Embed Size (px)
Citation preview

Course Notes
Tensor Calculus and Differential Geometry2WAH0
Luc Florack
March 21, 2017

Cover illustration: papyrus fragment from Euclid’s Elements of Geometry, Book II [8].

Contents
Preface iii
Notation 1
1 Prerequisites from Linear Algebra 3
2 Tensor Calculus 7
2.1 Vector Spaces and Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Dual Vector Spaces and Dual Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 The Kronecker Tensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Inner Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Reciprocal Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Bases, Dual Bases, Reciprocal Bases: Mutual Relations . . . . . . . . . . . . . . . . . . . . . . 16
2.7 Examples of Vectors and Covectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.8 Tensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.8.1 Tensors in all Generality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.8.2 Tensors Subject to Symmetries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.8.3 Symmetry and Antisymmetry Preserving Product Operators . . . . . . . . . . . . . . . 24
2.8.4 Vector Spaces with an Oriented Volume . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.8.5 Tensors on an Inner Product Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.8.6 Tensor Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.8.6.1 “Absolute Tensors” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37

CONTENTS i
2.8.6.2 “Relative Tensors” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.8.6.3 “Pseudo Tensors” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.8.7 Contractions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.9 The Hodge Star Operator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 Differential Geometry 45
3.1 Euclidean Space: Cartesian and Curvilinear Coordinates . . . . . . . . . . . . . . . . . . . . . 45
3.2 Tangent and Cotangent Bundle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3 Exterior Derivative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.4 Affine Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.5 Lie Derivative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.6 Torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.7 Levi-Civita Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.8 Geodesics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.9 Curvature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.10 Push-Forward and Pull-Back . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.11 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.11.1 Polar Coordinates in the Euclidean Plane . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.11.2 A Helicoidal Extension of the Euclidean Plane . . . . . . . . . . . . . . . . . . . . . . 58

ii CONTENTS

Preface
These course notes are intended for students of all TU/e departments that wish to learn the basics of tensorcalculus and differential geometry. Prerequisites are linear algebra and vector calculus at an introductory level.Some appendices have been added to illustrate the generic potential of tensor calculus and differential geometryin science and engineering. The treatment is condensed, and serves as a complementary source next to morecomprehensive accounts that can be found in the (abundant) literature. As a companion for classroom adoptionit does provide a reasonably self-contained introduction to the subject that should prepare the student for furtherself-study.
These course notes are based on course notes written in Dutch by Jan de Graaf. Large parts are straightforwardtranslations. I am therefore indebted to Jan de Graaf for many of the good things. I have, however, taken the libertyto skip, rephrase, and add material, and will continue to update these course notes (the date on the cover reflectsthe version). I am of course solely to blame for the errors that might have been introduced in this undertaking.
Rigor is difficult to reconcile with simplicity of terminology and notation. I have adopted Jan de Graaf’s styleof presentation in this respect, by letting the merit of simplicity prevail. The necessary sacrifice of rigor iscompensated by a great number of interspersed “caveats”, notational and terminological remarks, all meant totrain the reader in coming to grips with the parlance of tensor calculus and differential geometry.
Luc Florack
Eindhoven, March 21, 2017.

iv

Notation
Instead of rigorous notational declarations, a non-exhaustive list of examples is provided illustrating the notationfor the most important object types used in these course notes:
• Linear mappings: A , B, etc.
• Matrices: A, B, etc.
• Tensors: A, B, etc.
• Vectors: a, b, etc.
• Covectors: a, b, etc.
• Basis vectors: ei, fi, etc. (for holonomic basis also ∂/∂xi, ∂/∂yi, etc.)
• Basis covectors: ei, f i, etc. (for holonomic basis also dxi, dyi, etc.)
• Vector components: ai, bi, etc.
• Covector components: ai, bi, etc.
• Tensor components: Ai1...ipj1...jq, Bi1...ipj1...jq
, etc.

2

1. Prerequisites from Linear Algebra
Linear algebra forms the skeleton of tensor calculus and differential geometry. We recall a few basic definitionsfrom linear algebra, which will play a pivotal role throughout this course.
Reminder
A vector space V over the field K (R or C) is a set of objects that can be added and multiplied by scalars, suchthat the sum of two elements of V as well as the product of an element in V with a scalar are again elements ofV (closure property). Moreover, the following properties are satisfied for any u, v, w ∈ V and λ, µ ∈ K:
• (u+ v) + w = u+ (v + w),
• there exists an element o ∈ V such that o+ u = u,
• there exists an element −u ∈ V such that u+ (−u) = o,
• u+ v = v + u,
• λ · (u+ v) = λ · u+ λ · v,
• (λ+ µ) · u = λ · u+ µ · u,
• (λµ) · u = λ · (µ · u),
• 1 · u = u.
The infix operator + denotes vector addition, the infix operator · denotes scalar multiplication.
Terminology
Another term for vector space is linear space.
Remark
• We will almost exclusively consider real vector spaces, i.e. with scalar field K = R.
• We will invariably consider finite-dimensional vector spaces.
Reminder
A basis of an n-dimensional vector space V is a set {ei}ni=1, such that for each x ∈ V there exists a uniquen-tuple (x1, . . . , xn) ∈ Rn such that x =
∑ni=1 x
iei.

4 Prerequisites from Linear Algebra
Reminder
• A linear operator A : V → W , in which V and W are vector spaces over K, is a mapping that satisfiesthe following property: A (λ v + µw) = λA (v) + µA (w) for all λ, µ ∈ K and v, w ∈ V .
• The set L (V,W ) of all linear operators of this type is itself a vector space, with the following definitions ofvector addition and scalar multiplication: (λA + µB) (v) = λA (v) + µB(v) for all λ, µ ∈ K, A ,B ∈L (V,W ) and v ∈ V .
Notation
The set of square n× n matrices will be denoted by Mn.
Reminder
The determinant of a square matrix A ∈Mn with entries Aij (i, j = 1, . . . , n) is given by
detA =
n∑j1,...,jn=1
[j1, . . . , jn]A1j1 . . . Anjn =1
n!
n∑i1, . . . , in = 1j1, . . . , jn = 1
[i1, . . . , in] [j1, . . . , jn]Ai1j1 . . . Ainjn .
The completely antisymmetric symbol in n dimensions is defined as follows:
[i1, . . . , in] =
+1 if (i1, . . . , in) is an even permutation of (1, . . . , n) ,−1 if (i1, . . . , in) is an odd permutation of (1, . . . , n) ,0 otherwise .
Observation
• Exactly n! of the nn index realizations in [i1, . . . , in] yield nontrivial results.
• To determine detA, compose all n! products of n matrix entries such that the row labels as well as thecolumn labels of the factors in each product are all distinct. Rearrange factors such that the row labels areincrementally ordered. Assign a sign ±1 to each product corresponding to the permutation (even/odd) ofthe column labels observed in this ordered form, and add up everything. Cf. the following example.
Example
Let A ∈M3 be a 3× 3 matrix:
A =
A11 A12 A13
A21 A22 A23
A31 A32 A33
.
Carrying out the recipe yields Table 1.1:
product with row labels ordered sign of column label permutationA11A22A33 [123] = +1A12A23A31 [231] = +1A13A21A32 [312] = +1A13A22A31 [321] = −1A11A23A32 [132] = −1A12A21A33 [213] = −1
Table 1.1: detA = A11A22A33+A12A23A31+A13A21A32−A13A22A31−A11A23A32−A12A21A33.

Prerequisites from Linear Algebra 5
Observation
For a general square matrix A ∈Mn the following identities hold:
n∑i1,...,in=1
[i1, . . . , in]Ai1j1 . . . Ainjn = [j1, . . . , jn] detA ,
n∑j1,...,jn=1
[j1, . . . , jn]Ai1j1 . . . Ainjn = [i1, . . . , in] detA ,
n∑i1,...,in=1
n∑j1,...,jn=1
[i1, . . . , in] [j1, . . . , jn]Ai1j1 . . . Ainjn = n! detA .
Products of completely antisymmetric symbols can be expressed in terms of determinants:
[i1, . . . , in] [j1, . . . , jn] = det
δi1j1 . . . δi1jn...
...δinj1 . . . δinjn
def= δi1...inj1...jn
,
and, more generally,
n∑i1,...,ik=1
[i1, . . . , ik, ik+1, . . . , in] [i1, . . . , ik, jk+1, . . . , jn] = k! det
δik+1jk+1. . . δik+1jn
......
δinjk+1. . . δinjn
.
Example
• [i, j, k] [`,m, n] = δi`δjmδkn + δimδjnδk` + δinδj`δkm − δimδj`δkn − δi`δjnδkm − δinδjmδk`.
•∑3i=1 [i, j, k] [i,m, n] = δjmδkn − δjnδkm.
•∑3i,j=1 [i, j, k] [i, j, n] = 2δkn.
•∑3i,j,k=1 [i, j, k] [i, j, k] = 6.
Caveat
One often writes detAij instead of detA. The labels i and j are not free indices in this case!
Reminder
The cofactor matrix of A ∈Mn is the matrix A ∈Mn with entries Aij given by
Aij =∂ detA
∂Aij.
The adjugate matrix of A ∈Mn is a synonymous term for AT ∈Mn.
Notation
Cofactor and adjugate matrix of A ∈Mn are sometimes indicated by cofA and adjA, respectively.

6 Prerequisites from Linear Algebra
Notation
In any expression of the formXii , with a matching pair of sub- and superscript i = 1, . . . , n, in which n = dimV
is the dimension of an underlying vector space V , the Einstein summation convention applies, meaning that it isto be understood as an i-index-free sum:
Xii
def=
n∑i=1
Xii .
This convention applies to each pair of matching sub- and superscript within the same index range. Indices towhich the convention applies are referred to as spatial (or, depending on context, spatiotemporal) indices. Notethat matching upper and lower indices are dummies that can be arbitrarily relabelled provided this does not leadto conflicting notation.
Observation
• Each term in the polynomial detA contains at most one factor Aij for each fixed i, j = 1, . . . , n.
• As a result, Aij does not depend on Aij for fixed i, j = 1, . . . , n:∂Aij
∂Aij=∂2 detA
∂A2ij
= 0.
• If A : R→Mn : t 7→ A(t) is a matrix-valued function,ddetA
dt=∂ detA
∂Aij
dAijdt
= AijdAijdt
(chain rule).
• AAT = ATA = detAI , or A adjA = adjAA = detAI , i.e. AjkAik = AkiAkj = detAδij .
• If A is invertible, then AT = adjA = detAA−1.
• Each entry Aij of A = cofA is a homogeneous polynomial of degree n−1 in terms of the entries Aij of A.
• Unlike A−1, A = cofA and AT = adjA are always well-defined, even if A is singular.

2. Tensor Calculus
2.1. Vector Spaces and Bases
Ansatz
An n-dimensional vector space V over R furnished with a basis {ei}.
Notation
Unless stated otherwise the Einstein summation convention applies to identical pairs of upper and lower indices.Thus if
{Xij
}is any collection of numbers, then Xi
idef=∑ni=1X
ii .
Terminology
The act of constraining one upper and one lower index to be equal—and thus tacitly assuming summation, v.s.—iscalled an index contraction, or a trace.
Remark
Contracted indices are dummies that can be arbitrarily relabeled, as opposed to free indices. Thus for exampleXii = Xj
j .
Remark
For each basis {ei} of V and each x ∈ V there exists a unique collection of real numbers{xi}
such thatx = xiei, recall chapter 1.
Terminology
The real numbers xi are referred to as the contravariant components of the vector x relative to the vector basis{ei}.
Definition 2.1 The Kronecker symbol, or Kronecker-δ, is defined as
δij =
{1 if i = j0 if i 6= j .
Theorem 2.1 Let x = xiei ∈ V and fj = Aijei define a change of basis. If xiei = yifi, then
xi = Aijyj or, equivalently, yi = Bijx
j ,
in which, by definition, AikBkj = δij .

8 Tensor Calculus
Caveat
Pay attention to the occurrence of the components Aij in the transformation of basis vectors ei and contravariantcomponents xi, respectively.
Observation
Given a smooth manifold—to be defined later—with a coordinate system{xi}
, the collection of linear partialderivative operators
{ei ≡ ∂i ≡ ∂/∂xi
}at any (implicit) fiducial point defines a vector space basis. Upon a
coordinate transformation xi = xi(xj) the chain rule relates the corresponding bases by
∂j = Aij∂i ,
in which fj ≡ ∂j ≡ ∂/∂xj , and
Aij =∂xi
∂xj.
This is formally identical to the basis transformation in Theorem 2.1 on page 7.
Notation
On a smooth manifold one often encounters vector decomposition relative to a coordinate basis, i.e. v = vi∂i.(The fiducial point is implicit here.)
Terminology
The set {∂i} is called a coordinate (vector) basis, or a holonomic (vector) basis. By definition it spans the tangentspace of the manifold at the fiducial point.
Reminder
• Basis vectors are labeled with lower indices.
• Contravariant vector components are labeled with upper indices.
Remark
The distinction into upper and lower indices is relevant only if the indices are intrinsically constrained to takevalues in the range {1, . . . , n}, where n = dimV .
2.2. Dual Vector Spaces and Dual Bases
Ansatz
An n-dimensional vector space V over R.
Definition 2.2 A linear functional on V is a linear mapping from V into R. In other words, f : V → R is a linearfunctional if for all x,y ∈ V , λ, µ ∈ R,
f(λx + µy) = λf(x) + µf(y) .

2.2 Dual Vector Spaces and Dual Bases 9
Remark
The set V ∗ consisting of all linear functionals on V can be turned into a vector space in the usual way, viz. letf , g ∈ V ∗ and λ, µ ∈ R, define the linear combination λf + µg ∈ V ∗ by virtue of the identification
(λf + µg)(x) = λf(x) + µg(x)
for all x ∈ V , recall chapter 1.
Definition 2.3 The dual space is the vector space of linear functionals on V : V ∗ = L (V,R).
Ansatz
An n-dimensional vector space V over R furnished with a basis {ei}, and its dual space V ∗.
Remark
Each basis {ei} of V induces a basis{ei}
of V ∗ as follows. If x = xiei, then ei(x) = xi.
Result 2.1 The dual basis{ei}
of V ∗ is uniquely determined through its defining property
ei(ej) = δij .
Proof of Result 2.1. Let f ∈ V ∗.
• For any x = xiei ∈ V we have f(x) = f(xiei) = f(ei)xi = f(ei)e
i(x) = (f(ei)ei)(x) = (fie
i)(x)
with fi = f(ei). This shows that the set {ei} spans V ∗.
• Suppose αiei = 0 ∈ V ∗, then αi = αjδji = αj e
j(ei) = (αj ej)(ei) = 0 ∈ R for all i = 1, . . . , n. This
shows that {ei} is a linearly independent set.
Assumption
In view of this result, it will henceforth be tacitly understood that a given vector space V (with basis {ei}) impliesthe existence of its dual space V ∗ (with corresponding dual basis
{ei}
).
Observation
The dual basis V ∗ has the same dimension as V .
Terminology
A linear functional f ∈ V ∗ is alternatively referred to as a covector or 1-form. The dual space V ∗ of a vectorspace V is also known as the covector space or the space of 1-forms.
Remark
For each covector basis{ei}
of V ∗ and each x ∈ V ∗ there exists a unique collection of real numbers {xi} suchthat x = xie
i.
Terminology
The real numbers xi are referred to as the covariant components of the covector x relative to covector basis{ei}
.
We end this section with the dual analogue of Theorem 2.1 on page 7:

10 Tensor Calculus
Theorem 2.2 The change of basis fj = Aijei induces a change of dual vector basis
f j = Bji ei ,
in which AkjBik = δij . Consequently, if x = xie
i = yifi ∈ V ∗, then
xi = Bji yj or, equivalently, yi = Ajixj .
Proof of Theorem 2.2.
• Given fj = A`je` and f i = Bikek we obtain δij = f i(fj) = Bike
k(A`je`) = BikA`j ek(e`) = BikA
`jδk` =
BikAkj , from which it follows that B = A−1.
• Thus if we define xiei = yifi, then yj f j = yjB
ji ei, whence xi = Bji yj .
• Inversion yields the last identity.
Terminology
• Theorem 2.1, page 7, defines the so-called vector transformation law.
• Theorem 2.2, page 10, defines the so-called covector transformation law.
Observation
Recall the observation on page 8. Given a smooth manifold with a coordinate system{xi}
, and a coordinatetransformation xi = xi(xj), the chain rule (at any fiducial point) states that
dxj = Bji dxi in which Bji =
∂xj
∂xi.
Identifying ei ≡ dxi and f j ≡ dxj , this is formally identical to the dual vector basis transformation inTheorem 2.2. In particular we have, recall Result 2.1,
dxi(∂j) = δij .
Notation
On a smooth manifold one often encounters covector decomposition relative to a coordinate basis, i.e. v = vidxi.
(The fiducial point is implicit here.)
Terminology
The set {dxi} is called a coordinate (dual vector) basis, or holonomic (dual vector) basis. By definition it spansthe cotangent space of the manifold at the fiducial point.
Reminder
• Basis covectors are labeled with upper indices.
• Covariant components are labeled with lower indices.

2.3 The Kronecker Tensor 11
2.3. The Kronecker Tensor
Ansatz
An n-dimensional vector space V over R.
Notation
Instead of a standard function notation for f ∈ V ∗ one often employs the bracket formalism 〈f , · 〉 ∈ V ∗. Functionevaluation is achieved by dropping a vector argument x ∈ V into the empty slot: 〈f ,x〉 = f(x) ∈ R. In particularwe have
〈ei, ej〉 = ei(ej) = δij
for dual bases, recall Result 2.1 on page 9.
Definition 2.4 The bilinear map 〈 · , · 〉 : V ∗ × V → R : (f ,x) 7→ 〈f ,x〉 is called the Kronecker tensor.
Remark
The general concept of a tensor will be explained in section 2.8.
Caveat
Do not confuse the Kronecker tensor with an inner product. Unlike the Kronecker tensor an inner product requirestwo vector arguments from the same vector space.
Observation
The Kronecker tensor is bilinear:
• ∀ f , g ∈ V ∗,x ∈ V, λ, µ ∈ R : 〈λf + µg,x〉 = λ〈f ,x〉+ µ〈g,x〉,
• ∀ f ∈ V ∗,x,y ∈ V, λ, µ ∈ R : 〈f , λx + µy〉 = λ〈f ,x〉+ µ〈f ,y〉.
• Result 2.1 on page 9 shows that the components of the Kronecker tensor are given by the Kronecker symbol.
• If f = fiei ∈ V ∗ and x = xiei ∈ V , then bilinearity of the Kronecker tensor implies 〈f ,x〉 =
fixj〈ei, ej〉 = fix
jδij = fixi. Thus Kronecker tensor and index contraction are close-knit.
Remark
• The components of the Kronecker tensor are independent of the choice of basis. (Verify!)
• Given V , the assumption on page 9 implies that the Kronecker tensor exists.
• Since V ∗ is itself a vector space one may consider its dual (V ∗)∗ = V ∗∗. Without proof we state that if V(and thus V ∗) is finite-dimensional, then V ∗∗ is isomorphic to, i.e. may be identified with V . This does notgeneralize to infinite-dimensional vector spaces.
Notation
The use of the formally equivalent notations f and 〈f , · 〉 for an element of V ∗ reflects our inclination to regardit either as an atomic entity, or as a linear mapping with unspecified argument. The previous remark justifies theuse of similar alternative notations for an element of V , viz. either as x, say, or as 〈 · ,x〉 ∈ V ∗∗ ∼ V .

12 Tensor Calculus
2.4. Inner Products
Ansatz
An n-dimensional vector space V over R.
Definition 2.5 An inner product on a real vector space V is a nondegenerate positive symmetric bilinear mappingof the form ( · | · ) : V × V → R which satisfies
• ∀x,y ∈ V : (x|y) = (y|x),
• ∀x,y, z ∈ V, λ, µ ∈ R : (λx + µy|z) = λ (x|z) + µ (y|z),
• ∀x ∈ V : (x|x) ≥ 0 and (x|x) = 0 iff x = 0.
Definition 2.5 will be our default. In the context of smooth manifolds it is referred to as a Riemannian innerproduct or, especially in physics, as a ‘Riemannian metric’. Occasionally we may encounter an inner product ona complex vector space. Below, z = a− bi ∈ C denotes the complex conjugate of z = a+ bi ∈ C.
Definition 2.6 An inner product on a complex vector space V is a nondegenerate positive hermitean sesquilinearmapping of the form ( · | · ) : V × V → R which satisfies
• ∀x,y ∈ V : (x|y) = (y|x),
• ∀x,y, z ∈ V, λ, µ ∈ R : (x|λy + µz) = λ (x|z) + µ (y|z),
• ∀x ∈ V : (x|x) ≥ 0 and (x|x) = 0 iff x = 0.
Caveat
• Note that for the complex case (λx + µy|z) = λ (x|z) + µ (y|z), whence the attribute ‘sesquilinear’.
• The term “inner product” is used in different contexts to denote bilinear or sesquilinear forms satisfyingdifferent sets of axioms. Examples include the Lorentzian inner product in the context of special relativity(v.i.) and the symplectic inner product in the Hamiltonian formalism of classical mechanics.
• Unlike with the Kronecker tensor, the existence of an inner product is never implied, but must always bestipulated explicitly.
Definition 2.7 A Lorentzian inner product on a real vector space V is a nondegenerate symmetric bilinear map-ping of the form ( · | · ) : V × V → R which satisfies
• ∀x,y ∈ V : (x|y) = (y|x),
• ∀x,y, z ∈ V, λ, µ ∈ R : (λx + µy|z) = λ (x|z) + µ (y|z),
• ∀x ∈ V ∃y ∈ V such that (x|y) 6= 0.

2.4 Inner Products 13
Terminology
A vector space V endowed with an inner product ( · | · ) is also called an inner product space.
Ansatz
An n-dimensional inner product space V over R furnished with a basis {ei}.
Definition 2.8 The Gram matrix G is the matrix with components gij = (ei|ej).
Remark
Clearly, G is symmetric. Another consequence of the definition is that G is invertible. For suppose G wouldbe singular, then there exists x = xiei ∈ V,x 6= 0 such that gijxj = 0. Consequently, 0 = xigijx
j =xi (ei|ej)xj =
(xiei|xjej
)= (x|x). This contradicts Definition 2.5 on page 12.
Terminology
The components of the inverse Gram matrix G−1 are denoted by gij , i.e.
gikgkj = δij .
An inner product, if it exists, can be related to the Kronecker tensor, as we will see below.
Ansatz
An n-dimensional inner product space V over R.
Theorem 2.3 There exists a bijective linear map G : V → V ∗ such that
• ∀x,y ∈ V : (x|y) = 〈G(x),y〉,
• ∀ x ∈ V ∗,y ∈ V :(G−1(x)|y
)= 〈x,y〉.
The matrix representations of G and G−1 are given by the Gram matrix G and its inverse G−1, respectively,recall Definition 2.8 on page 13.
Proof of Theorem 2.3.
• For fixed x ∈ V define x ∈ V ∗ as the linear map x : V → R : y 7→ (x|y). Subsequently define the linearmap G : V → V ∗ : x 7→ G(x) ≡ x.
• For the second part we need to prove invertibility of G. Suppose x ∈ V,x 6= 0, is such that G(x) = 0.Then 0 = 〈G(x),y〉 = (x|y) for all y ∈ V , contradicting the nondegeneracy property of the inner product.Hence G is one-to-one1. Since dimV = n <∞ it is also bijective, hence invertible.
• To compute the matrix representation G of G, decompose x = xiei, y = yiei, and G(x) = G(xiei) =xiGij e
j , with matrix components defined via G(ei) = Gij ej .
– By construction (first item above) and by virtue of bilinearity of the inner product and the definitionof the Gram matrix, we have 〈G(x),y〉 = (x|y) = xiyj (ei|ej) = gijx
iyj .
– By definition of duality, we have 〈G(x),y〉 = Gijxiyk〈ej , ek〉 = Gijx
iykδjk = Gijxiyj .
1The terms “one-to-one” and “injective” are synonymous. A function f : D → C is injective if it associates distinct arguments withdistinct values. If the codomain C of the function is replaced by its actual range f(D), then it is also surjective, and hence bijective.

14 Tensor Calculus
Since xi, yj ∈ R are arbitrary it follows that Gij = gij , recall Definition 2.8.
• Consequently, the inverse G−1 : V ∗ → V has a matrix representation G−1 corresponding to the inverseGram matrix: (G−1)ij = gij .
Remark
• Note the synonymous formulations: G(x) ≡ x ≡ 〈G(x), · 〉 ≡ (x| · ). Recall the comment on notation,page 11. Definition 2.9 below introduces yet another synonymous form.
• The Riesz representation theorem, which states that for each x ∈ V ∗ there exists one and only one x ∈ Vsuch that 〈x,y〉 = (x|y) for all y ∈ V , is an immediate consequence of Theorem 2.3, viz. x = G−1(x).
Notation
• We reserve boldface symbols for intrinsic quantities such as vectors, covectors, and (other) linear mappings,in order to distinguish them from their respective components relative to a fiducial basis.
Definition 2.9 The conversion operators ] : V → V ∗ and [ : V ∗ → V are introduced as shorthand for G,respectively G−1, viz. if v ∈ V , v ∈ V ∗, then
]vdef= G(v) ∈ V ∗ respectively [v
def= G−1(v) ∈ V .
Terminology
G is commonly known as the metric, and G−1 as the dual metric. The operators ] : V → V ∗ and [ : V ∗ → Vare pronounced as sharp and flat, respectively.
Caveat
In the literature, the roles of sharp and flat are often reversed! Make sure to adhere to an unambiguous convention.
Result 2.2 Let v = viei ∈ V and v = viei ∈ V ∗, then
• ]v = gijviej = vj e
j = v ∈ V ∗, with vj = gijvi;
• [v = gijviej = vjej = v ∈ V , with vj = gijvi.
Proof of Result 2.2. This follows directly from the definition of ] and [ using
• ]ei = G(ei) = gij ej ∈ V ∗, respectively
• [ei = G−1(ei) = gijej ∈ V .
Notation
Unless stated otherwise we will adhere to the following convention. If vi ∈ R, then vjdef= gijv
i. reversely, if
vi ∈ R, then vj def= gijvi.

2.5 Reciprocal Bases 15
Caveat
In the foregoing G ∈ L (V, V ∗) and G−1 ∈ L (V ∗, V ), with prototypes G : V → V ∗, resp. G−1 : V ∗ → V .However, one often interprets the metric and its dual as bilinear mappings of type G : V × V → R, resp.G−1 : V ∗ × V ∗ → R. It should be clear from the context which prototype is implied. We return to thisambiguity in section 2.8.
Reminder
In an inner product space vectors can be seen as “covectors in disguise”, vice versa.
2.5. Reciprocal Bases
Ansatz
An n-dimensional inner product space V over R furnished with a basis {ei}.
Definition 2.10 The basis {ei} of V induces a new basis{[ei}
of V given by [ei = gijej , the so-called recip-rocal basis.
Definition 2.11 The basis{ei}
of V ∗ induces a new basis {]ei} of V ∗ given by ]ei = gij ej , the so-called
reciprocal dual basis.
Caveat
• Instead of [ei one sometimes writes ei for the reciprocal of ei.
• Likewise, instead of ]ei one sometimes writes ei for the reciprocal of ei.
• Since we conventionally label elements of V by lower indices, and elements of V ∗ by upper indices, wewill adhere to the notation employing the [ and ] operator.
Remark
• The reciprocal basis is uniquely determined by the inner product.
• The Gram matrix of the reciprocal basis is G−1, with components([ei|[ej
)= gikgj` (ek|e`) =
gikgj`gk` = gij .
• We have([ei|ej
)= gik (ek|ej) = gikgkj = δij .
Terminology
The vectors [ei and ej are said to be perpendicular for i 6= j.
Remark
For each reciprocal basis{[ei}
of V and each x ∈ V there exists a unique collection of real numbers {xi} suchthat x = xi[e
i.
Terminology
The real numbers xi are referred to as the covariant components of the vector x relative to the basis {ei}.

16 Tensor Calculus
Reminder
• Reciprocal basis vectors are labeled with upper indices.
• Covariant components are labeled with lower indices.
• No confusion is likely to arise if we adhere to the notation using the [ and ] converters.
2.6. Bases, Dual Bases, Reciprocal Bases: Mutual Relations
Heuristics
Dual and reciprocal bases are close-knit. The exact relationship is clarified in this section.
Sofar, a vector space V and its associated dual space V ∗ have been introduced as a priori independent entities. Vand V ∗ are mutually connected by virtue of the “interaction” between their respective elements, recall Result 2.1on page 9. One nevertheless retains a clear distinction between a vector (element of V ) and a dual vector (elementof V ∗) throughout. That is, there is no mechanism to convert a vector into a dual vector, vice versa.
An inner product provides us with an explicit mechanism to construct a one-to-one linear mapping (i.e. dualvector) associated with each vector by virtue of the metric G, cf. Theorem 2.3 on page 13. An inner product alsoenables us to construct a reciprocal basis that allows us to mimic duality within V proper. “Interchangeability”of vectors and reciprocal vectors as well as that of vectors and dual vectors is governed by the Gram matrix Gand its inverse.
Ansatz
An n-dimensional inner product space V over R furnished with a basis {ei}.
Observation
Result 2.3 on page 13 states that each vector x ∈ V induces a dual vector x = G(x) ∈ V ∗. Let x = xieirelative to basis {ei} of V . Then2 x = xie
i relative to the corresponding dual basis {ei} of V ∗. According toDefinition 2.10 on page 15 we also have x = xi[e
i relative to the reciprocal basis {[ei} of V . Given xi ∈ R wehave xi = xi = gijx
j .
Caveat
Notice the distinct prototypes of metric G : V → V ∗ and linear map G : V → V represented by the Grammatrix G, i.e. ei = G ([ei).
Notation
No confusion is likely to arise if we use identical symbols, xi ≡ xi, to denote both dual as well as reciprocalvector components. The underlying basis ({ei}, respectively {[ei}), and thus the correct geometric interpretation,should be inferred from the context. By default we shall interpret xi as dual vector components, henceforthomitting theˆ symbol, i.e. x = xie
i ∈ V ∗.
2For the sake of argument we temporarily write xi for dual, and xi for reciprocal vector components.

2.7 Examples of Vectors and Covectors 17
Reminder
• A dual basis does not require an inner product, a reciprocal basis does.
• A dual basis spans V ∗, a reciprocal basis spans V .
• In an inner product space—with metric G—the components of a vector x ∈ V relative to the reciprocalbasis are identical to the components of the dual vector x = G(x) relative to the dual basis.
• Thus, in an inner product space with fixed metric G, one may loosely identify a vector x ∈ V and its dualvector x ∈ V ∗ to the extent that x = G(x) and ( · |x) = 〈x, · 〉.
• The metric and its dual, G, respectively G−1, provide the natural mechanism to “toggle” between elementsof V and V ∗. Abbreviations: G(x) = ]x, G−1(x) = [x.
• The Gram matrix and its inverse,G, respectivelyG−1, or rather the associated linear mappings G : V → Vand G−1 : V → V , provide natural mechanisms to “toggle” between elements of V and their reciprocalsin V .
2.7. Examples of Vectors and Covectors
It is important to learn to recognize covectors and vectors in practice, and to maintain a clear distinction through-out. Some important examples from mechanics may illustrate this.
Example
• Particle velocity v provides an example of a vector.
• Particle momentum p provides an example of a covector.
• The metric tensor allows us to relate these two: p = G(v) = ]v, or equivalently, v = G−1(p) = [p.
Example
• Displacement x relative to a fiducial point in a continuous medium (or in vacuo) provides an example of avector.
• Spatial frequency k provides an example of a covector.
• The Kronecker tensor allows us to construct a scalar from these two: 〈k,x〉 ∈ R (“phase”).
Caveat
• In practice one often refrains from a notational distinction between covectors and vectors, writing e.g. pand k instead of p and k, as we do here.
• By the same token it is a common malpractice to speak of “the momentum vector p” and the “wave vectork” even if covectors are intended. (Of course, technically speaking covectors are vectors.)

18 Tensor Calculus
2.8. Tensors
2.8.1. Tensors in all Generality
Ansatz
• An n-dimensional vector space V over R.
• A basis {ei} of V .
Definition 2.12 A tensor is a multilinear mapping of type
T : V ∗ × . . .× V ∗︸ ︷︷ ︸p
×V × . . .× V︸ ︷︷ ︸q
→ R
for some p, q ∈ N0.
Notation
Recall Definition 2.12. The following notation will be used to indicate tensor prototypes:
T ∈ V ⊗ . . .⊗ V︸ ︷︷ ︸p
⊗V ∗ ⊗ . . .⊗ V ∗︸ ︷︷ ︸q
def= Tp
q(V ) .
Caveat
• The ordering of arguments matters!
• Thus the prototype may be specified with a different arrangement of linear spaces V and V ∗.
Terminology
• We refer to T ∈ Tpq(V ) sometimes as a
(pq
)-tensor.
• T ∈ Tpq(V ) is referred to as a mixed tensor of contravariant rank p and covariant rank q.
• If q 6= 0, T ∈ T0q(V ) is called a covariant tensor of rank q.
• If p 6= 0, T ∈ Tp0(V ) is called a contravariant tensor of rank p.
• T ∈ T00(V ) is called a scalar. We identify T with its value in this case, i.e. T ∈ R.
• The words cotensor/contratensor are synonymous to covariant/contravariant tensor.
Example
Let T be a(
12
)-tensor, and x,x1,x2,y,y1,y2 ∈ V , z, z1, z2 ∈ V ∗, and λ1, λ2 ∈ R arbitrary. Then we have
• T(λ1z1 + λ2z2,x,y) = λ1T(z1,x,y) + λ2T(z2,x,y);
• T(z, λ1x1 + λ2x2,y) = λ1T(z,x1,y) + λ2T(z,x2,y);
• T(z,x, λ1y1 + λ2y2) = λ1T(z,x,y1) + λ2T(z,x,y2).

2.8 Tensors 19
Result 2.3 Special cases of low rank tensors:
• A(
00
)-tensor is a scalar, i.e. T0
0(V ) = R.
• A(
01
)-tensor is a covector, i.e. T0
1(V ) = V ∗.
• A(
10
)-tensor is a vector, i.e. T1
0(V ) = V .
Proof of Result 2.3. The first case is a convention previously explained. The second case is true by Definition 2.2,page 8, recall the terminology introduced on page 9. The third case is true by virtue of the isomorphism V ∗∗ = V ,recall the remark on page 11.
Definition 2.13 The outer product f ⊗ g : X × Y → R of two R-valued functions f : X → R and g : Y → Ris defined as follows:
(f ⊗ g)(x, y) = f(x)g(y) for all x ∈ X , y ∈ Y .
Since both vectors as well as covectors can be interpreted as R-valued mappings, the following definition is anatural one.
Definition 2.14 For each (p+q)-tuple of indices (i1, . . . , ip, j1, . . . , jq) the mixed(pq
)-tensor ei1⊗ . . .⊗eip⊗
ej1 ⊗ . . .⊗ ejq ∈ Tpq(V ) is defined by(
ei1 ⊗. . .⊗ eip ⊗ ej1 ⊗. . .⊗ ejq)(x1,. . ., xp,y1,. . .,yq) = 〈x1, ei1〉. . .〈xp, eip〉〈e
j1 ,y1〉. . .〈ejq ,yq〉 ,
for all x1,. . ., xp ∈ V ∗ and y1,. . .,yq ∈ V .
Caveat
• The symbol ⊗ used in Definition 2.14 is related to, but should not be confused with the one used inDefinition 2.12. Mnemonic: ei1 ⊗. . .⊗ eip ⊗ ej1 ⊗. . .⊗ ejq ∈ V ⊗ . . .⊗ V︸ ︷︷ ︸
p
⊗V ∗ ⊗ . . .⊗ V ∗︸ ︷︷ ︸q
.
Result 2.4 If T ∈ Tpq(V ) there exists a set of numbers ti1...ipj1...jq
∈ R such that
T = ti1...ipj1...jq
ei1 ⊗ . . .⊗ eip ⊗ ej1 ⊗ . . .⊗ ejq ,
viz. ti1...ipj1...jq= T(ei1 , . . . , eip , ej1 , . . . , ejq ).
Proof of Result 2.4. We have
T(ei1 , . . . , eip , ej1 , . . . , ejq
)= t
k1...kp`1...`q
(ek1 ⊗ . . .⊗ ekp ⊗ e`1 ⊗ . . .⊗ e`q
) (ei1 , . . . , eip , ej1 , . . . , ejq
)= t
k1...kp`1...`q
〈ei1 , ek1〉. . .〈eip , ekp〉〈e`1 , ej1〉. . .〈e`q , ejq 〉
= tk1...kp`1...`q
δi1k1 . . . δipkpδ`1j1 . . . δ
`qjq
= ti1...ipj1...jq
.

20 Tensor Calculus
So, for general covector and vector arguments ω1, . . . , ωp ∈ V ∗, v1, . . . ,vq ∈ V ,
T (ω1, . . . , ωp,v1, . . . ,vq) = ti1...ipj1...jq
ω1,i1 . . . ωp,ipvj11 . . . vjqq .
Terminology
• If T ∈ T01(V ) = V ∗ there exist numbers ti ∈ R such that T = tie
i, viz. ti = T(ei). These are thecovariant components of T relative to basis {ei}.
• If T ∈ T10(V ) = V there exist numbers ti ∈ R such that T = tiei, viz. ti = T(ei). These are the
contravariant components of T relative to basis {ei}.
• If T ∈ Tpq(V ), the numbers ti1...ipj1...jq
∈ R are referred to as the mixed components of T relative to basis{ei}.
Caveat
Laziness has led to the habit of saying that T = ti1...ipj1...jq
ei1 ⊗ . . .⊗ eip ⊗ ej1 ⊗ . . .⊗ ejq is expressed “relative tobasis {ei}”, where it would have been more accurate to refer to the actual basis {ei1⊗ . . .⊗eip⊗ ej1⊗ . . .⊗ ejq}.
Example
Recall Definition 2.4 on page 11. We have yet another notation for the Kronecker tensor 〈 · , · 〉 ∈ V ⊗ V ∗, viz.
〈 · , · 〉 = ei ⊗ ei = δijei ⊗ ej ,
in which we recognize the Kronecker symbol as the mixed components of the Kronecker tensor relative to basis{ei}. To see this, insert an arbitrary covector y = yie
i ∈ V ∗ and vector x = xiei ∈ V on the r.h.s. The result is(ei ⊗ ei
)(y,x) = 〈y, ei〉〈ei,x〉 = yjx
k〈ej , ei〉〈ei, ek〉 = yjxkδji δ
ik = yix
jδij = yixj〈ei, ej〉 = 〈y,x〉 .
Note that the Kronecker tensor is parameter free. For this reason it is sometimes called a constant tensor. Sinceits coefficients δij do not depend on the chosen basis (an untypical property for tensor coefficients), they are saidto constitute an invariant holor.
Observation
• Tpq(V ) constitutes a linear space subject to the usual rules for linear superposition of mappings, i.e. for all
S,T ∈ Tpq(V ) and all λ, µ ∈ R we declare
(λS + µT) ((co)vectors) = λS((co)vectors) + µT((co)vectors) ,
in which “(co)vectors” generically denotes an appropriate sequence of arbitrary vector and/or covectorarguments.
• We have dimTpq(V ) = np+q .
• Lexicographical ordering of the components ti1...ipj1...jqof tensors T ∈ Tp
q(V ) establishes an isomorphism
with the “column vector space” Rnp+q .

2.8 Tensors 21
Terminology
• The indexed collection of tensor coefficients ti1...ipj1...jqis also referred to as a holor.
• Physicists and engineers are wont to refer to holors as “tensors”. In a mathematician’s vocabulary the(basis dependent) holor is strictly to be distinguished from the associated (basis independent) tensor,T = t
i1...ipj1...jq
ei1 ⊗ . . .⊗ eip ⊗ ej1 ⊗ . . .⊗ ejq .
• If {ei} is a basis of V , a basis of Tpq(V ) is given by {ei1 ⊗ . . .⊗ eip ⊗ ej1 ⊗ . . .⊗ ejq}. But do recall the
caveat on page 20 concerning terminology.
Caveat
Parlance and notation in tensor calculus tend to be somewhat sloppy. This is the price one must pay for simplicity.It is up to the reader to resolve ambiguities, if any, and provide correct mathematical interpretations.
Example
It is customary to think of the metric G ∈ L (V, V ∗) as a covariant tensor of rank 2. In order to understand this,let us clarify a previous remark on page 15. For given metric G, define g ∈ V ∗ ⊗ V ∗ = T0
2(V ) as follows:
g : V × V → R : (v,w) 7→ g(v,w) ≡ (G(v)) (w) ≡ (v|w) ≡ 〈]v,w〉 ,
recall the sharp operator, introduced on page 14.
Notation
• Except when this might lead to confusion, no notational distinction will henceforth be made between suchdistinct prototypes as g and G. We will invariably write G, whether it is intended as a covariant 2-tensor (gin the example, implied when we write G(v,w)), or as a vector-to-covector converter (]-operator, impliedwhen we write G(v)).
• The ]- and [-operators provide convenient shorthands for the (dual) metric if one wishes to stress its actionas a vector-to-covector (respectively covector-to-vector) converter.
Terminology
Irrespective of the intended interpretation, G will be referred to as the metric tensor.
Theorem 2.4 If S ∈ Tpq(V ), T ∈ Tr
s(V ), with
S = si1...ipj1...jq
ei1 ⊗ . . .⊗ eip ⊗ ej1 ⊗ . . .⊗ ejq and T = ti1...irj1...jsei1 ⊗ . . .⊗ eir ⊗ ej1 ⊗ . . .⊗ ejs ,
then S⊗T ∈ Tp+rq+s(V ), with S⊗T = s
i1...ipj1...jq
tip+1...ip+rjq+1...jq+s
ei1 ⊗ . . .⊗ eip+r ⊗ ej1 ⊗ . . .⊗ ejq+s .
Terminology
For S ∈ Tpq(V ), T ∈ Tr
s(V ), the tensor S ⊗ T ∈ Tp+rq+s(V ) is also referred to as the outer product or tensor
product of S and T.
Caveat
Notice that we have chosen to adhere to a default ordering of basis and dual basis vectors that span the tensorproduct space, recall Definition 2.12, page 18. This boils down to a rearrangement such that the first p + rarguments of the product tensor S⊗T are covectors, and the remaining q + s arguments are vectors.

22 Tensor Calculus
Proof of Theorem 2.4. Apply Definition 2.13, page 19, accounting for the occurrence of multiplicative coeffi-cients: ((λf) ⊗ (µg))(x, y) = ((λf)(x))((µg)(y)) = λµf(x)g(y). Further details are left to the reader (takinginto account the previous caveat).
Caveat
The tensor product is associative, distributive with respect to addition and scalar multiplication, but not commu-tative. (Work out the exact meaning of these statements in formulae.)
Reminder
• A mixed tensor T ∈ Tpq(V ) has contravariant rank p and covariant rank q.
• The holor ti1...ipj1...jq∈ R of T ∈ Tp
q(V ) is labeled with p upper and q lower indices.
• Elements of the underlying basis {ei1 ⊗ . . . ⊗ eip ⊗ ej1 ⊗ . . . ⊗ ejq} of Tpq(V ), on the other hand, are
labeled with p lower and q upper indices.
• A holor depends on the chosen basis, the tensor itself (by definition!) does not. (We return to this aspect inSection 2.8.6.)
• The outer product of two tensors yields another tensor. Ranks add up.
2.8.2. Tensors Subject to Symmetries
Ansatz
• An n-dimensional vector space V over R.
• A basis {ei} of V .
• Tensor spaces of type Tpq(V ).
Certain subspaces of Tpq(V ) are of special interest. For instance, it may be the case that the ordering of (co)vector
arguments in a tensor evaluation does not affect the outcome.
Remark
Recall a previous remark on page 8 concerning the convention for index positioning. In particular, in Defini-tions 2.15 and 2.16 below, indices are used to label an a priori unconstrained number of arguments, whence theupper/lower index convention is not applicable.
Notation
• π = {π(α1), . . . , π(αp)} denotes a permutation of the p ordered symbols {α1, . . . , αp}.
• π(αi), i = 1, . . . , p, is shorthand notation for the i-th entry of π.
Definition 2.15 Let π = {π(1), . . . , π(p)} be any permutation of labels {1, . . . , p}, then T ∈ T0p(V ) is called a
symmetric covariant tensor if for all v1, . . . ,vp ∈ V
T(vπ(1), . . . ,vπ(p)) = T(v1, . . . ,vp) .

2.8 Tensors 23
Likewise, T ∈ Tp0(V ) is called a symmetric contravariant tensor if for all v1, . . . , vp ∈ V ∗
T(vπ(1), . . . , vπ(p)) = T(v1, . . . , vp) .
Notation
• The vector space of symmetric covariant p-tensors is denoted∨p(V ) ⊂ T0
p(V ).
• The vector space of symmetric contravariant p-tensors is denoted∨p
(V ) ⊂ Tp0(V ).
• Alternatively one sometimes writes∨p(V ) = V ∗ ⊗S . . .⊗S V
∗︸ ︷︷ ︸q
and∨p
(V ) = V ⊗S . . .⊗S V︸ ︷︷ ︸p
.
Example
An example of a symmetric covariant p-tensor on Rn is given by the set of p-th order partial derivatives of asufficiently smooth function f ∈ Cp(Rn,R) at a fiducial point:
Dpf(0) =∂pf(0)
∂xi1 . . . ∂xipei1 ⊗ . . .⊗ eip .
Notation
• For simplicity we write fi1...ip(0) for the partial derivatives in the above expression.
• The fiducial point (origin in this example) is often suppressed in the notation.
Caveat
The derivative tensor field Dpf : Rn → T0p(V ) : x 7→ Dpf(x)—as opposed to the isolated tensor Dpf(0) ∈
T0p(V )—fails to be a tensor field unless one replaces partial derivatives by covariant derivatives. (We return to
this later.)
It may also happen that an interchange of two arguments causes the outcome to change sign.
Definition 2.16 Let sgn (π) denote the sign of the permutation π, i.e. sgn (π) = 1 if it is even, sgn (π) = −1 ifit is odd. T ∈ T0
p(V ) is called an antisymmetric covariant tensor if for all v1, . . . ,vp ∈ V and any permutationπ = {π(1), . . . , π(p)} of labels {1, . . . , p},
T(vπ(1), . . . ,vπ(p)) = sgn (π)T(v1, . . . ,vp) .
Likewise, T ∈ Tp0(V ) is called an antisymmetric contravariant tensor if for all v1, . . . , vp∈V ∗
T(vπ(1), . . . , vπ(p)) = sgn (π)T(v1, . . . , vp) .
Notation
• The vector space of antisymmetric covariant p-tensors is denoted∧p(V ) ⊂ T0
p(V ).
• The vector space of antisymmetric contravariant p-tensors is denoted∧p
(V ) ⊂ Tp0(V ).
• Alternatively one sometimes writes∧p(V ) = V ∗ ⊗A . . .⊗A V
∗︸ ︷︷ ︸q
and∧p
(V ) = V ⊗A . . .⊗A V︸ ︷︷ ︸p
.

24 Tensor Calculus
It is convenient to admit tensor ranks p < 2 in this notation by a natural extension.
Assumption
•∨
0(V ) =∨0
(V ) =∧
0(V ) =∧0
(V ) = R. (This is consistent with Definitions 2.15 and 2.16 if we setπ= id, sgnπ=1 on the empty index set ∅).
•∨
1(V ) =∧
1(V ) = V ∗. (This follows from Definitions 2.15 and 2.16, with π= id, sgnπ=1 on {1}).
•∨1
(V ) =∧1
(V ) = V . (This follows from Definitions 2.15 and 2.16, with π= id, sgnπ=1 on {1}).
2.8.3. Symmetry and Antisymmetry Preserving Product Operators
Ansatz
• An n-dimensional vector space V over R.
• A basis {ei} of V .
• Tensor spaces of type∨p(V ),
∧p(V ),
∨p(V ),
∧p(V ).
The outer product, recall Definition 2.13 on page 19 and in particular Theorem 2.4 on page 21, does not preserve(anti)symmetry. For this reason alternative product operators are introduced specifically designed for
∨p(V ),∧
p(V ), and their contravariant counterparts.
Definition 2.17 For every v1, . . . , vk ∈ V ∗ we define the antisymmetric covariant k-tensor v1 ∧ . . . ∧ vk ∈∧k(V ) as follows: (
v1 ∧ . . . ∧ vk)
(x1, . . . ,xk) = det〈vi,xj〉 for all xj ∈ V .
Example
Let v, w ∈ V ∗, x,y ∈ V , then
(v ∧ w) (x,y) = det
(〈v,x〉 〈v,y〉〈w,x〉 〈w,y〉
)= 〈v,x〉〈w,y〉 − 〈w,x〉〈v,y〉 .
Alternatively,v ∧ w = v ⊗ w − w ⊗ v .
A more general result will be given on page 28.
Terminology
The infix operator ∧ is referred to as the wedge product or the antisymmetric product.
Observation
•(e1 ∧ . . . ∧ ek
)(e1, . . . , ek) = det〈ei, ej〉 = 1.
•(ei1 ∧ . . . ∧ eik
)(ej1 , . . . , ejk) = δi1...ikj1...jk
, recall the completely antisymmetric symbols on page 5, cf.
•(ei1 ⊗ . . .⊗ eik
)(ej1 , . . . , ejk) = δi1j1 . . . δ
ikjk
.

2.8 Tensors 25
Observation
Furthermore, the wedge product is associative, bilinear and antisymmetric (whence nilpotent, vice versa), i.e. ifu, v, w ∈ V ∗, λ, µ ∈ R, then
• (u ∧ v) ∧ w = u ∧ (v ∧ w).
• (λu + µv) ∧ w = λu ∧ w + µv ∧ w.
• u ∧ (λv + µw) = λu ∧ v + µu ∧ w.
• u ∧ u = 0, or, equivalently, u ∧ v = −v ∧ u.
A similar symmetry preserving product exists for symmetric tensors. To this end we need to introduce thesymmetric counterpart of a determinant.
Definition 2.18 The operator perm assigns a number to a square matrix in a way similar to det, but with a +sign for each term, recall page 4:
permA =
n∑j1,...,jn=1
|[j1, . . . , jn]|A1j1 . . . Anjn =1
n!
n∑i1, . . . , in = 1j1, . . . , jn = 1
|[i1, . . . , in] [j1, . . . , jn]|Ai1j1 . . . Ainjn .
Remark
The formal role of the completely antisymmetric symbols in the above expressions is to restrict summation torelevant terms. The absolute value discards minus signs for odd parity terms, recall the last line in the observationmade on page 4.
Terminology
The operator perm is called the permanent.
Example
Analogous to Table 1.1 on page 4 we have for a 3× 3 matrix A,
permA = A11A22A33+A12A23A31+A13A21A32+A13A22A31+A11A23A32+A12A21A33 .
Definition 2.19 For every k-tuple v1, . . . , vk ∈ V ∗ we define the symmetric covariant k-tensor v1 ∨ . . . ∨ vk ∈∨k(V ) as follows: (
v1 ∨ . . . ∨ vk)
(x1, . . . ,xk) = perm 〈vi,xj〉 .
Example
Let v, w ∈ V ∗, x,y ∈ V , then
(v ∨ w) (x,y) = perm(〈v,x〉 〈v,y〉〈w,x〉 〈w,y〉
)= 〈v,x〉〈w,y〉+ 〈w,x〉〈v,y〉 .
Alternatively,v ∨ w = v ⊗ w + w ⊗ v .
Terminology
The infix operator ∨ is referred to as the vee product or the symmetric product.

26 Tensor Calculus
Observation
The vee product is associative, bilinear and symmetric, i.e. if u, v, w ∈ V ∗, λ, µ ∈ R, then
• (u ∨ v) ∨ w = u ∨ (v ∨ w).
• (λu + µv) ∨ w = λu ∨ w + µv ∨ w.
• u ∨ (λv + µw) = λu ∨ v + µu ∨ w.
• u ∨ v = v ∨ u.
Observation
• dimT0p(V ) = np.
• {ei1 ∧ . . . ∧ eip | 1 ≤ i1 < i2 < . . . < ip−1 < ip ≤ n} is a basis of∧p(V ).
• {ei1 ∨ . . . ∨ eip | 1 ≤ i1 ≤ i2 ≤ . . . ≤ ip−1 ≤ ip ≤ n} is a basis of∨p(V ).
• For p ≥ 2, dim∧p(V ) + dim
∨p(V ) ≤ dimT0
p(V ), with strict equality iff p = 2.
Caveat
It is customary to suppress the infix operator ∨ in the notation.
Theorem 2.5 Cf. the observations above. We have
dim∧p(V ) =
(np
)and dim
∨p(V ) =
(n+ p− 1
p
).
Proof of Theorem 2.5.
• As for the first identity, a strictly increasing ordering of labels in a product of the form ei1 ∧ . . . ∧ eip canbe realized in exactly as many distinct ways as one can select p items out of n different objects.
• In particular, if p > n, then dim∧p(V ) = 0, i.e.
∧p(V ) = {0}.
• As for the second identity, the number of ways in which a non-decreasing ordering of labels in a productof the form ei1 ∨ . . . ∨ eip can be realized can be inferred from the following argument3. Any admissibleordering of labels can be represented symbolically by a sequence of p dots • , split into subsequences ofequal labels separated by n − 1 crosses × , each of which marks a unit label transition. Examples, takingn = 5, p = 7:
• • × • × × • • • × • ≡ e1 ∨ e1 ∨ e2 ∨ e4 ∨ e4 ∨ e4 ∨ e5
• • × • • • • × • × × ≡ e1 ∨ e1 ∨ e2 ∨ e2 ∨ e2 ∨ e2 ∨ e3
There are exactly (n+ p− 1)! permutations of the n+ p− 1 symbols in such sequences, with exactly p!,respectively (n−1)! indistinguishable permutations among the identical symbols • , respectively× , in anygiven realization.
3Courtesy of Freek Paans.

2.8 Tensors 27
Remark
Notice the qualitative differences between∧p(V ) and
∨p(V ) with respect to dimensionality scaling with p. In
the former case we have dim∧p(V ) = 0 as soon as p > n = dimV , i.e. no nontrivial antisymmetric tensors
with ranks p exceeding vector space dimension n exist. In contrast, nontrivial symmetric tensors do exist for anyrank.
Example
Let Bp and Bp denote bases for∧p
(V ), respectively∧p(V ), in Euclidean 3-space V = R3.
p Bp dim0 {1} 11 {e1, e2, e3} 32 {e1 ∧ e2, e1 ∧ e3, e2 ∧ e3} 33 {e1 ∧ e2 ∧ e3} 1
p Bp dim0 {1} 1
1{e1, e2, e3
}3
2{e1 ∧ e2, e1 ∧ e3, e2 ∧ e3
}3
3{e1 ∧ e2 ∧ e3
}1
Observation
Definitions 2.17, page 24, and 2.19, page 25, are straightforwardly complemented by similar ones applicable to(anti)symmetric contravariant tensors.
Definition 2.20 The linear operator S : T0p(V )→
∨p(V ), given by
(S (T)) (v1, . . . ,vp) =1
p!
∑π
T(vπ(1), . . . ,vπ(p)) ,
in which summation runs over all permutations π of the index set {1, . . . , p}, is called the symmetrisation map.
Observation
• If T = ti1...ip ei1 ⊗ . . .⊗ eip ∈ T0
p(V ), then S (T) = t(i1...ip)ei1 ⊗ . . .⊗ eip ∈
∨p(V ), in which
t(i1...ip)def=
1
p!
∑π
tπ(i1)...π(ip) .
• If T =∨p(V ) is symmetric, then T = S (T).
• The symmetrisation map is a projection, i.e. it is idempotent: S ◦S = S .
These observations explain the normalization factor1
p!, since
1
p!
∑π
1 = 1.
Observation
• The ∨-product is particularly convenient in the context of the symmetrisation operator, for we have
S (ei1 ⊗ . . .⊗ eip) =1
p!ei1 ∨ . . . ∨ eip .
• T ∨U = U ∨T.
• The case p = 0, q > 0 is covered by defining λ ∨U = λU for all λ ∈ R, U ∈∨q(V ).
• Rule of thumb: The action of p!S on a ⊗-product amounts to a formal replacement ⊗ → ⊗S ≡ ∨.

28 Tensor Calculus
The following result generalizes the example given on page 25:
Result 2.5 Let T ∈∨p(V ) and U ∈
∨q(V ), then T ∨U =
(p+ q)!
p!q!S (T⊗U).
Definition 2.21 The linear operator A : T0p(V )→
∧p(V ), given by
(A (T)) (v1, . . . ,vp) =1
p!
∑π
sgn (π)T(vπ(1), . . . ,vπ(p)) ,
is referred to as the antisymmetrisation map.
Observation
• If T = ti1...ip ei1 ⊗ . . .⊗ eip ∈ T0
p(V ), then A (T) = t[i1...ip]ei1 ⊗ . . .⊗ eip ∈
∧p(V ), in which
t[i1...ip]def=
1
p!
∑π
sgn (π)tπ(i1)...π(ip) .
• If T =∧p(V ) is antisymmetric, then T = A (T).
• The antisymmetrisation map is a projection, i.e. it is idempotent: A ◦A = A .
Recall a previous remark on the normalization factor (page 27).
Observation
• The ∧-product is particularly convenient in the context of antisymmetrisation, for we have
A (ei1 ⊗ . . .⊗ eip) =1
p!ei1 ∧ . . . ∧ eip .
• The case p = 0, q > 0 is covered by defining λ ∧U = λU for all λ ∈ R, U ∈∧q(V ).
• Rule of thumb: The action of p!A on a ⊗-product amounts to a formal replacement ⊗ → ⊗A ≡ ∧.
The following result generalizes the example given on page 24.
Result 2.6 Let T ∈∧p(V ) and U ∈
∧q(V ), then T ∧U =
(p+ q)!
p!q!A (T⊗U).
Notation
• The Einstein summation convention, recall page 7, is usually adapted in the context of antisymmetrictensors. In general, if T ∈
∧p(V ), then we may use either of the following equivalent decompositions:
– T = ti1...ip ei1 ⊗ . . .⊗ eip =
∑i1,...,ip
ti1...ip ei1 ⊗ . . .⊗ eip ,
– T = t|i1...ip|ei1 ∧ . . . ∧ eip =
∑i1<...<ip
ti1...ip ei1 ∧ . . . ∧ eip .

2.8 Tensors 29
Observation
Note that t|i1...ip|ei1 ∧ . . . ∧ eip = 1
p! ti1...ip ei1 ∧ . . . ∧ eip , recall the previous observation.
Proof of Result 2.6. Let T = t|i1...ip|ei1 ∧ . . .∧ eip and U = u|ip+1...ip+q|e
ip+1 ∧ . . .∧ eip+q , with antisymmetricholors ti1...ip and uip+1...ip+q . Then
T ∧U = t|i1...ip|u|ip+1...ip+q|ei1 ∧ . . . ∧ eip+q
∗=
1
p!q!ti1...ipuip+1...ip+q e
i1 ∧ . . . ∧ eip+q
?=
(p+ q)!
p!q!ti1...ipuip+1...ip+qA
(ei1 ⊗ . . .⊗ eip+q
)=
(p+ q)!
p!q!A (T⊗U) .
Notice that all p+ q indices can be assumed to be distinct. In step ∗ we have used the fact that there are preciselyp! (respectively q!) orderings of p (respectively q) distinct indices. In step ?we have used the previous observationon the relationship between wedge product and antisymmetrised outer product. The last step exploits linearity ofA .
Result 2.7 Let T ∈∧p(V ) and U ∈
∧q(V ), then T ∧U = (−1)pqU ∧T.
Proof of Result 2.7. Cf. the proof of Result 2.6. To change the positions of the p basis covectors ei1 , . . . , eip inthe product ei1 ∧ . . . ∧ eip+q so as to obtain the reordered product eip+1 ∧ . . . ∧ eip+q ∧ ei1 ∧ . . . ∧ eip requiresp (one for each eik , k = 1, . . . , p) times q (one for each ei` , ` = p+ 1, . . . , p+ q) commutations, each of whichbrings in a minus sign.
Remark
If p+ q > n = dimV , then T ∧U = 0 ∈∧p+q(V ). Indeed,
∧k(V ) = {0} for all k > n.
Remark
• Both S as well as A are idempotent: S ◦S = S , respectively A ◦A = A . Thus they are, by definition,projections from T0
p(V ) onto∨p(V ), respectively onto
∧p(V ).
• Note that we have not defined the property of (anti)symmetry for a genuine mixed tensor.
• Most definitions also apply to the covariant and contravariant parts of a mixed tensor separately, i.e. treatingthe mixed tensor as a covariant tensor by freezing its covector arguments, respectively as a contravarianttensor by freezing its vector arguments.
• A (say covariant) 2-tensor can always be decomposed into a sum of a symmetric and antisymmetric 2-tensor, viz. T = S + A, with S = S (T) and A = A (T), i.e. S(v,w) = 1
2 (T(v,w) + T(w,v)) andA(v,w) = 1
2 (T(v,w) − T(w,v)). This is consistent with the dimensionality equality for p = 2 in theobservation on page 26.
• A general tensor is typically neither symmetric nor antisymmetric, nor can it be split into a sum of asymmetric and antisymmetric tensor, recall the dimensionality inequality in the observation on page 26.
• The metric tensor G is symmetric, and so is its inverse, the dual metric tensor G−1.
• Both the ∧-product as well as the ∨-product obey the “usual” rules for associativity, and distributivity withrespect to tensor addition and scalar multiplication.

30 Tensor Calculus
Example
Let V = R3, furnished with standard basis {e1, e2, e3}. One conventionally denotes
e1 =∂
∂xe2 =
∂
∂ye3 =
∂
∂z.
It is then customary to denote the corresponding dual basis {e1, e2, e3} of V ∗ by
e1 = dx e2 = dy e3 = dz .
Let u = uiei,v = viei,w = wiei ∈ V be arbitrary vectors. Then we have
dx(v) = 〈dx,v〉 = v1 ,
dy(v) = 〈dy,v〉 = v2 ,
dz(v) = 〈dz,v〉 = v3 .
Example
Notation as in the previous example.
(dx ∧ dy) (v,w) = det
(〈dx,v〉 〈dx,w〉〈dy,v〉 〈dy,w〉
)= det
(v1 w1
v2 w2
)= v1w2 − v2w1 ,
(dx ∧ dz) (v,w) = det
(〈dx,v〉 〈dx,w〉〈dz,v〉 〈dz,w〉
)= det
(v1 w1
v3 w3
)= v1w3 − v3w1 ,
(dy ∧ dz) (v,w) = det
(〈dy,v〉 〈dy,w〉〈dz,v〉 〈dz,w〉
)= det
(v2 w2
v3 w3
)= v2w3 − v3w2 .
Example
Notation as in the previous example.
(dx ∧ dy ∧ dz) (u,v,w) = det
〈dx,u〉 〈dx,v〉 〈dx,w〉〈dy,u〉 〈dy,v〉 〈dy,w〉〈dz,u〉 〈dz,v〉 〈dz,w〉
= det
u1 v1 w1
u2 v2 w2
u3 v3 w3
= u1v2w3 + u3v1w2 + u2v3w1 − u3v2w1 − u1v3w2 − u2v1w3 .
Notice that sofar no inner product has been invoked in any of the definitions and results of this section. With thehelp of an inner product certain “straightforward” modifications can be made that generalize foregoing definitionsand results. The underlying mechanism is that of the conversion tools provided by Definition 2.9 on page 14.
Ansatz
• An n-dimensional inner product space V over R.
• Tensor spaces of type∨p(V ),
∧p(V ),
∨p(V ),
∧p(V ).

2.8 Tensors 31
Observation
Recall Theorem 2.3, page 13, Definition 2.9 page 14, and Result 2.2, page 14. An inner product on V induces aninner product on the spaces
∧p(V ) and
∨p(V ), as follows. For any v1, . . . ,vk,x1, . . . ,xk ∈ V , set
• (v1 ∧ . . . ∧ vk|x1 ∧ . . . ∧ xk) = det〈]vi,xj〉, respectively
• (v1 ∨ . . . ∨ vk|x1 ∨ . . . ∨ xk) = perm 〈]vi,xj〉.
Likewise for the spaces∧p(V ) and
∨p(V ):
•(v1 ∧ . . . ∧ vk|x1 ∧ . . . ∧ xk
)= det〈vi, [xj〉, respectively
•(v1 ∨ . . . ∨ vk|x1 ∨ . . . ∨ xk
)= perm 〈vi, [xj〉,
for any v1, . . . , vk, x1, . . . , xk ∈ V ∗.
Section 2.8.5 covers tensors on an inner product space in more generality.
2.8.4. Vector Spaces with an Oriented Volume
Ansatz
• An n-dimensional vector space V over R.
• A fixed basis {ei} of V .
• A nonzero n-form µ ∈∧n(V ).
Terminology
If µ(e1, . . . , en) = 1 then µ is called the unit volume form.
Observation
• We have dim∧n(V ) = 1.
• Consequently, if µ1,µ2 ∈∧n(V ), then µ1 and µ2 differ by a constant factor λ ∈ R.
• For the unit volume form we have, according to the observation on page 28,
µ = e1 ∧ . . . ∧ en =1
n![i1, . . . , in] ei1 ∧ . . . ∧ ein = [i1, . . . , in] A
(ei1 ⊗ . . .⊗ ein
).
The A -operator on the right hand side may be dropped, since its effect is void when combined withantisymmetric coefficients. We conclude that the covariant components of µ ∈
∧n(V ) are given by
µi1...in = [i1, . . . , in].
Caveat
The identification µi1...in = [i1, . . . , in] holds only relative to the fixed basis used above to construct µ. We referto section 2.8.6 for a basis independent evaluation.
Observation
Thus µ = µ|i1...in|ei1 ∧ . . . ∧ ein = µi1...in e
i1 ⊗ . . . ⊗ ein . This shows the convenience of the two variants ofEinstein summation.

32 Tensor Calculus
Definition 2.22 Let (V,µ) denote the vector space V endowed with the n-form µ ∈∧n(V ).
• (V,µ) is called a vector space with an oriented volume.
• (V,µ) is said to have a positive orientation if µ(e1, . . . , en) > 0.
• (V,µ) is said to have a negative orientation if µ(e1, . . . , en) < 0.
Terminology
The use of attributes “positive” and “negative” in this context is usually self-explanatory, e.g.
• given a fixed basis {ei} of V one refers to µ ∈∧n(V ) as a positive volume form if µ(e1, . . . , en) > 0,
and
• given a basic volume form µ ∈∧n(V ) one refers to {ei} as a positively oriented basis if µ(e1, . . . , en) >
0, etc.
Notation
Instead of (V,µ) we shall simply write V . The existence and nature of an oriented volume should be clear fromthe context.
Observation
Using Definition 2.17 on page 24 we may write, for x1, . . . ,xn ∈ V ,
µ (x1, . . . ,xn) = det〈ej ,xi〉 = det
〈e1,x1〉 . . . 〈e1,xn〉
......
〈en,x1〉 . . . 〈en,xn〉
,
which clearly reveals the role of the Kronecker tensor (and thus of the dual vector space V ∗) in the definitionof µ. Consistent with a foregoing observation it follows that the covariant components of µ = µi1...in e
i1 ⊗. . . ⊗ ein are given by µi1...in = µ(ei1 , . . . , ein) = [i1, . . . , in]µ(e1, . . . , en) = [i1, . . . , in] det〈ej , ei〉 =[i1, . . . , in] det δji = [i1, . . . , in].
Definition 2.23 Let a1, . . . ,ak ∈ V for some k ∈ {0, . . . , n}, then we define the (n− k)-form µya1y . . .yak ∈∧n−k(V ) as follows:
(µya1y . . .yak) (xk+1, . . . ,xn) = µ (a1, . . . ,ak,xk+1, . . . ,xn) .

2.8 Tensors 33
Observation
• A trivial rewriting of the previous observation allows us to rewrite Definition 2.23 on page 32 as follows:
(µya1y . . .yak) (xk+1, . . . ,xn) = det
〈e1,a1〉 . . . 〈e1,ak〉 〈e1,xk+1〉 . . . 〈e1,xn〉
......
......
〈en,a1〉 . . . 〈en,ak〉 〈en,xk+1〉 . . . 〈en,xn〉
.
• The holor of µya1y . . .yak ∈∧n−k(V ) for given a1, . . . ,ak ∈ V is established as follows:
(µya1y . . .yak)(eik+1
, . . . , ein)
= ai11 . . . aikk (µyei1y . . .yeik)
(eik+1
, . . . , ein)
= ai11 . . . aikk µ (ei1 , . . . , ein) = µi1...ina
i11 . . . a
ikk ,
in which we have used the decompositions ap = aipp eip for p = 1, . . . , k together with multilinearity.
• By the same token, expanding also xq = xiqq eiq for q = k + 1, . . . , n, we obtain
(µya1y . . .yak) (xk+1, . . . ,xn) = µi1...inai11 . . . a
ikk x
ik+1
k+1 . . . xinn .
Remark
• An oriented volume µ ∈∧n(V ) on a vector space V does not require an inner product.
• An oriented volume µ ∈∧n(V ) exists by virtue of the existence of the dual space V ∗.
• If µ(e1, . . . , en) = 1, then µ = e1 ∧ . . . ∧ en.
• More generally, if µ(e1, . . . , en) = 1, then µye1y . . .yek = ek+1 ∧ . . . ∧ en.
The following example explains the terminology of a “volume form”.
Example
Let the notation be as in the examples on page 30 and following. The space∧
3(V ) is spanned by{µ = dx ∧ dy ∧ dz}, which, according to the previous example, is given by
µ(u,v,w) = u1v2w3 + u3v1w2 + u2v3w1 − u3v2w1 − u1v3w2 − u2v1w3 .
This is the (signed) volume of a parallelepiped spanned by the (column vectors corresponding to the) vectorsu,v,w. The result is positive (negative) if the ordered triple u,v,w has the same (respectively opposite) orien-tation as the basis {e1, e2, e3}.
The example suggests that similar interpretations hold for forms of lower degrees. This is indeed the case, as thenext example shows.

34 Tensor Calculus
Example
The spaces∧
1(R3) and∧
2(R3) are spanned by {dx, dy, dz} and {dx ∧ dy, dx ∧ dz, dy ∧ dz}, respectively.
• According to the example on page 30 we have
〈dx,v〉 = v1 〈dy,v〉 = v2 〈dz,v〉 = v3 .
One recognizes the (signed) 1-dimensional volumes (lengths) of the parallel projections of the vector vonto the x, y, respectively z axis. Recall the examples on page 17 for a physical interpretation in terms ofparticle kinematics or wave phenomena.
• According to the example on page 30 we have
(dx ∧ dy) (v,w) = det
(〈dx,v〉 〈dx,w〉〈dy,v〉 〈dy,w〉
)= det
(v1 w1
v2 w2
)= v1w2 − v2w1 .
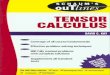
This is clearly the (signed) 2-dimensional volume (surface area) of the parallelogram spanned by v and was it exposes itself from a perspective along the z direction, i.e. the area of the parallelogram after projectionalong the z axis onto the x-y plane, cf. Fig. 2.1.
Figure 2.1: Illustration of (dx ∧ dy) (v,w) as the area of the cast shadow of a solar panel onto the ground (x–y-plane) when lit from above (along z-direction). Note that (v ∧w) (dx, dy) = (dx ∧ dy) (v,w) provides anequivalent interpretation of the same configuration.
2.8.5. Tensors on an Inner Product Space
Ansatz
An n-dimensional inner product space V over R.
Heuristics
The same mechanism that allows us to toggle between vectors and dual vectors in an inner product space, viz. viathe ]- and [-operator associated with the metric G, also allows us to establish one-to-one relationships betweenTpq(V ) and Tr
s(V ), provided total rank is the same: p + q = r + s. This implies that—in an inner productspace—tensor types can be ordered hierarchically according to their total ranks, and that, given fixed total rank, atensor can be represented in as many equivalent ways as there are ways to choose its covariant and contravariantrank consistent with its total rank. The basic principle is most easily understood by an example.

2.8 Tensors 35
Example
Let us interpret the metric G as an element of T02(V ), as previously discussed. We may consider the following
four equivalent alternatives:
• G : V × V → R : (v,w) 7→ G(v,w);
• H : V ∗ × V ∗ → R : (v, w) 7→ H(v, w)def= G([v, [w);
• I : V ∗ × V → R : (v,w) 7→ I(v,w)def= G([v,w);
• J : V × V ∗ → R : (v, w) 7→ J(v, w)def= G(v, [w).
Note that G ∈ T02(V ), H ∈ T2
0(V ), I ∈ T11(V ), J ∈ T1
1(V ). If {ei} is a basis of V , then
• G = gij ei ⊗ ej = ]ei ⊗ ei = ei ⊗ ]ei;
• H = gijei ⊗ ej = [ei ⊗ ei = ei ⊗ [ei;
• I = δijei ⊗ ej = ei ⊗ ei = [ei ⊗ ]ei;
• J = δji ei ⊗ ej = ei ⊗ ei = ]ei ⊗ [ei.
Caveat
The above example declines from the strict ordering of the spaces V and V ∗ in the domain of definition of atensor, as introduced in Definition 2.12 on page 18. This explains the existence of two distinct tensors, I 6= J, ofequal rank
(11
). Note that I(v,w) = J(w, v).
Definition 2.24 Recall Result 2.2 on page 14 and Definition 2.12 on page 18. For any p, q ∈ N0 we define thecovariant representation ]T ∈ T0
p+q(V ) of T ∈ Tpq(V ) as follows:
]T(v1, . . . ,vp+q) = T(]v1, . . . , ]vp,vp+1, . . . ,vp+q) for all v1, . . . ,vp+q ∈ V .
Likewise, the contravariant representation [T ∈ Tp+q0 (V ) of T ∈ Tp
q(V ) is defined as follows:
[T(v1, . . . , vp+q) = T(v1, . . . , vp, [vp+1, . . . , [vp+q) for all v1, . . . , vp+q ∈ V ∗.
In general, a mixed representation of T ∈ Tpq(V ) is obtained by toggling an arbitrary subset of (dual) vector
spaces V and V ∗ in the domain of definition of the tensor by means of the metric induced {], [}-mechanism in asimilar fashion.

36 Tensor Calculus
Example
Suppose T ∈ T12(V ) is given relative to a basis {ei} of V by T = tijkei ⊗ ej ⊗ ek. Let u = uie
i, v = vj ej ,
w = wkek, u = uiei, v = vjej , w = wkek. Then ]T = tijke
i ⊗ ej ⊗ ek and [T = tijkei ⊗ ej ⊗ ek. In termsof components:
T(u,v,w) = tijkuivjwk ,
]T(u,v,w) = T(]u,v,w) = tijkuivjwk ,
[T(u, v, w) = T(u, [v, [w) = tijkuivjwk .
(2.1)
The remaining five mixed representations are
T1(u, v,w) = T(u, [v,w) = tijkuivjwk ,
T2(u,v, w) = T(u,v, [w) = tijkuiv
jwk ,
T3(u, v, w) = T(]u, [v, [w) = tijkuiv
jwk ,
T4(u, v,w) = T(]u, [v,w) = tijku
ivjwk ,
T5(u,v, w) = T(]u,v, [w) = tijkuivjwk ,
(2.2)
making up the total of 23 = 8 different representations of the rank-3 tensor T, corresponding to the number ofpossibilities to toggle the arguments of the tensor’s 3 slots.
Caveat
The example shows that one quickly runs out of symbols if one insists on a unique naming convention for alldistinct tensors that can be constructed in this way, especially for high ranks. One could opt for a systematiclabeling, e.g. using a binary subscript to denote which argument requires a toggle (1) and which does not (0). Inthat case we would have, in the above example, T = T000, ]T = T100, [T = T011, T1 = T010, T2 = T001,T3 = T111, T4 = T110, T5 = T101.
Other labeling policies are possible, e.g. using a similar 3-digit binary code to denote argument type, 0 for avector and 1 for a covector, say. This would lead to the following relabeling: T = T100, ]T = T000, [T = T111,T1 = T110, T2 = T101, T3 = T011, T4 = T010, T5 = T001.
Conventions like these are, despite the mathematical clarity they provide, rarely used. One often simply writes Tfor all cases, relying on the particular tensor prototype for disambiguation (“function overloading”).
Notation
• By abuse of notation one invariably uses the same symbol, T say, to denote any of the (covariant, con-travariant, or mixed) prototypes discussed above.
• By the same token the space Tk(V ) =⋃p+q=kT
pq(V ) collectively refers to all tensors of total rank k.
• If a particular prototype T ∈ Tpq(V ) is intended it should be clear from the context.
• Instead of the potentially confusing notation ti1...irj1...jsfor a mixed holor one often writes ti1...ir j1...js , i.e. one
with a manifest ordering of indices.
Observation
• The invocation of the ]-operator to a vector argument of the tensor is reflected in the holor as an indexlowering.
• The invocation of the [-operator to a dual vector argument of the tensor is reflected in the holor as an indexraising.

2.8 Tensors 37
Caveat
• Recall that ]ei = G(ei) = gij ej , respectively [ei = G−1(ei) = gijej . Thus, at the level of (dual) basis
vectors, ] raises, and [ lowers indices!
• Notice the way indices are raised or lowered in a mixed holor, viz. such as to respect the index ordering, cf.a previous remark on mixed holor notation.
Reminder
• In an inner product space, tensor (holor) indices can be raised or lowered with the help of the (dual) metrictensor.
• As a rule of thumb, consistency of free index positioning determines whether and how to use metric anddual metric components, gij or gij , in an expression involving ] or [.
2.8.6. Tensor Transformations
2.8.6.1. “Absolute Tensors”
Ansatz
• An n-dimensional vector space V over R.
• A basis {ei} of V .
• A linear space of mixed tensors, Tpq(V ).
Recall that a holor depends on the chosen basis, but the corresponding tensor itself does not. This implies thatholors transform in a particular way under a change of basis, which is characteristic for tensors. In fact, in theliterature tensors are often defined by virtue of the tensor transformation law governing their holors. Here wepresent it essentially as a result.
Result 2.8 Let fj = Aijei define a change of basis, with transformation matrixA. DefineB = A−1, i.e.AB = I ,or in terms of components, AikB
kj = δij . Then
T = ti1...ipj1...jq
ei1 ⊗ . . .⊗ eip ⊗ ej1 ⊗ . . .⊗ ejqdef= t
i1...ipj1...jq
fi1 ⊗ . . .⊗ fip ⊗ f j1 ⊗ . . .⊗ f jq ,
iff the holor adheres to the tensor transformation law,
ti1...ipj1...jq
= A`1j1 . . . A`qjqBi1k1 . . . B
ipkptk1...kp`1...`q
.
Proof of Result 2.8. Suppose f i = Cij ej . Then, by definition of duality,
δijdef= 〈f i, fj〉 = 〈Cikek, A`je`〉
∗= CikA
`j〈ek, e`〉
def= CikA
`jδk` = CikA
kj ,
whence C = A−1 = B. Bilinearity of the Kronecker tensor has been used in ∗. Consequently,
ei = B`i f` and ej = Ajk fk .

38 Tensor Calculus
Substitution into the basis expansion of T yields the stated result for the respective holors.
Remark
The homogeneous nature of the tensor transformation law implies that a holor equation of the form ti1...ipj1...jq
= 0holds relative to any basis if it holds relative to a particular one.
Example
With the same notation as used in Result 2.8 we have for a vector v = viei = vifi:
vi = Bijvj ,
also referred to as vector transformation law. Recall Theorem 2.1 on page 7.
Example
Let df = ∂if ei ∈ V ∗ denote the gradient of a scalar function f ∈ C1(Rn), interpreted as a dual (!) vector and
evaluated at a fixed point. The interpretation of this is as follows. If v = viei ∈ V , then
〈df,v〉 = ∂ifvi ∗= (∇f |v) ,
the directional derivative of f along v. The equality marked by ∗ holds only if V is an inner product space, inwhich case we identify∇f = [df ∈ V .According to the tensor transformation law we have df = ∂if f
i, with f i = Bij ej , and
∂if = A`i∂`f .
Notice the analogy with “infinitesimal calculus”. Indeed, a change of coordinates, x 7→ x = φ(x), induces areparametrization df = ∂ifdx
i = ∂ifdxi, in which
∂if =∂f
∂xi=
∂f
∂x`∂x`
∂xi= A`i∂`f with A`i
def=
∂x`
∂xi,
by the chain rule.
Caveat
One should distinguish between the new variable x and the coordinate transformation function φ that relates it tothe original variable x by x = φ(x). In practice one often treats x either as a variable or as a function (i.e. x ≡ φ),depending on context. Likewise for x and φ−1.
Example
Recall the observation on page 10, which confirms the tensor transformation law for the dual basis vectors dxi:
dxi =∂xi
∂xjdxj = Bijdx
j ,
with B = A−1, cf. the previous example.
Caveat
Compare the latter example of the transformation law for a basis dual vector, dxi = Bijdxj , to the one on page 38
for the components (holor) of a vector, vi = Bijvj . The apparent formal correspondence has led practitioners
of tensor calculus (mostly physicists and engineers) to interpret the dual basis vector dxi as the “componentsof an infinitesimal displacement vector”. This misinterpretation is, although potentially confusing, harmless andindeed justified to the extent that it is consistent with the stipulated tensor transformation laws for basis dualvectors, respectively regular vector components.

2.8 Tensors 39
2.8.6.2. “Relative Tensors”
Recall the unit volume form introduced in section 2.8.4. On page 31 it was anticipated with a modest amountof foresight that the holor µi1...in = [i1, . . . , in] depends on the chosen basis. Heuristically this is clear fromthe geometric interpretation provided by the example on page 33 in terms of the volume of the parallelepipedspanned by the basis vectors. Let us scrutinize the situation more carefully.
Ansatz
• An n-dimensional vector space V over R.
• A fixed basis {ei} of V .
• The unit volume form µ = µ|i1...in|ei1 ∧ . . . ∧ ein = µi1...in e
i1 ⊗ . . . ⊗ ein ∈∧n(V ), with µi1...in =
[i1, . . . , in].
The following lemma allows us to compute the holor of µ relative to an arbitrary basis, given its canonical form[i1, . . . , in] relative to a fiducial basis, via Result 2.8, page 37.
Lemma 2.1 Let µ = µi1...in ei1 ⊗ . . . ⊗ ein ∈
∧n(V ), with µi1...in = [i1, . . . , in] relative to basis {ei} of V ,
and fj = Aijei, so that ei = Aij fj . Setting µ = µi1...in f
i1 ⊗ . . .⊗ f in , we have
µj1...jn = Ai1j1 . . . Ainjnµi1...in = detAµj1...jn .
Proof of Lemma 2.1. In accordance with Result 2.8, page 37, we have
µ = µi1...in ei1 ⊗ . . .⊗ ein = µi1...inA
i1j1. . . Ainjn f
j1 ⊗ . . .⊗ f jn .
This proves the first identity. Using µi1...in = [i1, . . . , in], together with an observation made on page 5 in thecontext of the determinant, this may be rewritten as
µ = detA [j1, . . . , jn] f j1 ⊗ . . .⊗ f jn .
This establishes the proof of the last identity.
Observation
• Note that detA is the volume scaling factor of the transformation with matrix A.
• If µ (e1, . . . , en) = 1, then µ (f1, . . . , fn) = detA.
Heuristics
Clearly, the constant antisymmetric symbol fails to define an invariant holor of a tensor. The definition of theholor in terms of the antisymmetric symbol requires us to single out a preferred basis relative to which it holds,i.e. the fiducial basis {ei} has a preferred status among all possible bases. The question arises whether it ispossible to give an invariant expression for the holor, i.e. one that holds in any basis, so that all bases are treatedon equal foot and no a priori knowledge of a preferred one is needed. This is indeed possible. There are two waysto remedy the problem:
1. without the help of an inner product (Result 2.9), respectively
2. with the help of an inner product (Definition 2.25 and Result 2.10).

40 Tensor Calculus
Result 2.9 Recall Result 2.8, page 37, for notation. If
µ = µ|i1...in|ei1 ∧ . . . ∧ ein = µ|i1...in|f
i1 ∧ . . . ∧ f in ,
and, by definition,
µi1...indef= (detA)
−1Aj1i1 . . . A
jninµj1...jn ,
then µi1...in ≡ µi1...in = [i1, . . . , in] is an invariant holor.
Terminology
• This adapted transformation law is also known as the relative tensor transformation law. The attribute“relative” refers to the occurrence of (a power of) the Jacobian determinant.
• By virtue of the relative tensor transformation law governing its holor, µ is referred to as a relative tensor.Strictly speaking this terminology refers to its holor definition!
Proof of Result 2.9. Using an observation on page 5 we find
µi1...indef= (detA)
−1Aj1i1 . . . A
jninµj1...jn = (detA)
−1Aj1i1 . . . A
jnin
[j1, . . . , jn]
= (detA)−1
[i1, . . . , in] detA = [i1, . . . , in] = µi1...in .
Remark
• In Lemma 2.1 on page 39 the holor µi1...in = [i1, . . . , in] is transformed according to the absolute tensortransformation law, recall Result 2.8 on page 37.
• In Result 2.9 the holor µi1...in = [i1, . . . , in] is transformed according to the relative tensor transformationlaw.
• There is no inconsistency, since in the former case no form invariance was presumed, i.e. in the former casethe definition µi1...in = [i1, . . . , in] holds only relative to a fiducial basis {ei}, whereas in the latter casethe same definition holds relative to any basis.
2.8.6.3. “Pseudo Tensors”
Ansatz
• An n-dimensional inner product space V over R.
• A fixed basis {ei} of V .
• The unit volume form µ = µ|i1...in|ei1 ∧ . . . ∧ ein = µi1...in e
i1 ⊗ . . . ⊗ ein ∈∧n(V ), with µi1...in =
[i1, . . . , in].
Notation
For brevity one denotes the determinant of the Gram matrix, gij = (ei|ej), by g = det gij , recall page 5concerning a remark on the use of indices, and Definition 2.8 on page 13.

2.8 Tensors 41
Definition 2.25 The Levi-Civita tensor is the unique unit n-form of positive orientation:
ε =√g e1 ∧ . . . ∧ en = ε|i1...in|e
i1 ∧ . . . ∧ ein .
Observation
• εi1...in =√g [i1, . . . , in] =
√gµi1...in relative to the fiducial basis {ei}.
• ε = εi1...in ei1⊗. . .⊗ein = ε|i1...in|e
i1∧. . .∧ein , recall page 7 and page 28 for the summation conventionsemployed.
• Relative to an orthonormal basis we have ε = µ.
Theorem 2.6 The contravariant representation of the Levi-Civita tensor, [ε ∈∧n
(V ), recall Definition 2.24 onpage 35, is given by [ε = ε|i1...in|ei1 ∧ . . . ∧ ein , with holor representation
εi1...in =1√g
[i1, . . . , in] .
Proof of Theorem 2.6. It suffices to prove the validity of the holor representation by index raising:
εi1...in = gi1j1 . . . ginjnεj1...jn = gi1j1 . . . ginjn√g [j1, . . . , jn] =
1√g
[i1, . . . , in] .
In the last step we have made use of the fact that gi1j1 . . . ginjn [j1, . . . , jn] = det gij [i1, . . . , in], an observationmade on page 5, together with the fact that det gij = 1/ det gij .
Observation
• εi1...in =1√g
[i1, . . . , in] =1√gµi1...in relative to the fiducial basis {ei}.
• [ε = εi1...inei1 ⊗ . . . ⊗ ein = ε|i1...in|ei1 ∧ . . . ∧ ein , recall page 7 and page 28 for the conventionsemployed.
• Relative to an orthonormal basis we have [ε = [µ.
Result 2.10 Recall Result 2.8, page 37, for notation. Let
ε = ε|i1...in|ei1 ∧ . . . ∧ ein
relative to basis {ei}, with εi1...in =√g [i1, . . . , in]. Moreover, let
ε = ε|i1...in|fi1 ∧ . . . ∧ f in
relative to {fi} with fi = Ajiej . Then the pseudotensor transformation law,
εi1...indef= sgn (detA)Aj1i1 . . . A
jninεj1...jn ,
renders the holor form invariant, in the sense that εi1...in =√g [i1, . . . , in].

42 Tensor Calculus
Proof of Theorem 2.10. By virtue of the transformation properties of gij , recall Result 2.8 on page 37, one obtains
gij = AkiA`jgk` ,
whence √g = |detA|√g .
By definition of the pseudotensor transformation law we have, using an observation on page 5,
εi1...indef= sgn (detA)Aj1i1 . . . A
jninεj1...jn = sgn (detA)Aj1i1 . . . A
jnin
√g [j1, . . . , jn]
= sgn (detA) detA√g [i1, . . . , in] = |detA|√g [i1, . . . , in] =
√g [i1, . . . , in] .
Terminology
• The Levi-Civita tensor is referred to as a pseudotensor, because its holor (!) transforms according to thepseudotensor transformation law of Result 2.10, page 41, not the absolute tensor transformation law ofResult 2.8, page 37. Notice the dependence on the orientation of the basis.
• In the literature the Levi-Civita tensor ε is often identified with the relative tensor µ, recall page 40 forterminology.
The following definition is based on an earlier observation, recall page 5.
Definition 2.26 The generalised Kronecker, or permutation symbol, is defined as
δi1...ikj1...jk= det
δi1j1 . . . δi1jk...
...δikj1 . . . δikjk
=
+1 if (i1, . . . , ik) even permutation of (j1, . . . , jk) ,−1 if (i1, . . . , ik) odd permutation of (j1, . . . , jk) ,0 otherwise .
Observation
• εj1...jnεi1...in = µj1...jnµi1...in = δi1...inj1...jn
.
• ε`1...`kj1...jn−kε`1...`ki1...in−k = µ`1...`kj1...jn−kµ
`1...`ki1...in−k = k!δi1...in−kj1...jn−k
.
• For the matrix A of a mixed tensor A ∈ T11(V ) we have detAij =
1
n!δi1...inj1...jn
Aj1i1 . . . Ajnin
.
2.8.7. Contractions
Ansatz
• An n-dimensional vector space V over R.
• A basis {ei} of V .
• A linear space of mixed tensors, Tpq(V ).

2.9 The Hodge Star Operator 43
Definition 2.27 Let T ∈ T11(V ). The trace, trT ∈ R, of T is defined as follows:
trT = T(ei, ei) .
Remark
• The tr -operator is applicable to any mixed tensor T ∈ Tpq(V ) provided p, q ≥ 1, viz. by arbitrarily fixing
p− 1 covector and q − 1 vector arguments.
• Without “frozen” arguments one may interpret trT as a mixed tensor trT ∈ Tp−1q−1(V ).
• The tr -operator lowers both covariant and contravariant ranks by one.
Caveat
• In general, the notation trT is ambiguous for T ∈ Tpq(V ), unless T is symmetric with respect to both
covector as well as vector arguments. (This is manifest if p = q = 1.)
• One could decorate the tr -operator with disambiguating subscripts and superscripts so as to indicate thecovector/vector argument pair it applies to. This is hardly ever done in the literature. Instead, ambiguitiesshould be resolved from the context.
2.9. The Hodge Star Operator
Ansatz
• An n-dimensional inner product space V over R furnished with a basis {ei}.
• The Levi-Civita tensor ε =√ge1 ∧ . . . ∧ en = ε|i1...in|e
i1 ∧ . . . ∧ ein ∈∧n(V ).
Definition 2.28 Let a1, . . . ,ak ∈ V . The Hodge star operator ∗ :∧k(V )→
∧n−k(V ) is defined as follows:
{∗1 = ε for k = 0,∗ (]a1 ∧ . . . ∧ ]ak) = εya1y . . .yak for k = 1, . . . , n,
followed by linear extension.
Remark
The Hodge star operator establishes an isomorphism between∧k(V ) and
∧n−k(V ), recall the dimensionality
argument on page 26:
dim∧k(V ) =
(nk
)=
(n
n− k
)= dim
∧n−k(V ) .

44 Tensor Calculus
Observation
• The holor of the tensor ∗ (]a1 ∧ . . . ∧ ]ak) for fixed ap = aipp eip , with p = 1, . . . , k, is obtained as follows:
(∗ (]a1 ∧ . . . ∧ ]ak))(eik+1
, . . . , ein)
= ai11 . . . aikk (∗ (]ei1 ∧ . . . ∧ ]eik))
(eik+1
, . . . , ein)
def= ai11 . . . a
ikk (εyei1y . . .yeik)
(eik+1
, . . . , ein)
= ai11 . . . aikk ε (ei1 , . . . , ein) = εi1...ina
i11 . . . a
ikk .
• By the same token, expanding also xq = xiqq eiq for q = k + 1, . . . , n, we obtain
(∗ (]a1 ∧ . . . ∧ ]ak)) (xk+1, . . . ,xn) = εi1...inai11 . . . a
ikk x
ik+1
k+1 . . . xinn .
Result 2.11 Alternatively, we may rewrite Definition 2.28 as follows:{∗1 = ε for k = 0,∗(a1 ∧ . . . ∧ ak
)= εy[a1y . . .y[ak for k = 1, . . . , n.
In this case we find, setting ap = apjp ejp for p = 1, . . . , k, and using ej = gij]ei,(
∗(a1 ∧ . . . ∧ ak
)) (eik+1
, . . . , ein)
= a1j1 . . . akjk
(∗(ej1 ∧ . . . ∧ ejk
)) (eik+1
, . . . , ein)
= gi1j1 . . . gikjka1j1 . . . akjk
(∗ (]ei1 ∧ . . . ∧ ]eik))(eik+1
, . . . , ein)
def= gi1j1 . . . gikjka1j1 . . . a
kjk
(εyei1y . . .yeik)(eik+1
, . . . , ein)
= gi1j1 . . . gikjka1j1 . . . akjkε (ei1 , . . . , ein)
= εi1...ingi1j1 . . . gikjka1j1 . . . a
kjk.
Observation
As a rule of thumb, in order to compute the holor of the Hodge star of a general antisymmetric cotensor ofrank k, the holor of which has free indices i1, . . . , ik, say, raise all indices and contract with the antisymmetricεi1...in -symbol. That is, if A ∈
∧k(V ), then the holor of ∗A ∈
∧n−k(V ) is given by
∗Aik+1...indef= (∗A)
(eik+1
, . . . , ein)
=1
k!εi1...ing
i1j1 . . . gikjkAj1...jk .
In other words,∗A = ∗Aik+1...in e
ik+1 ⊗ . . .⊗ ein = ∗A|ik+1...in|eik+1 ∧ . . . ∧ ein .
Remark
• Taking k = 0 in the above observation is consistent with ∗1 = ε.
• Taking k = n shows that ∗ε = 1.

3. Differential Geometry
3.1. Euclidean Space: Cartesian and Curvilinear Coordinates
In this chapter we consider tensor fields, i.e. tensors, in the widest sense as introduced in Chapter 2, attached to allpoints of an open subset Ξ ⊂ Rn and considered as “smoothly varying” functions of those points. The space Rnrepresents n-dimensional Euclidean space, i.e. “classical” space endowed with a flat, homogeneous and isotropicstructure as we usually take for granted [8, 9, 10].
Terminology
Recall Definition 2.5, page 12. The terminology “n-dimensional Euclidean vector space” is synonymous to“n-dimensional (real, positive definite) inner product space”.
Definition 3.1 An n-dimensional Euclidean space E is a metric space, i.e. an affine space equipped with a dis-tance function d : E × E → R, furnished with a mapping + : E × V → E, in which V is an n-dimensionalEuclidean vector space, such that
• for all x, y ∈ E there exists a unique v ∈ V such that y = x+ v, and d(x, y) =√
(v|v);
• for all x, y ∈ E and all v ∈ V d(x+ v, y + v) = d(x, y);
• for all x ∈ E and all u, v ∈ V (x+ u) + v = x+ (u+ v).
Heuristics
Roughly speaking, a Euclidean space is a Euclidean vector space V that has “forgotten” its origin, or for whichany point may be taken as origin.
Observation
The distance function naturally arises from the inner product: d(x, y) =√
(y − x|y − x), in which y−x denotesthe vector v ∈ V such that y = x+ v.
Caveat
Both E and V are usually written as Rn. It should be clear from the context whether a Euclidean space or aEuclidean vector space is meant.
A point in x ∈ E ∼ Rn can be represented by its Cartesian coordinates xi ∈ R relative to a (globally defined)Cartesian coordinate system or standard basis {ei}, i = 1, . . . , n, in the usual way: x = xiei. Here ei ∈ Rn isthe coordinate vector with an entry 1 in i-th position and with remaining n− 1 entries equal to 0. It is sometimesconvenient to consider (curvilinear) coordinates on (an open subset of) Rn.

46 Differential Geometry
Definition 3.2 Let Ξ ⊂ E ∼ Rn be an open subset. A system of n functions y : Ξ → Υ ⊂ Rn : x 7→ y(x),is called a (curvilinear) coordinate system if it is one-to-one and differentiable, with non-degenerate Jacobiandeterminant:
det∂yi
∂xj6= 0 .
Notation
• By abuse of notation one writes yi = yi(xj), where it is understood that the yi on the left hand side is thei-th coordinate of a point y ∈ Rn, whereas the same symbol on the right hand side denotes a function of nvariables, viz. all xj , j = 1, . . . , n.
• Likewise, the symbol y in y = y(x) is to be interpreted as a point in Υ = y(Ξ) ⊂ Rn (left hand side),respectively as an n-dimensional function of x ∈ Ξ ⊂ Rn (right hand side).
Terminology
• The function y : Ξ→ Υ : x 7→ y(x) is referred to as a (coordinate) chart of Ξ.
• The inverse function x : Υ→ Ξ : y 7→ x(y) is referred to as a parametrization of Υ.
• One generically refers to such coordinate charts and parametrizations as “coordinate system x” and “coor-dinate system y”, respectively.
Observation
By the inverse function theorem it follows that the function x : Υ→ Ξ is differentiable, with
∂yi
∂xk∂xk
∂yj= δij .
Example
Let Ξ = R2\{(x, 0) |x ≥ 0} and Υ = R+ × (0, 2π). Adhering to conventional notation by setting (y1, y2) =(r, φ) ∈ Υ and (x1, x2) = (x, y) ∈ Ξ, we may parametrize Ξ as follows,{
x(r, φ) = r cosφy(r, φ) = r sinφ
The parameters are known as polar coordinates. The coordinate chart is obtained by inversion:
r(x, y) =√x2 + y2
φ(x, y) =
arctan y/x (x > 0, y > 0)arctan y/x+ 2π (x > 0, y < 0)arctan y/x+ π (x < 0)π/2 (x = 0, y > 0)3π/2 (x = 0, y < 0)
Caveat
Note that in the above example we have carefully avoided to include the nonnegative x-axis. (We could haveexcluded any other half line originating at the origin.) In practice one admits the nonnegative x-axis, for whichone then sets (r, φ) = (x, 0), at the price of a discontinuity in the function φ. By the same token the origin is oftenadmitted, with r = 0, and φ undefined. These extensions are relatively harmless violations of the requirementsof differentiability and injectivity in Definition 3.2, page 46, and rarely pose problems in practice.

3.2 Tangent and Cotangent Bundle 47
Notation
Euclidean n-space is a special instance of an n-dimensional manifold, to be defined later. In anticipation of futuregeneralization we will henceforth use the symbol M to indicate a general n-dimensional manifold wheneverappropriate, reserving the symbol E for Euclidean n-space.
(Until further notice, you may identify M with Euclidean space E.)
3.2. Tangent and Cotangent Bundle
Ansatz
An n-dimensional manifold M.
Definition 3.3 The tangent space at x ∈ M, TMx, is a copy of Rn endowed with a vector space structure andattached to point x ∈ M.
Remark
The definition can be stated in intrinsic terms by defining TMx as the span of n tangent vectors of a familyof mutually transversal curves intersecting at x ∈ M. A special case is obtained by considering the n localcoordinate curves induced by the coordinate system at x ∈ M.
Terminology
In the latter case the basis is referred to as a coordinate basis or holonomic basis, in which case the i-th coordinatebasis vector ei is also often written as ∂i, recall the observation on page 8.
Definition 3.4 The tangent bundle, TM = ∪x∈MTMx, is the union of tangent spaces over all x ∈ M.
Observation
• We may identify TM = M × Rn, i.e. each element of the tangent bundle consists of a vector v ∈ Rntogether with a base point x ∈ M (“where it is at”).
• In order to identify the base points explicitly, one often incorporates the projection map, π : TM → M :(x,v) 7→ x, into the definition of the tangent bundle.
• Thus in particular π(TMx) = {π(x,v) | x ∈ M fixed, v ∈ Rn arbitrary} = x and π(TM) ={π(x,v) | (x,v) ∈ M× Rn arbitrary} = M.
Notation
• Recall Definition 3.3. The cotangent space at x ∈ M is denoted by T∗Mx.
• Recall Definition 3.4. The cotangent bundle is written as T∗M = ∪x∈MT∗Mx.

48 Differential Geometry
3.3. Exterior Derivative
Ansatz
The tangent bundle TM over an n-dimensional manifold M.
Definition 3.5 Let ωk = ωi1...ik dxi1 ∧ . . .∧ dxik ∈
∧k(TM) be an antisymmetric covariant tensor field of rank
k, or k-form for brevity, with x ∈ M. The exterior derivative of ω is the (k + 1)-form given by
dωk = dωi1...ik ∧ dxi1 ∧ . . . ∧ dxik ∈∧k+1(TM) ,
with df def= ∂if dx
i for any sufficiently smooth scalar field f : M→ R.
Caveat
We have loosely identified M ∼ Rn via an implicit choice of coordinates. Strictly speaking this can be done forsufficiently small neighbourhoods of any fiducial point x ∈ M and a corresponding open set of Rn.
Observation
One readily verifies the following properties:
• dωn = 0 for any ωn ∈∧n(TM).
• d2ωk def= ddωk = 0 for any ωk ∈
∧k(TM) and k = 0, . . . , n, in other words: d2 = 0.
• One sometimes writes d∧ instead of d.
Exterior derivatives are often used in combination with the Hodge star to extract derivatives from a k-form fieldin some desired format. Note that d increases the rank of a k-form by 1, whereas ∗ converts a k-form into an(n−k)-form. The following example illustrates this up to first order derivatives.
Example
In the following examples, α = α1dx + α2dy + α3dz ∈ T∗M, with αi ∈ C∞(M) and dim M = 3. Forsimplicity the manifold is assumed to be Euclidean, and identified with R3 in Cartesian coordinates (in whichthe inner product defining Gram matrix equals the identity matrix). Using ∗1 = dx ∧ dy ∧ dz, ∗dx = dy ∧ dz,∗dy = −dx ∧ dz, ∗dz = dx ∧ dy, ∗dx ∧ dy = dz, ∗dx ∧ dz = −dy, ∗dy ∧ dz = dx, ∗dx ∧ dy ∧ dz = 1, weobtain the following results:
• ∗α = α3dx ∧ dy − α2dx ∧ dz + α1dy ∧ dz;
• dα = (∂xα2 − ∂yα1) dx ∧ dy + (∂xα3 − ∂zα1) dx ∧ dz + (∂yα3 − ∂zα2) dy ∧ dz;
• ∗dα = (∂xα2 − ∂yα1) dz − (∂xα3 − ∂zα1) dy + (∂yα3 − ∂zα2) dx;
• d ∗ α = (∂xα1 + ∂yα2 + ∂zα3) dx ∧ dy ∧ dz;
• ∗d ∗ α = ∂xα1 + ∂yα2 + ∂zα3;
• et cetera.
Special cases arise if α = df for some f ∈ C∞(M), a so-called “exact 1-form”.

3.4 Affine Connection 49
3.4. Affine Connection
Ansatz
The tangent bundle TM over an n-dimensional manifold M.
Recall the observation on page 8 concerning the formal notation for vector decomposition relative to a coordinatebasis, v = vi∂i. Also recall from infinitesimal calculus that for a scalar function f ∈ C∞(M) we may define thedifferential df = ∂ifdx
i ∈ T∗M. This suggests that we interpret a vector as a directional derivative operator, asfollows.
Definition 3.6 Let f ∈ C∞(M) be a scalar function, and v = vi∂i ∈ TM. Then
vfdef= 〈df,v〉 def= vi∂if .
So, when acting on a scalar field it is tacitly understood that we make the formal identication v = 〈d · ,v〉.
Definition 3.7 An affine connection on a manifold M is a mapping ∇ : TM × TM → TM : (v,w) 7→∇vw, also referred to as the covariant derivative of w with respect to v, with the following properties. Letv,v1,v2,w,w1,w2 ∈ TM, f, f1, f2 ∈ C∞(M), and λ, λ1, λ2 ∈ R, then
1. ∇f1v1+f2v2w = f1∇v1
w + f2∇v2w for all f1, f2 ∈ C∞(M),
2. ∇v (λ1w1 + λ2w2) = λ1∇vw1 + λ2∇vw2, for all λ1, λ2 ∈ R,
3. ∇v(fw) = f∇v w +∇vf w for all f ∈ C∞(M). Here we have defined∇vf ≡ vf .
Thus the covariant derivative of a local frame vector (i.e. basis vector of the local tangent space) is a vector withinthe same tangent space. Consequently it can be written as a linear combination of frame vectors.
Definition 3.8 The Christoffel symbols Γkij are defined by∇ejei = Γkijek.
Caveat
1. Conventions for the ordering of the lower indices of the Christoffel symbols differ among literature sources.As a rule of thumb I put the differentiation index in second position.
2. The Christoffel symbols are not the components of a tensor, v.i.
To see how the Christoffel symbols transform, consider a vector and dual covector basis transformation:
ek = Sk` e` resp. ej = Tmj em .
The matrices T and S are the mutually inverse Jacobian matrices:
T ij =∂xi
∂xjresp. Sij =
∂xi
∂xj.
SetΓk
ij =⟨ek,∇ejei
⟩

50 Differential Geometry
Substitute the transformations, apply first and third rule of Definition 3.7,∇ej = T `j∇e` , respectively∇e`(T`i ek) =
∂`Tki ek + T `i∇e`ek, use the definition of the Christoffel symbols, ∇e`ek = Γmk`em, and finally the chain rule,
∂j = T `j ∂`, to obtain the following result:
Result 3.1 The components of the Christoffel symbols in coordinate system x are given relative to those in coor-dinate system x by
Γk
ij = Sk`(Tmj T
ni Γ`nm + ∂jT
`i
).
Thus the tensor transformation law, recall Result 2.8 on page 37, fails to hold due to the inhomogeneous term,which arises after any non-affine coordinate transformation.
Remark
For any fixed point on the manifold you can solve the system of equations Γk
ij = 0 by slick choice of Jacobianmatrix, i.e. by transforming to a suitable local coordinate system. However, in general it is not possible to achievethis globally, unless the manifold happens to be flat (zero Riemann curvature, v.i.).
Using the above definitions one can easily prove the following.
Result 3.2 Let v = viei, w = wiei ∈ TM be two vector fields. Then
∇vw = viDiwjej .
Here we have defined the components of the covariant derivative Diwj ≡ ∂iwj + Γjkiw
k.
Definition 3.9 See Definition 3.7. The affine connection can be extended to arbitrary tensor fields by generalizingthe product rule, viz. for any pair of tensor fields, T ∈ Tp
q(TM) and S ∈ Trs(TM), say, we require
∇v (S ⊗ T ) = ∇vS ⊗ T + S ⊗∇vT .
Observation
Recall the linear trace operator from Definition 2.27. For a covector field z ∈ T∗M and a vector field w ∈ TMwe have 〈z,w〉 = tr (z ⊗ v). Observe that (v · ∂)〈z,w〉 = ∇v〈z,w〉 = 〈∇vz,w〉 + 〈z,∇vw〉, implying theproduct rule Di(zjw
j) = Dizj wj + zjDi w
j .
Result 3.3 See Result 3.2. Let T = Ti1...ipj1...jq
ei1⊗. . .⊗eip⊗ej1⊗. . .⊗ejq and w = wiei be a tensor, respectivelyvector field on M, then
∇vT = viDiTi1...ipj1...jq
ei1 ⊗ . . .⊗ eip ⊗ ej1 ⊗ . . .⊗ ejq .
Here we have defined the components of the covariant derivative
DiTi1...ipj1...jq
≡ ∂iTi1...ipj1...jq
+ Γi1kiTki2...ipj1...jq
+ . . .+ ΓipkiT
i1...ip−1kj1...jq
− Γkj1iTi1...ipkj2...jq
− . . .− ΓkjqiTi1...ipj1...jq−1k
.
With this definition the covariant derivative operator Di satisfies the product rule for general holor products.
Terminology
• With affine geometry one indicates the geometrical structure of a manifold endowed with an affine connec-tion. Note that this does not require the existence of a metric. Without a Riemannian metric, M is referredto as an affine space or affine manifold.
• If a metric (induced by an inner product on each TMx) does exist we are in the realm of Riemanniangeometry. Endowed with a Riemannian metric, M is called a Riemannian space or Riemannian manifold.We refer to section 3.7 for further details.

3.5 Lie Derivative 51
Assumption
• Recall Definition 2.8, page 13. It is assumed that, if TMx is an inner product space for every x ∈ M, localbases are chosen in such a way that the coefficients of the Gram matrix, gij(x) = (ei|ej)x, vary smoothlyacross the manifold: gij ∈ C∞(M). (This is guaranteed if the basis is holonomic.)
• Similar assumptions will henceforth be implicit in the case of tensor fields in general.
Notation
The x-dependency of tensor fields is tacitly understood and suppressed in the notation.
3.5. Lie Derivative
Ansatz
The tangent bundle TM over an n-dimensional manifold M.
Definition 3.10 The Lie derivative of w ∈ V with respect to v ∈ V is defined as
Lvw = [v,w] ,
in which the so-called Lie bracket is defined by the commutator
[v,w] f = v(wf)−w(vf) =(vi∂iw
j − wi∂ivj)∂jf .
for any smooth function f .
Observation
• Lvw is itself a vector, with components [v,w]i = vj∂jwi − wj∂jvi.
• No connection is involved, since only derivations of R-valued functions are considered.
• Each term separately in the subtraction does not constitute a vector (it fails to satisfy the covariance re-quirement), but the difference does.
• The Lie-bracket is antisymmetric.
• The Lie-bracket satisfies the Jacobi identity: [u, [v,w]] + [w, [u,v]] + [v, [w,u]] = 0.
3.6. Torsion
Ansatz
• The tangent bundle TM over an n-dimensional manifold M.
• An affine connection.

52 Differential Geometry
Definition 3.11 Notation as before. The torsion tensor is given by
T(v,w) = ∇vw −∇wv − [v,w] .
Remark
The torsion tensor thus reveals the difference between a commutator of ordinary derivatives, as in the Lie deriva-tive, and of covariant derivatives induced by the affine connection.
Observation
Recall that∇vw = vi(∂iwj + wkΓjki)∂j , from which you derive the components of the torsion tensor:
T(v,w) = T jkivkwi∂j with T jki = Γjik − Γjki .
Observation
The torsion tensor is antisymmetric: T(v,w) = −T(w,v).
3.7. Levi-Civita Connection
Ansatz
• The tangent bundle TM over an n-dimensional manifold M.
• A Riemannian metric g ∈ T∗M⊗ T∗M.
An important result is that a Riemannian geometry induces a unique torsion-free connection.
Definition 3.12 Recall Definition 3.10, page 51 and Definition 3.11, page 52. A metric connection or Levi-Civitaconnection on a Riemannian manifold (M,g) satisfies the following properties:
• z (g(v,w)) = g(∇zv,w) + g(v,∇zw) for all v,w, z ∈ TM.
• T(v,w) = 0 for all v,w ∈ TM.
Observation
The first requirement is tantamount to the product rule: ∇z (v ·w) = ∇zv ·w + v · ∇zw for all v,w, z ∈ TM.
Terminology
• The product rule is variously phrased as “covariant constancy of metric”, “preservation of metric”, “metriccompatibility”, et cetera, and can be condensely written as∇zg = 0 for all z ∈ TM.
• The second requirement is referred to as the requirement of “zero torsion”.
Theorem 3.1 Recall Definition 3.12. The Levi-Civita connection is uniquely given by the Christoffel symbols
Γkij =1
2gk` (∂ig`j + ∂jg`i − ∂`gij) .

3.8 Geodesics 53
Proof of Theorem 3.1. The proof is based on (i) the general properties of an affine connection, recall Definition 3.7on page 49, and (ii) the defining properties of the Levi-Civita connection, Definition 3.12, page 52.
Here are the details. Show that relative to a basis the first condition of Definition 3.12 is equivalent toDmgij = 0,then cyclicly permute the three free indices; subtract the two resulting expressions from the given one. The resultis
∂mgij − ∂igjm − ∂jgmi = gi`(Γ`jm − Γ`mj
)+ g`j
(Γ`im − Γ`mi
)− g`m
(Γ`ij + Γ`ji
).
Subsequently, according to Definition 3.11 on page 52 and the subsequent observation on page 52, the secondcondition of Definition 3.12 is equivalent to
Γ`ij = Γ`ji .
Apply this to the previous equality. Contraction with − 12gkm on both sides, using the fact that gikgkj = δij ,
finally yields the stated result.
Observation
A metric connection is symmetric:Γkij = Γkji .
Recall that this is not necessarily the case for an affine connection in general.
3.8. Geodesics
Definition 3.13 The covariant differential Dv ∈ T11(TM) of a vector field v = vi∂i ∈ TM is defined as
Dv = ∇∂kvdxk .
Observation
If we define Dv = Dvj∂j , then Dvj = dvj + Γjkivkdxi = Div
jdxi, with Divj = ∂iv
j + Γjkivk.
Remark
The definition can be extended to arbitrary tensor fields T ∈ Tpq(TM):
DT = DTi1...ipj1...jq
dxj1 ⊗ . . .⊗ dxjq ⊗ ∂i1 ⊗ . . .⊗ ∂ip ,
with DT i1...ipj1...jq= DiT
i1...ipj1...jq
dxi, recall Result 3.3.
Heuristics
The conceptual advantage of a (covariant) differential over a (covariant) derivative is that the former is applicableto vectors known only along a curve, whereas the latter requires us to specify a vector field on a full neighbour-hood, as the following definition illustrates.
Definition 3.14 A geodesic is a curve with “covariantly constant tangent”, or a curve obtained by “paralleltransport” of its tangent vector at any fiducial point. In other words, if v(t) = xi(t)∂i for t ∈ I = (t0, t1), then
Dv(t) = 0 for all t ∈ I .

54 Differential Geometry
Remark
• It is tacitly understood that ∂i ∈ TMx(t) indicates the coordinate basis vector at point x(t).
• One often identifies v(x(t)) with v(t). It should be clear from the context which of these prototypes isapplicable.
Observation
• We may write Dv(t) =Dv(t)
dtdt.
• In terms of components we have Dvk(t)/dt = 0, or xk + Γkij xixj = 0.
Terminology
The latter second order ordinary differential equation is known as the geodesic equation.
Heuristics
• A geodesic generalizes the concept of a straight line, and can in general be seen as the “straightest line”between any two sufficiently close points on the geodesic.
• This should not be confused with the “shortest line”, for this would require the additional notion of a“length” or “distance” on the manifold (i.e. a Riemannian metric).
3.9. Curvature
Definition 3.15 For v,w∈TM the (antisymmetric) curvature operator, R(v,w) :TM→TM :u 7→R(v,w)u, isdefined as
R(v,w) = [∇v,∇w]−∇[v,w] .
Observation
Alternatively, in order to obtain a scalar valued mapping, we would need a covector field z ∈ T∗M besides thethree vector field arguments u,v,w∈TM involved in Definition 3.15. This naturally leads to the definition of afourth order mixed tensor field.
Definition 3.16 For u,v,w ∈ TM, z ∈ T∗M, the Riemann curvature tensor is defined as
R(z,u,v,w) = 〈z , R(v,w)u〉 .

3.10 Push-Forward and Pull-Back 55
Observation
• In order to find the components of the Riemann curvature tensor, write z = zρdxρ, u = uσ∂σ , v = vµ∂µ,
w = wν∂ν . Then, using previous result, you find R(z,u,v,w) = Rρσµνzρuσvµwν , in which
Rρσµν = 〈dxρ , R(∂µ, ∂ν)∂σ〉 = ∂µΓρσν − ∂νΓρσµ + ΓρλµΓλσν − ΓρλνΓλσµ .
• Instead of Rρσµν the holor is often written as Rρσµν in order to stress that the first slot of the tensor isintended for the covector argument.
• Note that R(∂µ, ∂ν) = [∇∂µ ,∇∂ν ]−∇[∂µ,∂ν ] = [∇∂µ ,∇∂ν ], i.e. the curvature operator and, a fortiori, theRiemann curvature tensor apparently capture the intrinsic non-commutativity of covariant derivatives.
3.10. Push-Forward and Pull-Back
Ansatz
• A smooth mapping φ : M→ N : x 7→ y = φ(x) between manifolds.
• A smooth scalar field f : N→ R : y 7→ z = f(y).
• A smooth vector field v ∈ TM.
• A smooth covector field ν ∈ T∗N.
Definition 3.17
• The pull-back φ∗f ∈ C∞(M) of f ∈ C∞(N) under φ is defined such that φ∗f = f ◦ φ.
• The push-forward φ∗v ∈ TN of v ∈ TM under φ is defined such that φ∗v(f) = v(φ∗f).
• The pull-back φ∗ν ∈ T∗M of ν ∈ T∗N under φ is defined such that 〈φ∗ν,v〉M = 〈ν, φ∗v〉N.
Terminology
The terminology reflects the “direction” of the mappings involved between (tangent or cotangent bundles over)the respective manifolds.
Remark
• Note that the dimensions of the manifolds M and N need not be the same.
Observation
• By decomposing φ∗v = vµJaµ∂∂ya∈ T∗N it follows that the components of the push-forward are given by
the Jacobian matrix of the mapping: Jaµ = ∂ya
∂xµ . (Note: µ = 1, . . . ,m = dim M, a = 1, . . . , n = dim N.)
• By the same token, decomposing φ∗ν = νaJaµdx
µ ∈ TM, it follows that the components of the pull-backare given by the same Jacobian.

56 Differential Geometry
3.11. Examples
3.11.1. Polar Coordinates in the Euclidean Plane
Example
Starting out from a Cartesian coordinate basis at an arbitrary point of the Euclidean plane E (i.e. Euclidean2-space),
ex =
(10
), ey =
(01
),
we obtain the local polar coordinate basis (recall the example on page 46) by transformation, as follows:
ei = ∂i =∂xj
∂xi∂j =
∂xj
∂xiej .
Here we identify x = (x, y), x = (r, φ), with{x(r, φ) = r cosφy(r, φ) = r sinφ .
Recall that the Jacobian matrix and its inverse are given by
T `i =∂x`
∂xiresp. Sk` =
∂xk
∂x`,
or, in explicit matrix notation (upper/lower index = row/column index):
T `i =
(cosφ −r sinφsinφ r cosφ
)=
x√
x2 + y2−y
y√x2 + y2
x
,
Sk` =
(cosφ sinφ
− sinφ
r
cosφ
r
)=
x√
x2 + y2y√
x2 + y2
− y
x2 + y2x
x2 + y2
.
Consequently, writing “r” and “φ” for index values 1 and 2, respectively,
er =(
cosφ sinφ)( ex
ey
)= cosφ ex + sinφ ey =
(cosφsinφ
),
eφ =(−r sinφ r cosφ
)( exey
)= −r sinφ ex + r cosφ ey =
(−r sinφr cosφ
).
Note that the polar basis depends on the base point of the tangent plane, whereas the Cartesian basis is identicalin form at all base points.

3.11 Examples 57
Example
Cartesian coordinates x = (x, y) in the Euclidean plane E induce a local basis for each TEx relative to whichall Γ`nm vanish identically (`,m, n = 1, . . . , 2). In terms of polar coordinates, x = (r, φ), we find, according toResult 3.1 on page 50:
Γk
ij = Sk` ∂jT`i .
From the previous example it follows that for any (row) index k = 1, 2 and (column) index i = 1, 2,
Γk
ir =
(cosφ sinφ
− sinφ
r
cosφ
r
)∂
∂r
(cosφ −r sinφsinφ r cosφ
)=
(0 0
01
r
),
Γk
iφ =
(cosφ sinφ
− sinφ
r
cosφ
r
)∂
∂φ
(cosφ −r sinφsinφ r cosφ
)=
(0 −r1
r0
).
In other words,
Γφ
φr =1
r, Γ
φ
rφ =1
r, Γ
r
φφ = −r , all other Γk
ij = 0.
Consequently,
∇reφ =1
reφ , ∇φer =
1
reφ , ∇φeφ = −rer , all other ∇ejei = 0.
This can be immediately confirmed by inspection of the (partial derivatives of the) coordinates of the polar basisvectors relative to the standard (Cartesian) basis, recall the previous example.

58 Differential Geometry
3.11.2. A Helicoidal Extension of the Euclidean Plane
Example
Consider two coordinatizations of 3-space, x = (x, y, φ), and x = (ξ, η, θ), related as follows1: x(ξ, η, θ) = ξ cos θ + η sin θy(ξ, η, θ) = −ξ sin θ + η cos θφ(ξ, η, θ) = θ ,
or
ξ(x, y, φ) = x cosφ− y sinφη(x, y, φ) = x sinφ+ y cosφθ(x, y, φ) = φ .
The Jacobian matrices are given by
T `i =∂x`
∂xi=
cos θ sin θ −ξ sin θ + η cos θ− sin θ cos θ −ξ cos θ − η sin θ
0 0 1
,
respectively
Sk` =∂xk
∂x`=
cosφ − sinφ −x sinφ− y cosφsinφ cosφ x cosφ− y sinφ
0 0 1
.
Again, recalling Result 3.1 on page 50: Γk
ij = Sk`(Tmj T
ni Γ`nm + ∂jT
`i
). There are different ways to proceed,
depending on our assumptions about the Γ`nm-symbols in (x, y, φ)-space. Here we pursue the simplest option,ignoring the remark in footnote 1, and assume Γ`nm = 0, i.e. (x, y, φ) is identified with a Cartesian coordinatetriple in Euclidean 3-space. In this case we may evaluate the Christoffel symbols as in the previous example:
Γk
iξ =
cosφ − sinφ −x sinφ− y cosφsinφ cosφ x cosφ− y sinφ
0 0 1
∂
∂ξ
cos θ sin θ −ξ sin θ + η cos θ− sin θ cos θ −ξ cos θ − η sin θ
0 0 1
,
Γk
iη =
cosφ − sinφ −x sinφ− y cosφsinφ cosφ x cosφ− y sinφ
0 0 1
∂
∂η
cos θ sin θ −ξ sin θ + η cos θ− sin θ cos θ −ξ cos θ − η sin θ
0 0 1
,
Γk
iθ =
cosφ − sinφ −x sinφ− y cosφsinφ cosφ x cosφ− y sinφ
0 0 1
∂
∂θ
cos θ sin θ −ξ sin θ + η cos θ− sin θ cos θ −ξ cos θ − η sin θ
0 0 1
.
A tedious but straightforward computation then reveals that
Γk
iξ =
0 0 00 0 −10 0 0
Γk
iη =
0 0 10 0 00 0 0
Γk
iθ =
0 1 −ξ−1 0 −η0 0 0
,
i.e. all Γk
ij = 0, except Γη
θξ = −1 ,Γξ
θη = 1 ,Γη
ξθ = −1 ,Γξ
ηθ = 1 ,Γξ
θθ = −ξ ,Γηθθ = −η. Note that Γk
ij−Γk
ji = 0,consistent with the fact that torsion vanishes identically by construction.
1We interpret this space as an extension of Euclidean 2-space E by attaching to each point a copy of the periodic circle S = {φ ∈[0, 2π)mod 2π} as an independent dimension. The parametrization can then be seen as a “shift-twist” transformation, whereby the Cartesianbasisvectors ex and ey of the underlying Euclidean 2-space E (at any fiducial point) are rotated in accordance to the periodic translation ineφ-direction (generating S).

3.11 Examples 59
Example
In the spirit of the previous example we consider a 3-space M, with coordinates (x, y, φ). However, we nowintroduce the following Riemannian metric g ∈ T∗M⊗ T∗M:
g(x, y, φ) = dx⊗ dx+ dy ⊗ dy + (x2 + y2)dφ⊗ dφ .
Note that the metric is form invariant under the reparametrization of the previous example:
g(ξ, η, θ) = dξ ⊗ dξ + dη ⊗ dη + (ξ2 + η2)dθ ⊗ dθ .
The induced Levi-Civita connection in (x, y, φ)-coordinates (and therefore also in (ξ, η, θ)-coordinates) followsfrom Theorem 3.1, page 52. In matrix notation we have for the metric and its dual, respectively,
G =
1 0 00 1 00 0 x2 + y2
and G−1 =
1 0 00 1 00 0 1/(x2 + y2)
.
The fact that metric and its dual are diagonal greatly simplifies the computation, for we have that
Γkij =1
2gkk (∂igkj + ∂jgki − ∂kgij) (no summation over k).
Moreover, by virtue of the fact that the coefficients gab are constants for a, b = 1, 2, the above matrix (with rowindex i and column index j, and k fixed) will have a null 2× 2 block in the upper left part:
Γkij =
0 0 ∗0 0 ∗∗ ∗ ∗
(row index i, column index j, k fixed.)
Finally, the (dual) metric coefficients do not depend on φ. By direct computation, taking these simplifyingremarks into account, we obtain
Γxij =
0 0 00 0 00 0 −x
Γyij =
0 0 00 0 00 0 −y
Γφij =1
x2 + y2
0 0 x0 0 yx y 0
.
Note that Γkij − Γkji = 0, consistent with the fact that torsion always vanishes in the case of the Levi-Civitaconnection.

60 Differential Geometry
Example
Rotational invariance in the x–y plane of the previous example suggests the use of cylinder coordinates x =(r, ψ, θ) instead of x = (x, y, φ): x(r, ψ, θ) = r cosψ
y(r, ψ, θ) = r sinψφ(r, ψ, θ) = θ .
To this end we once again invoke Result 3.1, page 50:
Γk
ij = Sk`(Tmj T
ni Γ`nm + ∂jT
`i
).
The Jacobian matrices are given by
T `i =∂x`
∂xi=
cosψ −r sinψ 0sinψ r cosψ 0
0 0 1
,
respectively
Sk` =∂xk
∂x`=
x/(x2 + y2) y/(x2 + y2) 0−y/(x2 + y2) x/(x2 + y2) 0
0 0 1
.

Bibliography
[1] R. Abraham, J. E. Marsden, and T. Ratiu. Manifolds, Tensor Analysis, and Applications, volume 75 ofApplied Mathematical Sciences. Springer-Verlag, New York, second edition, 1988.
[2] D. Bao, S.-S. Chern, and Z. Shen. An Introduction to Riemann-Finsler Geometry, volume 2000 of GraduateTexts in Mathematics. Springer-Verlag, New York, 2000.
[3] M. Berger. A Panoramic View of Riemannian Geometry. Springer-Verlag, Berlin, 2003.
[4] R. L. Bishop and S. I. Goldberg. Tensor Analysis on Manifolds. Dover Publications, Inc., New York, 1980.Originally published by The Macmillan Company in 1968.
[5] M. P. do Carmo. Differential Geometry of Curves and Surfaces. Mathematics: Theory & Applications.Prentice-Hall, Englewood Cliffs, New Jersey, 1976.
[6] M. P. do Carmo. Riemannian Geometry. Mathematics: Theory & Applications. Birkhauser, Boston, secondedition, 1993.
[7] E. Cartan. Lecons sur la Geometrie des Espaces de Riemann. Gauthiers-Villars, Paris, second edition, 1963.
[8] Sir Thomas L. Heath. The Thirteen Books of Euclid’s Elements, volume 1 (Books I and II). Dover Publica-tions, Inc., New York, second edition, 1956.
[9] Sir Thomas L. Heath. The Thirteen Books of Euclid’s Elements, volume 2 (Books III–IX). Dover Publica-tions, Inc., New York, second edition, 1956.
[10] Sir Thomas L. Heath. The Thirteen Books of Euclid’s Elements, volume 3 (Books X–XIII). Dover Publica-tions, Inc., New York, second edition, 1956.
[11] J. Jost. Riemannian Geometry and Geometric Analysis. Springer-Verlag, Berlin, fourth edition, 2005.
[12] J. J. Koenderink. Solid Shape. MIT Press, Cambridge, 1990.
[13] A. P. Lightman, W. H. Press, R. H. Price, and S. A. Teukolsky. Problem Book in Relativity and Gravitation.Princeton University Press, Princeton, 1975.
[14] D. Lovelock and H. Rund, editors. Tensors, Differential Forms, and Variational Principles. Dover Publica-tions, Inc., Mineola, N.Y., 1988.
[15] C. W. Misner, K. S. Thorne, and J. A. Wheeler. Gravitation. Freeman, San Francisco, 1973.
[16] H. Rund. The Hamilton-Jacobi Theory in the Calculus of Variations. Robert E. Krieger Publishing Com-pany, Huntington, N.Y., 1973.
[17] M. Spivak. Calculus on Manifolds. W. A. Benjamin, New York, 1965.
[18] M. Spivak. Differential Geometry, volume 1–5. Publish or Perish, Berkeley, 1975.