INSTRUMENTACIÓN
CONTROL DE PROCESOS
Proceso
disturbios
entradas
salidas
Elementos de un sistema de control
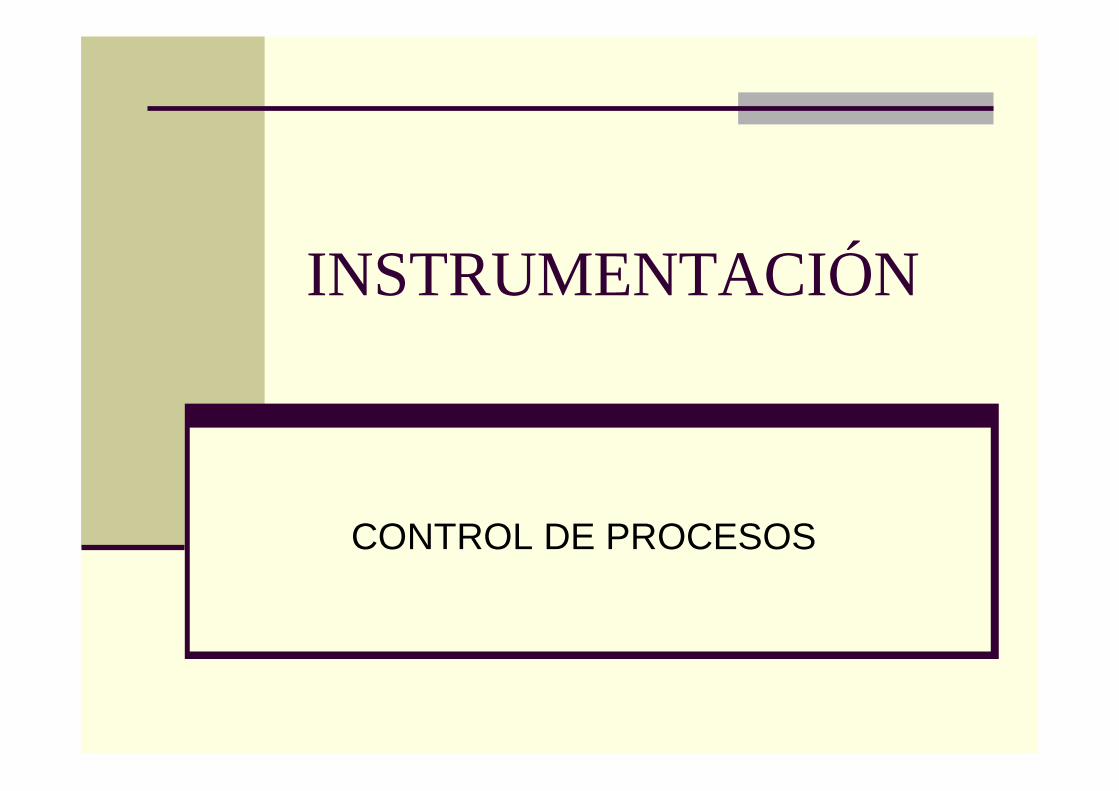
Un sistema de control se compone de� Proceso: (sistema al que se desea controlar)� Elemento primario de control (sensores):
tienen "contacto" con la variable dinámica que se está midiendo.
� Controlador: a partir de las señales obtenidas por los sensores, compara con una referencia y ejerce una acción correctiva de acuerdo con la desviación.
� Elemento final de control: efectúa la acción de control que afecta al proceso
� Transmisores: Recibe una señal del elemento primario, puede contener al transductor y enviar una señal estándar.
� Transductores: Recibe una señal y a partir de un sistema de control y mediante propiedades físicas, químicas, etc. la transforma en otra señal amplificada o más cómoda.
� Convertidor: Convierte una señal estándar en otra estándar mediante una relación lineal preferentemente. Por ejemplo convertidor P/I (de señal neumática a señal eléctrica de corriente) o su convertidor inverso I/P
Elementofinal decontrol
sensor sensor
controlador
Tipos de señales
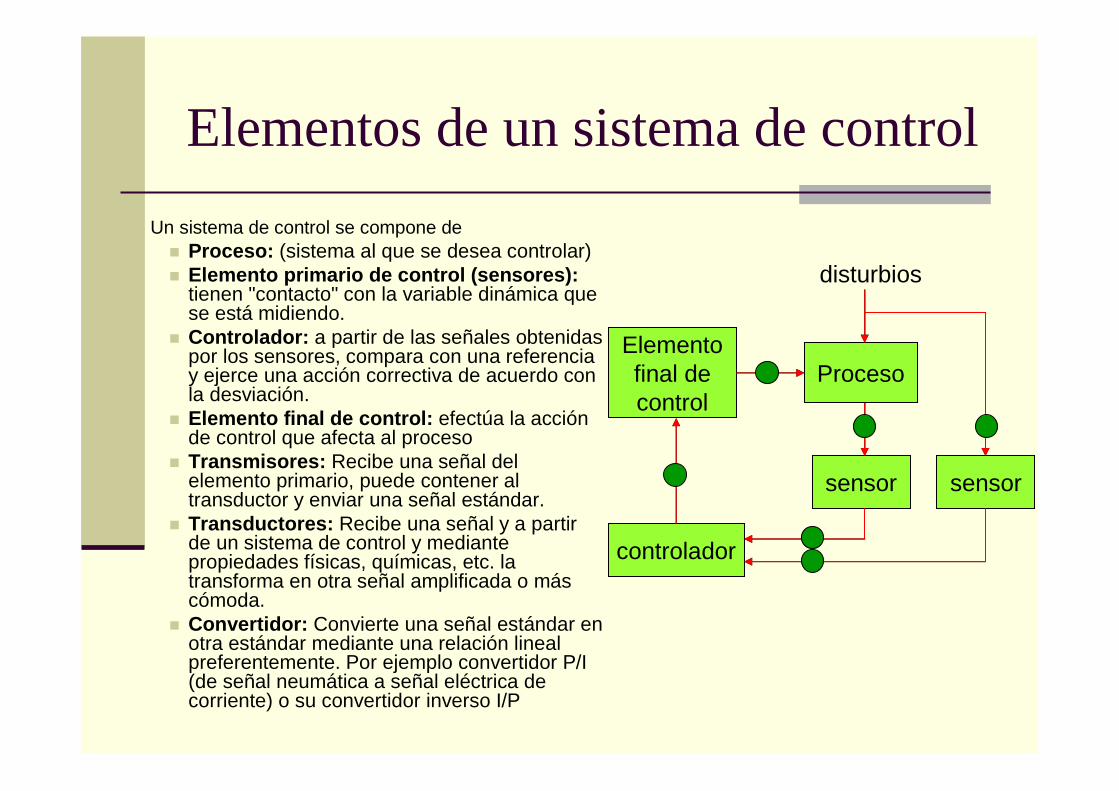
Dentro de los sistemas de control automático, las mediciones más frecuentes o estándar son�Señales eléctricas
� Voltaje: 0-5 V, ó 0-10 V� Corriente: 4-20 mA ó 0-20 mA
�Señales neumáticas: 3-15 psi�Señales hidráulicas�Señales digitales: (0,1)
�Señales telemétricas
Elementos primarios de mediciónLos elementos primarios de medición mas comunes son:�Temperatura
� Termómetros bimétalicos� Termómetros de vástago de vidrio� Pirómetros de radiación ópticos� Pirómetros de radiación infrarrojos� Indicadores pirometricos� Termómetros de cristal de cuarzo� Sistemas termales� Termopares� Resistencias eléctricas
(termoresistencias)�Presión
� Tubo Bourdon� Columnas� Sensores electrónicos
(piezoeléctricos)� Diafragmas� Fuelles� Cápsulas� Campanas
�Flujo (volumétricos y de masa)� Tubo pifot� Magnético� Turbina� Bomba dosificadora� Tubo venturi� Derramadores� Tubo de Dali� Tubo de Gentile� Rotámetro� Annubar� Placa de orificio� Tarjet� Remolino� Vortex
�Otras variables� Nivel (sólidos y líquidos)� pH� Conductividad� Cromatógrafos� Analizador infrarrojo� Redox� Conductividad térmica
Etc.
Definiciones en instrumentación (1)
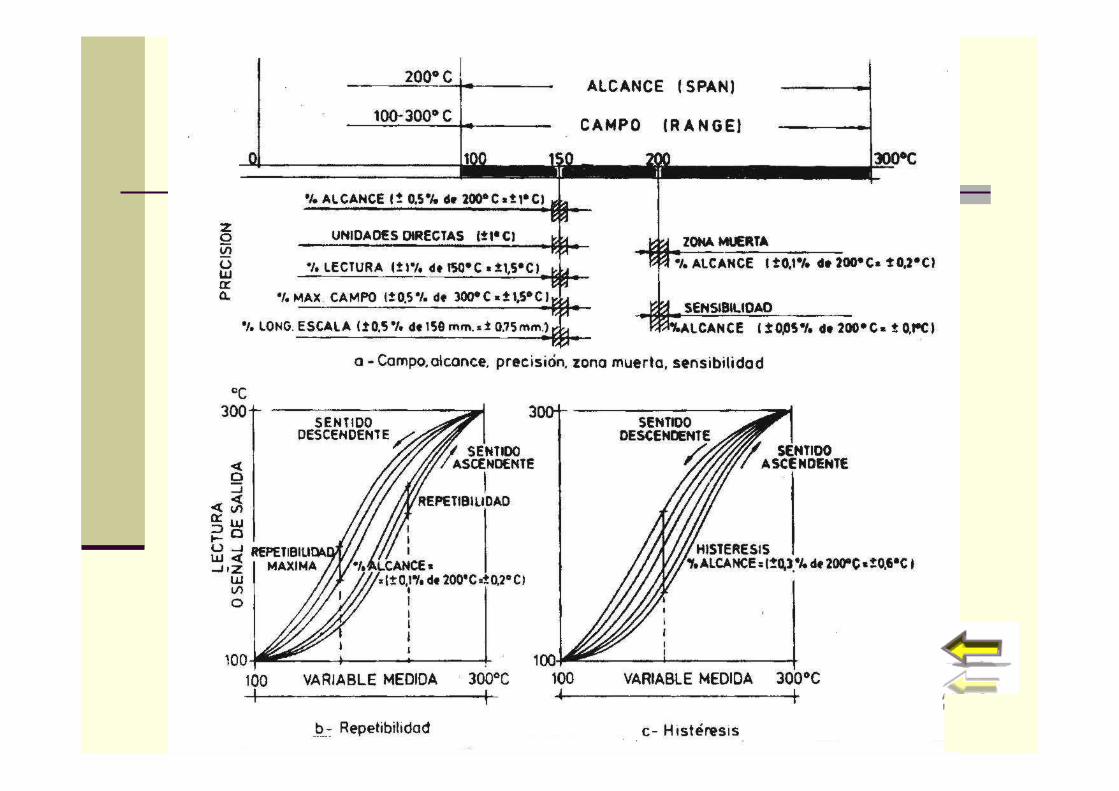
� Campo de medición (range): Qué se mide y en que intervalo, se expresa en valor máximo y mínimo que alcanza la variable medida.
� Alcance (span): Es la diferencia algebraica entre los valores superior e inferior del campo.
� Precisión (accuracy): Es la tolerancia de medición o transmisión del instrumento y define los errores cometidos cuando el instrumento se emplea en condiciones normales de servicio. Se puede expresar como:� Tanto por ciento del alcance
� En unidades de la variable de desviación� Tanto por ciento de la lectura efectuada
� Tanto por ciento de la lectura efectuada
Definiciones en instrumentación (2)
� Zona muerta (dead zone o dead band): Es el campo de valores de la variable que no hace variar la indicación o la señal de salida del instrumento.
� Sensibilidad (sensitivity): Es la razón entre el incremento de la lectura y el incremento de la variable que lo ocasiona, después de haber alcanzado el estado de reposo.
� Repetibilidad (repeatibility): Es la capacidad de reproducción de la misma lectura del instrumento al medir repetidamente valores idénticos de la variable en las mismas condiciones de servicio y en el mismo sentido de variación recorriendo todo el campo.
� Histéresis (hysteresis): Diferencia máxima que se observa en los valores de la lectura del instrumento para un mismo valor cualquiera del campo de medida, cuando la variable recorre toda la escala en los dos sentidos, ascendiente y descendiente.
Definiciones en instrumentación (3)
� Deriva (Derive): error a largo tiempo (el aparato se calienta, etc.). Es una variación de la salida del medidor con el tiempo a pesar de que la variable que medimos es constante. Se da cuando medimos algo por periodos muy largos. Da idea de si el medidor necesita calibración (deriva de cero y deriva térmica de cero).
� Linealidad (linearity): el aparato sigue alguna relación lineal. Expresa una relación muy simple entre la variación y la señal de salida del equipo. Si la relación no es lineal se hace lineal dentro del rango y se mide las máxima desviación, se puede linealizar por tramos.
� Resolución (resolution): distinción entre medidas muy cercanas. Es el más pequeño cambio de la señal que puede detectarse.
� Constante de tiempo (time constant): Tiempo que tarda en dar la respuesta.
� Alimentación (supply): Energía necesaria para que funcione el elemento.
� Otras: Ruido, fiabilidad, estabilidad, temperatura de servicio, etc.
Instrumentación
� Aquí va la figura 1.3
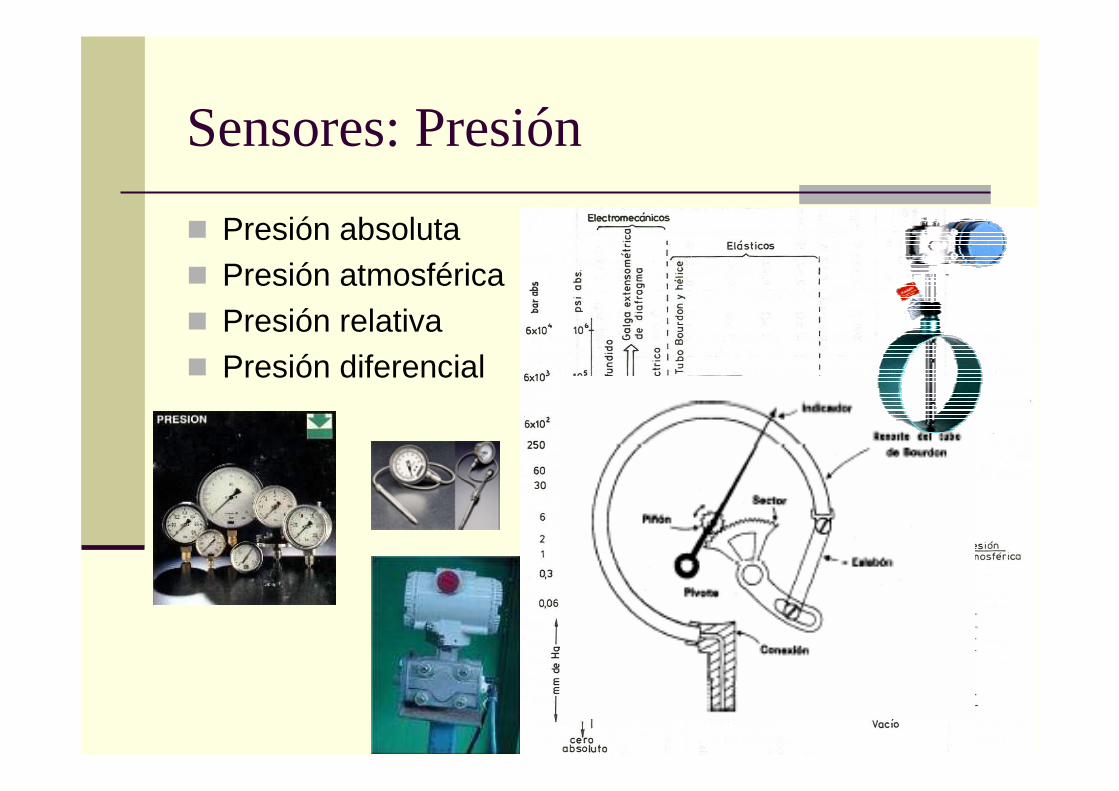
Sensores: Presión
� Presión absoluta� Presión atmosférica� Presión relativa� Presión diferencial
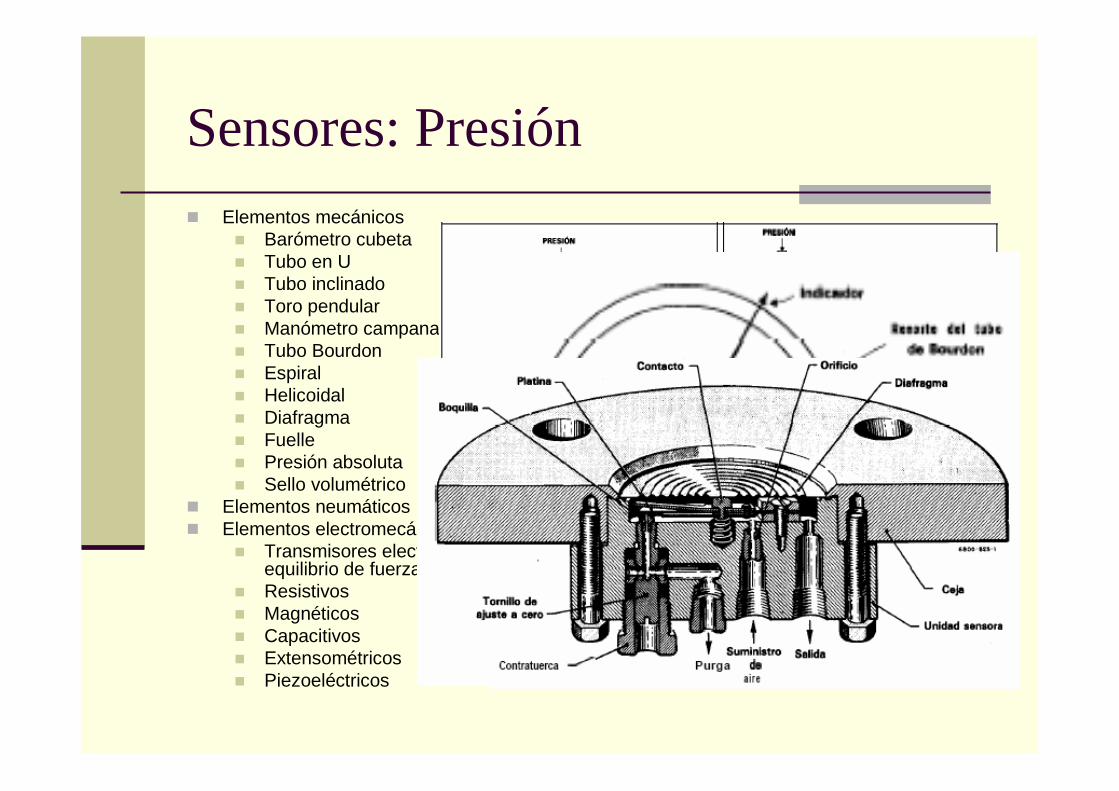
Sensores: Presión� Elementos mecánicos
� Barómetro cubeta� Tubo en U� Tubo inclinado� Toro pendular� Manómetro campana� Tubo Bourdon� Espiral� Helicoidal� Diafragma� Fuelle� Presión absoluta� Sello volumétrico
� Elementos neumáticos� Elementos electromecánicos
� Transmisores electrónicos de equilibrio de fuerzas
� Resistivos� Magnéticos� Capacitivos� Extensométricos� Piezoeléctricos
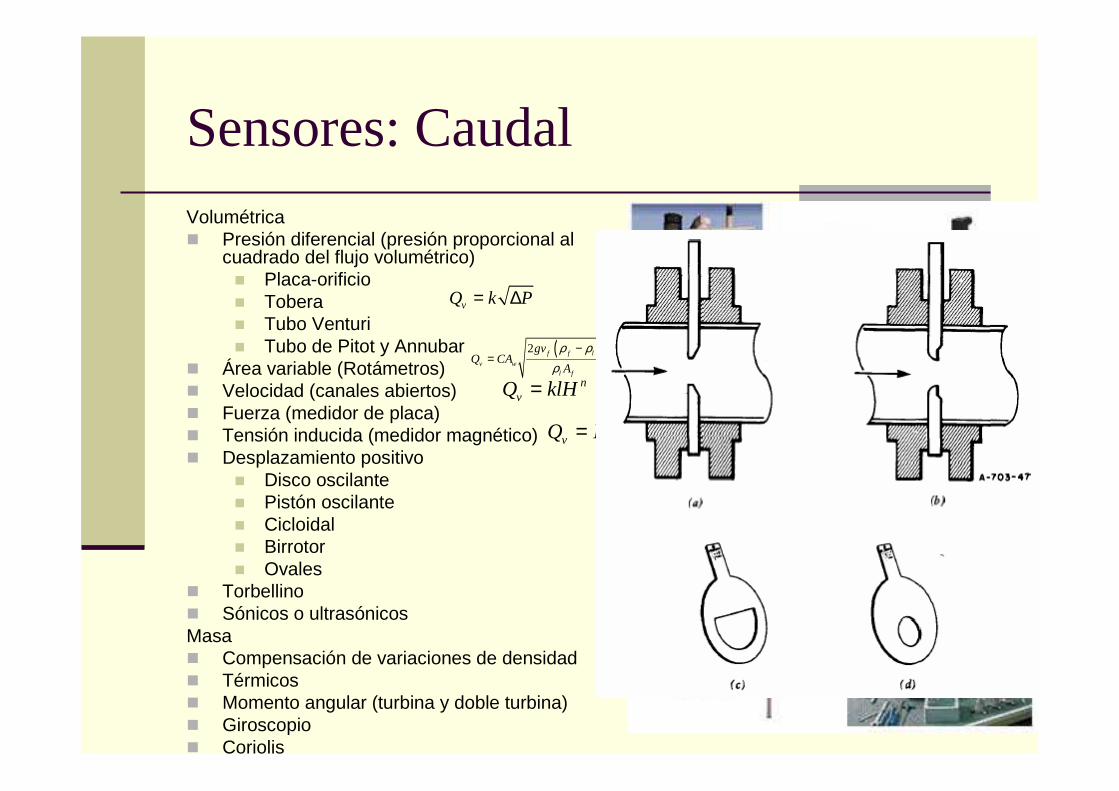
Sensores: CaudalVolumétrica� Presión diferencial (presión proporcional al
cuadrado del flujo volumétrico)� Placa-orificio� Tobera� Tubo Venturi� Tubo de Pitot y Annubar
� Área variable (Rotámetros)� Velocidad (canales abiertos)� Fuerza (medidor de placa)� Tensión inducida (medidor magnético)� Desplazamiento positivo
� Disco oscilante� Pistón oscilante� Cicloidal� Birrotor� Ovales
� Torbellino� Sónicos o ultrasónicosMasa� Compensación de variaciones de densidad� Térmicos� Momento angular (turbina y doble turbina)� Giroscopio� Coriolis
vQ k P= ∆
( )2 f f l
v wl f
gvQ CA
A
ρ ρρ
−=
nvQ klH=
Sv
EQ K D
B=
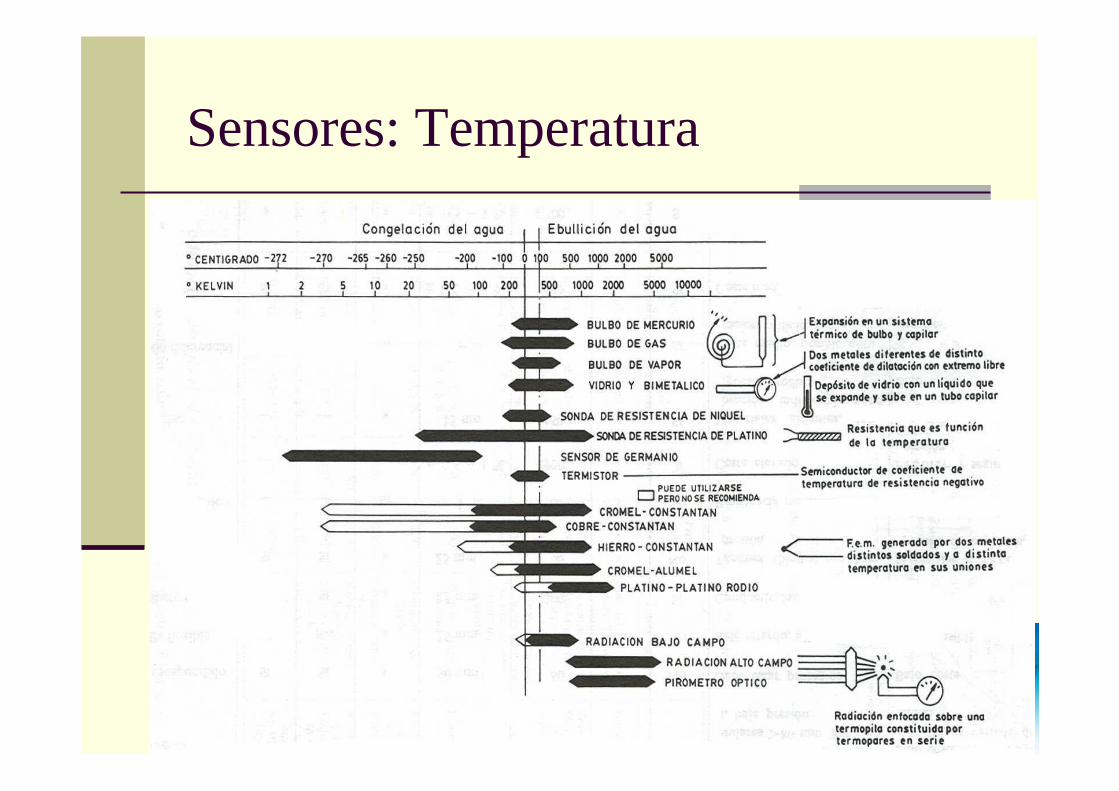
Sensores: Temperatura
� Termómetros de resistencia (termistores)
� Termopares (J, K, T, R, S)
� Pirómetros de radiación
� Circuitos integrados (LM35)

Sensores: Nivel
Líquidos� Medida directa
� Sonda� Cinta� Plomada� Flotador
� Basados en la presión hidrostática� Manométrico� Membrana� Burbujeo� Presión diferencial
� Basados en características eléctricas� Capacitivos� Conductivos
� Ultrasónicos� Radiación� LáserSólidos� Báscula, etc.
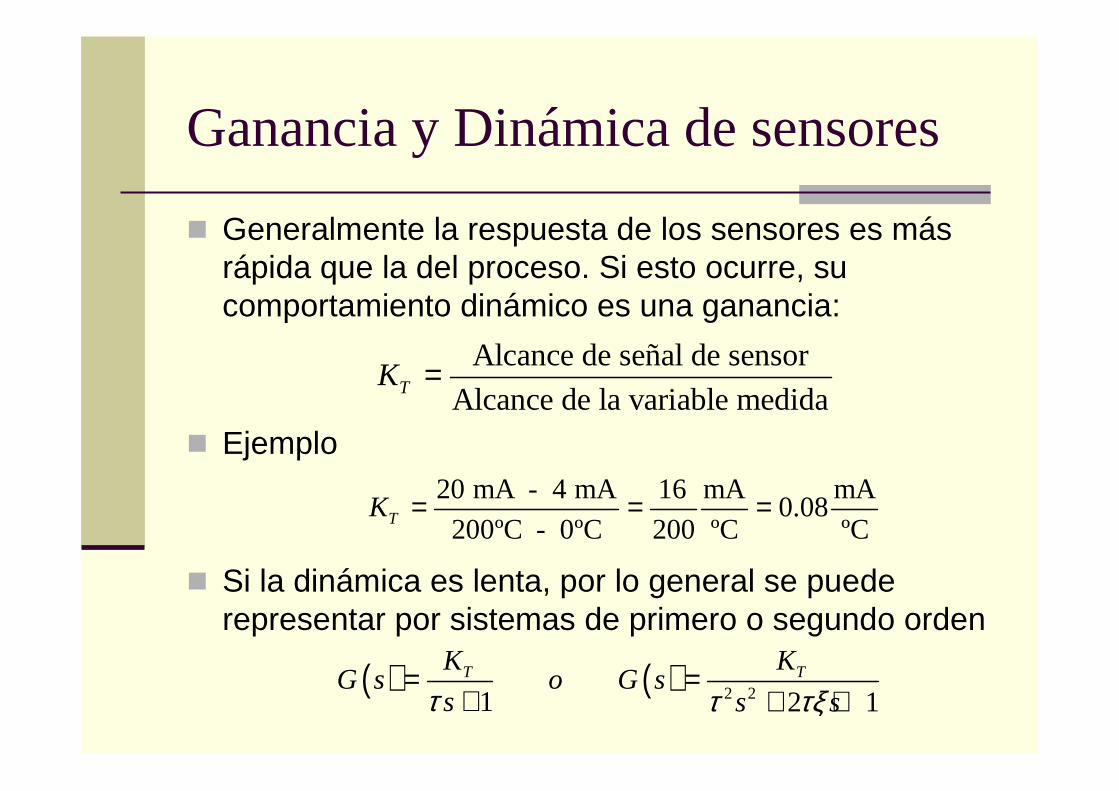
Ganancia y Dinámica de sensores
� Generalmente la respuesta de los sensores es más rápida que la del proceso. Si esto ocurre, su comportamiento dinámico es una ganancia:
� Ejemplo
� Si la dinámica es lenta, por lo general se puede representar por sistemas de primero o segundo orden
Alcance de señal de sensor
Alcance de la variable medidaTK =
20 mA - 4 mA 16 mA mA0.08
200ºC - 0ºC 200 ºC ºCTK = = =
( ) ( ) 2 21 2 1T TK K
G s o G ss s sτ τ τξ
= =+ + +
Transmisores
� Captan la variable de proceso y la transmiten a distancia a un instrumento receptor indicador, registrador, controlador o una combinación de estos.� Transmisores neumáticos (sistema tobera-
obturador)� Equilibrio de movimientos, fuerzas ó momentos.
� Transmisores eléctricos� Detectores de posición de inductancia� Transformador diferencial� Transmisores digitales
Actuadores
Los actuadores son dispositivos capaces de generar una fuerza a partir de líquidos, de energía eléctrica y gaseosa. El actuadorrecibe la orden de un regulador o controlador y da una salida necesaria para activar a un elemento final de control como lo son las válvulas. Existen tres tipos de actuadores:
� Hidráulicos (para potencia, mucha energía y mantenimiento)
� Neumáticos (precisión, mucha presión y mantenimiento)
� Eléctricos (servomotores, precisos y poco mantenimiento)
Actuadores hidráulicos
Los actuadores hidráulicos, que son los de mayor antigüedad, pueden ser clasificados de acuerdo con la forma de operación, funcionan en base a fluidos a presión. Existen tres grandes grupos:
� cilindro hidráulico � motor hidráulico � motor hidráulico de oscilación
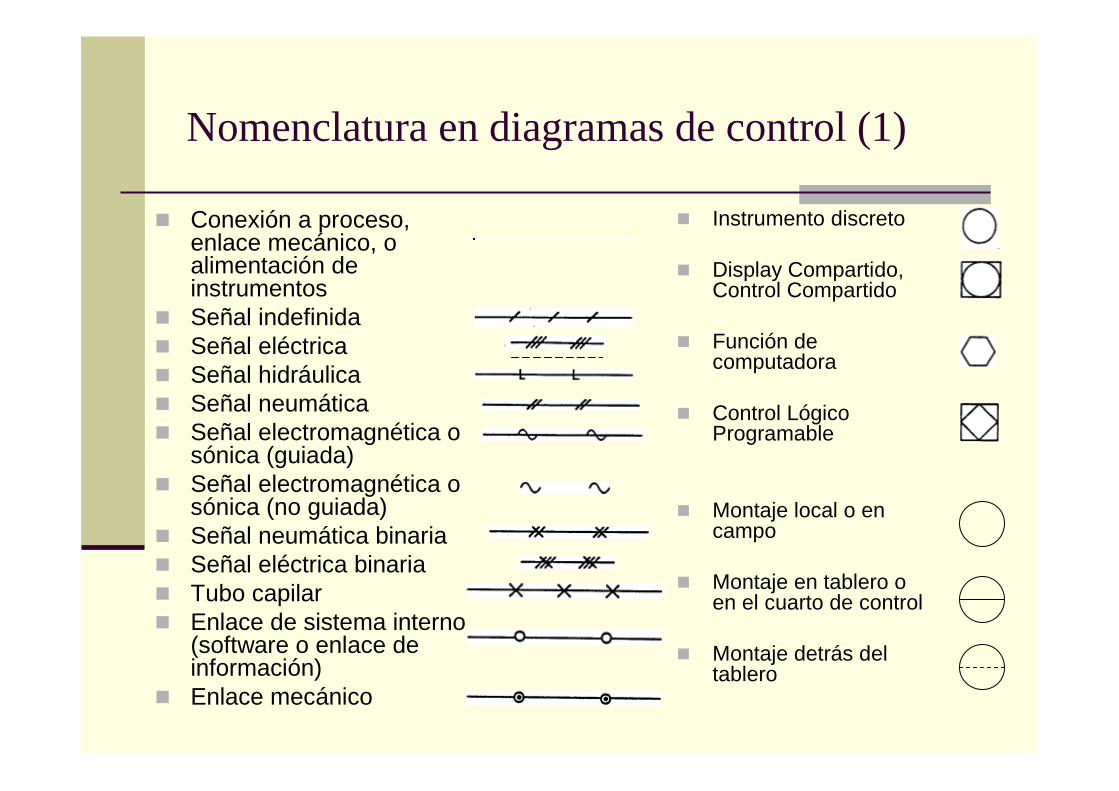
Nomenclatura en diagramas de control (1)
� Instrumento discreto
� Display Compartido, Control Compartido
� Función de computadora
� Control Lógico Programable
� Montaje local o en campo
� Montaje en tablero o en el cuarto de control
� Montaje detrás del tablero
� Conexión a proceso, enlace mecánico, o alimentación de instrumentos
� Señal indefinida� Señal eléctrica� Señal hidráulica� Señal neumática� Señal electromagnética o
sónica (guiada)� Señal electromagnética o
sónica (no guiada)� Señal neumática binaria� Señal eléctrica binaria� Tubo capilar� Enlace de sistema interno
(software o enlace de información)
� Enlace mecánico
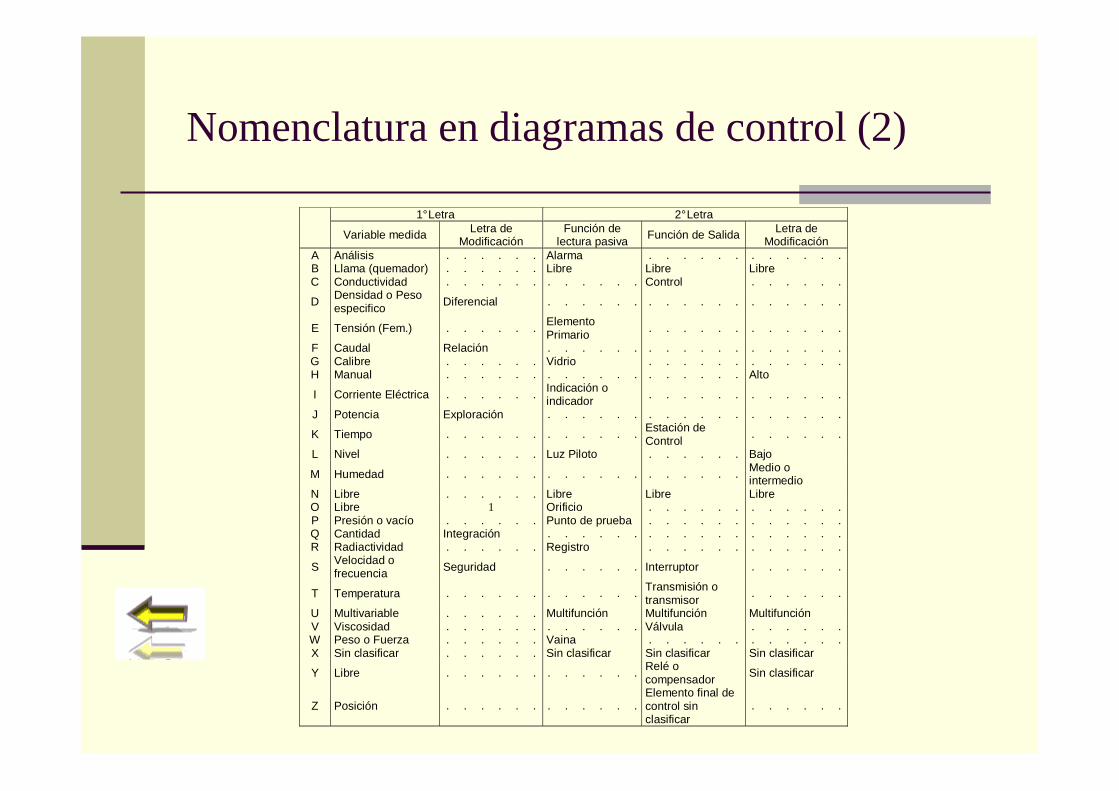
Nomenclatura en diagramas de control (2)
1° Letra 2° Letra
Variable medida Letra de Modificación
Función de lectura pasiva
Función de Salida Letra de Modificación
A Análisis . . . . . . Alarma . . . . . . . . . . . . B Llama (quemador) . . . . . . Libre Libre Libre C Conductividad . . . . . . . . . . . . Control . . . . . .
D Densidad o Peso especifico
Diferencial . . . . . . . . . . . . . . . . . .
E Tensión (Fem.) . . . . . . Elemento Primario
. . . . . . . . . . . .
F Caudal Relación . . . . . . . . . . . . . . . . . . G Calibre . . . . . . Vidrio . . . . . . . . . . . . H Manual . . . . . . . . . . . . . . . . . . Alto
I Corriente Eléctrica . . . . . . Indicación o indicador
. . . . . . . . . . . .
J Potencia Exploración . . . . . . . . . . . . . . . . . .
K Tiempo . . . . . . . . . . . . Estación de Control
. . . . . .
L Nivel . . . . . . Luz Piloto . . . . . . Bajo
M Humedad . . . . . . . . . . . . . . . . . . Medio o intermedio
N Libre . . . . . . Libre Libre Libre O Libre 1 Orificio . . . . . . . . . . . . P Presión o vacío . . . . . . Punto de prueba . . . . . . . . . . . . Q Cantidad Integración . . . . . . . . . . . . . . . . . . R Radiactividad . . . . . . Registro . . . . . . . . . . . .
S Velocidad o frecuencia
Seguridad . . . . . . Interruptor . . . . . .
T Temperatura . . . . . . . . . . . . Transmisión o transmisor
. . . . . .
U Multivariable . . . . . . Multifunción Multifunción Multifunción V Viscosidad . . . . . . . . . . . . Válvula . . . . . . W Peso o Fuerza . . . . . . Vaina . . . . . . . . . . . . X Sin clasificar . . . . . . Sin clasificar Sin clasificar Sin clasificar
Y Libre . . . . . . . . . . . . Relé o compensador
Sin clasificar
Z Posición . . . . . . . . . . . . Elemento final de control sin clasificar
. . . . . .
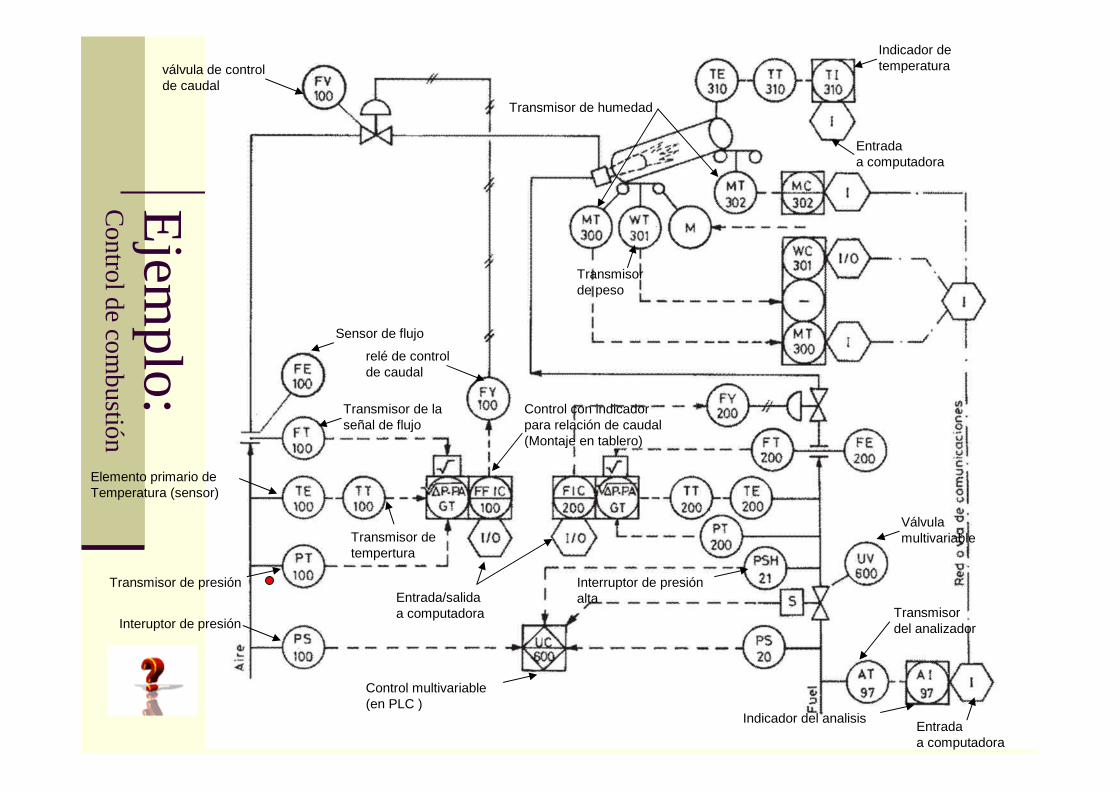
Ejem
plo:C
on
trol d
e comb
ustió
n
Elemento primario deTemperatura (sensor)
válvula de controlde caudal
Sensor de flujo
Transmisor de laseñal de flujo
Transmisor de presión
Interuptor de presión
relé de control de caudal
Transmisor detempertura
Control multivariable (en PLC )
Control con indicadorpara relación de caudal(Montaje en tablero)
Válvulamultivariable
Transmisordel analizador
Indicador del analisisEntradaa computadora
Interruptor de presiónaltaEntrada/salida
a computadora
Entradaa computadora
Indicador detemperatura
Transmisor de humedad
Transmisorde peso
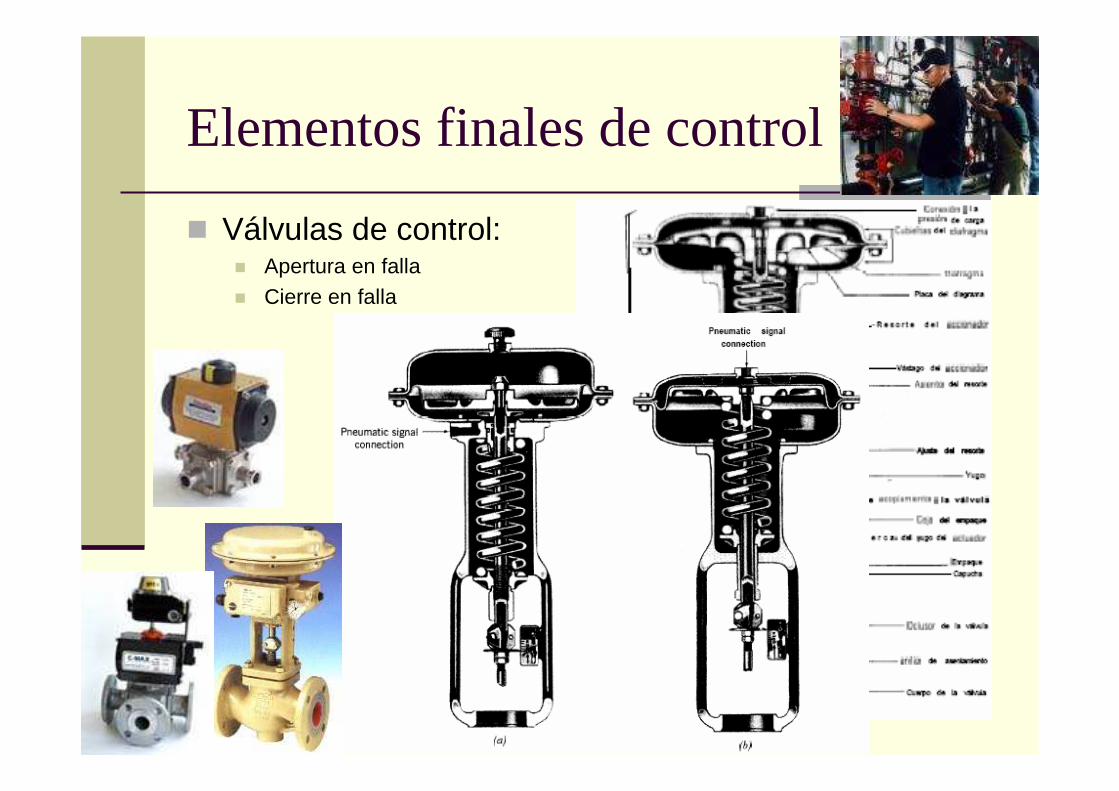
Elementos finales de control
� Válvulas de control:� Apertura en falla� Cierre en falla

Válvulas
El coeficiente CV se define como: � “la cantidad de agua en galones U.S. que fluyen por minuto a través de una
válvula completamente abierta, con una caída de presión de 1 psi en la sección transversal de la válvula”
� Líquidos:
� Gases y
vapores:
(depende del
fabricante)
500
Vf
V f
Pq C
G
W C G P
∆=
= ∆
q = flujo de líquido en, gpm∆P = Caída de presión en la válvula, psiGf = gravedad específica a la temp.W = Flujo del líquido en, lbm/hr
( )
( )
( ) ( )
31
1
31
31
1.63836 0.148
5202.8 0.148
1.83 0.1481 0.0007
vV f
f
V f
V fSH
ppQ C C y y y
C pGT
W C C p G y yTp
W C C y yT
∆= − =
= −
= −+
Q = flujo de gas scfh (ft3/h a condicionesestándar 14.7 psia y 60ºF)
G = Gravedad específica con respectoal aire
T = Temperatura de entrada a la válvula, RCf = Factor de flujo crítico. (rango
0.6-0.95), depende de la forma de laválvula
p1 = válvula de presión, psiaw = flujo de gas, lb/hTSH = grados de sobrecalentamiento, ºF
Masoneilan
11 1 rad
520 59.64sen v
g
pQ C p
GT C p
∆=
Fisher
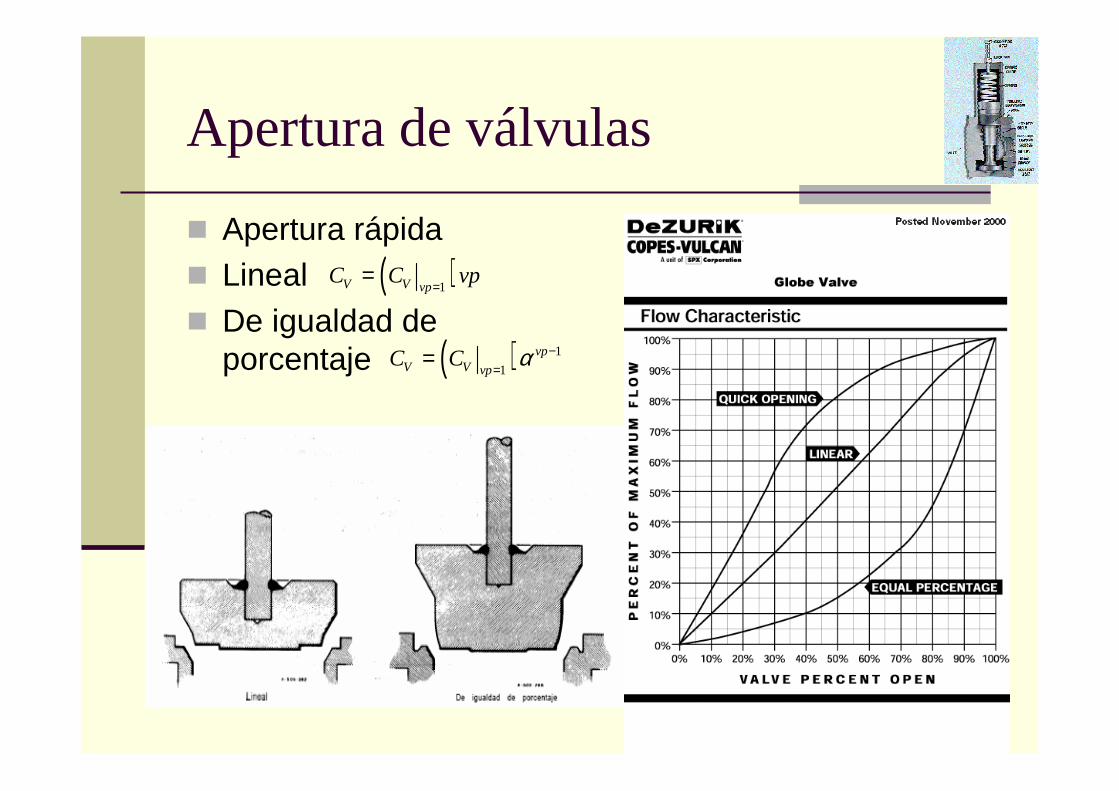
Apertura de válvulas
� Apertura rápida� Lineal� De igualdad de
porcentaje
( )1V V vpC C vp
==
( ) 1
1
vpV V vp
C C α −=
=
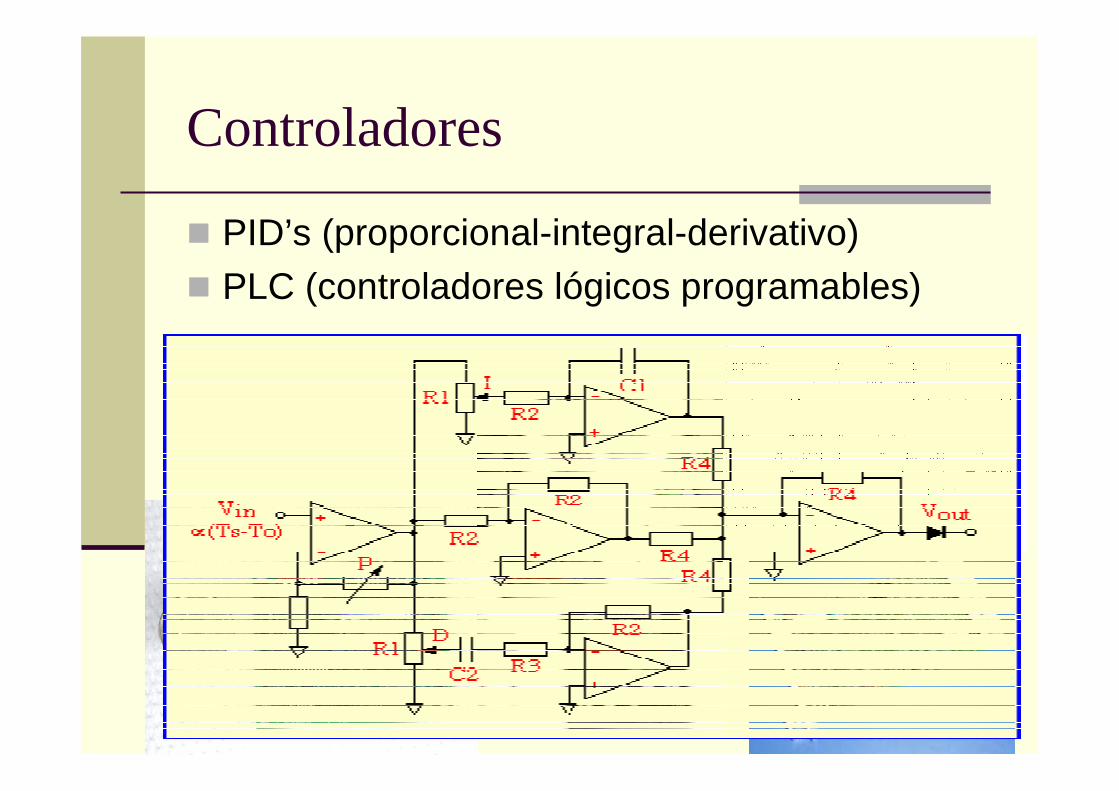
Controladores
� PID’s (proporcional-integral-derivativo)
� PLC (controladores lógicos programables)
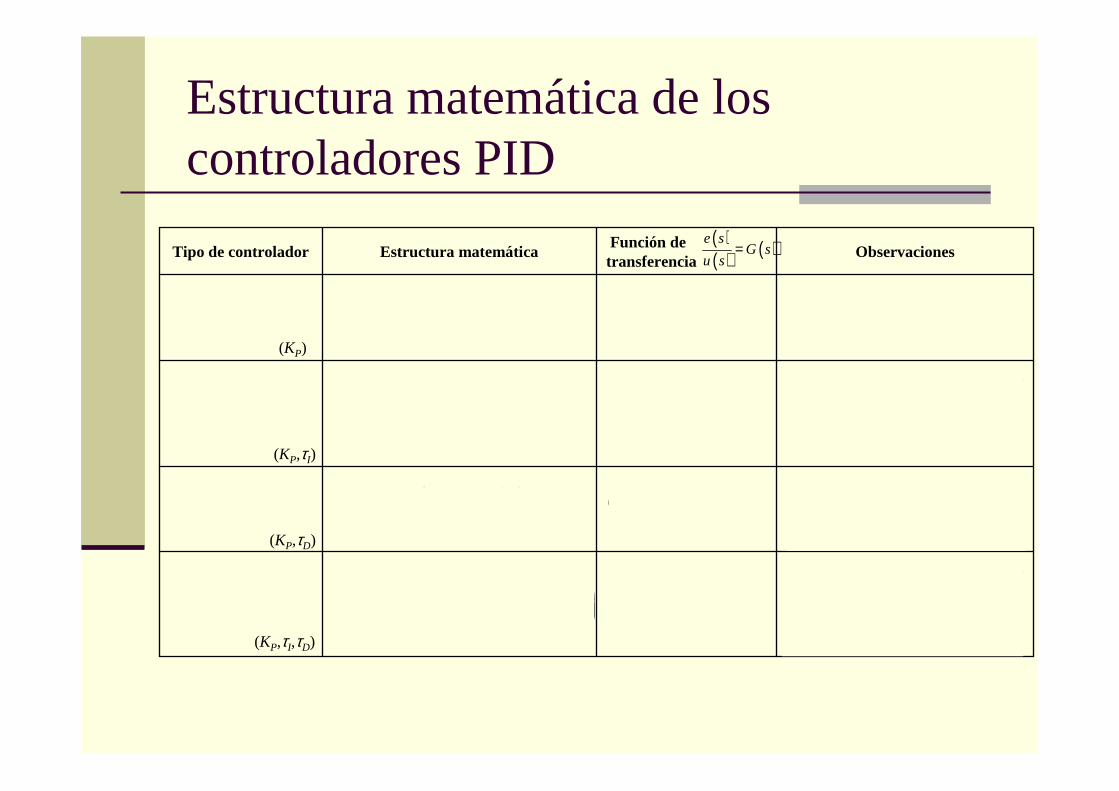
Estructura matemática de los controladores PID
• Aumenta la dimensión del sistema a lazo cerrado,
• no existe error estático,• se puede ajustar la velocidad de
respuesta del sistema
Proporcional-Integral-Derivativo (PID)
• No altera la dimensión del sistema a lazo cerrado,
• produce error estático,• acelera la respuesta del sistema
Proporcional-Derivativo (PD)
• Aumenta la dimensión del sistema a lazo cerrado,
• Elimina el error estático, • hace más lenta la respuesta del
sistema
Proporcional-Integral (PI)
• No altera la dimensión del sistema a lazo cerrado,
• produce error estático• Tiene un solo parámetro de ajuste
Proporcional (P)
ObservacionesFunción de transferencia
Estructura matemáticaTipo de controlador
( ) ( )Pu t u K e t= + ( ) PG s K=
( ) ( ) ( )0
1 t
PI
u t u K e t e t dtτ
= + +
∫ ( ) 1
1PI
G s Ksτ
= +
( ) ( ) ( )P D
de tu t u K e t
dtτ
= + +
( ) ( )1P DG s K sτ= +
( ) ( ) ( ) ( )0
1 t
P DI
de tu t u K e t e t dt
dtτ
τ
= + + +
∫ ( ) 11P D
I
G s K ss
ττ
= + +
(KP)
(KP,τI)
(KP,τD)
(KP,τI,τD)
( )( ) ( )e s
G su s
=
Banda proporcional
� Muchos fabricantes de controladores no utilizan el término ganancia para designar la cantidad de sensibilidad, sino que utilizan el término Banda Proporcional, PB. La relación entre la ganancia y la banda proporcional se expresa mediante
� Los controladores se pueden clasificar como de acción inversa y acción directa:� Acción inversa: si el error es negativo la salida del controlador decrece
si el error es positivo la salida del controlador aumentaKp > 0
� Acción directa: si el error es negativo la salida del controlador aumentasi el error es positivo la salida del controlador decrece
Kp < 0
100
P
PBK
=
Recommended