Embed Size (px)
Citation preview

1
The Specialist Committee onUnconventional Propulsors
Final Report andRecommendations to the 22nd ITTC
1 MEMBERSHIP AND MEETINGS
The 21st ITTC appointed the Specialist Com-mittee on Unconventional Propulsors with thefollowing membership:
• Dr. Neil Bose, (Canada), Chair; MemorialUniversity of Newfoundland, St. John’s.
• Dr. Michael Billet (USA), Secretary; Ap-plied Research Laboratory - Penn State,State College, PA.
• Dr. Poul Andersen (Denmark); TechnicalUniversity of Denmark, Lyngby.
• Dr. Mehmet Atlar (UK); University ofNewcastle upon Tyne, Newcastle uponTyne.
• Mr. Christian Dugué (France); Bassind’Essais des Carènes, Val de Reuil.
• Dr.Ing. Marco Ferrando (Italy); Universitàdegli Studi di Genova, Genova.
• Dr. Wenhao Qian (China); Marine Designand Research Institute of China, Shanghai.
• Dr. Yide Shen (Belgium); University ofLiège, Liège.
At the first meeting of the Committee, Dr.Michael Billet was elected Secretary of theCommittee. Meetings were held as follows:
• University of Liège, Belgium, February1997.
• Memorial University of Newfoundland,Canada, September 1997.
• Università degli Studi di Genova, Italy,February 1998.
• Bassin d’Essais des Carènes, France, Sep-tember 1998.
2 TASK SET FROM THE 21ST ITTC
Develop guidelines for carrying out propul-sion tests and extrapolating the results to fullscale for propellers with ducts, partial ducts,pre- and post-swirl devices, tip plates and z-drives.
3 INTRODUCTION
In order to address extrapolation methodol-ogy for unconventional propulsors, the Com-mittee first reviewed known extrapolationmethods currently in use for ships fitted withdifferent types of these devices. A summary ofthese reviews is given in section 4 of this report.Section 5 then describes the main extrapolationmethods in further detail.
Many of the extrapolation methods presen-tly in use for powering performance predictionof ships fitted with unconventional propulsorsare based on modifications of the ITTC 1978

2
method. The ITTC 1978 formulation was de-veloped primarily for single-screw open-propeller ships and established an extrapolationmethodology using interaction parameters suchas wake and thrust deduction fraction as wellas Reynolds number based friction corrections.Organisations have not only modified the ITTC1978 approach for open propellers based onexperience, but more importantly in the presentcontext, developed new methodology for eachparticular type of unconventional propulsortreated by using these methods. However, onthe horizon are developing unsteady RANScodes, new testing procedures for towing tanks,application of large high-Reynolds numberwater tunnels, etc., that can more rigorouslyaddress these issues. Also, there is still a greatneed for reliable full scale unconventional pro-pulsor performance data to validate any meth-odology.
Devices added to the blade tips, such asbands, tip fins, bulbs, etc., and those added tothe propeller hub, such as boss cap fins, form aclass of unconventional propulsor that canutilise relatively reliably the ITTC 1978 ex-trapolation methodology. However, the effectof Reynolds number on this methodologyneeds to be resolved as devices that locallymodify the flow field to control cavitation orimprove efficiency are often tested at relativelylow Reynolds number in the towing tank. Themore extreme cases where the propulsor can beconsidered part of the ship hull, such as inte-grated ducted propulsors, form a group of un-conventional propulsors where the ITTC 1978methodology is clearly not adequate. In somecases, unconventional propulsors involvingpre- and post-swirl vanes, ducts, propeller pods,etc., have been treated for extrapolation pur-poses by using a modified ITTC 1978 method-ology. In other cases new methods have beendeveloped for extrapolation and it is expectedthat the most reliable methods to be developedin the future will make use of new methods.
Section 6 discusses the rationale behind theCommittee’s proposals for the future develop-ment of more general extrapolation methods
for powering prediction of ships fitted with un-conventional propulsors. Section 7 gives theCommittee’s Conclusions and Recommenda-tions.
4. MODEL SCALE AND FULL SCALERESULTS OF VARIOUS EXTRAPOLA-TION METHODS FOR UNCONVEN-TIONAL PROPULSORS
4.1 Propeller Boss Cap Fins (PBCF)
Recent activities concerning effective bosscap designs to improve the efficiency andcavitation performance of marine screw pro-pellers have focused on the device known as“Propeller Boss Cap Fins” (PBCF). This wasproposed by a group of Japanese inventors,Ogura et al. (1988), as a means of increasingthe efficiency of a ship screw propeller. Almostall the research and development work onPBCF have been reported through a series oftechnical articles published by the technicaldepartments of the Mitsui OSK Lines Ltd.,West Japan Fluid Engineering Laboratory Co.Ltd and the Mikado Propeller Co Ltd. who arethe joint patent holders of the device.
Ouchi (1988) and Ouchi et al. (1988 and1989) presented early research and develop-ment work on PBCF involving detailed modeltests, flow visualisations and the first full-scalemeasurements on the 44,979 GT PCC “Mer-cury Ace”. These investigations reported a gainof 3-7% for the propeller efficiency through the“reverse POT” (Propeller Open Test) in a cir-culating water channel, 2 to 2.3 % gain in thepropulsive efficiency based on self-propulsiontests and finally a gain of 4% for the poweroutput on the actual vessel. Further investiga-tions were also reported by Ouchi (1989),Ouchi & Tamashima (1989) and Ouchi et al(1989,1990 and 1992) including 3-D LDVmeasurements in the model propeller slip-stream, full-scale measurements with 11 ves-sels and cavitation and noise investigations.The comparative analysis of the sea trial resultsof 11 ships and their models indicated consid-

3
erable scale effect between the model and actu-al measurements such that the efficiency gainat full scale could be two or three times that atthe model scale. This was mainly attributed tolaminar flow around the boss cap and possiblelaminar flow separation at the back of the fins.Finally a suitable scale factor, which could bedetermined from a large number of tests onmodels and actual ships in the same manner asthe roughness allowance in the resistance ofships, was recommended to compensate for thescale effect.
Ouchi (1988) and Ouchi et al. (1990) alsoreported on various other aspects of PBCF as-sociated with the extrapolation of the poweringperformance. They indicated that the presenceof a rudder significantly reduces the strength ofthe hub vortex and hence the gain in propellerefficiency due to PBCF can be reduced by 10-30%. Self-propulsion tests to investigate thepropulsive efficiency by PBCF indicated thatthe efficiency gain obtained from the self-propulsion tests were similar to the gain ob-tained from the “reverse POT” tests with therudder. The effectiveness of the PBCF was re-ported to be hardly affected by the hull wakesuggesting that most of the efficiency gain wasdue to the propeller flow itself, but it was im-portant to take into account the effect of therudder. The thrust identity analysis of the self-propulsion tests, in which the PBCF was con-sidered as an appendage to the propeller, de-monstrated that the effect of the PBCF pri-marily appears as an increase in the relative–rotative efficiency due to the reduction in thepropeller torque due to the PBCF.
In order to shed more light on the functionof PBCF, Gearhart & McBride (1989) carriedout a detailed flow analysis and power meas-urements with PBCF. The experimental analy-sis of the efficiency gain from PBCF utilisedthe results of LDV measurements in the ARLPennstate water tunnel with a model propellerbehind a hull including its rudder. This con-cluded that 2 % out of a total 6% efficiencygain was due to thrust increase while the re-maining 4% was associated with torque de-
crease. It was anticipated that the total gainwould be somewhat reduced due to the fric-tional drag of the fins. Indeed thrust and torquemeasurements with the same model showed5% gain in efficiency with the PBCF confirm-ing the earlier predictions independently. It wasalso claimed that it was not apparent from therespective studies that the PBCF type devicehad to contain the same number of vanes as thenumber of the propeller blades to achieve themax efficiency gain as claimed in the PBCFpatent.
As far as extrapolation methods are con-cerned, no particular procedure dedicated toPBCF has been reported in the above refer-ences. However, it appears that the patentholding companies have a well-establishedprocedure to quantify the power saving andhence the efficiency by the use of PBCF. Thisprocedure is based upon the reverse POT set-up in their circulating water channel and theexperience gained over a considerable numberof full-scale measurements. Moreover, privatecommunication with the West Japan Fluid En-gineering Laboratory Co. Ltd. by this commit-tee has confirmed that the standard extrapola-tion technique for the performance prediction isbased upon the ITTC 1978 procedure, as brie-fly reviewed in Section 5.6.
Atlar and Patience (1998) gave a detailedreview of activities on various boss cap designsas well as on PBCF. Amongst them is a recentinnovative concept, which is known as the HubVortex Vane (HVV), jointly developed by thePotsdam Model Basin, SVA and SCHOTTEL.The HVV is a small vane propeller fixed to thetip of a cone shaped boss cap within a limitingradial boundary where the tangential velocitiesdue to the hub vortex are greater than those ofthe propeller. In this range the small vane pro-peller diverts the high tangential velocities inthe direction of the jet, thereby generating ad-ditional thrust. It is claimed that this mecha-nism is different from the mechanism forPBCF where the fins are located usuallybeyond this limiting radius and the fins them-

4
selves do not generate thrust. Unlike PBCF, thenumber of the vanes of HVV is greater thanthat of the propeller blade. In their productbriefs, Potsdam Model Basin(SVA) (1995) andSCHOTTEL (1995), and in a detailed technicalreport by Schulze (1995), the results of LDVmeasurements and cavitation details with HVVmodels are presented. These publications reportremarkable reductions in the hub vortex cavi-tation by the HVV as well as a successful ap-plication of HVV on the full scale claiming anincrease of 3% in the propeller efficiency.
Atlar and Patience (1998) also reported ona series of experimental investigations withvarious boss caps, which were done in the Em-erson Cavitation Tunnel at Newcastle Univer-sity, over the last decade. These involved com-parative efficiency and cavitation performancemeasurements with different boss caps throughthe reverse open water tests in the presence ofno rudder and later on with a rudder for somecaps, Atlar et al (1998). The cylindrical bosscaps tested were fitted with: fins similar toPBCF; fins with end plates; fins as extension tothe propeller blades as Trailing Edge Flaps(TEF); an accelerating duct; a deceleratingduct and Boss Slots (or holes) (BoS). The latterare designed to increase the pressure in the hubvortex core. The comparison of the perfor-mances for these caps displayed comparableefficiency savings relative to a standard coneshape type except for the cap fitted with thedecelerating duct which displayed a largeamount of efficiency loss. The BoS type capdisplayed a superior suppression of the hubvortex cavitation, but also at the cost of a con-siderable efficiency loss. No particular mentionhas been made of extrapolation issues in theseinvestigations.
4.2 Tip Fins
End-plate and other such propellers thathave modified blade tips, have various nameslike tip-fin, Kappel, winglet, etc., propellers.
The special geometries are in general only lim-ited modifications of the propeller. For this rea-son the model testing and scaling of results tofull scale can in principle be done in the sameway as for a conventional propeller. In thissection a review of model testing methods andscaling of the results from such propellers isgiven. As far as end-plate and similar propel-lers are concerned the literature often dealswith the propulsors separately, i.e. if and howthey improve their efficiency, whereas scalingand power prediction are not treated. Here,only the latest references or those related toscaling and prediction are given.
Sparenberg & de Vries (1987) by usinglinear optimisation theory designed and tested a3-bladed end-plate propeller. Open water testswere carried out in two different series for twodifferent rates of revolutions. Correspondingly,the Reynolds numbers (with respect to chordlength and relative inflow velocity at the 0.85Rsection) varied. There were clearly differencesin the measured open-water curves (KQ and η,but only small differences in KT) reflecting theinfluence of Reynolds number. Over a range ofadvance ratios, including the design value, theefficiency was higher for the high Reynoldsnumber, as expected. The tests also includedmeasurements with the end-plate propellerworking behind the model of a tanker, makingit possible to present the propeller efficiency inthe behind condition.
Model testing of an optimally designedpropeller with two-sided shifted end plates onthe blades was described by de Jong et al.(1992). The tests consisted of open water testsand cavitation tests. The former were carriedout at a rate of rotation sufficiently high toavoid laminar-flow effects on the propellerblades which was checked by further experi-ments. In the cavitation tests uniform inflowwas considered. The interest was focused onthe end plate propeller and on comparisonswith the same propeller without end plates andwith a reference propeller. For that reason scaleeffects were not considered in greater detailthan as outlined above, nor were interaction

5
between propeller and ship or aspects of powerprediction dealt with.
For the special end-plate propeller knownas the CLT propeller, Hollstein et al. (1997)outline the design of such a propeller for a bulkcarrier and compare this with data for a sistership fitted with a conventional propeller. Ac-cording to them no model tests were carried out,although resistance, open-water and self-propulsion test results for a conventional pro-peller are available for the designer of the CLTpropeller. This is because “...the interpolation
procedure to be applied to test results with CLTpropellers request certain unexpected correc-tions only known by (the designer) and hencenot available for model basins. This makes itadvisable to rely for the predictions of full-scale performance of the CLT propeller on thebasis of direct calculations”. In their paper theyshow calculated open-water characteristics oftheir CLT propeller as well as the characteris-tics of the conventional propeller. They alsogive trial trip results for the ships with conven-tional and CLT propellers.
Table 1 Propulsion coefficients, power and rate of revolutions obtained by model experimentsand three different extrapolations and by theoretical predictions (Andersen 1996, table 3).
V = 9.03 m/s
DMI extrapola-tion
Tip-fin Conv.
ITTC-78
Extrapolation
Tip-fin Conv.
DMI-ITTC
extrapolation
Tip-fin Conv.
Design*
Tip-fin Conv.
w
t
ηR
ηH
η0
ηD
alconventionD
fintipD
ηη
0.30 0.27
0.16 0.16
1.00 1.02
1.21 1.16
0.63 0.62
0.75 0.73
1.037 1
0.27 0.26
0.16 0.16
1.00 1.02
1.16 1.14
0.68 0.66
0.79 0.76
1.038 1
0.30 0.27
0.16 0.16
1.00 1.02
1.21 1.16
0.67 0.65
0.81 0.77
1.047 1
0.26 0.26
- -
1.00 1.00
- -
- -
- -
- -
PD [kW]
n [1/s]
6720 6980
1.95 1.99
6410 6650
1.98 2.01
6270 6570
1.95 1.99
6850* 7260*
1.97 2.01
CTh 1.58 1.49 1.46 1.42 1.58 1.49 1.55* 1.55*
* Design includes an increase in resistance (allowance) of 9 per cent
For the tip-fin or Kappel propeller with in-tegrated fins in the tip region (bent blade tips)Andersen (1996) carried out a comparativestudy with the conventional propeller actuallyfitted on the ship as a reference. The modeltests consisted of traditional tests, i.e. in addi-tion to resistance tests for the ship model,open-water, self-propulsion and cavitation testsfor both conventional and tip-fin propellermodels. Three different methods were used formaking the full-scale power prediction on the
basis of model test results. One method wasdue to the model basin (Danish Maritime Insti-tute) where a correlation allowance and a cor-rection to the wake fraction coefficient was ap-plied. The second method followed the ITTC1978 with the exception that a more detailedscaling of the influence of friction on the open-water propeller characteristics was carried out.This procedure was based on the flat plate fric-tional resistance coefficient. The third methodcombined the two others in applying the proce-

6
dure of the model basin (correlation allowanceand correction to the wake) and the correctionto the propeller open-water characteristics. Thethree methods gave different required power,demonstrating the need for rational proceduresfor such estimations (see table 1.).
4.3 Surface Piercing Propellers
Surface piercing propellers (SPP) can beincluded into the unconventional propulsor fa-mily because of their particular mode of opera-tion. However, system geometry and compo-nents for surface piercing propulsion is quite aconventional concept for it includes only theclassical propeller-shaft-rudder layout.
Current extrapolation methods are focusedon two items:
1) extrapolation to full scale of the modelopen water performance;
2) extrapolation to full scale of the propellerhull interaction (wake fraction, thrust de-duction and relative rotative efficiency).
Comments on item 1). This extrapolationprocedure should take into account the influ-ence of two additional parameters, namely theFroude number, Fn, and the Weber number.The influence of the Froude number is relevantas the propeller acts at the interface between airand water much like hulls. The Weber numberis a ratio between inertial and surface tensionforces. Its influence can be easily foreseen foran SPP, which continually pierces the watersurface.
The first comments on the role of Fn aredue to Shiba (1953). In his investigation hepointed out that gravity affects the shape of theair cavity through the Bernoulli equation thatcan be enforced at the boundary between waterand the atmosphere vented cavity. Accordingly,the influence of Fn based on the diameter of thepropeller as the length parameter and nD as the
speed, vanished when the air cavity approachedits ultimate form, i.e. for Froude numbersgreater than 3. Hadler and Hecker (1968) indi-rectly concurred with this hypothesis, but theycalculated the Froude number using the totalinflow velocity and the immersion of the shaftas the length parameter. Finally, Olofsson(1996) acknowledged an influence of FnD, (cal-culated with the diameter as the length pa-rameter), but he set to 4 the limiting valuebeyond which the influence disappears. Sum-marizing, it is widely recognized that theFroude number does affect the behavior ofSPPs, and all authors have suggested the exis-tence of a threshold value that limits this influ-ence. The same general agreement has not beenreached on the minimum value that must beattained to avoid scaling problems. This is dueto the different kind of Froude numbers thathave been used. Further research is required toidentify the minimum value of Fn which mustbe achieved during open water tests. Never-theless, provided that open water tests are per-formed at Fn beyond the threshold value, theFroude number identity can be avoided duringthe tests without affecting the full scale per-formance of the propeller.
According to Shiba (1953), surface tensionplays its role when the propeller is about to befully ventilated. Complete ventilation is arather sudden phenomenon that can be corre-lated to a certain value of J called the criticaladvance coefficient JCR. The critical advancecoefficient can roughly be located in the mid-dle of the transition region and the sudden dropof KT and KQ identify its position. Indeed Shibafound a correlation between Wn and JCR for asingle propeller. Later work on this matter(Ferrando and Scamardella 1996) acknowl-edged the influence of the Weber number onthe location of JCR, and the existence of athreshold value of Wn beyond which its influ-ence disappears. Unfortunately there is not suf-ficient evidence to suggest the existence of aunique threshold value. Further research on thissubject is therefore strongly needed. Anyway,provided that open water tests are performed atWn beyond the threshold value, the Weber

7
number identity can be avoided during the testswithout affecting the full scale performance ofthe propeller.
As far as is known, provided that open wa-ter tests are performed in agreement with theabove requirements, the performance of SPPscan be scaled in the same fashion as conven-tional propellers, i.e. by applying a Reynoldsnumber correction only.
Comments on item 2). The propeller is usu-ally located quite far from the hull (i.e. 1 to 2diameters away) and the projection in the verti-cal plane of the immersed hull surface near thepropeller is small. As a consequence, the valueof the thrust deduction factor for SPPs is negli-gible or zero. Furthermore, from a theoreticalpoint of view the phenomenon of augmentedresistance for this kind of propulsion can betreated with the same physical model used forconventional propellers because no additionalthrust affecting devices are involved. Hence thesame scaling procedure adopted for conven-tional propulsion can apply also to SPPs.
Surface piercing propulsion is mainly em-ployed on planing or semi-displacement craft,exploiting the ventilation of the transom. AsSPPs operate far behind the hull the contribu-tion of the potential wake is small. On the otherhand, the viscous wake cannot be neglected,because part of the propeller lies in theboundary layer of the hull. Considering thatsurface piercing propulsion does not includeany additional wake modifying device and thatthe physics of the wake production process isthe same as in the case of conventional propul-sion there are no obstacles to using the samescaling procedure as that used in the case ofconventional propeller arrangements.
As regards relative rotative efficiency thereis no particular reason that prevents the appli-cation of traditional scaling methods.
Setting aside the preceding considerations,almost all applications of surface propulsionare in the pleasure craft trade. Generally, thebudget for the boat design does not allow for
big expenditures like extensive tank testing orhigh standard sea trials. There is not a singleknown case study in the open literatureproviding data for extrapolation purposes.
In some favourable circumstances EHP isdetermined by means of towing tests, while forthe great majority of applications an effectivehorse power estimate is performed using Savit-sky’s (1964) equations or something similar. Inboth these instances there is not enough datafor a true extrapolation of the propeller-hullinteraction. The absence of sea trial results pre-vents the development of a reliable full scaleextrapolation.
4.4 Oscillating Propulsors
Oscillating propulsors are still at the resear-ch and development stage. Only very few ac-tual applications have been built and tested atfull scale and all of these have been for smallcraft. Examples are the small boat driven by anoscillating propulsor and outboard motor des-igns built by Isshiki et al. (1987), the experi-ments done by a group led by M. Triantafyllouat MIT, and various oscillating propulsor des-igns used on human powered craft (e.g.Bennett 1996), including examples on humanpowered submersibles (Skidmore et al. 1989).As a result, extrapolation methods for power-ing prediction for oscillating propulsors arerare.
Other propulsors that operate with a similarpropulsive mechanism to the oscillating pro-pulsor are trochoidal propellers (a type of cy-cloidal propeller), the most recent example ofwhich is the Whale Tail Wheel (Anon. 1998)being fitted to the inland waterways vessel“Ludwina”. Such propulsors have been studiedat model scale (e.g. Manen 1973, Bose and Lai1989, Riijarvi et al. 1994). A special type ofoscillating propulsor, that might be describedas a hybrid between a conventional and an os-cillating propulsor, is a propeller with cyclicpitch control (e.g. Gabriel and Atlar, 1998).

8
Estimates of the full scale performance ofships fitted with oscillating propulsors havebeen made by Lai (1990) and Yamaguchi andBose (1994). These have been based on con-ventional approaches to powering predictionusing estimates of the hull efficiency to ac-count for propulsor/hull interaction. Yamagu-chi and Bose (1994) assumed neligiblehull/propulsor interaction leading to a hull effi-ciency of one. The rationale for this estimatewas that as an oscillating propulsor designnormally has relatively light loading, they areusually large devices with relatively largeswept area and large span relative to the shipbeam and/or draft. In view of this much of thepropulsor is not in close proximity to the hulland the hull/propulsor interaction was assumedto be small. For the ship under consideration,this was a conservative estimate as the hull ef-ficiency was above one for the comparableconventional propeller system. Lai (1990), onthe other hand, assumed similar values of thewake and thrust deduction fraction as the con-ventional propeller system for the oscillatingpropulsor proposal when considering the pow-ering performance of four ships. This wasdone in the absence of more detailed data asthe hull efficiencies for the four vessels variedfrom 0.92 to 1.12.
4.5 Pre and Post-Swirl Devices
Since the 1970s the development and appli-cation of hydrodynamic energy-saving devices(ESD) have been demonstrated all over theworld. Tables 2-4 show energy savings frompre- and post-swirl devices. The propeller in-flow compensate nozzles developed bySchneekluth have been installed on more than600 ships (Schneekluth, 1986). Powering per-formance prediction for full-scale ships withpre- and post-swirl devices have been madebased on model test results. For most of thesethe ITTC 1978 method and the two dimension-al Froude method have been used to predict thefull-scale performance for ships having a largerange of block coefficients. At MARIC severaldifferent prediction methods based on a modi-
fied ITTC 1978 method have been used to pre-dict full-scale performance from ship modeltest results. These predictions have been com-pared with the results from sea trials or fromstatistical sailing data.
Table 2 Pre-swirl energy-saving devices.
Name of pre-swirl device Energy-saving
mechanism
Energy-savingrate %
model test/trialReaction finNovel integrated ductInflow compensate nozzleSimplified compensate
nozzleWake-adapted ductHydrodynamic finsFore-propeller hydrody-
namic fin sectorThrust shaft bracketsSheathed shaft bracketHydrodynamic partition
plateAperture finStern-appended finFlettner rotor at stern postFore-propeller vane-wheel
PRIIPI
IPI, AFSIPI, AFS
IPI, AFSIPIIPI
PRIPRI
IPI, AFS
PRIIPI, AFSIPI, AFSIPI, AFS
4-8 / 4-94-5 / 4-66-11 / 84-9 / 4-9
4-9 / 4-94-6 / 3-94-7 / 4-7
4.5-12 / 5-85-8 / 5-8
2-3.7 / 2-3.7
2-4 / 2-43 / 38 /
3-4 /
Since 1984 MARIC has developed morethan ten ESDs such as the composite device ofsimplified compensate nozzle (SCN) and Costapropulsion bulb (CPB), thrust shaft brackets(TSB), fore-propeller hydrodynamic fin sector(FPHFS) etc. (Qian et al., 1992a, Zhou et al.,1990, Qian et al., 1992b). Eight different typeshave been put into use on more than 200 shipsover the range from 500 to 150,000 dwt withan annual 50,000 ton fuel-savings. In all casesa modified prediction method based on theITTC 1978 method has been used in the pre-diction of the full-scale performance from theship model test results. Practice indicates thatthe energy-saving rate (ESR) or the predictedspeed of the ships installed with ESDs correlatewell with the full scale data.

9
Table 3 Post-swirl energy-saving devices.
Name of post-swirl de-vices
Energy-saving
mechanism
Energy-savingrate %
model test/trialFixed guide vane after
propellerVane-wheelRudder-appended thrust
finsReaction rudder (asym.
rudder)COSTA propulsion bulbPropeller cap finsEddy-eliminating compo-
site propellerIntegrated duct-vane-
wheelRudder-appended Flettner rotor
RRE
RRERRE
RRE
DVPDEPDEP
RRE
PAT
4-6 / 5
5-15 / 6-124-5 / 4-8
2-4 / 2-4
2-4 / 2-42-5 / 2-55.1 / 8.7
5-10 /
10 /
Table 4 Pre and post-swirl energy-saving de-vices.
Name of pre and post-swirl devices
Energy-saving
mechanism
Energy-savingrate %
model test/trialHydrodynamic fins &
guide vane-wheelCOSTA propulsion bulb
& rudder-appendedthrust fins
Duct-thrust fins after pro-peller
COSTA propulsion bulb& simplified compen-sate nozzle
Assembly propulsion de-vices
Composite energy-saving technique
IPI, RRE
DVP, RRE
DVP, RRE
IPI, AFS,DVP
IPI, RRE
IPI, RRE
/ 9-18
4-14 / 4-7.4
4 / 4-5
6-12 / 4-12
5-15 / 5-15
8-14 / 8-14
PRI – give a pre-rotation to the propeller inflowIPI – improve propeller inflowAFS – alleviate flow separationRRE – recover rotational energy from downstreamDVP – decrease viscous loss after propeller capDEP – decrease eddy after propeller capPAT – produce additional thrust
4.6 Ducted PropulsorsSome methods for the powering performance
of ships fitted with ducted propellers are
described in section 5.4. Included here are someobservations from a set of tests done over arange of Reynolds numbers which include, inparticular, some trends at higher than normallytested values of Reynolds number.
Extensive propulsion related tests wererecently done on a tugboat model at Bassind'Essais des Carènes. This tug-boat was a twin-screw vessel with two ducted propulsors. Arudder was placed closely behind each shroud(about 1/3 of the chord of the rudder and lessthan 1/2 the length of the shrouds behind) so thatthe interaction between rudder and propulsor hadthe potential to be strong. The slope of the aftend of the boat was high, so that the propulsorswere working in inclined flow conditions. Thedistance between the shroud and the hull wassmall which created the possibility of detachedflow in some conditions and strong interactionbetween the hull and propulsors. Due torestricted space, the propulsors were highlyloaded.
The model was about 4.5 m long, equippedwith a propeller of about 20 cm diameter. Thespeeds tested, based on Froude number scaling,were about 1.5 m/s for the transit speed andabout 0.5 m/s for high towing conditions. Openwater, resistance, self-propulsion and varyingload tests at all advance ratios were performed,including measurements of the axial thrust ofone shroud. The boat was a twin screw vessel,which implies that the prediction andextrapolation methods based on open water,resistance and self propulsion tests should not beaffected by the problems of high wake as wouldbe expected on single-screw ships.
Additional tests were done to investigatesome problems related to prediction andextrapolation for ducted propellers and thesehave relevance also for some other types ofunconventional propulsors. These were:
- towing conditions at low speed (from 0.2to 0.4 m/s) to detect any scale effects due tolow Reynolds number, especially on theshrouds;- self propulsion tests without rudders(transit and towing), to separate effects from

10
interaction of the propulsor with the hull andthe propulsor with the rudder;- resistance tests of the hull plus the twoshrouds, without rudders and withoutpropellers;- resistance tests of the shroud alonewithout the propeller ("open water test").
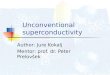
The drag of the shroud in the "open water"test (figure 1) clearly shows a separationphenomenon at low speed and a transition speed.A speed of at least 2 m/s is necessary to getstable values away from this transition. Thisproblem seems to be avoided in the behindcondition where the values are different.
0
10
20
30
0 1 2 3 4 5
velocity m/s
duct
dra
g/ve
loci
ty^2
Figure 1. Shroud drag. The circles denote thedrag from the “open water test”; the squaresare the values found from the resistance ofthe hull tested with and without the shroudsfitted.
The tests of resistance with the shrouds andwithout propellers showed that the shroud dragwas about 25% of the total. Comparison of thesevalues with those obtained from the open watertest on the shrouds, showed that the interactionterm was between 1 and 1.5% (the total drag ofthe hull plus shrouds was 1% to 1.5 % higherthan the value obtained from the addition of thenaked hull resistance and open water drag of theshrouds). This interaction term is very smalldespite the geometry.
The open water test of the whole propulsorshows a Reynolds number effect on KT and KQthat affects the propeller characteristics in thespeed range up to 4.5 m/s. The extrapolation ofthe characteristics of the propeller at the Froudespeed (about 0.5 and 1.5 m/s for towing andtransit) would not give the characteristics of thepropeller at the higher speed tested.
The plot of KT of the propeller (KT obtainedwith the shroud but not including the thrust ofthe shroud) versus KQ (figure 2) for the openwater tests and the two conditions of loadvarying tests (with and without rudders) showsthat over the whole range of advance ratio (frombollard pull to almost no thrust) the three curvesare almost identical. This indicates that therelative rotative efficiency is very close to 1 witha precision of less than 1%. The dispersionbetween the curves is due to precisionuncertainty in the measurements, the importanceof which becomes relatively smaller for pointsclose to bollard.
0.1
0.2
0.3
0.4
0.5
0.05 0.06 0.07 0.08 0.09 0.1
torque coefficient Kq
Kt p
rope
ller
Figure 2. Thrust coefficient of the propellerversus torque coefficient. The open squares areopen water values; the solid squares are thebehind condition with the rudder; and the solidcircles are the behind condition without therudder.
Nevertheless, looking at the detail of thecurves in figure 2 for high loads, there is animportant difference between the curves.Although the torque coefficient plots againstadvance coefficient are not shown here, the

11
torque coefficient in the bollard condition for theopen water and behind condition (KQ = 0.0915)was the same with a precision of less than 0.2 %for both propellers. However, KQ becomes0.0945 in the bollard condition with rudders (anincrease of 3%). Also, the KT of the propellershows little change from 0.422 in open water to0.414 in the behind condition without rudder (adecrease of 2%), while there is an increase to0.438 (plus 4%) with the rudder. Clearly, therudder has a "postswirl" effect on the propellerrotor, increasing the thrust by 6% and the torqueby 3% between the two behind conditions. As aresult of this postswirl effect, thrust is increasedmore than torque leading to an increase inefficiency. These arguments together with figure2 show that the effect of the rudder on therelative rotative efficiency is far more importantthan the difference between operating in openwater and the behind condition.
The plots against advance coefficient (seefigure 4 for thrust coefficient against advancecoefficient) show also that a KT identity for thebehind condition with rudder, based on the rotoralone is meaningless for low advance ratio: KTchanges from 0.438 in the bollard pull conditionto 0.426 for JS = 0.3 while KT in open water has amaximum value of 0.422. A KT identity withoutrudder is also problematic as a value of KT =0.414 is obtained in open water for J0 = 0.25 (i.e.less than the open water value and leading to anegative wake). A KQ identity could be done inthis latter case, as the bollard KQ is the same inthe open condition and the condition withoutrudder, but the slope of the KQ versus JS is toosmall to be precise at least for small J. When aplot was drawn (not presented here) showing KTof the propeller versus KQ, for the open watercondition and behind condition only, but withadditional points from propulsion tests at smallerReynolds number (simulating towing at fullscale speeds of 2 to 4 knots), there was a bigdiscrepancy between some of these last pointsdue to scale effects and/or large errors inmeasurement of very small forces.
The two plots of KT of the duct versus KQ andKT of duct versus KT of the propeller (the latter
only is plotted in figure 3) for open water andbehind condition with and without the ruddershows again an effect of the rudder.
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.2 0.25 0.3 0.35 0.4 0.45
thrust coefficient of the propellerth
rust
coe
ffic
ient
of d
uct
Figure 3. Thrust coefficient of the duct versusthrust coefficient of the propeller. The opensquares are open water values; the solidsquares are the behind condition with therudder; and the solid circles are the behindcondition without the rudder.
Direct comparisonbetwwww.kriso.re.kr/ITTC/index.htmleen theopen water and behind condition with ruddergives a confusing picture which at first sightseems to show that there is no effect on theshroud at transit speeds as a result of operating inthe hull wake and in an inclined flow, but thatthe effect at towing speeds is large. This is afalse conclusion since comparing the open waterresults with the behind condition curve withoutthe rudder shows a shift in the thrust of theshroud. However, the thrust values at bollard forthese two conditions are within 1%. Everythingappears as if the shroud is "seeing" a flow havingless speed than the propeller rotor itself, that is tosay as if the wake fraction "seen" by the shroudis a little bit larger than that "seen" by thepropeller rotor. Is this due to a boundary layereffect of the hull on the pressure distribution ofthe shroud? Direct comparison of the open waterresults with the behind condition with ruddergives then a confusing picture simply due to thefact that for the same flow around and in the

12
shroud, the rudder gives a shift on thrust andtorque of the propeller rotor (postswirl effect)which is an effect as large as the effect of thehull on the shroud. But the postswirl effectdoesn't change the flow around the shroud as thebollard thrust of the shroud indicates.
These latter points have further implicationson the identification of wake fraction from thethrust identity. From the plots of thrustcoefficient against advance coefficient (one ofwhich is shown in figure 4) the following can beseen. Comparing open water and behindcondition with rudder gives a wake fraction ofabout 10% for J around 0.3-0.4 (towingcondition). However, in the case without rudder,wake fraction is below 3%. The value of 1-w issurprisingly more than 1 in this region ofadvance ratio. There seems to be a difference ofregime between these low J values and theregion of transit.
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0 0.2 0.4 0.6 0.8 1 1.2
advance coefficient J
thru
st c
oeff
icie
nt o
f pro
pelle
r
Figure 4. Thrust coefficient of propeller versusadvance coefficient. The open squares areopen water values; the solid squares are thebehind condition with the rudder; and thesolid circles are the behind condition withoutthe rudder.In the region of transit speeds, the effect of
the rudders is about 0.04-0.05 on the advancecoefficient of the rotor. The KT identity basedupon the total KT may work because of acancelling effect between the rudder and theshroud.
4.7 Partial Ducts
Wake equalizing ducts were developed bySchneekluth (1986). They consist of two nozzle-shaped half ring ducts which are installed onboth sides of the stern ahead of the propeller.Their diameters are about the same as the radiusof the propeller and their chord is smaller thanthe diameter. Sometimes, only one duct is fittedto the stern on one side of the propeller.
The wake behind single-screw ships is non-homogeneous (i.e. there are very small velocitiesat the top of the propeller disc) and it is assumedthat improving the homogeneity of the wake willimprove the propulsion efficiency (essentiallythe open water propeller efficiency). Optimisingthe angle of the partial duct to the stern underload conditions (accelerating the flow in the toppart of the disc and slowing it in the lower part)is said to improve the homogeneity of the wake.
Power savings of 5 to 10 % have beenreported (Schneekluth 1986), despite the fact thatthis appendage creates an additional viscous drag.On the other hand, this partial duct can create athrust and reduce eventual separation.
The extrapolation of powering performanceof wake equalising ducts fitted on large single-screw ships are a typical example of thedifficulty of scaling data from model tests ofshort appendages. The reason is that thesedevices are usually fitted to very large ships,which means a very low towing speed in thetank to comply with Froude number scaling ofthe full scale ship speed. For a given ship speed,Froude number scaling imposes a reduction ofthe model speed for a smaller scale model;whereas the maximum model size remainsbasically the same for each facility.
Reynolds effects can act in the opposite way:
- separation which occurs on the model maynot occur, or may occur over a smaller region,at full scale, hence a partial duct effective atreducing this separation on the model may beless effective at full scale;

13
- the boundary layer is relatively far smallerat full scale than on the model, hence the sizeand inclination of the duct optimised for themodel may not be optimal on the full scale;
- friction of the partial duct is exaggerated onthe model due to the very low Reynoldsnumber on such small appendages (values ofReynolds number on the appendages may beabout 50,000 only).
Friesch and Johannsen (1994) did tests in alarge cavitation tunnel (HYKAT) on one modelof the size normally used in model towing tanktests at speeds from 3.4 to 5.5 m/s in order toinvestigate these Reynolds number effects. Aspublished results over a large Reynolds numberrange are rare, some of the implications of thiswork are described; however the Committeecautions that published records from many moretests of this type are needed for different types ofunconventional propulsor in order to reliablyidentify true trends. The equivalent Froude speedfor this model was about 1.2 m/s andcomparisons were made with towing tank testsdone at this speed. Their results are as follows:
- The wake equalising duct did not reduce thedrag of the ship (without the propeller).
- There was a reduction of power required forpropulsion, but the behaviour of it was veryReynolds number dependant: from 2.5 % atFroude speed; to 9.6% at 3.5 m/s; to only 6%at 5.5 m/s.
- The propeller characteristics were affectedvery little by the presence of the ducts (slightincrease of thrust and torque coefficients),but, alarmingly for the testing community,they became stable for speeds higher than 3.5m/s only (at which speed the torquecoefficient was reduced by 20% comparedwith the value obtained at Froude speed for acomparable thrust coefficient). This showsthat open water tests can be used, but thatReynolds number effects on thecharacteristics of the propeller may be
underestimated even for a conventionalpropeller.
- The propeller open water efficiencyactually decreased slightly with the duct forthis model, in contradiction to the principleof operation of wake-equalising ducts.
- The wake fraction and thrust deductionfraction changed slowly, but did not reach aconstant value over the range of speed tested.In these tests the ducts reduced suction andincreased wake so then the increase inpropulsive efficiency came from an increasein hull efficiency.
In conclusion, partial ducts may result inenergy saving at full scale, but this was not, andprobably cannot be proven by model tests atFroude speed by use of the present testingprocedure. These tests done at higher Reynoldsnumber in a large cavitation tunnel showed anerratic behaviour of the energy saving with testspeed.
No conclusion could be drawn from theFroude scale speed tests as they were affected byunrealistic levels of separation and otherReynolds number effects. Although notnecessarily true for all partial ducts, the savingsindicated in this set of model tests wereapparently due to increased hull efficiency; theopen-water efficiency seemed to decrease a bitand the wake was not more homogenous. Testswhere separation is occurring on the hull withoutthe propeller and where this is reduced/suppressed with the propeller, can lead to anunderestimation of suction (thrust deduction)and an overestimation of wake fraction (i.e. anoverestimation of hull efficiency) when analysedusing ITTC 1978 methods.
More generally, it is difficult to reliablypredict full scale performance of this type ofdevice from model tests at equivalent Froudespeed in the towing tank and even tests at higherspeeds in the cavitation tunnel can give uncertaintrends. To address these issues, and to bridge theReynolds number range, further reliablecorrelations are needed between: tests done in

14
large cavitation tunnels at even higher speeds;towing tank tests done for some equivalentspeeds at the lower end of the cavitation tunnelrange; and full scale trials results.
Tests performed on a large tanker in theGTH at the Bassin d’Essais des Carènes at fullspeed (11 m/s) with partial ducts optimised inmodel tests at Froude speed showed acompletely different effect of the duct on thewake in the two situations. This implies thatoptimisation of the inclination of the duct shouldbe done from the results of high Reynoldsnumber tests. Propulsive tests showed no energysaving for the high Reynolds number tests.Specifically:
- towing tank tests showed energy savings of1-2% depending on the propeller tested andspeed simulated;
- there was a difference in nature of the wake(without the partial duct) between tests at theFroude speed and those at higher Reynoldsnumber, in particular the occurrence of aregion of high vorticity in the region wherethe duct was to be fitted;
- by subtracting the wakes, the effect of thepartial duct appeared to be completelydifferent from the two tests at differingspeeds, the smoothing effect being cancelledat higher Reynolds number;
- pressure fluctuations were improved withthe duct fitted and reproduced in the higherReynolds number tests similar signals to thefull scale.Reynolds number effects in tests performed
at speeds of about 1 m/s may have more effecton the predictions than not using the Froudescaling identity, especially for ship testing atvery small Froude numbers.
4.8 Z - Drives (Podded Propulsors)
An early investigation into the power pre-diction of vessels fitted with podded drives was
done by Rains et al. (1981). They presented asemi-empirical approach to estimate the totaldrag of a podded drive and comparative powerestimations. The investigation also included amodel test programme with a DD-963 classdestroyer model fitted with 3 different drivesystems: a conventional twin drive; a non-azimuthing twin tractor; and a pusher typepodded propulsor. The tractor type drive has itspropeller ahead of the pod while this is re-versed in the pusher type. The model tests in-volved resistance tests with and without thepropulsion appendages, open water tests of thepropeller in isolation, which was the same forall three propulsion systems, and self-propulsion tests. In the latter tests, only torquefor each propeller was measured and the pro-pulsive coefficients analysed appear to bebased on the torque identity method. Althoughthe performance comparison of the three pro-pulsion systems was presented in terms of theappendage drag, effective power and deliveredpower on the full scale, no specific referencewas made as to how they were extrapolated tofull-scale.
Minsaas (1988) investigated a tractor typenon-azimuthing Z-drive, with a steering flap atthe tail of the drive strut, as a promising alter-native to water jet propulsion for speeds up to55 knots. Neglecting the cavitation and pro-peller induced drag, semi-empirical formulaewere given to calculate the viscous drag of theunit due to the body, the strut within the slip-stream and strut outside the slipstream. In theseformulae emphasis was placed on the consider-able scale effect on the resistance estimation aswell as on its validity for only smooth surfaces.Later Halstensen and Leivdal (1990) describedthe development and full scale application ofthis type of podded drive, called “SpeedZ”, toFjellstrand catamarans “Sleipner” and “Draup-ner” and to Westamarin SES catamarans “Su-per Swede” and “Super Dane”. The study re-ported on the open water tests done with subcavitating and partially cavitating propellersfitted to the propulsion unit in the cavitationtunnel at MARINTEK, as well as towing tanktests with the naked hull. Although no details

15
of the power performance prediction were dis-cussed, the complexity of the resistance pre-diction at full scale due to the effect of the pro-peller was reported. From this study it appearsthat the full-scale estimations were made basedon the naked hull resistance tests from thetowing tank and the efficiency of the total pro-pulsion unit obtained from the cavitation tunnel.The latter included a resistance correction forthe full scale.
A recent study on the power performanceaspects of azimuthing podded drives was pre-sented by Kurimo et al. (1998) on the devel-opment of two 14 MW Azipod units for thecruise ship “Elation”. The study reported on anextensive model test programme done in awind tunnel, towing tank and cavitation tunnelat three institutions. The experiments done inthe VTT towing tank involved open water testswith a stock propeller, hull resistance tests andself-propulsion tests. The purpose of the openwater tests was threefold: to determine the in-teraction coefficients between the propeller andthe unit; to compare the performance of twopusher and one tractor type unit; and to providea basis for the analyses of the propulsive coef-ficients. The open water tests were done usinga special dynamometer that could separatelymeasure the thrust of the propeller and resis-tance of the Azipod housing. Based on thesetests and separate wind tunnel experiments,which involved resistance measurements ofvarious components of the propeller housing, atractor type Azipod was optimised. The resis-tance tests were performed by using an earlierhull model which had appendages for conven-tional twin screw drive. However these ap-pendages were removed and the optimisedAzipod housing was fitted. These tests wereperformed with and without the housing suchthat the resistance of the housing could be ob-tained. In the self-propulsion tests, the totalthrust of the each Azipod unit was measured. Itwas not possible to measure the propeller thrustand the resistance of the pod separately due tothe small scale of the model. The measured de-livered power indicated a saving of 3-4% overthe same hull driven by conventional twin
screws.
The final group of tests, which were per-formed at MARIN, involved open water tests,hull resistance tests with the same hull and self-propulsion tests. However, the propeller usedwas a new design developed by the KrylovShip Research Institute which was customisedto the Azipod and hull. Two sets of open watertests were done with this propeller, with andwithout the Azipod housing. The calculated netefficiency of the Azipod in the open water tests,which was subject to low Reynolds numbereffects, was found to be slightly lower than thatof the propeller alone at the corresponding ad-vance coefficient. The hull resistance tests weredone without the Azipod units. Following theself-propulsion tests a value of 5-7% of powersaving was predicted on the full-scale whencompared with the original vessel fitted with aconventional propulsion system. Although nodetails were given, it was indicated that theprediction was carried out according to MA-RIN’s “Standard” method for thrusters.
In this study, the use of a special dyna-mometer for the open water tests highlightedthe importance of the complex interaction be-tween the Azipod housing and the propeller fora tractor type unit when the propeller thrust andthe resistance of the pod housing were meas-ured separately. Therefore it was argued thatthe adopted scale effect correction methodsused in the extrapolation of the thruster propul-sion test results often concentrate on the scal-ing of the measured “resistance” of the housing.This may be acceptable for the pusher typeAzipod, but not for the tractor type due to thecomplex interaction between the propeller andpod housing which results in an increased localpressure field behind the working propeller.Therefore, emphasis was placed on the gapbetween the Azipod housing and the propellersince low gap sizes would increase the resis-tance of the housing and the measured thrust ofthe propeller, if they were separately measured,although the net thrust of the azipod unit wouldbe the same. Based on this argument, it wasclaimed that the difference between the total

16
thrust of the unit and the thrust of the propellerin the tractor type of unit should not be relatedto Reynolds number dependent viscous effectsalone. Also, more detailed methods for the ex-trapolation of test results from tractor type de-vices are recommended to be developed.
Mewis (1998) has discussed recent devel-opments in large podded drives with a specificemphasis on the range of their efficiency im-provements and difficulties in power perfor-mance prediction. This relates mainly to thetractor types, a factor which was also pointedout by Kurimo (1998). A part of the difficultieshas been associated with the different configu-rations used in open water tests and the treat-ment of the thrust force measured during thesetests. In order to demonstrate these difficulties,open water tests of a tractor type Azipod drivehave been carried out in three different con-figurations as reported by the PropulsionCommittee of this Conference.
Kurimo (1998) presented the results of seatrials with the cruise ship “Elation” which werecarried out in the Gulf of Finland in December1997. The trial results involved the presenta-tion of speed measurements, cavitation obser-vations, pressure pulse measurements and ma-noeuvring tests. The trials indicated that at thefull power of 2 x 14MW, the vessel achievedapproximately 0.55 knots greater speed thanthe mean value of the corresponding speeds ofthe six previous sister ships, which have con-ventional twin-screw diesel electric drives. De-spite this, the scatter between the predictionsfrom the different model basins, which useddifferent extrapolation methods, was large anddesigners were cautioned to treat test resultswith great care to avoid optimistic expectations.
5 DESCRIPTION OF EXTRAPOLATIONMETHODS AND TEST PROCEDURES
5.1 Momentum Methods
The propulsion of a ship or marine vehicle
represents one of the earliest applications ofinviscid blade design theory and, as a result,introduces the problem of scaling. An ex-trapolation method developed by the ITTCcommunity has been widely used for commer-cial ships having an open screw propeller topredict full-scale powering performance. TheITTC 1978 methodology uses resistance testsof the ship model, open-water tests of themodel open propeller, and model-scale self-propulsion tests, to determine interaction coef-ficients, which are then scaled to predict full-scale performance. However, this methodolo-gy and the scaling of its interaction coefficientsare based on particular commercial ship data-bases. The direct application of this methodol-ogy to complex propulsors such as ducted pro-pellers or pump jets, water jets and variousnovel forms of open screw propellers continuesto be an unresolved issue.
Any propulsor configuration and its per-formance are highly dependent upon the hy-drodynamic characteristics of the shiphull/marine vehicle. Energy caused distortionsare present in the ingested flow due to the skinfriction drag of the ship hull/marine vehicleand upstream appendages. It is in this envi-ronment that wake-adapted complex propulsorsexcel. Complex propulsors provide more des-ign options with which to meet the many addi-tional performance requirements in these com-plex wakes. These new requirements include,but are not limited to: 1. minimization of un-steady forces, 2. reduction in radiated noise, 3.improved efficiency for heavily loaded pro-pellers, 4. reduction of cavitation and elimina-tion of specific cavitation types, 5. improvedoff-design performance, and 6. enhanced ship-maneuvering characteristics.
The principles employed and the problemsencountered in designing either an open screwpropeller or a complex propulsor are similar.However, the design methods employed aredifferent for the two cases. First of all, thedesign of a wake-adapted complex propulsorhaving a duct and/or multi-blade rows treatsthe propulsor as a unit. Therefore, its model-

17
scale testing procedure and scaling methodolo-gy will be different than that developed for anopen screw propeller. One present-day methodof designing complex propulsors includes acombination of a vortex lifting-surface methodwith a computational fluid dynamics basedthrough-flow analysis method. These twomethods allow for hull interactions, viscouseffects and blade-to-blade row effects to be in-cluded as well as three-dimensional effectssuch as streamline curvature, radial pressuregradients, and secondary flow (Kerwin et al.(1994) and Schott (1996)).
Interest in multi-blade row propulsors hasdeveloped because of increasing efficiencydemands for high-speed surface ships andsubmerged vehicles. The attractiveness ofducted propulsors for these applications is dueto the ability to design a propulsor having alower blade relative velocity and a higher effi-ciency than can be achieved by an open pro-peller in these applications. The similaritieswhich exist between ducted propulsors andaxial-flow compressors and liquid pumps havelead to the application of momentum analysismethods. Nowhere are different testing meth-odologies more evident between an open pro-peller and a complex multi-blade row marinepropulsor than in reviewing a momentum baseddesign methodology.
Early efforts in developing momentumbased design methodology are given by Wisli-cenus (1960 and 1968), Henderson et al.(1967), and Bruce et al. (1974). This methoddetermines the type, size, and design of anymultiblade row propulsor from an optimisationof the mass flow through the propulsor toachieve design goals. An optimised blade-rowspanwise-circulation distribution is obtainedfrom minimising the energy losses in the pro-pulsor and in the discharge jet. A detailedanalysis of the flow field at various stationsthrough the propulsor follows by solving themomentum, continuity and energy equations.The upstream boundary conditions are the massflow rate, the momentum and the kinetic ener-gy of the ingested flow.
A relationship to determine required rotorthrust is determined by integrating the mo-mentum in the stream wise direction between astation located far upstream of the propulsorand a station located after the body and can beexpressed as )( VmT ∆= � where T is the rotorthrust, m� is the mass flow rate and V∆ is theintegrated change in stream wise momentum.An important assumption in this relationship isthat free-stream static pressure exists at eachstation.
An incoming velocity profile near the planeof the propulsor and the predicted hull drag co-efficient are necessary to start the design proc-ess. This has been traditionally obtained frommodel scale tests with corrections for variationsin Reynolds number. In some cases, analyticalpredictions are also being used due to more re-liable computational fluid dynamic proceduresand their validation to specific geometries(Larsson et al. (1998), Arabshahi et al. (1998),Zierke et al. (1997) and Stern et al. (1996).
It is also necessary to determine the totaldrag of the hull, which includes increments dueto appendages, etc. The flow field solution re-quires the calculation of the frictional drag onall the various propulsor components. It mustbe remembered that the pressure drag of theafterbody, which is initially included only as abare-body drag coefficient, is substantiallymodified by the addition of the propulsor.However, this effect is initially estimated fromthe modified pressure distribution with the pro-pulsor/hull combination.
It must be emphasised that this momentum-based design procedure is applied where thereis incoming vorticity in the flow. The approachuses an inviscid calculation of the flow fieldand is coupled with an energy analysis throughthe propulsor. Therefore, all the energy lossesthrough the propulsor are calculated and theefficiency of the rotor becomes the hydraulicefficiency, which is the ratio of the energyplaced in the fluid to the shaft energy. Solu-

18
tions to the flow field are obtained by using theStreamline Curvature Method (Treaster, 1969).Today, this has been extended to a RANS so-lution using computational fluid dynamicsmodeling.
This design procedure for complex propul-sors does not require open water tests for ex-trapolation methodology to predict full-scalespeed and rpm. In fact, testing of these wake-adapted complex propulsors in uniform flowsignificantly reduces propulsor efficiency andintroduces corrections that are not well defined.Therefore, only model-scale propulsion testdata is required for extrapolation to full scale.This model test is conducted over a range ofover/under loading conditions. This is usuallyachieved by varying the rotor rpm at constantship velocity. Resistance test data or calcula-tions are only necessary for the design.
At these model scale conditions, the effi-ciency can be defined as
power deliveredpower effective
2)(
=−
=mm
mDTD nq
VFRm
πη
and
{ } 2 21))(1( mmmAfsfmD VSCCCkF ρ−−+=
From the model scale KT and JV curve, correc-tions are made to account for Reynolds numberdifferences to full-scale first by skin frictioncorrections to the propulsor components( QT KK ∆∆ , ) and secondly, by corrections tothe wake ( n∆ ). It is very important to note thatthese corrections cannot account for separatingflows.
In summary, the model scale propulsiontest provides a KT versus JV curve. This curvemust be corrected for Reynolds number effectsboth on the propulsor and on the hull whichproduces a wake scale effect. The weak pointof this or any other extrapolation methodologyremains the determination/prediction of the full
scale ship drag which must include appendagedrag and propulsor/hull interactions. Currentattempts to do this utilise CFD procedures, lar-ge water tunnel tests, and an extended analysisof propulsion data.
5.2 Other General Methods
Other extrapolation methods are being de-veloped using self-propulsion testing, the phi-losophy of which could be considered for un-conventional propulsors. For these methods anopen water test is not necessary, only a loadvarying self-propulsion test is required.
A modern MARIN method based on a formfactor (1+k) concept has been developed forsome ship configurations for the extrapolationof propulsion test data to full scale. The formfactor is the ratio of viscous resistance to theflat plate drag based on the ITTC 1957 formula.In general, this factor can be determined foreach hull form using low rpm self-propulsionmeasurement data. The scale effect on resis-tance (FD) is determined from the standardequation including an incremental resistancecoefficient (CA). The measured relationshipbetween the thrust coefficient (KT) and the ap-parent advance ratio (JV) from the propulsiontests is corrected for both wake and propellerblade friction scale effects to predict power andrpm. This is effectively an ITTC 1978 methodwith the wake fraction found from a statisticalmethod based on previous test results ratherthan directly through open water tests of theactual model components.
An extensive analysis of typical combat-ant/auxiliary Naval ship data has been conduct-ed by the Naval Surface Warfare Center,Carderock Division, to validate model test ex-trapolation procedures (Karafiath, 1997). Thedeveloped prediction methodology uses a cor-relation allowance (CA) to account for differ-ences between ship and model roughness andfor other variables that influence the poweringprediction. Thus, the propulsion test is con-ducted at an overload condition with an added

19
tow force (FD) to overcome the effects of anadditional frictional resistance and achieveequivalent thrust loading. This is accomplishedby varying the propeller rpm at a constant ve-locity. One basic assumption of this method isthat the efficiency of the model propeller is thesame as that of the ship propeller; this is ap-propriate for small wake fractions. This isagain an ITTC 1978 type method, but dis-penses with the form factor, open water testsand other corrections.
Both of the above methods have limitedapplication for unconventional propulsors sincethe previous test data and correlation coeffi-cients, needed for the methods to work, do notexist.
5.3 Performance Prediction Methods ForShips With Pre-Swirl Stators
Van, Kim and Lee of KRISO (1993) pro-posed two alternative procedures for perfor-mance prediction for ships fitted with pre-swirlstators. The authors explicitly state that the twoprocedures, named A and B respectively, basi-cally follow the ITTC 1978 method. In answerto a request for clarification Van pointed outthat at their towing tank the form factor methodis not used. Accordingly these procedures arenot true variations of the ITTC 1978 correla-tion methodology as they follow the 2-D ITTC1957 approach. The two procedures are dis-cussed separately.
Method A. In this method, the propellerand the stator are considered as a propulsionsystem and are tested together. This assump-tion implies that in both open water and self-propulsion tests, the thrusts of propeller andstator are measured simultaneously and theirsum is used as the thrust of the propulsion sys-tem. The hull resistance is scaled according tothe ITTC 1957 method (i.e. a form factor is notused).
In his correspondence with the Committee,Van stated that the open water characteristics
of the propeller are scaled following ITTC1978 procedure while no scale effect correctionis applied to the thrust/drag produced by thepre-swirl stator.
Van et al. (1993) state that this methodprovides a better full scale prediction than theITTC 1978 procedure. This statement is sup-ported by the close agreement between modeland full scale predictions presented, that is notfound by using the ITTC 1978 procedure di-rectly.
It is well known that the ITTC 1978 corre-lation procedure fails to correctly scale the per-formance of unconventional propulsion sys-tems, and this is due to two main causes. Thefirst one is that whatever device is applied tothe hull, it generally has a longitudinal dimen-sion which is much less than that of the hullitself. Given the usual testing speeds, this pro-duces a Reynolds number corresponding to alaminar flow on the device. The second causeis that the model hull has a boundary layer thatdiffers from the full scale one both in thicknessand in velocity distribution. Therefore, the in-teraction between the hull and the special devi-ce can seldom be correctly reproduced at modelscale if it strongly modifies the flow around thehull.
In this particular case of the pre-swirl stator,we can assume that the flow around the stern isnot overly affected. This can be argued fol-lowing the principle of operation of the pre-swirl stator that is designed to produce a rota-tional speed component opposite to that in-duced by the propeller. For this reason, testingthe stator together with the open propeller in-sures a higher Reynolds number on the statoritself due to the propeller-induced velocities.Probably this is the main reason of the betteragreement of Method A performance predic-tion with the model results.
Method B. This procedure does not requirethe joint test of the stator and the propeller be-cause the stator is tested with and consideredpart of the hull. On the other hand, it requiresthat a double set of resistance and self-

20
propulsions test are done with and without thestator.
The scaling process is again the two dimen-sional approach of the ITTC 1957 method withan exception made for the determination of thefull-scale wake, which is performed by meansof the following formula that closely resemblesthat suggested by the ITTC 1978 correlationprocedure:
( )
( ) ( )MOMSFM
AFSMOMO
MOS
wwC
CCtw
tw
−++
−−+
+=
04.0
04.0
where:wS = ship wakewMO = model wake without statorwMS = model wake with statortMO = model thrust deduction without stator.
while the standard ITTC 1978 ship wake is:
( )( ) ( )
( ) FM
FFSM
S
CkCCk
tw
tw
+∆++
−−+
+=
11
04.0
04.0
The major difference compared with theITTC 1978 formulation is the term (wMS – wMO).Since in the opinion of Van et al. (1993) themain effect of the stator is the increase of theangles of attack of the propeller blade sections,the stator action can be considered to be amainly potential phenomenon. Thus, the differ-ence in wakes with and without stator can bedirectly transferred to full scale.
If the flow on the hull is not overly affectedby the presence of the stator, this assumptionlooks reasonable and this procedure is accept-able. The same would not be true in the case ofother devices that accelerate or decelerate theflow on the hull, like ducts, partial ducts etc.Van et al. (1993) state also that Method B ex-hibits a good agreement with power savingsobtained at model scale.
General remarks. Both of the proposedmethods are basically 2-D procedures that canbe regarded as variations of the ITTC 1957 cor-relation approach, but in principle these tech-niques could be used also with the ITTC 19783D correlation procedure.
From a theoretical point of view, the pro-posed methods are acceptable when applied tospecial propulsive devices that do not consider-ably alter the flow around the hull. In otherwords, these methods are suitable for scalingthe performance of propulsive devices whoseeffect is mainly confined to altering the pro-peller inflow, without affecting the pressurefield around the hull. Since these methods ad-dress the scaling problem only from the poten-tial flow point of view, they are not suited totreat such devices that could produce a consid-erable variation of the pressure field acting onthe hull. Actually, a hull pressure-modifyingdevice could alter the characteristics of theflow around the model hull, e.g. the extent oflaminar separation. In this case, the proposedmethods will probably produce results as inac-curate as those of the unmodified ITTC 1978procedure. The lack of sea trials results pre-vents a practical evaluation of the capability ofthese methods to correlate model test resultswith the actual performance of the ship. Thus,further effort is required to validate thesemethods.
From an experimental point of view, if thetwo proposed techniques are equally reliable, itappears that Method B would be preferable.Actually, the testing procedure related toMethod B requires additional resistance andself-propulsion tests; this is its major drawback,but the procedure is straightforward and doesnot require any special test rig. On the contrary,an ad hoc test rig is necessary to simultane-ously measure the thrust of the propeller and ofthe stator as required by Method A. The timeconsumption of this technique is comparablewith that of standard tank practice, but the re-quired special equipment would not be feasibleor available in all of the towing tanks.

21
5.4 ITTC 1978 Modified Methods for Duct-ed Propellers.
Some ITTC 1978 modified methods havebeen proposed for extrapolation of poweringperformance of ducted propellers. Stierman(1984) presented three methods: where thenozzle is considered as an appendage; wherethe nozzle is treated as a part of the propulsionunit; or where the screw, nozzle and hull aretreated as three interacting objects respectively.
Nozzle as an appendage of the hull. Thenozzle is primarily considered as a flow regu-lator. The resistance test is done with the noz-zle behind the hull and the open water test withthe screw alone.
The thrust deduction fraction is defined as
t =TP − RH+ N
TPwhere Tp is the propeller thrust and RH+N is theresistance of the hull with nozzle. The wakefraction is found by propeller thrust identity
w =V −VA
Vwhere V is the model speed and VA is the ad-vance velocity of the screw. The total resis-tance of the hull with nozzle is extrapolated bysubtracting the estimated model nozzle resis-tance from the measured total resistance, scal-ing the resistance of the naked hull accordingto the ITTC 1978 method, and adding again theestimated full size nozzle resistance. It is as-sumed that the formula to estimate the nozzleresistance does not introduce too large errorsbecause the nozzle resistance only amounts to afew percent of the total resistance. Note thatthis is in contrast to the tests described in sec-tion 4.6.
The scaling of the propeller characteristicsis performed in exactly the same way as out-lined in the ITTC 1978 method. The interactioncoefficients are extrapolated either according tothe ITTC 1978 or by the method of Stierman
(1984). In the case of the open water screw test,the equivalent open water velocity in which thescrew works in the nozzle must be known. Thevelocity change is expressed by a ∆J correction
∆J =U NnD
= J 1− τ2τ
(1 + 1 + τCT )
where τ is the thrust ratio TP/TT. The purpose ofthe ∆J correction is to find the correct subdivi-sion of the wake fraction into a potential and aviscous part.
In this method, the influence of the nozzleon the screw is barely taken into account. Anozzle limits the radial outflow of a screw andtherefore, the KT/KQ ratio will not be measuredcorrectly during the open water test.
Nozzle as a part of the propulsion unit.Here the open water test is done with the screw+ nozzle system and the resistance test is donewith the naked hull. The thrust deduction frac-tion is defined using the naked hull resistance,and the total screw + nozzle thrust
t =TP + TN − RH
TP + TN
In this case, VA in the defining formula of thewake fraction is the entrance velocity into thescrew + nozzle system. The naked hull resis-tance is extrapolated according to the ITTC1978 guidelines. The scaling of the screwthrust and torque from the open water test isperformed with the same ∆KTP and ∆KQ correc-tions as proposed by the ITTC 1978. The noz-zle thrust coefficient KTN should also be scaled.The resistance difference ∆KTN is roughly esti-mated using a flat plate friction line and a for-mula according to Hoerner. The interaction co-efficients are extrapolated using the ITTC 1978method or by considering the effective powerof the screw + nozzle system in their normalposition and in a position far behind the hull.
The objections against the method are two-fold:

22
(1) the nozzle thrust must necessarily be meas-ured during the self-propulsion test;
(2) the action of the screw + nozzle system isdifferent in open and behind conditions.
In the behind condition the nozzle produces alarger thrust due to the contracting inflow at thestern. For instance, in an open water conditionτ = TP/TT = 0.90 may be found, while τ = 0.70in the behind condition. Such an effect can beseen also on a twin screw ship even with nocontracting inflow, perhaps due to boundarylayer or inclined flow influences. Due to thisdiscrepancy, it is incorrect to determine thewake fraction by using the total thrust identityaxiom.
Screw, nozzle and hull as three interactingobjects. To assess the interaction between thescrew and the nozzle, an open water test is car-ried out with the ducted screw. The resistancetest is performed with the nozzle behind thehull to take into account the interaction be-tween the nozzle and the hull. The thrust de-duction and wake fraction are defined as inmethod 1, by making use of the hull + nozzleresistance, the screw thrust measured duringthe self-propulsion test, and the entrance ve-locity VA into the screw disk. The open watervelocity VA in which the screw acts is the sumof the translation velocity of the screw + nozzlesystem and the nozzle induced velocity. Thescrew must be out of the nozzle. The KTP/KQratio remains constant, but the entrance veloc-ity is changed. This means a shift of the J-axisof the open water diagram with a ∆J-correction,standing for the dimensionless nozzle inducedvelocity. The nozzle induced velocity can becalculated by momentum methods, and vortexring or sheet methods.
The resistance of the hull and the nozzle isseparately extrapolated, as described in method1. The propeller characteristics are scaled usingthe well-known ∆KT and ∆KQ corrections.
5.5 The Modified Full-Scale PerformancePrediction Method (MARIC Method e.g.Zhao et al., 1988).
This method has been used to predict theperformance of ships fitted with energy savingdevices such as the simplified compensate noz-zle; COSTA propulsion bulb; thrust shaftbrackets; fore-propeller hydrodynamic fin sec-tor; COSTA propulsion bulb and rudder-appended thrust fins; composite energy-savingtechnique; etc.
The size of MARIC’s towing tank is70*5*2.5m. The length of the geosim shipmodels were 3.5 to 4.5m. The diameters ofsingle and twin-propeller models Dm are biggerthan 0.12m and 0.11m respectively. The fol-lowing method is used for the energy savingdevices described in section 4.5 and tested atMARIC. The method utilises resistance, self-propulsion and open water tests. The open wa-ter test is done with the propeller alone; the re-sistance and self-propulsion tests are done withand without the energy saving devices. Thistesting procedure is described in the followingparagraphs.
Resistance test. The resistance test of thesingle-screw ship model is usually donewithout the appendages such as bilge keel etc.Measurements are made of the total model re-sistance Rm, towing speed Vm and the watertemperature tm at the same loaded condition asthe propulsion test. To get a reliable value of(1+k) more data are taken in the low speed areathan elsewhere. For the power prediction of thefull-scale ship with the above mentioned ener-gy saving devices, the resistance test of theship model is usually done with and withoutthe above mentioned energy saving devices tocompare their influence on the resistance per-formance.
Open-water test. An open water test isdone for the propeller model used in the pro-pulsion test. In this test the propeller submer-gence is bigger than its diameter. The advancespeeds vary from 0 to the case of zero thrustwhile the rotational speed is kept constantduring the test. The results of the open-watertest are used in the analysis of the self-

23
propulsion test results. The Rn of the propellermodel in the open-water test should reach thecritical value 3*105 as far as possible. For thepower prediction of the full-scale ship with theabove mentioned energy saving devices, theopen-water test is usually carried out withoutthe energy saving device.
Self-propulsion test. When performing theself-propulsion test, the model is tested at aminimum of 5 different speeds. At each speedthe propelling forces Zm can be varied bychanging the propeller revolution rate to enablethe skin-friction correction FD to vary. Thethrust produced by the propeller should meetthe following condition:
mmmm RZtT =+− )1(
The ship self-propulsion point is given by thefollowing condition:
{ }FFSFMmmmDm CkCkCVSFZ ∆−+−+== )1()1(21 2ρ
The self-propulsion points can be calculatedwhen Vm, nm, Tm, Qm, Zm have been recorded.For the power prediction of the full-scale shipwith the above mentioned energy saving de-vices, the self-propulsion test of the ship modelis usually carried out with and without the en-ergy saving device in order to compare theirinfluence on the propulsion performance.
The ship model speed Vm is first correctedfor blockage (a procedure following the Emer-son method is used – see the Resistance Com-mittee report of the 19th ITTC, 1990). Thetesting procedure of the ship model with theenergy saving device is the same as thatwithout the energy saving device. The wettedsurface area of the energy saving device is nottaken into account in the transformation of theresults to the full scale.
The basic transformation. The followingformulae can be derived from the kinematicaland dynamical similarities
m/
S VV 21λ=
and
2/1/ λmS nn =
The following equations can be easily de-rived:
STSES VRP = and SSSTSTS SVCR 25.0 ρ=
mSmmDm nQP ρρλπ /2 5.3=
When the ITTC 1978 method is used
FWFSTS CCCkC ∆+++= )1(
and
)1( kCCC FmTmW +−=
( )[ ] 33/1 1064.0/105 −−=∆ WLSF LKC610150 −×=SK m
[ ]mmmmTm SVRC 25.0/ ρ=
and the friction coefficient is the ITTC 1957line.
When the Froude method is used
�FRFSTS CCCC ∆++=
FmTmR CCC −=
where, �FC∆ is the resistance correction coef-
ficient. It can be adjusted to keep CTS calculatedfrom both methods nearly the same. Normallyit can be taken from the following empiricalformulae:
WLF LC 00352.075.0103 −=∆�
or
( ) mSmDTmE VFRP ρρλ /5.3−=

24
where, FD is the resistance correction of theself-propulsion point. It can be estimated fromthe following formulae:
( ) ( )[ ]FFSFmmmmD CCkCkSVF ∆−+−+= 115.0 2ρ[ ]
�� FFSFmmmmD CCCSVF ∆−−= 25.0 ρ
Determination of the propulsion coefficient.The coefficients KTm and KQm are obtained fromthe self-propulsion test as follows
( )42/ mmmmTm DnTK ρ=
( )52/ mmmmQm DnQK ρ=
Based on the thrust identity method J0m, KQ0m
and m0η can be read from the propeller modelcharacteristics whose scale effect correctionhas been made with KTm as the input data. Fol-lowing this, the propulsion coefficients cantherefore be calculated as follows
( )( ) ( )
RmHmmDm
mmHm
mDmm
mmmmm
QmmQRm
wtTFRt
VDnJwKK
ηηηηη
η
0
0
0
1/1/1
/1/
=′−−=
−=−=−
=
where ′Dmη should be coincident with Dmη (in
the above equation DmEDm PP /=η ).
Basic transformation for twin-screw ships.With Tm and Qm values for both propeller mod-els as the input data, the power and the thrustdeduction fraction can be calculated. For de-termining wm, m0η , and Rmη the respective av-erage values for both propeller models shouldbe used.
Basic transformation for ships with asym-metrical stern form or twin-skeg form. Forships with a big tangential component in thepropeller inflow, such as those with asymmet-
rical stern and twin-skeg forms, the ship’s pre-rotating efficiency nη will lead to a propulsionefficiency in the form
nnn /0=η
where, n is the revolution rate of the propellerbehind the asymmetrical stern and n0 is the cor-responding nominal revolution rate. This canbe obtained by taking the average value be-tween the revolution rates of right-hand andleft-hand turning propeller models in the self-propulsion tests. Or it can be the revolution rateof this propeller model in the open-water testwith VA as its axial inflow speed when its thrustreaches the value in the following equation
( )( ) HRn
ASD w
tQQ
nn
QnTV
nQRV ηηηη
ππη 0
00
00 11
22=
−−==
The prediction of the full-scale performance forsingle screw ships. The scale effect of the pro-pulsion factors recorded in the self-propulsiontest revised at MARIC by the following for-mulae
( ) ( )[ ]( )[ ]kC
CkCtwtw
Fm
FFSmmmS +
∆++−+=
11
WLmmS Ltt 01262.008834.0 +−=
WLmRmRS L01236.008645.0 −+= ηη
J0s, KQ0s and η0S can be read from the load coef-ficient of the full-scale propeller KTS/JS
2 chartwith the KTS/JS
2 value as the input.
( )( )222
112/
SS
TSSTS wtD
SCJK
−−=
The following can then be calculated
( )DJ
Vwn
S
SSs
0
1−=
RSSQSSDS KnDP ηπρ /2 035=
( ) ( )SSHS wt −−= 1/1η
DSEDS PP /=η or

25
HSRSSDS ηηηη 0=
The additional increment of the bilge keeland the air resistance of the superstructure overthe water level can be estimated as 4-6% of PDS..The rate nS is proportional to (1.04-1.06)1/3. Thevalues of CP and CN obtained from this methodare close to 1, so PD, ns and VS can be used di-rectly to predict the full-scale performance.
For the prediction of the full-scale perfor-mance for twin-screw ships with shaft brackets
mS ww =
ms tt =
RmRS ηη =
For twin-skeg ships wm should be correctedbased on experience. The full-scale performan-ce prediction method and its procedure are thesame as those for single-screw ships.
5.6 Propeller Boss Cap Fins (PBCF)
Although no particular extrapolationmethod specific to PBCF has been reported inthe open literature, it appears that the PBCFpatent holding companies have a well estab-lished procedure to quantify the efficiency gainby the use of PBCF. This procedure is basedupon the so-called “reverse POT” (PropellerOpen Tests) set-up and experience gained overa considerable number of full-scale measure-ments. Furthermore, private communication bythis committee with the West Japan Fluid En-gineering Laboratory Co. Ltd has confirmedthat the extrapolation for ship powering per-formance is based upon the ITTC 1978 proce-dure, Nishimoto (1998). These are briefly re-viewed in the following.
In the reverse POT configuration the pro-peller is placed downstream of the open waterpropeller boat in order to provide a free flowfield for the development of the hub vortex.
Since the presence of a rudder would weakenthe swirl in the propeller slipstream, it is es-sential to place the rudder behind the propellerin these tests. By using this configuration, themeasurements of thrust and torque are takenfor the propeller with and without the PBCF.Based on the measured values of the torque, itis possible to estimate the delivered power andhence the ratio of the delivered power with andwithout the PBCF. The measurement of thisratio will be the gain (improvement rate) inpropeller efficiency (∆ηpm) due to the PBCFin the model scale.
In the POT set up one should bear in mindthat the presence of the boat housing and therudder behind the propeller will affect the pro-peller advance velocity. Therefore the neces-sary correction should be made in the advancecoefficient in terms of the wake fraction causedby the boat housing and rudder, and compari-son of the efficiencies should be made at thecorrected advance coefficient for the samethrust.
By considering the scale effects mentionedearlier in Section 4.1, the propeller efficiencygain in the model scale (∆ηpm) is related to theimprovement rate of the propulsion efficiencyon the full-scale (∆ηs) as shown, for example,by Ouchi & Tamashima (1989), in figure 5.This guidance implies that the power saving orefficiency gain expected at the full-scale willbe 2 to 3 times greater than the model scalepredictions.
In the above outlined procedure the pro-peller and PBCF are considered as a unit pro-pulsor and the effect of the PBCF is included inthe propeller open water characteristics. Theprediction of the efficiency gain due to PBCFdoes not require self-propulsion tests, but reliesheavily on the accumulated knowledge and ex-perience gained with PBCF on the full-scale.

26
0
1
2
3
4
5
6
7
8
9
0 1 2 3
Container
Ferry
Container Container
Pcc2
Pcc
Pcc
Container
Pcc
Reefer
Gain by Model Test (%)∆=η=pm
sG
ain
by S
hip
Tria
l Tes
t (%
)
Figure 5. Correlation of Efficiency Gains byPBCF between Model and Actual Ship,Ouchi & Tamashima (1989)
An alternative to the above procedure,which makes use of self-propulsion tests, hasbeen used by the West Japan Fluid EngineeringLaboratory Co Ltd. and is also reported im-plicitly by Ouchi (1988). In this procedure thePBCF is considered to be an appendage andthen the usual open water characteristics of thepropeller are predicted from standard seriesdata. The effect of the PBCF is included in theself-propulsion factors, which are obtained bymeans of the thrust identity method. The per-formance of the ship with PBCF is predictedbased on the standard ITTC 1978 procedure.
5.7 ITTC 1978 Modified Method for TipFins
The only extrapolation method reported indetail in the literature for end plate and similarpropellers is that reported by Andersen (1996).Since the tip fin propeller is only a slight modi-fication of a conventional propeller the ITTC1978 procedure has been followed with only aminor modification. The standard ITTC 1978
correction to the propeller characteristics due todifference in blade drag at model and full scaleis developed for conventional propellers.Moreover, it relies on data for one representa-tive profile only: at 0.75R. Hence due to differ-ences in geometry, velocity and load distribu-tions this method of scaling is not believed tobe accurate enough for tip fin propellers. In-stead the blade was subdivided into streamwisestrips and the sectional drag estimated usingthe theoretically calculated velocities and asimple, flat-plate estimate of the frictional re-sistance which was dependent on mainly thelocal Reynolds number. To secure a fair com-parison this procedure was applied to both thetip fin and the conventional comparator pro-pellers. By this procedure the corrections turn-ed out to be bigger for the tip fin propeller, i.e.it is more sensitive to scale effects. Unfortu-nately, no full scale tests have been done, so noconfirmation of this scaling procedure can bemade.5.8 Extrapolation From an Extended Analy-sis of Self Propulsion Test Data
Under this category are grouped somemethods that were developed with the aim ofimproving the powering prediction process byavoiding and replacing some of the assump-tions inherent in their use. The common themebehind these methods is that the use of thetowing resistance is considered meaningless ormisleading when attempting to predict fullscale power.
About ten years ago, some researchers(Holtrop 1990), started to make full scale pow-ering predictions using self propulsion andopen water tests as the sole source of experi-mental data. This was the first step in the di-rection of dispensing with towing resistancedata, but this method was still consistent withtraditional propulsion analysis since the modelresistance had to be reconstructed from modelself propulsion test results.
Briefly described here are two methodswhich fall into this category, but which havenot yet been developed to a stage suitable for

27
general application. These methods, however,have promise in the development of usefultools for the full scale powering prediction forvessels equipped with unconventional propul-sors.
Iannone (1997a, 1997b), starting from theITTC 1978 methodology framework, intro-duced a new propulsive analysis through theseparation of the self propulsion flow into itsviscous and potential components. To this endonly open water and British self propulsiontests are required. In particular, to evaluate theviscous component of the self propulsion flowthe innovative concept of self propulsion formfactor KSP is introduced.
In the first version of this methodology theself propulsion form factor was derived frommodel thrust measurements at low speed duringself propulsion tests. This procedure, however,produced rather uncertain values of KSP, due tothe small values of measured thrust and the un-avoidable presence of laminar flow or separa-tion.
Iannone’s investigations (1997b) revealedthat a sort of thrust deduction phenomena oc-curs during self propulsion tests. Furthermore itwas appreciated that the self propulsion formfactor at service conditions depends not onlyon hull trim at speed, but also on speed itself(Iannone 1998). As a consequence the predic-tion method was refined (Iannone 1998) bydetermining the thrust deduction factor and theself propulsion form factor by tests at the servi-ce speed. Moreover a new data reductionmethod was proposed (Iannone 1998), leadingto different relationships among propulsivecharacteristics measured during British selfpropulsion tests.
After some satisfactory applications tosingle and twin screw hulls, Iannone claimsthat the method, though still in a refinementphase, is promising for its suitability to be usedas an extrapolation tool for full scale poweringpredictions for unconventional propulsors.
The second method described in this sec-tion, Schmiechen’s (1991) “rational theory”, isa method for ship powering analysis based onresults from model self-propulsion load vary-ing tests alone. Stand alone resistance andpropulsor open water tests are avoided.
Two overload tests are done at the samesteady speed, but different values of the over-load. Care must be taken to ensure that thespeed is steady to avoid significant accelera-tion/inertia forces in the longitudinal momen-tum equation. The following parameters aremeasured for the two tests: speed, shaft rota-tional speed, shaft thrust, torque and the towingforce. These are designated
22222
11111
FQTNVFQTNV
The thrust, T, and torque QP, are assumedto vary as a quadratic function of the rotationalspeed N such that
NVQNQQNVTNTT
PHPp
HO
+=
+=2
0
2
which is equivalent to them being linear func-tions of the ship advance coefficient JH. Thesubscripted terms on the RHS of these equa-tions are found from the experimentally meas-ured values as follows
112
2222
1
1122210 VNNVNN
VNTVNTT−−
=
112
2222
1
12
222
1
VNNVNNTNTNTH −
−=
112
2222
1
1122210 VNNVNN
VNQVNQQP −−
=
112
2222
1
12
222
1
VNNVNNQNQNQPH −
−=
From the steady state form of the longitudinalmomentum equation

28
RFtTRFTE −+−=−+= )1(0
and by assuming that the thrust deduction frac-tion can be modelled as a linear function of theship advance coefficient
HH Jtt =
the value of tH is found as
����
� −−
−−+=
1
11
2
22
1122
DNVT
DNVT
FTFTtH
where D is the propeller diameter. The resis-tance is found from
11
11 1 F
DNVt
TR H +�
���
�−=
and the advance coefficients of the two steadystates are found as
2
22
1
1 ;1 DNV
JDNV
J HH ==
The following coefficients are then foundbased on Schmiechen’s definitions
450
0
340
0
;
;
DQK
DQ
K
DTK
DTK
PHQPH
PQP
HTHT
ρρ
ρρ
==
==
Schmiechen then assumes that the powercoefficient representing the power losses of thepropeller, the difference between the shaftpower supplied to the propeller and the jetpower of the propeller in coefficient form
PJPPPL KKK −=
can be represented by a quadratic equation inthe advance coefficient of the propeller, JP.
2
2
2p
PLPpPLPIPLPOPL
JKJKKK ++=
The coefficients of this parabola are found inthe following sequence from the coefficientsalready calculated:
2232
2
2
2
02/12/1
1
2/32/1
TTHTOPPHPLP
TOPPOPLPO
QPHPPH
QPOPPO
KKKKK
KKK
KK
KK
−���
�−=
��
��
�−=
=
=
π
π
π
π
To obtain KPLP2 use is made of the zero thrustcondition when the equation
00 =+= HTTHTT JKKK
yields in sequence
HT
TOHT K
KJ =
HTHPPPPOPLT JKKK +=
and a cubic equation for the propeller advancecoefficient in the zero thrust condition
21 )(42
PT
PLPOPLT
PT
PLP
TH
PPHPT J
KKJP
KKJ −+−=
ππ
As JPT occurs on both sides of this equation, asolution here is to assume a value for JPT on theRHS and calculate a new value for JPT on theLHS. This procedure can be iterated until theRHS and LHS values fall within a pre-set limit.From this the coefficient KPLP2 can be foundfrom

29
)(2122 PTPLPPLPOPLT
PTPLP JKKK
JK −−=
Using the above basis, the propulsive perfor-mance of the vessel can be found over a rangeof ship advance coefficients, JH, which can beassumed. In sequence the thrust and power co-efficients are found as
HPPHPPOPP
HTHTOT
JKKKJKKK
+=+=
An iteration is then necessary to obtain theworking value of the propeller advance coeffi-cient at this ship advance coefficient and this isdone using the loss parabola.
JP
T
T
PJP
PLPPPJ
PPLPPPLPPLPOPL
KK
KKJ
KKK
JKJKKK
2
22
1
2
2
π−=
−=
++=
In this procedure also, a value of Jp is assumedand a new value is calculated; the process isiterated until the desired accuracy is achieved.
From here the following propulsive coeffi-cients are obtained
π
π
2
2PL
QL
ppQP
KK
KK
=
=
wake fraction
H
P
JJw −=1
thrust loading coefficient
2
8
P
TP J
KCπ
=
various parameters in Schmiechen’s “ thrustdeduction theorem”
1)1( 2/1 −+= TCτ
thrust deduction fraction t = tH JH
)1(2
)1(2
t
tt
−
���
�−+
=
ττχ
energy wake
ww
wwe )1(1 −−= χ
and the various propulsive efficiencies:
propeller efficiency
PP
PTTP K
JK=η
jet efficiency
21
)1(1
2
T
TJC++
=η
pump efficiency
TJ
TPJP η
ηη =
effective thrust coefficient
����
�=
−= 222
)1(VD
TJ
tKC E
H
TE ρ
hull efficiency
)1()1(
wt
ET −−=η

30
total propulsive efficiency
TPETEP ηηη =
configuration efficiency
����
�==
J
E
JP
EPEJ P
Pηηη
energy wake
we = w – χ (1-w)
and normalized pressure level in the wake)2()1( 22 χχ +−= wC p .
Although Schmiechen has not done a wholeset of evaluations for a series of ships, he haspresented comparisons between model and fullscale parameters for detailed tests done on theMeteor. For this vessel, the following parame-ters were found to be similar for the model andfull scale: KT, KQL, ηJP, CE, ηEP and ηEJ.Small variations between model and full scaleoccurred in: KQ, w, ηTJ, ηTP , CP, ηET, CE, ηEJand t.
5.9 Z - Drives (Podded propulsors)
Allied with the recent upsurge in the num-ber of applications of podded drives, there isgrowing concern with the differences in testingprocedures and extrapolation methods beingused for these propulsors, particularly for trac-tor type units. The extrapolation methods in usehave not been published in the open literature.Also there is a lack of full-scale data for thesesystems due their short application history. Thefollowing outline approaches to the testing andextrapolation for podded propulsors have beensuggested.
In the first approach the housing of the
azimuthing unit and the propeller is consideredas a whole and the propulsive coefficients arerelated to the interaction between the wholepropulsion unit and the hull. In this case thesystem’s net thrust must include the drag forceson the housing. The resistance test with the hullis performed without the propulsion unit fitted.
In the second approach, the azimuthing unitis considered as an open propeller in isolationand the propulsive coefficients are related tothe interaction between the propeller and thehull appended with the housing. Therefore thepropeller thrust and torque will not include theeffect of the drag forces on the housing and theresistance test must be performed with thehousing unit fitted, but without the propeller inplace.
In both of the above approaches the prob-lem arises as to how to scale the drag of thehousing unit due to the low Reynolds numberat model scale which results in relatively largedrag forces. In the first approach, a scale effectcorrection can be applied to the model KT val-ues obtained from an open water test with thecomplete unit where the system’s net thrust ismeasured. In the second approach, this correc-tion can be applied to the appended hull resis-tance based on the resistance results. The finalpower prediction is expected to be the same forboth cases. However, the total propulsive effi-ciency will be different due to the difference inthe resistance for the naked and appended hull.This is actually a matter of definition of pro-pulsive efficiency. In some cases a stock pro-pulsor unit may be used instead of a geometri-cally similar model of the actual propulsor.
In a third approach, open water tests of thepodded drive as a whole unit are also done.However, the thrust and torque measurementsare taken at the shaft excluding the drag effectsof the housing and are corrected to the full-scale. The resistance tests with the model hullare done without the podded drive while theresistance of the drive housing and the scaleeffects are estimated numerically.
In a fourth approach, in addition to resis-

31
tance and self-propulsion tests, two open watertests: one with the propeller alone; the otherwith the propeller plus the housing together(whole unit), are used for the evaluation of thepodded drive. In this approach, the poddeddrive is assumed to be an appendage and itsdrag is converted to the full-scale without anycorrection for scale effects. The thrust deduc-tion fraction is calculated from the system’s(net) thrust and the total resistance with thepods. The wake fraction is obtained based on aKQ identity and no correction is made to the fullscale. The open water test results for the wholepodded drive are corrected for the difference inReynold’s number between the open water testand the self-propulsion test. Further correctionsare also made to the open water test results forthe full scale by using ∆KT and ∆KQ valuesbased on open water test results with the pro-peller alone.
6 DISCUSSION OF EXTRAPOLATIONMETHODOLOGIES
In section 4, this report has given an over-view of methods of extrapolation used in thepast for different types of unconventional pro-pulsor. Problems arising during testing and ex-trapolation have been highlighted in somecases. In section 5, these methods of extrapola-tion, together with other candidate extrapola-tion methodologies, have been discussed infurther detail.
To date, many extrapolations for uncon-ventional propulsors have used methods heav-ily based on the ITTC 1978 methodology.However, the modifications to the ITTC 1978method proposed and used for many of theseunconventional propulsors are different: i.e.there are as many or more modifications to theITTC 1978 method as there are types of un-conventional propulsor. This situation is lessthan ideal as there is always a question as towhether any power saving predicted is a fun-damental characteristic of the device or a func-tion of the testing, analysis and extrapolationmethod in use.
As a result of its work, the Committee feelsthat where there is weak interaction betweenthe unconventional propulsor and the ship hull,then methods developed on the core of theITTC 1978 approach can give levels of accura-cy for extrapolation of full scale ship poweringperformance that are of the same magnitude asthose obtained for conventional propulsors.Weak interaction occurs with devices such astip fin and tip plated propellers, propeller bosscap fins, and other devices that are only a smallmodification to a conventional propeller. Ef-fective modifications do need to be made toaccount for differences in blade frictional dragresulting from differences in Reynolds numberbetween model and full scale and a method todo this for tip fin propellers is referred to insection 5.7. However, where there is strong in-teraction between the device and the hull, thenmethods based on the ITTC 1978 approach arenot adequate. Strong interaction occurs with alltypes of ducted and partially ducted propellers,pre- and post-swirl devices, z-drives, etc. Thereason for this is that these latter unconven-tional propulsors have large, complex andstrongly modifying effects on the flow aroundthe hull. In addition, the exact physical mecha-nisms by which some of these devices interactwith the hull is not always clear. As a result,the testing and analysis leading to extrapolationdoes not lend itself to being broken down intothe pieces designated by the ITTC 1978 proce-dure (i.e. separate resistance, open water pro-pulsor, and self-propulsion tests and theiranalysis). Most of these interactions betweenpropulsor and hull are strongly Reynolds num-ber dependant.
Benchmark work is necessary to investigatethese flow phenomena and to identify trends inpowering performance as the Reynolds numberis increased. Examples of some of the types oftest that are necessary are described in sections4.6 and 4.7 for models fitted with ducts andpartial ducts. To do this work it is necessary touse the largest facilities available and to avoidstrict adherence to Froude scale speeds. Newtest techniques need to be developed in some

32
cases. A heavy reliance needs to be made onself-propulsion tests with geometrically scaledmodels of the unconventional propulsor andhull arrangements. Use can and should also bemade of RANS-type CFD calculations to in-vestigate trends in certain detailed flow be-haviour as the Reynolds number of a particularset up is increased.
To scale or extrapolate powering perform-ance, it is necessary to know the trends in per-formance as Reynolds number is increased andthis can be found from these specially designedand perhaps expensive tests. Full scale trialsresults from ships fitted with unconventionalpropulsors are needed for the same cases thathave been studied in depth at model scale. On-ce this base of knowledge is established, moreroutine work might be possible following amore simple test and extrapolation procedure.
In carrying out propulsion tests for uncon-ventional propulsors, the Committee recom-mends the use of extensive load varying testsdone at high values of Reynolds number. Inworking towards a guideline for extrapolation,the Committee recommends that the data fromthese tests be used in combination with ananalysis using one or more of: a momentumanalysis, as described in outline in section 5.1;the results from RANS-type CFD calculations;and/or an extended analysis of self-propulsiontests, some perhaps rather simplistic examplesof which are described in section 5.8. The aimis to avoid assumptions made in the conven-tional ITTC 1978 type analysis which areknown to be less than realistic. An example ofone of these is the use of a propeller open watertest (often done at one Reynolds number) withresults from the propeller in the behind condi-tion (often done at a different Reynolds num-ber) to identify a wake fraction. A second ex-ample is the empirical methods used for thescaling of that wake fraction from model to fullscale.
A true momentum analysis would identifystreamtubes passing from ahead of to behindthe propulsor unit. Detailed measurements of
the flow velocities would be made at these lo-cations and these would be used to identify thethrust of the device. (Note that this is analo-gous to the method of analysis proposed forwaterjets by the Waterjets Group of the 21st
ITTC.) The thrust deduction effect could befound from an integration of local pressuresover the afterbody. CFD methods would beused to supplement velocity values from actualtest results and to investigate trends at higherReynolds numbers. In contrast, the reason forlooking at an extended analysis of self-propulsion test data is with the plan that pow-ering performance information can be extractedfrom these tests in a more macro manner (thanby using the integrations referred to above), butby avoiding as far as possible the less realisticaspects of the assumptions present in conven-tional methods of extrapolation. The Commit-tee recommends that work is continued on thedevelopment of new general methods for ex-trapolation of the powering performance ofships fitted with unconventional propulsorsalong these lines.
The published performance of unconven-tional propulsor systems is sometimes cloudedfor a number of reasons. Often the advantage offitting an unconventional propulsor design isnot actual energy saving, but the suppression ofcavitation or the reduction of unsteady pressurepulses and vibration. There may be no efficien-cy gain in some situations. In addition, uncon-ventional propulsors can be fitted to shipswhere the initial design of the conventionalpropeller is not optimum. This latter leads to anapparently large propulsive efficiency gainwith the device, whereas a proportion of thatgain is the result of more focussed design effortbeing placed on the propulsion design in gen-eral.
7 DRAFT CONCLUSIONS AND REC-OMMENDATIONS
General technical conclusions

33
• The exact physical mechanism by whichsome unconventional propulsors interactwith the hull is not clear.
• Extrapolation of full scale powering forships fitted with unconventional propulsorsmay be developed from extensive loadvarying tests and in addition one or more ofmomentum analysis, CFD computations, oran extended analysis of self propulsion testdata.
• Use of extrapolation methods for uncon-ventional propulsors based on modifica-tions to the ITTC 1978 method show simi-lar levels of variation of the powering pre-diction found between methods as the levelof the power saving expected with the de-vice. In other words, the accuracy of theseextrapolation methods is in most cases ofthe same order of magnitude as the level ofpower saving of the device under analysis.
• There is a shortage of accurate data fromfull scale trials supporting extrapolationpredictions made for unconventional pro-pulsors.
• Extrapolations cannot be reliably made ofself-propulsion test data if flow separationwhich occurs on the unconventional pro-pulsor and/or the ship hull is not scaled cor-rectly.
• It is recognised that most methods of ex-trapolation currently in use are modifica-tions to a greater or lesser degree of theITTC 1978 method. It is recommended thatthe ITTC 1978 method is only used withcaution as a guideline for extrapolation ofmodel test results to full scale ship power-ing prediction for unconventional propul-sors.
• Extrapolation methods for unconventionalpropulsors based on modifications of theITTC 1978 method are expected to givepowering predictions to the same level ofaccuracy as that achieved for conventional
propulsors when applied to ships fitted withtip fin and tip plated propellers, propellerboss cap fins, surface piercing propellersand other devices which are modificationsof a conventional propeller.
Recommendations to the Conference
• For powering prediction it is recommendedthat ship models fitted with unconventionalpropulsors, such as propellers with ducts,partial ducts, pre- and post- swirl devices,z-drives, etc., should be tested as a unit andnot broken down into component tests ofthe hull, propulsor and rotor and statorcomponents.
• Extrapolation methods of full scale power-ing for unconventional propulsors shouldbe done using self-propulsion load varyingtests of the geometrically similar shipmodel and geometrically similar propulsor.
• It is recommended that for self-propulsiontests with unconventional propulsors the ef-fect of the rudder on the propulsion systembe considered due to the influence of thedownstream swirl on the rudder.
• To reduce/ eliminate the scaling of flowseparation effects during self-propulsiontests these tests should be done at higherlevels of Reynolds number than can beachieved by rigid adherence to Froudenumber scaling.
Recommendations for future work
• It is recommended that work is continuedon the development of new generalmethods for the extrapolation of model testresults for unconventional propulsors. Theextrapolation methods should be validatedagainst extensive model tests and full scaletrials.
• Extensive tests for unconventional propul-sors over a wide range of Reynolds num-bers have shown that some usual assump-

34
tions of trends in performance are false.There is a need for detailed tests over awide range of Reynolds numbers to be do-ne on ship models fitted with each differenttype of unconventional propulsor. Wherepossible such test results should be com-pared with CFD computations and fullscale trials.
REFERENCES
Andersen, P., 1996, A Comparative Study ofConventional and Tip-Fin Propeller Per-formance. In Proc. 21st Symp. on NavalHydrodynamics. Trondheim, Norway.
Anon., 1998, Whale tail hits the road, MarinNews, No. 65.
Arabshahi, A., Beddhu, M., Briley, W., Chen,J., Gaither, A., Gaither, K., Janus, J., Jiang,M., Marcum, D., McGinley, J., Pankajak-shan, R., Remotigue, M., Sheng, C.,Sreenivas, K., Taylor, L., Whitfield, D.,1998, A Perspective on Naval Hydrody-namics Flow Simulations, Twenty-SecondSymposium on Naval Hydrodynamics,Washington, D.C., August.
Atlar, M., Hannah, J., Takinaci, A.C., andKorkut, E., 1998, “Effect of various bosscaps on the efficiency and cavitation per-formance of a propeller.”, Intl SymposiumHonoring Tarik Sabuncu On the Occasionof His 75th Birthday, Istanbul TechnicalUniversity.
Atlar, M., Patience, G., 1998, “An Investiga-tion into Effective Boss Cap Designs toEliminate Hub Vortex Cavitation”,PRADS’98, The Hague.
Bennett, J., 1996, Of fiddles and fins, WoodenBoat, 132, September/October, 40-43.
Bose, N. and Lai, P.S.K., 1989, The experi-mental performance of a trochoidal pro-
peller with high aspect ratio blades, MarineTechnology, Vol. 26, No. 3, 192-201.
Bruce, E. P., Gearhart, W.S., Ross, J.R., andTreaster, A.L., 1974, The Design ofPumpjets for Hydrodynamic Propulsion,Proceedings of Fluid Mechanics, Acoustics,and Design of Turbo-Machinery, NASA,Washington, D.C.
Ferrando, M. & Scamardella, A. 1996 SurfacePiercing Propellers: Testing Methodologies,Result Analysis and Comments on OpenWater Characteristics. In Proceedings SmallCraft Marine Engineering Resistance &Propulsion Symposium, pp.5-1 – 5-27. Yp-silanti: University of Michigan
Friesch, J. & Johannsen, C. 1994 PropulsionOptimization Tests at High ReynoldsNumbers, SNAME Transactions, Vol. 102,pp.1 – 21
Gabriel, R. and Atlar, M., 1998, Calculation ofthe performance of a ship propeller withcyclic blade pitch control, InternationalShipbuilding Progress, 45 (443), 201-223.
Gearhart, W. S., McBride, M. W., 1989,“Performance Assessment of PropellerBoss Cap Fin Type Device”, 22nd ATTC, StJohn’s., Newfoundland.
Hadler J.B. & Hecker R. 1968 Performance ofpartially submerged propellers. In Pro-ceedings, Seventh Symposium on NavalHydrodynamics (ed. R.D.Cooper & S.W..Doroff), pp. 1449-1493. Arlington: Officeof Naval Research – Department of theNavy.
Halstensen, O. and Leivdal, PA., 1990. Thedevelopment of the speedZ propulsionsystem. The 7th high speed surface craftconf., London.
Henderson, R.E., McMahon, J.F. and Wisli-cenus, G.F., 1967, A Method to Design

35
Pumpjets, Underwater Missile Propulsion,Compass Publications.
Hollstein, H.J., Gomez, G.P. & Gonzalez-Adalid, J. 1997 Bulk carrier speed trial-swith a Sistemar CLT propeller. The NavalArchitect, February 1997, pp. 33-6.
Holtrop J., 1990, Are Resistance Tests Indis-pensable?, Proceedings 20th ITTC, Madrid,Vol. 2, pp. 454-459.
Iannone L., 1997a, Power Performance Analy-sis and Full-Scale Predictions withoutTowing Tests, Proceedings of Nav &HSMV 1997, Sorrento, Italy, 18 – 21March.
Iannone L., 1997b, Self-Propulsion Flow Com-ponents Analysis for Power PerformancePredictions, Proceedings Eight Congress ofthe International Maritime Association ofMediterranean (IMAM), Istanbul, Turkey.
Iannone L., 1998, Fattore di Forma e Risucchionelle Condizioni di Servizio dall’Analisidel Flusso di Autopropulsione, INSEAN(Rome model Basin) Report No. 1996-61,Rome, Italy.
Isshiki, N., Hashimoto, K. and Morokawa, H.1987 Studies on fin ship propelled by os-cillating tail fin, Proceedings InternationalMarine Engineering Conference, ChineseSociety of Naval Architecture and MarineEngineering, Shanghai.
de Jong, K., Sparenberg, J.A. Falcão de Cam-pos, J.A.C. & van Gent, W. 1992 ModelTesting of an Optimally Designed Propellerwith Two-Sided Shifted End Plates on theBlades. In Proc. 19th Symp. on Naval Hy-drodynamics, pp. 461-75. Washington DC:National Academy Press.
Karafiath, G, 1997, U. S. Navy Ship-ModelPowering Correlation and Propeller RPMPredictions, Propellers/Shafting ’97, So-ciety of Naval Architects and Marine Engi-neers.
Kerwin, J. E., Keenan, D.P., Black, S.D. andDiggs, J.G., 1994, A Coupled Vis-cous/Potential Flow Design Method forWake-Adopted Multi-Stage, Ducted Pro-pulsors using Generalized Geometry,Transactions of the Society of Naval Ar-chitects and Marine Engineers, New York,pp. 2-28.
Kurimo, R. et al.,1998. Azipod propulsion forpassenger cruisers: Details of the hydrody-namic development and experience on thepropeller design for “Fantasy”-class cruiseliners. NAV & HMSV Intl. Conference,Sorrento.
Kurimo, R., 1998. Sea trials experience of thefirst passenger cruiser with podded propul-sors. PRADS’98, The Hague.
Lai, P.S.K. 1990 Oscillating foil propulsion,Ph.D. thesis, University of Glasgow.
Larsson, L., Regnstrom, B., Broberg, L., Li, D-A, and Janson, C-E, 1998, Failures, Fanta-sies, and Feats in the Theoretical/NumericalPrediction of Ship Performance, Twenty-Second Symposium on Naval Hydrody-namics, Washington, D.C. August.
Manen, J.D. van, 1973, Non-conventional pro-pulsion devices, International ShipbuildingProgress, Vol. 20, No. 226, 173-193.
Mewis, F., 1998. Podded drives im vormarschhydrodynamische aspekte. Schiff & Hafen,11.
Minsaas K.J. 1998. Propulsion systems forhigh speed marine craft. MARINTEK A/SReport, May.
Nishimoto, H., 1998, Private Communicationswith West Japan Fluid Engineering Labo-ratory Co., Ltd.
Ogura, M., Koizuka, H., Takeshita, H., Kohno

36
Y., Ouchi, K., Shiotsu, T., 1988, “A ScrewPropeller Boss Cap with Fins”, UK PatentApplication , GB 2194295 A.
Olofsson, N. 1996 Force and FlowCharacteristics of a Partially SubmergedPropeller. Doctoral Thesis. Goteborg:Chalmers University of TechnologyDepartment of Naval Architecture andOcean Engineering.
Ouchi, K. 1988, “Research and Developmentof PBCF (Propeller Boss Cap Fins) to En-hance Propeller Effciency”, The MotorShip 10th. International Marine PropulsionConference, London
Ouchi, K., Ogura, M., Kono, Y., Orito, H.,Shiotsu, T., Tamashima, M., Koizuka, H.,1988, “ A Research and Development ofPBCF (Propeller Boss Cap Fins) - Im-provement of Flow from Propeller Boss -”,Journal of Society of Naval Architects ofJapan, Vol. 163.
Ouchi, K., 1989, “Research and Developmentof PBCF (Propeller Boss Cap Fins) – Im-provement of Flow from Propeller Boss –“,The Proceedings of the International Sym-posium on Ship Resistance and PoweringPerformance’89 (ISRP), Shanghai.
Ouchi, K., Tamashima, M., 1989, “Researchand Development of PBCF – New andPractical Device to Enhance Propeller Effi-ciency -”, PRADS’89.
Ouchi, K., Tamashima, M., Kawasaki, T., Koi-zuka, H., 1989, “A Research and Develop-ment of PBCF (Propeller Boss Cap Fins) –2nd Report: Study on Propeller Slipstreamand Actual Ship Performance-”, Journal ofSociety of Naval Architects of Japan, Vol165.
Ouchi, K., Tamashima, M., Kawasaki, T., Koi-zuka, H., 1990, “ Research and Develop-ment of PBCF (Propeller Boss Cap Fins) –Novel Energy-Saving Device to Enhance
Propeller Efficiency -”, Naval Architectureand Ocean Engineering, Vol. 28, PapersEdited by Society of Naval Architects ofJapan. Published by Ship and Ocean Foun-dation, Japan 1992.
Ouchi, K., Tamashima, M., Arai, K., 1992“Propeller Noise Reduction caused byPBCF”, PRADS’92, Newcastle upon Tyne.
Potsdam Model Basin (SVA), Propeller Design,1995, “TVV and HVV Propellers - an In-novative Concept developed by SVA inCooperation with SCHOTTEL”, PostdamModel Basin (SVA) Product Brief.
Qian, W.H. et al. 1992a The exploratory de-velopment of simplified compensate nozzleand its composite device. Proceedings ofthe 2nd International Symposium on Pro-peller and Cavitation, Hangzhou, China
Qian, W.H. et al. 1992b A new type of shipenergy-saving device—fore-propeller hy-drodynamic fin sector, Journal of KansaiSociety of Naval Architects of Japan, No.218.
Rains et al. 1981. Hydrodynamics of poddedship propulsion. Journal of Hydronautics,Vol. 15, Nos 1-4.
Riijarvi, T., Li, J., Veitch, B., Bose., N., 1994,Experimental performance and comparisonof performance prediction methods for atrochoidal propeller model, InternationalShipbuilding Progress, Vol. 41, No. 426,113-136.
Savitsky D. 1964 Hydrodynamic Design ofPlaning Hulls, Marine Technology, Vol. 1No. 1, Oct. 1964
Schmiechen, M., 1991, Proceedings of the 2nd
International Worshop on the RationalTheory of Ship Hull-Propeller Interactionand its Applications, VWS, The Berlin ShipModel Basin, HEFT 56, June 13-14.

37
Schneekluth, H. 1986 Wake equalizing duct,The Naval Architect, April, 1986 / A pam-phlet from Schneekluth Hydrodynamik,Entwicklungs- und Vertriebsges. MBH
Schott, C.G., 1996, Design and Analysis ofAxial Flow Turbo-Machinery Blades inSteady Incompressible Flow by a Combi-nation of Momentum and SingularityMethods, Master of Science Thesis, ThePennsylvania State University.
SCHOTTEL, 1995, “TVV and HVV Propeller,A Joint Development of SCHOTTEL andSVA”, SCHOTTEL-Werft Product Brief.
Schulze, R., 1995, “SVA- Nabenkappenflossenfur Schiffspropeller”, SVA (Postdam ModelBasin) Report No: 2218.
Shiba H. 1953 Air-Drawing of Marine Propel-lers. Transportation Technical Research In-stitute, Report No. 9. Tokyo: the Unyu-Gijutsu Kenkyujo.
Skidmore, J.E., Lueschen, J.D., Renzo, J.A.and Landrum, C. 1989 Design of a humanpowered wet submersible for competition,Oceans ‘89, Seattle.
Sparenberg, J.A. & de Vries, J. 1987. An Op-timum Screw Propeller with Endplates. In-ternational Shipbuilding Progress, vol. 34,no. 395, pp. 124-33.
Stern, F., Paterson, E. G., Tahara, Y., 1996.CFDSHIP-IOWA: CFD Method for Sur-face Ship Boundary Layers and Wakes andWave Fields, IIHR Report #381.
Stierman, E.J. 1984 “Extrapolation methods forships with a ducted propeller”, InternationalShipbuilding Progress, Vol.31, No. 356.
Treaster, A. L., 1969, “Computerized Applica-tion of the Streamline Curvature Method tothe Indirect, Axisymmetric TurbomachineProblem,” ARL TM 514.2491-16, ThePennsylvania State University.
Van, S-H, Kim, M-C. and Lee, J-T, 1993“Some remarks on the powering perfor-mance prediction method for a shipequipped with a pre-swirl stator-propellersystem”, Korea Research Institute of Shipand Ocean Engineering, Daejeon, Korea,ITTC 1993, Vol. 2.
Wislicenus, G.F., 1968, Pumping Machineryfor Marine Propulsion, ASME Symposiumon Pumping Machinery for Marine Propul-sion.
Wislicenus, G.F., 1960, Hydrodynamic andPropulsion of Submerged Bodies, J. Am.Rocket Soc., Vol. 30, No. 12, pp. 1140 –1148.
Yamaguchi, H. and Bose, N. 1994 Oscillatingfoils for marine propulsion, Proceedings ofthe Fourth International Offshore and PolarEngineering Conference, Osaka.
Zhao, H.H. et al. 1988 Experimental researchon the scale effect of ship geosim, Pro-ceedings of Ship Performance Symposiumof China Shipbuilding Engineering Society.
Zhou, Z. M. et al. 1990 Energy-saving shaftbracket suitable for multi-screw vessels,China Shipbuilding, No. 2, (in Chinese).
Zierke, W.C. (editor) and 18 authors, 1997, APhysics-Based Means of Computing theFlow Around a Maneuvering UnderwaterVehicle, Technical Report No. TR 97-002,Applied Research Laboratory, The Penn-sylvania State University.
.

1
�������������
������������������ �� �������������
�� �� ����
���� �������� � ��������� ��
�������������������� ��
by Pengfei Liu, Institute for Marine Dynamics
This report demonstrates an excellent jobby the Committee on such a difficult andcomprehensive subject in such a short time. Itis a pity that this Specialist Committee will notcontinue. Continuation of the work by thisCommittee is important, because the methodsof predicting, both numerically andexperimentally, the performance capabilities ofoscillating propulsors, tip fins on screwpropellers and others are still not yet fullydeveloped. There is a lot of remaining work tobe done.
A bigger database covering more aspectsof the performance of energy saving devices,and alternatives or modifications to theconventional propulsors would be valuable.Experiment data for calibration and validationof computer codes for unconventionalpropulsors is very scarce. For example, it isdifficult to find experimental data on tip fin orend plate propellers. Such data need to includenot only the propeller shaft thrust and torquecoefficients but the blade pressure distributionas well. As stated in the report, thedevelopment of oscillating foil propulsionsystems is in its infancy. Little experiment data
on pressure fluctuation on the oscillating foilsurface has been published. Such data wouldbe invaluable for calibration for CFD work.There is also a need for some research anddevelopment work on control mechanisms forfull scale oscillating propulsors, but this isoutside of the scope of the ITTC.
Building on the success of the workshopheld by the Propulsion Committee to compareRANS and panel methods to predict propellerperformance I suggest a workshop on CFDmodeling of propellers operating in ducts.Many issues could be addressed in such aworkshop. Both experimental and CFDpredictions of unsteady pressure distribution onthe inner surface of a duct are difficult to findin the literature, although some authors havepresented the steady pressure distributioninside the duct without experimentalverification. Benchmark data includingmeasurements of pressure fluctuation on theduct’s surface would be very useful forcalibration and verification of panel methodsand RANS codes. A workshop would focusefforts in this field.
� ��������������� ��
by M.X. van Rijsbergen (MARIN)
In the discussion on extrapolation ofoscillating propulsors, the report of thecommittee concentrates on propulsor-hull
������������� �����������
����������������������
���������������� ���������������
�������������� �� ���������������

2
interaction. MARIN would however like to askattention for scale effects on the oscillatingpropulsor itself.
MARIN has been thoroughly involved inthe development of the first prototype WhaleTail Wheel (see e.g. van Manen et al.,1996).This is a cycloidal propulsor which can operatein a trochoidal blade motion. From open watertests at scale factor 2 and several rotation rates,it appeared that mainly the torque coefficient isconsiderably sensitive to the Reynolds number(see the figure below).
The Reynolds number is defined as:
RV cRe =ν
where V� is the average resultant velocityrelative to the blade, c is the chord length and νis the kinematic viscosity of water. The torquecoefficient is defined as:
Q 2 4QK
n D L=
ρ
where Q is the torque delivered by the twomain shafts (corrected for friction), ρ is thedensity of water, n is the rotation rate, D is thediameter of the wheel and L is the span of theblades. The torque coefficient is normalisedrelative to the value at the lowest Reynoldsnumber for each condition and blade anglemotion (designated ‘bam A’ or ‘bam B’).
The figure above shows that the torquecoefficient decreases with 30 to 60% forReynolds numbers in the range from 2·10� to7·10�, dependent on the blade angle motion andthe condition. The torque coefficient of thewheel is dependent on both the lift and dragcoefficients of the blades.
The observed decrease in torque coefficientof the Whale Tail Wheel occurs in the sameregion of Reynolds numbers where asignificant decrease in drag coefficient ofstreamlined foils has been reported (see e.g.Hoerner, 1965).
Trochoidal propellers can operate at thecondition where at some point in the blade path,the entrance velocity to the blade equals zero orpractically zero, causing extremely lowReynolds numbers. Special precautions duringtesting and for extrapolation of results mayhave to be taken. Little is known on this issue.
Due to the sometimes large angles of attack ofthe flow on the blade, in combination with lowReynolds numbers, leading edge separationmay occur, which is also likely to be prone toscale effects.
References:
van Manen, J.D. and van Terwisga, T., “A newway of simulating Whale Tail Propulsion”, 21��
Symposium on Naval Hydrodynamics,Trondheim, June 1996
Hoerner, S.F., “Fluid-dynamic drag”, Hoernerfluid dynamics, 1965
�� �� ���
by Hassan Ghassemi, Institute for MarineDynamics
Of the many different unconventionalpropulsors considered by the Committee,podded propulsors are of increasing practical
Reynolds effect on torque coefficient Whale Tail Wheel
0%
20%
40%
60%
80%
100%
120%
2.0E+05 3.0E+05 4.0E+05 5.0E+05 6.0E+05 7.0E+05Re
KQ
bollard pull 'bam A'
design condition 'bam A'
design condition 'bam B'

3
interest at the present time. Due to their bettermaneuverability, regular inflow to the propeller,reduction of cavitation and vibration,compactness, different types of poddedpropulsion systems (pulling, pushing andshuttle) are becoming popular in currentconstruction using electrical propulsion inplace of conventional propulsion systems.
Some recent computational research on apulling type of podded propulsion system at theInstitute for Marine Dynamics (IMD)� �� raisedissues concerning the best approach to take inmaking reliable predictions. For example, thedrag of the strut/pod may be affected by thedownstream propeller wake and its modeling.Thus it is important to find a reasonable vortexwake model to calculate the drag of strut/pod inthe propeller slipstream using a panel method.By carrying out experiments, Halstansen andLeivdal showed that strut/pod drag iscompensated by recovery of rotational energyin the slipstream. What method does theCommittee recommend for the strut/pod dragof the pulling type of podded propulsion in thevortex wake generated by the propeller?
The hydrodynamics of different types ofpodded propulsion systems (pushing, pullingand shuttle) may change the overallhydrodynamic performance of the vessel. Canthe Committee comment on these differencesand how they may influence the approach tomaking performance predictions?
• Ghassemi, H. and Allievi A. 1999: FluidAnalysis and Hydrodynamic Performanceof Conventional and Podded PropulsionSystems, Oceanic Engineering International,Vol. 3 No. 2.
�� �� ���
by Jaakko V. Pylkkanen (VTT)
First of all I would like to express myappreciation to the Committee for itscompetent report.
(a) The fourth general technical conclusionis: “There is a shortage of accurate datafrom full scale trails supportingextrapolation predictions made forunconventional propulsors”. Myquestion is: Was any such dataavailable to the Committee; did thecommittee validate extrapolationprocedures with full-scale data?
(b) The fourth recommendation to theconference is: “To reduce the scalingof flow separation effects, self-propulsion tests should be done athigher levels of Reynolds number thancan be achieved by adherence to Froudenumber scaling.” My comment is: Inthis context turbulence stimulatorsshould account for this. I would like tohave recommendations for the use ofturbulence stimulators included in thecommittee report.
���������� ��� �������� �������
by Friedrick Mewis, HSVA
First I would like to give my thanks to thecommittee for it’s really good work. In chapter5.9 (page 240) are described very well thepossible methods for using open water testresults for podded drives.
Some factors are mentioned which affectthe measured values of propeller thrust,propeller torque and unit thrust (system thrust)and additionally four different approaches toextrapolation methods are described.
Unfortunately, the estimation of thepropeller thrust in the case of pulling pods isvery difficult and the correct measurement isimpossible. The reason for that fact is the gapbetween the propeller hub and the pod housing.The pressure in this gap influences to asubstantial level the measured propeller thrust.This substantial inner force in the gap is aresult of the high pressure behind the working

4
propeller, the pressure change due to thestagnation point of the pod shaft coupled withthe large gap area. The width of the gap, whichcan vary in different model tests, and indifferent towing tanks, influences the measuredthrust too.
The error can be up to 10% dependent onthe propeller loading, the pod-geometry, thewidth of the gap and other reasons. Themeasured unit thrust is not affected by thisproblem because the force in the gap is an innerforce of this unit. My proposal is to use themeasured unit-thrust as the basis for theestimation of the so called “small figures” likethrust deduction fraction, effective wakefraction, propulsor efficiency… in podpropulsion only.
���������� �� ��� �
����!���"#��
First of all, we would like to thank Dr. Liufor his very supportive comments on theCommittee’s efforts and his discussion. Themost difficult problem for the Committee wasto identify reliable model/full-scale data for anyunconventional propulsor. In almost every casethese databases are incomplete for thecalibration and validation of computer codes;however, it is very important to note that onlymodel-scale data exists for mostunconventional propulsors. We could notidentify any experimental database thatincludes details of the local steady/unsteadypressure and velocity fields associated with theunconventional propulsor. In most cases theunconventional propulsor was designed toimprove powering thus only nominal poweringmeasurements were made. At this time theCommittee could not identify a specificreference that presents unsteady duct pressuremeasurement data.
We agree that a workshop on CFDmodeling of propellers operating in ducts isneeded. These types of unconventional
propulsor are becoming more common andexperiments are being conducted in watertunnels to measure the flowfield.
����!��$"%"�����& ������
Having been involved to some extent[Riijarvi et al. 1994] with testing andcomputational work on trochoidal propellers,we agree that Reynolds number scale effectsare very important in the extrapolation of openwater and self propulsion data on thesepropellers. As the discussor explains, largeangles of attack do occur on the blades of atrochoidal propeller, both during eachrevolution and at low advance ratios ofoperation. Work has shown, in fact, a sort ofcritical advance ratio below which stalleffectively reduces both the thrust and torquecoefficients of the propeller.
A multiple stream tube theory [Bose,1987] using experimental lift/drag coefficientsat different Reynolds numbers for the foilsections in a quasi steady manner can be usedto predict the performance of a trochoidalpropeller in a way that models this behaviourand this critical advance coefficient, at least ina qualitative way. A more accurate methodwould require experimental characteristics forthe foil sections during dynamic stall fromoscillating foil tests for the appropriateconditions and over a range of Reynoldsnumbers.
References:
Riijarvi, T., Li, J., Veitch, B.J., Bose, N., 1994,Experimental performance and comparison ofperformance prediction methods for atrochoidal propeller model, InternationalShipbuilding Progress, Vol. 41, No. 426, pp.113-136.
Bose, N., 1987, Rotary foil propellers, Papersof the Ship Research Institute, Tokyo, Japan,Vol. 24, No. 5, pp. 45-67.

5
����!��'"(� ��� �$�
The committee would like to thank Dr.Ghassemi for his questions.
Although the methods for predicting thedrag of the pod housing is not the main concernof this committee, Dr. Ghassemi is asking forthe committee’s opinion on this issue. He isparticularly interested in the pulling (or tractor)type in which case the pod housing will be inthe wake of complex propeller flow.
As reported in Section 4.8 of thiscommittee’s report, studies due to Rains et al.(1981) and Minsaas (1988) include someinformation on the drag characteristics ofpusher and tractor type propulsors. In themethod for the tractor type, Minsaas neglectsthe effect of cavitation and propeller induceddrag, and provides a semi-empirical formulaefor the viscous drag of the housing componentsdepending upon whether the component is in oroutside the propeller’s slipstream.
On the other hand, amongst the reportedcomputational methods, one can mentionstudies e.g. Dumez (1997) (reported in Lemagazine du Bassin d’Essais des Carenes) andKorpus et al (1998) (reported in PRADS `98).The former of these studies is based on thepanel technique while the later utilized aRANS technique. There is also a recent usefulwork reported by Vartdal et al (1999)(published in the CFD `99 workshop, Norway)comparing these two procedures on a tractortype pod drive.
In the light of this information, thecommittee feels that panel methods areadequate to model the potential flow effectstaking into account the influence of thepropeller's vortex wake. However, the majorcontribution due to the viscous effects stillremains as the problem which will requirecomplex boundary layer and even separatedflow models. For these, the committeerecommends use of RANS techniques, assuccessfully applied by Korpus et al (1998),including the effect of the propeller.
As far as the performance prediction ofdifferent types of pods is concerned: whether itis a pusher or a tractor type, bothconfigurations are unconventional, the latterbeing less conventional and hence morecomplex to handle.
However, if the performance prediction isbased on model test procedures, it would notmake much difference to look for fundamentaldifferences in the approaches depending on thetype of the propulsor. This is because thecurrent procedures, which are not in the publicdomain although they are outlined in Section5.9 based on the best of our knowledge, utilizestandard tests of the resistance open water andself-propulsion. In any case, these tests will beperformed for both types in a similar fashion,although the scale effect correction for the poddrag (due to low Rn) will be more complex forthe tractor type.
However, our recommendation to theITTC as outlined in Section 7, is that theextrapolation of podded propulsors should bedone based on a self-propulsion test whichincludes the hull, pod and propeller as unit andnot by breaking the test up into componentssuch as open water, resistance etc.
References:
Dumez, F-X, 1997. PODS, some encouragingconclusions, Le magazine du Bassin d’Essaisdes Carenes, No. 7, January.
Korpus, R. et al., 1998. Hydrodynamic designof integrated propulsor/stern concepts byReynolds – Averaged Navier – Stokestechniques. PRADS ’98, The Hague
Vartdal, L., et al, 1999. On the use of CFDMethods in Developing the Azipull PoddedPropulsion System, CFD Conference ’99,Ulsteinrik, Norway
Minsaas, K.J., 1988. Propulsion Systems forHigh Speed Marine Craft, MARINTEK A/SReport, May issue.

6
����!��)"�!�**����
The following briefly summaries theverbal reply given at the conference.
(a) Where full scale data was available,estimates of energy efficiency gainswere made using this data and theresults presented in the report reflectthis. An example of this is included inthe efficiencies quoted in tables 2.4.
(b) The effectiveness of turbulencestimulators in controlling separation isextremely uncertain and cannot take theplace of tests done at increased levels ofthe Reynolds number.
����!��+"$�,�
The following briefly summarises theverbal reply given at the conference.
We thank the discusser for his commentsand we agree that the gap between propellerand pod in tractor units has a great influence onthe measured thrust values of the propeller.Again we recommend self propulsion tests tobe used on their own as the basis ofextrapolation of full scale power. Theintermediate values in this process, such asthrust deduction fraction, wake, etc., may nothave the same meaning, or values, as in thepowering prediction for conventionalpropulsion systems.





![RADIAL-FLOW WAVE ROTOR CONCEPTS, UNCONVENTIONAL …...rotor prototypes for propulsion applications [12, 13]. Mathematical Science Northwest (MSNW) also studied various aspects of wave](https://img.dokumen.tips/doc/110x75/5e7eeb9e4379aa3531764378/radial-flow-wave-rotor-concepts-unconventional-rotor-prototypes-for-propulsion.jpg)

![DEVELOPING THE UNMANNED UNCONVENTIONAL CARGO … · 4-seat small aircraft with different propulsion systems [3, 20]. The aircraft performance were compared with a hypothetical conventional](https://img.dokumen.tips/doc/110x75/6111aa14b9bcee7ead6bfaed/developing-the-unmanned-unconventional-cargo-4-seat-small-aircraft-with-different.jpg)