-
7/27/2019 Towards Visual SLAM in Dynamic Environments
1/12
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
2/12
Contents
1 Introduction 32 Sensor Error Treatment and Data Association in
SIFT SLAM 3
2.1 SIFT SLAM Strongly Trusts Sensor Data . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 5 2.2 Predictions for SIFT SLAM
in Dynamic Environments . . . . . . . . . . . . . . . . . . . . . .
6
3 Techniques for Improving Visual SLAM Performance 63.1 Tuning
Thresholds to Minimize Uncertainty . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 6 3.2 Identifying Outliers . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 3.3 Identifying Motion through Optical Flow . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 7
4 Optical Flow for Place Recognition 84.1 Common Infrastructure
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 8 4.2 Simple Demonstration of Keypoint Rejection . . . .
. . . . . . . . . . . . . . . . . . . . . . . 8 4.3 Use of Optical
Flow in Place Recognition . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 9 4.4 Choice of Optical Flow Scheme . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5 Conclusions 12
2
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
3/12
1 Introduction
To build autonomous robots capable of operating wherever humans
do, we must develop localization andmapping strategies that can
handle changing environments. Visual strategies are especially
desirable,
astheyhavethepotentialtoproducesubstantiallymoreusefulmapsthanotherapproaches(e.g.
withdenserfeatures at multiple height levels). Recent work by Se,
Lowe and Little has shown that current
machinevisiontechnologymakesvisualSLAMfeasible
inapotentiallywiderangeofstaticenvironments. However,their system
treats vision system errors in a manner which imposes a fundamental
limit on its ability tohandle
environments
with
motion.
In this paper, I first identify limitations of Se, Lowe and
Littles error handling approach common
to virtually all SLAM systems and, based on this analysis,
propose two techniques for overcoming theselimitations.
Ialsopresentathirdtechnique,basedonopticalflow,whichspecificallyaddressesthe
issueofvisual SLAM in dynamic environments. Finally, I discussa
proof-of-conceptsystem I built which
explorestheusefulnessofthisthirdtechniqueinthecontextofplacerecognition.
ItisworthnotingthattheoriginalfocusofmycourseprojectwastheuseofopticalflowtoenablevisualSLAM
in dynamic environments. While working with this idea, I made the
observations about Se, Loweand Littles errortreatment and possible
improvementsthat I outlined above; I believe these
observationsconstitutethemeatofmyproject.
2 Sensor Error Treatment and Data Association in SIFT SLAM
Virtually all metric SLAM systems operate by predicting relative
landmark positions based on relativelycoarse motion estimates,
interpreting sensor data to identify measured landmark positions
based on thoseestimates, and revising position accordingly.
Predicted landmark positions are a key element of the
dataassociationprocessinvirtuallyallmetricSLAMsystems,asfollows.
IfSLAM landmarkscannotbedistinguished by a sensor system other than
on the basis of their position (as with the flat region
landmarkstypicallyproducedbysonaror laserrangeanalysis),theymustbe
chosenverycarefullytoavoidconfusionwith other landmarks. In
practice, this has resulted in the use of a validation gate, a set
of thresholdsgoverninghowclose, inposition,a measured
landmarkmustbetoanexpected landmarkto be considereda match.
InSIFTSLAM,thevalidationgatetakestheformofapixelwindow(10x10inSe,LoweandLittlespaper)centeredonpredictedpositioninwhichlandmarksmustbetogetmatched,aswellassimilarconstraintsondisparityandSIFTscale(derivedfromdepth).
AlthoughSIFTSLAMincludesamatchingthresholdfortheSIFTorientationcomponentofalandmark,ameasureofitsactualimagecontent,thisthresholdisnotpartofthevalidationgate,asitsvaluehasnothingtodowiththepositionofthe
landmark. NotethatasSIFTfeature matching is a visual process, the
difference between matched and expected SIFT feature
positioncanbeviewedasanestimatefortheopticalfloworimagemotionatthelocationoftheSIFTfeaturebeingmatched.1
1It might perhaps be better to term the difference as measured
motion rather than optical flow, as sparse optical flow
issomewhatofanoxymoron,andoverloadsthetechnicaldefinitionsofopticalflow-
asopposedtomotionestimates- asapparent
3
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
4/12
TheparametersforthisgateimposehardlimitsontheperformanceoftheSLAMsysteminthefollowingways:
1. They imply a bound on the maximum odometry error that the
system can handle, as if odometryreadingsare sufficiently far off,
no landmarks previously known about by the sensor system will
fallwithinthevalidationgateboundaries.
2. Perhapsmore intuitively, they imply a maximum sensor error in
locating landmarks, as again if
thesensorsreadingforagivenlandmarkissufficientlyfaroff,itwillnotbecounted.
3. If the sensor system cannotdistinguish between landmarks at
all other than by their position - thatis, if a landmark is simply
a signal that is stably extractable from the world at a given
position the validation gate imposes a limit on the closeness of
landmarks. This is because if two
landmarkswerechosenwithoverlappingvalidationregions,theycouldnotbedistinguishedbythesystem.
NotethatinSIFTSLAM,thevisionsystemcandistinguishbetweenlandmarksonabasisotherthantheirposition;Iwilldiscussthe
implicationsofthis later.
4. They imply a limit on the motion resolution of the SLAM
system. That is, if the SLAM systemattempted to notice landmark
motion (either while moving, in which case the detected
landmarkmotion would be first computed relative to the robots
motion, or while stationary) it would onlybe able to do so for
landmarksmoving faster per sensorprocessing cycle than the
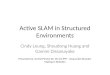
validation gate. Iattemptto illustratethisinthefigurebelow.
Inthisfigure,therobotisrepresentedbyMarioandaslowlymovingadversarybyWario.
Aslongaswariosmotioniswithinthegreyregion,correspondingtothevalidationgate,Mariowillthinkhispositionestimateisoffandadjustitaccordingly.
Whileotherlandmarksnotexhibitingthoseerrorsmight help to reduce the
impact of Wariosmotion, its effect will be nonzero,
andpossiblyquitesignificant.
motionof the brightnesspattern inan image.
4
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
5/12
2.1
SIFTSLAMStronglyTrustsSensorDataTheoverarchingconclusionofmanyofDavidLowesevaluationsofSIFTisthatitisremarkablyreliable;twoSIFTfeaturesarerelativelyrarelymatchedwhenthereal-worldobjectsonwhichthosefeaturesarelocateddonotlookthesametopeople.
ThestabilityresultsinhispaperindicatethatthemeasuredparametersofSIFTfeatures(theirscaleandorientation)arerelativelystableatleasttosmalldisplacements.
SIFTSLAMexploitsthisfactinitspositionestimationschemebyessentiallycircumventingthebulkoftraditional
EKF SLAM. It first treats the odometry reading as both the
measurement and prediction forthe robot pose, as opposedto treating
the odometry reading asthe prediction and the individual
positionobservationsfor landmarksasthe measurements. TheHmatrix for
theKalmanfilterSIFTSLAM usesissimplythe identity.
Itthenincorporateslandmarkpositionsbycomputingaleast-squaresbest-fitpositionminimizingerrorsbetweenpredicted
landmarkpixelcoordinates in itsviewandtheobservedones. Eventhis
processthrowsawayinformation,asthemeasureddepthsofthe
landmarksareusedonlyindirectly.
TheerrortermsbeingminimizedinSIFTSLAMarebelow,takenfromSe,LoweandLittlespaper,wherer
i
isthepredictedpixelrowpositionofmatched landmarki andrmi
isitsdetectedpixelposition:
eri =ri rmi (1)eci =ci cmi (2)
Althoughthedepthofalandmarkisusedtopredictthesevalues,SIFTscaleerror-
ameasurementanalogoustopixelpositionproducedbySIFT-
isnotdirectlyminimized.
Actually,SIFTSLAMcomputestwoleast-squaresfits,usingthefirstonetoidentifyoutliers(accordingtoastandardresidualmeasure,withathresholdof2pixels)andthesecondonetoproduceanestimateusingonlythenon-outliers.
SIFTSLAMthenapparentlycomputesameasureofthequalityoftheleast-squaresfitandtreatsitasakindofmeasurementuncertainty,addingittothepositionuncertaintypredictedfromitsmotionmodel.
ItthenfeedsthistotaluncertaintyestimateintoaKalman-filter-likeprocedure,whoseactualequivalencetoanEKFIhavenotbeenabletoverify,toweighttheleast-squarespositionestimateandtheodometryestimate.TheoutputisapositionestimatealongwithapositionuncertaintywhichislaterfedintoindependentEKFsfortheeachtrackedlandmark.
This structure reflects a strong trust in sensor readings in two
main ways. First, its definition of anoutlier in the least-squares
procedure is quite stringent. This means all the offsets in
measured
positionsmustbequitecoherent,reflectingprimarilymotionandnotsensorerror.
This isasomewhatsubtle point,which I have not had the opportunity
to verify in simulation, but worth investigating further. Second,
itdoesnotapplyafullEKFtotheSLAMproblem;instead,itdecouplesitintoposeestimationandlandmarkestimation,restrictinglandmarkuncertaintytobeindependent(alaFastSLAM).Thechoicetothrowawaythese
sources of information reflects the confidence the SIFT SLAM
designers had in the quality of SIFTmatching. Italsoraisesthe
issuethattheuncertaintyestimatesproducedbySIFTSLAMdonotmeanthesamethingsastheuncertaintyestimatesproducedbymanyothermetricSLAMalgorithms.
It would be interesting to check if the position estimates
produced by SIFT SLAM vary significantly
5
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
6/12
from the least squares estimates produced by its vision system;
if so, SIFT SLAM would be trusting itssensorsalmostabsolutely.
ItisalsoworthnotingthatthesensorerrormodelusedbySIFTSLAMintheper-landmarkEKFsuse
anarbitrarilychosenvarianceof1pixel; this value isquite
low,anotherreflectionof confidence. It is not as compelling,
however,because SIFT SLAM does not appear to use its
landmarkEKFsforformuch,givenitsdecouplingofthestateestimation.2.2
Predictions forSIFTSLAM inDynamicEnvironmentsThespecificchoicesmade
inSIFTSLAMsuggestitwillactuallyperformreasonablywellindynamicenvironments,
as long as motion is fast enoughthat it doesnt introduce the
validation gate errorsI discussedearlier. This is because if a
landmark is not matched (when expected) enough times, SIFT SLAM
throwsit away; landmarks on a moving person, then, are likely to
get thrown out if the person moves too much.If a person movesslowly
for awhile, it could conceivablycorrupt the robots position
estimate a bit, but
combinedwiththepossibilityofrejectionasanoutlierintheleast-squaresestimate-
itseemsunlikelythatthemajorityofmovingbodieswillconfuseSIFTSLAM.
AninterestingexercisewouldbetopredictthemotionthresholdsimpliedbySIFTSLAMserrorhandlingchoicestodetermine
whatamountofmotion ina scene is likely to fool it, orwhether
ornotsufficientlyslowmotionislikelytobeaprobleminanyrealSLAMscenarios.
3 Techniques for Improving Visual SLAM Performance
TheaboveanalysissuggestsseveralpossibleimprovementstoSIFTSLAM.SomeofthesemayevenbeusableinotherSLAMsystems.3.1
TuningThresholds toMinimizeUncertaintyThe default threshold values
provided in SIFT are were apparently set by Se, Lowe and Little
based ontheir experience with the SIFT system. It is not at all
clear that they were optimally chosen. Given
theuncertaintymeasurementsproducedbyvirtuallyallmetricSLAMalgorithms,however,itshouldbepossibletosearchforbetterthresholdvalues,perhapsonaperenvironmentbasis.
Anaivescheme fordoingsowould involverunningSIFT
SLAM(orperhapsaverysimilarSIFT-basedSLAMsetup usingFastSLAMat its
core)andmeasurepositionortotaluncertainty(e.g.
covariancemagnitudeorparticleentropy)forvariouschoicesofvalidationgatevalues,matchingthresholds,andlandmarktrackingmiss
countthresholds. The thresholds which producedthe best output atthe
end ofa run
couldthenbeusedinfutureSLAMscenariosinasimilarenvironment.
Alternately,ifthecostofevaluatingmultiplethresholdsissmall,thethresholdscouldbesetadaptively(perhapseveryfewframes)overthecourseofagivenSLAMtask.
Thismighthelp
improveSLAMperformanceintaskswhereSIFTperformancevaries,suchastransitionfromregionswith
identifyingmarksonwallstofairlyhomogeneousones.
Ofcourse,itisnotclearthatminimizinganuncertaintymeasurewillactuallyimproveSLAMaccuracy,astheworldmightconspiretoproduce
sensorreadingswith loweruncertainty inan incorrect location.
Infact,themotion/validationgateproblemIdiscussaboveisaninstanceofthis,whereminimizinguncertainty
6
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
7/12
via standard SLAM approachesnaively results in erroneousposition
estimates. However, it is not clear ifthiswillbeaproblem
inrealworldapplications,and
intheworstcasetuningthresholdsduringtrainingSLAMrunswhereabsolutepositioncanbetrackedmightstillimproveSLAMperformance.3.2
IdentifyingOutliersThecentralideabehindmostmetricSLAMsystemsisthatmotionerrorsshouldbeconsistentlyreflectedindeviations
from predicted and measured landmark positions (modulo sensor
uncertainty). Therefore,
eveninthepresenceofslowlymovingobjects,thevastmajorityofthelandmarksinasceneshoulddeviatefrompredictedvaluesinaconsistentmanner.
Relativemotionofsomelandmarksshouldshowupasaclusteroflandmarkswithadifferent(but
internallyconsistent)kindofdeviationfrommotionerror.
If these clusters could be programmatically detected, they could
be used to rule out deviations fromprediction which are more likely
to correspond to landmark motion than robot motion error.
IdentifyingtheseclustersviaPCAorevensomekindofregressionmightbepossible.
Oneinterestingquestioniswhetheror not the least-squares fit with
rejection of outliers in SIFT SLAM actually produces this effect to
somedegree.3.3 IdentifyingMotionthroughOpticalFlowA central problem
for SLAM in dynamic environments is the rejection of landmarks
which actually lie onmovingobjects. Therationale issimple: if
landmarksseemto move,anySLAMschemewill
interpretthismotionasanerrorinitspositionestimates,anderroneouslyrevisethem.
The problem, then, is to avoid selecting landmarks on things
which can move. A reasonablefirst steptowards this goal, reachable
given current machine vision technology, is to avoid selecting
landmarks onobjectswhicharemoving.
Asoutlinedabove,thisproblemiscurrentlyintractablewhentherobotperformingSLAMismoving,asitcannotdistinguishbetweensmallerrorsinitssensorapparatusormotionmodelandsmall
motions. A workable solution, however, may be to only assign new
landmarks when the robot
isstationary,andsensoruncertaintyisthereforesmall,soallmeasuredmotionoflandmarkcandidatesislikelytocorrespondtoreallandmarkmotion.
The measurement of landmark motion could proceed in at least two
ways. First note that he latestincarnation of SIFT includes
keypoint descriptors, a better measure of feature content than the
SIFTorientationsusedinSIFTSLAM.Ifkeypointdescriptorscanbematchedreliably,itwouldbeinterestingtoseehowSLAMperformanceisaffectedbyonlyusingmatchingthresholdsonSIFTproperties,notpositionalproperties.
Ifthisdidnotresultinlargenumbersoffalsematches,theSIFTsystemcouldthenuselandmarkmatchingtoestimatelandmarkmotionwhentherobotisstationary,andrejectthoselandmarkswhichmovedmorethan
some verysmall amount. This wouldessentially amount to setting the
validation gateto
someverylowvalueaslongastherobotisstationary,drivingthespeedneededtoconfusethesystemtoavaluelowenoughsoastobe
irrelevant.
Aslongasthesystemdidnotacquirenewlandmarkswhilemoving(stoppingtoacquirenewlandmarkswhenever
necessary), the system would be much less foolable by motion in the
environment. Given thedensityof
landmarksextractedviaSIFT(asdemonstrated
inSe,LoweandLittlespaper),thisshouldnot
7
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
8/12
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
9/12
Thesystemexecutableiscalledsimple.
Itacceptstwocommand-linearguments.
Thefirstistheprefixforthefilenameofallthe
frames,andthesecondisthenumberofframes.
Framefilenamesmustbeoftheform.pgm;framenumbersmuststartat0.
Forexample,torunthesystemonthefirst40framesofamoviewherethefirstframeisfoo000000.pgm,thecommandlineissimple
foo 40.
Thematchingcriteriausedbythesystem3
areasfollows(withallcountsinitially0):1. Ifafeatureismatchedatan
imagepointwithflowbelowthecurrentthreshold,set itscountsto0.2.
Ifafeatureismatchedatanimagepointwithflowabovethe currentthreshold,
incrementitsmoved
count. Ifthisexceedsthemovementthreshold,discardit.3.
Ifafeatureisnotmatchedatall,incrementitsmissedcount.
Ifthisexceedsthemissthreshold,discard
it.NotethatthesethresholdsareanalogoustothoseintheSIFTlandmarktrackingsystem.
Theresultsof
runningthissystemonframes500-550ofthePoolSharkentrytotheIRTC-
extractedfromtheincludedfilepoolshrk.mpg -
forthefirst39framesisshownbelow:
Courtesy of Neil Alexander. Used with permission.
The image on the left shows all keypoints found in the first
frame. The middle image shows
thosekeypointswhichsurvivedgivenaflowthresholdof30(essentiallyarbitrarilylargeflow),amovedthresholdof5framesandamissthresholdof10frames.
Theimageontherightshowsthosekeypointswhichsurvivedgivenaflowthresholdof0.1(essentiallynoflow).
All landmarksonthemovingpersonhavebeenpruned.
Thisservesasausefulproofofconceptoftheusefulnessofanopticalflowschemeforrejectingfeaturesonmovingbodies.4.3
UseofOpticalFlow inPlaceRecognitionThe secondsystemI built tests
the usefulness ofopticalflow for rejecting spurious features in the
contextofanaiveplacerecognitionsystem. Itshouldbenotedthatthe
usefulnessofflow in
thecontextofSLAMisnotatallmeasuredbytheseresults;adetailedexplanationofmyrationaleis
includedbelow.
Thenaiveplacerecognitionsystem,embodiedintheexecutableplacerec,operatesontwoinputmovies(specified
as for the simple optical flowdemo above). The first is the
training movie, containingan image
3Intraditionalbad-qualityresearchcodingstyle,theseareset
inthecode;thecurrentbuildofsimpleissettoanextremelyforgivingoptical
flowthreshold essentiallycorrespondingtonouse offlow. Cest
lavie.
9
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
10/12
sequence fromwhich featureswill beextracteddefining theplace.
The second isthe testmoviewhich
willbecomparedagainstthetrainingsequenceonaframe-by-framebasis.
Theplacerecognitionsystemisextremelynaive.
Itbuildsupaplacedefinitionbyperformingthesameprocessasthesimpledemoabove-
that is,
itdefinesaplacetobeacollectionofkeypointsextractedfromthefirstplaceframewhichwerestablymatched(andstationary)overtheentiretrainingsequence.
Foreachtestframe,itappliesthefollowingprocedure:
1. Extractthekeypointsfromtheframe.2. Foreachkeypoint,determine
if itlies inaregionwithflowbelowacertainthreshold. Ifso,keepit.3.
Storethenumberofkeptkeypoints.4. For each kept keypoint, check if
it matches a keypoint in the place definition. If so, increment
the
numberofmatches.5. Ifthepercentofmatches-
thatis,thepercentofkeptkeypointswhichmatchedakeypointintheplace
- exceedsathreshold,declaretheframetobefromthetrainingplace.The
idea is straightforwardenough: determine which keypoints correspond
to environmental rather
thantransientfeatures,andcheckhowmanyofthemmatch.
Itisnaivechieflyinthatitdoesnotattemptto weight features according
to how informative they are, and that it has a single simple
threshold fordeclaringamatch.
Snapshotsofthefeaturesselectedbythesystemfromamovietakeninanapartment
inSomervilleareshownbelow.
Theimageonthetopleftshowsthekeypointsextractedfromthefirst30framesofthetrainingmovie(dh-still).
Theimageonthetoprightshowsthefeaturesidentifiedinframe20withoutopticalflowpruning;notethefeaturesontheinterloper.
Theimageonthebottomleftshowstheopticalflowgeneratedbytheinterlopersdistractingdancemoves,andtheimageonthebottomrightshowsthefeaturesidentifiedgivenanopticalflowthresholdof1.0.
10
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
11/12
Givena matchingthresholdof20%,opticalflowpruning
improvedrecognitionperformancebyroughly13%(froma43%framerecognitionratetoa56%framerecognitionrateonasequenceof30frames).
Theaveragepercentofmatchesincreaesdbyroughly2%.
Opticalflowonlyresultedinasmallincreaseinperformanceprimarilybecausethereal-worldtestmoviesdid
not include enough motion distractors. A secondary factor was,
again, the naive nature of the placerecognitionscheme.
AnHMMapproachwithoutflowwouldeitherbeconfusedbyfeaturesonmovingobjects(notpresentinallfootageofagivenplace)orwouldassignthosefeatureslowprobability;opticalflowcouldpotentiallyprunethosefeaturesentirely.
ThesystemwasalsotestedonvideofootagefromMITsLobby7aswellasothersequencesfromthesameapartmentinSomerville.
Forthemajorityofthesescenes,placerecognitionperformanceingeneralwaspoorenough(that
is, few enoughkeypointsmatchedunambiguously)that the system
couldntaffordto
discardkeypointsbasedonopticalflow;thefewpointsdiscardedduetoerrorsintheopticalflowcomputationweretoocostly4.
Thispoorperformancewasprimarilyduetotwofactors:1. The resolution
of the movies produced by the Quickcam was 160x128; the SIFT
feature count was
fairlylowtobeginwith. with.2. Thecameraplacementcompoundedthe
lowfeatureproblembyincludinglargehomogeneousregions.
These regions result in ambiguous matches (in the absence of
position information as provided
bystereopsis)whicharerejectedbythekeypointmatchingprocedureIoutlinedabove.
4.4
ChoiceofOpticalFlowSchemeItshouldbenotedthatitwouldhavealsobeenpossibletouseSIFTfeaturematchingtoapproximateimagemotion
insteadofappealingtoHorn-Schunck. Thiswasnotdone initiallyasthe
ideadid notoccurtome.However,it
isnotclearthatSIFTmatchingwouldhaveperformedbetter.
4Detailed resultson these test movies was not tabulated, as
these were not relevant to the mainthrust of the project,
andwouldnotbetoo informative in anycasegiven thesimplicityofthe
placerecognition approach.
11
-
7/27/2019 Towards Visual SLAM in Dynamic Environments
12/12
5
ThestrengthinSIFTliesinitsfeaturedensity,permittingsubstantialmatchingerrorssuchasomissionsor
mismatchesto be dwarfedby the number of correctmatches in
recognitiontasks. The precise locationof individual SIFT features,
however, is not terribly stable; changes in the overall image
content such astheadditionofnewobjectsorsmallfluctuations
inbrightnesscancauseindividual
feaurestojumpseveralpixelsorvanishentirely. Theseerrorsareevident
inthefeaturelocationmoviesIprovided.
InSIFTSLAM,theerrorsintroducedbythesejumpsareminimizedduetotheuseof3Dfeaturepositionin
all matching tasks along with moderately stringent rejection
thresholds. In a typical place
recognitionscenario,however,thecamerapositionisnotknown;theonlyconstraintisthattheviewfromwhichaplaceistoberecognizedoverlapssubstantiallywithtrainingviews.
Geometricinformationisthereforeunavailableandcannotbeusedtoaidinthematchingtask.
While I could have designed a special-purpose SIFT matching
approach incorporating the particularconstraints of optical flow in
the place-recognition context, this did not seem particularly
relevant to myoverallgoals.
Horn-Schuncksopticalflowscheme,ontheotherhand,isformulatedtoincorporatesubstantialgeometricinformation.
Conclusions
In this paper, I argued thatvalidation gates impose fundamental
limits on SLAM accuracy, es-pecially in the presence of motion. I
suggestedseveraltechniques for addressing this issue as well
asothererrorhandling issues in SLAM, such astuning thresholds to
minimize uncertainty,detectingoutlying displacements, and pruning
landmarks based on optical flow. Finally, Ibuilt and de-scribed two
systems using optical flow to prune landmarks
andtestedtheminthecontextofanaiveapproachtoplacerecognition.
TheconjecturesinthispapercannotbetestedwithoutareimplmentationoftheSIFTSLAMsystem.
Asuccessfulreimplementationwhichwascapableofnavigatinginnoisyenvironments,suchasLobby7duringlunchtime,wouldconstituteasignificantcontributioninrobotics.
Ihaveconfidencethatsomecombinationoftheideasinthispaper(orperhapsevenanonlyslightlymodifiedversionofSIFTSLAMitself)wouldbeabletoachievethatgoal,andIhopetohavethechancetoinvestigatethisinthefuture.
12



![DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments · meanwhile providing a semantic presentation of the octo-tree map [8], which could be employed for high-level tasks](https://img.dokumen.tips/doc/110x75/5fb0b205986bcd68d3419468/ds-slam-a-semantic-visual-slam-towards-dynamic-environments-meanwhile-providing.jpg)