Embed Size (px)
Citation preview

Étude et évaluations des modulations multiporteuses enmilieu sous-marinMo tar Mossi IdrissaTuteurs : Cyrille Si let et Laurent Ros20-06-2008

Remer iementsJe remer ie tout d'abord mes deux en adrants M. Cyrille Si let et M. Laurent Ros, pourleur soutien durant e stage et surtout pour leur sympathie et leurs onseils. Je n'oublierai pastous eux ave qui je partage le bureau à savoir Emmanuel,Vin ent, Guillaume et aussi toutel'équipe de foot du labo. Je remer ie mon responsable de master Monsieur Gerard Fau onpour avoir toujours répondu positivement à mes demandes et aussi pour s'être dépla é pourma soutenan e. Je remer ie toute ma famille en parti ulier mon grand frère Kader qui m'atoujours soutenu et ma hère Balkissa pour sa on�an e.
1

Table des matièresIntrodu tion 81 Préambule 101.1 Le anal a oustique sous-marin . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.1.1 Les ara téristiques du anal a oustique sous-marin . . . . . . . . . . . . 101.1.2 Modélisation mathématique du anal . . . . . . . . . . . . . . . . . . . . 121.2 Les modulations multiporteuses . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.2.1 L'Orthogonal Frequen y Division Multiplex. (OFDM) lassique . . . . . 181.2.2 L'OFDM ave pré�xe y lique . . . . . . . . . . . . . . . . . . . . . . . . 191.2.3 L'OFDM/Quadrature Amplitude Modulation. (QAM) suré hantillonné . 212 Les modulations multiporteuses en ASM 222.1 Le al ul des anaux équivalents . . . . . . . . . . . . . . . . . . . . . . . . . . 222.1.1 Forme du symbole reçu après transformée . . . . . . . . . . . . . . . . . 222.1.2 Dis rétisation du anal physique . . . . . . . . . . . . . . . . . . . . . . 242.2 Ca ul du anal équivalent pour l'OFDM ave Filtres d'émission et de ré eption 252.2.1 OFDM sans pre�xe y lique . . . . . . . . . . . . . . . . . . . . . . . . . 262.2.2 OFDM ave pre�xe y lique . . . . . . . . . . . . . . . . . . . . . . . . . 272.3 Conditions sur la sele tivité fréquentielle et temporelle . . . . . . . . . . . . . . 282.3.1 Egaliseur simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303 Etat de l'art des modulations OFDM en ASM 323.1 Etudes de paramètres OFDM pour l'ASM . . . . . . . . . . . . . . . . . . . . . 323.2 Déte teur OFDM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.3 Étude de l'étalement du Doppler . . . . . . . . . . . . . . . . . . . . . . . . . . 354 Estimation et ompensation du Doppler 374.1 Estimation du Doppler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.1.1 Estimation du Doppler à l'aide du pré�xe y lique . . . . . . . . . . . . 374.2 Rée hantillonnage du signal reçu . . . . . . . . . . . . . . . . . . . . . . . . . . 404.3 Cal ul du Doppler à l'aide de la traje toire . . . . . . . . . . . . . . . . . . . . 414.3.1 Corre tion du Doppler estimé . . . . . . . . . . . . . . . . . . . . . . . 435 Simulation du anal et les résultat de l'estimation du Doppler 445.1 Simulation du anal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.2 Résulats obtenus pour l'estimation du Doppler . . . . . . . . . . . . . . . . . . 492

Con lusion 51Annexe 52
3

Table des �gures1.1 Relation entre fréquen e, Signal to Noise Ratio (rapport signal à bruit). (SNR)et portée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2 Modem OFDM numérique à base de transformées de Fourier. . . . . . . . . . . 191.3 Pré�xe y lique pour le symbole n (sm[n] = s((nN + m)Te)). . . . . . . . . . . 204.1 Système de orre tion possible . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.1 Fenêtre de test dans un anal sans perturbation . . . . . . . . . . . . . . . . . . 455.2 Fenêtre de test dans un anal ave retard . . . . . . . . . . . . . . . . . . . . . 455.3 Fenêtre de test dans un anal ave retard et Doppler . . . . . . . . . . . . . . . 465.4 Fenêtre de test dans un anal à 2 trajets sans Doppler . . . . . . . . . . . . . . 465.5 Fenêtre de test dans un anal ave retard et un Doppler négatif . . . . . . . . . 475.6 3 symboles dans un anal ave retard et Doppler . . . . . . . . . . . . . . . . . 485.7 3 symboles ave des Dopplers hangeant de signe entre symboles . . . . . . . . 485.8 3 symboles en présen e de dé alage Doppler . . . . . . . . . . . . . . . . . . . . 49
4

RésuméLe anal de transmission a oustique sous-marin est un anal qui présente des di� ultéspour lesquelles les te hniques basiques onnues en Radio Fréquen e (RF) ne sont pas e� a es.C'est pourquoi il va falloir trouver des solutions mieux adaptées au anal sous-marin.Notre travail a onsisté tout d'abord en l'étude des e�ets introduits par le anal et surtoutdans le as des modulations multiporteuses. Après ette étude du anal nous avons simulé le anal et testé une te hnique d'estimation du Doppler. Il reste à omparer les résultats de nos al uls aux simulations.
5

Symbolesfc : fréquen e porteuse.vm : Vitesse relative entre l'émetteur et le re epteur.c : élérité du son dans l'eau (1500m/s).∆τ : étalement des retard.d : distan e entre véhi ules.fd : é art Doppler.Tcoherence : temps de ohéren e.Bcoherence : bande de ohéren e.s : signal émis.r : signal reçu.Te : période d'é hantillonnage.h : réponse du anal.ρ : l'atténuation du anal.τ :retard du signal entre émission et re eption.T0 : durée d'un symbole.θ : angle d'arrivée.l : indi e des trajets.m,k : indi e des porteuses.n : indi e des symboles.M : nombre de porteuses.N :nombre de symboles sur la durée de transmission.c : symbole omplexe.c : symbole estimé en ré eption.∆l rapport Doppler ( vitesse sur la élérité).Tg : Durée de l'intervalle de garde.T1 : Durée du symbole OFDM plus l'intervalle de garde.F0 : espa ement interporteusesAbréviationADSL Asymmetri Digital Subs riber Line.ASM A oustique Sous MarinAUVs Autonomous Underwater Vehi lesDAB Digital Audio Broad asting.DFT Dis rete Fourier Transform.DVB-T Digital Video Broad asting - Terrestrial.CONNECT CONtrol of NEtwork Cooperative sysTems.FFT Fast Fourier Transform.ICI InterCarrier Interferen e (interféren e entre porteuses).IES Interféren es Entre Symboles.IFFT Inverse Fast Fourier Transform. 6

MAQ Modulation d'Amplitude en Quadrature.MOCA Multimedia Over Coax Allian e.OFDM Orthogonal Frequen y Division Multiplex.OQAM O�set QAM.QAM Quadrature Amplitude Modulation.RF Radio Fréquen eTFD Transformée de Fourier Dis rète.TFDI Transformée de Fourier Dis rète Inverse.SIR Signal to Interferen e Ratio (rapport signal à interféren e).SNR Signal to Noise Ratio (rapport signal à bruit).SSB-SC Single Side Band- Suppressed Carrier (modulation à bande laterale à porteuse sup-primée).VLSI Very Large S ale Integration (intégration à grande é helle).WIFI Wireless Fidelity.WIMAX Worldwide Interoperability for Mi rowave A ess.
7

Introdu tionCes dernières années ont vu une roissan e des systèmes de ommuni ation. Déjà à partirdes années 70 l'homme ommen e à téléphoner en se déplaçant, et ave e phénome de té-léphonie mobile l'espa e est devenu en ore plus un milieu de transmission intéressant. On aainsi assisté à une évolution rapide des systèmes de ommuni ation. Mais ette évolution n'apas été suivie dans le domaine de la ommuni ation en milieu sous-marin, bien que l'hommeait montré un intéret pour ette ommuni ation il y a fort longtemps. Ainsi d'après les é risde Leonard de Vin i on utilisait le bruit de l'eau dans le adre de la déte tion de navire. Lespremières réalisations datent de 1915-1918 ave les expérien es de Paul Langevin sur la Seineet en mer. Il démontra la possibilité de transmettre des ondes a oustiques et la déte tionde sous-marin à l'aide d'un système basé sur un transdu teur piezo-éle trique. C'est sur esystème qu'est basée la majorité des appli ations de nos jours.C'est ave la se onde guerre mondiale que l'intérêt pour e type de ommuni ation a aug-menté dans la re her he militaire et en 1945 le premier système de ommuni ation a osutiquesous-marin(ASM) a vu le jour, un téléphone basé sur la transmission Single Side Band- Sup-pressed Carrier (modulation à bande laterale à porteuse supprimée). (SSB-SC) utilisé pour la ommuni ation des sous marins. L'intérêt militaire, les sites d'exploitation de gaz et de pétroleen mer, les re her hes en mer et le dévelopement des te hnologies Very Large S ale Integration(intégration à grande é helle). (VLSI) permettant des traitements de grande quantité d'infor-mation en temps réel ont onduit des obje tifs qui vont au dela des ommuni ations point àpoint vers un réseau de ommuni ation mobile. Pour la mise au point d'une ommuni ationmobile sous-marine, des re her hes sont menées pour le développement de ommuni ationse� a es, des algorithmes de traitements de signaux, la mise au point de modulation adaptéeau anal ASM et de proto oles de ommuni ation.Même si l'évolution en ommuni ation a oustique sous-marine n'a pas suivi le rythme des ommuni ations Radio Fréquen e (RF), les te hniques dévéloppées par elles- i vont servirde base pour l'évolution des ommuni ations sous-marine. C'est dans e adre qu'on a vules re her hes en ommuni ation a oustique sous-marine s'intéresser aux modulations multi-porteuses. Ces re her hes en ommuni ation a oustique sous-marine sont plus dirigées versdes te hniques permettant d'adapter les te hniques RF à l'a oustique sous-marine, ar l'ASMprésente beau oup plus de di� ultés que les autres types de ommuni ations. Notre travailsera tout d'abord de soulever les ontraintes ren ontrées en a oustique sous-marine et sur-tout pour le as des modulations multiporteuses. Ce travail étant réalisé dans le adre d'unprojet de re her he de l'ANR (Agen e Nationale pour la Re her he), nous allons partir durapport de Cyrille Si let et de Laurent Ros pour e projet (CONtrol of NEtwork CooperativesysTems. (CONNECT)). Nous allons tout d'abord présenter le anal ASM et les modulationsmultiporteuses. Ensuite nous présenterons des te hniques proposées dans le adre des modu-lations multi porteuses en ASM et en�n le travail que nous avons e�e tué jusqu'à présent.8

Dans e rapport nous allons présenter tout d'abord le anal a oustique sous-marin et les mo-dulations multiporteuses. Après nous ferons l'étude des paramètres du anal a oustique dansle adre des modulations multiporteuses, ensuite l'estimation et la ompensation du Doppleret en�n la simulation du anal et les résultats obtenus.
9

Chapitre 1Préambule1.1 Le anal a oustique sous-marinLe son est par ex ellen e le support d'information le mieux adapté pour des appli ationsde ommuni ation en milieu sous-marin. Ce i nous amène à ommen er par une présentationdes ara térisques du anal A oustique Sous Marin (ASM) qui sont au ÷ur de ette étude.Nous verrons ensuite les prin ipes de bases des modulations multiporteuses.1.1.1 Les ara téristiques du anal a oustique sous-marinBien que le son se propage plus vite en milieu sous-marin que dans l'air, e milieu im-pose de nombreuses ontraintes qui rendent plus omplexe la modélisation de ses paramètres.Ce i a pour onséquen e de rendre omplexe les algorithmes d'estimations de paramètres enré eption. Les ara téristiques du anal sont surtout liées à sa portée, sa bande de fréquen eutilisable et le rapport signal à bruit.La portée, la bande de fréquen e et le rapport signal à bruitLes pertes de transmission sont généralement dues à l'atténuation du signal ausée par lespertes d'énergie. Ces pertes sont :� les pertes par divergen e géométrique :la propagation d'une onde peut être vue omme l'étalement de son énergie sur la surfa esur laquelle elle est per eptible. Ave le prin ipe de onservation de l'énergie, l'inten-sité dé roit proportionnellement à l'inverse de la surfa e en fon tion de la distan e parrapport à son point d'émission. C'est le phénomène de perte par divergen e géométrique.� les pertes par amortissement :le milieu de propagation est dissipatif et absorbe une partie de l'énergie de l'onde sonore,qui est dissipée par vis osité ou par réa tion himique. L'amortissement est souvent leplus important fa teur limitatif de la propagation a oustique. Sa valeur dépend forte-ment du milieu de propagation et de la fréquen e.Les pertes par divergen e sont le fa teur prin ipal entrainant la limitation de la portée detransmission. Quant à la bande de fréquen es utilisable elle est surtout in�uen ée par l'ab-sorption qui augmente ave la fréquen e.Le bruit observé en milieu sous-marin montre une plus forte dépendan e vis-à-vis de lafréquen e que du milieu de propagation. Généralement les environements pro he de la surfa e10

et surtout au niveau des sites d'exploitation présentent plus de bruits que les fonds marins.Au niveau de la �gure 1 on peut remarquer la relation entre SNR, fréquen e et portée detransmission. Ainsi les ommuni ations ASM peuvent être lassées en trois atégories : leslongues portées (plus de 10 km), les moyennes portées (1 à 10 km) et les ourtes portées(moins de 1 km). Pour une longue portée entre 10-100 km la largeur de bande est de quelqueskHz, pour une portée moyenne la largeur de bande est de quelques dizaines de kHz et pour une ourte portée la largeur est dans les entaines de kHz.(voir �gure 1). En plus de es limitationssur la lageur de bande et la portée, le anal ASM est aussi sujet à des multi-trajets.
Fig. 1.1 � Relation entre fréquen e, SNR et portéeaaextrait de www.mit.edu/ millitsa/resour es/pdfs/en y.pdfMulti-trajetsÀ la ré eption d'un signal, e dernier est suivi par des é hos dus à des ré�exions sur lasurfa e et le fond et souvent aux di�éren es de gradient dans l'eau. Ces é hos subissent des11

déformations di�érentes ar ils traversent des milieux à ara téristiques di�érentes. Ce i apour onséquen e une dégradation des perfoman es de déte tion d'où une augmentation de la omplexité du ré epteur optimal.Les déformations du signal� L'e�et DopplerL'e�et Doppler est une modi� ation de la fréquen e d'un signal pendant la propagation,dû à une variation de la durée des trajets émetteur-ré epteur pendant le temps d'émis-sion. Il peut être ausé par des mouvements du milieu de propagation ( le ourant marin,La houle ), mais aussi et en général surtout ave la vitesse relative émetteur-ré epteur ;dans e as la variation de fréquen e δf est donnée par : δf
fc=
vm
c. ave fc la fréquen eporteuse, vm la vitesse relative et c la vitesse du son dans l'eau.� Les �u tuationsLes �u tuations d'amplitude et de phase, lors de la propagation sont dues à la di�usionprovoquée par les inhonomogénéités du milieu : haque trajet est a ompagné d'un ontinuum de mi ro-trajes di�usés, dont l'énergie relative augmente ave la distan e.La variabilité de l'état de la surfa e marine à ause des ondulations de l'eau ontribuebeau oup à la variabilité temporelle du signal dans le as de transmission peu profonde.Pour obtenir ainsi un ré epteur optimal tous es paramètres doivent être judi ieusementétudiés a�n de tenir ompte de leurs e�ets sur le signal en ré eption. Il s'agit don d'unemodélisation mathématique qui répond aux ritéres de déformation du anal.1.1.2 Modélisation mathématique du analLa modélisation du anal permet de faire sortir les paramètres les plus in�uents sur la on eption d'un ré epteur optimal. Elle nous permettra aussi de voir les possibilités de rap-pro hement ave le anal RF. Nous allons présenter les paramètres d'un anal multi-trajets omme le anal ASM. Ensuite on verra omment ses paramètres varient dans le as d'unemodulation OFDM.Paramètres d'un anal multi-trajetsDans un anal multi-trajets, plusieurs versions du signal transmis arrivent au ré epteur. Ilest don né essaire de onnaître les paramètres intervenant pour les onditions d'une bonnetransmission. Ces paramètres ont déja été étudiés pour le anal radio-mobile.L'étalement des retardsL'étalement des retards fait réferen e au temps mis entre la ré eption du premier signal(dire t) et le dernier. Pour un signal emis, le temps ∆τmax est le retard maximum entre lepremier signal reçu et le dernier. Il représente le temps entre lequel l'énergie des multi-trajetsatteint une ertaine valeur où elle devient négligeable.Bande de ohéren eLa bande de ohéren e Bcoherence est inversement proportionnelle au retard maximal. Labande de ohéren e ara térise un anal multi-trajet dans le domaine fréquentiel, elle est une12

mesure statistique de la bande de fréquen e sur laquelle le anal multi-trajets laisse passertoutes les omposantes spe trales ave approximativement le même gain et une phase linéaire.En d'autres termes, la bande de ohéren e représente une bande de fréquen e où la orrélationdes omposantes fréquentielles est élévée, 'est une mesure de la séle tivité fréquentielle.L'étalement DopplerL'étalement Doppler est une mesure de l'élargissement fréquentiel. L'étalement Dopplerest dé�ni omme la bande de fréquen e entre −fdmax et +fdmax où fdmax est le dé alageDoppler maximal.Temps de ohéren eLe temps de ohéren e est une mesure de la durée sur laquelle la réponse du anal estpratiquement invariant, il quanti�e la similarité temporelle du anal. Le temps de ohéren eest le temps sur lequel deux signaux reçus ont une orrélation élévée en amplitude. Le tempsde ohéren e est inversement proportionnel à l'étalement du Doppler : Tcoherence = 1fdmax
.Séle tivité fréquentielleLes retards dus aux multi-trajets onduisent à une dispersion temporelle du anal multi-trajets. Ce i entraine le signal transmis à subir un e�a ement (fading) séle tif en fréquen e.Le signal transmis est sujet à un e�a ement séle tif en fréquen e si :Bs > Bcoherence (1.1)Où Bs est la bande de fréquen e du signal émis. En d'autres termes, pour l'e�a ement séle tifen fréquen e le signal transmis a un largeur de bande qui est plus grande que la bande de ohéren e du anal. Dans e as le anal devient séle tif en fréquen e, le gain du anal multi-trajets est di�érent pour les omposantes fréquentielles. L'e�a ement séle tif en fréquen eest ausé par le fait d'avoir un étalement des retards qui dépasse la durée du symbole. Ce ientraine une variation du anal dans le temps et onduit à de l'interféren e entre symboles.Le fading est plat si :
Bs << Bcoherence (1.2)Ce qui implique que si le anal multi-trajet a un gain onstant et une phase linéaire à traversla bande de ohéren e, qui est grand devant la largeur de la bande du signal transmis Bs , les ara téristiques spe trales du signal transmis à travers le anal sont préservées au ré epteur.Le fading plat n'induit pas d'interféren es inter-symbole,mais on peut avoir une dégradationdes perfoman es par diminution du rapport signal à bruit.La séle tivité temporelleL'étalement Doppler entraine une dispersion fréquentielle du anal multi-trajets, qui faitsubir au signal transmis un fading rapide ou lent. Ce i dépend de omment le signal varie parrapport au anal, le anal peut alors être à fading lent ou rapide. Le signal transmis subit unfading rapide lorsque la bande du signal est inférieure à l'étalement du Doppler.Bs > fdmax ou Ts > Tcoherence (1.3)13

Cette équation montre que si le temps de ohéren e du anal est inférieur à la durée du signaltransmis. Ce i ause une dispersion fréquentielle à ause de l'étalement Doppler. La distorsiondu signal pour le fading rapide augmente si l'étalement Doppler augmente relativement à labande du signal. Dans le as d'un fading lent la réponse du anal hange très lentement parrapport au signal transmis. Ce i indique que l'étalement Doppler du anal est très petit devantla largeur de bande de fréquen e du signal transmis. Ainsi le signal sujet à un slow fading sila durée symbole est négligeable devant le temps de ohéren e ou la bande de fréquen e estnégligeable devant l'étalement du Doppler.Ts << Tcoherence ou Bs >> fdmax (1.4)Ordres de grandeur pour le projet CONNECTLe lien de ommnuni ation �verti al�, 'est-à-dire du bateau de surfa e vers les Autono-mous Underwater Vehi les (AUVs), est très peu a�e té par le phénomène de trajets multiples, ontrairement au lien de ommuni ation �horizontal�, 'est-à-dire entre AUVs [1℄. Nous nousintéresserons don prin ipalement au lien horizontal, pour une système de moyenne portée(quelques kms) par �grands fonds� pour lequel la bande passante B peut atteindre une dizainede kHz [1℄. Nous pré isons dans la suite les quelques ordres de grandeur retenus pour notreétude dans le projet CONNECT :� distan e entre véhi ules d : 200 m à quelques kms� étalement des retards de propagation ∆τ : quelques msec à 50 msec� vitesse relative entre véhi ules vm : −3 m/sec à +3 m/sec� fréquen e porteuse fc : 10 kHz typiquement (ou quelques kHz à 20 kHz)L'é art Doppler (maximal) qui a�e te la fréquen e porteuse est dé�ni par :
fd =vm
c. fc (1.5)où c = 1500 m/sec est la vitesse de propagation des ondes a oustiques sous l'eau.Pour une porteuse de fc = 10 kHz, on pourra don onsidérer une plage de fréquen esDoppler maximale de :
fd ∈ [−20 Hz; +20 Hz]et don un temps de ohéren e Tcoherence = 1/|fd|, valant au minimum :Tmin
coherence = 50 msecLa transmission sur un tel anal peut s'avérer très di� ile d'une part à ause de l'étalementdes délais, mais aussi à ause de la variation au ours du temps en as de dépla ement rapidedes AUVs. Un anal serait jugé favorable [2℄ si fd × ∆τ << 1 ( anal dit �underspread�), maison voit que l'on est i i dans un pire as ( anal �overspread�) :fdmax × ∆τmax = 1Après avoir donné les ordres de grandeur du problème, nous allons donner une formalisationplus pré ise de la modélisation du anal a oustique sous-marin (ASM).14

Forme générale d'un anal à trajets multiplesSoient sHF
(t) et rHF
(t) les signaux �Haute Fréquen e� émis et reçus. Ces signaux sont dessignaux réels à bande étroite B autour de la fréquen e porteuse fc. Le signal HF émis peuts'é rire à partir de son enveloppe omplexe s(t) relative à fc sous la forme :s
HF(t) = ℜ{s(t).ej2πfct} (1.6)Les parties réelle (voie en phase �I") et imaginaire (voie en quadrature �Q�) de s(t) =
sI(t) + j sQ(t) orrespondent respe tivement aux signaux en bande de base qui ont moduléen phase et en quadrature la porteuse cos(2πfct) à l'émission :s
HF(t) = sI(t) cos(2πfct) + sQ(t) cos(2πfct +
π
2) (1.7)Le signal reçu en bande portée onstitue une superposition de versions retardées et atté-nuées du signal émis, en présen e d'un bruit additif :
rHF
(t) =
L∑
l=1
ρl(t)sHF(t − τl(t)) + n
HF(t) (1.8)où :
L est le nombre de trajets,τl est le retard de propagation asso ié au trajet numéro �l�, que l'on dénommera souvent plussimplement, retard du trajet �l�(on suppose τ1 ≤ τ2 ≤ ... ≤ τL) ,ρl est l'atténuation de propagation asso ié au trajet numéro �l�, ou en ore l'amplitude dutrajet �l� ; 'est un nombre réel.L'étalement des retards du anal est ainsi donné par :
∆τ = τL − τ1On déduit alors la forme de la réponse impulsionnelle du anal en bande portée :h
HF(τ, t) =
L∑
l=1
ρl(t)δ(τ − τl(t)) (1.9)Le signal reçu s'exprime ainsi omme un �ltrage du signal émis par la réponse impulsion-nelle réelle du anal de propagation physique hHF
(τ) et d'un bruit additif gaussien nHF
(t) dedensité spe trale de puissan e bilatérale N0/2 autour de fc. hHF
(τ, t) représente la réponse du anal au temps t d'une impulsion émise au temps t − τ .Modèle de variation des paramètresLe mouvement relatif entre les AUV va entrainer une variation des paramètres du analau ours du temps, liée à l'e�et Doppler. Ave la modulation OFDM, il faudra se positionnerpar rapport à 2 é helles de temps ( f se tion suivante sur l'OFDM) :15

� la durée d'un symbole OFDM, notée T0, hoisie généralement large par rapport à l'éta-lement temporel des trajets de propagation : T0 >> ∆τmax. Cette ondition permettrade rendre négligeable ou nulle l'interféren e entre les symboles OFDM su esifs (indi éspar n). Notons qu'en OFDM lassique, on prend souvent en pratique T0 = 4∆τmax.� la durée d'un é hantillon à l'intérieur d'un symbole OFDM, notée Te, ave Te = T0M ,don beau oup plus ourte que T0.La situation idéale se produit lorsque le anal peut-être onsidéré invariant durant un sym-bole OFDM, soit lorque fd . T0 << 1. D'après les ordres de grandeur de notre étude, ette ondition idéale ne se produira que si la vitesse relative entre les AUVs est très en dessous dumaximum possible. Cela orrespondra aux situations où les AUVs ont un faible dépla ement,ou bien un dépla ement à vitesse élevée, mais ave une dire tion homogène entres AUVs, ty-piquement vers le fond sous-marin.Pour une vitesse relative entre AUVs non négligeable, il faudra prendre en ompte la varia-tion à l'intérieur d'un symbole OFDM. Notons qu'en transmission Radio-Fréquen e aérienne,il est alors ourant [3℄ de ne onsidérer que les variations de phase (ou phase/amplitude) àl'intérieur d'un symbole et de négliger les variations de retard (au maximum égale à vm
c .T0).En e�et, es dernières sont de plusieurs ordres de grandeurs inférieures à Te (ou en ore à 1/B)due à la valeur élevée de la élérité c en RF. En ore une fois, ette simpli� ation d'analyseen RF ne s'appliquera pas en ASM. Par exemple pour une vitesse de vm = 3 m/sec etune durée symbole OFDM de 200 msec (= 4 × ∆τmax), on aura une variation possible dedélai de 31500 .200 = 0, 4 msec, qui est non négligeable relativement à 1/B (= 1 msec pour
B = 1 kHz). Dans la plupart des s énarios dynamiques ASM, il faudra don prendre en ompte la variation de délai à l'intérieur d'un symbole OFDM.Modèle pour une vitesse relative onstanteBien que ertains auteurs utilisent un modèle de variation pro he de e que l'on trouveen liaison radio-mobile ( anal de Rayleigh ave spe tre de Jakes [4℄), la plupart des auteursmodèlisent les variations à partir de la des ription déterministe du dépla ement relatif entreAUVs à vitesse relative vm onstante sur la durée d'un symbole [5℄, [6℄, [7℄, [8℄. Leur pertinen ea été validée en pratique par le développement d'algorithmes basés sur es modèles et testésave su ès sur des données réelles [8℄.Si l'on raisonne sur la durée d'un symbole, inférieure à 200 mse , et orrespondant à undépla ement relatif inférieur à 60m, les variations d'amplitudes dans l'équation (1.8) peuventêtre négligées, soit ρl(t) ≃ ρl, l = 1... L.A) Pour un seul trajet de propagation :Si on ne s'intéresse qu'au trajet l et sans bruit, le signal reçu (1.8) se résume à :r
HF(t) = ρl . s
HF(t − τl(t)) (1.10)L'évolution temporelle du retard du trajet �l� est donnée par une dérive linéaire :
τl(t) = τl(0) − ∆l . t (1.11)16

où le oe� ient de dérive, ∆l, est l'é art Doppler relatif donné par :∆l =
vm
c. cos(θl) (1.12)ave θl l'angle d'arrivée (par rapport au ve teur vitesse relative) pour le trajet �l".Ave une vitesse de vm = 3m/sec, la plage d'é art Doppler relatif est∆l ∈ [−2.10−3 ; +2.10−3], e qui orrespond à des valeurs élevées (à omparer ave le as RF ...).Interprétation :Pour fa iliter l'interprétation, nous supposons i i que la onstante τl(0) = 0. En utilisant (1.6),le signal réel HF reçu (1.10) devient :
rHF
(t) = ℜ{ ρl .s((1 + ∆l) . t) × ej2πfc(1+∆l)t } (1.13)Dans l'approximation bande-étroite (largement utilisée en RF), on peut négliger les varia-tions sur l'enveloppe omplexe (i.e. s((1+∆l) . t) ≈ s(t)) et l'e�et Doppler se traduit seulementpar un dé alage de la fréquen e porteuse apparente (f ′c)l observé au niveau du ré epteur :
(f ′c)l = fc(1 + ∆l) = fc + fd. cos(θl)Mais en ASM (et en transmission large-bande), on voit que (1+∆l) intervient aussi omme unfa teur d'é helle temporel qui dilate ou ompresse l'enveloppe omplexe du signal émis s(t).Cet e�et est lié au fait que lorsque la bande B n'est pas étroite relativement à la fréquen eporteuse fc, l'é art fréquentiel observé n'est pas le même dans toute la bande, et il vaut mieuxtravailler ave une des ritption temporelle telle (1.11).B) Pour l'ensemble des trajets :Si on reprend maintenant le problème le plus général, ave L trajets ayant des angles d'arrivéedi�érents, le modèle se déduit à partir de l'équation d'évolution (1.11) pour haque trajet,et un é art Doppler relatif ∆l di�érent pour haque trajet. En fait, l'ensemble des auteurs onsidèrent que le Doppler sur haque trajet est pro he (égal à un Doppler moyen) pourdévelopper leurs algorithmes de ré eption. Cette situation peut s'expliquer par le fait queles angles d'arrivée des di�érents trajets (di�érents modes) restent pro hes par grand fond.Cela peut évidemment onsidérablement fa iliter les algorithmes (estimer et ompenser unseul é art Doppler au lieu de L), dans le sens favorable ette fois par rapport au as de latransmission RF où une telle hypothèse ne serait pas valable.Don si on se ontente de e modèle (Cf [8℄), on arrive au modèle de variation des délais :
τl(t) = τl(0) − ∆ . t (1.14)∆ devient le paramètre à estimer à partir duquel les orre tions pourront se faire. Dans ette approximation, les délais sont distingués par les fa teurs τl(0), qui peuvent être hoisisde manière aléatoire dans un simulateur [6℄. Dans la suite on prendra τl(0) = τl.Dans ette partie nous avons vu les di� ultés que présente le anal ASM et l'évolutionsde ertains paramètre de transmission. Dans e qui va suivre nous allons nous intéresser àl'emploi des modulateur multiporteuses. 17

1.2 Les modulations multiporteusesLes modulations multiporteuses sont la base de nombreuses appli ations dévéloppé en RFou sur able, telles que le Wireless Fidelity. (WIFI), le Worldwide Interoperability for Mi ro-wave A ess. (WIMAX), l'Asymmetri Digital Subs riber Line. (ADSL) et tout derniérementle Multimedia Over Coax Allian e. (MOCA). Ainsi pour ses diverses intérêt elle est adoptéepour plusieurs appli ations en ommuni ation ASM. Nous allons voir ses prin ipes et er-taines de ses variantes. Nous pré iseront dans la suite du rapport seules les modulations lesplus lassiques (se tion 1.1.2 et 1.2.2) seront utilisées.1.2.1 L'OFDM lassiqueLe système OFDM le plus simple, que nous appellerons OFDM lassique, repose sur latransmission des symboles omplexes cm,n, 0 ≤ m ≤ M − 1, n ∈ Z grâ e à M porteuses, enutilisant un �ltre re tangulaire Π de durée T0 égale à l'inverse de l'espa ement inter-porteuseF0. Le signal OFDM lassique s'é rit ainsi en bande de base :
s(t) =1√T0
M−1∑
m=0
∞∑
n=−∞
cm,n Π(t − nT0)ej2πmF0t, (1.15)ave
Π(t) =
{
1 si −T02 ≤ t < T0
2 ,0 sinon. (1.16)Alors, pour un système dos-à-dos, la démodulation des symboles peut se faire par
cm,n =1√T0
∫ +∞
−∞
Π(t − nT0)e−j2πmF0ts(t)dt. (1.17)L'OFDM lassique est parfaitement équivalent en terme de débit théorique à une modu-lation monoporteuse lassique utilisant la bande B = MF0 et une durée symbole Ts = T0
M ,mais les propriétés des deux systèmes vis-à-vis d'un anal séle tif en fréquen e sont totalementdi�érentes. En e�et, le débit du système monoporteuse est M fois plus grand que le débit surune porteuse du système OFDM lassique, e qui le rend beau oup plus sensible à un analmultitrajet. Ainsi, si l'on onsidère un anal de réponse impulsionnelle h(τ, t) variant dans letemps et de durée T , et en faisant abstra tion du bruit, le signal OFDM lassique reçu s'é ritr(t) =
∫ T
0h(τ, t)s(t − τ)dτ (1.18)
=1√T0
M−1∑
m=0
+∞∑
n=−∞
cm,n
∫ T
0h(τ, t)Π(t − τ − nT0)e
j2πmF0(t−τ)dτ. (1.19)Alors, pour nT0 − T02 ≤ t < nT0 + T0
2 , si T0 su�samment grand devant T , on peut fairel'approximationr(t) ≈ 1√
T0
M−1∑
m=0
cm,nej2πmF0t
∫ T
0h(τ, t)e−j2πmF0τdτ
︸ ︷︷ ︸
H(mF0,t)
, (1.20)18

ave H(mF0, t) la réponse du anal à la fréquen e mF0 et à l'instant t. Alors, le symboleestimé après démodulation s'é ritcm,n =
1
T0
M−1∑
m′=0
cm′,n
∫ nT0+T02
nT0−T02
H(mF0, t)ej2π(m′−m)F0tdt. (1.21)Autrement dit, l'utilisation d'une modulation OFDM lassique a permis de supprimer l'in-terféren e entre symboles, mais pas né essairement l'interféren e entre porteuses. Celle- i nedisparaît que si le anal varie su�samment lentement sur une durée T0, auquel as on obtientque cm,n = Hm,ncm,n, ave Hm,n = H(mF0, nT0).Un autre intérêt de e système est qu'il peut être réalisé de manière très simple en numé-rique. En e�et, on peut véri�er que si l'on é hantillonne les équations de modulation (1.15)et de démodulation (1.17) à la période Te = T0
M , alors la modulation est une simple Transfor-mée de Fourier Dis rète Inverse. (TFDI) et la démodulation est une Transformée de FourierDis rète. (TFD) [9℄ ( f. �gure 1.2) :[s(nMTe), . . . , s((nM + M − 1)Te)] = TFDI {c0,n, . . . , cM−1,n} , (1.22)[c0,n, . . . , cM−1,n] = TFD {s(nMTe), . . . , s((nM + M − 1)Te)} . (1.23)
TFDI P/S S/P TFD
c0,n
cM−1,n
c0,n
cM−1,nFig. 1.2 � Modem OFDM numérique à base de transformées de Fourier.1.2.2 L'OFDM ave pré�xe y liqueÀ bande o upée onstante B, avoir un temps symbole grand revient à utiliser un grandnombre de porteuses M puisque B = MT0. Or, on ne peut généralement pas avoir su�sammentde porteuses pour s'a�ran hir omplètement de l'interféren e entre symboles, si bien que l'hy-pothèse M grand, i.e. T0 grand, rend la plupart du temps irréaliste l'approximation d'un analvariant lentement sur une durée T0. C'est pourquoi toutes les appli ations à base d'OFDM(ADSL, Digital Video Broad asting - Terrestrial. (DVB-T),...) utilisent une version modi�éepar l'ajout d'un intervalle de garde. Celui- i a été introduit en 1980 par Peled et Ruiz [10℄ etpermet sous ertaines onditions réalistes de supprimer omplètement l'interféren e entre sym-boles et entre porteuses. Le prin ipe est d'allonger la durée de la fon tion re tangulaire utiliséesur haque porteuse, sans hanger l'espa e inter-porteuses. Le signal OFDM ave intervalle degarde (OFDM/IG) s'é rit don en bande de base :
s(t) =1√T0
M−1∑
m=0
∞∑
n=−∞
cm,n Π∆(t − nT1)ej2πmF0t, (1.24)ave T1 = T0 + Tg > T0, (Tg intervalle de garde) et
ΠTg (t) =
{
1 si −Tg − T02 ≤ t < T0
2 ,0 sinon. (1.25)19

Quant à l'étape de démodulation, elle s'é rit :cm,n =
1√T0
∫ +∞
−∞
Π(t − nT1)e−j2πmF0ts(t)dt. (1.26)On notera que la démodulation fait bien intervenir la fon tion porte Π de durée T0 alorsque la modulation fait intervenir la fon tion porte ΠTg de durée T1 = T0 + Tg. Alors, poursupprimer totalement l'interféren e entre symboles et entre porteuses, il su�t que la réponseimpulsionnelle h(τ, t) du anal soit telle que 0 ≤ τ ≤ Tg et que h(τ, t) ≈ h(τ, t + T1). Ainsi, sil'on hoisit un intervalle de garde plus grand que l'é ho le plus lointain et que le anal varielentement sur une durée T1, alors le signal reçu s'é rit
r(t) =1√T0
M−1∑
m=0
+∞∑
n=−∞
cm,n
∫ Tg
0h(τ, t)ΠTg (t − nT1 − τ)ej2πmF0(t−τ)dτ, (1.27)et pour nT1 − T0
2 ≤ t < nT1 + T02 , r(t) devient
r(t) =1√T0
M−1∑
m=0
cm,nej2πmF0t
∫ ∆
0h(τ, t)ΠTg (t − nT1 − τ)e−j2πmF0τdτ
︸ ︷︷ ︸
H(mF0,t)≈Hm,n
. (1.28)Tout se passe don omme si le symbole Hm,ncm,n était émis à la pla e du symbole cm,n. Aprèsdémodulation, le symbole estimé est don cm,n = Hm,ncm,n. (1.29)Plut�t que d'intervalle de garde, on parle aussi parfois de pré�xe y lique et d'OFDM/CP ar, on peut montrer que, en numérique, introduire un intervalle de garde revient à faire unere opie des symboles après transformée de Fourier inverse, au ours de la modulation. En e�et,si T1
T0= N
M > 1, la modulation s'é rit aussi en numérique, ave Te = T0M :
[s(nNTe), . . . , s((nN + M − 1)Te)] = TFDI {c0,n, . . . , cM−1,n} , (1.30)et ( f. �gure 1.3)[s((nN + M − N)Te), . . . , s((nN − 1)Te)] = [s(nN + 2M − NTe), . . . , s((nN + M − 1)Te)] .
sN−1[n − 1]sM [n − 1] . . . s0[n] . . . sM+M−N [n] . . . sM−1[n]Fig. 1.3 � Pré�xe y lique pour le symbole n (sm[n] = s((nN + m)Te)).Ces équations montrent que ette modulation présente l'in onvénient d'avoir un débitthéorique plus faible que elui de l'OFDM lassique. En e�et, pour émettre M symboles, ilfaut un train de données qui ontient N symboles modulés, ave N > M . Pour limiter etteperte, on utilise en général un intervalle de garde ompris entre 15% et 25% de la duréeutile des symboles T0. En outre, la réponse fréquentielle de la fon tion porte qui est utiliséeest un sinus ardinal, elle est don mal lo alisée en fréquen e. C'est pourquoi l'intervalle degarde est né essaire. De plus le temps symbole T1 doit alors être su�sament grand d'où uneinterféren e induite lorsque le anal de transmission n'est pas onstant sur une durée T1. En�n,les évanouissements dus aux oe� ients Hm,n peuvent être très importants.20

1.2.3 L'OFDM/QAM suré hantillonnéL'OFDM ave �ltre re tangulaire de base est une modulation à e� a ité spe trale maxi-male : F0T0 = 1. Malheureusement, ette e� a ité spe trale maximale interdit l'emploi deformes d'ondes bien lo alisées dans le plan temps-fréquen e (rappelons qu'un re tangle entemps est un sinus ardinal en fréquen e, ave une dé roissan e en 1/f des lobes sé ondaires).C'est la onséquen e du théorème dit de Balian-Low. Si l'on relâ he la ontrainte d'optimalitésur l'e� a ité spe trale, il devient néanmoins possible de hanger de �ltre de mise en forme.Dans l'OFDM ave pré�xe y lique, l'e� a ité spe trale est bien sous-optimale (F0T1 > 1),mais e i n'est pas exploité pour utiliser une forme d'onde bien lo alisée puisqu'i i en ore, lamodulation est basée sur un �ltre re tangulaire.Les modulations OFDM/QAM suré hantillonnées généralisent l'OFDM ave pré�xe y- lique grâ e à l'utilisation de nouvelles formes d'onde, qu'on pourra optimiser, en parti ulierpour obtenir une bonne lo alisation temps-fréquen e. En revan he, le pré�xe y lique devraêtre abandonné. Lorsque les �ltres d'émission et de ré eption sont orthogonaux (�ltres deré eption égaux aux retournés onjugués des �ltres d'émission), on parle d' OFDM/QAMsuré hantillonné :s(t) =
M−1∑
m=0
∞∑
n=−∞
cm,nh(t − nT0)ej2πmF0t, (1.31)et
cm,n =
∫ +∞
−∞
h(t − nT0)e−j2πmF0ts(t)dt, (1.32)ave h(t) un �ltre non né essairement re tangulaire véri�ant la ontrainte d'orthogonalité :
∫ +∞
−∞
h(t − nT0)e−j2πmF0th∗(t − n′T0)e
j2πpm′F0tdt = δm,m′δn,n′ (1.33)On notera aussi que le terme é hantillonné qui quali�e es modulations provient de equ'elles ne sont pas à e� a ité spe trale optimale, e qui, après é hantillonnage, revient aufait que pour transmettre M symboles, il faut émettre un signal multiporteuses omportantN > M é hantillons.Après avoir présenté le anal et le type de modulation hoisie pour notre travail, nousallons voir omment le anal ASM agit sur les symboles et les divers problèmes qu'on peutren ontrer en ré eption. Ce qui suit est une étude théorique du anal de transmission ASMave l'OFDM.
21

Chapitre 2Les modulations multiporteuses enASMCette partie nous permettra de voir les di�érents ontraintes auxquels on fera fa e quandon utilise l'OFDM dans le milieu sous-marin. On ommen e d'abord par l'étude d'un symboleOFDM ensuite on verra le as de plusieurs symbole qui va entrainé de l'interféren e. Et en�nnous donnerons les onditions de transmission pour un égaliseur à un oe� ient.2.1 Le al ul des anaux équivalentsPour analyser les e�ets du anal physique sur le signal reçu, nous allons étudier le modèled'un anal équivalent global qui in lut :"Modulation OFDM- anal physique-démodulationOFDM" ela permettra de faire ressortir la forme du signal utile et l'e�et de l'InterCarrierInterferen e (interféren e entre porteuses). (ICI) àprès démodulation.2.1.1 Forme du symbole reçu après transforméeÀ partir du modèle des équations (1.13),(1.15) et (1.19) en nous interéssant à la transmis-sion d'un unique symbole OFDM nous avons :sHF (t) = ℜ{
M∑
m=0
cmej2π(m−M/2)F0tΠ(t)ej2πfct} (2.1)t ∈ [0, T + Tg] et fm = fc + (m − M/2)F0
rHF
(t) =∑
l
ρl . sHF
(t − τl(t)) (2.2)τl(t) ≃ τl − ∆lt (2.3)On suppose d'abord que la variation du anal est faible sur un symbole OFDM. Cette hypo-thèse n'est pas valable pour n'importe quelle valeur de la durée symbole. Nous supposons que ette ondition est véri�ée a�n de fa iliter les intégrales dans le temps. Ainsi l'équation (1.13)nous donne :
rHF (t) = ℜ {∑
l
ρl[
M−1∑
m=0
cmej2π(m−M/2)F0(t+∆lt−τl)Π(t + ∆lt − τl)]ej2πfc(t+∆lt−τl)} (2.4)22

Pour obtenir le signal omplexe bande de base nous allons faire une demodulation en multi-pliant le signal analytique rHFpar une fréquen e e−j2πfct , nous aurons :r(t) =
∑
l
ρl[
M−1∑
m=0
cmej2π(m−M/2)F0(t+∆lt−τl)Π(t + ∆lt − τl)]ej2πfc(t+∆lt−τl)ej2πfct
=
M−1∑
m=0
cmej2π(m−M/2)F0tej2πfm∆lt[∑
l
ρle−j2πfmτlΠ(t + ∆lt − τl)] (2.5)Pour obtenir le symbole en ré eption nous allons e�e tuer un transformée de fourier sur lesignal reçu. L'intégrale est e�e tuée i i sur la durée T0. Ce i ne hange pas les al uls pourl'OFDM sans p.
ck =
∫ T
0
M−1∑
m=0
cmej2π(m−M/2)F0tej2πfm∆lt[∑
l
ρle−j2πfmτlΠ(t + ∆lt − τl)]e
−j2π(k−M/2)F0tdt
=
M∑
m=0
cm[∑
l
ρle−j2πfmτl
∫ T
0Π(t + ∆lt − τl)e
−j2π(F0(k−m)−∆lfm)tdt (2.6)Et nous obtenons après intégrations ( f : Annexe), le résultat qui nous donne le oe� ient dusignal en fon tion de la ontribution des di�érentes sous-porteuses.ck = T
M−1∑
m=0
cm
∑
l
ρle−j2πfmτle−jπ(F0(k−m)−∆lfm)T sinc[(F0(k − m) − ∆lfm)T ] (2.7)Dans l'equation pré édente on peut faire sortir la forme du signal utile après déformation du anal et les omposantes d'ICI. On pose c = ck + Ik
ck = Tck
∑
l
ρle−j2πfmτle−jπ(∆lfm)T sinc[(−∆lfm)T ] (2.8)
ck est le signal utile qu'on doit avoir sur la porteuse k ave les déformations engendrées parle anal.Ik = T
M−1∑
m=0k 6=m
Cm
∑
l
ρle−j2πfmτle−jπ(F0(k−m)−∆lfm)T sinc[(F0(k − m) − ∆lfm)T ] (2.9)
Ik représente l'ICI due à la ontribution des autres porteuses.On véri�e dans le as idéal ou∆lfm serait nul on aurait absen e d'ICI, 'est-à-dire que Ik = 0 et le module de ck égal à elui de ck multiplié par l'atténuation du anal. L'obje tif de la majorité des démodulateursOFDM 'est d'arriver à éliminer l'ICI et d'augmenter en parallele le oe�e ient C pour unebonne performan e du système. Ce i nous amène à voir dans quelles onditions on peut rendrenégligeable la valeur de l'ICI.
23

2.1.2 Dis rétisation du anal physiqueLe signal OFDM (en bande de base) pour un symbole s'é rit �nallement :s(t) =
∑
m
cmej2π(m−M/2)F0tΠ(t) (2.10)En pratique : Ce signal est obtenu à partir d'é hantillons (sortie TFDI) au pas Te :s(kTe) =
∑
m
cmej2πm∆fkTeΠ(kTe) (2.11)La largeur de bande de s(t) est approximativement 1Te
d'où ( formule d'interpolation) :s(t) ≈ (
∑
k
s(kTe) . δ(t − kTe)) ∗ sinc[πt
Te] (2.12)Après passage dans le anal physique on a :
r(t) = h(τ, t) ∗ s(t) (2.13)En sortie du anal, le signal sera de nouveau é hantillonné au pas Te pour obtenir :r(nTe) = r(t)|t=nTe (2.14)Il est don intérressant de al uler le anal physique dis ret équivalent permettant d'obtenir
r(nTe) à partir de s(nTe). Ce al ul intègre don la limitation de bande, le anal analogiquephysique et l'é hantillonnage à la ré eption.On a :r(nTe) =
∫ −∞
∞
h(τ, nTe)∑
k
s(kTe) sinc[π
Te(nTe − τ − kTe)]dτ (2.15)
=
∫ −∞
∞
h(τ, nTe)∑
k
s(kTe) sinc[π
Te((n − k)Te − τ)]dτ (2.16)
=
∫ −∞
∞
∑
l
ρl(n)δ(τ − τl(n))∑
k
s(kTe) sinc[π
Te((n − k)Te − τ)]dτ (2.17)
=
∫ −∞
∞
∑
l
ρl(n)δ(τ + ∆lnTe − τl)∑
k
s(kTe) sinc[π
Te((n − k)Te − τ)]dτ (2.18)
=∑
l
ρl(n)∑
k
s(kTe) sinc[π
Te((n − k)Te + ∆lnTe − τl)] (2.19)
=∑
k
∑
l
ρl(n) sinc[π
Te((n − k)Te + ∆lnTe − τl)]
︸ ︷︷ ︸
h[k] anal dis ret équivalent s(kTe) (2.20)La dis rétisation du anal nous permet d'obtenir un modèle de anal fa ilement simulable,pour visualiser les e�ets du anal. h[k] représente la réponse impulsionnelle notre anal dis retet 'est à partir de ça qu'on fera notre simulation de anal.24

2.2 Ca ul du anal équivalent pour l'OFDM ave Filtres d'émis-sion et de ré eptionEn se tion 2.1.1 nous avons al ulé un anal équivalent pour l'OFDM ave l'émission d'unseul symbole et une mise en forme re tangulaire. Nous généraliserons i i pour une su essionde symboles émis et des �ltres d'émission et de ré eption quel onques. Comme on l'a déja ditles symbole OFDM à ause du retard sont sujets à des interféren es, pour ela il serait trèsutile de voir dans le as de l'ASM omment es interféren es sont ausés. Nous allons partir àpartir du signal OFDM en bande de base. soit le signal transmis s(t)
s(t) =N∑
n=1
M−1∑
m=0
cm,ngem,n(t) (2.21)Où ge est le �ltre de transmission qui est de la forme :gem,n
(t) = ge(t − nT0)ej2π(m−M/2)F0t (2.22)le signal en haute fréquen e est :
sHF
(t) = ℜ {s(t)ej2πfct} (2.23)Le signal reçu en haute fréquen e est :r
HF(t) = ℜ {
L∑
l=1
ρ(t)s(t − τl(t))ej2πfc(t−τl(t))} (2.24)
= ℜ {L∑
l=1
ρl(t)
N∑
n=1
M−1∑
m=0
cm,nge(t − nT0 − τl + ∆lt)ej2πfc(t−τl+∆lt)} (2.25)Soit après retour en bande de base :
r(t) =L∑
l=1
ρl(t)N∑
n=1
M−1∑
m=0
cm,ngt(t − nT0 − τl + ∆lt)ej2π(m−M/2)F0(t−τ+∆ltej2πfc(∆lt−τl) (2.26)
ck,p =
∫ +∞
−∞
grk,p(t)r(t)dt (2.27)ave grk,p
(t) = gr(t − pT0)e−j2π(k−M/2)F0t �ltre de ré eption. Pour la sous-porteuses désirée kà la ré eption du pème symbole.
ck,p =
∫ +∞
−∞
L∑
l=1
ρl(t)N∑
n=1
M−1∑
m=0
cm,nge(t(1+∆l)−nT0−τl)gr(t−pT0)ej2πfm(−τ+∆lt)ej2πF0t(m−k)dt(2.28)On suppose que la variation de l'atténuation du anal est très faible sur une Durée symbole 'est-à-dire que ρl(t) ≈ ρl (voir ondition sur la séle tivité frequentielle et temporelle en se tion2.3).
ck,p =
L∑
l=1
ρl
N∑
n=1
M−1∑
m=0
cm,n
∫ +∞
−∞
ge(t(1+∆l)−nT0 − τl)gr(t−pT0)ej2πfm(−τ+∆lt)ej2πF0t(m−k)dt(2.29)25

ck,p =L∑
l=1
ρl
N∑
n=1
M−1∑
m=0
cm,nej2πfmτl
∫ +∞
−∞
ge(t(1 + ∆l) − nT0 − τl)gr(t − pT0)ej2π(fm∆l+F0(m−k))tdt
︸ ︷︷ ︸
I (2.30)Notons "I" l'expression de l'intégrale.2.2.1 OFDM sans pre�xe y liqueEn OFDM lassique sans pré�xe y lique on aura :ge(t) = gr(t) =
{
1 si 0 ≤ t < T0,0 sinon. (2.31)Don on aura :
ge(t(1 + ∆l) − nT0 − τl) =
{
1 si nT0+τl
1+∆l≤ t < (n+1)T0+τl
1+∆l,
0 sinon. (2.32)et de même pour gr(t) on aura :gr(t − pT0) =
{
1 si pT0 ≤ t < (p + 1)T0,0 sinon. (2.33)En supposant le as où les deux domaines des �ltres se roisent -a-d qu'il y a interféren e ouque 'est le domaine du signal désiré on aura, pour nT0+τl
1+∆l≤ pT0 ≤ (n+1)T0+τl
1+∆l:
I1 =
∫ (n+1)T0+τl1+∆l
pT0
gt(t(1 + ∆l) − nT0 − τl)gr(t − pT0)︸ ︷︷ ︸
=1
ej2π(fm∆l+∆f(m−k))tdt (2.34)Posons fm∆l + F0(m − k) = f1 On aura :I1 =
1
j2πf1
∣∣∣
(n+1)T0+τl1+∆l
pT0
[ej2πf1t] (2.35)I1 =
1
j2πf1
(
ej2πf1(
(n+1)T0+τl1+∆l
) − ej2πf1(pT0)) (2.36)
I1 =1
j2πf1ejπf1(
(n+1)T0+τl1+∆l
)ejπf1(pT0)
(
ejπf1(
(n+1)T0+τl1+∆l
)e−jπf1(pT0) − e
−jπf1((n+1)T0+τl
1+∆l)ejπf1(pT0)
)(2.37)I1 =
1
j2πf1ejπf1(
(n+1)T0+τl1+∆l
+pT0)(
ejπf1(
(n+1)T0+τl1+∆l
−pT0) − e−jπf1(
(n+1)T0+τl1+∆l
−pT0)) (2.38)
I1 = [(n + 1)T0 + τl
1 + ∆l− pT0]e
jπf1((n+1)T0+τl
1+∆l−pT0) sinc
[f1(
(n + 1)T0 + τl
1 + ∆l− pT0)
] (2.39)Pour le as où nT0+τl
1+∆l≤ (p + 1)T0 ≤ (n+1)T0+τl
1+∆l, on aura le même intégrale av e des bornesd'intégration qui vont hanger :
I2 = [(p + 1)T0 −nT0 + τl
1 + ∆l]e
jπf1(nT0+τl1+∆l
+(p+1)T0)sinc
[f1((p + 1)T0 −
nT0 + τl
1 + ∆l)] (2.40)26

En réalité les seules interféren es possibles sur le symbole p est elui de p+1 et p-1, pourT0 > τmax, et même pour p+1 'est pratiquement impossible, ar ça orrespondrait à unavan e du anal. Don l'intégrale I1 n'est valable que pour le symbole p-1, pour le reste onsuppose que l'Interféren es Entre Symboles. (IES) est nul. Et l'Intégrale I1 est valable pourle symbole p. Ces al uls suppose qu'au une orre tion n'est faite pour avoir le debut dusymbole, e qui n'est pas for ement vraie si on utilise des pilotes pour dete ter le debut dessymboles. Dans e as p (en ré eption) va oin ider ave le debut du symbole p émis mais ilyaura toujours de l'interféren e ave le symbole p-1.Nous aurons les deux intégrales pour n = p et n = p − 1.
I(p−1)1 = [
∆lpT0 + τl
1 + ∆l]e
jπf1(∆lpT0 + τl
1 + ∆l)
sinc[f1(
∆lpT0 + τl
1 + ∆l)] (2.41)
I(p)2 = [
T0(1 + (p + 1)∆l) − τl
1 + ∆l]e
jπf1(T0(1 + (p + 1)∆l) − τl
1 + ∆l)
sinc[f1(
T0(1 + (p + 1)∆l) − τl
1 + ∆l)](2.42)En remplaçant les intégrales dans l'équation (2.30) on obtient :
ck,p =
L∑
l=1
ρl
M−1∑
m=0
cm,nej2πfmτl(I(p−1)1 + I
(p)2 + 0n 6=p,p−1) (2.43)2.2.2 OFDM ave pre�xe y liqueEn OFDM ave pré�xe y lique on aura un intervalle de garde et on suppose que pourune bonne transmission l'intervalle de garde utilisé est supérieur au retard maximal.
ge(t) =
{
1 si 0 ≤ t < T0 + Tg,0 sinon. (2.44)Si Tg véri�e la ondition Tg > τmax on aura seulement l'intégrale I1 ar à la ré eption lapartie d'interféren e qui est dans l'intervalle de garde est supprimée. Mais on aura toujoursle problème ave l'élargissement ou la ompression du signal transmis. Le symbole p aprèssuppression de l'intervalle de garde s'étendra sur : [
pT0 + Tg + τl
1 + ∆l− Tg,
(p + 1)T0 + Tg + τl
1 + ∆l].Le al ul sur I2 ne hangera qu'au niveau d'une borne d'intégration. On aura ainsi :
I(p)2 = [
T0((p + 1)∆l + 1) − τl + Tg∆l
1 + ∆l]e
jπf1(T0((p + 1)∆l + 1) − τl + Tg∆l
1 + ∆l) (2.45)
× sinc[f1(
T0((p + 1)∆l + 1) − τl + Tg∆l
1 + ∆l)]On aura :
ck,p =
L∑
l=1
ρl
M−1∑
m=0
cm,nej2πfmτlI(p)2 (2.46)On remarque que les onditions d'élimination d'IES est beau oup plus omplexe qu'en RF.Mise à part l'e�et du retard qui est très important en ASM, on assiste à une ompression ou27

élargissement des durées symboles. Ce i entraine l'insu�san e de l'intervalle de garde pouréliminer l'IES. Pour résoudre e problème on utilise généralement un reé hantillonnage a�nde re aler la fenêtre de ré eption sur la fenêtre d'émission qui a subi un élargissement ou une ompression.De même on peut remarquer qu'à l'intérieur d'un symbole, on tombe fa ilement dans uneperte d'orthogonalité entre les sous-porteuses, si ∆lfmest important devant l'espa ement entreporteuses. Si par exemple on a ∆lfm = F0 on aura un dé alage des sous-porteuses de sorteque la kème sous porteuse sera perçue à la pla e de la (k + 1)ème sous-porteuse entrainantune dégradation totale du système. Un retard très élévé en ASM nous entraîne à prendre unedurée symbole plus grand pour lutter ontre l'IES et pour lutter ontre l'ICI on a besoin d'unespa ement interporteuse plus élévé. En e�et, l'espa ement interporteuses est l'inverse de ladurée symbole. Une omprommis entre les deux doit être trouvé.Si l'on désire réaliser un égaliseur simple, 'est-à-dire ave un oe� ient il serait intéressantde voir les onditions né essaire pour son fon tionnement. C'est e qu'on appelle les onditionde séle tivité.2.3 Conditions sur la sele tivité fréquentielle et temporelleConditions sur la séle tivité nous donne des relations sur les paramètres de nos �ltresen ré eption et ou en émissions ave eux du anal. Et es relations une fois véri�ées nouspermettent de réaliser un égaliseur simple. Le rapport de stage de Bui Thi Minh Tu établissait es onditions en RF [11℄. À partir de là, nous avons pu les établir fa ilement en ASM ave notre onnaissan e sur e type de anal.À partir de l'équation 2.28 on a :ck,p =
∫ ∞
−∞
L∑
l=1
ρl(t)
N∑
n=1
M−1∑
m=0
cm,ngt(t(1+∆l)−nT0−τl)gr(t−pT0)ej2πfm(−τ+∆lt)ej2πF0t(m−k)dt(2.47)ave gt et gr �ltre d'émission et de ré eption. On voudrai avoir cm,n ≈ hm,ncm,n + bm,n, e iest possible si on peut é rire :1. ρ(t) ≈ ρ(nT0, ) sur le support de gr(t) ;2. gt(t(1 + ∆l) − qT0 − τl) ≈ gt(t − qT0) ;On va s'intéresser à ρ(t) de l'équation (2.47). On va prendre une fon tion F(t) pour représenterle reste.
ck,p =
∫ ∞
−∞
L∑
l=1
ρl(t)N∑
n=1
M−1∑
m=0
cm,ngt(t(1 + ∆l) − nT0 − τl)gr(t − pT0)ej2πfm(−τ+∆lt)ej2πF0t(m−k)
︸ ︷︷ ︸
F (t,τl)
dt(2.48)Ainsi l'expression pré edente s'é rira sous la forme :ck,p =
L∑
l=1
∫ ∞
−∞
ρl(t)F (t, τl)dt (2.49)On veut avoir ρ onstante sur une durée symbole, on prendra don l'intégrale sur un symbole.On suppose que l'énergie du �ltre de ré eption est on entrée sur un intervalle de temps qui28

est lié à son moment d'ordre 2, ∆t dé�ni pour un �ltre symétrique d'énergie unitaire par :(∆t)2 =
∫ ∞
−∞
t2|gt(t)|2dt (2.50)L'intégrale sur un symbole OFDM nous donnera :ck,p ≈
L∑
l=1
∫ pT0+(∆t2
)
pT0−(∆t2
)ρl(t)F (t, τl)dt (2.51)
=
L∑
l=1
∫ (∆t2
)
(∆t2
)ρl(t + pT0)F (t + pT0, τl)dtEn e�e tuant un developpement limité d'ordre 1 de ρ(t) on obtient :
ρl(t + nT0) = ρl(nT0) + td
dtρl(nT0) + 0(t) (2.52)Don pour satisfaire la ondition pré édente il faut :
|t d
dtρl(nT0)| << |ρl(nT0)|. (2.53)En utilisant la transformée de Fourier A(f) de ρ(t) on aura :
d
dtρ(t) =
d
dt
∫ ∞
−∞
A(f)ej2πftdf (2.54)=
d
dt
∫ fd
−fd
A(f)ej2πftdf
=
∫ fd
−fd
j2πfA(f)ej2πftdfAve l'inegalité de Cau hy-S hwartz on aura :|∫ fd
−fd
j2πfA(f)ej2πftdf |2 ≤∫ fd
−fd
4π2f2d |A(f)|2df
≤ 4π2f2d
∫ fd
−fd
|A(f)|2df
< 4π2f2d ||ρ(t)||2dt (2.55)On a : (∆t)2 > |t|2, on obtient.
|t d
dtρ(nT0)|2 <
(∆t)2
44π2f2
d ‖ ρ(t) ‖2 (2.56)On peut dire que la ondition (2.53) serai valable si et seulement si : (∆t)2π2f2d ≪ 1 d'où
∆tfd ≪ 1 (2.57)29

Pour la deuxième ondition qui permet d'éliminer l'IES, on doit avoir :gt(t(1 + ∆l) − qT0 − τl) ≈ gt(t − qT0) (2.58)Pour ela il faut d'abord que ∆l ≪ 1 ette ondition est né essaire pour supposer que l'éta-lement du signal ausé par le Doppler ne va pas entrainer la durée symbole à être supérieurau temps de oheren e. En pro édant de la même façon que la demonstration pré edente onaura :gt(t − τ) = gt(t) − τ
d
dtgt(t) + 0(τ). (2.59)Ce i nous amène à :
|τ d
dtgt(t)| << |gt(t)| (2.60)L'étalement fréquentiel du �ltre de ré eption est donné par le moment d'ordre 2 :
(ν)2 =
∫ ∞
−∞
ν2|F (ν)|2dν. (2.61)On a :d
dt=
d
dt
∫ ∞
−∞
F (ν)ej2πνtd (2.62)≈
∫ ∆ν2
−∆ν2
j2πνF (ν)ej2πνtdνEn utilisant l'inégalité Cau hy-S hwartz, on obtient ave la même pro édure que la demons-tration pré edente :T∆ν ≪ 1 (2.63)Où T est l'étalement temporel du anal.Ave es deux onditions on peut faire une égalisation ave un seul oe� ient.2.3.1 Egaliseur simplePour faire un égaliseur simple les onditions sur ∆tfd ≪ 1, ∆lmax ≪ 1 ∆ν ≪ 1 doivent êtrevéri�er. On peut remarquer aussi que es onditions sont identiques pour rendre négligeablel'ICI et l'IES en OFDM lassique. Pour rendre l'ICI négligeable on doit véri�er que : F0 ≫
∆lmaxfm or en OFDM lassique F0 = 1∆t et fd = ∆lfm. De même pour rendre l'IES négligeableon doit avoir T0 ≫ τlmax, en OFDM lassique on a : To = ∆ν et τlmax = T . Si es onditionssont réalisées on aura :
ck,p = Hk,pck,p +∑
(n,m)m6=ketn6=p
Hm,ncm,n + bk,p (2.64)Ave ‖ Hk,p ‖2≫
∑
(n,m)m6=ketn6=p
‖ Hm,n ‖2 +σ2 (2.65)A partir de l'équation 2.30 on a :Hm,n =
∑
l
ρlcm,nej2πfmτl
∫ ∞
−∞
gt(t − nT0)gr(t − pT0)ej2π(∆lfm+F0(m−k))tdt (2.66)30

On peut é rire alors :ck,p ≈ Hk,pck,p (2.67)et on déduit :ck,p ≈ ck,p
Hk,p(2.68)Nous venons de voir les onditions né essaire pour la réalisations d'un égaliseur et aussi lesfa teurs qui dégradent le signal en ré eption tels ques l'ICI ou l'IES. Comme nous l'avons vueau niveau des ordes de grandeurs du projet au hapitre 1, les onditions de fon tionnement d'unégaliseur simple ne sont pas véri�ées. Ce i nous a poussé à regarder du oté de la littérattureles solutions qui ont été proposées. C'est qui nous amène au hapitre suivant qui parlera del'état de l'art en ommuni ation ASM.
31

Chapitre 3Etat de l'art des modulations OFDMen ASMLes modulations multiporteuses sont des alternatives très intéressantes par rapport auxmodulations mono-porteuses pour des modulations large bande ave un anal de type ASM.Les modulations multiporteuses ont déja trouvé leur pla e dans les appli ations RF pour fairefa e aux anaux séle tifs en fréquen e et aussi lutter ontre l'ISI par l'usage de l'intervalle degarde. Comme nous l'avons déja dit plus haut il y a des onditions à respe ter pour ne pasdégrader les perfoman es du système soit par une perte de l'orthogonalité ou de l'interféren eentre symboles su essifs. On sait bien qu'un dé alage Doppler entraine un dé alage de fré-quen e e qui onduit à une perte d'orthogonalité entre sous porteuses, si le dé alage n'est pas orrigé. Pour résoudre e problème, di�erentes te hniques ont été mises au point. On verradans les trois te hniques présentées les appro hes adoptées pour une ommuni ations ASM.3.1 Etudes de paramètres OFDM pour l'ASMLe but de e travail est de montrer que l'OFDM est une bonne hoix pour la ommuni- ation ASM, et que l'on peut orriger la ompression ou dilation ausée par le doppler sursignal reçu par rée hantillonnage. [6℄ propose un modèle de anal large bande ave étalementDoppler, e modèle est appliqué à la modulation OFDM. Pour l'estimation et la ompensationdu paramètre Doppler, les auteurs utilisent une méthode basée sur l'information du pré�xe y lique. Ils posent d'abord omme hypothèse que la variation du oe� ient d'atténuation etla variation du rapport Doppler sont négligeables dans un symbole OFDM. Ils déterminent laforme du signal bande de base d'un é hantillon et en al ulant la fon tion d'auto orrélationils arrivent à trouver le dé alage donnant le pi de ette fon tion d'auto orrelation. Á partirde l'équation (1.13), où s(t) est prise omme symbole OFDM et le signal Haute fréquen eé hantillonnée au pas Te, on obtient le signal basse fréquen e suivant :r(mTe) =
∑
l
ρl
m=M−1∑
m=0
ckej2π(mF0+fc)[(1+∆)mTe−τl]−fcmTe0 + n(mTe) (3.1)
32

Ry(ξ) ≡ E{r(mTe) × r∗((m + ξ)Te)}
=∑
l
E{| ρ2l |}
m=M−1∑
m=0
e−j2πmF0(1+∆)ξTe × e−j2π[(1+∆)Te−Te0)ξf0 + En(mTen∗((m + ξ)Te)(3.2)Où Te0 est la période d'é hantillonnage au niveau de l'émetteur et Te la période d'é han-tillonnage au ré epteur. Á partir de la fon tion d'auto orrélation, ils prennent la valeur de ξdi�érente de zéro qui maximise Ry(ξ) noté ξpeak qui est telle que : ξpeak ≃ NTe0/[(1+δ)Te] Dela même manière ils déterminent le φpeak ≃ −2π[(1 + ∆)T0 − Te0]ξpeakfc. Ave une te hniqueitérative ils al ulent la valeur de ∆.Une fois ette valeur estimée à l'aide d'un bou le de retour la période d'é hantillonnageest re-évaluée a�n de ompenser le dé alage. Tout et ensemble est suivi d'une estimation de anal à l'aide de pilotes. La simulation de ette te hnique a montré que le ré-e hantillonnagepeut être une solution pour la ompensation du Doppler et surtout la robustesse de l'OFDMpour une ommuni ation à travers un anal séle tif en temps et en fréquen e.3.2 Déte teur OFDMCe déte teur est basé sur un algorithme proposé par [8℄, 'est une te hnique adaptativepour la déte tion du signal OFDM par ompensation du Doppler pour haque symbole à l'aided'un seul paramètre. L'auteur part d'un modèle de signal formé par le signal utile et l'ICI. Pourmontrer la né essité de tenir ompte du dé alage Doppler a�n d'améliorer les perfoman es dusystème.
Ik,m(n) = Hk(n)ηk,mcm(n)ejθm(n) (3.3)Où Hk(n) = H(fk, n) représente la transformée de Fourier du anal, θm(n) = ∆(n)ωmT1 ledéphasage introduit par le dé alage Doppler. ηk,m = sinc(αk,m)ejαk,m qui doit tendre vers 1pour k = m et zero sinon, pour un Doppler su�sament ompensé, elle introduit l'ICI. ave :αk,m =
(m − k)2πF0 + 2π∆(n)fm
1 + ∆(n)
T0
2(3.4)Le n représente l'indi e des temps symbole, et le signal en ré epetion est égal à la somme des
Ik,m. ck(n) =∑K−1
m=0 Ik,m + wk(n) et en�n on obtient :ck(n) = Hk(n)ck(n)ejθk(n) + zk(n) (3.5)Où le premier terme est le signal utile et le se ond zk(n) l'ICI plus le bruit . C'est de e modèleque part l'algorithme permettant l'estimation et la suppression du dé alage introduite.L'indi e"e" est utilisée pour une estimée et le n fait réferen e au symbole.L'agorithme de ré eptionDans un système où l'espa e interporteuses est faible on peut supposer qu'elles subissentune même dé alage fréquentiel. Don à partir de l'équation (3.5), on peut e�e tuer une esti-mation du symbole cek par la methode de l'erreur quadratique moyenne minimale (EQMM).cek0(n) = γk(n)H ′
k(n)ck(n)ejθk(n) (3.6)33

Où le H ′k est la retournée onjuguée de hk et
γk(n) = (σ2z + H ′
k(n)Hk(n))−1 (3.7)Mais à la ré eption du nème symbole les valeurs de Hk(n) et θk(n) sont in onnues, on doit her her leur estimé pour le symbole nème symbole. En utilisatnt l'estimé de θek(n) et ladé ision grossière sur cek(n) au lieu de sa vraie valeur et partir de ses valeurs trouver uneestimée du oe� ient du anal Hk(n) par erreur quadratique minimale (EQM).Hek(n) = λHek(n − 1) + (1 − λ)ck(n)e−jθek(n)c∗ek(n) (3.8)Ou λ est une onstante positif inferieur à 1.Une fois le oe� ient du anal estimé on peut resoudre l'equation (3.6).
cek(n) = γek(n − 1)H ′ek(n − 1)ck(n)e−jθek(n) (3.9)L'estimation de la phase est basée sur elle d'un Doppler induit par le dépla ement émetteur-ré epteur.
θk(n) = θk(n − 1) + ∆(n)ωk(T0 + Tg) (3.10)C'est à partir de ette équation que le Doppler sera estimé et après on al ulera le dephasagepour toutes les sous-porteuses.Puisqu'au nème symbole on a la valeur de θek(n − 1) et Hek(n − 1) on peut al uler ave le signal observé :cek1(n) = γek(n − 1)H ′
ek(n − 1)ck(n)e−jθek(n−1) (3.11)Ce i n'est pas une bonne estimation de cek(n) ar même quand le oe� ient du anal varielentement la phase peut avoir une variation onsiderable. Ce qui onduit à l'utilisation dumodèle (53) pour orriger le dé alage de phase sur cek1(n). Pour ette orre tion on peut avoirre ours aux informations sur les pilotes du symbole. Á l'aide de l'équation (3.10) on va faireune prédi tion de θk(n).θk(n) = θek(n − 1) + ∆e(n − 1)ωk(T0 + Tg) (3.12)On refait une nouvelle estimation de de cek(n) a�n de orriger le déphasage sur cek1(n)
cek2(n) = γek(n − 1)cek(n − 1)ck(n)e−jθk(n) (3.13)= cek2(n)e−j∆e(n−1)ωk(T0+Tg)Ainsi on peut é rire :
ck(n) =
{
ck(n) k ∈ K(n)dé ision[ck2(n)], ailleurs (3.14)Où K(n) est le domaine des pilotes reçus. Pour une bonne initialisation on peut prendre pourle premier symbole rien que que des pilotes. A partir de ck(n) on peut al uler le dé alage dephase :∆θek(n) = 〈cek1(n)c∗k(n)〉 (3.15)34

Pour le rapport Doppler on aura :∆e(n) =
1
K
K−1∑
k=0
∆θek(n)
ωk(T0 + Tg)(3.16)La moyenne sur le rapport doppler peut être faite rien qu'ave les informations des pilotes.On fera hanger les positions des pilotes à travers les symboles a�n de tenir omptes des e�etssur toutes les sous porteuses.
∆θek(n) = λθ∆θek(n − 1) + (1 − λθ)〈cek1(n)c∗k(n)〉 (3.17)Après obtention du rapport Doppler,on peut à partir de l'équation (53) faire l'estimation dela phase pour les sous porteuses et on aura :θek(n) = θek(n − 1) + ∆e(n)ωk(T0 + Tg) (3.18)Et en�n ette phase sera utilisée pour avoir l'estimé du symbole ck(n).
cek(n) = γek(n − 1)Hek(n − 1)ck(n)e−jθek(n) (3.19)= cek1(n)e−j∆e(n)ωk(T0+Tg)Finalement la dé ision sera :
ck(n) =
{
ck(n) k ∈ K(n)dé ision[ck(n)], ailleurs (3.20)L'algorithme est initialisé ave Hek(1) = ck(1)c∗k(1),∆e(1) = 0 et θek(1) = 0L'intérêt de et algorithme est d'être basé juste sur un seul paramètre et de plus les testfaite sur des signaux réels on fournit des résultats intéressants. À partir de es expérien es ila été montré qu'il existe un nombre de porteuses optimal pour lequel l'é� a ité de la bandespe trale est maximale, ave une adaptation blo à blo performante.3.3 Étude de l'étalement du DopplerL'étude s'intéresse plus parti ulièrement à l'e�et de l'ICI sur les performan es d'un systèmeOFDM [12℄. L'ICI ausé par le Doppler est étudié et une expression est tirée permettant defaire le lien entre l'ICI et les dégradations des perfoman es du système à l'aide du rapportsignal Interferen e et un exmple est donné pour illustrer le on ept developpé. En partantd'un modéle de anal OFDM en ASM, la puissan e sur la porteuse désirée est a ulée, ensuitel'ICI sur ette porteuse est déterminée et en�n à partir de es deux expressions on aura lerapport signal à interféren e. La puissan e de l'ICI est donnée par :
cm =1
T
∫ T
0r(t)e−j2πfmtdt (3.21)
= hm,mcm +∑
k 6=m
ckhm,k (3.22)35

Le se ond membre représentant l'ICI sur la porteuse m. La puissan e du anal est alors donnée omme suit :P
(m)ICI = E|
∑
k 6=m
ckhm,k|2 =∑
k 6=m
E|hm,k|2 (3.23)Après al ul le résultat �nal donnant la puissan e de l'ICI est :P
(m)ICI =
∑
k 6=m
∫ 1
−1P (f) sinc2(k − m + (fkT )f)df (3.24)Où fk =
vm
c(fc + kF0) et P(f) représente le spe tre du Doppler onsidéré dans [12℄ :
P (f) =
1
2π|θ| < π
0 otherwise (3.25)La forme de P (f) est obtenue pour une densité de probabilité uniforme sur l'angle d'arrivéeθ du trajet pour un modèle à deux trajets.La puissan e sur la porteuse désirée est obtenue en prenant dans l'équation de la puissan ede l'ICI k = m et à partir des deux valeurs on peut obtenir le rapport signal à interferen e(Signal to Interferen e Ratio (rapport signal à interféren e). (SIR)).
SIR =
∫ 1−1 P (f) sinc2(fmTf)df
∑
k 6=m
∫ 1−1 P (f) sinc2(k − m + (fkT )f)df
(3.26)Des al uls ont été faits pour déterminer la valeur minimale du SIR, eux- i ont montréqu'elle dépend de la vitesse relative, de la fréquen e de la porteuse, du nombre de porteuses,de l'espa ement interporteuses et de ertaines onstantes liées au modèle.Beau oup d'autres travaux ont été e�e tués en plus de es trois que nous avons jugé utile de iter. Le premier est une base pour aborder le problème de la modulation OFDM en milieu sousmarin il est une réferen e. Le se ond est un travail qui a été suivi par une expérimentationqui a donné ses résultats et le troisième donne une appro he du al ul de la puissan e desperturbations e qui est une appro he qui nous intéresse pour la suite de nos travaux. Onremarque aussi à ause de l'interféren e entre les sous porteuses, les systèmes OFDM ne sontpas dire tement appli able au risque d'une perte de l'orthogonalité. On utilise des te hniquesde traitement pré-démodulation dans le but de supprimer le dé alage introduit par le Dopplera�n de trouver un signal sur lequel on va appliquer les méthodes onnues de démodulation.Ainsi en suivant l'idée de l'arti le que nous avons présenté en premier [6℄ nous allonsadopter sa démar he dans l'estimation du Doppler et dans sa méthode de rée hantillonnage.Ce qui fera l'objet du pro hain hapitre.36

Chapitre 4Estimation et ompensation duDopplerNous allons présenter une methode qui permet de faire de l'estimation du Doppler, ettete hnique est pro he de elle dévéloppée dans [6℄. Ensuite on passera à la ompensation duDoppler par rée hantillonnage.Et en�n nous allons proposer une te hnique de prédi tion surle Doppler à base des onnaissan es sur la traje toire de l'émetteur et du ré epteur.4.1 Estimation du DopplerLa te hnique qu'on propose i i, est basée sur l'identi� ation du pré�xe y lique . C'est unete hnique sur laquelle se base plusieurs arti les, mais elle présente bien des ontraintes. Sa hantque l'origine du pré�xe y lique est de lutter ontre le multi-trajet, 'est-à-dire l'interféren eintersymbole, il devient très di� ile de l'identi�er par simple orrélation. Une fois le pré�xe y lique altéré par l'interféren e entre symbole, le traitement permettant de l'identi�é demeureun peu plus omplexe. Don l'appli ation de ette te hnique présente bien des ontraintes.Ce que l'on peut supposer omme ontrainte 'est l'usage d'un pré�xe y lique assez largea�n qu'une majeur partie ne soit altéré par l'IES a�n de fa ilité l'identi� ation. Et ela a pour onséquen e une perte de l'é� a ité spe trale. D'autres solutions existe qui sont basé sur lemême prin ipe, mais 'est de l'identi� ation de l'entête et de la �n du symbole transmis, aren pratique au niveau de la ou he MAC, des informations sont ajoutés au symbole OFDMpour la orre tion de ertains erreurs. Et on se sert de la durée du symbole emis et du symbolereçu pour estimer le Doppler. Je rois que l'usage de ette te hnique pour l'estimation duDoppler doit être plus avantageux que elui du pré�xe y lique, même si au fond ils sont baséesur une même idée de base qui est la onnaissan e de la durée du symbole à l'émission et à laré eption.4.1.1 Estimation du Doppler à l'aide du pré�xe y liqueLa di�eren e entre la te hnique proposée en[6℄ et la notre réside dans l'exploitation del'information que peut apporter le pré�xe y lique. Les auteurs de l'arti le proposent une me-thode itérative pour la re her he de la bonne fréquen e d'é hantillonnage, dans ette methodeils ne mentionnent pas omment faire le hoix pour onverger vers la bonne période. S'il n'ya pas d'algorithme ou un indi ateur pour le hoix de ette période d'é hantillonnage, il va37

falloir une multitude de test pour obtenir la bonne période d'é hantillonnage. Le noyau de laméthode 'est qu'on sait que la seule déformation qu'apporte le Doppler est sur la durée dusymbole. Dans e as, si le Doppler est onstant sur une durée symbole alors le pré�xe y liquedemeure identique à sa opie ave le même rapport de ompression ou de dilatation.La te hnique proposée [6℄La te hnique d'estimation devéloppée, onsiste à prendre l'auto orrélation sur un sym-bole. Comme dans haque symbole on ajoute un pre�xe y lique, qui est une opie de la �ndu symbole ajouté à l'entête. Cette auto orrelation est don maximale dans deux as, pourR(0) et R(M) ou M est le nombre sous porteuses et orrespond au nombre d'é hantillonsde la partie "utile" du symbole reçu 'est-à-dire sans le pré�xe y lique. Don à M on a un orrelation maximale ar les é hantillons sont pratiquement indentiques à leur opie. Ce i vanous permettre de trouver la période d'é hantillonnage en ré eption.
r′(kTe) =∑
l
∑
m
ρlcmej2πF0kTe 1+∆
1+∆ ej2πfckTe∆−∆
1+∆ e−j2πfmτl (4.1)r′((k + ξ)Te) =
∑
l
∑
m
ρlcmej2πF0(k+ξ)Te 1+∆
1+∆ ej2πfc(k+ξ)Te∆−∆
1+∆ e−j2πfmτl (4.2)R(ξ) = E{r′(kTe) × r∗
′
((k + ξ)Te)} (4.3)On aura ave une modulation BPSK cm = ±1,R(ξ) =
∑
l
E{|ρl|2}∑
m
ej2πmF0kTe
1+∆
1+∆ ej2πfckTe
∆−∆
1+∆ ej2πmF0(k+ξ)Te
1+∆
1+∆ ej2πfc(k+ξ)Te
∆−∆
1+∆ (4.4)R(ξ) =
∑
l
E{|ρl|2}∑
m
ej2πmF0ξTe
1+∆
1+∆ ej2πfcξTe
∆−∆
1+∆ (4.5)On a pour R(ξ) un maximum pour R(ξm) qui est tel que :ξ = ξm ≈ F0Te
1 + ∆
1 + ∆(4.6)
φm ≈ −2π(Te∆ − ∆
1 + ∆)fcξm (4.7)Si on a la bonne valeur sur ∆, on aura :
ξm = F0Te = M (4.8)etφm = 0. (4.9)Une te hnique itérative est proposée pour trouver ∆1. Prendre une valeur de ∆.2. Cal uler ξm et φm de R(ξ).3. Si ξm = M et φm = 0, terminer l'itération.4. Cher her une nouvelle valeur de ∆.5. répéter l'itération. 38

La te hnique proposée
Fig. 4.1 � Système de orre tion possible1. Estimation du DopplerCette te hnique est basée sur la même idée proposée dans [6℄. La di�éren e est quenous utiliserons la même fréquen e d'é hantillonnage en émission et en ré eption. Onidenti�e le pré�xe y lique par orrélation entre les symbole sur les é hantillons. Unefois le pré�xe y lique identi�é, à partir du temps qui sépare le pré�xe y lique et sa opie à l'emission et à la ré eption on peut déterminer le Doppler.∆ =
T0e
T0r− 1 (4.10)Et ela peut être obtenu à partir de l'équation (4.6) et (4.8) en prennant ∆ = 0.2. ré-e hantillonnageEn même temps que le signal r(t) ait été é hantilonné au pas Te pour l'estimation duDoppler, nous supposons que le signal r(t) est aussi é hantillonné au pas Te
1 + ∆pn
.Où ∆pn est le Doppler prédite pour le symbole ourant numéro n.Notons que l'on suppose une appli ation "en ligne" temps réel : la prédi tion ∆p
n peut sefaire à partir de l'estimation du Doppler faite au symbole pré édent ∆n−1, éventuellement orrigée d'une omposante ˆδ∆n devant traduire l'évolution du Doppler :∆p
n = ∆n−1 + ˆδ∆n (4.11)3. Corre tion du DopplerLa partie orre tion ˆδ∆n devant traduire l'évolution du Doppler estimé peut être dé-rivée de di�érentes manières. Nous supposons i i que la orre tion se fait à l'aide surla traje toire de l'émetteur et du ré epteur. Cette évolution orrespond à l'a élérationrelative entre l'émetteur et le ré epteur si elle est onstante sur une grand intervalle detemps elle peut servir à faire des orre tions.Avant d'expli iter le al ul sur la orre tion du Doppler à l'aide de la traje toire, nousallons dans la suite exprimer le signal en sortie du ré-e hantillonnage et démodulation OFDM.Ce i nous permettra de dis uter de l'intérêt du ré-é hantillonnage.39

4.2 Rée hantillonnage du signal reçuOn suppose que le rapport Doppler est di�erent pour haque trajet. À la re é eption lapériode d'é hantillonnage varie de Te à Te1+∆l
. Cela veut dire qu'on doit prendre une nouvellepériode d'é hantillonnage nous permettant de retrouver nos symboles à la re éption. On posepour ela :r′HF (nT ′
e) = rHF (nTe
1 + ∆) (4.12)Où ∆ est le rapport Doppler utilisé pour le rée hantillonnage.
r′HF (nT ′e) = ℜ {
∑
l
ρl[∑
m
ej2π(m−M/2)F0(nTe1+∆l1+∆
−τl)Π(nTe(1 + ∆l
1 + ∆) − τl)e
j2πfc(nTe1+∆l1+∆
−τl)]}(4.13)r′HF (nT ′
e) = ℜ {∑
l
ρl[∑
m
ej2π(m−M/2)F0(nTe1+∆l1+∆
)Π(nTe(1 + ∆l
1 + ∆)−τl)e
j2πfc(nTe1+∆l1+∆
)e−j2πfmτl ]}(4.14)r′(nT ′
e) =∑
l
ρl[∑
m
ej2π(m−M/2)F0(nTe1+∆l1+∆
)Π(nTe(1 + ∆l
1 + ∆)−τl)e
j2πfc(nTe1+∆l1+∆
)e−j2πfmτl ]e−j2πfcnTe(4.15)r′(nT ′
e) =∑
l
ρl[∑
m
ej2π(m−M/2)F0(nTe1+∆l1+∆
)Π(nTe(1 + ∆l
1 + ∆) − τl)e
j2πfc(nTe1+∆l1+∆
)−nTee−j2πfmτl ](4.16)r′(nT ′
e) =∑
l
ρl[∑
m
ej2π(m−M/2)F0(nTe1+∆l1+∆
)Π(nTe(1 + ∆l
1 + ∆) − τl)e
j2πfcnTe(1+∆l1+∆
−1)e−j2πfmτl ](4.17)r′(nT ′
e) =∑
l
ρl[∑
m
cmej2π(m−M/2)F0(nTe1+∆l1+∆
)Π(nTe(1 + ∆l
1 + ∆) − τl)e
j2πfcnTe∆l−∆
1+∆ e−j2πfmτl ](4.18)En passant par une transformée de Fourier on aura :ck =
1
M
∑
n
∑
l
∑
m
ρlcmej2π(m−M/2)F0(nTe1+∆l1+∆
)Π(nTe(1 + ∆l
1 + ∆)−τl)e
j2πfcnTe∆l−∆
1+∆ e−j2πfmτle−j2πF0(k−M/2)nTe(4.19)ck =
1
M
∑
n
∑
l
∑
m
ρlcmej2πF0nTe(m1+∆l1+∆
−k)Π(nTe(1 + ∆l
1 + ∆)−τl)e
j2πfcnTe∆l−∆
1+∆ e−j2πfmτl (4.20)Pour m=k on aura :ck =
1
M
∑
n
∑
l
ρlckej2πF0nTe(k
1+∆l1+∆
−k)Π(nTe(1 + ∆l
1 + ∆) − τl)e
j2πfcnTe∆l−∆
1+∆ e−j2πfmτl (4.21)ck =
1
M
∑
n
∑
l
ρlcpej2πF0nTek
∆l−∆
1+∆ Π(nTe(1 + ∆l
1 + ∆) − τl)e
j2πfcnTe∆l−∆
1+∆ e−j2πfmτl (4.22)Pour Les interferen es on aura :Ik =
1
M
∑
n
∑
l
∑
m,m6=k
ρlcmej2πF0nTe(m1+∆l1+∆
−k)Π(nTe(1 + ∆l
1 + ∆) − τl)e
j2πfcnTe∆l−∆
1+∆ e−j2πfmτl(4.23)40

Doppler onnu1. Si le Doppler est le même sur tous les trajets on aura :_ ∆l−∆1+∆ = 0 Pour le symboledésiré :
ck =1
M
∑
n
∑
l
ρlckΠ(nTe − τl)e−j2πfmτl (4.24)Et en interferen e :
Ik =1
M
∑
n
∑
l
∑
m,m6=k
ρlcmej2πF0nTe(m−k)Π(nTe − τl)e−j2πfmτl (4.25)Si de plus on a un seul trajet
ck =1
M
∑
n
ρckΠ(nTe − τ)e−j2πfmτ (4.26)Et en interferen e :Ik =
1
M
∑
n
∑
m,m6=k
ρcmej2πF0nTe(m−k)Π(nTe − τ)e−j2πfmτ (4.27)2. Si le Doppler est di�érent d'un trajet à l'autre, e i peut orrespondre au as ou leDoppler est onnu en moyenne, ou bien estimé ave une erreur εl pour le trajet numérosl. Ave εl = ∆l−∆
1+∆ . On a :ck =
1
M
∑
n
∑
l
ρlckej2πF0nTekεlΠ(nTe(1 + εl) − τl)e
j2πfcnTeεle−j2πfmτl (4.28)Et en interferen e :Ik =
1
M
∑
n
∑
l
∑
m,m6=k
ρlcmej2πF0nTe(mεl−k)Π(nTe(1+εl)−τl)ej2πfcnTeεle−j2πfmτl (4.29)Comme on peut le onstater la valeur de ε dépend de la bonne estimation du Doppler.Plus le Doppler est bien estimé plus la valeur de ε tend vers zero. I i nous avons posé un asqui ne se base que sur les équations mathématiques, où on suppose que haque trajet a unDoppler di�érent. C'est vrai mais à la ré eption on a qu'un seul signal sur lequel on va fairel'estimation et son Doppler pourra être la moyenne sur l'ensemble des trajets. Ce qui veutdire que ε ne pourra jamais être nul quelque soit l'estimation.4.3 Cal ul du Doppler à l'aide de la traje toireNous allons supposer que l'émetteur et le ré epteur sont sur un traje toire ir ulaire. Onsuppose un angle θk qui est tel que : θk = θk−1 + εk, où εk est un bruit blan gaussien entré.On fait ette hypotèse ar 'est un sénario qui arrive très souvent dans le adre du projet(formation ir ulaire des AUVs). Soient (x1k, y1k) et (x2k, y2k) les positions de l'émetteur etdu ré epteur à l'instant k. Les vitesses des deux mobiles sont données pour les omposanteshorizontales par : {
x1k = −rω sin ωkTe
x2k = −rω sin ω(kTe + θk)(4.30)41

La vitesse horizontale relative est égale à :∆xk = −rω(sin(ωkTe + θk) − sin(ωkTe)) (4.31)De la même façon on aura :
∆x(k−1) = −rω(sin(ω(k − 1)Te + θk−1) − sin(ω(k − 1)Te)) (4.32)On va al uler la di�eren e entre les vitesses relatives des deux positions a�n d'obtenir unevariation du Doppler qu'on note δx par rapport à l'axe des x.δx = −rω(sin(ωkTe+ θk)− sin ωkTe)+ rω(sin(ω(k− 1)Te+ θk−1)− sin(ω(k− 1)Te)) (4.33)
δx = −rω(sin(ωkTe + θk−1 + εk)− sin ωkTe) + rω(sin(ω(k − 1)Te + θk−1)− sin(ω(k − 1)Te))(4.34)δx = −rω(sin(ωkTe + θk−1) ∗ cos(εk) + cos(ωkTe + θk−1) ∗ sin(εk)
− sin(ωkTe) + rω(sin(ω(k − 1)Te + θk−1) − sin(ω(k − 1)Te)) (4.35)Si la valeur de ε est très faible on peut faire les approximations suivantes :cos(εk) ≈ 1 − ε2
k/2 (4.36)sin(εk) ≈ εk (4.37)Ainsi on aura :
δx = −rω[sin(ωkTe + θk−1)(1 − ε2k/2) + cos(ωkTe + θk−1)εk − sin(ωkTe)]
+rω[sin(ω(k − 1)Te + θk−1) − sin(ω(k − 1)Te)] (4.38)δx = −rω[sin(ωkTe + θk−1) − sin(ωkTe) − sin(ω(k − 1)Te + θk−1) + sin(ω(k − 1)Te)
− sin(ωkTe + θk−1)ε2k/2 + cos(ωkTe + θk−1)εk] (4.39)
δx = −rω[2 ∗ cos(2ωkTe + θk−1
2) sin(
θk−1
2) − 2 cos(
2ω(k − 1)Te + θk−1
2) sin(
θk−1
2)
− sin(ωkTe + θk−1)ε2k/2 + cos(ωkTe + θk−1)εk] (4.40)
δx = rω[4 sin(θk−1
2) sin(
ωTe
2) sin(
ωTe(2k − 1) + θk−1
2)
+ sin(ωkTe + θk−1)ε2k/2 − cos(ωkTe + θk−1)εk] (4.41)De la même façon on obtient la omposante verti ale δy.
δy = −rω[sin(θk−1
2) cos(
ωTe
2) cos(
ωTe(2k − 1) + θk−1
2)
− cos(ωkTe + θk−1)ε2k/2 − sin(ωkTe + θk−1)εk] (4.42)À partir de δx et δy on remarque que leurs moyennes dépendent de la varian e de εk quidans ertains as peut être onnu. De même si εk est quasi nul (s énario visée par la partie"automatique" du projet) et l'angle relatif θ onnu, on détermine pré isement les valeurs de δxet δy. À l'aide de ses deux valeurs on peut faire une prédi tion de la valeur du symbole (n+1)ave la valeur du symbole n. Ce qui nous permettra de orriger notre Doppler à la ré eptionvoir �gure 4.1. 42

4.3.1 Corre tion du Doppler estiméSi on se base toujours sur des information à priori sur la traje toire, on peut avoir l'idée defaire de la orre tion ave ses informations et elles obtenues sur la traje toire de l'émetteur etdu ré epteur. Ce qu'on imagine fa ilement 'est un orre teur qui ne propage pas l'erreur surl'estimation, ar omme nous le verrons dans le hapitre suivant la te hnique d'estimation nousdonne dans ertains as des mésures érronées, et omme nous somme dans une transmissionou les symbole se suivent il serait intéressant de pouvoir faire un orre teur qui ne propagepas l'erreur en as d'une mauvaise estimation.Le système qu'on propose i i est basé sur un véri� ateur de la bonne estimation. C'est-à-dire à partir de la qualité de démodulation des sous porteuses pilotes, on peut savoir si leDoppler estimé pour un symbole n est bien estimé ou pas. Si on a une bonne estimation,on peut s'en servir onnaissant la moyenne de la variation du Doppler entre le symbole net (n+1) à partir des équations pré édentes pour orriger le Doppler estimé en n, pour une ompensation à l'instant (n+1). Et véri�er e si peut nous permettre de voir on a fait unebonne etimation en omparant le Doppler qui est orrigé à partir de elui estimé pour lesymbole n et le Doppler estimé en n pour le symbole (n + 1).Tout e i pourrait être reformulé globalement à partir d'équations d'états et d'équationsd'observation et traité ave un �ltre de Kalman e qui fera parti des perspetives de e travail.
43

Chapitre 5Simulation du anal et les résultat del'estimation du Doppler5.1 Simulation du analLa simulation du anal est basée sur une te hnique d'interpolation (Cf se tion 2.1.2 équa-tion 2.20) permettant de trouver à partir des é hantillons émis à un instant t les é hantillonsa�e tées par le anal multi-trajet ave Doppler. On a fait un anal permettant de al ulerles é hantillons sur plusieurs trajets et après on a fait une sommation de l'ensemble des tra-jets pour trouver le signal reçu. Ce i nous permet de voir les e�et de l'interféren e entre lessymboles. I i nous allons présenter les di�érents sénarios que nous avons pris pour tester le anal. Ou l'on peut faire varier le nombre de trajets et le Doppler. I i e qui est entre ro hetet séparé par des virgules représentent les trajets d'un même symbole et e qui sont sépa-rés par des point virgules représente des symboles di�érents. Don si on prend par exemple :[0.01,0.3 ;0.4,0.5 ;0.4,0.1℄, on a trois symboles et deux trajets par symboles. I i 0.01 est la valeurdu rapport Doppler du premier trajet du premier symbole et 0.3 la valeur du rapport Dopplerdu deuxième trajet du premier symbole.Canal sans perturbationSur la �gure 1, on met un signal re tangulaire à l'entrée d'un anal sans Doppler ni retard.Le signal à la sortie nous donne un signal sans perturbation, ave juste l'atténuation que nousavons introduite.Les valeurs utilisées sont : ρ = [0.9], ∆ = [0] et τ = [0]Canal ave 1 trajetSur la �gure 2, on a une fenêtre à l'entrée d'un anal sans Doppler ave du retard.Les valeurs utilisées sont : ρ = [0.9], ∆ = [0] et τ = [0.02]Canal ave 1 trajetLa �gure 3, on a à l'entrée du anal une fenêtre à travers le anal ave du Doppler et duretard. 44

0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
temps (s)
Am
plitu
de
Fig. 5.1 � Fenêtre de test dans un anal sans perturbation
0 0.05 0.1 0.15 0.2 0.25−0.2
0
0.2
0.4
0.6
0.8
1
1.2
temps (s)
Am
plitu
de
Fig. 5.2 � Fenêtre de test dans un anal ave retard45
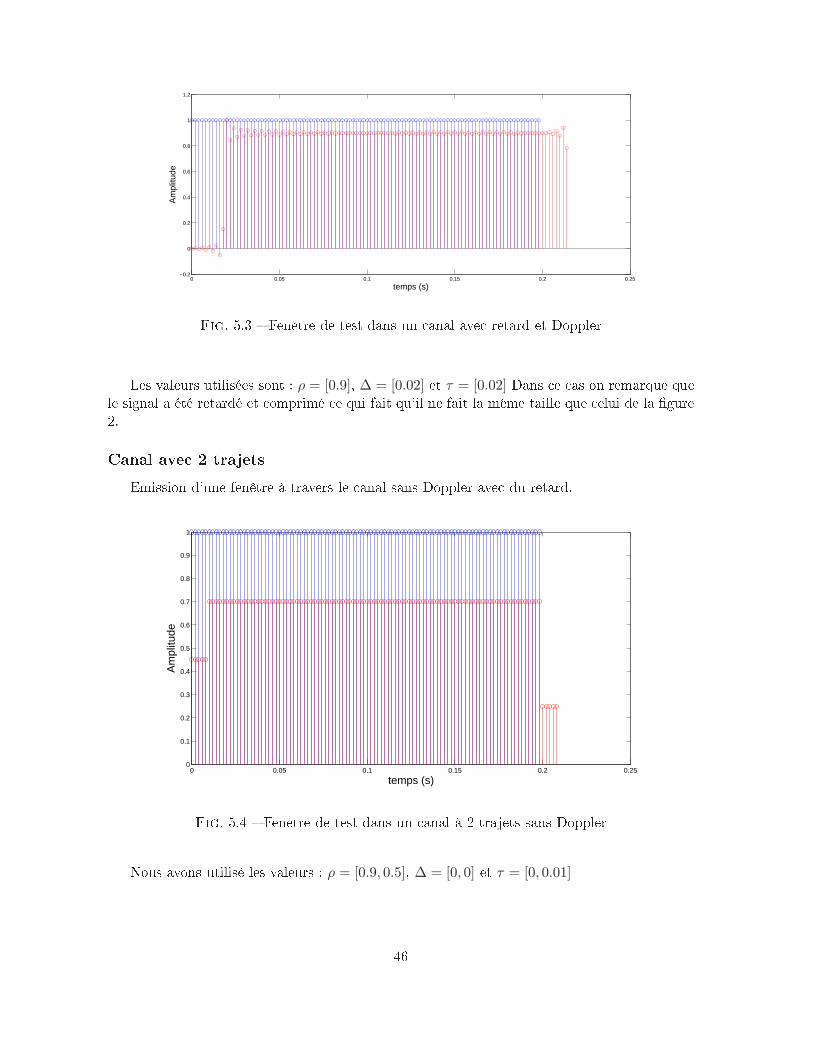
0 0.05 0.1 0.15 0.2 0.25−0.2
0
0.2
0.4
0.6
0.8
1
1.2
temps (s)
Am
plitu
de
Fig. 5.3 � Fenêtre de test dans un anal ave retard et DopplerLes valeurs utilisées sont : ρ = [0.9], ∆ = [0.02] et τ = [0.02] Dans e as on remarque quele signal a été retardé et omprimé e qui fait qu'il ne fait la même taille que elui de la �gure2.Canal ave 2 trajetsEmission d'une fenêtre à travers le anal sans Doppler ave du retard.
0 0.05 0.1 0.15 0.2 0.250
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
temps (s)
Am
plitu
de
Fig. 5.4 � Fenêtre de test dans un anal à 2 trajets sans DopplerNous avons utilisé les valeurs : ρ = [0.9, 0.5], ∆ = [0, 0] et τ = [0, 0.01]
46

Canal ave 2 trajetsFigure 5.5, émission d'un signal re tangulaire à travers le anal ave Doppler et du retard.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45−0.2
0
0.2
0.4
0.6
0.8
1
1.2
temps (s)
Am
plitu
de
Fig. 5.5 � Fenêtre de test dans un anal ave retard et un Doppler négatifNous avons utilisé les valeurs : ρ = [0.9, 0.5], ∆ = [−0.5,−0.5] et τ = [0.01, 0.02]. Onremarque que le signal à la ré eption est dilaté.Canal ave 2 trajets et 3 symbolesFigure 5.6, émission d'une fenêtre à travers le anal sans Doppler ave du retard.Nous avons utilisé les valeurs : ρ = [0.9, 0.4; 0.8, 0.6; 0.9, 0.3],∆ = [0.002, 0.001; 0.0015, 0.0010; 0.0025, 0.0017] et τ = [0.01, 0.02; 0.015, 0.03; 0.01, 0.025]Canal ave 2 trajets et 3 symbolesFigure 7, émission de trois sinusoïdes sous forme de symbole à travers le anal sans Dopplerave du retard.Nous avons utilisé les valeurs : ρ = [0.9, 0.4; 0.8, 0.6; 0.9, 0.3],∆ = [0.3, 0.35;−0.5,−0.45; 0.4, 0.3] et τ = [0.01, 0.02; 0.015, 0.03; 0.01, 0.025] Ce i est un asnous permettant de voir que même si les signaux ne sont pas retardés le Doppler va entrainer47

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
temps (s)
Am
plitu
de
Fig. 5.6 � 3 symboles dans un anal ave retard et Doppler
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
temps (s)
Am
plitu
de
Fig. 5.7 � 3 symboles ave des Dopplers hangeant de signe entre symboles48

de l'interféren e si le signal n'est pas rée hantillonné. Car la fenêntre de ré eption peut altérerle signal.Canal sur 2 trajets et 3 symbolesFigure 8, émission de trois sinusoïdes à travers le anal ave un Doppler variant par symboleet du retard, onséquen e du dé alage du au retard et au Doppler.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
temps (s)
Am
plitu
de
Fig. 5.8 � 3 symboles en présen e de dé alage DopplerLes valeurs utilisées sont : ρ = [0.9, 0.4; 0.8, 0.6; 0.9, 0.3],∆ = [0.02, 0.01; 0.015, 0.01; 0.025, 0.017] et τ = [0.0, 0.02; 0.015, 0.03; 0.01, 0.025]5.2 Résulats obtenus pour l'estimation du DopplerNous avons utilisé un signal aléatoire ayant la taille de deux symboles à travers un modu-lateur OFDM ave pré�xe y lique. Dans un premier temps nous avons utilisé une fenêtre de192 points qu'on notera N et de durée utile 128 qu'on notera M e qui nous donne un pré�xe y lique de (N-M) soit 64 é hantillons. Nous avons fait le premier test ave :� τ = [0, 0.01; 0.015, 0.03], ∆ = [0.02, 0.02; 0.01, 0.01] et ρ = [0.9, 0.4; 0.8, 0.6].� le Doppler estimé est de : 0.5.� τ = [0, 0.01; 0.015, 0.03], ∆ = [0.02, 0.02; 0.01, 0.01] et ρ = [0.9, 0.2; 0.8, 0.6].� le Doppler estimé est de : 0.045.� τ = [0, 0.01; 0.015, 0.03], ∆ = [−0.02,−0.02;−0.01,−0.01] et ρ = [0.9, 0.2; 0.8, 0.6].� le Doppler estimé est de : 0.005.Les résultats i-dessous sont don médio re. Le bons résultats ne sont obtenus qu'ave uneannulation de l'amplitude sur le se ond trajet.Après nous avons hangé la valeur de N et M pour N=768 et M=512.� τ = [0, 0.01; 0.015, 0.03], ∆ = [0.02, 0.02; 0.01, 0.01] et ρ = [0.9, 0.2; 0.8, 0.6].� le Doppler estimé est de : 0.0199. La valeur re her hée étant de 0.02 qui est elui dupremier symbole.� τ = [0, 0.01; 0.015, 0.03], ∆ = [0.02, 0.015; 0.01, 0.01] et ρ = [0.9, 0.2; 0.8, 0.6].49

� le Doppler estimé est de : 0.0199. La valeur re her hée est entre 0.02 et 0.015 qui sontles valeurs des Doppler du premier symbole. On retrouve la même valeur que pour le as pre édent même si on a fait varier le Doppler sur le deuxième trajet.� τ = [0, 0.01; 0.015, 0.03], ∆ = [0.02, 0.015; 0.01, 0.01] et ρ = [0.9, 0.8; 0.8, 0.6].� le Doppler estimé est de : 0.0199. La valeur re her hée est entre 0.02 et 0.015 qui sontles valeurs des Dopplers des trajets du premier symbole. On a augmenté la valeur del'amplitude du se ond trajet.� τ = [0, 0.01; 0.015, 0.03], ∆ = [0.02, 0.015; 0.01, 0.01] et ρ = [0.6, 0.9; 0.8, 0.6].� le Doppler estimé est de : 0.0159. La valeur re her hée est entre 0.02 et 0.015 qui sontles valeurs des Dopplers des trajets du premier symbole. On a augmenté la valeur del'amplitude du se ond trajet qui depasse elui du premier trajet.Le résultat est érroné� τ = [0, 0.02; 0.015, 0.03], ∆ = [0.02, 0.015; 0.01, 0.01] et ρ = [0.6, 0.9; 0.8, 0.6].� le Doppler estimé est de : 0.01. La valeur re her hée est entre 0.02 et 0.015 qui sontles valeurs des Dopplers des trajets du premier symbole. On a augmenté la valeur del'amplitude du se ond trajet qui depasse elui du premier trajet. On a augmenté leretard du se ond trajet.On remarque que dans les as ou le pré�xe y lique n'est pas assez large ou que le se ondtrajet est plus fort que le premier trajet les résultats sont faux. Ce i nous permet de dire quenotre signal à l'émission doit avoir un large pré�xe y lique et si e n'est pas le as, on peutfaire des mauvaises estimations.
50

Con lusionNous avons étudié les di�érents paramètres pour la ommuni ation en a oustique sous-marine et surtout dans le as des modulations multiporteuses. Après ela nous avons faitdes al uls théoriques autours des onditions permettant une bonne transmission. Comme es onditions ne sont pas véri�ées dans notre as nous nous sommes pen hés du oté des travauxmenés dans le domaine. Cela nous a permis d'avoir une te hnique permettant d'estimer leDoppler. Après les tests réalisés ave ette méthodes il s'est avéré qu'il y a des onditions àvéri�er pour avoir une bonne estimation. Ce qui nous reste à faire, 'est de véri�er les résultatsde nos al uls théoriques ave les résultats de la simulation. Ce sera l'objet de nos pro hainestravaux.Ave ses résultats il serait intéressant de voir la possibilité de réaliser un orre teur detype Kalman à l'aide d'information sur la traje toire, ar ses informations sont d'après lesdis ussions possibles à obtenir. Ce i va permettre de ompléter l'estimateur et de pouvoirfaire de bonne prédi tions sur le Doppler.
51

AnnexeCal ul d'intégraleEn posant :f ′ = F0(K − M) − ∆lfm
I =
∫ T
0Π(t + ∆lt − τl)e
−j2πf ′tdtposons t1 = t(1 + ∆l) − τl
t =t1 + τl
1 + ∆l
I =1
1 + ∆l
∫ T (1+∆l)τl
−τl
Π(t1)e−j2πf ′(
t1 + τl
1 + ∆l dt1
=e−j2πf ′(
τl
1 + ∆l
1 + ∆l
∫ T (1+∆l)−τl
−τl
Π(t1)e−j2π(
f ′
1 + ∆l dt1
=e−j2πf ′(
τl
1 + ∆l
1 + ∆l|T (1+∆l)−τl
−τl
e−j2π
f ′
1 + ∆lt1
−j2πf ′
1 + ∆l
=e−j2πf ′(
τl
1 + ∆l
1 + ∆l
1
−j2πf ′
1 + ∆l
[e−j2π
f ′
1 + ∆l(T (1+∆l)−τl)
− e−j2π
f ′
1 + ∆lτl
]
=1
−jπf ′e−jπf ′T [e−jπf ′T − ejπf ′T ]
= Te−jπf ′T sinc(f ′T )
52

Bibliographie[1℄ Mili a Stojanovi . Re ent advan es in high-speed underwater a ousti ommuni ations.IEEE Journal of O eani Engineering, 21(2) :125�136, April 1996.[2℄ John G. Proakis. Digital ommuni ationsl. M Graw-Hill, third edition edition, 1995.[3℄ Hussein Hijazi and Laurent Ros. Time-varying omplex gains estimation and i i suppres-sion in ofdm systems. In IEEE Global Communi ations Conferen e, GLOBECOM'07,nov 2007.[4℄ E. Bejjani and J.-C. Bel�ore. Multi arrier oherent ommuni ations for the underwatera ousti hannel. OCEANS '96. MTS/IEEE. 'Prospe ts for the 21st Century'. Conferen ePro eedings, 3 :1125�1130 vol.3, 23-26 Sep 1996.[5℄ Oliver R. Hinton Bayan S. Sharif, Je� Neasham and Alan E. Adams. A omputationale� ient doppler ompensation system for underwater a ousti ommuni ations. IEEEJournal of o eani engineering, 25(1) :52�61, January 2000.[6℄ Byung-Chul Kim and I-Tai Lu. Parameter study of ofdm underwater ommuni ationssystem. OCEANS 2000 MTS/IEEE Conferen e and Exhibition, 2 :1251�1255 vol.2, 2000.[7℄ Arndt-Borre Salberg and Ananthram Swami. Doppler and frequen y-o�set syn hroniza-tion in wideband ofdm. IEEE Transations on Wireless Communi ations, 4(6) :2870�2881,November 2005.[8℄ Mili a Stojanovi . Low omplexity ofdm dete tor for underwater a ousti hannels.OCEANS 2006, pages 1�6, Sept. 2006.[9℄ S. B. Weinstein and Paul M. Ebert. Data transmission by frequen y-division multiplexingusing the dis rete Fourier transform. IEEE Transa tions on Communi ations Te hnology,COM-19(5) :628�634, O tober 1971.[10℄ Abraham Peled and Antonio Ruiz. Frequen y domain data transmission using redu ed omputational omplexity algorithms. In IEEE International Conferen e on A ousti s,Spee h and Signal Pro essing, ICASSP'80, volume 3, pages 964�967, Denver, USA, April1980.[11℄ BUI THI Minh Tu. Performan es des modulations multiporteuses ofdm/oqam suré han-tillonnées en environnement radio-mobile, 2005.[12℄ R.C. Ilker, Li. Ye, and Swami Ananthram. E�e t of doppler spread in ofdm-based uwbsystems. IEEE Transa tions on WIRELESS COMMUNICATION, COM - 04(5) :2559�2567, 2005.[13℄ A.G. Bessios and F.M. Caimi. Fast underwater a ousti data link design via multi arriermodulation and higher-order statisti s equalization. OCEANS '95. MTS/IEEE. Chal-lenges of Our Changing Global Environment. Conferen e Pro eedings., 1 :594�599 vol.1,9-12 O t 1995. 53

[14℄ Christian Bjerrum-Niese and Ren�© Lutzen. Sto hasti simulation of a ousti ommuni- ation in turbulent shallow water. IEEE Journal of O eani engineering, 25(4) :523�532,O tober 2000.[15℄ F. Frassati, C. Lafon, P.-A. Laurent, and J.-M. Passerieux. Experimental assessment ofofdm and dsss modulations for use in littoral waters underwater a ousti ommuni ations.O eans 2005 - Europe, 2 :826�831 Vol. 2, 20-23 June 2005.[16℄ IUT-T G.992.1. ��metteurs-r�© epteurs de ligne d'abonn�© num�©rique asym�©trique,juin 1999.[17℄ J. Gomes and V. Barroso. Time-reversed ofdm ommuni ation in underwater hannels.Signal Pro essing Advan es in Wireless Communi ations, 2004 IEEE 5th Workshop on,pages 626�630, 11-14 July 2004.[18℄ Botaro Hirosaki. An analysis of automati equalizers for orthogonally multiplexed QAMsystems. IEEE Transa tions on Communi ations, COM-28(1) :73�83, January 1980.[19℄ Jianguo Huang, Jing Sun, Chengbing He, Xiaohong Shen, and Qunfei Zhang. High-speedunderwater a ousti ommuni ation based on ofdm. Mi rowave, Antenna, Propagationand EMC Te hnologies for Wireless Communi ations, 2005. MAPE 2005. IEEE Inter-national Symposium on, 2 :1135�1138 Vol. 2, 8-12 Aug. 2005.[20℄ D.P. Konstantakos, A.E. Adams, and B.S. Sharif. Multi arrier ode division multiplea ess (m - dma) te hnique for underwater a ousti ommuni ation networks using shortspreading sequen es. Radar, Sonar and Navigation, IEE Pro eedings -, 151(4) :231�239,Aug. 2004.[21℄ Zhong Kun, Quek Swee Sen, Koh Tiong Aik, and Tan Bien Aik. A real-time oded ofdma ousti modem in very shallow underwater ommuni ations. OCEANS 2006 - AsiaPa i� , pages 1�5, 16-19 May 2007.[22℄ G. Lapierre, N. Beuzelin, J. Labat, J. Trubuil, A. Goali , S. Saoudi, G. Ayela, P. Coin e,and S. Coatelan. 1995-2005 : ten years of a tive resear h on underwater a ousti ommu-ni ations in brest. O eans 2005 - Europe, 1 :425�430 Vol. 1, 20-23 June 2005.[23℄ Baosheng Li, Shengli Zhou, M. Stojanovi , and L. Freitag. Pilot-tone based zp-ofdmdemodulation for an underwater a ousti hannel. OCEANS 2006, pages 1�5, Sept. 2006.[24℄ Baosheng Li, Shengli Zhou, Mili a Stojanovi , Lee Freitag, and Peter Willett. Non-uniform doppler ompensation for zero-padded ofdm over fast-varying underwater a ous-ti hannels. OCEANS 2007 - Europe, pages 1�6, 18-21 June 2007.[25℄ Xavier Lurton. A oustique sous-marine - Pr�©sentation et appli ations. Éditions IFRE-MER, 1998.[26℄ D. Middleton. Channel modeling and threshold signal pro essing in underwater a ousti s :An analyti al overview. O eani Engineering, IEEE Journal of, 12(1) :4�28, Jan 1987.[27℄ Andrey K. Morozov and James C. Preisig. Underwater a ousti ommuni ations withmulti- arrier modulation. OCEANS 2006, pages 1�6, Sept. 2006.[28℄ N. Nasri, H. Ben Hnia, A. Ka houri, M. Abdellaoui, and M. Samet. Modula-tion/demodulation te hniques with fpga's ar hite ture to improve ofdm wireless under-water ommuni ation trans eiver. Design and Test of Integrated Systems in Nanos aleTe hnology, 2006. DTIS 2006. International Conferen e on, pages 400�403, Sept. 5-7,2006. 54

[29℄ R F Ormondroyd. A robust underwater a ousti ommuni ation system using ofdm-mimo. OCEANS 2007 - Europe, pages 1�6, 18-21 June 2007.[30℄ Hikmet Sari, Georges Karam, and Isabelle Jean laude. Transmission te hniques for digitalTV broad asting. IEEE Communi ations Magazine, pages 100�109, February 1995.[31℄ Cyrille Si let. Appli ation de la th�©orie des ban s de �ltres � l'analyse et � la on eption de modulations multiporteuses orthogo-nales et biorthogonales. PhD thesis, Universit�© de Rennes I, 2002.http://www.lis.inpg.fr/pages_perso/si let/rapport_these_si let.pdf[32℄ Cyrille Si let, Pierre Siohan, and Didier Pin hon. Analysis and design of OFDM/QAMand BFDM/QAM oversampled orthogonal and biorthogonal multi arrier modulations. InIEEE International Conferen e on A ousti s, Spee h and Signal Pro essing, ICASSP'2,Orlando, USA, May 2002. Student forum.[33℄ Wei Wei, Hu Xiaoyi, Wang Deqing, Xu Ru, and Sun Haixin. Performan e omparison oftime syn hronization algorithms for ofdm underwater ommuni ation system. Me hatro-ni s and Ma hine Vision in Pra ti e, 2007. M2VIP 2007. 14th International Conferen eon, pages 104�107, 4-6 De . 2007.[34℄ Fang Xu, Xiaoyi Hu, and Ru Xu. A novel implementation of arrier interferometry ofdmin an underwater a ousti hannel. OCEANS 2007 - Europe, pages 1�5, 18-21 June 2007.[35℄ Zhengyi Xu, Yuriy V. Zakharov, and Valeriy P. Kodanev. Spa e-time signal pro essingof ofdm signals in fast-varying underwater a ousti hannel. OCEANS 2007 - Europe,pages 1�6, 18-21 June 2007.[36℄ L.F. Yeung, R.S. Bradbeer, E.T.M. Law, Angus Wu, Bin Li, and Z.G. Gu. Underwatera ousti modem using multi arrier modulation. OCEANS 2003. Pro eedings, 3 :1368�1375 Vol.3, 22-26 Sept. 2003.[37℄ Y.V. Zakharov and V.P. Kodanev. Multipath-doppler diversity of ofdm signals in anunderwater a ousti hannel. A ousti s, Spee h, and Signal Pro essing, 2000. ICASSP'00. Pro eedings. 2000 IEEE International Conferen e on, 5 :2941�2944 vol.5, 2000.[38℄ Liang Zhao and Weiqing Zhu. Parti le �ltering dete tion in turbo oded ofdm systemover underwater a ousti ommuni ation hannels. OCEANS 2006 - Asia Pa i� , pages1�6, 16-19 May 2007.
55


























