Embed Size (px)
Citation preview
18.10.2016
1
Studia I stopnia inżynierskie, Semestr VII
Politechnika Gdańska
Wyd
ział
Ele
ktr
ote
chn
iki
i A
uto
mat
yki
AUTOMATYKA – ZASTOSOWANIA, METODY I NARZĘDZIA,
PERSPEKTYWY
Systemy hybrydowe –wybrane zagadnienia
Robert Piotrowski, dr inż.
Katedra Inżynierii Systemów Sterowania
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Wykorzystane zdjęcia (1/2)
www.bts.net.ua/pl (kolumna rektyfikacyjna)
www.naftoremont.com.pl; www.forum.nikoniarze.pl (instalacjeprzemysłowe)
www.strefabiznesu.gp24.pl (linia produkcji samochodów)
www.drozdowski.com.pl (maszyna do cięcia)
www.infoster.pl (linia z maszynami)
www.paiz.gov.pl (linia produkcyjna z robotem)
www.eko-swiat.pl (linia produkcyjna)
www.igopak.com.pl; www.supertraders.pl (opakowania)
www.kopex.com.pl (środki transportu)

18.10.2016
2
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Wykorzystane zdjęcia (2/2)
www.forumbiznesu.pl (zakład produkcyjny)
www.centrumdruku.com.pl (urządzenie wielofunkcyjne)
www.domhome.pl (pralko-suszarka)
www.eltar.net.pl (urządzenie wielofunkcyjne)
www.sp-hm.pl (układ scalony)
www.aereco.com.pl (wentylacja w budynku)
www.oczyszczalnie.pl (oczyszczalnia hybrydowa)
www.24.pl (samochód hybrydowy)
www.pl-sonic.com (spawanie hybrydowe)
www.actaenergetica.org (układ wytwarzania energii)
Część 1 – Wiadomości podstawowe
Studia I stopnia inżynierskie, Semestr VII
Politechnika Gdańska
Wyd
ział
Ele
ktr
ote
chn
iki
i A
uto
mat
yki

18.10.2016
3
Automatyka – zastosowania, metody i narzędzia, perspektywy
Podział procesów (1/5)
Źródło: Opracowanie własne na podstawie [Durlik I. Inżynieria zarządzania – część I. Strategie organizacji produkcji, nowekoncepcje zarządzania. Wydawnictwo Placet, Warszawa 2004].
Różne podziały procesów
Procesy wydobywcze – pozyskiwanie zasobów naturalnychz powietrza, wody i ziemi, np.: surowce energetyczne (węgiel kam., gaz ziemny, ropa naftowa, itd.) surowce budowlane (żwir, piasek, wapień, marmur, itd.) surowce chemiczne (sól kamienna, siarka, itd.) rudy metali i kruszce (rudy miedzi, rudy żelaza, złoto, itd.) kamienie półszlachetne i szlachetne (diament, agat, itd.) wody mineralne . . .
Procesy produkcyjne – wykorzystana technologia
Wydobywcze Montażowe/
Demontażowe
Przetwórcze Obróbkowe Naturalne/Biotechnologiczne
Charakterystyka i przykłady procesów wydobywczych – Dyskusja
Automatyka – zastosowania, metody i narzędzia, perspektywy
Podział procesów (2/5)
Procesy przetwórcze – zmiany własności fiz./chemicznych surowców
Procesy obróbkowe – zmiany kształtów, cech powierzchni, strukturywewnętrznej materiałów metalowych, z tworzyw, z drewna, itp.
Kształtowania
kucie cięcie odlewanie obróbka skrawaniem obróbka plastyczna obróbka laserowa zgrzewanie
spawanie . . .
Obróbki fizykochemicznej
utlenianie dyfuzja napylanie . . .
Obróbki powierzchniowej
malowanie polerowanie obróbka
galwaniczna
szlifowanie . . .
Obróbki cieplnejfizykochemicznej
hartowanie wyżarzanie odpuszczanie . . .
Procesy obróbkowe
Charakterystyka i przykłady procesów obróbkowych – Dyskusja

18.10.2016
4
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Podział procesów (3/5)
Procesy montażowe/demontażowe
Montaż połączeń
rozłącznych
zaciskanieskręcanie połącz. kołkowe połącz. klinowe …
Montaż połączeń nierozłącznych
nitowanie zgrzewanie spawanie klejenie …
Procesy montażowe
Montaż wyrobu gotowego
Montaż elementu, części
Procesy montażowe
Procesy montażowe
Montaż ruchomy Montaż stacjonarny
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Podział procesów (4/5)
Charakterystyka i przykłady procesów naturalnych – Dyskusja
Procesy naturalne/biotechnologiczne – zmiany strukturypowierzchniowej i wewnętrznej materiałów, z których wykonanowyroby, z wykorzystaniem sił natury: żywych organizmówi komórek czynnych biologicznie, np. procesy:
oczyszczania ścieków
kwaszenia w przemyśle spożywczym
fermentacyjne w przemyśle spożywczym (np. pieczywo, piwo, wino,przetwory mleczne)
produkcji żywności modyfikowanej biologicznie
produkcji leków
. . .

18.10.2016
5
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Podział procesów (5/5)
Charakterystyka i różnice – Dyskusja
Inny podział procesów – rodzaj zmiennych
CIĄGŁE (ANALOGOWE) DYSKRETNE
HYBRYDOWE
CAŁKOWITOLICZBOWE BINARNE
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Procesy ciągłe (PC)
Ciągła zmiana parametrów procesu, ciągły przepływ środków(materiałowych, energetycznych, informacyjnych) i odbiór produktów,zmienne stanu – ciągłe funkcje czasu.
Procesy ciągłe najczęściej przebiegają bez przerw(oprócz planowanych/nieplanowanych, np. remonty,awarie) i są na trwale związanie z urządzeniamiwytwórczymi.
Podstawowe gałęzie przemysłu:
chemiczny
petrochemiczny
spożywczy
. . .
farmaceutyczny
metalurgiczny
energetyczny
Przykłady procesów ciągłych – Dyskusja

18.10.2016
6
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – PC
1. Procesy destylacji/rektyfikacji (np. mieszaninaetanol-woda, ropy naftowej, itd.) – kolumnarektyfikacyjna
2. Procesu odzysku siarki (np. przemysłpetrochemiczny) – instalacja Clausa
3. Procesy biologiczne w oczyszczalni ścieków –reaktor biologiczny
4. Procesy wytapiania w hutach (np. stali, żeliwa)– wielki piec, żeliwiak
5. Procesy produkcji szkła – piece szklarskie
6. Procesy produkcji energii cieplnej,elektrycznej, itd. – np. elektrownia wodna,elektrownia jądrowa
7. . . .
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Procesy dyskretne (PD)
Nieciągła zmiana parametrów procesu, nieciągły przepływ środków(materiałowych, energetycznych, informacyjnych) i odbiór produktów,zmienne stanu – nieciągłe, wielowartościowe funkcje czasu.
Procesy te odznaczają się istnieniemskończonego zbioru zdarzeń związanychz zad. produkc., np. zdarzenie przesłaniamateriału z magazynu na stanowisko A,ze stanowiska A do stanowiska B.
Podstawowe gałęzie przemysłu:
samochodowy
elektromaszynowy
. . .
maszynowy
odzieżowy
Przykłady procesów dyskretnych – Dyskusja

18.10.2016
7
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
2. Problemy cięcia/rozkroju
3. Problemy plecakowe
Należy przewieźć n urządzeń środkiemtransportu o ładowności M. Każde i-teurządzenie ma masę wi i wartość ci .
Pojemność środka transport. wystarcza doprzewiezienia wszystkich urządzeń orazłączna masa urządzeń przekracza ładownośćM środka transportu.
Zadaniem jest takie zaplanowaniezaładunku, żeby przewieźć urządzeniao największej łącznej wartości.
Przykłady – PD – całkowitoliczbowe (1/2)
1. Problemy asortymentu produkcji
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – PD – całkowitoliczbowe (2/2)
4. Problemy modernizacji
Zadanie: wybór wariantu budowy nowychzakładów produkcyjnych (lokalizacja, mocprodukcyjna, specjalizacja produkcji, itp.)oraz rozbudowy i modernizacji zakładów jużistniejących, aby łączne koszty (inwestycjii produkcji bieżącej) były minimalne,a zapotrzebowanie wszystkich odbiorcówbyło zaspokojone.
5. . . .

18.10.2016
8
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – PD – binarne (1/2)
1. Problemy przydziału
detali do maszyn
czynności do stanowisk pracy
pracowników do czynności (zadań)
pracowników do maszyn
środków finansowych do projektów
. . .
2. Problemy plecakowe
Do plecaka o udźwigu M należy zapakowaćprzedmioty o masach wi i wartościach ci tak,żeby wartość plecaka była największa
a). Dodatkowy warunek: xi{0, 1} – po jednymprzedmiocie każdego rodzaju
b). Zadanie zapakowania wielu plecaków
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – PD – binarne (2/2)
3. Problemy załadunku
Danych jest n przedmiotów o długościach ai orazm opakowań o długościach lj .Zadaniem jest taki załadunek przedmiotów, żebyzużyć jak najmniej opakowań.
4. Problemy wyboru
wariantu rozwiązania np. modernizacji
projektu do realizacji
lokalizacji zakładu produkcyjnego
. . .
5. . . .

18.10.2016
9
Automatyka – zastosowania, metody i narzędzia, perspektywy
Procesy ciągłe i dyskretne – podsumowanie (1/2)
Procesy ciągłe: zmienne stanu – ciągłe funkcje czasu
Procesy dyskretne całkowitoliczbowe: zmienne stanu – nieciągłe,wielowartościowe funkcje czasu
Procesy dyskretne binarne: zmienne stanu – nieciągłe,dwuwartościowe funkcje czasu
Procesy ciągłe: temperatura surówki w piecu, ciśnienie wodyw zbiorniku, prędkość obrotowa silnika, natężenie przepływu gazuw rurociągu, stężenie azotu amonowego w ściekach, . . .
Procesy dyskretne całkowitoliczbowe: stany pracy pompy (np. 0, 1, 2);rodzaj materiału, obróbki; typ maszyny produkcyjnej , . . .
Procesy dyskretne binarne: stany pracy dmuchawy, zaworu; stanysygnalizatorów położenia (np. krańcówki) ; . . .
Fizyczne przykłady zmiennych stanu – Dyskusja
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Procesy ciągłe i dyskretne – podsumowanie (2/2)
Kiedy automatykowi potrzebne są zmienne dyskretne ? – Dyskusja
zmiana stanu urządzenia wykonawczego (np. zamknięty/otwarty;wyłączony/włączony; wyłączony/I bieg/II bieg)
zmiana stanu sygnalizatora położenia (np. początek, środek, koniec)
zmiana stanowiska obróbkowego (np. tokarka, frezarka, wiertarka)
zmiana rodzaju narzędzia obróbkowego (centrum obróbkowe, np. nóżtokarski, frez, wiertło)
długi (dyskretny) czas pomiaru (np. co 10 minut)
zmiana (przełączanie) modelu obiektu (np. awaria gazociągu w dzielnicy)
zmiana (przełączanie) sterowania (np. dwupołożeniowe/PID)
zmiana (przełączanie) metod optymalizacji (np. klasyczne/genetyczne)
. . .
18.10.2016
10
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Układy hybrydowe (1/4)
Źródło:Słownik Języka Polskiego, www.sjp.pl
Hybrydowy
stanowiący połączenie dwóch ras, form, pojęć, itp.
Hybryda – ogólnie
połączenie w jedną całość różnych części, składników, wykluczającychsię, gdy funkcjonują oddzielnie
Różne obszary zastosowań: nietechniczne i techniczne
Hybryda – chemia
połączenie co najmniej dwóch jednostkowych procesów chemicznychwzajemnie się uzupełniających, to jest reakcji chemicznej z technikąseparacji lub dwóch różnych technik separacyjnych
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Układy hybrydowe (2/4)
Źródło:Słownik Języka Polskiego, www.sjp.pl
Hybryda – biologia
a) krzyżówka odmian, ras lub gatunków roślinb) międzygatunkowy mieszaniec zwierzęcy
Hybryda (programowanie hybrydowe) – informatyka
Kodowanie algorytmu w co najmniej dwóch różnych językachprogramowania
Hybryda (układ hybrydowy) – technika
Połączenie w jedną maszynę (układ współdziałający), rozwiązańpozornie ze sobą niewspółgrających
Przykłady układów hybrydowych – Dyskusja

18.10.2016
11
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – Układy hybrydowe (1/4)
1. Urządzenie wielofunkcyjne (drukarka, ksero, skaner, fax)
2. Urządzenie wielofunkcyjne (pralko-suszarka)
3. Urządzenie wielofunkcyjne (piłowanie, cięcie, szlifowaniei usuwanie)
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – Układy hybrydowe (2/4)
4. Układ scalony (tranzystory, kondensatory, rezystory, diody, …)
5. Wentylacja w budynku (np. grawitacyjna i mechaniczna)

18.10.2016
12
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – Układy hybrydowe (3/4)
6. Układ napędowy samochodu (np. silnik spalinowy i silnikelektryczny)
7. Układ biologicznego oczyszczania ścieków (np. złoże biologicznei osad czynny)
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykłady – Układy hybrydowe (4/4)
8. Układ spawalniczy (np. spawanie łukowe i laserowe)
9. Układ wytwarzania energii elektrycznej (ze źródełnieodnawialnych i odnawialnych)
10. . . .

18.10.2016
13
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Układy hybrydowe (3/4)
Źródło: Antsaklis P.J. (2000). A Brief Introduction to the Theory and Applications of Hybrid Systems. Proc. of the IEEE: Special Issueon Hybrid Systems - Theory and Applications, Vol. 88, No. 7, pp. 879-887.
Hybrid system – automation
The hybrid systems of interest contain two distinct types ofcomponents: subsystems with continuous dynamics and subsystemswith discrete dynamics that interact with each other.Such hybrid systems arise in varied contexts in manufacturing,communication networks, auto pilot design, automotive enginecontrol, computer synchronization, traffic control, and chemicalprocesses, among others.Hybrid systems have a central role in embedded control systems thatinteract with the physical world. They also arise from the hierarchicalorganization of complex systems, and from the interaction of discreteplanning algorithms and continuous control algorithms inautonomous, intelligent systems.
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Układy hybrydowe (4/4)
Hybryda (układ (system) hybrydowy) - automatyka
Układ (system) dynamiczny o ciągłych i dyskretnych (w tym binarnych)własnościach dynamicznych
Ciągłe i dyskretne (w tym binarne) wartości zmiennych

18.10.2016
14
Studia I stopnia inżynierskie, Semestr VII
Politechnika Gdańska
Wyd
ział
Ele
ktr
ote
chn
iki
i A
uto
mat
yki
Część 2 – Hybrydowość w modelowaniu i sterowaniu
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Modelowanie – przypomnienie (1/3)
Model – reprezentacja wybranego fragmentu rzeczywistości w postaciinnej niż ta, w której występuje ona naprawdę, tworzonaw określonym celu, pozbawiona szczegółów i cech nieistotnych dlaosiągnięcia tego celu.
Model fizyczny (eksperymentalny) – inny układ fizyczny zbudowanyw celu przeprowadzenia eksperymentu, którego wyniki możnaodnieść z dostatecznym przybliżeniem do reprezentowanego przezmodel układu fizycznego.
Model matematyczny (teoretyczny) – uproszczony obrazrzeczywistego układu w postaci zbioru założeń i równańmatematycznych wiążących poszczególne wielkości istotne dla celów,jakim ma służyć ten model.
Model fizyczny a model matematyczny – Dyskusja

18.10.2016
15
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Modelowanie – przypomnienie (2/3)
Rodzaje modeli w automatyce i ich opis matematyczny – Dyskusja
liniowe / nieliniowe
ciągłe / dyskretne
stacjonarne / niestacjonarne
deterministyczne / stochastyczne
statyczne / dynamiczne
o parametrach skupionych / o parametrach rozłożonych
Gdzie modele hybrydowe ? – Dyskusja
Automatyka – zastosowania, metody i narzędzia, perspektywy
Modelowanie – przypomnienie (3/3)
Po co automatykowi modele matematyczne ? – Dyskusja
opis zjawiska/procesu/obiektu/systemu, który chcemy badać
poznanie i zrozumienie zachowania się procesu
odtworzenie zachowania się procesu w przeszłości
prognozowanie zachowania się procesu
badania projektów obiektu/procesu/systemu (jeszcze nieistniejące)
badania niemożliwe do przeprowadzenia na rzeczywistym układzie(ograniczenia techniczne, bezpieczeństwa, finansowe, itp.)
badania w warunkach nietypowych, zakłóceniowych i awaryjnych
do projektowania, optymalizacji i testowania układów sterowania
do diagnostyki procesów, np. wykrywania stanów nienormalnych, itp.
. . .

18.10.2016
16
Automatyka – zastosowania, metody i narzędzia, perspektywy
Modelowanie – rozwinięcie (1/4)
Budowa warunków logicznych W przy pomocy zmiennych binarnychxj{0,1} (do opisu różnych sytuacji decyzyjnych):
0xxWW 2121 Implikacja
0xxWW 2121 Równoważność
1xxxWWW n21n21 Alternatywa
1x
1x
1x
WWW
n
2
1
n21
Koniunkcja
1x1lub0xW~ 111 Negacja
Szczegóły, np.: Williams H.P. Model Building in Mathematical Programming.4th edition. John Wiley&Sons, 1999.
Automatyka – zastosowania, metody i narzędzia, perspektywy
Modelowanie – rozwinięcie (2/4)
Sprowadzenie typowych nieliniowości binarnych do postaci liniowej:
Niech: n,,2,1j;1,0x j
jnj xx Potęgowanie
lk xx Mnożenie binarne
Wprowadzenie nowej zmiennej binarnej =xk*xl spełniającej warunek:
11x1x1 lk
spełnienie (1) wymusza wprowadzenie dodatkowych ograniczeń:
1xx
0x
0x
lk
l
k

18.10.2016
17
Automatyka – zastosowania, metody i narzędzia, perspektywy
Modelowanie – rozwinięcie (3/4)
Niech:
0y
1,0x
yx Mnożenie mieszane
Wprowadzenie nowej zmiennej ciągłej z=x*y spełniającej warunki:
1yz1x
0z0x
spełnienie (1) wymusza wprowadzenie dodatkowych ograniczeń (M –górne ograniczenie y):
MxMzy
0zy
0xMz
Szczegóły, np.: Williams H.P. Model Building in Mathematical Programming.4th edition. John Wiley&Sons, 1999.
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Modelowanie – rozwinięcie (4/4)
Zbiory specjalnego uporządkowania (ang. Special Order Sets – SOS):
SOS1 – zbiór zmiennych (ciągłych lub dyskretnych), w którym tylkojedna zmienna może być niezerowa
SOS2 – uporządkowany zbiór zmiennych, w którym co najwyżej dwiezmienne (ciągłe lub dyskretne), mogą przyjąć niezerowe wartości, przyczym mogą to być jedynie zmienne sąsiednie w sensie przyjętego ichuporządkowania
Szczegóły, np.:
Beale E.M.L., Tomlin J.A. Special Facilities in a General Mathematical ProgrammingSystem for Nonconvex Problems Using Ordered Sets of Variables. In J. Lawrence(Ed.), Proceedings of the 5th International Conference on Operations Research,London, 1969.
Williams H.P. Model Building in Mathematical Programming. 4th edition. JohnWiley&Sons, 1999.

18.10.2016
18
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Różnice – Dyskusja
Regulator PID – ciągły,dyskretny, hybrydowy ? – Dyskusja
Sterowanie – przypomnienie (1/2)
Co to jest sterowanie ? – Dyskusja
Ogólny podział układów sterowania
CIĄGŁE
(ANALOGOWE)
DYSKRETNE
MIESZANE
(HYBRYDOWE)
Automatyka – zastosowania, metody i narzędzia, perspektywy
ALGORYTMY STEROWANIA
Sterowanie – przypomnienie (2/2)
Rodzaje algorytmów sterowania ? – Dyskusja
Mieszane (Hybrydowe)
Inteligentne wiedza
ekspertów zbiory
rozmyte sieci
neuronowe algorytmy
genetyczne …
Zaawansowane PI z
predyktoremSmitha
ślizgowe adaptacyjne predykcyjne …
Podstawowe PID kaskadowe ze
sprzężeniem do przodu
LQR …
Logiczne dwupołożeniowe trójpołożeniowe z użyciem
algebry Boole’a …

18.10.2016
19
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 1 – instalacja napowietrzająca (1/6)
2 dmuchawy
rurociągi (różne l i d)
4 przepustnice
dyfuzory
Dmuchawa zmiennoprędkościowa
Dmuchawa dwubiegowa
Komora
tlenowa 3 Komora
tlenowa 1
Komora
tlenowa 2 Komora
tlenowa 4
R R R R
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 1 – instalacja napowietrzająca (2/6)
Model 2 dmuchaw – hybrydowy !!! Model przepustnic – nieliniowy
Model rurociągów – nieliniowy Model dyfuzorów - liniowy
UWAGA:
W dalszej części – modelowanie dmuchaw
ph,1
pd,1
pv,1
Q1
Qair,1
Rv,1
Cd,1
Rd,1
pc
pa
ph,4
pd,4
pv,4
Q4
Qair,4
Rv,4
Cd,4
Rd,4
pb
Qb
Qc
Qb-Q
c
pvb,1
Cc
Qfb,1
Qvb,1
pfb,1
…
…

18.10.2016
20
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 1 – instalacja napowietrzająca (3/6)
2 dmuchawy: dwubiegowa i zmiennoprędkościowa (regulowanafalownikiem).Dmuchawa dwubiegowa: I bieg = 1500 obr/min, II bieg = 3000 obr/min.Dmuchawa zmiennoprędkościowa: 1200–2900 obr/min.
1000
1200
1400
1600
1800
2000
2200
2400
2600
10 20 30 40 50 60 70 Spadek ciśnienia [kPa]
Na
tęże
nie
prz
ep
ływ
u p
ow
ietr
za
[m
3/h
]
dla nvb=1500 [obr/min] dla nvb=1680 [obr/min] dla nvb=1875 [obr/min] dla nvb=2100 [obr/min] dla nvb=2400 [obr/min] dla nvb=2680 [obr/min] dla nvb=3000 [obr/min]
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 1 – instalacja napowietrzająca (4/6)
Zlinearyzowany model dmuchawy dwubiegowej:
Zlinearyzowany model dmuchawy zmiennoprędkościowej:
gdzie:Qb – natężenie przepływu powietrza przez dmuchawę [m3/godz]Δpb – spadek ciśnienia na dmuchawie [kPa]nb – prędkość obrotowa dmuchawy [obr/min]a1 = a2 = –4,14; b1 = 1251,6; b2 = 2655,6; a3 = 4,16, b3 = 0,9354, c3 = –150,69 –zidentyfikowane wartości parametrów dmuchawxb – stan dmuchawy pa – ciśnienie atmosferyczne [kPa]
Model stacji dmuchaw:
21ippp
10xnpxQQ
abib
21i
ibibibibibb
,;
,;,,
,
,
,,,,,
+ stan dmuchawy !3vb3vb3vb cnbpaQ
biegudrugiegodlabpaQ
biegupierwszegodlabpaQ
2fb2fb
1fb1fb
;
;
+ stan dmuchawy !

18.10.2016
21
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 1 – instalacja napowietrzająca (5/6)
Jak zamodelować hybrydowość ?
Hybrydowa dynamika modeli dmuchaw:
Stałoprędkościowa:
21skxbkpakQ fb
s
fb
ss
fb ,;
część ciągła zm. binarna
kxcknbkpakQ vb3vb3vb3vb
część ciągła zm. binarna
Zmiennoprędkościowa:
Zmienne ciągłe: Qb, Δpb, nb Zmienne binarne: xb
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 1 – instalacja napowietrzająca (6/6)
Jak pozbyć się hybrydowości ?
np. linearyzacja trzech nieliniowości typu iloczyn zmiennej ciągłeji dyskretnej poprzez wprowadzenie dodatkowych zmiennych orazukładów równań i nierówności
Szczegóły:
Piotrowski R. (2011). Hierarchiczne sterowanie predykcyjne stężeniem tlenu w reaktorzebiologicznej oczyszczalni ścieków. Monografie 112, Wydawnictwo Politechniki Gdańskiej.
Jak sterować ?
np. sterowanie predykcyjne – szczegóły – wykład z KSS, sem. VI
Model 2 dmuchaw – hybrydowy (zlinearyzowany) !!!
Model przepustnic – nieliniowy
Model rurociągów – nieliniowy
Model dyfuzorów - liniowy

18.10.2016
22
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (1/24)
Przykładowe zastosowanie: przemysł spożywczy (np. napoje, soki),farmaceutyczny (np. syropy), chemiczny (np. środki czystości,kosmetyki), agrochemiczny (np. środki ochrony roślin, nawozy),petrochemiczny (np. oleje, asfalty), itp.
Elementy procesu: zbiornik mieszania, dwie pompy, mieszadłoz napędem, zawór spustowy
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (2/24)
Proces: mieszanie dwóch cieczy o różnych gęstościach (acetoni octan etylu)
Zastosowanie uzyskanej mieszaniny: przemysł obuwniczy(rozpuszczalniki), produkcja zmywaczy do paznokci
Zbiornik mieszania: miejsce mieszania cieczy
Pompy: napełnianie zbiornika substratami
Mieszadło z napędem (silnik prądu stałego): mieszanie cieczy przezokreślony czas – do uzyskania jednorodnej mieszaniny
Zawór spustowy: opróżnienie zbiornika

18.10.2016
23
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (3/24)
1. Mieszanie (zmiana objętości cieczy i zasada zachowania masy)
gdzie: V-objętość mieszaniny [m3], Q1-przepływ pierwszej pompy [m3/s], Q2-przepływdrugiej pompy [m3/s], Qwy-natężenie wypływu [m3/s], ρ-gęstość mieszaniny [kg/m3],ρ1=900kg/m3-gęstość pierwszego składnika,ρ2=792kg/m3 -gęstość drugiego składnika
wyQQQdt
dV 21
V
V
Q
V
Q
dt
d 212
21
1
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (4/24)
2. Zbiornik mieszania
Zbiornik cylindryczny: średnica podstawy D=1m, wysokość H=1,2m, wysokośćmin. i maks. cieczy: Hmin=0,4m, Hmax=1m.Cztery przegrody wewnątrz zbiornika (przeciwdziałanie zawirowaniomcieczy) wokół osi pionowej (charakterystyczny lej). Umieszczone co 900 naobwodzie podstawy. Szerokość przegrody: B=D/10=0,1m.

18.10.2016
24
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (5/24)
3. Mieszadło
Mieszadło turbinowe dyskowe z sześcioma łopatkami prostymiumieszczonymi na obwodzie mieszadła co 600
Wymiary wynikały ze zbiornika mieszania, dobór na podstawie [1].
Wymiary mieszadła: a=6,25cm, b=5cm, c=1cm, d=25cm, d0=18,75cm,h=3,13cm, f=1cm.
Jm=0,0169kg*m2 - suma momentów bezwładności części składowych.
1. Stręk F. Mieszanie i mieszalniki. WNT, Warszawa, 1971.
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (6/24)
4. Napęd mieszadła (silnik prądu stałego) (1/2)
Elektryczne i mechaniczne parametry obwodu wirnika:
gdzie: Udc-napięcie twornika [V], i-prąd twornika [A], R-rezystancja twornika [Ω], L-indukcyjność twornika [H], e-siła elektromotoryczna [V], ωm-prędkość obrotowamieszadła [rad/s], M-moment elektryczny [Nm], Mop-moment oporowy [Nm], Jdc-moment bezwładności sprowadzony do wału silnika [kg*m2]
edt
diLRiUdc
opm
dc MMdt
dJ
Moment elektryczny M jest proporcjonalny do prądu twornika i, a siłaelektromotoryczna e do prędkości obrotowej ωm.
Pomija się moment oporowy Mop.
Jdc - suma momentu bezwładności wirnika Jw i mieszadła Jm.

18.10.2016
25
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (7/24)
4. Napęd mieszadła (silnik prądu stałego) (2/2)
Wzmocnienia prądowe i prędkościowe oraz reduktor prędkości:
gdzie: Ki-wzmocnienie prądowe [W*s/rad*A], Kω-wzmocnienie prędkościowe[V*s/rad], Pznam-moc znamionowa [W], ωwyj-żądana prędkość obrotowa za przekładnią[rad/s], m-przełożenie reduktora [-]
Wyznaczono: maks. prędkość silnika nmax=300obr/min, moc napędu dowymieszania cieczy Pznam=800W, przełożenie reduktora m=0,24.
Pozostałe parametry: karta katalogowa [2]: R=34Ω, L=0,214H, iznam=2,6A,Uznam=440V, Jw=0,0029kg*m2.
2. http://www.thrige-electric.com/english/motorslak2000.htm. dostęp:10.10.2014.
znamznam
znami
i
PK
znam
znamUK
mwyj m
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (8/24)
5. Pompa (dwie identyczne pompy)
Model napędu – wykorzystanie modelu napędu mieszadła (przyjęto m=1).
Zależność między prędkością obrotową a natężeniem przepływu - równanieróżniczkowe I rzędu (wzmocnienie Kkp, stała czasowa T):
gdzie: Q-przepływ pompy [m3/s], ωpomp-prędkość obrotowa pompy [rad/s]
Przyjęto: maks. przepływ: 5m3/godz=1,4*10-3m3/s, stała czasowa T=0,1s.
Wyznaczono: wzmocnienie Kkp=1,5*10-5 znając maksymalne wartościprzepływu i prędkości wirnika.
Pozostałe parametry: karta katalogowa [3]: R=12Ω, L=0,072H,Jdc=0,0029kg*m2,ωznam=94rad/s, iznam=2,7A, Uznam=180V, Pznam=350W.
3. http://www.thrige-electric.com/english/motorslak2000.htm. dostęp:10.10.2014.
T
Q
T
K
dt
dQ pompkp

18.10.2016
26
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (9/24)
6. Zawór spustowy
Zależność między natężeniem przepływu cieczy przez zawór w funkcjiwysokości mieszaniny w zbiorniku:
gdzie: Kv-współczynnik normalny przepływu [m3/s], Δp-spadek ciśnienia [Pa],g=9,81m/s2-przyspieszenie ziemskie, h-wysokość mieszaniny w zbiorniku [m]
Parametry: karta katalogowa [4]: zakładając średnicę równą 64mmodczytano Kv=51m3/godz.
4. http://www.asconumatics.pl/images/site/upload/_pl/pdf1/v1215pl.pdf. dostęp: 10.10.2014.
hKg
pKQ vvwy
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (10/24)
Cel sterowania: uzyskanie jednorodnej mieszaniny acetonui octanu etylu o odpowiedniej gęstości i objętości
Proces sterowania: proces mieszania dwóch cieczy
Urządzenia pomiarowe: pomiary gęstości i objętości mieszaniny
Urządzenia wykonawcze: pompy, mieszadło, zawór spustowy
Wielkości sterowane (regulowane): objętość i gęstość mieszaniny
Wielkości sterujące (regulujące): napięcia silników obu pomp, napięcienapędu mieszadła, sygnał binarny o stanie zaworu
Wielkości zakłócające: wahania gęstości obu cieczy, przyjęto: sygnałprostokątny o okresie 10s i ±5% wartości gęstości obu cieczy
Proces sterowania, urządzenia pomiarowe i wykonawcze – Dyskusja
Wielkości sterowane, sterujące, zakłócające – Dyskusja

18.10.2016
27
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (11/24)
Cechy procesu sterowania – Dyskusja
Cechy procesu sterowania:
dynamiczny
nieliniowy
wielowymiarowy (MIMO: 2 wejścia, 4 wyjścia)
hybrydowy (ciągłe i binarne zmienne sterujące)
Propozycja systemu sterowania (struktura, algorytmy) – Dyskusja
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (12/24)
Struktura systemu sterowania:

18.10.2016
28
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (13/24)
Warstwa nadrzędna (PC) – Napełnianie zbiornika mieszania:
Cel sterowania: nadążanie za wartościami zadanymi (ρzad, Vzad) –wyznaczanie wartości zadanych przepływów obu cieczy dlawarstwy bezpośredniej (Q1
zad, Q2zad)
Wejścia: ρzad, Vzad; Wyjścia: Q1zad, Q2
zad
Algorytm sterowania: regulator rozmyty – implementacjaw środowisku Matlab
Interfejs operatora: system SCADA (podawanie wartościzadanych: ρzad i Vzad, obserwacja procesu sterowanego) –implementacja w środowisku InTouch
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (14/24)
Warstwa nadrzędna – Regulator rozmyty (1/3):
4 zbiory rozmyte dla każdej wielkości sterowanej (ρ, V):
18.10.2016
29
Automatyka – zastosowania, metody i narzędzia, perspektywy
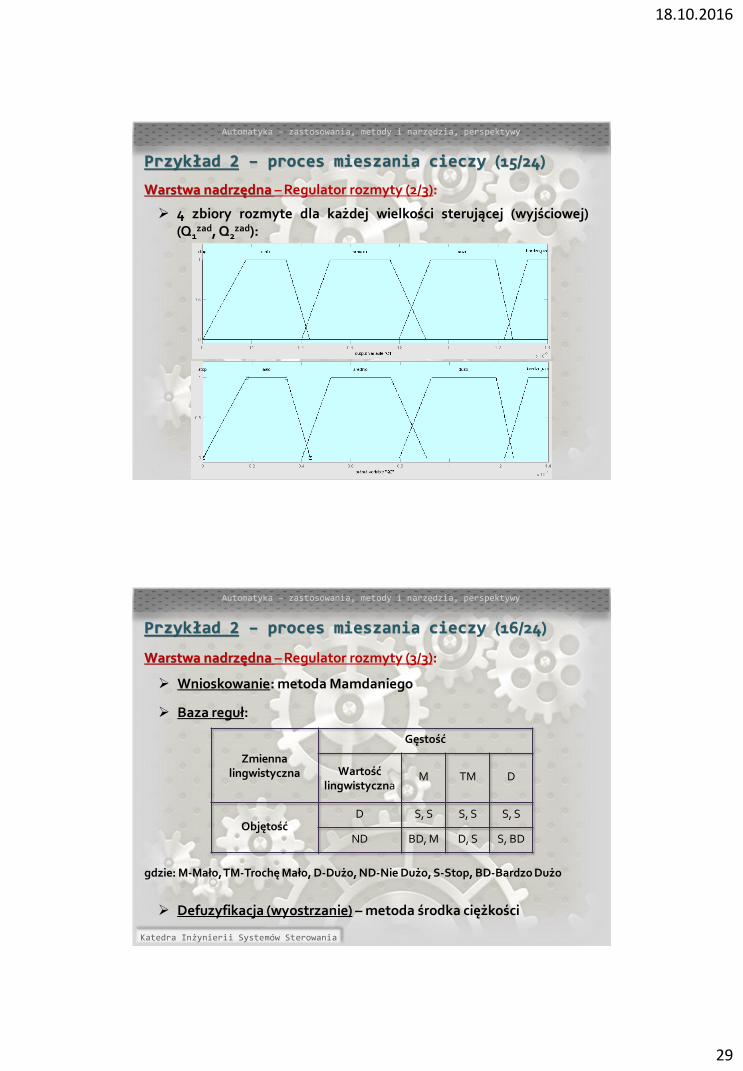
Przykład 2 – proces mieszania cieczy (15/24)
Warstwa nadrzędna – Regulator rozmyty (2/3):
4 zbiory rozmyte dla każdej wielkości sterującej (wyjściowej)(Q1
zad, Q2zad):
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (16/24)
Warstwa nadrzędna – Regulator rozmyty (3/3):
Wnioskowanie: metoda Mamdaniego
Baza reguł:
Zmienna lingwistyczna
Gęstość
Wartość lingwistyczna
M TM D
ObjętośćD S, S S, S S, S
ND BD, M D, S S, BD
gdzie: M-Mało,TM-Trochę Mało, D-Dużo, ND-Nie Dużo, S-Stop, BD-Bardzo Dużo
Defuzyfikacja (wyostrzanie) – metoda środka ciężkości

18.10.2016
30
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (17/24)
Warstwa bezpośrednia (PLC) – Sterowanie pompami z silnikiem prądustałego:
Cel sterowania: realizacja wartości zadanych przepływów obucieczy (Q1
zad, Q2zad) otrzymanych z warstwy nadrzędnej
Wejścia: Q1zad, Q2
zad; Wyjścia: napięcia tworników obu pomp(Upompy1, Upompy2) odpowiadające przepływom (Q1, Q2)
Algorytm sterowania: dwa regulatory PI, dobór nastaw:kryterium najkrótszego czasu regulacji i braku przeregulowania
Komunikacja obiekt (PC) – regulatory (PLC): karty akwizycjiAdvantech (PCI-1711, PCI-1720), praca w czasie rzeczywistym(biblioteka Real Time Windows Target)
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (18/24)
Warstwa bezpośrednia (PLC) – Sterowanie mieszadłem z silnikiemprądu stałego:
Cel sterowania: uzyskanie mieszaniny o jednorodnym składzie
Wejścia: zadana prędkość obrotowa mieszadła mzad; Wyjścia:
napięcie napędu mieszadła (Udc) odpowiadające prędkościobrotowej mieszadłam
Algorytm sterowania: regulator PI, dobór nastaw: czas ustalaniaprędkości = 5s (gwarancja bezpiecznego rozruchu mieszadła) ikryterium braku przeregulowania
Komunikacja obiekt (PC) – regulator (PLC): karty akwizycjiAdvantech (PCI-1711, PCI-1720), praca w czasie rzeczywistym(biblioteka Real Time Windows Target)

18.10.2016
31
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (19/24)
Warstwa bezpośrednia (PLC) – Sterowanie zaworem:
Cel sterowania: opróżnienie zbiornika mieszania
Wejścia: sygnał informujący o zakończeniu mieszaniai zatrzymaniu mieszadła; Wyjścia: sygnały binarne (zał/wyłzaworu)
Algorytm sterowania: sterowanie binarne uwarunkowanewarunkiem logicznym (zał/wył zawór)
Komunikacja obiekt (PC) – regulator (PLC): karty akwizycjiAdvantech (PCI-1711, PCI-1720), praca w czasie rzeczywistym(biblioteka Real Time Windows Target)
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (20/24)

18.10.2016
32
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (21/24)
Objętość mieszaniny w zbiorniku – koniec napełniania
Objętość mieszaniny w zbiorniku – początek napełniania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (22/24)
Gęstość mieszaniny w zbiorniku – początek napełniania
Gęstość mieszaniny w zbiorniku – koniec napełniania

18.10.2016
33
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (23/24)
Praca pierwszej pompy (Q1zad i Q1)
Praca drugiej pompy (Q2zad i Q2)
Automatyka – zastosowania, metody i narzędzia, perspektywy
Przykład 2 – proces mieszania cieczy (24/24)
Praca mieszadła (mzad i m)
Praca zaworu – opróżnianie zbiornika (objętość mieszaniny)

18.10.2016
34
Studia I stopnia inżynierskie, Semestr VII
Politechnika Gdańska
Wyd
ział
Ele
ktr
ote
chn
iki
i A
uto
mat
yki
Część 3 – Zakończenie
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Polecana literatura
Antsaklis P.J. (2000). A Brief Introduction to the Theory and Applications of HybridSystems. Proc. of the IEEE: Special Issue on Hybrid Systems - Theory andApplications,Vol. 88, No. 7, pp. 879-887.
Bemporad A., Morari M. (1999). Control of systems integrating logic, dynamicsand constraints. Automatica 35 (1999) 407-427.
Błaszkiewicz K., Biniecki P. (2012). Modelowanie i sterowanie wybranym proceseminżynierii chemicznej. Projekt inżynierski, Politechnika Gdańska, WydziałElektrotechniki i Automatyki (Promotor: Piotrowski R.).
Leyffer S., Linderoth J., Luedtke J., Miller A., Munson T. (2009). Applications andalgorithms for mixed integer nonlinear programming. Journal of Physics:Conference Series, Vol. 180, No. 1.
Lin H., Antsaklis P.J. (2014). Hybrid Dynamical Systems: An Introduction to Control andVerification. Foundations and Trends® in Systems and Control, Vol. 1, No. 1, pp.1–172.
Williams H.P. Model Building in Mathematical Programming. 4th edition. JohnWiley&Sons, 1999.

18.10.2016
35
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Wybrane prace w KISS (1/2)
Brdyś M.A., Duzinkiewicz K. Grochowski M., Rutkowski T. (2001). Robust estimation of integratedhydraulics and parameters in water distribution systems. Proc. of the 4th ASCE Annual WaterDistribution Systems Analysis, 2001 World Water and Environmental Resources Congress,Orlando, May 20-24, USA.
Grochowski M. (2003). Intelligent control of integrated wastewater treatment system under full range ofoperating conditions. Rozprawa doktorska, Politechnika Gdańska, Wydział Elektrotechnikii Automatyki.
Duzinkiewicz K. (2005). Zintegrowane sterowanie systemami zaopatrzenia w wodę pitną. WydawnictwaNaukowo – Dydaktyczne Akademii Górniczo-Hutniczej im. Stanisława Staszica w Krakowie. Seria:Rozprawy Monografie, nr 147.
Piotrowski R., Brdyś M.A., Konarczak K., Duzinkiewicz K., Chotkowski W. (2008). Hierarchical dissolvedoxygen control for activated sludge processes. Control Engineering Practice, Vol. 16, No. 1, pp. 114-131.
Brdyś M.A., Grochowski M., Gmiński T., Konarczak K., Drewa M. (2008). Hierarchical predictive controlof integrated wastewater treatment systems. Control Engineering Practice. Vol. 16, No. 6, pp. 751-767.
Duzinkiewicz K., Brdyś M.A., Kurek W., Piotrowski R. (2009). Genetic hybrid predictive controller foroptimised dissolved oxygen tracking at lower control level. IEEE Transactions on Control SystemsTechnology, Vol. 17, No. 5, pp. 1183-1192.
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Wybrane prace w KISS (2/2)
Piotrowski R. (2011). Hierarchiczne sterowanie predykcyjne stężeniem tlenu w reaktorze biologicznejoczyszczalni ścieków. Monografie 112, Wydawnictwo Politechniki Gdańskiej.
Cimiński A., Duzinkiewicz K. (2011). Optymalizujące krzepkie sterowanie hydrauliką systemuwodociągowego. Postępy Automatyki i Robotyki. Wydawnictwo Politechniki Świętokrzyskiej.
Błaszkiewicz K., Biniecki P., Piotrowski R. (2012). Hierarchiczny system sterowania procesem mieszania.Implementacja sprzętowa i badania testowe. Pomiary Automatyka Robotyka, 7-8/2012, 90-96.
Strojny R., Piotrowski R. (2013). Optymalizujące sterowanie układem napędowym samochodu z silnikiemspalinowym. Pomiary Automatyka Kontrola, Vol. 59, Nr 12, 1289-1293.
Piotrowski R. (2015). Two-Level Multivariable Control System of Dissolved Oxygen Tracking and AerationSystem for Activated Sludge Processes. Water Environment Research, Vol. 87, No. 1, pp. 3-13.
Piotrowski R. (2016). Comparison of Two Nonlinear Predictive Control Algorithms for Dissolved OxygenTracking Problem at WWTP. Journal of Automation, Mobile Robotics & Intelligent Systems, Vol.10, No. 1, pp. 8-16
Grochowski M., Rutkowski T. (2016). Supervised model predictive control of wastewater treatmentplant. Proc. of the 21st International Conference on Methods and Models in Automation andRobotics – MMAR 2016, August 29-September 01, 2016, Międzyzdroje, Poland.

18.10.2016
36
Katedra Inżynierii Systemów Sterowania
Automatyka – zastosowania, metody i narzędzia, perspektywy
Rozwinięcie tematyki
II stopień studiów
Kierunek: Automatyka i Robotyka
Specjalność: Systemy Sterowania i Wspomagania Decyzji
Przedmioty:
Struktury i algorytmy sterowania (M. Brdyś/K. Duzinkiewicz)
Struktury i algorytmy wspomagania decyzji (K. Duzinkiewicz)
Monitorowanie i diagnostyka w systemach sterowania (M. Grochowski)
Systemy inżynierii wiedzy (T. Rutkowski)
Komputerowe systemy sterowania i wspomagania decyzji (J. Tarnawski)
Procesy wytwórcze – metody wspomagania decyzji (R. Piotrowski)
Praca dyplomowa (wszyscy wyżej wymienieni)
Studia I stopnia inżynierskie, Semestr VII
Politechnika Gdańska
Wyd
ział
Ele
ktr
ote
chn
iki
i A
uto
mat
yki
Dziękuję za uwagę
Zapraszam na specjalność:
Systemy Sterowania i Wspomagania Decyzji
![Projektowanie systemów EM - eia.pg.edu.pl · 50 Hz 0,0028 0,008 0,021 0,036 0,056 0,08 0,11 0,17 0,22 Magnesowalnoś ć H [A/m]](https://img.dokumen.tips/doc/110x75/6018cb96a105734cfc670d7f/projektowanie-systemw-em-eiapgedupl-50-hz-00028-0008-0021-0036-0056.jpg)





![Ustalanie asortymentu handlowego 341[03].Z2 · „Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego” MINISTERSTWO EDUKACJI NARODOWEJ Donata Andrzejczak](https://img.dokumen.tips/doc/110x75/5f0bbe867e708231d43200ec/ustalanie-asortymentu-handlowego-34103z2-aprojekt-wspfinansowany-ze-rodkw.jpg)









![Silniki krokowe hybrydowe katalog 2015 - Pivexin Technology...PT35SKW34-050-6A 1.8 34 0.5 22 12 1000 95 13 0.17 6 Silniki krokowe hybrydowe 35 mm [NEMA 14] 1.8 o Uwaga! Przed podłączeniem](https://img.dokumen.tips/doc/110x75/60b7941ffe5c56132940863a/silniki-krokowe-hybrydowe-katalog-2015-pivexin-technology-pt35skw34-050-6a.jpg)


![Ustalanie asortymentu handlowego 341[03].Z2.02 Poradnik dla ucznia](https://img.dokumen.tips/doc/110x75/5876109a1a28abcb108b7591/ustalanie-asortymentu-handlowego-34103z202-poradnik-dla-ucznia.jpg)








