Embed Size (px)
Citation preview
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 1/44
TWO MARKS QUESTION AND ANSWERS
PREPARED BY
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 1
INDUR INSTITUTE OF ENGG & TECH,
SIDDIP ET
HoD,Assoc Professor /EEE
Mr.M.ARSHAD.M.TECH.MISTE,
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 2/44
MODULE I
DRIVE MOTOR CHARACTERISTICS
1. Define Drive and Electric Drive?
Drive: A combination of prime mover, transmission equipment and mechanical working
load is called a drive
Electric drive: An Electric Drive can be defined as an electromechanical device for
converting electrical energy to mechanical energy to impart motion to different machines and
mechanisms for various kinds of process control.
2. List out some examples of prime movers.
I.C Engines, Steam engine, Turbine or electric motors.
3. List out some advantages of electric drives.
i. Availability of electric drives over a wide range of power a few watts to mega watts.
ii. Ability to provide a wide range of torques over wide range of speeds.
iii. Electric motors are available in a variety of design in order to make them compatible
to any type of load.
4. Give some examples of Electric Drives.
i. Driving fans, ventilators, compressors and pumps.
ii. Lifting goods by hoists and cranes.
iii. Imparting motion to conveyors in factories, mines and warehouses
iv. Running excavators & escalators, electric locomotives trains,
cars trolley buses, lifts & drum winders etc.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 2
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 3/44
5. What are the types of electric drives?
Group electric drives (Shaft drive),
Individual Drives,
Multi motor electric drives.
6. Classify electric drives based on the means of control.
Manual, Semiautomatic, Automatic.
7. What is a Group Electric Drive (Shaft Drive)?
This drive consists of single motor, which drives one or more line shafts supported on
bearings The line shaft may be fitted with either pulleys & belts or gears, by means of which a
group of machines or mechanisms may be operated.
8. What are the advantages and disadvantages of Group drive (Shaft drive)?
Advantages:
A single large motor can be used instead of a number of small motors.
The rating of the single motor may be appropriately reduced taking into account
the diversity factor of loads.
Disadvantages:
There is no flexibility, Addition of an extra machine to the main shaft is difficult.
The efficiency of the drive is low, because of the losses occurring in several
transmitting mechanisms.
The complete drive system requires shutdown if the motor, requires servicing or
repair.
The system is not very safe to operate
The noise level at the work spot is very high.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 3
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 4/44
9. What is an individual electric drive? Give some examples.
In this drive, each individual machine is driven by a separate motor. This motor also
imparts motion to various other parts of the machine.
Single spindle drilling machine, Lathe machines etc.
10. What is a multi motor electric drive? Give some examples.
In this drive, there are several drives, each of which serves to activate on of the working
parts of the driven mechanisms.
Metal cutting machine tools, paper making machines, rolling mills, traction drive,
Traveling cranes etc.,
11. Write about manual control, semiautomatic control & Automatic control?
Manual control: The electric drives with manual control can be as simple as a room fan,
incorporating on switch and a resistance for setting the required speed.
Semiautomatic control: This control consists of a manual device for giving a certain
command (Starting, braking, reversing, change of speed etc.,) and an automatic device that in
response to command, operates the drive in accordance with a preset sequence or order.
Automatic control: The electric drives with automatic control have a control gear,
without manual devices
12. What are the Typical elements of an Electric Drive?
Electrical motors and load
Power modulator
Source
Control unit and Sensing unit
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 4
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 5/44
13. What is a load diagram? What are its types? What are required to draw a load
diagram?
A load diagram is the diagram which shows graphically the variation of torque acting on
the electric drive. The motor of the electric drive has to overcome the load torque expressed as a
function of time.
Types:
One for the static or steady state process
Other for the dynamic process, when the dynamic components of torque are induced by
the inertia of the motor & load. (Instantaneous speed, acceleration, Torque & power) as a
function of time are required to draw…..
14. What are the types Drive systems?
Electric Drives Mechanical Drives
Electromechanical Drives Hydraulic drives.
15. Give an expression for the losses occurring in a machine.
The losses occurring in a machine is given by
W = Wc + x2
Wv
Where Wc = Constant losses
Wv = Variable losses at full load
X = load on the motor expressed as a function of rated load.
16. What are the assumptions made while performing heating & cooling calculation of an
electric motor?
i. The machine is considered to be a homogeneous body having a uniform temperature
gradient. All the points at which heat generated have the same temperature. All the points at
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 5
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 6/44
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 7/44
19. How heating occurs in motor drives?
The heating of motor due to losses occurring inside the motor while converting the\
electrical power into mechanical power and these losses occur in steel core, motor winding &
bearing friction.
20. What are the classes of duties?
1. Continuous duty
2. Short time duty operation of motor Main classes of duties
3. Intermittent periodic duty
4. Intermittent periodic duty with starting
5. Intermittent periodic duty with starting & braking
6. Continuous duty with intermittent periodic loading
7. Continuous duty with starting & braking
8. Continuous duty with periodic load changes
21. How will you classify electric drives based on the method of speed control?
1. Reversible &non reversible in controlled constant speed
2. Reversible and non reversible step speed control
3. Reversible and non reversible smooth speed control
4. Constant predetermined position control
5. Variable position control
6. Composite control.
22. List out some applications for which continuous duty is required.
Centrifugal pumps, fans, conveyors & compressors
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 8/44
23. Why the losses at starting is not a factor of consideration in a continuous duty motor?
While selecting a motor for this type of duty it is not necessary to give importance to the
heating caused by losses at starting even though they are more than the losses at rated load. This
is because the motor does not require frequent starting it is started only once in its duty cycle and
the losses during starting do not have much influence on heating.
24. What is meant by “short time rating of motor”?
Any electric motor that is rated for a power rating P for continuous operation can be
loaded for a short time duty (Psh) that is much higher than P, if the temperature rise is the
consideration.
25. What is meant by “load equalization”?
In the method of “load Equalization” intentionally the motor inertia is increased by
adding a flywheel on the motor shaft, if the motor is not to be reversed. For effectiveness of the
flywheel, the motor should have a prominent drooping characteristic so that on load there is a
considerable speed drop.
26. How a motor rating is determined in a continuous duty and variable load ?
1. Method of Average losses
2. Method of equivalent power
3. Method of equivalent current
4. Method of equivalent Torque
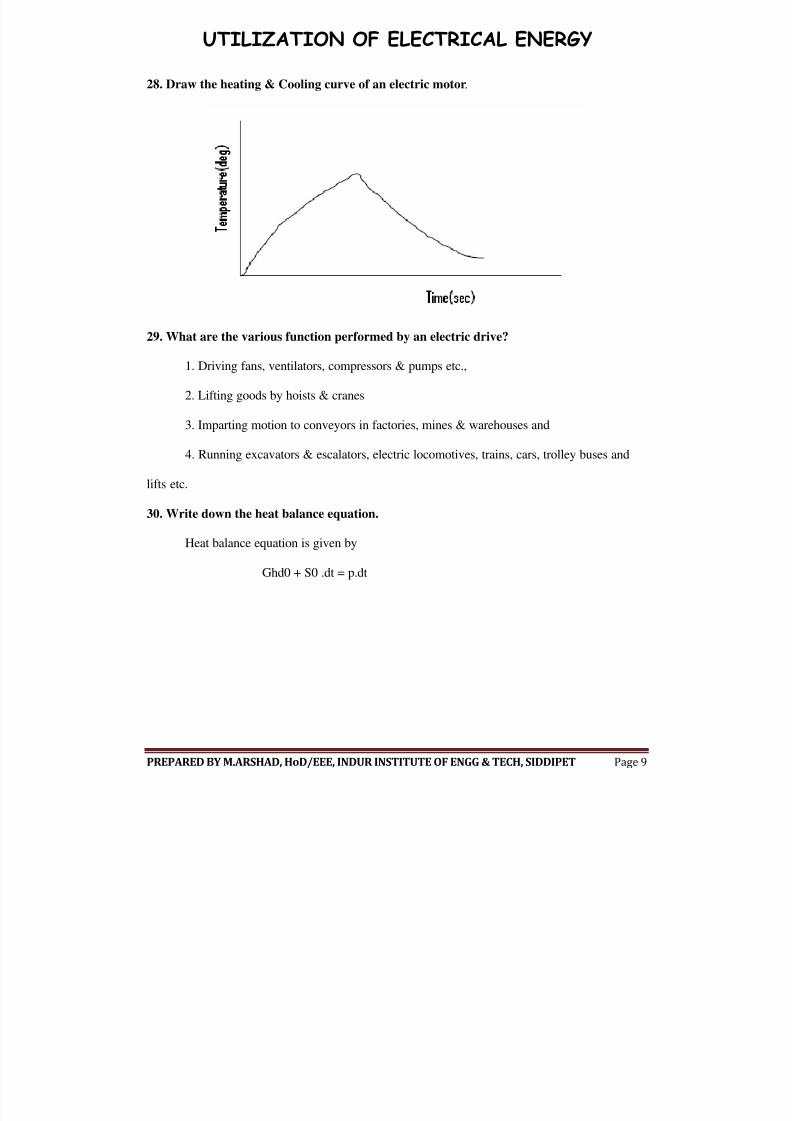
27. Define heating time constant & Cooling time constant?
The time required to heat the machine parts to 63.3% of its final temperature rise is called
as heating time constant. The time required to cool the machine parts to 36.6% of its final
temperature fall is called as cooling time constant.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page !
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 9/44
28. Draw the heating & Cooling curve of an electric motor.
29. What are the various function performed by an electric drive?
1. Driving fans, ventilators, compressors & pumps etc.,
2. Lifting goods by hoists & cranes
3. Imparting motion to conveyors in factories, mines & warehouses and
4. Running excavators & escalators, electric locomotives, trains, cars, trolley buses and
lifts etc.
30. Write down the heat balance equation.
Heat balance equation is given by
Ghd0 + S0 .dt = p.dt
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page "
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 10/44
MODULE II
BRAKING AND STARTING METHODS
1. Why a single phase induction motor does not self start?
When a single phase supply is fed to the single phase induction motor. Its stator winding
produces a flux which only alternates along one space axis. It is not a synchronously revolving
field, as in the case of a 2 or 3phase stator winding, fed from 2 or 3 phase supply.
2. What is meant by plugging?
The plugging operation can be achieved by changing the polarity of the motor there by
reversing the direction of rotation of the motor. This can be achieved in ac motors by changing
the phase sequence and in dc motors by changing the polarity.
3. Give some applications of DC motor.
Shunt : driving constant speed, lathes, centrifugal pumps, machine tools, blowers and
fans, reciprocating pumps
Series : electric locomotives, rapid transit systems, trolley cars, cranes and hoists,
conveyors
Compound : elevators, air compressors, rolling mills, heavy planners.
4. What are the different types of electric braking?
Dynamic or Rheostatic braking,
Counter current or plugging and
Regenerative braking
5. What is the effect of variation of armature voltage on N-T curve and how it can be
achieved?
The N-T curve moves towards the right when the voltage is increased. This can be
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 1#
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 11/44
achieved by means of additional resistance in the armature circuit or by using thyristor power
converter.
6. Compare electrical and mechanical braking.
Mechanical braking
Brakes require frequent maintenance
Not smooth
Can be applied to hold the system at any position torque.
Electrical braking
very little maintenance
smooth
cannot produce holding
7. When does an induction motor behave to run off as a generator?
When the rotor of an induction motor runs faster than the stator field, the slip becomes
negative. Regenerative braking occurs and the K.E. of the rotating parts is return back to the
supply as electrical energy and thus the machine generates power.
8. Define slip.
S = (Ns – Nr)/Ns
Where, Ns = synchronous speed in rpm.
Nr = rotor speed in rpm
S = Slip
9. Define synchronous speed.
It is given by Ns = 120f / p rpm.
Where Ns = synchronous speed,
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 11
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 12/44
p = no. of stator poles,
f = supply frequency in Hz
10. Why a single phase induction motor does not self start?
When a single phase supply is fed to the single phase induction motor. Its stator winding
produces a flux which only alternates along one space axis. It is not a synchronously revolving
field, as in the case of a 2 or 3phase stator winding, fed from 2 or 3 phase supply.
12. What is meant by regenerative braking?
In the regenerative braking operation, the motor operates as a generator, while it is still
connected to the supply here, the motor speed is grater that the synchronous speed. Mechanical
energy is converter into electrical energy, part of which is returned to the supply and rest as heat
in the winding and bearing.
13. Differentiate cumulative and differential compound motors.
Cumulative
The orientation of the series flux aids the shunt flux
Differential
series flux opposes shunt flux
14. What is meant by mechanical characteristics?
A curve drawn between the parameters speed and torque.
15. What is meant by electrical characteristics?
A curve drawn between the armature current and armature torque.
16. What is meant by performance characteristics?
The graph drawn between the output power Vs speed , efficiency, current and torque.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 12
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 13/44
17. What do you mean by Rheostatic braking?
In this braking armature is removed and connected across a variable rheostat.
18. Is Induction motor runs with synchronous speed or not?
Induction motor never runs with synchronous speed. It will stop if it tries to achieve
synchronous speed.
19. Mention the Starters used to start a DC motor?
Two point Starter
Three point Starter
Four point Starter
20. Mention the Starters used to start an Induction motor?
D.O.L Starter (Direct Online Starter)
Star-Delta Starter
Auto Transformer Starter
Reactance or Resistance starter
Stator Rotor Starter (Rotor Resistance Starter)
21. What are the protective devices in a DC/AC motor Starter.
Over load Release (O.L.R) or No volt coil
Hold on Coil
Thermal Relays
Fuses(Starting /Running)
Over load relay
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 13
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 14/44
22. Is it possible to include/ Exclude external resistance in the rotor of a Squirrel cage
induction motor?. Justify
No it is not possible to include/ Exclude external resistance in the rotor of a Squirrel cage
induction motor because, the rotors bars are permanently short circuited by means of circuiting
rings (end rings) at both the ends. i.e. no slip rings to do so.
23. Give the prime purpose of a starter for motors.
when induction motor is switched on to the supply, it takes about 5 to 8 times full load
current at starting. This starting current may be of such a magnitude as to cause objectionable
voltage drop in the lines. So Starters are necessary
24. Why motor take heavy current at starting?
When 3 phase supply is given to the stator of an induction motor, magnetic field rotating
in space at synchronous speed is produced. This magnetic field is cut by the rotor conductors,
which are short circuited. This gives to induced current in them.
Since rotor of an induction motor behaves as a short circuited secondary of a transformer
whose primary is stator winding, heavy rotor current will require corresponding heavy stator
balancing currents. Thus motor draws heavy current at starting.
25. What are the methods to reduce the magnitude of rotor current (rotor induced current)
at starting?.
By increasing the resistance in the rotor circuit
By reducing the magnitude of rotating magnetic field i.e by reducing the applied
voltage to the stator windings.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 14
UTILIZATION OF ELECTRICAL ENERGY
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 15/44
26. What is the objective of rotor resistance starter (stator rotor starter)?
To include resistance in the rotor circuit there by reducing the induced rotor current at
starting. This can be implemented only on a slip ring induction motor.
27. Why squirrel cage induction motors are not used for loads requiring high starting
torque?
Squirrel cage motors are started only by reduced voltage starting methods which leads to
the development of low starting torque at starting. This is the reason Why squirrel cage induction
motors are not used for loads requiring high starting torque.
28. How reduced voltage starting of Induction motor is achieved?.
D.O.L Starter (Direct Online Starter)
Star-Delta Starter
Auto Transformer Starter
Reactance or Resistance starter
29. Give the relation between line voltage and phase voltage in a
(i) Delta connected network
(ii) Star connected network
Delta connected network:
Vphase = Vline
Star connected network:
Vphase = Vline / _3
30. Give some advantages and disadvantages of D.O.L starter.
Advantages:
Highest starting torque
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 15
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 16/44
Low cost
Greatest simplicity
Disadvantages:
The inrush current of large motors may cause excessive voltage drop in the weak
power system
The torque may be limited to protect certain types of loads.
31. Explain double stage reduction of line current in an Auto transformer starter.
First stage reduction is due to reduced applied voltage
Second stage reduction is due to reduced number of turns
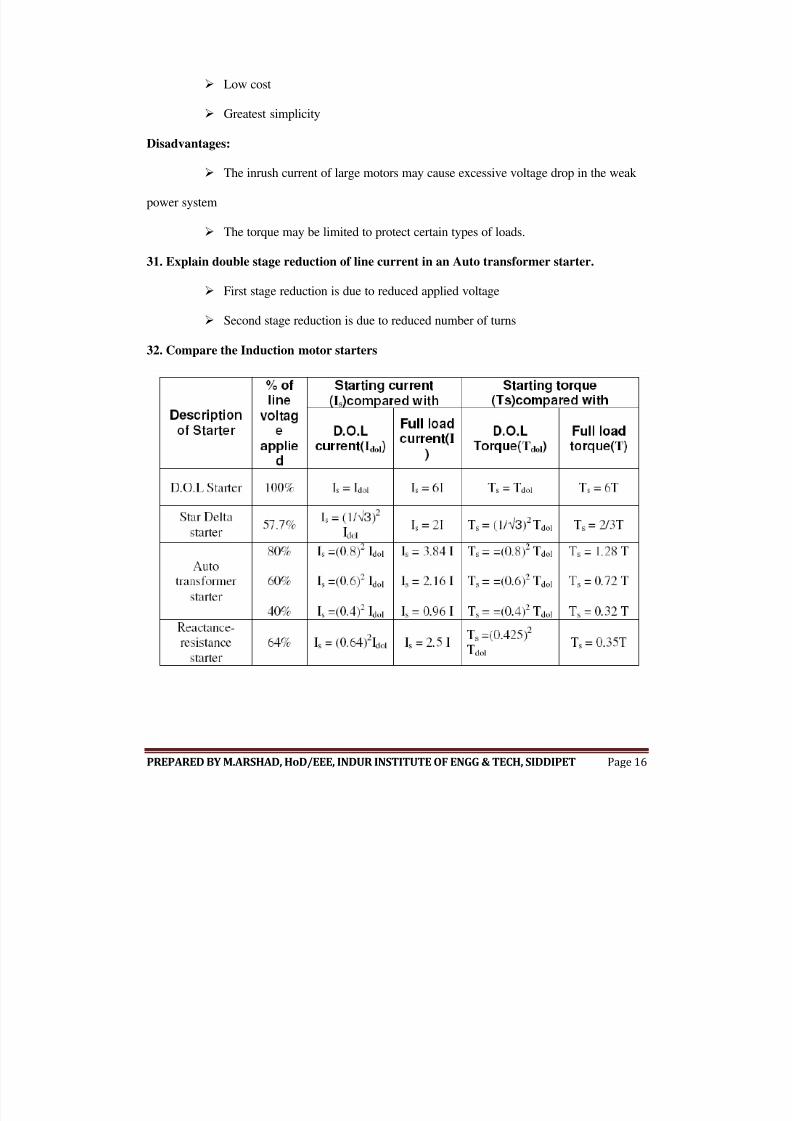
32. Compare the Induction motor starters
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 16
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 17/44
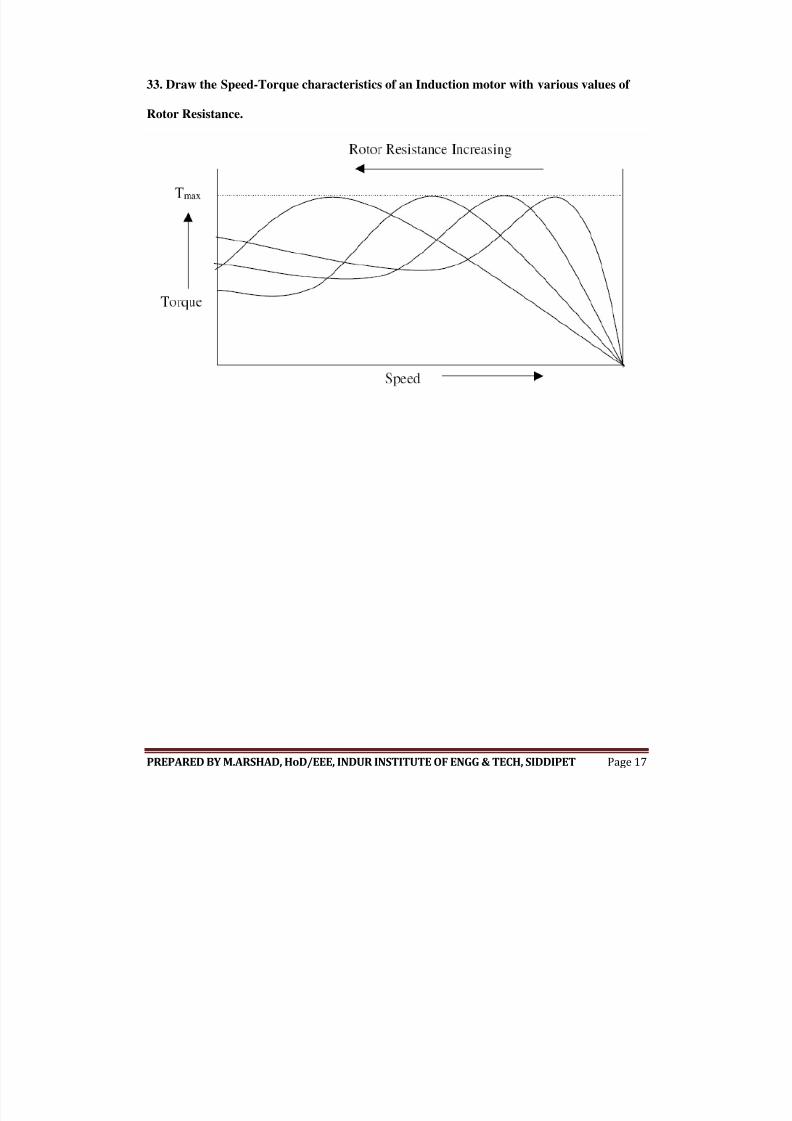
33. Draw the Speed-Torque characteristics of an Induction motor with various values of
Rotor Resistance.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 1
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 18/44
MODULE III
SPEED CONTROL OF DC AND AC MOTORS
1. Give the expression for speed for a DC motor.
Speed N = k (V-IaRa)/ Ф
where
V = Terminal Voltage in volts
Ia = Armature current in Amps
Ra = Armature resistance in ohms
Ф = flux per pole.
2. What are the ways of speed control in dc motors?
Field control –
by varying the flux per pole.
for above rated speed
Armature control-
by varying the terminal voltage
for below rated speed
3. Give the Limitation of field control
a. Speed lower than the rated speed cannot be obtained.
b. It can cope with constant kW drives only.
c. This control is not suitable to application needing speed reversal.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 1!
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 19/44

8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 20/44
It can give speeds above normal speed.
9. Compare the values of speed and torque in case of motors when in parallel and in series.
The speed is one fourth the speed of the motor when in parallel.
The torque is four times that produced by the motor when in parallel.
10. Mention the speed control method employed in electric traction.
Series-parallel speed control.
11. What is the effect of inserting resistance in the field circuit of a dc shunt motor on its
speed and torque?
For a constant supply voltage, flux will decrease, speed will increase and torque will
increase.
12. While controlling the speed of a dc shunt motor what should be done to achieve a
constant torque drive?
Applied voltage should be maintained constant so as to maintain field strength
13. What is a controlled rectifier?
A controlled rectifier is a device which is used for converting controlled dc power from a
control voltage ac supply.
14. What is firing angle?
The control of dc voltage is achieved by firing the thyristor at an adjustable angle with
respect to the applied voltage. This angle is known as firing angle.
15. Give some applications of phase control converters.
Phase control converters are used in the speed control of fractional kW dc motors as well
as in large motors employed in variable speed reversing drives for rolling mills. With motors
ratings as large as several MW’s.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 2#
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 21/44
16. What is the main purpose of freewheeling diode?
Freewheeling diode is connected across the motor terminal to allow for the dissipation of
energy stored in motor inductance and to provide for continuity of motor current when the
thyristors are blocked.
17. What is a full converter?
A full converter is a tow quadrant converter in which the voltage polarity of the output
can reverse, but the current remains unidirectional because of unidirectional thyristors.
18. What is natural or line commutation?
The commutation which occurs without any action of external force is called natural or
line commutation.
19. What is forced commutation?
The commutation process which takes place by the action of an external force is called
forced commutation.
20. What is a chopper?
A chopper is essentially an electronic switch that turns on the fixed-voltage dc source for
a short time intervals and applies the source potential to motor terminals in series of pulses.
21. What are the two main difficulties of variable frequency system?
Control of Va requires variation of chopper frequency over a wide range. Filter design for
variable frequency operation is difficult.At low voltage, a large value of toff makes themotor
current discontinuous.
22. Classify commutation.
* Voltage commutation
* Current commutation.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 21
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 22/44
23. What is voltage commutation?
A charged capacitor momentarily reverse-bias the conducting thyristor to turn it off. This
is known as voltage commutation.
24. What is current commutation?
A current pulse is forced in the reverse direction through the conducting thyristor. As the
net current becomes zero, the thyristor is turned OFF. This is known as current commutation.
25. What is load commutation?
The load current flowing through the thyristor either becomes zero (as in natural or line
commutation employed in converters) or is transferred to another device from the conducting
thyristor. This is known as load commutation.
26. What are the different means of controlling induction motor?
Stator voltage control.
Frequency control
Pole changing control.
Slip power recovery control.
27. What are the two ways of controlling the RMS value of stator voltage?
Phase control
Integral cycle control
28. Mention the two slip-power recovery schemes.
Static scherbius scheme
Static Kramer drive scheme.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 22

8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 23/44
29. Give the basic difference between the two slip-power recovery schemes.
The slip is returned to the supply network in scherbius scheme and in Kramer scheme, it
is used to drive an auxiliary motor which is mechanically coupled to the induction motor shaft.
30. Write short notes on inverter rectifier.
The dc source could be converted to ac form by an inverter, transformed to a suitable
voltage and then rectified to dc form. Because of two stage of conversion, the setup is bulky,
costly and less efficient.
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET Page 23

8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 24/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
TOPIC-1
INTRODUCTION
PART-A (2 MARKS)
1. Define Drives
2. Define Electric Drives.
3. What are the basic elements of Electric Drives?
4. Write the classification of Electric Drives.
5. Draw the block diagram of Electric Drive.
6. What is meant by Group drive? Give an example.
7. What is meant by Individual drive? Give an example.
8. What is meant by Multi-motor drive? Give an example.
9. What are the advantages and disadvantages of Individual drive system?
10. What are the advantages and disadvantages of Group drive system?
11. What are the advantages of electric drive over mechanical drive?
12. Mention the drawbacks of electric drives.
13. What are the factors influencing the choice of electric drives?
14. Mention the functions of Power modulators.
15. Compare Individual, Group and Multi-motor drives.
16. What are the motors used in Electric drives?
17. Mention the necessity of power rating?
18. Write down the dissipation equation due to convection process.
19. Draw the heating and cooling curve for a particular electric drive.
20. What are the classes of duty for an electric motor?
21. What is meant by continuous duty?
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 25/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
22. What is meant by continuous duty variable load?
23. What happens if the motor is selected at highest load handling capacity at continuous duty
variable?
24. What is meant by time intermittent duty?
25. What is meant by periodic intermittent duty?
26. What is duty factor?
27. Give the assumptions for heating and cooling calculation.
28. What is heating curve?
29. Define Heating time constant (ξ1).
30. What is cooling curve?
31. Compare A.C drives and D.C drives.
32. What is meant by short time rating of motor?
33. What are the factors that affect the power rating and size of electric drives?
PART-B(16 MARKS)
1. Explain the factors governing the selection of motors.(16)
2. Discuss in detail the determination of power rating of motors.(16)
3. (i).Explain the different types of loading of drives.(8)
(ii).Explain the choice of selection of the motor for different loads.(8)
4. (i).Describe the simplifications based on which the heating and cooling
calculations of an electric motor are made.(8)
(ii).Establish the heating time constant and the heating curves.(8)
5. (i).Compare the D.C and A.C drives.(8)
(ii).Write a brief note on classes of duty for an electric motor.(8)
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 26/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
6. Draw the typical temperature rise-time curve and derive the equation for temperature rise in
an electric drive.(16)
7. Explain the loading of an electric motor and its duty cycle with a simple diagram.(16)
8. Explain in detail about the various types of electric drives.(16)
9. (a).AT full load of a 10 H.P the temperature rise of a motor is 25⁰c after one hour and 40⁰c
after two hours. Find (1) the final temperature rise on full load
(2) heating time constant of motor
(3) half hour rating if iron losses which remain constant are 80% of
Copper losses at full load.(8)
(b).The 10 minutes rating of a motor used in domestic mixer is 200 watts. The heating time
constant is 40 minutes and the maximum efficiency occurs at full load (continuous).
determine the continuous rating.(8)
10.(a). The temperature rise of a motor when operating for 25 min on full load is 25⁰c and
Becomes 40⁰c when the motor operates for another 25 min on the same load. Determine
heating time constant and steady state temperature rise.(8)
(b). The temperature rise of motor after operating for 30 minutes on full load is 20⁰c and after
another 30 minutes 30⁰c on the same load. Find the final temperature rise and time
constant.(16)
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 27/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
TOPIC II
MOTOR CHARACTERISTICS
PART-A (2 MARKS)
1. Why motor characteristics are important?
2. Why DC series motor should never be started on no-load?
3. Why a fly-wheel setup is used in DC series motor?
4. Why differential compound motors are not used in practical?
5. What is the main reason of fitting fly-wheel along with the motor?
6. Draw the mechanical (or) speed – torque characteristics of all type of DC Motors.
7. State the condition at which the starting toque developed in a slip-ring induction motor is
maximum.
8. State the different modes of operation of three phase induction machines.
9. What is mechanical characteristics of a motor?
10. Give the application where DC Shunt, DC Series and DC Compound motors are used.
11. Draw the torque-slip characteristics of a three phase squirrel cage induction motor.
12. What is meant by braking?
13. Mention the Classifications of Braking.
14. What are the advantages and disadvantages of Electrical Braking?
15. Explain the plugging method of braking.
16. Why regenerative braking is not possible ion DC Series motor without modification?
17. Give the types of braking used for DC Motors.
18. What is meant by Regenerative braking in DC Motor?
19. Mention the demerits of mechanical braking.
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 28/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
20. Give the advantage of dynamic braking.
21. What is meant by rheostat (or) dynamic braking?
22. What is meant by Plugging in DC Motor?
23. Draw the speed-torque characteristics of various types of loads.
24. What are the conditions for the stable operations of the motors?
25. List the electrical braking for DC Compound Motor.
26. Differentiate Mechanical and Electrical Braking.
27. Draw the speed-torque characteristics of three phase induction motor.
28. Write short notes about the different types of loads.
PART-B(16 MARKS)
1. (i). List out the advantages and disadvantages of electrical braking over mechanical braking.(8)
(ii).Discuss any one method of electrical braking of DC Machines.(8)
2. Explain the Speed-Torque characteristics of 3ph induction motor with neat diagrams.(16)
3. Explain about the speed-torque characteristics of a DC Shunt Motor with suitable graph and
equations.(16)
4. Explain about the quadrantal diagram of speed-torque characteristics for a motor driving hoist
load.(16)
5. Explain how an induction motor is brought to stop by (i) Plugging and (ii).dynamic braking.(16)
6. Explain the various methods of braking of induction motors.(16)
7. Draw and explain various load characteristics of DC Shunt Motor.(16)
8. Explain Rheostat braking in DC Series Motor and Plugging in DC Shunt
Motor.(16)
9. Explain various methods of braking of DC Shunt Motors with neat
diagrams.(16)
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 29/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
10.Explain various methods of braking of DC Series Motors with neatdiagrams.(16)
11. (i). Explain the speed – torque curve of single phase induction motors in detail.(8)
(ii). Explain the method of regenerative braking employed in DC Motors.(8)
12. Explain about the speed-torque characteristics of a DC CompoundMotor with suitablegraph and equations.(16)
13.(a). A 400 V, 750 r.p.m., 70 A dc shunt motor has an armature of 0.3 ohm. When running
under rated conditions, the motor is to be braked by plugging with armature current
limited to 90A. what external resistance should be connected in series with the armature?
Calculate the initial braking torque and its value when the speed has fallen to 300 rpm.
Neglect saturation.(8)
(b).For a four pole induction motor the supply frequency is 50 Hz and it is rotating at a speed
of 1440 rpm.find its percentage slip and slip speed.(8)

8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 30/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
TOPIC III STARTING METHODS PART-A ( 2 MARKS)
1. What are the functions of starters?
2. What are the factors influencing the selection of starters?
3. Why starter is necessary for starting a DC Motor?
4. What are the starters used for starting DC Motors?
5. Why is starting current high in a DC Motor?
6. What are the protective devices used in DC Motor Starters?
7. How does the four point starter differ from three point starter?
8. Explain the function of NVR coil in DC Motor Starters?
9. Explain the function of OLR coil in DC Motor Starters?
10.What are the different methods of starting three phase induction motors?
11. How many terminals are provided on the terminal box of a squirrel cage induction
Motor to be started by a star-delta starter?
12. Mention the reasons for most of the three phase induction motors provided with delta
connected stator winding?
13. Write the applications of three phase induction motors?
14. Mention the merits of DOL starter.
15. Mention the demerits of DOL starter.
16. Why stator resistance starter is rarely used?
17. What are the effects of increasing rotor resistance on starting current and start torque?
18. How reduced voltage starting of induction motor is achieved?
19. How automatic starters are working in DC Motors?
20. How we start the wound-rotor (slip-ring) motors?
21. Why single phase induction motor is not self-starting?

8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 31/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
PART-B(16 MARKS)
1.Draw a neat schematic diagram of a three point starter and explain its working. (16)
2. Draw a neat schematic diagram of a four point starter and explain its working. (16)
3. Explain with neat circuit diagram, the star-delta starter method of starting squirrel cageinduction motor. (16)
4. Explain the typical control circuits for DC Series and Shunt motors (16)
5. Explain the different starting methods of three phase squirrel cage induction motors with neat
sketches. (16)
6. Explain different methods of starting of DC Motors. (16)
7. Explain with neat diagram the starting of three phase slip ring induction motor. (16)
8. Draw and explain the push-button operated direct-on line starter for three phase induction
motor. (16)
9. Draw and explain the manual auto-transformer starter for three phase induction motor.
10. (a). A starter required for a 220V shunt motor. The maximum allowable current is 55 A and
the minimum current is about 35 A .Find the number of starter resistance required and the
resistance of each section. The armature resistance of the motor is 0.4 ohm.(8)
(b). A three phase delta connected cage type induction motor when connected directly to 400
V, 50 HZ supply takes a starting current of 100 A in each stator phase. Calculate
(i).line current on direct on line starting.
(ii).line and phase starting currents for star-delta starting.
(iii).line and phase starting currents for a 70% tapping on autotransformer starting.(8)
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 32/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
TOPIC IV
CONVENTIONAL AND SOLID STATE SPEED CONTROL OF D.C DRIVES
PART-A ( 2 MARKS)
1. Enumerate the factors on which the speed of a DC Motor depends.
2. By what methods can the speed of a DC Shunt Motor be controlled?
3. Why the field control is considered superior to armature resistance control for DC Shunt Motors?
4. What is the effect of inserting resistance in the field circuit of a DCShunt Motor on its speed andtorque?
5. What is meant by speed control?
6. Mention the different methods of speed control employed for DC Series Motor.
7. What is meant by armature control?
8. What will be the effect of change in supply voltage on the speed of DC Shunt Motor?
9. What are the advantages and disadvantages of armature resistance control of DC Shunt Motor?
10. What are the advantages and disadvantages of Field control (or) Flux control method?
11. What is meant by flux control (or) field control method?
12. In which type of control the field current and armature current kept constant?
13. How we select the shunt and series motor based on the torque and speed in particular
application?
14. Write down the applications of Ward-Leonard system of speed control.
15. What are the advantages and disadvantages of Ward-Leonard method of speed control?
16. Write down the disadvantages and applications of armature diverted method of speed control of
DC Series Motor.
17. What is meant by solid state speed control?
18. What are the advantages and disadvantage of solid state drive methods?
19. What is meant by DC Chopper?
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 33/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
20. What is meant by duty cycle?
21. What are the different types of Chopper?22. What is the function of freewheeling diode?
23. Write the output equation for single phase half and full converters.
24. What are the arrangements are available using Power semi-conducting materials?
25. What are the two main methods for speed control of DC Shunt Motor?
26. What are the advantages of thyristor control on speed control of DC Motor?
27. Why Chopper based D.C drives give better performance than rectifier controlled drives?
28. Name the solid state controllers used for the speed control of D.C Shunt and Series Motor.
29. What is free-wheeling?
PART-B(16 ARKS)
1.Explain with neat sketch the chopper control method of speed control of DC Motors. (16)
2. Explain with neat sketches about the DC Shunt Motor speed control by using single phase
fully controlled bridge converter. (16)
3. Discuss the Ward-Leonard speed control system with a neat circuit diagram. Also mention
its advantages and disadvantages. (16)
4. Explain how the speed of a DC Shunt Motor can be varied both above and below the speed
at which it runs with full field current. (16)
5. (i) Explain with neat sketch the operation of chopper fed DC Series Motor drive. Also,derive the expression for average motor current. (10)
(ii) Explain Time ratio control and Current limit control. (6)
6. Explain the speed control schemes of DC Series Motor. (16)
7. Explain the different methods of speed control employed in DC Shunt Motor. (16)
8. Explain the control of DC drives using rectifiers and choppers. (16)
9. Explain the single phase half wave converter drive speed control for DC drive with
waveforms. (16)
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 34/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
10. Explain in detail the single phase semi-converter speed control for DC drive for separatelyexcited motor. (16)
11.(a).Speed of 200V SERIES MOTOR IS 800 RPM and takes 60 A. If 1/3 of the field turns
are cut out, find out the speed, assuming torque to remain constant. Armature resistance
is 0.2 ohms and field winding resistance is 0.21 ohms.(8)
(b).A 200 V, 10.5 A,2000rpm.shunt motor has the armature and field resistance of 0.50Ω and
400Ω r espectively. Its drives a load whose torque is constant at rated motor torque.
Calculate the motor speed if the source voltage drops to 175 V.(8)

8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 35/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
TOPIC V CONVENTIONAL AND SOLID STATE SPEED CONTROL OF
A.C DRIVES PART-A ( 2 MARKS)
1. List the different methods of speed control of three phase induction motor.
2. Write short notes about cascaded method of speed control?
3. Define Slip.
4. What is slip-power recovery system?
5. What are the advantages of Slip-power recovery system?
6. What is meant by Voltage control in induction motor? and where it is applicable?
7. What is meant by Voltage / Frequency control?
8. What are the main features of V/f control?
9. What is meant by Stator frequency control?
10. What is meant by AC Voltage controller?
11. Mention the advantages and disadvantages of Stator voltage control.
12. What are the possible methods of speed control available by using inverter?
13. Why we go for PWM inverter control?
14. Write the classifications of PWM techniques.
15. What is meant by Cyclo converter?
16. Write the types of cyclo converter.
17. Write the applications of Cyclo converter.
18. Write down the limitation of cyclo converter method of speed control.
19. Compare the Static Kramer and Scherbius System.
20. What are the advantages and disadvantages of Static Scherbius scheme of speed control?
21. Write the speed equation of an induction motor.
22. What is VVVF control?
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 36/44
TOTAL QUESTIONS FROM FIRST CHAPTER ELECTRICAL DRIVES OF UEE
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
PART-B(16 MARKS)
1. Draw the power circuit arrangement of three phase variable frequency inverter for the speed
control of three phase induction motor and explain its working. (16)
2. Explain the V/f control method of AC drive with neat sketches. (16)
3. Discuss the speed control of AC motors by using three phase AC Voltage regulators. (16)
4. Explain the speed control schemes of phase wound induction motors.(16)
5. Explain the concatenation operation of three phase induction motors.
Hence derive the speed experienced for the cascaded set. (16)
6. Explain in detail about Slip power recovery scheme. (16)
7. Explain the different methods of speed control used in three phase induction motors. (16)
8. Explain the working of following methods with neat circuit diagram. i) Kramer system ii)
Scherbius system (16)
9. Explain in detail rotor resistance method of speed control of a slip ring induction motor.(16)
10. (i) Explain the operation of Pole changing method of speed control. (8)
(ii) Explain the pole amplitude modulation method. (8)
11. Explain the static Kramer method and static scherbius method of speed control of three phaseinduction motor. (16)
12. Explain in detail about the various methods of solid state speed control techniques by using
inverters. (16)
13. Explain the solid state stator voltage control technique for the speed control of three phase
induction motor. (16)
14. Explain the various methods of speed control of a three phase induction motor when fed
through semiconductor devices. (16)
15.(a).A 3 phase.4 pole, 415 V,50 HZ induction motor has a star connected stator. The rotorimpedance at standstill is 0.1+j0.9Ω.The stator to rotor turns ratio is 1.75.calculate the
external resistance per phase required in the rotor to limit starting rotor current to 60 A, using
rotor resistance starter.(8)
(b).A 50 HZ induction motor uses a pole amplitude modulation method to control the speed.
The stator has 16 poles while the pole modulating function has 4 poles. At what speeds motor
can run?(8)
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 37/44
Objective ExamName: ______________________________ Hall Ticket No.
Answer All Questions. All Questions Carry Equal Marks.Time: 20 Min. Marks: 20.
I Choose the correct alternative:
1. Resistance ovens using alloys of 80% nickel and 20% chromium are used upto a temperature limit
of [ ]a) 100
0C b) 273
0C c) 1000
0F d) 1000
0C
2. In high frequency eddy current heating, the major part is played by the phenomena of [ ]a) hysteresis loss b) hysteresis and eddy current loss c) skin effect d) induction effect
3. The types of arc furnaces [ ]
a) direct and indirect arc furnaces b) gaseous and liquid type of arc furnacesc) constant liquid type of arc furnaces d) three phase type of arc furnaces
4. The voltage required to produce arc in welding is in the range of [ ]a) 20-30V b) 50-100V c) 100-220V d) 220-400V
5. The visible radiations lie between [ ]a) 500-2500 AU b) 100-1000 Angstrom unit (A.U) c) 400-4000 A U d) 4000-7500 AU
6. Brightness of a surface is defined as the luminous intensity per [ ]a) unit area projected b) 1m
2 plane c) 1 cm
2 curved surface d) one meter
7. Polar curves are the relation between [ ]a) lamp power and poles of street light b) candle power and angular position
c) MHCP and MSCP d) Rousseau’s candle power and distance from pole bottom
8. Joining of two similar materials by electrical means is called [ ]a) electrolytic process b) illumination c) electric welding d) air conditioning
9. Pick up the false statement [ ]a) electrodes used in arc furnaces are self baking
b) direct arc furnace is used to produce pure steel
c) three phase arc furnaces operate an 400 V supplyd) indirect-arc furnace is used to melt nonferrous metals
10. In high frequency eddy current heating, the depth of penetration ‘d’ is related to the relative
permeability r µ , conductivity σ mhos/m
3 at frequency f as [ ]
a)91 10
2 m
r
d c f π µ σ
= b)910
r m
f d c
µ σ = c)
71 10
2 m
r
d c f π µ σ
= d)710
r m
f d c
µ σ =
Cont…2
I UTILIZATION OF ELECTRICAL ENERGY
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 38/44
-oOo-
19. The relation between lux and lumens/m2 is __________
20. Low temperature heating chamber with provision for ventilation to termed as ________
II. Fill in the blanks:
11. Angstrom unit (AU) is equal to ________ metres.
12. The two laws of illumination are (1) _______________ (2) ___________
13. The most commonly used metal for filaments ____________
14. The normal value of p.f at which an electric arc furnace is to be operated is between ________
15. One of the types of heat transfer is __________
16. In individual drive ______ electric motor is used to drive one individual machine.
17. The process of smoothing out of fluctuations in load is known as __________
18. Integrating sphere is employed for measurement is ________
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 39/44
Objective ExamName: ______________________________ Hall Ticket No.
Answer All Questions. All Questions Carry Equal Marks.Time: 20 Min. Marks: 20.
I Choose the correct alternative:
1. The voltage required to produce arc in welding is in the range of [ ]
a) 20-30V b) 50-100V c) 100-220V d) 220-400V
2. The visible radiations lie between [ ]
a) 500-2500 AU b) 100-1000 Angstrom unit (A.U) c) 400-4000 A U d) 4000-7500 AU
3. Brightness of a surface is defined as the luminous intensity per [ ]
a) unit area projected b) 1m2 plane c) 1 cm
2 curved surface d) one meter
4. Polar curves are the relation between [ ]
a) lamp power and poles of street light b) candle power and angular position
c) MHCP and MSCP d) Rousseau’s candle power and distance from pole bottom
5. Joining of two similar materials by electrical means is called [ ]
a) electrolytic process b) illumination c) electric welding d) air conditioning
6. Pick up the false statement [ ]
a) electrodes used in arc furnaces are self baking b) direct arc furnace is used to produce pure steel
c) three phase arc furnaces operate an 400 V supplyd) indirect-arc furnace is used to melt nonferrous metals
7. In high frequency eddy current heating, the depth of penetration ‘d’ is related to the relative
permeability r µ , conductivity σ mhos/m3 at frequency f as [ ]
a)91 10
2 m
r
d c f π µ σ
= b)910
r m
f d c
µ σ = c)
71 10
2 m
r
d c f π µ σ
= d)710
r m
f d c
µ σ =
8. Resistance ovens using alloys of 80% nickel and 20% chromium are used upto a temperature limitof [ ]
a) 100
0
C b) 273
0
C c) 1000
0
F d) 1000
0
C
9. In high frequency eddy current heating, the major part is played by the phenomena of [ ]
a) hysteresis loss b) hysteresis and eddy current loss c) skin effect d) induction effect
10. The types of arc furnaces [ ]
a) direct and indirect arc furnaces b) gaseous and liquid type of arc furnaces
c) constant liquid type of arc furnaces d) three phase type of arc furnaces
Cont…2
UTILIZATION OF ELECTRICAL ENERGY
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 40/44
-oOo-
16. The relation between lux and lumens/m2 is __________
17. Low temperature heating chamber with provision for ventilation to termed as ________
18. Angstrom unit (AU) is equal to ________ metres.
19. The two laws of illumination are (1) _______________ (2) ___________
20. The most commonly used metal for filaments ____________
II. Fill in the blanks:
11. The normal value of p.f at which an electric arc furnace is to be operated is between ________
12. One of the types of heat transfer is __________
13. In individual drive ______ electric motor is used to drive one individual machine.
14. The process of smoothing out of fluctuations in load is known as __________
15. Integrating sphere is employed for measurement is ________
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 41/44
Objective ExamName: ______________________________ Hall Ticket No.
Answer All Questions. All Questions Carry Equal Marks.Time: 20 Min. Marks: 20.
I Choose the correct alternative:
1. Brightness of a surface is defined as the luminous intensity per [ ]
a) unit area projected b) 1m2 plane c) 1 cm
2 curved surface d) one meter
2. Polar curves are the relation between [ ]
a) lamp power and poles of street light b) candle power and angular positionc) MHCP and MSCP d) Rousseau’s candle power and distance from pole bottom
3. Joining of two similar materials by electrical means is called [ ]
a) electrolytic process b) illumination c) electric welding d) air conditioning
4. Pick up the false statement [ ]
a) electrodes used in arc furnaces are self baking b) direct arc furnace is used to produce pure steel
c) three phase arc furnaces operate an 400 V supply
d) indirect-arc furnace is used to melt nonferrous metals
5. In high frequency eddy current heating, the depth of penetration ‘d’ is related to the relative
permeability r µ , conductivity σ mhos/m3 at frequency f as [ ]
a)
91 10
2 mr
d c f π µ σ =
b) 910
r
m
f
d c
µ σ =
c)
71 10
2 mr
d c f π µ σ =
d) 710
r
m
f
d c
µ σ =
6. Resistance ovens using alloys of 80% nickel and 20% chromium are used upto a temperature limit
of [ ]
a) 1000C b) 273
0C c) 1000
0F d) 1000
0C
7. In high frequency eddy current heating, the major part is played by the phenomena of [ ]
a) hysteresis loss b) hysteresis and eddy current loss c) skin effect d) induction effect
8. The types of arc furnaces [ ]
a) direct and indirect arc furnaces b) gaseous and liquid type of arc furnacesc) constant liquid type of arc furnaces d) three phase type of arc furnaces
9. The voltage required to produce arc in welding is in the range of [ ]
a) 20-30V b) 50-100V c) 100-220V d) 220-400V
10. The visible radiations lie between [ ]
a) 500-2500 AU b) 100-1000 Angstrom unit (A.U) c) 400-4000 A U d) 4000-7500 AU
Cont…2
UTILIZATION OF ELECTRICAL ENERGY
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 42/44
-oOo-
14. The relation between lux and lumens/m2 is __________
15. Low temperature heating chamber with provision for ventilation to termed as ________
16. Angstrom unit (AU) is equal to ________ metres.
17. The two laws of illumination are (1) _______________ (2) ___________
18. The most commonly used metal for filaments ____________
19. The normal value of p.f at which an electric arc furnace is to be operated is between ________
20. One of the types of heat transfer is __________
-2-II. Fill in the blanks:
11. In individual drive ______ electric motor is used to drive one individual machine.
12. The process of smoothing out of fluctuations in load is known as __________
13. Integrating sphere is employed for measurement is ________
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 43/44
Objective ExamName: ______________________________ Hall Ticket No.
Answer All Questions. All Questions Carry Equal Marks.Time: 20 Min. Marks: 20.
I Choose the correct alternative:
1. Joining of two similar materials by electrical means is called [ ]
a) electrolytic process b) illumination c) electric welding d) air conditioning
2. Pick up the false statement [ ]
a) electrodes used in arc furnaces are self baking b) direct arc furnace is used to produce pure steel
c) three phase arc furnaces operate an 400 V supply
d) indirect-arc furnace is used to melt nonferrous metals
3. In high frequency eddy current heating, the depth of penetration ‘d’ is related to the relative
permeability r µ , conductivity σ mhos/m3 at frequency f as [ ]
a)91 10
2 m
r
d c f π µ σ
= b)910
r m
f d c
µ σ = c)
71 10
2 m
r
d c f π µ σ
= d)710
r m
f d c
µ σ =
4. Resistance ovens using alloys of 80% nickel and 20% chromium are used upto a temperature limitof [ ]
a) 1000C b) 273
0C c) 1000
0F d) 1000
0C
5. In high frequency eddy current heating, the major part is played by the phenomena of [ ]a) hysteresis loss b) hysteresis and eddy current loss c) skin effect d) induction effect
6. The types of arc furnaces [ ]
a) direct and indirect arc furnaces b) gaseous and liquid type of arc furnaces
c) constant liquid type of arc furnaces d) three phase type of arc furnaces
7. The voltage required to produce arc in welding is in the range of [ ]
a) 20-30V b) 50-100V c) 100-220V d) 220-400V
8. The visible radiations lie between [ ]
a) 500-2500 AU b) 100-1000 Angstrom unit (A.U) c) 400-4000 A U d) 4000-7500 AU
9. Brightness of a surface is defined as the luminous intensity per [ ]
a) unit area projected b) 1m2 plane c) 1 cm
2 curved surface d) one meter
10. Polar curves are the relation between [ ]
a) lamp power and poles of street light b) candle power and angular position
c) MHCP and MSCP d) Rousseau’s candle power and distance from pole bottom
Cont…2
UTILIZATION OF ELECTRICAL ENERGY
PREPARED BY M.ARSHAD, HoD/EEE, INDUR INSTITUTE OF ENGG & TECH, SIDDIPET
8/11/2019 UEE Ch-1 QnA
http://slidepdf.com/reader/full/uee-ch-1-qna 44/44
-oOo-
II. Fill in the blanks:
11. Integrating sphere is employed for measurement is ________
12. The relation between lux and lumens/m2 is __________
13. Low temperature heating chamber with provision for ventilation to termed as ________
14. Angstrom unit (AU) is equal to ________ metres.
15. The two laws of illumination are (1) _______________ (2) ___________
16. The most commonly used metal for filaments ____________
17. The normal value of p.f at which an electric arc furnace is to be operated is between ________
18. One of the types of heat transfer is __________
19. In individual drive ______ electric motor is used to drive one individual machine.
20. The process of smoothing out of fluctuations in load is known as __________





























