Embed Size (px)
Citation preview

Vector Calculus
CHAPTER 9.1 ~ 9.4

Ch9.1~9.4_2
Contents
9.1 Vector Functions9.2 Motion in a Curve9.3 Curvature and Components of Acceleration9.4 Partial Derivatives

Ch9.1~9.4_3
9.1 Vector Functions
IntroductionA parametric curve in space or space curve is a set of ordered (x, y, z), where x = f(t), y = g(t), z = h(t) (1)
Vector-Valued FunctionsVectors whose components are functions of t,
r(t) = <f(t), g(t)> = f(t)i + g(t)j or r(t) = <f(t), g(t), h(t)> = f(t)i + g(t)j + h(t)kare vector functions. See Fig 9.1

Ch9.1~9.4_4
Fig 9.1

Ch9.1~9.4_5
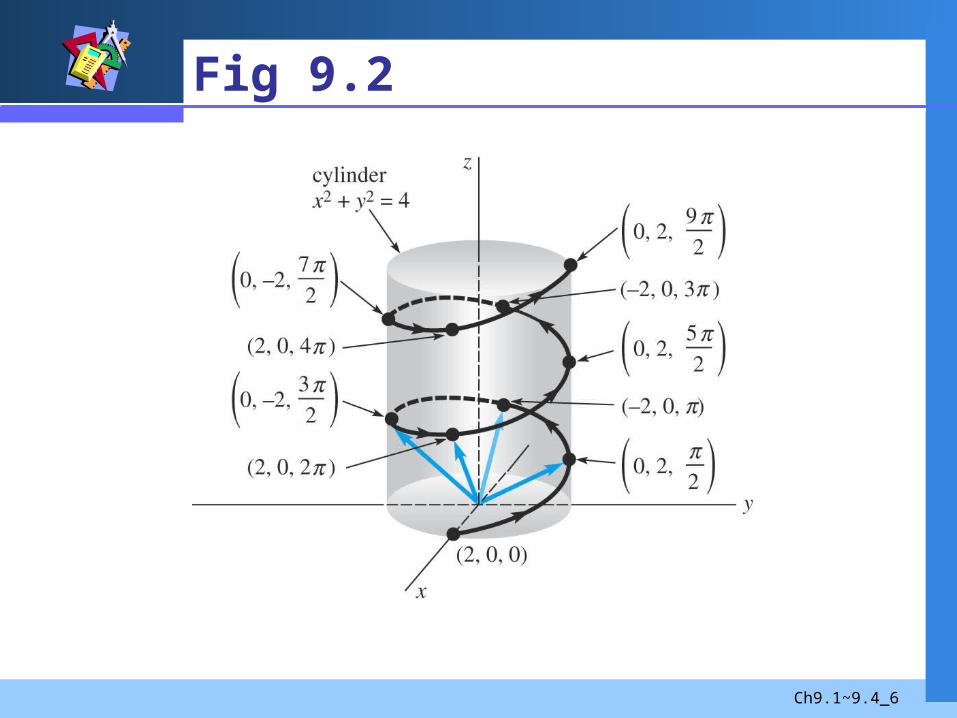
Example 1: Circular Helix
Graph the curve byr(t) = 2cos ti + 2sin tj + tk, t 0
Solutionx2 + y2
= (2cos t)2 + (2sin t)2 = 22
See Fig 9.2. The curve winds upward in spiral or circular helix.
Ch9.1~9.4_6
Fig 9.2
Ch9.1~9.4_7
Example 2
Graph the curve byr(t) = 2cos ti + 2sin tj + 3k
Solution x2 + y2
= (2cos t)2 + (2sin t)2 = 22, z = 3See Fig 9.3.

Ch9.1~9.4_8
Fig 9.3

Ch9.1~9.4_9
Example 3
Find the vector functions that describes the curve Cof the intersection of y = 2x and z = 9 – x2 – y2.
SolutionLet x = t, then y = 2t, z = 9 – t2 – 4t2 = 9 – 5t2
Thus, r(t) = ti + 2tj +(9 – 5t2)k. See Fig 9.4.

Ch9.1~9.4_10
Fig 9.4

Ch9.1~9.4_11
If exist, then
DEFINITION 9.1Limit of a Vector Function
)(lim),(lim),(lim thtgtf atatat
)(lim),(lim),(lim)(lim thtgtftatatatat
r

Ch9.1~9.4_12
If , then
(i) , c a scalar
(ii)
(iii)
THEOREM 9.1Properties of Limits
2211 )(lim,)(lim LrLr tt atat
11 )(lim Lr ctcat
2121 )]()([lim LLrr
ttat
2121 )()(lim LLrr ..
ttat

Ch9.1~9.4_13
A vector function r is said to be continuous at t = a if
(i) r(a) is defined, (ii) limta r(t) exists, and
(iii) limta r(t) = r(a).
DEFINITION 9.2Continuity
The derivative of a vector function r is (2)
for all t which the limits exists.
DEFINITION 9.3Derivative of Vector Function
)]()([1
lim)('0
tttt
tt
rrr

Ch9.1~9.4_14
Proof
If , where f, g, and h are
Differentiable, then
THEOREM 9.2Differentiation of a Components
)(),(),()( thtgtftr
)('),('),(')(' thtgtftr
tthtth
ttgttg
ttfttf
thtgtftthttgttft
t
t
t
)()(,
)()(,
)()(lim
])(),(),()(),(),([1
lim)(
0
0r
Ch9.1~9.4_15
Smooth Curve
When the component functions of r have continuous first derivatives and r’(t) 0 for t in the interval (a, b), then r is said to be a smooth function, and the corresponding curve is called a smooth curve.

Ch9.1~9.4_16
Geometric Interpretation of r’(t)
See Fig 9.5.
)()( ttt rrr
)]()([1
ttttt
rrr

Ch9.1~9.4_17
Fig 9.5

Ch9.1~9.4_18
Example 4
Graph the curve by r(t) = cos 2t i + sin t j, 0 t 2. Graph r’(0) and r’(/6).
Solutionx = cos 2t, y = sin t, then x = 1 – 2y2, −1 x 1
And r’(t) = −2sin 2ti + cos tj,
r’(0) = j, r’(/6) = jir23
36

Ch9.1~9.4_19
Fig 9.6
Ch9.1~9.4_20
Example 5
Find the tangent line to x = t2, y = t2 – t, z = −7t at t = 3
Solutionx’ = 2t, y’ = 2t – 1, z’ = −7
When t = 3,and r(3) = 9i + 6j – 21kthat is P(9, 6, –21), then we have
x = 9 + 6t, y = 6 + 5t, z = –21 – 7t
kjir 756)3(

Ch9.1~9.4_21
Example 6
If r(t) = (t3 – 2t2)i + 4tj + e-tk, then
r’(t) = (3t2 – 4t)i + 4j − e-tk, and
r”(t) = (6t – 4)i + e-tk.

Ch9.1~9.4_22
If r is a differentiable vector function and s = u(t) is a
differentiable scalar function, then the derivatives of r(s) with respect to t is
THEOREM 9.3Chain Rule
)(')(' tustd
dsdsd
tdd
rrr

Ch9.1~9.4_23
Example 7
If r(s) = cos2si + sin2sj + e–3sk, s = t4, then
kji
kjir
4334343
33
12)2cos(8)2sin(8
4]32cos22sin2[
t
s
ettttt
tessdtd

Ch9.1~9.4_24
If r1 and r2 be differentiable vector functions and u(t)
A differentiable scalar function.
(i)
(ii)
(iii)
(iv)
THEOREM 9.4Chain Rule
)()()]()([ 2121 tttttd
drrrr
)()()()()]()([ 111 ttuttuttutd
drrr
)()()()()]()([ 212121 tttttttd
drrrrrr ...
)()()()()]()([ 212121 tttttttd
drrrrrr

Ch9.1~9.4_25
Integrals of Vector Functions
kjir
kjir
b
a
b
a
b
a
b
adtthdttgdttfdtt
dtthdttgdttfdtt
)()()()(
)()()()(
kjir )()()()( thtgtft

Ch9.1~9.4_26
Example 8
If r(t) = 6t2i + 4e–2t j + 8cos 4t k, then
where c = c1i + c2j + c3k.
ckji
kji
kjir
tet
ctcect
dttdtedttdtt
t
t
t
4sin222
]4sin2[]2[]2[
4cos846)(
23
322
13
22

Ch9.1~9.4_27
Length of a Space Curve
If r(t) = f(t)i + g(t)j + h(t)k, then the length of this smooth curve is
(3)
b
a
b
adttdtthtgtfs ||)(||)]([)]([)]([ 222 r

Ch9.1~9.4_28
Example 9
Consider the curve in Example 1. Since , from (3) the length from r(0) to r(t) is
Using then (4)
Thus
5||)('|| tr
tdust
550
5/st
kjir55
sin25
cos2)(sss
s
5)(,
5sin2)(,
5cos2)(
ssh
ssg
ssf

Ch9.1~9.4_29
9.2 Motion on a Curve
Velocity and AccelerationConsider the position vector
r(t) = f(t)i + g(t)j + h(t)k, then
kjira
kjirv
)()()()()(
)()()()()(
thtgtftt
thtgtftt
222
||)(||
dt
dz
dt
dy
dt
dx
dt
dt
rv
||)(||)( tts v1
0
||)(||t
tts v

Ch9.1~9.4_30
Example 1
Position vector: r(t) = t2i + tj + (5t/2)k. Graph the curve defined by r(t) and v(2), a(2).
Solution
so that See Fig 9.7.
,25
2)()( kjirv ttt ira 2)()( tt
iakjiv 2)2(,2/54)2(

Ch9.1~9.4_31
Fig 9.7

Ch9.1~9.4_32
Note:
‖v(t)‖2 = c2 or v‧v = c2
a(t)‧v(t) = 0
02)( dt
d
dt
d
dt
d
dt
d vvv
vvvvv ....
0vv.
dt
d

Ch9.1~9.4_33
Example 2
Consider the position vector in Example 2 of Sec 9.1. Graph the velocity and acceleration at t = /4.
SolutionRecall r(t) = 2cos ti + 2sin tj + 3k.then v(t) = −2sin ti + 2cos tj
a(t) = −2cos ti −2sin t jand
jijia
jijiv
224
sin24
cos24
224
cos24
sin24

Ch9.1~9.4_34
Fig 9.8
Ch9.1~9.4_35
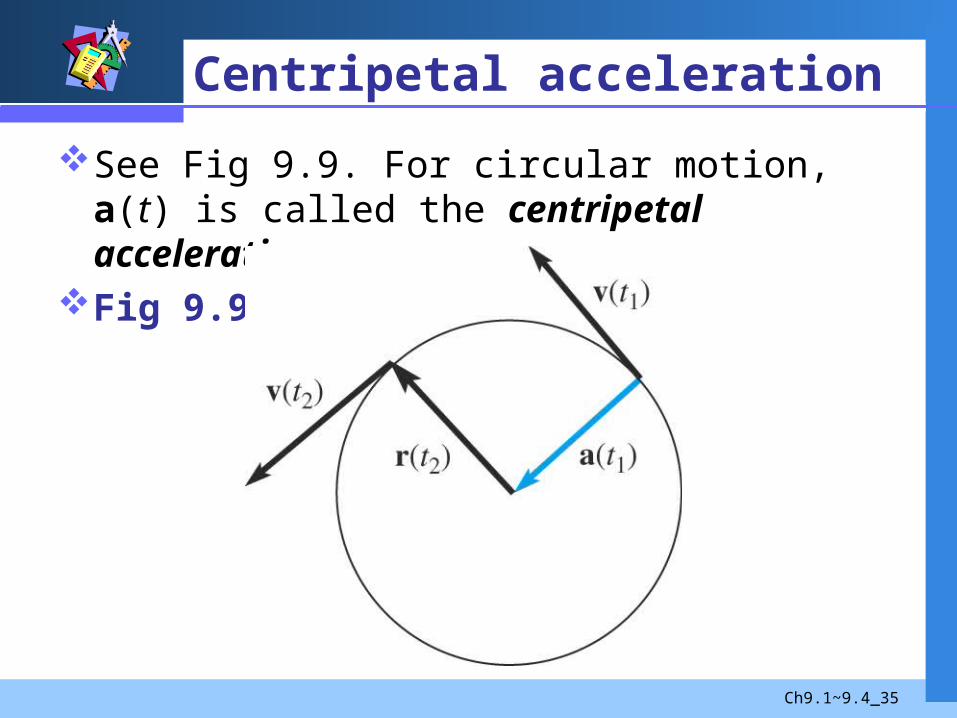
Centripetal acceleration
See Fig 9.9. For circular motion, a(t) is called the centripetal acceleration.
Fig 9.9

Ch9.1~9.4_36
Curvilinear Motion in the Plane
See Fig 9.10. Acceleration of gravity : −gjAn initial velocity: v0 = v0 cos i + v0 sin j from an initial height s0 = s0 j, then
where v(0) = v0, then c1 = v0. Therefore
v(t) = (v0cos )i + (– gt + v0sin )j
1)()( cgtdtgt jjv

Ch9.1~9.4_37
Integrating again and using r(0) = s0,
Hence we have
(1)
See Fig 9.11
jir
00
20 )sin(
2
1)cos()( stvgttvt
002
0 )sin(2
1)(,)cos()( stvgttytvtx

Ch9.1~9.4_38
Fig 9.10

Ch9.1~9.4_39
Fig 9.11

Ch9.1~9.4_40
Example 3
A shell is fired from ground level with v0 = 768 ft/s at an angle of elevation 30 degree. Find (a) the vector function and the parametric equations of the trajectory, (b) the maximum attitude attained, (c) the range of the shell (d) the speed of impact.
Solution(a) Initially we have s0 = 0, and
(2)
jijiv 3843384)30sin768()30cos768(0

Ch9.1~9.4_41
Example 3 (2)
Since a(t) = −32j and using (2) gives (3)
Integrating again,
Hence the trajectory is(4)
(b) From (4), we see that dy/dt = 0 when −32t + 384 = 0 or t = 12. Thus the maximum height H is
H = y(12) = – 16(12)2 + 384(12) = 2304 ft
jiv )38432()3384()( tt
jir )38416()3384()( 2 tttt
tttyttx 38416)(,3384)( 2

Ch9.1~9.4_42
Example 3 (3)
(c) From (4) we see that y(t) = 0 when −16t(t – 24) = 0, or t = 0, 24.
Then the range R is
(d) from (3), we obtain the impact speed of the shell
ft963,15)24(3384)24( xR
ft/s768)3384()384(||)24(|| 22 v

Ch9.1~9.4_43
9.3 Curvature and Components of Acceleration
Unit TangentWe know r’(t) is a tangent vector to the curve C, then
(1)
is a unit tangent. Since the curve is smooth, we also have ds/dt = ||r’(t)|| > 0. Hence
(2)
See Fig 9.19.
||)(||)(
tt
rr
T
,dtds
dsd
dtd rr T
rrrr
||)(||
)(//
tt
dtdsdtd
dsd

Ch9.1~9.4_44
Fig 9.16

Ch9.1~9.4_45
Rewrite (3) as
that is, (4)
From (2) we have T = dr/ds, then the curvature of C
at a point is(3)
DEFINITION 9.4Curvature
dsdT
,dtds
dsd
dtd TT
dtdsdtd
dsd
//TT
||r||T
)(||)(||
tt

Ch9.1~9.4_46
Example 1
Find the curvature of a circle of radius a.
SolutionWe already know the equation of a circle isr(t) = a cos ti + a sin tj, then
We get
Thus, (5)
and cossin||)(||
)()( ji
rr
T tttt
t
jiT ttt sincos)(
aatt
tt 1sincos
||)(||||)(|| 22
rT
and cossin)( jir tatat at ||)(|| r

Ch9.1~9.4_47
Fig 9.17

Ch9.1~9.4_48
Tangential and Normal Components
Since T is a unit tangent, then v(t) = ||v(t)||T = vT, then
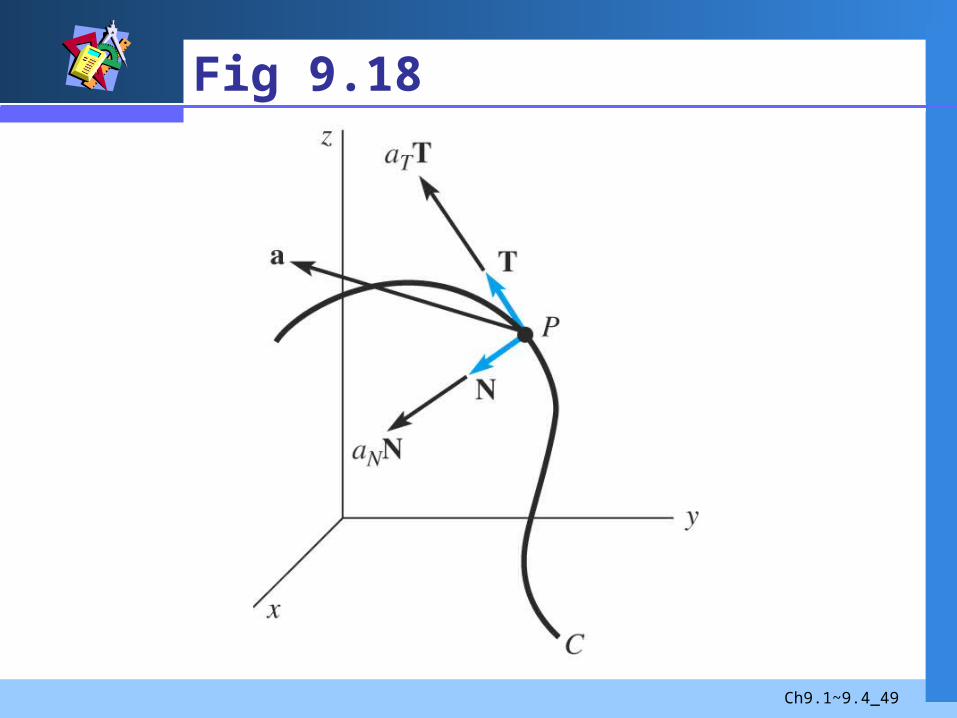
(6)Since T T = 1 so that T dT/dt = 0 (Theorem 9.4),we have T and dT/dt are orthogonal. If ||dT/dt|| 0, then
(7)is a unit normal vector to C at a point P with the direction given by dT/dt. See Fig 9.18.
||/||/dtddtd
TT
N
TT
adtdv
dtd
vt )(
Ch9.1~9.4_49
Fig 9.18

Ch9.1~9.4_50
The vector N is also called the principal normal. However =║dT / dt║/ v, from (7) we havedT/dt = vN. Thus (6) becomes
(8)
By writing (8) as a(t) = aNN + aTT (9)
Thus the scalar functions aN and aT are called the tangential and normal components.
TNadt
dvvt 2)(

Ch9.1~9.4_51
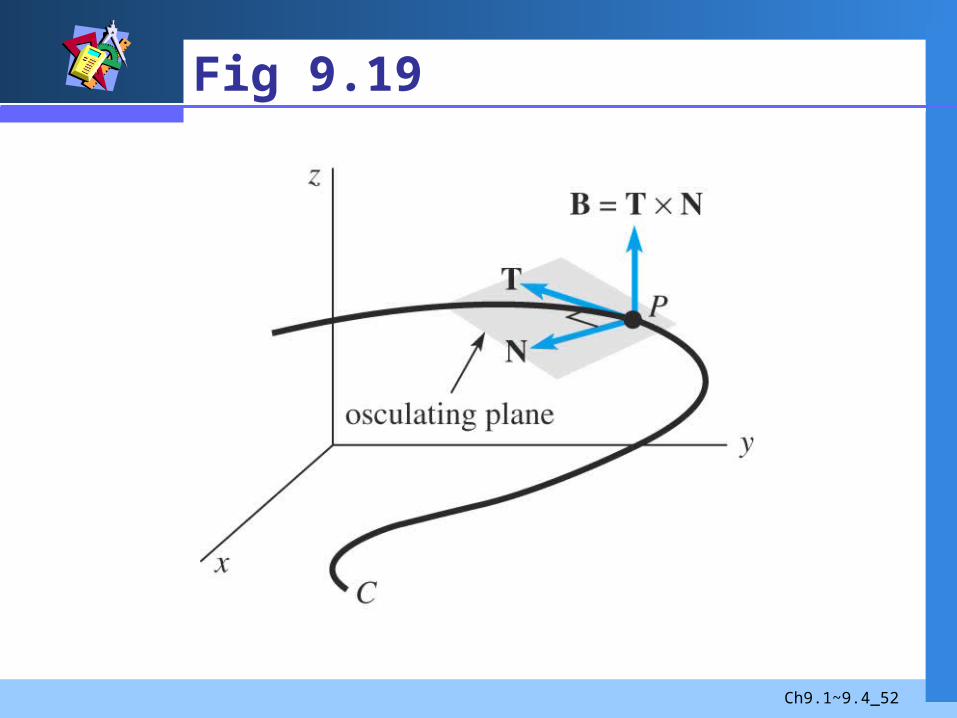
The Binormal
A third vector defined byB = T N
is called the binormal. These three vectors T, N, Bform a right-hand set of mutually orthogonal vectors called the moving trihedral. The plane of T and T is called the osculating plane, the plane of N and B is called the rectifying plane. See Fig 9.19.
Ch9.1~9.4_52
Fig 9.19
Ch9.1~9.4_53
Example 2
The position vector r(t) = 2cos ti + 2sin tj + 3tk, find the vectors T, N and B, and the curvature.
SolutionSincefrom (1),
Next we have
kjiT133
cos132
sin132 tt
,sin132
cos132
jiT
ttdtd
132
dtdT

Ch9.1~9.4_54
Example 2 (2)
Hence (3) gives N = – cos ti – sin tj
Now,
Finally using and
kji
kji
NTB
132
cos133
sin133
0sincos133
cos132
sin132
tt
tt
tt
13/2||/|| tddT 13||)(|| tr

Ch9.1~9.4_55
Example 2 (3)
From (4) we have
132
1313/2

Ch9.1~9.4_56
Formula for aT, aN and Curvature
Observe
then
(10)
On the other hand
vavava TTN )()(10
TTNTav ...
||r||rr
vav
)()()(
|||| ttt
dtdv
aT
..
BTTNTav0B
vavava NTN )()(

Ch9.1~9.4_57
Since ||B|| = 1, it follows that
(11)
then(12)
||r||rr
vav
)(||)()(||
||||||||2
ttt
vaN
3||r||
rr
v
av
)(
||)()(||
||||
||||3 t
tt

Ch9.1~9.4_58
Example 3
The position vector r(t) = ti + ½t2j + (1/3)t3k is said to be a “twisted” cube”. Find the tangential and normal components of the acceleration at t. Find the curvature.
Solution
Since v a = t + 2t3 and From (10),
kjrakjirv ttttttt 2)()(,)()( 2
42
3
1
2
tt
ttdtdv
aT

Ch9.1~9.4_59
Example 3 (2)
Now
and
From (11)
From (12)
kji
kji
av tt
t
tt 2
210
1 22
14|||| 24 ttav
1
14
1
1424
24
42
242
tt
tt
tt
ttvaN
2/324
2/124
)1(
)14(
tt
tt

Ch9.1~9.4_60
Radius of Curvatures
= 1/ is called the radius of curvature. See Fig 9.20.

Ch9.1~9.4_61
9.4 Partial Derivatives
Functions of Two VariablesSee Fig 9.21. The graph of a function z = f(x, y) is a surface in 3-space.

Ch9.1~9.4_62
Fig 9.21

Ch9.1~9.4_63
Level Curves
The curves defined by f(x, y) = c are called the level curves of f. See Fig 9.22.

Ch9.1~9.4_64
Example 1
The level curves of f(x, y) = y2 – x2 are defined by y2 – x2 = c. See Fig 9.23. For c = 0, we obtain the lines y = x, y = −x.

Ch9.1~9.4_65
Level Surfaces
The level surfaces of w = F(x, y, z) are defined by F(x, y, z) = c.

Ch9.1~9.4_66
Example 2
Describe the level curves of F(x, y, z) = (x2 + y2)/z.
SolutionFor c 0, (x2 + y2)/z = c, or x2 + y2 = cz. See Fig 9.24. ,

Ch9.1~9.4_67
Fig 9.24

Ch9.1~9.4_68
Partial Derivatives
For y = f(x),
For z = f(x, y),
(1)
(2)
xyxfyxxf
xz
x
),(),(lim
0
xxfxxf
dxdy
x
)()(lim
0
yyxfyyxf
yz
y
),(),(lim
0

Ch9.1~9.4_69
Example 3
If z = 4x3y2 – 4x2 + y6 + 1, find ,
Solutionxz
yz
xyxxz
812 22
53 68 yyxyz

Ch9.1~9.4_70
Alternative Symbols
If z = f(x, y), we have
xx fzxf
xz
yy fzyf
yz
Ch9.1~9.4_71
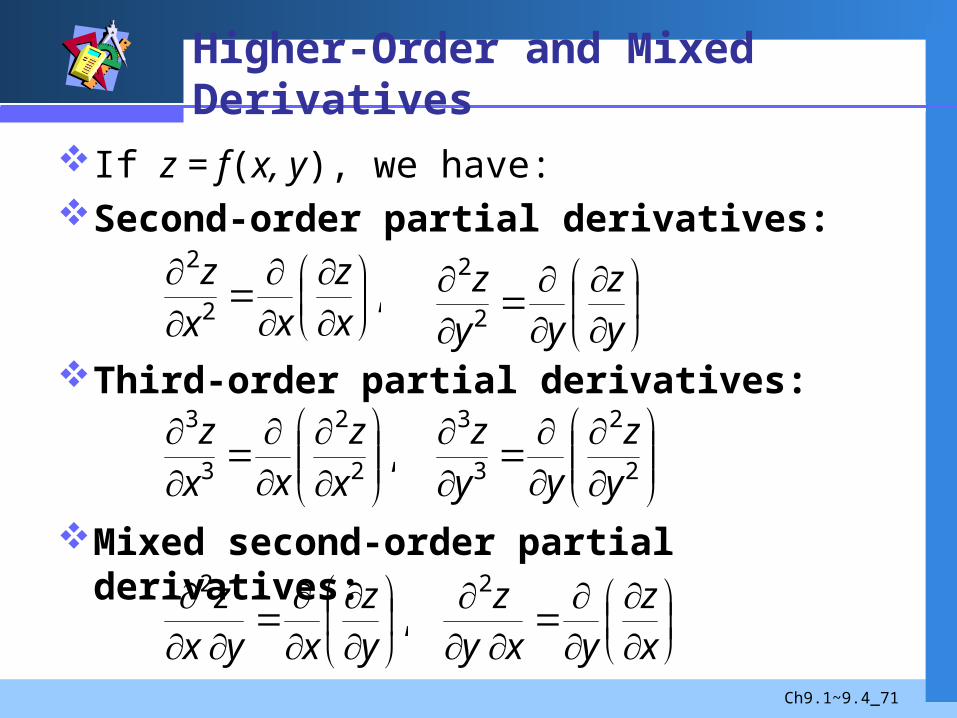
Higher-Order and Mixed Derivatives
If z = f(x, y), we have:Second-order partial derivatives:
Third-order partial derivatives:
Mixed second-order partial derivatives:
,2
2
xz
xx
z
yz
yy
z2
2
,2
2
3
3
x
zxx
z
2
2
3
3
y
zyy
z
,2
yz
xyxz
xz
yxyz2

Ch9.1~9.4_72
Alternative Symbols
If f has continuous second partial derivatives, then
fxy = fyx (3)
,)(2
xyz
xz
yff yxxy
yxz
f yx
2

Ch9.1~9.4_73
Example 4
If
then
yxetyxF t 6sin4cos),,( 3
yxetyxF
yxetyxF
yxetyxF
tt
ty
tx
6sin4cos3),,(
6cos4cos6),,(
6sin4sin4),,(
3
3
3

Ch9.1~9.4_74
If z = f(u, v) is differentiable, and u = g(x, y) and
v = h(x, y) have continuous first partial derivatives,
then
(5)
THEOREM 9.5Chain Rule
yv
vz
yu
uz
yz
xv
vz
xu
uz
xz
,

Ch9.1~9.4_75
Example 5
If z = u2 – v3, u = e2x – 3y, v = sin(x2 – y2), find andSolutionSincethen
(6)
(7)
xz /yz /
,2/ uuz 23/ vvz
)cos(64
)]cos(2[3)2(2
22232
22232
yxxvue
yxxveuxz
yx
yx
)cos(66
)]cos()2[(3)3(2
22232
22232
yxyvue
yxyveuyz
yx
yx

Ch9.1~9.4_76
Special Case
If z = f(u, v) is differentiable, and u = g(t) and v = h(t) are differentiable, then
(8)
If z = f(u1, u2,…, un) and each variable u1, u2,…, un are functions of x1, x2,…, xk, we have
(9)
dtdv
vz
dtdu
uz
dtdz
i
n
niii xu
uz
xu
uz
xu
uz
xz
2
2
1
1

Ch9.1~9.4_77
Similarly, if u1, u2,…, un are functions of a single variable t, then
(10)
These results can be memorized in terms of a tree diagram. See next page.
dtdu
uz
dtdu
uz
dtdu
uz
dtdz n
n
2
2
1
1

Ch9.1~9.4_78
Ch9.1~9.4_79
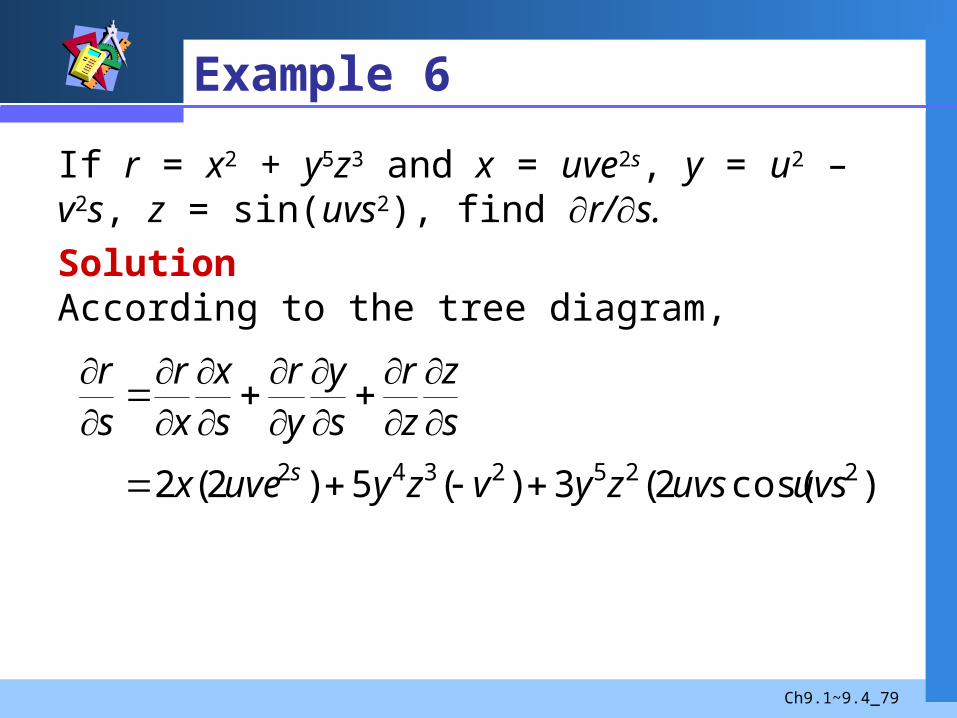
Example 6
If r = x2 + y5z3 and x = uve2s, y = u2 – v2s, z = sin(uvs2), find r/s.
SolutionAccording to the tree diagram,
))cos(2(3)(5)2(2 2252342 uvsuvszyvzyuvex
sz
zr
sy
yr
sx
xr
sr
s
Ch9.1~9.4_80
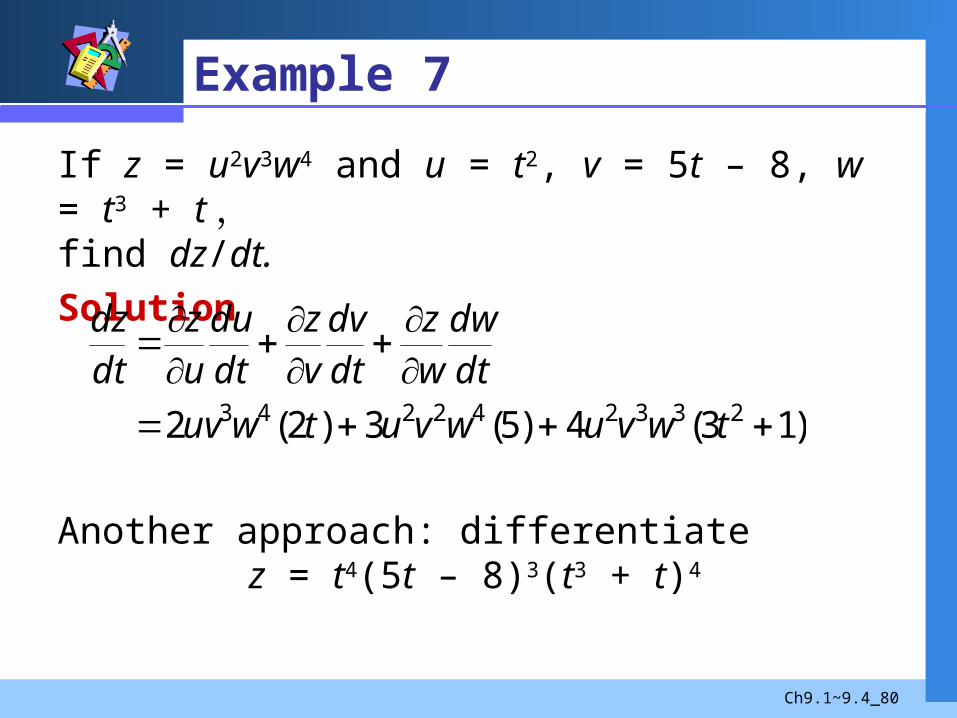
Example 7
If z = u2v3w4 and u = t2, v = 5t – 8, w = t3 + t,find dz/dt.
Solution
Another approach: differentiate z = t4(5t – 8)3(t3 + t)4
)13(4)5(3)2(2 233242243
twvuwvutwuv
dtdw
wz
dtdv
vz
dtdu
uz
dtdz

Ch9.1~9.4_81 Zill工程數學(上)茆政吉譯Zill工程數學(上)茆政吉譯








![[9.1] ¿Cómo estudiar este tema? [9.2] Equilibrio de ... · Mecanismos reguladores fisiológicos [9.1] ¿Cómo estudiar este tema? [9.2] Equilibrio de fluidos en el cuerpo [9.3]](https://img.dokumen.tips/doc/110x75/5f029dcd7e708231d4052717/91-cmo-estudiar-este-tema-92-equilibrio-de-mecanismos-reguladores.jpg)




















