-
Supplement 1
Networks, trusses, beams and frames
Topics that do not usually relate to error estimates but are
often covered in an
introductory course on finite element analysis include networks,
trusses, beams, and
frames. The latter three topics are often covered in books on
structural mechanics. To
assist the reader in these areas and to illustrate the use of
MODEL for these applications
we will cover some basic theory and a few examples.
13.1 Energy networks
In the previous chapters we saw that groverning principles based
on common
differential equations can often be cast into an exact
equivalent form based on a
governing integral principal that is frequently based on a
stational energy relation, or
’energy balance’. Here we will begin a review of such principals
where the primary
nodal unknowns are a scalar quantity and then introduce other
considerations that come
into play when they are vector quantities. The emphasis here is
on the network concept
where an essentially one-dimensional problem can be conceptually
(or actually) extended
to two- or three-dimensions because of available connectivity
data that describes how
basic one-dimensional components (elements) in the system are
interacting in the energy
balance process overall and at a connecting node of the network.
Here we refer to
balance equations as some discipline specific governing physical
equations that are
converted to a system of linear algebraic equations of the form
SD = C. Examples fromcommon engineering disciplines include: Heat
Transfer - Fourier’s Law, Electrical -
Ohm’s and Kirchoff’s Laws, Chemical - Flick’s Law, Mechanics
-Newton’s Laws, and
Structures - Minimum Total Potential Energy.
Many balance equations involve two quantities, D and C, in the
above system equations
whose product is an energy measure. If one of the quantities is
given at a point, then the
second must be computed as a reaction. The balance laws place
one of the variables in D
and the other in C. For example, in an electrical resistive
circuit network if the voltage,
V , at a point is given, then the current, j, necessary to
maintain that voltage is a reaction
that can be computed. The reverse situation is also true. Their
product is the energy,
E = jV . Similar related pairs used in common applications are:
temperature and heat
-
Supplement 1, Networks, trusses, beams and frames 449
flow in thermal studies; voltage and current in electrical
studies; displacement and force
in stress analysis; and velocity and pressure in fluid flow
models. Here we will utilize the
finite element concepts to represent in an energy form the basis
laws that engineers are
taught to employ on a more localized basis so they can develop
equations that are suitable
to hand solution. We will be solving the same governing concepts
but in a process
automated by finite element analysis. For example, our results
still satisfy the basis laws:
Thermal equilibrium networks: The algebraic sum of the heat
flows into a joint,
including external sources, is zero. The temperature
distribution in an assembly of
components minimizes the rate of entropy production.
Electrical resistive networks: The algebraic sum of the currents
flowing into a joint,
including external sources, is zero. The voltage (and resulting
current) distribution
minimizes the energy in a circuit network.
Elastic structures: The algebraic sum of the force components at
a joint, including
external sources, is zero. The equilibrium displacements of a
structure in
equilibrium minimize the total potential energy.
Recall from Chapter 2 that the principle of minimum total
potential energy states
that the unique set of displacements that occur at equilibrium
will satisfy the essential
displacement boundary conditions and minimize the total
potential energy of the system.
The total potential energy is the energy stored in the material
minus the mechanical work
of the external forces. For the linear spring, the total
potential energy, Π, isΠ = kd2 / 2 − Fd for the relative
displacement, d of a force, F , in stretching a spring ofstiffness,
k. Our alternate equilibrium balance statement was the minimization
operation:
∂Π / ∂d = 0, which gives 0 = kd − F , or simply F = kd which is
the well known force-displacement equilibrium covered in physics.
Likewise, we could represent the balance
of an electrical resistance network as an energy minimization
procedure. For a single
resistor, having a resistance R, with a voltage drop of V across
it due to a current flow, j,
we recall that the electrical energy is W = GV 2 / 2 − jV where
G = 1/R is theconductance of the element in the network. The
voltage that corresponds to a minimum
energy state is governed by ∂W / ∂V = 0, so GV = j which we
re-arrange to its morefamiliar form V = jR which is known as Ohm’s
law. Since energy is a scalar quantity, wecan write the energy
contribution from each component in a network and then sum (or
assemble) those to form the total system energy (or rate of
energy production) which is to
be minimized. This type of approach usually leads to a system of
symmetric linear
algebraic equations for the primary unknown at each node or
junction in the network. In
the current discussion we will put off considering transient
effects occuring over time.
We will often employ the thermal-electrical-mechanical
analogy:
Thermal Electrical Mechanical
k = conductivity G = conductance K = stiffness
T = temperature V = voltage U = displacement
q = heat flow j = current F = force
-
450 Finite Element Analysis with Error Estimators
2
1
3
5
8
4
6
7 11
10
9
1
2
4
6
75
3
Furnace, T=250 C
400
cm
T= 25 C
T= 25 C
200 cm 200 cm 300 cm
Elem Area Nodes
1 4.0 1 2
2 4.0 1 3
3 4.0 1 4
4 6.0 2 4
5 4.0 4 3
6 4.0 3 5
7 4.0 3 6
8 6.0 4 6
9 4.0 5 6
10 4.0 5 7
11 6.0 6 7
Steel
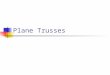
Figure 13.1 Thermal environment for a truss
0100
200300
400500
600700
−400−350
−300−250
−200−150
−100−50
0
50
100
150
200
250
7
X Coordinates
6
FEA Solution Component_1: 11 Elements, 7 Nodes
4
5−−−−−−max
2
3
Y Coordinates
−−−−−−min 1
Com
pone
nt 1
(m
ax =
250
, min
= 2
5)
A conducting truss system
Figure 13.2 Truss temperatures and mesh
-
Supplement 1, Networks, trusses, beams and frames 451
13.2 Thermal networks
There are many applications where a thermal equilibrium problem
can be accurately
represented as a two- or three-dimensional assembly of
one-dimensional thermal
elements. Two such examples would be the space frame of a
aircraft or rocket, and the
copper or gold path printed on a circuit board. In both cases
the primary purpose for the
existance of the network (carrying loads, and current,
respectively) also gives rise to the
ability, or need, to serve as a thermal network. While such
thermal systems can be
modeled in a continuum sense it is much more cost effective to
employ a network of line
components. For a thermal network we can directly utilize the
conduction and
convection element matrices developed earlier for a pure
one-dimensional formulation.
Only the calculation of the physical length of the element needs
to be generalized. That
is, we simply allow 2-D or 3-D coordinates to be input. The
element connectivity data
still govern where contributions get scattered into the system
solution.
Consider the two-dimensional thermal network shown in Fig. 13.1.
The far end
supports a furnace that keeps the end nodes at a high
temperature compared to the wall
supports at room temperature. In this case the two-dimensional
coordinates are mainly
for later use in a structural analysis and are used only to
compute the effective thermal
lengths in this example. The resulting temperature distributions
are shown in Fig. 13.2.
Here we have limited the element to a linear interpolation
between two nodes and no
numerical integration is required. The element matrices are so
simple they are hand
coded as given in Fig. 13.3. Note that the comments show that we
could allow
convection losses as well, and have the ability to give a heat
source per unit length, such
as an electric motor generating heat at a member. If we do
include convection then the
true solution along a member is not linear, but a hyperbolic
function. It is not practical to
consider an error estimator here for such a network and one
would have to consider
refining the mesh. Convection is usually not important in
trusses.
13.3 Electrical resistance networks
Consider an electric resistance element connecting two nodes in
a DC circuit
network. Ohm’s law giv es the relation between the direct
current, j, entering the element
at node 1, the voltage drop E2 − E1 over its length, and the
resistance, R, of the material.Specifically j = (E2 − E1) / R so
noting that the current flowing in one end is the negativeof that
flowing out at the other end (node 2) we can express this relation
in matrix form:
1
Re
1
−1−1
1
Ee1
Ee2
=
je1
je2
.
Symbolically this element relation is Ge Ee = je and the
corresponding system networkbalance relationship is G E = J (or our
previous notation S D = C). Here vector J is theresultant of all
nodal currents. That is, at each node J equals the sum of the
currents, je,
from all the connecting elements at that node, plus the external
current which is usually
zero (except for reactions to applied voltages).
As an example, consider the DC current circuit network,
illustrated in Fig. 13.4.
Assembling the system shown gives the system balance
equations:
-
452 Finite Element Analysis with Error Estimators
! ..............................................................
! 2! *** ELEM_SQ_MATRIX PROBLEM DEPENDENT STATEMENTS FOLLOW *** !
3! For required REAL (DP) :: S (LT_FREE, LT_FREE) ! 4! and optional
REAL (DP) :: C (LT_FREE) ! 5!
.............................................................. ! 6!
Define any new array or variable types, then give statements !
7
! 8! This file always need for a user defined application !
9
!10! A conducting, convection truss member with heat generation
!11! Equation: K*A U,xx - H*P (U - U_e) + Q_e = 0, !12! U =
temperature, K = conductivity, A = area, h = convection , !13! P =
perimeter, Q_e = heat source per unit length !14! 1 *---(K_e, A_e,
h_e, P_e, U_e, Q_e)---* 2, Element in xyz !15
REAL(DP) :: L_BAR ! Length !16REAL(DP) :: K_e, A_e, h_e, P_e,
U_e, Q_e ! properties !17
!18IF ( debug_el_sq .or. debug_include ) & !19
WRITE (N_BUG, *) ’Entering my_el_sq_inc’ !20!21
L_BAR = SQRT( SUM( (COORD (2, 1:N_SPACE) & !22- COORD (1,
1:N_SPACE)) **2) ) ! Length !23
K_e = GET_REAL_LP (1) ! thermal conductivity !24A_e =
GET_REAL_LP (2) ! area of bar !25h_e = GET_REAL_LP (3) ! convection
coefficent on perimeter !26P_e = GET_REAL_LP (4) ! perimeter of
area A_e !27Q_e = GET_REAL_LP (5) ! source per unit length, BTU/ hr
ft !28U_e = GET_REAL_LP (6) ! convecting temperature, F !29
!30S (1, 1) = K_e * A_e / L_BAR + h_e * P_e * L_BAR / 3.d0 !31S
(2, 1) = -K_e * A_e / L_BAR + h_e * P_e * L_BAR / 6.d0 !32S (1, 2)
= -K_e * A_e / L_BAR + h_e * P_e * L_BAR / 6.d0 !33S (2, 2) = K_e *
A_e / L_BAR + h_e * P_e * L_BAR / 3.d0 !34
!35C (1) = (h_e * P_e * U_e + Q_e) * L_BAR / 2.d0 !36C (2) =
(h_e * P_e * U_e + Q_e) * L_BAR / 2.d0 !37
Figure 13.3 General matrices for a two-node bar
j1 j2
G = 1 / R21
V1
V2
e
1
4
2
1
3
2
V4 = 0
Elem Nodes R
1 1 2 20
2 2 3 5
3 2 4 6
3
V1 = 140 v
V3 = 90 v
Network Current
4 a
6 a
10 a
Figure 13.4 A simple current driven network
-
Supplement 1, Networks, trusses, beams and frames 453
1
20
−1
20
0
0
−1
20
1
20+
1
5+
1
6
−1
5
−1
6
0
−1
51
5
0
0
−1
6
0
1
6
E1 = 140E2
E3 = 90E4 = 0
=
J1
0
J3
J4
Solving the network system equilibrium yields the single unknown
voltage at node 2:
(1/20 + 1/5 + 1/6) E2 = 0 + 140/20 + 90/5 or simply E2 = 60
volts. Substitutingall the voltages to determine the ‘reaction’
currents gives J1 = 4, J3 = 6, and J4 = − 10amps, respectively.
That is, external current entered the system at nodes 1 and 3 and
was
removed at node 4. Post-processing the results gives the current
in each element. The
results, for the first node in the topology, are
j(1) = (E2 − E1) / R1 = (60 − 140)/20 = − 4, from 1 to 2,j(2) =
(E3 − E2) / R2 = (90 − 60)/5 = + 6, from 3 to 2,j(3) = (E4 − E2) /
R3 = (0 − 60)/6 = − 10, from 2 to 4
In a similar manner the electrical power P = EJ = J2 R can be
computed at the systemlevel as a matrix product or by summing
similar products at the element level. At the
system level P = ET J or P = [140 60 90 0]T [4 0 6 − 10] = 1100
watts, and thisnetwork internal power should match the sum of the
power in the elements. That is,
1
1
3
4
2
V2 = 0
Elem Nodes R
1 1 2 36.
2 1 3 1.
3 2 5 2.
4 3 4 10.
5 4 5 20.
6 3 6 3.
7 4 7 5.
8 5 8 4.
9 6 7 7.
10 7 8 6.
10
9
5
8
7
6
V1 = 120 v 3 6
74
852
Figure 13.5 A voltage driven network
-
454 Finite Element Analysis with Error Estimators
! .......................................................... !
1! ** ELEM_SQ_MATRIX PROBLEM DEPENDENT STATEMENTS FOLLOW *** ! 2!
.......................................................... ! 3!
Define new array or variable types, then give statements ! 4! NOTE:
ELEMENT REACTIONS ARE THE IN & OUT CURRENT FLOWS ! 5
REAL(DP) :: resistance, conductance ! R, 1/R ! 6! 7
! Get resistance ! 8resistance = GET_REAL_LP (1) ! real element
property ! 9IF ( resistance > 0.d0 ) THEN !10
conductance = 1.d0 / resistance !11ELSE !12
PRINT *, ’WARNING: Invalid resistance, element ’, IE !13N_WARN =
N_WARN + 1 ; conductance = 1.d0 !14
END IF ! valid data !15!16
! Conductance matrix !17S (1,1) = conductance ; S (2,1) =
-conductance !18S (1,2) = -conductance ; S (2,2) = conductance
!19
! *** END ELEM_SQ_MATRIX PROBLEM DEPENDENT STATEMENTS ***
!20
Figure 13.6 A typical DC electric network element
P =eΣ Eet Se Ee
P1 = [140 60]
1
20
−1
20
−1
201
20
140
60
= 320
P2 = [60 90]
1
5
−1
5
−1
51
5
60
90
= 180
P3 = [60 0]
1
6
−1
6
−1
61
6
60
0
= 600
and the total power is P =eΣ Pe = (320 + 180 + 600) = 1100
watts, as expected.
These procedures can be used on DC systems in general, but it
can become difficult to
clarify the topology and the boundary conditions. A typical
implementation of a static
DC circuit is given in Fig. 13.6. When it is applied to the
network in Fig. 13.5 the
computed voltages are shown in Fig. 13.7. They are listed with
the element current
(element reactions) in Fig. 13.8. There we see that the external
reaction currents are
11.46 amps entering at node 1 and an equal amount leaving at
ground node 2. The
element reactions show how the current splits among the
elements. For example at node 1
-
Supplement 1, Networks, trusses, beams and frames 455
0
0.5
1
1.5
2
0
0.2
0.4
0.6
0.8
10
20
40
60
80
100
120
8
7
5
X Coordinates
6
4
FEA Solution Component_1: 10 Elements, 8 Nodes
−−−−−−min 2
3
Y Coordinates
1−−−−−−max
Com
pone
nt 1
(m
ax =
120
, min
= 0
)
Voltage driven network
Figure 13.7 Computed nodal voltage levels
*** REACTION RECOVERY *** ! 1NODE, PARAMETER, REACTION, EQUATION
! 2
1, DOF_1, 1.1461E+01 1 ! 32, DOF_1, -1.1461E+01 2 ! 4
! 5*** OUTPUT OF RESULTS IN NODAL ORDER *** ! 6
NODE, X-Coord, Y-Coord, DOF_1, ! 71 0.0000E+00 1.0000E+00
1.2000E+02 ! 82 0.0000E+00 0.0000E+00 0.0000E+00 ! 93 1.0000E+00
1.0000E+00 1.1187E+02 !104 1.0000E+00 5.0000E-01 7.3625E+01 !115
1.0000E+00 0.0000E+00 1.6255E+01 !126 2.0000E+00 1.0000E+00
9.8964E+01 !137 2.0000E+00 5.0000E-01 6.8845E+01 !148 2.0000E+00
0.0000E+00 3.7291E+01 !15
!16** ELEMENT REACTION, AND INTERNAL SOURCES ** !17ELEMENT NODE
DOF REACTION ELEM_SOURCE !18
1 1 1 3.33333E+00 0.00000E+00 !192 1 1 8.12749E+00 0.00000E+00
!203 2 1 -8.12749E+00 0.00000E+00 !214 3 1 3.82470E+00 0.00000E+00
!225 4 1 2.86853E+00 0.00000E+00 !236 3 1 4.30279E+00 0.00000E+00
!247 4 1 9.56175E-01 0.00000E+00 !258 5 1 -5.25896E+00 0.00000E+00
!269 6 1 4.30279E+00 0.00000E+00 !27
10 7 1 5.25896E+00 0.00000E+00 !28
Figure 13.8 Network voltage and current results
-
456 Finite Element Analysis with Error Estimators
we see that elements 1 and 2 take 3.33 and 8.13 amps (29 % and
71% ), respectively of
the incoming current.
13.4 Trusses as a network
The truss element is a very common structural member. A truss
element is a "two
force member". That is, it is loaded by two equal and opposite
collinear forces. These
two forces act along the line through the two connection points
of the member. In
elementary statics we compute the forces in truss elements as if
they were rigid bodies.
However, there was a class of problems, called statically
indeterminant, that could not be
solved by treating the members as rigid bodies. With the finite
element approach we will
be able to solve both classes of problems. In Sec. 7.4 the
equilibrium equation for an
elastic bar was developed. Clearly, the elastic bar is a special
form of a truss member. To
extend the previous work to include trusses in two- or
three-dimensions basically requires
some review of analytic geometry at this point.
13.4.1 Direction cosines
Consider a directed line segment in global space going from
point 1 at (x1 , y1 , z1)
to point 2 at (x2 , y2 , z2 ). Then the length of the line
between the two points has
components parallel to the axes of L x = x2 − x1 , L y = y2 − y1
, Lz = z2 − z1 and thetotal length is L2 = (L2x + L2y + L2z).
Specifying the end points of a line is a common way
Lx
Ly
X
Y
xL
yL
(X1, Y
1)
(X2, Y
2)
0
0
Y
X0
X
UX
UY
UL
a) Typical truss structure
b) Coordinates and displacement components
Figure 13.9 A truss structure and components
-
Supplement 1, Networks, trusses, beams and frames 457
of locating its direction in space. Another common way to
describe the direction is to
give the direction angles or the corresponding direction
cosines. Let the direction angles
from the x- , y- , and z-axes to the line segment be denoted by
θ x , θ y, and θ z , respectively.
Recall the relation between the total magnitude of a vector and
its components, i.e.,
L x = L Cos θ x , etc. We generally will find the inverse
geometric relation more useful.Specifically the direction cosines
become: Cos θ x = L x / L , Cos θ y = L y / L , andCos θ z = Lz / L
.
For two-dimensional problems we will assume that the structure
lies in the global
x - y plane so that Lz = 0, Cos θ z = 0, and θ z = 90. In that
special case only one angle isrequired to describe the direction
rather than the usual three. It is common then to select
θ x as the required angle and to omit reference to θ y = 90 − θ
x and to replace the seconddirection cosine with the relation Cos θ
y = Sin θ x (for θ z = 90 ). This is illustrated inFig. 13.9. For
two-dimensional problems one can utilize the simplicity of
referring to a
single angle. However, if one wants to automate the analysis for
two- and three-
dimensional problems then it is best in the long run to refer to
the direction cosines.
To extend the bar element to a general truss element we need to
consider the
relations between a local coordinate system that is parallel and
perpendicular to the
element and the fixed global coordinate directions. Let the
local x-axis lie along the
member, that is, it passes through the two end points of the
member. This means that the
direction cosines of the local x-axis are the same as those for
the line segment. The bar
element had a single displacement, u, at any point. That local
displacement vector will
have components in the global space. Let the global
displacements of a point be denoted
by ux , uy, and uz . To be consistent with this, one could also
define three local
components of the displacement. For a bar element the local y-
and z-components are
identically zero. Later we will consider members that have no
zero local components.
Thus, we will consider the general case of transformation of
local displacement
components. Referring to Fig. 13.9 again, one finds from
geometry that the local x
displacement is related to the two-dimensional global
displacements by
uxL = uxg Cos θ x + uyg Cos θ y .
Similarly, if there was a local y-component of displacement it
would be related to the
global components by uyL = − uxg Cos θ y + uyg Cos θ x . Writing
these identities in amatrix form in terms of θ x = θ
(13.1)
ux
uy
L
=
Cos θ
− Sin θSin θ
Cos θ
ux
uy
g
or symbolically this transformation is uL = t(θ ) ug where t is
a nodal transformationmatrix and ug and uL denote the global and
local displacement components, respectively,
at a point. If this relation is written at each node of the
element it defines the element dof
transformation matrix, T . Specifically,
-
458 Finite Element Analysis with Error Estimators
u1x
u1y
− − −u2x
u2y
e
L
=
Cos θ
− Sin θ− − − −
0
0
Sin θ
Cos θ
− − − −0
0
|
|
|
|
|
0
0
− − − −Cos θ
− Sin θ
0
0
− − − −Sin θ
Cos θ
u1x
u1y
− − − − −u2x
u2y
e
g
or(13.2)ueL = T(θ ) ueg .
The same type of coordinate transformation will apply to
components of the element
force vector, Pe , namely :(13.3)PeL = T(θ ) P
eg .
Notice that the transformation matrix is square. Thus, the
inverse transformation can be
found by inverting the matrix T . Therefore,
(13.4)ug = T−1 uL , Pg = T−1 PL .
If one carries out the inversion process, an interesting result
is obtained. Specifically, we
find that the inverse of the transformation is the same as its
transpose. This is always
true, and it makes our calculations much easier since we can
write
(13.5)T−1 = TT .
A matrix with this property is called an orthogonal matrix.
Therefore, the simple way to
write the inverse transformation is(13.6)ug = TT uL .
13.4.2 Transformation of element matrices
Our ultimate goal is to solve the global equilibrium equations.
This requires that all
elements be referred to a single global coordinate system, and
that the assembly of
element contributions be relative to that system. Therefore,
before we can assemble the
element stiffness and load matrices they must be written
relative to the global axes. This
means that we need to define global versions of the element
matrices, say Seg and Ceg.
Clearly, they are somehow related to the corresponding local
element matrices, SeL and
CeL . To gain some insight into the relation between the two
systems recall that the
element behavior was defined in terms of the total potential
energy, Πe , of the element.Since that quantity is a scalar, its
value must be the same regardless of whether it is
computed in element coordinates or global coordinates. If we
compute the total potential
energy Πe using Eq. 7.7 in local coordinates the result is
(13.7)Πe = 12
ueT
L SeL u
eL − ue
T
L CeL .
By way of comparison, if it is calculated in global
coordinates
(13.8)Πe = 12
ueT
g Seg u
eg − ue
T
g Ceg .
The two forms can be more easily compared if Eq. 13.7 is also
written in terms of the
global components of the displacements of the element. Before
doing that, let us recall
-
Supplement 1, Networks, trusses, beams and frames 459
! ........................................................... !
1! *** ELEM_SQ_MATRIX PROBLEM DEPENDENT STATEMENTS FOLLOW *** ! 2!
........................................................... ! 3!
Define any new local array or variable types, then statements !
4
! 5! A TWO-DIMENSIONAL TRUSS BY DIRECT ENERGY APPROACH ! 6!
ELEMENT REAL PROPERTIES: (1) = AREA, (2) = ELASTIC MODULUS ! 7! (3)
= TEMP RISE, (4) = COEFF EXPANSION, (5) = WEIGHT DENSITY ! 8
! 9REAL(DP) :: X_I, X_J, Y_I, Y_J ! coordinates !10REAL(DP) ::
D_X, D_Y, BAR_L ! lengths !11REAL(DP) :: DELTA_T, ALPHA ! temp
rise, expansion !12REAL(DP) :: AREA, GAMMA ! area, wt. density
!13REAL(DP) :: M_E, THERMAL ! modulus, thermal strain !14REAL(DP)
:: C_X, C_Y ! direction cosines !15
!16! Get geometry !17
X_I = COORD (1, 1) ; X_J = COORD (2, 1) !18Y_I = COORD (1, 2) ;
Y_J = COORD (2, 2) !19
!20! Get properties for this element !21
AREA = GET_REAL_LP (1); M_E = GET_REAL_LP (2) !22DELTA_T =
GET_REAL_LP (3); ALPHA = GET_REAL_LP (4) !23GAMMA = GET_REAL_LP (5)
!24
!25! Find bar length and direction cosines !26
D_X = X_J - X_I ; D_Y = Y_J - Y_I ! lengths !27BAR_L = SQRT (D_X
* D_X + D_Y * D_Y) ! total length !28C_X = D_X / BAR_L ; C_Y = D_Y
/ BAR_L ! cosines !29
!30! Form global strain-displacement matrix !31
B (1, :) = (/ - C_X, - C_Y, C_X, C_Y /) / BAR_L !32!33
! Form global stiffness, S = B’ EAL B !34S = M_E * AREA * BAR_L
* MATMUL ( TRANSPOSE (B), B ) !35
!36! Initial (thermal) strain loading !37
THERMAL = ALPHA * DELTA_T ! strain !38C = B (1, :) * M_E *
THERMAL * AREA * BAR_L ! force !39
!40! Weight load, in negative Y-direction (wt density * volume)
!41
C = C + (/ 0.d0, -0.5d0, 0.d0, -0.5d0 /) & ! components !42*
GAMMA * AREA * BAR_L ! total weight !43
!44! Save for stress post-processing (set post_el in keywords)
!45
IF ( N_TAPE1 > 0 ) WRITE (N_TAPE1) M_E, B, THERMAL !46! End
of application dependent code !47
Figure 13.10 A truss element stiffness and loads
the form of the element stiffness and load matrices for a bar
parallel to the x-axis :
SeL =Ee Ae
Le
1
−1−1
1
, CeL =
C1x
C2x
where C1 and C2 represent the resultant loads along the local
x-axis. Since the global
structure will have two displacements per node it will be useful
to rewrite the element
equations in terms of two local displacements per node.
Specifically, the expanded
-
460 Finite Element Analysis with Error Estimators
element equations for the equilibrium of a single element
are
Ee Ae
L
1
0
−10
0
0
0
0
−10
1
0
0
0
0
0
u1x
u1y
u2x
u2y
e
L
=
Ce1x
0
Ce2x
0
L
.
Note that the stiffness matrix has been expanded by adding rows
and columns of zeros to
correspond to the local y displacement. That was done because
the element cannot resist
loads in the local y direction. The above expanded element
matrices would be substituted
into Eq. 13.7. Next, substituting the transformation identity of
Eq. 13.2 into Eq. 13.7
yields Πe = 12
ueT
g (TeT SeL T
e) ueg − ueg(TeT Ceg) . Comparing this scalar with the same
quantity in Eq. 13.8 gives the desired identities
(13.9)Seg = TeT SeL T
e , and Ceg = TeT CeL .
Of major importance here is that Eq. 13.9 is not restricted to
truss elements. For certain
types of elements it would be simpler to form the global element
matrices numerically by
matrix multiplication. For the truss element in two dimensions
the products in these
transformations are easily written out. The results are
(13.10)Se =Ee Ae
Le
λ λ
λ µ
− λ µ− λ µ
λ µ
µ µ
− λ µ− µ µ
− λ µ− λ µ
λ λ
λ µ
− λ µ− µ µ
λ µ
µ µ
e
and(13.11)Ce
T = λC1x − µC1x λC2x − µC2x e
where λ = Cos θ x = L x / L, µ = Cos θ y = L y / L = Sin θ x . A
similar set of transformedglobal stiffness and force vectors can be
obtained for a truss element located in three-
dimensional space.
13.4.3 Direct energy approach
The above transformation process is valid in many structural
applications and is the
usually way to see truss, frame, plate, and shell elements
developed. The truss element
can be expressed directly from the energy approach and this
leads to a simpler program.
In Chapter 3 on variational methods we saw that we could define
the work and energy
terms in a general integral form. For an axially loaded bar the
stiffness and load matrices
are given in Eqs. 3.20-22 and the initial thermal strain effects
are in Eq. 3.32. Those
equations need the strain-displacement matrix Be expressed in
the global coordinate
system. Here we need to rotate the bar and express its behavior
in terms in terms of four
displacement components, instead of two as before. The two axial
displacements are
related to the four truss member displacements by a sub-set of
Eq 13.2, namely
uaxial = ττ eue
-
Supplement 1, Networks, trusses, beams and frames 461
u1x
u2x
e
axial
=
Cos θ
0
Sin θ
0
0
Cos θ
0
Sin θ
u1x
u1y
u2x
u2y
e
g
Thus we can get the global Be matrix as εε = Baxialuaxial =
(Baxialττ e)ue = Beue whichsimplifies to
Be = [ − Cos θ − Sin θ Cos θ Sin θ ] / Le
Assuming constant properties we can write the stiffness matrix
by inspection as the
matrix product
Se = BeT
Ee Be Ae Le
and the truss member load vector due to any temperature rise
(from stress free) is
Cet = BeT Ee α e ∆t Ae Le .
Another common loading condition is the member weight. Here we
just need to put half
the weight at each end node and assume that Y is vertical so
there are no X components
of this load. We get the weight from the weight density, γ ,
times the member volume.
This form is much simpler to program than the previous one. A
typical implementation is
shown in Fig. 13.10.
The calculation of the stiffness, thermal and weight effects
should be clear. In this
case Be has only one row but it usually has one per spatial
dimension. The last action, in
line 46, is to save data necessary to recover the strains and
stresses in each element. It
gets activated if the data keyword "post_el" is present. If it
is present then each element
gets post-processed as shown in Fig. 13.11. There the same data
(modulus of elasticity,
Be matrix, and initial strains) are recovered from sequential
storage. Multiplying Be by
the gathered displacements yields the mechanical strains, in
line 25. We inv oke Hooke’s
law, generalized to include initial strains, to get the one
stress component, in line 29, and
then present the three items for output.
The text by Logan [9] gives a detailed hand calculation of a two
bar truss with one
vertical heated member, one inclined member with a slope of
5:-4, and no external loads
applied. The two bottom nodes are pinned, while the top one is
prevented from
horizontal motion. The input data are shown in Fig. 13.12 and
the computed result was
exact, as summarized in the output of Fig. 13.13, and
illustrated in Fig. 13.14. Of course,
the heated vertical member was found to be in compression and
the unheated inclined
member was in tension.
-
462 Finite Element Analysis with Error Estimators
! ..............................................................
! 1! *** POST_PROCESS_ELEM PROBLEM DEPENDENT STATEMENTS FOLLOW ***
! 2! ..............................................................
! 3! Define any new array or variable types, then give statements !
4
! 5! A TWO-DIMENSIONAL TRUSS BY DIRECT ENERGY APPROACH ! 6!
ELEMENT REAL PROPERTIES: (1) = AREA, (2) = ELASTIC MODULUS ! 7! (3)
= TEMP RISE, (4) = COEFF EXPANSION, (5) = WEIGHT DENSITY ! 8
! 9! STRESS = M_E * (MECHANICAL STRAIN - INITIAL STRAIN) !10
!11REAL(DP) :: THERMAL ! initial strain !12REAL(DP) :: M_E !
modulus of elasticity !13LOGICAL, SAVE :: FIRST = .TRUE. ! printing
!14
!15IF ( FIRST ) THEN ! first call !16
FIRST = .FALSE. ; WRITE (6, 5) ! print headings !175 FORMAT (’ E
L E M E N T S T R E S S E S’, /, & !18& ’ ELEMENT STRESS
MECH. STRAIN THERMAL STRAIN’) !19
END IF ! first call !20!21
!--> Read stress strain data from N_TAPE1 (set by post_el)
!22READ (N_TAPE1) M_E, B, STRAIN_0 (1) ! THERMAL = STRAIN_0 !23
!24!--> Calculate mechanical strain, STRAIN = B * D !25
STRAIN (1) = DOT_PRODUCT ( B(1, :), D ) !26!27
!--> Generalized Hooke’s Law !28STRESS (1) = M_E * (STRAIN
(1) - STRAIN_0 (1)) !29
!30WRITE (6, 1) IE, STRESS (1), STRAIN (1), STRAIN_0 (1) !311
FORMAT (I5, 3ES15.5) !32
! *** END POST_PROCESS_ELEM PROBLEM DEPENDENT STATEMENTS ***
!33
Figure 13.11 Post-processing the truss
-
Supplement 1, Networks, trusses, beams and frames 463
title "Logan 3rd Ed. thermal loaded truss" ! 1nodes 3 ! Number
of nodes in the mesh ! 2elems 2 ! Number of elements in the system
! 3el_real 5 ! Number of real properties per element ! 4dof 2 !
Number of unknowns per node ! 5el_nodes 2 ! Maximum number of nodes
per element ! 6space 2 ! Solution space dimension ! 7b_rows 1 !
Number of rows in the B (operator) matrix ! 8shape 1 ! Element
shape, 1=line, 2=tri, 3=quad, 4=hex ! 9post_el ! Require
post-processing, create n_tape1 !10remarks 12 ! Number of user
remarks !11quit ! keyword input, begin remarks !12Logan Example
15.3, 2-D Truss with temperature rise !13occuring in bar (1) only
!14
1 o Y_Roller E = 30,000 ksi, A = 2 inˆ2 !15| \ 8 ft high, 6 ft
wide (96 by 72) !16
(1) (2) alpha = 7e-6, rise = 75 F !17| \ Y_1 = 0.0333 inch
!18
2 * * 3 Stress: -5,333, + 6,666 psi !19Pin Pin !20
ELEMENT REAL PROPERTIES: !21(1) = AREA, (2) = MODULUS OF
ELASTICITY, !22(3) = TEMP RISE, (4) = COEF THERMAL EXPANSION,
!23(5) = WEIGHT DENSITY !241 10 0.0 96.0 ! node, bc flag, x, y !252
11 0.0 0.0 !263 11 72.0 0.0 !27
1 1 2 ! element, two nodes !282 1 3 !29
1 1 0.0 ! node, direction, given displacement !302 1 0.0 !312 2
0.0 !323 1 0.0 !333 2 0.0 !34
1 2. 30.e6 75. 7.e-6 0. ! elem, properties !352 2. 30.e6 0.0
7.e-6 0. ! elem, properties !36
Figure 13.12 A simple thermally loaded truss
*** REACTION RECOVERY *** ! 1NODE, PARAMETER, REACTION, EQUATION
! 2
1, DOF_1, -8.0000E+03 1 ! 32, DOF_1, 0.0000E+00 3 ! 42, DOF_2,
1.0667E+04 4 ! 53, DOF_1, 8.0000E+03 5 ! 63, DOF_2, -1.0667E+04 6 !
7
! 8*** OUTPUT OF RESULTS IN NODAL ORDER *** ! 9NODE, X-Coord,
Y-Coord, DOF_1, DOF_2, !10
1 0.0000E+00 9.6000E+01 0.0000E+00 3.3333E-02 !112 0.0000E+00
0.0000E+00 0.0000E+00 0.0000E+00 !123 7.2000E+01 0.0000E+00
0.0000E+00 0.0000E+00 !13
!14E L E M E N T S T R E S S E S !15
ELEMENT STRESS MECH. STRAIN THERMAL STRAIN !161 -5.33333E+03
3.47222E-04 5.25000E-04 !172 6.66667E+03 2.22222E-04 0.00000E+00
!18
Figure 13.13 Output summary for the two bar truss
-
464 Finite Element Analysis with Error Estimators
−20 0 20 40 60 80 100
0
10
20
30
40
50
60
70
80
90
100
X
YFE Deformed Mesh Geometry (solid): Scale = 200
1
2 3
1 2
Pin Pin
Y Roller
Temperature rise
Figure 13.14 Deformation of the two bar truss
PY
PY
PX
2 @ 4 = 8 4
1
1
22
3
1
2
33'
2
1
b) Symmetric load & shapea) Unsymmetric load, symmetric
shape
Figure 13.15 A three-bar truss structure
-
Supplement 1, Networks, trusses, beams and frames 465
13.4.4 Example structure calculations
Consider the example three bar truss shown in Fig. 13.15. Assume
that all three
members have the same area and modulus of elasticity. The
structure is described by
Element L x L y L Topology EA
1 4 3 5 1 2 1000
2 8 0 8 1 3 1000
3 4 −3 5 2 3 1000
The structure is pinned at node 1 and on a horizontal roller at
node 3. No distributed
loads or thermal loads are considered on the bars. Thus, for
each element Ce = 00. Onlynodal loads are externally applied. Their
values, at node 2 are P x = 10, and P y = − 20.From Eq. 13.11 the
element stiffness matrices, when transformed to the global axes,
have
the values ofe = 1 : Global
Se =1000
125
16
12
−16−12
12
9
−12−9
−16−12
16
12
−12−912
9
1
2
3
4
e = 2 : Global
Se =1000
512
64
0
−640
0
0
0
0
−640
64
0
0
0
0
0
1
2
5
6
e = 3 : Global
Se =1000
125
16
−12−16
12
−129
12
−9
−1612
16
−12
12
−9−12
9
3
4
5
6
.
The assembled system equilibrium equations are
(128 + 125)
symmetric
96
72
−128−96
(128 + 128)
−96−72
(96 − 96)(72 + 72)
−1250
−12896
(125 + 128)
0
0
96
−72−96
72
u1
v1
u2
v2
u3
v3
=
0
0
P x
P y
0
0
+
R1
R2
0
0
0
R3
.
However, three displacements (u1, v1 , and v3) are prescribed to
be zero. Modifying the
above equations to include the boundary conditions reduces them
to
-
466 Finite Element Analysis with Error Estimators
256
Sym.
0
144
−12896
253
u2
v2
u3
=
P x
P y
0
.
These equations can be inverted by hand yielding:
u2
v2
u3
=1
4. 608 × 106
27216
−1228818432
48384
−24576
Sym.
36864
P x
P y
0
.
Substituting the given load values yields [u2 v2 u3] = [0. 1124
− 0. 2367 0. 1467] .The reader should verify that substituting
these three displacements into the original
equilibrium assembly yields reaction values of R1 = − 10. 00, R2
= 6. 25 andR3 = 13. 75. Thus, the resultant values are equal and
opposite to the applied loads asexpected. Of course, they also
satisfy moment equilibrium at all points in the plane.
Note that if P x had been zero, then u2 = u3 / 2 = 0. 0533, and
v2 = − 0. 21. That is, thedeformations would have been symmetric
with respect to the center of the truss.
The concepts of symmetry and anti-symmetry are often useful in
finite element
analysis. It is common to find half, quarter, or one-eighth
order symmetry conditions that
can reduce the analysis cost to the square of the corresponding
fractional part of a total
analysis cost. For a truss we have no rotational degrees of
freedom so we only have to
consider the displacement components tangent or normal to the
symmetry plane. Here
we will apply symmetry to the above truss. First, we view the
loads, members, and
supports as viewed relative to a mirror placed at the symmetry
section. The resulting
partial model is shown in Fig. 13.15. The applied loads and the
stiffness of members
lying in the symmetry plane are reduced by half. The nodes or
member midpoints that lie
in the symmetry plane are allowed to move only in that plane.
Any supports that are not
on the symmetry plane can be modified to support the structure
in a consistent manner
when viewed from the symmetry plane. This means that our
simplified structure can be
described as
Element L x L y L Topology EA
1 4 3 5 1 2 1000
2 4 0 4 1 3 1000
The stiffness for the third element is no longer needed. The
first member is unchanged.
The length of the second member is cut in half so its stiffness
doubles. The assembled
elements give the algebraic equations of equilibrium as:
-
Supplement 1, Networks, trusses, beams and frames 467
! *** ELEM_SQ_MATRIX PROBLEM DEPENDENT STATEMENTS FOLLOW *** !
1! ........................................................... !
2
! 3! APPLICATION: TWO-DIMENSIONAL TRUSS. ELEMENT REAL
PROPERTIES: ! 4! (1) = AREA, (2) = MODULUS OF ELASTICITY, ! 5! (3)
= TEMP RISE, (4) = COEF THERMAL EXPANSION ! 6
! 7REAL(DP) :: X_I, X_J, Y_I, Y_J ! coordinates ! 8REAL(DP) ::
D_X, D_Y, BAR_L ! lengths ! 9REAL(DP) :: DELTA_T, ALPHA ! temp
rise, coeff !10REAL(DP) :: AREA ! area !11REAL(DP) :: M_E ! modulus
of elasticity !12REAL(DP) :: C_X, C_Y, C_XX, C_XY, C_YY ! cosines
& products !13REAL(DP) :: F, STIF ! forces, stiffness
!14REAL(DP) :: THERMAL ! expansion !15
!16! Get geometry !17
X_I = COORD (1, 1) ; X_J = COORD (2, 1) !18Y_I = COORD (1, 2) ;
Y_J = COORD (2, 2) !19
!20! Get properties for this element !21
AREA = GET_REAL_LP (1) ! area !22M_E = GET_REAL_LP (2) ! elastic
modulus !23DELTA_T = GET_REAL_LP (3) ! temperature rise !24ALPHA =
GET_REAL_LP (4) ! coeff thermal expansion !25
!26!--> FIND BAR LENGTH AND DIRECTION COSINES !27
D_X = X_J - X_I ; D_Y = Y_J - Y_I ! lengths !28BAR_L = SQRT (D_X
* D_X + D_Y * D_Y) ! total length !29C_X = D_X / BAR_L ; C_Y = D_Y
/ BAR_L ! cosines !30
!31STIF = M_E * AREA / BAR_L ! AXIAL STIFFNESS, K=E*A/L !32
!33!--> TRANSFORM TO 2-D STIFFNESS (closed form) !34
C_XX = C_X * C_X ; C_XY = C_X * C_Y ; C_YY = C_Y * C_Y
!35!36
S (1, 1) = STIF * C_XX ; S (2, 1) = STIF * C_XY !37S (3, 1) = -
STIF * C_XX ; S (4, 1) = - STIF * C_XY !38S (1, 2) = STIF * C_XY ;
S (2, 2) = STIF * C_YY !39S (3, 2) = - STIF * C_XY ; S (4, 2) = -
STIF * C_YY !40S (1, 3) = - STIF * C_XX ; S (2, 3) = - STIF * C_XY
!41S (3, 3) = STIF * C_XX ; S (4, 3) = STIF * C_XY !42S (1, 4) = -
STIF * C_XY ; S (2, 4) = - STIF * C_YY !43S (3, 4) = STIF * C_XY ;
S (4, 4) = STIF * C_YY !44
!45! Form any local loads !46
C = 0.d0 ; THERMAL = 0.d0 ! initialize !47!48
IF ( DELTA_T /= 0.d0 ) THEN ! THERMAL STRAIN EFFECTS !49THERMAL
= ALPHA * DELTA_T ! thermal strain !50F = M_E * THERMAL * AREA !
thermal force !51C (1) = - C_X * F ; C (2) = - C_Y * F ! components
!52C (3) = C_X * F ; C (4) = C_Y * F ! components !53
END IF ! thermal !54!55
! End of application dependent code !56
Figure 13.16 Hard coding the 2-D truss element
-
468 Finite Element Analysis with Error Estimators
(128 + 250)
symmetric
96
72
−128−96128
−96−72
96
72
−2500
0
0
250
0
0
0
0
0
0
u1
v1
u2
v2
u3′
v3′
=
0
R1
R2
P y / 2R3′
0
.
Points in the plane of symmetry must always move in that plane.
Thus, u3′ = 0.Conversely, node 1 must be able to move normal to the
plane of symmetry. Thus, u1 ≠ 0.Node 2 has an external load, P,
applied tangent to the plane of symmetry. Thus, it must
be allowed to move tangent to the plane (v2 ≠ 0) so that the
force can do work on thestructure. That is, in a given direction
one can specify either the force or the
displacement at a point, but not both. Clearly, node 1 has an
unknown reaction that is
parallel to the symmetry plane. Thus, it must be restrained in
that direction, v1 = 0. Therestrained structural stiffness is
378
sym.
−9672
0
0
0
u1
v2
v3′
=
0
−20/20
.
However, these equations are still singular after the
application of the usually symmetric
conditions. Note that the third row and column are zero. This
means that there is no
stiffness associated with the displacement v3′ . From the
original structure in Fig. 13.15,
we note that the center of member 2 must have a zero vertical
deflection. Employing this
additional physical insight, we can now also state that v3′ = 0.
Therefore, for a symmetricstructure with symmetric loads the
equilibrium equations, relative to the plane of
symmetry are
378
−96−96
72
u1
v2
=
0
−10
,
u1
v2
=
−0. 05333−0. 21
as before, except for the sign change on u1. This solution shows
that for the above
example there are only two degrees of freedom required when
symmetry is available
versus the three that were used before. For this simple example
there was not much
difference in the computational effort required in the symmetric
and non-symmetric
solutions. However, if there are hundreds or thousands of
symmetric elements then the
cost saving is very significant when a symmetric analysis can be
utilized.
Since the two-dimensional truss is relatively simple it is easy
to avoid the matrix
operations used in Fig. 13.10 to form the stiffness matrix and
load vectors. Several
authods have giv en the explicit algebraic form of those
matrices. For completeness we
also illustrate that approach by implementing Eqs. 13.10-11 in
Fig. 13.16.
-
Supplement 1, Networks, trusses, beams and frames 469
11
6
7 8
9
2 1
54
3
1
3
4
2
10
L H
LL1 3
2 4 5
6
P5
P3
1 2
34
P3
L
P 13.1 P 13.2
P2
Figure 13.17 Typical planar truss geometries
0 2 4 6 8 10 12 14 16 18 20
−2
0
2
4
6
8
10
12
X for 11 Elements (with 2 nodes)
Y fo
r 6
Nod
es
Deformed Mesh (solid): Components [0.0016667, −0.0044013], Scale
= 200
1
2
3
4 5
6 1 2
3 4 5 6 7 8 9
10
11
P
Figure 13.18 Meek’s deformed planar truss example
-
470 Finite Element Analysis with Error Estimators
13.7 Example truss solutions
The truss P13.1 in Fig. 13.17 was used as an example problem by
Meek [11]. It has
two L = 10 inch bays with members made of steel, E = 30, 000
ksi, and constant cross-sections of A = 1 in2. The bottom center
load is P3 = 10, 000 lb, P5 = 0, and the left andright corners are
supported with a pin and roller, respectively. Its deformed shape
is
shown in Fig. 13.18. To compute the deflections and the
reactions one needs data such as
those listed in Fig. 13.19 to produce the selected outputs in
Fig. 13.20 that correspond to
the deformed plot. The latter output figure also includes the
member stresses at their
center (positive is tension). No member line loads are present
so there is no local bending
and they are pure axial loads of a typical truss. In other
words, both sides of the element
see the same constant stress in this example.
Of course, you can use a truss calculation to also solve simple
axial beam problems
simply yo setting the y-coordinates and y-displace,ents to zero.
Logan [9] gives an axial
bar thermal loading example that can be used to validate the
truss code. Employ two
equal length co-linear truss elements to model a bar that is
fixed at both ends and
undergoes a uniform temperature increase. Assume numerical
values of
E = 30, 000 ksi, A = 4 in2, L = 4 ft = 48 inches, α = 7e − 6 1/F
, and a temperature rise of50 F . We want to obtain the
displacements (null), reactions (42, 000 lb), and stress. The
input (lines 1-52) and output (lines 53-107) for this problem
are given in Fig. 13.22. Note
that all displacements are zero (lines 77-81), but the system
reactions are not (lines
67-75) are not, nor are the individual element reactions (lines
83-100). The latter show
the member to be in compression as do the member stresses (lines
102-106).
13.8 Introduction to beams
A common structural system considered in engineering is that of
the elastic beam.
Such a beam is shown in Fig. 13.23. In mechanics of materials a
number of common
assumptions are made in order to reduce the analysis to a
one-dimensional formulation.
The most common assumption is that planes in the beam, normal to
a fiber along the
x-axis, remain normal to that fiber in its deformed state. This
assumption makes that
axial displacement, u, and the axial strain, ε , vary linearly
with the transverse coordinate,
y. Let v denote the transverse displacement, and θ = v′ the
slope of the beam. Then theaxial displacement relation, for small
slopes, and the axial strain are
(13.12)u(x, y) = − yv′ = − ydv
dx,
(13.13)ε (x, y) =du
dx= − y
d2v
dx2= − yv′′ ,
respectively. For an elastic material the stress, σ , is defined
by Hooke’s law as
(13.14)σ (x, y) = E(x) ε (x, y)
where E is the elastic modulus of the material. These quantities
could vary with both of
the spatial coordinates. We desire to formulate a
one-dimensional model. We will define
-
Supplement 1, Networks, trusses, beams and frames 471
title "Sample Meek 2-D truss" ! 1nodes 6 ! Number of nodes in
the mesh ! 2elems 11 ! Number of elements in the system ! 3el_homo
! Element properties are homogeneous ! 4el_real 7 ! Number of real
properties per element ! 5dof 2 ! Number of unknowns per node !
6el_nodes 2 ! Maximum number of nodes per element ! 7space 2 !
Solution space dimension ! 8b_rows 1 ! Number of rows in B
(operator) matrix ! 9shape 1 ! Element shape, 1=line, 2=tri, 3=quad
!10loads ! An initial source vector is input !11el_react ! Compute
& list element reactions !12post_el ! Require post-processing
!13example 206 ! Source library example number !14data_set 1 ! Data
set for example (this file) !15remarks 15 ! Number of user remarks
!16quit ! keyword input, begin remarks !17
2 4 5 Meek’s Example 7.2 truss !18*--(10)-*--(11)-* E = 30,000
ksi, A = 1 inˆ2 !19|\(4) /|\(7) /| Two 10 inch bays !20| \ / | \ /
| Vertical deflection at 3 !21
(3) X (6) X (9) is -4.4013E-03 inches !22| / \ | / \ | !23|/(5)
\|/(8) \| Reactions 5K each at 1, 6 !24
1 #--(1)--*--(2)--o 6 !25Pin 3| Roller !26
v P=10K !27ELEMENT REAL PROPERTIES: !28(1) = AREA, (2) = MODULUS
OF ELASTICITY, !29(3) = TEMP RISE, (4) = COEF THERMAL EXPANSION,
!30(5) = LINE LOAD, (6) = MOMENT OF INERTIA, !31(7) = HALF DEPTH OF
BAR !321 11 0.0 0.0 ! node, bc flag, x, y !332 00 0.0 10.0 !343 00
10.0 0.0 !354 00 10.0 10.0 !365 00 20.0 10.0 !376 01 20.0 0.0
!38
1 1 3 ! element, two nodes !392 3 6 !403 1 2 !414 2 3 !425 1 4
!436 3 4 !447 4 6 !458 3 5 !469 5 6 !47
10 2 4 !4811 4 5 !49
1 1 0.0 ! node, direction, displacement !501 2 0.0 !516 2 0.0
!52
1 1. 30000. 0 0 0 0 0 ! elem, A, E, null properties !533 2 -10.
! node, direction, load !546 2 0.0 ! terminate with last !55
Figure 13.19 Typical data for Meek’s truss example
-
472 Finite Element Analysis with Error Estimators
title "Sample Meek 2-D truss" ! 1! 2
*** REACTION RECOVERY *** ! 3NODE, PARAMETER, REACTION, EQUATION
! 4
1, DOF_1, 4.4409E-16 1 ! 51, DOF_2, 5.0000E+00 2 ! 66, DOF_2,
5.0000E+00 12 ! 7
REACTION RESULTANTS ! 8PARAMETER, SUM POSITIVE NEGATIVE !
9DOF_1, 4.4409E-16 4.4409E-16 0.0000E+00 !10DOF_2, 1.0000E+01
1.0000E+01 0.0000E+00 !11
!12*** EXTREME VALUES OF THE NODAL PARAMETERS *** !13PARAMETER
MAXIMUM, NODE MINIMUM, NODE !14DOF_1, 1.6667E-03, 2 -1.5639E-04, 5
!15DOF_2, 0.0000E+00, 1 -4.4013E-03, 3 !16
!17*** OUTPUT OF RESULTS IN NODAL ORDER *** !18NODE, X-Coord,
Y-Coord, DOF_1, DOF_2, !19
1 0.0000E+00 0.0000E+00 0.0000E+00 0.0000E+00 !202 0.0000E+00
1.0000E+01 1.6667E-03 -9.1153E-04 !213 1.0000E+01 0.0000E+00
7.5514E-04 -4.4013E-03 !224 1.0000E+01 1.0000E+01 7.5514E-04
-2.8910E-03 !235 2.0000E+01 1.0000E+01 -1.5639E-04 -9.1153E-04 !246
2.0000E+01 0.0000E+00 1.5103E-03 0.0000E+00 !25
!26** BEGIN ELEMENT APPLICATION POST PROCESSING ** !27
E L E M E N T S T R E S S E S !28ELEMENT MID SECTION (BENDING)
STRESS AT: !29NUMBER RIGHT LEFT !30
1 0.2265409E+01 0.2265409E+01 !312 0.2265409E+01 0.2265409E+01
!323 -0.2734591E+01 -0.2734591E+01 !334 0.3867295E+01 0.3867295E+01
!345 -0.3203772E+01 -0.3203772E+01 !356 0.4530818E+01 0.4530818E+01
!367 -0.3203772E+01 -0.3203772E+01 !378 0.3867295E+01 0.3867295E+01
!389 -0.2734591E+01 -0.2734591E+01 !39
10 -0.2734591E+01 -0.2734591E+01 !4011 -0.2734591E+01
-0.2734591E+01 !41
Figure 13.20 Selected output for the Meek truss
-
Supplement 1, Networks, trusses, beams and frames 473
TITLE: "Logan 3rd Ed. thermal loaded bar" ! 1! 2
**** PROBLEM CLASS: (DEFAULT) VALUE **** ! 3DIMENSION OF SPACE
............................(1) 2 ! 4NUMBER OF ROWS IN B MATRIX
....................(1) 1 ! 5NUMBER OF ITERATIONS TO BE RUN
................(1) 1 ! 6NUMBER OF NODAL POINTS IN SYSTEM
..............(2) 3 ! 7NUMBER OF ELEMENTS IN SYSTEM
..................(1) 2 ! 8NUMBER OF PARAMETERS PER NODE
.................(1) 2 ! 9MAXIMUM NUMBER OF NODES PER ELEMENT
...........(2) 2 ! 10NUMBER OF DIFFERENT ELEMENT TYPES
.............(1) 1 ! 11SHAPE 1=LINE 2=TRI 3=QUAD 4=HEX 5=TET 6=WEDG
..(1) 1 ! 12NUMBER OF REAL PROPERTIES PER ELEMENT .........(0) 7 !
13HOMOGENEOUS ELEM PROPERTIES: 0=FALSE, 1=TRUE ..(0) 1 ! 14LIST
ELEMENT REACTIONS: 0=OMIT, 1=LIST ..(0) 1 ! 15
! 16THE NEXT 11 LINES ARE USER REMARKS ! 171 Logan Example 15.1,
Fixed bar with temperature rise ! 182 1 2 3 ! 193 *--(1)--*--(2)--*
E = 30,000 ksi, A = 4 inˆ2 ! 204 L = 4 ft = 48 inches, alpha =
7e-6, rise = 50 F ! 215 Reactions are 42,000 lb, stress = 10,500
psi ! 226 End points 1 & 3 fixed ! 237 ELEMENT REAL PROPERTIES:
! 248 (1) = AREA, (2) = MODULUS OF ELASTICITY, ! 259 (3) = TEMP
RISE, (4) = COEF THERMAL EXPANSION, ! 2610 (5) = LINE LOAD, (6) =
MOMENT OF INERTIA, ! 2711 (7) = HALF DEPTH OF BAR ! 28
! 29*** NODAL POINT DATA *** ! 30
NODE, BC_FLAG, X-Coord, Y-Coord, ! 311 11 0.0000 0.0000 ! 322 00
24.0000 0.0000 ! 333 10 48.0000 0.0000 ! 34
! 35ELEMENT TYPE NUMBER = 1 ! 36NUMBER OF NODES PER ELEMENT
.......... 2 ! 37NUMBER OF GEOMETRIC CONTROL NODES .... 2 !
38NUMBER OF PARAMETRIC DIMENSIONS ...... 1 ! 39
! 40*** ELEMENT CONNECTIVITY DATA *** ! 41ELEMENT, 2 NODAL
INCIDENCES. ! 42
1 1 2 ! 432 2 3 ! 44
! 45*** CONSTRAINT EQUATION DATA *** ! 46CONSTRAINT TYPE_ONE:
(PAR_1 @ NODE_1) = A_1. ! 47EQ. NO. NODE_1 PAR_1 A_1 ! 48
1 1 1 0.00000E+00 ! 492 1 2 0.00000E+00 ! 503 3 1 0.00000E+00 !
51
! 52
Figure 13.22a Truss model of a thermal stress bar
-
474 Finite Element Analysis with Error Estimators
*** SYSTEM GEOMETRIC PROPERTIES *** ! 53VOLUME = 4.80000E+01 !
54CENTROID = 2.40000E+01 0.00000E+00 ! 55
! 56*** ELEMENT PROPERTIES *** ! 57ELEMENT, 7 PROPERTY &
REAL_VALUE PAIRS ! 581 1 4.00E+00 2 3.00E+04 3 5.00E+01 4 7.00E-06
! 59
5 0.00E+00 6 0.00E+00 7 0.00E+00 ! 60! 61
*** INPUT SOURCE RESULTANTS *** ! 62ITEM SUM POSITIVE NEGATIVE !
63
1 0.0000E+00 4.2000E+01 -4.2000E+01 ! 642 0.0000E+00 0.0000E+00
0.0000E+00 ! 65
! 66*** REACTION RECOVERY *** ! 67
NODE, PARAMETER, REACTION, EQUATION ! 681, DOF_1, 4.2000E+01 1 !
691, DOF_2, 0.0000E+00 2 ! 703, DOF_1, -4.2000E+01 5 ! 71
REACTION RESULTANTS ! 72PARAMETER, SUM POSITIVE NEGATIVE !
73DOF_1, 0.0000E+00 4.2000E+01 -4.2000E+01 ! 74DOF_2, 0.0000E+00
0.0000E+00 0.0000E+00 ! 75
! 76*** OUTPUT OF RESULTS IN NODAL ORDER *** ! 77NODE, X-Coord,
Y-Coord, DOF_1, DOF_2, ! 78
1 0.0000E+00 0.0000E+00 0.0000E+00 0.0000E+00 ! 792 2.4000E+01
0.0000E+00 0.0000E+00 0.0000E+00 ! 803 4.8000E+01 0.0000E+00
0.0000E+00 0.0000E+00 ! 81
! 82** ELEMENT REACTION, INTERNAL SOURCES AND SUMMATIONS ** !
83
ELEMENT 1 ! 84NODE DOF REACTION ELEM_SOURCE SUMS ! 85
1 1 4.20000E+01 -4.20000E+01 ! 861 2 0.00000E+00 -0.00000E+00 !
872 1 -4.20000E+01 4.20000E+01 ! 882 2 0.00000E+00 0.00000E+00 !
89
SUM: 1 0.00000E+00 0.00000E+00 0.00000E+00 ! 90SUM: 2
0.00000E+00 0.00000E+00 0.00000E+00 ! 91
! 92ELEMENT 2 ! 93
NODE DOF REACTION ELEM_SOURCE SUMS ! 942 1 4.20000E+01
-4.20000E+01 ! 952 2 0.00000E+00 -0.00000E+00 ! 963 1 -4.20000E+01
4.20000E+01 ! 973 2 0.00000E+00 0.00000E+00 ! 98
SUM: 1 0.00000E+00 0.00000E+00 0.00000E+00 ! 99SUM: 2
0.00000E+00 0.00000E+00 0.00000E+00 !100
!101E L E M E N T S T R E S S E S !102
ELEMENT MID SECTION STRESS AT: !103NUMBER RIGHT LEFT !104
1 -0.1050000E+02 -0.1050000E+02 !1052 -0.1050000E+02
-0.1050000E+02 !106
ELEMENT POST PROCESSING COMPLETE. !107
Figure 13.22b Truss model of a thermal stress bar
-
Supplement 1, Networks, trusses, beams and frames 475
p(x)
x
dv / dxv(x)EI
v(x)
u(x)
x
dF
xdM (x)
stress
dy
y
Figure 13.23 A small deflection elastic beam
a generalized strain and a generalized stress to accomplish this
goal.
From calculus we should recall that the quantity v′′ (x) = 1 / ρ
is known as thecurvature of the deflected beam and ρ is the radius
of curvature. The signs in
Eqs. 13.12-13 have been chosen so that a positive sign denotes
tension. From statics one
can show that the resultant axial load from the distributed
stress is zero. However, there
is a non-zero resultant moment. Its value is given by
M(x) = ∫ dm = ∫ − y dF = ∫ − y σ da = ∫ − y E ε da =A
∫ E y2 v′′ da = EI v′′ (x)where A is the cross-sectional area of
the member and
I (x) =A
∫ y2 dais the moment of inertia of the cross sectional area. We
will call this moment our
-
476 Finite Element Analysis with Error Estimators
generalized stress measure since it only depends on x. In
mechanics of materials the
deflections of the beam are determined by solving the
differential equation of
equilibrium :d2
dx2EI
d2v
dx2
= p(x)
where p(x) is the distributed transverse load per unit length.
The four constants of
integration are determined by satisfying the boundary conditions
on the deflections, v,
and slopes, θ . Howev er, in our present study we need an
integral formulation for our
finite element model, that is equivalent to the solution of the
differential equation.
13.9 Variational procedure
A variational formulation for the elastic beam is related to
minimizing the total
energy and work in the system. One important term required for
the analysis is the strain
energy. That quantity is defined as half the volume integral of
the product of the stress
and strain. Here we wish to reduce this quantity to a function
of x alone. The scalar
strain energy is
(13.15)U =1
2
V
∫ σ ε dV = 12L
∫A(x)
∫ (E y v′′ ) ( y v′′ ) da dx .
Since only v′′ depends on x this reduces to
(13.16)U =1
2
L
∫ E(x) I (x) (v′′ )2 dx = 12L
∫ M(x) v′′ (x) dx .Comparing Eqs. 13.15-16 suggests that we
should select the curvature, v′′ , as ourgeneralized strain
measure. Having made this choice we can use Eq. 13.15 to define
a
generalized constitutive relation. Define
(13.17)σ = M(x) , ε = v′′ (x) , σ = E ε , E = E(x) I (x)
as the generalized Hooke’s law. The left hand side of the last
three equations have been
defined as arrays even though they only contain a single term.
This is done to give some
insight into what would happen for a plate or shell where there
would be three curvatures
of the surface, three corresponding moments, and E would become
a 3 × 3 arrayinvolving the material properties and thickness of the
section. If we consider a beam of
width b and thickness h then Eq. 13.17 could be written as E =
Eh3b / 12. For a plate thegeneralized stresses and strains would
be
σ T = [ M xx M yy M xy ] , ε T = [ w, xx w, yy w, xy ]
where w is the transverse displacement of the plate. The moments
are written on a unit
length basis (b = 1), so for the plate
E =Eh3
12(1 − ν 2)
1
0
0
0
1
0
0
0
(1 − ν ) / 2
.
While we do not plan to consider plates here we will use the
generalized symbolism to
give insight to such problems.
-
Supplement 1, Networks, trusses, beams and frames 477
Equation 13.17 shows that our selections for generalized
stress-strain measures will
correctly define the strain energy in the system. Next, we need
to define the work done
by the applied loads, Pi, or couples, Ci. The work done by a
transverse force is the
product of the force and the transverse displacement. Likewise,
the work done by a
couple is the product of the couple and rotation (slope) at its
point of application. These
contributions define a work term, W , giv en by
W =L
∫ v(x) p(x) dx +iΣ v(xi ) Pi +
jΣ v′(x j) C j .
The last two terms represent work done by concentrated point
loads or couples. Thus, the
total potential energy, Π = U − W is
(13.18)Π =1
2
L
∫ EI ( v′′ (x) )2 dx −L
∫ v(x) p(x) dx −iΣ vi Pi −
jΣ v′j C j .
To determine the displacement field, v(x), that corresponds to
the equilibrium state we
must minimize Π and satisfy the boundary conditions on v and v′
= θ .
13.10 Hermite element matrices
To introduce our finite elements we select a series of line
segments to make up the
region L. There are numerous elements that could be selected.
First we will select an
element with two nodes. Next, it is necessary to assume a
displacement approximation so
we can evaluate the potential energy in Eq. 13.16. That equation
contains second
derivatives and thus we need to assume a solution for v that
will at least have both the
deflection, v, and the slope, v′, continuous between elements.
The most commonassumption is to select the cubic Hermite polynomial
presented in Fig. 3.6. The
unknowns at each of the two element nodes are v and v′ = θ .
These quantities will becalled our generalized displacements or the
generalized degrees of freedom. Thus, our
element interpolation functions are the Hermite form in Fig.
3.6:
v(x) =
H e1(x) He2(x) H
e3(x) H
e4(x)
v1
v′1v2
v′2
e
or v(x) = He(x) δδ e, where δδ e denotes the generalized
displacements of the element. Thederivatives of the displacements
are
(13.19)v′(x) = θ (x) = He′(x) δδ e , v′′ (x) = He′′ (x) δδ e
.
Since v′′ and δδ e have been selected as our generalized strains
and generalizeddisplacements we will use the notation of Eq. 13.19
and write Eq. 13.17 as
ε e = Be δδ e
where ε = v′′ in our present study. In the study of plates and
shells additional curvatureterms would be present in ε . Employing
our generalized notation the stiffness matrix and
distributed load vector can be written by inspection as
-
478 Finite Element Analysis with Error Estimators
Ke =Le∫ Be(x)T De(x) Be(x) dx , Fep =
Le∫ He(x)T pe(x) dx .
Here we will again use unit coordinates on the element and set r
= x / Le so thatd( ) / dx = d( ) / dr × 1 / Le. Thus,
Be = He′′ =1
L2
d2H
dr2
so for the cubic Hermite in Fig. 3.6 this becomes (with L =
Le)
Be =1
L2
(12r − 6) L(6r − 4) (6 − 12r) L(6r − 2)
.
Recalling that
L
∫ rm dx =L
(m + 1)
and assuming that Ee is a constant then the stiffness (with L =
Le) is
(13.20)Ke =EI
L3
12
6L
−126L
4L2
− 6L2L2
12
−6L
sym.
4L2
.
If the lateral load, pe, is constant then
(13.21)Fep = peLe∫ HeT dx = pe Le
1
0
∫ HeT (r) dr = pe Le
1 / 2Le
T
/12
1 / 2−Le
T
/12
.
Note that the distributed load puts half the resultant load at
each end. It also causes equal
and opposite nodal couples at each of the two nodes.
When we wrote Eq. 13.18 we assumed that point loads would only
be applied at the
node points. This may not always be true and we should consider
such a load condition
as a special case of a distributed load. In that case the length
of the distributed load
approaches zero and the magnitude of the force per unit length
approaches infinity, but
the resultant load P is constant. That is, we define the load to
be p(x) = P δ (x − x0)where δ is the Dirac Delta distribution. Then
the generalized load vector is
Fep =Le∫ HeT (x)P δ (x − x0) dx
which is integrated by inspection by using the integral property
of the Dirac Delta to yield
Fep = P He(r0) where r0 = x0 / L is the point of application of
the load. To check this
concept, assume that the load is at Node 1. Then, r0 = 0 so
thatFe
T
p = P [ 1 0 0 0 ]
as expected. That is, all the force goes into Node 1 and no
element nodal moments are
generated. Other common loading conditions can be treated in the
same way and a
number have been tabulated by Akin [1] and others. As another
example, if p(x) varies
linearly from pe1 to pe2 at the nodes of element e then
-
Supplement 1, Networks, trusses, beams and frames 479
p(x) = (1 − x / Le) pe1 + x / Le pe2 = [ (1 − r) r ]
p1
p2
e
and
(13.22)Fep =Le∫
1 − 3r2 + 2r3
Le(r − 2r2 + r3)3r2 − 2r3
Le(r3 − r2)
p(x) dx =Le
20
7
Le
3
−2Le/3
3
2Le/3
7
−Le
p1
p2
e
.
If the load is constant so that pe1 = pe2 = pe, then this
reduces to Eq. 13.21, as expected.Likewise, if pe1 = 0 and pe2 = p,
this defines a triangular load and
(13.23)FeT
p =PL
20[ 3 2L/3 7 − L ] .
It is common to tabulate such results in terms of an applied
unit resultant load. That
resultant isRe =
Le∫ pe(x) dx .
For common load variations, such as constant, linear, parabolic,
and cubic forms where p
varies in proportion to rn, the resultant loads are Re = pL / (n
+ 1). The location, x, ofthe resultant applied load is found
from
x Re =Le∫ px dx
and the corresponding results are x = L(n + 1) / (n + 2). Thus,
if we normalize Eq. 13.23by dividing the resultant load, pL / 2,
the result is
feT
p = [ 3/10 L/15 7/10 − L/10 ] .
We can also check the unit load results by applying statics to
the data in that figure. To
check the load summary, we first take the sum of the moments
about Node 1. This gives
+ 1 = 0 + (7/10)L + L/15 − L/10 = L(21 + 2 − 3) / 30 , OK .
Similarly, the sum of the moments about Node 2 is verified.
13.11 Cantilever with triangular load
To present an analytic example of this element consider a single
element solution of
the cantilever beam shown in Fig. 13.24 to determine the
deflection and slope at the free
end. Usually the deflected shape of a beam is defined by a
fourth or fifth order
polynomial in x. Thus, our cubic element solution will usually
give only an approximate
solution. For a single element the system equations are
EI
L3
12
6L
− − − −−126L
6L
4L2
− − − −−6L2L2
|
|
|
|
|
−12−6L
− − − −12
−6L
6L
2L2
− − − −−6L4L2
v1
θ 1
− − −v2
θ 2
=WL
2
3/10
L/15
− − − −7/10
−L/10
+
0
0
F2
M2
.
-
480 Finite Element Analysis with Error Estimators
L
EI
w
v = w L4 / 30 E I
slope = - w L3 / 24 E I
3 R / 10
7 R / 10
R L / 15 R L / 10
R = w L / 2
Figure 13.24 A single element approximate solution
The right side support requires that v2 = 0 = θ 2. The reduced
equations become
EI
L3
12
6L
6L
L2
v1
θ 1
=WL
2
3/10
L/15
+
0
0
so that
v1
θ 1
=L3
12 EIL2
4L2
−6L−6L
12
3/10
L/15
WL
2=
WL3
EI
L/30
−1/24
.
The exact solution is 120 EI v = wL4 [ 4 − 5x / L + (x/L)5 ] so
that the exact values ofthe maximum deflection and slope are v = WL
/ (30 EI ) and θ = −WL3 / (24 EI ),respectively. Thus, our single
element solution gives the exact values of both v and θ at
the nodes, but is only approximate in the interior of the
element. The last two equations
give the exact reactions.
In practical analysis one can often utilize a partial model to
reduce the data
preparation and more importantly the analysis cost. One must be
alert for planes where
the geometry, material property, supports and loads are
symmetric mirror images. Often
the loading conditions occur in an anti-symmetric, or negative
mirror image, fashion so
that one can still use a half portion model and simply recognize
that the deflections and
-
Supplement 1, Networks, trusses, beams and frames 481
stresses on the omitted half have signs opposite from those in
the partial model. These
concepts are easy to illustrate for a beam, but are usually
employed in much larger and
more complicated structural systems. Even with today’s large
memory computers one
ev entually finds a structure that is too big to execute. Then
one searches for alternate
procedures such as solving two hav e size problems and combining
their results (with the
appropriate sign changes). The corresponding results for the
other half can be found by
superposition (with careful attention to their signs) and
output. These concepts extend to
two- and three-dimensional problems. By carefully using partial
models and carefully
combining their results one can obtain the full analysis results
in much less memory and
with substantially reduced computations. This also means reduced
wall clock turnaround
time on the analysis.
13.12 Beam matrices via Galerkin’s method
Here we will illustrate the development of the element matrices
by applying
Galerkin’s Method to the governing differential equation. Recall
that for a beam subject
to a load p(x), the differential equation describing the elastic
curve is giv en by Eq. 13.14.
If we substitute an approximate solution, u(x), this gives
(13.24)d2
dx2
EId2u
dx2
− p(x) = R(x)
where R(x) is the residual error term. Interpolating the
approximate solution with
u(x) = He(x) δδ e and applying Galerkin’s criterion to the error
term gives
0 = ∫ u(x) R(x) dx =eΣ
Le∫ u(x) R(x) dx =
eΣ δδ eT
Le∫ HeT (x) R(x) dx .
But the array δδ e is a vector of arbitrary constants. This
implies that we require
0 =Le∫ HeT (x) R(x) dx =
Le∫ HeT
d2
dx2EI
d2u
dx2− p(x)
dx .
Let a prime denote a derivative, then twice integrating the
first term by parts gives
(13.25)
L
∫ EI H′′ T u′′ dx + EI HT u′′′
L
0− EI H′T u′′
L
0−
L
∫ HT p dx = 00 .Substituting the interpolation for u the first
integral gives
(13.26)Le∫ EI H′′ T (x) H′′ (x) dx δδ e = Se δδ e , where Se
=
Le∫ EI H′′ T H′′ dx
is the element stiffness matrix given earlier. The last integral
is the consistent force
vector given earlier in Eq. 13.22. The remaining two terms
define the natural boundary
conditions on the beam.
13.13 Beam on an elastic foundation *
The stresses in a statically indeterminate structure on an
elastic foundation are
influenced by the deformation of the foundation while the
pressure distribution on the
-
482 Finite Element Analysis with Error Estimators
foundation is affected by the relative stiffness of the
structure and the foundation
medium. To allow for this structure-foundation interaction the
finite element method is
ideally suited. The problem has been studied by many authors.
Most of those works use
Winkler hypothesis, and assume that the soil adheres to the
beam, i.e., the separation
between beam and soil is not allowed. This is not true for many
physical cases. For
instance, when a beam or a beam-column rests on the soil
foundation with some type of
load on it, some parts of the beam might be lifted up. Because
of soils lacking both
adhesive and cohesive properties, gaps occur in those regions.
The method presented in
the study represents the foundation by a one-dimensional line
finite element. The
foundation is assumed to be of the two-parameter type. Also, the
separation between
structure and soil foundation is allowed when tension develops.
The location of those
regions is solved by iterating the solutions. The differential
equation of equilibrium of a
beam-column on an elastic foundation is
EI d4w / dx4 + N d2w / dx2 − ks d2w / dx2 + kw w = q(x)
in which kw and ks are Winkler modulus and second-parameter
foundation coefficients,
respectively, N is the axial tension force, q is the transverse
load, and EI is the bending
stiffness. This is the differential equation of an ordinary beam
on a Winkler elastic
foundation which is well known.
The analysis of beams, beam-columns and plates on elastic
foundations is wide-
spread in engineering. Hetenyi [8] extensively developed the
classical differential
equation solutions for this problem. Finite element approaches
have been used
extensively in the analysis of beams on an elastic foundation.
Most of these works use
the Winkler hypothesis. Thus, the foundation acts as if it
consisted of infinitely many
closely spaced linear springs. Bowles [3] formulates a stiffness
matrix by combining a
conventional beam element with discrete soil springs at the end
of the beam. The degree
of accuracy using this element is highly dependent on the number
of elements modeled.
Ting [19] derives the stiffness and flexibility matrices from
the exact solution of the
differential equation.
13.13.1 Foundation models
As a result of a line load, q(x), on the upper surface the beam
deflects, causing the
foundation to resist with a line load p(x), whose units may be
taken as N /mm. Various
foundation models define p(x) in various ways. The Winkler
Foundation model has been
used for a century. It assumes that the foundation applies only
a reaction p(x) normal to
the beam, and the p(x) is directly proportional to the beam
deflection w(x):
p(x) = k w(x). The Winkler foundation modulus k has units N /mm
/mm. Effectively,this foundation is a row of closely-packed linear
springs. Note that interactions between
the springs are not considered, so it does not accurately
represent the characteristics of
many practical foundations. To improve the Winkler model some
authors assumed
interactions between the springs and added a second parameter.
The Filonenko-Borodich
Foundation assumes that the top ends of the springs are
connected to an elastic membrane
that is stretched by a constant tension. The Pasternak
Foundation introduces shear
interactions between the springs. He assumed that the top ends
of the springs are
connected to an incompressible layer that resists only
transverse shear deformation. The
-
Supplement 1, Networks, trusses, beams and frames 483
Generalized Foundation model assumes that at each point of
contact there is not only a
pressure but also a moment applied to the beam by the
foundation. The moment is
assumed to be proportional to the angle of rotation (or slope)
of the beam.
Mathematically, all these models are equivalent. The only
difference is the definition of
the parameters, so we rewrite these equations in the form
p(x) = k w(x) − ks d2w(x) / dx2
in which k is the first parameter (Winkler’s modulus), and ks is
the second parameter.
The integral form mathematically equivalent to this problem is
to find the extremum
of the functional
Π =1
2L
∫ EI (w′′ )2 + N (w′ )2 − ks(w′ )2 + k2w2 − 2 q(x) w dxfor all
smooth functions w satisfying the boundary conditions. In a finite
element
formulation the assumed interpolation functions should be such
that w and w′ arecontinuous between elements. This assures that Π
is defined and that we can write Π asthe sum of contributions from
the elements into which the region is divided. Substituting
the usual interpolation matrices :
Π =1
2 eΣ u
T K1u + uT K2u + uT K3u + uT K4u − 2 uT C
e
allows us to define the total element stiffness matrix as K = K1
+ K2 + K3 + K4 whereK1 is the classical beam stiffness matrix,
given earlier, which involves the beam flexural
stiffness EI , K2 is the stiffness matrix which involves the
axial load N , called geometric
stiffness matrix, K3 is the second-parameter foundation
stiffness matrix, and K4 is the
Winkler foundation stiffness matrix. They are defined by the
relations
(13.27)uT K1u = ∫ EI (w′′ )2 dx , uT K2u = ∫ − N (w′)2 dx ,uT
K3u = ∫ − ks(w′)2 dx , uT K4u = ∫ kw w2 dx , uT C = ∫ q(x) w dx
where the integrations are carried out over the element and
where u denotes the element
degrees of freedom. Assembling the elements stiffness matrices
according to the
connectivity of elements, the system equations can be obtained
as K U = F.
13.13.2 Cubic beam-foundation matrices
The practical application of the finite element method depends
on the use of various
interpolation functions and their derivatives. Most of the
interpolation functions for C0
and C1 continuity elements are well known. The C0 functions are
continuous across an
inter-element boundary while the C1 functions also have their
first derivatives continuous
across the boundary. Here we begin with a C1 continuity element
for the beam. This
element is obtained by using Hermite interpolation polynomial
and nodal variables that
include derivatives as well. The geometrical nodes, function H
and the Jacobian matrix J
remain identical to those of the linear element ( C0 bar
element). The resulting matrices
are (with L = Le):
-
484 Finite Element Analysis with Error Estimators
(13.28)K1 = EI
L3
12
6L
−126L
4L2
−6L2L2
12
−6L
Sym.
4L2
K2 =−N30L
36
3L
−363L
4L2
−3L−L2
36
−3L
Sym.
4L2
, K3 =ks
NK2
K4 =kw
420
156
22L
54
−13L
4L2
13L
−3L2156
−22L
Sym.
4L2
.
13.13.3 Fifth order beam element
The Hermite family includes members with additional derivatives
at the two ends
(or with interior nodes with function and derivative values). To
seek a more accurate
solution we will next consider a two noded fifth order Hermite
polynomial. This has
three variables per node : wi, w′i, w′′i. The corresponding
generalized parameters are u1,u2, and u3, respectively. For a two
nodes line element, the equation of deflection is:
w(x) = H1u1 + H2u2 + H3u3 + H4u4 + H5u5 + H6u6 .
The shape function in local coordinates are given in Fig. 3.6.
By using numerical
integration and cubic interpolation one obtains the numerical
form equivalent to the
element stiffness matrices given in Eq. 13.28. Likewise, if we
employ the fifth order
interpolation functions, the corresponding numerically
integrated (6 × 6) matrices areobtained. Both forms can be used in
later examples.
For fourth or sixth order differential equations it is common to
use these same
higher order continuity elements when the "data" are everywhere
smooth. If the data,
p(x), in Eq. 13.24 is smooth then we expect the exact solution
(with R(x) = 0) to havesmooth fourth derivatives. Then we are
justified in using the higher continuity elements.
In the section on eigen-solutions to the Schrodinger equation we
will illustrate the
increased accuracy obtained for using higher continuity
elements.
-
Supplement 1, Networks, trusses, beams and frames 485
Table 13.1 Homogeneous solution interpolation for
semi-infinite beam on foundation
a) PDE :d2
dx2
EId2v
dx2
− Nd2v
dx2+ k v = q, |N | ≠ 2√ k EI
b) Homogeneous Interpolation : H =1
a − b
( a ebx − b eax ) ( eax − ebx )
c) Stiffness Matrix : c = a2 + 3 ab + b2
d) Force Vector : F =q
a b
−a − b1
e) Mass Matrix : M =ρ
2 ab(a + b)
−csym.
(a + b)−c
d = √ √ k4 EI + N4 EI , e = √ √ k4 EI − N4 EIa = − d + e, b = −
d + 2e.
K =1
2 ab(a + b)
(−EI a3 b3 − N a2 b2 − c k)symmetric
(EI a2 b2 − k)(a + b)(−c EI a3 b3 − N a2 b2 − k)
13.14 Nodally exact beam elements *
Recall that the analytic solution to a differential equation is
generally viewed as the
sum of a homogeneous solution and a particular solution. It has
been proved by
Tong [20] that if the finite element interpolation functions are
the exact solution to the
homogeneous differential equation, then the finite element
solution of a non-
homogeneous (no zero) source term will always be exact at the
nodes. Clearly, this also
means that if the source is zero, then this type of solution
would be exact everywhere. It
is well known that the exact solution of the non-homogeneous
equations for the beam on
an elastic foundation will generally involve the products and
sums of trigeometric and
hyperbolic functions. Therefore, if we replaced the previous
polynomial interpolations
with a more complicated set, we can assure ourselves of results
that are at least exact at
the nodes. In practice, using hyperbolic functions with large
arguments can break down
due to the way their values are computed in the operating system
mathematics library.
For a semi-infinite beam-column on an elastic foundation the
element matrices obtained
from interpolating with the homogeneous solutions are given in
Table 13.1.
-
486 Finite Element Analysis with Error Estimators
13.15 Plane frames
If we combine the bar member, which carrys only loads parallel
to its axis, and a
beam which carries only loads transferse to its axix we get the
so-called beam-column
element. The one dimensional version of that has three nodal
degrees of freedom: an
axial displacement vector, a transverse displacement vector, and
a rotation vector
(perpendicular to the other two). Analogous to a planar truss,
which is the extension of a
simple two force axial member to a planar assembly that resists
loads by axial loads only,
a frame is an assembly of beam-column members that adds the
ability to also transmit
moments (couples) through its joints. In other words, a frame is
a combination of
individual beam-column elements that resists loadings by a
combination of bending, axial
member forces, and transverse (shear) forces. Therefore it is a
more efficient structure
than a truss.
Weav er [22] has considered the detailed programming aspects of
several one-
dimensional structural elements (nn = 2). Among them is the
plane frame element whichhas two displacements and one rotation per
node (nd = 3). A typical element is similar tothat shown in Fig.
13.9 where xL and yL are the member axes and x, y are the global
axes
(ns = 2). The difference is that at each node there is a moment
vector perpendicular tothe paper (in the direction of the z axis).
A frame element with an area of A, having a
cross-sectional moment of inertia I , a length L, and made of a
material having a modulus
of E has an element square matrix (stiffness matrix) that is a
combination of those from
the axial bar and