Embed Size (px)
DESCRIPTION
IR senzor sharp GP2Y0A21YK0F
Citation preview

1
Univerzitet u Sarajevu Elektrotehnički fakultet Odsjek za automatiku i elektroniku Studijska 2012./2013. godina
Snimanje statičke karakteristike senzora IR senzor udaljenosti
Maj, 2013. Tim 3: Lamija Vuković Amina Šljivo

2
Sadržaj 1. Opis vježbe........................................................................................................................................3 2. Analiza principa rada senzora SHARP GP2Y0A21YK0F
2.1. Opis............................................................................................................................................4 2.2. Karakteristike.............................................................................................................................4 2.3. Princip rada................................................................................................................................5 2.4. Neke upotrebe...........................................................................................................................5 2.5. Blok dijagram.............................................................................................................................6 2.6. Primjer izlazne karakteristike....................................................................................................6 2.7. Način povezivanja senzora........................................................................................................7
3. Snimanje kalibracione krive 3.1. Korištena oprema......................................................................................................................8 3.2. Snimanje karakteristika IR senzora............................................................................................8
4. Radna kriva......................................................................................................................................11 4.1. Aproksimacija radne krive.......................................................................................................12 4.2. Linearizacija radne krive..........................................................................................................13
5. Razvoj VI u LabVIEW-u.....................................................................................................................16 6. Dijagrami poklapanja snimanjih veličina.........................................................................................17 7. Zaključak .........................................................................................................................................20

3
1. Opis vježbe
Zadade regulacije procesa je da vrijednosti određenih fizikalnih veličina u procesu, odnosno reguliranih veličina, održava na zadanoj razini uprkos promjenama intenziteta tehničkog procesa i promenljivim uticajima okoline. Regulacija fizičkih veličina se najčešde realizira korištenjem povratne sprege. Da bi se dobila informacija o vrijednosti fizičke veličine, neophodno je koristiti neki mjerni uređaj. Za samu regulaciju potrebno je detaljno poznavanje mjernih uređaja - senzora.
U našem slučaju radi se o regulaciji udaljenosti pomodu Infrared senzora udaljenosti. Sam zadatak vježbe bio je analizirati princip rada senzora, analizirati postupke linearizacije statičke karakteristike senzora, snimiti karakteristiku senzora u radnom opsegu manuelno, realizirati blok dijagram u LabVIEW-u ili funkciju u Matlabu koji za datu fizičku veličinu na analognom izlazu daje napom u odgovarajudem opsegu modula uz linearnu ovisnost o fizičkoj veličini, razviti VI u LabVIEW-u ili GUI u Matlabu koji omogudava korištenje senzora za mjerenje i prikaz te manuelno snimiti statičku karakteristiku lineariziranog senzora. Na osnovu prethodnog bilo je potrebno uporediti te detaljno proučiti dobivene rezultate.

4
2. Analiza principa rada senzora Infra red proximity sensor SHARP GP2Y0A21YK0F
Opis: Sharp GP2Y0A21YK0F je senzor za mjerenje udaljenosti, sastavljen od integrirane kombinacije PSD-a (position sensitive detector - senzor za detekciju položaja), IRED (infrared emitting diode) i kruga za procesuiranje signala. Infrared senzor udaljenosti koristi inracrvenu svjetlost na izlazu i očitava reflektovanu infracrvenu svjetlost pomodu fotodiode. Rezultirajuda veličina reflektovane svjetlosti sadrži podatak o udaljenosti objekta od fotodiode. Na primjer, kada je se objekat nalazi ispred senzora, odašilje se impuls infracrvene svjetlosti koji se odbija od objekat i vrada natrag do senzora. Bududi da objekat ne može reflektovati svjetlost u potpunosti, tj. ne može postidi 100% reflektivnosti zbog uticaja okoline, na fotodiodu
senzora vrada se samo dio poslanog signala. Razlika koju očitava senzor predstavlja podatak o udaljenosti. Različite refleksije, temperatura okoline i vrijeme upravljanja ne utiču uveliko na detekciju udaljenosti zbog usvajanja metode triangulacije. Ovaj uređaj na izlazu daje napon u zavisnosti od izmjerene udaljenosti. Još se može koristiti kao senzor neposredne blizine.
Karakteristike: Opseg mjerenja udaljenosti: 10 - 80 cm (3.1V za 10cm i 0.3V za 80 cm) Analogni signal na izlazu Tipično vrijeme odziva: 39 ms Potrošnja struje circa 30mA (max. 40 mA) Potreban napon 4.5 - 5.5 V Dimenzije 29.5×13×13.5 mm Težina 3.5 g Opseg temperatura: -10 do 60 °C
Sharp IR senzor
Način povezivanja senzora

5
Princip rada IR senzor koristi princip triangulacije i CCD senzor za mjerenje udaljenosti odnosno određvanja prisustva objekta u vidnom polju. Ideja na kojoj se zasniva rad senzora je sljededa: -emiter odašilje impuls infracrvene svjetlosti -svjetlost putuje kroz prostor i nailazi na neki objekat ili nastavlja svoju putanju. U slučaju da ne naiđe na objekat na svojoj putanji, ona se teoretski nikada nede odbiti i sezor nema očitanja. U slučaju da se svjetlost reflektuje (tačnije rasprši) od objekat, ona se vrada na detektor i stvara trougao između emitera, tačke refleksije i detektora. Uglovi tog trougla zavisit de od udaljenosti objekta. Prijemnik signala je zapravo precizni objektiv koji prenosi reflektovanu svjetlost na razne dijelove linearnog CCD senzora na osnovu ugla odbijanja zrake. CCD senzor može odrediti dati ugao pod kojim se svjetlost odbila i na osnovu toga izračunati udaljenost objekta. Ova metoda je skoro u potpunosti nezavisna od svjetlosti okoline i boje samog objekta.
Raspršivanje i detektovanje svjetlosti
Neke upotrebe: IR senzor se koristi u sljedede svrhe:
Beskontaktni prekidač
Robot čistač
Senzori za štednju energije
Industrijska automatizacija i kontrola
Uređaji za zabavu (roboti, arkadne igre...)

6
Blok dijagram: Blok dijagram IR Sharp senzora data je na sljededoj slici:
Blok dijagram senzora
Primjer izlazne karakteristike: U zavisnosti od udaljenosti objekta, IR senzor de na svom izlazu dat odgovarajudi napon. Kako je opseg rada ovoga senzora od 10 cm do 80 cm, vrijednosti izlaznog napona za udaljenosti ispod 10 cm i preko 80 cm se ne mogu uzeti kao tačne. Izlazna karakteristika senzora trebala bi približno izgledati kao na slici:
Primjer izlazne karakteristike U(d)

7
Način povezivanja senzora Pri manuelnom snimanju karakteristike senzora povezivanje senzora je prilično jednostavno. Što se tiče naponskog napajanja, senzor je potrebno povezati sa istosmjernim izvorom napajanja napona između Vcc=4.5 V i 5.5 V (crvena žica). Nakon što se poveže crvena žica, zaslužna za napajanje snagom, potrebno je povezati crnu žicu na minus napajanja i uzemljenje na voltmetru. Žuta žica predstavlja izlaz senzora(Vo). Izlaz je potrebno vezati na voltmetar kao na slici, da bi se mogao očitati izlazni napon sa senzora:
Povezivanje senzora za manuelno snimanje karakteristike
Kontakti (pinovi): 1,2,3

8
3. Snimanje kalibracione krive
Korištena oprema IR senzor udaljenosti SHARP GP2Y0A21YK0F Naponski izvor Univerzalni multimetar Metar Dodatna oprema (kablovi, stezaljke,žice, prepreka...)
Snimanje karakteristika IR senzora
Manualno snimanje karakteristike senzora udaljenosti IR Sharp vršeno je pomodu naponskog izvora za napajanje, univerzalnog multimetra korištenog kao voltmetar, metra za mjerenje udaljenosti i prepreke od bijelog stiropora. Na stol smo postavili metar i fiksirali senzor na udaljenost 0. Izvode senzora smo spojili na univerzalni multimetar podešen za mjerenje napona i njime mjerili izlazni napon sa senzora. Potom smo zapisivali izlazne vrijednosti napona senzoraza prepreku postavljanu na udaljenost od 0 do 20cm sa korakom od 0.5cm, te od 0 do 40cm sa korakom od 1cm. Nakon toga smo pomjerali prepreku unazad gore navedenim koracima i bilježili vrijednosti izlaznog napona senzora, kako bi se detektovala eventualna histereza njegove karakteristike. Prikaz promjene napona u zavisnosti od udaljenosti u slučaju uzlazne i silazne promjene udaljenosti dat je u slijededoj tabeli.
d [cm] U [V] uzlazno
U [V] silazno
d [cm] U [V] uzlazno
U [V] silazno
0 1.62 1.6 15 1.71 1.57
0.5 1.76 1.73 15.5 1.67 1.5
1 2.04 1.89 16 1.62 1.48
1.5 1.77 1.9 16.5 1.57 1.44
2 2.51 1.67 17 1.54 1.42
2.5 2.86 2.19 17.5 1.52 1.39
3 3.03 2.65 18 1.49 1.375
3.5 3.15 3 18.5 1.46 1.33
4 3.16 3.17 19 1.44 1.29
4.5 3.16 3.175 19.5 1.41 1.24
5 3.16 3.175 20 1.39 1.18
5.5 3.16 3.18 21 1.31 1.105
6 3.16 3.16 22 1.27 1.08
6.5 3.16 3.07 23 1.23 1.18
7 3.07 2.92 24 1.20 1.12
7.5 2.91 2.8 25 1.15 1.105
8 2.78 2.69 26 1.105 1.08
8.5 2.67 2.59 27 1.07 1.04
9 2.57 2.4 28 1.04 1.03
9.5 2.46 2.3 29 1.01 0.99
10 2.4 2.2 30 0.95 0.96

9
10.5 2.27 2.15 31 0.94 0.92
11 2.21 2.07 32 0.91 0.90
11.5 2.15 1.97 33 0.89 0.89
12 2.07 1.915 34 0.87 0.85
12.5 1.99 1.83 35 0.85 0.830
13 1.93 1.81 36 0.83 0.80
13.5 1.86 1.77 37 0.8 0.78
14 1.82 1.7 38 0.785 0.76
14.5 1.77 1.66 39 0.765 0.76
1.61 40 0.74 0.75
Tabela 1. Na osnovu dobivenih rezultata korištenjem Matlab-a nacrtali smo d-U karakteristike senzora u slučaju rastude i opadajude promjene udaljenosti:
Sa datih grafika možemo uočiti da postoji histereza, odnosno vrijednosti dobivenih napona za rastudu promjenu udaljenosti razlikuje se od vrijednosti napona na izlazu senzora dobivenih za opadajudu vrijednost udaljenosti prepreke, iako bi trebali dobiti isti napon.

10
Iz tog razloga našli smo srednju vrijednost karakteristike kao:
𝑈 = 0.7𝑈𝑢1 + 0.3𝑈𝑢2 Uzlazna, silazna i srednja karakteristika data je na sljededem grafiku:
U daljnjem radu smo se služili srednjom vrijednošdu karakteristike da bi smo što preciznije razvili aplikaciju i dobili što tačnije rezultate u real-time mjerenju.

11
4. Radna kriva Srednju vrijednost statičke karakteristike fitovali smo da bi smo mogli dobiti lineariziranu krivu. Za te svrhe koristili smo Curve Fitting Tool Matlab - ovog toolbox-a.
Fitovanje karakteristike
Da bi se što precizinije aproksimirala kriva, potrebno je isključiti sve tačke dobijene za udaljenosti na kojima nije predviđen rad senzora. Isključili smo sve vrijednosti napona dobivene za udaljenosti manje od 5.5 cm, što je prikazano na sljededoj slici:
Isključivanje tačaka
12
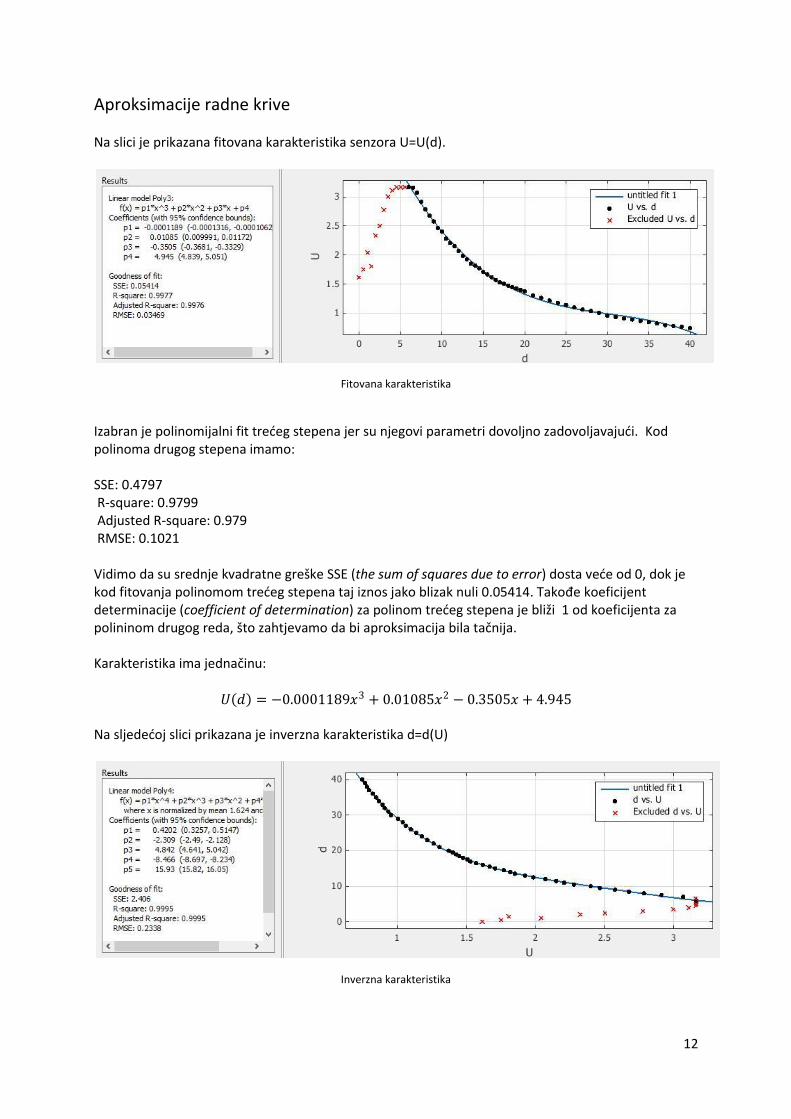
Aproksimacije radne krive Na slici je prikazana fitovana karakteristika senzora U=U(d).
Fitovana karakteristika
Izabran je polinomijalni fit tredeg stepena jer su njegovi parametri dovoljno zadovoljavajudi. Kod polinoma drugog stepena imamo: SSE: 0.4797 R-square: 0.9799 Adjusted R-square: 0.979 RMSE: 0.1021 Vidimo da su srednje kvadratne greške SSE (the sum of squares due to error) dosta vede od 0, dok je kod fitovanja polinomom tredeg stepena taj iznos jako blizak nuli 0.05414. Takođe koeficijent determinacije (coefficient of determination) za polinom tredeg stepena je bliži 1 od koeficijenta za polininom drugog reda, što zahtjevamo da bi aproksimacija bila tačnija. Karakteristika ima jednačinu:
𝑈 𝑑 = −0.0001189𝑥3 + 0.01085𝑥2 − 0.3505𝑥 + 4.945 Na sljededoj slici prikazana je inverzna karakteristika d=d(U)
Inverzna karakteristika

13
Koristili smo polinomijalnu jednačinu četvtog stepena jer za tredi stepen dobijemo SSE skoro 7, a za peti oko 1.5, blizu 2, tako da je zadovoljavajude.
𝑑 = 𝑑 𝑈 = 0.4204𝑈4 − 2.309𝑈3 + 4.842𝑈2 − 8.466𝑈 + 15.93
Linearizacija radne krive
Da bi smo dobili lineariziranu radnu krivu, koristili smo fitovanu i njenu inverznu karakteristiku. Fitovanu karakteristiku koju demo koristiti dobijamo isključivanjem dodatnih tačaka, odnosno posmatramo karakteristiku senzora na intervalu 6.5 cm do 40 cm. Data funkcija je polinom tredeg reda (cubic polynomial) i glasi:
𝑓 𝑥 = −0.0001175𝑥3 + 0.01075𝑥2 − 0.348𝑥 + 4.926
Fitovana U-d karakteristika
Za d = 6.5cm 𝑈𝑓𝑖𝑡 = 3.08 𝑉
Za d = 40 cm 𝑈𝑓𝑖𝑡 = 0.686 𝑉
Inverzna funkcija je eksponencijalna i ima oblik:
𝑓 𝑥 = 106.2𝑒−2.235𝑥 + 27.47𝑒−0.4495𝑥

14
d-U karakteristika
Za U = 3.16 V 𝑑 = 6.728 𝑉 ≈ 6.5 cm
Za U = 0.743 V 𝑈𝑓𝑖𝑡 = 39.85 𝑐𝑚 ≈ 40 cm
Udaljenost se mjeri u opsegu od 6.728 cm do 40 cm. Izlazni napon je od 0 do 5 V.
𝑈 = 𝑘𝑑 + 𝑛 0 = 𝑘 ∗ 6.728 + 𝑛 (1) 5 = 𝑘 ∗ 39.85 + 𝑛 (2)
Iz (1) i (2) dobijamo:
𝑘 = 0.150955 𝑛 = −1.015627
Odnosno 𝑈𝑙𝑖𝑛 = 0.150955𝑑 − 1.015627

15
Linearizirana zavisnost od napona od udaljenosti prepreke od senzora data je na sljededem grafiku:
Linearizirana U-d karakteristika
16
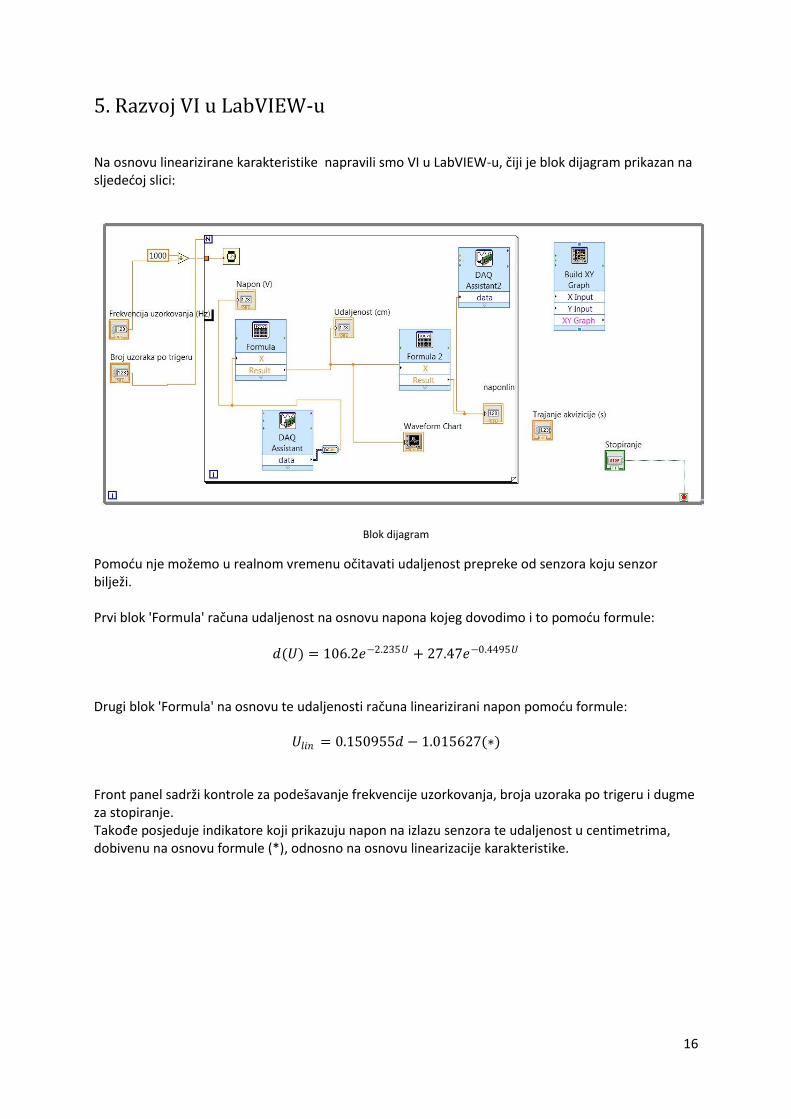
5. Razvoj VI u LabVIEW-u Na osnovu linearizirane karakteristike napravili smo VI u LabVIEW-u, čiji je blok dijagram prikazan na sljededoj slici:
Blok dijagram
Pomodu nje možemo u realnom vremenu očitavati udaljenost prepreke od senzora koju senzor bilježi. Prvi blok 'Formula' računa udaljenost na osnovu napona kojeg dovodimo i to pomodu formule:
𝑑(𝑈) = 106.2𝑒−2.235𝑈 + 27.47𝑒−0.4495𝑈 Drugi blok 'Formula' na osnovu te udaljenosti računa linearizirani napon pomodu formule:
𝑈𝑙𝑖𝑛 = 0.150955𝑑 − 1.015627(∗) Front panel sadrži kontrole za podešavanje frekvencije uzorkovanja, broja uzoraka po trigeru i dugme za stopiranje. Takođe posjeduje indikatore koji prikazuju napon na izlazu senzora te udaljenost u centimetrima, dobivenu na osnovu formule (*), odnosno na osnovu linearizacije karakteristike.

17
6. Dijagrami poklapanja snimanih veličina
Nakon što smo senzoru doveli napon te ga spojili na računar pomodu NI 6024E akvizicione kartice.
NI PCI-6024E
Šema spajanja data je na sljededoj slici:
Shema spajanja senzora na računar

18
Promjenom udaljenosti objekta od senzora, na front panelu našem VI-u mogli smo očitati sljedede
vrijednosti udaljenosti i napona:
dmj [cm] 10.3 15.7 20.8 26 31 36 40.8
dstv [cm] 10 15 20 25 30 35 40
Umj [V] 0.56 1.38 2.24 3.1 3.7 4.6 5.5
Tabela 2.
Na sljededim graficima su prikazani odnosi dmj - dstv i Umj -dstv : Na sljededem grafiku je prikazana zavisnost prikazane udaljenosti o očitanoj udaljenosti:
dmj - dstv karakteristika
Na sljededem grafiku je prikazana zavisnost izlaznog napona o očitanoj udaljenosti:
Umj - dstv karakteristika
Odstupanje stvarnog napona kojeg možemo očitati na računaru od lineariziranog napona kojeg smo
dobili aproksimacijom i linearizacijom karakteristike možemo vidjeti na sljededoj slici :

19
Odstupanje realne i stvarne karakteristike
Maksimalna odstupanja od očitane vrijednosti udaljenosti i stvarne vrijednosti izmjerili smo u na udaljenostima od 25 cm i iznosilo je 1 cm, odnosno 4% stvarne vrijednosti. Najmanje odtupanje izmjereno je na udaljenosti od 40 cm i iznosilo je 0.8 cm, odnosno 2%.
Vrijednost napona koji smo mjerili na izlazu je bila tokom cijelom mjerenja veda nego predviđena lineariziranom karakteristikom, što je posljedica neidealnosti mjernih instrumenata, nedovoljno precizne linearizacije te korištenja napona različitog od onog predviđenog.
Tabela ispod pokazuje odnose stvarne i izmjerene udaljenosti i napona:
dstv dmj Ulin Umj kd=dstv/ dmj kU= Ulin / Umj
10 10.3 0.4939 0.56 0.9708 0.8819
15 15.7 1.2487 1.38 0.9554 0.9048
20 20.8 2.0035 2.24 0.9615 0.8944
25 26 2.7582 3.1 0.9615 0.8974
30 31 3.5130 3.7 0.9677 0.9495
35 36 4.2678 4.6 0.9722 0.9278
40 40.8 5.0226 5.5 0.9804 0.9132
Tabela 3.

20
7. Zaključak
Počevši od manuelnog snimanja statičke karateristike senzora, mogli smo uočiti da postoji razlika u vrijednostima napona U za rastudu sekvencu udaljenosti i opadajudu, odnosno da postoji histereza. Najveda odstupanja javila su se u oblasti 𝑑 < 5 𝑐𝑚 iz razloga što senzor uopde nije predviđen za rad na udaljenostima manjim od 10 cm, dok je uočljivo poklapanje karakteristika na vedim udaljenostima. Postojanje histereze nije posljedica samog senzora, ved i nepreciznosti mjernih instrumenata i nemogudnosti preciznog postavljanja prepreke na određene karakteristične udaljenosti. Na osnovu podataka u tabeli 2. vidimo da se odstupanja izmjedju stvarne i izmjerene vrijednosti udaljenosti kredu od 0.3 cm do 1 cm, odnosno procentualno greška u odstupanju iznosi od 2 % do 4 % ukupne udaljenosti, što za naše uslove rada i zahtjeve predstavlja zadovoljavajudi rezultat. Iz tabele 3. vidimo da se vrijednosti koeficijenta kd , koja bi trebala biti približno jednaka 1, krede između 0.9554 i 0.9804 što znači da je linearizacija bila dovoljno precizna, odnosno rezultati koje dobijamo su jako bliski stvarnim vrijednostima,tj. zadovoljavajudi. Koeficijent kU je u prosjeku malo manji od koeficijenta kd, krede se u granicama od 0.8819 do 0.9495, međutim i dalje je dovoljno blizu 1 da bi bio zadovoljavajudi. U našem slučaju, bitnije je da očitane vrijednosti udaljenosti budu što preciznije, jer je to i svrha samog senzora.
Na sva mjerenja koja su vršena, bila ona manuelna il automatska, uticala su neželjena vanjska dejstva. U neželjene uticaje na precizno snimanje karakteristike spadaju: nepreciznost senzora, nedovoljna preciznost prilikom očitanja napona na multimetru, neprecizno očitavanje udaljenosti na metru, otpornost korištenih kablova i mjernih instrumenata i sl.
Na kraju možemo zaključiti da izmjerene karakteristike odgovaraju očekivanim te da je karakteristika senzora podešena da prikazuje dovoljno bliske rezultate stvarnim, odnosno uz pomod datog VI-a senzor bi se mogao koristi u praktične svrhe.








![, odmah. - Techne · 2019. 11. 14. · Identifikacija koristi za potrebe segmentacije tržišta na primjeru ... Princip rada retroreflektivnog optičkog senzora [3] Ovaj se tip senzora](https://img.dokumen.tips/doc/110x75/60bea0eb66f260049b5a7213/-odmah-techne-2019-11-14-identifikacija-koristi-za-potrebe-segmentacije.jpg)




















