Embed Size (px)
Citation preview

7 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Sistem Pemandu Kendaraan Untuk Parkir Paralel Secara Otomatis
Vehicle Guidance System for Automatic Parallel Parking
Ari Tri Overa, Muhammad Aria Universitas Komputer Indonesia
Jl. Dipati ukur No 112, Bandung
Email : [email protected]
Abstrak Paper ini akan membahas tentang sistem pemandu kendaraan untuk parkir paralel secara otomatis.
Perancangan sistem parkir ini dibuat dalam bentuk prototype mobil yang terdiri dari rangkaian
mikrokontroler ATmega 32, sensor ultrasonik SR-04, optocoupler, motor dc dan motor servo.
Sensor ultrasonik SR-04 dan optocoupler merupakan masukan dari sistem ini yang akan diproses
oleh mikrokontroler ATmega 32 dan nantinya akan menghasilkan keluaran ke motor dc dan motor
servo. Sistem parkir otomatis ini diawali dengan prototype mobil mencari ruang parkir yang sesuai
dengan ukuran yang ditentukan dan kemudian melakukan manuver parkir masuk ke ruang parkir.
Kontrol logika Fuzzy yang digunakan pada sistem parkir ini terdapat pada proses manuver parkir.
Masukan dari kontrol logika Fuzzy ini yaitu sensor ultrasonik yang dipasang di prototype mobil
bagian kiri-depan dan belakang. Setiap masukan tersebut akan diolah menggunakan logika Fuzzy
untuk menentukan besar dan arah putaran dari motor servo sebagai steering dari prototype mobil.
Hasil penelitian menunjukkan bahwa pertama yaitu sistem pemandu kendaraan parkir paralel secara
otomatis ini dapat bekerja cukup baik dengan rata-rata tingkat keberhasilan 85% untuk deteksi
space dan 75% untuk proses parkir hingga selesai dengan ukuran space sepanjang 72 cm dan lebar
40 cm. Kedua yaitu algoritma Fuzzy telah berhasil diimplementasikan ke mikrokontroler dan telah
dibandingkan dengan hasil perhitungan Matlab serta manual dimana menunjukkan hasil yang sama
untuk masukan yang sama pula. Ketiga yaitu hasil pengukuran jarak dari sensor ultrasonik SR-04
menunjukkan hasil yang hampir sama dengan ukuran yang sebenarnya. Keempat yaitu penggunaan
optocoupler sebagai counter dapat digunakan. Kelima yaitu duty cycle pada pengujian PWM
merupakan bagian utama dalam mengatur kecepatan motor DC. Keenam yaitu sinyal kontrol yang
dibuat untuk mengatur motor servo sama dengan dengan sinyal kontrol yang dijadikan acuan.
Ketujuh yaitu pengujian sistem secara bertahap mulai dari maju mendeteksi space hingga mundur
melakukan proses parkir dilakukan untuk mendapatkan ukuran space serta jarak yang ideal untuk
melakukan parkir secara keseluruhan yaitu sepanjang ±72 cm dan lebar ±40 cm.
Kata Kunci : Paralel Parkir, Logika Fuzzy, Parkir Otomatis, Pemandu Kendaraan Parkir, Counter Space
Parkir
Abstract
In this paper will be discussed on an automatic parallel parking system. Parking system design is
made in the form of a prototype car which consists of a microcontroller ATmega 32, SR-04
ultrasonic sensors, optocoupler, dc motors and servo motors. SR-04 ultrasonic sensors and
optocoupler are input of the system. They are will be processed by the microcontroller ATmega 32
and will produce output to dc motors and servo motors. The automated parking system begins with
a prototype car looking for a parking space in accordance with the specified size and then enter the
parking maneuver into parking spaces. Fuzzy logic control is used in the parking system was found
in the parking maneuver. Input of the fuzzy logic control is the ultrasonic sensors mounted on the
left side-car prototype front and rear. Any input will be processed using fuzzy logic to determine the
magnitude and direction of rotation of the steering servo motors of the prototype car. The results
showed that first is the automatic parallel parking assistance system this can work quite well with
the average success rate of 85% for detection of space and 75% for the process to complete the

8 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
parking space size of 72 cm long and 40 cm wide. Second is Fuzzy Algorithms have been
successfully implemented into the microcontroller and has been compared with the results of the
calculation of Matlab and manual which shows the same results for the same input as well. Third is
the results of the ultrasonic sensor measures the distance from the SR-04 showed almost the same
results with the actual size. Fourth is the use of the optocoupler can be used as a counter. Fifth is to
test the PWM duty cycle is a major part in regulating the speed of a DC motor. Sixth is The control
signal is made to set the servo motor is equal to the control signal is used as a reference. Seventh is
the system in stages starting from the advanced detecting space to reverse the process is done to get
the size of the parking space and distance are ideal for the overall parking along the ± 72 cm and ±
40 cm wide.
Keywords : Parallel Parking, Fuzzy Logic, Automated Parking, Guide Vehicle Parking, Counter Space
Parking, AssistanceVehicle For Parallel Parking
VI. PENDAHULUAN
Banyaknya produksi dan pengguna mobil saat
ini menjadikan sarana parkir yang tersedia tidak
memadai. Salah satu cara atau metoda parkir
kendaraan roda empat adalah parkir secara paralel
yaitu, metoda parkir dengan posisi kendaraan
dalam satu garis (sejajar) dengan kendaraan lain.
Kemampuan melakukan manuver parkir secara
paralel ini merupakan salah satu bagian tersulit
bagi pengemudi, terutama bagi lansia dan mereka
yang baru dalam belajar mengemudi. Lahan parkir
yang sempit, batasan pergerakan mobil, serta
jarak antara mobil menyulitkan pengemudi untuk
melakukan proses parkir ini. Kesulitan - kesulitan
tersebut menjadi salah satu alasan menjadikan
proses parkir secara paralel ini dilakukan secara
otomatis, guna mengurangi resiko serta tekanan
bagi pengemudi. Maka pada paper ini akan
membahas tentang sistem pemandu kendaraan
untuk parkir paralel secara otomatis.
VII. DASAR TEORI
Logika Fuzzy A.
Logika Fuzzy memungkinkan nilai
keanggotaan antara 0 dan 1, tingkat keabuan dan
juga hitam dan putih, dan dalam bentuk linguistik,
konsep tidak pasti seperti "sedikit", "lumayan"
dan "sangat" (Zadeh 1965).
Tahapan membangun sistem Fuzzy tergantung
metoda yang digunakan, karena banyak metoda
untuk membangun sistem Fuzzy. Namun secara
garis besar dapat disimpulkan sebagai berikut :
a. Fuzzification
Proses Fuzzification yaitu mengubah nilai
suatu masukan menjadi suatu fungsi
keanggotaan Fuzzy. Pada proses ini
Membership Function ditentukan.
Membership Function adalah suatu kurva
yang menunjukkan pemetaan titik-titik input
data kedalam nilai keanggotaannya.
Representasi Kurva Segitiga
Kurva segitiga pada dasarnya merupakan
gabungan antara 2 garis linear.
Gambar 1. Representasi Kurva Segitiga
Representasi kurva segitiga adalah
sebagai berikut:
(1)
Atau
(2)
Dimana:
a = nilai domain terkecil yang
mempunyai derajat keanggotaan
nol
b = nilai domain yang mempunyai
derajat keanggotaan satu
c = nilai domain terbesar yang
mempunyai derajat keanggotaan
nol
x = nilai input yang akan diubah ke
dalam bilangan Fuzzy

9 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Representasi Kurva Trapesium
Kurva trapesium pada dasarnya seperti
bentuk segitiga, hanya saja ada beberapa
titik yang memiliki nilai keanggotaan 1.
Gambar 2. Representasi Kurva Trapesium
Representasi kurva segitiga adalah
sebagai berikut:
(3)
Atau
(4)
Dimana:
a = nilai domain terkecil yang
mempunyai derajat keanggotaan
nol
b = nilai domain terkecil yang
mempunyai derajat keanggotaan
satu
c = nilai domain terbesar yang
mempunyai derajat keanggotaan
satu
d = nilai domain terbesar yang
mempunyai derajat keanggotaan
nol
x = nilai input yang akan diubah ke
dalam bilangan Fuzzy
b. Fuzzy Logic Inference
Mengaplikasikan aturan (Fuzzy Rule) pada
masukan Fuzzy yang dihasilkan dalam proses
Fuzzification dan mengevaluasi tiap aturan
dengan masukan yang dihasilkan dari proses
Fuzzyfikasi dengan mengevaluasi hubungan
atau derajat keanggotaannya. Pada bagian ini
dilakukan operasi Fuzzy yaitu
mengkombinasikan dan memodifikasi 2 atau
lebih himpunan Fuzzy. ada 3 operasi dasar
yang diciptakan oleh Zadeh:
Operator AND, berhubungan dengan
operasi intersection pada himpunan, α
predikat diperoleh dengan mengambil
nilai minimum antar kedua himpunan.
(5)
Operator OR, berhubungan dengan
operasi union pada himpunan, α predikat
diperoleh dengan mengambil nilai
maximum antar kedua himpunan.
(6)
Operasi NOT, berhubungan dengan
operasi komplemen pada himpunan, α
predikat diperoleh dengan mengurangkan
nilai keanggotaan elemen pada himpunan
dari 1.
(7)
c. Defuzzification
Proses Defuzzification merupakan
pengubahan kembali data-data Fuzzy kembali
kebentuk numeric yang dapat dikirimkan ke
peralatan pengendalian. Proses
Defuzzification dapat dilakukan dengan
beberapa cara, diantaranya:
Centroid Of Area,
(8)
Bisector Of Area,
(9)
Mean Of Maximum,
(10)
d. Fuzzy Inference System
Sistem Inferensi Fuzzy (Fuzzy Inference
System/FIS) disebut juga Fuzzy Inference Engine
adalah sistem yang dapat melakukan penalaran
dengan prinsip serupa seperti manusia melakukan
penalaran dengan nalurinya. Terdapat beberapa
jenis FIS yang dikenal yaitu Mamdani, Sugeno
dan lain sebagainya.
Sensor Jarak Ultrasonik SR-04 B.
Prinsip kerja dari sensor SR-04 adalah sebagai
berikut :
Gelombang ultrasonik akan dibangkitkan dan
dipancarkan melalui transmitter secara
menyebar.
Gelombang ultrasonik yang dipancarkan
tersebut kemudian akan merambat sebagai
sinyal / gelombang bunyi dengan kecepatan
bunyi yang berkisar 340 m/s. Sinyal tersebut

10 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
kemudian akan dipantulkan dan akan diterima
kembali oleh bagian receiver ultrasonik.
Setelah sinyal tersebut diterima kembali,
kemudian sinyal tersebut akan diproses untuk
menghitung jaraknya. Jarak dihitung
berdasarkan rumus :
S = 340.t/2
(11)
dimana S adalah jarak antara sensor ultrasonik
dengan bidang pantul, dan t adalah selisih
waktu antara pemancaran gelombang
ultrasonik sampai diterima kembali oleh
bagian penerima ultrasonik.
Optocoupler C.
Prinsip kerja dari optocoupler adalah sebagai
berikut:
Jika antara photo-transistor dan LED
terhalang maka photo-transistor tersebut akan
off sehingga output dari kolektor akan
berlogika high.
Sebaliknya jika antara photo-transistor dan
LED tidak terhalang maka phototransistor dan
LED tidak terhalang maka photo-transistor
tersebut akan on sehingga output-nya akan
berlogika low.
PWM Sebagai Pengatur Kecepatan D.
Motor DC
Motor DC adalah piranti elektronik yang
mengubah energi listrik menjadi energi mekanik
berupa gerak rotasi. Salah satu cara untuk
menurunkan kecepatan motor yaitu dengan
menurunkan rata-rata tegangan yang diberikan.
Yaitu dengan cata memutus dan menghubungkan
kembali supply tegangan listrik dengan sangat
cepat. Cara kerja inilah yang diadopsi oleh PWM.
(12)
Cepat lambatnya motor DC dapat diatur
berdasarkan duty cycle yang diberikan. Duty cycle
merupakan perbandingan atau rasio lamanya suatu
sistem bernilai logika high dan low. Variasi duty
cycle ini memberikan harga tegangan rata–rata
yang berbeda–beda.
PWM Sebagai Pengatur Kecepatan E.
Motor Servo
Motor servo adalah sebuah motor DC yang
dilengkapi rangkaian kendali dengan sistem
closed feedback yang terintegrasi dalam motor
tersebut. Pemberian pulsa sebagai pengontrolan
motor servo dapat dilakukan dengan metoda
PWM.
Secara umum untuk mengakses motor servo
tipe standard adalah dengan cara memberikan
pulsa high selama 1,5 ms dan mengulangnya
setiap 20 ms, maka posisi servo akan berada
ditengah atau netral (0°). Untuk pulsa 1 ms maka
akan bergerak berkebalikan arah jarum jam
dengan sudut -90°. Dan pulsa high selama 2 ms
akan bergerak searah jarum jam sebesar 90°
Mikrokontroler F.
Mikrokontroler adalah sebuah chip yang
berfungsi sebagai pengontrol rangkaian elektronik
dan umunya dapat menyimpan program
didalamnya. Mikrokontroler umumnya terdiri dari
CPU (Central Processing Unit), memori, I/O
tertentu dan unit pendukung seperti Analog-to-
Digital Converter (ADC) yang sudah terintegrasi
di dalamnya.
VIII. PERANCANGAN SISTEM
Pada perancangan sistem pemandu
kendaraan untuk parkir paralel secara otomatis ini,
secara umum terdiri dari tiga bagian utama, yaitu
masukan (input), proses dan keluaran (output).
Ketiga proses tersebut akan bekerja jika tombol
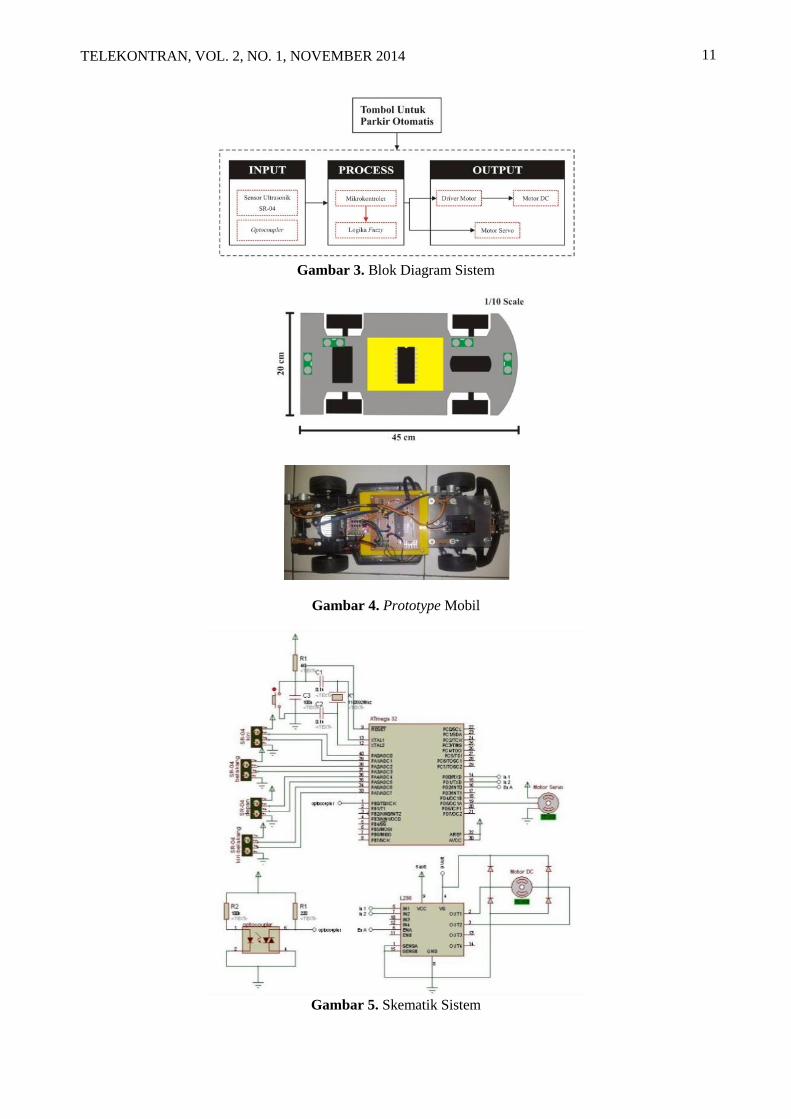
untuk parkir otomatis ditekan. Gambar 3
menunjukkan blok diagram sistem.
Pada blok diagram terdapat tiga bagian utama
dari sistem, yaitu pertama masukan berupa data
jarak dari sensor ultrasonik dan counter dari
optocoupler, kedua proses berupa mikrokontroler
yang akan memproses data masukan
menggunakan logika Fuzzy, dan ketiga adalah
keluaran berupa putaran motor DC maju atau
mundur dan perubahan sudut motor servo
(steering).
11 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Gambar 3. Blok Diagram Sistem
Gambar 4. Prototype Mobil
Gambar 5. Skematik Sistem

12 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Start
Tombol Parkir Ditekan
Inisialisasi Jarak Kiri – Belakang Jarak Kiri Depan Jarak Belakang Jarak Depan Optocoupler Motor DC (mobil) Steering
Mobil Maju Cek Jarak Kiri-Belakang Steering Normal
Jarak Kiri-Belakang >=30 cm
Optocoupler aktif Counter +1
Counter >=22
Mobil Berhenti Selama 2 Detik
Counter = 0
A
A
Mobil Mundur Proses Fuzzy Steering (out Fuzzy)
Jarak Belakang <=5 cm
Mobil Maju Steering (Putar Kiri)
Jarak Depan <=8 cm
Mobil Berhenti Steering Normal
End
Yes
Yes
Yes
Yes
No
No
No
No
Yes
No
Mobil Berhenti Selama 1 Detik
Steering Normal
Gambar 6. Diagram Alur Sistem
Perancangan Perangkat Keras A.
Dalam perancangan sistem parkir otomatis
pada paper ini akan dimodelkan pada mobil-
mobilan remote control. Model mobil-mobilan
yang dirancang memiliki 4 buah sensor ultrasonik
sebagai pendeteksi jarak, 1 buah optocoupler
sebagai penghitung ruang parkir, 1 motor DC
sebagai penggerak mobil, 1 buah motor servo
sebagai steerring mobil, 1 buah driver motor, dan
1 buah sistem minumum ATmega 32 sebagai
pusat pengendalian mobil. Gambar 4
menunjukkan prototipe mobil yang dirancang.
Perancangan sistem kontrol yang meliputi
pembuatan rangkaian-rangkaian elektronik yang
saling terintegrasi membentuk sistem kendali
dengan tujuan mengendalikan kerja sistem agar
dapat bekerja sesuai dengan keinginan. Gambar 5
menunjukkan skematik rangkaian yang
digunakan.
13 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Perancangan Perangkat Lunak B.
Perancangan perangkat lunak (software)
bertujuan untuk menentukan setiap alur eksekusi
dari perangkat sistem parkir otomatis yang
dirancang. Setiap masukan akan diterima dan
diproses oleh perangkat lunak (software) yang
nantinya akan menentukan keluaran (output) dari
sistem. Berikut alur kerja (flowchart) dari sistem
yang dirancang. Gambar 6 menunjukkan diagram
alir program yang digunakan.
Gambaran Sistem C.
Secara umum cara kerja dari sistem pemandu
kendaraan untuk parkir paralel secara otomatis ini
adalah pertama-tama mendeteksi ruang parkir
yang tersedia. Proses deteksi ini menggukan
sensor ultrasonik dan optocoupler untuk
menghitung putaran roda kendaraan dengan luas
ruang parkir yang tersedia. Jika ruang (space)
parkir yang tersedia sesuai dengan ukuran mobil,
maka proses parkir akan dijalankan secara
otomatis dengan menghitung jarak-jarak antara
benda yang ada di sekitar mobil.
Sistem parkir secara otomatis ini terdiri dari 2
proses yaitu proses mencari ruang (space) parkir
dan proses parkir itu sendiri. Pada proses parkir
ini terdiri dari dari 2 tahapan, yaitu proses mobil
mundur melakukan manuver parkir dan proses
maju di dalam ruang parkir.
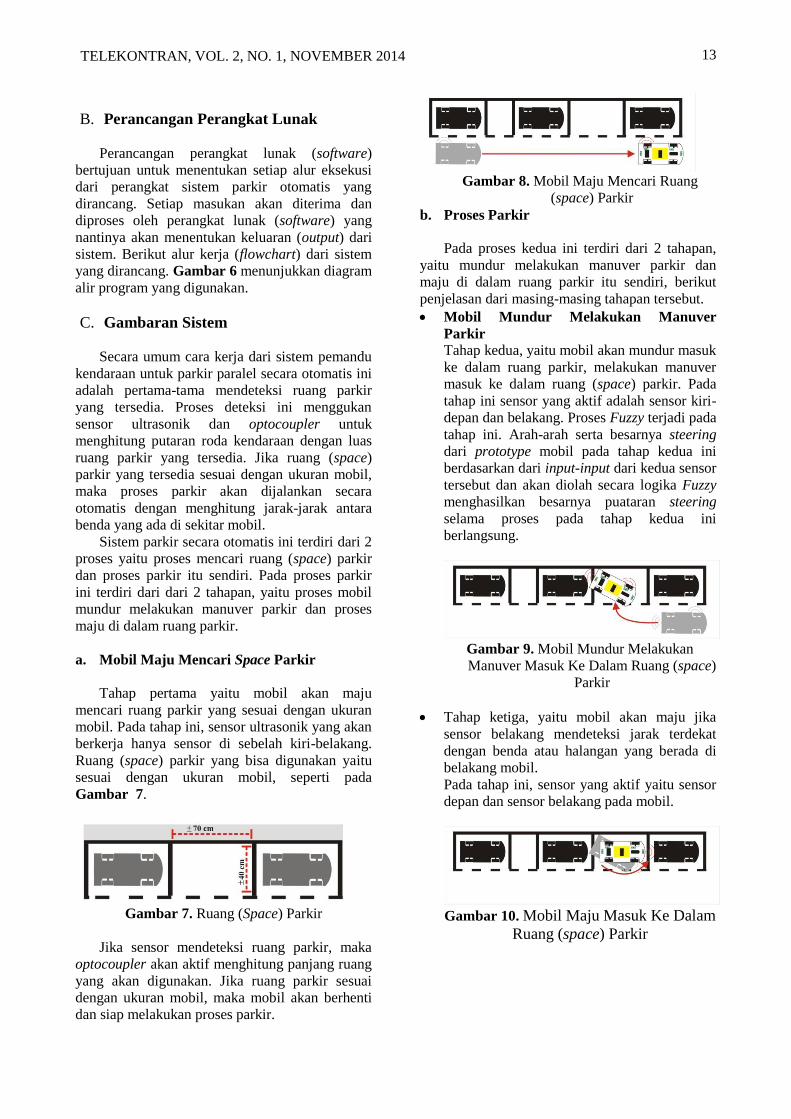
a. Mobil Maju Mencari Space Parkir
Tahap pertama yaitu mobil akan maju
mencari ruang parkir yang sesuai dengan ukuran
mobil. Pada tahap ini, sensor ultrasonik yang akan
berkerja hanya sensor di sebelah kiri-belakang.
Ruang (space) parkir yang bisa digunakan yaitu
sesuai dengan ukuran mobil, seperti pada
Gambar 7.
Gambar 7. Ruang (Space) Parkir
Jika sensor mendeteksi ruang parkir, maka
optocoupler akan aktif menghitung panjang ruang
yang akan digunakan. Jika ruang parkir sesuai
dengan ukuran mobil, maka mobil akan berhenti
dan siap melakukan proses parkir.
Gambar 8. Mobil Maju Mencari Ruang
(space) Parkir
b. Proses Parkir
Pada proses kedua ini terdiri dari 2 tahapan,
yaitu mundur melakukan manuver parkir dan
maju di dalam ruang parkir itu sendiri, berikut
penjelasan dari masing-masing tahapan tersebut.
Mobil Mundur Melakukan Manuver
Parkir Tahap kedua, yaitu mobil akan mundur masuk
ke dalam ruang parkir, melakukan manuver
masuk ke dalam ruang (space) parkir. Pada
tahap ini sensor yang aktif adalah sensor kiri-
depan dan belakang. Proses Fuzzy terjadi pada
tahap ini. Arah-arah serta besarnya steering
dari prototype mobil pada tahap kedua ini
berdasarkan dari input-input dari kedua sensor
tersebut dan akan diolah secara logika Fuzzy
menghasilkan besarnya puataran steering
selama proses pada tahap kedua ini
berlangsung.
Gambar 9. Mobil Mundur Melakukan
Manuver Masuk Ke Dalam Ruang (space)
Parkir
Tahap ketiga, yaitu mobil akan maju jika
sensor belakang mendeteksi jarak terdekat
dengan benda atau halangan yang berada di
belakang mobil.
Pada tahap ini, sensor yang aktif yaitu sensor
depan dan sensor belakang pada mobil.
Gambar 10. Mobil Maju Masuk Ke Dalam
Ruang (space) Parkir

14 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Logika Fuzzy Pada Sistem Parkir D.
Otomatis Secara Paralel
Logika Fuzzy pada sistem parkir otomatis
terdapat pada proses yang kedua, yaitu proses
mobil masuk dalam ruang (space) parkir. Input
Fuzzy dari sistem parkir ini berupa jarak yang
didapat dari 2 buah sensor ultrasonik yaitu kiri-
depan dan belakang. Sedangkan output dari Fuzzy
ini berupa putaran atau besarnya sudut putar
motor servo sebagai steering dari prototype mobil
ini.
Setiap input dari logika Fuzzy ini mempunyai
nilai keanggotaan (membership function) yang
direpresenatasikan dalam bentuk kurva segitiga
dan trapesium. Operator “AND” digunakan untuk
mengkombinasikan dan memodifikasi kedua input
jarak dari sensor ultrasonik. Berikut membership
function dari setiap input-an dan output Fuzzy:
Gambar 11. Membership Function untuk
Sensor Kiri-Depan
Keterangan:
Jarak dekat dari sensor kiri-depan
direpresentasikan dengan kurva trafesium
dengan nilai domain diantara 0cm –
15cm.
Jarak sedang dari sensor kiri-depan
direpresentasikan dengan kurva segita
dengan nilai domain diantara 10cm –
20cm.
Jarak jauh dari sensor kiri-depan
direpresentasikan dengan kurva trafesium
dengan nilai domain dari 15cm hingga
lenih dari 30cm.
Gambar 12. Membership Function untuk
Sensor Belakang
Keterangan:
Jarak belakang dari sensor kiri-depan
direpresentasikan dengan kurva trafesium
dengan nilai domain diantara 0cm –
30cm.
Jarak belakang dari sensor kiri-depan
direpresentasikan dengan kurva segita
dengan nilai domain diantara 10cm –
50cm.
Jarak jauh dari sensor belakang
direpresentasikan dengan kurva trafesium
dengan nilai domain dari 30cm hingga
lenih dari 60cm.
Gambar 13. Output Berupa Steering
Prototype Mobil
Keterangan:
P.Kiri : putar kiri dimana steering pada
prototype mobil dapat bergerak maksimal
sejauh -72°.
Tetap : dimana steering dari prototype
mobil berapa pada posisi normal yaitu
sebesar 0°.
P.Kanan : putar kanan dimana steering
pada prototype mobil dapat bergerak
maksimal sejauh 72°.
Sedangkan untuk rule Fuzzy diperoleh
dengan dengan cara mengukur dan melakukan
percobaan pada sistem parkir ini. Rule pada
sistem parkir otomatis ini sebanyak 15 rule dapat
dilihat pada tabel berikut:
Tabel 1. Rule Fuzzy
Kiri-
depan
Belakang
Dekat
Sedang
Jauh
Dekat Tetap P.kiri P.kanan
Sedang P.kiri P.kanan P.kanan
Jauh P.kiri P.kanan P.kanan
Keterangan dari rule di atas:
Rule 1 : jika jarak kiri-depan “dekat” dan
belakang “dekat” maka steering akan
“tetap”.
Rule 2 : jika jarak kiri-depan “dekat” dan
belakang “sedang” maka steering akan
“putar kiri”.

15 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Rule 3 : jika jarak kiri-depan “dekat” dan
belakang “jauh” maka steering akan
“putar kiri”.
Rule 4 : jika jarak kiri-depan “sedang”
dan belakang “dekat” maka steering akan
“putar kiri”.
Rule 5 : jika jarak kiri-depan “sedang”
dan belakang “sedang” maka steering
akan “putar kiri”.
Rule 6 : jika jarak kiri-depan “sedang”
dan belakang “jauh” maka steering akan
“putar kanan”.
Rule 7 : jika jarak kiri-depan “jauh” dan
belakang “dekat” maka steering akan
“putar kanan”.
Rule 8 : jika jarak kiri-depan “jauh” dan
belakang “sedang” maka steering akan
“putar kanan”.
Rule 9 : jika jarak kiri-depan “jauh” dan
belakang “jauh” maka steering akan
“putar kanan”.
IX. PENGUJIAN DAN ANALISIS
Pengujian Logika Fuzzy A.
Pengujian dari logika Fuzzy ini dilakukan
dengan membandingkan hasil output yang didapat
menggunakan simulasi Matlab, pengujian
program yang dibuat menggunakan Codevison
AVR dan pengujian perhitungan manual.
Dari ketiga pengujian tersebut, dapat lihat
perbandingan dari setiap output yang dihasilkan.
Tabel berikut menguraikan perbandingan hasil
pengujian dari ketiga cara yang telah dilakukan :
Tabel 2. Hasil Pengujian Logika Fuzzy No Input Output
Kiri-
Depan (cm)
Belakang
(cm)
Simulasi
Matlab
Program
Codevision AVR
Perhitungan
Manual
1 10 27 61,2 61,2 61,2
2 15 30 0 0 0
3 12 45 21,6 21,6 21,6
Dari tabel hasil pengujian logika Fuzzy
terlihat bahwa output dari program yang dibuat
menggunakan Codevision AVR bernilai sama
dengan simulasi Matlab maupun perhitungan
manual
Pengujian Sensor SR-04 B.Pengujian dilakukan sebanyak 25 kali dengan
menghubungkan sensor dengan mikrokontroler
dengan jarak halangan yang berbeda. Jarak yang
terukur oleh sensor akan ditampilkan ke LCD
dibandingkan dengan jarak yang sebenarnya.
Berikut hasil pengujian dari sensor jarak SR-04:
Tabel 3. Hasil Pengujian Sensor SR-04 Tampilan
di LCD
(cm)
Jarak
sebenarnya
(cm)
4,9 5
5,7 6
6,6 7
8,1 8
8,9 9
10,3 10
11,3 11
12,2 12
13 13
13,9 14
15 15
16,2 16
16,9 17
18 18
18,9 19
19,7 20
24,9 25
29,7 30
35,2 35
40,2 40
45 45
50,1 50
55,1 55
60,2 60
Berdasarkan tabel di atas dapat disimpulkan
bahwa kemampuan sensor SR-04 dalam
mendeteksi halangan hingga sejauh 60 cm
menghasilkan nilai yang hampir sama dengan
pengukuran sebenarnya, meskipun dalam
pengujian sensor ini sering terjadi error pada
jarak-jarak tertentu.
Pengujian Optocoupler C.
Pengujian dilakukan dengan memberikan
tegangan sebesar 5V pada rangkaian, kemudian
memutar roda cacah yang terdapat pada
optocoupler. Roda cacah ini berfungsi agar output
yang dihasilkan saat roda cacah diputar berupa
tegangan yang berlogika high dan low.
Tabel 4. Hasil Pengujian Optocoupler Tegangan input
Posisi roda cacah Tegangan output
Logika biner
5Volt
Menghalangi cahaya IR
LED
4,9Volt 1
Meloloskan cahaya IR
LED
0,85Volt 0

16 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
Dari tabel pengujian diatas terlihat bahwa
optocoupler yang digunakan menghasilkan
tegangan output sebesar 4,9Volt berlogika high
dan 0,85Volt berlogika low. Logika high dan low
ini akan menjadi input mikrokontroler, sehingga
dapat digunakan untuk menghitung panjang ruang
parkir yang dilewati oleh prototype mobil.
Pengujian PWM Sebagai Pengatur D.
Kecepatan Motor DC
Berikut hasil pengujian PWM sebgai pengatur
kecepatan motor DC ini:
Tabel 5. Hasil Pengujian Motor Servo V
Full
T
high
T
low
T
total
Duty
Cycle
V=DutyCycle
×Vfull
V
rata-
rata
5
V
0 10 10 0 0 V 0,9V
10 10 20 0,5 2,5 V 3,2V
20 10 30 0,67 3,35 V 3,7V
30 10 40 0,75 3,75 V 3,9V
50 10 60 0,83 4,15 V 4V
30 15 45 0,67 3,35 V 3,8V
Dari tabel diatas terlihat bahwa semakin besar
duty cycle yang diberikan, maka tegangan rata-
rata motor DC juga semakin besar sehingga
kecepatan motor DC juga akan semakin cepat.
Duty cycle yang diberikan dapat diaatur dengan
mengganti nilai T high atau T low dari lebar pulsa
PWM sesuai dengan keinginan.
Pengujian PWM Sebagai Pengatur E.
Kecepatan Motor Servo
Pengujian dilakukan sebanyak 3 kali dengan
menggunakan software Proteus untuk
mensimulasikan hasil dari program yang telah
dibuat mengunakan software CodeVision AVR
untuk mengatur sudut motor servo ini. Berikut
hasil dari pengujian motor servo:
Gambar 14. Sinyal Kontrol Motor Servo
Sebagai Acuan Dalam Pengujian
Gambar di atas merupakan sinyal kontrol
yang digunakan untuk mengubah sudut motor
servo. Sinyal di ataslah yang dijadikan acuan
untuk menentukan T high dan T low untuk
pengontrolan motor servo ini.
Gambar 15. Hasil Pengujian Motor Servo
Pertama
Pada gambar terlihat lebar pulsa sebesar 20ms
dengan T high sebesar 1ms menghasilkan
pergerakan motor servo dengan sudut -90.
Gambar 16. Hasil Pengujian Motor Servo
Kedua
Pada gambar terlihat lebar pulsa sebesar 20ms
dengan T high sebesar 1,5ms menghasilkan
pergerakan motor servo dengan sudut 0.
Gambar 17. Hasil Pengujian Motor Servo
Ketiga
Pada gambar terlihat lebar pulsa sebesar 20ms
dengan T high sebesar 2ms menghasilkan
pergerakan motor servo dengan sudut +90.
Dari ketiga hasil simulasi diatas terlihat
bahwa program yang dibuat untuk pengontrolan
motor servo ini dapat digunakan, karena lebar
pulsa yang dihasilkan dari program yang dibuat
telah sama dengan lebar pulsa yang dijadikan

17 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
acuan yaitu dengan cara memberikan pulsa high
selama 1,5 ms dan mengulangnya setiap 20 ms,
maka posisi servo akan berada ditengah atau
netral (0°). Untuk pulsa 1 ms maka akan bergerak
berkebalikan arah jarum jam dengan sudut -90°.
Dan pulsa high selama 2 ms akan bergerak searah
jarum jam sebesar 90°.
Pengujian Sistem Pemandu F.
Kendaraan Untuk Parkir Paralel
Secara Otomatis
(a)
(b)
(c)
Gambar 18. (a) Sequence Mobil Maju
Mencari Ruang (space) Parkir.
(b) Sequence Mobil Mundur Melakukan
Manuver Masuk Ke Dalam Ruang (space)
Parkir.
(c) Sequence Mobil Maju Masuk Ke Dalam
Ruang (space) Parkir
Pengujian ini bertujuan untuk mengetahui
kemanpuan dari sistem mulai dari mendeteksi
space parkir hingga proses parkir selesai
dilakukan. Pada pengujian kali ini dilakukan
sebanyak 20 kali dengan berbagai jarak posisi
start dengan ukuran space yang telah ditentukan
yaitu sebesar panjang 72 cm dan lebar 40 cm.
Gambar 18 menunjukkan contoh proses parkir
mulai dari mendeteksi space hingga proses parkir
selesai dilakukan. Tabel 6 menunjukkan hasil
pengujian dari proses secara keseluruan ini.
Tabel 6. Hasil Pengujian Sistem Pemandu
Kendaraan Untuk Parkir Paralel Secara
Otomatis NO
Jarak Start
Deteksi Space Proses Parkir Waktu
Berhasil Gagal Berhasil Gagal
1
3 cm
10.03
2 -
3 10.98
4 11.38
5 10.47
6
5 cm
10.36
7 10.36
8 10.21
9 -
10 -
11
7 cm
09.77
12 09.97
13 -
14 10.14
15 11.00
16
10
cm
-
17 10.68
18 10.26
19 11.26
20 10.53
Total : 17 3 15 5 157.4
Rata-rata :
Pada tabel di atas terlihat bahwa proses parkir
secara keseluruhan ini dapat dilakukan dengan
baik pada jarak posisi start atau jarak prototype
dengan mobil yang telah terparkir sebelumnya
kecil dari 10 cm dan ukuran space panjang 72 cm
dan lebar 40 cm dengan rata-rata tingkat
keberhasilan sebesar 85% untuk deteksi space dan
75% untuk proses parkir hingga selesai dilakukan
dengan rata-rata waktu selama 7.87 detik.
Kegagalan dalam melakukan deteksi maupun
proses parkir ini terjadi karena error dari sensor
ultrasonik yang digunakan. Meskipun jarak yang
terukur dari sensor ultrasonik hampir sama
dengan ukuran yang sebenarnya namun pada
pengujian sistem secara keseluruhan dimana
semua masukan akan diproses secara bersamaan
mengakibatkan error akibat sensor ini semakin
sering terjadi.
X. KESIMPULAN DAN SARAN
Kesimpulan A.
Berdasarkan hasil perancangan dan
pengujian serta analisis data dari sistem pemandu

18 TELEKONTRAN, VOL. 2, NO. 1, NOVEMBER 2014
kendaraan untuk parkir otomatis ini, dapat diambil
beberapa kesimpulan yang berkaitan dengan hasil
analisis data yang mengacu kepada tujuan
perancangan dan pembuatan sistem parkir
otomatis ini.
1. Sistem pemandu parkir paralel secara
otomatis ini dapat bekerja cukup baik dengan
rata-rata tingkat keberhasilan 85% untuk
deteksi space dan 75% untuk proses parkir
hingga selesai dengan ukuran space sepanjang
72 cm dan lebar 40 cm.
2. Algoritma Fuzzy telah berhasil
diimplementasikan ke mikrokontroler dan
telah dibandingkan dengan hasil perhitungan
Matlab serta manual dimana menunjukkan
hasil yang sama untuk masukan yang sama
pula.
3. Hasil pengukuran jarak dari sensor ultrasonik
SR-04 menunjukkan hasil yang hampir sama
dengan ukuran yang sebenarnya.
4. Penggunaan optocoupler sebagai counter
dapat digunakan, karena output dari
optcoupler ini menghasilkan logika high dan
low ke mikrokontroler.
5. Duty cycle pada pengujian PWM merupakan
bagian utama dalam mengatur kecepatan
motor DC
6. Sinyal kontrol yang dibuat untuk mengatur
motor servo sama dengan dengan sinyal
kontrol yang dijadikan acuan.
7. Pengujian sistem secara bertahap dilakukan
untuk mendapatkan ukuran space serta jarak
yang ideal untuk melakukan parkir secara
keseluruhan. Proses deteksi space akan
bekerja dengan baik apabila panjang ukuran
space lebih dari 70 cm dan lebar 40 cm
dengan jarak start kecil dari 15 cm.
Sedangkan untuk mundur melakukan proses
parkir akan bekerja dengan baik dengan jarak
start kecil dari 10 cm dan panjang space
parkir diantara 72 cm – 80 cm serta lebar 40
cm.
Saran B.
Untuk pengembangan dan peningkatan lebih
lanjut dari sistem pemandu kendaraan untuk
parkir paralel secara otomatis ini ada beberapa
poin yang perlu diperhatikan dalam
perancangannya.
1. Menambah membership function dari logika
Fuzzy yang digunakan sebagai pusat
pengendalian, karena semakin banyak
membership function yang dirancang akan
menghasilkan output yang lebih baik lagi.
2. Menggunakan jenis sensor jarak yang lebih
baik dan lebih banyak bertujuan untuk
mengatasi error yang sering terjadi pada
sistem yang telah dirancang.
3. Menambah sensor yang digunakan seperti
sensor kompas, GPS dan kamera bertujuan
agar proses parkir secara otomatis ini dapat
bekerja lebih baik dan dalam berbagai posisi
awal dari prototype mobil.
4. Penggunaan cukup banyak sensor serta output
berupa motor DC dan motor servo
membutuhkan konsumsi daya yang cukup
besar, sehingga penggunaan baterai yang baik
harus menjadi perhatian dalam perancangan.
Perancangan posisi sensor, membership
function dari logika fuzzy, serta rule-rule fuzzy
didapat berdasarkan percobaan dengan
menggunakan prototype mobil yang
digunakan. Apabila terdapat perbedaan
ukuran dari prototype mobil yang akan
digunakan, maka posisi sensor, membership
function dari logika fuzzy, serta rule-rule fuzzy
harus dilakukan percobaan ulang untuk
mendapatkan nilai-nilai yang sesuai dengan
ukuran dari prototype tersebut. Karena
perbedaan ukuran prototype mobil akan
berpengaruh dalam melakukan manuver
parkir ini. In the present version of educational simulator
of PSO, only unconstrained optimization
problems can be solved. The PSO algorithms for
constrained optimization problems will be
integrated to simultor soon.
DAFTAR PUSTAKA
[1] Faizun, Mohammad. 2010. “Pemograman Mikrokontroler
ATMega Dengan CV AVR Dan Simulasi Proteus Edisi Kedua”.Yogyakarta : Edumacs Publisher
[2] Yanan Zhao And G.Collins,Jr. 2005. “Robust Automatic
Parallel Parking In Tight Spaces Via Fuzzy Logic”. [3] Yanan Zhao And G.Collins,Jr. 2005. “Fuzzy Logic of
Autonomous Vehicle for Parallel Parking Maneuver”.
[4] Young-Woo Ryu, Se-Young Oh, and Sam-Yong Kim 2008. “Robust Automatic Parking without Odometry Using an
Evolutionary Fuuzy Logic Controller”.
Monica (2011). “Sejarah Logika Fuzzy.” Terdapat di : http://intanbrilliant-monica.blogspot.com/2011/09/sejarah-logika-
fuzzy.html, diakses tanggal 25 November 2013.





























