Embed Size (px)
Citation preview

TwidoSterowniki programowalneInstrukcja programowania
TWD USE 10AE Wersja 2.1

2
Spis treści
Ostrzeżenia bezpieczeństwa . . . . . . . . . . . . . . . . . . . . . . . . . . . .9Wstęp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
Część I Opis oprogramowania TwidoSoft . . . . . . . . . . . . . . . . . 15Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Rozdział 1 Wprowadzenie do oprogramowania TwidoSoft . . . . . . . . . . .17Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Wprowadzenie do TwidoSoft. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Wprowadzenie do języków Twido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Rozdział 2 Obiekty języka Twido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Zatwierdzanie obiektu języka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Obiekty typu bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Obiekty typu Word. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Obiekty zmiennoprzecinkowe i słowa podwójne . . . . . . . . . . . . . . . . . . . . . . . . . 31Adresowanie obiektów typu bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Adresowanie obiektów typu Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Adresowanie obiektów zmiennoprzecinkowych . . . . . . . . . . . . . . . . . . . . . . . . . 37Adresowanie słów podwójnych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Adresowanie wejść / wyjść . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Adresowanie sieciowe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Obiekty bloków funkcyjnych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Obiekty złożone. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Obiekty indeksowane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Obiekty symboliczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Rozdział 3 Pamięć użytkownika. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Struktura pamięci użytkownika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Kopia zapasowa i jej odtwarzanie bez wkładki pamięci . . . . . . . . . . . . . . . . . . . 52Kopia zapasowa i jej odtwarzanie z wkładką pamięci 32 kB. . . . . . . . . . . . . . . . 54Stosowanie wkładki rozszerzenia pamięci 64 kB . . . . . . . . . . . . . . . . . . . . . . . . 56
3
Rozdział 4 Tryby pracy sterownika. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Skanowanie cykliczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Skanowanie okresowe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Kontrola czasu skanowania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Tryby pracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Działanie przy zaniku i powrocie zasilania. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Działanie przy gorącym restarcie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69Działanie przy zimnym restarcie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Inicjalizacja sterownika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Rozdział 5 Zarządzanie zadaniem zdarzenia . . . . . . . . . . . . . . . . . . . . . . . 75Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Przegląd zadań zdarzeniowych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Opis różnych źródeł zdarzeń . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Zarządzanie zdarzeniem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Część II Funkcje specjalne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Rozdział 6 Komunikacja. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83Prezentacja różnych typów komunikacji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84Komunikacja TwidoSoft i sterownika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Komunikacja między TwidoSoft i modemem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88Komunikacja Remote Link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99Komunikacja ASCII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111Komunikacja Modbus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122Standardowe zapytania Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Rozdział 7 Wbudowane funkcje analogowe . . . . . . . . . . . . . . . . . . . . . . 145Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145Potencjometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Kanał analogowy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Rozdział 8 Zarządzanie modułami analogowymi. . . . . . . . . . . . . . . . . . . 149Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Opis modułów analogowych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150Adresowanie wejść i wyjść analogowych. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151Konfigurowanie wejść i wyjść analogowych. . . . . . . . . . . . . . . . . . . . . . . . . . . . 152Informacje stanu modułu analogowego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154Przykład stosowania modułów analogowych. . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Rozdział 9 Instalowanie magistrali AS-i V2 . . . . . . . . . . . . . . . . . . . . . . . 157Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157Prezentacja magistrali AS-i V2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
4
Opis podstaw funkcjonalnych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159Zasady ustawiania oprogramowania. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162Opis ekranów konfiguracyjnych magistrali AS-i . . . . . . . . . . . . . . . . . . . . . . . . 163Konfiguracja magistrali AS-i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165Opis ekranu strojenia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171Modyfikacja adresu podrzędnego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174Aktualizacja konfiguracji magistrali AS-i w trybie online . . . . . . . . . . . . . . . . . . 176Automatyczne adresowanie urządzenia podrzędnego AS-i V2 . . . . . . . . . . . . 181Jak wstawić urządzenie podrzędne do istniejącej konfiguracji . . . . . . . . . . . . . 182Automatyczna zamiana uszkodzonego urządzenia podrzędnego . . . . . . . . . . 183Adresowanie we/wy związanych z urządzeniem podrzędnym magistrali AS-i . 184Programowanie i diagnostyka magistrali AS-i . . . . . . . . . . . . . . . . . . . . . . . . . . 186Tryby pracy modułu interfejsu magistrali AS-i . . . . . . . . . . . . . . . . . . . . . . . . . . 191
Rozdział 10 Działanie wyświetlacza operatora . . . . . . . . . . . . . . . . . . . . .193Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193Wyświetlacz operatora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194Identyfikacja sterownika i informacja stanu . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197Obiekty systemu i zmienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199Nastawy portu szeregowego. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206Zegar czasu dziennego. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207Współczynnik korekcji czasu rzeczywistego . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
Część III Opis języków Twido . . . . . . . . . . . . . . . . . . . . . . . . . . . 209Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
Rozdział 11 Język Ladder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211Wprowadzenie do schematów drabinkowych . . . . . . . . . . . . . . . . . . . . . . . . . . 212Zasady programowania schematów drabinkowych. . . . . . . . . . . . . . . . . . . . . . 214Bloki schematów drabinkowych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216Elementy graficzne języka drabinkowego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219Instrukcje specjalne OPEN i SHORT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222Porady dla programisty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223Odwracalność Ladder / List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227Wskazówki do odwracalności Ladder / List. . . . . . . . . . . . . . . . . . . . . . . . . . . . 228Dokumentacja programu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
Rozdział 12 Język List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .233Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233Opis programu List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234Działanie Listy instrukcji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236Instrukcje języka List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237Stosowanie nawiasów. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240Instrukcje stosu (MPS, MRD, MPP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
5
Rozdział 13 Grafcet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245Opis instrukcji Grafcetu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246Opis struktury programu Grafcet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250Akcje przyporządkowane do etapu Grafcetu . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
Część IV Opis instrukcji i funkcji . . . . . . . . . . . . . . . . . . . . . . . . .255Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
Rozdział 14 Instrukcje podstawowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
14.1 Przetwarzanie boolowskie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258Instrukcje boolowskie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259Zrozumienie formatu opisującego instrukcje boolowskie. . . . . . . . . . . . . . . . . . 261Instrukcje ładowania (LD, LDN, LDR, LDF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263Instrukcje przypisania (ST, STN, R, S) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265Instrukcje iloczynu logicznego (AND, ANDN, ANDR, ANDF) . . . . . . . . . . . . . . 267Instrukcje sumy logicznej (OR, ORN, ORR, ORF). . . . . . . . . . . . . . . . . . . . . . . 269Instrukcje alternatywy (XOR, XORN, XORR, XORF) . . . . . . . . . . . . . . . . . . . . 271Instrukcja negacji (N) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
14.2 Podstawowe bloki funkcyjne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275Podstawowe bloki funkcyjne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276Zasady programowania podstawowych bloków funkcyjnych. . . . . . . . . . . . . . . 278Blok funkcyjny czasowy (%TMi). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280Typ TOF bloku czasowego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282Typ TON bloku czasowego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283Typ TP bloku czasowego. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284Programowanie i konfigurowanie bloków czasowych . . . . . . . . . . . . . . . . . . . . 285Blok funkcyjny licznika dwukierunkowego (%Ci) . . . . . . . . . . . . . . . . . . . . . . . . 288Programowanie i konfigurowanie liczników . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292Blok funkcyjny bitowego rejestru przesuwnego (%SBRi) . . . . . . . . . . . . . . . . . 294Blok funkcyjny licznika kroków (%SCi) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
14.3 Przetwarzanie numeryczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299Wprowadzenie do przetwarzania numerycznego . . . . . . . . . . . . . . . . . . . . . . . 300Instrukcje przypisania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301Instrukcje porównania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306Instrukcje arytmetyczne na liczbach całkowitych. . . . . . . . . . . . . . . . . . . . . . . . 308Instrukcje logiczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312Instrukcje przesuwania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314Instrukcje konwersji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316Instrukcje konwersji słów pojedynczych/podwójnych. . . . . . . . . . . . . . . . . . . . . 318
6
14.4 Instrukcje programu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319Instrukcje END . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320Instrukcja NOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322Instrukcje skoku. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323Instrukcje podprogramu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324
Rozdział 15 Instrukcje zaawansowane . . . . . . . . . . . . . . . . . . . . . . . . . . . .327Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
15.1 Zaawansowane bloki funkcyjne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 328Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 328Obiekty typu Bit i Word przypisane do zaawansowanych bloków funkcyjnych . 329Zasady programowania zaawansowanych bloków funkcyjnych . . . . . . . . . . . 331Blok funkcyjny rejestru LIFO/FIFO (%Ri) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333Działanie LIFO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334Działanie FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333Programowanie i konfigurowanie rejestrów. . . . . . . . . . . . . . . . . . . . . . . . . . . . 336Blok funkcyjny modulatora szerokości impulsu (%PWM) . . . . . . . . . . . . . . . . . 339Blok funkcyjny generatora wyjściowego (%PLS) . . . . . . . . . . . . . . . . . . . . . . . 342Blok funkcyjny kontrolera bębenkowego (%DR) . . . . . . . . . . . . . . . . . . . . . . . 345Działanie bloku funkcyjnego kontrolera bębenkowego . . . . . . . . . . . . . . . . . . . 347Programowanie i konfigurowanie kontrolera bębenkowego . . . . . . . . . . . . . . . 349Blok funkcyjny szybkiego licznika (%FC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349Blok funkcyjny bardzo szybkiego licznika (%VFC) . . . . . . . . . . . . . . . . . . . . . . 354Nadawanie/odbieranie komunikatów - instrukcja wymiany (EXCH) . . . . . . . . . 365Blok funkcyjny sterowania wymianą (%MSG) . . . . . . . . . . . . . . . . . . . . . . . . . . 366
15.2 Funkcje zegara . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369Funkcje zegara . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 370Bloki harmonogramu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371Znakowanie daty / czasu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374Ustawianie daty i czasu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376
15.3 Funkcja PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380Przegląd . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381Zasada pętli regulacyjnych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382Metodologia rozwoju aplikacji regulacyjnych. . . . . . . . . . . . . . . . . . . . . . . . . . . 383Kompatybilności i wydajności . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384Szczegółowe charakterystyki funkcji PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385Dostęp do konfiguracji PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 388Zakładka General funkcji PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389Zakładka IN funkcji PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391Zakładka PID funkcji PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393Zakładka OUT funkcji PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395Dostęp do strojenia PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398Zakładka Animation funkcji PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
7
Zakładka Trace funkcji PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401Metoda strojenia parametrów PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403Rola i wpływ parametrów PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406
15.4 Instrukcje zmiennoprzecinkowe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 410Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 410Instrukcje arytmetyczne na liczbach zmiennoprzecinkowych . . . . . . . . . . . . . . 411Instrukcje trygonometryczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414Instrukcje konwersji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416Instrukcje konwersji całkowite <-> zmiennoprzecinkowe. . . . . . . . . . . . . . . . . . 418
15.5 Instrukcje na tablicach obiektów . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421Funkcje sumowania tablicy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422Funkcje porównywania tablicy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423Funkcje przeszukiwania tablicy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425Funkcje szukania wartości maks. i min. tablicy . . . . . . . . . . . . . . . . . . . . . . . . . 427Zliczanie występowania wartości w tablicy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 428Funkcja przewijania tablicy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429Funkcja sortowania tablicy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431Funkcja interpolacji zmiennoprzecinkowej. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432Funkcja wartości średniej tablicy zmiennoprzecinkowej . . . . . . . . . . . . . . . . . . 433
Rozdział 16 Bity i słowa systemowe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435Rzut oka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435Bity systemowe (%S) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436Słowa systemowe (%SW) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445
8
§
Ostrzeżenia bezpieczeństwaWażne informacje
Przeczytaj uważnie poniższe instrukcje i obejrzyj urządzenie, aby dobrze zapoznać się z nim przed próbą instalowania, programowania i obsługi. Poniższe komunikaty specjalne pojawiające się w dokumentacji lub na urządzeniu przestrzegają przed możliwymi zagrożeniami lub wskazują na informacje wyjaśniające lub procedury upraszczające.
Dodanie tego symbolu do ramek "Niebezpieczeństwo" lub "Ostrzeżenie" wskazuje na zagrożenia porażeniem elektrycznym, które może wywołać poważne obrażenia, jeśli instrukcje nie będą przestrzegane.
To jest symbol alarmu bezpieczeństwa. Jest używany do ostrzegania przed możliwym ryzykiem obrażeń. Przestrzegaj wszystkich instrukcji bezpie-czeństwa dodanych do tego symbolu, aby uniknąć obrażeń lub śmierci.
"NIEBEZPIECZEŃSTWO" wskazuje na nieuchronne niebezpieczne sytuacje, które, jeśli są zachodzą, powodują śmierć, poważne obrażenia lub uszkodzenie urządzeń.
NIEBEZPIECZEŃSTWO
"OSTRZEŻENIE" wskazuje na możliwe niebezpieczne sytuacje, które, jeśli zachodzą, mogą powodować śmierć, poważne obrażenia lub uszkodzenie urządzeń.
OSTRZEŻENIE
"UWAGA" wskazuje na możliwe niebezpieczne sytuacje, które, jeśli zachodzą, mogą powodować obrażenia lub uszkodzenie urządzeń.
UWAGA
TWD USE 10 AE 9
Ostrzeżenia bezpieczeństwa
NOTA Urządzenia elektryczne mogą być obsługiwane tylko przez wykwalifikowany personel. Ten dokument nie jest instrukcją obsługi dla osób niewykwalifikowanych. Schneider Electric nie bierze odpowiedzialności za jakiekolwiek konsekwencje powstałe w wyniku użycia poniższych materiałów.
Dodatkoweinformacjebezpieczeństwa
Osoby odpowiedzialne za programowanie, zastosowanie lub eksploatację produktu powinny zapewnić, że do tworzenia każdej aplikacji zostały zastosowane wszelkie zasady projektowania, całkowicie przystające do odpowiednich praw, zasad działania, wymagań bezpieczeństwa, przepisów i standardów.
10 TWD USE 10 AE
Ostrzeżenia bezpieczeństwa
Podstawoweostrzeżenia i uwagi OSTRZEŻENIE
Zagrożenie wybuchem
Zastąpienie oryginalnych elementów może ograniczyć zgodność z wymaganiami Class 1, Div2.Nie odłączaj urządzenia, jeśli zasilanie nie jest wyłączone lub otoczenie jest uznane jest za niebezpieczne.
Niestosowanie się do powyższych uwag może spowodować ciężkie obrażenia lub uszkodzenie urządzenia.
OSTRZEŻENIENiezamierzone działanie urządzenia
Wyłącz zasilanie przed instalowaniem, demontowaniem, podłączaniem i obsługą.Produkt nie jest przeznaczony do realizacji funkcji bezpieczeństwa w maszynach niebezpiecznych. Tam gdzie istnieje duże ryzyko dla osób i / lub urządzeń zastosuj odpowiedni stykowy układ połączeń.Nie rozkładaj, nie naprawiaj i nie modyfikuj modułów.Sterownik jest zaprojektowany do pracy bez obudowy.Instaluj moduły w znamionowych warunkach otoczenia.Używaj wewnętrznego zasilacza sterownika tylko do zasilania czujników podłączonych do modułu.Do zabezpieczenia zasilania sterownika i jego obwodów wyjściowych używaj wkładek topikowych o odpowiednim napięciu i prądzie znamionowym, zgodnych z normami PN-EN 60127 "Bezpieczniki topikowe miniaturowe". Wkładka zalecana: zwłoczna, o wymiarach 5 x 20 mm.
Niestosowanie się do powyższych uwag może spowodować ciężkie obrażenia lub uszkodzenie urządzenia.
TWD USE 10 AE 11

Ostrzeżenia bezpieczeństwa
12 TWD USE 10 AE
Wstęp
Rzut oka
Zakres dokumentu
Jest to instrukcja oprogramowania do sterowników Twido i zawiera następujące główne części:
Opis oprogramowania Twido i wprowadzenie podstaw koniecznych do zaprogramowania sterowników Twido.Opis komunikacji, zarządzania wejściami / wyjściami analogowymi i innymi funkcjami specjalnymi.Opis języków programowania stosowanych do tworzenia programu Twido.Opis instrukcji i funkcji sterowników Twido.
Przeznaczenie dokumentu
Informacje w tej instrukcji mają zastosowanie tylko do sterownika Twido.
Ostrzeżenia związane z dokumentem
Schneider Electric nie bierze odpowiedzialności za jakiekolwiek błędy mogące pojawić się w tym dokumencie. Żadna z części tego dokumentu nie może być kopiowana w jakiejkolwiek formie lub jakimkolwiek sposobem, włączając elektroniczny, bez pisemnego zezwolenia Schneider Electric.
Komentarze użytkownika
Przyjmujemy twoje komentarze na temat tego dokumentu. Możesz pisać do nas na e-mail: [email protected]
TWD USE 10 AE 13

Wstęp
14 TWD USE 10 AE
TWD USE 10 AE
I
Opis oprogramowania TwidoSoftRzut oka
Wprowadzenie Ta część zawiera wprowadzenie do języków programowania oraz podstawowe informacje wymagane do stworzenia programu sterującego sterowników Twido.
Co jest w tej części?
Ta część zawiera następujące rozdziały:
Rozdział Tytuł rozdziału Strona
1 Wprowadzenie do oprogramowania TwidoSoft 17
2 Obiekty języka Twido 23
3 Pamięć użytkownika 49
4 Tryby pracy sterownika 59
5 Zarządzanie zadaniem zdarzenia 75
15

Opis oprogramowania TwidoSoft
16 TWD USE 10 AE
TWD USE 10 AE
1
Wprowadzenie do oprogramowania TwidoSoftRzut oka
Wprowadzenie Ten rozdział zawiera informacje wprowadzające do oprogramowania TwidoSoft, służącego do programowania i konfiguracji sterowników Twido, oraz do języków programowania List, Ladder i Grafcet.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Wprowadzenie do TwidoSoft 18
Wprowadzenie do języków Twido 19
17
Wprowadzenie do oprogramowania TwidoSoft
Wprowadzenie do TwidoSoft
Wprowadzenie TwidoSoft jest graficznym środowiskiem do tworzenia, konfigurowania sterowników utrzymania aplikacji sterowników programowalnych Twido. TwidoSoft pozwala na tworzenie programów w różnych typach języków (zobacz języki Twido, str. 19), a następnie transfer programu do pracującego sterownika.
TwidoSoft TwidoSoft jest programem opartym na 32-bitowym systemie Windows na komputery osobiste pracujące z systemem operacyjnym Microsoft Windows 98 Second Edition, Microsoft Windows 2000 Professional i Microsoft Windows XP.Podstawowe cechy oprogramowania TwidoSoft:
Standardowy interfejs użytkownika WindowsProgram i konfiguracja sterowników TwidoKomunikacja i sterowanie sterownika
Minimalnakonfiguracja Dla stosowania TwidoSoft minimalna konfiguracja to:
Pentium 300MHz,128 MB RAM,40 MB dostępnego miejsca na dysku twardym.
Nota: Łącze sterownik - komputer używa protokołu TCP/IP. Protokół ten musi być zainstalowany na komputerze.
18 TWD USE 10 AE
Wprowadzenie do oprogramowania TwidoSoft
Wprowadzenie do języków Twido
Wprowadzenie Sterownik programowalny czyta wejścia, wpisuje stany na wyjściach i wykonuje logikę w oparciu o program sterujący. Tworząc program sterujący dla sterownika Twido pisze się szereg instrukcji w jednym z języków programowania Twido.
Języki Twido Do tworzenia programu sterującego Twido można użyć następujących języków:List - Lista Instrukcji Język Lista Instrukcji jest szeregiem wyrażeń logicznych zapisanych jako kolejne instrukcje boolowskie.Ladder - Schemat Drabinkowy Schemat Drabinkowy jest graficznym sposobem przedstawienia wyrażeń logicznych.Grafcet Twido wspiera używanie listy instrukcji Grafcetu, lecz nie jest to Grafcet graficzny.
Możesz używać komputera osobistego (PC) do tworzenia i edycji programów sterujących Twido stosując powyższe języki programowania.Odwracalność List / Ladder pozwala na wygodne odwrócenie programu napisanego w Ladder na List i programu w List na Ladder.
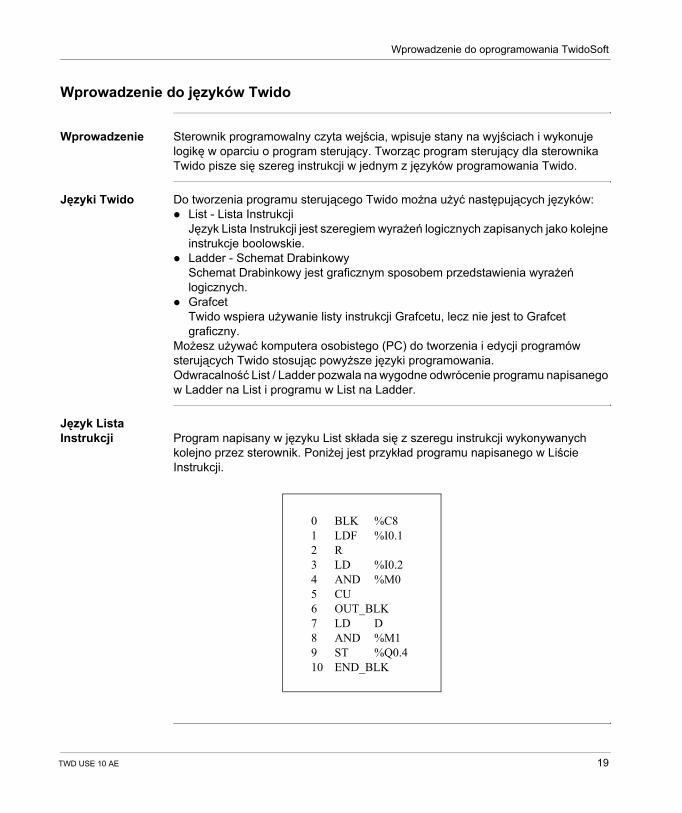
Język ListaInstrukcji Program napisany w języku List składa się z szeregu instrukcji wykonywanych
kolejno przez sterownik. Poniżej jest przykład programu napisanego w Liście Instrukcji.
0 BLK %C81 LDF %I0.12 R3 LD %I0.24 AND %M05 CU6 OUT_BLK7 LD D8 AND %M19 ST %Q0.4 10 END_BLK
TWD USE 10 AE 19

Wprowadzenie do oprogramowania TwidoSoft
Schematy Drabinkowe
Schematy drabinkowe są podobne do schematów logiki przekaźnikowej, która jest stosowana do przedstawiania przekaźnikowych obwodów sterowania. Elementy graficzne takie jak cewki, zestyki i bloki reprezentują instrukcje. Poniżej jest przykład programu napisanego w języku Ladder.
N%I0.1
%I0.2 %M0
%M1 %Q0.4
%C8R E
S ADJ Y D%C8.P 777
CU F
CD
20 TWD USE 10 AE
Wprowadzenie do oprogramowania TwidoSoft
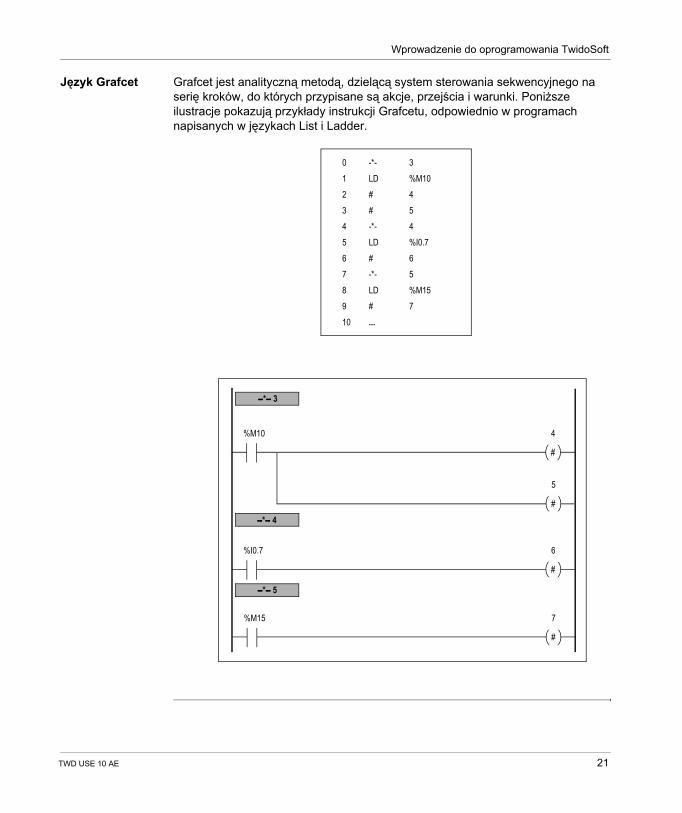
Język Grafcet Grafcet jest analityczną metodą, dzielącą system sterowania sekwencyjnego na serię kroków, do których przypisane są akcje, przejścia i warunki. Poniższe ilustracje pokazują przykłady instrukcji Grafcetu, odpowiednio w programach napisanych w językach List i Ladder.
012345678910
-*-LD##-*-LD#-*-LD#...
3%M10454%I0.765%M157
%M10 4
#
%I0.7 6
#
%M15 7
#
5
#
--*-- 3
--*-- 4
--*-- 5
TWD USE 10 AE 21

Wprowadzenie do oprogramowania TwidoSoft
22 TWD USE 10 AE
TWD USE 10 AE
2
Obiekty języka TwidoRzut oka
Wprowadzenie Ten rozdział zawiera szczegóły o obiektach języka służących do programowania sterowników Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Zatwierdzanie obiektów języka 24
Obiekty typu bit 25
Obiekty typu Word 28
Obiekty zmiennoprzecinkowe i słowa podwójne 31
Adresowanie obiektów typu Bit 35
Adresowanie obiektów typu Word 36
Adresowanie obiektów zmiennoprzecinkowych 37
Adresowanie słów podwójnych 38
Adresowanie wejść / wyjść 39
Adresowanie sieciowe 41
Obiekty bloków funkcyjnych 42
Obiekty złożone 43
Obiekty indeksowane 46
Obiekty symboliczne 48
23

Obiekty języka Twido
Zatwierdzenie obiektu języka
Wprowadzenie Obiekty typu bit i Word (słowo) są zatwierdzone, jeżeli zostaną umieszczone w przestrzeni adresowej pamięci sterownika. Aby to uzyskać muszą być użyte w aplikacji przed przesłaniem jej do sterownika.
Przykład Zakres zatwierdzonych obiektów zawiera się od zera do maksymalnego adresu dla tego typu obiektu. Na przykład, jeżeli w twojej aplikacji maksymalnym adresem słów pamięci jest %MW9, wtedy %MW0 do %MW9 są umieszczone w pamięci. W tym przykładzie %MW10 nie jest zatwierdzone i nie można uzyskać do niego dostępu ani wewnętrznie, ani zewnętrznie.
24 TWD USE 10 AE
Obiekty języka Twido
Obiekty typu bit
Wprowadzenie Obiekty typu bit są zmiennymi bitowymi oprogramowania, które są pojedynczymi bitami danych, które można użyć jako argumentów i testować instrukcjami boolowskimi. Poniżej jest lista obiektów bitowych:
Bity wejść / wyjśćBity wewnętrzne (bity pamięci)Bity systemoweBity krokówBity wyciągnięte ze słowa
TWD USE 10 AE 25
Obiekty języka Twido
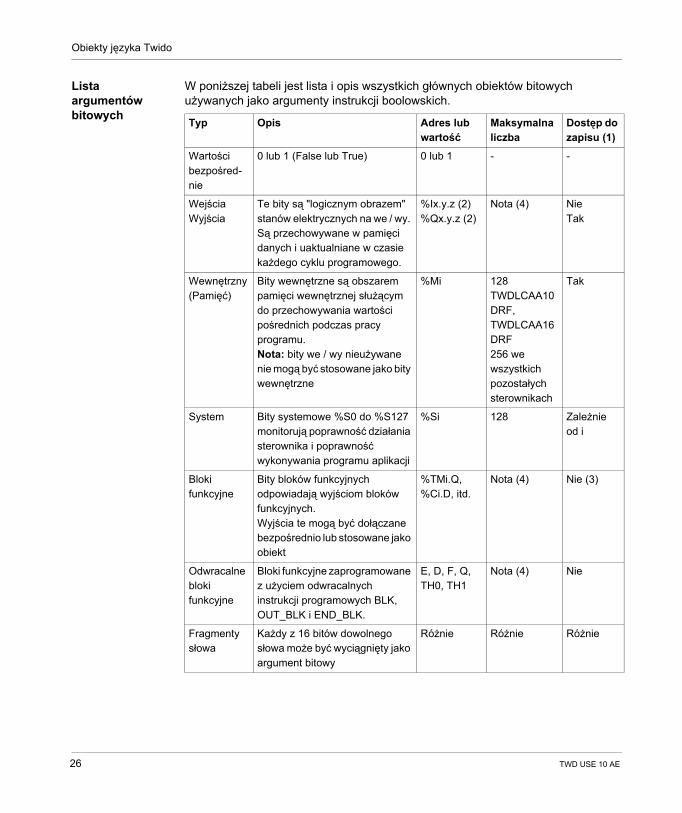
Lista argumentów bitowych
W poniższej tabeli jest lista i opis wszystkich głównych obiektów bitowych używanych jako argumenty instrukcji boolowskich.
Typ Opis Adres lub wartość
Maksymalna liczba
Dostęp do zapisu (1)
Wartości bezpośred-nie
0 lub 1 (False lub True) 0 lub 1 - -
WejściaWyjścia
Te bity są "logicznym obrazem" stanów elektrycznych na we / wy. Są przechowywane w pamięci danych i uaktualniane w czasie każdego cyklu programowego.
%Ix.y.z (2)%Qx.y.z (2)
Nota (4) NieTak
Wewnętrzny(Pamięć)
Bity wewnętrzne są obszarem pamięci wewnętrznej służącym do przechowywania wartości pośrednich podczas pracy programu.Nota: bity we / wy nieużywane nie mogą być stosowane jako bity wewnętrzne
%Mi 128 TWDLCAA10DRF, TWDLCAA16DRF256 we wszystkich pozostałych sterownikach
Tak
System Bity systemowe %S0 do %S127 monitorują poprawność działania sterownika i poprawność wykonywania programu aplikacji
%Si 128 Zależnie od i
Bloki funkcyjne
Bity bloków funkcyjnych odpowiadają wyjściom bloków funkcyjnych.Wyjścia te mogą być dołączane bezpośrednio lub stosowane jako obiekt
%TMi.Q, %Ci.D, itd.
Nota (4) Nie (3)
Odwracalne bloki funkcyjne
Bloki funkcyjne zaprogramowane z użyciem odwracalnych instrukcji programowych BLK, OUT_BLK i END_BLK.
E, D, F, Q, TH0, TH1
Nota (4) Nie
Fragmenty słowa
Każdy z 16 bitów dowolnego słowa może być wyciągnięty jako argument bitowy
Różnie Różnie Różnie
26 TWD USE 10 AE

Obiekty języka Twido
Noty:1. Zapisywanie przez program lub z użyciem Edytora Tablic Animacji.2. Patrz Adresowanie we / wy.3. Oprócz %SBRi.j i %SCi.j, te bity mogą być czytanie i zapisywane.4. Liczba zależna od typu sterownika.
Kroki Grafcetu
Bity %X1 do %Xi są przyporządkowane do kroków Grafcetu. Bit kroku %Xi jest ustawiony na 1 , gdy odpowiadający mu krok jest aktywny i jest ustawiony na 0, gdy krok jest nieaktywny
%Xi 62 w TWDLCAA10DRF, TWDLCAA16 DRF94 w TWDLCAA24DRF, i sterownikach Modular
Tak
Typ Opis Adres lub wartość
Maksymalna liczba
Dostęp do zapisu (1)
TWD USE 10 AE 27
Obiekty języka Twido
Obiekty typu Word
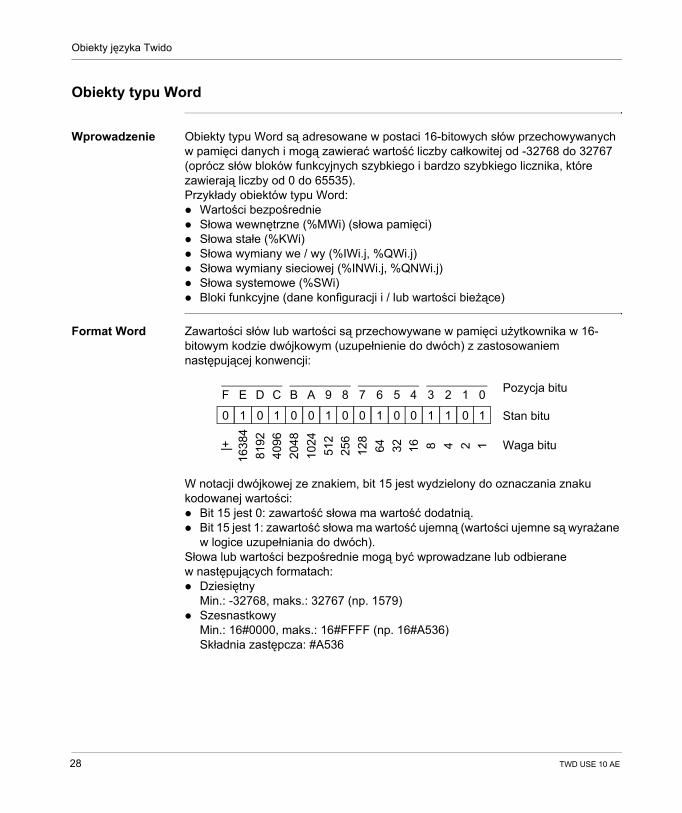
Wprowadzenie Obiekty typu Word są adresowane w postaci 16-bitowych słów przechowywanych w pamięci danych i mogą zawierać wartość liczby całkowitej od -32768 do 32767 (oprócz słów bloków funkcyjnych szybkiego i bardzo szybkiego licznika, które zawierają liczby od 0 do 65535).Przykłady obiektów typu Word:
Wartości bezpośrednieSłowa wewnętrzne (%MWi) (słowa pamięci)Słowa stałe (%KWi)Słowa wymiany we / wy (%IWi.j, %QWi.j)Słowa wymiany sieciowej (%INWi.j, %QNWi.j)Słowa systemowe (%SWi)Bloki funkcyjne (dane konfiguracji i / lub wartości bieżące)
Format Word Zawartości słów lub wartości są przechowywane w pamięci użytkownika w 16-bitowym kodzie dwójkowym (uzupełnienie do dwóch) z zastosowaniem następującej konwencji:
W notacji dwójkowej ze znakiem, bit 15 jest wydzielony do oznaczania znaku kodowanej wartości:
Bit 15 jest 0: zawartość słowa ma wartość dodatnią.Bit 15 jest 1: zawartość słowa ma wartość ujemną (wartości ujemne są wyrażane w logice uzupełniania do dwóch).
Słowa lub wartości bezpośrednie mogą być wprowadzane lub odbierane w następujących formatach:
Dziesiętny Min.: -32768, maks.: 32767 (np. 1579)Szesnastkowy Min.: 16#0000, maks.: 16#FFFF (np. 16#A536) Składnia zastępcza: #A536
F
0
|+
E
1
1638
4
D
0
8192
C
1
4096
B
0
2048
A
0
1024
9
1
512
8
0
256
7
0
128
6
1
645
032
4
016
3
18
2
1
4
1
0
2
0
1
1
Pozycja bitu
Stan bitu
Waga bitu
28 TWD USE 10 AE
Obiekty języka Twido
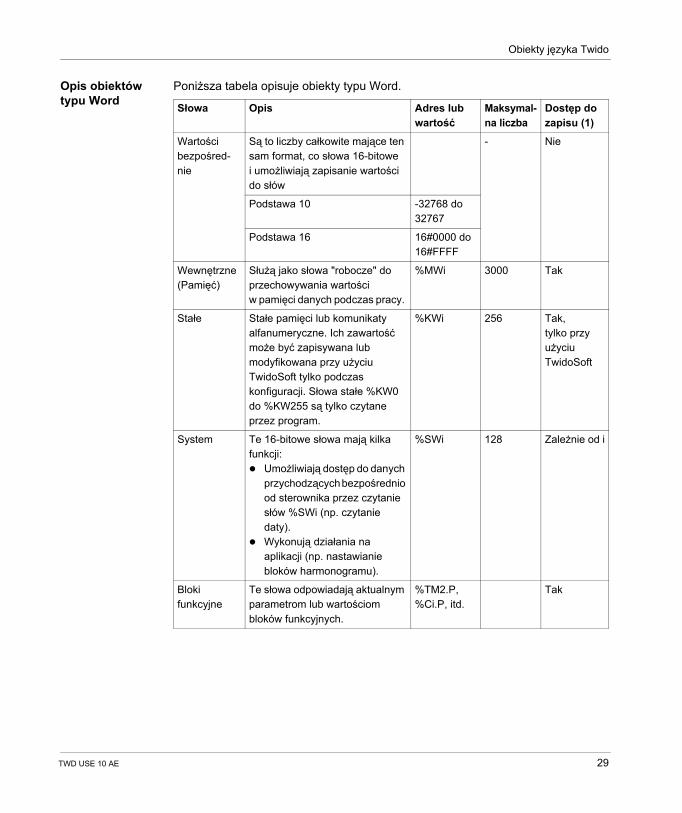
Opis obiektów typu Word
Poniższa tabela opisuje obiekty typu Word.
Słowa Opis Adres lub wartość
Maksymal-na liczba
Dostęp do zapisu (1)
Wartości bezpośred-nie
Są to liczby całkowite mające ten sam format, co słowa 16-bitowe i umożliwiają zapisanie wartości do słów
-
Nie
Podstawa 10 -32768 do 32767
Podstawa 16 16#0000 do 16#FFFF
Wewnętrzne (Pamięć)
Służą jako słowa "robocze" do przechowywania wartości w pamięci danych podczas pracy.
%MWi 3000 Tak
Stałe Stałe pamięci lub komunikaty alfanumeryczne. Ich zawartość może być zapisywana lub modyfikowana przy użyciu TwidoSoft tylko podczas konfiguracji. Słowa stałe %KW0 do %KW255 są tylko czytane przez program.
%KWi 256 Tak, tylko przy użyciu TwidoSoft
System Te 16-bitowe słowa mają kilka funkcji:
Umożliwiają dostęp do danych przychodzących bezpośrednio od sterownika przez czytanie słów %SWi (np. czytanie daty).Wykonują działania na aplikacji (np. nastawianie bloków harmonogramu).
%SWi 128 Zależnie od i
Bloki funkcyjne
Te słowa odpowiadają aktualnym parametrom lub wartościom bloków funkcyjnych.
%TM2.P, %Ci.P, itd.
Tak
TWD USE 10 AE 29
Obiekty języka Twido
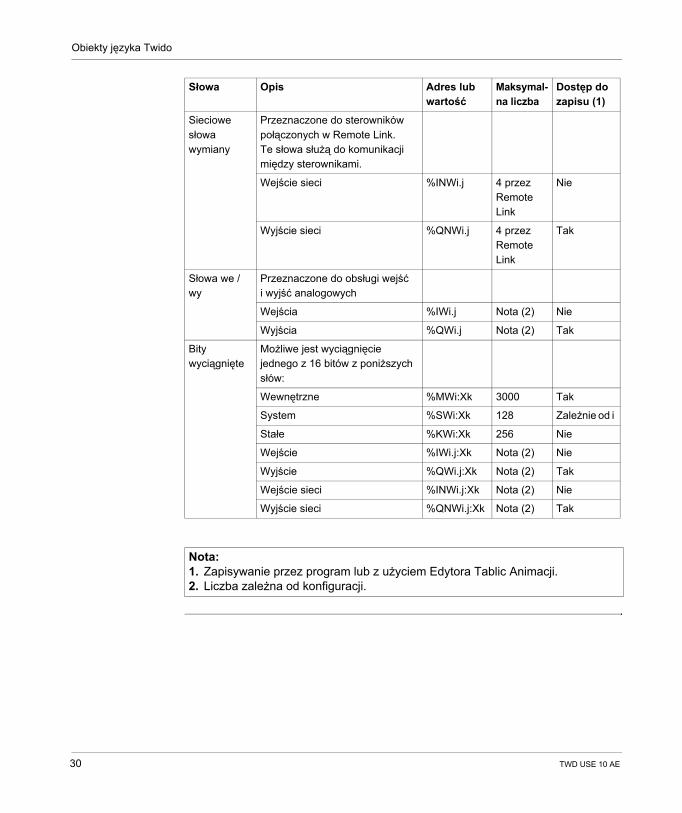
Sieciowe słowa wymiany
Przeznaczone do sterowników połączonych w Remote Link. Te słowa służą do komunikacji między sterownikami.
Wejście sieci %INWi.j 4 przez Remote Link
Nie
Wyjście sieci %QNWi.j 4 przez Remote Link
Tak
Słowa we / wy
Przeznaczone do obsługi wejść i wyjść analogowych
Wejścia %IWi.j Nota (2) Nie
Wyjścia %QWi.j Nota (2) Tak
Bity wyciągnięte
Możliwe jest wyciągnięcie jednego z 16 bitów z poniższych słów:
Wewnętrzne %MWi:Xk 3000 Tak
System %SWi:Xk 128 Zależnie od i
Stałe %KWi:Xk 256 Nie
Wejście %IWi.j:Xk Nota (2) Nie
Wyjście %QWi.j:Xk Nota (2) Tak
Wejście sieci %INWi.j:Xk Nota (2) Nie
Wyjście sieci %QNWi.j:Xk Nota (2) Tak
Nota: 1. Zapisywanie przez program lub z użyciem Edytora Tablic Animacji.2. Liczba zależna od konfiguracji.
Słowa Opis Adres lub wartość
Maksymal-na liczba
Dostęp do zapisu (1)
30 TWD USE 10 AE
Obiekty języka Twido
Obiekty zmiennoprzecinkowe i słowa podwójne
Wprowadzenie TwidoSoft pozwala na wykonywanie działań na obiektach zmiennoprzecinkowych i podwójnych słowach całkowitych.Obiekt zmiennoprzecinkowy jest argumentem matematycznym, mającym w wyrażeniu ułamek dziesiętny (np.: 3.4E+38, 2.3 lub 1.0)Podwójne słowo całkowite składa się z 4 bajtów przechowywanych w pamięci danych i zawierających wartość między -2147483648 i +2147483647.
Format i wartość zmiennoprze-cinkowa
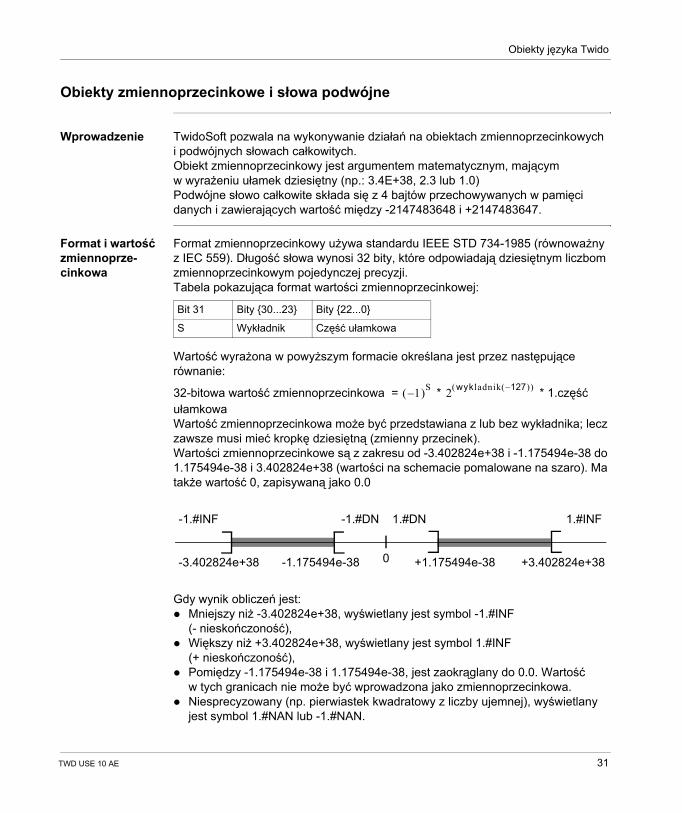
Format zmiennoprzecinkowy używa standardu IEEE STD 734-1985 (równoważny z IEC 559). Długość słowa wynosi 32 bity, które odpowiadają dziesiętnym liczbom zmiennoprzecinkowym pojedynczej precyzji.Tabela pokazująca format wartości zmiennoprzecinkowej:
Wartość wyrażona w powyższym formacie określana jest przez następujące równanie:
32-bitowa wartość zmiennoprzecinkowa = * * 1.część ułamkowaWartość zmiennoprzecinkowa może być przedstawiana z lub bez wykładnika; lecz zawsze musi mieć kropkę dziesiętną (zmienny przecinek).Wartości zmiennoprzecinkowe są z zakresu od -3.402824e+38 i -1.175494e-38 do 1.175494e-38 i 3.402824e+38 (wartości na schemacie pomalowane na szaro). Ma także wartość 0, zapisywaną jako 0.0
.
Gdy wynik obliczeń jest: Mniejszy niż -3.402824e+38, wyświetlany jest symbol -1.#INF (- nieskończoność),Większy niż +3.402824e+38, wyświetlany jest symbol 1.#INF (+ nieskończoność),Pomiędzy -1.175494e-38 i 1.175494e-38, jest zaokrąglany do 0.0. Wartość w tych granicach nie może być wprowadzona jako zmiennoprzecinkowa.Niesprecyzowany (np. pierwiastek kwadratowy z liczby ujemnej), wyświetlany jest symbol 1.#NAN lub -1.#NAN.
Bit 31 Bity {30...23} Bity {22...0}
S Wykładnik Część ułamkowa
1–( )S 2 wykladnik 127–( )( )
-1.#INF -1.#DN 1.#DN 1.#INF
-3.402824e+38 -1.175494e-38 +1.175494e-38 +3.402824e+380
TWD USE 10 AE 31
Obiekty języka Twido
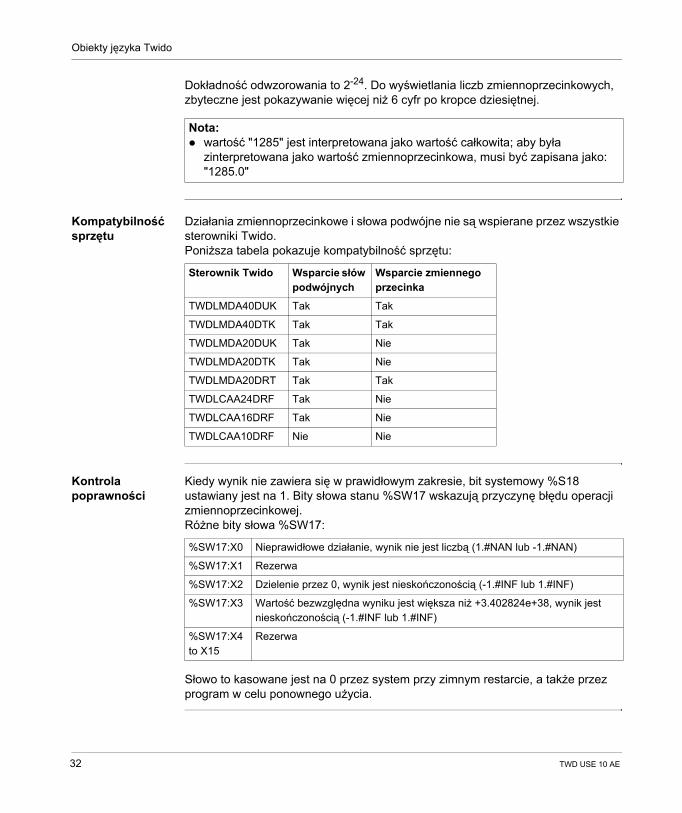
Dokładność odwzorowania to 2-24. Do wyświetlania liczb zmiennoprzecinkowych, zbyteczne jest pokazywanie więcej niż 6 cyfr po kropce dziesiętnej.
Kompatybilność sprzętu
Działania zmiennoprzecinkowe i słowa podwójne nie są wspierane przez wszystkie sterowniki Twido.Poniższa tabela pokazuje kompatybilność sprzętu:
Kontrola poprawności
Kiedy wynik nie zawiera się w prawidłowym zakresie, bit systemowy %S18 ustawiany jest na 1. Bity słowa stanu %SW17 wskazują przyczynę błędu operacji zmiennoprzecinkowej.Różne bity słowa %SW17:
Słowo to kasowane jest na 0 przez system przy zimnym restarcie, a także przez program w celu ponownego użycia.
Nota: wartość "1285" jest interpretowana jako wartość całkowita; aby była zinterpretowana jako wartość zmiennoprzecinkowa, musi być zapisana jako: "1285.0"
Sterownik Twido Wsparcie słów podwójnych
Wsparcie zmiennego przecinka
TWDLMDA40DUK Tak Tak
TWDLMDA40DTK Tak Tak
TWDLMDA20DUK Tak Nie
TWDLMDA20DTK Tak Nie
TWDLMDA20DRT Tak Tak
TWDLCAA24DRF Tak Nie
TWDLCAA16DRF Tak Nie
TWDLCAA10DRF Nie Nie
%SW17:X0 Nieprawidłowe działanie, wynik nie jest liczbą (1.#NAN lub -1.#NAN)
%SW17:X1 Rezerwa
%SW17:X2 Dzielenie przez 0, wynik jest nieskończonością (-1.#INF lub 1.#INF)
%SW17:X3 Wartość bezwzględna wyniku jest większa niż +3.402824e+38, wynik jest nieskończonością (-1.#INF lub 1.#INF)
%SW17:X4 to X15
Rezerwa
32 TWD USE 10 AE

Obiekty języka Twido
Opis obiektów zmiennoprzecin-kowych i słów podwójnych
Poniższa tabela opisuje obiekty zmiennoprzecinkowe i słowa podwójne:
Typ obiektu Opis Adres Maks. liczba
Dostęp do zapisu Forma indeksowana
Wartości bezpośrednie
Liczby całkowite i wartości dziesiętnie w identycznym formacie obiektu 32-bitowego
- [-] Nie -
Wewnętrzne słowo zmiennoprzecinkowe
Obiekty przechowujące w pamięci danych wartości w czasie działania
%MFi 1500 Tak %MFi[index]
Wewnętrzne słowo podwójne
%MDi 1500 Tak %MDi[index]
Słała zmiennoprzecinkowa
Służą do przechowania stałych
%KFi 255 Tak, tylko za pomocą TwidoSoft
%KFi[index]
Stałe słowo podwójne
%KDi 255 Tak, tylko za pomocą TwidoSoft
%KDi[index]
TWD USE 10 AE 33
Obiekty języka Twido
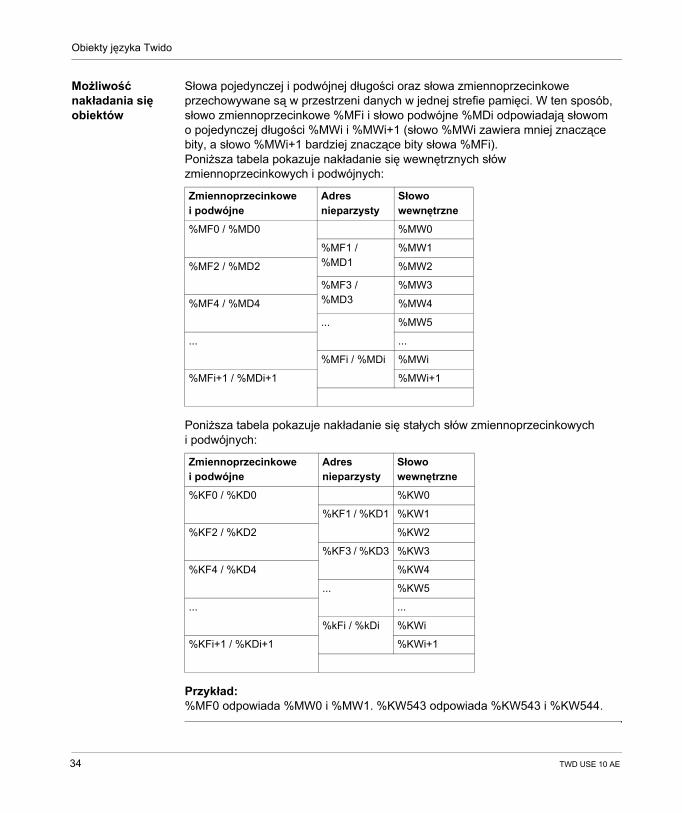
Możliwość nakładania się obiektów
Słowa pojedynczej i podwójnej długości oraz słowa zmiennoprzecinkowe przechowywane są w przestrzeni danych w jednej strefie pamięci. W ten sposób, słowo zmiennoprzecinkowe %MFi i słowo podwójne %MDi odpowiadają słowom o pojedynczej długości %MWi i %MWi+1 (słowo %MWi zawiera mniej znaczące bity, a słowo %MWi+1 bardziej znaczące bity słowa %MFi).Poniższa tabela pokazuje nakładanie się wewnętrznych słów zmiennoprzecinkowych i podwójnych:
Poniższa tabela pokazuje nakładanie się stałych słów zmiennoprzecinkowych i podwójnych:
Przykład: %MF0 odpowiada %MW0 i %MW1. %KW543 odpowiada %KW543 i %KW544.
Zmiennoprzecinkowe i podwójne
Adres nieparzysty
Słowo wewnętrzne
%MF0 / %MD0 %MW0
%MF1 / %MD1
%MW1
%MF2 / %MD2 %MW2
%MF3 / %MD3
%MW3
%MF4 / %MD4 %MW4
... %MW5
... ...
%MFi / %MDi %MWi
%MFi+1 / %MDi+1 %MWi+1
Zmiennoprzecinkowe i podwójne
Adres nieparzysty
Słowo wewnętrzne
%KF0 / %KD0 %KW0
%KF1 / %KD1 %KW1
%KF2 / %KD2 %KW2
%KF3 / %KD3 %KW3
%KF4 / %KD4 %KW4
... %KW5
... ...
%kFi / %kDi %KWi
%KFi+1 / %KDi+1 %KWi+1
34 TWD USE 10 AE
Obiekty języka Twido
Adresowanie obiektów typu bit
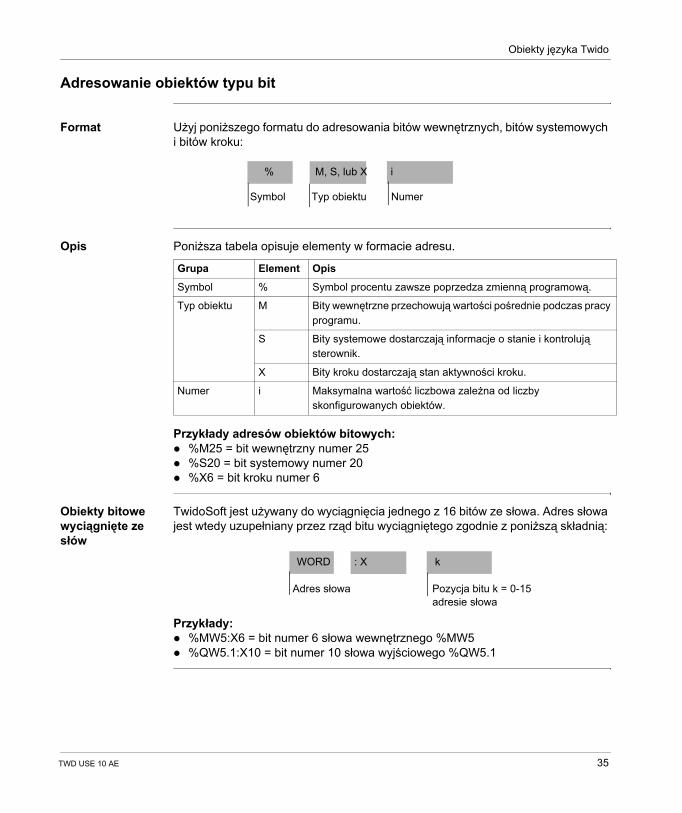
Format Użyj poniższego formatu do adresowania bitów wewnętrznych, bitów systemowych i bitów kroku:
Opis Poniższa tabela opisuje elementy w formacie adresu.
Przykłady adresów obiektów bitowych:%M25 = bit wewnętrzny numer 25%S20 = bit systemowy numer 20%X6 = bit kroku numer 6
Obiekty bitowe wyciągnięte ze słów
TwidoSoft jest używany do wyciągnięcia jednego z 16 bitów ze słowa. Adres słowa jest wtedy uzupełniany przez rząd bitu wyciągniętego zgodnie z poniższą składnią:
Przykłady:%MW5:X6 = bit numer 6 słowa wewnętrznego %MW5%QW5.1:X10 = bit numer 10 słowa wyjściowego %QW5.1
% M, S, lub X i
Symbol Typ obiektu Numer
Grupa Element Opis
Symbol % Symbol procentu zawsze poprzedza zmienną programową.
Typ obiektu M Bity wewnętrzne przechowują wartości pośrednie podczas pracy programu.
S Bity systemowe dostarczają informacje o stanie i kontrolują sterownik.
X Bity kroku dostarczają stan aktywności kroku.
Numer i Maksymalna wartość liczbowa zależna od liczby skonfigurowanych obiektów.
WORD : X k
Pozycja bitu k = 0-15 adresie słowa
Adres słowa
TWD USE 10 AE 35
Obiekty języka Twido
Adresowanie obiektów typu Word
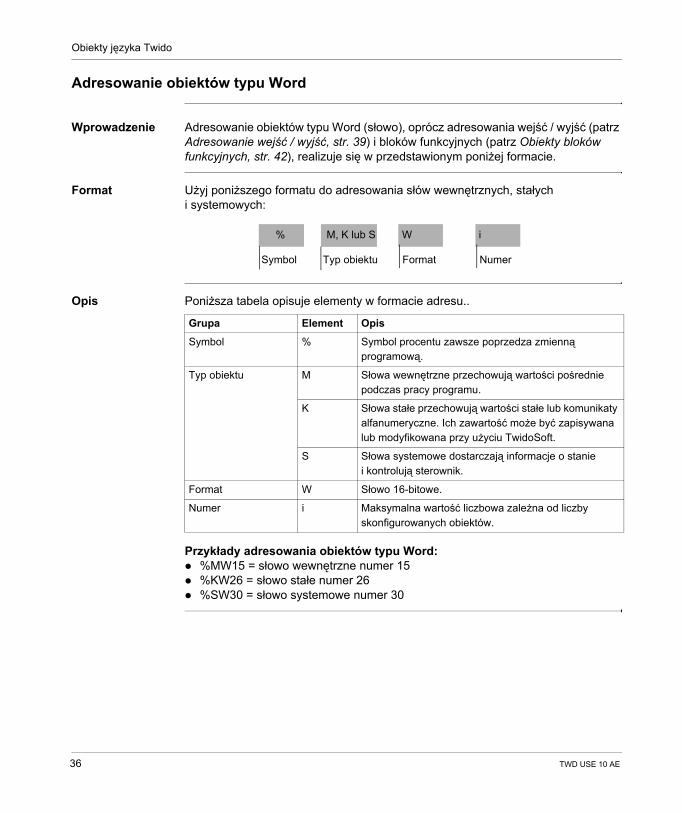
Wprowadzenie Adresowanie obiektów typu Word (słowo), oprócz adresowania wejść / wyjść (patrz Adresowanie wejść / wyjść, str. 39) i bloków funkcyjnych (patrz Obiekty bloków funkcyjnych, str. 42), realizuje się w przedstawionym poniżej formacie.
Format Użyj poniższego formatu do adresowania słów wewnętrznych, stałych i systemowych:
Opis Poniższa tabela opisuje elementy w formacie adresu..
Przykłady adresowania obiektów typu Word:%MW15 = słowo wewnętrzne numer 15%KW26 = słowo stałe numer 26%SW30 = słowo systemowe numer 30
% M, K lub S W i
Symbol Typ obiektu Format Numer
Grupa Element Opis
Symbol % Symbol procentu zawsze poprzedza zmienną programową.
Typ obiektu M Słowa wewnętrzne przechowują wartości pośrednie podczas pracy programu.
K Słowa stałe przechowują wartości stałe lub komunikaty alfanumeryczne. Ich zawartość może być zapisywana lub modyfikowana przy użyciu TwidoSoft.
S Słowa systemowe dostarczają informacje o stanie i kontrolują sterownik.
Format W Słowo 16-bitowe.
Numer i Maksymalna wartość liczbowa zależna od liczby skonfigurowanych obiektów.
36 TWD USE 10 AE
Obiekty języka Twido
Adresowanie obiektów zmiennoprzecinkowych
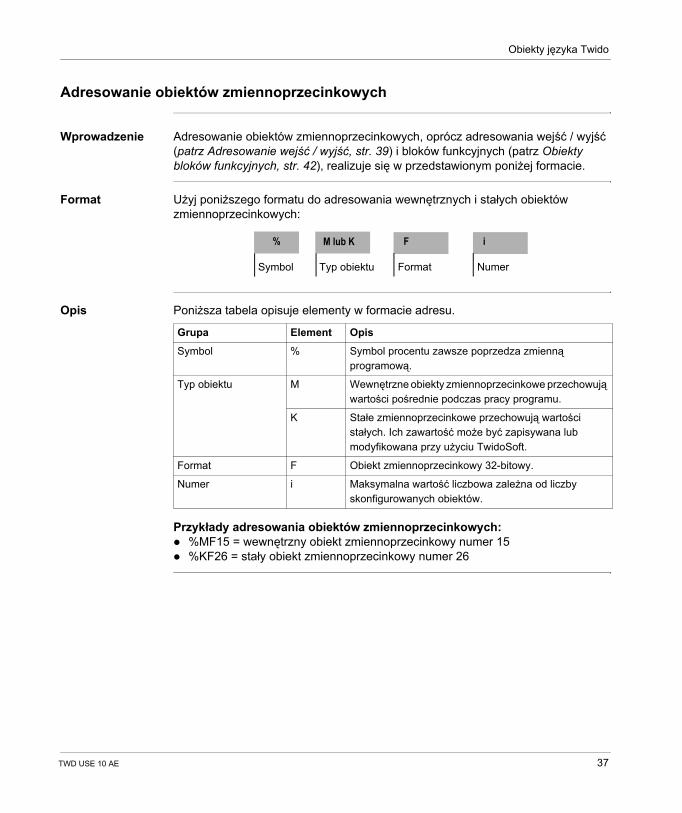
Wprowadzenie Adresowanie obiektów zmiennoprzecinkowych, oprócz adresowania wejść / wyjść (patrz Adresowanie wejść / wyjść, str. 39) i bloków funkcyjnych (patrz Obiekty bloków funkcyjnych, str. 42), realizuje się w przedstawionym poniżej formacie.
Format Użyj poniższego formatu do adresowania wewnętrznych i stałych obiektów zmiennoprzecinkowych:
Opis Poniższa tabela opisuje elementy w formacie adresu.
Przykłady adresowania obiektów zmiennoprzecinkowych:%MF15 = wewnętrzny obiekt zmiennoprzecinkowy numer 15%KF26 = stały obiekt zmiennoprzecinkowy numer 26
Symbol Format
% M lub K F
Typ obiektu Numer
i
Grupa Element Opis
Symbol % Symbol procentu zawsze poprzedza zmienną programową.
Typ obiektu M Wewnętrzne obiekty zmiennoprzecinkowe przechowują wartości pośrednie podczas pracy programu.
K Stałe zmiennoprzecinkowe przechowują wartości stałych. Ich zawartość może być zapisywana lub modyfikowana przy użyciu TwidoSoft.
Format F Obiekt zmiennoprzecinkowy 32-bitowy.
Numer i Maksymalna wartość liczbowa zależna od liczby skonfigurowanych obiektów.
TWD USE 10 AE 37
Obiekty języka Twido
Adresowanie słów podwójnych
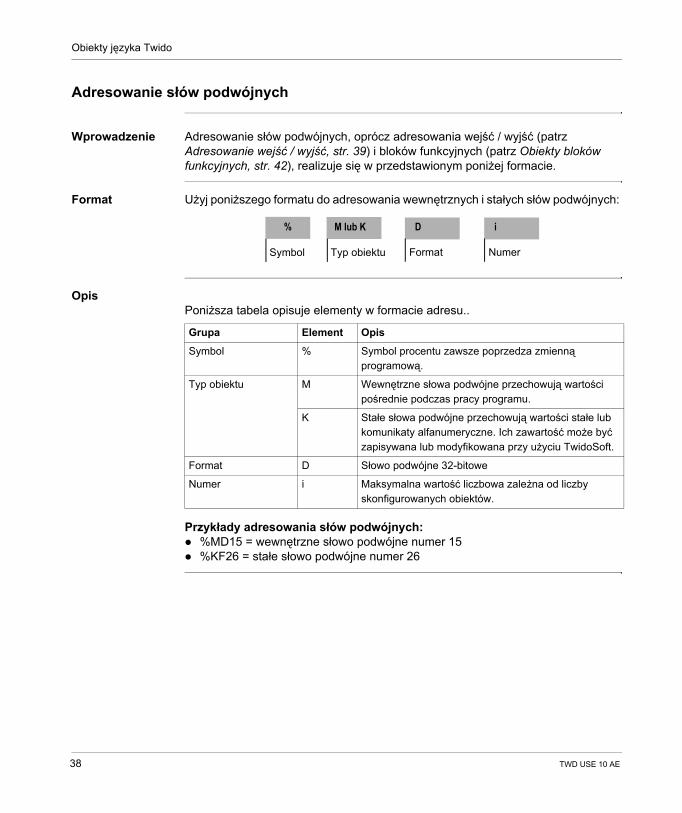
Wprowadzenie Adresowanie słów podwójnych, oprócz adresowania wejść / wyjść (patrz Adresowanie wejść / wyjść, str. 39) i bloków funkcyjnych (patrz Obiekty bloków funkcyjnych, str. 42), realizuje się w przedstawionym poniżej formacie.
Format Użyj poniższego formatu do adresowania wewnętrznych i stałych słów podwójnych:
OpisPoniższa tabela opisuje elementy w formacie adresu..
Przykłady adresowania słów podwójnych:%MD15 = wewnętrzne słowo podwójne numer 15%KF26 = stałe słowo podwójne numer 26
Symbol Format
% M lub K D
Typ obiektu Numer
i
Grupa Element Opis
Symbol % Symbol procentu zawsze poprzedza zmienną programową.
Typ obiektu M Wewnętrzne słowa podwójne przechowują wartości pośrednie podczas pracy programu.
K Stałe słowa podwójne przechowują wartości stałe lub komunikaty alfanumeryczne. Ich zawartość może być zapisywana lub modyfikowana przy użyciu TwidoSoft.
Format D Słowo podwójne 32-bitowe
Numer i Maksymalna wartość liczbowa zależna od liczby skonfigurowanych obiektów.
38 TWD USE 10 AE
Obiekty języka Twido
Adresowanie wejść / wyjść
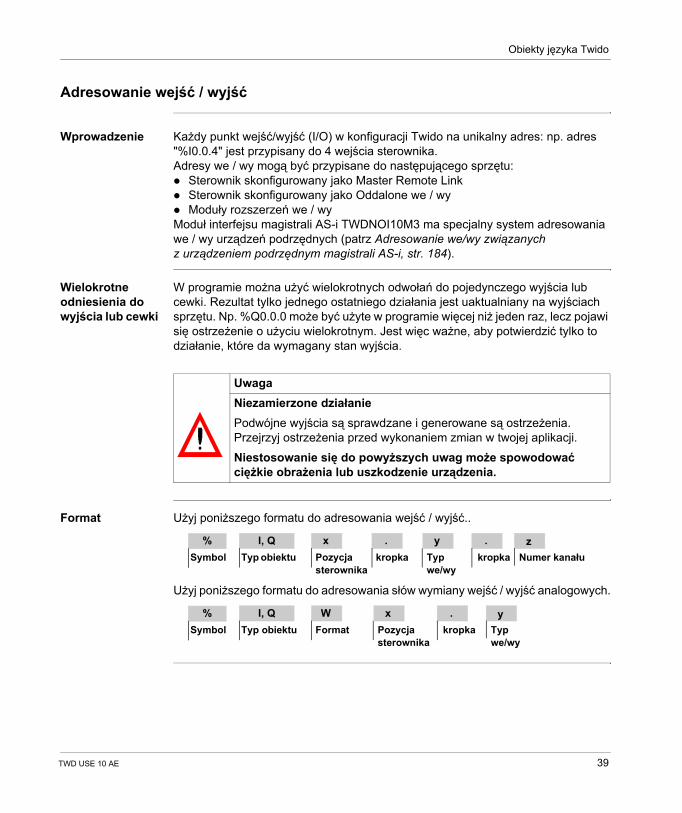
Wprowadzenie Każdy punkt wejść/wyjść (I/O) w konfiguracji Twido na unikalny adres: np. adres "%I0.0.4" jest przypisany do 4 wejścia sterownika.Adresy we / wy mogą być przypisane do następującego sprzętu:
Sterownik skonfigurowany jako Master Remote LinkSterownik skonfigurowany jako Oddalone we / wyModuły rozszerzeń we / wy
Moduł interfejsu magistrali AS-i TWDNOI10M3 ma specjalny system adresowania we / wy urządzeń podrzędnych (patrz Adresowanie we/wy związanych z urządzeniem podrzędnym magistrali AS-i, str. 184).
Wielokrotne odniesienia do wyjścia lub cewki
W programie można użyć wielokrotnych odwołań do pojedynczego wyjścia lub cewki. Rezultat tylko jednego ostatniego działania jest uaktualniany na wyjściach sprzętu. Np. %Q0.0.0 może być użyte w programie więcej niż jeden raz, lecz pojawi się ostrzeżenie o użyciu wielokrotnym. Jest więc ważne, aby potwierdzić tylko to działanie, które da wymagany stan wyjścia.
Format Użyj poniższego formatu do adresowania wejść / wyjść..
Użyj poniższego formatu do adresowania słów wymiany wejść / wyjść analogowych.
UwagaNiezamierzone działaniePodwójne wyjścia są sprawdzane i generowane są ostrzeżenia. Przejrzyj ostrzeżenia przed wykonaniem zmian w twojej aplikacji.
Niestosowanie się do powyższych uwag może spowodować ciężkie obrażenia lub uszkodzenie urządzenia.
% I, Q x zSymbol Typ obiektu Pozycja
sterownikaNumer kanału
.kropka
.kropka
yTyp we/wy
% I, Q W ySymbol Typ obiektu Format Typ
we/wy
.kropka
xPozycja sterownika
TWD USE 10 AE 39
Obiekty języka Twido
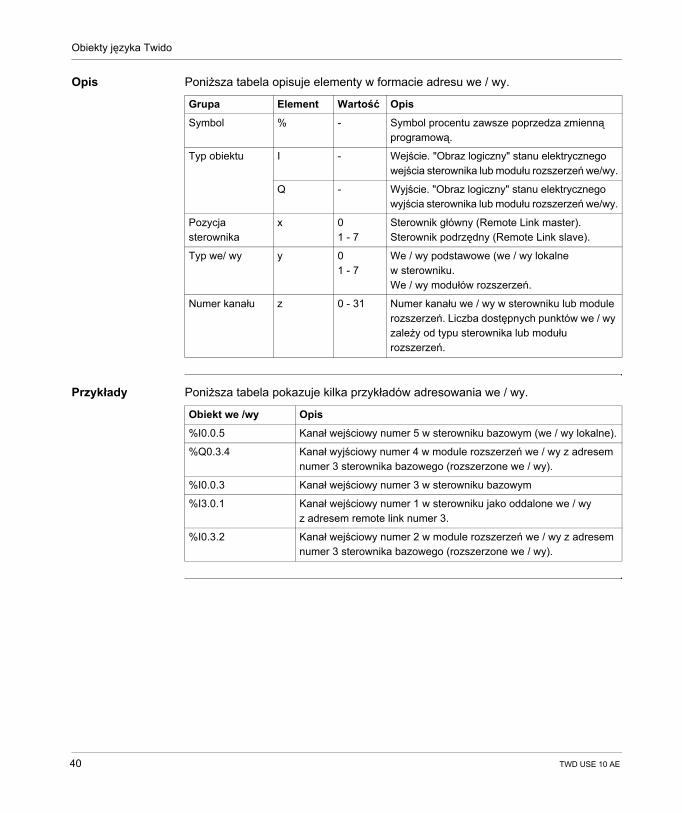
Opis Poniższa tabela opisuje elementy w formacie adresu we / wy.
Przykłady Poniższa tabela pokazuje kilka przykładów adresowania we / wy.
Grupa Element Wartość Opis
Symbol % - Symbol procentu zawsze poprzedza zmienną programową.
Typ obiektu I - Wejście. "Obraz logiczny" stanu elektrycznego wejścia sterownika lub modułu rozszerzeń we/wy.
Q - Wyjście. "Obraz logiczny" stanu elektrycznego wyjścia sterownika lub modułu rozszerzeń we/wy.
Pozycja sterownika
x 01 - 7
Sterownik główny (Remote Link master).Sterownik podrzędny (Remote Link slave).
Typ we/ wy y 01 - 7
We / wy podstawowe (we / wy lokalne w sterowniku.We / wy modułów rozszerzeń.
Numer kanału z 0 - 31 Numer kanału we / wy w sterowniku lub module rozszerzeń. Liczba dostępnych punktów we / wy zależy od typu sterownika lub modułu rozszerzeń.
Obiekt we /wy Opis
%I0.0.5 Kanał wejściowy numer 5 w sterowniku bazowym (we / wy lokalne).
%Q0.3.4 Kanał wyjściowy numer 4 w module rozszerzeń we / wy z adresem numer 3 sterownika bazowego (rozszerzone we / wy).
%I0.0.3 Kanał wejściowy numer 3 w sterowniku bazowym
%I3.0.1 Kanał wejściowy numer 1 w sterowniku jako oddalone we / wy z adresem remote link numer 3.
%I0.3.2 Kanał wejściowy numer 2 w module rozszerzeń we / wy z adresem numer 3 sterownika bazowego (rozszerzone we / wy).
40 TWD USE 10 AE

Obiekty języka Twido
Adresowanie sieciowe
Wprowadzenie Dane aplikacji są wymieniane w sieci Remote Link między sterownikami oddalonymi a sterownikiem głównym za pomocą słów sieciowych %INW i %QNW. (Patrz Komunikacja TwidoSoft i sterownika, str. 85)
Format Użyj poniższego formatu do adresowania sieciowego.
Opis formatu Poniższa tabela opisuje format adresowania sieciowego..
Przykłady Poniższa tabela pokazuje przykłady adresowania sieciowego..
% IN,QN W x jSymbol Typ obiektu Format Pozycja
sterownikaSłowo
.Kropka
Grupa Element Wartość Opis
Symbol % - Symbol procentu zawsze poprzedza zmienną programową.
Typ obiektu IN - Słowo wejściowe sieci. Transfer danych ze sterownika głównego do podrzędnego.
QN - Słowo wyjściowe sieci. Transfer danych ze sterownika podrzędnego do głównego.
Format W - Słowo 16-bitowe
Pozycja sterownika
x 01 - 7
Sterownik główny (Remote Link master).Sterownik podrzędny (Remote Link slave).
Słowo j 0 - 3 Każdy sterownik podrzędny używa do czterech słów do wymiany danych ze sterownikiem głównym.
Obiekt we /wy Opis
%INW3.1 Słowo sieciowe numer 1 sterownika oddalonego numer 3.
%QNW0.3 Słowo sieciowe numer 3 sterownika bazowego.
TWD USE 10 AE 41
Obiekty języka Twido
Obiekty bloków funkcyjnych
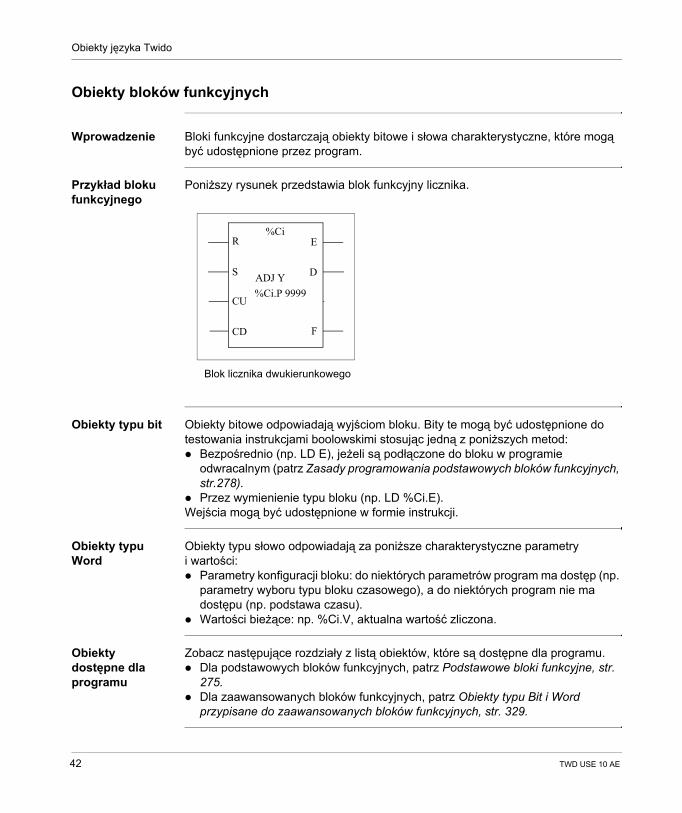
Wprowadzenie Bloki funkcyjne dostarczają obiekty bitowe i słowa charakterystyczne, które mogą być udostępnione przez program.
Przykład bloku funkcyjnego
Poniższy rysunek przedstawia blok funkcyjny licznika.
Obiekty typu bit Obiekty bitowe odpowiadają wyjściom bloku. Bity te mogą być udostępnione do testowania instrukcjami boolowskimi stosując jedną z poniższych metod:
Bezpośrednio (np. LD E), jeżeli są podłączone do bloku w programie odwracalnym (patrz Zasady programowania podstawowych bloków funkcyjnych, str.278).Przez wymienienie typu bloku (np. LD %Ci.E).
Wejścia mogą być udostępnione w formie instrukcji.
Obiekty typu Word
Obiekty typu słowo odpowiadają za poniższe charakterystyczne parametry i wartości:
Parametry konfiguracji bloku: do niektórych parametrów program ma dostęp (np. parametry wyboru typu bloku czasowego), a do niektórych program nie ma dostępu (np. podstawa czasu).Wartości bieżące: np. %Ci.V, aktualna wartość zliczona.
Obiekty dostępne dla programu
Zobacz następujące rozdziały z listą obiektów, które są dostępne dla programu.Dla podstawowych bloków funkcyjnych, patrz Podstawowe bloki funkcyjne, str. 275.Dla zaawansowanych bloków funkcyjnych, patrz Obiekty typu Bit i Word przypisane do zaawansowanych bloków funkcyjnych, str. 329.
Blok licznika dwukierunkowego
R E
S D
CD F
CU
%Ci
ADJ Y%Ci.P 9999
42 TWD USE 10 AE
Obiekty języka Twido
Obiekty złożone
Wprowadzenie Obiekty złożone są kombinacją obiektów prostych. Twido umożliwia stosowanie następujących obiektów złożonych:
Ciągi bitówTablice słówTablice słów podwójnychTablice słów zmiennoprzecinkowych
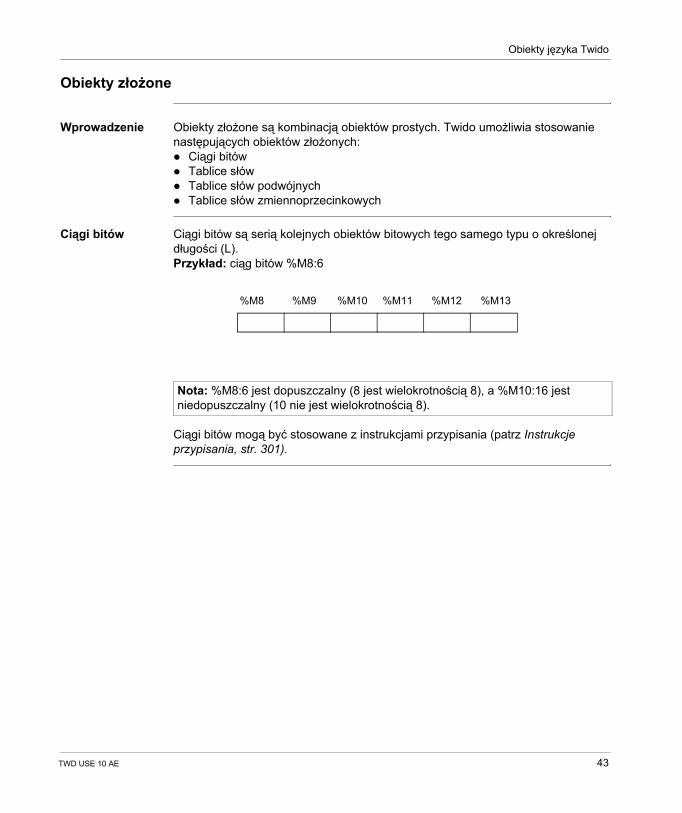
Ciągi bitów Ciągi bitów są serią kolejnych obiektów bitowych tego samego typu o określonej długości (L).Przykład: ciąg bitów %M8:6
Ciągi bitów mogą być stosowane z instrukcjami przypisania (patrz Instrukcje przypisania, str. 301).
Nota: %M8:6 jest dopuszczalny (8 jest wielokrotnością 8), a %M10:16 jest niedopuszczalny (10 nie jest wielokrotnością 8).
%M8 %M9 %M10 %M11 %M12 %M13
TWD USE 10 AE 43
Obiekty języka Twido
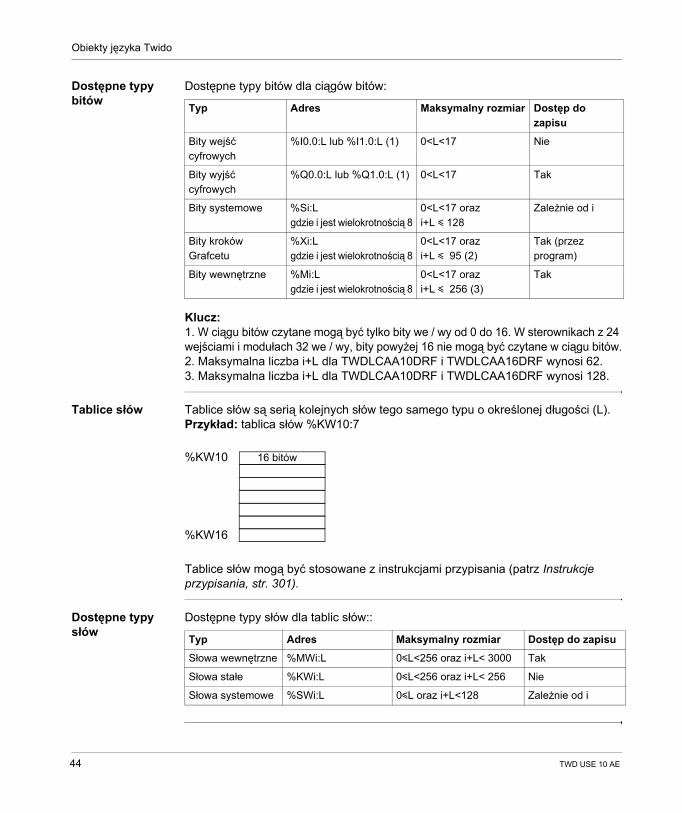
Dostępne typy bitów
Dostępne typy bitów dla ciągów bitów:
Klucz:1. W ciągu bitów czytane mogą być tylko bity we / wy od 0 do 16. W sterownikach z 24 wejściami i modułach 32 we / wy, bity powyżej 16 nie mogą być czytane w ciągu bitów.2. Maksymalna liczba i+L dla TWDLCAA10DRF i TWDLCAA16DRF wynosi 62.3. Maksymalna liczba i+L dla TWDLCAA10DRF i TWDLCAA16DRF wynosi 128.
Tablice słów Tablice słów są serią kolejnych słów tego samego typu o określonej długości (L).Przykład: tablica słów %KW10:7
Tablice słów mogą być stosowane z instrukcjami przypisania (patrz Instrukcje przypisania, str. 301).
Dostępne typy słów
Dostępne typy słów dla tablic słów::
Typ Adres Maksymalny rozmiar Dostęp do zapisu
Bity wejść cyfrowych
%I0.0:L lub %I1.0:L (1) 0<L<17 Nie
Bity wyjść cyfrowych
%Q0.0:L lub %Q1.0:L (1) 0<L<17 Tak
Bity systemowe %Si:Lgdzie i jest wielokrotnością 8
0<L<17 orazi+L y 128
Zależnie od i
Bity kroków Grafcetu
%Xi:Lgdzie i jest wielokrotnością 8
0<L<17 orazi+L y 95 (2)
Tak (przez program)
Bity wewnętrzne %Mi:Lgdzie i jest wielokrotnością 8
0<L<17 orazi+L y 256 (3)
Tak
%KW10
%KW16
16 bitów
Typ Adres Maksymalny rozmiar Dostęp do zapisu
Słowa wewnętrzne %MWi:L 0yL<256 oraz i+L< 3000 Tak
Słowa stałe %KWi:L 0yL<256 oraz i+L< 256 Nie
Słowa systemowe %SWi:L 0yL oraz i+L<128 Zależnie od i
44 TWD USE 10 AE
Obiekty języka Twido
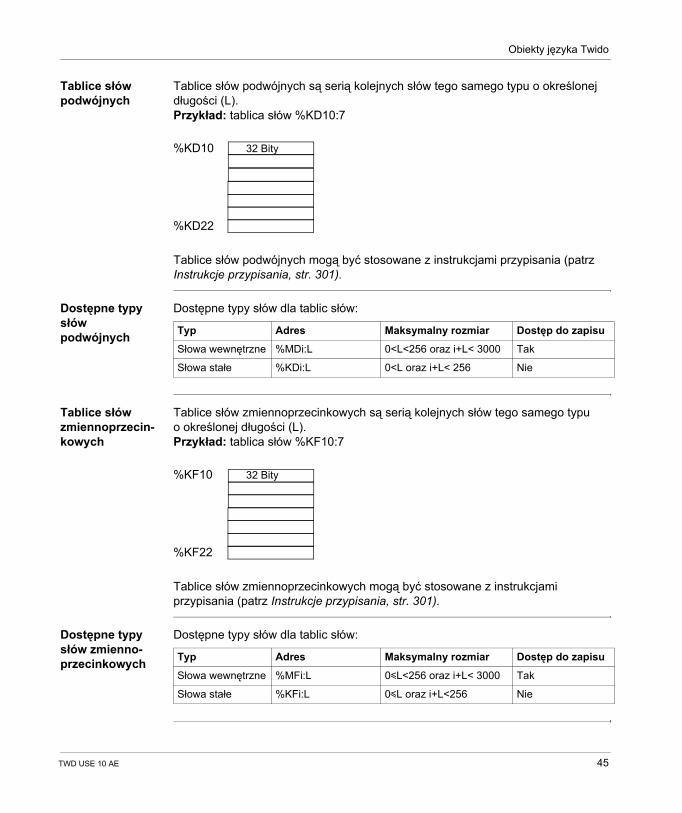
Tablice słów podwójnych
Tablice słów podwójnych są serią kolejnych słów tego samego typu o określonej długości (L).Przykład: tablica słów %KD10:7
Tablice słów podwójnych mogą być stosowane z instrukcjami przypisania (patrz Instrukcje przypisania, str. 301).
Dostępne typy słów podwójnych
Dostępne typy słów dla tablic słów:
Tablice słów zmiennoprzecin-kowych
Tablice słów zmiennoprzecinkowych są serią kolejnych słów tego samego typu o określonej długości (L).Przykład: tablica słów %KF10:7
Tablice słów zmiennoprzecinkowych mogą być stosowane z instrukcjami przypisania (patrz Instrukcje przypisania, str. 301).
Dostępne typy słów zmienno-przecinkowych
Dostępne typy słów dla tablic słów:
%KD10
%KD22
32 Bity
Typ Adres Maksymalny rozmiar Dostęp do zapisu
Słowa wewnętrzne %MDi:L 0<L<256 oraz i+L< 3000 Tak
Słowa stałe %KDi:L 0<L oraz i+L< 256 Nie
%KF10
%KF22
32 Bity
Typ Adres Maksymalny rozmiar Dostęp do zapisu
Słowa wewnętrzne %MFi:L 0yL<256 oraz i+L< 3000 Tak
Słowa stałe %KFi:L 0yL oraz i+L<256 Nie
TWD USE 10 AE 45
Obiekty języka Twido
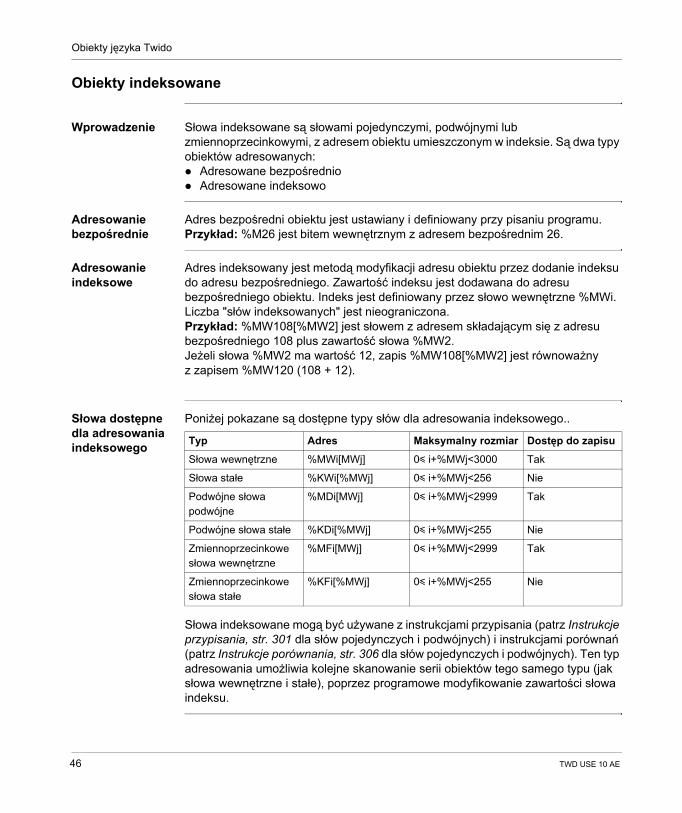
Obiekty indeksowane
Wprowadzenie Słowa indeksowane są słowami pojedynczymi, podwójnymi lub zmiennoprzecinkowymi, z adresem obiektu umieszczonym w indeksie. Są dwa typy obiektów adresowanych:
Adresowane bezpośrednioAdresowane indeksowo
Adresowanie bezpośrednie
Adres bezpośredni obiektu jest ustawiany i definiowany przy pisaniu programu.Przykład: %M26 jest bitem wewnętrznym z adresem bezpośrednim 26.
Adresowanie indeksowe
Adres indeksowany jest metodą modyfikacji adresu obiektu przez dodanie indeksu do adresu bezpośredniego. Zawartość indeksu jest dodawana do adresu bezpośredniego obiektu. Indeks jest definiowany przez słowo wewnętrzne %MWi. Liczba "słów indeksowanych" jest nieograniczona.Przykład: %MW108[%MW2] jest słowem z adresem składającym się z adresu bezpośredniego 108 plus zawartość słowa %MW2.Jeżeli słowa %MW2 ma wartość 12, zapis %MW108[%MW2] jest równoważny z zapisem %MW120 (108 + 12).
Słowa dostępne dla adresowania indeksowego
Poniżej pokazane są dostępne typy słów dla adresowania indeksowego..
Słowa indeksowane mogą być używane z instrukcjami przypisania (patrz Instrukcje przypisania, str. 301 dla słów pojedynczych i podwójnych) i instrukcjami porównań (patrz Instrukcje porównania, str. 306 dla słów pojedynczych i podwójnych). Ten typ adresowania umożliwia kolejne skanowanie serii obiektów tego samego typu (jak słowa wewnętrzne i stałe), poprzez programowe modyfikowanie zawartości słowa indeksu.
Typ Adres Maksymalny rozmiar Dostęp do zapisu
Słowa wewnętrzne %MWi[MWj] 0y i+%MWj<3000 Tak
Słowa stałe %KWi[%MWj] 0y i+%MWj<256 Nie
Podwójne słowa podwójne
%MDi[MWj] 0y i+%MWj<2999 Tak
Podwójne słowa stałe %KDi[%MWj] 0y i+%MWj<255 Nie
Zmiennoprzecinkowe słowa wewnętrzne
%MFi[MWj] 0y i+%MWj<2999 Tak
Zmiennoprzecinkowe słowa stałe
%KFi[%MWj] 0y i+%MWj<255 Nie
46 TWD USE 10 AE

Obiekty języka Twido
Bit systemowy %S20 przekroczenia indeksu
Przekroczenie indeksu zdarza się, gdy adres słowa indeksowanego przekracza granice strefy pamięci zawierającej ten sam typ obiektów. Podsumowując:
Adres obiektu plus zawartość indeksu jest mniejsza niż 0.Adres obiektu plus zawartość indeksu jest większa niż największe słowo bezpośrednio odniesione w aplikacji. Maksymalna liczba wynosi 2999 (dla słów %MWi) lub 255 (dla słów %KWi).
W przypadku przekroczenia indeksu, system ustawia bit systemowy %S20 na 1, a obiekt jest wyznaczony wartością indeksu 0.
Nota: Użytkownik jest odpowiedzialny za monitorowanie przekroczenia indeksu. Bit %S20 musi być czytany przez program, aby umożliwić przetwarzanie informacji o przekroczeniu indeksu. Użytkownik potwierdza to resetując bit na 0.%S20 (stan początkowy = 0):
Przy przekroczeniu indeksu: ustawiany na 1 przez system.Potwierdzenie przekroczenia: ustawiany na 0 przez użytkownika, po zmodyfikowaniu indeksu.
TWD USE 10 AE 47
Obiekty języka Twido
Obiekty symboliczne
Wprowadzenie Możesz używać symboli do adresowania obiektów języka oprogramowania Twido, poprzez nazwę lub własną mnemonikę. Stosowanie symboli pozwala na szybkie sprawdzanie i analizę logiki programu oraz znacznie upraszcza modyfikację i testowanie aplikacji.
Przykład Np. WASH_END jest symbolem, który może być stosowany do identyfikacji bloku czasowego, który reprezentuje koniec cyklu mycia. Odwołanie się do tej nazwy jest prostsze niż pamiętanie roli adresu programowego, takiego jak %TM3.
Wskazówki do definiowania symboli
Poniżej są wskazówki do definiowania symboli:Maksymalnie 32 znaki.Litery (A - Z), cyfry (0 - 9) lub podkreślenia(_).Pierwszy znak musi być znakiem alfabetycznym lub akcentowanym. Nie można używać symbolu procentu (%).Nie używaj spacji i znaków specjalnych.Nie ma rozróżnienia wielkości liter. Np. Pump1 i PUMP1 są tym samym symbolem i nie mogą być używane jednocześnie w aplikacji.
Edycja symboli Symbole są definiowane i łączone z obiektami języka w Edytorze Symboli. Symbole i ich komentarze są przechowywane z aplikacją na dysku twardym komputera, ale nie są przechowywane w sterowniku. Nie są więc przesyłanie z aplikacją do sterownika.
48 TWD USE 10 AE
TWD USE 10 AE
3
Pamięć użytkownikaRzut oka
Wprowadzenie Ten rozdział zawiera opis struktury i eksploatacji pamięci użytkownika Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Struktura pamięci użytkownika 50
Kopia zapasowa i jej odtwarzanie bez wkładki pamięci 52
Kopia zapasowa i jej odtwarzanie z wkładką pamięci 32 kB 54
Stosowanie wkładki rozszerzenia pamięci 64 kB 56
49
Pamięć użytkownika
Struktura pamięci użytkownika
Wprowadzenie Pamięć sterownika dostępna dla aplikacji użytkownika jest podzielona na dwa odrębne obszary:
Wartości bitówWartości słów (wartości 16-bitowe ze znakiem)
Pamięć bitów Pamięć bitów jest przechowywana w wewnętrznej pamięci RAM, zintegrowanej w sterowniku. Zawiera mapę 1280 obiektów bitowych.
Pamięć słów Pamięć słów (16-bitowa) zawiera:Słowa dynamiczne: pamięć operacyjna (przechowywana tylko w RAM).Słowa pamięci (%MW): dynamiczne dane systemu.Program: deskryptory i kod wykonywalny zadań.Dane konfiguracji: słowa stałe, wartości początkowe i konfiguracja wejść / wyjść.
Typy pamięci Poniżej przedstawione są różne rodzaje pamięci sterowników Twido.RAM Pamięć wewnętrzna: zawiera słowa dynamiczne, słowa pamięci, program i dane konfiguracji.EEPROMWbudowana 32 kB pamięć EEPROM dostarcza sterownikowi wewnętrznej kopii zapasowej programu i danych. Zabezpiecza przed utratą aplikacji z powodu uszkodzenia baterii lub przerwy w zasilaniu dłuższej niż 30 dni. Zawiera program i stałe. Przechowuje maksymalnie 512 słów pamięci. Program nie jest tu umieszczany, jeśli używana jest wkładka pamięci rozszerzonej 64 kB, a Twido został odpowiednio skonfigurowany.Wkładka pamięci zapasowej 32 kBOpcjonalna wkładka zewnętrzna służy do zachowania programu i przesyłania go do innych sterowników Twido. Może być użyta do uaktualnienia programu w RAM sterownika. Zawiera program i stałe, ale nie słowa pamięci. Wkładka rozszerzenia pamięci 64 kBOpcjonalna wkładka zewnętrzna przechowuje program o wielkości do 64 kB. Musi być koniecznie zamontowana w sterowniku, tak długo jak ten program jest używany.
Zachowanie pamięci
Wewnętrzna pamięć RAM sterownika może być zachowana przez:Baterię wewnętrzną (do 30 dni z dobrą baterią)Wewnętrzny EEPROM (maksymalnie 32 kB)
Przeniesienie aplikacji z wewnętrznej pamięci EEPROM do pamięci RAM jest wykonywane automatycznie po utracie aplikacji w RAM (lub jest brak baterii).Możliwy jest także transfer ręczny za pomocą TwidoSoft.
50 TWD USE 10 AE
Pamięć użytkownika
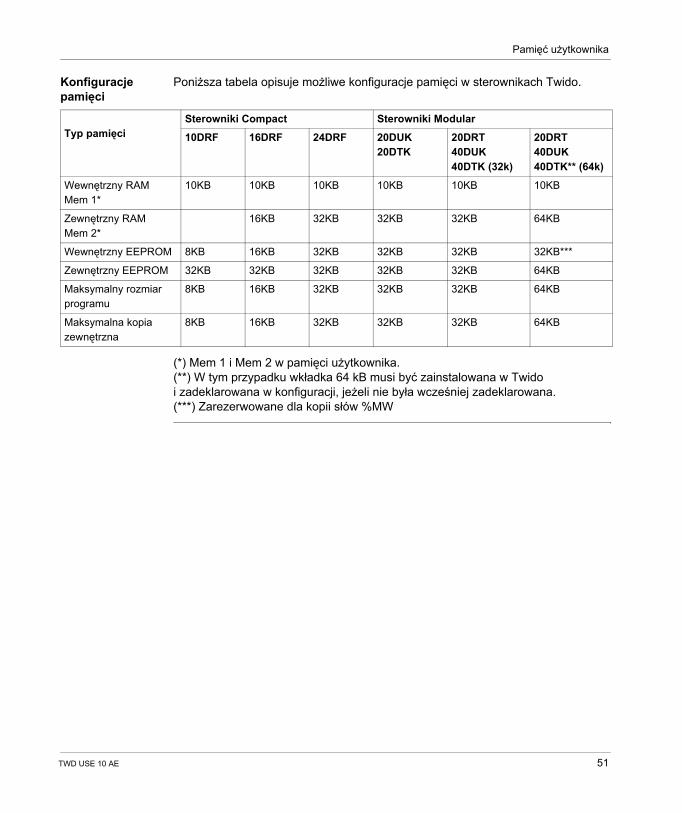
Konfiguracje pamięci
Poniższa tabela opisuje możliwe konfiguracje pamięci w sterownikach Twido.
(*) Mem 1 i Mem 2 w pamięci użytkownika.(**) W tym przypadku wkładka 64 kB musi być zainstalowana w Twido i zadeklarowana w konfiguracji, jeżeli nie była wcześniej zadeklarowana.(***) Zarezerwowane dla kopii słów %MW
Typ pamięciSterowniki Compact Sterowniki Modular
10DRF 16DRF 24DRF 20DUK20DTK
20DRT40DUK40DTK (32k)
20DRT40DUK40DTK** (64k)
Wewnętrzny RAM Mem 1*
10KB 10KB 10KB 10KB 10KB 10KB
Zewnętrzny RAMMem 2*
16KB 32KB 32KB 32KB 64KB
Wewnętrzny EEPROM 8KB 16KB 32KB 32KB 32KB 32KB***
Zewnętrzny EEPROM 32KB 32KB 32KB 32KB 32KB 64KB
Maksymalny rozmiar programu
8KB 16KB 32KB 32KB 32KB 64KB
Maksymalna kopia zewnętrzna
8KB 16KB 32KB 32KB 32KB 64KB
TWD USE 10 AE 51
Pamięć użytkownika
Kopia zapasowa i jej odtwarzanie bez wkładki pamięci
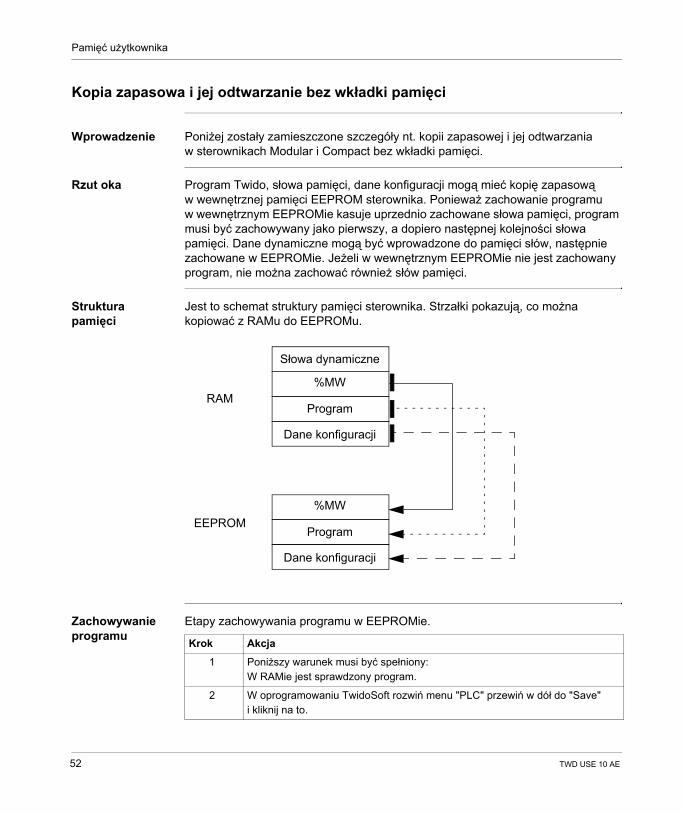
Wprowadzenie Poniżej zostały zamieszczone szczegóły nt. kopii zapasowej i jej odtwarzania w sterownikach Modular i Compact bez wkładki pamięci.
Rzut oka Program Twido, słowa pamięci, dane konfiguracji mogą mieć kopię zapasową w wewnętrznej pamięci EEPROM sterownika. Ponieważ zachowanie programu w wewnętrznym EEPROMie kasuje uprzednio zachowane słowa pamięci, program musi być zachowywany jako pierwszy, a dopiero następnej kolejności słowa pamięci. Dane dynamiczne mogą być wprowadzone do pamięci słów, następnie zachowane w EEPROMie. Jeżeli w wewnętrznym EEPROMie nie jest zachowany program, nie można zachować również słów pamięci.
Struktura pamięci
Jest to schemat struktury pamięci sterownika. Strzałki pokazują, co można kopiować z RAMu do EEPROMu.
Zachowywanie programu
Etapy zachowywania programu w EEPROMie.
Program
Dane konfiguracji
%MW
Słowa dynamiczne
Program
Dane konfiguracji
%MW
RAM
EEPROM
Krok Akcja
1 Poniższy warunek musi być spełniony:W RAMie jest sprawdzony program.
2 W oprogramowaniu TwidoSoft rozwiń menu "PLC" przewiń w dół do "Save" i kliknij na to.
52 TWD USE 10 AE
Pamięć użytkownika
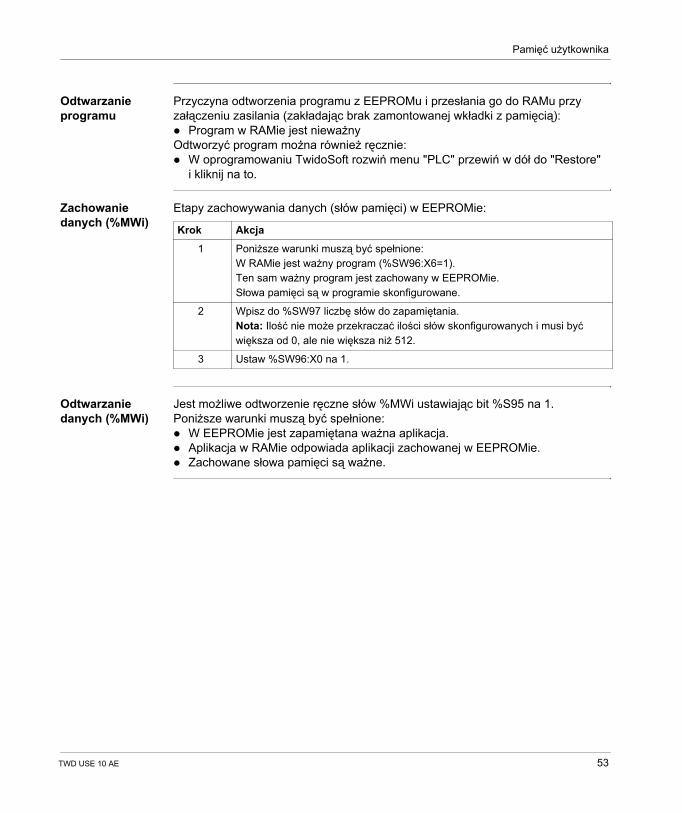
Odtwarzanie programu
Przyczyna odtworzenia programu z EEPROMu i przesłania go do RAMu przy załączeniu zasilania (zakładając brak zamontowanej wkładki z pamięcią):
Program w RAMie jest nieważnyOdtworzyć program można również ręcznie:
W oprogramowaniu TwidoSoft rozwiń menu "PLC" przewiń w dół do "Restore" i kliknij na to.
Zachowanie danych (%MWi)
Etapy zachowywania danych (słów pamięci) w EEPROMie:
Odtwarzanie danych (%MWi)
Jest możliwe odtworzenie ręczne słów %MWi ustawiając bit %S95 na 1. Poniższe warunki muszą być spełnione:
W EEPROMie jest zapamiętana ważna aplikacja.Aplikacja w RAMie odpowiada aplikacji zachowanej w EEPROMie.Zachowane słowa pamięci są ważne.
Krok Akcja
1 Poniższe warunki muszą być spełnione:W RAMie jest ważny program (%SW96:X6=1).Ten sam ważny program jest zachowany w EEPROMie.Słowa pamięci są w programie skonfigurowane.
2 Wpisz do %SW97 liczbę słów do zapamiętania.Nota: Ilość nie może przekraczać ilości słów skonfigurowanych i musi być większa od 0, ale nie większa niż 512.
3 Ustaw %SW96:X0 na 1.
TWD USE 10 AE 53
Pamięć użytkownika
Kopia zapasowa i jej odtwarzanie z wkładką pamięci 32 kB
Wprowadzenie Poniżej zostały zamieszczone szczegóły nt. kopii zapasowej i jej odtwarzania w sterownikach Modular i Compact z wkładką pamięci 32 kB.
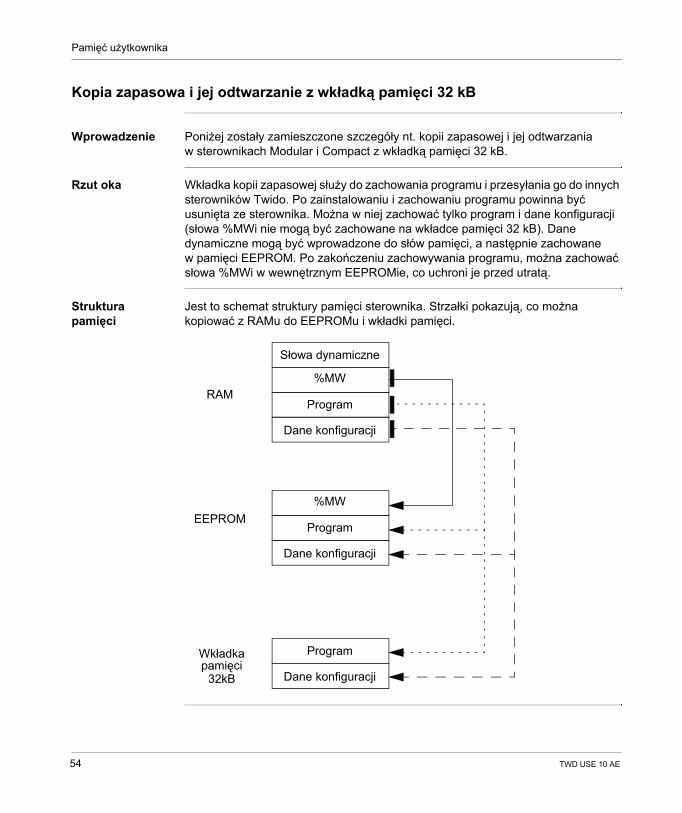
Rzut oka Wkładka kopii zapasowej służy do zachowania programu i przesyłania go do innych sterowników Twido. Po zainstalowaniu i zachowaniu programu powinna być usunięta ze sterownika. Można w niej zachować tylko program i dane konfiguracji (słowa %MWi nie mogą być zachowane na wkładce pamięci 32 kB). Dane dynamiczne mogą być wprowadzone do słów pamięci, a następnie zachowane w pamięci EEPROM. Po zakończeniu zachowywania programu, można zachować słowa %MWi w wewnętrznym EEPROMie, co uchroni je przed utratą.
Struktura pamięci
Jest to schemat struktury pamięci sterownika. Strzałki pokazują, co można kopiować z RAMu do EEPROMu i wkładki pamięci.
Program
Dane konfiguracji
%MW
Słowa dynamiczne
Program
Dane konfiguracji
%MW
Program
Dane konfiguracji
RAM
EEPROM
Wkładkapamięci
32kB
54 TWD USE 10 AE
Pamięć użytkownika
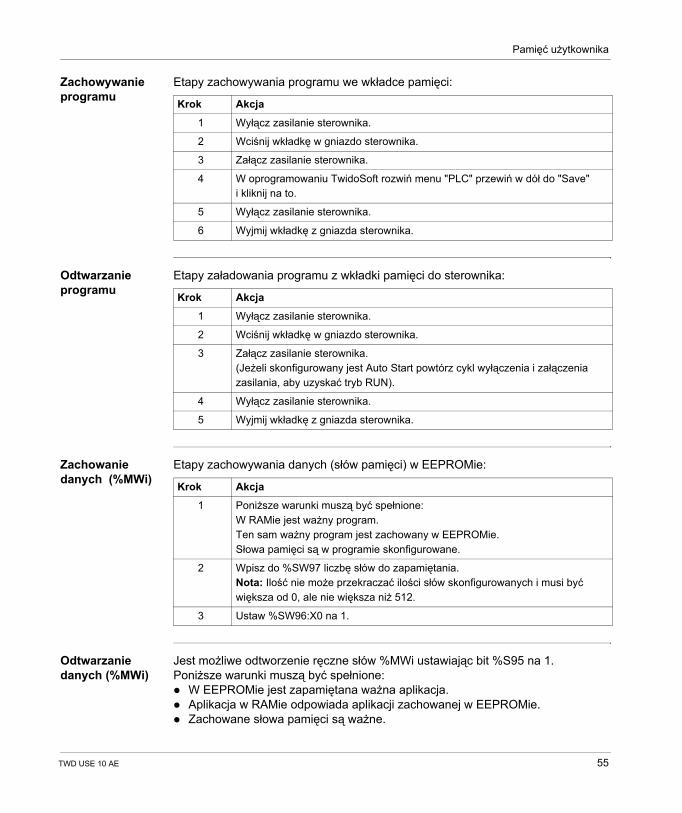
Zachowywanie programu
Etapy zachowywania programu we wkładce pamięci:
Odtwarzanie programu
Etapy załadowania programu z wkładki pamięci do sterownika:
Zachowanie danych (%MWi)
Etapy zachowywania danych (słów pamięci) w EEPROMie:
Odtwarzanie danych (%MWi)
Jest możliwe odtworzenie ręczne słów %MWi ustawiając bit %S95 na 1. Poniższe warunki muszą być spełnione:
W EEPROMie jest zapamiętana ważna aplikacja.Aplikacja w RAMie odpowiada aplikacji zachowanej w EEPROMie.Zachowane słowa pamięci są ważne.
Krok Akcja
1 Wyłącz zasilanie sterownika.
2 Wciśnij wkładkę w gniazdo sterownika.
3 Załącz zasilanie sterownika.
4 W oprogramowaniu TwidoSoft rozwiń menu "PLC" przewiń w dół do "Save" i kliknij na to.
5 Wyłącz zasilanie sterownika.
6 Wyjmij wkładkę z gniazda sterownika.
Krok Akcja
1 Wyłącz zasilanie sterownika.
2 Wciśnij wkładkę w gniazdo sterownika.
3 Załącz zasilanie sterownika.(Jeżeli skonfigurowany jest Auto Start powtórz cykl wyłączenia i załączenia zasilania, aby uzyskać tryb RUN).
4 Wyłącz zasilanie sterownika.
5 Wyjmij wkładkę z gniazda sterownika.
Krok Akcja
1 Poniższe warunki muszą być spełnione:W RAMie jest ważny program.Ten sam ważny program jest zachowany w EEPROMie.Słowa pamięci są w programie skonfigurowane.
2 Wpisz do %SW97 liczbę słów do zapamiętania.Nota: Ilość nie może przekraczać ilości słów skonfigurowanych i musi być większa od 0, ale nie większa niż 512.
3 Ustaw %SW96:X0 na 1.
TWD USE 10 AE 55
Pamięć użytkownika
Stosowanie wkładki 64 kB rozszerzającej pamięć
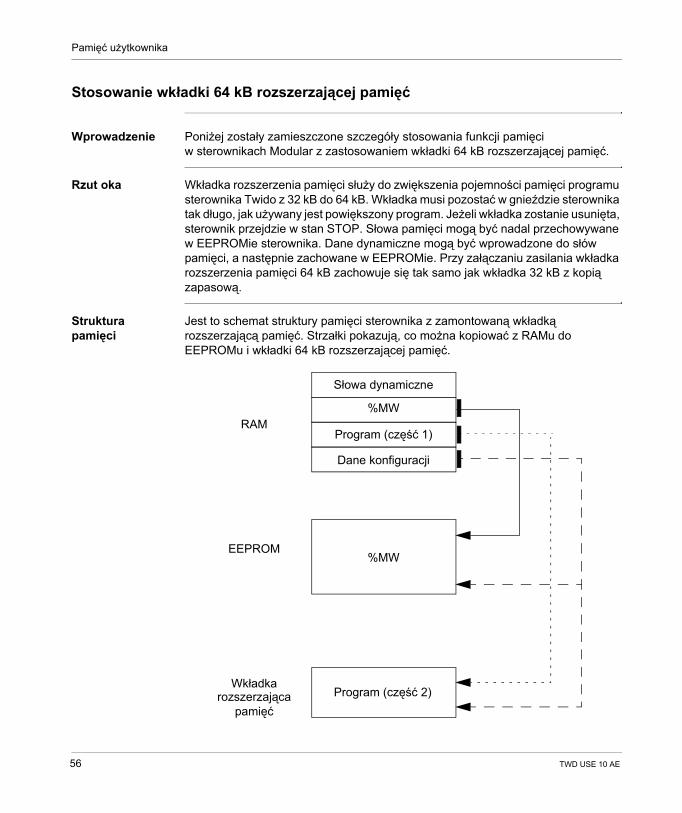
Wprowadzenie Poniżej zostały zamieszczone szczegóły stosowania funkcji pamięci w sterownikach Modular z zastosowaniem wkładki 64 kB rozszerzającej pamięć.
Rzut oka Wkładka rozszerzenia pamięci służy do zwiększenia pojemności pamięci programu sterownika Twido z 32 kB do 64 kB. Wkładka musi pozostać w gnieździe sterownika tak długo, jak używany jest powiększony program. Jeżeli wkładka zostanie usunięta, sterownik przejdzie w stan STOP. Słowa pamięci mogą być nadal przechowywane w EEPROMie sterownika. Dane dynamiczne mogą być wprowadzone do słów pamięci, a następnie zachowane w EEPROMie. Przy załączaniu zasilania wkładka rozszerzenia pamięci 64 kB zachowuje się tak samo jak wkładka 32 kB z kopią zapasową.
Struktura pamięci
Jest to schemat struktury pamięci sterownika z zamontowaną wkładką rozszerzającą pamięć. Strzałki pokazują, co można kopiować z RAMu do EEPROMu i wkładki 64 kB rozszerzającej pamięć.
Program (część 1)
Dane konfiguracji
%MW
Słowa dynamiczne
%MW
Program (część 2)
RAM
EEPROM
Wkładka
pamięć rozszerzająca
56 TWD USE 10 AE
Pamięć użytkownika
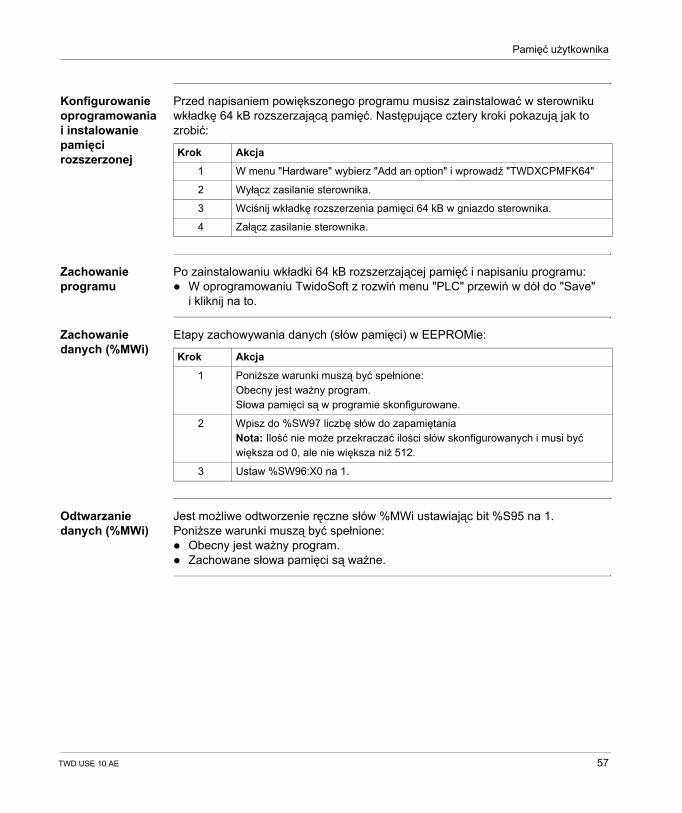
Konfigurowanie oprogramowania i instalowanie pamięci rozszerzonej
Przed napisaniem powiększonego programu musisz zainstalować w sterowniku wkładkę 64 kB rozszerzającą pamięć. Następujące cztery kroki pokazują jak to zrobić:
Zachowanie programu
Po zainstalowaniu wkładki 64 kB rozszerzającej pamięć i napisaniu programu:W oprogramowaniu TwidoSoft z rozwiń menu "PLC" przewiń w dół do "Save" i kliknij na to.
Zachowanie danych (%MWi)
Etapy zachowywania danych (słów pamięci) w EEPROMie:
Odtwarzanie danych (%MWi)
Jest możliwe odtworzenie ręczne słów %MWi ustawiając bit %S95 na 1. Poniższe warunki muszą być spełnione:
Obecny jest ważny program.Zachowane słowa pamięci są ważne.
Krok Akcja
1 W menu "Hardware" wybierz "Add an option" i wprowadź "TWDXCPMFK64"
2 Wyłącz zasilanie sterownika.
3 Wciśnij wkładkę rozszerzenia pamięci 64 kB w gniazdo sterownika.
4 Załącz zasilanie sterownika.
Krok Akcja
1 Poniższe warunki muszą być spełnione:Obecny jest ważny program.Słowa pamięci są w programie skonfigurowane.
2 Wpisz do %SW97 liczbę słów do zapamiętaniaNota: Ilość nie może przekraczać ilości słów skonfigurowanych i musi być większa od 0, ale nie większa niż 512.
3 Ustaw %SW96:X0 na 1.
TWD USE 10 AE 57

Pamięć użytkownika
58 TWD USE 10 AE
TWD USE 10 AE
4
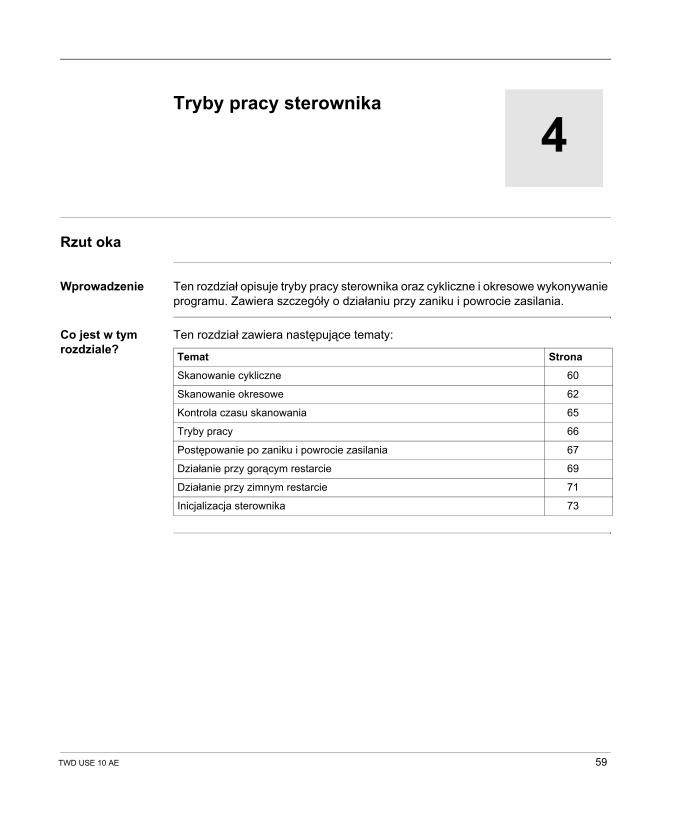
Tryby pracy sterownikaRzut oka
Wprowadzenie Ten rozdział opisuje tryby pracy sterownika oraz cykliczne i okresowe wykonywanie programu. Zawiera szczegóły o działaniu przy zaniku i powrocie zasilania.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Skanowanie cykliczne 60
Skanowanie okresowe 62
Kontrola czasu skanowania 65
Tryby pracy 66
Postępowanie po zaniku i powrocie zasilania 67
Działanie przy gorącym restarcie 69
Działanie przy zimnym restarcie 71
Inicjalizacja sterownika 73
59
Tryby pracy sterownika
Skanowanie cykliczne
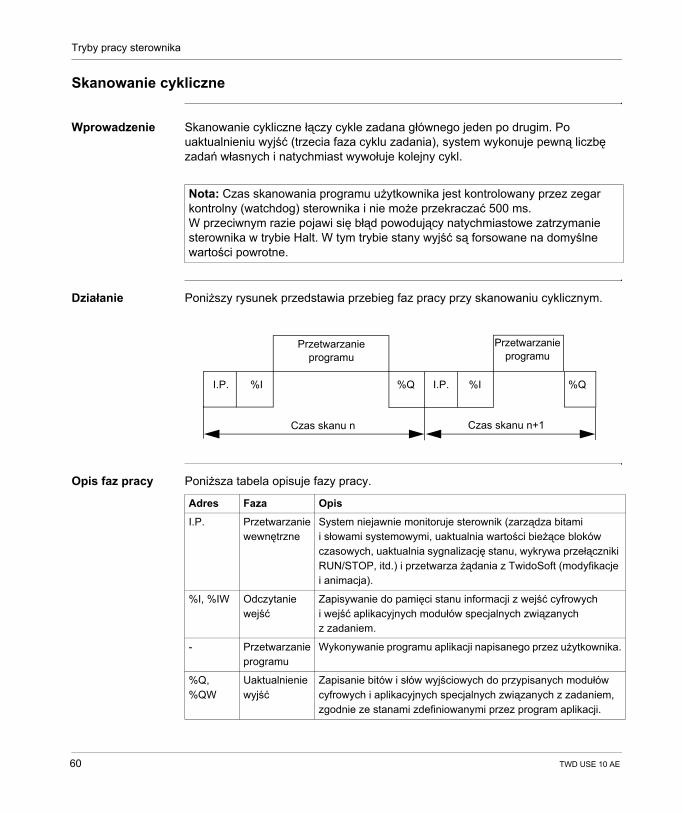
Wprowadzenie Skanowanie cykliczne łączy cykle zadana głównego jeden po drugim. Po uaktualnieniu wyjść (trzecia faza cyklu zadania), system wykonuje pewną liczbę zadań własnych i natychmiast wywołuje kolejny cykl.
Działanie Poniższy rysunek przedstawia przebieg faz pracy przy skanowaniu cyklicznym.
Opis faz pracy Poniższa tabela opisuje fazy pracy.
Nota: Czas skanowania programu użytkownika jest kontrolowany przez zegar kontrolny (watchdog) sterownika i nie może przekraczać 500 ms. W przeciwnym razie pojawi się błąd powodujący natychmiastowe zatrzymanie sterownika w trybie Halt. W tym trybie stany wyjść są forsowane na domyślne wartości powrotne.
Przetwarzanie programu
Przetwarzanie programu
I.P. %I %Q I.P. %I %Q
Czas skanu n Czas skanu n+1
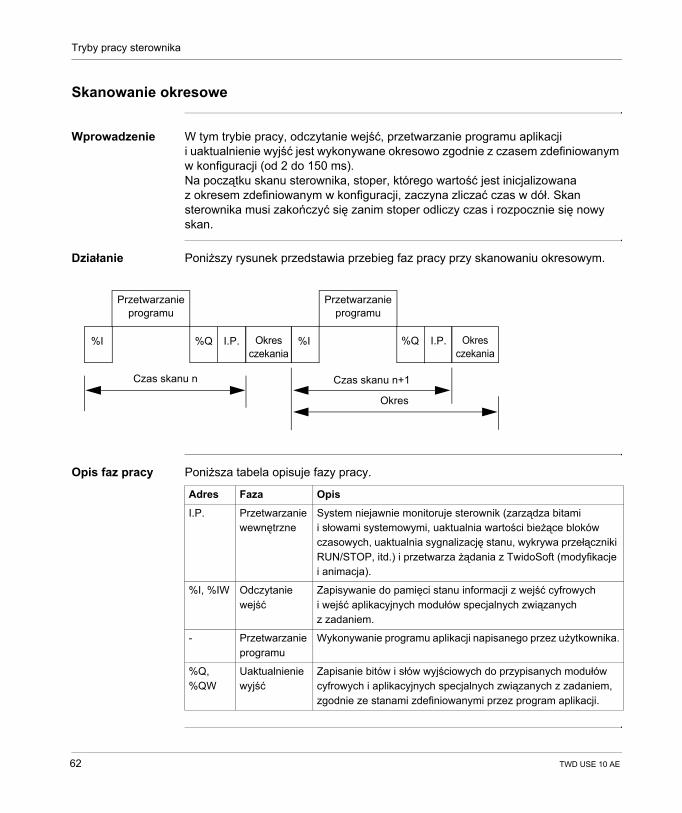
Adres Faza Opis
I.P. Przetwarzanie wewnętrzne
System niejawnie monitoruje sterownik (zarządza bitami i słowami systemowymi, uaktualnia wartości bieżące bloków czasowych, uaktualnia sygnalizację stanu, wykrywa przełączniki RUN/STOP, itd.) i przetwarza żądania z TwidoSoft (modyfikacje i animacja).
%I, %IW Odczytanie wejść
Zapisywanie do pamięci stanu informacji z wejść cyfrowych i wejść aplikacyjnych modułów specjalnych związanych z zadaniem.
- Przetwarzanie programu
Wykonywanie programu aplikacji napisanego przez użytkownika.
%Q, %QW
Uaktualnienie wyjść
Zapisanie bitów i słów wyjściowych do przypisanych modułów cyfrowych i aplikacyjnych specjalnych związanych z zadaniem, zgodnie ze stanami zdefiniowanymi przez program aplikacji.
60 TWD USE 10 AE
Tryby pracy sterownika
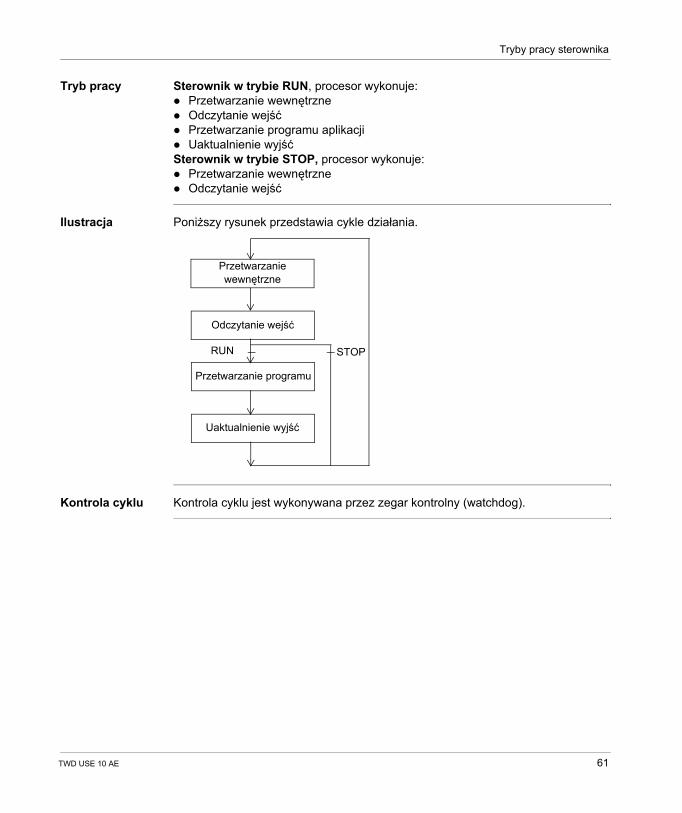
Tryb pracy Sterownik w trybie RUN, procesor wykonuje:Przetwarzanie wewnętrzneOdczytanie wejśćPrzetwarzanie programu aplikacjiUaktualnienie wyjść
Sterownik w trybie STOP, procesor wykonuje:Przetwarzanie wewnętrzneOdczytanie wejść
Ilustracja Poniższy rysunek przedstawia cykle działania.
Kontrola cyklu Kontrola cyklu jest wykonywana przez zegar kontrolny (watchdog).
Przetwarzanie wewnętrzne
Odczytanie wejść
Uaktualnienie wyjść
Przetwarzanie programu
RUN STOP
TWD USE 10 AE 61
Tryby pracy sterownika
Skanowanie okresowe
Wprowadzenie W tym trybie pracy, odczytanie wejść, przetwarzanie programu aplikacji i uaktualnienie wyjść jest wykonywane okresowo zgodnie z czasem zdefiniowanym w konfiguracji (od 2 do 150 ms).Na początku skanu sterownika, stoper, którego wartość jest inicjalizowana z okresem zdefiniowanym w konfiguracji, zaczyna zliczać czas w dół. Skan sterownika musi zakończyć się zanim stoper odliczy czas i rozpocznie się nowy skan.
Działanie Poniższy rysunek przedstawia przebieg faz pracy przy skanowaniu okresowym.
Opis faz pracy Poniższa tabela opisuje fazy pracy.
Okres czekania
Czas skanu n Czas skanu n+1
Przetwarzanie programu
Okres czekania
I.P.%Q I.P.%Q
Przetwarzanie programu
%I %I
Okres
Adres Faza Opis
I.P. Przetwarzanie wewnętrzne
System niejawnie monitoruje sterownik (zarządza bitami i słowami systemowymi, uaktualnia wartości bieżące bloków czasowych, uaktualnia sygnalizację stanu, wykrywa przełączniki RUN/STOP, itd.) i przetwarza żądania z TwidoSoft (modyfikacje i animacja).
%I, %IW Odczytanie wejść
Zapisywanie do pamięci stanu informacji z wejść cyfrowych i wejść aplikacyjnych modułów specjalnych związanych z zadaniem.
- Przetwarzanie programu
Wykonywanie programu aplikacji napisanego przez użytkownika.
%Q, %QW
Uaktualnienie wyjść
Zapisanie bitów i słów wyjściowych do przypisanych modułów cyfrowych i aplikacyjnych specjalnych związanych z zadaniem, zgodnie ze stanami zdefiniowanymi przez program aplikacji.
62 TWD USE 10 AE

Tryby pracy sterownika
Tryb pracy Sterownik w trybie RUN, procesor wykonuje:Przetwarzanie wewnętrzneOdczytanie wejśćPrzetwarzanie programu aplikacjiUaktualnienie wyjść
Jeżeli okres nie zakończył się, procesor dopełnia cykl pracy, aż zakończy się okres przetwarzania wewnętrznego. Jeżeli czas cyklu jest dłuższy niż skonfigurowany okres, sterownik pokazuje, że okres został przekroczony ustawiając bit systemowy %S19 na 1. Proces jest kontynuowany i wykonany jest całkowicie. Jednakże nie wolno przekraczać czasu kontrolnego sterownika. Kolejny skan jest rozpoczynany po zapisaniu wyjść w przetwarzaniu niejawnym.Sterownik w trybie STOP, procesor wykonuje:
Przetwarzanie wewnętrzneOdczytanie wejść
TWD USE 10 AE 63
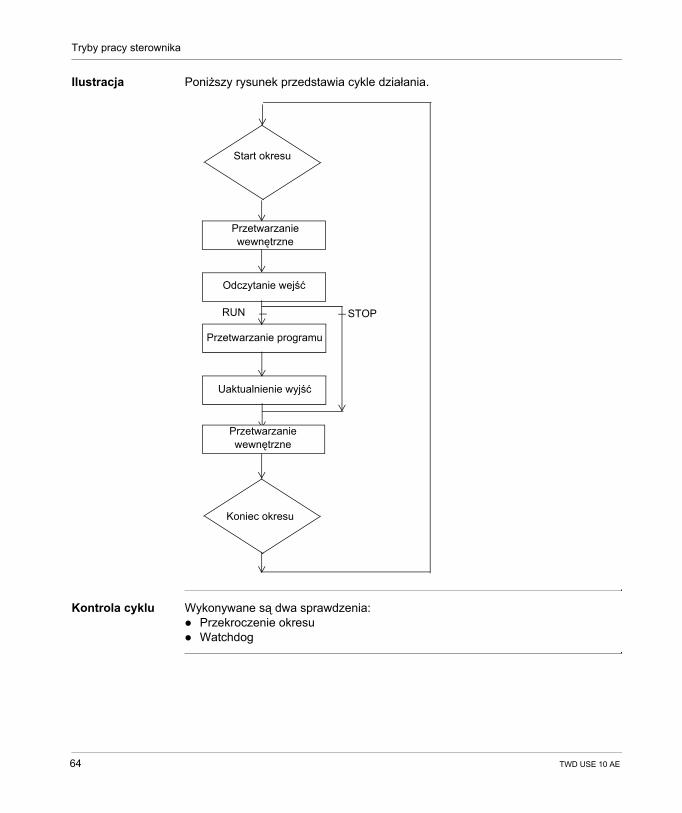
Tryby pracy sterownika
Ilustracja Poniższy rysunek przedstawia cykle działania.
Kontrola cyklu Wykonywane są dwa sprawdzenia:Przekroczenie okresuWatchdog
Przetwarzanie wewnętrzne
Odczytanie wejść
Uaktualnienie wyjść
Przetwarzanie programu
RUN STOP
Przetwarzanie wewnętrzne
Start okresu
Koniec okresu
64 TWD USE 10 AE
Tryby pracy sterownika
Kontrola czasu skanowania
Punkty główne Cykl główny zadania jest monitorowany przez zegar kontrolny (watchdog) nazwany Tmax (maksymalny czas trwania zadania głównego). Pozwala to na pokazanie błędów aplikacji (nieskończone pętle, itd.) i zabezpiecza maksymalny czas do odświeżenia wyjść.
Programowy watchdog (praca okresowa lub cykliczna)
Przy pracy okresowej i cyklicznej, wywołanie watchdoga powoduje błąd programowy. Aplikacja przechodzi w stan HALT i ustawia bit %S11 na 1. Wznowienie działania wymaga podłączenia TwidoSoft, dla zanalizowania przyczyny błędu, zmodyfikowania aplikacji dla poprawienia błędu, a następnie uruchomienia programu w RUN.
Kontrola pracy okresowej
Przy pracy okresowej stosowane jest dodatkowe sprawdzanie, aby wykrywać przekroczenie okresu:
%S19 wskazuje, że okres był przekroczony. Jest ustawiony na:1 przez system, gdy czas skanu jest większy okres zadania.0 przez użytkownika.
%SW0 zawiera wartość okresu (0 - 150 ms). Jest:Inicjalizowane przy zimnym restarcie na wartość ustawioną przy konfiguracji.Może być modyfikowane przez użytkownika.
Kontrola czasu zadania głównego
Poniższe słowa systemowe informują o czasie skanowania cyklu sterownika:%SW11 inicjalizowane na maksymalny czas watchdoga (10 - 500 ms).%SW30 zawiera czas wykonania ostatniego cyklu skanowania sterownika.%SW31 zawiera czas wykonania najdłuższego cyklu skanowania sterownika od ostatniego zimnego restartu.%SW32 zawiera czas wykonania najkrótszego cyklu skanowania sterownika od ostatniego zimnego restartu.
Nota: Stan HALT jest wtedy, gdy aplikacja jest natychmiast zatrzymana z powodu błędu programowego, takiego jak przekroczenie czasu skanu. Dane zachowują aktualne wartości umożliwiające analizę przyczyny błędu. Program zatrzymuje się na przetwarzanej instrukcji. Komunikacja ze sterownikiem jest otwarta.
Nota: Ta różnorodna informacja może być też dostępna z edytora konfiguracji.
TWD USE 10 AE 65
Tryby pracy sterownika
Tryby pracy
Wprowadzenie TwidoSoft umożliwia uwzględnienie trzech podstawowych grup trybów pracy:SprawdzanieRUN lub pracaSTOP lub zatrzymanie
Uruchamianie przez Grafcet
Różne tryby pracy mogą być otrzymane uruchamiając aplikację przez Grafcet, tzn. stosując następujące metody:
Inicjalizacja GrafcetuWstępne ustawianie krokówUtrzymanie sytuacjiZamrożenie grafów
Przetwarzanie wstępne i odpowiednie bity systemowe zapewniają skuteczne zarządzanie trybem pracy bez komplikowania i przeciążania programu użytkownika.
Bity systemowe Grafcetu
Bity systemowe %S21, %S22 i %S23 są zarezerwowane tylko do przetwarzania wstępnego. Bity te są automatyczne resetowane przez system. Powinny być zapisywane tylko przez instrukcję SET (S).Poniższa tabela pokazuje bity systemowe związane z Grafcetem:
Bit Funkcja Opis
%S21 Inicjalizacja Grafcetu
Normalnie ustawiony na 0, jest ustawiany na 1 przez:Zimny restart, %S0=1;Użytkownika, tylko w części programu przetwarzania wstępnego, stosując instrukcję Set S %S21 lub cewkę Set -(S)- %S21
Skutki:Deaktywacja wszystkich aktywnych kroków.Aktywacja wszystkich kroków początkowych.
%S22 Kasowanie Grafcetu
Normalnie ustawiony na 0, może być ustawiony na 1 tylko przez program w przetwarzaniu wstępnym.Skutki:
Deaktywacja wszystkich aktywnych kroków.Zatrzymanie skanowania przetwarzania sekwencyjnego.
%S23 Ustawienie i zamrożenie Grafcetu
Normalnie ustawiony na 0, może być ustawiony na 1 tylko przez program w przetwarzaniu wstępnym.
Kasowanie Grafcetu przez ustawienie %S22 na 1.Wstępne aktywacja kroków przez szereg instrukcji S %Xi.Umożliwienie wstępnej aktywacji przez ustawienie %S23 na 1.
Zamrażanie sytuacji:W sytuacji początkowej: przez utrzymanie %S21 na 1 przez program.W sytuacji "pustej": przez utrzymanie %S22 na 1 przez program.W sytuacji określonej: przez utrzymanie %S23 na 1.
66 TWD USE 10 AE
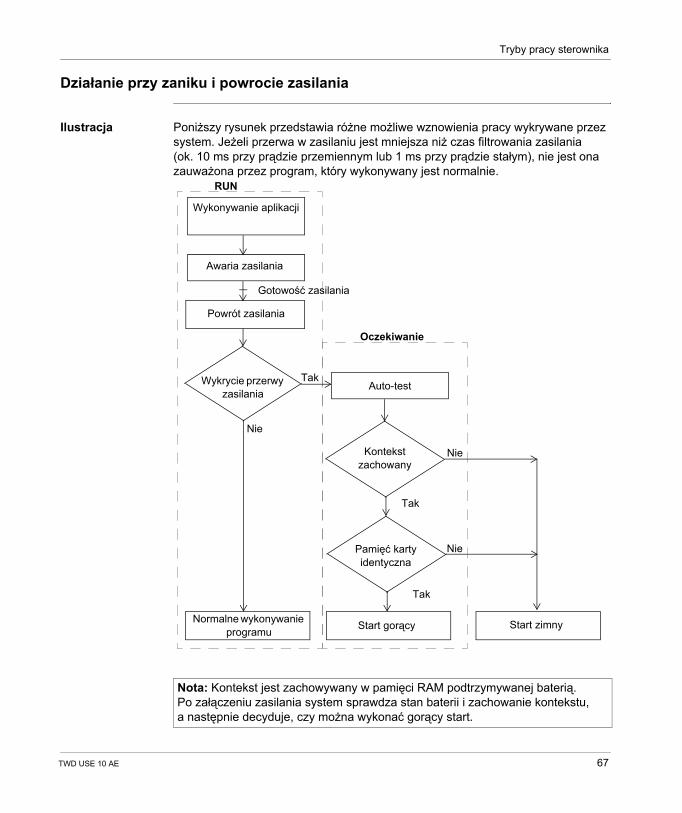
Tryby pracy sterownika
Działanie przy zaniku i powrocie zasilania
Ilustracja Poniższy rysunek przedstawia różne możliwe wznowienia pracy wykrywane przez system. Jeżeli przerwa w zasilaniu jest mniejsza niż czas filtrowania zasilania (ok. 10 ms przy prądzie przemiennym lub 1 ms przy prądzie stałym), nie jest ona zauważona przez program, który wykonywany jest normalnie.
Nota: Kontekst jest zachowywany w pamięci RAM podtrzymywanej baterią. Po załączeniu zasilania system sprawdza stan baterii i zachowanie kontekstu, a następnie decyduje, czy można wykonać gorący start.
Wykrycie przerwy zasilania
Wykonywanie aplikacji
Awaria zasilania
Powrót zasilania
Kontekst zachowany
Pamięć karty identyczna
Normalne wykonywanie programu Start gorący Start zimny
Gotowość zasilania
Nie
Tak
Tak
Tak
Nie
Nie
Auto-test
Oczekiwanie
RUN
TWD USE 10 AE 67
Tryby pracy sterownika
Wejście Run/Stop kontra Auto Run
Bit wejścia Run/Stop ma priorytet nad opcją Automatycznego Startu w Run, która jest dostępna w oknie Scan Mode. Jeżeli bit Run/Stop jest ustawiony, po załączeniu zasilania sterownik startuje w trybie Run.Następujące tryby sterownika określane przez:
Działanie Poniższa tabela opisuje fazy przetwarzania przy przerwach zasilania.
Bit wejścia Run/Stop Auto start w Run Stan otrzymany
Zero Zero Zatrzymany
Zero Jeden Zatrzymany
Zbocze narastające Bez efektu Uruchomiony
Jeden Bez efektu Uruchomiony
Nieskonfigurowany Zero Zatrzymany
Nieskonfigurowany Jeden Uruchomiony
Nota: We wszystkich sterownikach Compact z oprogramowaniem V1.0, jeśli przy wyłączeniu zasilania, sterownik był w trybie Run, a znacznik "Automatic Start in Run" nie był wybrany w oknie Scan Mode, to po powrocie zasilania sterownik będzie startował w trybie Stop. W innym przypadku będzie wykonany zimny restart.
Nota: We wszystkich sterownikach Modular i Compact z oprogramowaniem co najmniej V1.11, jeśli przy wyłączeniu zasilania, bateria w sterowniku jest naładowana, sterownik będzie startował w tym samym trybie jak przed przerwaniem zasilania. Znacznik "Automatic Start in Run", wybrany w oknie Scan Mode, nie wywoła żadnego skutku po powrocie zasilania.
Faza Opis
1 W przypadku przerwania zasilania system zachowuje kontekst aplikacji i czas przerwania.
2 Wszystkie wyjścia ustawiane są w stan domyślny (stan 0).
3 Po powrocie zasilania, kontekst zachowany jest porównywany z pierwszym wykonanym, co określa tryb uruchomienia:
Jeśli kontekst aplikacji był zmieniony (utrata kontekstu systemu lub nowa aplikacja), to sterownik inicjalizuje aplikację: zimny restart,Jeśli kontekst aplikacji jest ten sam, sterownik uruchamia się bez inicjalizacji danych: gorący restart.
68 TWD USE 10 AE
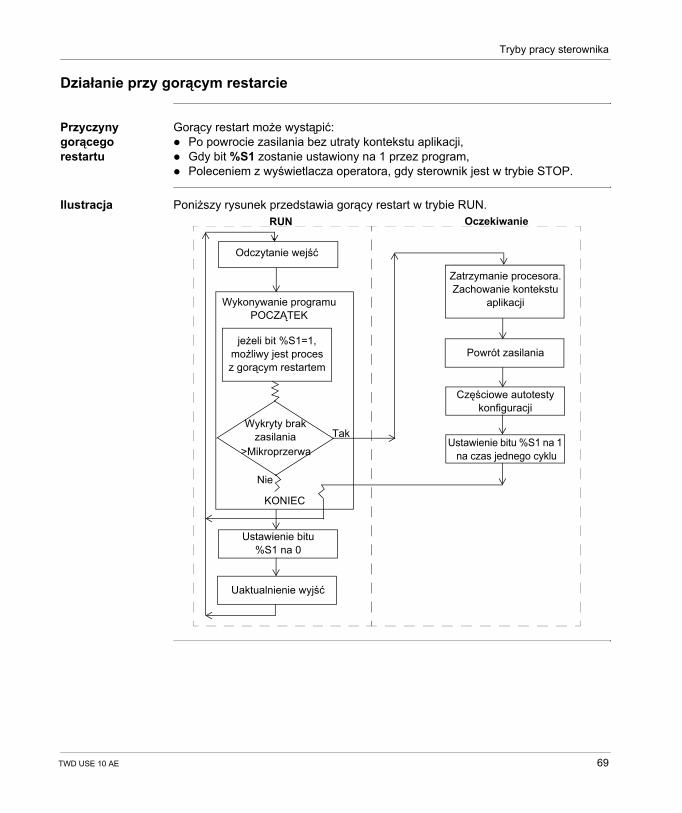
Tryby pracy sterownika
Działanie przy gorącym restarcie
Przyczyny gorącego restartu
Gorący restart może wystąpić:Po powrocie zasilania bez utraty kontekstu aplikacji,Gdy bit %S1 zostanie ustawiony na 1 przez program,Poleceniem z wyświetlacza operatora, gdy sterownik jest w trybie STOP.
Ilustracja Poniższy rysunek przedstawia gorący restart w trybie RUN.
Odczytanie wejść
jeżeli bit %S1=1, możliwy jest proces z gorącym restartem
Ustawienie bitu %S1 na 0
Wykonywanie programuPOCZĄTEK
Uaktualnienie wyjść
Zatrzymanie procesora.Zachowanie kontekstu
aplikacji
Powrót zasilania
Częściowe autotesty konfiguracji
Ustawienie bitu %S1 na 1 na czas jednego cyklu
OczekiwanieRUN
KONIEC
Nie
Tak
>Mikroprzerwa
Wykryty brak zasilania
TWD USE 10 AE 69
Tryby pracy sterownika
Wznowienie wykonywania programu
Poniższa tabela opisuje fazy wznowienia działania programu po gorącym restarcie.
Przetwarzanie gorącego restartu
W przypadku gorącego restartu, jeżeli wymagana jest szczególna procedura aplikacji, bit %S1 należy testować na początku cyklu zadania i wywoływać odpowiedni program.
Wyjścia po awarii zasilania
Po wykryciu awarii zasilania, wyjścia ustawiane są (domyślnie) w stan 0.Po powrocie zasilania wyjścia są w poprzednim stanie, aż do ponownego uaktualnienia przez zadanie.
Faza Opis
1 Wykonywanie programu zaczyna się od tego samego miejsca, przy którym nastąpiło przerwanie zasilania, ale bez uaktualnienia wyjść.Nota: Wznawiane są tylko elementy kodu użytkownika. Kod systemowy (np. uaktualnienie wyjść) nie jest wznawiany.
2 Na zakończenie cyklu wznowienia system:Odblokowuje aplikację, jeśli była zablokowana (i wywołuje STOP aplikacji w przypadku usuwania błędów)Ponownie inicjalizuje komunikaty
3 System przeprowadza cykl wznowienia, w którym:Uruchamia zadanie ustawiania bitów %S1 (znacznik gorącego restartu) i %S13 (pierwszy cykl w RUN) na 1Resetuje bity %S1 i %S13 na 0 po zakończeniu zadania pierwszego cyklu
70 TWD USE 10 AE
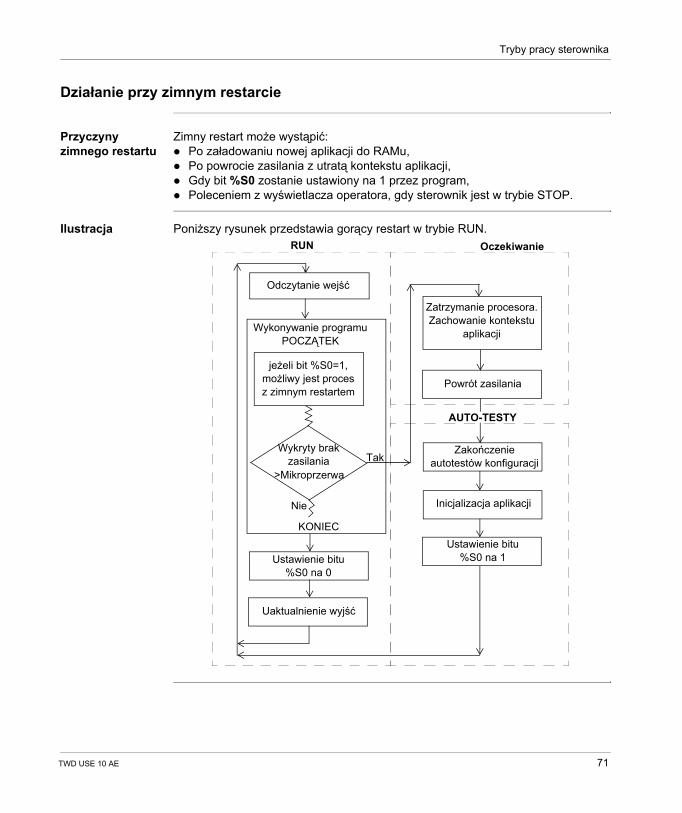
Tryby pracy sterownika
Działanie przy zimnym restarcie
Przyczyny zimnego restartu
Zimny restart może wystąpić:Po załadowaniu nowej aplikacji do RAMu,Po powrocie zasilania z utratą kontekstu aplikacji,Gdy bit %S0 zostanie ustawiony na 1 przez program,Poleceniem z wyświetlacza operatora, gdy sterownik jest w trybie STOP.
Ilustracja Poniższy rysunek przedstawia gorący restart w trybie RUN.
>Mikroprzerwa
Odczytanie wejść
jeżeli bit %S0=1, możliwy jest proces z zimnym restartem
Ustawienie bitu %S0 na 0
Wykonywanie programuPOCZĄTEK
Uaktualnienie wyjść
Zatrzymanie procesora.Zachowanie kontekstu
aplikacji
Powrót zasilania
Zakończenie autotestów konfiguracji
Ustawienie bitu %S0 na 1
Tak
Inicjalizacja aplikacji
OczekiwanieRUN
KONIEC
Nie
Wykryty brak zasilania
AUTO-TESTY
TWD USE 10 AE 71
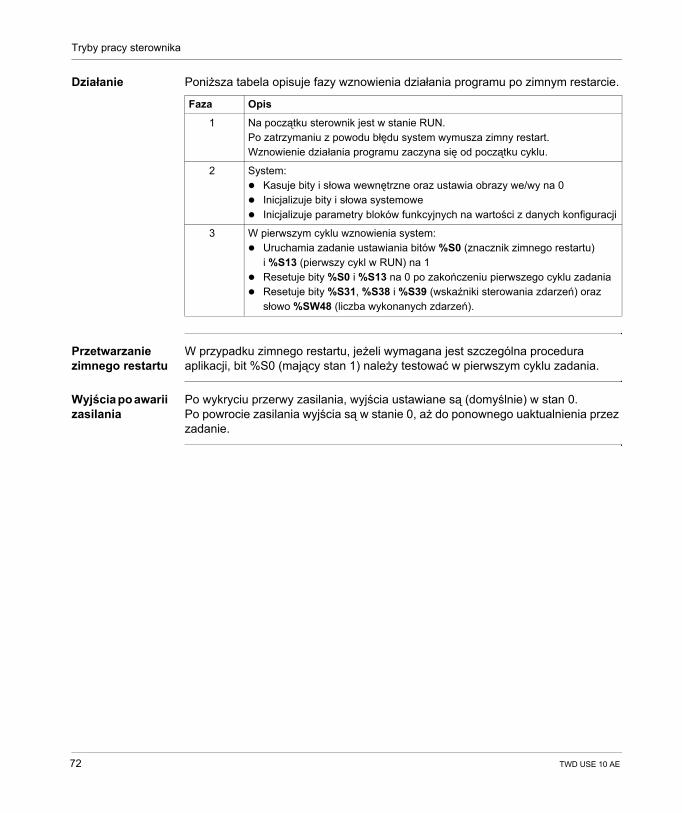
Tryby pracy sterownika
Działanie Poniższa tabela opisuje fazy wznowienia działania programu po zimnym restarcie.
Przetwarzanie zimnego restartu
W przypadku zimnego restartu, jeżeli wymagana jest szczególna procedura aplikacji, bit %S0 (mający stan 1) należy testować w pierwszym cyklu zadania.
Wyjścia po awarii zasilania
Po wykryciu przerwy zasilania, wyjścia ustawiane są (domyślnie) w stan 0.Po powrocie zasilania wyjścia są w stanie 0, aż do ponownego uaktualnienia przez zadanie.
Faza Opis
1 Na początku sterownik jest w stanie RUN.Po zatrzymaniu z powodu błędu system wymusza zimny restart.Wznowienie działania programu zaczyna się od początku cyklu.
2 System:Kasuje bity i słowa wewnętrzne oraz ustawia obrazy we/wy na 0Inicjalizuje bity i słowa systemoweInicjalizuje parametry bloków funkcyjnych na wartości z danych konfiguracji
3 W pierwszym cyklu wznowienia system:Uruchamia zadanie ustawiania bitów %S0 (znacznik zimnego restartu) i %S13 (pierwszy cykl w RUN) na 1Resetuje bity %S0 i %S13 na 0 po zakończeniu pierwszego cyklu zadaniaResetuje bity %S31, %S38 i %S39 (wskaźniki sterowania zdarzeń) oraz słowo %SW48 (liczba wykonanych zdarzeń).
72 TWD USE 10 AE
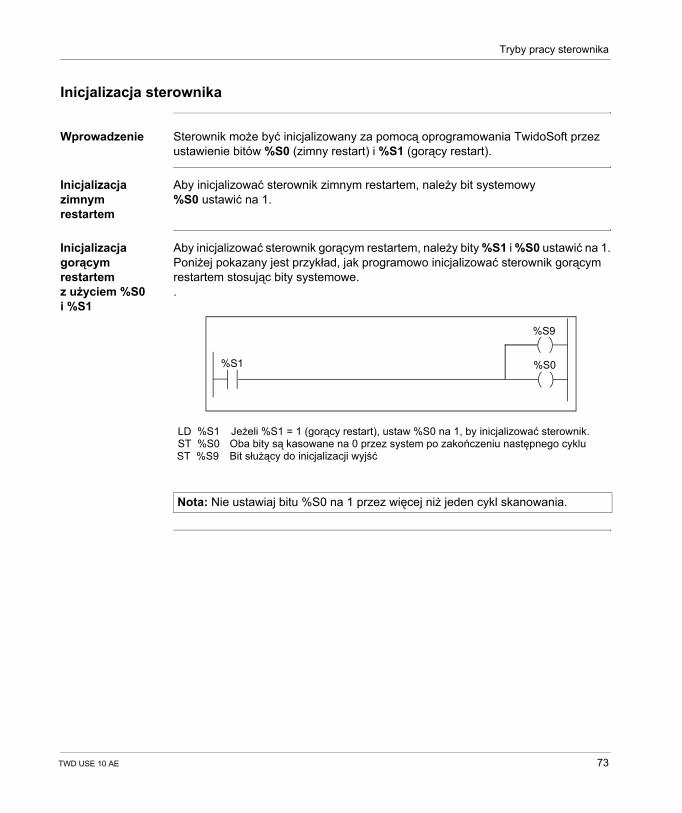
Tryby pracy sterownika
Inicjalizacja sterownika
Wprowadzenie Sterownik może być inicjalizowany za pomocą oprogramowania TwidoSoft przez ustawienie bitów %S0 (zimny restart) i %S1 (gorący restart).
Inicjalizacja zimnym restartem
Aby inicjalizować sterownik zimnym restartem, należy bit systemowy %S0 ustawić na 1.
Inicjalizacja gorącym restartem z użyciem %S0 i %S1
Aby inicjalizować sterownik gorącym restartem, należy bity %S1 i %S0 ustawić na 1.Poniżej pokazany jest przykład, jak programowo inicjalizować sterownik gorącym restartem stosując bity systemowe..
Nota: Nie ustawiaj bitu %S0 na 1 przez więcej niż jeden cykl skanowania.
%S1 %S0
LD %S1 Jeżeli %S1 = 1 (gorący restart), ustaw %S0 na 1, by inicjalizować sterownik.ST %S0 Oba bity są kasowane na 0 przez system po zakończeniu następnego cyklu
%S9
ST %S9 Bit służący do inicjalizacji wyjść
TWD USE 10 AE 73

Tryby pracy sterownika
74 TWD USE 10 AE
TWD USE 10 AE
5
Zarządzanie zadaniem zdarzeniaZawartość
Rzut oka Ten rozdział opisuje zadania zdarzeń oraz jak są one wykonywane w sterowniku.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Nota: Zadania zdarzeń nie są obsługiwane przez sterowniki Twido Compact 10 we/wy (TWDLCAA10DRF).
Temat Strona
Przegląd zadań zdarzeniowych 76
Opis różnych źródeł zdarzeń 77
Zarządzanie zdarzeniem 79
75
Zarządzanie zadaniem zdarzenia
Przegląd zadań zdarzeniowych
Wprowadzenie Poprzedni rozdział przedstawił zadania okresowe (zobacz Skanowanie okresowe, str. 62) i cykliczne (zobacz Skanowanie cykliczne, str. 60), w których obiekty uaktualniane są na początku i końcu zadania. Zródła zdarzeń mogą powodować, że niektóre zadania zostaną zatrzymane, gdy wykonywane są zadania z wyższym priorytetem, umożliwiające szybsze uaktualnianie obiektów.Zadanie zdarzenia:
jest częścią programu wykonywaną, gdy spełniony zostanie warunek (źródło zdarzenia),ma wyższy priorytet niż program główny,gwarantuje szybką reakcję, umożliwiając zmniejszenie całkowitego czasu reakcji systemu.
Opis zdarzenia Skład zdarzenia:źródło zdarzenia, które może być zdefiniowane jako programowy lub sprzętowy warunek przerwania programu głównego (zobacz Opis różnych źródeł zdarzeń, str. 77),niezależnie zaprogramowana sekcja w całości związana ze zdarzeniem,kolejka zdarzeń służąca do zapamiętania listy zdarzeń przed ich wykonaniem,poziom priorytetu określający kolejność wykonywania zdarzeń.
76 TWD USE 10 AE

Zarządzanie zadaniem zdarzenia
Opis różnych źródeł zdarzeń
Przegląd różnych źródeł zdarzenia
Zródło zdarzenia musi być obsługiwane przez oprogramowanie, aby uzyskać pewność, że program główny będzie właściwie przerwany przez zdarzenie oraz wywołać sekcję programową dołączoną do zdarzenia. Czas skanowania aplikacji nie ma znaczenia przy wykonywaniu zdarzeń.Dozwolone jest 9 źródeł zdarzenia:
4 warunki dołączone do progów bloku funkcyjnego %VFC (2 zdarzenia na każdy %VFC),4 warunki dołączone do wejść fizycznych sterownika podstawowego,1 warunek okresowy.
Zródło zdarzenia może być dołączone tylko do pojedynczego zdarzenia oraz musi być bezpośrednio wykrywane przez TwidoSoft. Po wykryciu, oprogramowanie wykonuje sekcję programową dołączoną do zdarzenia: każde zdarzenie jest przypisane do podprogramu z etykietą SRi: określonego przy konfiguracji źródeł zdarzenia.
Zdarzenia na wejściu fizycznym sterownika podstawowego
Wejścia %I0.2, %I0.3, %I0.4 i %I0.5 mogą być użyte jako źródła zdarzenia, z zastrzeżeniem, że nie są zablokowane oraz podczas konfiguracji zezwolono na zdarzenia. Przetwarzanie zdarzenia może być uruchomione przez wejścia 2 do 5 sterownika podstawowego (pozycja 0), przy zboczu narastającym lub opadającym.Więcej informacji o konfiguracji zdarzeń znajduje się sekcji zatytułowanej "Hardware Configuration -> Input Configuration" pliku pomocy "TwidoSoft Operation Guide".
Zdarzenie na wyjściu bloku funkcyjnego %VFC
Wyjścia TH0 i TH1 bloku funkcyjnego %VFC są źródłami zdarzenia. Wyjścia TH0 i TH1 są ustawiane odpowiednio:
na 1, gdy wartość bieżąca jest większa niż próg S0 i próg S1,na 0, gdy wartość bieżąca jest mniejsza niż próg S0 i próg S1
Zbocze narastające lub opadające na tych wyjściach może uruchamiać przetwarzanie zdarzenia.Więcej informacji o konfiguracji zdarzeń znajduje się sekcji zatytułowanej "Hardware Configuration -> Very Fast Counters" pliku pomocy "TwidoSoft Operation Guide".
TWD USE 10 AE 77

Zarządzanie zadaniem zdarzenia
Zdarzenie okresowe
Zdarzenie to okresowo wykonuje pojedynczą sekcję programu. Zadanie to ma wyższy priorytet niż zadanie główne (master).Jednakże, to źródło zdarzenia ma niższy priorytet niż inne źródła zdarzeń.Okres zadania jest ustawiany podczas konfiguracji od 5 do 255 ms. Może być użyte tylko jedno zdarzenie okresowe.Więcej informacji o konfiguracji zdarzeń znajduje się sekcji zatytułowanej "Hardware Configuration -> Scan Mode" pliku pomocy "TwidoSoft Operation Guide".
78 TWD USE 10 AE
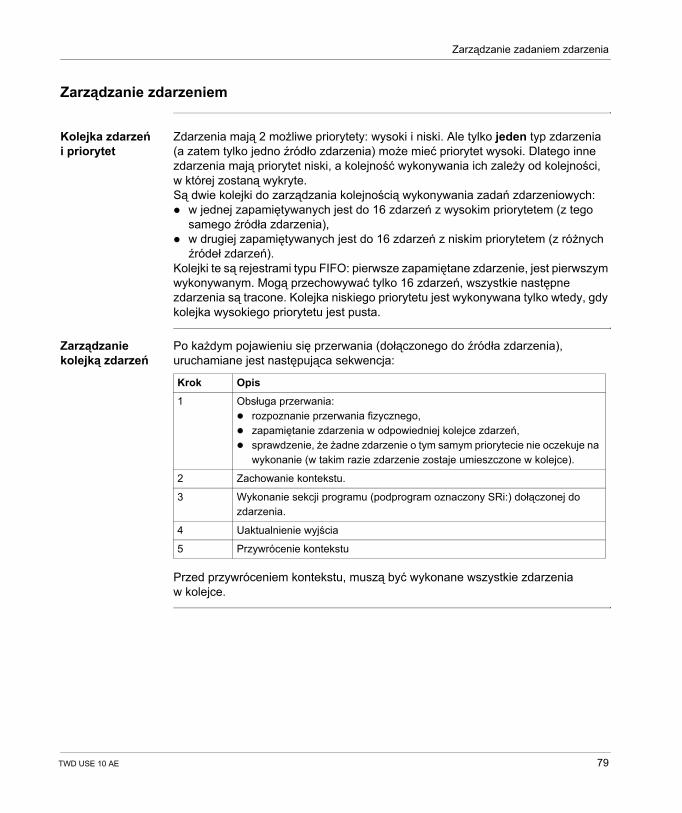
Zarządzanie zadaniem zdarzenia
Zarządzanie zdarzeniem
Kolejka zdarzeń i priorytet
Zdarzenia mają 2 możliwe priorytety: wysoki i niski. Ale tylko jeden typ zdarzenia (a zatem tylko jedno źródło zdarzenia) może mieć priorytet wysoki. Dlatego inne zdarzenia mają priorytet niski, a kolejność wykonywania ich zależy od kolejności, w której zostaną wykryte.Są dwie kolejki do zarządzania kolejnością wykonywania zadań zdarzeniowych:
w jednej zapamiętywanych jest do 16 zdarzeń z wysokim priorytetem (z tego samego źródła zdarzenia),w drugiej zapamiętywanych jest do 16 zdarzeń z niskim priorytetem (z różnych źródeł zdarzeń).
Kolejki te są rejestrami typu FIFO: pierwsze zapamiętane zdarzenie, jest pierwszym wykonywanym. Mogą przechowywać tylko 16 zdarzeń, wszystkie następne zdarzenia są tracone. Kolejka niskiego priorytetu jest wykonywana tylko wtedy, gdy kolejka wysokiego priorytetu jest pusta.
Zarządzanie kolejką zdarzeń
Po każdym pojawieniu się przerwania (dołączonego do źródła zdarzenia), uruchamiane jest następująca sekwencja:
Przed przywróceniem kontekstu, muszą być wykonane wszystkie zdarzenia w kolejce.
Krok Opis
1 Obsługa przerwania:rozpoznanie przerwania fizycznego,zapamiętanie zdarzenia w odpowiedniej kolejce zdarzeń,sprawdzenie, że żadne zdarzenie o tym samym priorytecie nie oczekuje na wykonanie (w takim razie zdarzenie zostaje umieszczone w kolejce).
2 Zachowanie kontekstu.
3 Wykonanie sekcji programu (podprogram oznaczony SRi:) dołączonej do zdarzenia.
4 Uaktualnienie wyjścia
5 Przywrócenie kontekstu
TWD USE 10 AE 79

Zarządzanie zadaniem zdarzenia
Kontrola zdarzenia
Bity i słowa systemowe służące do kontroli zdarzeń (zobacz Bity i słowa systemowe, str. 439):
%S31: służy do wykonania lub opóźnienia zdarzenia,%S38: służy do umieszczenia lub nie umieszczenia zdarzenia w kolejce,%S39: służy do stwierdzenia czy zdarzenia są oczekujące, czy tracone,%SW48: pokazuje jak dużo zdarzeń zostało wykonanych od ostatniego zimnego restartu.
Wartości bitów i słów są kasowane na zero przy zimnym restarcie lub po załadowaniu aplikacji, a zostają zachowane po gorącym restarcie. We wszystkich przypadkach kolejka zdarzeń jest kasowana.
80 TWD USE 10 AE
TWD USE 10 AE
II
Funkcje specjalneRzut oka
Wprowadzenie Ta część opisuje komunikację, wbudowane funkcje analogowe, zarządzanie modułami we/wy analogowych i instalowanie magistrali AS-i V2 dla sterowników Twido.
Co jest w tej części?
Ta część zawiera następujące rozdziały:
Rozdział Tytuł rozdziału Strona
6 Komunikacja 83
7 Wbudowane funkcje analogowe 145
8 Zarządzanie modułami analogowymi 149
9 Instalowanie magistrali AS-i V2 157
10 Działanie wyświetlacza operatora 193
81

Funkcje specjalne
82 TWD USE 10 AE
TWD USE 10 AE
6
KomunikacjaRzut oka
Wprowadzenie Ten rozdział zawiera informacje o konfigurowaniu, programowaniu i zarządzaniu funkcjami komunikacyjnymi dostępnymi w sterownikach Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Prezentacja różnych typów komunikacji 84
Komunikacja TwidoSoft i sterownika 85
Komunikacja między TwidoSoft i modemem 88
Komunikacja Remote Link 99
Komunikacja ASCII 111
Komunikacja Modbus 122
Standardowe polecenia Modbus 138
83
Komunikacja
Prezentacja różnych typów komunikacji
Rzut oka Twido jest wyposażony w jeden lub dwa porty szeregowe do komunikacji ze sterownikami oddalonymi, sterownikami dodatkowymi lub innymi urządzeniami zewnętrznymi. Każdy dostępny port może być użyty do dowolnej usługi, z wyłączeniem komunikacji z TwidoSoft, która może być realizowana tylko za pomocą portu pierwszego. W każdym sterowniku Twido dostępne są trzy podstawowe protokoły: Remote Link, ASCII i Modbus (modbus master lub modbus slave).
Remote Link Remote Link jest szybką magistralą master/slave przeznaczoną do transmisji niewielkiej ilości danych między sterownikiem master i maksymalnie siedmioma sterownikami oddalonymi (slave). Dane aplikacji i we/wy są przesyłane w zależności od skonfigurowania sterowników oddalonych. Można mieszać typy sterowników oddalonych, gdzie część może być oddalonymi we/wy, a część sterownikami dodatkowymi.
ASCII Protokół ASCII jest prostym protokołem znakowym typu pół-dupleks służącym do wysyłania i/lub odbierania ciągów znaków to / z prostych urządzeń (drukarka lub terminal). Protokół ten jest możliwy tylko przez instrukcję "EXCH".
Modbus Protokół Modbus jest protokołem master/slave, który pozwala jednemu, i tylko jednemu masterowi żądać odpowiedzi od urządzeń podrzędnych (slave'ów) lub wykonać działanie w oparciu o zapytania. Master może zwracać się do pojedynczych urządzeń podrzędnych lub inicjować nadawać komunikaty do wszystkich. Urządzenia podrzędne odsyłają komunikaty (odpowiadają) na zapytania, które są adresowane do nich indywidualnie. Nie są zwracane odpowiedzi na zapytania mastera do wszystkich.Modbus Master - Tryb modbus master pozwala sterownikowi Twido inicjować transmisję zapytania modbus, z oczekiwaniem odpowiedzi od urządzeń podrzędnych modbus. Tryb modbus master jest możliwy tylko przez instrukcję "EXCH". Tryb modbus master pozwala na Modbus ASCII i Modbus RTU.Modbus Slave - Tryb modbus slave pozwala sterownikowi Twido odpowiedzieć na zapytania od mastera modbus i jest domyślnym trybem komunikacji, jeśli komunikacja nie jest skonfigurowana. Sterownik Twido obsługuje standardowe dane i funkcje sterujące modbus oraz usługi rozszerzone dostępu do obiektu. Tryb modbus slave pozwala na Modbus ASCII i Modbus RTU.
Nota: W sieci RS-485 (bez wzmacniacza) może być do 32 węzłów (1 master i do 31 urządzeń podrzędnych), które mogą mieć adresy z zakresu 1-247.
84 TWD USE 10 AE
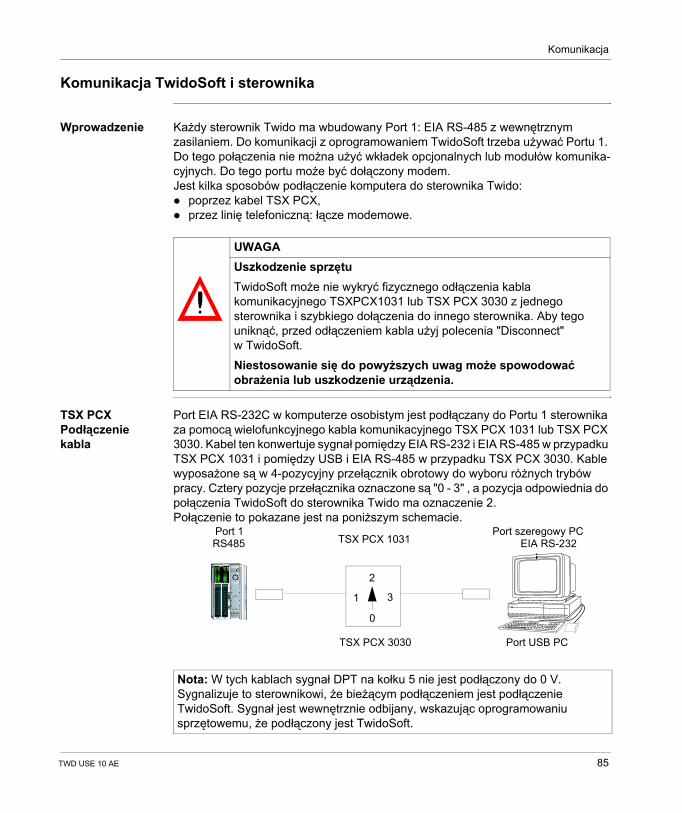
Komunikacja
Komunikacja TwidoSoft i sterownika
Wprowadzenie Każdy sterownik Twido ma wbudowany Port 1: EIA RS-485 z wewnętrznym zasilaniem. Do komunikacji z oprogramowaniem TwidoSoft trzeba używać Portu 1. Do tego połączenia nie można użyć wkładek opcjonalnych lub modułów komunika-cyjnych. Do tego portu może być dołączony modem.Jest kilka sposobów podłączenie komputera do sterownika Twido:
poprzez kabel TSX PCX,przez linię telefoniczną: łącze modemowe.
TSX PCX Podłączenie kabla
Port EIA RS-232C w komputerze osobistym jest podłączany do Portu 1 sterownika za pomocą wielofunkcyjnego kabla komunikacyjnego TSX PCX 1031 lub TSX PCX 3030. Kabel ten konwertuje sygnał pomiędzy EIA RS-232 i EIA RS-485 w przypadku TSX PCX 1031 i pomiędzy USB i EIA RS-485 w przypadku TSX PCX 3030. Kable wyposażone są w 4-pozycyjny przełącznik obrotowy do wyboru różnych trybów pracy. Cztery pozycje przełącznika oznaczone są "0 - 3" , a pozycja odpowiednia do połączenia TwidoSoft do sterownika Twido ma oznaczenie 2.Połączenie to pokazane jest na poniższym schemacie.
UWAGAUszkodzenie sprzętuTwidoSoft może nie wykryć fizycznego odłączenia kabla komunikacyjnego TSXPCX1031 lub TSX PCX 3030 z jednego sterownika i szybkiego dołączenia do innego sterownika. Aby tego uniknąć, przed odłączeniem kabla użyj polecenia "Disconnect" w TwidoSoft.
Niestosowanie się do powyższych uwag może spowodować obrażenia lub uszkodzenie urządzenia.
Nota: W tych kablach sygnał DPT na kołku 5 nie jest podłączony do 0 V. Sygnalizuje to sterownikowi, że bieżącym podłączeniem jest podłączenie TwidoSoft. Sygnał jest wewnętrznie odbijany, wskazując oprogramowaniu sprzętowemu, że podłączony jest TwidoSoft.
1
2
3
0
Port szeregowy PCEIA RS-232
Port 1RS485 TSX PCX 1031
TSX PCX 3030 Port USB PC
TWD USE 10 AE 85
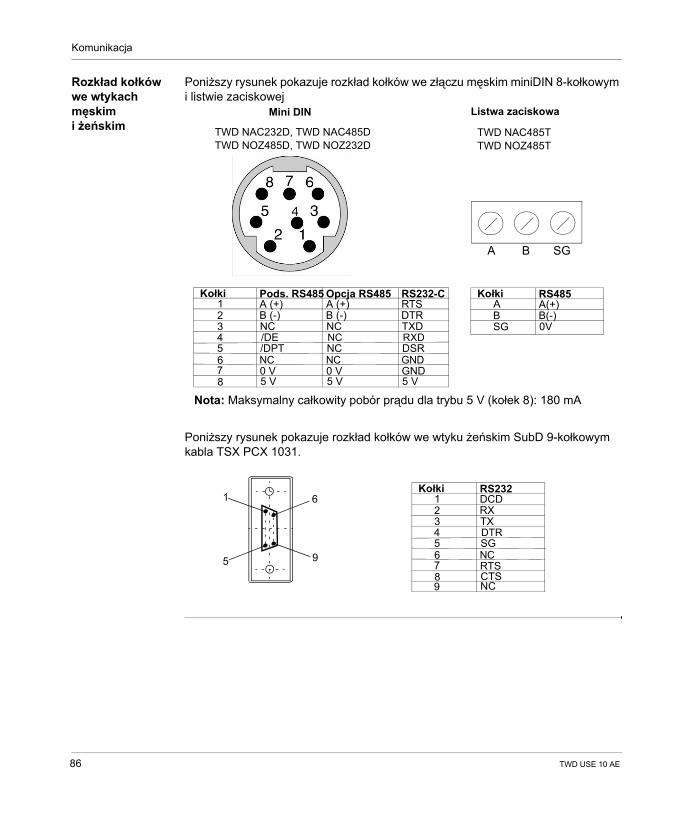
Komunikacja
Rozkład kołków we wtykach męskim i żeńskim
Poniższy rysunek pokazuje rozkład kołków we złączu męskim miniDIN 8-kołkowym i listwie zaciskowej
Poniższy rysunek pokazuje rozkład kołków we wtyku żeńskim SubD 9-kołkowym kabla TSX PCX 1031.
Opcja RS485Kołki1 2 3 4 5 6 7 8
Pods. RS485A (+)B (-)NC/DE/DPTNC0 V5 V
RS232-CRTS
TXD
DSR
GND5 V
DTR
RXD
GND
KołkiA BSG
RS485A(+)B(-)0V
A B SG
Mini DIN
TWD NAC232D, TWD NAC485DTWD NOZ485D, TWD NOZ232D
Listwa zaciskowa
TWD NAC485TTWD NOZ485T
A (+)B (-)NCNCNCNC0 V5 V
Nota: Maksymalny całkowity pobór prądu dla trybu 5 V (kołek 8): 180 mA
Kołki1 2 3 4 5 6 7 8
RS232DCDRXTXDTRSGNCRTSCTS
9 NC
1
5
6
9
86 TWD USE 10 AE
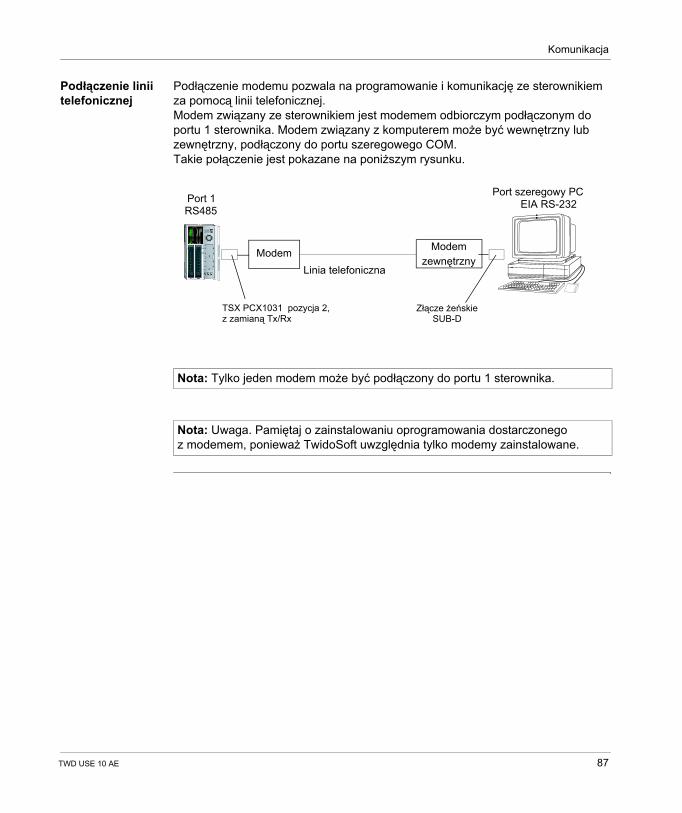
Komunikacja
Podłączenie linii telefonicznej
Podłączenie modemu pozwala na programowanie i komunikację ze sterownikiem za pomocą linii telefonicznej.Modem związany ze sterownikiem jest modemem odbiorczym podłączonym do portu 1 sterownika. Modem związany z komputerem może być wewnętrzny lub zewnętrzny, podłączony do portu szeregowego COM.Takie połączenie jest pokazane na poniższym rysunku.
Nota: Tylko jeden modem może być podłączony do portu 1 sterownika.
Nota: Uwaga. Pamiętaj o zainstalowaniu oprogramowania dostarczonego z modemem, ponieważ TwidoSoft uwzględnia tylko modemy zainstalowane.
Port szeregowy PCEIA RS-232Port 1
RS485
Linia telefoniczna Modem Modem
zewnętrzny
TSX PCX1031 pozycja 2, z zamianą Tx/Rx
Złącze żeńskieSUB-D
TWD USE 10 AE 87
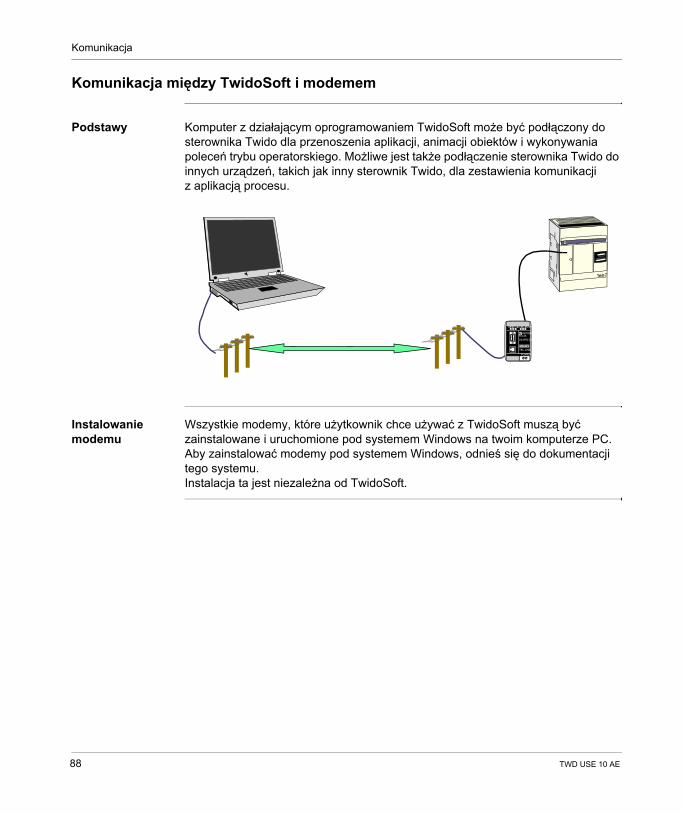
Komunikacja
Komunikacja między TwidoSoft i modemem
Podstawy Komputer z działającym oprogramowaniem TwidoSoft może być podłączony do sterownika Twido dla przenoszenia aplikacji, animacji obiektów i wykonywania poleceń trybu operatorskiego. Możliwe jest także podłączenie sterownika Twido do innych urządzeń, takich jak inny sterownik Twido, dla zestawienia komunikacji z aplikacją procesu.
Instalowanie modemu
Wszystkie modemy, które użytkownik chce używać z TwidoSoft muszą być zainstalowane i uruchomione pod systemem Windows na twoim komputerze PC.Aby zainstalować modemy pod systemem Windows, odnieś się do dokumentacji tego systemu.Instalacja ta jest niezależna od TwidoSoft.
Twido
TEL.LINE
POWER
V24/RS-232-CTD-33
WESTERMO
TDRDRTSDTRDCDPWR
88 TWD USE 10 AE
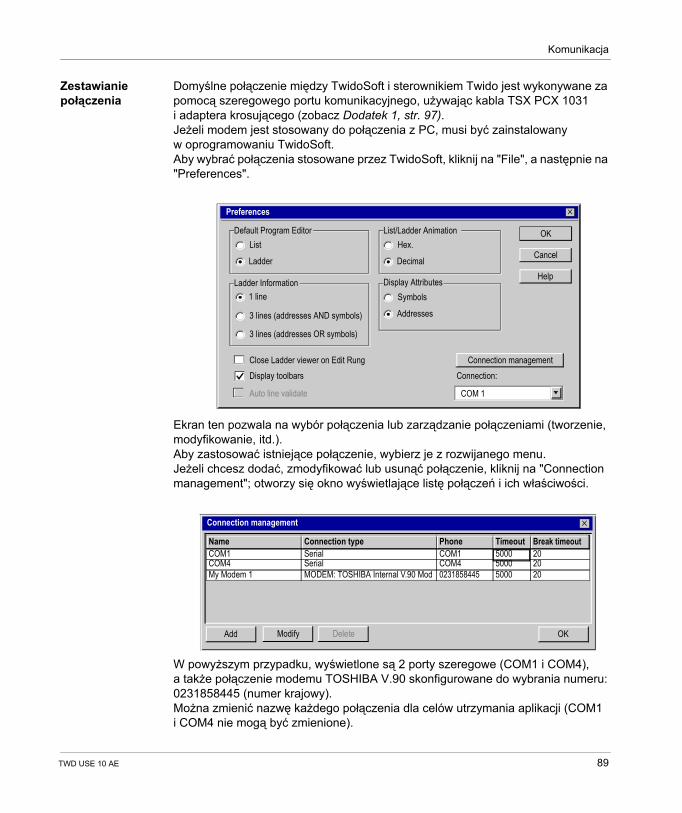
Komunikacja
Zestawianie połączenia
Domyślne połączenie między TwidoSoft i sterownikiem Twido jest wykonywane za pomocą szeregowego portu komunikacyjnego, używając kabla TSX PCX 1031 i adaptera krosującego (zobacz Dodatek 1, str. 97).Jeżeli modem jest stosowany do połączenia z PC, musi być zainstalowany w oprogramowaniu TwidoSoft.Aby wybrać połączenia stosowane przez TwidoSoft, kliknij na "File", a następnie na "Preferences".
Ekran ten pozwala na wybór połączenia lub zarządzanie połączeniami (tworzenie, modyfikowanie, itd.).Aby zastosować istniejące połączenie, wybierz je z rozwijanego menu.Jeżeli chcesz dodać, zmodyfikować lub usunąć połączenie, kliknij na "Connection management"; otworzy się okno wyświetlające listę połączeń i ich właściwości.
W powyższym przypadku, wyświetlone są 2 porty szeregowe (COM1 i COM4), a także połączenie modemu TOSHIBA V.90 skonfigurowane do wybrania numeru: 0231858445 (numer krajowy).Można zmienić nazwę każdego połączenia dla celów utrzymania aplikacji (COM1 i COM4 nie mogą być zmienione).
Preferences
List
LadderHelp
Cancel
OK
1 line
3 lines (addresses AND symbols)
3 lines (addresses OR symbols)
Hex.
Decimal
Symbols
Addresses
Connection managementClose Ladder viewer on Edit RungDisplay toolbars
Auto line validate
Connection:
COM 1
Ladder Information
Default Program Editor List/Ladder Animation
Display Attributes
Connection management
Add Modify Delete OK
NameCOM1COM4My Modem 1
Connection typeSerialSerialMODEM: TOSHIBA Internal V.90 Mod
PhoneCOM1COM40231858445
Timeout500050005000
Break timeout202020
TWD USE 10 AE 89

Komunikacja
Tak definiuje się i wybiera połączenia pozwalają podłączyć twój komputer PC do modemu.Jednakże, jest to tylko częścią procesu wykonania pełnego połączenia między komputerem i sterownikiem Twido.Następny etap dotyczy sterownika Twido. Oddalony Twido musi być podłączony do modemu.Wszystkie modemy do zestawienia połączenia wymagają inicjalizacji. Sterownik Twido zawierający ostatnią wersję oprogramowania sprzętowego V2.0, jest zdolny, przy załączaniu zasilania, wysłać do modemu dostosowany ciąg znaków, jeżeli modem jest skonfigurowany w aplikacji.
90 TWD USE 10 AE
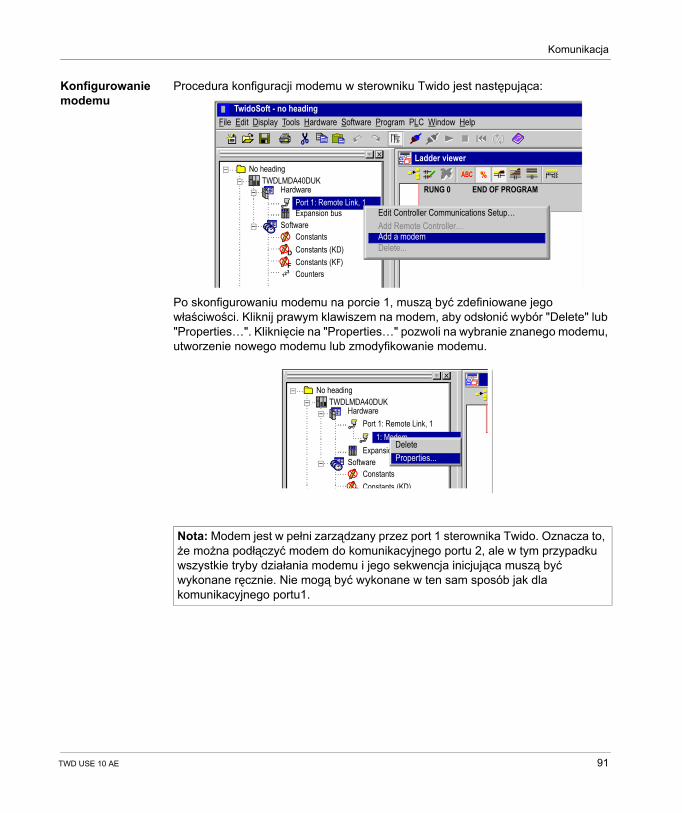
Komunikacja
Konfigurowanie modemu
Procedura konfiguracji modemu w sterowniku Twido jest następująca:
Po skonfigurowaniu modemu na porcie 1, muszą być zdefiniowane jego właściwości. Kliknij prawym klawiszem na modem, aby odsłonić wybór "Delete" lub "Properties…". Kliknięcie na "Properties…" pozwoli na wybranie znanego modemu, utworzenie nowego modemu lub zmodyfikowanie modemu.
Nota: Modem jest w pełni zarządzany przez port 1 sterownika Twido. Oznacza to, że można podłączyć modem do komunikacyjnego portu 2, ale w tym przypadku wszystkie tryby działania modemu i jego sekwencja inicjująca muszą być wykonane ręcznie. Nie mogą być wykonane w ten sam sposób jak dla komunikacyjnego portu1.
TwidoSoft - no headingFile Edit Display Tools Hardware Software Program PLC Window Help
No headingTWDLMDA40DUK
Hardware
SoftwareExpansion bus
Constants (KD)Constants (KF)Counters
Constants
123
D
F
ABCABC %%
Ladder viewer
Port 1: Remote Link, 1RUNG 0 END OF PROGRAM
Add a modem
Edit Controller Communications Setup…Add Remote Controller…
Delete...
No headingTWDLMDA40DUK
Hardware
SoftwareExpansion bus
Constants (KD)Constants
D
Port 1: Remote Link, 11: Modem
DeleteProperties...
TWD USE 10 AE 91
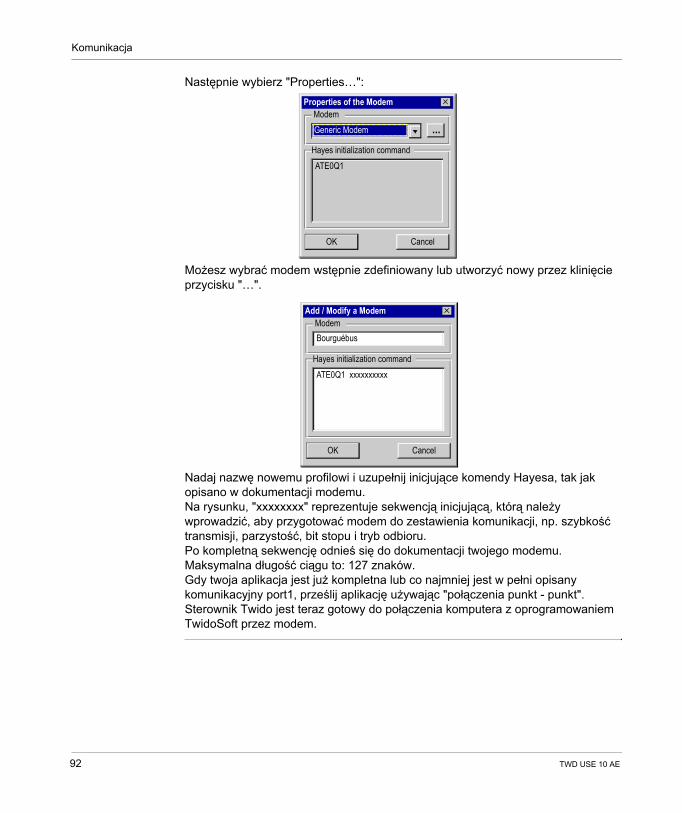
Komunikacja
Następnie wybierz "Properties…":
Możesz wybrać modem wstępnie zdefiniowany lub utworzyć nowy przez klinięcie przycisku "…".
Nadaj nazwę nowemu profilowi i uzupełnij inicjujące komendy Hayesa, tak jak opisano w dokumentacji modemu.Na rysunku, "xxxxxxxx" reprezentuje sekwencją inicjującą, którą należy wprowadzić, aby przygotować modem do zestawienia komunikacji, np. szybkość transmisji, parzystość, bit stopu i tryb odbioru.Po kompletną sekwencję odnieś się do dokumentacji twojego modemu.Maksymalna długość ciągu to: 127 znaków.Gdy twoja aplikacja jest już kompletna lub co najmniej jest w pełni opisany komunikacyjny port1, prześlij aplikację używając "połączenia punkt - punkt".Sterownik Twido jest teraz gotowy do połączenia komputera z oprogramowaniem TwidoSoft przez modem.
Properties of the Modem
OK Cancel
ATE0Q1
Modem
Hayes initialization command
...Generic Modem
Add / Modify a Modem
OK Cancel
ATE0Q1 xxxxxxxxxx
Bourguébus Modem
Hayes initialization command
92 TWD USE 10 AE
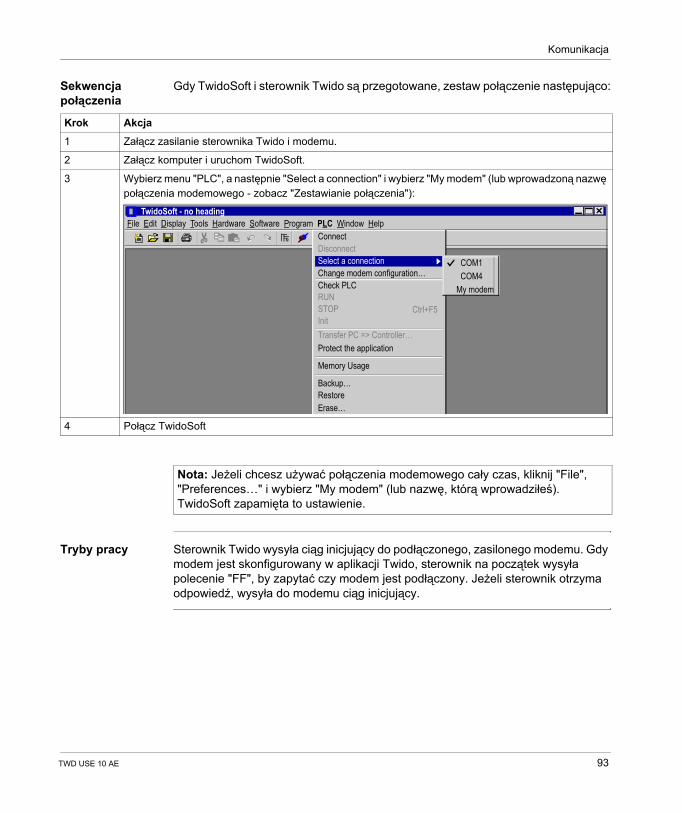
Komunikacja
Sekwencja połączenia
Gdy TwidoSoft i sterownik Twido są przegotowane, zestaw połączenie następująco:
Tryby pracy Sterownik Twido wysyła ciąg inicjujący do podłączonego, zasilonego modemu. Gdy modem jest skonfigurowany w aplikacji Twido, sterownik na początek wysyła polecenie "FF", by zapytać czy modem jest podłączony. Jeżeli sterownik otrzyma odpowiedź, wysyła do modemu ciąg inicjujący.
Krok Akcja
1 Załącz zasilanie sterownika Twido i modemu.
2 Załącz komputer i uruchom TwidoSoft.
3 Wybierz menu "PLC", a następnie "Select a connection" i wybierz "My modem" (lub wprowadzoną nazwę połączenia modemowego - zobacz "Zestawianie połączenia"):
4 Połącz TwidoSoft
TwidoSoft - no headingFile Edit Display Tools Hardware Software Program PLC Window Help
ConnectDisconnect
Change modem configuration…Check PLCRUN
Transfer PC => Controller…
Memory Usage
Backup…Restore
STOP
Select a connection
Init
Protect the application
Erase…
Ctrl+F5
COM1 COM4My modem
Nota: Jeżeli chcesz używać połączenia modemowego cały czas, kliknij "File", "Preferences…" i wybierz "My modem" (lub nazwę, którą wprowadziłeś). TwidoSoft zapamięta to ustawienie.
TWD USE 10 AE 93
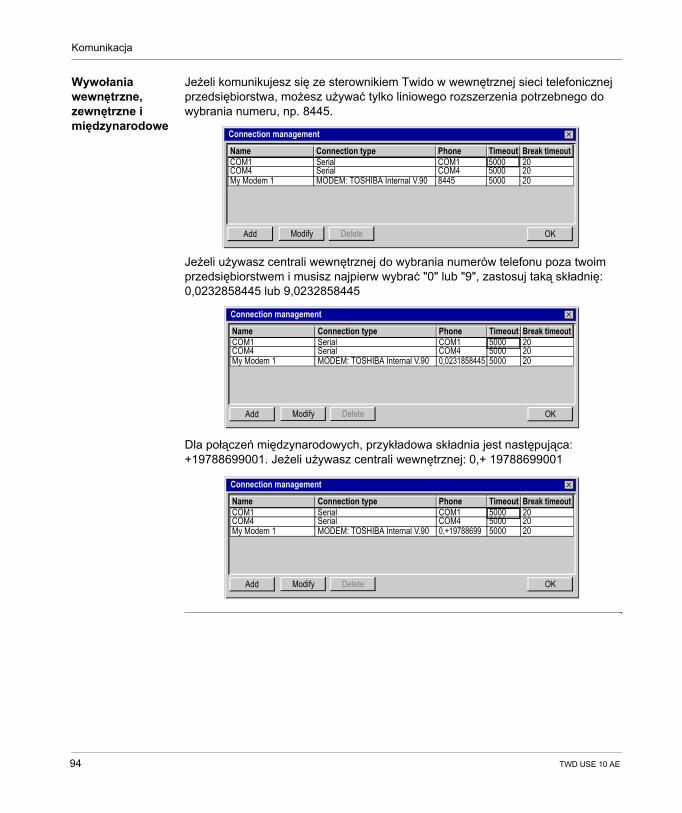
Komunikacja
Wywołania wewnętrzne, zewnętrzne i międzynarodowe
Jeżeli komunikujesz się ze sterownikiem Twido w wewnętrznej sieci telefonicznej przedsiębiorstwa, możesz używać tylko liniowego rozszerzenia potrzebnego do wybrania numeru, np. 8445.
Jeżeli używasz centrali wewnętrznej do wybrania numerów telefonu poza twoim przedsiębiorstwem i musisz najpierw wybrać "0" lub "9", zastosuj taką składnię: 0,0232858445 lub 9,0232858445
Dla połączeń międzynarodowych, przykładowa składnia jest następująca: +19788699001. Jeżeli używasz centrali wewnętrznej: 0,+ 19788699001
Connection management
Add Modify Delete OK
NameCOM1COM4My Modem 1
Connection typeSerialSerialMODEM: TOSHIBA Internal V.90
PhoneCOM1COM48445
Timeout500050005000
Break timeout202020
Connection management
Add Modify Delete OK
NameCOM1COM4My Modem 1
Connection typeSerialSerialMODEM: TOSHIBA Internal V.90
PhoneCOM1COM40,0231858445
Timeout500050005000
Break timeout202020
Connection management
Add Modify Delete OK
NameCOM1COM4My Modem 1
Connection typeSerialSerialMODEM: TOSHIBA Internal V.90
PhoneCOM1COM40,+19788699
Timeout500050005000
Break timeout202020
94 TWD USE 10 AE
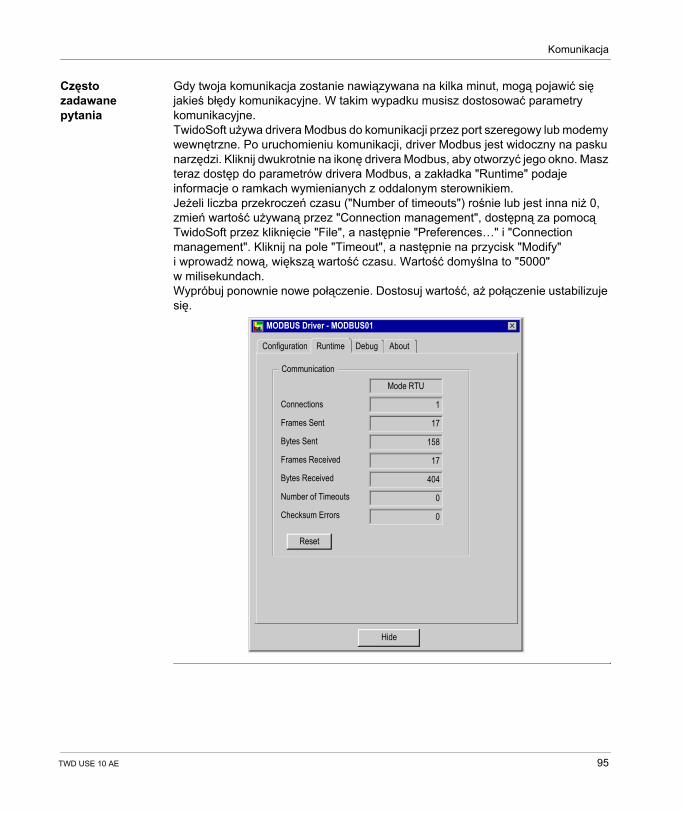
Komunikacja
Często zadawane pytania
Gdy twoja komunikacja zostanie nawiązywana na kilka minut, mogą pojawić się jakieś błędy komunikacyjne. W takim wypadku musisz dostosować parametry komunikacyjne.TwidoSoft używa drivera Modbus do komunikacji przez port szeregowy lub modemy wewnętrzne. Po uruchomieniu komunikacji, driver Modbus jest widoczny na pasku narzędzi. Kliknij dwukrotnie na ikonę drivera Modbus, aby otworzyć jego okno. Masz teraz dostęp do parametrów drivera Modbus, a zakładka "Runtime" podaje informacje o ramkach wymienianych z oddalonym sterownikiem.Jeżeli liczba przekroczeń czasu ("Number of timeouts") rośnie lub jest inna niż 0, zmień wartość używaną przez "Connection management", dostępną za pomocą TwidoSoft przez kliknięcie "File", a następnie "Preferences…" i "Connection management". Kliknij na pole "Timeout", a następnie na przycisk "Modify" i wprowadź nową, większą wartość czasu. Wartość domyślna to "5000" w milisekundach.Wypróbuj ponownie nowe połączenie. Dostosuj wartość, aż połączenie ustabilizuje się.
MODBUS Driver - MODBUS01
Reset
Communication
Configuration Runtime Debug About
Mode RTU
1
17
158
17
404
0
0
Connections
Frames Sent
Bytes Sent
Frames Received
Bytes Received
Number of Timeouts
Checksum Errors
Hide
TWD USE 10 AE 95
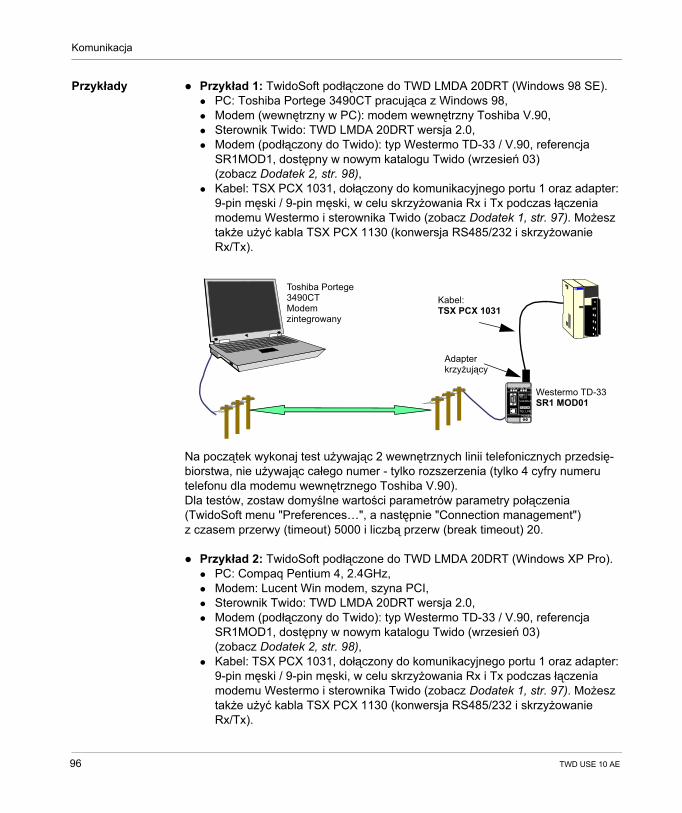
Komunikacja
Przykłady Przykład 1: TwidoSoft podłączone do TWD LMDA 20DRT (Windows 98 SE).PC: Toshiba Portege 3490CT pracująca z Windows 98,Modem (wewnętrzny w PC): modem wewnętrzny Toshiba V.90,Sterownik Twido: TWD LMDA 20DRT wersja 2.0,Modem (podłączony do Twido): typ Westermo TD-33 / V.90, referencja SR1MOD1, dostępny w nowym katalogu Twido (wrzesień 03) (zobacz Dodatek 2, str. 98),Kabel: TSX PCX 1031, dołączony do komunikacyjnego portu 1 oraz adapter: 9-pin męski / 9-pin męski, w celu skrzyżowania Rx i Tx podczas łączenia modemu Westermo i sterownika Twido (zobacz Dodatek 1, str. 97). Możesz także użyć kabla TSX PCX 1130 (konwersja RS485/232 i skrzyżowanie Rx/Tx).
Na początek wykonaj test używając 2 wewnętrznych linii telefonicznych przedsię-biorstwa, nie używając całego numer - tylko rozszerzenia (tylko 4 cyfry numeru telefonu dla modemu wewnętrznego Toshiba V.90).Dla testów, zostaw domyślne wartości parametrów parametry połączenia (TwidoSoft menu "Preferences…", a następnie "Connection management") z czasem przerwy (timeout) 5000 i liczbą przerw (break timeout) 20.
Przykład 2: TwidoSoft podłączone do TWD LMDA 20DRT (Windows XP Pro).PC: Compaq Pentium 4, 2.4GHz,Modem: Lucent Win modem, szyna PCI,Sterownik Twido: TWD LMDA 20DRT wersja 2.0,Modem (podłączony do Twido): typ Westermo TD-33 / V.90, referencja SR1MOD1, dostępny w nowym katalogu Twido (wrzesień 03) (zobacz Dodatek 2, str. 98),Kabel: TSX PCX 1031, dołączony do komunikacyjnego portu 1 oraz adapter: 9-pin męski / 9-pin męski, w celu skrzyżowania Rx i Tx podczas łączenia modemu Westermo i sterownika Twido (zobacz Dodatek 1, str. 97). Możesz także użyć kabla TSX PCX 1130 (konwersja RS485/232 i skrzyżowanie Rx/Tx).
TEL.LINE
POWER
V24/RS-232-CTD-33
WESTERMO
TDRDRTSDTRDCDPWR
Toshiba Portege3490CTModem zintegrowany
Adapter krzyżujący
Kabel:TSX PCX 1031
Westermo TD-33SR1 MOD01
96 TWD USE 10 AE
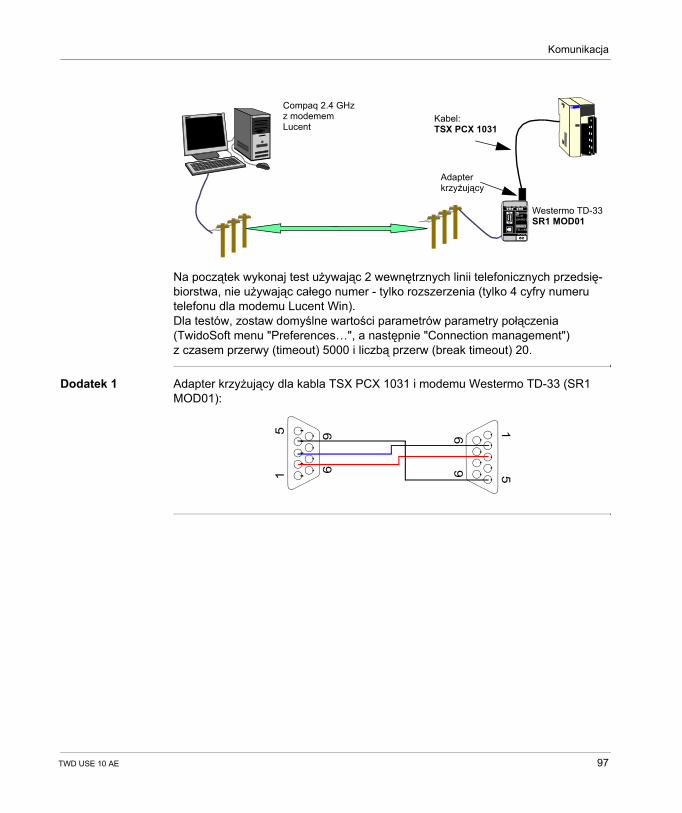
Komunikacja
Na początek wykonaj test używając 2 wewnętrznych linii telefonicznych przedsię-biorstwa, nie używając całego numer - tylko rozszerzenia (tylko 4 cyfry numeru telefonu dla modemu Lucent Win).Dla testów, zostaw domyślne wartości parametrów parametry połączenia (TwidoSoft menu "Preferences…", a następnie "Connection management") z czasem przerwy (timeout) 5000 i liczbą przerw (break timeout) 20.
Dodatek 1 Adapter krzyżujący dla kabla TSX PCX 1031 i modemu Westermo TD-33 (SR1 MOD01):
TEL.LINE
POWER
V24/RS-232-CTD-33
WESTERMO
TDRDRTSDTRDCDPWR
Compaq 2.4 GHzz modemem Lucent
Adapter krzyżujący
Kabel:TSX PCX 1031
Westermo TD-33SR1 MOD01
159
651 6
9
TWD USE 10 AE 97
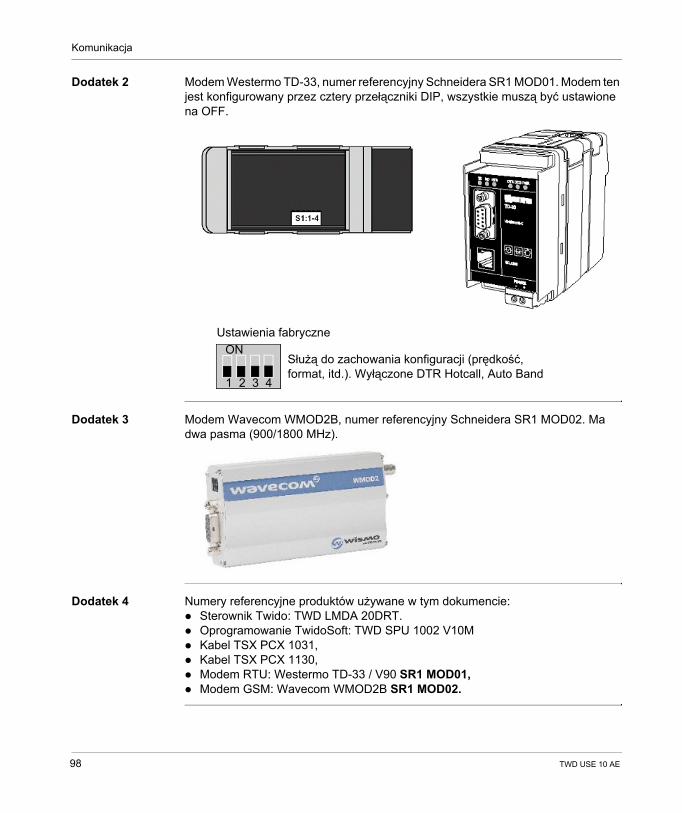
Komunikacja
Dodatek 2 Modem Westermo TD-33, numer referencyjny Schneidera SR1 MOD01. Modem ten jest konfigurowany przez cztery przełączniki DIP, wszystkie muszą być ustawione na OFF.
Dodatek 3 Modem Wavecom WMOD2B, numer referencyjny Schneidera SR1 MOD02. Ma dwa pasma (900/1800 MHz).
Dodatek 4 Numery referencyjne produktów używane w tym dokumencie:Sterownik Twido: TWD LMDA 20DRT.Oprogramowanie TwidoSoft: TWD SPU 1002 V10MKabel TSX PCX 1031,Kabel TSX PCX 1130,Modem RTU: Westermo TD-33 / V90 SR1 MOD01,Modem GSM: Wavecom WMOD2B SR1 MOD02.
Ustawienia fabryczne
Służą do zachowania konfiguracji (prędkość, format, itd.). Wyłączone DTR Hotcall, Auto Band
1 2 3 4
ON
98 TWD USE 10 AE
Komunikacja
Komunikacja Remote Link
Wprowadzenie Remote Link jest szybką magistralą master/slave przeznaczoną do transmisji niewielkiej ilości danych między sterownikiem master i maksymalnie siedmioma sterownikami oddalonymi (slave). Dane aplikacji i we/wy są przesyłane w zależności od skonfigurowania sterowników oddalonych. Można mieszać typy sterowników oddalonych, gdzie część może być oddalonymi we/wy, a część sterownikami dodatkowymi.
Nota: Sterownik master zawiera informacje o adresach oddalonych we/wy. Nie ma jednak informacji, który określony sterownik ma dany adres. Dlatego też, nie może sprawdzić, czy wszystkie oddalone we/wy używane w aplikacji użytkownika są w rzeczywistości obecne. Upewnij się, że te oddalone we/wy są w rzeczywistości obecne.
Nota: Magistrala oddalonych we/wy i stosowany protokół są zastrzeżone i żadne obce urządzenia nie są dopuszczone do tej sieci.
UWAGANiespodziewane działanie sprzętu
Upewnij się, że w sieci jest tylko jeden master oraz każde urządzenie podrzędne (slave) ma unikalny adres. Nieprzestrzeganie tej zasady może spowodować zniekształcenie danych lub nieoczekiwane i dwuznaczne działanie.Upewnij się, że wszystkie urządzenia podrzędne mają unikalne adresy. Żadne dwa urządzenia podrzędne nie mogą mieć tego samego adresu. Nieprzestrzeganie tej zasady może spowodować zniekształcenie danych lub nieoczekiwane i dwuznaczne skutki.
Niestosowanie się do powyższych uwag może spowodować obrażenia lub uszkodzenie urządzenia.
Nota: Sieć Remote Link wymaga złącza EIA RS-485 i może być działać tylko na jednym porcie jednocześnie.
TWD USE 10 AE 99
Komunikacja
Konfiguracja sprzętu
Remote Link musi używać minimum 3-przewodowego portu EIA RS-485. Może być skonfigurowane zarówno na porcie pierwszym, jak i porcie opcjonalnym, jeżeli jest obecny.
Poniższa tabela zestawia urządzenia, które mogą być stosowane:
Nota: Jednocześnie tylko jeden port komunikacyjny może być skonfigurowany jako Remote Link.
Urządzenie Port Charakterystyka
TWDLCAA10/16/24DRF, TWDLMDA20/40DUK, TWDLMDA20/40DTK, TWDLMDA20DRT
1 Sterownik bazowy wyposażony w złącze miniDin EIA RS-485 3-przewodowe.
TWDNOZ485D 2 Moduł komunikacyjny wyposażony w złącze miniDin EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
TWDNOZ485T 2 Moduł komunikacyjny wyposażony w złącze śrubowe EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
TWDNAC485D 2 Adapter komunikacyjny wyposażony w złącze miniDin EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDNAC485T 2 Adapter komunikacyjny wyposażony w złącze śrubowe EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDXCPODM 2 Moduł rozszerzenia z wyświetlaczem operatora wyposażony w adapter komunikacyjny ze złączem miniDin lub śrubowym EIA RS-485.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć komunikacyjnego modułu rozszerzenia.
Nota: Konfiguracja Portu 2 (dostępność i typ) jest sprawdzana tylko przy załączeniu zasilania lub inicjalizacji.
100 TWD USE 10 AE
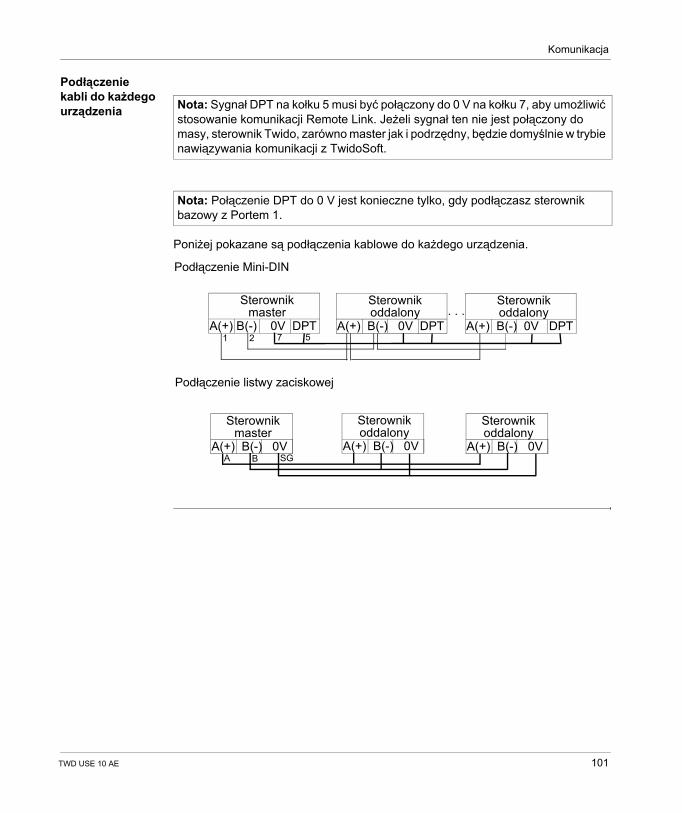
Komunikacja
Podłączenie kabli do każdego urządzenia
Poniżej pokazane są podłączenia kablowe do każdego urządzenia.
Nota: Sygnał DPT na kołku 5 musi być połączony do 0 V na kołku 7, aby umożliwić stosowanie komunikacji Remote Link. Jeżeli sygnał ten nie jest połączony do masy, sterownik Twido, zarówno master jak i podrzędny, będzie domyślnie w trybie nawiązywania komunikacji z TwidoSoft.
Nota: Połączenie DPT do 0 V jest konieczne tylko, gdy podłączasz sterownik bazowy z Portem 1.
A(+) B(-) 0V DPT
Sterownik. . .master
A(+) B(-) 0V DPT
Sterownikoddalony
A(+) B(-) 0V DPT
Sterownikoddalony
Podłączenie Mini-DIN
1 2 7 5
Podłączenie listwy zaciskowej
A(+) B(-) 0V
Sterownikmaster
A(+) B(-) 0V
Sterownikoddalony
A(+) B(-) 0V
Sterownikoddalony
A B SG
TWD USE 10 AE 101

Komunikacja
Konfiguracja oprogramowania
W sieci Remote Link może być zdefiniowany tylko jeden sterownik master. W dodatku, każdy sterownik oddalony musi otrzymać unikalny adres podrzędny (slave). Wielokrotne sterowniki master lub podrzędne o tym samym adresie mogą spowodować przerwanie transmisji lub dwuznaczność działania.
Konfiguracja sterownika master
Sterownik master jest konfigurowany za pomocą TwidoSoft do zarządzania siecią Remote Link z maksymalnie siedmioma sterownikami oddalonymi. Te siedem sterowników oddalonych może być skonfigurowane jako oddalone we/wy lub sterowniki dodatkowe. Adres mastera skonfigurowany z użyciem TwidoSoft ma wartość 0. Aby skonfigurować sterownik jako master, użyj TwidoSoft, skonfiguruj port 1 lub port 2 jako Remote Link i wybierz adres 0 (Master).Następnie, w oknie "Add remote PLC, możesz określić sterowniki podrzędne zarówno jako oddalone we/wy, jak i sterowniki dodatkowe, a także ich adresy.
Konfiguracja sterownika oddalonego
Konfiguracja sterownika oddalonego jest dostarczana za pomocą TwidoSoft przez skonfigurowanie portu 1 lub 2 jako Remote Link i przypisanie do portu adresu od 1 do 7.Poniższa tabela podsumowuje różnice i ograniczenia każdego typu konfiguracji sterowników oddalonych:
UWAGANiespodziewane uszkodzenie sprzętuUpewnij się, że w sieci jest tylko jeden master i każde urządzenie podrzędne (slave) ma unikalny adres. Nieprzestrzeganie tej zasady może spowodować zniekształcenie danych lub nieoczekiwane i dwuznaczne działanie.
Niestosowanie się do powyższych uwag może spowodować obrażenia lub uszkodzenie urządzenia.
Typ Program aplikacyjny Dostęp danych
Oddalone we/wy NieNawet bez prostej instrukcji "END".Tryb RUN jest związany z masterem.
%I i %QDostępne są tylko lokalne we/wy sterownika (ale nie jego rozszerzone we/wy).
Sterownik dodatkowy TakTryb RUN jest niezależny od mastera.
%INW i %QNWDo i od każdego dodatkowego mogą być przesyłane maksymalnie 4 słowa wejściowe i 4 słowa wyjściowe.
102 TWD USE 10 AE
Komunikacja
Synchronizacja cyklu sterownika oddalonego
Cykl uaktualniania sieci Remote Link nie jest zsynchronizowany z cyklem skanowania sterownika master. Komunikacja ze sterownikami oddalonymi jest sterowana przerwaniem i wykonywana jest jako zadanie w tle, równolegle ze skanowaniem sterownika master. Na końcu cyklu skanowania, aktualne dane są wczytane z danych aplikacji i będą użyte w następnym cyklu. Proces ten jest taki sam dla oddalonych we/wy i sterowników dodatkowych.Dowolny sterownik może sprawdzać ogólne działanie łącza za pomocą bitu systemowego %S111. Ale, aby osiągnąć synchronizację, sterownik master lub dodatkowy powinien używać bity systemowego %S110. Jest on ustawiony na 1, gdy miał miejsce kompletny cykl uaktualnienia. Program aplikacji jest odpowiedzialny za skasowanie go na 0.Master może umożliwić lub uniemożliwić działanie Remote Link za pomocą bitu systemowego %S112.Sterowniki mogą sprawdzać poprawność konfiguracji i jakość połączenia za pomocą %S113. Sygnał DPT w Porcie 1 (służy do określenia, czy podłączony jest TwidoSoft) jest wykrywany i określany bitem %S100.Wszystkie bity podsumowane są w poniższej tabeli:
Restart sterownika master
Przy wznowieniu działania sterownika master zachodzi jedno z poniższych zdarzeń:Zimny start (%S0 = 1) wymusza inicjalizację komunikacji.Gorący start (%S1 = 1) wymusza inicjalizację komunikacji.W trybie Stop master kontynuuje komunikację z podrzędnymi.
Bit systemowy
Stan Wskazanie
%S100 0 master/slave: DPT nieaktywny (kabel TwidoSoft nie podłączony)
1 master/slave: DPT aktywny (kabel TwidoSoft podłączony)
%S110 0 master/slave: kasowany przez aplikację
1 master: wszystkie wymiany zostały zakończone (tylko oddalone we/wy)slave: została zakończona wymiana z masterem
%S111 0 master: pojedyncza wymiana została zakończonaslave: pojedyncza wymiana została zakończona
1 master: jest w trakcie pojedyncza wymiana slave: została wykryta pojedyncza wymiana
%S112 0 master: uniemożliwienie działania Remote Link
1 master: umożliwienie działania Remote Link
%S113 0 master/slave: poprawna konfiguracja/działanie Remote Link
1 master: błąd konfiguracji/ działania Remote Linkslave: błąd działania Remote Link
TWD USE 10 AE 103
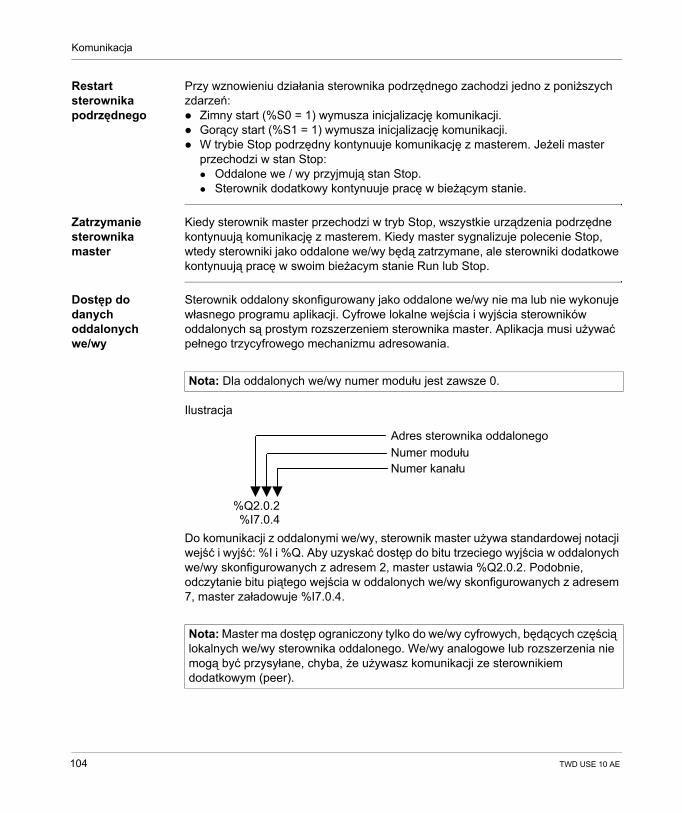
Komunikacja
Restart sterownika podrzędnego
Przy wznowieniu działania sterownika podrzędnego zachodzi jedno z poniższych zdarzeń:
Zimny start (%S0 = 1) wymusza inicjalizację komunikacji.Gorący start (%S1 = 1) wymusza inicjalizację komunikacji.W trybie Stop podrzędny kontynuuje komunikację z masterem. Jeżeli master przechodzi w stan Stop:
Oddalone we / wy przyjmują stan Stop.Sterownik dodatkowy kontynuuje pracę w bieżącym stanie.
Zatrzymanie sterownika master
Kiedy sterownik master przechodzi w tryb Stop, wszystkie urządzenia podrzędne kontynuują komunikację z masterem. Kiedy master sygnalizuje polecenie Stop, wtedy sterowniki jako oddalone we/wy będą zatrzymane, ale sterowniki dodatkowe kontynuują pracę w swoim bieżacym stanie Run lub Stop.
Dostęp do danych oddalonych we/wy
Sterownik oddalony skonfigurowany jako oddalone we/wy nie ma lub nie wykonuje własnego programu aplikacji. Cyfrowe lokalne wejścia i wyjścia sterowników oddalonych są prostym rozszerzeniem sterownika master. Aplikacja musi używać pełnego trzycyfrowego mechanizmu adresowania.
Ilustracja
Do komunikacji z oddalonymi we/wy, sterownik master używa standardowej notacji wejść i wyjść: %I i %Q. Aby uzyskać dostęp do bitu trzeciego wyjścia w oddalonych we/wy skonfigurowanych z adresem 2, master ustawia %Q2.0.2. Podobnie, odczytanie bitu piątego wejścia w oddalonych we/wy skonfigurowanych z adresem 7, master załadowuje %I7.0.4.
Nota: Dla oddalonych we/wy numer modułu jest zawsze 0.
Nota: Master ma dostęp ograniczony tylko do we/wy cyfrowych, będących częścią lokalnych we/wy sterownika oddalonego. We/wy analogowe lub rozszerzenia nie mogą być przysyłane, chyba, że używasz komunikacji ze sterownikiem dodatkowym (peer).
%Q2.0.2%I7.0.4
Adres sterownika oddalonegoNumer modułuNumer kanału
104 TWD USE 10 AE
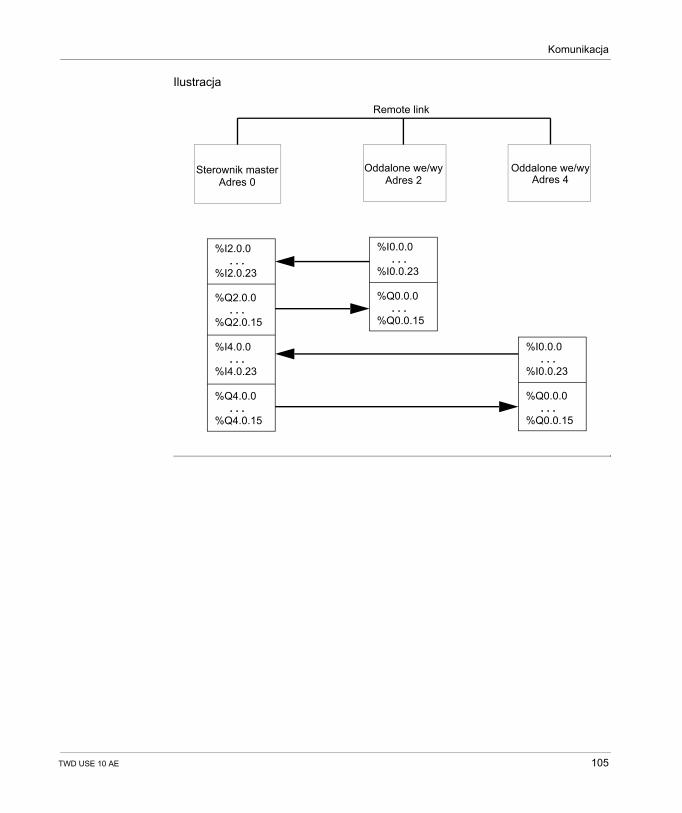
Komunikacja
Ilustracja
Oddalone we/wyAdres 2
%I2.0.0
%I2.0.23
%Q2.0.0
%Q2.0.15
%I4.0.0
%I4.0.23
%Q4.0.0 . . .%Q4.0.15
. . .
. . .
. . .
%I0.0.0
%I0.0.23
%Q0.0.0
%Q0.0.15
. . .
. . .
%I0.0.0
%I0.0.23
%Q0.0.0
%Q0.0.15
. . .
. . .
Remote link
Sterownik masterAdres 0
Oddalone we/wyAdres 4
TWD USE 10 AE 105
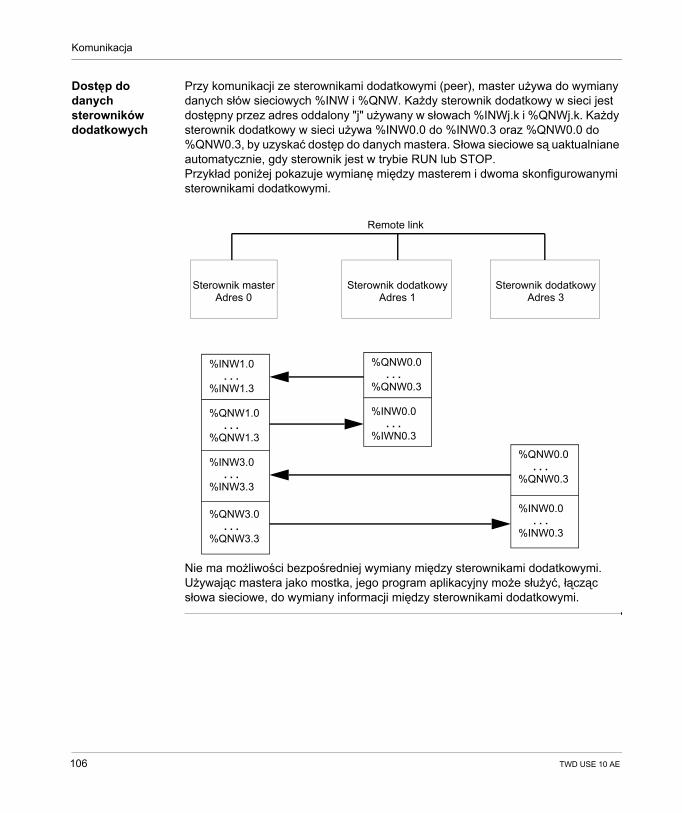
Komunikacja
Dostęp do danych sterowników dodatkowych
Przy komunikacji ze sterownikami dodatkowymi (peer), master używa do wymiany danych słów sieciowych %INW i %QNW. Każdy sterownik dodatkowy w sieci jest dostępny przez adres oddalony "j" używany w słowach %INWj.k i %QNWj.k. Każdy sterownik dodatkowy w sieci używa %INW0.0 do %INW0.3 oraz %QNW0.0 do %QNW0.3, by uzyskać dostęp do danych mastera. Słowa sieciowe są uaktualniane automatycznie, gdy sterownik jest w trybie RUN lub STOP.Przykład poniżej pokazuje wymianę między masterem i dwoma skonfigurowanymi sterownikami dodatkowymi.
Nie ma możliwości bezpośredniej wymiany między sterownikami dodatkowymi. Używając mastera jako mostka, jego program aplikacyjny może służyć, łącząc słowa sieciowe, do wymiany informacji między sterownikami dodatkowymi.
Sterownik dodatkowyAdres 1
%INW1.0
%INW1.3
%QNW1.0
%QNW1.3
%INW3.0
%INW3.3
. . .
. . .
. . .
%QNW0.0
%QNW0.3
%INW0.0
%IWN0.3
. . .
. . .
Remote link
%QNW0.0
%QNW0.3
%INW0.0
%INW0.3
. . .
. . .%QNW3.0
%QNW3.3 . . .
Sterownik masterAdres 0
Sterownik dodatkowyAdres 3
106 TWD USE 10 AE
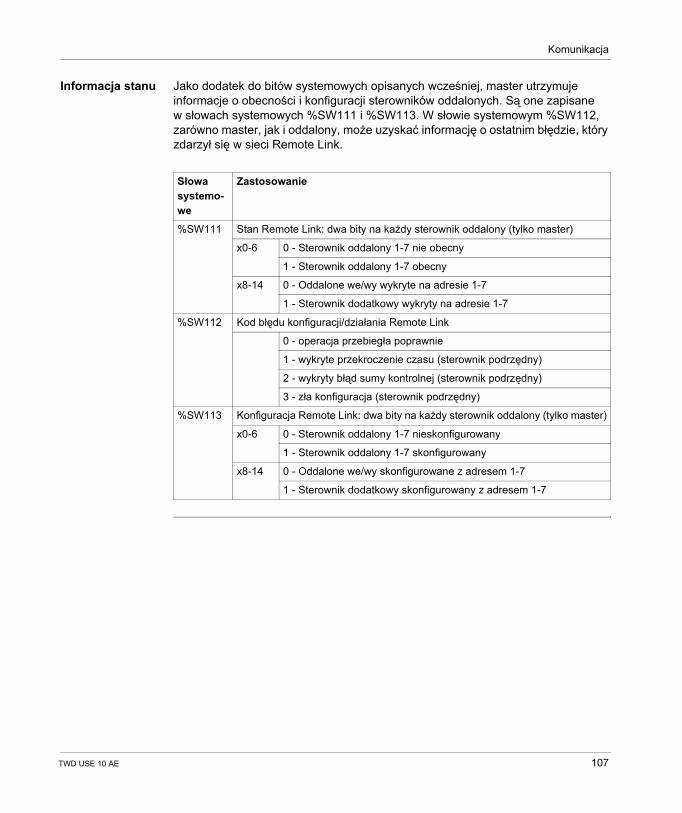
Komunikacja
Informacja stanu Jako dodatek do bitów systemowych opisanych wcześniej, master utrzymuje informacje o obecności i konfiguracji sterowników oddalonych. Są one zapisane w słowach systemowych %SW111 i %SW113. W słowie systemowym %SW112, zarówno master, jak i oddalony, może uzyskać informację o ostatnim błędzie, który zdarzył się w sieci Remote Link.
Słowa systemo-we
Zastosowanie
%SW111 Stan Remote Link: dwa bity na każdy sterownik oddalony (tylko master)
x0-6 0 - Sterownik oddalony 1-7 nie obecny
1 - Sterownik oddalony 1-7 obecny
x8-14 0 - Oddalone we/wy wykryte na adresie 1-7
1 - Sterownik dodatkowy wykryty na adresie 1-7
%SW112 Kod błędu konfiguracji/działania Remote Link
0 - operacja przebiegła poprawnie
1 - wykryte przekroczenie czasu (sterownik podrzędny)
2 - wykryty błąd sumy kontrolnej (sterownik podrzędny)
3 - zła konfiguracja (sterownik podrzędny)
%SW113 Konfiguracja Remote Link: dwa bity na każdy sterownik oddalony (tylko master)
x0-6 0 - Sterownik oddalony 1-7 nieskonfigurowany
1 - Sterownik oddalony 1-7 skonfigurowany
x8-14 0 - Oddalone we/wy skonfigurowane z adresem 1-7
1 - Sterownik dodatkowy skonfigurowany z adresem 1-7
TWD USE 10 AE 107
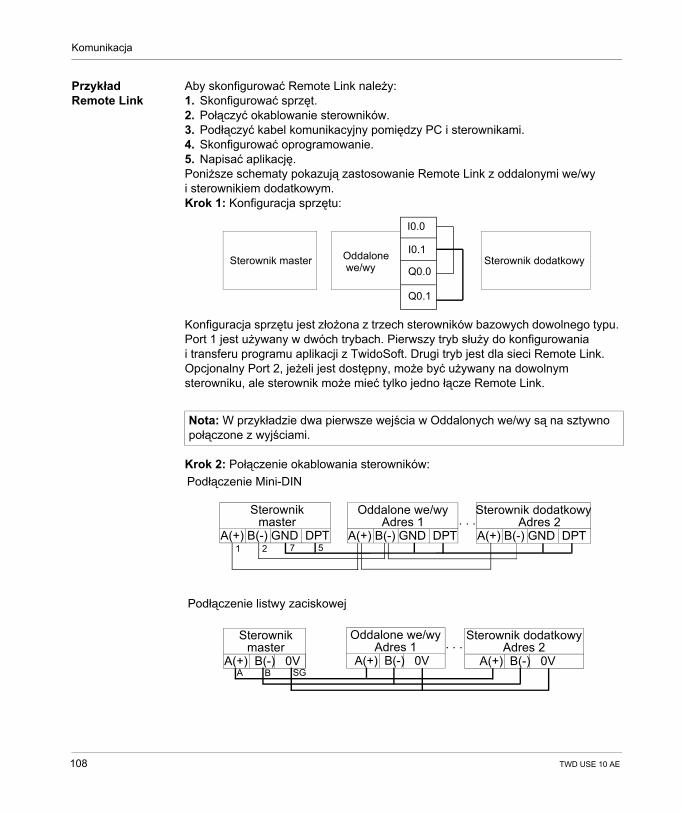
Komunikacja
Przykład Remote Link
Aby skonfigurować Remote Link należy:1. Skonfigurować sprzęt.2. Połączyć okablowanie sterowników.3. Podłączyć kabel komunikacyjny pomiędzy PC i sterownikami.4. Skonfigurować oprogramowanie.5. Napisać aplikację.Poniższe schematy pokazują zastosowanie Remote Link z oddalonymi we/wy i sterownikiem dodatkowym.Krok 1: Konfiguracja sprzętu:
Konfiguracja sprzętu jest złożona z trzech sterowników bazowych dowolnego typu. Port 1 jest używany w dwóch trybach. Pierwszy tryb służy do konfigurowania i transferu programu aplikacji z TwidoSoft. Drugi tryb jest dla sieci Remote Link. Opcjonalny Port 2, jeżeli jest dostępny, może być używany na dowolnym sterowniku, ale sterownik może mieć tylko jedno łącze Remote Link.
Krok 2: Połączenie okablowania sterowników:
Nota: W przykładzie dwa pierwsze wejścia w Oddalonych we/wy są na sztywno połączone z wyjściami.
Sterownik dodatkowy
I0.0
I0.1
Q0.0
Q0.1
Sterownik master Oddalone we/wy
A(+) B(-) GND DPT
Sterownik. . .master
A(+) B(-) GND DPT
Oddalone we/wyAdres 1
A(+) B(-) GND DPT
Sterownik dodatkowyAdres 2
Podłączenie Mini-DIN
1 2 7 5
Podłączenie listwy zaciskowej
A(+) B(-) 0V
Sterownikmaster
A(+) B(-) 0V
Oddalone we/wyAdres 1
A(+) B(-) 0V
Sterownik dodatkowyAdres 2
A B SG
. . .
108 TWD USE 10 AE
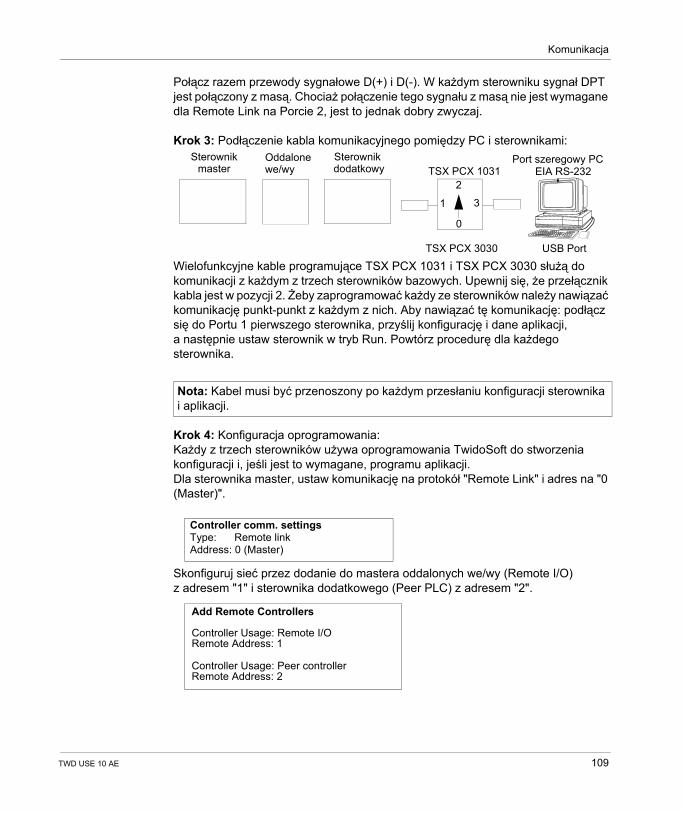
Komunikacja
Połącz razem przewody sygnałowe D(+) i D(-). W każdym sterowniku sygnał DPT jest połączony z masą. Chociaż połączenie tego sygnału z masą nie jest wymagane dla Remote Link na Porcie 2, jest to jednak dobry zwyczaj.
Krok 3: Podłączenie kabla komunikacyjnego pomiędzy PC i sterownikami:
Wielofunkcyjne kable programujące TSX PCX 1031 i TSX PCX 3030 służą do komunikacji z każdym z trzech sterowników bazowych. Upewnij się, że przełącznik kabla jest w pozycji 2. Żeby zaprogramować każdy ze sterowników należy nawiązać komunikację punkt-punkt z każdym z nich. Aby nawiązać tę komunikację: podłącz się do Portu 1 pierwszego sterownika, przyślij konfigurację i dane aplikacji, a następnie ustaw sterownik w tryb Run. Powtórz procedurę dla każdego sterownika.
Krok 4: Konfiguracja oprogramowania:Każdy z trzech sterowników używa oprogramowania TwidoSoft do stworzenia konfiguracji i, jeśli jest to wymagane, programu aplikacji. Dla sterownika master, ustaw komunikację na protokół "Remote Link" i adres na "0 (Master)".
Skonfiguruj sieć przez dodanie do mastera oddalonych we/wy (Remote I/O) z adresem "1" i sterownika dodatkowego (Peer PLC) z adresem "2".
Nota: Kabel musi być przenoszony po każdym przesłaniu konfiguracji sterownika i aplikacji.
1
2
3
0
Sterownik Sterownik OddaloneTSX PCX 1031
Port szeregowy PCEIA RS-232dodatkowymaster
TSX PCX 3030 USB Port
we/wy
Controller comm. settings Type: Remote link
Address: 0 (Master)
Add Remote Controllers
Controller Usage: Remote I/O
Controller Usage: Peer controller
Remote Address: 1
Remote Address: 2
TWD USE 10 AE 109
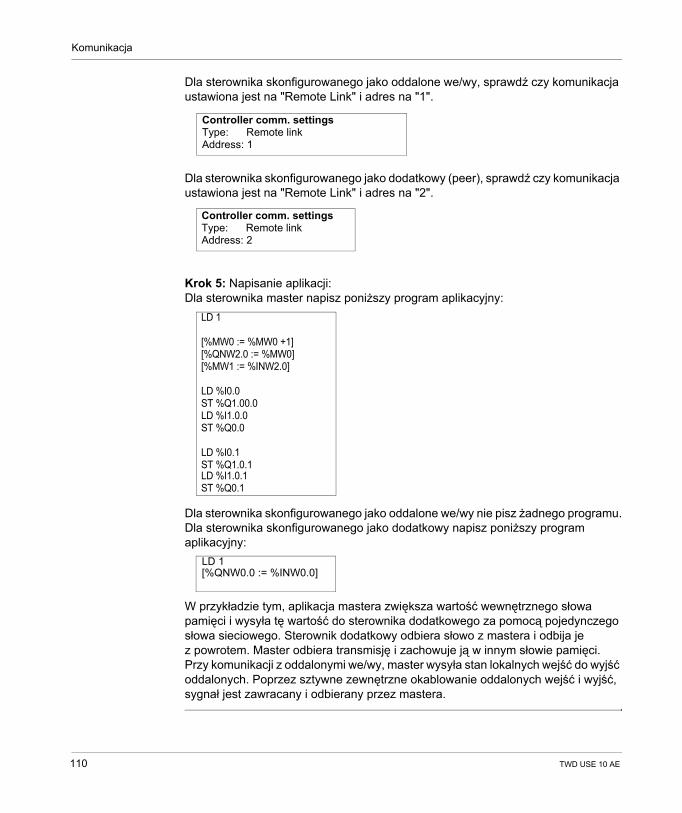
Komunikacja
Dla sterownika skonfigurowanego jako oddalone we/wy, sprawdź czy komunikacja ustawiona jest na "Remote Link" i adres na "1".
Dla sterownika skonfigurowanego jako dodatkowy (peer), sprawdź czy komunikacja ustawiona jest na "Remote Link" i adres na "2".
Krok 5: Napisanie aplikacji:Dla sterownika master napisz poniższy program aplikacyjny:
Dla sterownika skonfigurowanego jako oddalone we/wy nie pisz żadnego programu.Dla sterownika skonfigurowanego jako dodatkowy napisz poniższy program aplikacyjny:
W przykładzie tym, aplikacja mastera zwiększa wartość wewnętrznego słowa pamięci i wysyła tę wartość do sterownika dodatkowego za pomocą pojedynczego słowa sieciowego. Sterownik dodatkowy odbiera słowo z mastera i odbija je z powrotem. Master odbiera transmisję i zachowuje ją w innym słowie pamięci.Przy komunikacji z oddalonymi we/wy, master wysyła stan lokalnych wejść do wyjść oddalonych. Poprzez sztywne zewnętrzne okablowanie oddalonych wejść i wyjść, sygnał jest zawracany i odbierany przez mastera.
Controller comm. settings Type: Remote link
Address: 1
Controller comm. settings Type: Remote link
Address: 2
LD 1
[%MW0 := %MW0 +1][%QNW2.0 := %MW0][%MW1 := %INW2.0]
LD %I0.0ST %Q1.00.0LD %I1.0.0ST %Q0.0
LD %I0.1ST %Q1.0.1LD %I1.0.1ST %Q0.1
LD 1[%QNW0.0 := %INW0.0]
110 TWD USE 10 AE
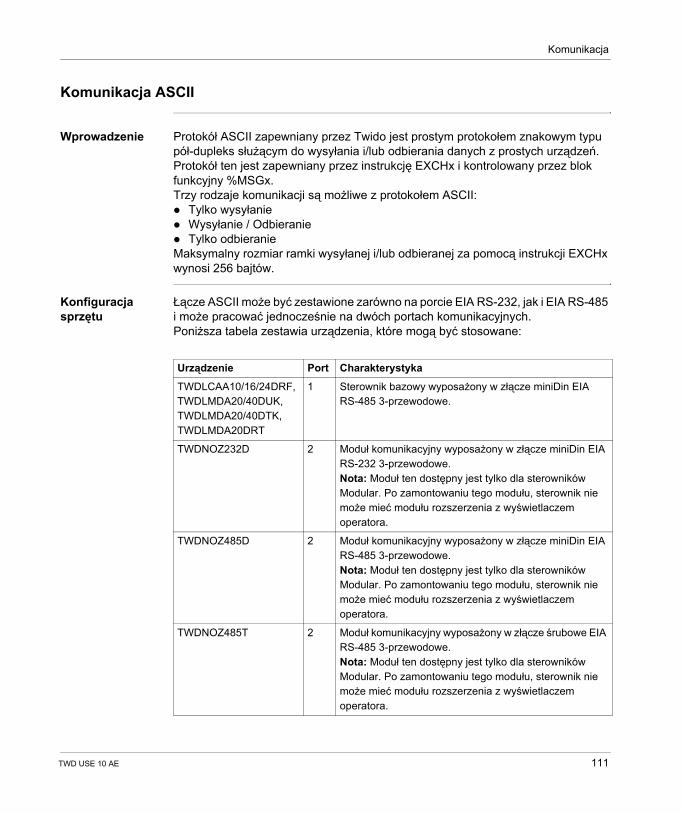
Komunikacja
Komunikacja ASCII
Wprowadzenie Protokół ASCII zapewniany przez Twido jest prostym protokołem znakowym typu pół-dupleks służącym do wysyłania i/lub odbierania danych z prostych urządzeń. Protokół ten jest zapewniany przez instrukcję EXCHx i kontrolowany przez blok funkcyjny %MSGx.Trzy rodzaje komunikacji są możliwe z protokołem ASCII:
Tylko wysyłanieWysyłanie / OdbieranieTylko odbieranie
Maksymalny rozmiar ramki wysyłanej i/lub odbieranej za pomocą instrukcji EXCHx wynosi 256 bajtów.
Konfiguracja sprzętu
Łącze ASCII może być zestawione zarówno na porcie EIA RS-232, jak i EIA RS-485 i może pracować jednocześnie na dwóch portach komunikacyjnych. Poniższa tabela zestawia urządzenia, które mogą być stosowane:
Urządzenie Port Charakterystyka
TWDLCAA10/16/24DRF, TWDLMDA20/40DUK, TWDLMDA20/40DTK, TWDLMDA20DRT
1 Sterownik bazowy wyposażony w złącze miniDin EIA RS-485 3-przewodowe.
TWDNOZ232D 2 Moduł komunikacyjny wyposażony w złącze miniDin EIA RS-232 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
TWDNOZ485D 2 Moduł komunikacyjny wyposażony w złącze miniDin EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
TWDNOZ485T 2 Moduł komunikacyjny wyposażony w złącze śrubowe EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
TWD USE 10 AE 111
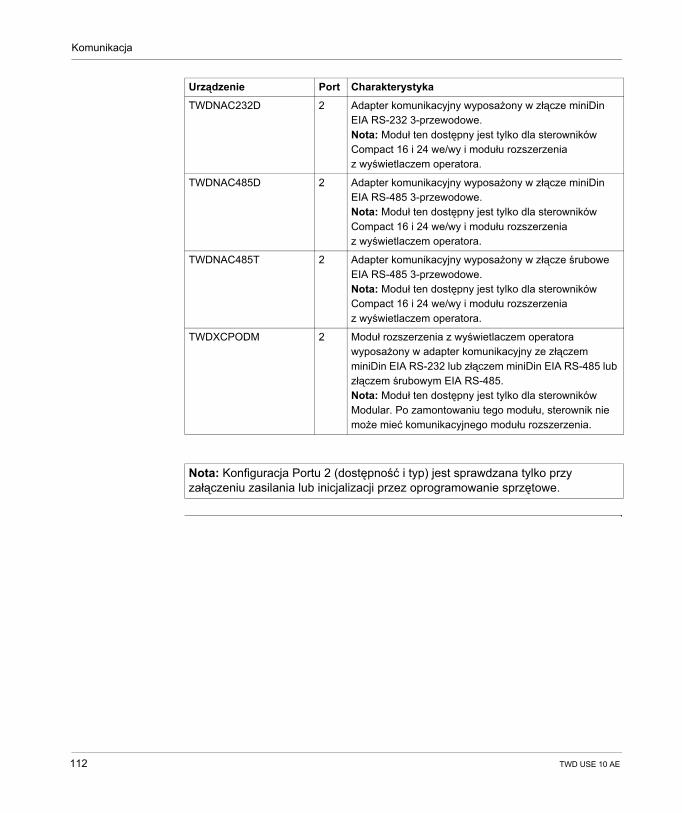
Komunikacja
TWDNAC232D 2 Adapter komunikacyjny wyposażony w złącze miniDin EIA RS-232 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDNAC485D 2 Adapter komunikacyjny wyposażony w złącze miniDin EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDNAC485T 2 Adapter komunikacyjny wyposażony w złącze śrubowe EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDXCPODM 2 Moduł rozszerzenia z wyświetlaczem operatora wyposażony w adapter komunikacyjny ze złączem miniDin EIA RS-232 lub złączem miniDin EIA RS-485 lub złączem śrubowym EIA RS-485.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć komunikacyjnego modułu rozszerzenia.
Nota: Konfiguracja Portu 2 (dostępność i typ) jest sprawdzana tylko przy załączeniu zasilania lub inicjalizacji przez oprogramowanie sprzętowe.
Urządzenie Port Charakterystyka
112 TWD USE 10 AE
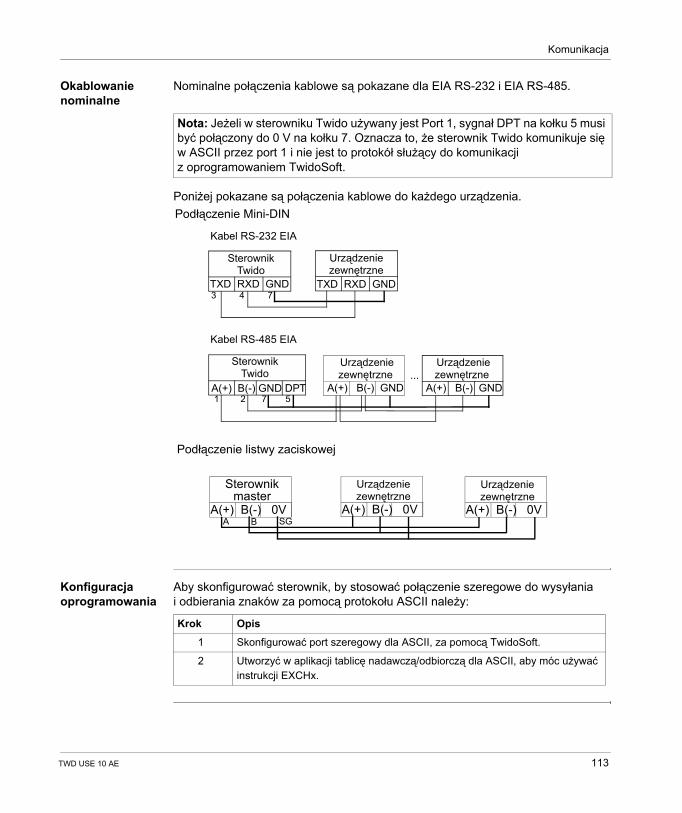
Komunikacja
Okablowanie nominalne
Nominalne połączenia kablowe są pokazane dla EIA RS-232 i EIA RS-485.
Poniżej pokazane są połączenia kablowe do każdego urządzenia.
Konfiguracja oprogramowania
Aby skonfigurować sterownik, by stosować połączenie szeregowe do wysyłania i odbierania znaków za pomocą protokołu ASCII należy:
Nota: Jeżeli w sterowniku Twido używany jest Port 1, sygnał DPT na kołku 5 musi być połączony do 0 V na kołku 7. Oznacza to, że sterownik Twido komunikuje się w ASCII przez port 1 i nie jest to protokół służący do komunikacji z oprogramowaniem TwidoSoft.
TXD RXD GND
SterownikTwido
Kabel RS-232 EIA
TXD RXD GND
Urządzeniezewnętrzne
A(+) B(-) GND DPT
Kabel RS-485 EIA
A(+) B(-) GND...
A(+) B(-) GND
Urządzeniezewnętrzne
Urządzeniezewnętrzne
SterownikTwido
3 4 7
1 2 7 5
Podłączenie Mini-DIN
Podłączenie listwy zaciskowej
A(+) B(-) 0V
Sterownikmaster
A(+) B(-) 0V
Urządzeniezewnętrzne
A(+) B(-) 0V
Urządzeniezewnętrzne
A B SG
Krok Opis
1 Skonfigurować port szeregowy dla ASCII, za pomocą TwidoSoft.
2 Utworzyć w aplikacji tablicę nadawczą/odbiorczą dla ASCII, aby móc używać instrukcji EXCHx.
TWD USE 10 AE 113
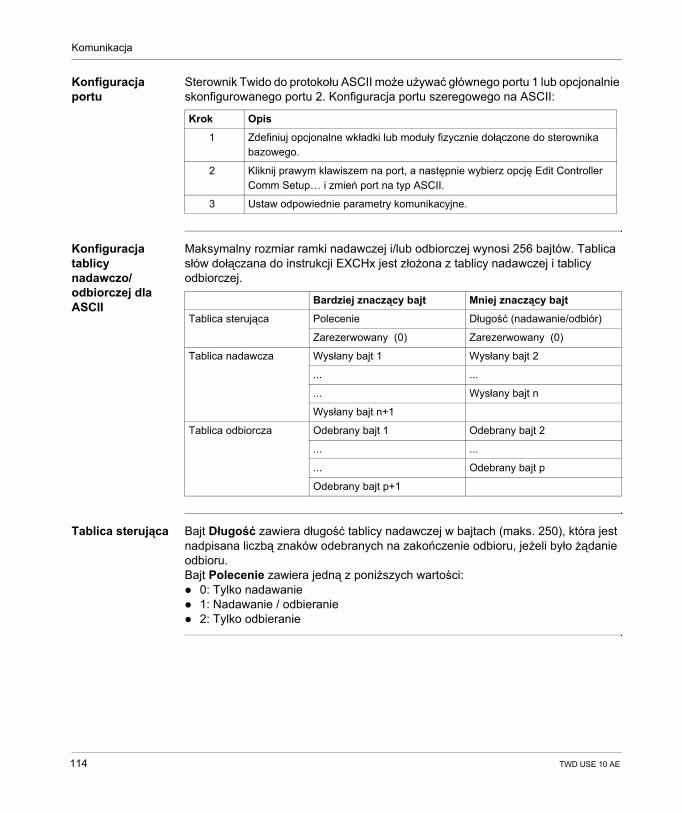
Komunikacja
Konfiguracja portu
Sterownik Twido do protokołu ASCII może używać głównego portu 1 lub opcjonalnie skonfigurowanego portu 2. Konfiguracja portu szeregowego na ASCII:
Konfiguracja tablicy nadawczo/odbiorczej dla ASCII
Maksymalny rozmiar ramki nadawczej i/lub odbiorczej wynosi 256 bajtów. Tablica słów dołączana do instrukcji EXCHx jest złożona z tablicy nadawczej i tablicy odbiorczej.
Tablica sterująca Bajt Długość zawiera długość tablicy nadawczej w bajtach (maks. 250), która jest nadpisana liczbą znaków odebranych na zakończenie odbioru, jeżeli było żądanie odbioru.Bajt Polecenie zawiera jedną z poniższych wartości:
0: Tylko nadawanie1: Nadawanie / odbieranie2: Tylko odbieranie
Krok Opis
1 Zdefiniuj opcjonalne wkładki lub moduły fizycznie dołączone do sterownika bazowego.
2 Kliknij prawym klawiszem na port, a następnie wybierz opcję Edit Controller Comm Setup… i zmień port na typ ASCII.
3 Ustaw odpowiednie parametry komunikacyjne.
Bardziej znaczący bajt Mniej znaczący bajt
Tablica sterująca Polecenie Długość (nadawanie/odbiór)
Zarezerwowany (0) Zarezerwowany (0)
Tablica nadawcza Wysłany bajt 1 Wysłany bajt 2
... ...
... Wysłany bajt n
Wysłany bajt n+1
Tablica odbiorcza Odebrany bajt 1 Odebrany bajt 2
... ...
... Odebrany bajt p
Odebrany bajt p+1
114 TWD USE 10 AE

Komunikacja
Tablice nadawcza i odbiorcza
W trybie Tylko Nadawanie tablice sterująca i nadawcza, przed wykonaniem instrukcji EXCHx, wypełnione są słowami, które mogą być typu %KW lub %MW. W tym trybie nie jest wymagana żadna przestrzeń do odbioru znaków. Po wysłaniu wszystkich bajtów, stan bitu %MSGx.D jest ustawiany na 1 i może być wykonana kolejna instrukcja EXCHx.W trybie Nadawanie / Odbieranie tablice sterująca i nadawcza są, przed wykonaniem instrukcji EXCHx, wypełnione słowami tylko typu %MW. Na końcu tablicy nadawczej potrzebna jest przestrzeń do umieszczenia do 256 bajtów odebranych. Po wysłaniu wszystkich bajtów, sterownik Twido przełącza się w tryb odbierania i czeka na odbiór dowolnych bajtów. W trybie Tylko Odbieranie tablica sterująca jest, przed wykonaniem instrukcji EXCHx, wypełniona słowami tylko typu %MW. Na końcu tablicy sterującej potrzebna jest przestrzeń do umieszczenia do 256 bajtów odebranych. Sterownik Twido natychmiast wchodzi w tryb odbierania i czeka na odbiór dowolnych bajtów. Odbiór kończy się, gdy odebrany jest bajt końca ramki lub zapełni się tablica odbiorcza. W ostatnim przypadku pojawi się błąd (przepełnienie tablicy odbiorczej) w słowach %SW63 i %SW64. Jeżeli została skonfigurowana niezerowa wartość czasu końca ramki (Response Timeout), odbiór kończy się po odliczeniu czasu. Jeżeli została wybrana zerowa wartość czasu końca ramki (Response Timeout), wtedy do zatrzymania odbioru należy aktywować wejście %MSGx.R.
Wymiana komunikatów
Język oferuje dwie usługi komunikacji:Instrukcja EXCHx: do nadawania/odbierania komunikatów,Blok funkcyjny %MSGx: do sterowania wymianą komunikatów.
Sterownik Twido używa protokołu skonfigurowanego dla tego portu, który przetwarzany jest w instrukcji EXCHx.
Nota: Każdy port komunikacyjny może być skonfigurowany dla różnych lub tych samych protokołów. Instrukcja EXCHx i blok funkcyjny %MSGx są dostępne dla każdego portu komunikacyjnego po dodaniu numeru portu (1 lub 2).
TWD USE 10 AE 115
Komunikacja
Instrukcja EXCHx
Instrukcja EXCHx pozwala sterownikowi Twido wysyłać i/lub odbierać informacje do / z urządzeń ASCII. Użytkownik definiuje tablicę słów (%MWi:L lub %KWi:L) zawierającą informacje sterujące i dane do wysłania i/lub odebrania (do 256 bajtów przy nadawaniu i/lub odbieraniu). Format tablicy słów jest opisany wcześniej.Wymiana komunikatów z użyciem instrukcji EXCHx:
Sterownik Twido musi zakończyć wymianę po pierwszej instrukcji EXCHx przed uruchomieniem drugiej. Wysyłając kilka wiadomości należy używać bloku funkcyjnego %MSGx.Przetwarzanie instrukcji EXCHx jest natychmiastowe, z nadawaniem uruchamianym przerwaniem (odbiór danych jest także sterowany przerwaniem), które uważane jest za przetwarzanie w tle.
Składnia: [EXCHx %MWi:L] lub [EXCHx %KWi:L]
L = liczba słów w tablicy sterującej, nadawczej i odbiorczej
gdzie: x = numer portu (1 lub 2)
116 TWD USE 10 AE
Komunikacja
Blok funkcyjny %MSGx
Stosowanie bloku funkcyjnego %MSGx jest opcjonalne; może być używany do zarządzania wymianą danych. Blok funkcyjny %MSGx ma trzy cele:
Sprawdzanie błędów komunikacjiSprawdzanie błędu kontroluje, czy parametr L (długość w tablicy słów) zaprogramowany z instrukcją EXCHx jest wystarczający do umieszczenia komunikatu do wysłania. Jest on porównywany z długością zaprogramowaną w mniej znaczącym bajcie pierwszego słowa tablicy.Koordynacja komunikatów wielokrotnychBlok funkcyjny %MSGx dostarcza informację o zakończeniu poprzedniego komunikatu, aby zapewnić koordynację wysyłania komunikatów wielokrotnych.Wysyłanie komunikatu priorytetowegoBlok funkcyjny %MSGx umożliwia zatrzymanie wysyłania bieżącego komunikatu, aby pozwolić na natychmiastowe wysłanie komunikatu pilnego.
Blok funkcyjny %MSGx na jedno wejście i dwa wyjścia:
Ograniczenia Należy odnotować następujące ograniczenia:Dostępność i typ Portu 2 (zobacz %SW7) jest sprawdzana tylko przy załączeniu zasilania lub resetowaniu.Przetwarzanie komunikatów na Porcie 1 jest przerywane, gdy podłączony jest TwidoSoft.EXCHx i %MSGx nie mogą być przetwarzane na porcie skonfigurowanym jako Remote Link.EXCHx przerywa aktywne przetwarzanie Modbus Slave (oprócz przetwarzania TwidoSoft).Przetwarzanie instrukcji EXCHx nie jest powtarzane w przypadku pojawienia się błędu.R %MSGx może być użyte do przerwania instrukcji EXCHx przetwarzającej odbieranie.Instrukcja EXCHx może być skonfigurowana z czasem zakończenia odbierania (timeout).Komunikaty wielokrotne są kontrolowane przez %MSG.D.
Wejście/wyjście Definicja Opis
R Wejście kasowania Ustawiane na 1: inicjalizuje komunikację lub resetuje blok (%MSGx=0 i %MSGx.D=1).
%MSGx.D Komunikacja kompletna
0: żądanie w trakcie1: komunikacja wykonana, jeśli koniec nadawania, odebrany znak końca, błąd lub zresetowanie bloku.
%MSGx.E Błąd 0: długość komunikatu OK i łącze OK.1: jeśli złe polecenie, nieprawidłowa konfiguracja tablicy, odebrany nieprawidłowy znak (prędkość, parzystość, itd.) lub pełna tablica odbioru.
TWD USE 10 AE 117
Komunikacja
Błąd i warunki trybu działania
Jeżeli, przy używaniu instrukcji EXCHx, zdarzy się błąd, bity %MSGx.D i %MSG.E ustawiane są na 1, a słowo systemowe %SW63 zawiera kod błędu dla Portu 1 i słowo systemowe %SW64 zawiera kod błędu dla Portu 2.
Skutki restartu sterownika dla komunikacji
Przy wznowieniu działania sterownika zachodzi jedno z poniższych zdarzeń:Zimny start (%S0 = 1) wymusza inicjalizację komunikacji.Gorący start (%S1 = 1) wymusza inicjalizację komunikacji.W trybie Stop sterownik zatrzymuje komunikację ASCII.
Słowa systemowe
Zastosowanie
%SW63 Kod błędu EXCH1:0 - działanie wykonane z sukcesem1 - bufor transmisji zbyt duży (> 250)2 - bufor transmisji zbyt mały3 - tablica słów zbyt mała4 - przepełniona tablica odbioru5 - minął czas zakończenia odbioru6 - nadawanie7 - złe polecenie w tablicy8 - wybrany port nieskonfigurowany / niedostępny9 - błąd odbioru (tylko tryb ASCII)10 - nie można używać %KW, jeżeli odbieranie11 - offset nadawczy większy niż tablica nadawania12 - offset odbiorczy większy niż tablica odbioru13 - sterownik zatrzymał przetwarzanie EXCH
%SW64 Kod błędu EXCH2. Patrz %SW63.
118 TWD USE 10 AE
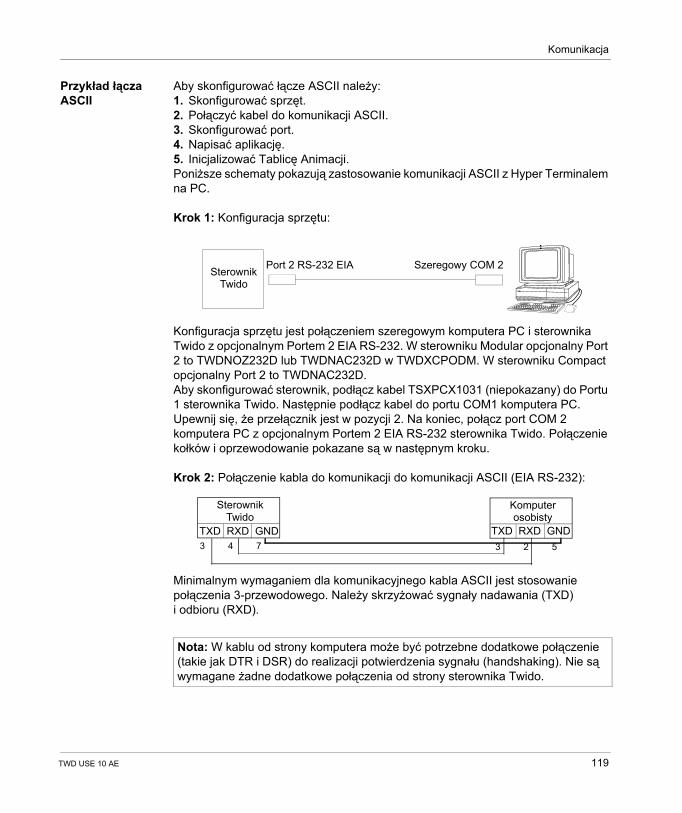
Komunikacja
Przykład łącza ASCII
Aby skonfigurować łącze ASCII należy:1. Skonfigurować sprzęt.2. Połączyć kabel do komunikacji ASCII.3. Skonfigurować port.4. Napisać aplikację.5. Inicjalizować Tablicę Animacji.Poniższe schematy pokazują zastosowanie komunikacji ASCII z Hyper Terminalem na PC.
Krok 1: Konfiguracja sprzętu:
Konfiguracja sprzętu jest połączeniem szeregowym komputera PC i sterownika Twido z opcjonalnym Portem 2 EIA RS-232. W sterowniku Modular opcjonalny Port 2 to TWDNOZ232D lub TWDNAC232D w TWDXCPODM. W sterowniku Compact opcjonalny Port 2 to TWDNAC232D.Aby skonfigurować sterownik, podłącz kabel TSXPCX1031 (niepokazany) do Portu 1 sterownika Twido. Następnie podłącz kabel do portu COM1 komputera PC. Upewnij się, że przełącznik jest w pozycji 2. Na koniec, połącz port COM 2 komputera PC z opcjonalnym Portem 2 EIA RS-232 sterownika Twido. Połączenie kołków i oprzewodowanie pokazane są w następnym kroku.
Krok 2: Połączenie kabla do komunikacji do komunikacji ASCII (EIA RS-232):
Minimalnym wymaganiem dla komunikacyjnego kabla ASCII jest stosowanie połączenia 3-przewodowego. Należy skrzyżować sygnały nadawania (TXD) i odbioru (RXD).
Nota: W kablu od strony komputera może być potrzebne dodatkowe połączenie (takie jak DTR i DSR) do realizacji potwierdzenia sygnału (handshaking). Nie są wymagane żadne dodatkowe połączenia od strony sterownika Twido.
Szeregowy COM 2Port 2 RS-232 EIA SterownikTwido
TXD RXD GNDTXD RXD GND
SterownikTwido
Komputerosobisty
3 4 7 3 2 5
TWD USE 10 AE 119
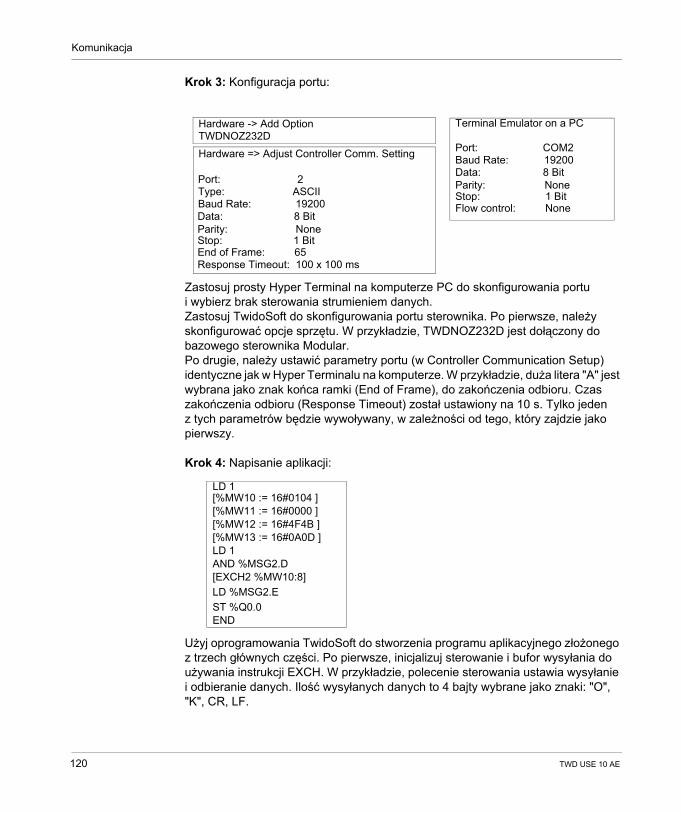
Komunikacja
Krok 3: Konfiguracja portu:
Zastosuj prosty Hyper Terminal na komputerze PC do skonfigurowania portu i wybierz brak sterowania strumieniem danych.Zastosuj TwidoSoft do skonfigurowania portu sterownika. Po pierwsze, należy skonfigurować opcje sprzętu. W przykładzie, TWDNOZ232D jest dołączony do bazowego sterownika Modular. Po drugie, należy ustawić parametry portu (w Controller Communication Setup) identyczne jak w Hyper Terminalu na komputerze. W przykładzie, duża litera "A" jest wybrana jako znak końca ramki (End of Frame), do zakończenia odbioru. Czas zakończenia odbioru (Response Timeout) został ustawiony na 10 s. Tylko jeden z tych parametrów będzie wywoływany, w zależności od tego, który zajdzie jako pierwszy.
Krok 4: Napisanie aplikacji:
Użyj oprogramowania TwidoSoft do stworzenia programu aplikacyjnego złożonego z trzech głównych części. Po pierwsze, inicjalizuj sterowanie i bufor wysyłania do używania instrukcji EXCH. W przykładzie, polecenie sterowania ustawia wysyłanie i odbieranie danych. Ilość wysyłanych danych to 4 bajty wybrane jako znaki: "O", "K", CR, LF.
Data: 8 BitParity: NoneStop: 1 BitEnd of Frame: 65
Port: 2Type: ASCIIBaud Rate: 19200
Terminal Emulator on a PC
Port: COM2Baud Rate: 19200Data: 8 BitParity: NoneStop: 1 BitFlow control: None
Hardware -> Add OptionTWDNOZ232DHardware => Adjust Controller Comm. Setting
Response Timeout: 100 x 100 ms
LD 1[%MW10 := 16#0104 ][%MW11 := 16#0000 ][%MW12 := 16#4F4B ][%MW13 := 16#0A0D ]LD 1AND %MSG2.D[EXCH2 %MW10:8]LD %MSG2.EST %Q0.0END
120 TWD USE 10 AE
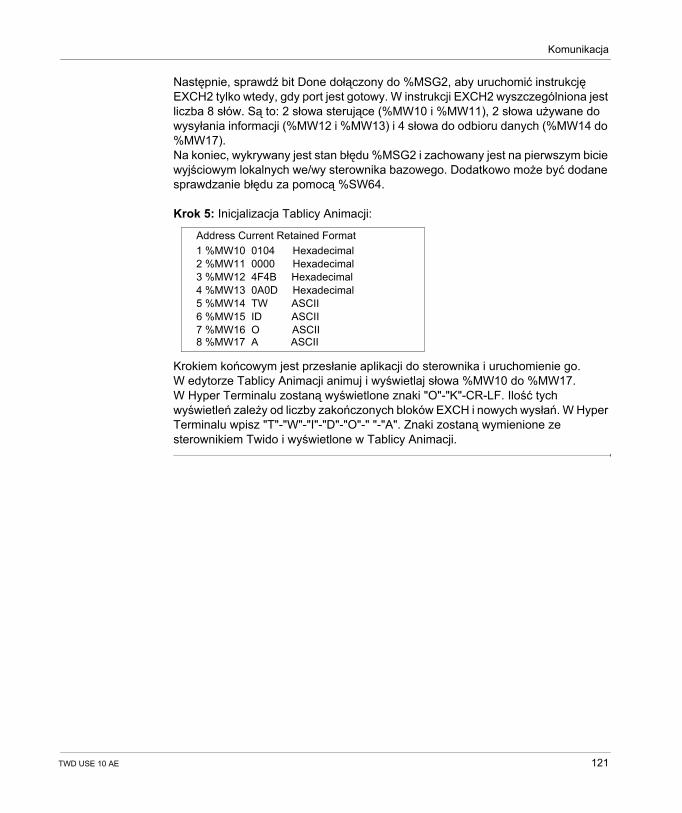
Komunikacja
Następnie, sprawdź bit Done dołączony do %MSG2, aby uruchomić instrukcję EXCH2 tylko wtedy, gdy port jest gotowy. W instrukcji EXCH2 wyszczególniona jest liczba 8 słów. Są to: 2 słowa sterujące (%MW10 i %MW11), 2 słowa używane do wysyłania informacji (%MW12 i %MW13) i 4 słowa do odbioru danych (%MW14 do %MW17).Na koniec, wykrywany jest stan błędu %MSG2 i zachowany jest na pierwszym bicie wyjściowym lokalnych we/wy sterownika bazowego. Dodatkowo może być dodane sprawdzanie błędu za pomocą %SW64.
Krok 5: Inicjalizacja Tablicy Animacji:
Krokiem końcowym jest przesłanie aplikacji do sterownika i uruchomienie go. W edytorze Tablicy Animacji animuj i wyświetlaj słowa %MW10 do %MW17. W Hyper Terminalu zostaną wyświetlone znaki "O"-"K"-CR-LF. Ilość tych wyświetleń zależy od liczby zakończonych bloków EXCH i nowych wysłań. W Hyper Terminalu wpisz "T"-"W"-"I"-"D"-"O"-" "-"A". Znaki zostaną wymienione ze sterownikiem Twido i wyświetlone w Tablicy Animacji.
Address Current Retained Format1 %MW10 0104 Hexadecimal2 %MW11 0000 Hexadecimal3 %MW12 4F4B Hexadecimal4 %MW13 0A0D Hexadecimal5 %MW14 TW ASCII6 %MW15 ID ASCII7 %MW16 O ASCII8 %MW17 A ASCII
TWD USE 10 AE 121
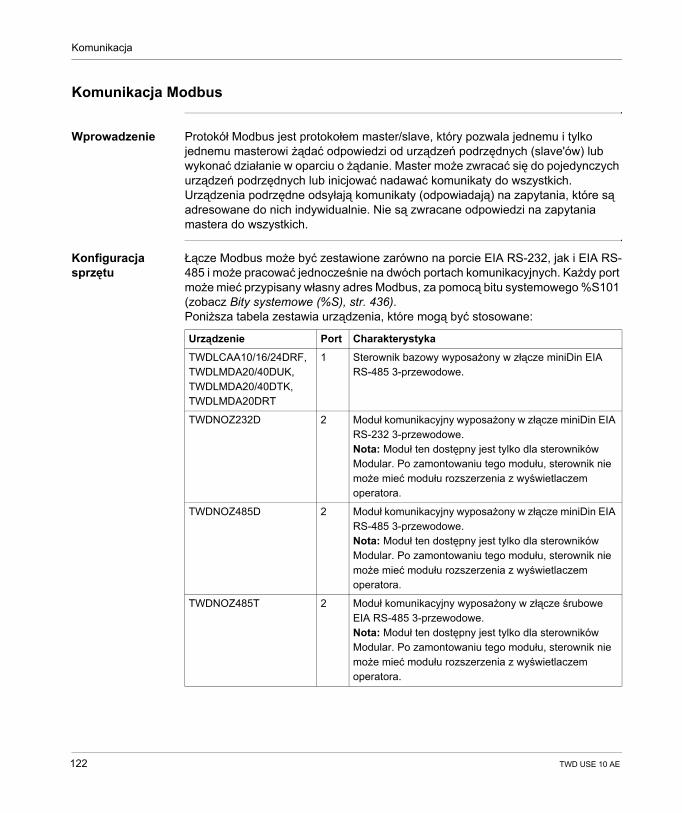
Komunikacja
Komunikacja Modbus
Wprowadzenie Protokół Modbus jest protokołem master/slave, który pozwala jednemu i tylko jednemu masterowi żądać odpowiedzi od urządzeń podrzędnych (slave'ów) lub wykonać działanie w oparciu o żądanie. Master może zwracać się do pojedynczych urządzeń podrzędnych lub inicjować nadawać komunikaty do wszystkich. Urządzenia podrzędne odsyłają komunikaty (odpowiadają) na zapytania, które są adresowane do nich indywidualnie. Nie są zwracane odpowiedzi na zapytania mastera do wszystkich.
Konfiguracja sprzętu
Łącze Modbus może być zestawione zarówno na porcie EIA RS-232, jak i EIA RS-485 i może pracować jednocześnie na dwóch portach komunikacyjnych. Każdy port może mieć przypisany własny adres Modbus, za pomocą bitu systemowego %S101 (zobacz Bity systemowe (%S), str. 436).Poniższa tabela zestawia urządzenia, które mogą być stosowane:
Urządzenie Port Charakterystyka
TWDLCAA10/16/24DRF, TWDLMDA20/40DUK, TWDLMDA20/40DTK, TWDLMDA20DRT
1 Sterownik bazowy wyposażony w złącze miniDin EIA RS-485 3-przewodowe.
TWDNOZ232D 2 Moduł komunikacyjny wyposażony w złącze miniDin EIA RS-232 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
TWDNOZ485D 2 Moduł komunikacyjny wyposażony w złącze miniDin EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
TWDNOZ485T 2 Moduł komunikacyjny wyposażony w złącze śrubowe EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć modułu rozszerzenia z wyświetlaczem operatora.
122 TWD USE 10 AE
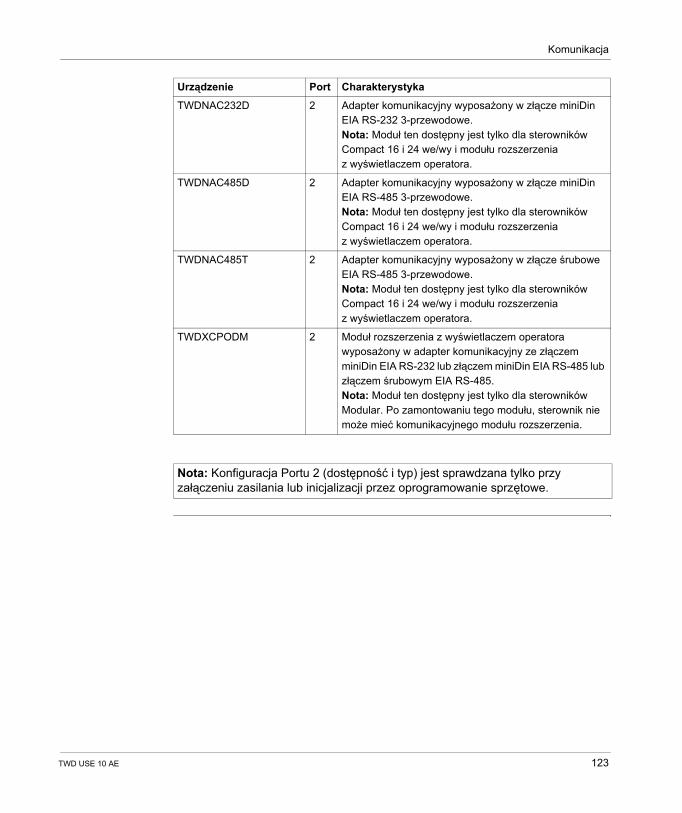
Komunikacja
TWDNAC232D 2 Adapter komunikacyjny wyposażony w złącze miniDin EIA RS-232 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDNAC485D 2 Adapter komunikacyjny wyposażony w złącze miniDin EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDNAC485T 2 Adapter komunikacyjny wyposażony w złącze śrubowe EIA RS-485 3-przewodowe.Nota: Moduł ten dostępny jest tylko dla sterowników Compact 16 i 24 we/wy i modułu rozszerzenia z wyświetlaczem operatora.
TWDXCPODM 2 Moduł rozszerzenia z wyświetlaczem operatora wyposażony w adapter komunikacyjny ze złączem miniDin EIA RS-232 lub złączem miniDin EIA RS-485 lub złączem śrubowym EIA RS-485.Nota: Moduł ten dostępny jest tylko dla sterowników Modular. Po zamontowaniu tego modułu, sterownik nie może mieć komunikacyjnego modułu rozszerzenia.
Nota: Konfiguracja Portu 2 (dostępność i typ) jest sprawdzana tylko przy załączeniu zasilania lub inicjalizacji przez oprogramowanie sprzętowe.
Urządzenie Port Charakterystyka
TWD USE 10 AE 123
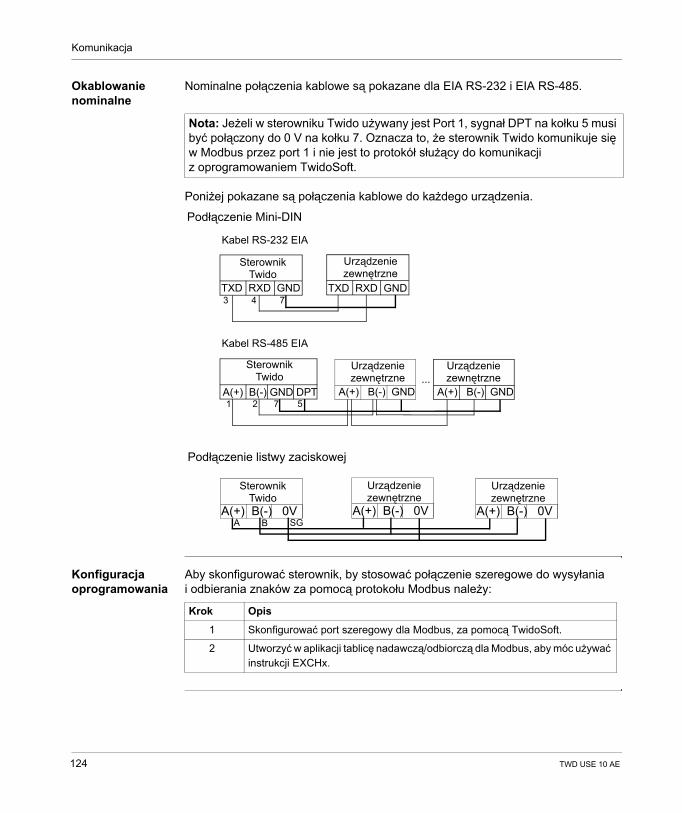
Komunikacja
Okablowanie nominalne
Nominalne połączenia kablowe są pokazane dla EIA RS-232 i EIA RS-485.
Poniżej pokazane są połączenia kablowe do każdego urządzenia.
Konfiguracja oprogramowania
Aby skonfigurować sterownik, by stosować połączenie szeregowe do wysyłania i odbierania znaków za pomocą protokołu Modbus należy:
Nota: Jeżeli w sterowniku Twido używany jest Port 1, sygnał DPT na kołku 5 musi być połączony do 0 V na kołku 7. Oznacza to, że sterownik Twido komunikuje się w Modbus przez port 1 i nie jest to protokół służący do komunikacji z oprogramowaniem TwidoSoft.
TXD RXD GND
SterownikTwido
Kabel RS-232 EIA
TXD RXD GND
Urządzeniezewnętrzne
A(+) B(-) GND DPT
Kabel RS-485 EIA
A(+) B(-) GND...
A(+) B(-) GND
Urządzeniezewnętrzne
Urządzeniezewnętrzne
SterownikTwido
3 4 7
1 2 7 5
Podłączenie Mini-DIN
Podłączenie listwy zaciskowej
A(+) B(-) 0V
SterownikTwido
A(+) B(-) 0V
Urządzeniezewnętrzne
A(+) B(-) 0V
Urządzeniezewnętrzne
A B SG
Krok Opis
1 Skonfigurować port szeregowy dla Modbus, za pomocą TwidoSoft.
2 Utworzyć w aplikacji tablicę nadawczą/odbiorczą dla Modbus, aby móc używać instrukcji EXCHx.
124 TWD USE 10 AE
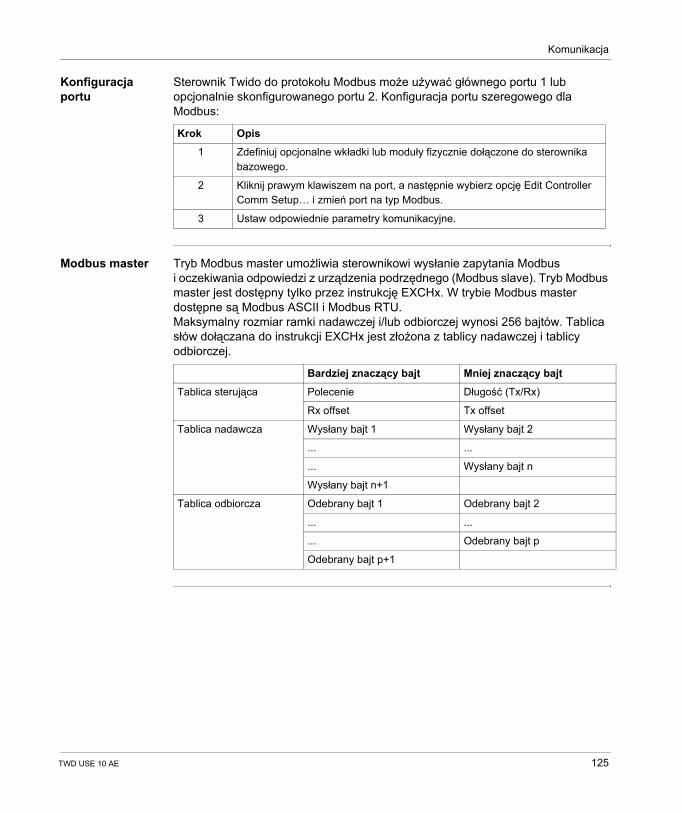
Komunikacja
Konfiguracja portu
Sterownik Twido do protokołu Modbus może używać głównego portu 1 lub opcjonalnie skonfigurowanego portu 2. Konfiguracja portu szeregowego dla Modbus:
Modbus master Tryb Modbus master umożliwia sterownikowi wysłanie zapytania Modbus i oczekiwania odpowiedzi z urządzenia podrzędnego (Modbus slave). Tryb Modbus master jest dostępny tylko przez instrukcję EXCHx. W trybie Modbus master dostępne są Modbus ASCII i Modbus RTU.Maksymalny rozmiar ramki nadawczej i/lub odbiorczej wynosi 256 bajtów. Tablica słów dołączana do instrukcji EXCHx jest złożona z tablicy nadawczej i tablicy odbiorczej.
Krok Opis
1 Zdefiniuj opcjonalne wkładki lub moduły fizycznie dołączone do sterownika bazowego.
2 Kliknij prawym klawiszem na port, a następnie wybierz opcję Edit Controller Comm Setup… i zmień port na typ Modbus.
3 Ustaw odpowiednie parametry komunikacyjne.
Bardziej znaczący bajt Mniej znaczący bajt
Tablica sterująca Polecenie Długość (Tx/Rx)
Rx offset Tx offset
Tablica nadawcza Wysłany bajt 1 Wysłany bajt 2
... ...
... Wysłany bajt n
Wysłany bajt n+1
Tablica odbiorcza Odebrany bajt 1 Odebrany bajt 2
... ...
... Odebrany bajt p
Odebrany bajt p+1
TWD USE 10 AE 125
Komunikacja
Tablica sterująca Bajt Długość zawiera długość tablicy nadawczej maksymalnie 256 bajtów, która jest nadpisana liczbą znaków na zakończenie odbioru, jeżeli było żądanie odbioru.Parametr ten jest długością tablicy nadawczej w bajtach. Jeżeli offset Tx jest równy 0, parametr ten będzie równy długości ramki nadawczej. Jeżeli offset Tx nie jest równy 0, jeden bajt bufora (wskazany przez wartość offsetu) nie będzie wysłany, a parametr jest równy długości ramki plus 1.Bajt Polecenia w przypadku zapytania Modbus RTU (oprócz nadawania do wszystkich - broadcast) musi być zawsze równy 1 (Tx i Rx). Bajt Offset Tx zawiera przesunięcie (1 dla pierwszego bajtu, 2 dla drugiego bajtu, itd.) w Tablicy Nadawczej do zignorowania przy transmisji pakietu. Służy to do wychwycenia wysłań przypisanych do wartości bajtów/słów w protokole Modbus. Np., jeśli ten bajt zawiera wartość 3, trzeci bajt będzie ignorowany, czyniąc czwarty bajt w tablicy, trzecim bajtem do wysłania. Bajt Offset Rx zawiera przesunięcie (1 dla pierwszego bajtu, 2 dla drugiego bajtu, itd.) w Tablicy Odbiorczej, dodawane przy transmisji pakietu. Służy to do wychwycenia odbiorów przypisanych do wartości bajtów/słów w protokole Modbus. Np., jeśli ten bajt zawiera wartość 3, trzeci bajt w tablicy będzie wypełniony przez ZERO i trzeci bajt będzie w rzeczywistości wprowadzany w czwartą pozycję tablicy.
126 TWD USE 10 AE
Komunikacja
Tablice nadawcza /odbiorcza
Stosując którykolwiek tryb (Modbus ASCII lub Modbus RTU), tablica nadawcza musi być wypełniona zapytaniem przed wykonaniem instrukcji EXCHx. W trakcie wykonywania jej, sterownik określa warstwę danych łącza i realizuje wszystkie potrzebne konwersje do przetworzenia wysyłania i odpowiedzi. Znaki początku, końca i kontroli nie są przechowywane w tablicach nadawczej i odbiorczej.Po wysłaniu wszystkich bajtów, sterownik przełącza się w tryb odbierania i czeka na odbiór dowolnych bajtów. Odbiór jest kończony na kilka sposobów:
zostanie wykryte przekroczenie czasu dla znaku lub ramki,odebranie znaku końca ramki w trybie ASCII,zapełnienie tablicy odbiorczej.
Wysłany bajt X wprowadza dane, zawierające protokół Modbus (kodowanie RTU), które zostaną wysłane. Jeżeli port komunikacyjny jest skonfigurowany na Modbus ASCII, znaki korekcji ramki dodawane są do transmisji. Bajt pierwszy zawiera adres urządzenia (określony lub nadawanie do wszystkich), bajt drugi zawiera kod funkcji, a pozostałe zawierają informacje związane z tą funkcją.
Odebrany bajt X prowadza dane, zawierające protokół Modbus (kodowanie RTU), które będą odebrane. Jeżeli port komunikacyjny jest skonfigurowany na Modbus ASCII, znaki korekcji ramki są usuwane z odpowiedzi. Bajt pierwszy zawiera adres urządzenia, bajt drugi zawiera kod funkcji (lub kod odpowiedzi), a pozostałe zawierają informacje związane z tą funkcją.
Nota: Jest to typowe zastosowanie, które nie wyczerpuje wszystkich możliwości. Żadne sprawdzanie danych transmitowanych nie będzie wykonywane.
Nota: Jest to typowe zastosowanie, które nie wyczerpuje wszystkich możliwości. Żadne sprawdzanie danych odbieranych nie będzie wykonywane, oprócz sprawdzania sumy kontrolnej.
TWD USE 10 AE 127
Komunikacja
Modbus Slave Tryb Modbus slave pozwala sterownikowi odpowiedzieć na zapytania Modbus ze sterownika Modbus master. Gdy do sterownika dołączony jest kabel TSXPCX1031, na porcie uruchomiony zostaje tryb Modbus slave, wyłączając czasowo tryb komunikacji, który działał przed dołączeniem kabla.Protokół Modbus ma dwa formaty danych (warstwy danych): ASCII i RTU. Każdy jest zdefiniowany przez realizację warstwy fizycznej, z ASCII używającym 7 bitów danych, z RTU używającym 8 bitów danych.Stosując tryb Modbus ASCII, każdy bajt w komunikacie jest wysyłany jako dwa znaki ASCII. Ramka Modbus ASCII zaczyna się znakiem początku (":"), a kończy dwoma znakami końca (CR i LF). Domyślny znak końca ramki (End of Frame) to 16#0x0A (przesuń o wiersz), ale użytkownik może modyfikować wartość tego bajtu podczas konfiguracji. Wartość kontrolna ramki Modbus ASCII jest prostym uzupełnieniem ramki do dwóch, wyłączając znaki początku i końca.Modbus RTU nie przeformatowuje komunikatów przed transmisją; jednakże używa innego trybu obliczania sumy kontrolnej, określanego jako CRC.W Modbusie warstwa danych ma następujące ograniczenia:
Adres: 1 - 247Bity: 128 bitów w zapytaniu, Słowa: 125 słowa 16-bitowe w zapytaniu,
Wymiana komunikatów
Sterownik Twido oferuje dwie usługi do wymiany danych:Instrukcja EXCHx: do nadawania/odbierania komunikatów,Blok funkcyjny %MSGx: do sterowania wymianą komunikatów.
Sterownik Twido używa protokołu skonfigurowanego dla portu, przy przetwarzaniu instrukcji EXCHx.
Nota: Każdy port komunikacyjny może być skonfigurowany dla różnych lub tych samych protokołów. Instrukcja EXCHx i blok funkcyjny %MSGx są dostępne dla każdego portu komunikacyjnego po dodaniu numeru portu (1 lub 2).
128 TWD USE 10 AE
Komunikacja
Instrukcja EXCHx
Instrukcja EXCHx pozwala sterownikowi Twido wysyłać i/lub odbierać informacje do / z urządzeń ASCII. Użytkownik definiuje tablicę słów (%MWi:L lub %KWi:L) zawierającą informacje sterujące i dane do wysłania i/lub odebrania (do 256 bajtów przy nadawaniu i/lub odbieraniu). Format tablicy słów jest opisany wcześniej.Wymiana komunikatów z użyciem instrukcji EXCHx:
Sterownik Twido musi zakończyć wymianę po pierwszej instrukcji EXCHx przed uruchomieniem drugiej. Wysyłając kilka wiadomości należy używać bloku funkcyjnego %MSGx.Przetwarzanie instrukcji EXCHx jest natychmiastowe, z nadawaniem uruchamianym przerwaniem (odbiór danych jest także sterowany przerwaniem), które uważane jest za przetwarzanie w tle.
Składnia: [EXCHx %MWi:L] lub [EXCHx %KWi:L]
gdzie: x = numer portu (1 lub 2)L = liczba słów w tablicy
TWD USE 10 AE 129
Komunikacja
Blok funkcyjny %MSGx
Stosowanie bloku funkcyjnego %MSGx jest opcjonalne; może być używany do zarządzania wymianą danych. Blok funkcyjny %MSGx ma trzy cele:
Sprawdzanie błędów komunikacjiSprawdzanie błędu kontroluje, czy długość bloku (tablicy słów) zaprogramowanego z instrukcją EXCHx jest wystarczająca do umieszczenia komunikatu do wysłania. Jest to porównywane z długością zaprogramowaną w mniej znaczącym bajcie pierwszego słowa tablicy.Koordynacja komunikatów wielokrotnychBlok funkcyjny %MSGx dostarcza informację o zakończeniu poprzedniego komunikatu, aby zapewnić koordynację wysyłania komunikatów wielokrotnych.Wysyłanie komunikatu priorytetowegoBlok funkcyjny %MSGx umożliwia zatrzymanie wysyłania bieżącego komunikatu, aby pozwolić na natychmiastowe wysłanie komunikatu pilnego.
Blok funkcyjny %MSGx na jedno wejście i dwa wyjścia:
Ograniczenia Należy odnotować następujące ograniczenia:Dostępność i typ Portu 2 jest sprawdzana tylko przy załączeniu zasilania lub resetowaniu.Przetwarzanie komunikatów na Porcie 1 jest przerywane, gdy podłączony jest TwidoSoft.EXCHx i %MSGx nie mogą być przetwarzane na porcie skonfigurowanym jako Remote Link.EXCHx przerywa aktywne przetwarzanie Modbus Slave (oprócz przetwarzania TwidoSoft).Przetwarzanie instrukcji EXCHx nie jest powtarzane w przypadku pojawienia się błędu.R %MSGx może być użyte do przerwania instrukcji EXCHx przetwarzającej odbieranie.Instrukcja EXCHx może być skonfigurowana z czasem zakończenia odbierania (timeout).Komunikaty wielokrotne są kontrolowane przez %MSG.D.
Wejście/wyjście Definicja Opis
R Wejście kasowania Ustawiane na 1: inicjalizuje komunikację lub resetuje blok (%MSGx=0 i %MSGx.D=1).
%MSGx.D Komunikacja kompletna
0: żądanie w trakcie1: komunikacja wykonana, jeśli koniec nadawania, odebrany znak końca, błąd lub zresetowanie bloku
%MSGx.E Błąd 0: długość komunikatu OK i łącze OK.1: jeśli złe polecenie, nieprawidłowa konfiguracja tablicy, odebrany nieprawidłowy znak (prędkość, parzystość, itd.) lub pełna tablica odbioru.
130 TWD USE 10 AE
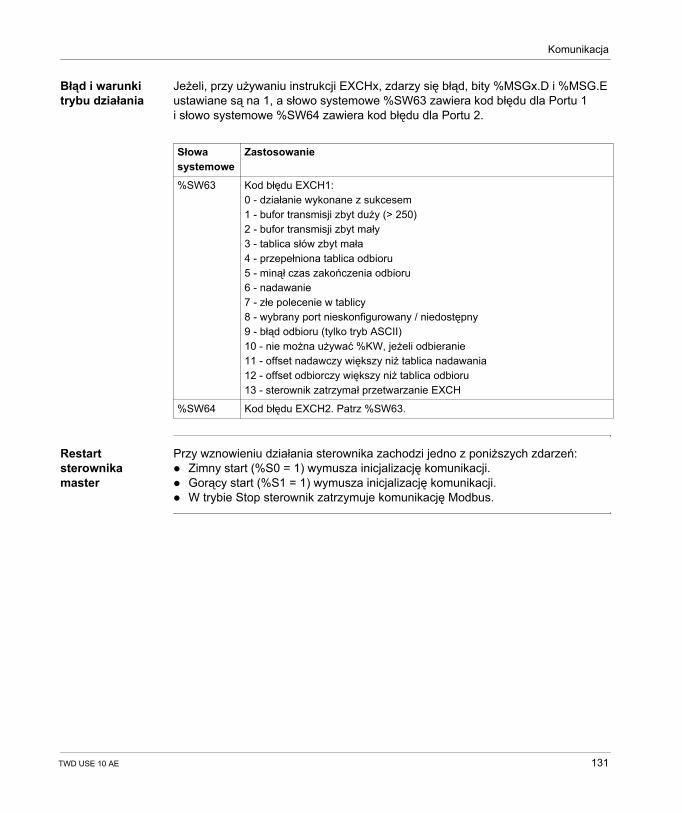
Komunikacja
Błąd i warunki trybu działania
Jeżeli, przy używaniu instrukcji EXCHx, zdarzy się błąd, bity %MSGx.D i %MSG.E ustawiane są na 1, a słowo systemowe %SW63 zawiera kod błędu dla Portu 1 i słowo systemowe %SW64 zawiera kod błędu dla Portu 2.
Restart sterownika master
Przy wznowieniu działania sterownika zachodzi jedno z poniższych zdarzeń:Zimny start (%S0 = 1) wymusza inicjalizację komunikacji.Gorący start (%S1 = 1) wymusza inicjalizację komunikacji.W trybie Stop sterownik zatrzymuje komunikację Modbus.
Słowa systemowe
Zastosowanie
%SW63 Kod błędu EXCH1:0 - działanie wykonane z sukcesem1 - bufor transmisji zbyt duży (> 250)2 - bufor transmisji zbyt mały3 - tablica słów zbyt mała4 - przepełniona tablica odbioru5 - minął czas zakończenia odbioru6 - nadawanie7 - złe polecenie w tablicy8 - wybrany port nieskonfigurowany / niedostępny9 - błąd odbioru (tylko tryb ASCII)10 - nie można używać %KW, jeżeli odbieranie11 - offset nadawczy większy niż tablica nadawania12 - offset odbiorczy większy niż tablica odbioru13 - sterownik zatrzymał przetwarzanie EXCH
%SW64 Kod błędu EXCH2. Patrz %SW63.
TWD USE 10 AE 131
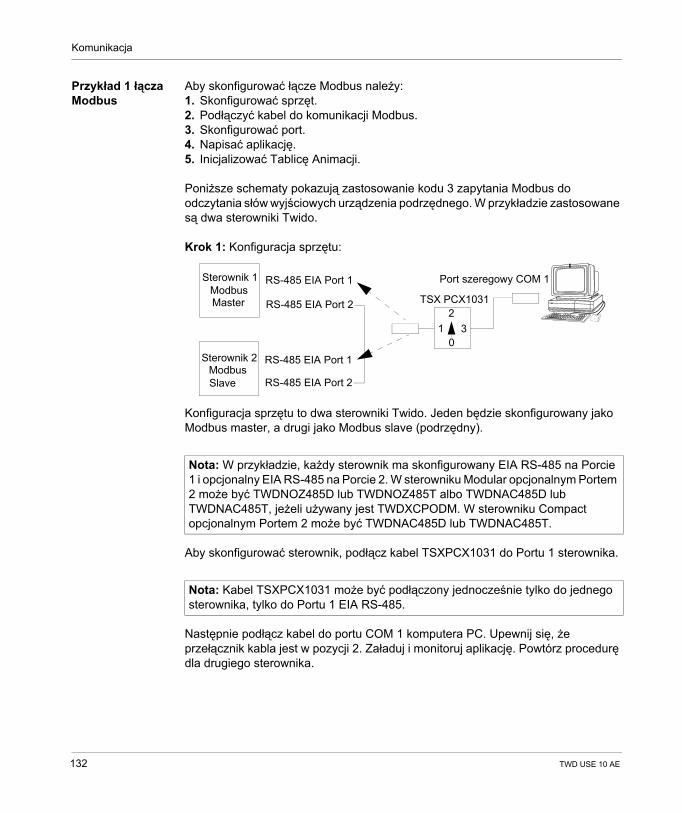
Komunikacja
Przykład 1 łącza Modbus
Aby skonfigurować łącze Modbus należy:1. Skonfigurować sprzęt.2. Podłączyć kabel do komunikacji Modbus.3. Skonfigurować port.4. Napisać aplikację.5. Inicjalizować Tablicę Animacji.
Poniższe schematy pokazują zastosowanie kodu 3 zapytania Modbus do odczytania słów wyjściowych urządzenia podrzędnego. W przykładzie zastosowane są dwa sterowniki Twido.
Krok 1: Konfiguracja sprzętu:
Konfiguracja sprzętu to dwa sterowniki Twido. Jeden będzie skonfigurowany jako Modbus master, a drugi jako Modbus slave (podrzędny).
Aby skonfigurować sterownik, podłącz kabel TSXPCX1031 do Portu 1 sterownika.
Następnie podłącz kabel do portu COM 1 komputera PC. Upewnij się, że przełącznik kabla jest w pozycji 2. Załaduj i monitoruj aplikację. Powtórz procedurę dla drugiego sterownika.
Nota: W przykładzie, każdy sterownik ma skonfigurowany EIA RS-485 na Porcie 1 i opcjonalny EIA RS-485 na Porcie 2. W sterowniku Modular opcjonalnym Portem 2 może być TWDNOZ485D lub TWDNOZ485T albo TWDNAC485D lub TWDNAC485T, jeżeli używany jest TWDXCPODM. W sterowniku Compact opcjonalnym Portem 2 może być TWDNAC485D lub TWDNAC485T.
Nota: Kabel TSXPCX1031 może być podłączony jednocześnie tylko do jednego sterownika, tylko do Portu 1 EIA RS-485.
Port szeregowy COM 1
12
30
RS-485 EIA Port 1Sterownik 1ModbusMaster
Sterownik 2ModbusSlave
RS-485 EIA Port 1
TSX PCX1031
RS-485 EIA Port 2
RS-485 EIA Port 2
132 TWD USE 10 AE
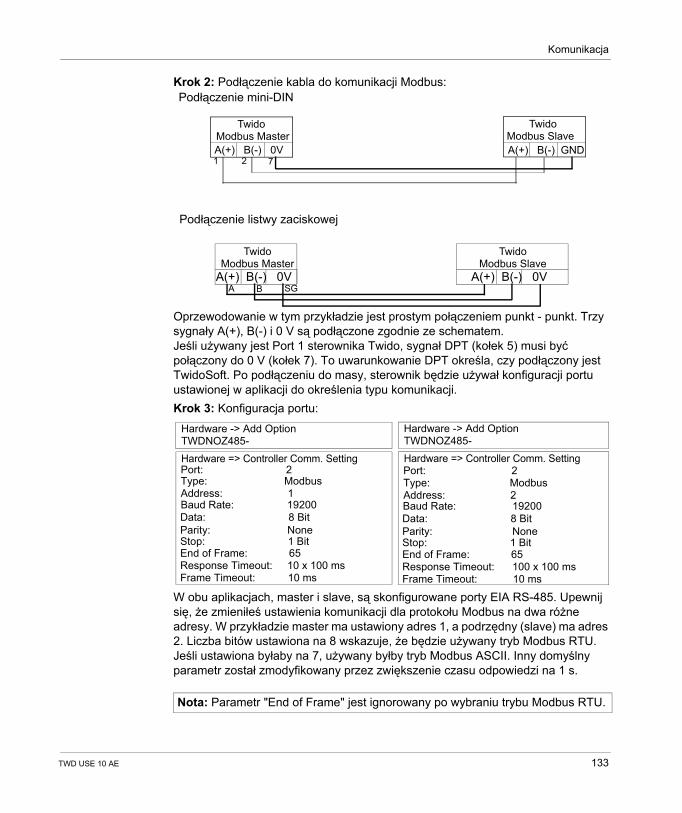
Komunikacja
Krok 2: Podłączenie kabla do komunikacji Modbus:
Oprzewodowanie w tym przykładzie jest prostym połączeniem punkt - punkt. Trzy sygnały A(+), B(-) i 0 V są podłączone zgodnie ze schematem.Jeśli używany jest Port 1 sterownika Twido, sygnał DPT (kołek 5) musi być połączony do 0 V (kołek 7). To uwarunkowanie DPT określa, czy podłączony jest TwidoSoft. Po podłączeniu do masy, sterownik będzie używał konfiguracji portu ustawionej w aplikacji do określenia typu komunikacji. Krok 3: Konfiguracja portu:
W obu aplikacjach, master i slave, są skonfigurowane porty EIA RS-485. Upewnij się, że zmieniłeś ustawienia komunikacji dla protokołu Modbus na dwa różne adresy. W przykładzie master ma ustawiony adres 1, a podrzędny (slave) ma adres 2. Liczba bitów ustawiona na 8 wskazuje, że będzie używany tryb Modbus RTU. Jeśli ustawiona byłaby na 7, używany byłby tryb Modbus ASCII. Inny domyślny parametr został zmodyfikowany przez zwiększenie czasu odpowiedzi na 1 s.
Nota: Parametr "End of Frame" jest ignorowany po wybraniu trybu Modbus RTU.
A(+) B(-) 0V A(+) B(-) GND
TwidoModbus Slave
TwidoModbus Master
1 2 7
Podłączenie mini-DIN
Podłączenie listwy zaciskowej
A(+) B(-) 0V
TwidoModbus Master
A(+) B(-) 0V
TwidoModbus Slave
A B SG
Data: 8 BitParity: NoneStop: 1 BitEnd of Frame: 65
Port: 2Type: Modbus
Baud Rate: 19200
Hardware -> Add OptionTWDNOZ485-Hardware => Controller Comm. Setting
Response Timeout: 100 x 100 ms
Data: 8 BitParity: NoneStop: 1 BitEnd of Frame: 65
Port: 2Type: Modbus
Baud Rate: 19200
Hardware -> Add OptionTWDNOZ485-Hardware => Controller Comm. Setting
Response Timeout: 10 x 100 ms
Frame Timeout: 10 ms Frame Timeout: 10 ms
Address: 1 Address: 2
TWD USE 10 AE 133
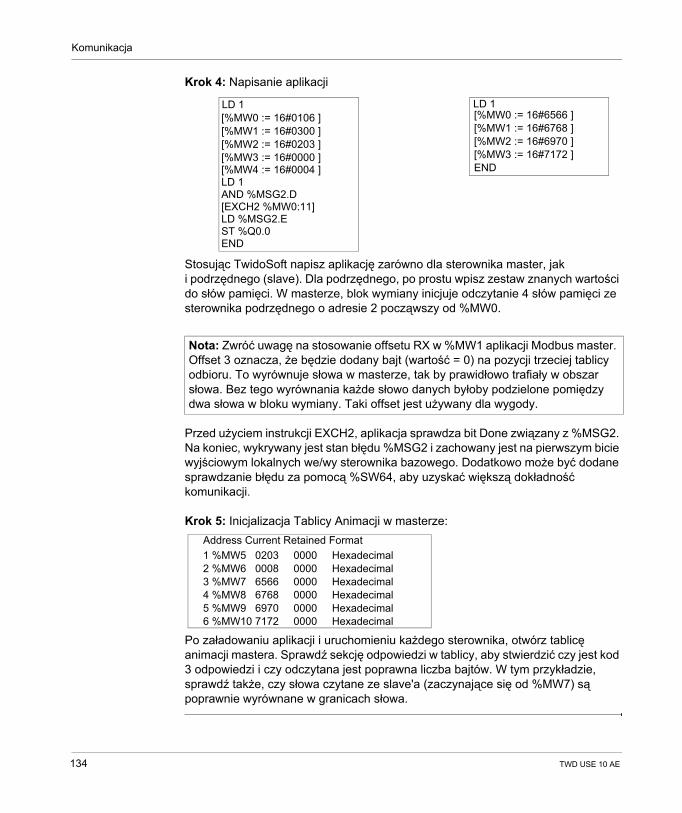
Komunikacja
Krok 4: Napisanie aplikacji
Stosując TwidoSoft napisz aplikację zarówno dla sterownika master, jak i podrzędnego (slave). Dla podrzędnego, po prostu wpisz zestaw znanych wartości do słów pamięci. W masterze, blok wymiany inicjuje odczytanie 4 słów pamięci ze sterownika podrzędnego o adresie 2 począwszy od %MW0.
Przed użyciem instrukcji EXCH2, aplikacja sprawdza bit Done związany z %MSG2. Na koniec, wykrywany jest stan błędu %MSG2 i zachowany jest na pierwszym bicie wyjściowym lokalnych we/wy sterownika bazowego. Dodatkowo może być dodane sprawdzanie błędu za pomocą %SW64, aby uzyskać większą dokładność komunikacji.
Krok 5: Inicjalizacja Tablicy Animacji w masterze:
Po załadowaniu aplikacji i uruchomieniu każdego sterownika, otwórz tablicę animacji mastera. Sprawdź sekcję odpowiedzi w tablicy, aby stwierdzić czy jest kod 3 odpowiedzi i czy odczytana jest poprawna liczba bajtów. W tym przykładzie, sprawdź także, czy słowa czytane ze slave'a (zaczynające się od %MW7) są poprawnie wyrównane w granicach słowa.
Nota: Zwróć uwagę na stosowanie offsetu RX w %MW1 aplikacji Modbus master. Offset 3 oznacza, że będzie dodany bajt (wartość = 0) na pozycji trzeciej tablicy odbioru. To wyrównuje słowa w masterze, tak by prawidłowo trafiały w obszar słowa. Bez tego wyrównania każde słowo danych byłoby podzielone pomiędzy dwa słowa w bloku wymiany. Taki offset jest używany dla wygody.
[%MW0 := 16#6566 ][%MW1 := 16#6768 ][%MW2 := 16#6970 ][%MW3 := 16#7172 ]END
LD 1[%MW0 := 16#0106 ][%MW1 := 16#0300 ][%MW2 := 16#0203 ][%MW3 := 16#0000 ][%MW4 := 16#0004 ]LD 1AND %MSG2.D[EXCH2 %MW0:11]LD %MSG2.EST %Q0.0END
LD 1
Address Current Retained Format1 %MW5 0203 0000 Hexadecimal2 %MW6 0008 0000 Hexadecimal3 %MW7 6566 0000 Hexadecimal4 %MW8 6768 0000 Hexadecimal5 %MW9 6970 0000 Hexadecimal6 %MW10 7172 0000 Hexadecimal
134 TWD USE 10 AE
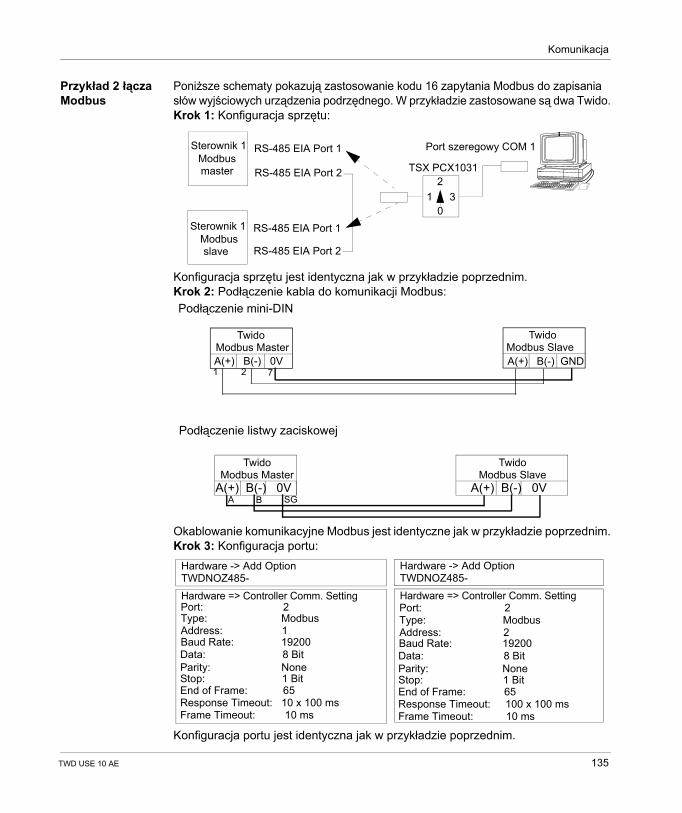
Komunikacja
Przykład 2 łącza Modbus
Poniższe schematy pokazują zastosowanie kodu 16 zapytania Modbus do zapisania słów wyjściowych urządzenia podrzędnego. W przykładzie zastosowane są dwa Twido.Krok 1: Konfiguracja sprzętu:
Konfiguracja sprzętu jest identyczna jak w przykładzie poprzednim.Krok 2: Podłączenie kabla do komunikacji Modbus:
Okablowanie komunikacyjne Modbus jest identyczne jak w przykładzie poprzednim.Krok 3: Konfiguracja portu:
Konfiguracja portu jest identyczna jak w przykładzie poprzednim.
Port szeregowy COM 1
12
30
RS-485 EIA Port 1Sterownik 1Modbusmaster
Sterownik 1Modbusslave
RS-485 EIA Port 1
TSX PCX1031
RS-485 EIA Port 2
RS-485 EIA Port 2
A(+) B(-) 0V A(+) B(-) GND
TwidoModbus Slave
TwidoModbus Master
1 2 7
Podłączenie mini-DIN
Podłączenie listwy zaciskowej
A(+) B(-) 0V
TwidoModbus Master
A(+) B(-) 0V
TwidoModbus Slave
A B SG
Data: 8 BitParity: NoneStop: 1 BitEnd of Frame: 65
Port: 2Type: Modbus
Baud Rate: 19200
Hardware -> Add OptionTWDNOZ485-Hardware => Controller Comm. Setting
Response Timeout: 100 x 100 ms
Data: 8 BitParity: NoneStop: 1 BitEnd of Frame: 65
Port: 2Type: Modbus
Baud Rate: 19200
Hardware -> Add OptionTWDNOZ485-Hardware => Controller Comm. Setting
Response Timeout: 10 x 100 ms
Frame Timeout: 10 ms Frame Timeout: 10 ms
Address: 1 Address: 2
TWD USE 10 AE 135
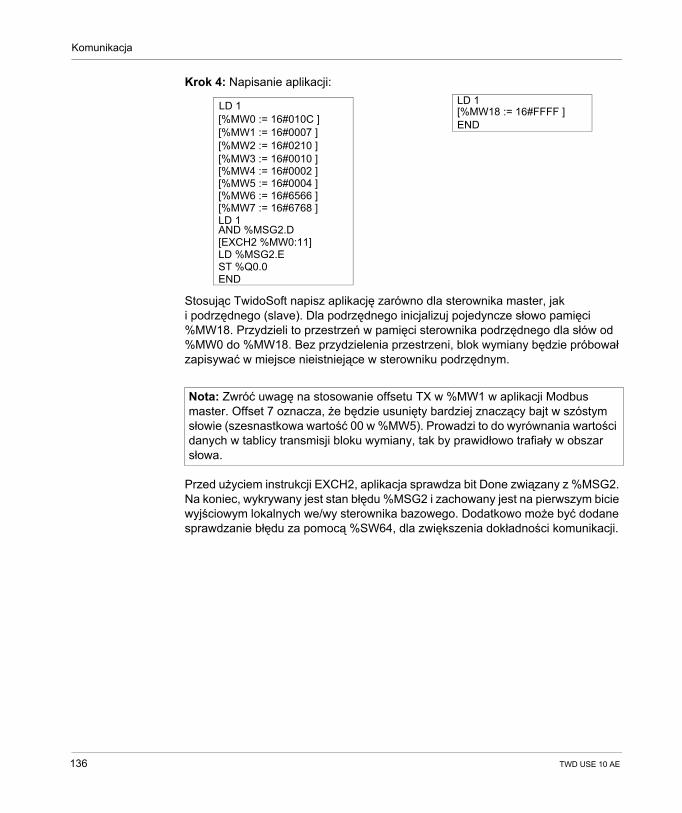
Komunikacja
Krok 4: Napisanie aplikacji:
Stosując TwidoSoft napisz aplikację zarówno dla sterownika master, jak i podrzędnego (slave). Dla podrzędnego inicjalizuj pojedyncze słowo pamięci %MW18. Przydzieli to przestrzeń w pamięci sterownika podrzędnego dla słów od %MW0 do %MW18. Bez przydzielenia przestrzeni, blok wymiany będzie próbował zapisywać w miejsce nieistniejące w sterowniku podrzędnym.
Przed użyciem instrukcji EXCH2, aplikacja sprawdza bit Done związany z %MSG2. Na koniec, wykrywany jest stan błędu %MSG2 i zachowany jest na pierwszym bicie wyjściowym lokalnych we/wy sterownika bazowego. Dodatkowo może być dodane sprawdzanie błędu za pomocą %SW64, dla zwiększenia dokładności komunikacji.
Nota: Zwróć uwagę na stosowanie offsetu TX w %MW1 w aplikacji Modbus master. Offset 7 oznacza, że będzie usunięty bardziej znaczący bajt w szóstym słowie (szesnastkowa wartość 00 w %MW5). Prowadzi to do wyrównania wartości danych w tablicy transmisji bloku wymiany, tak by prawidłowo trafiały w obszar słowa.
LD 1[%MW18 := 16#FFFF ]END
LD 1[%MW0 := 16#010C ][%MW1 := 16#0007 ][%MW2 := 16#0210 ][%MW3 := 16#0010 ][%MW4 := 16#0002 ]
LD 1AND %MSG2.D[EXCH2 %MW0:11]LD %MSG2.EST %Q0.0END
[%MW5 := 16#0004 ][%MW6 := 16#6566 ][%MW7 := 16#6768 ]
136 TWD USE 10 AE
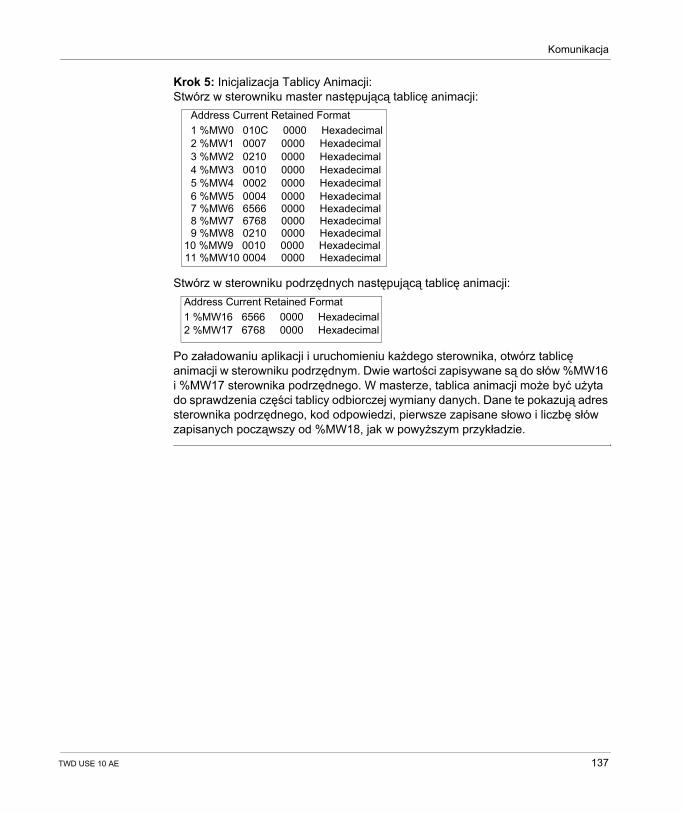
Komunikacja
Krok 5: Inicjalizacja Tablicy Animacji:Stwórz w sterowniku master następującą tablicę animacji:
Stwórz w sterowniku podrzędnych następującą tablicę animacji:
Po załadowaniu aplikacji i uruchomieniu każdego sterownika, otwórz tablicę animacji w sterowniku podrzędnym. Dwie wartości zapisywane są do słów %MW16 i %MW17 sterownika podrzędnego. W masterze, tablica animacji może być użyta do sprawdzenia części tablicy odbiorczej wymiany danych. Dane te pokazują adres sterownika podrzędnego, kod odpowiedzi, pierwsze zapisane słowo i liczbę słów zapisanych począwszy od %MW18, jak w powyższym przykładzie.
Address Current Retained Format1 %MW0 010C 0000 Hexadecimal2 %MW1 0007 0000 Hexadecimal3 %MW2 0210 0000 Hexadecimal4 %MW3 0010 0000 Hexadecimal5 %MW4 0002 0000 Hexadecimal6 %MW5 0004 0000 Hexadecimal7 %MW6 6566 0000 Hexadecimal8 %MW7 6768 0000 Hexadecimal9 %MW8 0210 0000 Hexadecimal
10 %MW9 0010 0000 Hexadecimal11 %MW10 0004 0000 Hexadecimal
Address Current Retained Format1 %MW16 6566 0000 Hexadecimal2 %MW17 6768 0000 Hexadecimal
TWD USE 10 AE 137
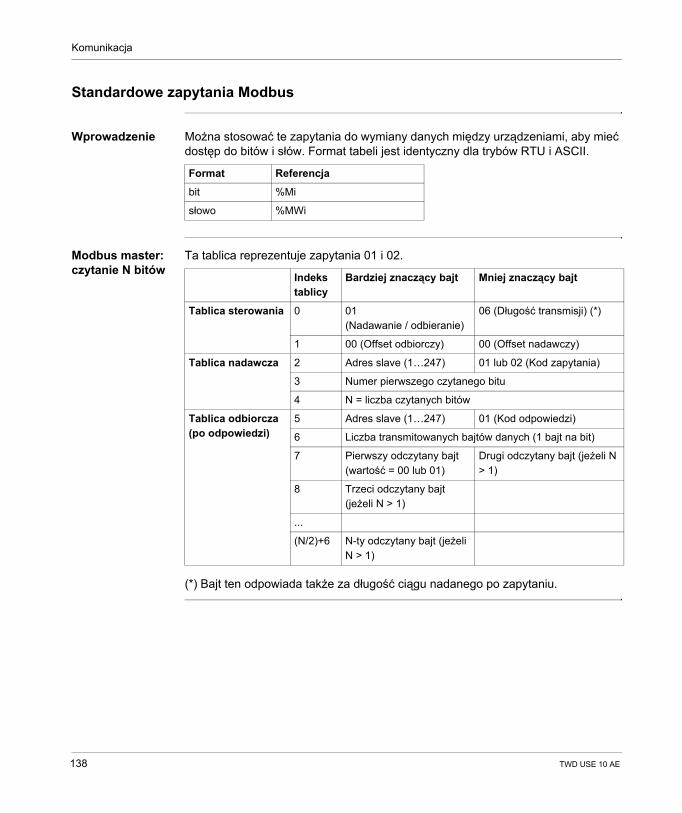
Komunikacja
Standardowe zapytania Modbus
Wprowadzenie Można stosować te zapytania do wymiany danych między urządzeniami, aby mieć dostęp do bitów i słów. Format tabeli jest identyczny dla trybów RTU i ASCII.
Modbus master: czytanie N bitów
Ta tablica reprezentuje zapytania 01 i 02.
(*) Bajt ten odpowiada także za długość ciągu nadanego po zapytaniu.
Format Referencja
bit %Mi
słowo %MWi
Indeks tablicy
Bardziej znaczący bajt Mniej znaczący bajt
Tablica sterowania 0 01 (Nadawanie / odbieranie)
06 (Długość transmisji) (*)
1 00 (Offset odbiorczy) 00 (Offset nadawczy)
Tablica nadawcza 2 Adres slave (1…247) 01 lub 02 (Kod zapytania)
3 Numer pierwszego czytanego bitu
4 N = liczba czytanych bitów
Tablica odbiorcza (po odpowiedzi)
5 Adres slave (1…247) 01 (Kod odpowiedzi)
6 Liczba transmitowanych bajtów danych (1 bajt na bit)
7 Pierwszy odczytany bajt (wartość = 00 lub 01)
Drugi odczytany bajt (jeżeli N > 1)
8 Trzeci odczytany bajt (jeżeli N > 1)
...
(N/2)+6 N-ty odczytany bajt (jeżeli N > 1)
138 TWD USE 10 AE
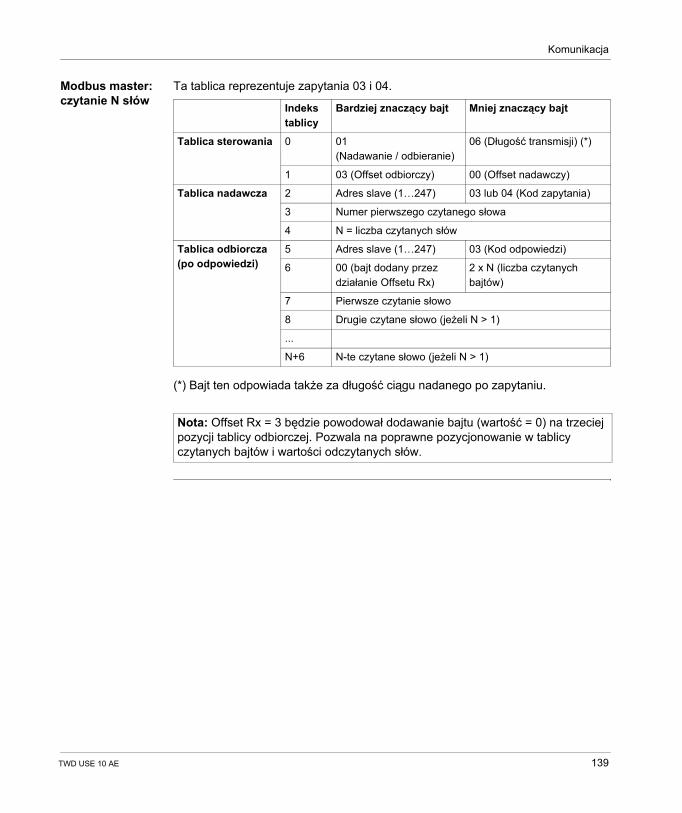
Komunikacja
Modbus master: czytanie N słów
Ta tablica reprezentuje zapytania 03 i 04.
(*) Bajt ten odpowiada także za długość ciągu nadanego po zapytaniu.
Indeks tablicy
Bardziej znaczący bajt Mniej znaczący bajt
Tablica sterowania 0 01 (Nadawanie / odbieranie)
06 (Długość transmisji) (*)
1 03 (Offset odbiorczy) 00 (Offset nadawczy)
Tablica nadawcza 2 Adres slave (1…247) 03 lub 04 (Kod zapytania)
3 Numer pierwszego czytanego słowa
4 N = liczba czytanych słów
Tablica odbiorcza (po odpowiedzi)
5 Adres slave (1…247) 03 (Kod odpowiedzi)
6 00 (bajt dodany przez działanie Offsetu Rx)
2 x N (liczba czytanych bajtów)
7 Pierwsze czytanie słowo
8 Drugie czytane słowo (jeżeli N > 1)
...
N+6 N-te czytane słowo (jeżeli N > 1)
Nota: Offset Rx = 3 będzie powodował dodawanie bajtu (wartość = 0) na trzeciej pozycji tablicy odbiorczej. Pozwala na poprawne pozycjonowanie w tablicy czytanych bajtów i wartości odczytanych słów.
TWD USE 10 AE 139
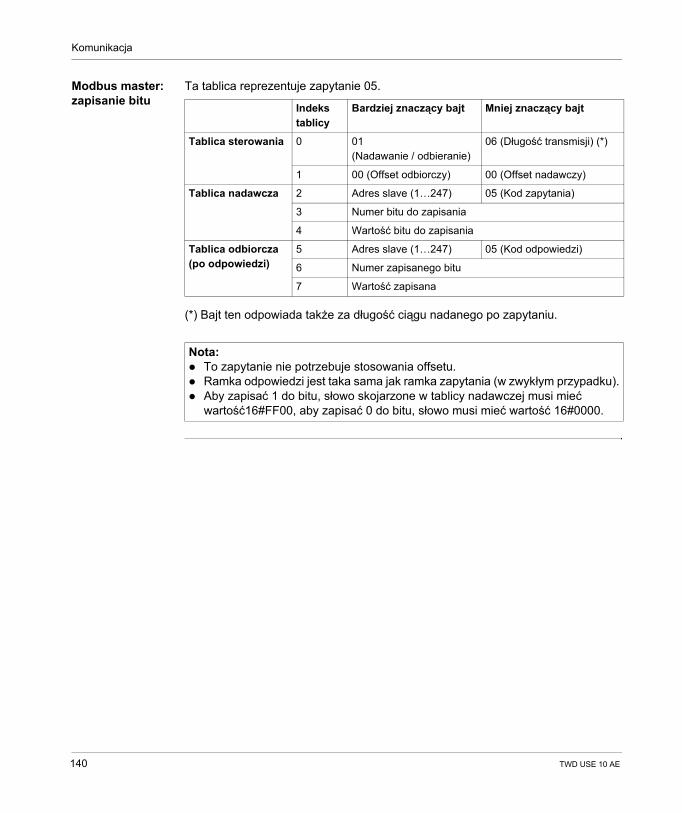
Komunikacja
Modbus master: zapisanie bitu
Ta tablica reprezentuje zapytanie 05.
(*) Bajt ten odpowiada także za długość ciągu nadanego po zapytaniu.
Indeks tablicy
Bardziej znaczący bajt Mniej znaczący bajt
Tablica sterowania 0 01 (Nadawanie / odbieranie)
06 (Długość transmisji) (*)
1 00 (Offset odbiorczy) 00 (Offset nadawczy)
Tablica nadawcza 2 Adres slave (1…247) 05 (Kod zapytania)
3 Numer bitu do zapisania
4 Wartość bitu do zapisania
Tablica odbiorcza (po odpowiedzi)
5 Adres slave (1…247) 05 (Kod odpowiedzi)
6 Numer zapisanego bitu
7 Wartość zapisana
Nota: To zapytanie nie potrzebuje stosowania offsetu.Ramka odpowiedzi jest taka sama jak ramka zapytania (w zwykłym przypadku).Aby zapisać 1 do bitu, słowo skojarzone w tablicy nadawczej musi mieć wartość16#FF00, aby zapisać 0 do bitu, słowo musi mieć wartość 16#0000.
140 TWD USE 10 AE
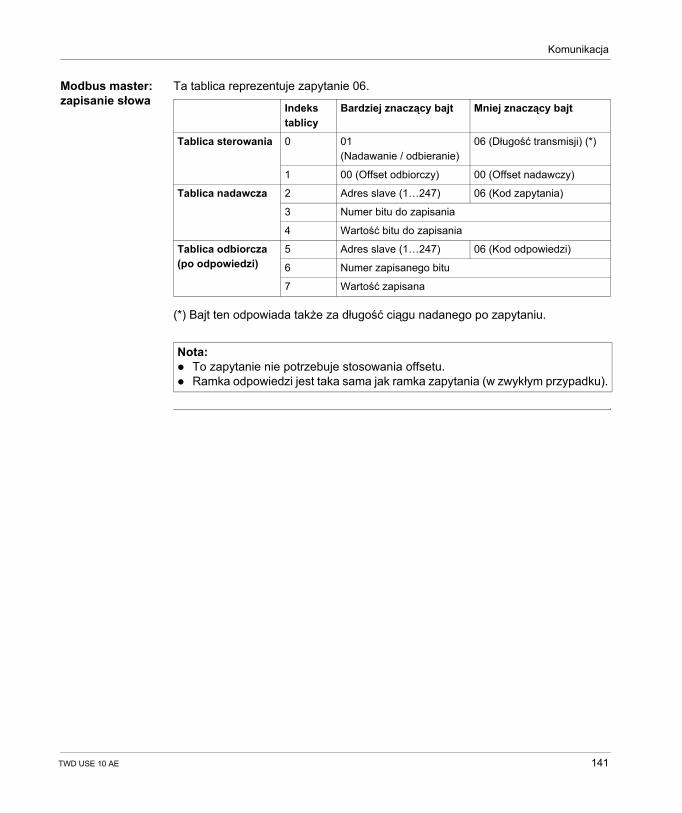
Komunikacja
Modbus master: zapisanie słowa
Ta tablica reprezentuje zapytanie 06.
(*) Bajt ten odpowiada także za długość ciągu nadanego po zapytaniu.
Indeks tablicy
Bardziej znaczący bajt Mniej znaczący bajt
Tablica sterowania 0 01 (Nadawanie / odbieranie)
06 (Długość transmisji) (*)
1 00 (Offset odbiorczy) 00 (Offset nadawczy)
Tablica nadawcza 2 Adres slave (1…247) 06 (Kod zapytania)
3 Numer bitu do zapisania
4 Wartość bitu do zapisania
Tablica odbiorcza (po odpowiedzi)
5 Adres slave (1…247) 06 (Kod odpowiedzi)
6 Numer zapisanego bitu
7 Wartość zapisana
Nota: To zapytanie nie potrzebuje stosowania offsetu.Ramka odpowiedzi jest taka sama jak ramka zapytania (w zwykłym przypadku).
TWD USE 10 AE 141
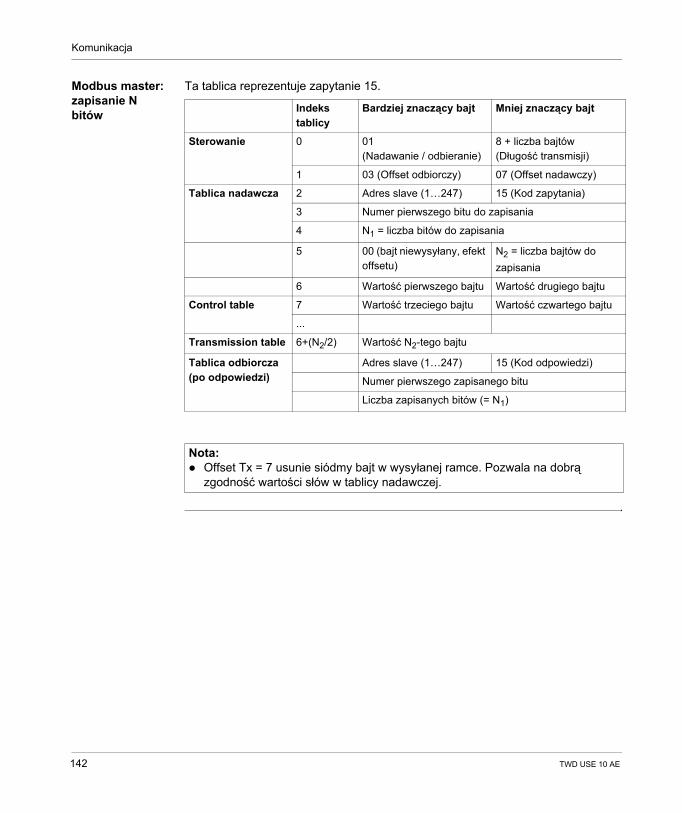
Komunikacja
Modbus master: zapisanie N bitów
Ta tablica reprezentuje zapytanie 15.
Indeks tablicy
Bardziej znaczący bajt Mniej znaczący bajt
Sterowanie 0 01 (Nadawanie / odbieranie)
8 + liczba bajtów (Długość transmisji)
1 03 (Offset odbiorczy) 07 (Offset nadawczy)
Tablica nadawcza 2 Adres slave (1…247) 15 (Kod zapytania)
3 Numer pierwszego bitu do zapisania
4 N1 = liczba bitów do zapisania
5 00 (bajt niewysyłany, efekt offsetu)
N2 = liczba bajtów do zapisania
6 Wartość pierwszego bajtu Wartość drugiego bajtu
Control table 7 Wartość trzeciego bajtu Wartość czwartego bajtu
...
Transmission table 6+(N2/2) Wartość N2-tego bajtu
Tablica odbiorcza (po odpowiedzi)
Adres slave (1…247) 15 (Kod odpowiedzi)
Numer pierwszego zapisanego bitu
Liczba zapisanych bitów (= N1)
Nota: Offset Tx = 7 usunie siódmy bajt w wysyłanej ramce. Pozwala na dobrą zgodność wartości słów w tablicy nadawczej.
142 TWD USE 10 AE
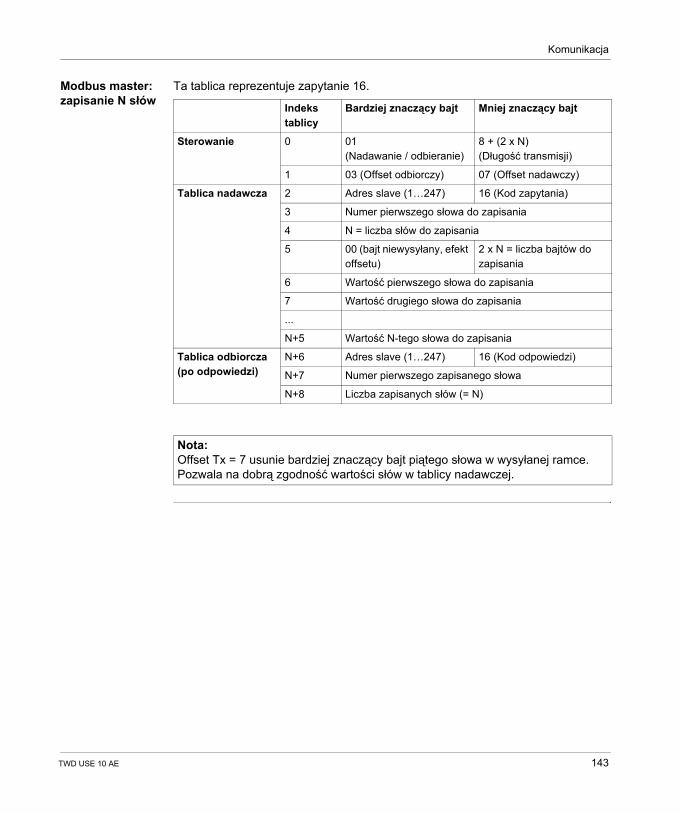
Komunikacja
Modbus master: zapisanie N słów
Ta tablica reprezentuje zapytanie 16.
Indeks tablicy
Bardziej znaczący bajt Mniej znaczący bajt
Sterowanie 0 01 (Nadawanie / odbieranie)
8 + (2 x N) (Długość transmisji)
1 03 (Offset odbiorczy) 07 (Offset nadawczy)
Tablica nadawcza 2 Adres slave (1…247) 16 (Kod zapytania)
3 Numer pierwszego słowa do zapisania
4 N = liczba słów do zapisania
5 00 (bajt niewysyłany, efekt offsetu)
2 x N = liczba bajtów do zapisania
6 Wartość pierwszego słowa do zapisania
7 Wartość drugiego słowa do zapisania
...
N+5 Wartość N-tego słowa do zapisania
Tablica odbiorcza (po odpowiedzi)
N+6 Adres slave (1…247) 16 (Kod odpowiedzi)
N+7 Numer pierwszego zapisanego słowa
N+8 Liczba zapisanych słów (= N)
Nota:Offset Tx = 7 usunie bardziej znaczący bajt piątego słowa w wysyłanej ramce. Pozwala na dobrą zgodność wartości słów w tablicy nadawczej.
TWD USE 10 AE 143

Komunikacja
144 TWD USE 10 AE
TWD USE 10 AE
7
Wbudowane funkcje analogoweRzut oka
Wprowadzenie Ten rozdział opisuje zarządzanie wbudowanymi kanałami analogowymi i potencjometrami.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Potencjometry 146
Kanał analogowy 148
145
Wbudowane funkcje analogowe
Potencjometry analogowe
Wprowadzenie Wszystkie sterowniki Twido mają:jeden potencjometr w sterownikach TWDLCAA10DRF, TWDLCAA16DRF i we wszystkich sterownikach Modular (TWDLMDA20DTK, TWDLMDA20DUK, TWDLMDA20DTR, TWDLMDA40DTK i TWDLMDA40DUK),dwa potencjometry w sterowniku TWDLCAA24DRF.
Programowanie Wartości liczbowe, od 0 do 1023 dla potencjometru analogowego 1 i od 0 do 511 dla potencjometru analogowego 2, odpowiadające wartościom analogowym dostarczanym przez te potencjometry, są umieszczone w poniższych słowach:
%IW0.0.0 dla potencjometru 1 (lewego)%IW0.0.1 dla potencjometru 2 (prawego)
Słowa te mogą być używane do operacji arytmetycznych. Mogą być używane do nastawiania, np. wartości zadanych bloków czasowych, liczników, częstotliwości generatora impulsów lub czasu wstępnego nagrzania maszyny.
146 TWD USE 10 AE
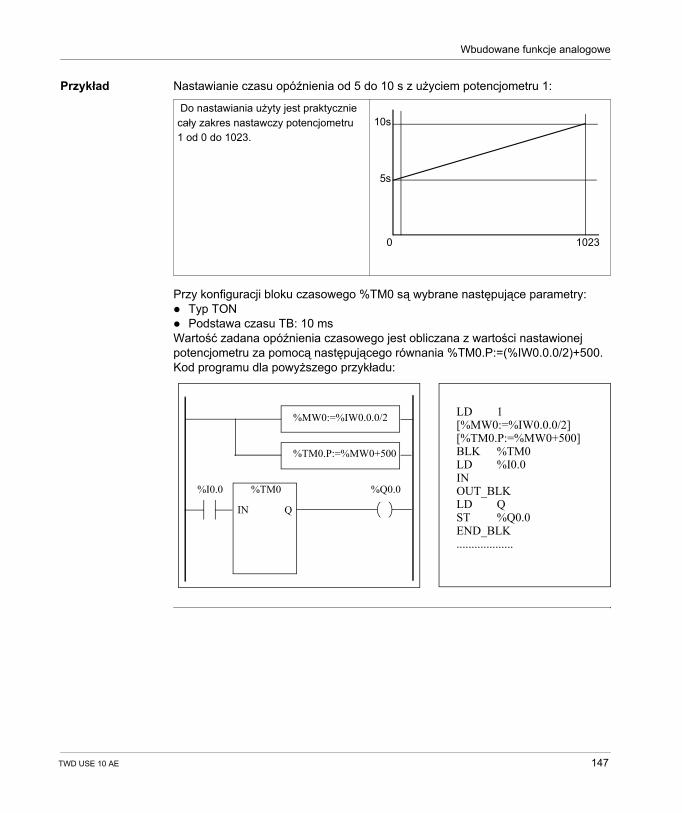
Wbudowane funkcje analogowe
Przykład Nastawianie czasu opóźnienia od 5 do 10 s z użyciem potencjometru 1:
Przy konfiguracji bloku czasowego %TM0 są wybrane następujące parametry:Typ TONPodstawa czasu TB: 10 ms
Wartość zadana opóźnienia czasowego jest obliczana z wartości nastawionej potencjometru za pomocą następującego równania %TM0.P:=(%IW0.0.0/2)+500.Kod programu dla powyższego przykładu:
Do nastawiania użyty jest praktycznie cały zakres nastawczy potencjometru 1 od 0 do 1023.
10s
5s
0 1023
LD 1[%MW0:=%IW0.0.0/2][%TM0.P:=%MW0+500]BLK %TM0LD %I0.0INOUT_BLKLD QST %Q0.0END_BLK...................
IN Q
%MW0:=%IW0.0.0/2
%TM0.P:=%MW0+500
%I0.0 %Q0.0%TM0
TWD USE 10 AE 147
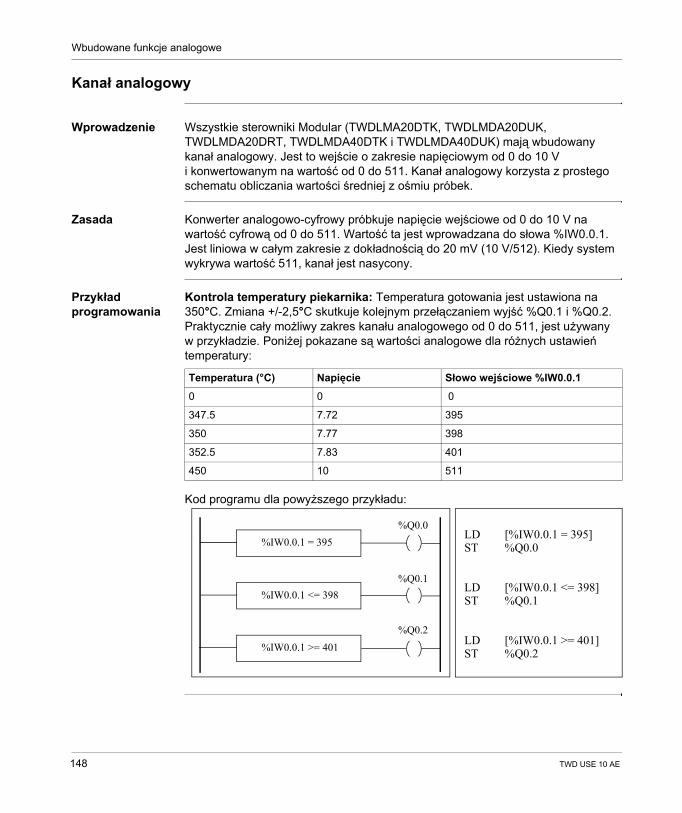
Wbudowane funkcje analogowe
Kanał analogowy
Wprowadzenie Wszystkie sterowniki Modular (TWDLMA20DTK, TWDLMDA20DUK, TWDLMDA20DRT, TWDLMDA40DTK i TWDLMDA40DUK) mają wbudowany kanał analogowy. Jest to wejście o zakresie napięciowym od 0 do 10 V i konwertowanym na wartość od 0 do 511. Kanał analogowy korzysta z prostego schematu obliczania wartości średniej z ośmiu próbek.
Zasada Konwerter analogowo-cyfrowy próbkuje napięcie wejściowe od 0 do 10 V na wartość cyfrową od 0 do 511. Wartość ta jest wprowadzana do słowa %IW0.0.1. Jest liniowa w całym zakresie z dokładnością do 20 mV (10 V/512). Kiedy system wykrywa wartość 511, kanał jest nasycony.
Przykład programowania
Kontrola temperatury piekarnika: Temperatura gotowania jest ustawiona na 350°C. Zmiana +/-2,5°C skutkuje kolejnym przełączaniem wyjść %Q0.1 i %Q0.2. Praktycznie cały możliwy zakres kanału analogowego od 0 do 511, jest używany w przykładzie. Poniżej pokazane są wartości analogowe dla różnych ustawień temperatury:
Kod programu dla powyższego przykładu:
Temperatura (°C) Napięcie Słowo wejściowe %IW0.0.1
0 0 0
347.5 7.72 395
350 7.77 398
352.5 7.83 401
450 10 511
LD [%IW0.0.1 = 395]ST %Q0.0
LD [%IW0.0.1 <= 398]ST %Q0.1
LD [%IW0.0.1 >= 401]ST %Q0.2
%IW0.0.1 = 395
%IW0.0.1 <= 398
%IW0.0.1 >= 401
%Q0.0
%Q0.1
%Q0.2
148 TWD USE 10 AE
TWD USE 10 AE
8
Zarządzanie modułami analogowymiRzut oka
Wprowadzenie Ten rozdział opisuje zarządzanie modułami analogowymi sterowników Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Opis modułów analogowych 150
Adresowanie wejść i wyjść analogowych 151
Konfigurowanie wejść i wyjść analogowych 152
Informacje stanu modułu analogowego 154
Przykład stosowania modułów analogowych 155
149
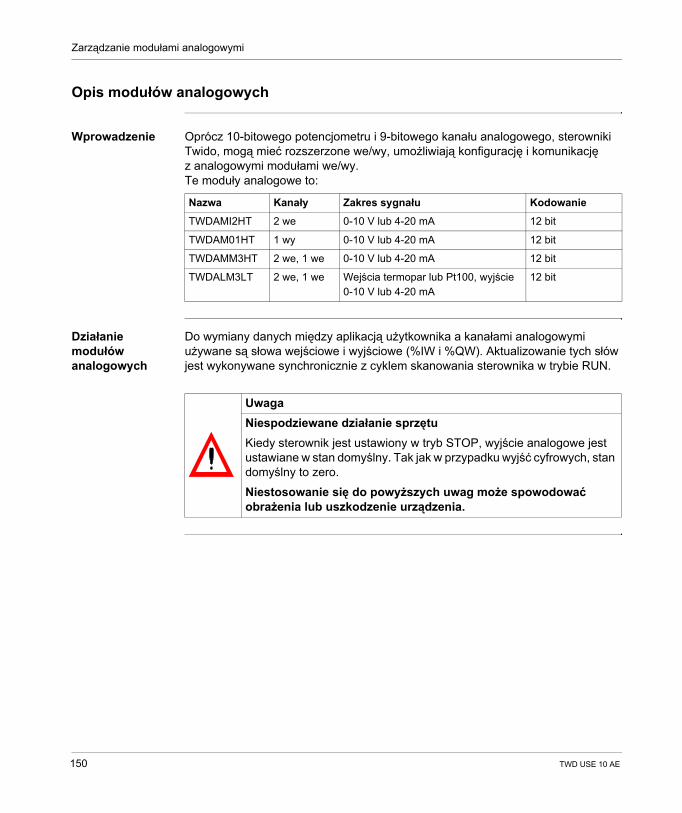
Zarządzanie modułami analogowymi
Opis modułów analogowych
Wprowadzenie Oprócz 10-bitowego potencjometru i 9-bitowego kanału analogowego, sterowniki Twido, mogą mieć rozszerzone we/wy, umożliwiają konfigurację i komunikację z analogowymi modułami we/wy.Te moduły analogowe to:
Działanie modułów analogowych
Do wymiany danych między aplikacją użytkownika a kanałami analogowymi używane są słowa wejściowe i wyjściowe (%IW i %QW). Aktualizowanie tych słów jest wykonywane synchronicznie z cyklem skanowania sterownika w trybie RUN.
Nazwa Kanały Zakres sygnału Kodowanie
TWDAMI2HT 2 we 0-10 V lub 4-20 mA 12 bit
TWDAM01HT 1 wy 0-10 V lub 4-20 mA 12 bit
TWDAMM3HT 2 we, 1 we 0-10 V lub 4-20 mA 12 bit
TWDALM3LT 2 we, 1 we Wejścia termopar lub Pt100, wyjście 0-10 V lub 4-20 mA
12 bit
UwagaNiespodziewane działanie sprzętuKiedy sterownik jest ustawiony w tryb STOP, wyjście analogowe jest ustawiane w stan domyślny. Tak jak w przypadku wyjść cyfrowych, stan domyślny to zero.
Niestosowanie się do powyższych uwag może spowodować obrażenia lub uszkodzenie urządzenia.
150 TWD USE 10 AE
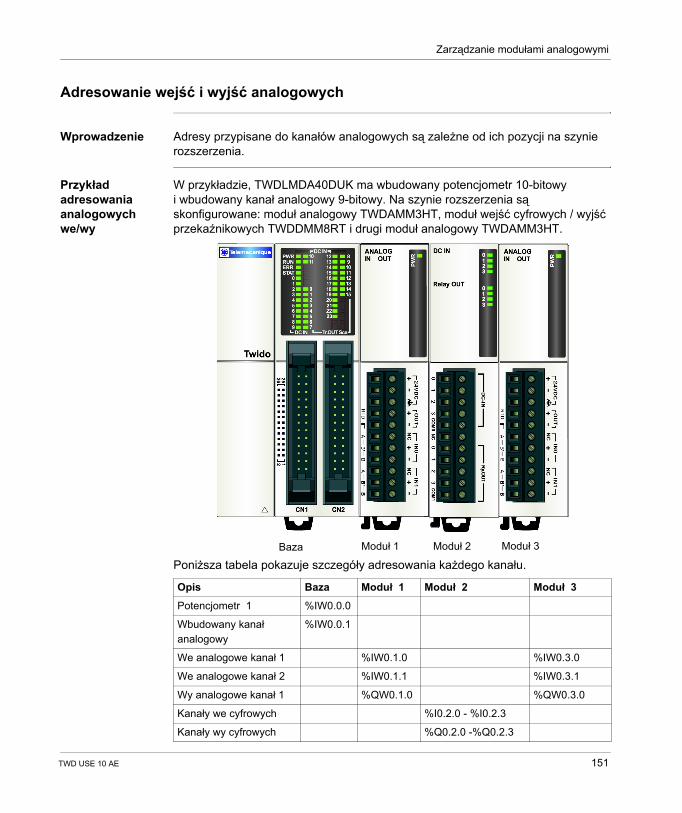
Zarządzanie modułami analogowymi
Adresowanie wejść i wyjść analogowych
Wprowadzenie Adresy przypisane do kanałów analogowych są zależne od ich pozycji na szynie rozszerzenia.
Przykład adresowania analogowych we/wy
W przykładzie, TWDLMDA40DUK ma wbudowany potencjometr 10-bitowy i wbudowany kanał analogowy 9-bitowy. Na szynie rozszerzenia są skonfigurowane: moduł analogowy TWDAMM3HT, moduł wejść cyfrowych / wyjść przekaźnikowych TWDDMM8RT i drugi moduł analogowy TWDAMM3HT.
Poniższa tabela pokazuje szczegóły adresowania każdego kanału.
Opis Baza Moduł 1 Moduł 2 Moduł 3
Potencjometr 1 %IW0.0.0
Wbudowany kanał analogowy
%IW0.0.1
We analogowe kanał 1 %IW0.1.0 %IW0.3.0
We analogowe kanał 2 %IW0.1.1 %IW0.3.1
Wy analogowe kanał 1 %QW0.1.0 %QW0.3.0
Kanały we cyfrowych %I0.2.0 - %I0.2.3
Kanały wy cyfrowych %Q0.2.0 -%Q0.2.3
Baza Moduł 2Moduł 1 Moduł 3
TWD USE 10 AE 151
Zarządzanie modułami analogowymi
Konfigurowanie wejść i wyjść analogowych
Wprowadzenie Ten rozdział dostarcza informacji o konfigurowaniu wejść i wyjść modułów analogowych.
Konfigurowanie we/wy analogowych
Do zarządzania parametrami modułów analogowych służy okno dialogowe "Configure Module".
Adresy przypisane do kanałów analogowych są zależne od ich pozycji na szynie rozszerzenia. Jako pomoc w programowaniu, można także przypisać do nich uprzednio zdefiniowane symbole, by odpowiednio zarządzać danymi w aplikacji użytkownika. Dla TWDAMO1HT, TWDAMM3HT i TWDALM3LT można skonfigurować typ jednego kanału wyjściowego:
nieużywany0 - 10 V 4 – 20 mA
Dla TWDAMI2HT i TWDAMM3HT można skonfigurować typ dwóch kanałów wejściowych:
nieużywany0 - 10 V 4 – 20 mA
Nota: Konfigurować parametry możesz tylko offline, gdy nie jesteś podłączony do sterownika.
UwagaNiespodziewane uszkodzenie sprzętuJeżeli okablujesz wejście analogowe do pomiaru napięcia, a w TwidoSoft skonfigurujesz typ prądowy wejścia, to możesz trwale uszkodzić moduł analogowy. Upewnij się, że instalacja jest zgodna z konfiguracją w TwidoSoft.
Niestosowanie się do powyższych uwag może spowodować obrażenia lub uszkodzenie urządzenia.
152 TWD USE 10 AE

Zarządzanie modułami analogowymi
Dla TWDALM3LT można skonfigurować typ dwóch kanałów wejściowych:nieużywanyTermopara typu KTermopara typu JTermopara typu TPT 100
Przy konfigurowaniu kanału można wyznaczyć jednostki i zakres pomiaru zgodnie z poniższą tabelą:
Zakres Jednostka Opis
Normalny Brak Zakres stały od minimum 0 do maksimum 4095.
Własny Brak Zakres definiowany przez użytkownika z minimum nie mniejszym niż -32768 i maksimum nie większym niż 32767
Celsjusz 0.1°C Międzynarodowa skala termometryczna. Dostępna tylko dla kanałów wejściowych TWDALM3LT.
Fahrenheit 0.1°F Skala termometryczna, gdzie punkt wrzenia wody to 212°F (100°C), punkt zamrażania to 32°F (0°C). Dostępna tylko dla kanałów wejściowych TWDALM3LT.
TWD USE 10 AE 153
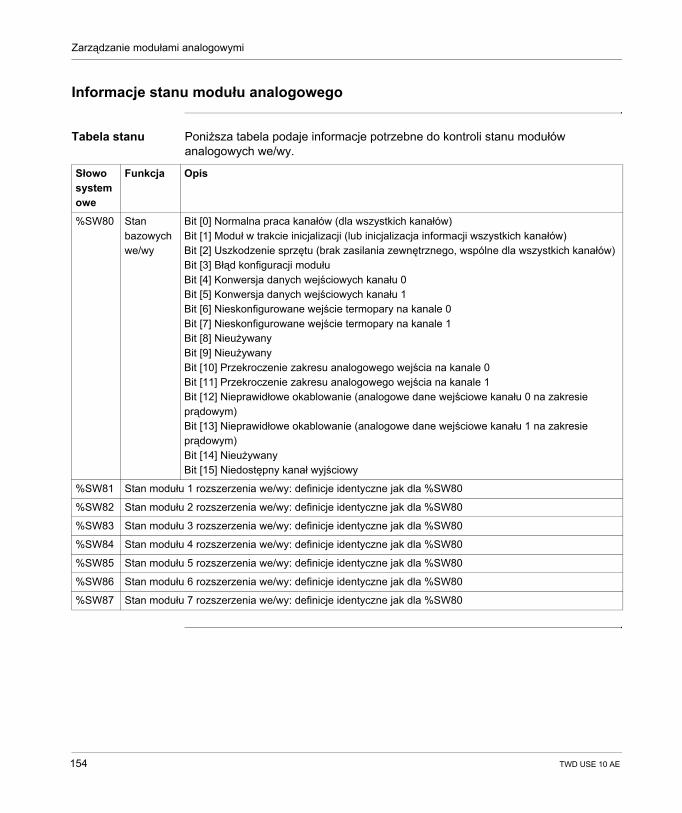
Zarządzanie modułami analogowymi
Informacje stanu modułu analogowego
Tabela stanu Poniższa tabela podaje informacje potrzebne do kontroli stanu modułów analogowych we/wy.
Słowo systemowe
Funkcja Opis
%SW80 Stan bazowych we/wy
Bit [0] Normalna praca kanałów (dla wszystkich kanałów)Bit [1] Moduł w trakcie inicjalizacji (lub inicjalizacja informacji wszystkich kanałów)Bit [2] Uszkodzenie sprzętu (brak zasilania zewnętrznego, wspólne dla wszystkich kanałów)Bit [3] Błąd konfiguracji modułuBit [4] Konwersja danych wejściowych kanału 0Bit [5] Konwersja danych wejściowych kanału 1Bit [6] Nieskonfigurowane wejście termopary na kanale 0Bit [7] Nieskonfigurowane wejście termopary na kanale 1Bit [8] NieużywanyBit [9] NieużywanyBit [10] Przekroczenie zakresu analogowego wejścia na kanale 0Bit [11] Przekroczenie zakresu analogowego wejścia na kanale 1Bit [12] Nieprawidłowe okablowanie (analogowe dane wejściowe kanału 0 na zakresie prądowym)Bit [13] Nieprawidłowe okablowanie (analogowe dane wejściowe kanału 1 na zakresie prądowym)Bit [14] NieużywanyBit [15] Niedostępny kanał wyjściowy
%SW81 Stan modułu 1 rozszerzenia we/wy: definicje identyczne jak dla %SW80
%SW82 Stan modułu 2 rozszerzenia we/wy: definicje identyczne jak dla %SW80
%SW83 Stan modułu 3 rozszerzenia we/wy: definicje identyczne jak dla %SW80
%SW84 Stan modułu 4 rozszerzenia we/wy: definicje identyczne jak dla %SW80
%SW85 Stan modułu 5 rozszerzenia we/wy: definicje identyczne jak dla %SW80
%SW86 Stan modułu 6 rozszerzenia we/wy: definicje identyczne jak dla %SW80
%SW87 Stan modułu 7 rozszerzenia we/wy: definicje identyczne jak dla %SW80
154 TWD USE 10 AE
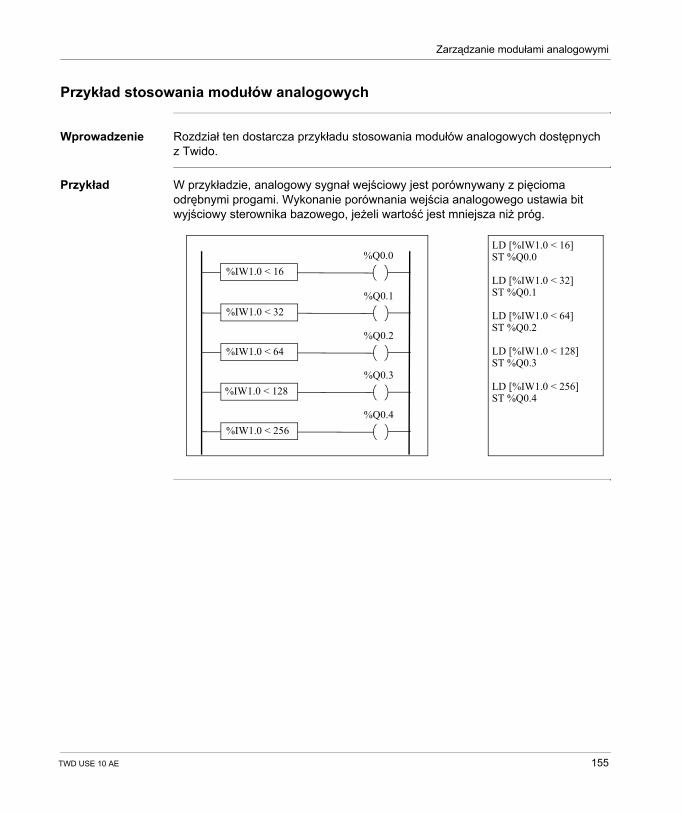
Zarządzanie modułami analogowymi
Przykład stosowania modułów analogowych
Wprowadzenie Rozdział ten dostarcza przykładu stosowania modułów analogowych dostępnych z Twido.
Przykład W przykładzie, analogowy sygnał wejściowy jest porównywany z pięcioma odrębnymi progami. Wykonanie porównania wejścia analogowego ustawia bit wyjściowy sterownika bazowego, jeżeli wartość jest mniejsza niż próg.
%Q0.2%IW1.0 < 64
%Q0.1%IW1.0 < 32
LD [%IW1.0 < 16]ST %Q0.0
LD [%IW1.0 < 32]ST %Q0.1
LD [%IW1.0 < 64]ST %Q0.2
LD [%IW1.0 < 128]ST %Q0.3
LD [%IW1.0 < 256]ST %Q0.4
%Q0.0%IW1.0 < 16
%Q0.3%IW1.0 < 128
%Q0.4%IW1.0 < 256
TWD USE 10 AE 155
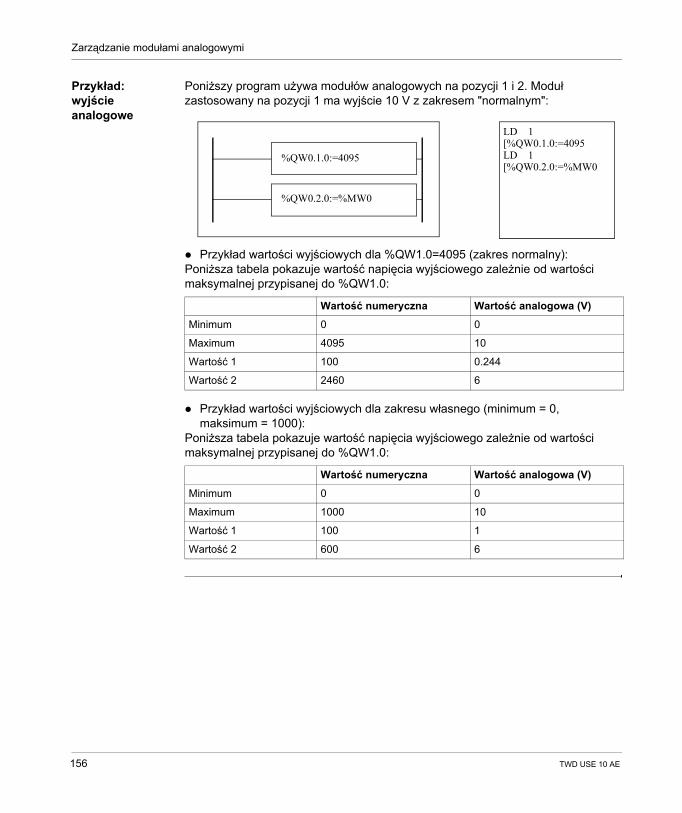
Zarządzanie modułami analogowymi
Przykład: wyjście analogowe
Poniższy program używa modułów analogowych na pozycji 1 i 2. Moduł zastosowany na pozycji 1 ma wyjście 10 V z zakresem "normalnym":
Przykład wartości wyjściowych dla %QW1.0=4095 (zakres normalny):Poniższa tabela pokazuje wartość napięcia wyjściowego zależnie od wartości maksymalnej przypisanej do %QW1.0:
Przykład wartości wyjściowych dla zakresu własnego (minimum = 0, maksimum = 1000):
Poniższa tabela pokazuje wartość napięcia wyjściowego zależnie od wartości maksymalnej przypisanej do %QW1.0:
Wartość numeryczna Wartość analogowa (V)
Minimum 0 0
Maximum 4095 10
Wartość 1 100 0.244
Wartość 2 2460 6
Wartość numeryczna Wartość analogowa (V)
Minimum 0 0
Maximum 1000 10
Wartość 1 100 1
Wartość 2 600 6
%QW0.2.0:=%MW0
LD 1[%QW0.1.0:=4095LD 1[%QW0.2.0:=%MW0
%QW0.1.0:=4095
156 TWD USE 10 AE
TWD USE 10 AE
9
Instalowanie magistrali AS-i V2Rzut oka
Wprowadzenie Ten rozdział dostarcza informacji o programowej instalacji modułu master AS-i TWDNOI10M3 i jego urządzeń podrzędnych.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Prezentacja magistrali AS-i V2 158
Opis podstaw funkcjonalnych 159
Zasady ustawiania oprogramowania 162
Opis ekranów konfiguracyjnych magistrali AS-i 163
Konfiguracja magistrali AS-i 165
Opis ekranu strojenia 171
Modyfikacja adresu podrzędnego 174
Aktualizacja konfiguracji magistrali AS-i w trybie online 176
Automatyczne adresowanie urządzenia podrzędnego AS-i V2 181
Jak wstawić urządzenie podrzędne do istniejącej konfiguracji 182
Automatyczna zamiana uszkodzonego urządzenia podrzędnego 183
Adresowanie we/wy związanych z urządzeniem podrzędnym magistrali AS-i 184
Programowanie i diagnostyka magistrali AS-i 186
Tryby pracy modułu interfejsu magistrali AS-i 191
157
Instalowanie magistrali AS-i V2
Prezentacja magistrali AS-i V2
Wprowadzenie Magistrala AS-i (interfejs napędu i czujnika) pozwala połączyć pojedynczym kablem czujniki / napędy na najniższym poziomie automatyzacji. Czujniki / napędy będą określane w dokumentacji jako urządzenia podrzędne (slave).
Aby wykonać magistralę AS-i należy zdefiniować fizyczny kontekst aplikacji, w której będzie integrowana (szyna rozszerzenia, zasilacz, procesor, moduły, urządzenia podrzędne AS-i dołączone do magistrali), a następnie zapewnić wprowadzenie go do oprogramowania.
Ten drugi aspekt będzie dostarczony przez różne edytory TwidoSoft:w trybie lokalnym,w trybie dołączonym.
Magistrala AS-i V2
Moduł master AS-i TWDNOI10M3 zawiera następujące funkcje:Profil M3: Profil ten zawiera wszystkie funkcje zdefiniowane przez standard AS-i V2, lecz nie wspiera profili analogowych S7-4Jeden kanał AS-i na modułAutomatyczne adresowanie urządzenia podrzędnego z adresem 0Zarządzanie profilami i parametramiZabezpieczenie przeciwko zamianie polaryzacji na wejściu magistrali
Taka magistrala AS-i uwzględnia:Do 31 adresów standardowych i 62 adresów rozszerzonych urządzeń podrzędnychDo 248 wejść i 186 wyjśćDo 7 podrzędnych urządzeń analogowych (maks. cztery we/wy na urządzenie)Maksymalny czas cyklu 10 ms
Do sterowników Twido Modular lub sterownika Compact LCAA24DRF może można dołączyć maksymalnie 2 moduły master AS-i.
158 TWD USE 10 AE
Instalowanie magistrali AS-i V2
Opis podstaw funkcjonalnych
Wprowadzenie ogólne
Dla konfiguracji AS-i, TwidoSoft umożliwia użytkownikowi:Ręczne konfigurowanie magistrali (deklaracja urządzeń podrzędnych i przypisanie adresów na magistrali)Dostosowanie konfiguracji zgodne ze stanem obecnym na magistraliPotwierdzenie parametrów urządzenia podrzędnegoKontrolowanie stanu magistrali
Aby to uzyskać, wszystkie dane wychodzące z lub idące do mastera AS-i są przechowywane w specyficznych obiektach (słowach i bitach).
TWD USE 10 AE 159
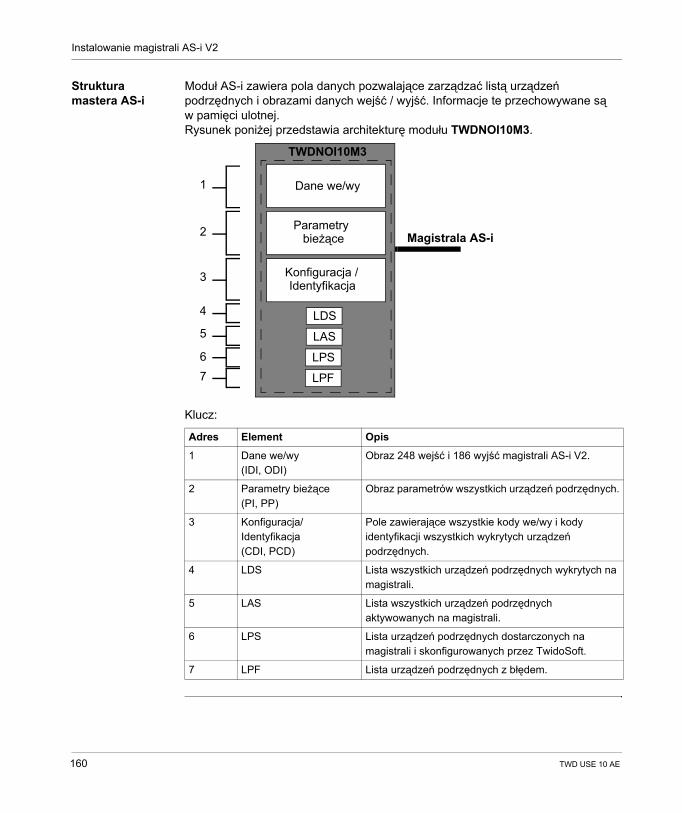
Instalowanie magistrali AS-i V2
Struktura mastera AS-i
Moduł AS-i zawiera pola danych pozwalające zarządzać listą urządzeń podrzędnych i obrazami danych wejść / wyjść. Informacje te przechowywane są w pamięci ulotnej.Rysunek poniżej przedstawia architekturę modułu TWDNOI10M3.
Klucz:
Adres Element Opis
1 Dane we/wy (IDI, ODI)
Obraz 248 wejść i 186 wyjść magistrali AS-i V2.
2 Parametry bieżące(PI, PP)
Obraz parametrów wszystkich urządzeń podrzędnych.
3 Konfiguracja/Identyfikacja(CDI, PCD)
Pole zawierające wszystkie kody we/wy i kody identyfikacji wszystkich wykrytych urządzeń podrzędnych.
4 LDS Lista wszystkich urządzeń podrzędnych wykrytych na magistrali.
5 LAS Lista wszystkich urządzeń podrzędnych aktywowanych na magistrali.
6 LPS Lista urządzeń podrzędnych dostarczonych na magistrali i skonfigurowanych przez TwidoSoft.
7 LPF Lista urządzeń podrzędnych z błędem.
Konfiguracja /Identyfikacja
Parametrybieżące
Dane we/wy
LDS
LAS
LPS
1
2
3
4
5
6
Magistrala AS-i
LPF7
TWDNOI10M3
160 TWD USE 10 AE
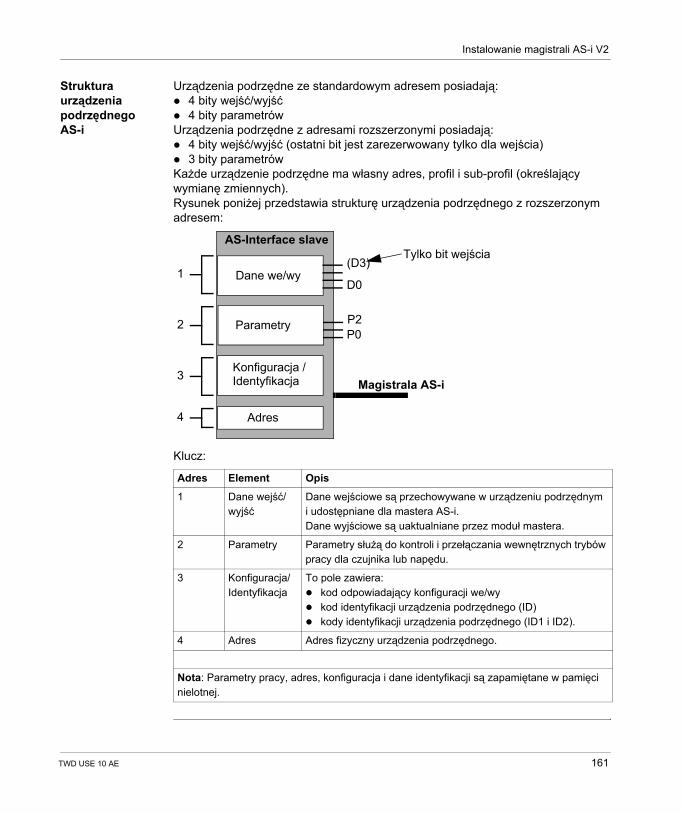
Instalowanie magistrali AS-i V2
Struktura urządzenia podrzędnego AS-i
Urządzenia podrzędne ze standardowym adresem posiadają:4 bity wejść/wyjść4 bity parametrów
Urządzenia podrzędne z adresami rozszerzonymi posiadają:4 bity wejść/wyjść (ostatni bit jest zarezerwowany tylko dla wejścia)3 bity parametrów
Każde urządzenie podrzędne ma własny adres, profil i sub-profil (określający wymianę zmiennych).Rysunek poniżej przedstawia strukturę urządzenia podrzędnego z rozszerzonym adresem:
Klucz:
Adres Element Opis
1 Dane wejść/wyjść
Dane wejściowe są przechowywane w urządzeniu podrzędnym i udostępniane dla mastera AS-i.Dane wyjściowe są uaktualniane przez moduł mastera.
2 Parametry Parametry służą do kontroli i przełączania wewnętrznych trybów pracy dla czujnika lub napędu.
3 Konfiguracja/Identyfikacja
To pole zawiera:kod odpowiadający konfiguracji we/wykod identyfikacji urządzenia podrzędnego (ID)kody identyfikacji urządzenia podrzędnego (ID1 i ID2).
4 Adres Adres fizyczny urządzenia podrzędnego.
Nota: Parametry pracy, adres, konfiguracja i dane identyfikacji są zapamiętane w pamięci nielotnej.
AS-Interface slave
Dane we/wy
Parametry
Konfiguracja /Identyfikacja
Adres
1
2
3
4
D0
(D3)
P0
Magistrala AS-i
P2
Tylko bit wejścia
TWD USE 10 AE 161
Instalowanie magistrali AS-i V2
Zasady ustawiania programowego
Rzut oka Ze względu na filozofię przyjętą w TwidoSoft, użytkownik powinien przy tworzeniu aplikacji AS-i postępować krok po kroku.
Zasada ustawiania
Użytkownik musi wiedzieć jak funkcjonalnie konfigurować swoją magistralę AS-i (Zobacz: Jak wstawić urządzenie podrzędne do istniejącej konfiguracji AS-i, str. 182).Poniższa tabela pokazuje poszczególne fazy programowego wykonania magistrali AS-i.
Środki ostrożności przed połączeniem
Przed połączeniem (przez oprogramowanie) komputera do sterownika, dla uniknięcia problemu wykrywania:
Upewnij się, że na magistrali fizycznie nie ma urządzeń podrzędnych z adresem 0.Upewnij się, że fizycznie nie ma dwóch urządzeń podrzędnych z tym samym adresem.
Tryb Faza Opis
Lokalny Deklaracja modułu Wybór miejsca montażu modułu master AS-i TWDNOI10M3 na szynie rozszerzenia.
Konfiguracja kanału modułu
Wybór trybów mastera.
Deklaracja urządzeń podrzędnych
Wybór dla każdego urządzenia:numeru miejsca na magistralitypu urządzenia z adresem standardowym lub rozszerzonym.
Potwierdzenie parametrów konfiguracji
Potwierdzenie na poziomie urządzenia podrzędnego.
Globalne potwierdzenie aplikacji
Potwierdzenie na poziomie aplikacji.
Lokalny lub podłączo-ny
Symbolizacja (opcjonalnie)
Nadanie symboli zmiennym związanym z urządzeniami podrzędnymi.
Programowanie Programowanie funkcji AS-i V2.
Podłączo-ny
Transfer Transfer aplikacji do PLC.
Strojenie Usuwanie błędów aplikacji z pomocą:ekranu strojenia służącego, z jednej strony do pokazania urządzeń podrzędnych (adres, parametry), a z drugiej do nadania im wymaganych adresów,
ekranów diagnostycznych umożliwiających identyfikację błędów.
Nota: Zadeklarowanie i skasowanie modułu master AS-i na szynie rozszerzenia jest identyczne jak innych modułów rozszerzenia. Jednakże po zadeklarowaniu na szynie rozszerzenia dwóch modułów master AS-i, TwidoSoft nie pozwoli na dodanie kolejnego.
162 TWD USE 10 AE
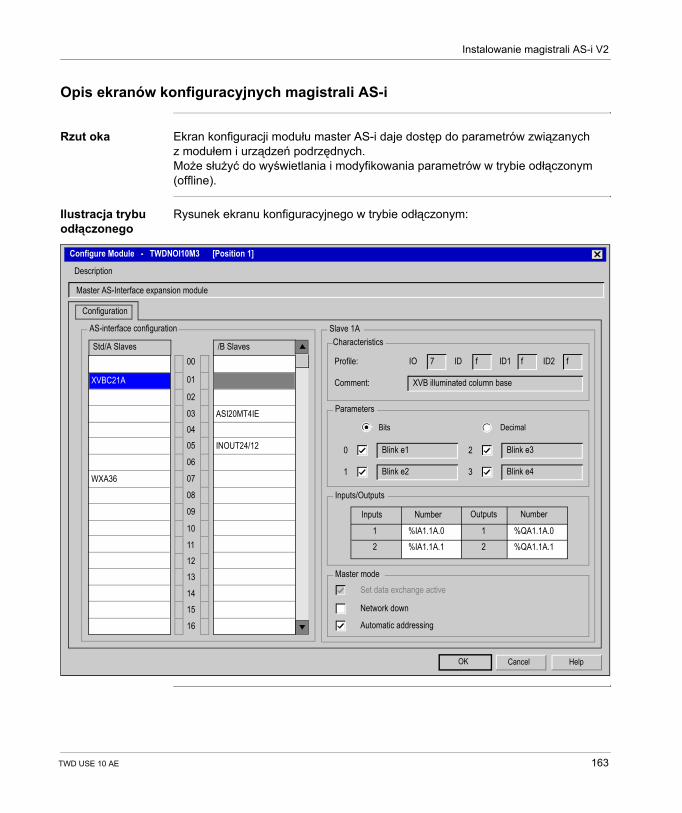
Instalowanie magistrali AS-i V2
Opis ekranów konfiguracyjnych magistrali AS-i
Rzut oka Ekran konfiguracji modułu master AS-i daje dostęp do parametrów związanych z modułem i urządzeń podrzędnych.Może służyć do wyświetlania i modyfikowania parametrów w trybie odłączonym (offline).
Ilustracja trybu odłączonego
Rysunek ekranu konfiguracyjnego w trybie odłączonym:
Configure Module - TWDNOI10M3 [Position 1]
OK
Description
Configuration
AS-interface configuration
Std/A Slaves00
01
02
030405
06
07
08
09
10
111213
1415
16
XVBC21A
WXA36
/B Slaves
ASI20MT4IE
INOUT24/12
Cancel Help
Characteristics
7IO fID fID1 fID2
Slave 1A
Profile:
Comment: XVB illuminated column base
Parameters
0 Blink e1 2 Blink e3
1 Blink e2 3 Blink e4
DecimalBits
Inputs/Outputs
Inputs
1
Number Outputs Number
212
%IA1.1A.0%IA1.1A.1
%QA1.1A.0%QA1.1A.1
Master mode
Network down
Automatic addressing
Master AS-Interface expansion module
Set data exchange active
TWD USE 10 AE 163
Instalowanie magistrali AS-i V2
Opis ekranu w trybie odłączonym
Ten ekran grupuje w trzech blokach wszystkie dane do tworzenia magistrali:
Ekran zawiera także 3 przyciski:
Bloki Opis
AS-Interface configuration Obraz magistrali wymaganej przez użytkownika: widok standardowych i rozszerzonych ustawień adresów urządzeń podrzędnych oczekiwanych na magistrali. Przewiń tabelę w dół, aby uzyskać dostęp do kolejnych adresów. Adresy pociemnione odpowiadają adresom niedostępnym do konfiguracji. Np. jeżeli urządzenie podrzędne ze standardowym adresowaniem jest zadeklarowane z adresem 1A, wtedy adres 1B jest pociemniony.
Slave xxA/B Konfiguracja wybranego urządzenia podrzędnego:Charakterystyki: kod IO, kod ID, kody ID1 i ID2 (profile) oraz komentarze do urządzeń podrzędnych,Parametry: lista parametrów (modyfikowalna) w formie binarnej (4 pola wyboru) lub dziesiętnej (jedno pole wyboru), do wypełnienia przez użytkownika,Wejścia/wyjścia: lista dostępnych wejść/wyjść i ich adresów.
Master mode Możliwa jest aktywacja lub dezaktywacja dwóch dostępnych funkcji dla tego modułu AS-i (np. adresowanie automatyczne).Automatyczne adresowanie jest wybrane domyślnie.Funkcja "Aktywacji wymiany danych" nie jest jeszcze dostępna.
Bloki Opis
OK Służy do zachowania wyświetlonej na ekranie konfiguracji magistrali AS-i
Cancel Powrót do głównego ekranu bez zatwierdzenia zmian.
Help Otwiera okno pomocy.
Nota: W ekranie konfiguracji można wykonywać zmiany tylko w trybie odłączenia.
164 TWD USE 10 AE
Instalowanie magistrali AS-i V2
Konfiguracja magistrali AS-i
Wprowadzenie Konfigurację magistrali AS-i wykonuje się w ekranie konfiguracyjnym w trybie lokalnym. Po wyborze mastera AS-i i jego trybów przechodzi się do konfigurowania urządzeń podrzędnych.
TWD USE 10 AE 165
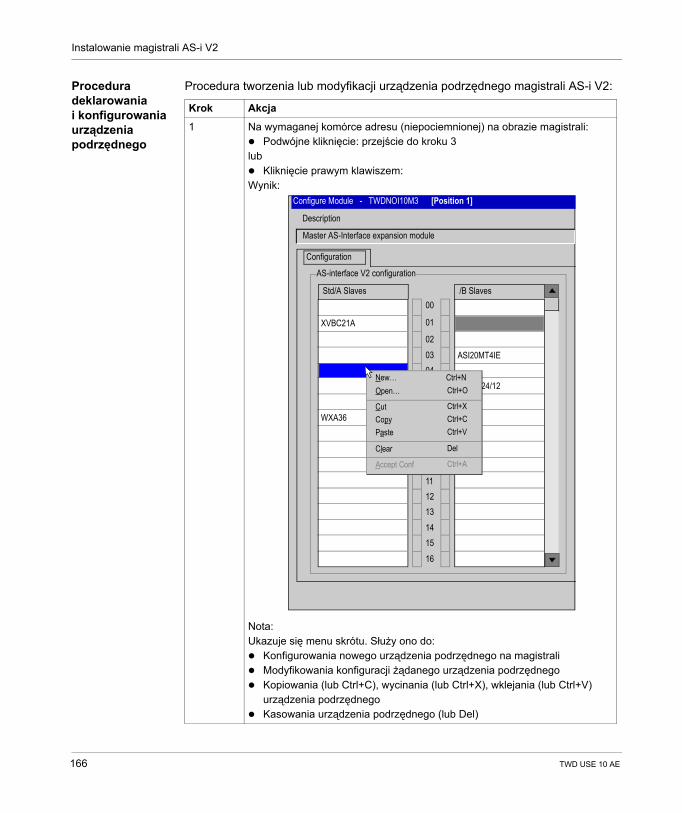
Instalowanie magistrali AS-i V2
Procedura deklarowania i konfigurowania urządzenia podrzędnego
Procedura tworzenia lub modyfikacji urządzenia podrzędnego magistrali AS-i V2:
Krok Akcja
1 Na wymaganej komórce adresu (niepociemnionej) na obrazie magistrali:Podwójne kliknięcie: przejście do kroku 3
lubKliknięcie prawym klawiszem:
Wynik:
Nota: Ukazuje się menu skrótu. Służy ono do:
Konfigurowania nowego urządzenia podrzędnego na magistraliModyfikowania konfiguracji żądanego urządzenia podrzędnegoKopiowania (lub Ctrl+C), wycinania (lub Ctrl+X), wklejania (lub Ctrl+V) urządzenia podrzędnegoKasowania urządzenia podrzędnego (lub Del)
Configure Module - TWDNOI10M3 [Position 1]
Description
Master AS-Interface expansion module
Configuration
AS-interface V2 configuration
Std/A Slaves00
01
0203040506070809
10111213141516
XVBC21A
WXA36
/B Slaves
ASI20MT4IE
INOUT24/12Open… Ctrl+ONew…
Cut Ctrl+XCopy Ctrl+C
Ctrl+N
Paste Ctrl+V
Clear Del
Accept Conf Ctrl+A
166 TWD USE 10 AE
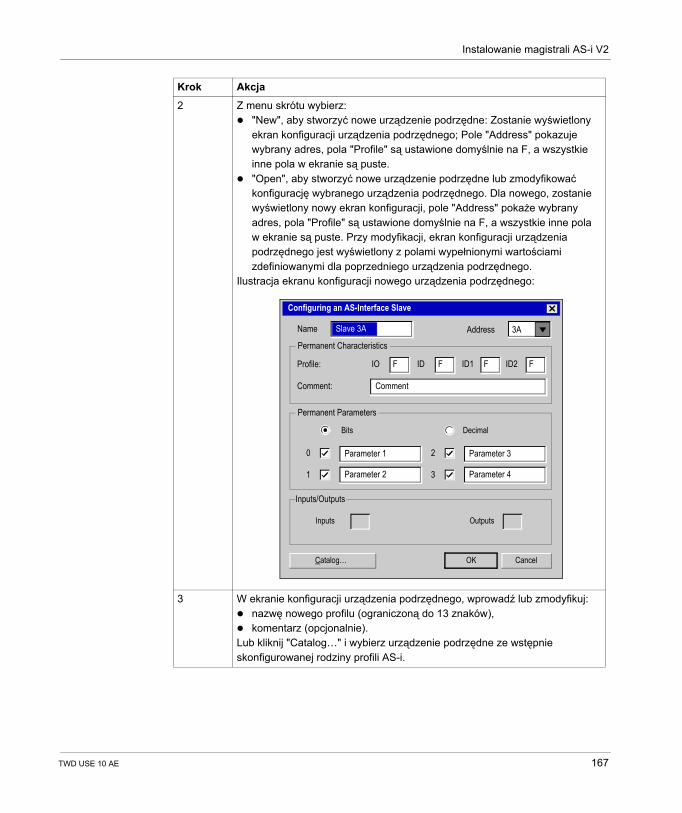
Instalowanie magistrali AS-i V2
2 Z menu skrótu wybierz:"New", aby stworzyć nowe urządzenie podrzędne: Zostanie wyświetlony ekran konfiguracji urządzenia podrzędnego; Pole "Address" pokazuje wybrany adres, pola "Profile" są ustawione domyślnie na F, a wszystkie inne pola w ekranie są puste."Open", aby stworzyć nowe urządzenie podrzędne lub zmodyfikować konfigurację wybranego urządzenia podrzędnego. Dla nowego, zostanie wyświetlony nowy ekran konfiguracji, pole "Address" pokaże wybrany adres, pola "Profile" są ustawione domyślnie na F, a wszystkie inne pola w ekranie są puste. Przy modyfikacji, ekran konfiguracji urządzenia podrzędnego jest wyświetlony z polami wypełnionymi wartościami zdefiniowanymi dla poprzedniego urządzenia podrzędnego.
Ilustracja ekranu konfiguracji nowego urządzenia podrzędnego:
3 W ekranie konfiguracji urządzenia podrzędnego, wprowadź lub zmodyfikuj:nazwę nowego profilu (ograniczoną do 13 znaków),komentarz (opcjonalnie).
Lub kliknij "Catalog…" i wybierz urządzenie podrzędne ze wstępnie skonfigurowanej rodziny profili AS-i.
Krok Akcja
Configuring an AS-Interface Slave
OK CancelCatalog…
Permanent Characteristics
IO ID ID1 ID2Profile:
Comment:
Permanent Parameters
0 2
1 3
DecimalBits
Comment
Parameter 1 Parameter 3
Parameter 2 Parameter 4
Inputs/Outputs
OutputsInputs
F F F F
Name Slave 3A 3AAddress
TWD USE 10 AE 167
Instalowanie magistrali AS-i V2
4 Wprowadź:kod IO (odpowiadający konfiguracji wejść/wyjść),kod ID (identyfikator), (plus ID1 dla typu rozszerzonego).
Nota: Pola "Inputs" i "Outputs" pokazują liczbę kanałów wejść i wyjść. Są automatycznie wypełniane po wprowadzeniu kodu IO.
5 Dla każdego parametru określ:potwierdzenie systemowe (pole wybrane w widoku "Bits" lub wartość od 0 do 15 w widoku "Decimal"),nazwę bardziej znaczącą niż "Parameter X" (opcjonalnie).
Nota: Wybrane parametry są obrazem trwałych parametrów dostarczonych przez master AS-i.
6 Jeżeli jest to potrzebne, zmodyfikuj adres (przy ograniczeniu dostępnych adresów na magistrali), klikając strzałki góra/dół z lewej strony adresu) lub przez wprowadzenie adresu z klawiatury.
7 Zatwierdź konfigurację urządzenia podrzędnego klikając na przycisk "OK."Skutkiem jest sprawdzenie czy:
IO i ID są autoryzowane,adres urządzenia podrzędnego (po wprowadzeniu z klawiatury) jest autoryzowany zgodnie z kodem ID ("bank" /B jest dostępny tylko wtedy, gdy kod ID jest równy A).
Jeżeli zdarzy się błąd, komunikat o błędzie ostrzega użytkownika (np. "The slave cannot have this address" - urządzenie podrzędne nie na tego adresu), a ekran wyświetla ponownie wartości początkowe (w profilu lub adresie, w zależności od błędu).
Nota: Oprogramowanie ogranicza liczbę zadeklarowanych analogowych urządzeń podrzędnych do 7.
Nota: Katalog Schneider AS-i: gdy klikniesz na "Catalog…", będziesz mógł stworzyć i konfigurować urządzenia podrzędne w rodzinie prywatnej ("Private family") (innej niż katalog Schneider AS-i.)
Krok Akcja
168 TWD USE 10 AE
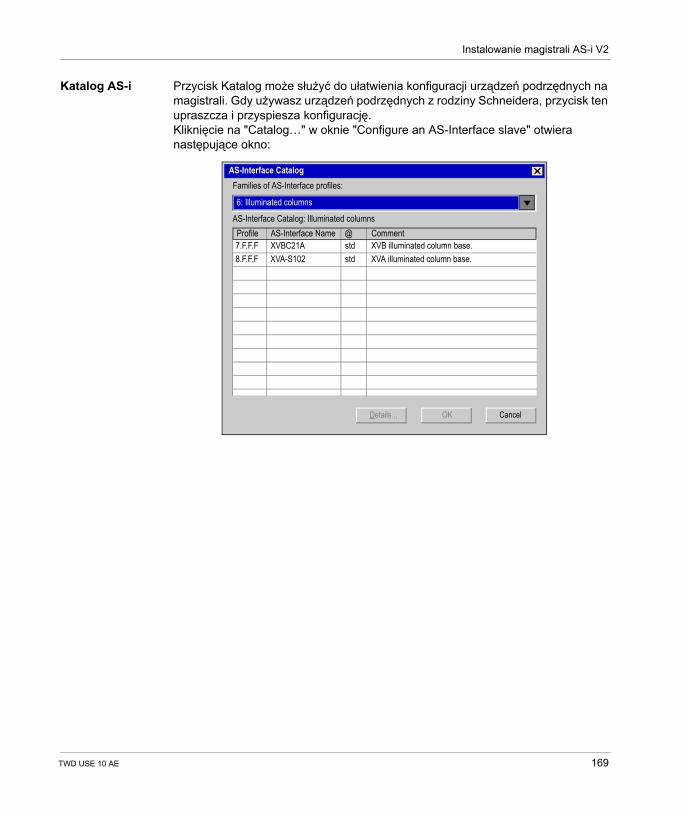
Instalowanie magistrali AS-i V2
Katalog AS-i Przycisk Katalog może służyć do ułatwienia konfiguracji urządzeń podrzędnych na magistrali. Gdy używasz urządzeń podrzędnych z rodziny Schneidera, przycisk ten upraszcza i przyspiesza konfigurację.Kliknięcie na "Catalog…" w oknie "Configure an AS-Interface slave" otwiera następujące okno:
AS-Interface Catalog
OK Cancel
7.F.F.F8.F.F.F
XVBC21AXVA-S102
Profile AS-Interface Name @stdstd
XVB illuminated column base.XVA illuminated column base.
Comment
Details...
AS-Interface Catalog: Illuminated columnsUp/Down Counter6: Illuminated columns
Families of AS-Interface profiles:
TWD USE 10 AE 169
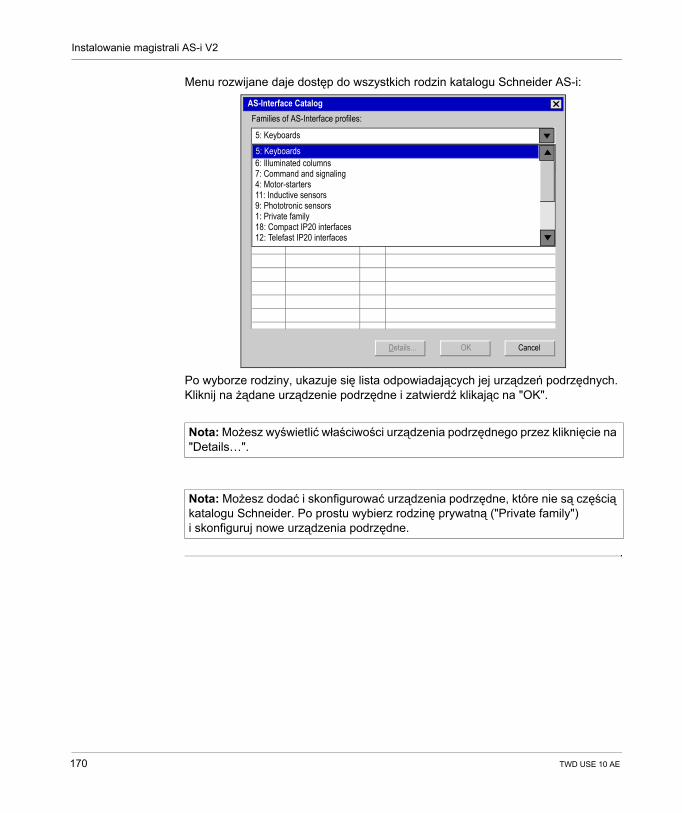
Instalowanie magistrali AS-i V2
Menu rozwijane daje dostęp do wszystkich rodzin katalogu Schneider AS-i:
Po wyborze rodziny, ukazuje się lista odpowiadających jej urządzeń podrzędnych. Kliknij na żądane urządzenie podrzędne i zatwierdź klikając na "OK".
Nota: Możesz wyświetlić właściwości urządzenia podrzędnego przez kliknięcie na "Details…".
Nota: Możesz dodać i skonfigurować urządzenia podrzędne, które nie są częścią katalogu Schneider. Po prostu wybierz rodzinę prywatną ("Private family") i skonfiguruj nowe urządzenia podrzędne.
AS-Interface Catalog
OK CancelDetails...
Up/Down Counter5: Keyboards
Families of AS-Interface profiles:
6: Illuminated columns7: Command and signaling4: Motor-starters11: Inductive sensors9: Phototronic sensors 1: Private family18: Compact IP20 interfaces12: Telefast IP20 interfaces
5: Keyboards
170 TWD USE 10 AE
Instalowanie magistrali AS-i V2
Opis ekranu strojenia
Rzut oka Kiedy komputer jest dołączony do sterownika (po uaktualnieniu aplikacji sterownika), wtedy po prawej stronie zakładki "Configuration" ukazuje się zakładka "Debug", umożliwiająca dostęp do ekranu strojenia.Ekran strojenia w sposób dynamiczny dostarcza obrazu fizycznej magistrali. Jego zawartość to:
Lista spodziewanych urządzeń podrzędnych (wprowadzonych podczas konfiguracji) wraz z ich nazwami oraz lista wykrytych urządzeń podrzędnych (z nieznanymi nazwami, bo inaczej są spodziewane),Stan modułu AS-i i urządzeń podrzędnych,Obraz profilu, parametrów i wartości wejść/wyjść wybranych urządzeń podrzędnych.
Umożliwia także użytkownikowi:Dostęp do diagnostyki urządzeń podrzędnych, w których zdarzył się błąd (zobacz Wyświetlanie stanu urządzenia podrzędnego, str. 173),Modyfikowanie adresu urządzenia podrzędnego w trybie dołączonym (zobacz Modyfikacja adresu urządzenia podrzędnego, str. 174),Przesłanie obrazu urządzeń podrzędnych do ekranu konfiguracyjnego (zobacz Uaktualnianie konfiguracji magistrali AS-i w trybie dołączonym, str. 176),Zaadresowanie wszystkich urządzeń podrzędnych wymaganymi adresami (podczas pierwszego strojenia).
TWD USE 10 AE 171
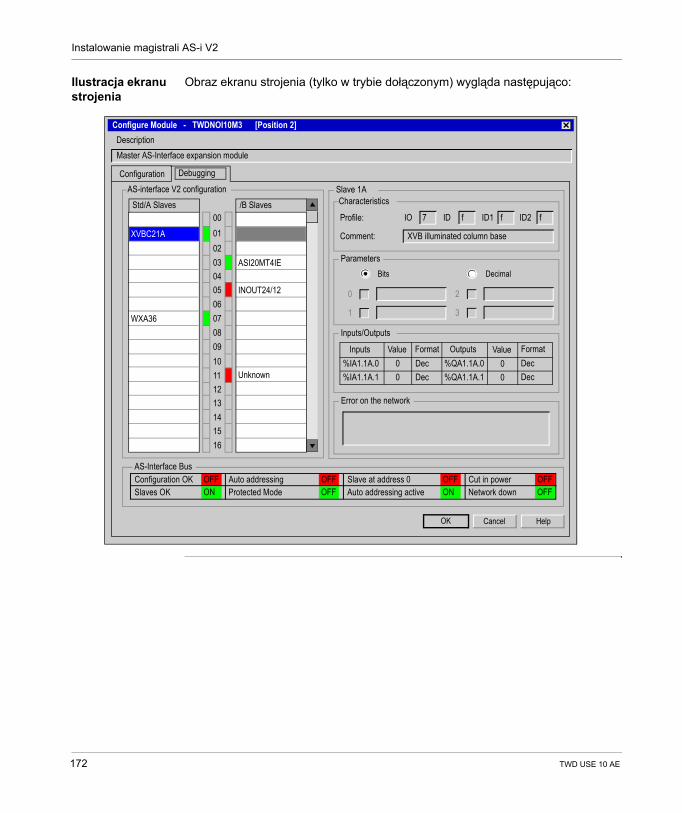
Instalowanie magistrali AS-i V2
Ilustracja ekranu strojenia
Obraz ekranu strojenia (tylko w trybie dołączonym) wygląda następująco:
Configure Module - TWDNOI10M3 [Position 2]
OK
DescriptionMaster AS-Interface expansion module
ConfigurationAS-interface V2 configuration
Std/A Slaves0001020304050607080910111213141516
XVBC21A
WXA36
/B Slaves
ASI20MT4IE
INOUT24/12
Cancel Help
Characteristics
7IO fID fID1 fID2
Slave 1A
Profile:
Comment: XVB illuminated column base
Parameters
0 2
1 3
Inputs/Outputs
Inputs0
Value Format Outputs
0DecDec
%IA1.1A.0%IA1.1A.1
%QA1.1A.0%QA1.1A.1
Error on the network
Debugging
0Value
0
FormatDecDecUnknown
AS-Interface BusConfiguration OKSlaves OK
OFFON
Auto addressing Protected Mode
OFFOFF
Slave at address 0 Auto addressing active
OFFON
Cut in powerNetwork down
OFFOFF
DecimalBits
172 TWD USE 10 AE
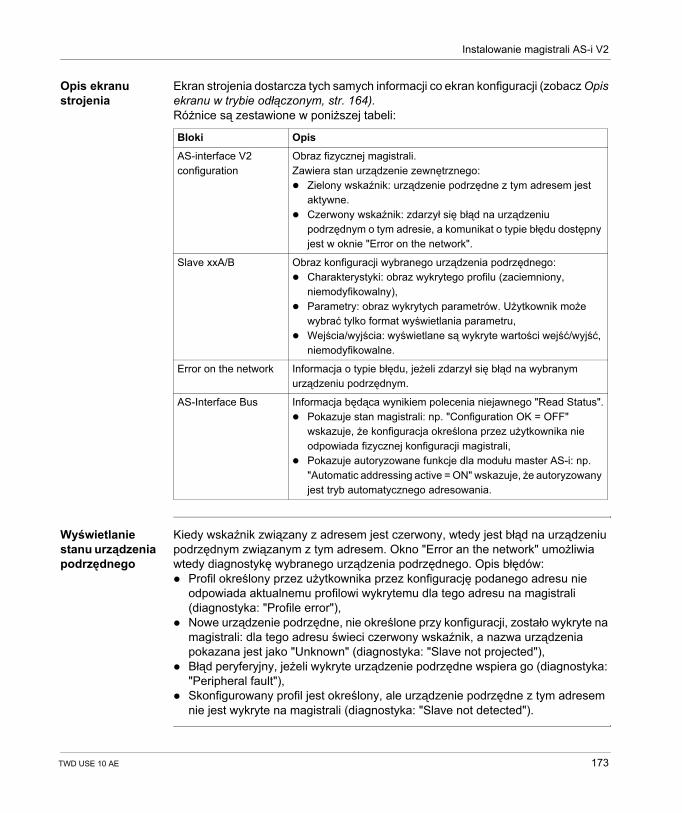
Instalowanie magistrali AS-i V2
Opis ekranu strojenia
Ekran strojenia dostarcza tych samych informacji co ekran konfiguracji (zobacz Opis ekranu w trybie odłączonym, str. 164).Różnice są zestawione w poniższej tabeli:
Wyświetlanie stanu urządzenia podrzędnego
Kiedy wskaźnik związany z adresem jest czerwony, wtedy jest błąd na urządzeniu podrzędnym związanym z tym adresem. Okno "Error an the network" umożliwia wtedy diagnostykę wybranego urządzenia podrzędnego. Opis błędów:
Profil określony przez użytkownika przez konfigurację podanego adresu nie odpowiada aktualnemu profilowi wykrytemu dla tego adresu na magistrali (diagnostyka: "Profile error"),Nowe urządzenie podrzędne, nie określone przy konfiguracji, zostało wykryte na magistrali: dla tego adresu świeci czerwony wskaźnik, a nazwa urządzenia pokazana jest jako "Unknown" (diagnostyka: "Slave not projected"),Błąd peryferyjny, jeżeli wykryte urządzenie podrzędne wspiera go (diagnostyka: "Peripheral fault"),Skonfigurowany profil jest określony, ale urządzenie podrzędne z tym adresem nie jest wykryte na magistrali (diagnostyka: "Slave not detected").
Bloki Opis
AS-interface V2 configuration
Obraz fizycznej magistrali.Zawiera stan urządzenie zewnętrznego:
Zielony wskaźnik: urządzenie podrzędne z tym adresem jest aktywne.Czerwony wskaźnik: zdarzył się błąd na urządzeniu podrzędnym o tym adresie, a komunikat o typie błędu dostępny jest w oknie "Error on the network".
Slave xxA/B Obraz konfiguracji wybranego urządzenia podrzędnego:Charakterystyki: obraz wykrytego profilu (zaciemniony, niemodyfikowalny),Parametry: obraz wykrytych parametrów. Użytkownik może wybrać tylko format wyświetlania parametru,Wejścia/wyjścia: wyświetlane są wykryte wartości wejść/wyjść, niemodyfikowalne.
Error on the network Informacja o typie błędu, jeżeli zdarzył się błąd na wybranym urządzeniu podrzędnym.
AS-Interface Bus Informacja będąca wynikiem polecenia niejawnego "Read Status".Pokazuje stan magistrali: np. "Configuration OK = OFF" wskazuje, że konfiguracja określona przez użytkownika nie odpowiada fizycznej konfiguracji magistrali,Pokazuje autoryzowane funkcje dla modułu master AS-i: np. "Automatic addressing active = ON" wskazuje, że autoryzowany jest tryb automatycznego adresowania.
TWD USE 10 AE 173
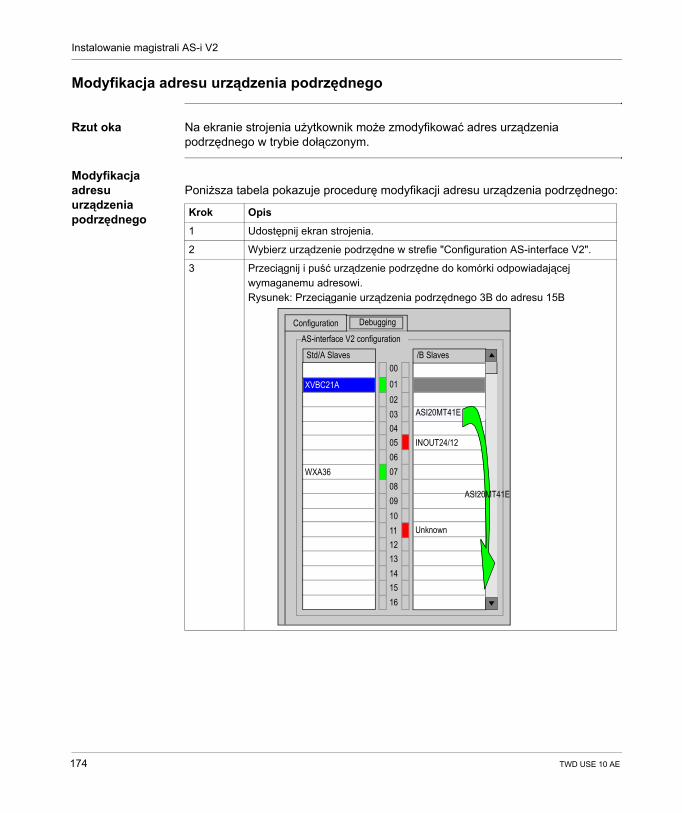
Instalowanie magistrali AS-i V2
Modyfikacja adresu urządzenia podrzędnego
Rzut oka Na ekranie strojenia użytkownik może zmodyfikować adres urządzenia podrzędnego w trybie dołączonym.
Modyfikacja adresu urządzenia podrzędnego
Poniższa tabela pokazuje procedurę modyfikacji adresu urządzenia podrzędnego:
Krok Opis
1 Udostępnij ekran strojenia.
2 Wybierz urządzenie podrzędne w strefie "Configuration AS-interface V2".
3 Przeciągnij i puść urządzenie podrzędne do komórki odpowiadającej wymaganemu adresowi.Rysunek: Przeciąganie urządzenia podrzędnego 3B do adresu 15B
ASI20MT41E
ConfigurationAS-interface V2 configuration
Std/A Slaves0001020304050607080910111213141516
XVBC21A
WXA36
/B Slaves
INOUT24/12
Debugging
Unknown
ASI20MT41E
174 TWD USE 10 AE
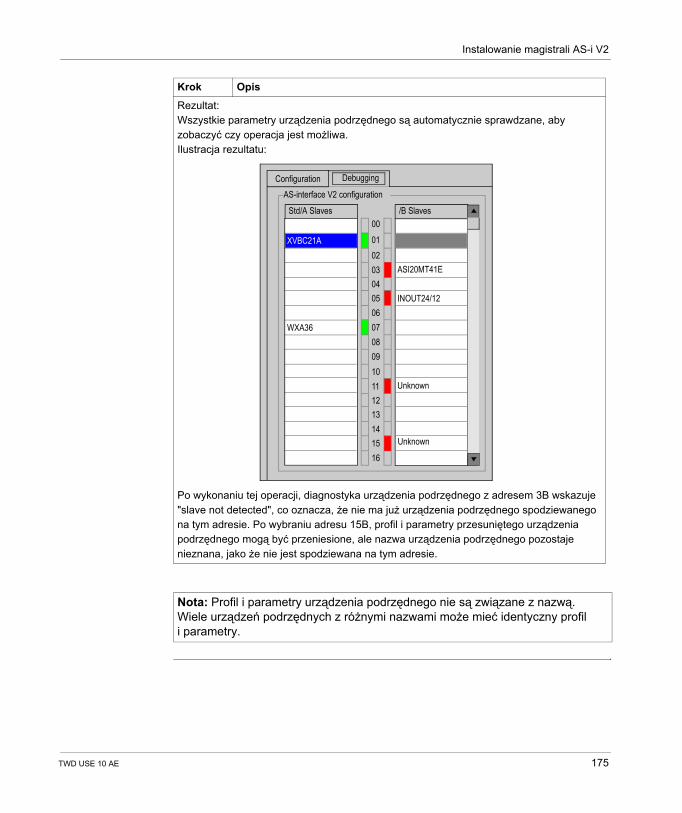
Instalowanie magistrali AS-i V2
Rezultat:Wszystkie parametry urządzenia podrzędnego są automatycznie sprawdzane, aby zobaczyć czy operacja jest możliwa.Ilustracja rezultatu:
Po wykonaniu tej operacji, diagnostyka urządzenia podrzędnego z adresem 3B wskazuje "slave not detected", co oznacza, że nie ma już urządzenia podrzędnego spodziewanego na tym adresie. Po wybraniu adresu 15B, profil i parametry przesuniętego urządzenia podrzędnego mogą być przeniesione, ale nazwa urządzenia podrzędnego pozostaje nieznana, jako że nie jest spodziewana na tym adresie.
Nota: Profil i parametry urządzenia podrzędnego nie są związane z nazwą. Wiele urządzeń podrzędnych z różnymi nazwami może mieć identyczny profil i parametry.
Krok Opis
ConfigurationAS-interface V2 configuration
Std/A Slaves0001020304050607080910111213141516
XVBC21A
WXA36
/B Slaves
INOUT24/12
Debugging
Unknown
Unknown
ASI20MT41E
TWD USE 10 AE 175
Instalowanie magistrali AS-i V2
Aktualizacja konfiguracji magistrali AS-i w trybie podłączonym
Rzut oka W trybie podłączonym, żadna modyfikacja na ekranie konfiguracji nie jest autoryzowana, a konfiguracja fizyczna i konfiguracja programowa mogą być różne. Różnice w profilu lub parametrach skonfigurowanych lub nieskonfigurowanych urządzeń podrzędnych mogą być uwzględnione na ekranie konfiguracji; możliwe jest przesłanie modyfikacji do ekranu konfiguracji przed transferem nowej aplikacji do sterownika.Procedura uwzględnienia konfiguracji fizycznej jest następująca:
Krok Opis
1 Transfer wymaganej konfiguracji urządzenia podrzędnego do ekranu konfiguracji.
2 Akceptacja konfiguracji na ekranie konfiguracji.
3 Zatwierdzenie nowej konfiguracji.
4 Transfer aplikacji do modułu.
176 TWD USE 10 AE
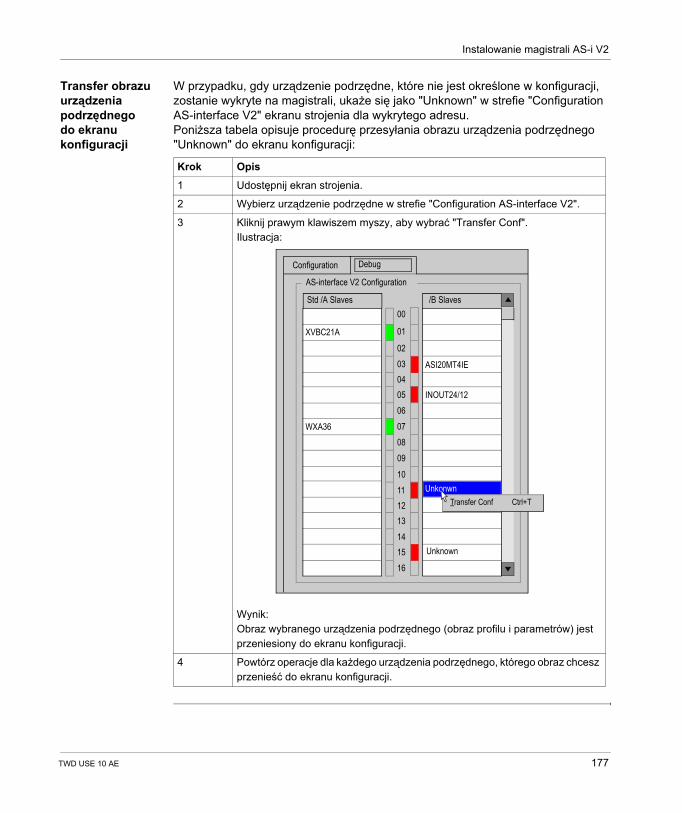
Instalowanie magistrali AS-i V2
Transfer obrazu urządzenia podrzędnego do ekranu konfiguracji
W przypadku, gdy urządzenie podrzędne, które nie jest określone w konfiguracji, zostanie wykryte na magistrali, ukaże się jako "Unknown" w strefie "Configuration AS-interface V2" ekranu strojenia dla wykrytego adresu.Poniższa tabela opisuje procedurę przesyłania obrazu urządzenia podrzędnego "Unknown" do ekranu konfiguracji:
Krok Opis
1 Udostępnij ekran strojenia.
2 Wybierz urządzenie podrzędne w strefie "Configuration AS-interface V2".
3 Kliknij prawym klawiszem myszy, aby wybrać "Transfer Conf".Ilustracja:
Wynik:Obraz wybranego urządzenia podrzędnego (obraz profilu i parametrów) jest przeniesiony do ekranu konfiguracji.
4 Powtórz operacje dla każdego urządzenia podrzędnego, którego obraz chcesz przenieść do ekranu konfiguracji.
Configuration
AS-interface V2 Configuration
Std /A Slaves00
01
0203040506070809
10111213141516
XVBC21A
WXA36
/B Slaves
INOUT24/12
Debug
Unkonwn
ASI20MT4IE
Transfer Conf Ctrl+T
Unknown
TWD USE 10 AE 177
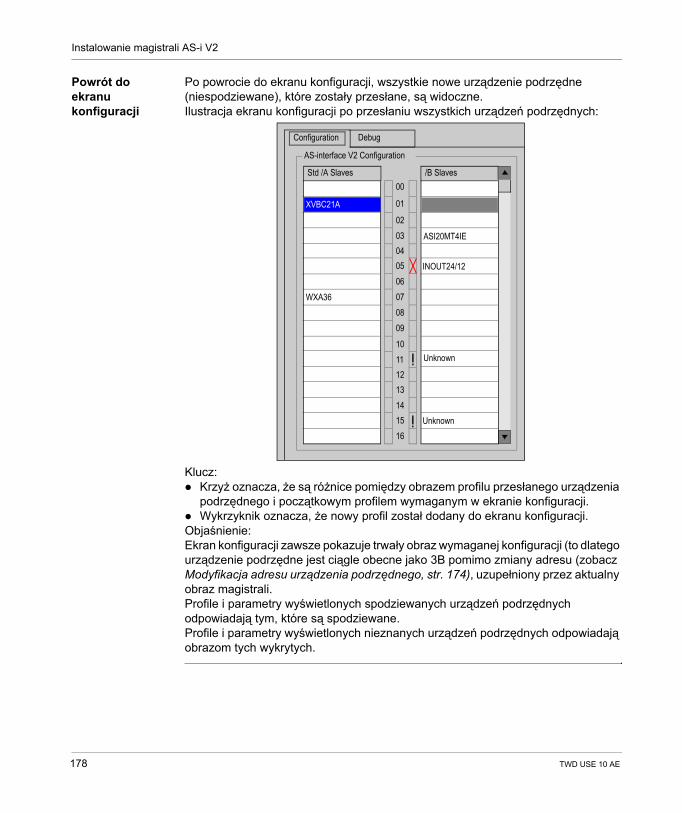
Instalowanie magistrali AS-i V2
Powrót do ekranu konfiguracji
Po powrocie do ekranu konfiguracji, wszystkie nowe urządzenie podrzędne (niespodziewane), które zostały przesłane, są widoczne.Ilustracja ekranu konfiguracji po przesłaniu wszystkich urządzeń podrzędnych:
Klucz: Krzyż oznacza, że są różnice pomiędzy obrazem profilu przesłanego urządzenia podrzędnego i początkowym profilem wymaganym w ekranie konfiguracji.Wykrzyknik oznacza, że nowy profil został dodany do ekranu konfiguracji.
Objaśnienie:Ekran konfiguracji zawsze pokazuje trwały obraz wymaganej konfiguracji (to dlatego urządzenie podrzędne jest ciągle obecne jako 3B pomimo zmiany adresu (zobacz Modyfikacja adresu urządzenia podrzędnego, str. 174), uzupełniony przez aktualny obraz magistrali.Profile i parametry wyświetlonych spodziewanych urządzeń podrzędnych odpowiadają tym, które są spodziewane. Profile i parametry wyświetlonych nieznanych urządzeń podrzędnych odpowiadają obrazom tych wykrytych.
AS-interface V2 Configuration
Std /A Slaves00
01
020304050607080910111213141516
WXA36
/B Slaves
INOUT24/12
Unknown
ASI20MT4IE
XVBC21A
Configuration Debug
Unknown
178 TWD USE 10 AE

Instalowanie magistrali AS-i V2
Procedura przenoszenia ostatecznej aplikacji do modułu
Przed przesłaniem nowej aplikacji do modułu, użytkownik może, dla każdego urządzenia podrzędnego, zaakceptować wykryty profil i parametry (przeniesione do ekranu konfiguracji) lub zmodyfikować konfigurację "ręcznie" (zobacz Procedura deklarowania i konfigurowania urządzenia podrzędnego, str. 166).Poniższa tabela opisuje etapy zatwierdzania i przenoszenia ostatecznej konfiguracji do modułu:
Krok Akcja
1 Przez oprogramowanie, odłącz komputer od modułu.Nota: Żadna modyfikacja nie może być wykonana w ekranie konfiguracji, jeżeli komputer jest dołączony do modułu.
2 Kliknij prawym klawiszem na wymaganym urządzeniu podrzędnym.
TWD USE 10 AE 179
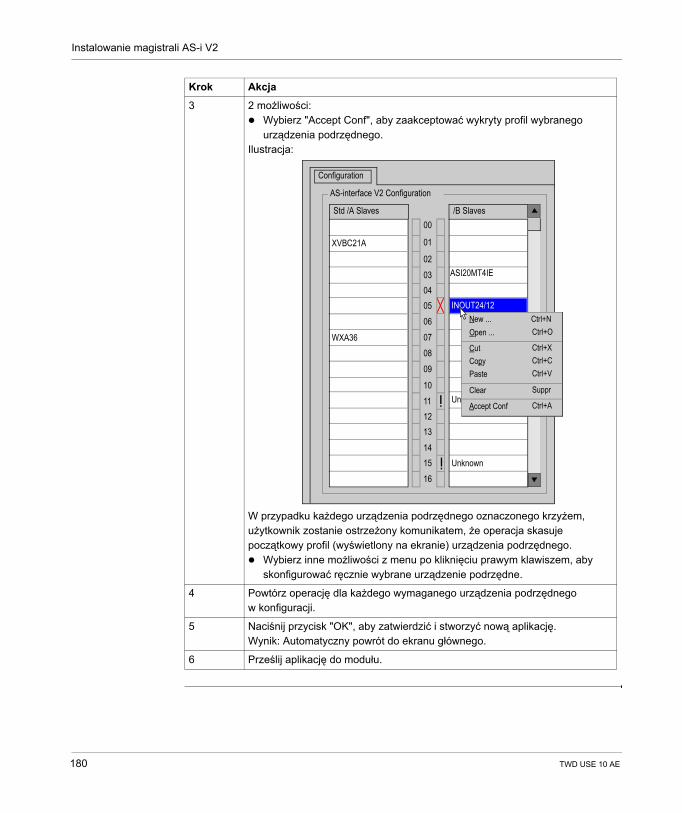
Instalowanie magistrali AS-i V2
3 2 możliwości: Wybierz "Accept Conf", aby zaakceptować wykryty profil wybranego urządzenia podrzędnego.
Ilustracja:
W przypadku każdego urządzenia podrzędnego oznaczonego krzyżem, użytkownik zostanie ostrzeżony komunikatem, że operacja skasuje początkowy profil (wyświetlony na ekranie) urządzenia podrzędnego.
Wybierz inne możliwości z menu po kliknięciu prawym klawiszem, aby skonfigurować ręcznie wybrane urządzenie podrzędne.
4 Powtórz operację dla każdego wymaganego urządzenia podrzędnego w konfiguracji.
5 Naciśnij przycisk "OK", aby zatwierdzić i stworzyć nową aplikację.Wynik: Automatyczny powrót do ekranu głównego.
6 Prześlij aplikację do modułu.
Krok Akcja
AS-interface V2 Configuration
Std /A Slaves00
01
0203040506070809
10111213141516
WXA36
/B Slaves
Unknown
Unknown
XVBC21A
Configuration
INOUT24/12
Open ... Ctrl+ONew ...
Cut Ctrl+XCopy Ctrl+C
Ctrl+N
Paste Ctrl+V
Clear Suppr
Accept Conf Ctrl+A
ASI20MT4IE
180 TWD USE 10 AE
Instalowanie magistrali AS-i V2
Automatyczne adresowanie urządzenia podrzędnego AS-i V2
Rzut oka Do każdego urządzenia podrzędnego na magistrali AS-i musi być przypisany (przez konfigurację) unikalny adres fizyczny. Musi być on taki sam jak zadeklarowany w TwidoSoft.
Oprogramowanie TwidoSoft oferuje automatyczne adresowanie urządzeń podrzędnych pozwalające na niestosowanie konsoli AS-i.Adresowanie automatyczne używa się do:
zastępowania uszkodzonego urządzenia podrzędnego,wstawiania nowego urządzenia podrzędnego.
Procedura Poniższa tabela pokazuje procedurę ustawiania parametrów automatycznego adresowania.
Krok Akcja
1 Udostępnij ekran konfiguracji modułu master AS-i V2.
2 Kliknij na pole wyboru Automatic addressing znajdujące się w strefie Master mode.Rezultat: Adresowanie automatyczne zostanie aktywowane (pole wybrane) lub wyłączone (pole niewybrane).Nota: Domyślnie, parametr adresowania automatycznego jest wybrany w ekranie konfiguracji.
TWD USE 10 AE 181
Instalowanie magistrali AS-i V2
Jak wstawić urządzenie podrzędne do istniejącej konfiguracji
Rzut oka Można wstawić urządzenie do istniejącej konfiguracji AS-i V2 bez konieczności posiadania programatora kieszonkowego.Operacja ta jest możliwa, gdy:
tryb konfiguracji adresowania automatycznego jest aktywny (zobacz Automatyczne adresowanie urządzenia podrzędnego AS-i V2, str. 181),w fizycznej konfiguracji brakuje pojedynczego urządzenia podrzędnego,urządzenie podrzędne, które zostało wstawione jest wyszczególnione w ekranie konfiguracji,urządzenie podrzędne ma profil spodziewany przez konfigurację,urządzenie podrzędne ma adres 0 (A).
Moduł AS-i V2 automatycznie przyporządkuje urządzeniu podrzędnemu wartość predefiniowaną w konfiguracji.
Procedura Poniższa tabela pokazuje procedurę automatycznego wstawienia rzeczywistego nowego urządzenia podrzędnego.
Krok Akcja
1 Dodaj nowe urządzenie podrzędne w ekranie konfiguracji w trybie lokalnym.
2 Prześlij konfigurację do PLC w trybie dołączonym.
3 Fizycznie podłącz nowe urządzenie podrzędne do magistrali AS-i V2.
Nota: Jeżeli to konieczne, aplikacja może być zmodyfikowana przez wielokrotne przeprowadzenie powyższych operacji.
182 TWD USE 10 AE
Instalowanie magistrali AS-i V2
Automatyczna zamiana uszkodzonego urządzenia podrzędnego
Zasada Gdy urządzenie podrzędne uszkodzi się, może być automatycznie zamienione na urządzenie podrzędne tego samego typu.Nie wymaga to zatrzymania magistrali AS-i V2 oraz konieczności jakichkolwiek manipulacji oprócz uruchomienia konfiguracji trybu adresowania automatycznego (zobacz Automatyczne adresowanie urządzenia podrzędnego AS-i V2, str. 181).
Dostępne są dwie opcje:Zamienione urządzenie podrzędne jest zaprogramowane z tym samym adresem za pomocą programatora kieszonkowego i ma ten sam profil i pod-profil jak uszkodzone urządzenie podrzędne. W ten sposób zostanie automatycznie wstawione do listy wykrytych urządzeń podrzędnych (LDS) i listy aktywnych urządzeń podrzędnych (LAS),Zamienione urządzenie podrzędne jest czyste (adres 0 (A), nowe urządzenie podrzędne) i ma ten sam profil jak uszkodzone urządzenie podrzędne. Automatycznie otrzymuje adres zamienianego urządzenia podrzędnego i wtedy zostanie wstawione do listy wykrytych urządzeń podrzędnych (LDS - List Detected Slaves) i listy aktywnych urządzeń podrzędnych (LAS - List Active Slaves).
TWD USE 10 AE 183
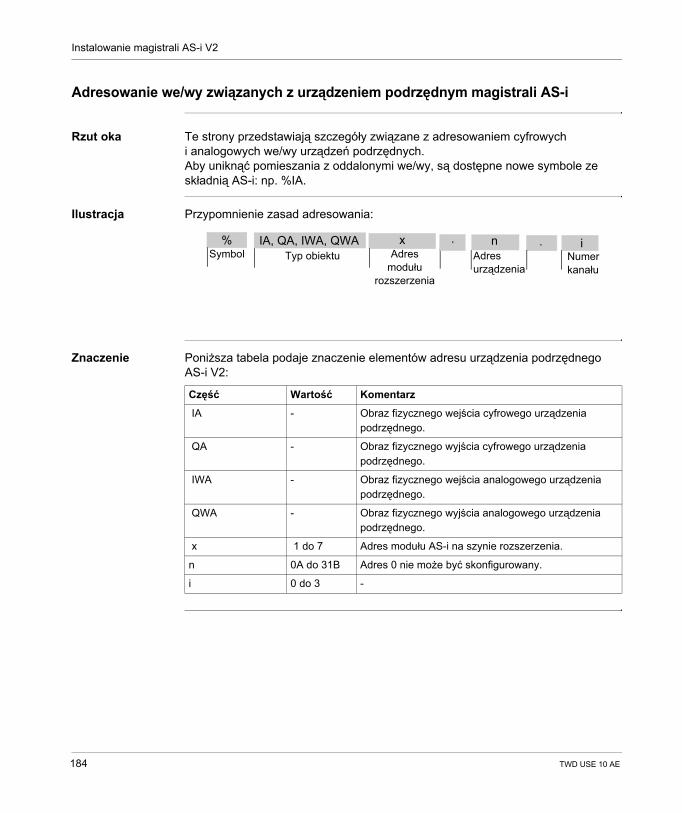
Instalowanie magistrali AS-i V2
Adresowanie we/wy związanych z urządzeniem podrzędnym magistrali AS-i
Rzut oka Te strony przedstawiają szczegóły związane z adresowaniem cyfrowych i analogowych we/wy urządzeń podrzędnych.Aby uniknąć pomieszania z oddalonymi we/wy, są dostępne nowe symbole ze składnią AS-i: np. %IA.
Ilustracja Przypomnienie zasad adresowania:
Znaczenie Poniższa tabela podaje znaczenie elementów adresu urządzenia podrzędnego AS-i V2:
% IA, QA, IWA, QWA . .n iTyp obiektuSymbol Adres
urządzeniaNumer kanału
xAdres
modułurozszerzenia
Część Wartość Komentarz
IA - Obraz fizycznego wejścia cyfrowego urządzenia podrzędnego.
QA - Obraz fizycznego wyjścia cyfrowego urządzenia podrzędnego.
IWA - Obraz fizycznego wejścia analogowego urządzenia podrzędnego.
QWA - Obraz fizycznego wyjścia analogowego urządzenia podrzędnego.
x 1 do 7 Adres modułu AS-i na szynie rozszerzenia.
n 0A do 31B Adres 0 nie może być skonfigurowany.
i 0 do 3 -
184 TWD USE 10 AE
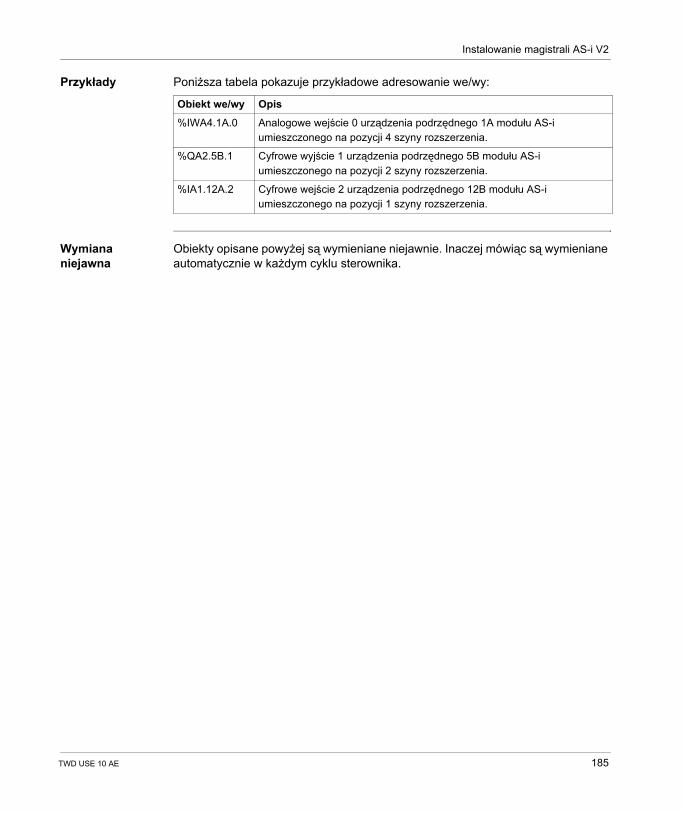
Instalowanie magistrali AS-i V2
Przykłady Poniższa tabela pokazuje przykładowe adresowanie we/wy:
Wymiana niejawna
Obiekty opisane powyżej są wymieniane niejawnie. Inaczej mówiąc są wymieniane automatycznie w każdym cyklu sterownika.
Obiekt we/wy Opis
%IWA4.1A.0 Analogowe wejście 0 urządzenia podrzędnego 1A modułu AS-i umieszczonego na pozycji 4 szyny rozszerzenia.
%QA2.5B.1 Cyfrowe wyjście 1 urządzenia podrzędnego 5B modułu AS-i umieszczonego na pozycji 2 szyny rozszerzenia.
%IA1.12A.2 Cyfrowe wejście 2 urządzenia podrzędnego 12B modułu AS-i umieszczonego na pozycji 1 szyny rozszerzenia.
TWD USE 10 AE 185
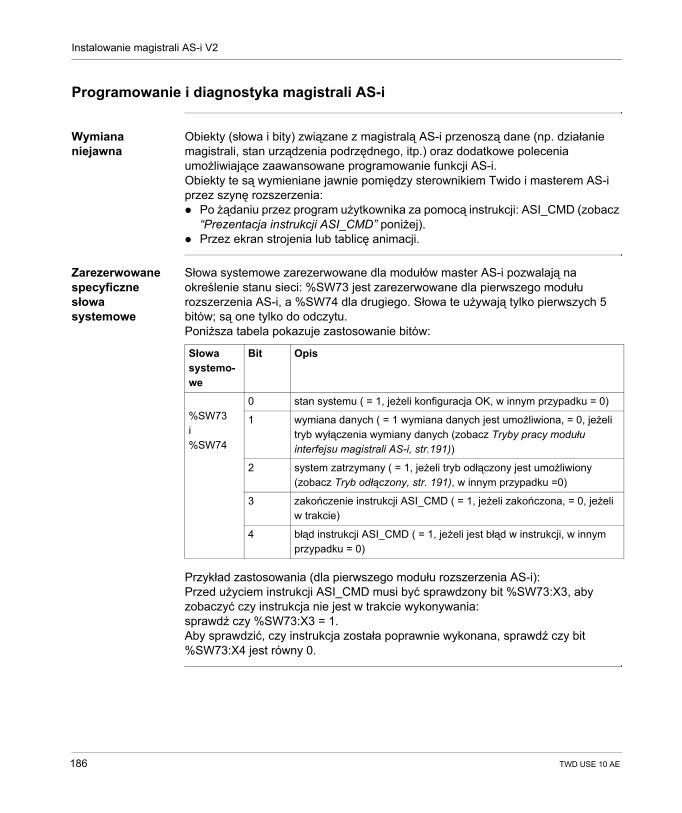
Instalowanie magistrali AS-i V2
Programowanie i diagnostyka magistrali AS-i
Wymiana niejawna
Obiekty (słowa i bity) związane z magistralą AS-i przenoszą dane (np. działanie magistrali, stan urządzenia podrzędnego, itp.) oraz dodatkowe polecenia umożliwiające zaawansowane programowanie funkcji AS-i.Obiekty te są wymieniane jawnie pomiędzy sterownikiem Twido i masterem AS-i przez szynę rozszerzenia:
Po żądaniu przez program użytkownika za pomocą instrukcji: ASI_CMD (zobacz “Prezentacja instrukcji ASI_CMD” poniżej).Przez ekran strojenia lub tablicę animacji.
Zarezerwowane specyficzne słowa systemowe
Słowa systemowe zarezerwowane dla modułów master AS-i pozwalają na określenie stanu sieci: %SW73 jest zarezerwowane dla pierwszego modułu rozszerzenia AS-i, a %SW74 dla drugiego. Słowa te używają tylko pierwszych 5 bitów; są one tylko do odczytu.Poniższa tabela pokazuje zastosowanie bitów:
Przykład zastosowania (dla pierwszego modułu rozszerzenia AS-i):Przed użyciem instrukcji ASI_CMD musi być sprawdzony bit %SW73:X3, aby zobaczyć czy instrukcja nie jest w trakcie wykonywania: sprawdź czy %SW73:X3 = 1.Aby sprawdzić, czy instrukcja została poprawnie wykonana, sprawdź czy bit %SW73:X4 jest równy 0.
Słowa systemo-we
Bit Opis
%SW73i%SW74
0 stan systemu ( = 1, jeżeli konfiguracja OK, w innym przypadku = 0)
1 wymiana danych ( = 1 wymiana danych jest umożliwiona, = 0, jeżeli tryb wyłączenia wymiany danych (zobacz Tryby pracy modułu interfejsu magistrali AS-i, str.191))
2 system zatrzymany ( = 1, jeżeli tryb odłączony jest umożliwiony (zobacz Tryb odłączony, str. 191), w innym przypadku =0)
3 zakończenie instrukcji ASI_CMD ( = 1, jeżeli zakończona, = 0, jeżeli w trakcie)
4 błąd instrukcji ASI_CMD ( = 1, jeżeli jest błąd w instrukcji, w innym przypadku = 0)
186 TWD USE 10 AE
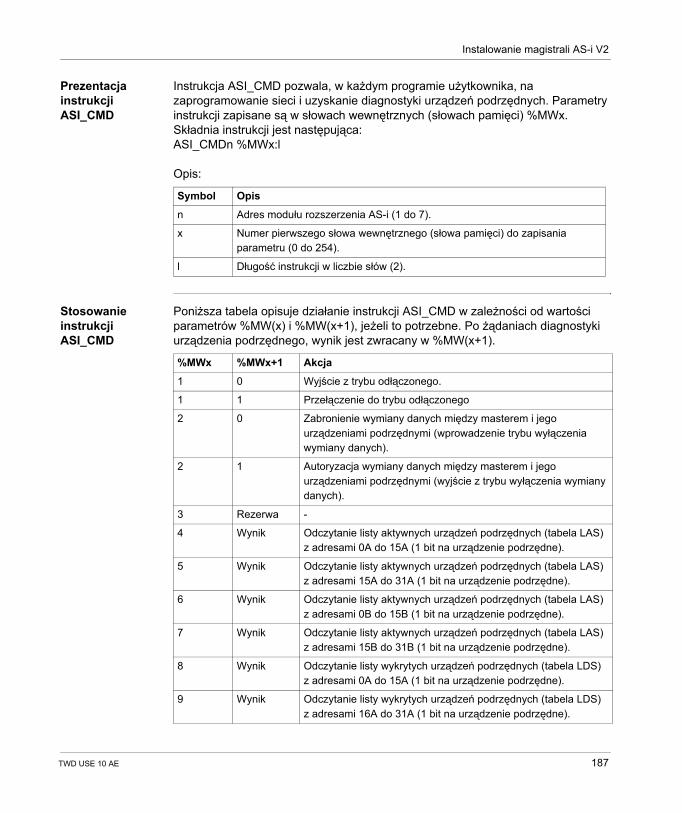
Instalowanie magistrali AS-i V2
Prezentacja instrukcji ASI_CMD
Instrukcja ASI_CMD pozwala, w każdym programie użytkownika, na zaprogramowanie sieci i uzyskanie diagnostyki urządzeń podrzędnych. Parametry instrukcji zapisane są w słowach wewnętrznych (słowach pamięci) %MWx.Składnia instrukcji jest następująca:ASI_CMDn %MWx:l
Opis:
Stosowanie instrukcji ASI_CMD
Poniższa tabela opisuje działanie instrukcji ASI_CMD w zależności od wartości parametrów %MW(x) i %MW(x+1), jeżeli to potrzebne. Po żądaniach diagnostyki urządzenia podrzędnego, wynik jest zwracany w %MW(x+1).
Symbol Opis
n Adres modułu rozszerzenia AS-i (1 do 7).
x Numer pierwszego słowa wewnętrznego (słowa pamięci) do zapisania parametru (0 do 254).
l Długość instrukcji w liczbie słów (2).
%MWx %MWx+1 Akcja
1 0 Wyjście z trybu odłączonego.
1 1 Przełączenie do trybu odłączonego
2 0 Zabronienie wymiany danych między masterem i jego urządzeniami podrzędnymi (wprowadzenie trybu wyłączenia wymiany danych).
2 1 Autoryzacja wymiany danych między masterem i jego urządzeniami podrzędnymi (wyjście z trybu wyłączenia wymiany danych).
3 Rezerwa -
4 Wynik Odczytanie listy aktywnych urządzeń podrzędnych (tabela LAS) z adresami 0A do 15A (1 bit na urządzenie podrzędne).
5 Wynik Odczytanie listy aktywnych urządzeń podrzędnych (tabela LAS) z adresami 15A do 31A (1 bit na urządzenie podrzędne).
6 Wynik Odczytanie listy aktywnych urządzeń podrzędnych (tabela LAS) z adresami 0B do 15B (1 bit na urządzenie podrzędne).
7 Wynik Odczytanie listy aktywnych urządzeń podrzędnych (tabela LAS) z adresami 15B do 31B (1 bit na urządzenie podrzędne).
8 Wynik Odczytanie listy wykrytych urządzeń podrzędnych (tabela LDS) z adresami 0A do 15A (1 bit na urządzenie podrzędne).
9 Wynik Odczytanie listy wykrytych urządzeń podrzędnych (tabela LDS) z adresami 16A do 31A (1 bit na urządzenie podrzędne).
TWD USE 10 AE 187
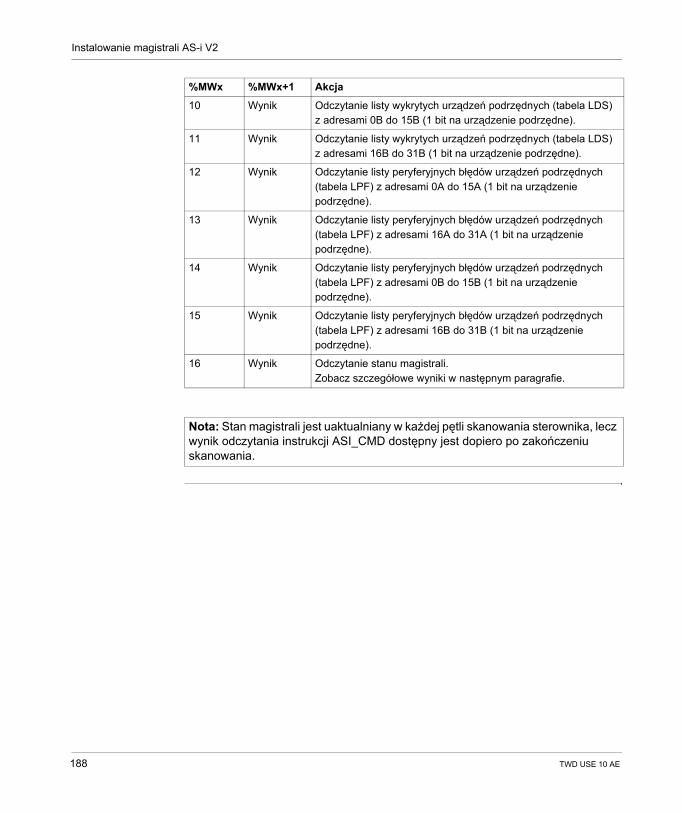
Instalowanie magistrali AS-i V2
10 Wynik Odczytanie listy wykrytych urządzeń podrzędnych (tabela LDS) z adresami 0B do 15B (1 bit na urządzenie podrzędne).
11 Wynik Odczytanie listy wykrytych urządzeń podrzędnych (tabela LDS) z adresami 16B do 31B (1 bit na urządzenie podrzędne).
12 Wynik Odczytanie listy peryferyjnych błędów urządzeń podrzędnych (tabela LPF) z adresami 0A do 15A (1 bit na urządzenie podrzędne).
13 Wynik Odczytanie listy peryferyjnych błędów urządzeń podrzędnych (tabela LPF) z adresami 16A do 31A (1 bit na urządzenie podrzędne).
14 Wynik Odczytanie listy peryferyjnych błędów urządzeń podrzędnych (tabela LPF) z adresami 0B do 15B (1 bit na urządzenie podrzędne).
15 Wynik Odczytanie listy peryferyjnych błędów urządzeń podrzędnych (tabela LPF) z adresami 16B do 31B (1 bit na urządzenie podrzędne).
16 Wynik Odczytanie stanu magistrali.Zobacz szczegółowe wyniki w następnym paragrafie.
Nota: Stan magistrali jest uaktualniany w każdej pętli skanowania sterownika, lecz wynik odczytania instrukcji ASI_CMD dostępny jest dopiero po zakończeniu skanowania.
%MWx %MWx+1 Akcja
188 TWD USE 10 AE
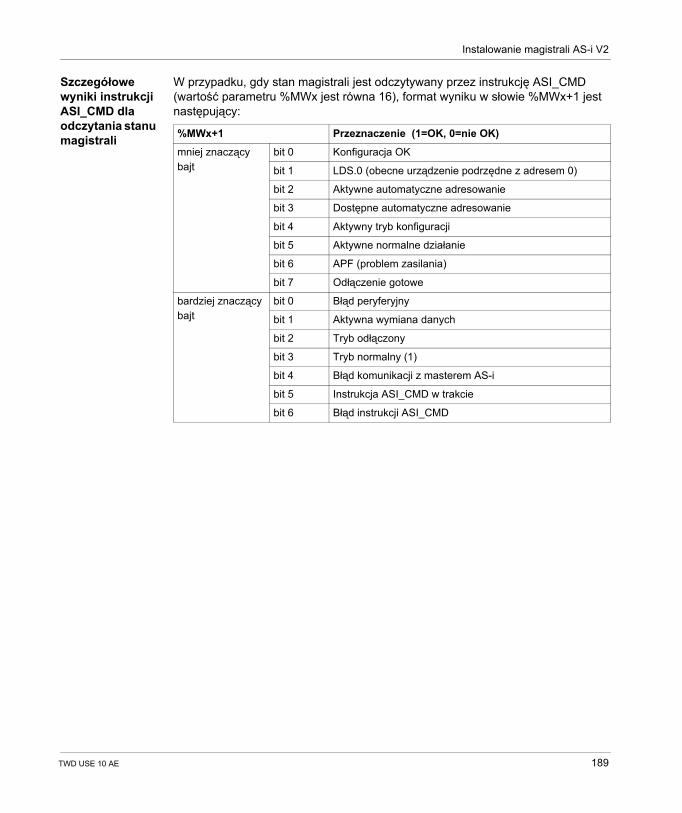
Instalowanie magistrali AS-i V2
Szczegółowe wyniki instrukcji ASI_CMD dla odczytania stanu magistrali
W przypadku, gdy stan magistrali jest odczytywany przez instrukcję ASI_CMD (wartość parametru %MWx jest równa 16), format wyniku w słowie %MWx+1 jest następujący:
%MWx+1 Przeznaczenie (1=OK, 0=nie OK)
mniej znaczący bajt
bit 0 Konfiguracja OK
bit 1 LDS.0 (obecne urządzenie podrzędne z adresem 0)
bit 2 Aktywne automatyczne adresowanie
bit 3 Dostępne automatyczne adresowanie
bit 4 Aktywny tryb konfiguracji
bit 5 Aktywne normalne działanie
bit 6 APF (problem zasilania)
bit 7 Odłączenie gotowe
bardziej znaczący bajt
bit 0 Błąd peryferyjny
bit 1 Aktywna wymiana danych
bit 2 Tryb odłączony
bit 3 Tryb normalny (1)
bit 4 Błąd komunikacji z masterem AS-i
bit 5 Instrukcja ASI_CMD w trakcie
bit 6 Błąd instrukcji ASI_CMD
TWD USE 10 AE 189
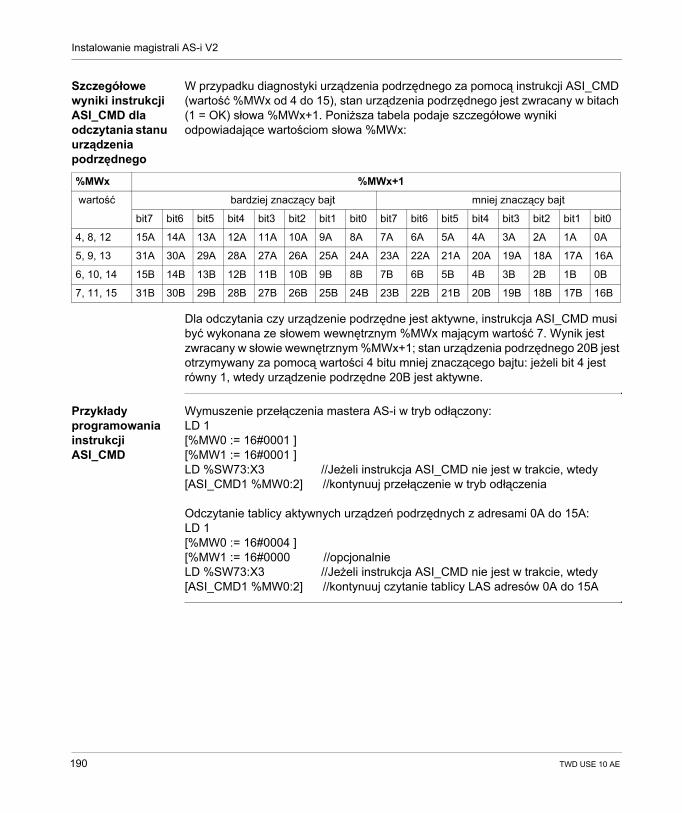
Instalowanie magistrali AS-i V2
Szczegółowe wyniki instrukcji ASI_CMD dla odczytania stanu urządzenia podrzędnego
W przypadku diagnostyki urządzenia podrzędnego za pomocą instrukcji ASI_CMD (wartość %MWx od 4 do 15), stan urządzenia podrzędnego jest zwracany w bitach (1 = OK) słowa %MWx+1. Poniższa tabela podaje szczegółowe wyniki odpowiadające wartościom słowa %MWx:
Dla odczytania czy urządzenie podrzędne jest aktywne, instrukcja ASI_CMD musi być wykonana ze słowem wewnętrznym %MWx mającym wartość 7. Wynik jest zwracany w słowie wewnętrznym %MWx+1; stan urządzenia podrzędnego 20B jest otrzymywany za pomocą wartości 4 bitu mniej znaczącego bajtu: jeżeli bit 4 jest równy 1, wtedy urządzenie podrzędne 20B jest aktywne.
Przykłady programowania instrukcji ASI_CMD
Wymuszenie przełączenia mastera AS-i w tryb odłączony:LD 1[%MW0 := 16#0001 ][%MW1 := 16#0001 ]LD %SW73:X3 //Jeżeli instrukcja ASI_CMD nie jest w trakcie, wtedy[ASI_CMD1 %MW0:2] //kontynuuj przełączenie w tryb odłączenia Odczytanie tablicy aktywnych urządzeń podrzędnych z adresami 0A do 15A:LD 1[%MW0 := 16#0004 ][%MW1 := 16#0000 //opcjonalnieLD %SW73:X3 //Jeżeli instrukcja ASI_CMD nie jest w trakcie, wtedy[ASI_CMD1 %MW0:2] //kontynuuj czytanie tablicy LAS adresów 0A do 15A
%MWx %MWx+1
wartość bardziej znaczący bajt mniej znaczący bajt
bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0 bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0
4, 8, 12 15A 14A 13A 12A 11A 10A 9A 8A 7A 6A 5A 4A 3A 2A 1A 0A
5, 9, 13 31A 30A 29A 28A 27A 26A 25A 24A 23A 22A 21A 20A 19A 18A 17A 16A
6, 10, 14 15B 14B 13B 12B 11B 10B 9B 8B 7B 6B 5B 4B 3B 2B 1B 0B
7, 11, 15 31B 30B 29B 28B 27B 26B 25B 24B 23B 22B 21B 20B 19B 18B 17B 16B
190 TWD USE 10 AE
Instalowanie magistrali AS-i V2
Tryby pracy modułu interfejsu magistrali AS-i
Rzut oka Moduł interfejsu magistrali AS-i TWDNOI10M3 ma trzy tryby działania, z których każdy odpowiada za szczególne potrzeby. Te tryby to:
Tryb chroniony,Tryb odłączonyTryb wyłączonej wymiany danych.
Zastosowanie w programie użytkownika instrukcji ASI_CMD (zobacz Prezentacja instrukcji ASI_CMD, str. 187) pozwala na wprowadzenie lub wyjście z tych trybów.
Tryb chroniony Tryb chroniony jest zazwyczaj stosowany dla pracującej aplikacji. Zakłada on, że moduł AS-i V2 jest skonfigurowany w TwidoSoft.On:
ciągle sprawdza, czy lista wykrytych urządzeń podrzędnych jest taka sama jak lista spodziewanych urządzeń podrzędnych,monitoruje zasilanie.
W tym trybie, urządzenie podrzędne będzie aktywne tylko, jeśli było zadeklarowane w konfiguracji i zostało wykryte.Po załączeniu zasilania lub podczas konfiguracji, sterownik Twido wymusza pracę modułu AS-i w trybie chronionym.
Tryb odłączony Kiedy moduł jest w trybie odłączonym, najpierw kasuje wszystkie obecne urządzenia podrzędne do zera i zatrzymuje wymianę na magistrali. W trybie odłączonym, wyjścia są wymuszone na zero.Dodatkiem do przycisku PB2 na module AS-i TWDNOI10M3, jest tryb odłączony dostępny przez oprogramowanie za pomocą instrukcji ASI_CMD (zobacz Przykłady programowania instrukcji ASI_CMD, str. 190), która także pozwala na wyjście z trybu i powrót do trybu chronionego.
Tryb wyłączonej wymiany danych
Kiedy uruchomiony jest tryb wyłączonej wymiany danych, wymiana na magistrali jest kontynuowana, ale dane nie są już odświeżane.Ten tryb może być dostępny tylko za pomocą instrukcji ASI_CMD (zobacz Stosowanie instrukcji ASI_CMD, str. 187).
TWD USE 10 AE 191
Instalowanie magistrali AS-i V2
192 TWD USE 10 AE
TWD USE 10 AE
10
Działanie wyświetlacza operatoraRzut oka
Wprowadzenie Ten rozdział opisuje szczegóły stosowania wyświetlacza operatora Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Wyświetlacz operatora 194
Identyfikacja sterownika i informacja stanu 197
Obiekty systemu i zmienne 199
Nastawy portu szeregowego 206
Zegar czasu dziennego 207
Współczynnik korekcji czasu rzeczywistego 208
193
Działanie wyświetlacza operatora
Wyświetlacz operatora
Wprowadzenie Opcjonalny wyświetlacz operatora jest interfejsem, który służy do pokazywania i kontrolowania danych aplikacji i niektórych funkcji sterownika takich jak, stan pracy i zegar czasu rzeczywistego (RTC). Opcja ta dostępna jest jako wkładka (TWDXCPODC) dla sterowników Compact lub jako moduł rozszerzenia (TWDXCPODM) dla sterowników Modular.Wyświetlacz operatora ma dwa tryby pracy:
Tryb wyświetlania: tylko pokazuje dane.Tryb edycji: pozwala na zmianę danych.
Wskazania i funkcje
Wyświetlacz dostarcza następujące wydzielone wskazania z przypisanymi funkcjami, które można wykonać na każdym wyświetlaczu.
Identyfikacja sterownika i informacja stanu: Wyświetlacz Operacji Wyświetla wersję oprogramowania sprzętowego (firmware) i stan sterownika. Zmienia stan sterownika poleceniami Run, Init i Stop. Obiekty systemu i zmienne: Wyświetlacz Danych Wybór danych aplikacji przez adres: %I, %Q i wszystkie inne obiekty oprogramowania w sterowniku bazowym. Kontroluje i zmienia wartości wybranych obiektów danych oprogramowania.Nastawy portu szeregowego: Wyświetlacz Komunikacji Wyświetla i modyfikuje nastawy portu komunikacyjnego.Zegar czasu dziennego: Wyświetlacz Czasu/Daty Wyświetla i konfiguruje bieżącą datę i czas (jeśli jest zainstalowany RTC).Współczynnik korekcji czasu korekcji: Współczynnik RTC Wyświetla i modyfikuje wartość RTC Correction dla opcjonalnego RTC.
Nota: Wyświetlacz operatora jest uaktualniany w określonym przedziale cyklu skanowania sterownika. Może to spowodować kłopoty w interpretacji wyświetlania wyjść dedykowanych do impulsów %PLS lub %PWM. W czasie próbkowania tych wyjść, ich wartość jest zawsze równa zero i ta wartość będzie wyświetlana.
Nota: Zegar czasu dziennego i korekcja czasu rzeczywistego są dostępne, jeśli jest zainstalowana opcjonalna wkładka (TWDXCPRTC) zegara czasu rzeczywistego (RTC).
194 TWD USE 10 AE
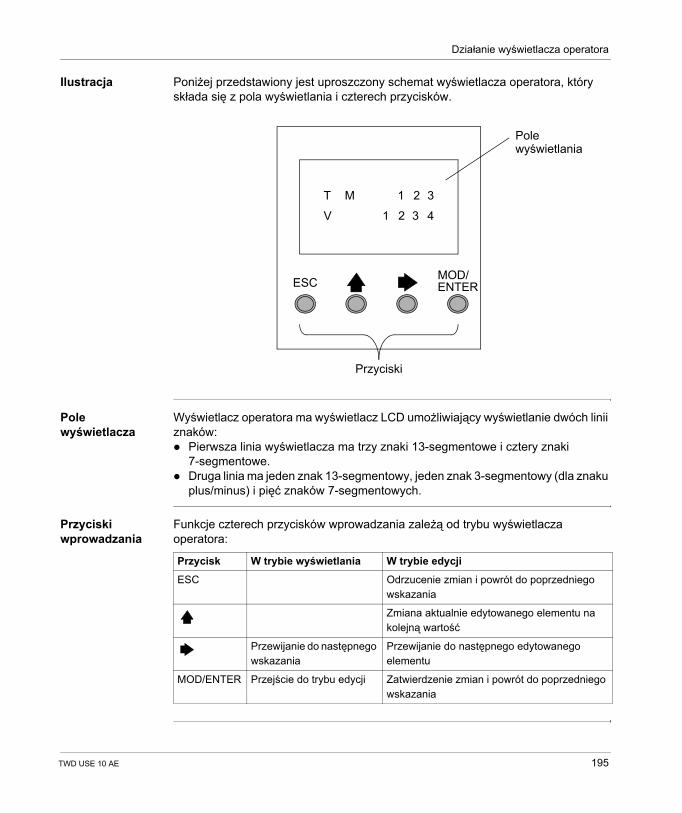
Działanie wyświetlacza operatora
Ilustracja Poniżej przedstawiony jest uproszczony schemat wyświetlacza operatora, który składa się z pola wyświetlania i czterech przycisków.
Pole wyświetlacza
Wyświetlacz operatora ma wyświetlacz LCD umożliwiający wyświetlanie dwóch linii znaków:
Pierwsza linia wyświetlacza ma trzy znaki 13-segmentowe i cztery znaki 7-segmentowe.Druga linia ma jeden znak 13-segmentowy, jeden znak 3-segmentowy (dla znaku plus/minus) i pięć znaków 7-segmentowych.
Przyciski wprowadzania
Funkcje czterech przycisków wprowadzania zależą od trybu wyświetlacza operatora:
T
V
2
4
31M
2 31
Przyciski
Pole
ESC MOD/ENTER
wyświetlania
Przycisk W trybie wyświetlania W trybie edycji
ESC Odrzucenie zmian i powrót do poprzedniego wskazania
Zmiana aktualnie edytowanego elementu na kolejną wartość
Przewijanie do następnego wskazania
Przewijanie do następnego edytowanego elementu
MOD/ENTER Przejście do trybu edycji Zatwierdzenie zmian i powrót do poprzedniego wskazania
TWD USE 10 AE 195
Działanie wyświetlacza operatora
Wybór i nawigacja wskazań
Początkowo wyświetlacz lub ekran wyświetlacza operatora pokazuje identyfikację sterownika i informację stanu. Naciskaj przycisk , aby kolejno przejść przez każde wskazanie. Ekrany dla zegara czasu dziennego i współczynnika korekcji czasu rzeczywistego nie są wyświetlane, jeżeli opcjonalna wkładka RTC (TWDXCPTRC) nie jest wykryta w sterowniku.Naciśnięcie przycisku ESC powoduje powrót od ekranu początkowego. Dla większości ekranów, naciśnięcie ESC spowoduje powrót do ekranu identyfikacji sterownika i informacji stanu. Tylko w czasie edycji obiektów systemu i zmiennych, gdy nie jest to wskazanie początkowe (%I0.0.0.), naciśnięcie ESC spowoduje wyświetlenie pierwszego lub początkowego obiektu systemu.Modyfikując wartość obiektu, aby dojść do pierwszej wartości cyfry, zamiast naciskania przycisku , można ponownie wcisnąć MOD/ENTER.
196 TWD USE 10 AE
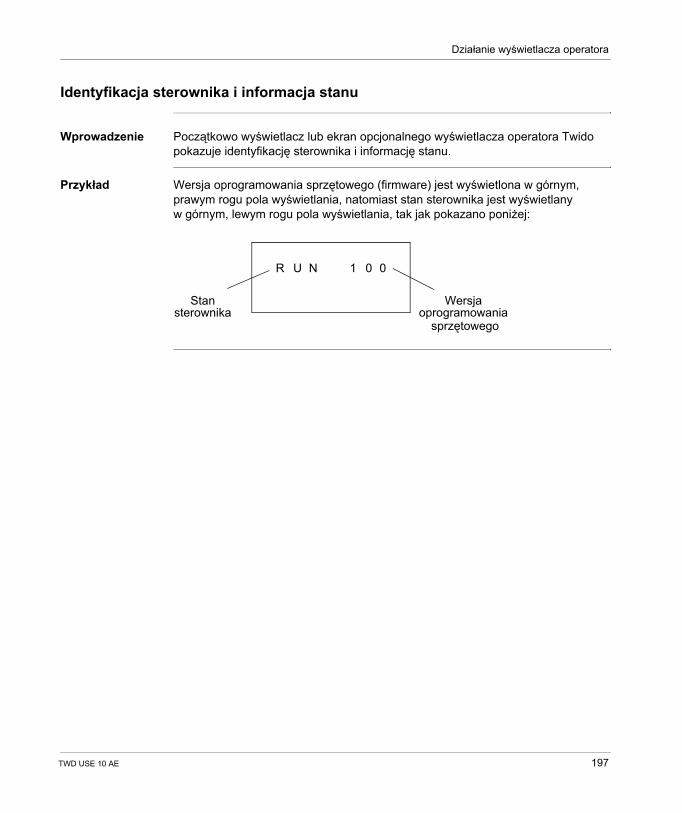
Działanie wyświetlacza operatora
Identyfikacja sterownika i informacja stanu
Wprowadzenie Początkowo wyświetlacz lub ekran opcjonalnego wyświetlacza operatora Twido pokazuje identyfikację sterownika i informację stanu.
Przykład Wersja oprogramowania sprzętowego (firmware) jest wyświetlona w górnym, prawym rogu pola wyświetlania, natomiast stan sterownika jest wyświetlany w górnym, lewym rogu pola wyświetlania, tak jak pokazano poniżej:
R 0 01U N
Wersja oprogramowania
Stansterownika
sprzętowego
TWD USE 10 AE 197
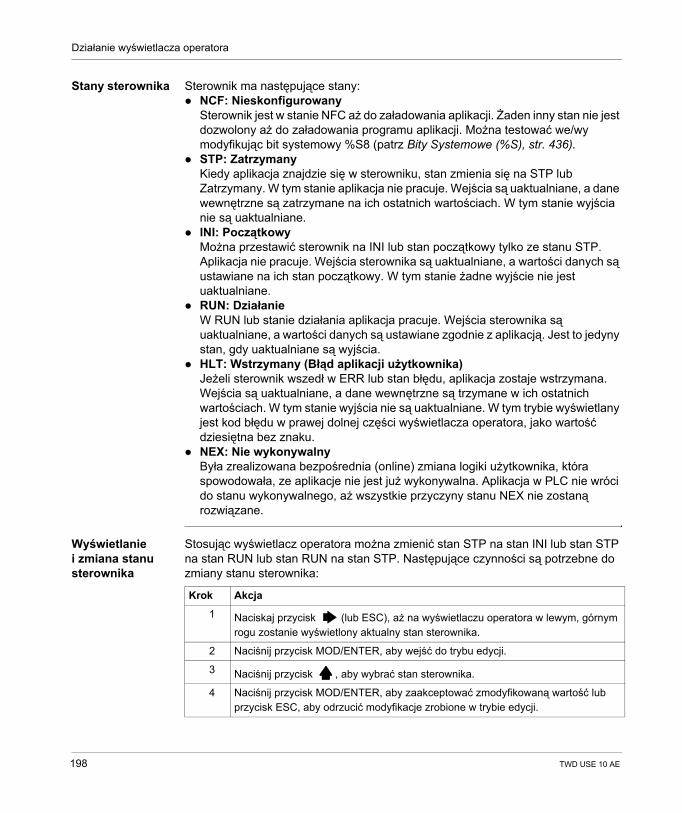
Działanie wyświetlacza operatora
Stany sterownika Sterownik ma następujące stany:NCF: NieskonfigurowanySterownik jest w stanie NFC aż do załadowania aplikacji. Żaden inny stan nie jest dozwolony aż do załadowania programu aplikacji. Można testować we/wy modyfikując bit systemowy %S8 (patrz Bity Systemowe (%S), str. 436).STP: ZatrzymanyKiedy aplikacja znajdzie się w sterowniku, stan zmienia się na STP lub Zatrzymany. W tym stanie aplikacja nie pracuje. Wejścia są uaktualniane, a dane wewnętrzne są zatrzymane na ich ostatnich wartościach. W tym stanie wyjścia nie są uaktualniane.INI: PoczątkowyMożna przestawić sterownik na INI lub stan początkowy tylko ze stanu STP. Aplikacja nie pracuje. Wejścia sterownika są uaktualniane, a wartości danych są ustawiane na ich stan początkowy. W tym stanie żadne wyjście nie jest uaktualniane.RUN: DziałanieW RUN lub stanie działania aplikacja pracuje. Wejścia sterownika są uaktualniane, a wartości danych są ustawiane zgodnie z aplikacją. Jest to jedyny stan, gdy uaktualniane są wyjścia.HLT: Wstrzymany (Błąd aplikacji użytkownika)Jeżeli sterownik wszedł w ERR lub stan błędu, aplikacja zostaje wstrzymana. Wejścia są uaktualniane, a dane wewnętrzne są trzymane w ich ostatnich wartościach. W tym stanie wyjścia nie są uaktualniane. W tym trybie wyświetlany jest kod błędu w prawej dolnej części wyświetlacza operatora, jako wartość dziesiętna bez znaku. NEX: Nie wykonywalnyByła zrealizowana bezpośrednia (online) zmiana logiki użytkownika, która spowodowała, ze aplikacje nie jest już wykonywalna. Aplikacja w PLC nie wróci do stanu wykonywalnego, aż wszystkie przyczyny stanu NEX nie zostaną rozwiązane.
Wyświetlanie i zmiana stanu sterownika
Stosując wyświetlacz operatora można zmienić stan STP na stan INI lub stan STP na stan RUN lub stan RUN na stan STP. Następujące czynności są potrzebne do zmiany stanu sterownika:
Krok Akcja
1 Naciskaj przycisk (lub ESC), aż na wyświetlaczu operatora w lewym, górnym rogu zostanie wyświetlony aktualny stan sterownika.
2 Naciśnij przycisk MOD/ENTER, aby wejść do trybu edycji.
3 Naciśnij przycisk , aby wybrać stan sterownika.
4 Naciśnij przycisk MOD/ENTER, aby zaakceptować zmodyfikowaną wartość lub przycisk ESC, aby odrzucić modyfikacje zrobione w trybie edycji.
198 TWD USE 10 AE
Działanie wyświetlacza operatora
Obiekty systemu i zmienne
Wprowadzenie Opcjonalny wyświetlacz operatora ma następujące możliwości monitorowania i nastawiania danych aplikacji:
Wybór danych aplikacji przez adres (taki jak %I lub %Q).Monitorowanie wartości wybranego obiektu / zmiennej oprogramowania.Zmiana wartości aktualnie wyświetlanego obiektu (obejmuje forsowanie wejść i wyjść).
TWD USE 10 AE 199
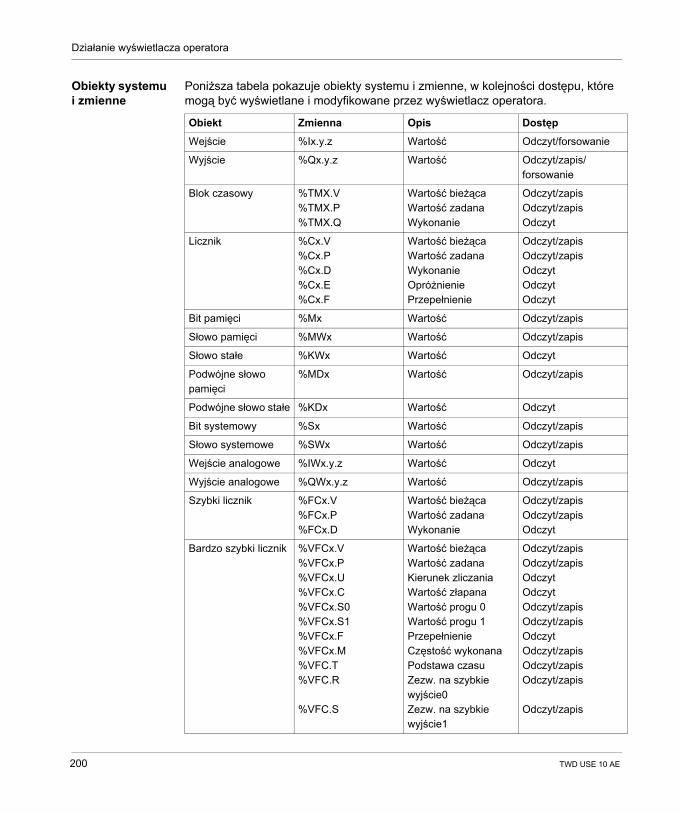
Działanie wyświetlacza operatora
Obiekty systemu i zmienne
Poniższa tabela pokazuje obiekty systemu i zmienne, w kolejności dostępu, które mogą być wyświetlane i modyfikowane przez wyświetlacz operatora.
Obiekt Zmienna Opis Dostęp
Wejście %Ix.y.z Wartość Odczyt/forsowanie
Wyjście %Qx.y.z Wartość Odczyt/zapis/ forsowanie
Blok czasowy %TMX.V%TMX.P%TMX.Q
Wartość bieżącaWartość zadanaWykonanie
Odczyt/zapisOdczyt/zapisOdczyt
Licznik %Cx.V%Cx.P%Cx.D%Cx.E%Cx.F
Wartość bieżącaWartość zadanaWykonanieOpróżnieniePrzepełnienie
Odczyt/zapisOdczyt/zapisOdczytOdczytOdczyt
Bit pamięci %Mx Wartość Odczyt/zapis
Słowo pamięci %MWx Wartość Odczyt/zapis
Słowo stałe %KWx Wartość Odczyt
Podwójne słowo pamięci
%MDx Wartość Odczyt/zapis
Podwójne słowo stałe %KDx Wartość Odczyt
Bit systemowy %Sx Wartość Odczyt/zapis
Słowo systemowe %SWx Wartość Odczyt/zapis
Wejście analogowe %IWx.y.z Wartość Odczyt
Wyjście analogowe %QWx.y.z Wartość Odczyt/zapis
Szybki licznik %FCx.V%FCx.P%FCx.D
Wartość bieżącaWartość zadanaWykonanie
Odczyt/zapisOdczyt/zapisOdczyt
Bardzo szybki licznik %VFCx.V%VFCx.P%VFCx.U%VFCx.C%VFCx.S0%VFCx.S1%VFCx.F%VFCx.M%VFC.T%VFC.R
%VFC.S
Wartość bieżącaWartość zadanaKierunek zliczaniaWartość złapanaWartość progu 0Wartość progu 1PrzepełnienieCzęstość wykonanaPodstawa czasuZezw. na szybkie wyjście0Zezw. na szybkie wyjście1
Odczyt/zapisOdczyt/zapisOdczytOdczytOdczyt/zapisOdczyt/zapisOdczytOdczyt/zapisOdczyt/zapisOdczyt/zapis
Odczyt/zapis
200 TWD USE 10 AE
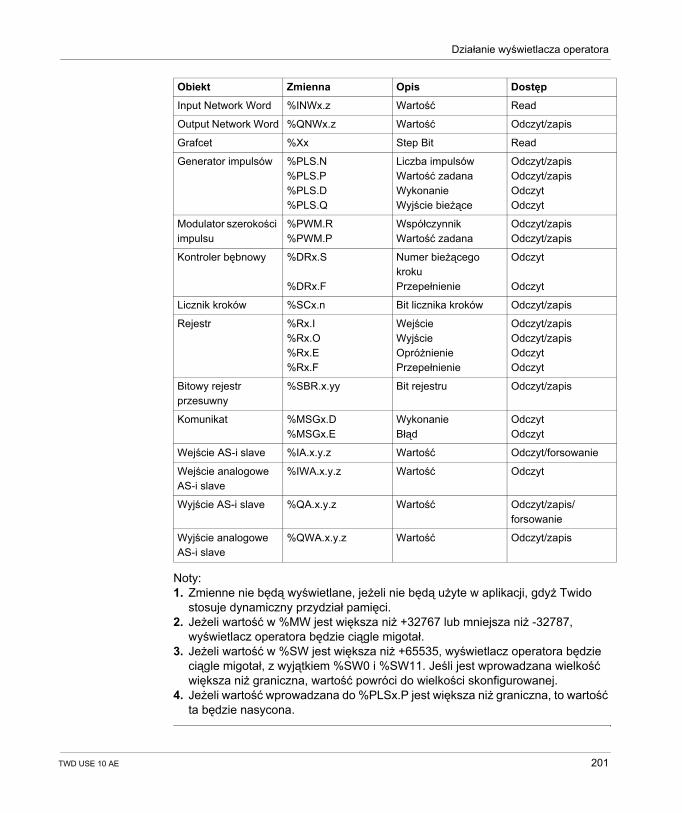
Działanie wyświetlacza operatora
Noty:1. Zmienne nie będą wyświetlane, jeżeli nie będą użyte w aplikacji, gdyż Twido
stosuje dynamiczny przydział pamięci.2. Jeżeli wartość w %MW jest większa niż +32767 lub mniejsza niż -32787,
wyświetlacz operatora będzie ciągle migotał.3. Jeżeli wartość w %SW jest większa niż +65535, wyświetlacz operatora będzie
ciągle migotał, z wyjątkiem %SW0 i %SW11. Jeśli jest wprowadzana wielkość większa niż graniczna, wartość powróci do wielkości skonfigurowanej.
4. Jeżeli wartość wprowadzana do %PLSx.P jest większa niż graniczna, to wartość ta będzie nasycona.
Input Network Word %INWx.z Wartość Read
Output Network Word %QNWx.z Wartość Odczyt/zapis
Grafcet %Xx Step Bit Read
Generator impulsów %PLS.N%PLS.P%PLS.D%PLS.Q
Liczba impulsówWartość zadanaWykonanieWyjście bieżące
Odczyt/zapisOdczyt/zapisOdczytOdczyt
Modulator szerokości impulsu
%PWM.R%PWM.P
WspółczynnikWartość zadana
Odczyt/zapisOdczyt/zapis
Kontroler bębnowy %DRx.S
%DRx.F
Numer bieżącego krokuPrzepełnienie
Odczyt
Odczyt
Licznik kroków %SCx.n Bit licznika kroków Odczyt/zapis
Rejestr %Rx.I%Rx.O%Rx.E%Rx.F
WejścieWyjścieOpróżnieniePrzepełnienie
Odczyt/zapisOdczyt/zapisOdczytOdczyt
Bitowy rejestr przesuwny
%SBR.x.yy Bit rejestru Odczyt/zapis
Komunikat %MSGx.D%MSGx.E
WykonanieBłąd
OdczytOdczyt
Wejście AS-i slave %IA.x.y.z Wartość Odczyt/forsowanie
Wejście analogowe AS-i slave
%IWA.x.y.z Wartość Odczyt
Wyjście AS-i slave %QA.x.y.z Wartość Odczyt/zapis/ forsowanie
Wyjście analogowe AS-i slave
%QWA.x.y.z Wartość Odczyt/zapis
Obiekt Zmienna Opis Dostęp
TWD USE 10 AE 201
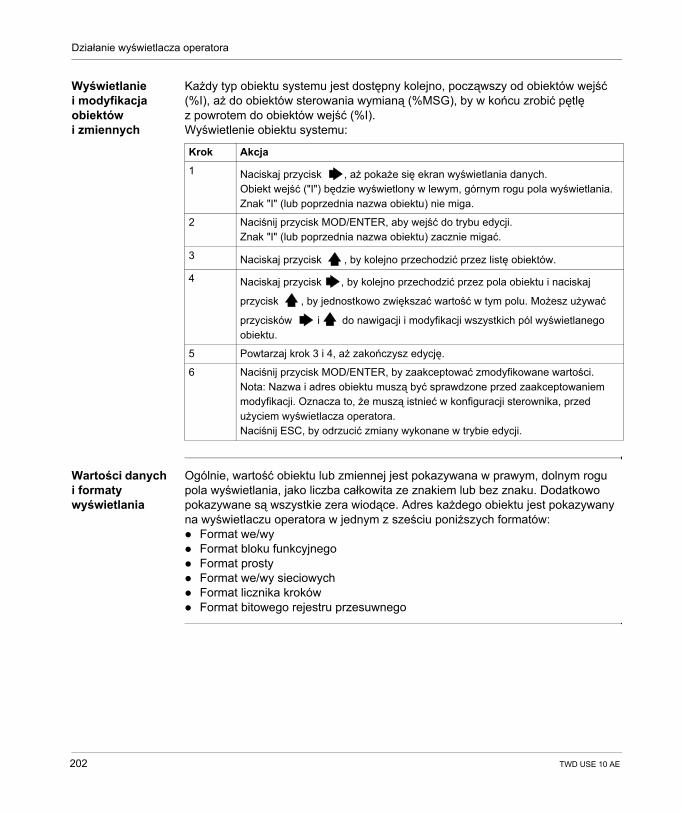
Działanie wyświetlacza operatora
Wyświetlanie i modyfikacja obiektów i zmiennych
Każdy typ obiektu systemu jest dostępny kolejno, począwszy od obiektów wejść (%I), aż do obiektów sterowania wymianą (%MSG), by w końcu zrobić pętlę z powrotem do obiektów wejść (%I).Wyświetlenie obiektu systemu:
Wartości danych i formaty wyświetlania
Ogólnie, wartość obiektu lub zmiennej jest pokazywana w prawym, dolnym rogu pola wyświetlania, jako liczba całkowita ze znakiem lub bez znaku. Dodatkowo pokazywane są wszystkie zera wiodące. Adres każdego obiektu jest pokazywany na wyświetlaczu operatora w jednym z sześciu poniższych formatów:
Format we/wyFormat bloku funkcyjnegoFormat prostyFormat we/wy sieciowychFormat licznika krokówFormat bitowego rejestru przesuwnego
Krok Akcja
1 Naciskaj przycisk , aż pokaże się ekran wyświetlania danych.Obiekt wejść ("I") będzie wyświetlony w lewym, górnym rogu pola wyświetlania. Znak "I" (lub poprzednia nazwa obiektu) nie miga.
2 Naciśnij przycisk MOD/ENTER, aby wejść do trybu edycji.Znak "I" (lub poprzednia nazwa obiektu) zacznie migać.
3 Naciskaj przycisk , by kolejno przechodzić przez listę obiektów.
4 Naciskaj przycisk , by kolejno przechodzić przez pola obiektu i naciskaj
przycisk , by jednostkowo zwiększać wartość w tym polu. Możesz używać
przycisków i do nawigacji i modyfikacji wszystkich pól wyświetlanego obiektu.
5 Powtarzaj krok 3 i 4, aż zakończysz edycję.
6 Naciśnij przycisk MOD/ENTER, by zaakceptować zmodyfikowane wartości.Nota: Nazwa i adres obiektu muszą być sprawdzone przed zaakceptowaniem modyfikacji. Oznacza to, że muszą istnieć w konfiguracji sterownika, przed użyciem wyświetlacza operatora.Naciśnij ESC, by odrzucić zmiany wykonane w trybie edycji.
202 TWD USE 10 AE
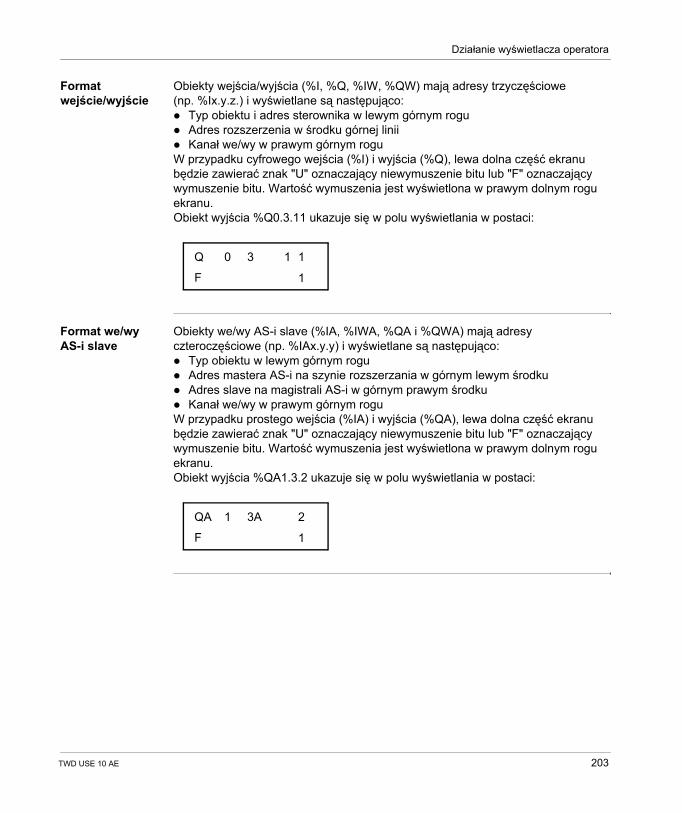
Działanie wyświetlacza operatora
Format wejście/wyjście
Obiekty wejścia/wyjścia (%I, %Q, %IW, %QW) mają adresy trzyczęściowe (np. %Ix.y.z.) i wyświetlane są następująco:
Typ obiektu i adres sterownika w lewym górnym roguAdres rozszerzenia w środku górnej liniiKanał we/wy w prawym górnym rogu
W przypadku cyfrowego wejścia (%I) i wyjścia (%Q), lewa dolna część ekranu będzie zawierać znak "U" oznaczający niewymuszenie bitu lub "F" oznaczający wymuszenie bitu. Wartość wymuszenia jest wyświetlona w prawym dolnym rogu ekranu.Obiekt wyjścia %Q0.3.11 ukazuje się w polu wyświetlania w postaci:
Format we/wy AS-i slave
Obiekty we/wy AS-i slave (%IA, %IWA, %QA i %QWA) mają adresy czteroczęściowe (np. %IAx.y.y) i wyświetlane są następująco:
Typ obiektu w lewym górnym roguAdres mastera AS-i na szynie rozszerzania w górnym lewym środkuAdres slave na magistrali AS-i w górnym prawym środkuKanał we/wy w prawym górnym rogu
W przypadku prostego wejścia (%IA) i wyjścia (%QA), lewa dolna część ekranu będzie zawierać znak "U" oznaczający niewymuszenie bitu lub "F" oznaczający wymuszenie bitu. Wartość wymuszenia jest wyświetlona w prawym dolnym rogu ekranu.Obiekt wyjścia %QA1.3.2 ukazuje się w polu wyświetlania w postaci:
Q
F
0 3 1
1
1
QA
F
1 3A
1
2
TWD USE 10 AE 203
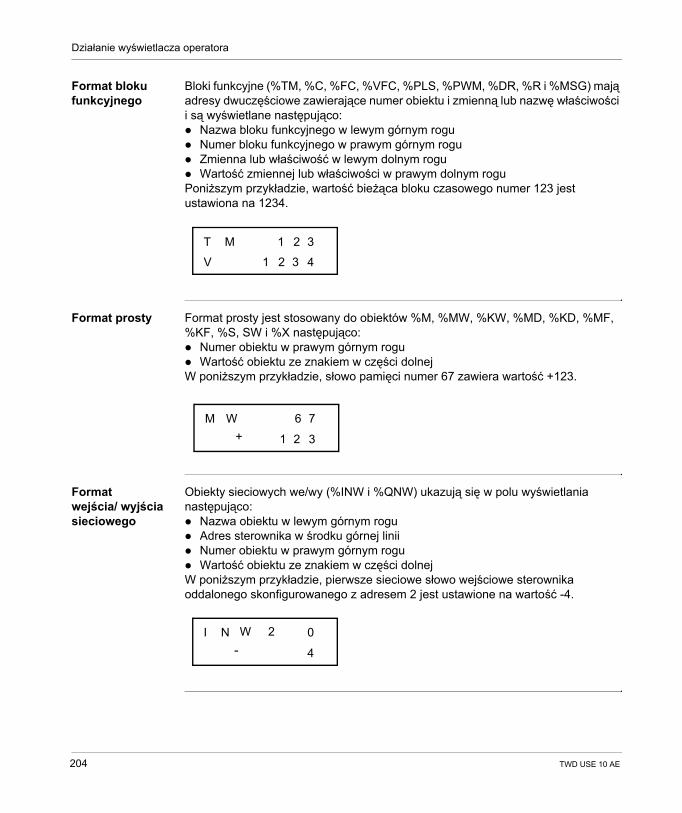
Działanie wyświetlacza operatora
Format bloku funkcyjnego
Bloki funkcyjne (%TM, %C, %FC, %VFC, %PLS, %PWM, %DR, %R i %MSG) mają adresy dwuczęściowe zawierające numer obiektu i zmienną lub nazwę właściwości i są wyświetlane następująco:
Nazwa bloku funkcyjnego w lewym górnym roguNumer bloku funkcyjnego w prawym górnym roguZmienna lub właściwość w lewym dolnym roguWartość zmiennej lub właściwości w prawym dolnym rogu
Poniższym przykładzie, wartość bieżąca bloku czasowego numer 123 jest ustawiona na 1234.
Format prosty Format prosty jest stosowany do obiektów %M, %MW, %KW, %MD, %KD, %MF, %KF, %S, SW i %X następująco:
Numer obiektu w prawym górnym roguWartość obiektu ze znakiem w części dolnej
W poniższym przykładzie, słowo pamięci numer 67 zawiera wartość +123.
Format wejścia/ wyjścia sieciowego
Obiekty sieciowych we/wy (%INW i %QNW) ukazują się w polu wyświetlania następująco:
Nazwa obiektu w lewym górnym roguAdres sterownika w środku górnej liniiNumer obiektu w prawym górnym roguWartość obiektu ze znakiem w części dolnej
W poniższym przykładzie, pierwsze sieciowe słowo wejściowe sterownika oddalonego skonfigurowanego z adresem 2 jest ustawione na wartość -4.
T
V
2
4
31M
2 31
M 6
3
7W
1 2+
I
4
0-
N W 2
204 TWD USE 10 AE
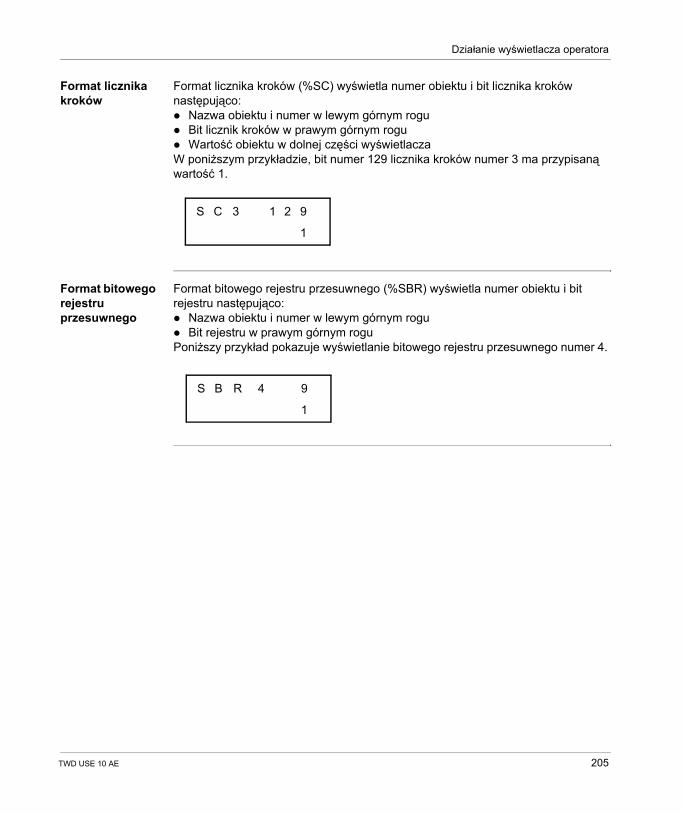
Działanie wyświetlacza operatora
Format licznika kroków
Format licznika kroków (%SC) wyświetla numer obiektu i bit licznika kroków następująco:
Nazwa obiektu i numer w lewym górnym roguBit licznik kroków w prawym górnym roguWartość obiektu w dolnej części wyświetlacza
W poniższym przykładzie, bit numer 129 licznika kroków numer 3 ma przypisaną wartość 1.
Format bitowego rejestru przesuwnego
Format bitowego rejestru przesuwnego (%SBR) wyświetla numer obiektu i bit rejestru następująco:
Nazwa obiektu i numer w lewym górnym roguBit rejestru w prawym górnym rogu
Poniższy przykład pokazuje wyświetlanie bitowego rejestru przesuwnego numer 4.
S
1
9C 3 1 2
S
1
9B R 4
TWD USE 10 AE 205
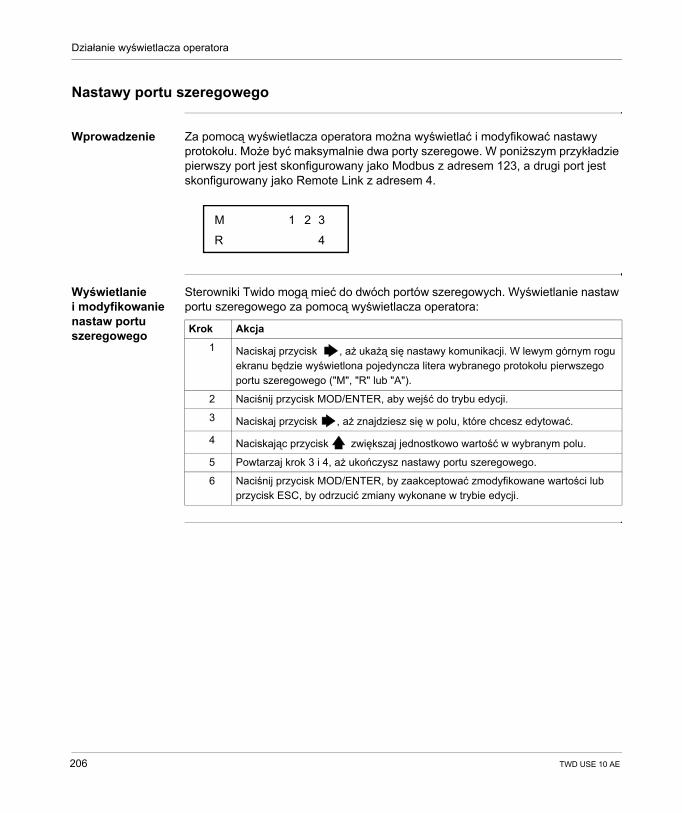
Działanie wyświetlacza operatora
Nastawy portu szeregowego
Wprowadzenie Za pomocą wyświetlacza operatora można wyświetlać i modyfikować nastawy protokołu. Może być maksymalnie dwa porty szeregowe. W poniższym przykładzie pierwszy port jest skonfigurowany jako Modbus z adresem 123, a drugi port jest skonfigurowany jako Remote Link z adresem 4.
Wyświetlanie i modyfikowanie nastaw portu szeregowego
Sterowniki Twido mogą mieć do dwóch portów szeregowych. Wyświetlanie nastaw portu szeregowego za pomocą wyświetlacza operatora:
M
R
2
4
31
Krok Akcja
1 Naciskaj przycisk , aż ukażą się nastawy komunikacji. W lewym górnym rogu ekranu będzie wyświetlona pojedyncza litera wybranego protokołu pierwszego portu szeregowego ("M", "R" lub "A").
2 Naciśnij przycisk MOD/ENTER, aby wejść do trybu edycji.
3 Naciskaj przycisk , aż znajdziesz się w polu, które chcesz edytować.
4 Naciskając przycisk zwiększaj jednostkowo wartość w wybranym polu.
5 Powtarzaj krok 3 i 4, aż ukończysz nastawy portu szeregowego.
6 Naciśnij przycisk MOD/ENTER, by zaakceptować zmodyfikowane wartości lub przycisk ESC, by odrzucić zmiany wykonane w trybie edycji.
206 TWD USE 10 AE
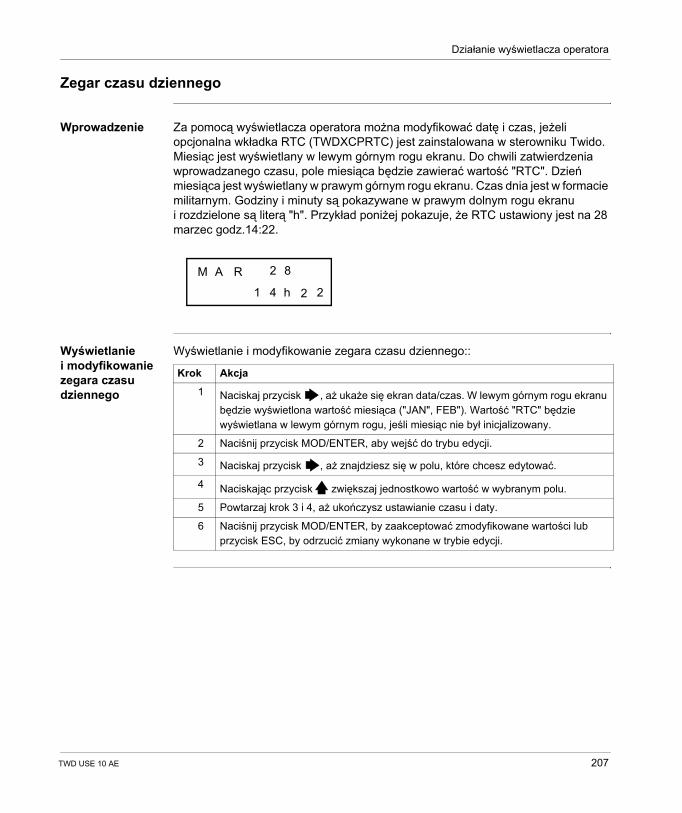
Działanie wyświetlacza operatora
Zegar czasu dziennego
Wprowadzenie Za pomocą wyświetlacza operatora można modyfikować datę i czas, jeżeli opcjonalna wkładka RTC (TWDXCPRTC) jest zainstalowana w sterowniku Twido. Miesiąc jest wyświetlany w lewym górnym rogu ekranu. Do chwili zatwierdzenia wprowadzanego czasu, pole miesiąca będzie zawierać wartość "RTC". Dzień miesiąca jest wyświetlany w prawym górnym rogu ekranu. Czas dnia jest w formacie militarnym. Godziny i minuty są pokazywane w prawym dolnym rogu ekranu i rozdzielone są literą "h". Przykład poniżej pokazuje, że RTC ustawiony jest na 28 marzec godz.14:22.
Wyświetlanie i modyfikowanie zegara czasu dziennego
Wyświetlanie i modyfikowanie zegara czasu dziennego::
M 8A R 2
24 h1 2
Krok Akcja
1 Naciskaj przycisk , aż ukaże się ekran data/czas. W lewym górnym rogu ekranu będzie wyświetlona wartość miesiąca ("JAN", FEB"). Wartość "RTC" będzie wyświetlana w lewym górnym rogu, jeśli miesiąc nie był inicjalizowany.
2 Naciśnij przycisk MOD/ENTER, aby wejść do trybu edycji.
3 Naciskaj przycisk , aż znajdziesz się w polu, które chcesz edytować.
4 Naciskając przycisk zwiększaj jednostkowo wartość w wybranym polu.
5 Powtarzaj krok 3 i 4, aż ukończysz ustawianie czasu i daty.
6 Naciśnij przycisk MOD/ENTER, by zaakceptować zmodyfikowane wartości lub przycisk ESC, by odrzucić zmiany wykonane w trybie edycji.
TWD USE 10 AE 207
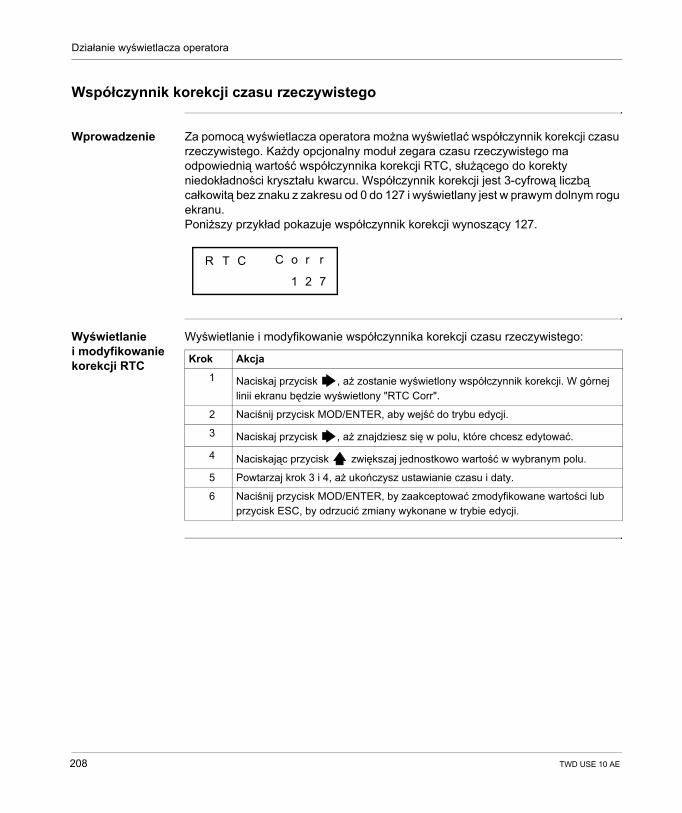
Działanie wyświetlacza operatora
Współczynnik korekcji czasu rzeczywistego
Wprowadzenie Za pomocą wyświetlacza operatora można wyświetlać współczynnik korekcji czasu rzeczywistego. Każdy opcjonalny moduł zegara czasu rzeczywistego ma odpowiednią wartość współczynnika korekcji RTC, służącego do korekty niedokładności kryształu kwarcu. Współczynnik korekcji jest 3-cyfrową liczbą całkowitą bez znaku z zakresu od 0 do 127 i wyświetlany jest w prawym dolnym rogu ekranu.Poniższy przykład pokazuje współczynnik korekcji wynoszący 127.
Wyświetlanie i modyfikowanie korekcji RTC
Wyświetlanie i modyfikowanie współczynnika korekcji czasu rzeczywistego:
R T C
21 7
C o r r
Krok Akcja
1 Naciskaj przycisk , aż zostanie wyświetlony współczynnik korekcji. W górnej linii ekranu będzie wyświetlony "RTC Corr".
2 Naciśnij przycisk MOD/ENTER, aby wejść do trybu edycji.
3 Naciskaj przycisk , aż znajdziesz się w polu, które chcesz edytować.
4 Naciskając przycisk zwiększaj jednostkowo wartość w wybranym polu.
5 Powtarzaj krok 3 i 4, aż ukończysz ustawianie czasu i daty.
6 Naciśnij przycisk MOD/ENTER, by zaakceptować zmodyfikowane wartości lub przycisk ESC, by odrzucić zmiany wykonane w trybie edycji.
208 TWD USE 10 AE
TWD USE 10 AE
III
Opis języków TwidoRzut oka
Wprowadzenie Ta część dostarcza informacji o instrukcjach używanych przez języki programowania Ladder, List i Grafcet służące do tworzenia programów sterujących sterowniki Twido.
Co jest w tej części?
Ta część zawiera następujące rozdziały:
Rozdział Tytuł rozdziału Strona
11 Język Ladder 211
12 Język List 233
13 Grafcet 245
209

Opis języków Twido
210 TWD USE 10 AE
TWD USE 10 AE
11
Język LadderRzut oka
Wprowadzenie Ten rozdział opisuje programowanie w języku Ladder.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Wprowadzenie do schematów drabinkowych 212
Zasady programowania schematów drabinkowych 214
Bloki schematów drabinkowych 216
Elementy graficzne języka drabinkowego 219
Instrukcje specjalne OPEN i SHORT 222
Porady dla programisty 223
Odwracalność Ladder / List 227
Wskazówki do odwracalności Ladder / List 228
Dokumentacja programu 230
211
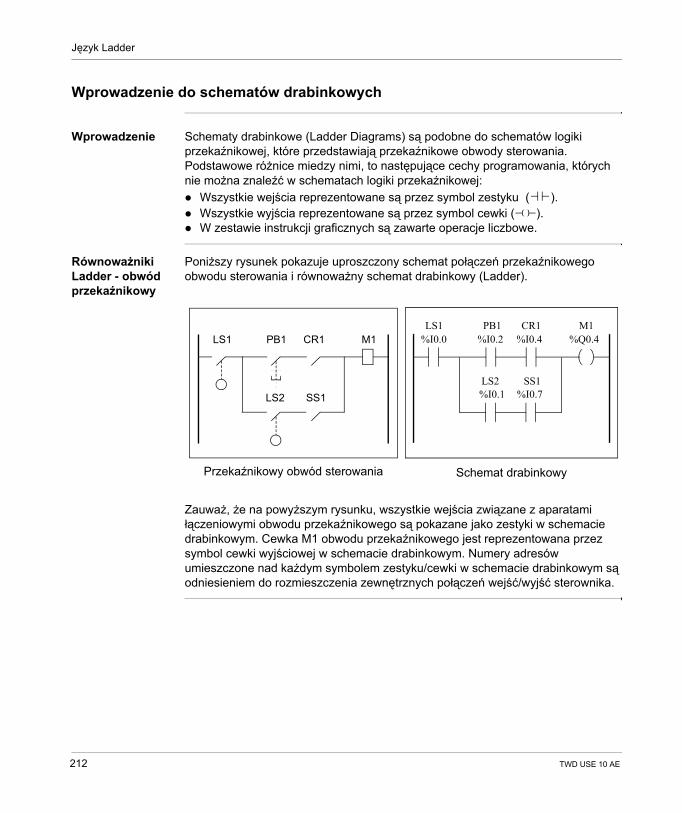
Język Ladder
Wprowadzenie do schematów drabinkowych
Wprowadzenie Schematy drabinkowe (Ladder Diagrams) są podobne do schematów logiki przekaźnikowej, które przedstawiają przekaźnikowe obwody sterowania. Podstawowe różnice miedzy nimi, to następujące cechy programowania, których nie można znaleźć w schematach logiki przekaźnikowej:
Wszystkie wejścia reprezentowane są przez symbol zestyku ( ).Wszystkie wyjścia reprezentowane są przez symbol cewki ( ).W zestawie instrukcji graficznych są zawarte operacje liczbowe.
Równoważniki Ladder - obwód przekaźnikowy
Poniższy rysunek pokazuje uproszczony schemat połączeń przekaźnikowego obwodu sterowania i równoważny schemat drabinkowy (Ladder).
Zauważ, że na powyższym rysunku, wszystkie wejścia związane z aparatami łączeniowymi obwodu przekaźnikowego są pokazane jako zestyki w schemacie drabinkowym. Cewka M1 obwodu przekaźnikowego jest reprezentowana przez symbol cewki wyjściowej w schemacie drabinkowym. Numery adresów umieszczone nad każdym symbolem zestyku/cewki w schemacie drabinkowym są odniesieniem do rozmieszczenia zewnętrznych połączeń wejść/wyjść sterownika.
Przekaźnikowy obwód sterowania Schemat drabinkowy
LS1 PB1 CR1 M1
LS2 SS1
%I0.2 %I0.4%I0.0
%I0.1 %I0.7
%Q0.4LS1 PB1 CR1 M1
LS2 SS1
212 TWD USE 10 AE
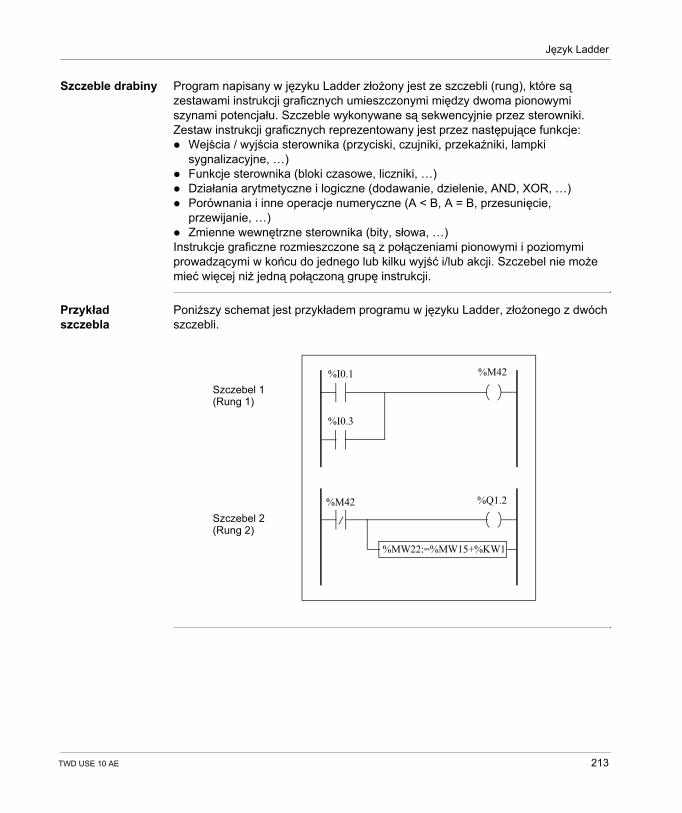
Język Ladder
Szczeble drabiny Program napisany w języku Ladder złożony jest ze szczebli (rung), które są zestawami instrukcji graficznych umieszczonymi między dwoma pionowymi szynami potencjału. Szczeble wykonywane są sekwencyjnie przez sterowniki.Zestaw instrukcji graficznych reprezentowany jest przez następujące funkcje:
Wejścia / wyjścia sterownika (przyciski, czujniki, przekaźniki, lampki sygnalizacyjne, …)Funkcje sterownika (bloki czasowe, liczniki, …)Działania arytmetyczne i logiczne (dodawanie, dzielenie, AND, XOR, …)Porównania i inne operacje numeryczne (A < B, A = B, przesunięcie, przewijanie, …)Zmienne wewnętrzne sterownika (bity, słowa, …)
Instrukcje graficzne rozmieszczone są z połączeniami pionowymi i poziomymi prowadzącymi w końcu do jednego lub kilku wyjść i/lub akcji. Szczebel nie może mieć więcej niż jedną połączoną grupę instrukcji.
Przykład szczebla
Poniższy schemat jest przykładem programu w języku Ladder, złożonego z dwóch szczebli.
%MW22:=%MW15+%KW1
Szczebel 1
Szczebel 2
%I0.1
%I0.3
%M42 %Q1.2
%M42
(Rung 1)
(Rung 2)
TWD USE 10 AE 213
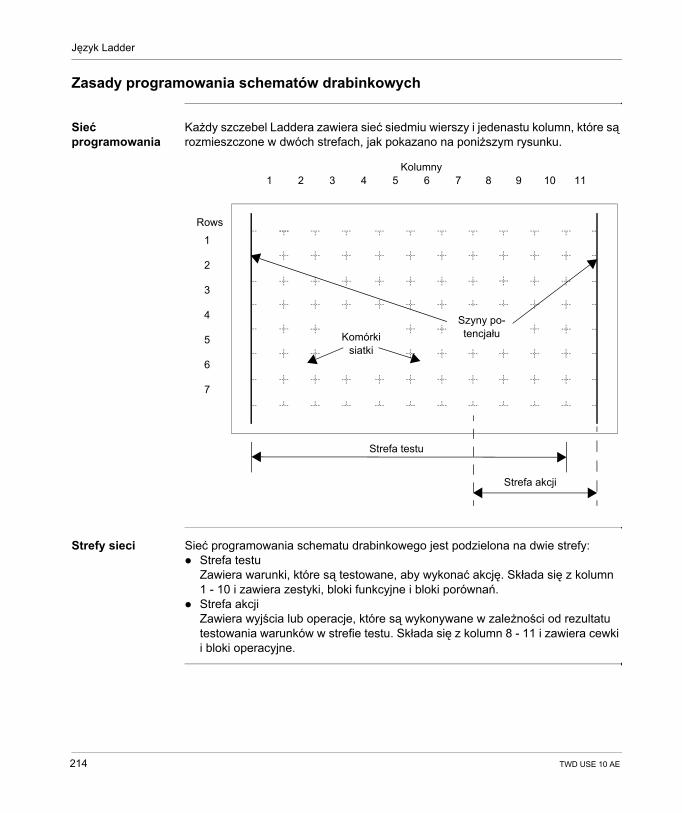
Język Ladder
Zasady programowania schematów drabinkowych
Sieć programowania
Każdy szczebel Laddera zawiera sieć siedmiu wierszy i jedenastu kolumn, które są rozmieszczone w dwóch strefach, jak pokazano na poniższym rysunku.
Strefy sieci Sieć programowania schematu drabinkowego jest podzielona na dwie strefy:Strefa testu Zawiera warunki, które są testowane, aby wykonać akcję. Składa się z kolumn 1 - 10 i zawiera zestyki, bloki funkcyjne i bloki porównań.Strefa akcji Zawiera wyjścia lub operacje, które są wykonywane w zależności od rezultatu testowania warunków w strefie testu. Składa się z kolumn 8 - 11 i zawiera cewki i bloki operacyjne.
Strefa testu
Strefa akcji
2
3
4
6
7
2 43 5 6 7 109 11
5
1
1 8
Rows
Kolumny
Komórki siatki
Szyny po-tencjału
214 TWD USE 10 AE
Język Ladder
Wprowadzanie instrukcji do sieci
Szczebel Laddera złożony jest z sieci siedem na jedenaście komórek, a zaczyna się w pierwszej komórce w lewym górnym rogu sieci. Programowanie polega na wprowadzaniu instrukcji w komórki sieci. Instrukcje testu, porównania i funkcje wprowadzane są w komórki strefy testu i są wyrównywane do lewej. Logika testów dołączona jest do strefy akcji, gdzie wprowadzane są, wyrównywane do prawej, cewki, operacje numeryczne i instrukcje sterowania wykonywaniem programu.Szczeble są rozwiązywane lub wykonywane (wykonanie testów i wyznaczenie wyjść) od góry do dołu i od lewej do prawej.
Nagłówki szczebli
Dodatkowo, bezpośrednio nad szczeblem może pojawić się nagłówek szczebla. Służy do opisania celu logiki szczebla. Nagłówek szczebla może zawierać poniższe informacje:
Numer szczeblaEtykieta (%Li)Deklaracja podprogramu (SRi:)Tytuł szczeblaKomentarz szczebla
Po więcej szczegółów nt. stosowania nagłówka szczebla w dokumentacji programu, patrz Dokumentacja programu, str. 230.
TWD USE 10 AE 215
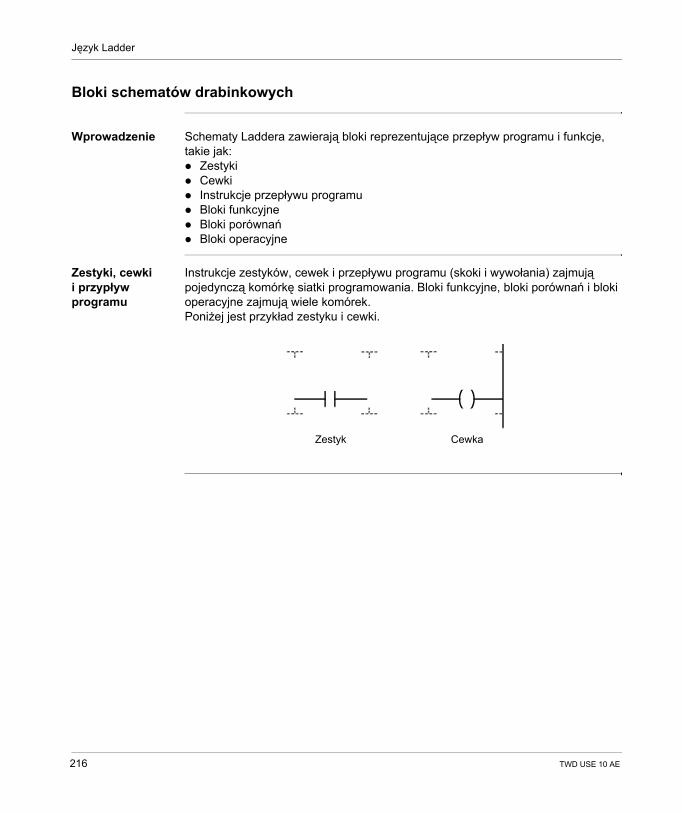
Język Ladder
Bloki schematów drabinkowych
Wprowadzenie Schematy Laddera zawierają bloki reprezentujące przepływ programu i funkcje, takie jak:
ZestykiCewkiInstrukcje przepływu programuBloki funkcyjneBloki porównańBloki operacyjne
Zestyki, cewki i przypływ programu
Instrukcje zestyków, cewek i przepływu programu (skoki i wywołania) zajmują pojedynczą komórkę siatki programowania. Bloki funkcyjne, bloki porównań i bloki operacyjne zajmują wiele komórek.Poniżej jest przykład zestyku i cewki.
Zestyk Cewka
216 TWD USE 10 AE

Język Ladder
Bloki funkcyjne Bloki funkcyjne są umieszczane w strefie testów sieci. Blok musi być wstawiony w pierwszym wierszu; żadna instrukcja lub linia nie może być umieszczona powyżej lub poniżej bloku funkcyjnego. Instrukcje testu prowadzą do boku wejść bloku funkcyjnego, a instrukcje testu i/lub instrukcje akcji prowadzą z boku wyjść bloku.Blok funkcyjny jest zorientowany pionowo i zajmuje dwie kolumny i cztery wiersze sieci programowania.Poniżej jest przykład bloku funkcyjnego licznika.
R
S
CU
CD
E
D
F
%C0
ADJ Y%C0.P 9999
TWD USE 10 AE 217
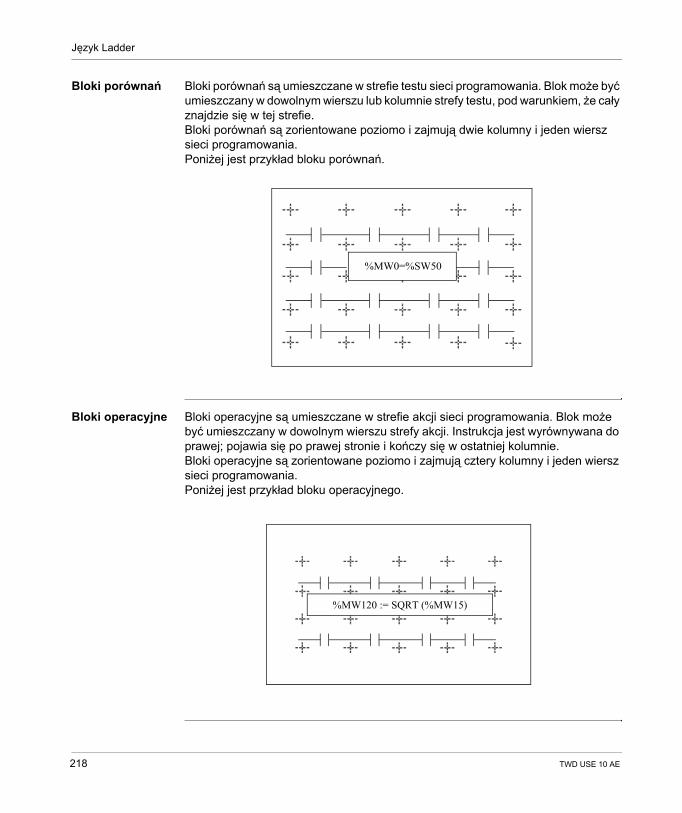
Język Ladder
Bloki porównań Bloki porównań są umieszczane w strefie testu sieci programowania. Blok może być umieszczany w dowolnym wierszu lub kolumnie strefy testu, pod warunkiem, że cały znajdzie się w tej strefie.Bloki porównań są zorientowane poziomo i zajmują dwie kolumny i jeden wiersz sieci programowania.Poniżej jest przykład bloku porównań.
Bloki operacyjne Bloki operacyjne są umieszczane w strefie akcji sieci programowania. Blok może być umieszczany w dowolnym wierszu strefy akcji. Instrukcja jest wyrównywana do prawej; pojawia się po prawej stronie i kończy się w ostatniej kolumnie.Bloki operacyjne są zorientowane poziomo i zajmują cztery kolumny i jeden wiersz sieci programowania.Poniżej jest przykład bloku operacyjnego.
%MW0=%SW50
%MW120 := SQRT (%MW15)
218 TWD USE 10 AE
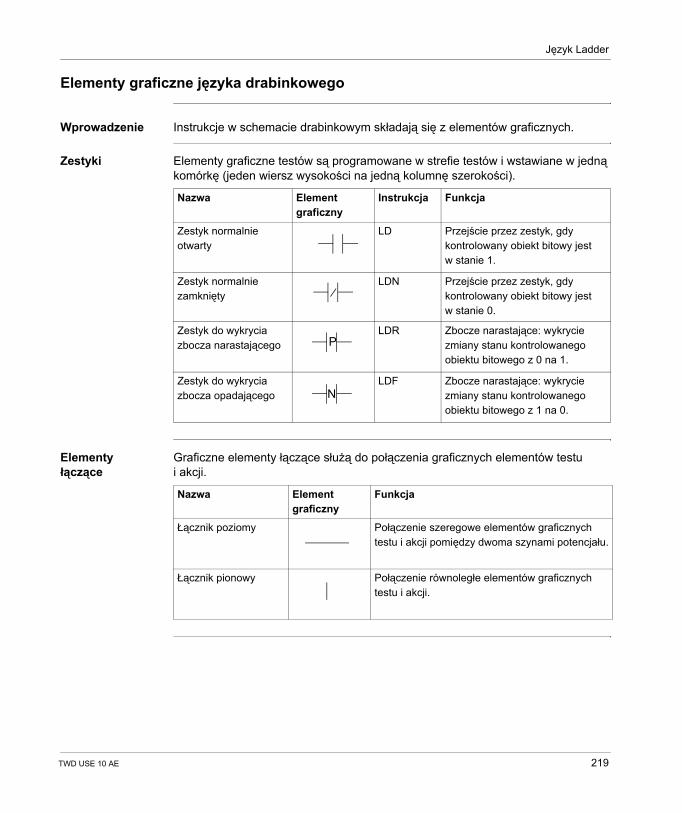
Język Ladder
Elementy graficzne języka drabinkowego
Wprowadzenie Instrukcje w schemacie drabinkowym składają się z elementów graficznych.
Zestyki Elementy graficzne testów są programowane w strefie testów i wstawiane w jedną komórkę (jeden wiersz wysokości na jedną kolumnę szerokości).
Elementy łączące
Graficzne elementy łączące służą do połączenia graficznych elementów testu i akcji.
Nazwa Element graficzny
Instrukcja Funkcja
Zestyk normalnie otwarty
LD Przejście przez zestyk, gdy kontrolowany obiekt bitowy jest w stanie 1.
Zestyk normalnie zamknięty
LDN Przejście przez zestyk, gdy kontrolowany obiekt bitowy jest w stanie 0.
Zestyk do wykrycia zbocza narastającego
LDR Zbocze narastające: wykrycie zmiany stanu kontrolowanego obiektu bitowego z 0 na 1.
Zestyk do wykrycia zbocza opadającego
LDF Zbocze narastające: wykrycie zmiany stanu kontrolowanego obiektu bitowego z 1 na 0.
P
N
Nazwa Element graficzny
Funkcja
Łącznik poziomy Połączenie szeregowe elementów graficznych testu i akcji pomiędzy dwoma szynami potencjału.
Łącznik pionowy Połączenie równoległe elementów graficznych testu i akcji.
TWD USE 10 AE 219
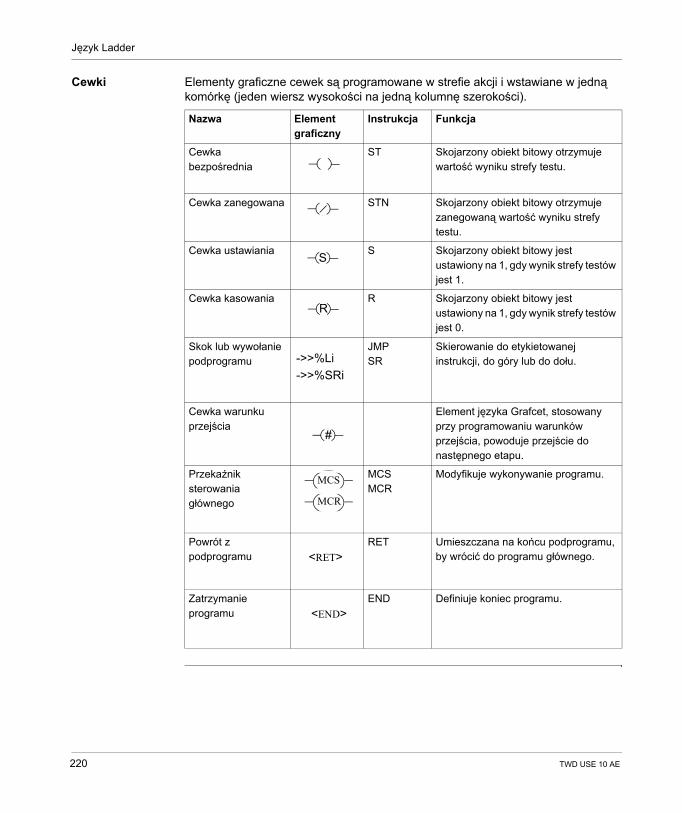
Język Ladder
Cewki Elementy graficzne cewek są programowane w strefie akcji i wstawiane w jedną komórkę (jeden wiersz wysokości na jedną kolumnę szerokości).
Nazwa Element graficzny
Instrukcja Funkcja
Cewka bezpośrednia
ST Skojarzony obiekt bitowy otrzymuje wartość wyniku strefy testu.
Cewka zanegowana STN Skojarzony obiekt bitowy otrzymuje zanegowaną wartość wyniku strefy testu.
Cewka ustawiania S Skojarzony obiekt bitowy jest ustawiony na 1, gdy wynik strefy testów jest 1.
Cewka kasowania R Skojarzony obiekt bitowy jest ustawiony na 1, gdy wynik strefy testów jest 0.
Skok lub wywołanie podprogramu
JMPSR
Skierowanie do etykietowanej instrukcji, do góry lub do dołu.
Cewka warunku przejścia
Element języka Grafcet, stosowany przy programowaniu warunków przejścia, powoduje przejście do następnego etapu.
Przekaźnik sterowania głównego
MCSMCR
Modyfikuje wykonywanie programu.
Powrót z podprogramu
RET Umieszczana na końcu podprogramu, by wrócić do programu głównego.
Zatrzymanie programu
END Definiuje koniec programu.
S
R
->>%Li->>%SRi
#
MCS
MCR
<RET>
<END>
220 TWD USE 10 AE
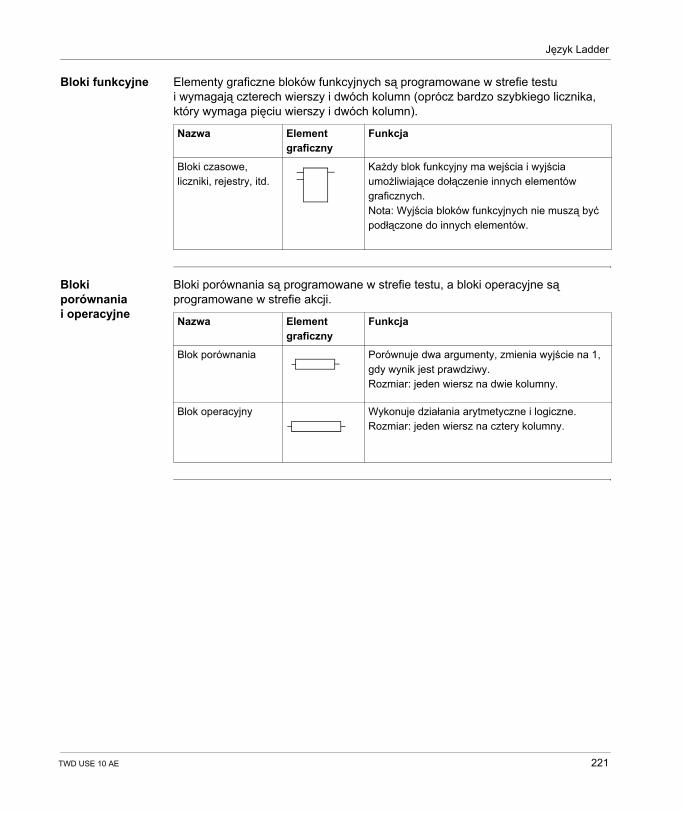
Język Ladder
Bloki funkcyjne Elementy graficzne bloków funkcyjnych są programowane w strefie testu i wymagają czterech wierszy i dwóch kolumn (oprócz bardzo szybkiego licznika, który wymaga pięciu wierszy i dwóch kolumn).
Bloki porównania i operacyjne
Bloki porównania są programowane w strefie testu, a bloki operacyjne są programowane w strefie akcji.
Nazwa Element graficzny
Funkcja
Bloki czasowe, liczniki, rejestry, itd.
Każdy blok funkcyjny ma wejścia i wyjścia umożliwiające dołączenie innych elementów graficznych.Nota: Wyjścia bloków funkcyjnych nie muszą być podłączone do innych elementów.
Nazwa Element graficzny
Funkcja
Blok porównania Porównuje dwa argumenty, zmienia wyjście na 1, gdy wynik jest prawdziwy.Rozmiar: jeden wiersz na dwie kolumny.
Blok operacyjny Wykonuje działania arytmetyczne i logiczne.Rozmiar: jeden wiersz na cztery kolumny.
TWD USE 10 AE 221
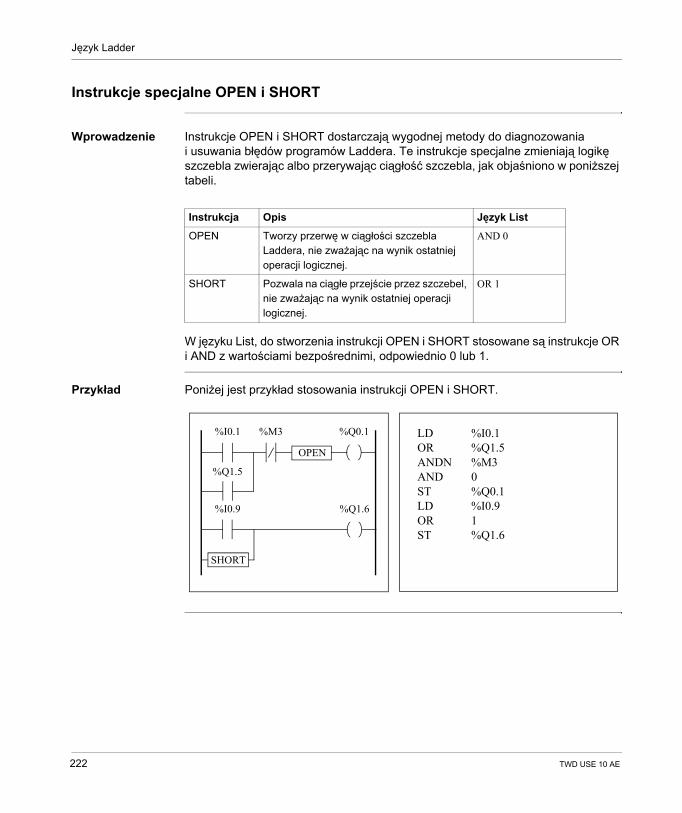
Język Ladder
Instrukcje specjalne OPEN i SHORT
Wprowadzenie Instrukcje OPEN i SHORT dostarczają wygodnej metody do diagnozowania i usuwania błędów programów Laddera. Te instrukcje specjalne zmieniają logikę szczebla zwierając albo przerywając ciągłość szczebla, jak objaśniono w poniższej tabeli.
W języku List, do stworzenia instrukcji OPEN i SHORT stosowane są instrukcje OR i AND z wartościami bezpośrednimi, odpowiednio 0 lub 1.
Przykład Poniżej jest przykład stosowania instrukcji OPEN i SHORT.
Instrukcja Opis Język List
OPEN Tworzy przerwę w ciągłości szczebla Laddera, nie zważając na wynik ostatniej operacji logicznej.
AND 0
SHORT Pozwala na ciągłe przejście przez szczebel, nie zważając na wynik ostatniej operacji logicznej.
OR 1
LD %I0.1 OR %Q1.5 ANDN %M3 AND 0 ST %Q0.1 LD %I0.9 OR 1 ST %Q1.6
%Q1.6%I0.9
%Q0.1%M3%I0.1
%Q1.5
OPEN
SHORT
222 TWD USE 10 AE
Język Ladder
Porady dla programisty
Obsługa skoków programu
Ostrożnie używaj skoków programowych unikając długich pętli, które mogą zwiększyć czas skanowania. Unikaj skoków do instrukcji położonych powyżej. (Linie instrukcji położone powyżej występują przed skokiem w programie, a linie instrukcji położone poniżej występują po skoku w programie.)
Programowanie wyjść
Bit wyjściowy lub bit wewnętrzny może być wyznaczany tylko raz w programie. W przypadku bitów wyjściowych, tylko ostatnia skanowana wartość jest brana pod uwagę przy uaktualnianiu wyjść.
Stosowanie czujników zatrzymania awaryjnego okablowanych bezpośrednio
Czujniki stosowane do bezpośredniego zatrzymania awaryjnego nie mogą być przetwarzane przez sterownik. Muszą być podłączone bezpośrednio do odpowiednich wyjść.
Obsługa powrotów zasilania
Zrób warunkowy powrót zasilania w trybie ręcznym, ponieważ automatyczny restart instalacji może spowodować niespodziewane zadziałanie urządzenia (wykorzystaj bity systemowe %S0, %S1 i %S9).
Zarządzanie czasem i blokiem harmonogramu
Powinien być sprawdzany stan bitu systemowego %S51, który wskazuje stan zegara czasu rzeczywistego
Sprawdzanie składni i błędu
Przy wprowadzaniu programu, TwidoSoft sprawdza składnię instrukcji, argumenty i ich połączenie.
TWD USE 10 AE 223
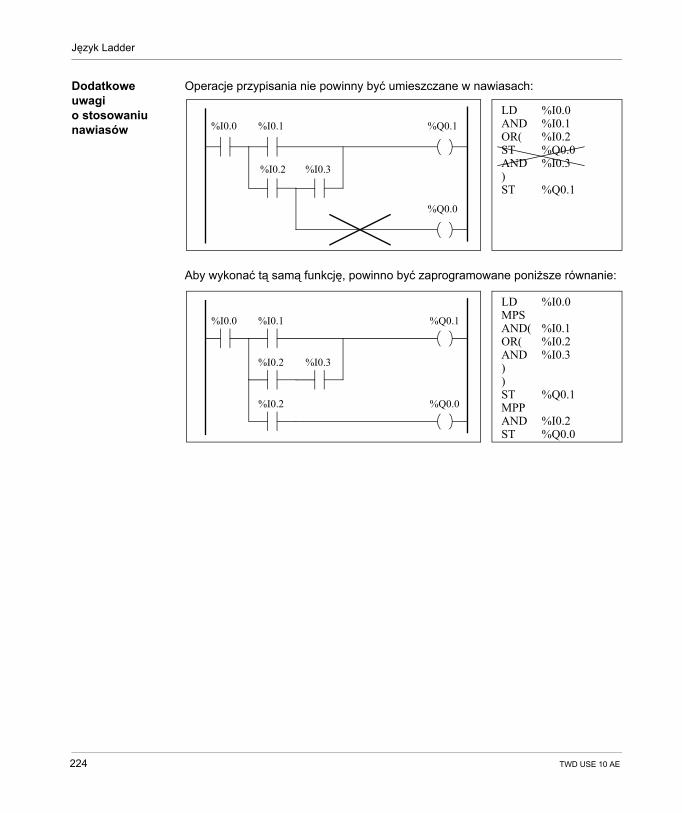
Język Ladder
Dodatkowe uwagi o stosowaniu nawiasów
Operacje przypisania nie powinny być umieszczane w nawiasach:
Aby wykonać tą samą funkcję, powinno być zaprogramowane poniższe równanie:
LD %I0.0AND %I0.1OR( %I0.2ST %Q0.0AND %I0.3)ST %Q0.1
%I0.0 %I0.1
%I0.2 %I0.3
%Q0.1
%Q0.0
LD %I0.0MPSAND( %I0.1OR( %I0.2AND %I0.3))ST %Q0.1MPPAND %I0.2ST %Q0.0
%I0.0 %I0.1
%I0.2
%I0.2
%I0.3
%Q0.1
%Q0.0
224 TWD USE 10 AE
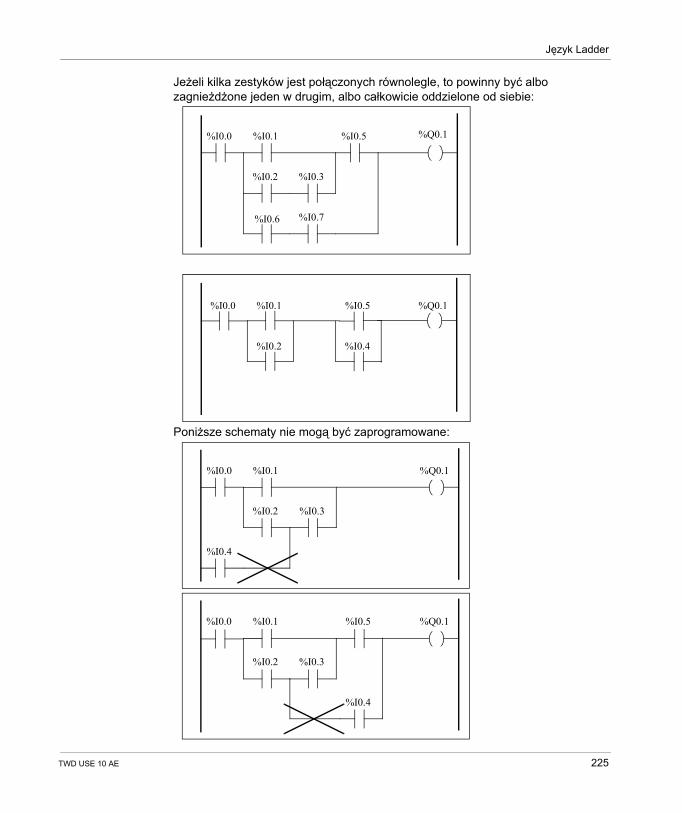
Język Ladder
Jeżeli kilka zestyków jest połączonych równolegle, to powinny być albo zagnieżdżone jeden w drugim, albo całkowicie oddzielone od siebie:
Poniższe schematy nie mogą być zaprogramowane:
%I0.0 %I0.1 %I0.5 %Q0.1
%I0.2 %I0.3
%I0.6 %I0.7
%I0.0 %I0.1 %I0.5 %Q0.1
%I0.2 %I0.4
%I0.0 %I0.1 %Q0.1
%I0.2 %I0.3
%I0.4
%I0.0 %I0.1 %I0.5 %Q0.1
%I0.2 %I0.3
%I0.4
TWD USE 10 AE 225
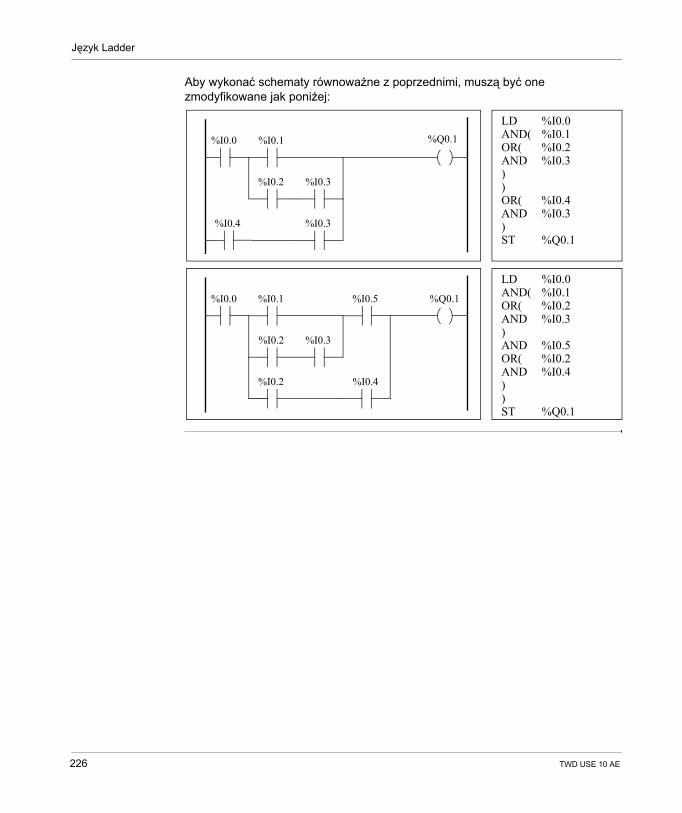
Język Ladder
Aby wykonać schematy równoważne z poprzednimi, muszą być one zmodyfikowane jak poniżej:
LD %I0.0AND( %I0.1OR( %I0.2AND %I0.3))OR( %I0.4AND %I0.3)ST %Q0.1
LD %I0.0AND( %I0.1OR( %I0.2AND %I0.3)AND %I0.5OR( %I0.2AND %I0.4))ST %Q0.1
%I0.0 %I0.1
%I0.2 %I0.3
%I0.4 %I0.3
%I0.0 %I0.1 %I0.5 %Q0.1
%I0.2 %I0.3
%I0.2 %I0.4
%Q0.1
226 TWD USE 10 AE
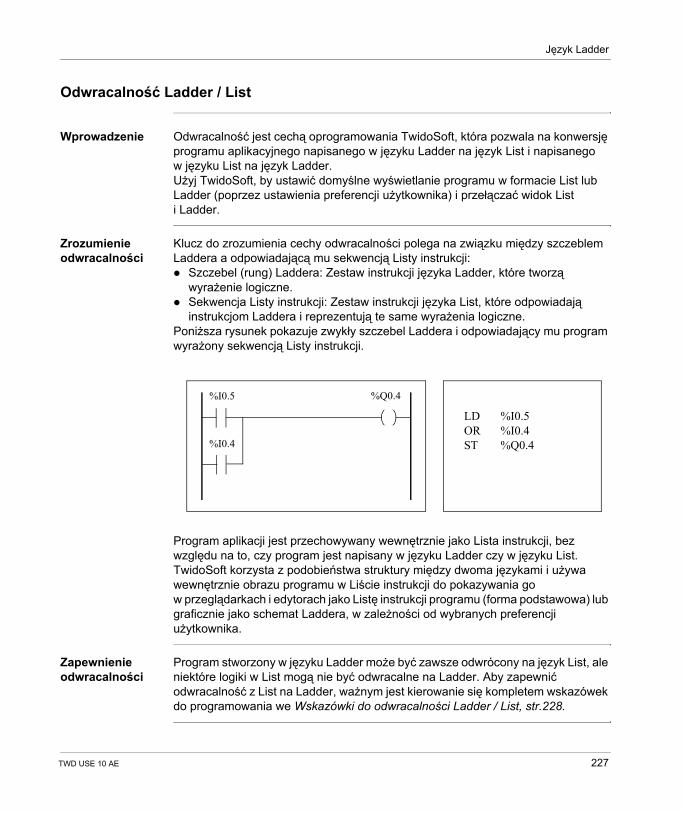
Język Ladder
Odwracalność Ladder / List
Wprowadzenie Odwracalność jest cechą oprogramowania TwidoSoft, która pozwala na konwersję programu aplikacyjnego napisanego w języku Ladder na język List i napisanego w języku List na język Ladder.Użyj TwidoSoft, by ustawić domyślne wyświetlanie programu w formacie List lub Ladder (poprzez ustawienia preferencji użytkownika) i przełączać widok List i Ladder.
Zrozumienie odwracalności
Klucz do zrozumienia cechy odwracalności polega na związku między szczeblem Laddera a odpowiadającą mu sekwencją Listy instrukcji:
Szczebel (rung) Laddera: Zestaw instrukcji języka Ladder, które tworzą wyrażenie logiczne.Sekwencja Listy instrukcji: Zestaw instrukcji języka List, które odpowiadają instrukcjom Laddera i reprezentują te same wyrażenia logiczne.
Poniższa rysunek pokazuje zwykły szczebel Laddera i odpowiadający mu program wyrażony sekwencją Listy instrukcji.
Program aplikacji jest przechowywany wewnętrznie jako Lista instrukcji, bez względu na to, czy program jest napisany w języku Ladder czy w języku List. TwidoSoft korzysta z podobieństwa struktury między dwoma językami i używa wewnętrznie obrazu programu w Liście instrukcji do pokazywania go w przeglądarkach i edytorach jako Listę instrukcji programu (forma podstawowa) lub graficznie jako schemat Laddera, w zależności od wybranych preferencji użytkownika.
Zapewnienie odwracalności
Program stworzony w języku Ladder może być zawsze odwrócony na język List, ale niektóre logiki w List mogą nie być odwracalne na Ladder. Aby zapewnić odwracalność z List na Ladder, ważnym jest kierowanie się kompletem wskazówek do programowania we Wskazówki do odwracalności Ladder / List, str.228.
LD %I0.5 OR %I0.4 ST %Q0.4
%I0.5 %Q0.4
%I0.4
TWD USE 10 AE 227
Język Ladder
Wskazówki do odwracalności Ladder / List
Instrukcje wymagane dla odwracalności
Struktura odwracalnego bloku funkcyjnego w języku List wymaga stosowania poniższych instrukcji:
BLK oznacza początek bloku i rozpoczęcie szczebla oraz początek wejściowej części bloku.OUT_BLK oznacza początek wyjściowej części bloku.END_BLK oznacza koniec bloku i szczebla.
Stosowanie odwracalnych bloków funkcyjnych nie jest wymagane dla prawidłowego funkcjonowania programu List. Dla niektórych instrukcji, jest możliwy program w List, który nie jest odwracalny. Opis nieodwracalnego programowania w List, patrz Zasady programowania podstawowych bloków funkcyjnych, str. 278.
Unikanie instrukcji nie równoważnych
Unikaj stosowania pewnych instrukcji języka List lub kombinacji instrukcji i argumentów, które nie mają odpowiedników w schematach Laddera. Np. instrukcja N (odwrotność wartości boolowskiej w akumulatorze) nie ma odpowiednika w instrukcji Laddera.Poniższa tabela identyfikuje wszystkie instrukcje języka List, które nie będą odwrócone na Laddera.
Instrukcja List Argument Opis
JMPCN %Li Skok warunkowy zanegowany
N brak Negacja
ENDCN brak Koniec warunkowy zanegowany
228 TWD USE 10 AE
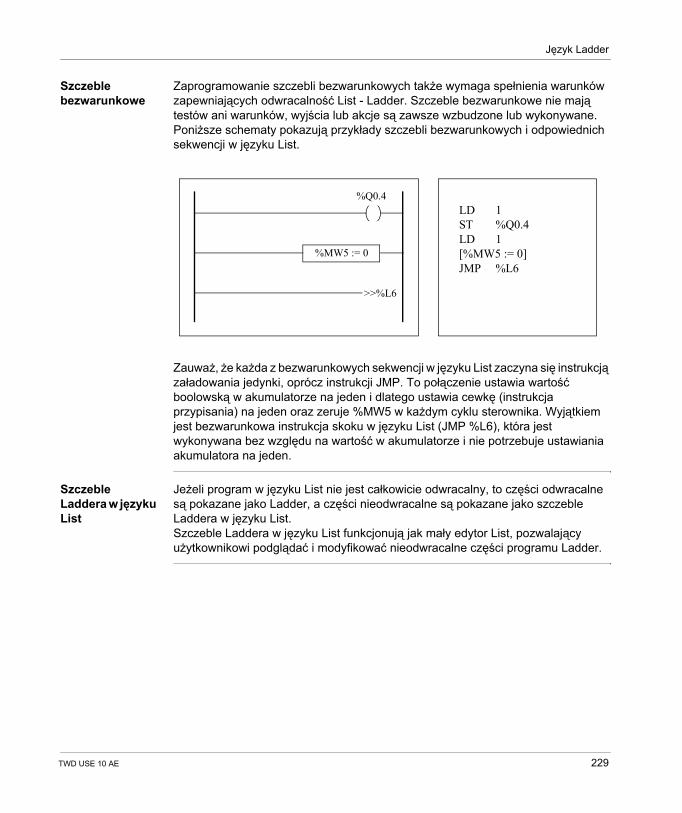
Język Ladder
Szczeble bezwarunkowe
Zaprogramowanie szczebli bezwarunkowych także wymaga spełnienia warunków zapewniających odwracalność List - Ladder. Szczeble bezwarunkowe nie mają testów ani warunków, wyjścia lub akcje są zawsze wzbudzone lub wykonywane.Poniższe schematy pokazują przykłady szczebli bezwarunkowych i odpowiednich sekwencji w języku List.
Zauważ, że każda z bezwarunkowych sekwencji w języku List zaczyna się instrukcją załadowania jedynki, oprócz instrukcji JMP. To połączenie ustawia wartość boolowską w akumulatorze na jeden i dlatego ustawia cewkę (instrukcja przypisania) na jeden oraz zeruje %MW5 w każdym cyklu sterownika. Wyjątkiem jest bezwarunkowa instrukcja skoku w języku List (JMP %L6), która jest wykonywana bez względu na wartość w akumulatorze i nie potrzebuje ustawiania akumulatora na jeden.
Szczeble Laddera w języku List
Jeżeli program w języku List nie jest całkowicie odwracalny, to części odwracalne są pokazane jako Ladder, a części nieodwracalne są pokazane jako szczeble Laddera w języku List.Szczeble Laddera w języku List funkcjonują jak mały edytor List, pozwalający użytkownikowi podglądać i modyfikować nieodwracalne części programu Ladder.
LD 1 ST %Q0.4 LD 1 [%MW5 := 0] JMP %L6
%Q0.4
%MW5 := 0
>>%L6
TWD USE 10 AE 229
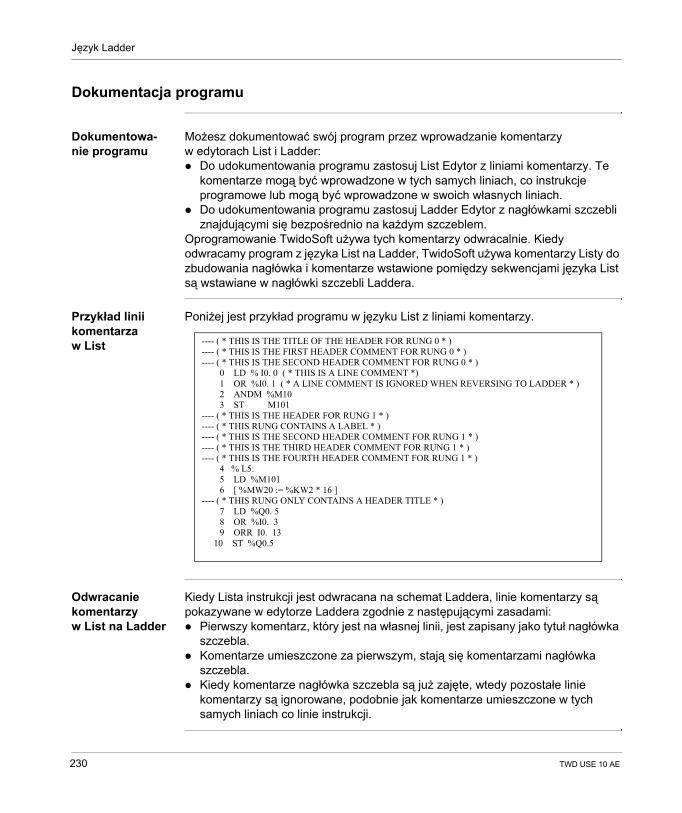
Język Ladder
Dokumentacja programu
Dokumentowa-nie programu
Możesz dokumentować swój program przez wprowadzanie komentarzy w edytorach List i Ladder:
Do udokumentowania programu zastosuj List Edytor z liniami komentarzy. Te komentarze mogą być wprowadzone w tych samych liniach, co instrukcje programowe lub mogą być wprowadzone w swoich własnych liniach.Do udokumentowania programu zastosuj Ladder Edytor z nagłówkami szczebli znajdującymi się bezpośrednio na każdym szczeblem.
Oprogramowanie TwidoSoft używa tych komentarzy odwracalnie. Kiedy odwracamy program z języka List na Ladder, TwidoSoft używa komentarzy Listy do zbudowania nagłówka i komentarze wstawione pomiędzy sekwencjami języka List są wstawiane w nagłówki szczebli Laddera.
Przykład linii komentarza w List
Poniżej jest przykład programu w języku List z liniami komentarzy.
Odwracanie komentarzy w List na Ladder
Kiedy Lista instrukcji jest odwracana na schemat Laddera, linie komentarzy są pokazywane w edytorze Laddera zgodnie z następującymi zasadami:
Pierwszy komentarz, który jest na własnej linii, jest zapisany jako tytuł nagłówka szczebla.Komentarze umieszczone za pierwszym, stają się komentarzami nagłówka szczebla.Kiedy komentarze nagłówka szczebla są już zajęte, wtedy pozostałe linie komentarzy są ignorowane, podobnie jak komentarze umieszczone w tych samych liniach co linie instrukcji.
---- ( * THIS IS THE TITLE OF THE HEADER FOR RUNG 0 * )---- ( * THIS IS THE FIRST HEADER COMMENT FOR RUNG 0 * )---- ( * THIS IS THE SECOND HEADER COMMENT FOR RUNG 0 * )
0 LD % I0. 0 ( * THIS IS A LINE COMMENT *)1 OR %I0. 1 ( * A LINE COMMENT IS IGNORED WHEN REVERSING TO LADDER * )2 ANDM %M103 ST M101
---- ( * THIS IS THE HEADER FOR RUNG 1 * )---- ( * THIS RUNG CONTAINS A LABEL * )---- ( * THIS IS THE SECOND HEADER COMMENT FOR RUNG 1 * )---- ( * THIS IS THE THIRD HEADER COMMENT FOR RUNG 1 * )---- ( * THIS IS THE FOURTH HEADER COMMENT FOR RUNG 1 * )
4 % L5:5 LD %M1016 [ %MW20 := %KW2 * 16 ]
---- ( * THIS RUNG ONLY CONTAINS A HEADER TITLE * )7 LD %Q0. 58 OR %I0. 39 ORR I0. 13
10 ST %Q0.5
230 TWD USE 10 AE
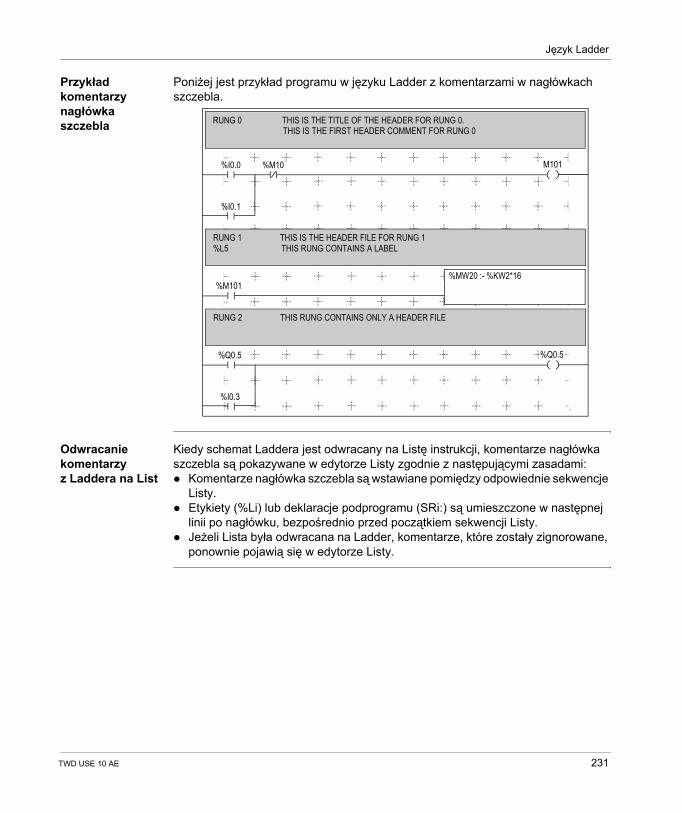
Język Ladder
Przykład komentarzy nagłówka szczebla
Poniżej jest przykład programu w języku Ladder z komentarzami w nagłówkach szczebla.
Odwracanie komentarzy z Laddera na List
Kiedy schemat Laddera jest odwracany na Listę instrukcji, komentarze nagłówka szczebla są pokazywane w edytorze Listy zgodnie z następującymi zasadami:
Komentarze nagłówka szczebla są wstawiane pomiędzy odpowiednie sekwencje Listy.Etykiety (%Li) lub deklaracje podprogramu (SRi:) są umieszczone w następnej linii po nagłówku, bezpośrednio przed początkiem sekwencji Listy.Jeżeli Lista była odwracana na Ladder, komentarze, które zostały zignorowane, ponownie pojawią się w edytorze Listy.
RUNG 0 THIS IS THE TITLE OF THE HEADER FOR RUNG 0. THIS IS THE FIRST HEADER COMMENT FOR RUNG 0
RUNG 1 THIS IS THE HEADER FILE FOR RUNG 1%L5 THIS RUNG CONTAINS A LABEL
RUNG 2 THIS RUNG CONTAINS ONLY A HEADER FILE
%MW20 :- %KW2*16
%I0.0
%I0.1
M101%M10
%M101
%Q0.5
%I0.3
%Q0.5
TWD USE 10 AE 231

Język Ladder
232 TWD USE 10 AE
TWD USE 10 AE
12
Język ListRzut oka
Wprowadzenie Ten rozdział opisuje programowanie w języku List Instruction.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Opis programu List 234
Działanie Listy instrukcji 236
Instrukcje języka List 237
Stosowanie nawiasów 240
Instrukcje stosu (MPS, MRD, MPP) 242
233
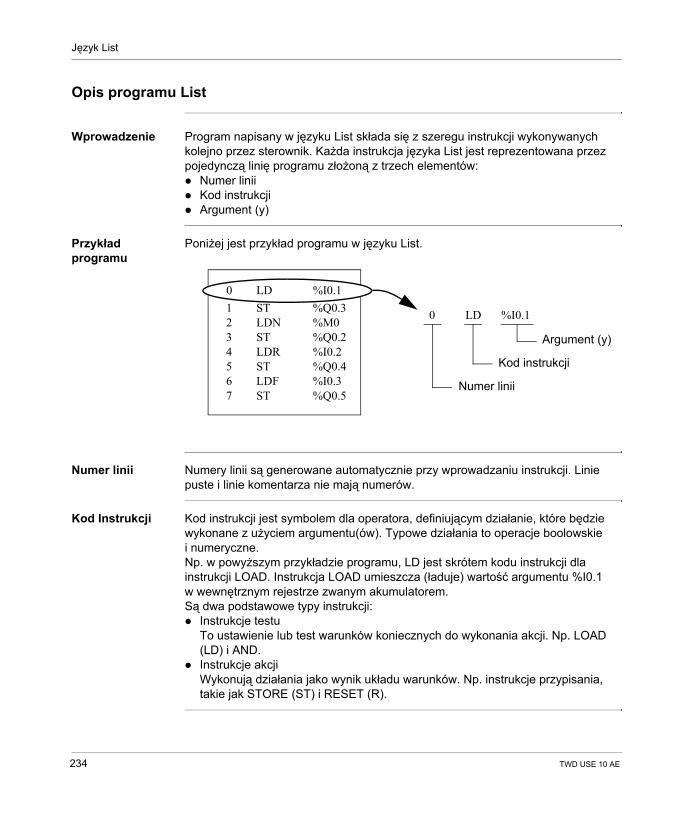
Język List
Opis programu List
Wprowadzenie Program napisany w języku List składa się z szeregu instrukcji wykonywanych kolejno przez sterownik. Każda instrukcja języka List jest reprezentowana przez pojedynczą linię programu złożoną z trzech elementów:
Numer liniiKod instrukcjiArgument (y)
Przykład programu
Poniżej jest przykład programu w języku List.
Numer linii Numery linii są generowane automatycznie przy wprowadzaniu instrukcji. Linie puste i linie komentarza nie mają numerów.
Kod Instrukcji Kod instrukcji jest symbolem dla operatora, definiującym działanie, które będzie wykonane z użyciem argumentu(ów). Typowe działania to operacje boolowskie i numeryczne.Np. w powyższym przykładzie programu, LD jest skrótem kodu instrukcji dla instrukcji LOAD. Instrukcja LOAD umieszcza (ładuje) wartość argumentu %I0.1 w wewnętrznym rejestrze zwanym akumulatorem.Są dwa podstawowe typy instrukcji:
Instrukcje testuTo ustawienie lub test warunków koniecznych do wykonania akcji. Np. LOAD (LD) i AND.Instrukcje akcjiWykonują działania jako wynik układu warunków. Np. instrukcje przypisania, takie jak STORE (ST) i RESET (R).
1 ST %Q0.3 2 LDN %M03 ST %Q0.24 LDR %I0.25 ST %Q0.46 LDF %I0.37 ST %Q0.5
%I0.1LD
Argument (y)
Numer linii
Kod instrukcji
0
0 LD %I0.1
234 TWD USE 10 AE
Język List
Argument Argument jest numerem, adresem lub symbolem reprezentującym wartość, którą program może używać w instrukcji. Np. w powyższym przykładzie programu, argument %I0.1 jest adresem przypisanym do wartości na wejściu sterownika. Instrukcja może mieć od zera do trzech argumentów zależnie od typu kodu instrukcji.Argumenty mogą być reprezentowane przez:
Wejścia i wyjścia sterownika, takie jak czujniki, przyciski i przekaźniki.Wstępnie zdefiniowane funkcje systemu, takie jak bloki czasowe i liczniki.Operacje arytmetyczne, logiczne, numeryczne i porównania.Wewnętrzne zmienne sterownika, takie jak bity i słowa.
TWD USE 10 AE 235
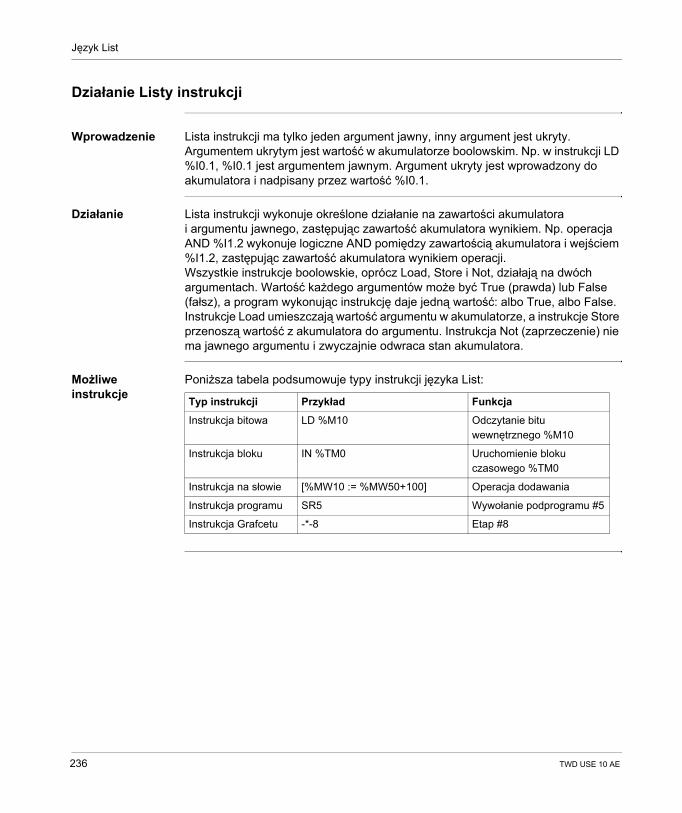
Język List
Działanie Listy instrukcji
Wprowadzenie Lista instrukcji ma tylko jeden argument jawny, inny argument jest ukryty. Argumentem ukrytym jest wartość w akumulatorze boolowskim. Np. w instrukcji LD %I0.1, %I0.1 jest argumentem jawnym. Argument ukryty jest wprowadzony do akumulatora i nadpisany przez wartość %I0.1.
Działanie Lista instrukcji wykonuje określone działanie na zawartości akumulatora i argumentu jawnego, zastępując zawartość akumulatora wynikiem. Np. operacja AND %I1.2 wykonuje logiczne AND pomiędzy zawartością akumulatora i wejściem %I1.2, zastępując zawartość akumulatora wynikiem operacji.Wszystkie instrukcje boolowskie, oprócz Load, Store i Not, działają na dwóch argumentach. Wartość każdego argumentów może być True (prawda) lub False (fałsz), a program wykonując instrukcję daje jedną wartość: albo True, albo False. Instrukcje Load umieszczają wartość argumentu w akumulatorze, a instrukcje Store przenoszą wartość z akumulatora do argumentu. Instrukcja Not (zaprzeczenie) nie ma jawnego argumentu i zwyczajnie odwraca stan akumulatora.
Możliwe instrukcje
Poniższa tabela podsumowuje typy instrukcji języka List:
Typ instrukcji Przykład Funkcja
Instrukcja bitowa LD %M10 Odczytanie bitu wewnętrznego %M10
Instrukcja bloku IN %TM0 Uruchomienie bloku czasowego %TM0
Instrukcja na słowie [%MW10 := %MW50+100] Operacja dodawania
Instrukcja programu SR5 Wywołanie podprogramu #5
Instrukcja Grafcetu -*-8 Etap #8
236 TWD USE 10 AE
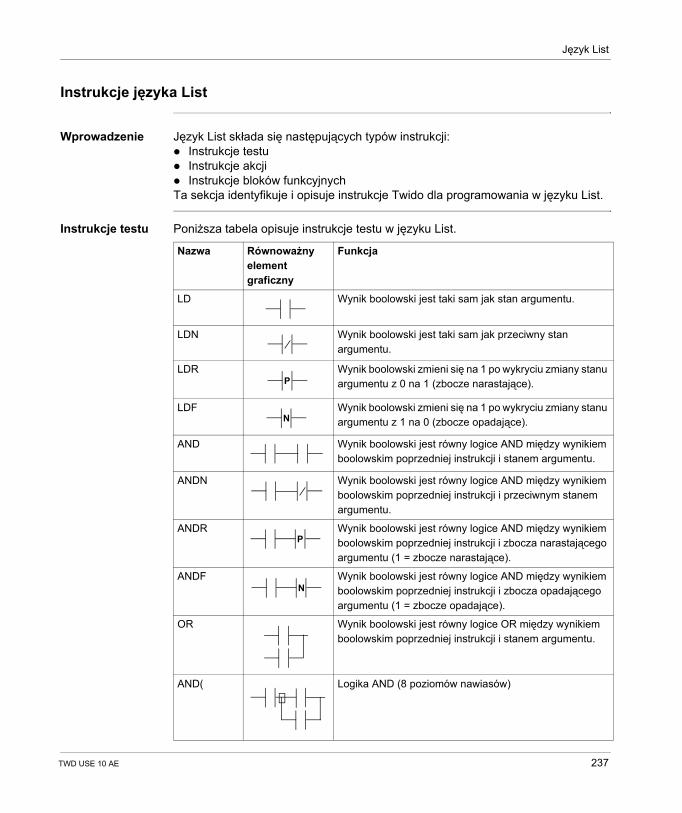
Język List
Instrukcje języka List
Wprowadzenie Język List składa się następujących typów instrukcji:Instrukcje testuInstrukcje akcjiInstrukcje bloków funkcyjnych
Ta sekcja identyfikuje i opisuje instrukcje Twido dla programowania w języku List.
Instrukcje testu Poniższa tabela opisuje instrukcje testu w języku List.
Nazwa Równoważny element graficzny
Funkcja
LD Wynik boolowski jest taki sam jak stan argumentu.
LDN Wynik boolowski jest taki sam jak przeciwny stan argumentu.
LDR Wynik boolowski zmieni się na 1 po wykryciu zmiany stanu argumentu z 0 na 1 (zbocze narastające).
LDF Wynik boolowski zmieni się na 1 po wykryciu zmiany stanu argumentu z 1 na 0 (zbocze opadające).
AND Wynik boolowski jest równy logice AND między wynikiem boolowskim poprzedniej instrukcji i stanem argumentu.
ANDN Wynik boolowski jest równy logice AND między wynikiem boolowskim poprzedniej instrukcji i przeciwnym stanem argumentu.
ANDR Wynik boolowski jest równy logice AND między wynikiem boolowskim poprzedniej instrukcji i zbocza narastającego argumentu (1 = zbocze narastające).
ANDF Wynik boolowski jest równy logice AND między wynikiem boolowskim poprzedniej instrukcji i zbocza opadającego argumentu (1 = zbocze opadające).
OR Wynik boolowski jest równy logice OR między wynikiem boolowskim poprzedniej instrukcji i stanem argumentu.
AND( Logika AND (8 poziomów nawiasów)
P
N
P
N
TWD USE 10 AE 237
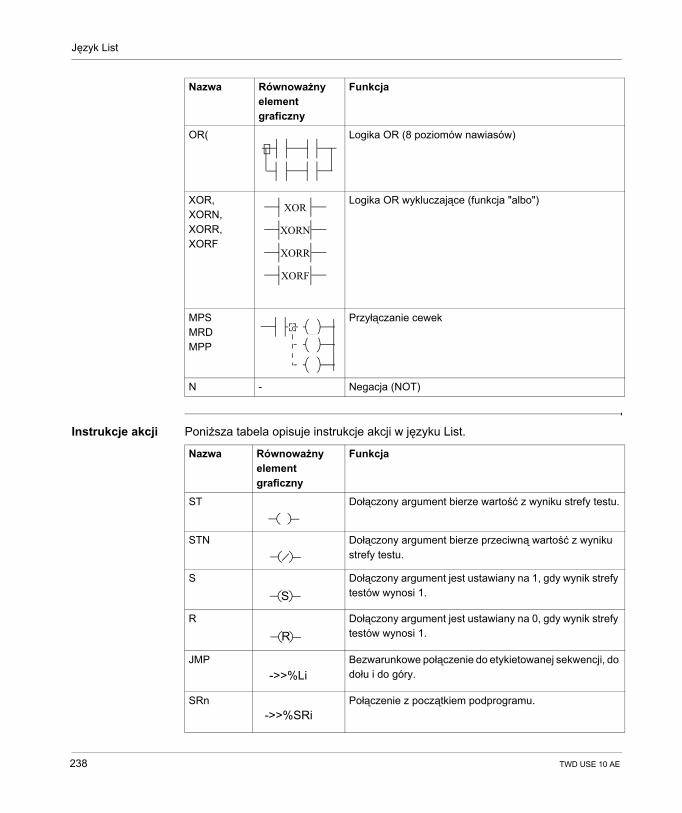
Język List
Instrukcje akcji Poniższa tabela opisuje instrukcje akcji w języku List.
OR( Logika OR (8 poziomów nawiasów)
XOR, XORN, XORR, XORF
Logika OR wykluczające (funkcja "albo")
MPSMRDMPP
Przyłączanie cewek
N - Negacja (NOT)
Nazwa Równoważny element graficzny
Funkcja
XORR
XORF
XORN
XOR
Nazwa Równoważny element graficzny
Funkcja
ST Dołączony argument bierze wartość z wyniku strefy testu.
STN Dołączony argument bierze przeciwną wartość z wyniku strefy testu.
S Dołączony argument jest ustawiany na 1, gdy wynik strefy testów wynosi 1.
R Dołączony argument jest ustawiany na 0, gdy wynik strefy testów wynosi 1.
JMP Bezwarunkowe połączenie do etykietowanej sekwencji, do dołu i do góry.
SRn Połączenie z początkiem podprogramu.
S
R
->>%Li
->>%SRi
238 TWD USE 10 AE
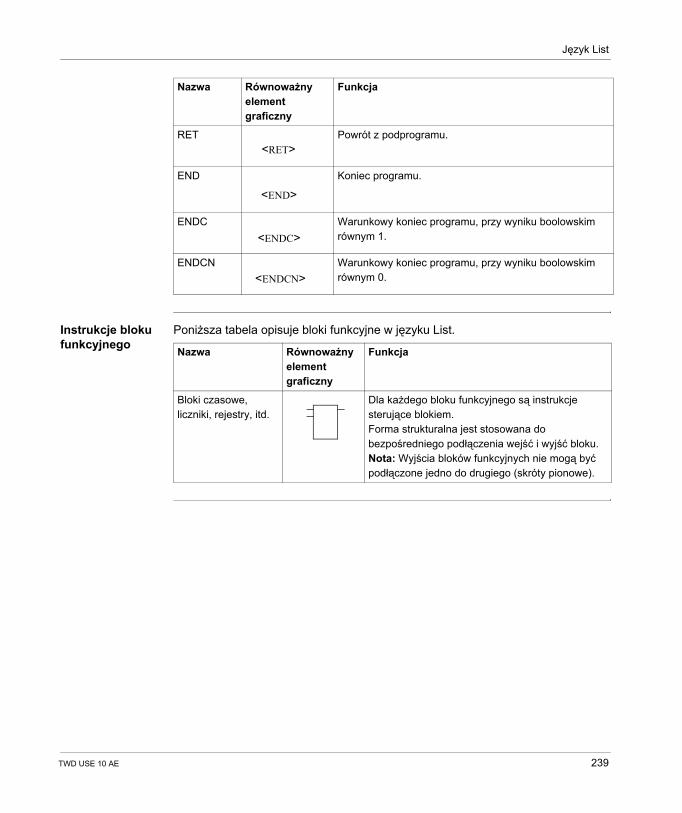
Język List
Instrukcje bloku funkcyjnego
Poniższa tabela opisuje bloki funkcyjne w języku List.
RET Powrót z podprogramu.
END Koniec programu.
ENDC Warunkowy koniec programu, przy wyniku boolowskim równym 1.
ENDCN Warunkowy koniec programu, przy wyniku boolowskim równym 0.
Nazwa Równoważny element graficzny
Funkcja
<RET>
<END>
<ENDC>
<ENDCN>
Nazwa Równoważny element graficzny
Funkcja
Bloki czasowe, liczniki, rejestry, itd.
Dla każdego bloku funkcyjnego są instrukcje sterujące blokiem.Forma strukturalna jest stosowana do bezpośredniego podłączenia wejść i wyjść bloku.Nota: Wyjścia bloków funkcyjnych nie mogą być podłączone jedno do drugiego (skróty pionowe).
TWD USE 10 AE 239
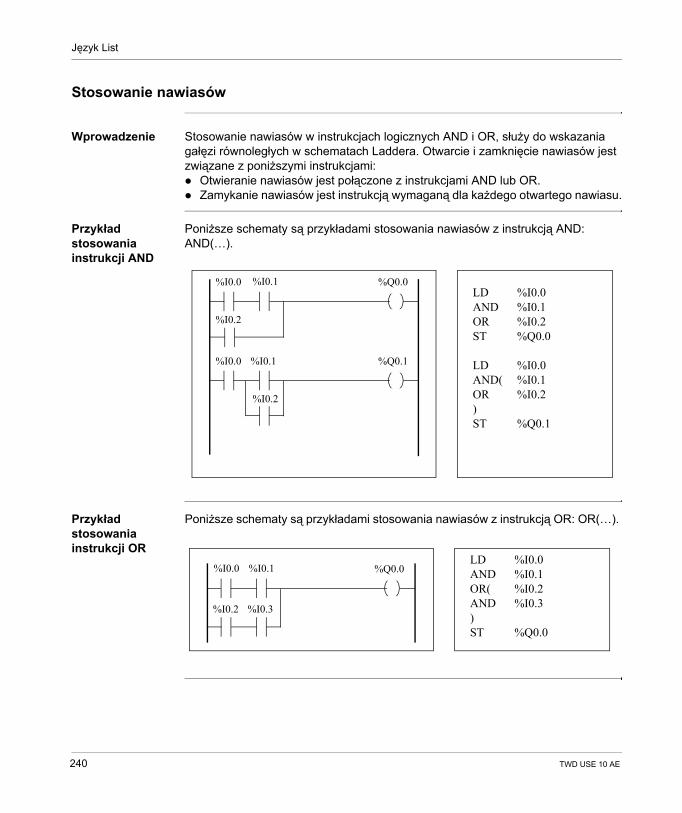
Język List
Stosowanie nawiasów
Wprowadzenie Stosowanie nawiasów w instrukcjach logicznych AND i OR, służy do wskazania gałęzi równoległych w schematach Laddera. Otwarcie i zamknięcie nawiasów jest związane z poniższymi instrukcjami:
Otwieranie nawiasów jest połączone z instrukcjami AND lub OR.Zamykanie nawiasów jest instrukcją wymaganą dla każdego otwartego nawiasu.
Przykład stosowania instrukcji AND
Poniższe schematy są przykładami stosowania nawiasów z instrukcją AND: AND(…).
Przykład stosowania instrukcji OR
Poniższe schematy są przykładami stosowania nawiasów z instrukcją OR: OR(…).
LD %I0.0 AND %I0.1 OR %I0.2 ST %Q0.0 LD %I0.0 AND( %I0.1 OR %I0.2 ) ST %Q0.1
%Q0.1
%Q0.0
%I0.2
%I0.0
%I0.1
%I0.2
%I0.0
%I0.1
LD %I0.0 AND %I0.1 OR( %I0.2 AND %I0.3 ) ST %Q0.0
%Q0.0%I0.0 %I0.1
%I0.2 %I0.3
240 TWD USE 10 AE
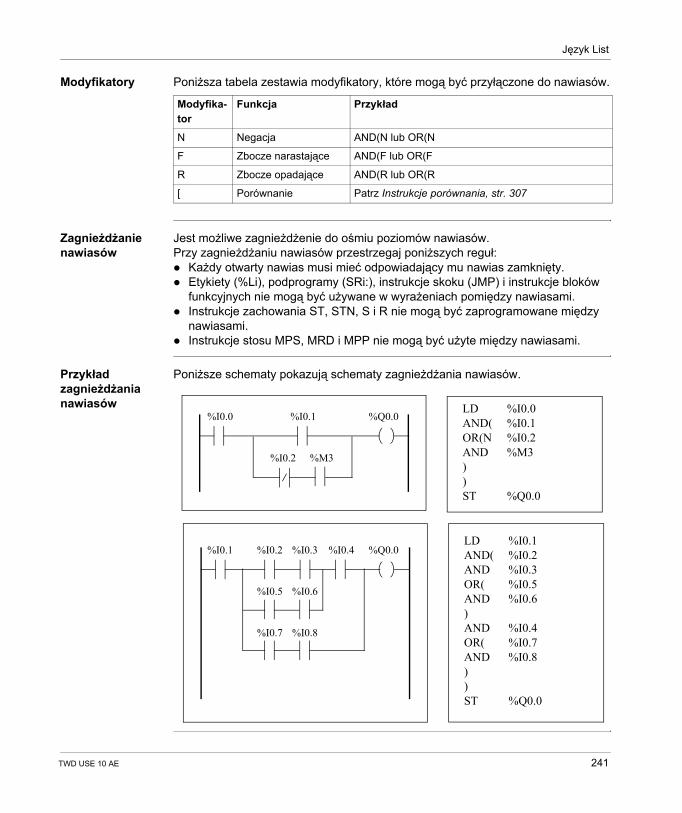
Język List
Modyfikatory Poniższa tabela zestawia modyfikatory, które mogą być przyłączone do nawiasów.
Zagnieżdżanie nawiasów
Jest możliwe zagnieżdżenie do ośmiu poziomów nawiasów.Przy zagnieżdżaniu nawiasów przestrzegaj poniższych reguł:
Każdy otwarty nawias musi mieć odpowiadający mu nawias zamknięty.Etykiety (%Li), podprogramy (SRi:), instrukcje skoku (JMP) i instrukcje bloków funkcyjnych nie mogą być używane w wyrażeniach pomiędzy nawiasami.Instrukcje zachowania ST, STN, S i R nie mogą być zaprogramowane między nawiasami.Instrukcje stosu MPS, MRD i MPP nie mogą być użyte między nawiasami.
Przykład zagnieżdżania nawiasów
Poniższe schematy pokazują schematy zagnieżdżania nawiasów.
Modyfika-tor
Funkcja Przykład
N Negacja AND(N lub OR(N
F Zbocze narastające AND(F lub OR(F
R Zbocze opadające AND(R lub OR(R
[ Porównanie Patrz Instrukcje porównania, str. 307
LD %I0.0 AND( %I0.1 OR(N %I0.2 AND %M3 ) ) ST %Q0.0
LD %I0.1 AND( %I0.2 AND %I0.3 OR( %I0.5 AND %I0.6 ) AND %I0.4 OR( %I0.7 AND %I0.8 ) ) ST %Q0.0
%Q0.0
%Q0.0%I0.1
%I0.0 %I0.1
%I0.2 %M3
%I0.2 %I0.3 %I0.4
%I0.6%I0.5
%I0.7 %I0.8
TWD USE 10 AE 241
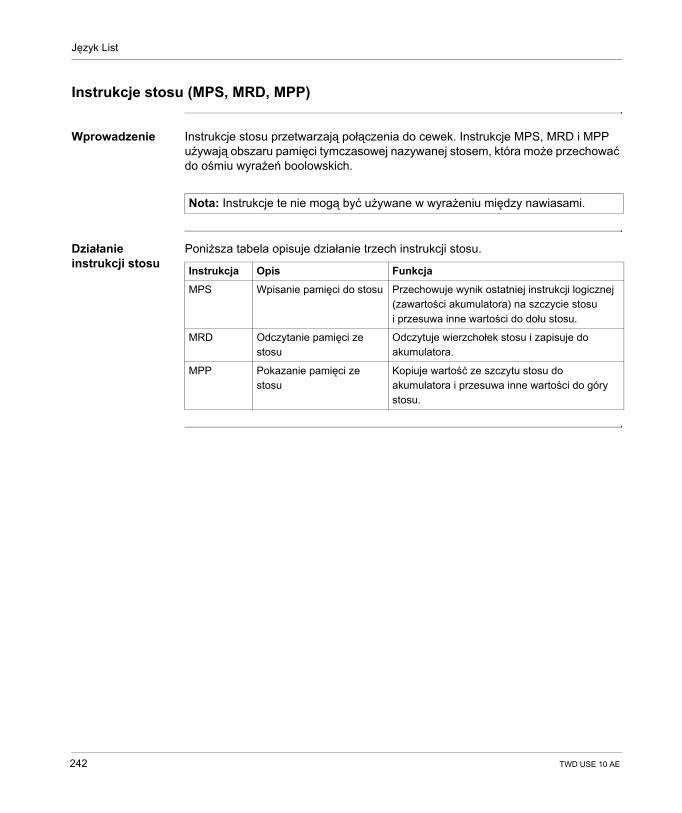
Język List
Instrukcje stosu (MPS, MRD, MPP)
Wprowadzenie Instrukcje stosu przetwarzają połączenia do cewek. Instrukcje MPS, MRD i MPP używają obszaru pamięci tymczasowej nazywanej stosem, która może przechować do ośmiu wyrażeń boolowskich.
Działanie instrukcji stosu
Poniższa tabela opisuje działanie trzech instrukcji stosu.
Nota: Instrukcje te nie mogą być używane w wyrażeniu między nawiasami.
Instrukcja Opis Funkcja
MPS Wpisanie pamięci do stosu Przechowuje wynik ostatniej instrukcji logicznej (zawartości akumulatora) na szczycie stosu i przesuwa inne wartości do dołu stosu.
MRD Odczytanie pamięci ze stosu
Odczytuje wierzchołek stosu i zapisuje do akumulatora.
MPP Pokazanie pamięci ze stosu
Kopiuje wartość ze szczytu stosu do akumulatora i przesuwa inne wartości do góry stosu.
242 TWD USE 10 AE
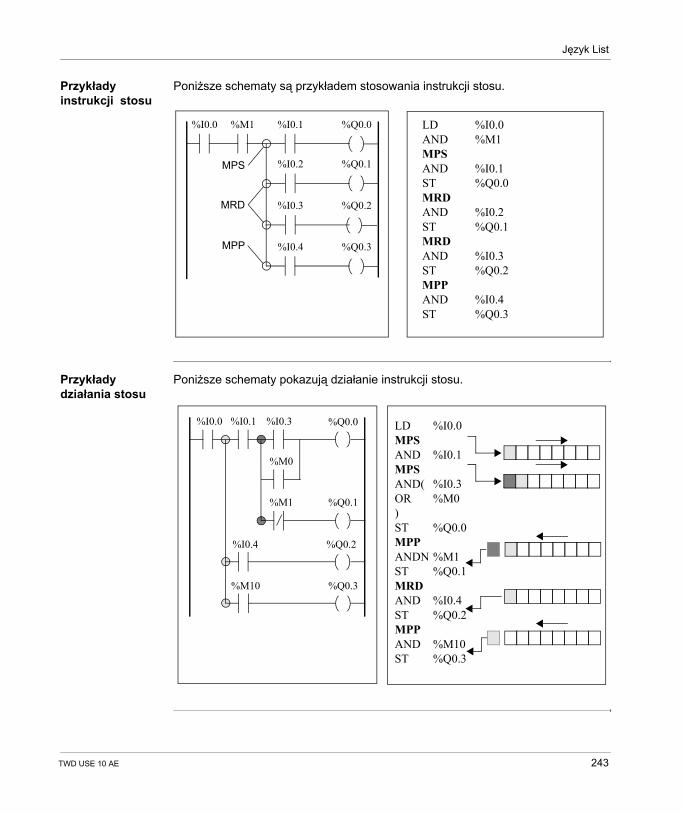
Język List
Przykłady instrukcji stosu
Poniższe schematy są przykładem stosowania instrukcji stosu.
Przykłady działania stosu
Poniższe schematy pokazują działanie instrukcji stosu.
LD %I0.0 AND %M1 MPS AND %I0.1 ST %Q0.0 MRD AND %I0.2 ST %Q0.1 MRD AND %I0.3 ST %Q0.2 MPP AND %I0.4 ST %Q0.3
%Q0.0
%Q0.1
%Q0.3
%Q0.2
%M1
%I0.2
%I0.3
%I0.4
%I0.1%I0.0
MPS
MPP
MRD
LD %I0.0 MPS AND %I0.1 MPS AND( %I0.3 OR %M0 ) ST %Q0.0 MPP ANDN %M1 ST %Q0.1 MRD AND %I0.4 ST %Q0.2 MPP AND %M10 ST %Q0.3
%Q0.0
%I0.4
%Q0.1
%Q0.2
%Q0.3
%I0.0 %I0.1 %I0.3
%M0
%M1
%M10
TWD USE 10 AE 243

Język List
244 TWD USE 10 AE
TWD USE 10 AE
13
GrafcetRzut oka
Wprowadzenie Ten rozdział opisuje programowanie w języku Grafcet.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Opis instrukcji Grafcetu 246
Opis struktury programu Grafcet 250
Akcje przyporządkowane do etapu Grafcetu 254
245
Grafcet
Opis instrukcji Grafcetu
Wprowadzenie Instrukcje TwidoSoft oferują prostą metodę przekształcenia sterowania sekwencyjnego (diagram Grafcet).Maksymalna liczba etapów Grafcetu zależy od typu sterownika Twido. Liczba etapów jednocześnie aktywnych jest ograniczona tylko przez całkowitą liczbę etapów. Dla TWDLCAA10DRF i TWDLCAA16DRF są dostępne etapy od 1 do 62. Etapy 0 i 63 są zarezerwowane dla przetwarzania wstępnego i końcowego (pre- i postprocessing). Dla wszystkich pozostałych sterowników są dostępne etapy od 1 do 95.
246 TWD USE 10 AE
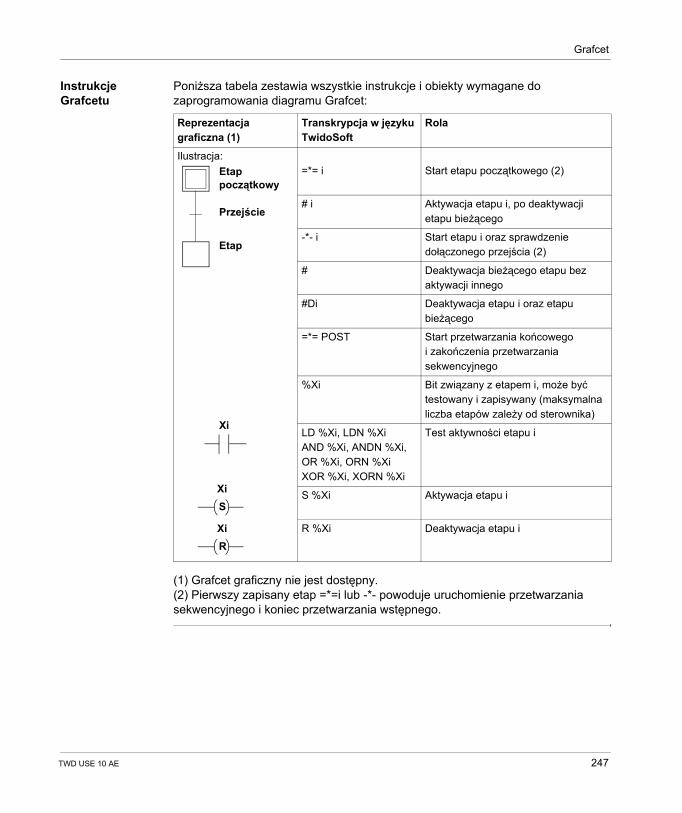
Grafcet
Instrukcje Grafcetu
Poniższa tabela zestawia wszystkie instrukcje i obiekty wymagane do zaprogramowania diagramu Grafcet:
(1) Grafcet graficzny nie jest dostępny.(2) Pierwszy zapisany etap =*=i lub -*- powoduje uruchomienie przetwarzania sekwencyjnego i koniec przetwarzania wstępnego.
Reprezentacja graficzna (1)
Transkrypcja w języku TwidoSoft
Rola
Ilustracja: =*= i Start etapu początkowego (2)
# i Aktywacja etapu i, po deaktywacji etapu bieżącego
-*- i Start etapu i oraz sprawdzenie dołączonego przejścia (2)
# Deaktywacja bieżącego etapu bez aktywacji innego
#Di Deaktywacja etapu i oraz etapu bieżącego
=*= POST Start przetwarzania końcowego i zakończenia przetwarzania sekwencyjnego
%Xi Bit związany z etapem i, może być testowany i zapisywany (maksymalna liczba etapów zależy od sterownika)
LD %Xi, LDN %XiAND %Xi, ANDN %Xi,OR %Xi, ORN %XiXOR %Xi, XORN %Xi
Test aktywności etapu i
S %Xi Aktywacja etapu i
R %Xi Deaktywacja etapu iXiR
XiS
Xi
Etap początkowy
Przejście
Etap
TWD USE 10 AE 247
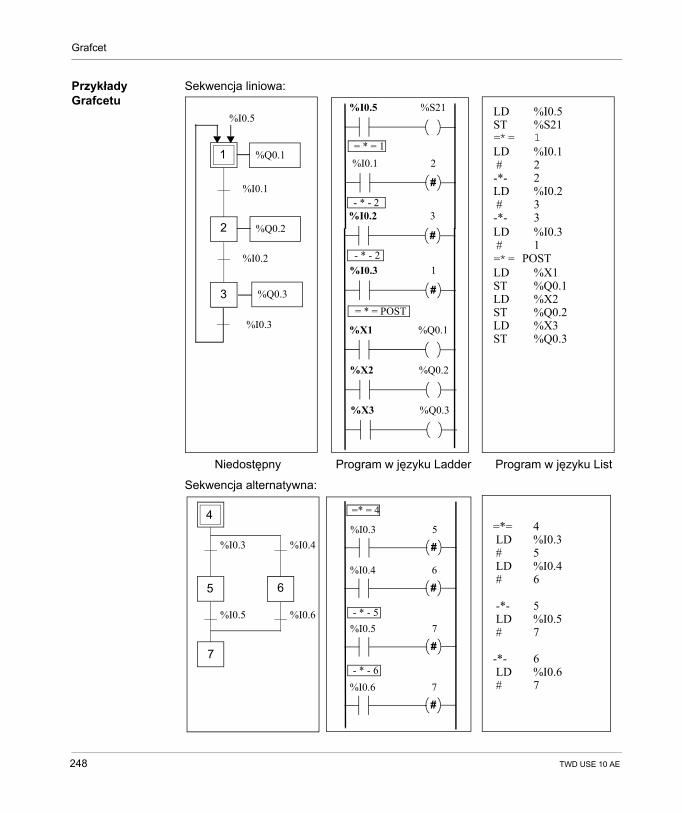
Grafcet
Przykłady Grafcetu
Sekwencja liniowa:
Sekwencja alternatywna:
LD %I0.5ST %S21=*= 1LD %I0.1 # 2-*- 2LD %I0.2 # 3-*- 3 LD %I0.3 # 1=*= POSTLD %X1ST %Q0.1LD %X2ST %Q0.2LD %X3ST %Q0.3
1
3
2
%I0.1
%I0.2
%I0.5
%I0.1
%S21
2
#
Niedostępny Program w języku Ladder Program w języku List
%I0.2
- * - 2
3
#
= * = 1
- * - 2
%I0.3
= * = POST
1
#
%X1 %Q0.1
%X2 %Q0.2
%X3 %Q0.3
%I0.5
%Q0.2
%Q0.1
%I0.3
%Q0.3
- * - 5
=*= 4 LD %I0.3 # 5 LD %I0.4 # 6
-*- 5 LD %I0.5 # 7 -*- 6 LD %I0.6 # 7
4
5 6
7 - * - 6
%I0.3 %I0.4
%I0.5 %I0.6
=* = 4
%I0.3 5
#
%I0.4 6
#
%I0.5 7
#
%I0.6 7
#
248 TWD USE 10 AE
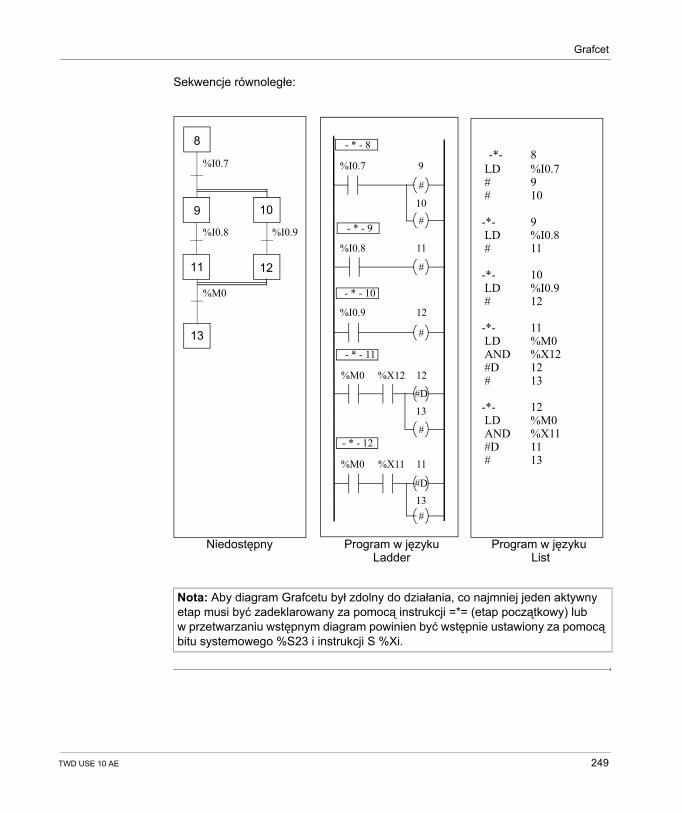
Grafcet
Sekwencje równoległe:
Nota: Aby diagram Grafcetu był zdolny do działania, co najmniej jeden aktywny etap musi być zadeklarowany za pomocą instrukcji =*= (etap początkowy) lub w przetwarzaniu wstępnym diagram powinien być wstępnie ustawiony za pomocą bitu systemowego %S23 i instrukcji S %Xi.
-*- 8 LD %I0.7 # 9 # 10 -*- 9 LD %I0.8 # 11 -*- 10 LD %I0.9 # 12 -*- 11 LD %M0 AND %X12 #D 12 # 13 -*- 12 LD %M0 AND %X11 #D 11 # 13
- * - 12
8
9 10
11 12
13
#
#
#
#
#
#
#D
#D
%I0.8
%I0.7
%I0.9
%M0
- * - 8
%I0.7
- * - 9
9
10
11%I0.8
- * - 10
%I0.9 12
12
- * - 11
%M0 %X12
13
11
13
%M0 %X11
Niedostępny Program w języku Program w języku Ladder List
TWD USE 10 AE 249
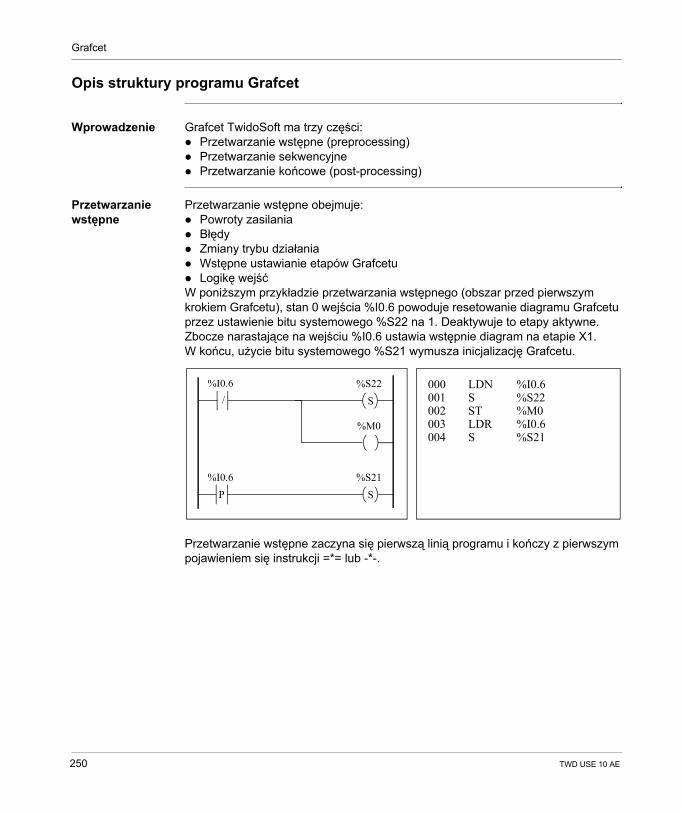
Grafcet
Opis struktury programu Grafcet
Wprowadzenie Grafcet TwidoSoft ma trzy części:Przetwarzanie wstępne (preprocessing)Przetwarzanie sekwencyjnePrzetwarzanie końcowe (post-processing)
Przetwarzanie wstępne
Przetwarzanie wstępne obejmuje:Powroty zasilaniaBłędyZmiany trybu działaniaWstępne ustawianie etapów GrafcetuLogikę wejść
W poniższym przykładzie przetwarzania wstępnego (obszar przed pierwszym krokiem Grafcetu), stan 0 wejścia %I0.6 powoduje resetowanie diagramu Grafcetu przez ustawienie bitu systemowego %S22 na 1. Deaktywuje to etapy aktywne. Zbocze narastające na wejściu %I0.6 ustawia wstępnie diagram na etapie X1. W końcu, użycie bitu systemowego %S21 wymusza inicjalizację Grafcetu.
Przetwarzanie wstępne zaczyna się pierwszą linią programu i kończy z pierwszym pojawieniem się instrukcji =*= lub -*-.
000 LDN %I0.6001 S %S22002 ST %M0003 LDR %I0.6004 S %S21
/
P S
S
%I0.6
%I0.6
%S22
%M0
%S21
250 TWD USE 10 AE

Grafcet
Do sterowania Grafcetem są przeznaczone trzy bity systemowe: %S21, %S22, %S23. Każdy z nich jest ustawiany na 1 (jeżeli potrzeba) przez aplikację, normalnie w przetwarzaniu wstępnym. Dołączona funkcja jest wykonywana przez system na zakończenie przetwarzania wstępnego, a bit systemowy jest wtedy kasowany na 0 przez system.
Bit systemowy
Nazwa Opis
%S21 Inicjalizacja Grafcetu
Wszystkie aktywne etapy są deaktywowane i aktywowany jest etap początkowy.
%S22 Kasowanie Grafcetu
Wszystkie etapy są deaktywowane.
%S23 Wstępne ustawienie Grafcetu
Ten bit musi być ustawiony na 1, jeśli %Xi jest jawnie zapisany przez aplikację w przetwarzaniu wstępnym. Jeśli bit jest utrzymywany na 1 przez przetwarzanie wstępne bez jawnej zmiany obiektu %Xi, to Grafcet jest zamrożony (żadne uaktualnienie nie jest uwzględnione).
TWD USE 10 AE 251
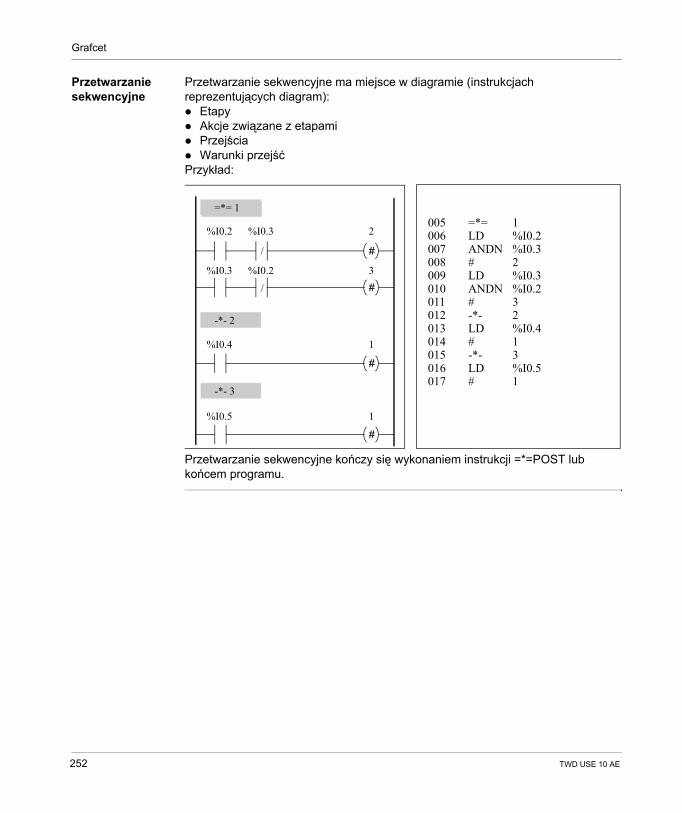
Grafcet
Przetwarzanie sekwencyjne
Przetwarzanie sekwencyjne ma miejsce w diagramie (instrukcjach reprezentujących diagram):
Etapy Akcje związane z etapamiPrzejściaWarunki przejść
Przykład:
Przetwarzanie sekwencyjne kończy się wykonaniem instrukcji =*=POST lub końcem programu.
005 =*= 1006 LD %I0.2007 ANDN %I0.3008 # 2009 LD %I0.3010 ANDN %I0.2011 # 3012 -*- 2013 LD %I0.4014 # 1015 -*- 3016 LD %I0.5017 # 1
/
/
=*= 1
-*- 2
-*- 3
#
#
#
#
3
2
1
1%I0.5
%I0.4
%I0.3
%I0.3
%I0.2
%I0.2
252 TWD USE 10 AE
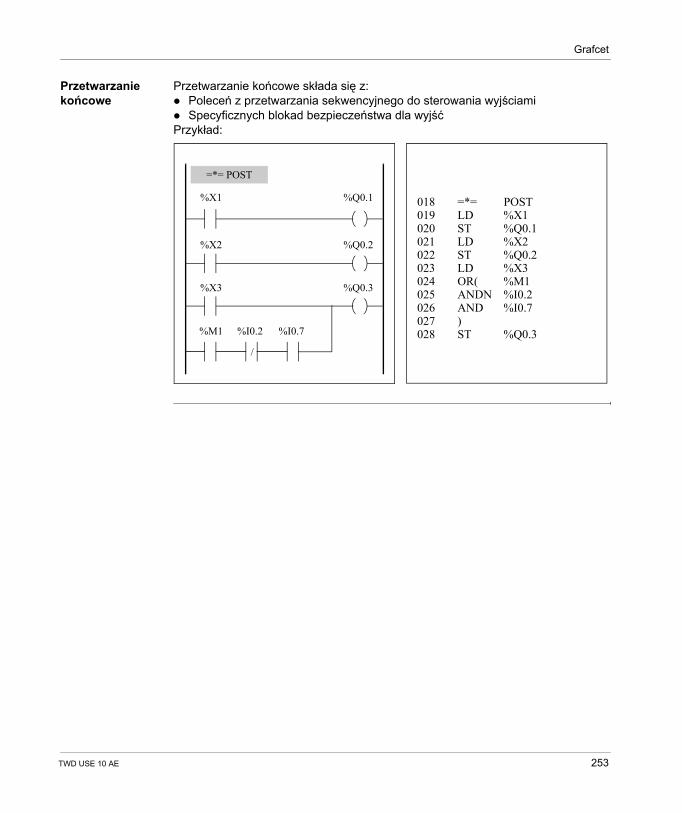
Grafcet
Przetwarzanie końcowe
Przetwarzanie końcowe składa się z:Poleceń z przetwarzania sekwencyjnego do sterowania wyjściamiSpecyficznych blokad bezpieczeństwa dla wyjść
Przykład:
018 =*= POST019 LD %X1020 ST %Q0.1021 LD %X2022 ST %Q0.2023 LD %X3024 OR( %M1025 ANDN %I0.2026 AND %I0.7027 ) 028 ST %Q0.3
/
%X1
%X2
%M1 %I0.2 %I0.7
%Q0.3
%Q0.2
%Q0.1
%X3
=*= POST
TWD USE 10 AE 253
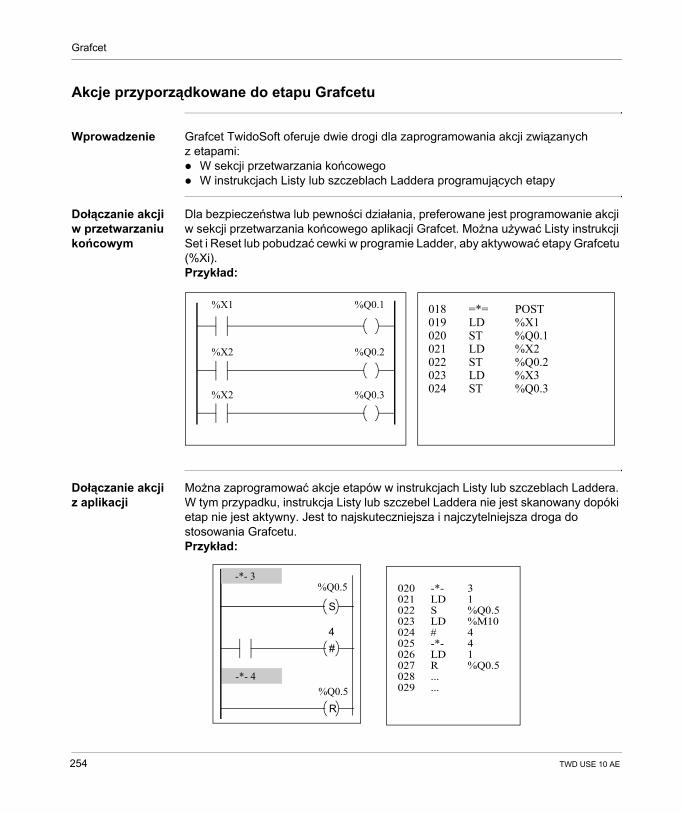
Grafcet
Akcje przyporządkowane do etapu Grafcetu
Wprowadzenie Grafcet TwidoSoft oferuje dwie drogi dla zaprogramowania akcji związanych z etapami:
W sekcji przetwarzania końcowegoW instrukcjach Listy lub szczeblach Laddera programujących etapy
Dołączanie akcji w przetwarzaniu końcowym
Dla bezpieczeństwa lub pewności działania, preferowane jest programowanie akcji w sekcji przetwarzania końcowego aplikacji Grafcet. Można używać Listy instrukcji Set i Reset lub pobudzać cewki w programie Ladder, aby aktywować etapy Grafcetu (%Xi).Przykład:
Dołączanie akcji z aplikacji
Można zaprogramować akcje etapów w instrukcjach Listy lub szczeblach Laddera. W tym przypadku, instrukcja Listy lub szczebel Laddera nie jest skanowany dopóki etap nie jest aktywny. Jest to najskuteczniejsza i najczytelniejsza droga do stosowania Grafcetu.Przykład:
018 =*= POST019 LD %X1020 ST %Q0.1021 LD %X2022 ST %Q0.2023 LD %X3024 ST %Q0.3
%X1
%X2
%Q0.3
%Q0.2
%Q0.1
%X2
-*- 4
#
R
S
-*- 3%Q0.5
%Q0.5
4
020021022023024025026027028029
-*-LDSLD#-*-LDR......
31%Q0.5%M10441%Q0.5
254 TWD USE 10 AE
TWD USE 10 AE
IV
Opis instrukcji i funkcjiRzut oka
Wprowadzenie Ta część dostarcza szczegółowy opis instrukcji podstawowych i zaawansowanych oraz bitów i słów systemowych dla języków Twido.
Co jest w tej części?
Ta część zawiera następujące rozdziały:
Rozdział Tytuł rozdziału Strona
14 Instrukcje podstawowe 257
15 Instrukcje zaawansowane 327
16 Bity systemowe i słowa systemowe 435
255

Opis instrukcji i funkcji
256 TWD USE 10 AE
TWD USE 10 AE
14
Instrukcje podstawoweRzut oka
Wprowadzenie Ten rozdział dostarcza szczegółowych informacji o instrukcjach i blokach funkcyjnych, które są stosowane do tworzenia podstawowych programów sterujących dla sterowników Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Sekcja Temat Strona
14.1 Przetwarzanie boolowskie 258
14.2 Podstawowe bloki funkcyjne 275
14.3 Przetwarzanie numeryczne 299
14.4 Instrukcje programu 319
257
Instrukcje podstawowe
14.1 Przetwarzanie boolowskie
Wprowadzenie do przetwarzania boolowskiego
Wprowadzenie Ta sekcja wprowadza przetwarzanie boolowskie, zawiera opisy i wskazówki programowania instrukcji boolowskich.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Instrukcje boolowskie 259
Zrozumienie formatu opisującego instrukcje boolowskie 261
Instrukcje ładowania (LD, LDN, LDR, LDF) 263
Instrukcje przypisania (ST, STN, R, S) 265
Instrukcje iloczynu logicznego (AND, ANDN, ANDR, ANDF) 267
Instrukcje sumy logicznej (OR, ORN, ORR, ORF) 269
Instrukcje alternatywy (XOR, XORN, XORR, XORF) 271
Instrukcja negacji (N) 273
258 TWD USE 10 AE
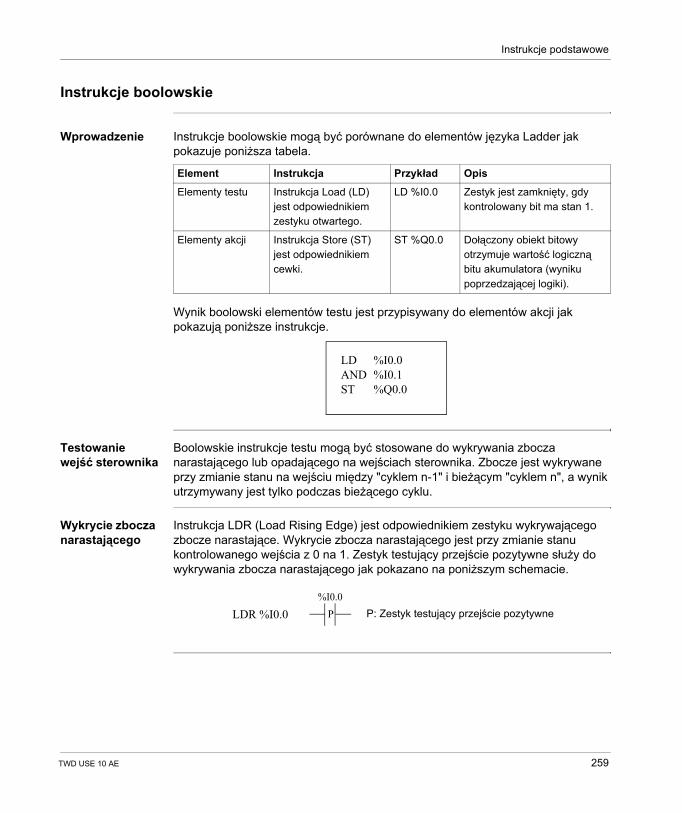
Instrukcje podstawowe
Instrukcje boolowskie
Wprowadzenie Instrukcje boolowskie mogą być porównane do elementów języka Ladder jak pokazuje poniższa tabela.
Wynik boolowski elementów testu jest przypisywany do elementów akcji jak pokazują poniższe instrukcje.
Testowanie wejść sterownika
Boolowskie instrukcje testu mogą być stosowane do wykrywania zbocza narastającego lub opadającego na wejściach sterownika. Zbocze jest wykrywane przy zmianie stanu na wejściu między "cyklem n-1" i bieżącym "cyklem n", a wynik utrzymywany jest tylko podczas bieżącego cyklu.
Wykrycie zbocza narastającego
Instrukcja LDR (Load Rising Edge) jest odpowiednikiem zestyku wykrywającego zbocze narastające. Wykrycie zbocza narastającego jest przy zmianie stanu kontrolowanego wejścia z 0 na 1. Zestyk testujący przejście pozytywne służy do wykrywania zbocza narastającego jak pokazano na poniższym schemacie.
Element Instrukcja Przykład Opis
Elementy testu Instrukcja Load (LD) jest odpowiednikiem zestyku otwartego.
LD %I0.0 Zestyk jest zamknięty, gdy kontrolowany bit ma stan 1.
Elementy akcji Instrukcja Store (ST) jest odpowiednikiem cewki.
ST %Q0.0 Dołączony obiekt bitowy otrzymuje wartość logiczną bitu akumulatora (wyniku poprzedzającej logiki).
LD %I0.0AND %I0.1ST %Q0.0
LDR %I0.0%I0.0
P: Zestyk testujący przejście pozytywneP
TWD USE 10 AE 259
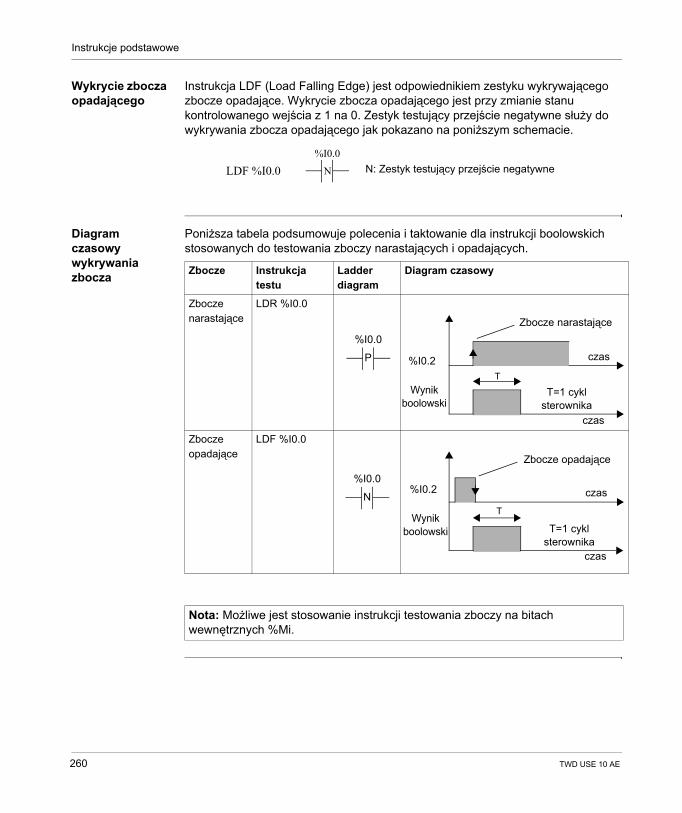
Instrukcje podstawowe
Wykrycie zbocza opadającego
Instrukcja LDF (Load Falling Edge) jest odpowiednikiem zestyku wykrywającego zbocze opadające. Wykrycie zbocza opadającego jest przy zmianie stanu kontrolowanego wejścia z 1 na 0. Zestyk testujący przejście negatywne służy do wykrywania zbocza opadającego jak pokazano na poniższym schemacie.
Diagram czasowy wykrywania zbocza
Poniższa tabela podsumowuje polecenia i taktowanie dla instrukcji boolowskich stosowanych do testowania zboczy narastających i opadających.
%I0.0N: Zestyk testujący przejście negatywneLDF %I0.0 N
Zbocze Instrukcja testu
Ladder diagram
Diagram czasowy
Zbocze narastające
LDR %I0.0
Zbocze opadające
LDF %I0.0
Nota: Możliwe jest stosowanie instrukcji testowania zboczy na bitach wewnętrznych %Mi.
P
%I0.0Zbocze narastające
czas
czas
T=1 cyklsterownika
Wynik boolowski
%I0.2T
N
%I0.0czas
czas
Wynik boolowski
%I0.2
Zbocze opadające
T=1 cyklsterownika
T
260 TWD USE 10 AE
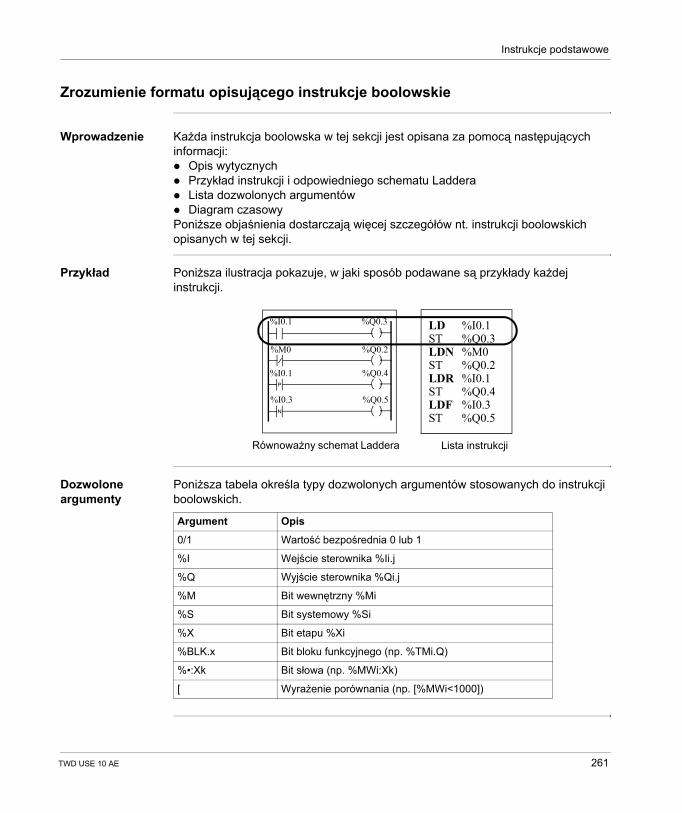
Instrukcje podstawowe
Zrozumienie formatu opisującego instrukcje boolowskie
Wprowadzenie Każda instrukcja boolowska w tej sekcji jest opisana za pomocą następujących informacji:
Opis wytycznychPrzykład instrukcji i odpowiedniego schematu LadderaLista dozwolonych argumentówDiagram czasowy
Poniższe objaśnienia dostarczają więcej szczegółów nt. instrukcji boolowskich opisanych w tej sekcji.
Przykład Poniższa ilustracja pokazuje, w jaki sposób podawane są przykłady każdej instrukcji.
Dozwolone argumenty
Poniższa tabela określa typy dozwolonych argumentów stosowanych do instrukcji boolowskich.
Równoważny schemat Laddera Lista instrukcji
LD %I0.1 ST %Q0.3 LDN %M0 ST %Q0.2 LDR %I0.1 ST %Q0.4 LDF %I0.3 ST %Q0.5
P
N
%I0.1
%M0
%I0.1
%I0.3
%Q0.3
%Q0.2
%Q0.4
%Q0.5
Argument Opis
0/1 Wartość bezpośrednia 0 lub 1
%I Wejście sterownika %Ii.j
%Q Wyjście sterownika %Qi.j
%M Bit wewnętrzny %Mi
%S Bit systemowy %Si
%X Bit etapu %Xi
%BLK.x Bit bloku funkcyjnego (np. %TMi.Q)
%•:Xk Bit słowa (np. %MWi:Xk)
[ Wyrażenie porównania (np. [%MWi<1000])
TWD USE 10 AE 261
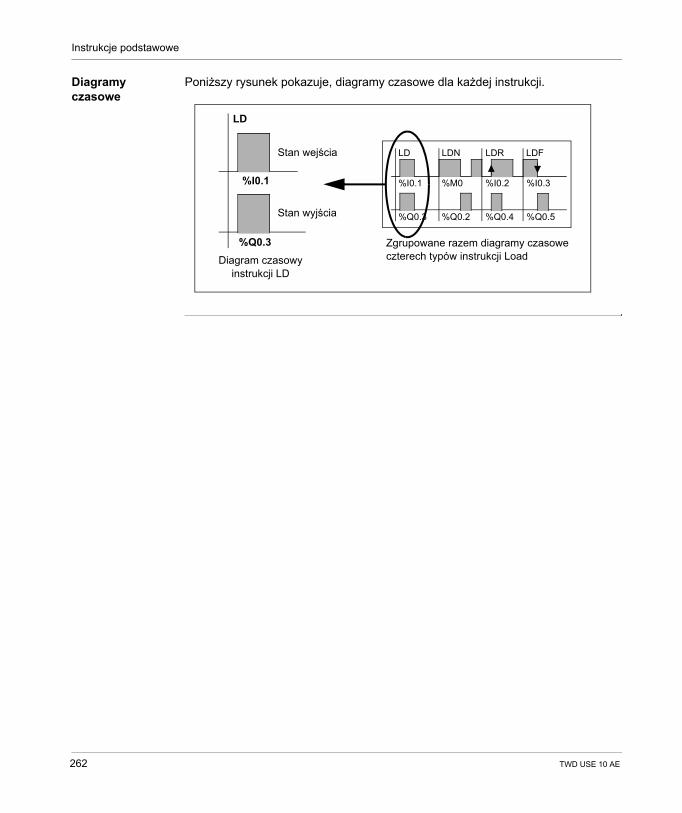
Instrukcje podstawowe
Diagramy czasowe
Poniższy rysunek pokazuje, diagramy czasowe dla każdej instrukcji.
Diagram czasowy instrukcji LD
Stan wejścia
Stan wyjścia
%M0 %I0.3%I0.1 %I0.2
LD LDN LDR LDF
%Q0.2 %Q0.5%Q0.3 %Q0.4
Zgrupowane razem diagramy czasowe czterech typów instrukcji Load
%I0.1
LD
%Q0.3
262 TWD USE 10 AE
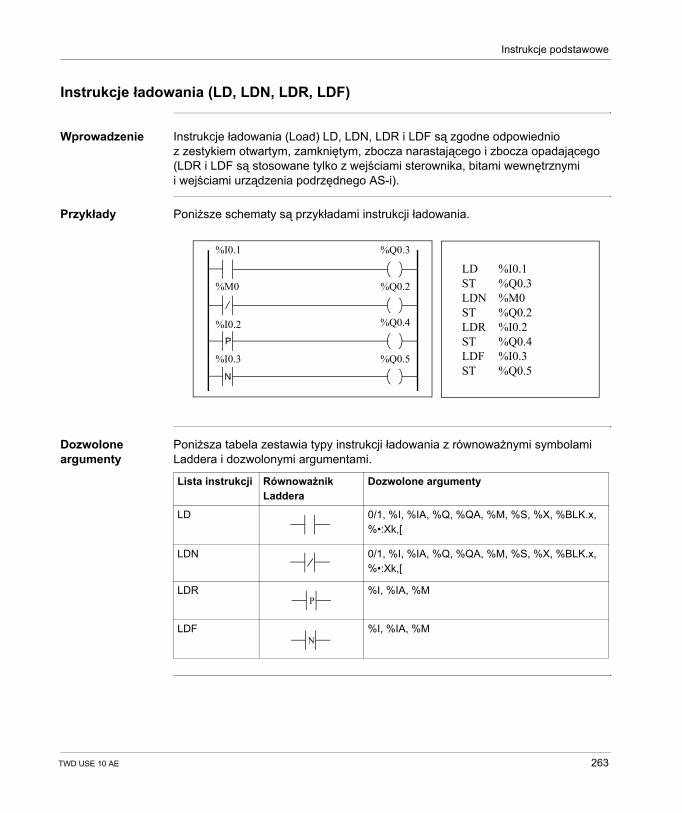
Instrukcje podstawowe
Instrukcje ładowania (LD, LDN, LDR, LDF)
Wprowadzenie Instrukcje ładowania (Load) LD, LDN, LDR i LDF są zgodne odpowiednio z zestykiem otwartym, zamkniętym, zbocza narastającego i zbocza opadającego (LDR i LDF są stosowane tylko z wejściami sterownika, bitami wewnętrznymi i wejściami urządzenia podrzędnego AS-i).
Przykłady Poniższe schematy są przykładami instrukcji ładowania.
Dozwolone argumenty
Poniższa tabela zestawia typy instrukcji ładowania z równoważnymi symbolami Laddera i dozwolonymi argumentami.
N
LD %I0.1 ST %Q0.3 LDN %M0 ST %Q0.2 LDR %I0.2 ST %Q0.4 LDF %I0.3 ST %Q0.5
P
%Q0.3
%Q0.2
%Q0.4
%Q0.5
%I0.1
%M0
%I0.2
%I0.3
Lista instrukcji Równoważnik Laddera
Dozwolone argumenty
LD 0/1, %I, %IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk,[
LDN 0/1, %I, %IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk,[
LDR %I, %IA, %M
LDF %I, %IA, %M
P
N
TWD USE 10 AE 263
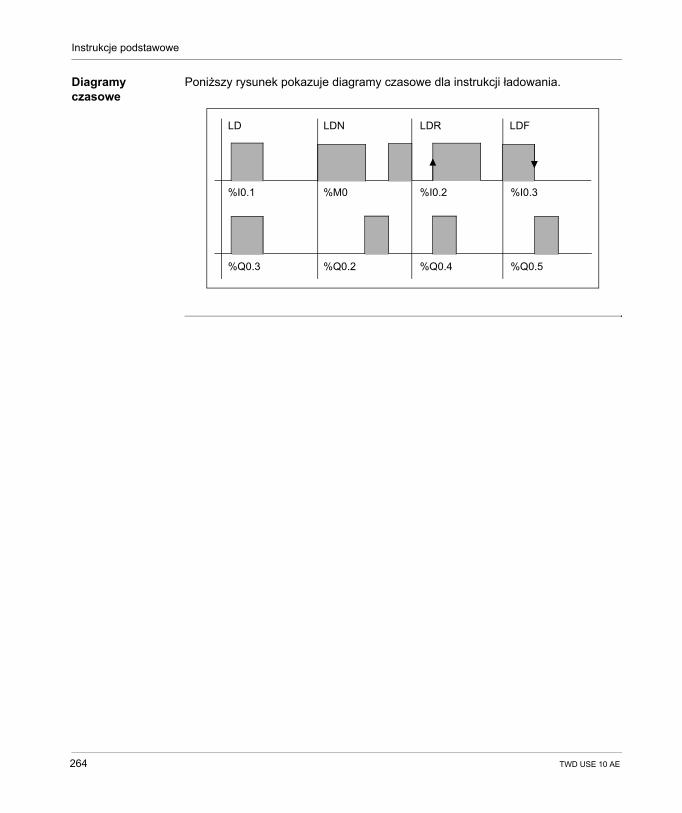
Instrukcje podstawowe
Diagramy czasowe
Poniższy rysunek pokazuje diagramy czasowe dla instrukcji ładowania.
%M0 %I0.3%I0.1 %I0.2
LD LDN LDR LDF
%Q0.2 %Q0.5%Q0.3 %Q0.4
264 TWD USE 10 AE
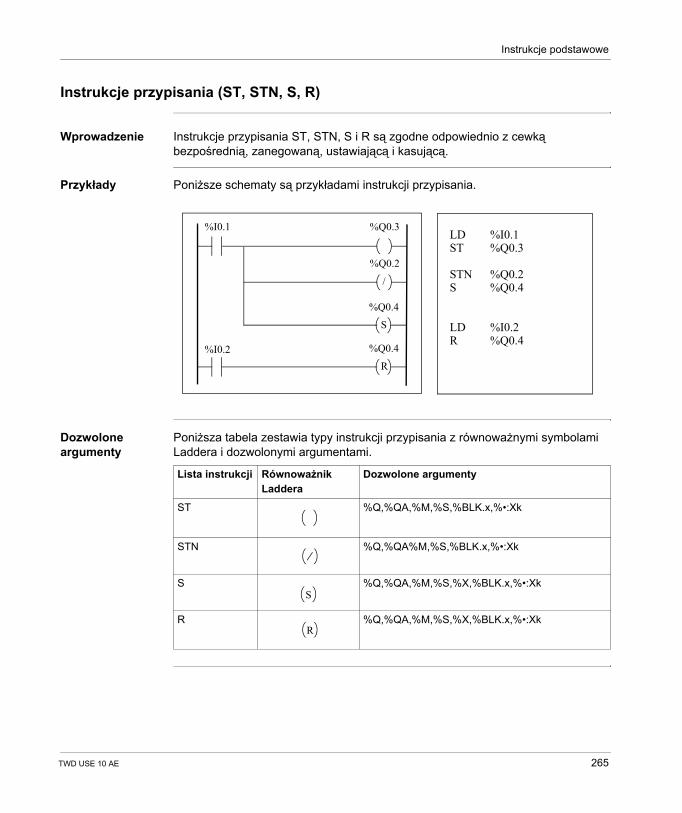
Instrukcje podstawowe
Instrukcje przypisania (ST, STN, S, R)
Wprowadzenie Instrukcje przypisania ST, STN, S i R są zgodne odpowiednio z cewką bezpośrednią, zanegowaną, ustawiającą i kasującą.
Przykłady Poniższe schematy są przykładami instrukcji przypisania.
Dozwolone argumenty
Poniższa tabela zestawia typy instrukcji przypisania z równoważnymi symbolami Laddera i dozwolonymi argumentami.
LD %I0.1 ST %Q0.3
STN %Q0.2S %Q0.4 LD %I0.2 R %Q0.4
%Q0.3
%Q0.2
%Q0.4
%Q0.4%I0.2
%I0.1
R
S
/
Lista instrukcji Równoważnik Laddera
Dozwolone argumenty
ST %Q,%QA,%M,%S,%BLK.x,%•:Xk
STN %Q,%QA%M,%S,%BLK.x,%•:Xk
S %Q,%QA,%M,%S,%X,%BLK.x,%•:Xk
R %Q,%QA,%M,%S,%X,%BLK.x,%•:Xk
S
R
TWD USE 10 AE 265
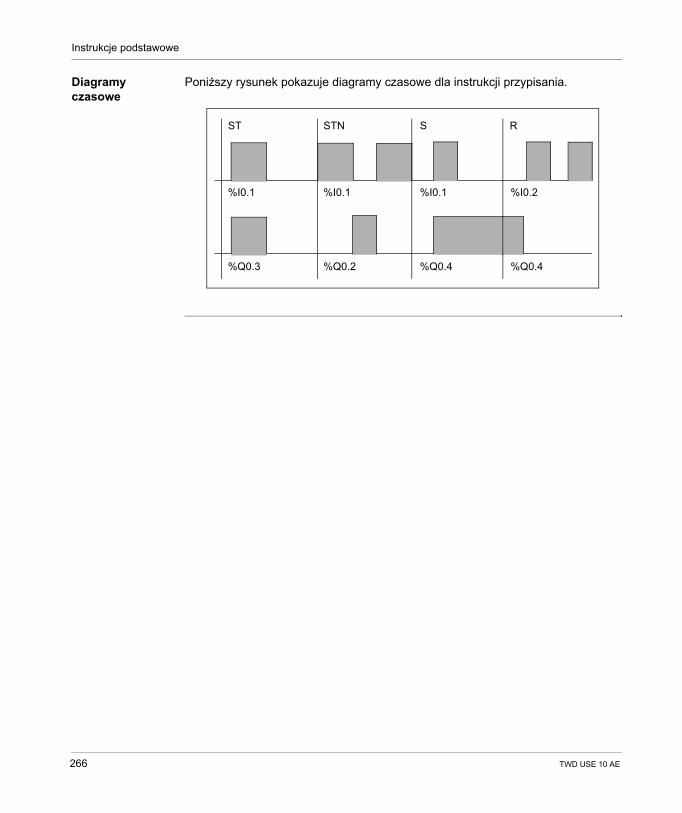
Instrukcje podstawowe
Diagramy czasowe
Poniższy rysunek pokazuje diagramy czasowe dla instrukcji przypisania.
%I0.1 %I0.2%I0.1 %I0.1
ST STN S R
%Q0.2 %Q0.4%Q0.3 %Q0.4
266 TWD USE 10 AE
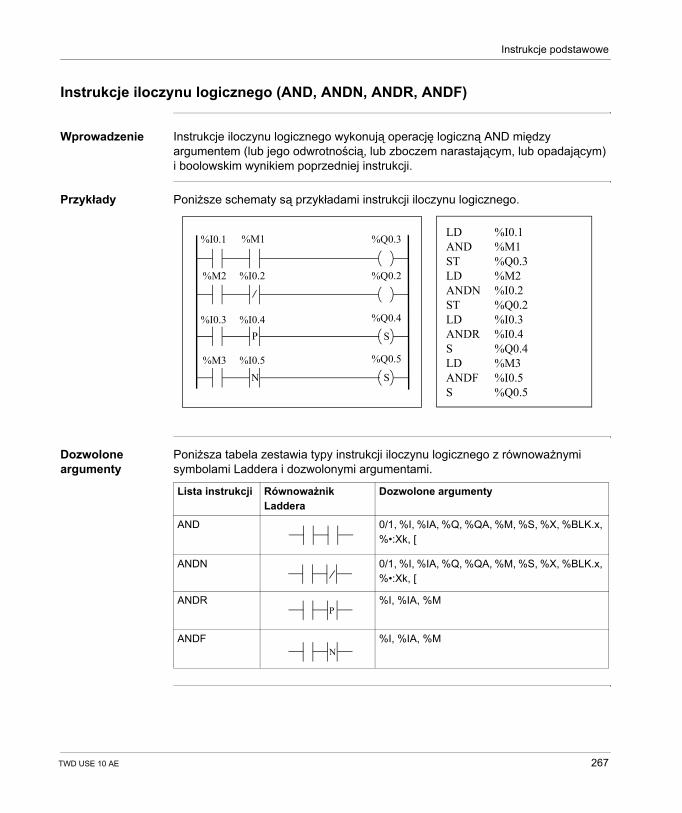
Instrukcje podstawowe
Instrukcje iloczynu logicznego (AND, ANDN, ANDR, ANDF)
Wprowadzenie Instrukcje iloczynu logicznego wykonują operację logiczną AND między argumentem (lub jego odwrotnością, lub zboczem narastającym, lub opadającym) i boolowskim wynikiem poprzedniej instrukcji.
Przykłady Poniższe schematy są przykładami instrukcji iloczynu logicznego.
Dozwolone argumenty
Poniższa tabela zestawia typy instrukcji iloczynu logicznego z równoważnymi symbolami Laddera i dozwolonymi argumentami.
LD %I0.1 AND %M1 ST %Q0.3LD %M2 ANDN %I0.2 ST %Q0.2LD %I0.3 ANDR %I0.4 S %Q0.4LD %M3 ANDF %I0.5S %Q0.5
%Q0.3
%Q0.2
%Q0.4
%Q0.5
S
S
%I0.1
%I0.2
%I0.4%I0.3
%I0.5%M3
%M2
%M1
N
P
Lista instrukcji Równoważnik Laddera
Dozwolone argumenty
AND 0/1, %I, %IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk, [
ANDN 0/1, %I, %IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk, [
ANDR %I, %IA, %M
ANDF %I, %IA, %M
P
N
TWD USE 10 AE 267
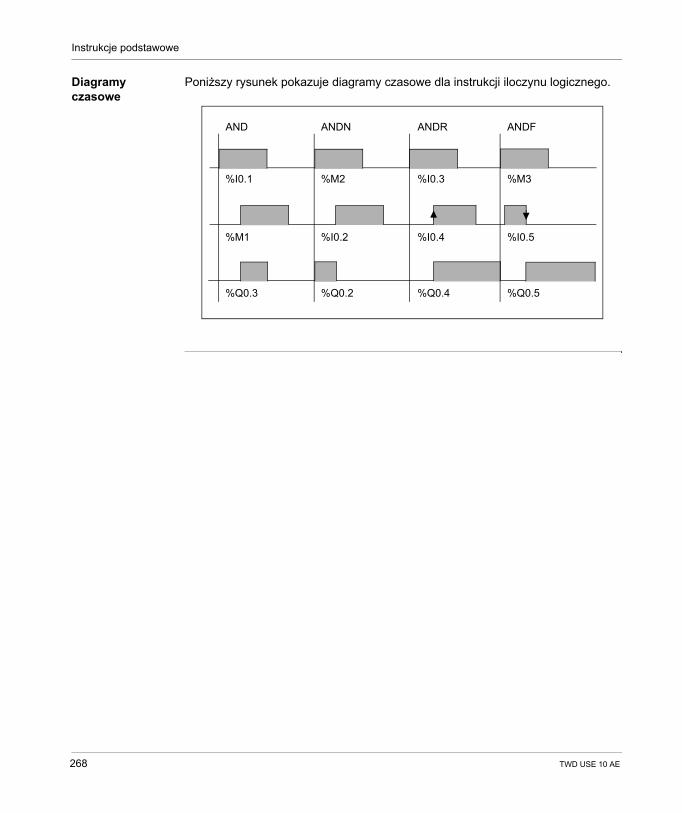
Instrukcje podstawowe
Diagramy czasowe
Poniższy rysunek pokazuje diagramy czasowe dla instrukcji iloczynu logicznego.
%M2 %M3%I0.1 %I0.3
AND ANDN ANDR ANDF
%I0.2 %I0.5%M1 %I0.4
%Q0.2%Q0.3 %Q0.4 %Q0.5
268 TWD USE 10 AE
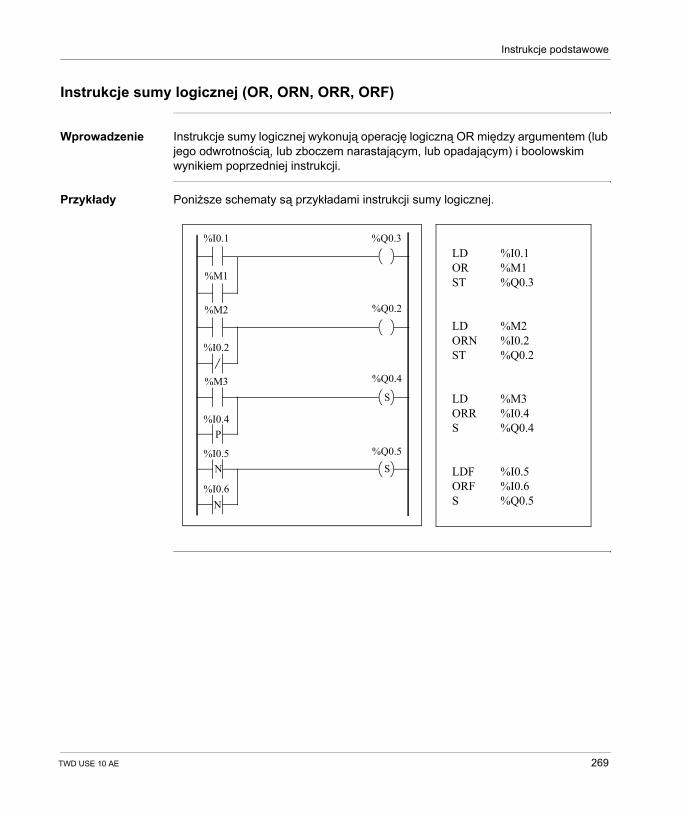
Instrukcje podstawowe
Instrukcje sumy logicznej (OR, ORN, ORR, ORF)
Wprowadzenie Instrukcje sumy logicznej wykonują operację logiczną OR między argumentem (lub jego odwrotnością, lub zboczem narastającym, lub opadającym) i boolowskim wynikiem poprzedniej instrukcji.
Przykłady Poniższe schematy są przykładami instrukcji sumy logicznej.
LD %I0.1 OR %M1 ST %Q0.3
LD %M2 ORN %I0.2 ST %Q0.2
LD %M3 ORR %I0.4 S %Q0.4
LDF %I0.5 ORF %I0.6S %Q0.5
%Q0.3
%Q0.2
%Q0.4
%Q0.5
S
S
%I0.1
%M1
%I0.2
%I0.4
%I0.5
%I0.6
%M2
%M3
P
N
N
TWD USE 10 AE 269
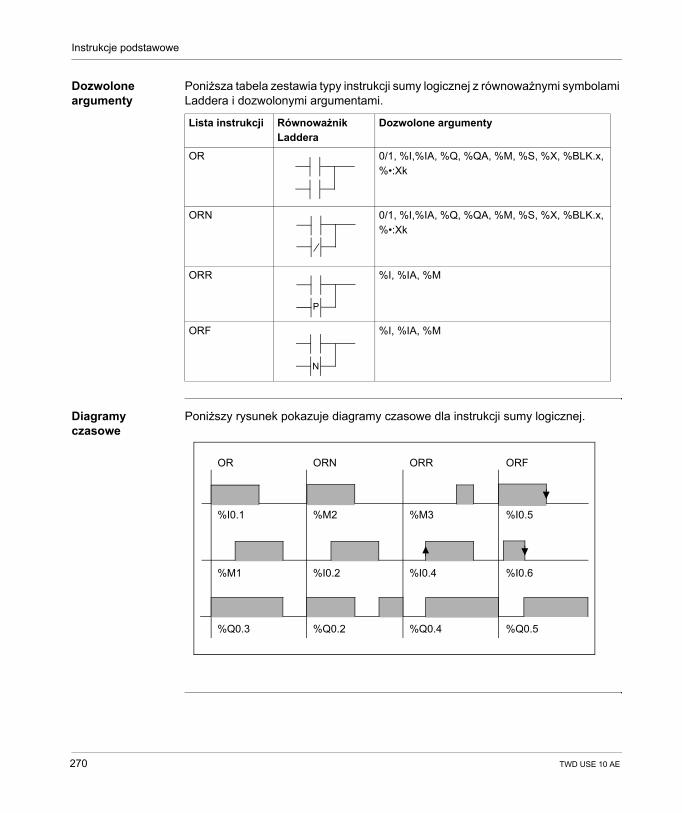
Instrukcje podstawowe
Dozwolone argumenty
Poniższa tabela zestawia typy instrukcji sumy logicznej z równoważnymi symbolami Laddera i dozwolonymi argumentami.
Diagramy czasowe
Poniższy rysunek pokazuje diagramy czasowe dla instrukcji sumy logicznej.
Lista instrukcji Równoważnik Laddera
Dozwolone argumenty
OR 0/1, %I,%IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk
ORN 0/1, %I,%IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk
ORR %I, %IA, %M
ORF %I, %IA, %M
P
N
%M2 %I0.5%I0.1 %M3
OR ORN ORR ORF
%I0.2 %I0.6%M1 %I0.4
%Q0.2%Q0.3 %Q0.4 %Q0.5
270 TWD USE 10 AE
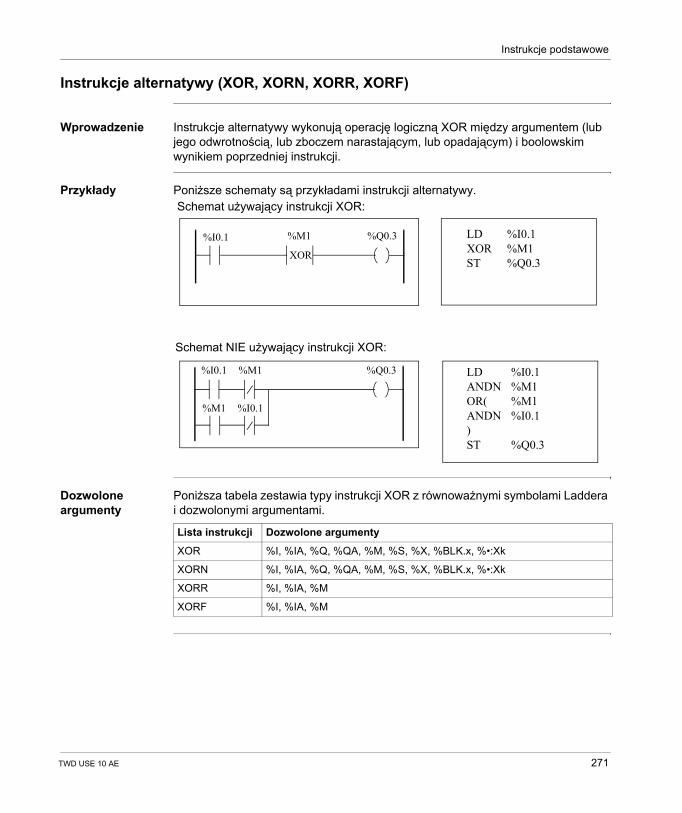
Instrukcje podstawowe
Instrukcje alternatywy (XOR, XORN, XORR, XORF)
Wprowadzenie Instrukcje alternatywy wykonują operację logiczną XOR między argumentem (lub jego odwrotnością, lub zboczem narastającym, lub opadającym) i boolowskim wynikiem poprzedniej instrukcji.
Przykłady Poniższe schematy są przykładami instrukcji alternatywy.
Dozwolone argumenty
Poniższa tabela zestawia typy instrukcji XOR z równoważnymi symbolami Laddera i dozwolonymi argumentami.
LD %I0.1 XOR %M1 ST %Q0.3
LD %I0.1 ANDN %M1OR( %M1ANDN %I0.1) ST %Q0.3
%Q0.3%M1%I0.1
XOR
%Q0.3
%I0.1
%I0.1
%M1
%M1
Schemat NIE używający instrukcji XOR:
Schemat używający instrukcji XOR:
Lista instrukcji Dozwolone argumenty
XOR %I, %IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk
XORN %I, %IA, %Q, %QA, %M, %S, %X, %BLK.x, %•:Xk
XORR %I, %IA, %M
XORF %I, %IA, %M
TWD USE 10 AE 271
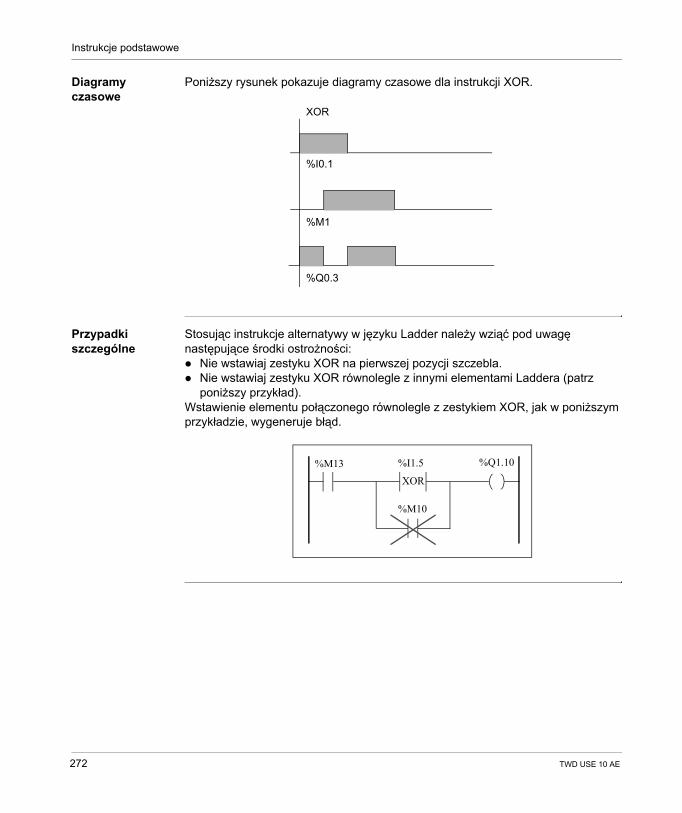
Instrukcje podstawowe
Diagramy czasowe
Poniższy rysunek pokazuje diagramy czasowe dla instrukcji XOR.
Przypadki szczególne
Stosując instrukcje alternatywy w języku Ladder należy wziąć pod uwagę następujące środki ostrożności:
Nie wstawiaj zestyku XOR na pierwszej pozycji szczebla.Nie wstawiaj zestyku XOR równolegle z innymi elementami Laddera (patrz poniższy przykład).
Wstawienie elementu połączonego równolegle z zestykiem XOR, jak w poniższym przykładzie, wygeneruje błąd.
%I0.1
XOR
%M1
%Q0.3
%Q1.10
%M10
XOR
%I1.5%M13
272 TWD USE 10 AE
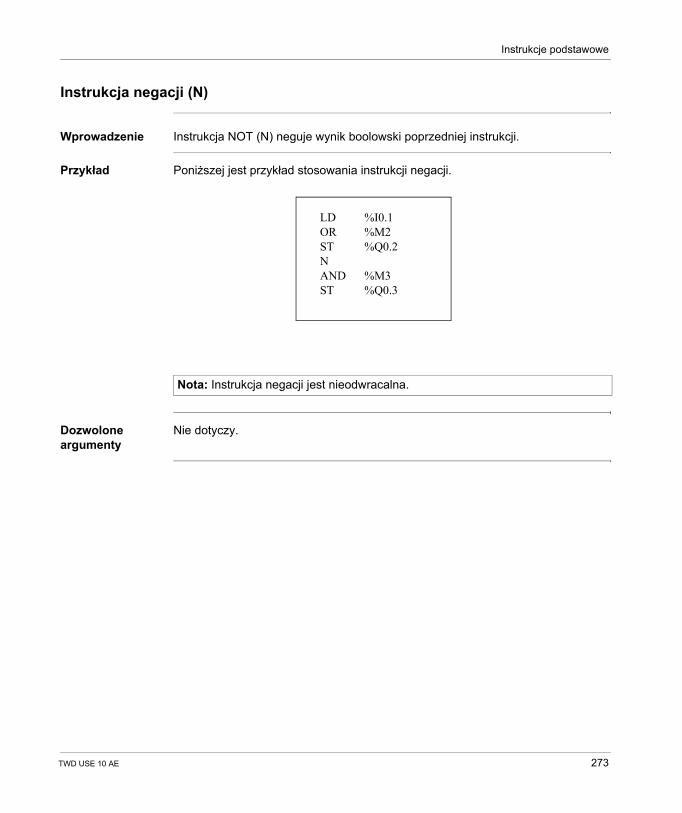
Instrukcje podstawowe
Instrukcja negacji (N)
Wprowadzenie Instrukcja NOT (N) neguje wynik boolowski poprzedniej instrukcji.
Przykład Poniższej jest przykład stosowania instrukcji negacji.
Dozwolone argumenty
Nie dotyczy.
Nota: Instrukcja negacji jest nieodwracalna.
LD %I0.1 OR %M2ST %Q0.2N AND %M3ST %Q0.3
TWD USE 10 AE 273
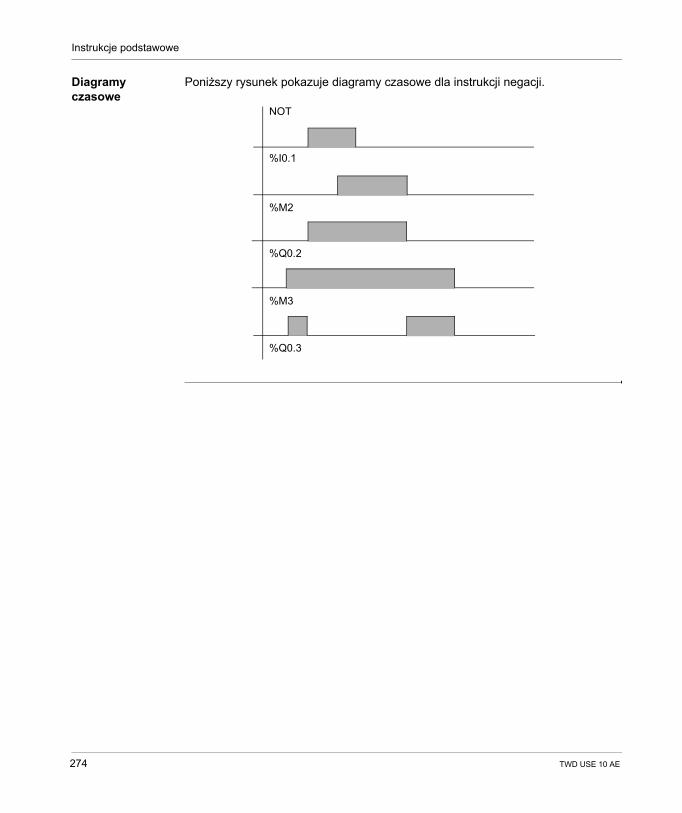
Instrukcje podstawowe
Diagramy czasowe
Poniższy rysunek pokazuje diagramy czasowe dla instrukcji negacji.
%I0.1
NOT
%M2
%Q0.2
%M3
%Q0.3
274 TWD USE 10 AE
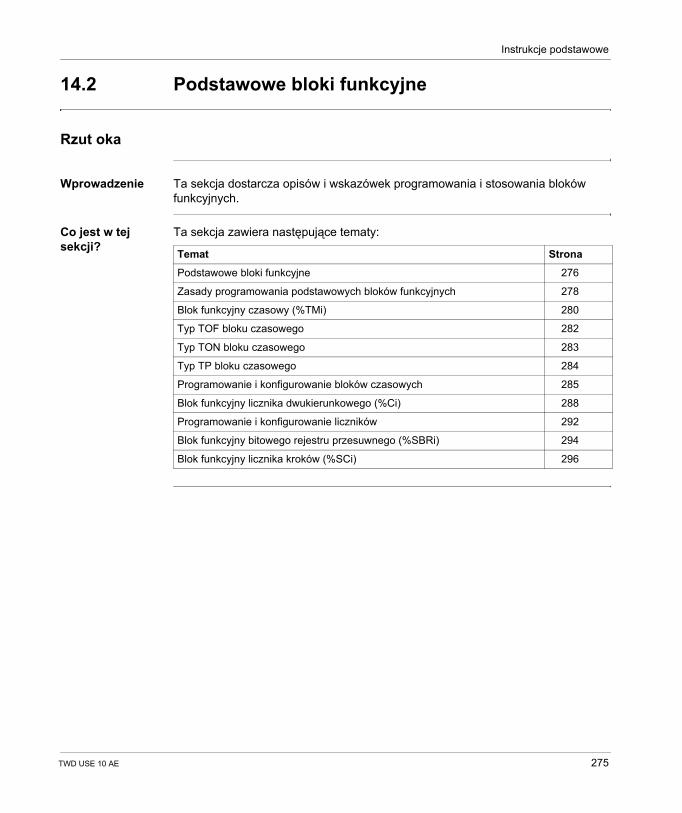
Instrukcje podstawowe
14.2 Podstawowe bloki funkcyjne
Rzut oka
Wprowadzenie Ta sekcja dostarcza opisów i wskazówek programowania i stosowania bloków funkcyjnych.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Podstawowe bloki funkcyjne 276
Zasady programowania podstawowych bloków funkcyjnych 278
Blok funkcyjny czasowy (%TMi) 280
Typ TOF bloku czasowego 282
Typ TON bloku czasowego 283
Typ TP bloku czasowego 284
Programowanie i konfigurowanie bloków czasowych 285
Blok funkcyjny licznika dwukierunkowego (%Ci) 288
Programowanie i konfigurowanie liczników 292
Blok funkcyjny bitowego rejestru przesuwnego (%SBRi) 294
Blok funkcyjny licznika kroków (%SCi) 296
TWD USE 10 AE 275
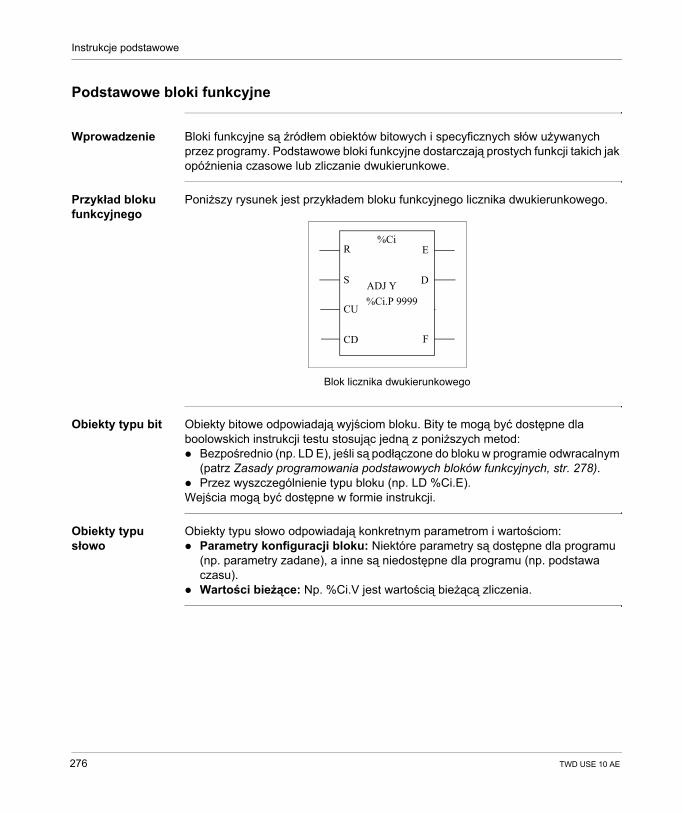
Instrukcje podstawowe
Podstawowe bloki funkcyjne
Wprowadzenie Bloki funkcyjne są źródłem obiektów bitowych i specyficznych słów używanych przez programy. Podstawowe bloki funkcyjne dostarczają prostych funkcji takich jak opóźnienia czasowe lub zliczanie dwukierunkowe.
Przykład bloku funkcyjnego
Poniższy rysunek jest przykładem bloku funkcyjnego licznika dwukierunkowego.
Obiekty typu bit Obiekty bitowe odpowiadają wyjściom bloku. Bity te mogą być dostępne dla boolowskich instrukcji testu stosując jedną z poniższych metod:
Bezpośrednio (np. LD E), jeśli są podłączone do bloku w programie odwracalnym (patrz Zasady programowania podstawowych bloków funkcyjnych, str. 278).Przez wyszczególnienie typu bloku (np. LD %Ci.E).
Wejścia mogą być dostępne w formie instrukcji.
Obiekty typu słowo
Obiekty typu słowo odpowiadają konkretnym parametrom i wartościom:Parametry konfiguracji bloku: Niektóre parametry są dostępne dla programu (np. parametry zadane), a inne są niedostępne dla programu (np. podstawa czasu).Wartości bieżące: Np. %Ci.V jest wartością bieżącą zliczenia.
Blok licznika dwukierunkowego
R E
S D
CD F
CU
%Ci
ADJ Y%Ci.P 9999
276 TWD USE 10 AE
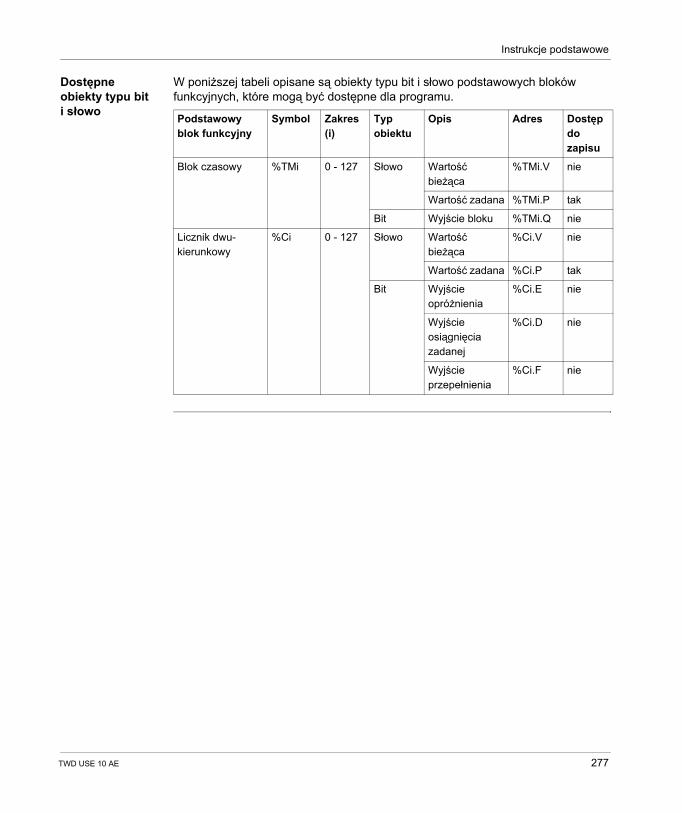
Instrukcje podstawowe
Dostępne obiekty typu bit i słowo
W poniższej tabeli opisane są obiekty typu bit i słowo podstawowych bloków funkcyjnych, które mogą być dostępne dla programu.
Podstawowyblok funkcyjny
Symbol Zakres (i)
Typ obiektu
Opis Adres Dostęp do zapisu
Blok czasowy %TMi 0 - 127 Słowo Wartość bieżąca
%TMi.V nie
Wartość zadana %TMi.P tak
Bit Wyjście bloku %TMi.Q nie
Licznik dwu-kierunkowy
%Ci 0 - 127 Słowo Wartość bieżąca
%Ci.V nie
Wartość zadana %Ci.P tak
Bit Wyjście opróżnienia
%Ci.E nie
Wyjście osiągnięcia zadanej
%Ci.D nie
Wyjście przepełnienia
%Ci.F nie
TWD USE 10 AE 277
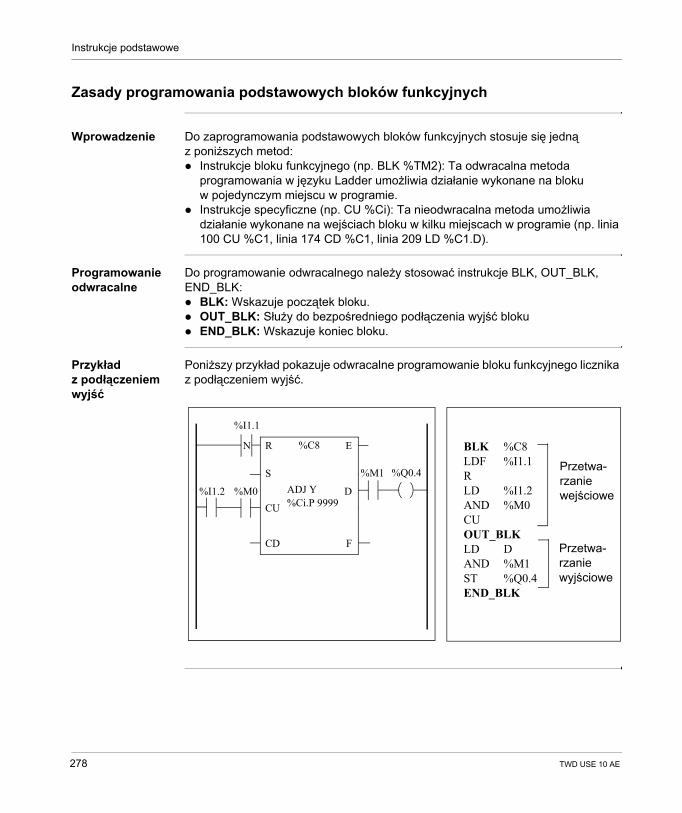
Instrukcje podstawowe
Zasady programowania podstawowych bloków funkcyjnych
Wprowadzenie Do zaprogramowania podstawowych bloków funkcyjnych stosuje się jedną z poniższych metod:
Instrukcje bloku funkcyjnego (np. BLK %TM2): Ta odwracalna metoda programowania w języku Ladder umożliwia działanie wykonane na bloku w pojedynczym miejscu w programie.Instrukcje specyficzne (np. CU %Ci): Ta nieodwracalna metoda umożliwia działanie wykonane na wejściach bloku w kilku miejscach w programie (np. linia 100 CU %C1, linia 174 CD %C1, linia 209 LD %C1.D).
Programowanie odwracalne
Do programowanie odwracalnego należy stosować instrukcje BLK, OUT_BLK, END_BLK:
BLK: Wskazuje początek bloku.OUT_BLK: Służy do bezpośredniego podłączenia wyjść blokuEND_BLK: Wskazuje koniec bloku.
Przykład z podłączeniem wyjść
Poniższy przykład pokazuje odwracalne programowanie bloku funkcyjnego licznika z podłączeniem wyjść.
BLK %C8LDF %I1.1RLD %I1.2AND %M0CUOUT_BLKLD DAND %M1ST %Q0.4END_BLK
N
Przetwa-rzanie wejściowe
Przetwa-rzanie wyjściowe
R
S
CU
CD
E
D
F
%C8
ADJ Y%Ci.P 9999
%I1.1
%I1.2 %M0
%M1 %Q0.4
278 TWD USE 10 AE
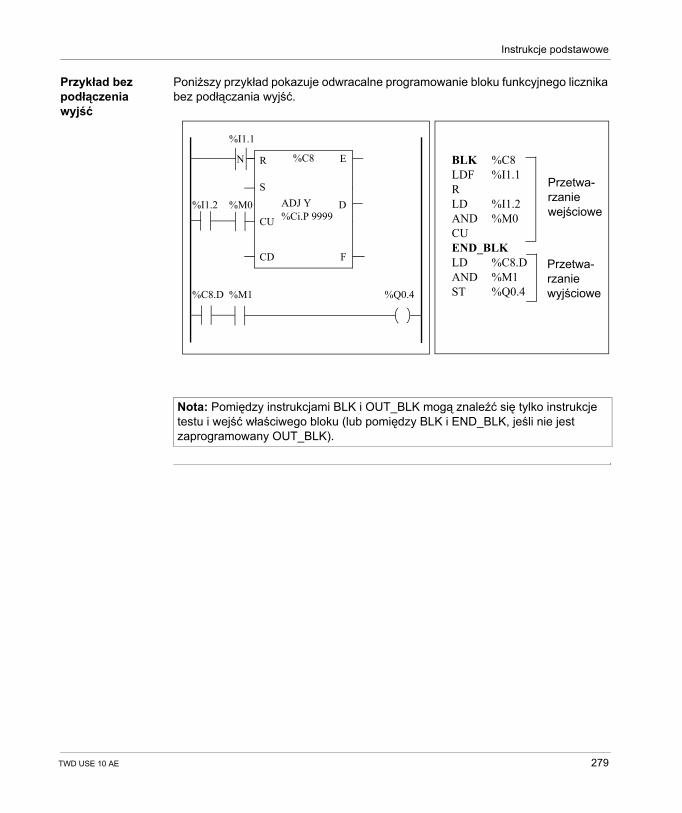
Instrukcje podstawowe
Przykład bez podłączenia wyjść
Poniższy przykład pokazuje odwracalne programowanie bloku funkcyjnego licznika bez podłączania wyjść.
Nota: Pomiędzy instrukcjami BLK i OUT_BLK mogą znaleźć się tylko instrukcje testu i wejść właściwego bloku (lub pomiędzy BLK i END_BLK, jeśli nie jest zaprogramowany OUT_BLK).
BLK %C8LDF %I1.1RLD %I1.2AND %M0CUEND_BLKLD %C8.DAND %M1ST %Q0.4
N R
S
CU
CD
E
D
F
%C8
ADJ Y%Ci.P 9999
%I1.1
%I1.2 %M0
%C8.D %M1 %Q0.4
Przetwa-rzanie wejściowe
Przetwa-rzanie wyjściowe
TWD USE 10 AE 279
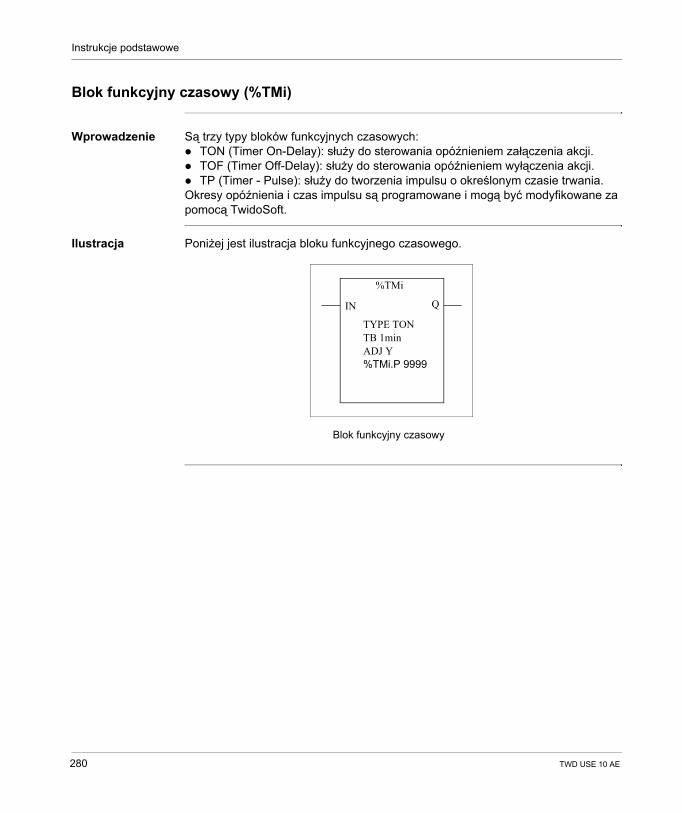
Instrukcje podstawowe
Blok funkcyjny czasowy (%TMi)
Wprowadzenie Są trzy typy bloków funkcyjnych czasowych:TON (Timer On-Delay): służy do sterowania opóźnieniem załączenia akcji.TOF (Timer Off-Delay): służy do sterowania opóźnieniem wyłączenia akcji.TP (Timer - Pulse): służy do tworzenia impulsu o określonym czasie trwania.
Okresy opóźnienia i czas impulsu są programowane i mogą być modyfikowane za pomocą TwidoSoft.
Ilustracja Poniżej jest ilustracja bloku funkcyjnego czasowego.
TYPE TONTB 1minADJ Y%TMi.P 9999
Blok funkcyjny czasowy
QIN
%TMi
280 TWD USE 10 AE
Instrukcje podstawowe
Parametry Blok funkcyjny czasowy ma następujące parametry:
Parametr Etykieta Wartość
Numer bloku czasowego
%TMi 0 do 63: TWDLCAA10DRF i TWDLCAA16DRF0 do 127: dla wszystkich innych sterowników
Typ TON • opóźnienie załączenia (domyślne)
TOF • opóźnienie wyłączenia
TP • impuls (monostabilny)
Podstawa czasu TB 1 min (domyślnie), 1 s, 100 ms, 10 ms, 1 ms
Wartość bieżąca %TMi.V Słowo, które zwiększa się od 0 do %TMi.P w trakcie działania bloku. Może być czytanie i testowane, ale nie może być zapisywane przez program. %TMi.V może być modyfikowane przez edytor tablic animacji.
Wartość zadana %TMi.P 0 - 9999. Słowo, które może być czytane, testowane i zapisywane przez program. Wartość domyślna: 9999. Generowany okres lub opóźnienie jest równe %TMi.P x TB.
Edycja w tablicy animacji
Y/N Y: Tak, wartość zadana %TMi.P może być modyfikowana przez edytor tablic animacji.N: Nie, wartość zadana %TMi.P nie może być modyfikowana.
Wejście ustawiania (lub instrukcja)
IN Uruchomienie bloku przy zboczu narastającym (typy TON i TP) lub zboczu opadającym (typ TOF).
Wyjście bloku czasowego
Q Dołączony bit %TMi.Q jest ustawiany na 1 w zależności od wykonywanej funkcji: TON, TOF lub TP.
Nota: Im większa wartość zadana, tym większa dokładność odmierzania czasu.
TWD USE 10 AE 281
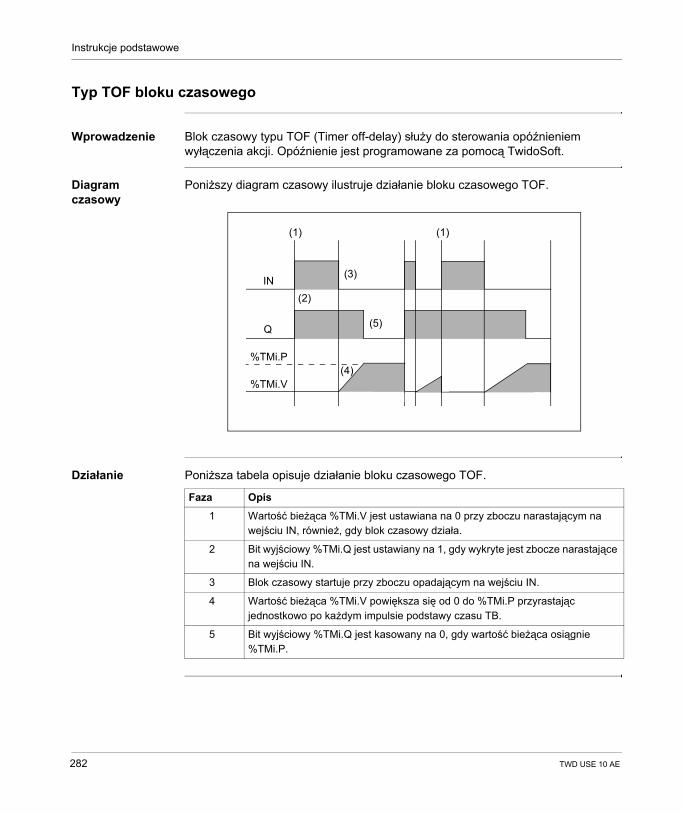
Instrukcje podstawowe
Typ TOF bloku czasowego
Wprowadzenie Blok czasowy typu TOF (Timer off-delay) służy do sterowania opóźnieniem wyłączenia akcji. Opóźnienie jest programowane za pomocą TwidoSoft.
Diagram czasowy
Poniższy diagram czasowy ilustruje działanie bloku czasowego TOF.
Działanie Poniższa tabela opisuje działanie bloku czasowego TOF.
IN
Q
%TMi.P
%TMi.V
(1)
(3)
(4)
(2)
(5)
(1)
Faza Opis
1 Wartość bieżąca %TMi.V jest ustawiana na 0 przy zboczu narastającym na wejściu IN, również, gdy blok czasowy działa.
2 Bit wyjściowy %TMi.Q jest ustawiany na 1, gdy wykryte jest zbocze narastające na wejściu IN.
3 Blok czasowy startuje przy zboczu opadającym na wejściu IN.
4 Wartość bieżąca %TMi.V powiększa się od 0 do %TMi.P przyrastając jednostkowo po każdym impulsie podstawy czasu TB.
5 Bit wyjściowy %TMi.Q jest kasowany na 0, gdy wartość bieżąca osiągnie %TMi.P.
282 TWD USE 10 AE
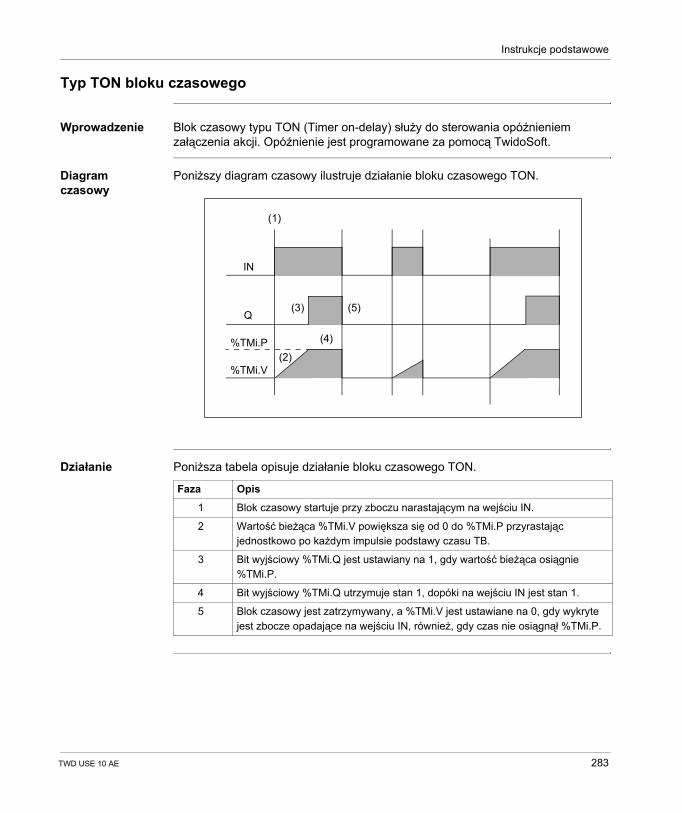
Instrukcje podstawowe
Typ TON bloku czasowego
Wprowadzenie Blok czasowy typu TON (Timer on-delay) służy do sterowania opóźnieniem załączenia akcji. Opóźnienie jest programowane za pomocą TwidoSoft.
Diagram czasowy
Poniższy diagram czasowy ilustruje działanie bloku czasowego TON.
Działanie Poniższa tabela opisuje działanie bloku czasowego TON.
IN
Q
%TMi.P
%TMi.V
(1)
(3)
(4)
(2)
(5)
Faza Opis
1 Blok czasowy startuje przy zboczu narastającym na wejściu IN.
2 Wartość bieżąca %TMi.V powiększa się od 0 do %TMi.P przyrastając jednostkowo po każdym impulsie podstawy czasu TB.
3 Bit wyjściowy %TMi.Q jest ustawiany na 1, gdy wartość bieżąca osiągnie %TMi.P.
4 Bit wyjściowy %TMi.Q utrzymuje stan 1, dopóki na wejściu IN jest stan 1.
5 Blok czasowy jest zatrzymywany, a %TMi.V jest ustawiane na 0, gdy wykryte jest zbocze opadające na wejściu IN, również, gdy czas nie osiągnął %TMi.P.
TWD USE 10 AE 283
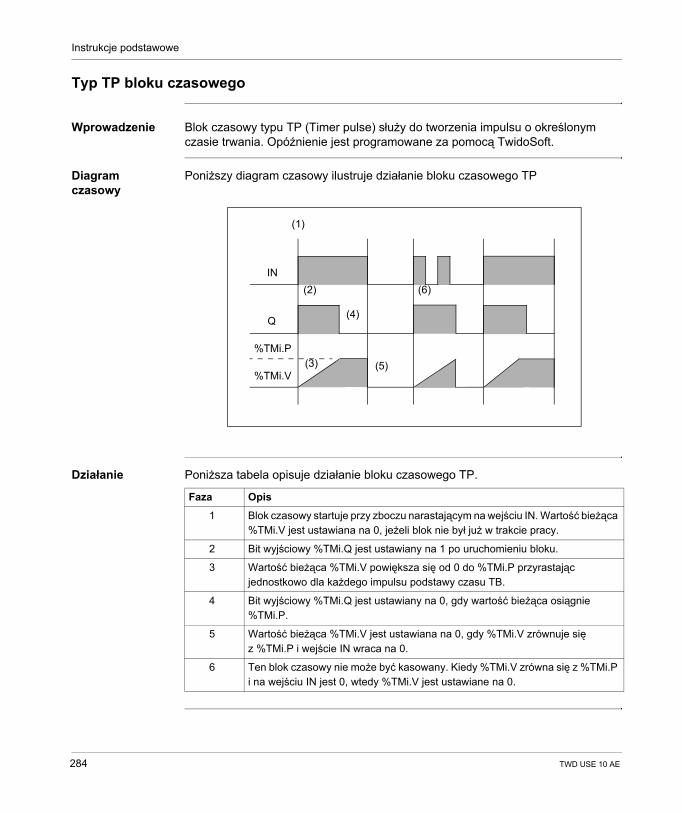
Instrukcje podstawowe
Typ TP bloku czasowego
Wprowadzenie Blok czasowy typu TP (Timer pulse) służy do tworzenia impulsu o określonym czasie trwania. Opóźnienie jest programowane za pomocą TwidoSoft.
Diagram czasowy
Poniższy diagram czasowy ilustruje działanie bloku czasowego TP
Działanie Poniższa tabela opisuje działanie bloku czasowego TP.
IN
Q
%TMi.P
%TMi.V
(1)
(3)
(4)
(5)
(2) (6)
Faza Opis
1 Blok czasowy startuje przy zboczu narastającym na wejściu IN. Wartość bieżąca %TMi.V jest ustawiana na 0, jeżeli blok nie był już w trakcie pracy.
2 Bit wyjściowy %TMi.Q jest ustawiany na 1 po uruchomieniu bloku.
3 Wartość bieżąca %TMi.V powiększa się od 0 do %TMi.P przyrastając jednostkowo dla każdego impulsu podstawy czasu TB.
4 Bit wyjściowy %TMi.Q jest ustawiany na 0, gdy wartość bieżąca osiągnie %TMi.P.
5 Wartość bieżąca %TMi.V jest ustawiana na 0, gdy %TMi.V zrównuje się z %TMi.P i wejście IN wraca na 0.
6 Ten blok czasowy nie może być kasowany. Kiedy %TMi.V zrówna się z %TMi.P i na wejściu IN jest 0, wtedy %TMi.V jest ustawiane na 0.
284 TWD USE 10 AE
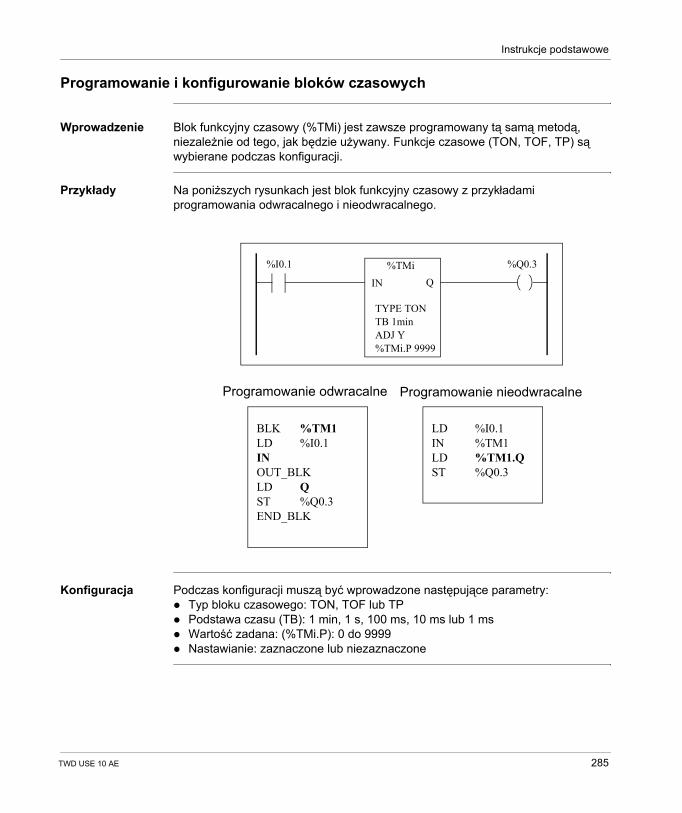
Instrukcje podstawowe
Programowanie i konfigurowanie bloków czasowych
Wprowadzenie Blok funkcyjny czasowy (%TMi) jest zawsze programowany tą samą metodą, niezależnie od tego, jak będzie używany. Funkcje czasowe (TON, TOF, TP) są wybierane podczas konfiguracji.
Przykłady Na poniższych rysunkach jest blok funkcyjny czasowy z przykładami programowania odwracalnego i nieodwracalnego.
Konfiguracja Podczas konfiguracji muszą być wprowadzone następujące parametry:Typ bloku czasowego: TON, TOF lub TPPodstawa czasu (TB): 1 min, 1 s, 100 ms, 10 ms lub 1 msWartość zadana: (%TMi.P): 0 do 9999Nastawianie: zaznaczone lub niezaznaczone
BLK %TM1LD %I0.1INOUT_BLKLD QST %Q0.3END_BLK
LD %I0.1IN %TM1LD %TM1.QST %Q0.3
TYPE TONTB 1minADJ Y%TMi.P 9999
%I0.1 %Q0.3%TMiIN Q
Programowanie odwracalne Programowanie nieodwracalne
TWD USE 10 AE 285
Instrukcje podstawowe
Przypadki szczególne
Poniższa tabela zawiera zestawienie przypadków szczególnych programowania i konfigurowania bloków czasowych.
Bloki czasowe z podstawą czasu 1 ms
Podstawa czasu 1 ms jest dostępna tylko dla pierwszych sześciu bloków czasowych. Cztery słowa systemowe %SW76, %SW77, %SW78 i %SW79 mogą być użyte jako "klepsydry". Słowa są osobno zmniejszane przez system co milisekundę, jeśli mają wartość dodatnią. Wybór wielokrotności czasu może być osiągnięty przez kolejne załadowanie jednego z tych słów i testowanie wartości pośrednich. Jeżeli wartość jednego z czterech słów jest mniejsza niż 0, nie będzie ono modyfikowane. Czas może być zamrożony przez ustawienie odpowiedniego bitu 15 na 1, a odmrożony przez skasowanie go na 0.
Przypadek szczególny Opis
Efekt zimnego restartu (%S0 = 1) Wymusza wartość bieżącą na 0. Ustawia wyjście %TMi.Q na 0. Wartość zadana jest ustawiana na wartość zdefiniowaną podczas konfiguracji.
Efekt gorącego restartu (%S1 = 1) Nie ma żadnego skutku dla wartości bieżących i zadanych bloku czasowego. Wartość bieżąca nie zmienia się podczas przerwy zasilania.
Skutek zatrzymania sterownika Zatrzymanie sterownika nie zamraża wartości bieżącej.
Skutek skoku programu Przeskakiwanie bloków czasowych nie zamraża odliczania czasu. Blok czasowy będzie kontynuował odliczanie, aż osiągnie wartość zadaną %TMi.P. Wtedy bit wykonania (%TMi.Q), związany z wyjściem Q bloku czasowego, zmieni stan. Jednakże, wyjście dołączone bezpośrednio do wyjścia bloku nie będzie aktywowane i nie będzie skanowane przez sterownik.
Testowanie bitu %TMi.Q (bit wykonania)
Zalecane jest testowanie bitu %TMi.Q tylko raz w programie.
Skutek instrukcji przekaźnika głównego MCS/MCR
Blok czasowy zaprogramowany między instrukcjami MCS/MCR jest kasowany, jeśli działa instrukcja MCS.
Skutek zmodyfikowania zadanej %TMi.P
Zmodyfikowanie wartości zadanej za pomocą instrukcji lub przez nastawianie, dochodzi do skutku dopiero przy następnej aktywacji bloku czasowego.
286 TWD USE 10 AE
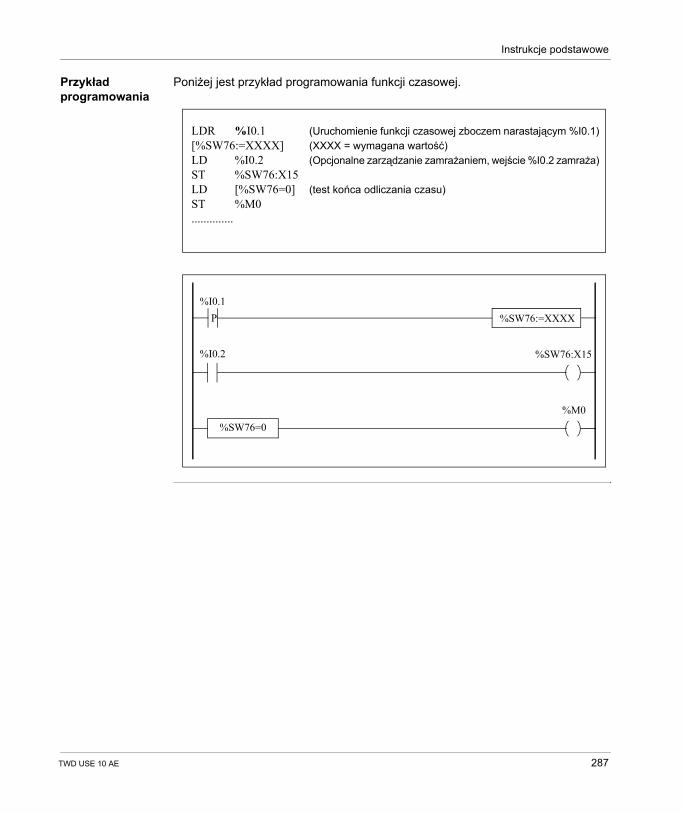
Instrukcje podstawowe
Przykład programowania
Poniżej jest przykład programowania funkcji czasowej.
LDR %I0.1 (Uruchomienie funkcji czasowej zboczem narastającym %I0.1)[%SW76:=XXXX] (XXXX = wymagana wartość)LD %I0.2 (Opcjonalne zarządzanie zamrażaniem, wejście %I0.2 zamraża)ST %SW76:X15LD [%SW76=0] (test końca odliczania czasu)ST %M0..............
%I0.1%SW76:=XXXX
%I0.2
%SW76=0%M0
%SW76:X15
P
TWD USE 10 AE 287
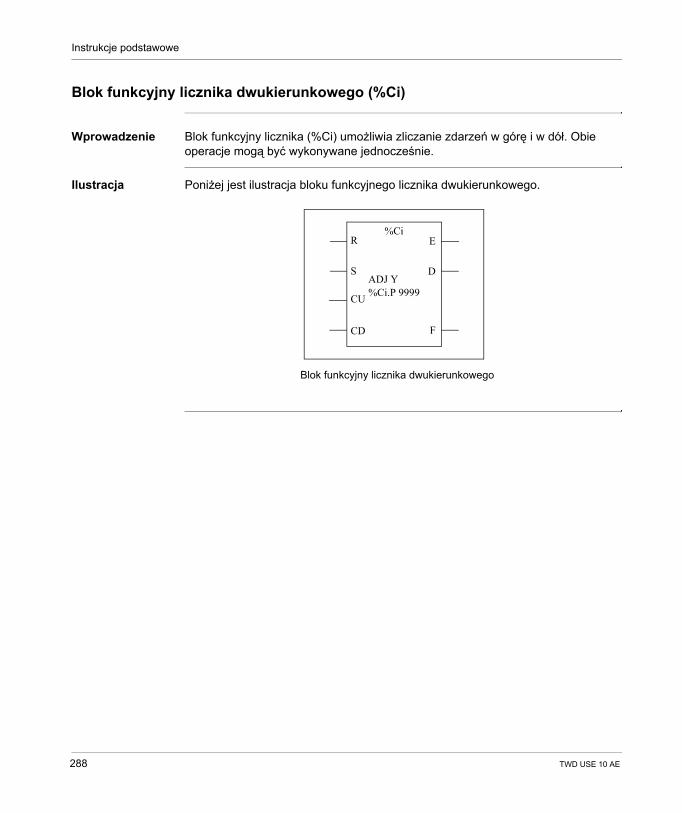
Instrukcje podstawowe
Blok funkcyjny licznika dwukierunkowego (%Ci)
Wprowadzenie Blok funkcyjny licznika (%Ci) umożliwia zliczanie zdarzeń w górę i w dół. Obie operacje mogą być wykonywane jednocześnie.
Ilustracja Poniżej jest ilustracja bloku funkcyjnego licznika dwukierunkowego.
ADJ Y%Ci.P 9999
Blok funkcyjny licznika dwukierunkowego
R E
S D
CD F
CU
%Ci
288 TWD USE 10 AE
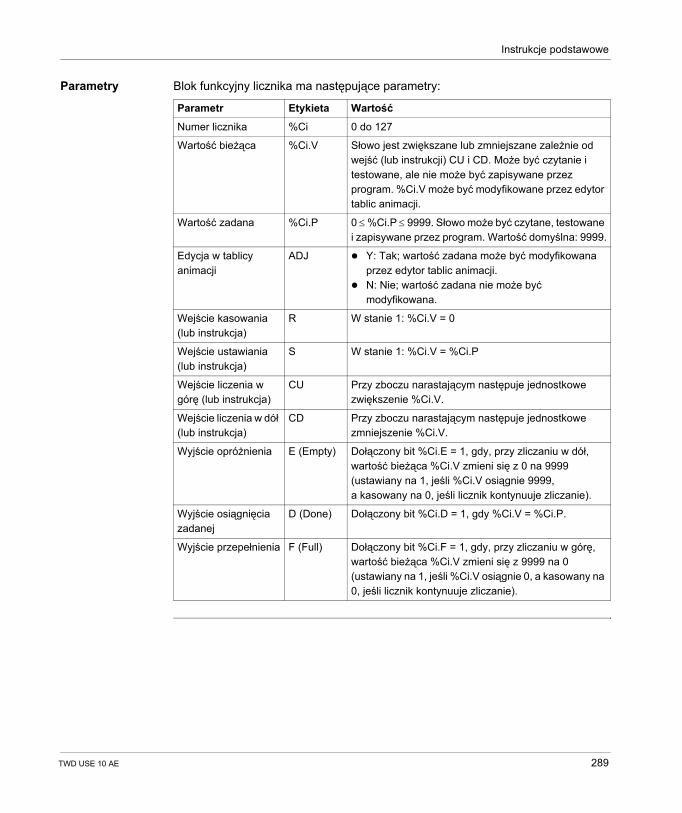
Instrukcje podstawowe
Parametry Blok funkcyjny licznika ma następujące parametry:
Parametr Etykieta Wartość
Numer licznika %Ci 0 do 127
Wartość bieżąca %Ci.V Słowo jest zwiększane lub zmniejszane zależnie od wejść (lub instrukcji) CU i CD. Może być czytanie i testowane, ale nie może być zapisywane przez program. %Ci.V może być modyfikowane przez edytor tablic animacji.
Wartość zadana %Ci.P 0 ≤ %Ci.P ≤ 9999. Słowo może być czytane, testowane i zapisywane przez program. Wartość domyślna: 9999.
Edycja w tablicy animacji
ADJ Y: Tak; wartość zadana może być modyfikowana przez edytor tablic animacji.N: Nie; wartość zadana nie może być modyfikowana.
Wejście kasowania (lub instrukcja)
R W stanie 1: %Ci.V = 0
Wejście ustawiania (lub instrukcja)
S W stanie 1: %Ci.V = %Ci.P
Wejście liczenia w górę (lub instrukcja)
CU Przy zboczu narastającym następuje jednostkowe zwiększenie %Ci.V.
Wejście liczenia w dół (lub instrukcja)
CD Przy zboczu narastającym następuje jednostkowe zmniejszenie %Ci.V.
Wyjście opróżnienia E (Empty) Dołączony bit %Ci.E = 1, gdy, przy zliczaniu w dół, wartość bieżąca %Ci.V zmieni się z 0 na 9999 (ustawiany na 1, jeśli %Ci.V osiągnie 9999, a kasowany na 0, jeśli licznik kontynuuje zliczanie).
Wyjście osiągnięcia zadanej
D (Done) Dołączony bit %Ci.D = 1, gdy %Ci.V = %Ci.P.
Wyjście przepełnienia F (Full) Dołączony bit %Ci.F = 1, gdy, przy zliczaniu w górę, wartość bieżąca %Ci.V zmieni się z 9999 na 0 (ustawiany na 1, jeśli %Ci.V osiągnie 0, a kasowany na 0, jeśli licznik kontynuuje zliczanie).
TWD USE 10 AE 289
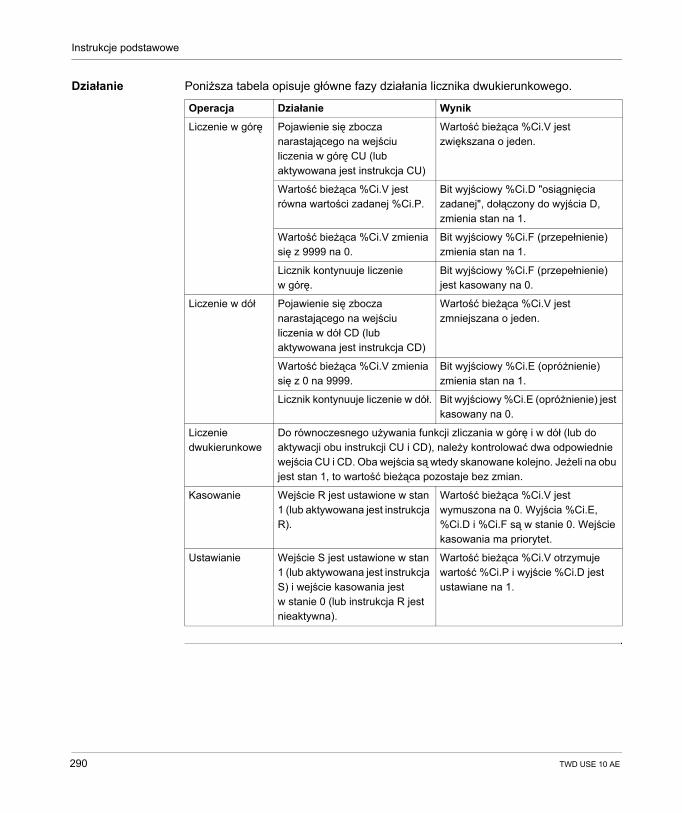
Instrukcje podstawowe
Działanie Poniższa tabela opisuje główne fazy działania licznika dwukierunkowego.
Operacja Działanie Wynik
Liczenie w górę Pojawienie się zbocza narastającego na wejściu liczenia w górę CU (lub aktywowana jest instrukcja CU)
Wartość bieżąca %Ci.V jest zwiększana o jeden.
Wartość bieżąca %Ci.V jest równa wartości zadanej %Ci.P.
Bit wyjściowy %Ci.D "osiągnięcia zadanej", dołączony do wyjścia D, zmienia stan na 1.
Wartość bieżąca %Ci.V zmienia się z 9999 na 0.
Bit wyjściowy %Ci.F (przepełnienie) zmienia stan na 1.
Licznik kontynuuje liczenie w górę.
Bit wyjściowy %Ci.F (przepełnienie) jest kasowany na 0.
Liczenie w dół Pojawienie się zbocza narastającego na wejściu liczenia w dół CD (lub aktywowana jest instrukcja CD)
Wartość bieżąca %Ci.V jest zmniejszana o jeden.
Wartość bieżąca %Ci.V zmienia się z 0 na 9999.
Bit wyjściowy %Ci.E (opróżnienie) zmienia stan na 1.
Licznik kontynuuje liczenie w dół. Bit wyjściowy %Ci.E (opróżnienie) jest kasowany na 0.
Liczenie dwukierunkowe
Do równoczesnego używania funkcji zliczania w górę i w dół (lub do aktywacji obu instrukcji CU i CD), należy kontrolować dwa odpowiednie wejścia CU i CD. Oba wejścia są wtedy skanowane kolejno. Jeżeli na obu jest stan 1, to wartość bieżąca pozostaje bez zmian.
Kasowanie Wejście R jest ustawione w stan 1 (lub aktywowana jest instrukcja R).
Wartość bieżąca %Ci.V jest wymuszona na 0. Wyjścia %Ci.E, %Ci.D i %Ci.F są w stanie 0. Wejście kasowania ma priorytet.
Ustawianie Wejście S jest ustawione w stan 1 (lub aktywowana jest instrukcja S) i wejście kasowania jest w stanie 0 (lub instrukcja R jest nieaktywna).
Wartość bieżąca %Ci.V otrzymuje wartość %Ci.P i wyjście %Ci.D jest ustawiane na 1.
290 TWD USE 10 AE

Instrukcje podstawowe
Przypadki szczególne
Poniższa tabela zawiera zestawienie przypadków szczególnych programowania i konfigurowania liczników.
Przypadek szczególny Opis
Efekt zimnego restartu (%S0 = 1) Wartość bieżąca %Ci.V jest ustawiana na 0.Bity wyjściowe %Ci.E, %Ci.D i %Ci.F są ustawiane na 0.Wartość zadana jest ustawiana na wartość zdefiniowaną podczas konfiguracji.
Efekt gorącego restartu (%S1 = 1) Nie ma żadnego skutku dla wartości bieżącej licznika (%Ci.V).
Skutek zmodyfikowania zadanej %Ci.P Zmodyfikowanie wartości zadanej za pomocą instrukcji lub przez nastawianie, dochodzi do skutku, gdy blok jest przetwarzany przez aplikację (aktywacja jednego z wejść).
TWD USE 10 AE 291
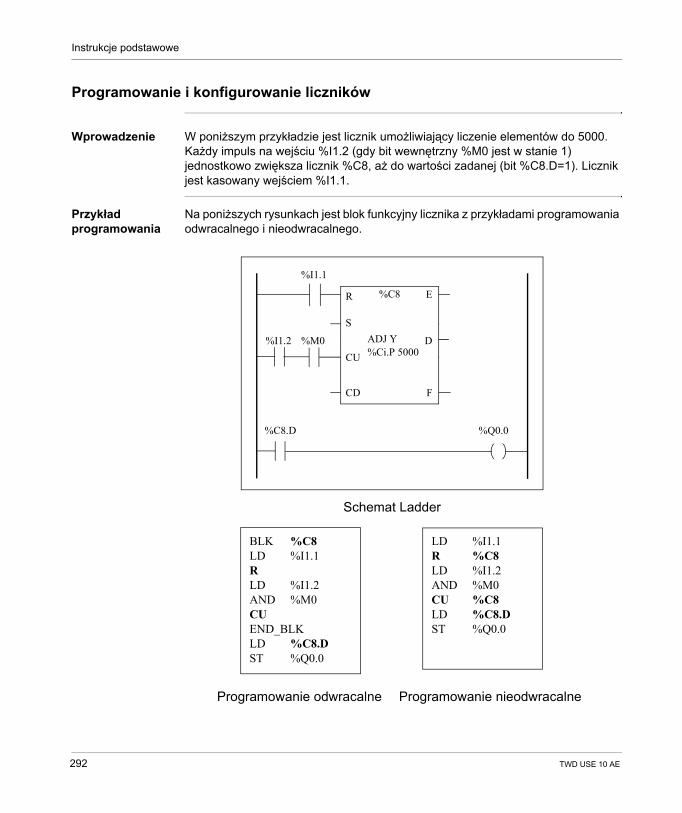
Instrukcje podstawowe
Programowanie i konfigurowanie liczników
Wprowadzenie W poniższym przykładzie jest licznik umożliwiający liczenie elementów do 5000. Każdy impuls na wejściu %I1.2 (gdy bit wewnętrzny %M0 jest w stanie 1) jednostkowo zwiększa licznik %C8, aż do wartości zadanej (bit %C8.D=1). Licznik jest kasowany wejściem %I1.1.
Przykład programowania
Na poniższych rysunkach jest blok funkcyjny licznika z przykładami programowania odwracalnego i nieodwracalnego.
BLK %C8LD %I1.1 R LD %I1.2 AND %M0 CU END_BLK LD %C8.D ST %Q0.0
R
S
CU
CD
E
D
F
%C8
ADJ Y%Ci.P 5000
%I1.1
%I1.2 %M0
%C8.D %Q0.0
LD %I1.1R %C8 LD %I1.2AND %M0 CU %C8 LD %C8.DST %Q0.0
Schemat Ladder
Programowanie odwracalne Programowanie nieodwracalne
292 TWD USE 10 AE
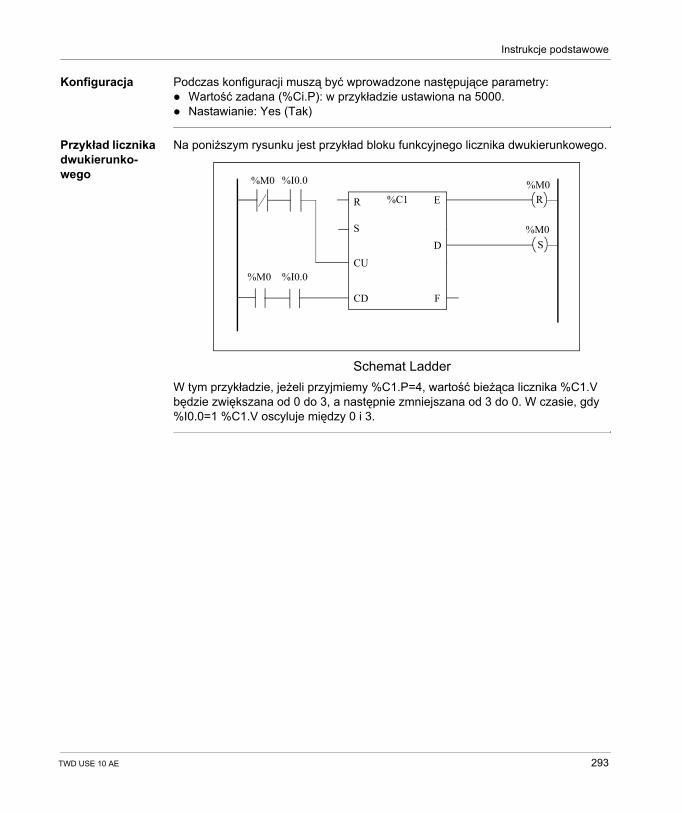
Instrukcje podstawowe
Konfiguracja Podczas konfiguracji muszą być wprowadzone następujące parametry:Wartość zadana (%Ci.P): w przykładzie ustawiona na 5000.Nastawianie: Yes (Tak)
Przykład licznika dwukierunko-wego
Na poniższym rysunku jest przykład bloku funkcyjnego licznika dwukierunkowego.
W tym przykładzie, jeżeli przyjmiemy %C1.P=4, wartość bieżąca licznika %C1.V będzie zwiększana od 0 do 3, a następnie zmniejszana od 3 do 0. W czasie, gdy %I0.0=1 %C1.V oscyluje między 0 i 3.
R
S
CU
CD
E
D
F
%C1
%I0.0
%M0 %I0.0
%M0 %M0
%M0
R
S
Schemat Ladder
TWD USE 10 AE 293
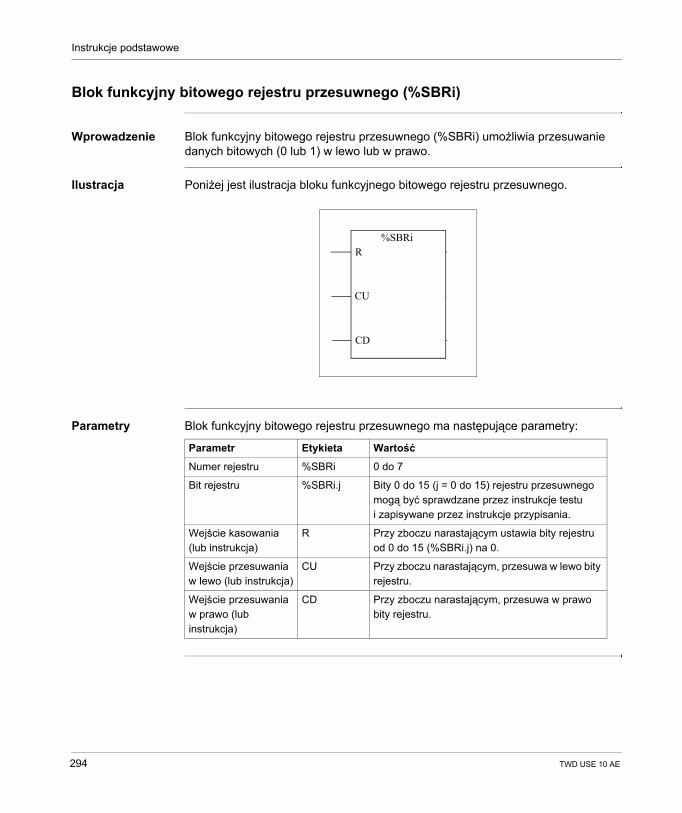
Instrukcje podstawowe
Blok funkcyjny bitowego rejestru przesuwnego (%SBRi)
Wprowadzenie Blok funkcyjny bitowego rejestru przesuwnego (%SBRi) umożliwia przesuwanie danych bitowych (0 lub 1) w lewo lub w prawo.
Ilustracja Poniżej jest ilustracja bloku funkcyjnego bitowego rejestru przesuwnego.
Parametry Blok funkcyjny bitowego rejestru przesuwnego ma następujące parametry:
%SBRiR
CU
CD
Parametr Etykieta Wartość
Numer rejestru %SBRi 0 do 7
Bit rejestru %SBRi.j Bity 0 do 15 (j = 0 do 15) rejestru przesuwnego mogą być sprawdzane przez instrukcje testu i zapisywane przez instrukcje przypisania.
Wejście kasowania (lub instrukcja)
R Przy zboczu narastającym ustawia bity rejestru od 0 do 15 (%SBRi.j) na 0.
Wejście przesuwania w lewo (lub instrukcja)
CU Przy zboczu narastającym, przesuwa w lewo bity rejestru.
Wejście przesuwania w prawo (lub instrukcja)
CD Przy zboczu narastającym, przesuwa w prawo bity rejestru.
294 TWD USE 10 AE
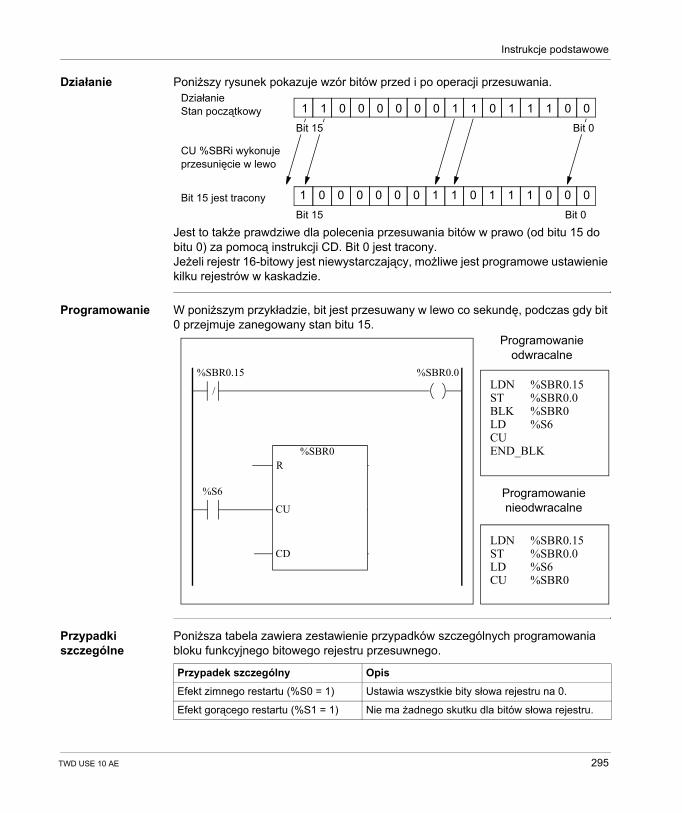
Instrukcje podstawowe
Działanie Poniższy rysunek pokazuje wzór bitów przed i po operacji przesuwania.
Jest to także prawdziwe dla polecenia przesuwania bitów w prawo (od bitu 15 do bitu 0) za pomocą instrukcji CD. Bit 0 jest tracony.Jeżeli rejestr 16-bitowy jest niewystarczający, możliwe jest programowe ustawienie kilku rejestrów w kaskadzie.
Programowanie W poniższym przykładzie, bit jest przesuwany w lewo co sekundę, podczas gdy bit 0 przejmuje zanegowany stan bitu 15.
Przypadki szczególne
Poniższa tabela zawiera zestawienie przypadków szczególnych programowania bloku funkcyjnego bitowego rejestru przesuwnego.
Bit 15 Bit 0
Bit 15 Bit 0
DziałanieStan początkowy
CU %SBRi wykonujeprzesunięcie w lewo
Bit 15 jest tracony
1 1 1 1 1 1 1
1 1 1 1 10
0 0 0 0 0 0 0 0 0
000000000 1
LDN %SBR0.15ST %SBR0.0BLK %SBR0LD %S6CUEND_BLK
LDN %SBR0.15ST %SBR0.0LD %S6CU %SBR0
Programowanie odwracalne
Programowanie nieodwracalne
%SBR0.0%SBR0.15
/
%SBR0R
CU
CD
%S6
Przypadek szczególny Opis
Efekt zimnego restartu (%S0 = 1) Ustawia wszystkie bity słowa rejestru na 0.
Efekt gorącego restartu (%S1 = 1) Nie ma żadnego skutku dla bitów słowa rejestru.
TWD USE 10 AE 295
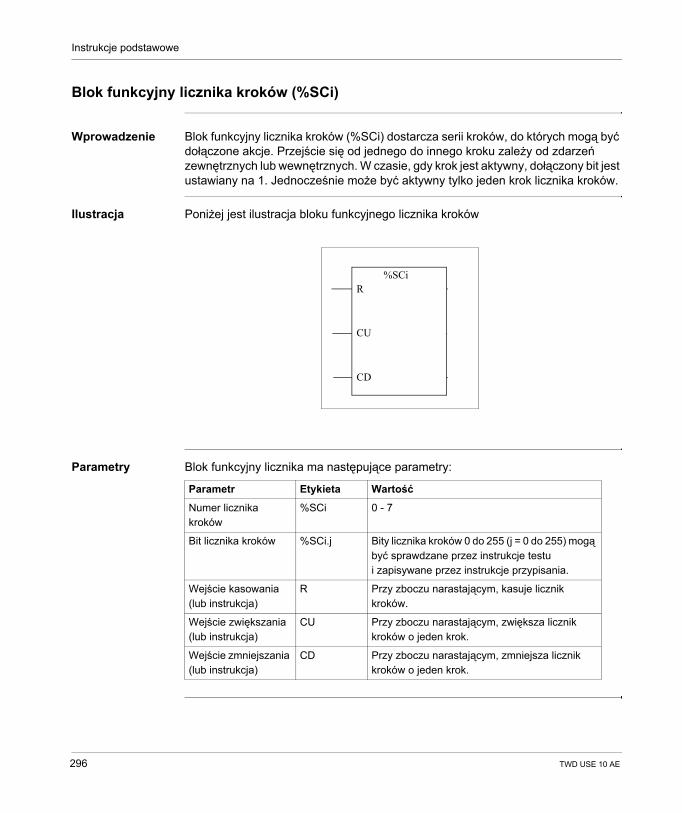
Instrukcje podstawowe
Blok funkcyjny licznika kroków (%SCi)
Wprowadzenie Blok funkcyjny licznika kroków (%SCi) dostarcza serii kroków, do których mogą być dołączone akcje. Przejście się od jednego do innego kroku zależy od zdarzeń zewnętrznych lub wewnętrznych. W czasie, gdy krok jest aktywny, dołączony bit jest ustawiany na 1. Jednocześnie może być aktywny tylko jeden krok licznika kroków.
Ilustracja Poniżej jest ilustracja bloku funkcyjnego licznika kroków
Parametry Blok funkcyjny licznika ma następujące parametry:
%SCiR
CU
CD
Parametr Etykieta Wartość
Numer licznika kroków
%SCi 0 - 7
Bit licznika kroków %SCi.j Bity licznika kroków 0 do 255 (j = 0 do 255) mogą być sprawdzane przez instrukcje testu i zapisywane przez instrukcje przypisania.
Wejście kasowania (lub instrukcja)
R Przy zboczu narastającym, kasuje licznik kroków.
Wejście zwiększania (lub instrukcja)
CU Przy zboczu narastającym, zwiększa licznik kroków o jeden krok.
Wejście zmniejszania (lub instrukcja)
CD Przy zboczu narastającym, zmniejsza licznik kroków o jeden krok.
296 TWD USE 10 AE
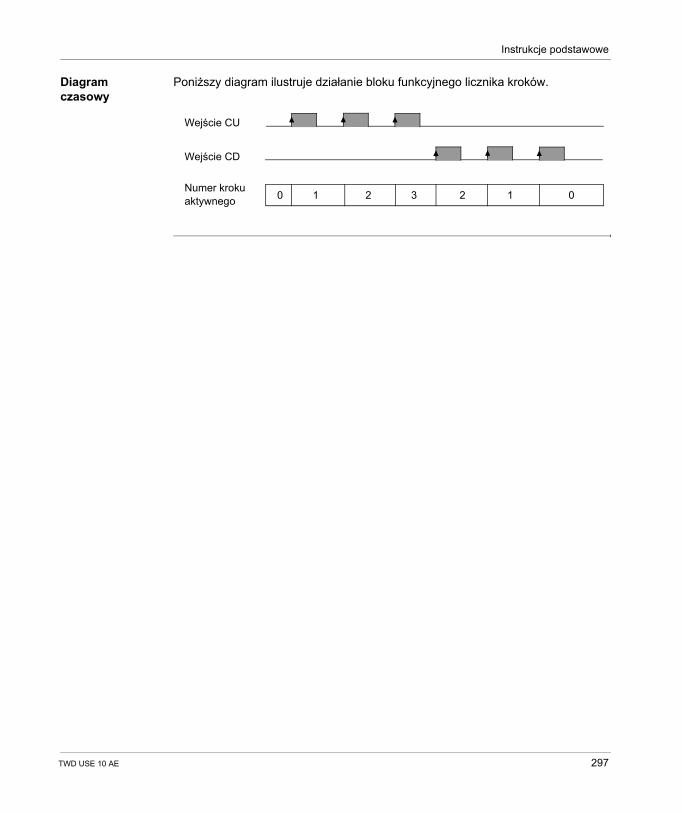
Instrukcje podstawowe
Diagram czasowy
Poniższy diagram ilustruje działanie bloku funkcyjnego licznika kroków.
Wejście CU
Wejście CD
Numer kroku aktywnego 0 1 2 3 2 1 0
TWD USE 10 AE 297
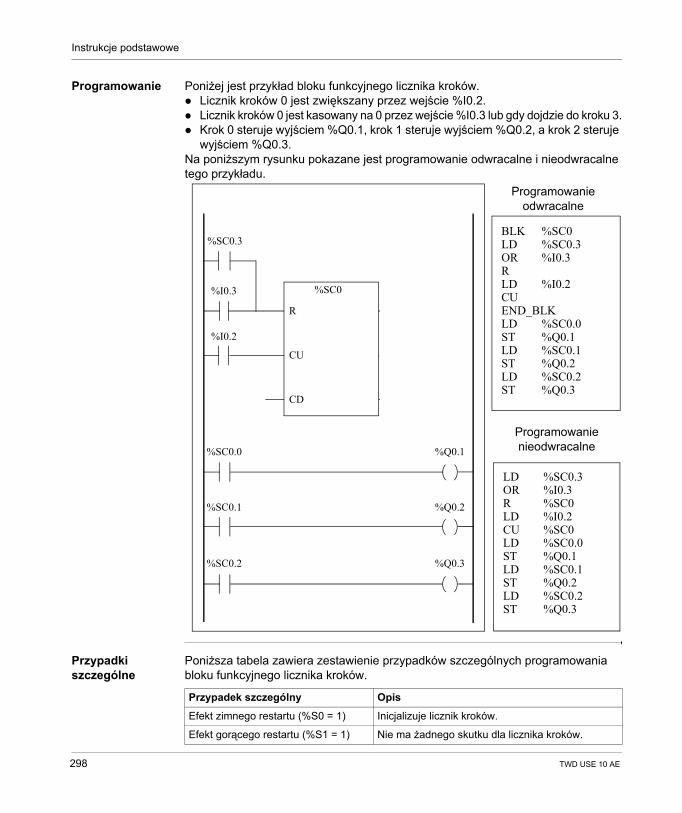
Instrukcje podstawowe
Programowanie Poniżej jest przykład bloku funkcyjnego licznika kroków.Licznik kroków 0 jest zwiększany przez wejście %I0.2.Licznik kroków 0 jest kasowany na 0 przez wejście %I0.3 lub gdy dojdzie do kroku 3.Krok 0 steruje wyjściem %Q0.1, krok 1 steruje wyjściem %Q0.2, a krok 2 steruje wyjściem %Q0.3.
Na poniższym rysunku pokazane jest programowanie odwracalne i nieodwracalne tego przykładu.
Przypadki szczególne
Poniższa tabela zawiera zestawienie przypadków szczególnych programowania bloku funkcyjnego licznika kroków.
BLK %SC0LD %SC0.3OR %I0.3RLD %I0.2CUEND_BLKLD %SC0.0ST %Q0.1LD %SC0.1ST %Q0.2LD %SC0.2ST %Q0.3
LD %SC0.3OR %I0.3R %SC0LD %I0.2CU %SC0LD %SC0.0ST %Q0.1LD %SC0.1ST %Q0.2LD %SC0.2ST %Q0.3
Programowanieodwracalne
Programowanienieodwracalne
%SC0.3
%I0.3
%I0.2
%SC0
R
CU
CD
%Q0.1%SC0.0
%SC0.1
%SC0.2
%Q0.2
%Q0.3
Przypadek szczególny Opis
Efekt zimnego restartu (%S0 = 1) Inicjalizuje licznik kroków.
Efekt gorącego restartu (%S1 = 1) Nie ma żadnego skutku dla licznika kroków.
298 TWD USE 10 AE
Instrukcje podstawowe
14.3 Przetwarzanie numeryczne
Wprowadzenie do przetwarzania numerycznego
Wprowadzenie Ta sekcja dostarcza wprowadzenia do przetwarzania numerycznego, zawiera opisy i wskazówki programowania.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Wprowadzenie do instrukcji numerycznych 300
Instrukcje przypisania 301
Instrukcje porównania 306
Instrukcje arytmetyczne na liczbach całkowitych 308
Instrukcje logiczne 312
Instrukcje przesuwania 314
Instrukcje konwersji 316
Instrukcje konwersji słów pojedynczych / podwójnych 318
TWD USE 10 AE 299
Instrukcje podstawowe
Wprowadzenie do instrukcji numerycznych
Wprowadzenie Instrukcje numeryczne przede wszystkim odnoszą się do słów 16-bitowych (patrz Obiekty typu Word, str. 28) i słów 32-bitowych (patrz Obiekty zmiennoprzecinkowe i słowa podwójne, str. 31). Są zapisywane między nawiasami kwadratowymi. Jeśli wynikiem poprzedzającej operacji logicznej jest prawda (akumulator boolowski = 1), to instrukcja numeryczna jest wykonywana. Jeśli wynikiem poprzedzającej operacji logicznej jest fałsz (akumulator boolowski = 0), to instrukcja numeryczna nie jest wykonywana i argument zostanie niezmieniony.
300 TWD USE 10 AE
Instrukcje podstawowe
Instrukcje przypisania
Wprowadzenie Instrukcje przypisania są stosowane do załadowania argumentu Op2 do argumentu Op1.
Przypisanie Składnia instrukcji przypisania.
Operacje przypisania mogą być wykonywane na:Ciągach bitówSłowachSłowach podwójnychSłowach zmiennoprzecinkowychTablicach słówTablicach słów podwójnychTablicach słów zmiennoprzecinkowych
Przypisanie ciągu bitów
Operacje mogą być wykonywane na następujących ciągach bitów (patrz Obiekty złożone, str. 43):
Ciąg bitów -> ciąg bitów (przykład 1)Ciąg bitów -> słowo (przykład 2)Słowo -> ciąg bitów (przykład 3)Wartość bezpośrednia -> ciąg bitów
[Op1:=Op2] <=> Op2 -> Op1
TWD USE 10 AE 301
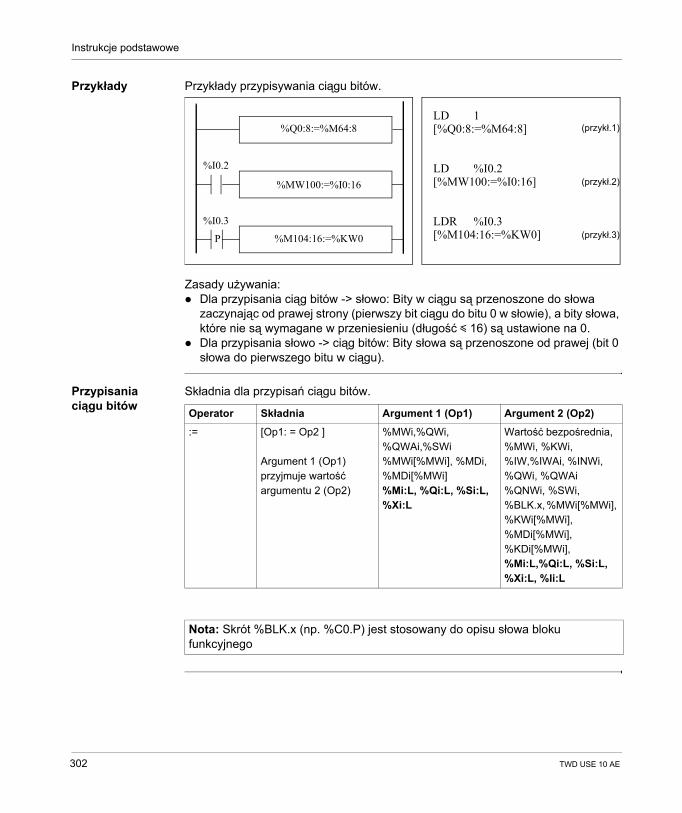
Instrukcje podstawowe
Przykłady Przykłady przypisywania ciągu bitów.
Zasady używania:Dla przypisania ciąg bitów -> słowo: Bity w ciągu są przenoszone do słowa zaczynając od prawej strony (pierwszy bit ciągu do bitu 0 w słowie), a bity słowa, które nie są wymagane w przeniesieniu (długość y 16) są ustawione na 0.Dla przypisania słowo -> ciąg bitów: Bity słowa są przenoszone od prawej (bit 0 słowa do pierwszego bitu w ciągu).
Przypisania ciągu bitów
Składnia dla przypisań ciągu bitów.
LD 1[%Q0:8:=%M64:8]
LD %I0.2[%MW100:=%I0:16]
LDR %I0.3[%M104:16:=%KW0]
(przykł.1)
(przykł.2)
(przykł.3)
%Q0:8:=%M64:8
%MW100:=%I0:16
%M104:16:=%KW0
%I0.2
%I0.3
P
Operator Składnia Argument 1 (Op1) Argument 2 (Op2)
:= [Op1: = Op2 ]
Argument 1 (Op1) przyjmuje wartość argumentu 2 (Op2)
%MWi,%QWi, %QWAi,%SWi %MWi[%MWi], %MDi, %MDi[%MWi]%Mi:L, %Qi:L, %Si:L, %Xi:L
Wartość bezpośrednia, %MWi, %KWi, %IW,%IWAi, %INWi, %QWi, %QWAi %QNWi, %SWi, %BLK.x, %MWi[%MWi], %KWi[%MWi], %MDi[%MWi], %KDi[%MWi], %Mi:L,%Qi:L, %Si:L, %Xi:L, %Ii:L
Nota: Skrót %BLK.x (np. %C0.P) jest stosowany do opisu słowa bloku funkcyjnego
302 TWD USE 10 AE
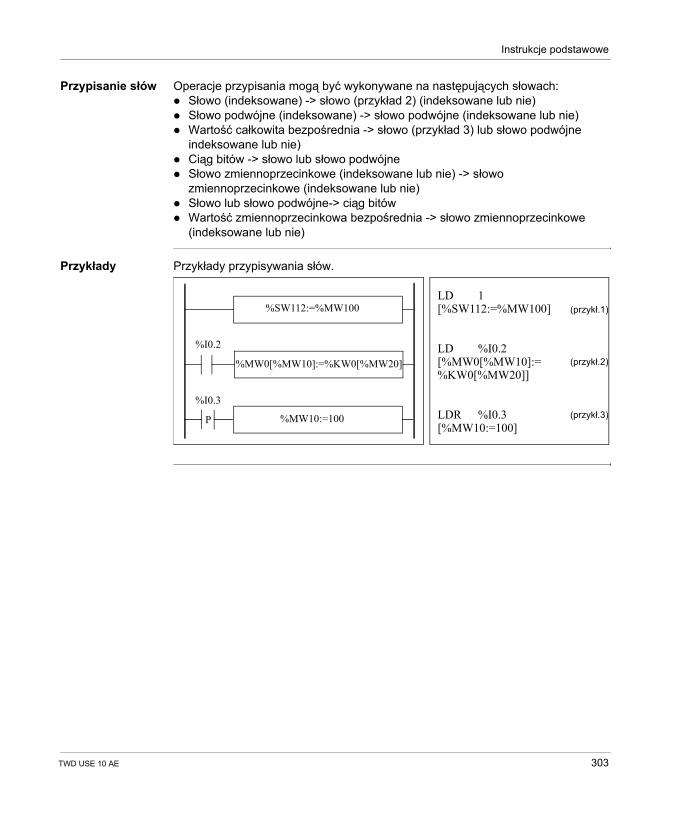
Instrukcje podstawowe
Przypisanie słów Operacje przypisania mogą być wykonywane na następujących słowach:Słowo (indeksowane) -> słowo (przykład 2) (indeksowane lub nie)Słowo podwójne (indeksowane) -> słowo podwójne (indeksowane lub nie)Wartość całkowita bezpośrednia -> słowo (przykład 3) lub słowo podwójne indeksowane lub nie)Ciąg bitów -> słowo lub słowo podwójneSłowo zmiennoprzecinkowe (indeksowane lub nie) -> słowo zmiennoprzecinkowe (indeksowane lub nie)Słowo lub słowo podwójne-> ciąg bitówWartość zmiennoprzecinkowa bezpośrednia -> słowo zmiennoprzecinkowe (indeksowane lub nie)
Przykłady Przykłady przypisywania słów.
LD 1[%SW112:=%MW100]
LD %I0.2[%MW0[%MW10]:= %KW0[%MW20]]
LDR %I0.3[%MW10:=100]
(przykł.1)
(przykł.2)
(przykł.3)
%SW112:=%MW100
%MW0[%MW10]:=%KW0[%MW20]
%MW10:=100
%I0.3
%I0.2
P
TWD USE 10 AE 303
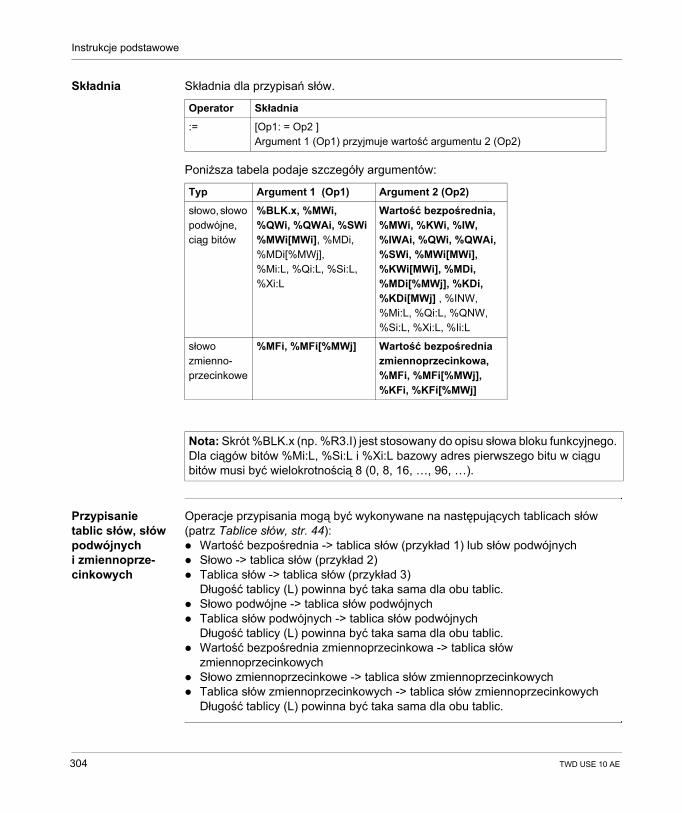
Instrukcje podstawowe
Składnia Składnia dla przypisań słów.
Poniższa tabela podaje szczegóły argumentów:
Przypisanie tablic słów, słów podwójnych i zmiennoprze-cinkowych
Operacje przypisania mogą być wykonywane na następujących tablicach słów (patrz Tablice słów, str. 44):
Wartość bezpośrednia -> tablica słów (przykład 1) lub słów podwójnychSłowo -> tablica słów (przykład 2)Tablica słów -> tablica słów (przykład 3) Długość tablicy (L) powinna być taka sama dla obu tablic.Słowo podwójne -> tablica słów podwójnychTablica słów podwójnych -> tablica słów podwójnych Długość tablicy (L) powinna być taka sama dla obu tablic.Wartość bezpośrednia zmiennoprzecinkowa -> tablica słów zmiennoprzecinkowychSłowo zmiennoprzecinkowe -> tablica słów zmiennoprzecinkowychTablica słów zmiennoprzecinkowych -> tablica słów zmiennoprzecinkowych Długość tablicy (L) powinna być taka sama dla obu tablic.
Operator Składnia
:= [Op1: = Op2 ] Argument 1 (Op1) przyjmuje wartość argumentu 2 (Op2)
Typ Argument 1 (Op1) Argument 2 (Op2)
słowo, słowo podwójne, ciąg bitów
%BLK.x, %MWi, %QWi, %QWAi, %SWi %MWi[MWi], %MDi, %MDi[%MWj], %Mi:L, %Qi:L, %Si:L, %Xi:L
Wartość bezpośrednia, %MWi, %KWi, %IW, %IWAi, %QWi, %QWAi, %SWi, %MWi[MWi], %KWi[MWi], %MDi, %MDi[%MWj], %KDi, %KDi[MWj] , %INW, %Mi:L, %Qi:L, %QNW, %Si:L, %Xi:L, %Ii:L
słowo zmienno-przecinkowe
%MFi, %MFi[%MWj] Wartość bezpośrednia zmiennoprzecinkowa, %MFi, %MFi[%MWj], %KFi, %KFi[%MWj]
Nota: Skrót %BLK.x (np. %R3.I) jest stosowany do opisu słowa bloku funkcyjnego. Dla ciągów bitów %Mi:L, %Si:L i %Xi:L bazowy adres pierwszego bitu w ciągu bitów musi być wielokrotnością 8 (0, 8, 16, …, 96, …).
304 TWD USE 10 AE
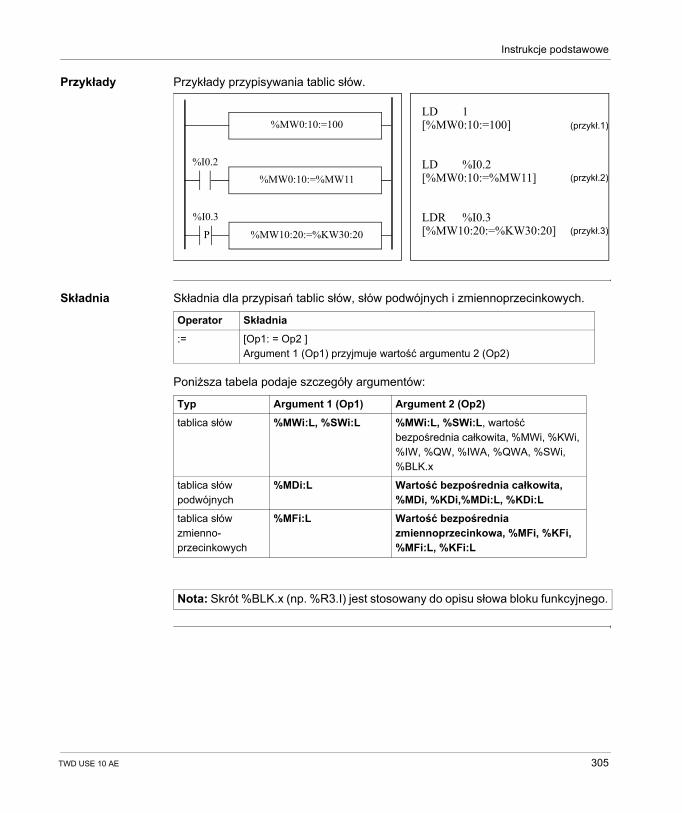
Instrukcje podstawowe
Przykłady Przykłady przypisywania tablic słów.
Składnia Składnia dla przypisań tablic słów, słów podwójnych i zmiennoprzecinkowych.
Poniższa tabela podaje szczegóły argumentów:
LD 1[%MW0:10:=100]
LD %I0.2[%MW0:10:=%MW11]
LDR %I0.3[%MW10:20:=%KW30:20]
(przykł.1)
(przykł.2)
(przykł.3)
%MW0:10:=100
%MW0:10:=%MW11
%MW10:20:=%KW30:20
%I0.2
%I0.3
P
Operator Składnia
:= [Op1: = Op2 ] Argument 1 (Op1) przyjmuje wartość argumentu 2 (Op2)
Typ Argument 1 (Op1) Argument 2 (Op2)
tablica słów %MWi:L, %SWi:L %MWi:L, %SWi:L, wartość bezpośrednia całkowita, %MWi, %KWi, %IW, %QW, %IWA, %QWA, %SWi, %BLK.x
tablica słów podwójnych
%MDi:L Wartość bezpośrednia całkowita, %MDi, %KDi,%MDi:L, %KDi:L
tablica słów zmienno-przecinkowych
%MFi:L Wartość bezpośrednia zmiennoprzecinkowa, %MFi, %KFi, %MFi:L, %KFi:L
Nota: Skrót %BLK.x (np. %R3.I) jest stosowany do opisu słowa bloku funkcyjnego.
TWD USE 10 AE 305
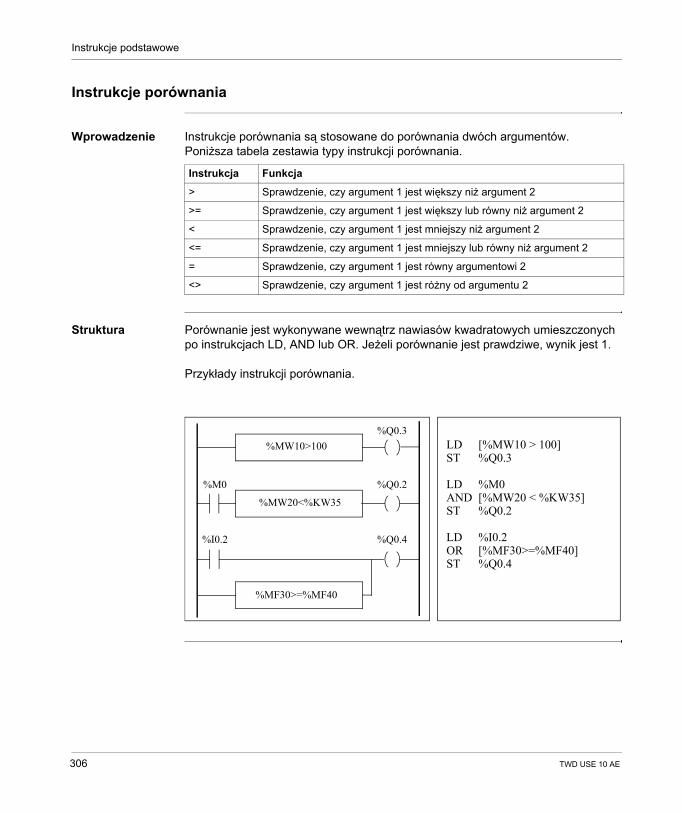
Instrukcje podstawowe
Instrukcje porównania
Wprowadzenie Instrukcje porównania są stosowane do porównania dwóch argumentów.Poniższa tabela zestawia typy instrukcji porównania.
Struktura Porównanie jest wykonywane wewnątrz nawiasów kwadratowych umieszczonych po instrukcjach LD, AND lub OR. Jeżeli porównanie jest prawdziwe, wynik jest 1.
Przykłady instrukcji porównania.
Instrukcja Funkcja
> Sprawdzenie, czy argument 1 jest większy niż argument 2
>= Sprawdzenie, czy argument 1 jest większy lub równy niż argument 2
< Sprawdzenie, czy argument 1 jest mniejszy niż argument 2
<= Sprawdzenie, czy argument 1 jest mniejszy lub równy niż argument 2
= Sprawdzenie, czy argument 1 jest równy argumentowi 2
<> Sprawdzenie, czy argument 1 jest różny od argumentu 2
LD [%MW10 > 100]ST %Q0.3
LD %M0AND [%MW20 < %KW35]ST %Q0.2
LD %I0.2OR [%MF30>=%MF40]ST %Q0.4
%Q0.3
%Q0.2
%Q0.4
%M0
%I0.2
%MW10>100
%MW20<%KW35
%MF30>=%MF40
306 TWD USE 10 AE
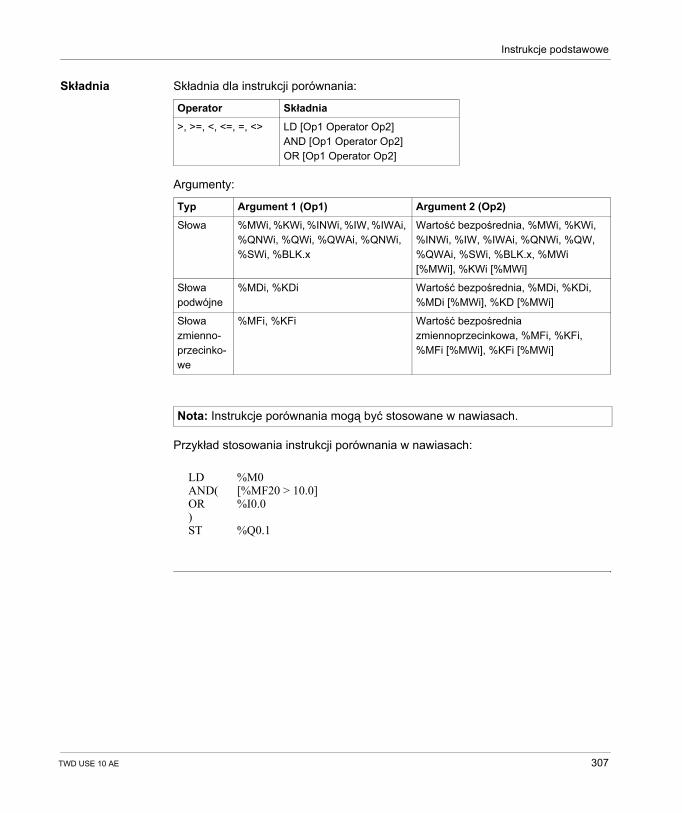
Instrukcje podstawowe
Składnia Składnia dla instrukcji porównania:
Argumenty:
Przykład stosowania instrukcji porównania w nawiasach:
Operator Składnia
>, >=, <, <=, =, <> LD [Op1 Operator Op2]AND [Op1 Operator Op2]OR [Op1 Operator Op2]
Typ Argument 1 (Op1) Argument 2 (Op2)
Słowa %MWi, %KWi, %INWi, %IW, %IWAi, %QNWi, %QWi, %QWAi, %QNWi, %SWi, %BLK.x
Wartość bezpośrednia, %MWi, %KWi, %INWi, %IW, %IWAi, %QNWi, %QW, %QWAi, %SWi, %BLK.x, %MWi [%MWi], %KWi [%MWi]
Słowa podwójne
%MDi, %KDi Wartość bezpośrednia, %MDi, %KDi, %MDi [%MWi], %KD [%MWi]
Słowa zmienno-przecinko-we
%MFi, %KFi Wartość bezpośrednia zmiennoprzecinkowa, %MFi, %KFi, %MFi [%MWi], %KFi [%MWi]
Nota: Instrukcje porównania mogą być stosowane w nawiasach.
LD %M0AND( [%MF20 > 10.0]OR %I0.0)ST %Q0.1
TWD USE 10 AE 307
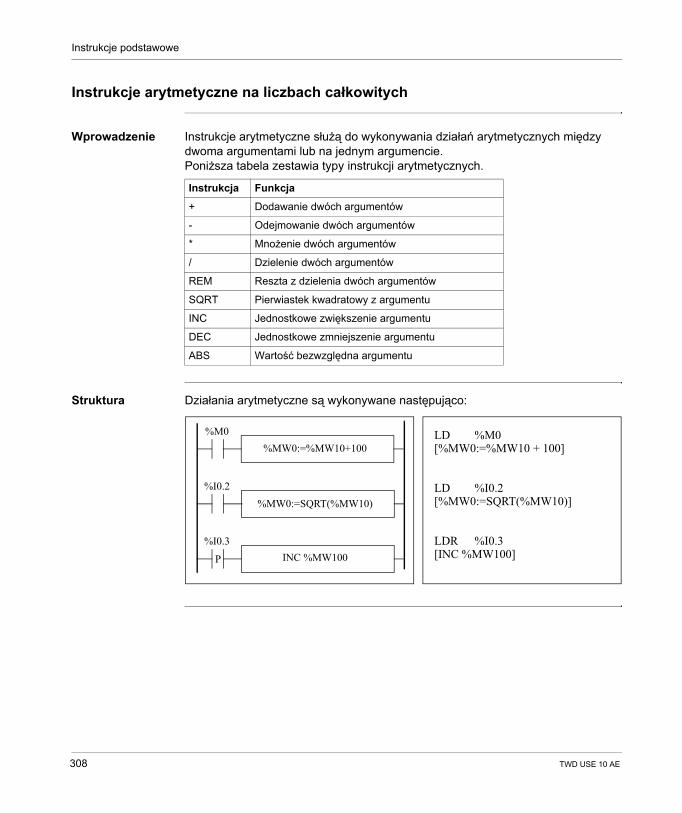
Instrukcje podstawowe
Instrukcje arytmetyczne na liczbach całkowitych
Wprowadzenie Instrukcje arytmetyczne służą do wykonywania działań arytmetycznych między dwoma argumentami lub na jednym argumencie.Poniższa tabela zestawia typy instrukcji arytmetycznych.
Struktura Działania arytmetyczne są wykonywane następująco:
Instrukcja Funkcja
+ Dodawanie dwóch argumentów
- Odejmowanie dwóch argumentów
* Mnożenie dwóch argumentów
/ Dzielenie dwóch argumentów
REM Reszta z dzielenia dwóch argumentów
SQRT Pierwiastek kwadratowy z argumentu
INC Jednostkowe zwiększenie argumentu
DEC Jednostkowe zmniejszenie argumentu
ABS Wartość bezwzględna argumentu
LD %M0[%MW0:=%MW10 + 100]
LD %I0.2[%MW0:=SQRT(%MW10)]
LDR %I0.3[INC %MW100]
%I0.3
P
%I0.2
%M0%MW0:=%MW10+100
%MW0:=SQRT(%MW10)
INC %MW100
308 TWD USE 10 AE
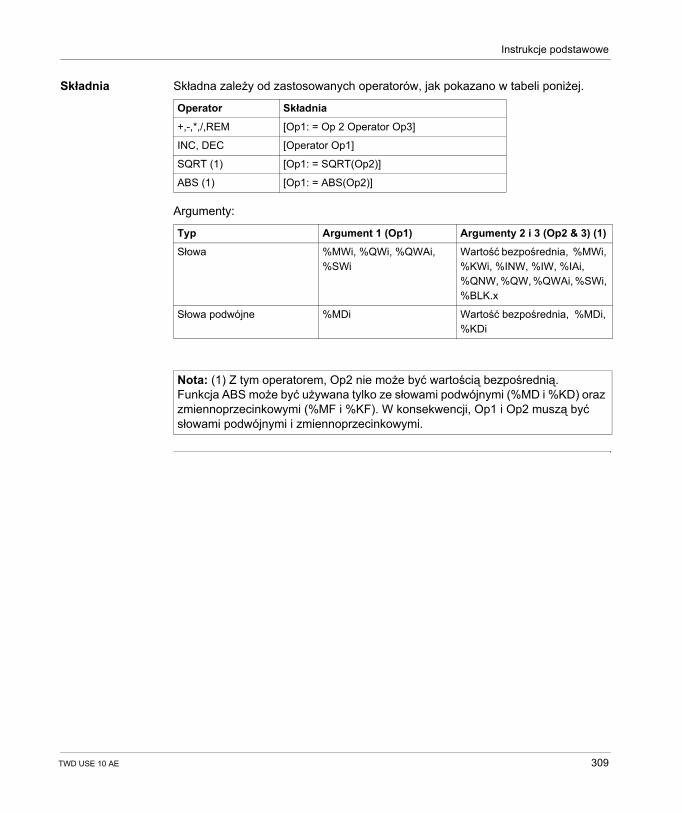
Instrukcje podstawowe
Składnia Składna zależy od zastosowanych operatorów, jak pokazano w tabeli poniżej.
Argumenty:
Operator Składnia
+,-,*,/,REM [Op1: = Op 2 Operator Op3]
INC, DEC [Operator Op1]
SQRT (1) [Op1: = SQRT(Op2)]
ABS (1) [Op1: = ABS(Op2)]
Typ Argument 1 (Op1) Argumenty 2 i 3 (Op2 & 3) (1)
Słowa %MWi, %QWi, %QWAi, %SWi
Wartość bezpośrednia, %MWi, %KWi, %INW, %IW, %IAi, %QNW, %QW, %QWAi, %SWi, %BLK.x
Słowa podwójne %MDi Wartość bezpośrednia, %MDi, %KDi
Nota: (1) Z tym operatorem, Op2 nie może być wartością bezpośrednią.Funkcja ABS może być używana tylko ze słowami podwójnymi (%MD i %KD) oraz zmiennoprzecinkowymi (%MF i %KF). W konsekwencji, Op1 i Op2 muszą być słowami podwójnymi i zmiennoprzecinkowymi.
TWD USE 10 AE 309
Instrukcje podstawowe
Warunki przepełnienia i błędu
DodawaniePrzepełnienie przez operacjęJeżeli wynik przekroczy pojemność słowa wynikowego, wtedy bit %S18 (przepełnienie) jest ustawiany na 1, a wynik operacji jest nieważny (patrz Przykład 1 na następnej stronie). Bitem %S18 zarządza program użytkownika.
Nota: Dla słów podwójnych granice to -2147483648 i 2147483647.Mnożenie
Przepełnienie przez operacjęJeżeli wynik przekracza pojemność słowa wynikowego, bit %S18 (przepełnienie) jest ustawiany na 1 i wynik ten nie jest ważny.
Dzielenie/ResztaDzielenie przez 0Jeżeli dzielnik jest równy 0, dzielenie jest niemożliwe, a bit systemowy %S18 jest ustawiany na 1. Wynik jest wtedy błędny.Przepełnienie przez operacjęJeżeli iloraz dzielenia przekracza pojemność słowa wynikowego, bit %S18 jest ustawiany na 1.
Pierwiastek kwadratowyPrzepełnienie przez operacjęWyciągnięcie pierwiastka kwadratowego jest wykonywalne tylko na wartościach dodatnich. Wynik jest też zawsze dodatni. Jeżeli argument pierwiastka kwadratowego jest ujemny, bit %S18 jest ustawiany na 1 i wynik nie jest ważny.
Nota: Program użytkownika jest odpowiedzialny za zarządzanie bitami systemowymi %S17 i %S18. Są one ustawiane na 1 przez sterownik i muszą być kasowane przez program, aby mogły być ponownie użyte (patrz przykład na następnej stronie).
310 TWD USE 10 AE
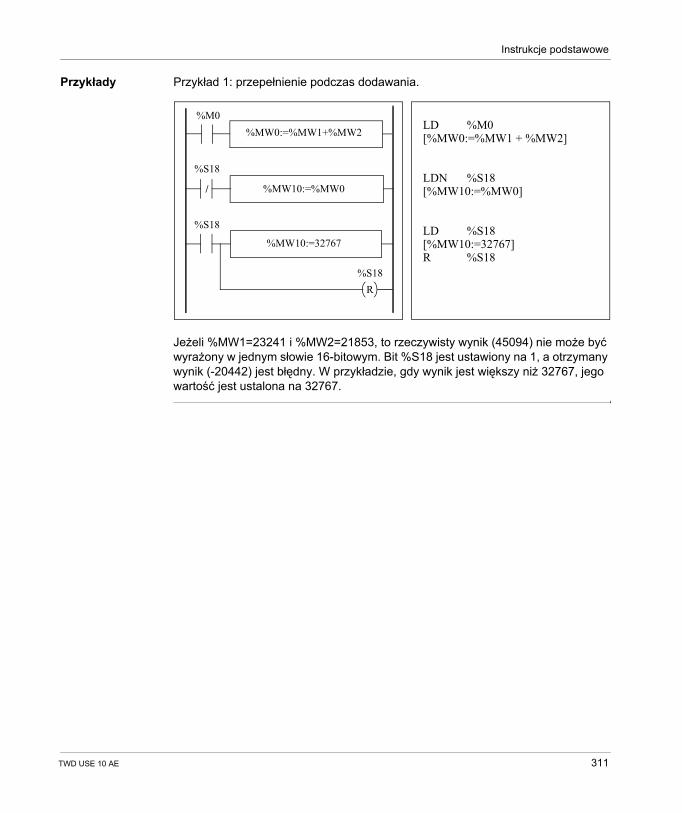
Instrukcje podstawowe
Przykłady Przykład 1: przepełnienie podczas dodawania.
Jeżeli %MW1=23241 i %MW2=21853, to rzeczywisty wynik (45094) nie może być wyrażony w jednym słowie 16-bitowym. Bit %S18 jest ustawiony na 1, a otrzymany wynik (-20442) jest błędny. W przykładzie, gdy wynik jest większy niż 32767, jego wartość jest ustalona na 32767.
LD %M0[%MW0:=%MW1 + %MW2]
LDN %S18[%MW10:=%MW0]
LD %S18[%MW10:=32767]R %S18
%M0
%S18
%S18
%MW0:=%MW1+%MW2
%MW10:=%MW0
%MW10:=32767
%S18R
/
TWD USE 10 AE 311
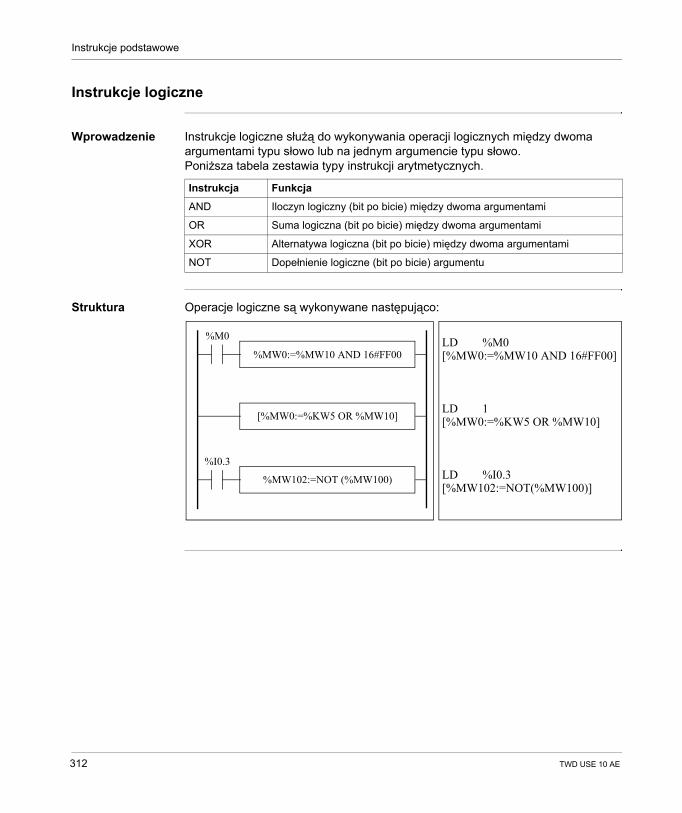
Instrukcje podstawowe
Instrukcje logiczne
Wprowadzenie Instrukcje logiczne służą do wykonywania operacji logicznych między dwoma argumentami typu słowo lub na jednym argumencie typu słowo.Poniższa tabela zestawia typy instrukcji arytmetycznych.
Struktura Operacje logiczne są wykonywane następująco:
Instrukcja Funkcja
AND Iloczyn logiczny (bit po bicie) między dwoma argumentami
OR Suma logiczna (bit po bicie) między dwoma argumentami
XOR Alternatywa logiczna (bit po bicie) między dwoma argumentami
NOT Dopełnienie logiczne (bit po bicie) argumentu
LD %M0[%MW0:=%MW10 AND 16#FF00]
LD 1[%MW0:=%KW5 OR %MW10]
LD %I0.3[%MW102:=NOT(%MW100)]
%M0
%I0.3
%MW0:=%MW10 AND 16#FF00
[%MW0:=%KW5 OR %MW10]
%MW102:=NOT (%MW100)
312 TWD USE 10 AE
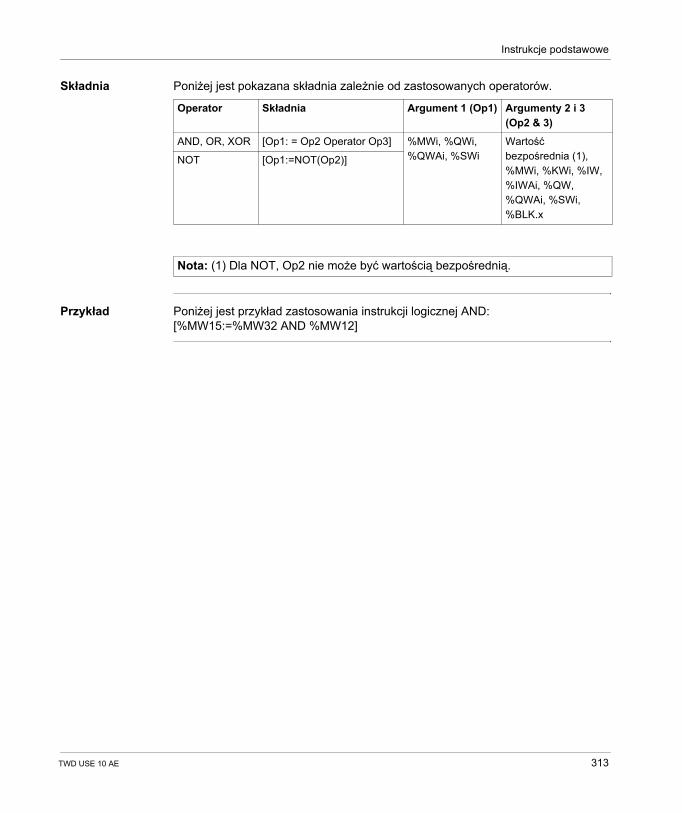
Instrukcje podstawowe
Składnia Poniżej jest pokazana składnia zależnie od zastosowanych operatorów.
Przykład Poniżej jest przykład zastosowania instrukcji logicznej AND:[%MW15:=%MW32 AND %MW12]
Operator Składnia Argument 1 (Op1) Argumenty 2 i 3 (Op2 & 3)
AND, OR, XOR [Op1: = Op2 Operator Op3] %MWi, %QWi, %QWAi, %SWi
Wartość bezpośrednia (1), %MWi, %KWi, %IW, %IWAi, %QW, %QWAi, %SWi, %BLK.x
NOT [Op1:=NOT(Op2)]
Nota: (1) Dla NOT, Op2 nie może być wartością bezpośrednią.
TWD USE 10 AE 313
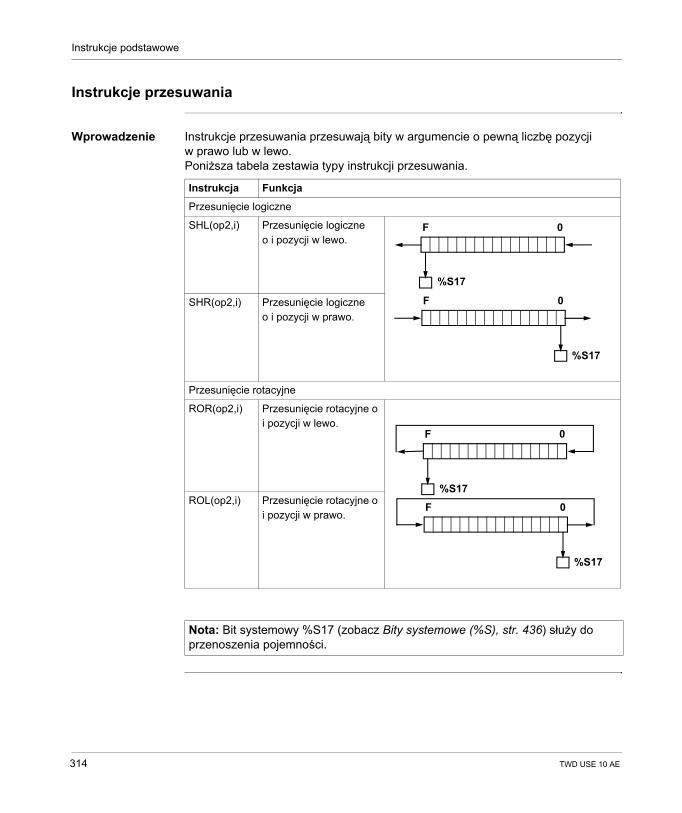
Instrukcje podstawowe
Instrukcje przesuwania
Wprowadzenie Instrukcje przesuwania przesuwają bity w argumencie o pewną liczbę pozycji w prawo lub w lewo.Poniższa tabela zestawia typy instrukcji przesuwania.
Instrukcja Funkcja
Przesunięcie logiczne
SHL(op2,i) Przesunięcie logiczne o i pozycji w lewo.
SHR(op2,i) Przesunięcie logiczne o i pozycji w prawo.
Przesunięcie rotacyjne
ROR(op2,i) Przesunięcie rotacyjne o i pozycji w lewo.
ROL(op2,i) Przesunięcie rotacyjne o i pozycji w prawo.
Nota: Bit systemowy %S17 (zobacz Bity systemowe (%S), str. 436) służy do przenoszenia pojemności.
F 0
%S17
F 0
%S17
F 0
F 0
%S17
%S17
314 TWD USE 10 AE
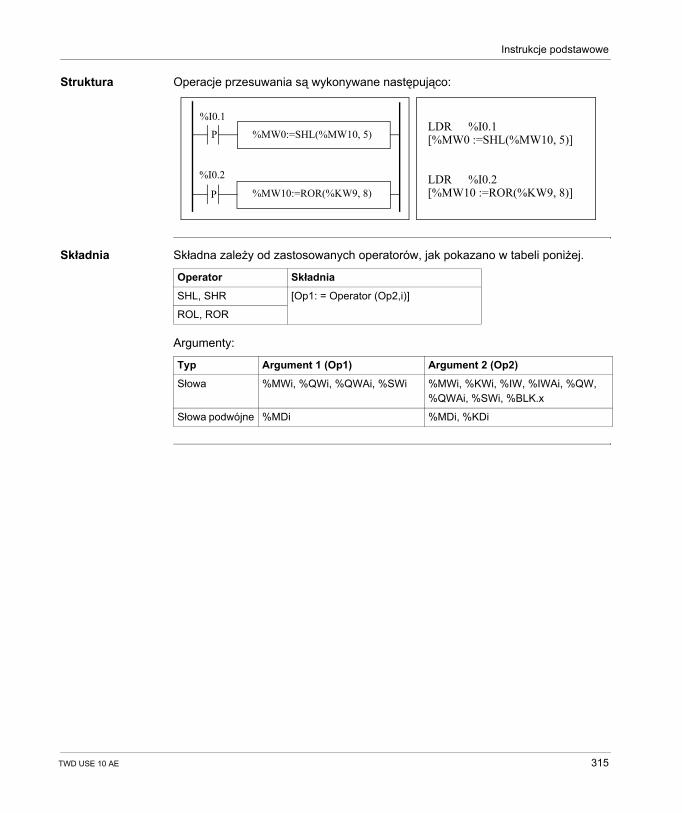
Instrukcje podstawowe
Struktura Operacje przesuwania są wykonywane następująco:
Składnia Składna zależy od zastosowanych operatorów, jak pokazano w tabeli poniżej.
Argumenty:
LDR %I0.1[%MW0 :=SHL(%MW10, 5)]
LDR %I0.2[%MW10 :=ROR(%KW9, 8)]
%I0.2
P
P %MW0:=SHL(%MW10, 5)
%MW10:=ROR(%KW9, 8)
%I0.1
Operator Składnia
SHL, SHR [Op1: = Operator (Op2,i)]
ROL, ROR
Typ Argument 1 (Op1) Argument 2 (Op2)
Słowa %MWi, %QWi, %QWAi, %SWi %MWi, %KWi, %IW, %IWAi, %QW, %QWAi, %SWi, %BLK.x
Słowa podwójne %MDi %MDi, %KDi
TWD USE 10 AE 315
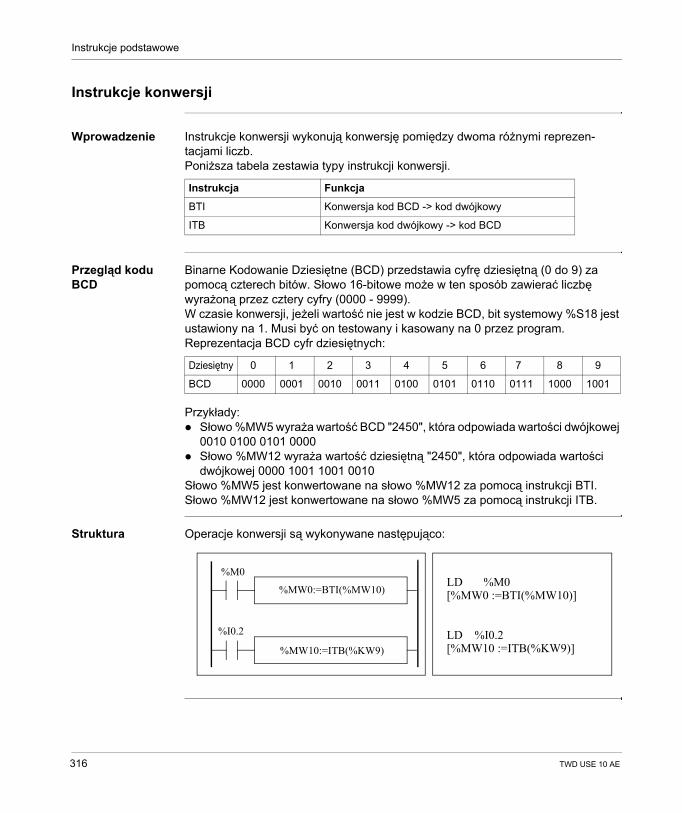
Instrukcje podstawowe
Instrukcje konwersji
Wprowadzenie Instrukcje konwersji wykonują konwersję pomiędzy dwoma różnymi reprezen-tacjami liczb.Poniższa tabela zestawia typy instrukcji konwersji.
Przegląd kodu BCD
Binarne Kodowanie Dziesiętne (BCD) przedstawia cyfrę dziesiętną (0 do 9) za pomocą czterech bitów. Słowo 16-bitowe może w ten sposób zawierać liczbę wyrażoną przez cztery cyfry (0000 - 9999).W czasie konwersji, jeżeli wartość nie jest w kodzie BCD, bit systemowy %S18 jest ustawiony na 1. Musi być on testowany i kasowany na 0 przez program.Reprezentacja BCD cyfr dziesiętnych:
Przykłady:Słowo %MW5 wyraża wartość BCD "2450", która odpowiada wartości dwójkowej 0010 0100 0101 0000Słowo %MW12 wyraża wartość dziesiętną "2450", która odpowiada wartości dwójkowej 0000 1001 1001 0010
Słowo %MW5 jest konwertowane na słowo %MW12 za pomocą instrukcji BTI.Słowo %MW12 jest konwertowane na słowo %MW5 za pomocą instrukcji ITB.
Struktura Operacje konwersji są wykonywane następująco:
Instrukcja Funkcja
BTI Konwersja kod BCD -> kod dwójkowy
ITB Konwersja kod dwójkowy -> kod BCD
Dziesiętny 0 1 2 3 4 5 6 7 8 9
BCD 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001
LD %M0[%MW0 :=BTI(%MW10)]
LD %I0.2[%MW10 :=ITB(%KW9)]
%I0.2
%M0
%MW0:=BTI(%MW10)
%MW10:=ITB(%KW9)
316 TWD USE 10 AE
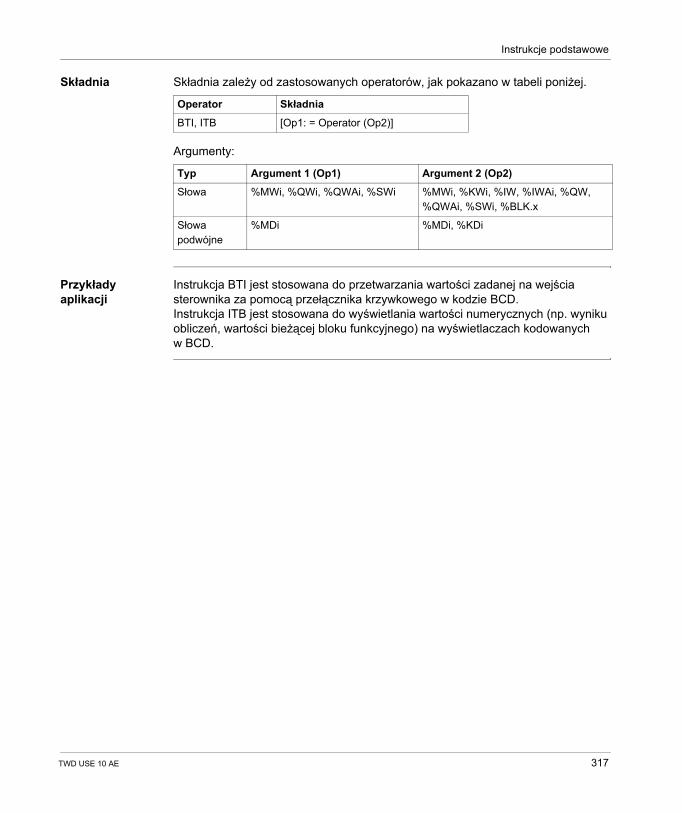
Instrukcje podstawowe
Składnia Składnia zależy od zastosowanych operatorów, jak pokazano w tabeli poniżej.
Argumenty:
Przykłady aplikacji
Instrukcja BTI jest stosowana do przetwarzania wartości zadanej na wejścia sterownika za pomocą przełącznika krzywkowego w kodzie BCD.Instrukcja ITB jest stosowana do wyświetlania wartości numerycznych (np. wyniku obliczeń, wartości bieżącej bloku funkcyjnego) na wyświetlaczach kodowanych w BCD.
Operator Składnia
BTI, ITB [Op1: = Operator (Op2)]
Typ Argument 1 (Op1) Argument 2 (Op2)
Słowa %MWi, %QWi, %QWAi, %SWi %MWi, %KWi, %IW, %IWAi, %QW, %QWAi, %SWi, %BLK.x
Słowa podwójne
%MDi %MDi, %KDi
TWD USE 10 AE 317
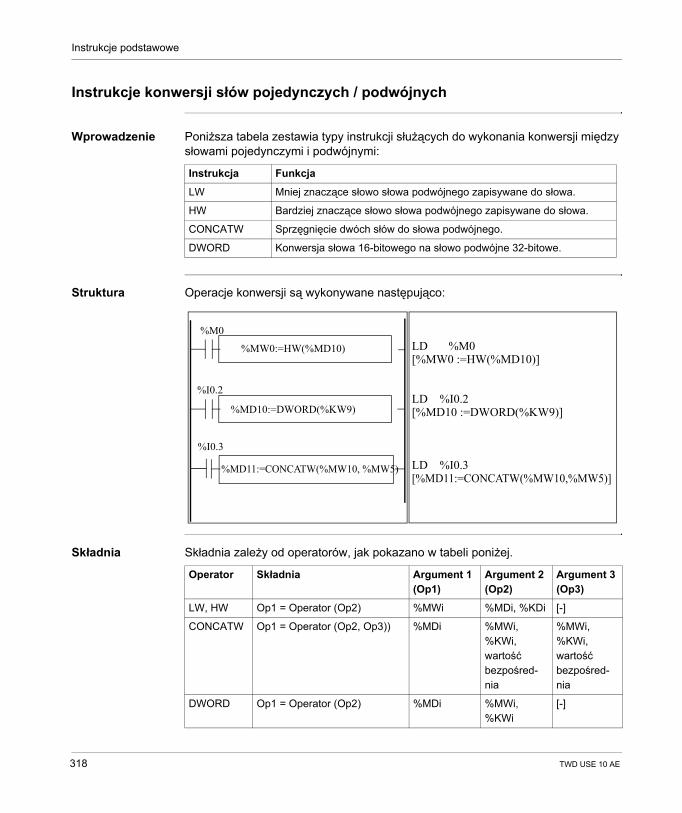
Instrukcje podstawowe
Instrukcje konwersji słów pojedynczych / podwójnych
Wprowadzenie Poniższa tabela zestawia typy instrukcji służących do wykonania konwersji między słowami pojedynczymi i podwójnymi:
Struktura Operacje konwersji są wykonywane następująco:
Składnia Składnia zależy od operatorów, jak pokazano w tabeli poniżej.
Instrukcja Funkcja
LW Mniej znaczące słowo słowa podwójnego zapisywane do słowa.
HW Bardziej znaczące słowo słowa podwójnego zapisywane do słowa.
CONCATW Sprzęgnięcie dwóch słów do słowa podwójnego.
DWORD Konwersja słowa 16-bitowego na słowo podwójne 32-bitowe.
LD %M0[%MW0 :=HW(%MD10)]
LD %I0.2[%MD10 :=DWORD(%KW9)]
LD %I0.3[%MD11:=CONCATW(%MW10,%MW5)]
%I0.2
%M0
%MW0:=HW(%MD10)
%MD10:=DWORD(%KW9)
%I0.3
%MD11:=CONCATW(%MW10, %MW5)
Operator Składnia Argument 1 (Op1)
Argument 2 (Op2)
Argument 3 (Op3)
LW, HW Op1 = Operator (Op2) %MWi %MDi, %KDi [-]
CONCATW Op1 = Operator (Op2, Op3)) %MDi %MWi, %KWi, wartość bezpośred-nia
%MWi, %KWi, wartość bezpośred-nia
DWORD Op1 = Operator (Op2) %MDi %MWi, %KWi
[-]
318 TWD USE 10 AE
Instrukcje podstawowe
14.4 Instrukcje programu
Wprowadzenie do instrukcji programu
Wprowadzenie Ta sekcja dostarcza wprowadzenia do instrukcji programu.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Instrukcje END 320
Instrukcje NOP 322
Instrukcje skoku 323
Instrukcje podprogramu 324
TWD USE 10 AE 319
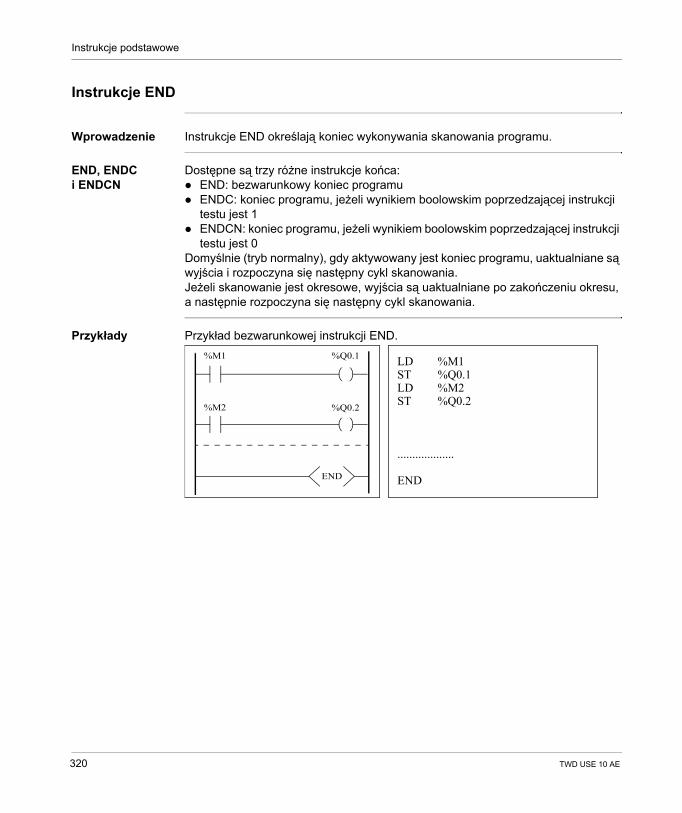
Instrukcje podstawowe
Instrukcje END
Wprowadzenie Instrukcje END określają koniec wykonywania skanowania programu.
END, ENDC i ENDCN
Dostępne są trzy różne instrukcje końca:END: bezwarunkowy koniec programuENDC: koniec programu, jeżeli wynikiem boolowskim poprzedzającej instrukcji testu jest 1ENDCN: koniec programu, jeżeli wynikiem boolowskim poprzedzającej instrukcji testu jest 0
Domyślnie (tryb normalny), gdy aktywowany jest koniec programu, uaktualniane są wyjścia i rozpoczyna się następny cykl skanowania.Jeżeli skanowanie jest okresowe, wyjścia są uaktualniane po zakończeniu okresu, a następnie rozpoczyna się następny cykl skanowania.
Przykłady Przykład bezwarunkowej instrukcji END.
LD %M1ST %Q0.1LD %M2ST %Q0.2
...................
END
%M1
%M2
%Q0.1
%Q0.2
END
320 TWD USE 10 AE
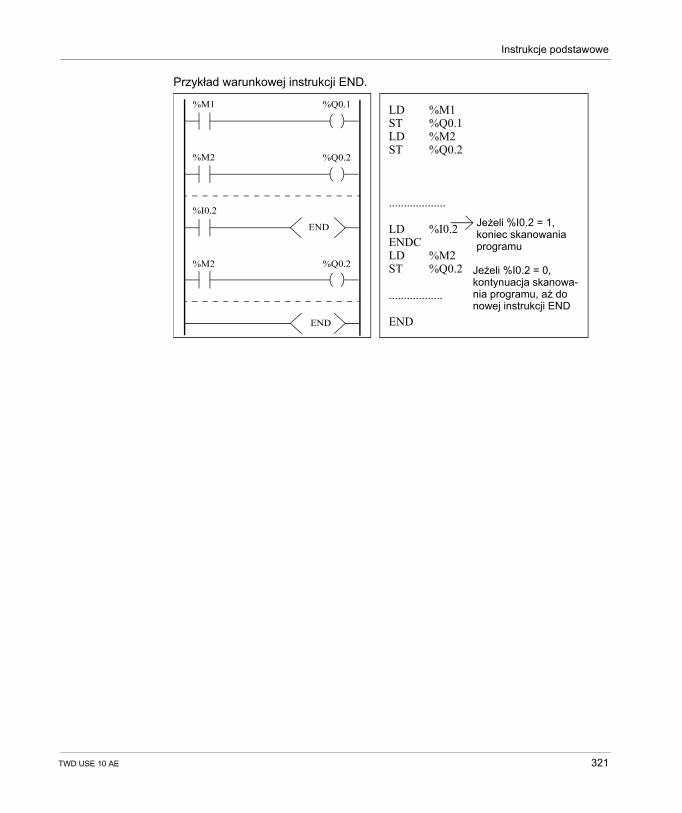
Instrukcje podstawowe
Przykład warunkowej instrukcji END.
LD %M1ST %Q0.1LD %M2ST %Q0.2
...................
LD %I0.2ENDCLD %M2ST %Q0.2
..................
END
Jeżeli %I0.2 = 1, koniec skanowania programu
Jeżeli %I0.2 = 0, kontynuacja skanowa-nia programu, aż do nowej instrukcji END
%Q0.1%M1
%M2
%I0.2
%M2 %Q0.2
END
END
%Q0.2
TWD USE 10 AE 321
Instrukcje podstawowe
Instrukcja NOP
NOP Instrukcja NOP nie wykonuje żadnej operacji. Służy do zarezerwowania linii w programie, aby można później wstawić instrukcje bez modyfikowania numerów linii.
322 TWD USE 10 AE
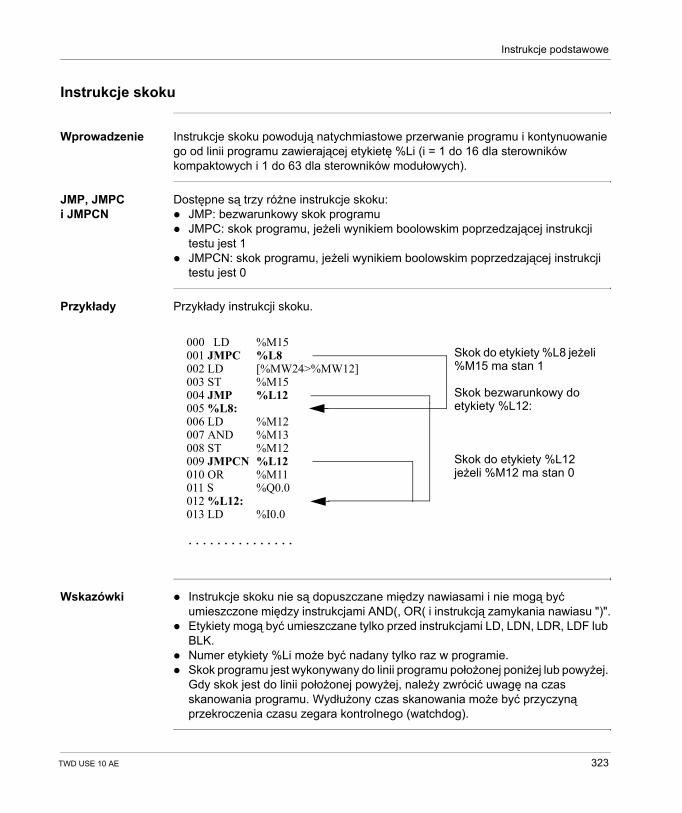
Instrukcje podstawowe
Instrukcje skoku
Wprowadzenie Instrukcje skoku powodują natychmiastowe przerwanie programu i kontynuowanie go od linii programu zawierającej etykietę %Li (i = 1 do 16 dla sterowników kompaktowych i 1 do 63 dla sterowników modułowych).
JMP, JMPC i JMPCN
Dostępne są trzy różne instrukcje skoku:JMP: bezwarunkowy skok programuJMPC: skok programu, jeżeli wynikiem boolowskim poprzedzającej instrukcji testu jest 1JMPCN: skok programu, jeżeli wynikiem boolowskim poprzedzającej instrukcji testu jest 0
Przykłady Przykłady instrukcji skoku.
Wskazówki Instrukcje skoku nie są dopuszczane między nawiasami i nie mogą być umieszczone między instrukcjami AND(, OR( i instrukcją zamykania nawiasu ")".Etykiety mogą być umieszczane tylko przed instrukcjami LD, LDN, LDR, LDF lub BLK.Numer etykiety %Li może być nadany tylko raz w programie.Skok programu jest wykonywany do linii programu położonej poniżej lub powyżej. Gdy skok jest do linii położonej powyżej, należy zwrócić uwagę na czas skanowania programu. Wydłużony czas skanowania może być przyczyną przekroczenia czasu zegara kontrolnego (watchdog).
000 LD %M15001 JMPC %L8002 LD [%MW24>%MW12]003 ST %M15004 JMP %L12005 %L8:006 LD %M12007 AND %M13008 ST %M12009 JMPCN %L12010 OR %M11011 S %Q0.0012 %L12:013 LD %I0.0
...............
Skok do etykiety %L8 jeżeli %M15 ma stan 1
Skok bezwarunkowy do etykiety %L12:
Skok do etykiety %L12 jeżeli %M12 ma stan 0
TWD USE 10 AE 323
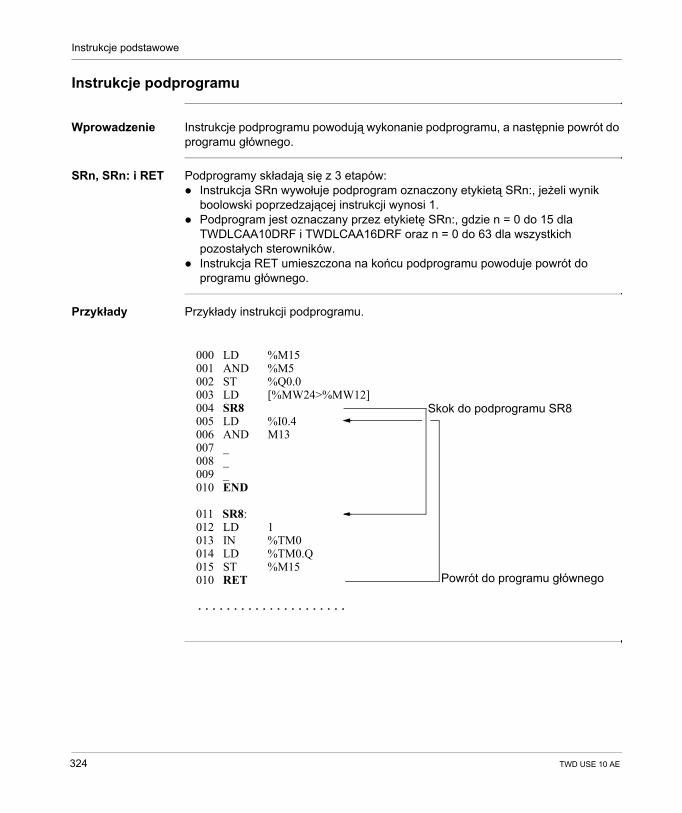
Instrukcje podstawowe
Instrukcje podprogramu
Wprowadzenie Instrukcje podprogramu powodują wykonanie podprogramu, a następnie powrót do programu głównego.
SRn, SRn: i RET Podprogramy składają się z 3 etapów:Instrukcja SRn wywołuje podprogram oznaczony etykietą SRn:, jeżeli wynik boolowski poprzedzającej instrukcji wynosi 1.Podprogram jest oznaczany przez etykietę SRn:, gdzie n = 0 do 15 dla TWDLCAA10DRF i TWDLCAA16DRF oraz n = 0 do 63 dla wszystkich pozostałych sterowników.Instrukcja RET umieszczona na końcu podprogramu powoduje powrót do programu głównego.
Przykłady Przykłady instrukcji podprogramu.
000 LD %M15001 AND %M5002 ST %Q0.0003 LD [%MW24>%MW12]004 SR8005 LD %I0.4006 AND M13007 _008 _009 _010 END
011 SR8:012 LD 1013 IN %TM0014 LD %TM0.Q015 ST %M15010 RET
.....................
Skok do podprogramu SR8
Powrót do programu głównego
324 TWD USE 10 AE
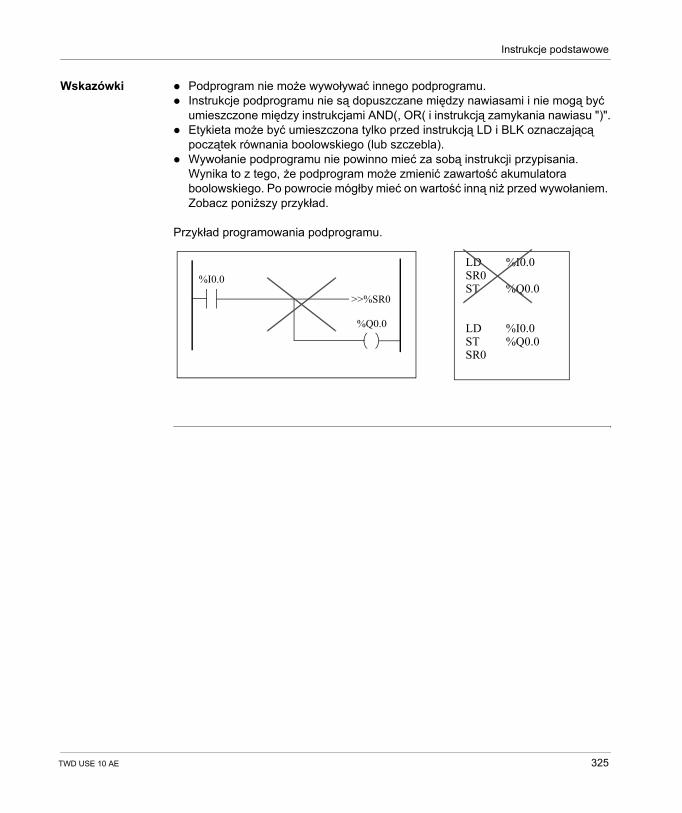
Instrukcje podstawowe
Wskazówki Podprogram nie może wywoływać innego podprogramu.Instrukcje podprogramu nie są dopuszczane między nawiasami i nie mogą być umieszczone między instrukcjami AND(, OR( i instrukcją zamykania nawiasu ")".Etykieta może być umieszczona tylko przed instrukcją LD i BLK oznaczającą początek równania boolowskiego (lub szczebla).Wywołanie podprogramu nie powinno mieć za sobą instrukcji przypisania. Wynika to z tego, że podprogram może zmienić zawartość akumulatora boolowskiego. Po powrocie mógłby mieć on wartość inną niż przed wywołaniem. Zobacz poniższy przykład.
Przykład programowania podprogramu.
LD %I0.0SR0ST %Q0.0
LD %I0.0ST %Q0.0SR0
%I0.0
>>%SR0
%Q0.0
TWD USE 10 AE 325

Instrukcje podstawowe
326 TWD USE 10 AE
TWD USE 10 AE
15
Instrukcje zaawansowaneRzut oka
Wprowadzenie Ten rozdział dostarcza szczegółowych informacji o instrukcjach i blokach funkcyjnych, które są stosowane do tworzenia zaawansowanych programów sterujących dla sterowników Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Sekcja Temat Strona
15.1 Zaawansowane bloki funkcyjne 328
15.2 Funkcje zegara 369
15.3 Funkcja PID 380
15.4 Instrukcje zmiennoprzecinkowe 410
15.5 Instrukcje na tablicach obiektów 421
327
Instrukcje zaawansowane
15.1 Zaawansowane bloki funkcyjne
Rzut oka
Cel tej sekcji Ta sekcja wprowadza zaawansowane bloki funkcyjne wraz z przykładami programowania.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Obiekty typu Bit i Word przypisane do zaawansowanych bloków funkcyjnych 329
Zasady programowania zaawansowanych bloków funkcyjnych 331
Blok funkcyjny rejestru LIFO/FIFO (%Ri) 333
Działanie LIFO 334
Działanie FIFO 335
Programowanie i konfigurowanie rejestrów 336
Blok funkcyjny modulacji szerokości impulsu (%PWM) 339
Blok funkcyjny generatora wyjściowego (%PLS) 342
Blok funkcyjny kontrolera bębenkowego (%DR) 345
Działanie bloku funkcyjnego kontrolera bębenkowego 347
Programowanie i konfigurowanie kontrolera bębenkowego 349
Blok funkcyjny szybkiego licznika (%FC) 351
Blok funkcyjny bardzo szybkiego licznika (%VFC) 354
Nadawanie/odbieranie komunikatów - instrukcja wymiany (EXCH) 365
Blok funkcyjny sterowania wymianą (%MSG) 366
328 TWD USE 10 AE
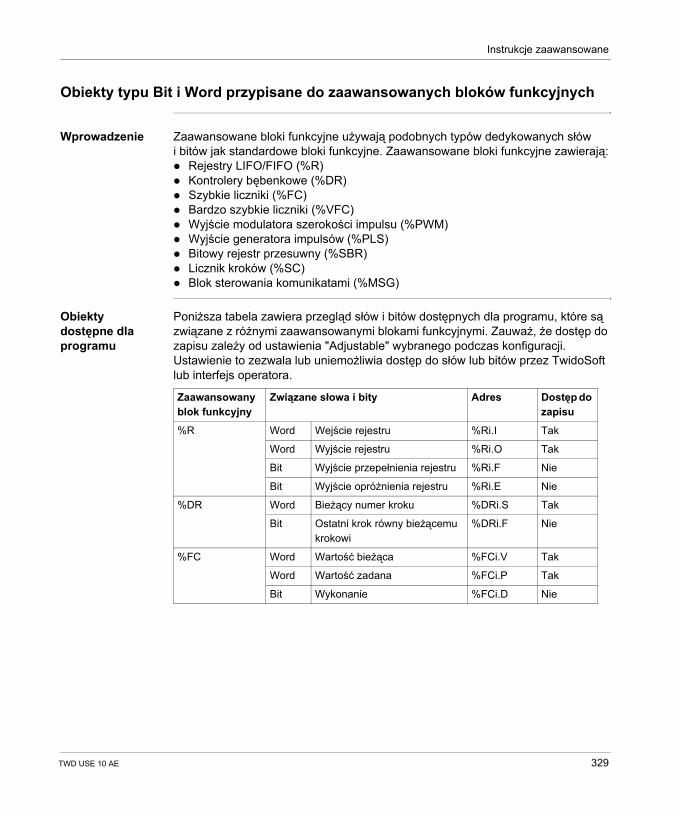
Instrukcje zaawansowane
Obiekty typu Bit i Word przypisane do zaawansowanych bloków funkcyjnych
Wprowadzenie Zaawansowane bloki funkcyjne używają podobnych typów dedykowanych słów i bitów jak standardowe bloki funkcyjne. Zaawansowane bloki funkcyjne zawierają:
Rejestry LIFO/FIFO (%R)Kontrolery bębenkowe (%DR)Szybkie liczniki (%FC)Bardzo szybkie liczniki (%VFC)Wyjście modulatora szerokości impulsu (%PWM)Wyjście generatora impulsów (%PLS)Bitowy rejestr przesuwny (%SBR)Licznik kroków (%SC)Blok sterowania komunikatami (%MSG)
Obiekty dostępne dla programu
Poniższa tabela zawiera przegląd słów i bitów dostępnych dla programu, które są związane z różnymi zaawansowanymi blokami funkcyjnymi. Zauważ, że dostęp do zapisu zależy od ustawienia "Adjustable" wybranego podczas konfiguracji. Ustawienie to zezwala lub uniemożliwia dostęp do słów lub bitów przez TwidoSoft lub interfejs operatora.
Zaawansowany blok funkcyjny
Związane słowa i bity Adres Dostęp do zapisu
%R Word Wejście rejestru %Ri.I Tak
Word Wyjście rejestru %Ri.O Tak
Bit Wyjście przepełnienia rejestru %Ri.F Nie
Bit Wyjście opróżnienia rejestru %Ri.E Nie
%DR Word Bieżący numer kroku %DRi.S Tak
Bit Ostatni krok równy bieżącemu krokowi
%DRi.F Nie
%FC Word Wartość bieżąca %FCi.V Tak
Word Wartość zadana %FCi.P Tak
Bit Wykonanie %FCi.D Nie
TWD USE 10 AE 329
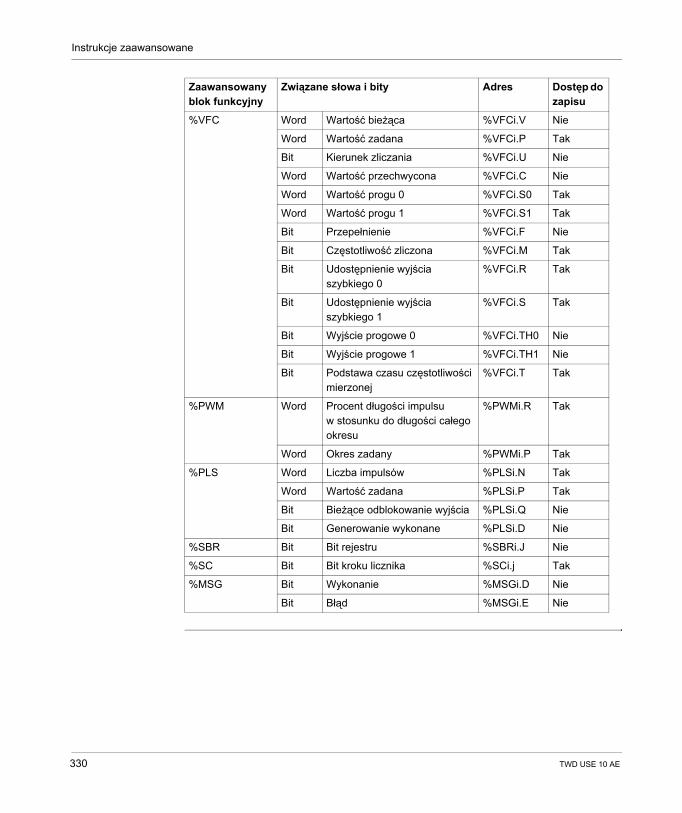
Instrukcje zaawansowane
%VFC Word Wartość bieżąca %VFCi.V Nie
Word Wartość zadana %VFCi.P Tak
Bit Kierunek zliczania %VFCi.U Nie
Word Wartość przechwycona %VFCi.C Nie
Word Wartość progu 0 %VFCi.S0 Tak
Word Wartość progu 1 %VFCi.S1 Tak
Bit Przepełnienie %VFCi.F Nie
Bit Częstotliwość zliczona %VFCi.M Tak
Bit Udostępnienie wyjścia szybkiego 0
%VFCi.R Tak
Bit Udostępnienie wyjścia szybkiego 1
%VFCi.S Tak
Bit Wyjście progowe 0 %VFCi.TH0 Nie
Bit Wyjście progowe 1 %VFCi.TH1 Nie
Bit Podstawa czasu częstotliwości mierzonej
%VFCi.T Tak
%PWM Word Procent długości impulsu w stosunku do długości całego okresu
%PWMi.R Tak
Word Okres zadany %PWMi.P Tak
%PLS Word Liczba impulsów %PLSi.N Tak
Word Wartość zadana %PLSi.P Tak
Bit Bieżące odblokowanie wyjścia %PLSi.Q Nie
Bit Generowanie wykonane %PLSi.D Nie
%SBR Bit Bit rejestru %SBRi.J Nie
%SC Bit Bit kroku licznika %SCi.j Tak
%MSG Bit Wykonanie %MSGi.D Nie
Bit Błąd %MSGi.E Nie
Zaawansowany blok funkcyjny
Związane słowa i bity Adres Dostęp do zapisu
330 TWD USE 10 AE
Instrukcje zaawansowane
Zasady programowania zaawansowanych bloków funkcyjnych
Rzut oka Wszystkie aplikacje Twido są zachowane w formie listy instrukcji także, jeżeli napisane są w edytorze Ladder i dlatego sterowniki Twido mogą być nazwane "maszynami" listy instrukcji. Termin "odwracalność" odnosi się do zdolności TwidoSoft, aby przedstawić listę instrukcji aplikacji jako schemat drabinkowy i odwrotnie. Domyślnie wszystkie programy drabinkowe są rewersyjne.Podobnie jak podstawowe bloki funkcyjne, zaawansowane bloki funkcyjne muszą także uwzględniać wymagania zasad odwracalności. Struktura odwracalnego bloku funkcyjnego w języku List wymaga użycia następujących instrukcji:
BLK: oznacza początek bloku i części wejściowej bloku funkcyjnegoOUT_BLK: oznacza początek części wyjściowej bloku funkcyjnegoEND_BLK: oznacza koniec bloku funkcyjnego
Dedykowane wejścia i wyjścia
Zaawansowane funkcje szybkiego licznika, bardzo szybkiego licznika, PLS i PWM używają dedykowanych wejść i wyjść, ale bity te nie są zarezerwowane do wyłącznego używania przez żaden pojedynczy blok. Raczej, użycie tych dedykowanych zasobów musi być zarządzane. Używając tych zaawansowanych funkcji, musisz zadecydować jak alokowane są dedykowane wejścia i wyjścia. TwidoSoft pomaga w konfigurowaniu tych zasobów przez pokazanie szczegółów konfiguracji wejść/wyjść i ostrzega, jeżeli dedykowane wejście lub wyjście jest już używane przez skonfigurowany blok funkcyjny.Poniższa tabela podsumowuje zależności między dedykowanymi wejściami i wyjściami a określonymi funkcjami.Gdy używane są funkcje zliczania:
Nota: Zastosowanie odwracalnych instrukcji bloków funkcyjnych nie jest obowiązkowe dla prawidłowego funkcjonowania programu List. Dla niektórych instrukcji możliwy jest program w języku List bez odwracalności.
Wejścia Zastosowanie
%I0.0.0 %VFC0: Zarządzanie góra/dół lub Faza B
%I0.0.1 %VFC0: Wejście impulsów lub Faza A
%I0.0.2 %FC0: Wejście impulsów lub %VFC0: wejście ustawiające
%I0.0.3 %FC1: Wejście impulsów lub %VFC0: wejście przechwycenia
%I0.0.4 %FC2: Wejście impulsów lub %VFC1: wejście przechwycenia
%I0.0.5 %VFC1: wejście ustawiające
%I0.0.6 %VFC1: Zarządzanie góra/dół lub Faza B
%I0.0.7 %VFC1: Wejście impulsów lub Faza A
TWD USE 10 AE 331
Instrukcje zaawansowane
Gdy używane są funkcje zliczania lub specjalne:
Używanie wejść i wyjść dedykowanych
TwidoSoft narzuca następujące zasady używania wejść i wyjść dedykowanych.Każdy blok funkcyjny, który używa we/wy dedykowanych musi być skonfigurowany, a następnie przeniesiony do aplikacji. Dedykowane we/wy są alokowane tylko, jeżeli blok funkcyjny zostanie skonfigurowany, a nie gdy jest zastosowany w programie. Po skonfigurowaniu bloku funkcyjnego, jego dedykowane wejścia i wyjścia nie mogą być używane przez aplikację lub inny blok funkcyjny. Np., jeżeli skonfigurujesz %PLS0, nie możesz użyć %Q0.0 dla %DR0 (kontroler bębenkowy) lub w logice aplikacji (to jest ST %Q0.0.0).Jeżeli dedykowane wejście lub wyjście jest wymagane przez blok funkcyjny, a jest już używane przez aplikację lub inny blok funkcyjny, ten blok funkcyjny nie może być skonfigurowany. Np., jeżeli skonfigurujesz %FC0 jako licznik zliczający w górę, nie możesz skonfigurować %VFC0 do używania %I0.0.2 jako wejścia przechwycenia.
Wyjścia Zastosowanie
%Q0.0.0 Wyjście %PLS0 lub %PWM0
%Q0.0.1 Wyjście %PLS1 lub %PWM1
%Q0.0.2 Wyjście szybkie dla %VFC0
%Q0.0.3
%Q0.0.4 Wyjście szybkie dla %VFC1
%Q0.0.5
Nota: Aby zmienić używanie dedykowanych we/wy, zdekonfiguruj blok funkcyjny przez ustawienie typu obiektu na "not used", a następnie usunięcie odniesień do bloku funkcyjnego z twojej aplikacji.
332 TWD USE 10 AE
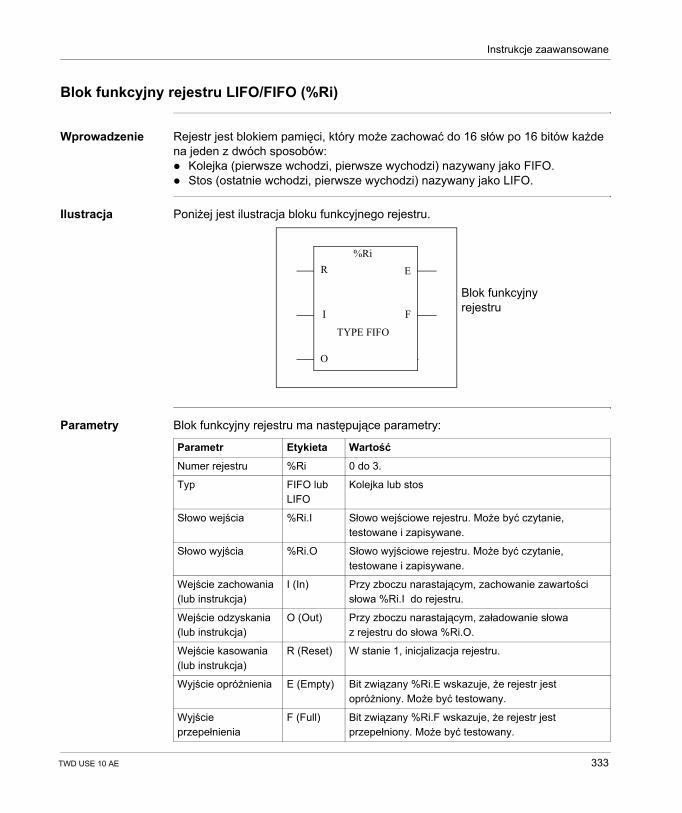
Instrukcje zaawansowane
Blok funkcyjny rejestru LIFO/FIFO (%Ri)
Wprowadzenie Rejestr jest blokiem pamięci, który może zachować do 16 słów po 16 bitów każde na jeden z dwóch sposobów:
Kolejka (pierwsze wchodzi, pierwsze wychodzi) nazywany jako FIFO.Stos (ostatnie wchodzi, pierwsze wychodzi) nazywany jako LIFO.
Ilustracja Poniżej jest ilustracja bloku funkcyjnego rejestru.
Parametry Blok funkcyjny rejestru ma następujące parametry:
Blok funkcyjny rejestru
R E
I F
O
%Ri
TYPE FIFO
Parametr Etykieta Wartość
Numer rejestru %Ri 0 do 3.
Typ FIFO lub LIFO
Kolejka lub stos
Słowo wejścia %Ri.I Słowo wejściowe rejestru. Może być czytanie, testowane i zapisywane.
Słowo wyjścia %Ri.O Słowo wyjściowe rejestru. Może być czytanie, testowane i zapisywane.
Wejście zachowania (lub instrukcja)
I (In) Przy zboczu narastającym, zachowanie zawartości słowa %Ri.I do rejestru.
Wejście odzyskania (lub instrukcja)
O (Out) Przy zboczu narastającym, załadowanie słowa z rejestru do słowa %Ri.O.
Wejście kasowania (lub instrukcja)
R (Reset) W stanie 1, inicjalizacja rejestru.
Wyjście opróżnienia E (Empty) Bit związany %Ri.E wskazuje, że rejestr jest opróżniony. Może być testowany.
Wyjście przepełnienia
F (Full) Bit związany %Ri.F wskazuje, że rejestr jest przepełniony. Może być testowany.
TWD USE 10 AE 333
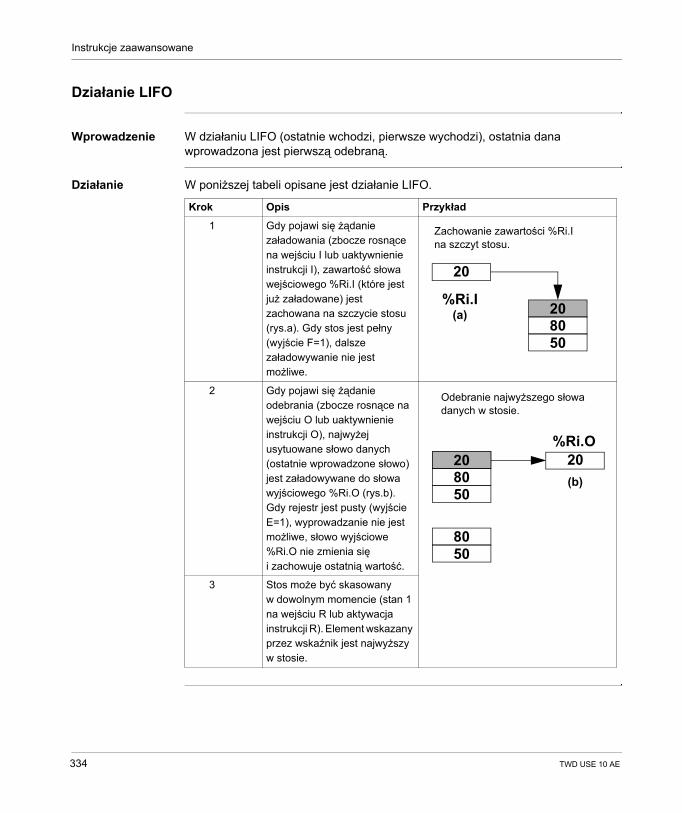
Instrukcje zaawansowane
Działanie LIFO
Wprowadzenie W działaniu LIFO (ostatnie wchodzi, pierwsze wychodzi), ostatnia dana wprowadzona jest pierwszą odebraną.
Działanie W poniższej tabeli opisane jest działanie LIFO.
Krok Opis Przykład
1 Gdy pojawi się żądanie załadowania (zbocze rosnące na wejściu I lub uaktywnienie instrukcji I), zawartość słowa wejściowego %Ri.I (które jest już załadowane) jest zachowana na szczycie stosu (rys.a). Gdy stos jest pełny (wyjście F=1), dalsze załadowywanie nie jest możliwe.
2 Gdy pojawi się żądanie odebrania (zbocze rosnące na wejściu O lub uaktywnienie instrukcji O), najwyżej usytuowane słowo danych (ostatnie wprowadzone słowo) jest załadowywane do słowa wyjściowego %Ri.O (rys.b).Gdy rejestr jest pusty (wyjście E=1), wyprowadzanie nie jest możliwe, słowo wyjściowe %Ri.O nie zmienia się i zachowuje ostatnią wartość.
3 Stos może być skasowany w dowolnym momencie (stan 1 na wejściu R lub aktywacja instrukcji R). Element wskazany przez wskaźnik jest najwyższy w stosie.
%Ri.I
508020
20
(a)
Zachowanie zawartości %Ri.I na szczyt stosu.
20(b)
508020
5080
%Ri.O
Odebranie najwyższego słowa danych w stosie.
334 TWD USE 10 AE
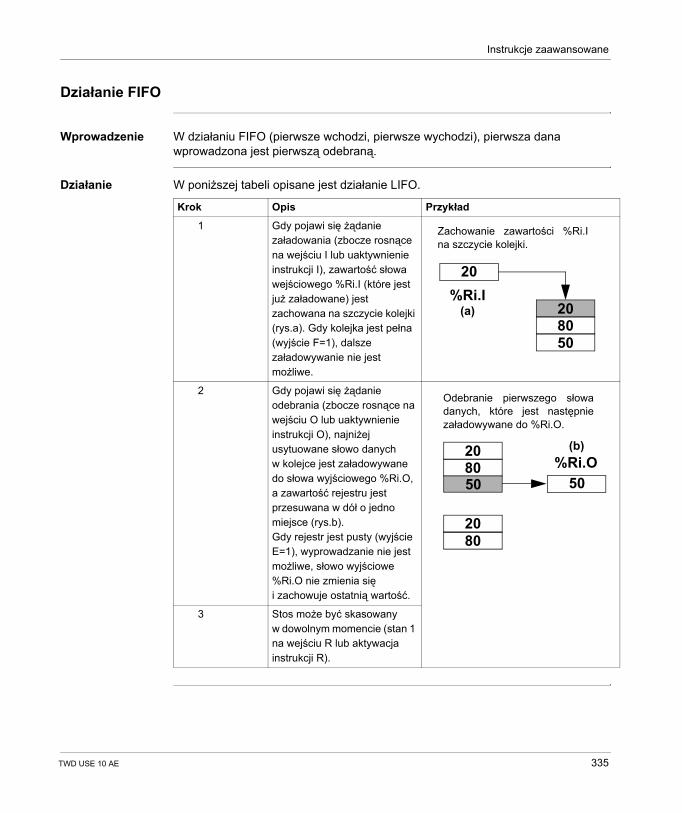
Instrukcje zaawansowane
Działanie FIFO
Wprowadzenie W działaniu FIFO (pierwsze wchodzi, pierwsze wychodzi), pierwsza dana wprowadzona jest pierwszą odebraną.
Działanie W poniższej tabeli opisane jest działanie LIFO.
Krok Opis Przykład
1 Gdy pojawi się żądanie załadowania (zbocze rosnące na wejściu I lub uaktywnienie instrukcji I), zawartość słowa wejściowego %Ri.I (które jest już załadowane) jest zachowana na szczycie kolejki (rys.a). Gdy kolejka jest pełna (wyjście F=1), dalsze załadowywanie nie jest możliwe.
2 Gdy pojawi się żądanie odebrania (zbocze rosnące na wejściu O lub uaktywnienie instrukcji O), najniżej usytuowane słowo danych w kolejce jest załadowywane do słowa wyjściowego %Ri.O, a zawartość rejestru jest przesuwana w dół o jedno miejsce (rys.b).Gdy rejestr jest pusty (wyjście E=1), wyprowadzanie nie jest możliwe, słowo wyjściowe %Ri.O nie zmienia się i zachowuje ostatnią wartość.
3 Stos może być skasowany w dowolnym momencie (stan 1 na wejściu R lub aktywacja instrukcji R).
%Ri.I
508020
20
(a)
Zachowanie zawartości %Ri.I na szczycie kolejki.
8020
%Ri.O50
20
(b)
Odebranie pierwszego słowa danych, które jest następnie załadowywane do %Ri.O.
50
80
TWD USE 10 AE 335
Instrukcje zaawansowane
Programowanie i konfigurowanie rejestrów
Wprowadzenie Poniższy przykład programu pokazuje ładowanie rejestru (%R2.I) zawartością słowa pamięci (%MW34) po odebraniu żądania zachowania (%I0.2), jeśli rejestr R2 nie jest pełny (%R2.F=0). Żądanie zachowania w rejestrze jest wykonane przez %M1. Żądanie odbioru jest wykonane przez wejście %I0.3 i załadowanie %R2.O do %MW20, jeżeli rejestr nie jest pusty (%R2.E=0).
336 TWD USE 10 AE
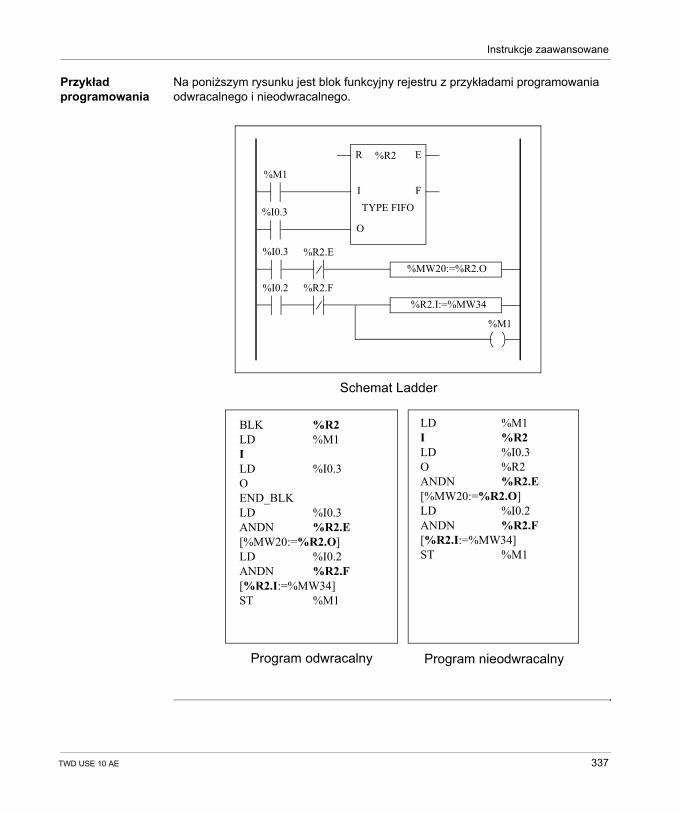
Instrukcje zaawansowane
Przykład programowania
Na poniższym rysunku jest blok funkcyjny rejestru z przykładami programowania odwracalnego i nieodwracalnego.
%R2R
I
O
E
FTYPE FIFO
BLK %R2LD %M1ILD %I0.3OEND_BLKLD %I0.3ANDN %R2.E[%MW20:=%R2.O]LD %I0.2ANDN %R2.F[%R2.I:=%MW34] ST %M1
LD %M1I %R2LD %I0.3O %R2ANDN %R2.E[%MW20:=%R2.O]LD %I0.2ANDN %R2.F[%R2.I:=%MW34] ST %M1
%M1
%R2.E
%R2.F
%I0.3
%M1
%I0.3
%I0.2
%MW20:=%R2.O
%R2.I:=%MW34
Schemat Ladder
Program odwracalny Program nieodwracalny
TWD USE 10 AE 337
Instrukcje zaawansowane
Konfiguracja Jedynym parametrem, który musi być wprowadzony podczas konfiguracji jest typ rejestru:
FIFO (domyślny) lubLIFO
Przypadki szczególne
Poniższa tabela zawiera listę przypadków szczególnych programowania bloku funkcyjnego rejestru.
Przypadek szczególny Opis
Skutek zimnego restartu (%S0=1) Inicjalizacja zawartości rejestru. Bit wyjściowy %Ri.E związany z wyjściem E jest ustawiany na 1.
Skutek gorącego restartu (%S1=1) zatrzymanego sterownika
Bez efektu dla wartości bieżącej rejestru i stanu bitów wyjściowych.
338 TWD USE 10 AE
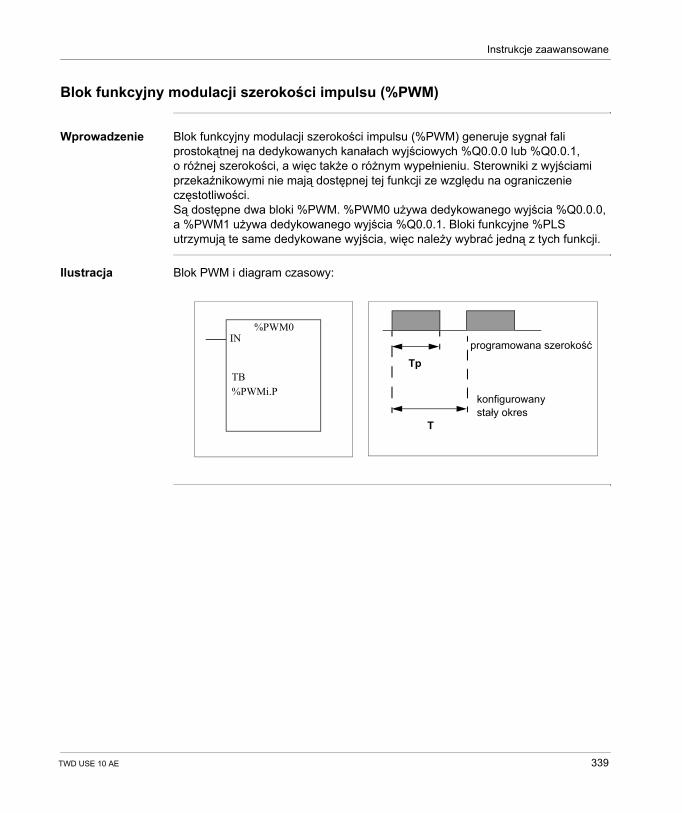
Instrukcje zaawansowane
Blok funkcyjny modulacji szerokości impulsu (%PWM)
Wprowadzenie Blok funkcyjny modulacji szerokości impulsu (%PWM) generuje sygnał fali prostokątnej na dedykowanych kanałach wyjściowych %Q0.0.0 lub %Q0.0.1, o różnej szerokości, a więc także o różnym wypełnieniu. Sterowniki z wyjściami przekaźnikowymi nie mają dostępnej tej funkcji ze względu na ograniczenie częstotliwości.Są dostępne dwa bloki %PWM. %PWM0 używa dedykowanego wyjścia %Q0.0.0, a %PWM1 używa dedykowanego wyjścia %Q0.0.1. Bloki funkcyjne %PLS utrzymują te same dedykowane wyjścia, więc należy wybrać jedną z tych funkcji.
Ilustracja Blok PWM i diagram czasowy:
IN
Tpprogramowana szerokość
konfigurowany stały okres
T
%PWM0
TB%PWMi.P
TWD USE 10 AE 339
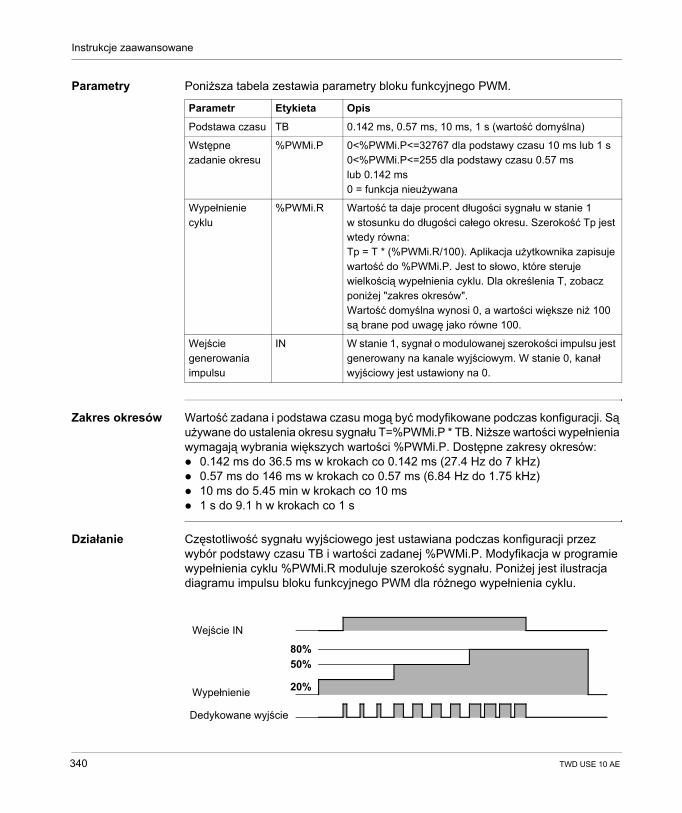
Instrukcje zaawansowane
Parametry Poniższa tabela zestawia parametry bloku funkcyjnego PWM.
Zakres okresów Wartość zadana i podstawa czasu mogą być modyfikowane podczas konfiguracji. Są używane do ustalenia okresu sygnału T=%PWMi.P * TB. Niższe wartości wypełnienia wymagają wybrania większych wartości %PWMi.P. Dostępne zakresy okresów:
0.142 ms do 36.5 ms w krokach co 0.142 ms (27.4 Hz do 7 kHz)0.57 ms do 146 ms w krokach co 0.57 ms (6.84 Hz do 1.75 kHz)10 ms do 5.45 min w krokach co 10 ms1 s do 9.1 h w krokach co 1 s
Działanie Częstotliwość sygnału wyjściowego jest ustawiana podczas konfiguracji przez wybór podstawy czasu TB i wartości zadanej %PWMi.P. Modyfikacja w programie wypełnienia cyklu %PWMi.R moduluje szerokość sygnału. Poniżej jest ilustracja diagramu impulsu bloku funkcyjnego PWM dla różnego wypełnienia cyklu.
Parametr Etykieta Opis
Podstawa czasu TB 0.142 ms, 0.57 ms, 10 ms, 1 s (wartość domyślna)
Wstępne zadanie okresu
%PWMi.P 0<%PWMi.P<=32767 dla podstawy czasu 10 ms lub 1 s0<%PWMi.P<=255 dla podstawy czasu 0.57 ms lub 0.142 ms0 = funkcja nieużywana
Wypełnienie cyklu
%PWMi.R Wartość ta daje procent długości sygnału w stanie 1 w stosunku do długości całego okresu. Szerokość Tp jest wtedy równa:Tp = T * (%PWMi.R/100). Aplikacja użytkownika zapisuje wartość do %PWMi.P. Jest to słowo, które steruje wielkością wypełnienia cyklu. Dla określenia T, zobacz poniżej "zakres okresów".Wartość domyślna wynosi 0, a wartości większe niż 100 są brane pod uwagę jako równe 100.
Wejście generowania impulsu
IN W stanie 1, sygnał o modulowanej szerokości impulsu jest generowany na kanale wyjściowym. W stanie 0, kanał wyjściowy jest ustawiony na 0.
Wypełnienie 20%
50%80%
Dedykowane wyjście
Wejście IN
340 TWD USE 10 AE
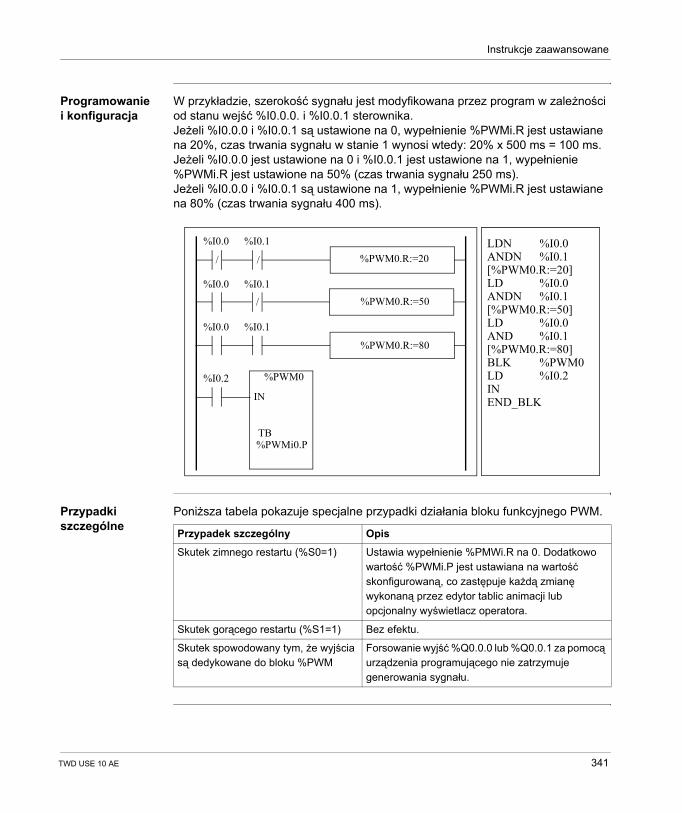
Instrukcje zaawansowane
Programowanie i konfiguracja
W przykładzie, szerokość sygnału jest modyfikowana przez program w zależności od stanu wejść %I0.0.0. i %I0.0.1 sterownika.Jeżeli %I0.0.0 i %I0.0.1 są ustawione na 0, wypełnienie %PWMi.R jest ustawiane na 20%, czas trwania sygnału w stanie 1 wynosi wtedy: 20% x 500 ms = 100 ms.Jeżeli %I0.0.0 jest ustawione na 0 i %I0.0.1 jest ustawione na 1, wypełnienie %PWMi.R jest ustawione na 50% (czas trwania sygnału 250 ms).Jeżeli %I0.0.0 i %I0.0.1 są ustawione na 1, wypełnienie %PWMi.R jest ustawiane na 80% (czas trwania sygnału 400 ms).
Przypadki szczególne
Poniższa tabela pokazuje specjalne przypadki działania bloku funkcyjnego PWM.
LDN %I0.0ANDN %I0.1[%PWM0.R:=20]LD %I0.0ANDN %I0.1[%PWM0.R:=50]LD %I0.0AND %I0.1[%PWM0.R:=80]BLK %PWM0LD %I0.2INEND_BLK
/ /
/
IN
%I0.0
%I0.0
%I0.0
%I0.1
%I0.1
%I0.1
%I0.2 %PWM0
%PWM0.R:=20
%PWM0.R:=50
%PWM0.R:=80
%PWMi0.PTB
Przypadek szczególny Opis
Skutek zimnego restartu (%S0=1) Ustawia wypełnienie %PMWi.R na 0. Dodatkowo wartość %PWMi.P jest ustawiana na wartość skonfigurowaną, co zastępuje każdą zmianę wykonaną przez edytor tablic animacji lub opcjonalny wyświetlacz operatora.
Skutek gorącego restartu (%S1=1) Bez efektu.
Skutek spowodowany tym, że wyjścia są dedykowane do bloku %PWM
Forsowanie wyjść %Q0.0.0 lub %Q0.0.1 za pomocą urządzenia programującego nie zatrzymuje generowania sygnału.
TWD USE 10 AE 341
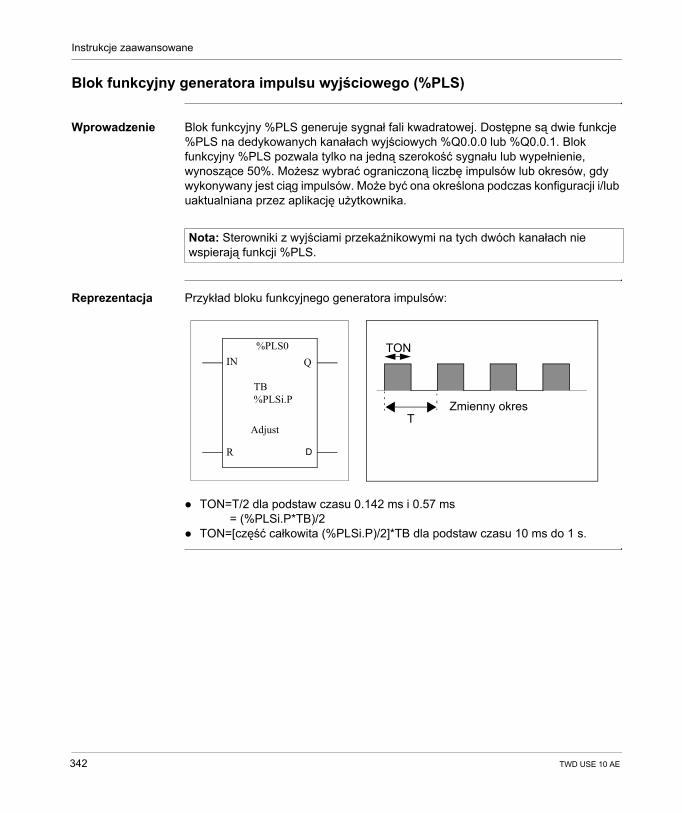
Instrukcje zaawansowane
Blok funkcyjny generatora impulsu wyjściowego (%PLS)
Wprowadzenie Blok funkcyjny %PLS generuje sygnał fali kwadratowej. Dostępne są dwie funkcje %PLS na dedykowanych kanałach wyjściowych %Q0.0.0 lub %Q0.0.1. Blok funkcyjny %PLS pozwala tylko na jedną szerokość sygnału lub wypełnienie, wynoszące 50%. Możesz wybrać ograniczoną liczbę impulsów lub okresów, gdy wykonywany jest ciąg impulsów. Może być ona określona podczas konfiguracji i/lub uaktualniana przez aplikację użytkownika.
Reprezentacja Przykład bloku funkcyjnego generatora impulsów:
TON=T/2 dla podstaw czasu 0.142 ms i 0.57 ms = (%PLSi.P*TB)/2TON=[część całkowita (%PLSi.P)/2]*TB dla podstaw czasu 10 ms do 1 s.
Nota: Sterowniki z wyjściami przekaźnikowymi na tych dwóch kanałach nie wspierają funkcji %PLS.
IN Q
R
%PLS0
TB%PLSi.P
D
Adjust
Zmienny okresT
TON
342 TWD USE 10 AE
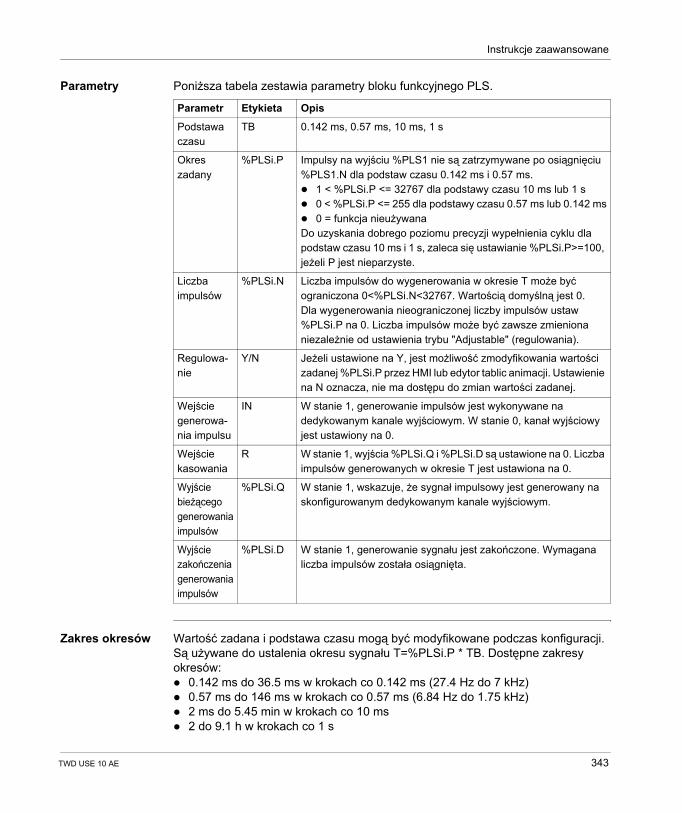
Instrukcje zaawansowane
Parametry Poniższa tabela zestawia parametry bloku funkcyjnego PLS.
Zakres okresów Wartość zadana i podstawa czasu mogą być modyfikowane podczas konfiguracji. Są używane do ustalenia okresu sygnału T=%PLSi.P * TB. Dostępne zakresy okresów:
0.142 ms do 36.5 ms w krokach co 0.142 ms (27.4 Hz do 7 kHz)0.57 ms do 146 ms w krokach co 0.57 ms (6.84 Hz do 1.75 kHz)2 ms do 5.45 min w krokach co 10 ms2 do 9.1 h w krokach co 1 s
Parametr Etykieta Opis
Podstawa czasu
TB 0.142 ms, 0.57 ms, 10 ms, 1 s
Okres zadany
%PLSi.P Impulsy na wyjściu %PLS1 nie są zatrzymywane po osiągnięciu %PLS1.N dla podstaw czasu 0.142 ms i 0.57 ms.
1 < %PLSi.P <= 32767 dla podstawy czasu 10 ms lub 1 s0 < %PLSi.P <= 255 dla podstawy czasu 0.57 ms lub 0.142 ms0 = funkcja nieużywana
Do uzyskania dobrego poziomu precyzji wypełnienia cyklu dla podstaw czasu 10 ms i 1 s, zaleca się ustawianie %PLSi.P>=100, jeżeli P jest nieparzyste.
Liczba impulsów
%PLSi.N Liczba impulsów do wygenerowania w okresie T może być ograniczona 0<%PLSi.N<32767. Wartością domyślną jest 0.Dla wygenerowania nieograniczonej liczby impulsów ustaw %PLSi.P na 0. Liczba impulsów może być zawsze zmieniona niezależnie od ustawienia trybu "Adjustable" (regulowania).
Regulowa-nie
Y/N Jeżeli ustawione na Y, jest możliwość zmodyfikowania wartości zadanej %PLSi.P przez HMI lub edytor tablic animacji. Ustawienie na N oznacza, nie ma dostępu do zmian wartości zadanej.
Wejście generowa-nia impulsu
IN W stanie 1, generowanie impulsów jest wykonywane na dedykowanym kanale wyjściowym. W stanie 0, kanał wyjściowy jest ustawiony na 0.
Wejście kasowania
R W stanie 1, wyjścia %PLSi.Q i %PLSi.D są ustawione na 0. Liczba impulsów generowanych w okresie T jest ustawiona na 0.
Wyjście bieżącego generowania impulsów
%PLSi.Q W stanie 1, wskazuje, że sygnał impulsowy jest generowany na skonfigurowanym dedykowanym kanale wyjściowym.
Wyjście zakończenia generowania impulsów
%PLSi.D W stanie 1, generowanie sygnału jest zakończone. Wymagana liczba impulsów została osiągnięta.
TWD USE 10 AE 343
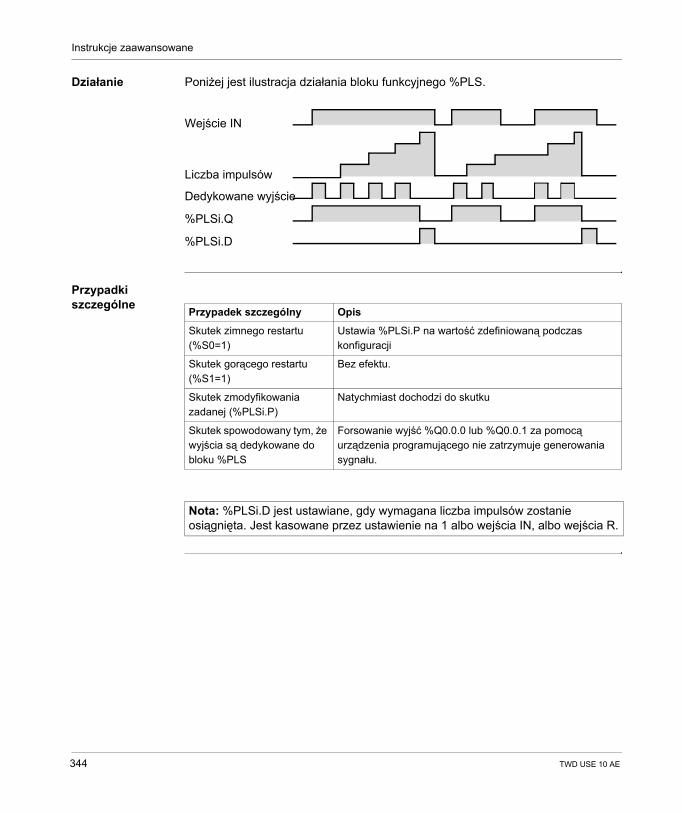
Instrukcje zaawansowane
Działanie Poniżej jest ilustracja działania bloku funkcyjnego %PLS.
Przypadki szczególne
Wejście IN
Liczba impulsów
Dedykowane wyjście
%PLSi.Q
%PLSi.D
Przypadek szczególny Opis
Skutek zimnego restartu (%S0=1)
Ustawia %PLSi.P na wartość zdefiniowaną podczas konfiguracji
Skutek gorącego restartu (%S1=1)
Bez efektu.
Skutek zmodyfikowania zadanej (%PLSi.P)
Natychmiast dochodzi do skutku
Skutek spowodowany tym, że wyjścia są dedykowane do bloku %PLS
Forsowanie wyjść %Q0.0.0 lub %Q0.0.1 za pomocą urządzenia programującego nie zatrzymuje generowania sygnału.
Nota: %PLSi.D jest ustawiane, gdy wymagana liczba impulsów zostanie osiągnięta. Jest kasowane przez ustawienie na 1 albo wejścia IN, albo wejścia R.
344 TWD USE 10 AE
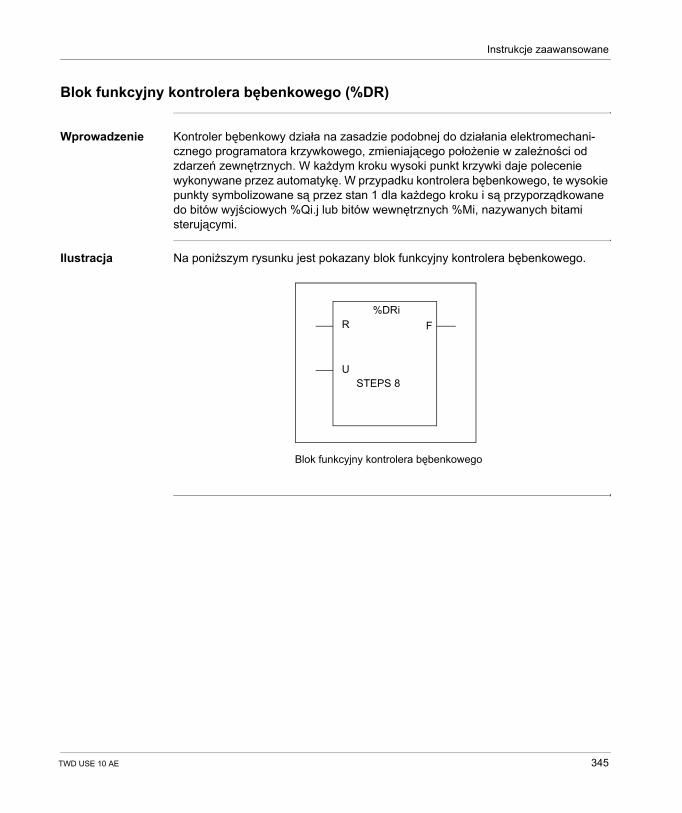
Instrukcje zaawansowane
Blok funkcyjny kontrolera bębenkowego (%DR)
Wprowadzenie Kontroler bębenkowy działa na zasadzie podobnej do działania elektromechani-cznego programatora krzywkowego, zmieniającego położenie w zależności od zdarzeń zewnętrznych. W każdym kroku wysoki punkt krzywki daje polecenie wykonywane przez automatykę. W przypadku kontrolera bębenkowego, te wysokie punkty symbolizowane są przez stan 1 dla każdego kroku i są przyporządkowane do bitów wyjściowych %Qi.j lub bitów wewnętrznych %Mi, nazywanych bitami sterującymi.
Ilustracja Na poniższym rysunku jest pokazany blok funkcyjny kontrolera bębenkowego.
%DRi
STEPS 8
Blok funkcyjny kontrolera bębenkowego
R F
U
TWD USE 10 AE 345
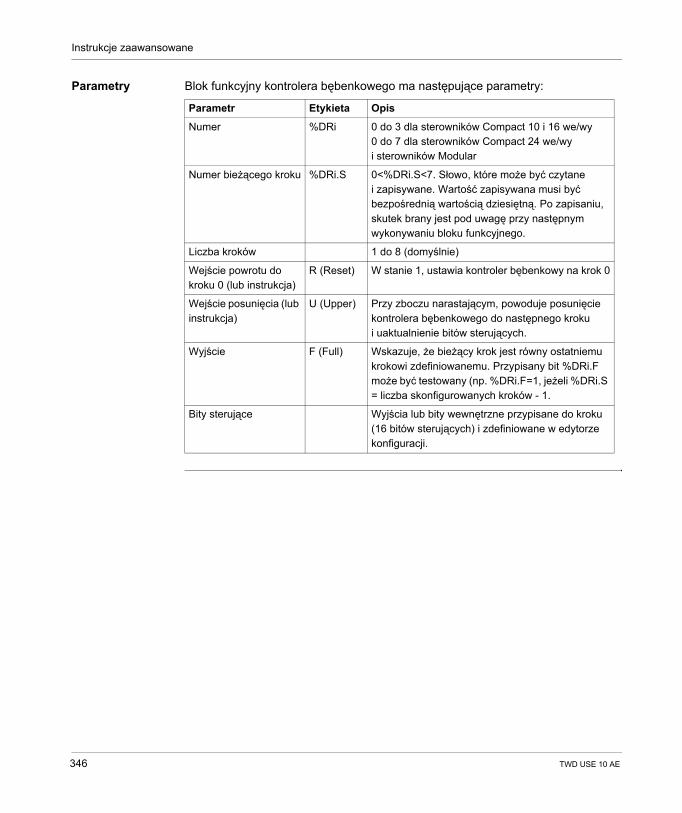
Instrukcje zaawansowane
Parametry Blok funkcyjny kontrolera bębenkowego ma następujące parametry:
Parametr Etykieta Opis
Numer %DRi 0 do 3 dla sterowników Compact 10 i 16 we/wy0 do 7 dla sterowników Compact 24 we/wy i sterowników Modular
Numer bieżącego kroku %DRi.S 0<%DRi.S<7. Słowo, które może być czytane i zapisywane. Wartość zapisywana musi być bezpośrednią wartością dziesiętną. Po zapisaniu, skutek brany jest pod uwagę przy następnym wykonywaniu bloku funkcyjnego.
Liczba kroków 1 do 8 (domyślnie)
Wejście powrotu do kroku 0 (lub instrukcja)
R (Reset) W stanie 1, ustawia kontroler bębenkowy na krok 0
Wejście posunięcia (lub instrukcja)
U (Upper) Przy zboczu narastającym, powoduje posunięcie kontrolera bębenkowego do następnego kroku i uaktualnienie bitów sterujących.
Wyjście F (Full) Wskazuje, że bieżący krok jest równy ostatniemu krokowi zdefiniowanemu. Przypisany bit %DRi.F może być testowany (np. %DRi.F=1, jeżeli %DRi.S = liczba skonfigurowanych kroków - 1.
Bity sterujące Wyjścia lub bity wewnętrzne przypisane do kroku (16 bitów sterujących) i zdefiniowane w edytorze konfiguracji.
346 TWD USE 10 AE
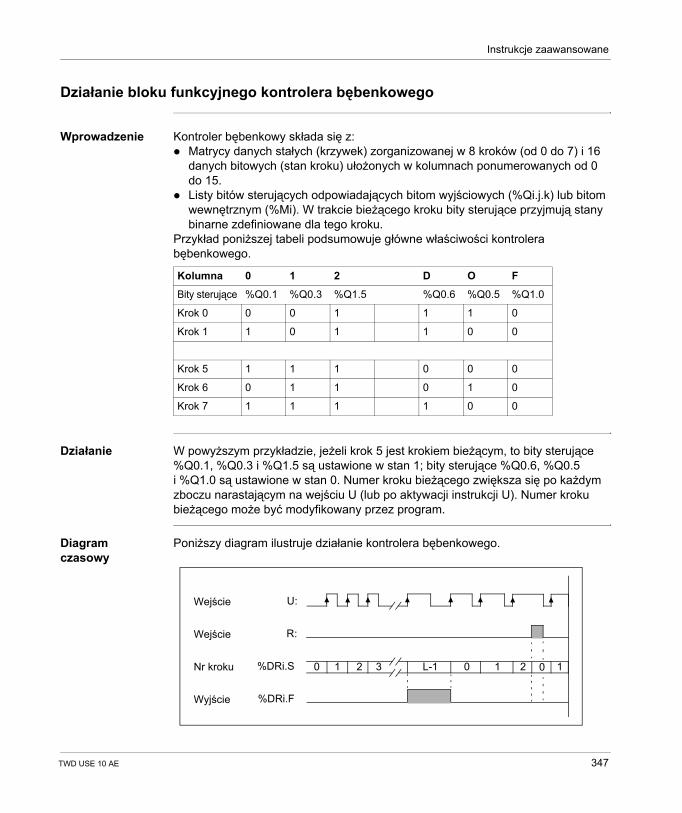
Instrukcje zaawansowane
Działanie bloku funkcyjnego kontrolera bębenkowego
Wprowadzenie Kontroler bębenkowy składa się z:Matrycy danych stałych (krzywek) zorganizowanej w 8 kroków (od 0 do 7) i 16 danych bitowych (stan kroku) ułożonych w kolumnach ponumerowanych od 0 do 15.Listy bitów sterujących odpowiadających bitom wyjściowych (%Qi.j.k) lub bitom wewnętrznym (%Mi). W trakcie bieżącego kroku bity sterujące przyjmują stany binarne zdefiniowane dla tego kroku.
Przykład poniższej tabeli podsumowuje główne właściwości kontrolera bębenkowego.
Działanie W powyższym przykładzie, jeżeli krok 5 jest krokiem bieżącym, to bity sterujące %Q0.1, %Q0.3 i %Q1.5 są ustawione w stan 1; bity sterujące %Q0.6, %Q0.5 i %Q1.0 są ustawione w stan 0. Numer kroku bieżącego zwiększa się po każdym zboczu narastającym na wejściu U (lub po aktywacji instrukcji U). Numer kroku bieżącego może być modyfikowany przez program.
Diagram czasowy
Poniższy diagram ilustruje działanie kontrolera bębenkowego.
Kolumna 0 1 2 D O F
Bity sterujące %Q0.1 %Q0.3 %Q1.5 %Q0.6 %Q0.5 %Q1.0
Krok 0 0 0 1 1 1 0
Krok 1 1 0 1 1 0 0
Krok 5 1 1 1 0 0 0
Krok 6 0 1 1 0 1 0
Krok 7 1 1 1 1 0 0
20L-1 1
Wejście
Wejście
Nr kroku
Wyjście
U:
R:
%DRi.S
%DRi.F
010 2 13
TWD USE 10 AE 347

Instrukcje zaawansowane
Przypadki szczególne
Poniższa tabela pokazuje specjalne przypadki działania bloku funkcyjnego kontrolera bębenkowego.
Przypadek szczególny Opis
Skutek zimnego restartu (%S0=1)
Ustawienie kontrolera bębenkowego na krok 0 (uaktualnienie bitów sterujących).
Skutek gorącego restartu (%S1=1)
Uaktualnienie bitów sterujących przypisanych do kroku bieżącego.
Skutek skoku w programie Fakt nieskanowania kontrolera bębenkowego oznacza, że bity sterujące nie są skasowane.
Uaktualnienie bitów sterujących
Ma miejsce tylko przy zmianie kroku lub w przypadku gorącego lub zimnego restartu.
348 TWD USE 10 AE
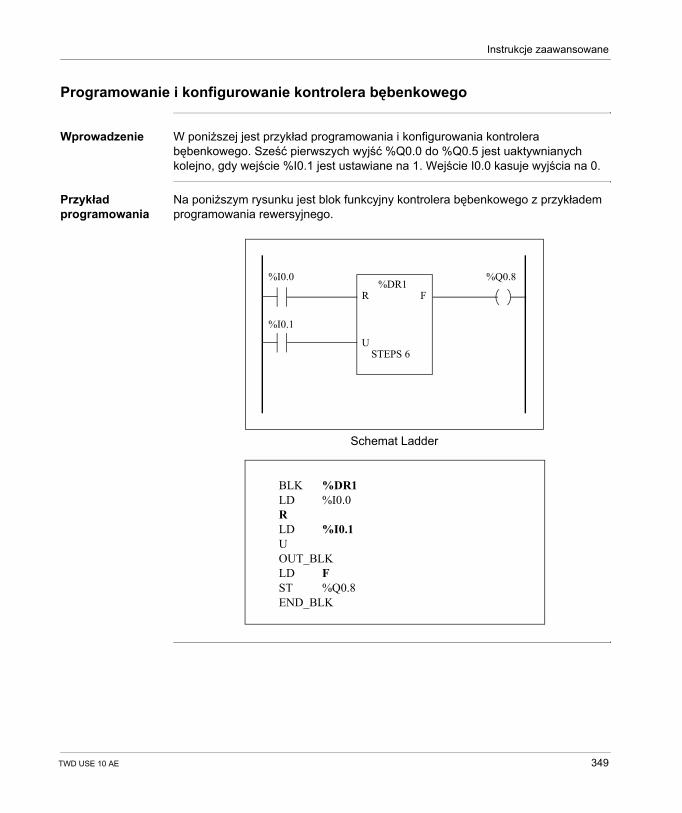
Instrukcje zaawansowane
Programowanie i konfigurowanie kontrolera bębenkowego
Wprowadzenie W poniższej jest przykład programowania i konfigurowania kontrolera bębenkowego. Sześć pierwszych wyjść %Q0.0 do %Q0.5 jest uaktywnianych kolejno, gdy wejście %I0.1 jest ustawiane na 1. Wejście I0.0 kasuje wyjścia na 0.
Przykład programowania
Na poniższym rysunku jest blok funkcyjny kontrolera bębenkowego z przykładem programowania rewersyjnego.
BLK %DR1LD %I0.0RLD %I0.1UOUT_BLKLD FST %Q0.8END_BLK
Schemat Ladder
R F
U
%DR1
STEPS 6
%I0.0
%I0.1
%Q0.8
TWD USE 10 AE 349
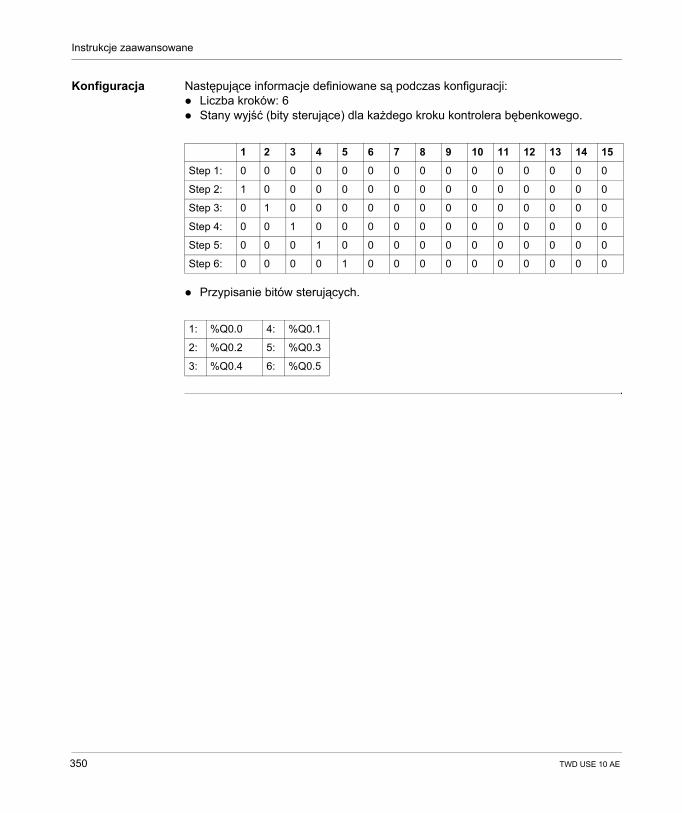
Instrukcje zaawansowane
Konfiguracja Następujące informacje definiowane są podczas konfiguracji:Liczba kroków: 6Stany wyjść (bity sterujące) dla każdego kroku kontrolera bębenkowego.
Przypisanie bitów sterujących.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Step 1: 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Step 2: 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Step 3: 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
Step 4: 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0
Step 5: 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0
Step 6: 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
1: %Q0.0 4: %Q0.1
2: %Q0.2 5: %Q0.3
3: %Q0.4 6: %Q0.5
350 TWD USE 10 AE
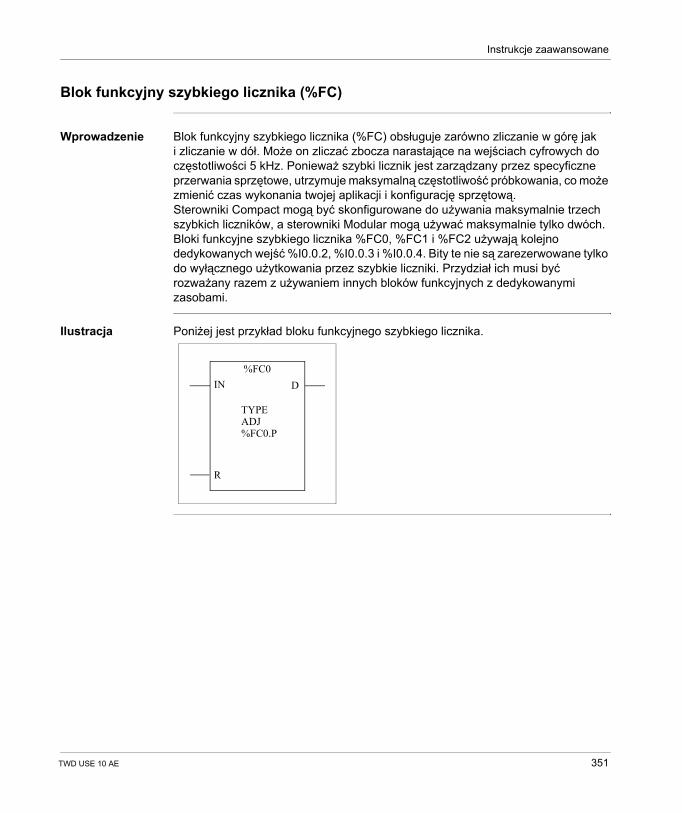
Instrukcje zaawansowane
Blok funkcyjny szybkiego licznika (%FC)
Wprowadzenie Blok funkcyjny szybkiego licznika (%FC) obsługuje zarówno zliczanie w górę jak i zliczanie w dół. Może on zliczać zbocza narastające na wejściach cyfrowych do częstotliwości 5 kHz. Ponieważ szybki licznik jest zarządzany przez specyficzne przerwania sprzętowe, utrzymuje maksymalną częstotliwość próbkowania, co może zmienić czas wykonania twojej aplikacji i konfigurację sprzętową.Sterowniki Compact mogą być skonfigurowane do używania maksymalnie trzech szybkich liczników, a sterowniki Modular mogą używać maksymalnie tylko dwóch. Bloki funkcyjne szybkiego licznika %FC0, %FC1 i %FC2 używają kolejno dedykowanych wejść %I0.0.2, %I0.0.3 i %I0.0.4. Bity te nie są zarezerwowane tylko do wyłącznego użytkowania przez szybkie liczniki. Przydział ich musi być rozważany razem z używaniem innych bloków funkcyjnych z dedykowanymi zasobami.
Ilustracja Poniżej jest przykład bloku funkcyjnego szybkiego licznika.
IN D
R
%FC0
TYPEADJ%FC0.P
TWD USE 10 AE 351
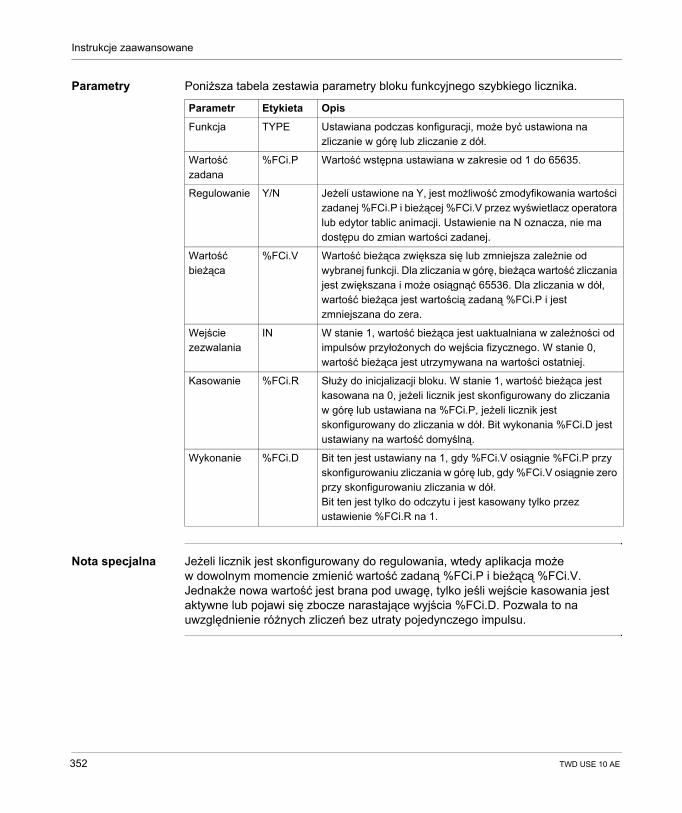
Instrukcje zaawansowane
Parametry Poniższa tabela zestawia parametry bloku funkcyjnego szybkiego licznika.
Nota specjalna Jeżeli licznik jest skonfigurowany do regulowania, wtedy aplikacja może w dowolnym momencie zmienić wartość zadaną %FCi.P i bieżącą %FCi.V. Jednakże nowa wartość jest brana pod uwagę, tylko jeśli wejście kasowania jest aktywne lub pojawi się zbocze narastające wyjścia %FCi.D. Pozwala to na uwzględnienie różnych zliczeń bez utraty pojedynczego impulsu.
Parametr Etykieta Opis
Funkcja TYPE Ustawiana podczas konfiguracji, może być ustawiona na zliczanie w górę lub zliczanie z dół.
Wartość zadana
%FCi.P Wartość wstępna ustawiana w zakresie od 1 do 65635.
Regulowanie Y/N Jeżeli ustawione na Y, jest możliwość zmodyfikowania wartości zadanej %FCi.P i bieżącej %FCi.V przez wyświetlacz operatora lub edytor tablic animacji. Ustawienie na N oznacza, nie ma dostępu do zmian wartości zadanej.
Wartość bieżąca
%FCi.V Wartość bieżąca zwiększa się lub zmniejsza zależnie od wybranej funkcji. Dla zliczania w górę, bieżąca wartość zliczania jest zwiększana i może osiągnąć 65536. Dla zliczania w dół, wartość bieżąca jest wartością zadaną %FCi.P i jest zmniejszana do zera.
Wejście zezwalania
IN W stanie 1, wartość bieżąca jest uaktualniana w zależności od impulsów przyłożonych do wejścia fizycznego. W stanie 0, wartość bieżąca jest utrzymywana na wartości ostatniej.
Kasowanie %FCi.R Służy do inicjalizacji bloku. W stanie 1, wartość bieżąca jest kasowana na 0, jeżeli licznik jest skonfigurowany do zliczania w górę lub ustawiana na %FCi.P, jeżeli licznik jest skonfigurowany do zliczania w dół. Bit wykonania %FCi.D jest ustawiany na wartość domyślną.
Wykonanie %FCi.D Bit ten jest ustawiany na 1, gdy %FCi.V osiągnie %FCi.P przy skonfigurowaniu zliczania w górę lub, gdy %FCi.V osiągnie zero przy skonfigurowaniu zliczania w dół. Bit ten jest tylko do odczytu i jest kasowany tylko przez ustawienie %FCi.R na 1.
352 TWD USE 10 AE
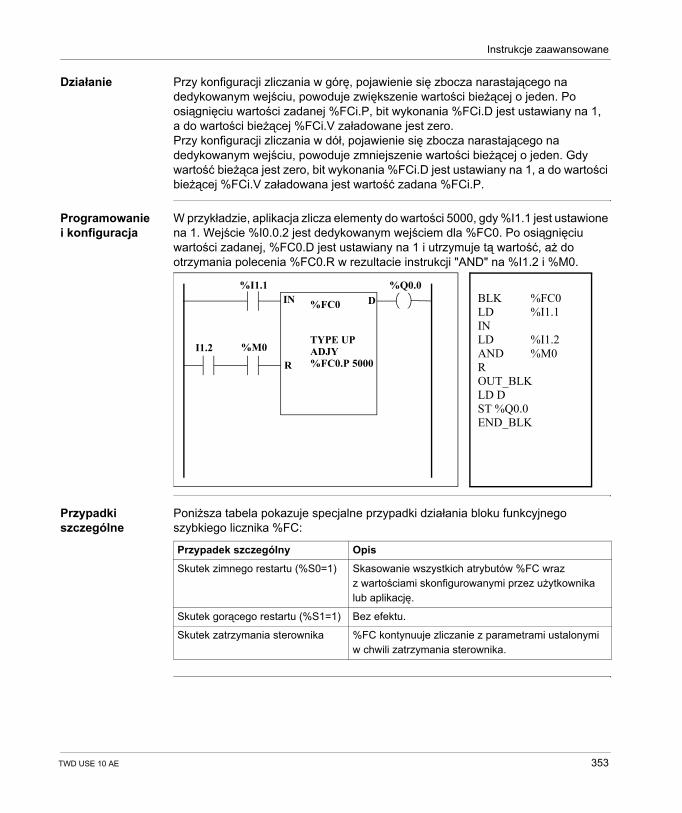
Instrukcje zaawansowane
Działanie Przy konfiguracji zliczania w górę, pojawienie się zbocza narastającego na dedykowanym wejściu, powoduje zwiększenie wartości bieżącej o jeden. Po osiągnięciu wartości zadanej %FCi.P, bit wykonania %FCi.D jest ustawiany na 1, a do wartości bieżącej %FCi.V załadowane jest zero.Przy konfiguracji zliczania w dół, pojawienie się zbocza narastającego na dedykowanym wejściu, powoduje zmniejszenie wartości bieżącej o jeden. Gdy wartość bieżąca jest zero, bit wykonania %FCi.D jest ustawiany na 1, a do wartości bieżącej %FCi.V załadowana jest wartość zadana %FCi.P.
Programowanie i konfiguracja
W przykładzie, aplikacja zlicza elementy do wartości 5000, gdy %I1.1 jest ustawione na 1. Wejście %I0.0.2 jest dedykowanym wejściem dla %FC0. Po osiągnięciu wartości zadanej, %FC0.D jest ustawiany na 1 i utrzymuje tą wartość, aż do otrzymania polecenia %FC0.R w rezultacie instrukcji "AND" na %I1.2 i %M0.
Przypadki szczególne
Poniższa tabela pokazuje specjalne przypadki działania bloku funkcyjnego szybkiego licznika %FC:
%I1.1
I1.2 %M0
%Q0.0IN
R
D%FC0
TYPE UPADJY%FC0.P 5000
BLKLDINLDANDROUT_BLKLD DST %Q0.0END_BLK
%FC0%I1.1
%I1.2%M0
Przypadek szczególny Opis
Skutek zimnego restartu (%S0=1) Skasowanie wszystkich atrybutów %FC wraz z wartościami skonfigurowanymi przez użytkownika lub aplikację.
Skutek gorącego restartu (%S1=1) Bez efektu.
Skutek zatrzymania sterownika %FC kontynuuje zliczanie z parametrami ustalonymi w chwili zatrzymania sterownika.
TWD USE 10 AE 353
Instrukcje zaawansowane
Blok funkcyjny bardzo szybkiego licznika (%VFC)
Wprowadzenie Blok funkcyjny bardzo szybkiego licznika (%VFC) może być skonfigurowany przez TwidoSoft do realizacji jednej z następujących funkcji:
Licznik zliczający w górę/ w dółLicznik 2-fazowy zliczający w górę/ w dółLicznik zliczający w góręLicznik zliczający w dółMiernik częstotliwości
%VFC wspiera zliczanie na wejściu cyfrowym do częstotliwości 20 kHz. W sterownikach Compact można skonfigurować jeden bardzo szybki licznik (%VFC), a w sterownikach Modular można skonfigurować dwa bardzo szybkie liczniki (%VFC).
354 TWD USE 10 AE
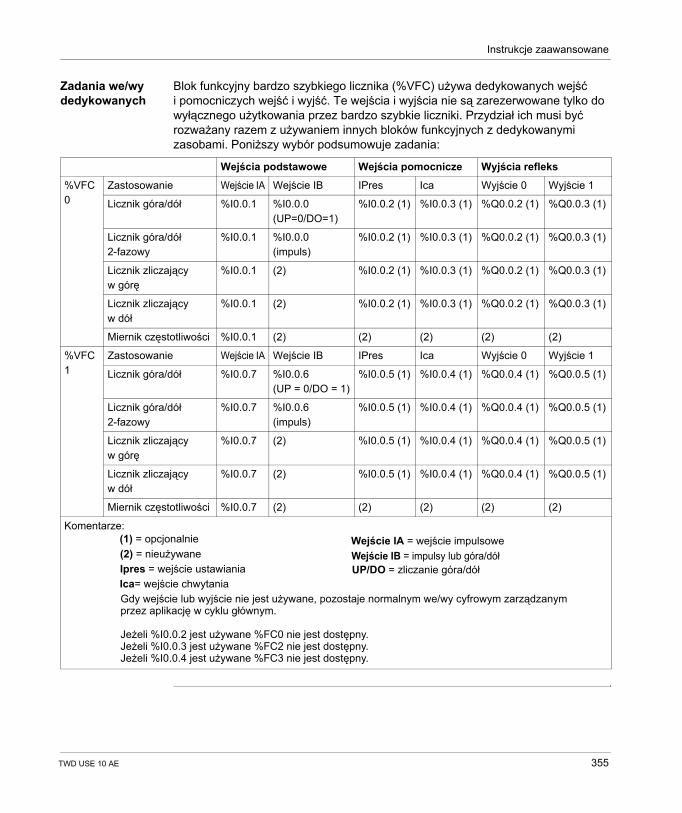
Instrukcje zaawansowane
Zadania we/wy dedykowanych
Blok funkcyjny bardzo szybkiego licznika (%VFC) używa dedykowanych wejść i pomocniczych wejść i wyjść. Te wejścia i wyjścia nie są zarezerwowane tylko do wyłącznego użytkowania przez bardzo szybkie liczniki. Przydział ich musi być rozważany razem z używaniem innych bloków funkcyjnych z dedykowanymi zasobami. Poniższy wybór podsumowuje zadania:
Wejścia podstawowe Wejścia pomocnicze Wyjścia refleks
%VFC0
Zastosowanie Wejście IA Wejście IB IPres Ica Wyjście 0 Wyjście 1
Licznik góra/dół %I0.0.1 %I0.0.0(UP=0/DO=1)
%I0.0.2 (1) %I0.0.3 (1) %Q0.0.2 (1) %Q0.0.3 (1)
Licznik góra/dół 2-fazowy
%I0.0.1 %I0.0.0 (impuls)
%I0.0.2 (1) %I0.0.3 (1) %Q0.0.2 (1) %Q0.0.3 (1)
Licznik zliczający w górę
%I0.0.1 (2) %I0.0.2 (1) %I0.0.3 (1) %Q0.0.2 (1) %Q0.0.3 (1)
Licznik zliczający w dół
%I0.0.1 (2) %I0.0.2 (1) %I0.0.3 (1) %Q0.0.2 (1) %Q0.0.3 (1)
Miernik częstotliwości %I0.0.1 (2) (2) (2) (2) (2)
%VFC1
Zastosowanie Wejście IA Wejście IB IPres Ica Wyjście 0 Wyjście 1
Licznik góra/dół %I0.0.7 %I0.0.6 (UP = 0/DO = 1)
%I0.0.5 (1) %I0.0.4 (1) %Q0.0.4 (1) %Q0.0.5 (1)
Licznik góra/dół 2-fazowy
%I0.0.7 %I0.0.6 (impuls)
%I0.0.5 (1) %I0.0.4 (1) %Q0.0.4 (1) %Q0.0.5 (1)
Licznik zliczający w górę
%I0.0.7 (2) %I0.0.5 (1) %I0.0.4 (1) %Q0.0.4 (1) %Q0.0.5 (1)
Licznik zliczający w dół
%I0.0.7 (2) %I0.0.5 (1) %I0.0.4 (1) %Q0.0.4 (1) %Q0.0.5 (1)
Miernik częstotliwości %I0.0.7 (2) (2) (2) (2) (2)
Komentarze:
Gdy wejście lub wyjście nie jest używane, pozostaje normalnym we/wy cyfrowym zarządzanymprzez aplikację w cyklu głównym.
Jeżeli %I0.0.2 jest używane %FC0 nie jest dostępny.Jeżeli %I0.0.3 jest używane %FC2 nie jest dostępny.Jeżeli %I0.0.4 jest używane %FC3 nie jest dostępny.
UP/DO = zliczanie góra/dół
(1) = opcjonalnie(2) = nieużywane
Ipres = wejście ustawianiaIca= wejście chwytania
Wejście IA = wejście impulsoweWejście IB = impulsy lub góra/dół
TWD USE 10 AE 355
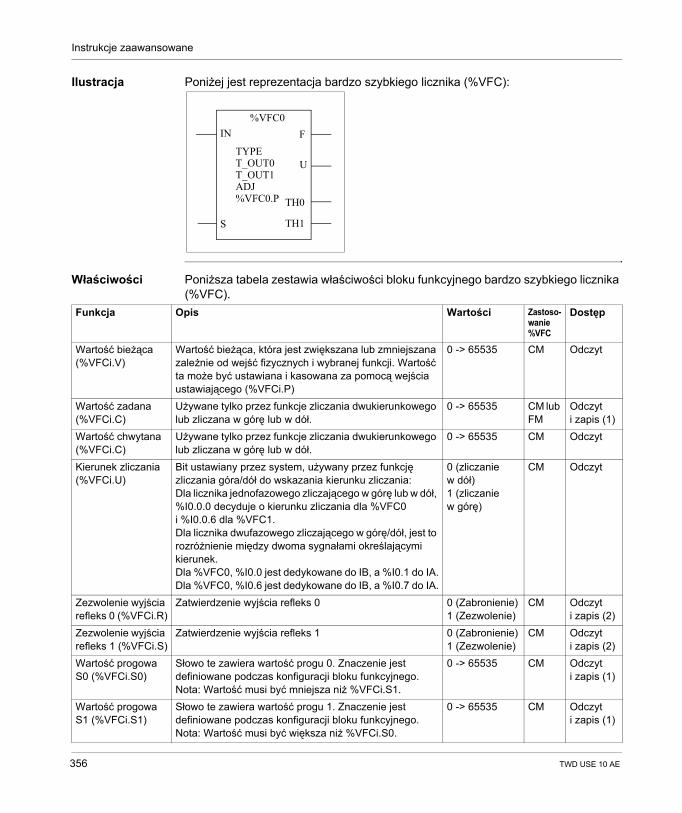
Instrukcje zaawansowane
Ilustracja Poniżej jest reprezentacja bardzo szybkiego licznika (%VFC):
Właściwości Poniższa tabela zestawia właściwości bloku funkcyjnego bardzo szybkiego licznika (%VFC).
IN F
S TH1
TH0
%VFC0
TYPET_OUT0T_OUT1ADJ%VFC0.P
U
Funkcja Opis Wartości Zastoso-wanie %VFC
Dostęp
Wartość bieżąca (%VFCi.V)
Wartość bieżąca, która jest zwiększana lub zmniejszana zależnie od wejść fizycznych i wybranej funkcji. Wartość ta może być ustawiana i kasowana za pomocą wejścia ustawiającego (%VFCi.P)
0 -> 65535 CM Odczyt
Wartość zadana (%VFCi.C)
Używane tylko przez funkcje zliczania dwukierunkowego lub zliczana w górę lub w dół.
0 -> 65535 CM lub FM
Odczyt i zapis (1)
Wartość chwytana (%VFCi.C)
Używane tylko przez funkcje zliczania dwukierunkowego lub zliczana w górę lub w dół.
0 -> 65535 CM Odczyt
Kierunek zliczania (%VFCi.U)
Bit ustawiany przez system, używany przez funkcję zliczania góra/dół do wskazania kierunku zliczania:Dla licznika jednofazowego zliczającego w górę lub w dół, %I0.0.0 decyduje o kierunku zliczania dla %VFC0 i %I0.0.6 dla %VFC1.Dla licznika dwufazowego zliczającego w górę/dół, jest to rozróżnienie między dwoma sygnałami określającymi kierunek.Dla %VFC0, %I0.0 jest dedykowane do IB, a %I0.1 do IA.Dla %VFC0, %I0.6 jest dedykowane do IB, a %I0.7 do IA.
0 (zliczanie w dół)1 (zliczanie w górę)
CM Odczyt
Zezwolenie wyjścia refleks 0 (%VFCi.R)
Zatwierdzenie wyjścia refleks 0 0 (Zabronienie)1 (Zezwolenie)
CM Odczyt i zapis (2)
Zezwolenie wyjścia refleks 1 (%VFCi.S)
Zatwierdzenie wyjścia refleks 1 0 (Zabronienie)1 (Zezwolenie)
CM Odczyt i zapis (2)
Wartość progowa S0 (%VFCi.S0)
Słowo te zawiera wartość progu 0. Znaczenie jest definiowane podczas konfiguracji bloku funkcyjnego. Nota: Wartość musi być mniejsza niż %VFCi.S1.
0 -> 65535 CM Odczyt i zapis (1)
Wartość progowa S1 (%VFCi.S1)
Słowo te zawiera wartość progu 1. Znaczenie jest definiowane podczas konfiguracji bloku funkcyjnego. Nota: Wartość musi być większa niż %VFCi.S0.
0 -> 65535 CM Odczyt i zapis (1)
356 TWD USE 10 AE
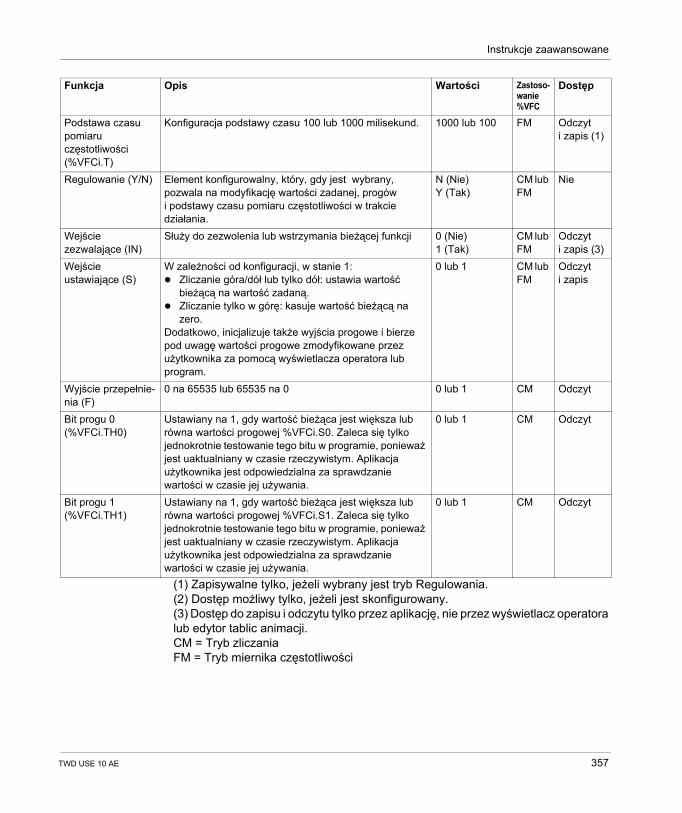
Instrukcje zaawansowane
(1) Zapisywalne tylko, jeżeli wybrany jest tryb Regulowania.(2) Dostęp możliwy tylko, jeżeli jest skonfigurowany.(3) Dostęp do zapisu i odczytu tylko przez aplikację, nie przez wyświetlacz operatora lub edytor tablic animacji.CM = Tryb zliczaniaFM = Tryb miernika częstotliwości
Podstawa czasu pomiaru częstotliwości(%VFCi.T)
Konfiguracja podstawy czasu 100 lub 1000 milisekund. 1000 lub 100 FM Odczyt i zapis (1)
Regulowanie (Y/N) Element konfigurowalny, który, gdy jest wybrany, pozwala na modyfikację wartości zadanej, progów i podstawy czasu pomiaru częstotliwości w trakcie działania.
N (Nie)Y (Tak)
CM lub FM
Nie
Wejście zezwalające (IN)
Służy do zezwolenia lub wstrzymania bieżącej funkcji 0 (Nie) 1 (Tak)
CM lub FM
Odczyt i zapis (3)
Wejście ustawiające (S)
W zależności od konfiguracji, w stanie 1:Zliczanie góra/dół lub tylko dół: ustawia wartość bieżącą na wartość zadaną.Zliczanie tylko w górę: kasuje wartość bieżącą na zero.
Dodatkowo, inicjalizuje także wyjścia progowe i bierze pod uwagę wartości progowe zmodyfikowane przez użytkownika za pomocą wyświetlacza operatora lub program.
0 lub 1 CM lub FM
Odczyt i zapis
Wyjście przepełnie-nia (F)
0 na 65535 lub 65535 na 0 0 lub 1 CM Odczyt
Bit progu 0 (%VFCi.TH0)
Ustawiany na 1, gdy wartość bieżąca jest większa lub równa wartości progowej %VFCi.S0. Zaleca się tylko jednokrotnie testowanie tego bitu w programie, ponieważ jest uaktualniany w czasie rzeczywistym. Aplikacja użytkownika jest odpowiedzialna za sprawdzanie wartości w czasie jej używania.
0 lub 1 CM Odczyt
Bit progu 1 (%VFCi.TH1)
Ustawiany na 1, gdy wartość bieżąca jest większa lub równa wartości progowej %VFCi.S1. Zaleca się tylko jednokrotnie testowanie tego bitu w programie, ponieważ jest uaktualniany w czasie rzeczywistym. Aplikacja użytkownika jest odpowiedzialna za sprawdzanie wartości w czasie jej używania.
0 lub 1 CM Odczyt
Funkcja Opis Wartości Zastoso-wanie %VFC
Dostęp
TWD USE 10 AE 357
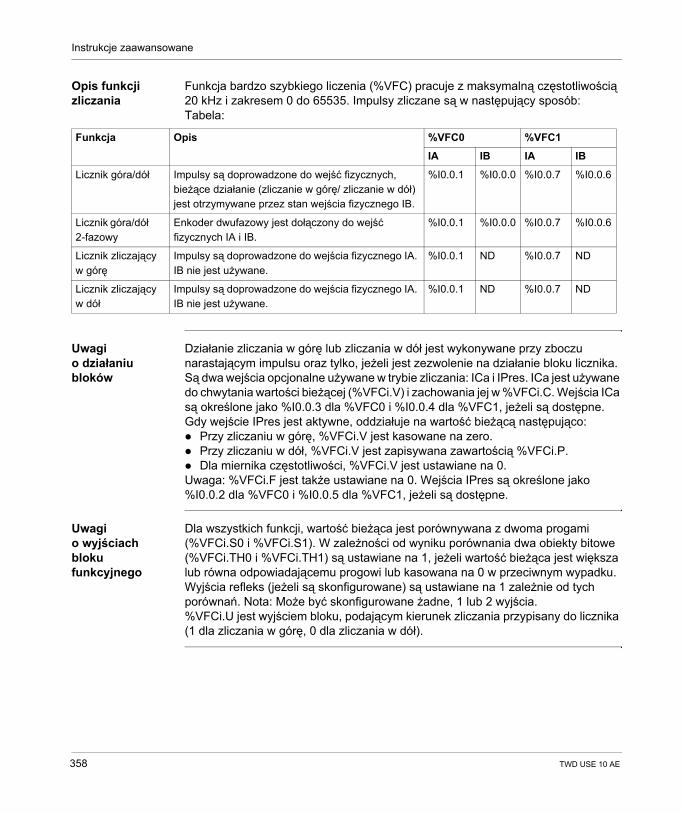
Instrukcje zaawansowane
Opis funkcji zliczania
Funkcja bardzo szybkiego liczenia (%VFC) pracuje z maksymalną częstotliwością 20 kHz i zakresem 0 do 65535. Impulsy zliczane są w następujący sposób:Tabela:
Uwagi o działaniu bloków
Działanie zliczania w górę lub zliczania w dół jest wykonywane przy zboczu narastającym impulsu oraz tylko, jeżeli jest zezwolenie na działanie bloku licznika.Są dwa wejścia opcjonalne używane w trybie zliczania: ICa i IPres. ICa jest używane do chwytania wartości bieżącej (%VFCi.V) i zachowania jej w %VFCi.C. Wejścia ICa są określone jako %I0.0.3 dla %VFC0 i %I0.0.4 dla %VFC1, jeżeli są dostępne. Gdy wejście IPres jest aktywne, oddziałuje na wartość bieżącą następująco:
Przy zliczaniu w górę, %VFCi.V jest kasowane na zero.Przy zliczaniu w dół, %VFCi.V jest zapisywana zawartością %VFCi.P.Dla miernika częstotliwości, %VFCi.V jest ustawiane na 0.
Uwaga: %VFCi.F jest także ustawiane na 0. Wejścia IPres są określone jako %I0.0.2 dla %VFC0 i %I0.0.5 dla %VFC1, jeżeli są dostępne.
Uwagi o wyjściach bloku funkcyjnego
Dla wszystkich funkcji, wartość bieżąca jest porównywana z dwoma progami (%VFCi.S0 i %VFCi.S1). W zależności od wyniku porównania dwa obiekty bitowe (%VFCi.TH0 i %VFCi.TH1) są ustawiane na 1, jeżeli wartość bieżąca jest większa lub równa odpowiadającemu progowi lub kasowana na 0 w przeciwnym wypadku. Wyjścia refleks (jeżeli są skonfigurowane) są ustawiane na 1 zależnie od tych porównań. Nota: Może być skonfigurowane żadne, 1 lub 2 wyjścia.%VFCi.U jest wyjściem bloku, podającym kierunek zliczania przypisany do licznika (1 dla zliczania w górę, 0 dla zliczania w dół).
Funkcja Opis %VFC0 %VFC1
IA IB IA IB
Licznik góra/dół Impulsy są doprowadzone do wejść fizycznych, bieżące działanie (zliczanie w górę/ zliczanie w dół) jest otrzymywane przez stan wejścia fizycznego IB.
%I0.0.1 %I0.0.0 %I0.0.7 %I0.0.6
Licznik góra/dół 2-fazowy
Enkoder dwufazowy jest dołączony do wejść fizycznych IA i IB.
%I0.0.1 %I0.0.0 %I0.0.7 %I0.0.6
Licznik zliczający w górę
Impulsy są doprowadzone do wejścia fizycznego IA. IB nie jest używane.
%I0.0.1 ND %I0.0.7 ND
Licznik zliczający w dół
Impulsy są doprowadzone do wejścia fizycznego IA. IB nie jest używane.
%I0.0.1 ND %I0.0.7 ND
358 TWD USE 10 AE
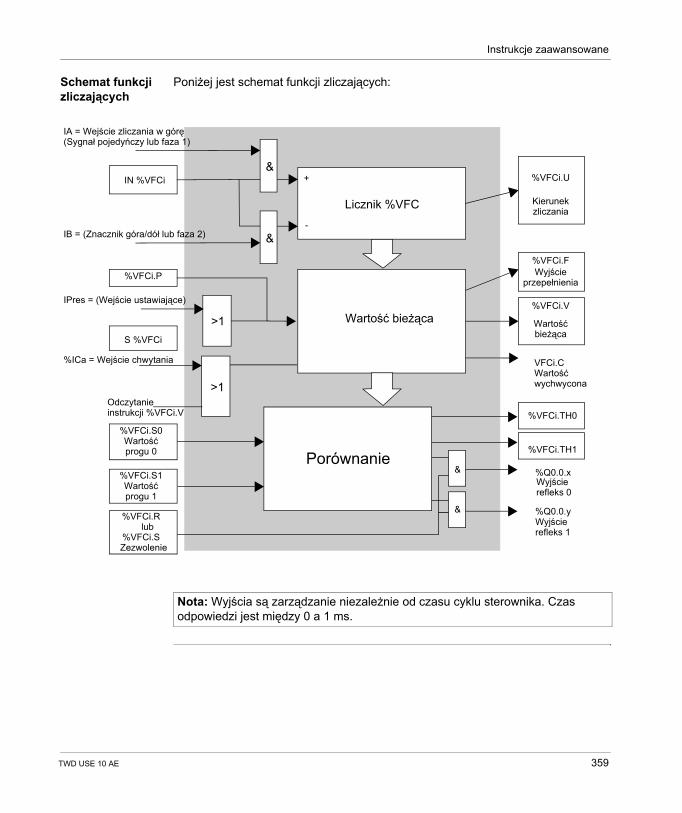
Instrukcje zaawansowane
Schemat funkcji zliczających
Poniżej jest schemat funkcji zliczających:
&
&
>1
>1
Licznik %VFC
Current Value
Porównanie
%VFCi.U
Kierunekzliczania
%VFCi.FWyjście
przepełnienia
%VFCi.V
Wartośćbieżąca
%VFCi.TH0
%VFCi.TH1
VFCi.CWartośćwychwycona
%Q0.0.xWyjścierefleks 0
%Q0.0.yWyjścierefleks 1
&
&
+
-
IA = Wejście zliczania w górę(Sygnał pojedyńczy lub faza 1)
IN %VFCi
%VFCi.P
IB = (Znacznik góra/dół lub faza 2)
S %VFCi
%VFCi.S0Wartośćprogu 0
%VFCi.S1Wartośćprogu 1
%VFCi.R lub
%VFCi.S Zezwolenie
IPres = (Wejście ustawiające)
%ICa = Wejście chwytania
Odczytanie instrukcji %VFCi.V
Wartość bieżąca
Nota: Wyjścia są zarządzanie niezależnie od czasu cyklu sterownika. Czas odpowiedzi jest między 0 a 1 ms.
TWD USE 10 AE 359
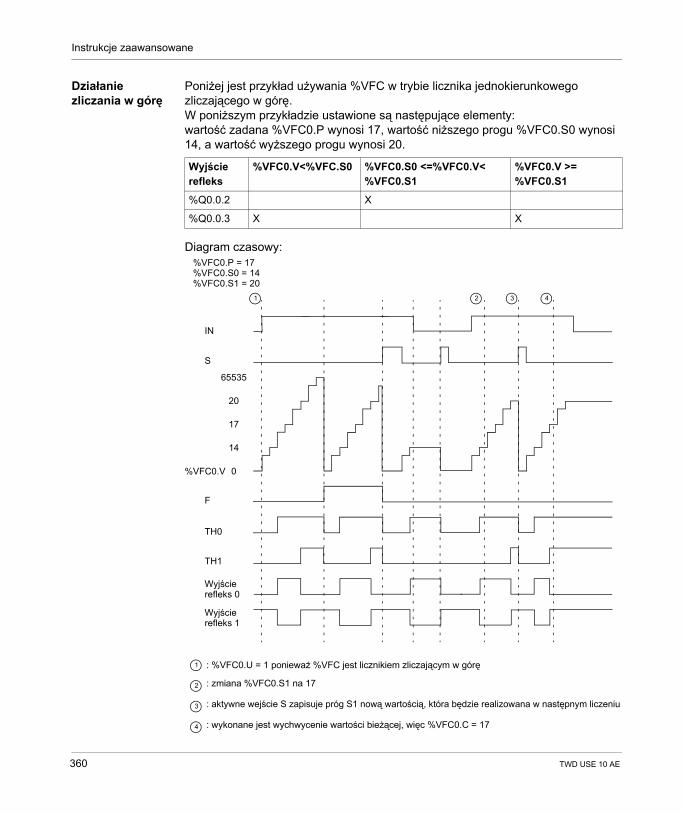
Instrukcje zaawansowane
Działanie zliczania w górę
Poniżej jest przykład używania %VFC w trybie licznika jednokierunkowego zliczającego w górę. W poniższym przykładzie ustawione są następujące elementy:wartość zadana %VFC0.P wynosi 17, wartość niższego progu %VFC0.S0 wynosi 14, a wartość wyższego progu wynosi 20.
Diagram czasowy:
Wyjście refleks
%VFC0.V<%VFC.S0 %VFC0.S0 <=%VFC0.V< %VFC0.S1
%VFC0.V >= %VFC0.S1
%Q0.0.2 X
%Q0.0.3 X X
%VFC0.P = 17%VFC0.S0 = 14%VFC0.S1 = 20
IN
S
65535
20
17
14
0%VFC0.V
F
TH0
Wyjścierefleks 0
TH1
Wyjścierefleks 1
1 2 3 4
: %VFC0.U = 1 ponieważ %VFC jest licznikiem zliczającym w górę
: zmiana %VFC0.S1 na 17
: aktywne wejście S zapisuje próg S1 nową wartością, która będzie realizowana w następnym liczeniu
: wykonane jest wychwycenie wartości bieżącej, więc %VFC0.C = 17
1
2
3
4
360 TWD USE 10 AE
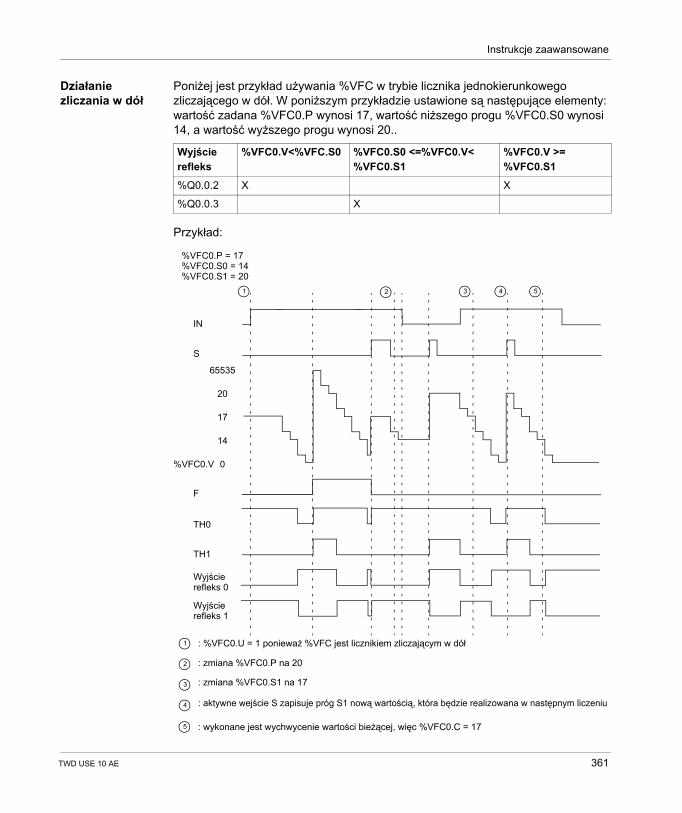
Instrukcje zaawansowane
Działanie zliczania w dół
Poniżej jest przykład używania %VFC w trybie licznika jednokierunkowego zliczającego w dół. W poniższym przykładzie ustawione są następujące elementy:wartość zadana %VFC0.P wynosi 17, wartość niższego progu %VFC0.S0 wynosi 14, a wartość wyższego progu wynosi 20..
Przykład:
Wyjście refleks
%VFC0.V<%VFC.S0 %VFC0.S0 <=%VFC0.V< %VFC0.S1
%VFC0.V >= %VFC0.S1
%Q0.0.2 X X
%Q0.0.3 X
%VFC0.P = 17%VFC0.S0 = 14%VFC0.S1 = 20
IN
S
65535
20
17
14
0%VFC0.V
F
TH0
Wyjścierefleks 0
TH1
Wyjścierefleks 1
1 3 4 5
: %VFC0.U = 1 ponieważ %VFC jest licznikiem zliczającym w dół
: zmiana %VFC0.S1 na 17
: aktywne wejście S zapisuje próg S1 nową wartością, która będzie realizowana w następnym liczeniu
1
2
3
4
2
5 : wykonane jest wychwycenie wartości bieżącej, więc %VFC0.C = 17
: zmiana %VFC0.P na 20
TWD USE 10 AE 361
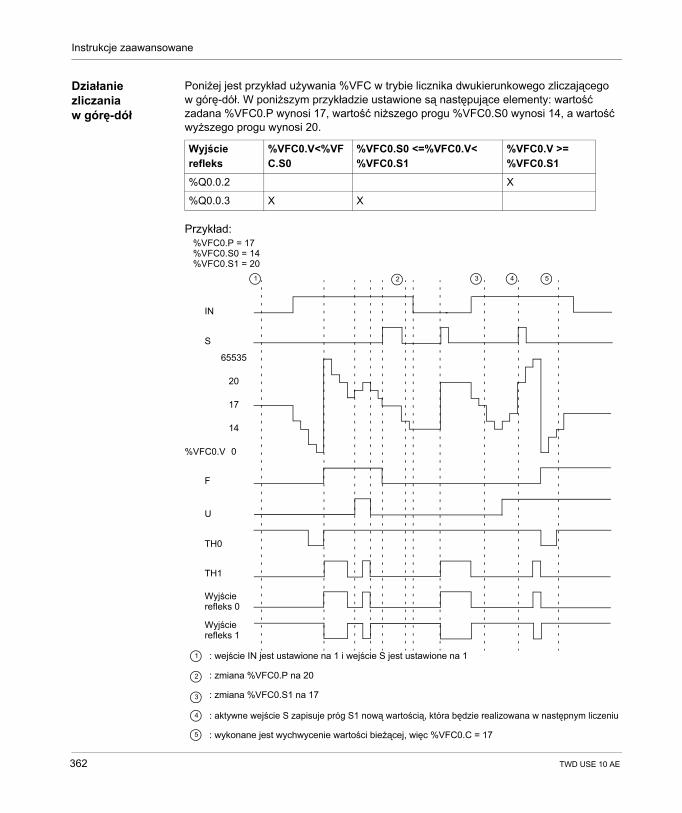
Instrukcje zaawansowane
Działanie zliczania w górę-dół
Poniżej jest przykład używania %VFC w trybie licznika dwukierunkowego zliczającego w górę-dół. W poniższym przykładzie ustawione są następujące elementy: wartość zadana %VFC0.P wynosi 17, wartość niższego progu %VFC0.S0 wynosi 14, a wartość wyższego progu wynosi 20.
Przykład:
Wyjście refleks
%VFC0.V<%VFC.S0
%VFC0.S0 <=%VFC0.V< %VFC0.S1
%VFC0.V >= %VFC0.S1
%Q0.0.2 X
%Q0.0.3 X X
%VFC0.P = 17%VFC0.S0 = 14%VFC0.S1 = 20
IN
S
65535
20
17
14
0%VFC0.V
F
TH0
Wyjścierefleks 0
TH1
Wyjścierefleks 1
1 3 4 5
: wejście IN jest ustawione na 1 i wejście S jest ustawione na 1
: zmiana %VFC0.S1 na 17
: aktywne wejście S zapisuje próg S1 nową wartością, która będzie realizowana w następnym liczeniu
1
2
3
4
2
5 : wykonane jest wychwycenie wartości bieżącej, więc %VFC0.C = 17
: zmiana %VFC0.P na 20
U
362 TWD USE 10 AE
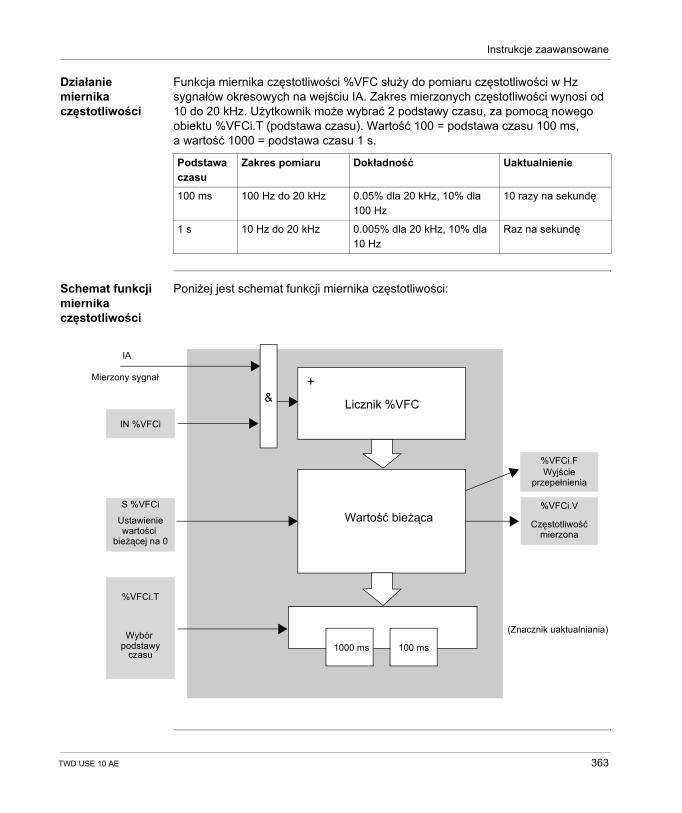
Instrukcje zaawansowane
Działanie miernika częstotliwości
Funkcja miernika częstotliwości %VFC służy do pomiaru częstotliwości w Hz sygnałów okresowych na wejściu IA. Zakres mierzonych częstotliwości wynosi od 10 do 20 kHz. Użytkownik może wybrać 2 podstawy czasu, za pomocą nowego obiektu %VFCi.T (podstawa czasu). Wartość 100 = podstawa czasu 100 ms, a wartość 1000 = podstawa czasu 1 s.
Schemat funkcji miernika częstotliwości
Poniżej jest schemat funkcji miernika częstotliwości:
Podstawa czasu
Zakres pomiaru Dokładność Uaktualnienie
100 ms 100 Hz do 20 kHz 0.05% dla 20 kHz, 10% dla 100 Hz
10 razy na sekundę
1 s 10 Hz do 20 kHz 0.005% dla 20 kHz, 10% dla 10 Hz
Raz na sekundę
& Licznik %VFC
current value
%VFCi.FWyjście
przepełnienia
%VFCi.V
Częstotliwość
+
IN %VFCi
S %VFCiWartość bieżąca
mierzona
(Znacznik uaktualniania)
1000 ms 100 ms
Ustawieniewartości
%VFCi.T
Wybór
czasu
IA
Mierzony sygnał
bieżącej na 0
podstawy
TWD USE 10 AE 363
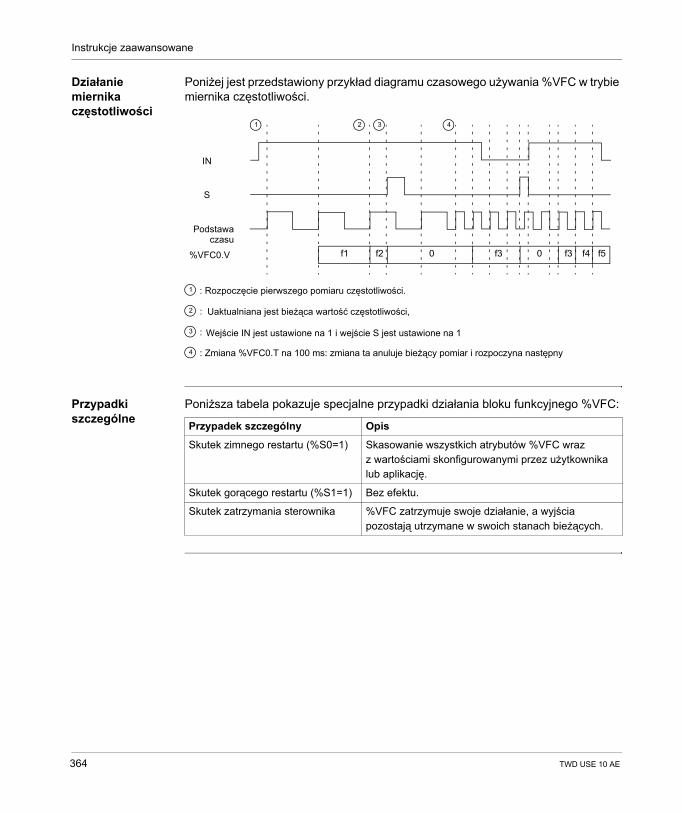
Instrukcje zaawansowane
Działanie miernika częstotliwości
Poniżej jest przedstawiony przykład diagramu czasowego używania %VFC w trybie miernika częstotliwości.
Przypadki szczególne
Poniższa tabela pokazuje specjalne przypadki działania bloku funkcyjnego %VFC:
IN
S
Podstawa
%VFC0.V
1 2 3 4
f1 f2 0 f3 f4 f5f30
1
2
: Rozpoczęcie pierwszego pomiaru częstotliwości.
:
:
: Zmiana %VFC0.T na 100 ms: zmiana ta anuluje bieżący pomiar i rozpoczyna następny
3
4
czasu
Uaktualniana jest bieżąca wartość częstotliwości,
Wejście IN jest ustawione na 1 i wejście S jest ustawione na 1
Przypadek szczególny Opis
Skutek zimnego restartu (%S0=1) Skasowanie wszystkich atrybutów %VFC wraz z wartościami skonfigurowanymi przez użytkownika lub aplikację.
Skutek gorącego restartu (%S1=1) Bez efektu.
Skutek zatrzymania sterownika %VFC zatrzymuje swoje działanie, a wyjścia pozostają utrzymane w swoich stanach bieżących.
364 TWD USE 10 AE
Instrukcje zaawansowane
Nadawanie/odbieranie komunikatów - instrukcja wymiany (EXCH)
Wprowadzenie Sterownik Twido może być skonfigurowany do komunikacji z urządzeniami podrzędnymi Modbus lub może wysyłać i / lub odbierać komunikaty w trybie znakowym (ASCII).TwidoSoft dostarcza następujących funkcji komunikacyjnych:
Instrukcja EXCH do wysyłania/odbierania komunikatówBlok funkcyjny kontroli wymiany (%MSG) do sterowania wymianą danych
Sterownik Twido używa protokołów skonfigurowanych dla określonego portu, gdy przetwarzana jest instrukcja EXCH. Każdy port komunikacyjny może być przypisany do innego protokołu. Dostęp do portów komunikacyjnych uzyskuje się przez dodanie numeru portu do funkcji EXCH lub %MSG (EXCH1, EXCH2, %MSG1, %MSG2).
Instrukcja EXCH Instrukcja EXCH pozwala sterownikowi Twido na wysyłanie i/lub odbieranie informacji do/z urządzeń ASCII i Modbus. Użytkownik definiuje tablicę słów (%MWi:L lub %KWi:L) zawierającą dane do wysłania i/lub odebrania (do 250 bajtów danych w nadawaniu i/lub odbiorze). Format tablicy słów jest opisany w paragrafach o każdym protokole. Wymiana komunikatów jest wykonywana za pomocą instrukcji EXCH.
Składnia Format instrukcji EXCH jest następujący:[EXCHx %MWi:L] lub [EXCHx %KWi:L]Gdzie: x = numer portu (1 lub 2); L = całkowita liczba słów w tablicy (maksymalnie 121). Sterownik Twido musi zakończyć wymianę pierwszej instrukcji EXCH przed rozpoczęciem drugiej instrukcji wymiany. Blok funkcyjny %MSG musi być stosowany, gdy wysyłanych jest kilka komunikatów.
TWD USE 10 AE 365
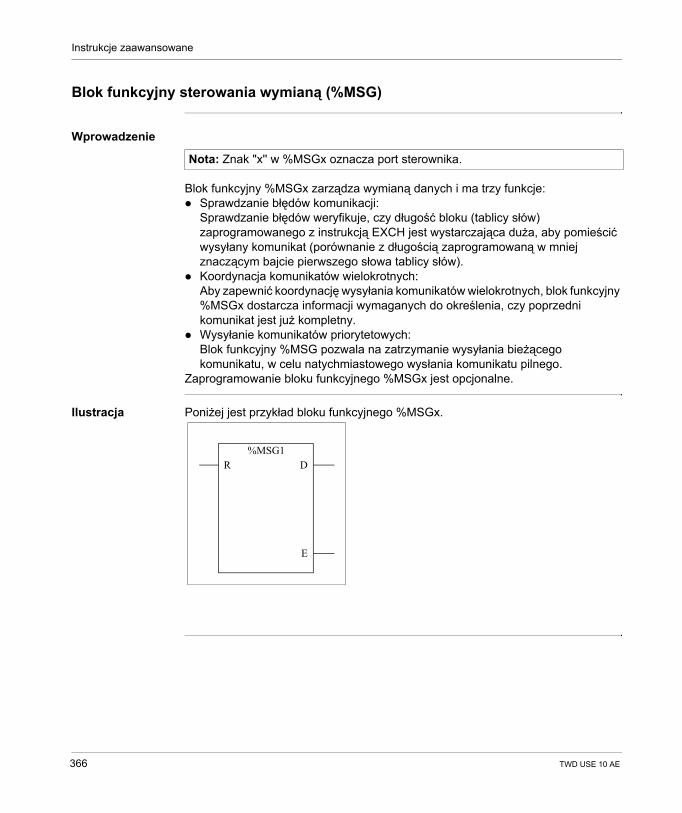
Instrukcje zaawansowane
Blok funkcyjny sterowania wymianą (%MSG)
Wprowadzenie
Blok funkcyjny %MSGx zarządza wymianą danych i ma trzy funkcje:Sprawdzanie błędów komunikacji:Sprawdzanie błędów weryfikuje, czy długość bloku (tablicy słów) zaprogramowanego z instrukcją EXCH jest wystarczająca duża, aby pomieścić wysyłany komunikat (porównanie z długością zaprogramowaną w mniej znaczącym bajcie pierwszego słowa tablicy słów).Koordynacja komunikatów wielokrotnych:Aby zapewnić koordynację wysyłania komunikatów wielokrotnych, blok funkcyjny %MSGx dostarcza informacji wymaganych do określenia, czy poprzedni komunikat jest już kompletny.Wysyłanie komunikatów priorytetowych:Blok funkcyjny %MSG pozwala na zatrzymanie wysyłania bieżącego komunikatu, w celu natychmiastowego wysłania komunikatu pilnego.
Zaprogramowanie bloku funkcyjnego %MSGx jest opcjonalne.
Ilustracja Poniżej jest przykład bloku funkcyjnego %MSGx.
Nota: Znak "x'' w %MSGx oznacza port sterownika.
R%MSG1
D
E
366 TWD USE 10 AE
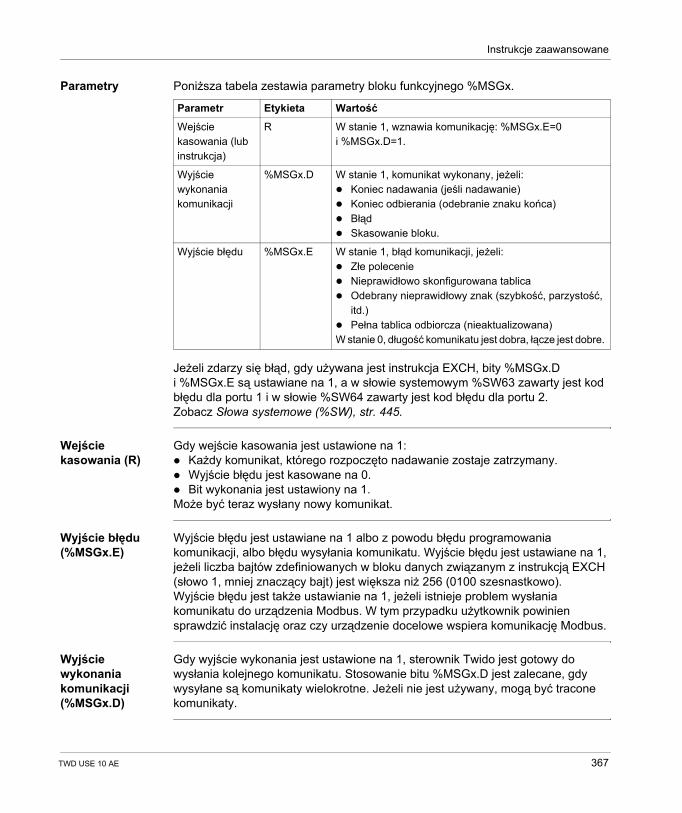
Instrukcje zaawansowane
Parametry Poniższa tabela zestawia parametry bloku funkcyjnego %MSGx.
Jeżeli zdarzy się błąd, gdy używana jest instrukcja EXCH, bity %MSGx.D i %MSGx.E są ustawiane na 1, a w słowie systemowym %SW63 zawarty jest kod błędu dla portu 1 i w słowie %SW64 zawarty jest kod błędu dla portu 2. Zobacz Słowa systemowe (%SW), str. 445.
Wejście kasowania (R)
Gdy wejście kasowania jest ustawione na 1:Każdy komunikat, którego rozpoczęto nadawanie zostaje zatrzymany.Wyjście błędu jest kasowane na 0.Bit wykonania jest ustawiony na 1.
Może być teraz wysłany nowy komunikat.
Wyjście błędu (%MSGx.E)
Wyjście błędu jest ustawiane na 1 albo z powodu błędu programowania komunikacji, albo błędu wysyłania komunikatu. Wyjście błędu jest ustawiane na 1, jeżeli liczba bajtów zdefiniowanych w bloku danych związanym z instrukcją EXCH (słowo 1, mniej znaczący bajt) jest większa niż 256 (0100 szesnastkowo).Wyjście błędu jest także ustawianie na 1, jeżeli istnieje problem wysłania komunikatu do urządzenia Modbus. W tym przypadku użytkownik powinien sprawdzić instalację oraz czy urządzenie docelowe wspiera komunikację Modbus.
Wyjście wykonania komunikacji (%MSGx.D)
Gdy wyjście wykonania jest ustawione na 1, sterownik Twido jest gotowy do wysłania kolejnego komunikatu. Stosowanie bitu %MSGx.D jest zalecane, gdy wysyłane są komunikaty wielokrotne. Jeżeli nie jest używany, mogą być tracone komunikaty.
Parametr Etykieta Wartość
Wejście kasowania (lub instrukcja)
R W stanie 1, wznawia komunikację: %MSGx.E=0 i %MSGx.D=1.
Wyjście wykonania komunikacji
%MSGx.D W stanie 1, komunikat wykonany, jeżeli:Koniec nadawania (jeśli nadawanie)Koniec odbierania (odebranie znaku końca)BłądSkasowanie bloku.
Wyjście błędu %MSGx.E W stanie 1, błąd komunikacji, jeżeli:Złe polecenieNieprawidłowo skonfigurowana tablicaOdebrany nieprawidłowy znak (szybkość, parzystość, itd.)Pełna tablica odbiorcza (nieaktualizowana)
W stanie 0, długość komunikatu jest dobra, łącze jest dobre.
TWD USE 10 AE 367
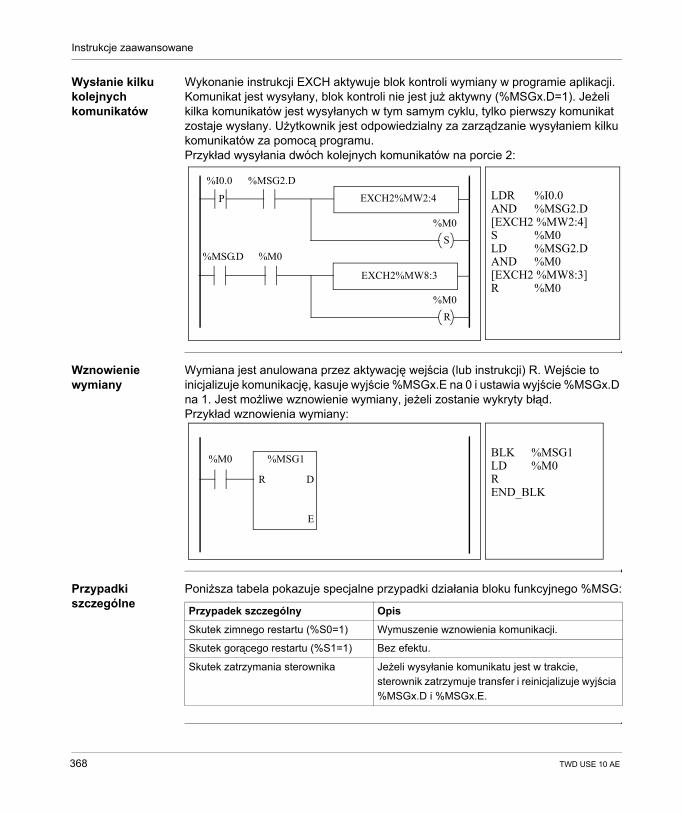
Instrukcje zaawansowane
Wysłanie kilku kolejnych komunikatów
Wykonanie instrukcji EXCH aktywuje blok kontroli wymiany w programie aplikacji. Komunikat jest wysyłany, blok kontroli nie jest już aktywny (%MSGx.D=1). Jeżeli kilka komunikatów jest wysyłanych w tym samym cyklu, tylko pierwszy komunikat zostaje wysłany. Użytkownik jest odpowiedzialny za zarządzanie wysyłaniem kilku komunikatów za pomocą programu.Przykład wysyłania dwóch kolejnych komunikatów na porcie 2:
Wznowienie wymiany
Wymiana jest anulowana przez aktywację wejścia (lub instrukcji) R. Wejście to inicjalizuje komunikację, kasuje wyjście %MSGx.E na 0 i ustawia wyjście %MSGx.D na 1. Jest możliwe wznowienie wymiany, jeżeli zostanie wykryty błąd.Przykład wznowienia wymiany:
Przypadki szczególne
Poniższa tabela pokazuje specjalne przypadki działania bloku funkcyjnego %MSG:
LDR %I0.0AND %MSG2.D[EXCH2 %MW2:4]S %M0LD %MSG2.DAND %M0[EXCH2 %MW8:3]R %M0
%I0.0 %MSG2.D
P EXCH2%MW2:4
%M0S
EXCH2%MW8:3
%M0R
%MSG.D %M0
BLK %MSG1LD %M0R END_BLK
%M0 %MSG1
R D
E
Przypadek szczególny Opis
Skutek zimnego restartu (%S0=1) Wymuszenie wznowienia komunikacji.
Skutek gorącego restartu (%S1=1) Bez efektu.
Skutek zatrzymania sterownika Jeżeli wysyłanie komunikatu jest w trakcie, sterownik zatrzymuje transfer i reinicjalizuje wyjścia %MSGx.D i %MSGx.E.
368 TWD USE 10 AE
Instrukcje zaawansowane
15.2 Funkcje zegara
Rzut oka
Cel tej sekcji Ta sekcja opisuje funkcje zarządzania czasem sterowników Twido.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Funkcje zegara 370
Bloki harmonogramu 371
Znakowanie daty / czasu 374
Ustawianie daty i czasu 376
TWD USE 10 AE 369
Instrukcje zaawansowane
Funkcje zegara
Wprowadzenie Sterowniki posiadają funkcje zegara czasu rzeczywistego, która wymagają opcjonalnej wkładki RTC i dostarczają:
Bloki harmonogramu, używane do sterowania działaniem we wstępnie ustawionych lub obliczonych czasach.Znakowanie czasu/daty, używane do przypisywania czasu i daty do zdarzeń i pomiar okresów zdarzeń.
Zegar czasu rzeczywistego może być dostępny przez wybranie bloków harmonogramów z menu oprogramowania TwidoSoft. Dodatkowo, zegar czasu rzeczywistego może być ustawiany przez program. Zegar kontynuuje pracę przez 30 dni po wyłączeniu zasilania sterownika, jeżeli bateria była ładowana przez co najmniej sześć kolejnych godzin przed wyłączeniem zasilania.Zegar czasu rzeczywistego ma format 24-godzinny i bierze pod uwagę lata przestępne.
Wartość korekty RTC
Wprowadzenie wartości korekty RTC jest konieczne dla prawidłowej pracy RTC. Każda wkładka RTC na własną wartość korekty zapisaną na obudowie. Wartość tą należy wstawić w TwidoSoft za pomocą opcji Configure RTC w oknie dialogowym Check PLC…
370 TWD USE 10 AE
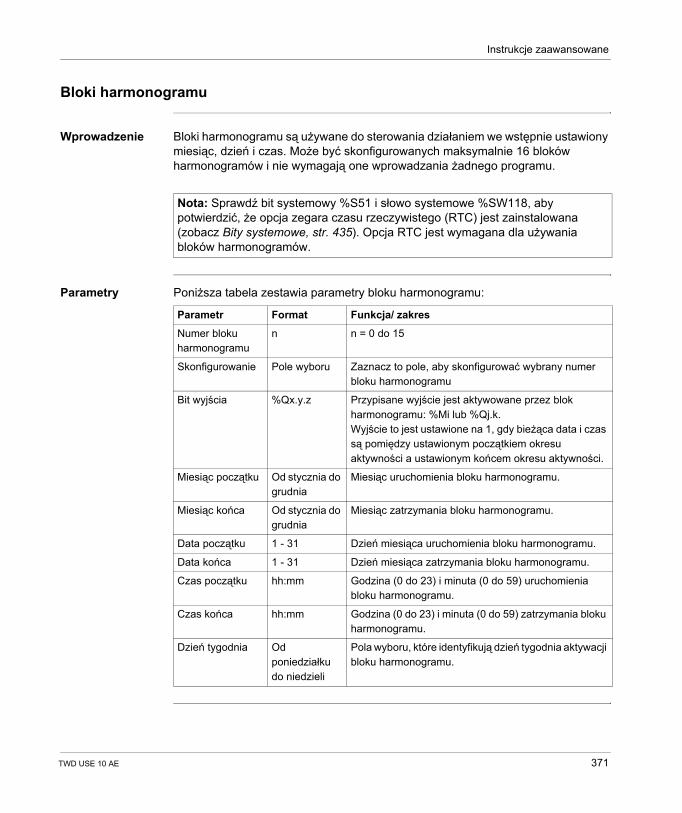
Instrukcje zaawansowane
Bloki harmonogramu
Wprowadzenie Bloki harmonogramu są używane do sterowania działaniem we wstępnie ustawiony miesiąc, dzień i czas. Może być skonfigurowanych maksymalnie 16 bloków harmonogramów i nie wymagają one wprowadzania żadnego programu.
Parametry Poniższa tabela zestawia parametry bloku harmonogramu:
Nota: Sprawdź bit systemowy %S51 i słowo systemowe %SW118, aby potwierdzić, że opcja zegara czasu rzeczywistego (RTC) jest zainstalowana (zobacz Bity systemowe, str. 435). Opcja RTC jest wymagana dla używania bloków harmonogramów.
Parametr Format Funkcja/ zakres
Numer bloku harmonogramu
n n = 0 do 15
Skonfigurowanie Pole wyboru Zaznacz to pole, aby skonfigurować wybrany numer bloku harmonogramu
Bit wyjścia %Qx.y.z Przypisane wyjście jest aktywowane przez blok harmonogramu: %Mi lub %Qj.k.Wyjście to jest ustawione na 1, gdy bieżąca data i czas są pomiędzy ustawionym początkiem okresu aktywności a ustawionym końcem okresu aktywności.
Miesiąc początku Od stycznia do grudnia
Miesiąc uruchomienia bloku harmonogramu.
Miesiąc końca Od stycznia do grudnia
Miesiąc zatrzymania bloku harmonogramu.
Data początku 1 - 31 Dzień miesiąca uruchomienia bloku harmonogramu.
Data końca 1 - 31 Dzień miesiąca zatrzymania bloku harmonogramu.
Czas początku hh:mm Godzina (0 do 23) i minuta (0 do 59) uruchomienia bloku harmonogramu.
Czas końca hh:mm Godzina (0 do 23) i minuta (0 do 59) zatrzymania bloku harmonogramu.
Dzień tygodnia Od poniedziałku do niedzieli
Pola wyboru, które identyfikują dzień tygodnia aktywacji bloku harmonogramu.
TWD USE 10 AE 371
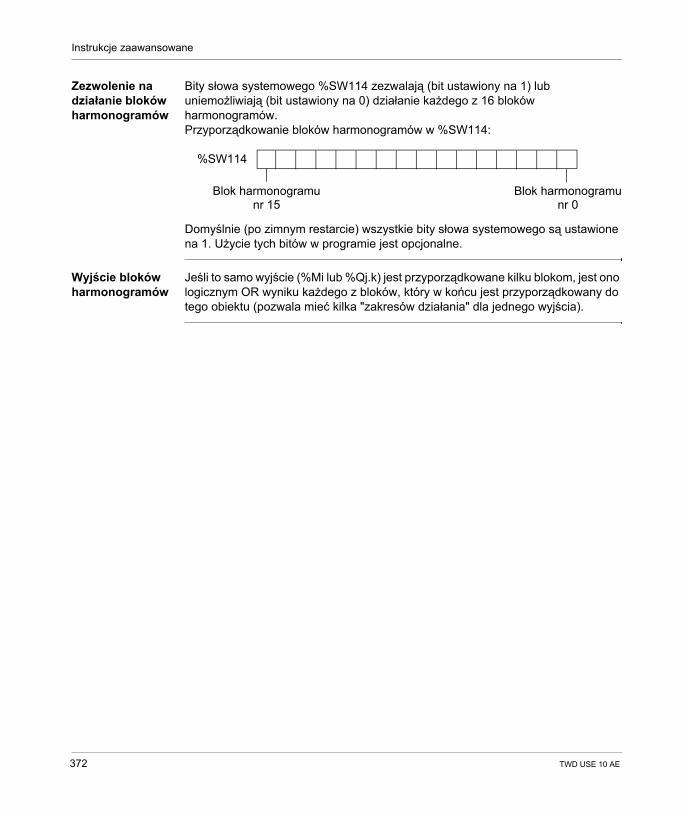
Instrukcje zaawansowane
Zezwolenie na działanie bloków harmonogramów
Bity słowa systemowego %SW114 zezwalają (bit ustawiony na 1) lub uniemożliwiają (bit ustawiony na 0) działanie każdego z 16 bloków harmonogramów.Przyporządkowanie bloków harmonogramów w %SW114:
Domyślnie (po zimnym restarcie) wszystkie bity słowa systemowego są ustawione na 1. Użycie tych bitów w programie jest opcjonalne.
Wyjście bloków harmonogramów
Jeśli to samo wyjście (%Mi lub %Qj.k) jest przyporządkowane kilku blokom, jest ono logicznym OR wyniku każdego z bloków, który w końcu jest przyporządkowany do tego obiektu (pozwala mieć kilka "zakresów działania" dla jednego wyjścia).
%SW114
Blok harmonogramunr 15
Blok harmonogramunr 0
372 TWD USE 10 AE
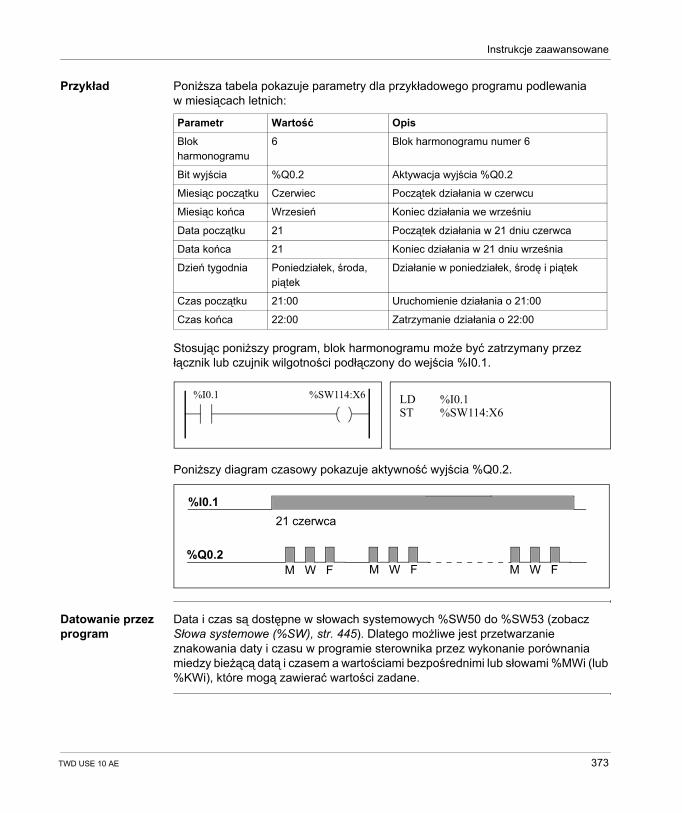
Instrukcje zaawansowane
Przykład Poniższa tabela pokazuje parametry dla przykładowego programu podlewania w miesiącach letnich:
Stosując poniższy program, blok harmonogramu może być zatrzymany przez łącznik lub czujnik wilgotności podłączony do wejścia %I0.1.
Poniższy diagram czasowy pokazuje aktywność wyjścia %Q0.2.
Datowanie przez program
Data i czas są dostępne w słowach systemowych %SW50 do %SW53 (zobacz Słowa systemowe (%SW), str. 445). Dlatego możliwe jest przetwarzanie znakowania daty i czasu w programie sterownika przez wykonanie porównania miedzy bieżącą datą i czasem a wartościami bezpośrednimi lub słowami %MWi (lub %KWi), które mogą zawierać wartości zadane.
Parametr Wartość Opis
Blok harmonogramu
6 Blok harmonogramu numer 6
Bit wyjścia %Q0.2 Aktywacja wyjścia %Q0.2
Miesiąc początku Czerwiec Początek działania w czerwcu
Miesiąc końca Wrzesień Koniec działania we wrześniu
Data początku 21 Początek działania w 21 dniu czerwca
Data końca 21 Koniec działania w 21 dniu września
Dzień tygodnia Poniedziałek, środa, piątek
Działanie w poniedziałek, środę i piątek
Czas początku 21:00 Uruchomienie działania o 21:00
Czas końca 22:00 Zatrzymanie działania o 22:00
LD %I0.1ST %SW114:X6
%I0.1 %SW114:X6
%I0.1
%Q0.2
21 czerwca
M W FM W FM W F
TWD USE 10 AE 373
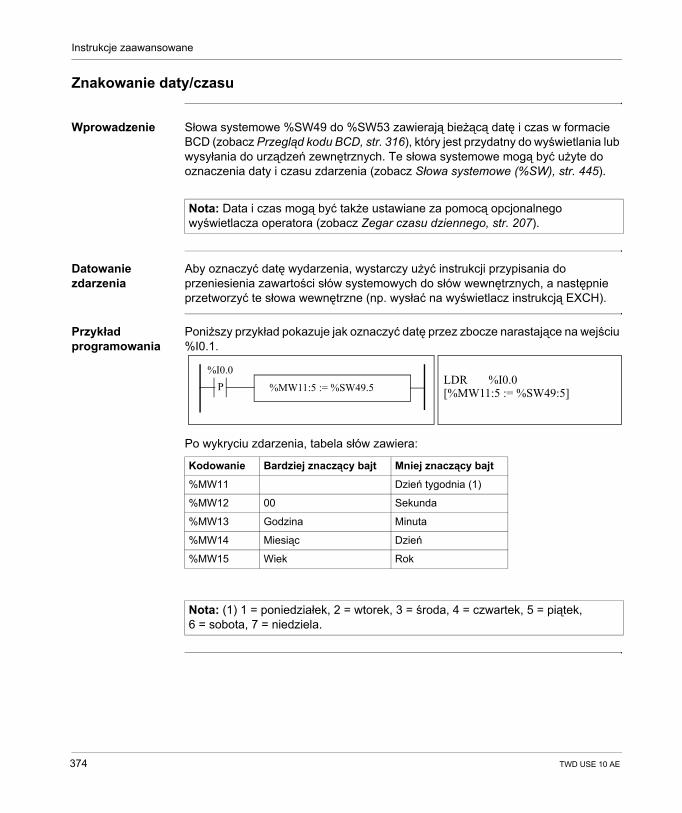
Instrukcje zaawansowane
Znakowanie daty/czasu
Wprowadzenie Słowa systemowe %SW49 do %SW53 zawierają bieżącą datę i czas w formacie BCD (zobacz Przegląd kodu BCD, str. 316), który jest przydatny do wyświetlania lub wysyłania do urządzeń zewnętrznych. Te słowa systemowe mogą być użyte do oznaczenia daty i czasu zdarzenia (zobacz Słowa systemowe (%SW), str. 445).
Datowanie zdarzenia
Aby oznaczyć datę wydarzenia, wystarczy użyć instrukcji przypisania do przeniesienia zawartości słów systemowych do słów wewnętrznych, a następnie przetworzyć te słowa wewnętrzne (np. wysłać na wyświetlacz instrukcją EXCH).
Przykład programowania
Poniższy przykład pokazuje jak oznaczyć datę przez zbocze narastające na wejściu %I0.1.
Po wykryciu zdarzenia, tabela słów zawiera:
Nota: Data i czas mogą być także ustawiane za pomocą opcjonalnego wyświetlacza operatora (zobacz Zegar czasu dziennego, str. 207).
Kodowanie Bardziej znaczący bajt Mniej znaczący bajt
%MW11 Dzień tygodnia (1)
%MW12 00 Sekunda
%MW13 Godzina Minuta
%MW14 Miesiąc Dzień
%MW15 Wiek Rok
Nota: (1) 1 = poniedziałek, 2 = wtorek, 3 = środa, 4 = czwartek, 5 = piątek, 6 = sobota, 7 = niedziela.
LDR %I0.0[%MW11:5 := %SW49:5]P %MW11:5 := %SW49.5
%I0.0
374 TWD USE 10 AE
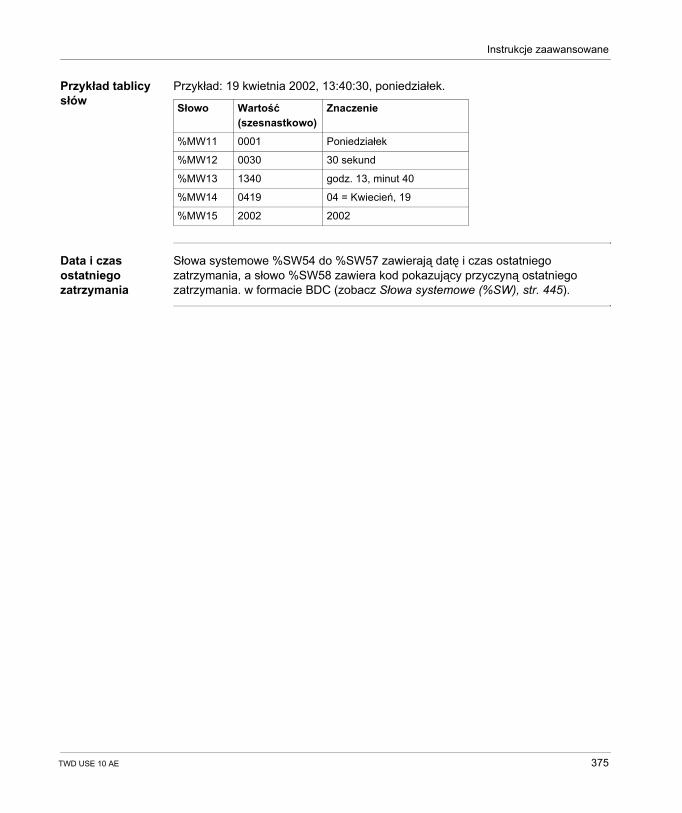
Instrukcje zaawansowane
Przykład tablicy słów
Przykład: 19 kwietnia 2002, 13:40:30, poniedziałek.
Data i czas ostatniego zatrzymania
Słowa systemowe %SW54 do %SW57 zawierają datę i czas ostatniego zatrzymania, a słowo %SW58 zawiera kod pokazujący przyczyną ostatniego zatrzymania. w formacie BDC (zobacz Słowa systemowe (%SW), str. 445).
Słowo Wartość (szesnastkowo)
Znaczenie
%MW11 0001 Poniedziałek
%MW12 0030 30 sekund
%MW13 1340 godz. 13, minut 40
%MW14 0419 04 = Kwiecień, 19
%MW15 2002 2002
TWD USE 10 AE 375

Instrukcje zaawansowane
Ustawianie daty i czasu
Wprowadzenie Możesz uaktualnić datę i czas za pomocą jednej z następujących metod:TwidoSoftUżyj okna dialogowego Set Time. Te okno dialogowe jest dostępne w oknie dialogowym Check PLC… Zostanie ono wyświetlone po wybraniu opcji Check PLC… z menu PLC. Słowa systemoweUżyj słów systemowych %SW49 do %SW53 lub słowa systemowego %SW59.
Ustawienia daty i czasu mogą być uaktualnione tylko, gdy opcjonalna wkładka RTC (TWDXCPRTC) jest zainstalowana w sterowniku.
376 TWD USE 10 AE
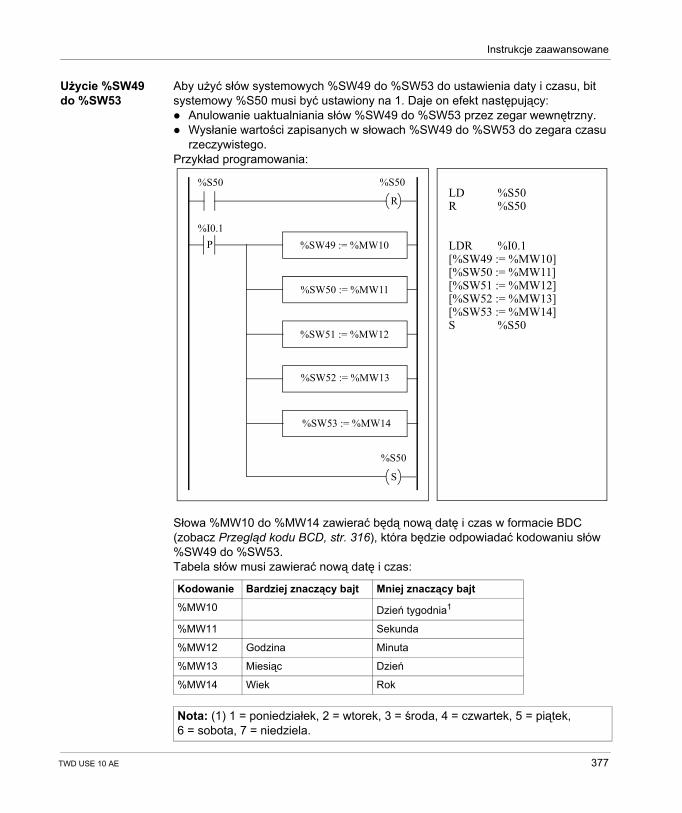
Instrukcje zaawansowane
Użycie %SW49 do %SW53
Aby użyć słów systemowych %SW49 do %SW53 do ustawienia daty i czasu, bit systemowy %S50 musi być ustawiony na 1. Daje on efekt następujący:
Anulowanie uaktualniania słów %SW49 do %SW53 przez zegar wewnętrzny.Wysłanie wartości zapisanych w słowach %SW49 do %SW53 do zegara czasu rzeczywistego.
Przykład programowania:
Słowa %MW10 do %MW14 zawierać będą nową datę i czas w formacie BDC (zobacz Przegląd kodu BCD, str. 316), która będzie odpowiadać kodowaniu słów %SW49 do %SW53.Tabela słów musi zawierać nową datę i czas:
Kodowanie Bardziej znaczący bajt Mniej znaczący bajt
%MW10 Dzień tygodnia1
%MW11 Sekunda
%MW12 Godzina Minuta
%MW13 Miesiąc Dzień
%MW14 Wiek Rok
Nota: (1) 1 = poniedziałek, 2 = wtorek, 3 = środa, 4 = czwartek, 5 = piątek, 6 = sobota, 7 = niedziela.
LD %S50R %S50
LDR %I0.1[%SW49 := %MW10][%SW50 := %MW11][%SW51 := %MW12][%SW52 := %MW13][%SW53 := %MW14]S %S50
%S50
%I0.1P %SW49 := %MW10
%SW50 := %MW11
%SW51 := %MW12
%S50
S
R
%S50
%SW52 := %MW13
%SW53 := %MW14
TWD USE 10 AE 377
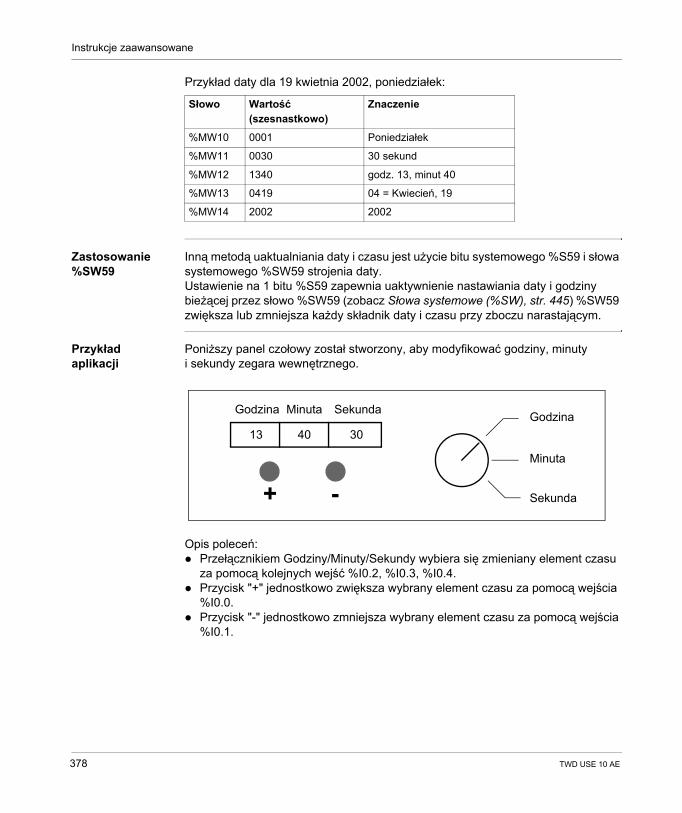
Instrukcje zaawansowane
Przykład daty dla 19 kwietnia 2002, poniedziałek:
Zastosowanie %SW59
Inną metodą uaktualniania daty i czasu jest użycie bitu systemowego %S59 i słowa systemowego %SW59 strojenia daty. Ustawienie na 1 bitu %S59 zapewnia uaktywnienie nastawiania daty i godziny bieżącej przez słowo %SW59 (zobacz Słowa systemowe (%SW), str. 445) %SW59 zwiększa lub zmniejsza każdy składnik daty i czasu przy zboczu narastającym.
Przykład aplikacji
Poniższy panel czołowy został stworzony, aby modyfikować godziny, minuty i sekundy zegara wewnętrznego.
Opis poleceń:Przełącznikiem Godziny/Minuty/Sekundy wybiera się zmieniany element czasu za pomocą kolejnych wejść %I0.2, %I0.3, %I0.4.Przycisk "+" jednostkowo zwiększa wybrany element czasu za pomocą wejścia %I0.0.Przycisk "-" jednostkowo zmniejsza wybrany element czasu za pomocą wejścia %I0.1.
Słowo Wartość (szesnastkowo)
Znaczenie
%MW10 0001 Poniedziałek
%MW11 0030 30 sekund
%MW12 1340 godz. 13, minut 40
%MW13 0419 04 = Kwiecień, 19
%MW14 2002 2002
Godzina
Minuta
Sekunda+ -
Godzina Minuta Sekunda
13 40 30
378 TWD USE 10 AE
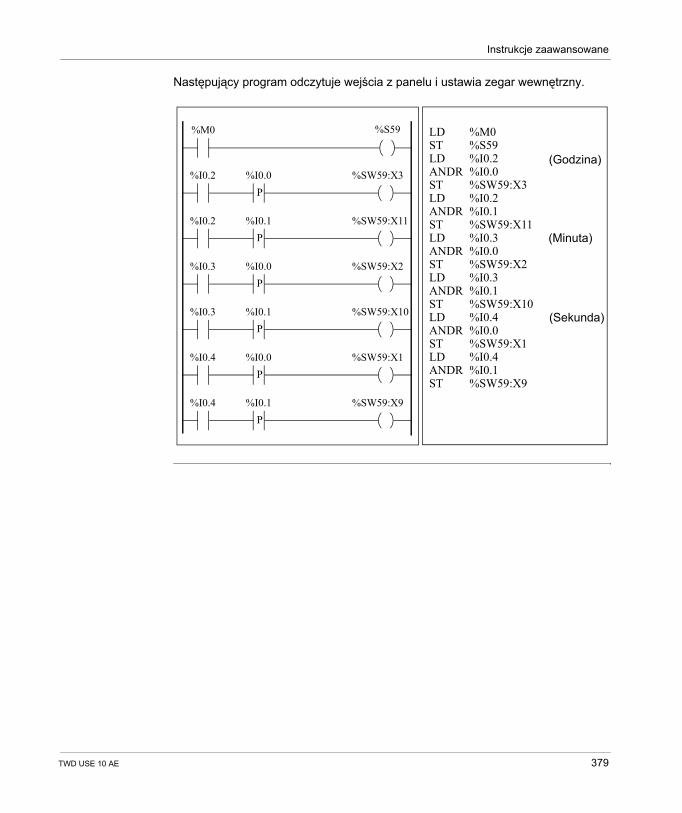
Instrukcje zaawansowane
Następujący program odczytuje wejścia z panelu i ustawia zegar wewnętrzny.
LD %M0ST %S59LD %I0.2ANDR %I0.0ST %SW59:X3LD %I0.2ANDR %I0.1ST %SW59:X11LD %I0.3ANDR %I0.0ST %SW59:X2LD %I0.3ANDR %I0.1ST %SW59:X10LD %I0.4ANDR %I0.0ST %SW59:X1LD %I0.4ANDR %I0.1ST %SW59:X9
(Godzina)
(Minuta)
(Sekunda)
%M0
%I0.2 %I0.0 %SW59:X3P
%S59
%I0.4 %I0.1 %SW59:X9P
%I0.4 %I0.0 %SW59:X1P
%I0.3 %I0.1 %SW59:X10P
%I0.2 %I0.1 %SW59:X11P
%I0.3 %I0.0 %SW59:X2P
TWD USE 10 AE 379
Instrukcje zaawansowane
15.3 Funkcja PID
Rzut oka
Cel tej sekcji Ta sekcja opisuje zachowanie, funkcjonowanie i implementację funkcji PID.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Przegląd 381
Zasada pętli regulacyjnych 382
Metodologia rozwoju aplikacji regulacyjnych 383
Kompatybilności i wydajności 384
Szczegółowe charakterystyki funkcji PID 385
Dostęp do konfiguracji PID 388
Zakładka General funkcji PID 389
Zakładka IN funkcji PID 391
Zakładka PID funkcji PID 393
Zakładka OUT funkcji PID 395
Dostęp do strojenia PID 398
Zakładka Animation funkcji PID 399
Zakładka Trace funkcji PID 401
Metoda strojenia parametrów PID 403
Rola i wpływ parametrów PID 406
380 TWD USE 10 AE
Instrukcje zaawansowane
Przegląd
Podstawy Funkcja regulacji PID jest funkcją języka programowania TwidoSoft. Pozwala ona na zaprogramowanie pętli regulacyjnych PID w sterownikach Twido wersji 1.2 lub wyższej.
Funkcja ta jest szczególnie dostosowana do:Spełnienia wymagań procesów sekwencyjnych, które potrzebują funkcji regulowania pomocniczego (np. maszyny pakujące folią plastikową, maszyny obróbki końcowej, prasy, itd.)Spełnienia wymagań prostej regulacji procesu (np. piece metalowe, piece ceramiczne, małe zespoły chłodnicze, itd.)
Funkcja PID jest bardzo prosta do instalacji i dostarczana na ekranach:Konfiguracjai Strojenie
dołączonych do linii programowej (bloku operacyjnego w Ladder Diagram lub prostego wywołania PID w Instruction List) wskazującej numer używanego PID.Przykład linii programowej w Ladder Diagram:
Kluczowe cechy Kluczowe cechy są następujące:Wejście analogowe,Konwersja liniowa skonfigurowanego pomiaru,Wysoki lub niski konfigurowalny alarm wejściowy,Wyjście analogowe lub PWM,Ograniczenia dla skonfigurowanego wyjścia,Konfigurowalna akcja bezpośrednia lub odwrócona.
Nota: W dowolnej aplikacji automatyki Twido, maksymalna liczba skonfigurowanych PID wynosi 14.
PID 0
TWD USE 10 AE 381
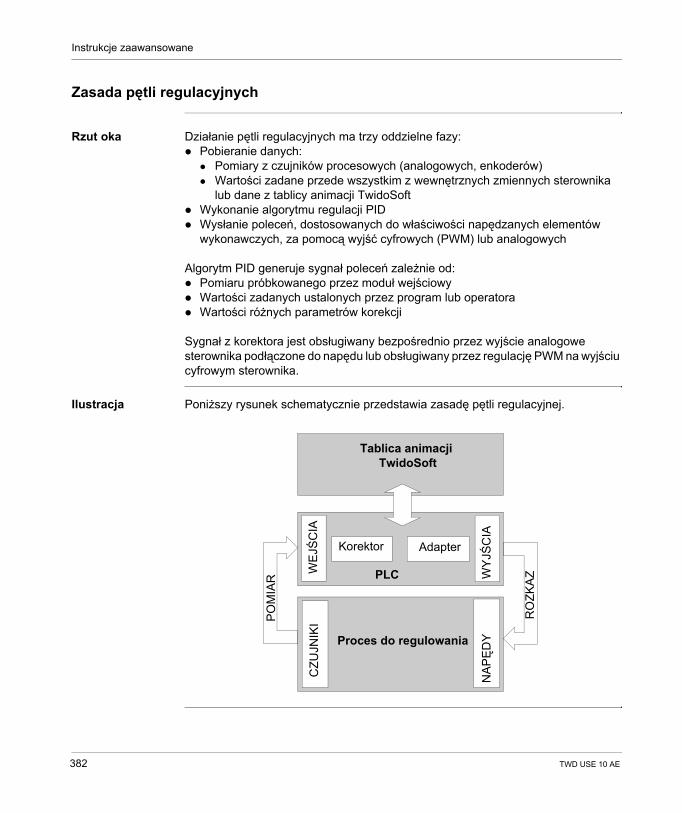
Instrukcje zaawansowane
Zasada pętli regulacyjnych
Rzut oka Działanie pętli regulacyjnych ma trzy oddzielne fazy:Pobieranie danych:
Pomiary z czujników procesowych (analogowych, enkoderów)Wartości zadane przede wszystkim z wewnętrznych zmiennych sterownika lub dane z tablicy animacji TwidoSoft
Wykonanie algorytmu regulacji PIDWysłanie poleceń, dostosowanych do właściwości napędzanych elementów wykonawczych, za pomocą wyjść cyfrowych (PWM) lub analogowych
Algorytm PID generuje sygnał poleceń zależnie od:Pomiaru próbkowanego przez moduł wejściowyWartości zadanych ustalonych przez program lub operatoraWartości różnych parametrów korekcji
Sygnał z korektora jest obsługiwany bezpośrednio przez wyjście analogowe sterownika podłączone do napędu lub obsługiwany przez regulację PWM na wyjściu cyfrowym sterownika.
Ilustracja Poniższy rysunek schematycznie przedstawia zasadę pętli regulacyjnej.
Korektor
WEJŚ
CIA
WY
JŚC
IA
PLC
Adapter
CZU
JNIK
I
Proces do regulowania
NA
PĘ
DY
Tablica animacji TwidoSoft
PO
MIA
R
RO
ZKA
Z
382 TWD USE 10 AE
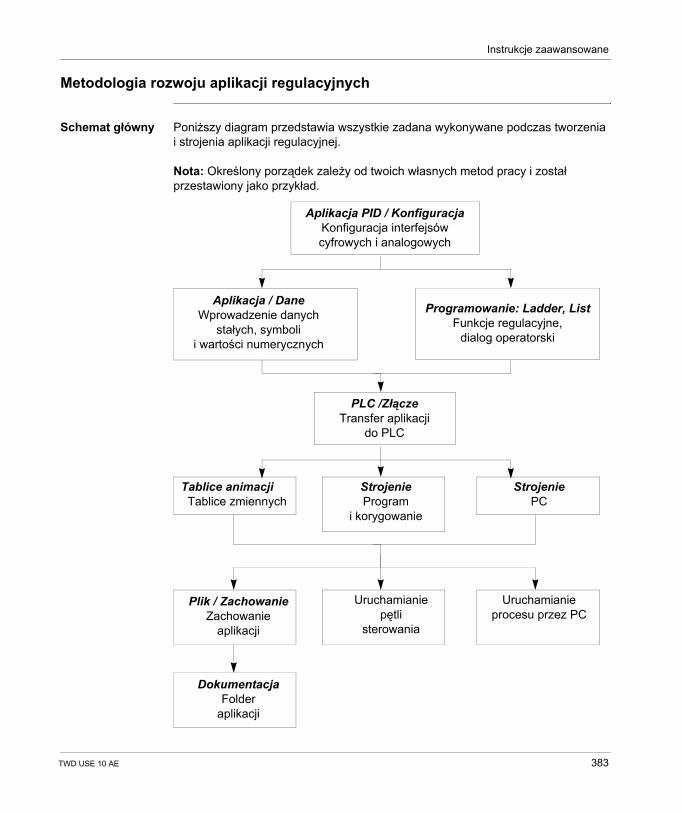
Instrukcje zaawansowane
Metodologia rozwoju aplikacji regulacyjnych
Schemat główny Poniższy diagram przedstawia wszystkie zadana wykonywane podczas tworzenia i strojenia aplikacji regulacyjnej.
Nota: Określony porządek zależy od twoich własnych metod pracy i został przestawiony jako przykład.
Aplikacja PID / KonfiguracjaKonfiguracja interfejsówcyfrowych i analogowych
Aplikacja / DaneWprowadzenie danych
stałych, symbolii wartości numerycznych
Programowanie: Ladder, ListFunkcje regulacyjne,
dialog operatorski
PLC /ZłączeTransfer aplikacji
do PLC
Tablice animacji Tablice zmiennych
StrojenieProgram
i korygowanie
StrojeniePC
Plik / ZachowanieZachowanie
aplikacji
Uruchamianiepętli
sterowania
Uruchamianie procesu przez PC
DokumentacjaFolder
aplikacji
TWD USE 10 AE 383
Instrukcje zaawansowane
Kompatybilności i wydajności
Rzut oka Funkcja PID jest funkcją dostępną dla Twido wersji 1.2 lub wyższej i dlatego jej instalacja jest zależna od kompatybilności sprzętowej i programowej opisanej w kolejnych paragrafach.Dodatkowo funkcja ta wymaga zasobów opisanych w paragrafie Wydajność.
Kompatybilność Funkcja PID jest dostępna w sterownikach Twido z oprogramowaniem sprzętowym wersji 1.2 lub wyższej. Jeżeli masz Twido z wcześniejszą wersją oprogramowania, możesz uaktualnić ją, aby używać funkcji PID.
Aby skonfigurować i zaprogramować PID na tych różnorodnych wersjach sprzętu, musisz posiadać oprogramowanie TwidoSoft wersji 1.2.
Wydajność Pętla regulacyjna PID ma następującą wydajność:
Nota: Moduły wejść/wyjść analogowych wersji 1.0 mogą być używane jako moduły wejść/wyjść PID, bez konieczności uaktualniania.
Opis Czas
Czas wykonania pętli 0.4 ms
384 TWD USE 10 AE
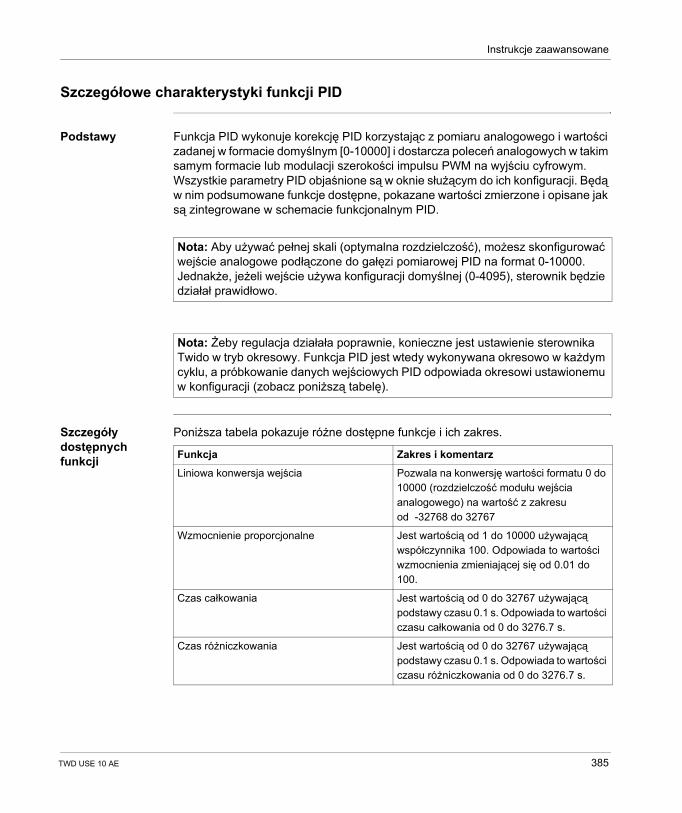
Instrukcje zaawansowane
Szczegółowe charakterystyki funkcji PID
Podstawy Funkcja PID wykonuje korekcję PID korzystając z pomiaru analogowego i wartości zadanej w formacie domyślnym [0-10000] i dostarcza poleceń analogowych w takim samym formacie lub modulacji szerokości impulsu PWM na wyjściu cyfrowym.Wszystkie parametry PID objaśnione są w oknie służącym do ich konfiguracji. Będą w nim podsumowane funkcje dostępne, pokazane wartości zmierzone i opisane jak są zintegrowane w schemacie funkcjonalnym PID.
Szczegóły dostępnych funkcji
Poniższa tabela pokazuje różne dostępne funkcje i ich zakres.
Nota: Aby używać pełnej skali (optymalna rozdzielczość), możesz skonfigurować wejście analogowe podłączone do gałęzi pomiarowej PID na format 0-10000. Jednakże, jeżeli wejście używa konfiguracji domyślnej (0-4095), sterownik będzie działał prawidłowo.
Nota: Żeby regulacja działała poprawnie, konieczne jest ustawienie sterownika Twido w tryb okresowy. Funkcja PID jest wtedy wykonywana okresowo w każdym cyklu, a próbkowanie danych wejściowych PID odpowiada okresowi ustawionemu w konfiguracji (zobacz poniższą tabelę).
Funkcja Zakres i komentarz
Liniowa konwersja wejścia Pozwala na konwersję wartości formatu 0 do 10000 (rozdzielczość modułu wejścia analogowego) na wartość z zakresu od -32768 do 32767
Wzmocnienie proporcjonalne Jest wartością od 1 do 10000 używającą współczynnika 100. Odpowiada to wartości wzmocnienia zmieniającej się od 0.01 do 100.
Czas całkowania Jest wartością od 0 do 32767 używającą podstawy czasu 0.1 s. Odpowiada to wartości czasu całkowania od 0 do 3276.7 s.
Czas różniczkowania Jest wartością od 0 do 32767 używającą podstawy czasu 0.1 s. Odpowiada to wartości czasu różniczkowania od 0 do 3276.7 s.
TWD USE 10 AE 385
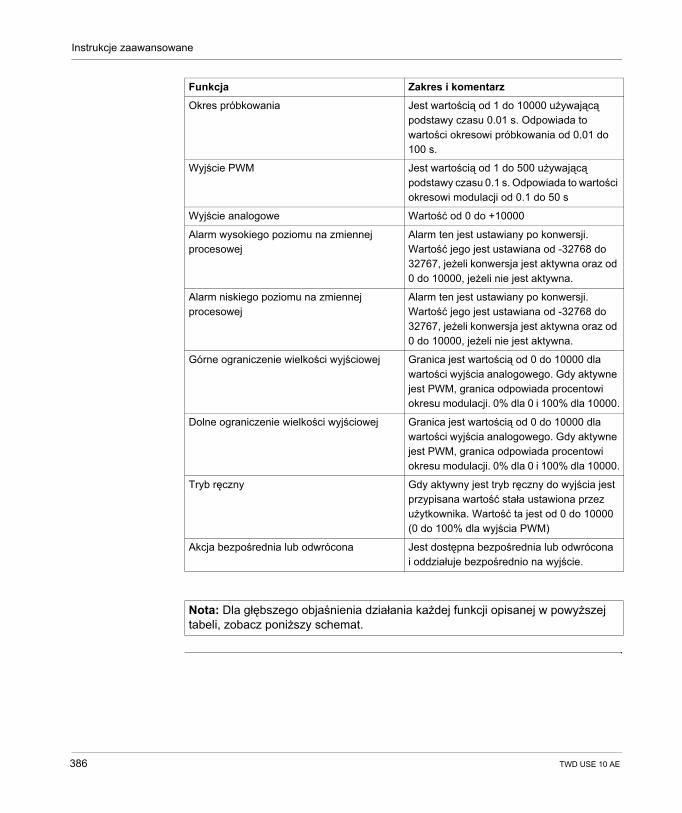
Instrukcje zaawansowane
Okres próbkowania Jest wartością od 1 do 10000 używającą podstawy czasu 0.01 s. Odpowiada to wartości okresowi próbkowania od 0.01 do 100 s.
Wyjście PWM Jest wartością od 1 do 500 używającą podstawy czasu 0.1 s. Odpowiada to wartości okresowi modulacji od 0.1 do 50 s
Wyjście analogowe Wartość od 0 do +10000
Alarm wysokiego poziomu na zmiennej procesowej
Alarm ten jest ustawiany po konwersji. Wartość jego jest ustawiana od -32768 do 32767, jeżeli konwersja jest aktywna oraz od 0 do 10000, jeżeli nie jest aktywna.
Alarm niskiego poziomu na zmiennej procesowej
Alarm ten jest ustawiany po konwersji. Wartość jego jest ustawiana od -32768 do 32767, jeżeli konwersja jest aktywna oraz od 0 do 10000, jeżeli nie jest aktywna.
Górne ograniczenie wielkości wyjściowej Granica jest wartością od 0 do 10000 dla wartości wyjścia analogowego. Gdy aktywne jest PWM, granica odpowiada procentowi okresu modulacji. 0% dla 0 i 100% dla 10000.
Dolne ograniczenie wielkości wyjściowej Granica jest wartością od 0 do 10000 dla wartości wyjścia analogowego. Gdy aktywne jest PWM, granica odpowiada procentowi okresu modulacji. 0% dla 0 i 100% dla 10000.
Tryb ręczny Gdy aktywny jest tryb ręczny do wyjścia jest przypisana wartość stała ustawiona przez użytkownika. Wartość ta jest od 0 do 10000 (0 do 100% dla wyjścia PWM)
Akcja bezpośrednia lub odwrócona Jest dostępna bezpośrednia lub odwrócona i oddziałuje bezpośrednio na wyjście.
Nota: Dla głębszego objaśnienia działania każdej funkcji opisanej w powyższej tabeli, zobacz poniższy schemat.
Funkcja Zakres i komentarz
386 TWD USE 10 AE
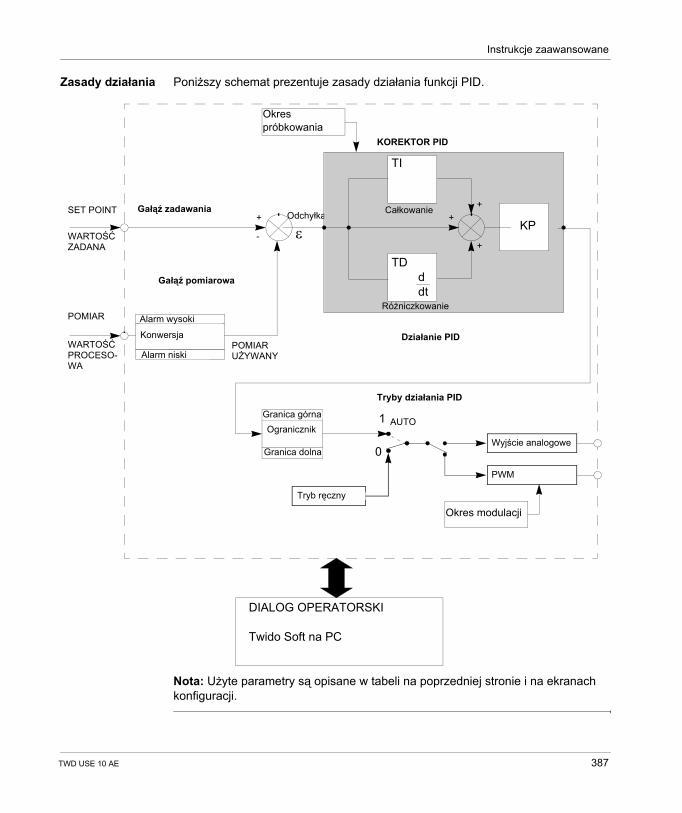
Instrukcje zaawansowane
Zasady działania Poniższy schemat prezentuje zasady działania funkcji PID.
Nota: Użyte parametry są opisane w tabeli na poprzedniej stronie i na ekranach konfiguracji.
Okres próbkowania
Gałąź zadawania
Gałąź pomiarowa
OdchyłkaiSET POINT
WARTOŚĆ PROCESO-WA
KOREKTOR PID
Działanie PID
WARTOŚĆ ZADANA
ε
TI
TD d dt
KP
++
+
Całkowanie
Różniczkowanie
+
-
POMIAR
Tryby działania PID
OgranicznikGranica górna
Granica dolna
Tryb ręczny
AUTO
DIALOG OPERATORSKI
Twido Soft na PC
1
0
POMIAR UŻYWANY
Konwersja
Alarm wysoki
Alarm niski
Wyjście analogowe
PWM
Okres modulacji
TWD USE 10 AE 387
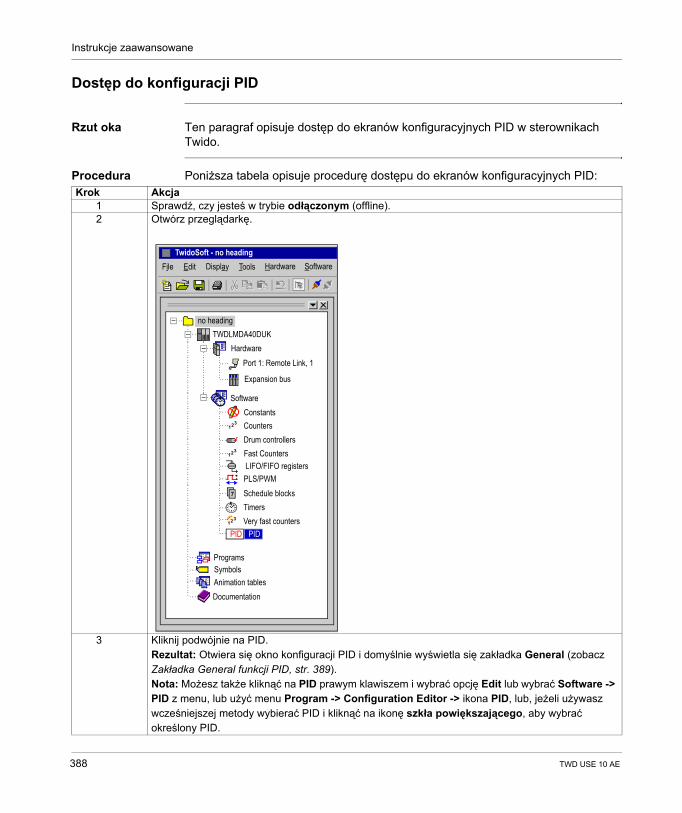
Instrukcje zaawansowane
Dostęp do konfiguracji PID
Rzut oka Ten paragraf opisuje dostęp do ekranów konfiguracyjnych PID w sterownikach Twido.
Procedura Poniższa tabela opisuje procedurę dostępu do ekranów konfiguracyjnych PID:Krok Akcja
1 Sprawdź, czy jesteś w trybie odłączonym (offline).2 Otwórz przeglądarkę.
3 Kliknij podwójnie na PID.Rezultat: Otwiera się okno konfiguracji PID i domyślnie wyświetla się zakładka General (zobacz Zakładka General funkcji PID, str. 389).Nota: Możesz także kliknąć na PID prawym klawiszem i wybrać opcję Edit lub wybrać Software -> PID z menu, lub użyć menu Program -> Configuration Editor -> ikona PID, lub, jeżeli używasz wcześniejszej metody wybierać PID i kliknąć na ikonę szkła powiększającego, aby wybrać określony PID.
TwidoSoft - no headingFile Edit Display Tools Hardware Software
Software
TWDLMDA40DUKHardware
Port 1: Remote Link, 1
Expansion bus
Timers
PLS/PWM
Drum controllers
Programs
Animation tablesDocumentation
Symbols
LIFO/FIFO registersFast Counters
CountersConstants
Very fast counters
Schedule blocks
123
123
77
123
no heading
PID PID
388 TWD USE 10 AE
Instrukcje zaawansowane
Zakładka General funkcji PID
Rzut oka Po otwarciu PID z przeglądarki, otworzy się okno konfiguracji PID. Okno to pozwala na:
konfigurację każdego PID Twido,strojenie każdego PID Twido.
Gdy otwierasz ten ekran, gdy jesteś:w trybie odłączonym: przejdziesz do domyślnej zakładki General i będziesz miał dostęp do parametrów konfiguracji,w trybie dołączonym: przejdziesz do zakładki Animation i będziesz miał dostęp do parametrów strojenia i dostosowania.
Kolejne paragrafy opisują zakładkę General.
Nota: Zakładki i pola wyszarzane są niedostępne, ponieważ będą dostępne dopiero w kolejnej wersji oprogramowania (np. automatyczne strojenie) albo aktualnie aktywny tryb (odłączony lub dołączony) nie pozwala dostęp do tych parametrów.
TWD USE 10 AE 389
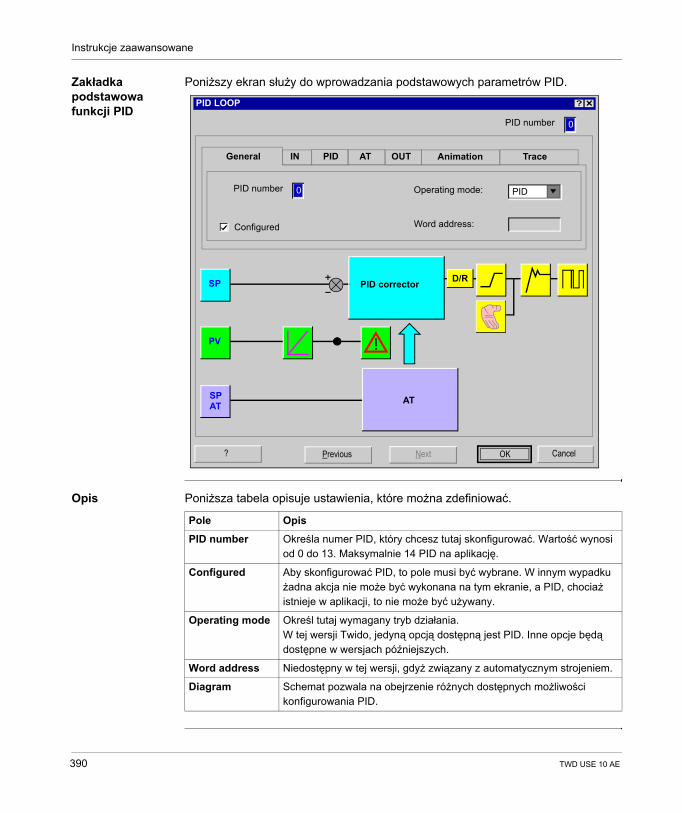
Instrukcje zaawansowane
Zakładka podstawowa funkcji PID
Poniższy ekran służy do wprowadzania podstawowych parametrów PID.
Opis Poniższa tabela opisuje ustawienia, które można zdefiniować.
PID number
?
PID LOOP ?
0
General IN PID AT OUT Animation Trace
PID number 0
Configured
Operating mode: PID
Word address:
OK Cancel
SP
PV
ATSPAT
D/RPID corrector
Previous Next
Pole Opis
PID number Określa numer PID, który chcesz tutaj skonfigurować. Wartość wynosi od 0 do 13. Maksymalnie 14 PID na aplikację.
Configured Aby skonfigurować PID, to pole musi być wybrane. W innym wypadku żadna akcja nie może być wykonana na tym ekranie, a PID, chociaż istnieje w aplikacji, to nie może być używany.
Operating mode Określ tutaj wymagany tryb działania.W tej wersji Twido, jedyną opcją dostępną jest PID. Inne opcje będą dostępne w wersjach późniejszych.
Word address Niedostępny w tej wersji, gdyż związany z automatycznym strojeniem.
Diagram Schemat pozwala na obejrzenie różnych dostępnych możliwości konfigurowania PID.
390 TWD USE 10 AE
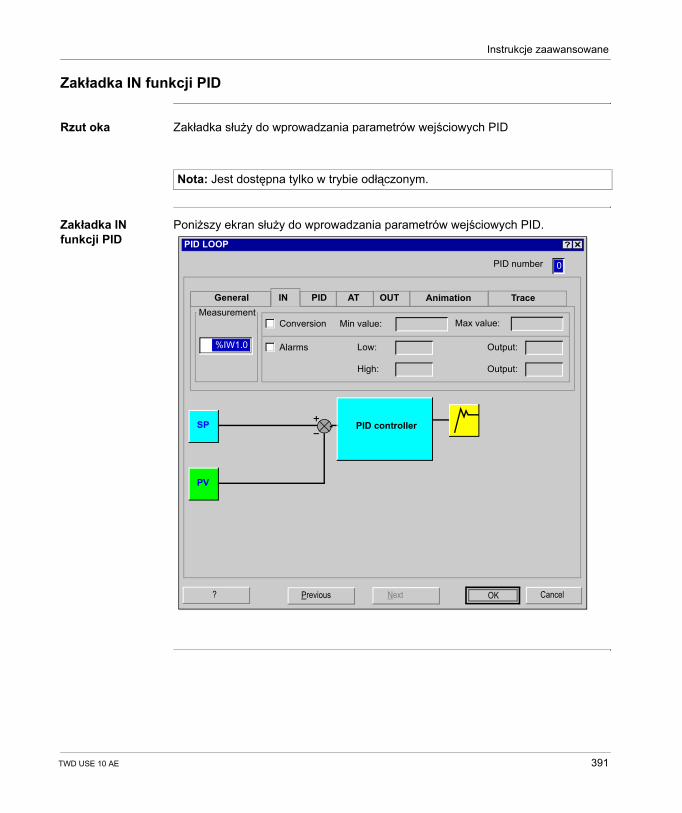
Instrukcje zaawansowane
Zakładka IN funkcji PID
Rzut oka Zakładka służy do wprowadzania parametrów wejściowych PID
Zakładka IN funkcji PID
Poniższy ekran służy do wprowadzania parametrów wejściowych PID.
Nota: Jest dostępna tylko w trybie odłączonym.
PID number
?
PID LOOP ?
0
General IN PID AT OUT Animation Trace
OK Cancel
SP PID controller
PV
Conversion
Alarms
Min value: Max value:
Low:
High:
Output:
Output:
%IW1.0
Measurement
Previous Next
TWD USE 10 AE 391
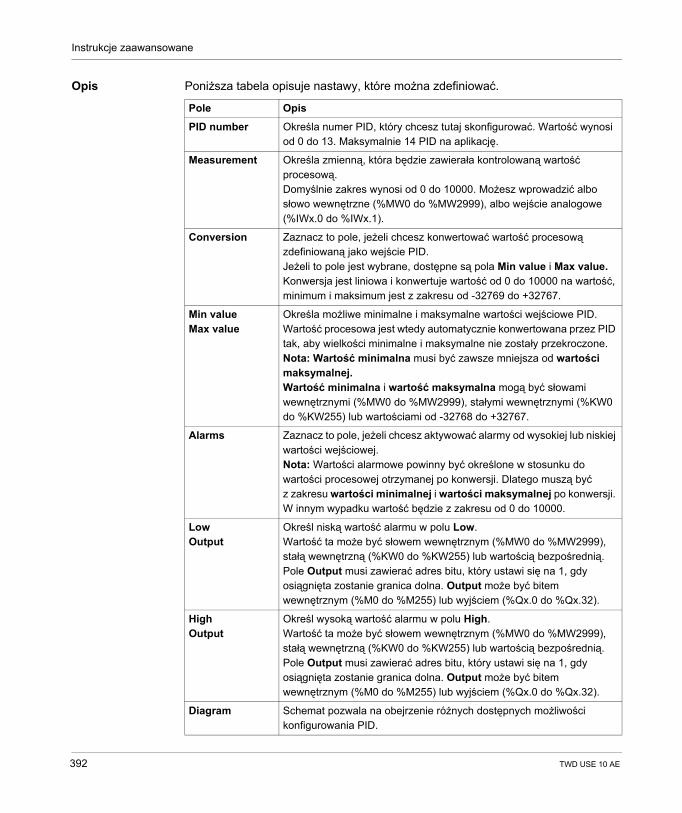
Instrukcje zaawansowane
Opis Poniższa tabela opisuje nastawy, które można zdefiniować.
Pole Opis
PID number Określa numer PID, który chcesz tutaj skonfigurować. Wartość wynosi od 0 do 13. Maksymalnie 14 PID na aplikację.
Measurement Określa zmienną, która będzie zawierała kontrolowaną wartość procesową.Domyślnie zakres wynosi od 0 do 10000. Możesz wprowadzić albo słowo wewnętrzne (%MW0 do %MW2999), albo wejście analogowe (%IWx.0 do %IWx.1).
Conversion Zaznacz to pole, jeżeli chcesz konwertować wartość procesową zdefiniowaną jako wejście PID.Jeżeli to pole jest wybrane, dostępne są pola Min value i Max value.Konwersja jest liniowa i konwertuje wartość od 0 do 10000 na wartość, minimum i maksimum jest z zakresu od -32769 do +32767.
Min valueMax value
Określa możliwe minimalne i maksymalne wartości wejściowe PID. Wartość procesowa jest wtedy automatycznie konwertowana przez PID tak, aby wielkości minimalne i maksymalne nie zostały przekroczone.Nota: Wartość minimalna musi być zawsze mniejsza od wartości maksymalnej.Wartość minimalna i wartość maksymalna mogą być słowami wewnętrznymi (%MW0 do %MW2999), stałymi wewnętrznymi (%KW0 do %KW255) lub wartościami od -32768 do +32767.
Alarms Zaznacz to pole, jeżeli chcesz aktywować alarmy od wysokiej lub niskiej wartości wejściowej.Nota: Wartości alarmowe powinny być określone w stosunku do wartości procesowej otrzymanej po konwersji. Dlatego muszą być z zakresu wartości minimalnej i wartości maksymalnej po konwersji. W innym wypadku wartość będzie z zakresu od 0 do 10000.
LowOutput
Określ niską wartość alarmu w polu Low.Wartość ta może być słowem wewnętrznym (%MW0 do %MW2999), stałą wewnętrzną (%KW0 do %KW255) lub wartością bezpośrednią.Pole Output musi zawierać adres bitu, który ustawi się na 1, gdy osiągnięta zostanie granica dolna. Output może być bitem wewnętrznym (%M0 do %M255) lub wyjściem (%Qx.0 do %Qx.32).
HighOutput
Określ wysoką wartość alarmu w polu High.Wartość ta może być słowem wewnętrznym (%MW0 do %MW2999), stałą wewnętrzną (%KW0 do %KW255) lub wartością bezpośrednią.Pole Output musi zawierać adres bitu, który ustawi się na 1, gdy osiągnięta zostanie granica dolna. Output może być bitem wewnętrznym (%M0 do %M255) lub wyjściem (%Qx.0 do %Qx.32).
Diagram Schemat pozwala na obejrzenie różnych dostępnych możliwości konfigurowania PID.
392 TWD USE 10 AE
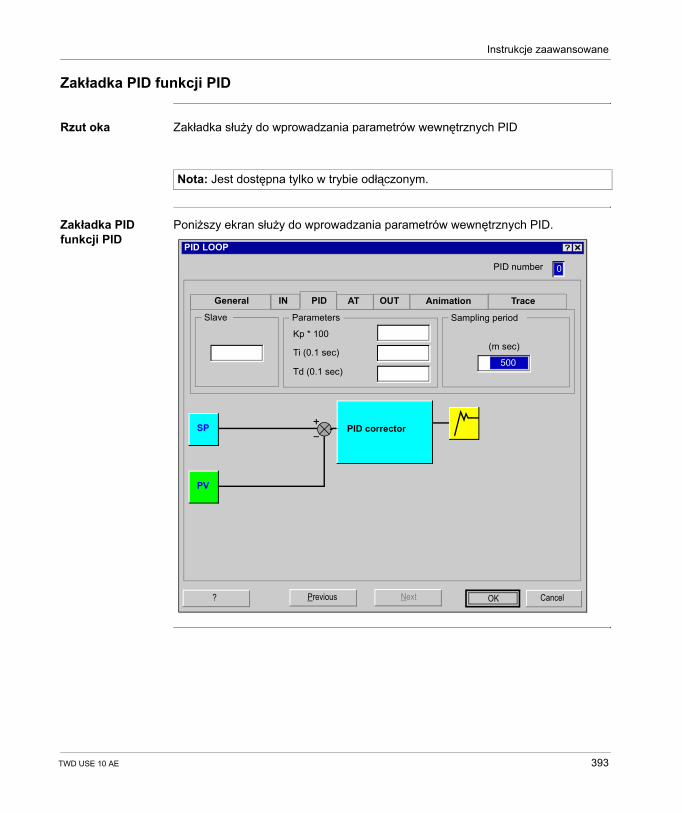
Instrukcje zaawansowane
Zakładka PID funkcji PID
Rzut oka Zakładka służy do wprowadzania parametrów wewnętrznych PID
Zakładka PID funkcji PID
Poniższy ekran służy do wprowadzania parametrów wewnętrznych PID.
Nota: Jest dostępna tylko w trybie odłączonym.
PID number
?
PID LOOP ?
0
General IN PID AT OUT Animation Trace
OK Cancel
SP PID corrector
PV
Kp * 100
Slave Parameters Sampling period
500Ti (0.1 sec)
Td (0.1 sec)
(m sec)
Previous Next
TWD USE 10 AE 393
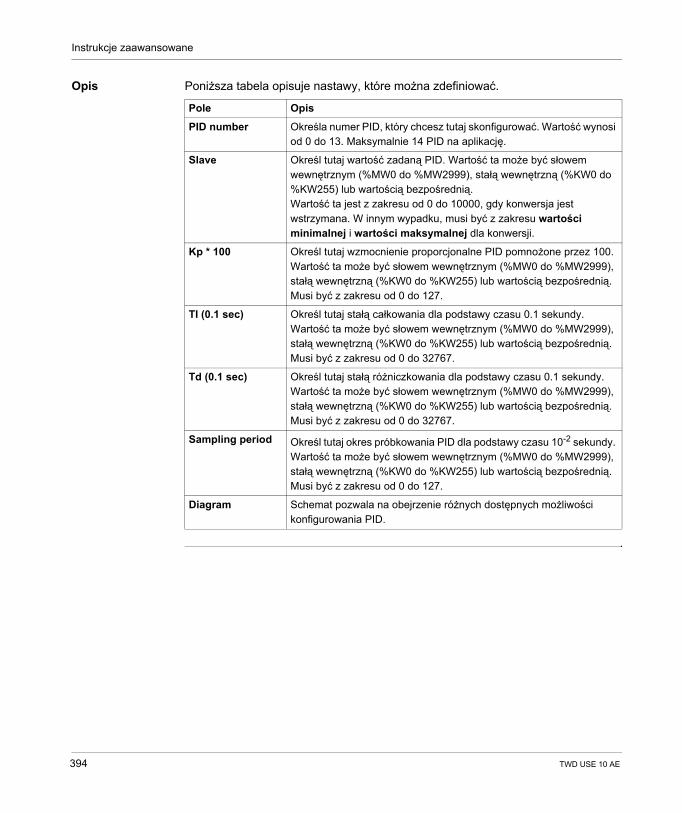
Instrukcje zaawansowane
Opis Poniższa tabela opisuje nastawy, które można zdefiniować.
Pole Opis
PID number Określa numer PID, który chcesz tutaj skonfigurować. Wartość wynosi od 0 do 13. Maksymalnie 14 PID na aplikację.
Slave Określ tutaj wartość zadaną PID. Wartość ta może być słowem wewnętrznym (%MW0 do %MW2999), stałą wewnętrzną (%KW0 do %KW255) lub wartością bezpośrednią.Wartość ta jest z zakresu od 0 do 10000, gdy konwersja jest wstrzymana. W innym wypadku, musi być z zakresu wartości minimalnej i wartości maksymalnej dla konwersji.
Kp * 100 Określ tutaj wzmocnienie proporcjonalne PID pomnożone przez 100. Wartość ta może być słowem wewnętrznym (%MW0 do %MW2999), stałą wewnętrzną (%KW0 do %KW255) lub wartością bezpośrednią. Musi być z zakresu od 0 do 127.
TI (0.1 sec) Określ tutaj stałą całkowania dla podstawy czasu 0.1 sekundy. Wartość ta może być słowem wewnętrznym (%MW0 do %MW2999), stałą wewnętrzną (%KW0 do %KW255) lub wartością bezpośrednią. Musi być z zakresu od 0 do 32767.
Td (0.1 sec) Określ tutaj stałą różniczkowania dla podstawy czasu 0.1 sekundy. Wartość ta może być słowem wewnętrznym (%MW0 do %MW2999), stałą wewnętrzną (%KW0 do %KW255) lub wartością bezpośrednią. Musi być z zakresu od 0 do 32767.
Sampling period Określ tutaj okres próbkowania PID dla podstawy czasu 10-2 sekundy. Wartość ta może być słowem wewnętrznym (%MW0 do %MW2999), stałą wewnętrzną (%KW0 do %KW255) lub wartością bezpośrednią. Musi być z zakresu od 0 do 127.
Diagram Schemat pozwala na obejrzenie różnych dostępnych możliwości konfigurowania PID.
394 TWD USE 10 AE
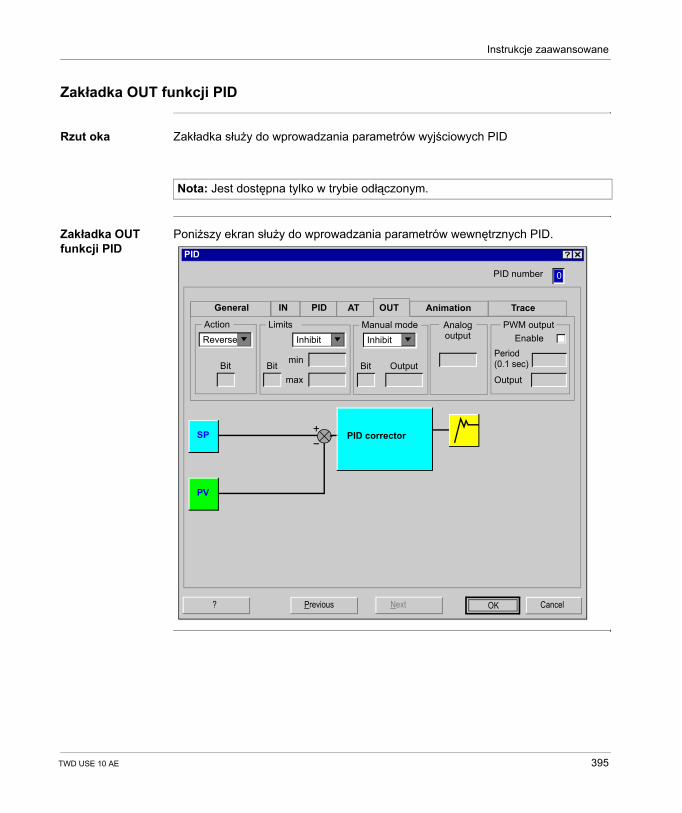
Instrukcje zaawansowane
Zakładka OUT funkcji PID
Rzut oka Zakładka służy do wprowadzania parametrów wyjściowych PID
Zakładka OUT funkcji PID
Poniższy ekran służy do wprowadzania parametrów wewnętrznych PID.
Nota: Jest dostępna tylko w trybie odłączonym.
PID number
?
PID ?
0
General IN PID AT OUT Animation Trace
Previous Next OK Cancel
SP PID corrector
PV
Action Limits PWM outputReverse Inhibit
min
maxBit Bit
Manual modeInhibit
Bit Output
Analogoutput
Period(0.1 sec)
Output
Enable
TWD USE 10 AE 395
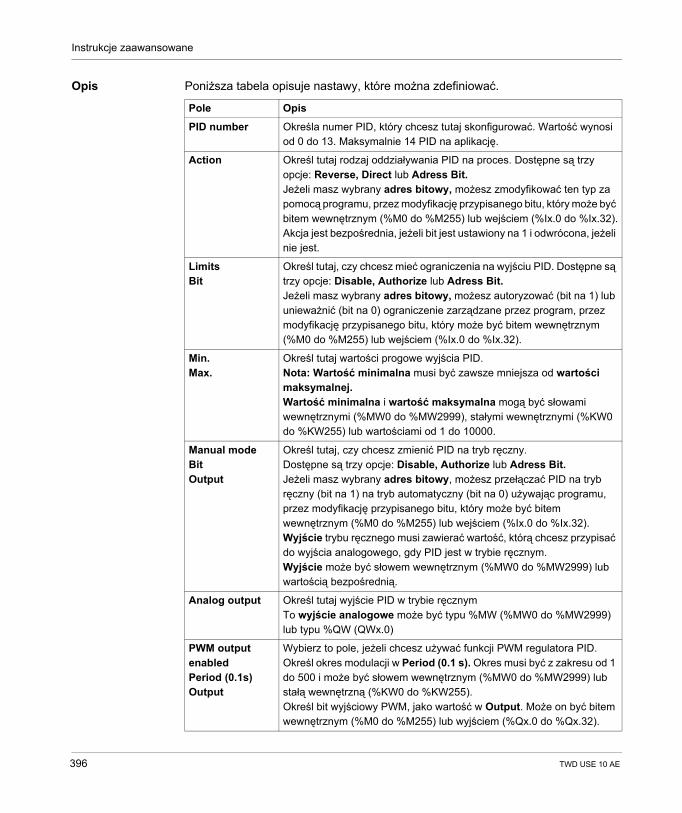
Instrukcje zaawansowane
Opis Poniższa tabela opisuje nastawy, które można zdefiniować.
Pole Opis
PID number Określa numer PID, który chcesz tutaj skonfigurować. Wartość wynosi od 0 do 13. Maksymalnie 14 PID na aplikację.
Action Określ tutaj rodzaj oddziaływania PID na proces. Dostępne są trzy opcje: Reverse, Direct lub Adress Bit.Jeżeli masz wybrany adres bitowy, możesz zmodyfikować ten typ za pomocą programu, przez modyfikację przypisanego bitu, który może być bitem wewnętrznym (%M0 do %M255) lub wejściem (%Ix.0 do %Ix.32).Akcja jest bezpośrednia, jeżeli bit jest ustawiony na 1 i odwrócona, jeżeli nie jest.
LimitsBit
Określ tutaj, czy chcesz mieć ograniczenia na wyjściu PID. Dostępne są trzy opcje: Disable, Authorize lub Adress Bit.Jeżeli masz wybrany adres bitowy, możesz autoryzować (bit na 1) lub unieważnić (bit na 0) ograniczenie zarządzane przez program, przez modyfikację przypisanego bitu, który może być bitem wewnętrznym (%M0 do %M255) lub wejściem (%Ix.0 do %Ix.32).
Min.Max.
Określ tutaj wartości progowe wyjścia PID.Nota: Wartość minimalna musi być zawsze mniejsza od wartości maksymalnej.Wartość minimalna i wartość maksymalna mogą być słowami wewnętrznymi (%MW0 do %MW2999), stałymi wewnętrznymi (%KW0 do %KW255) lub wartościami od 1 do 10000.
Manual modeBitOutput
Określ tutaj, czy chcesz zmienić PID na tryb ręczny.Dostępne są trzy opcje: Disable, Authorize lub Adress Bit.Jeżeli masz wybrany adres bitowy, możesz przełączać PID na tryb ręczny (bit na 1) na tryb automatyczny (bit na 0) używając programu, przez modyfikację przypisanego bitu, który może być bitem wewnętrznym (%M0 do %M255) lub wejściem (%Ix.0 do %Ix.32).Wyjście trybu ręcznego musi zawierać wartość, którą chcesz przypisać do wyjścia analogowego, gdy PID jest w trybie ręcznym.Wyjście może być słowem wewnętrznym (%MW0 do %MW2999) lub wartością bezpośrednią.
Analog output Określ tutaj wyjście PID w trybie ręcznymTo wyjście analogowe może być typu %MW (%MW0 do %MW2999) lub typu %QW (QWx.0)
PWM output enabledPeriod (0.1s)Output
Wybierz to pole, jeżeli chcesz używać funkcji PWM regulatora PID.Określ okres modulacji w Period (0.1 s). Okres musi być z zakresu od 1 do 500 i może być słowem wewnętrznym (%MW0 do %MW2999) lub stałą wewnętrzną (%KW0 do %KW255).Określ bit wyjściowy PWM, jako wartość w Output. Może on być bitem wewnętrznym (%M0 do %M255) lub wyjściem (%Qx.0 do %Qx.32).
396 TWD USE 10 AE
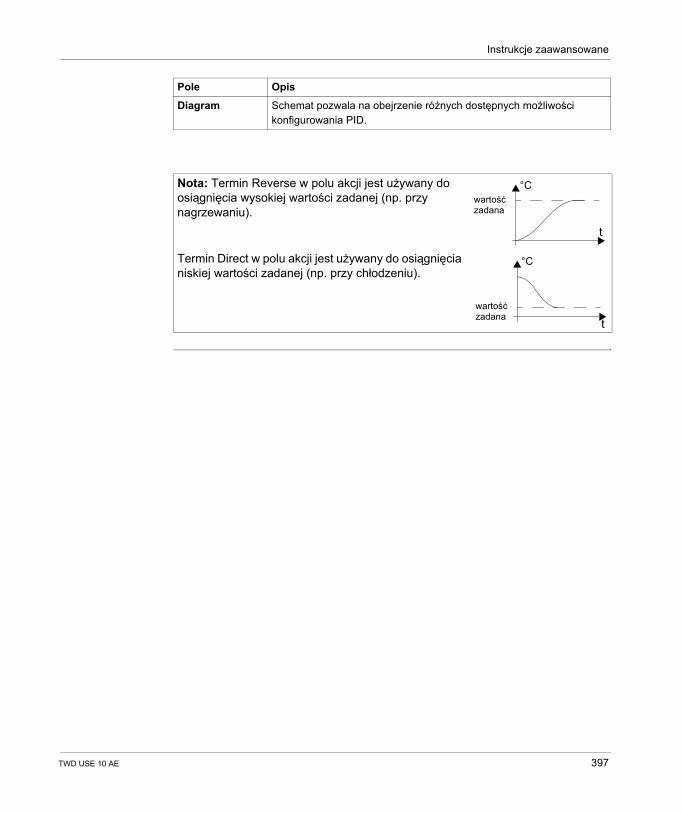
Instrukcje zaawansowane
Diagram Schemat pozwala na obejrzenie różnych dostępnych możliwości konfigurowania PID.
Nota: Termin Reverse w polu akcji jest używany do osiągnięcia wysokiej wartości zadanej (np. przy nagrzewaniu).
Termin Direct w polu akcji jest używany do osiągnięcia niskiej wartości zadanej (np. przy chłodzeniu).
Pole Opis
°Cwartość zadana
t
°C
wartość zadana
t
TWD USE 10 AE 397
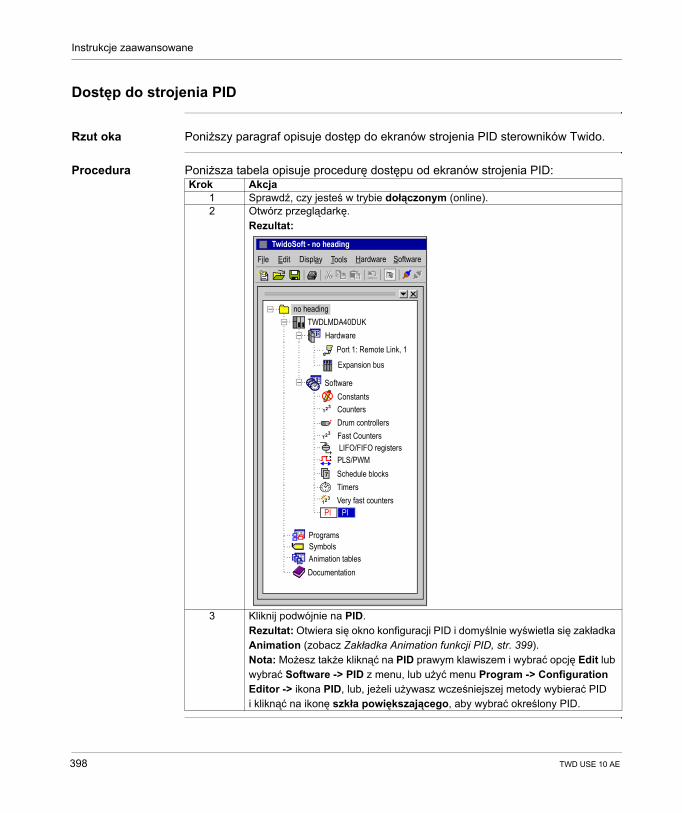
Instrukcje zaawansowane
Dostęp do strojenia PID
Rzut oka Poniższy paragraf opisuje dostęp do ekranów strojenia PID sterowników Twido.
Procedura Poniższa tabela opisuje procedurę dostępu od ekranów strojenia PID:Krok Akcja
1 Sprawdź, czy jesteś w trybie dołączonym (online).2 Otwórz przeglądarkę.
Rezultat:
3 Kliknij podwójnie na PID.Rezultat: Otwiera się okno konfiguracji PID i domyślnie wyświetla się zakładka Animation (zobacz Zakładka Animation funkcji PID, str. 399).Nota: Możesz także kliknąć na PID prawym klawiszem i wybrać opcję Edit lub wybrać Software -> PID z menu, lub użyć menu Program -> Configuration Editor -> ikona PID, lub, jeżeli używasz wcześniejszej metody wybierać PID i kliknąć na ikonę szkła powiększającego, aby wybrać określony PID.
TwidoSoft - no heading
Software
TWDLMDA40DUKHardware
Port 1: Remote Link, 1
Expansion bus
Timers
PLS/PWM
Drum controllers
Programs
Animation tablesDocumentation
Symbols
LIFO/FIFO registersFast Counters
CountersConstants
Very fast counters
Schedule blocks
123
123
77
123
no heading
PI PI
File Edit Display Tools Hardware Software
398 TWD USE 10 AE
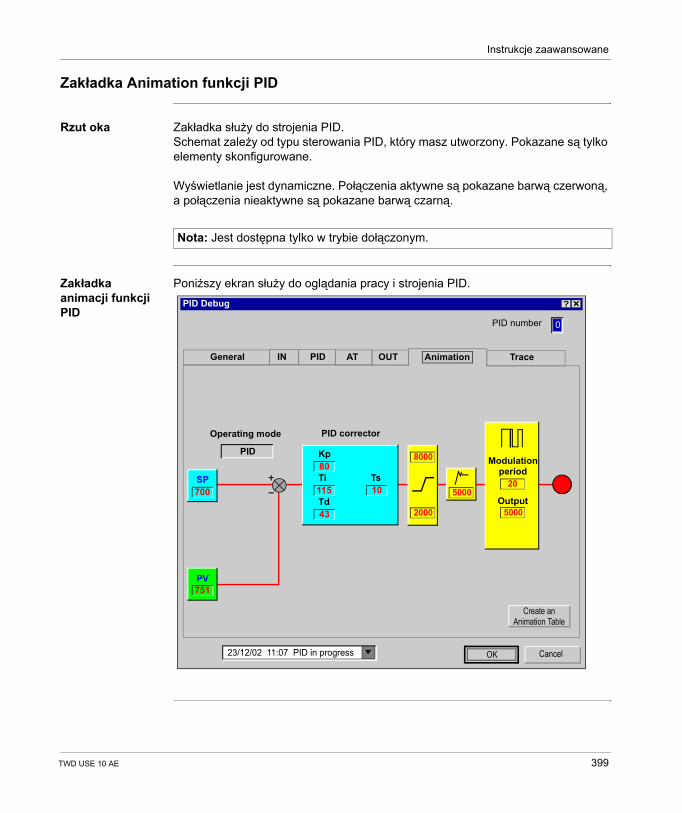
Instrukcje zaawansowane
Zakładka Animation funkcji PID
Rzut oka Zakładka służy do strojenia PID.Schemat zależy od typu sterowania PID, który masz utworzony. Pokazane są tylko elementy skonfigurowane.
Wyświetlanie jest dynamiczne. Połączenia aktywne są pokazane barwą czerwoną, a połączenia nieaktywne są pokazane barwą czarną.
Zakładka animacji funkcji PID
Poniższy ekran służy do oglądania pracy i strojenia PID.
Nota: Jest dostępna tylko w trybie dołączonym.
PID number
PID Debug ?
0
General IN PID AT OUT Animation Trace
OK Cancel
SP
PID corrector
PV
PID
Operating mode
700
751
Kp80Ti115Td43
Ts10
8000
2000
5000
Modulationperiod
5000Output
20
23/12/02 11:07 PID in progress
Create an Animation Table
TWD USE 10 AE 399

Instrukcje zaawansowane
Opis Poniższa tabela opisuje różne strefy okna.
Pole Opis
PID number Określa numer PID, który chcesz tutaj skonfigurować. Wartość wynosi od 0 do 13. Maksymalnie 14 PID na aplikację.
Operating mode Pole pokazuje aktualny tryb pracy PID.
Create an Animation Table
Kliknij na Utwórz tablice animacji, aby stworzyć plik zawierający wszystkie zmienne pokazane na schemacie i umożliwić modyfikacje ich w trybie dołączonym oraz strojenie PID.
list Lista na dole ekranu pozwala oglądać 15 ostatnich stanów PID w czasie rzeczywistym. Lista ta jest uaktualniana z każdą zmianą stanu wskazującego datę i czas, a także stanu bieżącego.
400 TWD USE 10 AE
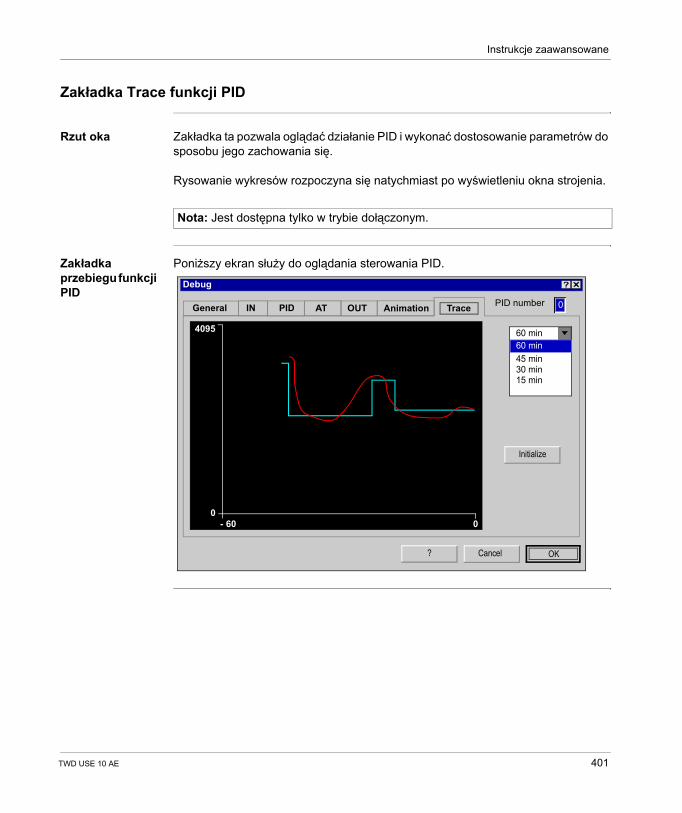
Instrukcje zaawansowane
Zakładka Trace funkcji PID
Rzut oka Zakładka ta pozwala oglądać działanie PID i wykonać dostosowanie parametrów do sposobu jego zachowania się.
Rysowanie wykresów rozpoczyna się natychmiast po wyświetleniu okna strojenia.
Zakładka przebiegu funkcji PID
Poniższy ekran służy do oglądania sterowania PID.
Nota: Jest dostępna tylko w trybie dołączonym.
PID number
Debug ?
0General IN PID AT OUT Animation Trace
OKCancel
60 min60 min45 min30 min15 min
?
4095
0- 60 0
Initialize
TWD USE 10 AE 401
Instrukcje zaawansowane
Opis Poniższa tabela opisuje różne strefy okna.
Pole Opis
PID number Określa numer PID, który chcesz tutaj skonfigurować. Wartość wynosi od 0 do 13. Maksymalnie 14 PID na aplikację.
Wykres Strefa ta pokazuje przebiegi wartości zadanej i wartości procesowej.Skala na osi poziomej (X) jest określana za pomocą menu w prawym górnym rogu okna.Skala na osi pionowej jest określana za pomocą skonfigurowanej wartości wejścia PID (z konwersją lub bez). Jest automatycznie optymalizowana w celu otrzymania najlepszego widoku przebiegów.
Menu skali osi poziomej
To menu pozwala zmodyfikować skalę osi poziomej. Możesz wybrać 4 wartości: 15, 30, 45 lub 60 minut.
Initialize Przycisk ten czyści wykres i wznawia rysowanie przebiegów.
402 TWD USE 10 AE
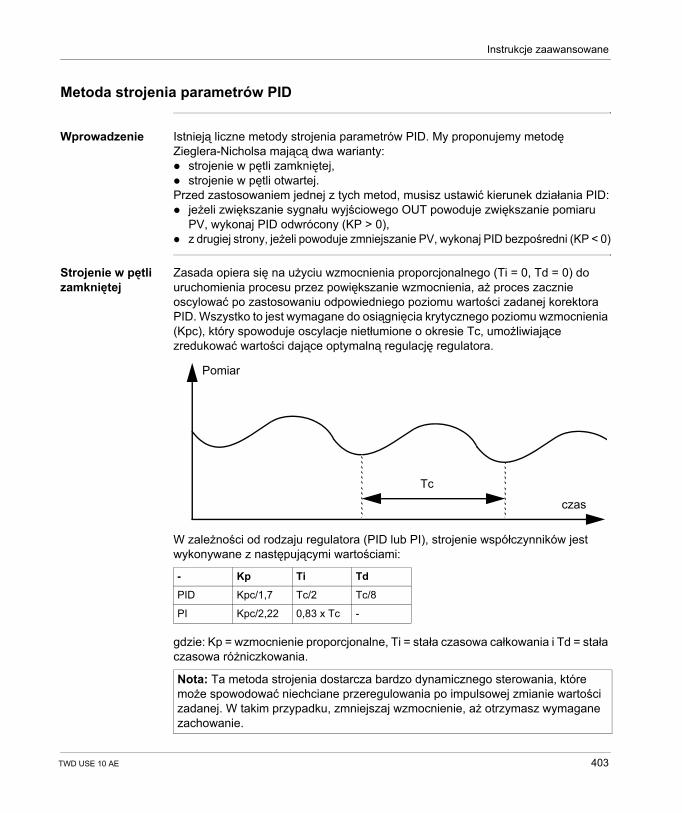
Instrukcje zaawansowane
Metoda strojenia parametrów PID
Wprowadzenie Istnieją liczne metody strojenia parametrów PID. My proponujemy metodę Zieglera-Nicholsa mającą dwa warianty:
strojenie w pętli zamkniętej,strojenie w pętli otwartej.
Przed zastosowaniem jednej z tych metod, musisz ustawić kierunek działania PID:jeżeli zwiększanie sygnału wyjściowego OUT powoduje zwiększanie pomiaru PV, wykonaj PID odwrócony (KP > 0),z drugiej strony, jeżeli powoduje zmniejszanie PV, wykonaj PID bezpośredni (KP < 0)
Strojenie w pętli zamkniętej
Zasada opiera się na użyciu wzmocnienia proporcjonalnego (Ti = 0, Td = 0) do uruchomienia procesu przez powiększanie wzmocnienia, aż proces zacznie oscylować po zastosowaniu odpowiedniego poziomu wartości zadanej korektora PID. Wszystko to jest wymagane do osiągnięcia krytycznego poziomu wzmocnienia (Kpc), który spowoduje oscylacje nietłumione o okresie Tc, umożliwiające zredukować wartości dające optymalną regulację regulatora.
W zależności od rodzaju regulatora (PID lub PI), strojenie współczynników jest wykonywane z następującymi wartościami:
gdzie: Kp = wzmocnienie proporcjonalne, Ti = stała czasowa całkowania i Td = stała czasowa różniczkowania.
- Kp Ti Td
PID Kpc/1,7 Tc/2 Tc/8
PI Kpc/2,22 0,83 x Tc -
Nota: Ta metoda strojenia dostarcza bardzo dynamicznego sterowania, które może spowodować niechciane przeregulowania po impulsowej zmianie wartości zadanej. W takim przypadku, zmniejszaj wzmocnienie, aż otrzymasz wymagane zachowanie.
Pomiar
Tc
czas
TWD USE 10 AE 403
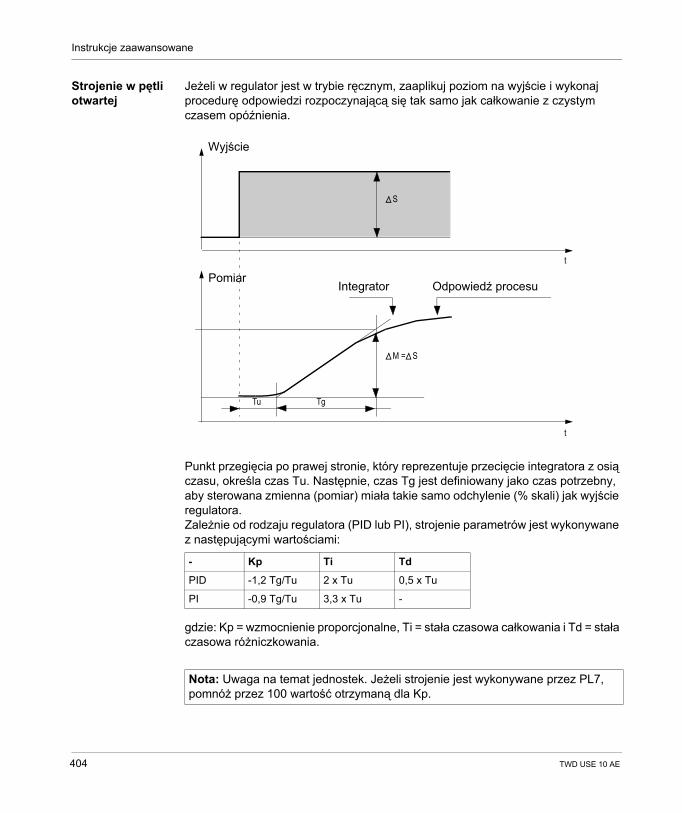
Instrukcje zaawansowane
Strojenie w pętli otwartej
Jeżeli w regulator jest w trybie ręcznym, zaaplikuj poziom na wyjście i wykonaj procedurę odpowiedzi rozpoczynającą się tak samo jak całkowanie z czystym czasem opóźnienia.
Punkt przegięcia po prawej stronie, który reprezentuje przecięcie integratora z osią czasu, określa czas Tu. Następnie, czas Tg jest definiowany jako czas potrzebny, aby sterowana zmienna (pomiar) miała takie samo odchylenie (% skali) jak wyjście regulatora.Zależnie od rodzaju regulatora (PID lub PI), strojenie parametrów jest wykonywane z następującymi wartościami:
gdzie: Kp = wzmocnienie proporcjonalne, Ti = stała czasowa całkowania i Td = stała czasowa różniczkowania.
- Kp Ti Td
PID -1,2 Tg/Tu 2 x Tu 0,5 x Tu
PI -0,9 Tg/Tu 3,3 x Tu -
Nota: Uwaga na temat jednostek. Jeżeli strojenie jest wykonywane przez PL7, pomnóż przez 100 wartość otrzymaną dla Kp.
Wyjście
Odpowiedź procesuIntegratorPomiar
Tg
S
M = S
Tu
t
t
404 TWD USE 10 AE

Instrukcje zaawansowane
Ta metoda strojenia dostarcza bardzo dynamicznego sterowania, które może spowodować niechciane przeregulowania po impulsowej zmianie wartości zadanej. W takim przypadku, zmniejszaj wzmocnienie, aż otrzymasz wymagane zachowanie. Metoda ta jest interesująca, ponieważ nie wymaga żadnych założeń o rodzaju i porządku procedury. Możesz zastosować ją dla procedur stabilnych, jak i dla rzeczywistych procedur zintegrowanych. Jest ona szczególnie interesująca dla procedur wolnozmiennych (przemysł szklarski, …), ponieważ do wyregulowania współczynników Kp, Ti i Td, użytkownik wymaga tylko początku odpowiedzi.
TWD USE 10 AE 405
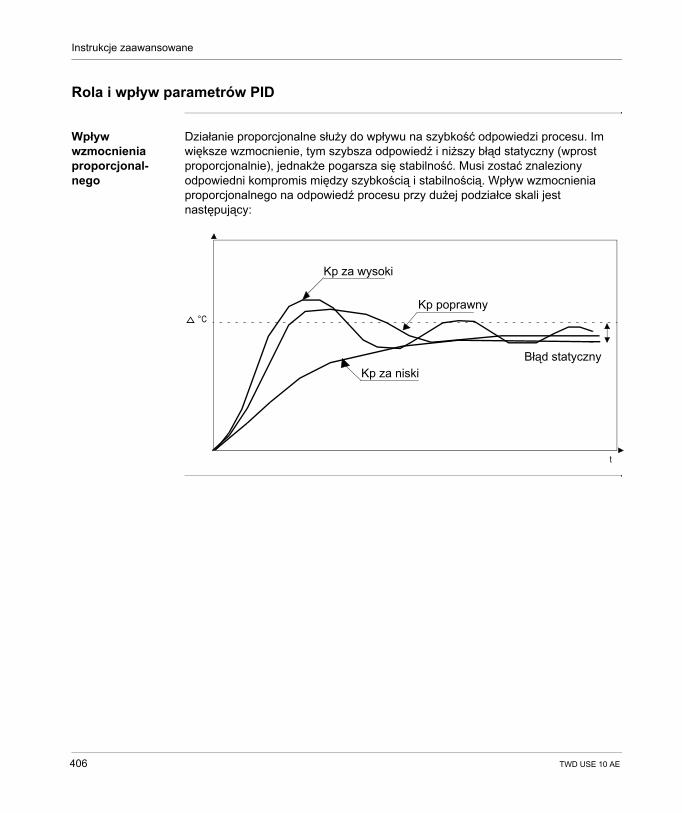
Instrukcje zaawansowane
Rola i wpływ parametrów PID
Wpływ wzmocnienia proporcjonal-nego
Działanie proporcjonalne służy do wpływu na szybkość odpowiedzi procesu. Im większe wzmocnienie, tym szybsza odpowiedź i niższy błąd statyczny (wprost proporcjonalnie), jednakże pogarsza się stabilność. Musi zostać znaleziony odpowiedni kompromis między szybkością i stabilnością. Wpływ wzmocnienia proporcjonalnego na odpowiedź procesu przy dużej podziałce skali jest następujący:
Kp za wysoki
Kp poprawny
Kp za niskiBłąd statyczny
°C
t
406 TWD USE 10 AE
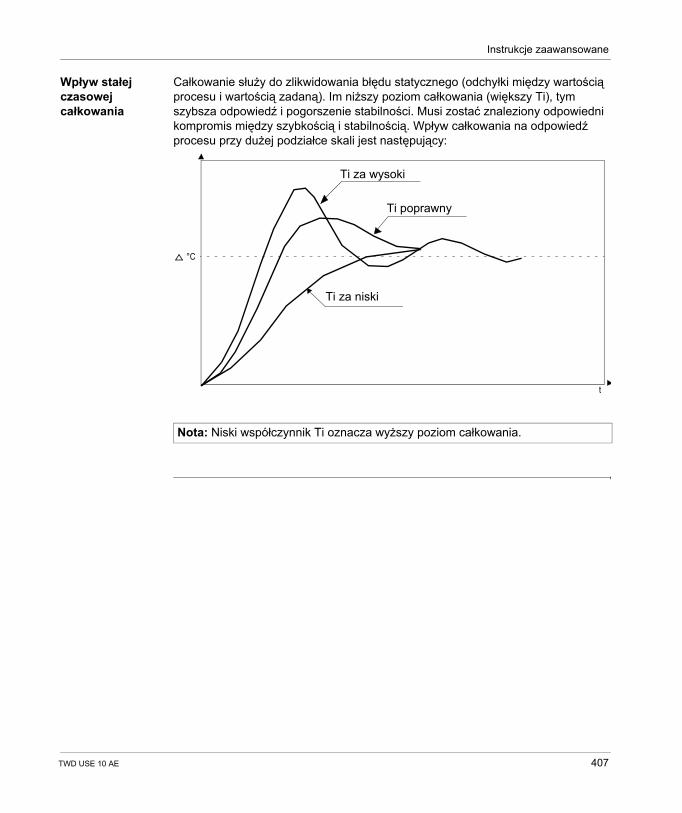
Instrukcje zaawansowane
Wpływ stałej czasowej całkowania
Całkowanie służy do zlikwidowania błędu statycznego (odchyłki między wartością procesu i wartością zadaną). Im niższy poziom całkowania (większy Ti), tym szybsza odpowiedź i pogorszenie stabilności. Musi zostać znaleziony odpowiedni kompromis między szybkością i stabilnością. Wpływ całkowania na odpowiedź procesu przy dużej podziałce skali jest następujący:
Nota: Niski współczynnik Ti oznacza wyższy poziom całkowania.
Ti za wysoki
Ti poprawny
Ti za niski
t
°C
TWD USE 10 AE 407
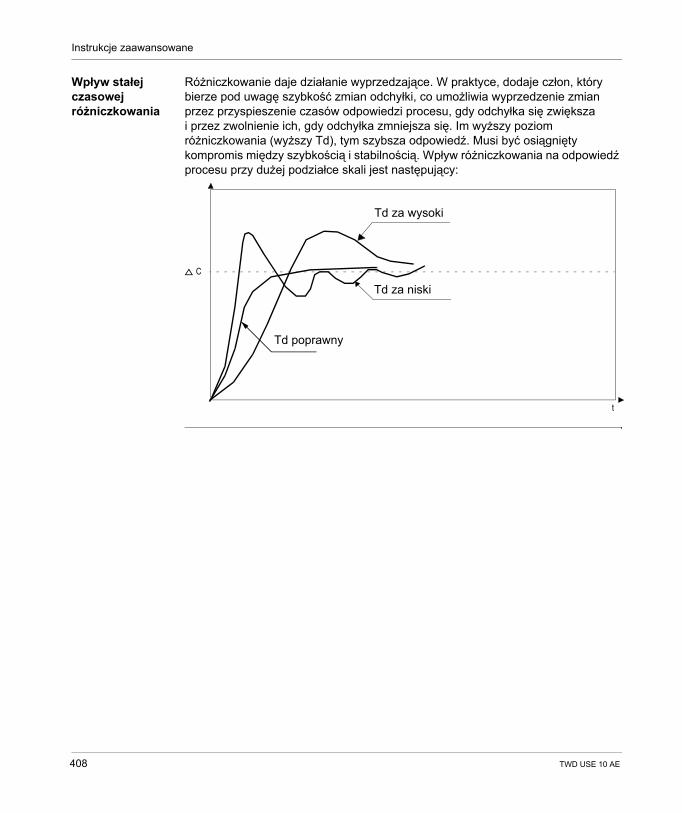
Instrukcje zaawansowane
Wpływ stałej czasowej różniczkowania
Różniczkowanie daje działanie wyprzedzające. W praktyce, dodaje człon, który bierze pod uwagę szybkość zmian odchyłki, co umożliwia wyprzedzenie zmian przez przyspieszenie czasów odpowiedzi procesu, gdy odchyłka się zwiększa i przez zwolnienie ich, gdy odchyłka zmniejsza się. Im wyższy poziom różniczkowania (wyższy Td), tym szybsza odpowiedź. Musi być osiągnięty kompromis między szybkością i stabilnością. Wpływ różniczkowania na odpowiedź procesu przy dużej podziałce skali jest następujący:
t
C
Td za wysoki
Td poprawny
Td za niski
408 TWD USE 10 AE
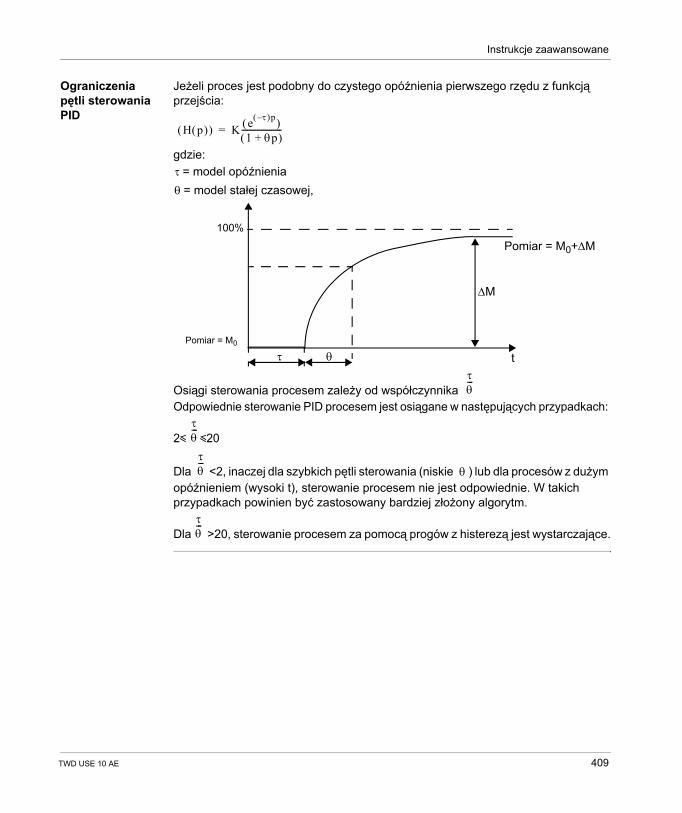
Instrukcje zaawansowane
Ograniczenia pętli sterowania PID
Jeżeli proces jest podobny do czystego opóźnienia pierwszego rzędu z funkcją przejścia:
gdzie:
= model opóźnienia= model stałej czasowej,
Osiągi sterowania procesem zależy od współczynnika Odpowiednie sterowanie PID procesem jest osiągane w następujących przypadkach:
2y y20
Dla <2, inaczej dla szybkich pętli sterowania (niskie ) lub dla procesów z dużym opóźnieniem (wysoki t), sterowanie procesem nie jest odpowiednie. W takich przypadkach powinien być zastosowany bardziej złożony algorytm.
Dla >20, sterowanie procesem za pomocą progów z histerezą jest wystarczające.
H p( )( ) K e τ–( )p( )1 θp+( )
--------------------=
τ
θ
100%
Pomiar = M0
Pomiar = M0+∆M
∆M
θτ tτθ---
τθ---
τθ---
θ
τθ---
TWD USE 10 AE 409
Instrukcje zaawansowane
15.4 Instrukcje zmiennoprzecinkowe
Rzut oka
Cel tej sekcji Ta sekcja opisuje zaawansowane instrukcje zmiennoprzecinkowe (zobacz Obiekty zmiennoprzecinkowe i słowa podwójne, str. 31) w językach TwidoSoft.Instrukcje porównania i przypisania są opisane w Przetwarzaniu numerycznym, str. 299.
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Instrukcje arytmetyczne na liczbach zmiennoprzecinkowych 411
Instrukcje trygonometryczne 414
Instrukcje konwersji 416
Instrukcje konwersji całkowite <-> zmiennoprzecinkowe 418
410 TWD USE 10 AE
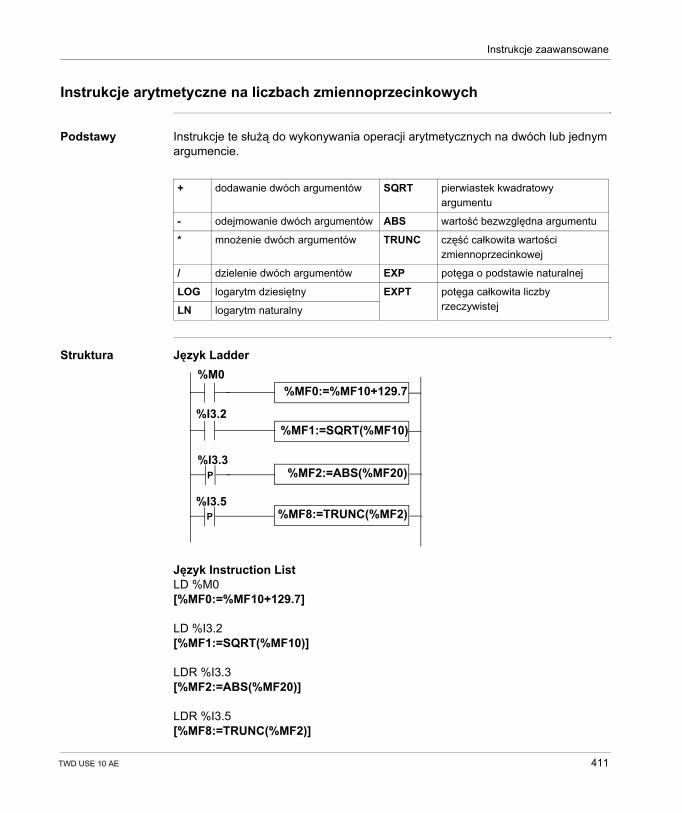
Instrukcje zaawansowane
Instrukcje arytmetyczne na liczbach zmiennoprzecinkowych
Podstawy Instrukcje te służą do wykonywania operacji arytmetycznych na dwóch lub jednym argumencie.
Struktura Język Ladder
Język Instruction ListLD %M0 [%MF0:=%MF10+129.7] LD %I3.2 [%MF1:=SQRT(%MF10)] LDR %I3.3 [%MF2:=ABS(%MF20)] LDR %I3.5 [%MF8:=TRUNC(%MF2)]
+ dodawanie dwóch argumentów SQRT pierwiastek kwadratowy argumentu
- odejmowanie dwóch argumentów ABS wartość bezwzględna argumentu
* mnożenie dwóch argumentów TRUNC część całkowita wartości zmiennoprzecinkowej
/ dzielenie dwóch argumentów EXP potęga o podstawie naturalnej
LOG logarytm dziesiętny EXPT potęga całkowita liczby rzeczywistejLN logarytm naturalny
P
P
%M0
%I3.2
%I3.3
%I3.5
%MF0:=%MF10+129.7
%MF1:=SQRT(%MF10)
%MF2:=ABS(%MF20)
%MF8:=TRUNC(%MF2)
TWD USE 10 AE 411
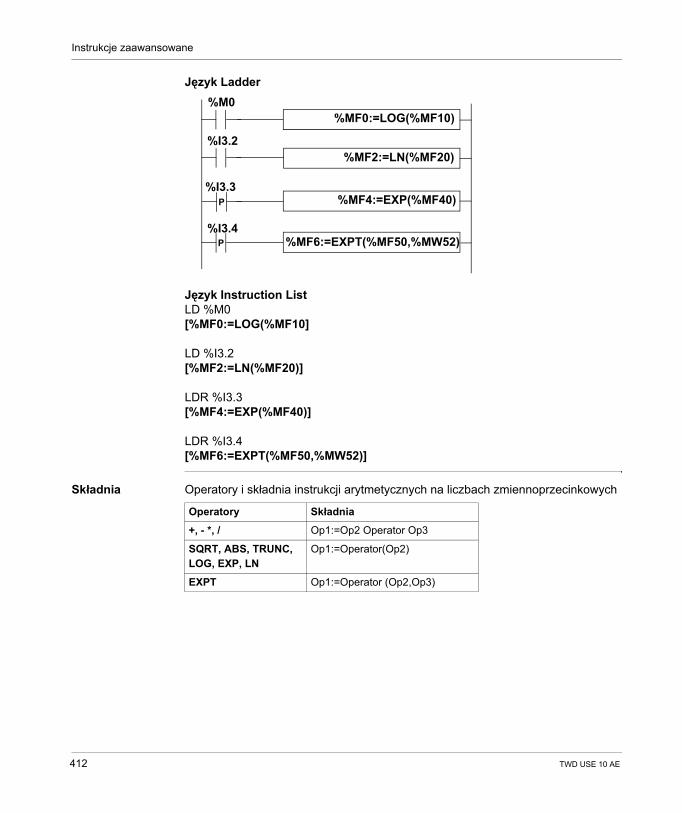
Instrukcje zaawansowane
Język Ladder
Język Instruction ListLD %M0 [%MF0:=LOG(%MF10] LD %I3.2 [%MF2:=LN(%MF20)] LDR %I3.3 [%MF4:=EXP(%MF40)] LDR %I3.4 [%MF6:=EXPT(%MF50,%MW52)]
Składnia Operatory i składnia instrukcji arytmetycznych na liczbach zmiennoprzecinkowych
%MF6:=EXPT(%MF50,%MW52)
P
P
%M0
%I3.2
%I3.3
%I3.4
%MF0:=LOG(%MF10)
%MF2:=LN(%MF20)
%MF4:=EXP(%MF40)
Operatory Składnia
+, - *, / Op1:=Op2 Operator Op3
SQRT, ABS, TRUNC, LOG, EXP, LN
Op1:=Operator(Op2)
EXPT Op1:=Operator (Op2,Op3)
412 TWD USE 10 AE
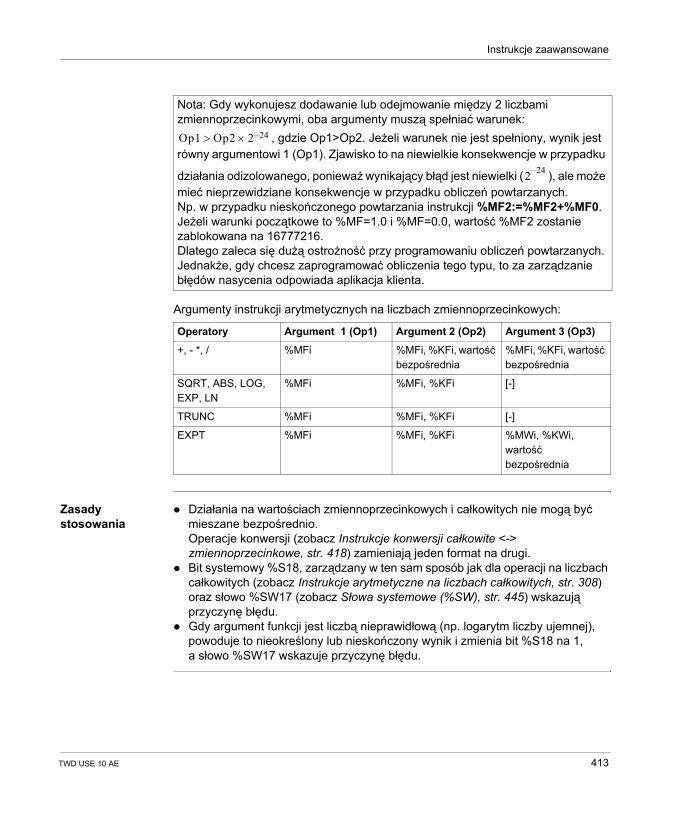
Instrukcje zaawansowane
Argumenty instrukcji arytmetycznych na liczbach zmiennoprzecinkowych:
Zasady stosowania
Działania na wartościach zmiennoprzecinkowych i całkowitych nie mogą być mieszane bezpośrednio. Operacje konwersji (zobacz Instrukcje konwersji całkowite <-> zmiennoprzecinkowe, str. 418) zamieniają jeden format na drugi.Bit systemowy %S18, zarządzany w ten sam sposób jak dla operacji na liczbach całkowitych (zobacz Instrukcje arytmetyczne na liczbach całkowitych, str. 308) oraz słowo %SW17 (zobacz Słowa systemowe (%SW), str. 445) wskazują przyczynę błędu.Gdy argument funkcji jest liczbą nieprawidłową (np. logarytm liczby ujemnej), powoduje to nieokreślony lub nieskończony wynik i zmienia bit %S18 na 1, a słowo %SW17 wskazuje przyczynę błędu.
Nota: Gdy wykonujesz dodawanie lub odejmowanie między 2 liczbami zmiennoprzecinkowymi, oba argumenty muszą spełniać warunek:
, gdzie Op1>Op2. Jeżeli warunek nie jest spełniony, wynik jest równy argumentowi 1 (Op1). Zjawisko to na niewielkie konsekwencje w przypadku
działania odizolowanego, ponieważ wynikający błąd jest niewielki ( ), ale może mieć nieprzewidziane konsekwencje w przypadku obliczeń powtarzanych. Np. w przypadku nieskończonego powtarzania instrukcji %MF2:=%MF2+%MF0. Jeżeli warunki początkowe to %MF=1.0 i %MF=0.0, wartość %MF2 zostanie zablokowana na 16777216.Dlatego zaleca się dużą ostrożność przy programowaniu obliczeń powtarzanych. Jednakże, gdy chcesz zaprogramować obliczenia tego typu, to za zarządzanie błędów nasycenia odpowiada aplikacja klienta.
Operatory Argument 1 (Op1) Argument 2 (Op2) Argument 3 (Op3)
+, - *, / %MFi %MFi, %KFi, wartość bezpośrednia
%MFi, %KFi, wartość bezpośrednia
SQRT, ABS, LOG, EXP, LN
%MFi %MFi, %KFi [-]
TRUNC %MFi %MFi, %KFi [-]
EXPT %MFi %MFi, %KFi %MWi, %KWi, wartość bezpośrednia
Op1 Op2 2 24–×>
2 24–
TWD USE 10 AE 413
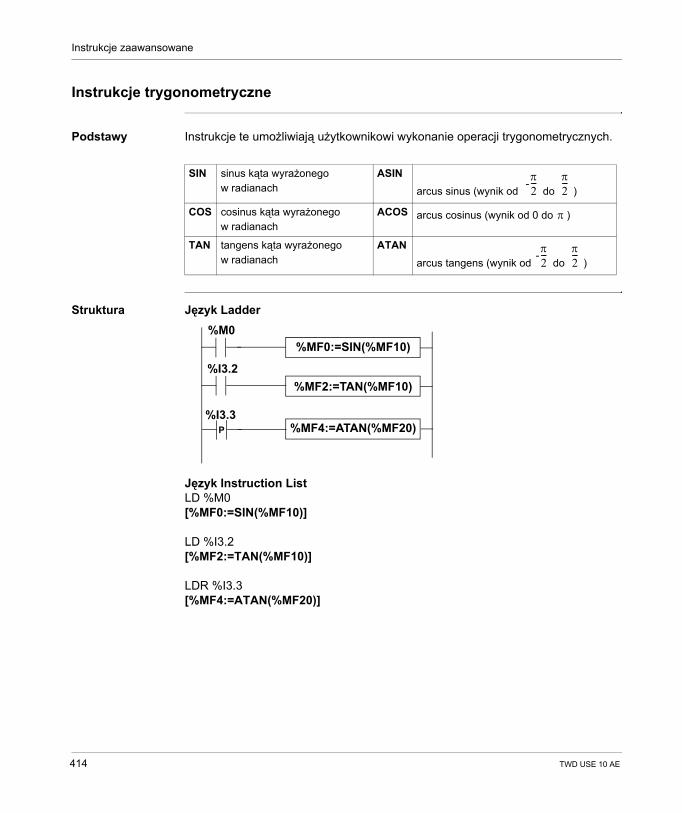
Instrukcje zaawansowane
Instrukcje trygonometryczne
Podstawy Instrukcje te umożliwiają użytkownikowi wykonanie operacji trygonometrycznych.
Struktura Język Ladder
Język Instruction ListLD %M0 [%MF0:=SIN(%MF10)] LD %I3.2 [%MF2:=TAN(%MF10)] LDR %I3.3 [%MF4:=ATAN(%MF20)]
SIN sinus kąta wyrażonego w radianach
ASINarcus sinus (wynik od do )
COS cosinus kąta wyrażonego w radianach
ACOS arcus cosinus (wynik od 0 do )
TAN tangens kąta wyrażonego w radianach
ATANarcus tangens (wynik od do )
-π2--- π
2---
π
-π2--- π
2---
P
%M0
%I3.2
%I3.3
%MF0:=SIN(%MF10)
%MF2:=TAN(%MF10)
%MF4:=ATAN(%MF20)
414 TWD USE 10 AE
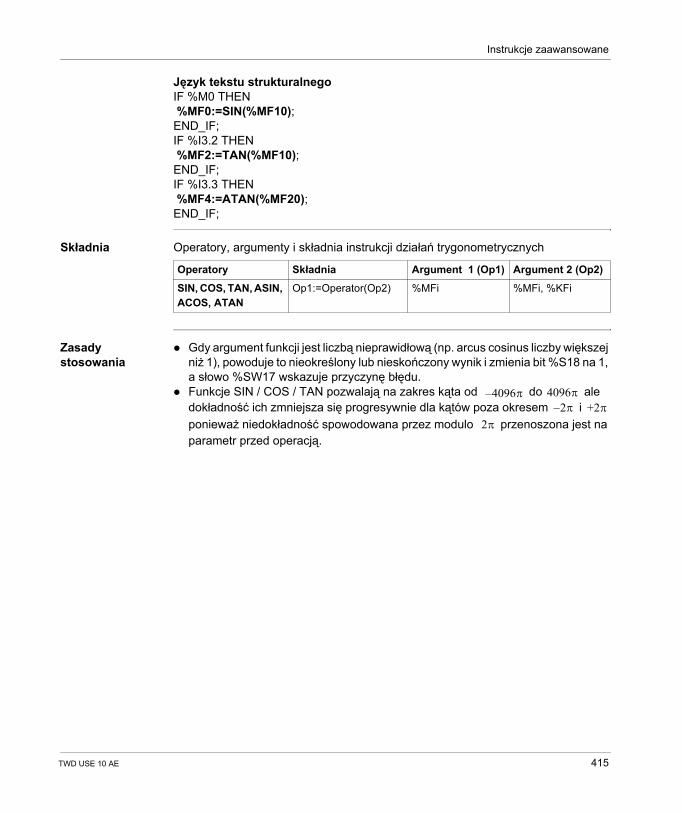
Instrukcje zaawansowane
Język tekstu strukturalnegoIF %M0 THEN %MF0:=SIN(%MF10); END_IF; IF %I3.2 THEN %MF2:=TAN(%MF10); END_IF; IF %I3.3 THEN %MF4:=ATAN(%MF20); END_IF;
Składnia Operatory, argumenty i składnia instrukcji działań trygonometrycznych
Zasady stosowania
Gdy argument funkcji jest liczbą nieprawidłową (np. arcus cosinus liczby większej niż 1), powoduje to nieokreślony lub nieskończony wynik i zmienia bit %S18 na 1, a słowo %SW17 wskazuje przyczynę błędu.Funkcje SIN / COS / TAN pozwalają na zakres kąta od do ale dokładność ich zmniejsza się progresywnie dla kątów poza okresem i ponieważ niedokładność spowodowana przez modulo przenoszona jest na parametr przed operacją.
Operatory Składnia Argument 1 (Op1) Argument 2 (Op2)
SIN, COS, TAN, ASIN, ACOS, ATAN
Op1:=Operator(Op2) %MFi %MFi, %KFi
4096π– 4096π2– π +2π
2π
TWD USE 10 AE 415
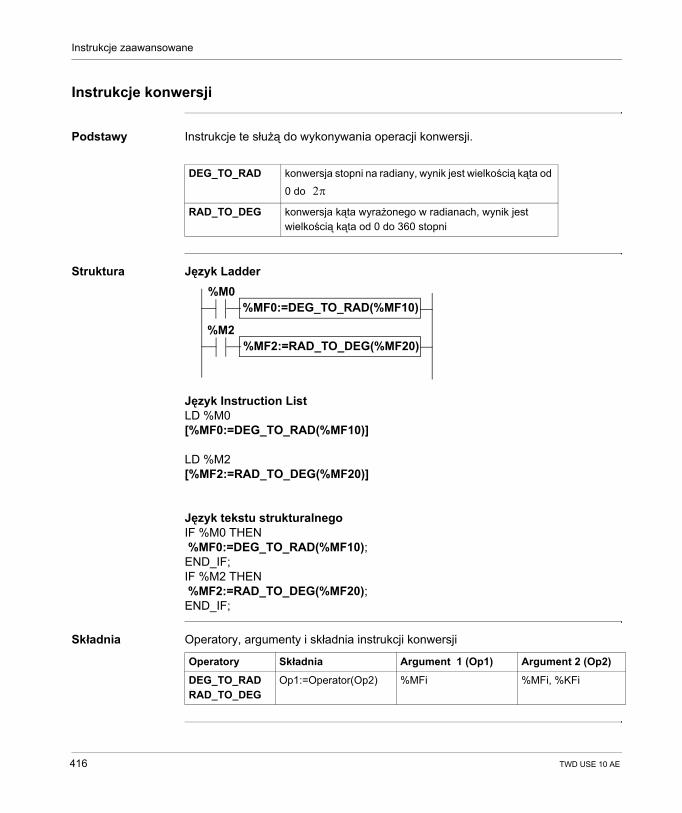
Instrukcje zaawansowane
Instrukcje konwersji
Podstawy Instrukcje te służą do wykonywania operacji konwersji.
Struktura Język Ladder
Język Instruction ListLD %M0 [%MF0:=DEG_TO_RAD(%MF10)] LD %M2 [%MF2:=RAD_TO_DEG(%MF20)]
Język tekstu strukturalnegoIF %M0 THEN %MF0:=DEG_TO_RAD(%MF10); END_IF; IF %M2 THEN %MF2:=RAD_TO_DEG(%MF20); END_IF;
Składnia Operatory, argumenty i składnia instrukcji konwersji
DEG_TO_RAD konwersja stopni na radiany, wynik jest wielkością kąta od
0 do
RAD_TO_DEG konwersja kąta wyrażonego w radianach, wynik jest wielkością kąta od 0 do 360 stopni
2π
%M0
%M2%MF2:=RAD_TO_DEG(%MF20)
%MF0:=DEG_TO_RAD(%MF10)
Operatory Składnia Argument 1 (Op1) Argument 2 (Op2)
DEG_TO_RAD RAD_TO_DEG
Op1:=Operator(Op2) %MFi %MFi, %KFi
416 TWD USE 10 AE
Instrukcje zaawansowane
Zasady stosowania
Konwertowany kąt musi być z zakresu -737280.0 i +737280.0 (dla konwersji DEG_TO_RAD) lub z zakresu i (dla konwersji RAD_TO_DEG).Dla wartości z poza tych zakresów, wyświetlany będzie wynik +1.#NAN, a bity %S18 i %SW17:X0 zostaną ustawione na 1.
4096π– 4096π
TWD USE 10 AE 417
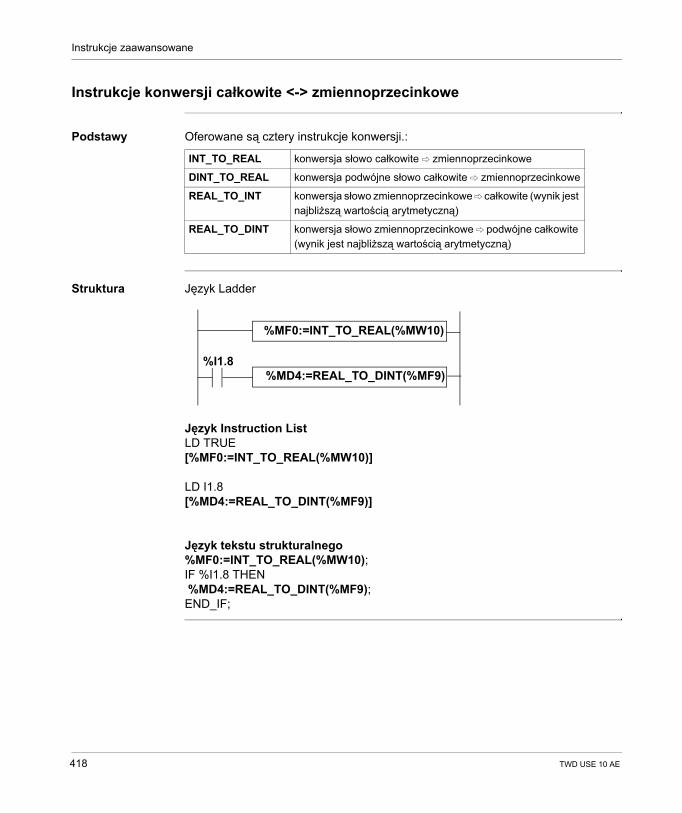
Instrukcje zaawansowane
Instrukcje konwersji całkowite <-> zmiennoprzecinkowe
Podstawy Oferowane są cztery instrukcje konwersji.:
Struktura Język Ladder
Język Instruction ListLD TRUE [%MF0:=INT_TO_REAL(%MW10)] LD I1.8 [%MD4:=REAL_TO_DINT(%MF9)]
Język tekstu strukturalnego%MF0:=INT_TO_REAL(%MW10); IF %I1.8 THEN %MD4:=REAL_TO_DINT(%MF9); END_IF;
INT_TO_REAL konwersja słowo całkowite C zmiennoprzecinkowe
DINT_TO_REAL konwersja podwójne słowo całkowite C zmiennoprzecinkowe
REAL_TO_INT konwersja słowo zmiennoprzecinkowe C całkowite (wynik jest najbliższą wartością arytmetyczną)
REAL_TO_DINT konwersja słowo zmiennoprzecinkowe C podwójne całkowite (wynik jest najbliższą wartością arytmetyczną)
%MF0:=INT_TO_REAL(%MW10)
%MD4:=REAL_TO_DINT(%MF9)%I1.8
418 TWD USE 10 AE
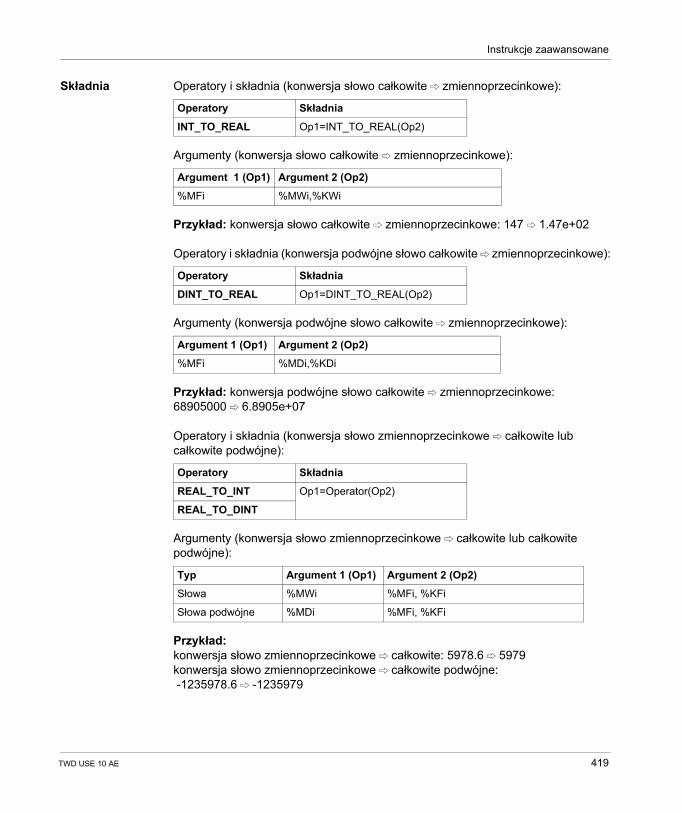
Instrukcje zaawansowane
Składnia Operatory i składnia (konwersja słowo całkowite C zmiennoprzecinkowe):
Argumenty (konwersja słowo całkowite C zmiennoprzecinkowe):
Przykład: konwersja słowo całkowite C zmiennoprzecinkowe: 147 C 1.47e+02
Operatory i składnia (konwersja podwójne słowo całkowite C zmiennoprzecinkowe):
Argumenty (konwersja podwójne słowo całkowite C zmiennoprzecinkowe):
Przykład: konwersja podwójne słowo całkowite C zmiennoprzecinkowe: 68905000 C 6.8905e+07
Operatory i składnia (konwersja słowo zmiennoprzecinkowe C całkowite lub całkowite podwójne):
Argumenty (konwersja słowo zmiennoprzecinkowe C całkowite lub całkowite podwójne):
Przykład: konwersja słowo zmiennoprzecinkowe C całkowite: 5978.6 C 5979konwersja słowo zmiennoprzecinkowe C całkowite podwójne: -1235978.6 C -1235979
Operatory Składnia
INT_TO_REAL Op1=INT_TO_REAL(Op2)
Argument 1 (Op1) Argument 2 (Op2)
%MFi %MWi,%KWi
Operatory Składnia
DINT_TO_REAL Op1=DINT_TO_REAL(Op2)
Argument 1 (Op1) Argument 2 (Op2)
%MFi %MDi,%KDi
Operatory Składnia
REAL_TO_INT Op1=Operator(Op2)
REAL_TO_DINT
Typ Argument 1 (Op1) Argument 2 (Op2)
Słowa %MWi %MFi, %KFi
Słowa podwójne %MDi %MFi, %KFi
TWD USE 10 AE 419

Instrukcje zaawansowane
Dokładność zaokrąglania
Standard IEEE 754 definiuje 4 tryby zaokrąglania dla operacji zmiennoprzecinkowych.Trybem zastosowanym przez powyższe instrukcje jest tryb "zaokrąglania do najbliższego": "jeżeli najbliższe odpowiadające wartości są w równej odległości od wyniku teoretycznego, wartość otrzymana będzie wartością, której mniej znaczący bit jest równy 0". Dlatego w pewnych przypadkach, wynik zaokrąglenia może przyjmować wartość domyślną lub wartość nadmiarową.
Na przykład:Zaokrąglenie wartości 10.5 C 10Zaokrąglenie wartości 11.5 C 12
Nota: Jeżeli podczas konwersji słowa rzeczywistego na całkowite (lub rzeczywistego na całkowite podwójne) wartość zmiennoprzecinkowa jest poza granicą słowa (lub słowa podwójnego), bit S18 jest ustawiany na 1.
420 TWD USE 10 AE
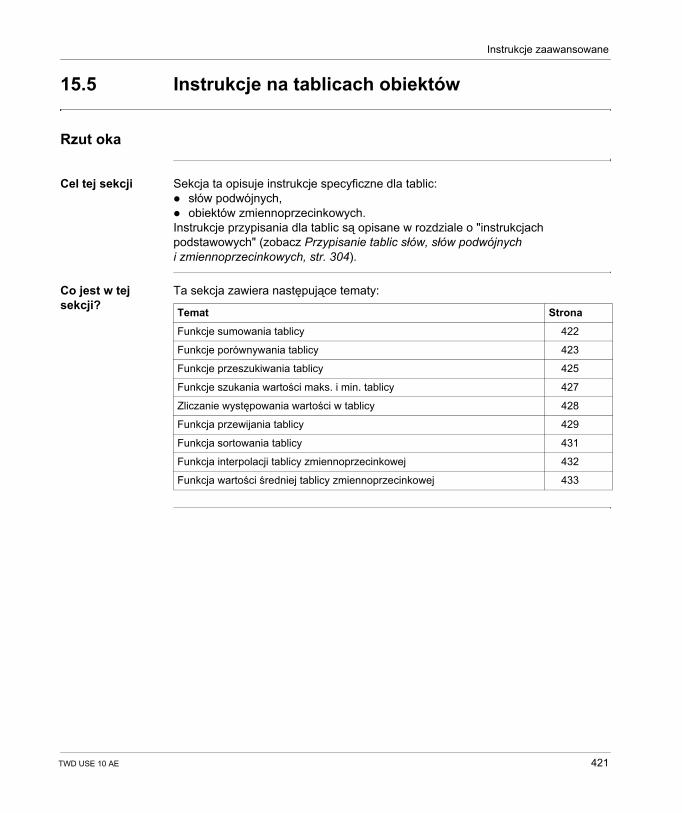
Instrukcje zaawansowane
15.5 Instrukcje na tablicach obiektów
Rzut oka
Cel tej sekcji Sekcja ta opisuje instrukcje specyficzne dla tablic:słów podwójnych,obiektów zmiennoprzecinkowych.
Instrukcje przypisania dla tablic są opisane w rozdziale o "instrukcjach podstawowych" (zobacz Przypisanie tablic słów, słów podwójnych i zmiennoprzecinkowych, str. 304).
Co jest w tej sekcji?
Ta sekcja zawiera następujące tematy:
Temat Strona
Funkcje sumowania tablicy 422
Funkcje porównywania tablicy 423
Funkcje przeszukiwania tablicy 425
Funkcje szukania wartości maks. i min. tablicy 427
Zliczanie występowania wartości w tablicy 428
Funkcja przewijania tablicy 429
Funkcja sortowania tablicy 431
Funkcja interpolacji tablicy zmiennoprzecinkowej 432
Funkcja wartości średniej tablicy zmiennoprzecinkowej 433
TWD USE 10 AE 421
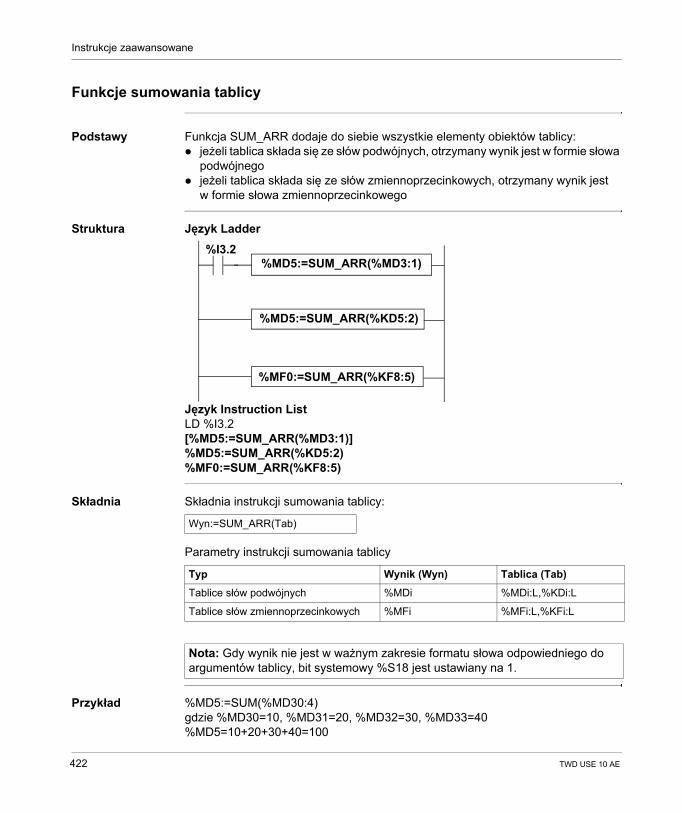
Instrukcje zaawansowane
Funkcje sumowania tablicy
Podstawy Funkcja SUM_ARR dodaje do siebie wszystkie elementy obiektów tablicy:jeżeli tablica składa się ze słów podwójnych, otrzymany wynik jest w formie słowa podwójnegojeżeli tablica składa się ze słów zmiennoprzecinkowych, otrzymany wynik jest w formie słowa zmiennoprzecinkowego
Struktura Język Ladder
Język Instruction ListLD %I3.2 [%MD5:=SUM_ARR(%MD3:1)]%MD5:=SUM_ARR(%KD5:2) %MF0:=SUM_ARR(%KF8:5)
Składnia Składnia instrukcji sumowania tablicy:
Parametry instrukcji sumowania tablicy
Przykład %MD5:=SUM(%MD30:4)gdzie %MD30=10, %MD31=20, %MD32=30, %MD33=40%MD5=10+20+30+40=100
%I3.2%MD5:=SUM_ARR(%MD3:1)
%MF0:=SUM_ARR(%KF8:5)
%MD5:=SUM_ARR(%KD5:2)
Wyn:=SUM_ARR(Tab)
Typ Wynik (Wyn) Tablica (Tab)
Tablice słów podwójnych %MDi %MDi:L,%KDi:L
Tablice słów zmiennoprzecinkowych %MFi %MFi:L,%KFi:L
Nota: Gdy wynik nie jest w ważnym zakresie formatu słowa odpowiedniego do argumentów tablicy, bit systemowy %S18 jest ustawiany na 1.
422 TWD USE 10 AE
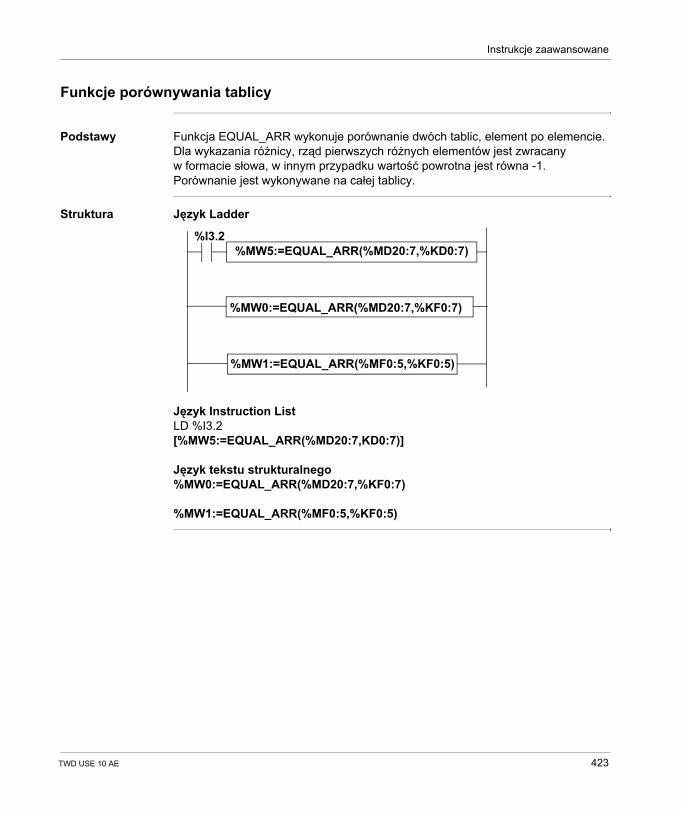
Instrukcje zaawansowane
Funkcje porównywania tablicy
Podstawy Funkcja EQUAL_ARR wykonuje porównanie dwóch tablic, element po elemencie.Dla wykazania różnicy, rząd pierwszych różnych elementów jest zwracany w formacie słowa, w innym przypadku wartość powrotna jest równa -1.Porównanie jest wykonywane na całej tablicy.
Struktura Język Ladder
Język Instruction ListLD %I3.2 [%MW5:=EQUAL_ARR(%MD20:7,KD0:7)]
Język tekstu strukturalnego%MW0:=EQUAL_ARR(%MD20:7,%KF0:7) %MW1:=EQUAL_ARR(%MF0:5,%KF0:5)
%MW5:=EQUAL_ARR(%MD20:7,%KD0:7)%I3.2
%MW0:=EQUAL_ARR(%MD20:7,%KF0:7)
%MW1:=EQUAL_ARR(%MF0:5,%KF0:5)
TWD USE 10 AE 423
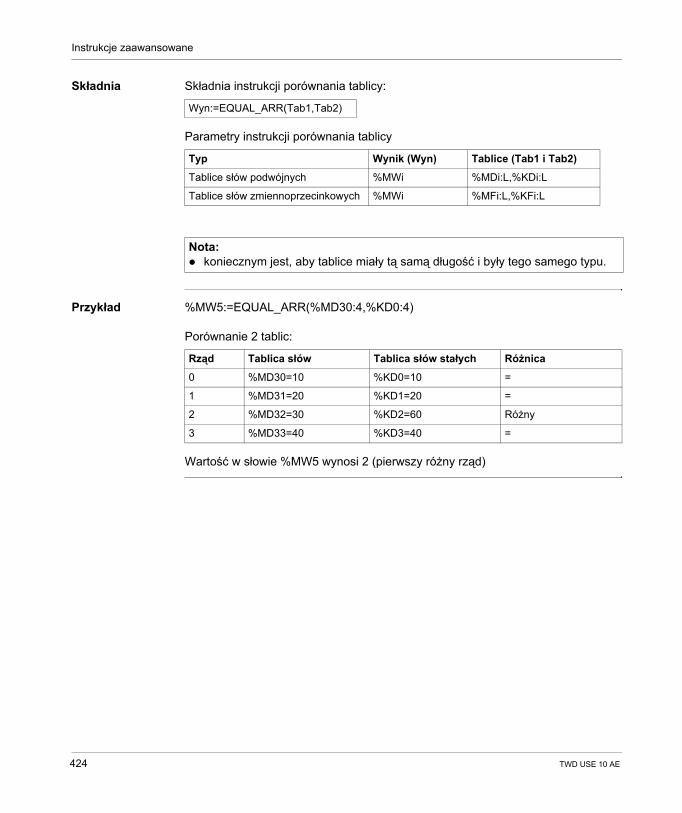
Instrukcje zaawansowane
Składnia Składnia instrukcji porównania tablicy:
Parametry instrukcji porównania tablicy
Przykład %MW5:=EQUAL_ARR(%MD30:4,%KD0:4)
Porównanie 2 tablic:
Wartość w słowie %MW5 wynosi 2 (pierwszy różny rząd)
Wyn:=EQUAL_ARR(Tab1,Tab2)
Typ Wynik (Wyn) Tablice (Tab1 i Tab2)
Tablice słów podwójnych %MWi %MDi:L,%KDi:L
Tablice słów zmiennoprzecinkowych %MWi %MFi:L,%KFi:L
Nota: koniecznym jest, aby tablice miały tą samą długość i były tego samego typu.
Rząd Tablica słów Tablica słów stałych Różnica
0 %MD30=10 %KD0=10 =
1 %MD31=20 %KD1=20 =
2 %MD32=30 %KD2=60 Różny
3 %MD33=40 %KD3=40 =
424 TWD USE 10 AE
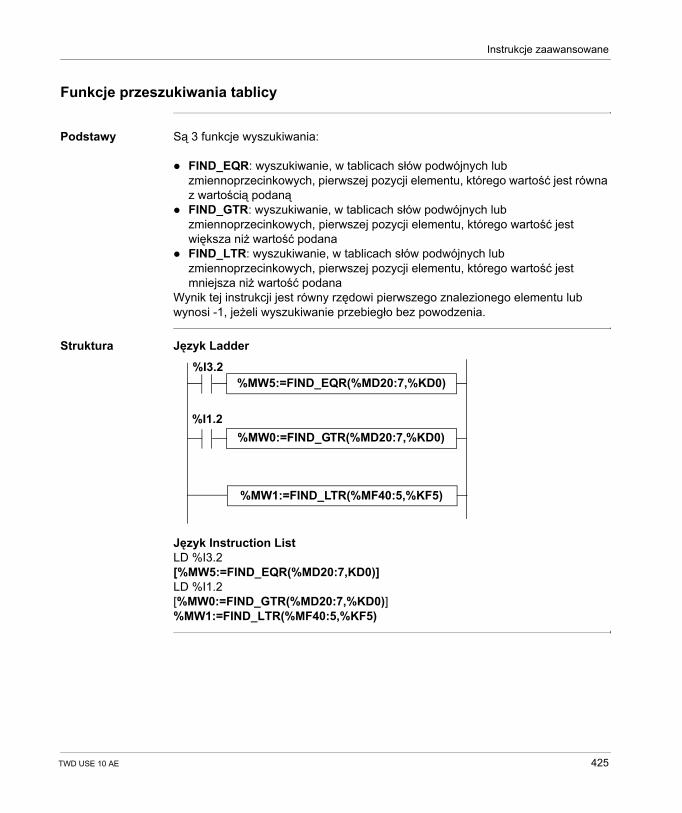
Instrukcje zaawansowane
Funkcje przeszukiwania tablicy
Podstawy Są 3 funkcje wyszukiwania:
FIND_EQR: wyszukiwanie, w tablicach słów podwójnych lub zmiennoprzecinkowych, pierwszej pozycji elementu, którego wartość jest równa z wartością podaną FIND_GTR: wyszukiwanie, w tablicach słów podwójnych lub zmiennoprzecinkowych, pierwszej pozycji elementu, którego wartość jest większa niż wartość podanaFIND_LTR: wyszukiwanie, w tablicach słów podwójnych lub zmiennoprzecinkowych, pierwszej pozycji elementu, którego wartość jest mniejsza niż wartość podana
Wynik tej instrukcji jest równy rzędowi pierwszego znalezionego elementu lub wynosi -1, jeżeli wyszukiwanie przebiegło bez powodzenia.
Struktura Język Ladder
Język Instruction ListLD %I3.2 [%MW5:=FIND_EQR(%MD20:7,KD0)]LD %I1.2 [%MW0:=FIND_GTR(%MD20:7,%KD0)] %MW1:=FIND_LTR(%MF40:5,%KF5)
%MW5:=FIND_EQR(%MD20:7,%KD0)%I3.2
%MW0:=FIND_GTR(%MD20:7,%KD0)
%MW1:=FIND_LTR(%MF40:5,%KF5)
%I1.2
TWD USE 10 AE 425
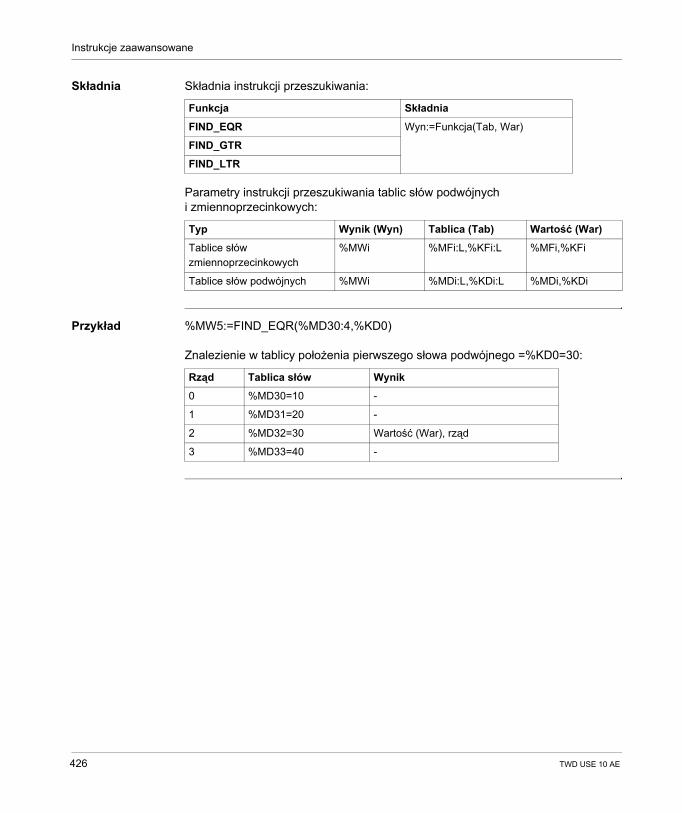
Instrukcje zaawansowane
Składnia Składnia instrukcji przeszukiwania:
Parametry instrukcji przeszukiwania tablic słów podwójnych i zmiennoprzecinkowych:
Przykład %MW5:=FIND_EQR(%MD30:4,%KD0)
Znalezienie w tablicy położenia pierwszego słowa podwójnego =%KD0=30:
Funkcja Składnia
FIND_EQR Wyn:=Funkcja(Tab, War)
FIND_GTR
FIND_LTR
Typ Wynik (Wyn) Tablica (Tab) Wartość (War)
Tablice słów zmiennoprzecinkowych
%MWi %MFi:L,%KFi:L %MFi,%KFi
Tablice słów podwójnych %MWi %MDi:L,%KDi:L %MDi,%KDi
Rząd Tablica słów Wynik
0 %MD30=10 -
1 %MD31=20 -
2 %MD32=30 Wartość (War), rząd
3 %MD33=40 -
426 TWD USE 10 AE
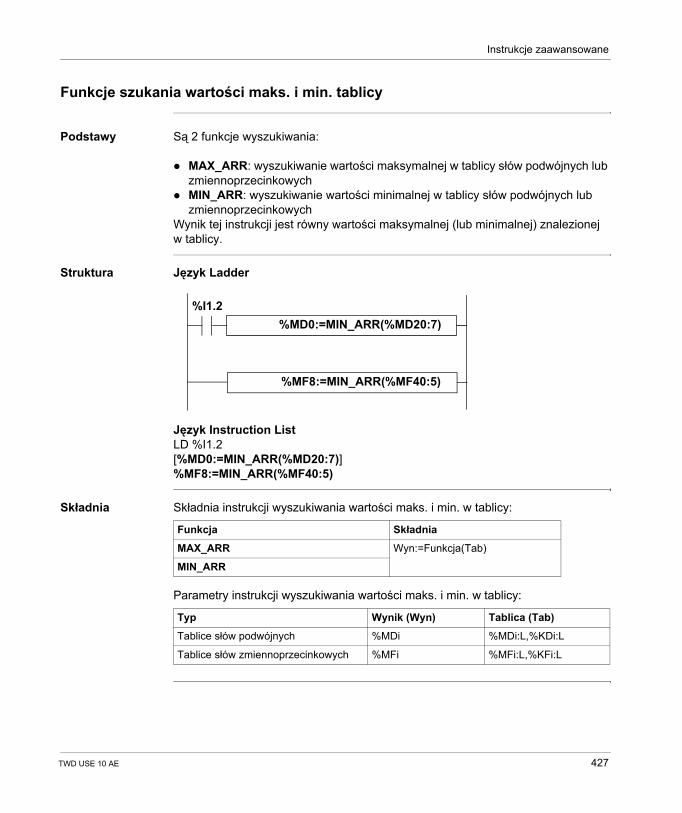
Instrukcje zaawansowane
Funkcje szukania wartości maks. i min. tablicy
Podstawy Są 2 funkcje wyszukiwania:
MAX_ARR: wyszukiwanie wartości maksymalnej w tablicy słów podwójnych lub zmiennoprzecinkowychMIN_ARR: wyszukiwanie wartości minimalnej w tablicy słów podwójnych lub zmiennoprzecinkowych
Wynik tej instrukcji jest równy wartości maksymalnej (lub minimalnej) znalezionej w tablicy.
Struktura Język Ladder
Język Instruction ListLD %I1.2 [%MD0:=MIN_ARR(%MD20:7)] %MF8:=MIN_ARR(%MF40:5)
Składnia Składnia instrukcji wyszukiwania wartości maks. i min. w tablicy:
Parametry instrukcji wyszukiwania wartości maks. i min. w tablicy:
%MD0:=MIN_ARR(%MD20:7)
%MF8:=MIN_ARR(%MF40:5)
%I1.2
Funkcja Składnia
MAX_ARR Wyn:=Funkcja(Tab)
MIN_ARR
Typ Wynik (Wyn) Tablica (Tab)
Tablice słów podwójnych %MDi %MDi:L,%KDi:L
Tablice słów zmiennoprzecinkowych %MFi %MFi:L,%KFi:L
TWD USE 10 AE 427
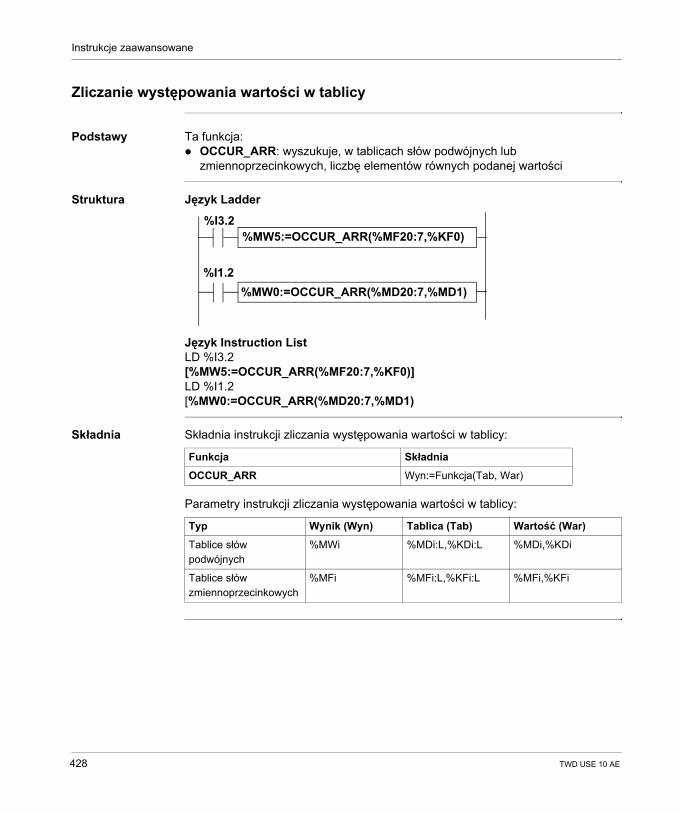
Instrukcje zaawansowane
Zliczanie występowania wartości w tablicy
Podstawy Ta funkcja:OCCUR_ARR: wyszukuje, w tablicach słów podwójnych lub zmiennoprzecinkowych, liczbę elementów równych podanej wartości
Struktura Język Ladder
Język Instruction ListLD %I3.2 [%MW5:=OCCUR_ARR(%MF20:7,%KF0)]LD %I1.2 [%MW0:=OCCUR_ARR(%MD20:7,%MD1)
Składnia Składnia instrukcji zliczania występowania wartości w tablicy:
Parametry instrukcji zliczania występowania wartości w tablicy:
%MW5:=OCCUR_ARR(%MF20:7,%KF0)%I3.2
%MW0:=OCCUR_ARR(%MD20:7,%MD1)%I1.2
Funkcja Składnia
OCCUR_ARR Wyn:=Funkcja(Tab, War)
Typ Wynik (Wyn) Tablica (Tab) Wartość (War)
Tablice słów podwójnych
%MWi %MDi:L,%KDi:L %MDi,%KDi
Tablice słów zmiennoprzecinkowych
%MFi %MFi:L,%KFi:L %MFi,%KFi
428 TWD USE 10 AE
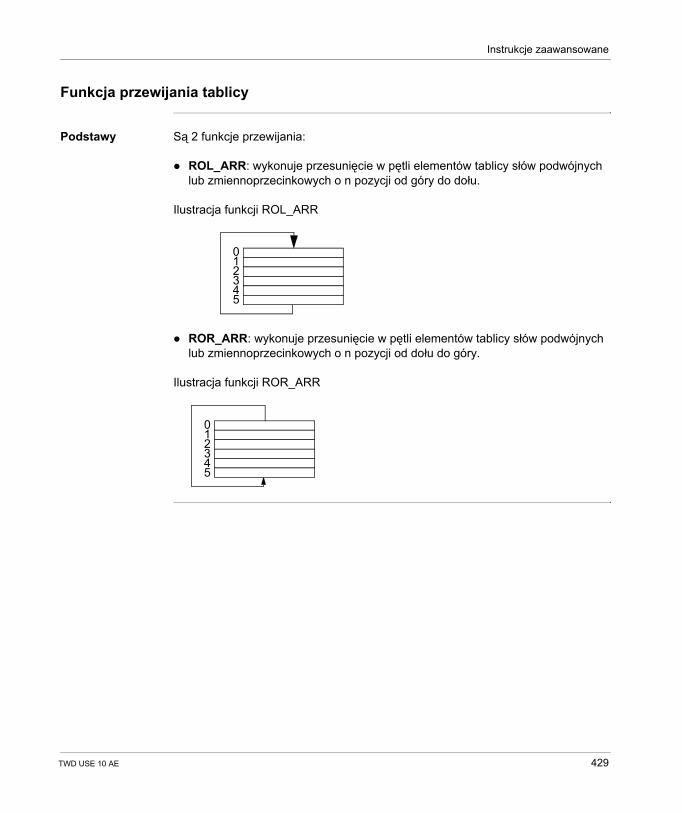
Instrukcje zaawansowane
Funkcja przewijania tablicy
Podstawy Są 2 funkcje przewijania:
ROL_ARR: wykonuje przesunięcie w pętli elementów tablicy słów podwójnych lub zmiennoprzecinkowych o n pozycji od góry do dołu.
Ilustracja funkcji ROL_ARR
ROR_ARR: wykonuje przesunięcie w pętli elementów tablicy słów podwójnych lub zmiennoprzecinkowych o n pozycji od dołu do góry.
Ilustracja funkcji ROR_ARR
012345
012345
TWD USE 10 AE 429
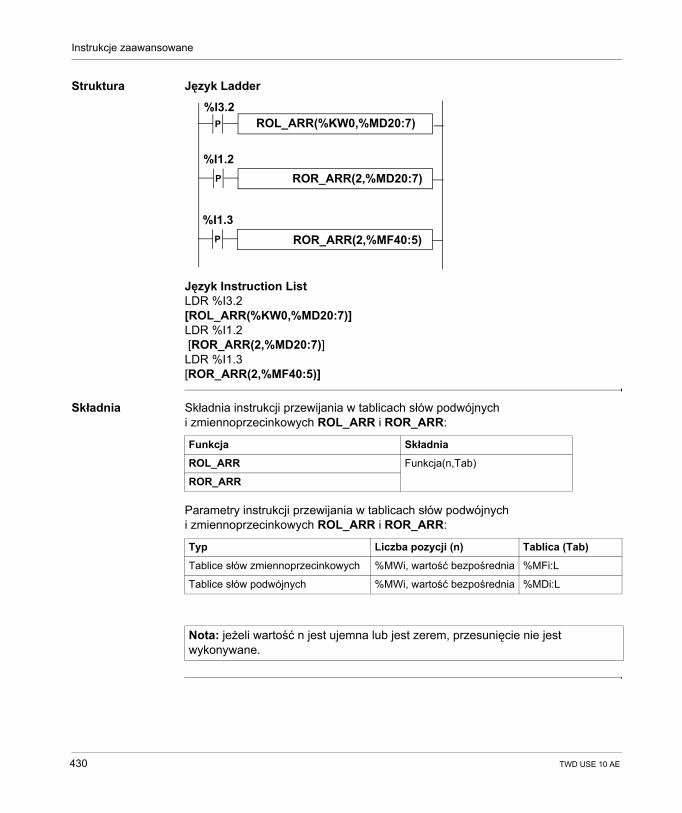
Instrukcje zaawansowane
Struktura Język Ladder
Język Instruction ListLDR %I3.2 [ROL_ARR(%KW0,%MD20:7)]LDR %I1.2 [ROR_ARR(2,%MD20:7)] LDR %I1.3 [ROR_ARR(2,%MF40:5)]
Składnia Składnia instrukcji przewijania w tablicach słów podwójnych i zmiennoprzecinkowych ROL_ARR i ROR_ARR:
Parametry instrukcji przewijania w tablicach słów podwójnych i zmiennoprzecinkowych ROL_ARR i ROR_ARR:
ROL_ARR(%KW0,%MD20:7)%I3.2
ROR_ARR(2,%MD20:7)%I1.2
P
P
ROR_ARR(2,%MF40:5)%I1.3
P
Funkcja Składnia
ROL_ARR Funkcja(n,Tab)
ROR_ARR
Typ Liczba pozycji (n) Tablica (Tab)
Tablice słów zmiennoprzecinkowych %MWi, wartość bezpośrednia %MFi:L
Tablice słów podwójnych %MWi, wartość bezpośrednia %MDi:L
Nota: jeżeli wartość n jest ujemna lub jest zerem, przesunięcie nie jest wykonywane.
430 TWD USE 10 AE
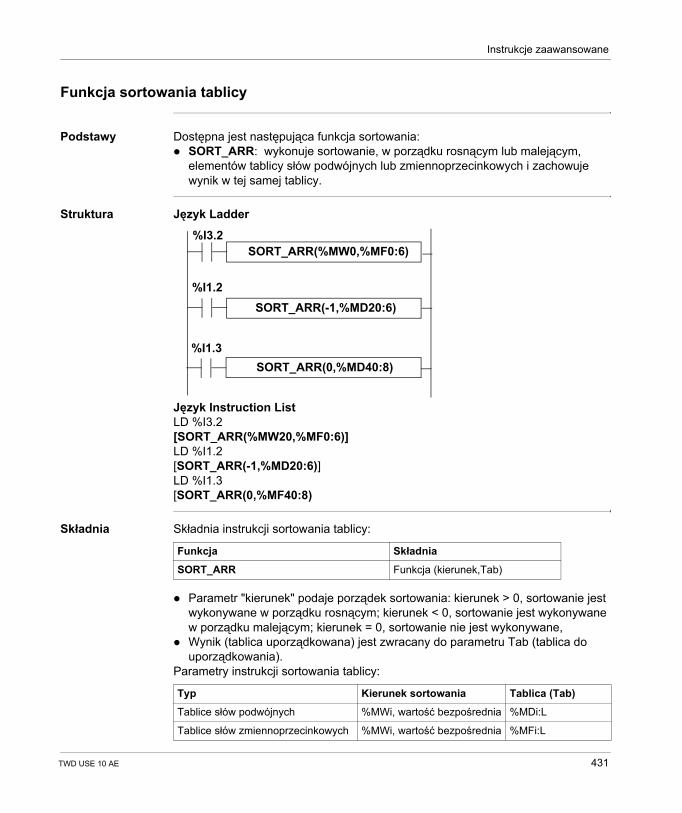
Instrukcje zaawansowane
Funkcja sortowania tablicy
Podstawy Dostępna jest następująca funkcja sortowania:SORT_ARR: wykonuje sortowanie, w porządku rosnącym lub malejącym, elementów tablicy słów podwójnych lub zmiennoprzecinkowych i zachowuje wynik w tej samej tablicy.
Struktura Język Ladder
Język Instruction ListLD %I3.2 [SORT_ARR(%MW20,%MF0:6)]LD %I1.2 [SORT_ARR(-1,%MD20:6)] LD %I1.3 [SORT_ARR(0,%MF40:8)
Składnia Składnia instrukcji sortowania tablicy:
Parametr "kierunek" podaje porządek sortowania: kierunek > 0, sortowanie jest wykonywane w porządku rosnącym; kierunek < 0, sortowanie jest wykonywane w porządku malejącym; kierunek = 0, sortowanie nie jest wykonywane,Wynik (tablica uporządkowana) jest zwracany do parametru Tab (tablica do uporządkowania).
Parametry instrukcji sortowania tablicy:
SORT_ARR(%MW0,%MF0:6)%I3.2
SORT_ARR(-1,%MD20:6)%I1.2
SORT_ARR(0,%MD40:8)%I1.3
Funkcja Składnia
SORT_ARR Funkcja (kierunek,Tab)
Typ Kierunek sortowania Tablica (Tab)
Tablice słów podwójnych %MWi, wartość bezpośrednia %MDi:L
Tablice słów zmiennoprzecinkowych %MWi, wartość bezpośrednia %MFi:L
TWD USE 10 AE 431
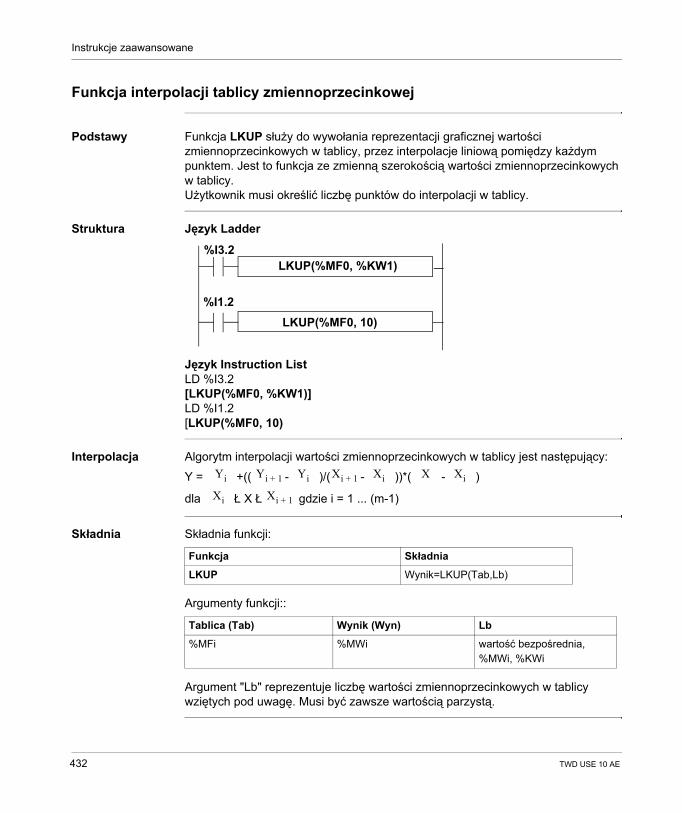
Instrukcje zaawansowane
Funkcja interpolacji tablicy zmiennoprzecinkowej
Podstawy Funkcja LKUP służy do wywołania reprezentacji graficznej wartości zmiennoprzecinkowych w tablicy, przez interpolacje liniową pomiędzy każdym punktem. Jest to funkcja ze zmienną szerokością wartości zmiennoprzecinkowych w tablicy.Użytkownik musi określić liczbę punktów do interpolacji w tablicy.
Struktura Język Ladder
Język Instruction ListLD %I3.2 [LKUP(%MF0, %KW1)]LD %I1.2 [LKUP(%MF0, 10)
Interpolacja Algorytm interpolacji wartości zmiennoprzecinkowych w tablicy jest następujący:
Y = +(( - )/( - ))*( - )
dla Ł X Ł gdzie i = 1 ... (m-1)
Składnia Składnia funkcji:
Argumenty funkcji::
Argument "Lb" reprezentuje liczbę wartości zmiennoprzecinkowych w tablicy wziętych pod uwagę. Musi być zawsze wartością parzystą.
LKUP(%MF0, %KW1)%I3.2
LKUP(%MF0, 10)%I1.2
Yi Yi 1+ Yi Xi 1+ Xi X Xi
Xi Xi 1+
Funkcja Składnia
LKUP Wynik=LKUP(Tab,Lb)
Tablica (Tab) Wynik (Wyn) Lb
%MFi %MWi wartość bezpośrednia, %MWi, %KWi
432 TWD USE 10 AE
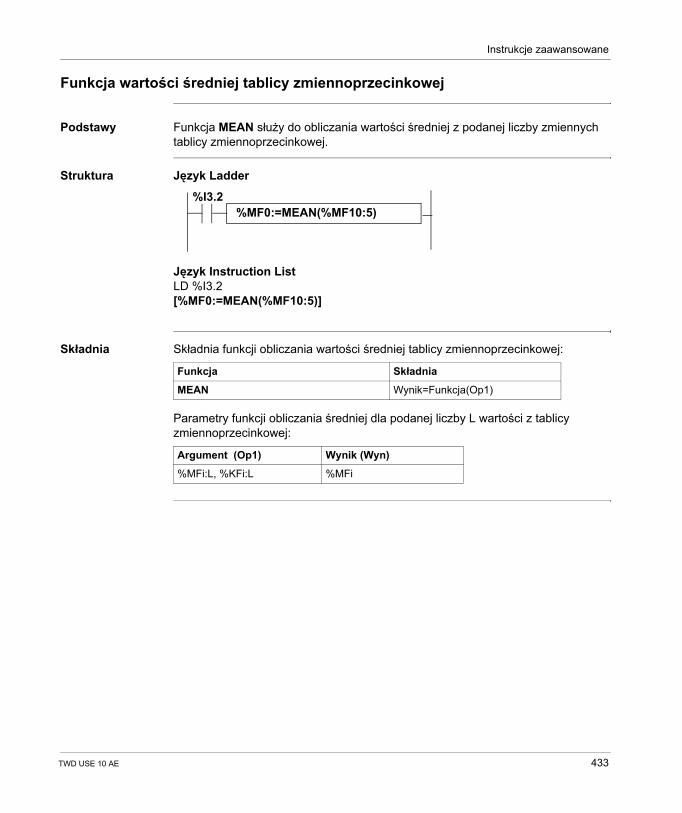
Instrukcje zaawansowane
Funkcja wartości średniej tablicy zmiennoprzecinkowej
Podstawy Funkcja MEAN służy do obliczania wartości średniej z podanej liczby zmiennych tablicy zmiennoprzecinkowej.
Struktura Język Ladder
Język Instruction ListLD %I3.2 [%MF0:=MEAN(%MF10:5)]
Składnia Składnia funkcji obliczania wartości średniej tablicy zmiennoprzecinkowej:
Parametry funkcji obliczania średniej dla podanej liczby L wartości z tablicy zmiennoprzecinkowej:
%MF0:=MEAN(%MF10:5)%I3.2
Funkcja Składnia
MEAN Wynik=Funkcja(Op1)
Argument (Op1) Wynik (Wyn)
%MFi:L, %KFi:L %MFi
TWD USE 10 AE 433

Instrukcje zaawansowane
434 TWD USE 10 AE
TWD USE 10 AE
16
Bity i słowa systemoweRzut oka
Temat tego rozdziału
Rozdział ten dostarcza przeglądu bitów i słów systemowych, które mogą być zastosowane do tworzenia programów sterujących sterowników Twido.
Co jest w tym rozdziale?
Ten rozdział zawiera następujące tematy:
Temat Strona
Bity systemowe (%S) 436
Słowa systemowe (%SW) 445
435
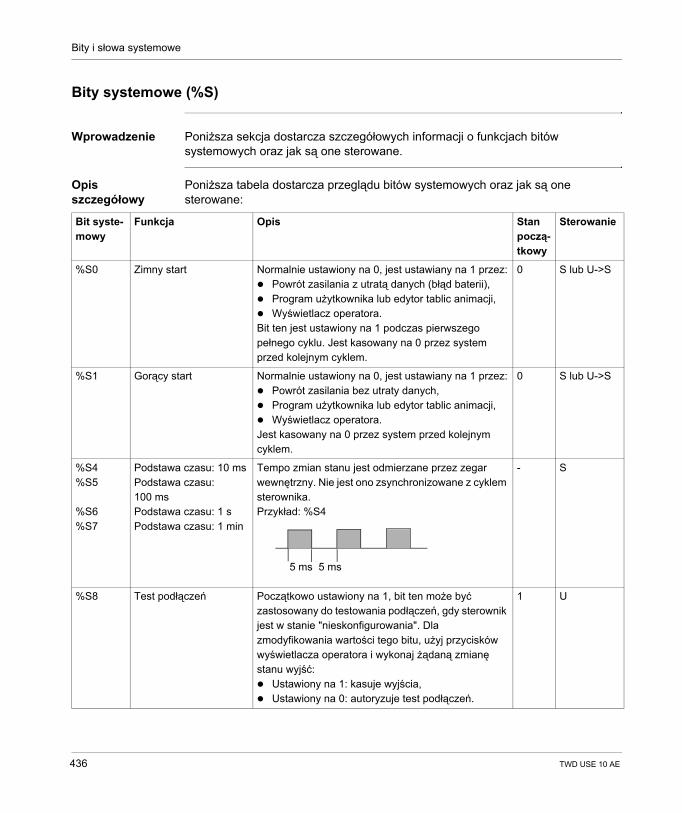
Bity i słowa systemowe
Bity systemowe (%S)
Wprowadzenie Poniższa sekcja dostarcza szczegółowych informacji o funkcjach bitów systemowych oraz jak są one sterowane.
Opis szczegółowy
Poniższa tabela dostarcza przeglądu bitów systemowych oraz jak są one sterowane:
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
%S0 Zimny start Normalnie ustawiony na 0, jest ustawiany na 1 przez:Powrót zasilania z utratą danych (błąd baterii),Program użytkownika lub edytor tablic animacji,Wyświetlacz operatora.
Bit ten jest ustawiony na 1 podczas pierwszego pełnego cyklu. Jest kasowany na 0 przez system przed kolejnym cyklem.
0 S lub U->S
%S1 Gorący start Normalnie ustawiony na 0, jest ustawiany na 1 przez:Powrót zasilania bez utraty danych,Program użytkownika lub edytor tablic animacji,Wyświetlacz operatora.
Jest kasowany na 0 przez system przed kolejnym cyklem.
0 S lub U->S
%S4%S5
%S6%S7
Podstawa czasu: 10 msPodstawa czasu: 100 msPodstawa czasu: 1 sPodstawa czasu: 1 min
Tempo zmian stanu jest odmierzane przez zegar wewnętrzny. Nie jest ono zsynchronizowane z cyklem sterownika.Przykład: %S4
- S
%S8 Test podłączeń Początkowo ustawiony na 1, bit ten może być zastosowany do testowania podłączeń, gdy sterownik jest w stanie "nieskonfigurowania". Dla zmodyfikowania wartości tego bitu, użyj przycisków wyświetlacza operatora i wykonaj żądaną zmianę stanu wyjść:
Ustawiony na 1: kasuje wyjścia,Ustawiony na 0: autoryzuje test podłączeń.
1 U
5 ms 5 ms
436 TWD USE 10 AE
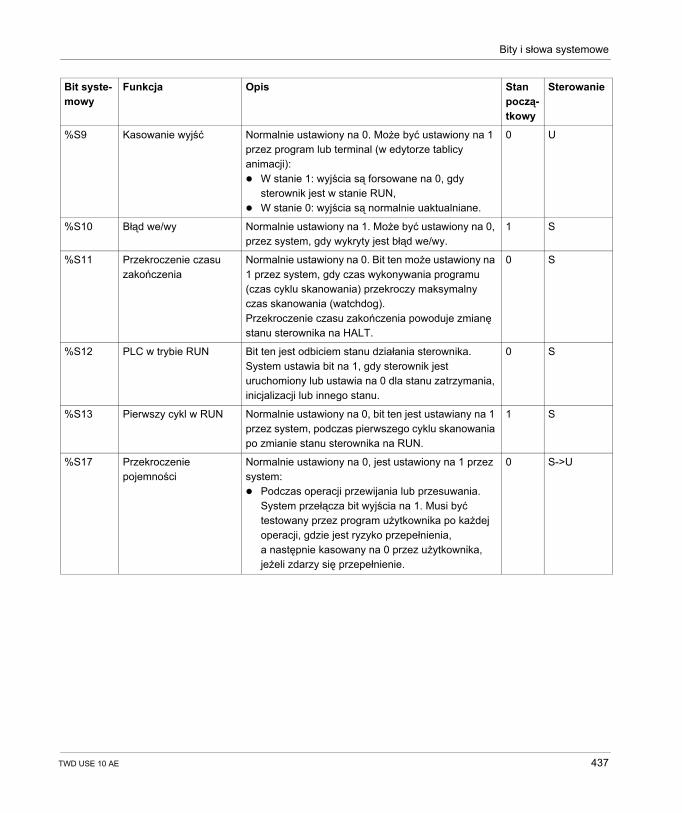
Bity i słowa systemowe
%S9 Kasowanie wyjść Normalnie ustawiony na 0. Może być ustawiony na 1 przez program lub terminal (w edytorze tablicy animacji):
W stanie 1: wyjścia są forsowane na 0, gdy sterownik jest w stanie RUN,W stanie 0: wyjścia są normalnie uaktualniane.
0 U
%S10 Błąd we/wy Normalnie ustawiony na 1. Może być ustawiony na 0, przez system, gdy wykryty jest błąd we/wy.
1 S
%S11 Przekroczenie czasu zakończenia
Normalnie ustawiony na 0. Bit ten może ustawiony na 1 przez system, gdy czas wykonywania programu (czas cyklu skanowania) przekroczy maksymalny czas skanowania (watchdog).Przekroczenie czasu zakończenia powoduje zmianę stanu sterownika na HALT.
0 S
%S12 PLC w trybie RUN Bit ten jest odbiciem stanu działania sterownika. System ustawia bit na 1, gdy sterownik jest uruchomiony lub ustawia na 0 dla stanu zatrzymania, inicjalizacji lub innego stanu.
0 S
%S13 Pierwszy cykl w RUN Normalnie ustawiony na 0, bit ten jest ustawiany na 1 przez system, podczas pierwszego cyklu skanowania po zmianie stanu sterownika na RUN.
1 S
%S17 Przekroczenie pojemności
Normalnie ustawiony na 0, jest ustawiony na 1 przez system:
Podczas operacji przewijania lub przesuwania. System przełącza bit wyjścia na 1. Musi być testowany przez program użytkownika po każdej operacji, gdzie jest ryzyko przepełnienia, a następnie kasowany na 0 przez użytkownika, jeżeli zdarzy się przepełnienie.
0 S->U
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
TWD USE 10 AE 437
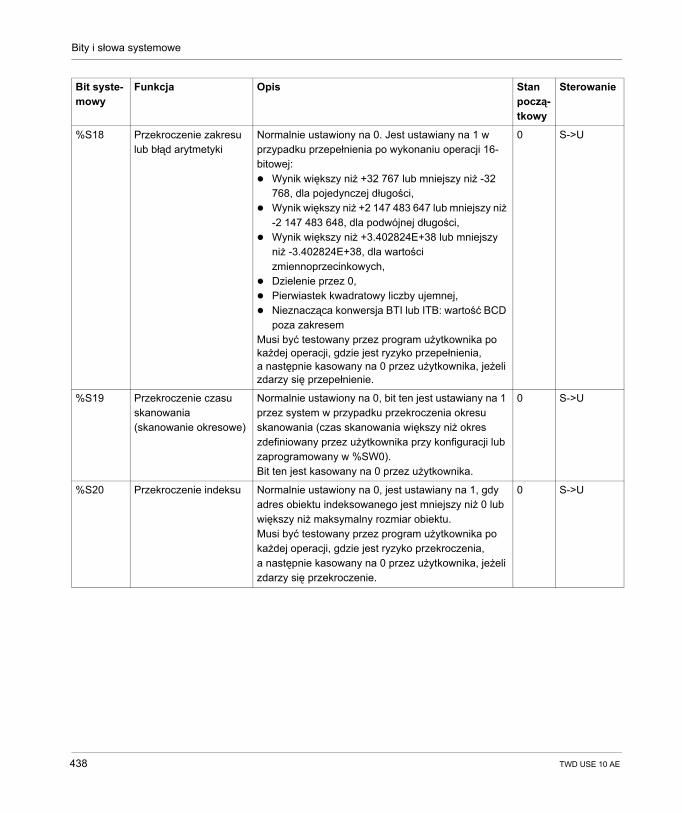
Bity i słowa systemowe
%S18 Przekroczenie zakresu lub błąd arytmetyki
Normalnie ustawiony na 0. Jest ustawiany na 1 w przypadku przepełnienia po wykonaniu operacji 16-bitowej:
Wynik większy niż +32 767 lub mniejszy niż -32 768, dla pojedynczej długości,Wynik większy niż +2 147 483 647 lub mniejszy niż -2 147 483 648, dla podwójnej długości,Wynik większy niż +3.402824E+38 lub mniejszy niż -3.402824E+38, dla wartości zmiennoprzecinkowych,Dzielenie przez 0,Pierwiastek kwadratowy liczby ujemnej,Nieznacząca konwersja BTI lub ITB: wartość BCD poza zakresem
Musi być testowany przez program użytkownika po każdej operacji, gdzie jest ryzyko przepełnienia, a następnie kasowany na 0 przez użytkownika, jeżeli zdarzy się przepełnienie.
0 S->U
%S19 Przekroczenie czasu skanowania (skanowanie okresowe)
Normalnie ustawiony na 0, bit ten jest ustawiany na 1 przez system w przypadku przekroczenia okresu skanowania (czas skanowania większy niż okres zdefiniowany przez użytkownika przy konfiguracji lub zaprogramowany w %SW0).Bit ten jest kasowany na 0 przez użytkownika.
0 S->U
%S20 Przekroczenie indeksu Normalnie ustawiony na 0, jest ustawiany na 1, gdy adres obiektu indeksowanego jest mniejszy niż 0 lub większy niż maksymalny rozmiar obiektu.Musi być testowany przez program użytkownika po każdej operacji, gdzie jest ryzyko przekroczenia, a następnie kasowany na 0 przez użytkownika, jeżeli zdarzy się przekroczenie.
0 S->U
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
438 TWD USE 10 AE
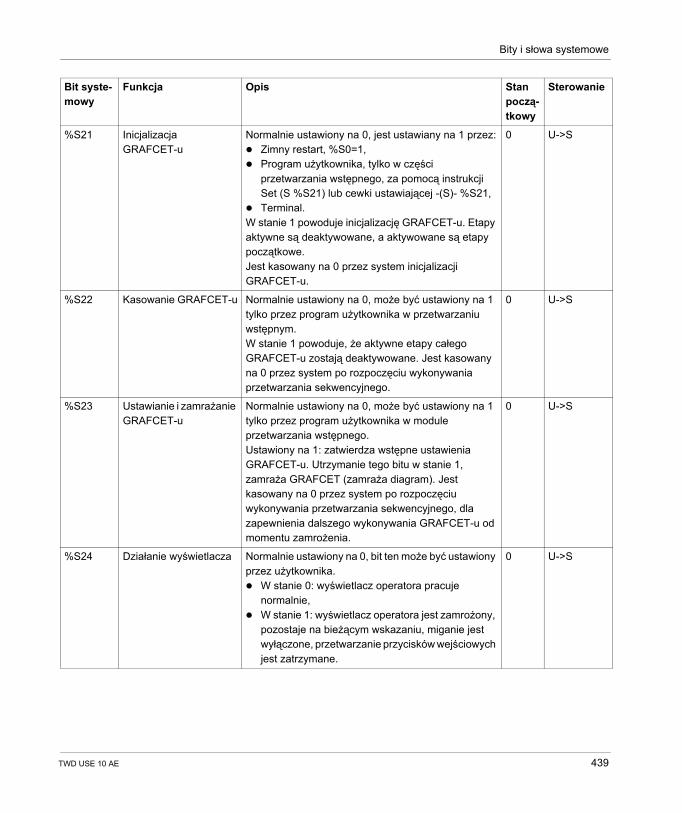
Bity i słowa systemowe
%S21 Inicjalizacja GRAFCET-u
Normalnie ustawiony na 0, jest ustawiany na 1 przez:Zimny restart, %S0=1,Program użytkownika, tylko w części przetwarzania wstępnego, za pomocą instrukcji Set (S %S21) lub cewki ustawiającej -(S)- %S21,Terminal.
W stanie 1 powoduje inicjalizację GRAFCET-u. Etapy aktywne są deaktywowane, a aktywowane są etapy początkowe.Jest kasowany na 0 przez system inicjalizacji GRAFCET-u.
0 U->S
%S22 Kasowanie GRAFCET-u Normalnie ustawiony na 0, może być ustawiony na 1 tylko przez program użytkownika w przetwarzaniu wstępnym.W stanie 1 powoduje, że aktywne etapy całego GRAFCET-u zostają deaktywowane. Jest kasowany na 0 przez system po rozpoczęciu wykonywania przetwarzania sekwencyjnego.
0 U->S
%S23 Ustawianie i zamrażanie GRAFCET-u
Normalnie ustawiony na 0, może być ustawiony na 1 tylko przez program użytkownika w module przetwarzania wstępnego.Ustawiony na 1: zatwierdza wstępne ustawienia GRAFCET-u. Utrzymanie tego bitu w stanie 1, zamraża GRAFCET (zamraża diagram). Jest kasowany na 0 przez system po rozpoczęciu wykonywania przetwarzania sekwencyjnego, dla zapewnienia dalszego wykonywania GRAFCET-u od momentu zamrożenia.
0 U->S
%S24 Działanie wyświetlacza Normalnie ustawiony na 0, bit ten może być ustawiony przez użytkownika.
W stanie 0: wyświetlacz operatora pracuje normalnie,W stanie 1: wyświetlacz operatora jest zamrożony, pozostaje na bieżącym wskazaniu, miganie jest wyłączone, przetwarzanie przycisków wejściowych jest zatrzymane.
0 U->S
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
TWD USE 10 AE 439
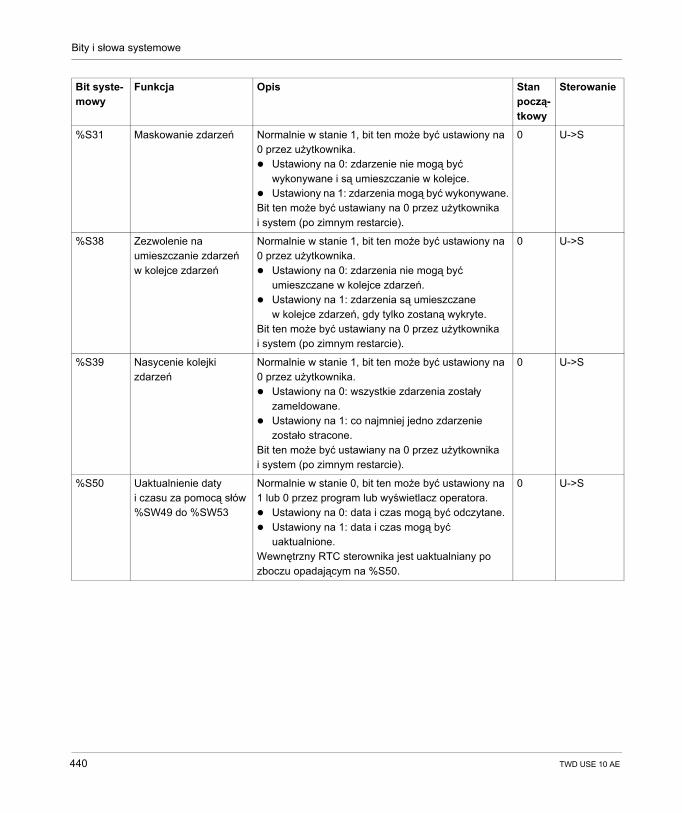
Bity i słowa systemowe
%S31 Maskowanie zdarzeń Normalnie w stanie 1, bit ten może być ustawiony na 0 przez użytkownika.
Ustawiony na 0: zdarzenie nie mogą być wykonywane i są umieszczanie w kolejce.Ustawiony na 1: zdarzenia mogą być wykonywane.
Bit ten może być ustawiany na 0 przez użytkownika i system (po zimnym restarcie).
0 U->S
%S38 Zezwolenie na umieszczanie zdarzeń w kolejce zdarzeń
Normalnie w stanie 1, bit ten może być ustawiony na 0 przez użytkownika.
Ustawiony na 0: zdarzenia nie mogą być umieszczane w kolejce zdarzeń.Ustawiony na 1: zdarzenia są umieszczane w kolejce zdarzeń, gdy tylko zostaną wykryte.
Bit ten może być ustawiany na 0 przez użytkownika i system (po zimnym restarcie).
0 U->S
%S39 Nasycenie kolejki zdarzeń
Normalnie w stanie 1, bit ten może być ustawiony na 0 przez użytkownika.
Ustawiony na 0: wszystkie zdarzenia zostały zameldowane.Ustawiony na 1: co najmniej jedno zdarzenie zostało stracone.
Bit ten może być ustawiany na 0 przez użytkownika i system (po zimnym restarcie).
0 U->S
%S50 Uaktualnienie daty i czasu za pomocą słów %SW49 do %SW53
Normalnie w stanie 0, bit ten może być ustawiony na 1 lub 0 przez program lub wyświetlacz operatora.
Ustawiony na 0: data i czas mogą być odczytane.Ustawiony na 1: data i czas mogą być uaktualnione.
Wewnętrzny RTC sterownika jest uaktualniany po zboczu opadającym na %S50.
0 U->S
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
440 TWD USE 10 AE
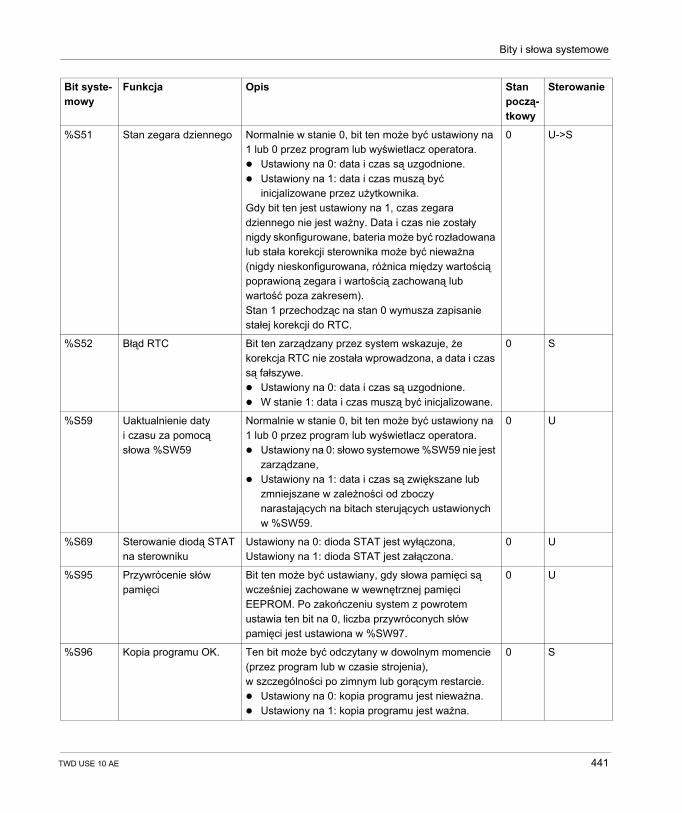
Bity i słowa systemowe
%S51 Stan zegara dziennego Normalnie w stanie 0, bit ten może być ustawiony na 1 lub 0 przez program lub wyświetlacz operatora.
Ustawiony na 0: data i czas są uzgodnione.Ustawiony na 1: data i czas muszą być inicjalizowane przez użytkownika.
Gdy bit ten jest ustawiony na 1, czas zegara dziennego nie jest ważny. Data i czas nie zostały nigdy skonfigurowane, bateria może być rozładowana lub stała korekcji sterownika może być nieważna (nigdy nieskonfigurowana, różnica między wartością poprawioną zegara i wartością zachowaną lub wartość poza zakresem).Stan 1 przechodząc na stan 0 wymusza zapisanie stałej korekcji do RTC.
0 U->S
%S52 Błąd RTC Bit ten zarządzany przez system wskazuje, że korekcja RTC nie została wprowadzona, a data i czas są fałszywe.
Ustawiony na 0: data i czas są uzgodnione.W stanie 1: data i czas muszą być inicjalizowane.
0 S
%S59 Uaktualnienie daty i czasu za pomocą słowa %SW59
Normalnie w stanie 0, bit ten może być ustawiony na 1 lub 0 przez program lub wyświetlacz operatora.
Ustawiony na 0: słowo systemowe %SW59 nie jest zarządzane,Ustawiony na 1: data i czas są zwiększane lub zmniejszane w zależności od zboczy narastających na bitach sterujących ustawionych w %SW59.
0 U
%S69 Sterowanie diodą STAT na sterowniku
Ustawiony na 0: dioda STAT jest wyłączona,Ustawiony na 1: dioda STAT jest załączona.
0 U
%S95 Przywrócenie słów pamięci
Bit ten może być ustawiany, gdy słowa pamięci są wcześniej zachowane w wewnętrznej pamięci EEPROM. Po zakończeniu system z powrotem ustawia ten bit na 0, liczba przywróconych słów pamięci jest ustawiona w %SW97.
0 U
%S96 Kopia programu OK. Ten bit może być odczytany w dowolnym momencie (przez program lub w czasie strojenia), w szczególności po zimnym lub gorącym restarcie.
Ustawiony na 0: kopia programu jest nieważna.Ustawiony na 1: kopia programu jest ważna.
0 S
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
TWD USE 10 AE 441
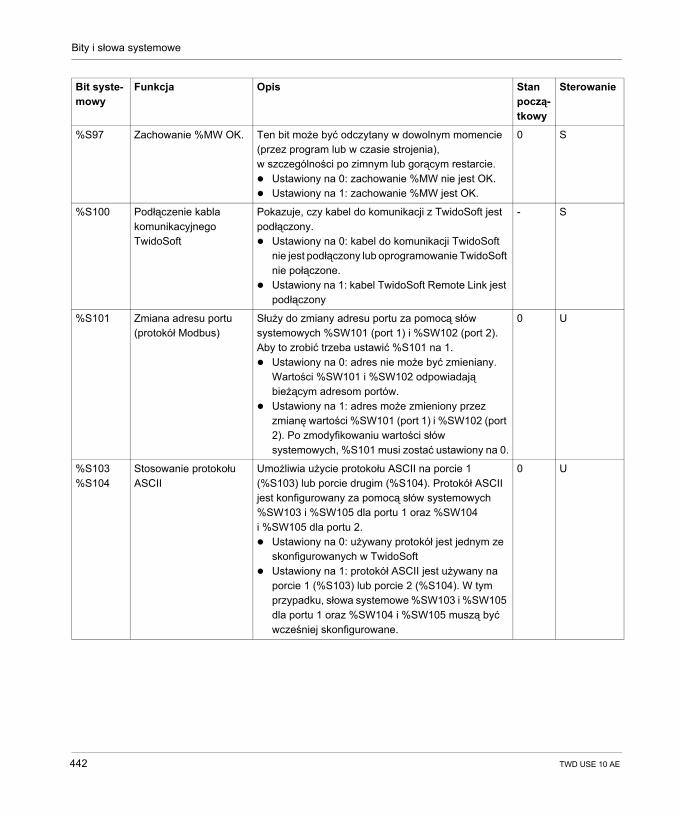
Bity i słowa systemowe
%S97 Zachowanie %MW OK. Ten bit może być odczytany w dowolnym momencie (przez program lub w czasie strojenia), w szczególności po zimnym lub gorącym restarcie.
Ustawiony na 0: zachowanie %MW nie jest OK.Ustawiony na 1: zachowanie %MW jest OK.
0 S
%S100 Podłączenie kabla komunikacyjnego TwidoSoft
Pokazuje, czy kabel do komunikacji z TwidoSoft jest podłączony.
Ustawiony na 0: kabel do komunikacji TwidoSoft nie jest podłączony lub oprogramowanie TwidoSoft nie połączone.Ustawiony na 1: kabel TwidoSoft Remote Link jest podłączony
- S
%S101 Zmiana adresu portu (protokół Modbus)
Służy do zmiany adresu portu za pomocą słów systemowych %SW101 (port 1) i %SW102 (port 2). Aby to zrobić trzeba ustawić %S101 na 1.
Ustawiony na 0: adres nie może być zmieniany. Wartości %SW101 i %SW102 odpowiadają bieżącym adresom portów.Ustawiony na 1: adres może zmieniony przez zmianę wartości %SW101 (port 1) i %SW102 (port 2). Po zmodyfikowaniu wartości słów systemowych, %S101 musi zostać ustawiony na 0.
0 U
%S103%S104
Stosowanie protokołu ASCII
Umożliwia użycie protokołu ASCII na porcie 1 (%S103) lub porcie drugim (%S104). Protokół ASCII jest konfigurowany za pomocą słów systemowych %SW103 i %SW105 dla portu 1 oraz %SW104 i %SW105 dla portu 2.
Ustawiony na 0: używany protokół jest jednym ze skonfigurowanych w TwidoSoftUstawiony na 1: protokół ASCII jest używany na porcie 1 (%S103) lub porcie 2 (%S104). W tym przypadku, słowa systemowe %SW103 i %SW105 dla portu 1 oraz %SW104 i %SW105 muszą być wcześniej skonfigurowane.
0 U
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
442 TWD USE 10 AE
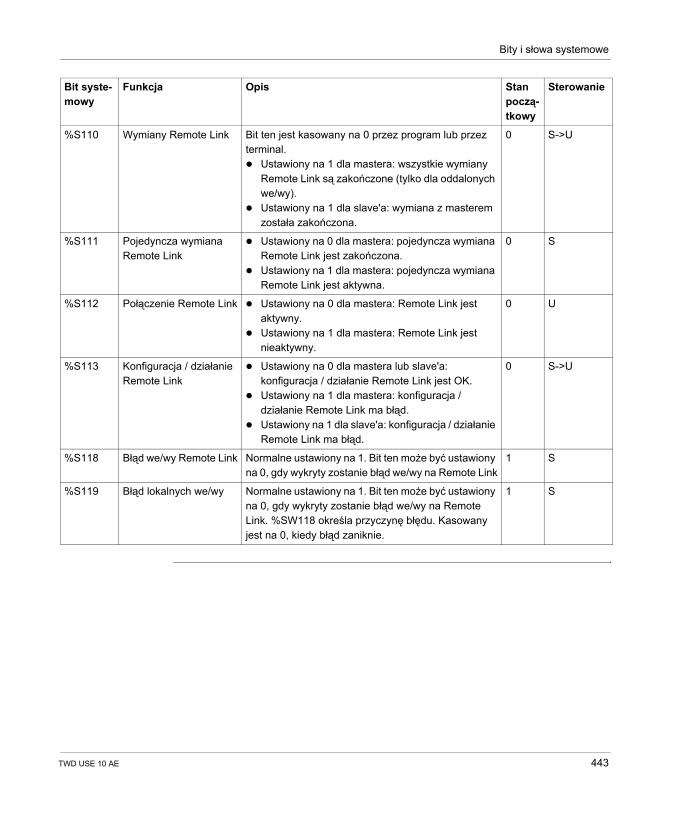
Bity i słowa systemowe
%S110 Wymiany Remote Link Bit ten jest kasowany na 0 przez program lub przez terminal.
Ustawiony na 1 dla mastera: wszystkie wymiany Remote Link są zakończone (tylko dla oddalonych we/wy).Ustawiony na 1 dla slave'a: wymiana z masterem została zakończona.
0 S->U
%S111 Pojedyncza wymiana Remote Link
Ustawiony na 0 dla mastera: pojedyncza wymiana Remote Link jest zakończona.Ustawiony na 1 dla mastera: pojedyncza wymiana Remote Link jest aktywna.
0 S
%S112 Połączenie Remote Link Ustawiony na 0 dla mastera: Remote Link jest aktywny.Ustawiony na 1 dla mastera: Remote Link jest nieaktywny.
0 U
%S113 Konfiguracja / działanie Remote Link
Ustawiony na 0 dla mastera lub slave'a: konfiguracja / działanie Remote Link jest OK.Ustawiony na 1 dla mastera: konfiguracja / działanie Remote Link ma błąd.Ustawiony na 1 dla slave'a: konfiguracja / działanie Remote Link ma błąd.
0 S->U
%S118 Błąd we/wy Remote Link Normalne ustawiony na 1. Bit ten może być ustawiony na 0, gdy wykryty zostanie błąd we/wy na Remote Link
1 S
%S119 Błąd lokalnych we/wy Normalne ustawiony na 1. Bit ten może być ustawiony na 0, gdy wykryty zostanie błąd we/wy na Remote Link. %SW118 określa przyczynę błędu. Kasowany jest na 0, kiedy błąd zaniknie.
1 S
Bit syste-mowy
Funkcja Opis Stan począ-tkowy
Sterowanie
TWD USE 10 AE 443
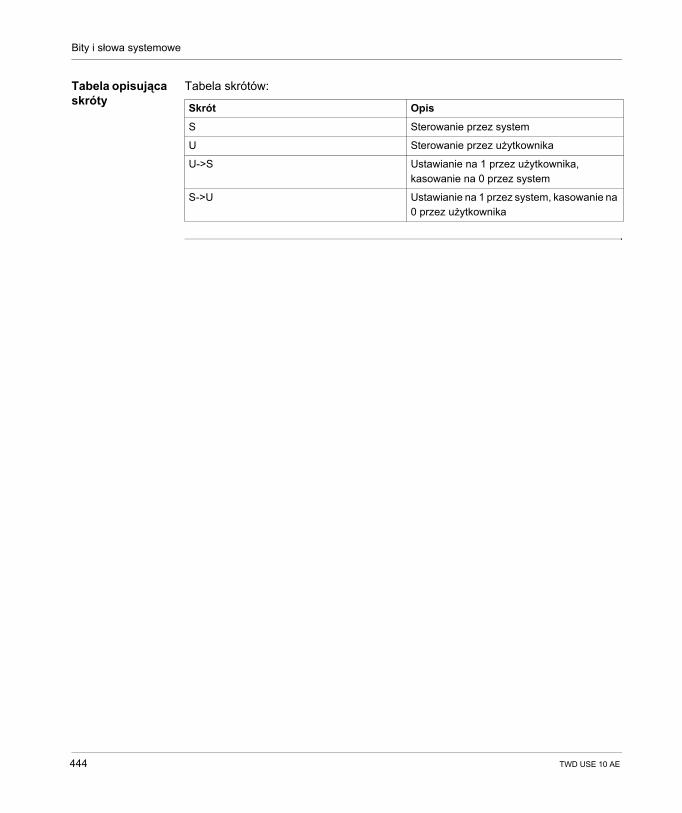
Bity i słowa systemowe
Tabela opisująca skróty
Tabela skrótów:
Skrót Opis
S Sterowanie przez system
U Sterowanie przez użytkownika
U->S Ustawianie na 1 przez użytkownika, kasowanie na 0 przez system
S->U Ustawianie na 1 przez system, kasowanie na 0 przez użytkownika
444 TWD USE 10 AE
Bity i słowa systemowe
Słowa systemowe (%SW)
Wprowadzenie Poniższa sekcja dostarcza szczegółowych informacji o funkcjach słów systemowych oraz jak są one sterowane.
TWD USE 10 AE 445
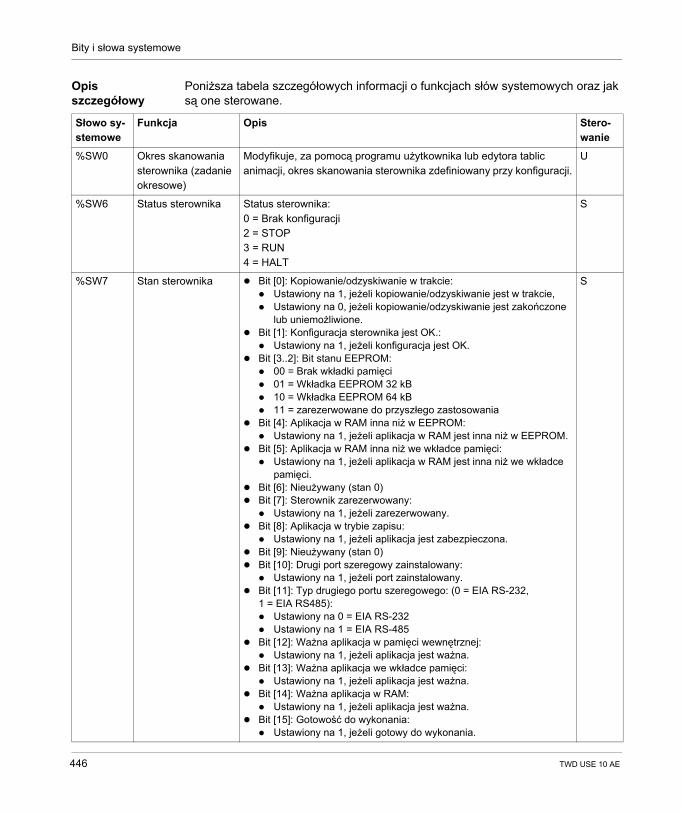
Bity i słowa systemowe
Opis szczegółowy
Poniższa tabela szczegółowych informacji o funkcjach słów systemowych oraz jak są one sterowane.
Słowo sy-stemowe
Funkcja Opis Stero-wanie
%SW0 Okres skanowania sterownika (zadanie okresowe)
Modyfikuje, za pomocą programu użytkownika lub edytora tablic animacji, okres skanowania sterownika zdefiniowany przy konfiguracji.
U
%SW6 Status sterownika Status sterownika:0 = Brak konfiguracji2 = STOP3 = RUN4 = HALT
S
%SW7 Stan sterownika Bit [0]: Kopiowanie/odzyskiwanie w trakcie:Ustawiony na 1, jeżeli kopiowanie/odzyskiwanie jest w trakcie,Ustawiony na 0, jeżeli kopiowanie/odzyskiwanie jest zakończone lub uniemożliwione.
Bit [1]: Konfiguracja sterownika jest OK.:Ustawiony na 1, jeżeli konfiguracja jest OK.
Bit [3..2]: Bit stanu EEPROM:00 = Brak wkładki pamięci01 = Wkładka EEPROM 32 kB10 = Wkładka EEPROM 64 kB11 = zarezerwowane do przyszłego zastosowania
Bit [4]: Aplikacja w RAM inna niż w EEPROM:Ustawiony na 1, jeżeli aplikacja w RAM jest inna niż w EEPROM.
Bit [5]: Aplikacja w RAM inna niż we wkładce pamięci:Ustawiony na 1, jeżeli aplikacja w RAM jest inna niż we wkładce pamięci.
Bit [6]: Nieużywany (stan 0)Bit [7]: Sterownik zarezerwowany:
Ustawiony na 1, jeżeli zarezerwowany.Bit [8]: Aplikacja w trybie zapisu:
Ustawiony na 1, jeżeli aplikacja jest zabezpieczona.Bit [9]: Nieużywany (stan 0)Bit [10]: Drugi port szeregowy zainstalowany:
Ustawiony na 1, jeżeli port zainstalowany.Bit [11]: Typ drugiego portu szeregowego: (0 = EIA RS-232, 1 = EIA RS485):
Ustawiony na 0 = EIA RS-232Ustawiony na 1 = EIA RS-485
Bit [12]: Ważna aplikacja w pamięci wewnętrznej:Ustawiony na 1, jeżeli aplikacja jest ważna.
Bit [13]: Ważna aplikacja we wkładce pamięci:Ustawiony na 1, jeżeli aplikacja jest ważna.
Bit [14]: Ważna aplikacja w RAM:Ustawiony na 1, jeżeli aplikacja jest ważna.
Bit [15]: Gotowość do wykonania:Ustawiony na 1, jeżeli gotowy do wykonania.
S
446 TWD USE 10 AE
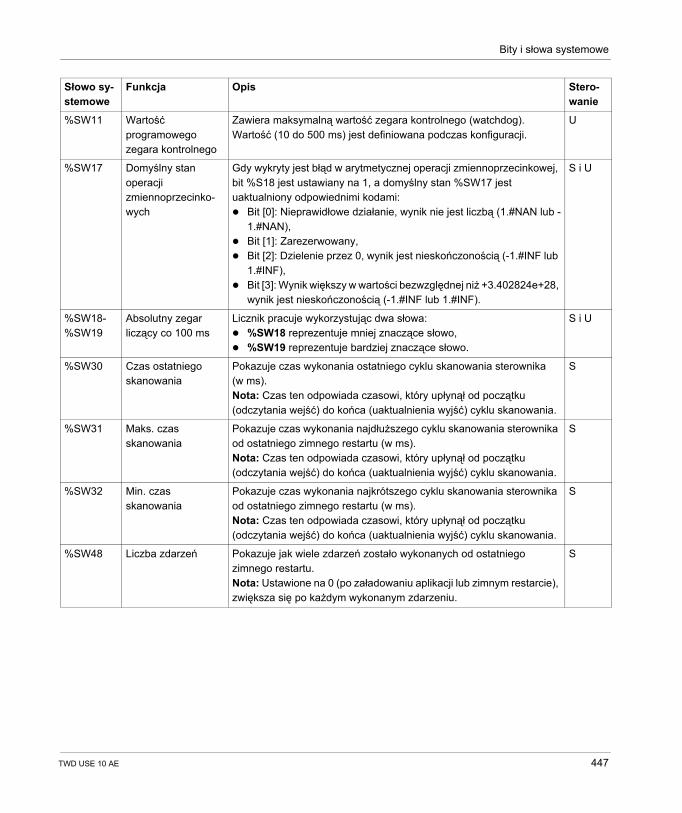
Bity i słowa systemowe
%SW11 Wartość programowego zegara kontrolnego
Zawiera maksymalną wartość zegara kontrolnego (watchdog). Wartość (10 do 500 ms) jest definiowana podczas konfiguracji.
U
%SW17 Domyślny stan operacji zmiennoprzecinko-wych
Gdy wykryty jest błąd w arytmetycznej operacji zmiennoprzecinkowej, bit %S18 jest ustawiany na 1, a domyślny stan %SW17 jest uaktualniony odpowiednimi kodami:
Bit [0]: Nieprawidłowe działanie, wynik nie jest liczbą (1.#NAN lub -1.#NAN),Bit [1]: Zarezerwowany,Bit [2]: Dzielenie przez 0, wynik jest nieskończonością (-1.#INF lub 1.#INF),Bit [3]: Wynik większy w wartości bezwzględnej niż +3.402824e+28, wynik jest nieskończonością (-1.#INF lub 1.#INF).
S i U
%SW18-%SW19
Absolutny zegar liczący co 100 ms
Licznik pracuje wykorzystując dwa słowa:%SW18 reprezentuje mniej znaczące słowo,%SW19 reprezentuje bardziej znaczące słowo.
S i U
%SW30 Czas ostatniego skanowania
Pokazuje czas wykonania ostatniego cyklu skanowania sterownika (w ms).Nota: Czas ten odpowiada czasowi, który upłynął od początku (odczytania wejść) do końca (uaktualnienia wyjść) cyklu skanowania.
S
%SW31 Maks. czas skanowania
Pokazuje czas wykonania najdłuższego cyklu skanowania sterownika od ostatniego zimnego restartu (w ms).Nota: Czas ten odpowiada czasowi, który upłynął od początku (odczytania wejść) do końca (uaktualnienia wyjść) cyklu skanowania.
S
%SW32 Min. czas skanowania
Pokazuje czas wykonania najkrótszego cyklu skanowania sterownika od ostatniego zimnego restartu (w ms).Nota: Czas ten odpowiada czasowi, który upłynął od początku (odczytania wejść) do końca (uaktualnienia wyjść) cyklu skanowania.
S
%SW48 Liczba zdarzeń Pokazuje jak wiele zdarzeń zostało wykonanych od ostatniego zimnego restartu.Nota: Ustawione na 0 (po załadowaniu aplikacji lub zimnym restarcie), zwiększa się po każdym wykonanym zdarzeniu.
S
Słowo sy-stemowe
Funkcja Opis Stero-wanie
TWD USE 10 AE 447
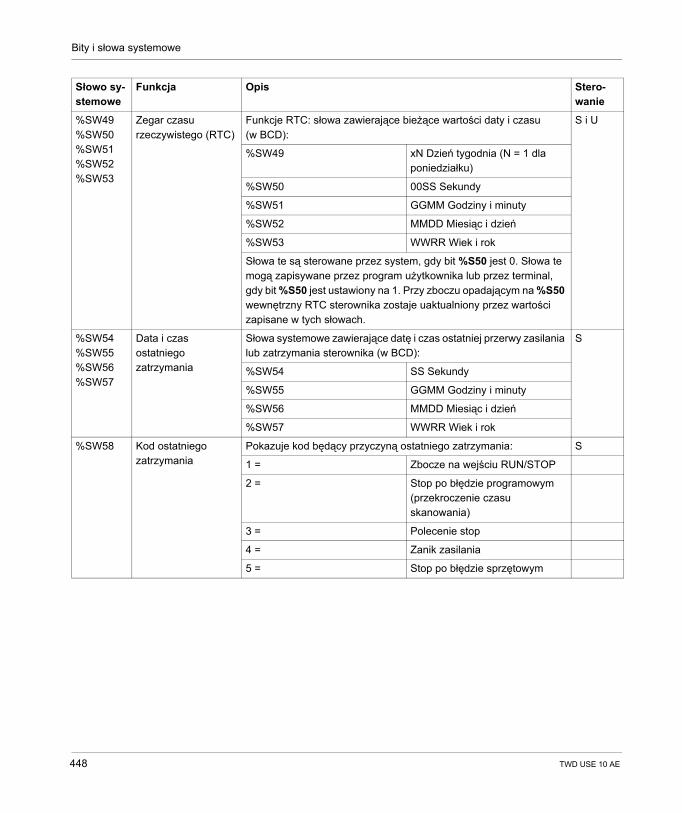
Bity i słowa systemowe
Słowo sy-stemowe
Funkcja Opis Stero-wanie
%SW49%SW50%SW51%SW52%SW53
Zegar czasu rzeczywistego (RTC)
Funkcje RTC: słowa zawierające bieżące wartości daty i czasu (w BCD):
S i U
%SW49 xN Dzień tygodnia (N = 1 dla poniedziałku)
%SW50 00SS Sekundy
%SW51 GGMM Godziny i minuty
%SW52 MMDD Miesiąc i dzień
%SW53 WWRR Wiek i rok
Słowa te są sterowane przez system, gdy bit %S50 jest 0. Słowa te mogą zapisywane przez program użytkownika lub przez terminal, gdy bit %S50 jest ustawiony na 1. Przy zboczu opadającym na %S50 wewnętrzny RTC sterownika zostaje uaktualniony przez wartości zapisane w tych słowach.
%SW54%SW55%SW56%SW57
Data i czas ostatniego zatrzymania
Słowa systemowe zawierające datę i czas ostatniej przerwy zasilania lub zatrzymania sterownika (w BCD):
S
%SW54 SS Sekundy
%SW55 GGMM Godziny i minuty
%SW56 MMDD Miesiąc i dzień
%SW57 WWRR Wiek i rok
%SW58 Kod ostatniego zatrzymania
Pokazuje kod będący przyczyną ostatniego zatrzymania: S
1 = Zbocze na wejściu RUN/STOP
2 = Stop po błędzie programowym (przekroczenie czasu skanowania)
3 = Polecenie stop
4 = Zanik zasilania
5 = Stop po błędzie sprzętowym
448 TWD USE 10 AE
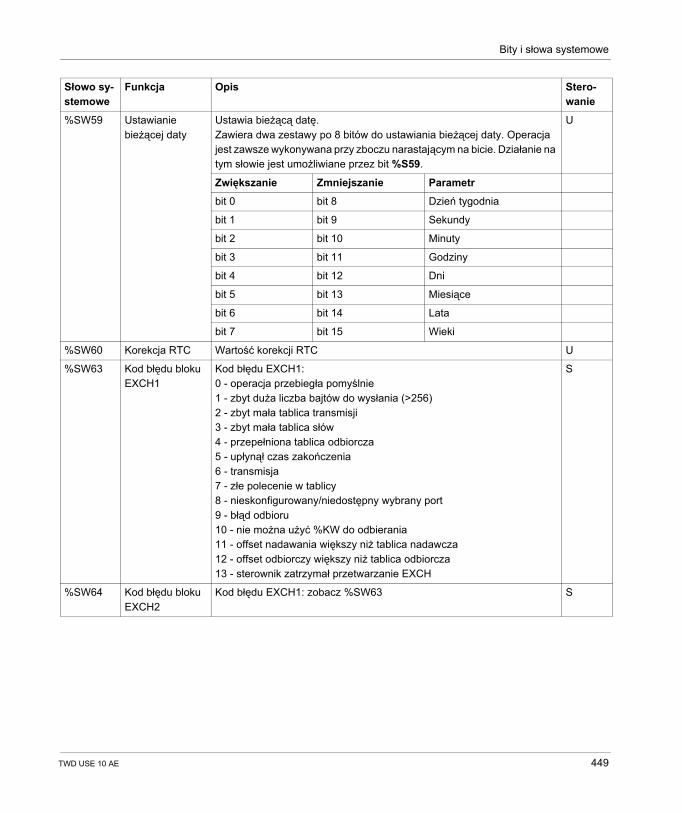
Bity i słowa systemowe
Słowo sy-stemowe
Funkcja Opis Stero-wanie
%SW59 Ustawianie bieżącej daty
Ustawia bieżącą datę.Zawiera dwa zestawy po 8 bitów do ustawiania bieżącej daty. Operacja jest zawsze wykonywana przy zboczu narastającym na bicie. Działanie na tym słowie jest umożliwiane przez bit %S59.
U
Zwiększanie Zmniejszanie Parametr
bit 0 bit 8 Dzień tygodnia
bit 1 bit 9 Sekundy
bit 2 bit 10 Minuty
bit 3 bit 11 Godziny
bit 4 bit 12 Dni
bit 5 bit 13 Miesiące
bit 6 bit 14 Lata
bit 7 bit 15 Wieki
%SW60 Korekcja RTC Wartość korekcji RTC U
%SW63 Kod błędu bloku EXCH1
Kod błędu EXCH1:0 - operacja przebiegła pomyślnie1 - zbyt duża liczba bajtów do wysłania (>256)2 - zbyt mała tablica transmisji3 - zbyt mała tablica słów4 - przepełniona tablica odbiorcza5 - upłynął czas zakończenia6 - transmisja7 - złe polecenie w tablicy8 - nieskonfigurowany/niedostępny wybrany port9 - błąd odbioru10 - nie można użyć %KW do odbierania11 - offset nadawania większy niż tablica nadawcza12 - offset odbiorczy większy niż tablica odbiorcza13 - sterownik zatrzymał przetwarzanie EXCH
S
%SW64 Kod błędu bloku EXCH2
Kod błędu EXCH1: zobacz %SW63 S
TWD USE 10 AE 449
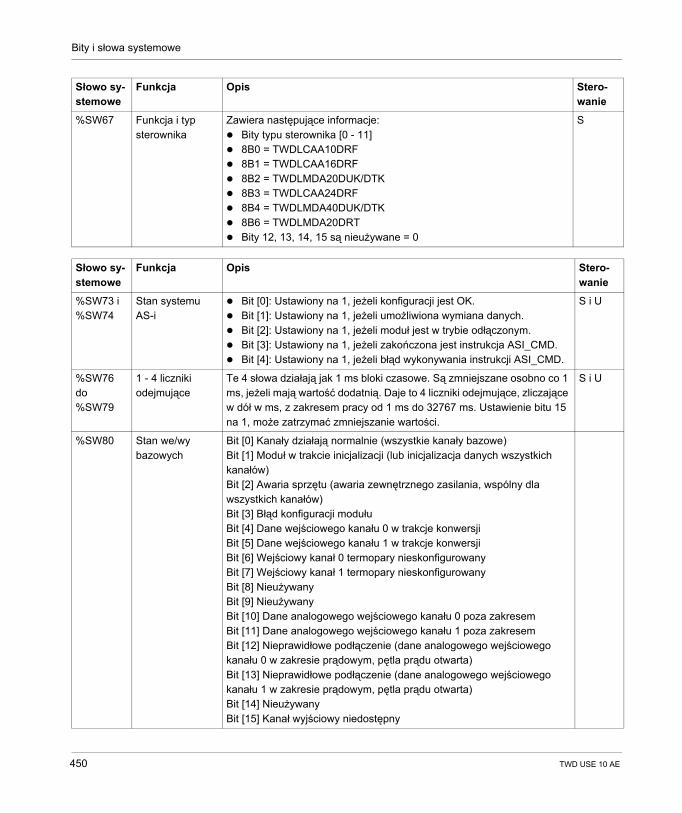
Bity i słowa systemowe
%SW67 Funkcja i typ sterownika
Zawiera następujące informacje:Bity typu sterownika [0 - 11]8B0 = TWDLCAA10DRF8B1 = TWDLCAA16DRF8B2 = TWDLMDA20DUK/DTK8B3 = TWDLCAA24DRF8B4 = TWDLMDA40DUK/DTK8B6 = TWDLMDA20DRTBity 12, 13, 14, 15 są nieużywane = 0
S
Słowo sy-stemowe
Funkcja Opis Stero-wanie
%SW73 i %SW74
Stan systemu AS-i
Bit [0]: Ustawiony na 1, jeżeli konfiguracji jest OK.Bit [1]: Ustawiony na 1, jeżeli umożliwiona wymiana danych.Bit [2]: Ustawiony na 1, jeżeli moduł jest w trybie odłączonym.Bit [3]: Ustawiony na 1, jeżeli zakończona jest instrukcja ASI_CMD.Bit [4]: Ustawiony na 1, jeżeli błąd wykonywania instrukcji ASI_CMD.
S i U
%SW76 do %SW79
1 - 4 liczniki odejmujące
Te 4 słowa działają jak 1 ms bloki czasowe. Są zmniejszane osobno co 1 ms, jeżeli mają wartość dodatnią. Daje to 4 liczniki odejmujące, zliczające w dół w ms, z zakresem pracy od 1 ms do 32767 ms. Ustawienie bitu 15 na 1, może zatrzymać zmniejszanie wartości.
S i U
%SW80 Stan we/wy bazowych
Bit [0] Kanały działają normalnie (wszystkie kanały bazowe)Bit [1] Moduł w trakcie inicjalizacji (lub inicjalizacja danych wszystkich kanałów)Bit [2] Awaria sprzętu (awaria zewnętrznego zasilania, wspólny dla wszystkich kanałów)Bit [3] Błąd konfiguracji modułuBit [4] Dane wejściowego kanału 0 w trakcje konwersjiBit [5] Dane wejściowego kanału 1 w trakcje konwersjiBit [6] Wejściowy kanał 0 termopary nieskonfigurowanyBit [7] Wejściowy kanał 1 termopary nieskonfigurowanyBit [8] NieużywanyBit [9] NieużywanyBit [10] Dane analogowego wejściowego kanału 0 poza zakresemBit [11] Dane analogowego wejściowego kanału 1 poza zakresemBit [12] Nieprawidłowe podłączenie (dane analogowego wejściowego kanału 0 w zakresie prądowym, pętla prądu otwarta)Bit [13] Nieprawidłowe podłączenie (dane analogowego wejściowego kanału 1 w zakresie prądowym, pętla prądu otwarta)Bit [14] NieużywanyBit [15] Kanał wyjściowy niedostępny
Słowo sy-stemowe
Funkcja Opis Stero-wanie
450 TWD USE 10 AE
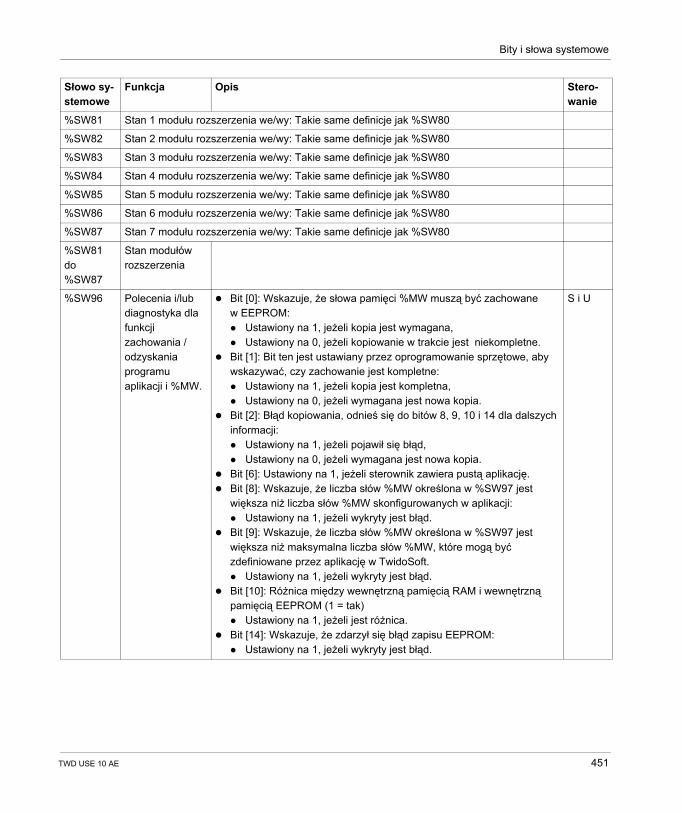
Bity i słowa systemowe
%SW81 Stan 1 modułu rozszerzenia we/wy: Takie same definicje jak %SW80
%SW82 Stan 2 modułu rozszerzenia we/wy: Takie same definicje jak %SW80
%SW83 Stan 3 modułu rozszerzenia we/wy: Takie same definicje jak %SW80
%SW84 Stan 4 modułu rozszerzenia we/wy: Takie same definicje jak %SW80
%SW85 Stan 5 modułu rozszerzenia we/wy: Takie same definicje jak %SW80
%SW86 Stan 6 modułu rozszerzenia we/wy: Takie same definicje jak %SW80
%SW87 Stan 7 modułu rozszerzenia we/wy: Takie same definicje jak %SW80
%SW81 do %SW87
Stan modułów rozszerzenia
%SW96 Polecenia i/lub diagnostyka dla funkcji zachowania / odzyskania programu aplikacji i %MW.
Bit [0]: Wskazuje, że słowa pamięci %MW muszą być zachowane w EEPROM:
Ustawiony na 1, jeżeli kopia jest wymagana,Ustawiony na 0, jeżeli kopiowanie w trakcie jest niekompletne.
Bit [1]: Bit ten jest ustawiany przez oprogramowanie sprzętowe, aby wskazywać, czy zachowanie jest kompletne:
Ustawiony na 1, jeżeli kopia jest kompletna,Ustawiony na 0, jeżeli wymagana jest nowa kopia.
Bit [2]: Błąd kopiowania, odnieś się do bitów 8, 9, 10 i 14 dla dalszych informacji:
Ustawiony na 1, jeżeli pojawił się błąd,Ustawiony na 0, jeżeli wymagana jest nowa kopia.
Bit [6]: Ustawiony na 1, jeżeli sterownik zawiera pustą aplikację.Bit [8]: Wskazuje, że liczba słów %MW określona w %SW97 jest większa niż liczba słów %MW skonfigurowanych w aplikacji:
Ustawiony na 1, jeżeli wykryty jest błąd.Bit [9]: Wskazuje, że liczba słów %MW określona w %SW97 jest większa niż maksymalna liczba słów %MW, które mogą być zdefiniowane przez aplikację w TwidoSoft.
Ustawiony na 1, jeżeli wykryty jest błąd.Bit [10]: Różnica między wewnętrzną pamięcią RAM i wewnętrzną pamięcią EEPROM (1 = tak)
Ustawiony na 1, jeżeli jest różnica.Bit [14]: Wskazuje, że zdarzył się błąd zapisu EEPROM:
Ustawiony na 1, jeżeli wykryty jest błąd.
S i U
Słowo sy-stemowe
Funkcja Opis Stero-wanie
TWD USE 10 AE 451
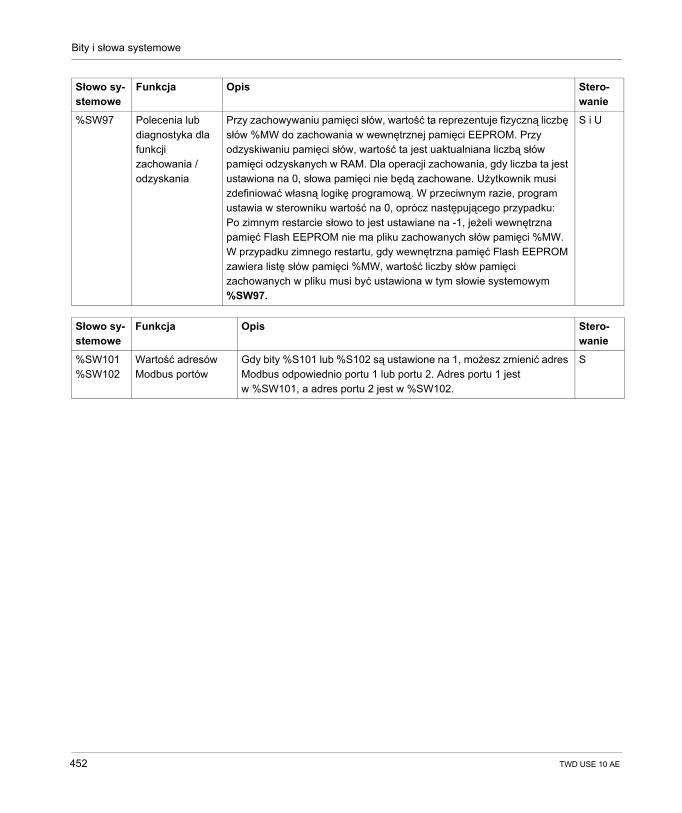
Bity i słowa systemowe
%SW97 Polecenia lub diagnostyka dla funkcji zachowania / odzyskania
Przy zachowywaniu pamięci słów, wartość ta reprezentuje fizyczną liczbę słów %MW do zachowania w wewnętrznej pamięci EEPROM. Przy odzyskiwaniu pamięci słów, wartość ta jest uaktualniana liczbą słów pamięci odzyskanych w RAM. Dla operacji zachowania, gdy liczba ta jest ustawiona na 0, słowa pamięci nie będą zachowane. Użytkownik musi zdefiniować własną logikę programową. W przeciwnym razie, program ustawia w sterowniku wartość na 0, oprócz następującego przypadku:Po zimnym restarcie słowo to jest ustawiane na -1, jeżeli wewnętrzna pamięć Flash EEPROM nie ma pliku zachowanych słów pamięci %MW. W przypadku zimnego restartu, gdy wewnętrzna pamięć Flash EEPROM zawiera listę słów pamięci %MW, wartość liczby słów pamięci zachowanych w pliku musi być ustawiona w tym słowie systemowym %SW97.
S i U
Słowo sy-stemowe
Funkcja Opis Stero-wanie
%SW101%SW102
Wartość adresów Modbus portów
Gdy bity %S101 lub %S102 są ustawione na 1, możesz zmienić adres Modbus odpowiednio portu 1 lub portu 2. Adres portu 1 jest w %SW101, a adres portu 2 jest w %SW102.
S
Słowo sy-stemowe
Funkcja Opis Stero-wanie
452 TWD USE 10 AE
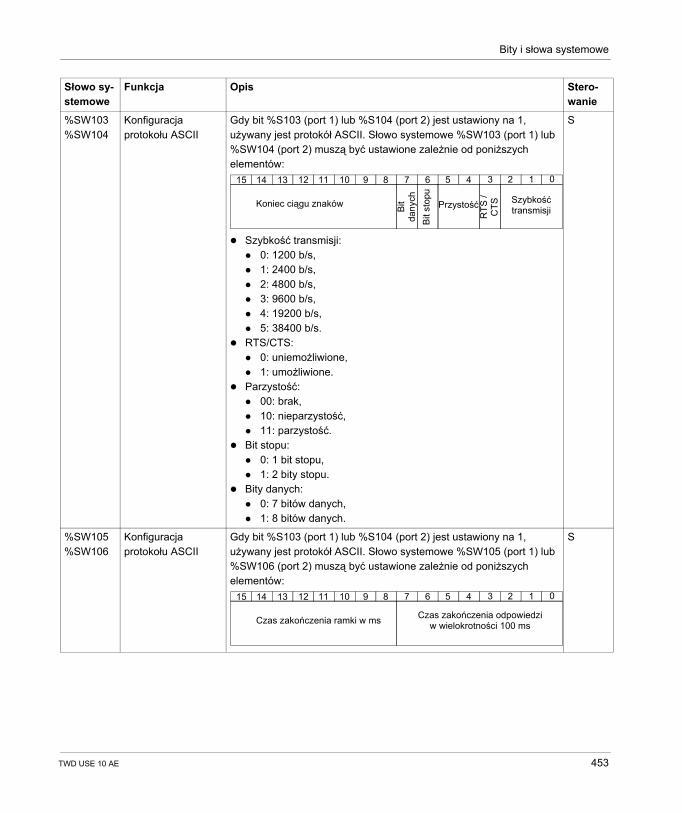
Bity i słowa systemowe
%SW103%SW104
Konfiguracja protokołu ASCII
Gdy bit %S103 (port 1) lub %S104 (port 2) jest ustawiony na 1, używany jest protokół ASCII. Słowo systemowe %SW103 (port 1) lub %SW104 (port 2) muszą być ustawione zależnie od poniższych elementów:
Szybkość transmisji:0: 1200 b/s,1: 2400 b/s,2: 4800 b/s,3: 9600 b/s,4: 19200 b/s,5: 38400 b/s.
RTS/CTS: 0: uniemożliwione,1: umożliwione.
Parzystość: 00: brak,10: nieparzystość,11: parzystość.
Bit stopu: 0: 1 bit stopu,1: 2 bity stopu.
Bity danych:0: 7 bitów danych,1: 8 bitów danych.
S
%SW105%SW106
Konfiguracja protokołu ASCII
Gdy bit %S103 (port 1) lub %S104 (port 2) jest ustawiony na 1, używany jest protokół ASCII. Słowo systemowe %SW105 (port 1) lub %SW106 (port 2) muszą być ustawione zależnie od poniższych elementów:
S
Słowo sy-stemowe
Funkcja Opis Stero-wanie
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Koniec ciągu znaków Bit
dany
chB
it st
opu
Przystość
RTS
/ C
TS
Szybkość transmisji
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Czas zakończenia ramki w ms Czas zakończenia odpowiedzi w wielokrotności 100 ms
TWD USE 10 AE 453
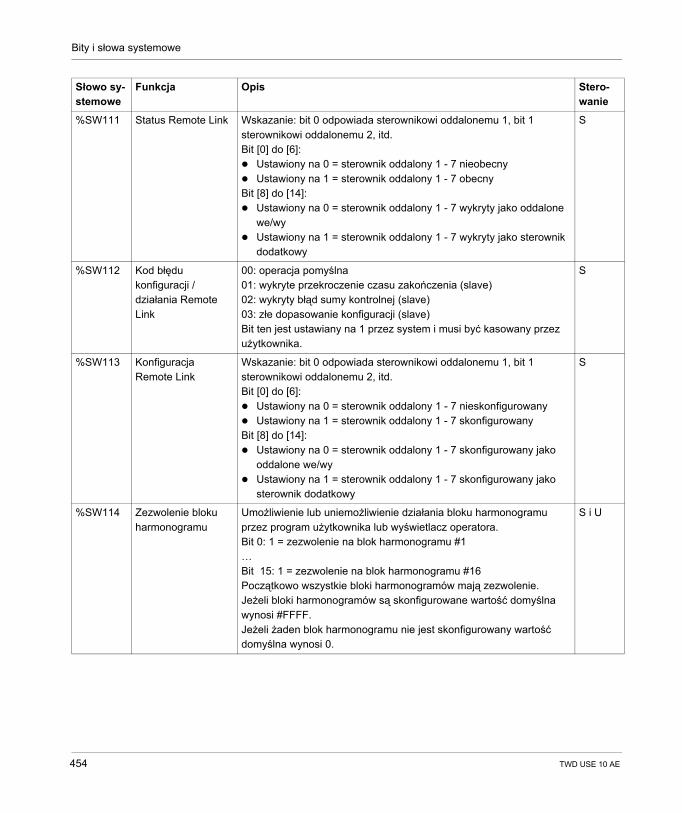
Bity i słowa systemowe
%SW111 Status Remote Link Wskazanie: bit 0 odpowiada sterownikowi oddalonemu 1, bit 1 sterownikowi oddalonemu 2, itd.Bit [0] do [6]:
Ustawiony na 0 = sterownik oddalony 1 - 7 nieobecnyUstawiony na 1 = sterownik oddalony 1 - 7 obecny
Bit [8] do [14]:Ustawiony na 0 = sterownik oddalony 1 - 7 wykryty jako oddalone we/wyUstawiony na 1 = sterownik oddalony 1 - 7 wykryty jako sterownik dodatkowy
S
%SW112 Kod błędu konfiguracji / działania Remote Link
00: operacja pomyślna01: wykryte przekroczenie czasu zakończenia (slave)02: wykryty błąd sumy kontrolnej (slave)03: złe dopasowanie konfiguracji (slave)Bit ten jest ustawiany na 1 przez system i musi być kasowany przez użytkownika.
S
%SW113 Konfiguracja Remote Link
Wskazanie: bit 0 odpowiada sterownikowi oddalonemu 1, bit 1 sterownikowi oddalonemu 2, itd.Bit [0] do [6]:
Ustawiony na 0 = sterownik oddalony 1 - 7 nieskonfigurowanyUstawiony na 1 = sterownik oddalony 1 - 7 skonfigurowany
Bit [8] do [14]:Ustawiony na 0 = sterownik oddalony 1 - 7 skonfigurowany jako oddalone we/wyUstawiony na 1 = sterownik oddalony 1 - 7 skonfigurowany jako sterownik dodatkowy
S
%SW114 Zezwolenie bloku harmonogramu
Umożliwienie lub uniemożliwienie działania bloku harmonogramu przez program użytkownika lub wyświetlacz operatora.Bit 0: 1 = zezwolenie na blok harmonogramu #1…Bit 15: 1 = zezwolenie na blok harmonogramu #16Początkowo wszystkie bloki harmonogramów mają zezwolenie.Jeżeli bloki harmonogramów są skonfigurowane wartość domyślna wynosi #FFFF.Jeżeli żaden blok harmonogramu nie jest skonfigurowany wartość domyślna wynosi 0.
S i U
Słowo sy-stemowe
Funkcja Opis Stero-wanie
454 TWD USE 10 AE
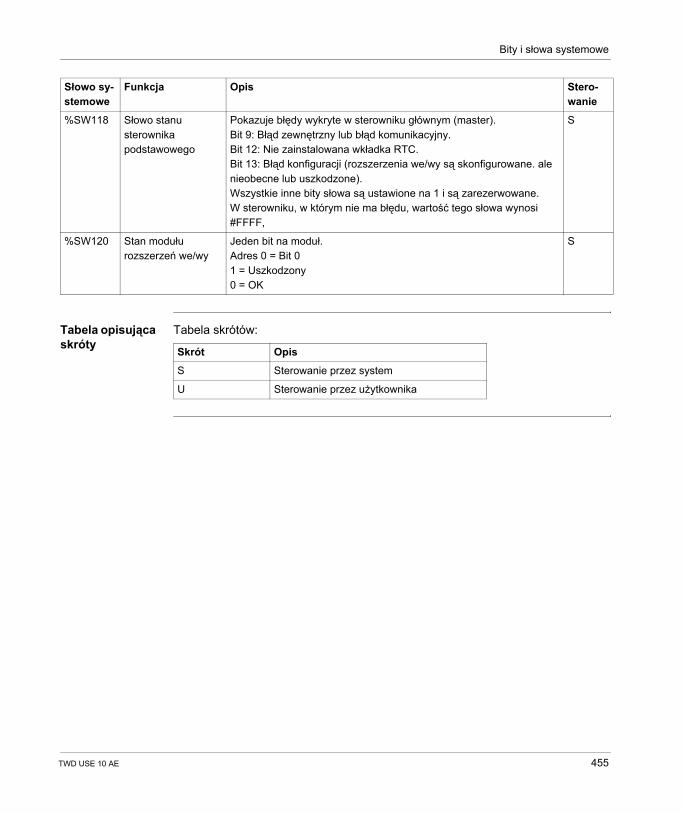
Bity i słowa systemowe
Tabela opisująca skróty
Tabela skrótów:
%SW118 Słowo stanu sterownika podstawowego
Pokazuje błędy wykryte w sterowniku głównym (master).Bit 9: Błąd zewnętrzny lub błąd komunikacyjny.Bit 12: Nie zainstalowana wkładka RTC.Bit 13: Błąd konfiguracji (rozszerzenia we/wy są skonfigurowane. ale nieobecne lub uszkodzone).Wszystkie inne bity słowa są ustawione na 1 i są zarezerwowane. W sterowniku, w którym nie ma błędu, wartość tego słowa wynosi #FFFF,
S
%SW120 Stan modułu rozszerzeń we/wy
Jeden bit na moduł.Adres 0 = Bit 01 = Uszkodzony0 = OK
S
Słowo sy-stemowe
Funkcja Opis Stero-wanie
Skrót Opis
S Sterowanie przez system
U Sterowanie przez użytkownika
TWD USE 10 AE 455

Bity i słowa systemowe
456 TWD USE 10 AE





























