Embed Size (px)
Citation preview

Tento materiál vznikl jako součást projektu In-TECH 2, který je
spolufinancován Evropským sociálním fondem a státním rozpočtem ČR.
Snímače polohy, dráhy
a jejich derivací - 1
Zpracoval: Vladimír Michna
Pracoviště: Katedra textilních a jednoúčelových strojů TUL
Verze 2
Doplněná inovovaná přednáška

In-TECH 2, označuje společný projekt Technické univerzity v Liberci a jejích
partnerů - Škoda Auto a.s. a Denso Manufacturing Czech s.r.o.
Cílem projektu, který je v rámci Operačního programu Vzdělávání pro
konkurenceschopnost (OP VK) financován prostřednictvím MŠMT z Evropského
sociálního fondu (ESF) a ze státního rozpočtu ČR, je inovace studijního programu
ve smyslu progresivních metod řízení inovačního procesu se zaměřením na rozvoj
tvůrčího potenciálu studentů.
Tento projekt je nutné realizovat zejména proto, že na trhu dochází ke zrychlování
inovačního cyklu a zkvalitnění jeho výstupů. ČR nemůže na tyto změny reagovat
bez osvojení nejnovějších inženýrských metod v oblasti inovativního a kreativního
konstrukčního řešení strojírenských výrobků.
Majoritní cílovou skupinou jsou studenti oborů Inovační inženýrství a Konstrukce
strojů a zařízení. Cíle budou dosaženy inovací VŠ přednášek a seminářů,
vytvořením nových učebních pomůcek a realizací studentských projektů
podporovaných experty z partnerských průmyslových podniků.
Délka projektu: 1.6.2009 – 31.5. 2012

Snímače polohy, dráhy a jejich derivací
Snímače polohy
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Snímače polohy:
- s nespojitým výstupním signálem (koncové, mezní – indikace
dosažení polohy, NE měření)
Kontaktní koncové spínače
Technické údaje:
zatižitelnost kontaktů: (napětí (AC x
DC), proud, typ zátěže R x L)
konfigurace kontaktů (přepínací x
spínací, společný potenciál x
izolované...)
funkce kontaktů (mžikové x pomalé)
hystereze a spínací dráha
typ aktivačního členu (kolečko,
kladka..)

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Správné používání koncových spínačů:
U koncových spínačů s
vrchním stlačovacím čepem
musí být operační síla
vyvinuta co nejblíže osy
čepu.
Vačka nebo zarážka musejí být takové,
aby se aktivní člen neuvolnil náhle a
samovolně nesepnul při zpětném pohybu.

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Indukčnostní snímač Princip funkce je založen na vzájemném působení mezi
vodivým předmětem (snímaná součást) a střídavým
elektromagnetickým polem.
Hlavní technické parametry:
jmenovité napájecí napětí
jmenovitý pracovní proud
spínací vzdálenost a frekvence
hystereze
stupeň elektrického krytí
typ výstupního obvodu (PNP x NPN, dvoudrát x
třídrát)

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Typy výstupních obvodů (nejen) indukčnostních snímačů:
PNP, spínání
plusu (napájení)
3-drát, DC spínač
NPN, spínání minusu
(přizemnění)
2-drát, DC spínač
lze přepólovat

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
a mnohé další snímače polohy s nespojitým výstupem:
– optické
– ultrazvukové
– laserové
– kapacitní
– s Hallovou sondou

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Snímače polohy a dráhy se spojitým (kvazispojitým) výstupním signálem:
- lineární snímače
- rotační snímače
Pod pojmem „dráha“ rozumějme:
• lineární úsek mezi dvěma koncovými body – lineární snímače
• úhel natočení (hřídele) mezi krajními body – rotační snímače
Podle výstupního údaje:
-absolutní snímače (po výpadku a následném připojení napájení se údaj
o poloze neztrácí)
- inkrementální snímače (po připojení napájení je nutno nejprve „najet“ do
výchozího (vztažného) místa

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Lineární snímače plohy:
Odporový (potenciometrický) snímač polohy:
zRRz K činitel zatížení
xR
R2 pro lineární
průběh R
dává pak hodnota UZ
informaci o vzdálenosti
(úhlu natočení) αx ?

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
vypočtěme Uz:
1 a 10 pro
V
je R pro
2
20 z
x
xx
z
z
UUUR
RU
UU
.....
:platí arezistorů řazení
paralelní o jde R pro
2
21
2
2
z
z
z
z
z
z
RR
RRR
RR
RR
U
U

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
V
11
U
K
U
z
xx
xz
zatížení výstupu potenciometrického
snímače se projeví na průběhu statické
charakteristiky následovně:
U
Uz
x
R
RK
zz
Důležitý závěr:
vstupní impedance měřidla musí
být řádově větší než odpor snímače

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
není-li dodržen požadavek Rz >> R, určí se absolutní chyba výstupního napětí
Uz podle vztahu:
V
1
....
2
20
UK
UUU
x
x
z
x
zz

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Nevýhody potenciometrických snímačů polohy:
- výstupní signál (napětí) nedává přímou informaci o poloze (vhodný jako zdroj
analogového zpětnovazebního signálu)
- nízká životnost – kontakty
- teplotní závislost u vinutých potenciometrů
- šum ve výstupním signálu
Výhody potenciometrických snímačů polohy:
- absolutní v celém rozsahu měření
- jednoduchý, tedy levný

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Magnetostrikční snímač polohy:
Magnetostrikční snímač měří bezdotykově polohu pohyblivého permanentního
magnetu pomocí doby šíření mechanického vzruchu vybuzeného interakcí mezi
magnetickými poli v magnetostrikčním materiálu. Je to snímač absolutní, pasivní.
Magnetostrikce je schopnost některých feromagnetických materiálů pod vlivem
magnetického pole měnit svoje rozměry (Wiedemannův jev – prochází-li dlouhou
a tenkou tyčí z feromagnetického materiálu, umístěnou v podélném magnetickém
poli, elektrický proud, namáhá se tyč krutem) – viz. „bzučení“ transformátorů
elektrického napětí
Magnetoelastický jev (Villariho jev) se vyznačuje změnou magnetických vlastností
(na př. permeability) materiálu feromagnetické tyče, vyvolanou deformací tyče v
podélném směru

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Princip činnosti magnetostrikčního snímače:

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Popis funkce magnetostrikčního snímače:
Měřící element („vlnovod“) je vyroben ze speciální slitiny niklu a oceli s průměrem
vnějším 0,7 mm a vnitřním 0,5 mm. Měděný vodič je vedený vnitřkem této
trubičky. Start měření je inicializován krátkým proudovým impulzem v měděném
vodiči. Elektrický proud vytváří kolem trubičky kruhové magnetické pole.
Permanentní magnet v místě měření je použit jako ukazatel polohy, magnetické
siločáry jeho pole jsou kolmé k elektromagnetickému poli vzniklému proudovým
impulzem. V místě pod permanentním magnetem se obě magnetická pole protnou
a jejich interakcí se v magnetostrikční trubičce vytvoří (v rozsahu mikro) torzní
impulz (Wiedemannův jev). Torzní impulz se šíří vlnovodem oběma směry ve
formě mechanické vlny. Rychlost jejího šíření vlnovodem je známa (2 830 m/s) a
je téměř nezávislá na vlivech okolního prostředí (teplota, rázy, vibrace, znečištění).
Část vlny, která dosáhne ke vzdálenému konci vlnovodu, je zatlumena (rušivý
odraz), druhá část, směřující k signálovému konvertoru je změněna na elektrický
signál – impulz - (Villariho jev). Doba přeběhu vlny od místa vzniku ke konvertoru
je přímo úměrná vzdálenosti ukazatele (permanentního magnetu) od konvertoru.
Naměřený čas pak dovoluje určit vzdálenost – dráhu – s extrémě vysokou
přesností.

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Uživatelské vlastnosti magnetostrikčního snímače :
pracovní rozsah měřené dráhy skládáním segmentů až 7 600 mm
(běžně 50 až 1 500 mm)
rozlišení systému min 10 μm (od 1 μm bez matematických
úprav – průměrování), závisí na způsobu
vyhodnocení
opakovatelnost min 10 μm
reprodukovatelnost min 20 μm
vzorkovací frekvence 1 až 10 kHz
max. odchylka od linearity < 200 μm do 500 jmenovité délky
typ. ± 0,02 %, max. ± 0,04 %
pro 500 až 1 500 mm jmenovité délky
napájecí napětí 20 až 28 V DC
proudový odběr < 70 mA (podle typu)
výstupní signál absolutní

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
LVDT (indukčnostní) snímač polohy (Lineární vysouvací diferenciální
transformátor)
Transformátor s primárním a dvojitým sekundárním vinutím, jejichž vzájemná
indukčnost je ovlivňována změnou vodivosti magnetického obvodu, která je
svázána s měřenou veličinou
- Absolutní (pasivní) snímač
- Bez tření – minimální zátěž měřené soustavy- Vysoké rozlišení (omezeno jen šumem)- Vysoká životnost – téměř neomezená (žádné mechanické kontakty)- Velká přesnost , linearita 0,1 %- Rozsah jednotky až stovky mm (podle typu)- Při překročení rozsahu nedojde k poškození – dutina je průchozí- Verze i pro velmi malá posunutí (mm)- Velmi dobrá dynamická odezva omezeno frekvencí napájení- Poměrně odolné proti znečištění

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
L2´
L2´´
L1
Princip činnosti LVDT snímače polohy:

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
a základní matematické vztahy obvodového řešení:
1
1
21
1
11
2100
120202
110101
111
: konstanta Časová
1
)( : Unaprázdno
napětí Výstupní
)()( :)(j Unapětí Sekundární
)()( :)(j Unapětí Sekundární
:proud Primární
R
L
j
MMj
R
jU
LjR
jUMMjjUj
jIMjjU
jIMjjU
LjR
jUjI
cc
cc
cc

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
L2´
L2´´
L1
Příklad uspořádání LVDT (schematicky) a typický průběh statických charakteristik

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Příklad snímače dráhy WA 200 (Hottinger Baldwin Messtechnik)
a jeho hlavní technické parametry:
jmenovitá měřící dráha: 200 mm
jmenovitý výstupní signál: 80 mV / V(při jmenovité dráze a nezatíženém výstupu)
jmenovité napájecí napětí a frekvence: 2,5 Vef / 4,8 kHz
odchylka linearity: 0,2 %
maximální dovolené zrychlení: 2 500 m/s2
hmotnost
tělesa snímače: 130g
zásuvné kotvy: 20 g

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Induktosyn:
Lineární (i rotační - resolver) senzor polohy, cyklicky absolutní
Nad pravítkem se pohybuje jezdec se dvěma vinutími (posun o l/4), pevně
spojený s částí stroje, jejíž polohu měříme
Obě vinutí jezdce se napájejí střídavým napětím s fázovým posunem 90o
tkUtutkUtu cos a sin 1211
Napětí na výstupu pravítka bude:
tkUttkUtututu coscoscossinsin12112
Přiřadíme-li délce kroku K úhel 2π, pak úhel φ je úměrný posuvu jezdce proti
pravítku v rámci jednoho kroku x a platí:
2
Kx

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
L
d
U2výstup
u (t)=U sin t11
bežec
pravítko
v
v
x
u (t)=U cos t12
pravítko
K
xtkUtu 2cos2
Pro vztah mezi posuvem
jezdce proti pravítku (dráze)
a výstupním indukovaným
napětím na pravítku (v rámci
jednoho kroku K) platí:
d = K * (x + ¼)

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Výhody:
- vysoká přesnost
- velký měřící rozsah (stovky až tisíce mm – na délku lože obráběcího stroje)
- necitlivost na změnu vzdálenosti a kolmosti pravítka a jezdce
- v uzavřeném provedení odolný proti znečištění
Nevýhody:
- cyklicky absolutní (při začátku měření i po výpadku napájení nutno „najet“ do
referenční (nulové) polohy
- elektronika musí počítat kroky

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Rotační snímače polohy:
Rotační inkrementální snímač polohy (IRC – Incremental rotary encoder):
je elektromechanický převodník – cyklicky absolutní rotační snímač polohy – úhlu
natočení rotoru vůči statoru.
Z principu činnosti si inkrementální snímače, na rozdíl od snímačů absolutních,
nepamatují polohu při vypnutí napájení.

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
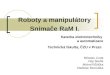
Princip činnosti rotačního inkrementálního snímače:

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Základem snímače je otočný optický disk, mechanicky spojený s připojovací
hřídelí snímače (obr. 1).
Pro rozlišení směru otáčení jsou na pevné části dvě soustavy clonek, vzájemně
posunuté o 90o (el.) (π /2). Popsaným způsobem tedy lze získat dva obdélníkové
signály posunuté o polovinu periody: kanál A a kanál B (obr. 3)
DŮLEŽITÁ POZNÁMKA:
všimněte si, že posunutí snímačů
obou kanálů (A a B) je 90o el. (π/2),
NIKOLI 180o el., jak by se na první
pohled zdálo. PROČ ?

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Pro zlepšení kvality a stability výstupních signálů se snímá vždy v diferenčním
režimu, kdy se porovnávají dva totožné signály s opačnou fází (fázový rozdíl je
180o el.). Diferenční způsob snímání umožňuje eliminovat vliv rušení.
I1
I2
I3

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Pro získání většího rozlišení se používá vícenásobného vyhodnocení signálu.
Například má-li snímač 100 pulzů/ot. (běžný počet bývá 5 000 až 10 000 pulzů/ot.,
ale i více) pak při čtyřnásobném vyhodnocení signálu (obě náběžné i sestupné
hrany kanálů A a B) je rozlišení 400 inkrementů (kroků) /ot.

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Vedle inkrementálních snímačů polohy se používají i absolutní rotační snímače
polohy (ARC), které si naměřenou polohu pamatují i po vypnutí napájení:
optický disk absolutního
snímače je kódový (na př. s
Grayovým kódem), každé
poloze natočení disku
odpovídá definované
„výstupní slovo“ složené z bitů
vyslaných LED snímači.
Každé následující slovo se liši
od předcházejícího právě o
jeden bit (možnost opravy při
chybě čtení)

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Příklad hlavních technických údajů snímače IRC 305,
(český výrobce LARM Netolice)
Otáčky: 10 000 min-1
Úhlové zrychlení: 40 000 rad.s-2
Moment setrvačnosti
mechanických částí: 20 g.cm-2
Počet impulzů na otáčku: 100 až 6 000
s jedním nulovým
impulzem na
otáčku
a další elektrické i konstrukční
údaje (viz. katalogové listy výrobce)

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Resolver:
je cyklicky absolutní rotační snímač polohy – úhlu
natočení rotoru vůči statoru (změny polohy proti
zvolenému - referenčnímu bodu).
Resolver je elektrický stroj, který má jedno vinutí na rotoru a dvě vinutí na statoru.
Statorová vinutí jsou vzájemně prostorově pootočena o 90o el. Rotorové vinutí je
napájeno ze zdroje sinusového napětí s frekvencí cca 2 kHz.
Se změnou úhlu natočení rotoru vůči statoru se sinusově mění i velikost napětí
indukovaných z rotoru do obou statorových vinutí.
Resolver může být napájen do rotoru nebo statoru.

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Budící napětí indukované do
rotoru:
tUtu sin
Napětí indukované ve
statorových vinutích:
cossin
sinsin
cos
sin
tkUtu
tkUtu
kde:
k = transformační poměr (rotor –
stator)
φ = úhel natočení rotoru vůči
statoru

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
POZNÁMKA:
při napájení do statoru musí být k dispozici dvě sinusová napájecí napětí:
tUtu
tUtu
cos
sin
cos
sin
napětí indukované v rotoru je pak:
tkUtu sin

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Teoreticky dosažitelná rozlišitelnost (přesnost) měření vyplývá z úvahy:
je-li frekvence napájecího napětí 2 kHz a resolver je dvoupólový (360o
geometrických = 360o el.), je počet vzorků za otáčku 360o / 2 000 = 0,18o, tedy
asi 11 úhlových minut

Snímače polohy, dráhy a jejich derivací
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
Technické údaje:
jako příklad je uveden katalogový list resolverů českého výrobce Atas Náchod