Embed Size (px)
Citation preview

Symmetrien i krystaller
Matematisk krystallografiSpeciale
7. juni 2018
• Anne-Marie Landbo •
Institut for Matematiske Fag
Skjernvej 4A • 9220 Aalborg Ø • http://math.aau.dk


Institut for Matematiske Fag
Matematik
Skjernvej 4A
9220 Aalborg Ø
http://math.aau.dkTitel:
Symmetrien i krystaller
Tema:
Matematisk krystallografi
Projektperiode:
Forår 2018
Studerende:
Anne-Marie Landbo
Vejleder:Martin Raussen
Oplagstal:
2
Sider:
39
Afleverings dato:
7. juni 2018
Synopsis:
Formålet med dette speciale er at klassifi-cere krystallografiske grupper og bestem-me dem. For at kunne gøre dette betrag-tes isometrier, det euklidiske vektorrum ogsymmetrier deri. For at kunne klassifice-re de krystallografiske grupper betragtesførst punktgrupper. En punktgruppe beståraf symmetrier, såsom ortogonale afbildnin-ger, der bevarer et gitter. Derfor betragtervi endelige undergrupper af den ortogona-le gruppe i rummet, og finder at der er 32krystallografiske undergrupper klassificeretop til konjugation, vi får altså 32 geometri-ske punktgrupper.Hvis vi betragter et gitter, som er genere-ret, via translationer, af en enhedscelle ud-spændt af tre lineært uafhængige vektorer,så får vi at der eksisterer 14 forskellige gi-tre, dem kan vi opdele i 7 krystalsystemer.Punktgrupperne opdeles også efter hvilketkrystalsystem de tilhører, og en punktgrup-pe virker kun på et gitter fra samme krystal-system. Det giver 73 aritmetiske krystal-klasser.Afslutningsvis er metoden for at klassifice-re affine krystalklasser skitseret, der er i alt219 affine krystalklasser eller 230 egentligaffine krystalklasser.
Rapportens indhold er frit tilgængelig, men offentliggørelse (med kildeangivelse) må kun ske efter aftale med
forfatter.


Abstract
This master’s thesis aims to give a classification of crystallographic groups and a descriptionof how to find them. In doing so, we examine isometries, the three-dimensional Euclideanspace and its symmetries. Furthermore, we look into point systems and Dirichlet domains,which is needed to prove the first theorem of Bieberbach.
In Chapter 2, we look into point groups. A point group consists of symmetries, suchas orthogonal maps, that fix a point in a lattice. Therefore, we determine the subgroupsof the three-dimensional special orthogonal group which enables us to discover that thereis 11 crystallographic subgroups. We then expand our search to the orthogonal group andestablishes that in total it has 32 crystallographic subgroups classified up to conjugation inthe orthogonal group, which means that we have found 32 geometric point groups.
In Chapter 3, we refine our classification by taking the lattice into account as well. Alattice is generated, by translations, from the three linear independent vectors that spanthe unit cell of a crystal. We divide the lattices into 7 crystal systems, and discover thatthere is 14 different lattices in total. The 32 geometric point groups are also categorisedinto a crystal system, and a pointgroup only acts on a lattice from the same crystal system.This gives us a total of 73 arithmetic crystal classes.
In Chapter 4, we refine our classification once again. Here we classify space groups. Inorder to do this, we use the second theorem of Bieberbach which simplifies the classifica-tion. Bieberbach’s result tells us that we can classify the space groups up to isomorphism,which gives us 219 affine crystal classes, or 230 if we distinguish between mirror images.
The main focus of this master’s thesis is the detection of the 32 point groups, where thesteps are described thoroughly, and the classification of the 73 arithmetic crystal classes,which are described in an exemplary fashion. Lastly, the method to classify the affinecrystal classes is only outlined.
i

Forord
Dette speciale er udarbejdet i forårssemesteret 2018 på Matematisk Institut på AalborgUniversitet af Anne-Marie Landbo i perioden 1. februar til den 7. juni 2018.
Jeg vil gerne takke min vejleder Martin Raussen for konstruktiv kritik og god vejledningundervejs i forløbet.
Læsevejledning
Teorien i dette speciale bygger på kurset Algebra 1 på Aalborg Universitet, og det anbefalesat læseren har kendskab til gruppeteori og de specielle egenskaber ved gruppen O(3,R).
Igennem specialet følger definitioner, sætninger, eksempler og lignende sammenummerering, hvor det første tal indikerer kapitlet og det næste afsnittet. Ligningernummereres separat, hvor første tal indikerer kapitlet. Figurer og tabeller nummereresseparat og med et enkelt tal. Definitioner, sætninger, propositioner og lignende skrives medkursiv for at tydeliggøre enden på disse. Beviser afsluttes med , og eksempler med J.
iii


Indhold
Abstract i
Forord iiiLæsevejledning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Indledning vii
1 Grundlæggende teori 11.1 Isometrier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Euklidisk vektorrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Symmetrier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Punktsystemer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.5 Dirichletområder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.6 Gitterbasis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Krystallografiske punktgrupper 132.1 Undergrupper af SO(3,R) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2 Undergrupper af O(3,R) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.3 Krystallografiske undergrupper . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 Aritmetiske krystalklasser 26
4 Affine krystalklasser 33
Konklusion 38
Bibliografi 39


Indledning
Krystaller er overalt, mange stoffer har krystalstruktur eller er krystaline, men hvad erkrystalstruktur egentlig, hvor mange forskellige er der, og hvordan skelner man mellemdem?
Baggrunden for dette speciale bunder i interessen for kemi, indenfor kemi læggesder stor vægt på hvilket krystalsystem stoffet er i, og hvilket gitter et stof har, da dettekan have stor indflydelse på et stofs egenskaber. Krystalsystemer er opdelt efter hvilkenstruktur der er i krystallet, er det f.eks. kun muligt at bevare krystalgitteret via en rotationmed orden 2, eller via en spejling, så er krystallet i det monokline krystalsystem. Der erbl.a. en speciel type glas under udvikling, bestående af et lag af Vanadiumoxid, som ertransparant. Ved stuetemperatur har Vanadiumoxid monoklin struktur, men ved en bestemtovergangstemperatur, hvor Vanadiumoxid går fra at være metal til at være en halvleder,sker der det, at strukturen ændrer sig til at være det der hedder tetragonal, hvor gitteretkun kan bevares ved en rotation med orden 4. Dette gør at glasset får den egenskab at detkan reflektere infrarøde stråler, og på den måde undgå at temperaturen inde i et rum vilstige yderligere, men der vil stadig komme lys ind i rummet (Parkin m.fl. 2006).
Dette speciale vil undersøge krystaller ud fra deres symmetrier. En symmetri eren afbildning der bevarer afstande og orientering, med andre ord, den overfører etkrystal i sig selv. Men først betragtes en mindre del af et krystal, nemlig enhedscellen.En enhedscelle er en 3-dimensionel kasse der vælges mindst mulig, således at helekrystallet består af translationer af enhedscellen, man kan betragte den som et krystalsbyggesten. Enhedscellen er udspændt af tre vektorer, og de vektorer man får frembragtvia translationer af cellen, der frembringer krystallet, danner et gitter. De forskellige gitrekan deles op i krystalsystemer. Man opdeler dem efter forholdet mellem længderne påde tre udspændende vektorer, samt deres indbyrdes vinkler. En punktgruppe består afsymmetrier der bevarer gitteret, man opdeler også punktgrupper i krystalsystemer, og forat en punktgruppe virker på et gitter skal de være i samme krystalsystem. Punktgrupperer endelige grupper der består af ortogonale afbildninger og skal bevare de geometriskeegenskaber af krystallet og dermed gitret, derfor klassificerer vi dem op til konjugationmed ortogonale afbildninger. Dvs. kan man komme fra én punktgruppe til en anden viakonjugation med en ortogonal afbildning, så anses de for geometrisk ækvivalente. Efterpunktgrupperne er klassificeret kan man nu kombinere dem med gitrene inden for detsamme krystalsystem. Man anser en punktgruppe og et gitter som punktgruppen virker på,som et par. Hvis man kan finde en isomorfi der overfører et gitter over i et andet, samtidig
vii

med at den via konjugation overfører den tilhørende punktgruppe over i det andet gitterstilhørende punktgruppe, så anses de to par for aritmetisk ækvivalente. Hvis man betragterbåde en punktgruppe, et gitter, samt hvordan punktgruppen virker på gitteret får man detman kan kalde en symmetrigruppe af et krystal, i dette speciale kaldet en rumgruppe.
Men hvordan klassificerer vi rumgrupper? Først betragtes det der kaldes affinækvivalens, hvor to rumgrupper anses for affin ækvivalente hvis der eksisterer en affinafbildning der via konjugation fører den ene rumgruppe over i den anden. Heldigvis harBieberbach bevist at to rumgrupper er affint ækvivalente hvis og kun hvis de er isomorfe(Bieberbach 1912).
I dette speciale vil der blive fokuseret på de første dele, nemlig klassifikation afpunktgrupper, de forskellige gitre, og punktgruppers virkning på gitre. Den sidste delomkring klassificering af rumgrupper vil kun blive skitseret.
viii

KAPITEL 1Grundlæggende teori
I dette kapitel vil der blive gennemgået nogle grundlæggende ting som vil blive brugtsenere. Dette kapitel er baseret på (Klemm 1982) og (Engel 1986).
1.1 Isometrier
I dette afsnit vil begrebet isometri blive indført, og isometriers egenskaber undersøgt.Vi betragter det n-dimensionelle euklidiske rum i et kartesisk koordinatsystem. Punktet
(x1, . . . , xn) kan fortolkes som et element i et reelt vektorrum med positiv definitskalarprodukt v · w. Vi har altså et Hilbertrum, og for to punkter v = (x1, . . . , xn) ogw = (y1, . . . , yn) så definerer vi afstanden mellem dem således
d(v, w) = ‖v − w‖ =√
(v − w) · (v − w) =
√√√√ n∑1
(xi − yi)2. (1.1)
1.1.1 Definition:Lad V være et n-dimensionelt Euklidisk rum. En afbildning f : V 7→ V hvor
d(f(v), f(w)) = d(v, w) for alle v, w ∈ V
kaldes en isometri i V .
Igennem dette speciale vil der blive brugt notationen (u, φ) hvor u ∈ V og φ er en ortogonalafbildning. (u, φ) er så en sammensætning af disse to. Vi har altså at (u, φ)(x) = φ · x+ u,hvor x ∈ V .
1.1.2 Eksempel:Nogle eksempler på isometrier er følgende:
a) For alle u ∈ V er translationen (u, I) : V 7→ V , hvor I er en n × n identites-matrix, og hvor (u, I)(v) = u + v, v ∈ V, er en isometri. Den inverse afbildningaf (u, I) er (u, I)−1 = (−u, I), og (0, I) er identiteten. Derudover har vi også at(u, I)(u′, I) = (u+ u′, I).
b) Lad (0, φ) være en ortogonal afbildning, dvs. en bijektiv, lineær afbildning i V , hvor0 er nul-vektoren, og hvor (0, φ)(v) · (0, φ)(w) = φ(v) · φ(w) = v ·w for alle v, w ∈ V .
1

1.1. Isometrier
Så er (0, φ) en isometri. Den inverse afbildning af (0, φ) er (0, φ)−1 = (0, φ−1).
c) Hvis en isometri f har en invers afbildning f−1 så er den inverse også en isometri.
d) Hvis f1 og f2 er isometrier, så er sammensætningen f1f2 også en isometri. J
Vi får altså at isometrier i Rn danner en gruppe som indeholder translationer og ortogonaleafbildninger. Isometrier har en række egenskaber, som beskrives i følgende sætning.
1.1.3 Sætning:a) Lad f være en isometri hvor f(0) = 0, så er f en ortogonal afbildning.b) Lad f være en isometri hvor f(u) = u for et u ∈ V , så eksisterer der en ortogonal
afbildning (0, φ) hvor f = (u, I)(0, φ)(u, I)−1.c) Lad f være en isometri. Så eksisterer der en translation (u, I) og en ortogonal afbildning
(0, φ) og f = (u, φ), hvor u og φ er entydige.d) For alle u, u′ ∈ V og alle lineære afbildninger φ, φ′ : V → V gælder der at
(u, φ)(u′, φ′) = (u+ φ(u′), φφ′),
og hvis det(φ) 6= 0 har vi ydermere at (u, φ)−1 = (−φ−1(u), φ−1).
Bevis:Først bevises a):Vi har at f er en isometri, og det gælder derfor at ‖f(v)− f(w)‖ = ‖v − w‖ og‖f(v)‖ = ‖v‖ for alle v, w ∈ V . Hvis vi anvender (1.1) har vi at
v · w =1
2
(−‖v − w‖2 + ‖v‖2 + ‖w‖2
)=
1
2
(−‖f(v)− f(w)‖2 + ‖f(v)‖2 + ‖f(w)‖2
)= f(v) · f(w).
Lad e1, . . . en være en ortonormal basis for V . Så har vi at f(ei) · f(ej) = ei · ej = 0 eller1, og f(e1), . . . , f(en) er også en ortonormal basis for V . For alle v =
∑n1 xiei ∈ V har vi
yderligere at xi = v · ei = f(v) · f(ei) og f(v) =∑n
1 xi(f(ei)). Lad w =∑n
1 yiei, så får vi at
f(v+w) = f
(n∑1
(xi + yi)ei
)=
n∑1
(xi+yi)f(ei) =n∑1
xif(ei)+n∑1
yif(ei) = f(v)+f(w).
På samme måde vises det at
f(av) = f
(a
n∑1
xiei
)= f
(n∑1
axiei
)=
n∑1
axif(ei) = an∑1
xif(ei) = af(v),
hvor a ∈ R, dermed følger det at f er lineær. For f(v) = 0 er ‖v‖ = ‖f(v)‖ = 0, altså erv = 0. Derfor er f injektiv og da dimensionen af V er endelig er f endda bijektiv, dermedhar vi altså at f er en ortogonal afbildning.
2

1. Grundlæggende teori
Nu bevises b):Lad (0, φ) = (−u, I)f(u, I), så er (0, φ) en isometri i følge punkt d) i Eksempel 1.1.2.Så gælder det, at (0, φ)(0) = 0. I følge a) har vi så at (0, φ) er ortogonal og f =
(u, I)(0, φ)(u, I)−1.Nu beviser vi c):Lad (0, φ) = (−f(0), I)f så er (0, φ) ortogonal i følge a) da (0, φ)(0) = (−f(0), I)f(0) =
−f(0) + f(0) = 0, og det gælder at f = (f(0), φ). Omvendt har vi at f = (u, φ), hvor(0, φ)(0) = 0, så må vi have at u = f(0) og (0, φ) = (−f(0), I)f .Til sidst bevises d):For alle v ∈ V har vi at
(0, φ)(u′, I)(0, φ)−1(v) = (0, φ)(u′, φ−1
)(v) = (φ(u′), I)(v).
Vi får altså at (0, φ)(u′, I)(0, φ)−1 = (φ(u′), I) og
(u, φ)(u′, φ′) = (u, I)(0, φ)(u′, I)(0, φ′)
= (u, I)(0, φ)(u, I)(0, φ)−1(0, φ)(0, φ′)
= (u, I)(φ(u′), I)(0, φφ′)
= (u, I)(φ(u′), φφ′)
= (u+ φ(u′), φφ′).
Hvis det(φ) 6= 0, så er (0, φ) og (u, φ) bijektiv. Vi lader u′ = −φ−1(u) og φ′ = φ−1 og fårdermed
(u, φ)(u′, φ′
)= (u+ φ(−φ−1(u)), φφ−1) = (0, I).
Vi har dermed at (u′, φ′) = (−φ−1(u), φ−1) = (u, φ)−1.
Vi får altså at en sammensætning af translationer og ortogonale afbildninger er isometrier,Sætning 1.1.3 giver os faktisk at Iso(Rn) = Rn oO(n,R).
Indtil videre har vi kun set på Rn som vektorrum, nu vil vi gerne beskæftige os medEuklidiske vektorrum.
1.2 Euklidisk vektorrum
For at kunne beskrive egenskaberne for en punktmængde X i et n-dimensionelt Euklidiskrum En, hvor n er endelig, så skal vi bruge konceptet for et reelt vektorrum. Som origovælger vi et punkt O ∈ En, punktet behøver ikke at ligge i X. Så betragter vi translationensom bringer O til et andet punkt x. Denne translation kan betragtes som vektoren x
fra origo til x. Vælger vi n lineært uafhængige vektorer a1, . . . , an som basisvektorer, såer enhver vektor x entydigt repræsenteret ved dens komponenter ξ1, . . . , ξn i forholdtil denne basis, x = ξ1a1 + · · · + ξnan. Komponenterne ξ1, . . . , ξn kan også betragtessom koordinaterne for punktet x. Dimensionen n er defineret som det maksimale antalaf lineært uafhængige basisvektorer. Som udgangspunkt er en vektor en søjlevektor ogsummen af to vektorer og multiplikation med en skalar er ligesom standard vektorregning.
3
1.2. Euklidisk vektorrum
Vektorrummet V n kaldes euklidisk hvis vi definerer skalarproduktet i forhold tilkoordinatsystemet a1, . . . , an, som følgende
x · y := (ξ1, . . . , ξn)
c11 · · · c1n...
...cn1 · · · cnn
ζ1...ζn
= x tCy,
og længden af en vektor er |x| := +√x tCx.
For en isometri kræver vi at længden af vektoren xy = y − x er bevaret:
|y − x|2 = (y − x)tC(y − x) = |y ′ − x ′|2 = |φy − φx|2 = (y − x)tφtCφ(y − x).
Denne ligning skal være gyldig for alle x, y ∈ En derfor må vi altså have at C = φtCφ.Hvis man tager standardbasis, så ville man have at C = I og φtφ = I. Da det(C) =
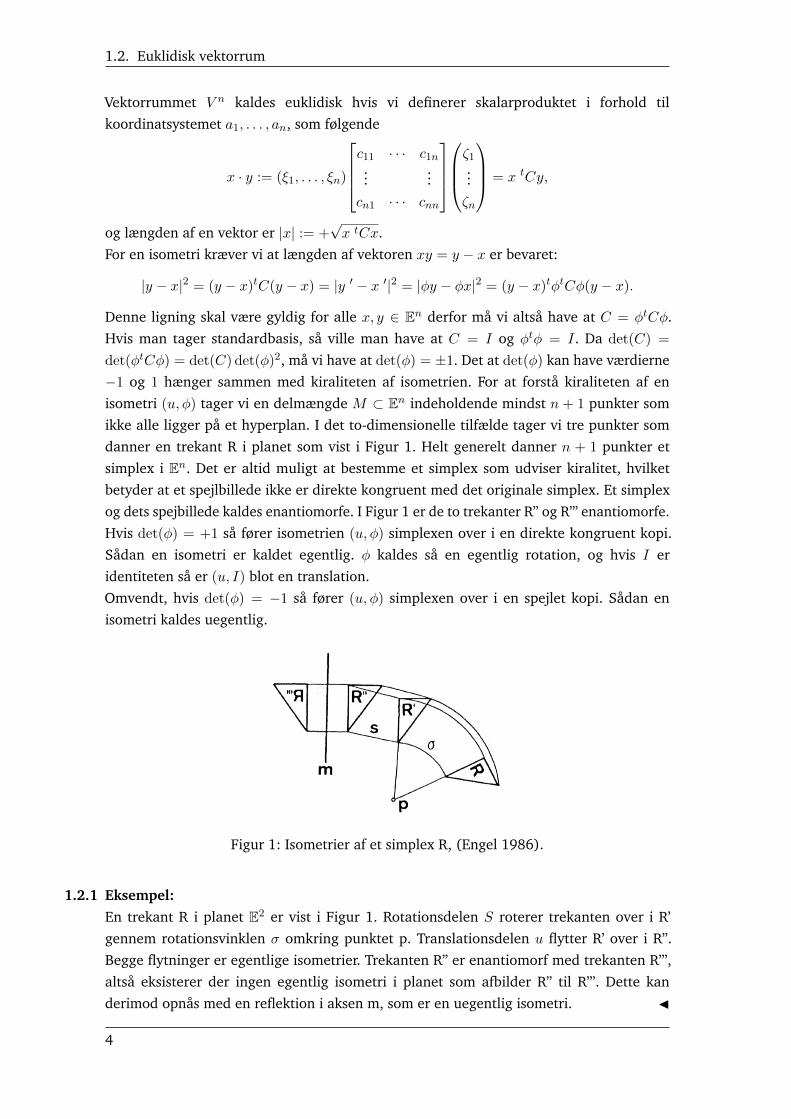
det(φtCφ) = det(C) det(φ)2, må vi have at det(φ) = ±1. Det at det(φ) kan have værdierne−1 og 1 hænger sammen med kiraliteten af isometrien. For at forstå kiraliteten af enisometri (u, φ) tager vi en delmængde M ⊂ En indeholdende mindst n + 1 punkter somikke alle ligger på et hyperplan. I det to-dimensionelle tilfælde tager vi tre punkter somdanner en trekant R i planet som vist i Figur 1. Helt generelt danner n + 1 punkter etsimplex i En. Det er altid muligt at bestemme et simplex som udviser kiralitet, hvilketbetyder at et spejlbillede ikke er direkte kongruent med det originale simplex. Et simplexog dets spejbillede kaldes enantiomorfe. I Figur 1 er de to trekanter R” og R”’ enantiomorfe.Hvis det(φ) = +1 så fører isometrien (u, φ) simplexen over i en direkte kongruent kopi.Sådan en isometri er kaldet egentlig. φ kaldes så en egentlig rotation, og hvis I eridentiteten så er (u, I) blot en translation.Omvendt, hvis det(φ) = −1 så fører (u, φ) simplexen over i en spejlet kopi. Sådan enisometri kaldes uegentlig.
Figur 1: Isometrier af et simplex R, (Engel 1986).
1.2.1 Eksempel:En trekant R i planet E2 er vist i Figur 1. Rotationsdelen S roterer trekanten over i R’gennem rotationsvinklen σ omkring punktet p. Translationsdelen u flytter R’ over i R”.Begge flytninger er egentlige isometrier. Trekanten R” er enantiomorf med trekanten R”’,altså eksisterer der ingen egentlig isometri i planet som afbilder R” til R”’. Dette kanderimod opnås med en reflektion i aksen m, som er en uegentlig isometri. J
4
1. Grundlæggende teori
Hvis sådan en isometri fører f.eks. et simplex over i sig selv, kaldes det en symmetri.
1.3 Symmetrier1.3.1 Definition:
Lad M være en delmængde af En. En symmetri der virker på en mængde M er en isometri derafbilder M over i sig selv.
Da en symmetri er en isometri der afbilder en mænge på sig selv, har en symmetri sammeegenskaber som en isometri. Vi ved derfor, at sammensætningen af to symmetrier igen er ensymmetri. Derudover har en symmetri en invers, den inverse er også en symmetrioperation,og sat sammen giver de identiteten (u, φ)(u, φ)−1 = (0, I). Hvilket betyder at symmetrierpå en mængde M danner en undergruppe af Iso(Rn).
Symmetrigrupper svarer til lineære repræsentationer af abstrakte grupper i euklidiskevektorrum. Så vi betragter (u, φ) som en repræsentation i En.
1.3.2 Definition (Punktgruppe):En gruppe G0 bestående af symmetrier der virker på en mængde M , kaldes en punktgruppe.
Inden vi kan gå videre med punktgrupper skal vi kigge på punktsystemer og deresegenskaber.
1.4 Punktsystemer1.4.1 Definition (Aksiomer for geometrisk krystallografi):
Lad punktmængden X være et n-dimensionelt Euklidisk rum, En, som opfylder følgendebetingelser:
1. Punktmængden X er diskret, det betyder, at man kan tegne en åben kugle med fikseretradius r > 0 omkring ethvert punkt i X, som ikke indeholder andre punkter i X. SeFigur 2.
2. Enhver mellemliggende kugle, altså enhver åben kugle som kan indlægges i En sådan atden undgår alle punkter i X, har en radius mindre end eller lig med et fikseret endeligtR. Se Figur 2.
3. Punktmængden X ser ens ud fra alle punkter i X.
En punktmængde X som opfylder alle tre betingelser kaldes et regulært punktsystem.
5

1.5. Dirichletområder
Figur 2: En del af et regulært punktsystem. (Engel 1986).
Betingelse nr. 2 sikrer at punkterne er uniformt fordelt over rummet. De kan f.eks. ikkealle ligge i den ene side af et hyperplan. Dette betyder at antallet af punkter i en kuglemed radius L > R stiger når n bliver større.Den tredje betingelse kan formuleres mere præcis. Hvis vi betragter en mængde af rettelinjer, tegnet fra et punkt i X til alle de resterende punkter i X. Så giver den tredjebetingelse, at linjesystemet for to punkter i X er direkte kongruente eller kongruente op tilspejling. Det betyder at for ethvert par af punkter i X kan vi finde en isometri af rummetsom bringer de to linjesystemer, og dermed hele punktmængden X, over i sig selv.Den tredje betingelse sikrer også at en største mellemliggende kugle med radius R
eksisterer. I et (r,R)-system er radien R supremum af radier af alle mellemliggende kuglerog dermed eksisterer der ikke nødvendigvis en kugle med radius R.
Vi betragter nu symmetrier af et regulært punktsystem X. Fra aksiom 1 iDefinition 1.4.1 eksisterer der, for ethvert par x, y ∈ X, en symmetri (u, φ) der førerx over i y og dermed afbilder X på sig selv. Vi har altså, at hvis x, y ∈ X og g er ensymmetri i X, så er g · x = y.Det følger at alle x ∈ X er forbundet gennem symmetrier der virker på X. Hvis dette eropfyldt siger vi at gruppen af symmetrier virker transitivt på X.
1.4.2 Definition (Rumgruppe):Enhver gruppe G af symmetrier der virker transitivt på et regulært punktsystem i En er enn-dimensionel rumgruppe.
Inden vi kan gå videre med et af Bieberbachs resultater betragter vi Dirichletområder.
1.5 Dirichletområder
De metriske og topologiske egenskaber af en punktmængde X ∈ En ses bedst ud fraDirichletområder.
6

1. Grundlæggende teori
1.5.1 Definition:Et Dirichletområde, D(x0) ∈ En, er den del af rummet indeholdende alle punkter i En
som er tættere på x0 ∈ X end noget andet punkt xi ∈ X. x0 kaldes referencepunktet forDirichletområdet D(x0).
Referencepunktet x0 anvender vi som origo. Vi tager nu et andet punkt xi ∈ X ogbestemmer det hyperplan H◦i som opdeler området mellem x0 og xi. Hyperplanet H◦ier normal til linjestykket x0xi = xi.
Figur 3: Dirichletområde, (Engel 1986).
Via konstruktion har vi, at alle punkter p ∈ H◦i har samme afstand til x0 som til xi.Hyperplanet H◦i opdeler rummet i to halv-rum H+
i og H−i . Vi antager at H+i indeholder
x0. Det følger altså deraf, at alle punkter p ∈ H+i er tættere på x0 end xi som vist i Figur 3.
Vi fortsætter med at bestemme de åbne halv-rum for hvert punkt xi ∈ X \ x0. Dermedopnår vi det åbne Dirichletområde D(x0) som fællesmængden af alle halv-rum H+
i ,
D(x0) =⋂
xi∈X\x0
H+i .
De åbne halv-rum H+i er konvekse, dermed er D(x0) også konveks.
For ethvert punkt p ∈ D(x0) betragter vi den åbne kugle B(p, |p|) med centrum i p ogradius |p|, og opnår området
Q0 =⋃
p∈D(x0)
B(p, |p|).
1.5.2 Sætning:Alle punkter xi ∈ X, som frembringer en facet af Dirichletområdet D(x0), ligger på randenaf Q0.
Bevis:Antag at der eksister et punkt xj ∈ X som er inden i en kugle B(p, |p|). Så må punktet pvære tættere på xj end x0. Men så har vi at p /∈ D(x0) hvilket er en modstrid. Et punkt xj
7

1.5. Dirichletområder
udenfor Q0 ligger altså udenfor enhver kugle B(p, |p|) ∈ Q0 for et p ∈ D(x0). Det følgerderaf, at |xjp| > |x0p| og derfor har vi at hyperplanet H◦j , som opdeler x0xj , altså ikkeskærer D(x0). Dermed får vi, at xj må ligge på randen af Q0.
1.5.3 Sætning:I et (r,R)-system X er ethvert Dirichletområde D(xi), xi ∈ X en begrænset konveks polytopmed et endeligt antal af randfacetter. D(xi) er konstrueret via alle punkter indenfor en kuglemed radius 2R og centrum i xi.
Bevis:I følge Sætning 1.5.2 har vi, at alle punkter i X som frembringer en facet afDirichletområdet D(xi) ligger på randen af Qi. Ud fra betingelse 2 i Definition 1.4.1er radien R supremum af alle radier af de mellemliggende kugler. Derfor må Qi væreindeholdt i en kugle B(xi, 2R). Ud fra betingelse 1 i Definition 1.4.1 er der kun etendeligt antal af punkter i kuglen B(xi, 2R). Dermed får vi, at der er et endeligt antalaf randfacetter.
Afslutningen af D(xi) noteres som D(xi).
1.5.4 Sætning:I et (r,R)-system X er området Qi for et Dirichletområde, D(xi), xi ∈ X, bestemt vedforeningen af alle kugler ved punkterne vj af D(xi),
Qi =⋃
vj∈D(xi)
B(vj , |xivj |).
Bevis:For bevis se side 15 i (Engel 1986).
1.5.5 Sætning:I et (r,R)-system X er Dirichletområdet D(xi) for et punkt xi ∈ X indeholdet i en kugle medradius R og centrum i xi.
Bevis:I følge betingelse 2 i Definition 1.4.1 er radius R supremum af radier for allemellemliggende kugler. Alle punkter i D(xi) ligger altså i det indre af kuglen B(xi, R).Dermed må D(xi) ⊂ B(xi, R).
1.5.6 Definition:Vi konstruer Dirichletområdet D(xi) for ethvert punkt xi ∈ X. Dette resulterer i en opdelingaf rum som har følgende egenskaber:
1. Foreningen af alle afsluttede Dirichletområder D(xi) dækker rummet,⋃xi∈X
D(xi) = En.
8

1. Grundlæggende teori
2. Fællesmængden af det indre af to Dirichletområder er tom,
int(D(xi)) ∩ int(D(xj)) = ∅, i 6= j.
3. Fællesmængden af to afsluttede Dirichletområder er enten tom eller en d-facet af hver.
For et regulært punktsystem X ⊂ En konstruerer vi en opdeling τ af Dirichletområder.Vi vælger x0 ∈ X som origo. Fra betingelse 3 i Definition 1.4.1 og Sætning 1.5.2 har vi,at enhver D(xi) ∈ τ er kongruent med D(x0). Fra Sætning 1.5.3 har vi at D(x0) har etendeligt antal facetter, og dermed eksisterer der en punktgruppe G0 med endelig orden,der afbilder τ over i sig selv og dermed D(x0) over i sig selv.
G0 := {Wi |Wi : τ 7→ τ,D(x0) 7→ D(x0)}.
Ud fra betingelse 3 i Definition 1.4.1 skal der være en rumgruppe G der virker transitivtpå X, dermed virker G også transitivt på τ , det betyder at for ethvert par D(xi), D(xj) ∈ τeksisterer der en isometri (u, φ) ∈ G der fører D(xi) over i D(xj) og dermed afbilder τover i sig selv.
1.5.7 Sætning:Rotationsdelen af isometrien (u, φ) ∈ G frembringer en punktgruppe med endelig orden.
Bevis:Vi ved at D(x0) har et endeligt antal af facetter, vi noterer dem Fi. Deraf følger det, atder eksister en endelig mængde M af isometrier (ui, φi) ∈ G, som afbilder D(x0) over i etD(xi), som har en fælles facet med D(x0),
M :={
(ui, φi) | (ui, φi) : D(x0) 7→ D(xi), D(x0) ∩D(xi) = Fi
}.
Hvis (ui, φi) ∈ M så er (ui, φi)Wj ∈ M , for ethvert Wj ∈ P (x0). For hvert D(yv) ∈ τ
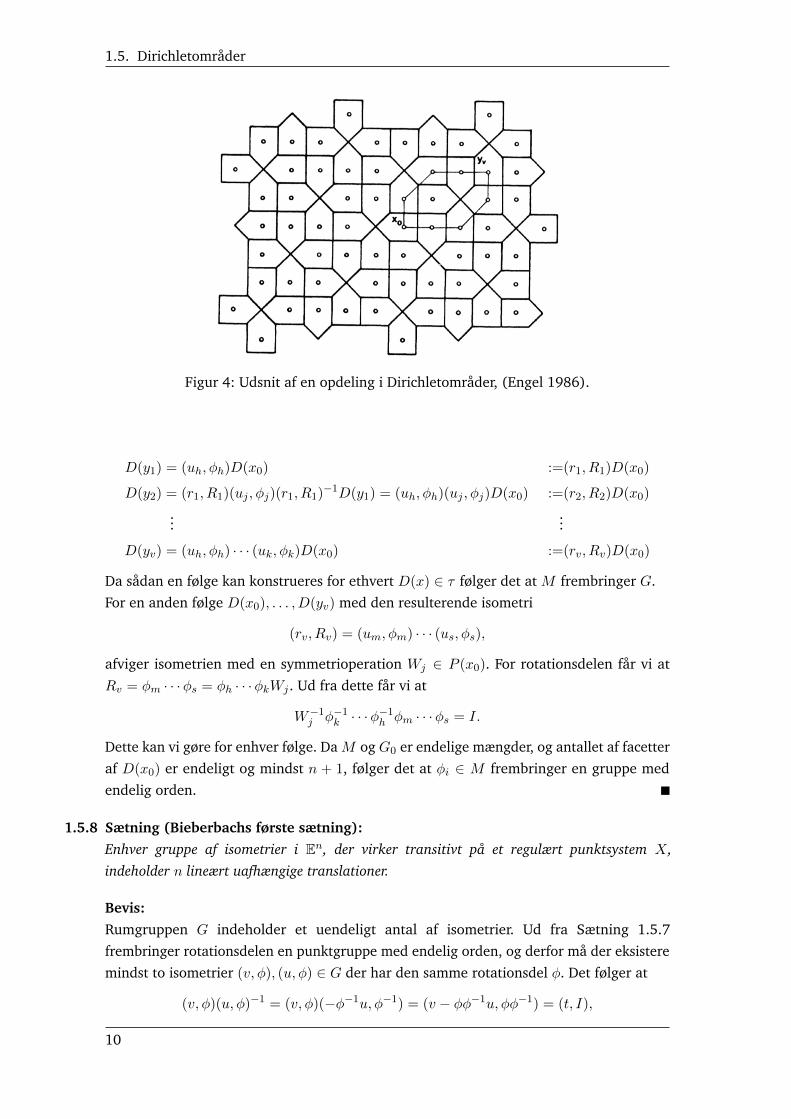
eksisterer der et uendeligt antal af følger D(x0), . . . , D(yv) af Dirichletområder der haren fælles facet. For en bestemt følge D(x0), D(y1), . . . , D(yv) bestemmer vi en isometri(rv, Rv) der via gentagen anvendelse af konjugerede udgaver af (ui, φi) ∈ M afbilderD(x0) over i D(yv), som vist i Figur 4.
9
1.5. Dirichletområder
Figur 4: Udsnit af en opdeling i Dirichletområder, (Engel 1986).
D(y1) = (uh, φh)D(x0) :=(r1, R1)D(x0)
D(y2) = (r1, R1)(uj , φj)(r1, R1)−1D(y1) = (uh, φh)(uj , φj)D(x0) :=(r2, R2)D(x0)
......
D(yv) = (uh, φh) · · · (uk, φk)D(x0) :=(rv, Rv)D(x0)
Da sådan en følge kan konstrueres for ethvert D(x) ∈ τ følger det at M frembringer G.For en anden følge D(x0), . . . , D(yv) med den resulterende isometri
(rv, Rv) = (um, φm) · · · (us, φs),
afviger isometrien med en symmetrioperation Wj ∈ P (x0). For rotationsdelen får vi atRv = φm · · ·φs = φh · · ·φkWj . Ud fra dette får vi at
W−1j φ−1k · · ·φ−1h φm · · ·φs = I.
Dette kan vi gøre for enhver følge. Da M og G0 er endelige mængder, og antallet af facetteraf D(x0) er endeligt og mindst n + 1, følger det at φi ∈ M frembringer en gruppe medendelig orden.
1.5.8 Sætning (Bieberbachs første sætning):Enhver gruppe af isometrier i En, der virker transitivt på et regulært punktsystem X,indeholder n lineært uafhængige translationer.
Bevis:Rumgruppen G indeholder et uendeligt antal af isometrier. Ud fra Sætning 1.5.7frembringer rotationsdelen en punktgruppe med endelig orden, og derfor må der eksisteremindst to isometrier (v, φ), (u, φ) ∈ G der har den samme rotationsdel φ. Det følger at
(v, φ)(u, φ)−1 = (v, φ)(−φ−1u, φ−1) = (v − φφ−1u, φφ−1) = (t, I),
10

1. Grundlæggende teori
hvor t = v − u er en translation. Lad (t1, I) være den mindste af sådan en translation. Detfrembringer en undergruppe med uendelig orden,
T 1 := {(t, I) | t = m1t1, m1 ∈ Z}.
Hvis vi anvender T 1 på D(x0) frembringes en lineær række af Dirichletområder.Vi bestemmer den højre sideklasse T 1(v, φ). Den frembringer en parallel række afDirichletområder. Antallet af sådanne rækker er uendelig, og dermed eksisterer der etuendeligt antal af sideklasser. Yderligere følger det, at der eksister to isometrier der tilhørerforskellige sideklasser, men som har den samme rotationsdel.På samme måde som før kan vi finde en anden translation (t, I), som er lineært uafhængigmed (t1, I). Lad (t2, I) være den korteste af sådan en translation. Translationsvektorernet1, t2 frembringer en undergruppe med uendelig orden,
T 2 := {(t, I) | t = m1t1 +m2t2, m1,m2 ∈ Z}.
Lignende argumenter viser, at der kan findes n lineært uafhængige translationsvektorer,hvilket beviser sætningen.
Bieberbachs første sætning giver, at enhver rumgruppe indeholder en undergruppe meduendelig orden,
Tn := {t, I) | t = m1t1 + · · ·+mntn, m1, . . . ,m1 ∈ Z}.
Hver sideklasse Tn(vi, φi) frembringer et kongruent gitter. Vi repræsenterer enhvergittervektor t ∈ Tn gennem dets slutpunkt og opnår dermed et gitter. Det følger at etregulært punktsystem kan repræsenteres som en mængde af kongruente punktgitre, alleparallelt placeret i rummet.
1.6 Gitterbasis
Vi arbejder i En og betragter gitteret Tn := {t | t = m1a1 + · · · + mnan, mi ∈ Z}, hvora1, . . . an er n lineært uafhængige gittervektorer.
1.6.1 Definition:En gitterbasis i En består af n lineært uafhængige gittervektorer a1, . . . an, og hver gittervektort ∈ Tn kan skrives som en linearkombination t = m1a1 + · · ·+mnan, hvor mi ∈ Z.
Metrikken af gitteret med basisvektorer a1, . . . , an er beskrevet af den ”metriske tensor”C, som er beskrevet i Afsnit 1.2. Det kvadrerede volumen af parallelepipedummet P ,udspændt af basisvektorerne, er givet ved determinanten af C, vol2(P ) = det(C).En ny gitterbasis, a′1, . . . , a
′n, opnås ved en lineær transformation af den gamle basis. Til
det anvender vi en transformationsmatrix A := (aij), hvor aij ∈ Z,a′1...a′n
=
a11 · · · a1n...
...an1 · · · ann
a1...an
.11

1.6. Gitterbasis
For at a′1, . . . , a′n også er en gitterbasis skal det nye parallelepipedum P ′ have samme
volumen som P . Dermed får vi, at det(A) = ±1. Antallet af sådanne matricer A eruendeligt, hvilket betyder at i En, hvor n > 1, eksisterer der et uendeligt antal af gitterbaserfor et gitter. Vi vælger en passende basis iblandt disse, og alt beregnes ud fra denne.Vi kan nu skrive en gittervektor t med hensyn til denne basis a1, . . . , an, som
t = m1a1 + · · ·+mnan,
hvor mi ∈ Z. Den kvadrerede længde af t er
|t|2 = ttCt =n∑i=1
n∑j=1
cijmimj := f(m1, . . . ,mn). (1.2)
Funktionen f(m1, . . . ,mn) er en positiv-definit n-ær kvadratisk form, hvilket betyder atfunktionen er positiv, og kun antager værdien nul hvis m1 = · · · = mn = 0.I forhold til en ny gitterbasis a′1, . . . , a
′n bliver gittervektoreren t = m′1a
′1 + · · · + m′na
′n.
De nye koefficienter m′1, . . . ,m′n er transformeret med den kontragrediente matrix A◦ :=
(A−1)t, hvor A er transformationsmatricen for basisvektorerne, og t′ = A◦t.Vi kræver at længden af t bevares under transformationen af gitterbasen:
|t|2 = ttCt = (t′)tACAtt′ = (t′)tC ′t′ = |t′|2.
Derfor er C ′ = ACAt. Dette er en ækvivalensrelation. Det siges at C ′ er ækvivalentmed C. Forskellige gitterbaser for det samme gitter har ækvivalente metriske tensorer,og den tilsvarende kvadratiske form siges også at være ækvivalent. Vi kan nu beregnehvilken transformation der sker med isometrien (v, φ) under basisskifte. I forhold til basena1, . . . , an har vi y = (v, φ)x. Anvendes en transformationsmatrix A, så vi får en ny basisa′1, . . . , a
′n bliver koordinaterne x og y transformeret via den kontragrediente matrix A◦,
og vi får at x′ = A◦x og y′ = A◦y. Det følger at Aty′ = (v, φ)Atx′ og
y′ = A◦(v, φ)Atx′ = (u, ψ)x′,
hvor (u, ψ) = (A◦v,A◦φAt).
Nu har vi det grundlæggende teori på plads, og kan begynde med første trin iklassificeringen, nemlig klassificering af punktgrupper.
12

KAPITEL 2Krystallografiske punktgrupper
I dette kapitel vil der blive defineret hvad en krystallografisk gruppe er, og derefter vilpunktgrupperne blive klassificeret. Dette kapitel er baseret på (Strebel 2010).
2.0.1 Definition (Krystallografisk gruppe):En krystallografisk gruppe G ∈ En er en undergruppe af isometrigruppen Iso(En), og gruppen
Γ(G) = {v ∈ En | (v, I) ∈ T (G)}
er et gitter i En. Er n = 3 kaldes det en rumgruppe.
Er G en krystallografisk gruppe i En, så er G0 dens punktgruppe, T (G) er en undergruppeaf G, bestående af translationsdelene i G, og Γ(G) er gitteret for translationsvektorer fraT (G).
2.0.2 Sætning:Translationsundergruppen T (G) er normal i G, og den er den største abelske undergruppe afG.
Bevis:For bevis se side 49 i (Strebel 2010).
For hver delmængde S ⊂ E3 eksisterer der en symmetrigruppe for S, som defineres ved
Sym(S) = {ψ ∈ Iso(E3) | ψ(S) = S}.
Da strukturen af en ideel krystal er invariant i tre lineært uafhængige retninger, udgørvektorerne for translationer i Sym(S) et gitter Γ(Sym(S)) i E3, symmetrigruppen er enrumgruppe og dermed en krystallografisk gruppe i det tre-dimensionelle rum.
2.0.3 Sætning:Lad f : G ∼7−→ G′ være en isomorfi mellem to krystallografiske grupper G,G′. Så afbilder ftranslationsgruppen T (G) over i T (G′) og inducerer en isomorfi f∗ der afbilder punktgruppenG0 over i G′0.
Bevis:For bevis se side 50 i (Strebel 2010).
13

2.1. Undergrupper af SO(3,R)
2.0.4 Korollar:Lad G og G′ være krystallografiske grupper. Er G og G′ isomorf, så er deres punktgrupper G0
og G′0 det også.
Da vi ved at punktgrupper består af symmetrier der afbilder en mængde på sig selv,kan vi starte med at finde de endelige undergrupper af SO(3,R), da de netop består afsådanne afbildninger, og vi vil betragte det tre-dimensionelle tilfælde.
2.1 Undergrupper af SO(3,R)
I dette afsnit vil de endelige undergrupper af SO(3,R) blive bestemt og beskrevet.
Følgende sætning er baseret på (Devisscher 2011).
2.1.1 Sætning:Lad G være en endelig undergruppe af SO(3,R). Så er G isomorf til præcis én af de følgendegrupper:
Cn, (n ≥ 1): rotations symmetrigruppe af en n-pyramide.
Dn, (n ≥ 2): rotations symmetrigruppe af en n-prisme.
A4: rotations symmetrigruppe af en regulær tetraeder, noteret som T .
S4: rotations symmetrigruppe af en terning, eller en regulær octaeder, noteret som O.
A5: rotations symmetrigruppe af en regulær dodekaeder, eller en regulær ikosaeder,noteret som Y .
Bevis:For bevis se (Devisscher 2011).
Nu vil vi beskrive de forskellige symmetrigrupper.
Den cykliske gruppe Cn:Vi bruger notationen Cn for den cykliske gruppe af orden n. En repræsentation af dencykliske gruppe kunne være symmetrigruppen af en n-pyramide, bestående af en n-gonsom bund og n ligebenede trekanter som sider, for eksempel se Figur 5. En cyklisk gruppehar den egenskab at hele gruppen kan genereres af et enkelt element. I dette tilfælde enrotation om den akse der går fra pyramidens ”spids” og så ned til centrum af ”bunden”.Hvis vi har en n-pyramide, ville vores element svare til en rotation med vinklen φ = 2π
n ,lad os kalde denne rotation g. Vi ville altså have at Cn = 〈g〉. For de to pyramider i Figur 5ville vi have at
C6 = {e, g, g2, g3, g4, g5} og C7 = {e, g, g2, g3, g5, g6}.
14

2. Krystallografiske punktgrupper
Figur 5: Til venstre en sekskantet pyramide, C6, til højre en syvkantet pyramide, C7.
Diedergruppen Dn:Vi bruger notationen Dn for diedergruppen af orden 2n, og en repræsentation kunne væresymmetrigruppen af en n-prisme. Diedergruppen indeholder også en rotation med vinklen2πn rundt om aksen der går fra midten af bunden til midten af toppen af en n-prisme, men
derudover kan man også rotere i flere andre akser, som er ortogonale på den første akse.Denne type akse er der n af. Hvis n er et lige tal så er der n
2 akser der går fra midte til midteaf to modstående sideflader, og n
2 akser der går fra midte til midte af to modstående kanter.Hvis n er ulige er der n akser der går fra midten af en kant til midten af den modståendeflade. I disse akser kan man kun rotere med π, sådan et element har altså orden 2. For deto prismer i Figur 6 har vi at
D6 = {e, u1, u2, u3, u4, u5, u6, g, g2, g3, g4, g5} og
D7 = {e, u1, u2, u3, u4, u5, u6, u7, g, g2, g3, g4, g5, g6}.
Figur 6: Til venstre en sekskantet prisme, D6, til højre en syvkantet prisme, D7.
Det ses at grupperne har orden 2n. Da u2i = e for i = 1, . . . , n ved vi at (gu1)2 = e og
gu1 = (gu1)−1 = u−11 g−1 = u1g
−1. Vi får altså at gu1 = u1g−1. Derudover har vi også at
uk+1 = gku1 for k = 1, . . . , n− 1.
Den alternerende gruppe A4:En tetraeder har to slags akser, en der går fra et hjørne og så gennem midten af denmodstående side. Den anden går gennem midten af to modstående kanter. Den første typeakse, lad os kalde den L, kan vi rotere omkring med vinklerne 2π
3 og 4π3 . Den anden type
akse, lad os kalde den M kan vi kun rotere omkring med vinklen π. Da en tetraeder harfire sideflader er der fire akser som L med to rotationer om hver, og vi kan finde tre akser
15

2.1. Undergrupper af SO(3,R)
som M , med én rotation om hver, det giver 11 rotationer i alt, gruppen må altså haveorden 12. Vi ville altså have at
A4 = {e,m1,m2,m3, l1, l21, l2, l
22, l3, l
23, l4, l
24}.
Figur 7: En tetraeder. Figur 8: En tetraeder med akser på. halløjsamed d d (Armstrong 1988).
Disse rotationer svarer hver især til en permutation af hjørnekanterne. Hvis vi nummerererde fire hjørner fra 1 til 4 kan hver rotation beskrives som lige permutationer. Hvis vibetragter den tetraeder som ses i Figur 9a, har vi kaldt ”toppen” 1, og de tre hjørneri ”bunden” for 2, 3 og 4. Hvis vi så vælger at rotere om aksen L, illusteret med rød,med vinklen 2π
3 bliver resultatet den tetraeder som ses i Figur 9b, og denne rotationsvarer til permutationen l = (234)(1). Hvis vi så nu vælger at rotere om M , illustreretmed rød, med vinklen π, så får vi den tetraeder som ses i Figur 9c, og denne rotationsvarer til permutationen m = (13)(24). De to rotationer sammen svarer til permutationenml = (143)(2). Hvis vi derimod vælger at lave de to rotationer i omvendt rækkefølge, såførst om M og derefter L, som ses i Figur 9d, 9e og 9f ses det, at slutresultatet er forskelligalt efter hvilken rækkefølge der anvendes, vi har at ml 6= lm. Gruppen er altså ikke-abelsk.
(a) l = (234)(1) (b) m = (13)(24) (c) ml = (143)(2)
(d) m = (14)(23) (e) l = (132)(4) (f) lm = (124)(3)
Figur 9: Permutationer af en tetraeder.
16
2. Krystallografiske punktgrupper
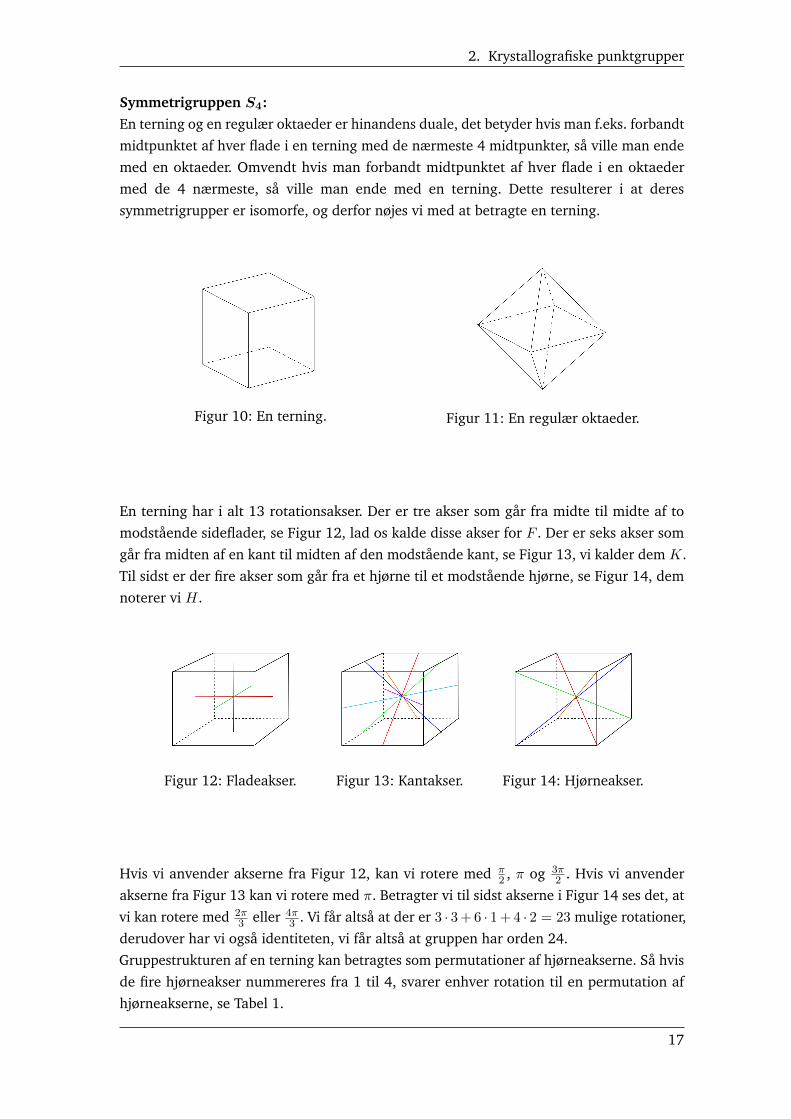
Symmetrigruppen S4:En terning og en regulær oktaeder er hinandens duale, det betyder hvis man f.eks. forbandtmidtpunktet af hver flade i en terning med de nærmeste 4 midtpunkter, så ville man endemed en oktaeder. Omvendt hvis man forbandt midtpunktet af hver flade i en oktaedermed de 4 nærmeste, så ville man ende med en terning. Dette resulterer i at deressymmetrigrupper er isomorfe, og derfor nøjes vi med at betragte en terning.
Figur 10: En terning. Figur 11: En regulær oktaeder.
En terning har i alt 13 rotationsakser. Der er tre akser som går fra midte til midte af tomodstående sideflader, se Figur 12, lad os kalde disse akser for F . Der er seks akser somgår fra midten af en kant til midten af den modstående kant, se Figur 13, vi kalder dem K.Til sidst er der fire akser som går fra et hjørne til et modstående hjørne, se Figur 14, demnoterer vi H.
Figur 12: Fladeakser. Figur 13: Kantakser. Figur 14: Hjørneakser.
Hvis vi anvender akserne fra Figur 12, kan vi rotere med π2 , π og 3π
2 . Hvis vi anvenderakserne fra Figur 13 kan vi rotere med π. Betragter vi til sidst akserne i Figur 14 ses det, atvi kan rotere med 2π
3 eller 4π3 . Vi får altså at der er 3 · 3 + 6 · 1 + 4 · 2 = 23 mulige rotationer,
derudover har vi også identiteten, vi får altså at gruppen har orden 24.Gruppestrukturen af en terning kan betragtes som permutationer af hjørneakserne. Så hvisde fire hjørneakser nummereres fra 1 til 4, svarer enhver rotation til en permutation afhjørneakserne, se Tabel 1.
17

2.1. Undergrupper af SO(3,R)
Symmetri Permutationer OrdenIdentitet e 1
Rotation om en fladeakse, f .(1, 2, 3, 4), (1, 4, 3, 2), (1, 2, 4, 3),
4(1, 3, 4, 2), (1, 3, 2, 4) og (1, 4, 2, 3).
Kvadreret rotation om en(1, 3)(2, 4), (1, 4)(2, 3) og (1, 2)(3, 4). 2
fladeakse, f2.Rotation om en kantakse, k. (1, 2), (1, 3), (1, 4), (2, 3), (2, 4) og (3, 4). 2
Rotation om en hjørneakse, h.(1, 2, 3), (1, 3, 2), (1, 2, 4), (1, 4, 2),
3(1, 3, 4), (1, 4, 3), (2, 3, 4) og (2, 4, 3).
Tabel 1: Permutationer af en terning.
Den alternerende gruppe A5:En regulær dodekaeder, se Figur 15, og en regulær ikosaeder, se Figur 16, er hinandensduale ligesom terningen og en oktaeder, og derfor betragter vi kun en regulær dodekaeder.
Figur 15: En regulær dodekaeder. Figur 16: En regulær ikosaeder.
På samme måde som terningen kan vi opdele en dodekaeder i fladeakser, kantakser oghjørneakser. Da en dodekaeder har 12 flader må den have seks fladeakser, og om hverfladeakse kan vi rotere med 2π
5 , 4π5 , 6π
5 og 8π5 . En dodekaeder indeholder 30 kanter, og vi
må derfor have 15 kantakser, om hver kantakse kan vi rotere med π. Tilsidst er der 20hjørner, og vi har derfor 10 hjørneakser, om hver hjørneakse kan vi rotere med 2π
3 og 4π3 .
Vi får altså 6 · 4 + 15 · 1 + 10 · 2 = 59 mulige rotationer. Derfor må gruppen have orden 60.Som i Figur 17 kan vi konstruere en terning indeni en dodekaeder, alle hjørnerne iterningen er også et hjørne i dodekaederen, og hver kant i terningen svarer til en diagonali en af de femkantede flader.
Figur 17: Terning indeni en dodekaeder, (Armstrong 1988).
18

2. Krystallografiske punktgrupper
Vi kan konstruere 5 forskellige terninger, og nummererer dem 1 til 5. Så kan vi, påsamme måde som med hjørneakserne i terningen, betragte hvordan disse fem konstrueredeterninger flytter sig, når vi laver en rotation om en symmetriakse i vores dodekaeder. Hvisvi betragter dette som permutationer af de fem konstruerede terninger, vil vi opnå atenhver rotation svarer til et element i S5. Hvis man betragter hjørneakserne vil man få, aten rotation om en hjørneakse vil give en 3-cykel, og alle rotationer om en hjørneakse viltilsammen give alle 3-cykler i S5. Netop alle 3-cykler i S5 generer tilsammen A5, og A5 harogså orden 60, dermed har vi at symmetrigruppen for en dodekaeder er isomorf med A5.
Nu da vi har styr på alle de endelige undergrupper af SO(3,R) kan vi gå videre til deendelige undergrupper af O(3,R).
2.2 Undergrupper af O(3,R)
Helt generelt for undergrupper af O(3,R) må vi have tre tilfælde. Første tilfælde er, atundergruppen er en undergruppe af SO(3,R). Andet tilfælde er en gruppe der indeholderelementer hvor det = −1, og −I er et element i gruppen. Hvorimod en gruppe af tredjetilfælde, også vil indeholde elementer hvor det = −1, men −I er ikke et element i dennetype gruppe.
Det er klart at alle undergrupper af SO(3,R) også er undergrupper af O(3,R). DaSO(3,R) ⊆ O(3,R). Vi kalder disse undergrupper for type 1, og anvender notationenT1 for mængden af undergrupper af type 1, yderligere noterer vi sådan en undergruppesom G+.
Lad os nu betragte dem vi vil kalde for type 2, noteret som T2. Det åbenlyse ville væreat tage alle matricer fra SO(3,R) og så lave en inversion, det betyder at g · (−I) ∈ T2
for enhver g ∈ G+, hvor G+ ∈ T1 og I er identitetsmatricen. Men denne undergruppevil ikke være lukket under multiplikation. Derfor bliver vi nødt til at tilføje noget mere tilundergruppen. Vi lader
T2 := {G+ × {−I, I} | G+ ∈ T1}
og noterer en undergruppe af type 2 som G− og tjekker nu om det er en undergruppeaf O(3,R). Først tjekkes om I ∈ G−, hvilket er tilfældet da I er det neutrale element iG+ og I · I = I, så dermed har vi I ∈ T2. Vi ved at alle elementer i G+ er invertible,da G+ ⊆ SO(3,R), vi ved også at både −I og I er invertible. Vi kan altså gøre følgende(g1 · (±I))−1 = (±I)−1 · g−11 = (±I) · g−11 , hvor g1 ∈ G+. Da I og −I kommuterer med alleelementer i G+ har vi at (g1 · (±I))−1 = g−11 · (±I), hvilket er et element i G−.Til sidst tjekkes om G− er lukket under multiplikation. Lad g1, g2 ∈ G+, så har vi at
(g1 · (±I)) · (g2 · (±I)) = g1 · g2 · (±I) · (±I) = g1 · g2 · I ∈ G− eller
(g1 · (±I)) · (g2 · (∓I)) = g1 · g2 · (±I) · (∓I) = g1 · g2 · (−I) ∈ G−.
Dermed får vi at G− er lukket under multiplikation. Vi har altså at G− ⊆ O(3,R).
19

2.2. Undergrupper af O(3,R)
Til sidst konstrueres den sidste type undergruppe. Vi lader G � SO(3,R). Betragtdet : G 7→ {±1}. Dette er en surjektiv homomorfi, dvs. vi kan sætte G1 = ker(det), såer G1 en normal undergruppe i G med indeks 2, [G : G1] = 2. Da G er en undergruppeaf type 3, ved vi at −I /∈ G. Idet [G : G1] = 2 er G = G1 ∪ (G \G1). Vi konstruerer nu engruppe G2 ≤ SO(3,R) ved at sætte
G2 = G1 ∪ (−I) · (G \G1).
Inden vi går videre, tjekkes om det er en undergruppe.Først tjekkes om I ∈ G2. Da G1 = ker(det) må I ∈ G1, og dermed er I ∈ G2. Nu tjekkesom gruppen er lukket under invers. Vi har to muligheder. For g1 ∈ G1 er g1 invertibel ogg−11 ∈ G1 og dermed har vi at g−11 ∈ G2. Den anden mulighed er hvis vi har et elementg3 ∈ G \G1. Så skal (−I) · g3 være invertibel og ligge i G2. Vi ved at (−I) er invertibel, vived også at g3 er invertibel da g3 ∈ O(3,R). Dermed får vi at ((−I) · g3)−1 = g−13 · (−I), davi ved at −I kommuterer med alle elementer i O(3,R) har vi at ((−I) · g3)−1 = (−I) · g−13 ,og g−13 ∈ G \G1, da det(g−13 ) = −1. Vi har altså at (−I) · g−13 ∈ G2 og G2 er dermed lukketunder invers.Nu tjekkes om G2 er lukket under multiplikation. Vi lader g1, g2 ∈ G1 og g3, g4 ∈ G \ G1.Så har vi tre tilfælde. Første tilfælde:g1 · g2 ∈ G1 og dermed har vi at g1 · g2 ∈ G2.Andet tilfælde:
((−I) · g3) · ((−I) · g4) = g3 · g4
Vi ved at det(g3) = −1 = det(g4) og har derfor at det(g3 · g4) = 1 hvilket giver atg3 · g4 ∈ G ∩ SO(3,R) = G1 og dermed at g3 · g4 ∈ G2.Tredje tilfælde:
g1 · ((−I) · g3 = (−I) · g1 · g3
Vi ved at det(g1) = 1 og det(g3) = −1, det medfører at det(g1 · g3) = −1 og dermed atg1 ·g3 ∈ G\G1. Hvilket giver at (−I)·g1 ·g3 ∈ G2. Dermed erG2 lukket under multiplikation,og vi har at G2 ≤ SO(3,R). Dette giver også at [G2 : G1] = 2. Omvendt gælder så at
G = G1 ∪ (−I) · (−I) · (G \G1) = G1 ∪ (−I) · (G2 \G1) ∈ T3.
Dette beskriver undergrupper af type 3, denne type noteres som T3. Dette leder til følgendesætning som kun er gældende for O(n,R) når vi arbejder i ulige dimensioner.
2.2.1 Sætning:Lad G være en gruppe, med en normal undergruppe G+, hvor [G : G+] = 2. Lad z ∈ G \G+
være et element med orden 2, og z kommuterer med alle elementer i G+. Så er der tre typeraf undergrupper U af G:
1. U er en undergruppe af G+.2. Hvis z ∈ U , så er U det direkte produkt mellem U+ = U ∩G+ og den cykliske gruppe〈z〉.
3. Hvis z /∈ U og U * G+ så gælder følgende:
∼U = U+ ∪ (U \ U+) · z
20

2. Krystallografiske punktgrupper
er en undergruppe af G og f : U 7→∼U ,
f : g 7→
{g, hvis g ∈ U+ = U ∩G+,
g · z, hvis g ∈ U \ U+,.
er en bijektiv homomorfi. Ydermere er [∼U : U+] = 2.
Bevis:Sætningen følger af det ovenstående, pånær at f er en bijektiv homomorfi. f er enhomomorfi pga. følgende udregning:
f(g1) · f(g2) =
g1 · g2, hvis g1, g2 ∈ U+,
(g1 · z) · g2 = (g1 · g2) · z, hvis g1 ∈ U \ U+, g2 ∈ U+,
g1 · (g2 · z) = (g1 · g2) · z, hvis g1 ∈ U+, g2 ∈ U \ U+,
(g1 · z) · (g2 · z) = (g1 · g2) · z2 = g1 · g2, hvis g1, g2 ∈ U \ U+,
= f(g1 · g2).
For at f skal være injektiv skal vi have at Ker(f) = I. Vi starter med at antage for etelement g ∈ U at f(g) = i. Hvis g ∈ U+, så har vi at g = I, og hvis g ∈ U \ U+ skal vihave at g · z = I, men for at det kan lade sig gøre skal vi have at g = z−1 = z hvilket eren modstrid da z /∈ U , så intet element fra U \ U+ kan ligge i Ker(f). Dermed har vi atKer(f) = I og f er injektiv.Nu vises det at f er surjektiv. For at f skal være surjektiv skal ethvert element i
∼U kunne
skrives som f(g) hvor g ∈ U . Vi har to tilfælde. For h ∈∼U har vi enten at h ∈ U+, hvilket
giver at h = f(h), eller at h ∈ (U \ U+) · z, så har vi at h = g · z for et g ∈ U \ U+ såledesat h = f(g), og dermed er f surjektiv og dermed bijektiv.
Nu vil vi gerne finde de endelige undergrupper af O(3,R), som er punktgrupper, men vi erkun interesseret i en bestemt type af dem, nemlig de krystallografiske.
2.3 Krystallografiske undergrupper
I dette afsnit vil de krystallografiske undergrupper af O(3,R) blive klassificeret op tilkonjugation.
2.3.1 Sætning (Krystallografisk restriktion):Hvis G er en endelig undergruppe af O(3,R) og G er en symmetrigruppe, så vil en rotation iundergruppen have orden 1, 2, 3, 4 eller 6.
Bevis:Hvis vi betragter en basis {u1, u2, u3} hvor u1 er rotationsaksen og u2, u3 ⊥ u1 ogu3 = u1 × u2. Så kan vi beskriver rotationer ved en matrix
φ =
1 0 0
0 cos(θ) − sin(θ)
0 sin(θ) cos(θ)
,21

2.3. Krystallografiske undergrupper
hvor Spor(φ) = 1 + 2 cos(θ) og θ = 2πn . Da G er en symmetrigruppe vil den bevare et gitter,
og dermed føre en gittervektor over i en gittervektor, vi kan derfor finde en gitterbasis{v1, v2, v3} og en matrix der beskriver samme rotation som φ, bare med den nye basis
A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
,hvor aij ∈ Z. Dvs. at Spor(A) ∈ Z. Vi ved, at det karakteristiske polynomium er detsamme for de to matricer, da de beskriver den samme lineære afbildning, bare med toforskellige baser, derfor har vi at Spor(A) = Spor(φ), og dermed at 1 + 2 cos(θ) ∈ Z. Viskal altså have at 2 cos(θ) skal være et heltal, de eneste muligheder der er for det, er hvisθ = {0,±π
3 ,±π2 ,±
2π3 , π}. Hvilket svarer til n = {1, 2, 3, 4, 6}.
Det er nu muligt at bestemme de krystallografiske undergrupper af de tre typer.
Type 1:Fra Sætning 2.1.1 ved vi hvilke undergrupper der ligger i SO(3,R). Hvilket erCn, Dn, T,O, Y . Kombineret med den krystallografiske restriktion fra Sætning 2.3.1 fårvi følgende 11 krystallografiske undergrupper af type 1:
C1, C2, C3, C4, C6, D2, D3, D4, D6, T og O. (2.1)
Ingen af disse 11 undergrupper er indbyrdes isomorfe, og dermed heller ikke konjugerede.Selvom Y er en endelig undergruppe af SO(3,R) er den ikke krystallografisk, da den inde-holder drejninger med orden 5.
Type 2:Inden vi går igang med at bestemme de krystallografiske undergrupper af type 2 definerervi forskellige typer af notation.Lad Gn være en symmetrigruppe indeholdende rotationer med orden n, aksen medegentlig rotationer af højeste orden kaldes for den primære akse, og andre akser betegnes iforhold til den. Hvis gruppen har et inversionscentrum noteres det som Gni. Hvis gruppenindeholder spejlinger i en plan som er vinkelret på den primære akse noteres det som Gnh,er spejlingsplanen derimod parallel i forhold til den primære akse noteres det som Gnv.Hvis intet parallelt spejlingsplan ”indeholder” en af de rotationssakser der står vinkelretpå den primære akse, men derimod ligger mellem dem, giver vi dem notationen Gnd, hvord står for ”diagonal”, dette er gældende for netop D3d.Da to grupper G og G′ indeholdende −I er konjugerede hvis og kun hvis deresundergrupper G+ = G ∩ SO(3,R) og G′+ = G′ ∩ SO(3,R) er konjugeret i SO(3,R) ellerO(3,R), giver hver undergruppe af type 1 grupperne nøjagtig én undergruppe af type 2.Vi husker at T2 = T1 × {−I, I}, så for at bestemme de krystallografiske undergrupperaf type 2 skal vi finde det direkte produkt mellem undergrupperne i (2.1) og {−I, I}.Yderligere er det vigtigt at hvis φ er en rotation, så er −φ = (−I) · φ en spejling, dvs. der
22

2. Krystallografiske punktgrupper
er en spejlingssplan. Vi opnår dermed de følgende krystallografiske undergrupper af type2, listet i samme rækkefølge som undergrupperne i (2.1):
C1i, C2h, C3i, C4h, C6h, D2h, D3d, D4h, D6h, Th og Oh. (2.2)
Vi bemærker dog at nogle af disse er isomorfe med nogen af undergrupperne i (2.1), mende er altså ikke konjugerede da elementer fra undergrupperne i (2.1) har det = 1, hvorelementer fra undergrupperne i (2.2) kan have det = −1. Vi kan altså ikke via konjugationkomme fra sådan et element over i et element fra en undergruppe af type 1.
Type 3:En undergruppe G er af type 3 hvis −I /∈ G, og gruppen ikke udelukkende består afrotationer, da den så ville være af type 1. Hvis vi udvælger alle isometrier ψ ∈ G, somikke er rotationer, så med (−I) · ψ = −ψ opnår vi en mængde bestående af rotationer.Fra Sætning 2.2.1 ved vi at denne mængde må være en undergruppe af SO(3,R), ogdet må nødvendigvis være én af grupperne benævnt i Sætning 2.1.1. Ydermere erG+ = G ∩ SO(3,R) en undergruppe i G hvor det gælder at [G : G+] = 2. Gruppen G
kan bestemmes ud fra par af undergrupper (∼G,G+) ved at tilføje isometrier −φ til G+,
hvor φ ∈∼G \G+.
Vi søger først blandt grupperne fra (2.1). Det vi søger efter, er par af undergrupper (∼G,G+),
hvor [∼G,G+] = 2. Så er G = G+ ∪ {−φ | φ ∈
∼G \G+} af type 3. Ved søgning får vi listen
(C2, C1), (C4, C2), (C6, C3), (D4, D2), (D6, D3),
(D2, C2), (D3, C3), (D4, C4), (D6, C6) og (O, T ).
Her gennemgår vi ikke alle parrene, men starter med at udvælge parrene (D4, D2), (D6, D3),disse kan skrives som (Dk, Dk/2) for k = 4, 6.Diedergrupperne Dk er frembragt af to rotationer ψk og ϕ,
ψk =
cos(2πk
)− sin
(2πk
)0
sin(2πk
)cos(2πk
)0
0 0 1
, ϕ =
1 0 0
0 −1 0
0 0 −1
.Undergrupperne Dk/2 er kan frembringes på to måder, enten via (ψk)
2 = ψk/2 og ϕ, ellervia ϕ · ψk og ψk/2. Vi har altså to undergrupper, vi noterer dem
G+1 = 〈ϕ,ψ2
k〉 = {I, ψ2ik , ϕ · ψ2i
k },
G+2 = 〈ϕ · ψk, ψ2
k〉 = {I, ψ2ik , ϕ · ψ2i+1
k }.
Dette giver to undergrupper af type 3 per par (Dk, Dk/2).Vi husker at Dk = 〈ϕ,ψk〉 = {ψik, ϕ · ψik}, og får altså at
G1 = {I, ψ2ik , ϕ · ψ2i
k ,−ψ2i+1k ,−ϕ · ψ2i+1
k },
G2 = {I, ψ2ik , ϕ · ψ2i+1
k ,−ψ2i+1k ,−ϕ · ψ2i+1
k }.
23

2.3. Krystallografiske undergrupper
Da vi søger efter undergrupper op til konjugation vil vi nu undersøge om vi kan kommefra den ene undergruppe til den anden via konjugation. Dette bruger vi normalisatoren til
NO(E3)(Dk) = {φ ∈ O(E3) | φ ·Dk · φ−1 = Dk}.
Normalisatoren indeholder drejningen ψ2k, og den kommuterer med drejningen ψk.
ψ2k · ϕ · ψ−12k =
cos(πk
)− sin
(πk
)0
sin(πk
)cos(πk
)0
0 0 1
·1 0 0
0 −1 0
0 0 −1
· cos
(πk
)sin(πk
)0
− sin(πk
)cos(πk
)0
0 0 1
=
cos(πk
)sin(πk
)0
sin(πk
)− cos
(πk
)0
0 0 −1
· cos
(πk
)sin(πk
)0
− sin(πk
)cos(πk
)0
0 0 1
=
cos2(πk
)− sin2
(πk
)2 · cos
(πk
)· sin
(πk
)0
2 · cos(πk
)· sin
(πk
)sin2
(πk
)− cos2
(πk
)0
0 0 −1
=
cos(2πk
)sin(2πk
)0
sin(2πk
)− cos
(2πk
)0
0 0 −1
=(ϕ · (ψk)−1
)∈ Dk.
Vi får altså at konjugation med ψ2k overfører G1 i G2. Vi kan derfor nøjes med at betragteden ene af G1 og G2 da vi søger efter undergrupper af O(3,R) op til konjugation.Vi starter med k = 4, vi har at
D4 = {I, ψ4, ψ24, ψ
34, ϕ, ϕ · ψ4, ϕ · ψ2
4, ϕ · ψ34}, D2 = {I, ψ2
4, ϕ, ϕ · ψ24}.
Vi får dermed at D4 \D2 = {ψ4, ψ34, ϕ · ψ4, ϕ · ψ3
4}, derfor har vi at den nye undergruppebliver
D2d = {I, ψ24, ϕ, ϕ · ψ2
4,−ψ4,−ψ34,−ϕ · ψ4,−ϕ · ψ3
4},
hvor −ψ4 og −ψ34 er drejespejlinger, og −ϕ · ψ4 og −ϕ · ψ3
4 er spejlinger.For k = 6 har vi at
D6 = {I, ψ6, ψ26, ψ
36, ψ
46, ψ
56, ϕ, ϕ · ψ6, ϕ · ψ2
6, ϕ · ψ36, ϕ · ψ4
6, ϕ · ψ56},
D3 = {I, ψ26, ψ
46, ϕ, ϕ · ψ2
6, ϕ · ψ46}.
Vi har altså atD6\D3 = {ψ6, ψ36, ψ
56, ϕ·ψ6, ϕ·ψ3
6, ϕ·ψ56}, og får derfor den nye undergruppe
D3h = {I, ψ26, ψ
46, ϕ, ϕ · ψ2
6, ϕ · ψ46,−ψ6,−ψ3
6,−ψ56,−ϕ · ψ6,−ϕ · ψ3
6,−ϕ · ψ56},
hvor −ψ6,−ψ36,−ψ5
6 er drejespejlinger og −ϕ · ψ6,−ϕ · ψ36,−ϕ · ψ5
6 er spejlinger.Nu betragtes parrene (D2, C2), (D3, C3), (D4, C4) og (D6, C6). Generelt kan disse skrivessom (Dk, Ck), hvor k = 2, 3, 4, 6, og Dk er frembragt af ψk og ϕ som beskrevet før, og Cker frembragt af ψk. Vi har altså at ϕ ∈ Dk \ Ck. Derfor sætter vi G = Ck ∪ ((−ϕ) · Ck). Da−ϕ giver et vertikalt refleksionsplan, og |Ck| af dem, får vi følgende fire krystallografiskeundergrupper af type 3:
C2v, C3v, C4v og C6v.
24

2. Krystallografiske punktgrupper
Vi kan udlede de resterende undergrupper af type 3 på lignende måde. Det samlede resultatses i Tabel 2.
(∼G,G+) Undergruppe (
∼G,G+) Undergruppe
(C2, C1) Cs (D2, C2) C2v
(C4, C2) S4 (D3, C3) C3v
(C6, C3) C3h (D4, C4) C4v
(D4, D2) D2d (D6, C6) C6v
(D6, D3) D3h (O, T ) Td
Tabel 2: De fundne par af (∼G,G+) og de tilhørende udledte undergrupper af type 3.
Der er altså 11 undergrupper af type 1, 11 undergrupper af type 2, og 10 undergrupper aftype 3, vi har derfor i alt 32 krystallografiske undergrupper klassificeret op til konjugationi O(3,R).
2.3.2 Definition (Geometrisk ækvivalens):Lad G og G′ være undergrupper af O(3,R). Hvis der eksisterer et ϕ ∈ O(3,R) hvor
G′ = ϕ ·G · ϕ−1
så er G og G′ geometrisk ækvivalente, noteret som G=G′.
Da vi netop har, at de 32 grupper er ækvivalente op til konjugation, så har vi at deer geometrisk ækvivalente, og vi kalder dem for geometriske krystalklasser. Geometriskækvivalente grupper er isomorfe, men to isomorfe grupper er ikke nødvendigvis geometriskækvivalente.
2.3.3 Eksempel:Vi har fra afsnit 2.3, at C2h og D2 ikke er geometrisk ækvivalente, men de er derimodisomorfe, da de begge har orden 4, og de tre elementer som ikke er identiteten har orden2. C4 har også orden 4, men da C4 indeholder et element med orden 4, er den ikke isomorfmed de andre, og ej heller geometrisk ækvivalent.Omvendt, hvis vi betragter C2 ogD1, så har begge grupper orden 2, og består af identitetenog en rotation med orden 2, derfor er C2 og D1 ikke bare isomorfe, men også konjugerede,og dermed geometrisk ækvivalente. J
Ved geometrisk ækvivalens har vi kun kigget på rotationsdelen af grupperne, med andreord kun punktgrupperne. For at kunne kvalificere rumgrupperne mere præcist betragter vinu også translationsdelen via gitre.
25

KAPITEL 3Aritmetiske krystalklasser
I dette kapitel vil vi betragte gitre, og hvilke punktgrupper der virker på hvert gitter, ogdermed bestemme de aritmetiske krystalklasser. Følgende kapitel er baseret på (Klemm1982).
3.0.1 Definition (Aritmetisk ækvivalens):Lad Γ og Γ′ være to gitre i R3, og H ≤ Sym(Γ), H ′ ≤ Sym(Γ′). Hvis der eksisterer en lineærisomorfi L : E3 7→ E3, hvor det gælder at
Γ′ = L · Γ og H ′ = L ·H · L−1.
Så kaldes H og H ′ aritmetisk ækvivalente, noteret som H(Γ) ∼ H ′(Γ′). (Klemm 1982).
Vi har altså at hvis to grupper er aritmetisk ækvivalente, så er de også geometriskækvivalente i følge (Klemm 1982, s. 143).
Inden vi begynder på at bestemme de aritmetiske krystalklasser, definerer vi gittertyper,og hvilke punktgrupper der virker på de gittertyper.Hvilke gittertyper som punktgrupperne virker på, afhænger af hvilket krystalsystem sompunktgruppen tilhører.
3.0.2 Definition (Krystalsystemer):Triklin, Σ1:- Ingen restriktioner.Monoklin, Σ2:- Én rotationsakse med orden 2 eller et spejlplan.Orthorhombisk, Σ22:- Tre rotationsakser med orden 2 eller én rotationsakse med orden 2 og to spejlplaner.Tetragonal, Σ4:- Én rotationsakse med orden 4.Trigonal, Σ3:- Én rotationsakse med orden 3.Hexagonal, Σ6:- Én rotationsakse med orden 6.Kubisk, Σc:- Fire rotationsakser med orden 3.
26
3. Aritmetiske krystalklasser
Vi kan nu opdele de 32 punktgrupper vi fandt frem til i Afsnit 2.3 ind i de forskelligekrystalsystemer.
Krystalsystem PunktgrupperTriklin, Σ1 C1i, C1
Monoklin, Σ2 C2, C2h, CsOrthorhombisk, Σ22 D2, D2h, C2v
Tetragonal, Σ4 C4, D4, C4h, D4h, S4, C4v, D2d
Trigonal, Σ3 C3, D3, C3i, D3d, C3v
Hexagonal, Σ6 C6, D6, C6h, D6h, C3h, C6v, D3h
Kubisk, Σc T,O, Th, Oh, Td
Tabel 3: Krystalsystemer med deres tilhørende punktgrupper.
Alt efter hvilket krystalsystem punktgruppen ligger i, vælges forskellige gitterbaser.
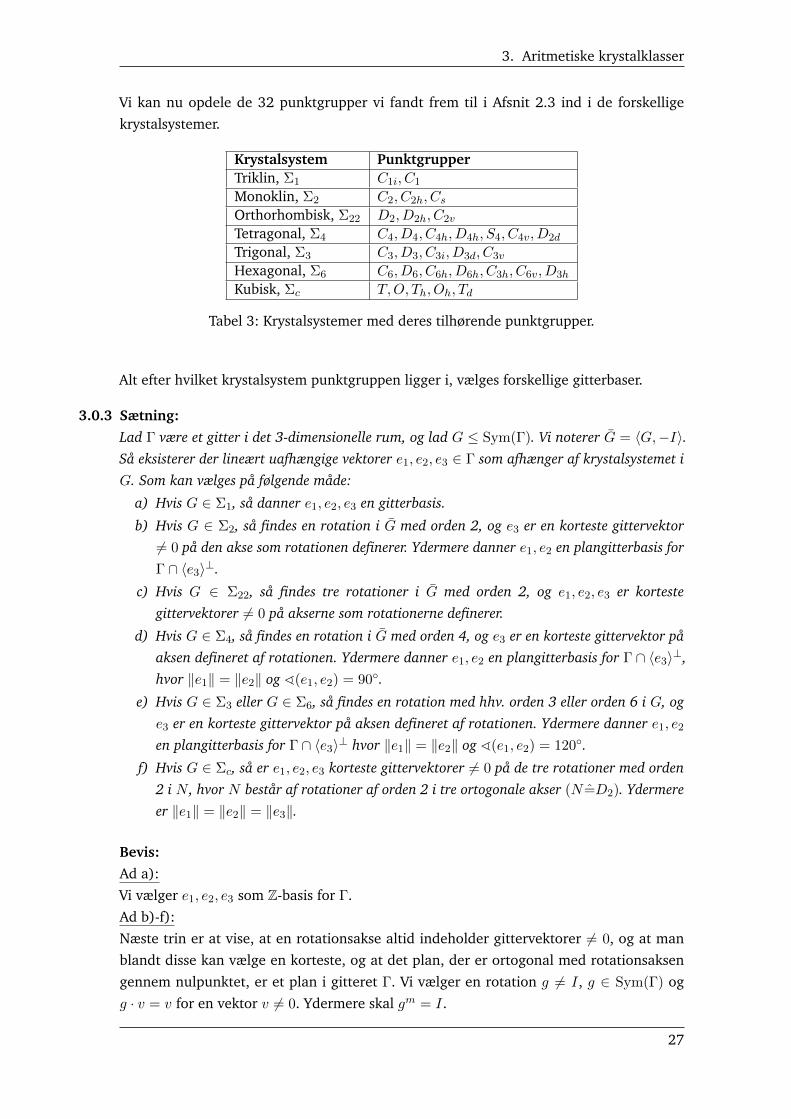
3.0.3 Sætning:Lad Γ være et gitter i det 3-dimensionelle rum, og lad G ≤ Sym(Γ). Vi noterer G = 〈G,−I〉.Så eksisterer der lineært uafhængige vektorer e1, e2, e3 ∈ Γ som afhænger af krystalsystemet iG. Som kan vælges på følgende måde:
a) Hvis G ∈ Σ1, så danner e1, e2, e3 en gitterbasis.
b) Hvis G ∈ Σ2, så findes en rotation i G med orden 2, og e3 er en korteste gittervektor6= 0 på den akse som rotationen definerer. Ydermere danner e1, e2 en plangitterbasis forΓ ∩ 〈e3〉⊥.
c) Hvis G ∈ Σ22, så findes tre rotationer i G med orden 2, og e1, e2, e3 er kortestegittervektorer 6= 0 på akserne som rotationerne definerer.
d) Hvis G ∈ Σ4, så findes en rotation i G med orden 4, og e3 er en korteste gittervektor påaksen defineret af rotationen. Ydermere danner e1, e2 en plangitterbasis for Γ ∩ 〈e3〉⊥,hvor ‖e1‖ = ‖e2‖ og ^(e1, e2) = 90◦.
e) Hvis G ∈ Σ3 eller G ∈ Σ6, så findes en rotation med hhv. orden 3 eller orden 6 i G, oge3 er en korteste gittervektor på aksen defineret af rotationen. Ydermere danner e1, e2en plangitterbasis for Γ ∩ 〈e3〉⊥ hvor ‖e1‖ = ‖e2‖ og ^(e1, e2) = 120◦.
f) Hvis G ∈ Σc, så er e1, e2, e3 korteste gittervektorer 6= 0 på de tre rotationer med orden2 i N , hvor N består af rotationer af orden 2 i tre ortogonale akser (N=D2). Ydermereer ‖e1‖ = ‖e2‖ = ‖e3‖.
Bevis:Ad a):Vi vælger e1, e2, e3 som Z-basis for Γ.Ad b)-f):Næste trin er at vise, at en rotationsakse altid indeholder gittervektorer 6= 0, og at manblandt disse kan vælge en korteste, og at det plan, der er ortogonal med rotationsaksengennem nulpunktet, er et plan i gitteret Γ. Vi vælger en rotation g 6= I, g ∈ Sym(Γ) ogg · v = v for en vektor v 6= 0. Ydermere skal gm = I.
27

Vi vælger et w ∈ Γ hvor w 6= 〈v〉⊥. Så er (I+ g+ · · ·+ gm−1)w en gittervektor 6= 0 på aksen〈v〉 for g, da vi har at
(I − g)(I + g + · · ·+ gm−1)w = (I − gm)w = 0 · w = 0.
Dette medfører at (I + g + · · ·+ gm−1) ∈ ker(I − g). Vi har at
ker(I − g) = ker
1 0 0
0 1 0
0 0 1
− A 0
0 1
= ker
I −A 0
0 1
=
0
0
t
∣∣∣∣∣∣∣ t ∈ R
= 〈v〉.
Derudover har vi at hvis w ∈ R3 så er
(I − g)(w · v) = w · v − g(w · v) = w · v − gw · gv = 0,
da g er en isometri. Dette medfører at (I−g)Γ ⊆ 〈v〉⊥∩Γ. Hvis w ∈ 〈v〉⊥∩Γ så er w ·v = 0
og g(w · v) = gw · gv = 0 hvilket giver at gw ∈ 〈v〉⊥ ∩ Γ.Vi vælger v, w1, w2 som lineært uafhængige gittervektorer i Γ. Så har vi at (I − g)w1,(I − g)w2 er lineært uafhængige gittervektorer i 〈v〉⊥ ∩ Γ. Hvilket giver at 〈v〉⊥ ∩ Γ er etgitter af dimension 2, hvori vi kan vælge en 2d-basis.Ad d):Lad e1 være en korteste vektor 6= 0 for N := Γ ∩ 〈e3〉⊥. Hvis A ∈ G er en rotation medorden 4, så er e1, A · e1 en basis for det kvadratiske 2D-gitter N , i følge (Klemm 1982, s.95), og ^(e1, A · e1) = 90◦.Ad e):På samme måde som i d) konkluderer vi at e1, D · e1 er en basis for det hexagonale 2D-gitter Γ ∩ 〈e3〉⊥, hvor D ∈ G er en rotation med orden 3 og ^(e1, D · e1) = 120◦.Ad f):I G er der en cyklisk permutation R om aksen 〈ek〉. Det følger at R · ek = ±ek′ og‖e1‖ = ‖e2‖ = ‖e3‖.
3.0.4 Eksempel:Vi betragter gruppen C2, indeholdende rotationen ψ =
−1 0 0
0 −1 0
0 0 1
, vi har at C2 ∈ Σ2,
derfor skal vi finde en korteste gittervektor på aksen defineret af ψ. Denne vektor noterervi som e3, se Figur 18. Ydermere skal e1 og e2 danne en plangitterbasis for Γ∩ 〈e3〉⊥, detteses også i Figur 18.
28

3. Aritmetiske krystalklasser
Figur 18: Eksempel på valg af gitter i C2.
Figur 19: Eksempel på valg af gitter i Cs.
Hvis vi derimod betragter gruppen Cs, indeholdende en spejling ϕ =
1 0 0
0 1 0
0 0 −1
, og
Cs ∈ Σ2. Denne gruppe indeholder altså ingen rotation med orden 2. Så husker vi, at e3skulle være på aksen defineret af en rotation med orden 2 i G = 〈G,−I〉, vi får altså at e3skal ligge på aksen defineret af ϕ · (−I), som netop svarer til ψ, og aksen defineret af ψer normalvektor til spejlplanet defineret af ϕ. e1 og e2 danner dermed et plan der entenligger i spejlplanen, eller er parallel med denne. Se Figur 19. J
3.0.5 Definition (Primitivt undergitter):Gittervektorer e1, e2, e3 bestemmes på samme måde som i Sætning 3.0.3, så har vi at
Γ{G} = 〈e1, e2, e3〉Z,
hvor Γ{G} kaldes det primitive undergitter af Γ tilhørende G.
Hvis Γ{G} = Γ kalder vi Γ et primitivt gitter med hensyn til G, hvis Γ{G} $ Γ kaldes Γ etcentreret gitter med hensyn til G.
3.0.6 Bemærkning:Ved et andet valg af e1, e2, e3, som i Sætning 3.0.3, fås det samme Γ{G}. Ydermere hvis G(Γ)
og G′(Γ′) er aritmetisk ækvivalente med en afbildning U : Γ 7→ Γ′, så er U · Γ{G} = Γ′{G′}.
Gittertyper:Lad Γ = Γ{G} = 〈e1, e2, e3〉Z være et primitivt gitter med hensyn til G, hvor G ≤ Sym+(Γ)
ogSym+(Γ) := {G ∈ Sym(Γ) | det(G) = 1}.
29

Vi lader a = ‖e1‖, b = ‖e2‖, c = ‖e3‖, α = ^(e2, e3), β = ^(e1, e3) og γ = ^(e1, e2) ogbetragter følgende heltalsmatricer:
E1 =
1 0 0
0 −1 0
0 0 −1
, E2 =
−1 0 0
0 1 0
0 0 −1
, E3 =
−1 0 0
0 −1 0
0 0 1
, E =
0 1 0
1 0 0
0 0 −1
E′ =
0 −1 0
−1 0 0
0 0 −1
, A =
0 −1 0
1 0 0
0 0 1
, R =
0 0 1
1 0 0
0 1 0
, B =
1 −1 0
1 0 0
0 0 1
og
D = B2 =
0 −1 0
1 −1 0
0 0 1
.Ydermere er S = −E, S′ = −E′ og Sj = −Ej , hvor j = 1, 2, 3. Bemærk at Ej , hvorj = 1, 2, 3 er rotationer med 180◦ om hhv. x-aksen, y-aksen og z-aksen, og Sj , hvorj = 1, 2, 3 er spejlinger i hhv. yz-planen, xz-planen og xy-planen. E, S, E′ og S′ erdrejninger om 180◦, A er en rotation om z-aksen med orden 4. R er en rotation med orden3 om linjen x = y = z. B og D er rotationer om z-aksen med hhv. orden 6 og 3.Kombinerer vi disse heltalsmatricer med Sætning 3.0.3 og noterer gittertyper som Fi nåren gruppe i Σi virker på gitteret, får vi følgende gittertyper:
F1-gitter: ingen begrænsninger, Sym+(Γ) k C1 = {I}.F2-gitter: α = β = 90◦, Sym+(Γ) k 〈E3〉 = C2.F22-gitter: α = β = γ = 90◦, Sym+(Γ) k {I, E1, E2, E3} = D2.F4-gitter: a = b, α = β = γ = 90◦, Sym+(Γ) k 〈A,E1〉 = D4.F6-gitter: a = b, α = β = 90◦, γ = 120◦, Sym+(Γ) = 〈B,E1〉 = D6.Fc-gitter: a = b = c, α = β = γ = 90◦, Sym+(Γ) = 〈R,A〉 = O.
For gittertyperne F6 og Fc kan vi angive Sym+(Γ) præcist, da der ikke eksisterer en størreendelig rotationsgruppe i de dertilhørende rumgrupper. Disse gitre kaldes hhv. hexagonaltog primitivt kubisk.
3.0.7 Sætning:Lad e1, e2, e3 være en gitterbasis valgt efter metoden beskrevet i Sætning 3.0.3, og klassificeretefter ovenstående gitterrestriktioner.
a) Lad Γ0 = 〈e1, e2, e3〉Z ∈ F2. Hvis v1 = e1, v2 = e2, v3 = 12(e1 + e2 + e3) og
Γ = 〈v1, v2, v3〉Z så er Γ = Γ0 ∪ (v3 + Γ0) et rumcentreret eller FM2 -gitter.På samme måde defineres FM22 -gitter, FM4 -gitter og FMc -gitter.
b) Lad Γ0 = 〈e1, e2, e3〉Z ∈ F22. Hvis v1 = 12(e2 + e3), v2 = 1
2(e1 + e3), v3 = 12(e1,+e2)
og Γ = 〈v1, v2, v3〉Z så er Γ = Γ0 ∪⋃3k=1(vk + Γ0) et fladecentreret eller FF22-gitter.
c) Lad Γ0 = 〈e1, e2, e3〉Z ∈ F22. Hvis v1 = 12(e1 + e2), v2 = 1
2(e1 − e2), v3 = e3 ogΓ = 〈v1, v2, v3〉Z så er Γ = Γ0 ∪ (v1 + Γ0) et endecentreret eller FC22-gitter.
d) Lad Γ0 = 〈e1, e2, e3〉Z ∈ F6. Hvis v = 13(e2 − e1 + e3) og Γ = 〈e1, e2, v〉Z så er
Γ = Γ0∪ (v+ Γ0)∪ (−v+ Γ0) et 3-centreret eller F3-gitter. Ydermere danner vektorernev1 = v − e2, v2 = v + e1, v3 = v en Z-basis for Γ, ‖v1‖ = ‖v2‖ = ‖v3‖, er alle ligelange, og to og to har de samme vinkel.
30

3. Aritmetiske krystalklasser
Bevis:For bevis se (Klemm 1982) side 149.
Vi får altså følgende muligheder for centrerede gitre i krystalsystemerne fra Definition 3.0.2.
3.0.8 Sætning:Lad G ≤ Sym(Γ) for et gitter Γ og lad Γ 6= Γ{G}.
a) Hvis G ∈ Σ2, så er Γ ∈ FM2 .
b) Hvis G ∈ Σ22, så er Γ ∈ FC22, FF22 eller FM22 .
c) Hvis G ∈ Σ4, så er Γ ∈ FM4 .
d) Hvis G ∈ Σ3 ∪ Σ6, så er Γ ∈ F3 og G /∈ Σ6.
e) Hvis G ∈ Σc, så er Γ ∈ FFC eller FMC .
Bevis:Vi vælger kun at bevise d). For resten se side 151-152 i (Klemm 1982).Da G ∈ Σ3 ∪ Σ6 indeholder G en undergruppe C3 = 〈D〉, og lad v = z · e3 + u ∈ Γ − Γ0
hvor z 6= 0 og u = −x · e1 + y · e2 6= 0. Vi kan antage at |x|, |y|, |z| ≤ 12 . Ydermere har vi at
D · e1 = e2, D · e2 = −e1 − e2, og D2 · v −D · v = D2 · u−D · u da D =
0 −1 0
1 −1 0
0 0 1
og
dermed fastholder z · e3, og flytter kun u. Derudover har vi at
D2 · u−D · u =
−1 1 0
−1 0 0
0 0 1
·−xy
0
−0 −1 0
1 −1 0
0 0 1
·−xy
0
=
x+ y
x
0
− −y−x− y
0
=
x+ 2y
2x+ y
0
∈ Γ,
dvs. at x + 2y, 2x + y ∈ Z. Vi har altså at 3y = 2(x + 2y)− (2x + y) ∈ Z og dermed også3x ∈ Z. Det følger at x = y = ±1
3 , de må nødvendigvis have samme fortegn for at x+ 2y
og 2x+ y skal give et heltal. Vi har at (E +D +D2)v = 3z · e3 ∈ Γ, og z = ±13 .
Vi får altså følgende muligheder
z = +1
3⇒ 1
3(−e1 + e2 + e3)
z = −1
3⇒ 1
3(−e1 + e2 − e3) ⇒
1
3(e1 − e2 + e3).
Hvis vi antager at 13(e2 − e1 + e3),
13(e1 − e2 + e3) ∈ Γ så skal summen af dem også ligge
i Γ, men summen af de to er 23e3 som ikke ligger i Γ og derfor må vi altså have at kun
13(e2 − e1 + e3) ∈ Γ, og at Γ ∈ F3.
Da B =
1 −1 0
1 0 0
0 0 1
/∈ Sym(Γ) må vi have at G /∈ Σ6.
31

3.0.9 Bemærkning:Vi får altså i alt 14 forskellige gitre ud fra de primitive gitre fra Sætning 3.0.3 og de centreredegitre fra Sætning 3.0.8.
Bevis:Vi har 6 primitive gitre, og 8 centrerede gitre. Vi viser nu at det ikke er muligt at etprimitivt gitter er aritmetisk ækvivalent med et centreret gitter. Vi husker at volumen afen enhedscelle svarer til determinanten, determinanten ved vi, i dette tilfælde, ligger iGL(3,Z).Det åbenlyse valg af en isomorfi, der måske ville kunne bringe os fra et centreret gitter tilet primitivt gitter, ligger i GL(3,R) med determinant ±1, og altså ikke i GL(3,Z). Men erdet muligt at finde en anden?Hvis vi antager at vi har en isomorfi A hvor A · Γ = Γ′ for to gitre Γ,Γ′ med hensyn tilen rumgruppe G. Så vælger vi en isomorfi B ∈ GL(3,Z) hvor B · Γ = Γ′. Men så har viat A · Γ = B · Γ, og dermed at (B−1A) · Γ = Γ og (A−1B) · Γ = Γ. Hvilket medfører atB−1A ∈ GL(3,Z) og dermed også A ∈ GL(3,Z). Det er altså ikke muligt at komme fra etcentreret gitter over i et primitivt, eller omvendt, via konjugation, og dermed får vi at dernetop er 14 forskellige gitre.
Vi husker fra Definition 3.0.1 at aritmetisk ækvivalens bedømmes ud fra par afpunktgrupper og et dertilhørende gitter. Vi har altså, at en punktgruppe kun virker pået gitter i samme krystalsystem. Dette giver i alt 73 aritmetiske krystalklasser. De 73klasser og hvordan man kommer frem til dem er beskrevet i (Klemm 1982) side 152 og153.
32

KAPITEL 4Affine krystalklasser
I dette kapitel vil vi skitsere metoden til at klassificere affine krystallasser. Følgene kapiteler baseret på (Strebel 2010) og (Hiller 1986).
4.0.1 Definition (Affin ækvivalens):Rumgrupperne G og G′ i Iso(E3) siges at være affint ækvivalente hvis der eksisterer en bijektivaffin afbildning α : E3 7→ E3, hvor det gælder at
G′ = α ·G · α−1 = {α · ψ · α−1 | ψ ∈ G}.
Hvis det er muligt at vælge en orienteringsbevarende α, kaldes G og G′ egentlig affinækvivalente.
4.0.2 Bemærkning:Hvis G og G′ er affint ækvivalente, er G og G′ isomorfe.
En affin afbildning α : En 7→ En er en sammensætning af en lineær afbildning L og entranslation v, en rumgruppe består derimod af isometrier.Hvis α = (u, L) er en bijektiv affin afbildning, vil α ·G · α−1 ikke altid være en rumgruppe,men hvis det er en rumgruppe, så får vi at
(u, L) · (v, ψ) · (u, L)−1 = (u+ L(v), Lψ) ·(−L−1(u), L−1
)=(u+ L(v)− LψL−1(u), LψL−1
),
og LψL−1 skal være ortogonalt for enhver ortogonal afbildning ψ ∈ G0. Hvilket giver atLG0L
−1 ≤ O(3,R).
4.0.3 Sætning (Bieberbachs anden sætning):Lad G og G′ være krystallografiske grupper. G og G′ er affint ækvivalente hvis og kun hvis deer isomorfe.(Bieberbach 1912).
Vi har altså nu, at hvis to grupper er isomorfe så er de affin ækvivalente, hvilket medfø-rer at de også er aritmetisk ækvivalente, og derudover er deres punktgrupper geometriskækvivalente.
33

Hvis G er en rumgruppe, har vi at G er med i en eksakt følge af homomorfier
1→ Γi−→ G
f−→ G0 → 1,
hvor Γ er en translationsgruppe og dermed en fri abelsk gruppe, G0 er en punktgruppe,og er en endelig gruppe, og G0 virker på Γ. Det at Γ, G og G0 passer ind i en eksakt følgegiver en metode til at klassificere rumgrupper i en given krystalklasse. Gitteret Γ sammenmed G0 og virkningen af G0 på Γ danner rumgrupper i en given krystalklasse, noteret som(G0,Γ). Vi ønsker at klassificere rumgrupper op til affin ækvivalens.Ud fra Sætning 1.5.8 kan vi antage at G ⊂ R3 oO(3,R) og at afbildningen f : G 7→ G0 eren projektion på O(3,R). Antag at τ : G0 7→ G er et snit til afbildningen f . Dette betyderat for ethvert element g i G0, så er f(τ(g)) = g. Så har vi at τ(g) = (σ(g), g) for et snitσ : G0 7→ R3.Det er muligt at vælge σ(g) til ethvert element i Γ, men for nogle elementer g ∈ G vil σ(g)
ikke give et element i Γ, f.eks. hvis g er en glidespejling. Sådan et snit σ er ikke entydigt,vi kan løse dette ved at lave en komposition med den naturlige projektion π : R3 7→ R3/Γ,så får vi en afbildning s = π ◦ σ hvor s : G0 7→ R3/Γ og s er veldefineret, hvilket ses vedfølgende:Hvis vi antager at σ′ : G0 7→ R3 er et andet snit, så har vi at
(σ′(g), g) · (σ(g), g)−1 = (σ′(g), g) · (−g−1(σ(g)), g−1)
= (σ′(g)− gg−1σ(g), gg−1)
= (σ′(g)− σ(g), I) ∈ G.
Vi må have at σ′(g)− σ(g) ∈ Γ og at π(σ′(g)− σ(g)) = 0 og dermed at π(σ′(g)) = π(σ(g)).Dermed er s veldefineret.Vi har altså at s er uafhængig af valget af σ. Vi får følgende resultat.
4.0.4 Proposition:Lad s : G0 7→ R3/Γ, så opfylder s følgende betingelser:
(i) s(I) = 0, hvor 0 betegner nulsideklassen.(ii) s(xy) = s(x) + x · s(y).
Bevis:Betingelse (i) sikrer at identitetselementet (0, I) ligger i G. For at vise (ii) bemærker vi atG0 virker på R3/Γ da Γ er invariant under G0, dermed får vi at
(s(xy), xy) = (s(x), x) · (s(y), y) = (s(x) + x · s(y), xy).
De to betingelser (i) og (ii) kaldes for cocykel betingelser og s er en 1-cocykel. De tobetingelser leder til følgende.
4.0.5 Korollar:Lad s være en cocykel der opfylder de to betingelser i Proposition 4.0.4, og g ∈ G0, så er
s(g−1) = −g−1s(g).
34

4. Affine krystalklasser
Bevis:Vi anvender betingelse (i) og (ii) fra Proposition 4.0.4 og får at
0 = s(I) = s(gg−1) = s(g) + g · s(g−1).
For at s(g) + g · s(g−1) = 0 må vi have at s(g−1) = −g−1 · s(g), da vi så har at
s(g) + g · s(g−1) = s(g)− gg−1 · s(g) = 0.
Mængden af alle 1-cocykler danner en abelsk gruppe, da R3/Γ er abelsk, og noteresZ1(G0,R3/Γ).Proceduren med at finde en 1-cocykel ud fra en gruppe G er reversibel, dvs. vi kankonstruere G ud fra en 1-cocykel ved at anvende følgende
G = {(σ(g) +m, g) | g ∈ G0, m ∈ Γ},
hvor σ : G0 7→ R3 er et vilkårligt snit således at π ◦ σ = s. Inden vi går videre tjekker viom G er en grupppe. Da G ≤ Iso(En) tjekkes om identitetselementet (0, I) ∈ Iso(En) ogsåligger i G.Vi har fra cocykel betingelserne at s(I) = 0, da 0 er identitetselementet i Γ må der gældeat σ(I) ∈ Γ, og dermed at (0, I) = (σ(I) + (−σ(I)), I) ∈ G.Nu tjekkes om G er lukket under invers. Vi antager at (σ(g) + m, g) ∈ G. g er invertibelda g ∈ G0, og σ(g) +m ∈ Γ er også invertibel, dermed er (σ(g) +m, g) invertibel i Iso(E3
med invers (−g−1(σ(g) +m), g−1) = (σ(g−1) + n, g−1), hvor n ∈ Γ.Nu tjekkes om G er lukket under multiplikation.Vi antager at (σ(g1) +m1, g1), (σ(g2) +m2, g2) ∈ G. Så har vi at
(σ(g1) +m1, g1) · (σ(g2) +m2, g2) = (σ(g1) +m1 + g1(σ(g2) +m2), g1g2)
= (σ(g1) + g1(σ(g2)) +m1 + g1m2, g1g2)
= (σ(g1g2) +m1 + g1m2, g1g2).
Vi har at m1 ∈ Γ og g1m2 ∈ Γ, derfor er venstresiden på formen σ(g) + m. Vi harydermere at g1g2 ∈ G0, og dermed har vi at (σ(g1g2) + m1 + g1m2, g1g2) ∈ G. Vi fåraltså at G ≤ Iso(E3).
Så fremfor at klassificere rumgrupper kan vi nøjes med at klassificere 1-cocykler, dvs.funktioner der opfylder cocykel betingelserne.Ifølge Sætning 4.0.3 kan isomorfi blandt rumgrupper findes via konjugation med en affinafbildning. Vi vil nu undersøge hvad der sker med en 1-cocykel under sådan en konjugation.En affin afbildning består af en sammensætning af en translation (a, I), hvor a ∈ R3, og enlineær afbildning (0, L), hvor L ∈ GL(R3). Dermed kan vi betragte hvordan konjugationmed dem separat ændrer en 1-cocykel.Vi starter med at antage, at a ∈ R3 og at 1-cocyklen s er frembragt fra σ : R3 7→ Γ. Så har
35

vi at
(a, I) · (σ(g), g) · (a, I)−1 = (a, I) · (σ(g), g) · (−a, I)
= (a+ σ(g), g) · (−a, I)
= (a+ σ(g)− g(a), g)
= (σ(g), g) + (a− g(a), g).
Vi har altså fået tilføjet en ekstra 1-cocykel på formen ba(g) = α−g(α), hvor α = a mod Γ.Vi tjekker nu at ba opfylder cocykel betingelserne fra Proposition 4.0.4:
(i) ba(I) = α− I(α) = α− α = 0.
(ii) ba(gg′) = α− gg′(α)
= α− g(α) + g(α)− gg′(α)
= ba(g) + g(α− g′(α))
= ba(g) + g(ba(g′)).
1-cocykler af denne form kaldes 1-corande, de danner en undergruppe af Z1(G0,R3/Γ),noteret som B1(G0,R3/Γ). Da både Z1(G0,R3/Γ) og B1(G0,R3/Γ) er abelske, er det klartat B1(G0,R3/Γ) er en normal undergruppe til Z1(G0,R3/Γ).Vi har nu at alle rumgrupper svarende til en 1-cocykel s samt s + t, hvor t er envilkårlig 1-corand, er isomorfe og dermed ækvivalente ifølge Sætning 4.0.3. Elementeri kvotientgruppen Z1(G0,R3/Γ)/B1(G0,R3/Γ) svarer derfor til rumgrupper som kanoverføres i hinanden ved en translation. Kvotientgruppen noteres H1(G0,R3/Γ) og kaldesden 1-dimensionelle cohomologigruppe for G0 med koefficienter i R3/Γ.
Vi mangler nu bare at tjekke effekten af konjugation med en lineær afbildning (0, L) hvorL ∈ GL(R3). Vi får udregningen:
(0, L) · (σ(g), g) · (0, L)−1 = (0, L) · (σ(g), g) · (0, L−1)
= (L(σ(g)), Lg) · (0, L−1)
= (L(σ(g)), LgL−1).
For at dette kan svare til en 1-cocykel i krystalklassen (G0,Γ), skal L bevare både Γ og G0,vi skal altså have at L·G0·L−1 = G0 og L(Γ) = Γ. Det betyder at L ∈ N(G0,Γ), ogN(G0,Γ)
virker på H1(G0,R3/Γ). Hvis det er tilfældet at L ∈ N(G0,Γ) så giver udregningen encocykel sL : G0 7→ R3/Γ hvor sL(g) er givet ved venstresiden af (L(σ(g′)), Lg′L−1) medLg′L−1 = g, hvilket giver at g′ = L−1gL. Vi har altså at sL(g) = L(s(L−1gL)), og s
og sL bestemmer affint ækvivalente rumgrupper, da banerne svarer til isomorfiklasser afrumgrupper i krystalklassen (G0,Γ). Hvilket leder til følgende resultat.
4.0.6 Sætning (Hovedsætning i Matematisk Krystallografi):Der er en én-til-én korrespondance mellem rumgrupper i de aritmetiske krystalklasser (G0,Γ)
og banerne af normalisatoren N(G0,Γ) der virker på H1(G0,R3/Γ).
36

4. Affine krystalklasser
Sætning 4.0.6 viser sig at være meget brugbar til at klassificere krystalstrukturer, og tilat finde ud af hvor mange forskellige der er. Man vil finde, at for rumgrupper er der 219affine krystalklasser eller 230 egentlig affine krystalklasser. Se kapitel 14 i (Klemm 1982).
Næste trin ville være at give et eksempel på metoden for at klassificere de affinekrystalklasser.
37

Konklusion
Formålet med dette speciale var at undersøge krystaller ud fra deres symmetrier, og vedhjælp af dette klassificere rumgrupper.
Vi startede ud med at bestemme de endelige undergrupper af O(3,R), vi fandt atder i alt var 32 krystallografiske undergrupper, som var klassificeret op til konjugation,og vi fandt dermed at der var 32 geometriske punktgrupper. Derefter giv vi videre tilat betragte gitre og fandt at der var 6 primitive gitre og 8 centrerede gitre, og det varikke muligt at komme fra et primitivt gitter til et centreret gitter via konjugation, vi fandtaltså i alt 14 gitre. Derefter opdelte vi gitrene og punktgrupperne i krystalsystemer, ogen punktgruppe virker kun på et gitter fra samme krystalsystem, ud fra dette fandt viat der er 73 aritmetiske krystalklasser. Derefter skitserede vi metoden til klassificering afrumgrupper, hvis to rumgrupper er affint ækvivalente sige de at være i samme krystalklasse.Vi fandt at man kunne klassificere rumgrupper op til isomorfi, da Bieberbach har vist at torumgrupper er affint ækvivalente hvis og kun hvis de er isomorfe. Dette giver 219 affinekrystalklasser eller 230 egentlig affine krystalklasser.
38
Bibliografi
Armstrong, M. A. (1988). Groups and Symmetry. Springer-Verlag New York.Bieberbach, Ludwig (1912). „Über die Bewegungsgruppen der Euklidischen Räume -
Zweite Abhandlung“. I: Mathematische Annalen 72, s. 400–412.Devisscher, Maud (2011). Classification of finite rotation groups. Sidst tjekket 27. februar
2018. URL:http://www.staff.city.ac.uk/maud.devisscher.1/GS/classif_rotation.pdf.
Engel, Peter (1986). Geometric Crystallography - An Axiomatic Introduction toCrystallography. First. D. Reidel Publishing Company - Dordrecht.
Hiller, Howard (1986). „Crystallography and Cohomology of Groups“. I: The AmericanMathematical Monthly 93.10, s. 765–779.
Klemm, Michael (1982). Symmetrien von Ornamenten und Kristallen. Springer-VerlagBerlin.
Parkin, Ivan P. og Troy D. Manning (2006). „Intelligent Thermochromic Windows“. I:Journal of Chemical Education 83.3, s. 393–400.
Strebel, Ralph (2010). Vorlesung über Kristallographicshe Gruppen. Sidst besøgt 11. april2018. URL: http://www2.math.uni-wuppertal.de/~volkert/Kristallographische%20Gruppen.pdf.
39



















![Forside - Oslo universitetssykehus · informasjon og drøfting. 6.2.2. Sammensetning m.v. Følgende skal være representert: Helseforetaket]sykehuset ved administrerende direktør,](https://img.dokumen.tips/doc/110x75/5f0ca7af7e708231d4367b3f/forside-oslo-universitetssykehus-informasjon-og-drfting-622-sammensetning.jpg)









