Embed Size (px)
Citation preview
Seminarausarbeitungen
Tits-Gebäude
Wintersemester 2007/2008
Betreut von Ralf Gramlich und Max Horn
Inhaltsverzeichnis
1 Coxetergruppen 4James Davey, Martin Franz1.1 Grundlegende Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1 Monoide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2 Gruppe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Coxetergruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Wortlänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4 Coxetermatrix und Coxeterdiagramm . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5 Beispiele für unendliche Coxetergruppen . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Endliche Spiegelungsgruppen 14Christian Puchert, Mohamed Madmar2.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2 Definitionen und Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4 Klassifikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Zellzerlegung 23Timo Jährling, Dequan Zeng3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2 Zellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3 Abgeschlossene Zellen und die Seitenrelation . . . . . . . . . . . . . . . . . . . . . . . 243.4 Panele und Wände . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.5 Simpliziale Kegel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.6 Eine Bedingung dafür, dass eine Kammer simplizial ist . . . . . . . . . . . . . . . . . . 273.7 Formale Eigenschaften der halbgeordneten Zellenmenge . . . . . . . . . . . . . . . . . 283.8 Der Kammerngraph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 The Simplicial Complex of a Reflection Group 31Nicolas Weber4.1 Prerequisites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2 The Action of W on Σ(W,V) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.3 The Longest Element of W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.4 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.5 Chambers are Simplicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.6 The Poset Σ as a Simplicial Complex . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2
Inhaltsverzeichnis
5 Buildings as Chamber Complexes 37Silke Möser5.1 Definition and First Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.2 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.3 The Building Associated to a Vector Space . . . . . . . . . . . . . . . . . . . . . . . . . 41
6 Weylabstand und Homotopietyp eines Gebäudes 44Stefan Witzel6.1 Weylabstand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.2 Homotopietyp eines Gebäudes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.2.1 Topologische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2.2 Gebäudetheoretische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . 496.2.3 Beweis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7 Buildings as W-Metric Spaces 52Nikoleta Hadzhitvanova, Dimitar Mechev, Veneta Velyanova7.1 Buildings of Type (W, S ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
7.1.1 Galleries and Words . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 547.2 Buildings as Chamber Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557.3 Residues and Projections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.3.1 J-Residues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 567.3.2 Projections and the Gate Property . . . . . . . . . . . . . . . . . . . . . . . . . 57
8 Euclidean Reflection Groups 61KyuSung Choi8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 618.2 Euclidean Reflection Groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.2.1 Affine Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 618.2.2 Formulas for Affine Reflections . . . . . . . . . . . . . . . . . . . . . . . . . . 628.2.3 Affine Reflection Groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 638.2.4 Finiteness Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 648.2.5 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits 66Dominik Plümacher9.1 Geodäten und CAT(0)-Räume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.2 Euklidische Gebäude als metrische Räume . . . . . . . . . . . . . . . . . . . . . . . . . 699.3 Der Fixpunktsatz von Bruhat und Tits . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Literaturverzeichnis 78
3
Kapitel 1CoxetergruppenJames Davey, Martin Franz, 18.02.2008
Basierend auf: Kapitel 2 aus [Wei03]
In diesem Kapitel werden Coxetergruppen aus algebraischer Sicht eingeführt und mit Beispielen ver-anschaulicht. Zunächst wird einiges an Vorarbeit geleistet und grundlegende Definitionen wiederholt,bevor anschließend Coxetergruppen hergeleitet werden. Danach werden Coxetermatrizen und Coxeter-diagramme vorgestellt. Zum Schluss folgen einige Eigenschaften sowie eine Diskussion der Endlichkeitvon Coxetergruppen.
1.1 Grundlegende Definitionen
In diesem Abschnitt möchten wir zunächst die mathematischen Grundlagen zusammentragen, auf denender Rest des Kapitels aufbaut.
1.1.1 Monoide
Die algebraische Struktur, über die wir zu den Coxetergruppen wollen, ist die des Monoids:
Definition 1.1.1. Ein Monoid ist eine Menge M zusammen mit einer binären Operation ◦ und einemausgezeichneten Element 1 ∈ M, welches die folgenden Bedingungen erfüllt:
(i) ∀s, r ∈ M gilt s ◦ r ∈ M ( Abgeschlossenheit ),
(ii) ∀s, r, q ∈ M gilt (s ◦ r) ◦ q = s ◦ (r ◦ q) ( Assoziativität ),
(iii) ∀s ∈ M gilt 1 ◦ s = 1 = s ◦ 1 ( neutrales Element ).
Für Ausdrücke der Forms ◦ s ◦ · · · ◦ s︸ ︷︷ ︸
n
werden wir auch abkürzend sn verwenden.Beispiele für Monoide sind die natürlichen Zahlen N zusammen mit der üblichen Multiplikation und
dem neutralen Element 1, sowie die Menge N0 = N∪ {0} zusammen mit der üblichen Addition und demneutralen Element 0.
Für uns ist nun eine ganz bestimmte Klasse von Monoiden interessant, die so genannten freien Mo-noide.
Definition 1.1.2. Ein Monoid M heißt frei, wenn es eine Teilmenge S ⊂ M gibt, so dass sich jedesElement von M eindeutig als ein endliches Produkt von Elementen aus S darstellen lässt.
4

1 Coxetergruppen
1.1.2 Gruppe
Es ist zu beachten, dass die Elemente eines Monoids nicht unbedingt ein Inverses besitzen müssen.Gruppen sind nun Monoide, bei denen jedes Element ein Inverses besitzt:
Definition 1.1.3. Eine Gruppe besteht aus einer Menge G und einer assoziativen binären Operation aufG, die ein neutrales Element hat und für die jedes Element von G ein inverses besitzt.
Definition 1.1.4. Eine Gruppe G heißt endlich, wenn sie endlich viele Elemente enthält. In diesem Fallnennen wir die Anzahl an Elementen die Ordnung der Gruppe, und bezeichnen diese mit |G|. Falls Gnicht endlich viele Elemente enthält, nennen wir G unendlich und bezeichnen dies mit |G| = ∞.
Definition 1.1.5. Die Ordnung eines Elements g einer Gruppe G ist die kleinste natürliche Zahl n ∈ Nfür die gn = 1 gilt. Wir schreiben in diesem Fall |g| = n. Wenn keine solche Zahl n existiert, dann hat gunendliche Ordnung und wir schreiben |g| = ∞.
Sei G eine Gruppe und g ∈ G ein Element der Ordnung n für ein n ∈ N. Dann sind die Elemente derMenge {gi|i = 1, . . . , n} alle in G enthalten. Sie bilden sogar eine Untergruppe von G. Falls |g| = ∞ dannsind alle Elemente der Menge {gi|i ∈ N} in G enthalten. Eine Gruppe G, die ein Element unendlicherOrdnung besitzt, ist also unendlich.
Da der Begriff der Gruppe schon bekannt sein sollte, verzichten wir an dieser Stelle auf weitere Bei-spiele und gehen direkt zur Herleitung der Coxetergruppen über.
1.2 Coxetergruppen
Sei S eine beliebige, aber endliche Menge von Erzeugern (S könnte auch unendlich sein, in dieser Arbeitbeschränken wir uns auf den endlichen Fall). Aus dieser Menge S konstruieren wir nun eine Menge M,die alle endlichen Verkettungen von Elementen von S enthält. Also
M = {k | k ist eine endliche Verkettung von Elementen aus S }. (1.2.1)
Die Elemente von S nennen wir auch Buchstaben, die der Menge M Wörter (über S ). Das leere Wortbezeichnen wir mit 1. Es ist leicht einzusehen, dass die Verkettung von Wörtern assoziativ ist und, dass1 die Neutralitätsbedingung erfüllt. Die Menge M ist auch nach Definition gegenüber Verkettung abge-schlossen. M ist also ein freies Monoid über S . Wir werden sehen, dass freie Monoide Coxetergruppenzugrunde liegen.
Beispiel 1.2.1. Sei S = {s1, s2}. Die oben definierte Menge M enthält dann als Elemente das leere Wort,die Elemente aus S , sowie unendlich viele (aber endlich lange) Verkettungen von Elementen aus S wiez.B. s1s1, s2s2, s1s2, s2s1, s1s2s1s2, und so weiter.
Als nächster Schritt wird eine Funktion definiert, über die wir aus M eine neue Menge gewinnenkönnen, die sogar die Eigenschaften einer Gruppe aufweist. Sei also m eine Funktion von S × S in dieMenge der natürlichen Zahlen zusammen mit dem Symbol∞. Also
m : S × S → N ∪ {∞} mit m(s, t) ∈ N ∪ {∞}, wobei m(s, s) = 1 und m(s, t) = m(t, s) ≥ 2
gelten soll für alle s, t ∈ S mit s , t.Für die Werte m(s, t) werden wir auch häufig abkürzend ms,t schreiben. Durch die Funktion m werden
nun die Elemente von M durch Relationen so miteinander verknüpft, dass gilt:
für alle s, t ∈ S ist (st)ms,t = 1, falls ms,t , ∞. (1.2.2)
Im Sonderfall s = t gilt also (ss)ms,s = (ss)1 = ss = 1. Wenn ms,t = ∞ dann existiert keine verknüp-fende Relation zwischen den Elementen s und t.
5

1 Coxetergruppen
Beispiel 1.2.2. Sei S die zweielementige Menge, die wie im obigen Beispiel definiert ist. Wir definierennun die Funktion m : S × S → N ∪ {∞} wie folgt:
m(s1, s1) = 1, m(s2, s2) = 1, m(s1, s2) = 3, m(s2, s1) = 3.
Dies ergibt die Relationen
s1s1 = 1, s2s2 = 1, s1s2s1s2s1s2 = 1 und s2s1s2s1s2s1 = 1.
Durch die Einführung dieser Relationen lassen sich die Elemente der aus S erzeugten Wörter verein-fachen, indem man Bereiche (Teilwörter) zunächst gegebenenfalls umformt, und dann Teilwörter kürztdie sich durch die neue Relation zu 1 ergeben. Diesen Prozess nennen wir das Reduzieren von Wörtern.
Beispiel 1.2.3. In unserem Beispiel lässt sich z.B. im Wort s2s1s2s1s2s1s2 das Teilwort s1s2s1s2s1s2durch 1 ersetzen. Somit erhält man durch Reduzieren s2s1s2s1s2s1s2 = s2.
Aus den Relationen 1.2.2 ergibt sich nun eine Relation ∼m auf M. Zwei Wörter a, b ∈ M nennen wiräquivalent, wenn sich a mittels 1.2.2 durch Einfügen oder Löschen in b umformen lässt. Es ist leicht zusehen, dass ∼m eine Äquivalenzrelation ist.
Mit ∼m lassen sich also die Wörter aus M in Äquivalenzklassen einteilen. Damit ergibt sich eine neueMenge W:
W = M/ ∼m . (1.2.3)
Zwei Elemente aus W können nun wieder miteinander multipliziert werden, indem zwei ihrer Re-präsentanten über die Verkettung in M miteinander multipliziert werden. Bezüglich dieser Operationergibt sich auch wieder ein neutrales Element in W: Die Äquivalenzklasse, in der 1 ∈ M enthalten ist.Diese Klasse nennen wir der Einfachheit halber wieder 1. Wenn wir weiter im Folgenden von einemWort w ∈ W sprechen, sprechen wir damit gleichfalls von einem beliebigen Repräsentanten für w, alsow = s1s2 · · · sn für geeignete Elemente si ∈ S und n ∈ N.
Satz 1.2.4. Die so definierte Menge W ist eine Gruppe.
Beweis. Die angegebene Operation in W ist wohldefiniert, denn wenn m1 ∼m m2 für zwei m1,m2 ∈ M,so kann m1 über die Relationen in m2 umgeformt werden. Diese Umformungen können auch auf jedeVerkettung ym1 (sowie m1y) mit y ∈ M angewendet werden, so dass sich daraus ym2 (bzw. m2y) ergibt.Das neutrale Element dieser Gruppe ist nach Definition 1. Da M ein Monoid ist, ist die Verkettung inM assoziativ, und daher auch als Operation in W. Ist nun ein Element w ∈ W mit Repräsentation w = sgegeben, so wissen wir bereits, dass wegen ss = 1 auch ww = 1 und damit w zu sich selbst invers ist.Gilt w = s1s2 · · · sn mit s1, . . . , sn ∈ S , so ergibt sich das Inverse w−1 zu w−1 = sn · · · s2s1, denn wegenss = 1 für alle s ∈ S gilt
ww−1 = s1s2 · · · sn−1snsnsn−1 · · · s2s1
= s1s2 · · · sn−1sn−1 · · · s2s1...
= s1s1 = 1.
Analog sieht man auch, dass w−1w = 1 gilt. �
Wie im Beweis gesehen, gilt dass die Elemente von S zu sich selbst invers sind. Solche Elementenennt man auch Involutionen.
Beispiel 1.2.5. Um unser Beispiel von oben zu vervollständigen, behaupten wir nun, dass W die folgen-den Elemente enthält:
W = {1, s1, s2, s1s2, s2s1, s1s2s1}.
6
1 Coxetergruppen
Beweis. Das Ziel ist es, für jedes Element von W einen Repräsentanten zu finden. Wegen sisi = 1 füri = 1, 2 müssen wir nur Elemente betrachten, die als alternierende Verkettungen von s1 und s2 darstellbarsind. Neben 1 gibt es nur die folgende Möglichkeiten:
s1, s1s2, s1s2s1, s1s2s1s2, s1s2s1s2s1 und s2, s2s1, s2s1s2, s2s1s2s1, s2s1s2s1s2,
Denn wegen m(s1, s2) = m(s2, s1) = 3 und damit z.B. s1s2s1s2s1s2 = 1 können alle Ketten mit mehr als5 Elementen wie im letzten Beispiel auf die oben genannten Elementen reduziert werden.
Diese Gleichungen folgen dann aus (s2s1)3 = 1 und (s1s2)3 = 1:
(s2s1)(s2s1s2s1) = 1 ⇔ (s2s1)(s2s1s2s1)(s1s2s1s2) = s1s2s1s2 ⇔ s2s1 = s1s2s1s2(s1s2)(s1s2s1s2) = 1 ⇔ (s1s2)(s1s2s1s2)(s2s1s2s1) = s2s1s2s1 ⇔ s1s2 = s2s1s2s1s2(s1s2s1s2s1) = 1 ⇔ s2(s1s2s1s2s1)(s2s1s2s1s2) = s2s1s2s1s2 ⇔ s2 = s2s1s2s1s2s1(s2s1s2s1s2) = 1 ⇔ s1(s2s1s2s1s2)(s1s2s1s2s1) = s1s2s1s2s1 ⇔ s1 = s1s2s1s2s1s1s2s1 = s1s2s1 ⇔ s1s2s1 = s1s2s1(s1s2s1s2s1s2) ⇔ s1s2s1 = s2s1s2.
Wenn wir die redundanten Elemente aus der obigen Liste entfernen, bekommen wir W wie gewünscht.�
Nun können wir den Begriff der Coxetergruppe definieren:
Definition 1.2.6. Eine solche Gruppe W, die aus einem freien Monoid und Relationen der Form 1.2.2entsteht, nennen wir eine Coxetergruppe.
Eine Coxetergruppe ist also im Wesentlichen eine Menge W, die aus einer Menge von ErzeugernS mit Relationen wie in 1.2.2 erzeugt wurde. Es existiert Beispiele Coxetergruppen W1 und W2 mitden jeweiligen Erzeugendenmengen S 1 und S 2, so dass W1 � W2 gilt, aber S 1 � S 2. Da für eineCoxetergruppe W nicht immer implizit aus dem Zusammenhang klar ist, aus welcher ErzeugendenmengeS sie erzeugt wurde, werden S und W häufig als Paar zusammen angegeben:
Definition 1.2.7. Das Paar (W, S ) nennen wir Coxetersystem.
Es gibt auch noch eine weitere Form die Relationen 1.2.2 anzugeben:
Satz 1.2.8. Für alle s, t ∈ S , falls ms,t , ∞, dann gilt (st)ms,t = 1 genau dann, wenn
ststs . . .︸ ︷︷ ︸ms,t Elemente
= tstst . . .︸ ︷︷ ︸ms,t Elemente
.
Beweis. Seien s, t ∈ S beliebig gegeben."⇒": Wird die Gleichung (st)ms,t = 1 genau ms,t mal abwechselnd mit s und dann mit t von links multi-pliziert, erhält man die gewünschte Gleichung sts . . . = tst . . . mit ms,t Elementen auf beiden Seiten."⇐": Nach Ausmultiplizieren erhält man:
(st)ms,t = stst . . . st︸ ︷︷ ︸2ms,t Elemente
.
Ersetzt man hier das erste Vorkommen von
ststs . . .︸ ︷︷ ︸ms,t Elemente
durch tstst . . .︸ ︷︷ ︸ms,t Elemente
erhält man (tst . . . ts)(sts . . . st) für ms,t gerade und (tst . . . st)(tst . . . st) für ms,t ungerade woraus mansukzessiv mit ss = 1 und tt = 1 kürzen kann. Somit erhält man (st)ms,t = 1. �
Statt also der Relation (st)ms,t = 1 hätte bei der Definition der Coxetergruppen also auch gleichwertigdie Relation sts . . . = tst . . . mit ms,t Elementen auf beiden Seiten verwendet werden können. Eine wei-tere erwähnenswerte Folgerung ist der Fall ms,t = 2. Hier gilt laut dem Satz st = ts. Mit anderen Worten,die Elemente s und t kommutieren.
7
1 Coxetergruppen
1.3 Wortlänge
Wenn wir ein Wort k = s1s2 · · · sn ∈ M betrachten, so können wir die Länge lM(k) dieses Wortes k alsdie Anzahl n von Elementen si definieren. Dieser Längenbegriff kann auch auf die Gruppe W übertragenwerden. Dazu betrachten wir zunächst die Länge aller Wörter k ∈ M einer Äquivalenzklasse, die dasgleiche Wort w ∈ W repräsentieren. Diese Längen müssen nicht gleich sein. Da diese Äquivalenzklasseallerdings immer mindestens ein Wort enthält, können wir aus allen in ihr enthaltenen Wörtern aber einWort k auswählen, so dass die Anzahl der in diesem Wort vorkommenden Buchstaben lM(k) minimalist. Ein solches Wort nennen wir auch reduziertes Wort. Es ist wichtig zu bemerken, dass ein solchesreduziertes Wort im Allgemeinen für seine Äquivalenzklasse nicht eindeutig ist. Hiermit lässt sich nunaber die Länge eines Wortes w ∈ W definieren:
Definition 1.3.1. Unter der Länge eines Wortes w ∈ W verstehen wir die Anzahl der Elemente allerreduzierten Wörter k ∈ M in der Äquivalenzklasse w. Für die Länge des Wortes w ∈ W schreiben wirauch kurz l(w).
Wählen wir als Repräsentanten für ein Wort w ∈ W ein reduziertes Wort k ∈ M, gelte also l(w) = lM(k).Wenn wir im Folgenden für ein Wort w ∈ W eine Repräsentation w = s1s2 · · · sn verwenden, so sei damitimmer ein reduziertes Wort gemeint, sofern nicht explizit anders angegeben.
Es fällt auf, dass wenn zwei Wörter in M das selbe Wort in W repräsentieren, sie entweder beidegerade oder ungerade Länge haben. Weitere interessante Eigenschaften sind die folgenden:
Satz 1.3.2. Seien v,w ∈ W. Dann gilt für die Längen dieser Wörter:
(i) l(vw) ≤ l(v) + l(w)
(ii) l(w−1) = l(w)
(iii) l(w) = 0⇔ w = 1
(iv) l(w) = 1⇔ es existiert ein s ∈ S , so dass s ein Repräsentant für w ist
Beweis. (i) Seien a, b ∈ M zwei Repräsentanten minimaler Länge für v und w. Es ist offensichtlich,dass für die Verkettung ab von a und b in M die Gleichheit gilt: lM(ab) = lM(a) + lM(b). Daab die Klasse vw repräsentiert, hat damit auch ein Repräsentant minimaler Länge der Klasse vwhöchstens die Länge lM(ab). Da durch die Relationen 1.2.2 ab nun aber reduziert werden könnte,kann die Länge von vw auch kleiner als die Summe l(v) + l(w) werden.
(ii) Wie wir im Beweis zu Satz 1.2.6 gesehen haben, ist für ein Element w = s1s2 · · · sn, s1, . . . , sn ∈ Sdas Inverse gegeben durch w−1 = sn · · · s2s1. Damit gilt l(w−1) ≤ l(w). Dass die Länge l(w−1) abernicht echt kleiner als l(w) sein kann erkennt man daran, dass für ein reduziertes Wort s1s2 · · · sn
auch das Wort sn · · · s2s1 bereits reduziert ist. Daraus ergibt sich die Gleichheit.
(iii) "⇐": Wenn w = 1 so ist der kürzeste Repräsentant für w das leere Wort 1 ∈ M. Dieser enthält aberkeine Elemente, also l(w) = lM(1) = 0."⇒": Für das Monoid M gilt offensichtlich bereits lM(k) = 0 für ein k ∈ M genau dann wenn k = 1.Gilt nun l(w) = 0 für ein w ∈ W, so ist aber auch für ein reduziertes Wort k der Äquivalenzklassew dann lM(k) = l(w) = 0. Damit ist aber k = 1, so dass w = 1 auch gilt.
(iv) "⇐": Wenn w = s für ein s ∈ S , dann gilt offensichtlich l(w) = lM(s) = 1."⇒": Gilt l(w) = 1, so auch lM(k) für ein reduziertes Wort k für w. Im Monoid M wissen wir aberwieder, dass lM(m) = 1 genau dann, wenn m = s für ein s ∈ S . Also gilt auch w = s für ein s ∈ S .
�
8
1 Coxetergruppen
1.4 Coxetermatrix und Coxeterdiagramm
Es gibt eine kompakte Form, die Werte der Abbildung m : S × S → N ∪ {∞} anzugeben. Dabei werdendiese in eine Matrix mit Zeilen und Spalten in den Indizes von S eingetragen.
Definition 1.4.1. Die Matrix [ms,t] oder kurz m nennen wir die Coxetermatrix zum Coxetersystem (W, S ):
[ms,t] =
s1 s2 · · · sn
s1 ms1,s1 ms1,s2 · · · ms1,sn
s2 ms2,s1 ms2,s2 · · · ms2,sn...
......
. . ....
sn msn,s1 msn,s2 · · · msn,sn
, wobei S = {s1, s2, . . . , sn}.
Die Coxetermatrix ist also immer eine symmetrische Matrix mit 1 auf der Hauptdiagonalen.
Beispiel 1.4.2. Die Coxetermatrix zu unserem Beispiel mit der Funktion m : S×S → N∪{∞}, m(s1, s1) =
1, m(s2, s2) = 1, m(s1, s2) = 3, m(s2, s1) = 3 hat die Form:(1 33 1
)Weiter gibt es die Möglichkeit, Coxetermatrizen mit Graphen zu veranschaulichen. Unter einem un-
gerichteten Graphen G verstehen wir ein Paar (V, E), wobei V Eckenmenge und E Kantenmenge desGraphen heißen. In unserem Fall werden V und E immer endliche Mengen sein. Die Kantenmenge be-steht aus zweielementigen Untermengen {v,w} der Eckenmenge V . Weiter kann jede Kante mit einerZahl markiert werden. Diese nennt man Gewicht oder einfach Kantenmarkierung.
Definition 1.4.3. Unter dem Coxeterdiagramm zur Coxetermatrix m verstehen wir einen ungerichtetenGraphen, der als Eckenmenge die Menge S = {s1, s2, . . . , sn} hat. Die Kantenmenge des Graphen enthältalle Paare {si, s j} für die mi, j ≥ 3 gilt, die Ecken si und s j werden also miteinander verbunden.
Üblicherweise werden beim Zeichnen der Coxeterdiagramme alle Kanten, für die mi, j ≥ 4 ist, mit mi, j
markiert. Die Kanten, für die mi, j = 3 ist, erhalten keine Markierung. Paare s, t ∈ S , für die ms,t = 2 gilt,werden im Coxeterdiagramm nicht miteinander verbunden.
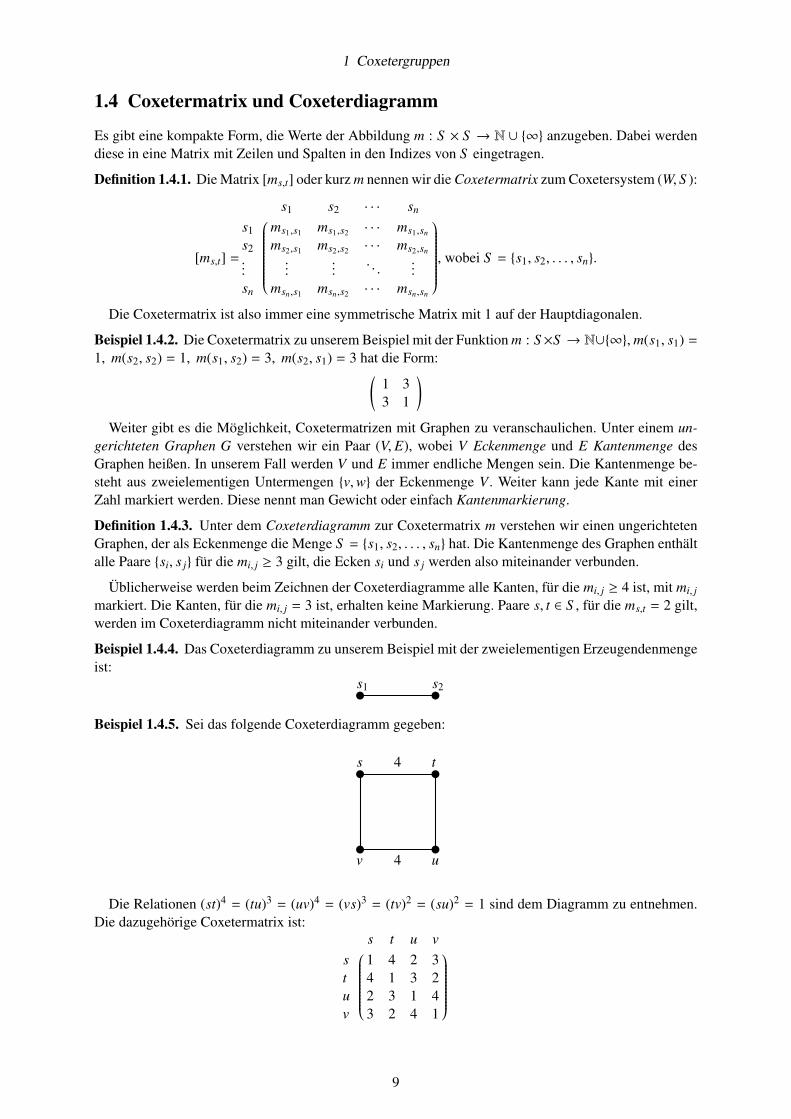
Beispiel 1.4.4. Das Coxeterdiagramm zu unserem Beispiel mit der zweielementigen Erzeugendenmengeist: u us1 s2
Beispiel 1.4.5. Sei das folgende Coxeterdiagramm gegeben:
u u
u u
v u
s t
4
4
Die Relationen (st)4 = (tu)3 = (uv)4 = (vs)3 = (tv)2 = (su)2 = 1 sind dem Diagramm zu entnehmen.Die dazugehörige Coxetermatrix ist:
s t u v
s 1 4 2 3t 4 1 3 2u 2 3 1 4v 3 2 4 1
9

1 Coxetergruppen
Coxeterdiagramme und -Matrizen sind als gleichwertig anzusehen, man kann also immer die eineDarstellungsform aus der anderen konstruieren.
Sei ein Graph G = (V, E) gegeben. Ein Kantenzug in G ist eine Folge von Ecken (v1, v2 . . . , vn) mitvi ∈ V für alle i = 1, . . . , n, so dass die Kanten {vi, vi+1} für alle i = 1, . . . , n − 1 in E enthalten sind. Fallsfür jedes Paar von Ecken v,w ∈ V ein Kantenzug existiert mit v = v1 und w = vn, dann nennen wir denGraph zusammenhängend. Man kann zeigen, dass jeder endliche, nicht zusammenhängende Graph einedisjunkte Vereinigung von endlich vielen zusammenhängenden Graphen ist, also
G = G1∪ · · · ∪GN = (V1∪ · · · ∪VN , E1∪ · · · ∪ EN).
Diese Graphen nennt man die Zusammenhangskomponenten von G.Eine Coxetermatrix und das dazugehörige Coxeterdiagramm nennt man irreduzibel, wenn das Coxe-
terdiagramm ein zusammenhängender Graph ist. Einen interessanten Zusammenhang zwischen Coxeter-diagramm und Coxetersystem sieht man, wenn das Coxeterdiagramm nicht zusammenhängend ist:
Satz 1.4.6. Wenn das Coxeterdiagramm zu einem gegebenen Coxetersystem (W, S ) ein nicht zusammen-hängender Graph ist, der aus genau zwei Zusammenhangskomponenten besteht, dann ist die zugehörigeCoxetergruppe ein direktes Produkt zweier Coxetergruppen W1 und W2.
Beweis. Sei G das Coxeterdiagramm mit den Zusammenhangskomponenten G1 = (S 1, E1) und G2 =
(S 2, E2). Dann ist die Menge der Erzeuger S des Coxertersystems die disjunkte Vereinigung von S 1 undS 2. Nun ergeben sich zwei weitere Coxetergruppen. Sei W1 die Coxetergruppe zur ErzeugendenmengeS 1 und Coxeterdiagramm G1. Analog dazu erhalten wir W2 aus S 2 und G2. Wir werden im Folgendenzeigen, dass das direkte Produkt W1 ×W2 isomorph zu W ist.
Sei ϕ : W1 × W2 → W die Funktion, die ein Tupel (w1,w2) aus W1 × W2 auf die Verkettung w1w2schickt. Also
ϕ((w1,w2)) = w1w2
Zuerst zeigen wir, dass ϕ ein Gruppenhomomorphismus ist: Für (v1, v2), (w1,w2) ∈ W1 ×W2 gilt
ϕ((v1, v2) · (w1,w2)) = ϕ((v1w1, v2w2))
= v1w1v2w2. (1.4.1)
Nun müssen wir zeigen, dass w1 mit v2 kommutiert. Alle Elemente der Gruppe W1 sind als Verkettungender Elemente aus S 1 darstellbar. Das gleiche gilt für W2 und S 2. Sei also w1 = s1 · · · sµ mit s1, . . . , sµ ∈ S 1und v2 = t1 · · · tν mit t1, . . . , tν ∈ S 2, wobei µ und ν natürliche Zahlen sind. Da im Coxterdiagramm dieElemente aus S 1 mit keinem der Elemente aus S 2 über eine Kante verbunden sind, kommutieren sie mitallen Elementen von S 2. Also können die si sukzessiv mit allen der ti vertauscht werden. Damit könnenwir Gleichung 1.4.1 weiter auswerten:
v1w1v2w2 = v1v2w1w2
= ϕ((v1, v2))ϕ((w1,w2)).
Das heißt, dass ϕ ein Gruppenhomomorphismus ist.Wir werden jetzt beweisen, dass ϕ bijektiv ist. Zunächst zeigen wir die Injektivität. Seien hierzu
(v1, v2), (w1,w2) ∈ W1 ×W2, so dass ϕ((v1, v2)) = ϕ((w1,w2)). Dann gilt
ϕ((v1, v2)) · ϕ−1((w1,w2)) = ϕ((v1w−11 , v2w−1
2 )) = 1
⇔ v1w−11 v2w−1
2 = 1
⇔ v1w−11 = w2v−1
2
⇒ v1w−11 = w2v−1
2 ∈ W1 ∩W2 = {1}
⇒ v1 = w1 und w2 = v2
Die Funktion ϕ ist also injektiv.
10
1 Coxetergruppen
Es bleibt uns nur noch, die Surjektivität von ϕ zu beweisen. Hierfür reicht es zu zeigen, dass jedesElement w ∈ W eine Darstellung w = w1w2 mit w1 ∈ W1 und w2 ∈ W2 zulässt. Damit wäre fürjedes w mindestens ein Element nämlich (w1,w2) im Urbild ϕ−1(w) enthalten. Sei also w = s1 · · · sµmit si ∈ S für alle i = 1, . . . µ. Mit dem folgenden Algorithmus formen wir w so um, dass wir diegewünschte Darstellung erreichen. Wir nutzen dabei wieder die Tatsache, dass alle Elemente von S 1 mitden Elementen von S 2 kommutieren.
(i) Sei i = 2.
(ii) Falls si ∈ S 1 und das Element t auf seiner linken Seite (sein linker Nachbar) in S 2 ist, vertauschensi mit t. Wiederhole diesen Vorgang so lange, bis entweder si keinen linken Nachbarn hat oder seinlinker Nachbar in S 1 ist.
(iii) Falls i = µ, ist der Algorithmus abgeschlossen. Ansonsten muss i um 1 inkrementiert und derzweite Schritt wiederholt werden.
Am Ende des Algorithmus liegt kein Buchstabe aus S 2 links von einem Buchstaben aus S 1 in der abge-änderten Darstellung von w. Das heißt, dass wir das Wort w in den Buchstaben aus S 1 (links) und dieBuchstaben aus S 2 (rechts) unterteilen können. Die gewünschte Darstellung liegt vor.
Damit ist bewiesen, dass ϕ ein Isomorphismus ist, und es gilt W1 ×W2 � W. �
1.5 Beispiele für unendliche Coxetergruppen
In diesem Abschnitt werden einige Beispiele für Coxetergruppen vorgeführt, um uns besser mit derStruktur der Gruppen vertraut zu machen. Wenn man sich mit Coxetergruppen beschäftigt, merkt manschnell, dass ein Großteil der Gruppen von unendlicher Ordnung ist, die Gruppen also unendlich vieleElemente enthalten. Es existierten zwar endliche Coxetergruppen, anhand der Erzeugendenmenge S undder Coxetermatrix m sind diese als solche allerdings nicht auf Anhieb zu erkennen. Daher werden wirzunächst Bedingungen angeben, die die Endlichkeit einer Coxetergruppe ausschließen. Eine genauereBetrachtung der endlichen Coxetergruppen erfolgt dann im nächsten Kapitel.
Dazu werden wir die Struktur der Gruppen ausgehend von ihren Diagrammen untersuchen, wodurchwir auch gleich ein besseres Verständnis für die Beziehung zwischen Diagramm und Gruppe gewinnen.
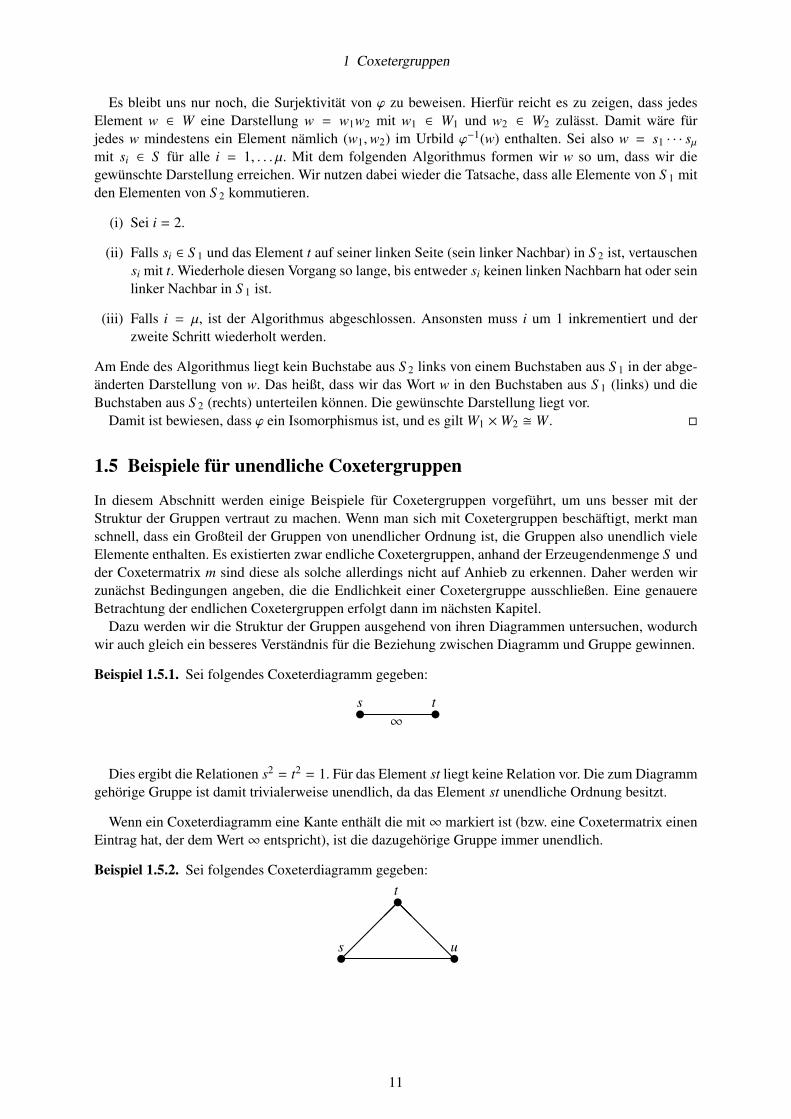
Beispiel 1.5.1. Sei folgendes Coxeterdiagramm gegeben:
u us t∞
Dies ergibt die Relationen s2 = t2 = 1. Für das Element st liegt keine Relation vor. Die zum Diagrammgehörige Gruppe ist damit trivialerweise unendlich, da das Element st unendliche Ordnung besitzt.
Wenn ein Coxeterdiagramm eine Kante enthält die mit∞ markiert ist (bzw. eine Coxetermatrix einenEintrag hat, der dem Wert∞ entspricht), ist die dazugehörige Gruppe immer unendlich.
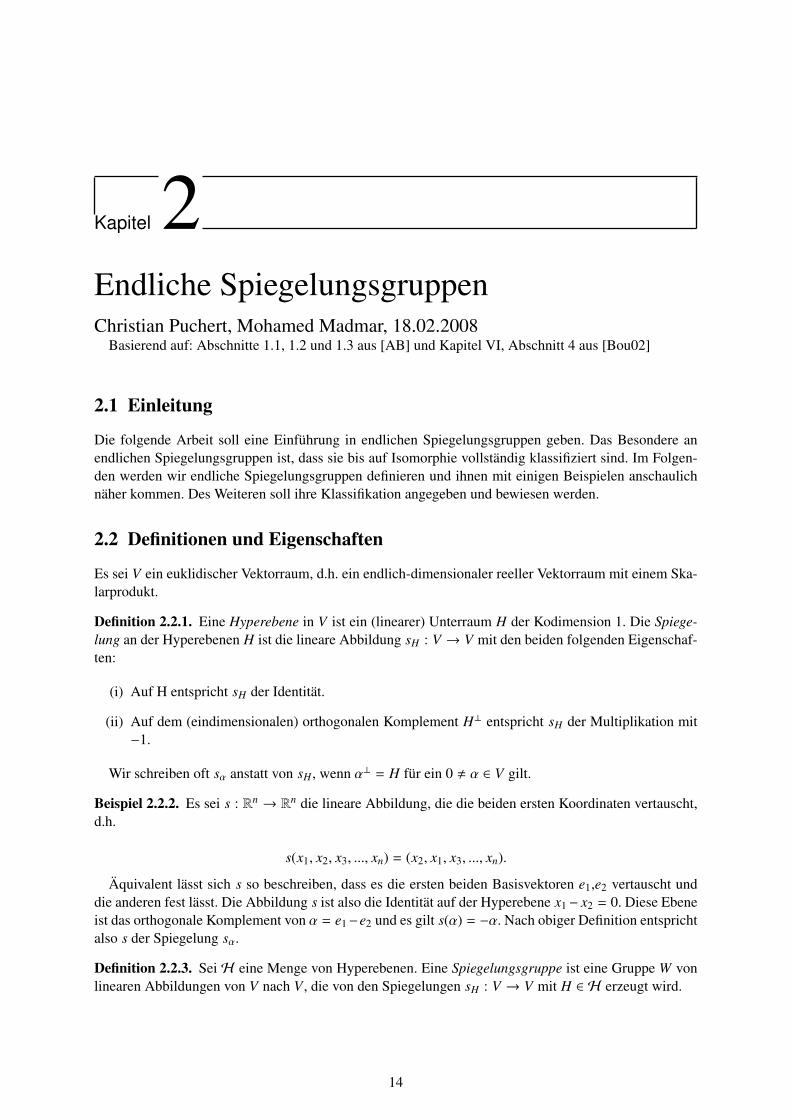
Beispiel 1.5.2. Sei folgendes Coxeterdiagramm gegeben:
�����
@@@
@@
uu
us
t
u
11

1 Coxetergruppen
Dies ergibt die Relationen s2 = t2 = u2 = (st)3 = (tu)3 = (su)3 = 1. Für das Element stu kann aberkeine Relation aus dem Diagramm abgeleitet werden. Das Element besitzt also unendliche Ordnung.Damit ist auch wieder die Ordnung der zum Diagramm gehörigen Coxetergruppe unendlich.
Das obige Beispiel zeigt ein Coxeterdiagramm, das einen Kreis beinhaltet. Dabei verstehen wir untereinem Kreis einen Kantenzug (v1, v2, . . . , vn), für den gilt:
(i) Für jedes Paar (vi, vi+1) aufeinander folgender Ecken, wobei i = 1, . . . , n − 1, existiert eine Kantezwischen vi und vi+1 im Diagramm, und
(ii) v1 = vn.
Wenn ein Diagramm nur aus einem Kreis besteht und eine der Kanten im Kreis entfernt wird, kann diesbedeutsame Änderungen an der Situation bedeuten, wie das nächste Beispiel zeigt:
Beispiel 1.5.3. Sei folgendes Coxeterdiagramm gegeben:
u u us t u
Dies ergibt die Relationen s2 = t2 = u2 = (st)3 = (tu)3 = 1. Da die zu s und u gehörigen Ecken imDiagramm nicht miteinander verbunden sind, gilt auch (su)2 = 1 und damit su = us. Da s und u damitkommutieren, können wir nicht mehr behaupten, dass stu unendliche Ordnung besitzt. Es gilt sogar:
(stu)4 = st(us)tust(us)tu
= (sts)(utu)(sts)(utu)
= ts(tt)u(tt)s(tt)ut
= t(su)sut
= (tus)(sut)
= 1.
Das Element hat also keine unendliche Ordnung. Seine Ordnung ist tatsächlich 4 und die zugehörigeGruppe ist endlich.
Diese Erkenntnis bringen wir nun in einen Satz:
Satz 1.5.4. Wenn ein Coxeterdiagramm einen Kreis enthält, ist die dazugehörige Gruppe unendlich.
Beweis. Sei G ein Coxeterdiagramm mit einem Kreis. Sei nun (a1, . . . , an) ⊂ G ein Kreis so, dass keineUntermenge der Ecken {a1, . . . , an−1} einen Kreis bildet. Seien mi,i+1 > 2 die Kantenmarkierungen vonden Kanten {ai, ai+1} für i = 1, . . . , n − 1. Dann gilt (aiai+1)mi,i+1 = 1 für i = 1, . . . , n − 1. Es existierenkeine weiteren Relationen zwischen den Elementen des Kreises, denn dies wäre ein Widerspruch dazu,dass der Kreis keinen weiteren Kreis als Untermenge enthält.
Wir betrachten nun das Wort a1a2 · · · an−1. Die Buchstaben des Wortes sind so angeordnet, dass keineaufeinander folgenden Buchstaben kommutieren und das Wort auch nicht reduziert werden kann. Alsoliegt eine Darstellung des Wortes minimaler Länge vor. Da a1 und an−1 ebenfalls nicht kommutieren,können auch Verkettungen des Wortes nicht reduziert werden. Da keine Relation für das Wort an sichvorliegt, können die Verkettungen beliebig lang werden, ohne reduziert werden zu können. Es liegt alsoein Element unendlicher Ordnung vor. Die Gruppe ist daher unendlich. �
Nun könnte man auf die Idee kommen, dass die Umkehrung des obigen Satzes gelten könnte. Sprich,dass falls ein Diagramm vorliegt, das keine Kreise oder Kanten enthält, die mit ∞ bezeichnet sind, diedazugehörige Gruppe endlich wäre. Diese Vermutung ist falsch, wie das nächste Beispiel zeigt.
12

1 Coxetergruppen
Beispiel 1.5.5. Sei folgendes Coxeterdiagramm gegeben:
u u us t u6
Dies ergibt die Relationen s2 = t2 = u2 = (st)6 = (tu)3 = 1. Die Buchstaben s und u kommutieren.Wir betrachten das Wort tstsu, für das es keine explizite Relation gibt. Wenn wir es mit sich selbst ver-ketten ergibt sich (tstsu)(tstsu). Nun können wir zwar das erste Vorkommen von su mit us ersetzen, dieswürde aber kein Wort ergeben, dass man reduzieren könnte: tst(us)tstsu. Man kann durch Umformungendie alternierenden Verkettungen maximaler Länge ststs, tu und ut als Teilwörter des Produkts erhalten.Keines dieser Wörtern kann reduziert werden. Das Wort ist also ein Element unendlicher Ordnung. Diedazu gehörige Coxetergruppe ist damit unendlich.
13
Kapitel 2Endliche SpiegelungsgruppenChristian Puchert, Mohamed Madmar, 18.02.2008
Basierend auf: Abschnitte 1.1, 1.2 und 1.3 aus [AB] und Kapitel VI, Abschnitt 4 aus [Bou02]
2.1 Einleitung
Die folgende Arbeit soll eine Einführung in endlichen Spiegelungsgruppen geben. Das Besondere anendlichen Spiegelungsgruppen ist, dass sie bis auf Isomorphie vollständig klassifiziert sind. Im Folgen-den werden wir endliche Spiegelungsgruppen definieren und ihnen mit einigen Beispielen anschaulichnäher kommen. Des Weiteren soll ihre Klassifikation angegeben und bewiesen werden.
2.2 Definitionen und Eigenschaften
Es sei V ein euklidischer Vektorraum, d.h. ein endlich-dimensionaler reeller Vektorraum mit einem Ska-larprodukt.
Definition 2.2.1. Eine Hyperebene in V ist ein (linearer) Unterraum H der Kodimension 1. Die Spiege-lung an der Hyperebenen H ist die lineare Abbildung sH : V → V mit den beiden folgenden Eigenschaf-ten:
(i) Auf H entspricht sH der Identität.
(ii) Auf dem (eindimensionalen) orthogonalen Komplement H⊥ entspricht sH der Multiplikation mit−1.
Wir schreiben oft sα anstatt von sH , wenn α⊥ = H für ein 0 , α ∈ V gilt.
Beispiel 2.2.2. Es sei s : Rn → Rn die lineare Abbildung, die die beiden ersten Koordinaten vertauscht,d.h.
s(x1, x2, x3, ..., xn) = (x2, x1, x3, ..., xn).
Äquivalent lässt sich s so beschreiben, dass es die ersten beiden Basisvektoren e1,e2 vertauscht unddie anderen fest lässt. Die Abbildung s ist also die Identität auf der Hyperebene x1− x2 = 0. Diese Ebeneist das orthogonale Komplement von α = e1−e2 und es gilt s(α) = −α. Nach obiger Definition entsprichtalso s der Spiegelung sα.
Definition 2.2.3. Sei H eine Menge von Hyperebenen. Eine Spiegelungsgruppe ist eine Gruppe W vonlinearen Abbildungen von V nach V , die von den Spiegelungen sH : V → V mit H ∈ H erzeugt wird.
14

2 Endliche Spiegelungsgruppen
Manchmal wird auch das Paar (W,V) als Spiegelungsgruppe bezeichnet, wenn es nicht offensichtlichist, auf welchem Raum V die Gruppe W operiert.Wir wollen uns im Folgenden nur mit endlichen Spiegelungsgruppen beschäftigen. Die Forderung, dassW endlich sein soll, ist sehr stark, wie ein einfaches Beispiel zeigt. Sei dimV = 2 und sei W erzeugtdurch zwei Spiegelungen s := sH und s′ := sH′ . Dann hat die Drehung ss′ ∈ W unendliche Ordnung(und somit auch W), es sei denn der Winkel zwischen den Geraden H und H′ ist ein rationales Vielfachevon π.
Ein hinreichendes Kriterium zur Überprüfung, ob eine durch Spiegelungen erzeugte Gruppe endlichist, liefert das folgende Lemma.
Lemma 2.2.4. Es sei Φ ⊂ V eine endliche Menge von Vektoren, die alle ungleich Null sind. W sei dieGruppe, die von den Spiegelungen sα (α ∈ Φ) erzeugt wird. Dann gilt: Ist Φ invariant unter der Wirkungvon W, dann ist Wendlich.
Beweis. Wir zeigen, dass W isomorph zu einer Gruppe von Permutationen der endlichen Menge Φ ist.Daraus folgt sofort, dass W endlich ist.Sei nun V1 der von Φ aufgespannte Raum und V0 das orthogonale Komplement von V1. Dann gilt
V0 =⋂α∈Φ
α⊥ = {v ∈ V |wv = v für alle w ∈ W}.
Die zweite Gleichheit sieht man leicht wie folgt ein: Ist v ∈ V senkrecht zu allen α ∈ Φ und w ∈ Wein beliebiges Gruppenelement, dann kann w geschrieben werden als w = sα1 sα2 ...sαk mit αi ∈ Φ undi = 1, ..., k. Damit gilt wv = sα1 sα2 ...sαk v = v, da wegen v ⊥ αi für alle i = 1, ..., k die Gleichheit sαiv = vgilt. Wählt man umgekehrt ein v ∈ V mit wv = v für alle w ∈ W, dann gilt insbesondere sαv = v für alleα ∈ Φ. Hieraus folgt v ⊥ α für alle α ∈ Φ.Betrachtet man die orthogonale Zerlegung V = V0 ⊕ V1, so folgt, dass jedes Element aus W vollständigdurch seine Wirkung auf V1 und somit (wegen der Linearität von Spiegelungen) auf Φ bestimmt wird. Mitden Annahmen, dass Φ endlich und W-invariant ist, folgt, dass W isomorph zu einer Permutationsgruppevon Φ ist. �
Definition 2.2.5. Die Gruppe W aus dem Lemma 2.2.4 wird als WΦ bezeichnet und Weyl-Gruppe ge-nannt.
Definition 2.2.6. Eine Menge Φ, die die Bedingungen aus dem Lemma 2.2.4 erfüllt, heißt allgemeinesWurzelsystem. Die Elemente von Φ werden Wurzeln genannt. Ohne Beschränkung der Allgemeinheitnehmen wir an, dass allgemeine Wurzelsysteme immer reduziert sind, d.h. dass ±α (für α ∈ Φ) dieeinzigen skalaren Vielfachen von α sind, die selbst wieder Wurzeln sind. Wir haben also genau ein Paar±α in Φ für jede erzeugende Spiegelung.
Einen Spezialfall von allgemeinen Wurzelsystemen sind die so genannten kristallographischen Wur-zelsysteme. Anstatt einer formalen Definition geben wir hier nur eine wichtige Eigenschaft kristallo-graphischer Wurzelsysteme an. Ein solches Wurzelsystem Φ erfüllt Lemma 2.2.4 und die zugehörigeWeyl-Gruppe WΦ lässt die von Φ erzeugte additive Untergruppe (ein Gitter) in V invariant.
Im Zusammenhang mit der orthogonalen Zerlegung von V , wie sie im Beweis von Lemma 2.2.4 ge-schieht, ist es üblich einige Begriffe einzuführen.
Definition 2.2.7. Die Menge V0 wird unwesentlicher Teil von V genannt. Ihr orthogonales KomplementV1 wird wesentlicher Teil von V genannt. Das Paar (W,V) heißt wesentlich, wenn V1 = V oder äquivalentdazu V0 = 0. Die Dimension von V1 wird Rang der endlichen Spiegelungsgruppe W genannt.
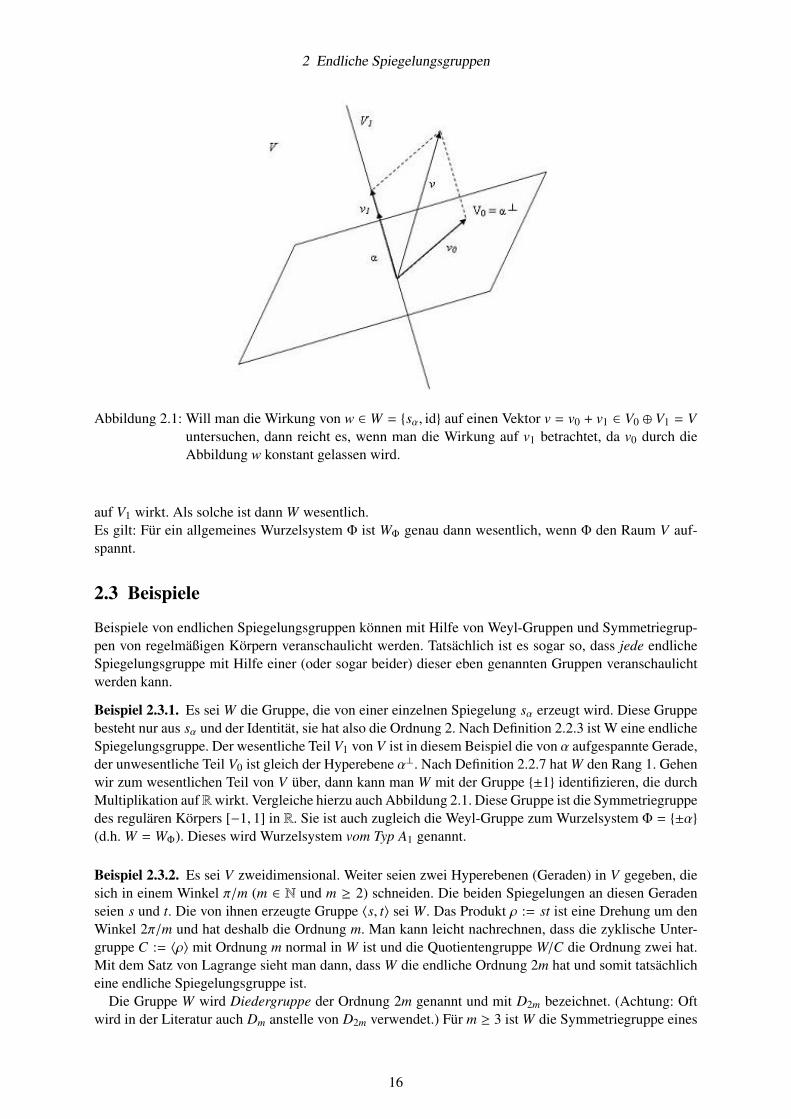
Die Untersuchung einer allgemeinen Spiegelungsgruppe (W,V) wird immer auf den wesentlichen Fallreduziert. Da wir die orthogonale Zerlegung V = V0 ⊕ V1 haben und wir wissen, dass die Wirkung vonW auf auf V0 trivial ist (V0 ist die Fixpunktmenge), reicht es, wenn wir nur die Wirkung von W auf V1betrachten (vgl. Abbildung 2.1). Als Folge dieser Überlegung identifizieren wir W mit einer Gruppe, die
15
2 Endliche Spiegelungsgruppen
Abbildung 2.1: Will man die Wirkung von w ∈ W = {sα, id} auf einen Vektor v = v0 + v1 ∈ V0 ⊕ V1 = Vuntersuchen, dann reicht es, wenn man die Wirkung auf v1 betrachtet, da v0 durch dieAbbildung w konstant gelassen wird.
auf V1 wirkt. Als solche ist dann W wesentlich.Es gilt: Für ein allgemeines Wurzelsystem Φ ist WΦ genau dann wesentlich, wenn Φ den Raum V auf-spannt.
2.3 Beispiele
Beispiele von endlichen Spiegelungsgruppen können mit Hilfe von Weyl-Gruppen und Symmetriegrup-pen von regelmäßigen Körpern veranschaulicht werden. Tatsächlich ist es sogar so, dass jede endlicheSpiegelungsgruppe mit Hilfe einer (oder sogar beider) dieser eben genannten Gruppen veranschaulichtwerden kann.
Beispiel 2.3.1. Es sei W die Gruppe, die von einer einzelnen Spiegelung sα erzeugt wird. Diese Gruppebesteht nur aus sα und der Identität, sie hat also die Ordnung 2. Nach Definition 2.2.3 ist W eine endlicheSpiegelungsgruppe. Der wesentliche Teil V1 von V ist in diesem Beispiel die von α aufgespannte Gerade,der unwesentliche Teil V0 ist gleich der Hyperebene α⊥. Nach Definition 2.2.7 hat W den Rang 1. Gehenwir zum wesentlichen Teil von V über, dann kann man W mit der Gruppe {±1} identifizieren, die durchMultiplikation aufRwirkt. Vergleiche hierzu auch Abbildung 2.1. Diese Gruppe ist die Symmetriegruppedes regulären Körpers [−1, 1] in R. Sie ist auch zugleich die Weyl-Gruppe zum Wurzelsystem Φ = {±α}
(d.h. W = WΦ). Dieses wird Wurzelsystem vom Typ A1 genannt.
Beispiel 2.3.2. Es sei V zweidimensional. Weiter seien zwei Hyperebenen (Geraden) in V gegeben, diesich in einem Winkel π/m (m ∈ N und m ≥ 2) schneiden. Die beiden Spiegelungen an diesen Geradenseien s und t. Die von ihnen erzeugte Gruppe 〈s, t〉 sei W. Das Produkt ρ := st ist eine Drehung um denWinkel 2π/m und hat deshalb die Ordnung m. Man kann leicht nachrechnen, dass die zyklische Unter-gruppe C := 〈ρ〉 mit Ordnung m normal in W ist und die Quotientengruppe W/C die Ordnung zwei hat.Mit dem Satz von Lagrange sieht man dann, dass W die endliche Ordnung 2m hat und somit tatsächlicheine endliche Spiegelungsgruppe ist.
Die Gruppe W wird Diedergruppe der Ordnung 2m genannt und mit D2m bezeichnet. (Achtung: Oftwird in der Literatur auch Dm anstelle von D2m verwendet.) Für m ≥ 3 ist W die Symmetriegruppe eines
16
2 Endliche Spiegelungsgruppen
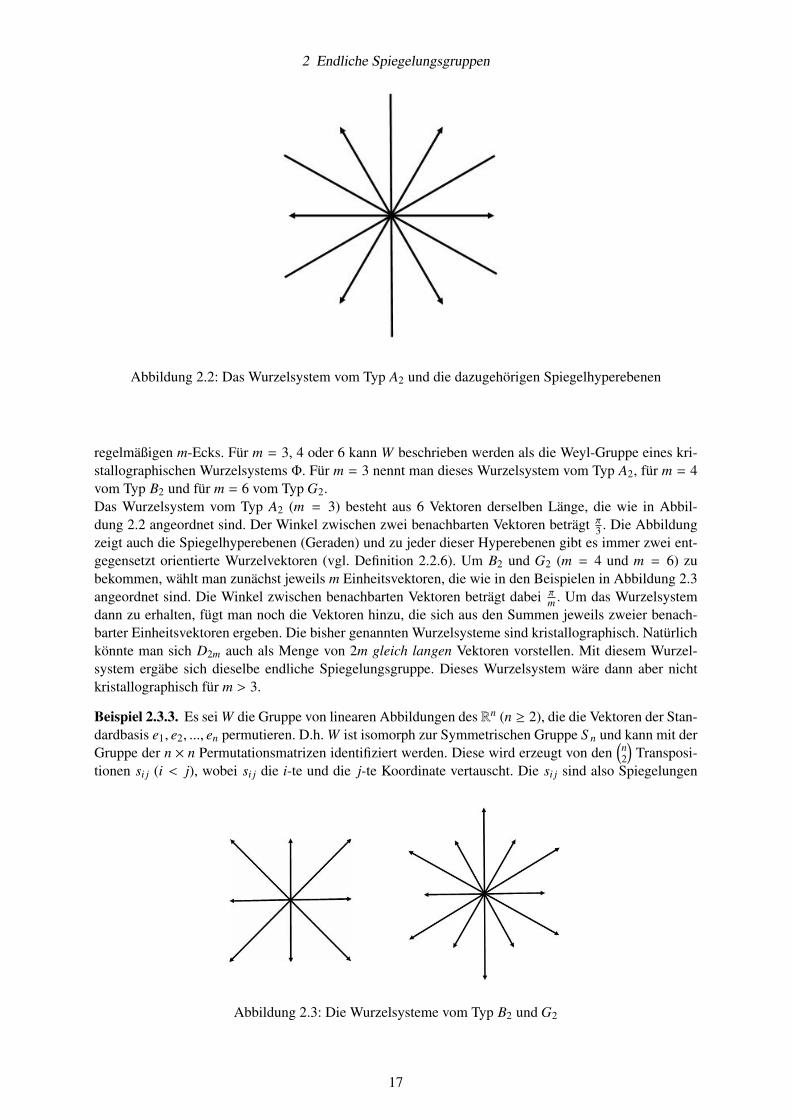
Abbildung 2.2: Das Wurzelsystem vom Typ A2 und die dazugehörigen Spiegelhyperebenen
regelmäßigen m-Ecks. Für m = 3, 4 oder 6 kann W beschrieben werden als die Weyl-Gruppe eines kri-stallographischen Wurzelsystems Φ. Für m = 3 nennt man dieses Wurzelsystem vom Typ A2, für m = 4vom Typ B2 und für m = 6 vom Typ G2.Das Wurzelsystem vom Typ A2 (m = 3) besteht aus 6 Vektoren derselben Länge, die wie in Abbil-dung 2.2 angeordnet sind. Der Winkel zwischen zwei benachbarten Vektoren beträgt π
3 . Die Abbildungzeigt auch die Spiegelhyperebenen (Geraden) und zu jeder dieser Hyperebenen gibt es immer zwei ent-gegensetzt orientierte Wurzelvektoren (vgl. Definition 2.2.6). Um B2 und G2 (m = 4 und m = 6) zubekommen, wählt man zunächst jeweils m Einheitsvektoren, die wie in den Beispielen in Abbildung 2.3angeordnet sind. Die Winkel zwischen benachbarten Vektoren beträgt dabei π
m . Um das Wurzelsystemdann zu erhalten, fügt man noch die Vektoren hinzu, die sich aus den Summen jeweils zweier benach-barter Einheitsvektoren ergeben. Die bisher genannten Wurzelsysteme sind kristallographisch. Natürlichkönnte man sich D2m auch als Menge von 2m gleich langen Vektoren vorstellen. Mit diesem Wurzel-system ergäbe sich dieselbe endliche Spiegelungsgruppe. Dieses Wurzelsystem wäre dann aber nichtkristallographisch für m > 3.
Beispiel 2.3.3. Es sei W die Gruppe von linearen Abbildungen des Rn (n ≥ 2), die die Vektoren der Stan-dardbasis e1, e2, ..., en permutieren. D.h. W ist isomorph zur Symmetrischen Gruppe S n und kann mit derGruppe der n × n Permutationsmatrizen identifiziert werden. Diese wird erzeugt von den
(n2
)Transposi-
tionen si j (i < j), wobei si j die i-te und die j-te Koordinate vertauscht. Die si j sind also Spiegelungen
Abbildung 2.3: Die Wurzelsysteme vom Typ B2 und G2
17

2 Endliche Spiegelungsgruppen
an den Hyperebenen (ei − e j)⊥ (i , j)und somit ist W eine endliche Spiegelungsgruppe. (W,Rn) ist abernicht wesentlich, denn der unwesentliche Teil V0 von Rn entspricht der Geraden x1 = x2 = ... = xn, dievom Vektor e = (1, 1, ..., 1) aufgespannt wird. Der Unterraum V1 von Rn, auf dem W wesentlich ist, istdas orthogonale Komplement e⊥, welches durch
∑ni=1 xi = 0 gegeben ist. Hieraus folgt auch, dass W den
Rang n − 1 hat.In diesem Beispiel kann W sowohl als Symmetriegruppe eines regelmäßigen Körpers als auch als Weyl-Gruppe beschrieben werden. W ist nämlich die Symmetriegruppe eines regelmäßigen (n− 1)-Simplex inV1. Außerdem ist W die Weyl-Gruppe des Wurzelsystems Φ = {ei − e j|i, j = 1, 2, ..., n, i , j} mit n(n− 1)Wurzeln. Dieses Wurzelsystem wird Wurzelsystem vom Typ An−1 genannt.Für n = 2 reduziert sich dieses Beispiel auf Beispiel 2.3.1. Für n = 3 bekommen wir Beispiel 2.3.2 mitm = 3 (nachdem man zum wesentlichen Teil übergegangen ist), d.h. W ist die Diedergruppe mit derOrdnung 6.
Beispiel 2.3.4. Es sei W die Gruppe von linearen Abbildungen des Rn (n ≥ 1), die die Menge {±ei|i =
1, 2, ..., n} invariant lassen. D.h. W entspricht der Gruppe der n × n Monomialmatrizen, deren nichtnull-Einträge gleich ±1 sind. (Monomialmatrizen sind Matrizen, die genau einen nichtnull-Eintrag in jederSpalte und jeder Zeile haben.) Die Gruppe W wird erzeugt von den Transpositionen (Spiegelungen) si j
wie oben und den Spiegelungen t1, ..., tn. Dabei ändert ti das Vorzeichen der i-ten Koordinate, d.h. ti istdie Spiegelung an der Hyperebenen xi = 0. Daraus folgt, dass W eine endliche Spiegelungsgruppe derOrdnung 2nn! ist.
W ist die Symmetriegruppe des n-dimensionalen Würfels [−1, 1]n in Rn. W ist auch eine Weyl-Gruppe,nämlich die Weyl-Gruppe mit dem Wurzelsystem Φ = {±ei,±ei ± e j|i, j = 1, 2, ..., n, i , j}, genanntWurzelsystem vom Typ Bn. Hierbei entspricht die Spiegelung an (±ei)⊥ der Vorzeichenänderung ti unddie Spiegelung an [±(ei − e j)]⊥ der Transposition si j, also dem Vertauschen von ei mit e j. Da Rn =
span(Φ), ist W wesentlich.Für n = 1 erhalten wir in diesem Beispiel dieselbe Spiegelungsgruppe wie im Beispiel 2.3.1; für n = 2ergibt sich das Beispiel 2.3.2 mit m = 4, d.h. W ist die Diedergruppe mit der Ordnung 8.
Beispiel 2.3.5. Es sei Φ = {±ei ± e j|i, j = 1, ..., n, i , j} ⊆ Rn mit n ≥ 2. Dieses Wurzelsystem ist vomTyp Dn. Die zugehörige Weyl-Gruppe WΦ ist eine Untergruppe von W mit Index 2 aus dem Beispiel2.3.4. Betrachten wir die Elemente von W als Monomialmatrizen mit den nichtnull-Einträgen ±1, dannbesteht WΦ aus den Elementen mit einer geraden Anzahl von Minuszeichen.
Für n = 2 ergibt sich hier das Beispiel 2.3.2 mit m = 2, d.h. WΦ ist die Diedergruppe der Ordnung 4.
Zum Abschluss dieses Kapitels geben wir eine weitere Möglichkeit an, wie man aus gegeben Beispie-len weitere Beispiele konstruieren kann.
Satz 2.3.6. Es seien die zwei endlichen Spiegelungsgruppen (V ′,W′) und (V ′′,W′′) gegeben. Dann istdas direkte Produkt W := W′ × W′′ eine endliche Spiegelungsgruppe auf der orthogonalen direktenSumme V := V ′ ⊕ V ′′.
Definition 2.3.7. Eine endliche Spiegelungsgruppe (W,V) heißt reduzibel, wenn es sich wie in obigemSatz in nicht triviale V ′ und V ′′ zerlegen lässt. Andernfalls heißt die Spiegelungsgruppe irreduzibel.
Beispielsweise lässt sich die Weyl-Gruppe vom Typ D2 zerlegen in ein Produkt von A1 mit sich selbst.D2 ist also reduzibel.
2.4 Klassifikation
Die endlichen Spiegelungsgruppen sind, wie oben bereits erwähnt, bis auf Isomorphie vollständig klas-sifiziert. Bei der Klassifikation beschränkt man sich praktischerweise auf die wesentlichen, irreduziblenund nicht trivialen endlichen Spiegelungsgruppen. Alle anderen erhält man durch Bilden von direkten
18

2 Endliche Spiegelungsgruppen
Produkten und Addieren von Summanden, auf denen die Gruppe auf trivialer Weise wirkt. Vergleichehierzu Satz 2.3.6.
Die Klassifikation erfolgt mit Hilfe von Coxetermatrizen und den zugehörigen quadratischen Formen.Das Bestimmen aller endlichen Spiegelungsgruppen ist nämlich äquivalent zum Bestimmen aller Co-xetergruppen endlicher Ordnung, so dass die zugehörige quadratische Form q positiv und nicht entartetist (siehe [Bou02]). Denn durch jede endliche Spiegelungsgruppe wird eine endliche Coxetergruppe de-finiert. Dazu werden die erzeugenden Spiegelungen ri der Spiegelungsgruppe und der Relationen mi j
verwendet. Umgekehrt definiert jede endliche Coxetergruppe eine endliche Spiegelungsgruppe. Zu jederendlichen Coxetergruppe kann nämlich ein Vektorraum und eine Bilinearform (wie in 2.4.1) angegebenwerden, so dass die Coxetergruppe gerade als Spiegelungsgruppe bezügliches dieses Raumes und dieserBilinearform realisiert wird. Für mehr Details siehe [Bou02].
Für dieses Kapitel sei also M eine endliche Coxetermatrix. Weiter nehmen wir an, dass das zugehöri-ge Coxeterdiagramm kreisfrei und zusammenhängend (also ein Baum) ist. Wenn das Coxeterdiagrammnämlich einen Kreis enthält, dann dann ist die zugehörige Coxetergruppe unendlich und somit auch dieentsprechende Spiegelungsgruppe. Würde man auch nicht zusammenhängende Coxeterdiagramme be-trachten, dann ergäben sich auch reduzible Coxeter- und Spiegelungsgruppen (siehe [AB]). Diese wollenwir aber für unsere Klassifikation nicht betrachten.
Im Folgenden soll die oben angesprochene quadratische Form q definiert werden. Für eine CoxetermatrixM = (mi j)i, j∈I mit endlicher Ordnung l := |I| sei
qi j = − cos(π/mi j) für mi j , ∞ und qi j = 1 für mi j = ∞.
Dann gilt qii = 1 und qi j = q ji ist gleich Null (wenn mi j = 2) oder ≤ −12 (wenn mi j ≥ 3) für i , j.
Daraus folgt q2i j ≥
14 für i , j.
Es sei E = RI und (ei)i∈I sei die kanonische Basis von E.
Definition 2.4.1. Die zur Coxetermatrix gehörende, symmetrische Bilinearform B auf E ist definiertdurch
B(ei, e j) = −2 cos(π/mi j) = 2qi j, i, j ∈ I.
Für mi j = ∞ wird B(ei, e j) = −2 gesetzt.Die zur Coxetermatrix gehörende quadratische Form q wird definiert durch
q(x) =12
B(x, x).
Aus der obigen Definition folgt B(ei, e j)2 ≥ q2i j für i, j ∈ I. Für x =
∑i∈I xiei kann q(x) geschrieben
werden alsq(x) =
∑i, j∈I
xix jqi j.
Aus der Bedingung, dass q positiv und nicht entartet ist, lassen sich Bedingungen für die mi j ableiten,mit deren Hilfe wir alle Möglichkeiten für die entsprechenden Coxeterdiagramme aufführen können.
Lemma 2.4.2. Für alle i ∈ I gilt: ∑j,i
q2i j < 1.
Beweis. Es sei J die Menge von j ∈ I, so dass qi j , 0, d.h., dass {i, j} eine Kante von M ist. Die MengeJ ist also die Menge aller Knoten j, die mit i verbunden sind. Für j, j′ ∈ J und j , j′ ist { j, j′} keineKante von M, denn andernfalls wäre i, j, j′ ein Kreis. Es gilt also m j j′ = 2 und somit B(e j, e j′) = 0. FürF = span{e j| j ∈ J} ist (e j) j∈J also eine Orthonormalbasis. Aus dem Satz des Pythagoras folgt dann fürden Abstand d von ei zu F
0 < d2 = 1 −∑j∈J
B(ei, e j)2 ≤ 1 −∑j∈J
q2i j = 1 −
∑j,i
q2i j.
Daraus folgt die Behauptung. �
19

2 Endliche Spiegelungsgruppen
Lemma 2.4.3. Jeder Knoten von M gehört zu höchstens drei Kanten.
Beweis. Da nach Konvention Paare {i, j} mit der Ordnung mi j = 2 keine Kanten im Coxeterdiagrammsind, kann mi j ≥ 3 und somit qi j ≤ −
12 angenommen werden. Daraus folgt q2
i j ≥14 . Es sei der Knoten i
verbunden mit h anderen Knoten j1, j2, ..., jh. Dann gilt mit Lemma 2.4.2
1 > q2i j1 + q2
i j2 + ... + q2i jh ≥ h
14.
Hieraus folgt h ≤ 3. �
Lemma 2.4.4. Wenn ein Knoten i zu drei Kanten gehört, dann haben diese alle die Ordnung drei.
Beweis. Angenommen, der Knoten i ist mit den drei Kanten {i, j1}, {i, j3} und {i, j3} verbunden, vondenen o.B.d.A. die letzte die Ordnung 4 oder höher hat. D.h. q2
i j3≥ cos(π4 ) ≥ 1
2 . Weiter ergibt sich:
q2i j1 + q2
i j2 + q2i j3 ≥
14
+14
+12
= 1.
Dies ist aber ein Widerspruch zu Lemma 2.4.2. �
Lemma 2.4.5. Gibt es eine Kante mit einer Ordnung größer oder gleich 6, dann gilt l := |I| = 2.
Beweis. Sei {i, j} eine Kante mit der Ordnung mi j = 6. Angenommen, es gilt l > 2, dann gibt es einenweiteren Knoten j′, der wegen des Zusammenhangs von M entweder mit i oder j verbunden sein muss.Angenommen, j′ ist mit i verbunden. Dann gilt:
q2i j + q2
i j′ ≥14
+ cos(π
6
)2=
14
+
√32
2
= 1
Dies widerspricht aber Lemma 2.4.2. �
Lemma 2.4.6. Ein Knoten kann nicht zu zwei verschiedenen Kanten mit Ordnung größer oder gleich 4gehören.
Beweis. Angenommen der Knoten i gehöre zu den beiden Kanten {i, j} und {i, k}mit mi j ≥ 4 und mik ≥ 4,dann gilt:
q2i j + q2
ik ≥ cos(π
4
)2+ cos
(π
4
)2= 1
Auch das ist ein Widerspruch zu 2.4.2. �
Lemma 2.4.7. Es gilt immer eine der folgenden Alternativen:
a) M hat genau einen Verzweigungspunkt und alle Kanten von M haben die Ordnung 3.
b) M ist eine Kette und hat höchstens eine Kante mit einer Ordnung größer oder gleich 4.
Für einen Beweis, siehe [Bou02].
Lemma 2.4.8. Sei M eine Kette mit den Knoten 1, 2, ..., l mit l ≥ 3 und Kanten {1, 2}, {2, 3}, ..., {l − 1, l}.Dann gilt:
(i) Hat eine der Kanten {2, 3}, {3, 4}, ..., {l−2, l−1} eine Ordnung größer oder gleich 4, dann hat diesedie Ordnung von genau 4 und M hat die Gestalt:
20
2 Endliche Spiegelungsgruppen
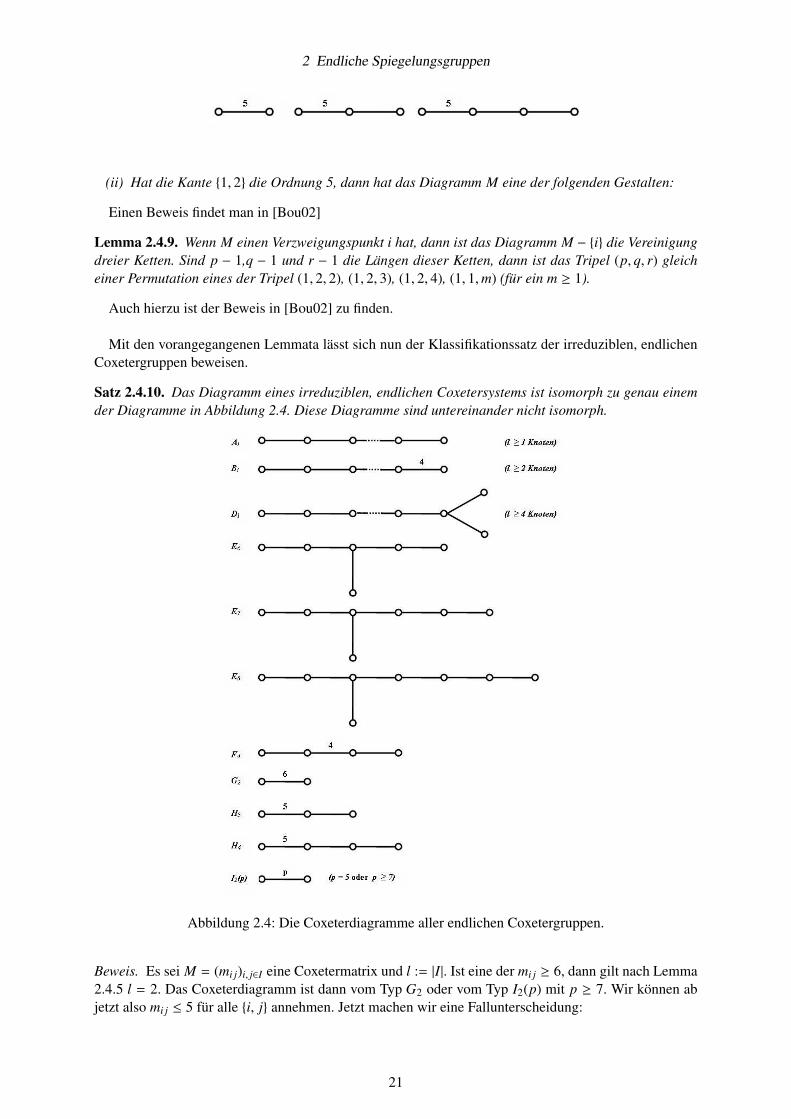
(ii) Hat die Kante {1, 2} die Ordnung 5, dann hat das Diagramm M eine der folgenden Gestalten:
Einen Beweis findet man in [Bou02]
Lemma 2.4.9. Wenn M einen Verzweigungspunkt i hat, dann ist das Diagramm M − {i} die Vereinigungdreier Ketten. Sind p − 1,q − 1 und r − 1 die Längen dieser Ketten, dann ist das Tripel (p, q, r) gleicheiner Permutation eines der Tripel (1, 2, 2), (1, 2, 3), (1, 2, 4), (1, 1,m) (für ein m ≥ 1).
Auch hierzu ist der Beweis in [Bou02] zu finden.
Mit den vorangegangenen Lemmata lässt sich nun der Klassifikationssatz der irreduziblen, endlichenCoxetergruppen beweisen.
Satz 2.4.10. Das Diagramm eines irreduziblen, endlichen Coxetersystems ist isomorph zu genau einemder Diagramme in Abbildung 2.4. Diese Diagramme sind untereinander nicht isomorph.
Abbildung 2.4: Die Coxeterdiagramme aller endlichen Coxetergruppen.
Beweis. Es sei M = (mi j)i, j∈I eine Coxetermatrix und l := |I|. Ist eine der mi j ≥ 6, dann gilt nach Lemma2.4.5 l = 2. Das Coxeterdiagramm ist dann vom Typ G2 oder vom Typ I2(p) mit p ≥ 7. Wir können abjetzt also mi j ≤ 5 für alle {i, j} annehmen. Jetzt machen wir eine Fallunterscheidung:
21

2 Endliche Spiegelungsgruppen
a) Sind die mi j nicht alle gleich 3, dann ist M nach Lemma 2.4.7 eine Kette und genau ein mi j istgleich 4 oder 5. Eine höhere Ordnung haben wir durch eine Annahme oben ausgeschlossen.Ist einer der mi j gleich 5, dann gilt mit 2.4.8, dass einer der Typen H3, H4 oder I2(5) vorliegt.Ist einer der mi j gleich 4, dann gilt mit demselben Lemma, dass einer der Typen Bl oder F4 vorliegt.
b) Seien nun alle mi j gleich 3. Ist M eine Kette, dann ist das Coxeterdiagramm vom Typen Al. Imanderen Fall (d.h. M hat einen Verzweigungspunkt) ist nach Lemma 2.4.9 das Diagramm M vomTypen E6, E7, E8 oder Dl.
Es ist klar, dass je zwei der Coxeterdiagramme nicht isomorph zueinander sind. �
Es bleibt noch zu zeigen, dass die Coxetergruppen aus der Klassifikation alle endlich sind.
Satz 2.4.11. Die durch die Coxeterdiagramme definierten Gruppen Al, Bl,...,I2(p) aus Satz 2.4.10 sindalle endlich.
Beweis. Wir geben hier nur eine kurze Skizze des Beweises an. Es ist klar, dass I2(p) endlich ist, da eszur Diedergruppe der Ordnung 2p gehört. Im Falle von H3 und H4 kann man die Endlichkeit mit Hilfeder quadratischen Form zeigen. Für die Typen Al,...,G2 können zugehörige Weyl-Gruppen konstruiertwerden (für Al, B1 und Dl siehe Beispiele 2.3.3,2.3.4 und 2.3.5). Diese sind per Definition endlich. �
22
Kapitel 3ZellzerlegungTimo Jährling, Dequan Zeng, 18.02.2008
Basierend auf: Abschnitt 1.4 (ohne 1.4.6 und 1.4.7) aus [AB]
3.1 Einleitung
Sei (W,V) eine essentielle endliche Spiegelungsgruppe. Die Hyperebenen H mit sH ∈ W zerteilen V . Wirwollen uns hier mit einer beliebigen endlichen MengeH von Hyperebenen beschäftigen. Wir nennenHgemäß der Standard-Terminologie eine Hyperebenen-Gruppierung und beschränken uns in diesem Kapi-tel auf endliche Mengen von linearen Hyperebenen. Während dieses Abschnitts bezeichnet V einen end-lichdimensionalen Vektorraum und H = {Hi|i ∈ I} eine Hyperebenen-Gruppierung in V (indiziert durcheine endliche Menge I).
3.2 Zellen
Sei fi : V → R, i ∈ I eine von Null verschiedene lineare Funktion. Durch fi = 0 wird eine HyperebeneHi eindeutig bestimmt (bis auf Multiplikation mit einem von Null verschiedenen Skalar)
Definition 3.2.1. Eine Zelle in V bezüglich H ist eine nichtleere Menge A, die wir erhalten, indem wirfür jedes i ∈ I ein Signum σi ∈ {+,−, 0} wählen und fordern, dass fi = σi.(Dabei bedeutet „ fi = +“{x ∈ V | fi(x) > 0}, entsprechend „ fi = −“.) Damit wird A durch homogene lineare Gleichungen bzw.strikte Ungleichungen bestimmt, eine pro Hyperebene.
Geometrisch können wir A schreiben als
A =⋂i∈I
Ui
wobei Ui entweder Hi oder eine der von Hi definierten offenen Halbräume ist. Das Tupel σ := (σi)i∈I ,welche die Definition von A kodiert, wird Signumstupel von A genannt und mit σ(A) bezeichnet. Zellen,für die σi , 0 für alle i ∈ I gilt, heißen Kammern.
Bemerkung 3.2.2. Kammern sind nichtleere offene Mengen, die das Komplement V \⋃
i∈I Hi von Vzerlegen. Im Allgemeinen ist eine Zelle A relativ offen bezüglich ihres Trägers, der als Unterraum
supp A :=⋂
σi(A)=0
Hi
von V definiert ist. (Achtung: Für {i ∈ I | σi(A) = 0} = ∅ ist supp A = V!) Anders ausgedrückt: supp Aist der lineare Spann von A (da A offen bzgl. seinem Träger ist). Die Dimension einer Zelle A ist perDefinition die Dimension ihres Trägers.
23

3 Zellzerlegung
Definition 3.2.3. Die Menge aller Zellen wird mit Σ(H), die Teilmenge aller Kammern mit C(H) be-zeichnet.
Die Zellen A partitionieren V in disjunkte konvexe Kegel, wobei ein Kegel eine unter Multiplikationmit positiven Skalaren abgeschlossene Teilmenge ist.
3.3 Abgeschlossene Zellen und die Seitenrelation
Wir definieren nun eine Ordnung auf der Menge Σ := σ(H) und nennen Σ dann eine geordnete Menge(engl. poset = partially ordered set).
Definition 3.3.1. Seien zwei Zellen A, B ∈ Σ gegeben. Dann ist B eine Seite von A und wir schreibenB ≤ A, wenn für jedes i ∈ I entweder σi(B) = 0 oder σi(B) = σi(A) gilt.
Ist A eine Zelle, dann sind also insbesondere {0} und A selbst Seiten von A. Äquivalent dazu ist diefolgende Definition: die Ordnung auf den Zellen ist durch eine koordinatenweise Ordnung der Signum-stupel gegeben, wobei wir vereinbaren, dass + und − größer als 0 sind.
In Gleichheiten und Ungleichheiten ausgedrückt heißt das dann, dass B ≤ A genau dann, wenn wir dieBeschreibung von B aus der Beschreibung von A erhalten können, indem wir eine beliebige Anzahl anUngleichungen durch Gleichungen ersetzen.
Definition 3.3.2. Sei eine Zelle A gegeben. Dann erhalten wir den Abschluss A von A, indem wir dieoffenen Halbräume aus Definition 3.2.1 durch die entsprechenden abgeschlossenen Halbräume ersetzen.
Äquivalent dazu können wir die strikten Ungleichungen fi > 0 bzw. fi < 0 aus der Beschreibungvon A durch schwache Ungleichungen fi ≤ 0 bzw. fi ≥ 0 ersetzen. Wir nennen A die zu A gehörigeabgeschlossene Zelle. Die Zelle A wird dagegen oft als offene Zelle bezeichnet, obwohl sie i.A. keineoffene Teilmenge von V ist. [Die genauere Bezeichnung lautet relativ offen, da A offen bezüglich seinesTrägers ist und damit auch bezüglich A.]
Direkt aus den Definitionen folgtA =
⋃B≤A
B.
Da die offenen Zellen disjunkt sind, folgt daraus, dass die Seitenrelation im Sinne von abgeschlossenenZellen durch Inklusion charakterisiert werden kann:
B ≤ A⇔ B ⊆ A.
Insbesondere gilt B = A genau dann, wenn B = A. Somit:
Proposition 3.3.3. Die Funktion A 7→ A ist eine Bijektion von den offenen Zellen auf die abgeschlosse-nen Zellen. �
Es wird sich als hilfreich herausstellen, eine geometrische Beschreibung des Zusammenhangs zwi-schen offenen und abgeschlossenen Zellen zu haben, die unabhängig vonH ist.
Proposition 3.3.4. Sei A eine offene Zelle. Dann gilt:
(1) A ist der topologische Abschluss von A in V.
(2) Sei L der lineare Spann von A. Dann ist A das Innere von A in L, d.h. die größte offene Teilmengevon L, die in A enthalten ist.
Beweis. (1) Offenbar ist A abgeschlossen in V , somit enthält es den Abschluss von A. Andersherum,sei y ∈ A und x ∈ A. Wir bezeichnen die abgeschlossene Verbindungsstrecke von x nach y mit [x, y].Jede Gleichung in der Beschreibung von A ist für die gesamte Verbindungsstrecke und jede strikte Un-gleichung für die halboffene Strecke [x, y) gültig. Damit ist [x, y) ⊆ A und damit y im Abschluss vonA.
24
3 Zellzerlegung
(2) Man bemerke zunächst, dass L = supp A; denn supp A enthält A und wird von A aufgespannt,womit es auch von A aufgespannt wird. Damit gilt A ⊆ intL(A) (wobei das Letztere das Innere von Ain L ist), da A offen bezüglich seines Trägers ist. Andersherum sei y ∈ A \ A. Betrachte wiederum dieVerbindungsstrecke [x, y]. Da y < A, muss es in der Beschreibung von A eine Ungleichung, sagen wirfi > 0, geben, für die fi(y) = 0 gilt. Wenn wir die Verbindungsstrecke also über y hinaus fortsetzen, giltsofort fi < 0, was bedeutet, dass wir A verlassen haben (uns aber weiterhin in L befinden). Damit gilty < intL(A). �
Wir können nun eine direkte Definition einer abgeschlossenen Zelle geben, ohne den Begriff der of-fenen Zelle einzuführen. Wir erinnern uns daran, dass eine abgeschlossene Zelle durch |I| Gleichungenoder schwache Ungleichungen beschrieben wird. Nehmen wir umgekehrt an, dass X eine beliebige Men-ge sei, die für jedes i die entsprechende Gleichung fi = 0 bzw. eine der schwachen Ungleichungen fi ≤ 0bzw. fi ≥ 0 enthält. Wir werden nun zeigen, dass X dann bereits eine abgeschlossene Zelle beschreibt.
Proposition 3.3.5. Sei X eine Menge, die durch Gleichungen oder schwache Ungleichungen wie obenbeschrieben bestimmt wird. Dann ist X eine abgeschlossene Zelle in Bezug aufH .
Beweis. Seiσi = 0, wenn fi = 0 in X. Andernfalls gelte in X entweder fi ≥ 0 oder fi ≤ 0. Entsprechendesgelte für σi = + und σi = −. [Vorsicht: Es ist möglich, dass unsere ursprüngliche Beschreibung vonX eine Ungleichung enthielt, sagen wir fi ≥ 0, dass in X aber trotzdem fi = 0 gilt; in diesem Fall istσi = 0.] Sei A die Menge, die von den σi definiert wird. Ist A nicht leer, ist A eine Zelle und es ist X = A.Um zu beweisen, dass A , ∅, wählen wir für jedes i mit σi ∈ {+,−} einen Vektor xi ∈ X mit fi(xi) , 0.Sei x die Summe dieser Vektoren (bzw. 0, falls es keine gibt). Dann ist schon x ∈ A. �
Folgerung 3.3.6. Der Schnitt von abgeschlossenen Zellen ist eine abgeschlossene Zelle. �
Wir kommen schließlich zur geometrischen Bedeutung der Seitenrelation. Wenn wir uns eine Zelle Aim R2 oder R3 vorstellen, können wir leicht sehen, was ihre Seiten sind, ohne das System aus Gleichun-gen und Ungleichungen zu kennen, das A beschreibt. Annähernd könnte man sagen, dass die Seiten dieflachen Teile sind, in die der Rand von A zerfällt. Die folgende Proposition drückt dies präzise aus:
Proposition 3.3.7. Sei A eine Zelle. Zwei unterschiedliche Punkte y, z ∈ A liegen genau dann in der sel-ben Seite von A, wenn es eine offene Strecke durch y und z gibt, die komplett in A liegt. Dem entsprechendhängt die Zerlegung von A nur von A (als Teilmenge von V) ab, nicht aber von der GruppierungH .
Beweis. Angenommen, y und z liegen in der gleichen Seite B ≤ A. Für jede Bedingung fi = σi inder Beschreibung von B können wir die Strecke [y, z] ein wenig in beide Richtungen verlängern, ohnedie Bedingung zu verletzen. Da es nur endlich viele solche Bedingungen gibt, folgt daraus, dass B eineoffene Strecke enthält, die wiederum y und z enthält. Gleiches gilt für A.
Nehmen wir nun an, dass y und z in unterschiedlichen Seiten von A liegen. Dann gibt es ein i von derArt, dass sich y und z unterschiedlich in Bezug auf fi verhalten, sagen wir fi(y) > 0 und fi(z) = 0. Wennwir die Strecke [y, z] nun über z hinaus verlängern, gilt sofort fi < 0, wir verlassen also A; damit gibt eskeine offene Strecke, die sowohl y als auch z enthält. �
Für uns bedeutet das: Wenn wir die polyedrische Struktur einer bestimmten Zelle A verstehen wollen,dann können wirH durch eine andere Hyperebenen-Gruppierung ersetzen, bezüglich der A immer nocheine Zelle ist. Für zukünftige Referenz bemerken wir:
Folgerung 3.3.8. Sei A eine Zelle in Bezug aufH . Ist A auch eine Zelle in Bezug auf eine GruppierungH ′, dann sind die Seiten von A, die durchH ′ beschrieben werden, die gleichen wie die, welche durchHbeschrieben werden. �
In der Anwendung wollen wir eine minimale Menge an Hyperebenen für eine gegebene Zelle A ver-wenden. Im nächsten Unterabschnitt verdeutlichen wir genau, wie wir das tun können für den Fall, dassA eine Kammer ist.
25
3 Zellzerlegung
3.4 Panele und Wände
Definition 3.4.1. Eine Zelle A mit genau einer Null in ihrem Signumstupel wird Panel genannt. Äquiva-lent hierzu ist die folgende Notation: A ist ein Panel, wenn supp A eine Hyperebene ist. Diese liegt dannnotwendigerweise inH . Wenn das Panel A eine Seite der Kammer C ist, dann sagen wir auch „A ist einPanel von C“. Seine Träger-Hyperebene nennen wir Wand von C.
In niedrig-dimensionalen Beispielen sehen wir leicht, dass jede Kammer durch die Ungleichungenentsprechend ihrer Wände bestimmt wird; alle anderen Ungleichungen sind überflüssig. Wir werden nunzeigen, dass dies immer der Fall ist. Betrachte eine Kammer C. Wir sagen, dass C von einer TeilmengeHC ⊆ H bestimmt wird, wenn C durch die Bedingungen fi = σi ausgedrückt werden kann, wobei i alleIndizes vonH∫ durchläuft.
Lemma 3.4.2. Wenn H ∈ H keine Wand von C ist, dann kann C durch HC B H \ {H} beschriebenwerden.
Beweis. Um die Notation zu vereinfachen, nehmen wir an, dass C für alle i von den Ungleichungenfi > 0 beschrieben wird. Sei weiterhin j derjenige Index, so dass H = H j. Nehmen wir an, dass C nichtvon H ′ beschrieben wird. Dann führt das Entfernen der Bedingung f j > 0 zu einer Menge C′ ⊃ C.Wähle y ∈ C′ \ C und x ∈ C. Da f j(x) > 0 und f j(y) ≤ 0, gibt es einen Punkt z ∈ (x, y], für den f j(z) = 0gilt. Dieser Punkt ist dann in einem Panel A von C enthalten, dessen Träger H ist. Also ist H eine Wandvon C. �
Proposition 3.4.3. Sei C eine Kammer undHC ∈ H ihre Wandmenge. Dann wird C durchHC beschrie-ben undHC ist gleichzeitig die kleinste Teilmenge vonH mit dieser Eigenschaft.
Beweis. Wenn C von H ′ ⊆ H bestimmt wird, können wir H ′ nach Folgerung 3.3.8 dazu verwenden,die Wände von C zu bestimmen. Damit ist H ′ ⊇ HC . Es bleibt zu zeigen, dass C von HC bestimmtwird. Wenn H irgendeine Hyperebene H enthält, die keine Wand von C ist, können wir diese nachLemma 3.4.2 streichen, um eine kleinere beschreibende MengeH ′ zu erhalten. Nun kann C immer nocheine Kammer in Bezug auf H ′ sein und wenn wir H durch H ′ ersetzen, ändert das die Wände nicht.Somit können wir dieses Vorgehen wiederholen, eine weitere Nicht-Wand entfernen und so weiter. DaH endlich ist, gelangen wir nach endlich vielen Schritten zuHC . �
Den Beweis, den wir gerade gegeben haben, macht wesentlichen Gebrauch von der Tatsache, dass derBegriff „Wand“ nicht von der jeweiligen bestimmenden Hyperebenen-Menge abhängt. Hier eine einfachezugehörige Charakterisierung von Wänden:
Proposition 3.4.4. Sei C eine Kammer und H eine lineare Hyperebene in V. Dann ist H genau dann eineWand von C, wenn C auf einer der von H definierten Halbräume liegt und C ∩ H ein nichtleeres Inneresin H hat.
Beweis. Wenn H der Träger eines Panels A von C ist, liegt C sicherlich auf einer Seite von H und C ∩Henthält A, welches eine nichtleere offene Teilmenge von H ist. Nehmen wir andersherum an, dass H eineHyperebene von der Art ist, dass C auf einer Seite von H liegt und C ∩ H nichtleeres Inneres in H hat.Dann ist C immer noch ein Panel in Bezug auf H+ B H ∪ {H}, womit wir H+ verwenden können, umdie Seiten von C zu bestimmen. Nach Proposition 3.3.5 ist C ∩ H eine bezüglich H+ abgeschlosseneZelle A und die zugehörige offene Zelle A ist eine Seite von C, da A ⊆ C. Weil A in H enthalten ist undnichtleeres Inneres in H besitzt, muss der Träger von A in H liegen. Dann ist A aber ein Panel von C undsein Träger H damit eine Wand von C. �
26
3 Zellzerlegung
3.5 Simpliziale Kegel
Sei C eine beliebige aber feste Kammer und seiHC ihre Wandmenge. Es ist dienlich, die Indexmenge Ifür H mit {1, 2, . . . ,m} zu bezeichnen für ein m ∈ N0. Der Einfachheit halber nehmen wir an, dass dieElemente vonH’ die Hyperebenen fi = 0 für 1 ≤ i ≤ r sind und dass fi > 0 für 1 ≤ i ≤ m in C.
Sei V0 B⋂m
i=1 Hi. Wir nennenH wesentlich, wenn V0 = 0. Durch die Beschränkung auf den wesent-lichen Fall geht die Allgemeingültigkeit nicht verloren. Denn wenn wir V1 B V/V0 setzen, dann gehendie linearen Funktionen fi in den Quotienten V1 über und definieren dort eine wesentliche Hyperebenen-menge. Die Zellen, die von den Hyperebenen in V1 bestimmt werden, stehen in Analogie zu den Zellenin V . Genauer gesagt sind die Zellen in V die Urbilder der Zellen in V1.
Man beachte, dass V0 selbst eine Zelle mit dem Signumstupel (0, 0, . . ., 0) ist. Sie ist die kleinsteZelle in dem Sinne, dass sie eine Seite jeder Zelle ist. Damit ist H wesentlich genau dann, wenn diekleinste Zelle ein Punkt ist. Man bemerke, dass V0 auch die kleinste Seite von C ist. Da wir die Seitenvon C beschreiben können, indem wir H’ anstatt H verwenden (Abschnitt 3.4), folgt hieraus, dassV0 =
⋂ri=1 Hi.
Nehmen wir nun an, dass H wesentlich ist. Dann führt unsere letzte Beobachtung zu⋂r
i=1 Hi = 0.Daraus folgt r ≥ n B dim V . Wir können uns einfache Beispiele überlegen, bei denen Ungleichheitgilt (C könnte im R3 zum Beispiel der Kegel über einem offenen Quadrat sein. In diesem Falle wärer = 4 > 3 = dim V). Wir zeigen nun, dass r = n genau dann, wenn der Kegel C simplizial ist. Damitist gemeint, dass C für eine Basise1, . . . , en von V als Linearkombination der Form
∑ni=1 λiei mit λi > 0
dargestellt werden kann. [Mit anderen Worten: C ist das Innere der Kegels über dem Simplex mit denKanten e1, . . . , en.]
Proposition 3.5.1. SeiH wesentlich. Dann sind die folgenden Aussagen über die Kammer C äquivalent:
(i) C ist ein simplizialer Kegel.
(ii) C hat genau n Panele und es gilt r = n.
(iii) f1, . . . , fr sind linear unabhängig.
(iv) f1, . . . , fr bilden eine Basis des Dualraums V* von V.
Beweis. Wie oben bereits erwähnt, impliziert die Annahme, dass H wesentlich ist, dass⋂r
i=1 Hi = 0,d.h. dass die Gleichungen f1 = 0, . . . , fr = 0 nur die triviale Lösung haben. Die Äquivalenz von (ii), (iii)und (iv) folgt leicht hieraus mit elementarer linearer Algebra.
Nehmen wir nun an, dass (ii)-(iv) gelte und sei (ei)1≤i≤n die zu ( fi) duale Basis V . Dann impliziertdie Beschreibung „ fi > 0 für 1 ≤ i ≤ n“ von C, dass C aus den positiven Linearkombinationen von ei
besteht. Dies beweist (i).Andersherum impliziert (i), dass C von xi > 0 für 1 ≤ i ≤ n beschrieben wird, wobei xi die ite
Koordinatenfunktion in Bezug auf eine Basis von V ist. Wir können diese Beschreibung von C dazuverwenden, um seine Wände zu bestimmen, welche, wie leicht zu sehen, die Koordinaten-Hyperebenenxi = 0 sind; dies beweist (ii)-(iv). �
3.6 Eine Bedingung dafür, dass eine Kammer simplizial ist
Das Ergebnis dieses Unterkapitels wird später dazu verwendet werden, zu zeigen, dass die Kammern,die einer essentiellen endlichen Spiegelungsgruppe angehören, immer simpliziale Kegel sind.
Wir fahren fort mit der Notation des vorangegangenen Unterkapitels. Wir nehmen weiter an, dass Vein Skalarprodukt 〈−,−〉 besitzt. Dann ist die lineare Funktion fi durch 〈ei,−〉 für einen Vektor ei ∈ Vgegeben. Ersetzen wir fi durch ein skalares Vielfaches, so können wir annehmen, dass ||ei|| = 1; damit istei einer von zwei Einheitsvektoren, die senkrecht auf Hi stehen. Immer wenn wir, wie gerade, von einerfesten Kammer C sprechen, können wir diese Uneindeutigkeit umgehen, indem wir festlegen, dass ei in
27
3 Zellzerlegung
den von Hi erzeugten Halbraum hinein zeigt, der C enthält. Dies ist äquivalent zu der Forderung, dass,wie oben, in C immer fi > 0 gilt.
Zusammenfassend nehmen wir nun an, dass die Kammer C von 〈ei,−〉 > 0 für 1 ≤ i ≤ m erzeugt wird,wobei ei Einheitsvektoren sind, und dass die ersten r Ungleichungen genügen, um C zu beschreiben.Weiterhin gebe es keine kleinere Menge von Ungleichungen, die C beschreibt. Wir wiederholen zurBetonung nochmals, dass die Vektoren (ei)1≤i≤r bis auf die Reihenfolge vollständig von C bestimmtwerden. Die folgende Proposition nennt eine notwendige Bedingung dafür, dass C simplizial ist undzwar in Bezug auf die Matrix der Skalarprodukte
⟨ei, e j
⟩(1 ≤ i, j ≤ r), welches oft auch Gram-Matrix
von C genannt wird.
Proposition 3.6.1. Sei H essentiell. Wenn⟨ei, e j
⟩≤ 0 für jedes i , j (i, j ≤ r), d.h. wenn der Winkel
zwischen ei und e j nicht spitz ist, dann ist C ein simplizialer Kegel.
Für spätere Zwecke führen wir eine Metrik auf der Kammernmenge C B C(H) ein. Für den Augen-blick bezeichnen wir diese Metrik mit dH (−,−); später lassen wir den IndexH aus, nachdem wir gezeigthaben, dass dH mit einer andere Metrik übereinstimmt.
Definition 3.6.2. Der Abstand zwischen zwei Kammern C,D ist die Anzahl an Hyperebenen in H , dieC von D trennen. dH ist auch die Anzahl der Einträge, an denen sich die Signumstupel von C und Dunterscheiden.
3.7 Formale Eigenschaften der halbgeordneten Zellenmenge
Erinnern wir uns aus Abschnitt 3.3, dass die geordnete Menge der (offenen) Zellen Σ B Σ(H) isomorphzur geordnete Menge der abgeschlossenen Zellen ist, wobei die letztere Menge durch Inklusion geordnetist. (Siehe Proposition 3.3.3 und der darauf folgende Abschnitt.) Weiterhin erinnern wir uns daran, dassder Schnitt von abgeschlossenen Zellen wieder eine abgeschlossene Zelle ist (Folgerung 3.3.6); damitgelangen wir zu:
Proposition 3.7.1. Zwei beliebige Elemente aus Σ haben eine größte untere Schranke.
Wir bezeichnen mit A ∩ B fortan die größte untere Schranke zweier offener Zellen A und B. Natürlichhandelt es sich hierbei nicht um den mengentheoretischen Schnitt von A und B, der ja leer wäre, außerwenn A = B; es handelt sich vielmehr um die offene Zelle, deren Abschluss der Schnitt von A und B ist.
Proposition 3.7.2. Jede beliebige Zelle A ∈ Σ ist die Seite einer Kammer. Ist A ein Panel, ist A die Seitevon genau zwei Kammern. �
Folgerung 3.7.3. Jede Hyperebene H ∈ H ist die Wand einer Kammer.
Beweis. H kann nicht die Vereinigung seiner Schnitte mit den andere Hyperebenen sein, damit gibt eswenigstens ein Panel A mit Träger H. Damit ist H eine Wand jeder Kammer C > A. �
3.8 Der Kammerngraph
Definition 3.8.1. Zwei Kammern C und C′ heißen adjazent, wenn sie disjunkt sind und ein gemeinsamesPanel A haben.
Man bemerke, dass C und C′ dann zwei Kammern sind, die A als Seite haben und die HyperebeneH B supp A das eindeutig bestimmte Element in H ist, das C von C′ trennt. Weiterhin ist A = C ∩ C′.[Diese letzte Annahme können wir entweder durch Argumentieren über die Dimension oder einfach überdie Definition von C∩C′ beweisen.] Wir werden in diesem Fall oft sagen „C und C′ sind adjazent entlangder Wand H.“
28

3 Zellzerlegung
Abbildung 3.1: Beispiel für einen Kammerngraphen
Definition 3.8.2. Der zu H gehörige Kammerngraph ist derjenige Graph, dessen Knotenmenge derKammernmenge C entspricht und es genau dann eine Kante zwischen C und C′ gibt, wenn sie adjazentsind.
Wir können den Kammerngraph darstellen, indem wir in jeden Kammer einen Punkt zeichnen undüber jedes Panel eine Kante laufen lassen (Abbildung 3.1). Teilweise zeichnen wir das folgende schema-tische Diagramm:
C C′
H
Damit zeigen wird, dass C und C′ adjazent entlang H sind. Die waagerechte Linie soll eine Kanteim Kammerngraph, die senkrechte Linie die Wand darstellen, die überquert wird, um von C nach C′ zugelangen.
Es gibt eine kanonische Metrik auf den Knoten eines Graphen, wobei die Entfernung zwischen zweiKnoten die Länge des kürzesten Weges zwischen ihnen ist. Befinden sich zwei Knoten in zwei unter-schiedlichen Zusammenhangskomponenten, wird ihr Abstand gewöhnlich mit ∞ angegeben. Wir wer-den weiter unten jedoch sehen, dass der Kammerngraph zusammenhängend ist und dass die Metrik desGraphen sogar mit der Metrik dH aus Definition 3.6.2 übereinstimmt. Bevor wir damit fortfahren, führenwir zuerst eine Terminologie ein, die wir während dieses Buches verwenden werden.
Definition 3.8.3. Ein Weg im Kammerngraph wird Galerie genannt. Damit ist eine Galerie eine Folgevon Kammern Γ (C0,C1, . . .C1) sodass zwei aufeinanderfolgende Kammern Ci−1 und Ci (i = 1 . . . , l)adjazent sind. Die Zahl l wird Länge von Γ genannt. Wir schreiben
Γ : C0, . . . ,Cl
und sagen, dass Γ eine Galerie von C0 bis Cl ist oder dass Γ C0 mit Cl verbindet.Die kleinste Länge l einer Galerie, die die Kammern C und D verbindet, heißt Galerie-Abstand und
wird mit d(C,D) bezeichnet. Zuletzt nennen wir eine Galerie C = C0, . . . ,Cl = D von minimaler Längel = d(C,D) eine kürzeste Galerie von C nach D. Im Kammerngraph wird dies gewöhnlich als Geodätebezeichnet.
Wenn wir einmal gezeigt haben, dass d = dH , benötigen wir weder die Schreibweise dH , noch brau-chen wir uns auf den Abstand als „Galerieabstand“ zu beziehen, auch wenn wir dies teilweise zur Beto-nung tun werden.
In manchen Fällen beschreiben wir eine Galerie schematisch durch das folgende Diagramm:
29

3 Zellzerlegung
Γ : C0 — C1 — C2 — · · · — Cl ,
welches wir zusätzlich mit Hyperebenen ausstatten können, wie oben.
Achtung: In manchen Büchern werden Galerien allgemeiner als Folgen von Zellen definiert, die entwe-der gleich oder adjazent sind. Solche Reihen kommen natürlicherweise vor, wie wir sehen werden. Wirnennen sie Prägalerien. Eine Prägalerie kann in eine Galerie umgewandelt werden, indem man doppelteZellen streicht.
Wir haben oben angemerkt, dass die Metrik dH aus Definition 3.6.2 die Eigenschaft hat, dass dH (C,C′)= 1, wenn C und C′ adjazent sind, d.h. wenn sie durch eine Kante des Kammerngraphen verbunden sind.Dies regt an zu:
Proposition 3.8.4. Der Kammerngraph ist zusammenhängend. Für zwei beliebige Kammern C, D istder Galerieabstand d(C,D) gleich dH (C,D).
Der Kernpunkt des Beweises ist das folgende Ergebnis:
Lemma 3.8.5. Für zwei beliebige Kammern C , D gibt es eine zu C adjazente Kammer, für die gilt:dH (C′,D) = dH (C′,D) − 1. �
Sei eine kleinste Galerie C = C0, . . . ,Cl = D gegeben und seien H1, . . . ,Hl ∈ H Hyperebenen so dassCi−1 und Ci adjazent entlang Hi sind. [Vorsicht: Diese Notation hat nichts mit unserer ursprünglichenIndizierung der Elemente (Hi)i∈I aus H zu tun; wir haben keine weitere Verwendung für diese Indizie-rung.] Wir werden auf die Hi verweisen als die von der Galerie „durchquerten Wände“. Da sich genaueine Komponente des Signumstupel ändert, wenn wir von einer Kammer in die nächste laufen und dasich genau l = d(C,D) Sigma insgesamt ändern, ist ersichtlich, dass die H1, . . . ,Hl eindeutig und genaudie Elemente von H sind, die C von D trennen. Sei umgekehrt eine Galerie von C nach D gegeben, diekeine Wand mehr als einmal durchquert. Wenn k die Länge der Galerie ist, dann ändern sich genau kSigma, es gilt k = l und damit ist die Galerie minimal. Wir haben bewiesen:
Proposition 3.8.6. Eine Galerie von C nach D ist minimal genau dann, wenn sie keine Wand mehr alseinmal durchquert. In diesem Fall sind die durchquerten Wände genau jene, die C von D trennen. �
Da die Kammernmenge C = C(H) ein metrischer Raum ist, hat sie einen wohldefinierten Durchmes-ser, den wir auch als Durchmesser von Σ bezeichnen werden; per Definition ist er der maximale Abstandd(C,D) zwischen zwei Zellen C,D. Das nachfolgende Ergebnis ist eine direkte Interpretation der Metrikauf C wie dH :
Proposition 3.8.7. Der Durchmesser von C ist m B |H|. Für jede Kammer C gibt es eine eindeutigeKammer D mit d(C,D) = m, nämlich die gegenüberliegende Kammer D = −C. �
Man beachte, dass für jede Kammern C und D gilt:
d(C,D) + d(D,−C) = m. (3.8.1)
Tatsächlich trennt jede Hyperebene inH die Kammer D entweder von C oder von −C, aber nicht vonbeiden gleichzeitig. Wenn wir nun eine kürzeste Galerie von C nach D mit einer kürzesten Galerie vonD nach −C verknüpfen, erhalten wir eine kleinste Galerie von C nach −C. Dementsprechend haben wir
Folgerung 3.8.8. Für zwei Kammern C,D gibt es eine kürzeste Galerie von C nach −C, die durch Dgeht. �
30
Chapter 4The Simplicial Complex of a ReflectionGroupNicolas Weber, 18.02.2008
Based on: Section 1.5 from [AB]
4.1 Prerequisites
In the following, let V be a Euclidean vector space, W a finite reflection group acting on V , and H aset of hyperplanes so that the reflections sH (H ∈ H) generate W. We assume H is W-invariant. Σ, orΣ(W,V), denotes the set Σ(H) of cells in V with respect toH as discussed in earlier talks.
4.2 The Action of W on Σ(W,V)
Let C be a fixed but arbitrary chamber from Σ, called the fundamental chamber, and let S be the setof reflections with respect to the walls of C. The elements of S are called fundamental reflections. Fors ∈ S let Hs be the hyperplane fixed by s and let As be the the panel of C with support Hs. By the earlierdefinition of our partial order on Σ we have Hs < C. Since Hs is fixed by s, we have As = sAs, and sinceW acts as a poset automorphism on Σ we know sAs < sC, so As is a face of sC as well. This means Cand sC are the only two chambers having As as a face (Proposition 3.7.2). Thus, the chambers adjacentto C are the sC for s ∈ S . With the W-action we deduce that, for any w ∈ W, the adjacent chambers ofwC are wsC for s ∈ S . They are adjacent along the wall wHs, the fixed hyperplane of wsw−1.
Thus, galleries correspond 1-1 to words in the alphabet S .
Theorem 4.2.1.
(i) The set S of fundamental reflections generates W.
(ii) The action of W is simply transitive on the set C given by w ↔ wC, where C is the fundamentalchamber. In particular, the number of chambers is equal to the order |W | := of W.
Proof. The proof consists of three steps:
1. The subgroup W′ := 〈S 〉 generated by S acts transitively on C: Given D ∈ C, we have a galleryfrom C to D (Proposition 3.8.4). The gallery corresponds to a word in S , so D = wC withw := s1s2 · · · sl ∈ W′, where l is the length of the gallery.
2. Now show W = W′: It suffices to show W′ contains the generators sH of W (H ∈ H). GivenH ∈ H , take a chamber D having H as a wall (Corollary 3.7.3). Then D = wC for w ∈ W′, soH = wHs for some wall Hs of C, and sH = wsw−1 ∈ W′.
31

4 The Simplicial Complex of a Reflection Group
3. Now only w , 1 ⇒ wC , C still needs to be shown. Let l : W → N be the function that maps anelement w ∈ W to the length of a shortest S -word representing w. We show
d(C,wC) = l(w) (4.2.1)
which completes the proof. Thus we must show that a gallery from C to wC is minimal if w =
s1s2 · · · sl with l = l(w). Write the gallery as
w0C −→w0H1
w1C −→w1H2
· · · −→wl−1Hl
wlC
where wi := s1 · · · si and Hi := Hsi (see beginning of the section and note that wi = wi−1si fori ≥ 1). Here w0 := 1. If the gallery is not minimal, then two of the walls indicated must coincide(Proposition 3.8.6). Thus wi−1Hi = w j−1H j for some i, j with 1 ≤ i < j ≤ l. Passing to theassociated reflections, we obtain wi−1siw−1
i−1 = w j−1s jw−1j−1, or
wiw−1i−1 = w jw−1
j−1.
This can be rewritten as w−1i−1w j−1 = w−1
i w j. Expanding both sides in terms of s1, . . . , sl, we obtain,finally,
si · · · s j−1 = si+1 · · · s j.
Hence
w = s1 · · · si−1(si · · · s j−1
)s j · · · sl
= s1 · · · si−1(si+1 · · · s j
)s j · · · sl
= s1 · · · si · · · s j · · · sl,
where the hats indicate deleted letters (note that s2j = 1). This contradicts the minimality of l and
completes the proof. �
Corollary 4.2.2. (Deletion Condition) Let w = s1s2 · · · sm with si ∈ S . If there exists a shorter expressionfor w as a product of elements of S , then there are indices i < j such that
w = s1 · · · si · · · s j · · · sm.
Proof. The hypothesis implies that d(C,wC) < m, so the gallery corresponding to the given expressionfor w is not minimal. The conclusion now follows from the third step of the previous proof. �
Corollary 4.2.3. H necessarily consists of all hyperplanes H in V such that sH ∈ W.
Proof. Suppose sH ∈ W but H < H . Then H *⋃
H′∈H H′, so H must meet a chamber D. Since theelement w := sH of W fixes H, it follows that wD meets D and hence that wD = D, contradicting thetheorem. �
Remark 4.2.4. For all w ∈ W and s ∈ S we have l(ws) = l(w) ± 1 and l(sw) = l(w) ± 1.
4.3 The Longest Element of W
Proposition 4.3.1. Let (W,V) be a finite reflection group.
(i) W has a unique element w0 of maximal length. Its length is given by l(w0) = |H|.
(ii) The element w0 is characterized by the property that w0C = −C, where C is the fundamentalchamber.
32

4 The Simplicial Complex of a Reflection Group
(iii) l(ww0) = l(w0) − l(w) for all w ∈ W.
(iv) w20 = 1, and w0 normalizes the set S of fundamental reflections.
Proof. By Theorem 4.2.1, there is a unique w0 such that w0C = −C. Parts (i) and (ii) now follow at oncefrom Proposition 3.8.7 and Equation 4.2.1.
For (iii), we have
l(ww0) = d(C,ww0C)
= d(C,w(−C))
= d(−C,wC)
= |H| − d(C,wC)
= l(w0) − l(w),
where the second to last equality follows from Proposition 3.8.7.For (iv): By (ii) we have w2
0C = w0(−C) = −w0C = C, so Theorem 4.2.1 implies that w20 = 1. −C
has the same walls as C, so S is the set of reflections with respect to the walls of −C. On the other hand,w0S w−1
0 (= w0S w0) is the set of reflections with respect to the walls of −C = w0C. So w0S w−10 = S . �
4.4 Examples
Example 4.4.1. Let (W,V) be essential and of rank 2. Let m := |H|. Then m ≥ 2, and the m lines in Hdivide the plane V into 2m chambers, each of which is a sector. By Theorem 4.2.1, W is transitive on theset of sectors, so the sectors have to be congruent. It follows that each sector has angle 2π/2m = π/m. Wis generated by two reflections in lines L1 and L2 that intersect at an angle of π/m.
Also note that, if ei (i = 1, 2) are the unit normal vectors to Li pointing towards the enclosed chamber,
〈e1, e2〉 = − cosπ
m. (4.4.1)
This example generalizes to the case that (W,V) has rank 2 but is not necessarily essential, i.e. if wewrite V = V0 ⊕ V1, then dim V1 = 2. Now we apply the above to V1. If C1 is a chamber in V1 with wallsLi and normals ei, then V0 × C1 is a chamber in V with walls V0 ⊕ Li and the same normals ei. It is stilltrue that a chamber C has two walls and the corresponding unit normal vectors satisfy equation 4.4.1.
Example 4.4.2. Let W be the reflection group of type H3, i.e. the group of symmetries of a regulardodecahedron in V := R3. We restrict the action of W to the unit sphere S 2 and think of W as a group ofisometries of this sphere. As such, it is the group of symmetries of the regular tesselation of the sphereobtained by radially projecting the faces of the dodecahedron onto the sphere. Let P be one of the 12spherical pentagons that occur in this tesselation. It has interior angles 2π/3 since there are 3 pentagonsat each vertex.
The circles of symmetry of this tesselation subdivide P, cutting it into 10 spherical triangles. Each ofthese triangles has angles π/2, π/3 and π/5. A chamber C in V is the cone over such a triangle T . Thereare 12 · 10 = 120 chambers, thus by Theorem 4.2.1 the dodecahedral group is of order 120 generated by3 reflections. By the angles computed above, we find the orders of the generating reflections are
(s1s2)3 = (s2s3)5 = (s3s1)2 = 1.
4.5 Chambers are Simplicial
As above, let (W,V) be a finite reflection group, C a fundamental chamber with walls Hs(s ∈ S ). Let es
be the unit normal of Hs pointing to the side of Hs containing C. The Gram matrix of C is the matrix ofinner products 〈es, et〉 whose rows and columns are indexed by S .
As indicated by the examples above, we get the following result:
33

4 The Simplicial Complex of a Reflection Group
Theorem 4.5.1. We have〈es, et〉 = − cos
π
m(s, t)(4.5.1)
for s, t ∈ S , where m(s, t) is the order of st. In particular, 〈es, et〉 ≤ 0 for s , t. Consequently, C is asimplicial cone if (W,V) is essential.
The proof makes use the following lemma:
Lemma 4.5.2. Given s , t in S , let W′ be the group generated by s and t. Then W′ is a rank 2 reflectiongroup, and C is contained in a W′-chamber C′ having Hs and Ht as its walls.
Proof. We have VW′ = Hs ∩ Ht = (Res ⊕ Ret)⊥, so (W′,V) has rank 2. Let H ′ ⊆ H be the set ofhyperplanes of the form w′Hs or w′Ht with w′ ∈ W′. Then H ′ is W′-invariant, and the reflections withrespect to the elements of H ′ are in W′ and generate it. Hence H ′ is the set of W′-walls, i.e. the set ofhyperplanes that define the W′-cells. Since C is convex and is disjoint from all the elements of H ′, it iscontained in a W′-chamber C′. The rank calculation shows that C′ has two walls. To see that these areHs and Ht, note that C′ ∩ Hs ⊇ C ∩ Hs, which has nonempty interior in Hs, and similarly for Ht. So Hs
and Ht are walls of C′ by Proposition 3.4.4. �
Now we can prove the theorem:
Proof. The last assertion follows from Proposition 3.6.1. To prove the first assumption, we assume s , t.Let W′ and C′ be as in the lemma. Then 〈es,−〉 and 〈et,−〉 are positive on C ⊆ C′, so es and et are thecanonical unit normals to the walls of C′. The inner product formula 4.5.1 now follows from example4.4.1. �
With the former result that there is a unique longest element w0 in W that normalizes S , we get anothercorollary.
Corollary 4.5.3. Assume that (W,V) is essential and irreducible.
(i) w0 is the only nontrivial element of W that normalizes S .
(ii) The center of W is trivial unless W contains −1, where −1 denotes −idV . In this case w0 = −1 andthe center is {±1} = {1,w0}.
Proof.
(i) Assume that w , 1 and that wS w−1 = S , and consider the chamber D := wC. the reflections withrespect to its walls are the reflections in wS w−1 = S , so D has the same walls Hs as C. We claimthat, given s, t ∈ S with m(s, t) > 2, either Hs and Ht both separate D from C or else neither ofthem separates D from C. This claim implies, by irreducibility and the fact that D , C, that everyHs separates D from C. Hence D is defined by 〈es,−〉 < 0 for all s ∈ S , i.e. D = −C = w0C andw = w0.To prove the claim, we set W′ := 〈s, t〉 and apply Lemma 4.5.2 to get a W′-chamber C′ ⊇ C suchthat Hs and Ht are the walls of C′. We can also apply the lemma with C replaced by D to get aW′-chamber D′ ⊇ D such that Hs and Ht are the walls of D′. Now we know exactly what rank 2reflection groups look like, and, since m(s, t) > 2, there are only two W′-chambers with Hs and Ht
as walls, namely C′ and −C′. Hence D′ = ±C′, and the claim follows.
(ii) The center of W normalizes S , so if there is a nontrivial center then w0 is central and is the uniquenontrivial element of the center by (i). But if w0 is central, then w0es = −es for all s, hencew0 = −1. �
34

4 The Simplicial Complex of a Reflection Group
4.6 The Poset Σ as a Simplicial Complex
First, we introduce what we mean by “simplicial complex”. Normally, a simplicial complex with a vertexset V is a nonempty collection ∆ of finite subsets of V (called simplices) such that every singleton {v}is a simplex and every subset of a simplex A is a simplex (called a face of A). The cardinality r of A iscalled the rank of A, and r − 1 is called the dimension of A. We include the empty set as a simplex withrank 0 and dimension -1. A subcomplex of ∆ is a subset ∆′ that contains, for each of its elements A, allthe faces of A; thus ∆′ is a simplicial complex in its own right, with vertex set equal to some subset ofV.
Note that ∆ is a poset, ordered by the inclusion of faces. It has the following properties:
(i) Any two elements A, B ∈ ∆ have a greatest lower bound A ∩ B.
(ii) For any A ∈ ∆, the poset ∆≤A of faces of A is isomorphic to the poset of subsets of {1, . . . , r} forsome r ≥ 0 (more concisely: “∆≤A is a Boolean lattice of rank r”).
These two conditions actually characterize simplicial complexes, a poset satisfying them can be identifiedwith the poset of simplices of a simplicial complex. Namely, take the vertex set V to be the set of rank1 elements of ∆ (the rank of A is defined as the rank of the Boolean lattice ∆≤A); then we can associateto each A ∈ ∆ the set A′ := {v ∈ V|v ≤ A}. The map A 7→ A′ defines a poset isomorphism of ∆ onto asimplicial complex with vertex setV.
Therefore, we use this extended definition:
Definition 4.6.1. Any nonempty poset ∆ satisfying the two conditions above will be called a simplicialcomplex. The elements of ∆ will be called simplices, and those of rank 1 will be called vertices.
We visualize a simplex A of rank r as a geometric (r− 1)-simplex, the convex hull of its r vertices. Wemake this precise by forming the geometric realization |∆| of ∆, which is a topological space partitionedinto (open) simplices |A|, one for each nonempty A ∈ ∆. To construct this topological space, start withan abstract vector space with V as a basis. Let |A| be the interior of the simplex in this vector spacespanned by the vertices of A, i.e. |A| consists of the linear combinations
∑v∈A λvv with λv > 0 for all v
and∑
v∈A λv = 1. We then set|∆| :=
⋃A∈∆
|A| .
If ∆ is finite, all of this happens in RN , where N is the number of vertices of ∆, and we simply topologize|∆| as a subspace of RN .
This concludes the definitions, and we can turn back to our previous discussion of finite reflectiongroups and their actions. Recall that Σ is the set of cells in V induced by the finite reflection group W.
Proposition 4.6.2. The poset Σ is a simplicial complex.
Proof. We may assume that (W,V) is essential, since Σ remains unchanged, up to canonical isomorphism,if we pass to the essential part. According to the definition of a simplicial complex above, we must checktwo conditions. Condition (i) is that any two elements of Σ have a greatest lower bound; this has alreadybeen proved in Proposition 3.7.1. As to condition (ii), concerning the poset Σ≤A of faces of a cell A ∈ Σ,we know that A is a face of a chamber, so it suffices to consider the case where A is a chamber. But it isa trivial matter to compute the poset of faces of a simplicial cone, and this poset is indeed isomorphic tothe set of subsets of {1, . . . , n}, where n = rank(A). �
Thus, in the essential case, Σ can be identified with an abstract simplicial complex this way: Every1-dimensional cell A ∈ Σ is a ray R∗+v, where R∗+ is the set of positive reals and v is a unit vector; the unitvectors v that arise in this way are the vertices of our simplicial complex. For each (q + 1)-dimensionalcell A ∈ Σ (q ≥ −1), there is a q-simplex
{v0, . . . , vq
}in our complex, where the vi are the unit vectors in
the 1-dimensional faces of A. Notice that we have allowed q = −1 above. The cell A is {0} in this case,and it corresponds to the empty set of vertices, which is always included as a simplex in our abstractsimplicial complex.
35

4 The Simplicial Complex of a Reflection Group
Proposition 4.6.3. The geometric realization |Σ| is canonically homeomorphic to a sphere of dimensionrank(W,V) − 1.
Proof. Again we may assume that (W,V) is essential, in which case we will exhibit a homeomorphismfrom |Σ| to the unit sphere in V . Recall from above that |Σ| consists of certain convex combinations∑
v λvv, where v ranges over the vertices of Σ, viewed as basis vectors of an abstract vector space. Nowthe vertices v0, . . . , vq of any A ∈ Σ can also be viewed as unit vectors in V that are linearly independent.Hence, we have a map |Σ| → V\{0}, given by
∑λvv 7→
∑λvv. Composing this with radial projection, we
obtain a continuous map φ : |Σ| → S n−1. Since φ takes |A| ⊂ |Σ| bijectively to A∩ S n−1, it is bijective andtherefore a homeomorphism (by compactness of |Σ|). �
In view of these results, an essential finite reflection group of rank n is also called a spherical reflectiongroup of dimension n − 1.
36
Chapter 5Buildings as Chamber ComplexesSilke Möser, 19.02.2008
Based on: Sections 4.1, 4.2, 4.3 from [AB]
5.1 Definition and First Properties
Definition 5.1.1. A building is a simplicial complex ∆ that can be expressed as the union of subcom-plexes Σ (called apartments) satisfying the following axioms:
(B0) Each apartment Σ is a Coxeter complex.
(B1) For any two simplices A, B ∈ ∆ there is an apartment containing both of them.
(B2) If Σ,Σ′ are two apartments containing A and B then there is an isomorphism Σ → Σ′ fixing A andB pointwise.
Note that by (B2) any two apartments are isomorphic since we can take both A and B to be theempty simplex. This implies, in particular, that ∆ is finite-dimensional, its dimension being the commondimension of its apartments. Moreover, ∆ is a chamber complex. For if C and C′ are maximal simplices,then by (B1) there is some apartment Σ containing both C and C′ as maximal simplices. Hence they areof the same dimension and connected by a gallery.
Any collectionA of subcomplexes that satisfy the above axioms will be called a system of apartmentsfor ∆. In particular, note that we do not require that ∆ be equipped, as part of its structure, with a specificsystem of apartments. The reason for this is that it turns out that a building always admits a canonicalsystem of apartments. In the special case where the apartments are finite Coxeter complexes it is eventrue that there is a unique system of apartments.
Remark 5.1.2. The complexes we have called buildings so far are sometimes called weak buildings inthe literature, the term “building" being reserved for the case where ∆ is thick. This means that everypanel is a face of at least three chambers.
In the presence of (B0) and (B1), (B2) is equivalent to the following axiom:
(B2′) Let Σ and Σ′ be two apartments containing a simplex C that is a chamber of Σ. Then there is anisomorphism Σ→ Σ′ that fixes every simplex in Σ ∩ Σ′.
(For a proof see [AB, Remark 4.4].)
Until the end of this section assume that ∆ is a building with a fixed systemA of apartments.
Proposition 5.1.3. Every building ∆ is colourable. Moreover, the isomorphisms Σ → Σ′ in axiom (B2)can be chosen in a type preserving way.
37

5 Buildings as Chamber Complexes
Proof. Fix an arbitrary chamber C and assign types to its vertices. If Σ is an apartment containing C,then (since Coxeter complexes are colourable) the assignment of types on C extends uniquely to a typefunction τΣ of Σ.
Now let Σ,Σ′ be any two apartments in ∆. If we construct τΣ′ as τΣ ◦ φ, where φ : Σ′ → Σ is theisomorphism fixing Σ ∩ Σ′ as in (B2′), then τΣ and τΣ′ agree on Σ ∩ Σ′. The various type functions τΣ
fit together since the extension of the colouring from one apartment to another is unique. Thus, we got awell-defined type function τ defined on the union all apartments that contain C. But by (B1) this is all of∆, which proves the first assertion.
To prove the second assertion, consider the isomorphisms that occur in (B2′). These are automaticallytype preserving since they fix a chamber pointwise. �
Choose a fixed type function τ on ∆ with values in a set S . Since τ is unique up to renaming the typesnothing we do will depend on the choice of τ. For any apartment Σ, the function τ yields a Coxetermatrix M := (m(s, t))s,t∈S , defined by
m(s, t) := diam(lkΣ A),
where A is any simplex in Σ of cotype {s, t}. Since any two apartments are isomorphic in a type-preservingway, we have:
Proposition 5.1.4. All apartments have the same Coxeter matrix M. �
We will therefore call M the Coxeter matrix of ∆. Similarly, we speak of the Coxeter diagram of ∆.Strictly speaking, we should talk about the Coxeter matrix and diagram of the pair (∆,A); but it is truethat the matrix and diagram are intrinsically associated with ∆ and do not depend on the system A ofapartments.
The importance of the Coxeter matrix is that it completely determines the isomorphism type of theapartments. Let (WM, S ) be the Coxeter system associated to M and ΣM the Coxeter complex Σ(WM, S ).It has a canonical type function with values in S . Thus, we have:
Corollary 5.1.5. For any apartment Σ there is a type-preserving isomorphism Σ→ ΣM. Thus, Σ endowedwith the type function τ|Σ is a Coxeter complex of type (WM, S ). �
There is one more simple consequence of the axioms that we will state in this section. Recall that thelink of a simplex in a Coxeter complex is again a Coxeter complex. The situation for buildings is similar:
Proposition 5.1.6. If ∆ is a building, then so is lk A for any A ∈ ∆. In particular, lk A is a chambercomplex.
Proof. See [AB, Proposition 4.9]. �
Corollary 5.1.7. A building ∆ is completely determined by its underlying chamber system. More pre-cisely, the simplices of ∆ are in one-to-one correspondence with the residues in C = C(∆), ordered byreverse inclusion. Here a simplex A corresponds to the residue C≥A, consisting of all chambers that haveA as a face. �
5.2 Examples
We begin this section by recalling the definitions of incidence geometries and flag complexes.
Definition 5.2.1 (Incidence geometry). An incidence geometry consists of
• a set P partitioned into non-empty subsets P0, . . . , Pn−1,
• and a reflexive and symmetric incidence relation I ⊂ P × P such that elements out of the same Pi
are not incident unless they are equal.
38

5 Buildings as Chamber Complexes
The number n is called the rank of the incidence geometry. The elements of the set Pi are said to havetype i; or more intuitively, the elements of P0, P1, P2, . . . are called points, lines, planes, . . . .
In practice, of course, one is mostly interested in incidence geometries that are subject to certainadditional axioms, such as the axioms for a projective geometry. We will see that different kinds ofgeometries correspond to different types of buildings (where the type of a building is determined by thetype of its Coxeter system).
Definition 5.2.2 (Flag complex). Let P be an incidence geometry. A flag in P is a set of pairwise incidentelements of P.
The flag complex of P is the (abstract) simplicial complex with P as vertex set and the finite flags of Pas simplices. A flag complex of rank 2 (dimension 1) is also called incidence graph.
Now we can proceed to the examples:
Example 5.2.3 (Rank-1-buildings). Suppose ∆ is a building of rank 1 (dimension 0). Then every apart-ment must be a 0-sphere S0, since this is the only Coxeter complex of rank 1. In particular, ∆ must haveat least two vertices. Conversely, every 0-dimensional simplicial complex with at least two vertices is abuilding, with every 2-vertex-subcomplex as an apartment.
Thus, the buildings of rank 1 are precisely the flag complexes of the rank 1 incidence geometries withat least two points.
It is, of course, reasonable to demand that a 1-dimensional space, or “line" be incident with at leasttwo points. In fact, one often even demands that there be at least three points, which is equivalent torequiring the flag complex to be thick.
Figure 5.1: A (thick) rank-1-building together with its unique system of apartments.
Definition 5.2.4. A projective plane is an incidence geometry of rank 2 satisfying the following threeaxioms:
• Any two points are incident to a unique line.
• Any two lines are incident to a unique point.
• There exist three non-collinear points.
Example 5.2.5 (Rank-2-buildings). Now suppose that ∆ is a building of rank 2 (dimension 1). Then anapartment has to be a 2m-gon for some 2 ≤ m ≤ ∞.
Let’s begin with the case m = 2. Then every apartment is a quadrilateral:
(The two colours, black and white, represent a colouring of the vertices.) It follows from the buildingaxioms that every vertex of type • is connected with every vertex of type ◦, i.e. ∆ is a complete bipartitegraph.
39

5 Buildings as Chamber Complexes
Figure 5.2: A complete bipartite graph (a rank-2-building with m = 2).
In the language of incidence geometry, ∆ is the flag complex of a “plane" in which every point isincident with every line. Conversely, the flag complex of such a plane is always a rank-2-building withm = 2, provided that there are at least two points and at least two lines.
Next suppose that m = 3. Then every apartment is a hexagon, which we may draw as the barycentricsubdivision of a triangle.
This picture suggests a configuration of three lines in a plane (one for each •) whose pairwise intersec-tions yield three points (one for each ◦). We see from Definition 5.2.4 that our building ∆ is the flagcomplex of a projective plane.
The most familiar example of a projective plane is the projective plane over a field K. Here the setP0 of “points" is the set of 1-dimensional subspaces of the 3-dimensional vector space K3; the set P1 of“lines" is the set of 2-dimensional subspaces of K3 and the incidence is given by the usual inclusion, i.e.a point x ∈ P0 is incident with a line L ∈ P1 if x ⊂ L as subspaces of K3.
It is now easy to construct concrete examples of buildings. Let P be the projective plane over the fieldF2, for instance. (F2 is the field with two elements.) This plane is called the Fano plane and depicted inFigure 5.3(a). It has seven points (each on exactly three lines) and seven lines (each containing exactlythree points).
The resulting flag complex ∆ is a thick building with 14 vertices and 21 edges; see Figure 5.3(b). More-over, ∆ has 28 apartments. Its symmetry group Aut ∆ is of order 336; the subgroup of type-preservingautomorphisms is GL3(F2), which is the simple group of order 168.
(a) The Fano plane. (b) The incidence graph of theFano plane (a rank-2-buildingwith m = 3).
Figure 5.3: The case m = 3.
In a similar way one could analyse the buildings corresponding to m = 4, 5, 6, . . .. Each value of mcorresponds to a particular type of plane geometry. The resulting buildings correspond to the so-calledgeneralised m-gons:
40

5 Buildings as Chamber Complexes
Definition 5.2.6. For 3 ≤ m < ∞ a generalised m-gon is a rank 2 incidence geometry whose flag complexis a building of type I2(m).
Thus, a generalised 3-gon or generalised triangle is the same as a projective plane.
Finally, suppose that m = ∞. Buildings of type I2(∞) are trees without leaves (where a leaf is a vertexwith degree 1). To see that these trees are buildings, take the apartments to be all possible paths that areinfinite in both directions (i.e. “∞-gons").
Figure 5.4: A tree without leaves (a rank-2-building with m = ∞).
Remark 5.2.7. It is no coincidence that all examples we have treated so far (except the trees) are flagcomplexes in a natural fashion. It is, in fact, true that every building is a flag complex.
5.3 The Building Associated to a Vector Space
Let V be a vector space of finite dimension n over an arbitrary field K.
Definition 5.3.1 (Projective spaces). The projective space of V consists of the non-zero proper subspacesof V , two such being called incident if one is contained in the other. Let ∆ = ∆(V) be the flag complexof this projective space; then the simplices of ∆ are the chains
V1 < V2 < . . . < Vk
of non-zero proper subspaces of V .The maximal simplices of ∆ are the chains
V1 < V2 < . . . < Vn−1
with dim Vi = i. Moreover, it will be notationally convenient to set V0 = 0 and Vn = V . We will call themaximal simplices chambers, even though we do not yet know that ∆ is a chamber complex.
A frame in V is a set F = {L1, . . . , Ln} of 1-dimensional subspaces of V such that V = L1 ⊕ . . . ⊕ Ln.Given a frame F , consider the set of subspaces V ′ of V such that V ′ is spanned by a non-empty propersubset of F . Let Σ(F ) be the subcomplex of ∆ consisting of flags of such subspaces. Call a subcomplexof this form an apartment.
41

5 Buildings as Chamber Complexes
L1 + L3
L1
L1 + L2
L2
L2 + L3
L3
Figure 5.5: An apartment for n = 3.
Example 5.3.2. If P is an n-dimensional projective space, then its flag complex is a rank n building oftype An, i.e. its Coxeter diagram is:
•1
•2
•3
................................................................................................................................................................................................ · · · •n − 1
•n
................................................................................................
Every apartment is isomorphic to the barycentric subdivision of the boundary of an n-simplex, and thereis one such apartment for every frame in the projective space. Conversely, every building of type An isthe flag complex of a projective space.
If n = 2 this examples reduces to the case m = 3 of Example 5.2.5.
The purpose of this section is to outline a proof that ∆ is a building, as claimed in Example 5.3.2.
Let Σ0 be the flag complex of the poset of non-empty proper subsets of {1, 2, . . . , n}. This is a Coxetercomplex of type An−1. To verify axiom (B0) one checks that every apartment Σ(F ) is isomorphic to Σ0.
Indeed, choose a chamber C in Σ(F ) with vertices V1, . . . ,Vn−1. Then the elements of F can benumbered L1, . . . , Ln in such that Vi = L1 + . . . + Li for all i (including i = 0, n). We then have anisomorphism ψ = ψF ,C : Σ(F ) → Σ0 defined as follows: Given a non-zero proper subspace U of V thatis a vertex of Σ(F ), consider a filtration (U ∩ Vi)0≤i≤n of U induced by C. Then ψ is given by
ψ(U) = {i ≥ 1 | U ∩ Vi > U ∩ Vi−1}.
Note that the definition of ψ makes no reference to F , only to C. In particular, if F ′ is a second framewhose apartment Σ(F ′) contains C, then ψF ′,C and ψF ,C agree on Σ(F ) ∩ Σ(F ′). Axiom (B2′) is nowimmediate: ψ−1
F ′,C ◦ ψF ,C : Σ(F )→ Σ(F ′) is an isomorphism fixing the intersection pointwise.
Now consider two chamber C,C′ of ∆ with vertex sets
V1 < . . . < Vn−1 and V ′1 < . . .V′n−1,
respectively. View {Vi}0≤i≤n and {V ′i }0≤i≤n as decomposition series for V . (Recall that a decompositionseries for a module M – and equivalently for our vector space V – is a sequence 0 = J0 ⊂ J1 ⊂ . . . ⊂ Jn =
M of submodules such that all inclusions are strict and Ji is a maximal submodule of Ji+1 for 0 ≤ i < n.)We will now make use of the Jordan-Hölder Theorem:
Theorem 5.3.3 (Jordan-Hölder). Let M be a module over a ring R. Then any two decomposition series
0 = J0 ⊂ J1 ⊂ . . . ⊂ Jn = M and 0 = J′0 ⊂ J′1 ⊂ . . . ⊂ J′n′ = M
of M are equivalent, that is, n = n′ and there are a permutation π ∈ S n and isomorphisms
J′i /J′i−1 → Jπ(i)/Jπ(i)−1.
42

5 Buildings as Chamber Complexes
In the special case of a vector space this is of course an utterly trivial fact. Still, it proves helpful togo through the details of the proof of the Jordan-Hölder Theorem and see how the permutation π and theisomorphisms V ′i /V
′i−1 → Vπ(i)/Vπ(i)−1 are constructed.
For each i ∈ {1, . . . , n}, the decomposition series {V j}0≤i≤n induces a filtration of V ′i /V′i−1, namely the
filtration {(V j ∩ V ′i ) + V ′i−1}0≤ j≤n. Since V ′i /V′i−1 is 1-dimensional, all but one of the successive quotients
in the filtration must be trivial. Define π(i) to be the index of the non-trivial quotient. That is, π(i) ischaracterised by the property that
V ′i−1 + (V ′i ∩ Vk) =
V ′i−1, for k < j,V ′i , for k ≥ j.
The resulting function π = π(C,C′) : {1, . . . , n} → {1, . . . , n} is called the Jordan-Hölder permutation ofthe pair C,C′. To see that π is indeed a permutation one shows that π(C,C′) and π(C′,C) are inverses ofone another. This can be looked up in many standard text books, see for instance [Jac89, Section 3.3].
Now we can verify (B1): Given maximal simplices C,C′, one can find a frame F such that Σ(F )contains C and C′ by choosing, for each i, j, a 1-dimensional subspace L j ≤ V ′i ∩V j whose image in bothV ′i /V
′i−1 and V j/V j−1 is non-trivial.
Thus, ∆(V) is a building.
As a by-product of the proof we have obtained a function C(∆) × C(∆)→ W, where W = S n, i.e. W isa Coxeter group of type An−1. Geometrically, this function can be interpreted as the Weyl distance.
Remark 5.3.4. Since for a fixed fieldK a vector space is determined up to isomorphism by its dimension,this section yields one example for each n ≥ 2 and each field K.
43
Kapitel 6Weylabstand und Homotopietyp einesGebäudesStefan Witzel, 19.02.2008
Basierend auf: Abschnitte 4.8 und 4.12 aus [AB]
6.1 Weylabstand
Im Vortrag von Wiebke haben wir gesehen, dass es auf einem Coxeter-Komplex Σ vom Typ (W, S ) einenWeylabstand
δ : C(Σ) × C(Σ)→ W
gibt.Die Idee dabei war die folgende: Wenn man eine beliebige Kammer C als fundamentale Kammer
auswählt und Σ mit Σ(W, S ) assoziiert, dann soll der Weylabstand δ(vC,wC) von vC und wC gerade v−1wsein (so dass wC = vδ(vC,wC)C). Wir haben auch gesehen, dass der Weylabstand berechnet werdenkann durch
δ(C,D) = s1 · · · sd
wobei (s1, . . . , sd) der Typ einer beliebigen Galerie von C nach D ist. In diesem Abschnitt wollen wirden Weylabstand und die Aussagen darüber soweit wie möglich auf Gebäude übertragen. Sei dazu imfolgenden ∆ ein Gebäude vom Typ (W, S ).
Proposition 6.1.1. Es existiert eine Abbildung δ : C(∆) × C(∆)→ W mit den folgenden Eigenschaften.
(i) Sei Γ : C0, . . . ,Cd eine minimale Galerie vom Typ s(Γ) = (s1, . . . , sd), dann ist δ(C0,Cd) = s1 · · · sd.
(ii) Sind C und D Kammern und w = δ(C,D), dann ist die Abbildung Γ 7→ s(Γ) eine Bijektion zwischenminimalen Galerien von C nach D und reduzierten Darstellungen von w.
Beweis. Seien C und D Kammern. Wir wählen ein Appartement Σ und definieren δ(C,D) = δΣ(C,D).Dadurch ist δ wohldefiniert, denn ist Σ′ ein anderes Appartement, dann gibt es nach Proposition 5.1.3einen typerhaltenden Isomorphismus Σ � Σ′, also ist δΣ(C,D) = δΣ′(C,D). Die Eigenschaften folgendann aus den entsprechenden Eigenschaften von δΣ. �
Definition 6.1.2. Sei ∆ ein Gebäude vom Typ (W, S ). Die Abbildung δ : C(∆)×C(∆)→ W in Proposition6.1.1 heißt Weylabstand von ∆.
Man kann zeigen, dass eine Galerie genau dann minimal ist, wenn sie reduziert ist. Also kann δ be-schrieben werden wie folgt.
Folgerung 6.1.3. Wenn es eine Galerie zwischen Kammern C und D gibt, deren Typ (s1, . . . , sd) reduziertist, dann ist δ(C,D) = s1 · · · sd. Insbesondere ist d(C,D) = l(δ(C,D)).
44

6 Weylabstand und Homotopietyp eines Gebäudes
Im Folgenden geben wir einige Eigenschaften des Weylabstands an.
Proposition 6.1.4. Der Weylabstand δ : C(∆) × C(∆)→ W hat folgende Eigenschaften.
(i) δ(C,D) = 1 genau dann wenn C = D.
(ii) δ(C,D) = δ(D,C)−1.
(iii) Wenn δ(C′,C) = s ∈ S und δ(C,D) = w, dann ist entweder δ(C′,D) = w oder δ(C′,D) = sw. Fallsl(sw) = l(w) + 1, dann δ(C′,D) = sw.
(iv) Wenn δ(C,D) = w, dann gibt es für s ∈ S ein C′ so dass δ(C′,C) = s und δ(C′,D) = sw. Wennl(sw) = l(w) − 1, dann gibt es genau ein solches C′.
Bemerkung 6.1.5. Die Eigenschaften von δ erinnern an die Eigenschaften einer Metrik: (i) entsprichtDefinitheit, (ii) entspricht Symmetrie und der erste Teil von (iii) erinnert an die Dreiecksungleichung.
Dass in (iii) der Fall δ(C′,D) = w eintreten kann, sieht man zum Beispiel, wenn C′, C und D alles-adjazent sind.
Um den zweiten Satz von (iii) und Eigenschaft (iv) zu verstehen, ist es hilfreich, sie sich anhand vonBäumen zu veranschaulichen (Bäume ohne Blätter sind Gebäude vom Typ ◦
∞−−◦):
Zu verschiedenen Kammern C und D gibt es potenziell mehrere Kammern, die benachbart zu C sindund weiter von D entfernt sind, aber genau eine Kammer, die benachbart zu C ist und näher an D liegt:
D C C ′
C ′′
D CC ′
Die linke Abbildung veranschaulicht den ersten Fall, die rechte den zweiten. Panels vom Typ s sindschwarz gefärbt.
Beweis von Proposition 6.1.4. Die ersten beiden Eigenschaften sind klar. Um die anderen beiden Ei-genschaften zu zeigen, sei δ(C,D) = w und C = C0, . . . ,Cd = D eine Galerie von reduziertem Typ(s1, . . . , sd).
Wenn l(sw) = l(w) + 1, dann hat für jedes C′ mit δ(C′,C) = s die Galerie C′,C0, . . . ,Cd reduziertenTyp (s, s1, . . . , sd). Also ist δ(C′,D) = sw nach Folgerung 6.1.3.
Andernfalls ist l(sw) = l(w) − 1 und die Galerie kann so gewählt werden, dass s1 = s. Dann istδ(C,C1) = s und δ(C1,D) = sw. Wenn nun C′ eine Kammer ist mit δ(C′,C) = s, dann sind C′, C undC1 jeweils paarweise s-adjazent. Falls C′ , C1 ist also die Galerie C′,C1, . . . ,Cd reduziert und folglichδ(C′,D) = w. �
6.2 Homotopietyp eines Gebäudes
Wir erinnern uns, dass ein Gebäude sphärisch genannt wird, wenn es endlichen Durchmesser hat. DasZiel dieses Abschnitts ist es, den folgenden Satz zu beweisen.
Satz 6.2.1 (Solomon-Tits). Sei ∆ ein Gebäude.Wenn ∆ sphärisch vom Rang n ist und C ∈ ∆ eine Kammer, dann hat |∆| den Homotopietyp eines
Bouquets (Wedgeprodukts) von (n − 1)-Sphären, wobei es eine Sphäre pro Appartement gibt, das Centhält.
Wenn ∆ nicht sphärisch ist, ist |∆| kontrahierbar.
45

6 Weylabstand und Homotopietyp eines Gebäudes
6.2.1 Topologische Grundlagen
Im folgenden werden wir zunächst einige topologische Begriffe klären, die zum Verständnis und Beweisdes Satzes nötig sind. Wir schreiben I für [0, 1].
Definition 6.2.2. Seien X und Y topologische Räume und f , g : X → Y stetige Abbildungen. Es heißenf und g homotop, geschrieben f ' g, falls es eine stetige Funktion F : X × I → Y gibt mit F(·, 0) = fund F(·, 1) = g. In diesem Fall ist F eine Homotopie von f nach g. Homotop zu sein ist eine Äquivalenz-relation auf der Menge der stetigen Abbildungen von X nach Y .
Zwei Räume X und Y heißen homotopieäquivalent, geschrieben X ' Y , wenn Abbildungen f : X → Yund g : Y → X existieren, so dass g ◦ f ' idX und f ◦ g ' idY . In diesem Fall sind f und g Homotopie-äquivalenzen. Homotopieäquivalent zu sein ist eine Äquivalenzrelation auf der Klasse der topologischenRäume. Der Homotopietyp eines topologischen Raums ist seine Äquivalenzklasse bezüglich dieser Re-lation.
Beispiel 6.2.3.
(i) Wenn zwei Räume homöomorph sind, dann sind sie auch homotopieäquivalent.
(ii) Die (n − 1)-dimensionale Sphäre ist die Menge
Sn−1 = {x ∈ Rn | ‖x‖ = 1}.
Sie ist homotopieäquivalent zu X = Rn \ {0}. Sei r : X → Sn−1 gegeben durch
r(x) =x‖x‖
und ι : Sn−1 ↪→ X die Inklusion. Dann ist r ◦ ι = idSn−1 . Es bleibt also, eine Homotopie von idX
nach ι ◦ r zu finden. Die Abbildung
R : X × I → X
(x, t) 7→ (1 − t) · x + t ·x‖x‖
ist eine solche Homotopie.
Dass wie im obigen Beispiel ein großer Raum auf einen Teilraum „zusammengezogen“ wird, kommtso häufig vor, dass es dafür einen eigenen Namen gibt.
Definition 6.2.4. Seien A und X topologische Räume und A ⊆ X. Dann ist A ein (starkes) Deformati-onsretrakt von X, falls eine Abbildung R : X × I → X existiert, so dass R(·, 0) = idX , R(X, 1) ⊆ A undR(a, t) = a für alle t ∈ I, a ∈ A. Eine solche Abbildung heißt (starke) Deformationsretraktion von Xauf A.
Wenn A ein Deformationsretrakt von X ist, dann sind X und A homotopieäquivalent. Denn sei ι : A ⊆ Xdie Inklusion und r : X → A die Abbildung R(·, 1), wobei R eine Deformationsretraktion ist. Dann istr ◦ ι = idA und R ist eine Homotopie von idX nach ι ◦ r.
Beispiel 6.2.5. Sei n ∈ N, n ≥ 1. Die n-dimensionale abgeschlossene Scheibe ist die Menge
Dn = {x ∈ Rn | x21 + . . . + x2
n ≤ 1} .
Wir schreibenDn−1− = {x ∈ Sn | xn ≤ 0}
für die (n − 1)-dimensionale abgeschlossene untere Halbsphäre (sie ist homöomorph zu Dn−1, daher derName). Sie ist ein starkes Deformationsretrakt der n-dimensionalen abgeschlossenen Scheibe Dn: Wirdefinieren r : Dn → Dn−1
− als die Abbildung die x ∈ Dn abbildet auf den eindeutig bestimmten Punkty ∈ Dn−1
− mit xi = yi für 1 ≤ i ≤ n − 1. Sei dann R : Dn × I → Dn gegeben durch
R(x, t) = (1 − t) · x + t · r(x) .
Die Abbildung R ist eine starke Deformationsretraktion von Dn auf Dn−1− .
46

6 Weylabstand und Homotopietyp eines Gebäudes
Definition 6.2.6. Ein topologischer Raum heißt zusammenziehbar wenn er homotopieäquivalent zu ei-nem einelementigen Raum ist.
Beispiel 6.2.7. Der Raum {0} ist ein Deformationsretrakt von Dn vermöge der DeformationsretraktionR : Dn × I → Dn mit R(x, t) = (1 − t)x.
Es ist klar, dass Deformationsretrakt zu sein transitiv ist, d.h. wenn A ein Deformationsretrakt von Bist und B ein Deformationsretrakt von X, dann ist auch A ein Deformationsretrakt von X. Tatsächlich giltsogar folgendes.
Proposition 6.2.8. Sei X0 ⊆ X1 ⊆ . . . eine Filtrierung eines Raums X (d.h.⋃
i∈N Xk = X), so dass fürjedes x ∈ X eine offene Umgebung U und ein k ∈ N existiert mit U ⊆ Xk. Angenommen Xi ist einDeformationsretrakt von Xi+1 für i ∈ N, dann ist X0 ein Deformationsretrakt von X.
Beweis. Für i ∈ N sei Fi : Xi+1×I → Xi+1 eine Deformationsretraktion von Xi+1 auf Xi. Sei ri : Xi+1 → Xi
die Abbildung ri = Fi(·, 1). Wir definieren si : X → Xi als
si(x) = r j ◦ . . . ◦ ri
für x ∈ X j+1 \ X j.Wir definieren Fi : X × I → Xi+1 durch
Fi(x, t) = Fi(si+1(x), t) .
Schließlich definieren wir R : X × I → X durch
R(x, t) =
x wenn t = 0
Fi(x,t− 1
i+21
i+1−1
i+2) wenn t ∈ [ 1
i+2 ,1
i+1 ]
und behaupten, dass R eine Deformationsretraktion von X auf X0 ist. Der kritische Punkt hierbei ist zuzeigen, dass R stetig in den Punkten (x, t) mit t = 0 ist. Ist aber x ∈ X, dann gibt es nach Voraussetzungeine offene Umgebung U von x und ein k ∈ N, so dass x ∈ U ⊆ Xk. Dann ist sk|U = idU . Außerdem istFk(·, t)|U = idU für alle t ∈ I. Folglich ist R(x′, t) = F j|(x′, t) = x′ für t ∈ [1/( j + 2), 1/( j + 1)], j ≥ k undx ∈ U, also insbesondere R stetig in (x, 0). �
Definition 6.2.9. Sei X ein topologischer Raum und ∼ eine Äquivalenzrelation auf X und sei π : X →X/∼ die kanonische Projektion. Die Quotiententopologie auf X/∼ ist die Topologie, in der eine MengeU genau denn offen ist, wenn π−1(U) offen in X ist.
Definition 6.2.10. Seien (X, x) und (Y, y) punktierte topologische Räume (d.h. X und Y sind topologischeRäume und x ∈ X, y ∈ Y). Das Wedgeprodukt von (X, x) und (Y, y), geschrieben (X, x) ∨ (Y, y), ist dertopologische Raum, der wie folgt konstruiert wird: Sei X q Y die disjunkte Vereinigung von X und Y .Wir definieren die Äquivalenzrelation ∼ auf X q Y , indem wir als einzige nicht-triviale Relation x ∼ ysetzen. Dann ist (X, x)∨ (Y, y) = (XqY)/∼. Falls die Punkte x und y aus dem Kontext klar oder nicht vonBedeutung sind, schreiben wir auch einfach X ∨ Y .
Beispiel 6.2.11. Sei n ∈ N und p ∈ Sn−1 der Punkt p = (0, . . . , 0, 1). Der Raum
(Sn−1, p) ∨ . . . ∨ (Sn−1, p)
ist ein Bouquet von (n − 1)-Sphären.
Aufgabe 6.2.12. Seien (X, x), (Y, y) und (Z, z) punktierte topologische Räume. Überlege dir, dass (X, x)∨(Y, y) auf natürliche Weise ein punktierter Raum ist und dass folglich der Ausdruck ((X, x)∨ (Y, y))∨ (Z, z)sinnvoll ist. Überlege dir weiterhin, dass ((X, x)∨(Y, y))∨(Z, z) homöomorph ist zu (X, x)∨((Y, y)∨(Z, z)).
47
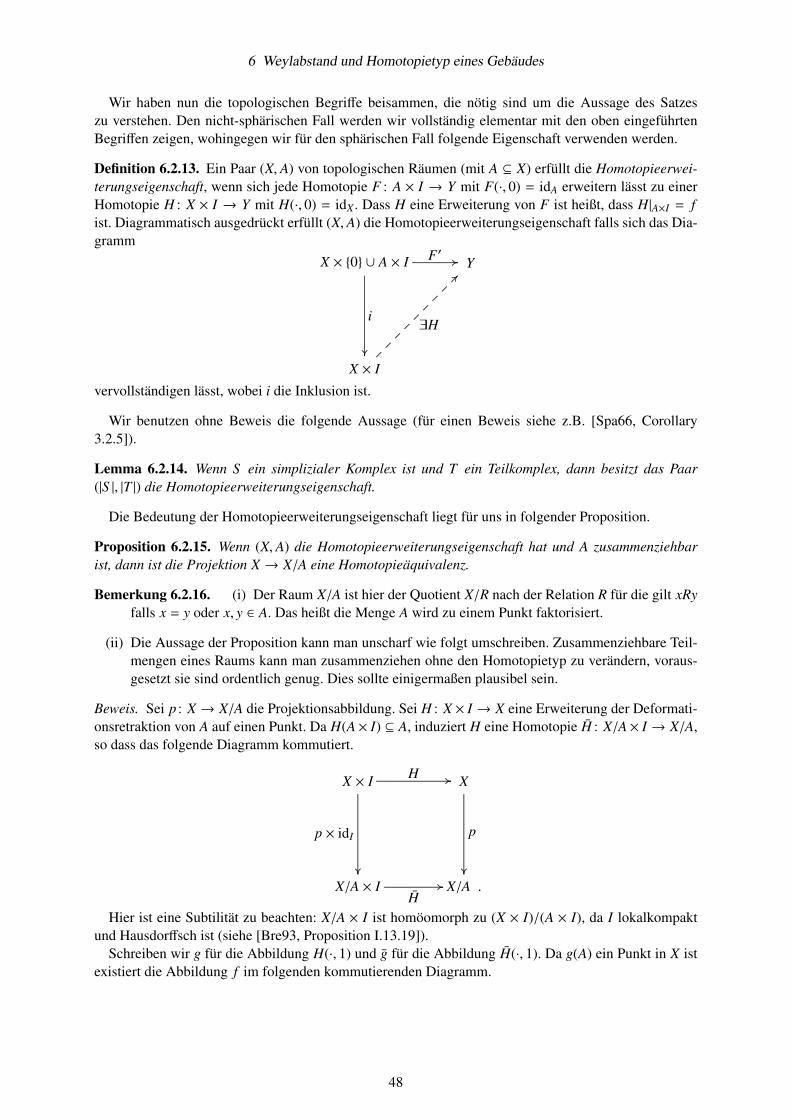
6 Weylabstand und Homotopietyp eines Gebäudes
Wir haben nun die topologischen Begriffe beisammen, die nötig sind um die Aussage des Satzeszu verstehen. Den nicht-sphärischen Fall werden wir vollständig elementar mit den oben eingeführtenBegriffen zeigen, wohingegen wir für den sphärischen Fall folgende Eigenschaft verwenden werden.
Definition 6.2.13. Ein Paar (X, A) von topologischen Räumen (mit A ⊆ X) erfüllt die Homotopieerwei-terungseigenschaft, wenn sich jede Homotopie F : A × I → Y mit F(·, 0) = idA erweitern lässt zu einerHomotopie H : X × I → Y mit H(·, 0) = idX . Dass H eine Erweiterung von F ist heißt, dass H|A×I = fist. Diagrammatisch ausgedrückt erfüllt (X, A) die Homotopieerweiterungseigenschaft falls sich das Dia-gramm
X × {0} ∪ A × I Y
X × I
.................................................................................................. ............F′
...............................................................................................................................................................................
i
.............................................................................................................................................
∃H
vervollständigen lässt, wobei i die Inklusion ist.
Wir benutzen ohne Beweis die folgende Aussage (für einen Beweis siehe z.B. [Spa66, Corollary3.2.5]).
Lemma 6.2.14. Wenn S ein simplizialer Komplex ist und T ein Teilkomplex, dann besitzt das Paar(|S |, |T |) die Homotopieerweiterungseigenschaft.
Die Bedeutung der Homotopieerweiterungseigenschaft liegt für uns in folgender Proposition.
Proposition 6.2.15. Wenn (X, A) die Homotopieerweiterungseigenschaft hat und A zusammenziehbarist, dann ist die Projektion X → X/A eine Homotopieäquivalenz.
Bemerkung 6.2.16. (i) Der Raum X/A ist hier der Quotient X/R nach der Relation R für die gilt xRyfalls x = y oder x, y ∈ A. Das heißt die Menge A wird zu einem Punkt faktorisiert.
(ii) Die Aussage der Proposition kann man unscharf wie folgt umschreiben. Zusammenziehbare Teil-mengen eines Raums kann man zusammenziehen ohne den Homotopietyp zu verändern, voraus-gesetzt sie sind ordentlich genug. Dies sollte einigermaßen plausibel sein.
Beweis. Sei p : X → X/A die Projektionsabbildung. Sei H : X × I → X eine Erweiterung der Deformati-onsretraktion von A auf einen Punkt. Da H(A× I) ⊆ A, induziert H eine Homotopie H : X/A× I → X/A,so dass das folgende Diagramm kommutiert.
X × I X
X/A × I X/A .
......................................................................................................................................................... ............H...............................................................................................................................................................................
p × idI
........................................................................................................................... ............
H
...............................................................................................................................................................................
p
Hier ist eine Subtilität zu beachten: X/A × I ist homöomorph zu (X × I)/(A × I), da I lokalkompaktund Hausdorffsch ist (siehe [Bre93, Proposition I.13.19]).
Schreiben wir g für die Abbildung H(·, 1) und g für die Abbildung H(·, 1). Da g(A) ein Punkt in X istexistiert die Abbildung f im folgenden kommutierenden Diagramm.
48

6 Weylabstand und Homotopietyp eines Gebäudes
X X
X/A X/A .
................................................................................................................................................................... ............g
................................................................................................................................................................................................................................................
f
...............................................................................................................................................................................
p
............................................................................................................................................... ............
g
...............................................................................................................................................................................
p
Nun gilt f ◦ p = g ' idX und p ◦ f = g ' idX/A. �
6.2.2 Gebäudetheoretische Grundlagen
Jetzt wenden wir uns wieder den Gebäuden zu, um die geometrische Grundlage des Satzes zu zeigen.Zunächst einmal müssen wir Appartementsysteme von sphärischen Gebäuden verstehen.
Definition 6.2.17. Wir nennen zwei Kammern C und D eines sphärischen Gebäudes gegenüberliegend,wenn d(C,D) = diam ∆.
Lemma 6.2.18. Seien C und D gegenüberliegende Kammern und sei Σ ein Appartement, das C und Denthält. Dann existiert für jede Kammer C′ ∈ Σ eine minimale Galerie von C nach D, die C′ enthält.
Beweis. Wir wissen, dass d(C,D) die Anzahl der Wände ist, die C und D trennen. Da d(C,D) = diam Σ,trennen also alle Wände in Σ die Kammern C und D. Wenn nun C′ eine weitere Kammer ist, dann giltfür jede Wand, dass sie entweder C von C′ trennt oder C′ von D trennt, aber nicht beides. Folglich istd(C,D) = d(C,C′) + d(C′,D). Aneinanderhängen einer minimalen Galerie von C nach C′ und einerminimalen Galerie von C′ nach D ergibt also eine minimale Galerie von C nach D. �
Wir wissen auch, dass Appartements konvex sind (für jede Galerie, die ein Appartement verlässt, istdie Retraktion auf das Appartement stotternd, also die Galerie nicht minimal), also folgt aus dem Lemma,dass Σ die konvexe Hülle jedes Paars von Kammern C,D mit Abstand d(C,D) = diam ∆ ist. Daraus folgtder Satz:
Satz 6.2.19. Ein sphärisches Gebäude hat ein eindeutig bestimmtes System von Appartements. Die Ap-partements sind genau die konvexen Hüllen von gegenüberliegenden Paaren von Kammern.
Beweis. Sei A ein System von Appartements. Jedes Σ ∈ A enthält ein Paar gegenüberliegender Kam-mern und ist also deren konvexe Hülle. Sind umgekehrt C und D gegenüberliegende Kammern, dannexistiert ein Appartement Σ ∈ A, das beide enthält. Nach dem Lemma ist dann Σ die konvexe Hülle vonC und D. �
Wir verwenden ohne Beweis folgende Aussage (man vergleiche sie aber mit (iv) in Proposition 6.1.4).
Proposition 6.2.20. Sei ∆ ein Gebäude, A ∈ ∆ ein Simplex und C ∈ ∆ eine Kammer. Es gibt eineeindeutig bestimmte Kammer AC ∈ ∆ mit der Eigenschaft, dass d(A,C) = d(AC,C) und jede minimaleGalerie von A nach C beginnt mit AC. Außerdem gilt die Gate-Eigenschaft
d(C,D) = d(C, AC) + d(AC,D)
für jede Kammer D, die A enthält.
Lemma 6.2.21. Sei ∆ ein Gebäude und A ∈ ∆. Der Komplex ∆≥A der aus den Seiten der Kammern Centsteht, die A enthalten, ist konvex.
Beweis. Seien C,D Kammern mit C,D ≥ A. Wir betrachten ein Appartement Σ, das C und D enthält.Wir betrachten eine minimale Galerie Γ : C = C0, . . . ,Cd = D in Σ. Angenommen es gäbe ein Ci indieser Galerie mit A 6≤ Ci, dann müsste die Galerie eine Wand überschreiten, die A nicht enthält. Dannlägen aber C und D auf der gleichen Seite dieser Wand, im Widerspruch zur Minimalität der Galerie. �
49

6 Weylabstand und Homotopietyp eines Gebäudes
Lemma 6.2.22. Sei ∆ ein Gebäude und C und D Kammern. Genau dann ist ∆ sphärisch und C und Dgegenüberliegend, wenn für jedes Panel A von D gilt, dass d(C, A) < d(C,D).
Beweis. Wenn ∆ sphärisch und C und D gegenüberliegend sind, so hat jede Kammer D′ die adjazent zuD ist Abstand d(C,D′) < d(C,D) von C. Folglich hat auch jedes Panel von D kleineren Abstand von Cals D.
Seien umgekehrt C und D so, dass für jedes Panel A von D gilt d(C, A) < d(C,D). Wir wählenein Appartement Σ, das C und D enthält, und wollen zeigen, dass Σ endlichen Durchmesser d(C,D)hat. Wir nehmen an, dass Σ = Σ(W, S ) und dass w ∈ W einer Galerie von C nach D entspricht. NachVoraussetzung ist l(ws) < l(w) und wir müssen zeigen, dass l(w′) < l(w) für alle w′ ∈ W. Dazu zeigenwir, dass l(w) = l(ww′−1) + l(w′) für alle w′ ∈ W per Induktion über die Länge von w′.
Für l(w′) = 0 ist nichts zu zeigen. Sei w′ = s1 · · · sd. Nach Induktionshypothese angewendet aufw′′ = s1 · · · sd−1 ist l(w) = l(ww′′−1) + l(w′′), d.h. w hat eine Darstellung die auf s1 · · · sd−1 endet. NachVoraussetzung ist l(wsd) < l(w), also können wir nach der Austausch-Bedingung einen Buchstaben ausder Darstellung gegen ein sd am Ende austauschen. Da aber l(w′) = d, kann der ausgetauschte Buchstabekeiner der s1, . . . , sd−1 am Ende sein. So erhalten wir eine reduzierte Darstellung von w mit s1 · · · sd amSchluss. �
Proposition 6.2.23. Sei ∆ ein Gebäude, C ∈ ∆ eine Kammer, d ∈ N mit d ≥ 1 und D eine Menge vonKammern mit folgenden Eigenschaften.
(i) d(C,D) ≤ d für alle D ∈ D und
(ii) D enthält alle Kammern D ∈ ∆ mit d(C,D) < d.
Sei ∆′ der Teilkomplex von ∆, der aus den Seiten von Kammern aus D besteht und sei D eine Kammervon ∆ mit D < D und d(C,D) = d. Dann ist
D ∩ ∆′ =⋃A∈P
A ,
wobei P die Menge der Panels A von D ist mit d(C, A) < d. Die Menge P enthält genau dann alle Panelsvon D wenn ∆ sphärisch ist und Durchmesser d hat.
Beweis. Wir behaupten zunächst, dass
D ∩ ∆′ = {B < D | d(C, B) < d} .
Die rechte Seite ist in der linken enthalten wegen Bedingung (ii). Sei umgekehrt B ∈ D ∩ ∆′. Dann gibtes ein D′ ∈ D mit B < D′ und es folgt
d(C, B) ≤ d(C,D′) ≤ d = d(C,D)
wegen Bedingung (i). Wäre d(C, B) = d, dann auch d(C,D′) = d = d(C,D) also nach Proposition 6.2.20D′ = BC = D im Widerspruch zu D < D. Also ist d(C, B) < d.
Nun behaupten wir, dass wenn B eine Seite von D ist mit d(C, B) < d, dann gibt es ein Panel A von D,so dass B ≤ A und d(C, A) < d. Nach der Gate-Eigenschaft ist
d = d(C,D) = d(C, BC) + d(BC,D) ,
also gibt es eine minimale Galerie Γ : C = C0, . . . , BC, . . . ,Cd = D von C nach D. Da ∆≥B konvex ist,liegt der Teil BC, . . . ,D vollständig darin und so ist B ≤ Cd−1. Für A = Cd−1 ∩ D gilt dann B ⊆ A undd(C, A) < d.
Insgesamt zeigt dies, dassD ∩ ∆′ =
⋃A∈P
A ,
wobei P die Menge der Panels A von D ist mit d(C, A) < d.Die verbleibende Aussage ist genau die des letzten Lemmas. �
50
6 Weylabstand und Homotopietyp eines Gebäudes
6.2.3 Beweis
Wie angekündigt schließen wir das Kapitel mit dem Beweis des Satzes über den Homotopietyp vonGebäuden.
Beweis von Satz 6.2.1. Sei l ∈ N ∪ {∞} der Durchmesser von ∆. Für d ∈ N bezeichnen wir mit Dd dieMenge der Kammern D von ∆ mit d(C,D) ≤ d. Außerdem bezeichnen wir mit ∆d den Teilkomplex von∆ der aus den Seiten von Elementen vonDd besteht. Wir behaupten, dass für 0 < d < l der Raum |∆d−1|
ein Deformationsretrakt von |∆d | ist.Überlegen wir zunächst, wie daraus der Satz folgt. Nach Beispiel 6.2.7 ist |∆0| zusammenziehbar. Mit
der obigen Behauptung folgt also, dass |∆d | zusammenziehbar ist für d < l. Falls l < ∞, also ∆ sphärischist, erhalten wir mit Lemma 6.2.14 und Proposition 6.2.15, dass |∆| homotopieäquivalent zu |∆|/|∆l−1| ist.Dieser Raum ist aber homöomorph zu (⋃
D
|D|)/(⋃
D
∂|D|)
,
dem gewünschten Bouquet von Sphären, wobei die Vereinigungen überDl \ Dl−1 laufen.Falls l = ∞ wollen wir mit Proposition 6.2.8 folgern, dass |∆| zusammenziehbar ist. Dazu müssen
wir verifizieren, dass für x ∈ |∆| ein k ∈ N und eine offene Umgebung U existieren, so dass U ⊆ |∆k|.Nun ist x in einer Kammer |D| enthalten. Wir setzen k = d(C,D) + 1. Jede andere Kammer die x enthältist adjazent zu D und hat daher höchstens Abstand k zu C. Wenn wir nun U so wählen, dass es keineKammer schneidet, die x nicht enthält (z.B. als den offenen Stern um x), dann ist x ∈ U ⊆ |∆k|.
Es bleibt, die anfängliche Behauptung zu beweisen. Für D,D′ ∈ Dd gilt nach Proposition 6.2.23, dassΛ = D ∩ (∆d−1 ∪ D′) von den Panels A von D mit d(C, A) < d erzeugt wird. Nach derselben Propositionist aber auch Λ = D ∩ ∆d−1. Insbesondere folgt daraus, dass D ∩ D′ ⊆ ∆d−1.
Wie in Beispiel 6.2.5 existiert für jedes D ∈ ∆d eine Deformationsretraktion RD von |D| auf |D∩∆d−1|.Mit obiger Beobachtung lassen sich diese zusammenfügen zu einer Deformationsretraktion R von |∆d |
auf |∆d−1|: Für x ∈ |∆d | definieren wir
R(x, t) =
{x wenn x ∈ |∆d−1|
RD(x, t) wenn x ∈ |D| für D ∈ Dd \ Dd−1 .
Diese Abbildung ist wohldefiniert weil die RD starke Deformationsretraktionen sind und weil für D,D′ ∈Dd gilt, dass |D ∩ D′| ⊆ |∆d−1|. �
51
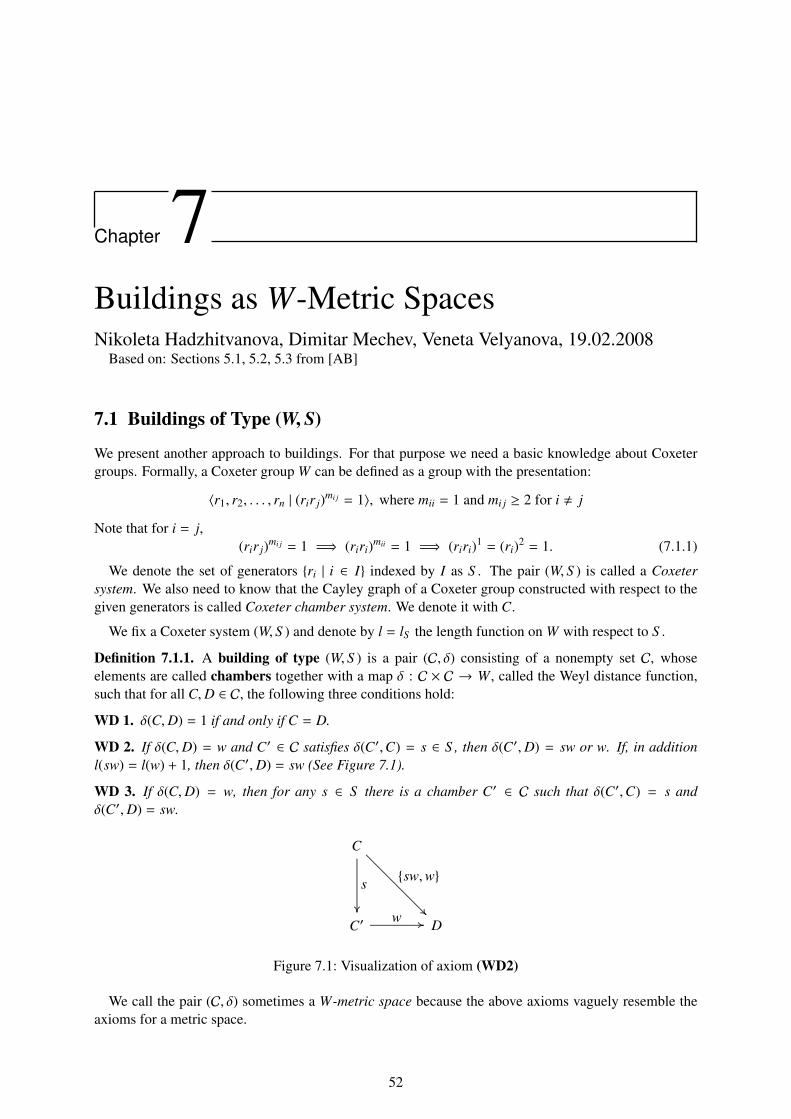
Chapter 7Buildings as W-Metric SpacesNikoleta Hadzhitvanova, Dimitar Mechev, Veneta Velyanova, 19.02.2008
Based on: Sections 5.1, 5.2, 5.3 from [AB]
7.1 Buildings of Type (W, S)
We present another approach to buildings. For that purpose we need a basic knowledge about Coxetergroups. Formally, a Coxeter group W can be defined as a group with the presentation:
〈r1, r2, . . . , rn | (rir j)mi j = 1〉, where mii = 1 and mi j ≥ 2 for i , j
Note that for i = j,(rir j)mi j = 1 =⇒ (riri)mii = 1 =⇒ (riri)1 = (ri)2 = 1. (7.1.1)
We denote the set of generators {ri | i ∈ I} indexed by I as S . The pair (W, S ) is called a Coxetersystem. We also need to know that the Cayley graph of a Coxeter group constructed with respect to thegiven generators is called Coxeter chamber system. We denote it with C.
We fix a Coxeter system (W, S ) and denote by l = lS the length function on W with respect to S .
Definition 7.1.1. A building of type (W, S ) is a pair (C, δ) consisting of a nonempty set C, whoseelements are called chambers together with a map δ : C × C → W, called the Weyl distance function,such that for all C,D ∈ C, the following three conditions hold:
WD 1. δ(C,D) = 1 if and only if C = D.
WD 2. If δ(C,D) = w and C′ ∈ C satisfies δ(C′,C) = s ∈ S , then δ(C′,D) = sw or w. If, in additionl(sw) = l(w) + 1, then δ(C′,D) = sw (See Figure 7.1).
WD 3. If δ(C,D) = w, then for any s ∈ S there is a chamber C′ ∈ C such that δ(C′,C) = s andδ(C′,D) = sw.
C′ D
C.............................................................................................................................
s
............................................................................................................................................................................ ............
{sw,w}
................................................................................................................. ............w
Figure 7.1: Visualization of axiom (WD2)
We call the pair (C, δ) sometimes a W-metric space because the above axioms vaguely resemble theaxioms for a metric space.
52

7 Buildings as W-Metric Spaces
Definition 7.1.2. Given s ∈ S , we say that the two chambers C,D ∈ C are s-adjacent if δ(C,D) = s. Wesay that they are s-equivalent, and we write
C ∼s D
if δ(C,D) ∈ {1, s}.
With the following lemma we can prove that s-adjacency is symmetric and s-equivalence is an equiv-alence relation.
Lemma 7.1.3. Let (C, δ) be a building of type (W, S ).
(1) If C,D ∈ C satisfy δ(C,D) = s ∈ S , then also δ(D,C) = s.
(2) If C,D, E ∈ C satisfy δ(C,D) = δ(D, E) = s ∈ S , then δ(C, E) ∈ {1, s}.
Proof. (1) We know that δ(C,D) = s and by (WD3) there is a chamber C′ such that δ(C′,C) = s andδ(C′,D) = s · s = s2 = 1 by (1). By (WD1) we can conclude that C′ = D and δ(C′,C) = δ(D,C) = s.
(2) That follows immediate from (WD2) since {s2, s} = {1, s}. See also this picture:
D E
C............................................................................................................................................................................ .........
...
{1, s}.............................................................................................................................
s
................................................................................................................. ............s�
Definition 7.1.4. The equivalence classes in C under s-equivalence are called s-panels. A panel is bydefinition an s-panel for some s ∈ S .
The following lemma is a refinement of the axiom (WD3)
Lemma 7.1.5. The chamber C′ in (WD3) is uniquely determined if l(sw) = l(w) − 1.
DC′C ................................................................................................................. ............s ................................................................................................................. ............sw...............................................................................................................................................................................................................................................................................................................
........................................................
w
Proof. Let P be the s-panel containing C.Existence: By (WD3) there exists a chamber C′ with δ(C′,C) = s and δ(C′,D) = sw. Then C′ ∈ P.Uniqueness: If there is a chamber C′′ distinct from C′ then by (WD3) follows that δ(C,C′′) = s andδ(C′′,D) = sw. But on the other hand δ(C′,D) = sw and δ(C′,C′′) = s. Then by (WD3). we haveδ(C′′,D) = s · sw = w, which leads to a contradiction. �
That proof implies that for any s-panel P and any chamber D there is a unique chamber C′ ∈ P thatis “closest” to D in the following sense: For any C , C′,we have δ(C,D) = sδ(C′,D) and l(δ(C,D)) =
l(δ(C′,D)) + 1.We can generalize the results in the following:
Remark 7.1.6. If δ(C,D) = w and C′ ∈ C satisfies δ(C′,C) = s, then δ(C′,D) = {sw,w}. If δ(C′,D) =
sw, then l(sw) = l(w) + 1 or l(sw) = l(w) − 1. But in the latter case, there is only one C′ such thatδ(C′,D) = sw. For all other C′′ that satisfy δ(C′′,C) = s, δ(C′′,D) = w.There are at least two chambers in every panel.
It is equivalent to replace (WD2) by the following two axioms:WD2a The relation of s-equivalence is transitive for each s ∈ S .WD2b If δ(C,C′) = s ∈ S , δ(C,D) = w, and l(sw) = l(w) + 1, then δ(C′,D) = sw.
53

7 Buildings as W-Metric Spaces
7.1.1 Galleries and Words
We define galleries using the given δ (and the associated adjacency relations), and we prove that δ canbe computed in the expected way in terms of galleries. Throughout this subsection assume that (C, δ) isa building of type (W, S ).
Definition 7.1.7. We call two chambers C,D ∈ C adjacent if they are s-adjacent for some s ∈ S .A sequence Γ : C0, . . . ,Cn of n + 1 chambers such that Ci−1 and Ci are adjacent for all 1 ≤ i ≤ nis called a gallery of length n. We say that C0 and Cn are connected by Γ. If there is no gallery oflength < n connecting C0 and Cn,then we say that the gallery distance between C0 and Cn is n and writed(C0,Cn) = n. The gallery Γ is called minimal if d(C0,Cn) = n. If si = δ(Ci−1,Ci) for 1 ≤ i ≤ n, thens(Γ) := (s1, . . . , sn) is called the type of the gallery Γ.
We can now derive some basic properties of galleries from the (WD)-axioms.
Lemma 7.1.8. Let C and D be chambers and let w := δ(C,D).
(1) If Γ is a gallery of type s = (s1, . . . , sn) connecting C and D, then there exists a subword (si1 , · · · , sim)of s such that w = si1 · · · sim , where 0 ≤ m ≤ n and 1 ≤ i1 ≤ · · · ≤ im ≤ n. If in addition, s is reduced,then w = s1 · · · sn and Γ is minimal.
(2) If w = s1 · · · sn with s1, . . . , sn ∈ S , then there exists a gallery Γ of type s = (s1, . . . , sn) withs1, . . . , sn ∈ S connecting C and D. If in addition s is reduced, then this gallery Γ is uniquelydetermined and minimal.
We first want to make clear what it means for s to be reduced: If there is no subword of s connectingC and D different from s then we say that s is reduced.
C′′C′C D
C′′′
................................................................................................................. ............s1
................................................................................................................. ............s2
................................................................................................................. ............s5
.................................................................................... ............
s2
.........................................................................................s2
We prove the lemma by induction.
Proof. (1) Let Γ : C = C0,C1, . . . ,Cn = D be the given gallery. Let w′ := δ(C1,D). By (WD2) followsthat w ∈ {s1w′,w′}. By induction, we may assume that w′ is the product of the elements occurring ina subword of (s2, . . . , sn). This immediately proves that w = si1 · · · sim . Therefore, l(w) ≤ m ≤ n (n isthe length of an arbitrary gallery, containing C and D). It follows that d(C,D) ≥ l(w).
Now assume,that s is reduced. Then also s′ := (s2, . . . , sn) is reduced. That means, that w′ =
δ(C1,D) = s2 · · · sn in this case. Hence l(s1w′) = l(s1 · · · sn) = n = l(w′) + 1. Because of that fact,w , w′, but it has to be equal to sw′ = s1 · · · sn. It immediately follows, that l(w) = n and by theprevious paragraph there is no gallery of length ≤ l(w) connection C and D. Hence Γ is minimal.
(2) Let w = s1 · · · sn with n > 0. From axiom (WD3) we can find a chamber C1 that is s1-adjacent to Cand δ(C1,D)) = s1w = (s1 · s1 · s2 · · · sn) = (s2 · · · sn) because s1 · s1 = 1. By the induction hypothesisthere exists a gallery Γ′ : C1, . . . ,Cn = D of type s′ = (s2, . . . , sn) connecting C and D. ThereforeΓ : C = C0,C1, . . . ,Cn = D is a gallery of type s connecting C and D.Now assume that s is reduced. Then by the first part of the proof it follows that Γ is minimal. We wantto show that there is no other gallery Γ of type s connecting C and D. Choose C1 that follows C = C0in Γ. It satisfies δ(C,C1)) = s1 and δ(C1,D)) = s2 · · · sn = s1w. Since l(s1w) = n − 1 = l(w) − 1.So from Lemma 7.1.5 we have that C1 is uniquely determined. Then by induction the gallery Γ′ ofreduced type s′ connecting C1 and D is uniquely determined. Hence Γ is unique. �
Corollary 7.1.9. For any two chambers C,D ∈ C, we have:
54
7 Buildings as W-Metric Spaces
(1) d(C,D) = l(δ(C,D))
(2) δ(D,C) = δ(C,D)−1
Proof. (1) Let w = δ(C,D)) = s1 · · · sn be reduced. Then by Lemma 7.1.8, there exists a gallery Γ : C =
C0,C1, . . . ,Cn = D of type s = (s1, . . . , sn) connecting C and D. That gallery is minimal since s isreduced and thus d(C,D) = n = l(w).
(2) Now D = Cn, . . . ,C0 = C is a gallery of reduced type (sn, . . . , s1) connecting C and D. So Lemma7.1.8 implies that δ(D,C)) = sn · · · s1 = w−1 = δ(C,D)−1. �
We can introduce two axioms similar (WD2) and (WD3):
WD 4. If D′ ∈ C satisfies δ(D′,D) = s ∈ S and δ(C,D) = w, then δ(C,D′) = {ws,w}. If, in additionl(ws) = l(w) + 1, then δ(C,D′) = ws.
WD 5. If δ(C,D) = w, then for any s ∈ S there is a chamber D′ ∈ C such that δ(D,D′) = s andδ(C,D′) = ws.
7.2 Buildings as Chamber Systems
In Definition 7.1.1 we introduced buildings by requiring certain properties of δ, which enabled us todefine the adjacency and galleries. There is a slightly different but closely related way of achieving thisby using “chamber systems”. First of all we need to define the notion af a chamber system. We will justconsider a chamber system as a set together with a family of equivalence relations.
Definition 7.2.1. A chamber system over a set S is a nonempty set C (whose elements are calledchambers) together with a family of equivalence relation (∼s)s∈S on C indexed by S . The elementsof an equivalence class with respect to ∼s are called s-panels. A panel is an s-panel for some s ∈ S .Two distinct chambers C and D are called s-adjacent if they are contained in the same s-panel andadjacent if they are s-adjacent for some s ∈ S . A gallery of length n connecting C0 and Cn is a sequenceΓ : C0, . . . ,Cn of n + 1 chambers such that Ci−1 and Ci are adjacent for all 1 ≤ i ≤ n. If Ci−1 and Ci aresi-adjacent with si ∈ S for all i, then we say that Γ is a gallery of type (s1, . . . , sn).
A chamber system can be viewed as a graph with colored edges; the vertices are the chambers, ands-adjacent chambers are connected by an edge of color s.
We now introduce the property that turns chamber systems into buildings.S is not anymore an arbitraryset but is a finite set of generators of a Coxeter group W. Thus we fix a Coxeter system (W, S ). Typesof galleries are words in S and we can talk as before of reduced types. The main building axiom in thissetup requires the existence of a map δ : C×C → W that is related to galleries by the following property:
Property 7.2.2. For any C,D ∈ C and any reduced S -word s = (s1, . . . , sn) there exists a gallery of types connecting C and D if and only if δ(C,D) = s1 · · · sn.
Now, we link chamber systems with buildings of type (W, S ) with the following result:
Proposition 7.2.3. Let (C, (∼s)s∈S ) be a chamber system over S such that each panel contains at least twochambers. Then a map δ : C ×C → W satisfies Property 7.2.2 if and only if it satisfies (WD1)–(WD3).
Proof. (⇐) Lemma 7.1.8 shows that WD-axioms imply Property 7.2.2.(⇒) Now we assume that δ satisfies Property 7.2.2 and prove the WD-axioms.(WD1) By definition the empty word is considered to be reduced and the corresponding product is theidentity element 1 ∈ W. Property 7.2.2 applied to the empty word leads to the fact that chambers C andD satisfy δ(C,D) = 1 if and only if there is a gallery of empty type connecting them, i.e., if and only ifC = D.(WD2a) When we apply Property 7.2.2 to words of length 1 we get that two chambers C′ and C are
55

7 Buildings as W-Metric Spaces
s-adjacent in the sense of Definition 7.1.2 if and only if δ(C′,C) = s which on the other hand is thedefinition of the relation ∼s of s-equivalence, which proves (WD2a).(WD2b) Assume that C′,C,D ∈ C satisfy δ(C′,C) = s ∈ S and δ(C,D) = w ∈ W. We must showthat δ(C,D) = sw if l(sw) = l(w) + 1. We choose a reduced decomposition w = s1 · · · sn of w, thenl(w) = n. We apply Property 7.2.2 and we get that there exists a gallery Γ : C = C0, . . . ,Cn of type(s1, . . . , sn) connecting C and D. Then the gallery Γ : C′,C = C0, . . . ,Cn connecting C′ and D is of type(s, s1, . . . , sn) and it is reduced. That implies that δ(C′,D) = sw.(WD3) Given C,D ∈ C and s ∈ S . Let δ(C,D) = w ∈ W. We can choose a chamber C′ such thatδ(C′,C) = s. We can do that because our assumption is that every panel contains at least two chambers.If l(sw) = l(w) + 1 we can apply (WD2b) which we have already proved to obtain δ(C′,D) = sw. Ifl(sw) = l(w) − 1, we choose a reduced decomposition w = s1 · · · sn of w with s1 = s and a gallery C =
C0,C1 . . . ,Cn = D of reduced type (s1, . . . , sn) connecting C and D. Then C1 satisfies δ(C′,C) = s1 = sand when we apply Property 7.2.2 we get δ(C1,D) = s2 · · · sn = s1w = sw. So we may take C′ = C inorder to satisfy (WD3). �
7.3 Residues and Projections
In this section we fix a Coxeter system (W, S ) and a building (C, δ) of type (W, S ). We introduce residuesby generalizing the notion of panel. We generalize panels in the sense that we now allow J-equivalencesfor any J ⊆ S instead of just s-equivalence. In the following we use the notation WJ = 〈J〉 ≤ W for anyJ ⊆ S .
7.3.1 J-Residues
Definition 7.3.1. Given J ⊆ S , we say that two chambers C,D ∈ C are J-equivalent, and we writeC ∼J D if and only if there is a gallery of type (s1, . . . sn) connecting C and D with si ∈ J for all1 ≤ i ≤ n. This implies that J-residues. The J-residue containing a given chamber C is denoted RJ(C).Thus
RJ(C) ={C′ ∈ C | δ(C,C′) ∈ WJ
}.
A subset R ⊆ C is called a residue if it is a J-residue for some J ⊆ S . The set J is called the type of theresidue, and the cardinality |J| is called its rank.
For instance, panels are residues of rank 1 and of type {s} for some s ∈ S ; and single chambers areresidues of rank 0 and type ∅.
Remark 7.3.2. Given a J-residue R, we can recover the standard subgroup WJ from R by
WJ = δ(R,R) := {δ(D, E) | D, E ∈ R}
We will prove this in Lemma 7.3.4. Since J is uniquely determined by WJ , it follows that each residue Rhas a well-defined type J.
We state a version of “triangle inequality” for our W-metric space C.
Lemma 7.3.3. Given C,D, E ∈ C, set u := δ(C,D) and v := δ(D, E). Then the following hold:
(1) If u = s1 · · · sm with si ∈ S for all i, then δ(C, E) = si1 · · · sik v for some 0 ≤ k ≤ m and 1 ≤ i1 < · · · <ik ≤ m.
(2) If v = t1 · · · tn with t j ∈ S for all j, then δ(C, E) = ut ji · · · t jl for some 0 ≤ l ≤ n and 1 ≤ j1 < · · · <jl ≤ n.
(3) If l(u, v) = l(u) + l(v), then δ(C, E) = uv.
56
7 Buildings as W-Metric Spaces
Proof. (1) Choose a gallery Γ : C = C0, . . . ,Cm = D of type s = (s1, . . . , sm) connecting C and D. Thenby (WD2) δ(Cm−1, E) = {smv, v}. Proceeding inductively, we see that δ(C, E) = u′v is the product ofthe elements of a subword of s.
(2) Proof similar to that of (1).
(3) We set u := s1 · · · sn to be a reduced decomposition of u and l(u) = m. We know that l(uv) =
l(u) + l(v), so it follows that l(si+1si+2 · · · smv) = m − i + l(v). We can use the fact that l(si · · · smv) =
l(si+1 · · · smv) + 1. Choose a gallery Γ =: C = C0, . . . ,Cm = D of type s = (s1, . . . , sm) connecting Cand D and by induction and (WD2) we obtain δ(C,D) = s1 · · · smw = uv. �
Lemma 7.3.4. Let R be a J-residue and S a K-residue with J,K ⊆ S . Then δ(R,S) is a double coset ofthe form WJwWK . In particular, δ(R,R) = WJ .
Proof. Let w = δ(C,D), u = δ(C′,C) and v = δ(D,D′) with C,C′ ∈ R, D,D′ ∈ S and respectivelyδ(C′,C) ∈ WJ , δ(D,D′) ∈ WK . From Lemma 7.3.3(1) we have that δ(C′,D) = u′w where u′ is theproduct of the elements of a subword of s, where s is the type of the gallery connecting C and D withu′ ∈ WJ . Analogously using Lemma 7.3.3(2) we deduce that δ(C′,D′) = u′wv′ with v′ ∈ WK . Henceδ(R,S) ∈ WJwWK . From (WD3) and (WD3’) we see that δ(R,S) is closed under left multiplication byelements of J and right multiplication by elements of K. So the equality δ(R,S) = WJwWK holds. Thesecond assertion follows from the first since 1 ∈ δ(R,R). �
From the theory of simplicial complexes we know that the link of a simplex in a building is again abuilding. Analogously we get the converse statement in our new approach.
Corollary 7.3.5. If J ⊆ S and R is a J-residue, then (R, δ|R×R) is a building of type (WJ , J).
Proof. From Lemma 7.3.3 we have that δ(R,R) = WJ so the function δ|R×R : R × R → WJ takes valuesin WJ . �
7.3.2 Projections and the Gate Property
Since in our approach there is no reference to apartments, we do not need to define projections ontoapartments. Using Lemma 7.3.3 and 7.3.4 we will define projections onto residues and explain theirmain properties.
From the definition of the function δ(M,N) on pairs of residues and Lemma 7.3.4 we have that thedouble coset WJwWK has a unique element of minimal length
w1 = minx∈WJwWK
{l(x)}
This means that w1 has minimal length in WJwWK . So we can write the minimal element as
w1 = min(δ(R,S)) ∈ W
for any two residues R,S. Using Corollary 7.1.9(1) we can characterize the element w1 ∈ δ(R,S) asfollows:
w1 = δ(C,D)
for any C ∈ R and D ∈ S such thatd(C,D) = d(R,S),
whered(R,S) := min {d(C,D) | C ∈ R,D ∈ S} .
We now present the gate property in our context.
Proposition 7.3.6. Let R be a residue and D a chamber. Then there exists a unique C1 ∈ R such thatd(C1,D) = d(R,D). This chamber C1 has the following properties:
57

7 Buildings as W-Metric Spaces
(1) δ(C1,D) = min(δ(R,D)).
(2) δ(C,D) = δ(C,C1)δ(C1,D) for all C ∈ R.
(3) d(C,D) = d(C,C1) + d(C1,D) for all C ∈ R.
Proof. (1) Let C1 ∈ R at minimal distance from D. We set S = {D} and let w = min(δ(R,S)) theminimal element. We have that d(C1,D) = d(R,D) = d(R,S), so we can conclude that δ(C1,D) =
w = min(δ(R,D)). (Note that C1 is not yet unique. We will prove the uniqueness in the last step).
(2) Let R is residue of type J and let w = d(C1,D) = min(δ(R,D)). We have l(wJw1) = l(wJ) + l(w1) forall wJ ∈ WJ . For any C ∈ R it holds that δ(C,C1) ∈ WJ , so l(δ(C,C1)w1) = l(δ(C,C1)) + l(w1). Inparticular
l(δ(C,C1)δ(C1,D)) = l(δ(C,C1)) + l(δ(C1,D))
for all C ∈ R. By Lemma 7.3.3(3) δ(C,D) = δ(C,C1)δ(C1,D), so C1 satisfies (2).
(3) We transform the result of (2) using Corollary 7.1.9(1) and obtain
d(C,D) = l(δ(C,D)) = l(δ(C,C1)δ(C1,D))
= l(δ(C,C1)) + l(δ(C1,D)) = d(C,C1) + d(C1,D)
for all C ∈ R. From (3) it follows that d(C,D) > d(C1,D) for all C ∈ R \ {C1} and this proves theuniqueness of C1. �
Now we will define the projection map of onto residues.
Definition 7.3.7. Let R be a residue in C.
(1) Let D ∈ C. The unique chamber C1 ∈ R at minimal distance from D is called the projection of Donto R and is denoted projRD. In other words C1 is the unique chamber in R so that
δ(C1,D) = min(δ(R,D)).
(2) If S is another residue, we setpro jRS :=
{projRD | D ∈ S
}and call it the projection of S onto R. Thus projRS is a subset of R.
Now we will study some important properties of projections, which are similar to those observed forprojections in simplicial buildings.
Lemma 7.3.8. Let R and S be residues of types J and K, respectively, where J,K ⊆ S . Let w1 :=min(δ(R,S)).
(1) The projection P := projRS is given by
P = {C ∈ R | w1 ∈ δ(C,S)} .
Let C ∈ R, then the following are equivalent:
(i) C ∈ P.(ii) There exists D ∈ S with δ(C,D) = w1.
(iii) There exists D ∈ S with d(C,D) = d(R,S).
Moreover, if C ∈ R and D ∈ S satisfy δ(C,D) = w1, then C = projRD.
(2) P = projRS is a residue of type J1 := J ∩ w1Kw−11 .
58
7 Buildings as W-Metric Spaces
(3) Given C,C′ ∈ R and D,D′ ∈ S with δ(C,D) = δ(C′,D′) = w1, we have
δ(C,C′) = w1δ(D,D′)w−11
andd(C,C′) = d(D,D′).
Proof. (1) Set P′ = {C ∈ R|w1 ∈ δ(C,S)}. Let C ∈ P′ and D ∈ S satisfy δ(C,D) = w1 (or d(C,D) =
d(R,S)). Then from Definition 7.3.7 follows that d(C,D) = d(R,D), so C = pro jRD ∈ P. Thisproves the inclusion P′ ⊆ P. To prove that P ⊆ P′ we set C = projRD′ with D′ ∈ S and setw := δ(C,D′) = min(δ(R,D′)). It is obvious that
δ(R,D′) ⊆ δ(R,S) = WJw1WK ,
so w can be written as w = wJw1wK with wJ ∈ WJ , wK ∈ WK and l(wJw1wK) = l(wJ)+ l(w1)+ l(wK).But w is minimal in δ(R,D′) = WJw so it must hold that wJ = 1. Hence w is in the form w = w1wk.So w1 ∈ wWK = δ(C,S) it implies C ∈ P′.
(2) We use (1). Let C1 ∈ P and D1 ∈ Swith w1 = δ(C1,D1). We will prove thatP is the residue RJ1(C1).Let C ∈ C and u := δ(C,C1). If C ∈ R, from (1) follows that C1 = projRD1 and Proposition 7.3.6implies that δ(C,D1) = δ(C,C1)δ(C1,D1) = uw1. Now we want to show that our arbitrary chamber
C ∈ P ⇔ δ(C,C1) ∈ WJ1
In order C ∈ P we need that u ∈ WJ and then that
w1 ∈ δ(C,S) = δ(C,D1)WK = uw1WK .
The second condition is equivalent to u ∈ w1WKw−11 , so we have proven that
C ∈ Pif and only ifu ∈ WJ ∩ w1WKw−11 .
From [AB, Lemma 2.24] we have that WJ ∩ w1WKw−11 = WJ1 where J1 := J ∩ w1Kw−1
1 . SoC ∈ P ⇔ u ∈ WJ1 . This mean that P = RJ1(C1).
(3) Consider the diagram below where u = δ(C,C′) ∈ WJ and v = δ(D,D′) ∈ WK . Now we willcompute δ(C,D′) and d(C,D′) in two different ways. From (2) we have that δ(C,D′) = uw1 andd(C,D′) = d(C,C′) + l(w1). By exchanging R and S analogously we find that δ(C,D′) = w1v andd(C,D′) = l(w1) + d(D,D′). Hence uw1 = w1v and d(C,C′) + l(w1) = l(w1) + d(D,D′). We haveproved (3). �
C′ D′
DC ................................................................................................................. ............w1
.............................................................................................................................
u
.............................................................................................................................
v
................................................................................................................. ............w1
With the following proposition we will show that two ’opposite’ projections of two residues onto oneanother are residues and more over isomorphic buildings.
Proposition 7.3.9. Let R be a residue of type J ⊆ S and S a residue of type K ⊆ S in C. Set R1 = projRSand S1 = projSR.
(1) R1 is a residue of type J1 := J ∩ w1Kw−11 , and S1 is a residue of type K1 := K ∩ w−1
1 Jw1.
59

7 Buildings as W-Metric Spaces
(2) Define maps f : R1 → S1 and g : S1 → R1 by f (C) = projSC and g(D) = pro jRD . Then f and gare bijections inverse to one another.
(3) Two chambers C ∈ R1 and D ∈ S1 correspond under the bijections in (2) if and only if δ(C,D) =
w1 := min(δ(R,S)) or, equivalently, if and only if d(C,D) = d(R,S).
(4) We haveδ( f (C), f (C′)) = w−1
1 δ(C,C′)w1
for all C,C′ ∈ R1 andδ(g(D), g(D′)) = w1δ(D,D′)w−1
1
for all D,D′ ∈ S1. The maps f and g preserve adjacency and gallery distance but not type ofadjacency.
Proof. We have already proved the first assertion of (1) in Lemma 7.3.8. The second assertion followsanalogously by interchanging R and S. From Lemma 7.3.8 it follows that for all C ∈ R1 there existsD ∈ S with d(C,D) = d(R,S), and we have C = projRD. Analogously, from the Lemma we see thatD = projSC. Now we can verify that for all C ∈ R1 g( f (C)) = C and analogously for all D ∈ S1f (g(D)) = D. This proves (2), (3) follows as a byproduct of the proof. (4) is a consequence of (3). �
60
Chapter 8Euclidean Reflection GroupsKyuSung Choi, 21.02.2008
Based on: Sections 10.1.1 – 10.1.4 and 10.1.7 from [AB]
8.1 Introduction
The main issue in this chapter is that we are now viewing the finite reflection group, which we have seenso far, in an affine way. Let us quickly remind ourselves what a reflection does; a reflection is a map thattransforms an object into its mirror image. Let us now approach to our topic with a simple definition ofthe (Euclidean) reflection group. A (Euclidean) reflection group is a group, acting on a finite dimensionalvector space, spanned by reflections, i.e. the elements of the reflection group fix a hyperplane in spacepointwise.
8.2 Euclidean Reflection Groups
We have seen in the second chapter what finite reflection groups are. Recall that a finite reflection groupis a finite group W of linear transformations of V generated by reflections sH where H ranges over a setof hyperplanes. In this chapter we will study reflections whose fixed hyperplane does not need to passthrough the origin.
8.2.1 Affine Concepts
Let V be a real vector space of finite dimension n ≥ 1. We shall start with affine subspace. Imagine alinear subspace V0 of a vector space V . An affine subspace of V is the form x + V0, where x is an elementof V and V0 a linear subspace of V . We will define the dimension of x +V0 to be the dimension of V0. Anaffine subspace is called an affine hyperplane, if the dimension is n− 1 (one dimension less of that of theaffine subspace), for we assume that it is the translate of a linear hyperplane. Equivalently, we can saythat an affine hyperplane is a subset defined by a linear equation of the form f = c, where f : V → R isa nonzero linear map and c is a constant (if f = 0 we would have a linear or homogeneous hyperplane).For any nonempty linear set X, an affine span of a set X is the minimal affine set containing X. It is theintersection of all affine sets that contain X.
aff(X) = {
k∑i=1
αixi|k ∈ N, αi ∈ R, xi ∈ X, f or all i,k∑
i=1
αi = 1}
There is an affine frame for V , which is a minimal subset X such that V itself is the affine span of X.We assume that such a frame contains the origin and the remaining elements form a basis for V . So thisframe has exactly n + 1 elements.
61

8 Euclidean Reflection Groups
The adjective ‘affine’ extends to linear maps. We say that a map a from V to a vector space V ′ is anaffine map, if it has the form a(x) = g(x) + v′, where g : V → V ′ is linear and v′ is in V ′. We can restatethis by saying that a is the composite τv′ ◦ g, where τv′ is the translation x′ 7→ x′ + v′. a will be calledan affine automorphism of V, if V = V’ and g is an automorphism. The expression of a as τv◦g is uniquewith v ∈ V and g ∈ GL(V), where GL(V) is the groups of linear automorphisms of V. From the form of awe can deduce that the group of affine automorphisms of V is the semidirect product
Aff(V) = V o GL(V).
We will call the GL(V)-component g of an affine map a ∈ Aff(V) the linear part of a.Now we assume that our vector space V is Euclidean. V possesses a scalar product which has the
property of positive definite inner product 〈·, ·〉. Therefore we can endow V a distance function d(x,y) :=‖x − y‖, where ‖v‖ :=
√〈v, v〉. With this notation we can check if a is an isometry. It is an isometry if
and only if its linear part g is in the orthogonal group O(V) < GL(V) consisting of automorphisms thatpreserve the inner product. In other words, if the linear map preserves the inner product, then the affinemap also preserves it and the affine map can only preserve the inner product if the linear map preservesit. Thus we come to the conclusion that the group of affine isometries of V is the semidirect product of Vand O(V).
We will continue with the orthogonal reflection. Let H be an affine hyperplane and let H0 be the linearhyperplane parallel to H, i.e., satisfying H = x1 + H0 for some x1 ∈ V. Let s0 be the orthogonal reflectionsH0 , and let s1 := τx1◦s0◦τ−x1 ; in other words, s1 is the conjugate of s0 by some translation taking H0 toH. If we put this all together into words, we are translating a point orthogonal to H to a point orthogonalto H0. We can derive a formula for s1 by applying the formula we obtained for an orthogonal reflectionin chapter 2:
s1(x) = x1 + s0(x − x1) = s0(x) + (id − s0)(x1) (8.2.1)
for any x ∈ V . We can easily see that s1 depends only on H, and not on the choice of x1. No matterwhat vector x we choose, the orthogonal reflection s holds for that chosen vector. This allows us to writes1 = sH and call s1 the reflection with respect to H.
Here are some exercises where we can build up our understanding so far.
Exercise
1. Let x0, x1, . . . , xn be an affine frame. Show that a point x ∈ V is completely determined by then + 1 numbers d(x, xi), i.e., if d(x, xi) = d(x′, xi) for all i, then x = x′.
2. Show that the reflection sH can be characterized as the unique nontrivial isometry of V that fixesH pointwise.
8.2.2 Formulas for Affine Reflections
In this section we will explain the formula 8.2.1 in a more detailed way and eventually reformulate it.Let H be a linear hyperplane and let α be a nonzero normal vector of H. Recall that we derived a
formula for the reflection s with respect to the hyperplane H in chapter 2.
s0(x) = x − 〈α, x〉α, (8.2.2)
α is the scalar multiple of α satisfying〈α, α〉 = 2. (8.2.3)
We can change α and α in 8.2.2 and rewrite it as
s0(x) = x − 〈α, x〉α. (8.2.4)
62

8 Euclidean Reflection Groups
A small change in 8.2.4 we get(id − s0)(x) = 〈α, x〉a (8.2.5)
By substituting 8.2.5 into 8.2.1 we obtain the following formula for the reflection s1 with respect to H1:
s1(x) = s0(x) + α. (8.2.6)
From our equation we see that the composite map s0◦s1 is the translation x 7→ x – α.
8.2.3 Affine Reflection Groups
Our assumption that V is a Euclidean vector space of dimension n ≥ 1 will continue. Let W be a groupof affine isometries of V.
Definition 8.2.1. We say that W is an affine reflection group if there is a set H of affine hyperplanes inV satisfying:
(i) W is generated by the reflections sH for H ∈ H .
(ii) H is W-invariant.
(iii) H is locally finite, in the sense that every point of V has a neighborhood that meets only finitelymany H ∈ H .
If we only assumed that W was generated by reflections, then we could always find a setH satisfying(i) and (ii). But we cannot simply expect the third condition to hold. Similar to Lemma 1 that we haveseen in the second chapter, which is the requirement for W to be finite in the linear case, condition (iii)plays the role in the affine setting of the requirement that W be finite.
What we are facing at the moment is not that different from what was covered in the second chapter forfinite reflection groups. The results go through with little or no change for affine reflection groups. Themain difference is that we now only have local finiteness of H instead of finiteness. For the remainingpart we assume that W is an affine reflection group andH is as in 8.2.1.
The hyperplanes H ∈ H yield a partition of V into convex cells, these being nonempty sets A definedby linear equalities or strict inequalities, one for each H ∈ H . More precisely, if H is defined by a linearequality f = c, then the definition of A will involve either the same equality or else one of the inequalitiesf > c or f < c. A cell A has a support;
suppA :=⋂
σi(A)=0
Hi. (8.2.7)
The support is an affine subspace of V, and A is open relative to its support. The dimension of A is thatof the support of A. Chambers are defined as the cells of maximal dimension n; they are the connectedcomponents of the complement on V of
⋃H∈H H. The cells of dimension n – 1 are called panels. Finally,
the supports of the panels of a chamber C are called the walls of C, and C is defined by its walls (i.e., bythe inequalities corresponding to the walls).
Everything we mentioned so far applies to any locally finite collection of affine hyperplanes. Now letus bring W into the picture. Choose a chamber C and let S be the set of reflections with respect to thewalls of C. Note that S, a priori, might be infinite; we will return to this below in the theorem. Let Hs
for s ∈ S be the hyperplane fixed by s, and let es be the unit vector perpendicular to Hs and pointing tothe side of Hs containing C. Thus es
⊥ is the linear hyperplane parallel to Hs, and one of the defininginequalities for C has the form 〈es, –〉 > c. Let m(s, t) for s, t ∈ S be the (possibly infinite) order of st.The following facts that were already proved for the finite case remain valid:
1Let Φ be a finite set of nonzero vectors in V, and let W be the group generated by the reflections sα (α ∈ Φ). If Φ is invariantunder the action of W, then W is finite.
63
8 Euclidean Reflection Groups
Remark 8.2.2. (i) W is simply transitive on the chambers.
(ii) W is generated by S.
(iii) H necessarily consists of all affine hyperplanes H with sH ∈ W.
(iv) (W, S) is a Coxeter system.
(v) 〈es, et〉 = – cos(π/m(s,t)) for all s, t ∈ S. Moreover, m(s,t) =∞ if and only if s , t and Hs is parallelto Ht.
(vi) C is a strict fundamental domain for the action of W on V, and the stabilizer of a point x ∈ C is thestandard subgroup of W generated by S x := {s ∈ S | sx = x}.
8.2.4 Finiteness Results
Let us now settle the question of the finiteness of S, along with some related questions:
Theorem 8.2.3. (i) C has only finitely many walls, hence S is finite.
(ii) The hyperplanes H ∈ H fall into finitely many classes under the relation of parallelism; in otherwords, there are only finitely many linear hyperplanes H0 such thatH contains a translate of H0.
(iii) Let W ≤ GL(V) be the set of linear parts of the elements w ∈ W, i.e., the image of W under theprojection Aff(V)� GL(V). Then W is a finite reflection group.
Proof. (i) The inner product formula in (v) above shows that the angle ](es, et) between es and et
satisfies ](es, et) ≥ π/2 for s , t. But if S were infinite, then the es would have a cluster point onthe unit sphere and hence there would be s, t with ](es, et) very small.
(ii) Let Φ := {±eH | H ∈ H}, where eH is the unit vector perpendicular to H and pointing to the sidecontaining C. We must show thatH is finite. As in the proof of (i), it suffices to show that ](e, e’)is bounded away from 0 for e , e’ in H . We will show that, in fact, there are only finitely manypossibilities for this angle.
Let H and H’ be elements of H perpendicular to e and e’, respectively. If H and H’ are parallel,then ](e, e’) = π [since e , e’]. Otherwise, choose x ∈ H∩H’ and choose W ∈W with wx ∈ C; thisis possible by vi. Then wH and wH’ are elements of H that meet C, and they are perpendicularto the vectors we, we′, where w is the linear part of W. Since ](e, e’) = ](we, we’), the proof willbe complete if we show that only finitely many elements of H meet C. Now C has only finitelymany walls by (i) of our theorem; so it is defined by finitely many inequalities and hence has onlyfinitely many faces. And each face meets only finitely many elements ofH by local finiteness andthe definition of “cell". The union C of the faces therefore meets only finitely many elements ofH .
(iii) The set Φ defined in the proof of (ii) is W-invariant. Since it was proven to be finite, W is a finitereflection group by our Lemma 2 that was recalled before. �
8.2.5 Example
Let W be the symmetric group on n letters (n ≥ 2). Recall that W is an essential, irreducible, finitereflection group acting on the (n − 1)-dimensional space
V := {(x1, . . . , xn) ∈ Rn |
n∑i=1
xi = 0}.
2go back to page 3 for this Lemma
64

8 Euclidean Reflection Groups
The associated linear hyperplanes in V are defined by the equations
xi − x j = 0 where i , j.
We construct an affine analogue of this example by introducing a lattice of translations.Let L := Zn ∩ V . Then L is a W-invariant lattice in V . It is generated, as an abelian group, by the
vectors ei − e j (i , j), where {e1, . . . , en} is the standard basis for Rn. We now set
W := L o W ≤ V o GL(V) = Aff(V).
Note that W, as an abstract group, is the Weyl group. To see that W is a Euclidean reflection group,let H be the set of affine hyperplanes in V of the form xi − x j = k with i , j and k ∈ Z. It is easy tocheck that θ is locally finite and W-invariant. It is also easy to compute the reflection with respect to thehyperplane xi – x j = k; on finds that it is given by
x 7→ si j(x) + k(ei − e j),
where si j is the transposition that interchanges the ith and jth coordinates. Thus W contains the reflectionsH for all H ∈ H .
The subgroup generated by these reflections contains W, and hence it contains the translations x 7→ x +
k(ei – e j). It follows that this subgroup is the whole group W, which is therefore an affine reflection group.We will compute its Coxeter diagram below and see that W is irreducible; alternatively, the irreducibilityof W follows from that of W. Since W is obviously infinite, it is an Euclidean reflection group.
As fundamental chamber C we take the subset of V defined by
x1 > . . . > xn > x1 − 1. (8.2.8)
This is an intersection of halfspaces associated to n of the elements ofH , and it lies on one side of everyH ∈ H , so it is indeed a chamber. The reflections with respect to the walls xi = xi+1 are the basictranspositions si := si,i+1 (i = 1, . . . , n − 1). And the reflection sn with respect to the wall xn = x1 − 1 isthe map x 7→ sn,1x) + (e1 − en). The canonical unit vectors f1, . . . , fn associated to C are given by fi =ei−ei+1√
2if i ≤ n− 1 and en−e1√
2if i = n. Note that they satisfy the linear relation
∑fi = 0, which has positive
coefficients. One can find the Coxeter diagram of W, either by computing the orders of the products sis j
or by computing the inner product 〈 fi, f j〉.
65
Kapitel 9Euklidische Gebäude und der Fixpunktsatzvon Bruhat-TitsDominik Plümacher, 19.02.2008
Basierend auf: Abschnitte 10.2, 11.1-3 aus [AB]
9.1 Geodäten und CAT(0)-Räume
Konvention 9.1.1. Im Folgenden sei mit (X, d) immer ein metrischer Raum bezeichnet. Im Folgendenbezeichnet Isometrie eine Abbildung Φ : X → Y zwischen zwei metrischen Räumen (X, dX) und (Y, dY ),sodaß für je zwei Punkte x und y aus X gilt: dX(x, y) = dY (Φ(x),Φ(y)).
Der wesentliche und zentrale Begriff der Geraden bzw. der Strecke in der Euklidischen Ebene erfährtin der Differentialgeometrie zwei Arten von Verallgemeinerung. Die eine fußt auf dem Gedanken, denBegriff der „Parallelität“ zu verallgemeinern. Man nennt einen Weg dann eine Gerade bzw. eine Geodäte,wenn seine Tangenten in einem geeigneten Sinn parallel entlang des Weges sind. Die zugehörige Strukturist dann der Paralleltransport welcher den Begriff der Parallelität entlang von Wegen formalisiert. Imeinfachen euklidischen Fall sind aber die Geraden auch genau die kürzesten Strecken zwischen zweiPunkten. Diese Begriffsbildung bedarf nur der Möglichkeit, Längen zu messen. In der RiemannschenDifferentialgeometrie stellt sich nun heraus, daß unter gewissen Bedingungen beide Begriffe auf das selbeKonzept von Geodäte hinausläuft. Die zweite Betrachtungsweise lässt sich nun aber auch auf beliebige(nicht notwendig differenzierbare) metrische Räume verallgemeinern.
Definition 9.1.2. Seien x, y ∈ X zwei Punkte. Eine Teilmenge Γ ⊂ X heißt Geodäte von x nach y, fallses eine Isometrie γ : R ⊃ [a, b]→ Γ ⊂ X gibt mit γ(a) = x und γ(b) = y. Wir schreiben für Γ auch [x, y]und bezeichnen dies als Gerade oder als abgeschlossenes (geodätisches) Segment von x nach y.Ist obiges γ nur auf einem offenen oder halboffenen Intervall I definiert (d.h. I =]a, b[, I = [a, b[ oderI =]a, b]), dann schreiben wir für Γ analog ]x, y[ bzw. [x, y[ bzw. ]x, y] und bezeichnen es als offene (resp.halboffene) Gerade bzw. Segment.
Bemerkung 9.1.3. (1) Die obige Isometrie γ : [a, b]→ Γ ist natürlich nur eindeutig bis auf Isometri-en Φ : [a′, b′] → [a, b] (a′ < b′, b′ − a′ = b − a) von R. Dabei ist der Fall a′ = 0 von besondererBedeutung, denn dann ist b gerade die Länge von Γ. In diesem Fall nennen wir γ ◦ Φ Parametri-sierung nach Bogenlänge. Sofern nichts anderes gesagt wird seien im Folgenden Geodäten immernach Bogenlänge parametrisiert.
(2) Die Notation [x, y] ist im Allgemeinen mit Vorsicht zu genießen, da für die meisten metrischenRäume Geodäten bzw. geodätische Segmente zwischen zwei Punkten nicht eindeutig sind. Bei-spiel hierfür sind etwa antipodale Punkte auf der n-Sphäre. Da die CAT(0)-Eigenschaft aber ins-besondere Eindeutigkeit der Geodäten impliziert, braucht uns diese Uneindeutigkeit nicht weiterzu stören.
66

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Nun lässt die allgemeine Definition von metrischen Raum auch (für uns) uninteressante pathologischeFälle zu wie etwa die diskrete Metrik. Daher schränken wir uns nun auf die für uns „interessanten“ Fälleein.
Definition 9.1.4. Ein metrischer Raum X heißt geodätischer Raum, falls für je zwei Punkte x und y eineGeodäte γ von x nach y existiert.
Eine der bemerkenswerten Erkenntnisse der Riemannschen Differentialgeometrie ist die, daß der Be-griff der Krümmung eine zweidimensionale Charakteristik hat. Tatsächlich ist die volle abstrakte Krüm-mungsgröße (der sogenannte Krümmungstensor) schon allein durch ihr Verhalten auf zweidimensionalenFlächen bestimmt. Zudem ist die Krümmung auf Flächen dadurch bestimmt, wie sehr die Innenwinkel-summe von Dreiecken von 2π abweicht. Diese Beobachtung legt den Versuch nahe, analoge geometri-sche Techniken auf beliebigen geodätischen metrischen Räumen einzuführen.
Definition 9.1.5. Seien x, y, z drei Punkte in X, dann ist ein geodätisches Dreieck ∆(x, y, z) gegeben durchdie Vereinigung der drei geodätischen Segmente [x, y], [y, z] und [z, x]. Dabei heißen die Punkte x, y undz Ecken von ∆(x, y, z) und die drei Geraden [x, y], [y, z] und [z, x] heißen Kanten des Dreiecks ∆(x, y, z).
Seien nun x, y, z drei Punkte in der euklidischen Ebene R2 mit den Abständen dX(x, y) = dR2(x, y),dX(y, z) = dR2(y, z) und dX(z, x) = dR2(z, x). Dann ist das Vergleichsdreieck ∆(x, y, z) in R2 gegeben durchdas geodätische Dreieck der drei Kanten [x, y],[y, z] und [z, x] in R2.
Bemerkung 9.1.6. Da Isometrien Abstände invariant lassen, sind Vergleichsdreiecke nur bis auf Isome-trien der euklidischen Ebene bestimmt.
Definition 9.1.7. Ein metrischer Raum X heißt CAT(0)-Raum, falls für je zwei Punkte x, y ∈ X eingeodätisches Segment [x, y] existiert, sodaß für jeden Punkt p ∈ [x, y] und jeden Punkt z ∈ X gilt
dX(z, p) ≤ dR2(z, p) (9.1.1)
Dabei bezeichnet z die zu z korrespondierende Ecke im Vergleichsdreieck ∆(x, y, z) und p den eindeutigbestimmten Punkt in [x, y] mit dR2(x, p) = dX(x, p).
x
z
p
y
p
x
y
z
Abbildung 9.1: Dreieck in CAT(0)-Raum und Vergleichsdreieck in R2
Bemerkung 9.1.8. Die CAT(0)-Eigenschaft ist die Verallgemeinerung des Begriffs der negativen Schnitt-krümmung für Riemannschen Mannigfaltigkeiten auf allgemeine geodätische metrische Räume. Daswird präzisiert durch einen entsprechenden Satz, daß jede Riemannsche Mannigfaltigkeit M genau dannlokal ein CAT(0)-Raum ist, falls die Schnittkrümmung nicht-positiv ist (d.h. κ(m) ≤ 0 für alle m ∈ M).
Die Bezeichnung CAT geht auf Gromov zurück und steht für die Namen von Élie Cartan, Pavel Alex-androv und V.A. Toponogov, welche wesentliche Ergebnisse auf diesem Gebiet erzielt haben.
67

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Die 0 im Namen bedeutet, daß die Vergleichsdreiecke, welche zum Vergleich der Abstände herange-zogen werden, in dem Modellraum der Euklidischen Ebene E2 bzw. R2 (versehen mit dem Standards-kalarprodukt) gewählt werden, also einem Raum mit verschwindender Krümmung. Analog kann mannun einen CAT(κ)-Raum definieren, indem man die Vergleichsdreiecke aus einem Modellraum M2
κ mitKrümmung κ wählt. Dabei ist M2
κ bis auf Isometrie eindeutig bestimmt und wird durch die Riemann-schen Mannigfaltigkeiten Sn
κ (für κ > 0), Rn (für κ = 0) bzw. Hnκ (für κ < 0) mit der um κ reskalierten
Standardmetrik auf Sn bzw. Hn realisiert.
H2S2
Abbildung 9.2: Geodätische Dreiecke in der Sphäre S2 und im hyperbolischen Raum H2
Proposition 9.1.9. Ein metrischer Raum X ist genau dann ein CAT(0)-Raum, wenn für je zwei Punktex, y ∈ X eine Geodäte [x, y] existiert mit der Eigenschaft, daß für jedes z ∈ X und jedes p ∈ [x, y] dieUngleichung
d(z, p)2 ≤ (1 − t)d(z, x)2 + td(z, y)2 − t(1 − t)d(x, y)2 (9.1.2)
erfüllt ist. Dabei ist t := d(p, x)/d(x, y) ∈ [0, 1].
Beweis. Da das Vergleichsdreieck nur bis auf Isometrie von R2 bestimmt ist, wählen wir z = 0. Danngilt
d(z, pt)2 = ‖ pt‖2 = (1 − t)2‖x‖2 + t2‖y‖ + 2t(1 − t)〈x, y〉
Wegen d(x, y)2 = ‖x‖2 + ‖y‖2 − 2〈x, y〉 folgt also nun
d(z, pt)2 = (1 − t)d(x, z)2 + td(y, z)2 − t(1 − t)d(x, y)2
Damit ist die Behauptung klar. �
Die letzte Gleichung des Beweises wird auch „verallgemeinertes Parallelogramm-Gesetz“ bezeichnet.Eine direkte Anwendung auf zwei Dreiecke in der euklidische Ebene mit einer gemeinsamen Seite liefertden folgenden, intuitiv offensichtlichen Sachverhalt.
Proposition 9.1.10. Seien x, y, z, z′ Punkte in R2. Seien ∆ und ∆′ die Dreiecke mit den Ecken x, y, z undx, y, z′. Sei ferner p ∈ [x, y] ein Punkt auf der gemeinsamen Seite der Dreiecke. Gilt dann d(x, z′) < d(x, z)und d(y, z′) < d(y, z), so gilt auch d(p, z′) < d(p, z).
Proposition 9.1.11. Sei X ein CAT(0)-Raum. Dann gibt es für je zwei Punkte x, y ∈ X eine eindeutigbestimmte Geodäte [x, y] von x nach y. Sie ist gegeben durch
[x, y] = {z ∈ X | d(x, y) = d(x, z) + d(z, y)} (9.1.3)
68

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
y
p
x
z′
z
Abbildung 9.3: Vergleichsdreiecke ∆ und ∆′ in R2
Beweis. Das jedes geodätische Segment [x, y] in {z ∈ X|d(x, y) = d(x, z) + d(z, y)} enthalten ist, ist klar.Sei also [x, y] das geodätische Segment, für welches die obige Bedingung der Definition von CAT(0)gilt. Angenommen z ∈ X erfüllt die Bedingung d(x, y) = d(x, z) + d(y, z), wähle für t := d(x,z)
d(x,y) den Punktpt ∈ [x, y], d.h. es gilt d(x, pt) = d(x, z). Betrachtet man nun ein Vergleichsdreieck in R2 mit den Eckenx, y und z, dann degeneriert es zu der Strecke [x, y] und es gilt z = pt. Folglich ist d(z, pt) ≤ d(z, pt) = 0,also gilt z ∈ {w ∈ X | d(x, y) = d(x,w) + d(w, y)}. Das zeigt die Behauptung. �
Proposition 9.1.12. Sei X ein CAT(0)-Raum. Dann ist die Abbildung
X × X × [0, 1]→ X
(x, y, t) 7→ pt
stetig, wobei pt ∈ [x, y] der eindeutige Punkt mit d(pt, x) = td(x, y) ist. Folglich ist X zusammenziehbar.
Beweis. Siehe [AB, 11.7] . �
Zum Schluss betrachten wir noch den Spezialfall von (9.1.2) für den Mittelpunkt m von [x, y], d.h.m = p 1
2. In dieser Situation ließt sich (9.1.2) also
d(z,m)2 ≤12
(d(z, x)2 + d(z, y)2
)−
14
d(x, y)2 . (9.1.4)
Das liefert uns eine weitere Charakterisierung von CAT(0)-Räumen, welche auf Bruhat und Tits zu-rück geht.
Proposition 9.1.13. Sei X ein metrischer Raum. Ist X ein CAT(0)-Raum, so gibt es für beliebige Punktex, y ∈ X einen eindeutigen Punkt m ∈ X, sodaß obige Ungleichung (9.1.4) erfüllt ist.
Ist X vollständig und gibt es zu je zwei Punkten x, y ∈ X einen Punkt m, welcher die Ungleichung(9.1.4) erfüllt, so ist X ein CAT(0)-Raum.
9.2 Euklidische Gebäude als metrische Räume
Zuerst wollen wir zu den im vorigen Kapitel eingeführten euklidischen Spiegelungsgruppen die zugehö-rigen Coxeterkomplexe betrachten und auf diesen eine euklidische Struktur definieren.
69

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Definition 9.2.1. Ein euklidisches Coxetersystem (W, S ) ist ein Coxetersystem, für das es eine eukli-dische Spiegelungsgruppe W ≤ Aff(V) auf einem euklidischen Vektorraum V und eine fundamentaleKammer C ⊂ V gibt, sodaß für die Menge S der Spiegelungen an den Wänden von C das Coxetersystem(W, S ) isomorph ist zu (W, S ).
Ein euklidischer Coxeterkomplex Σ ist ein Simplizialkomplex für den es ein euklidisches Coxetersy-stem (W, S ) gibt mit Σ � Σ(W, S ).
Lemma 9.2.2. Ein Simplizialkomplex Σ ist genau dann ein euklidischer Coxeterkomplex, wenn es eineeuklidische Spiegelungsgruppe W ≤ Aff(V) eines euklidischen Raumes V gibt mit Σ � Σ(W,V).
Beweis. Klar aus Definition von euklidischen Coxetersystem und nach Proposition (10.13) in [AB,10.1.5], daß Σ(W,V) � Σ(W, S ). �
Wir möchten nun auf der geometrischen Realisierung |Σ| eines euklidischen Coxeterkomplexes eineeuklidische Metrik definieren. Dazu benutzen wir wieder Proposition (10.13) aus [AB], welche uns einenIsomorphismus Σ(W,V) � Σ(W, S ) garantiert. Das dies aber wohldefiniert wird, liefert uns folgendeFeststellung.
Lemma 9.2.3. Seien (W,V) und W′,V ′) euklidische Spiegelungsgruppen mit Isomorphismus Φ : Σ(W,V)→Σ(W′,V ′). Dann induziert die geometrische Realisierung |Σ| einen affinen Isomorphismus φ : V → V ′,sodaß für den linearen Teil φL eine positive Konstante λ > 0 existiert mit der Eigenschaft 〈φL(x), φL(y)〉 =
λ〈x, y〉 für alle x, y ∈ V.
Beweis. Sei C eine fest gewählte Kammer in V . Dann seien mit Ai die Paneele von C und mit Hi dieWände von C für i = 1, . . . , n + 1 bezeichnet. Mit ei bezeichnen wir die Einheitsnormalen der WändeHi, die in Richtung der Kammer C zeigen. Nach einer Konjugation mit einer Translation in V könnenwir ohne Einschränkung annehmen, daß die Hyperebenen Hi durch die linearen Gleichungen 〈ei, .〉 = 0für i = 1, . . . n und Hn+1 durch 〈en+1, .〉 = c < 0 definiert sind. Durch eine Reskalierung aller Vektoren,können wir weiter annehmen, daß c = −1 ist. Diese Reskalierung liefert das gewünschte λ := 1
c aus derBehauptung.
Nun setzen wir C′ := Φ(C) und A′i := Φ(Ai). Für i = 1, . . . , n + 1 bezeichnen wir mit H′i die Wändevon C′ (mit A′i ⊂ H′i ), mit e′i die Einheitsnormalen auf H′i und mit s′i die Spiegelungen an H′I . Auch hierkönnen wir nach einer Verschiebung von V ′ annehmen, daß die H′i durch die Gleichungen 〈e′i , .〉 = 0 fürn ≤ n und 〈en+1, .〉 definiert sind.
Da die Coxetermatrix (mi j)i j eine kombinatorische Invariante eines Coxeterkomplexes ist (mi j ist derDurchmesser des Links lk(Ai ∩ A j)), haben Σ(W,V) und Σ(W′,V ′) aufgrund der Isometrie die selbeCoxetermatrix. Damit gilt aber für die Einheitsnormalen ei und e′i
〈ei, e j〉 = 〈e′i , e′j〉 für alle i, j ∈ {1, . . . , n + 1}. (9.2.1)
Da jeweils n Vektoren der ei eine Basis bilden, können wir nun einen Isomorphismus φ : V → V ′
konstruieren, indem wir für i ∈ {1, . . . , n} definieren φ(ei) := e′i . Wegen (9.2.1) erhält φ Skalarprodukteund es gilt 〈φ(en+1), .〉 = 〈e′n+1, .〉, also auch φ(en+1) = en+1.
Da nun aber φ(Hi) = H′i gilt, ist s′i = φsiφ−1 und somit auch W′ = φWφ−1. Daher induziert φ einen
Isomorphismus der Paare (W,V) → (W′,V ′) und folglich auch einen Isomorphismus Ψ : Σ(W,V) →Σ(W′,V ′). Da aber nach Konstruktion Ψ auf der Kammer C und den Paneelen Ai mit Φ übereinstimmt,ist schon Ψ = Φ. �
Definition 9.2.4. Auf der Realisierung |Σ| eines euklidischen Coxeterkomplex Σ ist eine euklidischeStruktur durch eine Äquivalenzklasse von Metriken d : |Σ| × |Σ| → R definiert, wobei zwei Metriken dund d′ äquivalent heißen, wenn es ein λ > 0 gibt mit d′ = λd.
Bemerkung 9.2.5. Nach Lemma 9.2.3 induziert jeder Isomorphismus zwischen den euklidischen Coxe-terkomplexen Σ und Σ′ einen Isomorphismus bezüglich der euklidischen Struktur auf |Σ| und |Σ′|. Insbe-sondere können wir für jeden Komplex Σ einen Repräsentanten der Metrik auf |Σ| frei wählen. Z.B. kann
70

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
man vereinbaren, daß man immer eine Metrik wählt, sodaß die Fundamentalkammer Durchmesser 1 oderdas Volumen 1 hat. Insbesondere können wir zu jedem abstrakten Isomorphismus zwischen euklidischenCoxeterkomplexen Σ und Σ′ entsprechend Metriken auf |Σ| und |Σ|′ auswählen, sodaß die geometrischenRealisierungen isometrisch bezüglich der durch den abstrakten Isomorphismus induzierten Abbildungsind.
Beispiel 9.2.6. Wir betrachten die Coxetergruppe W von Typ A2. Das zugehörige Coxeterdiagramm ist
u
s t
Die Ecken des Diagramms entsprechen den Erzeugern der Ordnung 2, d.h. S = {s, t, u}. Da die Er-zeuger auch gleichzeitig die Label der Ecken einer Kammer C ∈ Σ(W, S ) =: Σ sind, ist Σ ein Rang 3Kammerkomplex, hat also Dimension 2. Die Kammern sind somit Dreiecke, deren Innenwinkel durchdie Erzeugerrelationen m(s, t) = m(s, u) = m(t, u) = 3 bestimmt sind. Folglich liefert Σ(W, S ) eine Tri-angulierung der affinen Ebene mit gleichseitigen Dreiecken (siehe Abb. 9.4). Die Erzeuger sind nunrealisiert durch die Spiegelungen an den Wänden Hs,Ht und Hu der Fundamentalkammer C (= {1} inΣ(W, S )). Nun lässt sich eine der Ecken von C mit 0 ∈ R2 identifizieren, hier sei das die Ecken mit Labelu. Dann ist S = {s, t} ⊂ GL(R2) und die Translation ist gegeben durch v = stsu ∈ T ≤ Aff(R2).
vC
sC
tC
Hs
Ht
Hu
CtstC0
s
t
Abbildung 9.4: Der Coxeterkomplex A2 als Simplizialzerlegung des affinen 2-dimensionalen Raumes R2
Mit den nun eingeführten Begriffen und der obigen Feststellung können wir einen neuen Typ vonGebäude definieren, in dem alle Apartments euklidische Räume sind.
Definition 9.2.7. Ein Gebäude ∆ heißt euklidisches Gebäude oder affines Gebäude oder Gebäude vonaffinem Typ, wenn jedes Apartment Σ ein euklidischer Coxeter-Komplex ist.
Der Begriff „affin“ soll dabei daran erinnern, daß die zu den Apartments gehörige Gruppe als Un-tergruppe der affinen Gruppe eines euklidischen Raumes aufgefasst werden kann. Dahingegen hebt derBegriff „euklidisch“ die Tatsache hervor, daß auf den Apartments solcher Gebäude eine Metrik definiertist. Wie wir sehen werden ist dann auch auf dem Gebäude eine Metrik definiert. Diese ist allerdings vonder kombinatorischen Metrik, gegeben durch die Länge kürzester verbindender Galerien, zu unterschei-den.
71

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Beispiel 9.2.8. Die Gruppe G = SL2(Q2) besitzt eine BN-Paar-Struktur, zu der wiederum ein Gebäude∆(G, B) assoziiert ist (siehe Abbildung 9.5). Dieses ist vom Typ A1, d.h. die Apartments Σ sind triangu-lierte Geraden (� R). Es zeigt sich, daß ∆(G, B) ein unendlich langer Baum ist, bei dem jeder Knoten aufgenau drei Kanten liegt. Für Details vergleiche [AB].
Im Folgenden bezeichnen wir mit ∆ immer ein Euklidisches Gebäude und mitA ein beliebiges Systemvon Apartments. Wir wollen nun die Isomorphie der Apartments dazu benutzen, um auf dem Gebäude ∆
eine Metrik zu definieren. Dazu fassen wir jedes Apartment als euklidischen Raum auf und setzen die so„stückweise“ definierten Metriken zu einer Metrik auf ganz ∆ zusammen. Hierfür treffen wir folgendeVereinbarung.
Konvention 9.2.9. Im Folgenden bezeichnen wir mit X die geometrische Realisierung des Gebäudes∆, genauer, seines zugrundeliegenden Simplizialkomplexes. Die Realisierungen der Apartments Σ ∈ A
bezeichnen wir mit E := |Σ|. Zur Vereinfachung der Notation schreiben wir für jeden Simplex A ∈ ∆
auch für seine geometrische Realisierung, den offenen Simplex |A|, einfach nur A. Den abgeschlossenenSimplex von A bezeichnen wir mit A, d.h. A ist die geometrische Realisierung des Subkomplexes ∆≤A.
Zur Vereinfachung der Sprache bezeichnen wir auch den Raum X als Gebäude und den UnterraumE = |Σ| für Σ ∈ A als Apartment.
Definition 9.2.10. Sei Σ ein Simplizialkomplex. Dann ist eine Retraktion ρ : Σ → Σ eine simplizialeAbbildung mit ρ2 = ρ.
Ist X ein metrischer Raum und ρ : X → X eine stetige Abbildung mit ρ2 = ρ, dann heißt ρ ebenfallsRetraktion.
Bemerkung 9.2.11. Der Begriff der Retraktion ist eine Verallgemeinerung des Begriffs der Projektion.Daher sollte man sich eine Retraktion in den entsprechenden Fällen als „Projektion“ von X bzw. Σ aufdas Bild von ρ vorstellen.
Proposition 9.2.12. Sei ∆ ein beliebiges Gebäude. Für jede Kammer C von ∆ und jedes Apartment Σ
mit C ∈ Σ gibt es einer eindeutige Retraktion ρΣ,C : ∆ → Σ, welche C punktweise fest lässt und jedesApartment Σ′ mit C ∈ Σ′ isomorph auf Σ abbildet.
Beweis. Wähle ein Apartment Σ und eine Kammer C ∈ Σ. Für jedes weitere Apartment Σ′ welches Centhält, liefert das Gebäudeaxiom (B2) einen eindeutigen (typerhaltenden) Isomorphismus φΣ′ : Σ′ → Σ
der C punktweise fest lässt (d.h. φΣ′ |≤C = id |c). Die Eindeutigkeit folgt aus dem Standardargument,wonach ein Isomorphismus von labelbaren Kammerkomplexen durch das Bild einer Kammer festgelegtist. Ist Σ“ ein weiteres Apartment welches C enthält, so liefert Gebäudeaxiom (B2“) mit der Eindeutigkeitvon φΣ′ und φΣ“ die Gleichheit von φΣ′ und φΣ“ auf Σ′ ∩ Σ“.
Für C′ ∈ ∆ existiert nun ein Apartment Σ′ mit C,C′ ∈ Σ′. Nun definiere ρΣ,C(C′) durch das Bild vonφΣ′ auf C′, d.h. ρΣ,C(C′) = φΣ′(C′). Dann ist ρΣ,C nach obigem auf ganz ∆ wohldefiniert. Da ρΣ,C |Σ = idΣ
nach Konstruktion, ist ρΣ,C wie gewünscht eine Retraktion. �
Definition 9.2.13. Die Retraktion ρΣ,C heißt auch kanonische Retraktion zentriert in C.
Konvention 9.2.14. Im Falle eines euklidischen Gebäudes ∆ mit der Realisierung X bezeichnen wir diegeometrische Realisierung der von einem Apartment E und einer Kammer C ⊂ E induzierten kanoni-schen Retraktion ρΣ,C : ∆→ Σ mit ρE,C : X → E.
Da alle Apartments E von X euklidische Räume sind, bezeichnen wir die auf E definierte Metrik mitdE . Nun liefert jede Isomorphie Φ : Σ → Σ′ von zwei Apartments Σ,Σ′ ∈ A eine Isometrie |Φ| : E =
|Σ| → E′ = |Σ′| nach Proposition 9.2.3 und Bemerkung 9.2.5. D.h. wir wählen die Metriken dE derart,daß je zwei Apartments E und E′ zueinander isometrisch sind. Dann ist folgendes Lemma offensichtlich.
Lemma 9.2.15. Seien x und y Punkte aus X sowie E und E′ zwei Apartments mit x, y ∈ E und x, y ∈ E′.Dann gilt
dE(x, y) = dE′(x, y)
72

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Wir möchten nun die Metriken dE auf den Apartments E benutzen, um auf ganz X eine Metrik zudefinieren. Das erreichen wir, indem wir die Metriken auf den Apartments „zusammensetzen“. Dabeigarantiert uns das obige Lemma die Wohldefiniertheit der folgenden Definition.
Definition 9.2.16. Seien x, y ∈ X beliebig und E ein Apartment welches beide Punkte enthält. Dannsetzen wir
d : X × X −→ R : (x, y) 7−→ dE(x, y)
und erhalten eine wohldefinierte symmetrische und positiv definite Abstandsfunktion auf X.
Satz 9.2.17. (1) Die Abbildung d : X × X → R ist eine Metrik.
(2) Der metrische Raum (X, d) ist vollständig und ein CAT(0)-Raum.
(3) Für jedes Apartment E und jede Kammer C ⊂ E ist die Retraktion ρE,C : X → E abstandsverklei-nernd, d.h. für alle x, y ∈ X gilt
d(ρE,C(x), ρE,C(y)) ≤ d(x, y). (9.2.2)
Für x ∈ C gilt sogar Gleichheit.
(4) Für je zwei Punkte x, y ∈ X sei E ein Apartment, welches x und y enthält und [x, y] das geodätischeSegment in E. Dann ist [x, y] unabhängig von der Wahl von E und ist gegeben durch
[x, y] = {z ∈ X : d(x, y) = d(x, z) + d(z, y)} (9.2.3)
Für den Beweisschritt der Vollständigkeit brauchen wir noch zwei Begriffe und ein technisches Lem-ma.
Definition 9.2.18. Für einen Punkt x ∈ X ist der Stern um x gegeben als
st(x) :=⋃{A ⊆ X|A ist ein Simplex, x ∈ A}.
Sei C eine Kammer und y ∈ C. Wir sagen ein Punkt x ∈ X sei vom Typ y, falls es eine Kammerabbildung(bzw. deren geometrische Realisierung) Φ gibt mit Φ(x) = y.
Lemma 9.2.19. Sei C ⊂ X eine Kammer und y ∈ C. Dann gibt es ein δ > 0 derart, daß für jeden Punktx ∈ X vom Typ y die abgeschlossene Kugel Bδ(x) um x mit Radius δ im Stern st(x) enthalten ist.
Beweis. Sei E ein Apartment welches die Kammer C enthält. Mit H bezeichnen wir die Familie derWände, die E in Kammern und Simplexe zerlegt. Für δ wählen wir nun den minimalen Abstand von y zuWänden H ∈ H mit y < H. Sei nun y′ ∈ E mit d(y, y′) ≤ δ, dann berührt die offene Gerade ]y, y′[ keineWand. Daher liegt ]y, y′[ in einer einzigen offenen Facette A und somit sind y, y′ ∈ A.
Sei nun x ∈ X ein Punkt vom Typ y und x′ ∈ X mit d(x, x′) ≤ δ. Wir wählen ein Apartment E′, welchesx und x′ enthält, und eine Isometrie Φ : E′ → E mit Φ(x) = y. Dann gilt d(y,Φ(x′)) ≤ δ, also ist nachobigem Φ(x′) ∈ stE(x). Folglich ist x′ ∈ stE′(x) ⊂ stX(x). �
Beweis des Satzes. Wir zeigen zuerst (3): Der zweite Teil der Behauptung folgt direkt aus der Eigen-schaft, daß ρE,C die Kammer C fix läßt und der Stetigkeit der Metrik. Da ρE,C aber jede Kammer C′ ⊆ Xisometrisch auf ihr Bild abbildet, gilt das auch für deren Abschluss C′.Seien nun also x, y ∈ X. Dann gibt es ein Apartment E′ ⊆ X welches beide Punkte enthält. In dem eukli-dischen Raum E′ sei nun [x, y] das geodätische Segment, welches x und y verbindet. Da [x, y] kompaktist und das System der Hyperflächen, gegeben durch die Wände von Kammern in E′, lokal endlich ist,gibt es eine Unterteilung x = x0, x1, . . . , xm = y von [x, y], sodaß die Teilsegmente [xi, xi+1] in genaueiner Kammer von E′ enthalten sind (d.h. die Punkte xi liegen genau auf den Wänden entsprechenderKammern). Die Dreiecksungleichung liefert nun
d(ρ(x), ρ(y)) ≤m∑
i=1
d(ρ(xi−1), ρ(xi)) =
m∑i=1
d(xi−1, xi) = d(x, y).
73

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Dabei gilt die erste Gleichheit, da ρ auf abgeschlossenen Kammern isometrisch ist und die zweite nachLemma 9.1.11.
Die Behauptung (1) folgt nun leicht aus (3). Zu zeigen ist noch die Dreiecksungleichung, seien alsox, y, z ∈ X beliebig. Wähle nun ein Apartment E welches x und z enthält und eine beliebige Kammer Cin E. Da für d auf E die Dreiecksungleichung gilt, liefert (3) auf ρE,C angewandt nun
d(x, z) ≤ d(x, ρE,C(y)) + d(ρE,C(y), z) ≤ d(x, y) + d(y, z)
wie gewünscht.Nun zur CAT(0)-Eigenschaft. Gegeben x und y aus X wählen wir ein Apartment E mit x, y ∈ E.
Wieder sei [x, y] das verbindende geodätische Segment in E. Da die globale Metrik dX von X auf E mitder Metrik dE übereinstimmt, ist [x, y] auch in X ein geodätisches Segment. Seien nun z ∈ X und p ∈ [x, y]beliebig. Wir überprüfen die CAT(0)-Bedingung aus unserer Definition indem wir das Vergleichsdreieck∆(x, y, ρE,C(z)
)in E betrachten (dabei ist C wieder eine beliebige Kammer in E), d.h. wir setzen x =
x, y = y und z = ρE,C(z). Aus Lemma 9.1.10 folgt nun wegen d(ρE,X(z), x) ≤ d(z, x) und d(ρE,X(z), y) ≤d(z, y) die gewünschte Ungleichung d(ρE,X(z), p) ≤ d(z, p) und damit die Behauptung.
Behauptung (4) ist nun eine direkte Folge aus der CAT(0)-Eigenschaft (da Geodäten in CAT(0)-Räumen eindeutig sind) und Lemma 9.1.11 zur Charakterisierung der geodätischen Segmente.
Es bleibt die Vollständigkeit zu zeigen. Wir wählen eine Kammer C und bezeichnen mit τ : X → Cdie geometrische Realisierung der Retraktion ∆ → ∆≤C . Sei C′ eine weitere Kammer, dann bildet τ dieabgeschlossene Kammer C′ isometrisch auf C ab. Dazu sei E = |Σ| ein Apartment, daß beide KammernC und C′ enthält und w der eindeutige typerhaltende Automorphismus von Σ mit w(C′) = C. Da aber τ|Cmit der geometrischen Realisierung von w|∆≤C übereinstimmt und |w| eine Isometrie auf Σ ist, gilt diesauch für τ|C .
Wie auch bei den Retraktionen ρE,C auf Apartments ist τ abstandsverkleinernd. Ist (xn)n eine Cauchy-folge in X, so ist also auch die Bildfolge (τ(xn))n eine Cauchyfolge in C. Da C abgeschlossen ist, existiertder Grenzwert y := limn→∞ τ(xn) ∈ C. Wir wählen nun für jedes n eine Kammer Cn mit xn ∈ Cn undbezeichnen das Urbild von y unter τ in Cn mit yn (d.h. τ(yn) = y bzw. yn ist vom Typ y). Da τ auf C eineIsometrie ist, gilt
d(xn, yn) = d(τ(xn), y) −−−−→n→∞
0
womit auch (yn)n eine Cauchyfolge ist. Nun folgt die Vollständigkeit aus der Behauptung, daß (yn)n einediskrete Folge ist, d.h. es ist yn = yn0 für alle n ≥ n0 und n0 geeignet.
Die Behauptung über die Diskretheit von (yn)n folgt aus obigem Lemma 9.2.19 und der Tatsache,daß für ein z ∈ X der Stern st(z) keinen weiteren Punkt z′ vom Typ z enthält. Das heißt für n , m istd(ym, yn) ≥ δ. �
9.3 Der Fixpunktsatz von Bruhat und Tits
In diesem Abschnitt wollen wir den Fixpunktsatz von Bruhat und Tits vorstellen. Dabei handelt es sichin gewisser Weise um eine Verallgemeinerung des Fixpunktsatzes von Élie Cartan für Lie-Gruppen.Dieser besagt, daß jede kompakte Untergruppe G ≤ Isom(M, g) von Isometrien auf einer einfach-zusammenhängenden vollständigen Riemannschen Mannigfaltigkeit M nicht-negativer Schnittkrümmungmindestens einen Punkt fix lässt. Da ein CAT(0)-Raum das metrische Analogon von nicht-positiv ge-krümmten Mannigfaltigkeiten ist, macht der Fixpunktsatz von Bruhat-Tits eine Aussage über die Fix-punktmenge einer Gruppe von Isometrien auf einem CAT(0)-Raum. Dabei wird die Kompaktheit derGruppe durch eine Beschränktheitsbedingung an die Bahnen ersetzt.
Die zentrale Beweisidee fußt darauf, einer beschränkten Menge ein „Zentrum“ zuzuordnen. Wird die-ses Zentrum durch die Metrik bestimmt, so bleibt das Zentrum einer stabilisierten beschränkten Mengeunter Isometrien fest. Das wird die zentrale Beweisidee sein. Nun also zur benötigten Begriffsbildung.
Definition 9.3.1. Sei X ein metrischer Raum.
74

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
(i) Eine Teilmenge A ⊆ X heißt beschränkt, wenn es ein x ∈ X und ein R > 0 gibt, sodaß A in derKugel BR(x) um x mit Radius R enthalten ist.
(ii) Für eine beschränkte Menge A ⊆ X und einen beliebigen Punkt x ∈ X definieren wir
r(x, A) := supa∈A
d(x, a) = inf{R ∈ R+ | A ⊆ BR(x)},
d.h. r(x, A) ist die kleinste reelle Zahl, sodaß A komplett in einer abgeschlossenen Kugel mit Mit-telpunkt x und Radius r(x, A) enthalten ist.
(iii) Der Umkreisradius einer beschränkten Menge A ⊂ X ist definiert durch
r(A) := infx∈X
r(x, A)
Existiert ein x ∈ X mit r(x, A) = r(A), so nennen wir x den Schwerpunkt von A.(iv) Eine Teilmenge A ⊆ X heißt konvex, wenn für je zwei Punkte x, y ∈ A auch jedes geodätische
Segment [x, y] in A enthalten ist.
Beispiele 9.3.2. (1) Die Schwerpunkte einer zweielementigen Menge {x, y} sind gerade die Mittel-punkte der Geraden [x, y].
(2) Schwerpunkte existieren nicht immer. Man betrachte dazu etwa Rn und eine beschränkte TeilmengeA ⊂ Rn. Ist x nun der Schwerpunkt von A in Rn, so betrachte man einfach A\{x} ⊂ Rn\{x} mit derinduzierten Metrik.
(3) Der Schwerpunkt von Teilmengen A ⊂ Rn ist immer eindeutig. Derartiges gilt im Allgemeinennicht für positiv gekrümmte Räume, wie zum Beispiel die Einheitssphäre. Jeder Großkreis hat zweiantipodale Schwerpunkte, z.B. der Äquator den Nord- und den Südpol.
Daß die positive Krümmung das einzige „Problem“ bei der Eindeutigkeit ist, besagt folgender Satz.
Satz 9.3.3. Sei X ein vollständiger CAT(0)-Raum. Dann besitzt jede nichtleere beschränkte TeilmengeA ⊂ X genau einen Schwerpunkt.
Beweis. Sei (xn)n eine Folge in X mit der Eigenschaft, daß r(xn, A) → r(A) für n → ∞. Wir zeigenzuerst, daß (xn)n eine Cauchyfolge ist. Dann wird der Grenzwert x ein Schwerpunkt von A sein.
„(xn)n ist Cauchyfolge“: Im Folgenden wählen wir die Vergleichsdreiecke ∆ derart, daß 0 eine derEcken ist. Ferner sei ε > 0, dann wählen wir zwei Zahlen R > r(A) > R′ > 0 derart, daß der KreisringS := BR(0)\BR′(0) ⊂ R2 nur Geodäten enthält, die kürzer sind als ε.
Nun gibt es ein N ∈ N, sodaß r(xn, A) < R für alle n > N gilt. Seien nun n, n′ > N. Wir bezeichnen mitm den Mittelpunkt des geodeätischen Segments [xn, xn′] und betrachten für jedes a ∈ A das Vergleichs-dreieck ∆a mit den Ecken {0, xn, xn′}. Nun liegt für mindestens ein a ∈ A der Vergleichspunkt ma von min dem Kreisring S . Sonst wäre d(0,ma) < R′ und somit nach der CAT(0)-Eigenschaft auch d(a,m) < R′
für alle a ∈ A. Aber das bedeutet gerade r(m, A) < R′, was im Widerspruch zu R′ < r(A) steht.Also gibt es ein a ∈ A mit ma ∈ S und es liegt mindestens eine Hälfte des Segments [xn, xn′] in S .Nach der Wahl von R und R′ ist [xn, xn′] somit höchstens von der Länge 2ε. Das zeigt die Cauchyfolgen-Eigenschaft von (xn)n.
„Existenz eines Schwerpunktes x“: Wir definieren nun x := limn→∞ xn und behaupten, daß x wiegewünscht ein Schwerpunkt ist. Die Anwendung der Dreiecksungleichung liefert
r(x, A) = supa∈A
d(x, a) ≤ d(x, xn) + supa∈Ad(xn, a) = d(x, xn) + r(xn, A).
Die rechte Seite konvergiert für n→ ∞ gegen r(A), also ist x Schwerpunkt von A.„Eindeutigkeit von x“: Angenommen (xn)n und (yn)n seien Folgen in X mit r(xn, A) → r(A) und
r(yn, A) → r(A). Dann gilt für die alternierende Folge (zn)n mit z2n := xn und z2n+1 := yn ebenfallsr(zn, A)→ r(A). Nach obiger Beobachtung sind (xn)n, (yn)n sowie (zn)n Cauchyfolgen und deren Limitenx := limn∈N xn, y := limn∈N xn und z := limn∈N zn Schwerpunkte von A. Nach Konstruktion von (zn)n giltaber x = z = y, was die Eindeutigkeit zeigt. �
75
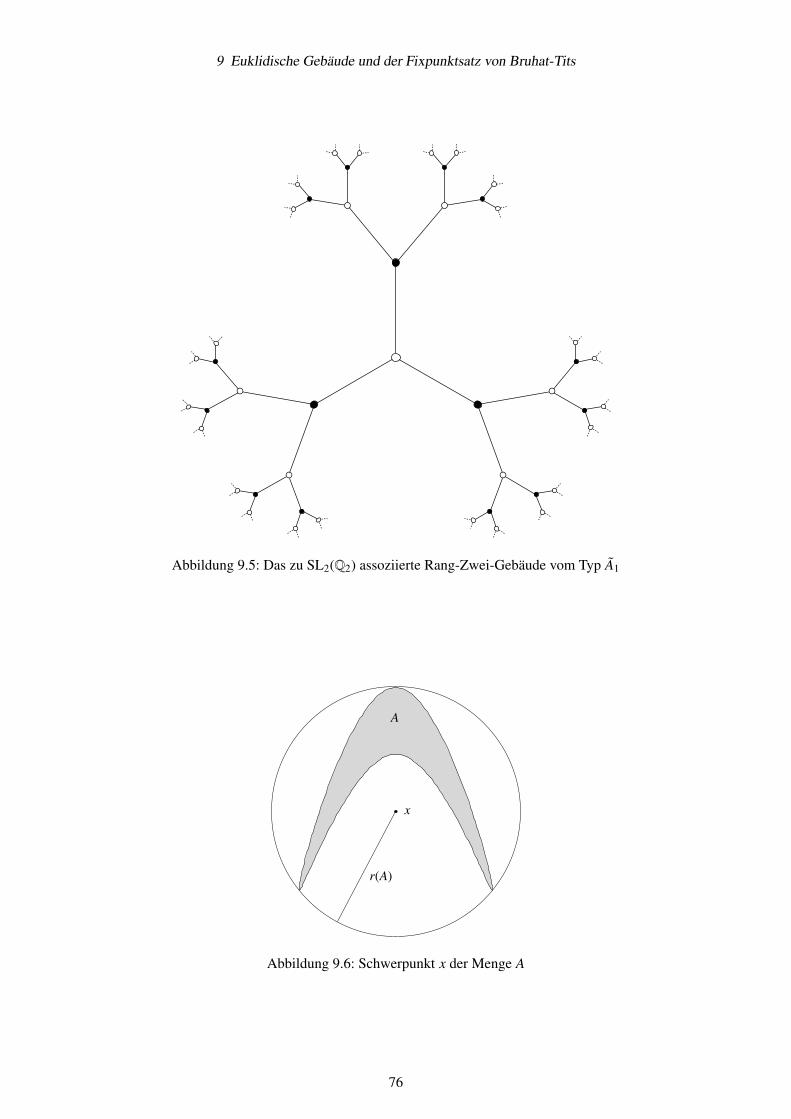
9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Abbildung 9.5: Das zu SL2(Q2) assoziierte Rang-Zwei-Gebäude vom Typ A1
r(A)
x
A
Abbildung 9.6: Schwerpunkt x der Menge A
76

9 Euklidische Gebäude und der Fixpunktsatz von Bruhat-Tits
Bemerkung 9.3.4. Unter gewissen technischen Einschränkungen gilt dieser Satz auch für Räume mitpositiver Krümmungschranke (d.h. CAT(κ)-Räume mit κ > 0). Die technische Beschränkung besteht dar-in, daß man die Eindeutigkeit der geodätischen Segmente und die Existenz von Vergleichsdreiecken nur„lokal“ auf Kugeln mit dem Durchmesser des Modellraumes garantieren kann (vgl. [BH99, I.2.10ff]).Anschaulich entspricht das der Situation, daß auf der Sphäre nur Geodäten auf einer Hemisphäre eindeu-tig sind. Die obige Beweisidee funktioniert aber dann auch für beliebige Krümmungsschranken κ.
Nun sind wir in der Lage, den gewünschten Satz zu zeigen.
Satz 9.3.5 (Bruhat-Tits). Sei X ein vollständiger CAT(0)-Raum und G eine Untergruppe der Isometrienvon X mit einer beschränkten Bahn. Dann ist die Fixpunktmenge Fix(G) nicht leer und konvex.
Beweis. Sei für x ∈ X die Bahn Ox von x unter G beschränkt. Nach obigem Satz 9.3.3 existiert einSchwerpunkt xS von Ox. Da die Menge Ox unter G gleich bleibt ist xS auch Schwerpunkt von g.Ox = Ox
für alle g ∈ G. Da g ∈ G als Isometrie wirkt, gilt insbesondere r(g.y, g.A) = r(y, A) für beliebige Punktey ∈ X und beschränkte Teilmengen A ⊆ X. Insbesondere ist also r(g.xS ,Ox) = r(xS ,Ox) = r(Ox) unddamit g.xS = xS nach der Eindeutigkeit von xS .
Seien nun x, y ∈ Fix(G), dann ist wegen 9.1.11 für jedes g ∈ G
g.[x, y] = g.{z ∈ X | d(x, z) + d(z, y) = d(x, y)}
= {z ∈ X | d(x, g−1.z) + d(g−1.z, y) = d(x, y)}
= {z ∈ X | d(g.x, z) + d(z, g.y) = d(g.x, g.y)}
= {z ∈ X | d(x, z) + d(z, y) = d(x, y)} = [x, y].
also ist [x, y] ⊆ Fix(G) und damit Fix(G) konvex. �
Bemerkung 9.3.6. In der Situation des Fixpunktsatzes von Cartan ist jede Bahn der kompakten GruppeG selbst kompakt, also beschränkt. Daher ist dieser Satz ein Spezialfall des obigen Satzes.
77
Literaturverzeichnis
[AB] Peter Abramenko, Kenneth S. Brown, Buildings – Theory and Applications, Springer, Berlin. Bookin preparation.
[Art91] Michael Artin, Algebra, Birkhäuser Verlag, 1991.
[Bou02] Nicolas Bourbaki, Elements of Mathematics, Lie Groups and Lie Algebras, Chapters 4-6, Sprin-ger, Berlin, 2002.
[Bre93] Glen E. Bredon, Topology and Geometry, Springer, New York, 1993.
[BH99] Martin R. Bridson, Andre Haefliger, Metric Spaces of Non-Positive Curvature, Springer, Berlin,1999.
[Cas] Homepage von Bill Casselman: http://www.math.ubc.ca/~cass/coxeter/crm.html,Stand: 15.2.2008.
[Ihr02] Thomas Ihringer, Diskrete Mathematik, Heldermann Verlag, 2002.
[Jac89] N. Jacobson, Basic algebra. II, 2nd ed., W. H. Freeman and Company, New York, 1989.
[Spa66] Edwin H. Spanier, Algebraic Topology, McGraw-Hill, New York, 1966.
[Wei03] Richard Weiss, The structure of spherical buildings, Princeton University Press, Princeton,2003.
78













![Tits Fixed Wing Alternatives for COIN[1]](https://img.dokumen.tips/doc/110x75/54ff38894a7959ec0f8b4bf7/tits-fixed-wing-alternatives-for-coin1.jpg)