Minerals Engineering 24 (2011) 1440–1447
Contents lists available at ScienceDirect
Minerals Engineering
journal homepage: www.elsevier .com/ locate/mineng
Acoustic emissions simulation of tumbling mills using charge dynamics
Poorya Hosseini a,⇑, Sudarshan Martins a, Tristan Martin b, Peter Radziszewski a, Francois-Raymond Boyer b
a Department of Mechanical Engineering, McGill University, Montreal, Quebec, Canadab Département de génie informatique et génie logiciel, École Polytechnique de Montréal, Canada
a r t i c l e i n f o
Article history:Received 26 January 2011Accepted 4 July 2011Available online 4 August 2011
Keywords:Discreet element modellingSimulationProcess instrumentationMineral processingSAG milling
0892-6875/$ - see front matter � 2011 Elsevier Ltd. Adoi:10.1016/j.mineng.2011.07.002
⇑ Corresponding author.E-mail address: [email protected] (P
a b s t r a c t
Knowledge of the internal variables of a mill is of importance in design and performance optimization ofthe mill, notwithstanding the difficulty in measuring these variables within the harsh mill environment.To overcome this problem, the research has focused on measuring the internal parameters through non-invasive measurement methods such as the use of the vibration/acoustic signal obtained from the mill.Alternatively, virtual instruments, such as discrete element methods (DEM), are employed. Here, a meth-odology is developed to simulate on-the-shell acoustic signal emitted from tumbling mills using theinformation extracted from a DEM simulator. The transfer function which links the forces exerted onthe internal surface of the mill and the acoustic signal measured on the outer surface is measured exper-imentally. Given this transfer function and the force distribution obtained from the DEM simulation, andassuming a linear time-invariant response, the on-the-shell acoustic of a laboratory scale ball mill hasbeen simulated. Comparison of this simulated signal with the signal measured experimentally can beused as a criterion to judge the validity of the DEM simulations, and as a tool for enhancing our under-standing of both DEM simulations and the use of acoustics within the context of mineral processing. Theresults derived from preliminary experiments on a laboratory scale mill shows satisfactory agreementbetween the actual measurement and the simulated acoustic signal.
� 2011 Elsevier Ltd. All rights reserved.
1. Introduction
Tumbling mills are a class of comminution devices, and are fre-quently used for the size reduction of the ore in the mineral pro-cessing industry. Better understanding of the mode andmechanism of energy utilization, and the dynamics of the chargecan potentially lead to significant energy savings. Due to the harshenvironment inside the mills, as well as severe charge–charge andcharge-liner impacts, the use of on-line sensors presents somepractical problems (Martins et al., 2008). An alternative solutionis the use of discrete element models (DEM) to simulate internalmill dynamics and the charge motion (Cleary, 2001; Cleary et al.,2003; Mishra, 2003; Mishra and Rajamani, 1992; Powell andNurick, 1996). Significant advances in computer technology havehad a role in the growing interest in using DEM to simulate dynam-ics of the mill; however, DEM simulations still lack in accuracy. Inaddition, there are ongoing challenges for DEM simulations of tum-bling mills, such as shortcomings in simulating the fine progenyand behaviour of the slurry (Morrison and Cleary, 2008).
It is known that ball mills undergo strong mechanical vibrations,caused by the impacts and collisions. As a result, they generate aloud noise. Though noise and vibration may be harmful, from the
ll rights reserved.
. Hosseini).
viewpoint of a human operator, and are a waste of the energy, theycan serve as a useful tool in studying the operation of the mills. Theacoustic/vibration signal contains information directly related tothe operating state of the mill and the mill charge dynamics. Anec-dotal evidence has long suggested that a skilled grinding mill oper-ator can evaluate the operating state of the mill by listening to thegenerated sound. The measurement of the sound of the mill bymeans of instrumentation has the benefit of full-time on-line oper-ation, increased precision, while having a greater tolerance to per-ilous or harsh working environments (Zeng and Forssberg, 1993).Over recent decades, different studies have been conducted on lab-oratory and industrial scale mills to correlate the acoustic/vibrationsignal with the operating parameters of the mill such as powerdraw, feed rate, mill load, pulp density, ore type and particles sizedistribution (Aldrich and Theron, 2000; Das et al., 2010; Kolacz,1997; Spencer et al., 1999; Tang et al., 2010; Watson, 1985; Zengand Forssberg, 1993). Moreover, there are some dynamic valueswhich play an important role in optimizing the mill performanceand mill design. The shoulder and toe angles are two such exam-ples. Correlating the acoustic/vibration signal with these dynamicfeatures has been much less studied than the relation betweenoperating parameter and the mill sound (Huang et al., 2009;Martins et al., 2006). Considering that the use of acoustic/vibrationsignal is a non-invasive, low cost tool of studying comminutionmachines, there remains room for more studies, specifically forindustrial applications.

Nomenclature
p acoustic pressurei impact forceh impulse responseft tangential component of contact forcefn normal component of contact forceK spring coefficient in contact modeldn relative normal displacement at contact~v translational velocity at contactm mass of particlef viscous damping ratio in contact modell sliding friction coefficient~n unit normal vector at the contact pointR radius of particle
f impact on mill shellF total force acting on mill shelld dirac delta functionG green’s FunctionA displacement of mill shellr position vectorrm position vector of microphoneh angular position of impacthm angular position of microphoneu angular difference between impact position and micro-
phone positiont time
P. Hosseini et al. / Minerals Engineering 24 (2011) 1440–1447 1441
Through the simulation of the charge motion inside tumblingmills, DEM models calculate distribution and magnitude of forcesand impacts. These forces and impacts engender the vibrations ofthe structure, and are the main cause of the sound signal generatedby the mill. If the relation between these impacts and the acoustic/vibration signal emitted from the mill is known, the vibration/acoustic signal can be simulated using the distribution of impactsextracted from the DEM simulator; such a simulation of acoustic/vibration signal was held to be unworkable in the past (McElroyet al., 2009). Replacement of surface vibration with DEM modellingallows the implementation of DEMs for soft-sensors design ap-proaches, with the objective of measuring the internal variablesof the mill (McElroy et al., 2009). Furthermore, the comparison be-tween the simulated signal and the signal measured experimentallycan be used as a criterion for evaluating validity of DEM simula-tions, and as tool for enhancing our understanding of the dynamicsof the mill. If the inverse approach is taken, it may be possible todetermine dynamic values currently obtained from other methods,such as impacts inside the mill, using only the acoustic/vibrationsignal. Implementing such an approach for a similar application –a vibratory ball mill containing a single ball – produced promisingresult in the prediction of impact force using the vibration signal(Huang et al., 1997). These so-called inverse techniques have beenextensively used to predict features of mechanical systems whichare difficult or impossible to measure directly. A categorization ofthese techniques for force-prediction models, various appliedexamples and the required theoretical background has been pre-sented by Wang (2002). Acoustic signal and vibration signal of
Fig. 1. Schematic of the lab
the mill are highly correlated; however, the acoustic signal is moreof interest, since its measurement is more practical and has the po-tential of being captured through sensors which are not necessarilyattached to the structure. In this paper, as mentioned earlier, it isdemonstrated that an acoustic signal can be calculated from DEMmodels. This simulated acoustic signal will be shown to be compa-rable to the measured acoustic signal.
2. Experimental setup
A brief description of the laboratory-scale ball mill used in theexperiments, the experimental setup used to capture the acousticsignal and to measure impact forces as well as the methodologyimplemented to process the primary measurements are presentedin this section.
2.1. The laboratory-scale ball mill
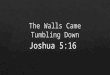
For the experiment, a laboratory-scale ball mill featuring a camdrive is used, as illustrated in Fig. 1. A large diameter aluminiumdisc is fixed to a shaft mounted on a bearing. The aluminium dischas two functions. Firstly, the followers for the cam drive are fixedto its face. Secondly, the mill drum (or shell) is bolted to the disc. Atransparent Plexiglas face closes the mill at the free end of thedrum, allowing for the observation of the charge. The drum con-sists of a steel cylinder, with a diameter of 1.524 m and a lengthof 0.3048 m. A set of twelve plates are fixed to the inner surface
oratory scale ball mill.

1442 P. Hosseini et al. / Minerals Engineering 24 (2011) 1440–1447
of the shell. These plates are called lifters. Their role is to furtherpromote the tumbling action of the charge, as induced by the rota-tion of the mill. The birch balls, which form the charge, have anaverage diameter of 5.1 cm and an average mass of 43 g.
2.2. Impulse response measurement
This section describes the method by which the relationship be-tween a single impact, inside the mill shell, at a specific positionand the corresponding acoustic signal captured on the mill shellis established. Impact force and the resulting acoustic signal aremeasured using an impact hammer with embedded forcetransducer and a pressure-field microphone, respectively. A mul-ti-channel data acquisition system is used to concurrently amplifyand digitize both signals and to stream the resulting signals to acomputer. Fig. 2 shows a sample of the impact force signal alongwith the resulting acoustic pressure signal.
Assuming the vibrations of the shell is linear and time invariant,meaning different impact at the same position at different timesproduce the same response, the shell response to the impact forcecan be characterized through the system impulse response. Conse-quently, the relationship between acoustic pressure p(t) and im-pact force i(t) can be expressed using the convolution integral(Phillips et al., 2008):
pðtÞ ¼ iðtÞ � hðtÞ ¼Z 1
�1iðsÞhðt � sÞ ds ð1Þ
where h(t) is the system impulse response to the impacts at a spe-cific position. By applying the Fourier transform to both sides of Eq.(1), the time domain convolution integral becomes a multiplicationin the frequency domain (Phillips et al., 2008):
PðjxÞ ¼ IðjxÞ � HðjxÞ ð2Þ
where P(jx), I(jx) and H(jx) are Fourier Transforms of p(t), i(t) andh(t) respectively. To obtain the impulse response in time domain,the Inverse Fourier Transform, then, is applied to the Eq. (2),
hðtÞ ¼ F�1 PðjxÞIðjxÞ
� �ð3Þ
If the force exerted by impact hammer is assumed to be an ideal im-pact – a perfect impulse that has an infinitely small duration causing
Fig. 2. Excitation exerted by impact hammer inside the mill shell (top), and response to
a constant amplitude in the frequency domain – the denominator ofEq. (3) becomes constant and the impulse response, in this case, isequal to the acoustic pressure divided by a constant (the magnitudeof the impact). However, in this research deconvolution of the actualexcitation exerted by hammer is used for calculations rather thanthe ideal impact assumption. Fig. 3 shows a sample of the calculatedimpulse response in the time domain.
2.3. Acoustic signal of the mill
The same microphone and recording system described in Sec-tion 2.2 were used to capture the acoustic signal of the mill whilerotating with the charge. The microphone is mounted on the millshell and rotates with the mill. The position of the microphone istracked through adding a fingerprint to the acoustic signal everytime the microphone passes by a certain point. To detect the posi-tion of the microphone, a fibber unit proximity sensor has beenused. At any time the sensor detects the microphone, a voltage isgenerated; this voltage becomes amplified and finally activates abuzzer. Since the frequency of the sound generated by this buzzeris unique, it can be distinguished from other sound sources in thesignal. The sensor has been used during the whole measurement;however, once the location of the microphone is known at a spe-cific time, its position can be found thereafter using the mill rota-tion speed.
3. DEM simulation
The DEM simulator used in this work has been originally devel-oped for broader research purposes in comminution, includingbreakage efficiency, and mill equipment design. DEM, in general,is a numerical iterative method which calculates the dynamics ofa discontinuous system of particles (Cundall and Strack, 1979). Inthe case of tumbling mills, it is the charge of the mill that is repre-sented by a collection of particles of defined properties. As shownin Fig. 4, at each cycle or time step, the calculator initially resolvescollisions and calculates the corresponding forces generated bythese collisions. The collision forces along with external forces,such as gravity or electrostatic forces are subsequently applied tothe appropriate particles. By repeating this calculation cycle, thesimulator generates trajectories and forces of particles as a
the excitation captured by a pressure microphone on the mill shell (bottom).

Fig. 3. A typical impulse response.
Fig. 4. Calculations steps of the DEM.
Table 1Parameters of simulation and contact model.
Parameter Value
Drum, d � l (cm) 152.4 � 30.5Normal viscous damping ratio 0.3Tangential viscous damping ratio 0.4Normal stiffness (N/m) 10,000Tangential stiffness (N/m) 20,000Particle diameter, D (mm) 50.6Particle density (g cm�3) 0.49Sliding friction coefficient 0.5Filling percentage of the mill (%) 30Rotation speed of the mill (rpm) 24
P. Hosseini et al. / Minerals Engineering 24 (2011) 1440–1447 1443
function of time. The time step of the simulation, varying from 10to 100 microseconds, is dynamically adjusted to achieve the bestpossible compromise between precision and performance.
While different contact models may be used to describe thecontacts in DEM simulations (Zhu et al., 2007), here the softwareadopts the linear spring-dashpot contact model (Cundall andStrack, 1979; Martins, 2011; Xiang et al., 2009). The tangentialcomponent (ft) and normal component (fn) of interparticle contactforce in this model are calculated as below,
Fig. 5. Demonstration of charge motion obtain
fn ¼ �Kndn~n� 2ffiffiffiffiffiffiffiffiffiffiKnmp
fnð~v �~nÞ~nft ¼minflfn;�Kt
R~v dt � 2
ffiffiffiffiffiffiffiffiffiKtmp
ftð~v �~nÞ �~ngð4Þ
where dn is the relative normal displacement at contact, ~v is thetranslational velocity, m is the mass of the particle, f is the viscousdamping ratio, l is the sliding friction coefficient, ~n is the unit nor-mal vector at the contact point, and finally Kn and Kt are normal-and tangential spring coefficients, respectively. The torque resultedfrom the tangential force (mt) can be easily calculated using equa-tion below,
mt ¼ R� ft ð5Þ
where R is the particle radius. The numerical value of the parametersused in the contact model, obtained through experimental measure-ment and by comparing the simulation results to experimental re-sults, are all given in Table 1. Fig. 5 demonstrates a sample of the
ed by DEM simulations and experiment.

1444 P. Hosseini et al. / Minerals Engineering 24 (2011) 1440–1447
charge motion profile obtained from the DEM simulator and com-pares it with the ones obtained from the laboratory-scale ball mill.
4. Transfer function
In Section 2.2, the method by which the impulse response of asingle impact at a specific position is recorded is explained. Theacoustic signal, captured by the microphone, is a superposition ofthe acoustic signals caused by all impacts at a specific time. For thisreason, a methodology or procedure is needed in order to relate allthe impacts at a specific time to the acoustic signal measured bythe microphone while the mill is running. An equation is derivedusing basic mathematics and fundamental concepts of mechanicalvibrations, in conjunction with some experimental measurements.
4.1. Formulation
Acoustic signal emitted from the mill is generated by the directimpacts on the shell as well as collision of the balls with one an-other. In the model and methodology adopted here, only direct im-pacts on the shell are taken into account; acoustic signal resultedfrom ball-on-ball impacts are neglected. This assumption is basedon the fact that shell vibrations induced by an acoustic waveresulting from a ball-on-ball impact (indirect stimulation of theshell) is of a much lower strength than those caused by a direct im-pacts (or stimulation) on the shell. Forces and displacements areassumed to be perpendicular to the shell surface; in other words,the effect of the tangential component of the impact forces invibration of the mill shell is neglected. For this reason, despitethe vector nature of forces and displacements, they are shown asscalars and their direction is assumed to be collinear with the out-ward radial direction throughout the paper. Fig. 6 depicts thegeometry, coordinate system and the normal vector which corre-sponds to the direction of forces and displacements. The total exci-tation force inside the mill is a summation of all the impacts, eachhaving a certain magnitude (fi) and being exerted at a specific loca-tion (ri) and at a specific time (ti),
Fðr; tÞ ¼Xn
i¼1
fi � dðr � riÞdðt � tiÞ ð6Þ
where n is the total number of impacts on the shell, throughout theduration of the simulation. These impacts induce vibrations all over
Fig. 6. Geometry and coordinate system.
the shell. Assuming these vibrations have a linear response, theyhave the same frequency and pattern as the near-field radiatedsound (Williams, 1999). Therefore, vibration response of the systemto the excitation expressed by Eq. (6) at the position of the micro-phone has the same frequency as the acoustic pressure capturedby the on-the-shell microphone. Fig. 7 depicts position of the im-pacts (ri) and that of microphone (rm) relative to reference point.For the excitation force expressed by Eq. (6), the displacement re-sponse (A) at the point where the microphone is mounted (rm) iscalculated using Green’s Function (G) of the structure and is givenby,
Aðrm; sÞ ¼Z
t
Z Zs
Fðr; tÞGðrm; r; s; tÞdsdt ð7Þ
where the integration is over the area of the source, in this case theouter surface of the mill (Hansen and Snyder, 1997). Assuming axialsymmetry, there is no dependence on z, the surface element of theintegration is simplified to a linear element as,
Aðrm; sÞ ¼Z
t
Ir
Fðr; tÞGðrm; r; s; tÞdrdt ð8Þ
Based on the physics of this problem, there is a rotational sym-metry for the Green’s Function of the structure. According to thisrotational symmetry, the impacts which are symmetric about theposition of the microphone are assumed to have the same acousticresponse,
GðuÞ ¼ Gð2p�uÞ ð9Þ
where u is the angular difference between the position vector andthe position of the microphone (see Fig. 7) expressed in the equa-tion below,
u ¼ hm � h ð10Þ
Moreover, assuming the response of the system is time-invari-ant; the Green’s Function can be taken to be a convolution opera-tor, that is,
Gðs; tÞ ¼ Gðs� tÞ ð11Þ
Considering two above-mentioned assumptions, Eq. (8) can berewritten as,
Aðrm; sÞ ¼Z
t
Ir
Fðr; tÞGðu; s� tÞdrdt ð12Þ
Fig. 7. Impacts and microphone position.

Lifters
Fig. 8. Stationary mill and its lifters.
15θ =
P. Hosseini et al. / Minerals Engineering 24 (2011) 1440–1447 1445
The forcing function, as defined by Eq. (6), is substitute into Eq.(12),
Aðrm; sÞ ¼Xn
i¼1
fi �Z
t
Ir
Gðu; s� tÞdðt � tiÞdðr � riÞdrdt ð13Þ
The magnitude of impact forces are pulled out of the integralsince it is not dependent on the integral variable. The time integra-tion can be readily done using the property of the delta function.For the radial integration to be done, u can be written in termsof the position vectors using equation below,
u ¼ cos�1 r � rm
jrjjrmj
� �¼ cos�1ðr̂ � r̂mÞ ð14Þ
where r̂ and r̂m are the unit vectors of r and rm, respectively. PuttingEq. (14) into Eq. (13) while conducting the time integration, we get,
Aðrm; sÞ ¼Xn
i¼1
fi �I
Gðcos�1ðr̂ � r̂mÞ; s� tiÞdðr � riÞdr ð15Þ
The properties of the delta function allows for the evaluation ofthe radial integral,
Aðrm; sÞ ¼Xn
i¼1
fi � Gðui; s� tiÞ ð16Þ
where ui is the angular difference between the impact position andmicrophone position. It is necessary to note that the excitation ofthe mill shell resulting from the impacts travels at the very samespeed as the microphone. Thus, the relative position of the excita-tions and microphone (ui) remains constant over time. Therefore,the amplitude is a function of s only,
AðsÞ ¼Xn
i¼1
fi � Teðui; s� tiÞ ð17Þ
The modified Green’s Function in the Eq. (16) is regarded as theTransfer Function between forces (impacts) and the acoustic signalmeasured experimentally using the pressure microphone. In con-formance with this interpretation, the letter G is replaced by theletter Te standing for the experimental Transfer Function.
To simulate the acoustic signal using Eq. (17), impact forces (fi)are obtained from DEM simulations (Section 3) and the TransferFunction, a response property of the mill, is measured experimen-tally (Section 4.2). Together, these two quantities allow for the cal-culation of the simulated acoustic signal using Eq. (17). To facilitatethe comparison of the simulated and experimental acoustic signal,the power of the acoustic signal will be plotted instead of theacoustic signal itself. The acoustic signal is directly proportionalto the amplitude of the vibration (A) while the power of the acous-tic signal is proportional to the amplitude square (Phillips et al.,2008). These relations are shown in equation below,
Acoustic signal ðpressureÞ / A
Power of the acoustic signal / A2 ð18Þ
Fig. 9. Impacts positions.
4.2. Transfer function measurement
To measure the experimental transfer function, a certain num-ber of impacts are exerted to the inner surface of the mill andthe corresponding acoustic signal is recorded using the procedureexplained in Section 2.2. To determine the continuous transferfunction, as described by the Eq. (17), a discrete number of impactsare initially applied to the inner surface of the mill. Finally, themethod of interpolation (built-in function in MATLAB) is used tocalculate the response in between two measured points, whereverdata is not available experimentally.
As illustrated in Fig. 8, the mill has 12 adjustable lifters. The an-gles of the lifters are variable, with a range of settings between 0and 180 �. For reasons of experimental ease, as shown in Fig. 9,the impacts were applied in the space between every two lifters.Thus, the impact response resolution is 24, for the spatial angle.Moreover, due to the symmetry of the structure, results from 180to 360 � should mirror those of 0 to 180 �; consequently, numberof impacts could be reduced to 12. It should be noted that theexperimental procedure and precision of the measurements maybe customized according to the specific feature or phenomenonwhich is of the utmost interest. For instance, depending onwhether events at the low- or high-frequency range are objectivesof the analysis, different types of microphones can be implementedor specific type of algorithms and filters may be chosen for themathematical analysis.
5. Results and discussion
To assess the validity of the model presented in this paper, thesimulated acoustic signal and the one measured experimentallyare compared for the operating conditions that follow. The millwas run at 70% of its critical speed (the speed in which the chargebegins to centrifuge). For the laboratory-scale mill used in theexperiments, the critical speed is equal to 34 rpm which is

Fig. 11. Power Spectrum of the acoustic signal.
1446 P. Hosseini et al. / Minerals Engineering 24 (2011) 1440–1447
equivalent to a frequency of 0.56 Hz. The mill charge or percentageof the mill volume filled with wooden balls is approximately 30%.The lifters are held constant at a 90 degrees position. As explainedin Section 3, initially, DEM simulator calculates dynamic featuresof the mill including the distribution of impact forces on the shell.Using this impact distribution and implementing Eq. (17), a com-puter code was developed using MATLAB software. The code inputsare the magnitude of forces (fi) and their corresponding positionsrelative to the microphone (ui), obtained from DEM simulations,as well as the experimental transfer function (Te) obtained by themethodology explained in Section 4.2. The code output is unsur-prisingly the simulated acoustic signal of a certain time length.For the same operating conditions described above, acoustic signalwas measured experimentally using the methodology described inSection 2.3. Using Eq. (18), the power of both acoustic signals is cal-culated by squaring the acoustic signal. It should be noted that, inthis step of the research, both the simulated and measured acousticsignals are not calibrated; therefore, the absolute value of theacoustic signal is not a subject of comparison. Consequently, forthe sake of better comparison, the amplitude of the power of bothacoustic signals is normalized with respect to the maximum valueof each signal. Fig. 10 shows the power of experimental and simu-lated acoustic signals in time domain.
At first glance, the simulated acoustic signal and the one mea-sured experimentally have more or less a general harmonic behav-iour. As the microphone follows the mill, the following behavioursare observed in proximity to the shell and dominate the micro-phone signal. As the mill turns, the charge is lifted and is subjectto small forces, producing little sound. As the charge reaches thetop, it is thrown. There is no longer any contact with the shell,and the sound is at its lowest. Finally, the charge falls to the bot-tom, producing large impact forces. These forces stimulate vibra-tion modes of the shell, producing a strong microphone response.Thus, the microphone response is expected to increase and de-crease as the microphone rotates about the mill. Therefore, the ob-served periodic behaviour of the acoustic signals is ascribed to theperiodic nature of the mill; however, because of a degree of ran-domness in the balls movement and probable limitations in themodel/methodology/assumptions, periodic behaviour could befully achieved neither in simulation nor in the experiment. FourierTransform of the experimental and the simulated signals providesa powerful tool for a more quantitative comparison of the signalsand identifying the fingerprints linked to the operating parameters.Fig. 11 shows the Fourier Transform of the measured and
Fig. 10. Power of the measured (blue) and simulated (red) acoustic signals. (Forinterpretation of the references to colour in this figure legend, the reader is referredto the web version of this article.)
simulated acoustic signals in the low-frequency domain which isalso called the power spectrum of the acoustic signals. This fre-quency range is chosen because of the specific phenomena whichare of the most interest to us is expected to be observed in thisrange. The frequency axis is normalized with respect to the millfrequency or the frequency that corresponds to the operatingspeed of the mill (fmill = 0.4 Hz).
The Fourier Transform of the acoustic signal contains featuresassociated to the operating parameters of the mill (rotation speed)and mill configuration (number of lifters). Plumbing the physicalinterpretation of all these features is not the objective of this paper,nor could it be described without detailed signal processing andextensive correlation of the acoustic/vibration signal to the inter-nal variables of the mill. Nonetheless, there are at least two distin-guishing features which can be explained. The first major peak inboth measured and simulated signals corresponds to the rotationspeed of the mill. According to the location of these peaks, the peri-odicities of the simulated and measured signals are 2.44 s and2.50 s, respectively. Equivalently, the periods of the simulatedand experimental signal correspond to frequencies of 0.41 and0.40 Hz, in that order. The mill speed or periodicity of the signalcan be additionally obtained through measuring the average timeinterval between two major peaks in the time domain (Fig. 10).The harmonics of the mill frequency are observed on the diagram,in the simulated and experimental results; their amplitude mustnormally decrease as the frequency increase, until finally, they be-come lost in the noise. Unexpectedly, the amplitude of the fourthharmonic in the simulated signal is higher than other harmonics.The reason for this is not fully clear to the authors; it may bedue to the shortcomings in the DEM simulator, or the transferfunction window length. If it were due to the simulation, identify-ing such deficiencies in the DEM with the aid of the simulatedacoustic signal was one of the main objectives of this researchwork. Another interesting signal feature is the peaks seen in bothsignals approximately at 12; this frequency corresponds to liftereffects as there are 12 lifters installed in the mill. Interestingly, ithas been postulated that variations in the amplitude of the ob-served peaks in the frequency domain is related to the variationsof the operating parameters (Das et al., 2010; Tang et al., 2010).It has been reported that parameters such as type of the load(balls), filling percentage or even grinding condition (dry or wet)has a effect on the amplitude of the observed peaks such as theone corresponding to the mill speed (Tang et al., 2010). Conse-quently, excellent agreement between the periodicity of the exper-imental and simulated signal (about 2% discrepancy) shows thevalidity and reliability of this specific simulation for such a study.

P. Hosseini et al. / Minerals Engineering 24 (2011) 1440–1447 1447
6. Conclusion
In this paper, a methodology is proposed to simulate the acous-tic/vibration signal emitted from the tumbling mills. To this end,the dynamic features of the mill, force distribution within the mill,have been calculated using a DEM simulator. These forces and im-pacts are the major cause for the acoustic signal emitted from themill surface. The relation between a single force and the resultedacoustic signal is measured experimentally. Thereafter, the acous-tic signal captured by the microphone has been simulated as thesuperposition of all those single phenomena. Furthermore, theon-the-shell acoustic signal of the mill has been experimentallymeasured using pressure microphones mounted on the mill shell.The simulated and measured acoustic signals have been plottedin both time and frequency domain and discussed. The peaks inthe frequency domain of acoustic signals (simulated and experi-mental) have been correlated to the operating parameters of themill (rotation speed) and mill configuration (number of lifters). Ithas been postulated that the variations in the amplitude of thesepeaks are linked to the variations of the operating parameters.The simulated signal is in good agreement with the actual signalin terms of sensitivity to the mill speed and also number of lifters.In a general sense, the discrepancy between simulated and mea-sured acoustic signal may be used as a criterion to judge the valid-ity of DEM simulator and thereby mend its possible deficiencies.Several questions remain to address, such as the signal powerand the relative amplitude discrepancies.
While using of the online sensors faces some practical difficul-ties due to the harsh environment inside the mill, comparison ofthe simulated and measured acoustic/vibration signal can be a cri-terion in assessing the validity of DEM simulations. Moreover, asthe potential extension of this research, through applying the in-verse approach, it is theoretically possible to obtain the force dis-tribution on the inner surface of the mill using vibration/acousticsignals on the outer surface of the shell in conjunction with theDEM simulation. Though this work discusses acoustic signal simu-lation of tumbling mills only, acoustic/vibration signals of othermill types may be simulated through identification of the phenom-ena causing the acoustic emissions in those mills and generalizingthis methodology accordingly.
Acknowledgments
Authors are grateful to Prof. Luc Mongeau and Prof. Annie Rossfor their advices and helpful discussion during the course of this re-search project and Dr. Amar Sabih for his help during the primarystages of the work. We also would like to thank Mr. ArnaudFaucher and Dr. Sami Makni from COREM for their invaluableassistance regarding the DEM simulations.
References
Aldrich, C., Theron, D., 2000. Acoustic estimation of the particle size distributions ofsulphide ores in a laboratory ball mill. Journal of the South African Institute ofMining and Metallurgy (South Africa) 100 (4), 243–248.
Cleary, P., 2001. Modelling comminution devices using DEM. International Journalfor Numerical and Analytical Methods in Geomechanics 25 (1), 83–105.
Cleary, P., Morrisson, R., Morrell, S., 2003. Comparison of DEM and experiment for ascale model SAG mill. International Journal of Mineral Processing 68 (1–4),129–165.
Cundall, P.A., Strack, O., 1979. A discrete numerical model for granular assemblies.Geotechnique 29 (1), 47–65.
Das, S., Das, D., Behera, S., Mishra, B., 2010. Interpretation of mill vibration signal viawireless sensing. Minerals Engineering.
Hansen, C., Snyder, S., 1997. Active control of noise and vibration, Taylor & Francis.Huang, H., Pan, J., McCormick, P., 1997. Prediction of impact forces in a vibratory
ball mill using an inverse technique. International Journal of ImpactEngineering 19 (2), 117–126.
Huang, P., Jia, M., Zhong, B., 2009. Investigation on measuring the fill level of anindustrial ball mill based on the vibration characteristics of the mill shell.Minerals Engineering 22 (14), 1200–1208.
Kolacz, J., 1997. Measurement system of the mill charge in grinding ball millcircuits. Minerals Engineering 10 (12), 1329–1338.
Martins, S., 2011. Exploring tumbling mill dynamics through sensor development.In: Mechanical Engineering, McGill University, Montreal.
Martins, S., Zepeda, J., Picard, B., Radziszewski, P., Roy D., 2006. Investigating on-the-Shell Acoustics. In SAG, Vancouver, vol. 3 (September), pp. 300–310.
Martins, S., Li, W., Radziszewski, P., Caron, S., Aguanno, M., Bakhos, M., Petch, E.,2008. Validating the instrumented ball outputs with simple trajectories.Minerals Engineering 21 (11), 782–788.
McElroy, L., Bao, J., Yang, R., Yu, A., 2009. Soft-sensors for prediction of impactenergy in horizontal rotating drums. Powder Technology.
Mishra, B., 2003. A review of computer simulation of tumbling mills by the discreteelement method: Part I-contact mechanics. International Journal of MineralProcessing 71 (1–4), 73–93.
Mishra, B., Rajamani, R., 1992. The discrete element method for the simulation ofball mills. Applied Mathematical Modelling 16 (11), 598–604.
Morrison, R., Cleary, P., 2008. Towards a virtual comminution machine. MineralsEngineering 21 (11), 770–781.
Phillips, C.L., Parr, J.M., Riskin, E.A., 2008. Signals, systems, and transforms, PrenticeHall.
Powell, M., Nurick, G., 1996. A study of charge motion in rotary mills part 2-experimental work⁄ 1. Minerals Engineering 9 (3), 343–350.
Spencer, S., Campbell, J., Weller, K., Liu, Y., Miner, C., Kenmore, Q., 1999. Acousticemissions monitoring of SAG mill performance.
Tang, J., Zhao, L., Zhou, J., Yue, H., Chai, T., 2010. Experimental analysis of wet millload based on vibration signals of laboratory-scale ball mill shell. MineralsEngineering.
Wang, B., 2002. Prediction of impact and harmonic forces acting on arbitrarystructures: theoretical formulation. Mechanical Systems and Signal Processing16 (6), 935–953.
Watson, J., 1985. An analysis of mill grinding noise. Powder Technology 41 (1), 83–89.
Williams, E., 1999. Fourier Acoustics: Sound Radiation and Nearfield AcousticalHolography. Academic Press.
Xiang, J., Munjiza, A., Latham, J.P., Guises, R., 2009. On the validation of DEM andFEM/DEM models in 2D and 3D. Engineering Computations 26 (6), 673–687.
Zeng, Y., Forssberg, E., 1993. Monitoring grinding parameters by signalmeasurements for an industrial ball mill. International Journal of MineralProcessing 40 (1–2), 1–16.
Zhu, H.P., Zhou, Z.Y., Yang, R.Y., Yu, A.B., 2007. Discrete particle simulation ofparticulate systems: theoretical developments. Chemical Engineering Science62, 3378–3396.
Recommended