-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١ -
CHAPTER 0ne RELATIVE VELOCITY & ACCELERATION
1. VELOCITY AND ACCELERATION DIAGRAMS: 1.1 RELATIVE VELOCITY
METHOD When accelerations of mechanisms are studied, however, it is
necessary to determine the relative velocities between points on a
link. For this reason, the relative velocity method of obtaining
velocities is the most useful method. This section involves the
construction of velocity diagrams, which needs to be done
accurately and to a suitable scale. Students should use a compass,
protractor and triangles and possess the necessary drawing
skills.
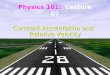
To explain the method, considering the two moving points A and B
in Figure 1.1, the absolute velocity VB of point B is equal to the
vector sum of the absolute velocity VA of point A and the velocity
VB/A of B relative to A. VB = VA ↦ VB/A
Therefore, it is necessary to know both the velocity VA of A and
the velocity VB/A of B relative to A to find the velocity VB of
B.
In Figure 1.2a, the velocity of A is known and the direction
only of B is known. Avelocity diagram is constructed as
follows:
1. Arbitrarily locate the origin o (lower-case letter), which
represents a fixed point. All vectors originating at o represent
absolute velocities.
2. The known absolute velocity VA is laid off from o.
3. The direction of the absolute velocity VB is drawn through
o.
4. The direction of the relative velocity VB/A is known to be ⊥
to the line connecting A and B, and it must connect the termini of
the two absolute velocities VA and VB. Therefore, a line is drawn
through the known terminus of VA and in a direction ⊥ to line
AB.
5. This establishes the magnitudes of VB and VB/A.
Note that VB/A points toward VB. A vector of opposite sense
would represent VA/B. Note also that the absolute velocities
emanate from the origin o and that terminus of each is labeled with
a lower-case letter corresponding to the point involved.
From the velocity diagram in Figure 1.2b it is evident that VB =
VA ↦ VB/A
VA = VB ↦ VA/B
Figure 1.1
Figure 1.2
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢ -
Example 1.1: In the mechanism shown in Figure 1.3, the velocity
of A is known and it is required to find the velocities of B, C, D,
E, and F. TO FIND VB:
1. The given velocity VA is laid off from origin, as shown in
Figure 1.3a'. 2. The direction of VB (⊥ to link 4) is drawn to
indefinite length through the origin. 3. The direction of VB/A (⊥
to line AB) is drawn through the terminus of VA. 4. The
intersection of the VB and VB/A direction lines determines the
magnitudes of both.
TO FIND VC (Figure 1.3b):
1. Draw a line through the terminus of VA in the direction of
VC/A (⊥ to CA). VC = VA ↦ VC/A
2. Draw a line through the terminus of VB in the direction of
VC/B (⊥ to CB). VC = VB ↦ VC/B
3. The terminus of VC is at the intersection of these two lines,
as shown in Figure 1.3b. TO FIND VD: Since A, D, and B lie along a
straight line on link 3, the relative velocities VD/A and VD/B
cannot be used together to get VD, because they are parallel
(coincide) and will yield no intersection. Therefore, VD/C must be
used in combination with VD/A (or VD/B). This is done as
follows:
1. Draw a line through the terminus of VC in the direction of
VD/C (⊥ to DC). VD = VC ↦ VD/C
2. Draw a line through the terminus of VA in the direction of
VD/A (⊥ to DA). This coincides with the VB/A line already drawn,
since A, D, and B lie on a straight line.
VD = VA ↦ VD/A 3. The terminus of VD is established by the
intersection of these
two lines, as shown in Figure 1.3c. TO FIND VD BY PROPORTION: An
easier way to locate VD is to take the advantage of the fact that
the velocity diagram is an image of the actual mechanism, as shown
in Figure 1.4. Distances along the images are proportional to
corresponding distances along the links. Therefore,
Figure 1.3 (a')
Fig1.4
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٣ -
(AD/AB) = (ad/ab) Similarly, the velocities of points E on link
2 and F on link 4 can be determined: (O2E/O2A) = (oe/oa) and
(O4F/O4B) = (of/ob) Example 1.2: In the mechanism shown in Figure
1.5 (Slider-crank mechanism), the velocity of A is known, and it is
required to find the velocities of B and C. TO FIND VB (direction
known):
1. Draw vector VA in velocity diagram. 2. Lay off direction of
VB. 3. From terminus of VA, lay off direction of VB/A (⊥ to line
BA). 4. The intersection of VB/A and VB lines determines the
magnitudes of both (VB = VA ↦ VB/A).
TO FIND VC:
1. Draw a line through the terminus of VA in direction of VC/A
(⊥ to line CA). VC = VA ↦ VC/A
2. Draw a line through the terminus of VB in the direction of
VC/B (⊥ to line CB). VC = VB ↦ VC/B
3. The intersection of VC/A with VB/A determines VC. In the
above example, if it were required to find the velocity of a point
such as D on link 3, it would be simple to extend the image in the
velocity diagram by proportion, (AB/AD) = (ab/ad), as shown in the
figure. 1.1.1 VELOCITIES OF POINTS ON A ROLLING BODY: Let disk 2 in
Figure 4.6 is rolling on body 1. Then body 2 is rotating about
point P in link1 at the instant. The center of the disk will have a
velocity VC = ω * R; where R is the radius and ω is the angular
velocity of the disk. Any other point on the disk, such as Q will
have a velocity relative to C which is VQ/C = CQ *ω. Vector VQ/C
must be ⊥ to the radius of rotation CQ. The absolute velocity of Q
is then VQ = VC ↦ VQ/C.
Figure 1.5
Fig.4.6
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٤ -
Example 1.3: In Figure 1.7, the velocity of A is known, and it
is required to find the velocity of C. It is assumed that no
slipping occurs, Therefore, VA = VB, and the mechanism could be
represented by the equivalent four-bar mechanism shown in dashed
lines. 4.1.2 VELOCITIES OF SLIDING LINKS: The solutions of sliding
link problems are based on the fact that the only possible relative
velocity that can exist between two sliding surfaces is along their
common tangent line. This establishes the direction of relative
motion, which provides sufficient information to complete the
velocity diagram. Figure 1.8 shows two sliding problems solved.
2
3
4
1
1
O2
O4
Figure 1.7
Figure 1.8
O2 O3
O2 O4
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٥ -
Figure 1.10
O4 O6
VELOCITIES OF COMPLEX MECHANISM: Example 1.4: In Figure 1.9a,
the velocity of point A is given and the velocities of points B and
C are required.
Solution Ex 1.4:
1. Draw vector oa in the velocity diagram (Figure 1.9b). 2. Lay
out the direction of ob (⊥ to link 6). 3. Through a, lay out the
direction of ab (⊥ to link 3). 4. The intersection of the ob and ab
direction lines locates b. 5. Lay out the direction of oc (⊥ to
link 4). 6. Through b, lay out the direction of bc (⊥ to link 5).
7. The intersection of the oc and bc direction lines locates c.
Example 1.5: In Figure 4.10a, the velocity of point A is given
and the velocities of points B, C, and D are required. Solution Ex
1.5: In this example, neither the direction nor the magnitude of VC
is known, nor is the magnitude of VC/A known. The trial-and-error
approach may be made to determine the velocities of points on link
5will be used here.
1. Draw oa in the velocity diagram (Figure 1.10b).
2. Lay out the direction for ob and oc. 3. Choose a trial
position for b
labeling it b*, i.e. any length ob* as shown in Figure 1.10b can
be assumed for VB.
4. Then VD will be od* which is ⊥ to link 4 and b*d* is ⊥ to
BD.
5. Lay out c* in the same relative position along b*d* that C
has relative to B and D, that is,
(BC/BD) = (b*c*/b*d*) 6. Now a line may be drawn from o to c*,
thereby establishing the direction of VC.
Figure 1.9
O4 O6
-
THEORY OF MACHINES 7. Through a, draw the direction of line
line drawn in step 6 locates c. 8. Through c, draw a line
parallel to b
Note: An alternative approach to this problem would be to
determine the dire Example 1.6: Figure 1.11, shows a variable
stroke engine mechanism. The lengths of the cranks OA and QB are 90
mm and 45respectively. The diameters of wheels with centers O and Q
are 250 mm and 120 mm respectively. Other lengths are shown in the
diagram in mm. There is a rolling contact between the two wheels.
If OA rotates at 100 rpm, determine the
(i) Velocity of the slider D (ii) Angular velocity of links BC
and CD.
(Relative velocity & acceleration) the direction of line ac
(⊥ to link 3). The intersection of this line and the
b*d*, which will locate the correct positions for
An alternative approach to this problem would be to determine
the direction VC by locating centre
, shows a variable ngths of the
45 mm respectively. The diameters of wheels with
mm Other lengths are shown in the
contact between the two wheels. If OA
Angular velocity of links BC and CD.
Figure 1.11
). The intersection of this line and the
, which will locate the correct positions for b and d.
by locating centre 15.
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٧ -
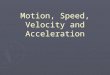
Example 1.7: In the mechanism shown below, the slider D is
constrained to move on a horizontal path. The crank OA is rotated
in a ccw direction at a speed of 150 RPM. The dimensions of the
links are as follows: OA = 180 mm, CB = 240 mm, and BD = 540 mm.
For the given configuration find the velocity of slider D and the
angular velocity of BD. Solution Ex 1.7: ωOA = π*150/30 = 15.707
rad/s VA = 15.707 * 180 = 2827.43 mm/s = 282.743 cm/s
360mm
105mm
A
O
B
D
C
From the velocity diagram the following velocities and angular
velocities can be determined:
VD=14.8924/0.2=74.46 cm/secVB/A= 147.932 cm/secϖBA=
147.932/36.0= 4.109 rad/sec ccwVD/B= 201.161 cm/secϖDB=
201.161/54.0= 3.725 rad/sec cwVB= 206.5835 cm/secϖCB= 8.606 rad/sec
ccwVelocity diagram
Scale = 0.2mm/cm/sec
b
d
a
o,c
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٨ -
Example 1.8: A cam with oscillating follower is shown below,
where the angular velocity of the cam is indicated. Find the
angular velocity of link 4. Solution Ex 1.8: By equivalent linkage
method: VA = 5*68.2 = 341 mm/s SV = 0.146627 mm/mm/s From velocity
diagram: VP4 = 214.56 mm/s ω4 = 214.56/191 = 1.123 rad/s cw
2 =5 rad/s
22 = 2.5 rad/s
2
O2
Path P4 describes on link 2
P2 ,P 4
3
O4
1
4
O2
Path P4 describes on link 2 4
3P2 ,P4
O4
A
2
Velocity diagramSV=0.146627 mm/mm/so
p4 a
VP4
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٩ -
Figure 1.12
240 mm
160 mm
Example 1.9: Figure 1.12 shows the mechanism of a molding press
in which O2A= 80 mm, AB = 320 mm, O4B = 120 mm, CD = 320 mm, BC =
80 mm. For the configuration shown, construct the velocity diagram
and determine VD/C, VC, and the angular velocity of link O2A. Q2)
Find the velocity ratio of the two co-axial shafts in the gear
shown in Figure 2: when (a) the wheel A1 is fixed and S1 is the
driver, (b) the wheel S2 is fixed. The tooth numbers of the gears
are S1 = 40, A1 = 120, S2 = 30, A2 = 100. Solution Ex 1.9: VD = 0.2
m/s (given) With SV = 100 mm /m/s the velocity diagram will be
drawing as shown in the figure below. From the velocity diagram: VD
= 0.2 m/s
VA = 20.0075/100 = 0.2 m/sVD/C = 6.963/100 = 0.0693 m/sVC =
19.83/100 = 0.198 m/sϖO2A = VA / O2A = 0.2/80 = 2.5 rad/s ccw
A
B
C
O4
O2
D
c*b*
a*
Velocity polygonSV = 100mm/ m/s
acb
o
d
VD VAVB
VC
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٠ -
Example 1.10: The absolute velocity of J in in the mechanism
shown is 450 cm /sec while the disk is slowing down with an
acceleration of 10 rad/sec2.
(a) Construct the velocity diagram and determine ω3, VD, VB and
VC.
(b) Determine the angular acceleration
of link 4.
Solution Ex 1.10: VJ = 450 cm/s = 4.5 m/s ∴ω2 = VJ/OJ = 4.5/.45
= 10 rad/sec cw ∴ VB = ω2 * OB = 10 * 0.3 = 3 m/s
Now draw the velocity diagram with suitable scale. Let SV = 20
mm/m/s; From the velocity diagram as shown below, the following can
be obtained:
VD = 62.78 / 20 = 3.139 m/s VC = 34.51 / 20 = 1.77255 m/s VC/B =
58.23 / 20 = 2.9115 m/s VD/B = 70.67 / 20 = 3.5335 m/s VD/C = 28.27
/ 20 = 1.4135 m/s
From the mechanism diagram, we can determine BC = 1.236 m. The
angular velocity of link 3 can be determined as follows:
ω3 = VC/B / BC = 2.9115 / 1.236 = 2.3556 rad/s ccw Or ω3 = VD/B
/ DB = 3.5335 / 1.5 = 2.3557 rad/s ccw Or ω3 = VD/C / DC = 1.4135 /
0.6 = 2.3558 rad/s ccw After that all the normal component of
acceleration will be calculated as follows:
onlydirectionknowna
s/m33.36.0
4135.1a
onlydirectionknowna
s/m858.6236.1
9115.2a
onlydirectionknowna
s/m3237.85.1
5335.3a
onlydirectionknowna
s/m422.166.0
129.3a
s/m33.0*10OB*a
s/m303.0
9OBVa
tD/C
22
nD/C
tB/C
22
nB/C
tB/D
22
nB/D
tD
22
nD
2tB
22Bn
B
=
==
=
==
=
==
=
==
===
===
α
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١١ -
Now draw the acceleration diagram with Sa = 3 mm/m/s2. From the
acceleration diagram, the angular acceleration of link 4 can be
obtained:
ccws/rad6333.156.038.9
s/m38.9314.28a
cws/rad327.366.0/7967.21
s/m7967.21339.65a
23
2tD/C
24
2tD
==∴
==
==∴
==
α
α
t
t
t
t
t
n
n
n
n
aC/D
aD/B
aD/B
aC/B
aC/B aB
aB
aDaD
Mechanism diagramSm = 75 mm/m
Velocity diagramSv = 20 mm/m/s
2Acceleration diagramSa = 3 mm/m/s
aC/B
aD/B
aC/D aD
aB
c
b
o
d
4
1
1
2
3
D
C
B
A
JO
VC
VD/C
VD/BVC/B
VB
cd
b
o
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٢ -
Problems (Relative velocity): Q1) (a) In Figure P1.1, link 4
rolls on link 1. Construct the velocity polygon, ω2 =144 rad/s. (b)
Determine ω3, ω4 in radians per second. Q2) (a) Construct the
velocity polygon for Figure P1.2. ω2 = 150 rad/s. Determine the
velocity of
slider 6 in meters per second. (b) Determine ω3, ω4 and ω5 in
radians per second. Q3) The velocity of point B of the linkage
shown in Figure P1.3 is 40 m/s. Find the velocity of point A
and
the angular velocity of link 3.
Q4) Crank 2 of the mechanism shown in Figure P1.4 is driven at
ω2 = 60 rad/s cw. Find the velocities of points B and C and the
angular velocity of link 3 and 4. O2A=150mm, AB=300mm, O4O2=75mm,
O4B=300mm, AD=150mm, DC=100mm. Q5) The inversion of the
slider-crank mechanism shown in Figure P1.5 is driven by link 2 at
ω2 = 60 rad/s ccw. Find the velocity of
point B and the angular velocities of links 3 and 4. O2A=75mm,
AB=400mm, O2O4=125mm. Q6) Find the velocity of point C and the
angular
velocity of link 3 of the mechanism shown in Figure P1.6. Link 2
is the driver and rotates at 8 rad/s ccw. O2A=150mm, AB=O4B=250mm,
O2O4=75mm, AC=300mm, CB=100mm.
Figure P1.1
Figure P1.2
AB=400 mm
Figure P1.3
Figure P1.4
Figure P1.5
Figure P1.6
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٣ -
Q7) Find the velocities of points B, C, and D of double slider
mechanism shown in Figure P1.7 if the crank 2 rotates at 42 rad/s
cw. O2A=2in, AB=10in, AC=4in, BC=7in, CD=8in, (Take 1 in= 25.4mm).
Q8) A Scotch-yoke mechanism shown in Figure P1.8. It is driven by
crank 2 at ω2 = 36 rad/s ccw. Find the velocity of the crosshead,
link 4. O2A=250mm. Q9) In the steam engine mechanism as shown in
Figure P1.9, the crank AB rotates at 200 rpm in cw direction. Find
the velocity of C, D, E, F, and P. The dimensions of the various
links are AB = 12 cm, BC = 48 cm, CD = 18 cm, DE = 36 cm, EF = 12
cm and FP = 36 cm. Q10) If V6 = 1.081 m/s down ward, Figure P1.2.
Construct the velocity diagram and determine the velocity of point
VC. Q11) Two rolling wheels are connected by link 3 as shown in
Figure P1.10. Wheel 2 rolls with uniform angular velocity and M
moves to the left by 6.25 m/sec. (a) Construct the velocity diagram
and find VR, VQ, and ω3. (b) Find aR, and α3. Q12) For the position
of the mechanism shown in Figure P1.11, find the velocity of the
slider B and the angular velocity of link AB if the velocity of the
slider A is 3 m/s.
Figure P1.7
Figure P1.8
P
F
E
D
C
B
A
Figure P1.9
45°
60°
R
1 2
5½
1
1
φ 2½
φ 3
Figure P1.10: (All dimensions in meter)
Figure P1.11
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٤ -
RELATIVE ACCELERATION METHOD The relative acceleration method of
analyzing accelerations of parts in a mechanism is based on the
following principles:
1. That all motions are considered instantaneous 2. That the
instantaneous motion of a point may considered pure rotation 3.
That the acceleration of a point much more easily analyzed if it is
resolved into two
rectangular components, one normal and one tangent to its path
4. That the relative velocities as well as the absolute velocities
of the various points in the
mechanism are available.
ACCELERATION DIRECTIONS The directions of accelerations of
points moving with curvilinear motion are not always known. It is
necessary to regard accelerations as made up of two rectangular
components: the normal component an and the tangential component
at. As shown in Figure 4.13, the normal component is directed
toward the center of rotation, and the tangential component is
perpendicular to the component, or tangent to the path of the
point. It is evident that the acceleration is vector sum of these
two components: that is, a = an ↦ at Figure 4.14 shows a link with
two points A and B, neither of which is fixed. If the link has
angular acceleration α, the normal and tangential acceleration
components for the acceleration aB/A of a point B relative to A are
shown in Figure 4.14a. The normal component anB/A points toward A,
and the tangential component atB/A is ⊥ to the line AB. In Figure
4.14b, the components for the acceleration of point A relative to B
are shown. The magnitudes of these acceleration components may be
expressed as follows:
αα ∗=∗=
==
ABaBAa
ABV
aAB
Va
tBA
tAB
BAnBA
ABnAB
//
2/
/
2/
/)()(
Example 4.11: In Figure 4.15a, crank 2 is rotating ccw at 75 rpm
and is slowing down at the rate of 15 rad/s2. It is required to
find the accelerations of point A and B and the angular velocities
and accelerations of links 3 and 4. O2O4=370mm, O2A=365mm,
AB=1067mm, O4B=762mm.
Figure 4.13
Figure 4.14
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٥ -
Solution Ex.4.10:
1. Draw the velocity diagram as shown in Figure 4.15b.
sm865252smm252865857365AOV
rad85760
7528660
N2
22A
2
/./..**
sec/.*.
====
===
ω
πω
a. Lay out VA from the original o (⊥ to link 2). b. Lay out the
direction of VB from the original o (⊥ to link 4). c. Lay out the
direction of VB/A from the terminus of VA (⊥ to link 3). d. The
intersection of the VB and VB/A direction lines determines the
magnitudes of
both. e. After that, all the linear and angular velocities can
be determined.
VB = 46.9945/10= 4.69945 m/s ω4= 4.69945/0.762= 6.16 rad/sec ccw
VB/A= 45.3530/10= 4.53530 m/s ω3= 4.5353/1.0670= 4.25 rad/sec
ccw
2. Write the acceleration equation for aB:
tAB
nAB
tA
nA
tB
nB
ABAB
aaaaaaaaa
//
/
aaaa
a
=
=
Figure 4.15
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٦ -
3. Determine the magnitudes and directions of the various
terms:
)3(*
)3(/27268.19067.1*25.4*
)2(/475.5365.0*15*
)2(/4922.22365.0*
)4(*
)4(/9145.28762.0*16.6762.0*
3/
2223/
222
223
2
244
2224
4
2
linktoonlyknowndirectionABa
linktoparallelsmABa
linktosmAOa
linktoparallelsmAO
Va
linktoonlyknowndirectionBOa
linktoparallelsmBO
Va
tAB
nAB
tA
AnA
tB
BnB
⊥=
===
⊥===
===
⊥=
====
α
ω
α
ω
α
ω
4. Draw the acceleration diagram to obtain aB (Figure
4.15c).
a. Lay out nBa from the original o (║to link 4). b. Through the
terminus of nBa draw a ⊥ line of indefinite length representing
the
direction of tBa , whose magnitude is unknown. c. Again starting
from the origin o, lay out nAa (║to link 2). d. From the terminus
of nAa and ⊥ to it, lay out tAa . This establishes the acceleration
aA
of A, which represents the known acceleration, aA= 23.148
m/sec2. e. From the terminus of aA, lay out n ABa / (║to link 3).
f. Through the terminus of n ABa / and ⊥ to it, draw a line of
indefinite length
representing the direction of t ABa / , whose magnitude is
unknown. g. The intersection of two indefinite-length lines draw in
steps (b) and (f),
representing tBa and t ABa / , respectively, determines aB,
which equals about 38.4 m/s2.
5. Compute the angular accelerations:
cwsrad46337620
525BO
a
cwsrad021606710924517
ABa
2
4
tB
4
2t
AB3
/..
.
/.../
===
===
α
α
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٧ -
Example 4.12: In Figure 4.16a, crank 2 rotates ccw with a
uniform angular velocity of 30 rad/sec. It is required to find the
linear accelerations of points A, B, C, and D and the angular
velocity and acceleration of link 3. O2A=75 mm, AD=25 mm, AB= 229
mm, AC= 1/3 AB.
Figure 4.16
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٨ -
Solution Ex.4.12: 1. Draw the velocity diagram as shown in
Figure 4.16b.
smsmmAOV A
/25.2/225030*75* 22
==== ω
VB = direction known only (D to path of link 4) VB/A= direction
known only (⊥ to AB)
2. Write the acceleration equation for aB:
tAB
nAB
tA
nAB
ABAB
aaaaa
aaa
//
/
aaa
a
=
=
3. Determine the magnitudes and directions of the various
terms:
)(*
)(/..
.
),(
)(/...
)(
/
//
3linktoonlyknowndirectionABa
3linktoparallelsm674112290
635051AB
Va
0uniformis0a
2linktoparallelsm5670750252
AOVa
sliderofpathtoParallelonlyknowndirectiona
3t
AB
222
ABnAB
22tA
22
2
2An
A
B
⊥=
===
==
===
=
α
αω
4. Draw the acceleration diagram to obtain aB (Figure 4.16c). a.
Lay out the direction aB (
tBB aa = ) through the original o (║to path of slider).
b. Again starting from the origin o, lay out Aa ( nAA aa = )
(║to link 2). c. From the terminus of Aa , lay out n ABa / . d.
Through the terminus of n ABa / and ⊥ to it, draw a line of
indefinite length
representing the direction of t ABa / , whose magnitude is
unknown. The intersection of this line with the aB direction line
drawn in step a determine aB
5. Obtain aC and aD (Figure 4.16c). Points c and d in the
acceleration diagram are located by proportion. 6. Determine the
angular velocity and acceleration of link 3:
ccwsrad752012290202346
ABa
cwrad1472290
635051AB
V
2t
AB3
AB3
/...
sec/..
.
/
/
===
===
α
ω
Example 4.13: In Figure 4.17a, crank 2 rotates ccw with a
uniform angular velocity of 240 rpm. It is required to find the
linear accelerations of points B, C, and D and the angular velocity
and acceleration of link 3 and link 5.
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ١٩ -
Ab=100mm, BD=500mm, BC=400mm
Solution Ex.4.13:
Figure 4.17
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٠ -
1. Draw the velocity diagram as shown in Figure 4.17b.
smsmmABV
rad
B /513.2/274.2513132.25*100*
sec/1327.2560
240*2
2
2
====
==
ω
πω
VC = direction known only (║to path of slider 4) VC/B= direction
known only (⊥ to CB) VD = direction known only (║to path of slider
6) VD/B= direction known only (⊥ to DB)
2. Write the acceleration equation for aC and aD:
tBD
nBD
tB
nBD
BDBD
tBC
nBC
tB
nBC
BCBC
aaaaaaaa
aaaaaaaa
//
/
//
/
aaa
a
aaa
a
=
==
=
3. Determine the magnitudes and directions of the various
terms:
)(*
)(/..
.
)()(*
)(/..
.
),(
)(/..
.
)(
/
//
/
//
3linktoonlyknowndirectionDBa
Btoward5linktoparallelsm517250
1218751DB
Va
6sliderofpathtoParallelonlyknowndirectiona3linktoonlyknowndirectionCBa
Btoward3linktoparallelsm1234840
80261CB
Va
0uniformis0a
Atoward2linktoparallelsm151696310
5132BAVa
4sliderofpathtoParallelonlyknowndirectiona
5t
BD
222
BDnBD
D
3t
BC
222
BCnBC
22tB
222
BnB
C
⊥=
===
=
⊥=
===
==
===
=
α
α
αω
4. Draw the acceleration diagram to obtain aC and aD (Figure
4.17c).
a. Lay out the direction aC ( tCC aa = ) through the original o
(║to path of slider 4).
b. Again starting from the origin o, lay out Ba ( nBB aa = )
(║to link 2 toward A).
c. From the terminus of Ba , lay out n BCa / .
d. Through the terminus of n BCa / and ⊥ to it, draw a line of
indefinite length
representing the direction of t BCa / , whose magnitude is
unknown. The intersection
of this line with the aC direction line drawn in step a
determine aC.
e. Lay out the direction aD through the original o (║to path of
slider 6).
f. From the terminus of Ba , lay out n BDa / .
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢١ -
g. Through the terminus of n BDa / and ⊥ to it, draw a line of
indefinite length
representing the direction of t BDa / , whose magnitude is
unknown. The intersection
of this line with the aD direction line drawn in step e
determine aD.
5. Obtain aB, aC and aD (Figure 4.17c), which are 63.15 m/s2,
44.89 m/s2 and 8.53 m/s2
respectively.
6. Determine the angular velocity and acceleration of link 3 and
link 5:
cwsrad062512050
0312560DB
a
cwrad24375250
1218751DB
V
cwsrad77610940
9105543CBa
cwrad5065440
80261CB
V
2t
BD5
BD5
2t
BC3
BC3
/..
.
sec/..
.
/..
.
sec/..
.
/
/
/
/
===
===
===
===
α
ω
α
ω
Example 4.14: In the link ABC in Figure 4.18a, AB = 600 mm, BC =
225 mm. A and B are
attached by pin joints to the sliding blocks. If, for the
position where BD = 375 mm, A is
sliding towards D with a velocity of 6 m/s and a retardation of
150 m/s2, find the acceleration of
C and angular acceleration of the link.
Solution Ex 4.14:
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٢ -
2
n
t aB/A
aB/A
t
(b)
(a)
2
2aC = 129.7702/0.5 = 259.54 m/sαAB = aB/A/AB = 175.38/0.6 =
292.3 rad/s
Acceleration diagramSA=0.5 mm/m/s
aB d
c
a
b
aA
aC
Answer Q2:
VCc
VC = 6.95518 m/sVC/A = 8.035 m/sVB/A =5.8438 m/s VB =5.6739
m/s
VB/A
VA
VB
Velocity diagramSV=10 mm/m/s
b
a
d
Mechanism diagramSM=0.2 mm/mm
C
B
A
D
Figure 4.18
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٣ -
4.2.2 CORIOLIS ACCELERATION:
Whenever a point in one body moves along a path on a second
body, and if the second body is
rotating, then the acceleration of the point in the first body
relative to a coincident point in the
second body will have a Coriolis component.
In Figure 4.19 let P3 be a point on slider 3 which is moving
along the path OF in body 2. Let P2
be a fixed point on the path and let P3 and P2 be coincident at
the instant. The angular velocity
for body 2 is ω2 and hence also for the path. The path is again
shown in Figure 4.19, where
23 / PPV is the velocity of P3 relative to P2. In a time
interval dt, line OF will rotate through an
angle dθ to position OF'. During this time P2 moves to P2' and
point P3 moves to P3' as shown
in Figure 4. 20.
θdBPBPArc )( '2'
3 =
But dtdanddtVBP PP 22/'
2 3ωθ ==
Thus 2
2/'
3 )(23 dtVBP PP ω= (1)
For a displacement with constant acceleration
2'3 )(21 dtABP = (2)
From Equations 1 and 2
22
2/ )(21)(
23dtadtV PP =ω
Or (3)
which is called the Coriolis component of acceleration for point
P3.
The relationship between23 / PP
V , ω2, and 2/ 232 ωPPV for the case of Figure 4.19 is shown in
Figure
4.19a. If 23 / PP
V is toward the center O, the relationship will be that of
Figure 4.19b. The rule is
as follows: the Coriolis acceleration is the direction of23 /
PP
V , after the latter has been rotated
90° in the direction of the angular velocity of the path.
From Equation 3 we note that if either 23 / PP
V or ω2, or both, are zero, then there will no Coriolis
component of acceleration.
2/ 232 ωPPc Va =
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٤ -
Figure 4.19
Figure 4.20
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٥ -
Figure 4.22
The general case of relative motion of two bodies in a plane is
illustrated in Figure 4.21. The
absolute acceleration of point P3 is
2323 / PPPP
aaa →=
Or 2/// 2323232233 2 ωPPt
PPn
PPtP
nP
tP
nP Vaaaaaa aaaaa = (4)
Figure 4.21
where the Coriolis component 2VP3/P2ω2 is part of the
acceleration of P3 relative to P2.
Example 4.15: A quick-return mechanism is shown in
Figure 4.22. Link 2 is the driver, and the angular
velocity and acceleration of link 4 are to be found.
Solution Ex 4.15:
Let P2 and P4 be fixed points on links 2 and 4 which are
coincident at the instant, then
ω2 = 2π*(9.5/60) = 0.995 rad/s
( ) smPOVP /151.0995.0*152.0* 2222 === ω
a
a
a
a
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٦ -
Scaling values from the velocity polygon in Figure 4.23, we find
smVP /0742.04 = and
smV PP /131.024 / = . Then
ccwsradPOVP /144.0
514.00742.0
444
4 ===ω
Before we can find the angular acceleration of link 4, it is
necessary to find the acceleration of
P4. Similar to Equation 4 we may write
2/// 242424224 2 ωPPt
PPn
PPtP
nPP Vaaaaa aaaa=
In order to solve this equation it is necessary to know the
radius of curvature of the path which
P4 describes on body 2. This path is not known. However, the
path which P2 describes on 4 is
straight line along the link. We can use this path if we write
the equation for2P
A . Then
××−×−×××××
= 4//0
/44
0
424242222 ωPP
tPP
nPP
tntP
nP Vaaaaaa aaaaa (5)
where 222
2
/15.0152.0151.02
2sm
POV
a PnP ===
00 22 == αbecauseatP
244
2
/0107.0514.0
0742.044
smPO
Va PnP ===
( ) unknownisbutPOa tP 44444 αα=
( ) 0131.0
22/
/42
42=
∝==
RV
a PPn PP
Figure 4.23
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٧ -
Figure 4.24
24/
/
/0377.0144.0*131.0*22
,
42
42
smV
andunknownisa
PP
tPP
==ω
Thus the magnitudes of the tangential components are the only
unknowns Equation 5. Their
values may be found by drawing the acceleration polygon which is
shown in Figure 4.24 or
4.25. Then 2/0921.04
sma tp = , and
2
444 /179.0514.0
0921.04 sradPO
a tp ===α
Figure 4.25
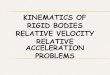
Example 4.16: A cam with oscillating follower is shown in Figure
4.26, where the angular
velocity and acceleration of the cam are indicated. The angular
acceleration of link 4 is wanted.
n
2p a =
t
42p /p a
n
t
4p a
p 4
a
2p
4p /p 2
42 4p /p
a
a
2V ω
o
4p
2p
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٢٨ -
The radius of curvature of the path is 138 mm and equals the
radius of the cam outline plus the
roller radius.
Solution Ex 4.16:
( ) smPOVP /417.05*0833.0* 2222 === ω
and the velocity polygon is shown in Figure 4.26. smVP /213.04 =
and smV PP /533.024 / = . Then
cwsradPOVP /12.1
191.0213.0
444
4 ===ω
Next, in order to find the angular acceleration of link 4, we
must find the acceleration of P4.
Thus
×××−×−××××
= 2//0
/22
0
242424442 ωPP
tPP
nPP
tntP
nP Vaaaaaa aaaaa (6)
where
244
2
/238.0191.0213.04
4sm
POV
a PnP ===
( ) 22222 /08.25*0833.022 smPOanP === ω
( ) 2222 /208.05.2*0833.0*2 smPOatP === α
( ) 22
2
2/
/ /06.2138.0533.024
24sm
CPV
a PPn PP ===
22/ /33.55*533.0.0*22 24 smV PP ==ω
Thus the magnitudes of the tangential components are the only
unknowns Equation 6.
Figure 4.28 shows the acceleration polygon. 2/97.14
sma tp = and then
cwsradPOa tp 2
444 /31.10191.0
97.14 ===α
-
THEORY OF MACHINES
Figure 4.2
Figure 4.2
Figure 4.28: Acceleration diagram
(Relative velocity & acceleration)
4.26: Mechanism diagram
4.27: Velocity diagram
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٣٠ -
Problems (Relative acceleration): Q132) For the data given in
the Figure P4.12, Find the velocity and acceleration of points B
and C. AB=16 cm, AC=10 cm, BC=8 cm Q14) For the straight-line
mechanism shown in Figure P4.13, ω2=20 rad/sec cw and α2=140
rad/sec2. Determine the velocity and acceleration of point B and
the angular acceleration of link 3. O2A=AC=AB=100mm Q15) In the
Figure P4.13, the slider 4 is moving to the left with a constant
velocity of 20 m/s2. Find the velocity and acceleration of link 2.
Q16) Solve (Q3) for the acceleration of point A and angular
acceleration of link 3. Q17) In the mechanism shown in Figure P4.14
the crank BC, 100mm long, turns at 300 rpm about center C offset
75mm from the horizontal line of stroke of A. The connecting rod
BA=300 mm. Find the velocity and acceleration of point A.
Q18) In the mechanism shown in Figure P4.15, the guide is part
of the fixed link and its centerline is a circular arc of radius R.
Determine the magnitude of the angular velocity of the slider when
ω2= 1 rad/sec, also determine aB and α4. Q19) In the mechanism
shown in Figure P4.16, Determine the relative velocity and
acceleration of the two sliders when ω2 is uniform and equal to 32
rad/sec cw and θ = 50°. Q20) (a) Construct the velocity diagram for
the mechanism of Figure P4.17 and determine the velocity of point
D. (b) Construct the acceleration diagram using a unit value of the
angular velocity of the driving link (α2= 0). Calculate the
acceleration of point D. Q21) Crank 2 in Figure P4.18 rotates ccw
with an angular velocity of 3 rad/sec and speeding up with an
acceleration of 50 rad/sec2. (a) Find VA and VB. (b) Find ω3 and
ω4. (c) Find aA and aB. (d) Find α3 and α4. Q22) Rework Example 4.7
when the crank OA is rotated in a ccw direction at a speed of 150
RPM and at an angular acceleration of 40 rad/s2 also in ccw
direction. Find the acceleration of slider D and the angular
acceleration of BD.
VA=1.6 m/s
aA= 4 m/s2
A
C
B
2
ω2=24 rad/sec
α2=160 rad/sec2
15°
Figure P4.12
Figure P4.14
Figure P4.13
2
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٣١ -
Figure P4.15
Figure P4.16
Figure P4.17
Q23) Crank 2 in Figure P4.19 rotates ccw with an angular
velocity of 24 rad/sec and speeding up with an acceleration of 300
rad/sec2. (a) Find the velocities of points A, B, C, and D. (b)
Find ω3 and ω4. (c) Find aA and aB, aC, and aD. (d) Find α3 and α4.
Q24) Crank 2 in Figure P4.20 rotates cw with an angular velocity of
6 rad/sec and speeding down with an acceleration of 50 rad/sec2.
(a) Find the velocities of points A, B, and C. (b) Find ω3 and ω4.
(c) Find aA and aB, and aC. (d) Find α3 and α4. Q25) (a) Construct
the velocity and acceleration polygons for the mechanism shown in
Figure P4.2, when ω2 = 150 rad/s and α2 = 300 rad/s2 cw. (b)
Determine the velocity and acceleration of slider 6.
Figure P4.18
Figure P4.19
Figure P4.20
-
THEORY OF MACHINES Q26) (a) Construct the velocity and
acceleration diagrams for Figure P (b) Determine ω3, ω6, α3, and
α6.
Q27) In Figure P4.22, disk 4 is driven by link through block 3,
which is pivoted on 2instantaneous velocity of slide of block 3
(a) Construct the velocity and acceleration polygons for points
(b) Determine α4.
Q28) In the mechanism shown in Figure Pmeans of the sliding
block at B. AB = 120When the crank is horizontal, as shown, and is
rotating at velocity of slider F, (b) the angular velocity of the
link CDE, and (c) the acceleration of slider F.
(Relative velocity & acceleration) Construct the velocity
and acceleration diagrams for Figure P4.21.
Figure P4.21
is driven by link 2 sliding in guides on 1 as shown. The drive
is 2 at point P3. The velocity of link 2 is constant. The 3 on link
4 is 38.1 m/s toward the center of
Construct the velocity and acceleration polygons for points O4,
P3, and P4.
Figure P2.22
) In the mechanism shown in Figure P2.23, the crank AB drives
the bent link CDE by 120 mm, CD = 90 mm, DE = 450 mm, EF =
When the crank is horizontal, as shown, and is rotating at 60
rpm anticlockwise, fvelocity of slider F, (b) the angular velocity
of the link CDE, and (c) the acceleration of slider
as shown. The drive is is constant. The
m/s toward the center of 4.
, the crank AB drives the bent link CDE by mm, EF = 450 mm.
rpm anticlockwise, find (a) the velocity of slider F, (b) the
angular velocity of the link CDE, and (c) the acceleration of
slider
-
THEORY OF MACHINES (Relative velocity & acceleration)
- ٣٣ -
Figure P2.24
Figure P2.25
Q29) Crank 2 in Figure P2.24 rotates ccw at 11rpm. (a) Find the
velocities of points A, B, and C on link 4. (b) Find the velocity
of link 4. (c) Find the acceleration of points A, B, and C on link
4. (d) Find the angular acceleration of link 4.
Q30) The dimensions of the various links in the mechanism shown
in Figure P2.25, are as follows: OA = 175 mm; AB = 180 mm; AD = 500
mm; and BC = 325 mm. Find: (a) the velocity ratio between C and D
when OB is vertical and crank OA rotates at a uniform speed of 120
rpm, (b) acceleration of D and C.
Figure P2.23