Embed Size (px)
Citation preview

The EM algorithm, and Fisher vector image representation
Jakob Verbeek
December 17, 2010
Course website:
http://lear.inrialpes.fr/~verbeek/MLCR.10.11.php

Plan for the course• Session 1, October 1 2010
– Cordelia Schmid: Introduction
– Jakob Verbeek: Introduction Machine Learning
• Session 2, December 3 2010– Jakob Verbeek: Clustering with k-means, mixture of Gaussians
– Cordelia Schmid: Local invariant features
– Student presentation 1: Scale and affine invariant interest point detectors, Mikolajczyk, Schmid, IJCV 2004.
• Session 3, December 10 2010– Cordelia Schmid: Instance-level recognition: efficient search
– Student presentation 2: Scalable Recognition with a Vocabulary Tree, Nister and Stewenius, CVPR 2006.

Plan for the course• Session 4, December 17 2010
– Jakob Verbeek: The EM algorithm, and Fisher vector image representation
– Cordelia Schmid: Bag-of-features models for category-level classification
– Student presentation 2: Beyond bags of features: spatial pyramid matching for recognizing natural scene categories, Lazebnik, Schmid and Ponce, CVPR 2006.
• Session 5, January 7 2011– Jakob Verbeek: Classification 1: generative and non-parameteric methods
– Student presentation 4: Large-Scale Image Retrieval with Compressed Fisher Vectors, Perronnin, Liu, Sanchez and Poirier, CVPR 2010.
– Cordelia Schmid: Category level localization: Sliding window and shape model
– Student presentation 5: Object Detection with Discriminatively Trained Part Based Models, Felzenszwalb, Girshick, McAllester and Ramanan, PAMI 2010.
• Session 6, January 14 2011– Jakob Verbeek: Classification 2: discriminative models
– Student presentation 6: TagProp: Discriminative metric learning in nearest neighbor models for image auto-annotation, Guillaumin, Mensink, Verbeek and Schmid, ICCV 2009.
– Student presentation 7: IM2GPS: estimating geographic information from a single image, Hays and Efros, CVPR 2008.
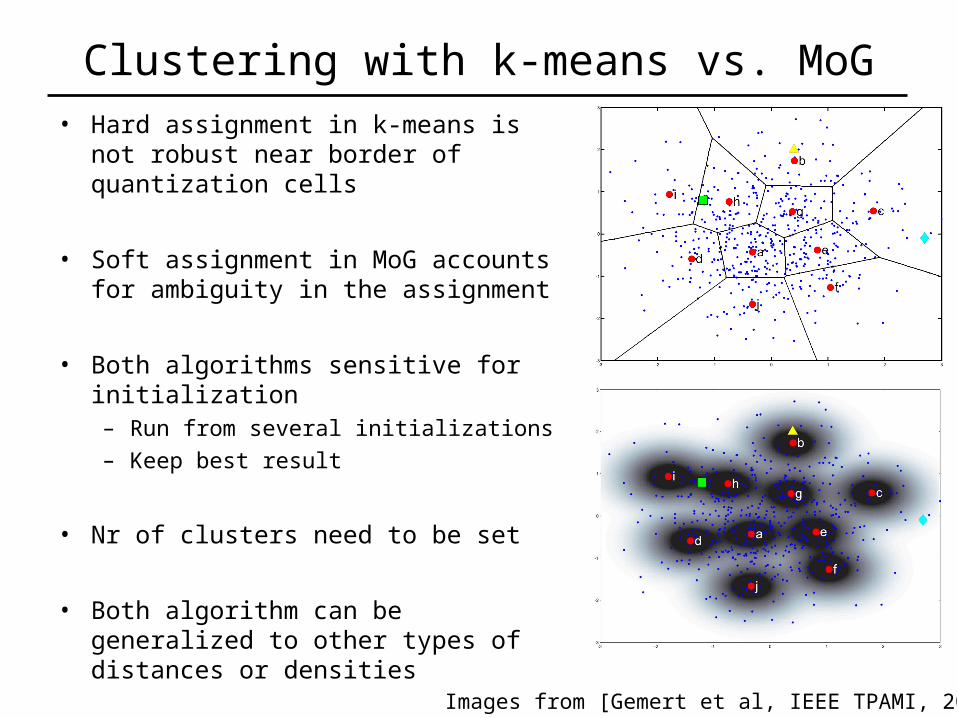
Clustering with k-means vs. MoG• Hard assignment in k-means is not
robust near border of quantization cells
• Soft assignment in MoG accounts for ambiguity in the assignment
• Both algorithms sensitive for initialization– Run from several initializations
– Keep best result
• Nr of clusters need to be set
• Both algorithm can be generalized to other types of distances or densities
Images from [Gemert et al, IEEE TPAMI, 2010]

Clustering with Gaussian mixture density
• Mixture density is weighted sum of Gaussians– Mixing weight: importance of each cluster
• Density has to integrate to unity, so we require
K
kkkk CmxNxp
1
),;()(
1
0
1
K
kk
k
)()(2
1exp||)2(),;( 12/12/ mxCmxCCmxN Td

Clustering with Gaussian mixture density
• Given: data set of N points xn, n=1,…,N
• Find mixture of Gaussians (MoG) that best explains data– Parameters: mixing weights, means, covariance matrices
– Assume data points are drawn independently
– Maximize log-likelihood of data set X w.r.t. parameters
• As with k-means objective function has local minima– Can use Expectation-Maximization (EM) algorithm
– Similar to the iterative k-means algorithm
Kkkkk
K
kkknk
N
n
N
nn
Cm
CmxNxpL
1
111
},,{
),;(log)(log)(

Maximum likelihood estimation of MoG• Use EM algorithm
– Initialize MoG parameters
– E-step: soft assign of data points to mixture components
– M-step: update the parameters
– Repeat EM steps, terminate if converged • Convergence of parameters or assignments
• E-step: compute posterior on z given x:
• M-step: update parameters using the posteriors
nkn
kknknn q
xp
CmxNxkzp
)(
),;()|(
mk 1
N k
qnkxnn1
N
Ck 1
N k
qnk (xn mk )(xn mk )T
n1
N
k 1
Nqnk
n1
N

Maximum likelihood estimation of MoG
• Example of several EM iterations

Bound optimization view of EM• The EM algorithm is an iterative bound optimization algorithm
– Goal: Maximize data log-likelihood, can not be done in closed form
– Solution: maximize simple to optimize bound on the log-likelihood
– Iterations: compute bound, maximize it, repeat
• Bound uses two information theoretic quantities– Entropy
– Kullback-Leibler divergence
K
knk
N
n
N
nn kxpxpL
111
)|(log)(log)(

Entropy of a distribution• Entropy captures uncertainty in a distribution
– Maximum for uniform distribution– Minimum, zero, for delta peak on single value
• Connection to information coding (Noiseless coding theorem, Shannon 1948)
– Frequent messages short code, optimal code length is (at least) -log p bits– Entropy: expected code length
• Suppose uniform distribution over 8 outcomes: 3 bit code words
• Suppose distribution: 1/2,1/4, 1/8, 1/16, 1/64, 1/64, 1/64, 1/64, entropy 2 bits!
• Code words: 0, 10, 110, 1110, 111100, 111101,111110,111111
• Codewords are “self-delimiting”: – code is of length 6 and starts with 4 ones, or stops after first 0.
K
k
kzqkzqqH1
)(log)()(
Low entropy High entropy

Kullback-Leibler divergence• Asymmetric dissimilarity between distributions
– Minimum, zero, if distributions are equal– Maximum, infinity, if p has a zero where q is non-zero
• Interpretation in coding theory– Sub-optimality when messages distributed according to q, but coding
with codeword lengths derived from p – Difference of expected code lengths
– Suppose distribution q: 1/2,1/4, 1/8, 1/16, 1/64, 1/64, 1/64, 1/64– Coding with uniform 3-bit code, p=uniform – Expected code length using p: 3 bits– Optimal expected code length, entropy H(q) = 2 bits– KL divergence D(q|p) = 1 bit
0)(
)(log)()||(
1
K
k kzp
kzqkzqpqD
)()(log)()||(1
qHkzpkzqpqDK
k

EM bound on log-likelihood• Define Gauss. mixture p(x) as marginal distribution of p(x,z)
• Posterior distribution on latent cluster assignment
• Let qn(zn) be arbitrary distribution over cluster assignment
• Bound log-likelihood by subtracting KL divergence D(q(z) || p(z|x))
K
kkknk
K
knnnn
kknnn
kn
CmxNkzxpkzpxp
CmxNkzxp
kzp
11
),;()|()()(
),;()|(
)(
)|(||)()(log)(log nnnnnn xzpzqDxpxp
)(
)|()()|(
n
nnnnn xp
zxpzpxzp

Maximizing the EM bound on log-likelihood• E-step: fix model parameters, update distributions qn
– KL divergence zero if distributions are equal– Thus set qn(zn) = p(zn|xn)
• M-step: fix the qn, update model parameters
• Terms for each Gaussian decoupled from rest !
N
nnnnnnn xzpzqDxpqL
1
))|(||)(()(log}){,(
N
nnn
knkn xkzpqqH
1
),(log)(
N
n knnnknkn xkzpqqxp
1
)|(loglog)(log
N
nkknk
knkn CmxNqqH
1
),;(loglog)(
N
nnnnnnn xzpzqDxpqL
1
)|(||)()(log}){,(

Maximizing the EM bound on log-likelihood
• Derive the optimal values for the mixing weights– Maximize
– Take into account that weights sum to one, define– Take derivative for mixing weight k>1
K
kk
21 1
N
n
K
kknkq
1 1
log
011
log1 1
111 1
N
nn
N
n knk
N
n
K
kknk
k
qqq
N
nn
N
n knk qq
1 11
1
11
N
nnk
N
nnk qq
11
11
N
nnqN
111
N
nnkk q
N 1
1

Maximizing the EM bound on log-likelihood
• Derive the optimal values for the MoG parameters– Maximize
)()(2
1||log
2
1)2log(
2),;(log 1 mxCmxC
dCmxN n
Tnn
)(),;(log 1 mxCCmxNm n
TmxmxCCmxNC
))((2
1
2
1),;(log
1
),;(log kknn
nk CmxNq
N
nnnkN
nnk
k xqq
m1
1
1
N
n
Tknknnk
nnk
k mxmxqq
C1
))((1

EM bound on log-likelihood• L is bound on data log-likelihood for any distribution q
• Iterative coordinate ascent on F– E-step optimize q, makes bound tight
– M-step optimize parameters
N
nnnnnnn xzpzqDxpqL
1
)|(||)()(log}){,(

Clustering for image representation• For each image that we want to classify / analyze
1. Detect local image regions– For example affine invariant interest points
2. Describe the appearance of each region – For example using the SIFT decriptor
3. Quantization of local image descriptors– using k-means or mixture of Gaussians
– (Soft) assign each region to clusters
– Count how many regions were assigned to each cluster
• Results in a histogram of (soft) counts– How many image regions were assigned to each cluster– Input to image classification method
• Off-line: learn k-means quantization or mixture of Gaussians from data of many images

Clustering for image representation• Detect local image regions
– For example affine invariant interest points
• Describe the appearance of each region – For example using the SIFT decriptor
• Quantization of local image descriptors– using k-means or mixture of Gaussians
– Cluster centers / Gaussians learned off-line
– (Soft) assign each region to clusters
– Count how many regions were assigned to each cluster
• Results in a histogram of (soft) counts– How many image regions were assigned to each cluster
• Input to image classification method

Fisher vector representation: motivation• Feature vector quantization is computationally expensive in practice• Run-time linear in
– N: nr. of feature vectors ~ 10^3 per image– D: nr. of dimensions ~ 10^2 (SIFT)– K: nr. of clusters ~ 10^3 for recognition
• So in total in the order of 10^8 multiplications per image to obtain a histogram of size 1000
• Can we do this more efficiently ?!– Yes, store more than the number of data points
assigned to each cluster centre / Gaussian
• Reading material: “Fisher Kernels on Visual
Vocabularies for Image Categorization”
F. Perronnin and C. Dance, in CVPR'07
Xerox Research Centre Europe, Grenoble
20
35
8
10

20
35
8
10
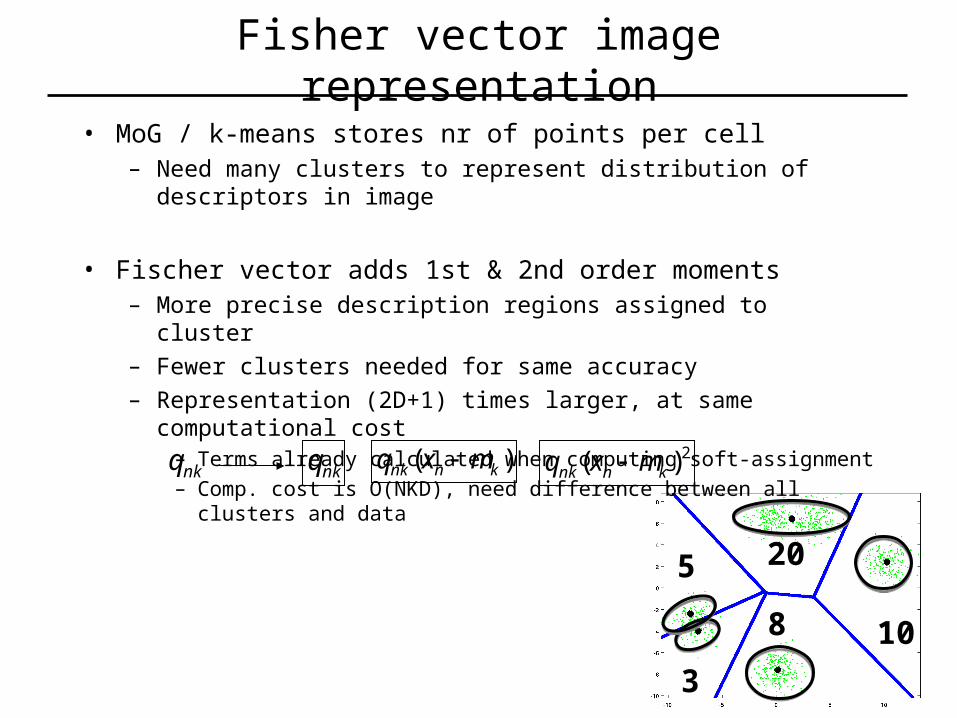
Fisher vector image representation
• MoG / k-means stores nr of points per cell– Need many clusters to represent distribution of descriptors in image– But increases computational cost
• Fisher vector adds 1st & 2nd order moments– More precise description of regions assigned to cluster– Fewer clusters needed for same accuracy– Per cluster also store: mean and variance of data in cell
20
3
5
8 10

Image representation using Fisher kernels• General idea of Fischer vector representation
– Fit probabilistic model to data– Use derivative of data log-likelihood as data representation, eg.for classification
See [Jaakkola & Haussler. “Exploiting generative models in discriminative classifiers”,
in Advances in Neural Information Processing Systems 11, 1999.]
• Here, we use Mixture of Gaussians to cluster the region descriptors
• Concatenate derivatives to obtain data representation
K
kkknk
N
n
N
nn CmxNxpL
111
),;(log)(log)(
N
nknnkk
k
mxqCLm 1
1 )()(
N
nnk
k
qL1
)(
N
n
Tknknknk
k
mxmxCqLC 1
1))((
2
1
2
1)(

Image representation using Fisher kernels• Extended representation of image descriptors using MoG
– Displacement of descriptor from center– Squares of displacement from center
– From 1 number per descriptor per cluster, to 1+D+D2 (D = data dimension)
• Simplified version obtained when– Using this representation for a linear classifier
– Diagonal covariance matrices, variance in dimensions given by vector vk
– For a single image region descriptor
– Summed over all descriptors this gives us• 1: Soft count of regions assigned to cluster
• D: Weighted average of assigned descriptors
• D: Weighted variance of descriptors in all dimensions
k
nnkq
km
1
kC
2)( knnk mxq nkqnkq )( knnk mxq
20
3
5
8 10
Fisher vector image representation
• MoG / k-means stores nr of points per cell– Need many clusters to represent distribution of descriptors in image
• Fischer vector adds 1st & 2nd order moments– More precise description regions assigned to cluster
– Fewer clusters needed for same accuracy
– Representation (2D+1) times larger, at same computational cost– Terms already calculated when computing soft-assignment– Comp. cost is O(NKD), need difference between all clusters and data
2)( knnk mxq nkqnkq )( knnk mxq

Images from categorization task PASCAL VOC• Yearly “competition” since 2005 for image classification (also object
localization, segmentation, and body-part localization)

Fisher Vector: results• BOV-supervised learns separate mixture model for each image class, makes
that some of the visual words are class-specific
• MAP: assign image to class for which the corresponding MoG assigns maximum likelihood to the region descriptors
• Other results: based on linear classifier of the image descriptions
• Similar performance, using 16x fewer Gaussians• Unsupervised/universal representation good

How to set the nr of clusters?• Optimization criterion of k-means and MoG always improved by
adding more clusters– K-means: min distance to closest cluster can not increase by adding a
cluster center– MoG: can always add the new Gaussian with zero mixing weight, (k+1)
component models contain k component models.
• Optimization criterion cannot be used to select # clusters
• Model selection by adding penalty term increasing with # clusters– Minimum description length (MDL) principle– Bayesian information criterion (BIC)– Aikaike informaiton criterion (AIC)
• Cross-validation if used for another task, eg. Image categorization– check performance of final system on validation set of labeled images
• For more details see “Pattern Recognition & Machine Learning”, by C. Bishop, 2006. In particular chapter 9, and section 3.4

How to set the nr of clusters?• Bayesian model that treats parameters as missing values
– Prior distribution over parameters– Likelihood of data given by averaging over parameter values
• Variational Bayesian inference for various nr of clusters– Approximate data log-likelihood using the EM bound
– E-step: distribution q generally too complex to represent exact– Use factorizing distribution q, not exact, KL divergence > 0
• For models with – Many parameters: fits many data sets– Few parameters: won’t fit data well– The “right” nr. of parameters: good fit
,,
)()|(),|()()|()(zz
pZpZXppXpXp
)|,(||),()(ln)(ln XZpZqDXpXp
)()(),( qZqZq
Data sets




























