Embed Size (px)
Citation preview

USING THE CHAINS OF RECURRENCES ALGEBRA FOR DATA
DEPENDENCE TESTING AND INDUCTION VARIABLE
SUBSTITUTION
Name: Johnnie L. BirchDepartment: Department of Computer ScienceMajor Professor: Robert A. Van EngelenDegree: Master of ScienceTerm Degree Awarded: Fall, 2002
Optimization techniques found in today’s restructuring compilers for both
single-processor and parallel architectures are often limited by ordering relationships
between instructions that are determined during dependence analysis. Unfortunately,
the conservative nature of these algorithms combined with an inability to effectively
analyze complicated loop nestings, result in missed opportunities for identification of
loop independences. This thesis examines the use of chains of recurrences (CRs)
as a basis for performing induction expression recognition and loop dependence
analysis. Specifically, we develop efficient algorithms for generalized induction
variable substitution and non-linear dependence testing, which rely on analysis of
induction variables that satisfy linear, polynomial, and geometric recurrences.

THE FLORIDA STATE UNIVERSITY
COLLEGE OF ARTS AND SCIENCES
USING THE CHAINS OF RECURRENCES ALGEBRA FOR DATA
DEPENDENCE TESTING AND INDUCTION VARIABLE
SUBSTITUTION
By
JOHNNIE L. BIRCH
A thesis submitted to theDepartment of Computer Science
in partial fulfillment of therequirements for the degree of
Master of Science
Degree Awarded:Fall Semester, 2002

The members of the Committee approve the thesis of Johnnie L. Birch defended
on November 22 2002.
Robert A. Van EngelenProfessor Directing Thesis
Kyle GallivanCommittee Member
David WhalleyCommittee Member
Approved:
Sudhir Aggarwal, ChairDepartment of Computer Science

ACKNOWLEDGEMENTS
I would like to thank Dr. Robert A. Van Engelen, Dr. Kyle Gallivan, Dr. David
Whalley, Dr. Paul Ruscher, and Dr. Patricia Stith.
iii

TABLE OF CONTENTS
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
1. INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Program Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Research Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Thesis Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. LITERATURE REVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1 Induction Variable Optimizations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.1 Induction Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.2 Strength Reduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.1.3 Code Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Induction Variable Recognition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2.1 Cocke’s Technique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.2 Harrison’s Technique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.3 Haghighat’s and Polychronopoulos’s Technique . . . . . . . . . . . . . . 12
2.3 Dependence Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3.1 Dependence Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3.2 Iteration Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3.3 Dependence Distances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3.4 Direction Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3.5 Dependence Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4 Dependence Analysis Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4.1 GCD Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.4.2 Extreme Value Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4.3 Fourier-Motzkin Variable Elimination . . . . . . . . . . . . . . . . . . . . . 222.4.4 Omega Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. CHAINS OF RECURRENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 Chains of Recurrences Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2 CR Rewrite Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
iv

3.2.1 Simplification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.2.2 CR Inverse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 An Example of Exploitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.3.1 Exploitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4 A CR Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.4.1 CR Implementation Representation . . . . . . . . . . . . . . . . . . . . . . . 343.4.2 The Expression Rewriting System . . . . . . . . . . . . . . . . . . . . . . . . 363.4.3 A Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4. A CHAINS OF RECURRENCES IVS ALGORITHM . . . . . . . . . . 38
4.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.1.1 Conversion to SSA form . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.1.2 GIV recognition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.1.3 Induction Variable Substitution . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.2 Testing the Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.2.1 TRFD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.2.2 MDG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5. THE EXTREME VALUE TEST BY CR’S . . . . . . . . . . . . . . . . . . . . 52
5.1 Monotonicity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525.1.1 Monotonicity of CR-Expressions . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.2 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.3 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.4 Testing the Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.5 IVS integrated with EVT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6. CONCLUSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 656.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
APPENDICES
A. CONSTANT FOLDING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
B. BOUNDS ANALYSIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
BIOGRAPHICAL SKETCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
v

LIST OF TABLES
2.1 Table showing direction vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1 Chains of Recurrences simplification rules. . . . . . . . . . . . . . . . . . . . . . . . 30
3.2 Chains of Recurrences inverse simplification rules. . . . . . . . . . . . . . . . . . 32
A.1 Constant Folding Rules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
B.1 Bounds analysis rules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
vi

LIST OF FIGURES
1.1 The results of loop induction variable substitution transforms the arrayaccess represented by the linear expression k, with a non-affine subscriptexpression i2−i
2+ i + j. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Loop induction variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 An example of strength reduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 An example of code motion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 An example of data dependences in sequentially executed code. . . . . . . 14
2.5 An example showing loop iteration spaces. Here Graph A shows theiteration dependences for array B, while Graph B shows the iterationdependences for array D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 An example showing normalized loop iteration spaces. Here Graph Ashows the iteration dependences for array B, while Graph B shows theiteration dependences for array D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.7 Here a 2-dimensional polytope is defined by 3 linear equations. In thisexample we project the polytope along the y-axis and illustrate thedifference between real and dark shadows. Notice that dark shadow isa subset of the real shadow, as it corresponds to the part of the polytopeat least one unit thick. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1 SUIF2 Internal Representation for the CR notation . . . . . . . . . . . . . . . . 35
3.2 CR-Driver Main Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3 CR-Driver Simplification Options Menu . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.1 Pseudocode for induction variable substitution (IVS) algorithm. HereS(L) denotes the loop body, i denotes the BIV of the loop, a denotesthe loop bound, and s denotes the stride of the loop. . . . . . . . . . . . . . . . 39
4.2 Shown here is Algorithm SSA, which is responsible for convertingvariable assignments to SSA form. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.3 Shown here is Algorithm MERGE, which is responsible for merging thesets of potential induction variables found in both the if and else partof an if-else statement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
vii

4.4 Shown here is Algorithm CR, which is responsible for convertingvariable-update pairs to CR form. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.5 Shown here is Algorithm HOIST, which is responsible for removing loopinduction variables and placing their closed-form outside of the loop. . . 44
4.6 The code segment from TRFD that we tested. . . . . . . . . . . . . . . . . . . . 45
4.7 The code segment from MDG that we tested . . . . . . . . . . . . . . . . . . . . . 50
5.1 Shown here is Algorithm EVT, which is responsible for merging thesets of potential induction variables found in both the if and else partof an if-else statement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2 The original loop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.3 The inner most loop is normalized. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.4 Dependence testing of the innermost loop . . . . . . . . . . . . . . . . . . . . . . . 58
5.5 SUIF2 Internal Representation for the CR notation . . . . . . . . . . . . . . . . 59
5.6 Dependence test in (∗, ∗) direction of array a . . . . . . . . . . . . . . . . . . . . . 60
5.7 Dependence test for (<, ∗) direction of array a. . . . . . . . . . . . . . . . . . . . 61
5.8 Testing dependence in the (=, ∗) direction. . . . . . . . . . . . . . . . . . . . . . . 62
5.9 Testing for dependence in the (>, ∗) direction. . . . . . . . . . . . . . . . . . . . . 63
viii

ABSTRACT
Optimization techniques found in today’s restructuring compilers for both single-
processor and parallel architectures are often limited by ordering relationships
between instructions that are determined during dependence analysis. Unfortunately,
the conservative nature of these algorithms combined with an inability to effectively
analyze complicated loop nestings, result in missed opportunities for identification of
loop independences. This thesis examines the use of chains of recurrences (CRs)
as a basis for performing induction expression recognition and loop dependence
analysis. Specifically, we develop efficient algorithms for generalized induction
variable substitution and non-linear dependence testing, which rely on analysis of
induction variables that satisfy linear, polynomial, and geometric recurrences.
ix
CHAPTER 1
INTRODUCTION
1.1 Program Optimization
The challenge of developing algorithms that effectively optimize and parallelize
code has been approached by focusing on restructuring loops since time spent in
loops frequently dominate program execution time. The effectiveness of an algorithm
designed to restructure a loop, depends heavily on its knowledge of data dependences
within loops which restrict certain code transformations. Unfortunately, the accuracy
and effectiveness of dependence analysis techniques in use today, including the
popular GCD test, the I-Test, the Extreme Value Test (a.k.a. the Banerjee test),
and the Omega Test, have all been shown to be limited. Resent work by Psarris
and Kyriakopoulos[13], which focused on testing the accuracy and efficiency of data
dependence test on non-ziv data[8], yielded surprising results. When analyzing
inner-loop problems on data from the Perfect Club Benchmarks, the extreme value
test failed to return an exact result 76 percent of the time. When analyzing the
I-Test and Omega test those test returned exact results 54 and 48 percent of the time
respectively. Because compilers must be conservative and assume that dependences
exist when analysis results are inconclusive, overstatements on the number of
dependences unnecessarily limit the freedom of optimizing algorithms. Psarris and
Kyriakopoulos determined that limitations in handling non-linear expressions and
non-rectagular loops were the main reasons for inexact returns, with secondary issues
1

being analyzing if-then-else statements, dealing with coupled subscripts and dealing
with varying loop strides.
Effective dependence analysis forms the basis for any loop restructuring algorithm,
however it is only part of the challenge. Having an algorithm that performs induction
variable recognition is essential for efficient parallelization and vectorization of the
Perfect Club Benchmarks1 code as well as other real-world code. In addition, many
powerful loop optimizations, used also by sequential compilers, including strength
reduction, code motion and induction variable elimination, rely on knowledge of
both basic and generalized induction variables. Unfortunately, generalized induction
variables may be hard to recognize due to polynomial and geometric progressions
through loop iterations. Most of the ad-hoc techniques for finding induction variables
in use today are not able to detect these types of progressions and hence are unable to
recognize all generalized induction variables. Haghighat’s symbolic differencing[10],
is one of the most powerful induction variable recognition methods in use today. The
method can be used to find dependent induction variables but suffers from limitations
in evaluating higher degree polynomials which limit its use in real world application
because its findings may be incorrect and produce erroneous code[16].
The focus of this thesis is the presentation of the implementation of new ap-
proaches to dependence analysis and induction variable recognition. The basis of
these approaches is the exploitation of chains of recurrences (CRs)[3][15][22]. Using
the SUIF2 restructuring compiler system we have implemented a CR representation
module as well the mappings that transform the CR representation to a closed form
function and vice versa. With our CR-based algorithms and implementation of induc-
tion variable recognition and dependence analysis[15] we demonstrate improvements
to the state-of-the-art, as well as provide a foundation, through our self-contained
library for CR construction, simplification and evaluation, for future innovations.
1Perfect Club Benchmarksr is a trademark of the University of Illinois.
2

1.2 Research Motivation
The development of software systems to automatically or interactively identify
parallelism in programs and restructure them accordingly is required if parallel
systems are to be exploited by the general user community. These systems range
from large scale distributed systems to a single chip CPU with instruction level
parallelism. Obtaining optimal performance from code is not only important from
the standpoint of greater computing speeds and increased productivity, but meeting
the constraints of time and power use is essential for critical systems. In addition,
the number of digital signal applications have grown due to advances in hardware
technology further increasing the complexity of high level code. Specifically, advances
in compiler analysis are needed to deal with generalized induction variable recognition
and data dependence analysis of non-rectangular loops and non-linear symbolic
expressions. It is a misnomer that non-linear array access occur frequently in
code. Indeed even if non-linear array access are not explicitly put in code by the
programmer other compiler optimizations may introduce non-linear expressions, as
Figure 1.1 illustrates. In this example initially there is not a dependence between
the definitions and the uses associated with array A. After induction variable
substitution is performed however, there is a newly introduced non-linear expression
i2−i2
+ i+ j. Traditional dependence analysis test must assume there is a dependence
since they can’t properly analyze the expression. A vast amount of work has been
done in designing better dependence analysis systems, but most of these methods
are restricted to linear and affine subscript expressions. Likewise most of the work
done on induction variable recognition has brought forth methods limited to basic
induction variables that don’t represent those dependent induction variables whose
update expressions form complex progressions through loops, i.e. those that form
geometric progressions. A novel approach however, has been proposed by Van
Engelen to tackle these issues. In [15] Van Engelen proposes the use of an algebraic
3

Figure 1.1. The results of loop induction variable substitution transforms the arrayaccess represented by the linear expression k, with a non-affine subscript expressioni2−i
2+ i + j.
framework called chains of recurrences (CR) to significantly increase the accuracy
and efficiency of symbolic analysis.
The building of a system which uses symbolic evaluation with CR algebra would
not only provide the resource for an empirical study of the advantages of using a CR
infrastructure for dependence analysis and optimizations, but it would also lay the
ground work for future innovations.
1.3 Thesis Organization
The remainder of this thesis is organized as follows. In Chapter 2 we discuss
some current and past research related to dependence analysis and induction variable
recognition. In Chapter 3 we introduce the chains of recurrences formalism. In
Chapter 4 we analyze the generalized induction variable recognition algorithm based
on an exploitation of CR algebra. In Chapter 5 we analyze an array dependence
analyzes algorithm which is also based on the exploitation of CR algebra. In Chapter
6 we provide our concluding remarks as well as comment on future innovations
possible through the groundwork presented in this thesis.
4
CHAPTER 2
LITERATURE REVIEW
Part of the focus of this thesis is to analyze and contrast the optimizations and
dependence analysis methods utilizing our CR framework with current methods. To
attain a proper understanding of the advantages we must first survey the properties
of current optimization and dependence analysis techniques.
2.1 Induction Variable Optimizations
Because programs tend to spend most of their execution time in loops, loop
optimizations are instrumental in improving execution speed on sequential machines.
They work by reducing the amount of work done in a loop either by decreasing
the number of instructions in the loop, or replacing expensive operations with less
expensive ones. In addition to explicitly reducing the amount of work done in a loop,
some optimizations promote parallelization of code. This section will focus on those
loop optimizations involving induction variables.
2.1.1 Induction Variables
Induction variables are recurrences that occur in variable update operations in a
loop. In addition to the potential use in a parallelizing compiler, sequential computers
are often equipped with special-purpose hardware which is designed to take advantage
of linear recurrences such as those that take place in induction variable updates. In
general, induction variables are of two types, those with simple updates and those
with non-linear updates:
5

1. Basic Induction Variables, or BIV’s - Are variables who’s value is modified by
the same constant once per loop iteration, explicitly through each iteration of
the loop. BIV’s have linear updates, finding them in loops amounts to finding
the closed-form characteristic function:
χ(n) = χ(n− 1) + K
where n is the iteration number and K is some constant.
BIV’s lend themselves to simple parallelization. For example the statement
j = j +1 is written j = j0 + i, where i is the normalized loop induction variable
and j0 is the original value of j. The closed form expression of a BIV is easily
formed.
2. Generalized Induction Variables, or GIV’s - Are variables that have multiple
updates per loop iteration, variables who’s update value is not constant, and
variables who’s update value is dependent upon another induction variable.
Finding them loops amounts to finding the closed-form characteristic function:
χ(n) = ϕ(n) + arn
where n is the iteration number, ϕ represents a polynomial, and r and a are
loop invariant expressions.
In addition to these two classifications, we can be more specific in describing an
induction variable with the following terms:
1. Direct/Independent - Recurrence relation updates must not be derived from
another induction variable.
2. Derived/Dependent - Recurrence relation updates must be derived from at least
one other induction variable.
6

For (J = 0; J ≤ 10; ++J){
W = W + JQ = Q * QU = R + GFor (I = 0; I ≤ J; ++I){
G = G + IB = G + BL = L + 4 + VR = R × 4T = T + WS = S × T
}}
Basic Induction Variables - J, I,LGeneralized Induction Variables - W,Q,U,G,B,R,T,SDirect/Independent Induction Variables - J, I,Q,R,LDerived/Dependent Induction Variables - W,U,G,B,T,S
Figure 2.1. Loop induction variables.
In Figure 2.1 we provide examples of loop induction variables. Notice that a
generalized induction variables can either be direct or derived.
2.1.2 Strength Reduction
One of the most common optimizations performed on induction variables is
strength reduction. It is a well-known code improvement technique that works
by replacing costly operations with less expensive ones. Examples of this include
replacing multiplication by addition, or by transforming exponentiation to multi-
plication, significantly reducing execution time, especially when the reduced code
is to be repeated as is the case with loops. In Figure 2.2 we provide a simple of
example of strength reduction being used to replace several multiplication operations
by several additions. Strength reduction is a special case of finite differencing in
which a continuous function is replaced by piecewise approximations. In [1] Cocke
7

Before Strength Reduction:
For (J = 0; J < 1000; ++J){
M[J] = J * B}
After Strength Reduction:
temp = 0For (J = 0; J < 1000; ++J){
M[J] = temptemp = temp + B
}
Figure 2.2. An example of strength reduction.
and Kennedy derive a simple algorithm which performs strength reduction in strongly
connected regions. In [5] Allen and Cocke provide a series of applications for strength
reduction. In [6] Cooper, Simpson, and Vick, provide an alternative algorithm for
performing strength reduction in which the static single-assignment(SSA) form of a
procedure is used.
2.1.3 Code Motion
Code motion is a modification that works to improve the efficiency of a program
by avoiding unnecessary re-computations of a value at runtime. One application
of the optimization, called loop invariant code motion, focuses on removing loop
invariant code from loops. Two variants of code motion are busy code motion and lazy
code motion. Busy code motion is an optimization derived from partial redundancy
elimination [4], an optimization that finds and eliminates redundant expressions.
Lazy code motion [11] attempts to increase the effectiveness of busy code motion
by exposing more redundant variables and by suppressing any non-beneficial code
8

Before Code Motion:
For (I = 0; I < 300; ++I){
For (J = 0; J < T - 1000; ++J){
M[J + T*I] = J * T}
}
After Code Motion:
temp TMINUS = T - 1000For (I = 0; I < 300; ++I){
temp TI = T × IFor (J = 0; J < temp TMINUS; ++J){
M[J + temp TI] = J * T}
}
Figure 2.3. An example of code motion.
motion, thus reducing register pressure. An implementation-oriented algorithm for
lazy code motion is presented in [12]. In Figure 2.3 we show an example of code
motion being performed on a loop header and body.
2.2 Induction Variable Recognition
There are many compiler analysis methods designed to recognize linear induction
variables. This section focuses on three of those techniques, due to Harrison, Cocke,
and Haghighat et al. respectively.
9

2.2.1 Cocke’s Technique
Cocke defines an algorithm for finding induction variables which amounts to
weeding out those variables which are not defined to be induction variables, from
a set of instructions in a strongly connected region. The first task in Cocke’s scheme
is to determine the set of region constants, i.e. the set of variables whose values
are not changed in a strongly connected region. From here, noting that induction
variables must have the form:
x← x± y,
x← x± y ± z,
where y and z represent either region constants or other induction variables, through
process of elimination, those variables that are not induction variables are eliminated
from the set. Variables are eliminated if they satisfy one of the two following criteria:
1. If x← op(y, z) and op is not one of the operations store, negate, add, subtract,
then x is not an induction variable.
2. If x ← op(y, z) and y and z are not both elements of the set of induction
variables and not both elements of IV ∪RC where the IV is the set of induction
variables and RC is the set of region constants, then x is not an induction
variable.
Cocke’s complete algorithm can be found on [5, p852].
2.2.2 Harrison’s Technique
Harrison uses abstract interpretation and a pattern matching scheme to automat-
ically recognize induction variables in loops. The technique has two parts. In the first
part, abstract interpretation is used to construct a map that associates each stored
10

(updated) variable with a symbolic form of its update. To illustrate his technique he
defines a grammar as follows:
A Language:
Inst : Ide = Exp
| Ide (exp) = Exp
| if Exp then Inst1 else Inst2
| begin Inst1, Inst2 ... Instn end
| for (Ide = 1, Exp) Inst endfor
and a domain of abstract stores:
Abstract-Store = Ide->
(Exp|Exp x Exp)
An abstract store is thus a mapping from an identifier to an expression, or
subscript expression.
In the second part of Harrison’s method, the elements of the map explained above
are unified with patterns which describe recurrence relations. He defines a method for
mapping with arrays, conditionals, and iterations. Although it is not able to detect
GIVs, Harrison’s technique is fast and efficient, and works effectively in finding BIVs.
2.2.3 Haghighat’s and Polychronopoulos’s Technique
Haghighat and Polychronopoulos use symbolic analysis as a framework to attain
larger solution spaces for program analysis problems than traditional methods.
Running the Perfect Club Benchmarks suite through the Parafrase-2 parallelizing
compiler, they demonstrate improvement in the solution space for code restructuring
optimizations that promote parallelism. The basis of their approach is to use abstract
interpretation, i.e. semantic approximation, to execute programs in an abstract
domain allowing the discovery of properties to aid in the detection of generalized
11

induction variables1. They detect GIVs in loops by differencing the values of
each variable through symbolically executing loop iterations and using Newton’s
interpolation formula to find the closed form.
2.3 Dependence Analysis
The two types of dependences which can occur when executing code are control
dependences, and data dependences. Control dependences occur when flow of control
is contingent upon a particular statement such as an if-then-else statement. Data
dependence occur when there is flow of data between statements. The rest of this
section focuses on data dependence.
2.3.1 Dependence Types
There are four types of data dependences which are defined as follows:
1. Flow dependence or true dependence, occurs when a variable is assigned in one
statement and then used in a statement that is later executed. This type of
dependence is denoted by δf . In Figure 2.4 on page 14 we would write S1δfS2,
meaning statement S2 is flow dependent on statement S1.
2. Anti-dependence occurs when a variable is used in a statement and then
reassigned in a statement that is later executed. This type of dependence
is denoted by δa. In Figure 2.4 we would write S1δaS4, meaning statement S4
is anti-dependent on statement S1.
3. Output dependence occurs when a variable is assigned in one statement and
then reassigned in a statement that is later executed. This type of dependence
is denoted by δo. In Figure 2.4 S2δoS3, meaning that statement S4 is output
dependent upon statement S3.
1They also show how the technique aids in symbolic constant propagation, generalized inductionvariable substitution, global forward substitution, and detection of loop-invariant computations
12

(S1) A = K(S2) B = A + D(S3) B = C × E(S4) K = C + F
Figure 2.4. An example of data dependences in sequentially executed code.
4. Input dependence occurs when a variable is used in one statement and then
used again in a statement that is later executed. This type of dependence is
denoted by δI . In Figure 2.4 S3δIS4, meaning S4 is input dependent upon
statement S3.
A set of dependence relationships can be represented by a directed graph, called
a data dependence graph. The nodes in the graph correspond to statements while
the edges correspond to the dependency constraints that may prevent reordering of
the statements.
Loop-carried refers to a data dependence relation between two statement in-
stances in two different iterations. Loop independent refers to a data dependence
relation between two statement instances in the same iteration.
2.3.2 Iteration Space
Given Svδ∗Sw, a dependence is considered lexically forward when Sv is executed
before Sw, and is considered lexically backward otherwise. The iteration space
associated with loops, is a concept helpful for understanding the dependences among
array accesses occurring in different iterations. The iteration space contains one
point for each iteration of a set of loops. An iteration space is graphically illustrated
with a directed graph called a dependence graph, with each dimension of the graph
representing a loop nest. If a statement in one iteration of the loop dependents on
a statement in another iteration that dependence would be represented by an edge
from the source iteration to the target iteration. For example consider the program
with the triangular loop:
13

Figure 2.5. An example showing loop iteration spaces. Here Graph A shows theiteration dependences for array B, while Graph B shows the iteration dependencesfor array D.
for (j = 2; j < 10; j = j + 2){
for (i = 0; i < j; ++i){
A[i] = B[i + 1]D[j, i + 1] = C[j] + F[j]B[i] = A[i] + D[j - 2, i]B[i] = C[j] * E[i]
}}
The directed dependence graph, associated with this code is shown in Figure 2.5.
The number of loop nest determine the dimensions of the graph. In this example,
with there being two nested loops, we need two dimensions in the dependence graph
to illustrate the iteration space. Notice that we have included two dependence graphs
in this example, one for dependences between array B and one for dependences for
array D.
14

Figure 2.6. An example showing normalized loop iteration spaces. Here GraphA shows the iteration dependences for array B, while Graph B shows the iterationdependences for array D.
2.3.3 Dependence Distances
Dependence distance is the vector difference between the iteration vectors of the
source and target iterations. The dependence distance will itself be a vector d,
called the distance vector, defined as d = it − is; where it is the target iteration
and is is the source iteration. It is important to note that the dependence distance
is not necessarily constant for all iterations. Figure 2.6 shows the iteration space
dependence graph with normalized iteration vectors. Many loop dependence analysis
test normalize iteration spaces in order to make dependence testing simpler.
2.3.4 Direction Vectors
Less precise than dependence distance are direction vectors. The symbols shown
in Table 2.1 are graphical symbols illustrating the ordering of vectors. For example
the ordering relation is < it indicates their is a lexically forward dependence between
the source and the target. The type of dependence is dependent on whether the
source is a def or a use, and on whether the target is a def or a use.
15

Table 2.1. Table showing direction vectors
< Crosses boundary forward= Doesn’t cross boundary> Crosses boundary backward≤ Occurs in the same iteration or forward≥ Occurs in the same iteration or backwards6= Cross an iteration boundary∗ Direction vector is unknown
2.3.5 Dependence Equations
A system of dependence equations is a system of linear equalities, or a system of
linear inequalities:
a11x1 + a12x2 + · · ·+ a1nxn � b1
a21x1 + a22x2 + · · ·+ a2nxn � b2
... =...
am1x1 + am2x2 + · · ·+ amnxn � bm
alternatively written in matrix notation as Ax � c, where � is either = or ≤, A is
the coefficient matrix composed of compile time constants, x is a vector of unknowns
composed of loop induction variables, and c is a vector of constants which represent
system constraints. In the case where the system is composed of linear inequalities,
when a variable appears with a positive coefficient, the inequality gives the upper
bound for the variable. Likewise, when a variable appears with a negative coefficient,
the inequality gives a lower bound for the variable. When a variable appears with
16

just a single nonzero coefficient, it is called a simple bounds. When a variable has
no upper bound or no lower bound it is called an unconstrained variable.
A system of linear inequalities describes a polytope. To solve a system of linear
inequalities, variables can be eliminated one at a time from the system by calculating
the shadow of the polytope when the polytope is projected along the dimension of
the variable we wish to eliminate. Later in this chapter we will look two techniques
for solving a system of linear inequalities Fourier-Motzkin variable elimination and
the Omega test, where Fourier-Motzkin variable elimination eliminates variables by
projecting real shadows, while the Omega test eliminates variables by projecting dark
shadows. There is an important difference in properties of real and dark shadows.
If a real shadow contains an integer point it doesn’t necessarily mean there is a
corresponding integer point located in the polytope described by the original system,
while if dark shadow contains an integer point, it will correspond to an integer point
located in the polytope described by the original system. Dark shadows are formed
from the part of the polytope which is at least one unit thick, while real shadows are
defined by no such constraints. As described in Wolfe[19] and Puge[14], the constraint
c2L ≤ c1U describes a real shadow, while the constraint c1U − c2L ≥ (c1− 1)(c2− 1)
defines a dark shadow, where c1 and c2 are the unknowns, U is the upper bound of
the shadow, and L is the lower bound of the shadow. Figure 2.7 provides a simple
illustration of dark and real shadows.
2.4 Dependence Analysis Systems
Compilers attempt to determine dependences by comparing subscript expressions
in loops. In order to do this the dependence analysis system must attempt to solve
a system of dependence equations and return its conservative findings. Essentially
there are three possible returns: has a solution, does not have a solution, or there
may be a solution. In this section, we will review four approaches to this problem.
17

Figure 2.7. Here a 2-dimensional polytope is defined by 3 linear equations. Inthis example we project the polytope along the y-axis and illustrate the differencebetween real and dark shadows. Notice that dark shadow is a subset of the realshadow, as it corresponds to the part of the polytope at least one unit thick.
We comment on each of their strengths and limitations. Also note that none of these
test are able to handle non-linear array indices when performing dependence analysis.
2.4.1 GCD Test
The Greatest Common Divisor(GCD) test is a well-known dependence analysis
test based on a theorem of elementary number theory which states that a linear
equation
a1x1 + a2x2 + a3x3 + . . . + anxn = b (2.1)
has an integer solution if and only if the greatest common divisor of the coefficients
a1, a2, a3, . . . , an, divides evenly into b. While the GCD test can detect independence,
when determining if there is a dependence, it returns inexact results in that it can
only determine if dependence is possible. Also the test indicates nothing about
18

dependence distances or direction. Furthermore, the greatest common divisor of all
the coefficients often turns out to be 1, in which case 1 will always divide evenly
into b. Despite these short comings however, it turns out determining the greatest
common divisor of two numbers is very inexpensive and easy to implement. For
this reason the GCD test often serves as a preliminary screening test to other more
complicated data dependence tests [9]. This screening is done to avoid analyzing
those array indices that could not possibly be dependent on one another such as the
following case illustrates:
for (i = 0; i < 10; i += 2){
A[i] = B[i + 1]D[i + 1] = A[i + 1]
}
Here the dependence equation would be 2id−2iu = 1. The GCD of the coefficients id
and iu is 2, which does not divided evenly into 1. In this example GCD determines
that there are no integer solutions and thus there can be no dependence.
2.4.2 Extreme Value Test
The extreme value test(EVT) is another well known dependence test. Sometimes
referred to as the Banerjee bounds test, it is based on the Intermediate Value Theorem
which states that if a continuous function takes on two values between two points, it
also takes on every value between those two points. This dependence test is inexact
because it can only determine if a real solution is possible but it is efficient and more
accurate than the GCD test. The test works by associating a lower and upper bound
for the left side of a dependence equation and then determining if dependence is
possible by determining if the value on right side of the equation lies between those
bounds. Traditionally in order to find the extreme value of a real number we use the
positive part r+ and r− of a number where:
19

r+ =
{0, r < 0r, r ≥ 0
r− =
{r, r ≤ 00, r > 0
hence in a dependence equation:
a1x1 + a2x2 + a3x3 + . . . + anxn = b (2.2)
the extreme values for the product of a variable and its coefficient, say for instance
a1x1 where L ≤ x ≤ U are represented by the lower bound:
a+1 L + a−1 U (2.3)
and the upper bound:
a+1 U + a−1 L (2.4)
as noted in [18].
In addition to determining if dependence is possible the EVT can also be used
to test for dependence in particular dependence directions. For instance as noted in
[17] to test for dependence in the direction id < iu where id represents a definition
of normalized induction variable i and iu represents a use of normalized induction
variable i, the upper bound for id can be replaced by iu − 1, or the lower bound for
iu can be replace by id + 1 with the algorithm followed as normal.
Essentially each equation has associated with it an upper bound and a lower
bound, and in order for dependence to be possible the constant on the right side
of the equation must lie between those bounds. In the case of an unknown having
no lower bound −∞ is the lower bound associated with equations containing the
unknown and likewise in the case of no upper bound for an unknown,∞ is the upper
bound associated with equations containing the unknown. Hence it is essential for
all unknowns to have at least one bound, whether it be upper or lower, associated
with it at compile time in order for this algorithm to be effective. Also note that with
20

triangular loop limits the test may return a false positive if there is a solution that
satisfies both the direction vector constraint and the loop limit constraint but not
both simultaneously. Here we show an example of using EVT to compute dependence
relations:
Consider the loop:
for (i = 0; i < 10; i += 1){
A[2i] = B[i + 6]D[i] = A[3i - 1]
}
With dependence equation:
2id − 3iu = −1
The upper bound and lower bound of both id and iu are computed as follows:
id = 2i iu = 3i= 2[0, 10] = 3[0, 10]= [0, 20] = [0, 30]
Which allow us to compute the upper and lower bounds for the dependence equation:
Lower Bound = 2id − 3iu Upper Bound = 2id − 3iu
= 2(0)− 3(30) = 2(20)− 3(0)= −90 = 40
Since -1 lies in the range of [-90,40] we know that dependence is a possibility.
2.4.3 Fourier-Motzkin Variable Elimination
Fourier-Motzkin Variable Elimination (FMVE), also Fourier-Motzkin Projection,
is a dependence analysis method that is often used as a basis for other dependence
analysis test. The test is able to determine if there are no real solutions for a system
of linear inequalities. The procedure works by systematically eliminating variables
21

from a system of inequalities until a contradiction occurs or all but a single variable
has been eliminated. For example, given a system of linear inequalities:
n∑j=1
aijxj ≥ bi, i = (1, . . . ,m) (2.5)
We can eliminate a variable xj by combining inequalities that describe its lower
bound and upper bound as follows:L ≤ c1xj
→ c2L ≤ c1Uc2xj ≤ U
(2.6)
Here L represents a lower bound for xj and U represents the upper bound and c1 and
c2 represents constants. Essentially FMVE works to find the n-1 dimensional real
shadow cast by an n dimensional object when variables are eliminated. By combining
the shadows of the intersection of each pair of upper and lower bounds a real shadow
of the original object is obtained.
The steps taken by the algorithm are listed below. Note that the steps are
repeated until all variables have been eliminated, or until a contradiction is reached.
1. A variable from the dependence equation is selected for elimination.
2. All inequalities of the dependence equations are rewritten in terms of the upper
and lower bounds for that variable.
3. New inequalities are derived that do not involve the variable selected for
elimination by comparing the lower bound with the upper bound for the
variable.
4. All the inequalities involving the variable are deleted, consequently the remain-
ing inequalities will be of one less variable.
If a contradiction is detected, or if there are no integer points in the real shadow
obtained, then dependence is not possible. If we are able to eliminate variables until
only one remains then dependence is possible.
22

When performing the algorithm as mentioned above it is useful to partition the
system of inequalities into three sets [7]:
D(x) : a′ix′i ≤ bi i = 1, . . . ,m1
E(x) : −x1 + a′jx′j ≤ bj, j = m1 + 1, . . . ,m2
F (x) : x1 + a′kx′k ≤ bk, k = m2 + 1, . . . ,m
(2.7)
where x’ is a vector containing all variables except that which is being eliminated,
a’ is a vector representing variable coefficients, and x1 is the variable which is being
eliminated. Each set D(x), E(x), and F (x) represents a partition of no bounds, lower
bounds, and upper bounds, respectively, for the variable x1. Equation 2.8 shows the
results of combining the lower and upper bounds of x1 to form new equations.
D(x) : a′i × x′ ≤ bi, i = 1, . . . ,m1a′j × x′ − bj ≤ bk − a′k × x′, j = m1 + 1, . . . ,m2
k = m2 + 1, . . . ,m(2.8)
Note that the process of FMVE can increase the number of inequalities exponentially
and is therefore at times not very efficient. Note also, with this test, the order in
which inequalities are eliminated makes a difference in exactness and performance.
Below we have include a simple example of FMVE using the equations shown in
Figure 2.7.
Consider the equations:
30y + x = 33027y − 7x = 84
27y − 10x = 81
We project out x, first expressing all inequalities as upper or lower bounds on x:
x ≤ −30y + 330−x ≤ −27
7y + 84
7
−x ≤ −2710
y + 8110
23

For any y, if there is an x that satisfies all the inequalities, then every lower bound
on x must be less than or equal to every upper bound on x. We eliminate x, and in
the process generate the following inequalities.
277y − 84
7≤ −30y + 330
2710
y − 8110≤ −30y + 330
Which leaves us with one unknown, y. The shadow of original region is given by
the line y ≤ 2394237
which is approximately 10, the tightest bound on y. Because we
have not run into any contradiction, we conclude that there are rational solutions to
the original system of inequalities, meaning dependence is a possibility.
2.4.4 Omega Test
The Omega test is an integer programming algorithm first introduced in [14]. It
is based on FMVE but it uses dark shadows, which are a subset of real shadows, to
determine if there is an integer solutions to a system of linear inequalities, and hence
is more accurate than FMVE. The main difference between the two tests is that
the Omega test works to find the shadows of the parts of the object thick enough,
i.e. at least one unit thick, to where there shadows must contain integer points
corresponding to the object the shadow is formed from. This change in technique
comes from the observation that there may be integer grid points in the shadow of
an object, even if though the object itself may contain no integer points.
24

CHAPTER 3
CHAINS OF RECURRENCES
Chains of Recurrences (CR’s) provide an efficient and compact means of repre-
senting functions on uniform grids. The formalism was first introduced as a means
to expedite the evaluation of closed-form functions at regular intervals. Polynomials,
rational functions, geometric series, factorials, trigonometric functions, and combi-
nations of the aforementioned are all efficiently represented by the CR notation.
In this Chapter we review the properties of CR’s as the CR notation provides the
mathematical basis for the induction variable substitution and dependence analysis
algorithms which we will present in subsequent chapters.
3.1 Chains of Recurrences Notation
Many compiler optimizations require the evaluation of closed-form functions at
various points within some interval. Specifically, given function F(x), starting point
x0, an increment h, and interval bounds i = 0, 1, . . . , n, we would like to find the value
for F(x0 + ih) over the range of i. Normally this type of evaluation is done recursively
where for each point on the grid represented by F(x), we must substitute in values
for all variables and evaluate the resulting expression, repeating the process from
scratch with each new point we wish to evaluate. Another more efficient approach to
this problem is instead of evaluating each point independently, take advantage of the
fixed relation defined between points on a regular grid and the value of the previous
point in order to compute the next. More specifically the function F can be rewritten
as a Basic Recurrence (BR) relation where:
25

f(i) =
{ι0, if i = 0f(i− 1)� g, if i > 0
(3.1)
with � ∈ {+, ∗}, g is a function defined over the natural numbers N, and ι0
representing an invariant. A more compact representation of equation 4.1 is
f(i) = {ι0,�, g}i (3.2)
where when substituting in the operators, + and ∗ for � we have the definitions,
{ι0, +, g}i = ι0 +i−1∑j=0
gj (3.3)
{ι0, ∗, g}i = ι0
i−1∏j=0
gj (3.4)
This BR notion is a simple representation of the first order linear recurrences shown
here:
f(0) = ι0
f(1) = ι0 � g(0)
f(2) = ι0 � g(0) � g(1)
f(3) = ι0 � g(0) � g(1) � g(2)...
f(i) = f(i-1) � g(i-1)
For all i > 0. This BR notion, which represents simple linear functions, can be
extended to represent more complex functions.
26

A closed-form function f can be rewritten as a mathematically equivalent
system of recurrence relations f0, f1, f2, . . . , fk, where the value of k depends on
the complexity of function f . Evaluating the function represented by fj for j =
0, 1, . . . , k − 1 within a loop with loop counter i, can be written as the recurrence
relation:
fj(i) =
{ιj, if i = 0fj(i− 1)�j+1 fj+1(i− 1), if i > 0
(3.5)
with �j+1 ∈ {+, ∗}, and ιj representing a loop invariant expression. Notice that
fk is not shown in equation 4.4; it is either a loop invariant expression or a similar
recurrence system. A more compact representation of equation 4.4 in which the BR
notation is extended is by writing g as a Chains of (Basic) Recurrences (CR’s) as
shown here:
Φi = {ι0,�1, {ι1,�2, . . . , {ιk−1,�k, g}i}i}i (3.6)
and also here flatten to a single tuple:
Φi = {ι0,�1, ι1,�2, . . . , ιk−1,�k, g}i (3.7)
Essentially BR’s are a simple case of CR’s in which g is represented by a constant
instead of another recurrence relation. CR’s are usually denoted by the Greek letter
Φ and that is the notation we will use throughout this thesis.
A CR Φ = {ι0,�1, ι1,�2, . . . ,�k, fk}i has the following properties:
- ι0, ι1, . . . , ιk are called the coefficients of Φ.
- k is called the length of Φ.
- if �j = + for all j = 1, 2, . . . , k, then Φ is called polynomial.
27
- if �j = ∗ for all j = 1, 2, . . . , k, then Φ is called exponential.
- if ik doesn’t not occur in the coefficients, then Φ is called regular.
- if Φ is regular and fk is a constant, then Φ is called simple.
3.2 CR Rewrite Rules
The CR formalism provides an efficient way of representing and evaluating
functions over uniform intervals. CRs and the expressions that contain them can be
manipulated through rewrite rules designed to either simplify the CR expression or
produce it’s equivalent closed form. These rewrite rules enable the development of an
algebra, such that the process of construction and simplification of CRs for arbitrary
closed-form functions can be automated within a symbolic computing environment
and hence are essential for algorithms we present later.
3.2.1 Simplification
The purpose of simplifying a CR expression is to produce an equivalent CR
expression that has the potential to be evaluated more efficiently. Bachmann[2]
categorizes CR simplification rules into the the four classes:
1. General - simplification rules that apply to all CR expressions.
2. Polynomial - simplification rules that apply to polynomial CR expressions.
3. Exponential - simplification rules that apply to exponential CR expressions.
4. Trigonometric - simplifications of CR expressions involving trigonometric
operators.
The simplification rules initially introduced in [20][21], given explicitly in [3] [22]
and then later extended in [2][15] are designed such that the rules enable the re-use of
28

Table 3.1. Chains of Recurrences simplification rules.
Expression Rewrite1. {ι0,+, 0}i =⇒ ι02. {ι0, ∗, 1}i =⇒ ι03. {0, ∗, f1}i =⇒ 04. −{ι0,+, f1}i =⇒ {−ι0,+,−f1}i5. −{ι0, ∗, f1}i =⇒ {−ι0, ∗, f1}i6. {ι0,+, f1}i ± E =⇒ {ι0 ± E,+, f1}i7. {ι0, ∗, f1}i ± E =⇒ {ι0 ± E,+, ι0 ∗ (f1 − 1), ∗, f1}i8. E ∗ {ι0,+, f1}i =⇒ {E ∗ ι0,+, E ∗ f1}i9. E ∗ {ι0, ∗, f1}i =⇒ {E ∗ ι0, ∗, f1}i10. E/{ι0,+, f1}i =⇒ 1/{ι0/E,+, f1/E}i11. E/{ι0, ∗, f1}i =⇒ {E/ι0, ∗, 1/f1}i12. {ι0,+, f1}i ± {ψ0,+, g1}i =⇒ {ι0 ± ψ0,+, f1 ± g1}i13. {ι0, ∗, f1}i ± {ψ0,+, g1}i =⇒ {ι0 ± ψ0,+, {ι0 ∗ (f1 − 1), ∗, f1}i ± g1}i14. {ι0,+, f1}i ∗ {ψ0,+, g1}i =⇒ {ι0 ∗ ψ0,+, {ι0,+, f1}1 ∗ g1+
{ψ,+, g1}i ∗ f1 + f1 ∗ g1}i15. {ι0, ∗, f1}i ∗ {ψ0, ∗, g1}i =⇒ {ι0 ± ψ0, ∗, f1 ∗ g1}i16. {ι0, ∗, f1}E =⇒ {ιE0 , ∗, fE1 }i17. {ι0, ∗, f1}{ψ0,+,g1}i
i =⇒ {ιψ00 , ∗, {ι0, ∗, f1}g1i ∗ f
{ψ0,+,g1}i1 ∗ fg11 }i
18. E{ι0,+,f1}i =⇒ {Eι0 , ∗, Ef1}i
19. {ι0,+, f1}ni =⇒{{ι0,+, f1}i ∗ {ι0,+, f1}n−1
i if n ∈ , n > 11/{ι0,+, f1}−ni if n ∈ , n < 0
20. {ι0,+, f1}i! =⇒
{{ι0!, ∗, (
∏f1j=1{ι0 + j,+, f1}i)}i if f1 ≥ 0
{ι0!, ∗, (∏|f1|j=1{ι0 + j,+, f1}i)−1}i if f1 < 0
21. {ι0,+, ι1, ∗, f1}i =⇒ {ι0, ∗, f2}i when ι1ι0 = f1 − 1
computational results obtained from previous evaluations. Mathematically speaking,
if we consider CRs as functions, then CR simplifications connect known algebraic
dependences of the domain values of CRs with dependences of the respective range
values. Table 3.1 shows the rewrite rules of interest as related to our implementations
of loop analysis and optimizations. Note that all the CR simplification rules are
applicable to CR’s representing both integer and floating point typed expressions.
29

3.2.2 CR Inverse
In [15], Van Engelen develops CR inverse rules (CR−1), designed to translate CR
expressions back to their equivalent closed-form. After application of the rules the
function that results must not contain any CRs as subexpressions. The CR inverse
system developed by Van Engelen can only derive a subset of closed form functions
corresponding to the CR expression since the mapping from closed form function
to CR is neither surjective nor one to one. However, mathematically speaking, the
mappings do return expressions equivalent to the domain of possible correct returns.
Table 3.2 shows the rewrite rules of interest as related to our implementations of loop
analysis and optimizations. Note as was the case with the CR simplification rules, all
the CR−1 rules are applicable to CR’s representing both integer and floating point
typed expressions. The transformation strategy for applying the CR−1 rules is to
reduce the innermost redexes first on nested CR tuples of the form equation 3. This
results in closed expressions for the increments in CR tuples which can be matched by
other rules. After the application of the inverse transformation CR−1, the resulting
closed form expression can be factorized to compress the representation.
3.3 An Example of Exploitation
Before we delve into any of the implementation details, we give an example
illustrating how CRs can be used to accelerate the evaluation of closed-form functions.
3.3.1 Exploitation
CRs afford an efficient method to accelerate the evaluation of closed-form func-
tions on regular grids by reusing values calculated at previous points. We consider
an iterative evaluation of a non-linear function over a number of regular points over
an interval.
30

Table 3.2. Chains of Recurrences inverse simplification rules.
Expression Rewrite1. {ι0,+, f1}i =⇒ ι0 + {0,+, f1}i2. {ι0, ∗, f1}i =⇒ ι0 ∗ {1, ∗, f1}i3. {0,+,−f1}i =⇒ −{0,+, f1}i4. {ι0,+, f1 + g1}i =⇒ {ι0,+, f1}i + {ι0,+, g1}i5. {ι0, ∗, f1 ∗ g1}i =⇒ f1 ∗ {ι0, ∗, g1}i6. {0,+, f i1}i =⇒ f i
1−1f1−1
7. {0,+, fg1+h11 }i =⇒ {0,+, fg11 ∗ f
h11 }i
8. {0,+, fg1∗h11 }i =⇒ {0,+, (fg11 )h1}i
9. {0,+, f1}i =⇒ i ∗ f1
10. {0,+, i}i =⇒ i2−i2
11. {0,+, in}i =⇒∑n
k=0(n+1
k )n+1 Bki
n−k+1
12. {1, ∗,−f1}i =⇒ (−1)i{1, ∗, f1}i13. {1, ∗, 1
f1}i =⇒ {1, ∗, f1}−1
i
14. {1, ∗, f1 ∗ g1}i =⇒ {1, ∗, f1}i ∗ {1, ∗, g1}i15. {1, ∗, fg11 }i =⇒ f
{1,∗,g1}i1
16. {1, ∗, gf11 }i =⇒ {1, ∗, g1}f1i17. {1, ∗, f1}i =⇒ f i118. {1, ∗, i}i =⇒ 0i
19. {1, ∗, i+ f1}i =⇒ (i+f1−1)!(f1−1)!
20. {1, ∗, f1 − 1}i =⇒ (−1)i ∗ (i−f1−1)!(−f1−1)!
Consider the polynomial:
p(x) = 2x3 + x2 + x + 9
which we would like to evaluate at the 21 points 0, .05, .10, . . . , .95, 1.00. In order
evaluate the polynomial, we generate the CR expression1:
Φ = 3 ∗ {0, +, .05}3 + {0, +, .05}2 + {0, +, .05}+ 9
Notice that Φ is similar to p, except that each occurrence of x in p is replaced by the
CR {0, +, .05}.1Algorithms for CR construction are described in [3], [22],[2]. In subsequent chapters we will
describe the algorithm given in [15] to be used in the induction variable substitution method
31

Now that we have our CR representing our original function, our next step is to
simplify the CR-expression. We do this using the simplification rules shown in Table
3.1 shown on page 30:
Original Equation:
Φ = 3× {0, +, .05}3 + {0, +, .05}2 + {0, +, .05}+ 9
After applying rule 19:
Φ = 3× {0, +, .000125, +.00075, +, .00075}+ {0, +, .0025, +, .005}+ {0, +, .05}+ 9
After applying rule 8:
Φ = {0, +, .000375, +.00225, +, .00225}+ {0, +, .0025, +, .005}+ {0, +, .05}+ 9
After applying rule 12:
Φ = {0, +, .052875, +.00725, +, .00225}+ 9
After applying rule 6
Φ = {9, +, .052875, +.00725, +, .00225}
After the CR has been simplified we can evaluate it over the regular grid using a
procedure as described in [2]:
ι0 = 9; ι1 = .052875; ι2 = .00725; ι3 = .00225
for (i = 0; i < 1000; ++i){
Φ[i] = ι0ι0 = ι0 + ι1ι1 = ι1 + ι2ι2 = ι2 + ι3
}32

Where Φi contains the values of p at the 21 points 0, .05, .10, . . . , .95, 1.00. Notice
that the computation of Φi requires just 3 additions per evaluation point where
normally we would of had to do an extra 21 multiplications. With any CR
Φi = {ι0,�1, ι1,�2, . . . , ιk−1,�k, g}i (3.8)
At most k additions or multiplications need to be performed at each loop iteration.
In later chapters we will see in detail how CR-expressions can be used to represent
recurrences and closed-form functions of loop induction variables to aid in induction
variable recognition and substitution, and dependence analysis.
3.4 A CR Framework
The exploitation of CRs in loop analysis and loop optimizations requires an
efficient and extensive framework based on the CR construct. The framework, in
turn, requires the implementation of CRs as an intermediate representation, the
implementation of a term rewriting system for both CR simplification and CR inverse,
and the development and implementation of various methods designed to aid in the
construction, simplification, and evaluation of CRs. We have used the second version
of Stanford University’s Intermediate Format (SUIF2) compiler infrastructure as our
reconstruction compiler. For our term rewriting system we choose to implement
functions in C in order to deal with compatibility and structural issues. For the
reminder of the this Chapter we examine our framework.
3.4.1 CR Implementation Representation
To avoid being too dependent upon any one compiler infrastructure, we use two
separate data structures to represent the CR notation. The first data structure
serves as an intermediate representation in SUIF2 and the second is written in C as
a conglomerate of structures and arrays.
33

#include "basicnodes/basic.hoof"
#include "suifnodes/suif.hoof"
module crexpr
{
include "basicnodes/basic.h";
include "suifnodes/suif.h";
include "pairsnodes/pairs.h";
import basicnodes;
import suifnodes;
import pairsnodes;
concrete CRSF : Expression
{
VariableSymbol * reference v;
int len;
int ref;
list<int> ops;
list<Expression * owner> coefficients;
};
}
Figure 3.1. SUIF2 Internal Representation for the CR notation
SUIF2, written in C++, is a modular based architecture, allowing for easy
extension of the intermediate representation. For our CR notation we wrote a simple
hoof2 file as seen in Figure 3.4.1, which created a CR expression module from the more
general expression already included in the SUIF2 infrastructure. Notice we have the
declarations, VariableSymbol v which represents the index variable of a CR, integer
len which represents the length of Φ, we have ref which is a simple flag indicating
if the CR is currently referenced, ops which is a list of �, where � ∈ {+, ∗}, and
coefficients which is a list of the coefficients Φ = {ι0,�1, ι1,�2, . . . ,�k, fk}i, where
k = len.
2For more information on the SUIF2 compiler infrastructure see ”The SUIF Programmer Guide”
34

CR-Driver Menu
------------------------------------------
1. Compute CR
2. Compute CR Inverse
3. Perform Induction Variable Substitution
4. Perform Dependence Anaylsis
5. Simple Bounds Checking
6. List Avaliable Input Files
7. Print Menu
8. Exit
Figure 3.2. CR-Driver Main Menu
For our C data structure representation of the CR notation we use arrays
encapsulated in structures to represent the ops and coefficients rather than linked
lists. The reason for this is to improve performance. Also two routines were
implemented, one that converts a CR expression written into a SUIF2 node, and
one that converts a CR SUIF2 node into a C expression.
3.4.2 The Expression Rewriting System
Our expression rewriting system is a mix of application of CR simplification rules
and constant folding. The CR simplification rules are the same as those seen in Table
3.1 and the constant folding rules are described in Appendix D.
3.4.3 A Driver
In order to test our framework we developed a small driver program ”CR-Driver”
as seen in Figure 3.2 and Figure 3.3. We use yacc and lex routines to scan and parse
input respectively.
35

Simplification Options
-----------------------
1. Verbose level ................ 1
2. Expanded Form ................ no
press ’x’ for exit or ’o’ for options.
-- to begin SIMPLIFY press enter.
Figure 3.3. CR-Driver Simplification Options Menu
36
CHAPTER 4
A CHAINS OF RECURRENCES IVS
ALGORITHM
Our implementation of the IVS algorithm was first presented by Van Engelen.
The algorithm recognizes both simple and generalized induction variables using the
CR framework, and then performs induction variable substitution. The algorithm
effectively removes all cross-iteration dependence induced by GIV updates, enabling
a loop to be parallelized. This Chapter presents the algorithm and and an imple-
mentation of it using the SUIF2 compiler system.
4.1 Algorithm
The CR based IVS algorithm is able to detect multiple induction variables in
loop hierarchies by using multivariate CRs. The algorithm, designed to be safe and
simple to implement, performs induction variable substitution on a larger class of
induction variables then existing ad hoc algorithms. Nine routines arranged in three
main components, make up the CR-based IVS algorithm. When analyzing loops the
algorithm supports sequences, assignments, if-then-else, do-loops, and while-loops.
The algorithm analyzes loop nests from the innermost to the outermost, removing
induction variable updates and replacing them with their closed forms. Pseudo-code
for the for the overall algorithm is shown in Figure 4.1. We discuss the routines,
SSA, CR, and HOIST, below.
37

Figure 4.1. Pseudocode for induction variable substitution (IVS) algorithm. HereS(L) denotes the loop body, i denotes the BIV of the loop, a denotes the loop bound,and s denotes the stride of the loop.
4.1.1 Conversion to SSA form
The first component of the IVS algorithm converts the body of every loop nest into
single-static assignment (SSA) form with assignments to scalar variables separated
from the body and stored in a set of variable-update pairs.
Figure 4.2 shows algorithm SSA. The algorithm defines a precedence relation on
variable-value pairs:
38

(U, Y ) � (V, X) if U 6= V and V occurs in Y
where U and V are the names of variables, in order to obtain a set of ordered
pairs taken from the loop body. The set of ordered pairs contain all the potential
induction variables of the loop, which are arranged in a directed acyclic graph for the
expressions of the pairs set. The algorithm saves space by storing the expressions in
such a way that common subexpressions share the same node in the graph. Notice in
the pseudo-code for the algorithm that both the if and else part of an if-else statement
are scanned for potential induction variables. Algorithm MERGE shown in Figure
4.3, merges the sets of potential induction variables. Notice also the algorithm fails
when � is not a partial order on the set of variable-value pairs. This occurs when
their are cyclic recurrences in the loop, something this algorithm cannot overcome.
4.1.2 GIV recognition
The second component of the IVS algorithm converts the expressions of the
variable-update pairs to CR-expressions so that the algorithm can detect BIV’s and
GIV’s. The algorithm utilizes the CR-simplification rules for CR construction of the
expressions.
Algorithm CR, shown in Figure 4.4 is constructs the CR for the expressions in the
variable-update pairs to obtain normalized CR-expressions. The CR’s are then used
to detect induction variables among the variable-update pairs. Notice the recognition
of wrap-around variables in the second else-if scope. Each use of a variable before its
definition is replaced by a CR-expression that represents the difference of value.
4.1.3 Induction Variable Substitution
The third component of the IVS algorithm performs the substitution of the
induction variable updates by their update’s closed forms. Algorithm Hoist shown
in Figure 4.5 hoist the induction variable assignments out of the loop and replaces
39

Figure 4.2. Shown here is Algorithm SSA, which is responsible for convertingvariable assignments to SSA form.
40

Figure 4.3. Shown here is Algorithm MERGE, which is responsible for merging thesets of potential induction variables found in both the if and else part of an if-elsestatement.
the induction variable expressions by their closed forms through the application of
CR-inverse rules.
4.2 Testing the Algorithm
Van Engelen created a prototype implementation of his IVS algorithm in the
CTADEL compiler system and illustrated its effectiveness with code segments from
MDG and TRFD, both of which are notorious for dependence between non-linear
expressions in different loop nest. We use the same code segments to test the
feasibility of a compiler implementation of the algorithm.
41

Figure 4.4. Shown here is Algorithm CR, which is responsible for convertingvariable-update pairs to CR form.
42

Figure 4.5. Shown here is Algorithm HOIST, which is responsible for removingloop induction variables and placing their closed-form outside of the loop.
4.2.1 TRFD
Certain code segments of TRFD from the Perfect Benchmark suite are difficult to
parallelize due to the presence of a number of coupled non-linear induction variables.
Figure 4.6 depicts the code segment of TRFD which we used to test the GIV
recognition method and the IVS algorithm.
The input for algorithm SSA is shown here:
Printing ForStatement Before ALGORITHM SSA 1
43

for (i = 0; i <= m; ++i)
{
for (j = 0; j <= i; ++j)
{
ij = ij + 1;
ijkl = ijkl + i - j + 1;
for (k = i + 1; k <= m; k++)
{
for (l = 1; l <= k; ++l)
{
ijkl = ijkl + 1;
xijkl[ijkl] = xkl[l];
}
}
ijkl = ijkl + ij + left;
}
}
Figure 4.6. The code segment from TRFD that we tested.
---------------------------------------------
for( l=1; l <= k; l+=1)
{
ijkl = (ijkl+1)
xijkl[ijkl] = xkl[l]
}
This is a code segment from the inner-most loop as the algorithm detects multi-
variant GIVs by working from the inner-most loop outward. The algorithm takes
the statement update for variable ijkl and stores it in the previously empty set of
variable-update pairs. The update to the array access of pointer xijkl is left to remain
in the loop as arrays are not candidates in our algorithm for induction variables.
However you may notice that the array indices has been transformed to its equivalent
CR form. The results of algorithm SSA:
44

Printing ForStatement Before ALGORITHM CR 1
--------------------------------------------
for( l=1; l <= k; l+=1)
{
xijkl[(ijkl+1)] = xkl[l]
}
Printing PairStruct Before ALGORITHM CR 1
------------------------------------------
0> ijkl = (ijkl+1)
serves as input to Algorithm CR. The CR algorithm converts the update expressions
in the set of variable-value pairs into normalized CR-expressions. This step detects
simple induction variable ijkl. Also the index expressions for xijkl and xkl are replaced
by their CR-expressions. The results of the CR algorithm are shown below:
Printing ForStatement Before ALGORITHM HOIST 1
-----------------------------------------------
for( l=1; l <= k; l+=1)
{
xijkl[{(1+ijkl),+,1}l] = xkl[{1,+,1}l]
}
Printing PairStruct Before ALGORITHM HOIST 1
------------------------------------------------
0> ijkl = {ijkl,+,1}l
Algorithm Hoist converts the CR-expressions in the set of variable-update pairs into
closed-form expressions by calling CR inverse. After algorithm Hoist, the variable
45

ijkl and its update are located outside of the original l loop. Notice that the
CR-expressions located in array indices are not touched until the final stage of the
IVS algorithm. The results of Algorithm Hoist are shown below:
Printing ForStatement After ALGORITHM Hoist 1
----------------------------------------------
for( l=0; l <= ((-1)+k); l+=1)
{
xijkl[{(1+ijkl),+,1}l] = xkl[{1,+,1}l]
}
ijkl = (ijkl+k)
The algorithm then proceeds to analysis the next loop located beyond the one just
analyzed. Working further outwards the algorithm continues to hoist out GIVs. The
results seen below show the k, j, and i loop being analyzed respectively.
Printing ForStatement After ALGORITHM Hoist 2
----------------------------------------------
ij = (ij+1)
ijkl = (((ijkl+i)+(-j))+1)
for( k=0; k <= ((-1)+((-i)+m)); k+=1)
{
for( l=0; l <= ((-1)+{(1+i),+,1}k); l+=1)
{
xijkl[{{(1+ijkl),+,(1+i),+,1}k,+,1}l] = xkl[{1,+,1}l]
}
}
ijkl = (ijkl+((0.500000*((-i)+m))
+((0.500000*(((-i)+m)*((-i)+m)))+(i*((-i)+m)))))
46
ijkl = ((ijkl+ij)+left)
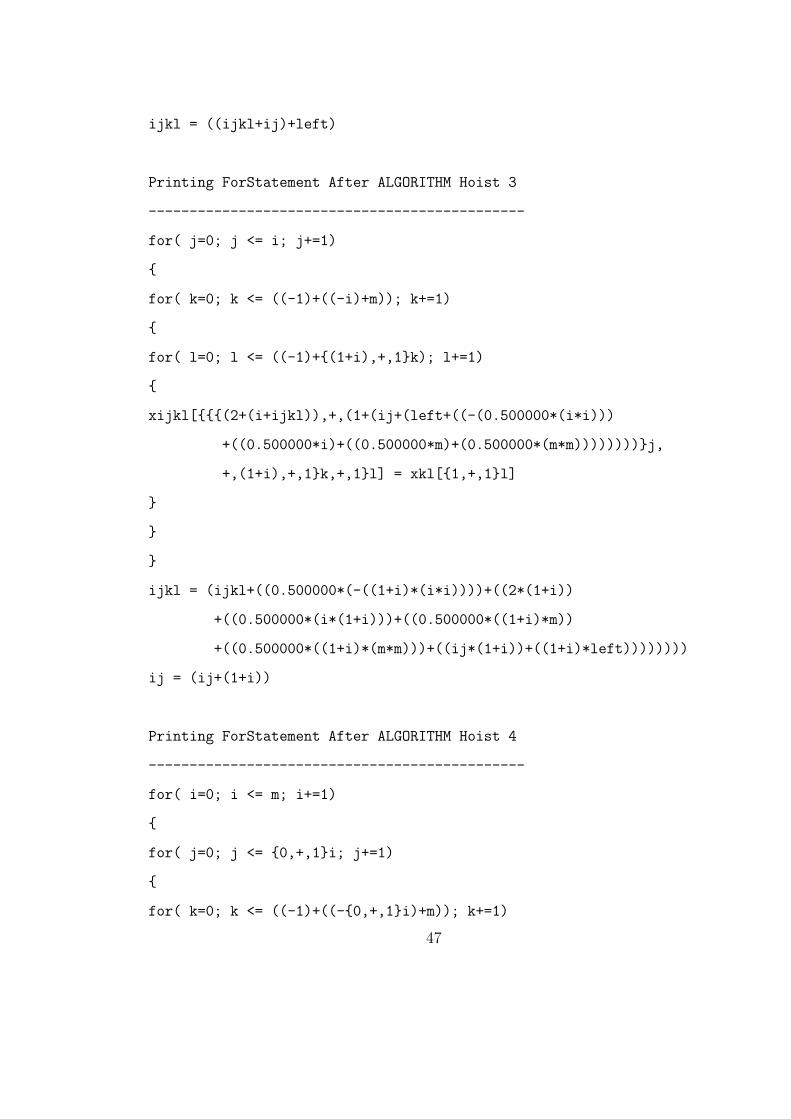
Printing ForStatement After ALGORITHM Hoist 3
----------------------------------------------
for( j=0; j <= i; j+=1)
{
for( k=0; k <= ((-1)+((-i)+m)); k+=1)
{
for( l=0; l <= ((-1)+{(1+i),+,1}k); l+=1)
{
xijkl[{{{(2+(i+ijkl)),+,(1+(ij+(left+((-(0.500000*(i*i)))
+((0.500000*i)+((0.500000*m)+(0.500000*(m*m))))))))}j,
+,(1+i),+,1}k,+,1}l] = xkl[{1,+,1}l]
}
}
}
ijkl = (ijkl+((0.500000*(-((1+i)*(i*i))))+((2*(1+i))
+((0.500000*(i*(1+i)))+((0.500000*((1+i)*m))
+((0.500000*((1+i)*(m*m)))+((ij*(1+i))+((1+i)*left))))))))
ij = (ij+(1+i))
Printing ForStatement After ALGORITHM Hoist 4
----------------------------------------------
for( i=0; i <= m; i+=1)
{
for( j=0; j <= {0,+,1}i; j+=1)
{
for( k=0; k <= ((-1)+((-{0,+,1}i)+m)); k+=1)
47

{
for( l=0; l <= ((-1)+{(1+{0,+,1}i),+,1}k); l+=1)
{
xijkl[{{{{(2+ijkl),+,(3+(ij+(left+((0.500000*m)
+((0.500000*(m*m))+(i*ij)))))),
+,(2+(ij+(left+((0.500000*m)+((0.500000*(m*m))
+(i*ij)))))),+,(ij+((i*ij)
+{(-3),+,(-3.000000)}i))}i,+,{(1+(ij+(left+((0.500000*m)
+(0.500000*(m*m)))))),+,1.000000}i}j,+,{1,+,1}i,+,1}k,+,1}l]
= xkl[{1,+,1}l]
}
}
}
}
ijkl = (ijkl+((-(0.125000*((1+m)*((1+m)*((1+m)*(1+m))))))
+((0.041667*(ij*((1+m)*(1+m))))+((0.041667*(ij*((1+m)
*((1+m)*((1+m)*(1+m))))))+((0.083333*(ij*((1+m)*((1+m)*(1
+m)))))+((0.250000*((1+m)*m))+((0.250000*(m*((1+m)*(1+m))))
+((0.250000*((1+m)*((1+m)*(1+m))))+((0.416667*(ij*((1+m)
*(1+m))))+((0.416667*((1+m)*ij))+((0.500000*((1+m)*left))
+((0.500000*((1+m)*(m*m)))+((0.500000*(left*((1+m)*(1+m))))
+((0.750000*(1+m))+((1.125000*((1+m)*(1+m)))+(((-(0.250000
*(1+m)))+(0.250000*((1+m)*(1+m))))*(m*m)))))))))))))))))
ij = (ij+((0.500000*(1+m))+(0.500000*((1+m)*(1+m)))))
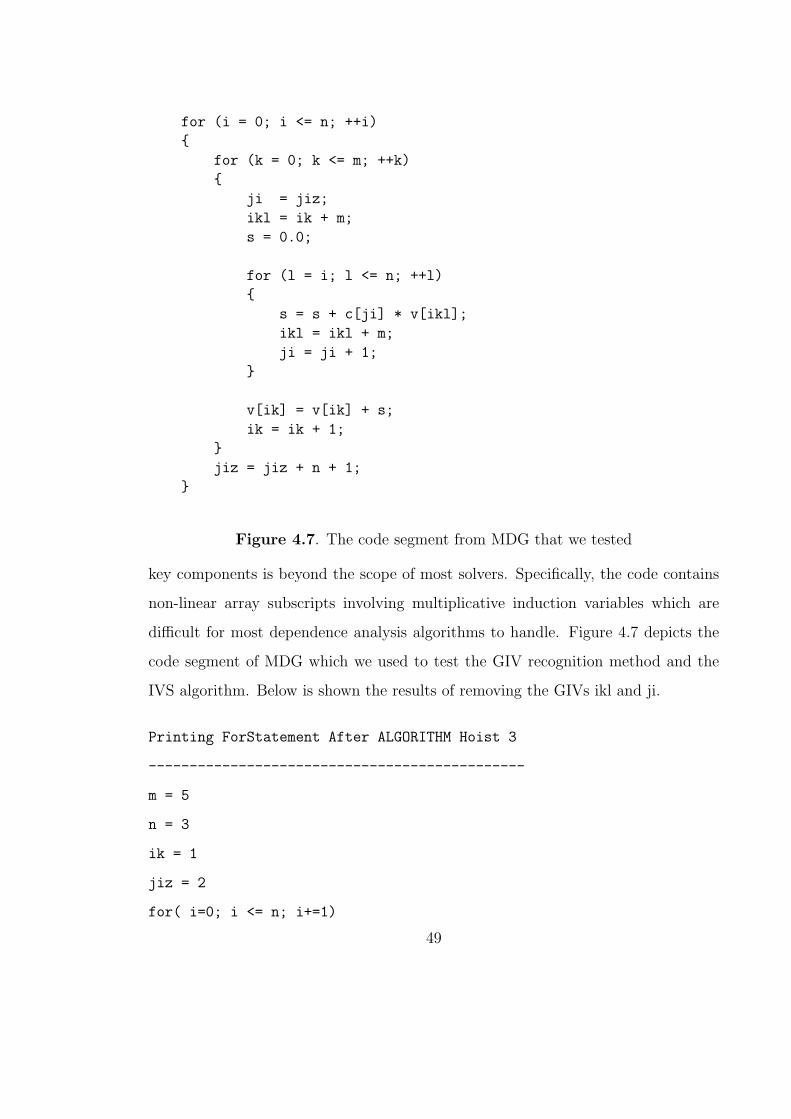
4.2.2 MDG
MDG from the Perfect Benchmarks suite contains key computational loops that
are safe to parallelize. Unfortunately performing proper dependence analysis on those
48
for (i = 0; i <= n; ++i)
{
for (k = 0; k <= m; ++k)
{
ji = jiz;
ikl = ik + m;
s = 0.0;
for (l = i; l <= n; ++l)
{
s = s + c[ji] * v[ikl];
ikl = ikl + m;
ji = ji + 1;
}
v[ik] = v[ik] + s;
ik = ik + 1;
}
jiz = jiz + n + 1;
}
Figure 4.7. The code segment from MDG that we tested
key components is beyond the scope of most solvers. Specifically, the code contains
non-linear array subscripts involving multiplicative induction variables which are
difficult for most dependence analysis algorithms to handle. Figure 4.7 depicts the
code segment of MDG which we used to test the GIV recognition method and the
IVS algorithm. Below is shown the results of removing the GIVs ikl and ji.
Printing ForStatement After ALGORITHM Hoist 3
----------------------------------------------
m = 5
n = 3
ik = 1
jiz = 2
for( i=0; i <= n; i+=1)
49

{
for( k=0; k <= m; k+=1)
{
s = 0.000000
for( l=0; l <= ((-{0,+,1}i)+n); l+=1)
{
s = (s+(c[{{jiz,+,(1+n)}i,+,1}l]*v[{({{ik,+,(1+m)}i,+,1}k+m),+,m}l]))
}
v[{{ik,+,(1+m)}i,+,1}k] = (s+v[{{ik,+,(1+m)}i,+,1}k])
}
}
ji = (1+((-n)+(jiz+(n+((1+n)*n)))))
jiz = ((1+n)+(jiz+((1+n)*n)))
ikl = ((-1)+((1+n)+(ik+((3*m)+(m*n)))))
ik = ((1+n)+(ik+((1+n)*m)))
Or testing shows that the algorithm is indeed able to cope with non-linear
expressions and improve upon the generalized induction variable recognition and
induction variable substitution algorithms.
50

CHAPTER 5
THE EXTREME VALUE TEST BY CR’S
CR’s afford an inexpensive method for determining the monotonicity of non-linear
functions. If monotonic analysis determines a function is increasing or decreasing
monotonically, efficient bounds analysis can be performed with the results utilized in
a non-linear dependence analysis test. In this Chapter we present the implementation
of a dependence analysis algorithm designed to take advantage of the efficiency
involved in analyzing the monotonic properties of a CR.
5.1 Monotonicity
A monotonic function is a function which is either entirely non-increasing or
nondecreasing. A characteristic of this type of function is that its first derivative
(which need not be continuous) does not change sign. If a function is known to be
monotonic, then value range analysis can be performed on the function and utilized
in non-linear dependence analysis test. For this reason monotonicity forms a basis
for non-linear dependence analysis.
If a function f(x) is known to be monotonically increasing, it has its greatest value
at the largest value of x and its lowest value at the smallest value of x. Conversely
if a function f(x) is known to be monotonically decreasing, it has its greatest value
at the smallest value of x and its lowest value at the smallest value of x. Traditional
methods used for determining maximum and minimum values deal strictly with linear
functions because determining the monotonicity of non-linear functions is expensive,
and more importantly can return incorrect results. For example consider value range
51

analysis on the index function f(i), where i ranges from 0, . . . , 10. The following steps
illustrate the potentially inaccurate returns of a traditional value range analysis test:
f(i) =i2 − i
2
=[0, 10]2 − [0, 10]
2
=[0, 100]− [0, 10]
2
=[−10, 100]
2
= [−5, 50]
This example shows a return of −5 for a lower bound and 50 for an upper bound
when the correct lower and upper bounds are really 0, and 45 respectively. Inaccurate
returns from a value range analyzers undermines the calling function, but as the next
example illustrates, inconsistent returns are also a problem:
f(i) =i(i− 1)
2
=[0, 10] ∗ ([0, 10]− [1, 1])
2
=[0, 10] ∗ [−1, 9]
2
=[−10, 90]
2
= [−5, 45]
Here we see having makes a difference in what value range analysis returns, and thus
it is essential to have a normalized form factor for obtaining consistent returns. For
this reason we use, as Van Engelen proposes in [15], normalized CRs where a CR
Φ = {ι0,�1, ι1, . . . , ιk−1,�k, fk}i is called normalized if fk 6= 0 when �k = + and
ιj 6= 0 when �k = ∗ and φj 6= 0 when �j+1 = ∗, for all 0 ≤ j < k.
52

5.1.1 Monotonicity of CR-Expressions
Determining the monotonicity of CRs is simple, efficient, and fast. If all the
coefficients of a CR are non-negative, the CR is considered positive and monotonically
increasing. Similarly if all the coefficients are negative the CR is considered negative
and monotonically decreasing. That is a CR
Φ = {ι0,�1, ι1,�2, . . . ,�k, fk}i (5.1)
has a positive monotonicity if for all j, where 0 ≤ j < k and fk ≥ 0, where fk
represents a CR. The lower bound L of a CR Φ = {ι0,�1, ι1,�2, . . . ,�k, fk}i is it’s
initial value ι0 if it is monotonically increasing. The upper bound U is obtained by
deriving the closed-form of the CR by applying the CR−1 rules.
5.2 Algorithm
The CR loop analysis method constructs CR-expressions for arbitrary index
expressions and simplifies them by using CR simplification rules. From the resulting
CRs, a fast and effective method of linear and non-linear index dependence testing
performs dependence analysis using direction vectors. The CR test, based on the
extreme value test, expands the former’s solution space by solving for both linear
and non-linear expressions in dependence equations.
The algorithm, pseudo code for which is seen in Figure 5.1, first seeks out an
outer most loop. The loop is then normalized. Next for each statement in the loop,
the loop induction variable is renamed to label it as begin used in conjunction with
a definition or a use. Next the algorithm constructs CR-expressions for the arbitrary
index expressions found in each statement of the loop. Then system of dependence
equations is formed by removing the CR-expressions from the array subscripts of
each statement, CR simplification is performed, and any remaining CR is moved
to the left side of the dependence equation with any remaining constants moving
53

Figure 5.1. Shown here is Algorithm EVT, which is responsible for merging thesets of potential induction variables found in both the if and else part of an if-elsestatement.
to the right. From here the algorithm determines the lower and upper bounds of
the CR-expressions and compares the result with the constant on the right side of
the equation. If the constant lies between the lower and upper bound range then
the algorithm determines dependence is possible and continues on to determine the
direction(s) in which it is possible by using the direction vector hierarchy. After the
algorithm finishes determining dependence with a loop it tries to see if it has any
inner loops and determines dependence based for low limits of both loops.
As is the case with the traditional extreme value test, our algorithm finds
the extreme values of an expression with unknowns located on the left side of a
dependence equations, then determines if dependence is possible by comparing the
expression’s range with the constant located on the right hand side of the dependence
54

equation. Also like the extreme value test a direction vector hierarchy is used to
determine the kind and direction of any possible dependences by applying direction
vector constraints.
5.3 Implementation
Needed for the CR loop analysis algorithm are two methods, one that determines
the lower bound of a CR-Expression and one that determines the upper bound.
In order for these methods to make definitive returns for CR-Expressions which
represent non-linear functions, another method which determines the monotonicity
of a CR is needed to cater to the lower and upper bound methods.
We implemented the routines for determining the lower bound, upper bound,
and monotonicity of a CR-expression in C, outside of SUIF2. With SUIF2 we simply
created a routine that find loops from the inner most outward, and pass them to
another function that would normalize the loop, labeling unknowns as defs or uses,
and then create a dependence equation. From here a routine test dependence based
on the direction vector hierarchy, only testing nodes in hierarchy who’s parents
indicated a possible dependence. Table B.1 in Appendix B shows the function
mappings for lower bound, upper bound, and monotonicity routines implemented
for the algorithm. Our CR monotonicity testing is performed in O(k) time, where k
is the degree of the polynomial.
To give you an idea of how the Min Max, and Monotonicity functions operate
the Table B.1 in appendix B shows their function mappings. A CR-expression with
annotated unknowns is passed to the Min and Max functions with a range for the
loop iteration variable, and they return the min and max of the those CR-expressions
respectively.
55

Orginal Loop
------------
for( I=1; I <= 10; I+=1)
{
for( J=1; J <= 10; J+=1)
{
a[((I*I)+J)] = 0
b[1] = a[(((I*10)+J)+(-1))]
b[3] = b[(I*3)]
}
}
Figure 5.2. The original loop
5.4 Testing the Algorithm
Testing the CR dependence algorithm to verify that its analysis range covers that
of both linear and non-linear subscript expressions, appropriate code was generated
and passed to the CREVT routine. The actions and results of the program executing
on that code are outlined in this section.
The original code is shown in Figure 5.2. The code was generated not only to
test the algorithms ability to handle non-linear subscripts such as the first statement
of the innermost loop, but also to test the algorithms ability to compute dependence
between subscripts with more than one unknown.
The loop dependence testing is performed on the inner most loop first, working
its way outward loop by loop. In the case of the loop in Figure 5.2 the loop with
induction variable j is passed to the CREVT routine first. From here Figure 5.3 shows
the results of the loop being normalized. Notice also it shows all the unknowns within
the loop have been renamed appropriately depending on whether it is located on the
left side (def) or the right side (use) of the equation. From this point dependence
equations with the unknowns encapsulated in CRs are defined as mentioned in the
algorithm above.
56

Normalized Loop
---------------
for( J=0; J <= 9; J+=1)
{
a[((I*I)+(J_def+1))] = 0
b[1] = a[(((I*10)+(J_use+1))+(-1))]
b[3] = b[(I*3)]
}
Figure 5.3. The inner most loop is normalized.
Dependence Testing
------------------
Loop: (J)
Direction: (*)
Testing Arrays: a[((I*I)+(J_def+1))] = a[(((I*10)+(J_use+1))+(-1))]
Dependence Equation: ({(1+(I*I)),+,1}J_def+{(-(10*I)),+,(-1)}J_use) = 0
Upperbound: Undefined
Lowerbound: Undefined
Possible Dependence: Yes
Direction: (*)
Testing Arrays: b[1] = b[(I*3)]
Dependence Equation: (1+(-(3*I))) = 0
Upperbound: Undefined
Lowerbound: Undefined
Possible Dependence: Yes
Direction: (*)
Testing Arrays: b[3] = b[(I*3)]
Dependence Equation: (3+(-(3*I))) = 0
Upperbound: Undefined
Lowerbound: Undefined
Possible Dependence: Yes
Figure 5.4. Dependence testing of the innermost loop
57

Normalized Loop
---------------
for( I=0; I <= 9; I+=1)
{
for( J=0; J <= 9; J+=1)
{
a[(((I_def+1)*(I_def+1))+(J_def+1))] = 0
b[1] = a[((((I_use+1)*10)+(J_use+1))+(-1))]
b[3] = b[((I_use+1)*3)]
}
}
Figure 5.5. SUIF2 Internal Representation for the CR notation
From this point, the J def and J use, have been annotated with there appropriate
lower and upper bounds based on the normalized loop index variable J, but the
variable I has been annotated with nothing as its bounds are unknown at this time1.
The algorithm precedes operating on limited information and tries to determine
dependence for each possible conflict between a set and a use, the results of which
are shown in Figure 5.4.
Figure 5.4 shows the algorithm returning that there is a possibility of dependence
between the three potential conflicts. This return however did not take into account
the bounds of the variable I. At this point the algorithm, the algorithm is obviously
returning conservative returns due to limited information. When the algorithm
reaches a point where it can analysis the outer most loop, the range of I will be known
and more accurate dependences will be shown, while traditional extreme value test
will still be forced to make a conservative return on the dependency involving the
access to array A, due to the non-linear expression associated with its dependence
equation.
1This can be done by annotating the symbol table with scope dependent bounds information,but this has not been done in our implementation
58

Direction: (*,*)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+({0,+,(-10)}I_use
+({0,+,1}J_def+{0,+,3,+,2}I_def))) = 8
Upperbound: 40
Lowerbound: -99
Possible Dependence: Yes
Figure 5.6. Dependence test in (∗, ∗) direction of array a
After the J-loop has finished going through its dependence analysis the I-loop
is next in line for its turn. Figure 5.5 shows the results of this loop being
normalized, with loop induction variable I being replaced throughout the loop with
the appropriate I def and I use variables which are both annotated with lower and
upper bounds for I. Notice at this point the J def and J use variable remain and
remain annotated. The next step in the loop is to set up the dependence equations,
which again, is done as mentioned in the algorithm above.
Testing the dependence between reference to array a, we see from Figure 5.6 that
in the (∗, ∗) direction the algorithm was able to produce lower of -99 and an upper
bound of 40 for the non-linear equation on the left side of the dependence equation.
Since 8, the constant on the right, lies between 40 and -99, the algorithm return there
is a possible dependence and continues on deeper in the dependence hierarchy to try
and discover the direction of the dependence.
Figure 5.7 shows that in the (<, ∗) direction there is no dependence, and since
there is no dependence at this point in the hierarchy the direction vectors (<,<),
(<, =), and (<,>) need not be tested and the algorithm moves on to test other
direction vectors.
Figure 5.8 shows testing dependence in the (=, ∗) direction produces a possible
dependence return. So from here the algorithm tries to pinpoint the exact dependence
direction which is shown to be in (=, >) direction.
59

Direction: (<,*)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+({0,+,(-10)}I_use
+({0,+,1}J_def+{0,+,3,+,2}I_def))) = 8
Upperbound: 3
Lowerbound: -99
Possible Dependence: NO
Figure 5.7. Dependence test for (<, ∗) direction of array a.
Figure 5.9 shows that dependence exist in all three directions (>,<), (>, =), and
(>,>). The reminder of the dependency checks done for array b, are not shown, but
they were also done.
From the above results we see how the monotonicity of CR’s allows for a fast and
efficient method of using the extreme value test to find dependences between array
indices even if those indices can non-linear expressions. The method expands the
solution space for the extreme value test.
5.5 IVS integrated with EVT
In the previous Chapter we saw how CR-expressions can be used to represent
recurrences and closed-form functions of loop induction variables to aid in induction
variable recognition and substitution. The IVS algorithm however, can be run as
an initial step to EVT analysis. The benefits of merging the two algorithm into one
is that by performing IVS first, we are able to minimize the amount of work that
needs to be done by EVT by removing updates and already having BIV’s, GIV’s
and potential multi-variant CR-expressions already in their CR forms. The following
code is used to illustrates this interaction:
The Original Code Segment:
60

Direction: (=,*)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+{0,+,1}J_def) = 8
Upperbound: 9
Lowerbound: -9
Possible Dependence: YES
Direction: (=,<)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+{0,+,1}J_def) = 8
Upperbound: -1
Lowerbound: -9
Possible Dependence: NO
Direction: (=,=)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: 0 = 8
Upperbound: 0
Lowerbound: 0
Possible Dependence: NO
Direction: (=,>)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+{0,+,1}J_def) = 8
Upperbound: 9
Lowerbound: 1
Possible Dependence: YES
Figure 5.8. Testing dependence in the (=, ∗) direction.
61

Direction: (>,*)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+({0,+,(-10)}I_use
+({0,+,1}J_def+{0,+,3,+,2}I_def))) = 8
Upperbound: 40
Lowerbound: -61
Possible Dependence: YES
Direction: (>,<)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+({0,+,(-10)}I_use
+({0,+,1}J_def+{0,+,3,+,2}I_def))) = 8
Upperbound: 30
Lowerbound: -61
Possible Dependence: YES
Direction: (>,=)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-10)}I_use+{0,+,3,+,2}I_def) = 8
Upperbound: 31
Lowerbound: -52
Possible Dependence: YES
Direction: (>,>)
Testing Arrays: a[(((I_def+1)*(I_def+1))+(J_def+1))]
= a[((((I_use+1)*10)+(J_use+1))+(-1))]
Dependence Equation: ({0,+,(-1)}J_use+({0,+,(-10)}I_use
+({0,+,1}J_def+{0,+,3,+,2}I_def))) = 8
Upperbound: 40
Lowerbound: -51
Possible Dependence: YES
Figure 5.9. Testing for dependence in the (>, ∗) direction.
62

k = 0for (i = 0; i < 10; ++i){
for (j = 0; j < i; ++j){
A[k] = A[(10*i) + j]k = k + 1
}}
is given to the SSA algorithm. After performing generalized induction variable
recognition and substitution the following code is produce:
for (i = 0; i < 10; ++i){
for (j = 0; j < i; ++j){
A[{{0,+,1,+,1}i,+,1}j] = A[{{0,+,10}i,+,1}j]}
}
Notice here that we leave the expressions of the array access in CR notion. From
here the code produced by SSA can be passed to EVT to produce the code:
for (i = 0; i < 10; ++i){
for (j = 0; j < i; ++j){
A[{{0,+,1,+,1}i def,+,1}j def] = A[{{0,+,10}i use,+,1}j use]}
}
and the dependence equation for the (*,*) direction:
{{0,+,1,+,1}i def,+,1}j def + {{0,+,-10}i use,+,-1}j use = 0
in order to determine possible dependence.
63

CHAPTER 6
CONCLUSIONS
6.1 Conclusions
We have developed and implemented efficient and effective techniques to analyze
induction variables and data dependences, to transform code based on those analysis.
We have demonstrated on examples from the Perfect Club Benchmark Suite, and
toy examples containing non-affine functions, the enhanced capabilities of these
algorithms. Through the design and implementation of a self-contained library we
have demonstrated the feasibility of a restructuring system based on these techniques.
We conclude that the implementations of loop analysis techniques based on the
chains of recurrence representation are not only feasible and practical, but also highly
advantageous.
6.2 Future Work
We believe the CR representation will aid in future enhancements to loop
strength reduction, code motion, program equivalence testing, program correctness
verification, and worst case execution time (WCET). Through utilization of our
developed CR framework, we feel that many advance can be made high performance
and parallel computing.
64

APPENDIX A
CONSTANT FOLDING
The following transformations define our constant folding rules. X, Y , and Z arearbitrary expressions, while N , M , and K are all constants.
Table A.1: Constant Folding Rules.
Expression RewriteAddition Rules
1. 0 +X =⇒ X2. X + (−X) =⇒ 03. X +X =⇒ X4. (N ×X) +X =⇒ (K ×X) where K = N + 15. (N ×X) + (−X) =⇒ (K ×X) where K = N − 16. (N ×X) + (M ×X) =⇒ (K ×X) where K = N +M
Multiplication Rules7. (0×X) =⇒ 08. (X ×X) =⇒ X9. (X × (1/X)) =⇒ 110. (X ×X) =⇒ (X2)11. (XN ×X) =⇒ (XK) where K = N + 112. (XN × (1/X)) =⇒ (XK) where K = N − 113. (XN ×XM ) + (M ×X) =⇒ (XK) where K = N +M
Exponentiation Rules14. X1 =⇒ X15. X−1 =⇒ (1/X)16. X0 =⇒ 117. 0X =⇒ 018. 1X =⇒ X
19. 1/(XY ) =⇒ (X(−Y ))20. (1/X)Y =⇒ (X(−Y ))21. (XY )Z =⇒ (X(Y×Z))
CR Rules22. {X,�, Y,�, Z,�, . . . ,+, 0} =⇒ {X,�, Y,�, Z,�, . . .}
– Continued –65

Table A.1: – Continued –
23. {X,�, Y,�, Z,�, . . . ,×, 1} =⇒ {X,�, Y,�, Z,�, . . .}24. {0,�, Y,�, Z,�, . . .} =⇒ 025. −{X,�, Y,�, Z,�, . . .} =⇒ {−X,�,−Y,�,−Z,�, . . .}
Distributive Rules26. −(X + Y + Z + . . .) =⇒ (−X) + (−Y ) + (−Z) + . . .27. 1/(X × Y × Z × . . .) =⇒ 1/((1/X)× (1/Y )× (1/Z)× . . .)28. ((−X)× Y × Z × . . .) =⇒ −(X × Y × Z × . . .)29. (X × (Y × Z)) =⇒ (X × Y ) + (X × Z)
66
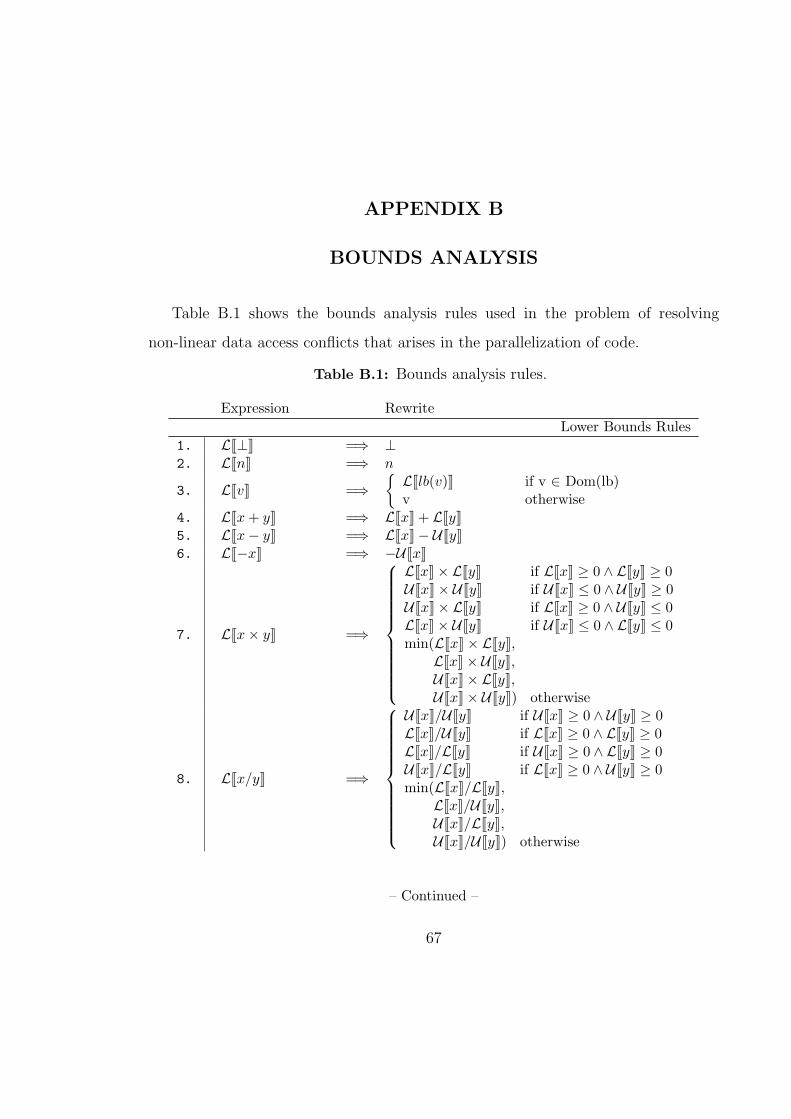
APPENDIX B
BOUNDS ANALYSIS
Table B.1 shows the bounds analysis rules used in the problem of resolving
non-linear data access conflicts that arises in the parallelization of code.
Table B.1: Bounds analysis rules.
Expression RewriteLower Bounds Rules
1. LJ⊥K =⇒ ⊥2. LJnK =⇒ n
3. LJvK =⇒{LJlb(v)K if v ∈ Dom(lb)v otherwise
4. LJx+ yK =⇒ LJxK + LJyK5. LJx− yK =⇒ LJxK− UJyK6. LJ−xK =⇒ −UJxK
7. LJx× yK =⇒
LJxK× LJyK if LJxK ≥ 0 ∧ LJyK ≥ 0UJxK× UJyK if UJxK ≤ 0 ∧ UJyK ≥ 0UJxK× LJyK if LJxK ≥ 0 ∧ UJyK ≤ 0LJxK× UJyK if UJxK ≤ 0 ∧ LJyK ≤ 0min(LJxK× LJyK,LJxK× UJyK,UJxK× LJyK,UJxK× UJyK) otherwise
8. LJx/yK =⇒
UJxK/UJyK if UJxK ≥ 0 ∧ UJyK ≥ 0LJxK/UJyK if LJxK ≥ 0 ∧ LJyK ≥ 0LJxK/LJyK if UJxK ≥ 0 ∧ LJyK ≥ 0UJxK/LJyK if LJxK ≥ 0 ∧ UJyK ≥ 0min(LJxK/LJyK,LJxK/UJyK,UJxK/LJyK,UJxK/UJyK) otherwise
– Continued –
67

Table B.1: – Continued –
9. LJxnK =⇒
LJxKn if n ≥ 0 ∧ LJxK ≥ 0UJxKn if n < 0 ∧ LJxK > 0UJxKn if n ≥ 0 ∧ n mod 2 = 0
∧ UJxK < 0LJxKn if n ≥ 0 ∧ n mod 2 = 1
∧ UJxK < 0LJxKn if n < 0 ∧ n mod 2 = 0
∧ UJxK < 0UJxKn if n < 0 ∧ n mod 2 = 1
∧ UJxK < 0min(LJxKn,UJxKn) otherwise
10. LJx÷ yK =⇒{
(LJxK− n+ 1)/n if n > 0UJxK/n if n < 0
11. LJx%nK =⇒{
0 if LJxK ≥ 01 - |n| otherwise
12. LJmax(x, y)K =⇒ max(LJxK,LJyK)13. LJmin(x, y)K =⇒ min(LJxK,LJyK)14. LJbxcK =⇒ LJxK− 115. LJdxeK =⇒ LJxK
16. LJΦK =⇒
LJι0K if LJMi(Φi)K ≥ 0LJCR−1
i (Φi)[i←U(i)]K if UJMi(Φi)K ≤ 0LJCR−1
i (Φi)K otherwiseUpper Bounds Rules
17. UJ⊥K =⇒ ⊥18. UJnK =⇒ n
19. UJvK =⇒{UJU(v)K if v ∈ Dom(U)v otherwise
20. UJx+ yK =⇒ UJxK + UJyK21. UJx− yK =⇒ UJxK− LJyK22. UJ−xK =⇒ −LJxK
23. UJx× yK =⇒
UJxK× LJyK if UJxK ≤ 0 ∧ LJyK ≥ 0LJxK× UJyK if LJxK ≥ 0 ∧ UJyK ≤ 0LJxK× LJyK if UJxK ≤ 0 ∧ UJyK ≤ 0UJxK× UJyK if LJxK ≥ 0 ∧ LJyK ≥ 0max(LJxK× LJyK,LJxK× UJyK,UJxK× LJyK,UJxK× UJyK) otherwise
– Continued –
68

Table B.1: – Continued –
24. UJx/yK =⇒
LJxK/UJyK if LJxK ≥ 0 ∧ UJyK < 0UJxK/UJyK if UJxK ≤ 0 ∧ LJyK > 0UJxK/LJyK if LJxK ≥ 0 ∧ LJyK > 0LJxK/LJyK if UJxK ≤ 0 ∧ UJyK < 0max(LJxK/LJyK,LJxK/UJyK,UJxK/LJyK,UJxK/UJyK) otherwise
25. UJxnK =⇒
LJxKn if n < 0 ∧ LJxK > 0UJxKn if n ≥ 0 ∧ LJxK ≥ 0LJxKn if n ≥ 0 ∧ n mod 2 = 0
∧ UJxK < 0UJxKn if n ≥ 0 ∧ n mod 2 = 1
∧ UJxK < 0LJxKn if n < 0 ∧ n mod 2 = 1
∧ UJxK < 0UJxKn if n < 0 ∧ n mod 2 = 0
∧ UJxK < 0max(LJxKn,UJxKn) otherwise
26. UJx÷ yK =⇒{UJxK/n if n > 0(LJxK− n+ 1)/n if n < 0
27. UJx%nK =⇒{
0 if UJxK ≤ 01 - |n| otherwise
28. UJmax(x, y)K =⇒ max(UJxK,UJyK)29. UJmin(x, y)K =⇒ min(UJxK,UJyK)30. UJbxcK =⇒ UJxK31. UJdxeK =⇒ UJxK + 1
32. UJΦK =⇒
UJι0K if UJMi(Φi)K ≤ 0UJCR−1
i (Φi)[i←U(i)]K if LJMi(Φi)K ≥ 0UJCR−1
i (Φi)K otherwiseMonotoncity Rules
33. Mi({ι0,+, f1}i) =⇒ f1
34. Mi({ι0, ∗, f1}i) =⇒
f1 − 1 if LJι0K ≥ 0 ∧ LJf1K > 01− f1 if LJι0K ≤ 0 ∧ LJf1K > 0⊥ otherwise
35. Mi({ι0,�1, f1}j) =⇒ Mi(ι0)
Here L represents the lowerbound function and U represents the upperbound
function. The Max and Min functions return respectively the maximum and
minimum values of an Expression or of a CR-Expression. Results returned are based
69

on induction variable extremes for monotonic functions and constant information.
The ⊥ symbol represents that a return value is unknown.
70

REFERENCES
[1] Allen, F., Cocke, J., and Kennedy, K. Reduction of operator strength.In Program Flow Analysis: Theory and Applications, S. Muchnick and N. Jones,Eds. Prentice-Hall Inc. Englewood Cliffs New Jersey, 1981, ch. 3, pp. 79–101.
[2] Bachmann, O. Chains of recurrences. PhD thesis, 1997.
[3] Bachmann, O., Wang, P. S., and Zima, E. V. Chains of recurrences -a method to expedite the evaluation of closed-form functions. In InternationalSymposium on Symbolic and Algebraic Computation (1994), pp. 242–249.
[4] Briggs, P., and Cooper, K. D. Effective partial redundancy elimination. InSIGPLAN Conference on Programming Language Design and Implementation(1994), pp. 159–170.
[5] Cocke, J., and Kennedy, K. An algorithm for reduction of operatorstrength. Communications of the ACM 20, 11 (1977), 850–856.
[6] Cooper, K. D., Simpson, L. T., and Vick, C. A. Operator strengthreduction. Programming Languages and Systems 23, 5 (2001), 603–625.
[7] George .B. Dantzig, B. C. E. Fourier-motzkin elimination and its dual.Journal of Combinatorial Theory 14, 14 (1973), 288–297.
[8] Goff, G., Kennedy, K., and Tseng, C.-W. Practical dependence testing.In Proceedings of the ACM SIGPLAN ’91 Conference on Programming LanguageDesign and Implementation (Toronto, Ontario, Canada, June 1991), vol. 26,pp. 15–29.
[9] Gupta, R., Pande, S., Psarris, K., and Sarkar, V. Compilationtechniques for parallel systems. Parallel Computing 25, 13–14 (1999), 1741–1783.
[10] Haghighat, M. R., and Polychronopoulos, C. D. Symbolic analysisfor parallelizing compilers. ACM Transactions on Programming Languages andSystems 18, 4 (July 1996), 477–518.
[11] Knoop, J., Ruething, O., and Steffen, B. Lazy code motion. InProceedings of the ACM SIGPLAN ’92 Conference on Programming Language
71

Design and Implementation (San Francisco, CA, June 1992), vol. 27, pp. 224–234.
[12] Knoop, J., Ruthing, O., and Steffen, B. Optimal code motion: Theoryand practice. ACM Transactions on Programming Languages and Systems 16,4 (July 1994), 1117–1155.
[13] Psarris, K., and Kyriakopoulos, K. Measuring the accuracy and effi-ciency of the data dependence tests. In International Conference on Paralleland Distributed Computing Systems (2001).
[14] Pugh, W. The omega test: a fast and practical integer programming algorithmfor dependence analysis. In Supercomputing (1991), pp. 4–13.
[15] van Engelen, R. Symbolic evaluation of chains of recurrences for loopoptimization, 2000.
[16] van Engelen, R. A. Efficient symbolic analysis for optimizing compilers.Lecture Notes in Computer Science 2027 (2001).
[17] Wolfe, M. High Performance Compilers for Parallel Computing. AddisonWesley, Redwood City, CA, 1996.
[18] Wolfe, M., and Banerjee, U. Data dependence and its application toparallel processing. International Journal of Parallel Programming 16, 2 (1987),137–178.
[19] Wolfe, M. J. Optimizing Supercompilers for Supercomputers. MIT Press,1990.
[20] Zima, E. V. Automatic construction of systems of recurrence relations.USSR Computational Mathematics and Mathematical Physics 24, 11-12 (1986),193–197.
[21] Zima, E. V. Recurrent relations and speed-up of computations using computeralgebra systems. In Proc. of DISCO, Bath, U.K., April 1992 (1992), pp. 152–161.
[22] Zima, E. V. Simplification and optimization transformations of chains of re-currences. In International Symposium on Symbolic and Algebraic Computation(1995), pp. 42–50.
72

BIOGRAPHICAL SKETCH
Johnnie L. Birch
Johnnie Birch graduated from Florida State University in the Fall of 1999 with a
B.S. degree in Meteorology. He worked for a educational outreach group in the
meteorology department until he went back to school in the Fall of 2000 to pursue
a Masters in Computer Science. While attending to earning his degree he became
a member of Upsilon Pi Epsilon, honor Society in the Computer Science, and a
member of ACM. Since 2001 he has been a research assistant for his major professor,
Dr. Robert Van Engelen.
73





























