Embed Size (px)
Citation preview

IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 8, NO. 3, MAY 2011 483
SODAR Pattern Classification by Graph MatchingNarayan Chandra Deb, Kumar S. Ray, and Hirday N. Dutta
Abstract—The sound detection and ranging (SODAR) system isan effective and active remote sensing tool to probe, in round-the-clock basis, the lower planetary boundary layer (LPBL) of theearth. The observations obtained from such SODAR systems canprove to be extremely useful for LPBL studies if classified andinterpreted automatically. Manual interpretation of such data byan expert in this field is very tedious and error-prone. Hence,in this letter, we attempt to classify such data obtained frommonostatic SODAR system, which is represented as echogram, bygraph matching method. We initially convert the time domain’ssample intensity variation, which is recorded as height versustime scale on echogram, to frequency domain for obtaining higherdiscriminating power of each sample of each class (as for example,thermal plume, inversion, etc.) of the echogram. For discriminat-ing the individual class of the echogram, we use a measure ofsimilarity. Thus, an expert system using graph matching methodbased on the frequency domain representation of each SODARsample of each class is developed.
Index Terms—Classification, echogram, expert system, graphmatching, similarity measure, Sound Detection and Ranging(SODAR) pattern.
I. INTRODUCTION
TO understand atmospheric dynamics at least up to a heightof about 1 km from the Earth’s surface, which is known
as the lower planetary boundary layer (LPBL) or planetaryboundary layer (PBL), continuous monitoring is needed, whichis possible using a very cost-effective system called monostaticsound detecting and ranging (SODAR). But PBL height variesaccording to space and time. This height is few hundred metersover the ocean; whereas on the plain land covered with greenpaddy fields and vegetation, the height is approximately 1 km.Over the desert region, it may vary up to 2 km. So, range ofoperation of the system may be determined according to theplace of operation.
PBL, which starts from the Earth’s surface, plays importantcharacteristic behavior in the transfer of heat, energy, andmomentum from the surface level to higher levels and viceversa. The PBL takes an active part in the formation of variousphenomena such as thunderstorms, cyclones, rains, floods, andhailstorms. Propagation of radio waves, accumulation and dis-persion of pollutants, and landing and taking off of aircraft, alsodepend on the characteristics of lower atmosphere. Therefore,
Manuscript received March 4, 2010; revised August 11, 2010 andSeptember 29, 2010; accepted September 29, 2010. Date of publicationNovember 28, 2010; date of current version April 22, 2011.
N. C. Deb and K. S. Ray are with the Electronics and CommunicationSciences Unit, Indian Statistical Institute, Kolkata 700 108, India (e-mail:[email protected]; [email protected]).
H. N. Dutta is with the Global Environmental Technologies, New Delhi110 015, India (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/LGRS.2010.2088105
meteorologists, climatologists, and researchers working in theareas of radio communication, civil aviation, and related fields,have long been realized the importance of PBL monitoring onround-the-clock basis.
Various published research works [1]–[3] already proved theutility of the techniques for PBL study.
SODAR essentially functions like active SONAR systems.A highly directional short burst of acoustic energy at audiofrequency is transmitted vertically up into the atmosphere withthe help of a parabolic dish antenna at regular intervals oftime. After undergoing scattering from atmospheric fluctua-tions, these are received by the same antenna (in which case,it is monostatic SODAR). Useful qualitative information aboutturbulent regions and their height above the sounder site, canbe obtained. Received backscattered energy as a function ofheight–time and intensity information is used to generate a 3-Dplot. These plots represent various atmospheric structureswhich are essential inputs for PBL study. In the last few years,[5]–[11] SODAR has assumed enhanced importance as a meansof remotely probing the behavior of thermal structure and windin the PBL.
The studies of wind flow and thermal structure characteristicsof the atmospheric boundary layer (ABL) in harsh environ-ments, e.g., polar region, high mountains, and ocean, have beenunder investigation for a long time. In this context, the Antarcticregion has been a particular focus of attention with the variouskinds of experimental campaigns. Schirmachar Oasis in EastAntarctica is of special interest because the well-developedkatabatic winds flow very often with velocity greater than50 m s−1 [12]. With these objectives, a monostatic SODARwas deployed at the Indian Antarctic station, Maitri (70.7◦ S;11.7◦ E; 120 m above sea level), and operated it in the harshpolar climatic conditions for over 6 years. Huge volume of datawas collected from Antarctica and the interpretation of thosedata was a challenging task to us. Proper interpretation of suchdata can only provide meaningful inputs to PBL study. In orderto avoid manual interpretation of such data, automization ofstructure patterns generated by SODAR is very much essentialfor the purpose of boundary layer investigation. Although weare quite aware of the fact that an non-Doppler SODAR ofthe first generation was quite useful from 1970 to 1980, stillwe consider such type of SODAR data instead of consideringDoppler SODAR of third and fourth generation for automiza-tion of SODAR structure recognition. Thus, the result of thispresent letter is of restricted value for the modern investigationof ABL, though the echograms are still useful for an analysis ofABL dynamics as before.
Basically, expert systems are computer programmed thatmodel the knowledge of experts and that are able to solveconcrete problems where knowledge of experts is needed.
1545-598X/$26.00 © 2010 IEEE

484 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 8, NO. 3, MAY 2011
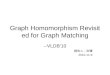
Fig. 1. Eight different SODAR structures.
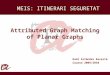
Fig. 2. Percentage occurrences of SODAR structures observed in Antarctica.
TABLE IDESCRIPTION OF SODAR STRUCTURE
SODAR structure classification is one such application whereknowledge of experts is needed.
In this letter, we propose a SODAR structure classificationmethod using graph matching technique, where the proposedmodel can classify eight different classes of SODAR struc-tures as shown and described in Figs. 1 and 2 and Table I,respectively.
For the present letter, first, we transfer the time domaindata of each SODAR sample obtained from the echogram tofrequency domain. We use standard discrete Fourier transfor-mation (DFT) to convert time domain data to frequency domainand obtained distinct pattern for each class as shown in Fig. 3
Fig. 3. Characteristic locus band for all the classes.
and these are denoted by characteristic locus band of eachclass. From such characteristic locus band of each class of theechogram, we generate eight representative patterns (Fig. 4),each of which is a prototype of each class of the SODARpattern. At the time of classification, we generate test pattern(Fig. 5) which is also based on DFT. The graph obtained fromthe prototype is matched with the graph obtained from the testpattern and a measure of similarity has been established. Basedon the degree of similarity, we have automatically classified thesaid eight classes of the SODAR pattern and a high classifica-tion score has been achieved.
II. SYSTEM DESCRIPTION
The purpose of the design and development of a SODARsystem was to capture the different atmospheric layers suchas thermal plumes and various types of inversion layers thatappeared in the LPBL persisting at the experiment site. At theIndian base in Antarctica, an indigenously developed PC-based

DEB et al.: SODAR PATTERN CLASSIFICATION BY GRAPH MATCHING 485
Fig. 4. Prototype for eight different classes.
monostatic SODAR system with various software modules wasdeployed to collect data on round- the-clock basis. The systemdeployed in Antarctica had the following properties: 10-W1transmitting power, operating frequency of 1800 Hz, pulselength of 50 ms, range resolution of approximately 8 m, and12-bit digital amplitude resolution. Design details has beendescribed by Naithani et al. [13].
Looking at the image structure received by the SODARsystem, thermal structure parameters, turbulence, and the ver-tical wind fields in the scattering volume can be computed bymeasuring the backscattered intensity of the received signals.
III. DATA PREPARATION AND PROCESSING
Actually, eight different structure patterns are observed bythe SODAR system operated at the Indian Antarctic station,Maitri in Antarctica. A visual inspection of original SODARdata shown in Fig. 1 clearly reveals structural differences.The percentage of occurrences of all those observed patternclasses is depicted in Fig. 2. Physical process and the develop-ment of different observed structure patterns are described byDeb et al. [14].
For the classification work, with respect to Fig. 2, wehave considered altogether eight classes which character-
Fig. 5. Test pattern for eight different classes.
ize more than 1.2% occurrence of SODAR structure. Forpercentage of occurrence <= 1.2%, three classes as shownin Fig. 2, i.e., i) inversion with wave motion (IW) 1.1%;ii) inversion with one or two elevated layers in motion (IWE)1.2%; and iii) inversion with more than two elevated layers inmotion (IWM) 1.2%, are considered as a single class. This isdenoted as class no.5, which is inversion with elevated layerin motion (IEM) as described in Table I. Here, each SODARsample of each class represents 400 discrete values along theY -axis of each class.
The Y -axis represents atmospheric height in meters up to1 km and X-axis represents the time scale. Finally, we handlethe sample values of the obtained SODAR data in frequencydomain as stated in the last paragraph of Section I. Theclassification result proposed in this letter is not universal. Itvaries from location to location. For instance, the classificationshown by Chowdhury and Mitra [16] for SODAR data ofKolkata, India is different from those of ours. And it is theinherent property of SODAR echograms. Accepting this factthat SODAR echograms will vary from place to place, we havedeveloped a method, i.e., graph.
IV. GRAPH MATCHING METHODE (GM)
A matching method is presented in Section V which isuniversal, i.e., it can be applied to SODAR echogram recorded

486 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 8, NO. 3, MAY 2011
in any place. For testing of a SODAR sample where each classrepresents 400 discrete values along the Y -axis, all SODARsamples obtained/recorded in any place can be directly used forclassification according to our scheme.
Graph Matching Algorithm:
1) Select data block (M × N) digitized backscattered inten-sity value from SODAR system, and each block repre-sents a particular class of SODAR data. Read in array[0:M-1][0:N-1] where, M = No of samples taken forclassification from time scale i.e., X-axis; in this case,30 samples for 10-min observation are considered. N =Maximum number of sample scanned in the Y -axis cor-respond to height up to which backscattering is observed,in meters; in our case, it is 400 samples for 1-km height,so data block size [0:29][0:399].
2) We define a term ‘Time window’. It denotes a collectionof contiguous data block of SODAR data. For e.g., Data[0:29][0:399] denotes a time window of block size =30× 400. Each time window has the same block size.start = The index of the first time sample in the timewindow. Preferably by sliding the time window acrossthe time axis. Though jumping the time window is alsopossible.
3) Take 2-D normal DFT of [0:M-1][0: N-1]. Call it DFT[0:M-1][N-1]. Plot these DFT (real value versus imagi-nary values) and call it “Characteristic locus band”.
4) Calculate the prototype from average time data by takingsimple average of all time samples. Call it prototype[0:399].
5) Take 1-D, normal DFT of prototype [0;N-1]. Call itprototype_DFT [0:399].
6) Select an averaged time strip from DFT [0:M-1][N-1].Call it test_sample_DFT [0:399].
7) We compare the distance between prototype_DFT[0:399] and test_sample_DFT [0:399], both of whichhappen to be a 400 tuple. The comparison is done by apointwise-distance metric, such as Euclidean, Hamming,or Minkowski with varying values of r ∈ �. The dis-tance between individual “points” i.e., elements of thetuple is summed up, and normalized by dividing by thenumber of elements in the tuple (400 here). This valuegives us the degree of “dissimilarity” between the two400 tuples. This can be easily converted to a degreeof similarity by normalizing to [0, 1], and subtractingfrom 1.0.
8) This degree of similarity gives us the degree of inclusionof the test time sample to individual classes. Using this,one can classify online SODAR data into the eight classesof environmental turbulence patterns.
9) We can either go by single classification or multipleclassification of test SODAR patterns.
V. IMPLEMENTATION AND RESULT
A. Implementation
For matching between prototype and test pattern, we usestandard Euclidean distance measure. We may apply any other
Fig. 6. Computational flow diagrams.
TABLE IIRESULT (CLASSIFICATION SCORE)
types of distant measures depending upon the need of theproblem. Fig. 6 shows computational flow diagram for thisclassification.
B. Result
We have measure the degree of similarity between the testpattern of each class and the corresponding prototype of eachclass. Table II depicts the result of our performance of clas-sification. All the classes are correctly classified in terms ofhighest degree of similarity. Thus, we have achieved successfulonline classification of SODAR data. And every online clas-sification of SODAR data, we need 4 min (i.e., 12 samplevalues) of SODAR data. For classification of SODAR pattern

DEB et al.: SODAR PATTERN CLASSIFICATION BY GRAPH MATCHING 487
of different locations, we can use the same procedure as statedin Fig. 6.
VI. CONCLUSION
Identification of atmospheric structures generated bya SODAR system and its observation completely depends onthe knowledge, experience, and expertise of researchers work-ing in the system. This restricts the utility of data capturedby the SODAR system to a limited number of persons havingexpertise in the field. Therefore, proper utilization of SODARdata and potential use of SODR observation demand for acomputer-based SODAR structure recognition system whichcan be developed by incorporating human expert knowledgeand experiences. Moreover, online classifications of SODARdata may be input to various atmospheric model thus enhancepotential use of SODAR system. High performance of classifi-cation of the SODAR data certainly increases the accuracy ofthe decision-making model wherever applicable in the relatedfield. As we know, formation of different classes of structuresin the various layer of PBL depends on the transfer of heat,momentum, and energy from the lower level to the higher leveland vice versa, so it is very important to know how all thesedynamics and formation of various structures responsible forthe formation different types of storms and various other meso-and microscale atmospheric phenomena such as fog, rain, haze,hail, and thermal convection and different types of temperatureinversion layers. So, PBL monitoring on a regular basis has agreat importance to the scientific community. Therefore, theemergence of the useful technique acoustic sounding system orSODAR may take important role to provide information aboutthe formation of different types of temperature inversion layers,thermal plumes, fog layer, wave motion, elevated temperatureinversion layers, and various other types of lower atmosphericstructures on a continuous basis and cost-effective manner.Finally, development of such instrument like SODAR systemby incorporating automatic structure classification method hasthe scope for various present and future applications.
In this letter, we have successfully classified ten classes ofSODAR structures using graph matching technique and a veryhigh classification score has been achieved. With this enhance-ment, we can develop an automatic SODAR data classificationsystem for future use.
ACKNOWLEDGMENT
N. C. Deb and H. N. Dutta both had been to Antarctica twiceas members of the Indian Scientific Expedition to Antarctica(ISEA). N. C. Deb would like to thank the authorities of theNational Physical Laboratories, New Delhi, and the Committeeon Scientific and Industrial Research, Antarctic cell, for select-ing him as a scientific member of ISEA.
REFERENCES
[1] L. G. Mcallister, “Acoustic sounding of the lower atmosphere,” J. Atmos.Terr. Phys., vol. 30, no. 7, pp. 1439–1440, 1968.
[2] C. G. Little, “Acoustic methods for the remote probing of the loweratmosphere,” Proc. IEEE, vol. 57, no. 4, pp. 571–578, Apr. 1969.
[3] S. P., Acoustic sounding techniques of the atmospheric boundary layer,New Zealand Meteorological Service, Scientific Report 30, 1992.
[4] R. H. Kraichnan, “The scattering of sound in a turbulent medium,” J.Acoust. Soc. Amer., vol. 25, no. 6, pp. 1096–1104, 1953.
[5] R. D. Kouznetsov, “The summertime ABL structure over an antarctic oasiswith a vertical Doppler sodar,” Meteorologische Zeitschrift, vol. 18, no. 2,pp. 163–167, Apr. 2009.
[6] K. Gajananda, H. N. Dutta, and V. E. Lagun, “An episode of coastaladvection fog over East Antarctica,” Curr. Sci., vol. 93, no. 5, pp. 654–659, 2007.
[7] I. A. Renfrew and P. S. Anderson, “Profiles of katabatic flow in summerand winter over Coats Land, Antarctica,” Q. J. R. Meteorol. Soc., vol. 132,no. 616, pp. 779–802, Apr. 2006.
[8] K. Gajananda, A. K. Aushik, and H. N. Dutta, “Thermal convectionover East Antarctica,” Potential Microorganism Dispersal. Aerobiologia,vol. 20, p. 2134, 2004.
[9] P. S. Anderson, “Fine-scale structure observed in a stable atmosphericboundary layer by sodar and kite-borne tethersonde,” Bound.-Layer Me-teorol., vol. 107, no. 2, pp. 323–351, May 2003.
[10] P. Pettre and S. Argentini, “On the vertical velocity sodar measurementin the region of Dumont D’urville, East Antarctica,” Geophys. Res. Lett.,vol. 28, no. 5, pp. 783–786, 2001.
[11] S. Argentini, G. Mastrantonio, A. Viola, P. Pettre, and G. Dargaud, “Sodarperformances and preliminary results after one year measurements atAdelie coast, East Antarctica,” Bound.-Layer Meteorol., vol. 81, no. 1,pp. 75–103, 1996.
[12] G. Wendler, Y. Kodama, and A. Poggi, “Katabatic winds in Adelie land,Antarctica,” J. United States, vol. 18, no. 5, pp. 236–238, 1983.
[13] J. Naithani, N. C. Deb, and M. Kapoor, “Design and Development of aPC controlled Acoustic Sounding System for Antarctica,” Eleventh IndianExpedition to Antarctica, Scientific Report, pp. 79–86, 1995, TechnicalPublication No. 9.
[14] N. C. Deb, S. Pal, D. C. Patranabis, and H. N. Dutta, “A neurocomputingmodel for SODAR structure classification,” Int. J. Remote Sens. (IJRS),vol. 31, no. 11, pp. 2995–3018, Apr. 2010.
[15] P. Bloomfield, Fourier Analysis of Time Series: An Introduction.New York: Wiley, 2000.
[16] S. Choudhury and S. Mitra, “A connectionist approach to SODAR patternclassification,” IEEE Geosci. Remote Sens. Lett., vol. 1, no. 2, pp. 42–46,Apr. 2004.