Embed Size (px)
Citation preview

IEEE SENSORS JOURNAL, VOL. 11, NO. 7, JULY 2011 1623
Wavefront Integrating Fiber Sensors forUltrasonic Detection
Borja Sorazu, Graham Thursby, and Brian Culshaw
Abstract—The response of an integrating optical fiber (OF) ul-trasound detector to varying sensor length and orientation withrespect to the acoustic source has been experimentally investigatedusing Lamb waves, analyzed theoretically, and simulated in theMatlab environment. The experimental results and the theoret-ical models show very similar trends in both sensitivity and direc-tivity. These properties have immense potential as a new tool indamage detection systems. Finally, we briefly discuss the prospectsfor the use of these sensor systems, possibly combined with otherfiber optic techniques, as the basis for realizing integrated struc-tural health monitoring systems.
Index Terms—Fiber sensor, polarimeter, ultrasound, wavefrontintegration.
I. INTRODUCTION
A COUSTO-ULTRASONICS is among the most promisingand developed nondestructive testing (NDT) technique
available for structural health monitoring (SHM) applications.This technique requires a stress and/or strain wave inducingprobe and a stress and/or strain detecting probe for the inspec-tion of a structure. In recent years, modern optical techniquesbased on optical fiber technology have been successfully appliedfor the detection of ultrasonic waves. These have included sur-face displacement interferometers designed to measure motionsout of the plane of a sample, fiber interferometers using the fiberitself in an interferometric mode and Bragg gratings [1]–[4].
In this paper, we shall concentrate on a sensing configura-tion which, to our knowledge, has yet to be critically analyzedin the literature—namely, a study of the birefringence, whichis introduced in an optical fiber as an ultrasonic wavefront, tra-verses it. The motivations for this study are threefold. First ofall, using birefringence enables the sensor itself to be config-ured using only a single fiber in contrast to interferometric sys-tems. Consequently, we expect a more stable system than onebased upon single-mode fiber interferometers. Second, since, in
Manuscript received April 22, 2010; revised November 16, 2010; acceptedNovember 17, 2010. Date of publication December 06, 2010; date of current ver-sion May 20, 2011. B. Sorazu wishes to acknowledge support from the BasqueGovernment (Spain) under a research scholarship through “Programa de For-mación de Investigadores del Departamento de Educación, Universidades e In-vestigación.” The associate editor coordinating the review of this paper and ap-proving it for publication was Prof. Istvan Barsony.
B. Sorazu was with the University of Strathclyde, Glasgow, G1 1XW U.K. Heis now with the Department of Physics and Astronomy, University of Glasgow,Glasgow, G12 8QQ U.K. (e-mail [email protected]).
G. Thursby and B. Culshaw are with the University of Strathclyde, Glasgow,G1 1XW U.K. (e-mail: [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JSEN.2010.2097247
effect, the interferometer detects changes in phase along one po-larization axis, we would anticipate a somewhat greater phasedeviation between the two birefringent axes than would be antic-ipated through an interferometric system which would measurethe phase deviation from one axis alone. This, as we shall see, isborne out by finite-element simulation of the interactions but isextremely difficult to verify in practice [5]. Third, we would an-ticipate that interesting wave front integration phenomena couldbe observed in sensors whose interactional length with the ultra-sonic waves is more than a few acoustic wavelengths in length,and indeed these too are borne out in practice. The geome-tries involved are dominated by near-field effects which, in turn,present some unexpected directionality phenonema.
This paper comprises a very brief critique of previous inves-tigations into ultrasonic detection using fiber optic systems fol-lowed by a short recap on ultrasonic Lamb waves which are theprincipal medium through which our investigations have beenconducted. We follow this with a detailed finite-element modelof the interaction between a Lamb wave and an optical fiber em-bedded in the medium through which the Lamb wave is prop-agating. Thereafter, we consider the wave front integration be-havior which we would expect from such a system. The paperconcludes with experimental verification of the wave front inte-grating phenomena through measuring the changing response ofan integrating optical fiber ultrasound detector to varying sensorlength and orientation with respect to an acoustic source.
II. OPTICAL FIBER SENSORS FOR ULTRASONIC DETECTION
Fiber sensors are one of many approaches to monitoringultrasonic propagation. The most commonly used are piezo-electric transducers. These have the virtue of simplicity andeconomy, but their response, both spatially and temporally, isvery much dominated by the transducer geometry. In particular,piezoelectric transducers almost invariably exhibit a relativelyhigh factor mechanical resonance at which frequency theultrasonic-to-electrical signal conversion is very significantlymore efficient than at other frequencies. Consequently, theirusefulness is very limited for anything other than narrow bandsignals [6].
In contrast, the response of optical fiber ultrasonic sensors isessentially nonresonant, but is inevitably influenced by the fibergeometry with respect to the ultrasonic field.
There are many facets to the interaction between light prop-agating in an optical fiber and an ultrasonic wave field, but per-haps the two most important questions are, What is the orien-tation of the optical fiber with respect to the ultrasonic wavefront? and How long is the detecting fiber (or detection system)in acoustic wavelengths?
1530-437X/$26.00 © 2010 IEEE

1624 IEEE SENSORS JOURNAL, VOL. 11, NO. 7, JULY 2011
The mechanical resonances in optical fibers do also affectthe optical to acoustic coupling and this is a feature they sharewith piezoelectric detectors. However, these mechanical reso-nances are typically both relatively low factor (since a sec-ondary coating on the optical fibers is usually an acousticallylossy polymer) and tend to occur at relatively high frequencies
20 MHz or beyond. In the work that we describe here, the prin-cipal frequency ranges are in the MHz region or below.
Both Bragg gratings and interferometers have successfullybeen used as optical fiber sensors for ultrasound detec-tion [1]–[4]. For the Bragg grating, the most efficient approachto couple between the ultrasound and the reflection wavelengthof the grating is to propagate an ultrasonic wave with a wave-length much longer than the grating in a direction parallelto the optical fiber in which the grating has been fabricated.This produces a longitudinal strain that is linearly related tothe ultrasonic wave, which results in a very specific polar re-sponse, experimentally verified in [7]. All fiber interferometersin contrast respond to changes in pressure and are typicallyconfigured to be much longer in wavelength than the ultrasonicradiation. Therefore, the response of these sensors is an inte-gration effect of the acoustic wavefront along the sensing fiber.In this case, the polar response is somewhat more complexthan the fiber Bragg grating, especially in the near field, andfurthermore, this system is most sensitive to acoustic wavestravelling perpendicular to the axis of the fiber. These featuresof the fiber interferometers are also shared by the polarimetricsystem which is the subject of this paper [8]. However, weshould mention that, to our knowledge, a systematic study of thepolar responses of fiber optic interferometric ultrasonic wavesensors, which, in this regard, act identically to polarimetricsensors, has not been presented—so there are limited results inthe literature [9].
Finally, there is a range of out-of-plane displacement mea-surement systems usually based upon interrogating via surfaceillumination spots which are submillimeter in diameter and,consequently, well below the length of acoustic wavelength inmost materials up to frequencies of many megahertz. At theselower frequencies, the surface interrogation point measuringsystems have no discernible directivity and also share an, inprinciple, flat transfer response between the acoustic signal(typically as a displacement) and the consequent optical phasechange. There have been many realizations of surface inter-rogating interferometric detection systems both fiber coupledand air coupled, and several of these are now available ascommercial product.1
One of the complexities in studying the interaction betweenultrasonic waves and light propagating in an optical fiber isthat the ultrasound itself can propagate in numerous manifes-tations, the simplest of which is probably the well-known com-pressional wave. In our study, we shall focus on the detectionof another type of ultrasonic wave, the Lamb waves, which areguided waves travelling through plates, the thickness of whichis less than or comparable to the wavelength of the ultrasonicpropagation. Lamb waves are dispersive and comprise mixtures
1Available [online] at http://www.intopsys.com/laserultrasound08.html andhttp://www.polytec.com/eur/158_321.asp
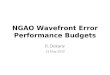
Fig. 1. (a) Lamb waves phase velocity dispersion curves for the first sixsymmetric (dashed lines) and antisymmetric (solid lines) modes in aluminium.(b) Snapshot of Lamb waves displacement for a symmetric � mode.
of compressional and shear wave components and consequentlyhave complex dispersion curves [10]. They manifest themselvesas two groups of waves, symmetric and antisymmetric modes,characterized by the symmetry of the normal displacement ofthe particles relative to the plate’s neutral axis. These groupsof waves are independent of one another and waves belongingto different groups can propagate simultaneously in a differentnumber of modes depending on the product of the wave fre-quency and the thickness of the plate. Some typical dispersioncurves, together with some typical displacement profiles, areshown in Fig. 1. The motivation for studying Lamb waves isthat, as guided waves, they can propagate over considerable dis-tances through plate-like structures. Since they produce stressfields throughout the bulk of the plate, their propagation char-acteristics provide mechanical and structural information appli-cable to the entire thickness. Such plate-like structures are oftenthe focus of applications in nondestructive testing.
III. INTERACTING LAMB WAVES WITH LIGHT
PROPAGATING IN OPTICAL FIBERS
This section describes the results of some finite-element mod-eling of the interaction between a propagating Lamb wave anda straight optical fiber mounted within the Lamb wave pressurefield generated by an acoustic point source perpendicular to thecenter position of the sensing fiber. We then demonstrate thatthis interaction induces time-varying birefringence in the op-tical fiber propagation path which, in turn, is proportional to theintegral of the pressure field along the fiber length.

SORAZU et al.: WAVEFRONT INTEGRATING FIBER SENSORS FOR ULTRASONIC DETECTION 1625
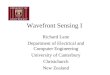
Fig. 2. (a) Longitudinal section view of the geometry of the simulated Lambwave integration model. All dimensions are in millimeters. (b) Approximationof the setup in (a) to an optical fiber cladding embedded into a 4.5-mm Perspexplate.
The basic features of the model that we have studied areshown in a cross section in Fig. 2. We concentrate on an epoxycast single-mode fiber attached to a Perspex plate of the dimen-sions shown in the top diagram. The Perspex plate is assumedto be large enough for reflections from the edges to be ignoredin this analysis. For the purposes of modeling the interactionbetween the optical fiber and the propagating Lamb wave, weapproximate the actual situation on the top diagram by a lo-calized thicker Perspex structure shown in the bottom diagramwith the fiber embedded within it. This approximation is real-istic since the acoustic impedances of the substrate (Perspex)and the epoxy casting are designed to be within a few percent ofeach other. Thus, we can calculate good approximations to theacoustic fields within the optical fiber.
The basic features of the wave front integrating geometry areshown in Fig. 3, which illustrates how the integrating propertiesof the fiber along the wave front depend upon the orientation ofthe fiber with respect to the wave front. These, in turn, affect theinteraction between the acoustic wave and the stress distributionwithin the fiber.
Calculating the stress distribution within the fiber is subtleand requires knowledge of the acceleration gradient experiencedacross the fiber itself. The reason for studying the gradient issimply that if the acceleration were to be constant across thefiber, then it would be experiencing no internal forces in thedirection of the acceleration. The force—and hence the stressinduced birefringence—is proportional to the gradient of thisacceleration rather than the acceleration itself. The detailed cal-culations for this acceleration gradient are briefly reviewed inthe Appendix.
The results for one of the simulations are shown in Fig. 4. Thecalculations are performed to produce stress distribution maps
Fig. 3. Plan view of the geometry of the simulated Lamb wave integrationmode, showing the varying pressure field distribution along the length of thesensing fiber as the wave passes through. The point P represents the center ofthe sensing fiber length.
Fig. 4. Simulation results of the stress induced by an ultrasonic wave on thesensing fiber. The simulation shows the normalized radial acceleration gradientacross the diameter of the sensing fiber along the � axis. The dark areas markedas T and C correspond to peaks of the acceleration gradient (tension pressure andcompression pressure respectively). The lighter sections marked B correspondto zeros of the pressure wave in this particular time snapshot.
across the cross section of the fiber as a function of distancealong from the point illustrated as P in Fig. 3. The longitudinalsection along the diameter along the axis is shown in Fig. 4. Inaddition, as the wave front traverses the fiber, the stress patternsshown in Fig. 4 will propagate outwards from the center point Pwith a periodicity of one cycle. In the snapshot shown in Fig. 4,the dark areas correspond to peaks of the acceleration gradient(marked as T for tension and C for compression), and the lightersections (marked B) correspond to zeros in this particular timesnapshot of the pressure wave.
The essential feature here is that the propagating wave doesindeed introduce opposite stress fields (compression and ten-sion) which are orthogonal to each other across the fiber andare propagating with the wave front. It is interesting to noticethat the peak values of these opposite stress fields are parallelto the in-plane ( -axis) and out-of-plane ( -axis) planes of theplate in which the sensor fiber is bonded, and they interchangeorientations along the fiber’s length. Consequently, the peakphase modulation, when integrated along these axes ( axis and
-axis), are in antiphase, and so the stress-induced birefringencecan be integrated linearly along the fiber. The simple phasedelay as perceived through an interferometric detection schemewould at best detect a phase deviation corresponding to the totalstress-induced phase. In contrast, the polarization based system

1626 IEEE SENSORS JOURNAL, VOL. 11, NO. 7, JULY 2011
Fig. 5. Comparison of the total stress induced within the fiber (as detected byan interferometric system) and the in-plane and out-of-plane components of thepeak values of the tension and compression stress fields (as detected by a polari-metric system), as a function of position along the propagation axis of the fiber.
detects the difference between these antiphase components, andso it is in principle more “sensitive,” as well as more stable, thanthe interferometric system.
Fig. 5 illustrates this, plotting the total induced stress fieldwithin the fiber (as detected by an interferometric system) andthe in- and out-of-plane components of the peak values of thecompression and tension-induced stress fields (as detected by apolarimetric system) as a function of position along the propa-gation axis of the fiber.
This modeling then has illustrated that a typical propagatingLamb wave would, in fact, produce birefringence within anoptical fiber embedded within the propagating structure. Thecase that we have examined assumes that the embedded fiber isclosely acoustically matched to the remainder of the medium,and, in practice, with the experimental work to be describedbelow, this is indeed the case. We have also approximated asurface mounted system based upon a matched medium to acontinuous plate of the same thickness within the modelingprocedures. Consequently, whilst the results in terms of relativestress levels as a function of position along the fiber will bereliable, the details for the variation in this relative stressdistribution as the frequency varies will be somewhat subjectto errors as the acoustic mode fields change. We should alsopoint out that whilst, in principle, an exact calibration of theexpected phase deviations along major and minor axes for aspecific acoustic power density can be readily achieved, inpractice measuring these power densities accurately within aparticular sample is extremely difficult. Our aim in this workis to provide insight into the process rather than to provide adetailed calibration of the interactions.
Fig. 6. Definition of the wave front integration model variables and geometry.
IV. WAVE FRONT INTEGRATION—MODELING AND
DEMONSTRATION EXPERIMENT
A. The Basic Principles—Phenomenological Theory
The essential integration features of the optical fiber sensorcan be readily gleaned from Fig. 6. Here, we assume an ef-fective point source (or equivalently that the sensor is in thefar field of the radiating ultrasonic course) and propagation ina plate of uniform thickness of an isotropic material such thatthe radiating wave is, in effect, constrained into two dimen-sions. Consequently, the linear power density of the radiatingwave is proportional to the inverse of the radius from the source,or, equivalently, the linear amplitude fields (pressure, velocityand related quantities) drop as the square root of the distancefrom the source. It is these amplitude quantities which, as wehave seen in the previous section, directly affect the stress dis-tributions within the detecting region of the fiber and, conse-quently, the effective differential phase (birefringence) betweenthe two principal eigenmodes within the optical fiber. We alsoassume a sinusoidal phase dependency of the amplitude fields.This phase is given as a function of time and the distance be-tween the ultrasonic source and any point in the fiber as
, where and are, respectively, the ultra-sonic wave frequency and wavelength. Thus, the interaction ata particular point between the propagating wave and the fiberdepends on the incident angle and that this varies proportion-ally to (1) (Fig. 6):
(1)
Here, we have normalized and half thelength of the fiber as . Equivalently, we define asthe number of ultrasonic wavelengths in the distance betweenthe ultrasonic source and the center of the fiber sensor, andis the number of ultrasonic wavelengths in half the length of thefiber sensor. All that is required then is simply to integrate theseinteractions along the length of the fiber to produce the totalnet interaction (as a normalized optical phase modulation) and,consequently, these equivalent directivity patterns.
This basic principle can be applied to produce relative sen-sitivity functions for any given arbitrary shape of fiber opticsensor with a constant interaction cross section throughout itslength within any arbitrary ultrasonic field within the geomet-rical constraints mentioned above. However, to demonstrate theprinciples, we shall here examine two particular cases. First, we

SORAZU et al.: WAVEFRONT INTEGRATING FIBER SENSORS FOR ULTRASONIC DETECTION 1627
Fig. 7. Simulated integration of the interaction between the ultrasonic waveand the sensing fiber (as by (1)), given by the envelope of the plot. Here, weshow the case where the distance sensor-source � ���� �� � ����, and withthe length of the fiber sensor varying from 0 to 14 � (it is the horizontal axisin the plot given as �, which is the number of ultrasonic wavelengths in halfthe length of the fiber sensor) and an ultrasonic frequency � � 100 kHz. Theoverlapping points are associated to the length of the fiber sensors used in theexperimental investigation of the model.
examine the response of a straight sensor of various lengths withthe source located a fixed distance from the axis of the sensorand orthogonal to the center of the sensor. Second, we discussthe case of a fixed radial distance between the source and thesensor and varying the angle between the sensor and the source.The experimental results are given in arbitrary units [a.u.] of thenormalized variation of the optic phase in the fiber sensor.
B. Effect of Sensor Length for Symmetric Excitation
This corresponds to examining the situation where thesource-to-sensor center radius is at an angle perpendicular tothe sensor itself and the sensor length is varied (or equivalentlythe angle in Fig. 6 is zero). Clearly, the geometrical parametersthat matter are conveniently normalized to ultrasonic wave-lengths. The distance between the source and sensor definesthe ultrasonic wave front curvature at the sensor. The numberof ultrasonic wavelengths intersecting the sensor depends onthis curvature. The results of the integration are shown in Fig. 7for the specific case where the distance between the sensor andthe source is 9.6 ultrasonic wavelengths and the half lengthof the fiber sensor is varied from zero to 7 wavelengths. Thepoints shown on Fig. 7 correspond to points examined in theexperimental investigation that follows for the specific case inthe experiment of excitation at 100 kHz. (The experiment alsoreports results from excitation frequencies of 60 and 150 kHzwhilst retaining the same physical source-to-sensor distance.)Notice that in Fig. 7, only the envelope of the plot is relevant,representing the maximum interaction during a full ultrasonictime period.
C. Fixed Sensor Length and Varying Incident Angle
Fig. 8 shows the results of a simulation for a specific caseof fixed source-to-sensor distance of 16 wavelengths and of half
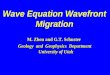
Fig. 8. Varying angle and polar response of the integrating sensors as predictedby our model for an ultrasonic frequency of 270 kHz, a fixed length of the sensorof 19.5 cm �� � ����� in an aluminium plate for a distance source-sensor of31 cm �� � ��. The overlapping points are associated to the ultrasonic sourceorientations used in the experimental verification of the model of Fig. 9.
the length of the fiber sensor equal to 5 wavelengths and varyingthe angle between the normal to the sensor at the center thereofand the center of the source between 0 and 90 . Again, thisrepresents the situation that is explored experimentally belowgiven by the overlapping points in Fig. 8.
One particularly interesting result of these simulations—ap-parent in Fig. 8—is that the peak sensitivity occurs when thesource is incident upon the sensor at an angle that is slightly offthe normal to the center point of the sensor itself. This asym-metry is also confirmed experimentally. Intuitively, we wouldexpect that the peak sensitivity would apply to normal excita-tion. However, whilst this certainly would apply if the sourcewere in the far field of the sensor aperture, we are here verymuch in the near field since “ ” is 100 and the source-to-sensor distance is only 16 . There are then significant varia-tions in wavefront amplitude with advancing ultrasonic phaseacross the sensor, further influenced by the cosine term in theinteraction.
D. Experimental Observations and Discussion
We include the results of two sets of experiments designedto highlight the trends illustrated above. First of all, we ex-amine the directivity of a single sensor using the arrangementshown in Fig. 9. Here, we have a single sensor and an array ofnominally identical piezo ceramic transducers (1 cm diameter)attached to an aluminium sheet (1 mm thick) which is largeenough to readily enable the separation of echoes from theedges. We also use the fixed piezo ceramic transducer shownlocated very close to the center of the fiber sensor as a ref-erence against which to normalize the outputs from each ofthe transducers within the quadrant. The excitation conditionsand geometry are identical to those simulated to obtain the re-sults shown in Fig. 8, corresponding to an ultrasonic excitationfrequency of 270 kHz equivalent to a sensor half length of 5wavelengths and a sensor to source distance of 16. We plotthe results of the experiment in Fig. 10 (as circles) together

1628 IEEE SENSORS JOURNAL, VOL. 11, NO. 7, JULY 2011
Fig. 9. Experimental layout of the experiment verifying the polar response of awave front integration sensor given by Fig. 8. Distance source-sensor = 31 cm,and length of the sensor � 19.5 cm.
Fig. 10. Experimental results for the experimental layout of Fig. 9 (circles) andcomparison with the model simulations (points).
Fig. 11. Layout of length analysis experiments, using a polarimetric detectionsystem. All the values are in centimeters. Distance source-sensor � 21.6 cm.Plate is Perspex 3 mm thick.
with the model simulations provided in Fig. 8 (as points), andwe see that the trends predicted by our model are very closelyfollowed in practice. In particular, the maximum experimentalsensitivity occurs at the angle 6.25 as correctly predicted byour model simulations.
Fig. 11 shows the experimental setup used to examinethe variation in relative sensitivity as a function of sensorlength for a constant source-to-sensor mid-point distance. Thetwo sources at the center of each group of four sensors are
Fig. 12. Comparison between the experimental results (circles) of the experi-mental layout in Fig. 11 and the simulated results of our model (points). For adistance source-sensor � �5.8 and � � 60 kHz.
Fig. 13. Comparison between the experimental results (circles) of the experi-mental layout in Fig. 11 and the simulated results of our model (points). For adistance source-sensor � � ��� and � � 100 kHz.
normalized to each other through their interaction with the11.3-cm-length sensor in the center of the array which is sharedby both groups of four. We also endeavour to ensure that thecoupling conditions between each of the seven sensors that weare investigating and the plate through which the ultrasound istraveling are identical among all the sensors. However, we alsoacknowledge that there is some uncertainty in this couplingeven though we have deliberately chosen a Perspex plate asthe test medium in order to optimize the coupling between thehemispherical sensor epoxy packaging [as shown in Fig. 2(a)]and the material through which the ultrasound is propagated.The results are shown in Figs. 12–14, all normalized to themaximum values. The results from the model described earlierare shown as dots, and the experimental data are representedas circles. The three graphs correspond to frequencies of 60,100, and 150 kHz with normalized source-to-sensor distances(actual distances of 21.6 cm) of 5.8, 9.6, and 14.4 wavelengths,

SORAZU et al.: WAVEFRONT INTEGRATING FIBER SENSORS FOR ULTRASONIC DETECTION 1629
Fig. 14. Comparison between the experimental results (circles) of the experi-mental layout in Fig. 11 and the simulated results of our model (points). For adistance source-sensor � � ���� and � � 150 kHz.
Fig. 15. Typical wave front integration fiber sensor detected ultrasonic signal(dark curve) for a 4.5 cycles tone burst driving signal (light curve) at 100 kHz.The first two arriving bursts correspond to the incident � and � mode, andthe rest are their reflections. In particular, the burst at 300 ms corresponds to thereflection of the incident � mode from the edge of the sample.
respectively. Again, the general trends predicted by the modelare verified, although there are obvious discrepancies that weascribe to variations in coupling coefficient and/or differencesin the accuracy of setting the combination of the polarizationcontroller and the polarization analyzer to the birefringencecharacteristics of each individual sensor. The laser sourcewithin the current experimental arrangement is applied to eachof the sensors in turn, and the entire system is based uponconventional, rather than polarization, maintaining fiber. Theresults demonstrate that our wave front integration model maybe used to determine the optimum length of the fiber sensor formaximum sensitivity in wave front integrating systems.
V. SOME PRACTICAL IMPLICATIONS AND OBSERVATIONS
An example of the wave fronts detected by these polarimetricsensors is shown in Fig. 15. This figure shows the excitation
pulse and the subsequent wave form detected by the sensor in-cluding a very strong first arrival (corresponding to the wavewhich is compressional-like) followed by smaller and slower re-sponse which corresponds to the wave (which is more shearwave-like). Clearly, the presence of any defect, acting as a sec-ondary passive (scattering) source, would introduce additionalcomponents into this wave form which could, in principle, beanalyzed to characterize the defects. The smallest pulse shownin Fig. 15, at 300 ms, corresponds to the reflection of the ,returning to the sensor from the edge of the sample.
There are numerous other observations which could be madehere. For example, a polarimetric sensor placed perpendicularto the principal sensor as in Fig. 3 would show very little re-sponse to the incident wave front but would have an enhancedresponse to the reflection from the damage within the plate. Wehave also mentioned in the introduction that fiber Bragg gratingswhen used as ultrasonic sensors at ultrasonic wavelengths muchlonger than the grating respond more to shear components thancompressional components and are consequently more sensitivewhen aligned perpendicular to the propagating wave fronts. Inprinciple, the same directional sensitivity for two sensors whichwe obtained by using orthogonal polarimetric sensors could beachieved by locating the Bragg grating in the middle of thepolarimetric sensor and interrogating the two systems throughcomplementary optical detection schemes. Here, we would havethe intriguing situation where the Bragg grating responds pre-dominantly to shear-like waves propagating in the direction ofthe optical fiber whilst the polarimetric system responds prefer-entially to compressional-like waves propagating in a directionperpendicular to the direction of the fiber used as a sensor.
There is clearly considerable scope for integrating intelligentdata processing with ingeniously designed optical fiber detec-tion systems as a route towards realizing a relatively straightfor-ward comprehensive fault detection network for use in structuralanalysis. This possibility has yet to be explored in detail andwill require close collaboration between structural engineers,data analysts, and optical fiber sensor designers. The tantalizingprospects that the selectivity and the directivity that fiber sen-sors can realize using combinations of integrating architecturesfrom polarimetric and Bragg grating detection within the samefiber appear to be extremely promising for the future.
VI. CONCLUSION
This paper has presented the results of theoretical and exper-imental investigations into the interaction between ultrasonicwaves and fiber optic sensors, focusing on the birefringenceintroduced within an optical fiber placed with its axis parallelto the ultrasonic wave front. We have shown how for thespecific case of Lamb waves, the induced birefringence canbe utilized as the basis for a sensitive polarimetric detectionsystem which is inherently stable and self referencing. We havealso demonstrated the wave front integration properties of thisgeometry and confirmed the trends predicted theoretically indemonstration experiments. Finally, we have briefly discussedthe prospects for the use of these sensor systems possiblycombined with other fiber optic techniques as the basis forrealizing an integrated structural health monitoring systems.

1630 IEEE SENSORS JOURNAL, VOL. 11, NO. 7, JULY 2011
Fig. 16. (Left) The cylindrical propagating Lamb waves can be approximatedto a plane wave for each infinitesimal segment length of the fiber sensor (Right).
APPENDIX
The Cartesian acceleration components across the sensingfiber due to the propagating ultrasonic Lamb waves can be ob-tained from the second time derivative of the Lamb wave prop-agation displacement equations [10], as given by
(2)
(3)
where and are theplate particles’ vertical and horizontal positions respectively,normalized in ultrasonic wavelengths. As shown in Fig. 2(a), theorigin of is situated at the middle of the sample plate’s depth(considered of thickness , thus the top surface is at andthe bottom surface at ).
The acceleration (2) and (3) are obtained considering thatthe wave front of the ultrasound is parallel to the fiber (henceonly the and acceleration components are needed). Inpractice, the propagating ultrasonic Lamb waves are not planewaves but cylindrical ones. Nevertheless, because the opticalfiber sensor will always be located in the far field of theultrasonic source, and because its diameter is much smallerthan an ultrasonic wavelength, then we can assume that thearriving Lamb wave front to each infinitesimal segment ofthe fiber dl is a plane wave as shown in Fig. 16. The finitelength of the sensing fiber is included on the varying distancebetween the acoustic source and each segment of the fiber.This distance is named , and it modifies the time-dependentphase value on (2) and (3) with the value given inFig. 16 (right). This figure also shows that the in-plane particledisplacement does not have the same direction for each ofthe fiber segments, it being a function of the angle betweenthe direction source:segment and the direction perpendicularto the fiber. We have named this angle . It is the projection ofthis displacement normal to the fiber that mainly dominates
Fig. 17. Conversion of the unitary vectors from the Cartesian displacement co-ordinates to the polar displacement coordinates.
the change in the fiber’s refractive index and so in its inducedbirefringence. As a first approximation, we will consider onlythis displacement component.
The Cartesian acceleration components of (2) and (3) wereconverted to cylindrical coordinates (with as the radial com-ponent unitary vector and as the tangential component) dueto the cylindrical symmetry of the problem (Fig. 17).
Although the tangential acceleration component has a twisteffect over the fiber that will affect its birefringence, we ne-glect it in the first approximation of the present analysis, onlytaking into account the effect of the radial acceleration compo-nent, given in (4):
(4)
The pressure across the fiber is given by the radial accelerationgradient calculated as the difference of the radial accelerationcomponents in opposite sides of each fiber section along thelength of the fiber.
REFERENCES
[1] S. G. Pierce, W. R. Philp, B. Culshaw, A. Gachagan, A. McNab, G.Hayward, and P. Lecuyer, “Surfacebonded optical fiber sensors for theinspection of CFRP plates using ultrasonic Lamb waves,” Smart Mater.Struct., vol. 5, pp. 776–787, 1996.
[2] K. Atherton, F. Dong, S. G. Pierce, and B. Culshaw, “Mach–Zehnderoptical fiber interferometers for the detection of ultrasound,” in SPIEProc. Smart Structures Materials 2000, 2000, pp. 27–34, SPIE-3986.
[3] G. Coppola, A. Minardo, A. Cusano, G. Breglio, G. Zeni, A. Cutolo,A. Calabro, M. Guirdano, and L. Nicolais, “Analysis on the feasibilityof the use of fiber Bragg grating sensors as ultrasound detectors,” Proc.Sensory Phenomena Measurement Instrumentation for Smart Struc-tures and Materials SPIE, vol. 4328, pp. 224–232, 2001.
[4] P. A. Fornitchov and S. Krishnaswamy, “Fibre Bragg grating ultra-sound sensor for process monitoring and NDE applications,” Rev.Progr. Quant. Nondestruct. Eval., vol. 21, pp. 937–944, 2002.
[5] L. Flax, J. H. Cole, R. P. De Paula, and J. A. Bucaro, “Acousticallyinduced birefringence in optical fibers,” J. Opt. Soc. Amer., vol. 72, no.9, pp. 1159–1162, 1982.
[6] R. J. Dewhurst, C. E. Edwards, A. D. W. Mickie, and S. B. Palmer,“Comparative study of wideband ultrasonic transducers,” Ultrason.,vol. 25, pp. 315–321, 1987.
[7] D. C. Betz, G. Thursby, B. Culshaw, and W. J. Staszewski, “Structuraldamage location with fiber Bragg grating rosettes and Lamb waves,”Structur. Health Monitor., vol. 6, no. 4, pp. 299–308, 2007.
[8] G. Thursby, F. Dong, Y. Yong, B. Sorazu, D. Betz, and B. Culshaw,“Fibre optic polarimetric detection of Lamb waves,” in Proc. 15th Op-tical Fiber Sensors Conf., 2002, pp. 321–324.
[9] W. B. Spillman, Jr., and D. R. Huston, “Scaling and antenna gain inintegrating fiber optic sensors,” in SPIE Proc. 10th Int. Conf. OpticalFibre Sensors, 1994, vol. 2360,, pp. 481–484.
[10] I. A. Viktorov, Rayleigh and Lamb Waves—Physical Theory and Ap-plications. New York: Plenum, 1967.

SORAZU et al.: WAVEFRONT INTEGRATING FIBER SENSORS FOR ULTRASONIC DETECTION 1631
Borja Sorazu graduated in physics (specializingin electronic and control engineering) from theUniversity of the Basque Country (UPV), Bizkaia,Spain, in 2000, and then he graduated in electronicengineering from the same university in 2001 andreceived the Ph.D. degree in electronic and electricalengineering (specializing in optical fiber sensors andlaser ultrasonics) from the University of Strathclyde,Glasgow, U.K., in 2006. During his Ph.D. studies,he was involved in the use of optical techniquesfor structural examination of mechanical systems
and material evaluation, including signal generation and acquisition and datainterpretation.
He has since joined the Institute for Gravitational Research (IGR) at the Uni-versity of Glasgow, U.K., as a Research Associate, where his current researchinterest focused on several aspects of advance interferometry for applicationto ground based gravitational wave detectors, and the detector characteriza-tion of GEO 600 (German–British contribution to the first world-network ofground-based interferometric gravitational wave detectors). He is author andcoauthor of more than 50 journals and conference papers.
Graham Thursby, photograph and biography were not available at the time ofpublication.
Brian Culshaw received the B.Sc. degree in physicsfrom the University College London (UCL), U.K.,and the Ph.D. degree in electronic and electrical engi-neering, specializing in microwave semiconductors,from UCL in 1969.
In 1970, he was a postdoctoral researcher atCornell University, Ithaca, NY, joining the staff ofBell Northern Research (now Nortel), Ottawa, ON,Canada, immediately afterwards and evolving intomicrowave system design, especially for long-haultransmission. He returned to UCL after three years
in Ottawa, joining the academic staff at UCL in 1975 and thereafter developingan interest in fiber optics for sensing and measurement. With many co-workers,he produced some basic results in the use of phase modulation in sensors andthe interferometric architectures to demodulate them. A sabbatical year withJ. Shaw at Stanford University, Stanford, CA, in 1982 gave an opportunityto contribute to basic research in fiber gyros. These interests in fiber sensingevolved into applications in ultrasonics, NDE, smart structures, advancedmaterials technologies, environmental sensing and MEMS. He has founded orco-founded three small companies, of which two survive. In 1983, he joinedStrathclyde University, Glasgow, U.K., as Professor of optoelectronics, andsince then has also become involved in a number of professional activities, in-cluding multi-partner national and international research project management,conference organization, and journal editing. At Strathclyde, he served sixyears as Vice-Dean (Engineering) in the United Kingdom’s largest EngineeringFaculty and has completed a five-year term as Head of Department.
His work with professional societies includes serving as President of SPIEduring 2007.