-
Time evolution of reachability sets for dynamicalsystems
Sergiy Zhukjoint work with T.Tcharakian and S. Tirupathi
IBM Research - Ireland
Edinburgh University
December 11, 2014
-
©
Outline
Reachability setsLinear systemsNon-linear systemsRelations to
Markov diffusions
Approximation of reachability setsLinear systemsClass of
non-linear systems
ExamplesTraffic density estimation: 1D conservation lawsFlood
modelling: 1D Saint Venant equations (with S.Tirupathi)2D
incompressible Euler equations (with T.Tcharakian)
1 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Reachability set for x ′ = −x , 0 ≤ x(0) ≤ 1.
2 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Liouville equations
Dynamical system with uncertain but bounded parameters:
dX
dt=M(X ), X (t0) = X0 ,
ϕ(X0) ≤ 1 .(1)
The reachability set can be represented as:
R(t) := {x ∈ Rn : V (t, x) ≤ 1}where V solves (in a viscosity
sense) the followingHamilton-Jacobi-Bellman equation:
∂tV +M ·∇V = 0,V (t0, x) = ϕ(x) , x ∈ Rn .
3 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Liouville equations
Dynamical system with uncertain but bounded parameters:
dX
dt=M(X ), X (t0) = X0 ,
ϕ(X0) ≤ 1 .(1)
The reachability set can be represented as:
R(t) := {x ∈ Rn : V (t, x) ≤ 1}where V solves (in a viscosity
sense) the followingHamilton-Jacobi-Bellman equation:
∂tV +M ·∇V = 0,V (t0, x) = ϕ(x) , x ∈ Rn .
3 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Hamilton-Jacobi-Bellman (HJB) equations
Dynamical system with uncertain but bounded parameters:
dX
dt=M(X (t)) + f (t), X (t0) = X0 ,
Y (t) = H(X (t)) + η(t) ,
ϕ(X0) +
∫ Tt0
‖f (t)‖2 + ‖η(t)‖2dt ≤ 1 .
(2)
The reachability set can be represented as:
R(t) := {x ∈ Rn : V (t, x) ≤ 1}where V solves (in a viscosity
sense) the followingHamilton-Jacobi-Bellman equation:
∂tV +M ·∇V = ‖Y (t)− H(x)‖2,V (t0, x) = ϕ(x) , x ∈ Rn .
4 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Hamilton-Jacobi-Bellman (HJB) equations
Dynamical system with uncertain but bounded parameters:
dX
dt=M(X (t)) + f (t), X (t0) = X0 ,
Y (t) = H(X (t)) + η(t) ,
ϕ(X0) +
∫ Tt0
‖f (t)‖2 + ‖η(t)‖2dt ≤ 1 .
(2)
The reachability set can be represented as:
R(t) := {x ∈ Rn : V (t, x) ≤ 1}where V solves (in a viscosity
sense) the followingHamilton-Jacobi-Bellman equation:
∂tV +M ·∇V = ‖Y (t)− H(x)‖2,V (t0, x) = ϕ(x) , x ∈ Rn .
4 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Kolmogorov equations: probabilistic approach
Diffusion process:
dX =M(X )dt + dW , X (t0) = X0, (3)W is a standard Wiener
process, M is “the model”.
Density:
Assume that the following linear parabolic PDE has a
uniquesolution:
∂tV +n∑
i=1
∂
∂xi(Mi (x)V )−
1
2∆V = 0, V (t0, x) = ρ(x) , (4)
where ρ is the density of X0. Then V (t, ·) is the density of X
(t).
5 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Kolmogorov equations: probabilistic approach
Diffusion process:
dX =M(X )dt + dW , X (t0) = X0, (3)W is a standard Wiener
process, M is “the model”.
Density:
Assume that the following linear parabolic PDE has a
uniquesolution:
∂tV +n∑
i=1
∂
∂xi(Mi (x)V )−
1
2∆V = 0, V (t0, x) = ρ(x) , (4)
where ρ is the density of X0. Then V (t, ·) is the density of X
(t).
5 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Kolmogorov equations: probabilistic approach
Diffusion process
dX =M(X )dt + dW , X (t0) = X0,Y (t) = H(X (t)) + η(t) .
(5)
“Conditional” moments:
Let us define a conditional expectation:
V (s, x) := E (
∫ Ts‖Y (τ)− H(X (τ))‖2dτ + ϕ(X (T )),X (s) = x) .
Then under some conditions (M is Lipschitz):∂Vs +M ·∇V +
1
2∆V + ‖Y (s)− H(x)‖2 = 0 ,
V (T , x) = ϕ(x) , x ∈ Rn .(6)
6 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Kolmogorov equations: probabilistic approach
Diffusion process
dX =M(X )dt + dW , X (t0) = X0,Y (t) = H(X (t)) + η(t) .
(5)
“Conditional” moments:
Let us define a conditional expectation:
V (s, x) := E (
∫ Ts‖Y (τ)− H(X (τ))‖2dτ + ϕ(X (T )),X (s) = x) .
Then under some conditions (M is Lipschitz):∂Vs +M ·∇V +
1
2∆V + ‖Y (s)− H(x)‖2 = 0 ,
V (T , x) = ϕ(x) , x ∈ Rn .(6)
6 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Kolmogorov equations vs HJB equations
HJB equation
∂tV +M·∇V = ‖Y (t)−H(x)‖2,V (t0, x) = ϕ(x) , x ∈ Rn . (7)
Backward Kolmogorov equation
∂sV +M ·∇V +1
2∆V + ‖Y (s)− H(x)‖2 = 0 ,
V (T , x) = ϕ(x) , x ∈ Rn .(8)
7 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Outline
Reachability setsLinear systemsNon-linear systemsRelations to
Markov diffusions
Approximation of reachability setsLinear systemsClass of
non-linear systems
ExamplesTraffic density estimation: 1D conservation lawsFlood
modelling: 1D Saint Venant equations (with S.Tirupathi)2D
incompressible Euler equations (with T.Tcharakian)
8 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Reachability set for a linear model
Assume that M(X ) = MX and H(X ) = HX . The reachability setis
given by an ellipsoid
R(t) = {X : V(t,X ) = 〈P(t)(X−X̂ (T )), (X−X̂ (t))〉Rn ≤
1−β2(t)}
where P solves the following Riccati equationdP
dt= −MP − PMT − P2 + HTH, P(t0) = I .
The dynamics of the minimax center X̂ of R(t) is described bydX̂
(t)
dt= MX̂ (t) + P(t)HT (Y (t)− HX̂ (t)), X̂ (0) = 0 .
The dynamics of the ”observation error” is
dβ2
dt= ‖Ŷ (t)− HX̂ (t)‖2, β2(0) = 0
9 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Reachability set for a linear model
Assume that M(X ) = MX and H(X ) = HX . The reachability setis
given by an ellipsoid
R(t) = {X : V(t,X ) = 〈P(t)(X−X̂ (T )), (X−X̂ (t))〉Rn ≤
1−β2(t)}where P solves the following Riccati equation
dP
dt= −MP − PMT − P2 + HTH, P(t0) = I .
The dynamics of the minimax center X̂ of R(t) is described bydX̂
(t)
dt= MX̂ (t) + P(t)HT (Y (t)− HX̂ (t)), X̂ (0) = 0 .
The dynamics of the ”observation error” is
dβ2
dt= ‖Ŷ (t)− HX̂ (t)‖2, β2(0) = 0
9 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Reachability set for a linear model
Assume that M(X ) = MX and H(X ) = HX . The reachability setis
given by an ellipsoid
R(t) = {X : V(t,X ) = 〈P(t)(X−X̂ (T )), (X−X̂ (t))〉Rn ≤
1−β2(t)}where P solves the following Riccati equation
dP
dt= −MP − PMT − P2 + HTH, P(t0) = I .
The dynamics of the minimax center X̂ of R(t) is described bydX̂
(t)
dt= MX̂ (t) + P(t)HT (Y (t)− HX̂ (t)), X̂ (0) = 0 .
The dynamics of the ”observation error” is
dβ2
dt= ‖Ŷ (t)− HX̂ (t)‖2, β2(0) = 0
9 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Reachability set for a linear model
Assume that M(X ) = MX and H(X ) = HX . The reachability setis
given by an ellipsoid
R(t) = {X : V(t,X ) = 〈P(t)(X−X̂ (T )), (X−X̂ (t))〉Rn ≤
1−β2(t)}where P solves the following Riccati equation
dP
dt= −MP − PMT − P2 + HTH, P(t0) = I .
The dynamics of the minimax center X̂ of R(t) is described bydX̂
(t)
dt= MX̂ (t) + P(t)HT (Y (t)− HX̂ (t)), X̂ (0) = 0 .
The dynamics of the ”observation error” is
dβ2
dt= ‖Ŷ (t)− HX̂ (t)‖2, β2(0) = 0
9 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Outline
Reachability setsLinear systemsNon-linear systemsRelations to
Markov diffusions
Approximation of reachability setsLinear systemsClass of
non-linear systems
ExamplesTraffic density estimation: 1D conservation lawsFlood
modelling: 1D Saint Venant equations (with S.Tirupathi)2D
incompressible Euler equations (with T.Tcharakian)
10 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Reachability set for bilinear models
Assume that M(X ) = A(X )X , A is linear in X and H(X ) = HX
.
Then the reachability set is contained in the ellipsoid:
R(t) = {X : V(t,X ) = 〈P(t)(X − X̂ (T )), (X − X̂ (t))〉Rn ≤
1}where P solves the following Riccati equation:
dP
dt= −A(X̂ )P − PAT (X̂ )− P2 + HTH, P(t0) = I .
The dynamics of the minimax center X̂ of R(t) is described
by:dX̂ (t)
dt= A(X̂ )X̂ (t) + P(t)HT (Y (t)− HX̂ (t)), X̂ (0) = 0 .
11 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Reachability set for bilinear models
Assume that M(X ) = A(X )X , A is linear in X and H(X ) = HX
.Then the reachability set is contained in the ellipsoid:
R(t) = {X : V(t,X ) = 〈P(t)(X − X̂ (T )), (X − X̂ (t))〉Rn ≤
1}where P solves the following Riccati equation:
dP
dt= −A(X̂ )P − PAT (X̂ )− P2 + HTH, P(t0) = I .
The dynamics of the minimax center X̂ of R(t) is described
by:dX̂ (t)
dt= A(X̂ )X̂ (t) + P(t)HT (Y (t)− HX̂ (t)), X̂ (0) = 0 .
11 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Outline
Reachability setsLinear systemsNon-linear systemsRelations to
Markov diffusions
Approximation of reachability setsLinear systemsClass of
non-linear systems
ExamplesTraffic density estimation: 1D conservation lawsFlood
modelling: 1D Saint Venant equations (with S.Tirupathi)2D
incompressible Euler equations (with T.Tcharakian)
12 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Macroscopic traffic flow models
13 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Lighthill-Whitham-Richards (LWR) model
The standard equilibrium traffic flow model consists of a
scalarconservation law:
∂tu(x , t) + ∂x f (u(x , t)) = 0 (9)
with periodic boundary conditions on the interval (0, 1) and
initialdata
u0(x) = u(x , 0) (10)
where u : R×R+ → R is the traffic density, x ∈ R and t ∈ R+
arethe independent variables, space and time respectively, andf :
R→ R is the flux function. A typical flux function is that
ofGreenshields, given by
f (u) = uVm
(1− u
um
)(11)
where the constants Vm and um are the maximum speed and
themaximum density respectively.
14 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Spectral viscosity for LWR model
We approximate u by uN , which is the N + 1-term truncated
series:
uN(x , t) =
N/2∑n=−N/2
an(t)einx , (12)
define the residual:
RN(x , t) =∂uN∂t
+∂f (uN)
∂x(13)
and require it to be orthogonal to span{e inx}|n|≤N/2. This
gives usequations for the coefficients an(t):
dandt
=
N/2∑k=−N/2|n−k|≤N/2
2ikan−k(t)ak(t)− inan(t),
n = −N/2 . . .N/2.
(14)
15 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Spectral viscosity for LWR model
We approximate u by uN , which is the N + 1-term truncated
series:
uN(x , t) =
N/2∑n=−N/2
an(t)einx , (12)
define the residual:
RN(x , t) =∂uN∂t
+∂f (uN)
∂x(13)
and require it to be orthogonal to span{e inx}|n|≤N/2. This
gives usequations for the coefficients an(t):
dandt
=
N/2∑k=−N/2|n−k|≤N/2
2ikan−k(t)ak(t)− inan(t),
n = −N/2 . . .N/2.
(14)
15 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Spectral viscosity for LWR model
However, solutions of LWR model can
developshock-discontinuities, even for smooth initial data. This
will giverise to strong oscillations which will spread to the
entire spatialdomain. We overcome this by adding “spectral
viscosity” on thehigher modes:
dandt
=
N/2∑k=−N/2|n−k|≤N/2
2ikan−k(t)ak(t)− inan(t) −εn2an(t) ,
n = −N/2 . . .N/2.
(15)
The viscosity term is only activated for |n/2| ≥ m, where m
issome threshold wave number.
16 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Data assimilation for LWR model
Figure : Tchrakian,Zhuk, IEEE Trans. on Intelligent
TransportationSystems, 2014
17 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
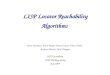
Ensemble Kalman filter for LWR model
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
time = 0.50
x
u
EnKF estimate
Truth
Perturbed observations
Figure : EnKF: 41 sensors
18 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Ensemble Kalman filter for LWR model
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
time = 2.00
x
u
EnKF estimate
Truth
Perturbed observations
Figure : EnKF: 41 sensors
19 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Ensemble Kalman filter for LWR model
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
time = 5.00
x
u
EnKF estimate
Truth
Perturbed observations
Figure : EnKF: 41 sensors
20 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Ensemble Kalman filter for LWR model
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
time = 1.00
x
u
EnKF estimate
Truth
Perturbed observations
Figure : EnKF: 6 sensors
21 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Ensemble Kalman filter for LWR model
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
time = 3.00
x
u
EnKF estimate
Truth
Perturbed observations
Figure : EnKF: 6 sensors
22 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Ensemble Kalman filter for LWR model
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
time = 8.00
x
u
EnKF estimate
Truth
Perturbed observations
Figure : EnKF: 6 sensors
23 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Outline
Reachability setsLinear systemsNon-linear systemsRelations to
Markov diffusions
Approximation of reachability setsLinear systemsClass of
non-linear systems
ExamplesTraffic density estimation: 1D conservation lawsFlood
modelling: 1D Saint Venant equations (with S.Tirupathi)2D
incompressible Euler equations (with T.Tcharakian)
24 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Flood modelling
25 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Saint Venant (StV) equations
The standard equilibrium flood model consists of a system of
scalarconservation laws:
∂th + ∂x(hu) = 0 ,
∂t(hu) + ∂x(hu2 +
gh2
2) = 0 .
(16)
with boundary conditions u(0, t) = ul(t) and h(0, t) = hl(t)
on(0, 1), where h is the fluid depth, u is the averaged velocity
and gis the gravitational constant.
Let U = (h, hu)T . Then (16) may be rewritten as a system
ofconservation laws:
∂tU + ∂x f (U) = 0
provided f is chosen appropriately.
26 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Saint Venant (StV) equations
The standard equilibrium flood model consists of a system of
scalarconservation laws:
∂th + ∂x(hu) = 0 ,
∂t(hu) + ∂x(hu2 +
gh2
2) = 0 .
(16)
with boundary conditions u(0, t) = ul(t) and h(0, t) = hl(t)
on(0, 1), where h is the fluid depth, u is the averaged velocity
and gis the gravitational constant.Let U = (h, hu)T . Then (16) may
be rewritten as a system ofconservation laws:
∂tU + ∂x f (U) = 0
provided f is chosen appropriately.
26 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Discontinuous Galerkin method for StV equations
We split the domain Ω into cells Ij = [xj− 12, xj+ 1
2] and integrate by
parts to obtain the weak form:∫Ij
∂tU(x , t)v(x)dx −∫Ij
f (U(x , t))∂xv(x)dx
+ F (U(x−j+ 1
2
),U(x+j+ 1
2
))v(x−j+ 1
2
)− F (U(x−j− 1
2
),U(x+j− 1
2
))v(x+j− 1
2
) = 0
with F (a, b) representing a Lax-Friedrichs numerical flux,
i.e.
F (a, b) =f (b) + f (a)− C (b − a)
2, C > 0 .
Here v belongs to a subspace generated by Lagrange
polynomials(up to 2nd order). To maintain stability and track
shocks correctlywe use Total Variation Diminishing flux
limiter.
27 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Data assimilation for StV model
Figure : Minimax: 6 sensors
28 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Data assimilation for StV model
Figure : Minimax: 6 sensors
29 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Data assimilation for StV model
Figure : Minimax: 6 sensors
30 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Data assimilation for StV model
Figure : Minimax: 6 sensors
31 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Outline
Reachability setsLinear systemsNon-linear systemsRelations to
Markov diffusions
Approximation of reachability setsLinear systemsClass of
non-linear systems
ExamplesTraffic density estimation: 1D conservation lawsFlood
modelling: 1D Saint Venant equations (with S.Tirupathi)2D
incompressible Euler equations (with T.Tcharakian)
32 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Euler equations
We consider 2D incompressible Euler equation in
vorticity-streamfunction form:
∂tω + u∂xω + v∂yω = 0 , u = −∂yψ , v = ∂xψ ,−∆ψ = ω , ψ(x , y) =
0 , (x , y) ∈ ∂Ω . (17)
Here ω denotes vorticity function and the initial vorticity
functionis obtained from the Matlab peaks function.
33 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Euler equations: discretization
• to compute ω(x , y , t + h) given ω(x , y , t) and u(x , y ,
t),v(x , y , t) we applied a 4th-order explicit RK methodevaluating
∂xω, ∂yω on a 128× 128 uniform grid Γ using fastFourier
transform;
• to get u(x , y , t), v(x , y , t) given ω(x , y , t) we
approximatedω(x , y , t) by its projection ω̃ =
∑N 12k,s=1〈ω, ϕks〉L2(Ω)ϕks , where
ϕks := sin(kx2 ) sin(
sy2 ) denotes the eigenfunction of the
Laplacian −∆ on Ω; this allowed us to find the exact solutionof
the Poisson equation −∆ψ = ω̃, namelyψ =
∑N 12k,s=1〈ω, ϕks〉L2(Ω)λ−1ks ϕks ; we then computed
u = −∂yψ, v = ∂xψ differentiating the representation for
thestream function ψ.
34 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
-
©
Data assimilation for Euler equations
Figure : Zero initial condition, 20× 20 sensor’s grid.
35 / 35 Dynamics of reachability sets (Sergiy Zhuk) IBM
Research
Reachability setsLinear systemsNon-linear systemsRelations to
Markov diffusions
Approximation of reachability setsLinear systemsClass of
non-linear systems
ExamplesTraffic density estimation: 1D conservation lawsFlood
modelling: 1D Saint Venant equations (with S.Tirupathi)2D
incompressible Euler equations (with T.Tcharakian)




![Computability and complexity of Julia sets: a review · veloped computability theory for Julia sets in complex dynamical systems by Braverman and Yampolsky [3]. 1 Computability and](https://img.dokumen.tips/doc/110x75/5f70383de1d45f618e32e1a5/computability-and-complexity-of-julia-sets-a-review-veloped-computability-theory.jpg)