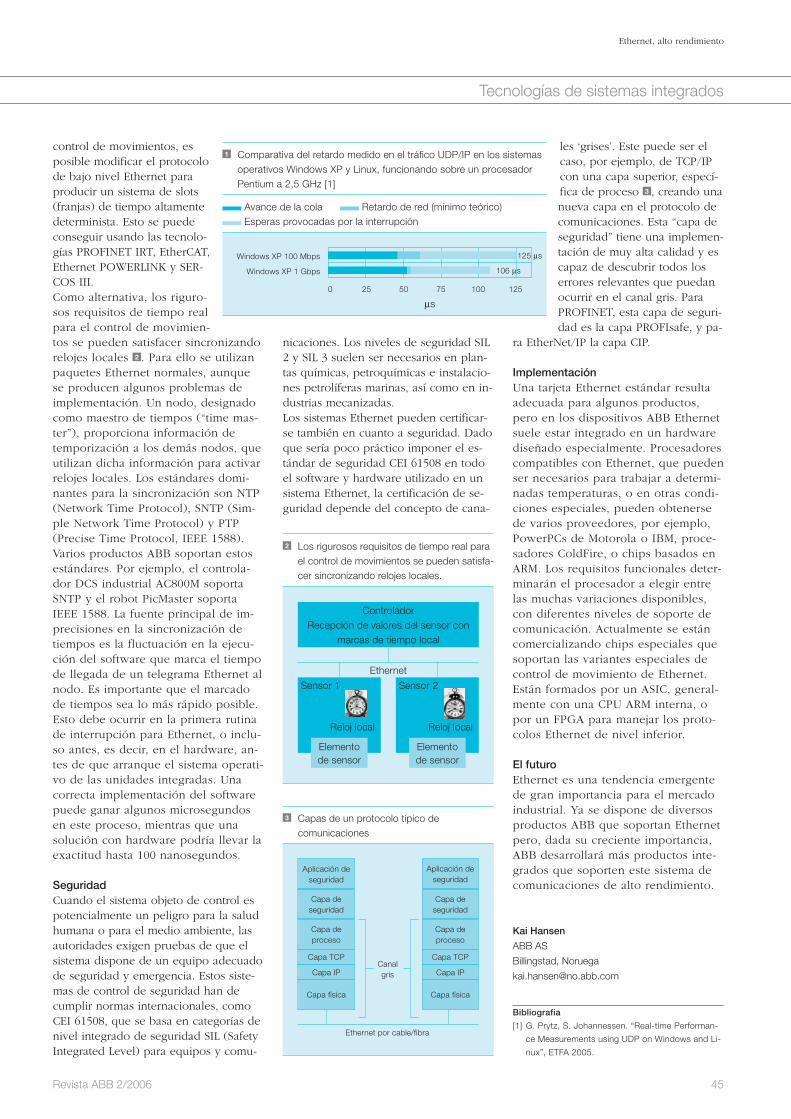
45Revista ABB 2/2006
Ethernet, alto rendimiento
control de movimientos, es posible modificar el protocolo de bajo nivel Ethernet para producir un sistema de slots (franjas) de tiempo altamente determinista. Esto se puede conseguir usando las tecnolo-gías PROFINET IRT, EtherCAT, Ethernet POWERLINK y SER-COS III. Como alternativa, los riguro-sos requisitos de tiempo real para el control de movimien-tos se pueden satisfacer sincronizando relojes locales 2 . Para ello se utilizan paquetes Ethernet normales, aunque se producen algunos problemas de implementación. Un nodo, designado como maestro de tiempos (“time mas-ter”), proporciona información de temporización a los demás nodos, que utilizan dicha información para activar relojes locales. Los estándares domi-nantes para la sincronización son NTP (Network Time Protocol), SNTP (Sim-ple Network Time Protocol) y PTP (Precise Time Protocol, IEEE 1588). Varios productos ABB soportan estos estándares. Por ejemplo, el controla-dor DCS industrial AC800M soporta SNTP y el robot PicMaster soporta IEEE 1588. La fuente principal de im-precisiones en la sincronización de tiempos es la fluctuación en la ejecu-ción del software que marca el tiempo de llegada de un telegrama Ethernet al nodo. Es importante que el marcado de tiempos sea lo más rápido posible. Esto debe ocurrir en la primera rutina de interrupción para Ethernet, o inclu-so antes, es decir, en el hardware, an-tes de que arranque el sistema operati-vo de las unidades integradas. Una correcta implementación del software puede ganar algunos microsegundos en este proceso, mientras que una solución con hardware podría llevar la exactitud hasta 100 nanosegundos.
SeguridadCuando el sistema objeto de control es potencialmente un peligro para la salud humana o para el medio ambiente, las autoridades exigen pruebas de que el sistema dispone de un equipo adecuado de seguridad y emergencia. Estos siste-mas de control de seguridad han de cumplir normas internacionales, como CEI 61508, que se basa en categorías de nivel integrado de seguridad SIL (Safety Integrated Level) para equipos y comu-
nicaciones. Los niveles de seguridad SIL 2 y SIL 3 suelen ser necesarios en plan-tas químicas, petroquímicas e instalacio-nes petrolíferas marinas, así como en in-dustrias mecanizadas. Los sistemas Ethernet pueden certificar-se también en cuanto a seguridad. Dado que sería poco práctico imponer el es-tándar de seguridad CEI 61508 en todo el software y hardware utilizado en un sistema Ethernet, la certificación de se-guridad depende del concepto de cana-
les ‘grises’. Este puede ser el caso, por ejemplo, de TCP/IP con una capa superior, especí-fica de proceso 3 , creando una nueva capa en el protocolo de comunicaciones. Esta “capa de seguridad” tiene una implemen-tación de muy alta calidad y es capaz de descubrir todos los errores relevantes que puedan ocurrir en el canal gris. Para PROFINET, esta capa de seguri-dad es la capa PROFIsafe, y pa-
ra EtherNet/IP la capa CIP.
ImplementaciónUna tarjeta Ethernet estándar resulta adecuada para algunos productos, pero en los dispositivos ABB Ethernet suele estar integrado en un hardware diseñado especialmente. Procesadores compatibles con Ethernet, que pueden ser necesarios para trabajar a determi-nadas temperaturas, o en otras condi-ciones especiales, pueden obtenerse de varios proveedores, por ejemplo, PowerPCs de Motorola o IBM, proce-sadores ColdFire, o chips basados en ARM. Los requisitos funcionales deter-minarán el procesador a elegir entre las muchas variaciones disponibles, con diferentes niveles de soporte de comunicación. Actualmente se están comercializando chips especiales que soportan las variantes especiales de control de movimiento de Ethernet. Están formados por un ASIC, general-mente con una CPU ARM interna, o por un FPGA para manejar los proto-colos Ethernet de nivel inferior.
El futuroEthernet es una tendencia emergente de gran importancia para el mercado industrial. Ya se dispone de diversos productos ABB que soportan Ethernet pero, dada su creciente importancia, ABB desarrollará más productos inte-grados que soporten este sistema de comunicaciones de alto rendimiento.
Kai Hansen
ABB AS
Billingstad, Noruega
Bibliografia
[1] G. Prytz, S. Johannessen. “Real-time Performan-
ce Measurements using UDP on Windows and Li-
nux”, ETFA 2005.
2 Los rigurosos requisitos de tiempo real para el control de movimientos se pueden satisfa-cer sincronizando relojes locales.
ControladorRecepción de valores del sensor con
marcas de tiempo local
Ethernet
Sensor 1 Sensor 2
Elemento de sensor
Elemento de sensor
Reloj local Reloj local
1 Comparativa del retardo medido en el tráfico UDP/IP en los sistemas operativos Windows XP y Linux, funcionando sobre un procesador Pentium a 2,5 GHz [1]
μs
Windows XP 100 Mbps
Windows XP 1 Gbps
0 25 50 75 100 125
125 μs
106 μs
Avance de la cola Retardo de red (mínimo teórico) Esperas provocadas por la interrupción
Tecnologías de sistemas integrados
3 Capas de un protocolo típico de comunicaciones
Aplicación de seguridad
Capa de seguridad
Capa de proceso
Capa TCP
Capa IP
Capa física
Aplicación de seguridad
Canal gris
Ethernet por cable/fibra
Capa de seguridad
Capa de proceso
Capa TCP
Capa IP
Capa física

Con frecuencia, la tecnología de interconexión de accionamientos con contro-ladores se integra directamente en el accionamiento. De este modo, el cliente se beneficia de una fabricación más flexible, de un cableado más sencillo, de más fiabilidad y de menores costes totales de instalación.
Aunque los buses de campo existen desde hace más de una década, durante los últimos años se ha prestado una gran atención a la aplicación de esta tecnología para accionamientos. Uno de los obstáculos para la rápida adop-ción de la tecnología de buses de campo ha sido la falta de estandarización. En los primeros tiempos, muchas compañías ofrecían soluciones privadas poco flexibles. Muchos clientes expresaron la necesidad de un bus de campo estandarizado, dada la poca flexibilidad de estas soluciones. Se crearon varias alianzas, que competían entre sí, para desarrollar un bus de campo abierto con posibilidades de convertirse en norma. El resultado es que hoy día existe una gran cantidad de estándares de buses de campo abiertos.
Algunos fabricantes como ABB han hecho importantes inversiones en esta tecnología. ABB utiliza en este contexto el concepto de conectividad universal. Para entender lo que significa este concepto, debemos examinar con cierto detalle la tecnología de buses de campo.
Un bus de campo es un sistema full dúplex1) digital de transmisión de
datos, que conecta dispositivos de cam-po y sistemas de automatización inteli-gentes con la red de una planta indus-trial. Un bus de campo sustituye al sis-tema de control E/S convencional por cable. También difiere de las conexio-nes punto a punto, que sólo permiten el intercambio de datos entre dos dis-positivos participantes.Un bus de campo transfiere informa-ción secuencialmente, por lo que a me-nudo se le denomina sistema de comu-nicación en serie. Para garantizar que dos dispositivos puedan comunicarse sobre un enlace serie es preciso adop-tar un protocolo que defina el significa-do de cada bit en un flujo de datos. Para facilitar la descripción de un pro-tocolo de comunicaciones en serie, los ingenieros suelen referirse a un modelo OSI que identifica siete capas 1 . El conjunto de todas las capas se conoce como pila de comunicación. Cada capa
46 Revista ABB 2/2006
Buses de campo para accionamientos Comunicación con bus de campo integradoIlpo Ruohonen

47Revista ABB 2/2006
Buses de campo para accionamientos
campo para control remoto. Esta ten-dencia está impulsada por el coste de-creciente del control del bus de campo, así como por la tendencia hacia una mayor automatización.La segunda tendencia es la expansión de la tecnología Ethernet industrial. Es-ta tecnología es relativamente nueva, pero promete grandes avances en las comunicaciones industriales. Ethernet se aplica a las dos capas inferiores de la pila de protocolos, según se muestra en la figura 1. La mayor parte de las funciones de un bus de campo se definen en la capa de aplicación de la pila de protocolos, pe-ro las capas inferiores son importantes para la ejecución. En muchos sistemas, los bucles de control cerrados por el bus de campo tienen que ser rápidos y permitir respuestas sincronizadas de los dispositivos, por ejemplo en el campo de automatización de la fabricación. En el pasado, este comportamiento se ma-terializaba implementando una capa fí-sica con comportamiento determinista. Ethernet no es determinista en princi-pio, pero hoy es posible implementar un protocolo Ethernet con velocidades de transmisión de hasta 1.000 Mbit/s. Esta velocidad es tan alta que, para la mayoría de las aplicaciones prácticas, los bucles de control que pueden im-plementarse se comportan de manera determinista.Sobre la capa física y la capa de enlace de datos se pueden ejecutar los proto-colos TCP/IP que conocemos de Inter-net. El resultado es un bus de campo compatible con los buses de control usuales en los niveles más altos de la arquitectura de control.La ventaja más evidente de Ethernet es que se basa en un estándar abierto. Es-to permitirá crear una arquitectura de red estandarizada empleando compo-
nentes de uso común. Otra ventaja es que hace posible una arquitectura de red escala-ble, lo que facilita a los clien-tes beneficiarse de los futuros avances técnicos, en contraste con las redes privadas. Ade-más, mucha gente está familia-rizada con la tecnología de In-ternet, de manera que se redu-cirán los costes de formación y la duración del desarrollo.Ethernet industrial es un desa-rrollo relativamente nuevo, pe-ro está siendo adoptado muy
rápidamente y es de esperar que, muy pronto, los buses de campo basados en Ethernet industrial dominarán el merca-do. Ésta es una buena noticia para los clientes, ya que mejorará la flexibilidad de su fabricación.
¿Adónde nos llevan estos avances?Para ABB Drives, Ethernet industrial es otro importante paso hacia la visión de conectividad universal de nuestra com-pañía.Los envíos de Ethernet industrial han ido creciendo a un ritmo del 60 por ciento anual, que sigue manteniéndose.Dado el extendido uso de Ethernet en redes de oficinas, las plantas y fábricas disfrutarán de la alta velocidad, bajo coste, amplia disponibilidad y compati-bilidad con las redes de oficina que les ofrece este sistema.La introducción de tecnología Internet en los accionamientos hará posibles muchas nuevas aplicaciones. Una vez asignada una dirección IP al acciona-miento se podrán ejecutar muchas fun-ciones a distancia. El diagnóstico tam-bién se perfeccionará. Esto es una con-dición previa para conseguir nuevas mejoras en el mantenimiento preventivo y aumentar, por consiguiente, la dispo-nibilidad de los equipos de planta.
Ilpo Ruohonen
ABB Oy
Helsinki, Finland
Notas1) Un canal semidúplex es un canal que puede transferir
información en ambos sentidos, pero no al mismo
tiempo. Un canal full dúplex puede transmitir informa-
ción simultáneamente en ambos sentidos.
de la pila define un conjunto de funciones.En vez de estandarizar la pila completa de comunicación, se definen estándares para cada capa de la pila o incluso para una función concreta de una capa. Así se explica en parte la gran variedad de pro-tocolos de buses de campo disponibles actualmente.Las capas inferiores de la pila, la capa física y la capa de en-lace de datos están determi-nadas por el hardware. Las capas superiores se implementan sim-plemente utilizando el software. Esta distinción ayuda a explicar cómo se puede conseguir la conectividad univer-sal y también la dependencia de este concepto de los últimos avances logra-dos en control integrado.
Conectividad universalEn ausencia de un estándar internacio-nal único para el hardware de un pro-tocolo, los fabricantes han estandariza-do la interfaz para sus propios equipos y han desarrollado adaptadores para los distintos protocolos que se conectan a esta interfaz. Debido al permanente proceso de miniaturización, estos adap-tadores se han hecho más pequeños y baratos, y ahora están disponibles como opciones que se incorporan directamen-te en el accionamiento. Se ha produci-do una cierta estandarización del hard-ware, lo que significa que se pueden implementar diferentes protocolos en la misma solución de hardware.Los últimos desarrollos del control inte-grado hacen ahora posible implementar las capas superiores de la pila de proto-colos simplemente descargando diferen-te software en el dispositivo de campo. Esta combinación de pequeños adapta-dores y software transferible facilita a los clientes conseguir un accionamiento fácilmente integrable en su sistema.ABB soporta una gran variedad de pro-tocolos de buses de campo, lo que per-mite al cliente elegir un accionamiento con independencia del sistema de auto-matización.
Tendencias de la tecnología de buses de campoLa primera tendencia constatable es el uso creciente de los buses de campo. Hoy en día, cerca del 40 por ciento de los accionamientos usan un bus de
1 Capas del modelo OSI y sus lugares en la pila del protocolo
Application
Presentation
Session
Transport
Network
Data Link
PhysicalEthernet
ProfiNet Modbus/TCP
Fieldbus HSE EtherNet/IP
TCP/UDP
IP
IEEE 802.1
IEEE 802.3
TCP/IP
Tecnologías de sistemas integrados

Un motor no tiene por qué ser una isla. Antes se consideraba que los motores eléctricos esta-ban conectados cuando las barras colectoras y el eje motor estaban acoplados correctamente, pero la conectividad de las redes se está haciendo cada día más importante. Las redes de co-municaciones permiten utilizar avanzadas funciones de control, coordinación y diagnóstico, así como de planificación del mantenimiento. Basado en los avances de la tecnología de buses de campo y en la inteligencia integrada, el centro de control de motores MNS i S, desarrollado por ABB, es una nueva generación avanzada para aplicaciones MCC de baja tensión.
48 Revista ABB 2/2006
El control inteligente de motores (IMCS) es una tecnología madura
y bien aceptada en los modernos en-tornos industriales. La tecnología de bus de campo, aparecida hace más de 10 años, ha conseguido que el usuario confíe en la aparamenta inteligente. La robustez de sus comunicaciones y la idoneidad de su tiempo de respues-ta han demostrado la fiabilidad de esta tecnología para las aplicaciones en tiempo real. Además, el empeño por reducir costes durante la vida de los equipos ha impulsado una plata-forma de ingeniería flexible con pues-ta en servicio más rápida, más infor-mación, mejor diagnóstico y manteni-miento predictivo y con una localiza-ción y corrección de fallos más senci-lla, con la consiguiente reducción de los tiempos improductivos.
La tecnología IMCS está pa-sando, sin embargo, por otro cambio fundamental. Los clientes buscan conseguir más productividad aumen-tando el tiempo de buen funcionamiento general de la planta y mejorando la coor-dinación de las operaciones y del mantenimiento. Para conseguir esto es fundamen-tal que el personal interesa-do disponga de la informa-ción adecuada en el momen-to oportuno. Esto no sería posible sin una buena
conectividad integrada. La arquitectura de los sistemas y las configuraciones de comunicación se están adaptando para satisfacer mejor esta demanda Tabla .ABB se anticipó a su época al identifi-car esta tendencia y responder a ella con su aparato de conmutación MNS i S. Un aspecto muy importante de esta in-novación es que la implementación de ABB ofrece un sistema escalable, es de-cir, el cliente puede añadir, modificar o perfeccionar las configuraciones de su sistema en cualquier etapa del proyecto.
BUS interno de aparato de conmutación: comunicación robusta y en tiempo realLa comunicación de la aparamenta MNS i S se basa en la red Ethernet, aunque es determinista y en tiempo real. La capaci-dad de Ethernet en cuanto a velocidad,
robustez de funcionamiento, sencillez de configuración de la red y posibilida-des de comunicación simultánea con varios arrancadores se explota al máxi-mo en MNS i S. La falta de determinismo de Ethernet se evitó con una interfaz de aplicación en tiempo real (RTAI) que proporciona temporización determinista y conmutación rápida entre tareas. Como pila de la red Ethernet se adoptó Rtnet, que implementa UDP/IP1), ICMP2) y ARP3) de forma determinista. Para evitar las colisiones y congestiones imprevisibles en Ethernet, el acceso a los medios está controlado por una capa adicional, RTmac. La necesidad de sepa-rar la red de aparamenta (bus de apara-menta por Ethernet) y la red de control del proceso (a través de Ethernet) se resuelve adoptando el estándar físico 10Base-I de Ethernet4).
Diversidad de configuraciones del sistema MNS iSLas aplicaciones MCC en el sector de procesos de trans-formación requieren configu-raciones de sistema para diversos conceptos de funcio-namiento de las instalaciones, o distintas demandas de flujo de información en función de la instalación. En MNS i S, el sistema de control externo del cliente puede acceder a varios subsistemas:
Medicina de motores Control y protección permanente de la salud de los motoresRajesh Tiwari
Aspectos de producto Situación actual Tendencias futuras
Inteligencia/ Opcional Integrado (incorporado comunicaciones en el diseño)Comunicación Maestro único Maestro múltipleComunicación DCS Conectividad Integración significativaConfiguraciones Punto a punto Combinaciones múltiples optimizadasInformación Excesiva y Pertinente y adecuada fuera de contexto para el operadorPosibilidades de Especiales Escalables y mejorables comunicación en cada fase de proyectoComunicación Cualquier Específico y bus de campo basado en Ethernet
Tabla Tendencias del Mercado de aparamenta de baja tensión

49Revista ABB 2/2006
Medicina de motores
mente se puede transmitir al sistema de mantenimiento eléctrico o al paquete SCADA sólo la información de manteni-miento. De este modo se puede presen-tar la información necesaria en el punto y momento deseados. Ya no hay que “programar el encaminamiento de los datos” en los PLC, que produce un costo-so trabajo de ingeniería o reduce el ren-dimiento de los PLC por debajo del ópti-mo, ni hace falta implementar un progra-ma de aplicación para transferir los datos.Con MNS i S, toda la información pertinente fluye hacia el operador apropiado en el momento oportuno.
Rajesh Tiwari
ABB Switzerland Ltd
Zurich, Suiza
Notas1) UDP (User Data Protocol) es un protocolo en el ni-
vel de transporte de la pila de comunicación (véase
también la figura de la página 47). Es un protocolo
más rápido que TCP, pero no ofrece el mismo nivel
de determinismo ni garantiza que los paquetes se
reciban en el orden de envío.2) ICMP (Internet Control Message Protocol) es un
protocolo en el nivel de red de la pila de comunica-
ción (igual que IP). Su uso más frecuente es el
envío de mensajes de error.3) ARP (Address Resolution Protocol) es otro protoco-
lo en el nivel de red. Resuelve la dirección hardware
de un dispositivo desde su dirección de protocolo. 4) 10Base-I: capa física de Ethernet Industrial 10Mbps5) Implementación de Profinet en preparación.6) DCS: sistema de control distribuido7) PLC: controlador lógico programable
1) Arrancadores de motores a través de la unidad de comunicación central, que permiten el acceso simultáneo a varios puntos de control por diferen-tes interfaces de comunicación.
2) Como alternativa, conexión directa de buses de campo5) a nivel de arrancador de motor individual: Este enfoque permite a una estación individual de control acceder a un arrancador específico de motor.
Lo mejor es combinar ambos plantea-mientos. Además, el sistema soporta configuración redundante para refor-zar la confianza del cliente en la dis-ponibilidad de la planta.
Capacidades de servidores OPC para MNS iSHay que mencionar también la interfaz OPC (OLE - Object Linking and Embedding - for
El bus de aparamenta MNS i S está integrado internamente. Todos los componentes de MNS i S en el bus son enchufables. Los clientes se li-beran del trabajo de cableado.
MNS i S ofrece integridad total de la comunicación con un comporta-miento previsible. La seguridad ope-racional del motor está garantizada contra diversas eventualidades:
Averías de la comunicación: MNS i S supervisa permanentemente la inte-gridad de la comunicación desde el arrancador del motor con el siste-ma de control externo (DCS, siste-ma de control distribuido). Si falla la comunicación, el motor es lleva-do a un estado seguro predefinido.
Control no autorizado del motor: Se puede acceder a la unidad del arrancador de motor de MNS i S desde varias estaciones de control.
La seguridad e integridad opera-cional están protegidas y las ope-raciones de control no autorizadas o no previstas se evitan mediante un mecanismo apropiado de con-trol de acceso de usuarios.
MNS i S proporciona: Comunicación DCS sobre bus de campo abierto Profibus DP-V1, Modbus TCP e Interfaz OPC (Im-plementación de Profinet en fase de preparación), que actualmente son estándares industriales
Conectividad de navegador web para HMI (Interfaz hombre-máqui-na) local de panel táctil
Conectividad directa de bus de campo con arrancadores de moto-res sobre Profibus DP-V1, Device Net o Modbus RTU *
* en fase de desarrollo
Ventajas a simple vista
Process Control) de enlace e integración de objetos para el control de procesos, utiliza-da en MNS i S. OPC es una forma estandari-zada de manejar información adicional, no crítica pero sí importante para el buen re-sultado de la operación y el mantenimiento de la planta. Utilizando OPC, los clientes pueden conectar directamente con puestos de operador, sistemas de mantenimiento, etc., sin tener que programar DCS6) ni PLC7).Con los servidores OPC para el campo de aplicación de MNS i S es posible aña-dir para el operador información adicio-nal en las placas frontales sin encamina-miento hacia controladores DCS/PLC. El tratamiento de alarmas y sucesos está totalmente automatizado, de modo que los puestos de operador son informados, directamente desde MNS i S, sobre alar-mas relevantes de arrancadores y de sucesos con marcas de tiempo. Opcional-
Centro de control de motores
MNS iS ofrece una gestión muy sencilla.
Tecnologías de sistemas integrados

50 Revista ABB 2/2006
Una red eficiente de comunicacio-nes es la columna vertebral de un
avanzado sistema eléctrico 1 . Los ope-radores de las compañías eléctricas se comunican entre sí para coordinar acciones e intercambiar todo tipo de información operativa. La red de co-municaciones conduce señales para el control remoto de estaciones sin per-sonal para transferir datos y valores de cargas desde las instalaciones a la uni-dad de control central a través del sis-tema eléctrico, y para transmitir co-mandos desde el control central a las instalaciones. Y, lo que es más impor-tante, la red de comunicaciones trans-porta muchas de las señales vitales que se intercambian diferentes puntos en tiempo real para garantizar un con-trol y protección óptimos del sistema eléctrico. En resumen, las redes de co-municación ayudan a las compañías eléctricas a mantener el flujo de elec-tricidad desde el generador hasta el consumidor final.Tradicionalmente, los sistemas de comunicación de las compañías eléctri-cas eran predominantemente módulos de hardware adaptados a las especifica-ciones del cliente. Los sistemas integra-dos actuales, como el sistema de onda portadora sobre línea de energía (PLC, Power Line Carrier) ETL600 de ABB, se basan en una plataforma de hardware, potente y flexible y en varios módulos versátiles de software. Esta tecnología
El canto de las líneas eléctricas La comunicación mantiene el flujo de energíaStefan Ramseier, Hermann Spiess
La transmisión segura y fiable de la energía eléctrica depende de la per-manente coordinación entre diferentes puntos de la red. Desde una simple conversación telefónica hasta el control y supervisión automati-zados de equipos remotos, un requisito previo para lograr un funciona-miento eficiente es disponer de una infraestructura robusta y fiable de comunicaciones. Los operadores de redes eléctricas utilizan una gran variedad de canales de comunicación, entre ellos sus propias líneas de transporte de electricidad.
ABB cuenta con 64 años de experiencia en la transmisión de datos por líneas eléctricas. El último producto de la compañía, el ETL600, abre una nueva vía al ofrecer una amplia funcionalidad. Es fácil de configurar con un par de clics del ratón y puede actualizarse sin dificultades (simplemente instalando nuevo software). Así queda garantizado que el cliente estará en la vanguardia tecnológica durante varios años.

51Revista ABB 2/2006
El canto de las líneas eléctricas
y por su gran alcance. Para mayores capacidades de transmisión, los siste-mas de banda ancha basados en fibras ópticas pueden manejar datos de com-pañías eléctricas, tanto operacionales como administrativos, e incluso –de-pendiendo de la estrategia de la com-pañía y de la legislación– proporcio-nar servicios de telecomunicaciones comerciales. La radiocomunicación por microondas no está limitada por rutas de líneas de transporte de electricidad y por tanto puede ofrecer una alterna-tiva ventajosa en determinadas cir-cunstancias, especialmente en terrenos difíciles (en montañas e islas, por ejemplo).Entre las aplicaciones típicas soporta-das por los sistemas de comunicación de las compañías eléctricas se encuen-tran las interconexiones de redes de área local (LAN), la videovigilancia, los diagnósticos y soporte remotos, la distribución automatizada, la lectura automática de contadores y los servi-cios estándar de telecomunicaciones.Las principales aplicaciones para las “comunicaciones operacionales” son el control del sistema eléctrico, la protec-ción de las líneas de transporte de electricidad y los servicios telefónicos operacionales. Puesto que los dos pri-meros son más importantes para el funcionamiento del sistema eléctrico, se explican a continuación con cierto detalle.La disponibilidad de energía eléctrica depende en gran medida de la fiabili-dad del sistema de control eléctrico. Por consiguiente, los sistemas de con-trol, y en particular el equipo de co-municaciones correspondiente, han de funcionar de forma fiable en las condi-ciones más desfavorables de opera-
ción. Las aplicaciones típicas de control de los sistemas eléctricos son el telecontrol (Supervisory Control and Data Acquisition o SCADA) y los sistemas de gestión de la energía (EMS, Energy Manage-ment Systems).El equipo de teleprotección, operando conjuntamente con la protección de líneas, ha de ser capaz de transmitir una se-ñal al extremo remoto de la línea, de forma fiable y en el menor tiempo posible en con-diciones extremas, que po-drían estar provocadas por
una avería del sistema eléctrico. Por otro lado, una interferencia en el canal de comunicaciones nunca debe provo-car un mal funcionamiento de la pro-tección, por ejemplo simulando una señal de disparo o de bloqueo en el extremo receptor si desde el extremo emisor no se ha enviado tal señal.
Portadora sobre línea de energía Los sistemas de onda portadora sobre línea de energía o PLC (Power Line Carrier) han sido utilizados durante mucho tiempo por las compañías eléctricas para transmitir información vital para el funcionamiento y la pro-tección de la red eléctrica, es decir, voz, comandos de protección y seña-les de control. Así pues, las líneas eléctricas no sólo se usan para trans-portar energía eléctrica (a una fre-cuencia de 50 ó 60 Hz), sino también para transmitir señales de comunica-ción (normalmente a frecuencias entre 40 kHz y 500 kHz). Se usan dispositi-vos especiales de acoplamiento para conectar los terminales de comunica-ción con líneas eléctricas de alta ten-sión. El uso de líneas eléctricas existentes para las comunicaciones es una im-portante alternativa, ya que propor-cionan el enlace más directo para la teleprotección (donde la velocidad es crucial), son fiables y están completa-mente bajo el control de la compañía eléctrica, algo muy importante sobre todo en los países que ha liberalizado el mercado de las telecomunicaciones. Además, las líneas de transporte de electricidad son un excelente medio de comunicación para enlazar puntos a distancias de varios cientos de kiló-metros sin ningún repetidor.
permite configurar un sistema complejo “con unos pocos clics de ratón” e incluso am-pliar en el futuro la funciona-lidad con la descarga de mó-dulos adicionales de soft-ware.
¿Qué y cómo comunican las compañías eléctricas?La capacidad de ABB en el campo de las comunicacio-nes se basa en su experien-cia, obtenida en instalacio-nes de compañías eléctricas de más de 140 países. Esta experiencia, y con ella las acreditadas soluciones que la acompa-ñan, es especialmente importante en la señalización de protecciones, donde la comunicación permite a los sistemas de protección corregir una avería de una línea en el menor tiempo posible, o aislar componentes básicos de la planta directamente afectados por una avería mientras todos los demás com-ponentes siguen estando disponibles.La mejor funcionalidad y el mayor ren-dimiento de los sistemas de comunica-ción de ABB aumentan la cantidad y la calidad de la información disponible para las funciones operacionales y de gestión. Habilitar todas las unidades de negocio de una compañía eléctrica para que tengan acceso inmediato a esta información significa que la mis-ma información puede utilizarse para el control remoto de subestaciones y para las tareas de evaluación, redu-ciendo al mínimo los costes de explo-tación y de mantenimiento. Disponer de servicios de comunicación potentes y fiables es absolutamente esencial pa-ra que las modernas compañías eléc-tricas puedan controlar, supervisar y gestionar las operaciones del sistema eléctrico 2 . Los rápidos avances tecnológicos de los últimos años y el proceso de libe-ralización de los mercados eléctricos han cambiado significativamente los requisitos de comunicación de las compañías eléctricas. Actualmente existen tres importantes tecnologías de comunicación usuales en la red WAN de área extensa que cumplen estos re-quisitos: PLC, fibra óptica y radiotrans-misión por microondas.Las técnicas PLC establecidas juegan un papel importante por su alta fiabili-dad, por sus costes relativamente bajos
1 Vista general de una red de comunicaciones
Tecnologías de sistemas integrados

52 Revista ABB 2/2006
El canto de las líneas eléctricas
De las válvulas a los sistemas integra-dosEn 1942 entró en funcionamiento el primer enlace PLC de ABB 3 . Durante los últimos 64 años se han instalado miles de enlaces en más de 120 países, con niveles de tensión de hasta 1.100 kV CA y 500 kV CC, cubriendo una longitud total de más de un millón de kilómetros. Durante más de seis décadas, cada nueva generación de equipos PLC se ha desarrollado a partir de la tecnolo-gía punta del momento y esto no ha cambiado. Por tanto, muchos de los avances tecnológicos logrados en el campo de la electrónica y de las teleco-municaciones durante las dos últimas
décadas se reflejan en el desarrollo del equipo PLC.Los primeros sistemas PLC usaban vál-vulas y la información se transmitía en gran medida como en los actuales sis-temas de radiotransmisión AM: las for-mas de onda analógicas (no señales ni bits digitales) se modulan a la frecuen-cia deseada (por ejemplo, entre 40 y 500 kHz). La señal sobre las líneas de energía eléctrica aparece dos veces, ya que aparece una copia duplicada de la señal original (doble banda lateral). A principios de los años cincuenta, la banda requerida de frecuencias –un recurso muy escaso– se redujo a la mi-tad, eliminando la señal duplicada (banda lateral única, SSB). Esta tecno-
logía SSB se sigue utilizando en los sistemas actuales y en los sistemas de radio de onda corta. A mediados de los años cincuenta, las válvulas fueron sustituidas por transistores de germa-nio, que fueron reemplazados más tar-de, a principios de los sesenta, por transistores de silicio y éstos, a media-dos de los setenta, por circuitos inte-grados. En los primeros noventa se hizo posible para el usuario adaptar el sistema PLC a sus necesidades reales, “programándolo” con conmutadores y puentes. El siguiente avance tecnológico se produjo a finales de los años noventa con la introducción del ETL500 de ABB, el primer sistema PLC numérico integrado. El sistema ya no se configu-raba solamente con conmutadores y puentes, sino principalmente con una interfaz gráfica de usuario (GUI) fun-cionando sobre un ordenador personal (PC). Las señales dentro del sistema ETL500 ya no se procesaban en formas de onda analógicas, sino en un flujo de bits digitales. Muchos de los com-plejos componentes analógicos, como osciladores, mezcladores y filtros, fue-ron sustituidos por operaciones mate-máticas ejecutadas por un procesador de señal digital (DSP). Tal procesador DSP (similar a un procesador interno de un PC, pero diseñado para aplica-ciones específicas de “cálculos numéri-cos”) puede realizar operaciones com-plejas a gran velocidad.Otro salto tecnológico fue posible gra-cias al trabajo pionero en modulación y codificación digital. Actualmente, la comunicación digital es parte de la vi-da diaria, ya sea en forma de teléfonos celulares, máquinas de fax, CD, DVD, emisión de radio y televisión digital terrestre o vía satélite, o reproductores MP3, por citar tan sólo algunos ejem-plos. Para visualizar la forma en que los avances técnicos han cambiado las condiciones de la vida diaria, conside-remos cómo se utilizaban antes las líneas telefónicas y cómo se utilizan ahora para transportar información digital con la ayuda de los llamados módems. Inicialmente se utilizó una tecnología conocida como modulación por desplazamiento de frecuencia o FSK (Frequency Shift Keying) y en 1962 se consiguió una velocidad de transmisión de datos de 300 bits/s (posteriormente estandarizada como V.21). Más de 30 años después, esa
Tecnologías de sistemas integrados
3 Una de las primeras instalaciones PLC de ABB, hacia 1944, publicada en Brown Boveri Mitteilungen, predecesora de Revista ABB, en enero/febrero de 1944 (figuras 169 y 170)
2 Vista general del sistema PLC
Transporte de energía eléctrica
Transmisión de datos, palabra y señales de protección
Línea de ATimpedancia ZSubestación
Filtro de línea
Filtro de línea Subestación
Condensador de acoplamiento
o CVT
Condensador de acoplamiento o CVT
Dispositivo de acoplamiento
MCD 80
Dispositivo de acoplamiento MCD 80Terminal
PLCTerminal
PLC

53Revista ABB 2/2006
El canto de las líneas eléctricas
velocidad ha aumentado en más de dos órdenes de magnitud, hasta alcan-zar 56 kbits/s (V.90/V.92). Con ADSL son posibles velocidades de transmi-sión aún mayores, aunque requieren un ancho de banda mucho mayor (no utilizado de otro modo en líneas de abonados telefónicos).Un avance similar fue posible con los sistemas PLC. Sin embargo, los princi-pios de modulación y codificación tu-vieron que ser adaptados para hacer frente a los escasos recursos de ancho de banda espectral y a las difíciles condiciones de los canales de los sis-temas PLC. Además había otro obstá-culo: había que superar distancias enormes. En 1999, ABB introdujo el primer sistema PLC digital del mundo con adaptación automática de veloci-dad (AMX500), que conseguía una velocidad de transmisión de datos de hasta 28,8 kbits/s en un ancho de ban-da de 4 kHz, o de hasta 64 kbits/s en 8 kHz. Una mejora, una vez más, de varios órdenes de magnitud.
ETL600, sistema PLC integrado y flexible para el futuro Durante los últimos años, los avances tecnológicos han creado nuevas opor-tunidades para las aplicaciones PLC, especialmente por la provisión de ma-yor ancho de banda, por la integración en redes digitales y por diversas mejo-ras funcionales, así como por la facili-dad y flexibilidad de su uso. Estas nuevas posibilidades, a las que hay que añadir la economía y la fiabilidad por las que destaca la tecnología PLC, han devuelto un gran auge a los siste-mas PLC en todo el mundo.ETL600, representante de la última ge-neración de equipos PLC de ABB, es un sistema realmente integrado que
incorpora y amplía con gran flexibili-dad muchos componentes del sistema predecesor 4 . Con esta nueva plata-forma integrada, que ofrece servicios múltiples, es posible realizar todas las aplicaciones PLC en un sistema único.La arquitectura del sistema ETL600 se basa en una combinación de tecnolo-gía acreditada y de hardware y soft-ware de vanguardia para el proceso de señales digitales. Esto permite al usua-rio configurar el sistema con unas po-cas pulsaciones de ratón, cuando hasta ahora, para integrar módulos adiciona-les de hardware, ha sido necesario programar puentes y conmutadores e, incluso, realizar soldaduras. Además de su facilidad de uso y de una flexi-bilidad de aplicación sin precedentes, ETL600 también garantiza total compa-tibilidad con los productos anteriores, así como con entornos de telecomuni-cación digital de la más avanzada tec-nología. El sistema ETL 600 de ABB proporciona velocidades de transmi-sión de datos cuatro veces mayores que los demás sistemas disponibles en el mercado.Para garantizar la seguridad y la fiabi-lidad, en el sistema ETL600 se han aplicado otras medidas que aumentan la disponibilidad y mejoran la protec-ción contra las interferencias electro-magnéticas y contra los daños causa-dos por las sobretensiones. Además de satisfacer todas las normas EMC/EMI1) relevantes, todas las interfaces, inclusi-ve los puertos de datos, están aisladas eléctricamente y por tanto ofrecen protección adicional contra las sobre-tensiones, las subidas del potencial de tierra y los bucles de tierra.
PerspectivasCada nuevo avance tecnológico mejo-ra y agiliza la realización de las tareas rutinarias pero, sobre todo, abre las puertas a muchas otras aplicaciones. Los sistemas PLC tradicionales eran, básicamente, enlaces punto a punto, habilitados para la conectividad de un punto dado con varios puntos de sis-temas SCADA. Hoy en día, gracias a la introducción del sistema PLC digital y de multiplexores, conmutadores o routers digitales, se pueden interco-nectar múltiples enlaces PLC para for-mar una red mallada. Esta red propor-ciona una gran elasticidad o flexibili-dad de reacción contra los fallos del enlace y soporta nuevas aplicaciones,
como supervisión, control y protec-ción de áreas extensas. Además, las señales de voz, que en gran medida siguen transmitiéndose como señales analógicas, se pueden convertir en flu-jos de bits digitales, reduciendo así su uso del precioso ancho de banda en las líneas eléctricas. Las nuevas características de la tecno-logía PLC digital permiten utilizar mo-dernos sistemas PLC para apoyar con fiabilidad servicios que cumplen mi-siones críticas, como SCADA y Tele-protección, normalmente dirigidos so-bre medios de banda ancha. En parti-cular, el nuevo e ingenioso modo de operación del sistema ETL600 prepara el terreno para proporcionar conectivi-dad Ethernet/IP (por ejemplo, para in-terconexiones LAN-LAN) sobre líneas eléctricas de alta tensión, una aplica-ción impensable con la tecnología PLC tradicional.Aunque este artículo se centra en la tecnología PLC, también se han conse-guido grandes avances tecnológicos en todos los productos de comunicación para compañías eléctricas y especial-mente en los campos de la fibra óptica y de la radiotransmisión por microon-das. ABB ofrece soluciones de comu-nicación integradas para aplicaciones críticas en compañías eléctricas, en el sector petrolífero y gasístico y en los ferrocarriles. Gracias a los últimos avances, hoy es posible utilizar un so-lo sistema para la gestión remota de toda la red de comunicaciones.
Más información en:
http://www.abb.com/utilitycommunications
Stefan Ramseier
Hermann Spiess
ABB Utility Communication Systems
Baden, Suiza
Notas:1) La compatibilidad electromagnética (CEM) es la ca-
pacidad de un equipo para funcionar sin interferen-
cias con otros equipos. La interferencia electromag-
nética (IEM) se concentra en el aumento de energía
emitida por los equipos electrónicos, que puede de-
gradar el funcionamiento de los equipos próximos.
4 Un sistema PLC pionero, el ETL600
Tecnologías de sistemas integrados
Cuando alguien habla de desarrollo de productos, mucha gente imagina un inventor solitario trabajando afanosamen-te en un penumbroso garaje. A este cliché se asocian indi-vidualidades como Thomas Edison o jóvenes genios de los microordenadores. Pero estos métodos no son representa-tivos del desarrollo de la mayor parte de los productos, que se produce en un mercado cada vez más exigente y diná-mico.El proceso de desarrollo ha dejado de ser un método intui-tivo y empírico que llevaba al ingenio individual a triunfar sobre el mundo para convertirse en un proceso de creación
Ideas brillantes Cooperación global para suministrar los mejores productosDeia Bayoumi, Katja Rajaniemi, Eric Buchholtz
gestionado científicamente. La impresionante cantidad de herramientas de soporte abarca desde el análisis de mer-cados y gestión de riesgos hasta la Teoría de las Limitacio-nes1). En el proceso de desarrollo actúan numerosos parti-cipantes con diferentes puntos de vista, ideas, prioridades y culturas. La gestión exitosa de un proyecto consiste en conseguir que todos estos grupos trabajen para conseguir un único objetivo. En este artículo, Revista ABB revisa el proceso de desarro-llo de las actividades de nuestra compañía en el campo ABB Distribution Automation.
54 Revista ABB 2/2006
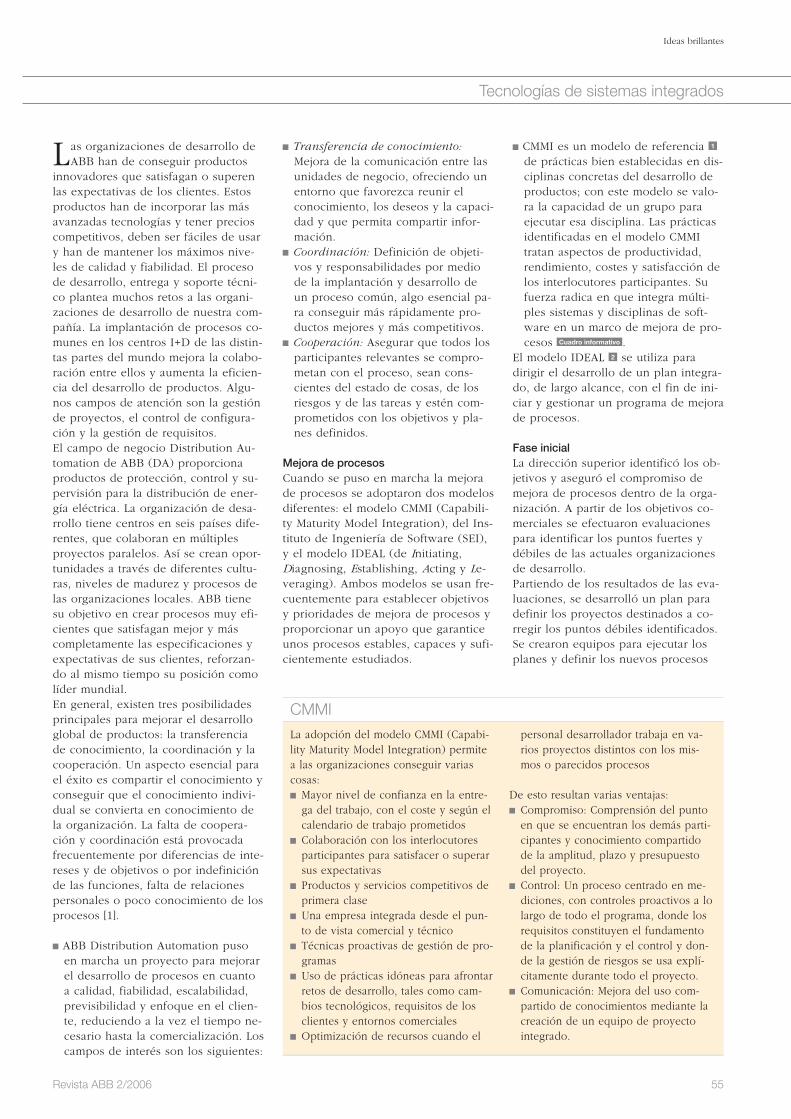
55Revista ABB 2/2006
Ideas brillantes
Las organizaciones de desarrollo de ABB han de conseguir productos
innovadores que satisfagan o superen las expectativas de los clientes. Estos productos han de incorporar las más avanzadas tecnologías y tener precios competitivos, deben ser fáciles de usar y han de mantener los máximos nive-les de calidad y fiabilidad. El proceso de desarrollo, entrega y soporte técni-co plantea muchos retos a las organi-zaciones de desarrollo de nuestra com-pañía. La implantación de procesos co-munes en los centros I+D de las distin-tas partes del mundo mejora la colabo-ración entre ellos y aumenta la eficien-cia del desarrollo de productos. Algu-nos campos de atención son la gestión de proyectos, el control de configura-ción y la gestión de requisitos. El campo de negocio Distribution Au-tomation de ABB (DA) proporciona productos de protección, control y su-pervisión para la distribución de ener-gía eléctrica. La organización de desa-rrollo tiene centros en seis países dife-rentes, que colaboran en múltiples proyectos paralelos. Así se crean opor-tunidades a través de diferentes cultu-ras, niveles de madurez y procesos de las organizaciones locales. ABB tiene su objetivo en crear procesos muy efi-cientes que satisfagan mejor y más completamente las especificaciones y expectativas de sus clientes, reforzan-do al mismo tiempo su posición como líder mundial.En general, existen tres posibilidades principales para mejorar el desarrollo global de productos: la transferencia de conocimiento, la coordinación y la cooperación. Un aspecto esencial para el éxito es compartir el conocimiento y conseguir que el conocimiento indivi-dual se convierta en conocimiento de la organización. La falta de coopera-ción y coordinación está provocada frecuentemente por diferencias de inte-reses y de objetivos o por indefinición de las funciones, falta de relaciones personales o poco conocimiento de los procesos [1].
ABB Distribution Automation puso en marcha un proyecto para mejorar el desarrollo de procesos en cuanto a calidad, fiabilidad, escalabilidad, previsibilidad y enfoque en el clien-te, reduciendo a la vez el tiempo ne-cesario hasta la comercialización. Los campos de interés son los siguientes:
Transferencia de conocimiento: Mejora de la comunicación entre las unidades de negocio, ofreciendo un entorno que favorezca reunir el conocimiento, los deseos y la capaci-dad y que permita compartir infor-mación.
Coordinación: Definición de objeti-vos y responsabilidades por medio de la implantación y desarrollo de un proceso común, algo esencial pa-ra conseguir más rápidamente pro-ductos mejores y más competitivos.
Cooperación: Asegurar que todos los participantes relevantes se compro-metan con el proceso, sean cons-cientes del estado de cosas, de los riesgos y de las tareas y estén com-prometidos con los objetivos y pla-nes definidos.
Mejora de procesosCuando se puso en marcha la mejora de procesos se adoptaron dos modelos diferentes: el modelo CMMI (Capabili-ty Maturity Model Integration), del Ins-tituto de Ingeniería de Software (SEI), y el modelo IDEAL (de Initiating, Diagnosing, Establishing, Acting y Le-veraging). Ambos modelos se usan fre-cuentemente para establecer objetivos y prioridades de mejora de procesos y proporcionar un apoyo que garantice unos procesos estables, capaces y sufi-cientemente estudiados.
CMMI es un modelo de referencia 1 de prácticas bien establecidas en dis-ciplinas concretas del desarrollo de productos; con este modelo se valo-ra la capacidad de un grupo para ejecutar esa disciplina. Las prácticas identificadas en el modelo CMMI tratan aspectos de productividad, rendimiento, costes y satisfacción de los interlocutores participantes. Su fuerza radica en que integra múlti-ples sistemas y disciplinas de soft-ware en un marco de mejora de pro-cesos Cuadro informativo .
El modelo IDEAL 2 se utiliza para dirigir el desarrollo de un plan integra-do, de largo alcance, con el fin de ini-ciar y gestionar un programa de mejora de procesos.
Fase inicialLa dirección superior identificó los ob-jetivos y aseguró el compromiso de mejora de procesos dentro de la orga-nización. A partir de los objetivos co-merciales se efectuaron evaluaciones para identificar los puntos fuertes y débiles de las actuales organizaciones de desarrollo.Partiendo de los resultados de las eva-luaciones, se desarrolló un plan para definir los proyectos destinados a co-rregir los puntos débiles identificados. Se crearon equipos para ejecutar los planes y definir los nuevos procesos
Tecnologías de sistemas integrados
La adopción del modelo CMMI (Capabi-lity Maturity Model Integration) permite a las organizaciones conseguir varias cosas: Mayor nivel de confianza en la entre-ga del trabajo, con el coste y según el calendario de trabajo prometidos
Colaboración con los interlocutores participantes para satisfacer o superar sus expectativas
Productos y servicios competitivos de primera clase
Una empresa integrada desde el pun-to de vista comercial y técnico
Técnicas proactivas de gestión de pro-gramas
Uso de prácticas idóneas para afrontar retos de desarrollo, tales como cam-bios tecnológicos, requisitos de los clientes y entornos comerciales
Optimización de recursos cuando el
personal desarrollador trabaja en va-rios proyectos distintos con los mis-mos o parecidos procesos
De esto resultan varias ventajas: Compromiso: Comprensión del punto en que se encuentran los demás parti-cipantes y conocimiento compartido de la amplitud, plazo y presupuesto del proyecto.
Control: Un proceso centrado en me-diciones, con controles proactivos a lo largo de todo el programa, donde los requisitos constituyen el fundamento de la planificación y el control y don-de la gestión de riesgos se usa explí-citamente durante todo el proyecto.
Comunicación: Mejora del uso com-partido de conocimientos mediante la creación de un equipo de proyecto integrado.
CMMI
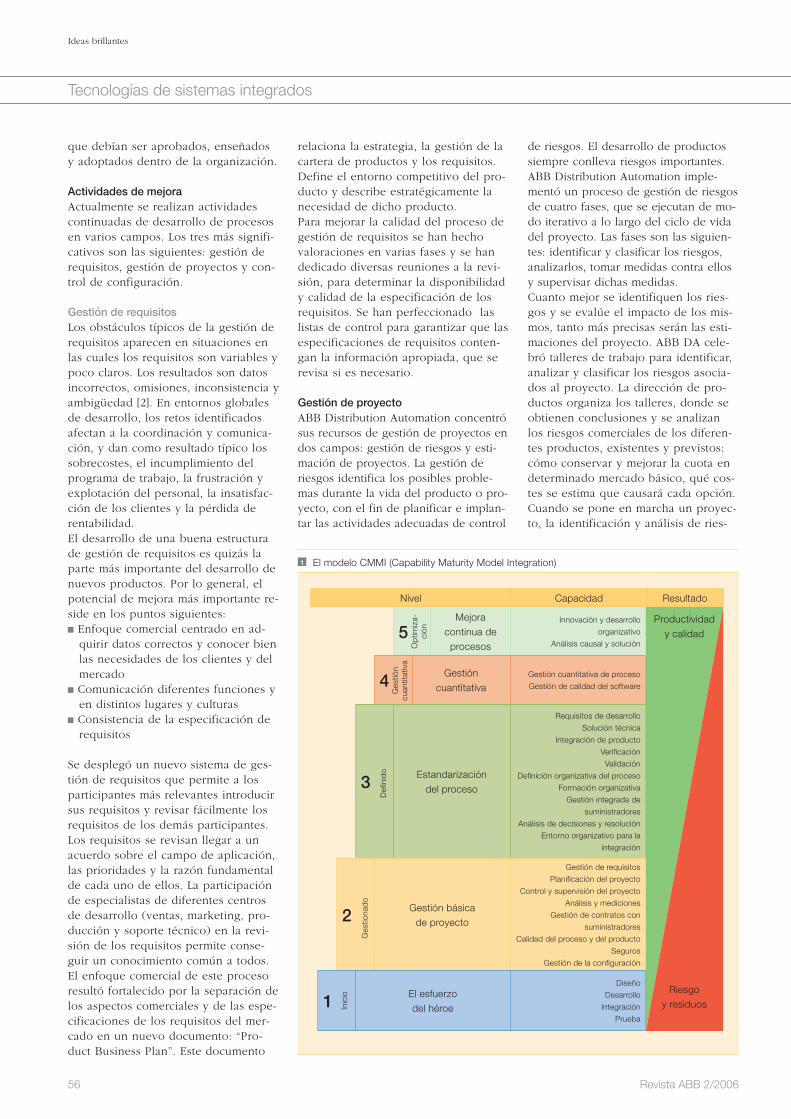
56 Revista ABB 2/2006
Ideas brillantes
relaciona la estrategia, la gestión de la cartera de productos y los requisitos. Define el entorno competitivo del pro-ducto y describe estratégicamente la necesidad de dicho producto. Para mejorar la calidad del proceso de gestión de requisitos se han hechovaloraciones en varias fases y se han dedicado diversas reuniones a la revi-sión, para determinar la disponibilidad y calidad de la especificación de los requisitos. Se han perfeccionado las listas de control para garantizar que las especificaciones de requisitos conten-gan la información apropiada, que se revisa si es necesario.
Gestión de proyectoABB Distribution Automation concentró sus recursos de gestión de proyectos en dos campos: gestión de riesgos y esti-mación de proyectos. La gestión de riesgos identifica los posibles proble-mas durante la vida del producto o pro-yecto, con el fin de planificar e implan-tar las actividades adecuadas de control
de riesgos. El desarrollo de productos siempre conlleva riesgos importantes. ABB Distribution Automation imple-mentó un proceso de gestión de riesgos de cuatro fases, que se ejecutan de mo-do iterativo a lo largo del ciclo de vida del proyecto. Las fases son las siguien-tes: identificar y clasificar los riesgos, analizarlos, tomar medidas contra ellos y supervisar dichas medidas.Cuanto mejor se identifiquen los ries-gos y se evalúe el impacto de los mis-mos, tanto más precisas serán las esti-maciones del proyecto. ABB DA cele-bró talleres de trabajo para identificar, analizar y clasificar los riesgos asocia-dos al proyecto. La dirección de pro-ductos organiza los talleres, donde se obtienen conclusiones y se analizan los riesgos comerciales de los diferen-tes productos, existentes y previstos: cómo conservar y mejorar la cuota en determinado mercado básico, qué cos-tes se estima que causará cada opción. Cuando se pone en marcha un proyec-to, la identificación y análisis de ries-
que debían ser aprobados, enseñados y adoptados dentro de la organización.
Actividades de mejoraActualmente se realizan actividades continuadas de desarrollo de procesos en varios campos. Los tres más signifi-cativos son las siguientes: gestión de requisitos, gestión de proyectos y con-trol de configuración.
Gestión de requisitosLos obstáculos típicos de la gestión de requisitos aparecen en situaciones en las cuales los requisitos son variables y poco claros. Los resultados son datos incorrectos, omisiones, inconsistencia y ambigüedad [2]. En entornos globales de desarrollo, los retos identificados afectan a la coordinación y comunica-ción, y dan como resultado típico los sobrecostes, el incumplimiento del programa de trabajo, la frustración y explotación del personal, la insatisfac-ción de los clientes y la pérdida de rentabilidad.El desarrollo de una buena estructura de gestión de requisitos es quizás la parte más importante del desarrollo de nuevos productos. Por lo general, el potencial de mejora más importante re-side en los puntos siguientes: Enfoque comercial centrado en ad-quirir datos correctos y conocer bien las necesidades de los clientes y del mercado
Comunicación diferentes funciones y en distintos lugares y culturas
Consistencia de la especificación de requisitos
Se desplegó un nuevo sistema de ges-tión de requisitos que permite a los participantes más relevantes introducir sus requisitos y revisar fácilmente los requisitos de los demás participantes. Los requisitos se revisan llegar a un acuerdo sobre el campo de aplicación, las prioridades y la razón fundamental de cada uno de ellos. La participación de especialistas de diferentes centros de desarrollo (ventas, marketing, pro-ducción y soporte técnico) en la revi-sión de los requisitos permite conse-guir un conocimiento común a todos. El enfoque comercial de este proceso resultó fortalecido por la separación de los aspectos comerciales y de las espe-cificaciones de los requisitos del mer-cado en un nuevo documento: “Pro-duct Business Plan”. Este documento
1 El modelo CMMI (Capability Maturity Model Integration)
5Mejora
continua de procesos
Innovación y desarrollo
organizativo
Análisis causal y soluciónOpt
imiz
a-ci
ón
4 Gestión cuantitativa
Gestión cuantitativa de proceso
Gestión de calidad del software
Ges
tión
cuan
titat
iva
3 Estandarización del proceso
Requisitos de desarrollo
Solución técnica
Integración de producto
Verificación
Validación
Definición organizativa del proceso
Formación organizativa
Gestión integrada de
suministradores
Análisis de decisiones y resolución
Entorno organizativo para la
integración
Def
inid
o
2 Gestión básica de proyecto
Gestión de requisitos
Planificación del proyecto
Control y supervisión del proyecto
Análisis y mediciones
Gestión de contratos con
suministradores
Calidad del proceso y del producto
Seguros
Gestión de la configuración
Ges
tiona
do
1 El esfuerzo del héroe
Diseño
Desarrollo
Integración
Prueba
Inic
io
Productividad y calidad
Riesgo y residuos
Tecnologías de sistemas integrados
ResultadoNivel Capacidad

57Revista ABB 2/2006
Ideas brillantes
nal de proyecto que sirve para com-partir el conocimiento de los distintos participantes y comunicarlo a un grupo mayor de personas.La dirección de proyectos garantiza que a cada proyecto se le asignen los recur-sos necesarios, como si se tratara de un proyecto individual. ABB DA emplea técnicas de Teoría de Limitaciones (TOC)1), entre otras, para garantizar una eficiente planificación, supervisión y control en un entorno de varios pro-yectos. Con TOC se generan planes de proyectos basados en la estimación op-timista y pesimista de cada tarea. Así se crea la cadena crítica2) y buffers de pro-yectos basados en esas estimaciones. Los proyectos se inician programándo-los de acuerdo con la disponibilidad de recursos críticos. Además, estos recur-sos críticos sólo se emplean en tareas que necesitan la capacidad especial de dichos recursos, optimizando así el ren-dimiento global del proceso. Para faci-litar la programación se asigna a cada proyecto una prioridad relativa. Un proyecto con mayor prioridad obtiene recursos con preferencia a otro con menor prioridad. El consumo del buffer de riesgos y el progreso en la cadena crítica son supervisados y comunicados semanalmente. Los directores de pro-yectos obtienen información semanal sobre el trabajo pendiente en cada ta-rea, de modo que disponen de toda la información necesaria para dirigir el proceso completo.
gos se centran sobre todo en los ries-gos técnicos y en la posibilidad de di-rigir el proyecto de acuerdo con el ca-lendario de trabajo, el coste y la ampli-tud previstos. Los talleres de estudio de riesgos se estructuran del modo siguiente: Celebración de sesiones de brainstor-ming sobre fuentes de riesgos
Utilización de una lista de posibles fuentes de riesgos y de riesgos espe-cíficos de la organización, conocidos por la experiencia
Priorización de los riesgos (probabili-dad y gravedad) de acuerdo con las categorías definidas de riesgos
La idea de utilizar las categorías de gravedad y fuentes de riesgos garantiza que, además de los riesgos más proba-bles y con consecuencias menos gra-ves, se identificarán también otros tipos de riesgos, evitándose así que queden sin identificar riesgos con gra-ves consecuencias pero que hasta aho-ra no han ocurrido. La priorización de riesgos identifica también aquéllos que requieren planes de contingencia y/o de mitigación para reducir el impacto o la probabilidad de que el riesgo se convierta en un problema.Los riesgos se supervisan y comunican durante la evaluación de las fases y en las reuniones mensuales del comité de seguimiento del proyecto. Además, cada semana se informa a la dirección sobre los riesgos en un informe sema-
Control de la configuraciónAl igual que en la gestión de requisi-tos, se desplegó un sistema global de control de configuración con un siste-ma de gestión del ciclo de vida. Este sistema tiene varias ventajas: Comunicación: Permite compartir información a través de diferentes funciones, lugares y culturas, ha-ciendo que la información esté disponible para todos los interlocu-tores participantes.
Control: Garantiza que todo el mun-do trabaje con la misma versión del documento.
Compromiso: Requiere el acuerdo de los participantes pertinentes mediante la aprobación de docu-mentos.
Calidad: Exige efectuar revisiones para garantizar que los productos del trabajo sean completos y preci-sos.
Uso compartido de conocimientos: Utilización de un servicio del siste-ma y una fuente de información.
Sólo una profunda comprensión y la
implantación de un proceso de de-sarrollo puede satisfacer las deman-das del mercado del futuro.
Deia Bayoumi
ABB Inc.
Allentown, PA, USA
Katja Rajaniemi
ABB Oy
Vassa, Finlandia
Eric Buchholtz
ABB Inc.
Raleigh, NC, USA
Bibliografía
[1] Smith, 1995, Surakka, 2005, Hoopes, Postrel,
1999
[2] Hooks, Farry, 2001
Notas 1) Más información sobre TOC en “Cómo controlar la
cadena con TOC”, Revista ABB 1/2006, pág. 25.2) El camino crítico es la secuencia de paquetes de tra-
bajo en un proceso con la mayor duración total, te-
niendo en cuenta las dependencias de los recursos.
Tecnologías de sistemas integrados
2 El modelo IDEAL (Initiating, Diagnosing, Establishing, Acting, and Leveraging)
Formación
Dirección
Establecimiento
Diagnóstico
Inicio
Estímulo para el cambio
ContextoFinan-
ciación
Permiso de
infra-
estructura
Definición de estado actual y deseado
Recomen-
daciones de
desarrolloDefinición
de
prioridades
Enfoque
de
desarrollo
Plan de
acción
Creación de
soluciones
Prueba de
solución
piloto
Perfec-
cionamiento
de la solución
Aplicación
de la
solución
Análisis y
validaciónPropuesta
de acciones
futuras
Robótica do-it-yourself Software integrado para que el usuario programe sus propias aplicaciones de robotsIngela Brorsson, Ralph Sjöberg, Anna Liberg
58 Revista ABB 2/2006
ABB recibió en 2005 más pedidos de robots que nunca. El controlador de robots IRC5 de quinta generación de ABB se ha ganado una gran reputación en el mer-cado mundial, alcanzando ventas superiores a las de su predecesor, el S4CPlus. El controlador IRC5 es un hito de la robótica: su potente función MultiMove® establece nuevos estándares de control de movimientos. Esta función permite definir complejos patrones coordinados para controlar hasta cuatro robots (hasta 36 ejes) con movimientos independientes o sincronizados por medio de un único módulo controlador. Pero no es sólo el controlador el que abre nuevas vías hacia el futuro. IRC5 Flex-Pendant, un moderno programa integrado en la nueva unidad portátil, permite ahora a los usuarios de IRC5 beneficiarse de las interfaces hechas a medida.

59Revista ABB 2/2006
Robótica do-it-yourself
El controlador IRC5 se basa en la facilidad de uso y en la flexibili-
dad. La unidad FlexPendant es básica para esta filosofía, centrada en el usuario y representativa de un impor-tante avance conceptual y tecnológi-co. Aunque parte integrante del con-trolador IRC5, la unidad es un ordena-dor completo desarrollado con Win-dows CE.NET, la última tecnología de Microsoft para sistemas integrados. Presenta un innovador diseño ergonó-mico fácilmente adaptable a cualquie-ra de las dos manos, dejando la otra libre. Destaca la singular palanca de mando de tres vías, desarrollada por ABB para el movimiento lento y gra-dual –intuitivo– del robot. Sólo tiene ocho pulsadores reales, para el acceso rápido a funciones esenciales como arrancar y parar programas de robots y, por supuesto, una parada de emer-gencia. Otros pulsadores –por ejemplo un teclado virtual para entrada de tex-to–, necesarios para el funcionamien-to, aparecen en la pantalla gráfica tác-til sólo cuando hacen falta. Ésta es una gran mejora respecto de los com-plejos teclados de la competencia. FlexPendant ha de funcionar perma-nentemente en duros entornos indus-triales, pero la pantalla táctil es fácil de limpiar y resiste al agua, a los pro-ductos químicos e incluso a las salpi-caduras accidentales de material de soldadura.La utilidad ha sido el criterio de desa-rrollo de la unidad FlexPendant. El uso de la pantalla táctil es rápido y natural
y la interfaz de tipo Windows, con ico-nos bien conocidos, es familiar para los usuarios y, por tanto, reduce al mínimo la necesidad de formar al operador. El nombre FlexPendant ya sugiere su adaptabilidad a las necesidades especí-ficas del usuario. La unidad ya puede operar en 14 idiomas diferentes, inclu-so de caracteres asiáticos como el japo-nés y el chino. Un operador zurdo pue-de adaptar el dispositivo simplemente girando 180 grados la pantalla 1 . Ade-más, cuatro teclas básicas son progra-mables, es decir, el usuario final puede asignarles las funciones que desee.
Desarrollo de la unidad FlexPendantEl desarrollo de IRC5 FlexPendant co-menzó realmente a finales de 2001. Los requisitos técnicos del dispositivo se ajustaban perfectamente a Windows CE 4.0, sistema operativo integrado de Microsoft para dispositivos portátiles inteligentes. Aunque la elección del sistema operativo era clara, fue más di-fícil elegir el modelo de programación. Para la interfaz de usuario se pensó utilizar COM/ATL como tecnología de componentes con MFC. El principal problema estaba en la complejidad del modelo de programación. FlexPendant tenía que comercializarse en un plazo de dos años y su tecnología debía pro-porcionar un kit de desarrollo de soft-ware de fácil uso para poder añadir aplicaciones específicas al dispositivo. Pronto se vio que la futura estructura de Microsoft para dispositivos integra-dos, .NET Compact Framework (.NET
CF), ofrecería un modelo de programa-ción mejor, más rápido y con menos errores. Sin embargo, la adopción de una nueva tecnología conlleva el ries-go de que surjan problemas técnicos imprevistos que retrasen el trabajo. En este caso era necesario usar versiones alfa y beta de Microsoft. No obstante, las ventajas de calidad y productividad de Windows CE.NET hacían muy atrac-tiva esta opción y permitían a ABB hacer una buena personalización para el operador. Durante el primer año de desarrollo, ABB colaboró estrechamente con Mi-crosoft en el programa EAP (Early Adopter Program para .NET CF). La ayuda de Microsoft contribuyó al éxito del proyecto y la aprobación del pro-grama EAP garantizó el compromiso necesario de Microsoft para hacer con-verger el desarrollo de la unidad Flex-Pendant y de la plataforma de software para la misma. Por su parte, ABB se comprometió a comercializar la unidad FlexPendant poco después del lanza-miento de .NET CF, previsto para 2003.
ABB era prácticamente el único partici-pante en el programa EAP que explo-raba NET CF en Windows CE, mientras otros utilizaban PocketPC como siste-ma operativo. Microsoft tenía gran in-terés en desarrollar FlexPendant y muy pronto utilizó los robots de ABB en su publicidad televisiva de .NET. La rela-ción con Microsoft se caracterizó por el alto grado de compromiso y de competencia técnica y llevó a ABB a
1 La unidad FlexPendant se ajusta fácilmente para un usuario zurdo.
2 Klöckner-Desma (Alemania) fue una de las primeras compañías en adoptar FlexPendant SDK.
Tecnologías de sistemas integrados

60 Revista ABB 2/2006
Robótica do-it-yourself
lanzar uno de los primeros productos realmente avanzados, basados en Win-dows CE.NET y destinados a la indus-tria, El volumen de código desarrolla-do para la unidad FlexPendant es con-siderable: más de 180.000 líneas ejecu-tables de código C# y unas 25.000 lí-neas de código C++ que proporcionan la capa de comunicación hacia el con-trolador del robot.
“El equipo FlexPendant de ABB team ha actuado con gran inteligencia estudian-do nuevas funciones y ca-pacidades de nuestra pla-taforma. Nos ha ayudado mucho a perfeccionar la plataforma .NET Compact Framework.” Richard Greenberg1)
Kit de desarrollo del softwareFlexPendant SDK (kit de desarrollo del software), fue iniciado en 2003, parale-lamente a otra mejora del software ba-se de FlexPendant. Pronto se inició un programa EAP para los clientes de ABB y Klöckner-Desma, suministrador ale-mán para fabricantes de calzado, desa-rrolló varias innovaciones para facilitar el control del montaje de suelas. La idea consistía en visualizar gráficamen-te la trayectoria del robot –el contorno de la suela– para ajustar mejor las po-siciones del mismo 2 . Los robots se entregan normalmente con una interfaz general de operador, pero el usuario final suele preferir una solución perso-nalizada, que es más fácil de usar y optimiza la inversión del cliente de au-tomatización. FlexPendant-SDK es par-te del software Robot Application Buil-der (RAB) 3 de ABB desde 2004 y per-mite al usuario final o a un tercero de-sarrollar sus propias aplicaciones robó-ticas. Estas aplicaciones RAB están in-tegradas con la funcionalidad básica de FlexPendant por medio de un mismo sistema de menú estructurado. RAB es un importante avance de la tecnología de robots, que sitúa los productos de ABB por delante de la competencia.La plataforma de software integrado elegida para FlexPendant simplifica el trabajo de los usuarios de RAB. Entre los programadores, .NET destaca por
el modelo de programación que ofre-ce la estructura .NET Framework de Microsoft. Caracterizado por la inde-pendencia del lenguaje de programa-ción, permite al desarrollador de RAB elegir cualquier lenguaje de Microsoft Visual Studio, el entorno de desarrollo integrado. La mayoría prefiere C# o Visual Basic por su seguridad y efi-ciencia. Como los programadores sue-len conocer la programación de plata-formas de Windows con Visual Studio, no necesitan una formación especial para operar con RAB 4 .
Productos avanzados de softwareEl paquete RAB incluye Virtual IRC5 para acelerar el desarrollo para el cliente. La tecnología de robots virtua-les permite a Virtual IRC5 ejecutar el software de IRC5 en un PC y por tanto pone un controlador de robots literal-mente sobre la mesa. Otra característi-ca de .NET Framework es que el códi-go .NET compilado es procesable en cualquier plataforma soportada. Esto permitió desarrollar una unidad virtual FlexPendant que está incluida en IRC5, paralelamente al dispositivo real. Hoy es posible desarrollar y probar aplica-ciones del cliente en un sistema de sobremesa. La puesta a punto es fácil con PlexPendant, sea virtual o real. El programador no tiene más que conec-tar el proceso principal a Visual Studio, establecer un punto de interrupción en el código y saltar a través de él cuando se ejecute. Desarrollar aplicaciones de tiempo real para dispositivos con re-
cursos limitados de proceso y de me-moria es evidentemente más complejo que desarrollar aplicaciones de PC. Por eso, la documentación de usuario enfa-tiza la optimización de prestaciones y de memoria.
Desarrollo de RAB en China y SueciaMuchos clientes, entre ellos algunos integradores de sistemas de robots, compañías automovilísticas e incluso la propia ABB, ya se benefician del uso de RAB. ABB creó en 2004 un equipo de desarrollo de software en Shanghai para reforzar su posición en China y Lejano Oriente. Su primer reto fue des-arrollar con RAB un software para el sector del plástico. El objetivo era ace-lerar la programación y el funciona-miento de los robots ABB para el mol-deo por inyección. RAB, que propor-ciona una interfaz clara para todas las funciones del controlador, es una gran ayuda para los equipos de trabajo de todo el mundo. El resultado, Robot-Ware Plastics, fue lanzado con éxito en 2005. También en este caso se buscó sobre todo la facilidad de uso y se
“FlexPendant es una de las aplicaciones más refinadas que hemos visto utilizando .NET Compact Framework en Windows CE.” Mike Zintel 2)
contó con los usuarios finales desde las primeras etapas del proyecto. Uno de los primeros clientes interesa-dos en RobotWare Plastics fue AD-Plast, compañía sueca fabricante de
3 RAB (Robot Application Builder) permite al cliente desarrollar sus propias aplicaciones de robots.
Tecnologías de sistemas integrados
Notas1) Richard Greenberg, director de Programación del equipo
.NET Compact Framework, Microsoft (abril de 2006).2) Mike Zintel, dirección de Producción del equipo
.NET Compact Framework, Microsoft (abril de 2006).
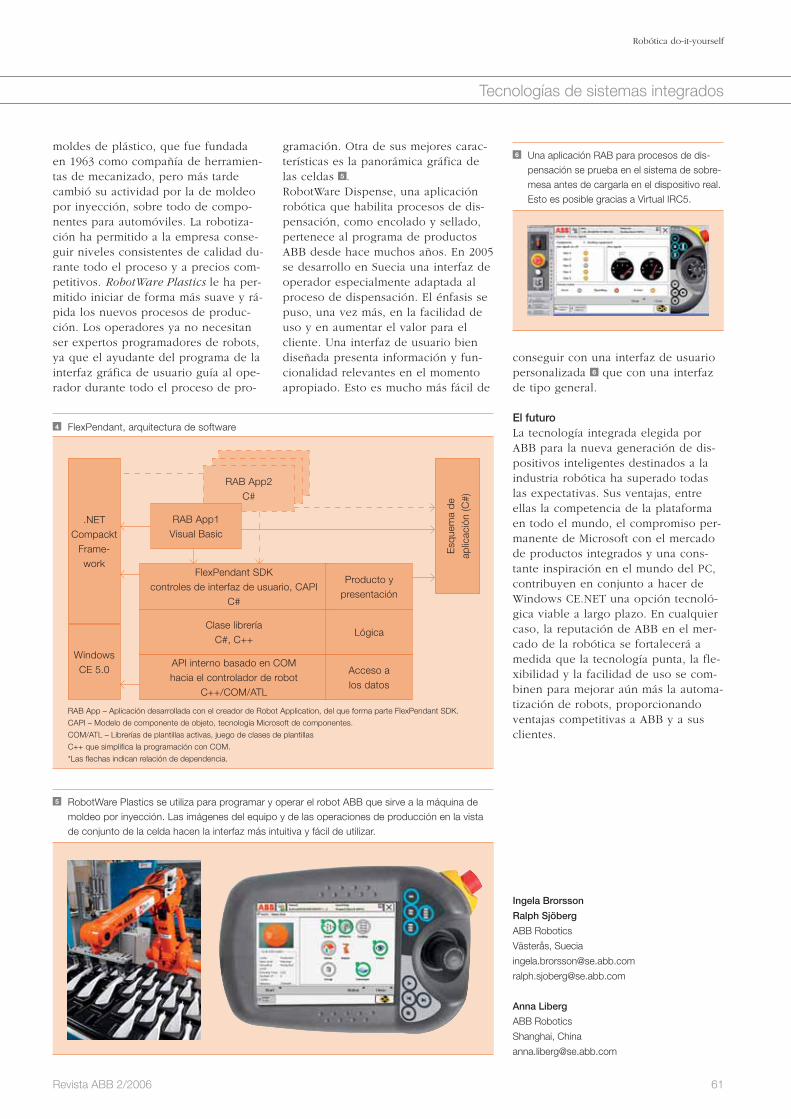
61Revista ABB 2/2006
Robótica do-it-yourself
moldes de plástico, que fue fundada en 1963 como compañía de herramien-tas de mecanizado, pero más tarde cambió su actividad por la de moldeo por inyección, sobre todo de compo-nentes para automóviles. La robotiza-ción ha permitido a la empresa conse-guir niveles consistentes de calidad du-rante todo el proceso y a precios com-petitivos. RobotWare Plastics le ha per-mitido iniciar de forma más suave y rá-pida los nuevos procesos de produc-ción. Los operadores ya no necesitan ser expertos programadores de robots, ya que el ayudante del programa de la interfaz gráfica de usuario guía al ope-rador durante todo el proceso de pro-
conseguir con una interfaz de usuario personalizada 6 que con una interfaz de tipo general.
El futuroLa tecnología integrada elegida por ABB para la nueva generación de dis-positivos inteligentes destinados a la industria robótica ha superado todas las expectativas. Sus ventajas, entre ellas la competencia de la plataforma en todo el mundo, el compromiso per-manente de Microsoft con el mercado de productos integrados y una cons-tante inspiración en el mundo del PC, contribuyen en conjunto a hacer de Windows CE.NET una opción tecnoló-gica viable a largo plazo. En cualquier caso, la reputación de ABB en el mer-cado de la robótica se fortalecerá a medida que la tecnología punta, la fle-xibilidad y la facilidad de uso se com-binen para mejorar aún más la automa-tización de robots, proporcionando ventajas competitivas a ABB y a sus clientes.
Ingela Brorsson
Ralph Sjöberg
ABB Robotics
Västerås, Suecia
Anna Liberg
ABB Robotics
Shanghai, China
gramación. Otra de sus mejores carac-terísticas es la panorámica gráfica de las celdas 5 . RobotWare Dispense, una aplicación robótica que habilita procesos de dis-pensación, como encolado y sellado, pertenece al programa de productos ABB desde hace muchos años. En 2005 se desarrollo en Suecia una interfaz de operador especialmente adaptada al proceso de dispensación. El énfasis se puso, una vez más, en la facilidad de uso y en aumentar el valor para el cliente. Una interfaz de usuario bien diseñada presenta información y fun-cionalidad relevantes en el momento apropiado. Esto es mucho más fácil de
Tecnologías de sistemas integrados
5 RobotWare Plastics se utiliza para programar y operar el robot ABB que sirve a la máquina de moldeo por inyección. Las imágenes del equipo y de las operaciones de producción en la vista de conjunto de la celda hacen la interfaz más intuitiva y fácil de utilizar.
6 Una aplicación RAB para procesos de dis-pensación se prueba en el sistema de sobre-mesa antes de cargarla en el dispositivo real. Esto es posible gracias a Virtual IRC5.
4 FlexPendant, arquitectura de software
.NET Compackt
Frame-work
Esq
uem
a de
ap
licac
ión
(C#)
Windows CE 5.0
RAB App2C#
RAB App1Visual Basic
FlexPendant SDKcontroles de interfaz de usuario, CAPI
C#
Clase libreríaC#, C++
API interno basado en COM hacia el controlador de robot
C++/COM/ATL
Producto y presentación
Lógica
Acceso a los datos
RAB App – Aplicación desarrollada con el creador de Robot Application, del que forma parte FlexPendant SDK.
CAPI – Modelo de componente de objeto, tecnología Microsoft de componentes.
COM/ATL – Librerías de plantillas activas, juego de clases de plantillas
C++ que simplifica la programación con COM.
*Las flechas indican relación de dependencia.
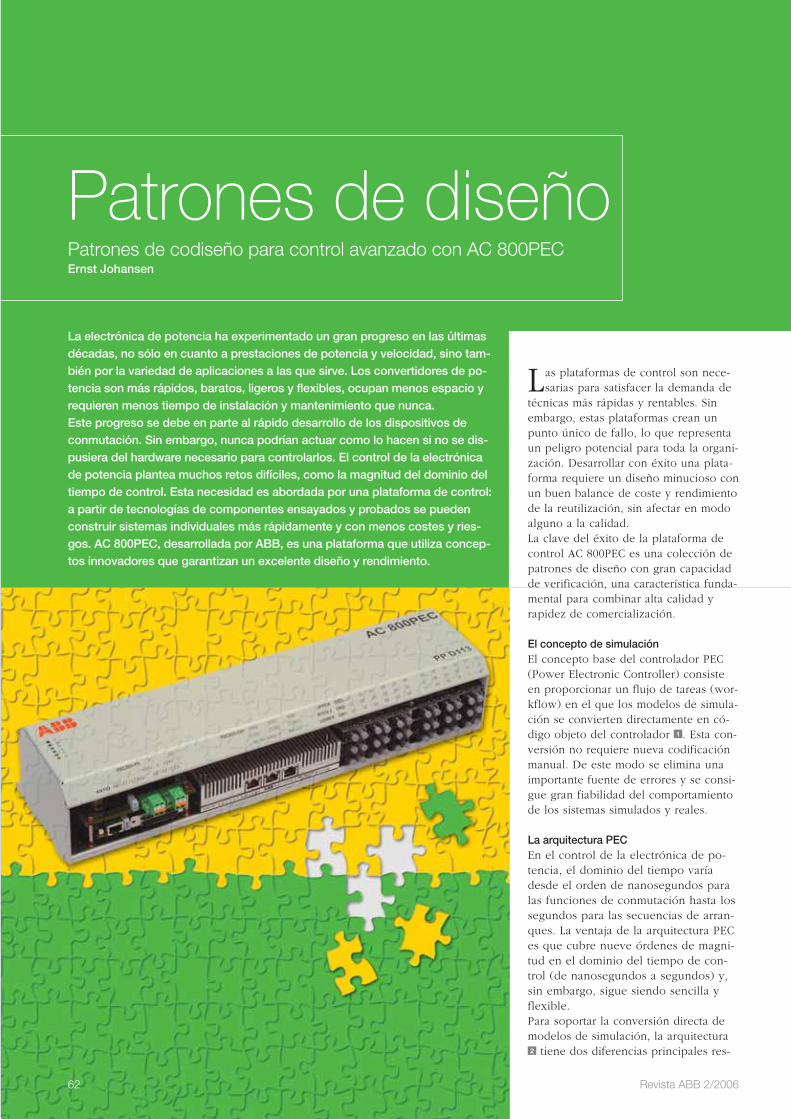
Patrones de diseño Patrones de codiseño para control avanzado con AC 800PECErnst Johansen
La electrónica de potencia ha experimentado un gran progreso en las últimas décadas, no sólo en cuanto a prestaciones de potencia y velocidad, sino tam-bién por la variedad de aplicaciones a las que sirve. Los convertidores de po-tencia son más rápidos, baratos, ligeros y flexibles, ocupan menos espacio y requieren menos tiempo de instalación y mantenimiento que nunca. Este progreso se debe en parte al rápido desarrollo de los dispositivos de conmutación. Sin embargo, nunca podrían actuar como lo hacen si no se dis-pusiera del hardware necesario para controlarlos. El control de la electrónica de potencia plantea muchos retos difíciles, como la magnitud del dominio del tiempo de control. Esta necesidad es abordada por una plataforma de control: a partir de tecnologías de componentes ensayados y probados se pueden construir sistemas individuales más rápidamente y con menos costes y ries-gos. AC 800PEC, desarrollada por ABB, es una plataforma que utiliza concep-tos innovadores que garantizan un excelente diseño y rendimiento.
62 Revista ABB 2/2006
Las plataformas de control son nece-sarias para satisfacer la demanda de
técnicas más rápidas y rentables. Sin embargo, estas plataformas crean un punto único de fallo, lo que representa un peligro potencial para toda la organi-zación. Desarrollar con éxito una plata-forma requiere un diseño minucioso con un buen balance de coste y rendimiento de la reutilización, sin afectar en modo alguno a la calidad. La clave del éxito de la plataforma de control AC 800PEC es una colección de patrones de diseño con gran capacidad de verificación, una característica funda-mental para combinar alta calidad y rapidez de comercialización.
El concepto de simulaciónEl concepto base del controlador PEC (Power Electronic Controller) consiste en proporcionar un flujo de tareas (wor-kflow) en el que los modelos de simula-ción se convierten directamente en có-digo objeto del controlador 1 . Esta con-versión no requiere nueva codificación manual. De este modo se elimina una importante fuente de errores y se consi-gue gran fiabilidad del comportamiento de los sistemas simulados y reales.
La arquitectura PECEn el control de la electrónica de po-tencia, el dominio del tiempo varía desde el orden de nanosegundos para las funciones de conmutación hasta los segundos para las secuencias de arran-ques. La ventaja de la arquitectura PEC es que cubre nueve órdenes de magni-tud en el dominio del tiempo de con-trol (de nanosegundos a segundos) y, sin embargo, sigue siendo sencilla y flexible.Para soportar la conversión directa de modelos de simulación, la arquitectura 2 tiene dos diferencias principales res-
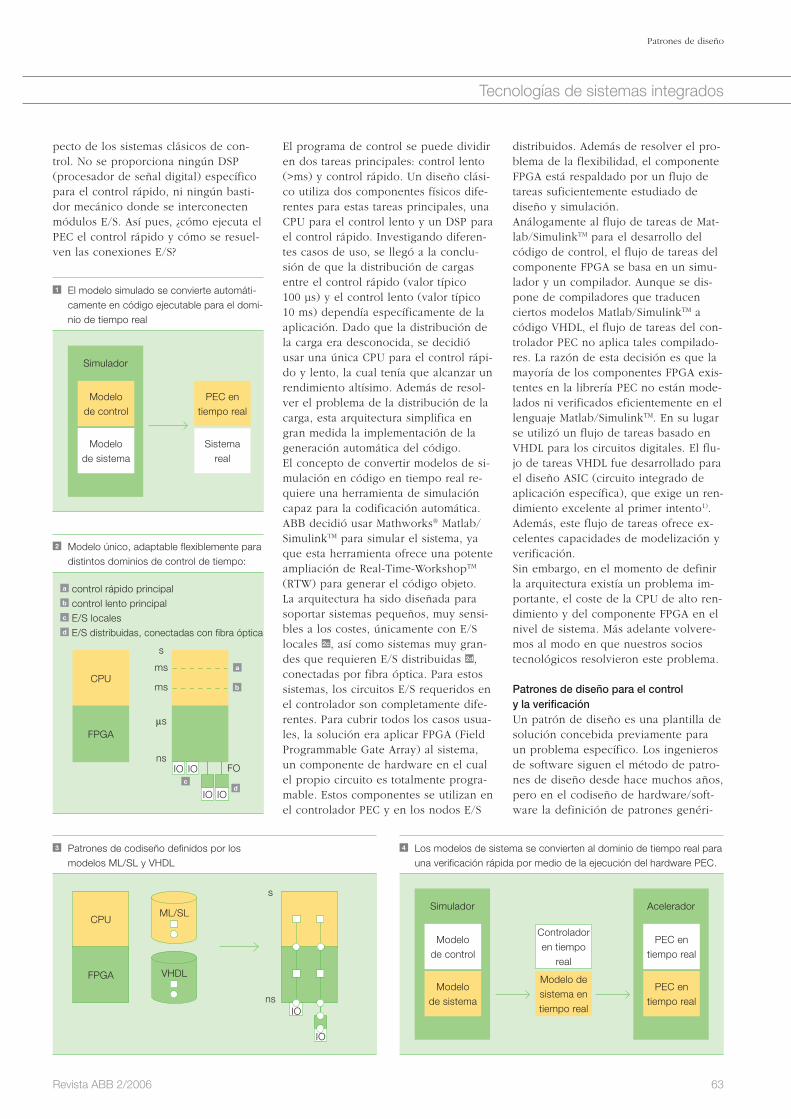
63Revista ABB 2/2006
Patrones de diseño
El programa de control se puede dividir en dos tareas principales: control lento (>ms) y control rápido. Un diseño clási-co utiliza dos componentes físicos dife-rentes para estas tareas principales, una CPU para el control lento y un DSP para el control rápido. Investigando diferen-tes casos de uso, se llegó a la conclu-sión de que la distribución de cargas entre el control rápido (valor típico 100 µs) y el control lento (valor típico 10 ms) dependía específicamente de la aplicación. Dado que la distribución de la carga era desconocida, se decidió usar una única CPU para el control rápi-do y lento, la cual tenía que alcanzar un rendimiento altísimo. Además de resol-ver el problema de la distribución de la carga, esta arquitectura simplifica en gran medida la implementación de la generación automática del código.El concepto de convertir modelos de si-mulación en código en tiempo real re-quiere una herramienta de simulación capaz para la codificación automática. ABB decidió usar Mathworks® Matlab/SimulinkTM para simular el sistema, ya que esta herramienta ofrece una potente ampliación de Real-Time-WorkshopTM (RTW) para generar el código objeto. La arquitectura ha sido diseñada para soportar sistemas pequeños, muy sensi-bles a los costes, únicamente con E/S locales 2c, así como sistemas muy gran-des que requieren E/S distribuidas 2d, conectadas por fibra óptica. Para estos sistemas, los circuitos E/S requeridos en el controlador son completamente dife-rentes. Para cubrir todos los casos usua-les, la solución era aplicar FPGA (Field Programmable Gate Array) al sistema, un componente de hardware en el cual el propio circuito es totalmente progra-mable. Estos componentes se utilizan en el controlador PEC y en los nodos E/S
distribuidos. Además de resolver el pro-blema de la flexibilidad, el componente FPGA está respaldado por un flujo de tareas suficientemente estudiado de diseño y simulación.Análogamente al flujo de tareas de Mat-lab/SimulinkTM para el desarrollo del código de control, el flujo de tareas del componente FPGA se basa en un simu-lador y un compilador. Aunque se dis-pone de compiladores que traducen ciertos modelos Matlab/SimulinkTM a código VHDL, el flujo de tareas del con-trolador PEC no aplica tales compilado-res. La razón de esta decisión es que la mayoría de los componentes FPGA exis-tentes en la librería PEC no están mode-lados ni verificados eficientemente en el lenguaje Matlab/SimulinkTM. En su lugar se utilizó un flujo de tareas basado en VHDL para los circuitos digitales. El flu-jo de tareas VHDL fue desarrollado para el diseño ASIC (circuito integrado de aplicación específica), que exige un ren-dimiento excelente al primer intento1). Además, este flujo de tareas ofrece ex-celentes capacidades de modelización y verificación.Sin embargo, en el momento de definir la arquitectura existía un problema im-portante, el coste de la CPU de alto ren-dimiento y del componente FPGA en el nivel de sistema. Más adelante volvere-mos al modo en que nuestros socios tecnológicos resolvieron este problema.
Patrones de diseño para el control y la verificaciónUn patrón de diseño es una plantilla de solución concebida previamente para un problema específico. Los ingenieros de software siguen el método de patro-nes de diseño desde hace muchos años, pero en el codiseño de hardware/soft-ware la definición de patrones genéri-
pecto de los sistemas clásicos de con-trol. No se proporciona ningún DSP (procesador de señal digital) específico para el control rápido, ni ningún basti-dor mecánico donde se interconecten módulos E/S. Así pues, ¿cómo ejecuta el PEC el control rápido y cómo se resuel-ven las conexiones E/S?
Tecnologías de sistemas integrados
3 Patrones de codiseño definidos por los modelos ML/SL y VHDL
CPU
FPGA
s
nsIO
IO
ML/SL
VHDL
4 Los modelos de sistema se convierten al dominio de tiempo real para una verificación rápida por medio de la ejecución del hardware PEC.
Simulador
Modelo de control
Modelo de sistema
Controlador en tiempo
real
Modelo de sistema en tiempo real
Acelerador
PEC en tiempo real
PEC en tiempo real
1 El modelo simulado se convierte automáti-camente en código ejecutable para el domi-nio de tiempo real
Simulador
Modelo de control
Modelo de sistema
PEC en tiempo real
Sistema real
2 Modelo único, adaptable flexiblemente para distintos dominios de control de tiempo:
CPU
FPGA
ms
s
ms
μs
nsIO FOIO
IO IO
a
b
cd
a control rápido principalb control lento principalc E/S localesd E/S distribuidas, conectadas con fibra óptica
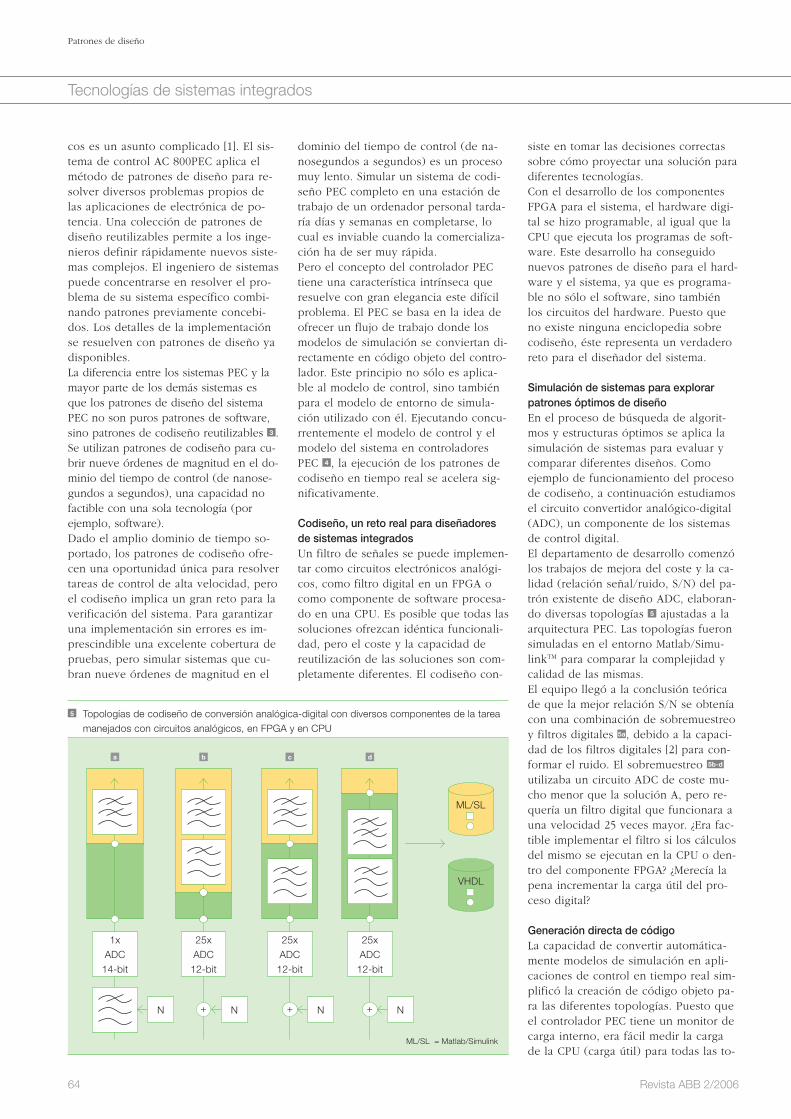
64 Revista ABB 2/2006
Patrones de diseño
cos es un asunto complicado [1]. El sis-tema de control AC 800PEC aplica el método de patrones de diseño para re-solver diversos problemas propios de las aplicaciones de electrónica de po-tencia. Una colección de patrones de diseño reutilizables permite a los inge-nieros definir rápidamente nuevos siste-mas complejos. El ingeniero de sistemas puede concentrarse en resolver el pro-blema de su sistema específico combi-nando patrones previamente concebi-dos. Los detalles de la implementación se resuelven con patrones de diseño ya disponibles.La diferencia entre los sistemas PEC y la mayor parte de los demás sistemas es que los patrones de diseño del sistema PEC no son puros patrones de software, sino patrones de codiseño reutilizables 3 . Se utilizan patrones de codiseño para cu-brir nueve órdenes de magnitud en el do-minio del tiempo de control (de nanose-gundos a segundos), una capacidad no factible con una sola tecnología (por ejemplo, software). Dado el amplio dominio de tiempo so-portado, los patrones de codiseño ofre-cen una oportunidad única para resolver tareas de control de alta velocidad, pero el codiseño implica un gran reto para la verificación del sistema. Para garantizar una implementación sin errores es im-prescindible una excelente cobertura de pruebas, pero simular sistemas que cu-bran nueve órdenes de magnitud en el
dominio del tiempo de control (de na-nosegundos a segundos) es un proceso muy lento. Simular un sistema de codi-seño PEC completo en una estación de trabajo de un ordenador personal tarda-ría días y semanas en completarse, lo cual es inviable cuando la comercializa-ción ha de ser muy rápida.Pero el concepto del controlador PEC tiene una característica intrínseca que resuelve con gran elegancia este difícil problema. El PEC se basa en la idea de ofrecer un flujo de trabajo donde los modelos de simulación se conviertan di-rectamente en código objeto del contro-lador. Este principio no sólo es aplica-ble al modelo de control, sino también para el modelo de entorno de simula-ción utilizado con él. Ejecutando concu-rrentemente el modelo de control y el modelo del sistema en controladores PEC 4 , la ejecución de los patrones de codiseño en tiempo real se acelera sig-nificativamente.
Codiseño, un reto real para diseñadores de sistemas integradosUn filtro de señales se puede implemen-tar como circuitos electrónicos analógi-cos, como filtro digital en un FPGA o como componente de software procesa-do en una CPU. Es posible que todas las soluciones ofrezcan idéntica funcionali-dad, pero el coste y la capacidad de reutilización de las soluciones son com-pletamente diferentes. El codiseño con-
siste en tomar las decisiones correctas sobre cómo proyectar una solución para diferentes tecnologías.Con el desarrollo de los componentes FPGA para el sistema, el hardware digi-tal se hizo programable, al igual que la CPU que ejecuta los programas de soft-ware. Este desarrollo ha conseguido nuevos patrones de diseño para el hard-ware y el sistema, ya que es programa-ble no sólo el software, sino también los circuitos del hardware. Puesto que no existe ninguna enciclopedia sobre codiseño, éste representa un verdadero reto para el diseñador del sistema.
Simulación de sistemas para explorar patrones óptimos de diseñoEn el proceso de búsqueda de algorit-mos y estructuras óptimos se aplica la simulación de sistemas para evaluar y comparar diferentes diseños. Como ejemplo de funcionamiento del proceso de codiseño, a continuación estudiamos el circuito convertidor analógico-digital (ADC), un componente de los sistemas de control digital. El departamento de desarrollo comenzó los trabajos de mejora del coste y la ca-lidad (relación señal/ruido, S/N) del pa-trón existente de diseño ADC, elaboran-do diversas topologías 5 ajustadas a la arquitectura PEC. Las topologías fueron simuladas en el entorno Matlab/Simu-linkTM para comparar la complejidad y calidad de las mismas. El equipo llegó a la conclusión teórica de que la mejor relación S/N se obtenía con una combinación de sobremuestreo y filtros digitales 5a, debido a la capaci-dad de los filtros digitales [2] para con-formar el ruido. El sobremuestreo 5b-d utilizaba un circuito ADC de coste mu-cho menor que la solución A, pero re-quería un filtro digital que funcionara a una velocidad 25 veces mayor. ¿Era fac-tible implementar el filtro si los cálculos del mismo se ejecutan en la CPU o den-tro del componente FPGA? ¿Merecía la pena incrementar la carga útil del pro-ceso digital?
Generación directa de códigoLa capacidad de convertir automática-mente modelos de simulación en apli-caciones de control en tiempo real sim-plificó la creación de código objeto pa-ra las diferentes topologías. Puesto que el controlador PEC tiene un monitor de carga interno, era fácil medir la carga de la CPU (carga útil) para todas las to-
Tecnologías de sistemas integrados
5 Topologías de codiseño de conversión analógica-digital con diversos componentes de la tarea manejados con circuitos analógicos, en FPGA y en CPU
1xADC
14-bit
25xADC
12-bit
25xADC
12-bit
25xADC
12-bit
N + +N N N+
ML/SL
VHDL
a b c d
ML/SL = Matlab/Simulink

65Revista ABB 2/2006
Patrones de diseño
pologías 6 . La operación del filtro rápido 6b en el software dio como resultado la genera-ción de una carga demasiado alta para la CPU, por lo que esta solución no resultaba factible. Puesto que Matlab/SimulinkTM ofrece librerías muy amplias, en realidad no hacía falta de-sarrollar ningún nuevo código para diseñar los filtros de la CPU, ya que los filtros esta-ban disponibles en las libre-rías estándar.
Componentes VHDL optimiza-dosSe utilizó Matlab/SimulinkTM para evaluar la topología y característica de los filtros FPGA y calcular sus coeficientes. La im-plementación y simulación de los filtros se realizó en el entorno VHDL.En un circuito FPGA, la carga útil se mi-de en la zona de circuito. En el diseño de un filtro FPGA existen muchas más opciones que en el de un filtro digital calculado en la CPU. La precisión (nú-mero de bits), la frecuencia del reloj, la arquitectura del filtro, la capacidad de tratamiento (muestras por segundo), el número de bloques MAC (multiplica-
ción-acumulación) por filtro y el núme-ro de canales por filtro son aspectos programables de los que resultan nu-merosas alternativas de diseño, todas ellas con distintas cargas útiles. La topo-logía 5c ofrecía la solución de codiseño de mejor coste, con un filtro de alta ve-locidad operando dentro del circuito FPGA y un filtro más lento calculado por la CPU. Finalmente se eligió esta solución como patrón de diseño para la conversión ADC 7 .
Verificación realDurante el codiseño se modeló el sistema real, inclusive el rui-do de señal previsto. En mu-chos sistemas, el ruido es im-predecible y la simulación del ruido poco fiable. Por consi-guiente, la verificación real sigue siendo importante para garantizar la calidad del pro-ducto 8 .
Coste y rendimiento, objetivo móvil En el momento de su defini-ción, en 1999, la arquitectura PEC tenía el inconveniente del alto coste de la CPU y del com-ponente FPGA en el nivel de sistema. Puesto que estos com-ponentes eran muy caros por
aquel entonces, se utilizaron principal-mente en aplicaciones de nivel supe-rior, como simuladores de vuelo y siste-mas prototipo para el desarrollo de cir-cuitos ASIC.Dada la rápida evolución y mejora de la tecnología de procesos para circuitos digitales, el coste de fabricación de las unidades CPU y FPGA se redujo espec-tacularmente. En un plazo de 5 años, el coste de estos circuitos digitales se re-dujo en más del 90%. Cuando estos dis-positivos de menor coste estuvieron disponibles en el mercado, se hizo pa-tente otra ventaja de la arquitectura, la excelente portabilidad de la aplicación. ABB ofrece actualmente controladores AC 800PEC, productos de excelente ca-lidad a precios muy competitivos, basa-dos en la rentable tecnología de proce-so de silicio de 90 nm.
Ernst Johansen
ABB Schweiz AG
Turgi, Suiza
Bibliografía
[1] F. Mayer-Lindenberg, Dedicated Digital Proces-
sors: Methods in Hardware/Software Co-Design,
John Wiley & Sons (February 12, 2004),
ISBN 0-470844-44-2
[2] Walt Kester, Analog-Digital Conversion,
Analog Devices Inc. (March 2004),
ISBN 0-916550-27–3, 2.37–2.41
Notas1) El rendimiento al primer intento es la relación entre
el número de “buenas” unidades (que no necesitan
repaso) y el total de unidades fabricadas.
8 Verificación 12-bit en tiempo real / 1MSps ADC (amarillo) y filtro FPGA con conformación de ruido (rosa)
Tecnologías de sistemas integrados
6 Evaluación de carga objetivo de las variantes 5b-d
ML/SLRTW
Compiler
Target CPULoad
Monitor
dcb
Simulator
7 Patrón óptimo de filtro VHDL (variante 5c )
VHDL
ML/SLVHDLTestbench8 Ch
IIR
1x MAC
80 MHz
35-bit
c
ML/SL = Matlab/Simulink
Una aplicación industrial puede tener miles de subsistemas integrados que necesitan comunicarse con su entor-no. Cada uno de ellos requiere sus propios datos y su propia conexión de potencia. El cableado, costoso de ins-talar, es una fuente de frecuentes fa-llos y un freno a la flexibilidad. Estas aplicaciones funcionan mejor con tec-nologías inalámbricas.
La comunicación inalámbrica en en-tornos de automatización ha avanzado mucho durante los últimos años [1]. Sin embargo, las fuentes de alimenta-ción sin cables siguen siendo un reto. En 2004, ABB comercializó una serie de productos inalámbricos únicos, los conmutadores de proximidad inalám-bricos que no utilizan cables ni para la comunicación ni para la fuente de energía. Desde la introducción de es-tos dispositivos se ha seguido am-pliando la tecnología “WISA” (Wireless Interface to Sensors and Actuators) [2], que sirvió para desarrollar los mis-mos, para incluir nuevos productos y perfiles de comunicación.
Energía inalámbrica en productos sin cables Eliminar el cable de alimentaciónGuntram Scheible, Rolf Disselnkoetter
66 Revista ABB 2/2006
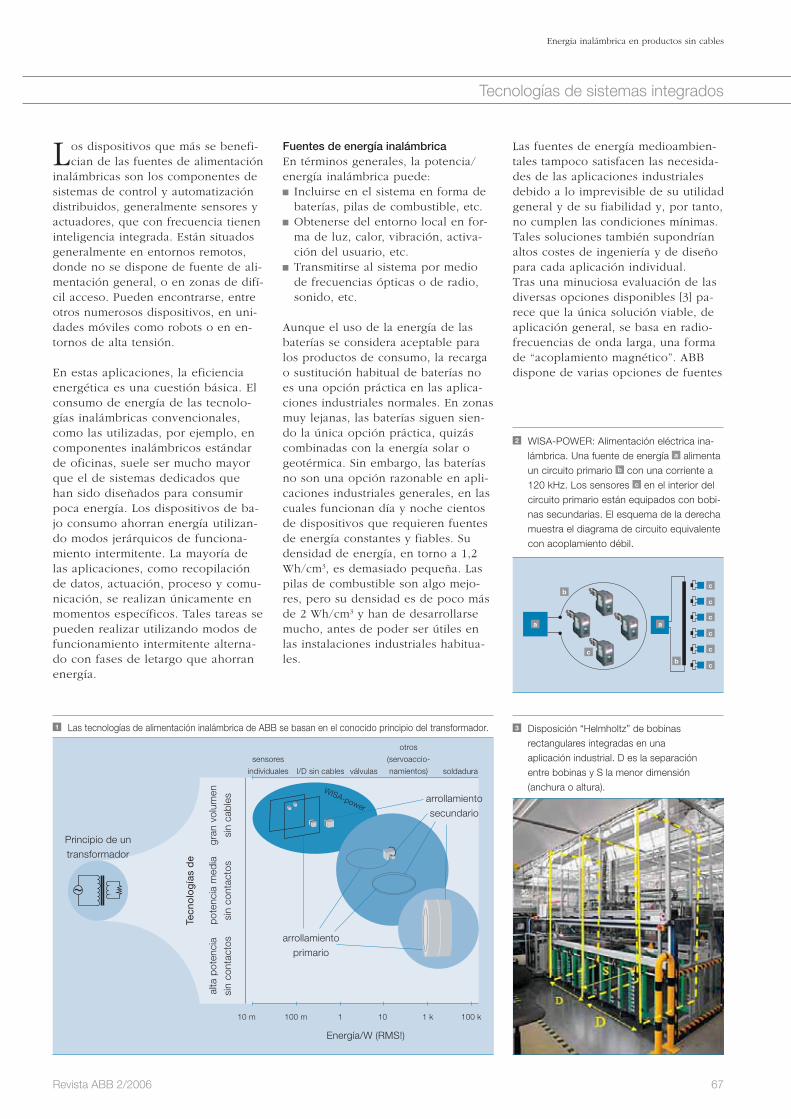
67Revista ABB 2/2006
Energía inalámbrica en productos sin cables
Los dispositivos que más se benefi-cian de las fuentes de alimentación
inalámbricas son los componentes de sistemas de control y automatización distribuidos, generalmente sensores y actuadores, que con frecuencia tienen inteligencia integrada. Están situados generalmente en entornos remotos, donde no se dispone de fuente de ali-mentación general, o en zonas de difí-cil acceso. Pueden encontrarse, entre otros numerosos dispositivos, en uni-dades móviles como robots o en en-tornos de alta tensión.
En estas aplicaciones, la eficiencia energética es una cuestión básica. El consumo de energía de las tecnolo-gías inalámbricas convencionales, como las utilizadas, por ejemplo, en componentes inalámbricos estándar de oficinas, suele ser mucho mayor que el de sistemas dedicados que han sido diseñados para consumir poca energía. Los dispositivos de ba-jo consumo ahorran energía utilizan-do modos jerárquicos de funciona-miento intermitente. La mayoría de las aplicaciones, como recopilación de datos, actuación, proceso y comu-nicación, se realizan únicamente en momentos específicos. Tales tareas se pueden realizar utilizando modos de funcionamiento intermitente alterna-do con fases de letargo que ahorran energía.
Fuentes de energía inalámbrica En términos generales, la potencia/energía inalámbrica puede: Incluirse en el sistema en forma de baterías, pilas de combustible, etc.
Obtenerse del entorno local en for-ma de luz, calor, vibración, activa-ción del usuario, etc.
Transmitirse al sistema por medio de frecuencias ópticas o de radio, sonido, etc.
Aunque el uso de la energía de las baterías se considera aceptable para los productos de consumo, la recarga o sustitución habitual de baterías no es una opción práctica en las aplica-ciones industriales normales. En zonas muy lejanas, las baterías siguen sien-do la única opción práctica, quizás combinadas con la energía solar o geotérmica. Sin embargo, las baterías no son una opción razonable en apli-caciones industriales generales, en las cuales funcionan día y noche cientos de dispositivos que requieren fuentes de energía constantes y fiables. Su densidad de energía, en torno a 1,2 Wh/cm3, es demasiado pequeña. Las pilas de combustible son algo mejo-res, pero su densidad es de poco más de 2 Wh/cm3 y han de desarrollarse mucho, antes de poder ser útiles en las instalaciones industriales habitua-les.
Las fuentes de energía medioambien-tales tampoco satisfacen las necesida-des de las aplicaciones industriales debido a lo imprevisible de su utilidad general y de su fiabilidad y, por tanto, no cumplen las condiciones mínimas. Tales soluciones también supondrían altos costes de ingeniería y de diseño para cada aplicación individual. Tras una minuciosa evaluación de las diversas opciones disponibles [3] pa-rece que la única solución viable, de aplicación general, se basa en radio-frecuencias de onda larga, una forma de “acoplamiento magnético”. ABB dispone de varias opciones de fuentes
3 Disposición “Helmholtz” de bobinas rectangulares integradas en una aplicación industrial. D es la separación entre bobinas y S la menor dimensión (anchura o altura).
Tecnologías de sistemas integrados
2 WISA-POWER: Alimentación eléctrica ina-lámbrica. Una fuente de energía a alimenta un circuito primario b con una corriente a 120 kHz. Los sensores c en el interior del circuito primario están equipados con bobi-nas secundarias. El esquema de la derecha muestra el diagrama de circuito equivalente con acoplamiento débil.
a a
b
cb
c
c
c
c
c
c
1 Las tecnologías de alimentación inalámbrica de ABB se basan en el conocido principio del transformador.
Principio de un transformador
Tecn
olo
gía
s d
e
gran
vol
umen
sin
cabl
espo
tenc
ia m
edia
si
n co
ntac
tos
alta
pot
enci
a si
n co
ntac
tos
sensores
individuales I/D sin cables válvulas
otros
(servoaccio-
namientos) soldadura
arrollamiento primario
arrollamiento secundario
Energía/W (RMS!)
10 m 100 m 1 10 1 k 100 k
WISA-power

5 Estructura de bobina primaria toroidal WISA-Power en una devanadora de cable comple-tamente giratoria (ABB High Voltage Cable, Karlskrona, Suecia). 156 conmutadores de proximidad inalámbricos WPS con electróni-ca integrada giran en un complejo movi-miento bidireccional dentro de la máquina para garantizar una producción sin fallos.
4 Bobina local primaria WISA-POWER, integrada en una máquina herramienta con bobina receptora proporcionada por el cliente y electrónica integrada (sistema ina-lámbrico de sondeo herramental DDU WiSy por cortesía de ARTIS GmbH, Bispingen, Alemania)[5]
68 Revista ABB 2/2006
Energía inalámbrica en productos sin cables
de energía con acoplamiento magnéti-co 1 . Dependiendo de la distancia de transmisión es posible implementar una amplia variedad de aplicaciones y numerosos niveles de potencia.
Las necesidades de energía de los dis-positivos electrónicos distribuidos en entornos de automatización de fabri-cación discreta, como, por ejemplo, los sensores individuales y los dispo-sitivos inalámbricos E/S, son cubiertas por la primera generación de produc-tos WISA 1 . La unidad de alimenta-ción inalámbrica WPU100, junto con una configuración de bobina (“hilos del circuito primario”), proporciona una fuente de energía de bajo nivel para grandes distancias (algunos me-tros). Esta solución es adecuada para la mayoría de los sensores y actuado-res empleados en la automatización de la fabricación discreta.
WISA-POWER: La ’fuente magnética’El fundamento de una fuente de ener-gía inducida por un campo magnético puede describirse mediante el conoci-do principio del “transformador” 2 . En el caso de la unidad WPU100, la fuente de energía alimenta el devana-do primario 2b, una gran bobina que puede disponerse alrededor de una célula de producción, cuyo lado se-cundario corresponde a un número prácticamente ilimitado de pequeñas bobinas receptoras 2c. Cada bobina receptora incluye un núcleo de ferrita para aumentar el flujo recogido por la bobina.
Para este tipo de “transformador”, el acoplamiento magnético es bajo. La potencia admisible está determinada por la amplitud del campo magnético en el lugar del devanado “receptor” (secundario). Sin embargo, si las bobi-nas primarias están configuradas en una disposición de tipo “Helmholtz” 3 , el campo (y, por tanto, la potencia admisible) será prácticamente cons-tante en un gran espacio.Las reglas de diseño en cuanto al nú-mero y tamaño de las bobinas prima-rias son muy simples: D = 0,7 x S, donde S es la menor dimensión (an-chura o altura) de la estructura de una bobina y D es la separación entre bo-binas para proporcionar una amplitud de campo suficientemente homogénea dentro de la disposición 3 .
Aunque la gente pocas veces trabajará continuamente en una célula de pro-ducción automatizada de este tipo, la intensidad del campo magnético en todas las posiciones normales de tra-bajo (inclusive dentro de la célula) cumple las reglas y recomendaciones internacionales de trabajo profesional [4]. WISA-POWER funciona a una fre-cuencia similar (120 kHz) y de forma exactamente igual que muchos de los sistemas antirrobo y de identificación de radiofrecuencias utilizados en tien-das y supermercados.
Dentro de este campo magnético, li-mitado en amplitud, se pueden elevar los niveles de potencia de acuerdo con las necesidades de diferentes apli-caciones, modificando el tamaño de la bobina secundaria. Esto permite co-nectar sistemas integrados con poten-cia inalámbrica mediante la integra-ción de una bobina receptora y de un circuito adecuados. Un buen ejemplo puede verse en 4 . Artis, compañía es-tablecida en Bispingen (Alemania), ha utilizado tecnología WISA-POWER pa-ra crear su propia electrónica en el lado secundario, adaptada a las nece-sidades especiales de sensores de las herramientas de mecanizado [5].
Las pérdidas de energía en un sistema como éste son sorprendentemente pe-queñas y se deben sobre todo a efec-tos peliculares (Kelvin) y de corrientes de Foucault en la bobina o en objetos metálicos cercanos. En entornos típi-
cos de automatización de fábricas, las pérdidas de energía están en torno a 15 W/m3.
Fuente de alimentación resonante a frecuencia media Estos transformadores no convencio-nales funcionan mejor en modo ‘reso-nante’. En este modo, las inductancias de fuga relativamente grandes de los transformadores son compensadas por una capacitancia, que permite a la unidad WPU estimular el circuito reso-nante a tensiones relativamente bajas. La fuente de energía primaria de WISA WPU100 ha de poder admitir también otras condiciones: Cambios en el entorno a lo largo del tiempo, por ejemplo debidos al movimiento de grandes objetos me-tálicos móviles, como los robots.
Diferentes requisitos de ’carga’, de-bidos a bobinas primarias diferente-mente dimensionadas (valores de las inductancias), y pérdidas causa-das por diferentes factores, como las corrientes de Foucault, en obje-tos metálicos contiguos.
Otros sistemas de alimentación ina-lámbricos cercanos, que pueden acoplarse inductivamente.
Para satisfacer estos requisitos, WISA WPU100 contiene una unidad de con-trol rápida y muy precisa que com-pensa estos cambios y mantiene auto-máticamente el sistema primario en una frecuencia de resonancia fija de 120 kHz. La unidad WPU100 puede
Tecnologías de sistemas integrados

69Revista ABB 2/2006
Energía inalámbrica en productos sin cables
adaptarse para cargas inductivas de 11–54 µH y corrientes de alimentación de 4–24 A.Las unidades primarias WPU100 se sintonizan y controlan automática-mente, lo que significa que el sistema de alimentación WISA-POWER se pue-de emplear para diferentes aplicacio-nes sin más que modificar la geome-tría de las bobinas primarias, por ejemplo, utilizando estructuras de bo-binas de tipo toroidal o lineal, o bobi-nas locales 4 5 . Este aspecto es parti-cularmente útil si la potencia inalám-brica sólo se necesita en ciertas áreas de una instalación, por ejemplo, en dispositivos que se mueven a lo largo de una estructura anular o lineal, o para enlazar puntos críticos en un sis-tema.
Debido a sus especiales capacidades, la unidad WPU100 se puede utilizar también en aplicaciones con unidades receptoras de energía personalizadas, adaptadas a las necesidades específi-cas, geométricas y de la aplicación 4 .
Campo rotatorioLos campos magnéticos unidirecciona-les pueden ser apantallados por obje-tos metálicos de forma no intenciona-da. Para evitar que esto ocurra, se pueden montar dos bucles ortogona-les. Los bucles han de ser alimentados por fuentes de alimentación separa-das, cuyas corrientes están desfasadas 90° entre sí. Esto crea un campo bidi-mensional continuamente giratorio.
Estructura de receptor omnidireccionalPara conseguir suficiente potencia de salida en el lado receptor, las bobinas secundarias han de operar también en modo resonante. Además, para que la potencia disponible sea independiente de la orientación del receptor respec-to del vector de campo primario, se ha elegido una configuración ortogo-nal de tres bobinas sobre un núcleo común. Al ser fácilmente sintonizable con la frecuencia de resonancia fija, esta disposición resulta muy apropia-da para la fabricación en serie.
Utilizando esta tecnología, las densi-dades de potencia disponibles para las condiciones de apantallamiento tí-picamente “más desfavorables” en aplicaciones reales siguen siendo del orden de 1,2 mW/cm3. El nivel abso-luto de potencia se puede modificar con el tamaño y la forma de las bobi-nas.
La escalabilidad e integración de bobi-nas receptoras WISA-POWER dentro de productos han sido demostradas en diversas aplicaciones. El consumo total de potencia del conmutador de proximidad inalámbrico y su electró-nica 6 es sensiblemente inferior a 10mW; el nuevo bloque de sensores, WSP100 7 , que permite conectar y ali-mentar hasta ocho cabezas sensoras, puede proporcionar varias decenas de milivatios ya en las condiciones “más desfavorables” de apantallamiento. En condiciones normales, con este tama-
ño, el principio WISA-POWER puede proporcionar varios cientos de mi-liwatios y hasta 1 vatio en condiciones controladas.
Futuro sin límites Con la introducción de tecnologías WISA de alimentación eléctrica y co-municación, ABB ha conseguido gran-des avances en la tecnología de siste-mas integrados inalámbricos. Los pro-blemas fundamentales de distribución de la potencia inalámbrica y de fiabili-dad de la comunicación inalámbrica en tiempo real han sido resueltos sa-tisfactoriamente.
La tecnología genérica y modular de la familia de productos WISA, que empezó con los conmutadores de proximidad inalámbricos, se está am-pliando actualmente para otros dispo-sitivos y aplicaciones. Las tecnologías genéricas de alimentación WISA-POWER y de comunicación WISA-COM podrán ser utilizadas en muchas otras aplicaciones.
Guntram Scheible
ABB STOTZ-KONTAKT GmbH
Heidelberg, Alemania
Rolf Disselnkoetter
ABB Corporate Research
Ladenburg, Alemania
Bibliografía
[1] Niels Aakvaag, Jan-Erik Frey: Comunicación ina-
lámbrica y redes de sensores, nuevas soluciones
de interconexión para la automatización industrial.
En este número de Revista ABB.
[2] Jan-Erik Frey, Andreas Kreitz, Guntram Scheible:
Desenchufado pero conectado. Revista ABB 3 y
4/2005
[3] G. Scheible: Wireless energy autonomous syste-
ms: Industrial use? Sensoren und Messysteme
VDE/IEEE Conference, Ludwigsburg, Germany,
March 11-12 2002.
[4] International Commission on Non-Ionizing Radia-
tion Protection (ICNIRP): Guidelines for Limiting
Exposure to Time-Varying Electric, Magnetic, and
Electromagnetic Fields (up to 300 GHz). Health
Physics vol 74, no 4, 494-522, 1998.
[5] Berend Denkena, Dirk Lange, Dipl.-Ing. Jan
Brinkhaus: Spielraum in der Überwachung; Fach-
zeitschrift mav „maschinen anlagen verfahren“
Konradin Verlag Robert Kohlhammer, 2005
6 Integración del ‘Cubo de Potencia’ WISA-POWER en el módulo de comunicación WISA WSIX100 de un conmutador de proxi-midad inalámbrico
7 Integración de un ‘Cubo de Potencia’ WISA-POWER en el bloque de sensores WISA WSP100 para alimentar ocho cabe-zas sensoras y su comunicación WISA-COM en tiempo real
Tecnologías de sistemas integrados

Buscar una solución electrónica para un problema puede convertirse en una tarea desalentadora, aparentemente insuperable. A menudo, la velocidad del avance tecnológico hace que el cliente no llegue a convencerse de que dispone del aparato más moderno y eficiente. Los diseñadores de siste-mas integrados de altas prestaciones se esfuerzan sin cesar para integrar en un mismo paquete más potencia de proceso. Es necesario decir que este “esfuerzo” viene en buena medida dic-tado por la exigencia, cada día mayor,
Hacia la mayoría de edad Sistemas integrados FPGA y VHDLErik Carlson, Franz Zurfluh, Catherine Körbächer
70 Revista ABB 2/2006
Una matriz de puertas programable por el usuario, más conocida como FPGA,
es un dispositivo semiconductor que con-tiene componentes lógicos e interconexio-nes programables. Los componentes lógi-cos se pueden programar para duplicar la funcionalidad de las puertas lógicas bási-cas (como Y, O, O exclusivo, NO) o de funciones combinatorias más complejas como decodificadores o funciones mate-máticas sencillas. En la mayoría de FPGA, estos componentes lógicos programables (o bloques lógicos, en jerga FPGA) inclu-yen también elementos de memoria, que pueden ser simples flip-flops o bloques de memoria más completos.
La tecnología FPGA fue introducida hace varios años 1 . Sin embargo, sus limitacio-nes de coste y rendimiento redujeron su campo de aplicación al desarrollo rápido de prototipos. La producción en serie se realizaba entonces utilizando un diseño ASIC 1) (Circuito Integrado de Aplicación Específica). Hoy en día, el desarrollo de circuitos ASIC lleva mucho más tiempo y tiene mayores costes de utillajes debido al rápido aumen-to de la complejidad. A medida que se ha
de comercialización rápida, por la de-manda de más eficiencia energética y mayor capacidad, y por la necesidad de sacar máximo rendimiento de un dispositivo. Sin embargo, es muy pro-bable que los clientes, en lugar de comprar nuevos dispositivos, prefieran actualizar o añadir nuevas característi-cas a los que ya tienen. Tradicional-mente, esto se ha hecho diseñando los productos con microprocesadores y software. Una forma de satisfacer esta demanda es aplicar tecnología FPGA en lugar de
procesadores de señales digitales. In-troduciendo la lógica FPGA es posible utilizar el hardware con tanta flexibili-dad como el software. Además de conseguir alta velocidad es posible re-ducir el consumo de potencia y reutili-zar fácilmente circuitos lógicos bien acreditados. ABB lleva varios años usando tecnología FPGA de media y alta tensión, especialmente para el sector de la automatización. En este artículo se discuten algunos aspectos del diseño FPGA, además de sus ven-tajas para ABB y sus clientes.
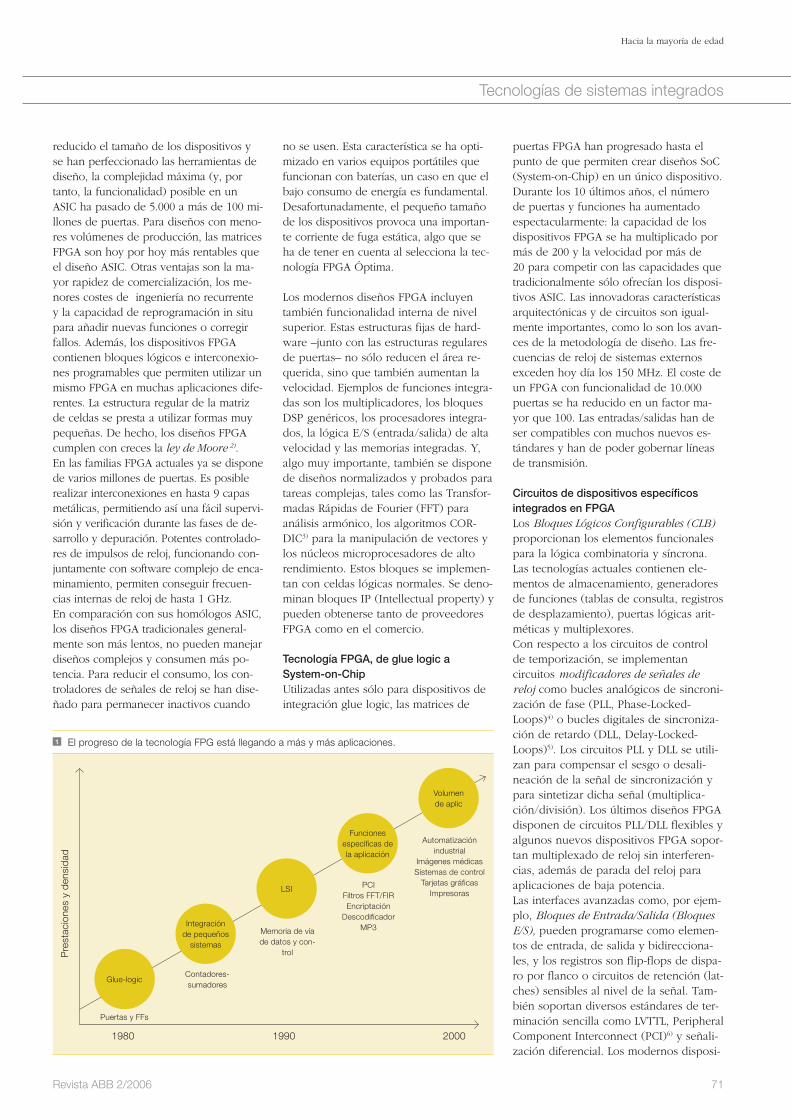
71Revista ABB 2/2006
Hacia la mayoría de edad
no se usen. Esta característica se ha opti-mizado en varios equipos portátiles que funcionan con baterías, un caso en que el bajo consumo de energía es fundamental. Desafortunadamente, el pequeño tamaño de los dispositivos provoca una importan-te corriente de fuga estática, algo que se ha de tener en cuenta al selecciona la tec-nología FPGA Óptima.
Los modernos diseños FPGA incluyen también funcionalidad interna de nivel superior. Estas estructuras fijas de hard-ware –junto con las estructuras regulares de puertas– no sólo reducen el área re-querida, sino que también aumentan la velocidad. Ejemplos de funciones integra-das son los multiplicadores, los bloques DSP genéricos, los procesadores integra-dos, la lógica E/S (entrada/salida) de alta velocidad y las memorias integradas. Y, algo muy importante, también se dispone de diseños normalizados y probados para tareas complejas, tales como las Transfor-madas Rápidas de Fourier (FFT) para análisis armónico, los algoritmos COR-DIC3) para la manipulación de vectores y los núcleos microprocesadores de alto rendimiento. Estos bloques se implemen-tan con celdas lógicas normales. Se deno-minan bloques IP (Intellectual property) y pueden obtenerse tanto de proveedores FPGA como en el comercio.
Tecnología FPGA, de glue logic a System-on-ChipUtilizadas antes sólo para dispositivos de integración glue logic, las matrices de
puertas FPGA han progresado hasta el punto de que permiten crear diseños SoC (System-on-Chip) en un único dispositivo. Durante los 10 últimos años, el número de puertas y funciones ha aumentado espectacularmente: la capacidad de los dispositivos FPGA se ha multiplicado por más de 200 y la velocidad por más de 20 para competir con las capacidades que tradicionalmente sólo ofrecían los disposi-tivos ASIC. Las innovadoras características arquitectónicas y de circuitos son igual-mente importantes, como lo son los avan-ces de la metodología de diseño. Las fre-cuencias de reloj de sistemas externos exceden hoy día los 150 MHz. El coste de un FPGA con funcionalidad de 10.000 puertas se ha reducido en un factor ma-yor que 100. Las entradas/salidas han de ser compatibles con muchos nuevos es-tándares y han de poder gobernar líneas de transmisión.
Circuitos de dispositivos específicos integrados en FPGA Los Bloques Lógicos Configurables (CLB) proporcionan los elementos funcionales para la lógica combinatoria y síncrona. Las tecnologías actuales contienen ele-mentos de almacenamiento, generadores de funciones (tablas de consulta, registros de desplazamiento), puertas lógicas arit-méticas y multiplexores.Con respecto a los circuitos de control de temporización, se implementan circuitos modificadores de señales de reloj como bucles analógicos de sincroni-zación de fase (PLL, Phase-Locked-Loops)4) o bucles digitales de sincroniza-ción de retardo (DLL, Delay-Locked-Loops)5). Los circuitos PLL y DLL se utili-zan para compensar el sesgo o desali-neación de la señal de sincronización y para sintetizar dicha señal (multiplica-ción/división). Los últimos diseños FPGA disponen de circuitos PLL/DLL flexibles y algunos nuevos dispositivos FPGA sopor-tan multiplexado de reloj sin interferen-cias, además de parada del reloj para aplicaciones de baja potencia.Las interfaces avanzadas como, por ejem-plo, Bloques de Entrada/Salida (Bloques E/S), pueden programarse como elemen-tos de entrada, de salida y bidirecciona-les, y los registros son flip-flops de dispa-ro por flanco o circuitos de retención (lat-ches) sensibles al nivel de la señal. Tam-bién soportan diversos estándares de ter-minación sencilla como LVTTL, Peripheral Component Interconnect (PCI)6) y señali-zación diferencial. Los modernos disposi-
Tecnologías de sistemas integrados
reducido el tamaño de los dispositivos y se han perfeccionado las herramientas de diseño, la complejidad máxima (y, por tanto, la funcionalidad) posible en un ASIC ha pasado de 5.000 a más de 100 mi-llones de puertas. Para diseños con meno-res volúmenes de producción, las matrices FPGA son hoy por hoy más rentables que el diseño ASIC. Otras ventajas son la ma-yor rapidez de comercialización, los me-nores costes de ingeniería no recurrente y la capacidad de reprogramación in situ para añadir nuevas funciones o corregir fallos. Además, los dispositivos FPGA contienen bloques lógicos e interconexio-nes programables que permiten utilizar un mismo FPGA en muchas aplicaciones dife-rentes. La estructura regular de la matriz de celdas se presta a utilizar formas muy pequeñas. De hecho, los diseños FPGA cumplen con creces la ley de Moore 2). En las familias FPGA actuales ya se dispone de varios millones de puertas. Es posible realizar interconexiones en hasta 9 capas metálicas, permitiendo así una fácil supervi-sión y verificación durante las fases de de-sarrollo y depuración. Potentes controlado-res de impulsos de reloj, funcionando con-juntamente con software complejo de enca-minamiento, permiten conseguir frecuen-cias internas de reloj de hasta 1 GHz. En comparación con sus homólogos ASIC, los diseños FPGA tradicionales general-mente son más lentos, no pueden manejar diseños complejos y consumen más po-tencia. Para reducir el consumo, los con-troladores de señales de reloj se han dise-ñado para permanecer inactivos cuando
1 El progreso de la tecnología FPG está llegando a más y más aplicaciones.
Pre
stac
ione
s y
dens
idad
1980 1990 2000
Puertas y FFs
Contadores-sumadores
Memoria de vía de datos y con-
trol
PCIFiltros FFT/FIREncriptación
Descodificador MP3
Automatización industrial
Imágenes médicasSistemas de control
Tarjetas gráficasImpresoras
Glue-logic
Integración de pequeños
sistemas
LSI
Funciones específicas de la aplicación
Volumen de aplic

72 Revista ABB 2/2006
Hacia la mayoría de edad
tivos FPGA son compatibles con muchos estándares y tensiones de entrada/salida.Utilizando bloques CLB es posible emular pequeñas memorias RAM, pero éstas son lentas y consumen gran cantidad de lógi-ca. Muchos dispositivos FPGA disponen hoy en día de bloques RAM de puerto de acceso simple, doble y cuádruple. Son implementaciones de memoria RAM opti-mizadas en coste y prestaciones. Otros circuitos de dispositivos específicos integrados en las actuales FPGA son los siguientes:
Núcleos CPU de software y hardware: Un dispositivo FPGA con un bloque IP de hardware CPU integrado es una nueva ca-tegoría de microprocesador. Hoy en día se dispone de productos con CPU de 8 ó 32 bits. Los dos componentes básicos de una plataforma FPGA son el núcleo de la CPU y la arquitectura de buses sobre chips. Multiplicadores: Algunas familias FPGA in-cluyen multiplicadores hardware especia-les –algunos varían de 8 × 8 a 18 × 18 bits– que contribuyen a aumentar la po-tencia de cálculo. Se pueden modelar mul-tiplicadores en prácticamente cualquier FPGA usando bloques CLB, pero la mode-lación requiere una gran cantidad de lógi-ca y los multiplicadores son más lentos que los multiplicadores dedicados.
Proceso de desarrollo de los dispositivos FPGADiseñar una FPGA con un millón de puertas se ha convertido en un problema arquitectónico y de nivel de sistema. Los lenguajes más modernos, como UML7) (Unified Modeling Language), son nece-sarios para garantizar una especificación y un diseño correctos. La simulación y verificación se suele realizar con “Ma-thlab” u otras herramientas de simulación de alto nivel. Sin embargo, la descripción de la lógica se realiza principalmente por medio de un lenguaje HDL de descrip-ción del hardware.Un lenguaje HDL describe circuitos elec-trónicos en términos del funcionamiento del circuito, de su diseño y de las prue-bas necesarias para verificar su funciona-miento por medio de simulación. A dife-rencia de un lenguaje de programación de software, la sintaxis y la semántica de HDL incluyen notaciones explícitas para expresar el tiempo y la concurrencia, que son los atributos básicos del hardware. VHDL (VHSIC Hardware Description Lan-guage) es un lenguaje de descripción de circuitos integrados de muy alta veloci-
dad muy utilizado como lenguaje de en-trada de diseño para FPGA y ASIC en el campo de la automatización del diseño electrónico de circuitos digitales. VHDL fue desarrollado originalmente a principios de los años ochenta a requeri-miento del Departamento de Defensa de EE UU para documentar el comporta-miento de los circuitos ASIC que los pro-veedores incluían en los equipos. En otras palabras, fue desarrollado como al-ternativa a los enormes y complejos ma-nuales de instrucciones. La ventaja princi-pal de VHDL cuando se utiliza para el di-seño de sistemas es que permite describir (modelar) y verificar (simular) el compor-tamiento del sistema requerido antes de que las herramientas de síntesis traduzcan el diseño a un hardware real. Otra venta-ja es que VHDL permite describir un sis-tema concurrente y sintetiza detallada-mente la estructura desde una especifica-ción más abstracta.
Proceso básico de diseño de VHDLLa creación de la estructura y del com-portamiento de una aplicación antes po-der descargarla en un dispositivo FPGA requiere varios pasos. En 2 se ilustra el proceso básico de diseño de VHDL. El primer paso es la codificación del dise-ño, que puede hacerse usando un len-guaje de descripción de hardware, como VHDL, Verilog o SystemC, o bien gene-rando el código con los llamados compi-ladores de sistemas (véase ‘Diseño de aplicaciones DSP para FPGA’, más ade-lante en este mismo artículo). Paralela-mente se desarrolla un banco de pruebas para poder verificar el diseño utilizando un simulador, que ejecuta el diseño y comprueba los resultados. Una vez corre-gidos todos los errores del diseño se rea-liza una síntesis completa, durante la cual se genera una representación intermedia
del hardware, llamada netlist, para la he-rramienta de trazado (layout).
El paso siguiente, denominado trazado o emplazamiento y conexionado (place-and-route), consiste en proyectar las estructuras lógicas descritas en la netlist en forma de macroceldas, interconexiones y pines de entrada y salida. En otras palabras, la netlist se ajusta a la arquitectura FPGA real. Sin embargo, algunos factores, como la optimi-zación de la velocidad y de la superficie, l imitan el trazado. La herramienta de traza-do puede generar otra netlist con la infor-mación del retardo de sincronización en formato SDF (Standard Delay Format)8). Esta netlist se puede usar también para la simulación en el banco de pruebas con ob-jeto de verificar el correcto comportamien-to de la temporización. Finalmente se ge-nera un flujo de bits de configuración. Este archivo se puede descargar en la memoria de control del dispositivo FPGA o directa-mente en el propio dispositivo FPGA.
Proceso de señales digitales basado en FPGALos dispositivos FPGA de tecnología avan-zada proporcionan la capacidad funcional básica para implementar funciones de proceso de señales, incluso en las series de bajo coste. Estos dispositivos son idea-les como coprocesadores o preprocesado-res/posprocesadores para descargar fun-ciones de cálculo muy intenso. Implemen-tar algoritmos de proceso de señales en un dispositivo FPGA, en lugar de utilizar un DSP, proporciona al diseñador grados adicionales de libertad. Como muestra 3 , se pueden implementar cálculos muy rá-pidos en paralelo, para aplicaciones que han de tratar un gran caudal de datos, y en semiparalelo o en serie para aplicacio-nes de bajo precio. La arquitectura se puede personalizar idealmente para dife-
Tecnologías de sistemas integrados
2 Proceso básico de diseño de VHDL
Codificación de diseño
Síntesis
Código VHDL
Netlist
Esquema
Netlist VHDL
Código VHDL
Simulación
SDF y Netlist
Banco de pruebas de desarrollo
Generación de archivo BIT
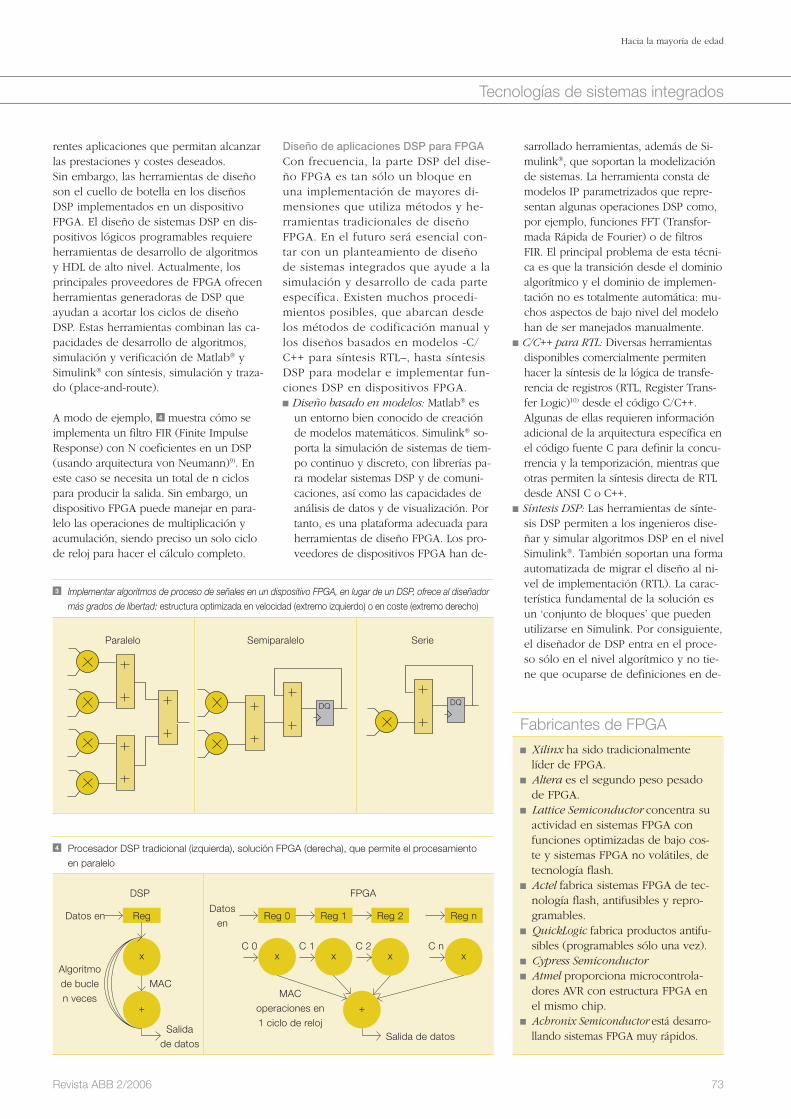
73Revista ABB 2/2006
Hacia la mayoría de edad
rentes aplicaciones que permitan alcanzar las prestaciones y costes deseados. Sin embargo, las herramientas de diseño son el cuello de botella en los diseños DSP implementados en un dispositivo FPGA. El diseño de sistemas DSP en dis-positivos lógicos programables requiere herramientas de desarrollo de algoritmos y HDL de alto nivel. Actualmente, los principales proveedores de FPGA ofrecen herramientas generadoras de DSP que ayudan a acortar los ciclos de diseño DSP. Estas herramientas combinan las ca-pacidades de desarrollo de algoritmos, simulación y verificación de Matlab® y Simulink® con síntesis, simulación y traza-do (place-and-route).
A modo de ejemplo, 4 muestra cómo se implementa un filtro FIR (Finite Impulse Response) con N coeficientes en un DSP (usando arquitectura von Neumann)9). En este caso se necesita un total de n ciclos para producir la salida. Sin embargo, un dispositivo FPGA puede manejar en para-lelo las operaciones de multiplicación y acumulación, siendo preciso un solo ciclo de reloj para hacer el cálculo completo.
Diseño de aplicaciones DSP para FPGACon frecuencia, la parte DSP del dise-ño FPGA es tan sólo un bloque en una implementación de mayores di-mensiones que utiliza métodos y he-rramientas tradicionales de diseño FPGA. En el futuro será esencial con-tar con un planteamiento de diseño de sistemas integrados que ayude a la simulación y desarrollo de cada parte específica. Existen muchos procedi-mientos posibles, que abarcan desde los métodos de codificación manual y los diseños basados en modelos -C/C++ para síntesis RTL–, hasta síntesis DSP para modelar e implementar fun-ciones DSP en dispositivos FPGA. Diseño basado en modelos: Matlab® es un entorno bien conocido de creación de modelos matemáticos. Simulink® so-porta la simulación de sistemas de tiem-po continuo y discreto, con librerías pa-ra modelar sistemas DSP y de comuni-caciones, así como las capacidades de análisis de datos y de visualización. Por tanto, es una plataforma adecuada para herramientas de diseño FPGA. Los pro-veedores de dispositivos FPGA han de-
sarrollado herramientas, además de Si-mulink®, que soportan la modelización de sistemas. La herramienta consta de modelos IP parametrizados que repre-sentan algunas operaciones DSP como, por ejemplo, funciones FFT (Transfor-mada Rápida de Fourier) o de filtros FIR. El principal problema de esta técni-ca es que la transición desde el dominio algorítmico y el dominio de implemen-tación no es totalmente automática: mu-chos aspectos de bajo nivel del modelo han de ser manejados manualmente.
C/C++ para RTL: Diversas herramientas disponibles comercialmente permiten hacer la síntesis de la lógica de transfe-rencia de registros (RTL, Register Trans-fer Logic)10) desde el código C/C++. Algunas de ellas requieren información adicional de la arquitectura específica en el código fuente C para definir la concu-rrencia y la temporización, mientras que otras permiten la síntesis dire cta de RTL desde ANSI C o C++.
Síntesis DSP: Las herramientas de sínte-sis DSP permiten a los ingenieros dise-ñar y simular algoritmos DSP en el nivel Simulink®. También soportan una forma automatizada de migrar el diseño al ni-vel de implementación (RTL). La carac-terística fundamental de la solución es un ‘conjunto de bloques’ que pueden utilizarse en Simulink. Por consiguiente, el diseñador de DSP entra en el proce-so sólo en el nivel algorítmico y no tie-ne que ocuparse de definiciones en de-
Xilinx ha sido tradicionalmente líder de FPGA.
Altera es el segundo peso pesado de FPGA.
Lattice Semiconductor concentra su actividad en sistemas FPGA con funciones optimizadas de bajo cos-te y sistemas FPGA no volátiles, de tecnología flash.
Actel fabrica sistemas FPGA de tec-nología flash, antifusibles y repro-gramables.
QuickLogic fabrica productos antifu-sibles (programables sólo una vez).
Cypress Semiconductor Atmel proporciona microcontrola-dores AVR con estructura FPGA en el mismo chip.
Achronix Semiconductor está desarro-llando sistemas FPGA muy rápidos.
Fabricantes de FPGA
4 Procesador DSP tradicional (izquierda), solución FPGA (derecha), que permite el procesamiento en paralelo
FPGA
MAC operaciones en 1 ciclo de reloj
DSP
Datos en
Algoritmo de buclen veces
Reg
MAC
Salida de datos
x
+
x
Datos en
Reg 0 Reg 1 Reg 2 Reg n
x x x
+
Salida de datos
C 0 C 1 C 2 C n
3 Implementar algoritmos de proceso de señales en un dispositivo FPGA, en lugar de un DSP, ofrece al diseñador
más grados de libertad: estructura optimizada en velocidad (extremo izquierdo) o en coste (extremo derecho)
Semiparalelo SerieParalelo
DQ DQ
Tecnologías de sistemas integrados
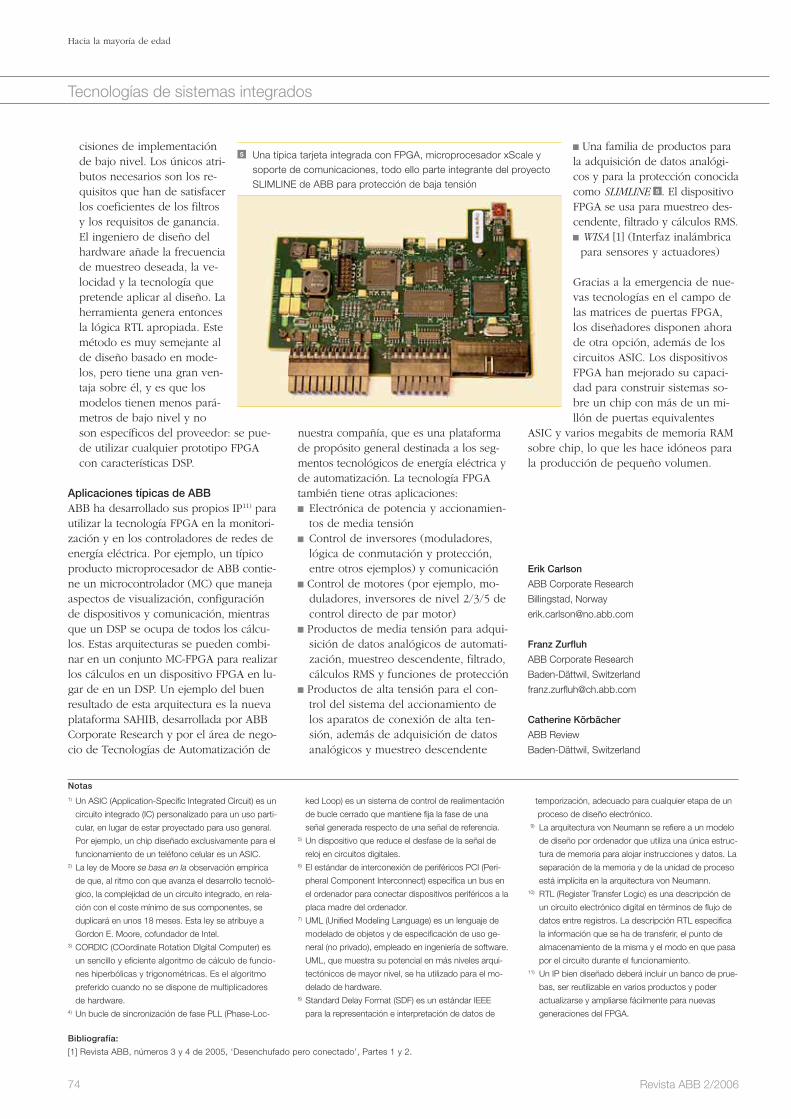
74 Revista ABB 2/2006
Hacia la mayoría de edad
cisiones de implementación de bajo nivel. Los únicos atri-butos necesarios son los re-quisitos que han de satisfacer los coeficientes de los filtros y los requisitos de ganancia. El ingeniero de diseño del hardware añade la frecuencia de muestreo deseada, la ve-locidad y la tecnología que pretende aplicar al diseño. La herramienta genera entonces la lógica RTL apropiada. Este método es muy semejante al de diseño basado en mode-los, pero tiene una gran ven-taja sobre él, y es que los modelos tienen menos pará-metros de bajo nivel y no son específicos del proveedor: se pue-de utilizar cualquier prototipo FPGA con características DSP.
Aplicaciones típicas de ABBABB ha desarrollado sus propios IP11) para utilizar la tecnología FPGA en la monitori-zación y en los controladores de redes de energía eléctrica. Por ejemplo, un típico producto microprocesador de ABB contie-ne un microcontrolador (MC) que maneja aspectos de visualización, configuración de dispositivos y comunicación, mientras que un DSP se ocupa de todos los cálcu-los. Estas arquitecturas se pueden combi-nar en un conjunto MC-FPGA para realizar los cálculos en un dispositivo FPGA en lu-gar de en un DSP. Un ejemplo del buen resultado de esta arquitectura es la nueva plataforma SAHIB, desarrollada por ABB Corporate Research y por el área de nego-cio de Tecnologías de Automatización de
nuestra compañía, que es una plataforma de propósito general destinada a los seg-mentos tecnológicos de energía eléctrica y de automatización. La tecnología FPGA también tiene otras aplicaciones: Electrónica de potencia y accionamien-tos de media tensión
Control de inversores (moduladores, lógica de conmutación y protección, entre otros ejemplos) y comunicación
Control de motores (por ejemplo, mo-duladores, inversores de nivel 2/3/5 de control directo de par motor)
Productos de media tensión para adqui-sición de datos analógicos de automati-zación, muestreo descendente, filtrado, cálculos RMS y funciones de protección
Productos de alta tensión para el con-trol del sistema del accionamiento de los aparatos de conexión de alta ten-sión, además de adquisición de datos analógicos y muestreo descendente
Una familia de productos para la adquisición de datos analógi-cos y para la protección conocida como SLIMLINE 5 . El dispositivo FPGA se usa para muestreo des-cendente, filtrado y cálculos RMS. WISA [1] (Interfaz inalámbrica
para sensores y actuadores)
Gracias a la emergencia de nue-vas tecnologías en el campo de las matrices de puertas FPGA, los diseñadores disponen ahora de otra opción, además de los circuitos ASIC. Los dispositivos FPGA han mejorado su capaci-dad para construir sistemas so-bre un chip con más de un mi-llón de puertas equivalentes
ASIC y varios megabits de memoria RAM sobre chip, lo que les hace idóneos para la producción de pequeño volumen.
Erik Carlson
ABB Corporate Research
Billingstad, Norway
Franz Zurfluh
ABB Corporate Research
Baden-Dättwil, Switzerland
Catherine Körbächer
ABB Review
Baden-Dättwil, Switzerland
5 Una típica tarjeta integrada con FPGA, microprocesador xScale y soporte de comunicaciones, todo ello parte integrante del proyecto SLIMLINE de ABB para protección de baja tensión
Notas
Bibliografía:
[1] Revista ABB, números 3 y 4 de 2005, ‘Desenchufado pero conectado’, Partes 1 y 2.
1) Un ASIC (Application-Specific Integrated Circuit) es un
circuito integrado (IC) personalizado para un uso parti-
cular, en lugar de estar proyectado para uso general.
Por ejemplo, un chip diseñado exclusivamente para el
funcionamiento de un teléfono celular es un ASIC.2) La ley de Moore se basa en la observación empírica
de que, al ritmo con que avanza el desarrollo tecnoló-
gico, la complejidad de un circuito integrado, en rela-
ción con el coste mínimo de sus componentes, se
duplicará en unos 18 meses. Esta ley se atribuye a
Gordon E. Moore, cofundador de Intel. 3) CORDIC (COordinate Rotation DIgital Computer) es
un sencillo y eficiente algoritmo de cálculo de funcio-
nes hiperbólicas y trigonométricas. Es el algoritmo
preferido cuando no se dispone de multiplicadores
de hardware. 4) Un bucle de sincronización de fase PLL (Phase-Loc-
ked Loop) es un sistema de control de realimentación
de bucle cerrado que mantiene fija la fase de una
señal generada respecto de una señal de referencia.5) Un dispositivo que reduce el desfase de la señal de
reloj en circuitos digitales.6) El estándar de interconexión de periféricos PCI (Peri-
pheral Component Interconnect) especifica un bus en
el ordenador para conectar dispositivos periféricos a la
placa madre del ordenador.7) UML (Unified Modeling Language) es un lenguaje de
modelado de objetos y de especificación de uso ge-
neral (no privado), empleado en ingeniería de software.
UML, que muestra su potencial en más niveles arqui-
tectónicos de mayor nivel, se ha utilizado para el mo-
delado de hardware.8) Standard Delay Format (SDF) es un estándar IEEE
para la representación e interpretación de datos de
temporización, adecuado para cualquier etapa de un
proceso de diseño electrónico. 9) La arquitectura von Neumann se refiere a un modelo
de diseño por ordenador que utiliza una única estruc-
tura de memoria para alojar instrucciones y datos. La
separación de la memoria y de la unidad de proceso
está implícita en la arquitectura von Neumann.10) RTL (Register Transfer Logic) es una descripción de
un circuito electrónico digital en términos de flujo de
datos entre registros. La descripción RTL especifica
la información que se ha de transferir, el punto de
almacenamiento de la misma y el modo en que pasa
por el circuito durante el funcionamiento.11) Un IP bien diseñado deberá incluir un banco de prue-
bas, ser reutilizable en varios productos y poder
actualizarse y ampliarse fácilmente para nuevas
generaciones del FPGA.
Tecnologías de sistemas integrados
Revista ABB 2/2006
Thema
Los algoritmos básicos y avanzados de procesamiento de señales se ejecutan en numerosos productos ABB equipados con electrónica integrada, desde los pequeños detectores de movimiento domésticos hasta las avanzadas unidades de control de aparamenta de media y alta tensión. En los dispositivos de campo, especialmente, el proceso de señales proporciona una oportunidad para mejorar la calidad de las mediciones y la funcionalidad global de los instrumentos.
El algoritmo PILD (Plugged Impulse Line Diagnostics) es un ejemplo de esta mejora. Ha sido desarrollado para alertar a los operadores de la existencia de obstrucciones en las líneas de impulsión de los transmisores de presión. Tal sistema de alerta permite a los usuarios pasar de los programas de manteni-miento preventivo a prácticas de tipo predictivo, gobernadas por sucesos, que son más económicas.
Procesamiento de señales en sistemas integrados Oportunidad para mejorar la funcionalidad de los instrumentos industrialesAndrea Andenna
75

76 Revista ABB 2/2006
Procesamiento de señales en sistemas integrados
El proceso de señales suele traer-nos a la memoria aplicaciones de
audio, de procesado de imágenes o de tecnologías de comunicación, pero una mirada cuidadosa a la cartera de productos de ABB nos da una imagen mucho más amplia. Las aplicaciones del procesado de señales se encuen-tran en muchos productos ABB, tanto de tecnología de automatización como de energía eléctrica. Muchas de las aplicaciones están integradas en dis-positivos como las unidades de con-trol y los instrumentos industriales, y se ejecutan en plataformas integradas.Los módems de comunicaciones de lí-neas eléctricas, por ejemplo, utilizan una gran diversidad de algoritmos de proce-so digital de señales (DSP). Algunos as-pectos básicos son la modulación y des-modulación digitales, el filtrado digital, las transformadas de Fourier, la conver-sión de frecuencias de muestreo, la ad-quisición de tramas, la sincronización de fase de portadora y temporización de símbolos, la estimación y ecualización de canales y la detección y corrección de errores. Los principios básicos del proceso de señales, bien conocidos, se aplican en todos los sistemas de comuni-caciones actuales. Sin embargo, hacen falta importantes inversiones en I+D pa-ra satisfacer los requisitos, cada día más estrictos, de los sistemas de comunica-ción de líneas eléctricas. La potencia de tratamiento, cada vez mayor, soportará mayores velocidades de transferencia de datos por canal. Los anchos de banda de los canales aumenta-rán desde el valor tradicional de 4 kHz hasta ~32 kHz. A lar-go plazo, es posible que los sistemas individuales ofrezcan soporte flexible (configurable) de anchos de banda mucho mayores, de hasta 1 MHz. Ta-les módems de líneas eléctri-cas, realmente de banda an-cha, tendrán que contar con algoritmos más eficientes para el procesado de señales.Las unidades actuales de pro-tección y control de aparatos de conexión e interruptores proporcionan numerosas fun-ciones de protección electró-nica para los sistemas eléctri-cos que supervisan. Estos dis-positivos funcionan midiendo la intensidad y la tensión pa-ra, a continuación, digitalizar
y procesar las señales adquiridas. Esto se consigue generalmente por medio del análisis de Fourier: se calculan los armó-nicos de las señales eléctricas, que pa-san a ser las entradas principales para la mayoría de las funciones de protección, como son las protecciones contra sobre-intensidades, contra sobretensiones, de tipo diferencial y de distancia.Los dispositivos de campo y los ins-trumentos analíticos de ABB están equipados normalmente con una sec-ción electrónica que adquiere señales de la sección detectora del dispositi-vo: los transmisores de presión, por ejemplo, adquieren una señal de un chip sensor piezorresistivo, los cauda-límetros magnéticos leen la tensión in-ducida por el campo magnético gene-rado y los transmisores de temperatu-ra leen la señal en un termopar. Así pues, en general, en un instrumento industrial, una o más señales eléctri-cas son adquiridas desde la parte de-tectora (a veces conocida como la sección primaria) por la parte electró-nica (la sección secundaria). En gene-ral, todas estas señales de los sensores se han de amplificar, filtrar analógica-mente, convertir de analógicas a digi-tales y luego procesar digitalmente en microprocesadores o DSP. El proceso de señales también es importante en los actuales sistemas de sensores para modelar las curvas características de los sensores, para compensar la falta de linealidad y los efectos influyentes.
Procesado de señales, una oportunidad para mejorar los dispositivos de campoLos dispositivos de campo son cada vez más inteligentes, gracias sobre todo a los rápidos avances del sector de semi-conductores en cuanto a costes y consu-mo de energía de los componentes. En este contexto, el proceso de señales es una oportunidad de mejorar las propie-dades de los sensores a pesar de los nu-merosos efectos de los que depende: la variabilidad de la fabricación, la histére-sis, la deriva, el envejecimiento y las in-terferencias, entre otros, factores inevita-bles que son una fuente sistemática de incertidumbre [2]. Además, los clientes exigen instrumentos industriales con funciones que van más allá del objetivo principal del dispositivo. Las funciones de diagnóstico de dispositivos y proce-sos son particularmente apreciadas, de-bido a que persiguen reducir los costes de mantenimiento y mejorar la fiabilidad general de los instrumentos. Las compa-ñías de la competencia están confirman-do, sin duda, esta tendencia y el térmi-no “diagnóstico” es hoy una palabra cla-ve de uso común en las especificaciones comerciales de los instrumentos de nue-va generación. Hasta ahora, esta funcio-nalidad de supervisión de procesos se proporcionaba generalmente en el nivel de sistema de control de una planta, donde se dispone de la máxima poten-cia de cálculo. Sin embargo, la mejora de las plataformas integradas permite ahora la integración de algoritmos com-
plejos en el nivel de dispositi-vo, en lugar de en PC y siste-mas de control. En otras pala-bras, hoy se tiende a desplazar la inteligencia desde el sistema hasta los instrumentos y dispo-sitivos de campo. En la última parte de este artículo analizare-mos un caso concreto.
Limitaciones de las plataformas integradasSon bien conocidos los especta-culares avances de los últimos años en el campo de los com-ponentes electrónicos, como procesadores, memorias y chips, que han multiplicado sus prestaciones y reducido su ta-maño y coste. Así sucede en to-dos los segmentos del mercado de los chips, desde los ordena-dores personales hasta las ar-quitecturas integradas de menor
Tecnologías de sistemas integrados
1 Transmisor de presión diferencial en un entorno severo con dificultades de acceso para el mantenimiento

77Revista ABB 2/2006
Procesamiento de señales en sistemas integrados
tamaño empleadas en las aplicaciones industriales. Sin embargo, en las platafor-mas integradas utilizadas típicamente en los dispositivos e instrumentos ABB, el coste y el consumo de energía siguen siendo un reto:En el mercado de la instrumentación in-dustrial, el precio juega un papel muy importante a la hora de conservar y au-mentar la cuota de mercado. Con mucha frecuencia, los productos en competen-
cia son similares en cuanto a calidad y las decisiones de los clientes se basan principalmente en el precio. Sin embar-go, según se ha descrito más arriba, la tendencia general es la reducción del precio de los chips y, aunque el coste de la electrónica suele ser una parte signifi-cativa de los costes de producción de un dispositivo, los costes de fabricación y de material del instrumento pueden lle-gara a ser mucho mayores. Por consi-
guiente, desde el punto de vista del cos-te, las estructuras integradas utilizadas actualmente en la instrumentación indus-trial tienen potencial para mejorar la po-tencia de cálculo y la memoria, pues es posible añadir fácilmente algoritmos más avanzados e inteligencia adicional.Muchas arquitecturas integradas tienen limitaciones respecto al consumo de energía. Los dispositivos alimentados por baterías, por ejemplo tienen que sa-tisfacer requisitos específicos en cuanto a duración de las baterías y, por tanto, están limitados por su consumo de ener-gía. Existen dispositivos que normal-mente funcionan con una fuente de ali-mentación auxiliar (110 / 220 V), que, en caso de emergencia, han de poder operar sin esta alimentación, aunque sea con limitaciones funcionales. Este es el caso de muchas unidades de control de interruptores. La solución, en este caso, es una batería o una estrategia de autoa-limentación (por ejemplo, energía obte-nida de la corriente que circula a través del interruptor).Muchos instrumentos son alimentados a través del canal de 4–20 mA, que se uti-liza también como canal de entrada o salida analógica principal. Estos disposi-tivos, conocidos como instrumentos bifi-lares, pueden consumir tan sólo algunas decenas de milivatios. La seguridad in-trínseca proporcionada por este bajo consumo de energía es una ventaja para los instrumentos industriales de dos hi-los. Ésta es, realmente, una de las prin-cipales razones de que los clientes aún apoyen fuertemente este tipo de fuente de energía. Hace algunos años, el con-sumo de energía era un factor restrictivo para la mejora de la electrónica y por tanto, de la funcionalidad, y hoy sigue siendo un problema particular para los dispositivos bifilares.
PILD, aplicación integrada de proceso de señales La función PILD (Plugged Impulse Line Diagnostics) es un algoritmo de proceso de señales que recientemente ha sido integrado en los transmisores de presión diferencial de ABB, uno de los dispositi-vos de campo de uso más común. Este proyecto de I+D mostró el potencial del proceso de señales para mejorar los dis-positivos de campo y también las res-tricciones impuestas por las limitaciones de sus arquitecturas integradas.Los transmisores de presión diferencial son instrumentos que detectan la dife-
2 Nivel de ruido en la señal de presión diferencial en diversas condiciones de las líneas de impulsión
0.02
0.015
0.01
0.005
0
En.
del
rui
do/e
n. d
e la
señ
al
0 50 100 150 200 250 300
tiempo (s)
a Líneas no conectadas
0.02
0.015
0.01
0.005
0
En.
del
rui
do/e
n. d
e la
señ
al
0 50 100 150 200 250 300
tiempo (s)
b Ambas líneas conectadas
0.02
0.015
0.01
0.005
0
En.
del
rui
do/e
n. d
e la
señ
al
0 50 100 150 200 250 300
tiempo (s)
c (+) línea conectada
0.02
0.015
0.01
0.005
0
En.
del
rui
do/e
n. d
e la
señ
al
0 50 100 150 200 250 300
tiempo (s)
d (-) línea conectada
Tecnologías de sistemas integrados

78 Revista ABB 2/2006
Procesamiento de señales en sistemas integrados
rencia de presión entre dos puntos de un proceso. Se pueden instalar en entor-nos severos, con dificultades de acceso para el mantenimiento 1 . La principal aplicación de este dispositivo es calcular el caudal dentro de una tubería midien-do la caída de presión causada por un elemento primario, generalmente un tu-bo de Venturi o una placa con un orifi-cio. A partir de esta medida, y conocien-do la forma geométrica del elemento primario, se puede calcular el caudal.Los transmisores de presión diferencial se conectan al proceso por medio de dos tuberías llamadas líneas de impul-sión. Éstas suelen tener un diámetro pe-queño, inferior a 1 cm, y pueden ser de gran longitud. Durante la vida útil de un dispositivo, las líneas de impulsión pue-den quedar parcial o totalmente blo-queadas por material sólido del proceso (por ejemplo, arena), sedimentos o de-pósitos que se acumulan dentro de las líneas, o por agua congelada.A diferencia de los fallos de funciona-miento de casi todos los demás disposi-tivos de campo, una línea de impulsión obstruida no tiene efecto alguno sobre el hardware del dispositivo, de modo que, si pasa desapercibida, el valor del proceso permanecerá en condiciones consideradas válidas. Al obstruirse la lí-nea de impulsión, el estado actual de la presión queda bloqueado y desacoplado respecto del estado real del proceso. El sistema de control sigue utilizando el valor de la presión en los bucles de control, sin tener en cuenta que dicho valor está “congelado”. La única indica-ción de tal situación para el operador del proceso es el anómalo comporta-miento de los bucles de control, que también podría estar causado por el
desgaste de las válvulas, de hecho la causa más probable.Es necesario un gran trabajo de manteni-miento para identificar y desbloquear una línea de impulsión obstruida. Sin embargo, si se sabe que un fluido de un proceso tiende a causar obstrucciones, normalmente se realizará un costoso mantenimiento preventivo. Los transmi-sores de presión diferencial que identifi-can rápidamente las obstrucciones en las líneas de impulsión ofrecen posibilidades para bajar los costes por reducción del trabajo de mantenimiento preventivo.
El algoritmo PILDEl principio de la detección de líneas de impulsión obstruidas se basa en las características observadas de las señales de presión a lo largo del tiempo. Los procesos de flujo resultan afectados por fluctuaciones del valor de la presión, causadas por otros dispositivos y máqui-nas que interaccionan con el proceso, como pueden ser las bombas. Estas fluc-tuaciones se pueden observar como rui-do en la señal de presión diferencial. En condiciones normales de operación, con líneas de impulsión despejadas 2a , este ruido del proceso es prácticamente nu-lo, debido a que el dispositivo mide la presión desde dos puntos relativamente próximos entre sí, separados normal-mente por unos pocos centímetros. Si se bloquea una de las líneas de impulsión 2c 2d ,las fluctuaciones de presión ya no se anulan y el ruido del proceso se hace evidente en la señal de presión diferen-cial. Si se bloquean las dos líneas de im-pulsión 2b , el ruido del proceso se redu-ce casi a cero, y que se pierde por com-pleto la conexión de presión entre el-sensor y el proceso.
Así pues, la función PILD mide en pri-mer lugar el nivel de ruido en la señal de presión diferencial cuando las lí-neas de impulsión están despejadas (fase de aprendizaje). Después, duran-te el funcionamiento normal del dis-positivo, compara estadísticamente el nivel de ruido con los valores almace-nados durante la fase de aprendizaje. Si el análisis estadístico muestra una diferencia significativa entre los valo-res actuales de operación y los adqui-ridos durante la fase de aprendizaje, una alarma indica que están obstrui-das una o ambas líneas de impulsión.
La fase de aprendizaje es un período de tiempo configurable, durante el cual el algoritmo ‘aprende’ las condiciones no-minales del proceso para más tarde identificar las lecturas que indican obs-trucción de las líneas de impulsión. Un aprendizaje fiable y eficiente es funda-mental para el buen resultado de la fun-ción PILD. Los transmisores de presión diferencial se usan en condiciones de proceso muy diferentes en lo que se re-fiere a medios (líquidos de alta viscosi-dad, agua, vapor, gases, etc.) y condi-ciones ambientales (temperatura de –40 a +85 °C y presión absoluta de hasta 600 bares). Sin un procedimiento auto-mático que adapte el algoritmo a esta gran variedad de condiciones, la función PILD sería inútil.La función PILD, desarrollada entre 2003 y 2005, se ha integrado recientemente en la nueva versión de Transmisores de Presión Diferencial ABB 264 con interfaz Foundation Fieldbus.
Andrea Andenna
ABB Corporate Research Centre
Baden, Suiza
Bibiografia
[1] Hengjun Zhu, E.H.Higham, J.E.Amadi-Echendu,
Signal Analysis applied to Detect Blockages in
Pressure and Differential Pressure Measurement
Systems, IEEE Instrumentation and Measurement
Technology Conference, Proceedings Vol. 2
(1994), Pages 741–744.
[2] H.Tränkler, O.Kanoun, “Importance of Signal
Processing in Sensor Systems”, Technisches
Messen 71 (2004) 3
[3] A.Andenna, G.Invernizzi, D.Eifel, “Embedded diag-
nosis to detect plugged impulse lines of a differen-
tial pressure transmitter”, ITG-/GMA Sensoren und
Messsysteme 2006, Conference Proceedings
Tecnologías de sistemas integrados
79Revista ABB 2/2006
Editorial Board
Peter TerwieschCTO, Group R&D and Technology
Adam RoscoeCorporate Communications
Ron PopperGroup Editorial ServicesCorporate Communications
Friedrich PinnekampGroup R&D and Technology
Nils LefflerChief [email protected]
EditorialABB Schweiz AGCorporate ResearchABB Review/REVCH-5405 Baden-DättwilSuiza
La Revista ABB se publica cuatro veces al año en inglés, francés, alemán, español, chino y ruso.La reproducción o reimpresión parcial está permitida a condición de citar la fuente. La reimpresión completa precisa del acuerdo por escrito del editor. Revista ABB es una publicación gratuita para todos los interesados en la tecnología y objetivos de ABB y para aquellas perso-nas que ocupan puestos directivos y nece-sitan estar informados sobre los últimos avances de la tecnología. Si usted desea una suscripción gratuita puede ponerse en contacto con la representación ABB más próxima o directamente con la editorial.
Editor © 2006ABB Ltd, Zurich/Suiza
ImpresiónVorarlberger Verlagsanstalt AGAT-6850 Dornbirn/Austria
DesignDAVILLA Werbeagentur GmbHAT-6900 Bregenz/Austria
TraducciónBrugos ÜbersetzungenBern, [email protected]
Exención de responsabilidad:Las informaciones contenidas en esta revis-ta reflejan el punto de vista de sus autores y tienen una finalidad puramente informativa. El lector no deberá actuar con base en las afirmaciones contenidas en esta revista sin contar con asesoramiento profesional. Nuestras publicaciones están a disposición de los lectores sobre la base de que no im-plican asesoramiento técnico o profesional de ningún tipo por parte de los autores, ni opiniones sobre materias o hechos específi-cos, y no asumimos responsabilidad alguna en relación con el uso de las mismas. Las empresas del Grupo ABB no garantizan ni aseguran, explícita o implícitamente, el contenido o la exactitud de los puntos de vista expresados en esta revista.
ISSN: 1013-3119
www.abb.com/abbreview
Preview 3/2006
Como publicación técnica del Grupo ABB, Revista ABB intenta cubrir ade-cuadamente los trabajos de Investiga-ción y Desarrollo del Grupo. Sus artí-culos presentan regularmente las ten-dencias, logros y aplicaciones, tanto de los centros de I+D como de los negocios principales de ABB. Sin embargo, más allá de los campos de negocio más conocidos, ABB trabaja con gran éxito en diversos negocios nicho. El próximo número de Revista ABB estará dedicado a estos campos, menos conocidos, del Grupo ABB.
Algunos de estos esfuerzos de negocio han traído consigo notables resultados aplicando en un campo, principal o no, de nuestra compañía, conocimien-to y soluciones obtenidos en otros campos totalmente distintos. Los gru-
pos de ingeniería de las empresas ABB locales han aplicado nuestra cartera de productos y nuestro conocimiento a la solución creativa de problemas plan-teados por los clientes, inclusive algu-nas aplicaciones muy poco ortodoxas.
Revista ABB espera que con este acce-so a soluciones inteligentes aplicadas en un mercado puedan nacer oportuni-dades para que el conjunto de conoci-mientos de ABB pueda abrirse a otros mercados. Los ejemplos que presenta-remos en el próximo número serán una fuente de inspiración para el pensa-miento creador y abrirán nuevos cam-pos a la sinergia y a la innovación, per-mitiendo así a más sectores industria-les, productos y personas beneficiarse de la gran cantidad de conocimiento y experiencia de nuestra compañía.

Ensuring areliable powergrid is where
we really shine.
Ensuring areliable powergrid is where
we really shine.
© 2005 ABB
Providing breakthroughs in power transmission anddistribution for the 21st century. Visit us at www.abb.com
a
Recommended

















