Compressed Sensing Solutions for Airborne LowFrequency SAR
Mike E. Davies & Shaun I. KellyThe University of Edinburgh
WF3 - Compressive sensing for radar applications

Overview
Motivation/Challenges
I Motivation: Why Airborne LF SAR?I Challenges:
I Notching on transmitI Radio Frequency Interference (RFI)I Phase errorsI Near field imaging
I Solutions (CS based)
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 2

Motivation
Why use VHF/UHF Spectrum?
I FoliagePenetration (FoPEN) Radar
I Ground PenetrationRadar (GPR)
I Scattering is dependent onwavelength.
X-BAND VHF/UHF
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 3

Challenges
Issues which effect the VHF/UHF spectrum
I Interference between SARsystems and radio, televisionand communications systems.
I Radio frequencyinterference (RFI)
I Interference Types:
1. SAR systems can interfere with other spectrum users.2. Other users in the spectrum can interfere with SAR system.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 4

Challenges
Notched LFM on Transmit
Σ
t
t
f
LFM Chirp
Notch
Notched LFM
Chirp
100 150 200 250 300 350 400 450 500−60
−50
−40
−30
−20
−10
0
10
frequency (MHz)
norm
alis
ed p
ow
er
(dB
)
−10 −8 −6 −4 −2 0 2 4 6 8 10−60
−50
−40
−30
−20
−10
0
10
range (m)
norm
alis
ed p
ow
er
(dB
)
100 150 200 250 300 350 400 450 500−60
−50
−40
−30
−20
−10
0
10
frequency (MHz)
norm
alis
ed p
ow
er
(dB
)
−10 −8 −6 −4 −2 0 2 4 6 8 10−60
−50
−40
−30
−20
−10
0
10
range (m)
norm
alis
ed p
ow
er
(dB
)
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 5

Challenges
Standard Image Formation with Notching
x (m)
y (
m)
−50 −40 −30 −20 −10 0 10 20 30 40 50−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
kx (rad m
−1)
ky (
rad m
−1)
−30 −20 −10 0 10 20 30
−30
−20
−10
0
10
20
30
−70
−60
−50
−40
−30
−20
−10
0
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 6

Solution Outline
CS-based componentsI Sparse Image Formation
I Fast forward/back projections
I Compressive Autofocus
I RFI suppression
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 7

System model
Notched LFM on Transmit
System model (after dechirping and deskewing):
Y = diag (w)h(X) + N
Y ∈ CM′×N′, N ∈ CM×N , w ∈ RM
I X is the scene reflectivities
I Y is the phase history
I h(·) is the system model without notching
I w is a weighting that models the transmit notching
I N is the RFI and additive noise
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 8

Sparse Image Formation SAR
First Ingredient: Sparsity
I The signal/image must be sparse or well approximated by a sparsesignal/image (compressible)
Will be considered later.
Second Ingredient: “Good” Measurements
I Measurement equation Y = h(X)
An approximate sub-sampling of the k-space!
Third Ingredient: Reconstruction Algorithm
I Sparse reconstruction algorithm, e.g. constrained `1 min., greedyalgorithms - OMP, IHT, etc.
Many fast algorithms available if there are fast operators available!
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 9

Sparse Image Formation SAR
Sparsity in Wavelets?
Image Domain Wavelet Domain
SAR images are not significantly compressible in any basis!
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 10

Sparse Image Formation SAR
Interaction of Reflectors in a Range CellI Random interference: Speckle dominates images due to many
random reflectors in a range cell inducing multiplicative noisein the reconstructed image - not compressible.
I Coherent interference: Coherent reflectors (often targets ofinterest) whose intensity tend to be much larger thanincoherent reflections - compressible in spatial domain.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 11

Sparse Image Formation SAR
Compressed Sensing Image Formation
argminXs
‖Xs‖1 s.t. ‖Y − h(Xs)‖F ≤ ε
x (m)
y (
m)
−50 −40 −30 −20 −10 0 10 20 30 40 50−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Bright Targets
argminXbg
∥∥Y − h(Xbg + Xs
)∥∥F
x (m)
y (
m)
−50 −40 −30 −20 −10 0 10 20 30 40 50−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Background Speckle
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 12

Sparse Image Formation SAR
Compressed Sensing Image Formation
x (m)
y (
m)
−50 −40 −30 −20 −10 0 10 20 30 40 50−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Standard Image Formationx (m)
y (
m)
−50 −40 −30 −20 −10 0 10 20 30 40 50−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Compressed Sensing Image Formation
Significant improvement in imaging of bright targets!
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 13

Sparse Image Formation SAR
Compressed Sensing Image Formation
x (m)
y (
m)
−50 −40 −30 −20 −10 0 10 20 30 40 50−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Fully Sampled Reference Imagex (m)
y (
m)
−50 −40 −30 −20 −10 0 10 20 30 40 50−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Compressed Sensing Image Formation
Degradation in background speckle!
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 14

Fast SAR Operators
Compressed Sensing Image FormationI LF SAR typically has long apertures and large beam width
making the aperture non-linear and the imaging near field.I Efficient iterative reconstruction requires fast
forward/backward operators:
× Direct Forward/Backward Projection - too slow: O(N3)
× Polar Format Algorithm - far field imaging only× Range Migration Algorithm - flat terrain model and linear
apertureX Fast decimation-based Forward/Backward Projection
Algorithms, e.g. [McCorkle et al. ’96],...
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 15

Fast SAR Operators
Decimation-in-phase-history
I Recursive splitting of image anddecimating of phase history.
I O(N2 logN
)operations.
I e.g. [McCorkle et al. 1996],
[Wahl et al. 2008].
phase history SAR image
Decimation-in-image
I Recursive splitting of phase historyand decimating of image.
I O(N2 logN
)operations.
I e.g. [Kelly and D. 2014]
phase history SAR image
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 16

Fast SAR Operators
Image Formation Times (seconds)
N BP fast BP fast BP PFA(dec.-in-image) (dec.-in-phase-history)
256 18.26 4.75 4.64 0.90512 140.22 18.77 18.74 3.241024 1120.96 77.18 76.98 13.152048 9052.47 318.43 317.36 69.15
I NFFT algorithm with an interpolation kernel length of 24 samples.
I Time on a single core of 2.5 GHz Intel Xeon processor with N2 element imagesand N2 element phase histories.
I log2 N − log2 64 decomposition stages.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 17

Fast SAR Operators
Pixel-wise Relative Errors
x (m)
y (
m)
−60 −40 −20 0 20 40 60
−60
−40
−20
0
20
40
60
−120
−100
−80
−60
−40
−20
0
decimation-in-image
kx (rad m
−1)
ky (
rad m
−1)
−300 −295 −290 −285 −280 −275
−25
−20
−15
−10
−5
0
5
−120
−100
−80
−60
−40
−20
0
decimation-in-phase-history
I Images formed using fast decimation-in-image and decimation-in-phase-historyBP algorithms with three decomposition stages.
I Pixel-wise/k-space wise relative errors in the fast BP algorithms with respect tothe BP algorithm.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 18

Phase Calibration (Autofocus)
Phase ErrorsI Inaccuracies in the propagation delay estimates introduce
unknown phase errors, φτek :
φτek≈ ω0τek − ατ
2ek
with, τek - delay error at aperture position kω0 - carrier freq. and α - chirp rate.
I Modified SAR observation model with phase errors
Y = h (X) diag{
ejφ}
I If not corrected, phase errors can defocus targets and degradereconstructed image.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 19

Phase Calibration (Autofocus)
Classical Autofocus
Classical (image based) autofocus assumes far field small aperture model
I System model ∼ fullydetermined and separable:
Y = h(X) diag{
ejφ}≈ AXΨB
I A and B ∼ Fourier
I Autofocus ∼ deconvolution
columns of Ψ, due toa quadratic phase error
−50 −40 −30 −20 −10 0 10 20 30 40 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
meters
|ψ|
I X is recovered from XΨ using classical autofocus methods, e.g.Map Drift (MD) or Phase Gradient Autofocus (PGA)
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 20

Phase Calibration (Autofocus)
Undetermined System Model
Y = A′XΨ
I A′ ∈ CN×S is undetermined, e.g. due to notching
Post-Reconstruction AutofocusI Can XΨ be recovered from Y followed by a
post-reconstruction autofocus?I CS Stable Sparse Recovery [Rudelson, Vershynin ’08]:
S ≥ CKΨKX log4(N)
with original sparsity KX and blurring factor KΨ
Reconstruction quality deteriorates as phase errors increases!
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 21

Phase Calibration (Autofocus)
Compressive AutofocusI Better Solution: perform joint reconstruction
minimiseX,d
‖X‖1
subject to ‖Y diag {d} − h(X)‖F ≤ σ
d∗ndn = 1, n = 1, . . . ,N .
I Fast Block-relaxation algorithms via majorisation-minimisationexist [Kelly et al 2012/14]
I No far field/small aperture assumptions
I Theoretical guarantees: open problem
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 22

Phase Calibration (Autofocus)
Reconstruction performance versus under-sampling ratio
0 10 20 30 40 50 60 70 80 90 100−10
−5
0
5
10
15
20
25
30
sampling ratio (%)
rela
tive S
NR
(dB
)
0 10 20 30 40 50 60 70 80 90 100−10
−5
0
5
10
15
20
25
30
sampling ratio (%)
rela
tive S
NR
(dB
)
0 10 20 30 40 50 60 70 80 90 100−10
−5
0
5
10
15
20
25
30
sampling ratio (%)
rela
tive S
NR
(dB
)
−→ increasing phase errors −→
‘◦’ oracle reconstruction, ‘�’ compressive auto-focus, ‘×’ sparse image formation with
post-processing autofocus.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 23

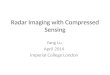
Phase Calibration (Autofocus)
meters
me
ters
−50 −40 −30 −20 −10 0 10 20 30 40 50
−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
(a)
meters
me
ters
−50 −40 −30 −20 −10 0 10 20 30 40 50
−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
(b)
meters
me
ters
−50 −40 −30 −20 −10 0 10 20 30 40 50
−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
(c)
Figure: LF SAR image formations: (a) was formed using the BPalgorithm; (b) was formed using sparse reconstruction (no autofocus);and (c) was formed using Compressive Autofocus.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 24

Radio Frequency Interference
RFI suppression
I Strong interference from AM/FMtransmitters.
I RFI pre-processing suppression methods:
1. Estimate-and-subtract: estimatethe frequencies and phases of theRFI and then abstract.Computationally expensive and
approximation dependent.
2. Linear filter: minimise RFI usinglinear filter, e.g. LMS filter andWiener filter.Can produce large side lobes.
Unfiltered PSF
meters
met
ers
−20 −15 −10 −5 0 5 10 15 20−20
−15
−10
−5
0
5
10
15
20
Filtered PSF
meters
met
ers
−20 −15 −10 −5 0 5 10 15 20−20
−15
−10
−5
0
5
10
15
20
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 25

Radio Frequency Interference
Dechirping
After dechirping and deskewing:
I narrowband interferes become concentrated in time and
I spectral notches become notches in time.
Time (µs)
Fre
quen
cy (
MH
z)
−8 −6 −4 −2 0 2 4 6 8100
150
200
250
300
350
400
450
500
−50
−40
−30
−20
−10
0
Before dechirping
Time (µs)
Fre
quen
cy (
MH
z)
−8 −6 −4 −2 0 2 4 6 8−150
−100
−50
0
50
100
150
−50
−40
−30
−20
−10
0
After dechirping and deskewing
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 26

Radio Frequency Interference
Filter-based RFI suppression
Linear RFI Filtered Reconstruction:
X = g(H vec(Y))
H = diag([H1, · · · ,HN′ ])
I g(·) is the filtered back-projection algorithm.
I Hn′ are the Wiener filters for each slow-time position, i.e.
Hn′ = I−Qnn′(Qyn′
+ Qnn′)-1 for Qx = E
[xxH]
I Qyn′ are the covariance matrices of the received signal at eachslow-time position
I Qnn′ are the covariance matrices of the RFI at each slow-timeposition
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 27

Radio Frequency Interference
RFI-aware Sparse Image Formation
Incorporate RFI into the Basis Pursuit Denoising:
X = minimiseX
‖X‖1
subject to ‖Y − h(X)‖QN-1 ≤ ε,
where, ‖A‖Q = vec(A)HQ vec(A)
I QN is full covariance matrix of the RFI and additive noise.
I QN is well approximated using a diagonal matrix so the datafidelity term becomes a weighted Frobenius norm.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 28

Radio Frequency Interference
RFI-aware Sparse Image Formation Implementation
Estimate Noise Covariance:
Estimate QN using ten “dead-time” measurements.Assume elements of N are independent.
Unconstrained Optimisation:
X = minimiseX
‖X‖1 + λ(‖Y − diag (w)h(X)‖QN-1 − ε)
Approximately solved using thirty iterations of a fast iterative shrinkagethresholding algorithm.
Project onto Domain of h(·):
X← g(h(X))
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 29

Radio Frequency Interference
VHF/UHF SAR simulation Parameters
parameter valuecarrier frequency (ω0/2π) 308 MHz
altitude 7000 mnumber of targets 20
chirp bandwidth (αT/π) 324 MHzstand-off distance 7000 m
number of interferes 80IF bandwidth 60 MHz
aperture length 7000 msignal to noise ratio (SNR) 60 dB
scene radius (L) 75 mnumber of aperture samples 300
signal to interference ratio (SIR) -30 dBtransmit notch centre frequencies 175, 330, 389, 416 and 448 MHz
transmit notch bandwidths 15, 7, 13, 20 and 10 MHz
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 30

Radio Frequency Interference
Reconstructed Images
meters
mete
rs
−50 −40 −30 −20 −10 0 10 20 30 40 50
−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Filtered back-projection
meters
mete
rs
−50 −40 −30 −20 −10 0 10 20 30 40 50
−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Wiener filtered followed byfiltered back-projection
meters
mete
rs
−50 −40 −30 −20 −10 0 10 20 30 40 50
−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
RFI-aware sparse image formation
meters
mete
rs
−50 −40 −30 −20 −10 0 10 20 30 40 50
−50
−40
−30
−20
−10
0
10
20
30
40
50
−70
−60
−50
−40
−30
−20
−10
0
Range compression RFI-awaresparse image formation
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 31

Conclusions
ConclusionsI Iterative CS-based algorithms provide a good solution to LF
SAR image formation with notch on transmit
I Compressive Autofocus can be performed simultaneously
I Receiver RFI suppression easily incorporated using a weightedFrobenius norm.
I The proposed technique is superior to previous approaches asit does not suffer from poor range side lobes and it canaccommodate a wide range of RFI.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 32

References
I S. I. Kelly, G. Rilling, M. Davies, and B. Mulgrew, 2011, ”Iterative imageformation using fast (re/back)-projection for spotlight-mode SAR,” in Proc.IEEE Radar Conf. 2011, pp. 835-840.
I S. I. Kelly, C. Du, G. Rilling and M. Davies, 2012, ”Advanced image formationand processing of partial synthetic aperture radar data,” Signal Processing, IET6 (5), pp. 511-520.
I S. I. Kelly, M. Yaghoobi and M. E. Davies, 2012, ”Auto-focus for under-sampledsynthetic aperture radar,” in Sensor Signal Processing for Defence (SSPD 2012)pp. 1-5.
I S. I. Kelly and M. E. Davies, 2013, ”RFI suppression and sparse image formationfor UWB SAR,” Radar Symposium (IRS), 14th International 2, pp. 655-660.
I S. I. Kelly, M. Yaghoobi and M. E. Davies, 2014, ”Sparsity-based Autofocus forUnder-sampled Synthetic Aperture Radar” to appear in IEEE Trans. Aerospaceand Electronic Systems, 2014.
I S. I. Kelly and M. E. Davies, 2014, ”A Fast Decimation-in-imageBack-projection Algorithm for SAR,” in Proc. IEEE Radar Conf. 2014.
October 9, 2014 WF3 - CS solutions for Airborne LF SAR - Mike E. Davies 33
Recommended