Embed Size (px)
Citation preview

Sicherheit
Sicherheit
WARNUNGHOCHSPANNUNG!Bei Anschluss an die Netzspannung führen Frequenzum-richter Hochspannung. Nur qualifiziertes Fachpersonal darfInstallation, Inbetriebnahme und Wartung vornehmen.Erfolgt Installation, Inbetriebnahme und Wartung nichtdurch qualifiziertes Personal, kann dies Tod oder schwereVerletzungen zur Folge haben.
HochspannungFrequenzumrichter sind an gefährliche Netzspannungenangeschlossen. Sie müssen alle verfügbaren Schutzmaß-nahmen gegen elektrischen Schlag ergreifen. Nurgeschultes Fachpersonal, das mit elektronischen Gerätenund Betriebsmitteln vertraut ist, ist befugt, diese Geräte zuinstallieren, zu starten oder zu warten.
WARNUNGUNERWARTETER ANLAUF!Bei Anschluss des Frequenzumrichters an das Netz kannder angeschlossene Motor jederzeit unerwartet anlaufen.Der Frequenzumrichter, Motor und alle angetriebenenGeräte müssen daher betriebsbereit sein. Andernfallskönnen Tod, schwere Verletzungen, Geräte- oderSachschäden auftreten.
Unerwarteter AnlaufWenn der Frequenzumrichter an das Netz angeschlossenist, können Sie den Motor über einen externen Schalter,einen seriellen Busbefehl, ein Sollwertsignal oder einenquittierten Fehlerzustand starten. Ergreifen Sie zum Schutzvor unerwartetem Anlauf entsprechende Vorsichtsmaß-nahmen.
WARNUNGENTLADUNGSZEIT!Die Zwischenkreiskondensatoren des Frequenzumrichterskönnen auch bei abgeschaltetem Frequenzumrichtergeladen bleiben. Trennen Sie zur Vermeidung elektrischerGefahren die Netzversorgung, alle Permanentmagnet-Motoren und alle externen DC-Zwischenkreisversorgungen,einschließlich von externen Batterie-, USV- und DC-Zwischenkreisverbindungen mit anderenFrequenzumrichtern. Warten Sie, bis sich die Konden-satoren vollständig entladen haben, bevor Sie Wartungs-oder Reparaturarbeiten durchführen. Die entsprechendeWartezeit finden Sie in der Tabelle Entladungszeit. WennSie diese Wartezeit nach Trennen der Netzversorgung vorWartungs- oder Reparaturarbeiten nicht einhalten, kanndies Tod oder schwere Verletzungen zur Folge haben.
Spannung [V] Nennleistung [kW] Mindestwartezeit[Minuten]
3x400 90-250 20
3x400 110-315 20
3x500 110-315 20
3x500 132-355 20
3x525 75-250 20
3x525 90-315 20
3x690 90-250 20
3x690 110-315 20
Entladungszeit
Zulassungen
Tabelle 1.2
Sicherheit VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss

Sicherheit VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss

Inhaltsverzeichnis
1 Einführung 4
1.1 Explosionszeichnungen 4
1.2 Zielsetzung des Handbuchs 5
1.3 Zusätzliche Ressourcen 5
1.4 Grundlegende Funktionen 5
1.5 Aufbau des Frequenzumrichters 5
1.6 Baugrößen und Nennleistungen 6
2 Installation 7
2.1 Planung des Aufstellungsorts 7
2.2 Checkliste vor der Installation 7
2.3 Mechanische Installation 7
2.3.1 Kühlung 7
2.3.2 Heben des Frequenzumrichters 8
2.3.3 Wandmontage – Geräte mit Schutzart IP21 und IP54 8
2.4 Elektrische Installation 8
2.4.1 Allgemeine Anforderungen 8
2.4.2 Erdungsanforderungen 11
2.4.2.1 Erdableitstrom (>3,5 mA) 11
2.4.2.2 Erdung für IP20-Gehäuse 12
2.4.2.3 Erdung für IP21/54-Gehäuse 12
2.4.3 Motoranschluss 12
2.4.4 Motorkabel 15
2.4.5 Motordrehrichtungsprüfung 15
2.4.6 Netzanschluss 15
2.5 Anschluss von Steuerleitungen 16
2.5.1 Zugang 16
2.5.2 Verwendung abgeschirmter Steuerleitungen 16
2.5.3 Erdung abgeschirmter Steuerkabel 16
2.5.4 Steuerklemmentypen 17
2.5.5 Verdrahtung der Steuerklemmen 18
2.5.6 Steuerklemmenfunktionen 18
2.6 Serielle Kommunikation 18
3 Inbetriebnahme 19
3.1 Voraussetzungen 19
3.2 Stromversorgung des Frequenzumrichters 20
3.3 Grundlegende Programmierung 20
3.4 Prüfung der Handsteuerung vor Ort 22
3.5 Systemstart 22
Inhaltsverzeichnis VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 1

4 Benutzerschnittstelle 23
4.1 LCP Bedieneinheit 23
4.1.1 Aufbau des LCP 23
4.1.2 Einstellen von Displaywerten des LCP 24
4.1.3 am Display 24
4.1.4 Navigationstasten 25
4.1.5 Tasten zur lokalen Bedienung 25
4.2 Sichern und Kopieren von Parametereinstellungen 26
4.2.1 Daten vom Frequenzumrichter zum LCP übertragen 26
4.2.2 Daten vom LCP zum Frequenzumrichter übertragen 26
4.3 Wiederherstellen der Werkseinstellungen 26
4.3.1 Empfohlene Initialisierung 26
4.3.2 Manuelle Initialisierung 27
5 Programmieren 28
5.1 Einführung 28
5.2 Beispiel für die Programmierung 28
5.3 Beispiele zur Programmierung der Steuerklemmen 30
5.4 Werkseinstellungen der Parameter (International/Nordamerika) 30
5.5 Parametermenüaufbau 31
5.5.1 Hauptmenüaufbau 32
5.6 Fernprogrammierung mit MCT 10 Software 36
6 Anwendungsbeispiele 37
6.1 Einleitung 37
6.2 Anwendungsbeispiele 37
7 Zustandsmeldungen 42
7.1 Statusanzeige 42
7.2 Tabelle mit Definitionen der Zustandsmeldungen 42
8 Warnungen und Alarmmeldungen 45
8.1 Systemüberwachung 45
8.2 Warnungs- und Alarmtypen 45
8.2.1 Warnungen 45
8.2.2 Alarm (Abschaltung) 45
8.2.3 Alarm (Abschaltblockierung) 45
8.3 Anzeige von Warn- und Alarmmeldungen 45
8.4 Definitionen von Warn-/Alarmmeldungen 47
8.5 Fehlermeldungen 48
9 Grundlegende Fehlersuche und -behebung 56
Inhaltsverzeichnis VLT® AQUA Drive (D-Rahmen)Produkthandbuch
2 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss

9.1 Inbetriebnahme und Betrieb 56
10 Technische Daten 60
10.1 Leistungsabhängige technische Daten 60
10.2 Allgemeine technische Daten 61
10.3 Sicherungstabellen 66
10.3.1 Schutz 66
10.3.2 Keine Übereinstimmung mit UL-Zulassung 66
10.3.3 UL-Konformität 67
10.3.4 Anzugsdrehmomente für Anschlüsse 67
Index 68
Inhaltsverzeichnis VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 3

1 Einführung
1.1 Explosionszeichnungen
1
15 14
8
9
12
13 (IP 20/Chassis)
13 (IP 21/54
NEMA 1/12)
11
10
130B
C25
2.10
Abbildung 1.1 Innere Baugruppen bei D1
130B
C30
1.10
1
2
3
4
5
6
7
8
9
Abbildung 1.2 Nahaufnahme: LCP und Regelungsfunktionen
1 LCP Bedienteil 9 Relais 2 (04, 05, 06)
2 Anschluss serielle RS485-Schnittstelle 10 Hebering
3 Digitale I/O- und 24-V-Stromversorgung 11 Steckplatz
4 Analoger I/O-Stecker 12 Kabelschelle (PE-Leiter)
5 USB-Anschluss 13 Masse (Erde)
6 Klemmenschalter serielle Schnittstelle 14 Motorausgangsklemmen 96 (U), 97 (V), 98 (W)
7 Analoge Schalter (A53), (A54) 15 Netzeingangsklemmen 91 (L1), 92 (L2), 93 (L3)
8 Relais 1 (01, 02, 03)
Tabelle 1.1
Einführung VLT® AQUA Drive (D-Rahmen)Produkthandbuch
4 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
11

1.2 Zielsetzung des Handbuchs
Dieses Handbuch stellt Ihnen detaillierte Informationen zurInstallation und Inbetriebnahme des Frequenzumrichterszur Verfügung. 2 Installation enthält die notwendigenAnforderungen für die mechanische und elektrische Instal-lation, darunter Verdrahtung für Netzversorgung, Motor,Steuerung und serielle Kommunikation sowie Steuerklem-menfunktionen. 3 Inbetriebnahme beschreibt ausführlichdie Verfahren für die Inbetriebnahme, eine grundlegendeProgrammierung für den Betrieb sowie Funktionsprü-fungen. Die übrigen Kapitel enthalten zusätzliche Angaben.Hierzu gehören die Inbetriebnahme, die Benutzerschnitt-stelle, die detaillierte Programmierung,Anwendungsbeispiele, Fehlersuche und -behebung sowiedie technischen Daten.
1.3 Zusätzliche Ressourcen
Es stehen weitere Ressourcen zur Verfügung, die Ihnenhelfen, erweiterte Funktionen und Programmierung vonFrequenzumrichtern zu verstehen.
• Das VLT® Programmierungshandbuch, MG33MXYY,enthält noch umfassendere Informationen für dieArbeit mit Parametern sowie viele Anwendungs-beispiele.
• Das VLT® Projektierungshandbuch, MG33BXYY,enthält umfassende Informationen zu Möglich-keiten und Funktionen zur Auslegung vonSteuerungssystemen für Motoren.
• Zusätzliche Veröffentlichungen und Handbüchersind von Danfoss erhältlich.Eine Übersicht finden Sie unter http://www.danfoss.com/Germany/BusinessAreas/Drives-Solutions/Documentation/literature.htm.
• Es stehen Optionsmodule zur Verfügung, dieeinige der beschriebenen Verfahren ändernkönnen. Bitte prüfen Sie die Anleitungen dieserOptionsmodule auf besondere Anforderungenhin. Wenden Sie sich an einen Danfoss-Händler inIhrer Nähe oder besuchen Sie http://www.danfoss.com/Products/Literature/Technical+Documentation.htm, um Downloads oderzusätzliche Informationen zu erhalten.
1.4 Grundlegende Funktionen
Ein Frequenzumrichter ist ein elektronischer Motorregler,der einen Netzeingangs-Wechselstrom in einen variablenAusgangsstrom in AC-Wellenform umwandelt. So steuernFrequenz und Spannung des Ausgangsstroms dieMotordrehzahl und das Motordrehmoment. Der Frequen-
zumrichter kann die Drehzahl des Motors entsprechendeiner Systemrückführung z. B. durch Positionssensoren aufeinem Förderband variieren. Zusätzlich kann Frequenzum-richter den Motor ebenfalls durch Signale von externenReglern regeln.
Zudem überwacht der Frequenzumrichter den System- undMotorzustand, gibt Warnungen oder Alarme bei Fehlerbe-dingungen aus, startet und stoppt den Motor, optimiertdie Energieeffizienz und bietet darüber hinaus viele weitereFunktionen zur Steuerung, Regelung, Überwachung undVerbesserung des Wirkungsgrads. Betriebs- und Überwa-chungsfunktionen stehen als Zustandsanzeigen für einexternes Steuerungssystem oder ein serielles Kommunikati-onsnetzwerk zur Verfügung.
1.5 Aufbau des Frequenzumrichters
Abbildung 1.3 zeigt ein Blockschaltbild der internenBaugruppen des Frequenzumrichters. Ihre jeweiligenFunktionen werden unter Tabelle 1.2 beschrieben.
Abbildung 1.3 Blockschaltbild des Frequenzumrichters
Nummer
Bezeichnung Funktionen
1 Netzversorgung • Dreiphasige Wechselspan-nungsversorgung desFrequenzumrichters
2 Gleichrichter • Die Gleichrichterbrückewandelt den Wechselstrom ineinen Gleichstrom zurStromversorgung desWechselrichters um.
3 Gleichspannungs-zwischenkreis
• Der Gleichspannungszwi-schenkreis führt denGleichstrom.
Einführung VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 5
1 1

Nummer
Bezeichnung Funktionen
4 Zwischenkreis-drosseln
• Die Zwischenkreisdrosselnfiltern die Zwischenkreisg-leichspannung.
• Sie bieten Schutz vorNetztransienten.
• Sie reduzieren denEffektivwert des Stroms.
• Sie heben den Leistungsfaktoran.
• Sie reduzieren Oberwellen amNetzeingang.
5 Gleichspannungs-kondensatoren
• Sie speichern die Gleich-spannung.
• Sie überbrücken kurzzeitigeSpannungsausfälle oder -einbrüche.
6 Wechselrichter • Der Wechselrichter erzeugtaus der Gleichspannung einepulsbreitenmodulierteWechselspannung an denMotorklemmen für einevariable Motorregelung.
Nummer
Bezeichnung Funktionen
7 Motorklemmen • Anschlussklemmen für dieMotorkabel zur Versorgungdes Motors mit der geregeltendreiphasigen Motorspannung.
8 Steuerteil • Das Steuerteil überwacht dieinterne Verarbeitung, denMotorausgang und denMotorstrom, um für eineneffizienten Betrieb und eineeffiziente Regelung zu sorgen.
• Es überwacht die Benutzer-schnittstelle sowie dieexternen Signale und führtdie resultierenden Befehleaus.
• Es stellt die Zustandsmel-dungen undKontrollfunktionen bereit.
Tabelle 1.2 Interne Baugruppen des Frequenzumrichters
1.6 Baugrößen und Nennleistungen
Frequenzumrichter mit Nennleistung in kW
kW Hohe Überlast 75 90 110 132 160 200 250 315 315
kW Normale Überlast 90 110 132 160 200 250 315 355 400
400 V D3h D3h D3h D4h D4h D4h
500 V D3h D3h D3h D4h D4h D4h
525 V D4h D3h D3h D4h D4h D4h D4h
690 V D3h D3h D3h D4h D4h D4h
Tabelle 1.3
Frequenzumrichter mit Nennleistung in US-HP (nur für Nordamerika!)
HP HoheÜberlast
100 125 150 200 250 300 350 350
HP NormaleÜberlast
125 150 200 250 300 350 400 450
460 V D3h D3h D3h D4h D4h D4h
575 V D3h D3h D3h D4h D4h D4h D4h
Tabelle 1.4
Einführung VLT® AQUA Drive (D-Rahmen)Produkthandbuch
6 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
11

2 Installation
2.1 Planung des Aufstellungsorts
VORSICHTBevor Sie die Installation durchführen, ist es wichtig, dieInstallation des Frequenzumrichters zu planen. Geschiehtdies nicht, können Sie sich damit zusätzliche Arbeitwährend und nach der Installation machen.
Wählen Sie den bestmöglichen Standort, indem Sie diefolgenden Aspekte berücksichtigen (siehe Details auf denfolgenden Seiten und die jeweiligen Projektierungshand-bücher):
• Umgebungstemperatur am Betriebsort
• Installationsmethode
• Verfahren zur Kühlung des Frequenzumrichters
• Position des Frequenzumrichters
• Kabelführung
• Stellen Sie sicher, dass die Stromquelle dierichtige Spannung und den notwendigen Stromliefert.
• Stellen Sie sicher, dass der Motornennstrominnerhalb des maximalen Stroms des Frequen-zumrichters liegt.
• Wenn der Frequenzumrichter keine eingebautenSicherungen hat, stellen Sie sicher, dass dieexternen Sicherungen das notwendige Schalt-vermögen haben.
Installation in großen Höhenlagen
Spannung Beschränkungen in Höhenlagen
380-500 V Wenden Sie sich bei einer Installation in einer Höhevon mehr als 3 km hinsichtlich PELV (Schutzklein-spannung – Protective extra low voltage) an Danfoss.
525-690 V Wenden Sie sich bei einer Installation in einer Höhevon mehr als 2 km hinsichtlich PELV (Schutzklein-spannung – Protective extra low voltage) an Danfoss.
Tabelle 2.1
2.2 Checkliste vor der Installation
• Stellen Sie vor dem Auspacken des Frequenzum-richters sicher, dass die Verpackung unbeschädigtist. Setzen Sie sich bei Beschädigung sofort mitdem Transportunternehmen in Verbindung, umSchadensersatz anzufordern.
• Platzieren Sie den Frequenzumrichter vor demAuspacken so nah wie möglich am endgültigenAufstellungsort.
• Vergleichen Sie die Modellnummer des Frequen-zumrichters auf dem Typenschild mit denBestellangaben, um sicherzustellen, dass Sie dasrichtige Gerät erhalten haben.
• Vergewissern Sie sich, dass alle Komponenten fürdie gleiche Nennspannung ausgelegt sind:
• Netzversorgung
• Frequenzumrichter
• Motor
• Der Ausgangsnennstrom des Frequenzumrichtersmuss zur Gewährleistung der optimalenMotorleistung gleich oder größer als derNennstrom des Motors sein.
• Motorgröße und Frequenzumrichter-leistung müssen zur Gewährleistungeines ordnungsgemäßen Überlast-schutzes übereinstimmen.
• Wenn die Nennwerte des Frequenzum-richters unter denen des Motors liegen,kann der Motor seine maximale Leistungnicht erreichen.
2.3 Mechanische Installation
2.3.1 Kühlung
• Sehen Sie über und unter dem Frequenzum-richter zur Luftzirkulation einen ausreichendenAbstand vor. In der Regel ist ein Abstand von 225mm erforderlich.
• Eine unsachgemäße Montage kann zuÜberhitzung und einer reduzierten Leistungführen.
• Berücksichtigen Sie eine Leistungsreduzierungaufgrund hoher Temperaturen zwischen 45 °Cund 50 °C und/oder einer Höhenlage von 1000 mund mehr über dem Meeresspiegel. WeitereInformationen finden Sie im VLT® Projektierungs-handbuch, MG33BXYY.
Die Danfoss VLT Frequenzumrichter hoher Leistung nutzenein Kühlkonzept über rückseitige Kühlkanäle, die Kühlkör-perkühlluft abführt und damit etwa 90 % der Wärme desFrequenzumrichters über die Rückseite des Frequenzum-richters abführt. Sie können die vom rückseitigen Kühlkanalabgeführte warme Luft aus dem Schaltschrank oder Raummit Hilfe eines der nachstehenden Lüftungs-Einbausätzeableiten.
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 7
2 2

Lüftungs-EinbausatzEin Lüftungs-Einbausatz mit rückseitigem Kühlkanal stehtzur Verfügung, mit dem Sie die Kühlkörperkühlluft ausdem Schaltschrank ableiten können, wenn Frequenzum-richter der Schutzart IP20 in einem Rittal-Schaltschrankeingebaut sind. Durch Verwendung dieses Einbausatzesverringern Sie die Wärmeentwicklung im Schaltschrank,sodass Sie kleinere Türkühllüfter für den Schaltschrankverwenden können.
Rückseitige Kühlung (Dach- und Bodenabdeckbleche)Sie können die Kühllüft, die aus dem rückseitigenLüftungskanal abgeführt wird, aus dem Raum ableiten,damit die entstandene Wärme nicht in die Steuerzentraleabgeführt wird.
Im Schaltschrank ist ein Türlüfter erforderlich, um die nichtim Lüftungskanal des Frequenzumrichters gehalteneWärme und die durch weitere Komponenten im Schalt-schrank erzeugte Wärme abzuführen. Sie müssen dieinsgesamt erforderliche Belüftung so berechnen, dass Siedie passenden Lüfter auswählen können.
LuftströmungDie notwendige Luftströmung über den Kühlkörper musssichergestellt werden. Die Luftströmungsrate wird inTabelle 2.2 aufgeführt.
Die Aktivierung des Lüfters erfolgt aus folgenden Gründen:
• AMA
• DC-Halten
• Vormagnetisierung
• DC-Bremse
• 60 % des Nennstroms wird überschritten
• Bestimmte Kühlkörpertemperatur überschritten(abhängig von der Leistungsgröße)
• Bestimmte Umgebungstemperatur derLeistungskarte überschritten (abhängig von derLeistungsgröße)
• Bestimmte Umgebungstemperatur derSteuerkarte überschritten
Gehäuse Türlüfter/Dachlüfter Kühlkörperlüfter
D1h/D3h 102 m3/h 420 m3/h
D2h/D4h 204 m3/h 840 m3/h
Tabelle 2.2 Luftströmung
2.3.2 Heben des Frequenzumrichters
Heben Sie den Frequenzumrichter immer an den dafürvorgesehenen Hebeösen an. Verwenden Sie einenTragbalken, um die Ösen nicht zu verbiegen.
130B
C25
3.10
Abbildung 2.1 Platzieren Sie Hebegurte an den angegebenenStellen
VORSICHTDer Winkel von der Oberkante des Frequenzumrichters biszum Hebeseil muss 60° oder mehr betragen.
2.3.3 Wandmontage – Geräte mit SchutzartIP21 und IP54
Berücksichtigen Sie vor der Auswahl des endgültigenAufstellungsorts die folgenden Punkte:
• Freier Platz für Kühlung
• Zugang zum Öffnen der Tür
• Kabeleinführung von unten
2.4 Elektrische Installation
2.4.1 Allgemeine Anforderungen
Dieser Abschnitt enthält ausführliche Anweisungen zurVerdrahtung des Frequenzumrichters und beschreibt diefolgenden Aufgaben:
• Anschließen der Ausgangsklemmen des Frequen-zumrichters
• Anschließen der Netzversorgung an die Eingangs-klemmen des Frequenzumrichters
• Anschließen der Steuerleitungen und der Kabelder seriellen Kommunikation
• Prüfen der Eingangs-, Motor- sowie Steuer-klemmen auf ihre bestimmungsgemäße Funktionnach Anlegen der Netzspannung
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
8 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
22

*
230 VAC50/60Hz
230 VAC50/60Hz
TB6 Contactor
TB5R1
Regen +
Regen -83
Regen
1
2
Brake Temp (NC)
91 (L1)92 (L2)93 (L3)
PE
88 (-)89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)0/4-20 mA
12 (+24V OUT)
13 (+24V OUT)
18 (D IN)
20 (COM D IN)
15mA 200mA
(U) 96(V) 97
(W) 98(PE) 99
(COM A OUT) 39
(A OUT) 420/4-20 mA
03
0-10Vdc
+10Vdc
0-10Vdc
0/4-20 mA
24Vdc
02
01
05
04
06240Vac, 2A
24V (NPN) 0V (PNP)
0V (PNP)24V (NPN)
19 (D IN)
24V (NPN) 0V (PNP)27
24V
0V
(D IN/OUT)
0V (PNP)24V (NPN)
(D IN/OUT)
0V
24V29
24V (NPN) 0V (PNP)
0V (PNP)24V (NPN)
33 (D IN)
32 (D IN)
12
ON
S201
ON2
1S202ON=0-20mAOFF=0-10V
95
400Vac, 2AP 5-00
(R+) 82
(R-) 81
37 (D IN)
+ - + -
130B
C30
0.10
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0V
5V
S801
RS-485RS-485
21 O
N
S801
3 Phasepowerinput
Load Share Switch ModePower Supply
Motor
Analog Output
Interface
relay1
relay2
ON=TerminatedOFF=Open
Brakeresistor
(NPN) = Sink(PNP) = Source
==
=
240Vac, 2A
400Vac, 2A
Abbildung 2.2
WARNUNGGEFAHR DURCH ANLAGENKOMPONENTEN!Drehende Wellen und elektrische Betriebsmittel stellenpotenzielle Gefahrenquellen dar. Alle Elektroarbeitenmüssen den VDE-Vorschriften und anderen lokal geltendenElektroinstallationsvorschriften entsprechen. Nur qualifi-ziertes Fachpersonal darf Installation, Inbetriebnahme undWartung vornehmen. Eine Nichtbeachtung dieserRichtlinien kann Tod oder schwere Verletzungen zur Folgehaben.
VORSICHTGETRENNTE VERLEGUNG VON LEITUNGEN!Verlegen Sie die Netz-, Motor- und Steuerleitungen zumSchutz vor Hochfrequenzstörungen in drei getrenntenKabelkanälen oder verwenden Sie getrennte abgeschirmteLeitungen. Nichtbeachten kann die einwandfreie undoptimale Funktion des Frequenzumrichters sowie andererangeschlossenen Geräte beeinträchtigen.
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 9
2 2

Beachten Sie zu Ihrer eigenen Sicherheit die folgendenAnforderungen:
• Elektronische Steuer- und Regeleinrichtungensind an gefährliche Netzspannung angeschlossen.Bei Anlegen der Netzversorgung an den Frequen-zumrichter müssen alle notwendigenSchutzmaßnahmen ergriffen werden.
• Verlegen Sie Motorkabel von mehreren Frequen-zumrichtern getrennt. Induzierte Spannung durchnebeneinander verlegte Motorkabel kann Geräte-kondensatoren auch dann aufladen, wenn dieGeräte freigeschaltet sind.
• Sie dürfen an Feldverdrahtungsklemmen keinegrößeren Leiter als angegeben anschließen.
Überlast- und Geräteschutz
• Eine elektronisch realisierte Funktion im Frequen-zumrichter bietet Überlastschutz für den Motor.Die Überlastfunktion berechnet aus denhinterlegen ETR-Kurven die Überlast undbestimmt daraus die Zeit bis zur Motorab-schaltung (Reglerausgangsstopp). Je höher dieStromaufnahme, desto schneller erfolgt dieAbschaltung. Die Überlastfunktion bietetMotorüberlastschutz der Klasse 20. Siehe 8 Warnungen und Alarmmeldungen für nähereInformationen zur Abschaltfunktion.
• Da die Motorkabel Hochfrequenzstrom führen, isteine getrennte Verlegung der Netzversorgung,der Motorkabel und Steuerleitungen wichtig.Verwenden Sie hierzu Kabelkanäle oder getrennteabgeschirmte Kabel. Siehe Abbildung 2.3. DieNichtbeachtung dieser Vorgabe könnte dieoptimale Funktion des Frequenzumrichters undanderer angeschlossenen Geräte beeinträchtigen.
• Versehen Sie alle Frequenzumrichter mitKurzschluss- und Überlastschutz. Dieser Schutzwird durch Sicherungen am Eingang gewähr-leistet, siehe Abbildung 2.4. Wenn die Sicherungennicht Bestandteil der Lieferung ab Werk sind,muss sie der Installateur als Teil der Installationbereitstellen. 10.3.1 Schutz zeigt die maximalenNennwerte der Sicherungen.
MotorLine Power
Stop
Start
Speed
Control
130B
X370
.10
Abbildung 2.3 Beispiel für sachgemäße elektrische Installationüber Kabelkanäle
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
10 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
22

• Versehen Sie alle Frequenzumrichter mitKurzschluss- und Überlastschutz. Dieser Schutzwird durch Sicherungen am Eingang gewähr-leistet, siehe Abbildung 2.4. Wenn die Sicherungennicht Bestandteil der Lieferung ab Werk sind,muss sie der Installateur als Teil der Installationbereitstellen. 10.3.1 Schutz zeigt die maximalenNennwerte der Sicherungen.
L1
L1
L2
L2
L3
L3
GND
91 92 93Fuses
130B
B460
.10
Abbildung 2.4 Sicherungen für Frequenzumrichter
Leitungstyp und Nennwerte
• Die Querschnitte und Hitzebeständigkeit allerverwendeten Kabel sollten den örtlichen undnationalen Vorschriften entsprechen.
• Danfoss empfiehlt, alle Leistungsanschlüssemittels Kupferdraht mit einer Hitzebeständigkeitvon mindestens 75 °C vorzunehmen.
2.4.2 Erdungsanforderungen
WARNUNGVORSCHRIFTSMÄSSIG ERDEN!Aus Gründen der Bedienersicherheit ist es wichtig, dass Sieden Frequenzumrichter gemäß der geltenden Vorschriftenund entsprechend den Anweisungen in diesem Produk-thandbuch richtig erden. Verwenden Sie keinen an denFrequenzumrichter angeschlossenen Kabelkanal als Ersatzfür eine ordnungsgemäße Erdung. Der Ableitstrom gegenErde ist höher als 3,5 mA. Eine nicht vorschriftsmäßigeErdung des Frequenzumrichters kann zum Tod oderschweren Verletzungen führen.Vorschriftsmäßig erden
HINWEISEs obliegt dem Benutzer oder einem zertifizierten Elektro-installateur, für eine einwandfreie Erdung der Gerätegemäß geltenden nationalen und örtlichen Elektroinstallati-onsvorschriften und -normen zu sorgen.
• Beachten Sie alle örtlichen und nationalenElektroinstallationsvorschriften zur einwandfreienErdung elektrischer Geräte und Betriebsmittel.
• Sie müssen eine ordnungsgemäße Schutzerdungfür Geräte mit Erdströmen über 3,5 mA mussvorgenommen werden, siehe2.4.2.1 Erdableitstrom (>3,5 mA).
• Für Netzversorgung-, Motorkabel und Steuerlei-tungen ist ein spezieller Schutzleiter erforderlich.
• Verwenden Sie die im Lieferumfang der Geräteenthaltenen Kabelschellen für ordnungsgemäßeErdanschlüsse.
• Erden Sie Frequenzumrichter nicht in Reihehintereinander.
• Halten Sie die Erdungsleiterverbindungen so kurzwie möglich.
• Verwenden Sie zur Reduzierung des elektrischenRauschens mehrdrahtige Leitungen.
• Befolgen Sie die Anforderungen an dieMotorkabel des Motorherstellers.
2.4.2.1 Erdableitstrom (>3,5 mA)
Befolgen Sie im Hinblick auf die Schutzerdung von Gerätenmit einem Ableitstrom gegen Erde von mehr als 3,5 mAalle nationalen und lokalen Vorschriften. In der Frequen-zumrichtertechnik werden hohe Frequenzen mit hoherLeistung geschaltet. Hierdurch entsteht ein Ableitstrom inder Erdverbindung. Ein Fehlerstrom im Frequenzumrichteran den Ausgangsleistungsklemmen kann eine Gleichstrom-komponente enthalten, die die Filterkondensatoren ladenund einen transienten Erdstrom verursachen kann. DerAbleitstrom gegen Erde hängt von verschiedenen System-konfigurationen ab, wie EMV-Filter, abgeschirmteMotorkabel und Leistung des Frequenzumrichters.
EN 61800-5-1 (Produktnorm für Elektrische Leistungsant-riebssysteme mit einstellbarer Drehzahl) stellt besondereAnforderungen, wenn der Erdableitstrom 3,5 mAübersteigt. Die Erdverbindung muss auf eine der folgendenArten verstärkt werden:
• Erdverbindung mit einem Leitungsquerschnittvon mindestens 10 mm2
• zwei getrennt verlegte Erdungskabel, die dievorgeschriebenen Maße einhalten
Weitere Informationen in EN 60364-5-54 § 543.7.
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 11
2 2

FehlerstromschutzschalterWenn Fehlerstromschutzschalter (RCD), auch alsErdschlusstrennschalter bezeichnet, zum Einsatz kommen,sind die folgenden Anforderungen einzuhalten: Fehler-stromschutzschalter (RCD)
• Verwenden Sie RCD mit Einschaltverzögerung, umFehler durch transiente Erdströme zu vermeiden.
• Verwenden Sie RCD mit Einschaltverzögerung, umFehler durch transiente Erdströme zu vermeiden
• Bemessen Sie RCD in Bezug auf Systemkonfigu-ration und Umgebungsbedingungen
2.4.2.2 Erdung für IP20-Gehäuse
Sie sollten den Frequenzumrichter über abgeschirmteKabel erden. Verwenden Sie zur Erdung der Leistungsan-schlüsse die in Abbildung 2.6 gezeigten speziellvorgesehenen Erdungsanschlüsse.
130B
C30
3.10
Abbildung 2.5 Erdungsanschlüsse für IP20-Gehäuse
2.4.2.3 Erdung für IP21/54-Gehäuse
Sie sollten den Frequenzumrichter über abgeschirmteKabel erden. Verwenden Sie zur Erdung der Leistungsan-schlüsse die in Abbildung 2.6 gezeigten speziellvorgesehenen Erdungsanschlüsse.
130B
C30
4.10
Abbildung 2.6 Erdung für IP21/54-Gehäuse
2.4.3 Motoranschluss
WARNUNGINDUZIERTE SPANNUNG!Verlegen Sie Motorkabel von mehreren Frequenzum-richtern getrennt. Induzierte Spannung durchnebeneinander verlegte Motorkabel kann Gerätekonden-satoren auch dann aufladen, wenn die Gerätefreigeschaltet sind. Die Nichtbeachtung dieser Empfehlungkann schwere Personenschäden oder sogar tödliche Verlet-zungen zur Folge haben.
• Maximale Kabelquerschnitte finden Sie in 10.1 Leistungsabhängige technische Daten..
• Befolgen Sie bezüglich der Kabelquerschnittelokale und nationale Vorschriften.
• Kabeleinführungen für Motorkabel sind amUnterteil von Frequenzumrichtern mit SchutzartIP21/54 oder höher vorgesehen.
• Installieren Sie Kondensatoren zur Korrektur desLeistungsfaktors nicht zwischen dem Frequen-zumrichter und dem Motor.
• Schließen Sie ein Start- oder Polumschal-tungsgerät nicht zwischen Frequenzumrichterund Motor an.
• Schließen Sie die 3 Phasen des Motorkabels andie Klemmen 96 (U), 97 (V) und 98 (W) an.
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
12 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
22

• Erden Sie das Kabel gemäß den Erdungsanwei-sungen in diesem Handbuch.
• Ziehen Sie die Klemmen gemäß den Anzugsdreh-momenten in 10.3.4 Anzugsdrehmomente fürAnschlüsse an.
• Befolgen Sie die Anforderungen an dieMotorkabel des Motorherstellers.
A
A
B
B
33 1.3
[]
0 0.0
[]
62 2.4
[]
101 4.0
[]
140 5.5
[]
163 6.4
[]
185 7.3
[]
224 8.8
[]
263 10
.4[
]29
3 11.5
[]
GROUND 883.5[ ]
00.0[ ]
2007.9[ ]
943.7[ ]
244 9.6
[]
0 0.0
[]
272 10
.7[
]
0 0.0
[]
S U W
R T V
3X M8x20 STUDWITH NUT
SECTION A-AMAINS TERMINALS
MAINS TERMINAL
SECTION B-BMOTOR TERMINALS
MOTORTERMINAL
130B
C30
5.10
Abbildung 2.7 Lage der Klemmen D1h
A
A
B
B
833.3[ ]
00.0[ ]
1887.4[ ]
244 9.6
[]
0 0.0
[]
290 11
.4[
]272 10
.7[
]
0 0.0
[]
22 0.9
[]
0 0.0
[]
62 2.4
[]
101 4.0
[]
145 5.7
[]
184 7.2
[]
223 8.8
[]
152 6.0
[]
217 8.5
[]
29211.5[ ]
R
S
T
U
V
W
BRAKE
SECTION A-AMAINS TERMINALS
MAINSTERMINAL
SECTION B-BMOTOR TERMINALS AND
BRAKE TERMINALS
MOTOR TERMINAL
BRAKETERMINAL
130B
C30
2.10
Abbildung 2.8 Lage der Klemmen D3h
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 13
2 2

B
B
A
A
254.
710[
] 0.0 0[]
GROUND 143.46[ ]
0.00[ ]
GROUND 168.47[ ]
331.213[ ]
211.18[ ]
GROUND168.47[ ]
GROUND143.46[ ]
42.4 2[]
0.0 0[]
68.1 3[]
125.
85[
]18
3.5
7[]
245.
810[
]29
9.8
12[]
353.
814[
]37
7.6
15[]
284.
211[
]0.0 0[]
R
S
T
U
V
W
4X M10x20 STUDWITH NUT
SECTION B-BMOTOR TERMINALS AND
BRAKE TERMINALS
MOTOR TERMINAL
SECTION A-AMAINS TERMINALS
MAINS TERMINAL
130B
C33
2.10
Abbildung 2.9 Lage der Klemmen D2h
A
A
B
B
33 1.3
[]
0 0.0
[]
91 3.6
[]
149 5.8
[]
211 8.3
[]
265 10
.4[
]31
9 12.6
[]
2007.9[ ]
00.0[ ]
31912.6[ ]
37614.8[ ]
293 11
.5[
]
255 10
.0[
]
0 0.0
[]
306 12
.1[
]
284 11
.2[
]
0 0.0
[]
236.
89[
]
R
S
T
U
V
W
BRAKETERMINALS
SECTION A-AMAINS TERMINALS
MAINS TERMINAL
SECTION B-BMOTOR TERMINALS AND
BRAKE TERMINALS
TERMINALBRAKE / REGEN
MOTOR TERMINAL
130B
C33
3.10
Abbildung 2.10 Lage der Klemmen D4h
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
14 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
22

2.4.4 Motorkabel
Sie müssen den Motor an die Klemmen U/T1/96, V/T2/97,W/T3/98 anschließen; das Erdungskabel gehört an Klemme99. Sie können alle Arten dreiphasiger Standard-Asynchron-motoren mit einem Frequenzumrichter verwenden. DieWerkseinstellung ist Rechtslauf, wobei der Frequenzumrich-terausgang wie folgt angeschlossen ist:
Klemme Nr. Funktion
96, 97, 98, 99 Netz U/T1, V/T2, W/T3Masse/Erde
Tabelle 2.3
2.4.5 Motordrehrichtungsprüfung
Sie können die Drehrichtung durch Vertauschen von zweiPhasen im Motorkabel oder durch Ändern der Einstellungvon 4-10 Motor Drehrichtung ändern.
• Klemme U/T1/96angeschlossen an Phase U
• Klemme V/T2/97angeschlossen an Phase V
• Klemme W/T3/98angeschlossen an Phase W
96 97
U V
96 97 98
U V W
98
W 130H
A03
6.10
Tabelle 2.4
Sie können eine Motordrehrichtungsprüfung über1-28 Motordrehrichtungsprüfung und die am Displaygezeigten Schritte durchführen.
2.4.6 Netzanschluss
• Wählen Sie die Querschnitte der Kabel anhanddes Eingangsstroms des Frequenzumrichters.
• Befolgen Sie bezüglich der Kabelquerschnittelokale und nationale Vorschriften.
• Schließen Sie die 3 Phasen des Netzeingangs andie Klemmen L1, L2 und L3 an (sieheAbbildung 2.11).
130B
C25
4.10
21
Abbildung 2.11 Netzanschluss
1 Netzanschluss
2 Motoranschluss
Tabelle 2.5
• Erden Sie das Kabel gemäß den Erdungsanwei-sungen in diesem Handbuch.
• Sie können alle Frequenzumrichter an einem IT-Netz oder einem geerdeten Versorgungsnetzbetreiben. Versorgt ein IT-Netz, eine potenzialfreieDreieckschaltung oder ein TT/TN-S Netz mitgeerdetem Zweig (geerdete Dreieckschaltung)den Frequenzumrichter, so stellen Sie den EMV-Schalter über 14-50 EMV-Filter auf AUS. In derPosition AUS sind die internen EMV-Filterkonden-satoren zwischen Rahmen und Zwischenkreisabgeschaltet, um Schäden am Zwischenkreis zuvermeiden und die Erdkapazität gemäß IEC61800-3 zu verringern.
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 15
2 2

2.5 Anschluss von Steuerleitungen
• Trennen Sie Steuerleitungen von Hochspannungs-bauteilen des Frequenzumrichters.
• Ist der Frequenzumrichter an einen Thermistorangeschlossen, müssen Thermistorsteuerleitungenzur Beibehaltung des PELV-Schutzgrads verstärkt/zweifach isoliert sein. Danfoss empfiehlt eine 24 VDC-Versorgungsspannung.
2.5.1 Zugang
Alle Klemmen zu den Steuerkabeln befinden sich unterdem LCP im Frequenzumrichter. Öffnen Sie zum Zugriffdarauf die Tür (IP21/54) oder entfernen Sie die Vorderab-deckung (IP20).
2.5.2 Verwendung abgeschirmterSteuerleitungen
Danfoss empfiehlt die Verwendung abgeschirmter Kabel,um die EMV-Störfestigkeit der Steuerleitungen zuoptimieren und die EMV-Störaussendung der Motorkabelzu verhindern.
Die Fähigkeit eines Kabels, ein- und ausstrahlendeelektrische Störstrahlung zu reduzieren, hängt von derÜbertragungsimpedanz (ZT) ab. Die Abschirmung vonKabeln ist normalerweise darauf ausgelegt, dieÜbertragung elektrischer Störungen zu mindern, wobeiallerdings Abschirmungen mit niedrigerem ZT wirksamersind als Abschirmungen mit höherer Übertragungsim-pedanz ZT.
Die Übertragungsimpedanz (ZT) wird von den Kabelhers-tellern selten angegeben. Durch Sichtprüfung undBeurteilung der mechanischen Eigenschaften des Kabelslässt sich die Übertragungsimpedanz jedoch einigermaßenabschätzen.
Sie können die Übertragungsimpedanz (ZT) aufgrundfolgender Faktoren beurteilen:
- Leitfähigkeit des Abschirmmaterials
- Kontaktwiderstand zwischen den Leitern desAbschirmmaterials
- Schirmabdeckung, d. h., die physische Fläche desKabels, die durch den Schirm abgedeckt ist; wirdhäufig in Prozent angegeben
- Art der Abschirmung (geflochten oder verdrillt)
a. Aluminium-Ummantelung mit Kupferdraht
b. Gewundener Kupferdraht oder bewehrtesStahldrahtkabel
c. Einlagiges Kupferdrahtgeflecht mit prozentualschwankender SchirmabdeckungDanfoss-Mindestanforderung.
d. Zweilagiges Kupferdrahtgeflecht
e. Zweilagiges Kupferdrahtgeflecht mit magnet-ischer, abgeschirmter Zwischenlage
f. In Kupfer- oder Stahlrohr geführtes Kabel
g. Bleikabel mit 1,1 mm Wandstärke
Abbildung 2.12
2.5.3 Erdung abgeschirmter Steuerkabel
Richtige AbschirmungDie bevorzugte Methode zur Abschirmung ist in denmeisten Fällen die beidseitige Befestigung von Steuer- undseriellen Schnittstellenkabeln mit Schirmbügeln, ummöglichst großflächigen Kontakt von Hochfrequenzkabelnzu erreichen. Wenn das Massepotenzial zwischen Frequen-zumrichter und SPS abweicht, können elektrischeStörungen des gesamten Systems auftreten. Schaffen SieAbhilfe durch das Anbringen eines Potenzialausgleichs-kabels neben der Steuerleitung. Mindestkabelquerschnitt:16 mm2.
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
16 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
22

12
PE
FC
PE
PLC
130B
B922
.11
PE PE
Abbildung 2.13
1 Min. 16 mm2
2 Potenzialausgleichskabel
Tabelle 2.6
50/60-Hz-BrummschleifenBei sehr langen Steuerleitungen können Brummschleifenauftreten. Beheben Sie dieses Problem durch Anschlusseines Schirmendes an Erde über einen 100-nF-Kondensator(mit möglichst kurzen Leitungen).
100nF
FC
PEPE
PLC
130B
B609
.11
Abbildung 2.14
Vermeidung von EMV-Störungen auf der seriellenKommunikationDiese Klemme ist über die interne RC-Verbindung an dieErdung angeschlossen. Verwenden Sie Twisted-Pair-Kabelzur Reduzierung von Störungen zwischen Leitern. Dieempfohlene Methode ist unten dargestellt:
PE
FC
PE
FC
130B
B923
.11
PE PE
696861
696861
12
Abbildung 2.15
1 Min. 16 mm2
2 Potenzialausgleichskabel
Tabelle 2.7
Alternativ können Sie die Verbindung zu Klemme 61 lösen:
PE
FC
PE
FC
130B
B924
.11
PE PE
69696868
12
Abbildung 2.16
1 Min. 16 mm2
2 Potenzialausgleichskabel
Tabelle 2.8
2.5.4 Steuerklemmentypen
2.5.6 Steuerklemmenfunktionen fasst Klemmenfunktionenund Werkseinstellungen zusammen.
1
4
2
3
130B
A01
2.11
6168
69
3942
5053
5455
1213
1819
2729
3233
2037
Abbildung 2.17 Lage der Steuerklemmen
• Anschluss 1 stellt vier programmierbare Digital-eingangsklemmen, zwei zusätzliche digitaleKlemmen, die entweder als Eingang oderAusgang programmiert werden können, eine 24 VDC-Klemmen-Versorgungsspannung und einen
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 17
2 2

Bezugspotenzialausgang für eine optionale, vomKunden bereitgestellte 24-V DC-Spannung bereit
• Anschluss 2, Klemmen (+)68 und (-)69, sind füreine serielle RS485-Kommunikationsverbindungbestimmt
• Anschluss 3 stellt zwei Analogeingänge, einenAnalogausgang, 10-V DC-Versorgungsspannungund „Common“-Anschlüsse für die Ein- undAusgänge bereit
• Anschluss 4 ist ein USB-Anschluss zurVerwendung mit der MCT 10 Software
• Der Frequenzumrichter stellt ebenfalls zwei Form-C-Relaisausgänge bereit, die sich je nachKonfiguration und Größe des Frequenzumrichtersan verschiedenen Positionen befinden
• Einige Optionsmodule, die zur Bestellung mitdem Gerät verfügbar sind, stellen ggf. weitereKlemmen bereit. Näheres finden Sie im Handbuchder Geräteoption.
2.5.5 Verdrahtung der Steuerklemmen
Sie können Klemmenstecker zum einfachen Zugriffentfernen.
130B
T306
.10
Abbildung 2.18
2.5.6 Steuerklemmenfunktionen
Der Frequenzumrichter führt bestimmte Funktionen aus,wenn er die entsprechenden Steuereingangssignaleempfängt.
• Programmieren Sie jede Klemme für ihrejeweilige Funktion in den Parametern, die mitdieser Klemme verknüpft sind. 5 Programmierenund 6 Anwendungsbeispiele zeigt Klemmen undzugehörige Parameter.
• Es ist wichtig, dass die Steuerklemme für diegewünschte Funktion richtig programmiert ist.Weitere Informationen zum Zugriff auf Parameterfinden Sie in 5 Programmieren.
• Die Programmierung der Klemmen in ihrerWerkseinstellung ist dazu bestimmt, die Funktion
des Frequenzumrichters in einer typischenBetriebsart zu starten.
2.6 Serielle Kommunikation
RS485 ist eine zweiadrige Busschnittstelle, die mit einerMultidrop-Netzwerktopologie kompatibel ist, d. h.Teilnehmer können als Bus oder über Abzweigkabel übereine gemeinsame Leitung verbunden werden. Insgesamtkönnen 32 Teilnehmer mit einem Netzwerksegmentverbunden werden.Netzwerksegmente sind durch Busverstärker (Repeater)unterteilt. Jeder Repeater wirkt als Teilnehmer in demSegment, in dem er installiert ist. Jeder mit einemNetzwerk verbundene Teilnehmer muss über alleSegmente hinweg eine einheitliche Teilnehmeradresseaufweisen.Schließen Sie die Segmente an beiden Endpunkten ab –entweder mit Hilfe des Terminierungsschalters (S801) desFrequenzumrichters oder mit einem Widerstandsnetzwerk.Verwenden Sie stets ein STP-Kabel (Screened Twisted Pair)für die Busverkabelung, und beachten Sie stets diebewährten Installationsverfahren.Eine Erdung der Abschirmung mit geringer Impedanz anallen Knoten ist wichtig, auch bei hohen Frequenzen.Schließen Sie daher die Abschirmung großflächig an Massean, z. B. mit einer Kabelschelle oder einer leitfähigenKabelverschraubung. Ein unterschiedliches Erdpotenzialzwischen Geräten kann durch Anbringen einesAusgleichskabel gelöst werden, das parallel zumSteuerkabel verlegt wird, vor allem in Anlagen mit großenKabellängen.Um eine nicht übereinstimmende Impedanz zu verhindern,müssen Sie im gesamten Netzwerk immer den gleichenKabeltyp verwenden. Beim Anschluss eines Motors an denFrequenzumrichter ist immer ein abgeschirmtesMotorkabel zu verwenden.
Kabel Screened Twisted Pair (STP)
Impedanz 120 ΩMax. Kabellänge 1200 m (einschließlich Abzweigleitungen)
500 m zwischen Stationen
Tabelle 2.9
Installation VLT® AQUA Drive (D-Rahmen)Produkthandbuch
18 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
22

3 Inbetriebnahme
3.1 Voraussetzungen
VORSICHTPrüfen Sie vor Anlegen der Netzspannung an den Frequen-zumrichter die gesamte Anlage, wie in Tabelle 3.1beschrieben. Markieren Sie die geprüften Punkteanschließend mit einem Haken.
Prüfpunkt Beschreibung Zusatzeinrichtungen • Erfassen Sie Zusatzeinrichtungen, Zubehör, Schalter, Trenner oder Netzsicherungen bzw.
Hauptschalter, die netz- oder motorseitig angeschlossen sein können. Stellen Sie sicher, dassdiese für einen Berieb bei voller Drehzahl bereit sind.
• Prüfen Sie den Zustand und die Funktion von Sensoren, die Istwertsignale zum Frequenzum-richter senden.
• Entfernen Sie die Kondensatoren zur Korrektur des Leistungsfaktors am Motor, falls vorhanden.
Kabelführung • Verlegen Sie Netzkabel, Motorkabel und Steuerkabel in drei getrennten Kabelkanälen (zumSchutz vor Hochfrequenzstörgeräuschen).
Steuerleitungen • Prüfen Sie, ob Kabel gebrochen oder beschädigt sind und ob lose Verbindungen vorliegen.
• Stellen Sie zur Gewährleistung der Störfestigkeit sicher, dass Steuerleitungen getrennt von Netz-und Motorkabeln verlaufen.
• Prüfen Sie den Stellbereich der Signale.
• Danfoss empfiehlt die Verwendung von abgeschirmten Kabeln oder Twisted-Pair-Kabeln. StellenSie sicher, dass die Abschirmung richtig abgeschlossen ist.
Luftzirkulation • Messen Sie, ob für eine ausreichende Luftzirkulation entsprechende Freiräume über und unterdem Frequenzumrichter vorhanden sind. Die Werte finden Sie weiter vorne in diesemHandbuch.
EMV-Aspekte • Prüfen Sie auf EMV-gerechte Installation.
Umgebungsbedin-gungen
• Beachten Sie die Grenzwerte der maximalen Umgebungs- und Betriebstemperatur auf demTypenschild.
• Die relative Luftfeuchtigkeit muss zwischen 5 und 95 % ohne Kondensatbildung liegen.
Sicherungen undTrennschalter
• Stellen Sie sicher, dass die richtigen Sicherungen oder Trennschalter eingebaut sind.
• Prüfen Sie, dass alle Sicherungen fest eingesetzt und in einem betriebsfähigen Zustand sowiealle Trennschalter geöffnet sind.
(Erdung) • Stellen Sie sicher, dass ein Erdleiter zwischen dem Filter und der Gebäudeerdung angeschlossenist.
• Prüfen Sie, dass die Anlage eine Erdverbindung besitzt und die Kontakte fest angezogen sindund keine Oxidation aufweisen.
• Eine Erdung an Kabelkanälen oder eine Montage der Rückwand an einer Metallfläche stellenkeine ausreichende Erdung dar.
Netz- und Motorkabel • Prüfen Sie, dass alle Kontakte fest angeschlossen sind.
• Stellen Sie sicher, dass Motor- und Netzkabel in getrennten Kabelkanälen verlegt sind oderverwenden Sie getrennte abgeschirmte Kabel.
Gehäuseinneres • Stellen Sie sicher, dass das Innere des Frequenzumrichters frei von Schmutz, Metallspänen,Feuchtigkeit und Korrosion ist.
Inbetriebnahme VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 19
3 3

Prüfpunkt Beschreibung Schalter • Stellen Sie sicher, dass alle Schalter und Trennschalter in der richtigen Schaltposition sind.
Vibrationen • Stellen Sie sicher, dass der Frequenzumrichter je nach Anforderung stabil montiert ist oderSchwingungsdämpfer verwendet werden.
• Prüfen Sie, ob übermäßige Vibrationen vorhanden sind.
Tabelle 3.1 Checkliste vor der Inbetriebnahme
3.2 Stromversorgung des Frequenzumrichters
WARNUNGHOCHSPANNUNG!Bei Anschluss an die Netzspannung führen Frequenzum-richter Hochspannung. Nur qualifiziertes Fachpersonal darfInstallation, Inbetriebnahme und Wartung vornehmen.Erfolgt Installation, Inbetriebnahme und Wartung nichtdurch qualifiziertes Personal, kann dies Tod oder schwereVerletzungen zur Folge haben.
WARNUNGUNERWARTETER ANLAUF!Bei Anschluss des Frequenzumrichters an das Netz kannder angeschlossene Motor jederzeit unerwartet anlaufen.Der Frequenzumrichter, Motor und alle angetriebenenGeräte müssen daher betriebsbereit sein. Andernfallskönnen Tod, schwere Verletzungen, Geräte- oderSachschäden auftreten.
1. Stellen Sie sicher, dass die Abweichung in derSpannungssymmetrie höchstens ±3 % beträgt. Istdies nicht der Fall, so korrigieren Sie dieUnsymmetrie der Eingangsspannung, bevor Siefortfahren. Wiederholen Sie das Verfahren nachder Spannungskorrektur.
2. Stellen Sie sicher, dass die Verkabelung optionalerAusrüstung, sofern vorhanden, dem Zweck derAnlage entspricht.
3. Stellen Sie sicher, dass alle Bedienvorrichtungenauf AUS stehen. Die Gehäusetüren müssengeschlossen bzw. die Abdeckung muss montiertsein.
4. Legen Sie die Netzversorgung am Frequenzum-richter an, starten Sie ihn aber jetzt noch NICHT.Stellen Sie bei Frequenzumrichtern mitTrennschaltern diese auf EIN, um die Netzver-sorgung am Frequenzumrichter anzulegen.
HINWEISFalls die Statuszeile unten am LCP AUTO FERN FREILAUFanzeigt, bedeutet dies, dass das Gerät zwar betriebsbereitist, aber kein Eingangssignal an Klemme 27 anliegt.
3.3 Grundlegende Programmierung
Für eine optimale Leistung ist eine grundlegende Program-mierung des Frequenzumrichters vor dem eigentlichenBetrieb erforderlich. Hierzu geben Sie die Typenschilddatendes betriebenen Motors sowie die minimale und maximaleMotordrehzahl ein. Geben Sie die Daten wie nachstehendbeschrieben ein. Die empfohlenen Parametereinstellungensind lediglich für die Inbetriebnahme und eine ersteFunktionsprüfung bestimmt. Anwendungseinstellungenkönnen abweichen. Eine genaue Anleitung zur Eingabevon Daten über das LCP finden Sie in 4.1 LCP Bedien-einheit .
Geben Sie die Daten ein, während die Netzspannung amFrequenzumrichter EIN, jedoch noch keine Funktion desFrequenzumrichters aktiviert ist.
1. Drücken Sie zweimal auf die Taste [Main Menu]am LCP.
2. Navigieren Sie mit den Navigationstasten zuParametergruppe 0-** Betrieb/Display unddrücken Sie auf [OK].
130B
P066
.10
1107 UPM
0 - ** Betrieb/Display
1 - ** Motor/Last
2 - ** Bremsfunktionen
3 - ** Sollwert/Rampen
3,84 A 1 (1)
Hauptmenü
Abbildung 3.1
Inbetriebnahme VLT® AQUA Drive (D-Rahmen)Produkthandbuch
20 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
33

3. Navigieren Sie mit den Navigationstasten zuParametergruppe 0-0* Grundeinstellungen unddrücken Sie auf [OK].
0-**Operation / Display0.0%
0-0* Basic Settings
0-1* Set-up Opperations
0-2* LCP Display
0-3* LCP Custom Readout
0.00A 1(1)
130B
P087
.10
Abbildung 3.2
4. Navigieren Sie mit den Navigationstasten zu0-03 Ländereinstellungen und drücken Sie auf[OK].
0-0*Basic Settings0.0%
0-03 Regional Settings
[0] International
0.00A 1(1)
130B
P088
.10
Abbildung 3.3
5. Wählen Sie mithilfe der Navigationstasten diezutreffende Option International oderNordamerika und drücken Sie auf [OK]. (Diesändert die Werkseinstellungen für eine Reihe vongrundlegenden Parametern. 5.5 Parameterme-nüaufbau enthält eine vollständige Liste.)
6. Drücken Sie auf [Quick Menu] am LCP.
7. Navigieren Sie mit den Navigationstasten zuParametergruppe Q2 Inbetriebnahme-Menü unddrücken Sie auf [OK].
130B
B847
.10
Q1 My Personal Menu
Q2 Quick Setup
Q5 Changes Made
Q6 Loggings
13.7% 13.0A 1(1)
Quick Menus
Abbildung 3.4
8. Wählen Sie die Sprache und drücken Sie auf [OK].Geben Sie dann die Motordaten in Parametern1-20/1-21 bis 1-25 ein. Die entsprechendenAngaben finden Sie auf dem Motor-Typenschild.
1-20 Motornennleistung [kW] oder1-21 Motornennleistung [PS]
1-22 Motornennspannung
1-23 Motornennfrequenz
1-24 Motornennstrom
1-25 Motornenndrehzahl
130B
T772
.10
Q2
0.0 Hz 0.00kW 1(1)
Motor Setup
1 - 21 Motor Power [kW]
4.0 kW
Abbildung 3.5
9. Zwischen den Steuerklemmen 12 und 27 musseine Drahtbrücke angebracht sein. Lassen Sie indiesem Fall bei 5-12 Klemme 27 Digitaleingang dieWerkseinstellung unverändert. Wählen Sieandernfalls Keine Funktion. Bei Frequenzum-richtern mit einer optionalen Danfoss-Überbrückung benötigen Sie keine Drahtbrücke.
10. 3-02 Minimaler Sollwert
11. 3-03 Max. Sollwert
12. 3-41 Rampenzeit Auf 1
13. 3-42 Rampenzeit Ab 1
14. 3-13 Sollwertvorgabe. Verknüpft mit Hand/Auto*Ort Fern.
Damit ist die Kurzinbetriebnahme abgeschlossen. DrückenSie auf [Status], um zur Betriebsanzeige zurückzukehren.
Inbetriebnahme VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 21
3 3

3.4 Prüfung der Handsteuerung vor Ort
VORSICHTSTARTEN DES MOTORS!Sorgen Sie dafür, dass der Motor, das System und alleangeschlossenen Geräte startbereit sind. Es obliegt demBenutzer, einen sicheren Betrieb unter allen Bedingungensicherzustellen. Ist nicht sichergestellt, dass der Motor, dasSystem und alle angeschlossenen Geräte startbereit sind,können Personen- oder Geräteschäden auftreten.
HINWEISDie [Hand on]-Taste legt einen Handstart-Befehl amFrequenzumrichter an. Die [Off]-Taste dient zum Stoppendes Frequenzumrichters.Beim Betrieb im Ortbetrieb erhöhen und verringern diePfeile [] und [] den Drehzahlausgang des Frequenzum-richters. [] und [] bewegen den Displaycursor in derZahlenanzeige.
1. Drücken Sie [Hand on].
2. Beschleunigen Sie den Frequenzumrichter durchDrücken von [] auf volle Drehzahl. EineBewegung des Cursors links vom Dezimalpunktführt zu schnelleren Änderungen des Eingangs.
3. Achten Sie darauf, ob Beschleunigungsproblemeauftreten.
4. Drücken Sie auf [Off].
5. Achten Sie darauf, ob Verzögerungsproblemeauftreten.
Bei Beschleunigungsproblemen:
• Informationen zu Warn- oder Alarmmeldungenfinden Sie unter 8 Warnungen und Alarmmel-dungen.
• Stellen Sie sicher, dass Sie die Motordaten korrekteingegeben haben.
• Erhöhen Sie die Rampenzeit Auf in3-41 Rampenzeit Auf 1.
• Erhöhen Sie die Stromgrenze in 4-18 Stromgrenze.
• Erhöhen Sie die Drehmomentgrenze in4-16 Momentengrenze motorisch.
Bei Verzögerungsproblemen:
• Informationen zu Warn- oder Alarmmeldungenfinden Sie unter .
• Stellen Sie sicher, dass Sie die Motordaten korrekteingegeben haben.
• Erhöhen Sie die Rampenzeit Ab in3-42 Rampenzeit Ab 1.
• Aktivieren Sie die Überspannungssteuerung in2-17 Überspannungssteuerung.
HINWEISDer OVC-Algorithmus funktioniert bei Verwendung vonPM-Motoren nicht.
Informationen zum Quittieren des Frequenzumrichtersnach einer Abschaltung finden Sie unter 4.1.1 LCP Bedien-einheit .
HINWEISDie Abschnitte 3.2 Stromversorgung des Frequenzumrichtersbis 3.3 Grundlegende Programmierung in diesem Kapitelbeschreiben die Verfahren zum Anlegen der Netzspannungam Frequenzumrichter, grundlegende Programmierung,Konfiguration und Funktionsprüfung.
3.5 Systemstart
Vor der Durchführung der in diesem Abschnittbeschriebenen Inbetriebnahme müssen Verdrahtung derAnwendung und Anwendungsprogrammierungabgeschlossen sein. Nähere Informationen zurAnwendungskonfiguration siehe 6 Anwendungsbeispiele.Das folgende Verfahren wird nach erfolgter Anwendungs-konfiguration durch den Benutzer empfohlen.
VORSICHTSTARTEN DES MOTORS!Sorgen Sie dafür, dass der Motor, das System und alleangeschlossenen Geräte startbereit sind. Es obliegt demBenutzer, einen sicheren Betrieb unter allen Bedingungensicherzustellen. Nichtbeachten kann zu Verletzungen vonPersonen sowie Schäden am Gerät führen.
1. Drücken Sie auf [Auto on].
2. Vergewissern Sie sich, dass die externen Steuer-ungsfunktionen richtig an den Frequenzumrichterangeschlossen sind und die Programmierungabgeschlossen ist.
3. Legen Sie einen externen Startbefehl an.
4. Stellen Sie den Drehzahlsollwert über denDrehzahlbereich ein.
5. Entfernen Sie den externen Startbefehl.
6. Notieren Sie eventuelle Probleme.
Informationen zu Warn- oder Alarmmeldungen finden Sieunter 8 Warnungen und Alarmmeldungen.
Inbetriebnahme VLT® AQUA Drive (D-Rahmen)Produkthandbuch
22 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
33

4 Benutzerschnittstelle
4.1 LCP Bedieneinheit
Die LCP Bedieneinheit ist die Displayeinheit mitintegriertem Tastenfeld an der Vorderseite des Geräts. DasLCP ist die Benutzerschnittstelle des Frequenzumrichters.
Das LCP verfügt über verschiedene Funktionen fürBenutzer.
• Start, Stopp und Regelung der Drehzahl beiHand-Steuerung
• Anzeige von Betriebsdaten, Zustand, Warn- undAlarmmeldungen
• Programmierung von Funktionen des Frequen-zumrichters
• Quittieren Sie den Frequenzumrichter nach einemFehler manuell, wenn automatisches Quittiereninaktiv ist.
Als Option ist ebenfalls ein numerisches LCP (LCP 101)erhältlich. Das LCP 101 funktioniert ähnlich zum grafischenLCP 102. Angaben zur Bedienung des LCP 101 finden Sieim VLT® Programmierungshandbuch, MG33MXYY.
4.1.1 Aufbau des LCP
Das LCP ist in vier Funktionsbereiche unterteilt (sieheAbbildung 4.1).
Autoon ResetHand
onO
StatusQuickMenu
MainMenu
AlarmLog
Cancel
Info
Status 1(1)1234rpm
Back
OK
43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130B
C362
.10
a
b
c
d
1.0 A
Abbildung 4.1 LCP
a. Displaybereich.
b. Menütasten zur Änderung der Zustandsanzeige,zum Programmieren oder zum Zugriff auf denAlarm- und Fehlerspeicher.
c. Navigationstasten zur Programmierung vonFunktionen, Bewegen des Cursors und Drehzahl-regelung bei Hand-Steuerung. Hier befinden sichauch Kontrollanzeigen zur Anzeige des Zustands.
d. Tasten zur Wahl der Betriebsart und zumQuittieren (Reset).
Benutzerschnittstelle VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 23
4 4

4.1.2 Einstellen von Displaywerten des LCP
Das Display ist aktiviert, wenn Netzspannung, eine DC-Zwischenkreisklemme oder eine externe 24-V-Stromversorgung den Frequenzumrichter mit Spannungversorgen.
Sie können die am LCP angezeigten Informationen für diejeweilige Anwendung anpassen.
• Mit jeder Displayanzeige ist ein Parameterverknüpft.
• Wählen Sie die Optionen im Quick-Menü Q3-13Displayeinstellungen.
• Display 2 hat eine alternative, größere Display-option.
• Der Zustand des Frequenzumrichters in derunteren Zeile des Displays wird automatischabgerufen und ist nicht wählbar.
Display Parameternummer Werkseinstellung
1.1 0-20 Motordrehzahl
1.2 0-21 Motorstrom
1.3 0-22 Motornennleistung(kW)
2 0-23 Motornennfrequenz
3 0-24 Sollwert in Prozent
Tabelle 4.1
1.1
2
3 1.3
1.2
130B
P041
.10
799 UPM
Auto-Fern-Rampe
1 (1)36,4 kW7,83 A
0,000
53,2 %
Status
Abbildung 4.2
1.1
1.2
2
1.3
130B
P062
.10
207 UPM
Auto-Fern-Betrieb
1 (1)
24,4 kW5,25 A
6,9 Hz
Status
Abbildung 4.3
4.1.3 am Display
Mit den Menütasten greifen Sie auf verschiedene Menüszur Parametereinstellung zu, schalten zwischenverschiedenen Displayanzeigen während des normalenBetriebs um und zeigen Daten aus dem Alarm- und Fehler-speicher an.
130B
P045
.10
Status QuickMenu
MainMenu
AlarmLog
Abbildung 4.4
Taste FunktionStatus Diese Taste zeigt Betriebsinformationen an.
• Halten Sie die Taste im Autobetriebgedrückt, um zwischen den Zustandsan-zeigen umzuschalten.
• Drücken Sie die Taste mehrmals, umzwischen den Zustandsanzeigen durchzu-blättern.
• Halten Sie [Status] gedrückt und drücken Sie
gleichzeitig auf [] oder [], um die
Helligkeit des Displays anzupassen.
• Das Symbol oben rechts im Display zeigt dieMotordrehrichtung und den aktiven Parame-tersatz. Dies ist nicht programmierbar.
Quick-Menü Dieses Menü bietet schnellen Zugang zuParametern zur Programmierung für die ersteInbetriebnahme und zu vielen detailliertenAnwendungshinweisen.
• Drücken Sie die Taste, um auf Q2Inbetriebnahme-Menü zuzugreifen; diesesMenü enthält alle notwendigen Parameterund Anweisungen zur grundlegendenProgrammierung des Frequenzumrichters.
• Gehen Sie die Parameter in der gezeigtenReihenfolge durch, um die wichtigstenFunktionen einzurichten.
Main Menu Dient zum Zugriff auf alle Parameter.
• Drücken Sie die Taste zweimal, um zurnächsthöheren Menüebene zu gelangen.
• Drücken Sie die Taste einmal, um zumzuletzt aufgerufenen Menü oder Parameterzurückzukehren.
• Halten Sie die Taste gedrückt, um eineParameternummer zum direkten Zugriff aufdiesen Parameter einzugeben.
Benutzerschnittstelle VLT® AQUA Drive (D-Rahmen)Produkthandbuch
24 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
44

Taste FunktionAlarm Log Zeigt eine Liste aktueller Warnungen, der
letzten 10 Alarme und den Wartungsspeicher.
• Einzelheiten zum Zustand des Frequenzum-richters vor dem Auftreten desAlarmzustands sehen Sie, wenn Sie dieAlarmnummer mit den Navigationstastenauswählen und auf [OK] drücken.
Tabelle 4.2
4.1.4 Navigationstasten
Die Navigationstasten dienen zum Navigieren durch dieProgrammierfunktionen und zum Bewegen des Display-cursors. Die Navigationstasten ermöglichen zudem eineDrehzahlregelung im Handbetrieb (Ortsteuerung). Indiesem Bereich befinden sich darüber hinaus die dreiKontrollanzeigen (LED) zur Anzeige des Zustands.
130B
T117
.10
OK
Back
Info
Warm
Alarm
On
Cancel
Abbildung 4.5
Taste Funktion
Back Bringt Sie zum vorherigen Schritt oder zurvorherigen Liste in der Menüstruktur zurück.
Cancel Macht die letzte Änderung oder den letzten Befehlrückgängig, so lange der Anzeigemodus bzw. dieDisplayanzeige nicht geändert worden ist.
Info Zeigt Informationen zu einem Befehl, einemParameter oder einer Funktion im Anzeigefenster.
Navigations-tasten
Navigieren Sie mit Hilfe der vier Navigationspfeilezwischen den verschiedenen Optionen in denMenüs.
OK Nutzen Sie diese Taste, um auf Parametergruppenzuzugreifen oder die Wahl eines Parameters zubestätigen.
Tabelle 4.3
LED Anzeige Funktion
Grün ON Die ON-LED ist aktiv, wenn derFrequenzumrichter an dieNetzspannung, eine DC-Zwischen-kreisklemme oder eine externe 24-V-Versorgung angeschlossen ist.
Gelb WARN Die gelbe WARN-LED leuchtet,wenn eine Warnung auftritt. ImDisplay erscheint zusätzlich einText, der das Problem angibt.
Rot ALARM Die rote Alarm-LED blinkt beieinem Fehlerzustand. Im Displayerscheint zusätzlich ein Text, derden Alarm näher spezifiziert.
Tabelle 4.4
4.1.5 Tasten zur lokalen Bedienung
Tasten zur lokalen Bedienung und zur Wahl der Betriebsartbefinden sich unten an der Bedieneinheit.
130B
P046
.10
Handon O Auto
on Reset
Abbildung 4.6
Taste Funktion
Hand on Drücken Sie diese Taste, um den Frequenzum-richter im Handbetrieb (Ortsteuerung) zu starten.
• Mit den Navigationstasten können Sie dieDrehzahl des Frequenzumrichters regeln.
• Ein externes Stoppsignal über Steuersignaleoder serielle Kommunikation hebt denHandbetrieb auf.
Off Stoppt den angeschlossenen Motor, schaltetjedoch nicht die Spannungsversorgung zumFrequenzumrichter ab.
Auto on Diese Taste versetzt das System in denFernbetrieb (Autobetrieb).
• Sie reagiert auf einen externen Startbefehlüber Steuerklemmen oder serielle Kommuni-kation.
• Der Drehzahlsollwert stammt von einerexternen Quelle.
Reset Dient dazu, den Frequenzumrichter nachBehebung eines Fehlers manuell zurückzusetzen.
Tabelle 4.5
Benutzerschnittstelle VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 25
4 4

4.2 Sichern und Kopieren vonParametereinstellungen
Programmierdaten speichert der Frequenzumrichter iminternen Speicher.
• Sie können die Daten zur Sicherung in denSpeicher des LCP übertragen.
• Nach dem Sichern im LCP können Sie die Datenauch wieder in den Frequenzumrichterübertragen.
• Zudem können Sie die Daten auch in andereFrequenzumrichter übertragen, indem Sie das LCPan diese Frequenzumrichter anschließen und diegespeicherten Einstellungen übertragen. (Solassen sich mehrere Frequenzumrichter schnellmit den gleichen Einstellungen programmieren.)
• Die Initialisierung des Frequenzumrichters zurWiederherstellung von Werkseinstellungen ändertdie im Speicher des LCP gespeicherten Datennicht.
WARNUNGUNERWARTETER ANLAUF!Bei Anschluss des Frequenzumrichters an das Netz kannder angeschlossene Motor jederzeit unerwartet anlaufen.Der Frequenzumrichter, Motor und alle angetriebenenGeräte müssen daher betriebsbereit sein. Andernfallskönnen Tod, schwere Verletzungen, Geräte- oderSachschäden auftreten.
4.2.1 Daten vom Frequenzumrichter zumLCP übertragen
1. Drücken Sie die [Off]-Taste, um den Motor zustoppen, bevor Sie Daten laden oder speichern.
2. Gehen Sie zu 0-50 LCP-Kopie.
3. Drücken Sie [OK].
4. Wählen Sie Speichern in LCP.
5. Drücken Sie [OK]. Sie können den Vorgang aneinem Statusbalken verfolgen.
6. Drücken Sie auf [Hand on] oder [Auto on], umzum Normalbetrieb zurückzukehren.
4.2.2 Daten vom LCP zumFrequenzumrichter übertragen
1. Drücken Sie die [Off]-Taste, um den Motor zustoppen, bevor Sie Daten laden oder speichern.
2. Gehen Sie zu 0-50 LCP-Kopie.
3. Drücken Sie [OK].
4. Wählen Sie Lade von LCP, Alle.
5. Drücken Sie [OK]. Sie können den Vorgang aneinem Statusbalken verfolgen.
6. Drücken Sie auf [Hand on] oder [Auto on], umzum Normalbetrieb zurückzukehren.
4.3 Wiederherstellen derWerkseinstellungen
VORSICHTDie Initialisierung stellt die Werkseinstellungen desFrequenzumrichters wieder her. Alle Daten zur Program-mierung, Motordaten, Lokalisierungsinformationen undÜberwachungsdatensätze gehen verloren. Durch Speichernder Daten im LCP können Sie diese vor der Initialisierungsichern.
Die Initialisierung des Frequenzumrichters stellt dieWerkseinstellungen der Parameter während derInbetriebnahme wieder her. Eine Initialisierung ist über14-22 Betriebsart oder manuell möglich.
• Die Initialisierung über 14-22 Betriebsart ändertkeine Daten des Frequenzumrichters wie Betriebs-stunden, über die serielle Schnittstelle gewählteOptionen, Einstellungen im Benutzer-Menü,Fehlerspeicher, Alarmspeicher und weitereÜberwachungsfunktionen.
• Generell wird die Verwendung von14-22 Betriebsart empfohlen.
• Eine manuelle Initialisierung löscht alle Daten zuMotor, Programmierung, Lokalisierung undÜberwachung und stellt die Werkseinstellungenwieder her.
4.3.1 Empfohlene Initialisierung
1. Drücken Sie zweimal auf [Main Menu], um aufParameter zuzugreifen.
2. Blättern Sie zu 14-22 Betriebsart.
3. Drücken Sie [OK].
4. Navigieren Sie zu Initialisierung.
5. Drücken Sie [OK].
6. Schalten Sie den Frequenzumrichterspannungslos und warten Sie, bis das Displayerlischt.
7. Legen Sie die Netzversorgung an den Frequen-zumrichter an.
Die Werkseinstellungen der Parameter werden währendder Inbetriebnahme wiederhergestellt. Dies kann etwaslänger dauern als normal.
Benutzerschnittstelle VLT® AQUA Drive (D-Rahmen)Produkthandbuch
26 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
44

8. Alarm 80 wird angezeigt.
9. Mit [Reset] kehren Sie zum normalen Betriebzurück.
4.3.2 Manuelle Initialisierung
1. Schalten Sie den Frequenzumrichterspannungslos und warten Sie, bis das Displayerlischt.
2. Drücken Sie gleichzeitig die Tasten [Status], [MainMenu] und [OK] und legen Sie die Netzspannungan den Frequenzumrichter an.
Die Initialisierung stellt die Werkseinstellungen derParameter während der Inbetriebnahme wieder her. Dieskann etwas länger dauern als normal.
Die manuelle Initialisierung setzt die folgenden Frequen-zumrichterinformationen nicht zurück:
• 15-00 Betriebsstunden
• 15-03 Anzahl Netz-Ein
• 15-04 Anzahl Übertemperaturen
• 15-05 Anzahl Überspannungen
Benutzerschnittstelle VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 27
4 4

5 Programmieren
5.1 Einführung
Parameter, die Sie entsprechend der Anwendung program-mieren können, bestimmen die Funktion desFrequenzumrichters in der Anwendung. Sie können auf dieParameter zugreifen, indem Sie entweder auf [Quick Menu](Quick-Menü) oder [Main Menu] (Hauptmenü) auf dem LCPdrücken. (Genaue Informationen zur Bedienung der Funkti-onstasten am LCP finden Sie unter 4.1 LCP Bedieneinheit .)Sie können auf die Parameter auch über einen PC mit Hilfeder MCT 10 Software (siehe 5.6.1 Fernprogrammierung mitMCT 10 Software) zugreifen.
Das Quick-Menü ist für die erste Inbetriebnahme (Q2-**Inbetriebnahme-Menü) bestimmt und enthält detaillierteAnweisungen zu gängigen Frequenzumrichteranwen-dungen (Q3-** Funktionssätze). Es enthält auch Schritt-für-Schritt-Anweisungen. Mit diesen Anweisungen können Siedie Parameter, die Sie zur Programmierung vonAnwendungen benötigen, in der richtigen Reihenfolgedurchgehen. In einem Parameter eingegebene Datenkönnen die in anderen Parametern verfügbaren Optionenändern. Das Quick-Menü bietet eine einfache Hilfestellung,mit der sich die meisten Systeme programmieren lassen.
Das Hauptmenü greift auf alle Parameter zu undermöglicht die Programmierung des Frequenzumrichtersfür erweiterte Anwendungen.
5.2 Beispiel für die Programmierung
Hier sehen Sie ein Beispiel für die Programmierung desFrequenzumrichters für eine gängige Anwendung mitRegelung ohne Rückführung über das Quick-Menü.
• Mit diesem Verfahren programmieren Sie denFrequenzumrichter für den Empfang einesanalogen 0-10-V-DC-Steuersignals an derEingangsklemme 53.
• Der Frequenzumrichter reagiert, indem er einen6-50-Hz-Ausgang proportional zum Eingangs-signal an den Motor sendet (0-10 V DC = 6-50Hz).
Dies ist eine gängige Pumpen- oder Lüfteranwendung.
Drücken Sie auf [Quick Menu] und wählen Sie diefolgenden Parameter, indem Sie mit Hilfe der Navigations-tasten zu den Bezeichnungen navigieren und nach jedemSchritt auf [OK] drücken.
1. Q3 Funktionssätze
2. Parameterdatensatz
130B
T112
.10
Q1 Benutzer-Menü
Q2 Inbetriebnahme-Menü
Q3 Funktionssätze
Q5 Liste geänderte Par.
69,3 % 5,20 A 1(1)
Quick-Menüs
Abbildung 5.1
3. Q3-2 Einst. Drehz. o. Rückf.
Q3
130B
T760
.10
Q3-1 General Settings
Q3-2 Open Loop Settings
Q3-3 Closed Loop Settings
Q3-4 Application Settings
28.4% 2.05A 1(1)
Function Setups
Abbildung 5.2
4. Q3-21 Analogsollwert
Q3-2
130B
T761
.10
Q3-20 Digital Reference
Q3-21 Analog Reference
14.7% 0.00A 1(1)
Open Loop Settings
Abbildung 5.3
5. 3-02 Minimaler Sollwert. Programmieren Sie denminimalen internen Frequenzumrichtersollwertauf 0 Hz. (Dies setzt die minimale Drehzahl desFrequenzumrichter auf 0 Hz.)
Q3-21
130B
T762
.10
3-02 Minimum Reference
0.000 Hz
14.7% 0.00A 1(1)
Analog Reference
Abbildung 5.4
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
28 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
55

6. 3-03 Max. Sollwert. Programmieren Sie denmaximalen internen Frequenzumrichtersollwertauf 50 Hz. (Dies setzt die maximale Drehzahl desFrequenzumrichters auf 50 Hz. Beachten Sie, dass50/60 Hz durch die Ländereinstellung bestimmtwird.)
Q3-21
130B
T763
.11
3-03 Maximum Reference
50.000 Hz
14.7% 0.00A 1(1)
Analog Reference
Abbildung 5.5
7. 6-10 Klemme 53 Skal. Min.Spannung. Stellen Sieden minimalen Sollwert für die externe Spannungan Klemme 53 auf 0 V ein. (Dies legt alsminimales Eingangssignal 0 V fest.)
Q3-21
130B
T764
.10
6-10 Terminal 53 Low
Voltage
0.00 V
14.7% 0.00A 1(1)
Analog Reference
Abbildung 5.6
8. 6-11 Klemme 53 Skal. Max.Spannung. Program-mieren Sie den maximalen externenSpannungssollwert an Klemme 53 auf 10 V. (Dieslegt als maximales Eingangssignal 10 V fest.)
Q3-21
130B
T765
.10
6-11 Terminal 53 High
Voltage
10.00 V
14.7% 0.00A 1(1)
Analog Reference
Abbildung 5.7
9. 6-14 Klemme 53 Skal. Min.-Soll/Istwert. Program-mieren Sie den minimalen Drehzahlsollwert anKlemme 53 auf 20 Hz. (Dies gibt dem Frequen-zumrichter die Information, dass die an Klemme53 (0 V) empfangene minimale Spannung einemAusgangssignal von 20 Hz entspricht.)
130B
T773
.11
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 14 Terminal 53 Low Ref./Feedb. Value
000020.000
Abbildung 5.8
10. 6-15 Klemme 53 Skal. Max.-Soll/Istwert. Program-mieren Sie den maximalen Drehzahlsollwert anKlemme 53 auf 50 Hz. (Die gibt dem Frequen-zumrichter die Information, dass die an Klemme53 (10 V) empfangene maximale Spannung einemAusgangssignal von 50 Hz entspricht.)
130B
T774
.11
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 15 Terminal 53 High Ref./Feedb. Value
50.000
Abbildung 5.9
Wenn Sie jetzt ein externes Gerät, das ein 0-10-V-Steuer-signal sendet, an Klemme 53 des Frequenzumrichtersanschließen, ist das System betriebsbereit. Sie könnensehen, dass sich die Bildlaufleiste rechts in der letztenAbbildung des Displays ganz unten befindet. Dies zeigt an,dass das Verfahren abgeschlossen ist.
Abbildung 5.10 zeigt das Anschlussbild dieses Aufbaus.
53
55
6-1* +
A53
U - I
130B
B482
.10
0-10V
Abbildung 5.10 Anschlussbeispiel für ein externes Gerät, das ein0-10-V-Steuersignal sendet
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 29
5 5

5.3 Beispiele zur Programmierung derSteuerklemmen
Sie können Steuerklemmen programmieren.
• Jede Klemme hat vorgegebene Funktionen, diesie ausführen kann.
• Mit der Klemme verknüpfte Parameter aktivierendie jeweilige Funktion.
• Für eine einwandfreie Funktion des Frequenzum-richters müssen Sie die Steuerklemmen
korrekt verdrahten
für die gewünschte Funktion program-mieren
mit einem Signal verbinden
Die Parameternummern und Werkseinstellung für Steuer-klemmen finden Sie unter Tabelle 5.1. (Werkseinstellungenkönnen abhängig von der Auswahl in 0-03 Ländereinstel-lungen unterschiedlich sein.)
Im folgenden Beispiel wird der Zugriff auf Klemme 18 zurAnzeige der Werkseinstellung erläutert.
1. Drücken Sie zweimal [Main Menu] (Hauptmenü),blättern Sie zu Parametergruppe 5-** Digit. Ein-/Ausgänge und drücken Sie [OK].
130B
T768
.10
2-** Brakes
3-** Reference / Ramps
4-** Limits / Warnings
5-** Digital In/Out
14.6% 0.00A 1(1)
Main Menu
Abbildung 5.11
2. Blättern Sie zur Parametergruppe 5-1* Digita-leingänge und drücken Sie [OK].
130B
T769
.10
5-0* Digital I/O mode
5-1* Digital Inputs
5-4* Relays
5-5* Pulse Input
14.7% 0.00A 1(1)
Digital In/Out 5-**
Abbildung 5.12
3. Blättern Sie zu 5-10 Klemme 18 Digitaleingang.Drücken Sie [OK], um die Funktionsoptionenaufzurufen. Die Werkseinstellung Start wirdangezeigt.
5-1*
130B
T770
.10
5-10 Terminal 18 Digital
Input
[8]] Start
14.7% 0.00A 1(1)
Digital Inputs
Abbildung 5.13
5.4 Werkseinstellungen der Parameter(International/Nordamerika)
Die Einstellung von 0-03 Ländereinstellungen auf [0] Interna-tional oder [1] Nordamerika ändert die Werkseinstellungeneiniger Parameter. Tabelle 5.1 zeigt eine Liste der davonbetroffenen Parameter.
Parameter InternationaleWerkseinstellung
Nordamerika-nische
Werkseinstellung0-03 Ländereinstel-lungen
International Nord-Amerika
0-71 Datumsformat TT-MM-JJJJ MM/TT/JJJJ
0-72 Uhrzeitformat 24 h 12 h
1-20 Motornenn-leistung [kW]
Siehe Hinweis 1 Siehe Hinweis 1
1-21 Motornenn-leistung [HP]
Siehe Hinweis 2 Siehe Hinweis 2
1-22 Motornenn-spannung
230 V/400 V/575 V 208 V/460 V/575 V
1-23 Motorfrequenz 50 Hz 60 Hz
3-03 Max. Sollwert 50 Hz 60 Hz
3-04 Sollwert-Funktion
Addierend Externe Anwahl
4-13 Max. Drehzahl[UPM]Siehe Hinweis 3
1500 UPM 1800 UPM
4-14 Max Frequenz[Hz]Siehe Hinweis 4
50 Hz 60 Hz
4-19 Max.Ausgangsfrequenz
100 Hz 120 Hz
4-53 WarnungDrehz. hoch
1500 UPM 1800 UPM
5-12 Klemme 27Digitaleingang
Motorfreilauf (inv.) Externe Verriegelung
5-40 Relaisfunktion Alarm Kein Alarm
6-15 Klemme 53Skal. Max. Soll-/Istwert
50 60
6-50 Klemme 42Analogausgang
Drehzahl 0 -Max.Grenze
Drehzahl 4-20 mA
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
30 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
55

Parameter InternationaleWerkseinstellung
Nordamerika-nische
Werkseinstellung14-20 Quittier-funktion
Manuell Quittieren Unbegr. Auto. Quitt.
22-85 Drehzahl anAuslegungspunkt[UPM]Siehe Hinweis 3
1500 UPM 1800 UPM
22-86 Freq. amAuslegungspunkt[Hz]
50 Hz 60 Hz
24-04 Max. SollwertNotfallbetrieb
50 Hz 60 Hz
Tabelle 5.1 Werkseinstellungen der Parameter (International/Nordamerika)
5.5 Parametermenüaufbau
Um die richtige Programmierung für Anwendungen zuerhalten, müssen häufig Funktionen in mehrerenverwandten Parametern eingestellt werden. Diese Parame-tereinstellungen liefern dem Frequenzumrichter dieSystemdetails für den ordnungsgemäßen -Betrieb. Zu denSystemdetails gehören z. B. Eingangs- und Ausgangssig-naltypen, die Programmierung von Klemmen, minimaleund maximale Signalbereiche, benutzerdefinierte Displays,automatischer Wiederanlauf und andere Funktionen.
• Das LCP-Display zeigt detaillierte Optionen zurProgrammierung und Einstellung von Parameternan.
• Drücken Sie in einer beliebigen Menüoption auf[Info], um zusätzliche Informationen zu dieserFunktion anzuzeigen.
• Drücken Sie auf [Main Menu] und halten Sie dieTaste gedrückt, um eine Parameternummereinzugeben und diese direkt aufzurufen.
• 6 Anwendungsbeispiele enthält Einzelheiten zugängigen Anwendungseinstellungen.
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 31
5 5

5.5.
1H
aupt
men
üauf
bau
0-**
Betr
ieb/
Dis
play
0-0*
Gru
ndei
nste
llung
en0-
01Sp
rach
e0-
02H
z/U
PM U
msc
haltu
ng0-
03Lä
nder
eins
tellu
ngen
0-04
Net
z-Ei
n M
odus
0-05
Einh
eit
Han
d-Be
trie
b0-
1*Pa
ram
eter
sätz
e0-
10A
ktiv
er P
aram
eter
satz
0-11
Prog
ram
m-S
atz
0-12
Satz
ver
knüp
fen
mit
0-13
Anz
eige
: Ver
knüp
fte
Para
met
ersä
tze
0-14
Anz
eige
: Par
.sät
ze/K
anal
bea
rbei
ten
0-2*
LCP-
Dis
play
0-20
Dis
play
zeile
1.1
0-21
Dis
play
zeile
1.2
0-22
Dis
play
zeile
1.3
0-23
Dis
play
zeile
20-
24D
ispl
ayze
ile 3
0-25
Benu
tzer
-Men
ü0-
3*LC
P-Be
nutz
erde
f0-
30Fr
eie
Anz
eige
einh
eit
0-31
Frei
e A
nzei
ge M
in.-W
ert
0-32
Frei
e A
nzei
ge M
ax.-W
ert
0-37
Dis
play
text
10-
38D
ispl
ayte
xt 2
0-39
Dis
play
text
30-
4*LC
P-Ta
sten
0-40
[Han
d o
n]-L
CP T
aste
0-41
[Off]
-LCP
Tas
te0-
42[A
uto
on]
-LCP
Tas
te0-
43[R
eset
]-LCP
Tas
te0-
44[O
ff/Re
set]
-LCP
Tas
te0-
45[D
rive
Bypa
ss]-L
CP T
aste
0-5*
Kopi
e/Sp
eich
ern
0-50
LCP-
Kopi
e0-
51Pa
ram
eter
satz
kopi
e0-
6*Pa
ssw
ort
0-60
Hau
ptm
enü
Pas
swor
t0-
61H
aupt
men
ü Z
ugrif
f oh
ne P
W0-
65Be
nutz
er-M
enü-
Pass
wor
t0-
66Be
nutz
er-M
enü
Zug
riff
ohne
PW
0-7*
Uhr
eins
tellu
ng0-
70D
atum
und
Zei
t0-
71D
atum
sfor
mat
0-72
Zeitf
orm
at0-
74M
ESZ/
Som
mer
zeit
0-76
MES
Z/So
mm
erze
itsta
rt0-
77M
ESZ/
Som
mer
zeite
nde
0-79
Uhr
Feh
ler
0-81
Arb
eits
tage
0-82
Zusä
tzl.
Arb
eits
tage
0-83
Zusä
tzl.
Nic
htar
beits
tage
0-89
Anz
eige
Dat
um/U
hrze
it1-
**M
otor
/Las
t1-
0*G
rund
eins
tellu
ngen
1-00
Rege
lver
fahr
en1-
03D
rehm
omen
tver
halte
n d
er L
ast
1-06
Rech
tsla
uf1-
1*M
otor
ausw
ahl
1-10
Mot
orar
t1-
1*VV
C+ P
M1-
14D
ämpf
ungs
vers
tärk
ung
1-15
Filte
rzei
tkon
st. n
iedr
ige
Dre
hzah
l1-
16Fi
lterz
eitk
onst
. hoh
e D
rehz
ahl
1-17
Filte
rzei
tkon
st. S
pann
ung
1-2*
Mot
orda
ten
1-20
Mot
orne
nnle
istu
ng [k
W]
1-21
Mot
orne
nnle
istu
ng [H
P]1-
22M
otor
nenn
span
nung
1-23
Mot
orne
nnfr
eque
nz1-
24M
otor
nenn
stro
m1-
25M
otor
nenn
dreh
zahl
1-26
Dau
er-
Nen
ndre
hmom
ent
1-28
Mot
ordr
ehric
htun
gspr
üfun
g1-
29A
utom
. Mot
oran
pass
ung
1-3*
Erw
. Mot
orda
ten
1-30
Stat
orw
ider
stan
d (R
s)1-
31Ro
torw
ider
stan
d (R
r)1-
35H
aupt
reak
tanz
(Xh)
1-36
Eise
nver
lust
wid
erst
and
(Rfe
)1-
37D
-Ach
sen-
Indu
ktiv
ität
(Ld)
1-39
Mot
orpo
lzah
l1-
40G
egen
-EM
K b
ei 1
000
UPM
1-5*
Last
unab
h. E
inst
ellu
ng1-
50M
otor
mag
netis
ieru
ng b
ei 0
/min
1-51
Min
. Dre
hzah
l nor
m. M
agne
tis. [
UPM
]1-
52M
in. D
rehz
ahl n
orm
. Mag
netis
. [H
z]1-
58Fa
ngsc
haltu
ng T
estim
puls
e St
rom
1-59
Fang
scha
ltung
Tes
timpu
lse
Freq
uenz
1-6*
Last
abh.
Ein
stel
lung
1-60
Last
ausg
leic
h n
iedr
ige
Dre
hzah
l1-
61La
stau
sgle
ich
hoh
e D
rehz
ahl
1-62
Schl
upfa
usgl
eich
1-63
Schl
upfa
usgl
eich
Zei
tkon
stan
te1-
64Re
sona
nzdä
mpf
ung
1-65
Reso
nanz
däm
pfun
g Z
eitk
onst
ante
1-66
Min
. Str
om b
ei n
iedr
. Drz
.1-
7*St
artf
unkt
ion
1-70
PM-S
tart
mod
us1-
71St
artv
erzö
g.1-
72St
artf
unkt
ion
1-73
Mot
orfa
ngsc
haltu
ng1-
77Ve
rdic
hter
star
t M
ax. D
rehz
ahl [
UPM
]1-
78Ve
rdic
hter
star
t M
ax. F
requ
enz
[Hz]
1-79
Verd
icht
erst
art
Max
. Zei
t bi
s A
bsch
alt.
1-8*
Stop
pfun
ktio
n1-
80Fu
nktio
n b
ei S
topp
1-81
Ein.
-Dre
hzah
l für
Sto
ppfu
nktio
n [U
PM]
1-82
Min
. Dre
hzah
l für
Sto
ppfu
nktio
n [H
z]1-
86M
in. A
bsch
altd
rehz
ahl [
UPM
]1-
87M
in. A
bsch
altd
rehz
ahl [
Hz]
1-9*
Mot
orte
mpe
ratu
r1-
90Th
erm
isch
er M
otor
schu
tz1-
91Fr
emdb
elüf
tung
1-93
Ther
mis
torq
uelle
2-**
Brem
sfun
ktio
nen
2-0*
DC
Hal
t/D
C B
rem
se2-
00D
C-H
alte
-/Vo
rwär
mst
rom
2-01
DC-
Brem
sstr
om2-
02D
C-Br
emsz
eit
2-03
DC-
Brem
se E
in [U
PM]
2-04
DC-
Brem
se E
in [H
z]2-
06Pa
rkst
rom
2-07
Park
daue
r2-
1*G
ener
ator
. Bre
mse
n2-
10Br
emsf
unkt
ion
2-11
Brem
swid
erst
and
(Ohm
)2-
12Br
emsw
ider
stan
d L
eist
ung
(kW
)2-
13Br
emsw
ider
st. L
eist
ungs
über
wac
hung
2-15
Brem
swid
erst
and
Tes
t2-
16A
C-Br
emse
max
. Str
om2-
17Ü
bers
pann
ungs
steu
erun
g3-
**So
llwer
t/Ra
mpe
n3-
0*So
llwer
tgre
nzen
3-02
Min
imal
er S
ollw
ert
3-03
Max
imal
er S
ollw
ert
3-04
Sollw
ert-
Funk
tion
3-1*
Sollw
erte
inst
ellu
ng3-
10Fe
stso
llwer
t3-
11Fe
stdr
ehza
hl J
og [H
z]3-
13So
llwer
tvor
gabe
3-14
Rela
tiver
Fes
tsol
lwer
t3-
15So
llwer
t 1
Que
lle3-
16So
llwer
t 2
Que
lle3-
17So
llwer
t 3
Que
lle3-
19Fe
stdr
ehza
hl J
og [U
PM]
3-4*
Ram
pe 1
3-41
Ram
penz
eit
Auf
13-
42Ra
mpe
nzei
t A
b 1
3-5*
Ram
pe 2
3-51
Ram
penz
eit
Auf
23-
52Ra
mpe
nzei
t A
b 2
3-8*
Wei
tere
Ram
pen
3-80
Ram
penz
eit
JOG
3-81
Ram
penz
eit
Schn
ells
topp
3-82
Ram
penz
eit
Auf
Sta
rt3-
9*D
igita
lpot
i3-
90D
igita
lpot
i Ein
zels
chrit
t3-
91D
igita
lpot
i Ram
penz
eit
3-92
Dig
italp
oti s
peic
hern
bei
Net
z-A
us3-
93D
igita
lpot
i Max
. Gre
nze
3-94
Dig
italp
oti M
in. G
renz
e3-
95Ra
mpe
nver
zöge
rung
4-**
Gre
nzen
/War
nung
en4-
1*M
otor
Gre
nzen
4-10
Dre
hric
htun
g d
es M
otor
s4-
11M
in. M
otor
dreh
zahl
[UPM
]4-
12M
in. D
rehz
ahl [
Hz]
4-13
Max
. Mot
ordr
ehza
hl [U
PM]
4-14
Max
. Fre
quen
z [H
z]4-
16M
omen
teng
renz
e m
otor
isch
4-17
Mom
ente
ngre
nze
gene
rato
risch
4-18
Stro
mgr
enze
4-19
Max
. Aus
gang
sfre
quen
z4-
5*W
arnu
ngen
Gre
nzen
4-50
War
nung
Str
om n
iedr
ig4-
51W
arnu
ng S
trom
hoc
h4-
52W
arnu
ng D
rehz
. nie
drig
4-53
War
nung
Dre
hz. h
och
4-54
War
nung
Sol
lwer
t ni
edr.
4-55
War
nung
Sol
lwer
t ho
ch4-
56W
arnu
ng Is
twer
t ni
edrig
4-57
War
nung
Istw
ert
hoch
4-58
Funk
tion
fehl
ende
Mot
orph
ase
4-6*
Dre
hz.a
usbl
endu
ng4-
60A
usbl
. Dre
hzah
l von
[UPM
]4-
61A
usbl
. Dre
hzah
l aus
[Hz]
4-62
Aus
bl. D
rehz
ahl b
is [U
PM]
4-63
Aus
bl. D
rehz
ahl b
is [H
z]4-
64H
alba
utom
. Aus
bl.s
atz
5-**
Dig
it. E
in-/
Aus
gäng
e5-
0*G
rund
eins
tellu
ngen
5-00
Scha
ltlog
ik5-
01Kl
emm
e 27
Fun
ktio
n5-
02Kl
emm
e 29
Fun
ktio
n5-
1*D
igita
lein
gäng
e5-
10Kl
emm
e 18
Dig
itale
inga
ng5-
11Kl
emm
e 19
Dig
itale
inga
ng5-
12Kl
emm
e 27
Dig
itale
inga
ng5-
13Kl
emm
e 29
Dig
itale
inga
ng5-
14Kl
emm
e 32
Dig
itale
inga
ng5-
15Kl
emm
e 33
Dig
itale
inga
ng5-
16Kl
emm
e X3
0/2
Dig
itale
inga
ng5-
17Kl
emm
e X3
0/3
Dig
itale
inga
ng5-
18Kl
emm
e X3
0/4
Dig
itale
inga
ng5-
19Kl
emm
e 37
Sic
here
r St
opp
5-3*
Dig
itala
usgä
nge
5-30
Klem
me
27 D
igita
laus
gang
5-31
Klem
me
29 D
igita
laus
gang
5-32
Klem
me
X30/
6 D
igita
laus
gang
(MCB
101)
5-33
Klem
me
X30/
7 D
igita
laus
gang
(MCB
101)
5-4*
Rela
is5-
40Re
lais
funk
tion
5-41
Ein
Ver
zög.
, Rel
ais
5-42
Aus
Ver
zög.
, Rel
ais
5-5*
Puls
eing
änge
5-50
Klem
me
29 M
in. F
requ
enz
5-51
Klem
me
29 M
ax. F
requ
enz
5-52
Klem
me
29 M
in. S
oll-/
Istw
ert
5-53
Klem
me
29 M
ax. S
oll-/
Istw
ert
5-54
Puls
eing
ang
29
Filte
rzei
t5-
55Kl
emm
e 33
Min
. Fre
quen
z5-
56Kl
emm
e 33
Max
. Fre
quen
z5-
57Kl
emm
e 33
Min
. Sol
l-/ Is
twer
t5-
58Kl
emm
e 33
Max
. Sol
l-/ Is
twer
t5-
59Pu
lsei
ngan
g 3
3 Fi
lterz
eit
5-6*
Puls
ausg
änge
5-60
Klem
me
27 P
ulsa
usga
ng5-
62A
usga
ng 2
7 M
ax. F
requ
enz
5-63
Klem
me
29 P
ulsa
usga
ng
5-65
Aus
gang
29
Max
. Fre
quen
z5-
66Kl
emm
e X3
0/6
Puls
ausg
ang
5-68
Aus
gang
X30
/6 M
ax. F
requ
enz
5-8*
E/A
-Opt
ione
n5-
80A
HF-
Kond
. Ein
scha
ltver
zög.
5-9*
Buss
teue
rung
5-90
Dig
./Rel
ais
Aus
g. B
usst
euer
ung
5-93
Klem
me
27, W
ert
bei B
usst
euer
ung
5-94
Klem
me
27, W
ert
bei B
us-T
imeo
ut5-
95Kl
emm
e 29
, Wer
t be
i Bus
steu
erun
g5-
96Kl
emm
e 29
, Wer
t be
i Bus
-Tim
eout
5-97
Klem
me
X30/
6, W
ert
bei B
usst
euer
ung
5-98
Klem
me
X30/
6, W
ert
bei B
us-T
imeo
ut6-
**A
nalo
gein
-/-a
usgä
nge
6-0*
Gru
ndei
nste
llung
en6-
00Si
gnal
ausf
all Z
eit
6-01
Sign
alau
sfal
l Fun
ktio
n6-
02N
otfa
llbet
rieb
Sig
nala
usfa
ll Fu
nktio
n6-
1*A
nalo
gein
gang
53
6-10
Klem
me
53 M
in. S
pann
ung
6-11
Klem
me
53 M
ax. S
pann
ung
6-12
Klem
me
53 M
in. S
trom
6-13
Klem
me
53 M
ax. S
trom
6-14
Klem
me
53 M
in. S
oll-/
Istw
ert
6-15
Klem
me
53 M
ax. S
oll-/
Istw
ert
6-16
Klem
me
53 F
ilter
zeitk
onst
ante
6-17
Klem
me
53 S
igna
lfehl
er6-
2*A
nalo
gein
gang
54
6-20
Klem
me
54 S
kal.
Min
.Spa
nnun
g6-
21Kl
emm
e 54
Ska
l. M
ax.S
pann
ung
6-22
Klem
me
54 S
kal.
Min
.Str
om6-
23Kl
emm
e 54
Ska
l. M
ax.S
trom
6-24
Klem
me
54 S
kal.
Min
.-Sol
l/ Is
twer
t6-
25Kl
emm
e 54
Ska
l. M
ax.-S
oll/
Istw
ert
6-26
Klem
me
54 F
ilter
zeit
6-27
Klem
me
54 S
igna
lfehl
er6-
3*A
nalo
gein
gang
X30
/11
6-30
Kl.X
30/1
1 Sk
al. M
in. S
pann
ung
6-31
Kl.X
30/1
1 Sk
al. M
ax.S
pann
ung
6-34
Kl. X
30/1
1 Sk
al. M
in.-S
oll/
Istw
ert
6-35
Kl. X
30/1
1 Sk
al. M
ax.-S
oll/
Istw
ert
6-36
Kl. X
30/1
1 Fi
lterz
eit
6-37
Kl. X
30/1
1 Si
gnal
fehl
er6-
4*A
nalo
gein
gang
X30
/12
6-40
Klem
me
X30/
12 S
kal.
Min
.Spa
nnun
g6-
41Kl
emm
e X3
0/12
Ska
l. M
ax.S
pann
ung
6-44
Kl. X
30/1
2 Sk
al. M
in.-S
oll/
Istw
ert
6-45
Kl. X
30/1
2 Sk
al. M
ax.-S
oll/
Istw
ert
6-46
Kl. X
30/1
2 Fi
lterz
eit
6-47
Kl. X
30/1
2 Si
gnal
fehl
er6-
5*A
nalo
gaus
gang
42
6-50
Klem
me
42 A
nalo
gaus
gang
6-51
Kl. 4
2 A
usga
ng m
in. S
kalie
rung
6-52
Kl. 4
2 A
usga
ng m
ax. S
kalie
rung
6-53
Klem
me
42, W
ert
bei B
usst
euer
ung
6-54
Kl. 4
2, W
ert
bei B
us-T
imeo
ut6-
55A
nalo
gaus
gang
sfilt
er6-
6*A
nalo
gaus
gang
X30
/86-
60Kl
emm
e X3
0/8
Ana
loga
usga
ng
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
32 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
55

6-61
Kl. X
30/8
, Aus
gang
min
. Ska
lieru
ng6-
62Kl
. X30
/8, A
usga
ng m
ax. S
kalie
rung
6-63
Kl. X
30/8
, Wer
t be
i Bus
steu
erun
g6-
64Kl
. X30
/8, W
ert
bei B
us-T
imeo
ut8-
**O
pt./S
chni
ttst
elle
n8-
0*G
rund
eins
tellu
ngen
8-01
Führ
ungs
hohe
it8-
02St
euer
quel
le8-
03St
euer
wor
t Ti
meo
ut-Z
eit
8-04
Steu
erw
ort
Tim
eout
-Fun
ktio
n8-
05St
euer
wor
t Ti
meo
ut-E
nde
8-06
Tim
eout
Ste
uerw
ort
quitt
iere
n8-
07D
iagn
ose
Trig
ger
8-08
Anz
eige
filte
r8-
09Ko
mm
unik
atio
nssc
hrift
satz
8-1*
Rege
lein
stel
lung
en8-
10St
euer
prof
il8-
13Ko
nfig
urat
ion
Zus
tand
swor
t ST
W8-
3*Se
r. F
C-Sc
hnitt
st.
8-30
Prot
okol
l8-
31A
dres
se8-
32Ba
udra
te8-
33Pa
rität
/Sto
ppbi
ts8-
34G
esch
ätzt
e Zy
klus
zeit
8-35
Min
. Ant
wor
tzei
tver
zöge
rung
8-36
FC-A
ntw
ortz
eit
Max
.-Del
ay8-
37FC
Inte
rcha
r. M
ax.-D
elay
8-4*
FC/M
C-Pr
otok
oll
8-40
Tele
gram
mty
p8-
42PC
D-K
onfig
urat
ion
Sch
reib
en8-
43PC
D-K
onfig
urat
ion
Les
en8-
5*Be
tr. B
us/K
lem
me
8-50
Mot
orfr
eila
uf8-
52A
usw
ahl D
C-Br
emse
8-53
Star
t8-
54A
usw
ahl R
ever
sier
ung
8-55
Aus
wah
l Par
amet
ersa
tz8-
56A
usw
ahl F
ests
ollw
ert
8-7*
BACn
et8-
70BA
Cnet
-Ger
ätei
nsta
nz8-
72M
S/TP
Max
. Mas
ter
8-73
MS/
TP M
ax. I
nfo-
Fram
es8-
74“I-
Am
”-Se
rvic
e8-
75In
itial
isie
rung
spas
swor
t8-
8*FC
-Ser
.-Dia
gnos
e8-
80Zä
hler
Bus
mel
dung
en8-
81Zä
hler
Bus
fehl
er8-
82Zä
hler
Sla
vem
eldu
ngen
8-83
Zähl
er S
lave
fehl
er8-
84G
esen
dete
Sla
vem
eldu
ngen
8-85
Slav
e-Ti
meo
ut-F
ehle
r8-
89D
iagn
osez
ähle
r8-
9*Bu
s-Fe
stdr
./Ist
wer
te8-
90Bu
s-Fe
stdr
ehza
hl 1
8-91
Bus-
Fest
dreh
zahl
28-
94Bu
s-Is
twer
t 1
8-95
Bus-
Istw
ert
28-
96Bu
s-Is
twer
t 3
9-**
Prof
ibus
9-00
Sollw
ert
9-07
Istw
ert
9-15
PCD
-Kon
figur
atio
n S
chre
iben
9-16
PCD
-Kon
figur
atio
n L
esen
9-18
Teiln
ehm
erad
ress
e9-
22Te
legr
amm
typ
9-23
Sign
al-P
aram
eter
9-27
Para
met
er b
earb
eite
n9-
28Pr
ofib
us S
teue
rung
dea
ktiv
iere
n9-
44Zä
hler
: Feh
ler
im S
peic
her
9-45
Spei
cher
: Ala
rmw
orte
9-47
Spei
cher
: Feh
lerc
ode
9-52
Zähl
er: F
ehle
r G
esam
t9-
53Pr
ofib
us-W
arnw
ort
9-63
Akt
ive
Baud
rate
9-64
Bus-
ID9-
65Pr
ofiln
umm
er9-
67St
euer
wor
t 1
9-68
Zust
ands
wor
t 1
9-71
Dat
enw
erte
spe
iche
rn9-
72Fr
eq.u
mr.
Res
et9-
75D
O-ID
9-80
Def
inie
rte
Para
met
er (1
)9-
81D
efin
iert
e Pa
ram
eter
(2)
9-82
Def
inie
rte
Para
met
er (3
)9-
83D
efin
iert
e Pa
ram
eter
(4)
9-84
Def
inie
rte
Para
met
er (5
)9-
90G
eänd
erte
Par
amet
er (1
)9-
91G
eänd
erte
Par
amet
er (2
)9-
92G
eänd
erte
Par
amet
er (3
)9-
93G
eänd
erte
Par
amet
er (4
)9-
94G
eänd
erte
Par
amet
er (5
)9-
99Pr
ofib
us-V
ersi
onsz
ähle
r10
-**
CAN
und
Dev
iceN
et10
-0*
Gru
ndei
nste
llung
en10
-00
Prot
okol
l10
-01
Baud
rate
naus
wah
l10
-02
MA
C-ID
Adr
esse
10-0
5Zä
hler
Übe
rtra
gung
sfeh
ler
10-0
6Zä
hler
Em
pfan
gsfe
hler
10-0
7Zä
hler
Bus
-Off
10-1
*D
evic
eNet
10-1
0Pr
ozes
sdat
enty
p10
-11
Proz
essd
aten
Sch
reib
en K
onfig
urat
ion
10-1
2Pr
ozes
sdat
en L
esen
Kon
figur
atio
n10
-13
War
nung
spar
amet
er10
-14
Dev
iceN
et S
ollw
ert
10-1
5D
evic
eNet
Ste
ueru
ng10
-2*
COS-
Filte
r10
-20
COS-
Filte
r 1
10-2
1CO
S-Fi
lter
210
-22
COS-
Filte
r 3
10-2
3CO
S-Fi
lter
410
-3*
Para
met
erzu
griff
10-3
0A
rray
Inde
x10
-31
Dat
enw
erte
spe
iche
rn10
-32
Dev
iceN
et R
evis
ion
10-3
3Im
mer
spe
iche
rn10
-34
Dev
iceN
et-P
rodu
ktco
de
10-3
9D
evic
eNet
F-P
aram
eter
11-*
*Lo
nWor
ks11
-0*
LonW
orks
ID11
-00
Neu
ron
ID11
-1*
LON
-Fun
ktio
nen
11-1
0D
rive-
Prof
il11
-15
LON
War
nwor
t11
-17
XIF-
Revi
sion
11-1
8Lo
nWor
ks-R
evis
ion
11-2
*LO
N P
aram
. Zug
ang
11-2
1D
aten
wer
te s
peic
hern
12-*
*Et
hern
et12
-0*
IP-E
inst
ellu
ngen
12-0
0IP
-Adr
essz
uwei
sung
12-0
1IP
-Adr
esse
12-0
2Su
bnet
Mas
k12
-03
Stan
dard
-Gat
eway
12-0
4D
HCP
-Ser
ver
12-0
5Le
ase
läuf
t ab
12-0
6N
amen
sser
ver
12-0
7D
omai
n N
ame
12-0
8H
ost-
Nam
e12
-09
Phys
. Adr
esse
12-1
*Ve
rbin
dung
12-1
0Ve
rb.s
tatu
s12
-11
Verb
.dau
er12
-12
Aut
o. V
erbi
ndun
g12
-13
Verb
.ges
chw
.12
-14
Verb
.dup
lex
12-2
*Pr
ozes
sdat
en12
-20
Steu
erin
stan
z12
-21
Proz
essd
aten
Sch
reib
en K
onfig
urat
ion
12-2
2Pr
ozes
sdat
en L
esen
Kon
figur
atio
n12
-27
Prim
ärer
Mas
ter
12-2
8D
aten
wer
te s
peic
hern
12-2
9Im
mer
spe
iche
rn12
-3*
Ethe
rNet
/IP12
-30
War
nung
spar
amet
er12
-31
Dev
iceN
et S
ollw
ert
12-3
2D
evic
eNet
Ste
ueru
ng12
-33
CIP
Rev
isio
n12
-34
CIP
Pro
dukt
code
12-3
5ED
S-Pa
ram
eter
12-3
7CO
S Sp
errt
imer
12-3
8CO
S Fi
lter
12-4
*M
odbu
s TC
P12
-40
Stat
us P
aram
eter
12-4
1A
nzah
l Sla
ve-M
eldu
ngen
12-4
2A
nzah
l Sla
ve-A
usna
hme-
Mel
dung
en12
-8*
Die
nste
12-8
0FT
P-Se
rver
12-8
1H
TTP-
Serv
er12
-82
SMTP
-Ser
vice
12-8
9Tr
ansp
aren
t So
cket
Cha
nnel
Por
t12
-9*
Erw
eite
rte
Die
nste
12-9
0Ka
beld
iagn
ose
12-9
1M
DI-X
12-9
2IG
MP-
Snoo
ping
12-9
3Fe
hler
Kab
ellä
nge
12-9
4Br
oadc
ast
Stor
m S
chut
z12
-95
Broa
dcas
t St
orm
Filt
er12
-96
Ans
chlu
ss K
onfig
.12
-98
Schn
ittst
elle
nzäh
ler
12-9
9M
edie
nzäh
ler
13-*
*Sm
art
Logi
c13
-0*
SL-C
ontr
olle
r13
-00
SL-C
ontr
olle
r-M
odus
13-0
1St
arte
reig
nis
13-0
2St
oppe
reig
nis
13-0
3Re
set
SLC
13-1
*Ve
rgle
iche
r13
-10
Verg
leic
her-
Ope
rand
13-1
1Ve
rgle
iche
r-Fu
nktio
n13
-12
Verg
leic
her-
Wer
t13
-2*
Tim
er13
-20
SL-C
ontr
olle
r-Ti
mer
13-4
*Lo
gikr
egel
n13
-40
Logi
kreg
el B
oole
sch
113
-41
Logi
kreg
el V
erkn
üpfu
ng 1
13-4
2Lo
gikr
egel
Boo
lesc
h 2
13-4
3Lo
gikr
egel
Ver
knüp
fung
213
-44
Logi
kreg
el B
oole
sch
313
-5*
SL-P
rogr
amm
13-5
1SL
-Con
trol
ler-
Erei
gnis
13-5
2SL
-Con
trol
ler-
Akt
ion
14-*
*So
nder
funk
tione
n14
-0*
IGBT
-Ans
teue
rung
14-0
0Sc
haltm
odus
14-0
1Ta
ktfr
eque
nz14
-03
Übe
rmod
ulat
ion
14-0
4PW
M-J
itter
14-1
*N
etza
usfa
ll14
-10
Net
zaus
fall
14-1
1N
etza
usfa
ll-Sp
annu
ng14
-12
Funk
tion
bei
Net
zpha
senf
ehle
r14
-2*
Rese
t/In
itial
isie
ren
14-2
0Re
set-
Mod
us14
-21
Aut
omat
isch
e W
iede
ranl
aufz
eit
14-2
2Be
trie
bsar
t14
-23
Type
ncod
eein
stel
lung
14-2
5D
rehm
om.g
renz
e Ve
rzög
erun
gsze
it14
-26
Abs
chal
tver
zöge
rung
bei
Wec
hsel
rich-
terf
ehle
r14
-28
Prod
uktio
nsei
nste
llung
en14
-29
Serv
icec
ode
14-3
*St
rom
gren
ze14
-30
Regl
er P
-Ver
stär
kung
14-3
1Re
gler
I-Ze
it14
-32
Regl
er, F
ilter
zeit
14-4
*En
ergi
eopt
imie
rung
14-4
0Q
uadr
.Mom
. Anp
assu
ng14
-41
Min
imal
e A
EO-M
agne
tisie
rung
14-4
2M
inim
ale
AEO
-Fre
quen
z14
-43
Mot
or C
os-P
hi14
-5*
Um
gebu
ng14
-50
EMV-
Filte
r14
-51
Zwis
chen
krei
skom
pens
atio
n14
-52
Lüft
erst
euer
ung
14-5
3Lü
fter
über
wac
hung
14-5
5A
usga
ngsf
ilter
14-5
9A
nzah
l akt
iver
Wec
hsel
richt
er14
-6*
Aut
o-Re
duzi
er.
14-6
0Fu
nktio
n b
ei Ü
bert
empe
ratu
r14
-61
Funk
tion
bei
WR-
Übe
rlast
14-6
2in
v. Ü
berla
st R
eduz
iers
trom
15-*
*In
fo/W
artu
ng15
-0*
Betr
iebs
date
n15
-00
Betr
iebs
stun
den
15-0
1M
otor
lauf
stun
den
15-0
2kW
h-Zä
hler
15-0
3A
nzah
l Net
z-Ei
n15
-04
Anz
ahl Ü
bert
empe
ratu
ren
15-0
5A
nzah
l Übe
rspa
nnun
gen
15-0
6Re
set
kWh-
Zähl
er15
-07
Rese
t M
otor
lauf
stun
denz
ähle
r15
-08
Anz
ahl d
er S
tart
s15
-1*
Echt
zeitk
anal
15-1
0Ec
htze
itkan
al Q
uelle
15-1
1Ec
htze
itkan
al A
btas
trat
e15
-12
Echt
zeitk
anal
Trig
gere
reig
nis
15-1
3Ec
htze
itkan
al P
roto
kolla
rt15
-14
Echt
zeitk
anal
Wer
te v
or T
rigge
r15
-2*
Prot
okol
lieru
ng15
-20
Prot
okol
l: Er
eign
is15
-21
Prot
okol
l: Is
twer
t15
-22
Prot
okol
l: Ze
it15
-23
Prot
okol
l: D
atum
und
Zei
t15
-3*
Ala
rm L
og15
-30
Fehl
ersp
eich
er: F
ehle
rcod
e15
-31
Fehl
ersp
eich
er: I
stw
ert
15-3
2Fe
hler
spei
cher
: Zei
t15
-33
Fehl
ersp
eich
er: D
atum
und
Zei
t15
-4*
Type
ndat
en15
-40
FC-T
yp15
-41
Leis
tung
stei
l15
-42
Span
nung
15-4
3So
ftw
arev
ersi
on15
-44
Type
ncod
e (o
rigin
al)
15-4
5Ty
penc
ode
(akt
uell)
15-4
6Ty
p B
este
llnum
mer
15-4
7Le
istu
ngst
eil B
este
llnum
mer
15-4
8LC
P-Ve
rsio
n15
-49
Steu
erka
rte
SW-V
ersi
on15
-50
Leis
tung
stei
l SW
-Ver
sion
15-5
1Ty
p S
erie
nnum
mer
15-5
3Le
istu
ngst
eil S
erie
nnum
mer
15-5
5Li
efer
ante
n-U
RL15
-56
Lief
eran
tenn
ame
15-5
9CS
IV-D
atei
nam
e15
-6*
Inst
all.
Opt
ione
n15
-60
Opt
ion
inst
allie
rt15
-61
SW-V
ersi
on O
ptio
n15
-62
Opt
ions
best
elln
r.15
-63
Opt
ions
serie
nnr.
15-7
0O
ptio
n A
15-7
1O
ptio
n A
- S
oftw
arev
ersi
on15
-72
Opt
ion
B
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 33
5 5

15-7
3O
ptio
n B
- S
oftw
arev
ersi
on15
-74
Opt
ion
C0
15-7
5O
ptio
n C
0 -
Soft
war
ever
sion
15-7
6O
ptio
n C
115
-77
Opt
ion
C1
- So
ftw
arev
ersi
on15
-8*
Betr
iebs
date
n II
15-8
0Lü
fter
lauf
stun
den
15-8
1Vo
rein
gest
ellte
Lüf
terla
ufst
unde
n15
-9*
Para
met
erin
fo15
-92
Def
inie
rte
Para
met
er15
-93
Geä
nder
te P
aram
eter
15-9
8Ty
pend
aten
15-9
9Pa
ram
eter
-Met
adat
en16
-**
Dat
enan
zeig
en16
-0*
Anz
eige
n-A
llgem
ein
16-0
0St
euer
wor
t16
-01
Sollw
ert
[Ein
heit]
16-0
2So
llwer
t [%
]16
-03
Zust
ands
wor
t16
-05
Hau
ptis
twer
t [%
]16
-09
Benu
tzer
defin
iert
e A
nzei
ge16
-1*
Anz
eige
n-M
otor
16-1
0Le
istu
ng [k
W]
16-1
1Le
istu
ng [h
p]16
-12
Mot
orsp
annu
ng16
-13
Freq
uenz
16-1
4M
otor
stro
m16
-15
Freq
uenz
[%]
16-1
6D
rehm
omen
t [N
m]
16-1
7D
rehz
ahl [
UPM
]16
-18
Ther
m. M
otor
schu
tz16
-22
Dre
hmom
ent
[%]
16-2
6Le
istu
ng g
efilt
ert
[kW
]16
-27
Leis
tung
gef
ilter
t [H
P]16
-3*
Anz
eige
n-FU
16-3
0D
C-Sp
annu
ng16
-32
Brem
slei
stun
g/s
16-3
3Br
emsl
eist
ung/
2 m
in16
-34
Kühl
körp
erte
mpe
ratu
r16
-35
FC Ü
berla
st16
-36
Nen
n- W
R- S
trom
16-3
7M
ax.-
WR-
Stro
m16
-38
SL C
ontr
.Zus
tand
16-3
9St
euer
kart
ente
mp.
16-4
0Ec
htze
itkan
alsp
eich
er v
oll
16-4
1Ec
htze
itkan
alsp
eich
er v
oll
16-4
3St
atus
Zei
tabl
aufs
teue
rung
16-4
9St
rom
fehl
erqu
elle
16-5
*So
ll- &
Istw
erte
16-5
0Ex
tern
er S
ollw
ert
16-5
2Is
twer
t [E
inhe
it]16
-53
Dig
iPot
Sol
lwer
t16
-54
Istw
ert
1 [E
inhe
it]16
-55
Istw
ert
2 [E
inhe
it]16
-56
Istw
ert
3 [E
inhe
it]16
-58
PID
-Aus
gang
[%]
16-6
*A
nzei
g. E
in-/
Aus
g.16
-60
Dig
itale
ingä
nge
16-6
1A
E 53
Mod
us
16-6
2A
nalo
gein
gang
53
16-6
3A
E 54
Mod
us16
-64
Ana
loge
inga
ng 5
416
-65
Ana
loga
usga
ng 4
2 [m
A]
16-6
6D
igita
laus
gäng
e16
-67
Puls
eing
ang
29
[Hz]
16-6
8Pu
lsei
ngan
g 3
3 [H
z]16
-69
Puls
ausg
ang
27
[Hz]
16-7
0Pu
lsau
sgan
g 2
9 [H
z]16
-71
Rela
isau
sgän
ge16
-72
Zähl
er A
16-7
3Zä
hler
B16
-75
Ana
loge
inga
ng X
30/1
116
-76
Ana
loge
inga
ng X
30/1
216
-77
Ana
loga
usga
ng X
30/8
[mA
]16
-8*
Anz
eig.
Sch
nitt
st.
16-8
0Bu
s St
euer
wor
t 1
16-8
2Fe
ldbu
s So
llwer
t 1
16-8
4Fe
ldbu
s-Ko
mm
. Sta
tus
16-8
5FC
Ste
uerw
ort
116
-86
FC-S
chni
ttst
elle
Sol
lwer
t 1
16-9
*Bu
s D
iagn
ose
16-9
0A
larm
wor
t16
-91
Ala
rmw
ort
216
-92
War
nwor
t16
-93
War
nwor
t 2
16-9
4Er
w. Z
usta
ndsw
ort
16-9
5Er
w. Z
usta
ndsw
ort
216
-96
War
tung
swor
t18
-**
Info
/Anz
eige
n18
-0*
War
tung
spro
toko
ll18
-00
War
tung
spro
toko
ll: P
os.
18-0
1W
artu
ngsp
roto
koll:
Akt
ion
18-0
2W
artu
ngsp
roto
koll:
Zei
t18
-03
War
tung
spro
toko
ll: D
atum
und
Zei
t18
-1*
Not
fallb
etrie
bspr
otok
oll
18-1
0N
otfa
llbet
riebs
prot
okol
l: Er
eign
is18
-11
Not
fallb
etrie
bspr
otok
oll:
Zeit
18-1
2N
otfa
llbet
riebs
prot
okol
l: D
atum
und
Zeit
18-3
*A
nzei
g. E
in-/
Aus
g.18
-30
Ana
loge
inga
ng X
42/1
18-3
1A
nalo
gein
gang
X42
/318
-32
Ana
loge
inga
ng X
42/5
18-3
3A
nalo
gaus
gang
X42
/7 [V
]18
-34
Ana
loga
usga
ng X
42/9
[V]
18-3
5A
nalo
gaus
gang
X42
/11
[V]
18-3
6A
nalo
gein
gang
X48
/2 [m
A]
18-3
7Te
mp.
Ein
gang
X48
/418
-38
Tem
p. E
inga
ng X
48/7
18-3
9Te
mp.
Ein
gang
X48
/10
18-5
*So
ll- &
Istw
erte
18-5
0A
nzei
ge o
hne
Geb
er [E
inhe
it]20
-**
PID
-Reg
ler
20-0
*Is
twer
t20
-00
Istw
ert
1 Q
uelle
20-0
1Is
twer
t 1
Um
wan
dlun
g20
-02
Istw
ert
1 Ei
nhei
t20
-03
Istw
ert
2 Q
uelle
20-0
4Is
twer
t 2
Um
wan
dlun
g20
-05
Istw
ert
2 Ei
nhei
t20
-06
Istw
ert
3 Q
uelle
20-0
7Is
twer
t 3
Um
wan
dlun
g20
-08
Istw
ert
3 Ei
nhei
t20
-12
Soll-
/Istw
erte
inhe
it20
-13
Min
. Sol
l-/Is
twer
t20
-14
Max
imal
er S
ollw
ert/
Istw
ert
20-2
*Is
twer
t/So
llwer
t20
-20
Istw
ertf
unkt
ion
20-2
1So
llwer
t 1
20-2
2So
llwer
t 2
20-2
3So
llwer
t 3
20-3
*Er
w. I
stw
ertu
mw
andl
.20
-30
Kälte
mitt
el20
-31
Benu
tzer
def.
Kälte
mitt
el A
120
-32
Benu
tzer
def.
Kälte
mitt
el A
220
-33
Benu
tzer
def.
Kälte
mitt
el A
320
-34
Que
rsch
nitt
Luf
tkan
al 1
[m2]
20-3
5Q
uers
chni
tt L
uftk
anal
1 [i
n2]
20-3
6Q
uers
chni
tt L
uftk
anal
2 [m
2]20
-37
Que
rsch
nitt
Luf
tkan
al 2
[in2
]20
-38
Spez
. Gew
icht
sfak
tor
d. L
uft
[%]
20-6
*O
hne
Geb
er20
-60
Einh
eit
ohne
Geb
er20
-69
Info
rmat
ione
n o
hne
Geb
er20
-7*
PID
Aut
o-A
npas
sung
20-7
0PI
D-R
egle
rart
20-7
1PI
D-V
erha
lten
20-7
2PI
D-A
usga
ngsä
nder
ung
20-7
3M
in. I
stw
erth
öhe
20-7
4M
axim
ale
Istw
erth
öhe
20-7
9PI
D A
uto-
Anp
assu
ng20
-8*
PID
-Gru
ndei
nste
ll.20
-81
PID
-Nor
mal
/Inve
rs-R
egel
ung
20-8
2PI
D-S
tart
dreh
zahl
[UPM
]20
-83
PID
-Sta
rtdr
ehza
hl [H
z]20
-84
Band
brei
te Is
t-So
llwer
t20
-9*
PID
-Reg
ler
20-9
1PI
D-A
nti-W
indu
p20
-93
PID
-Pro
port
iona
lver
stär
kung
20-9
4PI
D In
tegr
atio
nsze
it20
-95
PID
-Diff
eren
tiatio
nsze
it20
-96
PID
-Pro
zess
D-V
erst
ärku
ng/G
renz
e21
-**
Erw
. PID
-Reg
ler
21-0
*Er
w. P
ID-A
uto-
Anp
assu
ng21
-00
PID
-Reg
lera
rt21
-01
PID
-Ver
halte
n21
-02
PID
-Aus
gang
sänd
erun
g21
-03
Min
. Ist
wer
thöh
e21
-04
Max
imal
e Is
twer
thöh
e21
-09
PID
Aut
o-A
npas
sung
21-1
*Er
w. P
ID S
oll-/
Istw
. 121
-10
Erw
. Sol
l-/Is
twer
tein
heit
121
-11
Erw
. 1 M
inim
aler
Sol
lwer
t21
-12
Erw
. 1 M
ax. S
ollw
ert
21-1
3Er
w. v
aria
bler
Sol
lwer
t 1
21-1
4Ex
t. 1
Istw
erta
nsch
luss
21-1
5Ex
t. 1
Sol
lwer
t
21-1
7Er
w. S
ollw
ert
1 [E
inhe
it]21
-18
Erw
. Ist
wer
t 1
[Ein
heit]
21-1
9Er
w. 1
Aus
gang
[%]
21-2
*Er
w. P
roze
ss-P
ID 1
21-2
0Er
w. 1
Nor
mal
/Inve
rs-R
egel
ung
21-2
1Er
w. 1
P-V
erst
ärku
ng21
-22
Erw
. 1 I-
Zeit
21-2
3Er
w. 1
D-Z
eit
21-2
4Er
w. 1
D-V
erst
ärku
ng/G
renz
e21
-3*
Erw
. PID
Sol
l-/Is
tw. 2
21-3
0Er
w. S
oll-/
Istw
erte
inhe
it 2
21-3
1Er
w. 2
Min
imal
er S
ollw
ert
21-3
2Er
w. 2
Max
. Sol
lwer
t21
-33
Erw
. var
iabl
er S
ollw
ert
221
-34
Ext.
2 Is
twer
tans
chlu
ss21
-35
Ext.
2 S
ollw
ert
21-3
7Er
w. S
ollw
ert
2 [E
inhe
it]21
-38
Erw
. Ist
wer
t 2
[Ein
heit]
21-3
9Er
w. 2
Aus
gang
[%]
21-4
*Er
w. P
roze
ss-P
ID 2
21-4
0Er
w. 2
Nor
mal
/Inve
rs-R
egel
ung
21-4
1Er
w. 2
P-V
erst
ärku
ng21
-42
Erw
. 2 I-
Zeit
21-4
3Er
w. 2
D-Z
eit
21-4
4Er
w. 2
Dif.
- D
-Ver
stär
kung
/Gre
nze
21-5
*Er
w. P
ID S
oll-/
Istw
. 321
-50
Erw
. Sol
l-/Is
twer
tein
heit
321
-51
Erw
. 3 M
inim
aler
Sol
lwer
t21
-52
Erw
. 3 M
ax. S
ollw
ert
21-5
3Er
w. v
aria
bler
Sol
lwer
t 3
21-5
4Ex
t. 3
Istw
erta
nsch
luss
21-5
5Ex
t. 3
Sol
lwer
t21
-57
Erw
. Sol
lwer
t 3
[Ein
heit]
21-5
8Er
w. I
stw
ert
3 [E
inhe
it]21
-59
Erw
. 3 A
usga
ng [%
]21
-6*
Erw
. Pro
zess
-PID
321
-60
Erw
. 3 N
orm
al/In
vers
-Reg
elun
g21
-61
Erw
. 3 P
-Ver
stär
kung
21-6
2Er
w. 3
I-Ze
it21
-63
Erw
. 3 D
-Zei
t21
-64
Erw
. 3 D
-Ver
stär
kung
/Gre
nze
22-*
*A
nw.-
Funk
tione
n22
-0*
Vers
chie
dene
s22
-00
Verz
öger
ung
ext
. Ver
riege
lung
22-0
1Fi
lterz
eit
Leis
tung
22-2
*N
o-Fl
ow-E
rken
nung
22-2
0Le
istu
ng t
ief
Aut
okon
fig.
22-2
1Er
fass
ung
Lei
stun
g t
ief
22-2
2*E
rfas
sung
Dre
hzah
l tie
f22
-23
No-
Flow
Fun
ktio
n22
-24
No-
Flow
Ver
zöge
rung
22-2
6Tr
ocke
nlau
ffunk
tion
22-2
7Tr
ocke
nlau
fver
zöge
rung
22-3
*N
o-Fl
ow L
eist
ungs
anpa
ssun
g22
-30
No-
Flow
Lei
stun
g22
-31
Leis
tung
skor
rekt
urfa
ktor
22-3
2D
rehz
ahl t
ief
[UPM
]22
-33
Dre
hzah
l nie
drig
[Hz]
22-3
4Le
istu
ng D
rehz
ahl t
ief
[kW
]
22-3
5Le
istu
ng D
rehz
ahl t
ief
[HP]
22-3
6D
rehz
ahl h
och
[UPM
]22
-37
Dre
hzah
l hoc
h [H
z]22
-38
Leis
tung
Dre
hzah
l hoc
h [k
W]
22-3
9Le
istu
ng D
rehz
ahl h
och
[HP]
22-4
*En
ergi
espa
rmod
us22
-40
Min
. Lau
fzei
t22
-41
Min
. Ene
rgie
spar
-Sto
ppze
it22
-42
Ener
gies
par-
Star
tdre
hz. [
UPM
]22
-43
Ener
gies
pars
tart
-Dre
hz. [
Hz]
22-4
4En
ergi
esta
rt-S
W/IW
-Diff
eren
z22
-45
Sollw
ert-
Boos
t22
-46
Max
. Boo
st-Z
eit
22-5
*Ke
nnlin
iene
nde
22-5
0Ke
nnlin
iene
ndef
unkt
ion
22-5
1Ke
nnlin
iene
ndev
erz.
22-6
*Ri
emen
bruc
herk
ennu
ng22
-60
Riem
enbr
uchf
unkt
ion
22-6
1Ri
emen
bruc
hmom
ent
22-6
2Ri
emen
bruc
hver
zöge
rung
22-7
*Ku
rzzy
klus
-Sch
utz
22-7
5Ku
rzzy
klus
-Sch
utz
22-7
6In
terv
all z
wis
chen
Sta
rts
22-7
7M
in. L
aufz
eit
22-7
8M
in. L
aufz
eitk
orre
ktur
22-7
9M
in. L
aufz
eitk
orre
ktur
wer
t22
-8*
Dur
chflu
ssau
sgle
ich
22-8
0D
urch
fluss
ausg
leic
h22
-81
Qua
dr.-l
inea
re K
urve
nnäh
erun
g22
-82
Arb
eits
punk
tber
echn
.22
-83
Dre
hzah
l bei
No-
Flow
[UPM
]22
-84
Freq
uenz
bei
No-
Flow
[Hz]
22-8
5D
rehz
ahl a
n A
usle
gung
spun
kt [U
PM]
22-8
6Fr
eq. a
m A
usle
gung
spun
kt [H
z]22
-87
Dru
ck b
ei N
o-Fl
ow-D
rehz
ahl
22-8
8D
ruck
bei
Nen
ndre
hzah
l22
-89
Volu
men
stro
m a
n A
usle
gung
spun
kt22
-90
Dur
chflu
ss b
ei N
ennd
rehz
ahl
23-*
*Ze
itfun
ktio
nen
23-0
*Ze
itabl
aufs
teue
rung
23-0
0EI
N-Z
eit
23-0
1EI
N-A
ktio
n23
-02
AU
S-Ze
it23
-03
AU
S-A
ktio
n23
-04
Erei
gnis
23-0
*Ei
nste
llung
en Z
eita
blau
fste
ueru
ng23
-08
Mod
us Z
eita
blau
fste
ueru
ng23
-09
Reak
tivie
rung
Zei
tabl
aufs
teue
rung
23-1
*In
stan
dhal
tung
23-1
0W
artu
ngsp
unkt
23-1
1W
artu
ngsa
ktio
n23
-12
War
tung
szei
tbas
is23
-13
War
tung
szei
tinte
rval
l23
-14
Dat
um u
nd U
hrze
it W
artu
ng23
-1*
War
tung
s-Re
set
23-1
5W
artu
ngsw
ort
quitt
iere
n23
-16
War
tung
stex
t23
-5*
Ener
giep
roto
koll
23-5
0En
ergi
epro
toko
llauf
lösu
ng
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
34 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
55

23-5
1St
artz
eitr
aum
23-5
3En
ergi
epro
toko
ll23
-54
Rese
t En
ergi
epro
toko
ll23
-6*
Tren
ddar
stel
lung
23-6
0Tr
endv
aria
ble
23-6
1Ko
ntin
uier
liche
BIN
Dat
en23
-62
Zeita
blau
f BI
N D
aten
23-6
3Ze
itabl
auf
Star
tzei
trau
m23
-64
Zeita
blau
f St
oppz
eitr
aum
23-6
5M
inim
aler
Bin
-Wer
t23
-66
Rese
t Ko
ntin
uier
liche
Bin
-Dat
en23
-67
Rück
setz
en d
er Z
eita
blau
f Bi
n-D
aten
23-8
*A
mor
tisat
ions
zähl
er23
-80
Sollw
ertf
akto
r Le
istu
ng23
-81
Ener
giek
oste
n23
-82
Inve
stiti
on23
-83
Ener
giee
insp
arun
gen
23-8
4Ko
sten
eins
paru
ngen
24-*
*A
nw.-
Funk
tione
n 2
24-0
*N
otfa
llbet
rieb
24-0
0N
otfa
llbet
riebs
funk
tion
24-0
1N
otfa
llbet
riebs
konf
igur
atio
n24
-02
Einh
eit
Not
fallb
etrie
b24
-03
Min
. Sol
lwer
t N
otfa
llbet
rieb
24-0
4M
ax. S
ollw
ert
Not
fallb
etrie
b24
-05
Fest
sollw
ert
Not
fallb
etrie
b24
-06
Sollw
ertq
uelle
Not
fallb
etrie
b24
-07
Istw
ertq
uelle
Not
fallb
etrie
b24
-09
Ala
rmha
ndha
bung
Not
fallb
etrie
b24
-1*
FU-B
ypas
s24
-10
FU-B
ypas
s-Fu
nktio
n24
-11
Verz
öger
ungs
zeit
FU
-Byp
ass
24-9
*La
stve
rhal
ten
bei
24-9
0Fu
nktio
n M
otor
fehl
t24
-91
Mot
or fe
hlt
Koef
fizie
nt 1
24-9
2M
otor
fehl
t Ko
effiz
ient
224
-93
Mot
or fe
hlt
Koef
fizie
nt 3
24-9
4M
otor
fehl
t Ko
effiz
ient
424
-95
Funk
tion
blo
ckie
rter
Rot
or24
-96
Bloc
kier
ter
Roto
r Ko
effiz
ient
124
-97
Bloc
kier
ter
Roto
r Ko
effiz
ient
224
-98
Bloc
kier
ter
Roto
r Ko
effiz
ient
324
-99
Bloc
kier
ter
Roto
r Ko
effiz
ient
425
-**
Kask
aden
regl
er25
-0*
Syst
emei
nste
llung
en25
-00
Kask
aden
regl
er25
-02
Mot
or S
tart
25-0
4Pu
mpe
nrot
atio
n25
-05
Fest
e Fü
hrun
gspu
mpe
25-0
6A
nzah
l der
Pum
pen
25-2
*Ba
ndbr
eite
nein
stel
lung
en25
-20
Scha
ltban
dbre
ite25
-21
Scha
ltgre
nze
25-2
2Fe
ste
Dre
hzah
lban
dbre
ite25
-23
SBB
Zus
chal
tver
zöge
rung
25-2
4SB
B A
bsch
altv
erzö
geru
ng25
-25
Scha
ltver
zöge
rung
25-2
6N
o-Fl
ow A
bsch
altu
ng25
-27
Zusc
haltf
unkt
ion
25-2
8Zu
scha
ltfun
ktio
nsze
it25
-29
Abs
chal
tfun
ktio
n25
-30
Abs
chal
tfun
ktio
nsze
it25
-4*
Zusc
halte
inst
ell.
25-4
0Ra
mpe
-ab-
Verz
öger
ung
25-4
1Ra
mpe
-auf
-Ver
zöge
rung
25-4
2Zu
scha
ltsch
wel
le25
-43
Abs
chal
tsch
wel
le25
-44
Zusc
haltd
rehz
ahl [
UPM
]25
-45
Zusc
haltd
rehz
ahl [
Hz]
25-4
6A
bsch
altd
rehz
ahl [
UPM
]25
-47
Abs
chal
tdre
hzah
l [H
z]25
-5*
Wec
hsel
eins
tell.
25-5
0Fü
hrun
gspu
mpe
n-W
echs
el25
-51
Wec
hsel
erei
gnis
25-5
2W
echs
elze
itint
erva
ll25
-53
Wec
hsel
zeiti
nter
vallg
eber
25-5
4W
echs
elze
it /
Fes
twec
hsel
zeit
25-5
5W
echs
el b
ei L
ast
<50
%25
-56
Zusc
haltm
odus
bei
Wec
hsel
25-5
8Ve
rzög
erun
g N
ächs
te P
umpe
25-5
9Ve
rzög
erun
g N
etzb
etrie
b25
-8*
Stat
us25
-80
Kask
aden
stat
us25
-81
Pum
pens
tatu
s25
-82
Führ
ungs
pum
pe25
-83
Rela
is S
tatu
s25
-84
Pum
pe E
IN-Z
eit
25-8
5Re
lais
EIN
-Zei
t25
-86
Rück
setz
en d
es R
elai
szäh
lers
25-9
*Se
rvic
e25
-90
Pum
penv
errie
gelu
ng25
-91
Man
uelle
r W
echs
el26
-**
Ana
log-
E/A
-Opt
ion
26-0
*G
rund
eins
tellu
ngen
26-0
0Kl
emm
e X4
2/1
Funk
tion
26-0
1Kl
emm
e X4
2/3
Funk
tion
26-0
2Kl
emm
e X4
2/5
Funk
tion
26-1
*A
nalo
gein
gang
X42
/126
-10
Kl.X
42/1
Ska
l. M
in. S
pann
ung
26-1
1Kl
.X42
/1 S
kal.
Max
.Spa
nnun
g26
-14
Kl. X
42/1
Ska
l. M
in.-S
oll-/
Istw
ert
26-1
5Kl
. X42
/1 S
kal.
Max
.-Sol
l-/ Is
twer
t26
-16
Kl. X
42/1
Filt
erze
it26
-17
Kl. X
42/1
Sig
nalfe
hler
26-2
*A
nalo
gein
gang
X42
/326
-20
Kl.X
42/3
Ska
l. M
in. S
pann
ung
26-2
1Kl
.X42
/3 S
kal.
Max
.Spa
nnun
g26
-24
Kl. X
42/3
Ska
l. M
in.-S
oll-/
Istw
ert
26-2
5Kl
. X42
/3 S
kal.
Max
.-Sol
l-/ Is
twer
t26
-26
Kl. X
42/3
Filt
erze
it26
-27
Kl. X
42/3
Sig
nalfe
hler
26-3
*A
nalo
gein
gang
X42
/526
-30
Kl.X
42/5
Ska
l. M
in. S
pann
ung
26-3
1Kl
.X42
/5 S
kal.
Max
.Spa
nnun
g26
-34
Kl. X
42/5
Ska
l. M
in.-S
oll-/
Istw
ert
26-3
5Kl
. X42
/5 S
kal.
Max
.-Sol
l-/ Is
twer
t26
-36
Kl. X
42/5
Filt
erze
it26
-37
Kl. X
42/5
Sig
nalfe
hler
26-4
*A
nalo
gaus
gang
X42
/726
-40
Kl. X
42/7
Aus
gang
26-4
1Kl
emm
e X4
2/7
Min
. Ska
lieru
ng26
-42
Klem
me
X42/
7 M
ax. S
kalie
rung
26-4
3Kl
emm
e X4
2/7,
Wer
t be
i Bus
steu
erun
g26
-44
Kl. X
42/7
, Wer
t be
i Bus
-Tim
eout
26-5
*A
nalo
gaus
gang
X42
/926
-50
Kl. X
42/9
Aus
gang
26-5
1Kl
emm
e X4
2/9
Min
. Ska
lieru
ng26
-52
Klem
me
X42/
9 M
ax. S
kalie
rung
26-5
3Kl
emm
e X4
2/9,
Wer
t be
i Bus
steu
erun
g26
-54
Kl. X
42/9
, Wer
t be
i Bus
-Tim
eout
26-6
*A
nalo
gaus
gang
X42
/11
26-6
0Kl
. X42
/11
Aus
gang
26-6
1Kl
emm
e X4
2/11
Min
. Ska
lieru
ng26
-62
Klem
me
X42/
11 M
ax. S
kalie
rung
26-6
3Kl
emm
e X4
2/11
, Wer
t be
iBu
sste
ueru
ng26
-64
Kl. X
42/1
1, W
ert
bei B
us-T
imeo
ut31
-**
Bypa
ssop
tion
31-0
0By
pass
mod
us31
-01
Bypa
ss-S
tart
zeitv
erzö
geru
ng31
-02
Bypa
ss-A
bsch
altz
eitv
erzö
geru
ng31
-03
Test
betr
ieba
ktiv
ieru
ng31
-10
Bypa
ss-Z
usta
ndsw
ort
31-1
1By
pass
-Lau
fstu
nden
31-1
9Re
mot
e-By
pass
aktiv
ieru
ng35
-**
Sens
orei
ngan
gsop
tion
35-0
*Te
mp.
Ein
gang
smod
us35
-00
Kl. X
48/4
Tem
p. E
inhe
it35
-01
Kl. X
48/4
Ein
gang
styp
35-0
2Kl
. X48
/7 T
emp.
Ein
heit
35-0
3Kl
. X48
/7 E
inga
ngst
yp35
-04
Kl. X
48/1
0 Te
mp.
Ein
heit
35-0
5Kl
. X48
/10
Eing
angs
typ
35-0
6Te
mpe
ratu
rfüh
ler
Ala
rmfu
nktio
n35
-1*
Tem
p. E
inga
ng X
48/4
35-1
4Kl
. X48
/4 F
ilter
zeit
35-1
5Kl
. X48
/4 T
emp.
Mon
itor
35-1
6Kl
. X48
/4 M
in. T
emp.
Gre
nze
35-1
7Kl
. X48
/4 M
ax. T
emp.
Gre
nze
35-2
*Te
mp.
Ein
gang
X48
/735
-24
Kl. X
48/7
Filt
erze
it35
-25
Kl. X
48/7
Tem
p. M
onito
r35
-26
Kl. X
48/7
Min
. Tem
p. G
renz
e35
-27
Kl. X
48/7
Max
. Tem
p. G
renz
e35
-3*
Tem
p. E
inga
ng X
48/1
035
-34
Kl. X
48/1
0 Fi
lterz
eit
35-3
5Kl
. X48
/10
Tem
p. M
onito
r35
-36
Kl. X
48/1
0 M
in. T
emp.
Gre
nze
35-3
7Kl
. X48
/10
Max
. Tem
p. G
renz
e35
-4*
Ana
loge
inga
ng X
48/2
35-4
2Kl
. X48
/2 M
in. S
trom
35-4
3Kl
. X48
/2 M
ax. S
trom
35-4
4Kl
. X48
/2 M
in. S
oll-/
Istw
ert
35-4
5Kl
. X48
/2 M
ax. S
oll-/
Istw
ert
35-4
6Kl
. X48
/2 F
ilter
zeit
35-4
7Kl
. X48
/2 S
igna
lfehl
er99
-*D
evel
-Unt
erst
ützu
ng
99-0
0D
AC
1-A
usw
ahl
99-0
1D
AC
2-A
usw
ahl
99-0
2D
AC
3-A
usw
ahl
99-0
3D
AC
4-A
usw
ahl
99-0
4D
AC
1-S
kala
99-0
5D
AC
2-S
kala
99-0
6D
AC
3-S
kala
99-0
7D
AC
4-S
kala
99-0
8Te
stpa
ram
. 199
-09
Test
para
m. 2
99-1
0D
AC-
Opt
ions
stec
kpla
tz99
-11
EMV
299
-12
Lüft
er99
-13
Leer
lauf
zeit
99-1
4Pa
ram
db A
nfra
gen
in W
.sch
lang
e99
-15
Seku
ndär
-Tim
er b
ei W
echs
elric
hter
-fe
hler
99-1
6A
nzah
l Str
omse
nsor
en99
-20
Kühl
k.Te
mp.
LT1
99-2
1Kü
hlk.
Tem
p. L
T299
-22
Kühl
k.Te
mp.
LT3
99-2
3Kü
hlk.
Tem
p. L
T499
-24
Kühl
k.Te
mp.
LT5
99-2
5Kü
hlk.
Tem
p. L
T699
-26
Kühl
k.Te
mp.
LT7
99-2
7Kü
hlk.
Tem
p. L
T899
-29
Plat
tfor
m-V
ersi
on99
-40
Star
tupW
izar
dSta
te99
-90
Vorh
ande
ne O
ptio
nen
99-9
1M
otor
leis
tung
inte
rn99
-92
Mot
orsp
annu
ng in
tern
99-9
3In
tern
e M
otor
freq
uenz
99-9
4U
nsym
m.-R
eduz
. [%
]99
-95
Tem
pera
tur-
Redu
z. [%
]99
-96
Übe
rlast
-Red
uz. [
%]
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 35
5 5

5.6 Fernprogrammierung mit MCT 10Software
Danfoss stellt ein Softwareprogramm zur Verfügung, mitdem Sie ganze Projekte zur Programmierung des Frequen-zumrichters entwickeln, speichern und übertragen können.Mit Hilfe der MCT 10 Software können Sie einen PC an denFrequenzumrichter anschließen und den Frequenzum-richter online programmieren, anstatt das LCP zubenutzen. Zudem können Sie die gesamte Frequenzum-richterprogrammierung offline vornehmen undabschließend dann einfach in den Frequenzumrichterübertragen. Alternativ kann die MCT 10 das gesamteFrequenzumrichterprofil zur Sicherung oder Analyse aufden PC übertragen.
Zum Anschluss des Frequenzumrichters an den PC stehender USB-Anschluss oder die RS485-Schnittstelle bereit.
MCT 10 Software kann unter www.VLT-software.comkostenlos heruntergeladen werden. Sie ist ebenfalls auf CDerhältlich (Bestellnummer 130B1000). Das Produk-thandbuch (MG10RXYY) enthält Informationen zurInstallation und Verwendung der MCT 10 Software aufeinem PC.
Programmieren VLT® AQUA Drive (D-Rahmen)Produkthandbuch
36 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
55

6 Anwendungsbeispiele
6.1 Einleitung
HINWEISUm den Frequenzumrichter in Werkseinstellung zubetreiben, benötigen Sie ggf. Drahtbrücken zwischenKlemme 12 (oder 13) und Klemme 27.
Die Beispiele in diesem Abschnitt sollen als Schnellreferenzfür häufige Anwendungen dienen.
• Parametereinstellungen sind die regionalenWerkseinstellungen, sofern nicht andersangegeben (in 0-03 Ländereinstellungenausgewählt).
• Neben den Zeichnungen sind die Parameter fürdie Klemmen und ihre Einstellungen aufgeführt.
• Wenn Schalteinstellungen für die analogenKlemmen A53 und A54 erforderlich sind, werdendiese ebenfalls dargestellt
6.2 Anwendungsbeispiele
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B929
.10 Funktion Einstellung
1-29 Autom.Motoranpassung
[1] KompletteAnpassung
5-12 Klemme 27Digitaleingang
[2]*Motorfreilauf(inv.)
* = Werkseinstellung
Hinweise/Anmerkungen: DieParametergruppe 1-2* mussentsprechend dem Motoreingestellt werden
Tabelle 6.1 AMA mit angeschlossener Kl. 27
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B930
.10 Funktion Einstellung
1-29 Autom.Motoranpassung
[1] KompletteAnpassung
5-12 Klemme 27Digitaleingang
[0] OhneFunktion
* = Werkseinstellung
Hinweise/Anmerkungen: DieParametergruppe 1-2* mussentsprechend dem Motoreingestellt werden
Tabelle 6.2 AMA ohne angeschlossene Kl. 27
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
-10 - +10V
+
-
130B
B926
.10 Funktion Einstellung
6-10 Klemme 53Skal.Min.Spannung 0,07 V*
6-11 Klemme 53Skal.Max.Spannung
10 V*
6-14 Klemme 53Skal. Min.-Soll/Istwert
0 UPM
6-15 Klemme 53Skal. Max.-Soll/Istwert
1500 UPM
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 6.3 Analoger Drehzahlsollwert (Spannung)
Anwendungsbeispiele VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 37
6 6

Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
4 - 20mA
+
-
130B
B927
.10 Funktion Einstellung
6-12 Klemme 53Skal. Min.Strom
4 mA*
6-13 Klemme 53Skal. Max.Strom
20 mA*
6-14 Klemme 53Skal. Min.-Soll/Istwert
0 UPM
6-15 Klemme 53Skal. Max.-Soll/Istwert
1500 UPM
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 6.4 Analoger Drehzahlsollwert (Strom)
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B802
.10 Funktion Einstellung
5-10 Klemme 18Digitaleingang
[8] Start*
5-12 Klemme 27Digitaleingang
[0] OhneFunktion
5-19 Terminal 37Safe Stop
[1] S.Stopp/Alarm
* = Werkseinstellung
Hinweise/Anmerkungen:Wenn 5-12 Klemme 27 Digital-eingang auf [0] Ohne Funktionprogrammiert ist, wird keineDrahtbrücke zu Klemme 27benötigt.
Tabelle 6.5 Start-/Stopp-Befehl mit sicherem Stopp
130B
B805
.10
Speed
Start [18]
Abbildung 6.1
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B803
.10 Funktion Einstellung
5-10 Klemme 18Digitaleingang
[9] Puls-Start
5-12 Klemme 27Digitaleingang
[6] Stopp(invers)
* = Werkseinstellung
Hinweise/Anmerkungen:Wenn 5-12 Klemme 27 Digital-eingang auf [0] Ohne Funktionprogrammiert ist, wird keineDrahtbrücke zu Klemme 27benötigt.
Tabelle 6.6 Puls-Start/Stopp
Speed
130B
B806
.10
Latched Start (18)
Stop Inverse (27)
Abbildung 6.2
Anwendungsbeispiele VLT® AQUA Drive (D-Rahmen)Produkthandbuch
38 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
66

Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B934
.10 Funktion Einstellung
5-10 Klemme 18Digitaleingang
[8] Start
5-11 Klemme 19Digitaleingang
[10]Reversierung*
5-12 Klemme 27Digitaleingang
[0] OhneFunktion
5-14 Klemme 32Digitaleingang
[16]FestsollwertBit 0
5-15 Klemme 33Digitaleingang
[17]FestsollwertBit 1
3-10 Festsollwert Festsollwert 0Festsollwert 1Festsollwert 2Festsollwert 3
25%50%75%100%
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 6.7 Start/Stopp mit Reversierung und 4 voreingestelltenDrehzahlen
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B928
.10 Funktion Einstellung
5-11 Klemme 19Digitaleingang
[1] Reset
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 6.8 Externe Alarmquittierung
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
130B
B683
.10 Funktion Einstellung
6-10 Klemme 53Skal.Min.Spannung 0,07 V*
6-11 Klemme 53Skal.Max.Spannung
10 V*
6-14 Klemme 53Skal. Min.-Soll/Istwert
0 UPM
6-15 Klemme 53Skal. Max.-Soll/Istwert
1500 UPM
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 6.9 Drehzahlsollwert (über ein manuelles Potenziometer)
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B804
.10 Funktion Einstellung
5-10 Klemme 18Digitaleingang
[8] Start*
5-12 Klemme 27Digitaleingang
[19] Sollw.speich.
5-13 Klemme 29Digitaleingang
[21] Drehzahlauf
5-14 Klemme 32Digitaleingang
[22] Drehzahlab
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 6.10 Drehzahlkorrektur auf/ab
Anwendungsbeispiele VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 39
6 6

S t a r t ( 1 8 )
F r e e z e r e f ( 2 7 )
S p e e d u p ( 2 9 )
S p e e d d o w n ( 3 2 )
S p e e d
R e f e r e n c e
130B
B840
.10
Abbildung 6.3
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
616869
RS-485
+
130B
B685
.10 Funktion Einstellung
8-30 FC-Protokoll FC-Profil*
8-31 Adresse 1*
8-32 Baudrate 9600*
* = Werkseinstellung
Hinweise/Anmerkungen:Wählen Sie in den obengenannten ParameternProtokoll, Adresse undBaudrate.
Tabelle 6.11 RS485-Netzwerkverbindung
VORSICHTThermistoren müssen verstärkt oder zweifach isoliertwerden, um die PELV-Anforderungen zu erfüllen.
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
130B
B686
.11 Funktion Einstellung
1-90 ThermischerMotorschutz
[2]Thermistor-Abschalt.
1-93 Thermistor-anschluss
[1] Analog-eingang 53
* = Werkseinstellung
Hinweise/Anmerkungen:Wenn nur eine Warnunggewünscht wird, sollten Sie1-90 Thermischer Motorschutzauf [1] Thermistor Warnungprogrammieren.
Tabelle 6.12 Motorthermistor
Anwendungsbeispiele VLT® AQUA Drive (D-Rahmen)Produkthandbuch
40 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
66

Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130B
B839
.10 Funktion Einstellung
4-30 Drehgeberü-berwachungFunktion [1] Warnung
4-31 Drehgebermax. Fehlab-weichung
100 UPM
4-32 DrehgeberTimeout-Zeit
5 s
7-00 Drehgeber-rückführung
[2] MCB 102
17-11 Inkremental Auflösung[Pulse/U]
1024*
13-00 SmartLogic Controller
[1] Ein
13-01 SL-Controller Start
[19] Warnung
13-02 SL-Controller Stopp
[44] [Reset]-Taste
13-10 Vergleicher-Operand
[21] Nr. derWarnung
13-11 Vergleicher-Funktion
[1] ≈*
13-12 Vergleicher-Wert
90
13-51 SL-ControllerEreignis
[22]Vergleicher 0
13-52 SL-Controller Aktion
[32] Digital-ausgang A-AUS
5-40 Relais-funktion
[80] SL-Digitalausgang A
* = Werkseinstellung
Hinweise/Anmerkungen:Wenn der Grenzwert derDrehgeberüberwachungüberschritten wird, gibt derFrequenzumrichter Warnung 90aus. Der SLC überwachtWarnung 90, und wennWarnung 90 WAHR wird, löstdies Relais 1 aus.Externe Geräte können dannanzeigen, dass ggf. eineWartung erforderlich ist. Wennder Istwertfehler innerhalb von5 s wieder unter diese Grenzefällt, läuft der Frequenzum-richter weiter, und die Warnungwird ausgeblendet. Relais 1bleibt hingegen ausgelöst, bisSie [Reset] auf dem LCPdrücken.
Tabelle 6.13 Verwendung von SLC zur Einstellung eines Relais
Parameter
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COMR1
R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130B
B841
.10 Funktion Einstellung
5-40 Relais-funktion
[32] Mech.Bremse
5-10 Klemme 18Digitaleingang
[8] Start*
5-11 Klemme 19Digitaleingang
[11] Start +Reversierung
1-71 Startverzög. 0,2
1-72 Startfunktion
[5] VVCplus/FLUX Re.
1-76 Startstrom Im,n
2-20 Bremseöffnen beiMotorstrom
Anw.-abhängig
2-21 Bremseschliessen beiMotordrehzahl
Hälfte desNennschlupfsdes Motors
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 6.14 Mechanische Bremssteuerung
Start (18)
Start reversing (19)
Relay output
Speed
Time
Current
1-71 1-712-21 2-21
1-76
OpenClosed
130B
B842
.10
Abbildung 6.4
Anwendungsbeispiele VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 41
6 6

7 Zustandsmeldungen
7.1 Statusanzeige
Wenn sich der Frequenzumrichter im Zustandsmodusbefindet, erzeugt er automatisch Zustandsmeldungen undzeigt sie im unteren Bereich des Displays an (sieheAbbildung 7.1).
Status799RPM 7.83A 36.4kW
0.000
53.2%
1(1)
AutoHandOff
RemoteLocal
RampingStopRunningJogging...Stand by
130B
B037
.10
a b c
Abbildung 7.1 Zustandsanzeige
a. Der erste Teil der Statuszeile zeigt den Ursprungdes Stopp/Start-Befehls.
b. Der zweite Teil der Statuszeile zeigt den Ursprungder Drehzahlregelung an.
c. Der letzte Teil der Statuszeile gibt den aktuellenZustand des Frequenzumrichters an. Es wird dieBetriebsart des Frequenzumrichters angezeigt.
HINWEISIm Auto-/Fernbetrieb benötigt der FrequenzumrichterBefehle über externe Signale, um Funktionen auszuführen.
7.2 Tabelle mit Definitionen derZustandsmeldungen
Die nächsten drei Tabelle definieren die Bedeutung derangezeigten Zustandsmeldungen.
Betriebsmodus
Aus Der Frequenzumrichter reagiert erst auf einSteuersignal, wenn Sie die Taste [Auto on]oder [Hand on] auf der Bedieneinheit drücken.
Auto on Der Frequenzumrichter erhält Signale über dieSteuerklemmen und/oder die serielle Schnitt-stelle.
Hand on Sie können den Frequenzumrichter über dieNavigationstasten am LCP steuern.Stoppbefehle, Reset, Reversierung, DC-Bremseund andere Signale, die an den Steuer-klemmen anliegen, können die Hand-Steuerung aufheben.
Tabelle 7.1
Sollwertvorgabe
Fern Externe Signale, eine serielle Schnittstelle oderinterne Festsollwerte geben den Drehzahl-sollwert vor.
Ort Der Frequenzumrichter nutzt den Handbetrieboder Sollwerte vom LCP.
Tabelle 7.2
BetriebsstatusAC-Bremse Sie haben in 2-10 Bremsfunktion AC-Bremse
gewählt. Die AC-Bremse übermagnetisiert denMotor, um ein kontrolliertes Verlangsamen zuerreichen.
AMA Ende OK Der Frequenzumrichter hat die AutomatischeMotoranpassung (AMA) erfolgreichdurchgeführt.
AMA bereit Die AMA ist startbereit. Drücken Sie zumStarten auf die [Hand on]-Taste.
AMA läuft... Die AMA findet statt.
Bremsen Der Bremschopper ist in Betrieb. Der Bremswi-derstand nimmt generatorische Energie auf.
Max. Bremsung Der Bremschopper ist in Betrieb. DerBremsvorgang hat die Leistungsgrenze desBremswiderstands (definiert in 2-12 Bremswi-derstand Leistung (kW)) erreicht.
Zustandsmeldungen VLT® AQUA Drive (D-Rahmen)Produkthandbuch
42 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
77

BetriebsstatusMotorfreilauf • Sie haben Motorfreilauf invers als Funktion
eines Digitaleingangs gewählt (Parameter-gruppe 5-1*). Die entsprechende Klemmeist nicht angeschlossen.
• Motorfreilauf über die serielle Schnittstelleaktiviert.
Ger. Ram.-Ab In 14-10 Netzausfall haben Sie Geregelte Rampeab gewählt.
• Die Netzspannung liegt unter dem in14-11 Netzausfall-Spannung beiNetzfehler festgelegten Wert.
• Der Frequenzumrichter fährt denMotor über eine geregelte Rampe abherunter.
Strom hoch Der Ausgangsstrom des Frequenzumrichtersliegt über der in 4-51 Warnung Strom hochfestgelegten Grenze.
Strom niedrig Der Ausgangsstrom des Frequenzumrichtersliegt unter der in 4-52 Warnung Drehz. niedrigfestgelegten Grenze.
DC-Halten Sie haben DC-Halten in 1-80 Funktion bei Stoppgewählt und es ist ein Stoppbefehl aktiv. EinDC-Strom, der in 2-00 DC-Halte-/Vorwärmstromeingestellt ist, hält den Motor an.
DC-Stopp Während einer festgelegten Zeitdauer(2-01 DC-Bremsstrom) hält ein DC-Strom(2-02 DC-Bremszeit) den Motor.
• Sie haben DC-Bremse in 2-03 DC-BremseEin [UPM] aktiviert und es ist einStoppbefehl aktiv.
• Sie haben DC-Bremse (invers) als Funktioneines Digitaleingangs gewählt (Parameter-gruppe 5-1*). Die entsprechende Klemmeist nicht aktiv.
• Die DC-Bremse wurde über die serielleSchnittstelle aktiviert.
Istwert hoch Die Summe aller aktiven Istwerte liegt überder Istwertgrenze in 4-57 Warnung Istwerthoch.
Istwert niedr. Die Summe aller aktiven Istwerte liegt unterder Istwertgrenze in 4-56 Warnung Istwertniedr..
Drehz. speich. Der Fernsollwert ist aktiv, wodurch dieaktuelle Drehzahl gehalten wird.
• Sie haben Drehzahl speichern als Funktioneines Digitaleingangs gewählt (Parameter-gruppe 5-1*). Die entsprechende Klemmeist aktiv. Eine Drehzahlregelung ist nurüber die Klemmenfunktionen Drehzahl aufund Drehzahl ab möglich.
• Rampe halten ist über serielle Schnittstelleaktiviert.
BetriebsstatusSpeicheraufford. Sie haben einen Befehl zum Speichern der
Drehzahl gesendet, der Motor bleibt jedochgestoppt, bis er ein Startfreigabe-Signalempfängt.
Sollw. speichern Sie haben Sollwert speichern als Funktion einesDigitaleingangs gewählt (Parametergruppe5-1*). Die entsprechende Klemme ist aktiv. DerFrequenzumrichter speichert den tatsächlichenSollwert. Der Sollwert lässt sich jetzt über dieKlemmenfunktionen Drehzahl auf undDrehzahl ab ändern.
Jogaufford. Es wurde ein Festdrehzahl JOG-Befehlgesendet, der Frequenzumrichter stoppt denMotor jedoch so lange, bis er einStartfreigabe-Signal über einen Digitaleingangempfängt.
Festdrz. (JOG) Der Motor läuft wie in 3-19 Festdrehzahl Jog[UPM] programmiert.
• Sie haben Festdrehzahl JOG als Funktioneines Digitaleingangs gewählt (Parameter-gruppe 5-1*). Die entsprechende Klemme(z. B. Klemme 29) ist aktiv.
• Die Festdrehzahl JOG-Funktion wird überdie serielle Schnittstelle aktiviert.
• Die Festdrehzahl JOG-Funktion wurde alsReaktion für eine Überwachungsfunktiongewählt (z. B. Kein Signal). Die Überwa-chungsfunktion ist aktiv.
Motortest Sie haben in 1-80 Funktion bei Stopp Motortestgewählt. Ein Stoppbefehl ist aktiv. Um sicher-zustellen, dass ein Motor an denFrequenzumrichter angeschlossen ist, legtdieser einen Testdauerstrom an den Motor an.
Übersp.-Steu. Sie haben die Überspannungssteuerung in2-17 Überspannungssteuerung aktiviert. Derangeschlossene Motor versorgt den Frequen-zumrichter mit generatorischer Energie. DieÜberspannungssteuerung passt das U/f-Verhältnis an, damit der Motor geregelt läuftund der Frequenzumrichter nicht abschaltet.
PowerUnit Aus (Nur bei Frequenzumrichtern mit externer 24-V-Stromversorgung.) Die Netzversorgung desFrequenzumrichters ist ausgefallen oder nichtvorhanden, die externen 24 V versorgenjedoch die Steuerkarte.
Zustandsmeldungen VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 43
7 7

BetriebsstatusProtect.Mod. Protection Mode ist aktiv. Der Frequenzum-
richter hat einen kritischen Zustand (einenÜberstrom oder eine Überspannung) erfasst.
• Um eine Abschaltung zu vermeiden,reduziert der Frequenzumrichter dieTaktfrequenz auf 4 kHz.
• Sofern möglich, endet der Protection Modenach ca. 10 s.
• Sie können die Dauer des Protection Modein 14-26 WR-Fehler Abschaltverzögerungbeschränken.
Schnellstopp Der Frequenzumrichter verzögert den Motorgemäß 3-81 Rampenzeit Schnellstopp.
• Sie haben Schnellstopp invers als Funktioneines Digitaleingangs gewählt (Parameter-gruppe 5-1*). Die entsprechende Klemmeist nicht aktiv.
• Sie haben die Schnellstoppfunktion überserielle Schnittstelle aktiviert.
Rampe Der Frequenzumrichter beschleunigt/verzögertden Motor gemäß aktiver Rampe auf/ab. DerMotor hat seinen Sollwert, einen Grenzwertoder den Stillstand noch nicht erreicht.
Sollw. hoch Die Summe aller aktiven Sollwerte liegt überder Sollwertgrenze in 4-55 Warnung Sollwerthoch.
Sollw. niedrig Die Summe aller aktiven Sollwerte liegt unterder Sollwertgrenze in 4-54 Warnung Sollwertniedr..
Ist=Sollwert Der Frequenzumrichter läuft im Sollwert-bereich. Der Istwert entspricht dem Sollwert.
Startauffor-derung
Ein Startbefehl wurde gesendet, der Frequen-zumrichter stoppt den Motor jedoch so lange,bis er ein Startfreigabesignal über Digital-eingang empfängt.
Motor ein Der Frequenzumrichter treibt den Motor an.
Drehzahl hoch Die Motordrehzahl liegt über dem Wert in4-53 Warnung Drehz. hoch.
Drehzahl niedrig Die Motordrehzahl liegt unter dem Wert in4-52 Warnung Drehz. niedrig.
Standby Im Autobetrieb startet der Frequenzumrichterden Motor mit einem Startsignal von einemDigitaleingang oder einer seriellen Schnitt-stelle.
Startverzög. Sie haben in 1-71 Startverzög. eine Verzöge-rungszeit zum Start eingestellt. Ein Startbefehlist aktiviert und der Motor startet nach Ablaufder Anlaufverzögerungszeit.
BetriebsstatusFWD+REV akt. Sie haben Start nur Rechts und Start nur Links
als Funktionen für zwei unterschiedlicheDigitaleingänge ausgewählt (Parametergruppe5-1*). Der Motor startet abhängig von deraktivierten Klemme im Vorwärts- oderRücklauf.
Stopp Der Frequenzumrichter hat einen Stoppbefehlvom LCP, über Digitaleingang oder serielleSchnittstelle empfangen.
Alarm Ein Alarm ist aufgetreten und der Motor istgestoppt. Sobald Sie die Ursache des Alarmsbehoben haben, können Sie den Frequenzum-richter manuell durch Drücken von [Reset]oder fernbedient über Steuerklemmen oderserielle Schnittstelle quittieren.
Abschaltblo-ckierung
Ein Alarm ist aufgetreten und der Motor istgestoppt. Sobald Sie die Ursache des Alarmsbehoben haben, müssen Sie die Netzver-sorgung des Frequenzumrichters aus- undwieder einschalten, um die Blockierungaufzuheben. Sie können den Frequenzum-richter dann manuell über die [Reset]-Tasteoder fernbedient über Steuerklemmen oderserielle Schnittstelle quittieren.
Tabelle 7.3
Zustandsmeldungen VLT® AQUA Drive (D-Rahmen)Produkthandbuch
44 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
77

8 Warnungen und Alarmmeldungen
8.1 Systemüberwachung
Der Frequenzumrichter überwacht den Zustand seinesEingangsstroms, des Ausgangs und der Motorfaktorensowie anderer Systemleistungsanzeigen. Eine Warnungoder ein Alarm zeigt nicht zwangsläufig ein internesProblem des Frequenzumrichters selbst an. In vielen Fällenzeigen sie Fehlerbedingungen bei Eingangsspannung,Motorlast bzw. -temperatur, externen Signalen oderanderen Bereichen an, die der Frequenzumrichterüberwacht. Untersuchen Sie diese Bereiche außerhalb desFrequenzumrichters entsprechend des Alarms oder derWarnung.
8.2 Warnungs- und Alarmtypen
8.2.1 Warnungen
Der Frequenzumrichter gibt eine Warnung aus, wenn einAlarmzustand bevorsteht oder ein abnormer Betriebs-zustand vorliegt, der zur Ausgabe eines Alarms durch denFrequenzumrichter führen kann. Eine Warnung wirdautomatisch quittiert, wenn Sie die abnorme Bedingungbeseitigen.
8.2.2 Alarm (Abschaltung)
Das Display des Frequenzumrichters zeigt einen Alarm,wenn der Frequenzumrichter abgeschaltet hat, d. h. derFrequenzumrichter unterbricht seinen Betrieb, um Schädenan sich selbst oder am System zu verhindern. Der Motorläuft im Freilauf aus und stoppt. Die Steuerung desFrequenzumrichters ist weiter funktionsfähig undüberwacht den Zustand des Frequenzumrichters. NachBehebung des Fehlerzustands können Sie dieAlarmmeldung des Frequenzumrichters quittieren. Er istdanach wieder betriebsbereit.
Es gibt 4 Möglichkeiten, eine Abschaltung zu quittieren:
• Drücken Sie die Bedientaste [RESET] am LCP
• Über einen Digitaleingang mit der Funktion„Reset“.
• Über serielle Schnittstelle.
• Automatisches Quittieren
8.2.3 Alarm (Abschaltblockierung)
Bei einem Alarm, der zu einer Abschaltblockierung desFrequenzumrichters führt, müssen Sie die Eingangs-spannung Netzversorgung aus- und wieder einschalten.Der Motor läuft im Freilauf aus und stoppt. Die Steuerungdes Frequenzumrichters ist weiter funktionsfähig undüberwacht den Zustand des Frequenzumrichters. TrennenSie die Netzversorgung vom Frequenzumrichter undbeheben Sie die Fehlerursache. Schalten Sie die Netzver-sorgung dann wieder ein. Dies versetzt denFrequenzumrichter in einen Abschaltzustand, wie obenbeschrieben, und lässt sich auf eine der vier genanntenArten quittieren.
8.3 Anzeige von Warn- undAlarmmeldungen
130B
P085
.11
Status0.0Hz 0.000psi 0.00A
0.0Hz1:0 - Off
!Live zero error [W2]Off Remote Stop
!1(1)
Abbildung 8.1
Ein Alarm oder ein Alarm mit Abschaltblockierung blinktzusammen mit der Nummer des Alarms auf dem Display.
130B
P086
.11
Status0.0Hz 0.000kW 0.00A
0.0Hz0
Earth Fault [A14]Auto Remote Trip
1(1)
Abbildung 8.2
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 45
8 8

Neben dem Text und dem Alarmcode im Display desFrequenzumrichters leuchten die LED zur Zustandsanzeige.
Autoon Reset
Handon Off
Back
Cancel
InfoOKOn
Alarm
Warn.
130B
B467
.10
Abbildung 8.3
Warn. LED Alarm LED
Warnung AN AUS
Alarm AUS AN (blinkt)
Abschaltblockierung AN AN (blinkt)
Tabelle 8.1
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
46 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
88

8.4 Definitionen von Warn-/Alarmmeldungen
Nr. Beschreibung Warnung Alarm/Abschaltung
Alarm/Abschaltblo-ckierung
Parameterbe-zeichnung
1 10V niedrig X
2 Signalfehler (X) (X) 6-01
3 Kein Motor (X) 1-80
4 Netzphasenfehler (X) (X) (X) 14-12
5 DC-Spannung hoch X
6 DC-Spannung niedrig X
7 DC-Überspannung X X
8 DC-Unterspannung X X
9 WR-Überlast X X
10 Motortemperatur Überlast (X) (X) 1-90
11 Motor Thermistor (X) (X) 1-90
12 Drehmomentgrenze X X
13 Überstrom X X X
14 Erdschluss X X X
15 Inkompatible Hardware X X
16 Kurzschluss X X
17 Steuerwort-Timeout (X) (X) 8-04
23 Interne Lüfter X
24 Externe Lüfter X 14-53
25 Bremswiderstand Kurzschluss X
26 Bremswiderstand Leistungsgrenze (X) (X) 2-13
27 Bremschopper-Fehler X X
28 Bremstest Fehler (X) (X) 2-15
29 Kühlkörpertemp. X X X
30 Motorphase U fehlt (X) (X) (X) 4-58
31 Motorphase V fehlt (X) (X) (X) 4-58
32 Motorphase W fehlt (X) (X) (X) 4-58
33 Inrush Fehler X X
34 Feldbus-Fehler X X
35 Außerhalb Frequenzbereich X X
36 Netzausfall X X
37 Phasenunsym. X X
39 Kühlkörpergeber X X
40 Digitalausgang 27 ist überlastet (X) 5-00, 5-01
41 Digitalausgang 29 ist überlastet (X) 5-00, 5-02
42 Digitalausgang X30/6 oder X30/7 ist überlastet (X) 5-32
46 Umrichter Versorgung X X 5-33
47 24-V-Fehler X X X
48 1,8-V-Fehler X X
49 Drehzahlgrenze X
50 AMA-Kalibrierungsfehler X
51 AMA-Motordaten überprüfen X
52 AMA Motornennstrom überprüfen X
53 AMA-Motor zu groß X
54 AMA-Motor zu klein X
55 AMA-Daten außerhalb des Bereichs X
56 AMA-Abbruch durch Benutzer X
57 AMA-Timeout X
58 AMA-interner Fehler X X
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 47
8 8

Nr. Beschreibung Warnung Alarm/Abschaltung
Alarm/Abschaltblo-ckierung
Parameterbe-zeichnung
59 Stromgrenze X
60 Externe Verriegelung X
62 Ausgangsfrequenz am Maximum X
64 Motorspannung X
65 Steuerkarte Übertemperatur X X X
66 Temperatur zu niedrig X
67 Optionen neu X
68 Sicherer Stopp aktiviert X1)
69 Umrichter Übertemperatur X X
70 Ungültige FC-Konfiguration X
71 PTC 1 Sich. Stopp X X1)
72 Gefährl. Fehler X1)
73 Sicherer Stopp, automatischer Wiederanlauf
76 Konfiguration Leistungseinheit X
79 Ungültige Leistungsteilkonfiguration X X
80 Frequenzumrichter initialisiert X
91 AI 54 Einstellungsfehler X
92 Kein Durchfluss X X 22-2*
93 Trockenlauf X X 22-2*
94 Kennlinienende X X 22-5*
95 Riemenbruch X X 22-6*
96 Startverzögerung X 22-7*
97 Stoppverzögerung X 22-7*
98 Uhrfehler X 0-7*
104 Mischlüfterfehler X X 14-53
220 ÜL-Abschalt. X
243 Bremse IGBT X X
244 Kühlkörpertemp. X X X
245 Kühlkörpergeber X X
246 Umr.Versorgung X X
247 Umrichter Übertemperatur X X
248 Ungültige Leistungsteilkonfiguration X X
250 Neues Ersatzteil X
251 Neuer Typencode X X
Tabelle 8.2 Liste der Aktionen bei Warnung/Alarm
(X) Parameterabhängig1) Autom. Quittieren über 14-20 Quittierfunktion nicht möglichEine Abschaltung ist ein Zustand, der in Fehlersituationen eintritt. Die Abschaltung führt zum Motorfreilauf und kann durchDrücken der Taste [Reset] oder mit einem Reset über einen Digitaleingang (Parametergruppe 5-1* [1]) zurückgesetzt werden.Das Ereignis, das einen Alarm verursacht hat, kann den Frequenzumrichter so nicht beschädigen und nicht zu gefährlichenBedingungen führen. Eine Abschaltblockierung kann nur durch Aus- und Einschalten der Stromversorgung zurückgesetztwerden.
8.5 Fehlermeldungen
Die nachstehenden Warn-/Alarminformationen beschreibenden Warn-/Alarmzustand, geben die wahrscheinlicheUrsache des Zustands sowie Einzelheiten zur Abhilfe undzu den entsprechenden Verfahren zur Fehlersuche und -behebung an.
WARNUNG 1, 10 Volt niedrigDie Spannung von Klemme 50 an der Steuerkarte ist unter10 Volt.Die 10-Volt-Versorgung ist überlastet. Verringern Sie dieLast an Klemme 50. Max. 15 mA oder min. 590 Ω.
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
48 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
88

Diese Bedingung kann ein Kurzschluss in einemangeschlossenen Potenziometer oder eine falscheVerkabelung des Potenziometers verursachen.
Fehlersuche und -behebungEntfernen Sie das Kabel an Klemme 50. Wenn der Frequen-zumrichter die Warnung nicht mehr anzeigt, liegt einProblem mit der Kundenverkabelung vor. Zeigt er dieWarnung weiterhin an, tauschen Sie die Steuerkarte aus.
WARNUNG/ALARM 2, SignalfehlerDer Frequenzumrichter zeigt diese Warnung bzw. diesenAlarm nur an, wenn dies der Benutzer in 6-01 SignalausfallFunktion programmiert hat. Das Signal an einem derAnalogeingänge ist unter 50 % des Mindestwertes, der fürdiesen Eingang programmiert ist. Diese Bedingung kannein gebrochenes Kabel oder ein defektes Gerät, das dasSignal sendet, verursachen.
Fehlersuche und -behebungPrüfen Sie die Anschlüsse an allen Analogein-gangsklemmen: Steuerkartenklemmen 53 und 54für Signale, Klemme 55 Bezugspotenzial. MCB101, Klemmen 11 und 12 für Signale, Klemme 10Bezugspotenzial, MCB 109, Klemmen 1, 3, 5 fürSignale, Klemmen 2, 4, 6 Bezugspotenzial.
Prüfen Sie, ob die Programmierung des Frequen-zumrichters und Schaltereinstellungen mit dem typ übereinstimmen.
Prüfen Sie das Signal an den Eingangsklemmen.
WARNUNG/ALARM 3, Kein MotorAm Ausgang des Frequenzumrichters ist kein Motorangeschlossen.
WARNUNG/ALARM 4, NetzphasenfehlerVersorgungsseitig fehlt eine Phase, oder das Ungleich-gewicht der Netzspannung ist zu hoch. Diese Meldungerscheint im Falle eines Fehlers im Eingangsgleichrichterdes Frequenzumrichters. Programmieren Sie Optionen in14-12 Netzphasen-Unsymmetrie.
Fehlersuche und -behebungKontrollieren Sie die Versorgungsspannung und die Versor-gungsströme zum Frequenzumrichter.
WARNUNG 5, DC-Spannung hochDie Zwischenkreisspannung (DC) liegt oberhalb derÜberspannungsgrenze des Steuersystems. Die Grenze istabhängig von der Nennspannung des Frequenzumrichters.Das Gerät bleibt aktiv.
WARNUNG 6, DC-Spannung niedrigDie Zwischenkreisspannung (DC) liegt unter demSpannungsgrenzwert des Steuersystems. Die Grenze istabhängig von der Nennspannung des Frequenzumrichters.Das Gerät bleibt aktiv.
WARNUNG/ALARM 7, DC-ÜberspannungÜberschreitet die Zwischenkreisspannung den Grenzwert,schaltet der Frequenzumrichter nach einiger Zeit ab.
Fehlersuche und -behebungSchließen Sie einen Bremswiderstand an
Verlängern Sie die Rampenzeit
Ändern Sie den Rampentyp
Aktivieren Sie die Funktionen in2-10 Bremsfunktion
Erhöhen Sie 14-26 WR-Fehler Abschaltverzögerung
WARNUNG/ALARM 8, DC-UnterspannungWenn die Zwischenkreisspannung (DC-Zwischenkreis) unterden unteren Spannungsgrenzwert sinkt, prüft der Frequen-zumrichter, ob eine externe 24 V DC-Versorgungangeschlossen ist. Wenn keine externe 24 V DC-Versorgungangeschlossen ist, schaltet der Frequenzumrichter nacheiner festgelegten Zeit ab. Die Verzögerungszeit hängt vonder Gerätegröße ab.
Fehlersuche und -behebungPrüfen Sie, ob die Versorgungsspannung mit derSpannung des Frequenzumrichters überein-stimmt.
Führen Sie den Eingangsspannungstest durch.
Prüfen Sie die Vorladekreisschaltung.
WARNUNG/ALARM 9, WechselrichterüberlastDer Frequenzumrichter schaltet aufgrund von Überlastung(zu hoher Strom über zu lange Zeit) bald ab. Der Zähler fürden elektronischen, thermischen Wechselrichterschutz gibtbei 98 % eine Warnung aus und schaltet bei 100 % miteinem Alarm ab. Sie können den Frequenzumrichter erstzurücksetzen, wenn der Zähler unter 90 % fällt.Das Problem besteht darin, dass Sie den Frequenzum-richter zu lange Zeit mit mehr als 100 % Ausgangsstrombelastet haben.
Fehlersuche und -behebungVergleichen Sie den angezeigten Ausgangsstromauf dem LCP mit dem Nennstrom des Frequen-zumrichters.
Vergleichen Sie den auf dem LCP angezeigtenAusgangsstrom mit dem gemessenenMotorstrom.
Lassen Sie die thermische Last des Frequenzum-richters auf dem LCP anzeigen und überwachenSie den Wert. Bei Betrieb des Frequenzumrichtersüber dem Dauer-Nennstrom sollte der Zählerwertsteigen. Bei Betrieb unter dem Dauernennstromdes Frequenzumrichters sollte der Zählerwertsinken.
WARNUNG/ALARM 10, Motortemperatur ÜberlastGemäß dem elektronischen thermischen Schutz (ETR) istder Motor zu heiß. In 1-90 Thermischer Motorschutz könnenSie wählen, ob der Frequenzumrichter eine Warnung odereinen Alarm ausgeben soll, wenn der Zähler 100 %erreicht. Der Fehler tritt auf, wenn der Motor zu langedurch über 100 % überlastet wird.
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 49
8 8

Fehlersuche und -behebungPrüfen Sie den Motor auf Überhitzung.
Prüfen Sie, ob der Motor mechanisch überlastetist.
Prüfen Sie die Einstellung des richtigenMotorstroms in 1-24 Motornennstrom.
Überprüfen Sie, ob die Motordaten in denParametern 1-20 bis 1-25 korrekt eingestellt sind.
Wenn Sie einen externen Lüfter verwenden,stellen Sie in 1-91 Fremdbelüftung sicher, dass erausgewählt ist.
Ausführen einer AMA in 1-29 Autom. Motoran-passung stimmt den Frequenzumrichter genauerauf den Motor ab und reduziert die thermischeBelastung.
WARNUNG/ALARM 11, Motor ThermistorDer Thermistor bzw. die Verbindung zum Thermistor istggf. unterbrochen. Wählen Sie in 1-90 ThermischerMotorschutz, ob der Frequenzumrichter eine Warnung odereinen Alarm ausgeben soll.
Fehlersuche und -behebungPrüfen Sie den Motor auf Überhitzung.
Prüfen Sie, ob der Motor mechanisch überlastetist.
Überprüfen Sie, ob der Thermistor korrektzwischen Klemme 53 oder 54 (Analogspannungs-eingang) und Klemme 50 (+ 10 Volt-Versorgung)angeschlossen ist und dass der Schalter fürKlemme 53 oder 54 auf Spannung eingestellt ist.Prüfen Sie, ob 1-93 Thermistoranschluss Klemme53 oder 54 wählt.
Prüfen Sie bei Verwendung der Digitaleingänge18 oder 19, ob der Thermistor korrekt zwischenKlemme 18 oder 19 (nur Digitaleingang PNP) undKlemme 50 angeschlossen ist.
Wenn ein KTY-Sensor benutzt wird, prüfen Sie, obder Anschluss zwischen Klemme 54 und 55korrekt ist.
Prüfen Sie bei Verwendung eines Thermoschaltersoder Thermistors die Programmierung von 1-93Thermistoranschluss – sie muss der Sensorverka-belung entsprechen.
Prüfen Sie bei Verwendung eines KTY-Sensors dieProgrammierung von Parametern 1-95 KTY-Sensortyp, 1-96 KTY-Thermistoranschluss und 1-97KTY-Schwellwert – sie muss der Sensorverka-belung entsprechen.
WARNUNG/ALARM 12, DrehmomentgrenzeDas Drehmoment ist höher als der Wert in 4-16 Momenten-grenze motorisch oder der Wert in 4-17 Momentengrenzegeneratorisch. In 14-25 Drehmom.grenze Verzögerungszeitkönnen Sie einstellen, ob der Frequenzumrichter bei dieser
Bedingung nur eine Warnung ausgibt oder ob ihr einAlarm folgt.
Fehlersuche und -behebungWenn das System die motorische Drehmoment-grenze während Rampe auf überschreitet,verlängern Sie die Rampe-auf-Zeit.
Wenn das System die generatorische Drehmo-mentgrenze während der Rampe abüberschreitet, verlängern Sie die Rampe-ab-Zeit.
Wenn die Drehmomentgrenze im Betrieb auftritt,erhöhen Sie ggf. die Drehmomentgrenze. StellenSie dabei sicher, dass das System mit höheremDrehmoment sicher arbeitet.
Überprüfen Sie die Anwendung auf zu starkeStromaufnahme vom Motor.
WARNUNG/ALARM 13, ÜberstromDie Spitzenstromgrenze des Wechselrichters (ca. 200 % desNennstroms) ist überschritten. Die Warnung dauert ca. 1,5s. Danach schaltet der Frequenzumrichter ab und gibteinen Alarm aus. Diesen Fehler könnten eine Stoßbe-lastung oder eine schnelle Beschleunigung mit hohenTrägheitsmomenten verursachen. Bei Auswahl dererweiterten mechanischen Bremssteuerung können Sie dieAbschaltung extern quittieren.
Fehlersuche und -behebung
Entfernen Sie die Netzversorgung und prüfen Sie,ob die Motorwelle gedreht werden kann.
Kontrollieren Sie, ob die Motorgröße mit demFrequenzumrichter übereinstimmt.
Überprüfen Sie die Parameter 1-20 bis 1-25 aufkorrekte Motordaten.
ALARM 14, ErdschlussEs liegt entweder im Kabel zwischen dem Frequenzum-richter oder im Motor selbst ein Erdschluss derAusgangsphasen vor.
Fehlersuche und -behebung:Schalten Sie den Frequenzumrichter aus undbeheben Sie den Erdschluss.
Prüfen Sie, ob Erdschlüsse im Motor vorliegen,indem Sie mithilfe eines Megaohmmeters denWiderstand der Motorkabel und des Motors zurMasse messen.
Führen Sie einen Stromsensortest durch.
ALARM 15, Inkompatible HardwareEin eingebautes Optionsmodul ist mit der aktuellenHardware oder Software der Steuerkarte nicht kompatibel.
Notieren Sie den Wert der folgenden Parameter undwenden Sie sich an den Danfoss-Service:
15-40 FC-Typ
15-41 Leistungsteil
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
50 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
88

15-42 Nennspannung
15-43 Softwareversion
15-45 Typencode (aktuell)
15-49 Steuerkarte SW-Version
15-50 Leistungsteil SW-Version
15-60 Option installiert
15-61 SW-Version Option (für alle Optionssteck-plätze)
ALARM 16, KurzschlussEs liegt ein Kurzschluss im Motor oder in den Motorkabelnvor.
Schalten Sie den Frequenzumrichter ab und beheben Sieden Kurzschluss.
WARNUNG/ALARM 17, Steuerwort-TimeoutEs besteht keine Kommunikation zum Frequenzumrichter.Die Warnung ist nur dann aktiv, wenn Sie in8-04 Steuerwort Timeout-Funktion NICHT [0] AUS gewählthaben.Wenn Sie 8-04 Steuerwort Timeout-Funktion auf Stopp undAlarm eingestellt haben, zeigt der Frequenzumrichter eineWarnung an und fährt dann unter Ausgabe eines Alarmsnach Rampe ab bis zur Abschaltung herunter.
Fehlersuche und -behebung:Überprüfen Sie die Anschlüsse am Kabel derseriellen Schnittstelle.
Erhöhen Sie 8-03 Steuerwort Timeout-Zeit
Überprüfen Sie die Funktion der Kommunikati-onsgeräte.
Überprüfen Sie auf EMV-gerechte Installation.
WARNUNG/ALARM 22, Mech. BremseAus dem Berichtwert kann Ursache ermittelt werden:0 = Drehmomentsollwert wurde nicht vor dem Timeouterreicht.1 = Keine Rückmeldung der Bremse vor Timeout.
WARNUNG 23, Interne LüfterDie Warnfunktion des Lüfters prüft, ob der Lüfter läuft/installiert ist. Sie können die Lüfterwarnung in 14-53 Lüfter-überwachung ([0] Deaktiviert) deaktivieren.
Bei Filtern der Baugröße D, E oder F erfolgt eineÜberwachung der geregelten Lüfterspannung.
Fehlersuche und -behebungPrüfen Sie den Lüfterwiderstand.
Prüfen Sie die Vorladesicherungen.
WARNUNG 24, Externe LüfterDie Warnfunktion des Lüfters prüft, ob der Lüfter läuft/installiert ist. Sie können die Lüfterwarnung in 14-53 Lüfter-überwachung ([0] Deaktiviert) deaktivieren.
Fehlersuche und -behebungPrüfen Sie den Lüfterwiderstand.
Prüfen Sie die Vorladesicherungen.
WARNUNG 25, Bremswiderstand KurzschlussDer Frequenzumrichter überwacht den Bremswiderstandwährend des Betriebs. Ein Kurzschluss bricht dieBremsfunktion abgebrochen und verursacht eine Warnung.Sie können den Frequenzumrichter weiterhin betreiben,allerdings ohne Bremsfunktion. Schalten Sie den Frequen-zumrichter aus und tauschen Sie den Bremswiderstand aus(siehe 2-15 Bremswiderstand Test).
WARNUNG/ALARM 26, Bremswiderstand LeistungsgrenzeDie auf den Bremswiderstand übertragene Leistung wirdals Mittelwert für die letzten 120 s berechnet. DieBerechnung erfolgt anhand der Zwischenkreisspannungund des Bremswiderstandswertes (2-16 AC-Bremse max.Strom). Die Warnung ist aktiv, wenn die übertrageneBremsleistung höher als 90 % ist. Ist Abschaltung [2] in2-13 Bremswiderst. Leistungsüberwachung gewählt, schaltetder Frequenzumrichter mit einem Alarm ab, wenn dieBremsleistung 100 % erreicht.
WARNUNGEs besteht das Risiko einer Überhitzung des Bremswider-standes und der in der Nähe montierten Bauteile, wennder Bremstransistor einen Masseschluss hat.
WARNUNG/ALARM 27, Bremschopper-FehlerDer Frequenzumrichter überwacht den Bremstransistorwährend des Betriebs. Bei einem Kurzschluss bricht er dieBremsfunktion ab und gibt die Warnung aus. Sie könnenden Frequenzumrichter weiterhin betreiben, aufgrund desKurzschlusses überträgt der Frequenzumrichter jedoch einehohe Leistung an den Bremswiderstand, auch wenn derUmrichter den Motor nicht bremst.Schalten Sie den Frequenzumrichter aus und entfernen Sieden Bremswiderstand.
Dieser Alarm bzw. diese Warnung könnte auch auftreten,wenn der Bremswiderstand überhitzt. Klemmen 104 und106 stehen als Klixon-Schaltereingänge für Bremswider-stände zur Verfügung, siehe dazu der AbschnittTemperaturschalter Bremswiderstand.
WARNUNG/ALARM 28, Bremstest FehlerDer Bremswiderstand ist nicht angeschlossen oder funkti-oniert nicht.Siehe 2-15 Bremswiderstand Test.
ALARM 29, Kühlkörpertemp.Der Kühlkörper überschreitet seine maximal zulässigeTemperatur. Sie können den Temperaturfehler erst dannquittien, wenn die Kühlkörpertemperatur eine definierteKühlkörpertemperatur wieder unterschritten hat. DieAbschalt- und Quittiergrenzen sind je nach derLeistungsgröße des Frequenzumrichters unterschiedlich.
Fehlersuche und -behebungMögliche Ursachen:
Umgebungstemperatur zu hoch
Zu langes Motorkabel.
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 51
8 8

Falsche Freiräume zur Luftzirkulation über undunter dem Frequenzumrichter.
Blockierte Luftzirkulation des Frequenzumrichters.
Beschädigter Kühlkörperlüfter
Schmutziger Kühlkörper
Bei den Frequenzumrichtern der Baugröße D, E und Fberuht dieser Alarm auf der vom in den IGBT-Moduleneingebauten Kühlkörpersensor gemessenen Temperatur.Bei den Frequenzumrichtern der Baugröße F kann diesenAlarm auch der Thermosensor im Gleichrichtermodulverursachen.
Fehlersuche und -behebungPrüfen Sie den Lüfterwiderstand.
Prüfen Sie die Vorladesicherungen.
Prüfen Sie den IGBT-Thermosensor.
ALARM 30, Motorphase U fehltMotorphase U zwischen dem Frequenzumrichter und demMotor fehlt.
Schalten Sie den Frequenzumrichter aus und prüfen SieMotorphase U.
ALARM 31, Motorphase V fehltMotorphase V zwischen dem Frequenzumrichter und demMotor fehlt.
Schalten Sie den Frequenzumrichter aus und prüfen SieMotorphase V.
ALARM 32, Motorphase W fehltMotorphase W zwischen dem Frequenzumrichter und demMotor fehlt.
Schalten Sie den Frequenzumrichter aus und prüfen SieMotorphase W.
ALARM 33, Einschaltstrom-FehlerZu viele Einschaltungen (Netz-Ein) haben innerhalb zukurzer Zeit stattgefunden. Lassen Sie den Frequenzum-richter auf Betriebstemperatur abkühlen.
WARNUNG/ALARM 34, Feldbus-FehlerDer Feldbus auf dem Feldbusmodul funktioniert nicht.
WARNUNG/ALARM 36, NetzausfallDiese Warnung bzw. dieser Alarm ist nur aktiv, wenn dieVersorgungsspannung zum Frequenzumrichter nichtvorhanden ist und 14-10 Netzausfall NICHT auf [0] OhneFunktion programmiert ist. Prüfen Sie die Sicherungen zumFrequenzumrichter und die Netzversorgung zum Gerät.
ALARM 38, Interner FehlerWenn ein interner Fehler auftritt, erzeugt dies eineCodenummer, definiert in der nachstehenden Tabelle, dieim LCP erscheint.
Fehlersuche und -behebungSchalten Sie die Stromversorgung aus und wiederein.
Stellen Sie sicher, dass die Optionen richtigmontiert sind.
Prüfen Sie, ob lose Anschlüsse vorliegen oderAnschlüsse fehlen.
Wenden Sie sich ggf. an Ihren Lieferanten oder denDanfoss-Service. Notieren Sie zuvor die Codenummer, umweitere Hinweise zur Fehlersuche und -behebung zuerhalten.
Nr. Text0 Die serielle Schnittstelle kann nicht initialisiert
werden. Wenden Sie sich an Ihren Danfoss-Lieferanten oder an die Danfoss Service-Abteilung.
256-258 EEPROM-Daten Leistungskarte defekt oder zu alt
512 EEPROM-Daten der Steuerkarte defekt oder zu alt
513 Kommunikationstimeout beim Lesen von EEPROM-Daten
514 Kommunikationstimeout beim Lesen von EEPROM-Daten
515 Anwendungsorientierte Steuerung kann dieEEPROM-Daten nicht erkennen
516 Schreiben zum EEPROM nicht möglich, da einSchreibbefehl ausgeführt wird
517 Schreibbefehl ist unter Timeout
518 Fehler im EEPROM
519 Fehlende oder ungültige Barcodedaten in EEPROM
783 Parameterwert außerhalb min./max. Grenzen
1024-1279 Ein CAN-Telegramm konnte nicht gesendet werden
1281 Flash-Timeout des digitalen Signalprozessors
1282 Leistungs-Mikro-Software-Version inkompatibel
1283 Leistungs-EEPROM-Datenversion inkompatibel
1284 Software-Version des digitalen Signalprozessorskann nicht gelesen werden
1299 SW der Option in Steckplatz A ist zu alt
1300 SW der Option in Steckplatz B ist zu alt
1301 Option SW in Steckplatz C0 ist zu alt
1302 SW der Option in Steckplatz C1 ist zu alt
1315 SW der Option in Steckplatz A ist nicht unterstützt(nicht zulässig)
1316 SW der Option in Steckplatz B ist nicht unterstützt(nicht zulässig)
1317 Option SW in Steckplatz C0 wird nicht unterstützt(nicht zulässig)
1318 SW der Option in Steckplatz C1 ist nichtunterstützt (nicht zulässig)
1379 Option A hat bei Berechnung der Plattformversionnicht geantwortet
1380 Option B hat bei Berechnung der Plattformversionnicht geantwortet
1381 Option C0 hat bei der Berechnung der Plattform-version nicht geantwortet
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
52 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
88

Nr. Text1382 Option C1 hat bei der Berechnung der Plattform-
version nicht geantwortet
1536 Es wurde eine Ausnahme in der anwendungsorien-tierten Steuerung erfasst. Debug-Informationen inLCP geschrieben.
1792 DSP-Watchdog ist aktiv. Debugging der Leistungs-teildaten, Daten der motororientierten Steuerungnicht korrekt übertragen.
2049 Leistungsdaten neu gestartet
2064-2072 H081x: Option in Steckplatz x neu gestartet
2080-2088 H082x: Option in Steckplatz x hat eine Netz-Ein-Wartemeldung ausgegeben
2096-2104 H983x: Option in Steckplatz x hat eine legale Netz-Ein-Wartemeldung ausgegeben
2304 Daten von Leistungs-EEPROM konnten nichtgelesen werden
2305 Fehlende SW-Version von Leistungseinheit
2314 Fehlende Leistungseinheitsdaten von Leistungs-einheit
2315 Fehlende SW-Version von Leistungseinheit
2316 Fehlende io_statepage von Leistungseinheit
2324 Leistungskartenkonfiguration wurde bei Netz-Einals inkorrekt ermittelt
2325 Eine Leistungskarte hat bei aktiver Netzversorgungdie Kommunikation eingestellt
2326 Fehlerhafte Konfiguration der Leistungskarte nachverzögerter Registrierung der Leistungskartenermittelt
2327 Zu viele Leistungskartenorte wurden als anwesendregistriert
2330 Leistungsgrößeninformationen zwischen denLeistungskarten stimmen nicht überein
2561 Keine Kommunikation von DSP zu ATACD
2562 Keine Kommunikation von ATACD zu DSP (Zustand„In Betrieb“)
2816 Stapelüberlauf Steuerkartenmodul
2817 Scheduler langsame Aufgaben
2818 Schnelle Aufgaben
2819 Parameterthread
2820 LCP Stapelüberlauf
2821 Überlauf serielle Schnittstelle
2822 Überlauf USB-Anschluss
2836 cfListMempool zu klein
3072-5122 Parameterwert außerhalb seiner Grenzen
5123 Option in Steckplatz A: Hardware mit Steuerkarten-hardware nicht kompatibel
5124 Option in Steckplatz B: Hardware mit Steuerkarten-hardware nicht kompatibel
5125 Option in Steckplatz C0: Hardware mit Steuerkar-tenhardware nicht kompatibel
5126 Option in Steckplatz C1: Hardware mit Steuerkar-tenhardware nicht kompatibel
Nr. Text5376-6231 N. genug Spei.
Tabelle 8.3
ALARM 39, KühlkörpergeberKein Istwert vom Kühlkörpertemperaturgeber.
Das Signal vom thermischen IGBT-Sensor steht an derLeistungskarte nicht zur Verfügung. Es könnte ein Problemmit der Leistungskarte, der Gate-Ansteuerkarte oder demFlachkabel zwischen der Leistungskarte und der Gate-Ansteuerkarte vorliegen.
WARNUNG 40, Digitalausgang 27 ist überlastetPrüfen Sie die Last an Klemme 27 oder beseitigen Sie denKurzschluss. Prüfen Sie 5-00 Schaltlogik und 5-01 Klemme 27Funktion.
WARNUNG 41, Digitalausgang 29 ist überlastetPrüfen Sie die Last an Klemme 29 oder beseitigen Sie denKurzschluss. Prüfen Sie 5-00 Schaltlogik und 5-02 Klemme 29Funktion.
WARNUNG 42, Digitalausgang X30/6 oder X30/7 istüberlastetPrüfen Sie für X30/6 die Last, die an X30/6 angeschlossenist, oder entfernen Sie die Kurzschlussverbindung. Siehe5-32 Klemme X30/6 Digitalausgang.
Prüfen Sie für X30/7 die Last, die an X30/7 angeschlossenist, oder entfernen Sie die Kurzschlussverbindung. Siehe5-33 Klemme X30/7 Digitalausgang.
ALARM 46, Umrichter VersorgungDie Stromversorgung der Leistungskarte liegt außerhalbdes Bereichs.
Das Schaltnetzteil (SMPS) auf der Leistungskarte erzeugtdrei Spannungsversorgungen: 24 V, 5 V, ± 18 V. Bei einerVersorgungsspannung von 24 VDC bei der Option MCB107 überwacht der Frequenzumrichter 24 V und 5 V. BeiVersorgung mit dreiphasiger Netzspannung überwacht eralle drei Versorgungsspannungen.
WARNUNG 47, 24-V-Versorgung – FehlerDie 24-V-DC-Versorgung wird an der Steuerkartegemessen. Die externe 24-V-DC-Versorgung istmöglicherweise überlastet. Andernfalls wenden Sie sich anIhren Danfoss-Händler.
WARNUNG 48, 1,8-V-Versorgung – FehlerDie 1,8-Volt-DC-Versorgung der Steuerkarte liegt außerhalbdes Toleranzbereichs. Die Spannungsversorgung wird ander Steuerkarte gemessen. Überprüfen Sie, ob dieSteuerkarte defekt ist. Wenn eine Optionskarte eingebautist, prüfen Sie, ob eine Überspannungsbedingung vorliegt.
WARNUNG 49, DrehzahlgrenzeWenn die Drehzahl nicht mit dem Bereich in 4-11 Min.Drehzahl [UPM] und 4-13 Max. Drehzahl [UPM] überein-stimmt, zeigt der Frequenzumrichter eine Warnung an.Wenn die Drehzahl unter der Grenze in 1-86 Min.
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 53
8 8

Abschaltdrehzahl [UPM] liegt (außer beim Starten oderStoppen), schaltet der Frequenzumrichter ab.
ALARM 50, AMA-KalibrierungsfehlerWenden Sie sich an Ihren Danfoss-Lieferanten oder an dieDanfoss Service-Abteilung.
ALARM 51, AMA-Motordaten überprüfenDie Einstellung von Motorspannung, Motorstrom und/oderMotorleistung ist vermutlich falsch. Überprüfen Sie dieEinstellungen in den Parametern 1-20 bis 1-25.
ALARM 52, AMA-MotornennstromDer Motorstrom ist zu niedrig. Überprüfen Sie die Einstel-lungen.
ALARM 53, AMA-Motor zu großDer Motor ist für die Durchführung der AMA zu groß.
ALARM 54, AMA-Motor zu kleinDer Motor ist für die Durchführung der AMA zu klein.
ALARM 55, AMA-Daten außerhalb des BereichsDie Parameterwerte des Motors liegen außerhalb deszulässigen Bereichs. Die AMA lässt sich nicht ausführen.
56 ALARM, AMA-Abbruch durch BenutzerDer Benutzer hat die AMA abgebrochen.
ALARM 57, AMA-interner FehlerVersuchen Sie einen Neustart der AMA, bis die AMAdurchgeführt wird. Beachten Sie, dass wiederholter Betriebzu einer Erwärmung des Motors führen kann, waswiederum eine Erhöhung der Widerstände Rs und Rrbewirkt. Im Regelfall ist dies jedoch nicht kritisch.
ALARM 58, AMA-interner FehlerWenden Sie sich an den Danfoss-Service.
WARNUNG 59, StromgrenzeDer Strom ist höher als der Wert in 4-18 Stromgrenze.Überprüfen Sie, ob die Motordaten in den Parametern 1-20bis 1-25 korrekt eingestellt sind. Erhöhen Siemöglicherweise die Stromgrenze. Achten Sie darauf, dassdas System sicher mit einer höheren Grenze arbeiten kann.
WARNUNG 60, Externe VerriegelungDie externe Verriegelung wurde aktiviert. Zur Wieder-aufnahme des normalen Betriebs legen Sie 24 V DC an dieKlemme an, die für externe Verriegelung programmiert istund quittieren Sie den Frequenzumrichter (über Bus,Klemme oder Drücken der Taste [Reset]).
WARNUNG/ALARM 61, Drehg. Abw.Der Frequenzumrichter hat eine Abweichung zwischen derberechneten Drehzahl und der Drehzahlmessung vomIstwertgeber festgestellt. Sie stellen die Funktion Warnung/Alarm/Deaktivieren in 4-30 Drehgeberüberwachung Funktionein. In 4-31 Drehgeber max. Fehlabweichung stellen Sie dieakzeptierte Abweichung und in 4-32 Drehgeber Timeout-Zeitdie Zeit ein, wie lange der Drehzahlfehler überschrittensein muss. Während der Inbetriebnahme ist die Funktionggf. wirksam.
WARNUNG 62, Ausgangsfrequenz am MaximumDie Ausgangsfrequenz überschreitet den in 4-19 Max.Ausgangsfrequenz eingestellten Wert.
ALARM 64, Motorspannung GrenzeDie Last- und Drehzahlverhältnisse erfordern eine höhereMotorspannung als die aktuelle Zwischenkreisspannungzur Verfügung stellen kann.
WARNUNG/ALARM 65, Steuerkarte ÜbertemperaturDie Abschalttemperatur der Steuerkarte beträgt 80 ° C.
Fehlersuche und -behebung
• Stellen Sie sicher, dass Umgebungs- und Betriebs-temperatur innerhalb der Grenzwerte liegen.
• Prüfen Sie, ob die Filter verstopft sind.
• Prüfen Sie die Lüfterfunktion.
• Prüfen Sie die Steuerkarte.
WARNUNG 66, Temperatur zu niedrigDie Temperatur des Frequenzumrichters ist zu kalt für denBetrieb. Diese Warnung basiert auf den Messwerten desTemperaturfühlers im IGBT-Modul.Erhöhen Sie die Umgebungstemperatur der Einheit. Siekönnen den Frequenzumrichter zudem durch Einstellungvon 2-00 DC-Halte-/Vorwärmstrom auf 5 % und1-80 Funktion bei Stopp mit einem Erhaltungsladestromversorgen, wenn der Motor gestoppt ist.
Fehlersuche und -behebungDie Kühlkörpertemperatur wird als 0 °C gemessen.Möglicherweise ist der Temperatursensor defekt. DieLüfterdrehzahl wird auf das Maximum erhöht. Wenn dasSensorkabel zwischen dem IGBT und der Gate-Ansteu-erkarte getrennt ist, zeigt der Frequenzumrichter dieseWarnung an. Überprüfen Sie auch den IGBT-Thermosensor.
ALARM 67, Optionsmodul neuSie haben seit dem letzten Netz-Ein eine oder mehrereOptionen hinzugefügt oder entfernt. Überprüfen Sie, obdie Konfigurationsänderung absichtlich erfolgt ist, undquittieren Sie das Gerät.
ALARM 68, Sicherer Stopp aktiviertDie Funktion „Sicherer Stopp“ wurde aktiviert. Legen Siezum Fortsetzen des normalen Betriebs 24 V DC an Klemme37 an, und senden Sie dann ein Quittiersignal (über Bus,Klemme oder durch Drücken der Taste [Reset]).
ALARM 69, Umrichter ÜbertemperaturDer Temperaturfühler der Leistungskarte erfasst entwedereine zu hohe oder eine zu niedrige Temperatur.
Fehlersuche und -behebungPrüfen Sie den Betrieb der Türlüfter.
Prüfen Sie, dass die Filter der Türlüfter nichtverstopft sind.
Prüfen Sie, dass das Bodenblech bei IP21/IP54-Frequenzumrichtern richtig montiert ist.
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
54 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
88

ALARM 70, Ungültige FrequenzumrichterkonfigurationDie aktuelle Kombination aus Steuerkarte undLeistungskarte ist ungültig. Wenden Sie sich mit demTypencode des Geräts vom Typenschild und denTeilenummern der Karten an Ihren Lieferanten, um dieKompatibilität zu überprüfen.
ALARM 71, PTC 1 Sicherer StoppDie PTC-Thermistorkarte hat den sicheren Stopp aktiviert(Motor zu warm). Normaler Betrieb kann wiederaufgenommen werden, wenn die wieder 24 V DC an Kl. 37anlegt (wenn die Motortemperatur einen akzeptablen Werterreicht) und wenn der Digitaleingang von der deaktiviertwird. Wenn dies geschieht, muss ein Reset-Signal (überBus, Digitalein-/-ausgang oder durch Drücken der Reset-Taste) gesendet werden. Beachten Sie, dass derFrequenzumrichter den Motor bei aktiviertem automa-tischem Wiederanlauf starten kann, sobald der Fehlerbehoben ist.
ALARM 72, Gefährlicher FehlerSicherer Stopp mit Abschaltblockierung. UnerwarteteSignalniveaus am Eingang für sicheren Stopp und Digital-eingang von der PTC-Thermistorkarte.
WARNUNG 73, Sicherer Stopp, autom. WiederanlaufDer Frequenzumrichter hat sicheren Stopp aktiviert. Wennautomatischer Wiederanlauf aktiviert ist, kann der Motornach Behebung des Fehlers starten.
WARNUNG 76, Leistungsteil KonfigurationDie benötigte Zahl von Leistungsteilen stimmt nicht mitder erfassten Anzahl aktiver Leistungsteile überein.
Fehlersuche und -behebung:Beim Austausch eines Moduls in Baugröße F tritt dies auf,wenn leistungsspezifische Daten in der Leistungskarte desModuls nicht mit dem Rest des Frequenzumrichtersübereinstimmen. Bitte bestätigen Sie, dass die Bestell-nummer des Ersatzteils und seiner Leistungskarteübereinstimmen.
77 WARNUNG, Reduzierter LeistungsmodusDie Warnung zeigt an, dass der Frequenzumrichter imreduzierten Leistungsmodus arbeitet (d. h. mit weniger alsder erlaubten Anzahl von Wechselrichterabschnitten). DerFrequenzumrichter zeigt diese Warnung beim Aus- undEinschalten an, wenn Sie ihn auf den Betrieb mit wenigerWechselrichtern einstellen, und bleibt eingeschaltet.
ALARM 79, Ungültige LeistungsteilkonfigurationDie Bestellnummer der Skalierungskarte ist falsch oder sieist nicht installiert. Außerdem ist der Anschluss MK102 aufder Leistungskarte ggf. nicht installiert.
ALARM 80, Frequenzumrichter initialisiertEin manueller Reset hat den Frequenzumrichter mitWerkseinstellungen initialisiert. Führen Sie einen Reset desFrequenzumrichters durch, um den Alarm zu beheben.
ALARM 81, CSIV beschädigtDie Syntax der CSIV-Datei ist fehlerhaft.
ALARM 82, CSIV-ParameterfehlerCSIV-Fehler bei Parameterinit.
ALARM 85, Gefährl. F. PB:Profibus/Profisafe-Fehler.
WARNUNG/ALARM 104, MischlüfterfehlerDie Lüfterüberwachung überprüft, ob der Lüfter beimEinschalten des Frequenzumrichters oder bei Einschaltendes Mischlüfters läuft. Läuft der Lüfter nicht, zeigt derFrequenzumrichter einen Fehler an. Sie können denMischlüfterfehler in Parameter 14-53 (Lüfterüberwachung)als Warnung oder Abschaltung konfigurieren.
Fehlersuche und -behebung Schalten Sie den Frequenzum-richter aus und wieder ein, um zu sehen, ob er dieWarnung bzw. der Alarm erneut anzeigt.
WARNUNG 250, Neues ErsatzteilEin Bauteil im Frequenzumrichter wurde ersetzt. Führen Siefür Normalbetrieb ein Reset des Frequenzumrichters durch.
WARNUNG 251, Typencode neuDie Leistungskarte oder andere Bauteile wurdenausgetauscht und der Typencode geändert. Führen Sie einReset durch, um die Warnung zu entfernen und Normal-betrieb fortzusetzen.
Warnungen und Alarmmeldunge... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 55
8 8

9 Grundlegende Fehlersuche und -behebung
9.1 Inbetriebnahme und Betrieb
Symptom Mögliche Ursache Test Lösung
Display dunkel/OhneFunktion
Fehlende Eingangsleistung Siehe Tabelle 3.1. Prüfen Sie die Netzeingangsquelle.
Fehlende oder offene Sicherungenoder Trennschalter ausgelöst
Mögliche Ursachen finden Sie indieser Tabelle unter offeneSicherungen und ausgelösterTrennschalter.
Folgen Sie den gegebenenEmpfehlungen.
Keine Stromversorgung zum LCP Prüfen Sie, ob das LCP-Kabel richtigangeschlossen oder möglicherweisebeschädigt ist.
Ersetzen Sie das defekte LCP oderAnschlusskabel.
Kurzschluss an der Steuer-spannung (Klemme 12 oder 50)oder an den Steuerklemmen
Überprüfen Sie die 24-V-Steuer-spannungsversorgung für Klemme12/13 bis 20-39 oder die 10-V-Stromversorgung für Klemme 50bis 55.
Verdrahten Sie die Klemmenrichtig.
Falsches LCP (LCP von VLT® 2800oder 5000/6000/8000/FCD oderFCM)
Verwenden Sie nur LCP 101 (Best.-Nr. 130B1124) oder LCP 102 (Best.-Nr. 130B1107).
Falsche Kontrasteinstellung Drücken Sie auf [Status] + []/[],
um den Kontrast anzupassen.
Display (LCP) ist defekt Führen Sie einen Test mit einemanderen LCP durch.
Ersetzen Sie das defekte LCP oderAnschlusskabel.
Fehler der internen Spannungsver-sorgung oder defektesSchaltnetzteil (SMPS)
Wenden Sie sich an den Händler.
Displayaussetzer
Überlastetes Schaltnetzteil (SMPS)durch falsche Steuerverdrahtungoder Störung im Frequenzum-richter
Um sicherzustellen, dass keinProblem in den Steuerleitungenvorliegt, trennen Sie alle Steuerlei-tungen durch Entfernen derKlemmenblöcke.
Leuchtet das Display weiterhin,liegt ein Problem in den Steuerlei-tungen vor. Überprüfen Sie dieKabel auf Kurzschlüsse oder falscheAnschlüsse. Wenn das Displayweiterhin aussetzt, führen Sie dasVerfahren unter „Display dunkel“durch.
Grundlegende Fehlersuche un... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
56 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
99

Symptom Mögliche Ursache Test Lösung
Motor läuft nicht
Serviceschalter offen oderfehlender Motoranschluss
Prüfen Sie, ob der Motorangeschlossen und dieserAnschluss nicht unterbrochen ist(durch einen Serviceschalter oderein anderes Gerät).
Schließen Sie den Motor an undprüfen Sie den Serviceschalter.
Keine Netzversorgung bei 24 VDC-Optionskarte
Wenn das Display funktioniert,jedoch kein Ausgang vorliegt,prüfen Sie, dass Netzspannung amFrequenzumrichter anliegt.
Legen Sie Netzspannung an, umden Frequenzumrichter zubetreiben.
LCP-Stopp Überprüfen Sie, ob die [Off]-Tastebetätigt wurde.
Drücken Sie auf [Auto on] oder[Hand on] (je nach Betriebsart), umden Motor in Betrieb zu nehmen.
Fehlendes Startsignal (Standby) Stellen Sie sicher, dass 5-10 Klemme18 Digitaleingang die richtigeEinstellung für Klemme 18 besitzt(verwenden Sie die Werksein-stellung).
Legen Sie ein gültiges Startsignalan, um den Motor zu starten.
Motorfreilaufsignal aktiv (Freilauf) Stellen Sie sicher, dass 5-12Motorfreilauf (inv.) die richtigeEinstellung für Klemme 27 hat(verwenden Sie die Werksein-stellung).
Legen Sie 24 V an Klemme 27 anoder programmieren Sie dieseKlemme auf Ohne Funktion.
Falsche Sollwertsignalquelle Überprüfen Sie das Sollwertsignal:Ist es ein Ort-, Fern- oder Bus-Sollwert? Ist der Festsollwert aktiv?Ist der Anschluss der Klemmenkorrekt? Ist die Skalierung derKlemmen korrekt? Ist das Sollwert-signal verfügbar?
Programmieren Sie die richtigenEinstellungen. Siehe 3-13 Sollwert-vorgabe. Setzen Sie denFestsollwert in Parametergruppe3-1* Sollwerteinstellung auf aktiv.Prüfen Sie, ob Frequenzumrichterund Motor richtig verkabelt sind.Prüfen Sie die Skalierung derKlemmen. Überprüfen Sie dasSollwertsignal.
Die Motordrehrichtung istfalsch
Motordrehgrenze Überprüfen Sie, ob 4-10 MotorDrehrichtung korrekt programmiertist.
Programmieren Sie die richtigenEinstellungen.
Aktives Reversierungssignal Überprüfen Sie, ob ein Reservie-rungsbefehl für die Klemme inParametergruppe 5-1* Digita-leingänge programmiert ist.
Deaktivieren Sie das Reversierungs-signal.
Falscher Motorphasenanschluss Siehe 2.4.5 Motordrehrichtungs-prüfung in diesem Handbuch.
Motor erreicht maximaleDrehzahl nicht
Frequenzgrenzen falsch eingestellt Überprüfen Sie die Ausgangsbe-schränkungen in 4-13 Max. Drehzahl[UPM], 4-14 Max Frequenz [Hz] und4-19 Max. Ausgangsfrequenz
Programmieren Sie die richtigenGrenzen.
Sollwerteingangssignal nichtrichtig skaliert
Überprüfen Sie die Skalierung desSollwerteingangsignals in 6-*Grundeinstellungen und in Parame-tergruppe 3-1* Sollwerteinstellung.Sollwertgrenzen werden in Parame-tergruppe 3-0* eingestellt.
Programmieren Sie die richtigenEinstellungen.
Grundlegende Fehlersuche un... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 57
9 9

Symptom Mögliche Ursache Test Lösung
Motordrehzahl instabil
Möglicherweise falsche Parameter-einstellungen
Überprüfen Sie die Einstellungenaller Motorparameter, darunterauch alle Schlupfausgleichseinstel-lungen. Prüfen Sie bei Regelungmit Rückführung die PID-Einstel-lungen.
Überprüfen Sie die Einstellungen inParametergruppe 1-6* Grundeinstel-lungen. Beim Betrieb mitIstwertrückführung prüfen Sie dieEinstellungen in Parametergruppe20-0* Istwert.
Motor läuft unruhig
Möglicherweise Übermagneti-sierung
Prüfen Sie alle Motorparameter auffalsche Motoreinstellungen.
Überprüfen Sie die Motoreinstel-lungen in den Parametergruppen1-2* Motordaten, 1-3* Erw.Motordaten und 1-5* Lastunabh.Einst..
Motor bremst nicht
Möglicherweise falsche Einstel-lungen in den Bremsparametern.Möglicherweise sind die Rampe-ab-Zeiten zu kurz.
Prüfen Sie die Bremsparameter.Prüfen Sie die Einstellungen für dieRampenzeiten.
Überprüfen Sie Parametergruppe2-0* DC-Bremse und 3-0* Sollwert-grenzen.
Offene Netzsicherungenoder Trennschalterausgelöst
Kurzschluss zwischen Phasen Kurzschluss zwischen Phasen anMotor oder Bedienteil. Prüfen Siedie Motor- und Bedienteilphasenauf Kurzschlüsse.
Beseitigen Sie erkannteKurzschlüsse.
Motorüberlastung Motor wird durch die Anwendungüberlastet.
Führen Sie die Inbetriebnahme-prüfung durch und stellen Siesicher, dass der Motorstrom imRahmen der technischen Datenliegt. Wenn der Motorstrom denNennstrom auf dem Typenschildüberschreitet, läuft der Motor ggf.nur mit reduzierter Last.Überprüfen Sie die technischenDaten der Anwendung.
Lose Anschlüsse Führen Sie die Inbetriebnahme-prüfung nach losen Anschlüssenund Kontakten durch.
Ziehen Sie lose Anschlüsse undKontakte fest.
Abweichung der Netzstro-munsymmetrie ist größerals 3 %
Problem mit der Netzversorgung(siehe Beschreibung unter Alarm 4Netzunsymmetrie)
Wechseln Sie die Netzein-gangskabel am Frequenzumrichterum eine Position: A zu B, B zu C, Czu A.
Wenn die Unsymmetrie dem Kabelfolgt, liegt ein Netzstromproblemvor. Prüfen Sie die Netzversorgung.
Problem mit dem Frequenzum-richter
Wechseln Sie die Netzein-gangskabel am Frequenzumrichterum eine Position: A zu B, B zu C, Czu A.
Wenn der unsymmetrischeLeitungszweig in der gleichenEingangsklemme bleibt, liegt einProblem mit dem Gerät vor. Bittewenden Sie sich an denLieferanten.
Motorstromunsymmetriegrößer 3 %
Problem mit Motor oderMotorverdrahtung
Wechseln Sie die Kabel zum Motorum eine Position: U zu V, V zu W,W zu U.
Wenn die Unsymmetrie dem Kabelfolgt, liegt das Problem beimMotor oder in den Motorkabeln.Überprüfen Sie den Motor und dieMotorkabel.
Problem mit dem Frequenzum-richter
Wechseln Sie die Kabel zum Motorum eine Position: U zu V, V zu W,W zu U.
Wenn die Unsymmetrie an dergleichen Ausgangsklemmebestehen bleibt, liegt ein Problemmit dem Frequenzumrichter vor.Bitte wenden Sie sich an denLieferanten.
Grundlegende Fehlersuche un... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
58 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
99

Symptom Mögliche Ursache Test Lösung
Störgeräusche oderVibrationen (z. B. verursachtein Lüfterflügel beibestimmten FrequenzenGeräusche oderVibrationen)
Resonanzen, z. B. im Motor-/Lüftersystem
Überbrückung kritischerFrequenzen durch die Verwendungder Parameter in Parametergruppe4-6*.
Überprüfen Sie, ob Störgeräuscheund/oder Vibrationen auf einenakzeptablen Grenzwert reduziertwurden.
Schalten Sie die Übermodulation in14-03 Übermodulation aus.
Ändern Sie den Schaltmodus unddie Frequenz in Parametergruppe14-0*.
Erhöhen Sie die Resonanz-dämpfung in1-64 Resonanzdämpfung.
Tabelle 9.1
Grundlegende Fehlersuche un... VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 59
9 9

10 Technische Daten
10.1 Leistungsabhängige technische Daten
Netzversorgung 3x380-480 VAC
N110 N132 N160 N200 N250 N315
Hohe/normale Last* NO NO NO NO NO NO
Typische Wellenleistung bei 400V [kW]
110 132 160 200 250 315
150 200 250 300 350 450
Typische Wellenleistung bei 480V [kW]
132 160 200 250 315 355
Schutzart IP21 D1h D1h D1h D2h D2h D2h
Schutzart IP54 D1h D1h D1h D2h D2h D2h
Schutzart IP20 D3h D3h D3h D4h D4h D4h
Ausgangsstrom
Dauerbetrieb (bei 400 V) [A] 212 260 315 395 480 588
Überlast (60 s) (bei 400 V) [A] 233 286 347 435 528 647
Dauerbetrieb (bei 460/500 V) [A] 190 240 302 361 443 535
Überlast (60 s) (bei 460/500 V)[A]
209 264 332 397 487 588
Dauerbetrieb kVA (bei 400 V)[kVA]
147 180 218 274 333 407
Dauerbetrieb kVA (bei 460 V)[kVA]
151 191 241 288 353 426
Max. Eingangsstrom
Dauerbetrieb (bei 400 V) [A] 204 251 304 381 381 463 463 567
Dauerbetrieb (bei 460/500 V) [A] 183 231 291 348 348 427 427 516
Max. Kabelquerschnitt: Netz,Motor, Bremse und Zwischen-
kreiskopplung [mm2 (AWG2))]5)
2 x 95(2 x 3/0)
2 x 185(2 x 350)
Max. externe Netzsicherungen
[A]1
315 350 400 550 630 800
Geschätzte Verlustleistung bei
400 V [W] 4
2555 2949 3764 4109 5129 6663
Geschätzte Verlustleistung bei460 V [W]
2257 2719 3622 3561 4558 5703
Gewicht, Gehäuse IP21, IP54 [kg] 62 (135) 125 (275)
Gewicht, Schutzart IP20 [kg] 62 (135) 125 (275)
Wirkungsgrad4) 0,98
Ausgangsfrequenz 0-800 Hz 0-600 Hz
*Normale Überlast = 110 % Strom / 60 s
Tabelle 10.1
1) Zum Sicherungstyp siehe 10.3 Sicherungstabellen.
2) American Wire Gauge
3) Gemessen mit 5 m abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz.
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
60 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
1010

4) Die typische Verlustleistung gilt für Nennlastbedingungen und sollte innerhalb von +/-15 % liegen (Toleranzbezieht sich auf variierende Spannungs- und Kabelbedingungen).
5) Feldverdrahtungsklemmen bei den FC202-Modellen N132, N160 und N315 sind nicht für den Anschluss vongrößeren Leitern als angegeben bestimmt.
Werte basieren auf einem typischen Motorwirkungsgrad (Grenzlinie Wirkgrad2/Wirkgrad3). Motoren mitniedrigerem Wirkungsgrad tragen ebenfalls zum Leistungsverlust im Frequenzumrichter bei und umgekehrt.
Die Verluste basieren auf der Standard-Taktfrequenz. Die Verluste sind bei höheren Taktfrequenzen erheblichhöher. Typische Leistungsaufnahmen von LCP und Steuerkarte sind eingeschlossen. Weitere Optionen undKundenlast können bis zu 30 W zu den Verlusten addieren. (Typisch sind allerdings nur 4 W zusätzlich bei einervollständig belasteten Steuerkarte oder jeweils Option A oder B).
10.2 Allgemeine technische Daten
Netzversorgung (L1, L2, L3)Versorgungsspannung 380-480 V ± 10 %
Niedrige Netzspannung/Netzausfall:Bei niedriger Netzspannung oder Netzausfall arbeitet der Frequenzumrichter weiter, bis die Spannung des Zwischenkreises unterden minimalen Stopppegel abfällt – normalerweise 15 % unter der niedrigsten Versorgungsnennspannung des Frequenzum-richters. Bei einer Netzspannung unter 10 % der niedrigsten Versorgungsnennspannung des Frequenzumrichters kann keineEinschaltung mit vollem Drehmoment erwartet werden.
Netzfrequenz 50 ± 5 %Max. kurzzeitiges Ungleichgewicht zwischen Netzphasen 3,0 % der VersorgungsnennspannungWirkleistungsfaktor (λ) ≥ 0,9 bei NennlastVerschiebungs-Leistungsfaktor (cos ϕ) nahe 1 (> 0,98)Schalten am Versorgungseingang L1, L2, L3 (Netz-Ein) max. 1x/2 MinutenUmgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2
Das Gerät eignet sich für Netzversorgungen, die maximal 100.000 ARMS (symmetrisch) bei maximal je 480/600 V liefern können.
Motorausgang (U, V, W)Ausgangsspannung 0-100 % der VersorgungsspannungAusgangsfrequenz 0-800 Hz*Schalten am Ausgang UnbegrenztRampenzeiten 0,01-3600 s
* Spannungs- und leistungsabhängig
Drehmomentverhalten der LastStartmoment (konstantes Drehmoment) maximal 110 % / 60 s *Startmoment maximal 135 % bis zu 0,5 s*Überlastmoment (konstantes Drehmoment) maximal 110 % / 60 s*
Prozentzahl bezieht sich auf das Nenndrehmoment des Frequenzumrichters.
Kabellängen und QuerschnitteMax. Motorkabellänge, abgeschirmt 150 mMax. Motorkabellänge, nicht abgeschirmt 300 mMax. Querschnitt für Motor, Netz, Zwischenkreiskopplung und Bremse *Max. Querschnitt zu Steuerklemmen, starrer Draht 1,5 mm2/16 AWG (2 x 0,75 mm2)Max. Querschnitt zu Steuerklemmen, flexibles Kabel 1 mm2/18 AWGMax. Querschnitt für Steuerklemmen, Kabel mit Aderendhülse 0,5 mm2/20 AWGMindestquerschnitt zu Steuerklemmen 0,25 mm2DigitaleingängeProgrammierbare Digitaleingänge 4 (6)Klemmennummer 18, 19, 271), 291), 32, 33Logik PNP oder NPNSpannungsbereich 0-24 V DCSpannungsniveau, logisch „0“ PNP < 5 V DC
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 61
10 10

Spannungsniveau, logisch „1“ PNP > 10 V DCSpannungsniveau, logisch „0“ NPN > 19 V DCSpannungsniveau, logisch „1“ NPN < 14 V DCMaximale Spannung am Eingang 28 V DCEingangswiderstand, Ri ca. 4kΩ
Alle Digitaleingänge sind galvanisch von der Versorgungsspannung (PELV = Protective extra low voltage / Schutzkleinspannung)und anderen Hochspannungsklemmen getrennt.1) Sie können die Klemmen 27 und 29 auch als Ausgang programmieren.
AnalogeingängeAnzahl Analogeingänge 2Klemmennummer 53, 54Betriebsarten Spannung oder StromBetriebsartwahl Schalter A53 und A54Einstellung Spannung Schalter A53/A54 = (U)Spannungsbereich 0 V bis 10 V (skalierbar)Eingangswiderstand, Ri ca. 10 kΩMax. Spannung ± 20 VStrom Schalter A53/A54 = (I)Strombereich 0/4 bis 20 mA (skalierbar)Eingangswiderstand, Ri ca. 200 ΩMax. Strom 30 mAAuflösung der Analogeingänge 10 Bit (+ Vorzeichen)Genauigkeit der Analogeingänge Max. Abweichung 0,5 % der GesamtskalaBandbreite 200 Hz
Die Analogeingänge sind galvanisch von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen getrennt.
Abbildung 10.1
PulseingängeProgrammierbare Pulseingänge 2Klemmennummern 29, 33Max. Frequenz an Klemme 29, 33 110 kHz (Gegentakt)Max. Frequenz an Klemme 29, 33 5 kHz (offener Kollektor)Min. Frequenz an Klemme 29, 33 4 HzSpannungsbereich siehe Abschnitt zu DigitaleingängenMaximale Spannung am Eingang 28 V DCEingangswiderstand, Ri ca. 4 kΩPulseingangsgenauigkeit (0,1-1 kHz) Max. Abweichung: 0,1 % der GesamtskalaAnalogausgangAnzahl programmierbarer Analogausgänge 1Klemmennummer 42Strombereich am Analogausgang 0/4-20 mAMax. Widerstandslast zu Masse am Analogausgang 500 ΩGenauigkeit am Analogausgang Max. Abweichung: 0,8 % der Gesamtskala
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
62 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
1010

Auflösung am Analogausgang 8 Bit
Der Analogausgang ist galvanisch von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen getrennt.
Steuerkarte, RS485 serielle SchnittstelleKlemmennummer 68 (P,TX+, RX+), 69 (N,TX-, RX-)Klemmennummer 61 Masse für Klemmen 68 und 69
Die serielle RS485-Schnittstelle ist von anderen zentralen Stromkreisen funktional und von der Versorgungsspannung (PELV)galvanisch getrennt.
DigitalausgangProgrammierbare Digital-/Pulsausgänge 2Klemmennummer 27, 29 1)
Spannungsbereich am Digital-/Pulsausgang 0-24 VMax. Ausgangsstrom (Körper oder Quelle) 40 mAMax. Last am Pulsausgang 1 kΩMax. kapazitive Last am Pulsausgang 10 nFMin. Ausgangsfrequenz am Pulsausgang 0 HzMax. Ausgangsfrequenz am Pulsausgang 32 kHzGenauigkeit am Pulsausgang Max. Abweichung: 0,1 % der GesamtskalaAuflösung der Pulsausgänge 12 Bit
1) Sie können Klemmen 27 und 29 auch als Eingang programmieren.
Der Digitalausgang ist galvanisch von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen getrennt.
Steuerkarte, 24-V-DC-AusgangKlemmennummer 12, 13Max. Last 200 mA
Die 24-V-DC-Versorgung ist galvanisch von der Versorgungsspannung (PELV) getrennt, hat jedoch das gleiche potenzial wie dieAnalog- und Digitalein- und -ausgänge.
RelaisausgängeProgrammierbare Relaisausgänge 2Klemmennummer Relais 01 1-3 (öffnen), 1-2 (schließen)Max. Klemmenleistung (AC-1)1) an 1-2 (schließen) (ohmsche Last)2)3) 400 V AC, 2 AMax. Klemmenleistung (AC-15)1) an 1-2 (schließen) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 AMax. Klemmenleistung (DC-1)1) an 1-2 (schließen) (ohmsche Last) 80 V DC, 2 AMax. Klemmenleistung (DC-13)1) an 1-2 (schließen) (induktive Last) 24 V DC, 0,1 AMax. Klemmenleistung (AC-1)1) an 1-3 (öffnen) (ohmsche Last) 240 V AC, 2 AMax. Klemmenleistung (AC-15)1) an 1-3 (öffnen) (induktive Last bei cosφ 0,4) 240 V AC, 0,2 AMax. Klemmenleistung (DC-1)1) an 1-3 (öffnen) (ohmsche Last) 50 V DC, 2 AMax. Klemmenleistung (DC-13)1) an 1-3 (öffnen) (induktive Last) 24 V DC, 0,1 AMin. Klemmenleistung an 1-3 (öffnen), 1-2 (schließen) 24 V DC 10 mA, 24 V AC 20 mAUmgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2Klemmennummer Relais 02 4-6 (öffnen), 4-5 (schließen)Max. Klemmenleistung (AC-1)1) an 4-5 (schließen) (ohmsche Last)2)3) 400 V AC, 2 AMax. Klemmenleistung (AC-15)1) an 4-5 (schließen) (induktive Last @ cosφ 0,4) 240 V AC, 0,2 AMax. Klemmenleistung (DC-1)1) an 4-5 (schließen) (ohmsche Last) 80 V DC, 2 AMax. Klemmenleistung (DC-13)1) an 4-5 (schließen) (induktive Last) 24 V DC, 0,1 AMax. Klemmenleistung (AC-1)1) an 4-6 (öffnen) (ohmsche Last) 240 V AC, 2 AMax. Klemmenleistung (AC-15)1) an 4-6 (öffnen) (induktive Last @ cosφ 0,4) 240 V AC, 0,2 AMax. Klemmenleistung (DC-1)1) an 4-6 (öffnen) (ohmsche Last) 50 V DC, 2 AMax. Klemmenleistung (DC-13)1) an 4-6 (öffnen) (induktive Last) 24 V DC, 0,1 AMin. Klemmenleistung an 4-6 (öffnen), 4-5 (schließen) 24 V DC 10 mA, 24 V AC 20 mAUmgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2
1) IEC 60947 Teil 4 und 5Die Relaiskontakte sind galvanisch durch verstärkte Isolierung vom Rest der Stromkreise isoliert (PELV).2) Überspannungskategorie II3) UL-Anwendungen 300 V AC 2 A
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 63
10 10

Steuerkarte, 10-V-DC-AusgangKlemmennummer 50Ausgangsspannung 10,5 V ±0,5 VMax. Last 25 mA
Die 10-V-DC-Versorgung ist von der Versorgungsspannung (PELV (Schutzkleinspannung – Protective extra low voltage)) undanderen Hochspannungsklemmen galvanisch getrennt.
SteuerungseigenschaftenAuflösung der Ausgangsfrequenz bei 0-1000 Hz +/- 0,003 HzSystem-Reaktionszeit (Klemmen 18, 19, 27, 29, 32, 33) ≤ 2 msDrehzahlregelbereich (ohne Rückführung) 1:100 der SynchrondrehzahlDrehzahlgenauigkeit (ohne Rückführung) 30-4000 UPM: Maximale Abweichung von ±8 UPM
Alle Angaben zu Steuerungseigenschaften basieren auf einem 4-poligen Asynchronmotor
Umgebungen:Gehäusetyp D1h/D2h IP21, IP54Gehäusetyp D3h/D4h IP20/GehäuseVibrationstest alle Gehäuse 1,0 gRelative Luftfeuchtigkeit 5 % - 95 % (IEC 721-3-3; Klasse 3K3 (nicht kondensierend) bei BetriebAggressive Umgebungsbedingungen (IEC 60068-2-43) H2S-Test Prüfung kDPrüfverfahren nach IEC 60068-2-43 Hydrogensulfid (10 Tage)Umgebungstemperatur (bei 60° AVM Schaltmodus)- mit Leistungsreduzierung max. 55 °C1)
- bei voller Ausgangsleistung typischer EFF2-Motoren (bis zu 90 % Ausgangsstrom) max. 50 °C1)
- bei vollem FC-Dauerausgangsstrom max. 45 °C1)
1) Zur Leistungsreduzierung siehe Projektierungshandbuch, Abschnitt Besondere Betriebsbedingungen.
Min. Umgebungstemperatur bei Volllast 0 °CMin. Umgebungstemperatur bei reduzierter Leistung - 10 °CTemperatur bei Lagerung/Transport -25 - +65/70 °CMax. Höhe über dem Meeresspiegel ohne Leistungsreduzierung 1000 mMax. Höhe über dem Meeresspiegel mit Leistungsreduzierung 3000 m
Zur Leistungsreduzierung aufgrund von niedrigem Luftdruck siehe Abschnitt Besondere Bedingungen
EMV-Normen, Störaussendung EN 61800-3, EN 61000-6-3/4, EN 55011, IEC 61800-3
EMV-Normen, StörfestigkeitEN 61800-3, EN 61000-6-1/2,
EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
Siehe Abschnitt zu besonderen Betriebsbedingungen
SteuerkartenleistungAbtastintervall 5 ms
Steuerkarte, USB serielle SchnittstelleUSB-Standard 1.1 (Full Speed)USB-Stecker USB-Stecker Typ B (Gerät)
VORSICHTDer Anschluss an einen PC erfolgt über ein standardmäßiges USB-Kabel.Die USB-Verbindung ist galvanisch von der Versorgungsspannung (PELV, Schutzkleinspannung) und anderen Hochspan-nungsklemmen getrennt.Der USB-Erdanschluss ist nicht galvanisch von der Schutzerde getrennt. Verwenden Sie nur einen isolierten Laptop/PC alsVerbindung zum USB-Stecker am Frequenzumrichter oder ein isoliertes USB-Kabel bzw. einen Umrichter.
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
64 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
1010

Schutz und Funktionen
• Elektronischer thermischer Motor-Überlastschutz.
• Die Temperaturüberwachung des Kühlkörpers stellt sicher, dass der Frequenzumrichter abschaltet, wenn dieTemperatur 95 °C ± 5 °C erreicht. Sie können eine Überlasttemperatur erst zurücksetzen, nachdem die Kühlkörper-temperatur wieder unter 70 °C ± 5 °C gesunken ist (Richtwert: diese Temperaturen sind je nach Leistungsgrößen,Gehäuse usw. unterschiedlich). Der Frequenzumrichter hat eine Funktion zur automatischen Leistungsreduzierung,um zu vermeiden, dass die Temperatur des Kühlkörpers 95 °C erreicht.
• Der Frequenzumrichter ist gegen Kurzschlüsse an Motorklemmen U, V, W geschützt.
• Wenn eine Netzphase fehlt, schaltet der Frequenzumrichter ab oder gibt eine Warnung aus (abhängig von derLast).
• Die Überwachung der Zwischenkreisspannung stellt sicher, dass der Frequenzumrichter abschaltet, wenn dieZwischenkreisspannung zu gering oder zu hoch ist.
• Der Frequenzumrichter ist gegen Erdschlüsse an Motorklemmen U, V, W geschützt.
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 65
10 10

10.3 Sicherungstabellen
10.3.1 Schutz
Abzweigschutz:Sie müssen alle Abzweigkreise in einer Installation, Schalt-anlage, in Maschinen usw. gegen Kurzschluss undÜberstrom gemäß einschlägigen Vorschriften absichern,um elektrische Gefahren und ein Brandrisiko zu vermeiden.
Kurzschluss-Schutz:Sie müssen den Frequenzumrichter gegen Kurzschlussabsichern, um elektrische Gefahren und ein Brandrisiko zuvermeiden. Danfoss empfiehlt die Verwendung dernachstehenden Sicherungen, um Servicepersonal undGeräte im Fall eines internen Defekts im Frequenzum-richter zu schützen. Der Frequenzumrichter bietetvollständigen Kurzschluss-Schutz bei einem Kurzschluss amMotorausgang.
Überstromschutz:Sorgen Sie für Überlastschutz, um Brandgefahr durchÜberhitzen der Kabel in der Anlage zu vermeiden. DerFrequenzumrichter verfügt über einen internen Überstrom-schutz, der für vorgeschalteten Überlastschutz genutztwerden kann (UL-Anwendungen ausgeschlossen). Siehe4-18 Stromgrenze. Darüber hinaus können Sie Sicherungenoder Trennschalter verwenden, um der Installation denerforderlichen Überstromschutz zu bieten. Ein Überstrom-schutz muss stets den nationalen Vorschriften entsprechen.
10.3.2 Keine Übereinstimmung mit UL-Zulassung
Wenn keine Übereinstimmung mit der UL/cUL-Zulassungbestehen muss, empfehlen wir die Wahl der Sicherungenin der Tabelle unten, um Konformität mit EN 50178 sicher-zustellen. Im Falle einer Fehlfunktion kann dasNichtbeachten der Empfehlung zu unnötigen Schäden amFrequenzumrichter führen.
N110 - N250 380-500 V Typ gG
N315 380-500 V Typ gR
Tabelle 10.2
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
66 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss
1010

10.3.3 UL-Konformität
380-500 V: Das Schaltvermögen der nachstehendenSicherungen ist für 100.000 Arms (symmetrisch) abhängigvon der Nennspannung des Frequenzumrichters ausgelegt.
Nennleistung
Sicherungsoptionen
BussmannTeilenummer
LittelFuseTeilenummer
LittelFuseTeilenummer
BussmannTeilenummer
SibaTeilenummer
Ferraz-ShawmutTeilenummer
Ferraz-ShawmutTeilenummer(Europa)
Ferraz-ShawmutTeilenummer(Nordamerika)
N110 170M2619 LA50QS300-4 L50S-300 FWH-300A 20 61031.315
A50QS300-4 6,9URD31D08A0315 A070URD31KI0315
N132 170M2620 LA50QS350-4 L50S-350 FWH-350A 20 61031.350
A50QS350-4 6,9URD31D08A0350 A070URD31KI0350
N160 170M2621 LA50QS400-4 L50S-400 FWH-400A 20 61031.400
A50QS400-4 6,9URD31D08A0400 A070URD31KI0400
N200 170M4015 LA50QS500-4 L50S-500 FWH-500A 20 61031.550
A50QS500-4 6,9URD31D08A0550 A070URD31KI0550
N250 170M4016 LA50QS600-4 L50S-600 FWH-600A 20 61031.630
A50QS600-4 6,9URD31D08A0630 A070URD31KI0630
N315 170M4017 LA50QS800-4 L50S-800 FWH-800A 20 61031.800
A50QS800-4 6,9URD32D08A0800 A070URD31KI0800
Tabelle 10.3 Alternative Sicherungen
10.3.4 Anzugsdrehmomente für Anschlüsse
Beim Festziehen der elektrischen Verbindungen müssen Sieunbedingt das richtige Anzugsdrehmoment verwenden.Ein zu geringes oder zu hohes Anzugsdrehmoment führtzu einem schlechten elektrischen Anschluss. Verwenden Sieeinen Drehmomentschlüssel, um das richtige Drehmomentzu erzielen. Verwenden Sie stets einen Drehmoment-schlüssel, um die Schrauben festzuziehen.
Baugröße Klemme Anzugsdreh-moment
Schrau-bengröße
D1h/D3h NetzMotorZwischenkreis-kopplungRegen
19-40 Nm M10
Masse/ErdeBremse
8,5-20,5 Nm M8
D2h/D4h NetzMotorRegenZwischenkreis-kopplungMasse/Erde
19-40 Nm M10
Bremse 8,5-20,5 Nm M8
Tabelle 10.4 Anzugsdrehmoment für Klemmen
Technische Daten VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 67
10 10

Index
AAbgeschirmte
Kabel..................................................................................................... 10Leitungen.............................................................................................. 9
Abgeschirmten Kabeln....................................................................... 19
Abschaltfunktion.................................................................................. 10
AC-Wellenform........................................................................................ 5
Alarm Log................................................................................................ 24
AMAAMA............................................................................................... 50, 54Mit Angeschlossener Kl. 27........................................................... 37Ohne Angeschlossene Kl. 27........................................................ 37
Analogausgang.............................................................................. 18, 62
Analogeingänge..................................................................... 18, 49, 62
Analogeingangsklemmen................................................................. 49
Analogsignal.......................................................................................... 49
Analogsollwert...................................................................................... 28
Anlage....................................................................................................... 19
Anwendungsbeispiele........................................................................ 37
Anzugsdrehmoment Für Klemmen............................................... 67
Ausgangsnennstrom............................................................................. 7
Ausgangsstrom....................................................................... 43, 49, 63
AutoAuto...................................................................................................... 25On................................................................................................... 25, 42
Autobetrieb............................................................................................ 44
Auto-Betrieb........................................................................................... 24
Automatische Motoranpassung..................................................... 42
Automatisches Quittieren................................................................. 23
BBeispiele Zur Programmierung Der Steuerklemmen.............. 30
Bremsen................................................................................................... 42
Bremsleistung........................................................................................ 51
Brummschleifen.................................................................................... 17
CCheckliste Vor Der Installation........................................................... 7
DDC-Spannung........................................................................................ 49
DC-Strom................................................................................................. 43
Definitionen Von Warn-/Alarmmeldungen................................ 47
Digitalausgang...................................................................................... 63
Digitaleingang......................................................................... 17, 44, 50
Digitaleingänge...................................................................... 30, 44, 61
Drehmomentgrenze............................................................................ 22
Drehmomentverhalten Der Last..................................................... 61
Drehzahlsollwert.............................................................. 22, 29, 37, 42
EEffektivwert Des Stroms....................................................................... 6
Eingangsklemme 53............................................................................ 28
Eingangsleistung.................................................................................. 56
Eingangssignal...................................................................................... 29
Eingangsspannung....................................................................... 20, 45
Eingangsstrom...................................................................................... 15
Eingangsstroms..................................................................................... 45
EMV.............................................................................................. 17, 19, 64
EMV-Filter................................................................................................ 15
Erdableitstrom (>3,5 MA).................................................................. 11
Erdanschlüsse........................................................................................ 11
Erdleiter.................................................................................................... 19
ErdungErdung................................................................................................. 19Abgeschirmter Steuerkabel......................................................... 16Für IP20-Gehäuse............................................................................. 12Für IP21/54-Gehäuse...................................................................... 12
Erdverbindung...................................................................................... 19
Explosionszeichnungen........................................................................ 4
ExterneSignale................................................................................................. 42Spannung........................................................................................... 29Verriegelung...................................................................................... 30
ExternenReglern................................................................................................... 5Signale.................................................................................................... 6
FFehlermeldungen................................................................................. 48
Fehlerspeicher....................................................................................... 24
Fehlerstromschutzschalter (RCD)................................................... 12
Fehlersuche Und -behebung................................................ 5, 48, 56
Feldbus..................................................................................................... 52
Fernprogrammierung......................................................................... 36
Fernsollwert............................................................................................ 43
Frequenzumrichter....................................................................... 10, 12
Funktionsprüfung................................................................................ 22
Funktionsprüfungen.............................................................................. 5
GGeerdete Dreieckschaltung.............................................................. 15
Gleichstrom............................................................................................... 5
Grenzwerte............................................................................................. 19
Index VLT® AQUA Drive (D-Rahmen)Produkthandbuch
68 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss

HHand
Hand..................................................................................................... 25On............................................................................................ 22, 25, 42
Handstart................................................................................................. 22
Hand-Steuerung..................................................................... 23, 25, 42
Hauptmenü............................................................................................ 28
Heben Des Frequenzumrichters........................................................ 8
Hochfrequenzstörgeräusche............................................................ 19
Hochfrequenzstörungen...................................................................... 9
IIEC 61800-3...................................................................................... 15, 64
Inbetriebnahme.................................................................. 5, 26, 28, 56
Induzierte Spannung.......................................................................... 10
Initialisierung......................................................................................... 27
Installation............................................................................ 5, 10, 11, 20
Istwert......................................................................................... 19, 43, 53
IT-Netz...................................................................................................... 15
KKabelkanäle..................................................................................... 10, 19
Kabellängen Und -querschnitte...................................................... 61
Klemme 53.............................................................................................. 29
Kondensatoren...................................................................................... 19
Kopieren Von Parametereinstellungen........................................ 26
Kühlung...................................................................................................... 7
Kurzinbetriebnahme........................................................................... 21
Kurzschluss............................................................................................. 51
LLCP Bedieneinheit................................................................................ 23
Leistungsanschlüsse............................................................................ 11
Leistungsfaktor................................................................................. 6, 12
Leistungsreduzierung............................................................. 7, 64, 65
Luftströmung........................................................................................... 8
Lüftungs-Einbausatz.............................................................................. 8
Luftzirkulation........................................................................................ 19
MMain Menu.............................................................................................. 24
Manuelle Initialisierung...................................................................... 27
MCT 10 Software................................................................................... 36
Menüstruktur......................................................................................... 25
Menütasten...................................................................................... 23, 24
Montage.................................................................................................. 19
Motor........................................................................................................... 9
MotorausgangMotorausgang..................................................................................... 6(U, V, W)............................................................................................... 61
Motordaten........................................................................ 21, 22, 50, 54
Motordrehung....................................................................................... 24
Motordrehzahl....................................................................................... 20
Motorkabel.................................................................. 10, 11, 12, 15, 19
Motorleistung........................................................................................ 54
Motornennfrequenz............................................................................ 24
Motornennleistung.............................................................................. 24
Motorstrom................................................................................. 6, 24, 54
Motorüberlastschutz........................................................................... 10
Motor-Überlastschutz......................................................................... 65
Motorzustand........................................................................................... 5
NNavigationstasten.................................................... 20, 23, 25, 28, 42
Nennstrom.......................................................................................... 7, 49
Netz.............................................................................................................. 9
Netz- Oder Motorseitig....................................................................... 19
Netzanschluss........................................................................................ 15
Netzeingang...................................................................................... 5, 15
Netzspannung......................................................................... 24, 25, 43
NetzversorgungNetzversorgung.................................................................. 10, 11, 45(L1, L2, L3)........................................................................................... 61
OOberwellen................................................................................................ 6
Ohne Rückführung............................................................................... 64
Optionaler Ausrüstung....................................................................... 20
Optionsmodule........................................................................................ 5
Ortbetrieb......................................................................................... 22, 23
PParametereinstellungen.................................................................... 26
Parametermenüaufbau...................................................................... 31
Parametersatz........................................................................................ 24
PELV............................................................................................. 16, 40, 63
Phasenfehler........................................................................................... 49
Potenzialausgleichskabel.................................................................. 16
Potenzialfreie Dreieckschaltung..................................................... 15
ProgrammierungProgrammierung........................ 5, 20, 22, 23, 24, 26, 31, 36, 49Der Klemmen..................................................................................... 18
Pulseingänge......................................................................................... 62
Index VLT® AQUA Drive (D-Rahmen)Produkthandbuch
MG21A103 - VLT® ist eine eingetragene Marke von Danfoss 69

QQuick Menu............................................................................................. 24
Quick-Menü..................................................................................... 24, 28
Quittieren........................................................................... 44, 45, 23, 27
RRampenzeit
Ab.......................................................................................................... 22Auf......................................................................................................... 22
Rauschen................................................................................................. 11
Regelung Ohne Rückführung.......................................................... 28
Relaisausgänge............................................................................... 18, 63
Reset................................................................................................... 25, 55
RS485........................................................................................................ 18
SSchnellreferenz...................................................................................... 37
Schnittstellenkabel.............................................................................. 16
SchutzSchutz................................................................................................... 66Und Funktionen................................................................................ 65Vor Netztransienten.......................................................................... 6
Schutzerdung........................................................................................ 11
Schutzleiter............................................................................................. 11
SerielleKommunikation......................................................................... 17, 18RS485-Kommunikation.................................................................. 18Schnittstelle........................................................... 25, 42, 43, 44, 45
Serielles Kommunikationsnetzwerk................................................. 5
Sicherungen........................................................ 19, 10, 11, 19, 52, 56
Signale........................................................................................................ 5
Sollwert........................................................................... 1, 24, 42, 43, 44
Spannungsunsymmetrie................................................................... 49
Startbefehl.............................................................................................. 22
Startfreigabe........................................................................................... 43
Steuereingangssignale....................................................................... 18
Steuerkabel............................................................................................. 19
Steuerkarte.............................................................................................. 49
Steuerkarte,10-V-DC-Ausgang............................................................................ 6424-V-DC-Ausgang............................................................................ 63RS485 Serielle Schnittstelle:......................................................... 63USB Serielle Schnittstelle............................................................... 64
Steuerkartenleistung........................................................................... 64
Steuerklemmen.................................................. 18, 21, 25, 30, 42, 44
Steuerklemmenfunktionen............................................................... 18
Steuerklemmentypen......................................................................... 17
Steuerleitungen......................................................................... 9, 11, 17
Steuersignal.............................................................................. 28, 29, 42
Steuerungseigenschaften................................................................. 64
Steuerungssystem.................................................................................. 5
Stoppbefehl............................................................................................ 43
Stromgrenze........................................................................................... 22
Systemrückführung................................................................................ 5
TTaktfrequenz.......................................................................................... 44
Tasten Zur Lokalen Bedienung........................................................ 25
Technischen Daten................................................................................. 5
Thermistor................................................................................. 16, 40, 50
Thermistorsteuerleitungen............................................................... 16
Trennschalter.................................................................................. 19, 20
ÜÜberlastschutz.................................................................................. 7, 10
Überspannung................................................................................ 22, 43
Überstrom............................................................................................... 44
UUmgebung.............................................................................................. 64
Und Ausgangssignaltypen................................................................ 31
VVerdrahtung Der Steuerklemmen.................................................. 18
Versorgungsspannung.................................................. 16, 17, 52, 63
Vorschriftsmäßig Erden...................................................................... 11
WWechselspannung.................................................................................. 6
Wechselspannungsversorgung......................................................... 5
Wechselstrom........................................................................................... 5
Wiederherstellen Der Werkseinstellungen................................. 26
ZZurücksetzen.......................................................................................... 49
Zustandsmeldungen........................................................................... 42
Zustandsmodus.................................................................................... 42
Index VLT® AQUA Drive (D-Rahmen)Produkthandbuch
70 MG21A103 - VLT® ist eine eingetragene Marke von Danfoss







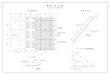






![EX-PROTECTION - Wandfluh AG · 2017. 4. 3. · 25 40 80 150 15 40 25 100 6 6 60 25 25 25 Pmax [bar] 350 350 350 315 350 350 350 350 350 350 350 350 40 100 350 350 350 350 VALVES EX](https://img.dokumen.tips/doc/110x75/610826360cc123139028f4a3/ex-protection-wandfluh-ag-2017-4-3-25-40-80-150-15-40-25-100-6-6-60-25-25.jpg)