Embed Size (px)
Citation preview

Matjaž Adler
Vodenje pogona vozila za načrtovanje okolju prijazne vožnje
Magistrsko delo
Maribor, oktober 2012

I
Vodenje pogona vozila za načrtovanje okolju prijazne vožnje Magistrsko delo
Študent: Matjaž Adler
Študijski program: Univerzitetni študijski program
Smer: Mehatronika
Mentor: doc. dr. Miran Rodič
Mentor: doc. dr. Uroš Župerl
Lektorica: Lidija Adler, prof. slovenščine

II

III
Zahvala Zahvaljujem se obema mentorjema za strokovno pomoč, usmerjanje in nasvete pri izdelavi diplomskega dela. Posebna zahvala je namenjena moji družini, ki mi je vsa leta izobraževanja stala ob strani, me finančno podpirala, bila v upora in na razpolago kadarkoli, ter verjela. Največja zahvala pa gre moji punci, ki mi je vedno stala ob strani in me vzpodbujala, mentorju Miranu Rodiču in podjetju Virtual Vehicle predvsem somentorju Josefu Girstmaierju, za strokovno pomoč in mnogo na novo osvojenega znanja.

IV
Vodenje pogona vozila za načrtovanje okolju prijazne vožnje
Ključne besede: avtomobil, avtomatski menjalnik, Matlab/SIMULINK, PI regulacija,
optimizacija
UDK: xxxxxx
Povzetek
V sodelovanju s podjetjem Virtual Vehicle (ViF-Virtuelle Fahrzeug) iz Avstrije sem v
okviru magistrske naloge dobil model vozila, kateri je bil v podjetju uporabljen za
testiranje nizkih frekvenc vibracij na okvirju vozila. Model je zgrajen v Matlab/Simulinku.
Ta model sem testiral, spremenil in dogradil vrsto mehanskih komponent ( avtomatični
menjalnik, zavorni sistem, sistem za porabo goriva, vozne cikle in naklon cestišča).
Glavni cilj v magistrski nalogi je bil, narediti regulacijo, katera bo regulirala želeno
hitrost in porabo goriva.
Model je bil precej kompleksen, zato je bilo potrebno pred implementacijo ustreznega
regulatorja, pošteno spremenit zgradbo modela.
Za zmanjšanje porabe goriva, sem manipuliral s prestavljanjem na avtomatskem
menjalniku tako, da je prestavljanje izvršeno ob optimalni porabi goriva.
Regulacija je izvedena na različnih standariziranih voznih ciklih ( NEUDC, EUDC,
ECE15,...), regulacija bo izvedena s PI regulatorjem.
V te vozne cikle pa je bil naknadno vključen tudi naklon cestišča.
V prihodnosti bo možno ta model prenesti na strojno opremo, ki deluje v realnem času
(MicroAutoBox), to je naprava ki jo proizvaja dSpace. Ta naprava se uporablja za realno
časovne simulacije, implementiramo pa jo lahko tudi na mehanske sisteme, na primer v
avtomobil.

V
Vehicle driveline control for predictive green driving
Key words: automotive, automatic transmission, Matlab/SIMULINK, PI controller,
optimization
UDK: xxxxxx
Abstract
I have done my master thesis in cooperation with Virtual vehicle (VIF- Virtuelle Fahrzeug)
from Austria. In this thesis i got a model of a vehicle and this model was originally used to
test low frequency drivetrain vibrations in a car. The model is build up in Matlab/Simulink.
So, for my thesis i had test the model, then do some upgrades and add some mechanical
components to the vehicle (automatic transmission, brake system, fuel consumption system,
driving cycles and road slope).
The main goal was to model some controller, which will first regulate the desired speed
and second control fuel consumption.
The model of the vehicle is very complex, so before i had install the controller into the
model, there have been done some changes on the model.
To reduce fuel consumption, i had control the gear selection (automatic transmission). So
that changing the gear was done in an optimal way to save fuel.
Different driving cycles (NEUDC, EUDC, ECE15,...) have been done with PI controller.
Additional i had install some random inclinations (slopes), to this driving cycles.
In the future this model can be transferred from Matlab to an real time hardware system
(MicroAutoBox), this is a dSpace component, which can be used for real time simulations
and which also can be connected to mechanical systems, in our car for example.

VI
KAZALO
1 UVOD ............................................................................................................................. - 1 -
2 MODEL VOZILA ........................................................................................................... - 4 -
2.1 Voznik ........................................................................................................................................ - 7 -
2.2 Motor ......................................................................................................................................... - 8 -
2.3 Pretvornik navora .................................................................................................................... - 10 -
2.4 Pogonski sklop ......................................................................................................................... - 12 -
2.5 Menjalnik ................................................................................................................................. - 14 -
2.5.1 Avtomatski menjalnik ........................................................................................................... - 15 -
2.5.1.1 Avtomatski menjalnik EGA ( Efficient Gear Actuator)..................................................... - 16 -
2.5.2 Izgube na menjalniku ............................................................................................................ - 24 -
2.6 Upori ........................................................................................................................................ - 27 -
2.6.1 Zdrs koles ............................................................................................................................. - 27 -
2.6.2 Aerodinamični upor .............................................................................................................. - 28 -
2.6.3 Upor naklona cestišča ........................................................................................................... - 29 -
3 ZAVORE ....................................................................................................................... - 29 -
4 CESTA .......................................................................................................................... - 33 -
4.1 Vozni cikli ................................................................................................................................. - 33 -
4.2 Naklon cestišča......................................................................................................................... - 39 -
5 PORABA GORIVA, BSFC........................................................................................... - 41 -
5.1 Interpolacija in ekstrapolacija .................................................................................................. - 43 -
6 REGULACIJA ............................................................................................................... - 45 -
6.1 PID regulator ............................................................................................................................ - 46 -

VII
6.2 Kaskadni sistem regulacije ....................................................................................................... - 47 -
6.3 Implementacija regulatorjev v model ....................................................................................... - 48 -
6.3.1 Regulator rotacijske hitrosti motorja ..................................................................................... - 49 -
6.3.2 Regulator hitrosti vozila ........................................................................................................ - 50 -
6.3.3 Regulator zaviranja vozila...................................................................................................... - 55 -
7 SIMULACIJE ................................................................................................................ - 57 -
7.1 Simulacija na voznem ciklu ECE-15 ........................................................................................... - 58 -
7.2 Simulacija na voznem ciklu NEUDC .......................................................................................... - 61 -
7.3 Simulacija na voznem ciklu HWFET........................................................................................... - 62 -
7.4 Primerjava različnih voznih ciklov in porabe goriva .................................................................. - 63 -
8 SKLEP .......................................................................................................................... - 65 -
9 VIRI .............................................................................................................................. - 67 -

VIII
KAZALO SLIK
SLIKA 1: IZVEDBA CELOTNEGA MODELA S KONTROLERJEM.............................................. - 1 -
SLIKA 2: PREDVIDEN MODEL VOZILA .............................................................................. - 4 -
SLIKA 3: MODEL VOZILA V MATLAB/SIMULINKU ............................................................ - 5 -
SLIKA 4: PRIKAZ PORAZDELITVE MODELA NA POSAMEZNE ENOTE .................................... - 5 -
SLIKA 5: POVEZAVA VOZNIKA, VOZILA IN OKOLJA .......................................................... - 7 -
SLIKA 6: MODEL MOTORJA V MATLAB/SIMULINKU ......................................................... - 9 -
SLIKA 7: MAPA ZA MODEL MOTORJA V MATLAB/SIMULINKU ........................................ - 10 -
SLIKA 8: KOMBINACIJA MEHANSKE IN HIDRAVLIČNE SKLOPKE ...................................... - 11 -
SLIKA 9: HIDRAVLIČNI PRETVORNIK NAVORA ............................................................... - 11 -
SLIKA 10: MODEL PRETVORNIKA NAVORA V MATLAB/SIMULINKU ................................ - 12 -
SLIKA 11: GRAFIČNI PRIKAZ ODE SISTEMA.................................................................. - 13 -
SLIKA 12: MATEMATIČNI ZAPIS ODE SISTEMA IN ZDRSA KOLES .................................... - 14 -
SLIKA13: GRAF PRESTAVNEGA RAZMERJA .................................................................... - 15 -
SLIKA 14: MODEL MENJALNIKA V MATLAB/SIMULINKU ................................................ - 15 -
SLIKA 15: TABELA ZA PRESTAVLJANJE ......................................................................... - 16 -
SLIKA 16: MODEL STATEFLOW V KOMBINACIJI Z RATE TRANSITION .............................. - 17 -
SLIKA 17: STATEFLOW MODEL PRESTAVLJANJA V MATLAB/SIMULINKU ........................ - 17 -
SLIKA 18: ZAKASNITEV NA AVTOMATSKEM MENJALNIKU .............................................. - 18 -
SLIKA 19: MODEL OPTIMIZACIJE AVTOMATSKEGA MENJALNIKA V MATLAB/SIMULINKU - 19 -
SLIKA 20: MAPA ZA PRVO PRESTAVO, INTERPOLACIJSKA METODA LOWESS .................... - 20 -
SLIKA 21: MAPA ZA DRUGO PRESTAVO, INTERPOLACIJSKA METODA NEAREST NEIGHBOR - 21 -
SLIKA 22: MAPA ZA TRETJO PRESTAVO, INTERPOLACIJSKA METODA POLYNOMIAL ......... - 21 -
SLIKA 23: MAPA ZA ČETRTO PRESTAVO, INTERPOLACIJSKA METODA BIHARMONIC (V4) . - 22 -
SLIKA 24: OBMOČJE PRESTAV ...................................................................................... - 23 -
SLIKA 25: PRIKAZ PORABE GORIVA V VSEH ŠTIRIH PRESTAVAH ...................................... - 24 -
SLIKA 26: PRIMER MERITEV IZGUB NA MENJALNIKU ...................................................... - 25 -
SLIKA 27: IZGUBE NA MENJALNIKU ZA PRVO IN DRUGO PRESTAVO ................................. - 26 -
SLIKA 28: IZGUBE NA MENJALNIKU ZA TRETJO IN ČETRTO PRESTAVO ............................. - 26 -
SLIKA 29: PRIKAZ VSEH UPOROV GLEDE NA GIBANJE VOZILA ......................................... - 27 -
SLIKA 30: GRAF ZDRSA KOLES ..................................................................................... - 28 -

IX
SLIKA 31: TEST MODELA NA VOZNEM CIKLU BREZ UPORABE ZAVOR .............................. - 30 -
SLIKA 32: PREPROST PRIMER ZAVOR NA VOZILU ........................................................... - 30 -
SLIKA 33: MATEMATIČNO PRIKAZAN ZAVORNI SISTEM .................................................. - 31 -
SLIKA 34: SILA ZAVIRANJA .......................................................................................... - 32 -
SLIKA 35: TEST VOZNEGA CIKLA Z UPORABO ZAVOR ..................................................... - 33 -
SLIKA 36: VOZILO V KOMBINACIJI Z DVEMA DINAMOMETROMA, FULL POWERTRAIN TEST
FACILITY .............................................................................................................. - 34 -
SLIKA 37: VOZNI CIKEL FTP 75 .................................................................................... - 35 -
SLIKA 38: VOZNI CIKEL NYCC- NEW YORK CITY CYCLE ............................................. - 35 -
SLIKA 39: VOZNI CIKEL HWFET- HIGHWAY FUEL ECONOMY ....................................... - 36 -
SLIKA 40: VOZNI CIKEL LA92- LOS ANGELES .............................................................. - 36 -
SLIKA 41: VOZNI CIKEL ECE 15 ................................................................................... - 37 -
SLIKA 42: VOZNI CIKEL EUDC .................................................................................... - 37 -
SLIKA 43: VOZNI CIKEL NEUDC .................................................................................. - 38 -
SLIKA 44: MODEL VOZNIH CIKLOV V SIMULINKU .......................................................... - 39 -
SLIKA 45: NAKLON CESTIŠČA ....................................................................................... - 40 -
SLIKA 46: SISTEM ZA PRIDOBIVANJE INFORMACIJ O CESTIŠČU ........................................ - 40 -
SLIKA 47:BSFC MAP ................................................................................................... - 42 -
SLIKA 48: MAPA ZA PORABO GORIVA IN UČINKOVITOST MOTORJA ................................. - 44 -
SLIKA 49: MODEL PRERAČUNA POVPREČNO PORABO GORIVA, PREVOŽENE POTI,... V
MATLAB/SIMULINKU ............................................................................................ - 45 -
SLIKA 50: PRIMER KASKADNE REGULACIJE ................................................................... - 47 -
SLIKA 51: BLOKOVNA SHEMA V SIMULINKU REGULACIJE MOTORJA .............................. - 49 -
SLIKA 52: POENOSTAVLJEN MODEL MOTORJA ............................................................... - 49 -
SLIKA 53: BLOKOVNI DIAGRAM VOZILA Z REGULATORJEM HITROSTI ............................. - 51 -
SLIKA 54: "GAIN SCHEDULING" PRISTOP ZA SPREMINJANJE PI PARAMETROV MED SIMULACIJO
............................................................................................................................ - 52 -
SLIKA 55: DIAGRAM STANJ ZA "GAIN SCHEDULING" ...................................................... - 53 -
SLIKA 56: " CHECK STEP RESPONSE CHARACTERISTICS" ............................................... - 54 -
SLIKA 57: NASTAVITEV MEJ V STOPNIČNEM ODZIVU ..................................................... - 54 -
SLIKA 58: UPORABA FUNKCIJE FMINCON ...................................................................... - 55 -
SLIKA 59: DIAGRAM STANJ POSPEŠEVANJA IN ZAVIRANJA ............................................. - 56 -

X
SLIKA 60: GUI, GRAFIČNI VMESNIK V MATLAB/SIMULINKU .......................................... - 57 -
SLIKA 61: SIMULACIJA NA VOZNEM CIKLU ECE-15 ....................................................... - 58 -
SLIKA 62: GRAFI: ECE-15, POGREŠEK, PEDAL ZA PLIN, PEDAL ZA ZAVIRANJE ................. - 59 -
SLIKA 63: SIMULACIJA ECE-15, PODATKI O PORABI GORIVA ......................................... - 60 -
SLIKA 64: SIMULACIJA ECE-15, OSTALI ZANIMIVI PODATKI ZA VOZNIKA ....................... - 61 -
SLIKA 65: SIMULACIJA NA VOZNEM CIKLU EUDC ......................................................... - 62 -
SLIKA 66: SIMULACIJA NA VOZNEM CIKLU HWFET ...................................................... - 63 -
SLIKA 67: PRIMERJAVA NEUDC IN FTP-75 ................................................................. - 64 -

- 1 -
1 UVOD
Avtomobilska industrija je ena izmed največjih industrijskih panog na svetu. Leta 2010 je
bilo proizvedenih 80 milijonov komercialnih vozil, sodi med tiste gospodarske dejavnosti,
kjer je konkurenčni boj najbolj oster. Zato je vlaganje v razvoj vozil veliko, glavna cilja
razvoja pa sta: doseganje višje varnosti in udobnosti med vožnjo, komaj v zadnjem stoletju
pa se je začelo močno vlaganje v razvoj varčnih vozil. Vzrok je predvsem zavedanje, da je
zemlja vedno bolj onesnažena in da so se cene naftnih derivatov začele hitro dvigovati.
Računalniške simulacije so postale ključen produkt za izboljšanje vozil. Z izvedbo
računalniških simulacij, lahko hitro,učinkovito in z manjšimi stroški pridemo do rešitev, ki
so lahko kasneje izvedene na realnem sistemu.
V podjetju Virtual Vehicle mi je bila predstavljena ideja o simulaciji modela vozila s
krmilnikom, ki bi zmanjševal porabo goriva. Ker je podjetje usmerjeno bolj v preučevanje
vibracij na posameznih sklopih vozila in akustiki vozil, sem bil jaz prvi na takšnem
projektu. Opis problema- naloge je prikazan na spodnji sliki:
Slika 1: Izvedba celotnega modela s kontrolerjem

- 2 -
Model vozila v Matlab/Simulinku je bil že narejen, vendar je bil narejen za testiranje
vibracij na šasiji avtomobila, zato so bile potrebne precejšne spremembe na modelu vozila.
Ideja je bila zmanjšanje porabe goriva, glede na dano mapo (cestno omrežje), s pomočjo
optimalnega prestavljanja. Celoten model je možno razdeliti na tri večje enote: model
vožnje (road map), model vozila, krmilnik. Podatki v mapi cestišča bi bili: želena hitrost in
naklon cestišča, medtem, ko bi krmilnik reguliral želeno hitrost glede na dejansko, s
pomočjo pedala za plin. Upravljal pa bi tudi z optimiziranim menjavanjem, kar pomeni
izbrati najbolj optimalno prestavo (najmanjša poraba goriva) v danih pogojih in ob
izbranih zahtevah (čas med menjavanjem, postopno prestavljanje iz prve v drugo, šele nato
v tretjo,...).
V tej magistrski nalogi bo najprej opisan celoten model vozila. Model vozila bo razdeljen
na logične sklope. Najprej bodo opisani sklopi, ki so že bili narejeni (za poznavanje
modela vozila je bilo potrebno natančno preučiti tudi te). Sklope, ki sem jih sam naredil ali
spremenil, pa bodo bolj podrobno opisani. V model vozila so vključeni vozni cikli, ki se
uporabljajo za testiranje porabe goriva na različnih motorjih. Iz njih lahko dobimo želeno
hitrost glede na čas. Nato bo uporabljen regulator hitrosti vozila in regulator hitrosti
motorja. Regulatorja bosta v izvedbi PI, to pomeni iz proporcionalnega dela in
integralnega dela. Ojačenja 𝐾𝑝 in 𝐾𝑖, se bosta spreminjala glede na trenutno prestavo v
vozilu, kajti vsaka prestava ima svoj izkoristek. Zmodeliran bo tudi nov avtomatski
menjalnik, v katerega bo vključena optimizirana poraba goriva, vozilo bo v prestavi, v
kateri ima najnižjo porabo goriva glede na vse parametre. V ta menjalnik bodo vključene
tudi izgube navora na njem, te meritve so opravljene na realnem sistemu. Vozni cikli imajo
vključeno tudi hitro zniževanje hitrosti, regulator hitrosti pa je narejen kot pedal za plin,
torej gre od 0 do 100%. Ko je pedal za plin na 0%, se vozilo upočasnjuje zaradi zračnega
upora, trenja in naklona cestišča. Vendar to še ni dovolj, da bi vozilo doseglo želeno
znižano hitrost voznega cikla. Zato je bil zmodeliran tudi zavorni sistem, zaviranje se je
izvajalo s pomočjo regulatorja. Tako so bili v model implementirani trije regulatorji in
narejena kaskadna regulacija. Model vozila je bil testiran na različnih mednarodnih voznih
ciklih, v katere so vključeni tudi naklon cestišča, saj ima le-ta velik vpliv na porabo goriva.
Načrti za prihodnost so: voznik si izbere želeno destinacijo na navigacijskem sistemu,
navigacijski sistem sporoči podatke računalniku: primernost cestišča, naklon, dovoljena

- 3 -
hitrost. Ta izvede simulacijo za vsa cestišča in izbere najbolj varčno pot, s stališča
najmanjše porabe goriva, sproti pa vozniku sporoča primerno hitrost in primerno prestavo
za najnižjo porabo goriva.

- 4 -
2 MODEL VOZILA
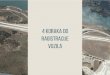
Celotno vozilo lahko razdelimo na več posameznih enot, kot vidimo na sliki 2:
Slika 2: Predviden model vozila
Posamezne enote lahko razdelimo na dva sklopa, glede na avtorja:
Enote, ki so bile že narejene:
- Voznik - Motor - Pretvornik navora, lock-up sklopka, preprost menjalnik - Pogon s prenosom
Enote, ki sem jih nadgradil ali dogradil:
- Voznik, izbrisan - Dodani vozni cikli - Regulator hitrosti (izhod iz regulatorja je voznik) - Avtomatski menjalnik - Optimizacija porabe goriva - Zavore, z regulacijo - Naklon cestišča
Na sliki 3 lahko vidimo celoten model vozila v Matlabovem okolju Simulink. Slika 4 pa
nam prikazuje podrobno porazdelitev in povezavo vseh enot modela.

- 5 -
Slika 3: Model vozila v Matlab/Simulinku
Slika 4: Prikaz porazdelitve modela na posamezne enote
V nadaljevanju bodo samo na grobo opisane posamezne komponente vozila in obrazloženo
njihovo obnašanje in matematično ozadje, ki je že bilo narejeno. Za spreminjanje in
3.6
m/s to km/h
Engine_w
engine_w3
Tin
Tout
v
alfa
w
M
D_clutch
DT-dx1
Transmission
Scope3
Mengine
w
v
Optimization of Fuel consumption
Engine_M
M3
[v_vehicle]
From2
[v_vehicle]
From1w
Malfa
Tin
Engine
Out6
Drving Cycles
v
DT_dx1
T_out
Drivetrain
v CGasPedal
Controller
0
Constant

- 6 -
dograjevanje modela je bilo potrebno preučiti še njihovo delovanje in lastnosti. V
naslednjih poglavjih pa bodo podrobno opisane tudi nove enote na modelu.
Karakteristike realnega vozila na podlagi katerega je bil narejen model:
Osnovne karakteristike Vrednosti Enote
Masa vozila 1500 kg
Diameter koles 0,3 m
Število valjev 4
Osnovne dimenzije
Prostorska zmogljivost motorja 1968 𝑐𝑚3
Premer valja 81 mm
Displacement 95,5 mm
Prostornina enega valja 492 𝑐𝑚3
Medosna razdalja valjev 88 mm
Zmogljivosti
Max. moč pri hitrosti motorja 103 at
4000
kW at 1 /min
Max. navor pri navorju motorja 320 at
1750
Nm at 1/min
Specifična zmogljivost 52,3 kW/L
Specifični navor 162,6 Nm/L

- 7 -
2.1 Voznik
Voznik je bistveni člen v našem sistemu. Na spodnjih treh slikah je prikazano kakšen
medsebojni vpliv imajo voznik, vozilo in okolje:
Slika 5: Povezava voznika, vozila in okolja
V našem primeru »voznik« upravlja s pedalom za plin ter z zavornim pedalom. Vozilo se
bo premikalo samo vzdolžno, kar pomeni, brez zavojev. V tem primeru ne potrebujemo
volana. Menjalnik bo avtomatski, kar pomeni, da ima voznik samo posredni vpliv na
prestavljanje in sklopko.
Vozilo bo povratno dajalo »vozniku« raznovrstne informacije (trenutna, povprečna, in
totalna poraba goriva, trenutna in povprečna hitrost, navor na motorju,….) Za nas najbolj
zanimiva sta podatka o trenutni porabi goriva in trenutni hitrosti.

- 8 -
Vpliv okolja bomo zanemarili, oziroma bo konstanten, kar pomeni, da nam preostane
samo cestišče. Na cestišču se bo spreminjal samo naklon, vse ostale spremenljivke (
hrapavost, zgradba,…) bodo konstantni.
Če povzamemo je naš »voznik« v bistvu naš pedal za hitrost. Določen je s črko α in sicer
0<α<100, ko je pedal na 0 vozilo miruje ali pa zavira, medtem ko je pedal na 100, vozilo
maksimalno pospešuje. Pedal za hitrost vpliva na motor, z večanjem bo višja tudi hitrost
motorja. Vpliva pa tudi na menjalnik, prestava je odvisna od pedala za plin in hitrosti.
2.2 Motor
Motor je možno predstaviti na dva načina: mean value model in detailed cycle-model.
Uporabljen je bil drugi primer modela motorja.
V cycle-resolved modelu motorja smo vzeli podatke iz štirivaljnega dizelskega motorja od
proizvajalca Volkswagen, model Golf 4, motor VW TDI 2.0 PD.
Komponente v realnem motorju, ki bistveno vplivajo na proces izgorevanja v tem
dizelskem motorju:
Osnovne karakteristike VW TDI 2.0 PD
Vbrizgalni sistem Bosch črpalka, šoba »UI-P2«
Polnilnik( charger) Turbopuhalo z variabilno turbino (pnevmatično
gnana)
EGR system - Exhaust Gas Recirculation,
sistem obtoka izpušnih plinov
Zunanji sistem obtoka izpušnih plinov s
preklopnim EGR hladilnim sistemom
Obremenitveni prenos 4-ventilni ( ventil ima zasuk za 45 stopinj) z
dvema zgornjima odmičnima gredema

- 9 -
Slika 6: Model motorja v Matlab/Simulinku
𝐼𝑒𝑖 ∗ 𝑁�̇� = 𝑇𝑒 − 𝑇𝑖 (2.1)
Ne = engine speed, hitrost na motorju [rpm]
Iei = moment of inertia, of the engine and the impeller, navor vztrajnosti na motorju in na
rotorju
Te, Ti = engine and impeller torque, navor na motorju in rotorju
Kot je razvidno iz slike 6, je vhod v model motorja alfa, (alfa je določena kot voznik
vozila), v povratno zanko pa je povezana tudi hitrost motorja. S tema dvema veličinama se
lahko določi potreben navor motorja in to s pomočjo LookUp2d tabele v Simulinku. Ta
tabela z interpolacijo dveh vhodov določi izhod, glede na vstavljene podatke. Če pa so
vhodi izven področij, ki so znana (npr: alfa=120% in hitrost motorja=8000 rpm), se izvede
ekstrapolacija.
Dobljen navor je deljen z vztrajnostjo motorja, ki je konstantna. Odšteje se še navor na
rotorju, ki nastane na menjalniku in tako se z integratorjem določi hitrost na motorju v
rad/s.
2engine_M
1engine_walpha
we
Mengine
Subsystem1
1s
Integrator
1/engine.J
Gain3
1/engine.J
Gain2
1trans_Tin
engine_M engine_w

- 10 -
Slika 7: Mapa za model motorja v Matlab/Simulinku
Na sliki 7 je vidna mapa za model motorja. Mapa je sestavljena iz pedala za plin (Gas
Pedal), hitrosti na motorju (Engine speed) in navora na motorju (Engine torque), kot je
razvidno iz mape je možen tudi negativen navor. To se zgodi ko ima pedal za plin vrednost
blizu 0, hitrost na motorju pa je večja kot 0. V praksi to pomeni, da vozilo stoji na mestu in
je menjalnik v nevtralni prestavi, sklopka je odprta. Druga možnost pa je, vožnja po klancu
navzdol in zaviranje z motorjem.
2.3 Pretvornik navora
Avtomatski menjalnik uporablja pretvornik navora namesto klasične sklopke, ki se
uporablja pri ročnih menjalnikih. Ti so sestavljeni iz dveh vzporedno vezanih sklopk. To
pomeni iz hidravlične sklopke in iz mehanske - navadne sklopke. Sklopki imata različne
izkoristke, zato se hidravlična sklopka uporablja ob speljevanju in prestavljanju. S tem se
poveča udobnost vožnje (manjše trenje zaradi tekočine). Mehanska sklopka, pa se
020
4060
80100
1000
2000
3000
4000
5000-100
-50
0
50
100
150
200
250
300
350
Gas Pedal [%]
Engine MAP
Engine speed [rpm]
Engi
ne to
rque
[Nm
]

- 11 -
uporablja med vožnjo s konstantno hitrostjo, saj ima boljši izkoristek. Na sliki 8 je
prikazana vzporedna vezava dveh sklopk.
Slika 8: Kombinacija mehanske in hidravlične sklopke
Slika 9: Hidravlični pretvornik navora
Hidravlični pretvornik navora lahko razdelimo na tri komponente:
- Impeller of pump, rotor tlačilke - Stator

- 12 -
- Turbina Rotor je obroč s kovinskimi lopaticami in je voden s pomočjo gredi iz motorja. Prenaša
kinetično energijo preko tekočine. S pomočjo vrtenja črpa tekočino v center in tvori
vakum. Pritisk v tekočini požene turbino, ta prenese kinetično energijo na menjalnik.
Tekočina nato zapusti turbino v nasprotni smeri. Tukaj odigra svojo vlogo stator. Izdelan
je iz dveh vrst nerotirajočih se lopatic in je vgrajen med rotor in turbino. Stator preprečuje
tekočini, da bi le-ta zavirala motor, če bi prišla v črpalko. Na sliki 10 je prikazana zgradba
pretvornika navora v Simulinku.
Slika 10: Model pretvornika navora v Matlab/Simulinku
2.4 Pogonski sklop
Pogonski sklop je razviden na sliki 11. Sestavljen je iz vseh delov vozila med motorjem in
kolesom.

- 13 -
Če je predpostavljeno ravnotežje kot je prikazano na sliki, se lahko s pomočjo ODE
sistema izračuna rotacijska hitrost φ. Vhod v sistem sta rotacijska hitrost in navor. φ se
določi z uporabo diagrama zdrsa koles, v katerega je vhod obodna sila. Obodna sila je
določena na kolesu vozila. Pospešek vozila se lahko izračuna na naslednji način:
𝐹𝑜𝑏𝑜𝑑𝑛𝑎 = 𝑚𝑣𝑜𝑧𝑖𝑙𝑎 ∗ 𝑎𝑣𝑜𝑧𝑖𝑙𝑎 (2.2)
Z integracijo 𝑎𝑣𝑜𝑧𝑖𝑙𝑎 dobimo hitrost vozila.
Slika 11: Grafični prikaz ODE sistema
ODE- ordinary differential equation, to je v večini primerov sistem prvega reda linearno
diferencialne enačbe, izrazi se lahko kot:
�̇� = 𝐴𝑋 + 𝐵 , 𝑦 = 𝐶𝑥 + 𝐷 (2.3)
V tem primeru je bil uporabljen sistem drugega reda, vendar je bil transformiran v sistem
prvega reda, zaradi hitrejšega preračunavanja v Matlabu. V Matlab/Simulinku je bil
uporabljen blok State-Space, ki implementira linearne state-space sisteme. Matrike, ki so
bile vstavljene v state-space blok so prikazane na sliki 12.

- 14 -
Slika 12: Matematični zapis ODE sistema in zdrsa koles
2.5 Menjalnik
Menjalnik je zmodeliran s pomočjo statičnih prestavnih razmerij, slika spodaj.
𝑅𝑇𝑅 = 𝑓1(𝑔𝑒𝑎𝑟) (2.4)
𝑇𝑜𝑢𝑡 = 𝑅𝑇𝑅 ∗ 𝑇𝑖𝑛 (2.5)
𝑁𝑖𝑛 = 𝑅𝑇𝑅 ∗ 𝑁𝑜𝑢𝑡 (2.6)
Tin , Tout = transmission input and output torques, vhodni in izhodni navor na menjalniku
Nin, Nout = transmisiion input and output speed, vhodna in izhodna hitrost na menjalniku
[rpm]
RTR = transmission ratio, prestavna učinkovitost - slika spodaj, na x osi je trenutna
prestava, na y osi pa prestavna učinkovitost.

- 15 -
Slika13: Graf prestavnega razmerja
Slika 14: Model menjalnika v Matlab/Simulinku
2.5.1 Avtomatski menjalnik
1 1.5 2 2.5 3 3.5 4
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6R
atio
←1
Gear
Gear ratio
2Nin1
1Tout
Look-UpTable1
Divide3Divide1
3Nout1
2gear
1Tin

- 16 -
V model vozila je bil vgrajen avtomatski menjalnik, ki je menjaval glede na pozicijo
pedala za plin in trenutne hitrosti. Bila je narejena tabela za prestavljanje kot jo lahko
vidite na sliki 15.
Slika 15: Tabela za prestavljanje
V ta avtomatski menjalnik ni bilo vključenih nobenih podatkov o porabi goriva. Velike
količine goriva, pa se lahko prihranijo ravno ob pravilnem prestavljanju. V ta namen je bil
narejen nov avtomatski menjalnik, ki je opisan v naslednjem poglavju.
2.5.1.1 Avtomatski menjalnik EGA ( Efficient Gear Actuator)
Avtomatski menjalnik je zasnovan s pomočjo funkcije Stateflow. Stateflow blok
predstavlja logiko za prestavljanje v avtomatskem menjalniku. Vhod v Stateflow blok je
Gear_in, izhod pa Gear. Gear_in je dobljen iz optimizirane porabe goriva. Pomembno je
tudi, da se funkcija v celotnem Stateflow diagramu izvede hitreje kot pa je nastavljen
t_step –sample time, to je korak simulacije celotnega modela. V mojem primeru se je
korak v celotnem Stateflow diagramu izvedel v 0.2 ms, medtem ko je t_step = 0.5 ms. S

- 17 -
pomočjo bloka Rate Transition, se lahko signali iz različnih blokov združijo kljub
različnemu sample time. Na sliki 16 lahko je vidna uporaba blokov Rate Transition.
Slika 16: Model Stateflow v kombinaciji z Rate Transition
Slika 17: Stateflow model prestavljanja v Matlab/Simulinku
Kot vidite na zgornji sliki imamo dva ločena diagrama:
- Gear_state Privzeto je nastavljeno, da vozilo začne vožnjo v prvi prestavi. S pomočjo stanj UP in DOWN se lahko vrši prestavljanje na menjalniku, s tem, da ima UP stanje prednost pred stanjem DOWN.
- Selection_state Privzeto je nastavljen oblaček steady_state, kar pomeni, da se na začetku simulacije ne izvaja prestavljanje v višjo ali nižjo prestavo. Dokler je Gear_in= Gear tudi
Gear_in Gear
ShiftLogicRate Transition1Rate Transition

- 18 -
ostane tako. Ko je Gear večji ali manjši od Gear_in se stanje prestavi v downshifting, oziroma upshifting. To sproži stanje DOWN oziroma UP, kar povzroči prestavljanje v nižjo, oziroma višjo prestavo v oblačku steady_state. Med prestavljenjem je določena zakasnitev petih sekund, (zakaj je tako, je podrobno opisano v poglavju hidravlična sklopka). Nastavljena pa je tudi zakasnitev 0.2 sekundi med prestavljanjem, tolikšen je povprečni čas, ki ga realni avtomatski menjalnik porabi za prehod iz ene prestave v drugo. Slika spodaj.
Slika 18: Zakasnitev na avtomatskem menjalniku
2.5.1.1.1 Optimizacija prestavljanja (EGA)
EGA – Efficient Gear actuator, temelji na izbiranju prestave konstantno v vsakem
trenutku, glede na optimizacijske mape.
Porabo goriva lahko zmanjšamo s številnimi tehnikami. Dokaj dosti rezerv je še tudi pri
porabi ob nepravilnem ali ne-optimiziranem prestavljanju, bodisi v ročnem, avtomatskem
ali robotskem menjalniku. V bistvu lahko v določenem voznem območju peljemo z
različnimi prestavami, ki zadovoljijo voznika. Ta izbira je velikokrat odvisna od številnih
faktorjev, pogosto celo nasprotujočih si, na primer: stil vožnje, ekonomične in ekološke
vožnje in prilagoditve na posamezne razmere (vremena, kondicije cestišča, ovir,…).
Eden izmed glavnih nalog – ciljev, je bilo narediti optimizirano prestavljanje, kar pomeni,
da bi vozilo bilo ves čas v tisti prestavi, ki bi bila optimalna glede na porabo goriva. Kljub
temu pa bi bila izpolnjena pogoja za udobnost voznika. Zelo pomembno je tudi določiti čas
med dvema prestavama (minimalen čas v katerem mora biti posamezna prestava). S tem

- 19 -
dosežemo udobnost voznika v vozilu in zmanjšanje izgub navora ob prestavljanju (ob
vsakem prestavljanju imamo nekaj izgub navora).
V model sta bila vključena naklon cestišča (pozitiven naklon zahteva bistveno večji navor
in obratno) in želena hitrost na določenem odseku.
Narejene so bile štiri mape, vsaka prestava je imela svojo mapo. Vhod v to mapo sta bila v-
dejanska hitrost in Fx1- sila, ki je dobljena v izbrani prestavi. Izhod je bil poraba goriva v
L/s.
Za vsako prestavo je bila izračunana teoretična najnižja in najvišja hitrost, glede na izbran
motor. Kako izgleda model v Simulinku je prikazano na sliki spodaj.
Slika 19: Model optimizacije avtomatskega menjalnika v Matlab/Simulinku
𝐹𝑥1 = (𝑅𝑇𝑅(1) ∗ 𝑇𝐸 ∗ 𝑖1 ∗ 𝑖2)/𝑟𝑤ℎ𝑒𝑒𝑙 (2.7)
𝐹𝐶 �𝐿𝑠� = 𝐵𝑆𝐶𝐹[
𝑔𝑘𝑊ℎ] ∗ 𝑃𝑒[𝑘𝑊] ∗ 𝐷𝑖𝑒𝑠𝑒𝑙𝐷/(3600)
(2.8)
RTR(1) = transmission ratio, prestavna konstanta za prvo prestavo
TE = engine torque, navor na motorju
i1, i2 = constant, konstanta
rwheel = radius of wheel, polmer kolesa
44
33
22
11
Reifen.r
wheel radius
3.6
m/s to km/h4
3.6
m/s to km/h3
3.6
m/s to km/h2
3.6
m/s to km/h1
0.677
i4
1
i3
1.588
i22
1.45
i2
2.1
i11
2.393
i1
v
f uel
okfcn
function3
v
f uel
okfcn
function2
v
f uel
okfcn
function1
v
f uel
okfcn
function
Saturation
Gear4
Gear3
Gear2
Gear1
v
From6
v
From5
v
From4
M
From3
v
From2
v
From1
Divide

- 20 -
FC – Fuel Consumption, poraba goriva
Pe – Moč motorja
DieselD – Gostota diesla [kg/L], običajno 0.832
Iz slike 47 na kateri je mapa sem razbral okoli 200 podatkov za vse tri parametre ( pe, we,
BSCF). Da so bili ti podatki porazdeljeni po celotnem delovnem območju je bilo
uporabljeno Simulinkovo orodje Curve fiting tool. V tem orodju so bile z interpolacijo
razporejene vrednosti po celotnem delovnem območju, (več o tem: poglavje Interpolacija
in ekstrapolacija).
Opravljene so bile simulacije na vseh šestih metodah, za najbolj natančno metodo se je
izkazala metoda Lowess in Biharmonic (v4). Domnevam, da zaradi dokaj velikega števila
podatkovnih točk, ki pa niso bile razporejene po celotnem delovnem območju.
Na spodnjih štirih slikah so prikazane mape za vsako prestavo posebej, mape so prikazane
z različnimi postopki interpolacije (v modelu sem uporabil za vse prestave metodo lowess).
Slika 20: Mapa za prvo prestavo, interpolacijska metoda lowess
46
810
1214
1618
0
2000
4000
6000
80000
1
2
3
4
5
6
7
8
9x 10-3
vehicle speed [m/s]Fx1 [N]
Fuel
Con
sum
ptio
n [L
/s]

- 21 -
Slika 21: Mapa za drugo prestavo, interpolacijska metoda Nearest neighbor
- Tretja prestava
Slika 22: Mapa za tretjo prestavo, interpolacijska metoda Polynomial
1015
2025
10002000
30004000
0
1
2
3
4
5
6x 10-3
vehicle speed [m/s]Fx2 [N]
Fuel
Con
sum
ptio
n [L
/s]
1015
2025
3035
40
5001000
15002000
25003000
0
1
2
3
4
5
6
7
8
9x 10-3
vehicle speed[m/s]Fx3 [N]
Fuel
Con
sum
ptio
n [L
/s]

- 22 -
- Četrta prestava
Slika 23: Mapa za četrto prestavo, interpolacijska metoda Biharmonic (v4)
Kot je razvidno iz grafov posameznih map se pri določenih hitrostih in silah grafi
prekrivajo, kar lahko vidimo na sliki spodaj.
2030
4050
60
500
1000
1500
2000
-1
0
1
2
3
4
5
6
7
8x 10-3
vehicle speed [m/s]Fx4 [4]
Fuel
Con
sum
ptio
n [L
/s]

- 23 -
Slika 24: Območje prestav
Polje označeno s črno je območje v katerem se lahko teoretično vozi v vseh štirih
prestavah. Program, ki je bil zasnoval je narejen tako, da izbere prestavo v kateri je poraba
vozila najmanjša. Upoštevani so vsi parametri: naklon cestišča, zdrs koles, zračni upor,
hitrost, navor, zaviranje,....

- 24 -
Slika 25: Prikaz porabe goriva v vseh štirih prestavah
Na sliki 25 je vidna poraba goriva v vseh štirih prestavah skozi celoten cikel EUDC. Kot je
razvidno iz drugega grafa, je kar nekaj območij, kjer lahko vozilo vozi v vseh štirih
prestavah. Določene so bile tudi maksimalne in minimalne hitrosti za posamezne prestave.
Na primer, v času simulacije od 0 do 60 sekund, lahko vozilo vozi v prvi prestavi, pri 60
sekundah pa to ni več možno, saj je želena hitrost večja od maksimalne za to prestavo,
(vse skupaj je dobro razvidno iz zgornje slike). Za izbiro prestave je bila v okolju
Matlab/Simulink uporabljena metodo fminsearch , ta najde minimum skalarne funkcije, ki
ima lahko več spremenljivk.
2.5.2 Izgube na menjalniku

- 25 -
V samem modelu so bile upoštevane tudi izgube navora na posameznih prestavah. V
podjetju Virtual Vehicle sem sodeloval s sodelavcem Thomasom Schaffnernerjem, ta je
opravil meritve na realnem menjalniku. Iz meritev na realnem menjalniku so bili dobljeni
vsi podatki o izgubah na posameznih delih menjalnika. Meritve so bile opravljene na
menjalniku pri različnih: temperaturah, prestavah, hitrostih in navoru. Ti pridobljeni
podatki so bili uporabljeni na modelu vozila v Matlab/Simulinku. Kot je razvidno iz slik 27
in 28, so izgube na večjih komponentah menjalnika in so odvisne od temperature, hitrosti
na menjalniku ter navora na menjalniku. Kar pa je bistveno za izbran model, izgube so
različne glede na prestavo v kateri vozi vozilo.
Slika 26: Primer meritev izgub na menjalniku
Na sliki 25 je skica, kako se opravljajo meritve izgub na menjalniku. Izgube so lahko
podane na dva načina:
∆𝑇𝑖𝑧𝑔𝑢𝑏𝑎 = 𝑇𝑖𝑛 − 𝑇𝑜𝑢𝑡 [𝑁𝑚] (2.8)
Ali
∆𝑇𝑖𝑧𝑔𝑢𝑏𝑎 =𝑇𝑜𝑢𝑡𝑇𝑖𝑛
[%] (2.9)

- 26 -
Slika 27: Izgube na menjalniku za prvo in drugo prestavo
Slika 28: Izgube na menjalniku za tretjo in četrto prestavo

- 27 -
Podatki, ki so bili dobljeni iz meritev niso bili testirani na celotnem področju delovanja modela vozila. Zato sem s pomočjo interpolacije, ( več o tem v poglavju Interpolacija in ekstrapolacija), razporedil vrednosti po celotnem območju. Pri podatkih iz meritev pogosto pride do odstopanj - šuma, zaradi zunanjih vplivov. V Matlab/Simulinku obstaja opcijo glajenja signalov lowess- smoothing tool, ta funkcija je bila tudi uporabljena za bolj natančne podatke iz meritev.
2.6 Upori
Slika 29: Prikaz vseh uporov glede na gibanje vozila
Kot je razvidno iz slike vsi ti upori vplivajo zaviralno na končno hitrost vozila.
𝑚�̈� = 𝐹𝑒𝑛𝑔𝑖𝑛𝑒 − 𝐹𝑑𝑟𝑎𝑔 − 𝐹𝑟𝑜𝑙𝑙𝑖𝑛𝑔 𝑟𝑒𝑠𝑖𝑠𝑡𝑎𝑛𝑐𝑒 − 𝐹𝑟𝑜𝑎𝑑 𝑔𝑟𝑎𝑑𝑒 (2.10)
2.6.1 Zdrs koles
Zdrs koles se lahko izračuna po naslednji enačbi:
𝐹𝑟𝑜𝑙𝑙𝑖𝑛𝑔 𝑟𝑒𝑠𝑖𝑠𝑡𝑎𝑛𝑐𝑒 = (𝑤_𝑟 − 𝑣)/𝑣 (2.11)

- 28 -
w_r – speed of the wheel
v – speed of the vehicle
Slika 30: Graf zdrsa koles
Iz grafa je razviden koeficient-u, ki pove koliko znaša zdrs koles.
2.6.2 Aerodinamični upor
𝐹𝑑𝑟𝑎𝑔 = 12𝜌𝐴𝐶𝑑𝑣
2 = 𝐶𝑑𝑓𝑣2 (2.12)
ρ – gostota zraka 1,2 kg/𝑚3 na morski gladini, z nadmorsko višino se zmanjšuje
A – površina sprednjega dela avtomobila
𝐶𝑑 – koeficient upora, pri avtomobilih med 0.1 in 0.6 ( 𝐶𝑑 𝑔𝑜𝑙𝑓 = 0.32)

- 29 -
2.6.3 Upor naklona cestišča
𝐹𝑟𝑜𝑎𝑑 𝑔𝑟𝑎𝑑𝑒 = 𝑚𝑔𝑠𝑖𝑛(𝛼) (2.13)
Več o tem v poglavju Naklon cestišča.
3 ZAVORE
Ob simulacijah na različnih voznih ciklih sem zasledil, da dejanska hitrost modela
avtomobila v Matlab/Simulinku ne zmore slediti želeni hitrosti ob hitrem zmanjševanju
hitrosti. Kajti regulator hitrosti je manipuliral s pedalom za plin, kateri pa je omejen na
vrednost med 0 in 100. Ko je ta postavljen na 0 model, zmanjšuje hitrost, vendar ne dovolj.
Zaviranje na modelu je bilo narejeno v obliki uporov, ( zdrs koles, zračni upor) - poglavje
2.6 Upori. Ti upori pa niso zadostovali zmanjšani hitrosti na voznem ciklu slika 31.

- 30 -
Slika 31: Test modela na voznem ciklu brez uporabe zavor
Zato je bil v model dodan preprost zaviralni sistem.
Slika 32: Preprost primer zavor na vozilu
0 100 200 300 400 500 600 7000
20
40
60
80
100
120
140
Time [s]
Velo
city
[km
/h]
EUDC driving cycle

- 31 -
Zaviralni sistem je sestavljen iz pedala, hidravlične povezave, zavornih čeljusti, zavornih
ploščic ter zavornega diska, ta je fiksno pritrjen na kolo.
Takšen hidravličen sistem nam omogoča prenos energije iz pedala na zavorne čeljusti.
Povprečen zaviralni sistem ima naslednjo pretvorbo: po pritisku na pedal s silo 10N,
dobimo na zavornih ploščicah silo 360N, to je sila na enem kolesu.
Slika 33: Matematično prikazan zavorni sistem
𝐹𝑅𝐹 = 𝜇 × 𝐹𝑛 × 2 (3.1)
𝐹𝑏𝑟𝑎𝑘𝑖𝑛𝑔 = 𝐹𝑅𝐹 × 𝑟𝑡𝑖𝑟𝑒 (3.2)
𝐹𝑅𝐹- Zaviralna sila na disku
𝜇- koeficient trenja, odvisen od materialov diska in ploščic
𝐹𝑛- Sila, ki deluje na zaviralne ploščice, deljena z dva, kajti ploščice so na vsaki strani in
predpostavimo, da ploščici zavirata z enako silo
𝑟𝑡𝑖𝑟𝑒 – polmer kolesa
𝐹𝑏𝑟𝑎𝑘𝑖𝑛𝑔 − zaviralna sila na kolesu
Model v Matlab/Simulinku je bil narejen po sliki 33. Silo 𝐹𝑏𝑟𝑎𝑘𝑖𝑛𝑔 je bila regulirana s
pomočjo PI regulatorja. Določiti je bilo potrebno tudi naslednje predpostavke:
- Zavira se lahko s pomočjo zavore samo, ko je pedal za plin blizu vrednosti 0 ali je enak 0.

- 32 -
- Zavorna sila 𝐹𝑏𝑟𝑎𝑘𝑖𝑛𝑔 ima najmanjšo vrednost 0, takrat, ko je zavora nepotrebna za doseganje želene hitrosti, ima zavorni pedal vrednost 0. Največjo vrednost 𝐹𝑏𝑟𝑎𝑘𝑖𝑛𝑔 je določena, ob predpostavki, da voznik pritisne na zavorni pedal z silo 40 N.
- Sila zaviranja je negativna, saj deluje v nasprotni smeri kot sila premikanja vozila - Maksimalna sila na zavornih ploščicah znaša 5760 N. Dobljena sila je iz naslednje
enačbe.
𝐹𝑓𝑖𝑛𝑎𝑙 = 𝐹𝑏𝑟𝑎𝑘𝑖𝑛𝑔 ∗ 𝑐ℎ𝑦𝑑𝑟𝑎𝑢𝑙𝑖𝑐 𝑠𝑦𝑠𝑡𝑒𝑚 ∗ 𝑡𝑖𝑟𝑒𝑠 (3.3)
Z uporabo zavornega sistema, je bila narejena ista simulacija kot na sliki 30, torej na
voznem ciklu EUDC-15. Na sliki 34 je razvidno kakšna je sila na zavornih ploščicah. Na
sliki 35 pa je prikazana simulacija na voznem ciklu EUDC-15.
Slika 34: Sila zaviranja
0 100 200 300 400 500 600 700-2500
-2000
-1500
-1000
-500
0
Time [s]
F__b
raki
ng [N
]

- 33 -
Slika 35: Test voznega cikla z uporabo zavor
4 CESTA
Predpostavljeno je bilo:
- Avto se premika samo vzdolžno ( brez ovinkov) - Material cestišča je konstanten in s tem tudi oprijem cestišča - Zdrs koles je enak na vseh štirih kolesih - Upoštevane so hitrostne omejitve ter naklon cestišča
4.1 Vozni cikli
Vozni cikel je množica točk, ki nam predstavlja hitrost vozila glede na čas. Razvile so jih
različne države in veliki avtomobilski koncerni za preizkušanje svojih vozil. Ti vozni cikli
so narejeni pri naslednjih pogojih:
- Temperatura vozila je med 20-30°C, normalno je 25°C - Cesta je dokaj ravna z manjšimi nakloni - Odsotnost vetra
0 100 200 300 400 500 600 7000
20
40
60
80
100
120
140
Time [s]
Vehi
cle
spee
d [k
m/h
]

- 34 -
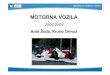
- Narejeni so na preizkusnem valju, na tej napravi vključijo zračni upor in maso vozila
- Pri tem ne upoštevajo vseh ostalih bremen (klima, kompresor, luči, ogrevanje,...) S pomočjo voznih ciklov se lahko določi poraba goriva ter emisije izpušnih plinov. Vozni
cikli se uporabljajo tako, da vozilo zapelje na dinamometer ali pa v računalniških
simulacijah.
Slika 36: Vozilo v kombinaciji z dvema dinamometroma, Full powertrain test facility
Razdelimo jih lahko v naslednje skupine:
- International
• World Harmonized Stationary Cycle (WHSC)
• World Harmonized Transient Cycle (WHTC)
• Nonroad Transient Cycle (NRTC)
• ISO 8178
- United States
• FTP 75
Prehodni vozni cikel za avtomobile in lažja tovorna vozila

- 35 -
Slika 37: Vozni cikel FTP 75
• SFTP SC03
Dodatek k FTP 75 za vožnjo na avtocestah
• New York City Cycle
Za počasno mestno vožnjo
Slika 38: Vozni cikel NYCC- New York City Cycle
• Highway Fuel Economy (HWFET)
Vozni cikel za preizkus gospodarnosti vozila v medmestnem prometu.
Vključene so regionalne, hitre in avtoceste.

- 36 -
Slika 39: Vozni cikel HWFET- Highway Fuel Economy
• California Unified Cycle (UC, LA92)
Vozni cikel za Kalifornijo
Slika 40: Vozni cikel LA92- Los Angeles
- Eurpean Union
• ECE 15
Imenujejo ga tudi še UDC - urban driving cycle, kar pomeni, da se
uporablja za simulacijo vožnje skozi večja evropska mesta ( Pariz, Rim,…).
Definiran je z majhno hitrostjo vozila in majhnim navorom.

- 37 -
Slika 41: Vozni cikel ECE 15
• EUDC
Extra Urban Driving Cycle, je nadgradnja ECE 15, ki se uporablja za
agresivnejšo simulacijo vožnje- hitrosti so višje.
Slika 42: Vozni cikel EUDC
• NEUDC New European Driving Cycle, nadgradnja voznega cikla EUDC, najpogosteje uporabljen vozni cikel na vseh novejših testih. Sestavljen je iz štirih ECE 15 voznih ciklov in enega EUDC voznega cikla.

- 38 -
Slika 43: Vozni cikel NEUDC
• Common Artemis Driving Cycles (CADC)
Vsebuje 3 vozne cikle (mestnega, podeželskega in vožnjo po avtocesti),
narejen je bil v okviru Artemis projekta, ki temelji na statistični analizi
realnih voznih razmer v Evropi.
- Japan
• 10-15 Mode Cycle
Vozni cikel za avtomobile
- Australia
• CUEDC (Diesel)
Composite Urban Emissions Drive Cycle, vsebuje šest voznih ciklov za
motorje na dizelsko gorivo.
Na sliki spodaj so prikazani vsi vozni cikli, ki so bili testirani v Simulinku. Na sliki lahko
vidimo tudi logiko s stikali, ki so služila za izbiranje voznega cikla. Vozni cikel je možno
izbrati tudi s preprostim klikom v grafičnem vmesniku – GUI (podrobnejši opis v poglavju
Simulacije).

- 39 -
Slika 44: Model voznih ciklov v Simulinku
4.2 Naklon cestišča
Naša optimizacija porabe goriva bo temeljila na optimalnem prestavljanju. Pričakovale pa
so se največje izboljšave ravno pri vožnji navkreber. Pri pozitivnem naklonu je potreben
bistveno večji navor na motorju za doseganje iste hitrosti, kar pomeni, da je tudi sila -
Fx1,2,3,4 večja. Poraba goriva se torej povečuje in se lahko bistveno zmanjša z vožnjo v
optimalni prestavi. Po negativnem klancu – vožnji navzdol, pa se lahko zavira tudi s
pomočjo motorja in zavor, kar pomeni, da je poraba goriva ničelna.
1Out6
-K-
km/h to m/s
driving cycle US06
driving cycle NYDC
driving cycle NEUDC
driving cycle LA
driving cycle HFET
driving cycle FTP
driving cycle EUDC
driving cycle ECE15
Manual Switch6
Manual Switch5
Manual Switch4
Manual Switch3
Manual Switch2
Manual Switch1
Manual Switch

- 40 -
Slika 45: Naklon cestišča
𝛼 = 𝑎𝑟𝑐𝑡𝑎𝑛𝑠𝑙𝑜𝑝𝑒100
(4.1)
Na prometnih znakih je podan naklon v odstotkih (slope = 10%), za izračun v Simulinku,
pa je potrebna alfa v stopinjah. S pomočjo formule 4.1 dobimo alfo.
Informacije o naklonu cestišča se lahko pridobijo s pomočjo GPS- Global Positioning
System, najbolj pogost način je prikazan na sliki spodaj.
Na strehi avtomobila sta pritrjeni dve GPS anteni, ki sta vgrajeni fiksno. Vsaka od anten
dobi informacijo o nadmorski višini in s pomočjo razlike se preračuna naklon cestišča.
Druga možnost je, da antena glede na vodoravno in navpično hitrost preračuna naklon
cestišča. Na ta način se lahko pridobijo podatki o naklonu cestišča z odstopanjem ±2%.
Slika 46: Sistem za pridobivanje informacij o cestišču

- 41 -
5 PORABA GORIVA, BSFC
BSFC - Brake Specific Fuel Consumption, dejanska specifična poraba goriva, je razmerje
med maso goriva, ki jo motor potrebuje in močjo, ki jo proizvede. Pove nam, pri katerih
obratih in hitrosti motorja, je poraba goriva najmanjša oziroma največja. To merilo se
uporablja pri vseh batnih motorjih. Omogoča nam primerjavo vseh vrst batnih motorjev.
To veličino se izračuna po naslednji enačbi:
𝐵𝑆𝐹𝐶 =𝑟𝑃 [𝑔𝐽 ] 𝑃 = 𝜏 ∗ 𝜔[𝑊] (5.1)
BSCF – brake specific fuel consumption
r – poraba goriva [g/s]
𝜔 – hitrost motorja [rad/s]
𝜏 – navor motorja [N/m]
Priporočene enote za BSFC so g/kWh, zato je potrebno narediti transformacijo:
𝐵𝑆𝐹𝐶 �𝑔
𝑘𝑊ℎ� = 𝐵𝑆𝐶𝐹 �
𝑔𝐽 � ∗ (3,6 ∗ 106) (5.2)
V našem primeru potrebujemo porabo goriva v L/s, zato uporabimo naslednjo
transformacijo:
𝐹𝐶 �𝐿𝑠� = 𝐵𝑆𝐶𝐹[
𝑔𝑘𝑊ℎ] ∗ 𝑃𝑒[𝑘𝑊] ∗ 𝐷𝑖𝑒𝑠𝑒𝑙𝐷/(3600)
(5.3)
FC – Fuel Consumption, poraba goriva
Pe – Moč motorja
DieselD – Gostota diesla [kg/L], običajno 0.832

- 42 -
Obstaja pa tudi povezava med BSFC in učinkovitostjo motorja. Za izračun učinkovitosti
motorja je potrebno imeti še podatek o energijski gostoti goriva, ki ga motor uporablja.
Različna goriva imajo različne energijske gostote, ki so definirane z LHV - lower heating
value, spodnja kurilna vrednost. Te vrednosti se uporabljajo za motorje z notranjim
izgorevanjem, uporabljajo se lahko samo do temperature 150° C.
LHV za gorivi:
- Bencin = 0.0122225 kWh/g - Diesel = 0.0119531 kWh/g
𝐸𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑐𝑦 = 1/(𝐵𝑆𝐹𝐶 × 𝐿𝐻𝑉)[%] (5.4)
V našem primeru je najnižji BSFC = 201 g/kWh, kar pomeni, da učinkovitost motorja pri
optimalnem razmerju hitrosti in navora na motorju znaša 41,62%. Najvišji BSFC pa znaša
500 g/kWh, kar je enako 16,73% učinkovitosti motorja.
Slika 47:BSFC map

- 43 -
5.1 Interpolacija in ekstrapolacija
Iz slike 46 je moč razbrati okoli 200 podatkov za vse tri parametre (pe, we, BSCF). Ta graf
je bil narejen za motor VW TDI 2.0 PD. Za porazdelitev podatkov po celotnem delovnem
območju je bilo uporabljeno Simulinkovo orodje Curve fiting tool. S pomočjo
interpolacijo so bile vrednosti razporejene po celotnem delovnem območju.
Preizkušene so bile vse možnosti interpolacije, (interpolacija je postopek za ocenitve
vrednosti med dvema znanima točkama ali ocenitev vrednosti naslednje točke na podlagi
prejšnjih znanih točk - ekstrapolacija), ki jih ponuja Simulink:
- Linear interpolation, to je najpreprostejši postopek interpolacije, obstajata dve vrednosti v točkah 𝑣1 in 𝑣2 . Tako določimo približni vrednosti z uteženo srednjo vrednostjo med dvema točkama, ki sta odvisni od vrednosti x.
𝐿𝐼 = 𝑣1�1 − 𝑥𝑓� + 𝑣2(𝑥𝑓) (5.5)
- Cubic spline, ta metoda si izbere drugačen kubičen polinom za vsak par točk. - Shape- preserving, ta metoda ohranja monotonost in obliko podatkov - Biharmonic (v4)-griddata method, to metode se uporablja, ko so podatkovne točke
močno razpršene. - Lowess- smoothing tool, se največkrat uporablja za odstranjevanje šuma iz niza
podatkov, hkrati pa ohranja nam pomembne vzorce. To omogoča izdelavo prediktivnega modela, brez določitve funkcionalnega razmerja med točkami.
- Nearest neighbor, ta metoda določi vrednost interpolirane točke, na vrednost najbližje podane točke. Ta metoda se uporablja, ko je na voljo mnogo podatkovnih točk.
- Polynomial, ta metoda se uporablja za preproste empirične modele. S pomočjo polinomov se lahko izvrši interpolacija ali ekstrapolacija. Največja prednost te metode je fleksibilnost, kar pomeni, da je interpolacija preprosta. Vendar samo za ne preveč zahtevne modele, ki so linearni.
Simulacije so bile testirane na vseh petih metodah, za najbolj natančno metodo se je
izkazala metoda Lowess. Domnevam, da zaradi dokaj velikega števila podatkovnih točk.
Na spodnji sliki pa so točke porazdeljene z metodo Lowess.

- 44 -
Slika 48: Mapa za porabo goriva in učinkovitost motorja
S pomočjo podatkov pridobljenih iz slike 47, sem naredil mapo slika 48, ki ima vrednosti
na celotnem delovnem območju. Mapo sem naredil s pomočjo linearne interpolacije.
V Simulinku je bil narejen blok, kot ga lahko vidimo na sliki 49. Ta blok je dobil na vhod
informacije o hitrosti vozila in porabi goriva. Na izhodu pa so bili podatki, ki so zanimivi
za voznika (povprečna poraba goriva, trenutna poraba goriva, prevožena razdalja,…).
50100
150200
250300
10002000
30004000
200
250
300
350
400
450
500
550
600
650
700
Engine torque [Nm]
Brake specific fuel consumption MAP
Engine speed [rpm]
BSFC
[g/k
Wh]

- 45 -
Slika 49: Model preračuna povprečno porabo goriva, prevožene poti,... v
Matlab/Simulinku
6 REGULACIJA
Model vozila ima dokaj zapleteno zgradbo. Na obnašanje hitrosti, ki je v tem primeru zelo
pomembna vpliva mnogo faktorjev, zato se je bilo potrebno odločiti za uporabo tako
imenovanih »Advance Control Scenarios«. To pomeni nadgradnjo klasičnih PID,PI in P
regulatorjev. Ko so motnje v modelu prevelike, jih navadni regulator ne more rešiti tako
učinkovito kot lahko to naredimo z ACS regulatorji. Poznamo naslednje tipe teh sistemov
regulatorjev:
- Cascade control system - kaskadna regulacija - Feedforward control system - vnaprej določena regulacija - Ratio control system - je najbolj osnovna oblika Feedforward sistema in se
uporablja skoraj izključno za nadzor pretoka. - Inferential control system - včasih pride do težav pri merjenju določenih procesnih
parametrov, to lahko posledično uteži nadzor. Regulacija postane slabo vodljiva ali nevodljiva. Inferential-sklepni kontrolni sistem uporablja veličine, ki so lahko merljive (temperatura, tlak), za sklepanje o količinah, ki so težko merljive.
V tem modelu je bil uporabljen kaskadni sistem, zato bo ta sistem podrobno opisan v
naslednjih podpoglavjih.
Scope3
Scope2
Vehicle speed [km/h]
Fuel consumption [L/s]
(L/100km)
Av erage FC L/100km
Total f uel consumption(L)
(km/L)
range[m]
Time(s)
Av erage speed(km/h)
Calculate fuel economy

- 46 -
6.1 PID regulator
Osnovna enačba PID regulatorja:
𝑢(𝑡) = 𝑘𝑝𝑒(𝑡) + 𝑘𝑖 � 𝑒(𝜏)𝑑𝜏 + 𝑘𝑑𝑑𝑒𝑑𝑡
𝑡
0
(6.1)
V tem primeru je u signal, ki pride iz regulatorja in e-error ali pogrešek (𝑒 = 𝑣𝑟 − 𝑣𝑑).
Referenčno hitrost 𝑣𝑟 lahko imenujemo tudi setpoint (nastavljena vrednost). Dejanska
hitrost 𝑣𝑑 pa je izhod iz modela vozila. Torej pogrešek je razlika med referenčno in
dejansko hitrostjo. Končni signal dobimo iz vsote:
- P-del, proporcionalni del Proporcionalni del omogoča takojšen odziv na pogrešek. V stabilnih
sistemih je velikokrat dovolj samo P regulacijski del. Težava nastane pri nestabilnih sistemih.
V tem primeru nas pripelje do želene pasovne širine »bandwidth« - I-del, integracijski del
V tem primeru naredi »steady state error« zelo majhen ali ničen Upočasni odziv
- D-del, odvodni del
Povzetek lahko vidite v tabeli:
PID krmilnik Čas vzpona Prenihaj Čas umiritve Pogrešek
Kp Zmanjša Poveča Mala sprememba Zmanjša
Ki Zmanjša Poveča Poveča Eliminira
Kd Mala sprememba Zmanjša Zmanjša Mala sprememba
Te korelacije niso vedno takšne kot so v tabeli, kajti 𝐾𝑝 , 𝐾𝑖 𝑖𝑛 𝐾𝑑 vplivajo drug na
drugega. Če se spremeni vrednost enega dela, lahko vpliva na preostala dva. Zaradi tega je

- 47 -
ta tabela lahko samo v majhno pomoč pri izbiri regulatorja (P, PI ali PID) in parametrov le
tega.
6.2 Kaskadni sistem regulacije
V številnih kompleksnih sistemih obstaja preveč motenj za izvedbo regulacije z eno
povratno zanko. Boljše zmogljivosti, oziroma rezultate se lahko doseže z večimi
povratnimi zankami. Takšni sistemi dosegajo visoko robustnost ob pojavu motenj, z njimi
se da doseči zelo zanesljivo delovanje tudi v močnih prehodnih pojavih. Za uspešno
delovanje kaskadnih regulacij je potrebno ustrezno nastaviti hitrost delovanja obeh
regulatorjev. Regulator z notranjo zanko mora delovati med 3 do 10-krat hitreje, v
primerjavi z regulatorjem z zunanjo zanko.
Slika 50: Primer kaskadne regulacije

- 48 -
6.3 Implementacija regulatorjev v model
Dejstva:
- Prvotni cilj, slediti želeni hitrosti vozila - Referenca, želena hitrost (v modelu jo dobimo iz voznega cikla, v realnosti jo
določajo hitrostne omejitve in promet) - Izhod procesa - dejanska hitrost - Izhod glavnega regulatorja pedal za plin in zaviralni pedal - Motnje: naklon cestišča, zračni upor, zdrs koles,… - Izgube na sistemu: izgube na sklopki, izgube na menjalniku in izgube ob
prestavljanju in speljevanju - Nelinearnost sistema
Zahteve za implementacijo regulatorja:
- Vozilo mora pospešiti za 10km/h v manj kot 5-tih sekundah, ob normalnih pogojih (naklon cestišča=0, brez vetra, ob normalnem zdrsu koles,…)
- Overshoot - prenihaj pri tej stopnici < 10% - Rise time – čas vzpona < 5 sec - Steady state error < 2% - Dejanska hitrost skozi celoten vozni cikel lahko odstopa za ±5%, glede na želeno
hitrost
Da je vozilo lahko sledilo, kar se da dobro želeni hitrosti iz voznih ciklov, so bili v model
implementirani tri PI regulatorji. Model vsebuje kar nekaj nelinearnih komponent, zato je
bilo potrebno model razdeliti na dva podsistema. Velika prednost PI regulatorjev je tudi,
da se jih lahko uporabi več v istem sistemu, s čimer se poveča dinamičnost. Uporabljena je
bila kaskadna regulacija dveh posameznih regulatorjev. Primarni regulator regulira želeno
hitrost vozila, med tem ko sekundarni regulator, regulira želeno rotacijsko hitrost motorja.
V primeru, ko pa vozilo ne zmore zavirati dovolj hitro, kljub vsem silam, ki delujejo nanj,
pa primarni regulator postane PI regulator za zaviranje.

- 49 -
6.3.1 Regulator rotacijske hitrosti motorja
Vzrok za ta regulator je bila predvsem mapa (slika 7, EngineMAP), ki predstavlja motor
vozila. Na spodnji sliki je viden celoten podsistem modela vozila.
Slika 51: Blokovna shema v Simulinku regulacije motorja
Ta mapa naredi sistem nelinearen. Celoten podsistem na sliki 51 je bil lineariziran. To
pomeni, da so nelinearne karakteristike linearizirane v neki delovni točki (sistemov z
nezvezno karakteristiko ni mogoče linearizirat). V tem primeru je bilo izbranih nekaj
najbolj pogostih delovnih območij in na njih so bili nastavljeni parametri regulatorja.
Model, ki ga vidimo na prejšnji sliki je bil poenostavljen , kot lahko vidimo na sliki 52.
Slika 52: Poenostavljen model motorja
Gas Pedalerror
Torque w_engine
w_engine
60/2*pirad/s to rpm
PID(s)
PI Controller 1/s
Integrator
1/J
Inertia
0.6Gain
Engine MAP
1/JDisturbance
0-250 rad/s 0-100

- 50 -
Parameter K nam predstavlja vse konstante, ki se pojavijo v modelu. Parametra 𝐾𝑝 in 𝐾𝑖
sta proporcionalni in integralni del PI regulatorja. Če slednji enačbi združimo, kot vidimo
spodaj dobimo časovno konstanto regulacijskega sistema (1
𝐾𝑖×𝐾).
𝐻(𝑠) =
𝑠𝐾𝑝 + 𝐾𝑖𝑠 ∗ 𝐾
𝜏𝑠 + 1
1 +𝑠𝐾𝑝 + 𝐾𝑖
𝑠 ∗ 𝐾𝜏𝑠 + 1
;𝑝𝑟𝑒𝑑𝑝𝑜𝑠𝑡𝑎𝑣𝑖𝑚𝑜 𝜏 =𝐾𝑝𝐾𝑖
(6.2)
𝐻(𝑠) = 𝐾𝑖 ∗
𝑠𝐾𝑝𝐾𝑖
+ 1𝑠 ∗ 𝐾
𝜏𝑠 + 11 + 𝐾𝑖𝐾
𝑠 ; 𝐼𝑧𝑝𝑜𝑠𝑡𝑎𝑣𝑖𝑚𝑜 𝐾𝑖 𝑖𝑛 𝑝𝑜𝑘𝑟𝑎𝑗š𝑎𝑚𝑜
(6.3)
𝐻(𝑠) = 𝐾𝑖𝐾
𝑠 + 𝐾𝑖𝐾=
11𝐾𝑖𝐾
𝑠 + 1
(6.4)
6.3.2 Regulator hitrosti vozila
Regulator hitrosti v vozilu bo narejen na istem principu, kot so narejeni tempomati v
sodobnih avtomobilih. Namen tempomata je ohranjanje konstantne hitrosti vozila. Voznik
vozi avtomobil na želeni hitrosti, s pritiskom na gumb pa lahko vključi tempomat. Ob
vključenem tempomatu se vozilo premika s konstantno hitrostjo. Glavne motnje nastanejo
zaradi: naklona cestišča, zračnega upora in zdrsa koles. Tempomat izmeri razliko med
želeno in dejansko hitrostjo in s povratno informacijo ohranja to razliko čim manjšo, kljub
vsem motnjam. Povratni signal je poslan na aktuator, kateri upravlja s pedalom za plin,
posledično vpliva tudi na silo, ki jo proizvede motor.
V tem primeru bo regulator hitrosti sledil želeni hitrosti, ki jo dodeli vozni cikel glede na
čas simulacije.

- 51 -
Slika 53: Blokovni diagram vozila z regulatorjem hitrosti
Ker je zaželeno, da regulator ohranja konstanto hitrost v stacionarnih pogojih, je v tem
primeru najboljša izbira PI regulator.
𝑢(𝑡) = 𝑘𝑝𝑒(𝑡) + 𝑘𝑖 � 𝑒𝑡
0(𝜏)𝑑𝜏
(6.5)
V modelu so bili upoštevani izkoristki in izgube za vsako prestavo posebej, zato je bilo
potrebno v sistem vgraditi »gain scheduling PI controller«. Na sliki 54 je prikazan
blokovni model gain scheduling PI krmilnika. Ta koncept deluje tako, da se parametri PI
regulatorja spreminjajo, glede na stanje v katerem je sistem. Ta tehnika se imenuje »gain
scheduling technique«. V modelu vozila so izkoristki in izgube na menjalniku odvisni od
trenutne prestave. Tako, da je bil nastavljen kriterij za spreminjanje parametrov glede na
trenutno prestavo.
Kako je program deloval je prikazano na diagramu stanj slika 55.
Z isto tehniko, ob izbiri dveh kriterijev (trenutne prestave in trenutne hitrosti), je bil tudi
testiran model. Saj je pri višjih hitrostih zračni upor višji in tudi vrednost zdrsa koles se
spremeni. Vendar pa je regulator deloval že dovolj dobro ob izbiri parametrov PI, samo
glede na trenutno prestavo, zato je bila uporabljena ta varianta.
Izjema bi bila četrta prestava, kajti v četrti prestavi lahko vozilo pelje, seveda teoretično,
med hitrostjo 50-220 km/h. To pomeni, da se zračni upor zelo poveča, z večanjem

- 52 -
zračnega upora pa bi moralo priti tudi do spremembe parametrov v PI regulatorju. Vendar
pa v navedenih voznih ciklih vozilo ne preseže hitrosti 100 km/h. Iz tega lahko zaključimo,
da v tem primeru ni potrebno nastaviti kriterija za hitrost.
Slika 54: "gain scheduling" pristop za spreminjanje PI parametrov med simulacijo

- 53 -
Slika 55: Diagram stanj za "gain scheduling"
Vozilo je bilo testirano na vseh prestavah pri različnih hitrostih in odzivih na stopnične
vhode. Uporabil sem Simulinkov blok »Check Step Response Characteristics«, s tem sem
ugotovil ali je dejanska hitrost znotraj vseh meja, ki sem si jih nastavil. Na sliki 56 in 57 je
viden ta simulinkov blok ter nastavitve, katere so opisane spodaj:
- Step time (s), čas v sekundah pove nam kdaj naj se prične odziv na stopnico - Initial value, začetna vrednost - Final value, končna vrednost - Rise time (s), porabljen čas, da signal doseže določen odstotek končne vrednosti
(Rise [%]) - % Rise, odstotek končne vrednosti, velja do Settling[%] - Settling time (s), čas do katerega mora priti signal v določene meje ( Settling[%]) - % Settling, odstotek končne vrednosti, ko je signal v poravnanem stanju - % Overshoot, vrednost nad končno vrednostjo v odstotkih do katere dovolimo
signalu, samo do Settling[%] - % Undershoot, vrednost do katere lahko signal gre pod začetno vrednostjo

- 54 -
Slika 56: " Check Step Response Characteristics"
Slika 57: Nastavitev mej v stopničnem odzivu
Ta blok ima tudi dodatno možnost avtomatskega iskanja vrednosti parametrov v
regulatorju »Response optimization«, v primeru, da odziv ni v želenih mejah. Tukaj se

- 55 -
lahko uporabi optimizacijski solver » Gradient descent (fmincon)«, ta spreminja parametre
tako dolgo, dokler ne pride odziv v želene meje. Fmincon, išče minimum omejene
nelinearne funkcije z večimi spremenljivkami. Definiran je z naslednjo enačbo:
min𝑓(𝑥) =
⎩⎪⎨
⎪⎧
𝑐(𝑥) ≤ 0𝑐𝑒𝑞(𝑥) = 0𝐴 ∗ 𝑥 ≤ 𝑏
𝐴𝑒𝑞 ∗ 𝑥 = 𝑏𝑒𝑞𝑙𝑏 ≤ 𝑥 ≤ 𝑢𝑏 ⎭
⎪⎬
⎪⎫
(6.5)
- x, b, beq, lb in ub - so vektorji - A in Aeq sta matriki - c(x) in ceq(x) sta funkciji, ki nam za rezultat vrneta vektor - f(x) je funkcija, katere rezultat je skalarno število - f(x), c(x) in ceq(x) so lahko nelinearne funkcije
Torej fmincon poizkuša najti omejen minimum skalarne funkcije večih spremenljivk,
postavljenih na začetku. Rešitev je v mejah, ki jih postavimo na začetku.
Slika 58: Uporaba funkcije fmincon
6.3.3 Regulator zaviranja vozila

- 56 -
PI regulator za zaviranje vozila je bilo potrebno vgraditi, saj vozilo ni zmoglo slediti
voznemu ciklu ob hitrem zmanjševanju hitrosti. Ob je bilo potrebno paziti, da le-ta ni
deloval istočasno kot PI regulator hitrosti vozila, kajti pedal za plin in pedal za zaviranje
ne smeta biti prožena hkrati. Upoštevati pa je bilo tudi treba, da vozilo lahko zavira že s
silami, ki delujejo nanj (naklon cestišča, zračni upor,…). Kako je deloval celoten regulator
je vidno na sliki spodaj.
Slika 59: Diagram stanj pospeševanja in zaviranja

- 57 -
7 SIMULACIJE
V Matlabovem okolju je možno narediti tudi GUI- graphical user interface, torej grafični
vmesnik, ki lahko deluje tudi v realnem času. Ta vmesnik zelo poenostavi simuliranje
modelov za ljudi, ki ne poznajo zgradbe modela in jih zanimajo le določene informacije.
Grafični vmesnik vsebuje naslednje komponente:
- Zaženemo/Ustavimo simulacijo - Izberemo vozilo, ki ga želimo simulirat ( s tem tudi posodobimo vse lastnosti
vozila) - Izberemo vozni cikel na katerem želimo simulirat izbrano vozilo (čas simulacije je
odvisen od posameznega cikla) - Stikalo za naklon cestišča in določitev naklona cestišča od -10% do+10%. Naklon
lahko določimo z drsnikom ali pa vpišemo želeno vrednost. - Med simulacijo lahko spremljamo vrsto podatkov (hitrost vozila, prevoženo
razdaljo, čas simulacije, povprečno porabo goriva, povprečno hitrost vozila in trenutno prestavo)
Slika 60: GUI, grafični vmesnik v Matlab/Simulinku

- 58 -
Simulacije so bile testirane na vseh voznih ciklih opisanih v poglavju Vozni cikli. Na vseh
voznih ciklih so bile simulacije v okviru normativov, ki jih določajo posamezni vozni cikli.
Ker pa Slovenci prihajamo iz evropskega območja, bodo bolj podrobno predstavljene
simulacije na voznih ciklih, ki se uporabljajo v Evropi.
7.1 Simulacija na voznem ciklu ECE-15
En cikel voznega cikla ECE-15 zajema 188 sekund, predstavlja pa nam predvsem mestno
vožnjo. Na sliki 61 sta vidni dejanska in želena hitrost vozila med simulacijo.
Slika 61: Simulacija na voznem ciklu ECE-15
Kot je razvidno iz slike ni prišlo do večjih odstopanj med dejansko in želeno hitrostjo.
Torej regulatorji in vse ostale komponente delujejo dobro. Največje odstopanje nastane pri

- 59 -
speljevanju, kar je pričakovano, saj za speljevanje potrebujemo velik navor (postavil sem
zahteve naj vozilo spelje čim hitreje). Naslednje opazno odstopanje nastane pri preklopu
regulatorjev, med regulatorjem za zaviranje in regulatorjem za pospeševanje. Program je
narejen tako, da vozilo zavira s pomočjo uporov (zračnega upora, naklona cestišča ter
zdrsa koles), ko je to možno. S tem se v realnih vozilih pripomore k manjši obrabi zavor
kar je precej priporočljivo. To se lepo vidi na sliki 61, zgornja slika levo. Maksimalno
odstopanje v tem voznem ciklu je ± 1 km/h. Torej je regulacija na vseh območjih v teh
mejah.
Na sliki 62 je vidno delovanje obeh regulatorjev (za pospeševanje in za zaviranje).
Slika 62: grafi: ECE-15, pogrešek, pedal za plin, pedal za zaviranje
Zgornja slika predstavlja naslednje grafe:
- Prvi graf, želena in dejanska hitrost - Drugi graf, error-pogrešek, to je razlika med 𝑒𝑟𝑟𝑜𝑟 = 𝑣ž𝑒𝑙𝑗𝑒𝑛𝑎 − 𝑣𝑑𝑒𝑗𝑎𝑛𝑠𝑘𝑎 - Tretji graf prikazuje pedal za plin, iz grafa je tudi razvidno, da 100% vrednost
uporabimo samo za speljevanje, posledično pride tudi do prenihaja, razvidno iz prejšnje slike. V ostalih območjih ne potrebujemo tako hitrega pospeševanja.

- 60 -
- Četrti graf prikazuje pedal za zaviranje, pedal za zaviranje ne sme delovati istočasno kot pedal za plin, kar se lahko izbere iz grafa. V poglavju Zavore je obrazloženo kaj predstavlja sila na grafu.
Iz modela pa je možno dobiti tudi vrsto informacij, ki so zanimive za voznika.
Slika 63: Simulacija ECE-15, podatki o porabi goriva
Iz zgornje slike je možno dobiti naslednje informacije:
- Prvi graf - trenutna poraba goriva, to je poraba ob določenem času. Vsi novejši avtomobili imajo prikaz le-te. Program je narejen tako, da prikazuje maksimalno porabo 20 l/100km, čeprav je ob hitrem pospeševanju vozila lahko poraba tudi višja. Predvsem pri speljevanju vozila je poraba mnogo višja. Trenutna poraba je nična, ko ima pedal za plin vrednost 0.
- Drugi graf - povprečna poraba goriva. Povprečna poraba je za voznika najbolj zanimiv podatek, saj pove kolikšno porabo ima dejansko njegovo vozilo. Iz grafa je možno razbrati, da je ta precej visoka. Razlog je predvsem nizka povprečna hitrost, slika spodaj. Saj gre v tem voznem ciklu za mestno vožnjo. Povprečna poraba za en cikel voznega cikla ECE-15 znaša 7,54 l/100km.

- 61 -
- Tretji graf - skupna poraba goriva. Ta predstavlja koliko goriva je porabilo vozilo ob koncu simualcije. Skupna poraba skozi en cikel voznega cikla ECE-15 znaša 57,6 mL.
- Četrti graf, pove koliko kilometrov naredimo z enim litrom goriva. Tudi ta prikaz je omogočen na nekaterih realnih vozilih.
Slika 64: Simulacija ECE-15, ostali zanimivi podatki za voznika
Zgornja slika prikazuje:
- Trenutno prestavo, prestavljanje je izvedeno s pomočjo optimizacije glede na porabo goriva.
- Prevoženo razdaljo - Čas izvajanja simulacije - Povprečno hitrost vozila, v enem ciklu voznega cikla ECE-15 znaša 21,2 km/h
7.2 Simulacija na voznem ciklu NEUDC
NEUDC je trenutno najbolj uporabljan in najnovejši vozni cikel v Evropi. Zajema tri cikle
voznega cikla ECE-15 ter en cikel voznega cikla EUDC, kar pomeni, da je sestavljen iz
mestne in primestne vožnje. Simulacija enega cikla traja 1000 sekund.

- 62 -
Slika 65: Simulacija na voznem ciklu EUDC
Pogrešek skozi celoten vozni cikel je zelo majhen. Pogrešek je na območju, kjer je vozni
cikel EUDC mnogo manjši, kot na treh voznih ciklih ECE-15. Kar pomeni, da regulator
deluje bolje pri srednjih in visokih hitrostih. Na sliki zgoraj levo je vidno, da pogrešek
znaša samo 0,032% trenutne hitrosti. Slika spodaj levo, pa prikazuje spremembo pogreška
ob menjavi prestave, v tem primeru prestavimo iz tretje v četrto. S pomočjo »gain
scheduling«( poglavje 6.3.2.) se ta pogrešek hitro zmanjša.
7.3 Simulacija na voznem ciklu HWFET
»Highway Fuel Economy Test«, kot že samo ime pove se uporablja za simulacijo vožnje
na hitrih cestah. Maksimalna hitrost je skoraj 100 km/h, čas simulacije pa je 788 sekund.

- 63 -
Slika 66: Simulacija na voznem ciklu HWFET
Kot je razvidno iz slike 66, je ta vozni cikel bolj razgiban in nima konstantnih hitrosti.
Kljub temu dejanska hitrost dobro sledi želeni. Največji pogreški nastajajo ob
prestavljanju.
7.4 Primerjava različnih voznih ciklov in porabe goriva
Med seboj sem primerjal najbolj pogost evropski in najbolj uporabljan ameriški vozni
cikel. Na grafih so razvidne bistvene razlike med njima. Iz teh podatkov pa je mogoče tudi
sklepati, kdaj in zakaj se poraba goriva veča oziroma manjša.

- 64 -
Slika 67: Primerjava NEUDC in FTP-75
Na zgornji sliki imamo tri grafe in sicer:
- Celotni vozni cikel - Povprečna hitrost vozila - Povprečna poraba goriva
Z modro barvo je označen vozni cikel NEUDC, z rdečo barvo FT-75. Iz druge slike je
razvidno, da ima ameriški vozni cikel višjo povprečno hitrost skoraj skozi celoten vozni
cikel. Po tisočih sekundah pa sta povprečni hitrosti vozila skorajda enaki. Motor pa ima
mnogo boljši izkoristek ob višjih hitrostih (slika 47), kar pomeni, da ima tudi posledično
manjšo porabo goriva.

- 65 -
8 SKLEP
V magistrski nalogi sem si zadal cilj izdelati, oziroma izboljšati model vozila, ki je
matematično zmodeliran v programskem paketu Matlab/Simulink. Na tem modelu narediti
regulacijo za vožnjo po vseh bolj znanih voznih ciklih. Simulacija vožnje in hitrosti vozila
je morala zadostovati vsem zahtevam, ki jih določajo vozni cikli. Naslednja naloga na tem
modelu je bila narediti optimalno prestavljanje, glede na trenutno porabo goriva.
Model vozila, ki sem ga dobil je bil narejen dokaj kompleksno. Vendar pa vseeno ni
vseboval nekaterih komponent, ki so nujne za simulacijo vožnje, kajti pri preučevanju
vibracij na šasiji avtomobila, le-teh niso potrebovali. Tako sem se moral najprej seznaniti z
delovanjem vseh komponent realnega avtomobila (motor, gred, sklopka, avtomatski
menjalnik, šasija ter kolesa). Najprej sem se posvetil že izdelanem modelu, ga preučil in
nato nekatere dele zamenjal ali dogradil. S tem smo dobili vozilo, v katerega je bil vhod
pedal za plin, izhod pa končna hitrost. Cel sistem pa je bil nelinearen, kajti vseboval je
mnogo map, tabel ter programske kode. Zato implementacija regulatorja hitrosti ni bila
tako preprosta. Cel sistem sem razdelil na dva dela: motor in ostale komponente. Tako sem
naredil za vsak del svoj PI regulator, kar pomeni, da smo dobili kaskadno regulacijo. Prvi
del sistema, torej motor sem linealiziral v najbolj pogostem delovnem območju in tako
nastavil parametre za PI regulator. Na drugem delu sistema, pa sem s pomočjo »gain
scheduling«, nastavljal parametre za vsako prestavo posebej. Naslednja naloga je bila
narediti optimalno prestavljanje avtomatskega menjalnika glede na porabo goriva. Tako
sem vgradil še porabo goriva v izdelanem modelu in napisal program, ki prestavlja v
prestavo, ki je optimalna v danem trenutku.
Simuliral sem nov model na različnih voznih ciklih, zraven pa dodal še naklon cestišča, saj
optimizirano prestavljanje najbolj pride do izraza ob vožnji navkreber. Odločil pa sem se
narediti tudi še grafični vmesnik- GUI. Ta bi uporabniku omogočal lažje spremljanje in
spreminjanje začetnih nastavitev ter nastavitev parametrov med simulacijo.

- 66 -
Načrti za prihodnost so povezati model s Dspace-ovo komponento MicroAutoBox in
izvajati simulacije in teste na njej. Na to komponento lahko povežemo mnogo sistemov in
tako testiramo program tudi na realnih sistemih.

- 67 -
9 VIRI
[1] Dolinar, Drago. Dinamika linearnih sistemov in regulacije. Feri. Prva izdaja.
Maribor 2006
[2] Jazar, Reza. Vehicle Dynamics: Theory and Application. Springer. New York
2008.
[3] Chen, Chi_Tsong. Analog and Digital Control System Design: Transfer-
Function, State-Space, and Algebraic Methods. Sanders College Publishing.
New York 2006.
[4] O´Dwyer, Aidan. Handbook of PI and PID Controller Tuning Rulee. Second
edition. Imperial College Press. London 2006
[5] Landau, Lozano in M´Saad, Karimi. Adaptive Control. Springer. Second
edition. London 2011
[6] Rill, George. Road Vehicle Dynamics: Fundamentals and Modeling. Taylor &
Francis Group, LCC. New York 2012.
[7] D. Rakopoulos, Constantine, G. Giakoumis, Evangelos. Diesel Engine Transient
Operation. Springer. Athens 2009
[8] Isermann, Rolf. Fahrdynamik- Regelung. GWV Fachverlage GmbH. Wiesbaden
2006
[9] Su Whan Sung, Jietae Lee in In-Beum, Lee. Proces identification and PID
control. John Wiley & Sons. Republic of Korea 2009
[10] [svetovni splet]. Mathworks, products of Matlab, the language of technical
computing, and Simulink, for simulation and Model-Based Design. Dostopna na
www.mathworks.com
[11] [svetovni splet]. Online information service on clean diesel engines and diesel
emissions. Dostopna na http://www.dieselnet.com
[12] [svetovni splet]. Online tool to calculate how much energy is consumed by
aerodynamic drag, rolling resistance and braking as a vehicle travels along a
specified driving cycle. Dostopna na http://www.virtual-car.org

- 68 -
[13] [diplomsko delo]. Girstmair, Josef. Vergleich der Brennverfahren zweier
moderner DI- Dieselmotoren. Graz 2004
[14] [diplomsko delo]. Albertini Philippe. Entwicklung eines
Gesamtantriebsstrangmodells unter Berücksichtigung des hydromdynamischen
Drehmomentwandlers. Graz 2011

- 69 -

- 70 -

- 71 -

- 72 -

- 73 -