Embed Size (px)
Citation preview
Studies on Precision Agriculture in CAU
Li Minzan, Wang Maohua
Key Laboratory of Modern Precision Agriculture Integration Research,
China Agricultural University

China Agricultural University
Key Laboratory of Modern
Precision Agriculture System
Integration Research,
Ministry of Education, China
China Agricultural University
Dr. Maohua Wang
Professor of China Agricultural University
Member of Chinese Academy of Engineering
Member of International Eurasian Academy of
Sciences
Honor President of Chinese Society of
Agricultural Engineering
Honor President of Chinese Society of
Agricultural Machinery
China Agricultural University

China Agricultural University
Prof. Simon Blackmore
Head of Engineering
Harper Adams University, UK

China Agricultural University
Prof. Peter Shulze Lammers
Bonn University, Germany
China Agricultural University
Prof. Nick Sigrimis
The Agricultural University
of Athens, Greece
2013/11/12 [email protected] 8
Overview of precision agriculture
Data collection
Modeling and DSS
VRT
2013/11/12 [email protected] 9
Outline
Studies on smart agricultural machines 2
Development of agricultural sensors 1
We need to strengthening studies
on modeling and DSS 3
2013/11/12 [email protected] 10
Development of agricultural sensors
Development of crop sensors 2
Development of other sensors in PA 3
Development of soil sensors 1
2013/11/12 [email protected] 12
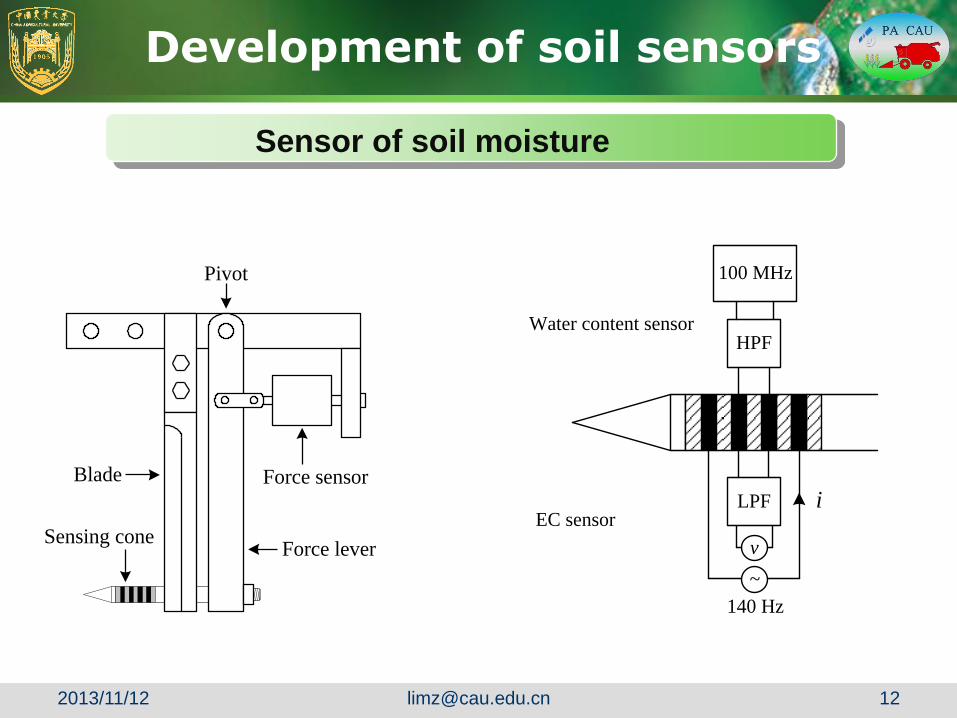
Development of soil sensors
Sensor of soil moisture
Force sensor
Pivot
Force lever
Blade
Sensing coneEC sensor
Water content sensor
100 MHz
HPF
v
140 Hz
~
LPF i
2013/11/12 [email protected] 14
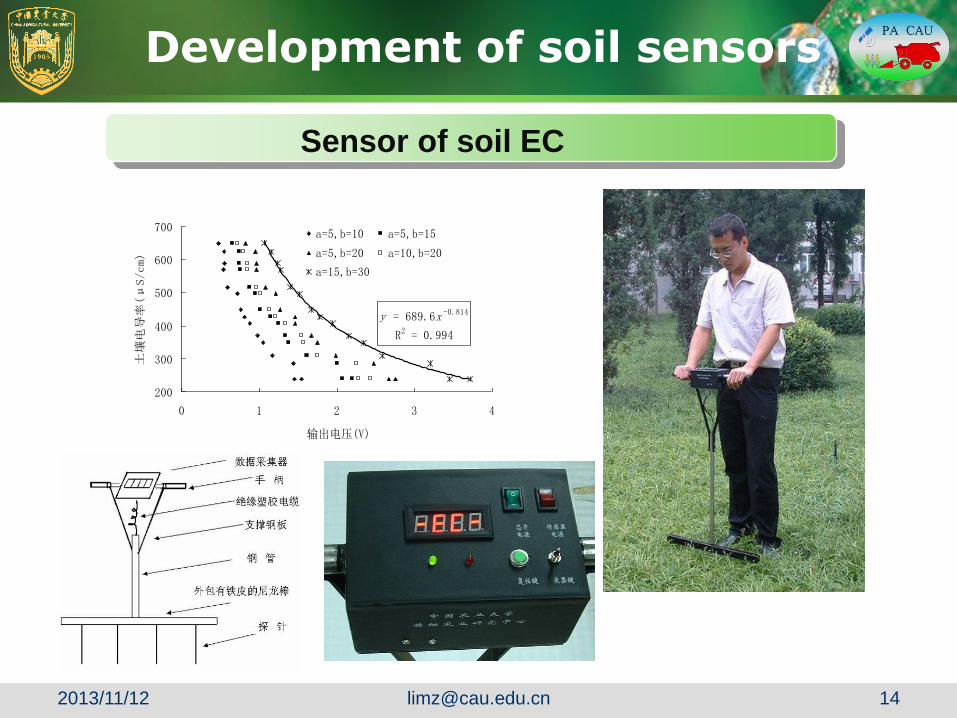
Development of soil sensors
Sensor of soil EC
y = 689.6x -0.814
R2 = 0.994
200
300
400
500
600
700
0 1 2 3 4
输出电压(V)
土壤
电导
率(μ
S/cm)
a=5,b=10 a=5,b=15
a=5,b=20 a=10,b=20
a=15,b=30
15
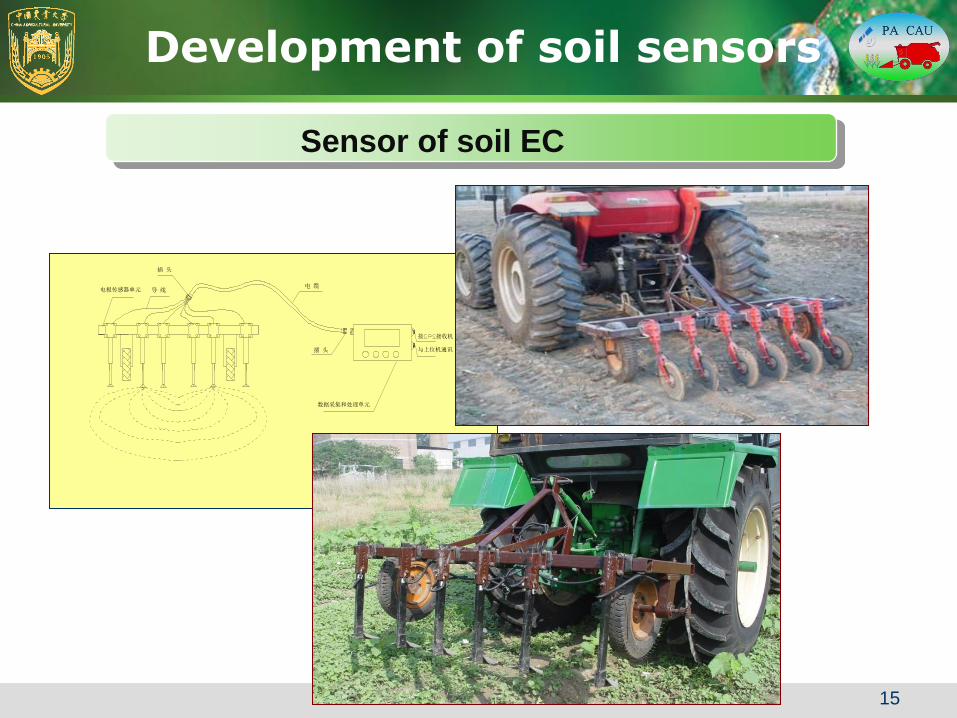
Development of soil sensors
Sensor of soil EC
电极传感器单元 导 线电 缆
插 头
插 头
数据采集和处理单元
接 接收机
与上位机通讯
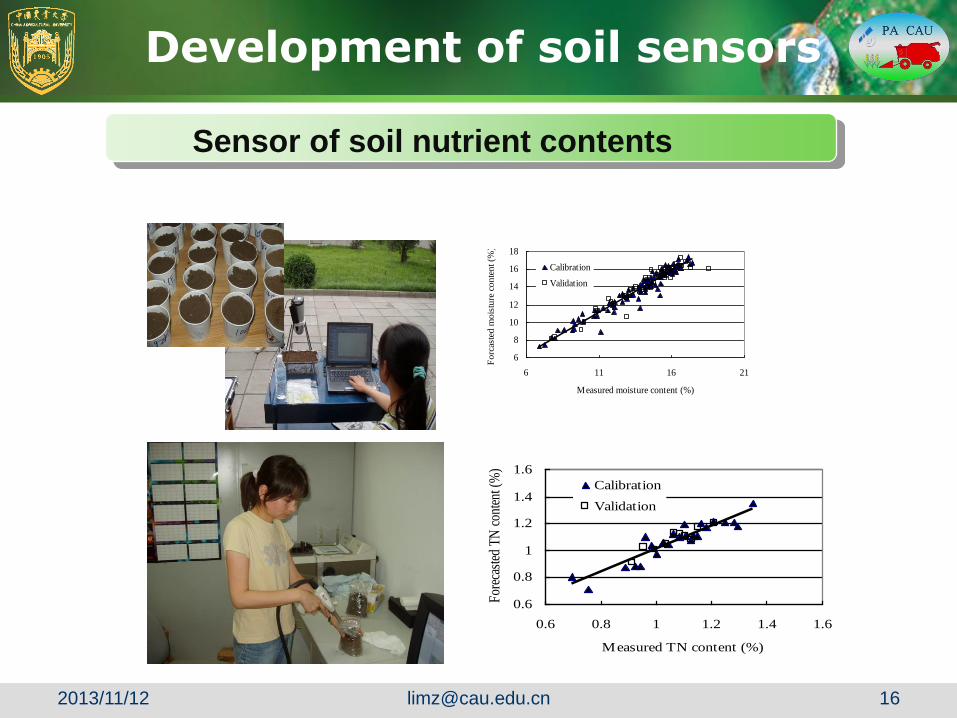
Development of soil sensors
Sensor of soil nutrient contents
6
8
10
12
14
16
18
6 11 16 21
Measured moisture content (%)
Forc
aste
d m
ois
ture
conte
nt (%
)
Calibration
Validation
0.6
0.8
1
1.2
1.4
1.6
0.6 0.8 1 1.2 1.4 1.6
Measured TN content (%)
For
ecas
ted
TN
con
tent
(%
)Calibration
Validation
2013/11/12 [email protected] 16
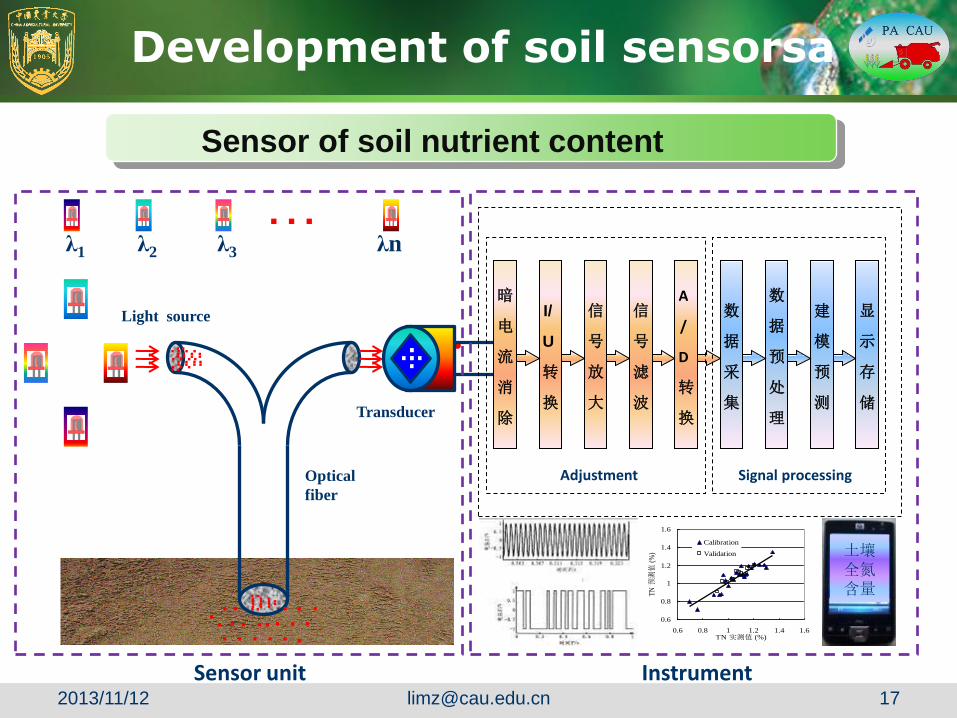
Development of soil sensorsa
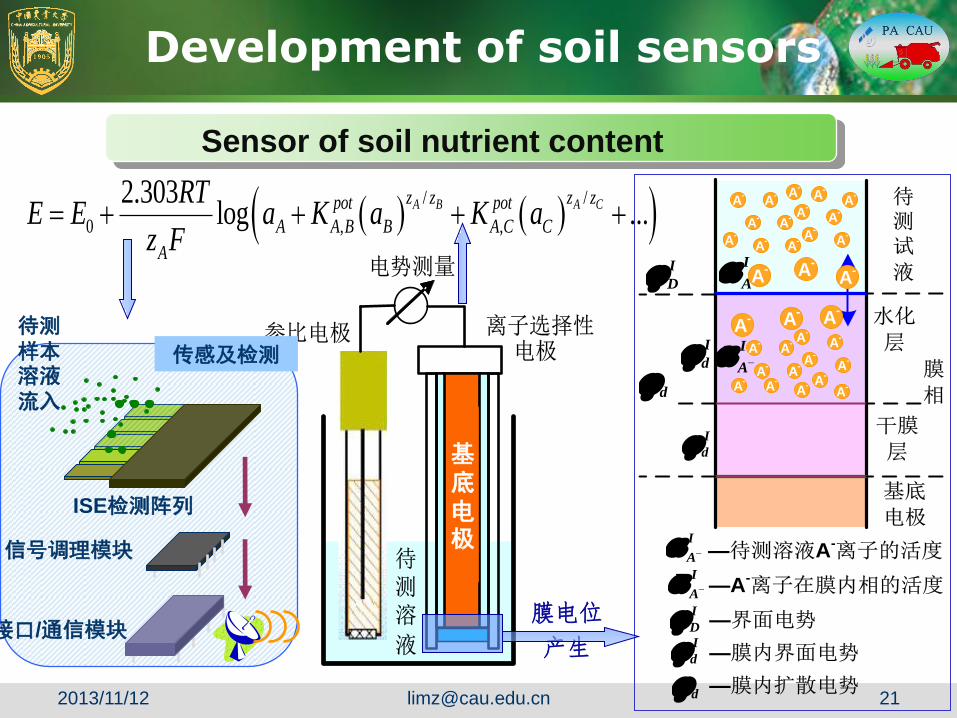
Sensor of soil nutrient content
2013/11/12 [email protected] 17
.. … …. …. … ..
… λ1 λ2 λ3 λn
Light source
Optical
fiber
Transducer
Sensor unit Instrument
.. .… .… .… …. …. …. … ..
. .
. . . . .
. . .
. . . . . . . . . .
. . . . . . .
Adjustment
数
据
采
集
I/
U
转
换
信
号
放
大
A
/
D
转
换
信
号
滤
波
暗
电
流
消
除
数
据
预
处
理
建
模
预
测
显
示
存
储
Signal processing
土壤全氮含量
0.6
0.8
1
1.2
1.4
1.6
0.6 0.8 1 1.2 1.4 1.6TN 实测值 (%)
TN
预测值
(%
)
Calibration
Validation
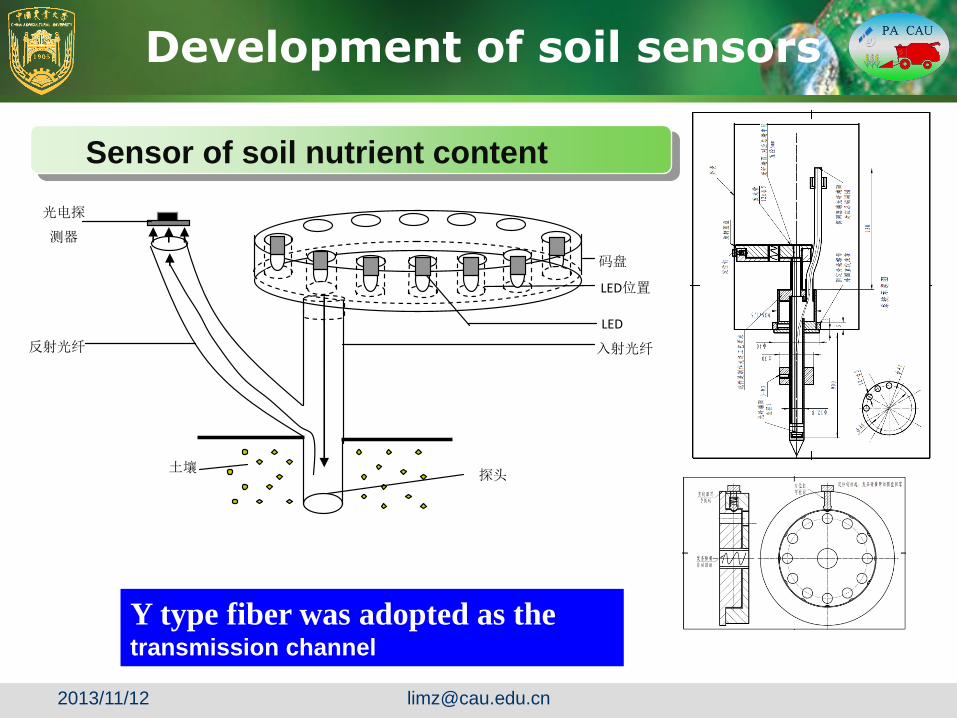
Y type fiber was adopted as the transmission channel
2013/11/12 [email protected]
Development of soil sensors
光电探
测器
土壤
入射光纤
码盘
反射光纤
LED位置
LED
探头
Sensor of soil nutrient content
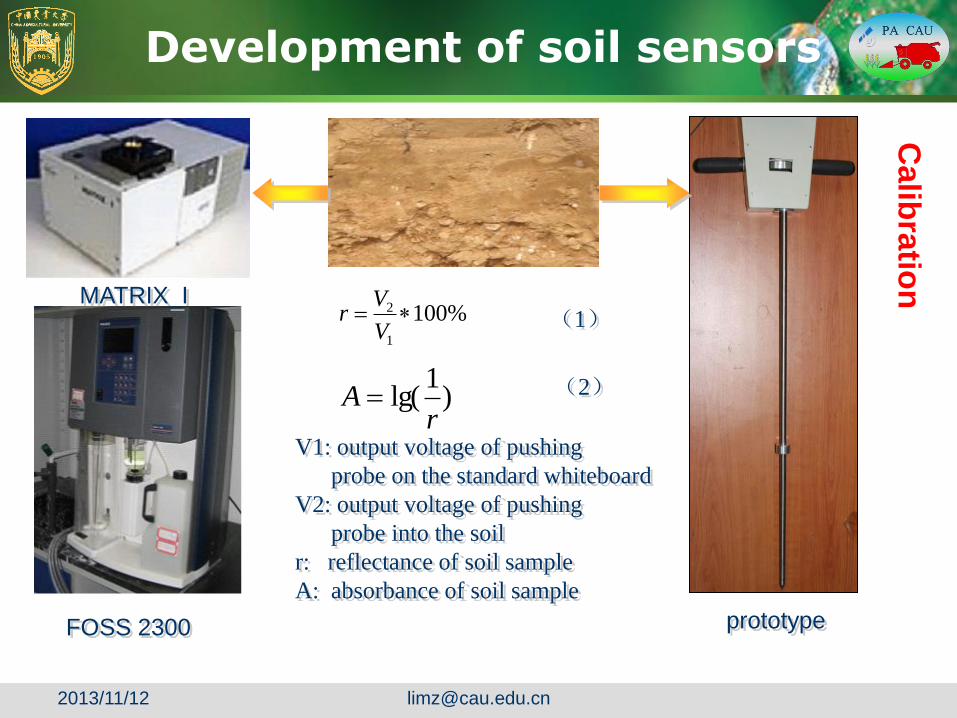
%1001
2 V
Vr
MATRIX_I
)1
lg(r
A
(1)
(2)
V1: output voltage of pushing
probe on the standard whiteboard
V2: output voltage of pushing
probe into the soil
r: reflectance of soil sample
A: absorbance of soil sample
FOSS 2300 prototype
Calib
ratio
n
2013/11/12 [email protected]
Development of soil sensors
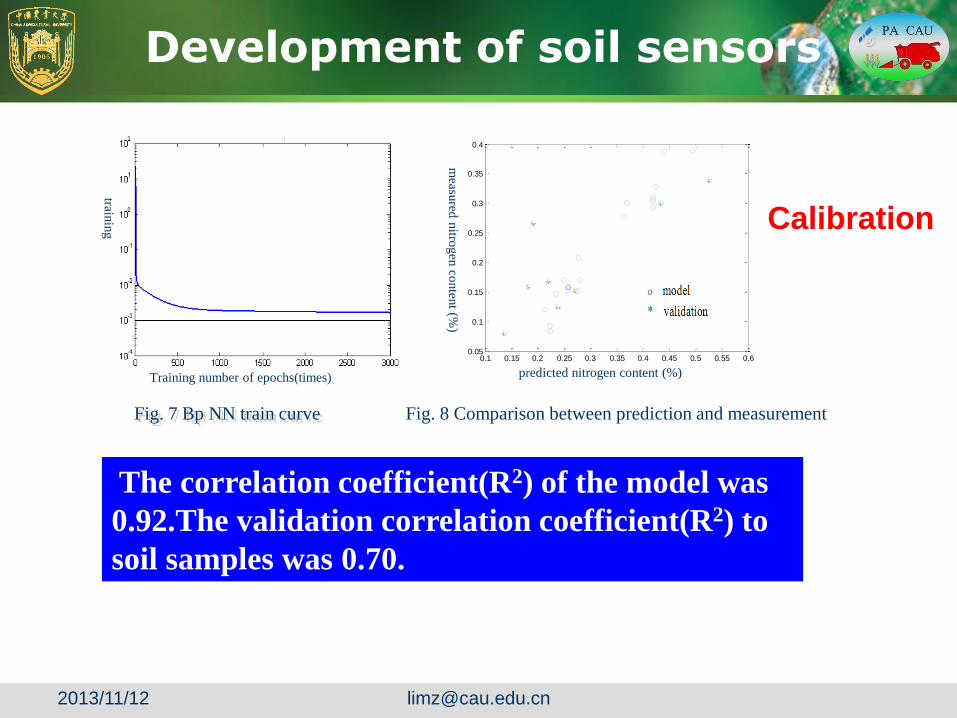
Fig. 8 Comparison between prediction and measurement
The correlation coefficient(R2) of the model was
0.92.The validation correlation coefficient(R2) to
soil samples was 0.70.
Fig. 7 Bp NN train curve
Training number of epochs(times)
trainin
g
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.60.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
predicted nitrogen content (%)
measu
red n
itrogen
conten
t (%)
Calibration
2013/11/12 [email protected]
Development of soil sensors
Development of soil sensors
Sensor of soil nutrient content
2013/11/12 [email protected] 21
膜
相
基底
电极
待测试
液
水化
层
干膜
层
I
A
I
A
I
D
I
d
d
I
d
—A-离子在膜内相的活度
I
A —待测溶液A
-离子的活度
I
A
I
D
—界面电势I
d —膜内界面电势
d —膜内扩散电势
基
底
电
极
离子选择性电极
参比电极
电势测量
待测溶
液
膜电位
产生
A- A
-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
A-
基底电极
/ /
0 , ,
2.303log ...A B A Cz z z zpot pot
A A B B A C C
A
RTE E a K a K a
z F
ISE检测阵列
信号调理模块
接口/通信模块
待测样本溶液
流入
传感及检测
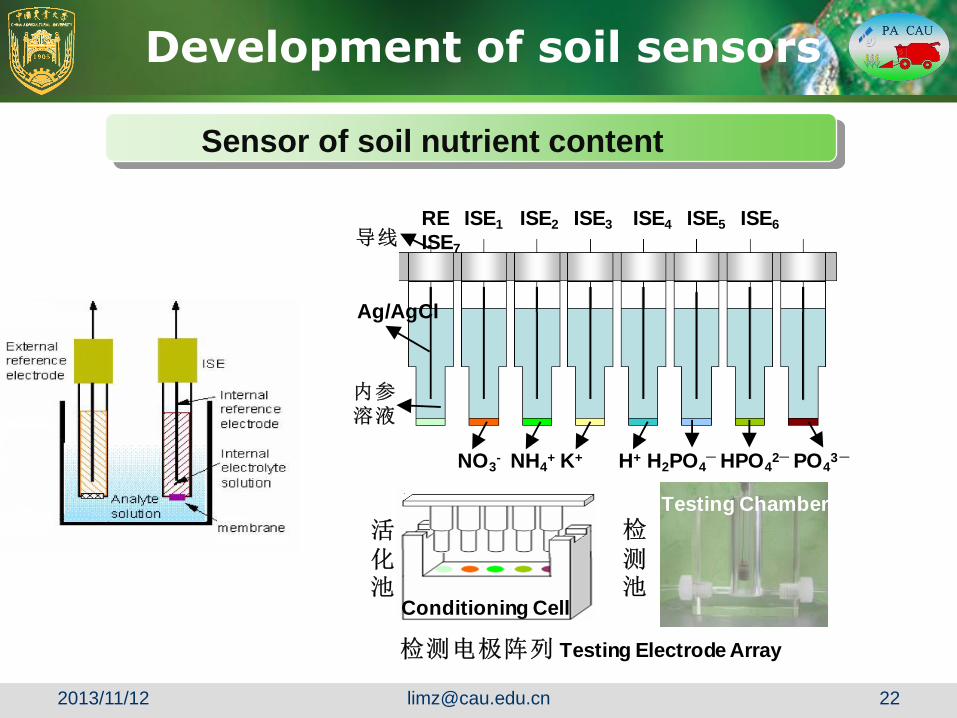
Development of soil sensors
Sensor of soil nutrient content
检测电极阵列 Testing Electrode Array
Ag/AgCl
NO3-
导线
NH4+ K+ H+ H2PO4
- PO43-HPO4
2-
内参溶液
RE ISE1 ISE2 ISE3 ISE4 ISE5 ISE6
ISE7
Conditioning Cell
活化池
检测池
Testing Chamberl
2013/11/12 [email protected] 22
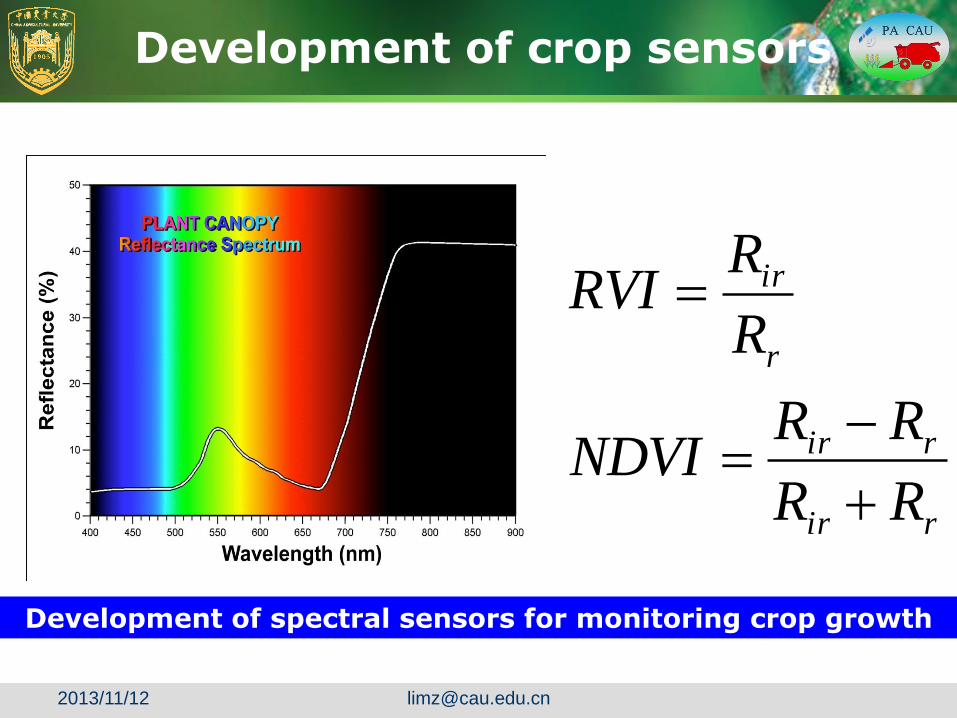
rir
rir
r
ir
RR
RRNDVI
R
RRVI
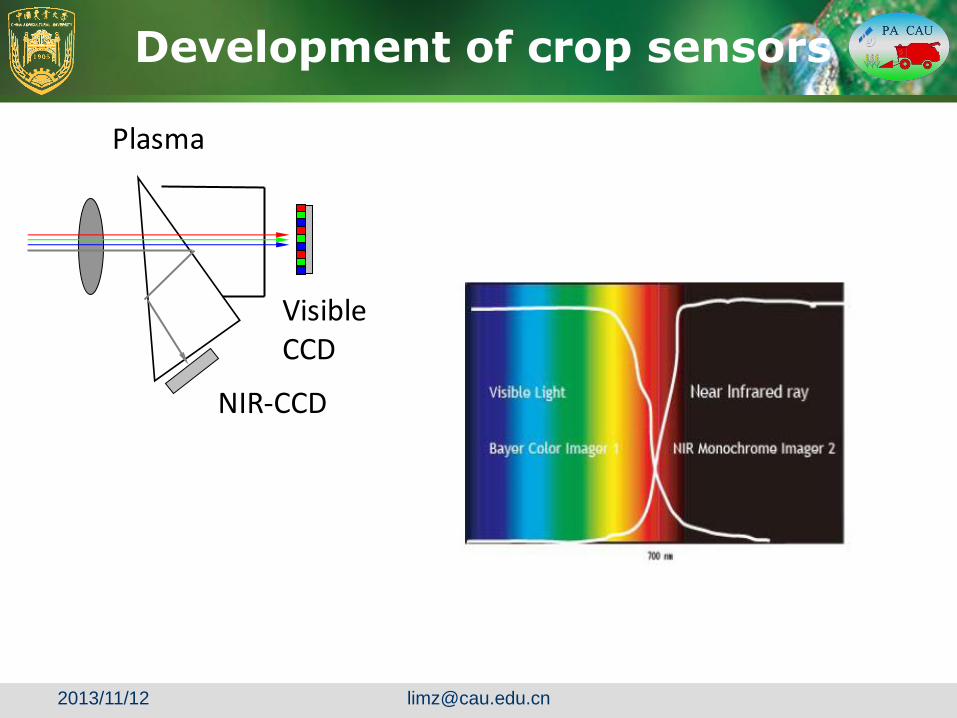
Development of spectral sensors for monitoring crop growth status
Development of crop sensors
2013/11/12 [email protected]
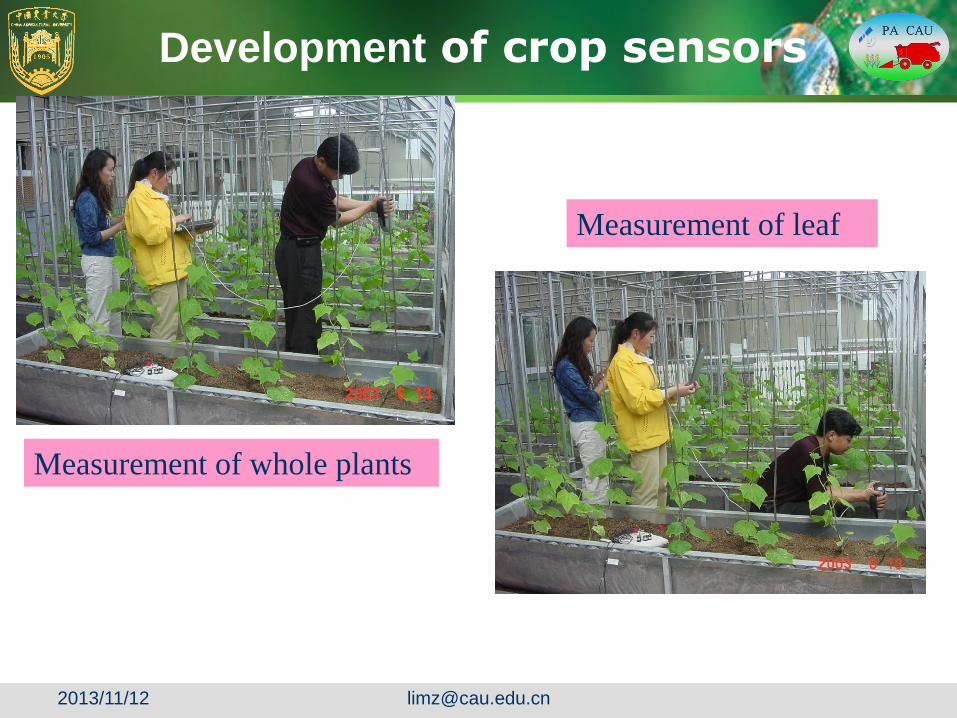
Measurement of whole plants
Measurement of leaf
Development of crop sensors
2013/11/12 [email protected]
+
-
+
-
+
-
+
-
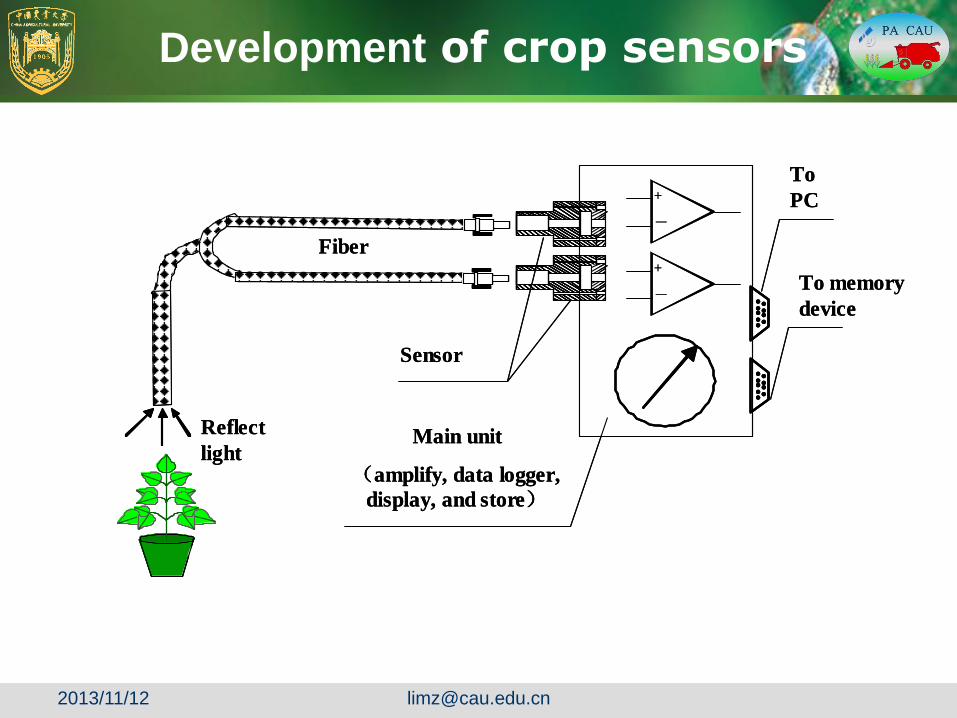
.........
.........
Reflect
light
Fiber
Sensor
Main unit
(amplify, data logger,
display, and store)
To
PC
To memory
device
+
-
+
-
+
-
+
-
..................
..................
Reflect
light
Fiber
Sensor
Main unit
(amplify, data logger,
display, and store)
To
PC
To memory
device
Development of crop sensors
2013/11/12 [email protected]
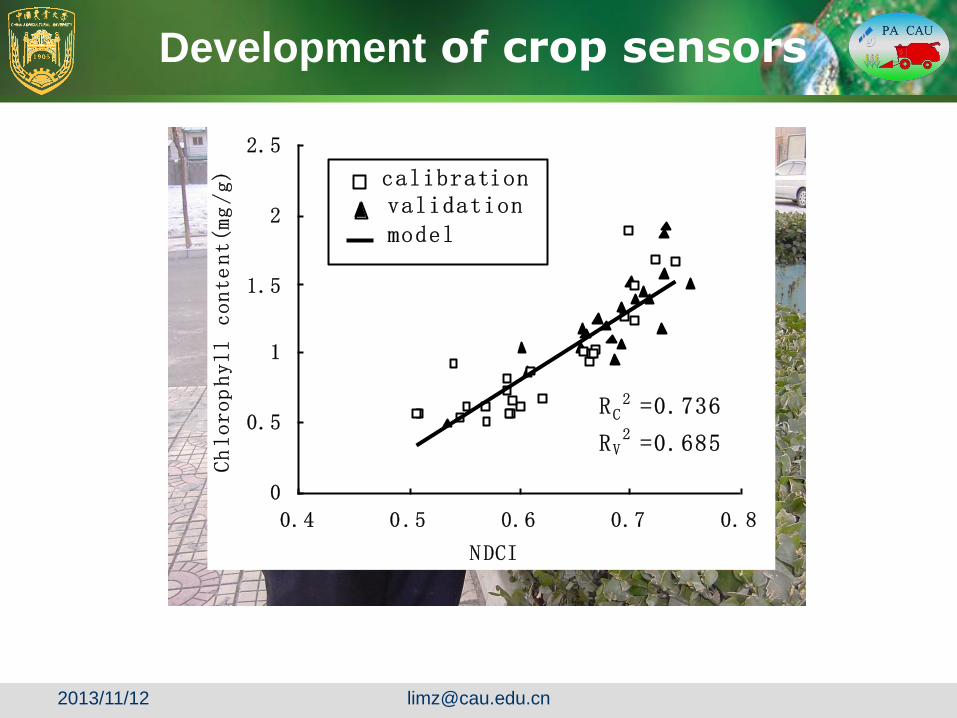
0
0.5
1
1.5
2
2.5
0.4 0.5 0.6 0.7 0.8
NDCI
Chlorophyll content(mg/g) calibration
validation model
RC2 =0.736
RV2 =0.685
Development of crop sensors
2013/11/12 [email protected]
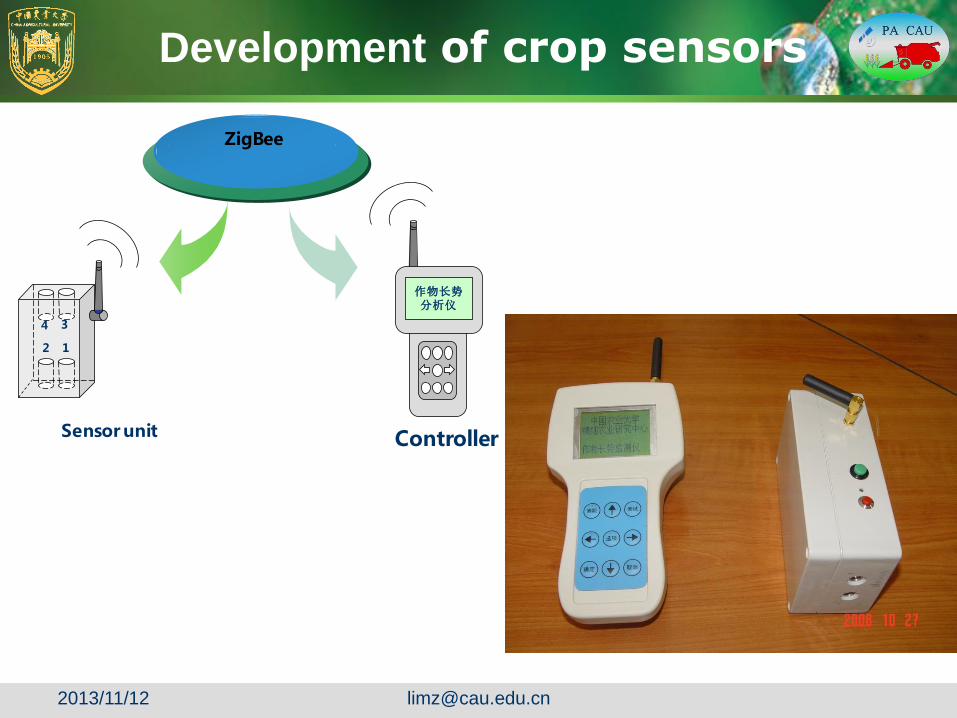
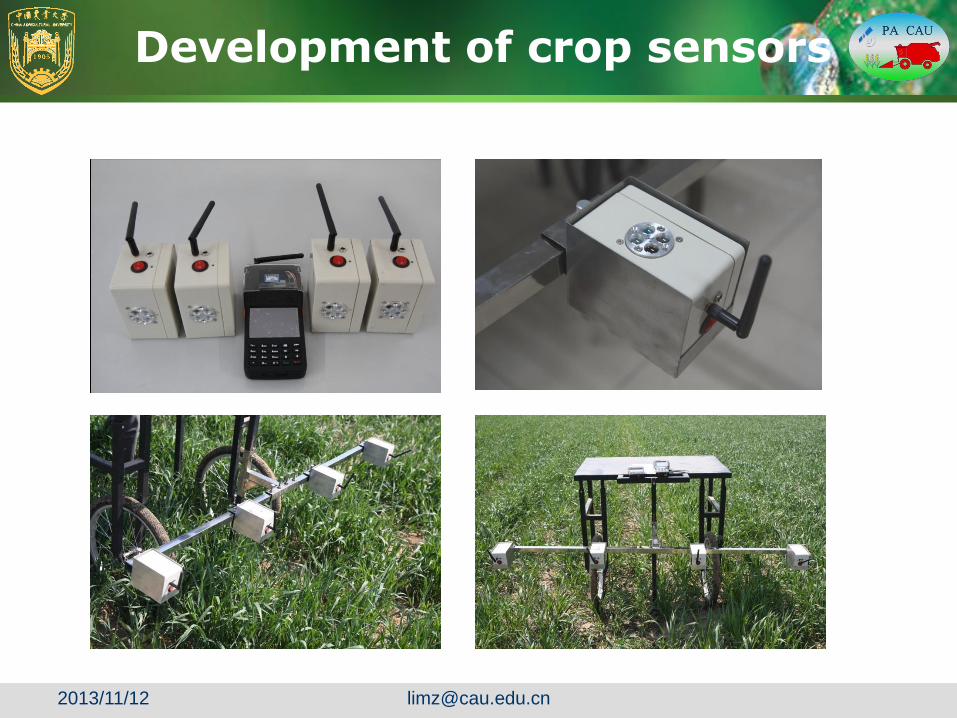
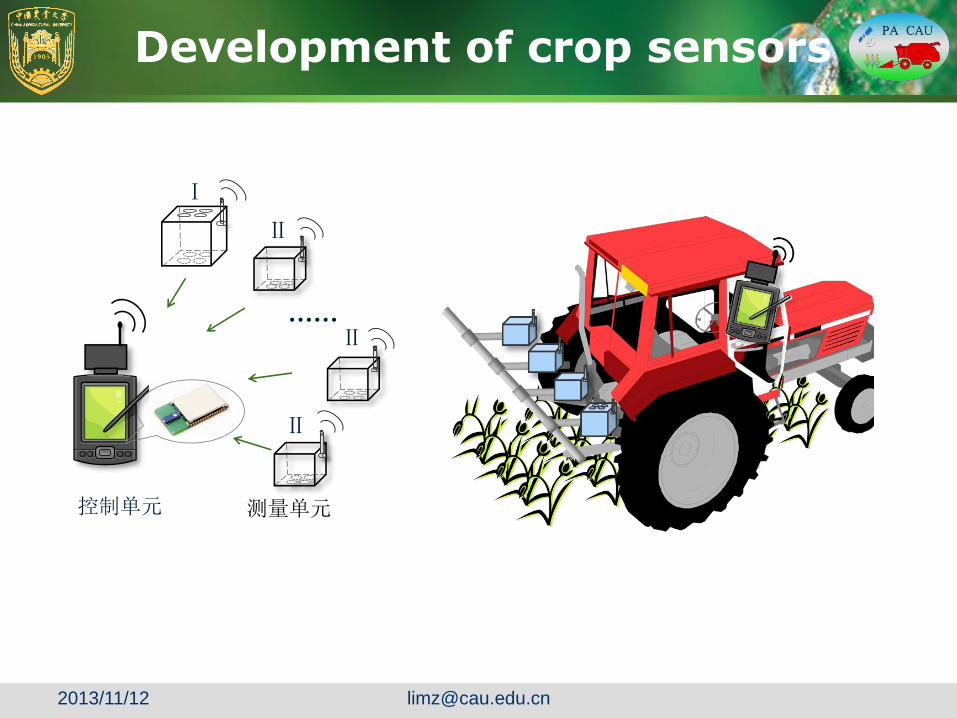
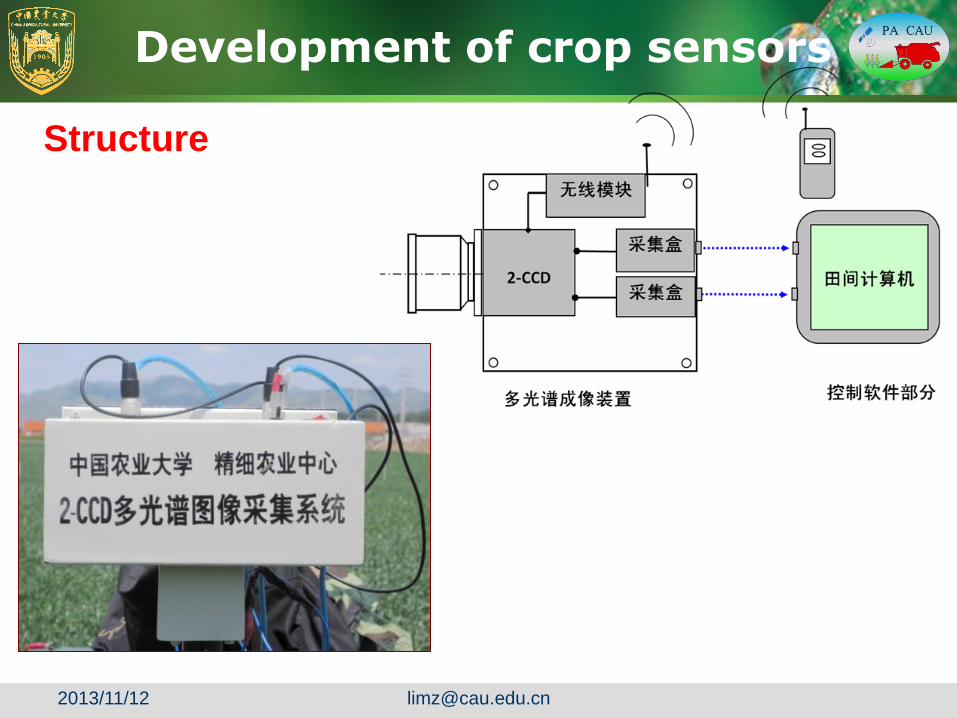
Development of crop sensors
2013/11/12 [email protected]
ZigBee
作物长势分析仪
Controller
4 3
12
Sensor unit
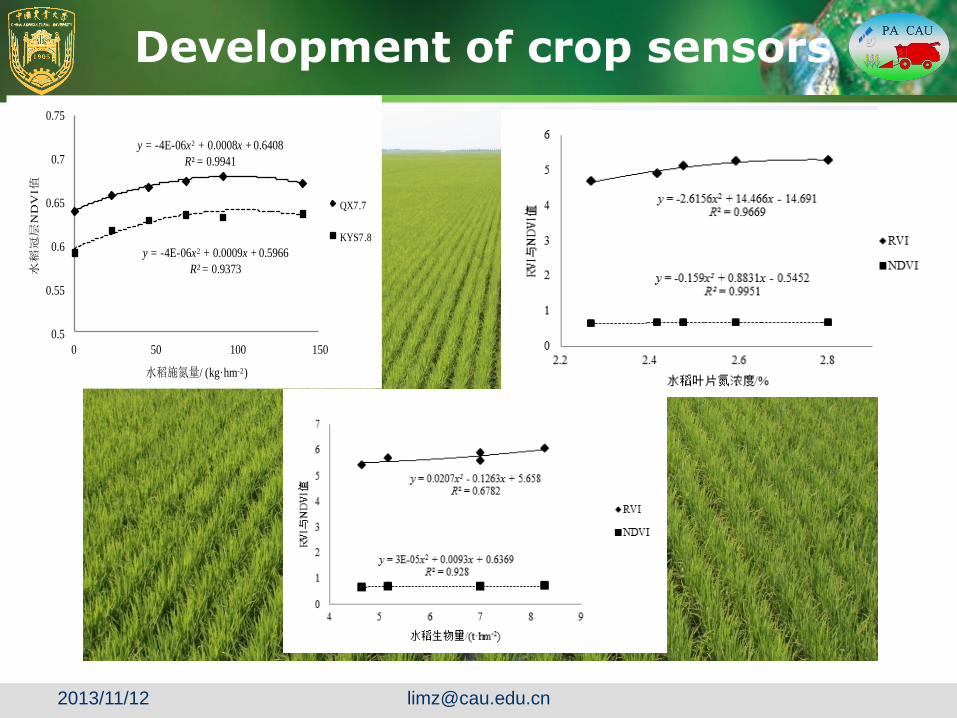
y = -4E-06x2 + 0.0008x + 0.6408
R² = 0.9941
y = -4E-06x2 + 0.0009x + 0.5966
R² = 0.9373
0.5
0.55
0.6
0.65
0.7
0.75
0 50 100 150
水稻
冠层
ND
VI值
水稻施氮量/ (kg·hm-2)
QX7.7
KYS7.8
Development of crop sensors
2013/11/12 [email protected]

Data Process
sunlight
Sunlight
Reflect
Sunlight
550nm,650nm, 766nm, 850nmnm
Development of crop sensors
2013/11/12 [email protected]
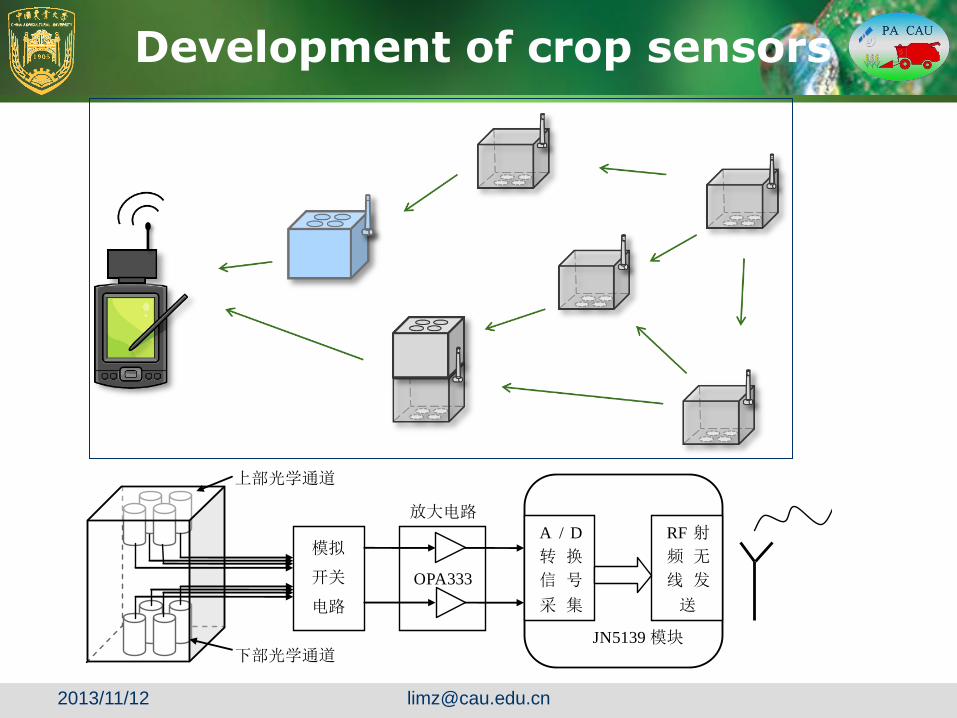
OPA333
JN5139 模块
RF 射
频 无
线 发
送
A / D
转 换
信 号
采 集
上部光学通道
下部光学通道
模拟
开关
电路
放大电路
Development of crop sensors
2013/11/12 [email protected]
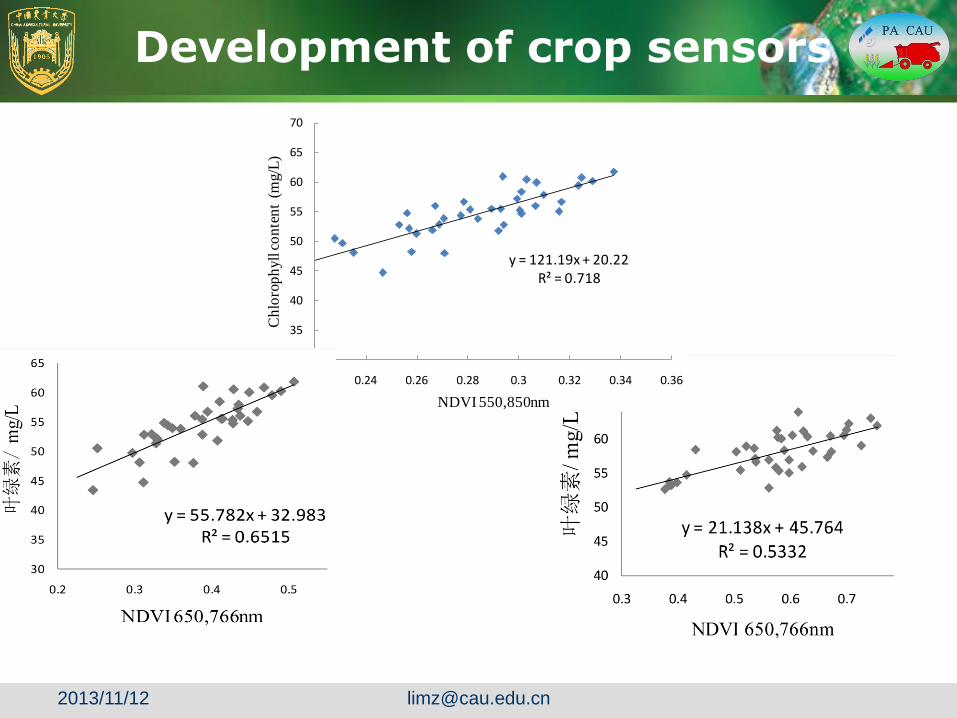
y = 121.19x + 20.22R² = 0.718
30
35
40
45
50
55
60
65
70
0.22 0.24 0.26 0.28 0.3 0.32 0.34 0.36
Ch
loro
ph
yll
co
nte
nt
(mg/L
)
NDVI 550,850nm
Development of crop sensors
2013/11/12 [email protected]
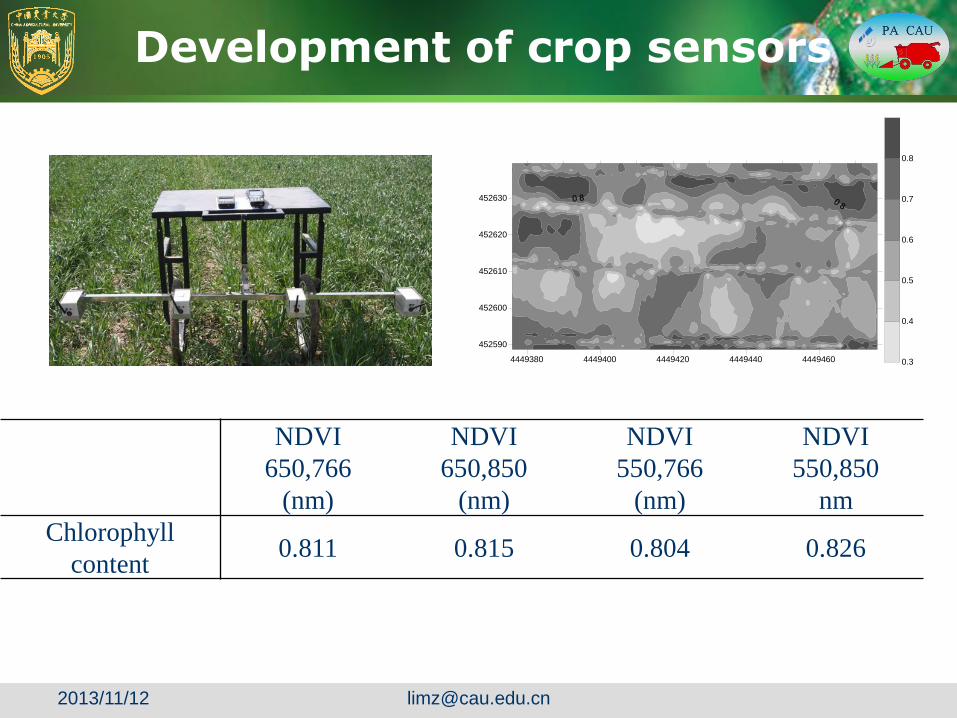
4449380 4449400 4449420 4449440 4449460
452590
452600
452610
452620
452630
0.3
0.4
0.5
0.6
0.7
0.8
NDVI
650,766
(nm)
NDVI
650,850
(nm)
NDVI
550,766
(nm)
NDVI
550,850
nm
Chlorophyll
content 0.811 0.815 0.804 0.826
Development of crop sensors
2013/11/12 [email protected]
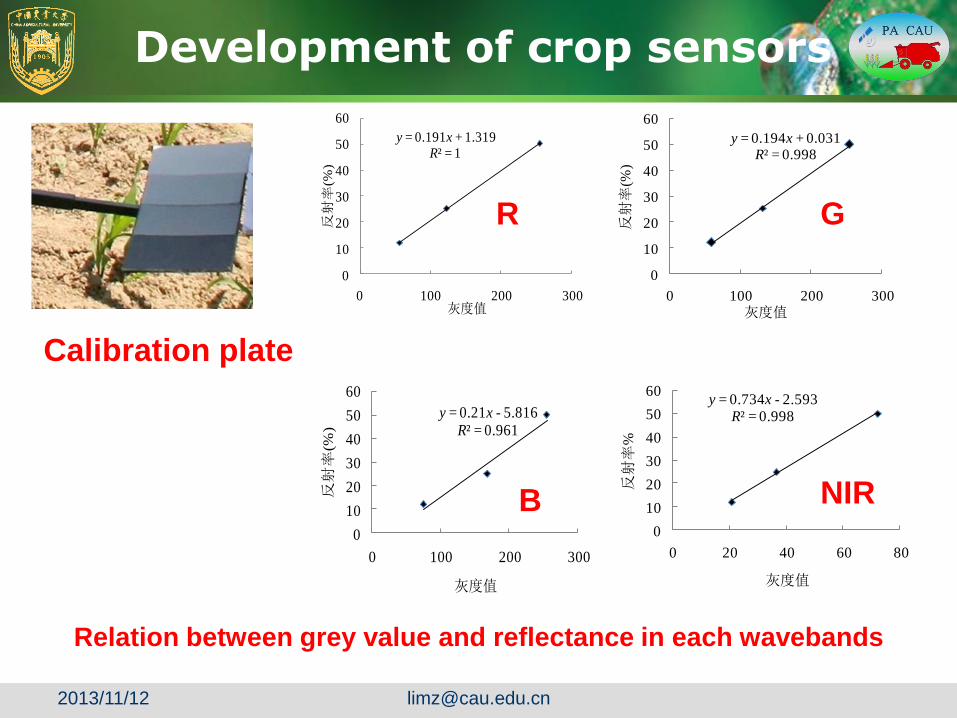
Relation between grey value and reflectance in each wavebands
Calibration plate
y = 0.191x + 1.319R² = 1
0
10
20
30
40
50
60
0 100 200 300
反射
率(%
)
灰度值
y = 0.194x + 0.031R² = 0.998
0
10
20
30
40
50
60
0 100 200 300
反射
率(%
)
灰度值
y = 0.21x - 5.816R² = 0.961
0
10
20
30
40
50
60
0 100 200 300
反射
率(%
)
灰度值
y = 0.734x - 2.593R² = 0.998
0
10
20
30
40
50
60
0 20 40 60 80
反射率
%
灰度值
R G
B NIR
Development of crop sensors
2013/11/12 [email protected]

Experiments on tomato plants
Relationship between nutrient parameter and vegetation index
R NDVI GNDVI GRVI RVI NDGI DVI
SPAD 0.925 0.936 0.934 0.927 0.770 0.926
N content
0.771 0.795 0.810 0795 0.672 0.621
0
10
20
30
40
50
0 10 20 30 40 50
SP
AD值预测值
SPAD值实测值
建模
验证
RC=0.926RV=0.951
1
2
3
4
5
6
1 2 3 4 5 6
全N含
量预
测值
(%)
全N含量实测值(%)
建模
验证
RC=0.807RV=0.680
Development of crop sensors
2013/11/12 [email protected]
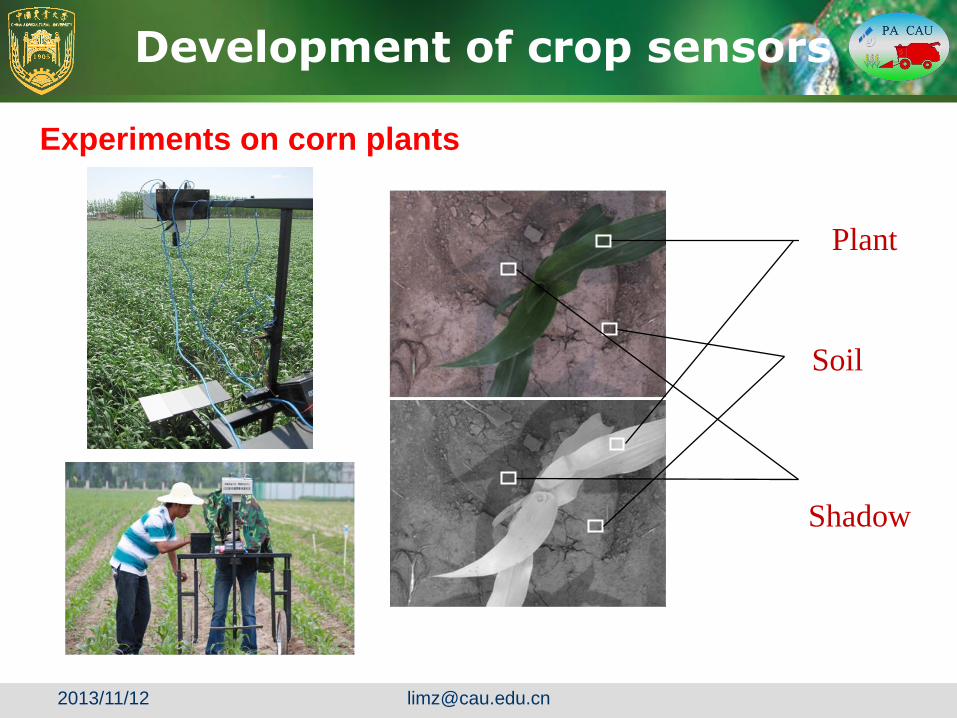
Experiments on corn plants
Plant
Soil
Shadow
Development of crop sensors
2013/11/12 [email protected]
(a) RGB image (b) 2G-R-B for filtering (c) OTSU separating
(a) NIR image (b) Median for filtering (c) OTSU separating
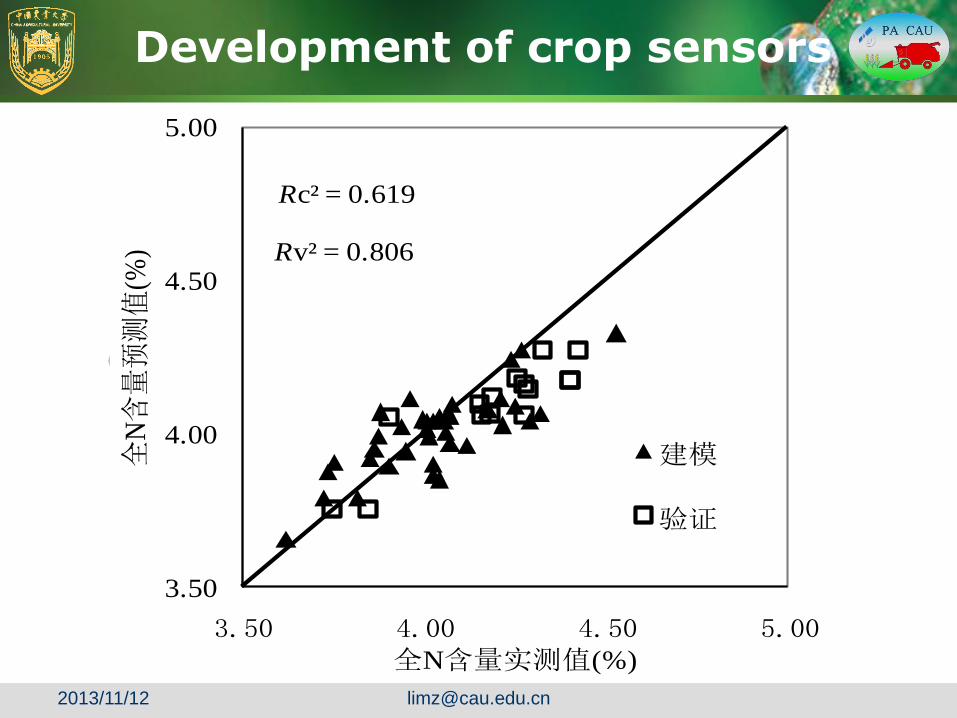
Rc² = 0.619
Rv² = 0.806
3.50
4.00
4.50
5.00
3.50 4.00 4.50 5.00
全N含
量预
测值
(%)
全N含量实测值(%)
建模
验证
Development of crop sensors
2013/11/12 [email protected]
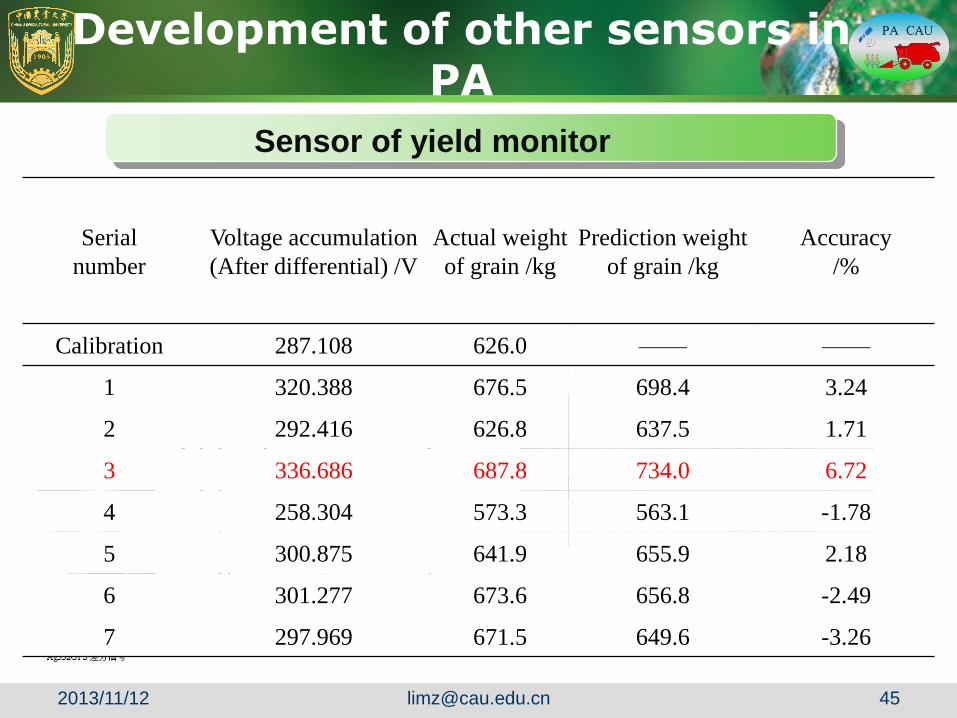
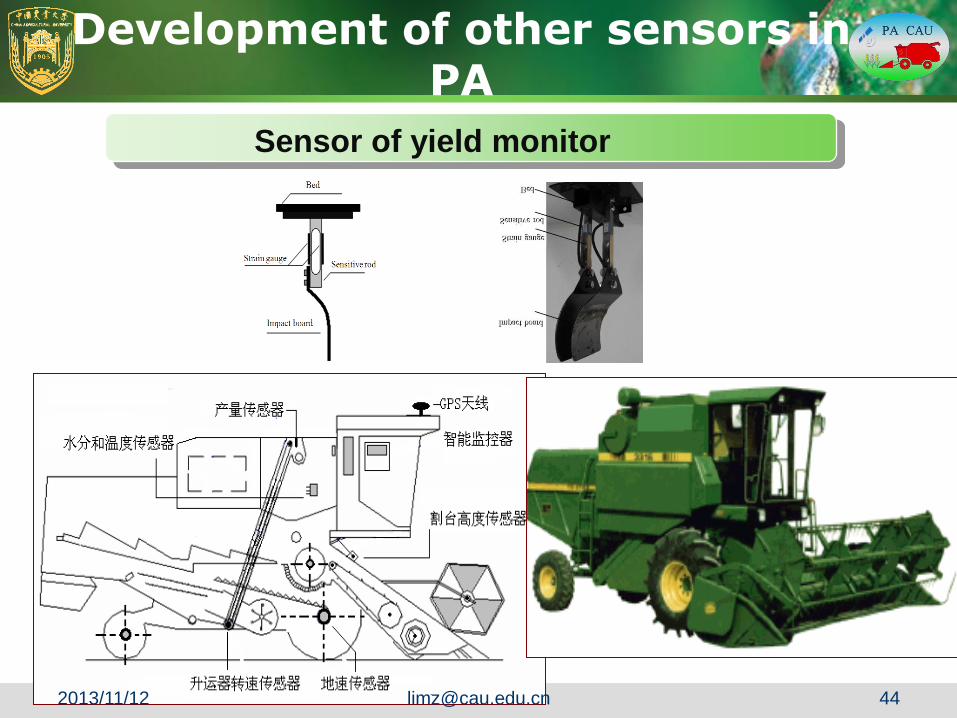
Sensor of yield monitor
Serial
number
Voltage accumulation
(After differential) /V
Actual weight
of grain /kg
Prediction weight
of grain /kg
Accuracy
/%
Calibration 287.108 626.0 —— ——
1 320.388 676.5 698.4 3.24
2 292.416 626.8 637.5 1.71
3 336.686 687.8 734.0 6.72
4 258.304 573.3 563.1 -1.78
5 300.875 641.9 655.9 2.18
6 301.277 673.6 656.8 -2.49
7 297.969 671.5 649.6 -3.26
2013/11/12 [email protected] 45
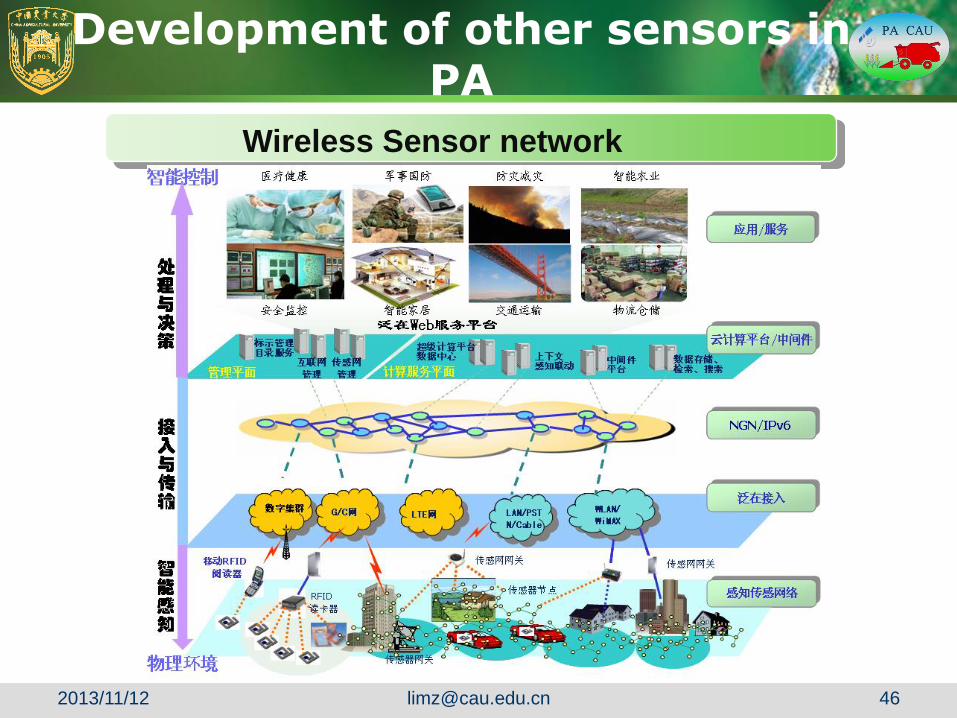
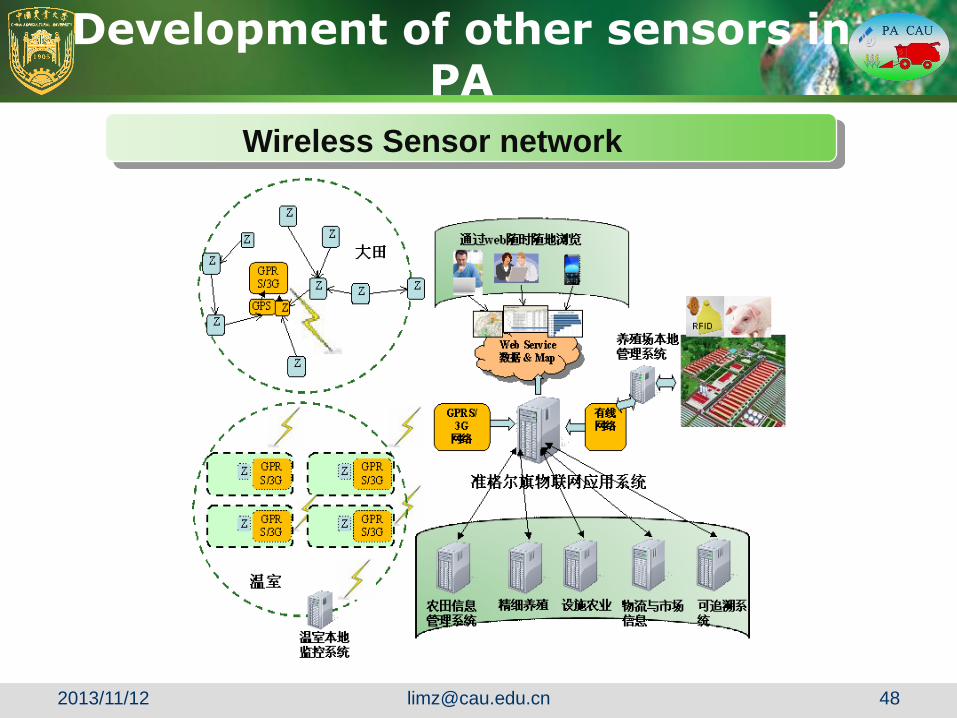
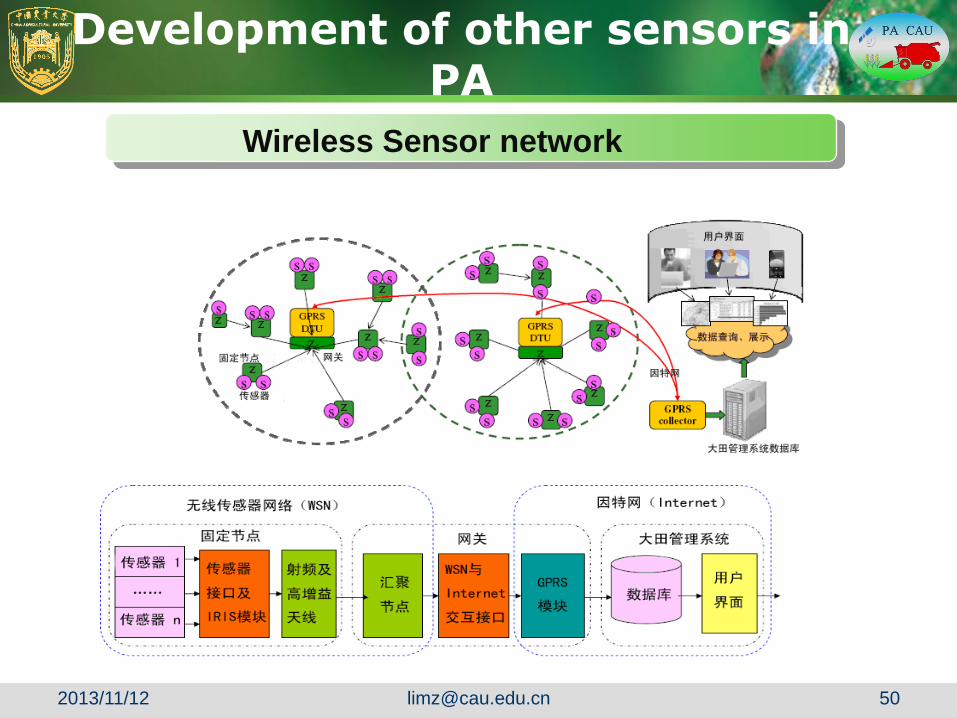
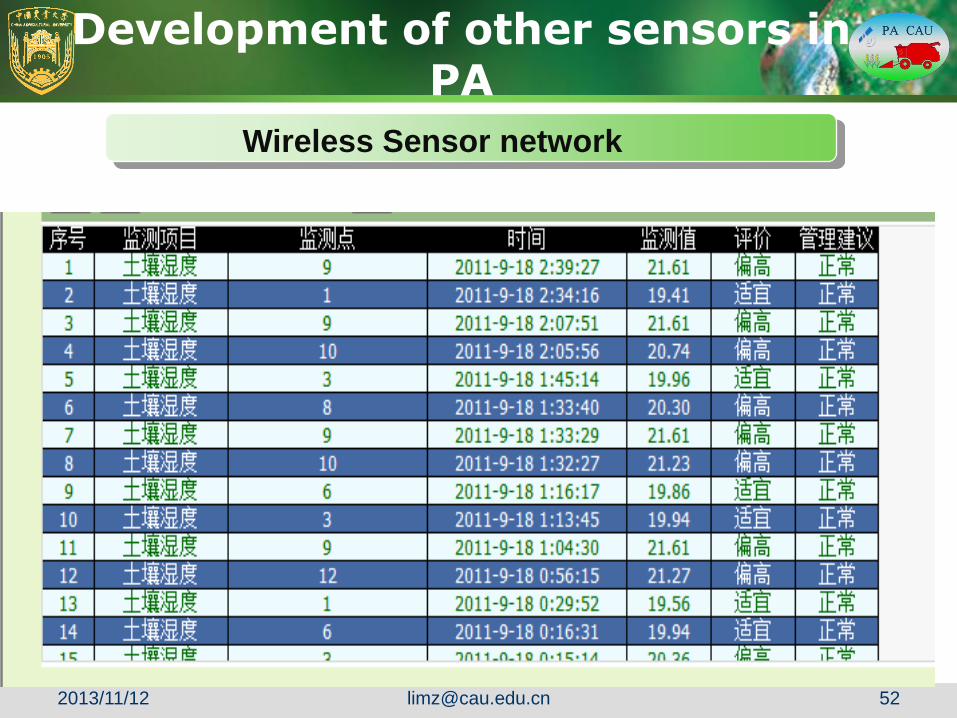
Development of other sensors in PA
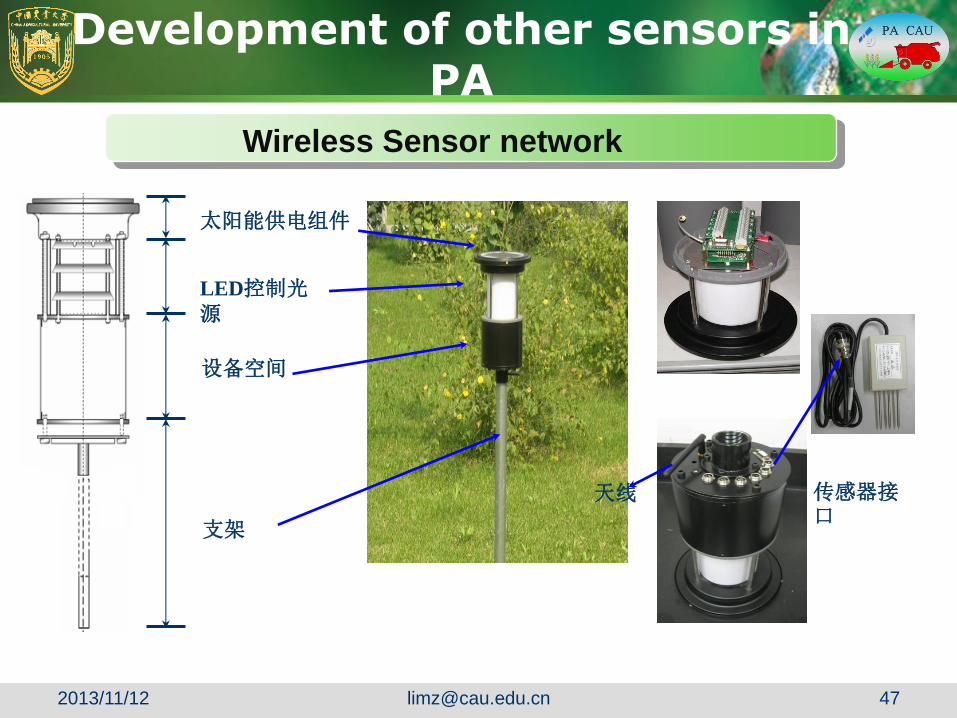
Wireless Sensor network
2013/11/12 [email protected] 47
太阳能供电组件
LED控制光源
支架
设备空间
天线 传感器接口
Development of other sensors in PA

ARM 920T
S3C2442AGPS
GPRS
ZigBee
COM5
COM2
COM4
ZigBee无
线模块
5V电源板
子
土壤水分
传感器ADC
ON/OFF
3.7V锂充
电电池 7.4V锂充
电电池
集成PDA框图
传感器节点框图
2013/11/12 [email protected] 53 2013/11/12 [email protected]
Development of other sensors in PA
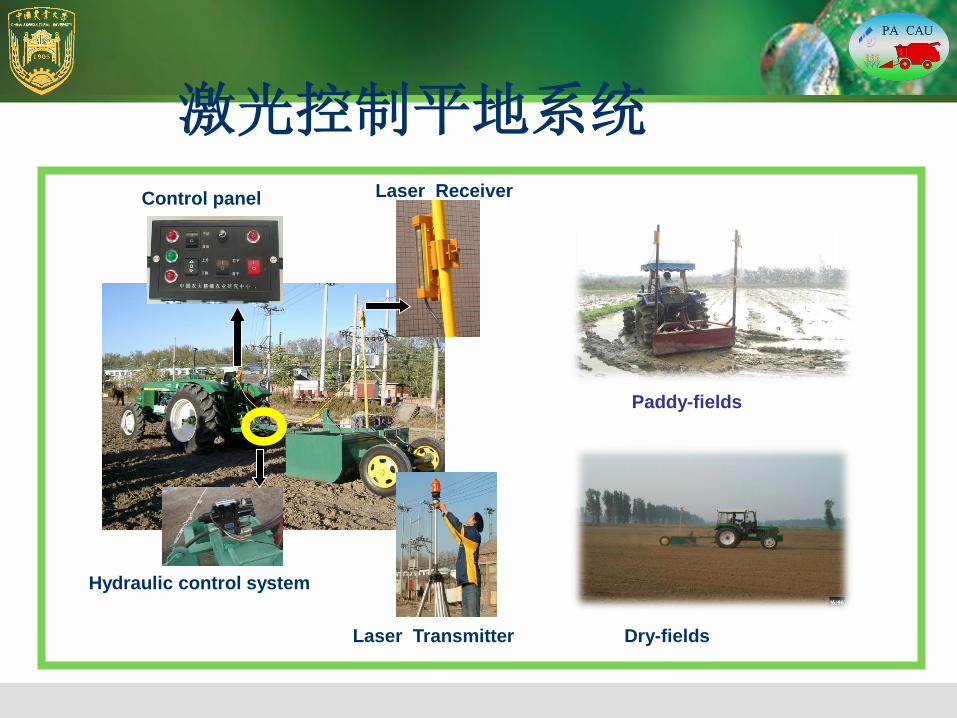
激光控制平地系统
Laser Transmitter
Laser Receiver Control panel
Hydraulic control system
Dry-fields
Paddy-fields

Structure of the System
Tractor
Controller
RTK GPS Receiver
Hydraulic system
Forklift
Vehicle-mounted IPC
RTK GPS Receiver
Vehicle-mounted IPC
Hydraulic
System
MTI-
AHRS
MTI-AHRS
Topographic Surveying Land Leveling
Data
Processing
Forklift
Maximum
Elevation
Differenc
e
Standard
Deviation
|hi - hd |≤8cm
Percentage
Before
leveling 39 16.8 13
After
leveling 17 7.8 85
Test Results of GPS Land Leveling
GPS控制平地系统
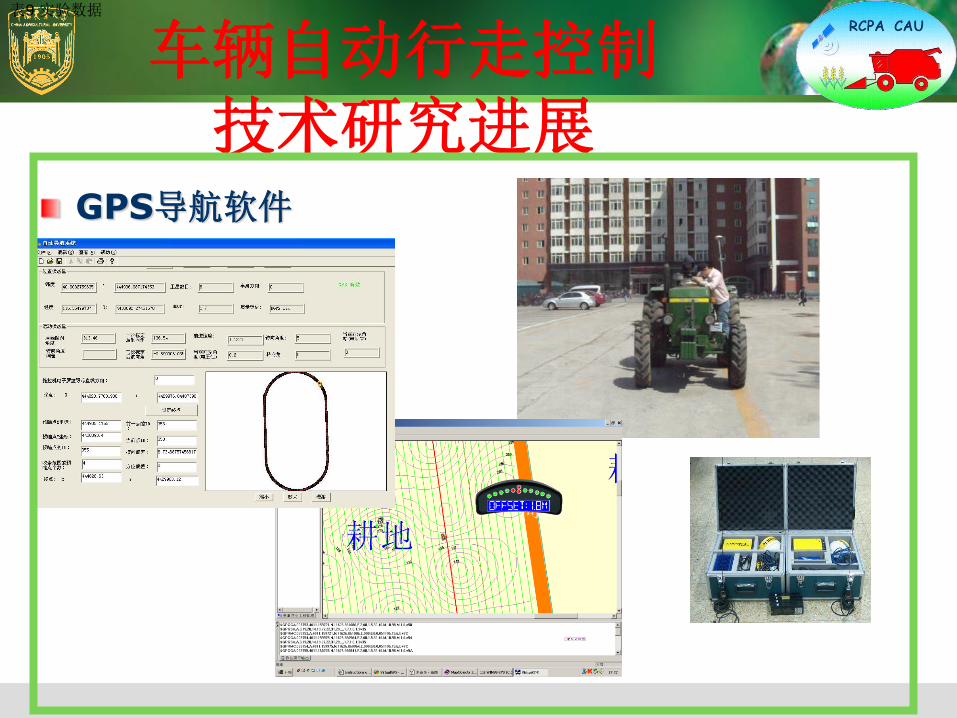
车辆自动行走控制 技术研究进展
表9 实验数据
GPS导航软件
车辆自动行走控制 技术研究进展
表9 实验数据
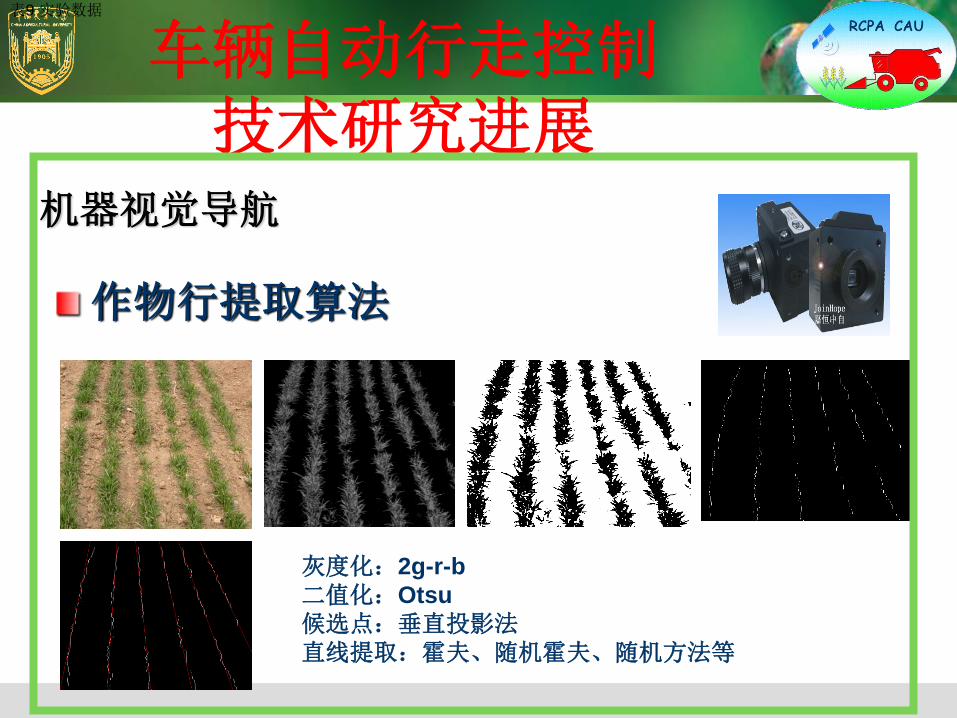
机器视觉导航
作物行提取算法
灰度化:2g-r-b
二值化:Otsu
候选点:垂直投影法
直线提取:霍夫、随机霍夫、随机方法等
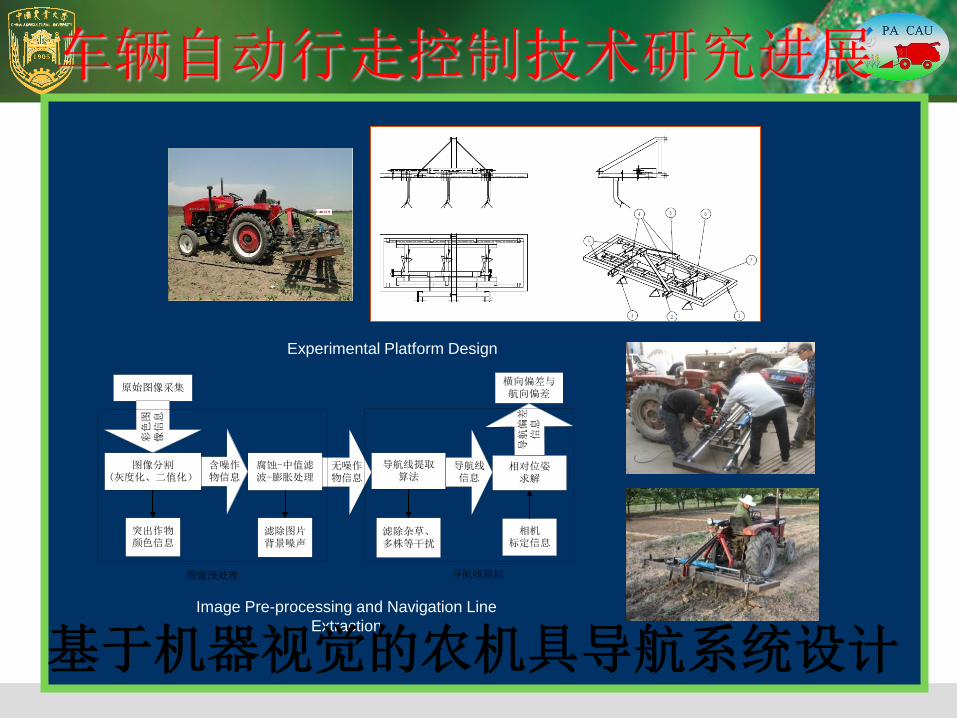
Experimental Platform Design
原始图像采集
腐蚀-中值滤波-膨胀处理
导航线提取算法
横向偏差与航向偏差
彩色
图像
信息
含噪作物信息
突出作物颜色信息
滤除图片背景噪声
滤除杂草、多株等干扰
相对位姿求解
相机标定信息
导航偏差
信息
图像分割(灰度化、二值化)
无噪作物信息
导航线信息
图像预处理 导航线提取
Image Pre-processing and Navigation Line
Extraction
基于机器视觉的农机具导航系统设计
车辆自动行走控制技术研究进展
车辆自动行走控制 技术研究进展
表9 实验数据
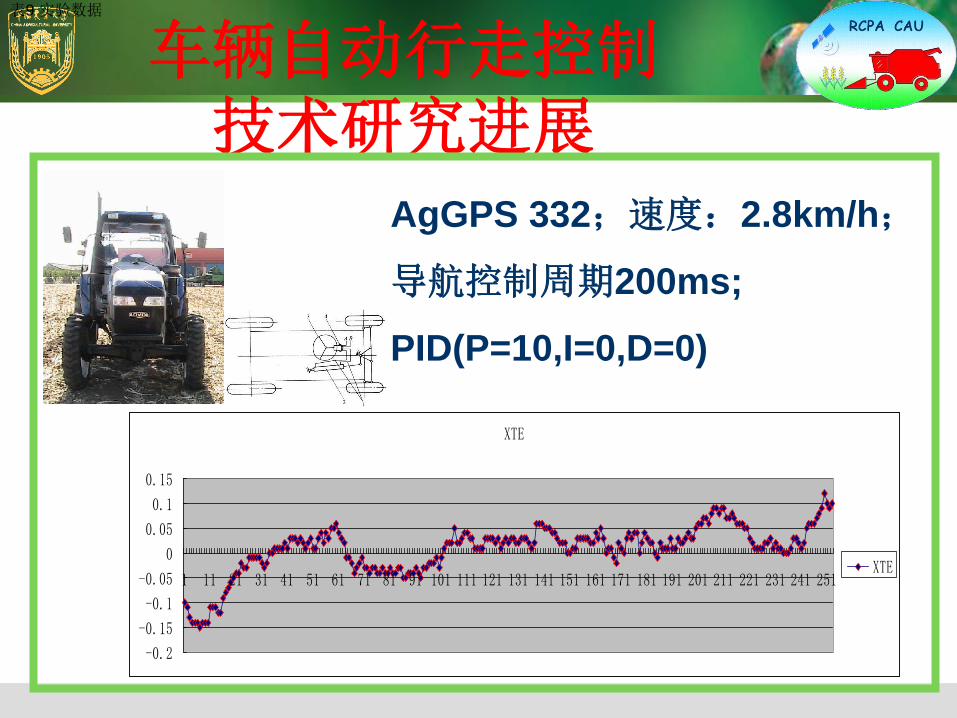
XTE
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
1 11 21 31 41 51 61 71 81 91 101 111 121 131 141 151 161 171 181 191 201 211 221 231 241 251XTE
AgGPS 332;速度:2.8km/h;
导航控制周期200ms;
PID(P=10,I=0,D=0)
[email protected] 62 2013/11/12

2013/11/12 JSAM2010, Matsuyama
谢 谢 !