Embed Size (px)
DESCRIPTION
Pentru transmiterea mişcării de rotaţie între două elemente aparţinând, unul unei maşini motoare iar altul unei maşini de lucru sau aparţinând ambele aceleiaşi maşini, se folosesc transmisiile mecanice. Transmisiile mecanice sunt ansamblele formate din organe de maşini specifice şi în funcţie de modul cum transmit mişcarea, se împart în două mari categorii
Citation preview
Elemente de inginerie mecanică
CAPITOLUL 4 TRANSMISII MECANICE DIRECTE SI INDIRECTE 4.1. Introducere Pentru transmiterea mişcării de rotaţie între două elemente aparţinând,
unul unei maşini motoare iar altul unei maşini de lucru sau aparţinând ambele aceleiaşi maşini, se folosesc transmisiile mecanice. [32],[36],[88].
Transmisiile mecanice sunt ansamblele formate din organe de maşini
specifice şi în funcţie de modul cum transmit mişcarea, se împart în două
mari categorii:
I- transmisi mecanicei directe, care transmit mişcarea prin organe legate de elementul motor şi cel rezistent cu contact direct între ele:
a) Mecanisme cu roti dintate b) Mecanisme cu came c) Mecanisme cu roti de frictiune
II- transmisii indirecte, la care intervine un element intermediar între
elementul de intrare şi cel de ieşire. Transmisiile mecanice indirecte se împart în trei grupe, în funcţie de
tipul elementului intermediar: a) transmisii prin curele; b) transmisii prin lanţuri; c) transmisii prin pârghii.
I. TRANSMISII MECANICE DIRECTE
4.2. Mecanisme cu roţi dinţate.
4.2.1. Definiţii. Caracterizare
Mecanismele cu roţi dinţate, cunoscute sub denumirea de angrenaje, servesc la transmiterea mişcării de rotaţie de la o roată conducătoare, numită pinion, la o roată condusă prin intermediul unor dinţi care angrenează succesiv şi continuu.
Cap. 4. Transmisii mecanice directe şi indirecte Angrenajele pot reduce viteza unghiulară de intrare şi, în acest caz, se numesc reductoare, sau pot amplifica această viteză, numindu-se multiplicatoare. Angrenajele pot fi utilizate şi pentru transformarea mişcării de rotaţie în mişcare de translaţie şi invers, când una dintre roţi are o rază infinită, numită cremalieră. Angrenajul este format, de regulă, din două roţi dinţate cu forme şi dimensiuni diferite, de la zecimi de milimetru până la circa 12 metri şi sunt utilizate în toate domeniile de activitate, ocupând peste 65% din transmisiile mecanice datorită avantajelor semnificative pe care le prezintă. Transmisiile prin roţi dinţate se întâlnesc în cele mai variate domenii ale tehnicii, de la tehnica aerospaţială la maşinile agricole şi de la maşinile cele mai grele la mecanica fină, în construcţiile de roboţi industriali, în tehnica de calcul şi birotică.
4.2.2. Clasificarea angrenajelor
Formele variate ale roţilor dinţate şi ale angrenajelor au impus stabilirea unor criterii de clasificare ce vor fi prezentate mai jos. I. După direcţia dintelui roţilor dinţate; II. După mişcarea axelor celor două roţi dinţate ce formează angrenajul; III. După profilul dintelui; IV. După forma roţilor dinţate; V. Un ultim criteriu de clasificare, considerat în literatura de specialitate [34],[35],[36],[46],[64],[73] unul dintre cel mai important criteriu de clasificare a angrenajelor, se referă la orientarea în spaţiu a axelor între care se transmite mişcarea de rotaţie.
După acest criteriu angrenajele se clasifică în: 1. Angrenaje cu axe paralele; 2. Angrenaje cu axe concurente; 3. Angrenaje cu axe încrucişate.
I. După criteriul direcţiei dintelui: - dinte drept; - dinte înclinat; - dinte în V; - dinte curb.
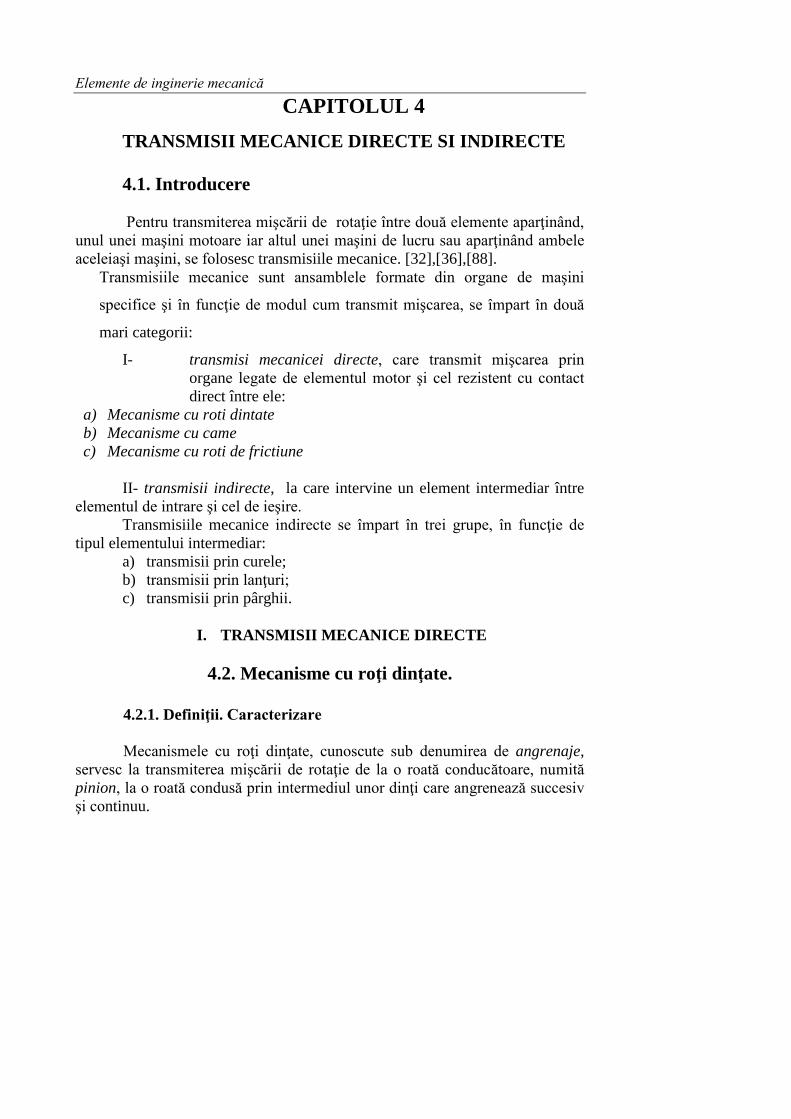
II. După criteriul privind mişcarea axelor: - angrenaje cu axe fixe (fig. 4.1); - angrenaje cu axe mobile (fig. 4.2);
Elemente de inginerie mecanică
Fig.4.1 Fig.4.2
III. După profilul dintelui:
- evolventă; - arc de cerc; - cicloidă; - octoidă; - spirală arhimedică.
IV. După forma roţilor dinţate: - angrenaje cu roţi cilindrice; - angrenaje cu roţi conice; - angrenaje hiperboloide; - angrenaje melcate; - angrenaje cremalieră; - angrenaje necirculare.
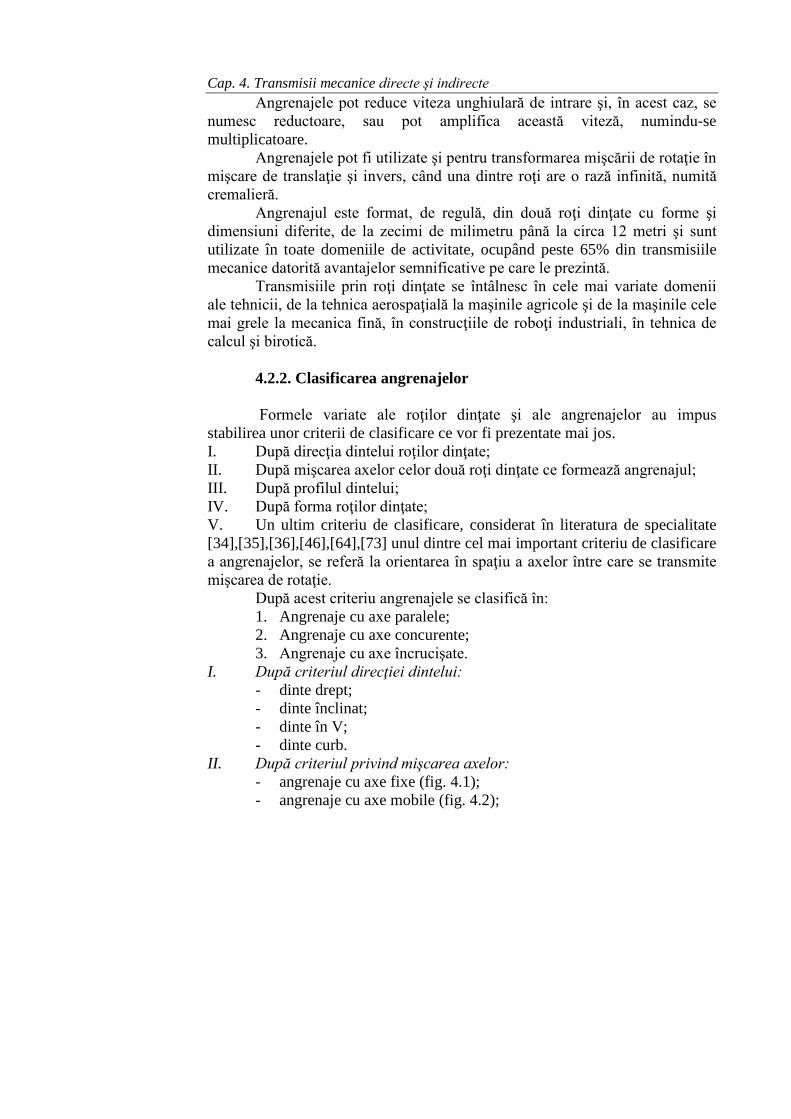
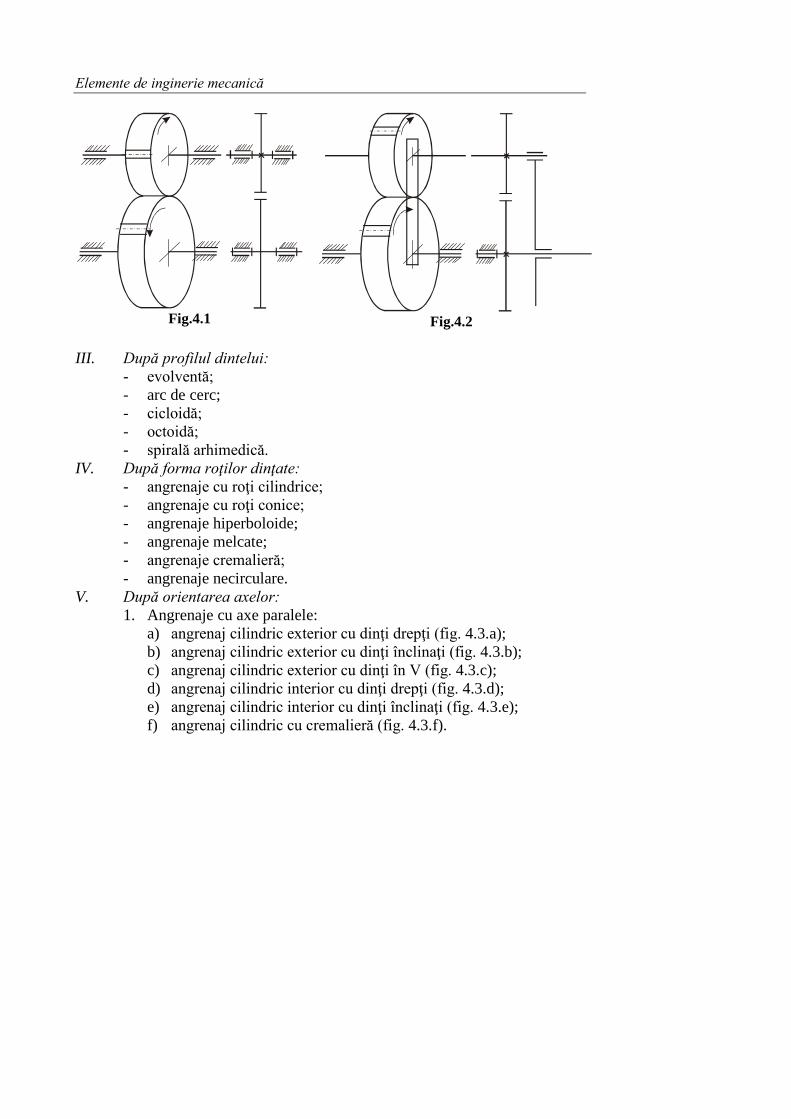
V. După orientarea axelor: 1. Angrenaje cu axe paralele:
a) angrenaj cilindric exterior cu dinţi drepţi (fig. 4.3.a); b) angrenaj cilindric exterior cu dinţi înclinaţi (fig. 4.3.b); c) angrenaj cilindric exterior cu dinţi în V (fig. 4.3.c); d) angrenaj cilindric interior cu dinţi drepţi (fig. 4.3.d); e) angrenaj cilindric interior cu dinţi înclinaţi (fig. 4.3.e); f) angrenaj cilindric cu cremalieră (fig. 4.3.f).
Cap. 4. Transmisii mecanice directe şi indirecte
a)
b)
c)
d)
e)
f) Fig.4.3
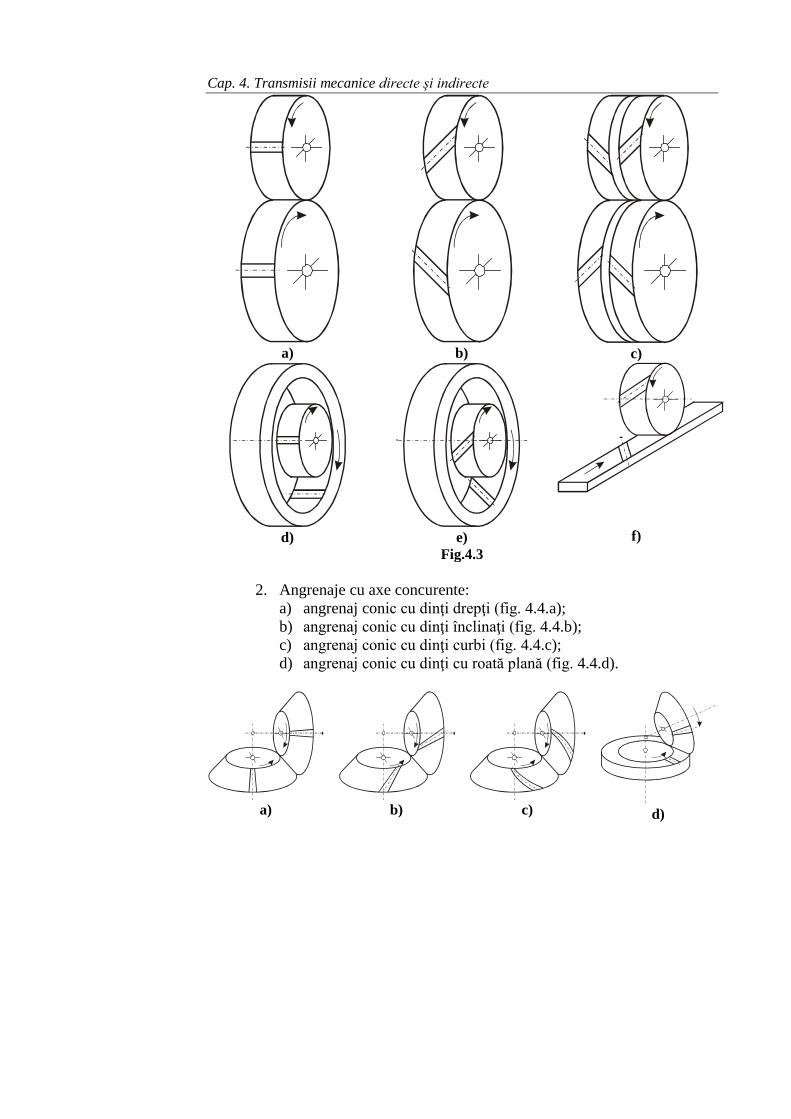
2. Angrenaje cu axe concurente:
a) angrenaj conic cu dinţi drepţi (fig. 4.4.a); b) angrenaj conic cu dinţi înclinaţi (fig. 4.4.b); c) angrenaj conic cu dinţi curbi (fig. 4.4.c); d) angrenaj conic cu dinţi cu roată plană (fig. 4.4.d).
a)
b)
c)
d)
Elemente de inginerie mecanică Fig.4.4
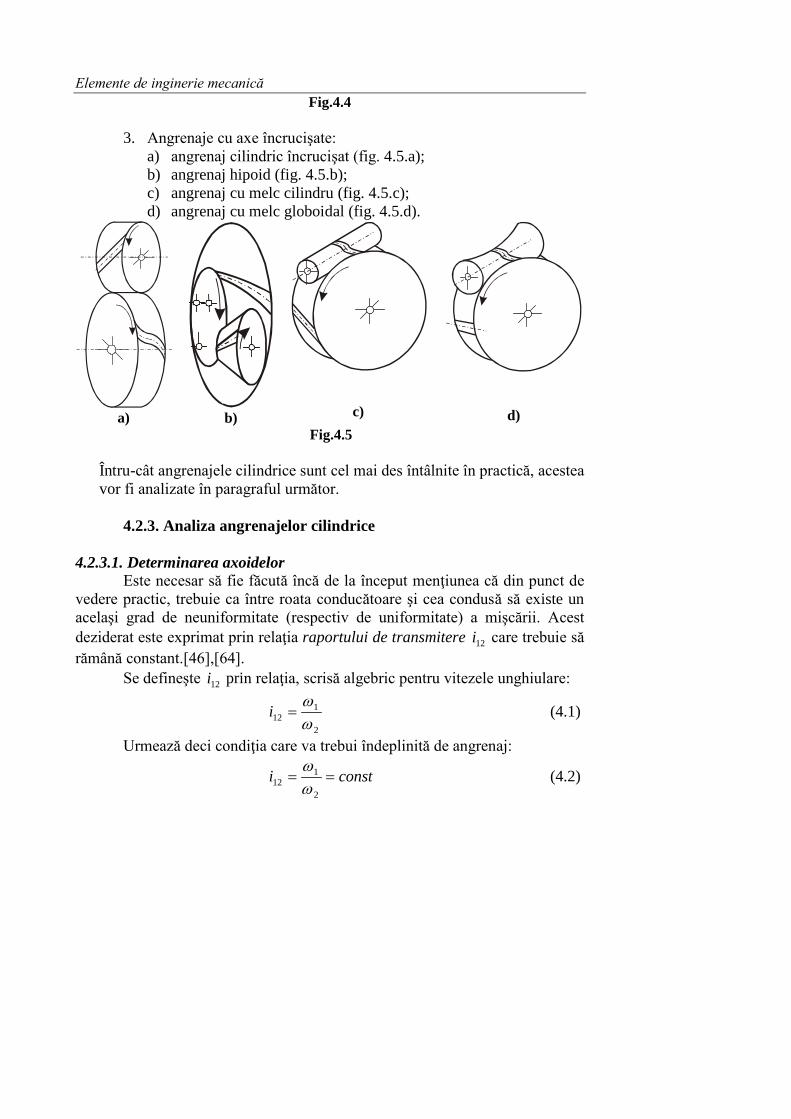
3. Angrenaje cu axe încrucişate:
a) angrenaj cilindric încrucişat (fig. 4.5.a); b) angrenaj hipoid (fig. 4.5.b); c) angrenaj cu melc cilindru (fig. 4.5.c); d) angrenaj cu melc globoidal (fig. 4.5.d).
a)
b)
c)
d) Fig.4.5
Întru-cât angrenajele cilindrice sunt cel mai des întâlnite în practică, acestea vor fi analizate în paragraful următor.
4.2.3. Analiza angrenajelor cilindrice
4.2.3.1. Determinarea axoidelor Este necesar să fie făcută încă de la început menţiunea că din punct de vedere practic, trebuie ca între roata conducătoare şi cea condusă să existe un acelaşi grad de neuniformitate (respectiv de uniformitate) a mişcării. Acest deziderat este exprimat prin relaţia raportului de transmitere 12i care trebuie să rămână constant.[46],[64]. Se defineşte 12i prin relaţia, scrisă algebric pentru vitezele unghiulare:
2
112 ω
ω=i (4.1)
Urmează deci condiţia care va trebui îndeplinită de angrenaj:
consti ==2
112 ω
ω (4.2)
Cap. 4. Transmisii mecanice directe şi indirecte
α1
1r1
C
S1
(∆ )2
ω1 ω2
−ω2
Ω
1r2
(∆ )1
(∆)
−ω2
S2
Fig. 4.6
Relaţia (4.2) va fi găsită ca o condiţie de realizare a danturii la toate tipurile de angrenaje. În continuare se va analiza modul în care se transmite mişcarea între cele două roţi, având ca ipoteză relaţia (4.2). Pentru aceasta se introduc noţiunile de axoide, în mişcarea relativă a celor două corpuri. Axoidele au două caracteristici fundamentale: - sunt două suprafeţe riglate, tangente, descrise în fiecare spaţiu asociat rigidelor, de axa instantanee a mişcării relative (sunt suprafeţe, în general, nematerializate); - se rostogolesc fără alunecare (în orice punct al generatoarei de contact viteza liniară este comună).
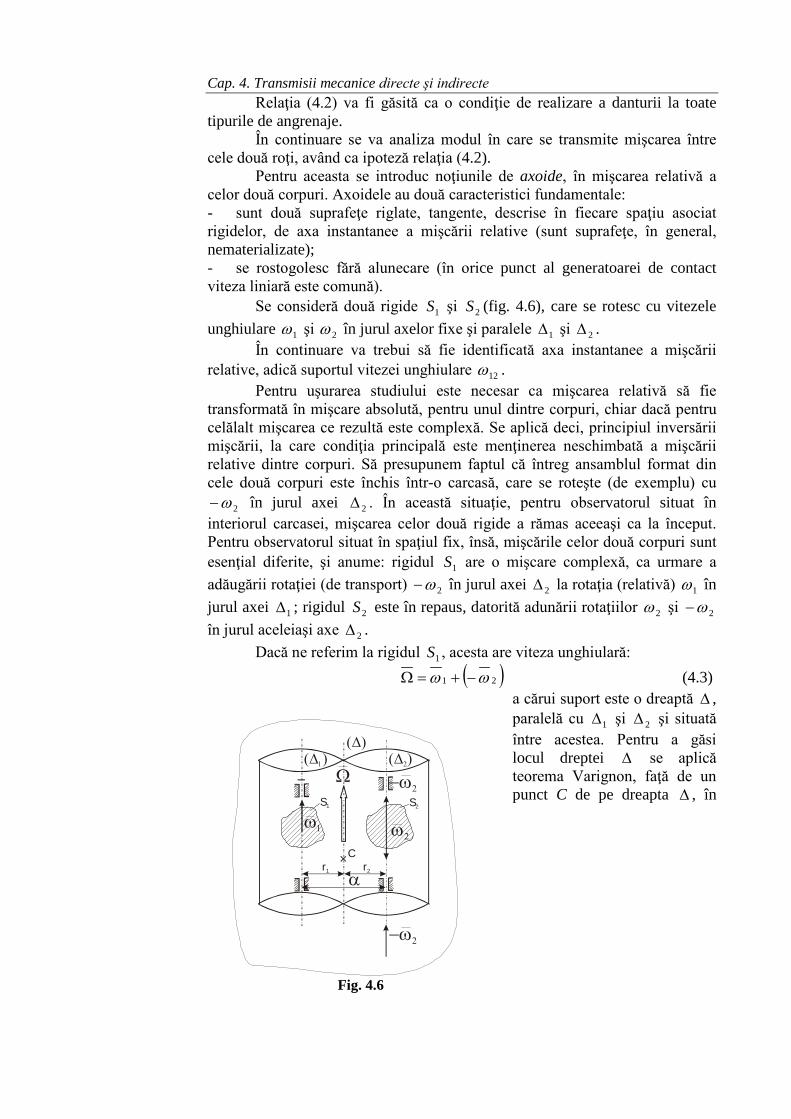
Se consideră două rigide 1S şi 2S (fig. 4.6), care se rotesc cu vitezele unghiulare 1ω şi 2ω în jurul axelor fixe şi paralele 1∆ şi 2∆ .
În continuare va trebui să fie identificată axa instantanee a mişcării relative, adică suportul vitezei unghiulare 12ω . Pentru uşurarea studiului este necesar ca mişcarea relativă să fie transformată în mişcare absolută, pentru unul dintre corpuri, chiar dacă pentru celălalt mişcarea ce rezultă este complexă. Se aplică deci, principiul inversării mişcării, la care condiţia principală este menţinerea neschimbată a mişcării relative dintre corpuri. Să presupunem faptul că întreg ansamblul format din cele două corpuri este închis într-o carcasă, care se roteşte (de exemplu) cu
2ω− în jurul axei 2∆ . În această situaţie, pentru observatorul situat în interiorul carcasei, mişcarea celor două rigide a rămas aceeaşi ca la început. Pentru observatorul situat în spaţiul fix, însă, mişcările celor două corpuri sunt esenţial diferite, şi anume: rigidul 1S are o mişcare complexă, ca urmare a adăugării rotaţiei (de transport) 2ω− în jurul axei 2∆ la rotaţia (relativă) 1ω în jurul axei 1∆ ; rigidul 2S este în repaus, datorită adunării rotaţiilor 2ω şi 2ω− în jurul aceleiaşi axe 2∆ . Dacă ne referim la rigidul 1S , acesta are viteza unghiulară:
( )21 ωω −+=Ω (4.3) a cărui suport este o dreaptă ∆ , paralelă cu 1∆ şi 2∆ şi situată între acestea. Pentru a găsi locul dreptei ∆ se aplică teorema Varignon, faţă de un punct C de pe dreapta ∆ , în
Elemente de inginerie mecanică cazul compunerii vectorilor paraleli şi rezultă:
( ) 02211 =−×+× ωω rr . (4.4) Deoarece l⋅= 11 ωω , de acelaşi sens cu 2ω− , iar 1r şi 2r au sensuri contrare, relaţia (2.4) se scrie sub forma scalară:
02211 =⋅+⋅ rr ωω (4.5)
sau 1
2
2
1
rr
−=ωω . (4.6)
Dacă se notează cu a distanţa constantă dintre 1∆ şi 2∆ , se poate scrie: arr =+ 21 . (4.7)
Din relaţiile (4. 6) şi (4.7) asociate cu ipoteza (4.2) rezultă că 2r este constant, adică dreapta ∆ descrie un cilindru circular drept de rază 2r şi de axă
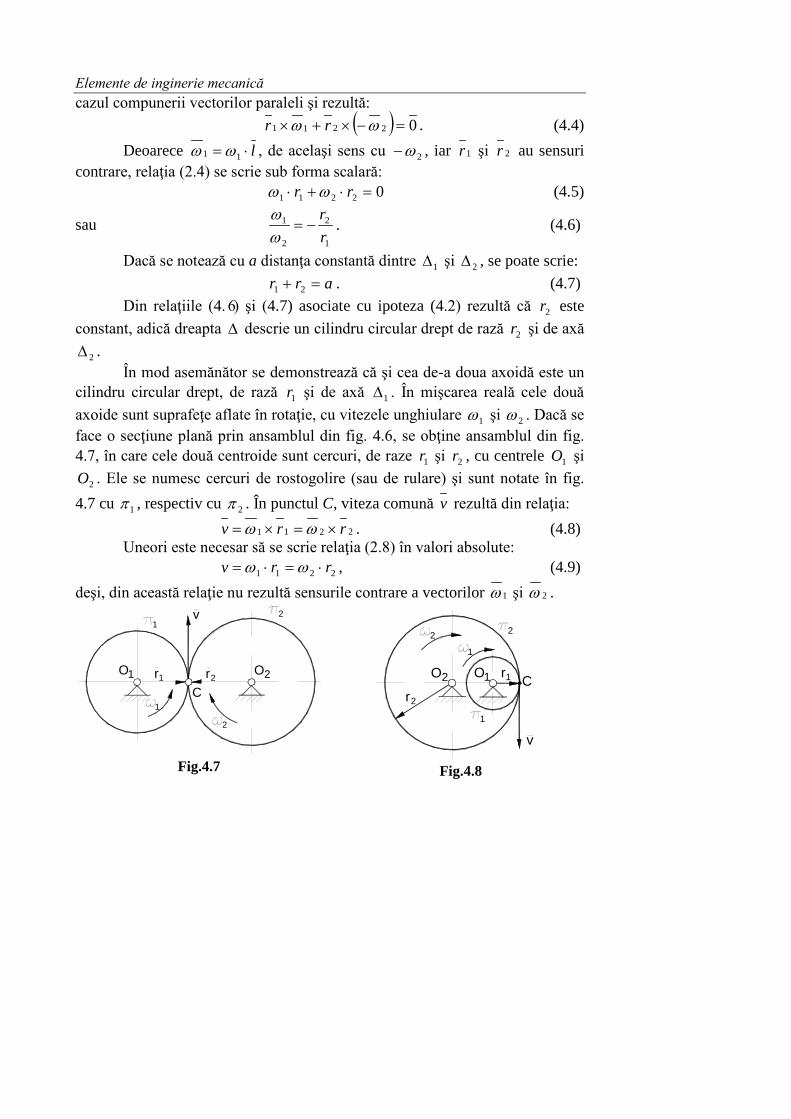
2∆ . În mod asemănător se demonstrează că şi cea de-a doua axoidă este un cilindru circular drept, de rază 1r şi de axă 1∆ . În mişcarea reală cele două axoide sunt suprafeţe aflate în rotaţie, cu vitezele unghiulare 1ω şi 2ω . Dacă se face o secţiune plană prin ansamblul din fig. 4.6, se obţine ansamblul din fig. 4.7, în care cele două centroide sunt cercuri, de raze 1r şi 2r , cu centrele 1O şi
2O . Ele se numesc cercuri de rostogolire (sau de rulare) şi sunt notate în fig. 4.7 cu 1π , respectiv cu 2π . În punctul C, viteza comună v rezultă din relaţia:
2211 rrv ×=×= ωω . (4.8) Uneori este necesar să se scrie relaţia (2.8) în valori absolute:
2211 rrv ⋅=⋅= ωω , (4.9) deşi, din această relaţie nu rezultă sensurile contrare a vectorilor 1ω şi 2ω .
1O
2
O21r r2
v
1
21
C
Fig.4.7
r
2
2
v
O2 1rO1
1
2
1
C
Fig.4.8

Cap. 4. Transmisii mecanice directe şi indirecte În fig. 4.8. este arătat contactul interior a celor două axoide, în punctul C, spre deosebire de contactul exterior prezentat în fig. 4.6 şi în fig. 4.7. În cazul contactului interior, în relaţia (4.4) 1r şi 2r au acelaşi sens; la fel şi vectorii 1ω şi 2ω . Astfel relaţia (4.5) devine:
02211 =⋅−⋅ rr ωω (4.10) iar relaţia (2.6) se scrie acum:
1
2
2
112 r
ri ==ωω . (4.11)
În concluzie, relaţiile (4.6) şi (4.11) se pot scrie sub o singură formă:
1
2
2
112 r
ri ==ωω (4.12)
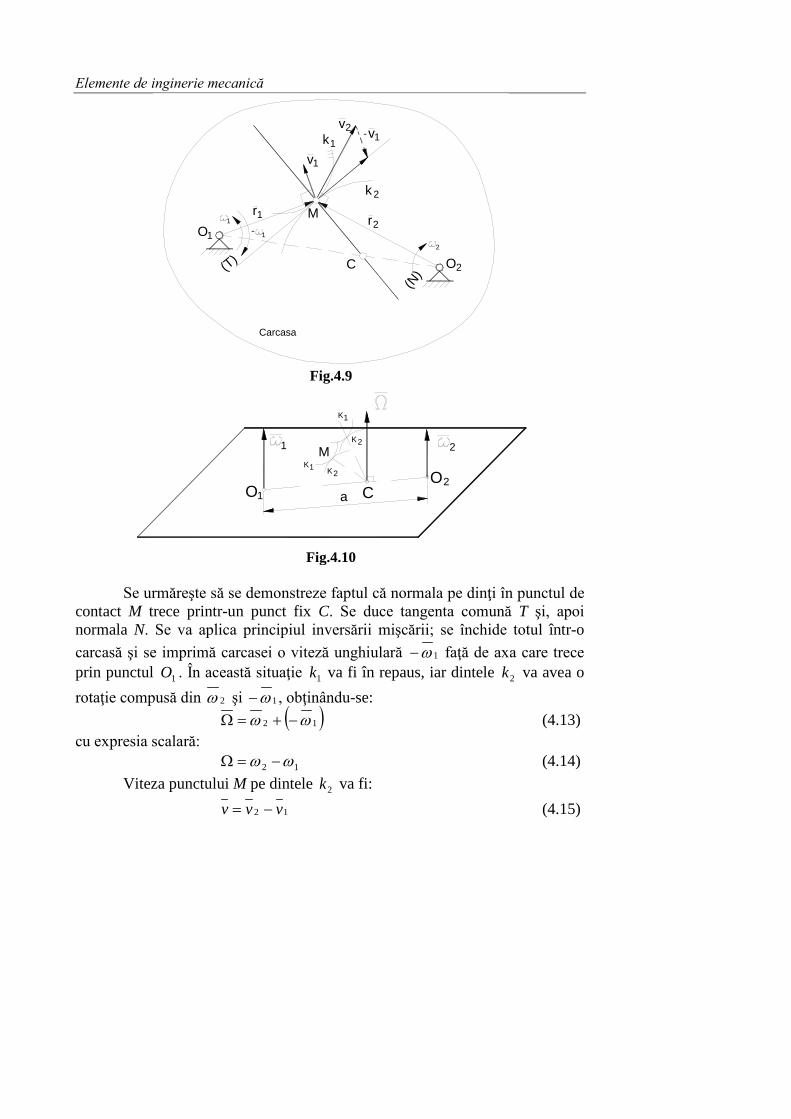
unde semnele minus şi plus corespund respectiv contactului exterior şi interior. 4.2.3.2. Teorema fundamentală a angrenării (Teorema Willis) Se consideră două roţi de raze 1r şi 2r cu centrele fixe 1O şi respectiv
2O , având doi dinţi în contact. Contactul dintre cei doi dinţi 1k şi 2k are loc în punctul M (fig. 4.7). Viteza unghiulară a roţii de centru 1O este 1ω iar a roţii de centru 2O este 2ω . [46],[64]. Prin ipoteză se consideră raportul de transmitere .12 consti = ; dinţii rămân tangenţi, neexistând tendinţa de a intra unul în celălalt sau de a se despărţi. Punctul M alunecă pe profilul dinţilor, vitezele 1v şi 2v fiind perpendiculare în M pe 1r , respectiv 2r .
Elemente de inginerie mecanică
O1
O2
1
1-2
M
k 2
k1
r1 r2
v1
2v1v-
(N)(T) C
Carcasa
Fig.4.9
1O
21 M
1K
K2
K1 K2
aO2
C
Fig.4.10
Se urmăreşte să se demonstreze faptul că normala pe dinţi în punctul de
contact M trece printr-un punct fix C. Se duce tangenta comună T şi, apoi normala N. Se va aplica principiul inversării mişcării; se închide totul într-o carcasă şi se imprimă carcasei o viteză unghiulară 1ω− faţă de axa care trece prin punctul 1O . În această situaţie 1k va fi în repaus, iar dintele 2k va avea o rotaţie compusă din 2ω şi 1ω− , obţinându-se:
( )12 ωω −+=Ω (4.13) cu expresia scalară:
12 ωω −=Ω (4.14) Viteza punctului M pe dintele 2k va fi:
12 vvv −= (4.15)
Cap. 4. Transmisii mecanice directe şi indirecte care va fi pe direcţia tangentei, în aşa fel încât să se respecte ipoteza ca dinţii să rămână tangenţi. Normala pe dinţi, care este acum şi normala pe viteza v , trebuie să treacă prin centrul instantaneu de rotaţie, care nu este oriunde pe normală, ci în punctul C de pe dreapta 21OO . Rezultanta 12 ωω −=Ω (fig. 4.9) este în planul celor două componente, deci pe dreapta 21OO . Punctul C se află utilizându-se teorema lui Varignon:
( )[ ] ( ) 02211 =⋅+⋅−− COCO ωω (4.16) Din relaţia (4.16) rezultă:
COCO
1
2
2
1 −=ωω (4.17)
Dar din ipoteză .2
112 consti ==
ωω (4.18)
Şi din relaţiile (2.17) şi (2.18) rezultă că:
.1
2
2
1 constCOCO
=−=ωω (4.19)
Însă ( ) ( ) aCOCO =+ 21 (4.20)
unde a este distanţa dintre axe (care este constantă); rezultă din (4.19) şi (2.20) că .1 constCO = şi .2 constCO = , adică tocmai ce era de demonstrat. În concluzie, teorema fundamentală a angrenării se enunţă astfel: În timpul contactului a doi dinţi conjugaţi, normala comună trece printr-un punct fix C de pe linia centrelor.
În fig. 4.10 este desenată şi o a doua poziţie de contact a celor doi dinţi conjugaţi 1k ′ şi 2k ′ ; normala trebuie să treacă tot prin punctul C. 4.2.3.3. Elementele geometrice ale angrenajelor cilindrice cu dinţi drepţi
Se disting elementele geometrice ale fiecărei roţi dinţate şi elementele geometrice ale angrenajului în ansamblul sau. A. Elementele geometrice ale roţii (fig. 4.11)
Elemente de inginerie mecanică
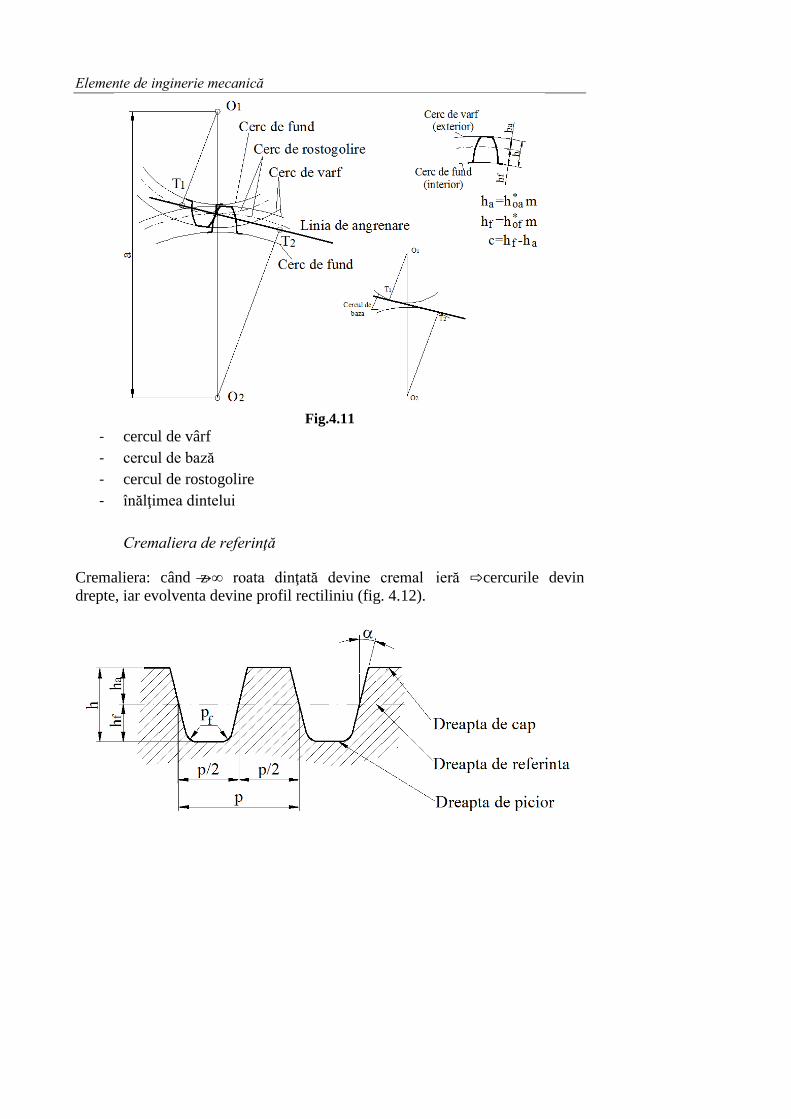
Fig.4.11
- cercul de vârf - cercul de bază - cercul de rostogolire - înălţimea dintelui
Cremaliera de referinţă
Cremaliera: când z→∞ roata dinţată devine cremal ieră cercurile devin drepte, iar evolventa devine profil rectiliniu (fig. 4.12).

Cap. 4. Transmisii mecanice directe şi indirecte
Fig.4.12 Elementele geometrice standardizate se definesc pe cremaliera de referinţă:
(coeficientul înălţimii capului dintelui) (coeficientul jocului danturii) (coeficientul racordării piciorului dintelui). Cremaliera de referinţă standardizată: α=20°; ;
a) pasul danturii p- măsurat pe cercul de divizare = distanţa dintre 2 flancuri omoloage consecutive
= pas pe cercul de bază; b) modulul-parametrul principal al unui angrenaj m. Modulul m este o mărime standardizată prin STAS 822:
, rezultă = ; numărul de dinţi. Observaţie importantă: roţile dinţate conjugate pot angrena numai dacă sunt de acelaşi fel şi au acelaşi pas şi deci acelaşi modul. c) Diametrele caracteristice - de vârf (exterior) - de fund (interior) - de divizare (de generare) d: - de rostogolire - de bază d) Înălţimea dintelui h: - înălţimea piciorului dintelui
- înălţimea capului dintelui coeficientul înălţimii capului dintelui - jocul la fundul danturii c= Pentru roţile dinţate obişnuite : B) Elemente geometrice ale agregatului În procesul de funcţionare, punctele succesive de contact definesc segmentul de angrenare AE. Puncte pe linia de angrenare : A- punctul de intrare în angrenare; E-punctul de ieşire din angrenare; B,D-punctele de angrenare unipară.
Elemente de inginerie mecanică
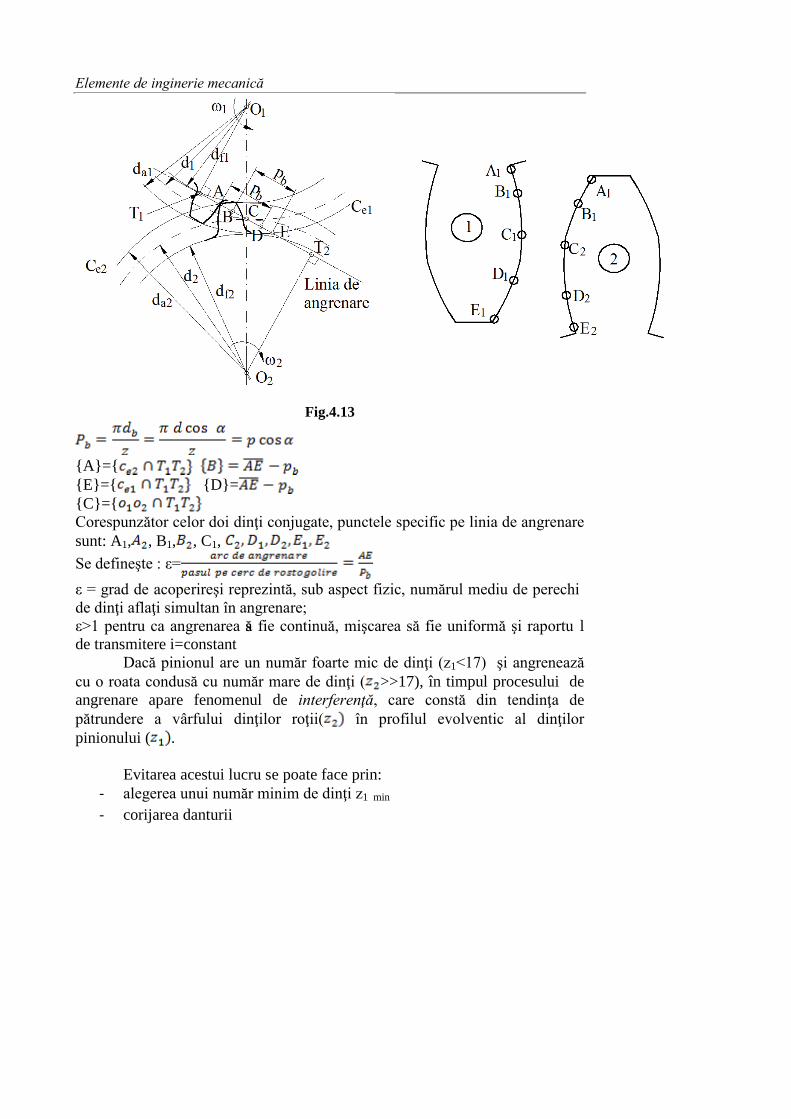
Fig.4.13
A= E= D= C= Corespunzător celor doi dinţi conjugate, punctele specific pe linia de angrenare sunt: A1, , B1, , C1, Se defineşte : ε= ε = grad de acoperire şi reprezintă, sub aspect fizic, numărul mediu de perechi de dinţi aflaţi simultan în angrenare; ε>1 pentru ca angrenarea să fie continuă, mişcarea să fie uniformă şi raportu l de transmitere i=constant Dacă pinionul are un număr foarte mic de dinţi (z1<17) şi angrenează cu o roata condusă cu număr mare de dinţi ( >>17), în timpul procesului de angrenare apare fenomenul de interferenţă, care constă din tendinţa de pătrundere a vârfului dinţilor roţii( în profilul evolventic al dinţilor pinionului ( . Evitarea acestui lucru se poate face prin:
- alegerea unui număr minim de dinţi z1 min - corijarea danturii
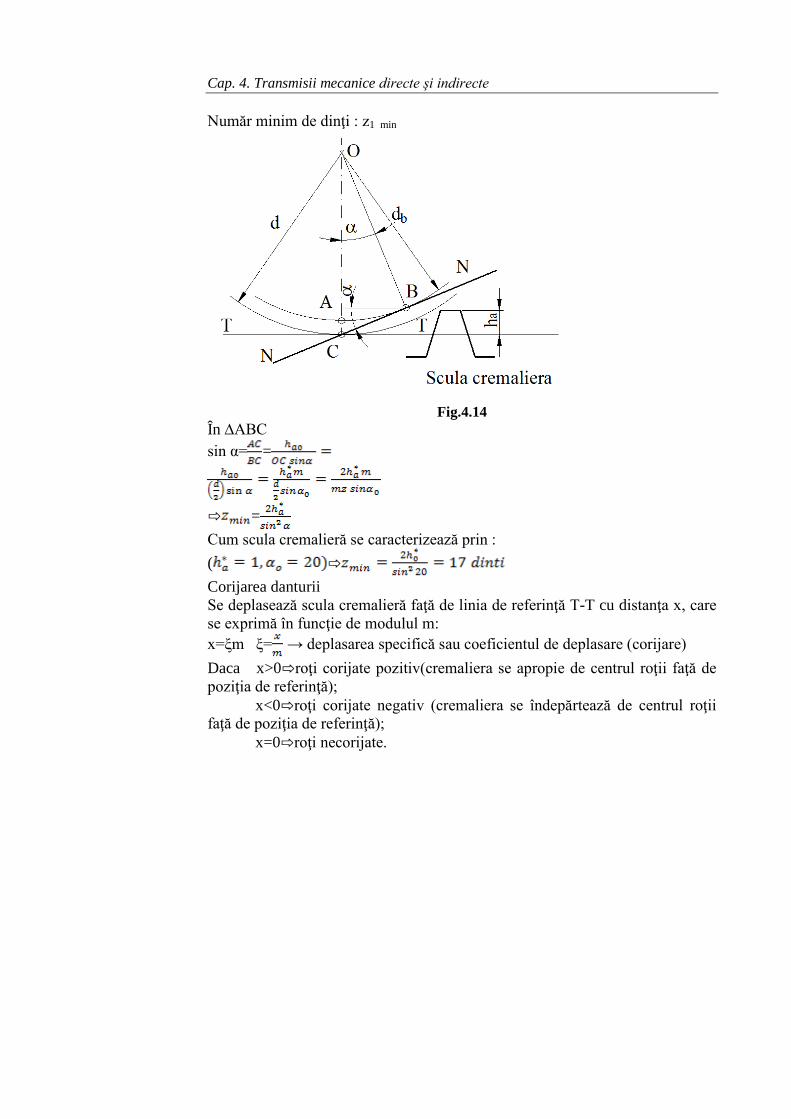
Cap. 4. Transmisii mecanice directe şi indirecte Număr minim de dinţi : z1 min
Fig.4.14
În ∆ABC sin α= =
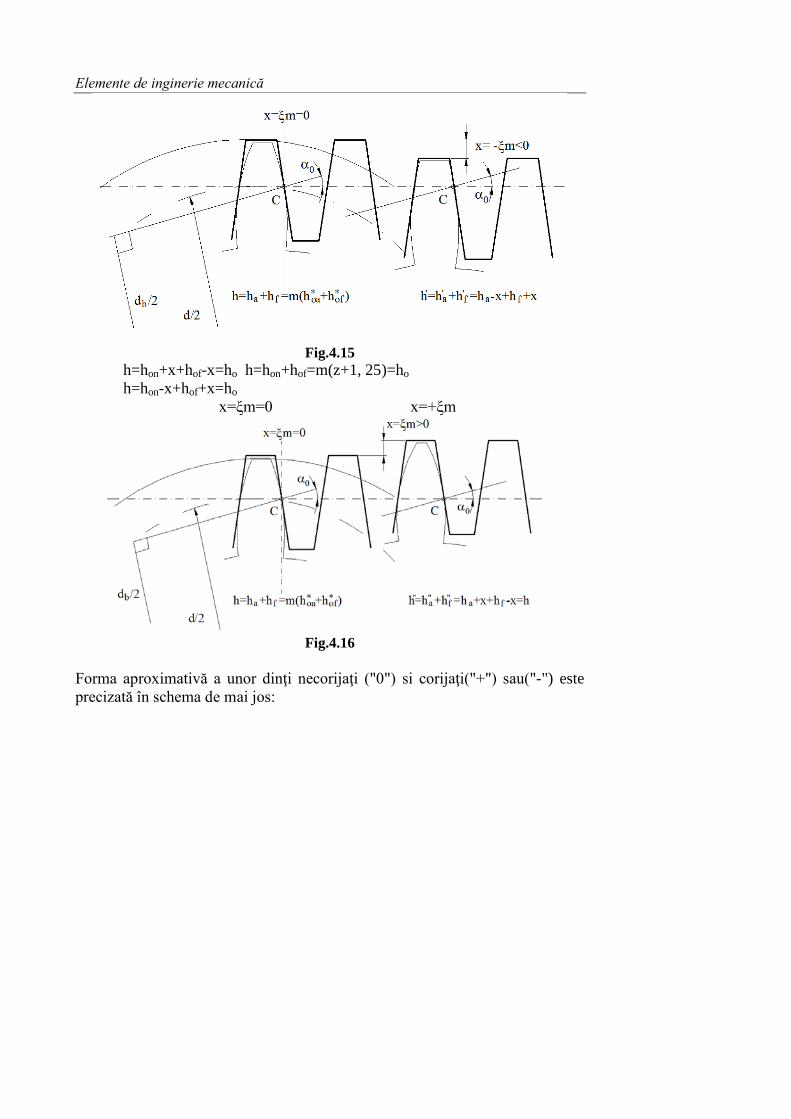
= Cum scula cremalieră se caracterizează prin : ( Corijarea danturii Se deplasează scula cremalieră faţă de linia de referinţă T-T cu distanţa x, care se exprimă în funcţie de modulul m: x=ξm ξ= → deplasarea specifică sau coeficientul de deplasare (corijare) Daca x>0roţi corijate pozitiv(cremaliera se apropie de centrul roţii faţă de poziţia de referinţă); x<0roţi corijate negativ (cremaliera se îndepărtează de centrul roţii faţă de poziţia de referinţă);
x=0roţi necorijate.
Elemente de inginerie mecanică
Fig.4.15
h=hon+x+hof-x=ho h=hon+hof=m(z+1, 25)=ho h=hon-x+hof+x=ho x=ξm=0 x=+ξm
Fig.4.16
Forma aproximativă a unor dinţi necorijaţi ("0") si corijaţi("+") sau("-") este precizată în schema de mai jos:

Cap. 4. Transmisii mecanice directe şi indirecte
Fig.4.17
Pentru a îmbunătăţi comportarea angrenajului, deplasarea profilului se poate face, diferit, pe cele 2 roţi: a) angrenaj cu dantura compensată (se schimbă raportul dintre înălţimile capului şi piciorul dinţilor)
b)
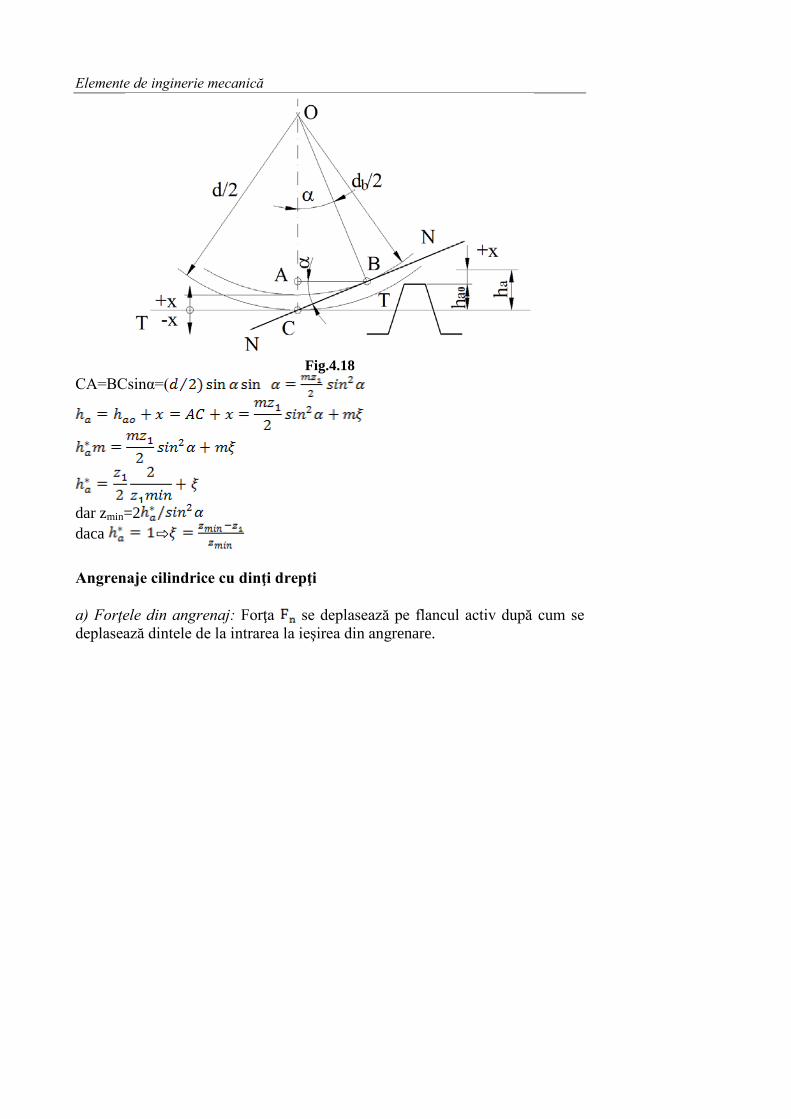
∆a=( Necesitatea deplasării(corijării) a) realizarea unor roţi cu gabarit redus, deci cu număr de dinţi foarte mic, astfel încât să se evite fenomenul de interferenţă. b) realizarea unor distanţe dintre axe impuse c) creşterea capacităţii portante la încovoiere şi la presiune contact d) reducerea alunecării dintre flancuri e) creşterea gradului de acoperire. Realizarea unei roţi cu un număr minim de dinţi
Elemente de inginerie mecanică
Fig.4.18
CA=BCsinα=(
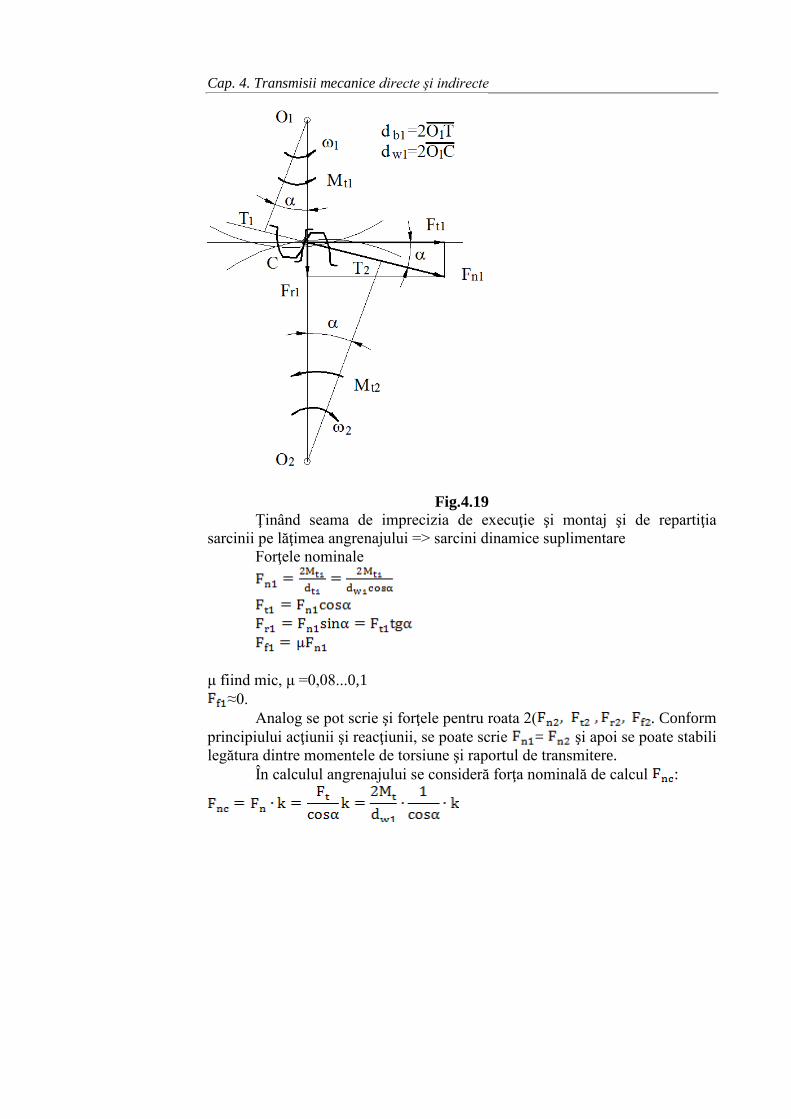
dar zmin=2 daca Angrenaje cilindrice cu dinţi drepţi a) Forţele din angrenaj: Forţa se deplasează pe flancul activ după cum se deplasează dintele de la intrarea la ieşirea din angrenare.
Cap. 4. Transmisii mecanice directe şi indirecte
Fig.4.19 Ţinând seama de imprecizia de execuţie şi montaj şi de repartiţia sarcinii pe lăţimea angrenajului => sarcini dinamice suplimentare Forţele nominale
μ fiind mic, μ =0,08...0,1
≈0. Analog se pot scrie şi forţele pentru roata 2( . Conform
principiului acţiunii şi reacţiunii, se poate scrie = şi apoi se poate stabili legătura dintre momentele de torsiune şi raportul de transmitere. În calculul angrenajului se consideră forţa nominală de calcul :

Elemente de inginerie mecanică k = factorul de sarcină: unde : coeficient de suprasarcină, dependent de maşina de lucru şi de maşina motoare coeficient dinamic dependent de viteza şi clasa de precizie a angrenajului. coeficient de repartizare a sarcinii pe lăţimea dintelui, dependent de lăţimea roţii şi de diametrul de rostogolire. b ) Calculul la solicitarea de încovoiere Ipoteze simplificatoare: - se consideră forţa normală de valoare aplicată în vârful dintelui
(Ԑ-gradul de acoperire); -se consideră doar efortul de încovoiere în secţiunea de la baza dintelui; -secţiunea periculoasă de la baza dintelui se defineşte prin punctul de tangenţă la profilul dintelui în zona de racordare cu corpul roţii dinţate.
Fig.4.20

Cap. 4. Transmisii mecanice directe şi indirecte unde: B este lungimea dintelui; =coeficientul de formă al dintelui coeficientul gradului de acoperire
relaţie ce poate fi utilizată
pentru dimensionare sau verificare; Unde: rezistenţa limită la oboseală prin încovoiere la piciorul dintelui - 250...300 pentru oţeluri aliate îmbunătăţite - 400...450 pentru oţeluri aliate de cementare - 40...60 pentru fonte cenuşii -150...170 pentru fonte cu grafit nodular factorul minim de siguranţă la încovoiere - 1,25...1,35 pentru materiale îmbunătăţite - 1,75...2 pentru materiale cementate-călite
factorul concentratorului de tensiune: funcţie de raza de racordare a piciorului dintelui - 1....1,2
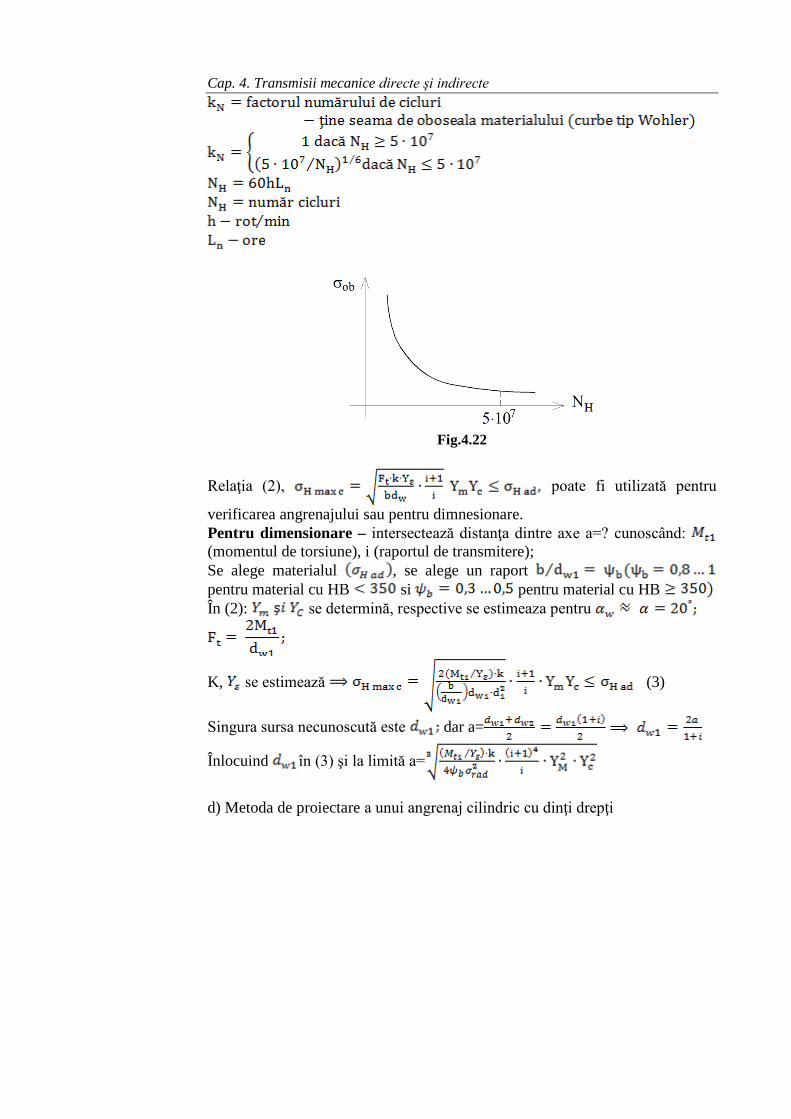
factorul numărului de cicluri
( n – turaţia în rotaţii pe minut, h – numărul de ore de
funcţionare). Pentru dimensionare: Se alege: - 6 pentru dinţi neprelucraţi - 10...20 pentru dinţi prelucraţi şi roţi pe lagăre detaşabile
0,1...0,3 angrenaj deschis 0,15...0,3 angrenaje cu duritatea HB 350 0,3...0,4 pentru reductoare obişnuite
0,3 pentru angrenaje cementate călite prin
CIF (curenţi de înaltă frecvenţă) - Determinarea modulului

Elemente de inginerie mecanică
Iar , i fiind raportul de transmitere. Dacă se calculează modulul, atunci se standardizează m STAS 822 Se calculează şi apoi se standardizează a. STAS 6055; pentru realizarea STAS a distanţei dintre axe se face corijarea danturii ( unghiul real de angrenare). În cazul când se calculează din relaţia de dimensionare şi apoi distanţa dintre axe
b) Calculul pe baza solicitării de contact (ciupire, pitting) Ipoteze simplificatoare (teoria lui Hertz) - corpuri omogene şi izotrope - materialul respectă legea lui Hooke (E=ct) -forţele exterioare acţionează normal pe suprafaţă -suprafeţele sunt netede -se neglijează forţele de frecare Contactul sub acţiunea sarcinii este o fâşie de lăţime 2b şi lungime B
Unde
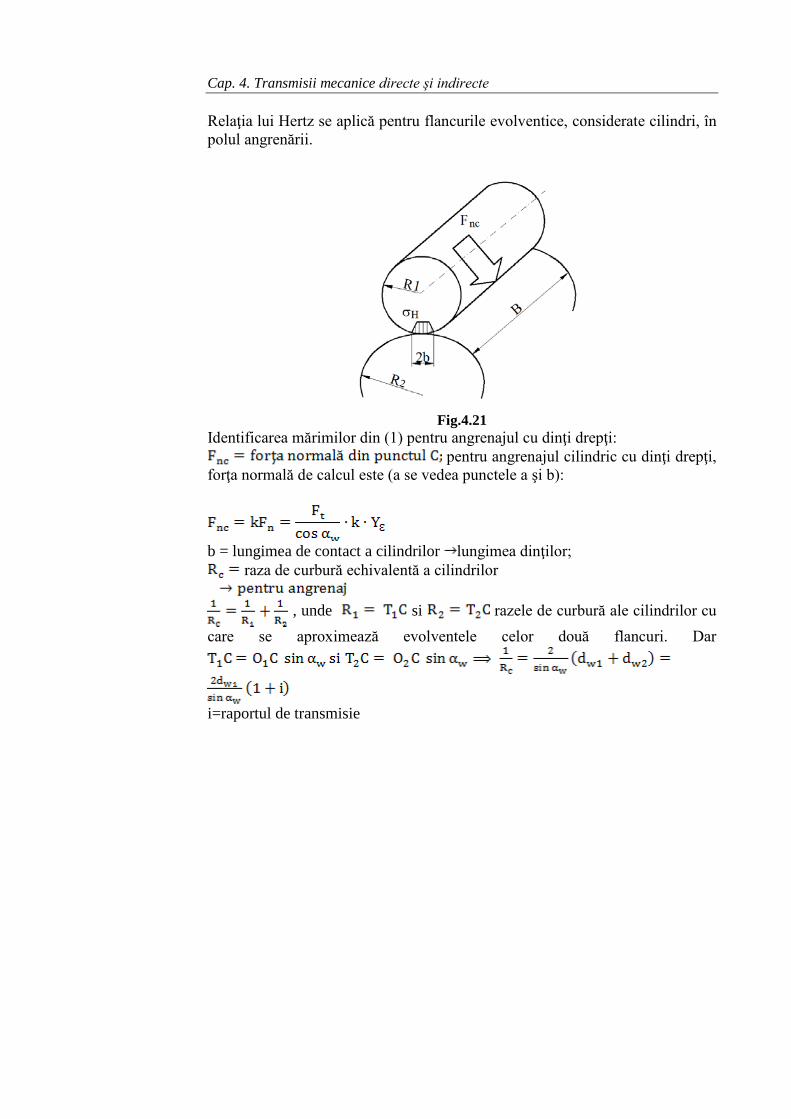
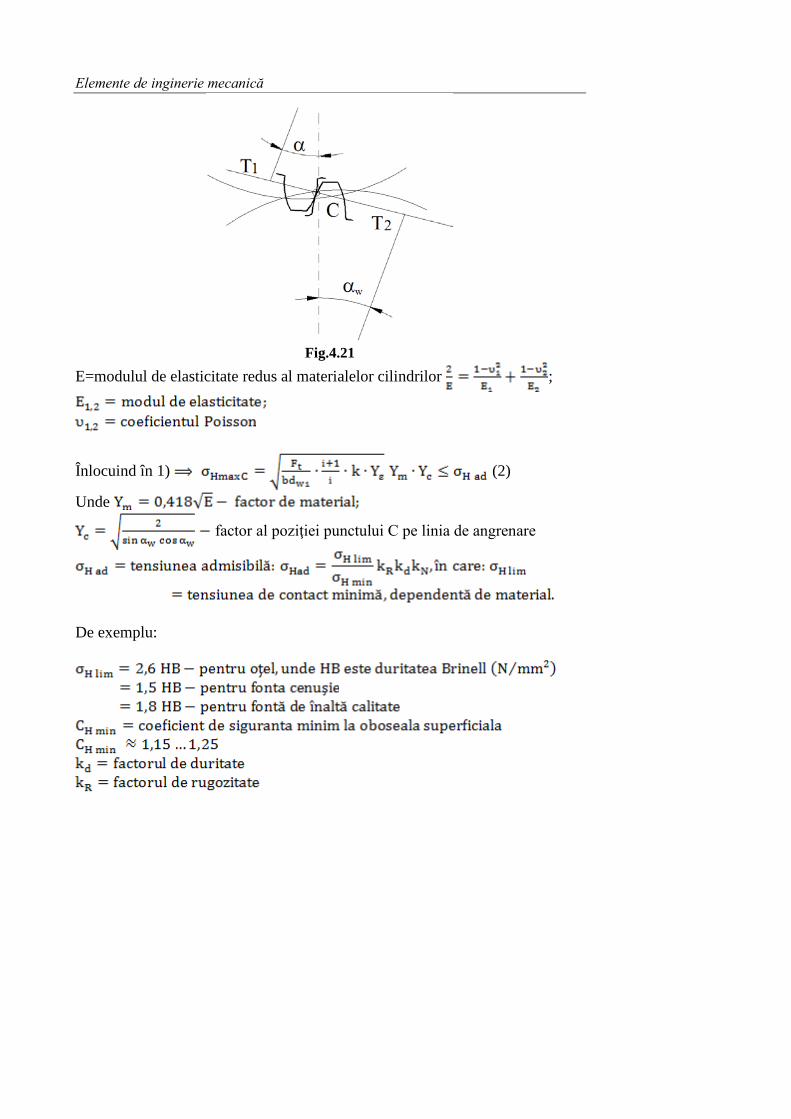
Cap. 4. Transmisii mecanice directe şi indirecte Relaţia lui Hertz se aplică pentru flancurile evolventice, considerate cilindri, în polul angrenării.
Fig.4.21
Identificarea mărimilor din (1) pentru angrenajul cu dinţi drepţi: pentru angrenajul cilindric cu dinţi drepţi,
forţa normală de calcul este (a se vedea punctele a şi b):
b = lungimea de contact a cilindrilor lungimea dinţilor;
raza de curbură echivalentă a cilindrilor
, unde si razele de curbură ale cilindrilor cu care se aproximează evolventele celor două flancuri. Dar
i=raportul de transmisie
Elemente de inginerie mecanică
Fig.4.21
E=modulul de elasticitate redus al materialelor cilindrilor ;
Înlocuind în 1) (2)
Unde
factor al poziţiei punctului C pe linia de angrenare
De exemplu:
Cap. 4. Transmisii mecanice directe şi indirecte
Fig.4.22
Relaţia (2), poate fi utilizată pentru
verificarea angrenajului sau pentru dimnesionare. Pentru dimensionare – intersectează distanţa dintre axe a=? cunoscând: (momentul de torsiune), i (raportul de transmitere); Se alege materialul , se alege un raport pentru material cu HB si pentru material cu HB În (2): se determină, respective se estimeaza pentru
K, se estimează (3)
Singura sursa necunoscută este dar a=
Înlocuind în (3) şi la limită a=
d) Metoda de proiectare a unui angrenaj cilindric cu dinţi drepţi

Elemente de inginerie mecanică Se dau: Se aleg: materialul Calcul:
calculul
elementelor geometrice. Calculul geometric:
A) Elementele cremalierei de referinţă
B) Calculul deplasărilor specifice ale danturii
-unghiul de rostogolire a cremalierei – distanţa dintre axe standardizată, distanţa de referinţă
-repartizarea deplasărilor specifice si se calculeaza Elementele geometrice ale angrenajului
-unghiul de presiune la capul dintelui ( arcul dintelui pe cercul de cap ( -lăţimea danturii ; ; -diametrele cercurilor începutului profilului evolventic (relaţiile sunt date în Îndrumare de proiectare). -gradul de acoperire C) Relaţiile de calcul pentru verificarea dimensională a danturii roţilor
Cap. 4. Transmisii mecanice directe şi indirecte -lungimea (cota) peste N dinţi; coarda de divizare etc (relaţiile sunt date în Îndrumare de proiectare). 4.2.3.4. Serii de angrenaje Seriile sau trenurile de angrenaje se clasifică în: serii cu axe fixe şi serii cu axe mobile. a) Serii de angrenaje cu axe fixe.
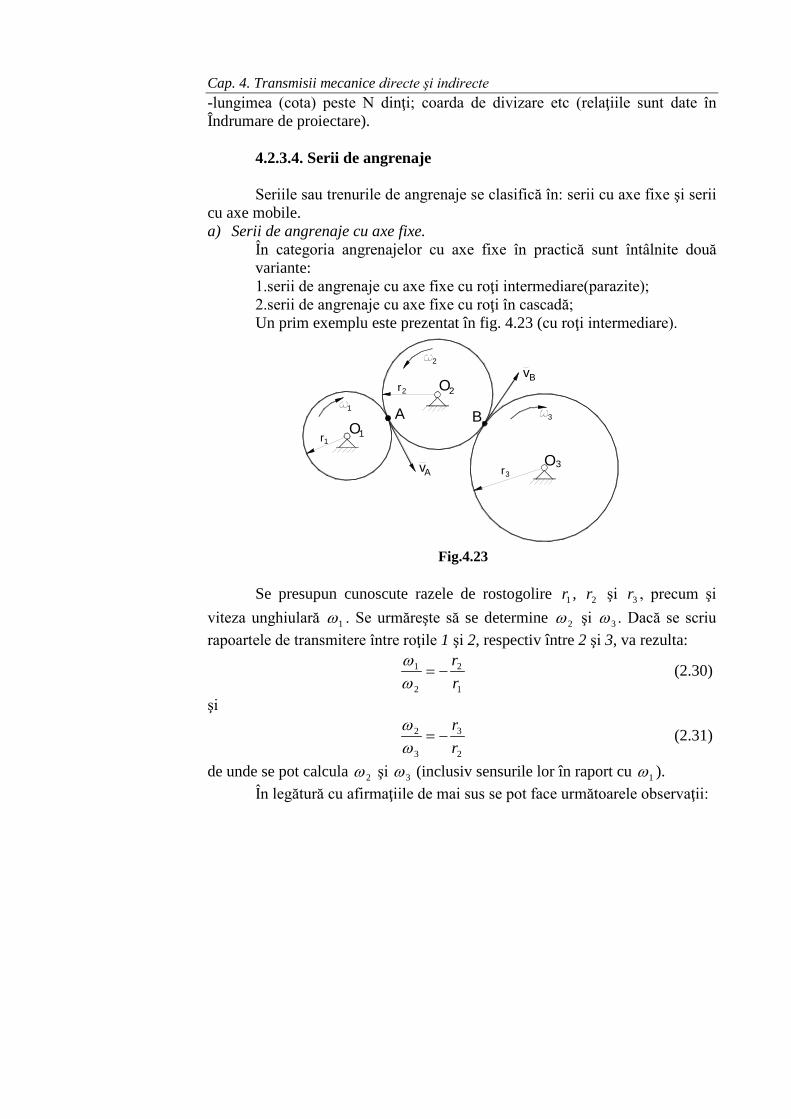
În categoria angrenajelor cu axe fixe în practică sunt întâlnite două variante: 1.serii de angrenaje cu axe fixe cu roţi intermediare(parazite); 2.serii de angrenaje cu axe fixe cu roţi în cascadă; Un prim exemplu este prezentat în fig. 4.23 (cu roţi intermediare).
O
r
r 1
1
1
2
2
v
O2
AO3r3
3
vB
A B
Fig.4.23
Se presupun cunoscute razele de rostogolire 1r , 2r şi 3r , precum şi
viteza unghiulară 1ω . Se urmăreşte să se determine 2ω şi 3ω . Dacă se scriu rapoartele de transmitere între roţile 1 şi 2, respectiv între 2 şi 3, va rezulta:
1
2
2
1
rr
−=ωω (2.30)
şi
2
3
3
2
rr
−=ωω (2.31)
de unde se pot calcula 2ω şi 3ω (inclusiv sensurile lor în raport cu 1ω ). În legătură cu afirmaţiile de mai sus se pot face următoarele observaţii:

Elemente de inginerie mecanică - dacă în locul razelor de rulare ar fi fost date numerele de dinţi, relaţiile (2.30) şi (2.31) ar fi fost scrise:
1
2
2
1
zz
−=ωω şi
2
3
3
2
zz
−=ωω (2.32)
- relaţiile (2.30) şi (2.31) ar putea fi regăsite şi prin exprimarea vitezelor liniare în punctele de contact:
2211 rrvA ⋅=⋅= ωω
3322 rrvB ⋅=⋅= ωω (2.33) Se observă că relaţiile (2.33) scrise sub formă de raporturi ca în relaţiile (2.30), (2.31) şi (2.32), trebuie să fie corectate, ţinându-se seama de semnul (sensul) vitezelor unghiulare respective. - dacă în problema propusă interesează numai transmiterea mişcării între roţile 1 şi 3, din relaţiile (2.30), (2.31) şi (2.32) rezultă:
1
3
1
3
3
1
zz
rr
==ωω (2.34)
relaţii care, cu excepţia semnului, s-ar regăsi dacă roţile 1 şi 3 ar fi puse în contact direct. Din această cauză, roata 2 este denumită uneori roată parazită. Ea se utilizează în practică, fie pentru a asigura transmiterea mişcării între axele ce se proiectează în 1O şi 3O , atunci când pe aceste axe se montează diverse roţi de raze 1r şi 3r variabile, fie pentru a se obţine un acelaşi sens de rotaţie pentru roata conducătoare 1 şi roata condusă 3. Se mai observă faptul că la relaţia (2.34) se poate ajunge şi prin “amplificarea formală a raportului de transmitere” în sensul următor:
231213 iii ⋅= (2.35)
adică: 1
3
2
3
1
213 r
rrr
rr
i =
−⋅
−= . (2.36)
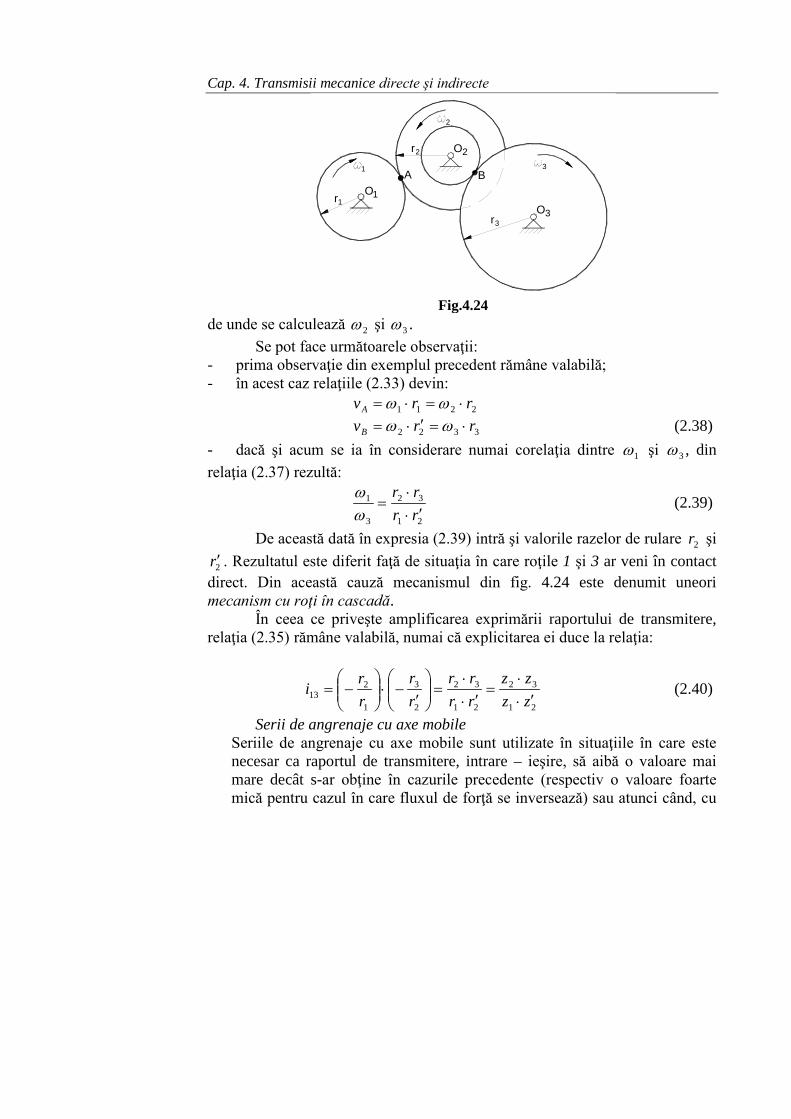
Un al doilea exemplu de serii de angrenaje cu axe fixe este mecanismul prezentat în fig. 2.14(cu roţi în cascadă) , la care roţile cu razele de rulare 2r şi
2r ′ sunt solidarizate pe acelaşi ax, deci au aceeaşi viteză unghiulară 2ω . Se scrie şi acum raportul de transmitere între roţile 1 şi 2, respectiv între roţile 2 şi 3 şi rezultă:
1
2
2
1
rr
−=ωω ;
2
3
3
2
rr′
−=ωω (2.37)
Cap. 4. Transmisii mecanice directe şi indirecte
Or
r1O1
1
2 2
2
O3r
3
3
A B
Fig.4.24
de unde se calculează 2ω şi 3ω . Se pot face următoarele observaţii:
- prima observaţie din exemplul precedent rămâne valabilă; - în acest caz relaţiile (2.33) devin:
2211 rrvA ⋅=⋅= ωω
3322 rrvB ⋅=′⋅= ωω (2.38) - dacă şi acum se ia în considerare numai corelaţia dintre 1ω şi 3ω , din relaţia (2.37) rezultă:
21
32
3
1
rrrr′⋅
⋅=
ωω (2.39)
De această dată în expresia (2.39) intră şi valorile razelor de rulare 2r şi
2r ′ . Rezultatul este diferit faţă de situaţia în care roţile 1 şi 3 ar veni în contact direct. Din această cauză mecanismul din fig. 4.24 este denumit uneori mecanism cu roţi în cascadă. În ceea ce priveşte amplificarea exprimării raportului de transmitere, relaţia (2.35) rămâne valabilă, numai că explicitarea ei duce la relaţia:
21
32
21
32
2
3
1
213 zz
zzrrrr
rr
rri
′⋅⋅
=′⋅
⋅=
′
−⋅
−= (2.40)
Serii de angrenaje cu axe mobile Seriile de angrenaje cu axe mobile sunt utilizate în situaţiile în care este necesar ca raportul de transmitere, intrare – ieşire, să aibă o valoare mai mare decât s-ar obţine în cazurile precedente (respectiv o valoare foarte mică pentru cazul în care fluxul de forţă se inversează) sau atunci când, cu
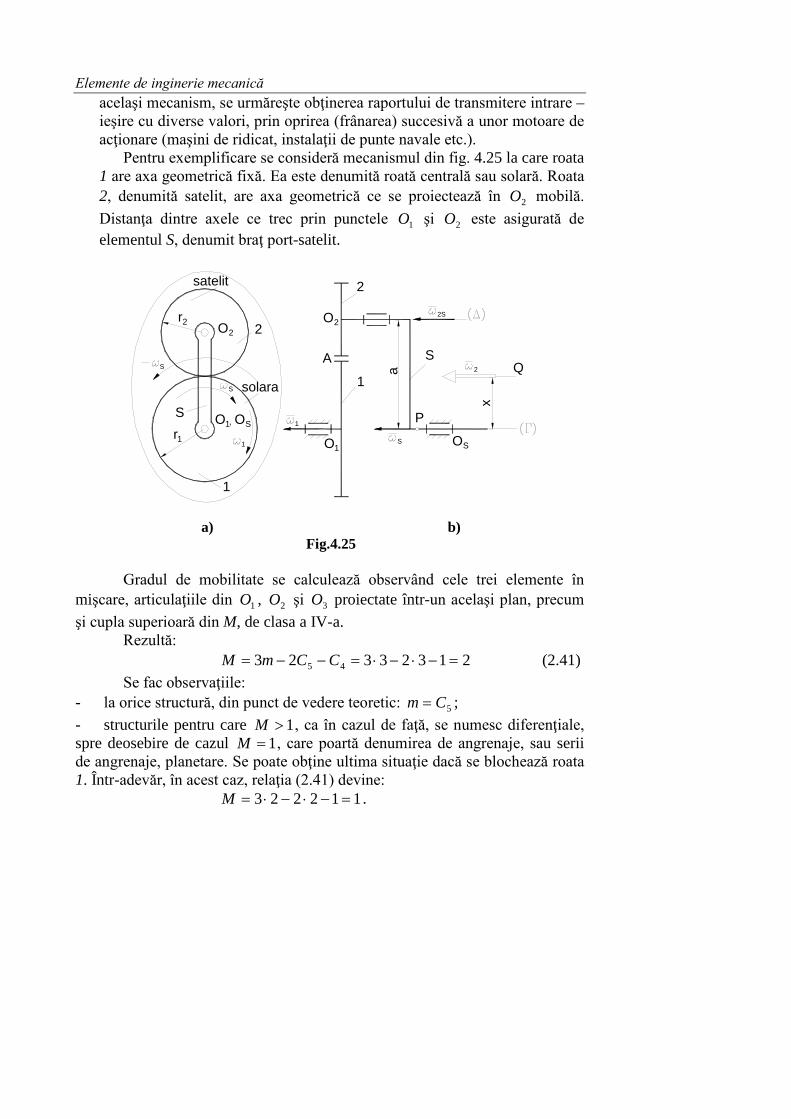
Elemente de inginerie mecanică acelaşi mecanism, se urmăreşte obţinerea raportului de transmitere intrare – ieşire cu diverse valori, prin oprirea (frânarea) succesivă a unor motoare de acţionare (maşini de ridicat, instalaţii de punte navale etc.). Pentru exemplificare se consideră mecanismul din fig. 4.25 la care roata 1 are axa geometrică fixă. Ea este denumită roată centrală sau solară. Roata 2, denumită satelit, are axa geometrică ce se proiectează în 2O mobilă. Distanţa dintre axele ce trec prin punctele 1O şi 2O este asigurată de elementul S, denumit braţ port-satelit.
1O
2O
SO,S
1
1r
2r2
S
S
1
solara
satelit
1
1O S SO
1
A
P
S
2S
2
O2
x
a 2 Q
a) b)
Fig.4.25
Gradul de mobilitate se calculează observând cele trei elemente în mişcare, articulaţiile din 1O , 2O şi 3O proiectate într-un acelaşi plan, precum şi cupla superioară din M, de clasa a IV-a.
Rezultă: 21323323 45 =−⋅−⋅=−−= CCmM (2.41)
Se fac observaţiile: - la orice structură, din punct de vedere teoretic: 5Cm = ; - structurile pentru care 1>M , ca în cazul de faţă, se numesc diferenţiale, spre deosebire de cazul 1=M , care poartă denumirea de angrenaje, sau serii de angrenaje, planetare. Se poate obţine ultima situaţie dacă se blochează roata 1. Într-adevăr, în acest caz, relaţia (2.41) devine:
112223 =−⋅−⋅=M .

Cap. 4. Transmisii mecanice directe şi indirecte - se observă că mecanismul din fig. 4.23 nu poate funcţiona decât dacă axa de rotaţie Γ este comună atât pentru roata 1, cât şi pentru S. Din acest motiv aceste mecanisme sunt denumite angrenaje coliniare.
Revenind la fig. 2.15 şi în baza relaţiei (2.41), se consideră următoarele mărimi de intrare: 1z , 2z , 1ω , Sω , precum şi modulul danturii, m.
Se caută vectorul 2ω (inclusiv suportul acestui vector). Pentru aceasta, se vor scoate în evidenţă unele caracteristici mecanice ale mecanismului şi anume: - Suporturile vectorilor 1ω şi Sω sunt pe Γ . În problema propusă s-au acceptat aceleaşi sensuri, presupuse pozitive. - Satelitul 2 are o mişcare comună, rezultată din:
SS 22 ωωω += (2.42) unde S2ω reprezintă componenta relativă şi este situată pe axul ∆ al roţii 2 iar
Sω este componenta de transport. - Punctul A este 21I denumit centrul instantaneu relativ în mişcarea elementelor 1 şi 2 şi este suportul vectorului 21ω .
Pentru a se putea calcula scalarul vectorului 2ω , este necesar să fie aplicată relaţia:
1
2
1
212 z
zrri == , (2.43)
numai că ea este valabilă numai dacă ambele roţi au axele geometrice fixe. Pentru a se putea realiza această situaţie este necesar ca şi de această dată să fie aplicat principiul inversării mişcării. Se presupune că s-a închis întregul mecanism într-o carcasă şi se dă acestei carcase viteza unghiulară
Sω− în jurul axei Γ . Rezultă că ambele roţi au acum axele geometrice fixe (din cauză că elementul S este în repaus). Pentru sistematizarea calculului se propune completarea tabelului 2.1, în care: - pe linia 1 sunt numerotate elementele ce se iau în discuţie; - pe linia 2 sunt arătaţi scalarii vitezelor unghiulare, în mişcarea reală; - pe linia 3 sunt arătaţi scalarii vitezelor unghiulare, pentru fiecare element, după ce a fost aplicat principiul inversării mişcării. Aceşti scalari sunt implicaţi acum în relaţia (2.43), deoarece ambele roţi au axele fixe.
Tabelul 2.1. Indicele elementului considerat 1 2 3
Scalarii vitezelor unghiulare reale 1ω 2ω 3ω
Scalarii vitezelor unghiulare obţinute după Sωω −1 Sωω −2 0
Elemente de inginerie mecanică inversare
Din cele arătate mai sus rezultă:
1
2
1
2
2
1
zz
rr
S
S −=−=−−
ωωωω
(2.44)
de unde rezultă scalarul vectorului 2ω . Pentru a găsi şi suportul acestui vector, este necesar ca în expresia (2.42) să se calculeze scalarul vitezei unghiulare relative, S2ω . El rezultă din:
SS ωωω −= 22 . În membrul al doilea al relaţiei (2.42) sunt cunoscuţi atât scalarii componentelor, cât şi suporturile acestor vectori. Suportul vectorului 2ω va fi obţinut prin aplicarea teoremei Varignon. În fig. 4.25.b s-a ales ca pol al momentelor punctul P de pe Γ . Rezultă:
ax SS ⋅+⋅=⋅ 22 0 ωωω (2.45) În relaţia (2.45) se menţionează că distanţa a se calculează din:
( )2121 2zzmrra +=+= (2.46)
Se fac următoarele observaţii: - Pe lângă metoda de rezolvare a vitezelor unghiulare care a avut la bază metoda aplicării inversării mişcării, se mai pot folosi şi alte metode şi anume metoda analitică şi chiar metoda grafică. - În cazul mecanismelor cu structură mai complexă decât exemplul din fig. 4.25 setul de ecuaţii necesare rezolvării problemei mai poate cupride şi următoarele:
- Un grup de ecuaţii scrise pentru unele roţi aflate în structură şi care efectiv au axele geometrice fixe. Pentru aceasta se utilizează direct relaţii de forma (2.32) înainte de a se aplica inversarea;
- Un grup de relaţii care exprimă calculul distanţei a pe mai multe laturi ale angrenajelor care au această distanţă comună între axele roţilor. - Dacă se rezolvă ecuaţia (2.44) se obţine:
( )1
11212 z
zzzS ⋅−+⋅=
ωωω . (2.47)
Datele de intrare pot fi alese în aşa fel încât să se obţină 02 =ω . În această situaţie satelitul S este într-o mişcare de translaţie circulară. - S-a observat mai înainte că dacă roata 1 este în repaus, mecanismul este planetar. În această situaţie atât în tabelul 2.1, cât şi în relaţia (2.44) se va
Cap. 4. Transmisii mecanice directe şi indirecte înlocui 01 =ω . Este de menţionat că, în acest caz, suportul vectorului 2ω trebuie să treacă prin punctul A. Calculul trebuie să conducă la acest rezultat.
2.3.5. Aplicaţii la angrenajele cu axe fixe şi mobile Aplicaţii la angrenajele cu axe fixe:
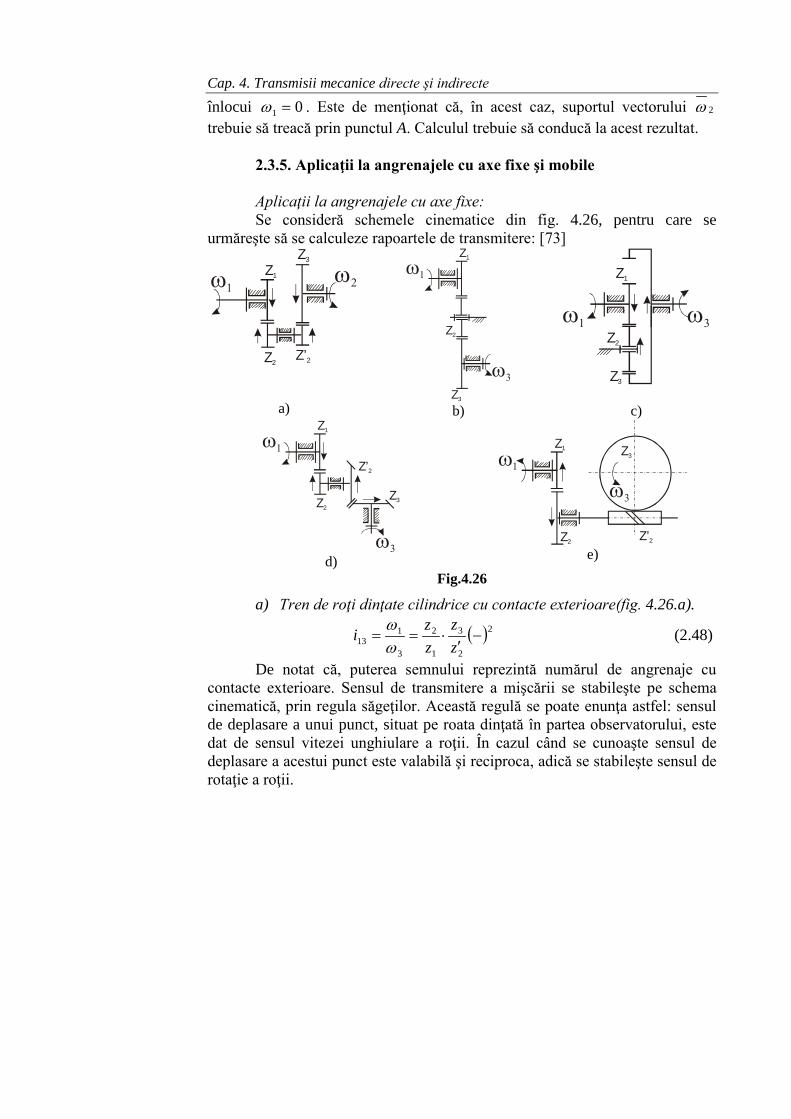
Se consideră schemele cinematice din fig. 4.26, pentru care se urmăreşte să se calculeze rapoartele de transmitere: [73]
ω1ω2
Z2Z’2
Z3
Z1
a)
ω1
ω3
Z2
Z3
Z1
b)
ω1 ω3
Z1
Z3
Z2
c)
Z’2
ω1
ω3
Z3
Z1
Z2
d)
Z2 Z’2
ω3
ω1
Z1 Z3
e)
Fig.4.26
a) Tren de roţi dinţate cilindrice cu contacte exterioare(fig. 4.26.a).
( )2
2
3
1
2
3
113 −
′⋅==
zz
zzi
ωω (2.48)
De notat că, puterea semnului reprezintă numărul de angrenaje cu contacte exterioare. Sensul de transmitere a mişcării se stabileşte pe schema cinematică, prin regula săgeţilor. Această regulă se poate enunţa astfel: sensul de deplasare a unui punct, situat pe roata dinţată în partea observatorului, este dat de sensul vitezei unghiulare a roţii. În cazul când se cunoaşte sensul de deplasare a acestui punct este valabilă şi reciproca, adică se stabileşte sensul de rotaţie a roţii.

Elemente de inginerie mecanică b) Tren de roţi cilindrice cu contacte exterioare la care roata 2z este
parazită(fig.4.26.b), pentru că nu influenţează valoarea raportului de transmitere, însă schimbă sensul mişcării de rotaţie, motiv pentru care se numeşte şi roată inversoare:
( ) ( )2
1
32
2
3
1
2
3
113 −=−⋅==
zz
zz
zzi
ωω (2.49)
c) Angrenaj cilindric exterior cu angrenaj cilindric interior(fig.2.16.c):
( )1
31
2
3
1
2
3
113 z
zzz
zzi −=−⋅==
ωω (2.50)
d) Angrenaj cilindric exterior cu angrenaj conic exterior(fig.2.16.d):
2
3
1
2
3
113 z
zzzi
′⋅==
ωω (2.51)
De observat că în acest caz, relaţia de calcul nu a mai fost afectată de semn, întrucât axele nu sunt paralele şi sensurile de rotaţie, a roţii conducătoare şi a celei conduse, nu se pot compara. Sensurile se stabilesc pe schemă prin regula săgeţii.
e) Angrenaj cilindric exterior cu angrenaj melcat(fig.2.16.e):
2
3
1
2
3
113 z
zzzi
′⋅==
ωω (2.52)
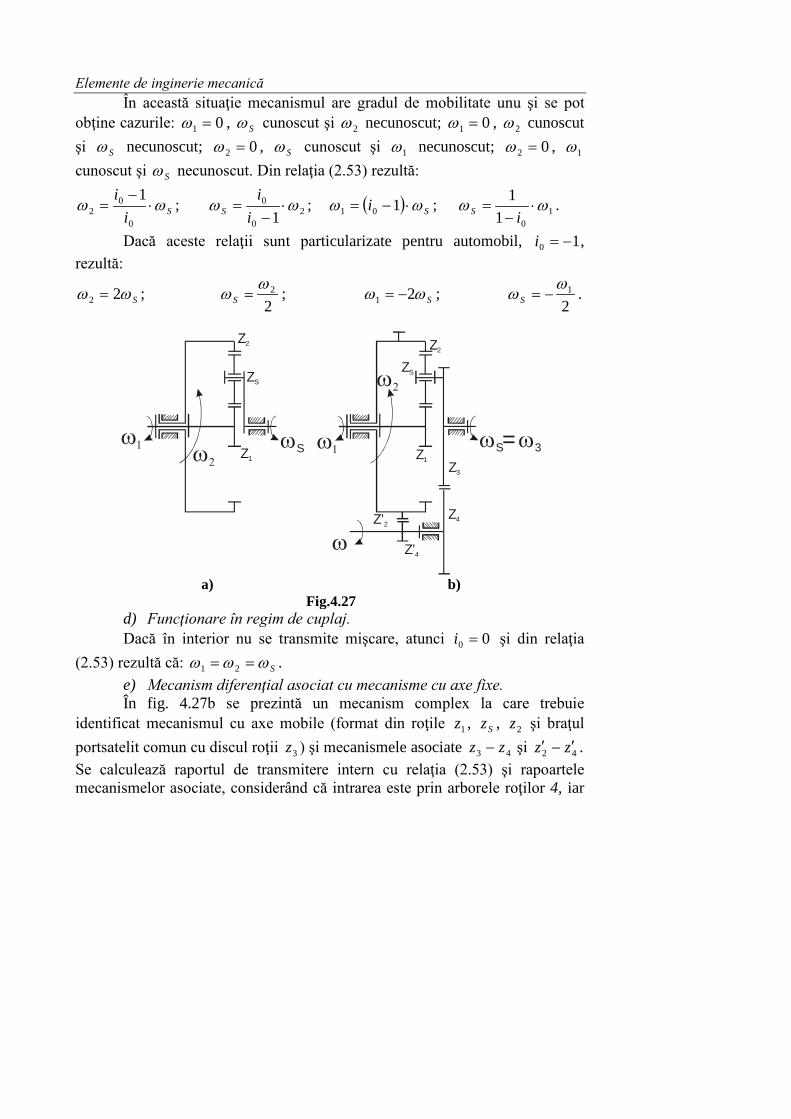
Se face aceeaşi observaţie, ca şi în cazul precedent, cu precizarea că la angrenajul melcat trebuie aplicată şi regula burghiului pentru şurubul melc, 2z′ , cu luarea în considerare a sensului de înclinare a elicei filetului. În exemplul dat, înclinarea este spre dreapta, ceea ce înseamnă că la rotirea melcului în sensul acelor de ceasornic, el va avea o mişcare imaginară de deplasare spre înainte, faţă de observatorul situat în partea roţii 2z . Aplicaţii la angrenajele cu axe mobile: În fig. 4.27a, se prezintă un angrenaj cu axe mobile, format din două
roţi centrale cu axe fixe, 1z , respectiv 2z şi un braţ portsatelit cu o roată cu axa
mobilă Sz . De precizat că roţile pot fi cilindrice sau conice şi că acest
mecanism are gradul de mobilitate doi şi se numeşte diferenţial. Această
denumire provine din faptul că mişcarea de la o roată centrală se poate
transfera la cealaltă, viteza unei roţi este mai mică cu cantitatea care se

Cap. 4. Transmisii mecanice directe şi indirecte transferă celeilalte roţi. Calculul raportului de transmitere se realizează cu
relaţia Willis, sub forma:
( )1
212
10
2
121 z
zzz
zz
iiS
S
S
SS −=−⋅==−−
=− ωωωω
(2.53)
unde: 0i este raportul intern de transmitere şi se calculează ca la angrenajele cu axe fixe dacă se consideră observatorul plasat pe portsatelitul S.
Acest mecanism mai poate funcţiona şi ca mecanism cu axe fixe dacă portsatelitul este fix; ca planetar când una dintre roţile centrale este fixă; cuplaj când între roţile centrale nu se face transfer de mişcare. Pentru a înţelege această funcţionare, se face referire la funcţionarea diferenţialului de automobil, care lucrează ca: diferenţial atunci când autovehiculul se deplasează în curbă; planetar când o roată stă nemişcată iar cealaltă patinează; cuplaj când autovehiculul se deplasează în linie dreaptă.
În următoarele exemple de calcul, se fac referiri la toate posibilităţile de funcţionare:
a) Funcţionare ca angrenaj cu axe fixe. Se consideră fig. 4.27a, în care portsatelitul este fix. În această situaţie
mecanismul are gradul de mobilitate unu şi se convine ca roata 1 să fie motoare.
Din relaţia (2.53), pentru 0=Sω rezultă că raportul de transmitere este chiar raportul intern 0i . Dacă elementul conducător va fi roata 2, valoarea
raportului de transmitere va fi 0
1i
.
b) Funcţionare ca diferenţial. Mecanismul având gradul de mobilitate doi, mărimile cunoscute pot fi:
1ω şi 2ω cu necunoscuta Sω ; 1ω şi Sω cu necunoscuta 2ω ; 2ω şi Sω cu necunoscuta 1ω . Din relaţia (2.53) se calculează:
10
120
−−⋅
=i
iS
ωωω ;
( )0
012
1i
i Sωωω
⋅−+= ; ( ) Sii ωωω ⋅−−⋅= 10201
Dacă se particularizează aceste relaţii pentru diferenţialul automobilului, la care 10 −=i , se obţine:
221 ωω
ω+
=S ; 12 2 ωωω −= S ; 21 2 ωωω −= S .
c) Funcţionare ca planetar.
Elemente de inginerie mecanică În această situaţie mecanismul are gradul de mobilitate unu şi se pot
obţine cazurile: 01 =ω , Sω cunoscut şi 2ω necunoscut; 01 =ω , 2ω cunoscut şi Sω necunoscut; 02 =ω , Sω cunoscut şi 1ω necunoscut; 02 =ω , 1ω cunoscut şi Sω necunoscut. Din relaţia (2.53) rezultă:
Sii
ωω ⋅−
=0
02
1; 2
0
0
1ωω ⋅
−=
ii
S ; ( ) Si ωω ⋅−= 101 ; 101
1 ωω ⋅−
=iS .
Dacă aceste relaţii sunt particularizate pentru automobil, 10 −=i , rezultă:
Sωω 22 = ; 2
2ωω =S ; Sωω 21 −= ;
21ω
ω −=S .
ZSω2
ωS=ω3ω1
ω1
ω1Z1
Z2
ω2
ZS
Z2
Z’2
Z3
Z4
ωSZ1
Z’4
a) b) Fig.4.27
d) Funcţionare în regim de cuplaj. Dacă în interior nu se transmite mişcare, atunci 00 =i şi din relaţia
(2.53) rezultă că: Sωωω == 21 . e) Mecanism diferenţial asociat cu mecanisme cu axe fixe. În fig. 4.27b se prezintă un mecanism complex la care trebuie
identificat mecanismul cu axe mobile (format din roţile 1z , Sz , 2z şi braţul portsatelit comun cu discul roţii 3z ) şi mecanismele asociate 43 zz − şi 42 zz ′−′ . Se calculează raportul de transmitere intern cu relaţia (2.53) şi rapoartele mecanismelor asociate, considerând că intrarea este prin arborele roţilor 4, iar
Cap. 4. Transmisii mecanice directe şi indirecte ieşirile prin arborii roţilor 1 şi 3, unde arborele 3 este identic cu arborele portsatelit:
1
2
2
10 z
ziS
S −=−−
=ωωωω
4
34
3
443 z
zi
S
−===ωω
ωω ;
4
2
2
424 z
zi′′
−==′′ ωω .
Interesează determinarea vitezelor unghiulare 1ω şi Sωω ≡3 . Din relaţia raportului parţial 43i se obţine 3ω , iar din relaţia raportului parţial 24 ′′i se obţine 2ω . Aceste viteze unghiulare se introduc în relaţia raportului intern, din care se deduce:
321
42242143241 zzz
zzzzzzzzz⋅′⋅
⋅′⋅−⋅′⋅−′⋅⋅⋅= ωω (2.54)
Din relaţia (2.54) se poate calcula raportul total 1
441 ω
ω=i .
4.3. MECANISME CU CAME.
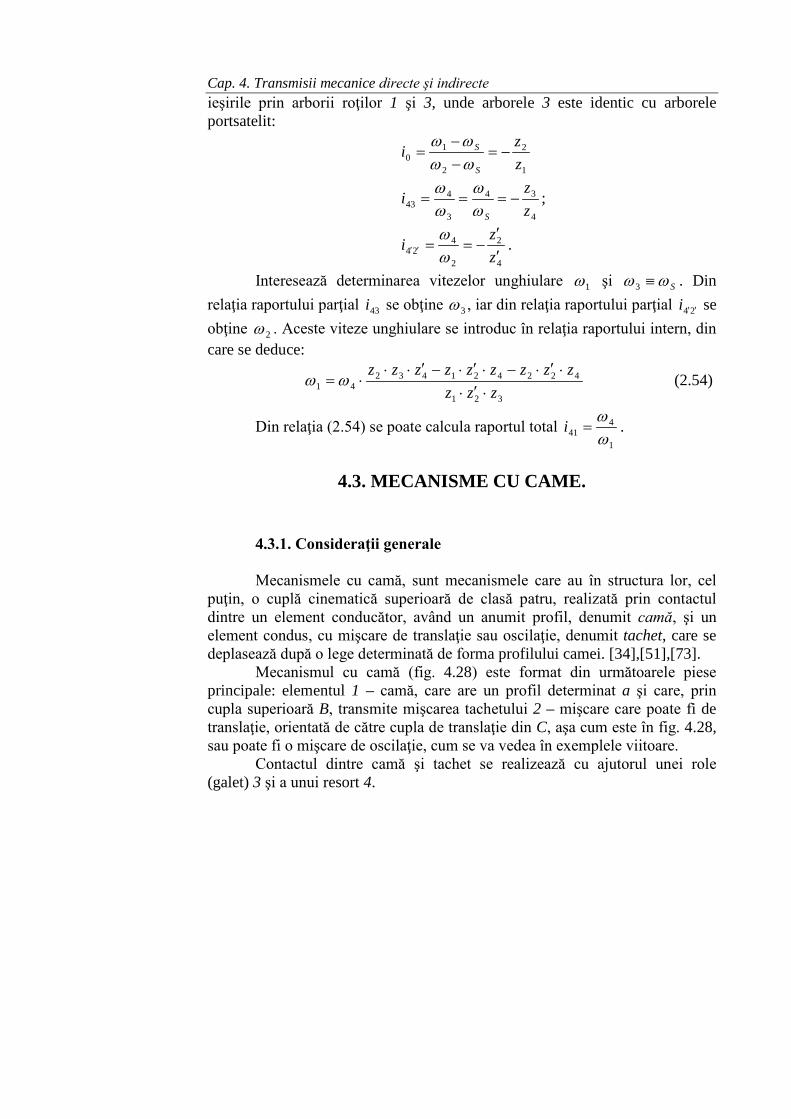
4.3.1. Consideraţii generale Mecanismele cu camă, sunt mecanismele care au în structura lor, cel puţin, o cuplă cinematică superioară de clasă patru, realizată prin contactul dintre un element conducător, având un anumit profil, denumit camă, şi un element condus, cu mişcare de translaţie sau oscilaţie, denumit tachet, care se deplasează după o lege determinată de forma profilului camei. [34],[51],[73]. Mecanismul cu camă (fig. 4.28) este format din următoarele piese principale: elementul 1 – camă, care are un profil determinat a şi care, prin cupla superioară B, transmite mişcarea tachetului 2 – mişcare care poate fi de translaţie, orientată de către cupla de translaţie din C, aşa cum este în fig. 4.28, sau poate fi o mişcare de oscilaţie, cum se va vedea în exemplele viitoare. Contactul dintre camă şi tachet se realizează cu ajutorul unei role (galet) 3 şi a unui resort 4.

Elemente de inginerie mecanică Mecanismul cu camă din fig. 4.28, este un mecanism plan, deoarece mişcările tuturor punctelor au loc în plane paralele. Mecanismul din figură este axat (centric), dar sunt întâlnite în practică şi mecanisme excentrice (dezaxate) atunci când direcţia de deplasare a tachetului este la distanţa e, faţă de centrul de rotaţie al camei. Mecanismele cu came sunt folosite în toate domeniile de activitate unde sunt necesare anumite legi de mişcare cerute de procesul tehnologic sau de sistemele de mecanizare şi automatizare: construcţii de maşini, mecanică fină, maşini de calcul, industria alimentară, industria textilă. Utilizarea acestor mecanisme este recomandată de o serie de avantaje: gabarit mic, proiectare uşoară, durabilitate foarte bună pentru legi complicate; schimbarea legii de mişcare se realizează numai prin înlocuirea camei, simplitate în construcţie, compactitatea mecanismului. Mecanismele cu camă au unele dezavantaje şi anume: uzură mare a celor două elemente mobile (cama şi tachetul) în părţile lor de contact, fapt care, cu timpul, poate duce la modificarea legii de mişcare a mecanismului; dificultăţi la execuţia cu precizie a profilelor complicate pentru camă; apariţia unor rezistenţe suplimentare (de frecare, vibraţii), din cauza contactului, de regulă, forţat (prin intermediul arcurilor) între camă şi tachet. Dezavantajele arătate pot fi parţial înlăturate prin alegerea unor soluţii tehnice deosebite, şi nu scad, în general, gradul de utilizare al mecanismelor cu camă.
Cap. 4. Transmisii mecanice directe şi indirecte
C
B
A
profilul camei(a)
traiectoriacentrului rolei
12
3
4
Fig.4.28
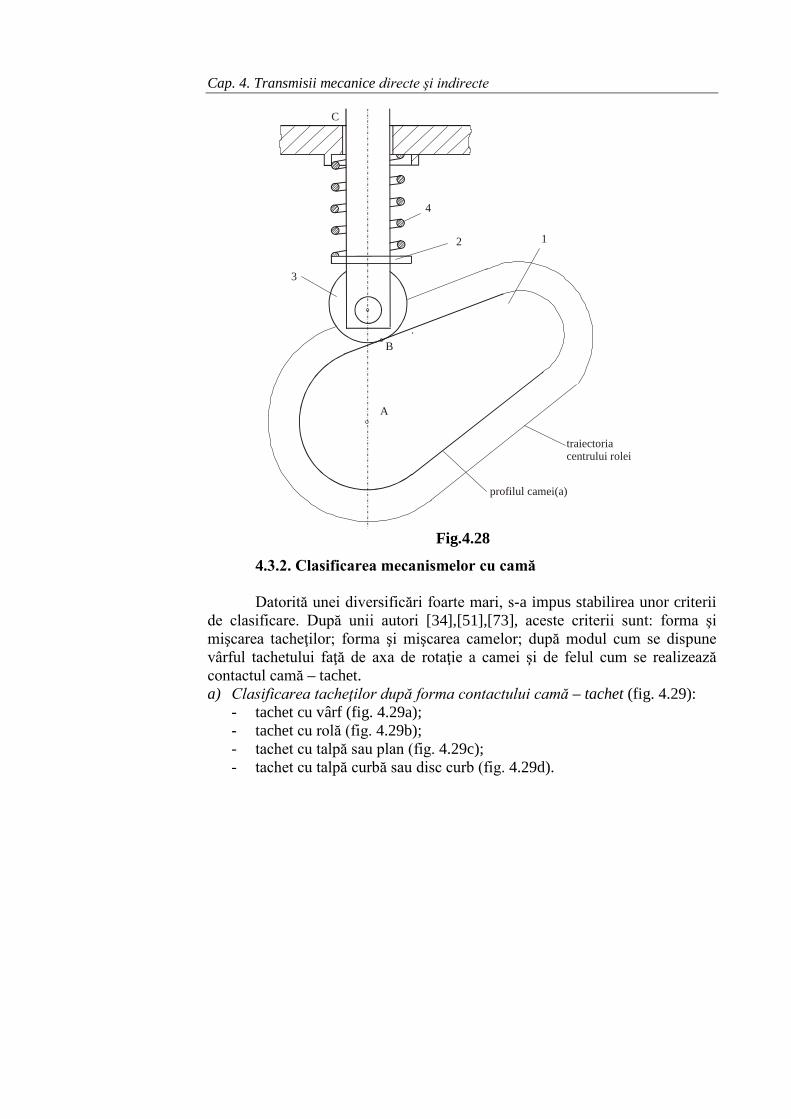
4.3.2. Clasificarea mecanismelor cu camă Datorită unei diversificări foarte mari, s-a impus stabilirea unor criterii de clasificare. După unii autori [34],[51],[73], aceste criterii sunt: forma şi mişcarea tacheţilor; forma şi mişcarea camelor; după modul cum se dispune vârful tachetului faţă de axa de rotaţie a camei şi de felul cum se realizează contactul camă – tachet. a) Clasificarea tacheţilor după forma contactului camă – tachet (fig. 4.29):
- tachet cu vârf (fig. 4.29a); - tachet cu rolă (fig. 4.29b); - tachet cu talpă sau plan (fig. 4.29c); - tachet cu talpă curbă sau disc curb (fig. 4.29d).
Elemente de inginerie mecanică
a b c
Fig. 4.30
a b c d
Fig.4.29
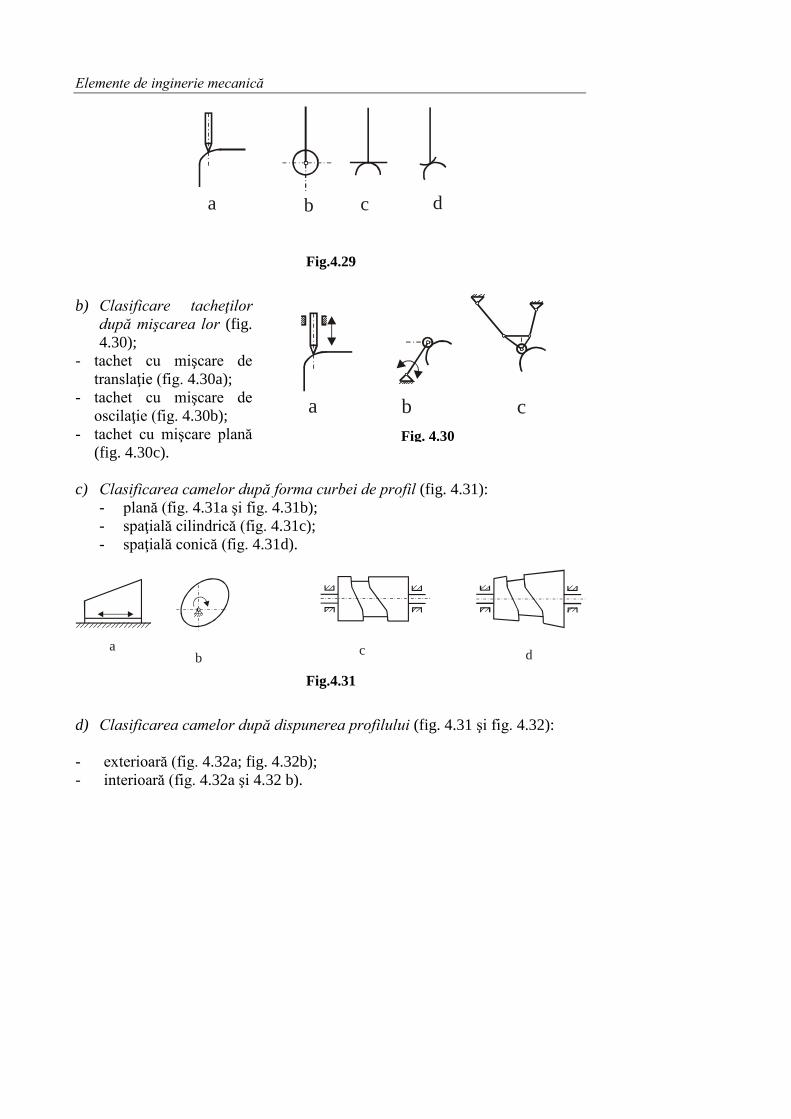
b) Clasificare tacheţilor
după mişcarea lor (fig. 4.30);
- tachet cu mişcare de translaţie (fig. 4.30a);
- tachet cu mişcare de oscilaţie (fig. 4.30b);
- tachet cu mişcare plană (fig. 4.30c).
c) Clasificarea camelor după forma curbei de profil (fig. 4.31):
- plană (fig. 4.31a şi fig. 4.31b); - spaţială cilindrică (fig. 4.31c); - spaţială conică (fig. 4.31d).
ab c d
Fig.4.31
d) Clasificarea camelor după dispunerea profilului (fig. 4.31 şi fig. 4.32): - exterioară (fig. 4.32a; fig. 4.32b); - interioară (fig. 4.32a şi 4.32 b).
Cap. 4. Transmisii mecanice directe şi indirecte
a b
Fig.4.32
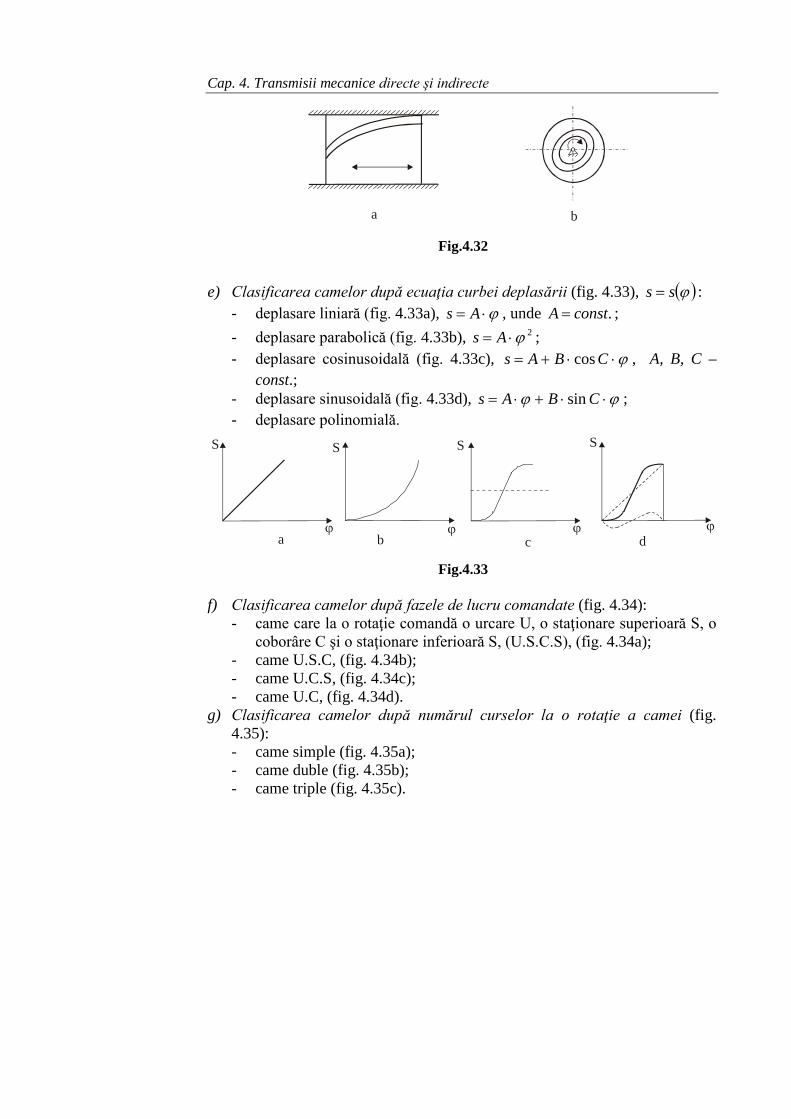
e) Clasificarea camelor după ecuaţia curbei deplasării (fig. 4.33), ( )ϕss = :
- deplasare liniară (fig. 4.33a), ϕ⋅= As , unde .constA = ; - deplasare parabolică (fig. 4.33b), 2ϕ⋅= As ; - deplasare cosinusoidală (fig. 4.33c), ϕ⋅⋅+= CBAs cos , A, B, C –
const.; - deplasare sinusoidală (fig. 4.33d), ϕϕ ⋅⋅+⋅= CBAs sin ; - deplasare polinomială.
S
ϕa b c d
S
ϕϕ
S
ϕ
S
Fig.4.33
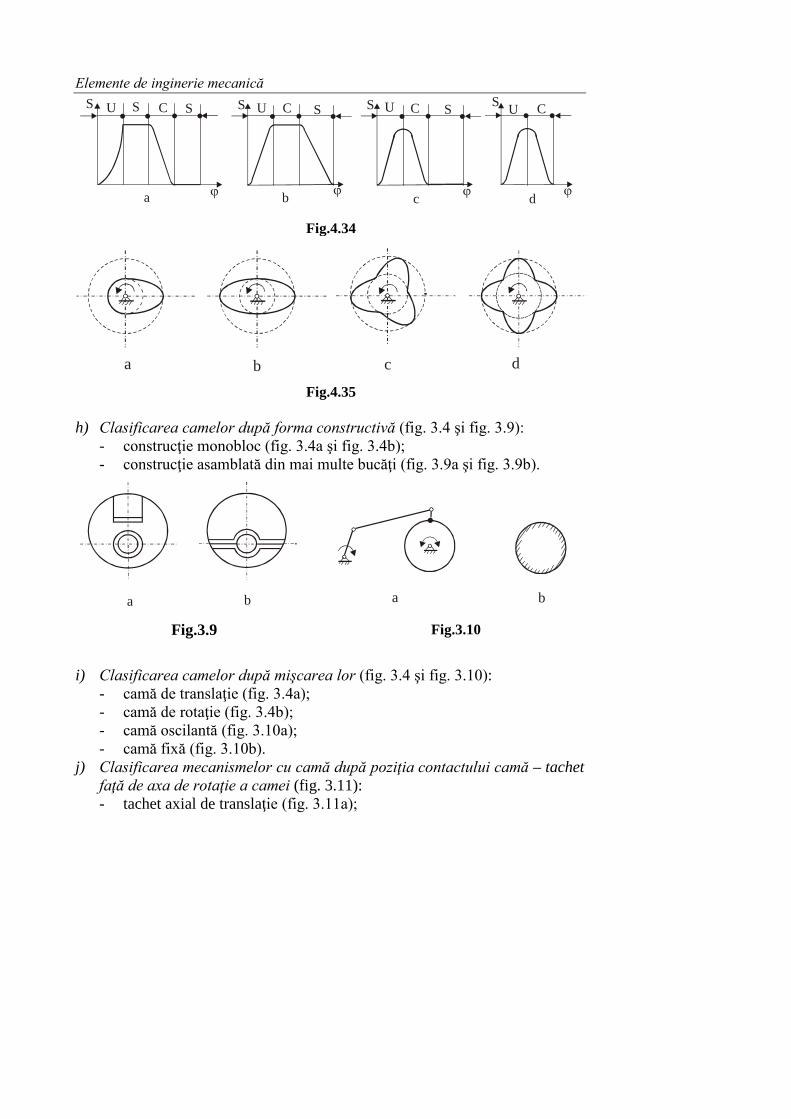
f) Clasificarea camelor după fazele de lucru comandate (fig. 4.34):
- came care la o rotaţie comandă o urcare U, o staţionare superioară S, o coborâre C şi o staţionare inferioară S, (U.S.C.S), (fig. 4.34a);
- came U.S.C, (fig. 4.34b); - came U.C.S, (fig. 4.34c); - came U.C, (fig. 4.34d).
g) Clasificarea camelor după numărul curselor la o rotaţie a camei (fig. 4.35): - came simple (fig. 4.35a); - came duble (fig. 4.35b); - came triple (fig. 4.35c).
Elemente de inginerie mecanică
•••• ••• ••• ••
a b c d
U CS
ϕ
S
ϕ
S CU
ϕ
CU SS
ϕ
CU S SS
Fig.4.34
a cb d
Fig.4.35 h) Clasificarea camelor după forma constructivă (fig. 3.4 şi fig. 3.9):
- construcţie monobloc (fig. 3.4a şi fig. 3.4b); - construcţie asamblată din mai multe bucăţi (fig. 3.9a şi fig. 3.9b).
a b
Fig.3.9
•
a b
Fig.3.10
i) Clasificarea camelor după mişcarea lor (fig. 3.4 şi fig. 3.10):
- camă de translaţie (fig. 3.4a); - camă de rotaţie (fig. 3.4b); - camă oscilantă (fig. 3.10a); - camă fixă (fig. 3.10b).
j) Clasificarea mecanismelor cu camă după poziţia contactului camă – tachet faţă de axa de rotaţie a camei (fig. 3.11): - tachet axial de translaţie (fig. 3.11a);
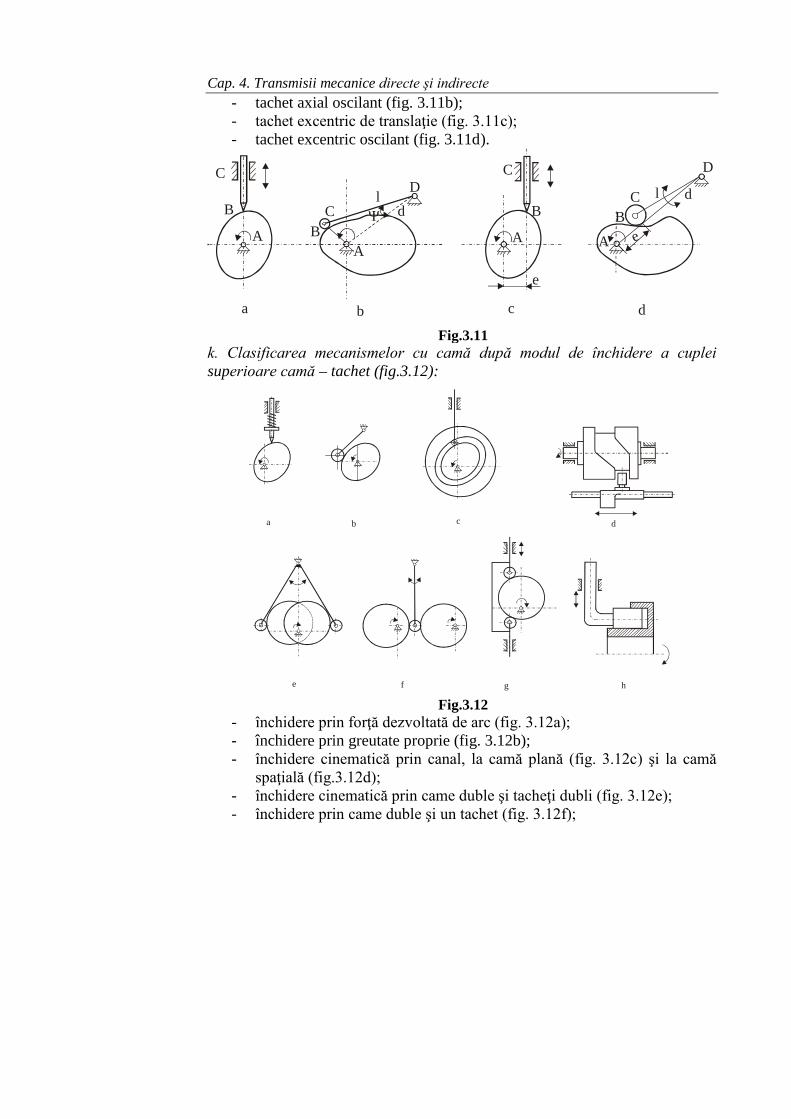
Cap. 4. Transmisii mecanice directe şi indirecte - tachet axial oscilant (fig. 3.11b); - tachet excentric de translaţie (fig. 3.11c); - tachet excentric oscilant (fig. 3.11d).
A
B
C
Ψ
AB
CD
A
B
C D
CB
A
a b c d
e
l dd
l
e
Fig.3.11
k. Clasificarea mecanismelor cu camă după modul de închidere a cuplei superioare camă – tachet (fig.3.12):
a b c d
e f g h Fig.3.12
- închidere prin forţă dezvoltată de arc (fig. 3.12a); - închidere prin greutate proprie (fig. 3.12b); - închidere cinematică prin canal, la camă plană (fig. 3.12c) şi la camă
spaţială (fig.3.12d); - închidere cinematică prin came duble şi tacheţi dubli (fig. 3.12e); - închidere prin came duble şi un tachet (fig. 3.12f);
Elemente de inginerie mecanică - închidere prin tachet dublu şi o camă (fig. 3.12g); - închidere prin canal cu tachet cu două role (fig. 3.12h).
Pe baza criteriilor prezentate, se poate realiza o clasificare generală a celor mai uzuale mecanisme cu camă şi tachet.
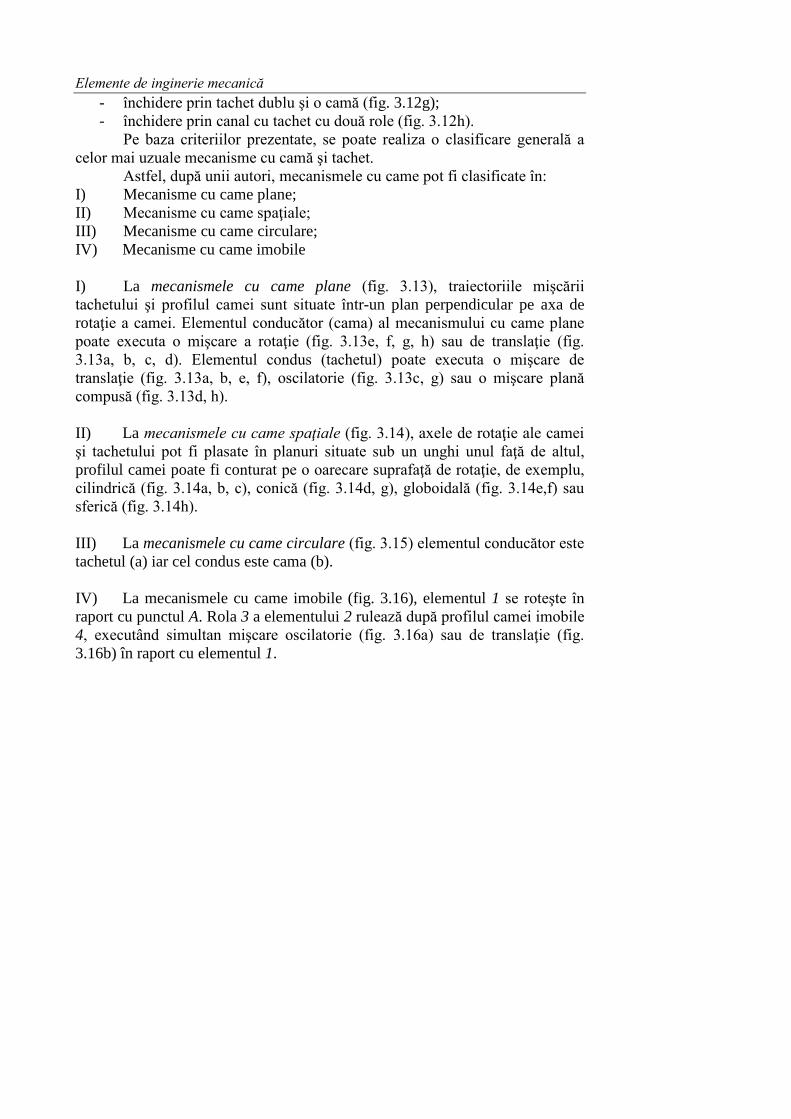
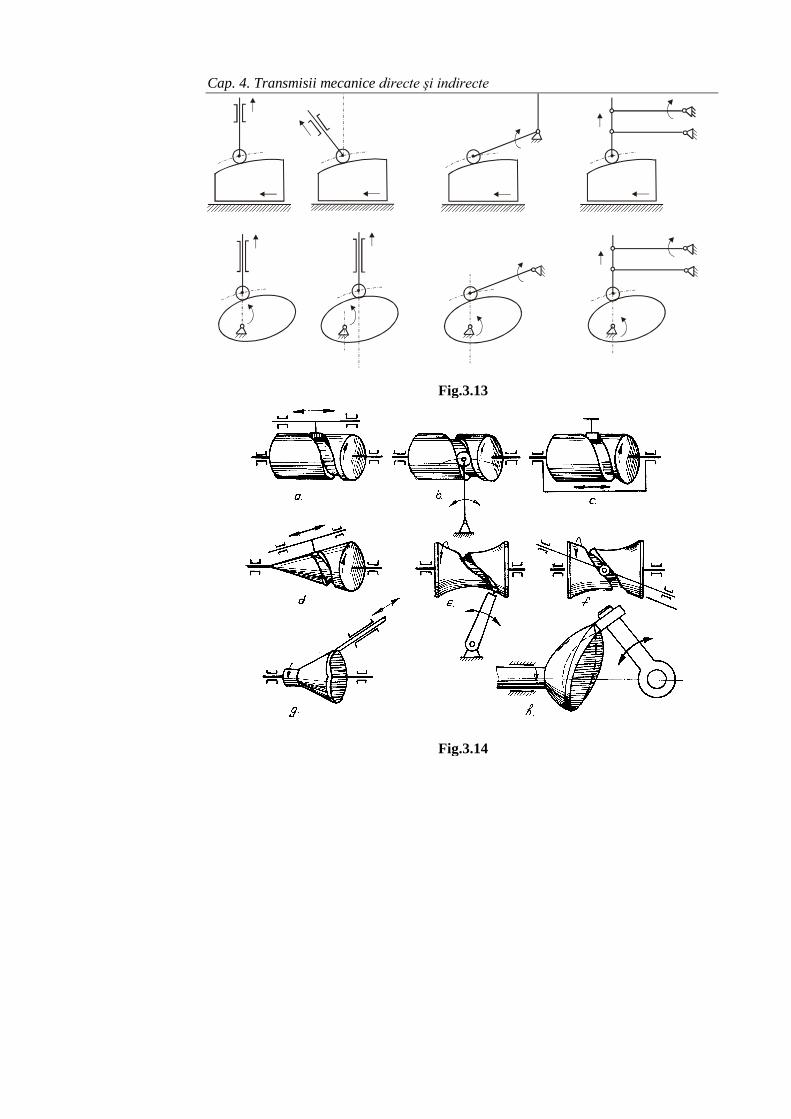
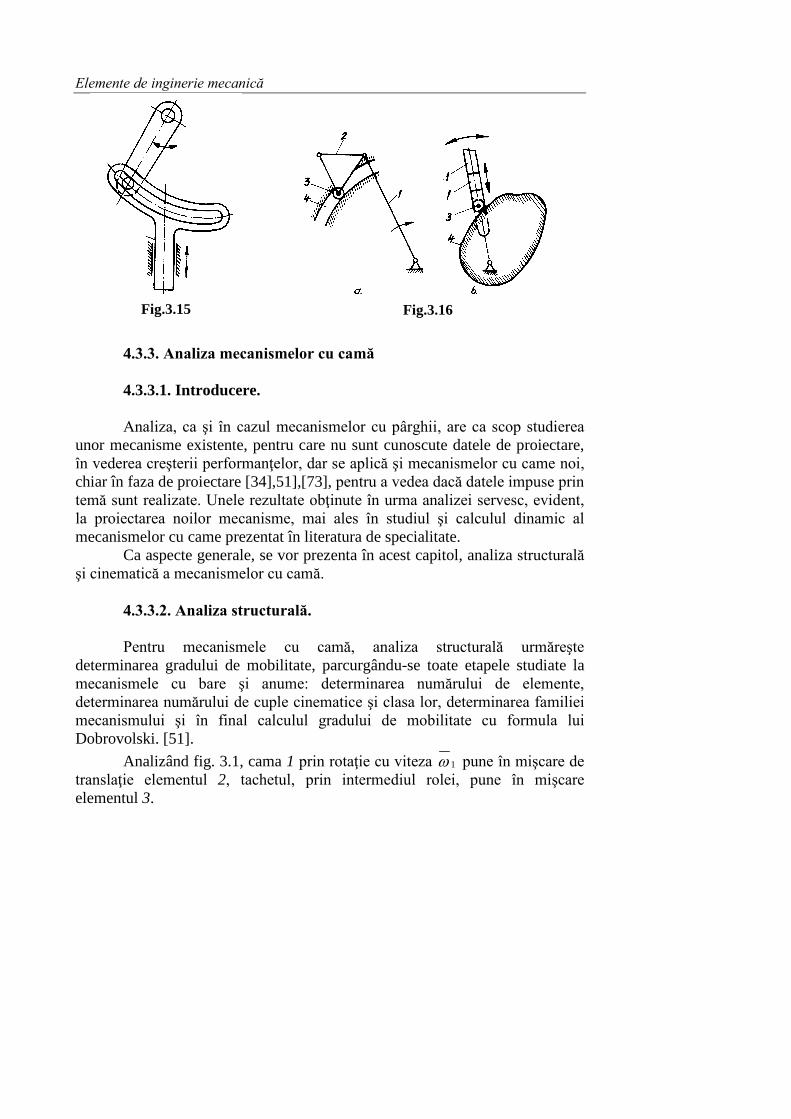
Astfel, după unii autori, mecanismele cu came pot fi clasificate în: I) Mecanisme cu came plane; II) Mecanisme cu came spaţiale; III) Mecanisme cu came circulare; IV) Mecanisme cu came imobile I) La mecanismele cu came plane (fig. 3.13), traiectoriile mişcării tachetului şi profilul camei sunt situate într-un plan perpendicular pe axa de rotaţie a camei. Elementul conducător (cama) al mecanismului cu came plane poate executa o mişcare a rotaţie (fig. 3.13e, f, g, h) sau de translaţie (fig. 3.13a, b, c, d). Elementul condus (tachetul) poate executa o mişcare de translaţie (fig. 3.13a, b, e, f), oscilatorie (fig. 3.13c, g) sau o mişcare plană compusă (fig. 3.13d, h). II) La mecanismele cu came spaţiale (fig. 3.14), axele de rotaţie ale camei şi tachetului pot fi plasate în planuri situate sub un unghi unul faţă de altul, profilul camei poate fi conturat pe o oarecare suprafaţă de rotaţie, de exemplu, cilindrică (fig. 3.14a, b, c), conică (fig. 3.14d, g), globoidală (fig. 3.14e,f) sau sferică (fig. 3.14h). III) La mecanismele cu came circulare (fig. 3.15) elementul conducător este tachetul (a) iar cel condus este cama (b). IV) La mecanismele cu came imobile (fig. 3.16), elementul 1 se roteşte în raport cu punctul A. Rola 3 a elementului 2 rulează după profilul camei imobile 4, executând simultan mişcare oscilatorie (fig. 3.16a) sau de translaţie (fig. 3.16b) în raport cu elementul 1.
Cap. 4. Transmisii mecanice directe şi indirecte
Fig.3.13
Fig.3.14
Elemente de inginerie mecanică
Fig.3.15
Fig.3.16
4.3.3. Analiza mecanismelor cu camă
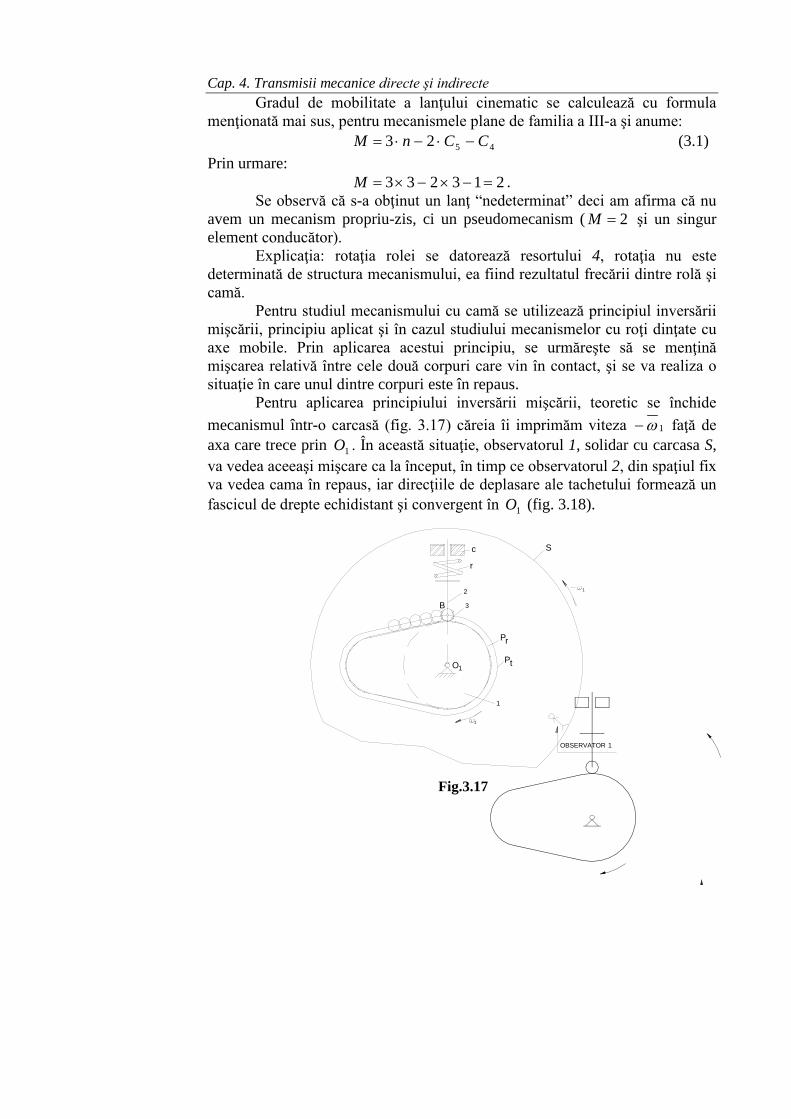
4.3.3.1. Introducere. Analiza, ca şi în cazul mecanismelor cu pârghii, are ca scop studierea unor mecanisme existente, pentru care nu sunt cunoscute datele de proiectare, în vederea creşterii performanţelor, dar se aplică şi mecanismelor cu came noi, chiar în faza de proiectare [34],51],[73], pentru a vedea dacă datele impuse prin temă sunt realizate. Unele rezultate obţinute în urma analizei servesc, evident, la proiectarea noilor mecanisme, mai ales în studiul şi calculul dinamic al mecanismelor cu came prezentat în literatura de specialitate. Ca aspecte generale, se vor prezenta în acest capitol, analiza structurală şi cinematică a mecanismelor cu camă. 4.3.3.2. Analiza structurală. Pentru mecanismele cu camă, analiza structurală urmăreşte determinarea gradului de mobilitate, parcurgându-se toate etapele studiate la mecanismele cu bare şi anume: determinarea numărului de elemente, determinarea numărului de cuple cinematice şi clasa lor, determinarea familiei mecanismului şi în final calculul gradului de mobilitate cu formula lui Dobrovolski. [51]. Analizând fig. 3.1, cama 1 prin rotaţie cu viteza 1ω pune în mişcare de translaţie elementul 2, tachetul, prin intermediul rolei, pune în mişcare elementul 3.
Cap. 4. Transmisii mecanice directe şi indirecte Gradul de mobilitate a lanţului cinematic se calculează cu formula menţionată mai sus, pentru mecanismele plane de familia a III-a şi anume:
4523 CCnM −⋅−⋅= (3.1) Prin urmare:
213233 =−×−×=M . Se observă că s-a obţinut un lanţ “nedeterminat” deci am afirma că nu avem un mecanism propriu-zis, ci un pseudomecanism ( 2=M şi un singur element conducător). Explicaţia: rotaţia rolei se datorează resortului 4, rotaţia nu este determinată de structura mecanismului, ea fiind rezultatul frecării dintre rolă şi camă. Pentru studiul mecanismului cu camă se utilizează principiul inversării mişcării, principiu aplicat şi în cazul studiului mecanismelor cu roţi dinţate cu axe mobile. Prin aplicarea acestui principiu, se urmăreşte să se menţină mişcarea relativă între cele două corpuri care vin în contact, şi se va realiza o situaţie în care unul dintre corpuri este în repaus. Pentru aplicarea principiului inversării mişcării, teoretic se închide mecanismul într-o carcasă (fig. 3.17) căreia îi imprimăm viteza 1ω− faţă de axa care trece prin 1O . În această situaţie, observatorul 1, solidar cu carcasa S, va vedea aceeaşi mişcare ca la început, în timp ce observatorul 2, din spaţiul fix va vedea cama în repaus, iar direcţiile de deplasare ale tachetului formează un fascicul de drepte echidistant şi convergent în 1O (fig. 3.18).
O1
1
2
3B
r
c
Pr
tP
1
1
OBSERVATOR 1
S
Fig.3.17
Elemente de inginerie mecanică
1
tPO1
1
C
0B1B2B
3B
1
2
Bs3
r0 =s0
Fig.3.18
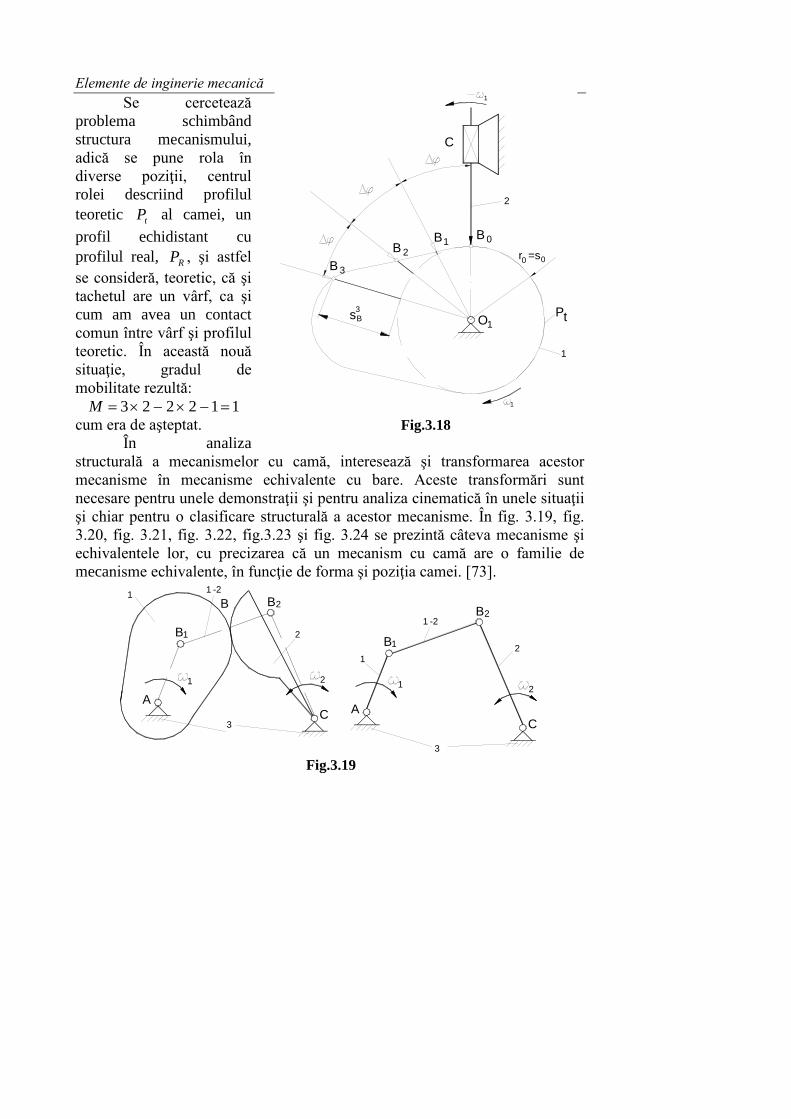
Se cercetează problema schimbând structura mecanismului, adică se pune rola în diverse poziţii, centrul rolei descriind profilul teoretic tP al camei, un profil echidistant cu profilul real, RP , şi astfel se consideră, teoretic, că şi tachetul are un vârf, ca şi cum am avea un contact comun între vârf şi profilul teoretic. În această nouă situaţie, gradul de mobilitate rezultă:
112223 =−×−×=M cum era de aşteptat. În analiza structurală a mecanismelor cu camă, interesează şi transformarea acestor mecanisme în mecanisme echivalente cu bare. Aceste transformări sunt necesare pentru unele demonstraţii şi pentru analiza cinematică în unele situaţii şi chiar pentru o clasificare structurală a acestor mecanisme. În fig. 3.19, fig. 3.20, fig. 3.21, fig. 3.22, fig.3.23 şi fig. 3.24 se prezintă câteva mecanisme şi echivalentele lor, cu precizarea că un mecanism cu camă are o familie de mecanisme echivalente, în funcţie de forma şi poziţia camei. [73].
B
AC
1
1
2B
1
1 -2
2
3
2A
3C
1
1B
-21
2
2
B2
1
B
Fig.3.19
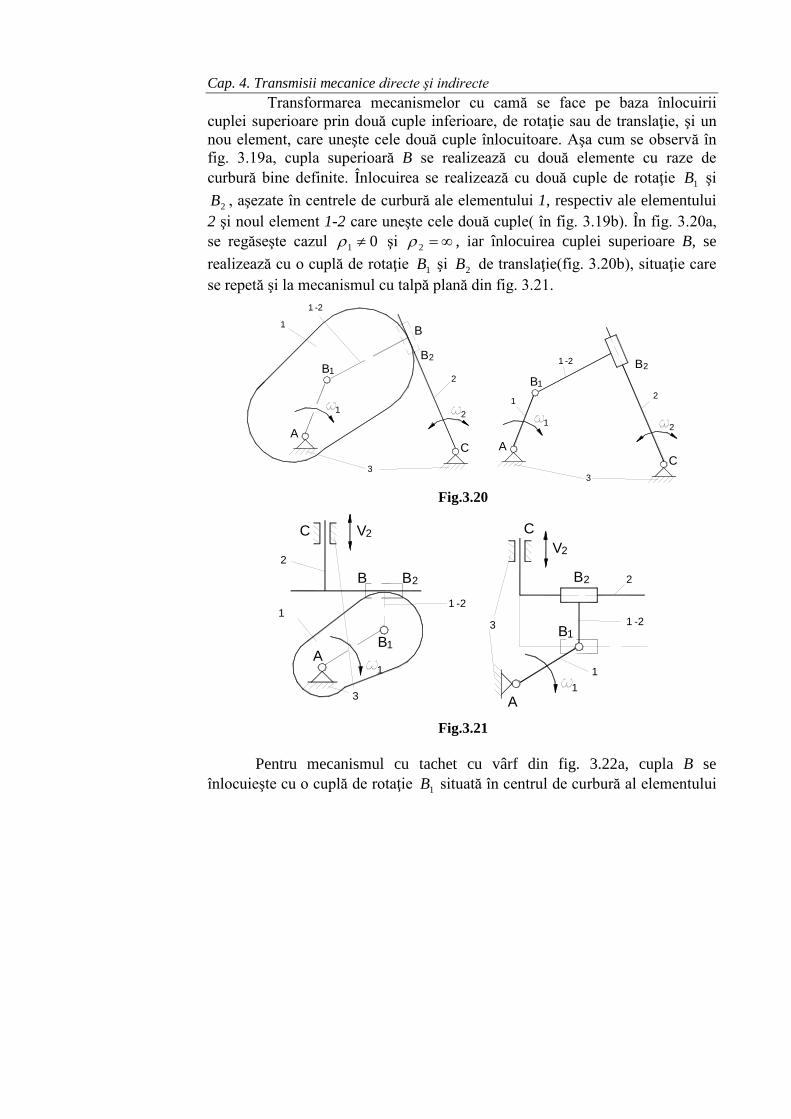
Cap. 4. Transmisii mecanice directe şi indirecte Transformarea mecanismelor cu camă se face pe baza înlocuirii cuplei superioare prin două cuple inferioare, de rotaţie sau de translaţie, şi un nou element, care uneşte cele două cuple înlocuitoare. Aşa cum se observă în fig. 3.19a, cupla superioară B se realizează cu două elemente cu raze de curbură bine definite. Înlocuirea se realizează cu două cuple de rotaţie 1B şi
2B , aşezate în centrele de curbură ale elementului 1, respectiv ale elementului 2 şi noul element 1-2 care uneşte cele două cuple( în fig. 3.19b). În fig. 3.20a, se regăseşte cazul 01 ≠ρ şi ∞=2ρ , iar înlocuirea cuplei superioare B, se realizează cu o cuplă de rotaţie 1B şi 2B de translaţie(fig. 3.20b), situaţie care se repetă şi la mecanismul cu talpă plană din fig. 3.21.
A
3
C
1
1
1B
-21
2
2
B2
A
3
C
1 -2
1
1
B
1
B2
2
2
B
Fig.3.20
A
3
C
1 -2
11
B2 2
1B
A1
B B2
C
B1
-21
2
1
3
V2V2
Fig.3.21
Pentru mecanismul cu tachet cu vârf din fig. 3.22a, cupla B se
înlocuieşte cu o cuplă de rotaţie 1B situată în centrul de curbură al elementului
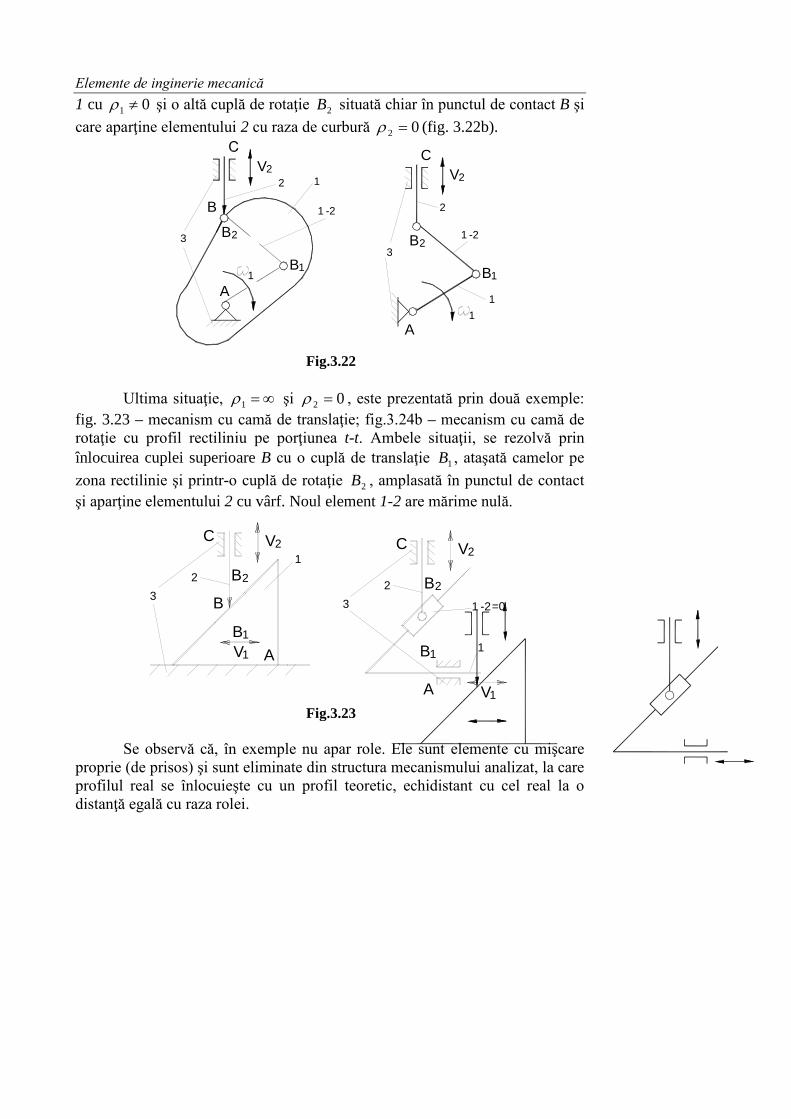
Elemente de inginerie mecanică 1 cu 01 ≠ρ şi o altă cuplă de rotaţie 2B situată chiar în punctul de contact B şi care aparţine elementului 2 cu raza de curbură 02 =ρ (fig. 3.22b).
2
2B
B
A
3
11
1
-21
VC
2
1B
A1
1
B3
-21
2
2V2
B
Fig.3.22
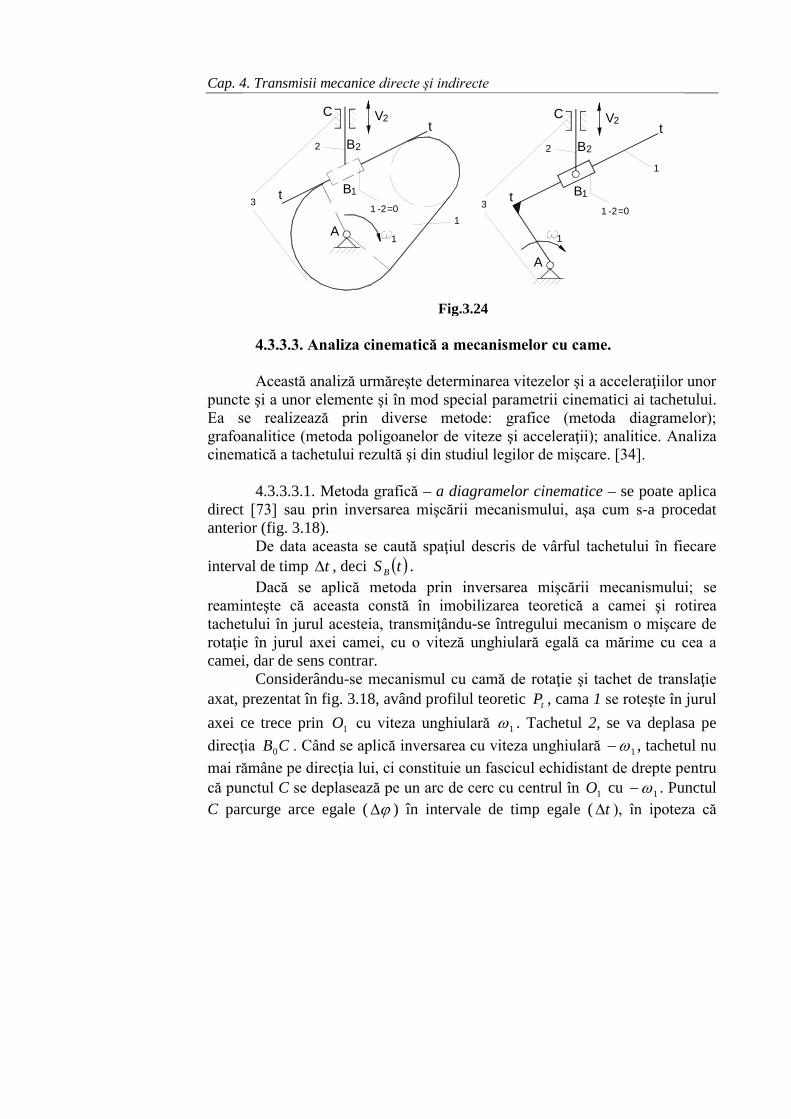
Ultima situaţie, ∞=1ρ şi 02 =ρ , este prezentată prin două exemple:
fig. 3.23 – mecanism cu camă de translaţie; fig.3.24b – mecanism cu camă de rotaţie cu profil rectiliniu pe porţiunea t-t. Ambele situaţii, se rezolvă prin înlocuirea cuplei superioare B cu o cuplă de translaţie 1B , ataşată camelor pe zona rectilinie şi printr-o cuplă de rotaţie 2B , amplasată în punctul de contact şi aparţine elementului 2 cu vârf. Noul element 1-2 are mărime nulă.
23
B2
1
-21
1B
C V2
1VA
=0
1V
2C V
32 2B
AB1
B
1
Fig.3.23
Se observă că, în exemple nu apar role. Ele sunt elemente cu mişcare
proprie (de prisos) şi sunt eliminate din structura mecanismului analizat, la care profilul real se înlocuieşte cu un profil teoretic, echidistant cu cel real la o distanţă egală cu raza rolei.
Cap. 4. Transmisii mecanice directe şi indirecte
B
1
1
1
2C V
3
2 2B
-2=0
A
1
t
t3
A
1
2 B2
t B1
C
1-2=0
2Vt
1
Fig.3.24
4.3.3.3. Analiza cinematică a mecanismelor cu came. Această analiză urmăreşte determinarea vitezelor şi a acceleraţiilor unor puncte şi a unor elemente şi în mod special parametrii cinematici ai tachetului. Ea se realizează prin diverse metode: grafice (metoda diagramelor); grafoanalitice (metoda poligoanelor de viteze şi acceleraţii); analitice. Analiza cinematică a tachetului rezultă şi din studiul legilor de mişcare. [34]. 4.3.3.3.1. Metoda grafică – a diagramelor cinematice – se poate aplica direct [73] sau prin inversarea mişcării mecanismului, aşa cum s-a procedat anterior (fig. 3.18). De data aceasta se caută spaţiul descris de vârful tachetului în fiecare interval de timp t∆ , deci ( )tS B . Dacă se aplică metoda prin inversarea mişcării mecanismului; se reaminteşte că aceasta constă în imobilizarea teoretică a camei şi rotirea tachetului în jurul acesteia, transmiţându-se întregului mecanism o mişcare de rotaţie în jurul axei camei, cu o viteză unghiulară egală ca mărime cu cea a camei, dar de sens contrar. Considerându-se mecanismul cu camă de rotaţie şi tachet de translaţie axat, prezentat în fig. 3.18, având profilul teoretic tP , cama 1 se roteşte în jurul axei ce trece prin 1O cu viteza unghiulară 1ω . Tachetul 2, se va deplasa pe direcţia CB0 . Când se aplică inversarea cu viteza unghiulară 1ω− , tachetul nu mai rămâne pe direcţia lui, ci constituie un fascicul echidistant de drepte pentru că punctul C se deplasează pe un arc de cerc cu centrul în 1O cu 1ω− . Punctul C parcurge arce egale ( ϕ∆ ) în intervale de timp egale ( t∆ ), în ipoteza că
Elemente de inginerie mecanică
1 2 3 41 2 3
R P C P
sB
Fig.3.25
.1 const=ω Aceste intervale de unghi ce vor apare vor fi de forma: t∆⋅=∆ 1ωϕ (3.2) Pentru diviziuni de ordin i, rezultă:
ϕϕ ∆⋅= ii (3.3) În fig. 3.18, se observă modul în care este citit BS , şi anume pornind de la cercul de cea mai mică rază, denumit cerc de bază notat cu 0r . În figură, s-a arătat spaţiul BS corespunzător diviziunii 3, notat cu 3
BS . De asemenea se observă, analizând relaţiile de mai sus, că funcţia
( )ϕBS este aceeaşi
cu ( )1ωtS B .
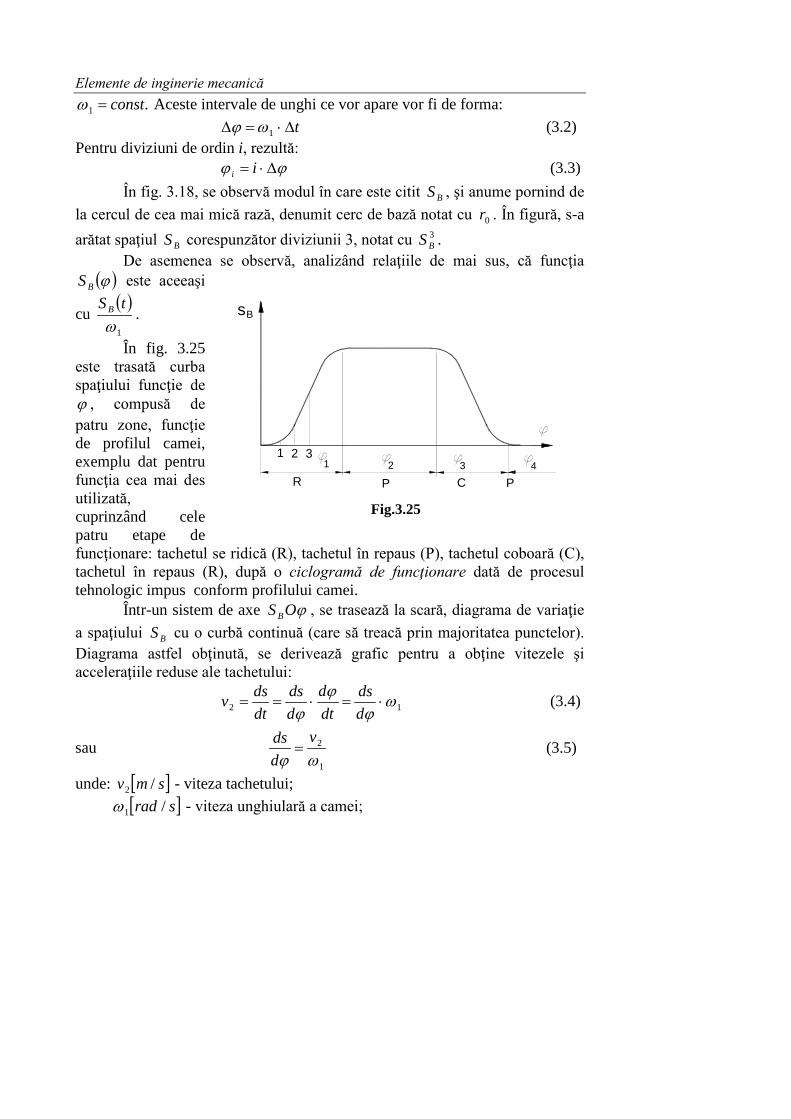
În fig. 3.25 este trasată curba spaţiului funcţie de ϕ , compusă de patru zone, funcţie de profilul camei, exemplu dat pentru funcţia cea mai des utilizată, cuprinzând cele patru etape de funcţionare: tachetul se ridică (R), tachetul în repaus (P), tachetul coboară (C), tachetul în repaus (R), după o ciclogramă de funcţionare dată de procesul tehnologic impus conform profilului camei.
Într-un sistem de axe ϕOS B , se trasează la scară, diagrama de variaţie a spaţiului BS cu o curbă continuă (care să treacă prin majoritatea punctelor). Diagrama astfel obţinută, se derivează grafic pentru a obţine vitezele şi acceleraţiile reduse ale tachetului:
12 ωϕ
ϕϕ
⋅=⋅==dds
dtd
dds
dtdsv (3.4)
sau 1
2
ωϕv
dds
= (3.5)
unde: [ ]smv /2 - viteza tachetului; [ ]srad /1ω - viteza unghiulară a camei;
Cap. 4. Transmisii mecanice directe şi indirecte
1B
B
sB3
3
2B
1
O1
0rs0
1
tP
B0
C
2
1
A0
1A
2A3A
e
Fig.3.26
[ ]mv
1
2
ω - viteza redusă,
iar pentru acceleraţie: 212
2
12 ωϕ
ωϕ
ϕϕ
⋅=⋅=⋅==d
sdddv
dtd
ddv
dtdva (3.6)
sau: 2
2
21
2
ϕω dsda
= (3.7)
în care: [ ]22 / sma - acceleraţia tachetului;
[ ]ma
21
2
ω - acceleraţia redusă.
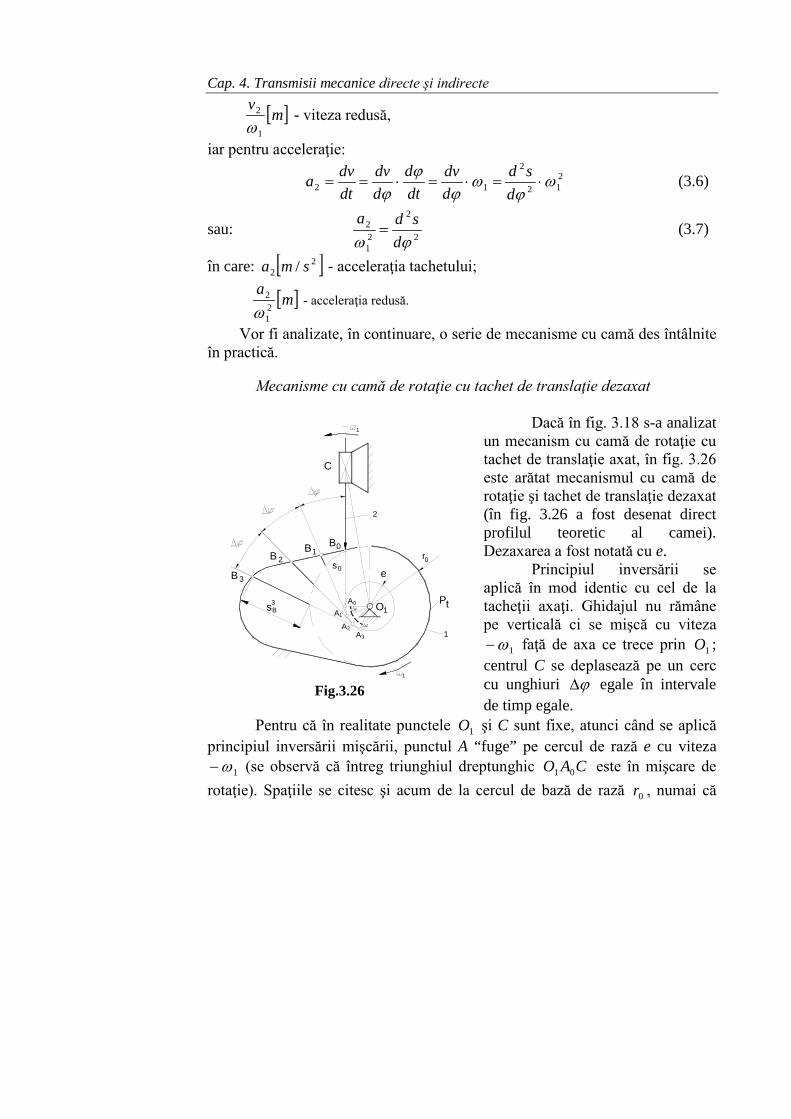
Vor fi analizate, în continuare, o serie de mecanisme cu camă des întâlnite în practică. Mecanisme cu camă de rotaţie cu tachet de translaţie dezaxat
Dacă în fig. 3.18 s-a analizat
un mecanism cu camă de rotaţie cu tachet de translaţie axat, în fig. 3.26 este arătat mecanismul cu camă de rotaţie şi tachet de translaţie dezaxat (în fig. 3.26 a fost desenat direct profilul teoretic al camei). Dezaxarea a fost notată cu e. Principiul inversării se aplică în mod identic cu cel de la tacheţii axaţi. Ghidajul nu rămâne pe verticală ci se mişcă cu viteza
1ω− faţă de axa ce trece prin 1O ; centrul C se deplasează pe un cerc cu unghiuri ϕ∆ egale în intervale de timp egale.
Pentru că în realitate punctele 1O şi C sunt fixe, atunci când se aplică principiul inversării mişcării, punctul A “fuge” pe cercul de rază e cu viteza
1ω− (se observă că întreg triunghiul dreptunghic CAO 01 este în mişcare de rotaţie). Spaţiile se citesc şi acum de la cercul de bază de rază 0r , numai că
Elemente de inginerie mecanică acum 22
02
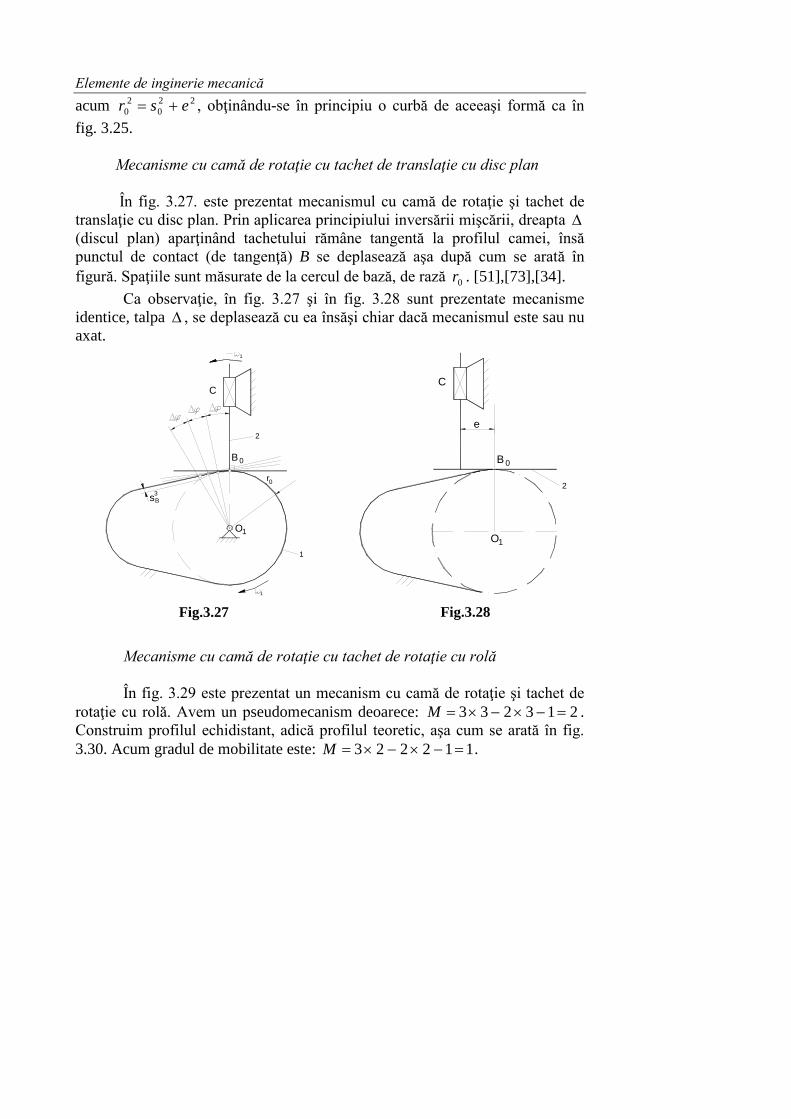
0 esr += , obţinându-se în principiu o curbă de aceeaşi formă ca în fig. 3.25. Mecanisme cu camă de rotaţie cu tachet de translaţie cu disc plan În fig. 3.27. este prezentat mecanismul cu camă de rotaţie şi tachet de translaţie cu disc plan. Prin aplicarea principiului inversării mişcării, dreapta ∆ (discul plan) aparţinând tachetului rămâne tangentă la profilul camei, însă punctul de contact (de tangenţă) B se deplasează aşa după cum se arată în figură. Spaţiile sunt măsurate de la cercul de bază, de rază 0r . [51],[73],[34]. Ca observaţie, în fig. 3.27 şi în fig. 3.28 sunt prezentate mecanisme identice, talpa ∆ , se deplasează cu ea însăşi chiar dacă mecanismul este sau nu axat.
sB3
1
O1
0r
1
B 0
C
2
1
Fig.3.27
1O
C
2
0B
e
Fig.3.28
Mecanisme cu camă de rotaţie cu tachet de rotaţie cu rolă În fig. 3.29 este prezentat un mecanism cu camă de rotaţie şi tachet de
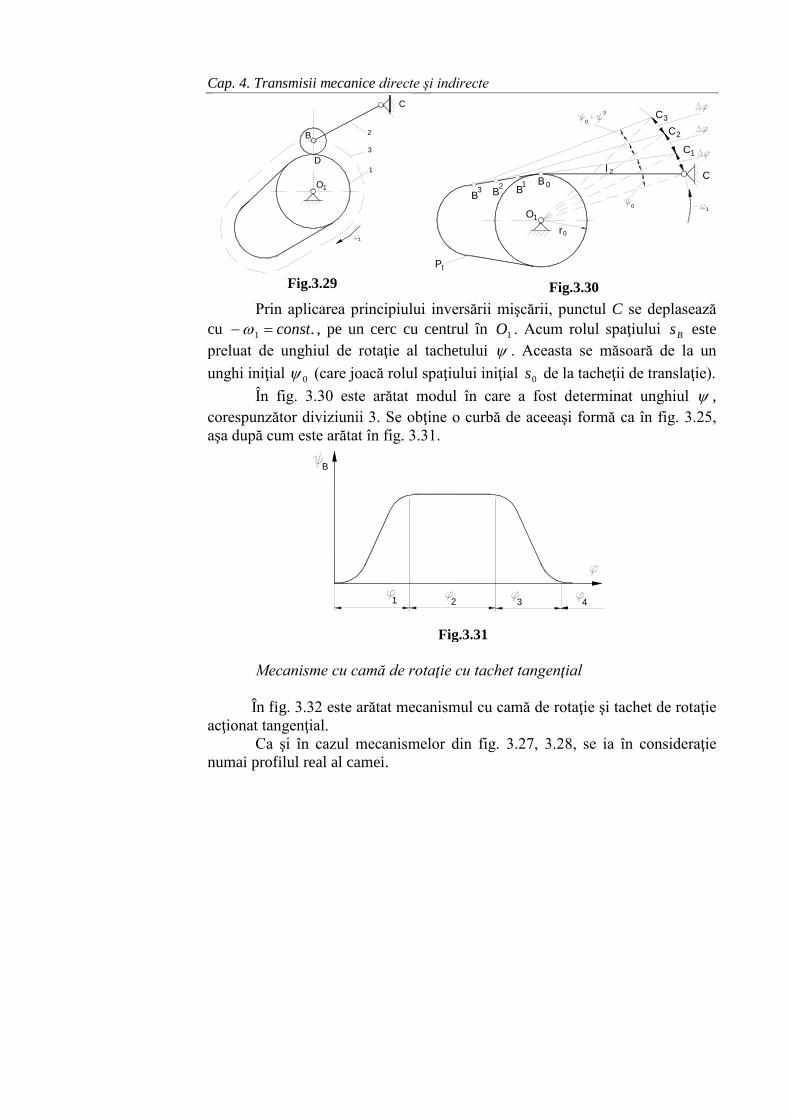
rotaţie cu rolă. Avem un pseudomecanism deoarece: 213233 =−×−×=M . Construim profilul echidistant, adică profilul teoretic, aşa cum se arată în fig. 3.30. Acum gradul de mobilitate este: 112223 =−×−×=M .
Cap. 4. Transmisii mecanice directe şi indirecte
1O1
3
2B
D
C
1
Fig.3.29
O1
B 0B12B3B
C
C1
2C3C
r0
Pt
0
0
3
1
2l
Fig.3.30
Prin aplicarea principiului inversării mişcării, punctul C se deplasează cu .1 const=− ω , pe un cerc cu centrul în 1O . Acum rolul spaţiului Bs este preluat de unghiul de rotaţie al tachetului ψ . Aceasta se măsoară de la un unghi iniţial 0ψ (care joacă rolul spaţiului iniţial 0s de la tacheţii de translaţie).
În fig. 3.30 este arătat modul în care a fost determinat unghiul ψ , corespunzător diviziunii 3. Se obţine o curbă de aceeaşi formă ca în fig. 3.25, aşa după cum este arătat în fig. 3.31.
1 2 3 4
B
Fig.3.31
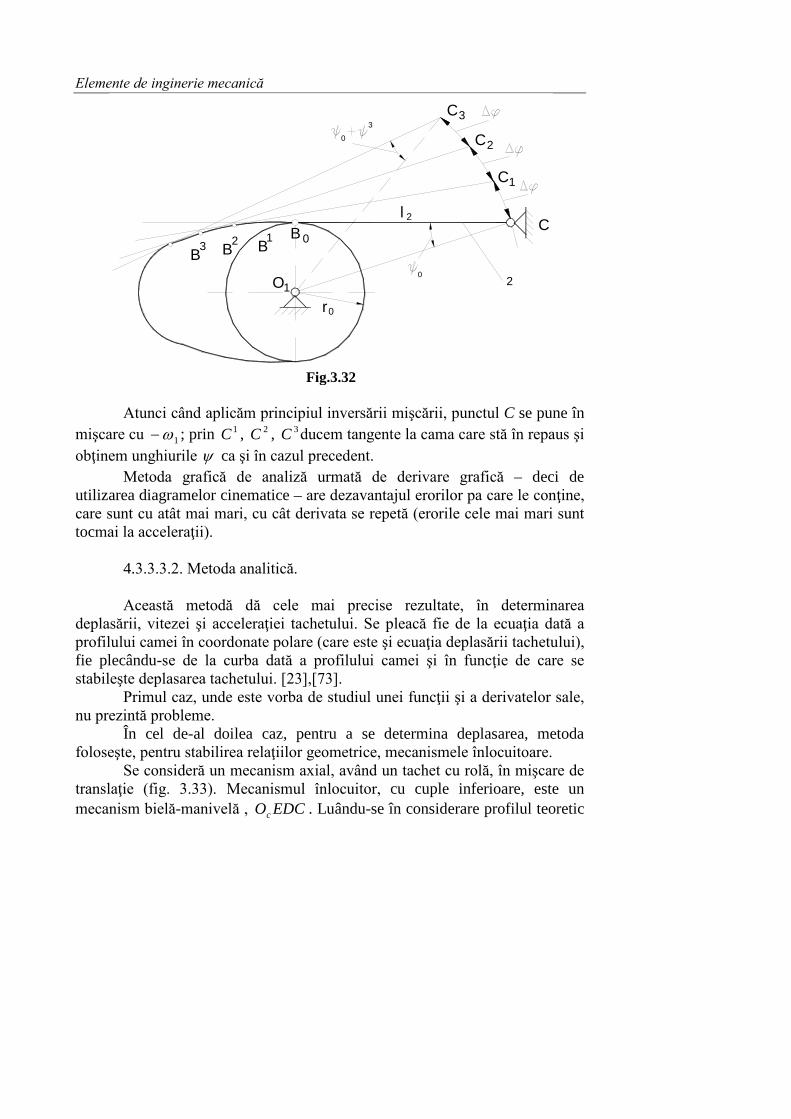
Mecanisme cu camă de rotaţie cu tachet tangenţial
În fig. 3.32 este arătat mecanismul cu camă de rotaţie şi tachet de rotaţie acţionat tangenţial. Ca şi în cazul mecanismelor din fig. 3.27, 3.28, se ia în consideraţie numai profilul real al camei.
Elemente de inginerie mecanică
33C
BB
O1
3 B2 1B
0r
0
0
0
C
1
2C
C
2l
2
Fig.3.32
Atunci când aplicăm principiul inversării mişcării, punctul C se pune în
mişcare cu 1ω− ; prin 1C , 2C , 3C ducem tangente la cama care stă în repaus şi obţinem unghiurile ψ ca şi în cazul precedent. Metoda grafică de analiză urmată de derivare grafică – deci de utilizarea diagramelor cinematice – are dezavantajul erorilor pa care le conţine, care sunt cu atât mai mari, cu cât derivata se repetă (erorile cele mai mari sunt tocmai la acceleraţii). 4.3.3.3.2. Metoda analitică. Această metodă dă cele mai precise rezultate, în determinarea deplasării, vitezei şi acceleraţiei tachetului. Se pleacă fie de la ecuaţia dată a profilului camei în coordonate polare (care este şi ecuaţia deplasării tachetului), fie plecându-se de la curba dată a profilului camei şi în funcţie de care se stabileşte deplasarea tachetului. [23],[73]. Primul caz, unde este vorba de studiul unei funcţii şi a derivatelor sale, nu prezintă probleme. În cel de-al doilea caz, pentru a se determina deplasarea, metoda foloseşte, pentru stabilirea relaţiilor geometrice, mecanismele înlocuitoare. Se consideră un mecanism axial, având un tachet cu rolă, în mişcare de translaţie (fig. 3.33). Mecanismul înlocuitor, cu cuple inferioare, este un mecanism bielă-manivelă , EDCOc . Luându-se în considerare profilul teoretic

Cap. 4. Transmisii mecanice directe şi indirecte
D
C
D1
Oc
E"
E'
E1
rr
rr l
srr
ls
E
r
B
Fig.3.33
al camei, se determină deplasarea s a tachetului (ca deplasare a patinei de la mecanismul bielă-manivelă). Unghiul ϕ de rotaţie al camei se consideră în raport cu raza care corespunde deplasării tachetului. Dacă punctul E ajunge în 1E , punctul D ajunge în 1D . Cu notaţiile din fig. 3.33, deplasarea s a tachetului este:
llrrs −⋅+⋅−= βϕ coscos (3.8)
Notându-se λ=lr şi ţinându-se
seama că ϕλϕβ sinsinsin ⋅==lr .
Relaţia de mai sus devine:
⋅−⋅+−−⋅= ϕλ
λλϕ 22 sin111cos1rs . (3.9)
Viteza va fi:
⋅−⋅−⋅⋅=
ϕλ
ϕλϕω221
sin1
2sin2
sinrv , (3.10)
iar acceleraţia:
( )
⋅−
⋅−
⋅−
⋅−⋅⋅=
322
23
22
21
sin14
2sin
sin1
2coscosϕλ
ϕλ
ϕλ
ϕλϕωra , (3.11)
unde 1ω este viteza unghiulară a camei.
4.3.4. Sinteza mecanismelor cu camă
4.3.4.1. Introducere Sinteza mecanismelor cu camă cuprinde determinarea profilului camei în funcţie de legea de mişcare prescrisă tachetului şi determinarea dimensiunilor principalelor elemente geometrice şi funcţionale ale unui mecanism cu respectarea condiţiilor prin tema de proiectare: legea de mişcare a tachetului, cursa tachetului, unghiurile de fază. Etapele sintezei sunt: studiul

Elemente de inginerie mecanică temei; analiza legilor de mişcare; stabilirea unghiului admisibil de presiune; stabilirea parametrilor de bază şi gabaritul camei; determinarea profilului camei; verificarea profilului; analiza cinematică, cinetostatică, dinamica; calculul organologic; stabilirea preciziei de execuţie. Legea de mişcare poate fi cinematică, dinamică, de gabarit minim sau de precizie optimă. O mare parte din etapele prezentate se studiază la discipline de specialitate, aşa că problemele care vor fi tratate sunt: determinarea profilului camei şi legile de mişcare ale tachetului. [23],[50],[51]. Asupra determinării profilului camei se precizează că prin metoda grafică utilizând metodologia prezentată la trasarea diagramei SB = f(φ), de la paragraful §3.3.3.1, se inversează doar unele etape. Din aceste motive nu se va trata în detaliu determinarea profilului camei.
4.3.4.2. Legi de mişcare ale tachetului Cele mai uzuale legi întâlnite în practică vor fi analizate în cele ce urmează. Legea parabolică.
Pentru porţiunea corespunzătoare unghiului 1ϕ de ridicare a tachetului, legea de mişcare este dată de ecuaţiile:
- pentru variaţia lui ϕ de la 0=ϕ la 2
1ϕϕ = :
221
2 ϕϕ
⋅⋅
=hsB , (3.12)
ϕϕω
⋅⋅
= 211
4 hvB , (3.13)
21
21
4ϕω
hvB ⋅= . (3.14)
- pentru variaţia lui ϕ de la 2
1ϕϕ = la 1ϕ :
( )2212
1
2 ϕϕϕ
−⋅
−=hhsB , (3.15)
Cap. 4. Transmisii mecanice directe şi indirecte
SB
h
h/2
OB0
4B
8B 0B'
B'4
B'81 2 3 4 5 6 7 8
1'2'3'4'
5'6'7'8' 5 6 7
12
12 2
32
32 4
vB1
0 4 812h
2h 3
0' 4' 8'
aB12
840 0' 8'4'
4h 12
24h 1
24h 3
a)
24h 3
b)
c)
Fig.3.34

Elemente de inginerie mecanică
( )ϕϕϕω
−⋅
= 1211
4 hvB , (3.16)
21
21
4ϕω
haB ⋅−= . (3.17)
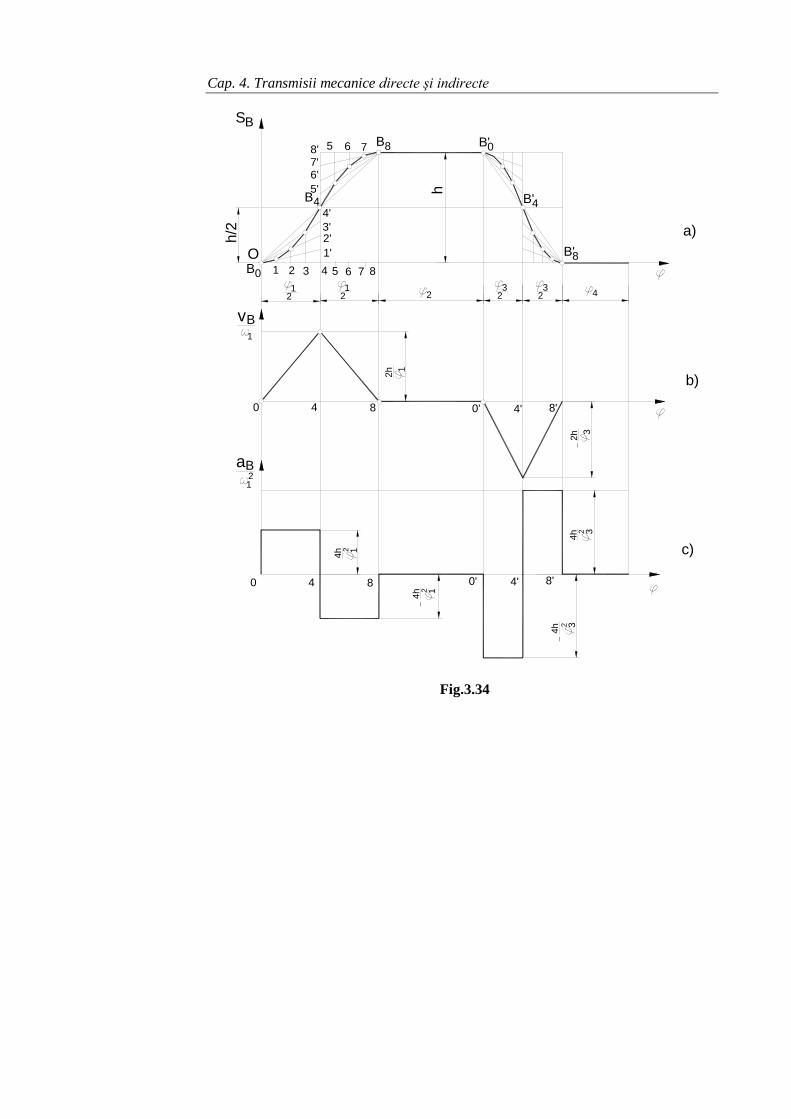
În fig. 3.34 sunt tratate curbele de variaţie ale deplasării ( Bs ), vitezei
reduse
1ωBv
şi acceleraţiei reduse
21ωBa
corespunzătoare legii de mişcare
parabolice a tachetului.
Viteza redusă maximă are loc la 2
1ϕϕ = şi are valoarea:
1max1
2ϕω
hvB ⋅=
. (3.18)
Legea sinusoidală.
Corespunzător unghiului de ridicare 1ϕ , legea de mişcare a tachetului este dată de ecuaţiile:
⋅⋅−⋅= ϕ
ϕπ
πϕϕ
11
2sin21hsB , (3.19)
⋅−= ϕ
ϕπ
ϕω 111
2cos1hvB , (3.20)
ϕϕπ
ϕπ
ω⋅⋅
⋅=
121
21
2sin2 haB . (3.21)
În fig. 3.35 sunt trasate curbele de variaţie ale deplasării ( Bs ), vitezei
reduse
1ωBv
şi acceleraţiei reduse
21ωBa
corespunzătoare legii de mişcare
sinusoidale a tachetului.
Viteza redusă maximă a tachetului are loc pentru 2
1ϕϕ = şi are
valoarea:
1max1
2ϕω
hvB ⋅=
. (3.22)
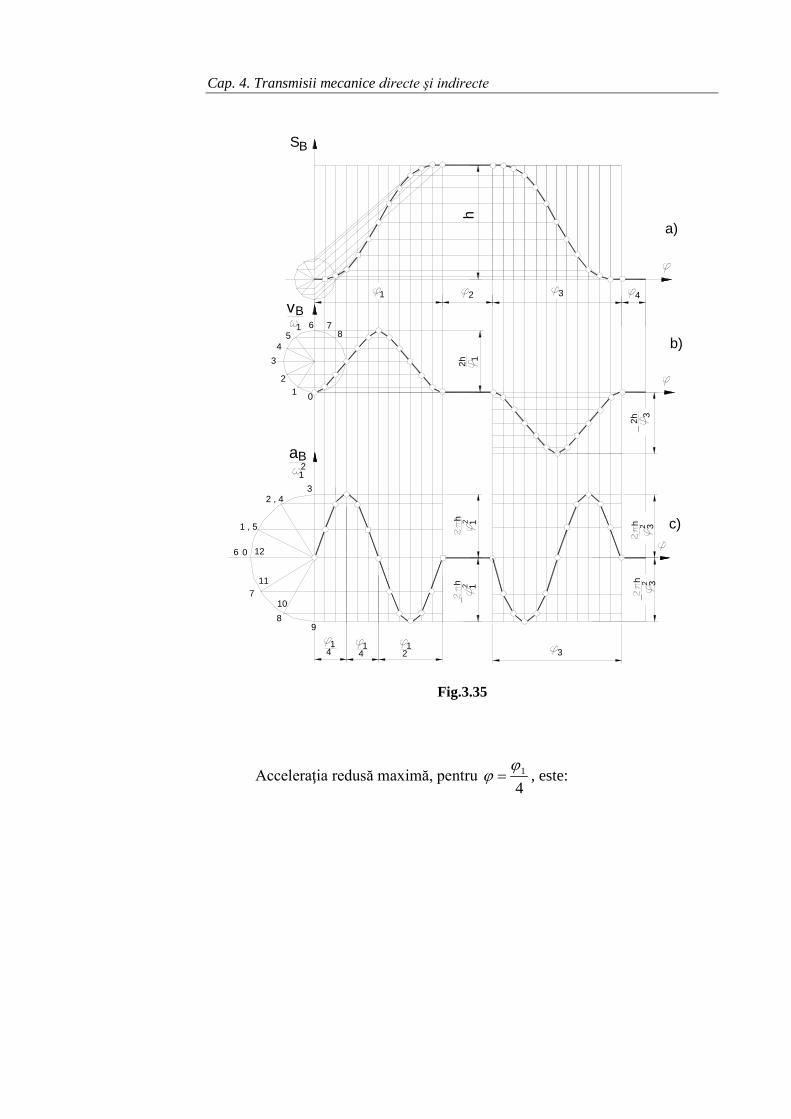
Cap. 4. Transmisii mecanice directe şi indirecte
Acceleraţia redusă maximă, pentru 4
1ϕϕ = , este:
SB
Bv1
Ba21
h
1 2 3 4
012
34
56 7
8
2h 1
2h 3
0
1 , 5
2 , 43
126
711
810
9
2h 12h 1
14 4
121
32h 3
h 32
a)
b)
c)
Fig.3.35

Elemente de inginerie mecanică
21max
21
2ϕω
haB ⋅=
, (3.23)
iar cea minimă, pentru 4
3 1ϕϕ
⋅= , are valoarea:
21min
21
2ϕω
haB ⋅−=
. (3.24)
Legea cosinusoidală. Corespunzător unghiului 1ϕ , legile de mişcare ale tachetului sunt:
⋅−= ϕ
ϕπ
1
cos12hsB , (3.25)
ϕϕπ
ϕπ
ω⋅⋅
⋅⋅
=111
sin2
hvB , (3.26)
ϕϕπ
ϕπ
ω⋅⋅
⋅⋅
=1
21
2
21
cos2
haB . (3.27)
În fig. 3.36 sunt tratate curbele de variaţie ale deplasării ( Bs ), vitezei
reduse
1ωBv
şi acceleraţiei reduse
21ωBa
corespunzătoare legii de mişcare
cosinusoidale a tachetului.
Viteza redusă maximă a tachetului are loc pentru 2
1ϕϕ = şi este:
1max1 2 ϕ
πω ⋅
⋅=
hvB . (3.28)
Acceleraţia redusă maximă, pentru 0=ϕ , este:
21
2
max21 2 ϕ
πω ⋅
⋅=
haB , (3.29)
iar cea minimă, pentru 1ϕϕ = , are valoarea:
21
2
min21 2 ϕ
πω ⋅
⋅−=
haB . (3.30)
SB
10 2 3 4 5 6 7 8 8' 7' 6' 3'5' 4' 2' 1' 0'0'12
3
4
5
6
70
0 1 2 3 64 5 7 80'5'6'7'8' 1'2'3'4'
4352
61
70 80' 8'
1'7'
6'2'
3'5'
4'
0 1 2 3 64 5 7 8
017'2 6'
3 5'
4 4'
3'5
2'6
1'7
0'8
h 2h
v1
B
a12B
1 2 3 4
h 1
h 3h
322
h2 32
B B1
B2
B3
B4
B5
B6 B7
B8
1
23
4
56
7
7'
6'5'
4'
3'2'
1'
12
3
56
7
8
8'
8'
7'
6'
5'
4'
3'
2' 1'
0'
a)
b)
c)

Cap. 4. Transmisii mecanice directe şi indirecte Mai pot exista şi profile corespunzătoare pentru:
- legea de mişcare liniară a tachetului racordată cu: - legea parabolică;
Elemente de inginerie mecanică - legea sinusoidală; - legea cosinusoidală; - arce de cerc;
- construcţii cu arce de cerc: - care imprimă tachetului o lege de mişcare liniară; - care imprimă tachetului o mişcare cu acceleraţie constantă.
4.4.Transmisii prin roţi de fricţiune 4.2.1.Generalităţi
Transmisiile prin roţi de fricţiune sunt formate din două roţi în contact pe
suprafaţă cilindrică sau plană, apăsate una faţă de alta cu o forţă capabilă să
realizeze o forţă de frecare mai mare decât forţa periferică dată de
momentul de torsiune transmis. [10],[11],[32].
Faţă de alte transmisii, acestea se caracterizează prin funcţionare liniştită, fără şocuri şi vibraţii, având posibilitatea de a patina la suprasarcini, asigurând astfel protecţia instalaţiei din care fac parte, la suprasarcini.
Materialele folosite pentru construcţia roţilor de fricţiune trebuie să prezinte următoarele particularităţi:
- să asigure un coeficient de frecare mare; - să aibă o bună rezistenţă la uzură; - rezistenţă bună la presiunea de contact. Printre cuplurile de materiale mai utilizate sunt: oţel călit – oţel călit;
oţel călit – fontă; oţel – cauciuc; lemn – cauciuc; masă plastică – masă plastică. 4.2.2.Clasificarea transmisiilor prin roţi de fricţiune Transmisiile prin roţi de fricţiune se clasifică după trei criterii
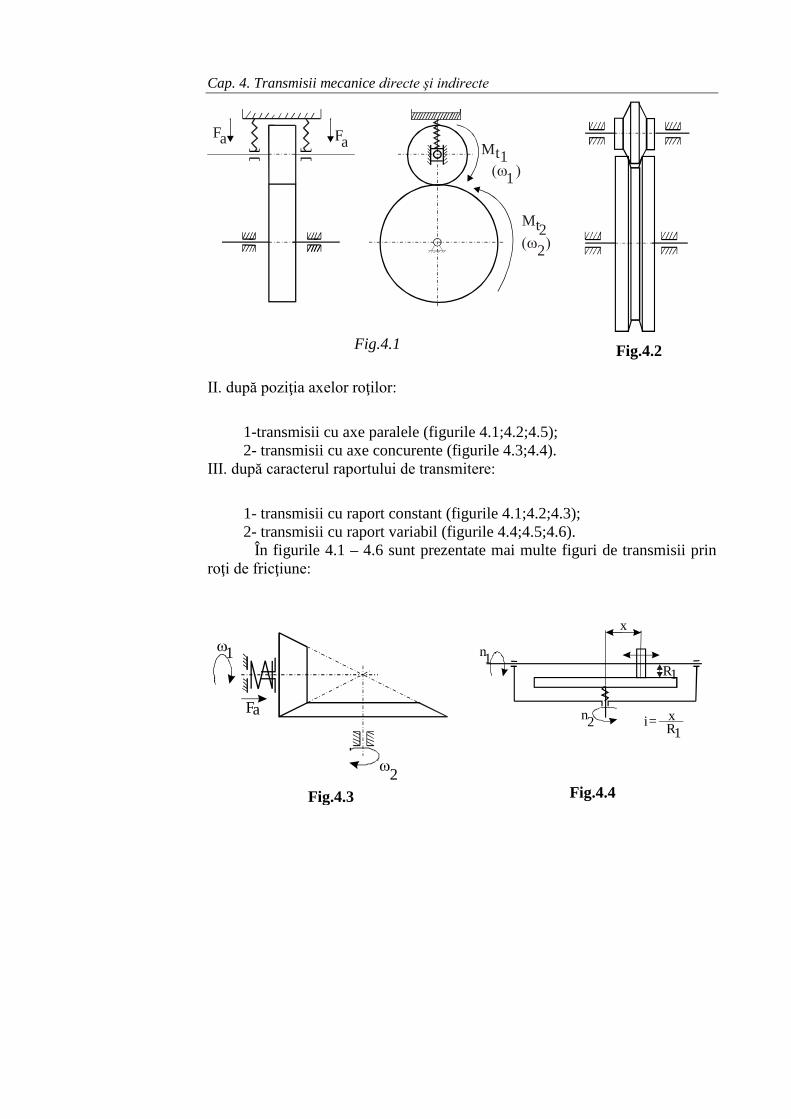
principale: I. după forma suprafeţei cilindrice a roţilor:
1-transmisii cu roţi cilindrice netede (figura 4.1); 2- transmisii cu roţi cilindrice canelate (figura 4.2).
Cap. 4. Transmisii mecanice directe şi indirecte
Fa a
Mt
1
2
Mt(ω )1
(ω )2
Fig.4.1
Fig.4.2
II. după poziţia axelor roţilor:
1-transmisii cu axe paralele (figurile 4.1;4.2;4.5); 2- transmisii cu axe concurente (figurile 4.3;4.4).
III. după caracterul raportului de transmitere:
1- transmisii cu raport constant (figurile 4.1;4.2;4.3); 2- transmisii cu raport variabil (figurile 4.4;4.5;4.6).
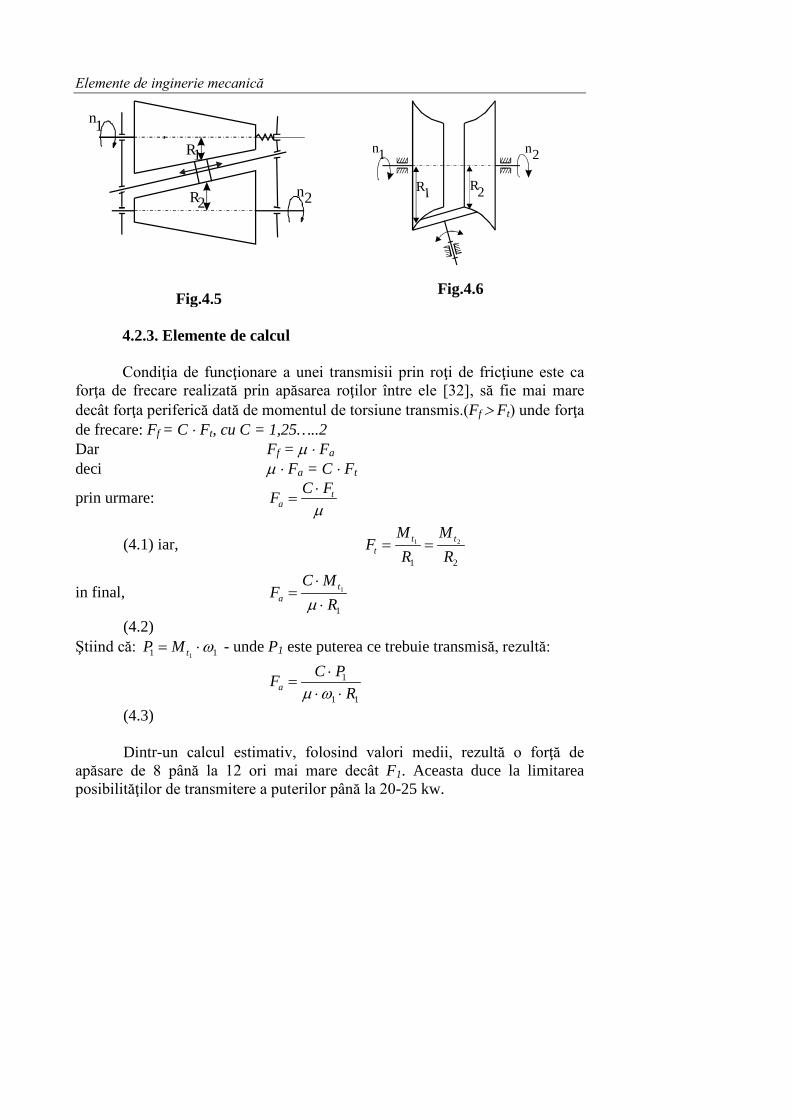
În figurile 4.1 – 4.6 sunt prezentate mai multe figuri de transmisii prin roţi de fricţiune:
Fa
ω2
ω1
Fig.4.3
x
n 2
n R
1 1
= x i R 1
Fig.4.4
Elemente de inginerie mecanică
R1
n2 R2
n1
Fig.4.5
n1
R
n2
R2
Fig.4.6
4.2.3. Elemente de calcul Condiţia de funcţionare a unei transmisii prin roţi de fricţiune este ca
forţa de frecare realizată prin apăsarea roţilor între ele [32], să fie mai mare decât forţa periferică dată de momentul de torsiune transmis.(Ff > Ft) unde forţa de frecare: Ff = C ⋅ Ft, cu C = 1,25…..2 Dar Ff = µ ⋅ Fa deci µ ⋅ Fa = C ⋅ Ft
prin urmare: µ
ta
FCF ⋅=
(4.1) iar, 21
21
RM
RM
F ttt ==
in final, 1
1
RMC
F ta ⋅
⋅=
µ
(4.2) Ştiind că: 11 1
ω⋅= tMP - unde P1 este puterea ce trebuie transmisă, rezultă:
11
1
RPCFa ⋅⋅
⋅=
ωµ
(4.3) Dintr-un calcul estimativ, folosind valori medii, rezultă o forţă de apăsare de 8 până la 12 ori mai mare decât F1. Aceasta duce la limitarea posibilităţilor de transmitere a puterilor până la 20-25 kw.
Cap. 4. Transmisii mecanice directe şi indirecte Pentru mărirea acestei limite se folosesc roţile canelate, la care frecările sunt mai mari pentru aceeaşi forţă de apăsare:
Fa = 2 ⋅ FN ⋅ sinα
µµtf
NFCF
F ⋅==
deci: αµ
sin2 ta
FCF ⋅⋅=
(4.4) Se observă în acest caz că dacă sinα < ½ ⇔ α < 300, rezultă o forţă de apăsare mai mică decât la roţile cilindrice netede. Dezavantajul care apare în acest caz constă în existenţa unor frecări mai mari pe pereţii laterali şi caneluri, datorită diferenţelor de viteze de alunecare ale celor două roţi, pe zonele diferite de diametrul mediu. Aceste frecări duc desigur la uzură mai accentuată şi durabilitate mai mică a transmisiei. În cazul roţilor conice, forţa de apăsare Fa se descompune într-o componentă normală la linia de contact şi o componentă pe direcţia acestei linii.
1
2
2
1
RRi ==
ωω
22
11
sinsin
αα
⋅=⋅=
OAROAR
Deci: 2
1
sinsin
αα
=i
1sinαN
aFF =
µµtf
NFCF
F ⋅==
Deci: 1sinαµ ⋅
⋅= t
aFCF (4.5)
Dimensionarea roţilor de fricţiune se face pe baza rezistenţei de contact. Se porneşte de la formula lui Herz, din care în final se ajunge la valoarea distanţei dintre axe:
aHN
H bEF σ
ρσ ≤
⋅⋅
= 418,0
(4.6)

Elemente de inginerie mecanică E este modulul de elasticitate echivalent:
21
212EEEEE
+⋅⋅
=
ρ este raza de curbură echivalentă:
21
111RR
==ρ
se vor exprima ρ şi b în funcţie de a şi i: a = R1 ± R2 = R1 (i ± 1) la roţile cilindrice:
( )( )
abaiMC
F
iia
RRRRMCFCF
iiaR
iaR
a
tn
ttN
⋅=⋅
±⋅⋅=
±⋅
=±⋅
=⋅
=⋅
=
±⋅
=
±=
ψµ
µµ1
1
1
1
1
12
21
21
2
1
unde ψa = 0,2…..0,4, este coeficient de lăţime în funcţie de distanţa între axe a Înlocuind în formula (4.6) se obţine:
( )
aHa
tH ia
iMCσ
ψµσ ≤
⋅⋅⋅±⋅⋅
= 3
31418,0 1
(4.7) La limită:
( )32
11747,0
iEMC
iiaaaH
t
⋅⋅⋅⋅⋅⋅
±=ψσµ
(4.8)
II. TRANSMISII MECANICE INDIRECTE
4.5.Transmisii prin curele
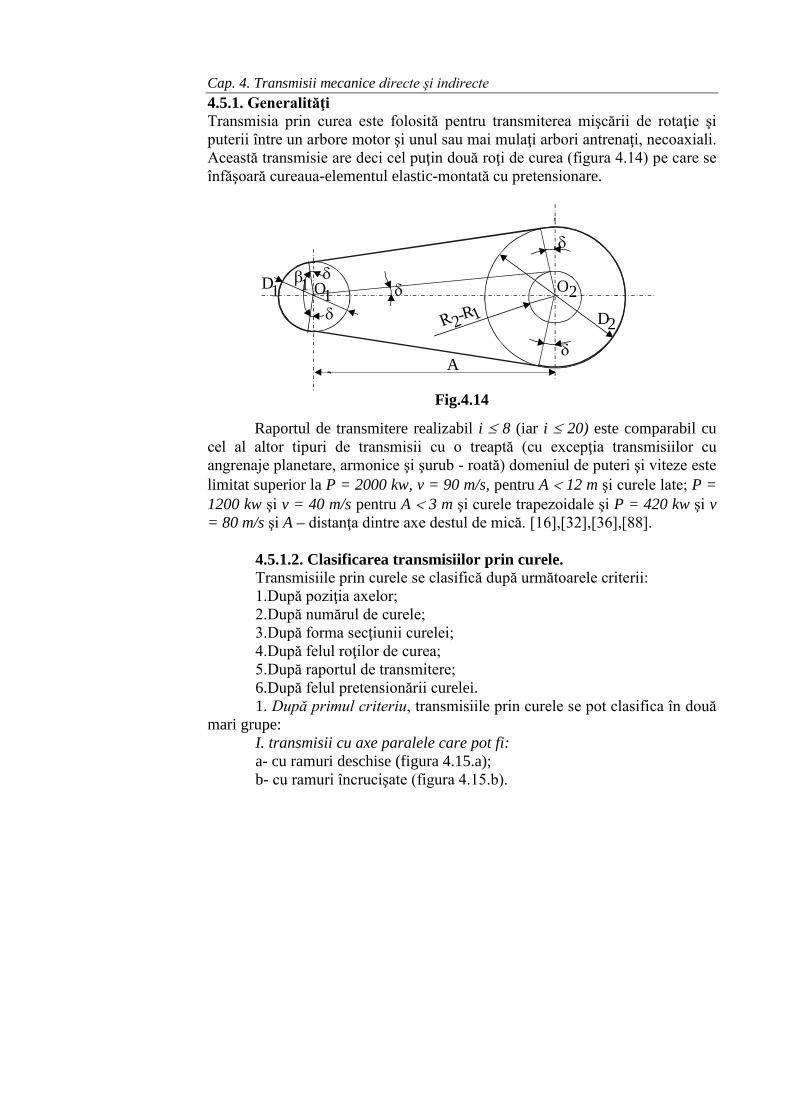
Cap. 4. Transmisii mecanice directe şi indirecte 4.5.1. Generalităţi Transmisia prin curea este folosită pentru transmiterea mişcării de rotaţie şi puterii între un arbore motor şi unul sau mai mulaţi arbori antrenaţi, necoaxiali. Această transmisie are deci cel puţin două roţi de curea (figura 4.14) pe care se înfăşoară cureaua-elementul elastic-montată cu pretensionare.
D 2 δ
δ O
1 δ
A
O 2 - R
2
1
δ
D 1 β 1 δ
Fig.4.14
Raportul de transmitere realizabil i ≤ 8 (iar i ≤ 20) este comparabil cu cel al altor tipuri de transmisii cu o treaptă (cu excepţia transmisiilor cu angrenaje planetare, armonice şi şurub - roată) domeniul de puteri şi viteze este limitat superior la P = 2000 kw, v = 90 m/s, pentru A < 12 m şi curele late; P = 1200 kw şi v = 40 m/s pentru A < 3 m şi curele trapezoidale şi P = 420 kw şi v = 80 m/s şi A – distanţa dintre axe destul de mică. [16],[32],[36],[88].
4.5.1.2. Clasificarea transmisiilor prin curele. Transmisiile prin curele se clasifică după următoarele criterii: 1.După poziţia axelor; 2.După numărul de curele; 3.După forma secţiunii curelei; 4.După felul roţilor de curea; 5.După raportul de transmitere; 6.După felul pretensionării curelei. 1. După primul criteriu, transmisiile prin curele se pot clasifica în două
mari grupe: I. transmisii cu axe paralele care pot fi: a- cu ramuri deschise (figura 4.15.a); b- cu ramuri încrucişate (figura 4.15.b).
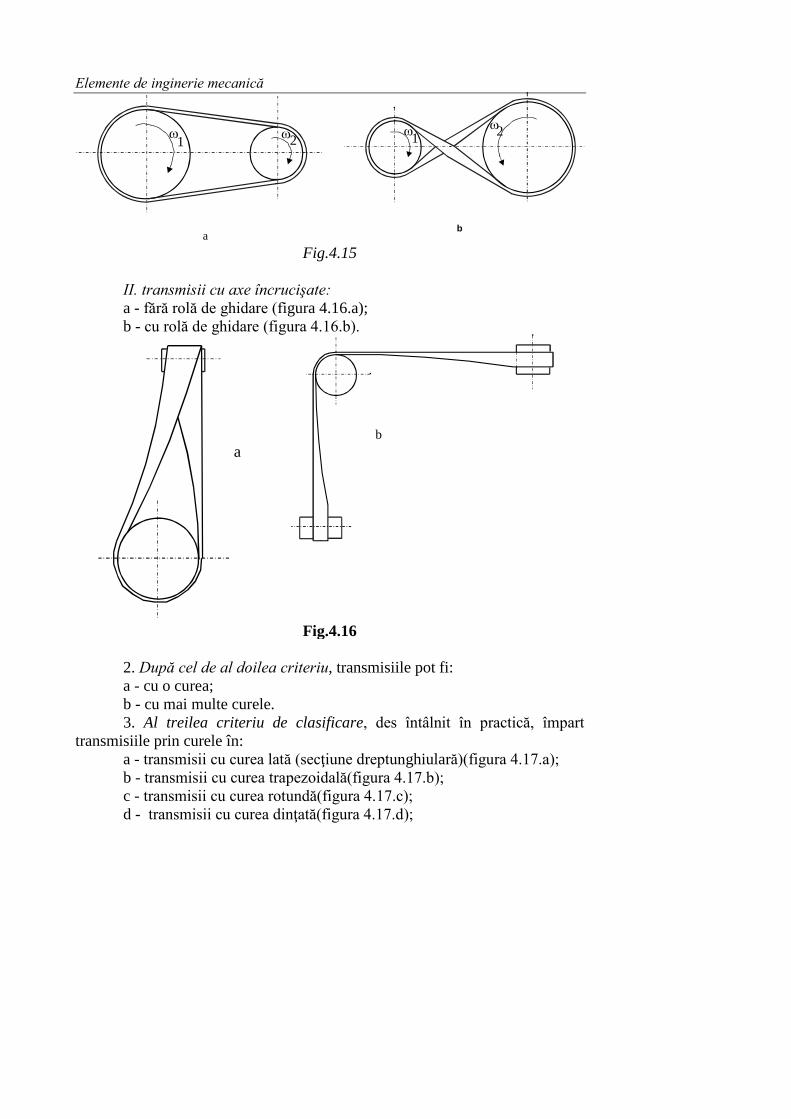
Elemente de inginerie mecanică
a
ω 1 ω 2
1 ω 2
b
ω
Fig.4.15
II. transmisii cu axe încrucişate: a - fără rolă de ghidare (figura 4.16.a); b - cu rolă de ghidare (figura 4.16.b).
a
b
Fig.4.16 2. După cel de al doilea criteriu, transmisiile pot fi: a - cu o curea; b - cu mai multe curele. 3. Al treilea criteriu de clasificare, des întâlnit în practică, împart
transmisiile prin curele în: a - transmisii cu curea lată (secţiune dreptunghiulară)(figura 4.17.a); b - transmisii cu curea trapezoidală(figura 4.17.b); c - transmisii cu curea rotundă(figura 4.17.c); d - transmisii cu curea dinţată(figura 4.17.d);

Cap. 4. Transmisii mecanice directe şi indirecte
d
a
c
b
Fig.4.17
a
b
x
x
Fig.4.18 4. După felul roţilor de curea: I- după forma constructivă: a - cu obadă netedă; b - cu obadă canelată; c - cu obadă în trepte; d - cu obadă dinţată. II- după rolul funcţional: a - cu roată liberă (figura 4.18.a); b - cu roţi multiple (figura 4.18.b). 5. După criteriul raportului de transmitere, transmisiile prin curea pot
fi: a - transmisii cu raport constant; b - transmisii cu raport variabil. 6. După ultimul criteriu de clasificare, transmisiile prin curele sunt: a - cu distanţă între axe fixă; b - cu distanţă între axe variabilă. 4.5.1.3. Transmisii prin curele late.
Materialele utilizate pentru curele late sunt specificate în tabelul 4.1, având principalele caracteristici exprimate în unităţi SI.
Tabelul 4.1.
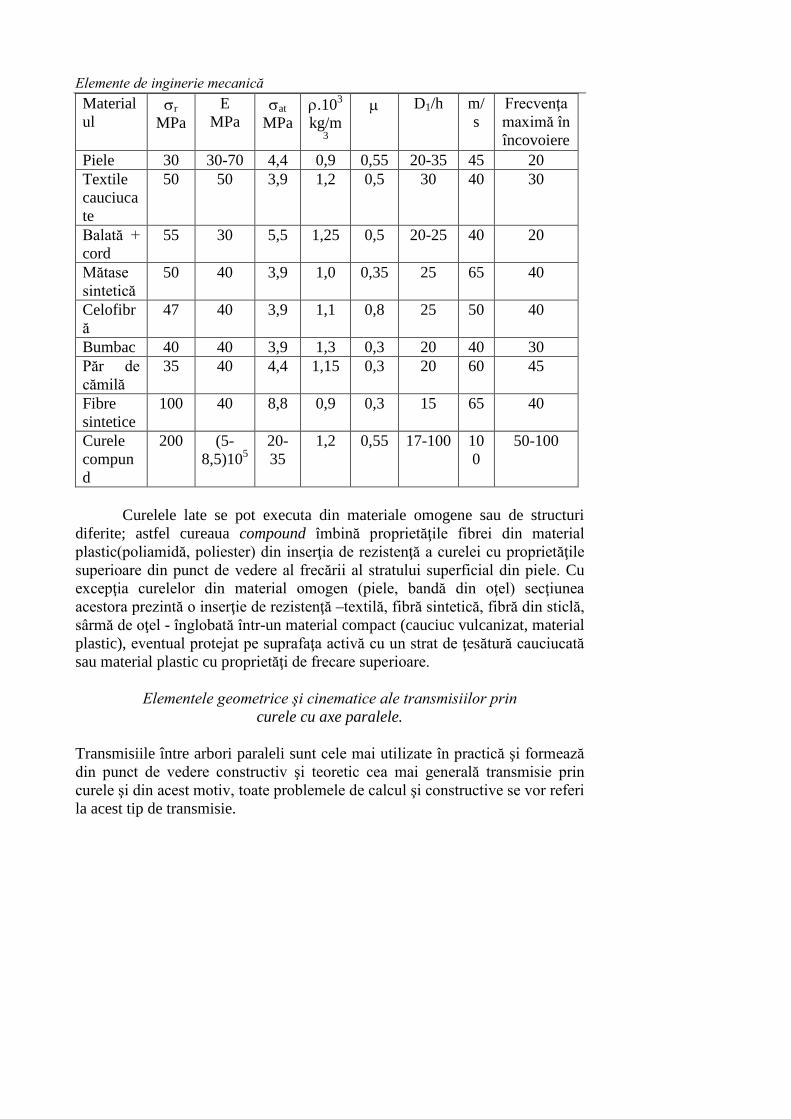
Elemente de inginerie mecanică Materialul
σr MPa
E MPa
σat MPa
ρ.103 kg/m
3
µ D1/h m/s
Frecvenţa maximă în încovoiere
Piele 30 30-70 4,4 0,9 0,55 20-35 45 20 Textile cauciucate
50 50 3,9 1,2 0,5 30 40 30
Balată + cord
55 30 5,5 1,25 0,5 20-25 40 20
Mătase sintetică
50 40 3,9 1,0 0,35 25 65 40
Celofibră
47 40 3,9 1,1 0,8 25 50 40
Bumbac 40 40 3,9 1,3 0,3 20 40 30 Păr de cămilă
35 40 4,4 1,15 0,3 20 60 45
Fibre sintetice
100 40 8,8 0,9 0,3 15 65 40
Curele compund
200 (5-8,5)105
20-35
1,2 0,55 17-100 100
50-100
Curelele late se pot executa din materiale omogene sau de structuri
diferite; astfel cureaua compound îmbină proprietăţile fibrei din material plastic(poliamidă, poliester) din inserţia de rezistenţă a curelei cu proprietăţile superioare din punct de vedere al frecării al stratului superficial din piele. Cu excepţia curelelor din material omogen (piele, bandă din oţel) secţiunea acestora prezintă o inserţie de rezistenţă –textilă, fibră sintetică, fibră din sticlă, sârmă de oţel - înglobată într-un material compact (cauciuc vulcanizat, material plastic), eventual protejat pe suprafaţa activă cu un strat de ţesătură cauciucată sau material plastic cu proprietăţi de frecare superioare.
Elementele geometrice şi cinematice ale transmisiilor prin curele cu axe paralele.
Transmisiile între arbori paraleli sunt cele mai utilizate în practică şi formează din punct de vedere constructiv şi teoretic cea mai generală transmisie prin curele şi din acest motiv, toate problemele de calcul şi constructive se vor referi la acest tip de transmisie.
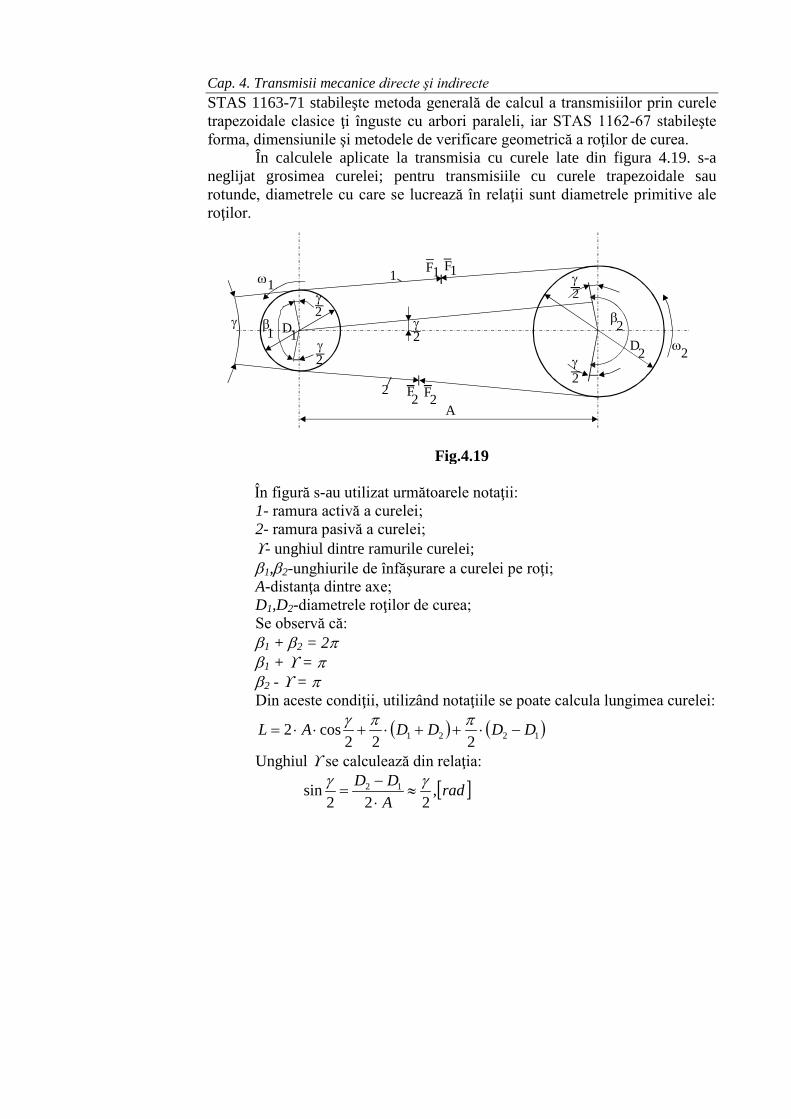
Cap. 4. Transmisii mecanice directe şi indirecte STAS 1163-71 stabileşte metoda generală de calcul a transmisiilor prin curele trapezoidale clasice ţi înguste cu arbori paraleli, iar STAS 1162-67 stabileşte forma, dimensiunile şi metodele de verificare geometrică a roţilor de curea.
În calculele aplicate la transmisia cu curele late din figura 4.19. s-a neglijat grosimea curelei; pentru transmisiile cu curele trapezoidale sau rotunde, diametrele cu care se lucrează în relaţii sunt diametrele primitive ale roţilor.
γ
1
ω D
2
D
F γ
γ 2 F 2
γ 2
γ 2
1
2 2
1
β
2
γ
2
A
β 1
1 F 1
F
ω
2
2
Fig.4.19
În figură s-au utilizat următoarele notaţii: 1- ramura activă a curelei; 2- ramura pasivă a curelei; ϒ- unghiul dintre ramurile curelei; β1,β2-unghiurile de înfăşurare a curelei pe roţi; A-distanţa dintre axe; D1,D2-diametrele roţilor de curea; Se observă că: β1 + β2 = 2π β1 + ϒ = π β2 - ϒ = π Din aceste condiţii, utilizând notaţiile se poate calcula lungimea curelei:
( ) ( )1221 222cos2 DDDDAL −⋅++⋅+⋅⋅=
ππγ
Unghiul ϒ se calculează din relaţia:
[ ]radADD ,
222sin 12 γγ
≈⋅−
=
Elemente de inginerie mecanică
( )2
2122
41
2sin1
2cos
ADD
⋅−
−=−=γγ (4.23)
Dacă se consideră cureaua inextensibilă, vitezele periferice ale roţilor sunt egale:
222
21
1DDv ⋅=⋅= ωω
sau 6060
2211 nDnDv ⋅⋅=
⋅⋅=
ππ
unde n1 şi n2 sunt turaţiile, în rot/min, ale roţilor de curea. Cureaua nu este inextensibilă, existând o alunecare elastică a curelei pe
roţi, ceea ce face ca viteza să nu fie aceeaşi. Astfel se defineşte un coeficient al alunecării elastice:
1
21
vvv −
=ε
În aceste condiţii, raportul de transmitere real este:
( )ε−⋅==
11
2
2
1
DD
nni (
4.5.4 Transmisii prin curele dinţate 4.5.4.1. Consideraţii generale Din multiplele tipuri de curele, un interes deosebit, pentru construcţia
de aparate, de maşini electronice şi tehnică de calcul, prezintă curelele dinţate (figura 4.20) care transmit mişcarea prin angrenarea dinţilor curelei cu dinţii roţilor de curea. [36],[88].
Transmisiile prin curele dinţate cumulează avantajele transmisiilor prin lanţuri: raport de transmitere riguros constant, randament mare, tensionare mică a curelelor, întreţinere simplă, domeniu mare de viteze(până la 80 m/s), domeniul întins de puteri( de la 0,12 până la 420 kw), distanţă mică între axe şi funcţionare liniştită.
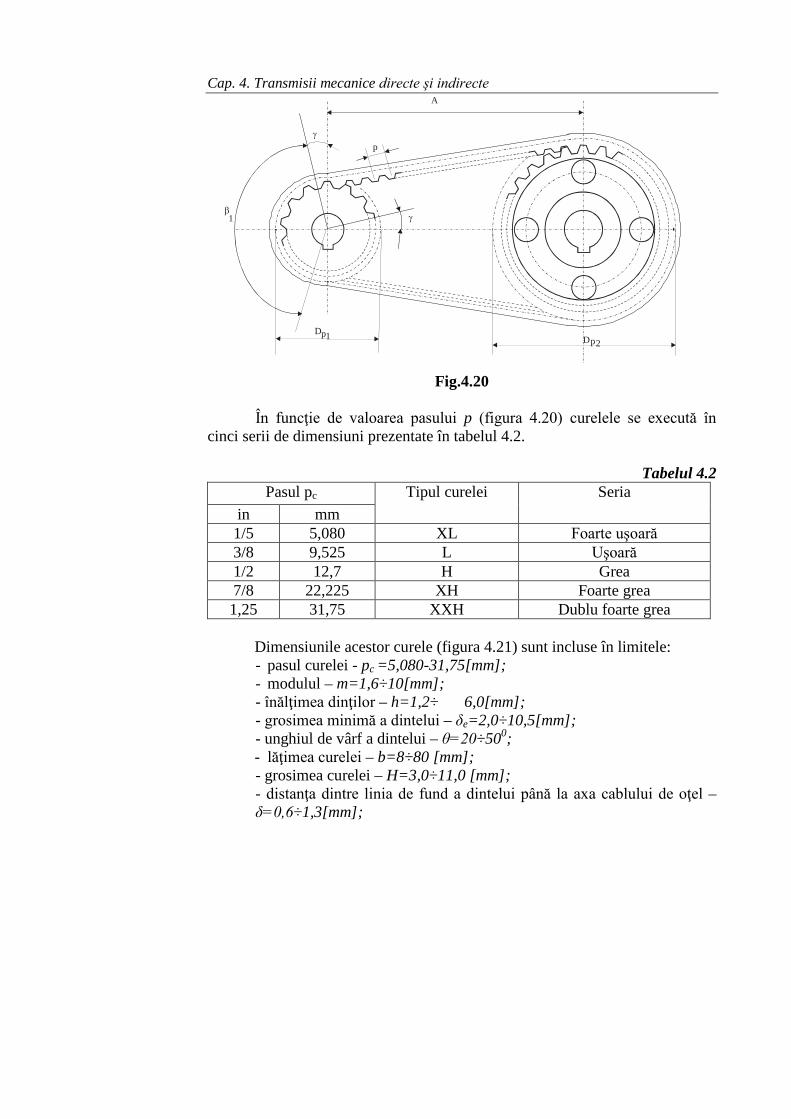
Cap. 4. Transmisii mecanice directe şi indirecte
γ
γ
p
Dp2
1 Dp
A
β1
Fig.4.20
În funcţie de valoarea pasului p (figura 4.20) curelele se execută în
cinci serii de dimensiuni prezentate în tabelul 4.2.
Tabelul 4.2 Pasul pc Tipul curelei Seria
in mm 1/5 5,080 XL Foarte uşoară 3/8 9,525 L Uşoară 1/2 12,7 H Grea 7/8 22,225 XH Foarte grea 1,25 31,75 XXH Dublu foarte grea
Dimensiunile acestor curele (figura 4.21) sunt incluse în limitele: - pasul curelei - pc =5,080-31,75[mm]; - modulul – m=1,6÷10[mm]; - înălţimea dinţilor – h=1,2÷ 6,0[mm]; - grosimea minimă a dintelui – δe=2,0÷10,5[mm]; - unghiul de vârf a dintelui – θ=20÷500; - lăţimea curelei – b=8÷80 [mm]; - grosimea curelei – H=3,0÷11,0 [mm]; - distanţa dintre linia de fund a dintelui până la axa cablului de oţel – δ=0,6÷1,3[mm];
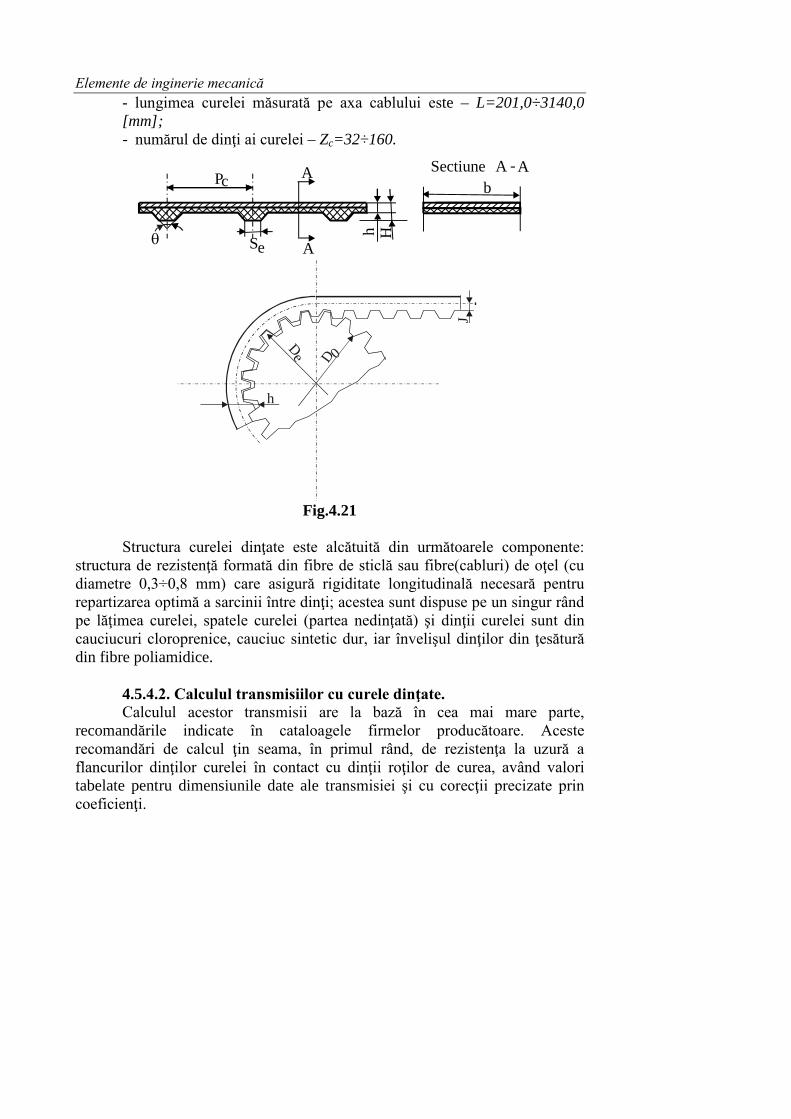
Elemente de inginerie mecanică - lungimea curelei măsurată pe axa cablului este – L=201,0÷3140,0 [mm]; - numărul de dinţi ai curelei – Zc=32÷160.
Sectiune A - A
A
A
H h θ
P c
S e
b
h
De 0
J
D
Fig.4.21
Structura curelei dinţate este alcătuită din următoarele componente:
structura de rezistenţă formată din fibre de sticlă sau fibre(cabluri) de oţel (cu diametre 0,3÷0,8 mm) care asigură rigiditate longitudinală necesară pentru repartizarea optimă a sarcinii între dinţi; acestea sunt dispuse pe un singur rând pe lăţimea curelei, spatele curelei (partea nedinţată) şi dinţii curelei sunt din cauciucuri cloroprenice, cauciuc sintetic dur, iar învelişul dinţilor din ţesătură din fibre poliamidice.
4.5.4.2. Calculul transmisiilor cu curele dinţate. Calculul acestor transmisii are la bază în cea mai mare parte,
recomandările indicate în cataloagele firmelor producătoare. Aceste recomandări de calcul ţin seama, în primul rând, de rezistenţa la uzură a flancurilor dinţilor curelei în contact cu dinţii roţilor de curea, având valori tabelate pentru dimensiunile date ale transmisiei şi cu corecţii precizate prin coeficienţi.
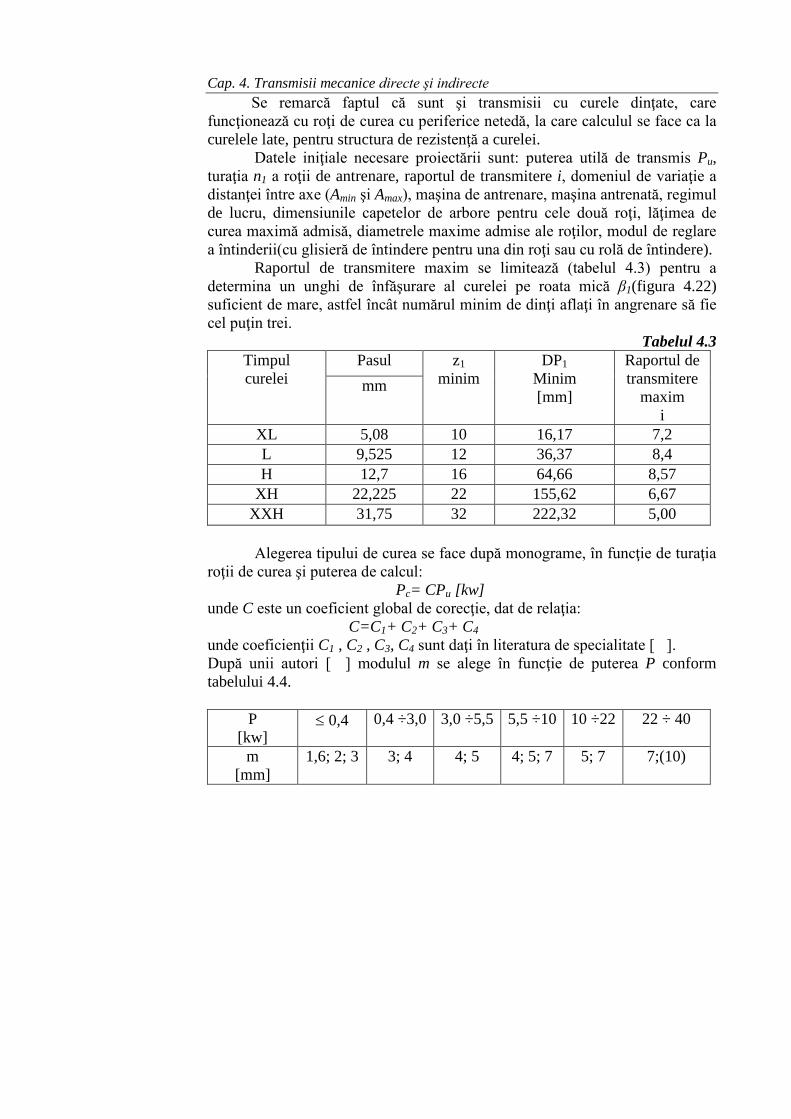
Cap. 4. Transmisii mecanice directe şi indirecte Se remarcă faptul că sunt şi transmisii cu curele dinţate, care funcţionează cu roţi de curea cu periferice netedă, la care calculul se face ca la curelele late, pentru structura de rezistenţă a curelei.
Datele iniţiale necesare proiectării sunt: puterea utilă de transmis Pu, turaţia n1 a roţii de antrenare, raportul de transmitere i, domeniul de variaţie a distanţei între axe (Amin şi Amax), maşina de antrenare, maşina antrenată, regimul de lucru, dimensiunile capetelor de arbore pentru cele două roţi, lăţimea de curea maximă admisă, diametrele maxime admise ale roţilor, modul de reglare a întinderii(cu glisieră de întindere pentru una din roţi sau cu rolă de întindere).
Raportul de transmitere maxim se limitează (tabelul 4.3) pentru a determina un unghi de înfăşurare al curelei pe roata mică β1(figura 4.22) suficient de mare, astfel încât numărul minim de dinţi aflaţi în angrenare să fie cel puţin trei.
Tabelul 4.3 Timpul curelei
Pasul z1 minim
DP1 Minim [mm]
Raportul de transmitere
maxim i
mm
XL 5,08 10 16,17 7,2 L 9,525 12 36,37 8,4 H 12,7 16 64,66 8,57
XH 22,225 22 155,62 6,67 XXH 31,75 32 222,32 5,00 Alegerea tipului de curea se face după monograme, în funcţie de turaţia
roţii de curea şi puterea de calcul: Pc= CPu [kw]
unde C este un coeficient global de corecţie, dat de relaţia: C=C1+ C2+ C3+ C4
unde coeficienţii C1 , C2 , C3, C4 sunt daţi în literatura de specialitate [ ]. După unii autori [ ] modulul m se alege în funcţie de puterea P conform tabelului 4.4.
P [kw]
≤ 0,4 0,4 ÷3,0 3,0 ÷5,5 5,5 ÷10 10 ÷22 22 ÷ 40
m [mm]
1,6; 2; 3 3; 4 4; 5 4; 5; 7 5; 7 7;(10)

Elemente de inginerie mecanică La stabilirea numărului de dinţi ai roţilor ( i = z2/z1) se au în vedere
valorile z1 minime prezentate în tabelul 4.3, admiţându-se abateri de ± 1 % între raportul de transmitere teoretic şi real. Calculul preliminar al lungimii curelei pentru transmisia fără rolă de întindere, se face cu o valoare medie a distanţei între axe:
A= 0,5 (Amin + Amax);
ADPDPDPDPAL
4)()(57,12
212
21−
+++=
unde: DP1=mz1; DP2=mz2 În final se obţine:
)(2)()(57,1)(
maxmin
212
21maxmin AAmzmzzzmAAL
+−
++++= (4.28)
unde modulul m, conform literaturii de specialitate, se ia din tabelul 4.5. Tabelul 4.5.
În cazul transmisiei cu rolă de întindere pe faţa interioară sau pe faţa exterioară a curelei, lungimea L se determină cu relaţiile modificate corespunzător. Valoarea L obţinută mai sus, conform relaţiei 4.28, se rotunjeşte în plus sau în minus la un multiplu întreg de paşi. Cu valoarea astfel obţinută pentru L normalizată se recalculează
distanţa dintre axe. Lăţimea curelei b normalizată se alege având la bază relaţia de calcul:
zb
c
KKPPb
⋅≥
0
[in].
unde Pc- reprezintă puterea de calcul [kw]; P0- puterea transmisă de o curea lată de 1 in;[kw]; Kb şi Kz- coeficienţi daţi în literatura de specialitate[ ]. Numărul de dinţi ai roţii mici de curea z0 se calculează cu relaţia :
π
β2
10
zz ⋅=
unde β = π – arc sin[m(z2-z1)/2A] [rad] Cataloagele firmelor producătoare utilizează simboluri adecvate atât pentru curele, cât şi pentru roţile corespunzătoare de cure. În literatură, sunt date elementele geometrice caracteristice roţilor de curea şi relaţiilor de calcul.
Tipul curelei Modulul m [mm]
XL 1,617 L 3,032 H 4,042
XH 7,074 XXH 10,106
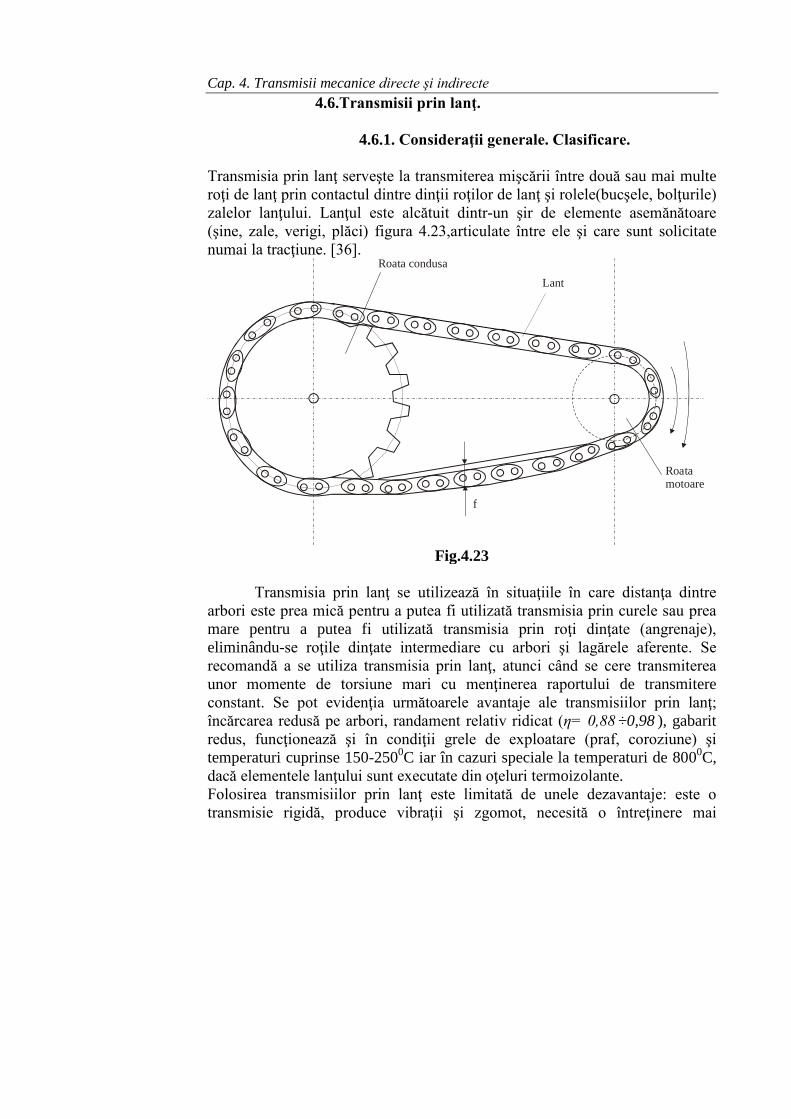
Cap. 4. Transmisii mecanice directe şi indirecte 4.6.Transmisii prin lanţ. 4.6.1. Consideraţii generale. Clasificare. Transmisia prin lanţ serveşte la transmiterea mişcării între două sau mai multe roţi de lanţ prin contactul dintre dinţii roţilor de lanţ şi rolele(bucşele, bolţurile) zalelor lanţului. Lanţul este alcătuit dintr-un şir de elemente asemănătoare (şine, zale, verigi, plăci) figura 4.23,articulate între ele şi care sunt solicitate numai la tracţiune. [36].
Roata condusa
Roatamotoare
f
Lant
Fig.4.23
Transmisia prin lanţ se utilizează în situaţiile în care distanţa dintre
arbori este prea mică pentru a putea fi utilizată transmisia prin curele sau prea mare pentru a putea fi utilizată transmisia prin roţi dinţate (angrenaje), eliminându-se roţile dinţate intermediare cu arbori şi lagărele aferente. Se recomandă a se utiliza transmisia prin lanţ, atunci când se cere transmiterea unor momente de torsiune mari cu menţinerea raportului de transmitere constant. Se pot evidenţia următoarele avantaje ale transmisiilor prin lanţ; încărcarea redusă pe arbori, randament relativ ridicat (η= 0,88 ÷0,98 ), gabarit redus, funcţionează şi în condiţii grele de exploatare (praf, coroziune) şi temperaturi cuprinse 150-2500C iar în cazuri speciale la temperaturi de 8000C, dacă elementele lanţului sunt executate din oţeluri termoizolante. Folosirea transmisiilor prin lanţ este limitată de unele dezavantaje: este o transmisie rigidă, produce vibraţii şi zgomot, necesită o întreţinere mai
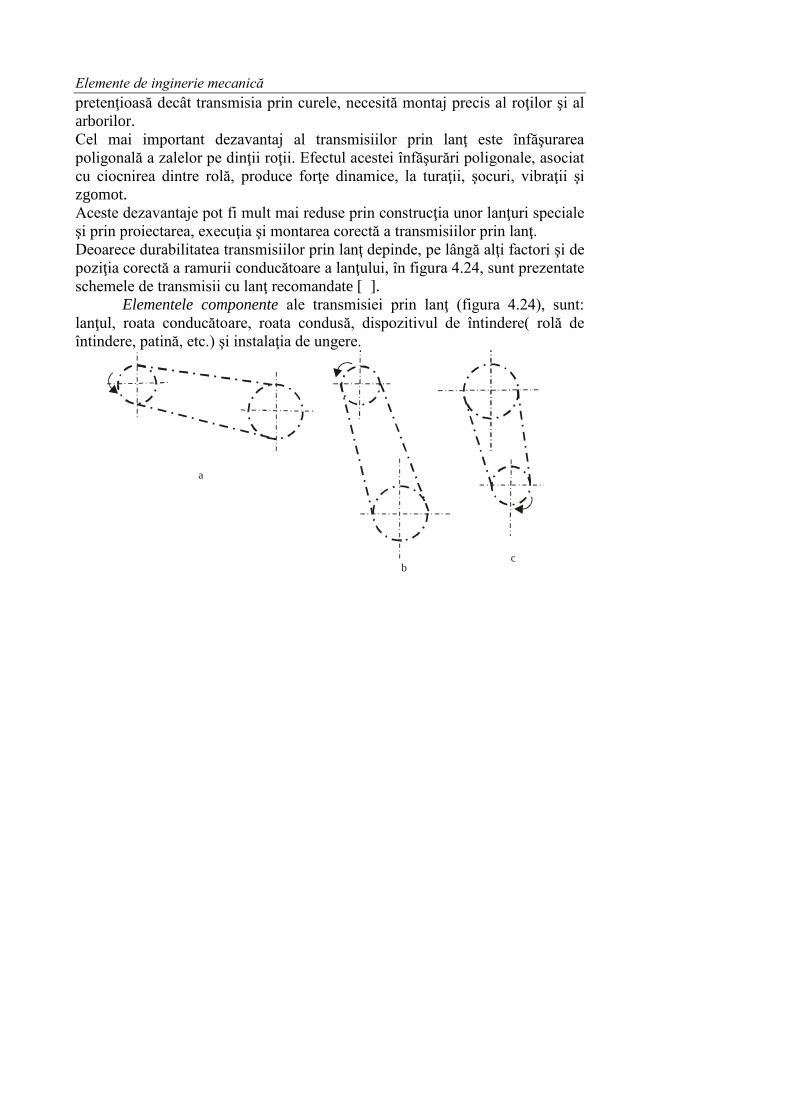
Elemente de inginerie mecanică pretenţioasă decât transmisia prin curele, necesită montaj precis al roţilor şi al arborilor. Cel mai important dezavantaj al transmisiilor prin lanţ este înfăşurarea poligonală a zalelor pe dinţii roţii. Efectul acestei înfăşurări poligonale, asociat cu ciocnirea dintre rolă, produce forţe dinamice, la turaţii, şocuri, vibraţii şi zgomot. Aceste dezavantaje pot fi mult mai reduse prin construcţia unor lanţuri speciale şi prin proiectarea, execuţia şi montarea corectă a transmisiilor prin lanţ. Deoarece durabilitatea transmisiilor prin lanţ depinde, pe lângă alţi factori şi de poziţia corectă a ramurii conducătoare a lanţului, în figura 4.24, sunt prezentate schemele de transmisii cu lanţ recomandate [ ].
Elementele componente ale transmisiei prin lanţ (figura 4.24), sunt: lanţul, roata conducătoare, roata condusă, dispozitivul de întindere( rolă de întindere, patină, etc.) şi instalaţia de ungere.
a
bc
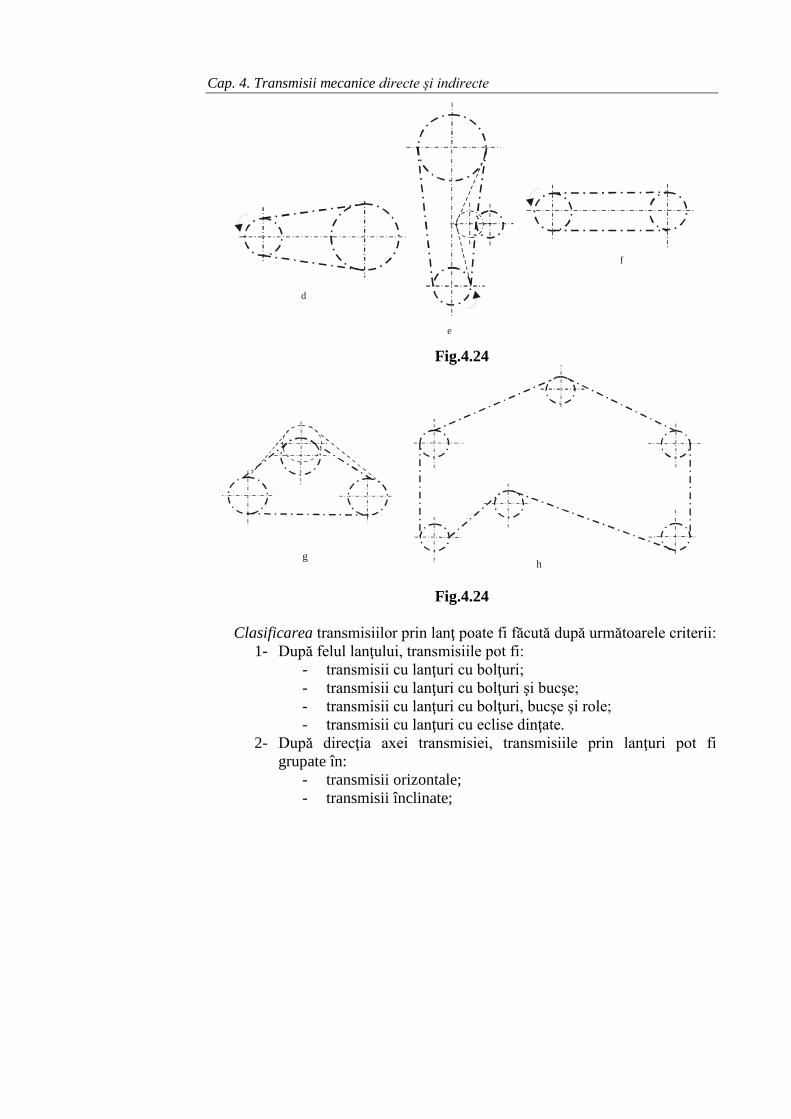
Cap. 4. Transmisii mecanice directe şi indirecte
d
e
f
Fig.4.24
gh
Fig.4.24
Clasificarea transmisiilor prin lanţ poate fi făcută după următoarele criterii:
1- După felul lanţului, transmisiile pot fi: - transmisii cu lanţuri cu bolţuri; - transmisii cu lanţuri cu bolţuri şi bucşe; - transmisii cu lanţuri cu bolţuri, bucşe şi role; - transmisii cu lanţuri cu eclise dinţate.
2- După direcţia axei transmisiei, transmisiile prin lanţuri pot fi grupate în:
- transmisii orizontale; - transmisii înclinate;
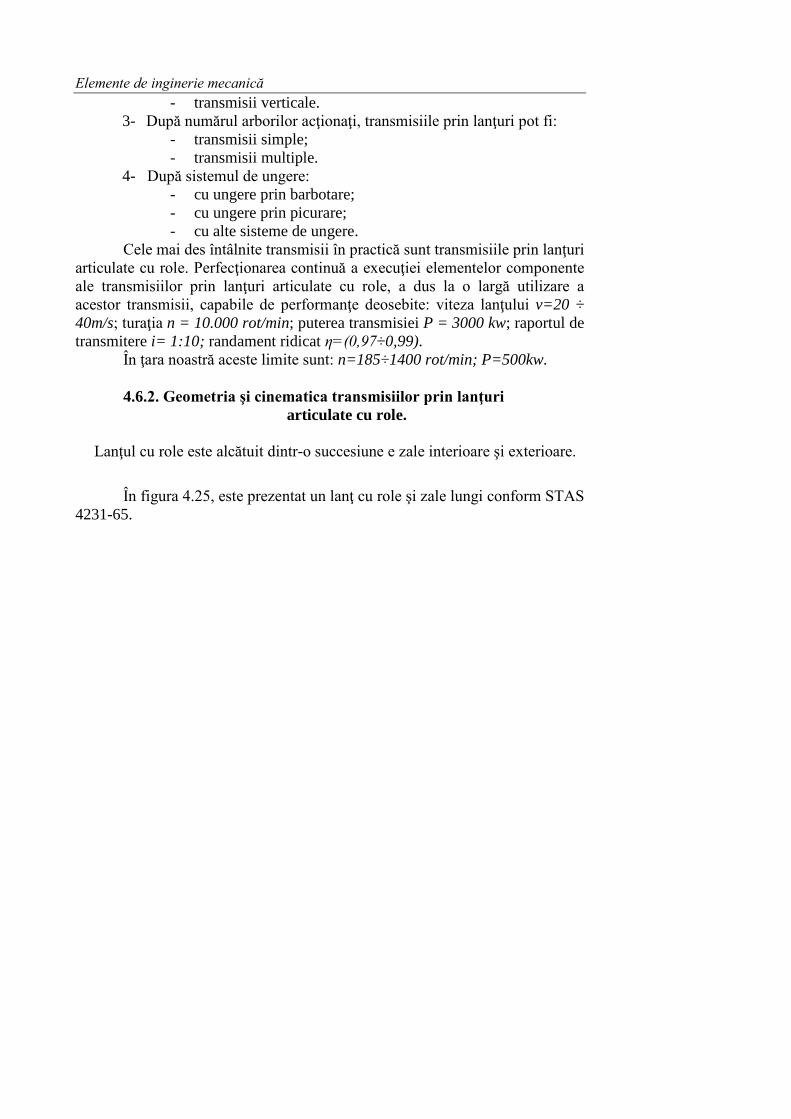
Elemente de inginerie mecanică - transmisii verticale.
3- După numărul arborilor acţionaţi, transmisiile prin lanţuri pot fi: - transmisii simple; - transmisii multiple.
4- După sistemul de ungere: - cu ungere prin barbotare; - cu ungere prin picurare; - cu alte sisteme de ungere.
Cele mai des întâlnite transmisii în practică sunt transmisiile prin lanţuri articulate cu role. Perfecţionarea continuă a execuţiei elementelor componente ale transmisiilor prin lanţuri articulate cu role, a dus la o largă utilizare a acestor transmisii, capabile de performanţe deosebite: viteza lanţului v=20 ÷ 40m/s; turaţia n = 10.000 rot/min; puterea transmisiei P = 3000 kw; raportul de transmitere i= 1:10; randament ridicat η=(0,97÷0,99).
În ţara noastră aceste limite sunt: n=185÷1400 rot/min; P=500kw. 4.6.2. Geometria şi cinematica transmisiilor prin lanţuri articulate cu role.
Lanţul cu role este alcătuit dintr-o succesiune e zale interioare şi exterioare.
În figura 4.25, este prezentat un lanţ cu role şi zale lungi conform STAS 4231-65.
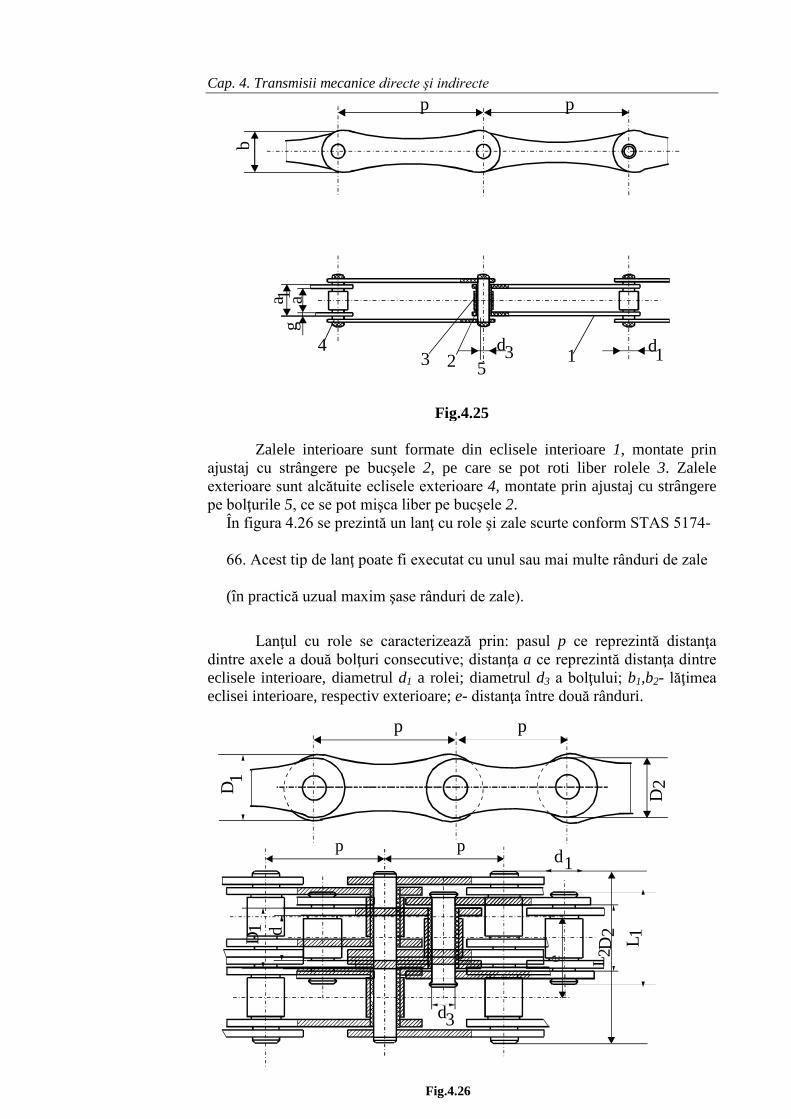
Cap. 4. Transmisii mecanice directe şi indirecte
1
g
a 1
3 d d
p p
b
5 2 3 4 1
a
Fig.4.25
Zalele interioare sunt formate din eclisele interioare 1, montate prin
ajustaj cu strângere pe bucşele 2, pe care se pot roti liber rolele 3. Zalele exterioare sunt alcătuite eclisele exterioare 4, montate prin ajustaj cu strângere pe bolţurile 5, ce se pot mişca liber pe bucşele 2.
În figura 4.26 se prezintă un lanţ cu role şi zale scurte conform STAS 5174-
66. Acest tip de lanţ poate fi executat cu unul sau mai multe rânduri de zale
(în practică uzual maxim şase rânduri de zale).
Lanţul cu role se caracterizează prin: pasul p ce reprezintă distanţa dintre axele a două bolţuri consecutive; distanţa a ce reprezintă distanţa dintre eclisele interioare, diametrul d1 a rolei; diametrul d3 a bolţului; b1,b2- lăţimea eclisei interioare, respectiv exterioare; e- distanţa între două rânduri.
p p
D 1 d
D
2
D 1
L 1
d
1 d
3
D2
2
p p
L e
Fig.4.26
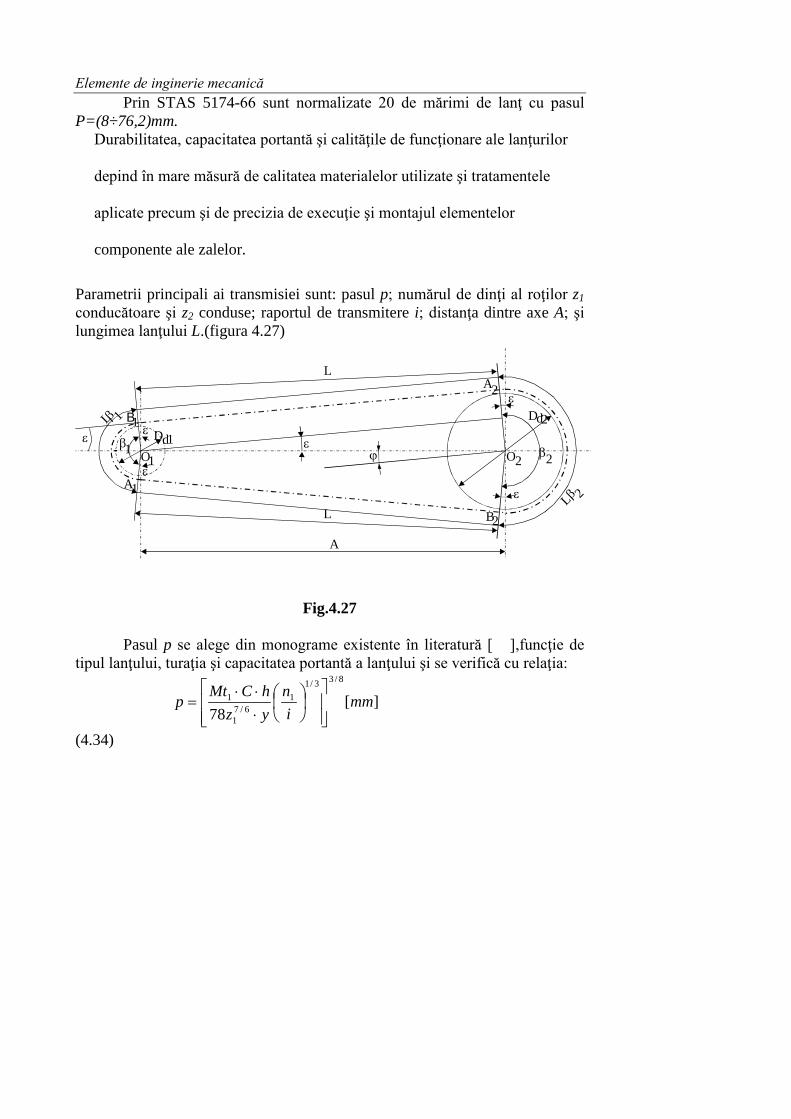
Elemente de inginerie mecanică Prin STAS 5174-66 sunt normalizate 20 de mărimi de lanţ cu pasul
P=(8÷76,2)mm. Durabilitatea, capacitatea portantă şi calităţile de funcţionare ale lanţurilor
depind în mare măsură de calitatea materialelor utilizate şi tratamentele
aplicate precum şi de precizia de execuţie şi montajul elementelor
componente ale zalelor.
Parametrii principali ai transmisiei sunt: pasul p; numărul de dinţi al roţilor z1 conducătoare şi z2 conduse; raportul de transmitere i; distanţa dintre axe A; şi lungimea lanţului L.(figura 4.27)
ε 2
1 β L
ε 1
1
1 β
ε d 1 D O
L B
A
B
A
L
ε
ε
A
2
L
β
2
O ϕ
d D 2
2
1
ε
2β
Fig.4.27
Pasul p se alege din monograme existente în literatură [ ],funcţie de
tipul lanţului, turaţia şi capacitatea portantă a lanţului şi se verifică cu relaţia:
][78
8/33/11
6/71
1 mmi
nyzhCMtp
⋅⋅⋅
=
(4.34)

Cap. 4. Transmisii mecanice directe şi indirecte
unde: 1
1 ωPMt = reprezintă momentul de transmis la roata conducătoare; y este
numărul de rânduri de zale; C coeficientul de corecţie total [ ]; h durata de funcţionare propusă, în ore. Pasul lanţului se recomandă să fie cât mai mic posibil deoarece permite alegerea unui număr de dinţi mai mare la roţi, ceea ce duce la micşorarea şocurilor şi vibraţiilor, şi prin urmare la o funcţionare liniştită. Numărul de dinţi la roata conducătoare, z1, se alege funcţie de tipul lanţului, turaţia roţii şi de raportul de transmitere [ ]; sau se calculează cu relaţia: z1min = 29-2i; (4.35) Luând în consideraţie următoarele recomandări: z1min ≥ 13……15; la v ≤ 2 m/s; z1min > 19; la v > 2 m/s;
z1min ≥ 23 când transmisia lucrează sub sarcini cu şoc. Raportul de transmitere efectiv i, în calculele practice, se ia în
considerare folosind relaţia:
1
2
1
2
1
2
2
1
2
1
MtMt
DdDd
zz
nni
ηωω
===== (4.36)
Distanţa dintre axe A (figura 4.27) se recomandă să fie: 20p < A < 80 cu limitele inferioare se acceptă în situaţia când transmisia suportă sarcini pulsatorii. Uzual se adoptă valori pentru A în intervalul: 30 p ÷ 50 p. La stabilirea distanţei dintre axe A, se verifică ca unghiul β1 de înfăşurare a lanţului pe roata mică > 1200. Distanţa dintre axe calculată teoretic At trebuie corectată. În situaţia când transmisia cu lanţ are distanţa dintre axe reglabilă, atunci: A = ( 1-S)⋅At; unde: S=0,5[ 4fr / (sin 4fr) – 1] este un factor de corecţie datorită săgeţii relative fr a ramurii inferioare egală cu 2% din A în cazul transmisiilor cu unghiul de înclinare faţă de orizontală ϕ≤450 şi cu 1-1,5 din A pentru situaţia transmisiilor cu ϕ≥450.Lăţimea lanţului, se exprimă în număr de rânduri de zale y, şi se alege din monograme [ ] odată cu alegerea pasului lanţului. Lungimea lanţului se calculează din punct de vedere geometric, funcţie de elementele componente ale transmisiei. Pentru o transmisie cu două roţi de lanţ se foloseşte relaţia: X = 2At/p+0,5(z1+z2)+0,25(z2-z1)2p/(π2At) [zale]
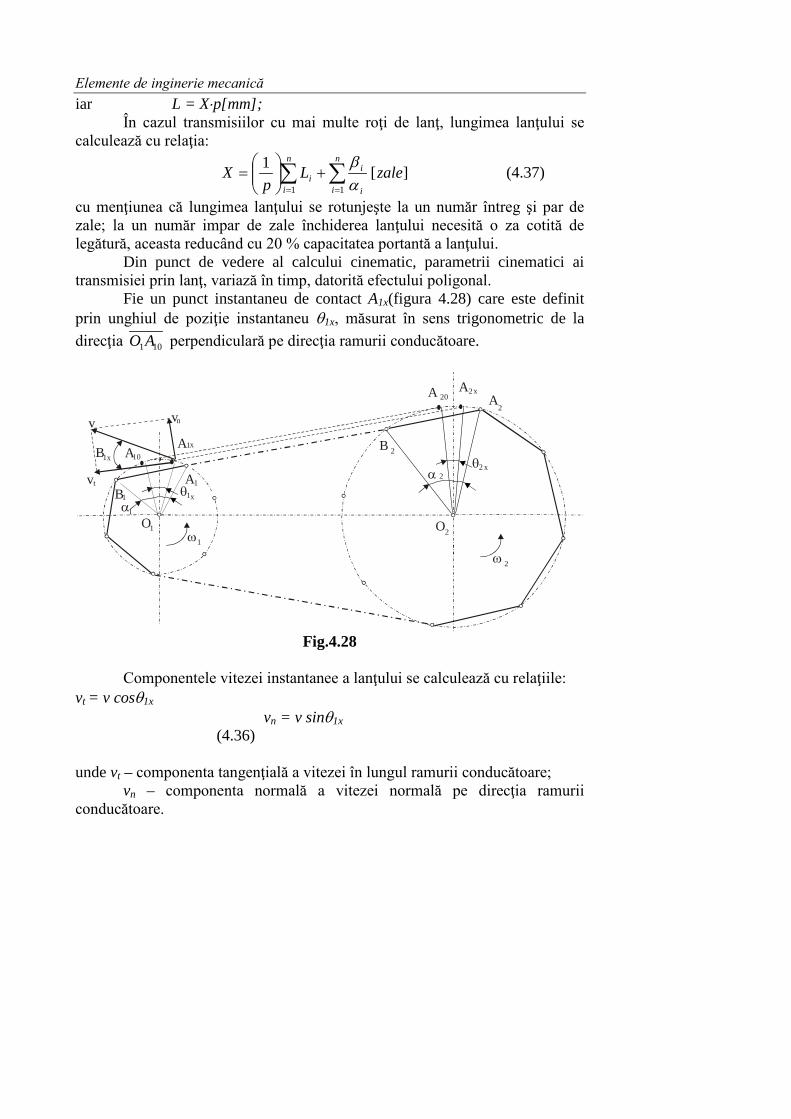
Elemente de inginerie mecanică iar L = X⋅p[mm]; În cazul transmisiilor cu mai multe roţi de lanţ, lungimea lanţului se calculează cu relaţia:
∑∑==
+
=
n
i i
in
iiL
pX
11
1αβ
][zale (4.37)
cu menţiunea că lungimea lanţului se rotunjeşte la un număr întreg şi par de zale; la un număr impar de zale închiderea lanţului necesită o za cotită de legătură, aceasta reducând cu 20 % capacitatea portantă a lanţului. Din punct de vedere al calcului cinematic, parametrii cinematici ai transmisiei prin lanţ, variază în timp, datorită efectului poligonal. Fie un punct instantaneu de contact A1x(figura 4.28) care este definit prin unghiul de poziţie instantaneu θ1x, măsurat în sens trigonometric de la direcţia 101AO perpendiculară pe direcţia ramurii conducătoare.
•
• •
•
O1
2A10
20
xB
vt
n
1
vv
B1
A1θ
ω
α
1
1
1
B
A A
A
A
2
2
2
2
2
1x
x
αθ
ω
x
2 x
O
Fig.4.28
Componentele vitezei instantanee a lanţului se calculează cu relaţiile: vt = v cosθ1x
vn = v sinθ1x (4.36)
unde vt – componenta tangenţială a vitezei în lungul ramurii conducătoare; vn – componenta normală a vitezei normală pe direcţia ramurii conducătoare.

Cap. 4. Transmisii mecanice directe şi indirecte
Ştiind că: 11
11
1 2ωπωαθ −=−=
ztx ; 11
5,0 ωdDv = şi ( )[ ]1/sin/1
zPDd π= ,
relaţiile 4.36 devin: ( )[ ]
1
111 /sin
cos5,0
ztzpvt π
ωπω
−= ;
( )[ ]( )1
111 /sin
/sin5,0
ztzpvn π
ωπω
−= (4.37)
Pentru valorile limită ale unghiului θ1x∈[-α1/2;+α1/2] se obţine: - în punctul A10:
( )111max /sin/5,05.01
zpDv dt πωω == , vn = 0 (4.38) - în punctele A1 şi B1:
( )[ ] ( ) ( )1
1111min
5,0sin//cos5,0ztg
pzzpvt πω
ππω ==
1max 5,0 ωpvn = (4.38’)
Ţinând seama că, la o rotaţie a roţii, lanţul parcurge un drum egal cu perimetrul poligonului de divizare pz al roţii, viteza medie de înaintare a lanţului se calculează cu relaţia:
πω
260⋅
=⋅
=pznpz
vm
(4.39) Derivând expresiile vitezelor vt şi vn din relaţia (4.37) ţinând seama de valorile limită ale unghiului θ1x, se obţin valorile limită ale acceleraţiilor: - în punctul A10- 0min =ta ( )1
21max sin/5,0 zpat πω−=
- în punctele A1 şi B1- 2
1max 5,0 ωpat =
( )1
21
min /5,0
ztgpat π
ω=
(4.40)
Din raportul vitezelor ( ) 1/cos
11min
max ≥=zv
vt
t
π, rezultă că variaţia vitezei
de înaintare a lanţului depinde numai de numărul de dinţi al roţii conducătoare. Observaţii
Elemente de inginerie mecanică - Componenta normală a vitezei, vn determină apariţia vibraţiilor
transversale ale ramurii conducătoare a lanţului, proporţionale cu pasul lanţului şi viteza unghiulară ω1 a roţii conducătoare.
- Componenta tangenţială a acceleraţiei, at, dezvoltă forţe inerţiale în ramura conducătoare a lanţului şi în masele elementelor acţionate de aceasta.
- Componenta normală, an, produce solicitări dinamice transversale în ramura conducătoare, care nu se transmit sistemului acţionat.





























