Embed Size (px)
Citation preview
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca Automática
2º Curso del Grado en
Ingeniería en Tecnología Industrial
Tema 2.
Descripción externa de sistemas
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Contenido
Tema 2.- Descripción externa de sistemas:
2.1. Introducción. Sistemas lineales.
2.2. Transformada de Laplace.
2.3. Matriz (Función) de transferencia.
2.4. Diagramas de bloques:
2.4.1 Función de transferencia en bucle abierto y cerrado.
2.4.2 Reducción de diagramas de bloques.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Contenido
Tema 2.- Descripción externa de sistemas:
2.1. Introducción. Sistemas lineales.
2.2. Transformada de Laplace.
2.3. Matriz (Función) de transferencia.
2.4. Diagramas de bloques:
2.4.1 Función de transferencia en bucle abierto y cerrado.
2.4.2 Reducción de diagramas de bloques.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
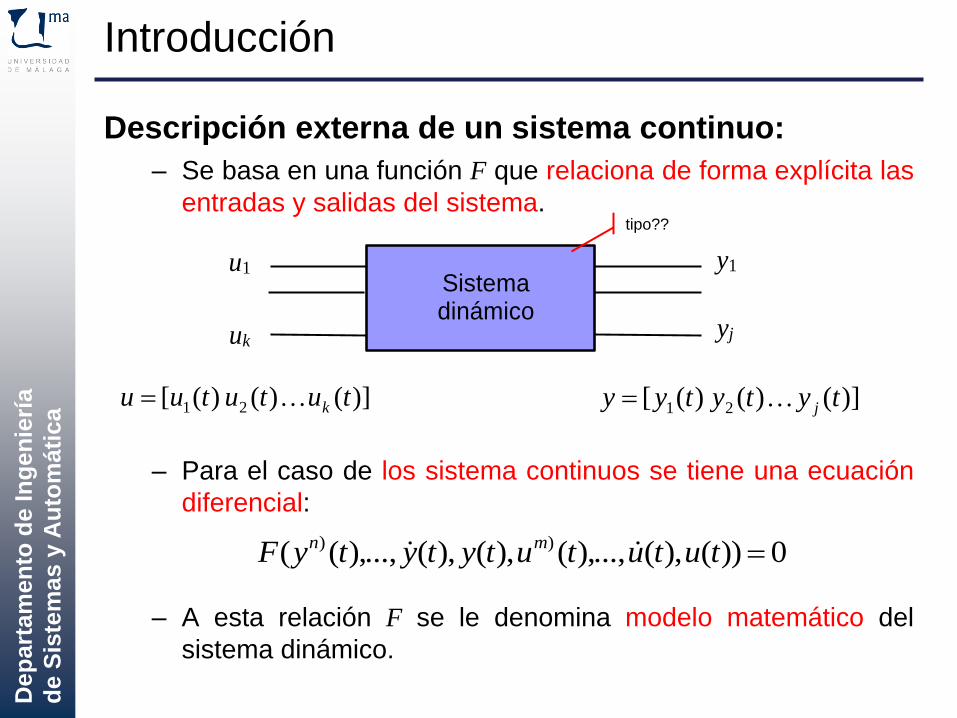
Descripción externa de un sistema continuo:
– Se basa en una función F que relaciona de forma explícita las
entradas y salidas del sistema.
– Para el caso de los sistema continuos se tiene una ecuación
diferencial:
– A esta relación F se le denomina modelo matemático del
sistema dinámico.
Introducción
Sistema dinámico
u1
uk
y1
yj
)]()( )([ 21 tytytyy j)]()( )([ 21 tututuu k
0))(),(),...,(),(),(),...,(( )) tutututytytyF mn
tipo??
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
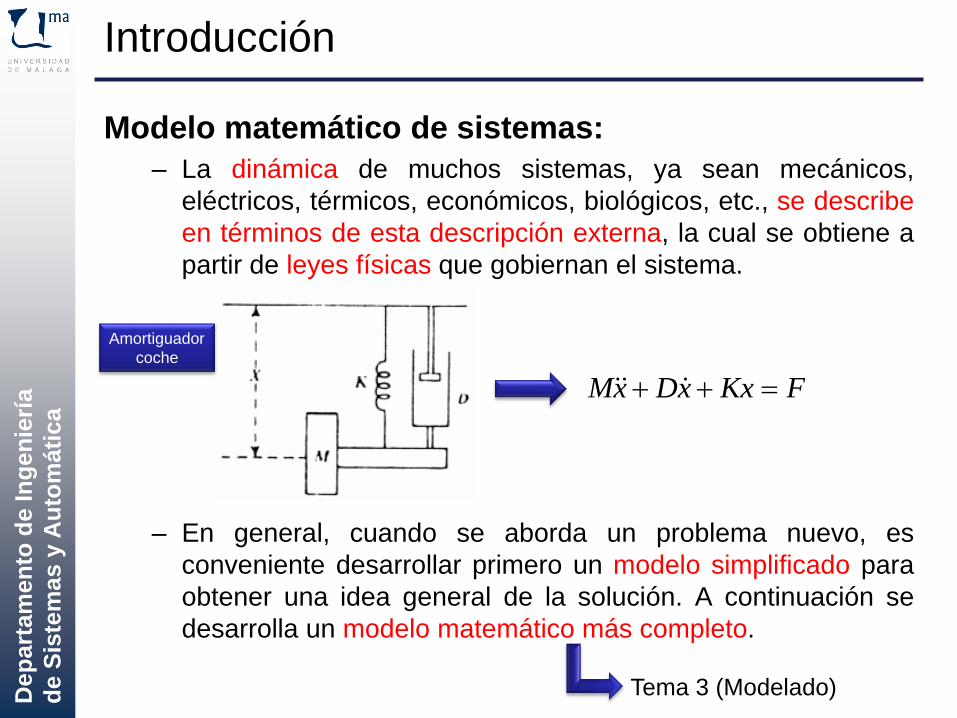
Modelo matemático de sistemas:
– La dinámica de muchos sistemas, ya sean mecánicos,
eléctricos, térmicos, económicos, biológicos, etc., se describe
en términos de esta descripción externa, la cual se obtiene a
partir de leyes físicas que gobiernan el sistema.
– En general, cuando se aborda un problema nuevo, es
conveniente desarrollar primero un modelo simplificado para
obtener una idea general de la solución. A continuación se
desarrolla un modelo matemático más completo.
FKxxDxM
Introducción
Tema 3 (Modelado)
Amortiguador
coche
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Introducción
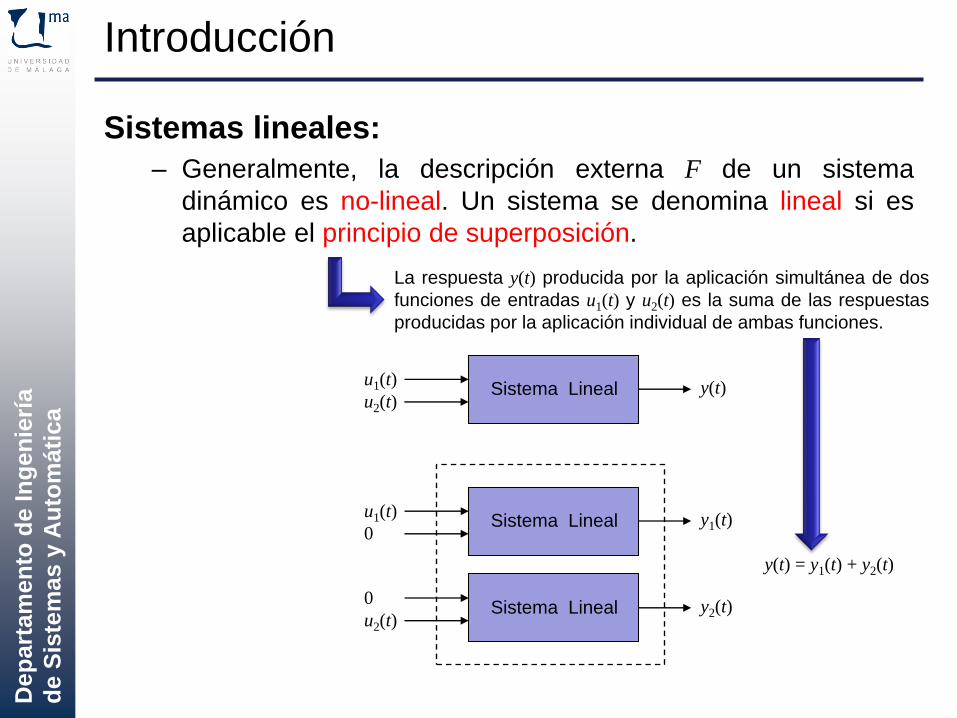
Sistemas lineales:
– Generalmente, la descripción externa F de un sistema
dinámico es no-lineal. Un sistema se denomina lineal si es
aplicable el principio de superposición.
La respuesta y(t) producida por la aplicación simultánea de dos
funciones de entradas u1(t) y u2(t) es la suma de las respuestas
producidas por la aplicación individual de ambas funciones.
u1(t)
u2(t)Sistema Lineal y(t)
u1(t)
0Sistema Lineal y1(t)
0
u2(t)Sistema Lineal y2(t)
y(t) = y1(t) + y2(t)
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Introducción
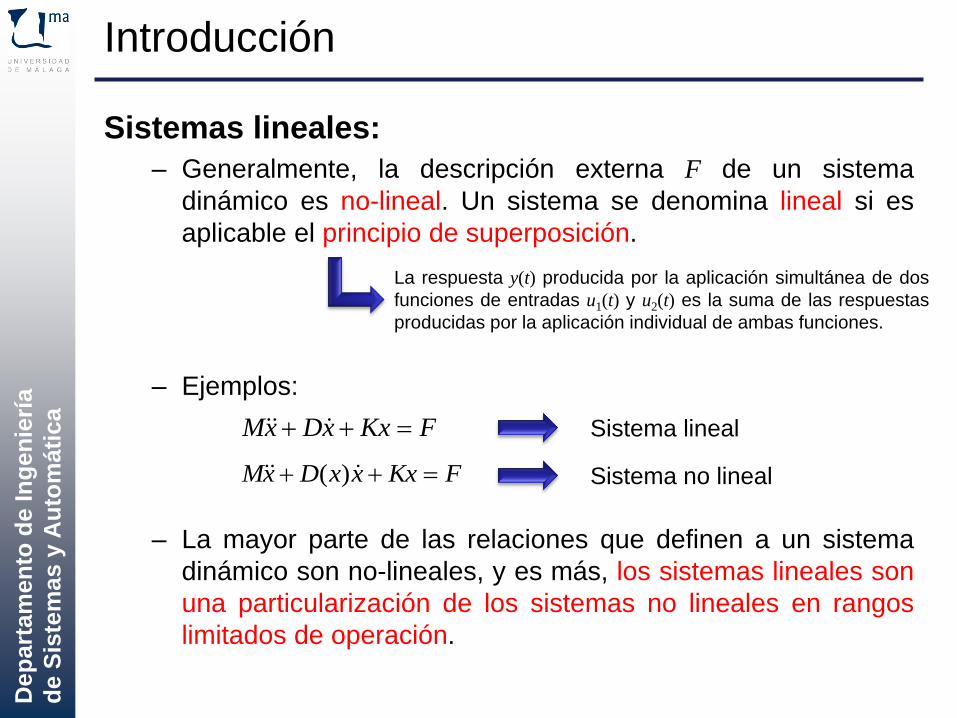
Sistemas lineales:
– Generalmente, la descripción externa F de un sistema
dinámico es no-lineal. Un sistema se denomina lineal si es
aplicable el principio de superposición.
– Ejemplos:
– La mayor parte de las relaciones que definen a un sistema
dinámico son no-lineales, y es más, los sistemas lineales son
una particularización de los sistemas no lineales en rangos
limitados de operación.
Sistema no lineal
Sistema linealFKxxDxM
FKxxxDxM )(
La respuesta y(t) producida por la aplicación simultánea de dos
funciones de entradas u1(t) y u2(t) es la suma de las respuestas
producidas por la aplicación individual de ambas funciones.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
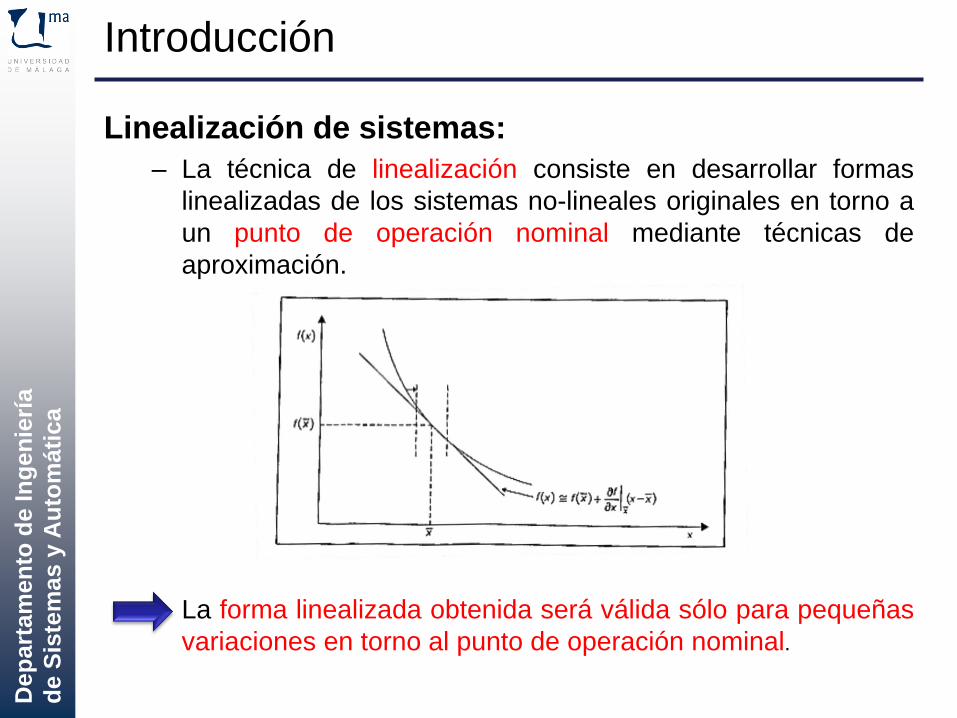
Linealización de sistemas:
– La técnica de linealización consiste en desarrollar formas
linealizadas de los sistemas no-lineales originales en torno a
un punto de operación nominal mediante técnicas de
aproximación.
– La forma linealizada obtenida será válida sólo para pequeñas
variaciones en torno al punto de operación nominal.
Introducción
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Sistemas continuos lineales:
Una sistema continuo es lineal si su descripción externa F viene
dada por una ecuación diferencial combinación lineal de
variables independientes.
donde los coeficientes son constantes o son funciones sólo de
la variable independiente t:
• Sistemas lineales invariantes con el tiempo de coeficientes ai y bj
constantes.
• Sistemas lineales variantes con el tiempo de coeficientes ai y bj
que son funciones del tiempo.
ubububyayayaya m
m
n
n
n
n 01
)
01
)1
1
)
Introducción
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Contenido
Tema 2.- Descripción externa de sistemas:
2.1. Introducción. Sistemas lineales.
2.2. Transformada de Laplace.
2.3. Matriz (Función) de transferencia.
2.4. Diagramas de bloques:
2.4.1 Función de transferencia en bucle abierto y cerrado.
2.4.2 Reducción de diagramas de bloques.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
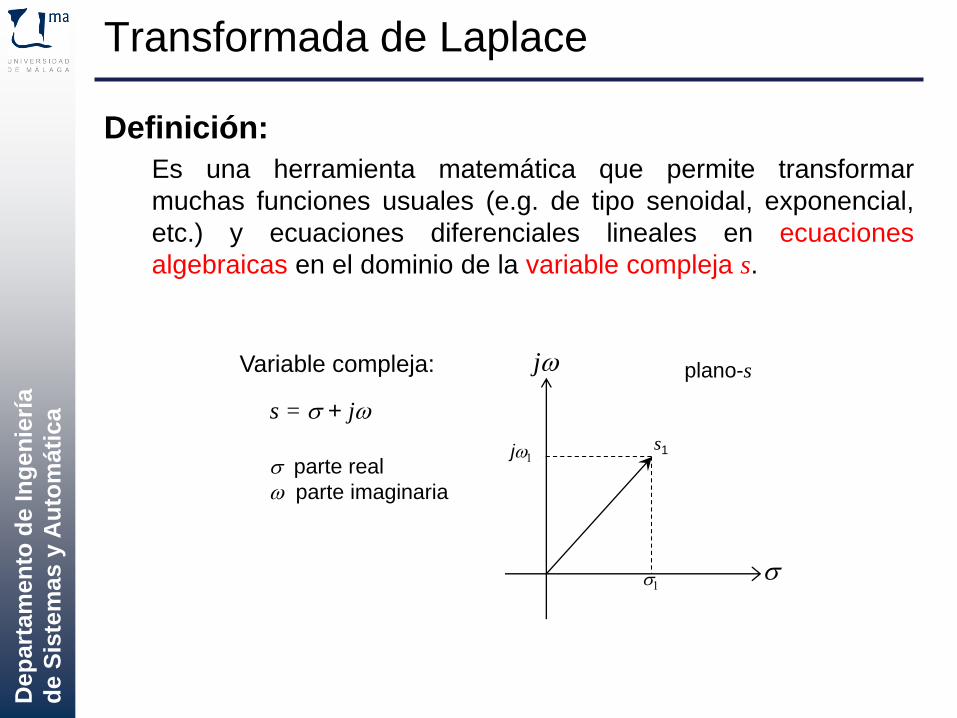
Definición:
Es una herramienta matemática que permite transformar
muchas funciones usuales (e.g. de tipo senoidal, exponencial,
etc.) y ecuaciones diferenciales lineales en ecuaciones
algebraicas en el dominio de la variable compleja s.
Variable compleja:
s = s + jw
s parte real
w parte imaginaria
plano-s
jw1
s1
jw
s
s1
Transformada de Laplace
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
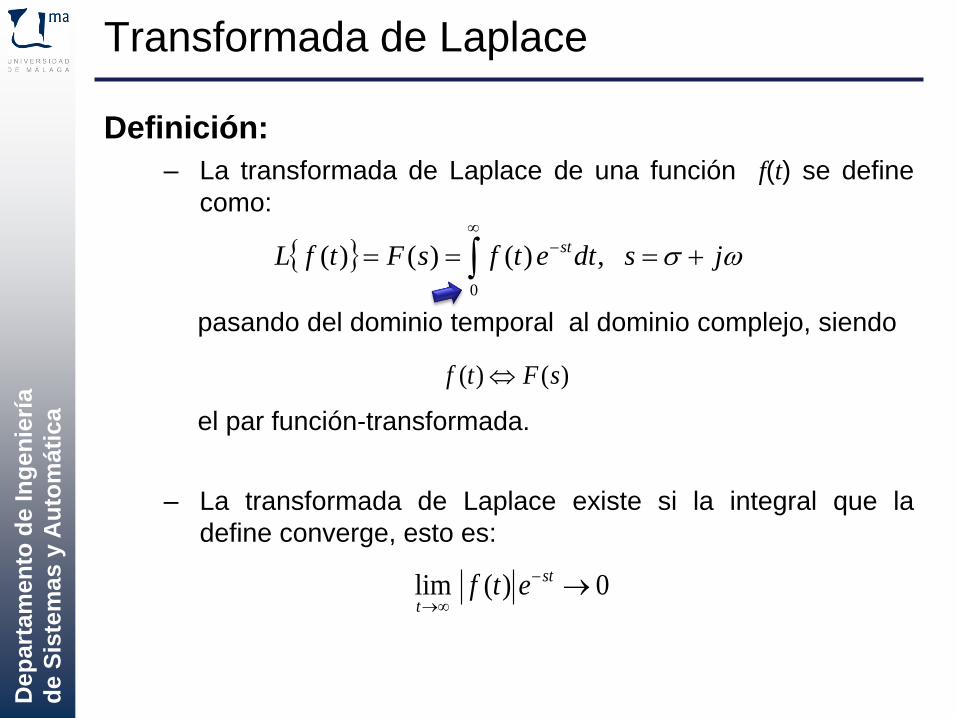
Definición:
– La transformada de Laplace de una función f(t) se define
como:
pasando del dominio temporal al dominio complejo, siendo
el par función-transformada.
– La transformada de Laplace existe si la integral que la
define converge, esto es:
0
,)()()( ws jsdtetfsFtfL st
)()( sFtf
0)(lim
st
tetf
Transformada de Laplace
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
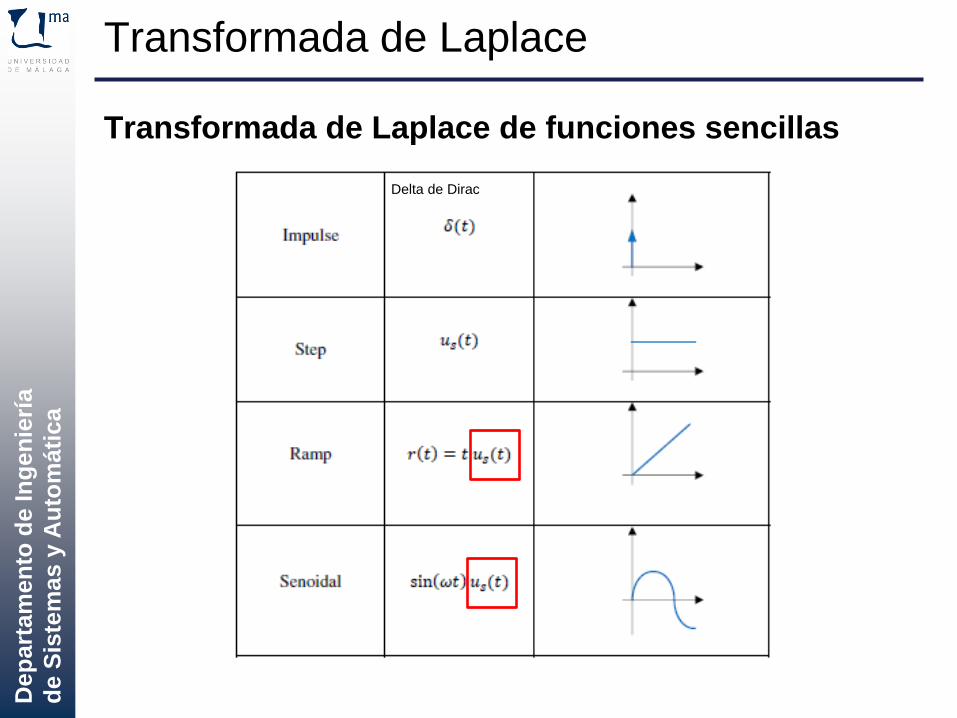
Transformada de Laplace de funciones sencillas
Transformada de Laplace
Delta de Dirac
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
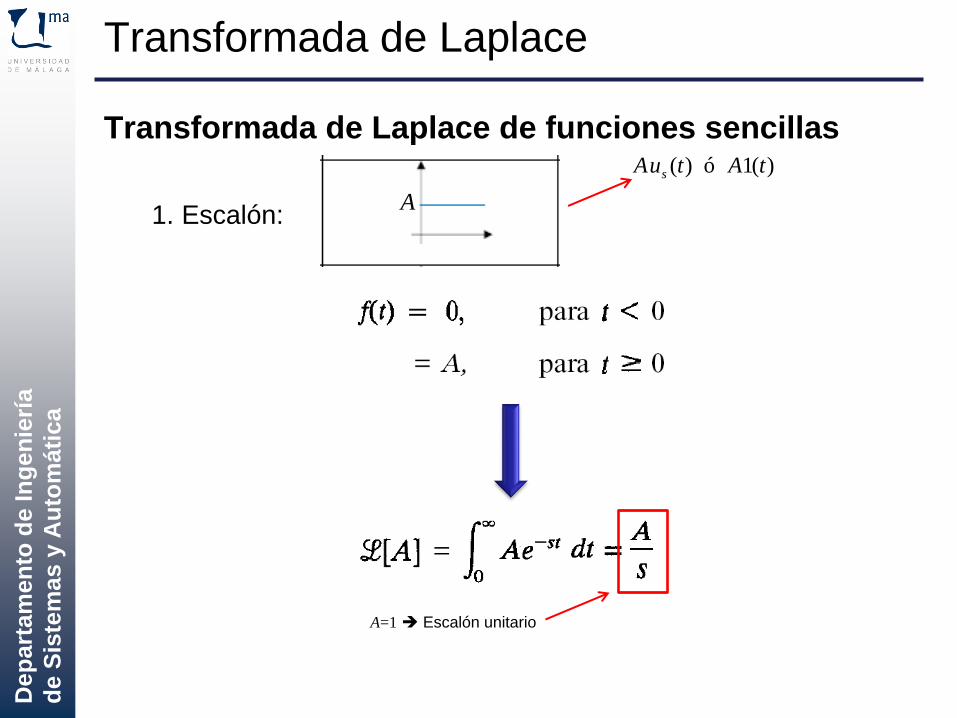
Transformada de Laplace de funciones sencillas
1. Escalón:
Transformada de Laplace
A
A=1 Escalón unitario
)(1ó)( tAtuA s
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
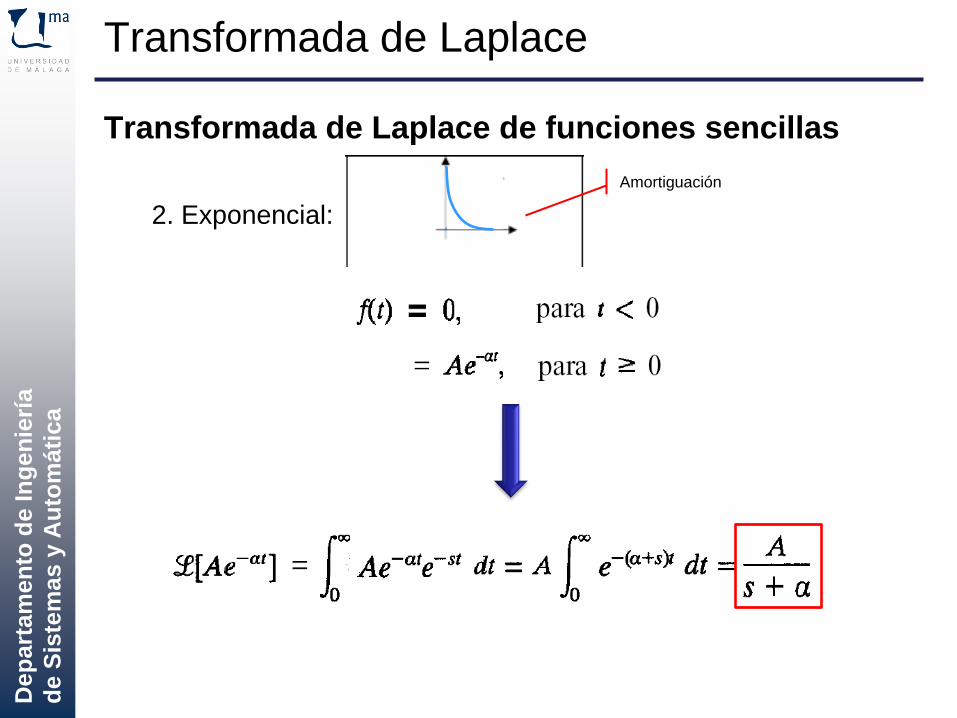
Transformada de Laplace de funciones sencillas
2. Exponencial:
Transformada de Laplace
Amortiguación
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
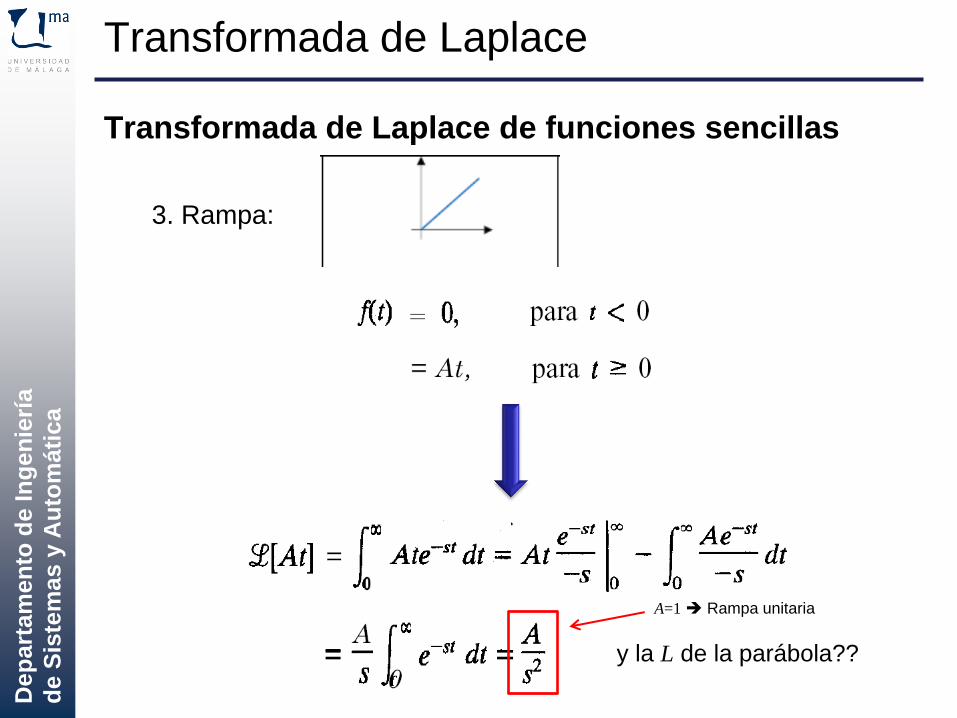
Transformada de Laplace de funciones sencillas
3. Rampa:
Transformada de Laplace
y la L de la parábola??
A=1 Rampa unitaria
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
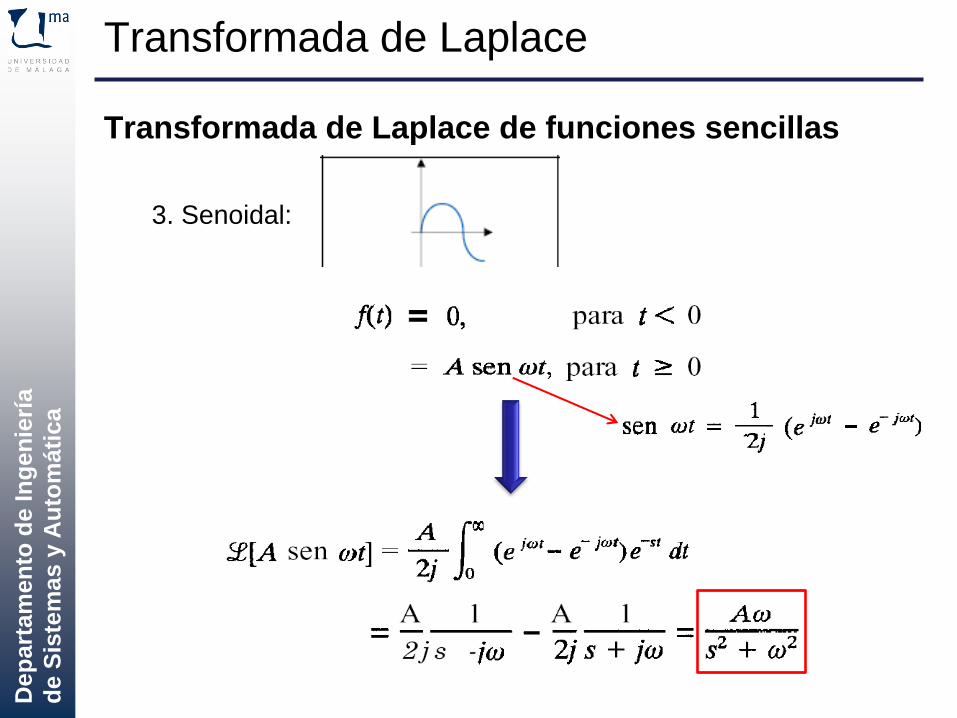
Transformada de Laplace de funciones sencillas
3. Senoidal:
Transformada de Laplace
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
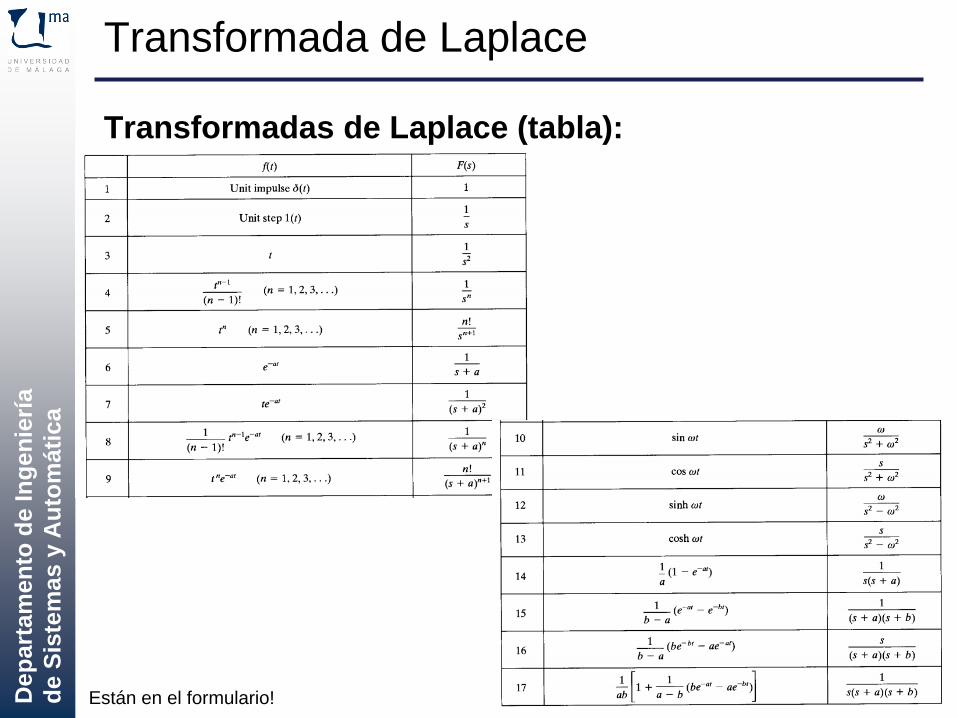
Transformadas de Laplace (tabla):
Transformada de Laplace
Están en el formulario!
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Transformada de Laplace
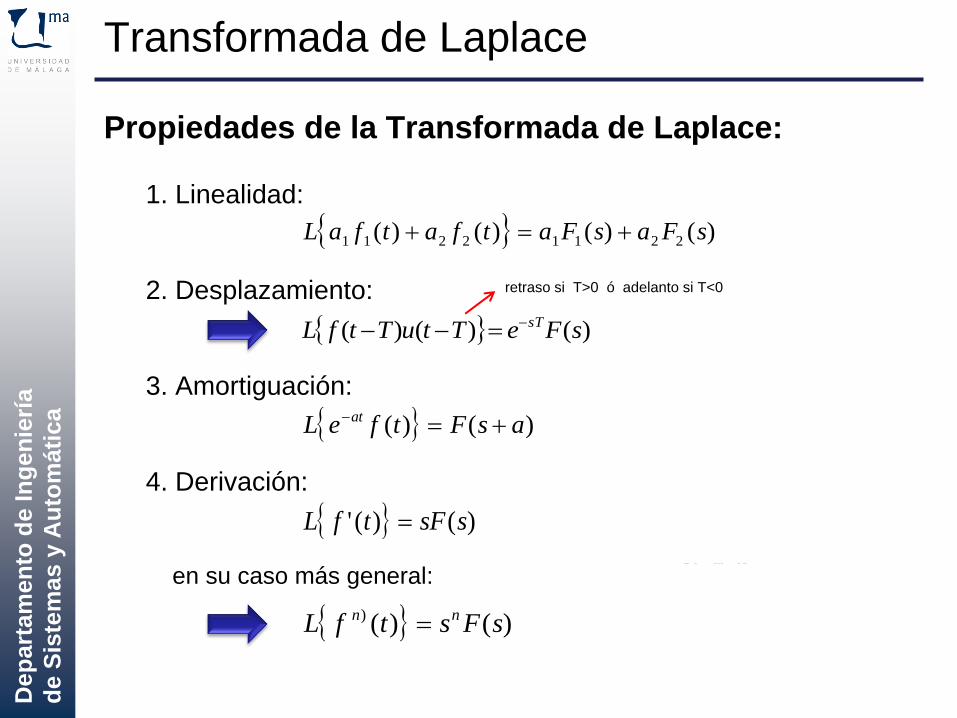
Propiedades de la Transformada de Laplace:
1. Linealidad:
2. Desplazamiento:
3. Amortiguación:
4. Derivación:
en su caso más general:
L a f t a f t a F s a F s1 1 2 2 1 1 2 2( ) ( ) ( ) ( )
)()()( sFeTtuTtfL sT
L e f t F s aat ( ) ( )
L f t sF s f' ( ) ( ) ( ) 0
L f t s F s s f s f fn n n n n) )( ) ( ) ( ) ' ( ) ( ) 1 2 10 0 0
0
Si condiciones
iniciales nulas
retraso si T>0 ó adelanto si T<0
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
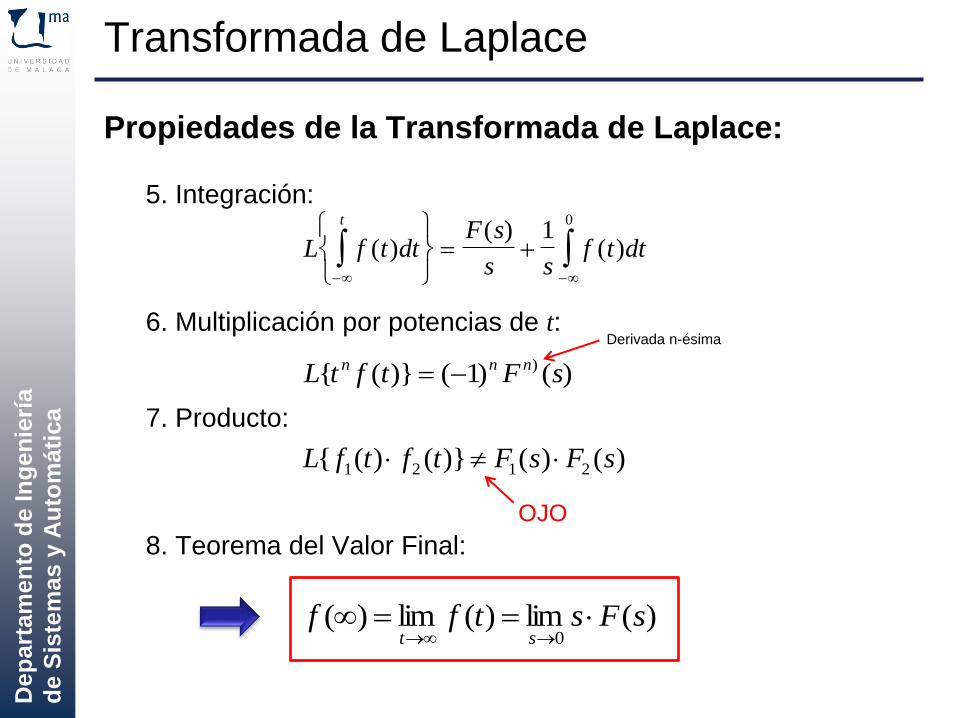
Propiedades de la Transformada de Laplace:
5. Integración:
6. Multiplicación por potencias de t:
7. Producto:
8. Teorema del Valor Final:
Transformada de Laplace
L f t dtF s
s sf t dt
t
( )( )
( )
1
0
L t f t F sn n n{ ( )} ( ) ( )) 1
)()()}()({ 2121 sFsFtftfL
)(lim)(lim)(0
sFstffst
OJO
Derivada n-ésima
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
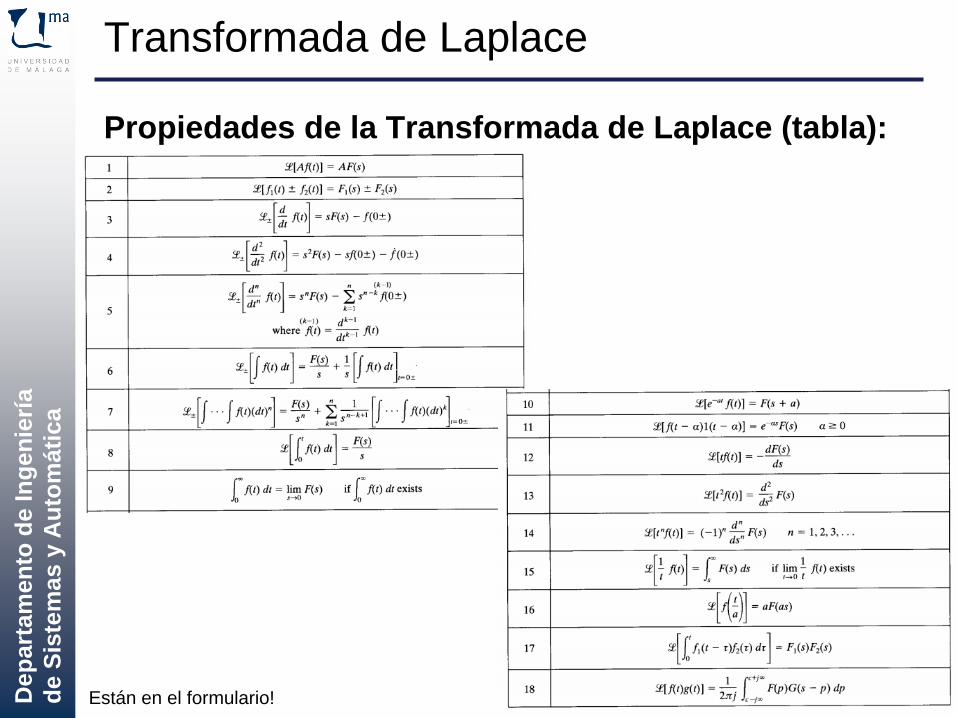
Propiedades de la Transformada de Laplace (tabla):
Transformada de Laplace
Están en el formulario!
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
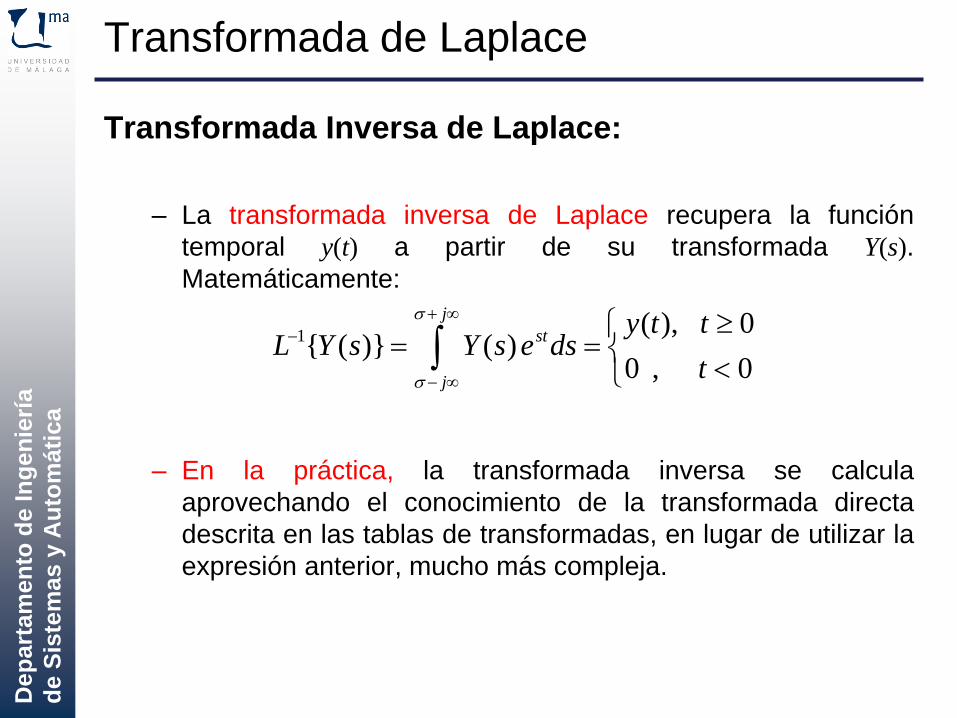
Transformada Inversa de Laplace:
– La transformada inversa de Laplace recupera la función
temporal y(t) a partir de su transformada Y(s).
Matemáticamente:
– En la práctica, la transformada inversa se calcula
aprovechando el conocimiento de la transformada directa
descrita en las tablas de transformadas, en lugar de utilizar la
expresión anterior, mucho más compleja.
j
j
st
t
ttydsesYsYL
s
s0 , 0
0 ),()()}({1
Transformada de Laplace
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
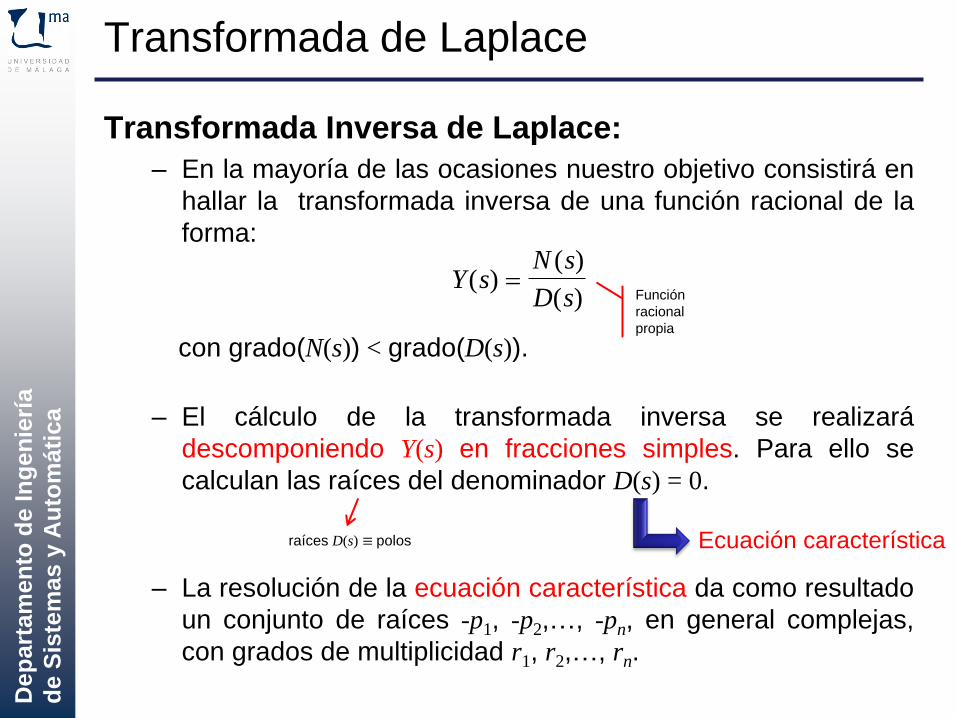
Transformada Inversa de Laplace:
– En la mayoría de las ocasiones nuestro objetivo consistirá en
hallar la transformada inversa de una función racional de la
forma:
con grado(N(s)) < grado(D(s)).
– El cálculo de la transformada inversa se realizará
descomponiendo Y(s) en fracciones simples. Para ello se
calculan las raíces del denominador D(s) = 0.
– La resolución de la ecuación característica da como resultado
un conjunto de raíces -p1, -p2,…, -pn, en general complejas,
con grados de multiplicidad r1, r2,…, rn.
Transformada de Laplace
Y sN s
D s( )
( )
( )
Ecuación característicaraíces D(s) ≡ polos
Función
racional
propia
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
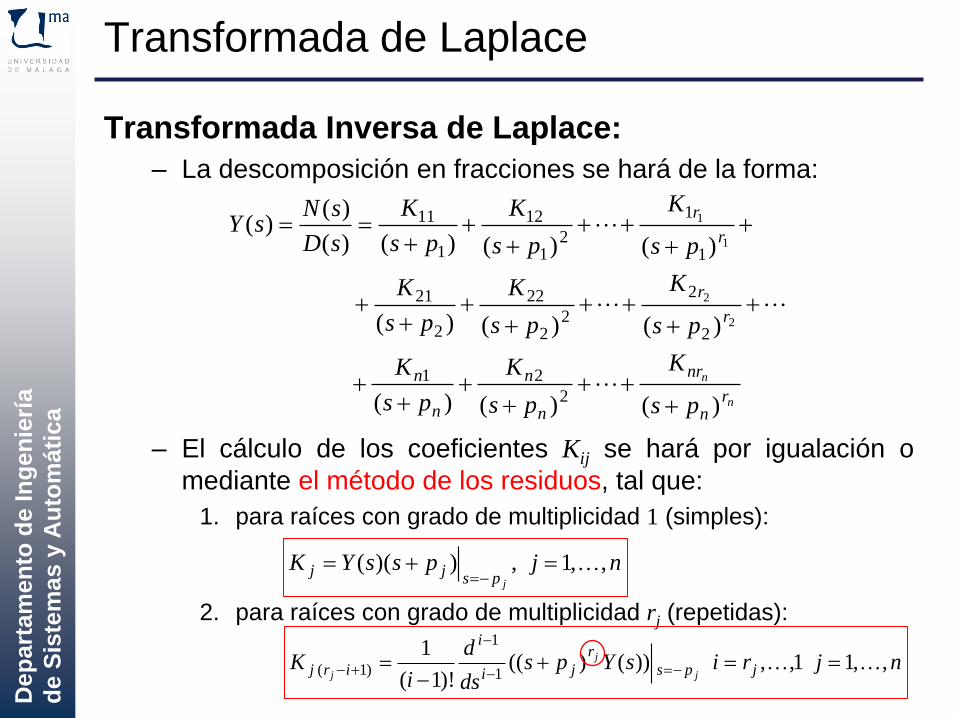
Transformada Inversa de Laplace:
– La descomposición en fracciones se hará de la forma:
– El cálculo de los coeficientes Kij se hará por igualación o
mediante el método de los residuos, tal que:
1. para raíces con grado de multiplicidad 1 (simples):
2. para raíces con grado de multiplicidad rj (repetidas):
Transformada de Laplace
n
n
rn
nr
n
n
n
n
r
r
r
r
ps
K
ps
K
ps
K
ps
K
ps
K
ps
K
ps
K
ps
K
ps
K
sD
sNsY
)()()(
)()()(
)()()()(
)()(
2
21
2
2
22
22
2
21
1
1
21
12
1
11
2
2
1
1
njpssYKjps
jj ,,1 ,)()(
njrisYpsds
d
iK jps
r
ji
i
irj j
j
j,,1 1,, ))()((
)!1(
11
1
)1(
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
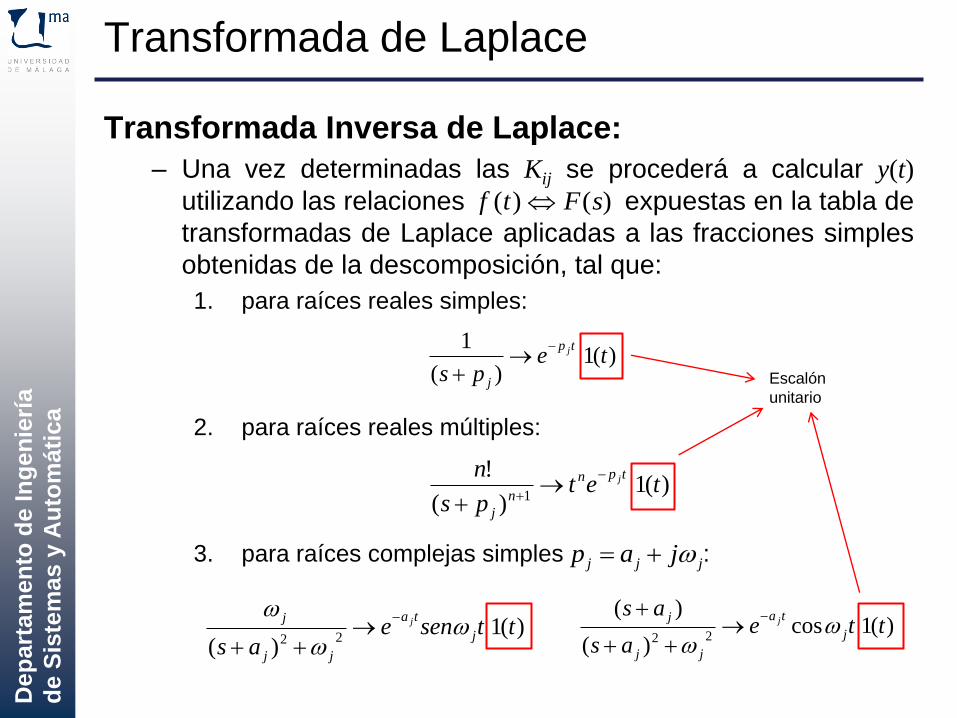
Transformada Inversa de Laplace:
– Una vez determinadas las Kij se procederá a calcular y(t)
utilizando las relaciones expuestas en la tabla de
transformadas de Laplace aplicadas a las fracciones simples
obtenidas de la descomposición, tal que:
1. para raíces reales simples:
2. para raíces reales múltiples:
3. para raíces complejas simples :
Transformada de Laplace
f t F s( ) ( )
)(1)(
1te
ps
tp
j
j
)(1)(
!1
tetps
n tpn
n
j
j
jjj jap w
)(1)(
22ttsene
asj
ta
jj
j j ww
w
)(1cos
)(
)(22
tteas
asj
ta
jj
j j ww
Escalón
unitario
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
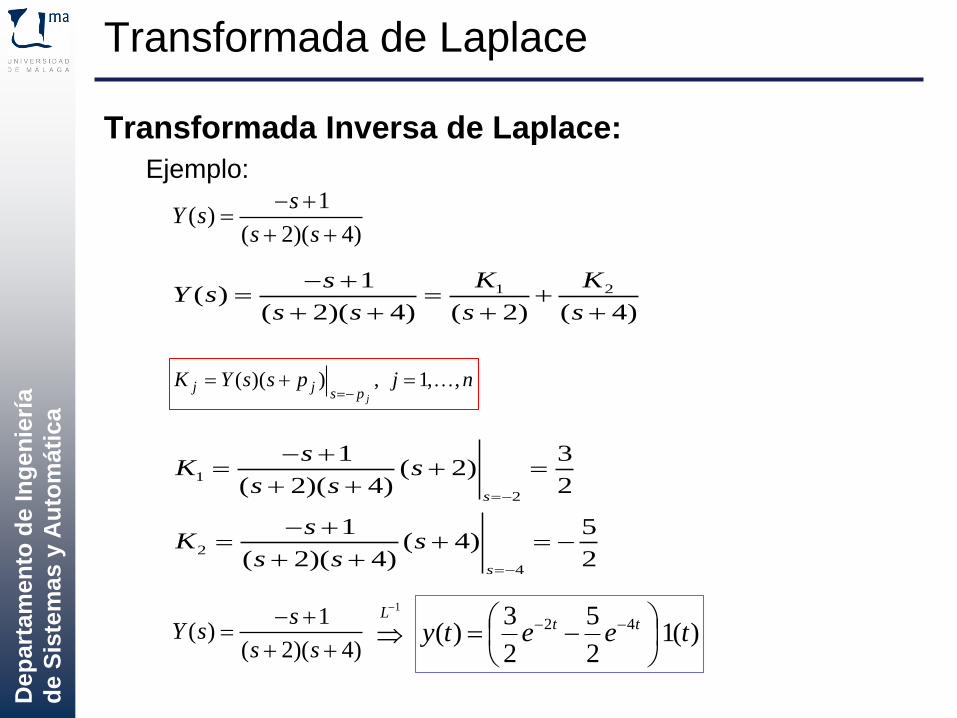
Transformada Inversa de Laplace:
Ejemplo:
Transformada de Laplace
njpssYKjps
jj ,,1 ,)()(
1( )
( 2)( 4)
sY s
s s
1 21( )
( 2)( 4) ( 2) ( 4)
K KsY s
s s s s
1
2
2
4
1 3( 2)
( 2)( 4) 2
1 5( 4)
( 2)( 4) 2
s
s
sK s
s s
sK s
s s
)(12
5
2
3)( 42 teety tt
1
( )( 2)( 4)
sY s
s s
1
L
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Transformada Inversa de Laplace:
Ejemplo:
Transformada de Laplace
2
5( 2)( )
( 1)( 3)
sY s
s s s
311 12 2
2 2
5( 2)( )
( 1)( 3) 1 3
KK K KsY s
s s s s s s s
1
2
2
11 1(2 2 1) 2
0
2
12 1(2 1 1) 2
0
1 5( 2) 25
1! ( 1)( 3) 9
1 5( 2) 10
0! ( 1)( 3) 3
i
i
s
s
d sK K s
ds s s s
sK K s
s s s
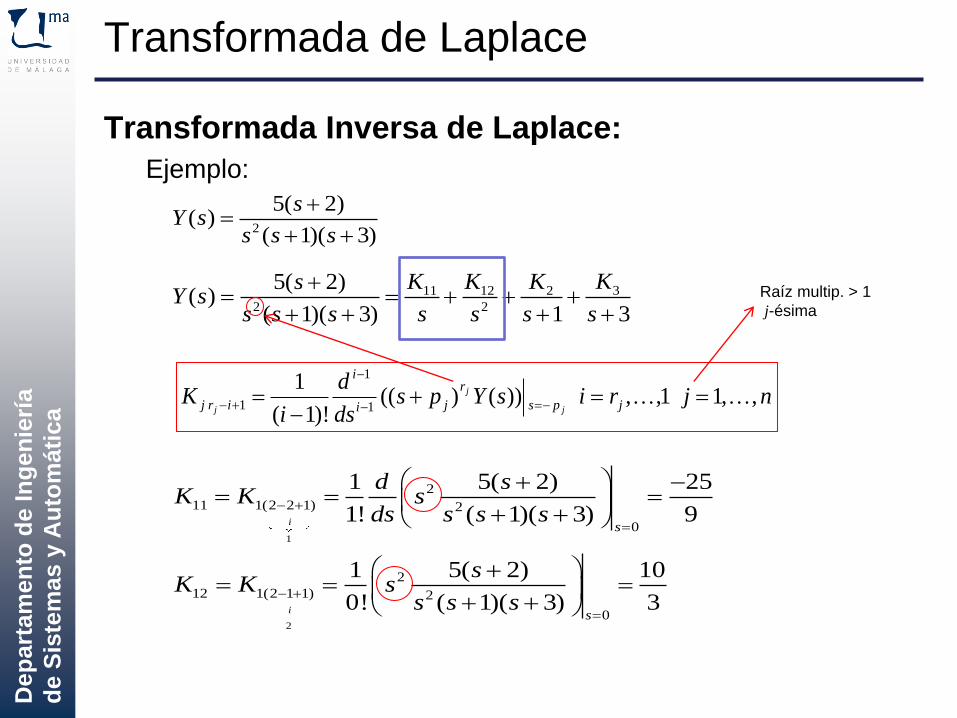
njrisYpsds
d
iK jps
r
ji
i
irj j
j
j,,1 1,, ))()((
)!1(
11
1
1
Raíz multip. > 1
j-ésima
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
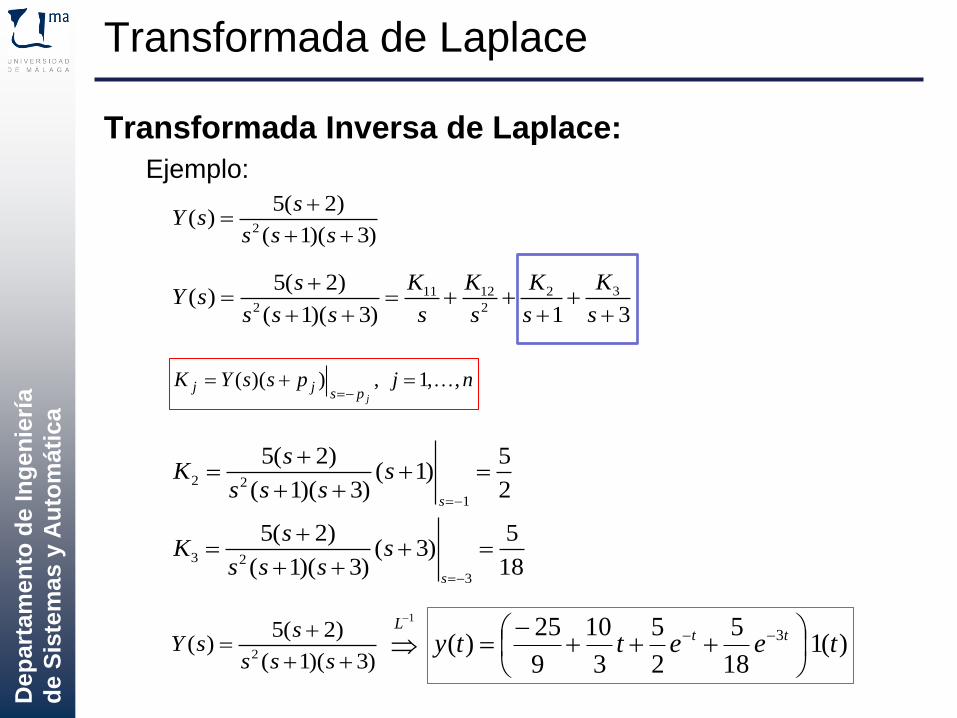
Transformada Inversa de Laplace:
Ejemplo:
Transformada de Laplace
njpssYKjps
jj ,,1 ,)()(
2 2
1
3 2
3
5( 2) 5( 1)
( 1)( 3) 2
5( 2) 5( 3)
( 1)( 3) 18
s
s
sK s
s s s
sK s
s s s
2
5( 2)( )
( 1)( 3)
sY s
s s s
311 12 2
2 2
5( 2)( )
( 1)( 3) 1 3
KK K KsY s
s s s s s s s
)(118
5
2
5
3
10
9
25)( 3 teetty tt
2
5( 2)( )
( 1)( 3)
sY s
s s s
1
L

De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Transformada Inversa de Laplace:
Ejemplo:
Transformada de Laplace
)52(
3)(
2
ssssY
))21(())21(()52(
3)( 321
2 js
K
js
K
s
K
ssssY
22
'
3
22
'
21
2 2)1(
2
2)1(
)1(
)52(
3)(
s
K
s
sK
s
K
ssssY
cosate tw sinate tw
3
'
32
'
2 Im2,Re2 KKKK donde:
22
'
3
22
'
2
)()(
)(
w
w
w
as
K
as
asK
1L 1L
Existe L-1 directa de
esta expresión??
'
2K'
3K

De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Transformada Inversa de Laplace:
Ejemplo:
Transformada de Laplace
njpssYKjps
jj ,,1 ,)()(
6.05
3
)52(
3
0
21
s
ssss
K
6.0)15.03.0Re(2)21()21)(21(
3 '
2
21
2
jKjsjsjss
Kjs
3.0)15.03.0Im(2)21()21)(21(
3 '
3
21
3
jKjsjsjss
Kjs
)(1)2sin(3.0)2cos(6.06.0)( ttetety tt )52(
3)(
2
ssssY
1
L
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Resolución de Ecuación Diferencial Lineal:
1. Se toma la transformada de Laplace de cada término de la
ecuación diferencial y se convierte la ecuación diferencial en
una ecuación algebraica en s.
2. Se obtiene la expresión para la transformada de Laplace de
la variable dependiente reordenando la ecuación algebraica.
3. La solución en el tiempo de la ecuación diferencial se
obtiene encontrando la transformada inversa de Laplace de
la variable dependiente.
Transformada de Laplace
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
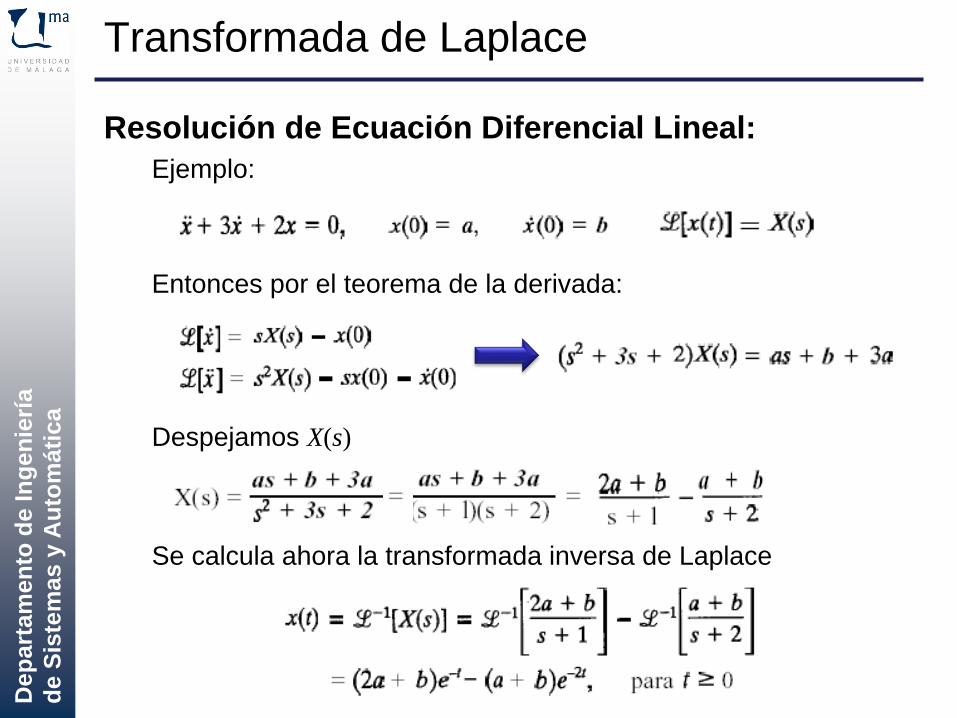
Resolución de Ecuación Diferencial Lineal:
Ejemplo:
Entonces por el teorema de la derivada:
Despejamos X(s)
Se calcula ahora la transformada inversa de Laplace
Transformada de Laplace
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Contenido
Tema 2.- Descripción externa de sistemas:
2.1. Introducción. Sistemas lineales.
2.2. Transformada de Laplace.
2.3. Matriz (Función) de transferencia.
2.4. Diagramas de bloques:
2.4.1 Función de transferencia en bucle abierto y cerrado.
2.4.2 Reducción de diagramas de bloques.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
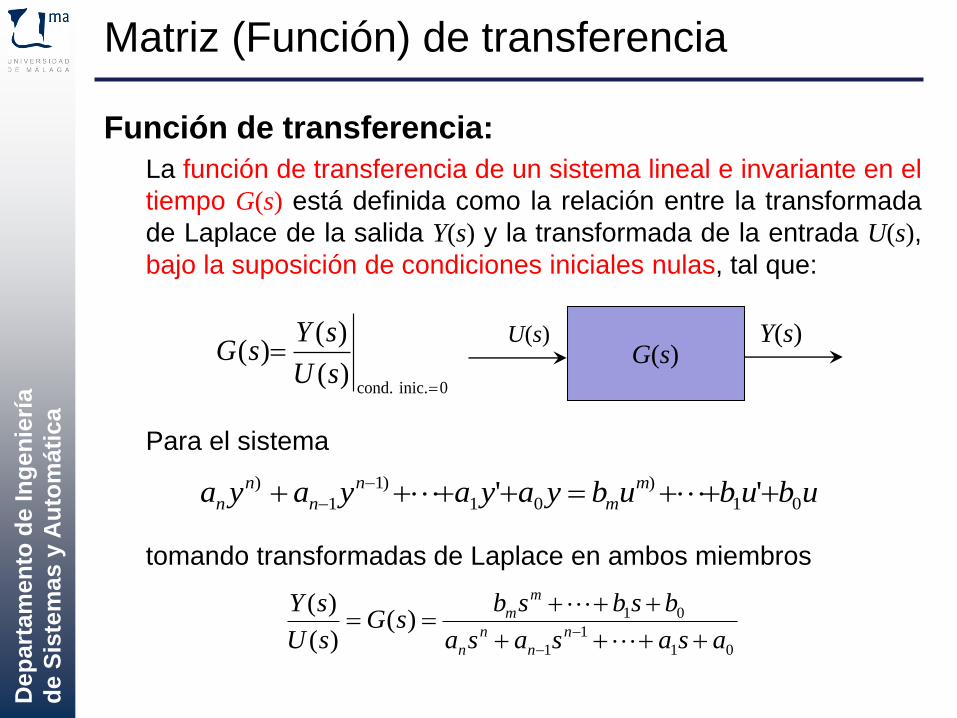
Función de transferencia:
La función de transferencia de un sistema lineal e invariante en el
tiempo G(s) está definida como la relación entre la transformada
de Laplace de la salida Y(s) y la transformada de la entrada U(s),
bajo la suposición de condiciones iniciales nulas, tal que:
Para el sistema
tomando transformadas de Laplace en ambos miembros
Matriz (Función) de transferencia
a y a y a y a y b u b u b un
n
n
n
m
m) ) )' '
1
1
1 0 1 0
01
1
1
01)()(
)(
asasasa
bsbsbsG
sU
sYn
n
n
n
m
m
U(s) Y(s)
0inic.cond.)(
)()(
sU
sYsG G(s)
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Función de transferencia (cont.):
1. La función de transferencia de un sistema es un modelo
matemático porque es un método operacional para expresar la
ecuación diferencial que relaciona la variable de salida con la
variable de entrada.
2. La función de transferencia es una propiedad de un sistema,
independiente de la magnitud y naturaleza de la entrada o
función de excitación.
3. La función de transferencia incluye las unidades necesarias para
relacionar la entrada con la salida, pero no proporciona
información acerca de la estructura física del sistema.
Matriz (Función) de transferencia
Sistemas análogos: sistemas físicamente
diferentes con funciones de transferencia
idénticas.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Función de transferencia (cont.):
4. A partir de la función de transferencia de un sistema, se puede
estudiar la respuesta para diferentes tipos de entrada.
5. La función de transferencia de un sistema puede establecerse
experimentalmente introduciendo entradas conocidas y
estudiando la salida del sistema.
6. Analizando la respuesta impulso u(t) = d(t)
la transformada inversa de Laplace de G(s) es la respuesta al
impulso unitario:
Matriz (Función) de transferencia
)()()()( sGsUsGsY
Identificación (Tema 4)
)()()( 11 tgsGLsYL
1)( tL d
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
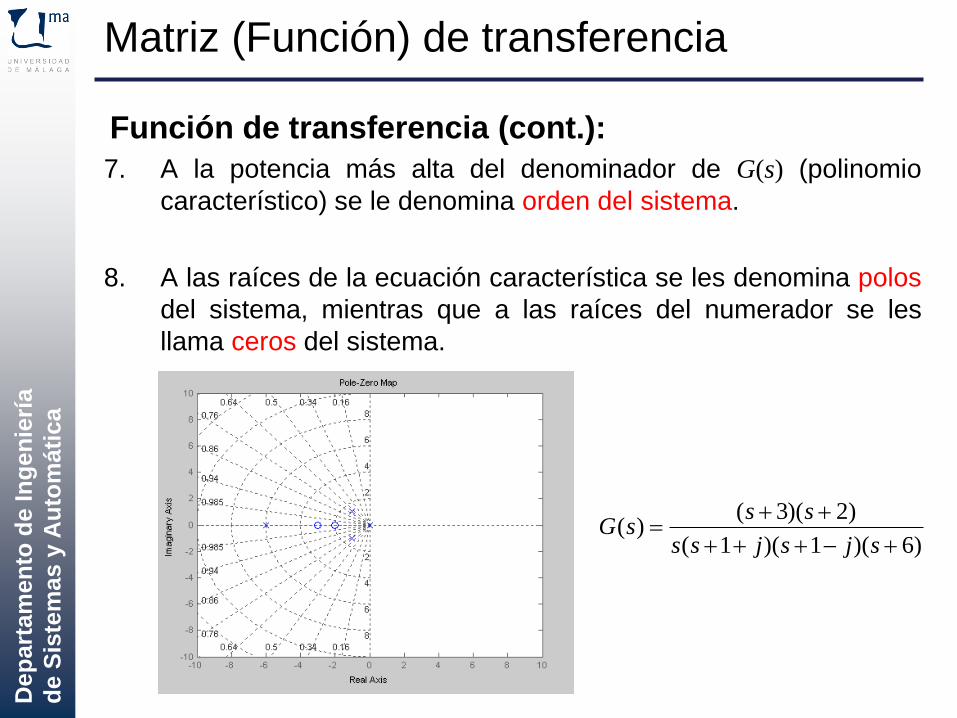
Función de transferencia (cont.):
7. A la potencia más alta del denominador de G(s) (polinomio
característico) se le denomina orden del sistema.
8. A las raíces de la ecuación característica se les denomina polos
del sistema, mientras que a las raíces del numerador se les
llama ceros del sistema.
Matriz (Función) de transferencia
)6)(1)(1(
)2)(3()(
sjsjss
sssG
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Matriz (Función) de transferencia
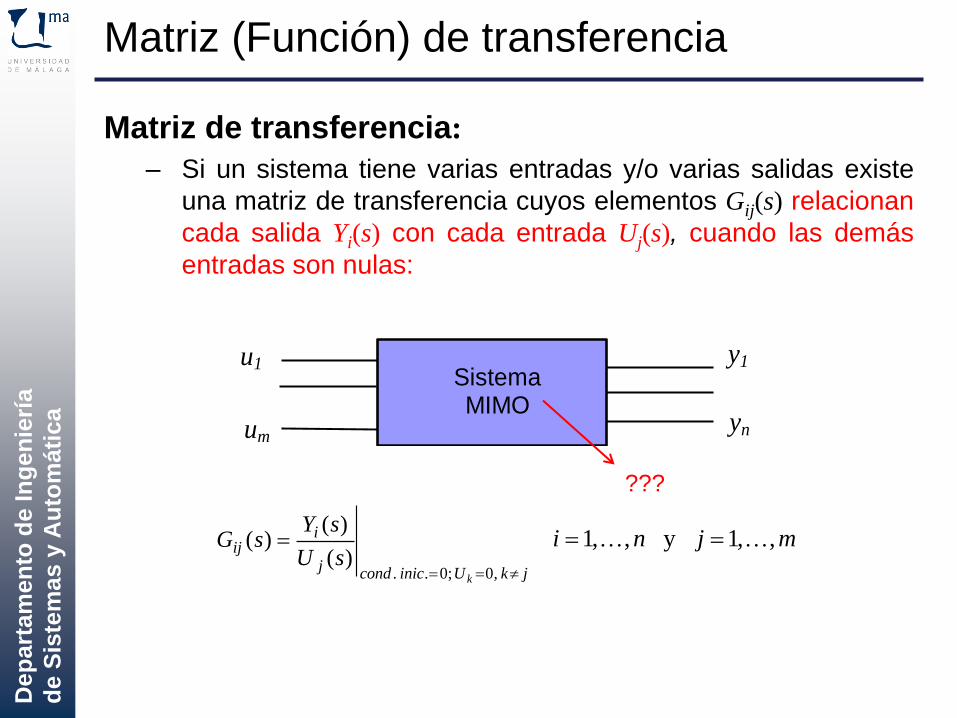
Matriz de transferencia:
– Si un sistema tiene varias entradas y/o varias salidas existe
una matriz de transferencia cuyos elementos Gij(s) relacionan
cada salida Yi(s) con cada entrada Uj(s), cuando las demás
entradas son nulas:
jkUiniccondj
iij
k
sU
sYsG
,0 ;0..)(
)()( mjni ,,1y ,,1
Sistema MIMO
u1
um
y1
yn
???
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Matriz (Función) de transferencia
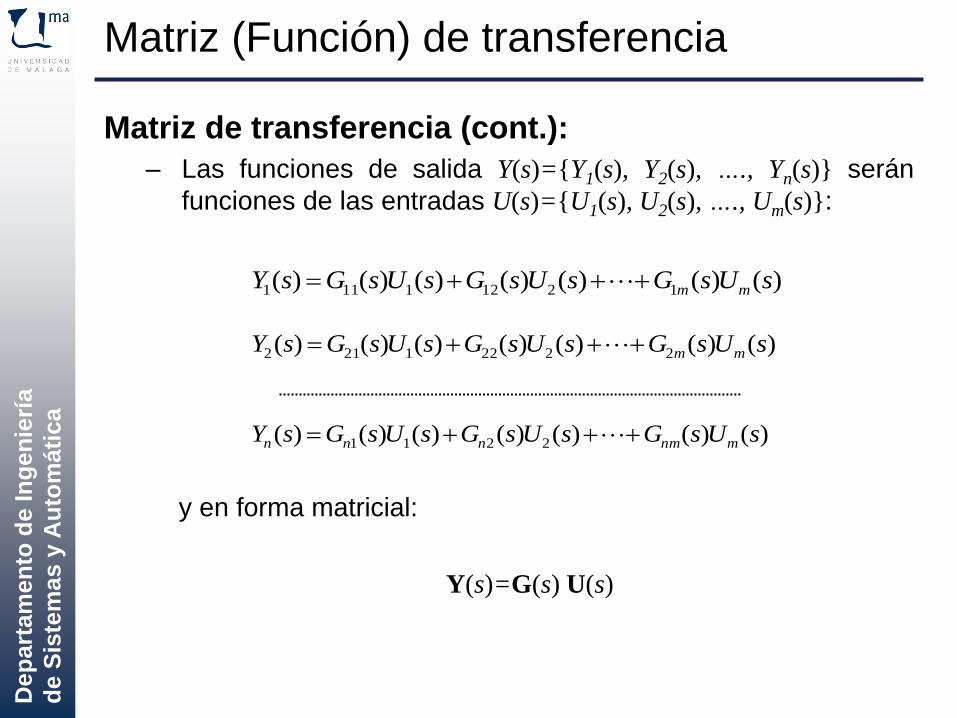
Matriz de transferencia (cont.):
– Las funciones de salida Y(s)={Y1(s), Y2(s), …., Yn(s)} serán
funciones de las entradas U(s)={U1(s), U2(s), …., Um(s)}:
y en forma matricial:
Y(s)=G(s) U(s)
)()()()()()()( 12121111 sUsGsUsGsUsGsY mm
)()()()()()()( 22221212 sUsGsUsGsUsGsY mm
)()()()()()()( 2211 sUsGsUsGsUsGsY mnmnnn
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Contenido
Tema 2.- Descripción externa de sistemas:
2.1. Introducción. Sistemas lineales.
2.2. Transformada de Laplace.
2.3. Matriz (Función) de transferencia.
2.4. Diagramas de bloques:
2.4.1 Función de transferencia en bucle abierto y cerrado.
2.4.2 Reducción de diagramas de bloques.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Diagrama de bloques:
– Un sistema de control puede tener varios componentes. Para
mostrar las funciones que lleva a cabo cada componente se
usa, por lo general, una representación denominada
diagrama de bloques.
– El diagrama de bloques de un sistema es una representación
gráfica de las funciones que lleva a cabo cada componente y
el flujo de señales entre ellos.
– A diferencia de una representación matemática puramente
abstracta, un diagrama de bloques tiene la ventaja de indicar
en forma más realista el flujo de las señales del sistema real.
Diagramas de bloques
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
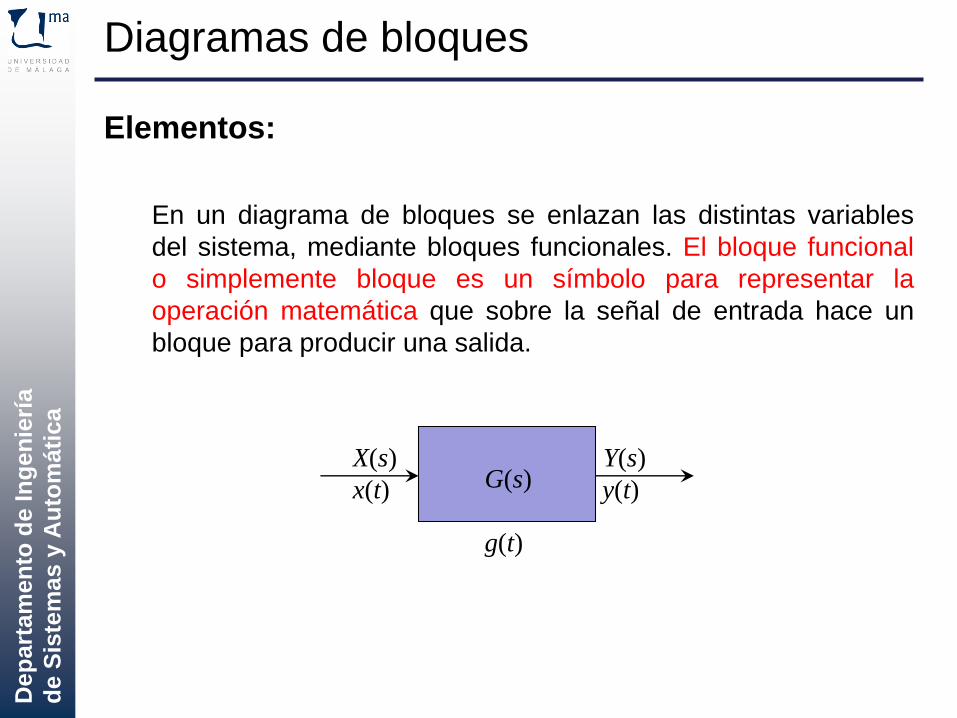
Elementos:
En un diagrama de bloques se enlazan las distintas variables
del sistema, mediante bloques funcionales. El bloque funcional
o simplemente bloque es un símbolo para representar la
operación matemática que sobre la señal de entrada hace un
bloque para producir una salida.
Diagramas de bloques
G(s)
g(t)
X(s) Y(s)
x(t) y(t)

De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Elementos:
Otros elementos importantes en un diagrama de bloques son:
– Punto suma (o resta):
– Punto de bifurcación o reparto:
Diagramas de bloques
X1(s)
X2(s)
X(s)+
-
X(s) X(s)
X(s)
.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Diagramas de bloques
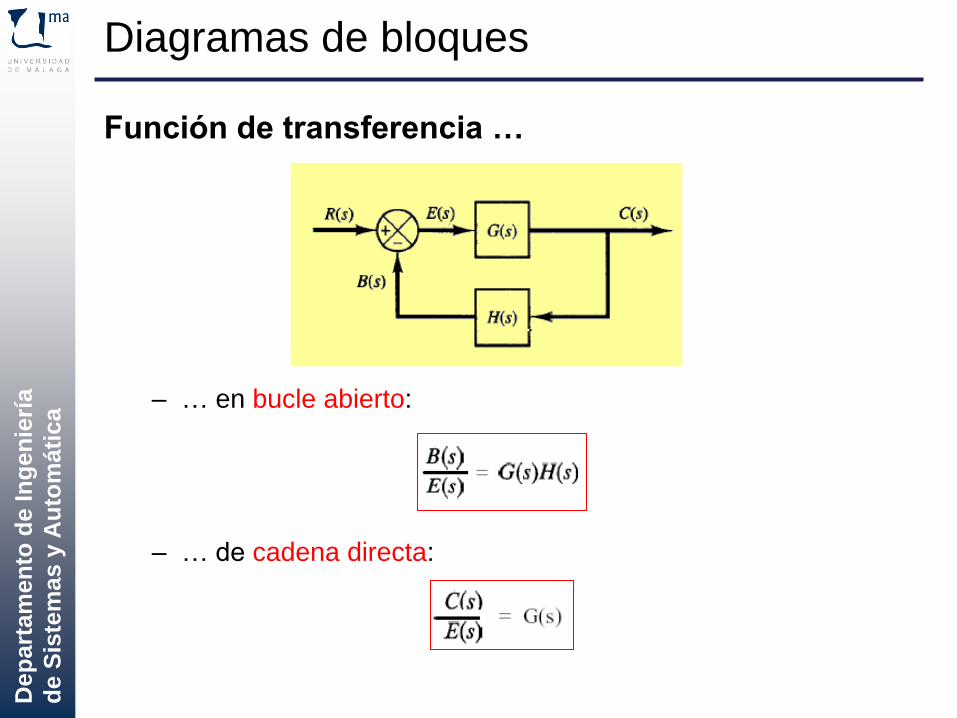
Función de transferencia …
– … en bucle abierto:
– … de cadena directa:
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Diagramas de bloques
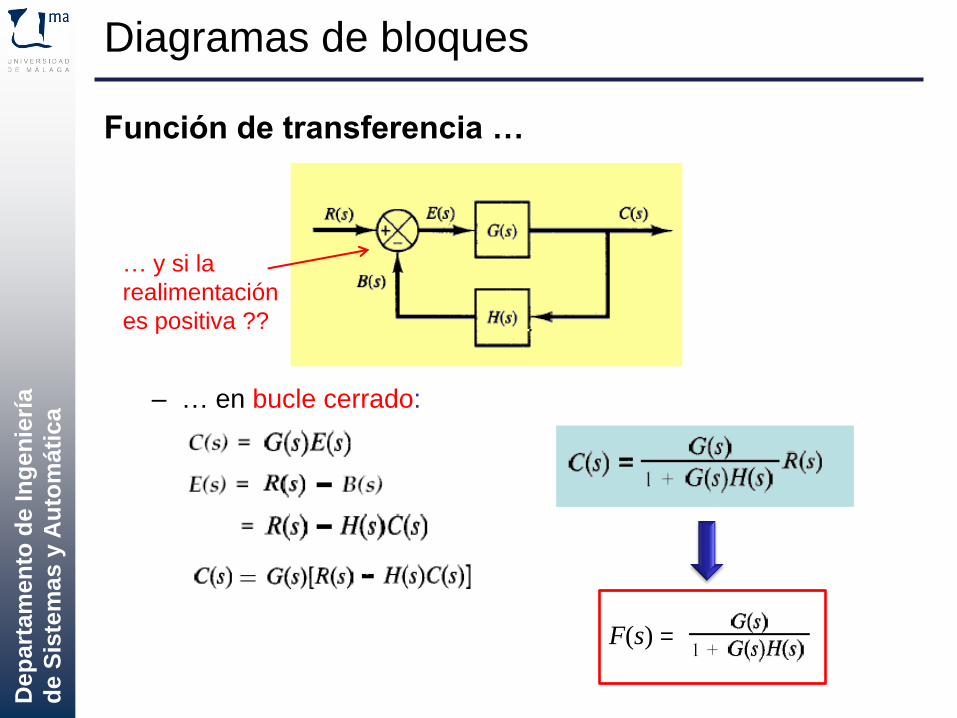
Función de transferencia …
– … en bucle cerrado:
F(s) =
… y si la
realimentación
es positiva ??
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Diagramas de bloques
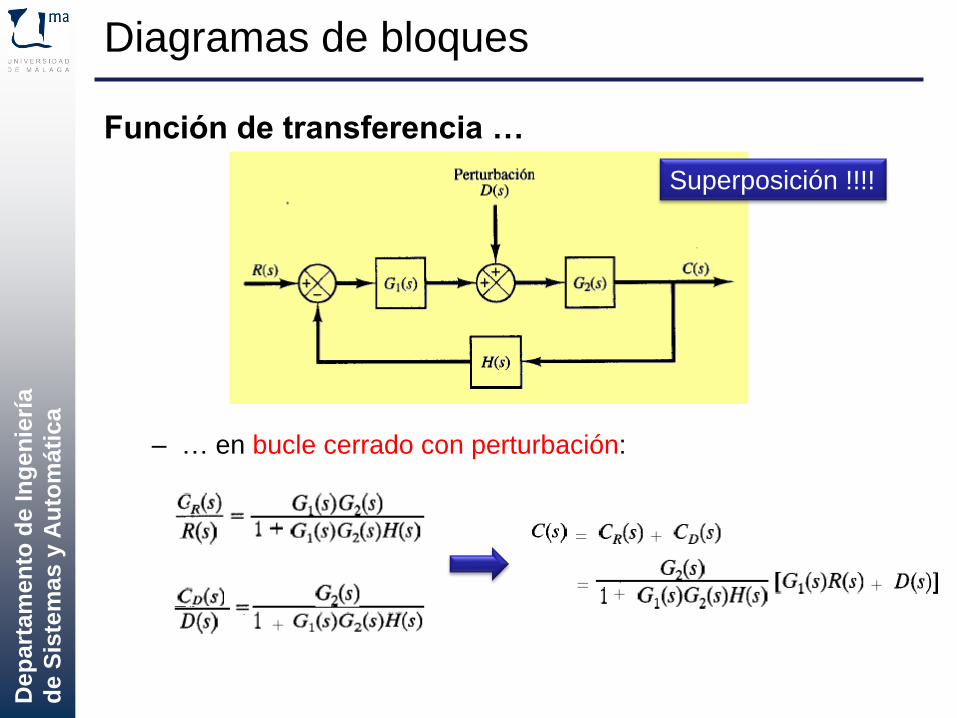
Función de transferencia …
– … en bucle cerrado con perturbación:
Superposición !!!!
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Diagramas de bloques
Para obtener el diagrama de bloques de un sistema…
1. Se escriben las ecuaciones que describen el
comportamiento dinámico de cada componente.
2. Se toman las transformadas de Laplace de estas
ecuaciones, suponiendo que las condiciones iniciales son
cero, y
3. Se representa individualmente en forma de bloques cada
ecuación transformada por el método de Laplace.
4. Por último, se integran los elementos en un diagrama de
bloques completo.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
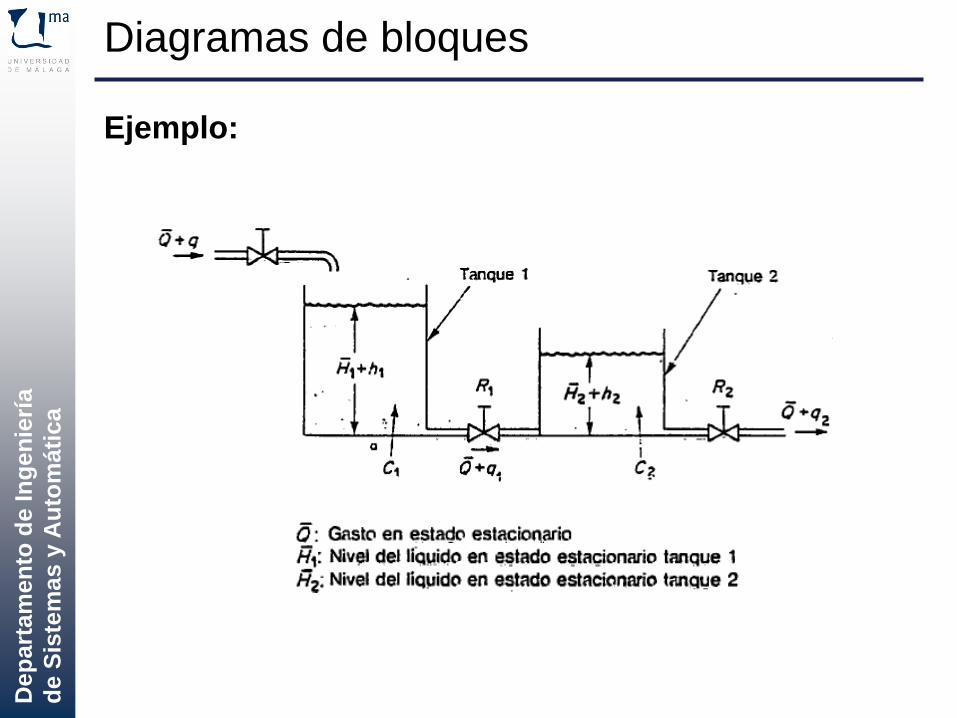
Ejemplo:
Diagramas de bloques
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
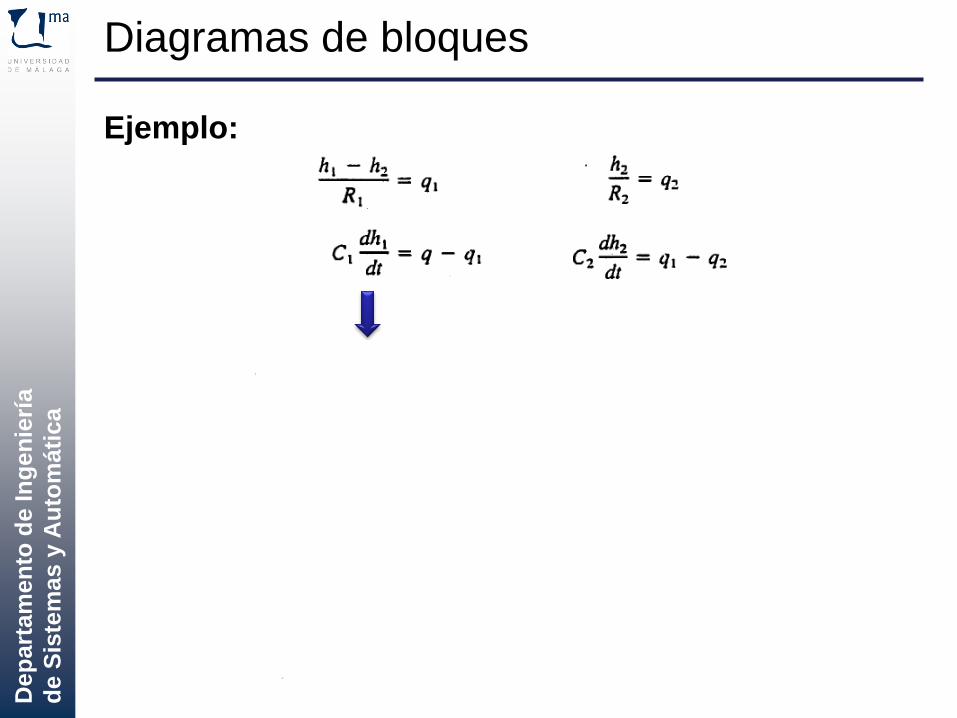
Diagramas de bloques
Ejemplo:
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
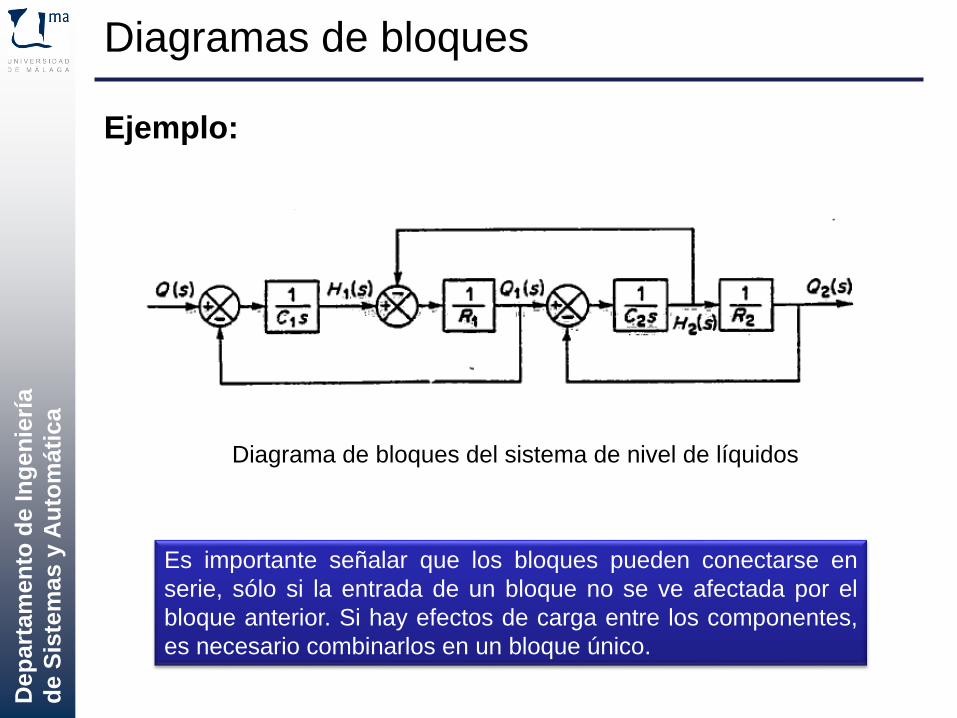
Diagrama de bloques del sistema de nivel de líquidos
Diagramas de bloques
Ejemplo:
Es importante señalar que los bloques pueden conectarse en
serie, sólo si la entrada de un bloque no se ve afectada por el
bloque anterior. Si hay efectos de carga entre los componentes,
es necesario combinarlos en un bloque único.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
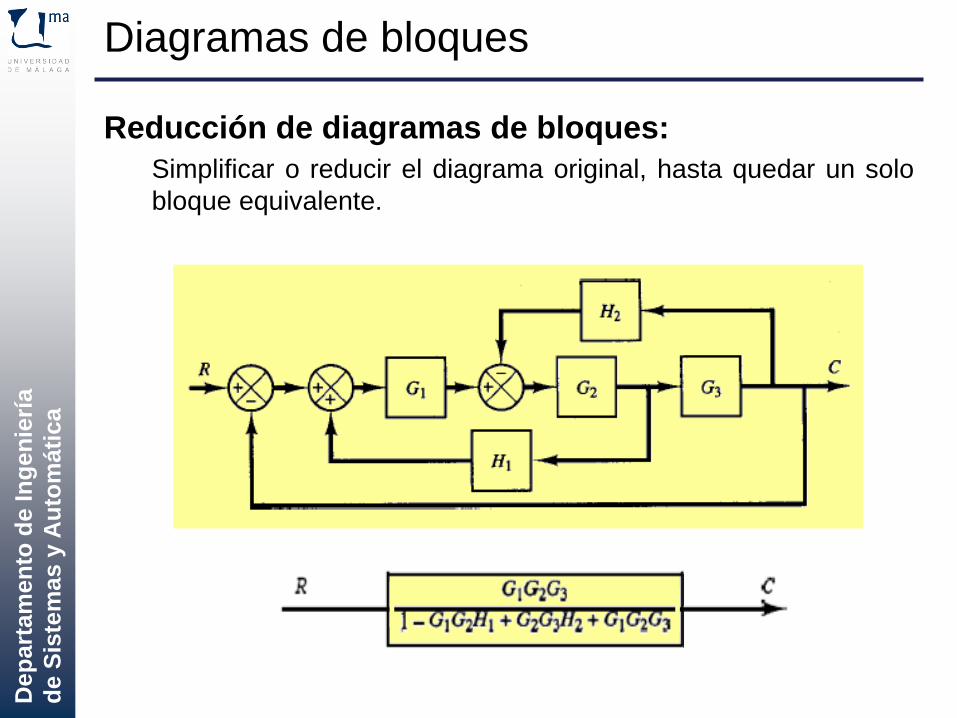
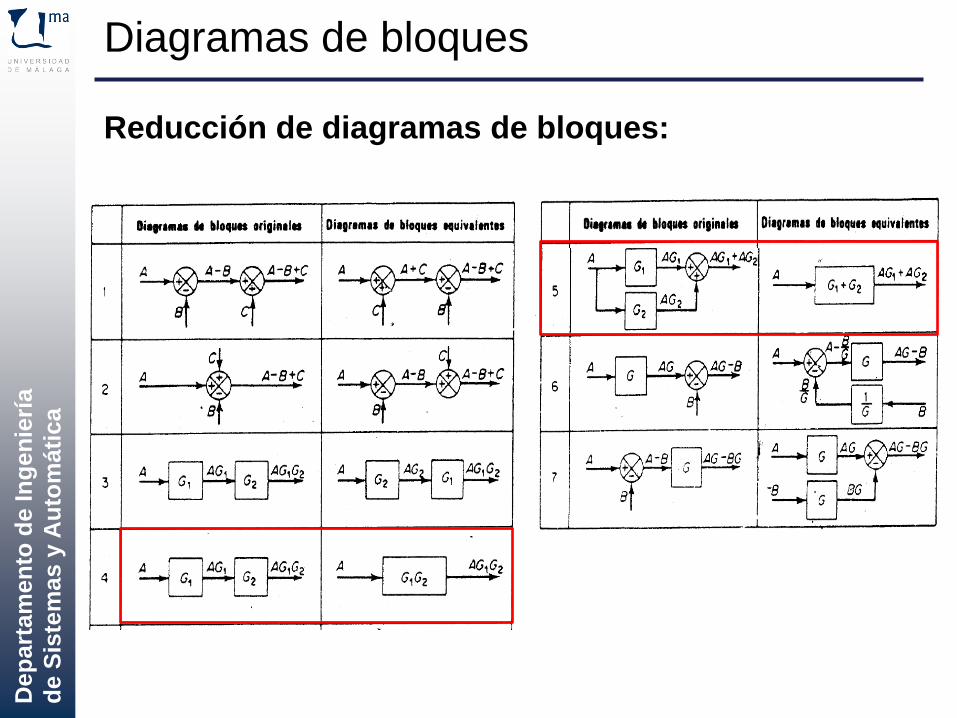
Reducción de diagramas de bloques:
Simplificar o reducir el diagrama original, hasta quedar un solo
bloque equivalente.
Diagramas de bloques
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Reducción de diagramas de bloques:
Diagramas de bloques
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
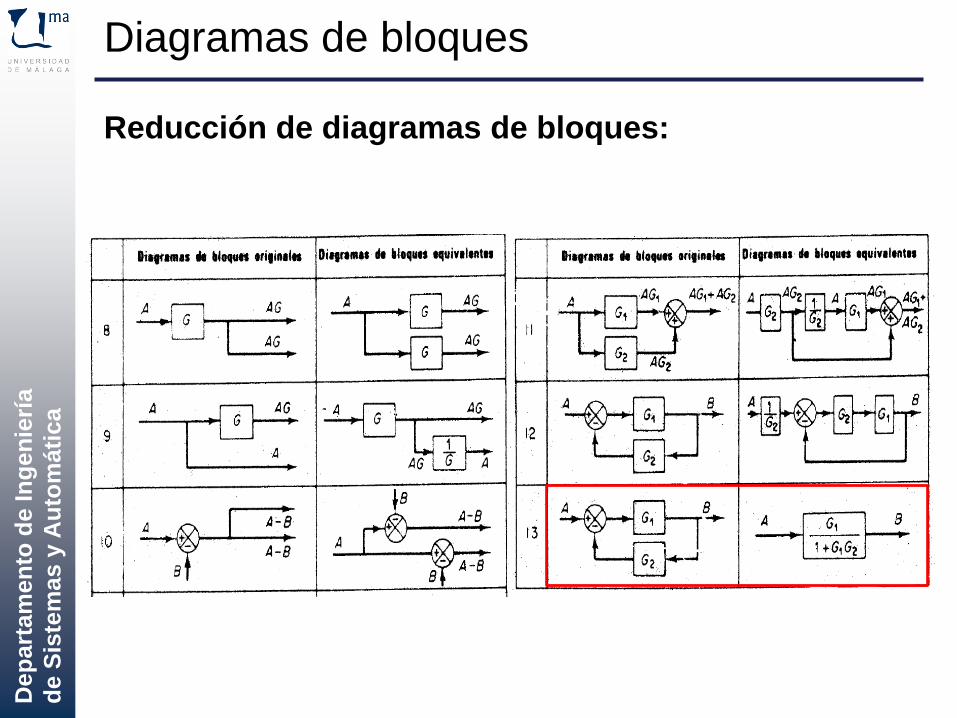
Reducción de diagramas de bloques:
Diagramas de bloques
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
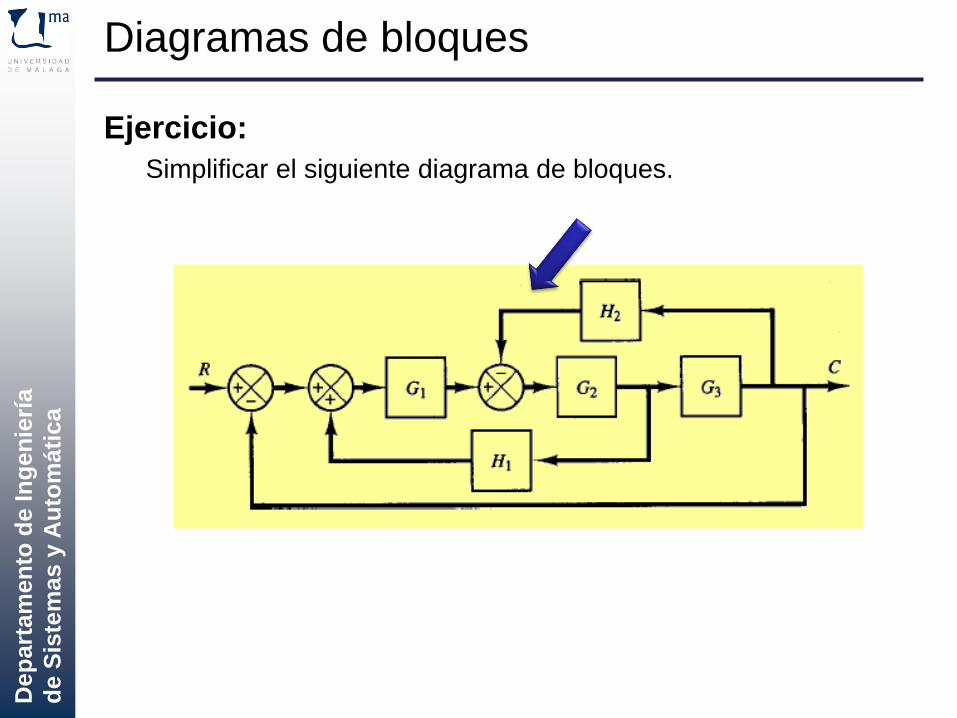
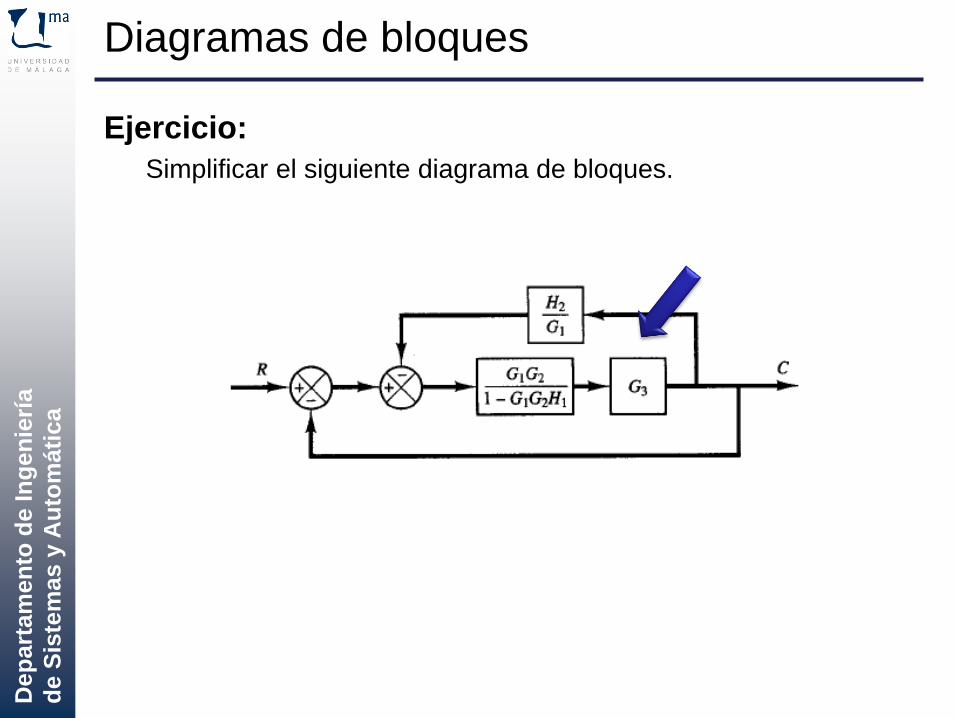
Ejercicio:
Simplificar el siguiente diagrama de bloques.
Diagramas de bloques
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
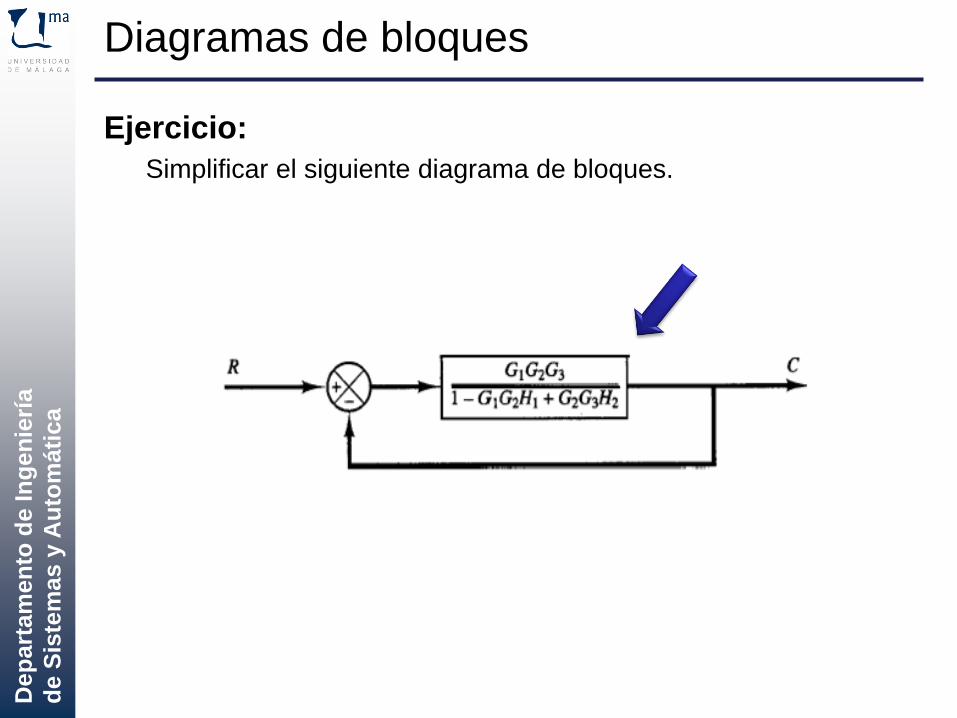
Ejercicio:
Simplificar el siguiente diagrama de bloques.
Diagramas de bloques
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
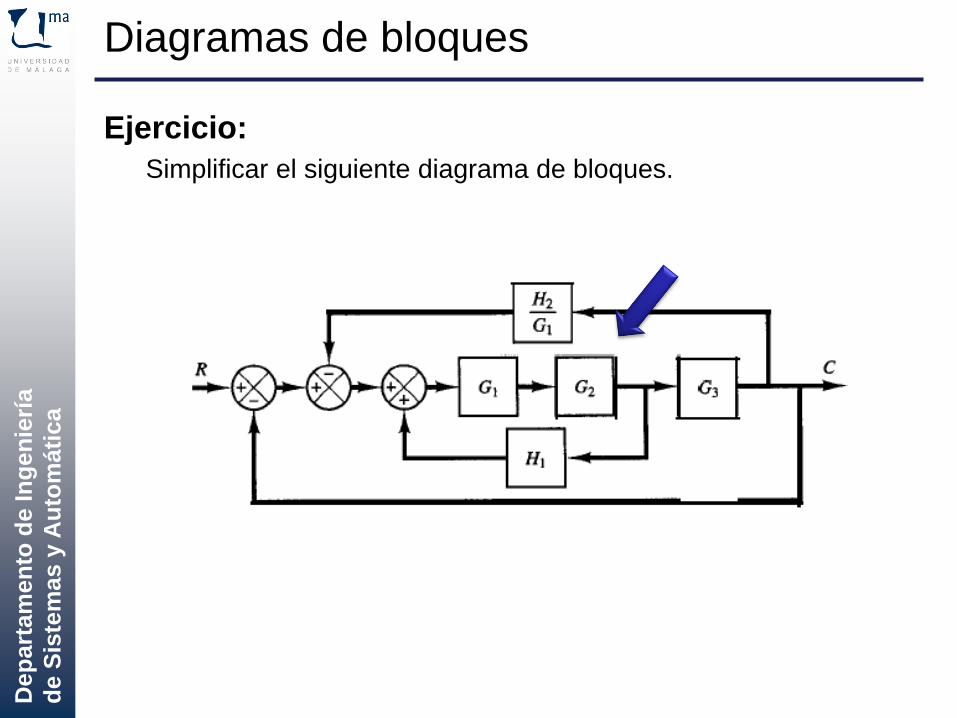
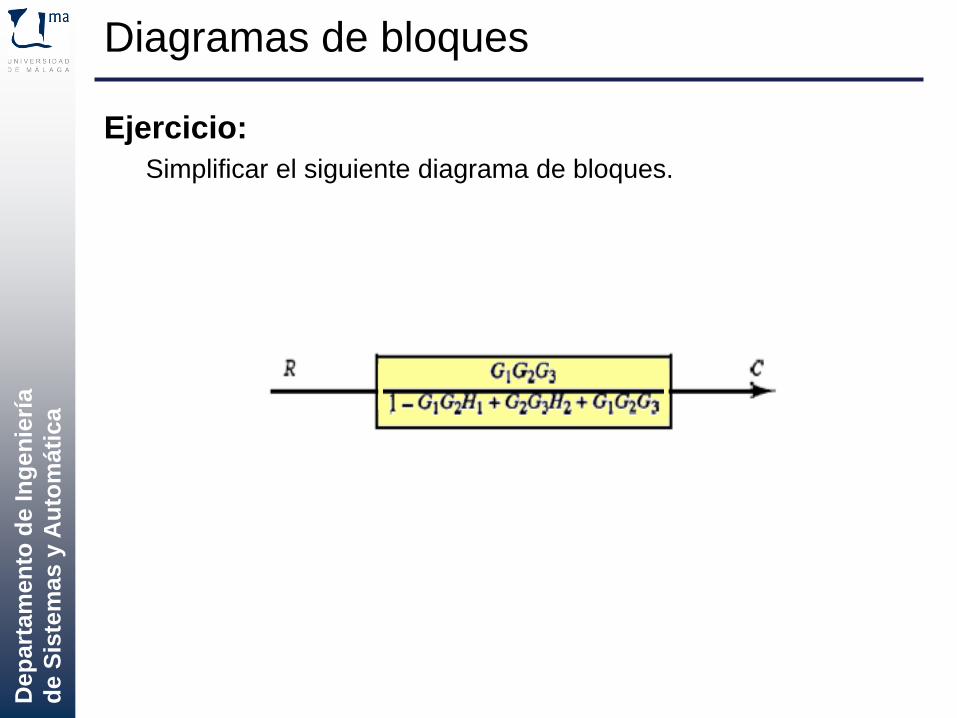
Diagramas de bloques
Ejercicio:
Simplificar el siguiente diagrama de bloques.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Diagramas de bloques
Ejercicio:
Simplificar el siguiente diagrama de bloques.
De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca
Ejercicio:
Simplificar el siguiente diagrama de bloques.
Diagramas de bloques

De
part
am
en
to d
e In
gen
ierí
a
de S
iste
ma
s y
Au
tom
áti
ca Automática
2º Curso del Grado en
Ingeniería en Tecnología Industrial
FIN





























